Folie 1
Geometrical and Kinematical Precise Orbit Determination of
GOCEAkbar ShabanlouiInstitute of Geodesy and Geoinformation,
University of Bonn
7th October 2010Cologne, Germany
Titelmaster1Prof. Helfrich Thank you very much for your
introduction, Good afternoon ladies and Gentlemen and welcome to my
Ph.D presentation with the title of A new approach for a
kinematical-dynamical Determination of LEOs based on GNSS
observations.Outline2Precise Orbit Determination (POD)
principleGOCE Lagrange receiver (clock)Zero difference estimation
procedureResultsConclusionsGeometrical Precise Orbit Determination
(GPOD)Kinematical Precise Orbit Determination (KPOD)2What is the
concept of Precise Orbit Determination (POD) with GNSS observations
as main tools. In this case we use the GPS satellite orbits as
known parameters from IGS centers, and GPS-SST observations to
transfer these positions to LEO satellites. Our final goal in space
geodesy is determination of the Earth gravity field is to have a
kinematical representation of these LEO satellites. As you see
here, CHAMP orbit has been tracked with 4 GPS satellites to
determine its point-wise orbit.
Precise Orbit Determination (POD) 3Credit by ESA
3What is the concept of Precise Orbit Determination (POD) with
GNSS observations as main tools. In this case we use the GPS
satellite orbits as known parameters from IGS centers, and GPS-SST
observations to transfer these positions to LEO satellites. Our
final goal in space geodesy is determination of the Earth gravity
field is to have a kinematical representation of these LEO
satellites. As you see here, CHAMP orbit has been tracked with 4
GPS satellites to determine its point-wise orbit.
Precise Orbit Determination (POD)
methods4PODGeometricalKinematicalDynamicalPrecise Orbit
Determination (or POD) is classified in three main methods namely
geometrical, kinematical and dynamical methods. Geometrical-POD is
shown with blue colour and kinematical and dynamical with these
coloures. The transition from geometrical to kinematical or
kinematical to dynamical is possible. 4Geometrical Precise Orbit
Determination (GPOD)5
5What are tools to determine geometrical precise orbit? Our
observations as I mentioned are Only, just Only geometrical SST
observations between the GPSs and LEO satellites, with these SST
observations we want to transfer coordinates of GPS satellites to
LEO satellite (s). Our model to solve observation equations are,
Gauss-Markov model, and our unknowns are LEO satellite (s)
positions at the observed epochs namely point-wise epochs.
As you see in the given movies, only Geometrical SST
observations have been used, and LEO positions have been estimated
in the observed epochs, and representation of orbit isnt
continuous, but discrete.
Precise Orbit Determination (POD)
methods6PODGeometricalKinematicalDynamicalPrecise Orbit
Determination (or POD) is classified in three main methods namely
geometrical, kinematical and dynamical methods. Geometrical-POD is
shown with blue colour and kinematical and dynamical with these
coloures. The transition from geometrical to kinematical or
kinematical to dynamical is possible. 6Kinematical Precise Orbit
Determination (KPOD)7
7What are tools to determine Kinematical precise orbit? Our
observations as I mentioned are geometrical SST observations
between GPS and LEO satellites & given representation form of
LEO orbit, with these SST observations and given representation
form of orbit (short arc) we want to transfer coordinates of GPS
satellites to LEO satellite (s). Our model to solve observation
equations are, Gauss-Markov model, and our unknowns are LEO
satellite (s) representation parameters.
As you see in the given movie, Geometrical SST observations and
representation form have been used, and LEO representation
parameters (namely short arc parameters) have been estimated
therefore LEO positions can been estimated at every epochs, in
other word the representation of the LEO orbit is continuous.
Precise Orbit Determination (POD)
methods8PODGeometricalKinematicalDynamicalGeometrical POD :
point-wise, positionsKinematical POD : continous, positions,
velocities and accelerationsDynamical POD : continous, positions,
velocities and accelerations based on force function information!=
KPOD, e.g. BernPrecise Orbit Determination (or POD) is classified
in three main methods namely geometrical, kinematical and dynamical
methods. Geometrical-POD is shown with blue colour and kinematical
and dynamical with these coloures. The transition from geometrical
to kinematical or kinematical to dynamical is possible. 8GPS
LAGRANGE receiver onboard GOCE9
Credit by ESAPrecise Orbit Determination (or POD) is classified
in three main methods namely geometrical, kinematical and dynamical
methods. Geometrical-POD is shown with blue colour and kinematical
and dynamical with these coloures. The transition from geometrical
to kinematical or kinematical to dynamical is possible. 910GNSS
receiver on-board GOCE
Credit by ESA10In simulated case with GPOD to estimate the
absolute precise, 15 deg. cut-off angle has been applied to GPS-SST
observations. Zero difference carrier phase observations are used
in data processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
11GNSS receiver on-board GOCELAGRANGE (Laben GNSS Receiver for
Advanced Navigation, Geodesy and Experiments)
12 chanels, dual frequency (L1 and L2) GPS/GLONASSThe clock of
the GOCE LAGRANAGE receiver is not steered to integer seconds (free
clock system)Interpolation of SST observations (Data Screening with
triple differenced method)Interpolation of GPS orbits (Zero
differenced)
11In simulated case with GPOD to estimate the absolute precise,
15 deg. cut-off angle has been applied to GPS-SST observations.
