PENNSTATE Creative Campus Department of Mechanical and Nuclear Engineering
Modifications to Various Systems for a Rolling Dance VehicleA design specification report for a transmission and braking mechanism for a twelve foot dance
vehicle, capable of supporting six dancers.
March 15, 2012
Stephen ThorBrett CowanJon TackieJason Kuruc Intellectual Property Rights Agreement: No

Steven Bates Non-Disclosure Agreement: No
Executive SummaryThis design specification report (DSR) by The Penn State Engineering Design Team is an
outline for the development and design of a gliding transmission that will be implemented on a large dance vehicle. This dance vehicle will have an inner cage that rotates freely on 12’ diameter wheels. The team was tasked with designing a fully functional mechanism that would be completed in 10 weeks (due April 2nd, 2012) within a $1000 budget. The primary needs of the dancers and architects are to minimize noise and friction while ensuring that the vehicle is safe to use.
A roller coaster wheel design was selected to construct the gliding mechanism. The primary design consists of four wheels mounted in a ‘T’ configuration. There are two in-line wheels on the bottom of to bear the load of the inner cage and dancers. There is one guide wheel on either side of the guide rail to prevent the cage from slipping off of the 12’ diameter wheels that they are attached to.
The design team was requested by the sponsor to produce a pre-alpha prototype, allowing them to visually understand the chosen design for the gliding mechanism. Three 2” wide by 3.5” diameter brown phenolic wheels were ordered for this pre-alpha prototype. The team spent one week manufacturing the gliding mechanism, primarily out of plywood and metal shafts. After completion, the sponsor and the architects were better able to grasp the team’s proposed concept. During manufacturing, the team discovered that the brown phenolic wheels would not be suitable for the final design due to the low quality of the roller bearings in them. Only the inside of the wheel would spin freely which would cause additional friction between the wheel and the casing.
The next step for the team was to order wheels with stronger bearings that would not cause any friction between the wheel and the casing and could still withstand the loads that will be applied. The team decided to order four 1” wide by 5” diameter performance rubber-tred wheels because they met all the needs that were discovered during the pre-alpha prototype. A new SolidWorks drawing of the casing was generated for the new wheels. This SolidWorks drawing was used to water jet the casing out of 1/16” thick stainless steel sheet metal to manufacture the alpha prototype for testing. In addition to the 1/16” thick stainless steel, the team used 1.5” square steel tubing for additional supports. After completion, the team met with the sponsor and tested the strength of the alpha prototype. The prototype was loaded and rolled down a rail to analyze friction and deflection of the wheels. The wheels and the casing proved to be satisfactory for the final design. The team has recently ordered the steel and additional wheels for the 6 sets of 4 gliding mechanisms.
The total cost of the gliding mechanisms and sheet metal come to $700. The steel used for the framing of the dance vehicle was donated which means there is $300 available to machine components and make small purchases as needed as the project progresses. The budget for this project is $1000 and since the team only has $700 spent, the project is under budget and on schedule thus far.
2

Table of ContentsExecutive Summary.....................................................................................................................2
1.0 Introduction............................................................................................................................4
1.1 Background....................................................................................................................41.2 Initial Problem Statement..............................................................................................41.3 Objectives......................................................................................................................5
2.0 Customer Needs Assessment..................................................................................................5
2.1 Gathering Customer Input.............................................................................................52.2 Weighting of Customer Needs.......................................................................................6
3.0 External Search.......................................................................................................................7
3.1 Patents...........................................................................................................................83.2 Existing Products...........................................................................................................8
4.0 Engineering Specifications.....................................................................................................9
4.1 Establishing Target Specifications................................................................................94.2 Relating Specifications to Customer Needs..................................................................9
5.0 Concept Generation & Selection..........................................................................................10
5.1 Problem Clarification...................................................................................................105.2 Concept Generation.....................................................................................................115.3 Concept Selection........................................................................................................16
6.0 System Level Design............................................................................................................18
7.0 Special Topics......................................................................................................................19
7.1 Preliminary Economic Analyses- Budget and Vendor Purchase Information............197.2 Project Management....................................................................................................207.4 Ethics Statement..........................................................................................................21
8.0 Detailed Design....................................................................................................................22
8.0.1. Modifications to Statement of Work.......................................................................228.0.1.1. Introduction...........................................................................................................228.0.1.2. Customer Needs Assessment................................................................................228.0.1.3. External Search.....................................................................................................228.0.1.4. Engineering Specifications...................................................................................228.0.1.5. Concept Generation and Selection........................................................................238.0.1.6. System Level Design............................................................................................238.0.1.7. Special Topics.......................................................................................................24
3

