Embed Size (px)
Citation preview

T H R E E - D I M E N S I O N A L
R I G I D B O D I E S *
N O N L I N E A R V I B R A T I O N S OF
V . O . K o n o n e n k o UDC 534.082
A rigid body subjected to the action of a system of forces has for a long t ime served as a dynamic model or as a calculation scheme in the study of most highly diverse technical objects. Many and important scientific resul ts have been obtained by analyzing the motion of a rigid body as a system describable by l inear differential equations. A l inear ized t rea tment of problems concerned with the motion of a rigid body in a fo rce field f ramed the basis of the ideas concerning the possibi l i t ies of analyzing the motion of a rigid body as a sys tem with a single degree of freedom, the possibi l i ty of considering the motion of a rigid body in a single plane or for other res t r ic t ing assumptions. Thus, during the present t imes , seldom have we to analyze the motion of an a i rc ra f t in a single plane, or to analyze the motion of a satelli te in the plane of an orbit , considering these objects as rigid bodies.
At the same time we must bear in mind that the motion of a rigid body is charac ter ized by variat ion of its six coordinates. The lat ter are connected with one another by nonlinear relat ions in the form of com- plete equations describing the motion of the body in a force field. Owing to this, considerat ion of the mo- t ion of a rigid body by analyzing only the variat ion of a par t of its coordinates is valid only in those cases where the coordinates assumed to be invariant (zero) in fact cannot assume other values, i . e . , the motion of the body is r e s t r i c t ed by appropriate constraints . But in the case of an a i rc ra f t moving in a ver t ical plane~ or in the case of a plane motion of a satellite in an orbit there are no such constraints; therefore , no certainty exists that the proposed charac te r of motion is real ized.
The existence of nonlinear connections between the coordinates and the equations of motion of a rigid body leads to the fact that vibrat ions of the body in the direct ion of one of its coordinates is near ly always accompanied by vibrations inthe direct ion of other coordinates. Usuallythe la t ter vibrations are smal l in com- pa r i son and are of no interest . However, cases a reposs ib le , where a radical redis tr ibut ion ofthe ene rgyof v ibra- t ion between the coordinates takes place, and then these vibrat ions can become dominant. Energy r ed i s t r i - bution can take place only under cer ta in conditions, f i rs t of all in the presence of resonance relat ions be- tween frequencies of the sys tem and frequencies of the external action. Fur the rmore , these conditions are determined by the relat ions between pa rame te r s of the system which charac te r ize interaction between the fac tors contributing to excitation of vibrations and the factors hindering it.
The specific features of the v ibra tory phenomena under considerat ion can be demonstrated and studied more c lear ly by means of an analysis of the following problem. The rigid body kept in a state of equilibrium by potential forces is considered as a sys tem with six degrees of freedom. Forces res is t ing motion, the p resence of which leads to damping of vibrat ions, act in addition to the potential forces . An external per iod- ic force acts on the body in the direct ion of one of the coordinates. It is required to determine the possible vibrations of the body. The publications [1-7] are devoted to the solution of this problem. In the present paper we set forth the general ized concepts of the proper t ies of the system under consideration.
Vibrations of the body occur as a resul t of the action of the external force. These vibrations can have completely different qualitative and quantitative charac te r i s t i c s , dependent on whether a redis t r ibut ion of energy takes place or whether there is no significant energy redistr ibution.
*Presen ted at the Third All-Union Congress on Theoret ical and Applied Mechanics, on January 31, 196& Moscow.
Institute of Mechanics, Academy of Sciences of the Ukrainian SSR. Translated from Prikladnaya Mekhanika, Vol. 5, No. 2, pp. 13-27, February, 1969. Original article submitted December 3, 1968.
�9 1972 Consultants Bureau, a division of Plenum Ptzblishing Corporation, 227 West t7th Street, New York, N. Y. I0011. All rights reserved. This article cannot be reproduced for any purpose whatsoever without permission of the publisher. A copy of this article is available from the publisher for $15.00.
117

If the condit ions for energy r e d i s t r i b u t i o n a re unfavorable , then the motion of the body is c h a r a c - t e r i z e d by forced v ib ra t ions in the d i r ec t ion of the coordinate being exci ted , r e l a t i ve to which the externa l pe r iod ic force acts . All other coord ina tes of the body pe r f o r m v ibra t ions which a r e negl igibly smal l in compar i son with the v ibra t ions of the coordinate being excited. The de sc r ip t i on of the v ib ra t ions of the body in such a case is in fact reduced to the wel l -known r e p r e s e n t a t i o n s of the forced v ibra t ions of it as a sys t em of a single deg ree of f reedom.
If the conditions for energy d i s t r ibu t ion a re favorable , then they a r e r e a l i z e d by the sys t em i tself . As a r e su l t of this the c h a r a c t e r of the v i b r a t o r y motion of the body d r a s t i c a l l y changes. In addit ion to the fo rced v ibra t ions in the d i r ec t ion of the coordina te being exci ted , v ibra t ions of another coordina te (or o ther coordinates) a r i s e , in fact, of the one for which the condit ions of ene rgy r e d i s t r i b u t i o n t u r n e d out to be favorable . Since one of the n e c e s s a r y condit ions of ene rgy r e d i s t r i b u t i o n is r e a l i z a t i o n of a r e sonance r e l a t ionsh ip between f requenc ies , the coordInate r ece iv ing ene rgy as a r e s u l t of i ts r ed i s t r ibu t ion , wil l p e r f o r m resonance v ibra t ions and become resona t ing . As a r e su l t , the b o d y p e r f o r m s a compl ica ted v i b r a t o r y motion cons is t ing of fo rced v i - b ra t ions (nonresonance or resonance) of the coord ina te being exci ted and the r e sonance v ib ra t ions of the r e s o n a t - ing coord ina te .
