Embed Size (px)
DESCRIPTION
Damit der fertige Tunnel am Ende seine Funktion erfüllen kann, muss er exakt so liegen, wie er geplant wurde. Einfluss auf die Vortriebsgenauigkeit haben Trassen- und Gradientenplanung, Baugrund- und Grundwasserverhältnisse, das gewählte Vortriebsverfahren, Einwirkungen und Widerstände auf die Vortriebsmaschine sowie die begleitende Bauüberwachung und Kontrolle. Das Handbuch ist Grundlage für die Bauvorbereitung, die Vermessung und Bauüberwachung von Schildvortrieben und gilt gleichermaßen für Rohr- und Tübbingvortriebe, die mit gesteuerten Schildmaschinen durchgeführt werden. Bauherren, Planer, Prüfer und Ausführenden werden dieses Handbuch als technischen Leitfaden für einen sicheren und zielgenauen Vortrieb nutzen. Das Buch ist darüber hinaus auch als Lehrbuch im Rahmen der Aus- und Weiterbildung geeignet.
Citation preview

Damit der fertige Tunnel seine Funktion erfüllen kann, muss er exakt so
liegen, wie er geplant wurde. Ein� uss auf die Vortriebsgenauigkeit haben
Trassen- und Gradientenplanung, Baugrund- und Grundwasserverhält-
nisse, das gewählte Vortriebsverfahren, Einwirkungen und Widerstände
auf die Vortriebsmaschine sowie die begleitende Bauüberwachung und
Kontrolle. Das Handbuch ist Grundlage für die Bauvorbereitung, die Ver-
messung und Bauüberwachung von Schildvortrieben und gilt gleicher-
maßen für Rohr- und Tübbingvortriebe, die mit gesteuerten Schildmaschi-
nen durchgeführt werden. Bauherren, Planer, Prüfer und Ausführende
werden dieses Handbuch als technischen Leitfaden für einen sicheren und
zielgenauen Vortrieb nutzen. Das Buch ist darüber hinaus auch als Lehr-
buch im Rahmen der Aus- und Weiterbildung geeignet.
Prof. Dr.-Ing. Dietmar Placzek, Gesellschafter der ELE Beratende Ingenieure GmbH, Erd-
baulaboratorium Essen, ist Mitglied des Deutschen Ausschusses für Unterirdisches Bauen
(DAUB), Mitglied des Vorstands der Deutschen Gesellschaft für Geotechnik (DGGT), Pro-
fessor an der Universität Duisburg-Essen, öffentlich bestellter und vereidigter Sachver-
ständiger und Prüfsachverständiger.
Dipl.-Ing. Rolf Bielecki, Ph.D. ist Vorsitzender des Vorstands der Wissenschaftsstiftung
Deutsch-Tschechisches Institut (WSDTI) in Hamburg und Lehrbeauftragter für Unterirdi-
sches Bauen der Ostfalia Hochschule für angewandte Wissenschaften, Campus Suderburg.
Dipl.-Ing. Manfred Messing, Gesellschafter und Geschäftsführer der VMT GmbH Gesell-
schaft für Vermessungstechnik, Bruchsal, war maßgeblich an der Entwicklung automati-
sierter Navigations- und Datenmanagementsysteme für den Tunnelbau beteiligt.
Frank Schwarzer, freiberu� icher Berater für Microtunnelling und Rohrvortriebe, war maß-
geblich beteiligt an der Entwicklung von Kreiselkompass gestützten Navigationssystemen
und verfügt über langjährige Erfahrungen auf dem Gebiet der Separationstechnik.
www.ernst-und-sohn.de
ISBN 978-3-433-03114-8
Zielg
enau
bis an
s En
de d
es Tun
nels
D. P
laczek, R
. Biele
cki, M. M
essing
, F. S
chw
arzer
Dietmar PlaczekRolf BieleckiManfred MessingFrank Schwarzer
Zielgenau bis ans Ende des TunnelsHandbuch für die Bauvorbereitung, Vermessung
und Bauüberwachung von Schildvortrieben

Vorwort
Der maschinelle Tunnelbau hat in den zurückliegenden Jahren immer mehr an Be-deutung gewonnen, auch dort, wo bislang bergmännische Bauweisen weit verbreitetwaren. Damit einher ging in den letzten 10 bis 15 Jahren eine rasante Entwicklungder Automatisierung und Digitalisierung, um ein Höchstmaß an Genauigkeit undGeschwindigkeit bei Schildvortrieben ohne menschliche Fehlerquellen mit hoher Si-cherheit für Mineure und Umfeld zu erreichen.
Doch trotz umfassender Mechanisierung stellen unterirdische Schildvortriebe auchheute noch besondere Herausforderungen beim sehr komplexen Tunnelbau dar. Die-se exemplarisch für die Bauvorbereitung (Planung und Ausschreibung), Vermessungund Bauüberwachung erstmalig zusammengefasst zu erläutern, soll Aufgabe diesesBuches sein. Es wurde u. a. aus der Fülle gemachter Erfahrungen für Bauherrn, Pla-ner, Bauausführende sowie für den Ingenieurnachwuchs geschrieben und wird derweiteren Forschung und Entwicklung wichtige Hinweise geben.
Das vorliegende Buch stellt die unterschiedlichen Anforderungen an den Schildvor-trieb dar, weist auf Risiken hin und bietet von der Bauvorbereitung bis zur Bauüber-wachung Lösunghilfen an. Dabei stehen im Fokus die Anforderungen aus der Nut-zung, dem Baugrund, den unterschiedlichen maschinellen Vortriebsverfahren, derQualität der Infrastrukturbauwerke, der Standsicherheit und – nicht zu vergessen –
der Vermessung. Daneben enthält es als Handbuch Empfehlungen für die Ausschrei-bung und kann so als Leitfaden für einen zielgenauen Schildvortrieb dienen.
Große faszinierende Tunnelbauaufgaben stehen in der Zukunft an. Sie zu bewälti-gen, erfordert eine fundiertes Wissen und damit eine internationale Zusammenarbeitvon Experten aus verschiedensten Fachrichtungen, so z. B. auf den Gebieten Bau,Geologie, Hydrologie, Geotechnik, Maschinenbau, Geodäsie, Elektrik, TechnischeInformatik, Umweltschutz und Sicherheitstechnik. Grund genug, im Buch begleiten-de Themen zielgenauer Schildvortriebe teils auch im Anhang aufzunehmen.
Danksagung
Die Autoren bedanken sich bei der Emschergenossenschaft Essen dafür, dass sie beieinem der größten Infrastrukturprojekte Europas, der Umgestaltung der Emscher, imRahmen eines Arbeitskreises ihre Erfahrungen einbringen konnten und dafür, dasseinige ihrer für dieses Projekt entwickelten Ergebnisse in diesem Buch Eingang fin-den dürfen.
Februar 2016 Dietmar Placzek, Rolf Bielecki, Manfred Messing, Frank Schwarzer

Inhaltsverzeichnis
1 Einführung ...................................................................................... 1
2 Planungsgrundlagen ....................................................................... 52.1 Anforderungen aus der Nutzung der Tunnel ....................................... 52.2 Anforderungen aus Genehmigungen ................................................... 62.3 Anforderungen aus dem Baugrund und dem Grundwasser .................. 62.3.1 Vorbemerkungen ............................................................................... 62.3.2 Lockergesteine .................................................................................. 72.3.3 Steine, Findlinge ................................................................................ 102.3.4 Festgestein ........................................................................................ 102.3.5 Künstliche Bauhindernisse ................................................................. 122.3.6 Baugrundeinflüsse auf den Vortrieb ................................................... 132.3.7 Anforderungen an den Vortrieb .......................................................... 242.4 Anforderungen aus den maschinellen Vortriebsverfahren .................... 262.4.1 Übersicht über die verschiedenen Vortriebsverfahren .......................... 262.4.2 Unbemannte steuerbare Vortriebsverfahren ......................................... 262.4.3 Bemannte steuerbare Vortriebsverfahren ............................................. 282.4.4 Erfahrungswerte für den Einsatz der Verfahren ................................... 312.5 Anforderungen an die Qualität unterirdischer
Infrastrukturbauwerke ........................................................................ 332.6 Anforderungen aus der Vermessung ................................................... 332.6.1 Realisierbarkeit .................................................................................. 332.6.2 Erhebung notwendiger Unterlagen ...................................................... 352.6.3 Bestandsvergleich (Ortsbegehungen) und Bestandsaufnahme ............... 352.7 Anforderungen an die Standsicherheit ................................................ 362.7.1 Stützung der Ortsbrust ....................................................................... 362.7.2 Mindestüberdeckung .......................................................................... 382.7.3 Setzungen/Hebungen ......................................................................... 392.8 Anforderungen aus dem Umweltschutz ............................................... 39
3 Planung ........................................................................................... 413.1 Vorbemerkungen ............................................................................... 413.2 Ergänzende Bestandsaufnahme zur Vervollständigung
der Planunterlagen ............................................................................. 423.3 Planung des Grundlagennetzes ........................................................... 423.3.1 Grundlagennetz (GLN) ...................................................................... 423.3.2 Baustellennetz ................................................................................... 433.3.3 Portalnetz .......................................................................................... 443.3.4 Überprüfung und Neubestimmung von Festpunkten ............................ 453.3.5 Grundsätzliche Umstände zur Erzielung des gewünschten Ergebnisses 45