Zero difference carrier phase observations are used in data
processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
12GNSS receiver on-board GOCE (Rinex SST)
Clock is not steerd to be integer12In simulated case with GPOD
to estimate the absolute precise, 15 deg. cut-off angle has been
applied to GPS-SST observations. Zero difference carrier phase
observations are used in data processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
13Clock jumps of receiver (Nov. 2009)GPS LAGRANGE receiver clock
behavior!
13In simulated case with GPOD to estimate the absolute precise,
15 deg. cut-off angle has been applied to GPS-SST observations.
Zero difference carrier phase observations are used in data
processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
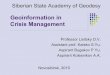
14Clock behavior of receiver (Nov. 2009)Clock jumps of 20 ms at
~27 hours can be seen
20 ms 14In simulated case with GPOD to estimate the absolute
precise, 15 deg. cut-off angle has been applied to GPS-SST
observations. Zero difference carrier phase observations are used
in data processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
15GPS visibility onboard GOCE (Nov. 2009)7 < Number of GPS
satellites (PRNs) < 12
15In simulated case with GPOD to estimate the absolute precise,
15 deg. cut-off angle has been applied to GPS-SST observations.
Zero difference carrier phase observations are used in data
processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
167 < Number of GPS satellites (PRNs) < 12GPS visibility
onboard GOCE (Nov. 2009)
16In simulated case with GPOD to estimate the absolute precise,
15 deg. cut-off angle has been applied to GPS-SST observations.
Zero difference carrier phase observations are used in data
processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
17Zero differenced GPOD
Credite by ESA17In simulated case with GPOD to estimate the
absolute precise, 15 deg. cut-off angle has been applied to GPS-SST
observations. Zero difference carrier phase observations are used
in data processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
Zero DifferenceOnly connection between LEO satellite and GPS
satellites,GeometricalOnly pure geometrical relations between LEO
and the GPS satellites have to be used, no force models and no
constraints,PreciseConsideration all effects on GPS-SST
observations and using precise GNSS satellites ephemerides.Zero
differenced GPOD1818At the beginning of presentation these three
precise orbit determinations methods, three concepts have to be
declared.At first Zero difference, Zero difference means that we
must use only SST observations between two sender and receiver.
Geometrical observation, is only observation, which it doesnt
depend on any dynamical or kinematical model.
What is the meaning of Precise, Precise means that we must
consider all systematical error sources on the sender,
observations, and on the receiver.Processing conceptGPODZero
differencing procedure (ZD)Phase measurementsCode
measurements1919The measurements are code (pseudo-range) and
carrier phase observations, we use these measurements in Zero
difference form, in another words, we use only these observations
without differencing in place. Then as I already mentioned, the
three main types of orbits can be determined.Precise Orbit
Determination (POD) 20
No troposphere effect at GOCE altitude (~250 km)First order
ionospheric effect eliminated with Ion-free linear
combinationAmbiguity term cannot be solved as Integer (real)!GPS
precise orbits (at 15 minutes) and clocks at 30 sec20What is the
concept of Precise Orbit Determination (POD) with GNSS observations
as main tools. In this case we use the GPS satellite orbits as
known parameters from IGS centers, and GPS-SST observations to
transfer these positions to LEO satellites. Our final goal in space
geodesy is determination of the Earth gravity field is to have a
kinematical representation of these LEO satellites. As you see
here, CHAMP orbit has been tracked with 4 GPS satellites to
determine its point-wise orbit.
21GPS Antenna offsets
21In simulated case with GPOD to estimate the absolute precise,
15 deg. cut-off angle has been applied to GPS-SST observations.
Zero difference carrier phase observations are used in data
processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
22GPS antenna offsets GPS receiver offset with respect to GOCE
reference frame is constantOffset with respect to center of mass
(COM) is slowly varing!L1 and L2 (L3) Phase Center Offsets (PCO)
are derived from IGS ANTEX (ANTenna Exchange format)Phase Center
Variation (PCV) can be empirical estimated based on carrier phase
residuals! (or ANTEX?)
22In simulated case with GPOD to estimate the absolute precise,
15 deg. cut-off angle has been applied to GPS-SST observations.
Zero difference carrier phase observations are used in data
processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
23Geometrical POD hl-SST
23To show how Geometrical orbit of the LEO is estimated, we
assume that 5 GPS satelites are available at every observation
epoch. For s1 as a first tracked GPS satellites, carrier phase
obseration equation can be written as
An the corresponding linearized model is,
If the same process is repeated for all tracke GPS satellites
from s1-s5, then the observation equations at time t can be
formulated as,
It is clear for the first epoch, the number of the unknows are
more than the observations (the observation system is
underdetermined). To solve the problme, the GPS-SST observations at
the next epochs must be added to the system. Or in the other words,
Geometrical Orbit determination with carrier phase observations
must be solved in a Batch processing.