In the genera l case the const i tuent v ibra t ions have dif ferent f requenc ies , and the v ibra t ions of the r ig id body a re e i the r pe r iod ic or a lmos t per iod ic . It is not diff icult to imagine that the v ibra t ions of the resona t ing coordinate can have an ampli tude which s e v e r a l t imes exceed the ampli tude of the coordinate being exci ted. This is more l ikely to be the case , when the forced v ibra t ions a r e nonresonant . R e s o - nance condit ions eanbe fulf i l led not only for one but a lso for two and more coord ina tes . Then as a r e su l t of energy r ed i s t r i bu t i on two or more coord ina tes become resonat ing. Accordingly the r e p r e s e n t a t i o n of the motion ls changed. It cons i s t s of the forced v ibra t ions of the coordinate being exci ted and the v ib ra t ions of s eve ra l resona t ing coord ina tes .
The v ibra t ions being cons ide red a r e perhaps c h a r a c t e r i s t i c by the fact that he re the most in te res t ing v i b r a t o r y p r o c e s s e s take place af te r r e d i s t r i b u t i o n of the v ib ra t ion energy suppl ied, this p r o c e s s being r e a l i z e d by the mechanism of nonl inear connections between the coord ina tes . We agree to ca l l them t h r e e - d imens iona l nonl inear v ibra t ions of a r ig id body.
The r e p r e s e n t a t i o n of nonl inear t h r e e - d i m e n s i o n a l v ibra t ions of a r ig id body d e s c r i b e d above r e f e r s to the s imp le s t cases . Let us mention a few more complex cases . Let not one but, for example , two ex- t e rna l pe r iod ic forces act on the sys t em in the d i rec t ion of two coord ina te s of the body. Then v ibra t ions can occur in the d i r ec t ion of the th i rd , r e sona t ing coordina te : the resona t ing coord ina te wil l r e c e i v e energy f rom the two coordina tes being exci ted. A su re condition for the ex is tence of such v ib ra t ions is fulf i lment of a r e sonance r e l a t ionsh ip between the frequency of na tura l v ibra t ions of the resona t ing coord ina te and the f requencies of the forced v ib ra t ions of the two coord ina tes being exci ted .
A case of t h r e e - d i m e n s i o n a l nonl inear v ibra t ions of i n t e r e s t and impor tance occur s when the en t i r e r ig id body or a pa r t of it (or this pa r t and another together) p e r f o r m s a ro t a to ry motion about one of the axes. Then in the equations of motion two or four coord ina tes of the body a re connected by l inea r gy roscop ic t e rms ; the ini t ial coord ina tes of the l i nea r i zed sys tem cease to be the p r inc ipa l coord ina tes . In connection with this the mode of v ibra t ions is subs tan t ia l ly a l t e r ed , and the ana lys i s is made more difficult . Neve r - t h e l e s s , in the p r e s e n c e of c e r t a i n resonance r e l a t ionsh ips between the f requencies of na tura l v ibra t ions of the resona t ing coord ina tes and the f requencies of forced v ibra t ions of the coordinates being exci ted, non- l i nea r t h r e e - d i m e n s i o n a l r e sonance v ibra t ions will occur and develop intensively. The i r e s sence a lso l ies in r ed i s t r i bu t ion of the v ib ra t ion ene rgy , r e a l i z e d as a r e su l t of the exis tence of nonl inear connections b e - tween the coord ina tes of the sys tem being exci ted and those resonat ing .
The spec ia l f ea tu re s of the methods and mathemat ica l means used allow the ana lys i s of t h r e e - d i m e n - s ional nonl inear v ib ra t ions to be divided into two s tages , each of which can be of impor tance when taken independently. The f i r s t s tage can be reduced to the de te rmina t ion of the paths and conditions of r e d i s t r i - bution, between the coord ina tes , of the energy supplied to the sys t em. In this s tage the coordina tes of the s y s t e m which can become resonat ing are de t e rmined , and conditions or c r i t e r i a a r e es tab l i shed which, when fulf i l led, r e s u l t in the appearance and fur ther development of resonance v ibra t ions . Answers to these p r o b l e m s can be obtained compara t ive ly eas i ly , if we r e s o r t to the s tab i l i ty ana lys i s of forced v ibra t ions of a r ig id body under the act ion of given ex te rna l pe r iod ic fo rces . The coordinate of the body which can b e - come resonat ing , is taken as not being exci ted. The ins tabi l i ty condit ions of its s ta te of r e s t wil l be the conditions for the occu r r ence of its resonance v ibra t ions . In this way g r e a t ma themat ica l d i f f icul t ies can be avoided, and p rob l ems of the f i r s t s tage r ece ive an eas i ly unders tandable solution.
118

The second stage of the solution of the problem is advisably devoted to the study of the cha rac t e r i s - t ics of the vibrations of resonat ing coordinates, the conditions of occurrence of which have been established in the f i rs t stage. Here periodic or almost periodic solutions, character iz ing the vibratory motion of the body as a whole, must be set up, and the stability of the vibrations must be analyzed. This stage is con- nected with complicated analysis and computations, but to them we must r e so r t only in cases where we cannot l imit ourse lves to the study of the conditions giving r i se to nonlinear three-dimensional vibrations of a rigid body.
w 1. E q u a t i o n s o f M o t i o n
We consider the motion of a rigid body about a fixed O~V~ coordinate sys tem, at the origin of which the center of the mass M of the body is located. Also there is located the origin of a moving Oxyz coor - dinate sys tem, unalternably fixed to the body. Its axes coincide with the principal centroidal axes of the body; A, B, C are the moments of the inertia of the body about these axes. In the position of equilibrium the axes O~ and Ox, OV and Oy, O~ and Oz coincide, while their mutual orientation during the motion of the body is charac ter ized by the Euler angles 0, r go, (Fig. 1); together with the l inear coordinates ~, V, they determine the position of the body in space.
The initial equations of motion of the body are
d ~ OU M dt 2 = - ~ - ; . M
A - ~ - + (C - - B) qr =
d~l OU . M d2~ OU . - 3 W = o~ ' ~ = aS '
dq Q'4; B ~ - + (A - - C) pr = Q~;
c~ dt ~ (B - - A) pq = 0"6.