3.3.6 Vorgaben für die Ausführung der Vermessungsarbeiten ...................... 463.4 Trassen- und Gradientenplanung – Parameter der Achsplanung ........... 473.4.1 Design und Begriffsdefinition ............................................................ 473.4.2 Trasse ............................................................................................... 483.4.3 Gradiente .......................................................................................... 493.5 Feststellung der Baugrund- und Grundwasserverhältnisse .................... 503.6 Ermittlung der äußeren Einwirkungen auf den Tunnel ........................ 533.7 Berechnung der Bewegungen an der Geländeoberfläche ...................... 543.8 Beweissicherung ................................................................................ 573.8.1 Anforderungen an die Beweissicherung .............................................. 573.8.2 Festlegung des Einflussbereichs der Baumaßnahme ............................ 573.8.3 Zustandserfassung vorhandener Anlagen, der Geländeoberfläche
und des Baugrunds ............................................................................ 583.8.4 Dokumentation der Ergebnisse der Beweissicherung ........................... 623.9 Tunnelbautechnische Planung ............................................................ 623.10 Tunnelbautechnische Prüfung ............................................................. 633.11 Auswahl des Vortriebsverfahrens ....................................................... 643.12 Festlegung der Ausbauqualität ............................................................ 863.13 Risikobewertung „EG-Tunnelrichtlinie“ .............................................. 86
4 Maschinen- und Verfahrenstechnik .............................................. 874.1 Hinweise für die Baugruben und deren Einrichtungen
beim Rohrvortrieb ............................................................................. 874.1.1 Startbaugruben .................................................................................. 964.1.2 Zwischenbaugruben ........................................................................... 984.1.3 Zielbaugruben ................................................................................... 994.2 An-, Aus-, Durch- und Einfahren der TBM ........................................ 1004.2.1 Überprüfung der Einsatzfähigkeit der TBM ........................................ 1004.2.2 Presseinrichtung und Widerlager bei Rohrvortrieben ........................... 1014.2.3 Aus- und Einfahrdichtungen ............................................................... 1024.2.4 Positionieren und Anfahren der TBM ................................................. 1034.2.5 Steuerbarkeit ..................................................................................... 1044.3 Hinweise für den Tunnelausbau ......................................................... 1054.3.1 Vortriebsrohre ................................................................................... 1054.3.2 Tübbingausbau .................................................................................. 1064.4 Vortriebsarbeiten ............................................................................... 1074.4.1 Personaleinsatz während des Vortriebs ............................................... 1074.4.2 Überschnitt/Ringspalt ......................................................................... 1094.4.3 Vortriebskräfte ................................................................................... 1124.4.4 Rohrschmierung ................................................................................ 1134.4.5 Haltungslängen .................................................................................. 1154.4.6 Zwischenpressstationen ...................................................................... 1154.4.7 Kurvenradien ..................................................................................... 1184.4.8 Verrollungssicherung ......................................................................... 1194.4.9 Sicherheitstechnik .............................................................................. 1204.4.10 Vortriebsbegleitende Baugrunderkundung ........................................... 121
InhaltsverzeichnisVIII

4.5 Navigationstechnik ............................................................................ 1234.5.1 Einführung ........................................................................................ 1234.5.2 Navigationssysteme für Microtunnelling/Rohrvortrieb ......................... 1274.5.3 Navigationssysteme für Vortriebe mit Tübbingausbau ......................... 1374.6 Spezifikation des Datenerfassungssystems
für den Rohrvortrieb .......................................................................... 1494.6.1 Aufzuzeichnende Parameter in Abhängigkeit der verwendeten Geräte
und Verfahren ................................................................................... 1504.6.2 Anforderungen an Erfassung, Anzeige, Sicherung usw.
der relevanten Vortriebsparameter ...................................................... 1594.6.3 Definition von Minimal-, Mittel- und Maximalwerten ......................... 1604.6.4 Datenerfassung beim Einsatz von Zwischenpressstationen ................... 1604.6.5 Bereitstellung der Daten zur Auswertung, Ausgabe, Dokumentation,
Weiterverarbeitung ............................................................................ 1604.6.6 Schnittstellen ..................................................................................... 1614.7 Steuerungstechnik .............................................................................. 1614.7.1 Aufgaben der Steuerungstechnik/Steuerungssysteme
für den Rohrvortrieb (Trassierung, Maschinentechnik, Rohrdimension,Automatisierungsgrad, Notprogramme) ............................................... 161
4.7.2 Anordnung der Steuereinrichtung ....................................................... 1624.7.3 Kurskorrekturen ................................................................................. 1634.7.4 Kontrollmöglichkeiten ........................................................................ 1744.7.5 Automatische Steuersysteme .............................................................. 1754.7.6 Verrollungskompensierte Steuerung .................................................... 1764.8 Separations- und Aufbereitungstechnik bei Schildvortrieben
mit flüssigkeitsgestützter Ortsbrust ..................................................... 1774.8.1 Vorbemerkungen ............................................................................... 1774.8.2 Art und Umfang des Separationskonzepts ........................................... 1794.8.3 Zusammenspiel der Komponenten ...................................................... 1864.8.4 Zusammenfassung ............................................................................. 187
5 Vermessung .................................................................................... 1895.1 Bezugssysteme – geodätisches Datum ................................................ 1905.1.1 Geodätisches Datum bei kleinräumigen Projekten ............................... 1905.1.2 Geodätisches Datum bei großräumigen Projekten ................................ 1915.1.3 Definition des Bezugssystems ............................................................ 1925.1.4 Projektion .......................................................................................... 1935.1.5 Streckenreduktionen ........................................................................... 1935.2 Vorhandenes Lage- und Höhennetz .................................................... 1945.2.1 Lagereferenznetz ................................................................................ 1945.2.2 Höhenreferenznetz ............................................................................. 1955.2.3 Referenznetzkonfiguration .................................................................. 1955.3 Vorgaben für die Ausführung der Vermessungsarbeiten ...................... 1975.3.1 Einzusetzendes Personal des Auftragnehmers ..................................... 1985.3.2 Feldbuch ........................................................................................... 198
IX

5.4 Oberirdische Vermessungsarbeiten(Kombinierte Lage- und Höhenvermessung) ....................................... 199
5.4.1 GNSS-Messungen .............................................................................. 1995.4.2 Tachymetrie ...................................................................................... 2065.5 Oberirdische Vermessungsarbeiten (Höhenvermessung) ...................... 2145.5.1 Trigonometrische Höhenübertragung .................................................. 2145.5.2 Geometrisches Nivellement ................................................................ 2155.5.3 Hydrostatisches Nivellement .............................................................. 2185.6 Unterirdische Vermessungsarbeiten .................................................... 2185.6.1 Grundsätzliches ................................................................................. 2185.6.2 Refraktion ......................................................................................... 2195.6.3 Untertägige Lagevermessung .............................................................. 2215.6.4 Auswertung von Vermessungsergebnissen .......................................... 2275.6.5 Durchschlagsprognose ....................................................................... 2285.6.6 Unabhängige durchgreifende Kontrolle der horizontalen
Punktbestimmung mithilfe geodätischer Kreiselmessung ..................... 2285.6.7 Untertägige Höhenbestimmung .......................................................... 2335.7 Messungen in Start- und Zielbaugrube ............................................... 2355.7.1 Punkt- und Richtungsübertragung ....................................................... 2365.7.2 Teufenmessung .................................................................................. 2415.8 Festpunkte ......................................................................................... 2425.8.1 Design .............................................................................................. 2425.8.2 Genauigkeit der Festpunkte ................................................................ 2465.8.3 Nummerierungsprinzipien der Festpunkte ........................................... 2465.9 Übergabe der Trasse vom Auftraggeber an den Auftragnehmer ........... 2475.9.1 Trassierungspunkte und ‑elemente ...................................................... 2475.9.2 Festlegung der Vorgehensweise bei Änderung der Trasse ................... 250
6 Qualitätsmanagement .................................................................... 2516.1 Vermessungs- und Navigationsgeräte ................................................. 2516.1.1 Regelmäßige Prüfung der Geräte und Prüfberichte .............................. 2516.1.2 Prüfung der Geräte vor Beginn der Messung ...................................... 2516.2 Vermessungsverfahren ....................................................................... 2526.2.1 Dokumentation des Vermessungsverfahrens ........................................ 2526.2.2 Dokumentation von Kontrollsystemen ................................................ 2536.3 Maschinen- und Verfahrenstechnik ..................................................... 2546.3.1 Prüfung der verwendeten Maschinen und Verfahren ........................... 2546.3.2 Maschinenunabhängige Kontrollverfahren .......................................... 2546.3.3 Verifikationen der verwendeten Verfahren .......................................... 2546.3.4 „Worst case“-Szenario, Informationskette und Entscheidungsstationen 2546.3.5 Erfassung, Aufbereitung, Darstellung, Dokumentation usw.
der relevanten Parameter gemäß den definierten Kriterien ................... 2556.3.6 Überprüfung auf Einhaltung der vorgegebenen Grenzwerte ................. 2556.4 Prozess-Controlling und Datenmanagement ........................................ 2556.4.1 Entwicklungsschritte .......................................................................... 2566.4.2 Datenerfassung und Anforderungen im Baubetrieb ............................. 256
InhaltsverzeichnisX

