Embed Size (px)
DESCRIPTION
Transformari geometrice in spatiu
Citation preview
1
Liceul Teoretic “Lucian Blaga”
Proiect la matematică: Transformări geometrice în spațiu. Aplicații
A elaborat: Dana RusuClasa: a 11-a “B”, profil real
Conducător științific: Anatolie Pisaru
Bălți,2014
2
Introducere:
Anterior am făcut conoștință cu diferite contexte a noțiunilor de: simetrie axială, simetrie centrală, asemănarea in plan, translație. De
asemenea, a fost definită congruența triunghiurilor.Congruența figurilor mai complicate însă, se definește cu ajutorul transformărilor
geometrice, care au o aplicație largă. De exemplu, pentru a elabora un program ce permite vizualizarea pe ecranul calculatorului a unei figuri
spațiale în mișcare, sînt necesare transformările geometrice.În această lucrare am introdus câteva noţuni legate de acestea care se
pot fi utile în viitor fiecaruia. Înainte de toate voi prezenta câteva aspecte teoretice, o mare parte din ele nefiind foarte interesante o parte fiind conţinute şi în manualele de liceu. Cititorul poate trece direct la probleme și, în măsura în care noţiunile din soluţii îi sunt
neclare, poate reveni asupra părţii teoretice.
3
Transformări geometrice
Fie P mulțimea punctelor unui plan.
Definiție. O funcție f :PP sau o restricție a unei asemenea funcții se numește transformarea geometrică.
Așadar, transformarea f este denumirea geometrică a funcției. Dacă F este o figură geometrică (o submulțime de pumcte ale planului P), atunci
F(F)={f(F)| F F}
Se numește Imaginea mulțimii F prin transformarea f (f(F) se mai numește transformarea figurii F prin f) f(F)= F” este transformatul punctului F prin f sau imaginea punctului F prin f)