(i.I)
The last three equations of the system (1.1) are supplemented by the kinematic relat ionships and direct ion cosines corresponding to the Euler angles O, r go thus chosen.
In the role of the force function U we consider a certain general ized function of coordinates U = U(~, ~?, ~, O, r go) which can be represented in the form
6
1 U = T ~_ c~x~ + U~ (x~ . . . . . x~).
Here and in the following, for the sake of convenience of writing, we use the notations
x l = ~; x2 = ~1; x s = ~; x , = O; x 5 = ~p; x~ = %
The quantity U I contains t e rms of the third an d higher o rde rs with respec t to the coordinates x i.
The general ized forces Qi, r e fe r r ed to the corresponding coordinates, a re determined from the fo r - mula
where
OU Q~ (x . . . . . xo) Ox~ c~x, + Q: (x . . . . . . ~o),
8U1
For the sake of general i ty of the problem we assume that each Qs has all t e rms of the f i rs t , second, and third orders with respec t to the coordinates ( terms of higher o rders are not considered here)
. .~(s) v " X Q~ - - ~.~.~ + E ci~>~, ~, "~ E ' ~ . , , ' ~ / ' ~ ~, i,j /,],h
where Cs, C(i~) , Cl~k ) are constant coefficients.
119

As an example, we present the expression for the general ized force Q~ which rea l izes an eiastic suspension of the body consisting of 18 symmetr ica l ly ar ranged elastic l inear elements [1]
G = c~p + C ~ ~- + C (6~2 + C~6~ , ~6~o _ p~6, ~3 _ ~6~3 ,~1~1~2~ .. C(~0- 2 2 t l -{- - . - 13 $ ~ q - ( ~ i 4 ~ U "3- ~ l l l G -~" ~, . '222q "q - �9 " " q - ~ - ' l 1 2 b q " J - - - ~ '155 1~(~.
The forces of res i s tance to the motion are assumed to be proport ional to the velocit ies of motion of the body, and are taken as small. They are represented by a dissipative function of the form
6
�9 1 "2
External forces Ni(t), r e fe r r ed to the coordinates xi, act on the system. These forces are given functions of time.
The v ibra tory motion close to the position of static equilibrium is considered. Such values of the co- ordinate angles 0, r ~ a r e considered for which the approximate representat ions sin 0 = 0 - 1/603; cos 0 = 1 - 1/202, e t c . , apply.
The equations of motion, set up in the manner descr ibed above, have the following form
At~ +H,~ + c,~ + QI ~ (~ . . . . . ~)=N, (t); M~+H=6 + c2~+Q; (~ . . . . . ~)=N= (t);
A'0 + H,0 + c,0 + (A - - B) ~'q~ + (.4 - - B § C) ~ e C'q;, + W, (0, 0, 0, , , ~, ~, ~o, ~, ~') + Q; (~ . . . . . q~) = N,(t); (1.2)
B~ + H ~ + c~ q~ 4- (A - - B)'0 q~ q- (A - - B - - C) q~0"-- C~o() + W~ (0, 6,'0, , , 6, ~', q~, ~,'~) + Q; (~ . . . . . q~) = N, (t);
For the above res t r ic t ions the nonlinear t e rms of the equations can be taken as small in compar ison with the l inear t e r m s . Singling out the small t e rms by introducing the small parameter /~ , we obtain
i,l i,i,a
" ~ . " 2 . . . . . . . . . . . . . . . xr+~hrxr+Lxr~ ~G (x~, x~, x~, xq, xq, xq) +~W; (x~, x~, x4, x~, xs, x~, x6, x6, x6) + ~ ~ S~;x x i + ~ ~ S~xi, x~, G = N (t); (1.3) if i,i,k
(s= 1,2,3; i , ] , k = l . . . . . 6; p ,q=4 ,5 ,6 ) .
For the l inear par t of the equations, the xi are normal coordinates, while the coefficients Xi are the frequencies of natural vibrations of the corresponding undamped system
Here we have denoted:
M ~ = M 2 = M ~ = M : M4=A ; M 5=B; M~=C.
~hi = tI,M-E~; ~S~I ~ 1___ p!O. . S~il 1 C ' " B C = M~v ' l ' V' i i k = - ~ 7 ilk, b = - A ; c~ - -~ ;
Fig. 1
t20

| - - ~ ~ W ; = ~ W , ( r = 4 , 5 , 6 ) ; ~ L , = ( 1 - - b ) ' ~ q ~ q - ( l - - b + c ) ~ - i - c t p t p ;
"- l) O I "" 2 p.W, = (b - - c) ~ 0 - - (1 - - b) 0",~- - - (1 - - b) 2~pq) - - ~- O, - - (1 - - b + c) "~6, + (b - - c)~,O;
~ 6 = c - ' (1 - b ) i$r - - c - ' (1 - - b) ;~r - - c - ' ( l - - b) ~ ' +
+ c - ' (1 - - b) "0"0~ + c - ' (1 - - b - - c) ~0~ + c - ' (1 - - b) 6"-~.
w T h e A p p r o x i m a t i o n M e t h o d o f A n a l y s i s o f N o n l i n e a r
T h r e e - D i m e n s i o n a l V i b r a t i o n s o f a R i g i d B o d y
The a n a l y s i s of a n u m b e r of p a r t i c u l a r c a s e s of n o n l i n e a r t h r e e - d i m e n s i o n a l v i b r a t i o n s of a r i g i d body l e a d s to the fo l lowing g e n e r a l no t ions about the c h a r a c t e r of t h e s e v i b r a t i o n s .
