Embed Size (px)
Citation preview
Team #17Dynamic Muscle Recorder
Client: Dr. Enderle
Group Members:Michael PetrowiczJames PorteusFarrukh Rahman
Presentation Outline
Client and Objective Muscle Model Isometric and Isotonic Experiments LabView and Optimization Setup Cost Acknowledgements Questions
Client and Objective
Dr. John Enderle
Design and construct a measurement device to record muscle properties in junior level Biomeasurements lab
Specifications
Final product less than $300 LabView interface Record data from isometric and isotonic
muscle contractions
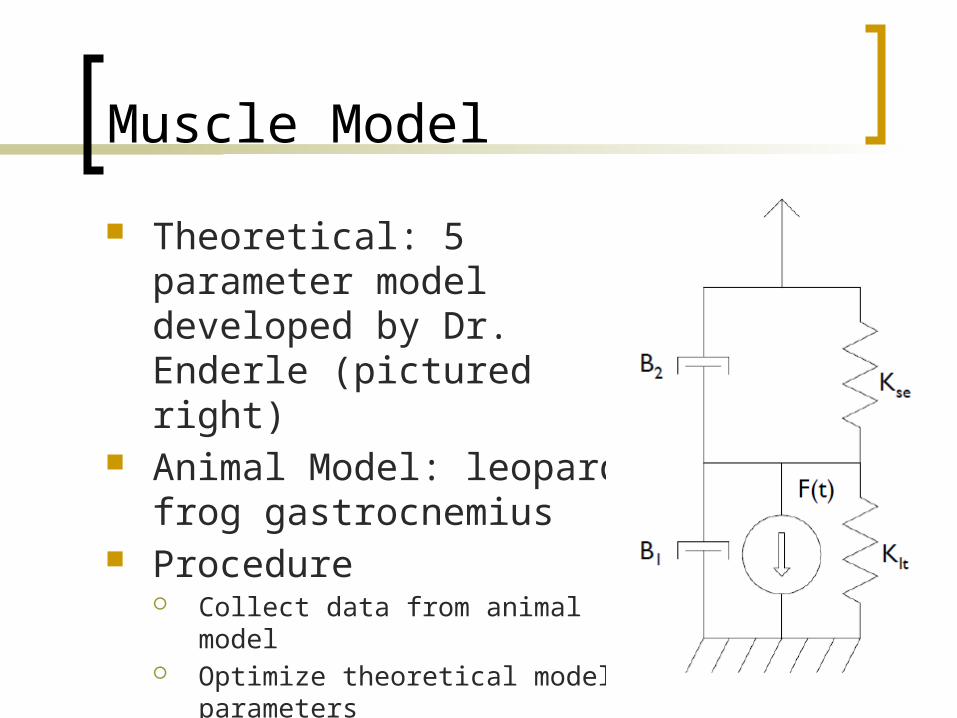
Muscle Model
Theoretical: 5 parameter model developed by Dr. Enderle (pictured right)