8.1 Manufacturing Process Plan........................................................................................248.2 Analysis.......................................................................................................................258.3 Material and Material Selection Process.....................................................................268.4 Component and Component Selection Process...........................................................278.5 CAD Drawings............................................................................................................278.6 Test Procedure.............................................................................................................288.7 Economic Analysis- Budget and Vendor Purchase Information.................................29
References..................................................................................................................................29
Appendices.................................................................................................................................31
Appendix A: Full Customer Needs List............................................................................31Appendix B: Engineering Parameters...............................................................................33Appendix C: Design Team Budget....................................................................................34Appendix D: Bill of Materials...........................................................................................35Appendix E: Gantt Chart...................................................................................................37Appendix F: Layout of transmission piece for water jetting.............................................38Appendix G: Dimensioned drawings of transmission components...................................39Appendix H: Team Resumes.............................................................................................43
1.0 Introduction
1.1 BackgroundA group of Penn State faculty was issued a grant from the Doris Duke Foundation to
work with the Diavolo dance company to create a new performance piece. “Diavolo Dance Theater is an internationally renowned modern acrobatic dance company” (www.diavolo.org). The theme of the project is walking and focuses on the relationship between people, technology, and public spaces. The faculty and students brainstormed and generated an idea for a 12 ft. dance vehicle that would successfully incorporate all of these elements. The idea is that people can walk within the 12 ft. diameter wheels of the dance vehicle to make it transverse terrain, thus connecting people (dancers), technology (the dance vehicle), and public spaces (the terrain upon which the dance vehicle maneuvers). A prototype with a planetary gearing system was built before the engineering design team was presented with the project.
1.2 Initial Problem StatementThe Penn State University engineering design team was presented with a problem
concerning the transmission of a large 12 ft. dance vehicle. A design was to be implemented for a gliding/braking mechanism that would allow the inner cage of the dance vehicle to rotate
4

independently from the outer wheels that maneuvered on the terrain. The gearing system of the prototype had to be improved in order for the dance vehicle to operate smoothly and to allow the inner cage to rotate freely. All of this had to be done while minimizing noise and friction that would be created by metal-on-metal contact points. The dance vehicle would not be moving faster than about 5-10mph which influenced the sponsor’s decision in manufacturing a braking system. The sponsor stated that if time permitted, the design team would create a braking mechanism after the completion of the gliding system. The team has a number of goals to achieve while working under a $1000 budget.
1.3 ObjectivesThe objective of the project for the design team was to design a gliding mechanism that
allowed the inner cage to rotate freely from the outer wheels. This gliding mechanism was to have a braking system that would lock the cage to the wheels; thus the cage would rotate as the wheels rotated. The sponsor noted that manufacturing the braking system was a secondary goal for the team and that completion of that component was not paramount. The architects and the dancers were mainly focused on generating a smooth gliding system. The steel tubing used to construct the dance vehicle did not come out of the Design Team’s $1000 budget. The team had sufficient funds to create and manufacture the gliding/braking mechanism. Because the entire budget was allocated entirely towards such a small scope of the design, few limitations were placed on the design. This provided the opportunity for much creative freedom. The team was expected to deliver all aspects of the project on time, as indicated by the sponsor, and with high quality. The design team’s main priority was to satisfy most, if not all, of the customer needs listed in section 2.
2.0 Customer Needs Assessment
2.1 Gathering Customer InputThe engineering design team worked closely with the Penn State faculty in architecture,
landscape architecture, and dance. The customers for the 12ft. dance vehicle were the three architects (Marcus Shaffer, Alex Bruce, and Kyle Brown) and six selected dance performers that would be using the vehicle in April. The design team worked closely with the architects multiple times each week to specify what issues needed to be resolved. Meetings were held every Friday with both the architects and dancers to discuss what alterations needed to be made to the design and what were the goals for the following week. Detailed records of the customer needs are included in the Appendix A.
The primary needs of the customers were for the design team to redesign and improve the transmission and gearing elements to allow the inner cage to spin freely from the outer two wheels while reducing friction and noise. It is important to address that the design team decided
5