We a s s u m e tha t the e x t e r n a l exc i t i ng f o r c e Nb(t) (for the s ake of s i m p l i c i t y , a h a r m o n i c fo rce ) a c t s i m m e d i a t e l y in the d i r e c t i o n of the c o o r d i n a t e x b (the index b can a s s u m e any v a l u e f r o m 1 to 6), wh i l e o t h e r Ns(t) = 0. When the f r e q u e n c y co b of the f o r c e s b e c o m e s c l o s e o r equal to the f r e q u e n c y Xb of f r e e v i b r a t i o n s of the body , r e s o n a n c e v i b r a t i o n s of the body o c c u r in the d i r e c t i o n of the Xb c o o r d i n a t e . It can be shown tha t if b e t w e e n the f r e q u e n c y A b and the r e m a i n i n g f r e q u e n c i e s of f r e e v i b r a t i o n s of the body t h e r e a r e no m u l t i p l e r a t i o s , then the mot ion of the body is c o m p l e t e l y s p e c i f i e d by the v a r i a t i o n of the x b c o o r d i n a t e , wh i l e the o t h e r c o o r d i n a t e s r e m a i n n o n p e r t u r b e d o r v e r y s l i g h t l y p e r t u r b e d . Th i s s i m p l e s t c a s e of r e s o - n a n c e v i b r a t i o n s i s not r e q u i r e d in a d e t a i l e d a n a l y s i s , e s p e c i a l l y a s the mot ion of the body c o r r e s p o n d i n g to i t i s not t h r e e - d i m e n s i o n a l .
If the f r e q u e n c y co b of the e x t e r n a l f o r c e is not in a r e s o n a n c e r a t i o wi th f r e q u e n c y Xb, then the body p e r f o r m s n o n r e s o n a n c e f o r c e d v i b r a t i o n s in the d i r e c t i o n of x b.
Since x b i s con ta ined in n o n l i n e a r t e r m s of aI1 o t h e r equa t ions of the s y s t e m (1.3), mo t ions in the d i r e c t i o n of o t h e r c o o r d i n a t e s of the body t a k e p l a c e . The f r e q u e n c y cob can be in a r e s o n a n c e r a t i o wi th one of the f r e q u e n c i e s of n a t u r a l v i b r a t i o n s , for e x a m p l e , ) ' r ( r = 1 ,2 . . . . . 6; r ~ b). Then r e s o n a n c e v i - b r a t i o n s of the r i g i d body can o c c u r in the d i r e c t i o n of the Xr c o o r d i n a t e , hav ing been g e n e r a t e d by i t s f o r c e d n o n r e s o n a n c e v i b r a t i o n s in the d i r e c t i o n of the c o o r d i n a t e x b. The r e m a i n i n g four c o o r d i n a t e s e i t h e r wi l l be in a s t a t e of r e s t , o r p e r f o r m v i b r a t i o n s which a r e s m a l l in c o m p a r i s o n wi th the mo t ions x r and x b. Thus , in the c a s e unde r c o n s i d e r a t i o n the body wi l l p e r f o r m t h r e e - d i m e n s i o n a l n o n l i n e a r v i b r a t i o n s , the p r i n c i p a l c o m p o n e n t s of which a r e the m o t i o n s in the d i r e c t i o n of the x r and x b c o o r d i n a t e s .
In c o n f o r m i t y wi th the e x p e c t e d c h a r a c t e r of mo t ion for r e s o n a n c e s d e s c r i b e d above , we r e p r e s e n t e d the mode of t h i s mo t ion a s fo l lows : a) the mo t ion of the c o o r d i n a t e x b b e i n g e x c i t e d d i r e c t l y by the a c t i o n of t he f o r c e Nb(t ) = Fb s incobt , the f r e q u e n c y w b of which i s in a n o n r e s o n a n c e r a t i o wi th t he f r e q u e n c y of n a t u r a l v i b r a t i o n s hb, has the f o r m
I _ (ei,%t _ e - t~g) Fb (2.1) x~ -- -~t qb + Cb eizbt + Db e - i ~ ; qb= 2 2 ; Lb - - cob
b) the mo t ion of the c o o r d i n a t e x r p e r f o r m i n g r e s o n a n c e v i b r a t i o n s t a k e s p l a c e for the f r e q u e n c y r e l a t i o n - sh ip
6
miX~ q- n% = O,
w h e r e m i , n a r e p o s i t i v e o r nega t ive i n t e g e r s for which Ira1[ + [m2I + . . . + [nl -< 5.
In the s i m p l e s t c a s e the r e s o n a n c e r e l a t i o n s h i p fo r the x r c o o r d i n a t e i s
- - n mrXr-f- rlo)b=O o r ~,----- o) O - ~ - v r .
121

Then the resonance vibrat ions are represen ted in the form
Xr = C,eiV,t + Dre-iVrt, (2.2)
while the motion of the remaining four coordinates Xq are r ep resen ted in the form of f ree vibrations
xq = C j ~qt ~ Dqe - '~r (q = 1,2 . . . . . 6, q 4: r, q =/= b). (2.3)
In the following, using these fo rms , we consider the quantities Cs, Ds (s = 1 . . . . . 6), charac te r iz ing he re the vibrat ion amplitudes, as new functions which have tobe de termined f rom the sys tem of equa- tions of the problem under considerat ion. The charac te r of var ia t ion of these functions will descr ibe the behavior of the envelopes of the principal par t s of the v ibra tory motion. This enables us to obtain an idea about the possible resonances or stability of motion of the rigid body.
With the objective of finding the quantities Cs and Ds, we introduce analogous representa t ions for the veloci t ies dxs/dt :
dx b 1 �9 e_i%t) dt 2 c%q (e '~162 + + i~ b ( C j ~~ - - Dbe'-tXbt); (2.4)
dxr = iv, ( C j vrt - - D,e-'*Z); dxq = i~,q (Cqe ix.' - - Dqe-*Xqt). dt dt
Considering the express ions (2.1)-(2.4) as formulas for replacing the previous var iables Xs, dxs/dt by the new var iables Cs, Ds, we t r ans fo rm the system of equations (1.3) into the form
. . dDr dD l 2ivr dCrdt ixd)~e-:*'t; 2i~/ dC!dt . . . . . ~@Je-i~lt; ] -~ r; ztv, ~ = i~f~fliVrt; 2i)~ i ~ = l~Ofl ixit. (2.5)
Here the functions ~j r ep re sen t the totality of small nonlinear t e r m s in the j - th equation of the sys tem (1.3).