6.4.3 Virtuelle Sensorik .............................................................................. 2626.4.4 Aktuelle Entwicklungen ..................................................................... 2626.4.5 Auswertung und Analyse im Rahmen von Soll-Ist-Vergleichen ........... 2636.4.6 Aushubmassentransport/Logistik ........................................................ 2636.4.7 Eingliederung von Informationssytemen in die Bauabläufe .................. 2666.5 Schulung und Weiterbildung des Personals ......................................... 2676.5.1 Vermessungsfachkräfte ...................................................................... 2676.5.2 Maschinenfahrer ................................................................................ 268
7 Risikomanagement ......................................................................... 2697.1 Tunnelbauhandbuch (THB) ................................................................ 2697.2 Risikofolgen – Abschätzung und Sicherheitsbewertung ....................... 2707.3 Risikoverteilung bei Bauverträgen ...................................................... 2717.4 Zielgrößen einer risikominimierten Bauwerkserstellung ....................... 271
8 Empfehlungen für die Ausschreibung ........................................... 2738.1 Allgemeine Hinweise ......................................................................... 2738.2 Baugrundrisiko .................................................................................. 2778.3 Störfallanalyse mit Risikobewertung und -verteilung ........................... 2788.4 Qualitätssicherung ............................................................................. 2848.5 Pflichtenheft der Tunnelbohrmaschine (TBM) .................................... 2868.6 Versicherungen .................................................................................. 286
9 Schlusswort – Ausblick .................................................................. 289
Anhang 1 ...................................................................................................... 291
Anhang 2 ...................................................................................................... 295
Anhang 3 ...................................................................................................... 303
Anhang 4 ...................................................................................................... 311
Literatur ....................................................................................................... 315
Normen und Regelwerke ............................................................................ 319
Stichwortverzeichnis ................................................................................... 325
XI

4.1.2 Zwischenbaugruben
Zwischenbaugruben (Durchfahrbaugruben) sind Bauwerke, welche entweder aus denAnforderungen des Bauwerks (z. B. Zugangsschacht) oder jenen des Rohrvortriebs(z. B. Werkzeugwechsel) hervorgehen. Nach der Herstellung sind die Durchfahr-querschnitte nach Koordinaten aufzumessen und zu dokumentieren, die Übereinstim-mung mit dem Trassenverlauf ist nachzuweisen. Es ist sicherzustellen, dass die Vor-triebstrasse und die Achse zwischen Ein- und Ausfahrquerschnitt identisch sind.
Ist die TBM bis auf 30 m an die Zwischenbaugrube herangefahren, ist eine Kon-trollvermessung durchzuführen; die aufgenommenen Koordinaten sind mit jenen desBaugrubenaufmaßes und inklusive der Richtung der montierten Einfahr-/Ausfahr-dichtung – sofern verbaut – auf Übereinstimmung hin zu überprüfen.
Werden Ein- und Ausfahrdichtungen verwendet, ist darauf zu achten, dass der Bohr-kopf der Maschine im nicht drehenden Zustand durch die Dichtungen geschoben
Bild 4.8 Berechnung desPressenhubs
Bild 4.9 Grundsätzliche Gegenüberstellung einer Kompaktpresse (links) und einer Hauptpresse(rechts)
4 Maschinen- und Verfahrenstechnik98

werden kann, um eine Beschädigung bzw. Zerstörung der Dichtung, auch durch ausder Baugrubenwand herausgelöste Betonbrocken, zu vermeiden. Bei Druckluftvor-trieben sind erforderlichenfalls Ein-/Ausfahrtöpfe zu verwenden.
Beim Durchfahren von Zwischenbaugruben ist darauf zu achten, dass schädlicheAbweichungen von der vorgegebenen Soll-Linie vermieden werden. Hierfür sind er-forderlichenfalls vor der Durchfahrt die entsprechenden Bauhilfsmaßnahmen zu defi-nieren und durchzuführen.
Während der Durchfahrt von Zwischenbaugruben sind extreme Steuerbewegungenzu vermeiden, damit der nachfolgende Rohrstrang die Zwischenbaugrube zwän-gungsfrei passieren kann.
4.1.3 Zielbaugruben
Zielbaugruben dienen, sofern sie nicht für eine permanente Nutzung des Bauvor-habens vorgesehen sind, der Bergung der beim Rohrvortrieb verwendeten Tunnel-bohrmaschine. Nach der Herstellung ist der Einfahrquerschnitt nach Koordinatenaufzumessen und zu dokumentieren, die Übereinstimmung mit dem Trassenverlaufist nachzuweisen.
Sofern Form und Abmessungen der Zielbaugrube nicht durch eine spätere Funktionvorgegeben sind, richten sie sich nach den Abmessungen der verwendeten Tunnel-bohrmaschine bzw. den Abmessungen und Transportanforderungen der jeweiligenEinzelkomponenten (Maschinenrohre).
Erfordert der Rohrvortrieb eine Abdichtung des Rohrstrangs gegenüber der Zielbau-grube, ist eine für das vorgesehene Zielbauwerk geeignete und ausreichend dimen-sionierte Einfahrdichtung bzw. ein Einfahrtopf exakt zu positionieren und in geeig-neter Art und Weise zu befestigen. Erforderlichenfalls ist eine Einfahrschleuse zuinstallieren.
Ist die TBM bis auf 30 m an die Zielbaugrube herangefahren, ist eine Kontrollver-messung durchzuführen; die aufgenommenen Koordinaten sind mit jenen des Bau-grubenaufmaßes inklusive der Richtung der montierten Einfahrdichtung auf Überein-stimmung hin zu überprüfen.
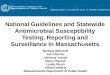
Bild 4.10 zeigt eine fehlerhafte Einfahrt des Rohrvortriebs in eine relativ lange Ein-fahrtdichtung (Einfahrtopf) und lässt deutlich erkennen, dass ein genaues Aufmaßdes Einfahrtopfes nach Lage und Richtung erforderlich ist. Das Aufmaß ist in Bezugzur Planungsachse des Rohrvortriebs zu setzen.
Erforderlichenfalls ist die Position der Einfahrdichtung zu korrigieren.
Bei der Einfahrt ist darauf zu achten, dass der Bohrkopf der Maschine im nichtdrehenden Zustand durch die Dichtungen geschoben werden kann, um eine Beschä-digung bzw. Zerstörung der Dichtung zu vermeiden.
Weiterhin ist zu beachten, dass die Dichtung bei der Einfahrt nicht durch aus derBaugrubenwand herausgelöste Betonbrocken beschädigt wird.
4.1 Hinweise für die Baugruben und deren Einrichtungen beim Rohrvortrieb 99

4.2 An-, Aus-, Durch- und Einfahren der TBM
4.2.1 Überprüfung der Einsatzfähigkeit der TBM
Für die vorgesehene TBM ist einsatzspezifisch ein statischer Nachweis über die Ein-satzfähigkeit zu führen. Vor dem Einsatz der vorgesehenen TBM ist zur Überprü-fung der Einsatzfähigkeit ein zu dokumentierendes Aufmaß vorzunehmen. Dabeisind für den Bohrkopf (Vollschnitt), den Schild sowie für alle zum Einsatz kommen-den Maschinenrohre der TBM die folgenden Werte aufzunehmen und mit denen derKonstruktionszeichnung des Herstellers zu vergleichen. Das Aufmaß ist von einemunabhängigen Vermesser vorzunehmen.– Länge (z. B. 3 Messungen × 120° Winkelversatz),– Winkelhaltigkeit,– Umfang (z. B. jeweils am Anfang und am Ende des Maschinenrohrs),– Rundheit (z. B. jeweils am Anfang und am Ende des Maschinenrohrs,
Messen des Außendurchmessers, 6 Messungen × 30° Winkelversatz ausgehendvon der vertikalen Maschinenachse),
– Entwicklung des Überschnitts vom Bohrkopf bzw. Schneidschuh biszum Vortriebsrohr,
– Knickwinkel Schild – Maschinenrohr 1 bei Steuerzylinder Nullstellung.
Die Grundlage für die zulässigen Toleranzen für rundgewalzte bzw. geschweißteStahlkonstruktionen (Schildmantel) bildet dabei die EN ISO 13920, Klasse BF. Un-zulässige Abweichungen haben zur Folge, dass die Maschine nicht eingesetzt wer-den darf. Der AN hat nachzuweisen, dass die in der TBM verbauten, mit dem Bau-
Bild 4.10 Situation Einfahrtopf
4 Maschinen- und Verfahrenstechnik100

grund in Verbindung stehenden Dichtungssysteme für den vorgesehenen Einsatzausreichend dimensioniert sind.
Der AN ist weiterhin verpflichtet, eine Erklärung über die generelle Verfügbarkeitvon Ersatzteilen der vorgesehenen Vortriebsmaschine und der sonstigen Ausrüs-tungskomponenten abzulegen. Die Vortriebsanlage ist auf die Installation/Vollstän-digkeit der jeweils geforderten Zusatzeinrichtungen (z. B. automatisches Rohr-schmiersystem, Datenprotokollierung) hin zu überprüfen.
Die Einsatzfähigkeit der Maschine ist in Form eines Prüfzeichens in der TBM zudokumentieren.
Der AN hat für die Dauer der Baumaßnahme eine vollständige Dokumentation derTBM und der sonstigen Ausrüstungskomponenten auf der Baustelle vorzuhalten.
Die Vortriebsmaschine darf erst nach dem Unterzeichnen eines entsprechenden (vomAN zu erstellenden) Dokuments durch den Auftraggeber in die Startbaugrube abge-lassen werden.
Qualifizierung des MaschinenfahrersDerzeit existiert keine Spezifikation bzw. kein Qualifikationsnachweis für Maschi-nenfahrer. Der AG ist angeraten, vom AN persönliche Projektreferenzen (gefahreneMaschinen, gefahrene Haltungen) für die vorgesehenen Maschinenfahrer anzufor-dern. Die derzeitige Praxis einer Übermittlung von Projektreferenzen bezieht sich inder Regel auf die Firmenreferenzen, was jedoch keinen Aufschluss über die Qualifi-zierung des vorgesehenen Personals gibt. Unabhängig davon ist es erforderlich, einSystem zur Sicherstellung einer Mindestqualifikation für Maschinenfahrer einzurich-ten.
4.2.2 Presseinrichtung und Widerlager bei Rohrvortrieben
Zu Beginn der Startbaugrubeneinrichtung wird die Hauptpressenstation (Kompakt-pressenstation, Pressenstation mit separatem Pressenschlitten, Rohrauflager) auf derBaugrubensohle bzw. darin eingebundenen Befestigungsvorrichtungen (z. B. ein-betonierte Profile) installiert (Bild 4.11).
Dabei ist auf eine exakte Positionierung nach Lage, Höhe und Ausrichtung zu ach-ten. Zur Einrichtung der Pressenstation bzw. des Rohrauflagers ist ein Vortriebsrohrbzw. Blindringe des Tübbingausbaus oder eine Schablone, welche den Innen- undAußendurchmesser des Tunnels darstellt, zu verwenden.
Ein erforderlichenfalls einzubauendes Widerlager aus Stahlbeton zur Aufnahme undWeiterleitung der Presskräfte über die Baugrubenwand in den Baugrund ist im An-schluss daran zu installieren, um den erforderlichen Verbund (Lagesicherheit, gleich-mäßige Druckverteilung) sicherzustellen.
Widerlagerkonstruktionen ausschließlich bestehend aus Stahlkonstruktionen sindnicht zu verwenden, da hierbei von größeren Bewegungen und schlechterem Ver-bund bzw. schlechterer Lastverteilung ausgegangen werden muss. Es sind Widerla-ger aus Stahlbeton und, sofern an der Presseinrichtung nicht installiert, mit pressen-
4.2 An-, Aus-, Durch- und Einfahren der TBM 101