that safety is paramount in this particular project. Heavy materials were used and dancers were performing in the vehicle while it is in motion.
2.2 Weighting of Customer NeedsBy gathering the customer needs, the team was then able to assess each one. Weighting
of these needs was vital to the project because the team could clearly identify what main requirements would be needed in the vehicle. Weighting the customer needs also enabled the team to prioritize what aspects of the vehicle to work on to ensure the highest satisfaction by the customer. Speaking directly with the architects and dancers gave the team substantial amount of information to generate a Comparison Chart to weigh the most important needs.
Table 1. AHP Comparison Chart to Determine Weighting for Main Objective Target Specifications
Safe
Ease of Use
Ease of Mfg Cost
Aesthetics
Stability Dur.
Visib.
Precise/Accurate Total Weight
Safe 1.00 2.00 2.00 2.00 4.00 2.00 2.00 5.00 2.00 22.00 0.16Ease of Use 0.50 1.00 1.00 0.33 3.00 0.33 0.25 3.00 0.33 9.75 0.09Ease of Mfg 0.50 1.00 1.00 1.00 5.00 1.00 0.50 3.00 2.00 15.00 0.11Cost 0.50 3.00 1.00 1.00 3.00 1.00 1.00 4.00 2.00 16.50 0.11Aesthetics 0.25 0.33 0.20 0.33 1.00 0.25 0.20 1.00 0.25 3.82 0.08Stability 0.50 3.00 1.00 1.00 4.00 1.00 1.00 5.00 2.00 18.50 0.14Durability 0.50 4.00 2.00 1.00 5.00 1.00 1.00 5.00 2.00 21.50 0.14Visibility 0.20 0.33 0.33 0.25 1.00 0.20 0.20 1.00 0.25 3.77 0.08Precise/ Accurate 0.50 3.00 0.50 0.50 4.00 0.50 0.50 4.00 1.00 14.50 0.1
Table 2 lists each customer need in order from most important to least important
Table 2. Weighted Hierarchal Customer Needs1. Safety (0.15, 0.15)
1.1. Large hand and foot placements (0.05, .333)1.2. Moving parts are concealed (0.1, 0.666)
2. Durability (0.13, 0.13)2.1. Strong material (0.065, 0.5)2.2. Strong under dynamic force loading (0.0325, 0.25)
6