The solution of these equations can be obtained approximately , using the averaging method [8]. Ac- cording to this method the approximate solution can be wri t ten
C~ = C: -q- ~S~ (t, C~, D~) + Ix 2,..; D~ = D~ + IxD~ (t, C:, D]) + t~... (s = 1, 2 . . . . . 6).
The functions C~, D~ are de termined f rom the auxil iary equations which are obtained by averaging (2.5) with respec t to the t ime t contained explici t ly. Thus, we have:
for the resonance coordinates
dC~ _ ~t X~ (C; . . . . . C'6, D~, , D~); dD~ ~ Y, (C~, , C6, D~, , D~), (2.6) dt 2i~ r "'" dt 2ivr . . . . . .
t
X, =t-~lim ~-1 S L, (C[, . . . . . . , C'6, D], , D*6, t) e-iWtdt;
o
t
Y~ = lira 1 _ (" L~ " , C~, D;, D'~, t) ei~rt dt; t-,~ t .} (el . . . . . . . . 0
where?
for the nonresonanee coordinates
dC~ I ~ * * - ~ = - - ~ X i (Ci, Di);
where
dDi ~ . dt - - - 2 - ~ i Y' (C~, D;), (2.7)
t
Xj = t-~lim l__t f ' Li (C], . . . , C~, D~, . . . , D*~, t) e-'~fldt;
0
t
Yi = t~lim -7-__1 , f Lf (C~, . . . , C6, D[, ... , D~, t) e~X:dt. o
The par t icu la r solutions of Eqs. (2.6), (2.7) allow us to de termine the charac te r of var ia t ion of the amplitude functions C* s and Ds, as well as to de termine the stabili ty of the possible s tat ionary reg imes of vibrat ions, with constant values of Cg and D~ in them. Consequently, it is possible to obtain an approxi- mate notion about the cha rac te r of the possible resonance reg imes in three-d imens ional vibrat ions of a r igid body.
SThe functions Lj are obtained from ~j by substituting the express ions (2.2)-(2.6) into the la t te r .
122

The r e s o n a n c e s a r i s i n g in the c a s e when two e x t e r n a l f o r c e s , fo r e x a m p l e , Nb(t ) = F b s i n w b t and NH(t) = F H sinc0Ht ac t s i m u l t a n e o u s l y on the body , a r e a n a l y z e d in an ana logous m a n n e r , but wi th the d i f - f e r e n c e tha t t he s o l u t i o n in the f o r m (2.1) is t a k e n not only fo r the c o o r d i n a t e x b but a l s o fo r XH, i . e . ,
1 i%t e-f%t) Cb e O, bt " 1 (r e_..iO~Ht) Dne_o, nt xb = -ffi- qb (e - - + § Dbe-'Xr xn = ~ qn - - Jr OH cO'Hi "}- "
H e r e
Fb -FH qb = iL~, - - co,~ ; qH ,X,H--COH2 2 '
i t is a s s u m e d tha t the f r e q u e n c i e s co b and co H a r e not r e s o n a n t for x b and x H.
The r e s o n a n c e r e l a t i o n s h i p of the f r e q u e n c i e s fo r the x r c o o r d i n a t e in t h i s c a s e h a s the f o r m
m~ § n6% + n2co H = O,
f r o m which v r = nlcob/rn + nlcoH/m.
Equa t ions (2.6), (2.7) in th i s c a s e keep t h e i r f o r m .
R e s o n a n c e p h e n o m e n a a r e a n a l y z e d in a s l i g h t l y d i f f e r e n t m a n n e r , when two c o o r d i n a t e s r e s o n a t e s i m - u l t a n e o u s l y , i . e . , i f s ide by s i de wi th the n o n l i n e a r r e s o n a n c e e x c i t e d by the e x t e r n a l f o r c e an i n t e r n a l r e s o n a n c e of the s y s t e m t a k e s p l a c e . Such c a s e s a r e p o s s i b l e , for e x a m p l e , when the r e s o n a t i n g e o o r - d i n a t e x r h a s the f r e q u e n c y )t r wh ich i s in a m u l t i p l e r a t i o wi th a n o t h e r f r e q u e n c y , s a y , Xp, of the s y s t e m . Then the two c o o r d i n a t e s x r and Xp can be in the r e s o n a n c e r e g i m e of mo t ion , p r o v i d e d the f r e q u e n c y r e l a - t i o n s h i p
mrL, 4- rn~.~ -~ r/m a = 0
is s a t i s f i e d .
The mot ion of the r e s o n a t i n g c o o r d i n a t e s (2.2) is r e p r e s e n t e d in the f o r m
Xr = Cre ixrt "@ D~e - i~ t ; x v = C~e i ~ § Dpe-i% t.
I n s t ead of Eqs . (2.5) we ob t a in equa t ions in which the v a r i a b l e s Cr , Dr , Cp, Dp a r e not s e p a r a t e d . T h i s s o m e w h a t c o m p l i c a t e s the subsequen t a n a l y s i s , and l e a d s to c u m b e r s o m e r e l a t i o n s .
~ 3 . A n a l y s i s o f t h e P o s s i b l e R e s o n a n c e S t a t e s
A d i r e c t a n a l y s i s of the equa t ions of mo t ion e n a b l e s us to d r a w the c o n c l u s i o n tha t the p r e s e n c e of n o n l i n e a r t e r m s of the s e c o n d o r d e r wi th r e s p e c t to the c o o r d i n a t e s and t h e i r d e r i v a t i v e s can l e a d to the a p p e a r a n c e of r e s o n a n c e s t a t e s fo r t he fo l lowing f r e q u e n c y r e l a t i o n s h i p s :
COb . ~, = 2cob; ~r = - ~ - , ~, = coo 4- 0~H; ),r - - Lp = cob.
