-
7/30/2019 The Delusion of Maneuver Detection
1/6
1
THE DELUSION OF MANEUVER OR ACCELERATION
DETECTION
J. W. Bell,[email protected]
October 27, 2012
ABSTRACT
The purpose of this note is to demonstrate by example that a
smooth transition occurs in
the MSE (or RMSE) of a tracking estimator when a target
accelerates; and that major spikes
actually occur only when the target stops accelerating. As a
result, it appears to be a delusion to
believe that a maneuver or increase in acceleration can be
effectively detected and used.
KEY WORDS
Tracking Filter, Tracking, Kalman Filter, Optimal Filter,
Optimal Estimation, Mean Square
Estimation, Least Squares Method, Minimum Mean Square Error
mailto:[email protected]:[email protected]:[email protected]:[email protected]
-
7/30/2019 The Delusion of Maneuver Detection
2/6
2
EXAMPLE SCENARIO
Consider the following scenario: Target has constant velocity
for 10 scans, accelerates at
3g for 10 scans, travels at constant velocity for 10 scans,
decelerates at 1.5g for 10 scans, and
ends up traveling at a constant velocity for the final 10
scans.
Assume 5-point one step prediction. As we saw in Example 5 of
[1], the sample period at
which the MSE of a 5-point 2nd
order predictor applied to a target with a maximum
acceleration
of 3g's crosses over the a 5-point 3rd
order predictor variance (MSE) is c = 0.235 sec.
Consider the optimal 5-point FOE matching that sample period of
c = 0.235 for
comparison with the standard 5-point 2nd
and 3rd
order predictors.
The optimal FOE 5-point one step prediction weights are wopt=
[0.1 -0.35 -0.3 0.25, 1.3].
The 3rd
order 5-point one step predictor weights are w3 = [0.6 -0.6 -0.8
0.0 1.8], and the 2nd
order 5-point one step predictor weights are w2 = [-0.4 -0.1 0.2
0.5 0.8].
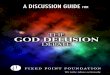
Figure 1 shows the plots of the one step predicted RMSEs (used
rather than the MSE to
reduce the scale of the plot) comprised of the theoretical
variance (based on a measurement noise
variance of unity) plus the actual bias squared. Since the
variance remains constant, the only
variation in the plots is due to changes in the bias. Track
initiation is ignored for simplicity.
Therefore, the first sample in the plots actually start on the
5th
scan; and the acceleration begins
on the 6th sample (10th scan in the plot).
-
7/30/2019 The Delusion of Maneuver Detection
3/6
3
ANALYSIS AND DISCUSSION
The most striking feature of these plots is that all of the
estimators make a smooth RMSE
transition when the target begins to accelerate at the 6th
sample (or decelerate at the 26th
sample).
In fact, major transition spikes occur only at the end of
acceleration at the 15th
sample (or
deceleration at the 35th
sample).
Thus, in this case a maneuver detector or acceleration estimator
would be expected to
kick in only after the target has stopped accelerating (or
decelerating). Therefore, not only would
adaptivity increase the error as suggested in [2], it would
cause more havoc by calling for an
estimator matched to an acceleration which no longer existsa
major double whammy.
Figure 1
-
7/30/2019 The Delusion of Maneuver Detection
4/6
4
Other things to note are as follows:
(1) The 2nd
order RMSE does equal the 3rd
order RMSE for max acceleration of 3g as designed.
(2) The 3rd
Order RMSE has double spikes for both acceleration and
deceleration.
(3) Both 2nd
and 3rd
order RMSEs have spike widths of 4 samples for both acceleration
and
deceleration.
(4) Optimal predictor RMSE has both lower spikes than 2nd
and 3rd
order predictors and spike
widths of only 2 samples in both caseshalf that of both the
2
nd
and 3
rd
order predictors.
FORMULAS AND NUMBERS
Normalized 3rd
order predictor variance:)2)(1(
699||
22
3
NNN
NN = 4.6, for N = 5.