2.3. Tolerate long periods of operation (0.0325, 0.25)3. Stability (0.13, 0.13)
3.1. Structure can support the loads (0.065, 0.5)3.2. Minimal vehicle vibration (0.065, 0.5)
4. Cost (0.10, 0.10)4.1. Inexpensive components (0.033, .333)4.2. Stay within the budget (0.067, 0.666)
5. Ease of Manufacturing (0.10, 0.10)5.1. Easy to assemble (0.05, 0.5)5.2. Purchase completed components (0.05, 0.5)
6. Precise/Accurate (0.10, 0.10)6.1. No rough edges (0.025, 0.25)6.2. 90 degree bent angels (0.025, 0.25)6.3. Tightly secures roller mechanism (0.05, 0.5)
7. Ease of Use (0.08, 0.08)7.1. Dancers can move freely (0.06, 0.75)7.2. Vehicle can move without having to use excessive force (0.02, 0.25)
8. Visibility (0.07, 0.07)8.1. User can be seen while operating/dancing (0.035, 0.5)8.2. Audience can see from any angle the performance (0.035, 0.5)
9. Aesthetics (0.07, 0.07)9.1. Pleasing to the eye of the audience (0.035, 0.5).9.2. Get a sense of “play” while watching the performance (0.035, 0.5).
After completing the Comparison Chart and the Hierarchical Needs List, the team was able to determine that safety, stability, durability, and ease of manufacturing were the areas of most concern and required greatest concentration during the design process. The outcome of the AHP Chart and the Hierarchical Needs List aided the team in the generation and selection of concepts for the vehicle while meeting the primary needs of the customer.
3.0 External SearchThe design team’s external search focused primarily on a way to allow the inner cage of
the dance vehicle to move independently from the outer wheels. In order to accomplish this, the team researched systems involving objects moving on rails. One design was a monorail car, which hung from a grooved horizontal bar with two wheels oriented at angles that fit inside the grooves (as seen in References). Another system was a roller coaster car that had two wheels above and below the rail and an additional two wheels either on the inside or outside of the rail (as seen in References).
The reason for the multitude of wheels in these systems was to avoid wheels disengaging
7

from the guide rail and to support the heavy loads. For the monorail, the wheels were kept in place because of their location within the groove of the rail. As for the roller coaster car, the wheels above and below are load bearing, while the wheels on the side keep the system in place. Both systems were under consideration when generating concepts, which is further detailed in Section 5.
Along with the rail systems, braking systems were also researched. The team focused on simpler designs, including brake pads, because they would be easier to install and would be less of a hazard for the dancers within the vehicle.
3.1 PatentsPrior to establishing the engineering specifications and beginning the concept generation
process, a patent search was carried out. By performing this search, it was determined that there were several existing technologies which could be incorporated into the design of the dance vehicle. The types of technologies that were most highly researched were patents for roller coaster wheels and gliding assemblies, roller coaster braking systems, and motorcycle and bicycle hydraulic disk brake systems. The team concluded through the research that while roller coaster braking systems would not be suitable for this project, the gliding mechanisms could certainly be adopted and modified as necessary. Additionally, the hydraulic disk brake systems seen on modern bicycles could be integrated to work with the dance vehicle’s sub-systems (gliding mechanism).
Table 3: Art-Function MatrixFunction
Mechanical Design Braking Mechanism Gliding Mechanism
Provide load rollers 7594473 32654493675978
Secure dance cage 3194178 0229929216289
3791305
Provide stability 7594473
Art
3.2 Existing Products......The search for existing dance vehicles yielded few results. An extensive search to find other dance vehicles of this nature did not present any results similar to the PSU Creative Campus 1 Project. This presents the unique and challenging problem of having essentially no existing research or knowledge in the art of building a dance vehicle. However, this also affords much opportunity for creative freedom in design without being restricted by any sort of standard. Because there are no current designs such as the one which is being proposed, the vehicle can take on virtually any form deemed to be appropriate by the design team.
8