We c o n s i d e r e a c h of the p o s s i b l e r e s o n a n c e s .
R e s o n a n c e of the Type X r = 2w t . The equa t ions fo r the e n v e l o p e s r e d u c e to the f o r m
@_ S(r~n2 \ dCr bb,b | . dD, dt t* C, - - 8-~-Z ] " dt
dCi @_ dDi hl "dt = - - I ~ Ci; dt ix --~ Dj
(~r .~(r)n2 \ Vbb~lb ~.
IX D, + 8-g~ ) '
( j = l , 2 . . . . . 6; ] # r ; 14=b).
(3.1)
Hence i t fo l lows tha t
C. = - - D, = S~q~ hi hi 4fL~h~ ; Ci = C f o e - ~ - t ; D~ = Djoe-~--f -t.
F o r t h i s s t a b l e r e s o n a n c e v i b r a t i o n s of the body t a k e p l ace ; the cond i t ions
123

s(r)n2 bb "l b x/= ~ sin 2o#; x~ = q~ sin od; x~ = 0,
w h e r e Sbb (r) is the coe f f i c i en t of the n o n l i n e a r t e r m Sbb(r)xt~ in Eq. (1.3), a r e fu l f i l l ed in t h e s e equa t ions .
If de tuning is to be t a k e n into accoun t , then we can use the e x p r e s s i o n
o{n q~ sin (2r ~ 5). (3.2) X ~ - ~
2 2 2
Resonance of the Type 2X r = w b. The equations for the envelopes have the following form:
(3.3)
dO,at (_~_ ~bq~o~oS~rtb ' ) dDtdt p 2ht = - - p D , - - , . . . Cr ; = - - D~
o r
R e s o n a n c e v i b r a t i o n s t ake p l a c e fo r the cond i t ion
R e s o n a n c e v i b r a t i o n s of the body a r e :
(0 b Xr = C,oe xt cos ~ t ;
Resonance of the Type Xr = Wb ~ WH"
S~)q O) b
• h~; xb=qbsinobt; x t = O . O} b
The equa t ions fo r the e n v e l o p e s a s s u m e the f o r m
h[.~_ S~t}qbqH ]. dCt h t tiC, = _ ~ C, = -- p ~- C;; dt 8i (r !r J' d t
dD, [_~ S~]~qn l. dDi hi - ~ - = - - ~ D" + 8 i ~ ) ] ' d-t = - - V 2 - o h
w h e r e Srb( r ) , SbH (r) a r e the c o e f f i c i e n t s of the n o n l i n e a r t e r m s Srb(r )xrXb; SbH(r)XbXH of Eq. (1.3).
F r o m the f o r m u l a s (3.4) we ob ta in
n i n~ S~nq, bqn . C t = Ctoe-~-~-t; D i = Dioe-~T t. Cr = -- Dr = 4ihr (~%::t=on) ,
In th i s c a s e the r e s o n a n c e v i b r a t i o n s a r e a s fo l l ows :
(3.4)
S~qbqn sin (r b 4- (on) t; x, 2(o b• h,
xb ----- qb sin r xn = qn sin r x i ---- O.
R e s o n a n c e of t he Type Xr =F Xp = r b. a n g u l a r c o o r d i n a t e s . F o r the s ake of be ing e x p l i c i t , we a s s u m e tha t
xr = x4 = O; xp = x 5 = ~; x b ~ x~ = ~ = q6 sin co d.
The fo l lowing equa t ions p l a y a d e c i s i v e r o l e in d e t e r m i n i n g th i s r e s o n a n c e :
i d
]=o i j
A r e s o n a n c e o f t h i s t y p e is of i n t e r e s t , when x r and Xp, x b a r e
(3.5)
124

The solut ion is sought in the f o r m
1 . t~, -- e-l~,t) 0 = C4e ~(z~+c~ .-~ Dle-"x'+~')t; ~ = "~i-qe te ' + Cse i~'t + D6e-rX't;
= DseZ( x,-~,~t q_ D,e -~(~,-'~.)t ; x i ~- CietXi t + Df e-i~it.
In the case under c o n s i d e r a t i o n the fol lowing equat ions a re obtained fo r the enve lopes :
dDt _~ dC4 Ix (h4Cl -~- g4C5); ~- - - (hiD4 "{- gtDs); dt 2 dt
dC~ dDs __
- - -~ (htC~ + g,Cl); = (h~D~ q- g~D,); dt = dt
dC, - - -~h ,Ci ; dO, - - - - ; h , D , . at = dt
(3.6)
Here
~ ] c k o46 / ~ 1 - - Xi-- Tte6 -~sJ"
The f i r s t four equat ions in p a i r s a r e b rough t into the f o r m
d~B dB IX~ dr" q- -~ (hi + h~) ~ + --4- (hih~ - - gigs) B = O, (3.7)
w h e r e B deno tes any of the v a r i a b l e s C4, C5, D4, D 5.
It is obvious that the exc i ta t ion condi t ion of the r e s o n a n c e being s tudied is
g4g~ > hth~
or
(i--b)~+c~ x-i-J i-- x,--Tte~ -~-j>h,h,. When this inequali ty is sa t i s f ied , the fol lowing r e s o n a n c e v ib ra t ions se t in:
--i(~,--{el)t O = e~t[Ate ax'+~')t + Ble -t(~,+~~ ap = e ~t [Ase iO'-~')t Jr- B~e ]; r = q6 s in test,
the r e m a i n i n g va lues x s = 0, w h e r e
• = F ]/-g4gs-- "~- (hi = hs).