Animal Model: leopard frog gastrocnemius
Procedure Collect data from animal model Optimize theoretical model
parameters Reproduce isotonic experiment with
theoretical model
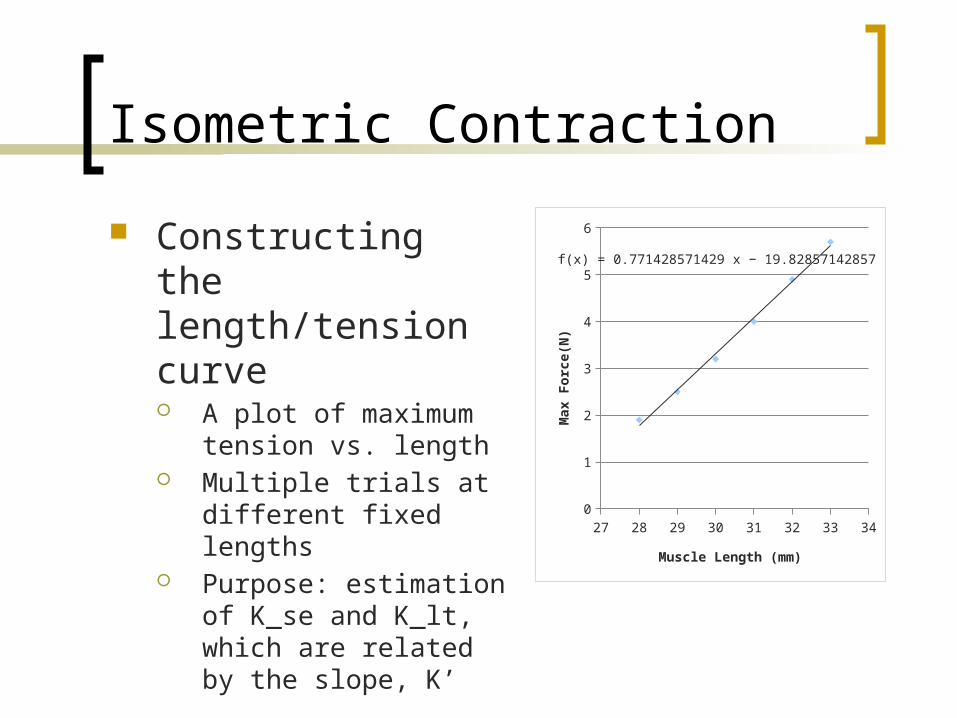
Isometric Contraction
Constructing the length/tension curve A plot of maximum
tension vs. length Multiple trials at different
fixed lengths Purpose: estimation of
K_se and K_lt, which are related by the slope, K’ 27 28 29 30 31 32 33 34
0
1
2
3
4
5
6
f(x) = 0.771428571428572 x − 19.8285714285714
Muscle Length (mm)M
ax F
orc
e(N
)
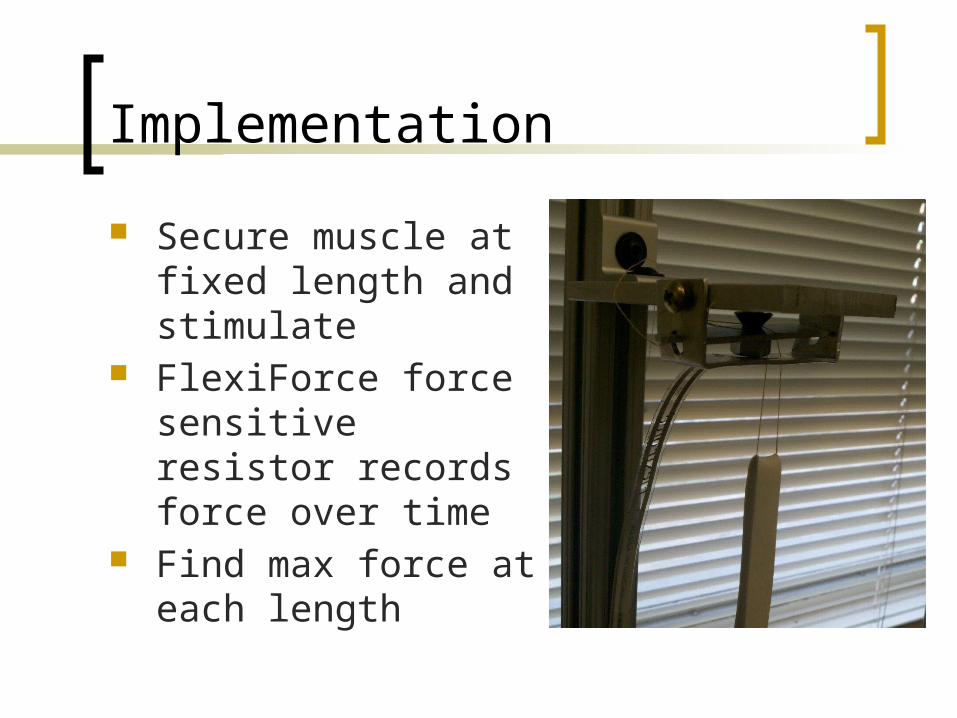
Implementation
Secure muscle at fixed length and stimulate
FlexiForce force sensitive resistor records force over time