Atunci când utilizăm transformările geometrice în rezolvarrea unor probleme de geometrie (aici discutăm translația si omoteria) trebuie să știm:
1) să precizăm elementele care definesc transformările geometrice.2) să construim imaginea unui punct printr-o transformare geometrică.3) să construim imaginea unei figuri printr-o transformare geometrică.4) să determinăm punctele care corespund printr-o transformare
geometrică.
4
Translația în planTranslaţia unei figuri geometrice reprezintă mişcarea tuturor componentelor ei pe o anumita distanţă si direcţie. Această transformare poate fi uşor caracterizată de un vector v = (dx, dy). Când vrem să translatăm un punct P(x, y) după v, e de ajuns să facem operaţia P’ = P + v. Astfel, P’ are cooronatele (x + dx, y + dy).
Definiție: Fie v⃗ un vector dat. Se numește translție de vector v⃗ , funcția care asociază fiecărui punct M din planul P astfel încât: M⃗M ' = v⃗
Deci T v⃗ (M) = M’. M⃗M '= v ; M’ este imaginea lui M prin T v⃗ .
v⃗ M’
M
Proprietăţi:
1. păstrează distanţele;2. pastrează orientarea poligoanelor (adică, dacă vârfurile poligonului
sunt parcurse în ordine trigonometrică, atunci vârfurile corespondente din poligonul transformat vor fi şi ele în ordine trigonometrică);
3. păstrează unghiurile;4. o dreaptă va fi transformată în altă dreaptă paralelă cu prima;5. înafară de translaţia trivială de vector v = (0, 0), această transformare
nu are puncte fixe (adică orice punct va fi transformat într-un punct diferit);
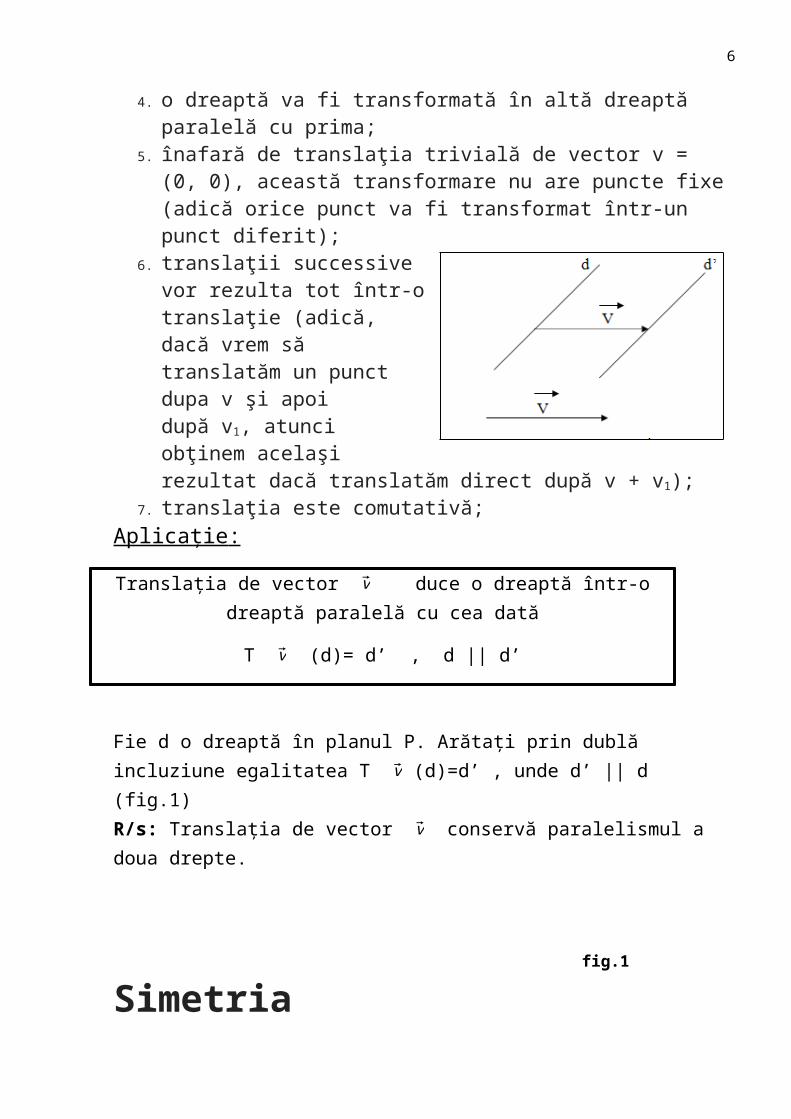