R e s o n a n c e of the Type X r = co b. The dec i s ive ro le in shaping such a r e s o n a n c e is p layed by th i rd o r d e r non l inea r t e r m s of the f o r m :
s(r• 2 n(r) 2 . c,(r) 3 rrbXrX b, ~]i'bX, IX b , Obbb,r
In the p r e s e n c e of non l inea r t e r m s of the f o r m Srrb(r)x2rx b t h e equat ions fo r the enve lopes will be..
dt hrC, q- - ~ b o.b~, -- - - S,,bCrD, , 0 b
= _ ~ r o(r)n2 qb o(O~ h i . dDrdt 2 LhtDr ~- ~ orrOt-'r - - ,,rr~,.,,.,..,,.j, (s.s)
dCt dDl -~ hlCl; h#D i. dt = dt -- - - z
F r o m the f i r s t two equat ions for d C r / d t = 0, d D r / d t = 0 we can d e t e r m i n e the ampl i tudes of s t a t i ona ry v ib ra t ions dur ing a r e s o n a n c e
2hr% C, ---- Dr = o ( r ~ "
Orrbqb
125

But a s t a b i l i t y a n a l y s i s shows tha t th is so lu t i on is uns t ab l e ; t h e r e f o r e r e s o n a n c e v i b r a t i o n s cannot e x i s t
f o r X r = co b. The s t a t e Cr = Dr = Cj = Dj = 0 is s t a b l e , and the mo t ion of the s y s t e m h a s the f o r m
x o = q sin obt; x r = O; x i = O.
In the p r e s e n c e of n o n l i n e a r t e r m s of the f o r m S r r b ( r ) x ~ x b the equa t ions f o r t he e n v e l o p e s wRl be:
I (r) ]. dCt _ Ix dC, Ix h r G - q~ Si/bCiDi dt = - - -2 -%o ' W -- - - 2- h iC i;
, = - - qb S J ; ) b C i D i ; . = - hjDt" dD,dt - - hrO, ~ d.t
(3.9)
It is s e e n d i r e c t l y f r o m the equa t ions tha t the s t a t e of r e s t of the s y s t e m , fo r which D r = C r = Cj = Dj = 0, i s s t a b l e . The m o t i o n of the s y s t e m a s s u m e s the f o r m x b = qb sinCObt; Xr = 0; x] = 0. Consequen t ly , in the c a s e u n d e r c o n s i d e r a t i o n the r e s o n a n c e v i b r a t i o n s cannot t a k e p l a c e .
I t is not d i f f i cu l t to s e e tha t a l s o the p r e s e n c e of the t e r m s S r r b ( r ) x 2 x b and Sjjb(r)xjLxb s i m u l t a n e o u s l y in the equa t ion fo r x r d o e s no t a l t e r the c o n c l u s i o n tha t r e s o n a n c e v i b r a t i o n s fo r X r = Wb~lO not t ake p l a c e .
If , h o w e v e r , a n o n l i n e a r t e r m of the f o r m Sbbb( r )x~ e x i s t s in the equa t ion fo r Xr, t hen the equa t ions f o r the e n v e l o p e s wi l l be :
~ [ 3 S(,, _s ] dCi dc, _ h,c,--a;-, = - } h , c , ; d t ' = dt
dD, = _ ~ 3 (r, 31 [hrOr . " - ~ Sbvbqb],
dt
F r o m the f o r m u l a s (3.10) it fo l lows tha t
C, = D, = S~,)~fi; D = D M '~ �9
Stab le r e s o n a n c e v i b r a t i o n s a r e the fo l lowing:
dD, d t = - - ~ -hIDi"
Ct = Cioe - T t;
(3. lO)
3er as Obbb'* b
x, = - 4L, h, cos obt; xb ~- qb sin Olbt ; X i = 0. (3.11)
R e s o n a n c e of the Type X r = 3CO b. Th i s r e s o n a n c e i s connec t ed wi th the p r e s e n c e of n o n l i n e a r t e r m s of the f o r m Sbbb(r)x~. The equa t ion fo r the e n v e l o p e s a r e a s fo l lows :
dC,. hrCr + S ~ q ~ ; = - - h, Cj; dt = - - dt
I o(,) _s] . dD,dt = - - .~IX h , D , + ~ obbtqbJ, dDi I1_ = m -~. hrDi"
dt d ,
(3.12)
F r o m Eqs . (3.12) we o b t a i n
bbbqb . C i = Cjoe-~Tt; Di = D~ " ~ ' t . C , = D , = ~ 8k~hr '
Here the s t a b l e r e s o n a n c e v i b r a t i o n s t ake p l a c e
s(r) s bb~/b cos 3%t; % = % sin %t; x~ = O. Xr = 4krh"
R e s o n a n c e of the Type X r = 2A) i COb. The p r e s e n c e of n o n l i n e a r t e r m s of t he f o r m S j j b ( r ) x ~ b i s e s - s e n t i a l fo r the e x i s t e n c e of th i s r e s o n a n c e .
The equa t ions fo r the e n v e l o p e s a r e of the fo l lowing f o r m :
(r) dCr IX hrC , 4" Siiffl" r2.]" dCj p~ hiCi; d/ ~- --2X-~- ~'J' ~ = - - T (3.13)
-~I o(r, I dD, -r ~ r~21 dD~ ~-~ h,Di cY -- - - h,m, _ - - 2 ~ u i l : dt = .
126

1,./2
HI
I o
Ill
IT
~r
Fig . 2
21 r
N /I N _
2a r a~
It fo l lows d i r e c t l y f r o m Eqs. (3.13) tha t the only s t a b l e s t a t e of the s y s t e m is C r = D r = Cj = Dj = 0. The m o t i o n of the s y s t e m is d e s c r i b e d by the e x p r e s s i o n s
x~--qbsin~bt ; x , = O ; X i = O ,
i. e . , a r e s o n a n c e does not t ake p l a c e .