seitig eingelassener Stahlplatte bzw. eingelassenen Stahlplatten zur Lasteinleitungvorzusehen; die ordnungsgemäße Krafteinleitung ist nachzuweisen.
Bei den ortsfest in der Startbaugrube installierten Systemkomponenten des Vermes-sungs- bzw. Navigationssystems ist darauf zu achten, dass die Aufnahme lagesichererfolgt und dass ein ausreichender Schutz gegen Beschädigung vorhanden ist. EineInstallation im Bereich Hauptpresse/Widerlager ist nicht zulässig.
4.2.3 Aus- und Einfahrdichtungen
Die Ausfahrdichtung dient der Abdichtung der Startbaugrube gegen in den Ring-spalt eingepresstes Schmier- und Stützmittel und/oder gegen eindringendes Grund-wasser (Grundbruchgefahr). Bei der Verwendung von Vortriebsmaschinen mit Flüs-sigkeitsstützung verhindert sie zusätzlich den Rücklauf der Spülflüssigkeit über denRingspalt in die Startbaugrube; speziell in der Anfahrphase. Sie besteht je nachAnforderung aus einer Einfach- oder Zweifach-Elastomerdichtung und wird imDurchfahrbereich auf der Baugrubenwand bzw. der Ausfahrwand positioniert; erfor-derlichenfalls wird die Dichtung zusätzlich mit einer manuell nachstellbaren Not-dichtung ausgestattet.
Bild 4.11 Baustelleneinrichtung einer Kompaktpresse (links) und einerHauptpressenstation (rechts)
Bild 4.12 Beispiele Anfahrdichtung
4 Maschinen- und Verfahrenstechnik102

Insbesondere bei Zweifach-Elastomerdichtungen (Doppellippendichtungen z. B.„Phönixdichtungsprofile“) führen bereits geringe Abweichungen zur Beeinträchti-gung bzw. Beschädigung/Zerstörung der Dichtung. Es ist sicherzustellen, dass diemontierte Dichtung nicht mit der Auflast aus Maschinengewicht und Tunnelauflastbeaufschlagt wird, was eine Zerstörung der Dichtung zur Folge hätte; es ist eineausreichend tragfähige Bettung herzustellen.
Die Dichtung wird an der Baugrubeninnenseite bzw. an der Ausfahrwand durch An-flanschen eines Schraubenrings bzw. Dichtungstopfes angebracht.
Bei der Auswahl und der Installation des Dichtungssystems ist sicherzustellen,dass ein ausreichender Abstand zwischen Dichtlippe und Baugrubenwand zur Ver-fügung steht, damit der Bohrkopf der TBM im nicht drehenden Zustand durch dieDichtung geschoben werden kann, um Beschädigungen an der Dichtlippe zu ver-meiden. In Sonderfällen (z. B. geringes Dichtungsspiel) kann die Dichtung vordem Positionieren auf die TBM geschoben werden und nach dem Positionieren ander Ausfahrwand befestigt werden. Erforderlichenfalls muss dabei die Vortriebs-maschine vor der Dichtungsmontage einen Teil der Ausfahrwand abbauen. Bei derAusfahrt in den Baugrund muss die Dichtlippe voll auf dem Schildmantel auflie-gen.
Die Abdichtung der Ausfahröffnung kann erforderlichenfalls durch geeignete Bau-hilfsmaßnahmen (z. B. Injektionsblöcke) unterstützt werden, die aber in jedem Fallals reduntante Systeme auszubilden sind.
Die Auswahl des jeweiligen Dichtungstyps richtet sich nach den zulässigen Be-triebstoleranzen (Durchmesser) der Dichtung während des Betriebs und den Projekt-randbedingungen. Im Wesentlichen wird der Dichtungstyp durch den anstehendenWasserdruck bzw. den Schmierdruck vorgegeben.
4.2.4 Positionieren und Anfahren der TBM
In der Regel erlauben die Baugrubenabmessungen keine komplette Montage derTBM in der Startbaugrube. Die TBM wird dann in Segmenten in die Startbaugrubeabgelassen und positioniert.
Vor der Ausfahrt aus der Startbaugrube sind Lage, Höhe und Ausrichtung der TBMzu vermessen und zu protokollieren. Die aufgenommenen Koordinaten und Richtun-gen sind mit jenen des durchgeführten Grubenaufmaßes (insbesondere Ausfahrdich-tung) und des vorgegebenen Trassenverlaufs auf Übereinstimmung hin zu überprü-fen.
Der Auftragnehmer ist verpflichtet, für die Dauer des Anfahrvorgangs, in welchernoch keine Personenschleuse verbaut ist bzw. noch nicht an die TBM gekoppelt ist,ein Notprogramm hinsichtlich des Zugangs zur Ortsbrust auszuarbeiten und demAuftraggeber zu übermitteln.
Vor Vortriebsbeginn ist der Stationswertaufnehmer der Startbaugrube zu installierenund die Stationierung auf „null“ zurückzusetzen.
4.2 An-, Aus-, Durch- und Einfahren der TBM 103

Eine permanente Kontrolle der Vortriebsparameter ist insbesondere in dieser Phasedes Vortriebs sehr wichtig, da größere Abweichungen zur Solllinie während bzw.kurz nach der Ausfahrt in der Regel weitere Probleme nach sich ziehen.
Beim Eintritt der TBM in den Baugrund besteht ein erhöhtes Grundbruchrisiko, wel-ches durch die Ausfahrdichtung und die Einstellung des vorberechneten Stützdruckszu kompensieren ist.
In Abhängigkeit der aufzufahrenden Geologie (Tragfähigkeit des Baugrunds) ist vorder Ausfahrt aus der Startbaugrube vom AN festzulegen, ob und mit welcher Vor-steuerung (in der Regel erhöhter Neigungswinkel des Schildes) die TBM in denBaugrund einzufahren hat, um z. B. ein Absinken aufgrund des Maschinengewichtszu vermeiden. Extreme Steuerbewegungen sind zu vermeiden.
4.2.5 Steuerbarkeit
Zur Steuerung der TBM werden in der Regel hydraulische Steuerzylinder verwen-det, welche im Schildgelenk durch Aus-/Einfahren für das erforderliche Verschwen-ken des vorderen Teiles der TBM sorgen, Neigungen bis etwa 3° sind zu ermögli-chen. Die verwendete Schildgelenkdichtung ist auf diese besondere Belastungauszulegen.
Bei Maschinen für Rohrdurchmesser größer DN 1200 sind die verwendeten Dich-tungen in der Regel nachstellbar. Das Schildgelenk ist mit einer Verrollungssiche-rung (Beweglichkeit in Vortriebsrichtung ist sicherzustellen) auszustatten. Maschi-nen für Rohrdurchmesser bis etwa DN 1500 arbeiten mit drei Hydraulikzylindern,in größeren Anlagen sind vier Zylinder verbaut. Bei der Verwendung von vier Steu-erzylindern ist darauf zu achten, dass die Zylinder im Betrieb nur paarweise betätigtwerden können, eine entsprechende Verriegelung ist vorzusehen.
Das manuelle Nachjustieren der einzelnen Zylinder ist zu ermöglichen (z. B. Entrie-gelungsschalter). Werden aufgedoppelte TBM verwendet, ist ein Nachweis zu füh-ren, dass die verbauten Steuerzylinder in der Lage sind, die Zusatzbelastungen (z. B.zusätzliche Anpresskraft Bohrkopf, zusätzliche Kraft aus Stützdruck) mit ausreichen-der Sicherheit aufzunehmen. Als Steuerzylinder sind nur zweifach wirkende Hydrau-likzylinder zu verwenden, es ist darauf zu achten, dass die größere Kraftkomponentedes Hydraulikzylinders in Richtung des Vortriebs wirkt. Die Zylinder sind auf diezu erwartenden bzw. zulässigen Vortriebskräfte abzustimmen. Hierbei sind insbeson-dere die Anpresskraft an die Ortsbrust und der einzustellende Stützdruck zu berück-
Bild 4.13 Betätigung derSteuerzylinder – Zulässige undunzulässige Paarkombinationen
4 Maschinen- und Verfahrenstechnik104