6. translaţii successive vor rezulta tot într-o translaţie (adică, dacă vrem să translatăm un punct dupa v şi apoi după v1, atunci obţinem acelaşi rezultat dacă translatăm direct după v + v1);
7. translaţia este comutativă;Aplicație :
5
Translația de vector v⃗ duce o dreaptă într-o dreaptă paralelă cu cea dată
T v⃗ (d)= d’ , d || d’
Fie d o dreaptă în planul P. Arătați prin dublă incluziune egalitatea T v⃗ (d)=d’ , unde d’ || d (fig.1)R/s: Translația de vector v⃗ conservă paralelismul a doua drepte.
Simetria
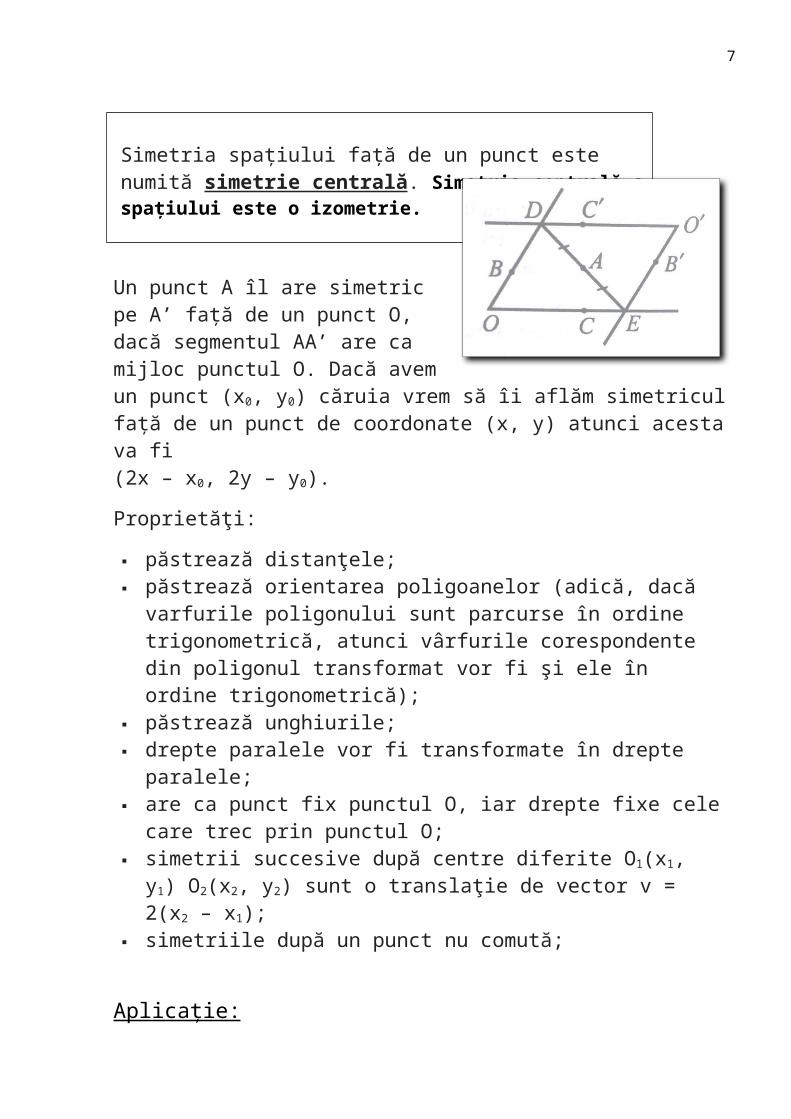
Simetria spațiului față de un punct este numită simetrie centrală. Simetria centrală a spațiului este o izometrie.
Un punct A îl are simetric pe A’ față de un punct O, dacă segmentul AA’ are ca mijloc punctul O. Dacă avem un punct (x0, y0) căruia vrem să îi aflăm simetricul față de un punct de coordonate (x, y) atunci acesta va fi (2x – x0, 2y – y0).
Proprietăţi:
păstrează distanţele; păstrează orientarea poligoanelor (adică, dacă varfurile poligonului
sunt parcurse în ordine trigonometrică, atunci vârfurile corespondente din poligonul transformat vor fi şi ele în ordine trigonometrică);
păstrează unghiurile; drepte paralele vor fi transformate în drepte paralele; are ca punct fix punctul O, iar drepte fixe cele care trec prin punctul O; simetrii succesive după centre diferite O1(x1, y1) O2(x2, y2) sunt o
translaţie de vector v = 2(x2 – x1); simetriile după un punct nu comută;
fig.1
6
Aplicație:
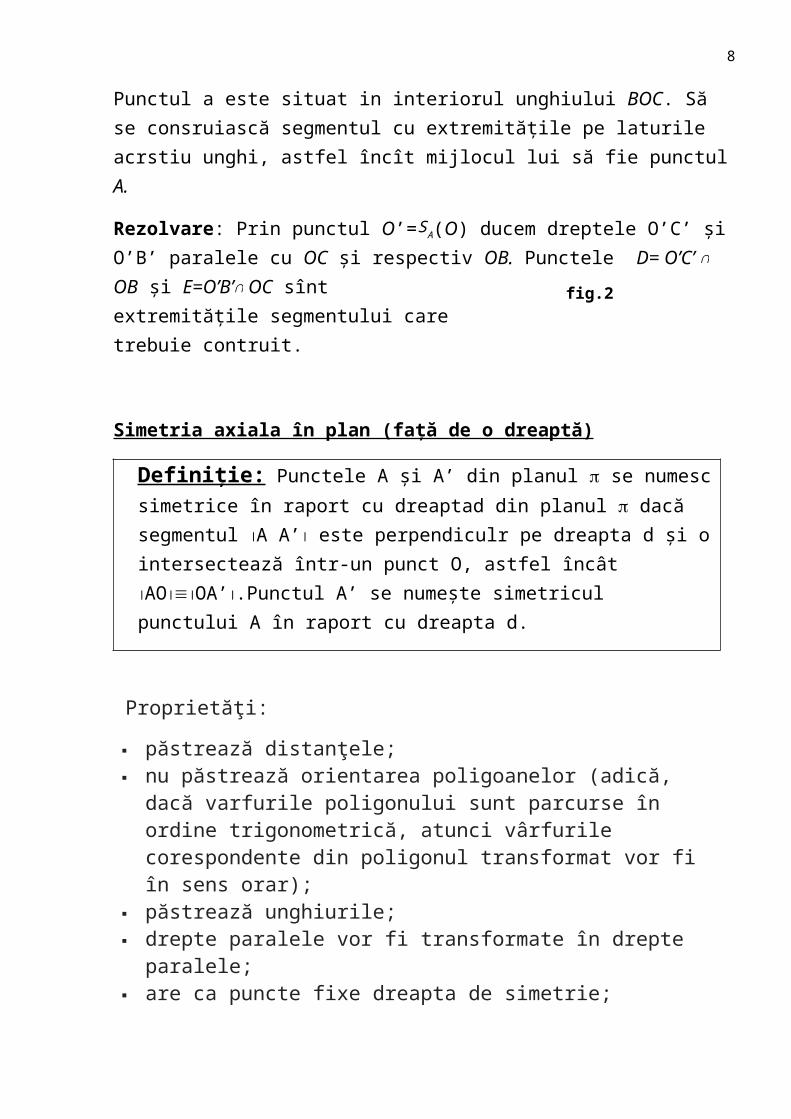
Punctul a este situat in interiorul unghiului BOC. Să se consruiască segmentul cu extremitățile pe laturile acrstiu unghi, astfel încît mijlocul lui să fie punctul A.