15.2RMSE . This we see pretty much everywhere in Figure 1 except
for the large spikes as
well as the small blip at N=7 during acceleration and the almost
imperceptible blip at N=27
during deceleration.
Normalized 2nd
order predictor variance:)1(
24|| 22
NN
N = 1.1, for N = 5.
05.1RMSE . This occurs everywhere there is no acceleration or
deceleration: between N = 1 to
5, N = 20 to 25, and N = 40 to 45.
Normalized 2nd order predictor bias squared at worst case
acceleration of 3gs:
2
3
22
2T
a
= 3.5 where
2
2
36
)2)(1(
NNT =49 and
)4)(1(
180
2 22
22
NNN
a= 1/14
for N = 5. This occurs between N = 10 to 15.
-
7/30/2019 The Delusion of Maneuver Detection
5/6
5
Normalized 2nd
order predictor mean square error (MSE) at worst case:
2
3
22
2
22
|| Ta
MSE
= 4.6 for N=5. This matches the 3rd order variance at
maximum
acceleration of 3gs as designed. Again 15.2RMSE . This occurs
between N = 10 to 15.
Normalized FOE predictor MSE:
2
33
22
2
3
2
3
2
2 )1(2
)|||(|
fT
afMSE ,
wheref3 is the interpolation factor (or fraction) between the
2nd
and 3rd
order predictors. For the
optimum at worst case of 3gs, this reduces to )|||(| 23,32
2 optopt fMSE , where
2
2
2
3
2
3 |||||| .
By design the optimal FOE in this case is based on the optimal
fraction, or interpolation
factor off3opt = 0.5. Therefore, 85.2)6.41.1(5.0)|||(|5.02
3
2
2 MSE . 69.1RMSE .
This occurs also at maximum acceleration between N = 10 to
15.
On the other hand, if there is no bias, the FOE predictor MSE
reduces to the normalized
variance: )|||(|var 232322 fiancenomalizedMSE , which can be
written as
975.1)1.136.4(4
1)||3|(|
4
1)|||(|
4
1|| 22
2
3
2
2
2
3
2
2
2 xMSE p .
40.1RMSE . This occurs during no acceleration or deceleration: N
= 1 to 5, N = 20 to 25, and
N=40 to 45.
CONCLUSION
Detecting the onset of a target maneuver or acceleration is
shown in this example to be
problematic. Spikes in the RMSE at the end of a maneuver or
acceleration suggest that a change
in the tracking estimator based on maneuver or acceleration
detection is likely to cause more
havoc by introducing the change after the fact. Therefore, not
only would adaptivity increase the
-
7/30/2019 The Delusion of Maneuver Detection
6/6
6
error as suggested in [2], it would call for an estimator
matched to an acceleration which no
longer existsa major double whammy.
REFERENCES
[1] Bell, J. W., The Fall acy Of Using A 2ndOrder Estimator On
Acceleration,
http://site.infowest.com/personal/j/jeffbell/The2ndOrderEstimatorFallacy.pdf
[2] Bell, J. W., Tracking Estimator Adaptivity: What Pri
ce?,
http://site.infowest.com/personal/j/jeffbell/WhatPriceAdaptivity.pdf
http://site.infowest.com/personal/j/jeffbell/The2ndOrderEstimatorFallacy.pdfhttp://site.infowest.com/personal/j/jeffbell/The2ndOrderEstimatorFallacy.pdfhttp://site.infowest.com/personal/j/jeffbell/WhatPriceAdaptivity.pdfhttp://site.infowest.com/personal/j/jeffbell/WhatPriceAdaptivity.pdfhttp://site.infowest.com/personal/j/jeffbell/WhatPriceAdaptivity.pdfhttp://site.infowest.com/personal/j/jeffbell/The2ndOrderEstimatorFallacy.pdf