4.0 Engineering Specifications
4.1 Establishing Target SpecificationsThe established target specifications, shown below in Table 1, resulted from both
customer needs and the design team’s expectations for the dance vehicle. The safety and well-being of the dancers was a huge concern for the team, so metrics like guards on hazard areas, stepping bars for the dancers, and a slow speed for the dance vehicle were included to address this issue. Table 4: Target engineering specifications
From external research and personal experience with roller coasters, it was established that the track should roll smoothly on the rail in order to provide the dancers with a stable vehicle. Based on the external search and progress with the project, the team believed that the target values for these metrics were completely attainable.
4.2 Relating Specifications to Customer NeedsThe Needs-Metrics Matrix in Table 2 below specifies how the metrics of the target
specifications meet the customer needs outlined in Section 2. The design team was uncertain whether it could satisfy the need “Braking system for inner cage” due to time constraints, so no metric is allocated to this particular need. Once the team has established the final design concept and is able to implement it in the dance vehicle, further consideration will be made for the braking system.
9
No. Metric Importance Units Target Value1 Unit production cost 4 US$ < 10002 Operational life 4 Yrs 103 Number of maintenance appointments per year 3 Appts < 34 Simple mechanical design 4 - Subj.5 Hazard areas guarded 5 - Subj.6 Track wheels roll on glide rail smoothly 4 - Subj.7 Minimize number of steel rods for structure 4 lbs < 12008 Track wheels support machine weight 5 lbs/wheel > 3009 Simply powered 3 - Subj.10 Speed of dance vehicle 4 ft/s < 14.711 Stepping bars within wheels for dancers 5 Amt./wheel 20

Table 5: Needs-Metrics Matrix
MET
RIC
S
Haz
ard
area
s gua
rded
Min
imiz
e nu
mbe
r of s
teel
rods
for s
truct
ure
Sim
ply
pow
ered
Num
ber o
f mai
nten
ance
app
oint
men
ts pe
r yea
r
Uni
t pro
duct
ion
cost
Sim
ple
mec
hani
cal d
esig
n
Whe
els s
uppo
rt m
achi
ne w
eigh
t
Ope
ratio
nal l
ife
Whe
els r
oll o
n gl
ide
rail
smoo
thly
Spee
d of
dan
ce v
ehic
le
Step
ping
bar
s with
in w
heel
s for
dan
cers
NEEDSNoise reduction X XMinimal friction XDance machine is durable X X X X XRemains within budget X XRolling System supports inner cage XDance machine is safe X X XAccomodates six dancers XLightweight XEasy to stop X XSlow movement XLow maintenance X XMaximum visibility of dancers X X XBraking system for inner cage
5.0 Concept Generation & Selection
5.1 Problem ClarificationThe PSU Creative Campus 1 project is to design and build a dance vehicle to be used as a
prop for the Diavolo dance company. The vehicle consists of two 12 ft. diameter wheels attached by a central cage. The center cage and the wheels will each hold two dancers (for a total of six dancers). The first iteration of the design (constructed entirely by architects prior to the induction of the engineering design team) presented several problems. Firstly, the wheels on the previous design had a tendency to bow outwards away from the cage. Secondly, the inner cage is meant to roll independently from the wheels, which should also need to roll independently from one another. Finally, a locking system needs to be implemented so that the dancers are able to arrest the independent motion between the wheels and inner cage from inside the vehicle itself (so all three main components roll as one). The design team determined that all three of these problems may be solved by installing a roller mechanism, similar to those seen on
10

modern roller coasters. To help understand the design requirements, a functional decomposition flow chart (e.g. black box diagram) was used. This chart shows the basic functions that need to be carried out, sub-functions, and outputs.
5.2 Concept GenerationAfter performing an external search and researching many different patents relating to
roller coaster rolling and breaking systems, the concept generation process began. The designs for the roller mechanism/locking system are to be incorporated into one apparatus. It was decided that the rolling system would be based on the designs that roller coasters use. An entirely new braking/locking system needed to be design since the brakes used with modern roller coasters are actually located in the tracks and not on the car. To assist the team with governing what engineering principles needed to be applied to the design in order to fulfill specific parameters, a TRIZ chart was created as featured below in Table 6. The full List of the Engineering Parameters is located in Appendix B.
11
Cage & wheelsMove independently
Wheels held vertically in place
Cage & wheels can lock together
Gliding mechanism
Reduce friction b/w cage & wheels
Smooth independent rolling
Dancer input
Locking mechanism
Kinetic energy from wheels
Thermal energy
Induced stress on mechanism