Rezolvare: Prin punctul O’=SA(O) ducem dreptele O’С’ și O’B’ paralele cu OC și respectiv OB. Punctele D= O’C’ ∩ OB și E=O’B’∩ OC sînt extremitățile segmentului care trebuie contruit.
Simetria axiala în plan (față de o dreaptă)
Definiție: Punctele A și A’ din planul se numesc simetrice în raport cu dreaptad din planul dacă segmentul A A’ este perpendiculr pe dreapta d și o intersectează într-un punct O, astfel încât AOOA’.Punctul A’ se numește simetricul punctului A în raport cu dreapta d.
Proprietăţi:
păstrează distanţele; nu păstrează orientarea poligoanelor (adică, dacă varfurile poligonului
sunt parcurse în ordine trigonometrică, atunci vârfurile corespondente din poligonul transformat vor fi în sens orar);
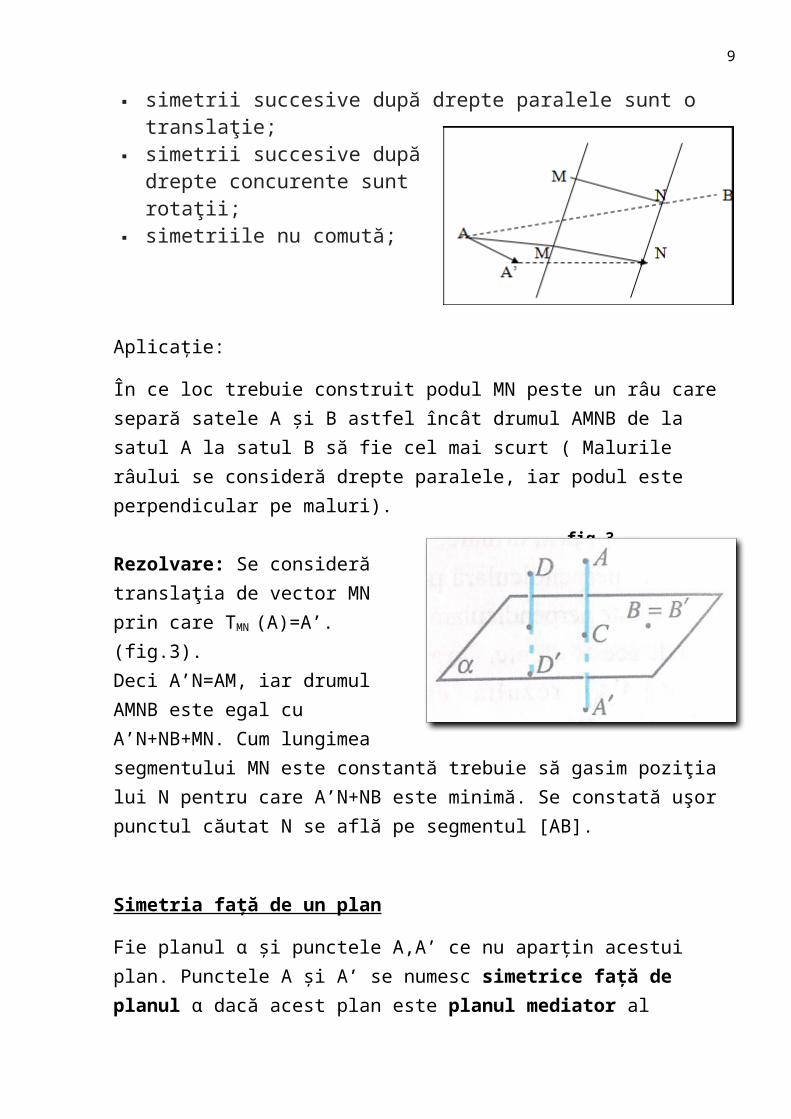