sichtigen. Während des Betriebs ist darauf zu achten, dass die Zylinder nicht im vollein- oder ausgefahrenen Zustand betrieben werden, um einen ggf. erforderlichenVerfahrweg in besonderen Situationen zu gewährleisten. Die Steuerzylinder sind mitintegrierten (z. B. induktiven) Wegmesssystemen auszustatten, der Verfahrweg istmit einer Genauigkeit von 1 mm aufzunehmen. Dem Maschinenfahrer sind für alleSteuerzylinder die Verfahrwege in [mm] und hinsichtlich der Kraftbelastung nebenden Einzelwerten zusätzlich zur Ermittlung der Bohrkopfanpresskraft der zugehörigeGesamtwert in [kN] anzuzeigen.
Bei Großtunneln in Tübbingbauweise erfolgt die Steuerung analog der o. g. Ver-fahrensweise. Hier stützen sich die Hydraulikzylinder jedoch nicht auf das Pres-senwiderlager in der Startbaugrube bzw. über die Zwischenpressstationen, sondernauf die bereits eingebauten Tübbingringe, vornehmlich auf den letzten Tübbingringab.
4.3 Hinweise für den Tunnelausbau
4.3.1 Vortriebsrohre
4.3.1.1 Kriterien der Dimensionierung der Rohre
Je mehr Boden eine im Grundwasser liegende Rohrleitung überdeckt, desto größersind bei sandigen, insbesondere feinsandigen, Böden die Wandreibungskräfte beiRohrvortrieben. Hier gilt es bereits bei der Ausschreibung zur Abwehr eines „Fest-fahrens“ auf die besonderen Randbedingungen hinzuweisen und bei der Vergabe derBaumaßnahme u. a. auf folgende Kriterien besonders zu achten:– richtige Wahl und Ausführung der Tunnelvortriebsmaschine,– gezielte Auswahl der zuerst aufzufahrenden Vortriebsstrecke,– ausreichende Dimensionierung und Qualität der mit glatten Außen- und Innen-
wandungen herzustellenden Vortriebsrohre,– vollautomatische, ständig unter Druck zu haltende Schmierung der Vortriebsrohre
an richtiger Stelle des Rohrstrangs (z. B. jedes zweite Rohr) und -umfangs,– auf die speziellen örtlichen Boden- und Grundwasserverhältnisse abgestimmte Zu-
sammensetzung der Ringspaltverpressung,– genügende Auslegung der Pressenkräfte und der Zwischenpressstationen.
Maßnahmen zur Verhinderung des Kontakts Rohr/Boden hinsichtlich Minimierungdes Reibungswiderstands sind– vollständige Verfüllung des Ringraums mit Bentonitsuspension ab Verlassen der
Rohre aus dem Startschacht über die gesamte Vortriebsstrecke,– kontinuierlicher Ersatz verlustig gegangener Bentonitsuspension,– Aufrechterhaltung des Suspensionsdrucks.
Die Summe der Vortriebskräfte setzt sich zusammen aus– dem Eindringwiderstand des Bohrkopfes bzw. des Schneidschuhs an der Orts-
brust (Erfahrungswert je nach Geologie 200 bis 400 kN – 20 bis 40 t – pro lfdm.Schneidenumfang),
– dem Stützdruck an der Ortsbrust,
4.3 Hinweise für den Tunnelausbau 105

– der Mantelreibung der TBM und des Rohrstrangs (normale Kurven erhöhen dieerforderlichen Verpresskräfte um ca. 20% – ohne Schmierung betragen die Rei-bungskräfte 20 bis 40 kN – 2 bis 4 t – pro m2 Rohrwandfläche, mit Schmierung2,2 bis 10 kN – 0,22 bis 1 t – pro m2 Rohrwandfläche),
– dem Widerstand beim Schließen von Zwischenpressstationen (die erste Zwischen-pressstation sollte wegen des Schneidenwiderstands einen kurzen Abstand (z. B.30 m) hinter der TBM haben).
Außerdem sind aus unterschiedlichen Fugenspaltweiten und analogen Verwinklun-gen der Rohrachsen Zwängungskräfte den aufzubringenden Vortriebskräften hin-zuzuzählen.
4.3.1.2 Rohrlängen und Trassen beim Rohrvortrieb
Die Rohrlängen von z. B. Stahlbetonvortriebsrohren variieren von ca. 2,00 m bis4,00 m, max. 5,00 m. Kurze Rohre lassen sich besser steuern und sind daher fürengere Kurven geeignet. Als Faustformel für die Wanddicke von Stahlbetonvor-triebsrohren gilt 12 bis 14% von DN oder 10% von DN + 5 cm. Die zentrischenDruckspannungen auf die Holzringzwischenlagen sollten mit Rücksicht auf die elas-tischen Eigenschaften des Holzes mit etwa 7 N/mm2 (70 kg/cm2) begrenzt werden.
Rohrvortriebe von DN < 1.000 können mit Auffahrlängen von 300 m und Rohrvor-triebe mit DN > 1.000 mit Auffahrlängen von > 300 m (bei größeren bemanntenRohrvortrieben von zu 3.000 m und mehr) von einem Schacht aus – auch in Kur-venfahrten mit R = 300 bis 400 × Da in Meter – hergestellt werden. Dabei könnenAuffahrgenauigkeiten von ±5 cm Abweichung von der Soll-Lage gefordert werden(bei längeren Vortrieben ±5 bis 8 cm).
Aus der Startbaugrube sollten zunächst die ersten 50 m in Geradeausfahrt vorgetrie-ben werden.
Der Personaleinsatz bei Rohrvortrieben unter Druckluftbeaufschlagung wird u. a.durch eine minimale lichte Schleusenhöhe von 1,60 m und eine minimale Höhe derArbeitskammer von 1,80 m geregelt. Insofern müssen Vortriebsrohre unter Einsatzvon Druckluft mindestens einen DN von 1500 mm haben.
4.3.2 Tübbingausbau
Bild 4.14 zeigt die grundsätzlichen Ausbaumöglichkeiten beim Tunnelbau in berg-männischer Bauweise. Dabei wird zwischen ein- und zweischaligem Ausbau unter-schieden. Für Schildvortriebe sind folgende Ausbaumethoden relevant:– Beim einschaligen Tübbingausbau bilden die Tübbings die fertige Tunnelwand.– Beim zweischaligen Tübbingausbau mit Ortbetoninnenschale wird gegen die vor-
handene Innenwandung der Tübbingringe eine komplette Stahlbetoninnenschale be-toniert. Diese ist gegebenenfalls für den vollen Außenwasserdruck zu bemessen.
– Beim Tübbingausbau mit Inliner-Rohr wird, z. B. aus Korrosionsschutzgründen,ein Inliner-Rohr aus Polymerbeton eingebaut und verankert. Dieses ist für den
4 Maschinen- und Verfahrenstechnik106

vollen Außenwasserdruck zu bemessen. Der Zwischenraum ist danach mit Däm-mer zu verpressen.
Entwurf, Ausführung, Herstellen und Qualitätssicherung des Tübbingausbaus wer-den u. a. in den einschlägigen DAUB-Empfehlungen, Vorschriften und Richtliniensowie in [4.1] und [4.2] behandelt.
4.4 Vortriebsarbeiten
Die Wahl der Tunnelbohrmaschine (TBM) richtet sich im Wesentlichen nach dem zudurchfahrenden Baugrund und dem anstehenden Wasserdruck. Die Maschinen- undVerfahrenstechnik wird dabei zusätzlich durch planerische und geometrische Randbe-dingungen (Trassen- und Gradientenführung, vorhandene Anlagen usw.) beeinflusst.
4.4.1 Personaleinsatz während des Vortriebs
4.4.1.1 Schichtbetrieb
Für einen kontinuierlichen Vortrieb ist ein Betrieb in mehreren Schichten notwen-dig. Bei größeren Vortrieben umfassen diese i. Allg. 20 Stunden am Tag, wobeizusätzlich 4 Stunden für Wartung, Kontrollmessungen u. a. notwendig sind. Auf-lagen von Behörden können zu Vortriebsunterbrechungen führen oder es kann durchGenehmigungsbehörden gar ein Mehrschichtbetrieb untersagt werden, was sich aufdie vereinbarte Bauzeit auswirken kann.
Mehrschichtbetriebe sind besonders sorgfältig im Hinblick auf den Personaleinsatzund die Dauer des Einsatzes zu planen.
Bild 4.14 Ausbaumethoden für den Tunnelbau in geschlossener Bauweise (ohne Rohrvortrieb) [4.2]
4.4 Vortriebsarbeiten 107