Find max force at each length
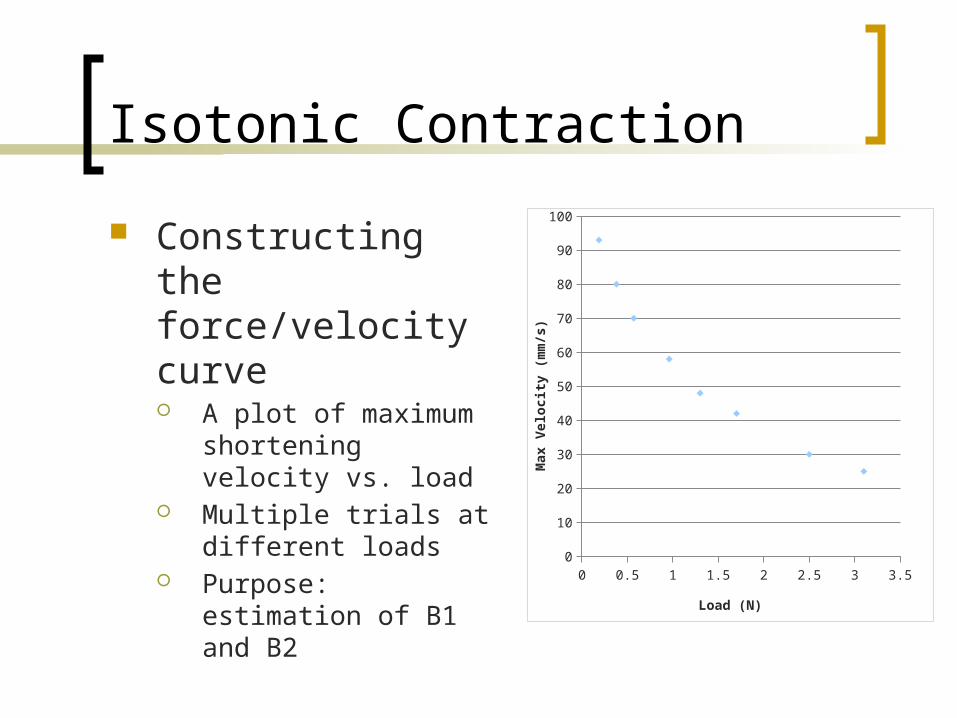
Isotonic Contraction
Constructing the force/velocity curve A plot of maximum
shortening velocity vs. load
Multiple trials at different loads
Purpose: estimation of B1 and B2
0 0.5 1 1.5 2 2.5 3 3.50
10
20
30
40
50
60
70
80
90
100
Load (N)
Max
Vel
oci
ty (
mm
/s)
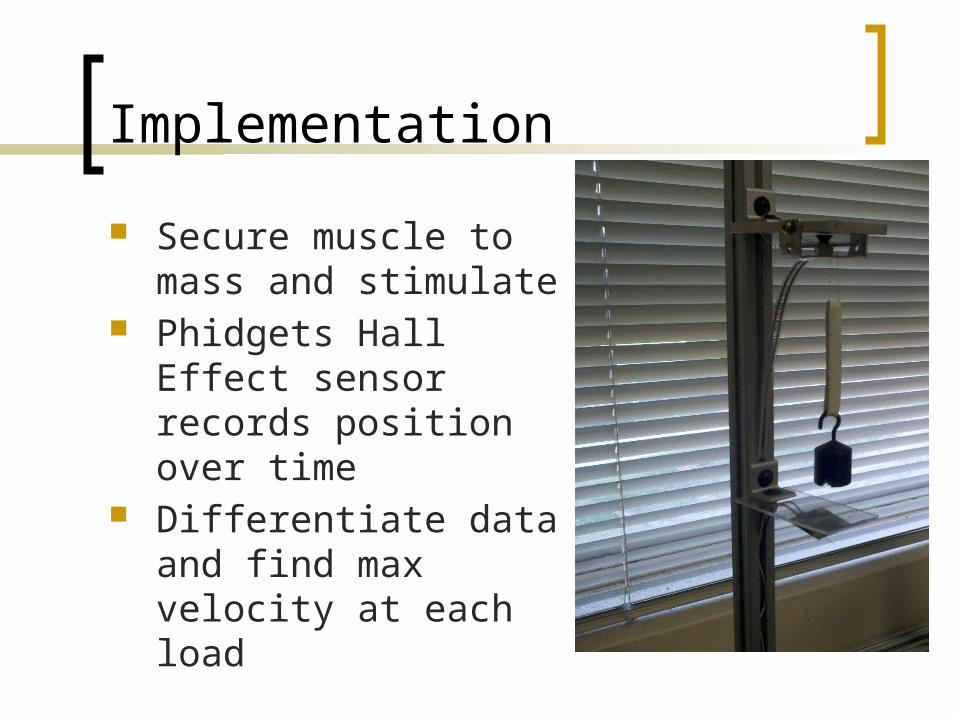
Implementation
Secure muscle to mass and stimulate
Phidgets Hall Effect sensor records position over time
Differentiate data and find max velocity at each load
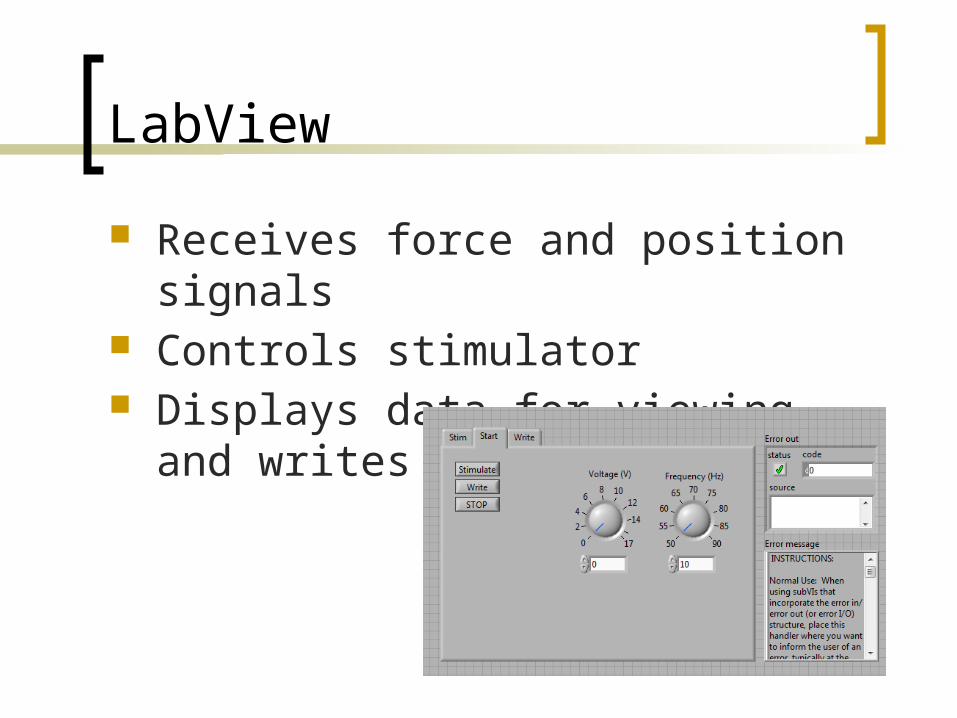
LabView
Receives force and position signals Controls stimulator Displays data for viewing and writes to
file
Optimization