păstrează unghiurile; drepte paralele vor fi transformate în drepte paralele; are ca puncte fixe dreapta de simetrie; simetrii succesive după drepte paralele sunt o translaţie; simetrii succesive după drepte concurente sunt rotaţii; simetriile nu comută;
Aplicație:
fig.2
7
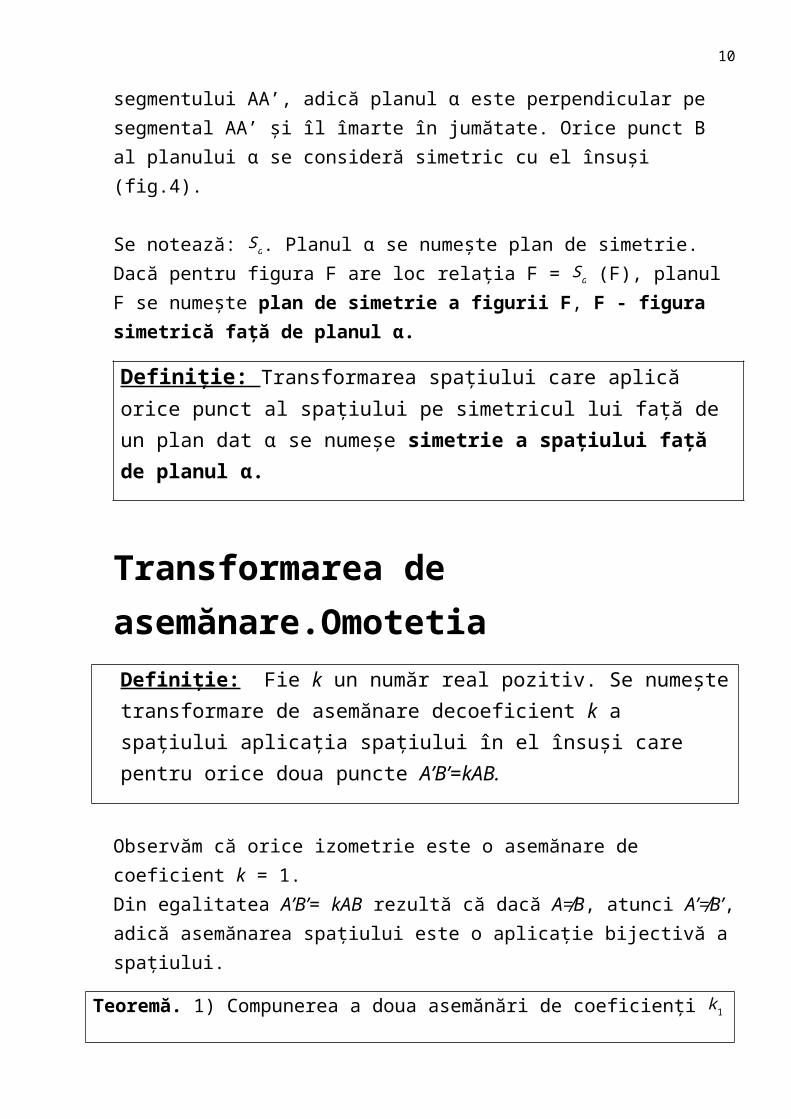
În ce loc trebuie construit podul MN peste un râu care separă satele A și B astfel încât drumul AMNB de la satul A la satul B să fie cel mai scurt ( Malurile râului se consideră drepte paralele, iar podul este perpendicular pe maluri).
Rezolvare: Se consideră translaţia de vector MN prin care TMN (A)=A’.(fig.3). Deci A’N=AM, iar drumul AMNB este egal cu A’N+NB+MN. Cum lungimea segmentului MN este constantă trebuie să gasim poziţia lui N pentru care A’N+NB este minimă. Se constată uşor punctul căutat N se află pe segmentul [AB].