InstrumenteDie nominelle Winkelmessgenauigkeit moderner, geodätischer Totalstationen erreichtheute 1 bis 0,5“ (0,3 bis 0,15 mgon), die Streckenmessgenauigkeit auf geeigneteReflektoren 0,6 mm + 1 ppm (konstanter bzw. streckenabhängiger Fehleranteil).
Für Messungen im Punktfeld sind grundsätzlich Tachymeter der oberen geodäti-schen Genauigkeitsklasse zu verwenden, d. h. 0,3 mgon oder besser bzw. 1 mm +1 ppm oder besser. Die Geräte sollten motorisiert und zur automatischen Zielerfas-sung geeignet sein. Die Winkelmessung hat elektronisch zu erfolgen. Das Instru-ment soll für automatische Satzmessung ausgestattet sein und über einen funktions-fähigen Stehachskompensator verfügen. Darüber hinaus sollte digitaleDatenaufzeichnung vorgesehen sein.
Die Streckenmessung des Tachymeters erfolgt über einen integrierten axialen Entfer-nungsmesser. Das Arbeiten mit Aufsatzentfernungsmessern ist nicht zulässig.
Die Kombination Tachymeter und Reflektor muss aufeinander abgestimmt sein. Re-flektorhalter und Tachymeter müssen über einheitliche Zwangszentrierungseinrich-tungen verfügen. Abhängig von der Wellenlänge des Streckenmesssignals ist derSignalweg im Reflektor unterschiedlich lang. Für jede Reflektor/Tachymeter-Kom-bination muss daher die sogenannte Prismenkonstante bekannt sein und im Instru-ment berücksichtigt werden. Beides muss im Feldbuch dokumentiert sein. Beim Da-tenexport soll die Prismenkonstante ebenfalls angezeigt und vor der Auswertunggeprüft werden.
Es ist empfehlenswert, das Gerät mit Tastaturen auf beiden Geräteseiten bzw. einemexternen User-Interface auszustatten, damit die Bedienung auch in unbequemen Auf-stellungen ohne artistische Einlagen bzw. Gefährdung des Bedienpersonals (z. B.Absturz) möglich ist. Das Instrument sollte mit einem stabilen, gerätespezifischenTransportkoffer ausgestattet sein, um Beschädigungen während des Transports aus-zuschließen.
Thermometer und Barometer gehören ebenso wie ein Maßband zur Bestimmungvon Instrumenten- bzw. Reflektorhöhe zur Standardausrüstung des Vermessers imFelde. Temperatur, Luftdruck und relative Luftfeuchtigkeit werden am Instrumenteingegeben und zur Skalierung des durch das durchquerte Medium beeinträchtigtenSignals verarbeitet.
Die das Instrument aufnehmenden Dreifüße sollen geeignet sein, das Instrument op-tisch über der Vermarkung zu zentrieren. Es ist darauf zu achten, dass im Instrumentoder Dreifuß implementierte Zentriereinrichtungen (optisches Lot oder Laserlot) jus-tiert sind. Die Justierung ist regelmäßig zu prüfen. Die Prüfung ist im Rahmen desQualitätsmanagements nachzuweisen.
Bei festverbauten Einheiten kann die Prüfung einen Justierstand erfordern. Im All-gemeinen bedeutet das, das Instrument zur Kalibrierung an den Hersteller oder eineautorisierte Institution zu senden. Vorzuziehen sind separate optische Lote, mit de-nen es auch im Falle, dass sie dejustiert sind, möglich ist, mittels Messung in vierunterschiedlichen Lagen, korrekte Zentrierung zu gewährleisten.
5.4 Oberirdische Vermessungsarbeiten (Kombinierte Lage- und Höhenvermessung) 213

Grundsätzlich sind geodätische Tachymeter regelmäßig zu warten. Die Intervalle rich-ten sich nach Betriebsstunden und Gerätezustand. Die Alterung elektronischer Bauteileist heutzutage i. Allg. unkritisch. Jedoch sollte ein Instrument dringend geprüft werden,wenn es Schaden genommen hat oder die Funktionsprüfung einen entsprechenden Ver-dacht begründet. Eine Prüfung kann ebenfalls erforderlich sein, sofern sich z. B. derTransport als unsanft erwiesen hat oder das Instrument lange gelagert worden ist.
5.5 Oberirdische Vermessungsarbeiten (Höhenvermessung)
Die Höhenmessung stellt einen Sonderfall der Koordinatenbestimmung dar. Das be-deutet, dass die Referenzrichtung der Gebrauchshöhen grundsätzlich die Lotrichtung,d. h. die Fallrichtung, ist.
Höhenunterschiede werden demnach im Erdschwerefeld eindimensional entlang derLotrichtung bestimmt. Kleinräumig ist die Höhenmessung damit trivial, großräumigdagegen aufgrund der Inhomogenität der Referenzfläche (siehe Bild 5.2) wissen-schaftlich anspruchsvoll.
5.5.1 Trigonometrische Höhenübertragung
Die Höhenbestimmung kann auf unterschiedliche Weise erfolgen. Bild 5.10 zeigtein einfaches Prinzip der trigonometrischen Höhenübertragung. Der Höhenunter-schied zwischen Instrumentenkippachse und Zentrum des Reflektors wird mittels tri-gonometrischer Funktion aus gemessener Distanz S und Zenitwinkel z bestimmt.Korrigiert um die Instrumentenhöhe i und die Reflektorhöhe t über Stand- bzw.Zielpunkt ergibt sich der Höhenunterschied zweier Punkte.
Die trigonometrische Höhenbestimmung fällt als „Nebenprodukt“ der tachymetri-schen Lagebestimmung ab. Das Verfahren ist relativ schnell und eignet sich auchzum Überbrücken größerer Distanzen und Hindernisse. Die Auswertung der Höhenerfolgt gesondert von der Lageausgleichung.
Die Genauigkeit der einzelnen trigonometrischen Höhenübertragung mit geodäti-schen Totalstationen liegt bei Distanzen bis etwa 200 m im Bereich weniger Milli-meter [5.1]. Bei Distanzen darüber hinaus übersteigt der Einfluss von Erdkrümmungund Refraktion diese Größenordnung und muss über Taylor-Approximation rech-nerisch berücksichtigt werden. Daraus folgt, dass Tal- oder Stromübergänge ge-wöhnlich erhöhten Aufwand bedeuten. Es ist dringend zu empfehlen, speziell auf
Bild 5.10 Prinzip dertrigonometrischenHöhenübertragung [5.3]
5 Vermessung214

großen Distanzen gleichzeitig-gegenseitig zu beobachten, um den Einfluss der ver-tikalen Refraktion verfahrensseitig zu minimieren.
Die für die trigonometrische Höhenübertragung erforderlichen Instrumente sindidentisch mit den im vorangegangenen Abschnitt beschriebenen.
5.5.2 Geometrisches Nivellement
PrinzipStandardverfahren der präzisen Höhenbestimmung ist das geometrische Nivellement.Das Verfahren ist geometrisch ungeheuer simpel und von sorgfältigem Personal inkürzester Zeit zu erlernen und durchzuführen.
Beim geometrischen Nivellement handelt es sich um ein Verfahren, bei dem, vergli-chen mit dem Nivellementsweg, auf kurzen Teilstrecken (ca. 60 m) Höhenunter-schiede bestimmt werden. Der Höhenunterschied ergibt sich aus der Differenz zwi-schen den horizontalen Ablesungen auf einer rückwärts und vorwärts je lotrechtüber einem Punkt aufgerichteten Nivellierlatte. Die Summe der vertikalen Differen-zen zwischen Start- und Zielpunkt ergibt der Höhenunterschied (siehe Bild 5.11).
Festpunkte sind grundsätzlich als Wechselpunkte zu beobachten. Das heißt, dass einsolcher Punkt in der aktuellen Aufstellung als vorwärtiger Lattenaufstellungspunktdient sowie in der darauf folgenden Aufstellung als rückwärtiger. Nur auf dieseWeise sind die bestimmten Höhen im Verbund durchgreifend kontrolliert.
Vorteil des geometrischen Nivellements ist, dass jede Aufstellung lokal im Schwere-feld orientiert ist und aufgrund der inkrementell kurzen Abschnitte das Nivellementdirekt physikalische Höhenunterschiede liefert. Erkauft wird die Eigenschaft damit,dass sich auch sehr kleine systematische Fehler aufgrund der hohen Zahl von kon-tinuierlich aneinander anschließenden Repetitionen von Aufstellungen signifikantauswirken. Gerade das geometrische Nivellement erfordert daher akribisches Einhal-ten von Arbeitsabläufen und äußerste Sorgfalt.
So werden z. B. Justierfehler der Zielachse eliminiert, indem zwischen Rückblickund Vorblick je gleiche Zielweiten (ca. 30 m) eingehalten werden („Zielung aus derMitte“). Gegebenenfalls ist der Nivellementsweg vorher zu erkunden und sind Lat-ten- und Instrumentenstandpunkt vorab zu markieren.
Bild 5.11 Prinzip des geometrischen Nivellements (Spirit Leveling) [5.3]
5.5 Oberirdische Vermessungsarbeiten (Höhenvermessung) 215