Table 6. TRIZ Method for the Dance VehicleParameter Conflict (Trade-off)
Parameter to Improve Weight
Force on Transmission Shape Stability Durability Manufacturability Complexity
Weight
Force on Transmission
8, 28, 40
4, 13, 22, 28 8, 18, 28 3, 5, 28 21, 24 1, 33
Shape
3, 14, 35, 40 4, 13, 22, 28
1, 4, 7, 15
1, 4, 14, 40 3, 14, 33 1, 14, 33
Stability 4, 8, 18 8, 18, 281, 4, 7,
15 8 1, 4, 14, 22 5, 28, 33
Durability
1, 3, 21, 40 3, 5, 28 1, 4, 40 8 35, 40 3, 4, 6, 22
Manufacturability
1, 6, 14, 26 21, 24
3, 14, 33
1, 4, 14, 22 35, 40 1, 4, 6, 24
Complexity
1, 6, 14, 22 1, 33
1, 14, 33 5, 28, 33
3, 4, 6, 22 1, 4, 6, 24
The first concept was a five-wheel design that would implement a braking system similar to the disk brakes used on a bicycle or motorcycle. All of the concepts generated implement similar roller systems that travel over a large square-tube guide rail, however the methods used to lock the cage and the wheels are all different. For this particular concept, the front four wheels were all to be used as guide wheels, while the fifth wheel, located in the back, was to be a dedicated braking wheel. In this design, the rolling motion of the braking wheel itself was retarded. A rotor is attached to the dedicated braking wheel so that they move together. The rotor runs through a brake caliper which is controlled by a hand lever. By using a braking system of this fashion, friction between the castor rail and the braking wheel would cause the larger wheels of the vehicle and the inner cage to lock together.
12

Figure 1. Concept A
The next three designs are very similar to the first in that they all utilize a motorcycle-like brake caliper and rotor system. After examination of the previous system, it was determined that, with the correct placement of the guide wheels, a dedicated braking wheel was not necessary. Therefore the fifth wheel was eliminated to produce a new-four wheel system. In this second concept, the back guide wheel also acts as the braking wheel. There are three rollers of these systems on each side of the cage (although only one on each side includes the brake). By reducing the number of wheels from five to four on each apparatus, the total number of wheels is reduced from thirty to twenty four. This design reduces the size and weight of the system as well as lowers the manufacturing cost while maintaining the same braking force.
The four-wheel design was widely accepted by the design team and therefore is present in all of the following concepts. Notwithstanding, the locking system for each concept is different. The third concept is much the same as the second, still using four wheels with the back wheel as
13
Guide Rail
Guide Wheels
Load Bearing WheelsBraking Wheel
Rotor Brake LeverCaliper
Casing
Casing
Brake Caliper
Rotor
Guide Guide Load Bearing
Figure 2. Concept B
Caliper
Brake
Rotor
Load Bearing
Casin
Guide
Guide
Figure 3. Concept B (section view)

the primary braking wheel. The new design is focused on increasing the surface area between the guide wheels and the guide rail so that the overall braking force is enhanced. In order to do this, the concept uses two wheels out of the four that act as both guide and braking wheels. Like the previous design, there is still only one rotor and an attached caliper. To incorporate the secondary braking wheel, a gear is mounted on top of the back wheel where the rotor is attached. A second gear is then placed on the front wheel. A chain links these two gears so that when the caliper is activated both wheels seize simultaneously.
Figure 4. Concept C
The fourth concept was generated from the idea that two guide wheels could be active as part of the locking mechanism as opposed to only one. This design utilizes a similar gear-to-gear system as in the previous design. This design takes further advantage of a gear ratio that is not 1:1 so that braking force can be further increased. In addition to this change the rotor is mounted completely independent of the wheels so that it rotates on its own. There are two large gears that rotate in a concentric manner with the rotor. Each of these large gears are connected by chain to smaller gears that are mounted on each of the guide/braking wheels. When activated, the caliper stops the motion of the rotor which in turn stops the rotation of the wheels because of the chain linkage.
14
Rotor
Load Bearing WheelsGuide Wheels Guide Rail
Casing Brake Lever
Caliper
Gears
Chain