Simetria față de un plan
Fie planul α și punctele A,A’ ce nu aparțin acestui plan. Punctele A și A’ se numesc simetrice față de planul α dacă acest plan este planul mediator al segmentului AA’, adică planul α este perpendicular pe segmental AA’ și îl îmarte în jumătate. Orice punct B al planului α se consideră simetric cu el însuși (fig.4).
Se notează: Sα. Planul α se numește plan de simetrie. Dacă pentru figura F are loc relația F = Sα (F), planul F se numește plan de simetrie a figurii F, F - figura simetrică față de planul α.
Definiție: Transformarea spațiului care aplică orice punct al spațiului pe simetricul lui față de un plan dat α se numeșe simetrie a spațiului față de planul α.
Transformarea de asemănare.OmotetiaDefiniție: Fie k un număr real pozitiv. Se numește transformare de asemănare decoeficient k a spațiului aplicația spațiului în el însuși care pentru orice doua puncte A’B’=kAB.
Observăm că orice izometrie este o asemănare de coeficient k = 1.
fig.3
fig.4
8
Din egalitatea A’B’= kAB rezultă că dacă A≠B, atunci A’≠B’, adică asemănarea spațiului este o aplicație bijectivă a spațiului.
Teoremă. 1) Compunerea a doua asemănări de coeficienți k 1 și k 2 este o asemănare se coeficient k 1k2.2) Transformarea inversă asemănării de coeficient k este o asemănare de
coeficient 1k .
Două figuri se numesc asemenea dacă există o transformare de asemănare a spațiului care aplică una din aceste figuri pe cealaltă. Congruența figurilor este un caz particular al asemănării (k = 1).
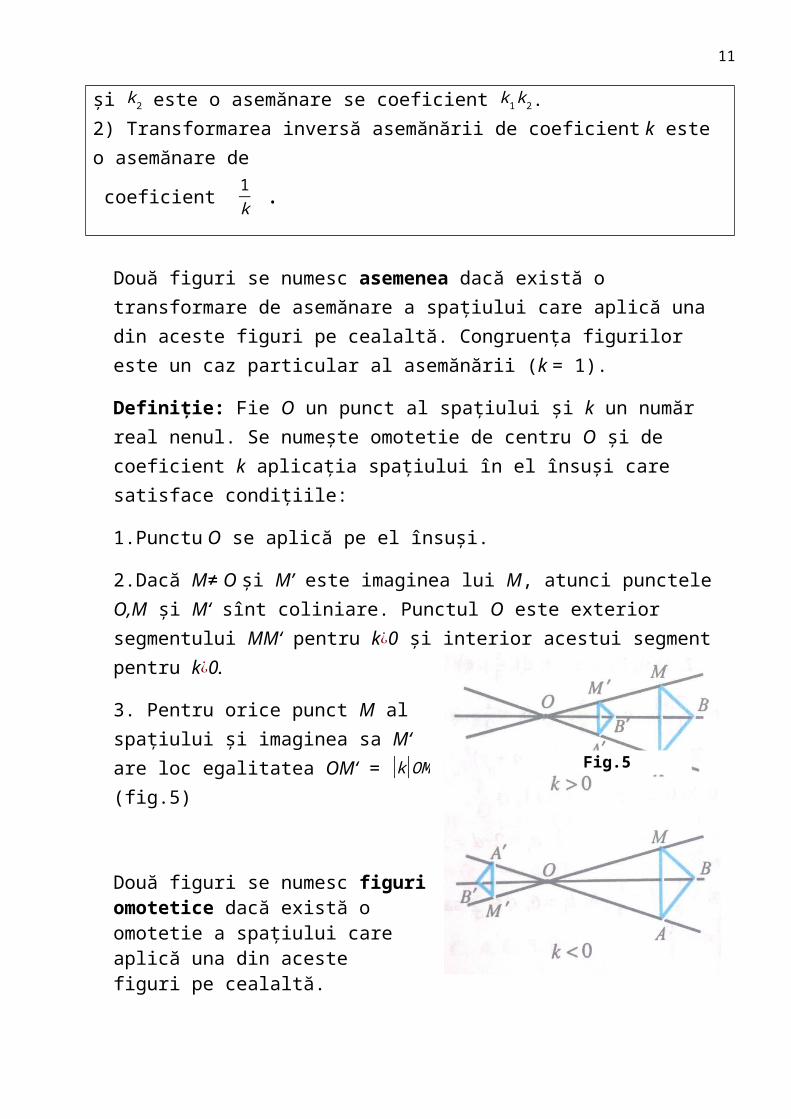
Definiție: Fie O un punct al spațiului și k un număr real nenul. Se numește omotetie de centru O și de coeficient k aplicația spațiului în el însuși care satisface condițiile:
1.Punctu O se aplică pe el însuși.