Temproräre Wechselpunkte werden kurzfristig durch eine schwere, tragbare Unter-legplatte mit wohldefiniertem Höhenpunkt („Frosch“) realisiert. Es ist darauf zu ach-ten, dass der Frosch während der Lattenaufstellung stabil bleibt und sich in seinerHöhe nicht ändert. Für sämtliche einzuhaltenden Abläufe (Verfahren „Rote Hose“,RVVR usw.) sowie alle relevanten Einflussgrößen (unsymmetrische Refraktion,Kompensatorkleben, Lattenmaßstabs- und ‑nullpunktsfehler, Lattenschiefe usw.) seihier auf die Literatur verwiesen, z. B. [5.1].
Grundsätzlich ist jedes Nivellement als sogenanntes Doppelnivellement durchzufüh-ren. Das heißt: Alle aufzunehmenden Festpunkte sind in Hin- und Rückweg alsWechselpunkte zu besetzen und das Nivellement als Schleife am Startpunkt abzu-schließen. Der sich ergebende Schleifenschlussfehler ist in geeigneter Weise zu ver-teilen. In Summe lässt sich aus den Residuen (Restklaffen) zwischen Hin- undRückweg die erreichte Genauigkeit ermitteln.
Im Deutschen Haupthöhennetz (DHHN) sind für Höhenfestpunkte 1. Ordnung Ge-nauigkeiten je Kilometer Doppelnivellement von S0 < 1 mm vorgeschrieben [5.1].Unter Berücksichtigung der genannten Einflüsse sind die Forderungen realistisch. InPräzisionsnivellements können diese Werte sogar noch unterschritten werden.
Für Nivellementsschleifen mit Ausdehnungen von mehreren Zehnerkilometern kön-nen Einflüsse des Schwerefelds nicht vollständig eliminiert werden. Es kommt zusogenannten theoretischen Schleifenschlussfehlern (Misclosure) aufgrund der „Nicht-parallelität der Niveauflächen“ sowie der Inhomogenität des Schwerefelds. Sollendiese Einflüsse berücksichtigt werden, wird das Nivellementsnetz nicht mehr übermetrische Höhenunterschiede, sondern unter Zuhilfenahme von Schweremessungenin wegunabhängigen sogenannten Geopotentiellen Koten ausgeglichen.
Während kleinräumige Nivellements vom AN durchgeführt werden, können die zu-letzt genannten Maßnahmen i. d. R. nur durch den AG veranlasst werden. Der Auf-wand ist erheblich, aber bei großen Projektausdehnungen, insbesondere in gebirgi-gen Regionen, nicht zu vermeiden.
Das vertikale GLN ist vom AG zur Verfügung zu stellen. Anschlussmessungen sindvom AN nach den beschriebenen Verfahren und geodätischen Grundsätzen durch-zuführen.
Die Nivellementsweg ist vorab zu erkunden; der Verlauf auf stabilem Untergrundeinem evtl. kürzeren Nivellement auf weniger stabilem Untergrund vorzuziehen.
Die Überquerung von Brücken bedarf besonderer Sorgfalt. Geeignete Witterungs-bedingungen sind abzuwarten (wenig Wind). Zeiten geringsten Verkehrsaufkom-mens sind zu nutzen, ggf. ist nachts zu messen. Das Abklingen evtl. auftretenderSchwingung z. B. durch Verkehr ist abzuwarten. Festpunkte auf Brücken sind nichtzulässig.
Das (Doppel-)Nivellement über eine Brücke ist an unterschiedlichen Tagen mindes-tens einmal zu wiederholen. Den Residuen zwischen Hin- und Rückweg der andas Brückennivellement angrenzenden Festpunkte ist besondere Beachtung zuschenken.
5 Vermessung216

Die Überwindung von Steigungen ist natürlich auch bei Nivellements nicht gänzlichzu vermeiden. Zur Vermeidung des Einflusses unsymmetrischer Refraktion ist da-rauf zu achten, Zielungen im unteren halben Meter der Nivellierlatte zu meiden.Gegebenenfalls ist die Zielweite, gleich in Hin- und Rückblick, zu verringern. SteileAnstiege sind mäandrierend zu ersteigen. Strom- und Talübergänge erfordern gleich-zeitig-gegenseitige Beobachtungen sowie gesonderte Ausrüstung mit Drehkeilvor-satz. Für Details sei auf die Literatur verwiesen (s. o.) [5.1].
InstrumenteHauptjustierforderung des geometrischen Nivellements ist die Horizontierung desZielstrahls. Als automatisches Nivellier bezeichnet man dabei ein Instrument, dasden Zielstrahl mithilfe eines mechanischen Kompensators, z. B. ein freihängendesGlasprisma, in einem gewissen Einstellbereich selbstständig horizontiert. Die Ver-wendung solcher Instrumente ist für die in der Tunnelvermessung vorgesehenenAufgaben vorzuschreiben. Durch den Einsatz sogenannter Planplatten kann die Ge-nauigkeit bei analogen Geräten weiter erhöht werden.
Nicht zu verwechseln ist ein automatisches Nivellier mit einem Digitalnivellier.Beim Digitalnivellier wird vom Instrument ein Abschnitt der Nivellierlatte im In-strument abgebildet, die anstelle der analogen Teilung einen für jeden Lattenteil-bereich individuellen, binären Bar-Code aufweist. Aus dem erfassten Lattenabschnittermittelt das Instrument die Lattenablesung (Bild 5.12).
Alle auf dem Markt befindlichen Digitalnivelliere der geodätischen Genauigkeits-klasse sind gleichzeitig automatische Nivelliere. Digitalnivelliere sind Instrumentenmit manueller, d. h. analoger Ablesung vorzuziehen, da Ablesefehler bzw. Fehlerbeim Notieren der Messwerte so ausgeschlossen sind. Zudem ist der Datenfluss ge-währleistet und Beobachtungen können direkt an die Auswertesoftware übergebenwerden.
Sowohl bei analogen als auch bei digitalen Nivellierinstrumenten handelt es sich umpassive Systeme. Dementsprechend ist bei widrigen Verhältnissen, speziell unterta-ge, für ausreichende Beleuchtung der Nivellierlatte zu sorgen. Im Falle der digitalen
Bild 5.12 Beispiel eines Digitalnivelliersmit Bar-Code-Nivellierlatte(VMT GmbH)
5.5 Oberirdische Vermessungsarbeiten (Höhenvermessung) 217

Instrumente werden bereits hintergrundbeleuchtete Latten bzw. anklemmbare Latten-beleuchtungen angeboten.
Die Temperaturausdehnung der Nivellierlatte wirkt als Lattenmaßstab auf die Ablesun-gen der Lattenteilung. Da dieser Fehler systematisch auf jeden einzelnen bestimmtenHöhenunterschied wirkt, ist auf die Qualität der Nivellierlatten besonderer Wert zu le-gen. Für besonders großräumige Nivellements bzw. für Präzisionsnivellements wirddaher die Lattenteilung auf ein besonders temperaturresistentes Material (Invar) auf-gebracht und mittels Feder unter konstantem Zug auf den Lattenkörper aufgespannt.
Nivellier und dazugehörige Latten werden heutzutage aufrechtstehend in geeig-neten Temperaturkammern als System kalibriert. Der Maßstab (Lattenmeter) kanndort für jeden Teilabschnitt gesondert bestimmt werden. Die Kalibrierung ist regel-mäßig vorzunehmen. In Nivellementnetzen großer Ausdehnung erfolgt die Ausglei-chung unter Berücksichtigung der temperaturabhängigen Korrektur jeder einzelnenAblesung.
5.5.3 Hydrostatisches Nivellement
Ein Sonderverfahren der physikalischen Höhenbestimmung stellt das hydrostatischeNivellement (Schlauchwaage) dar. Ein mit einer geeigneten Flüssigkeit gefülltesSystem kommunizierender Röhren wird genutzt, ein Höhenniveau von einem Punktzum anderen zu übertragen. In einem offenen System wird der Wasserstand in denam jeweiligen Ende befindlichen Zylinder abgelesen und als gleich angenommen.Die Differenz der vertikalen Abstände des jeweils zu bestimmenden Punkts zumWasserstand ergibt dann den Höhenunterschied beider Punkte. Naturgemäß könnenauf diese Weise nur geringe Höhenunterschiede überwunden werden.
Im geschlossenen System wird der Unterschied des am jeweiligen Ende registriertenWasserdrucks in einen Höhenunterschied umgewandelt. Damit können deutlich grö-ßere Höhenunterschiede überwunden werden.
Prinzipiell muss das hydrostatische Nivellement als nicht mobil angesehen werden.Vorteil des Verfahrens ist, dass kein direkter Sichtkontakt erforderlich ist und diesesSystem leicht zu automatisieren ist. Lässt man den z. T. erheblichen Materialauf-wand unberücksichtigt, lassen sich mit dem hydrostatischen Nivellement Höhen übergroße Distanzen äußerst genau übertragen. Das Verfahren kann damit durchaus alsAlternative zum Stromübergangsnivellement angesehen werden. Werden Luftdruck,Temperatur und eine Reihe von Modellkorrekturen berücksichtigt, sind für die Ge-nauigkeit Größenordnungen von 0,5 bis 0,01 mm realisierbar [5.1]. Das Verfahreneignet sich in besonderer Weise zur redundanten Höhenbestimmung in Navigations-systemen oder für Monitoringaufgaben.
5.6 Unterirdische Vermessungsarbeiten
5.6.1 Grundsätzliches
Wie bereits angesprochen, ist der Hauptzweck der Tunnelvermessung, das oberirdi-sche Referenznetz aus dem GLN über das Portalnetz in den Tunnel zu übertragen.
5 Vermessung218