Figure 5. Concept D
Unlike the previous four designs, the fifth concept only uses a motorcycle-like brake caliper, but does not require the use of a rotor or chain linkage. In this design, none of the guide wheels are used in the braking system. Instead, a secondary rail is attached to the guide rail. This rail is the same thickness as the rotors used in the previous designs only it extends the entire
way around the guide rail. The caliper is attached to the roller system and the secondary rail runs through the caliper. This system is a direct locking mechanism in that it directly links the outer wheel to the cage. This is different from previous designs that use friction between the guide wheels and the castor rail to link the vehicle wheels to the inner cage together.
15
Figure 6. Concept E
Gears
Caliper
Chain
Casing
Brake Lever
Guide Rail Load Bearing Wheels
Guide Wheels
Rotor
CaliperGuide Wheels
Guide Rail
Load Bearing Wheels
Secondary Braking Rail
Casing
Caliper
Guide Rail
Guide Wheels
Load Bearing Wheels

The sixth and final design is the most unlike all of the previous designs. This concept utilizes a direct locking mechanism like the fifth design. Unlike the fifth design, however, this concept does not use a rotor or a caliper. Nor does this design require the addition of a secondary rail. Instead, the walls of the castor rail itself are used as the braking surface. A V-brake system (similar to those used on road bicycles and older mountain bikes) is attached to the housing of the four-wheel roller mechanism. The brake pads of this V-brake run along either side of the guide rail. When the brake is activated the pads come into contact with the guide rail and lock the vehicle wheels to the cage.
FFigure 7. Concept F
5.3 Concept SelectionAfter the concept generation process, a final concept had to be selected. To do this, the
design team first went through a concept screening process. This process eliminates extraneous concepts so that only the best designs will be scored and ranked. This is done by creating a concept screening matrix. A variety of selection criteria are chosen by the design team and each concept is screened against these criteria. The screening process involves three basic ratings; pluses, minuses, and zeros. Either a plus, minus, or zero is assigned to each concept for each criterion. These values are then added to give the net score and then concepts are ranked. The lowest ranking concepts are cut and are no longer taken into consideration as viable options for the final design.
16
Brake Lever
Load Bearing Wheels
Guide WheelsV-Brake
Guide Rail
Casing
V-Brake
Guide Rail

Table 7. Concept Screening MatrixConcepts
Selection Criteria 1 2 3 4 5 6
Cost - - - - - +
Safety - 0 0 - + 0
Size - + + - + +
Manufacturability 0 0 0 0 - -
Reliability 0 + + 0 + +
Brake power + + + + + +
Overall strength - 0 - - + -
Easy to mount to cage 0 0 0 0 - 0
Sum + 1 5 3 1 5 4
Sum 0 3 2 3 3 0 2
Sum - 4 1 2 4 3 2
Net Score -3 3 1 -3 2 2
Rank 4 1 3 4 2 2
Continue? No Yes Yes No Yes Yes
1 Five-wheel Design
2 Wheel mounted rotor w/o gearing
3 Wheel mounted rotor with gearing
4 Independently mounted rotor with gearing
5 Caliper with secondary rail (no rotor)
6 V-brake system
After the screening process was completed, a Pugh chart was created and each concept was scored based on different criteria. A weight factor was assigned to each of these criterions. Each concept is than ranked on how well it fulfills the criteria on a one-to-five scale (five being the best performance). The score multiplied by the weight gives a weighted score for one category. After all the concepts have been assigned weighted scores for each criterion, these scores are added to determine the best designs. The highest scoring design was concept number six (with the V-brake arrangement). This design proved to be the most practical and simplistic
17