2.Dacă M≠ O și M’ este imaginea lui M, atunci punctele O,M și M‘ sînt coliniare. Punctul O este exterior segmentului MM‘ pentru k¿0 și interior acestui segment pentru k¿0.
3. Pentru orice punct M al spațiului și imaginea sa M‘ are loc egalitatea OM‘ = |k|OM (fig.5)
Două figuri se numesc figuri omotetice dacă există o omotetie a spațiului care aplică una din aceste figuri pe cealaltă.Omotetie este un caz particular al asemănării.Proprietăţi:
nu păstrează distanţele; păstrează orientarea poligoanelor; păstrează unghiurile; drepte paralele vor fi transformate
în drepte paralele, iar transformata unei drepte va fi paralelă cu dreapta;
Fig.5
9
are ca punct fix centrul de omotetie; două omotetii succesive H1(O1,
k1) şi H2(O2, k2) se compun într-o translaţie sau omotetie H3(O3, k1 + k2);
în general omotetiile nu comută;
RotaţiaAceasta este o transformare care roteşte punctele în sens trigonometric în jurul unui punct numit centru de rotaţie după un unghi fixat numit unghi de rotaţie. Dacă avem rotaţia de centru O(x0, y0) şi unghi α, atunci imaginea unui punct P(x, y) va fi P’(x0 + (x – x0) ∙ cos α - (y – y0) ∙sin α, y0 + (x – x0) ∙ ∙sinα+ (y – y0) ∙cos α).
Proprietăţi:
păstrează distanţele; păstrează orientarea poligoanelor; păstrează unghiurile; drepte paralele vor fi transformate în drepte paralele; dacă nu este o rotaţie trivială de unghi 0 atunci are ca punct fix centrul
de rotaţie; nu are drepte fixe, dar are cercuri fixe centrate în centrul de rotaţie; două rotaţii succesive R1(O1, α) şi R2(O2, β) se compun într-o translaţie
sau o rotaţie R3(O3, α + β); în general rotaţiile nu comută;
Se notează: Rlφ. Se consideră că direcția rotației (în planul α) de la punctul A la A’ este aceiași pentru toate punctele A dacă privim într-un sens al dreptei l (fig.6). Dreaptă l se numește axa de rotație, iar unghiul φ, unghi de rotație. Dacă Rlφ(F)=F, atunci dreapta l este o axă de rotație a a figurii F. Se poate arăta că rotația axială este o izometrie.
10
Cercul, discul, sfera, cilindrul, conul, sînt figure de rotație.
ConcluziiÎn conținutul lucrării sunt prezentate diverse metode unde sunt aplicate transformări geometrice în spațiu și anume la simetria centrală, simetria axială, simetria față de un plan, translație, omotetie și rotația axială. Cercetînd transformările geometrice descrise anterior vom fi capabili să construim imaginile unor figuri cu metodele studiate, saă utilizăm materialul propus în lucrare la rezolvarea problemelor.
Bibliografie1. http://www.infoarena.ro/transformari-geometrice#aplicatia-1 2. http://ro.math.wikia.com/wiki/Transformare_geometric%C4%83
Fig.6
11
3. http://webbut.unitbv.ro/Carti%20on-line/GD/GEOME/6.Metodele %20geometriei%20descriptive..pdf
4. http://www.math.uaic.ro/~manastas/geomsup/ cap.3.transfgeom.pdf
5. „Transformări geometrice”, D.Smaranda, N.Soare. Editura Academiei Republicii Socialiste Romania 1988.
6. “Mică enciclopedie matematică”, Editura Tehnică, București, 1980.7. “Matematică” cl. a XI-a Editura Prut International 2010





