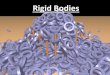
In o r d e r to ob ta in a c l e a r concep t about the r e l a t i v e d i s p o s i t i o n of r e s o n a n c e in t h r e e - d i m e n s i o n a l v i b r a t i o n s of a r i g i d body , we c o n s i d e r the s i ng l e r e s o n a t i n g c o o r d i n a t e Xr, a s s u m i n g tha t the f r e q u e n c y Wb of the p e r t u r b i n g f o r c e can a s s u m e any v a l u e s f r o m w b = 0 to w b = 2), r . In th i s f r e q u e n c y r a n g e t h e r e a r e a l l the r e s o n a n c e s c o n s i d e r e d above (Fig . 2). As we s e e , f r o m the twelve r e s o n a n c e s i n v e s t i g a t e d h e r e fou r w e r e found to be u n r e a l i z a b l e (they a r e shown by the d a s h e d l i n e s ) . T h r e e r e s o n a n c e s among the e igh t (Xr - Xp, Xr + )~p, 2Xr) a r e s i m i l a r to p a r a m e t r i c r e s o n a n c e s in t h e i r c h a r a c t e r .
In Fig . 2 we have r e p r e s e n t e d only the l o c a t i o n of the r e s o n a n c e s on the ax i s of the f r e q u e n c i e s w b of the p e r t u r b i n g f o r c e . The s y m m e t r i c shape of the r e s o n a n c e p e a k s is d e p i c t e d t e n t a t i v e l y . A m o r e d e - t a i l e d a n a l y s i s [5, 6, 7] shows tha t the a m p l i t u d e - f r e q u e n c y c h a r a c t e r i s t i c s of t h e s e r e s o n a n c e s have a s y m m e t r i c d i s t o r t e d s h a p e s , r e m i n d i n g one of the t y p i c a l r e s o n a n c e c u r v e s of n o n l i n e a r v i b r a t o r s wi th a sof t o r h a r d c h a r a c t e r i s t i c of the e l a s t i c f o r c e s .
N o n l i n e a r r e s o n a n c e p h e n o m e n a in t h r e e - d i m e n s i o n a l v i b r a t i o n s of r i g i d b o d i e s , a p p a r e n t l y , mus t be t a k e n as b e l o n g i n g to u n d e s i r a b l e p h e n o m e n a , s i n c e they can d i s t u r b an a s s u m e d n o n r e s o n a n c e r e g i m e of m o t i o n of the s y s t e m , and can l e a d to u n d e s i r a b l e c o n s e q u e n c e s . A r a d i c a l m e a n s of e l i m i n a t i n g n o n l i n e a r r e s o n a n c e p h e n o m e n a i s a cho ice o f p a r a m e t e r ~ a l u e s of the s y s t e m , such tha t the r e s o n a n c e r e l a t i o n s b e - t w e e n the f r e q u e n c i e s a r e not s a t i s f i e d , i . e . , such tha t the s y s t e m is "de tuned" f r o m n o n l i n e a r r e s o n a n c e s .
A n o t h e r e f fec t ive me thod of f ight ing n o n l i n e a r r e s o n a n c e s is to choose the s y s t e m p a r a m e t e r s wi th the cond i t ion that they s a t i s f y the s t a b i l i t y c r i t e r i a of the n o n p e r t u r b e d s t a t e of the c o o r d i n a t e s of the r i g i d body which a r e not a c t e d upon by the e x t e r n a l f o r c e s . The l a t t e r me thod s u c c e e d s even in t h o s e c a s e s w h e r e i t i s not p o s s i b l e to e l i m i n a t e the r e s o n a n c e r e l a t i o n s b e t w e e n the f r e q u e n c i e s , but i t is e f f ec t ive only fo r r e s o n a n c e s of the type 2~ r = Wb, ) ' r • Xp = w b. E x p e r i m e n t s c a r r i e d out on m e c h a n i c a l s y s t e m s , showed tha t the r e s o n a n c e s t a t e s f o r Xr • Xp = w b a r e much l e s s s e n s i t i v e to s m a l l v a r i a t i o n s in the p a - r a m e t e r s t h a n t h e r e s o n a n c e s t a t e s of the type 2), r = Wb.
io
2.
3.
4.
LITERATURE CITED
V . O . Kononenko , "On v i b r a t i o n s of r i g i d body c l o s e to the m a s s c e n t e r , " Izv. Akad . Nauk SSSR, Mekh. i M a s h i n o s t r o e n i e , N o . 4 (1963). V . O . Kononenko and R. F. Ganiev , "On n o n l i n e a r v i b r a t i o n s of a r i g i d body c a r r y i n g a sp inn ing r o t o r , " Izv. Akad . Nauk SSSR, M e k h . , No. 5 (1965). V . O . Kononenko and R. F. Ganiev , "On a t y p i c a l p r o b l e m of v i b r a t i o n i s o l a t i o n in a n o n l i n e a r f o r m u - l a t i o n , " Izv. Akad . Nauk SSSR, M a s h i n o s t r o e n i e , No. 3 (1965). V . O . Kononenko and R . F . Gan iev , "On the e f fec t of the v i b r a t o r y b a s e on the s t a b i l i t y of v i b r a t i o n s of a r i g i d body , " P r i k ] . M e k h . , 3, No. 7 (1967).
127

5o
6.
7m
8.
V.O. KononenkoandR. F.Ganiev, "On nonlinear r e sonances in th ree -d imens iona l v ibra t ions of a r igid body, " Inzh. Zh . , Mekh. Tverd . Tela , No. 4 (1967). V.O. Kononenko and R. F. Ganiev, "Determinat ion of ampli tudes in th ree -d imens iona l v ibra t ions of a r igid body in the case of s ingle- f requency resonances , " in: The Dynamics of Systems of Rigid and Liquid Bodies [in Russian] , AN UkrSSR, Kiev (1967). V.O. Kononenko and R. F. Ganiev, "Nonlinear th ree -d imens iona l v ibra t ions of an ar t i f ic ia l sate l l i te of E a r t h , ' Inzh. Zh . , Mekh. Tverd . Tela , No. 3 (1968). I .G. Malkin, Cer ta in P rob l em s of the Theory of Nonlinear Vibrat ions [in Russian] , Gostekhizdat , Moscow {1958).
128