Matlab routine modified from that developed by Dr. Daniel Sierra
Uses force/velocity and length/tension data with an initial parameter guess to determine the optimum model parameters
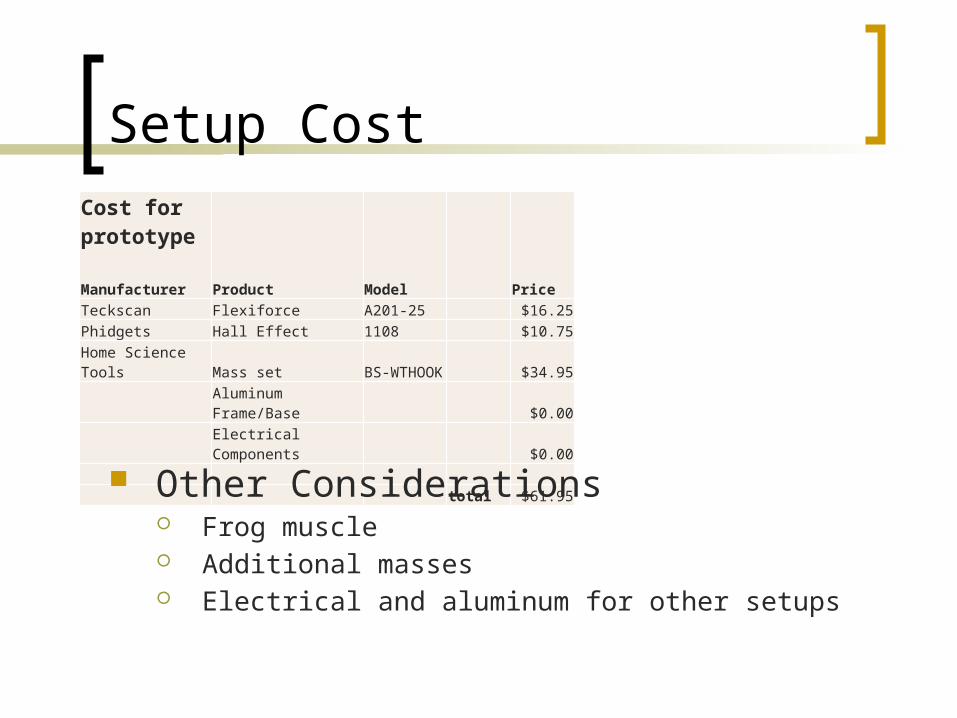
Setup CostCost for prototype
Manufacturer Product Model PriceTeckscan Flexiforce A201-25 $16.25Phidgets Hall Effect 1108 $10.75Home Science Tools Mass set
BS-WTHOOK $34.95
Aluminum Frame/Base $0.00 Electrical Components $0.00 total $61.95
Other Considerations Frog muscle Additional masses Electrical and aluminum for other setups
Acknowledgments
Dr. John Enderle, our sponsor Dr. Daniel Sierra, matlab optimization Dave Kaputa, LabView Serge and Peter, machine shop
Questions