Dort installierte Festpunkte dienen als Referenz für Navigation, Bestandsaufnahme,Absteckungsarbeiten und ggf. Deformationsmonitoring.
Die Grundgeometrie des Bauwerks „Tunnel“ als i. Allg. langgestreckte Röhre,schränkt dabei die entstehende Netzgeometrie drastisch ein. Klassisch werden lang-gestreckte Punktabfolgen als Polygonzug gemessen, d. h. als Abfolge von gemesse-nen Brechungswinkeln und Strecken auf abwechselnd als Ziel- bzw. Standpunkt be-setzten Punkten (siehe Bild 5.19).
Das Fehlen seitlicher Anschlusspunkte zur Stabilisierung der Netzgeometrie bedingteine mit fortschreitendem Tunnelvortrieb ungünstiger werdende Punktkonstellation,die sich in einem, vor allem orthogonal zur Tunnelachse, stark anwachsenden Koor-dinatenfehler niederschlägt. Dieses Verhalten lässt sich am ehesten mit dem Schwin-gen eines nur in einem Ende gelagerten Hebelarms vergleichen, dessen Schwin-gungsamplitude sich mit zunehmender Länge vergrößert.
Generell sind Vermessungspunkte so zu installieren, dass sie zumindest für die Dau-er der Vermessungsarbeiten als Festpunkte, d. h. in Lage und Höhe als stabil, be-zeichnet werden können. Speziell in dieser Charakteristik unterscheiden sich aus derSicht der Vermessung Rohrvortrieb und Schildvortrieb mit Segmentausbau bzw.Schildvortrieb im Hartgestein.
Während der Schildvortrieb mit Segmentausbau bzw. Schildvortrieb im Hartgesteineine weitgehend ortsfeste Tunnelröhre hinterlässt, die es erlaubt, Festpunkte nachInstallation mit stabilen Koordinaten anzunehmen, bewegt sich im Rohrvortriebwährend des Vortriebs der gesamte Rohrstrang. Installierte Punkte sind weder inLage noch Höhe ortsfest. Im Schildvortrieb mit Segmentausbau bzw. Schildvor-trieb im Hartgestein kann daher ausgehend von der jeweils vorhergehenden Ver-messung fortschreitend gearbeitet werden, wogegen im Rohrvortrieb bei jederKontrollvermessung das gesamte Polygon vom Portal bis an die Ortsbrust vollstän-dig neu gemessen werden muss.
Abgesehen von GNSS-Verfahren, die naturgemäß unterirdisch keine Anwendungfinden können, unterscheiden sich die geodätischen Messverfahren unterirdisch nichtvon denen an der Tagesoberfläche. Die Durchführung der unterirdischen Vermes-sungsarbeiten obliegt dem AN. Die Kontrolle durch eine unabhängige Bauaufsichtist vorzusehen.
5.6.2 Refraktion
Refraktion entsteht, wenn Licht beim Übergang zwischen Medien unterschiedlicherDichte (z. B. Luftschichtungen) an der Grenzfläche zum Einfallslot hin (Übergangin dichteres Medium z. B. kältere Luftschicht) oder von Einfallslot weg (Übergangin weniger dichte d. h. wärmere Luftschicht) abgelenkt werden. Dadurch verändertsich der Signalweg in Richtung und Länge, Messergebnisse werden verfälscht.
An der Tagesoberfläche folgt die Luftschichtung im Wesentlichen der Topografieund ist damit relativ leicht zu modellieren. Der Einfluss der Refraktion wird dort,wie bereits an anderen Stellen beschrieben, entweder verfahrensseitig eliminiert
5.6 Unterirdische Vermessungsarbeiten 219

(gleiche Zielweiten, gleichzeitig-gegenseitiges Beobachten, Änderung des Nivelle-mentswegs usw.) oder durch Korrekturterme (siehe trigonometrische Höhenübertra-gung) weitgehend aufgefangen.
Es ist wichtig zu verstehen, dass bereits unter den unkomplizierten obertägigen Be-dingungen die Refraktion nicht allein auf die Strecke direkt, sondern auf den gesam-ten Signalweg und damit auch auf den gemessenen Zenitwinkel wirkt. Das heißt,dass sich z. B. Höhenunterschiede durch Refraktionseinfluss weit mehr ändern alssich proportional aus Streckenänderungen erklären lässt.
Soll die gemessene Strecke auf 1 ppm genau skaliert werden, so muss der Luftdruckauf 3 mbar genau, die Temperatur auf 1 °C und die relative Luftfeuchtigkeit auf20% genau bekannt sein [5.1].
Untertage nimmt die gesamte umgebende Oberfläche sowie sämtliche temperatur-beeinflussenden Einrichtungen (Fahrzeuge, Leuchten, Maschinen und Motoren, Be-lüftungseinrichtungen usw.) und der Wetterzug selbst Einfluss auf die Luftschich-tung. Der geometrische Einfluss der Refraktion ist daher nicht prädizierbar und kannsowohl lokal als auch gleichmäßig über größere Distanzen wirken. Darüber hinauskann sich der Refraktionseinfluss auch mit der Zeit, d. h. mit der Änderung der Um-stände (Temperatur, Luftdruck, Luftfeuchtigkeit usw.) ändern.
Das Thema Refraktion im Tunnel ist in der wissenschaftlichen Literatur erschöpfendbehandelt (z. B. [5.10]). Dennoch gibt es keinen Ansatz, die Refraktion oder ihrenEinfluss flächendeckend zu erfassen oder zu modellieren.
Im kreisrunden Regelprofil ergibt sich eine mehr oder weniger konzentrische Luft-schichtung, die aber durch eine nahezu unendliche Anzahl von Einflüssen gestörtwerden kann. Der Einfluss der Refraktion auf das Fehlerbudget der Messungen istzudem systematisch und somit nicht durch Wiederholungsmessung zu verringernoder gar zu kompensieren.
Baustellenseitig kann dem Einfluss der Refraktion nur durch ausreichende Belüftungmit Frischluft und gleichmäßig gute Ventilation (d. h. Durchmischung) entgegengewirktwerden. Allerdings sollte das ohnehin selbstverständlich sein, um die Sichtbedingungen,die auch durch Dunst, Staub oder etwa Abgase oder Schweissdämpfe beeinträchtigt seinkönnen, zu optimieren und arbeitsmedizinischen Vorschriften zu entsprechen.
Die Refraktion gehört zu den gefährlichsten und zudem größten Fehlereinflüssen inder Tunnelvermessung. Der Einfluss auf die Winkelmessung kann leicht das Zehn-fache der Instrumentenmessgenauigkeit und mehr annehmen, ohne durch konventio-nelle Methoden aufgedeckt werden zu können.
Aufgrund der Platzverhältnisse im Tunnel sind die Möglichkeiten zur Beobachtungin unterschiedlichen geometrischen Anordnungen sehr eingeschränkt. Die größteÄnderung der Luftschichtung ist i. d. R. in der Nähe der Tunnelwandung, mit deutli-cher Abnahme des Gradienten zur Tunnelachse hin, anzunehmen. Die homogenstenBedingungen sind bei Beobachtungen durch die Tunnelachse zu erwarten.
Aufgrund des die Messung umgebenden Profils lässt sich Horizontal- und Vertikal-refraktion nicht schlüssig trennen. Zu unterscheiden ist allenfalls Refraktion, die an-
5 Vermessung220

teilig auf die Bestimmung von Horizontalkoordinaten wirkt und diejenige, die aufdie Bestimmung der Vertikalkomponenten wirkt. Der Signalweg selbst wird dreidi-mensional im Raum „verbogen“.
Abgesehen von Ablotungen durch Sondierungsbohrlöcher kann die entstehende ho-rizontale Fehlorientierung des Vortriebs nur durch Kreiselmessungen behoben wer-den.
Der vertikale Refraktionseinfluss lässt sich weitestgehend durch gleichzeitig-gegen-seitiges Beobachten bzw. kurze Zielweiten eliminieren.
5.6.3 Untertägige Lagevermessung
5.6.3.1 Lagevermessung bei der Tübbingbauweise
Tunnelvortriebe mit Tübbingausbau decken Profildurchmesser von wenigen Meternbis deutlich über 10 m ab. Die Forderung, das Tunnelpolygon durch die Tunnelach-se zu beobachten, ist also nur in den seltensten Fällen zu realisieren. Häufig istsogar eine Anordnung in der Tunnelmitte (horizontal gesehen) nicht möglich, da derZutritt durch Tunnelinfrastrukur (z. B. Gleise und Verkehr) usw. eingeschränkt ist.Insbesondere die Installation von festen Einrichtungen (Pfeiler) ist hier selten mög-lich. Werden Pfeiler errichtet, sind Sicherheitsabstände zu Verkehrsräumen, beweg-lichen Teilen, elektrischen Installationen usw. einzuhalten. Eine solche Konstellationkommt der optimalen Anordnung im Sinne des Refraktionseinflusses am nächsten.
Alternativ werden Tunnelfestpunkte auf Konsolen an der Tunnelwandung ange-bracht (Bild 5.13). Bei der Nutzung von Konsolen ist darauf zu achten, dass sieausreichend ausladend sind und maximalen Abstand zur Tunnelwandung bieten. Beider Installation sollte ein maximaler Abstand des Instruments von Hochspannungs-leitungen oder anderen elektrischen Einrichtungen, die ein signifikantes Magnetfeldgenerieren, gewahrt werden, da dadurch ggf. die elektronischen Ableseeinrichtungenbeeinträchtigt werden könnten.
Bild 5.13 Beispiel einerWandkonsole (VMT GmbH)
5.6 Unterirdische Vermessungsarbeiten 221

BESTELLSCHEIN
Liefer- und Rechnungsanschrift: �privat �geschäftlich
Vertrauensgarantie: Dieser Auftrag kann innerhalb von zwei Wochen beim Verlag Ernst & Sohn, Wiley-VCH, Boschstr. 12, D- 69469 Weinheim, schriftlich widerrufen werden.
Datum / Unterschrift *€-Preise gelten ausschließlich in Deutschland. Alle Preise enthalten die gesetzliche Mehrwertsteuer. Die Lieferung erfolgt zuzüglich Versandkosten. Es gelten die Lieferungs- und Zahlungsbedingungen des Verlages. Irrtum und Änderungen vorbehalten. Stand: Juni 2016 (homepage_Probekapitel)
Stück Bestell-Nr.: Titel Preis* €
978-3-433-03114-8 Zielgenau bis ans Ende des Tunnels - Placzek / Bielecki / Messing / Schwarzer
79,-
909538 Gesamtverzeichnis Ernst & Sohn 2016/2017 kostenlos
bitte ankreuzen Monatlicher E-Mail-Newsletter kostenlos
Firma
Ansprechpartner Telefon
UST-ID Nr. / VAT-ID No. Fax
Straße//Nr. E-Mail
Land - PLZ Ort
Wilhelm Ernst & Sohn Verlag für Architektur und technische Wissenschaften GmbH & Co. KG Rotherstraße 21, 10245 Berlin Deutschland www.ernst-und-sohn.de