For example if we add the observation equations from time t2 to
time tn, then the Gauss-Markov model for all tracked epochs can be
written as
The convergence of the unknowns can be achieved after a few
iterartions.
24Ground tracks of GPS, GOCE (2 Nov. 1 Rev.)
24In simulated case with GPOD to estimate the absolute precise,
15 deg. cut-off angle has been applied to GPS-SST observations.
Zero difference carrier phase observations are used in data
processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
25Short arc of GOCE (02 Nov. 2 Rev.)
30 minutes short arc (2009-11-02 02 00 00 - 02 30 00)25In
simulated case with GPOD to estimate the absolute precise, 15 deg.
cut-off angle has been applied to GPS-SST observations. Zero
difference carrier phase observations are used in data
processing.
Elevation weighting strategy has been applied.to weigthing
GPS-SST observations.
GPOD GOCE results26Estimated geometrical 3D Pos. - PSO
In the GPOD, geometrical configuration of the GPS satellites and
the number of them, play an important role in precision of
determined point-wise orbits. As you see here, at the top-left
figure , the PDOPS and the number of tracked GPS satellites are
shown (they are between 5 and 10 satellites), and at top-right GPS
satellite elevation angles are shown.
To test the GPOD in error case, the GPS-SST observations are
contaminated with white noise, the GPS-SST observations are
contaminated with 2 cm white noise. As you see, at the top-left
figure, the position differences are in the range of +- 2-3 cm and
the corresponding residuals of GPS-SST observations are in the
+-5-6 cm. 2627Kinematical POD
27In Kinematical Precise Orbit Determination, we want to connect
the geometrical orbit to represent a continous LEO orbit. To do
that
Equation of motion w.r.t self-adjoint differential operator can
be written as
The corresponding Integral equation of Fredholms type to this
differenetial equation can be formulated as
The definition of parameters
If simple newton operator is selected then differential equation
can be written as..
The corresponding Fredholms integral equation can be formulated
as...With the triangle integral kernel as
The Hammerstein solution of Fredholms intergral equation is
shown as.. With linear connection between the short arc boundaries
and Bilinear Integral kernel as If we insert the Integral kernel in
Freholms intergal equation and compare with Hammerstein solution,
then the amplitudes of sine function can be directly estimated.
As you see, the LEO short arc at every epoch is represented
through linear connection between the boudaries and the sine
function.
28Short arc representationLEO orbit can be represented as:
Gibbs effect!
Precision!
Solution?
fast convergence!or28Now in brief,
As a first method, a satellite shor arc is represented through
Fourier series, but Gibbs effect is a major problem in this
method.
As a alternative, a short arc is expressed through
Euler-Bernoullo polynomials, but precise of this form is the major
problem, Now what is the solution. A combination of Hybrid of these
two methods seems to be very flexible method to determine short
arcs.
Because of smoothness of the difference funtion of
Euler-Bernoulli term, convergence of remainder function is very
fast, and shows minimum Gibbs effect in the representation
step.29
Reference motion Euler-Bernoulli
Determination of Euler-Bernoulli coefficientsA satellite short
arc can be represented with the Euler-Bernoulli term up to degree J
as:29If we negelct remainder term, then Euler-Bernoulli series can
be demonstrated as a summation of Euler and Bernoulli term up to a
sufficient degree J.
For example, if a satellite short arc orbit is determined with
GPOD (Geometrical Precise Orbit Determination) procedure, then with
absolute positions as observations, observation equation is linear
with respect to Euler-Bernoulli coefficients. The unknows can be
determined in one step.
For example as you see KPOD GOCE results30Estimated kinematical
Pos. (J=4) PSO (Fourier index 30 and 40)
In the GPOD, geometrical configuration of the GPS satellites and
the number of them, play an important role in precision of
determined point-wise orbits. As you see here, at the top-left
figure , the PDOPS and the number of tracked GPS satellites are
shown (they are between 5 and 10 satellites), and at top-right GPS
satellite elevation angles are shown.
To test the GPOD in error case, the GPS-SST observations are
contaminated with white noise, the GPS-SST observations are
contaminated with 2 cm white noise. As you see, at the top-left
figure, the position differences are in the range of +- 2-3 cm and
the corresponding residuals of GPS-SST observations are in the
+-5-6 cm. 3031Conclusions and recommendationsNo gravity field and
no force models have been used in the Geometrical and Kinematical
modes (advantage).Kinematical POD can be used to recover the Earths
gravity field model based on the hl-SST methods, (GOCE SST
model).Empirical PCV results should improve POD of GOCE!GNSS-GOCE
satellites configuration and geometrical strength play an important
role in POD.Estimated Geometrical Precise Orbit can be used to
estimate kinematical POD of GOCE.31Thank youfor your attention!
32