solution. Concept three (a four-wheel arrangement with added gearing system) was chosen as an alternative design in the event that the V-brake system proves to be unsuitable during preliminary testing.
Table 8. Concept Scoring ChartConcept
2 3 5 6 (ref)
Selection Criteria Weight RatingWgtd. Score Rating
Wgtd. Score Rating
Wgtd. Score Rating
Wgtd. Score
Safe 0.16 2 0.32 1 0.16 4 0.64 3 0.48Ease of Use 0.09 3 0.27 3 0.27 3 0.27 3 0.27
Ease of Mfg. 0.11 5 0.55 1 0.11 1 0.11 3 0.33Cost 0.11 1 0.11 2 0.22 2 0.22 3 0.33Aesthetics 0.075 2 0.15 2 0.15 3 0.225 3 0.225Stability 0.13 3 0.39 3 0.39 3 0.39 3 0.39Durability 0.13 5 0.65 4 0.52 3 0.39 3 0.39Visibility 0.075 2 0.15 2 0.15 2 0.15 3 0.225Precise/Accurate 0.1 3 0.30 3 0.30 3 0.30 3 0.30
Total Score 2.755 2.270 2.695 2.940Rank 2 4 3 1Continue Yes-Alt No No Yes-Prim
Relative Performance RatingMuch worse than reference 1Worse than reference 2Same as reference 3Better than reference 4Much better than reference 5
6.0 System Level Design
18

The primary design consists of six sets of four wheels mounted in a ‘T’ configuration, as shown in Figure 8. There are two load bearing wheels located on the inner side of the guiderail
that is attached to the inner cage. There is also one guide wheel on either side of the guiderail to form the top of the T. The guide wheels are positioned slightly away from the guiderail so as to not induce unnecessary friction. As opposed to the first set of wheels, these function mainly as guides to keep the vehicle wheels in place and rolling on a collinear axis with the inner cage. These wheels do not bear the load of the inner cage.
To hold the wheels in place is an outer housing. This housing is made of sheet metal which is bent around the wheels. The housing has pieces of square tubing connecting the top corners of the T to the base. These pieces are present to increase the overall strength of the housing. Attached to the housing is the locking mechanism. The locking mechanism used in the primary design (concept 6) consists of a V-brake which is attached to the housing via an extension of the sheet metal and extends around the guide rail. This brake is controlled by a hand lever. The alternative design (concept 2) uses a disk brake system. The rotor is attached to the back wheel so that the two rotate together. The rotor runs through a caliper which is attached to the housing. Like the V-brake design, the caliper is also controlled with a hand lever. Both systems are hydraulic (as opposed to a cable system) to increase braking force. See Figure 7 in
section 5.2 for details.
7.0 Special Topics
7.1 Preliminary Economic Analyses- Budget and Vendor Purchase Information
The budget for this project is split between materials, components, and other assorted expenses. These values are approximate and
are therefore subject to change. Fortunately, all of the steel tubing required for this project was acquired for free through the sponsor, which dramatically cut down on material expenses. Other material that needed to be purchased was sheet metal for the housing of the gliding mechanism. The pricing estimate on this item came from the McMaster-Carr website. Components that needed to be purchased included the wheels for the gliding mechanism, in addition to a braking system, or materials that needed to be
19
Figure 9. Transmission Assembly
Guide Wheels
Guide Wheels
Load Bearing Wheels
Casing
Square Tubing
Square Tubing

purchased to fabricate a braking system. The price estimates for the wheels also came from McMaster-Carr and estimates for the braking system were based on the average price for bicycle braking components. Other expenses include a poster, and travel expenses. For all items that needed to be ordered, the estimated shipping costs are included in the prices seen on the budget. Since the sponsor is on-campus, no money was reserved for travel expense. In addition to materials, components and other expenses, twenty percent of the budget was allocated towards contingency. This was in case more money had to be spent on materials or components, or if there were last minute parts that needed to be purchased. The budget and Bill of Materials can be seen in the Appendix C and Appendix D, accordingly. The project is currently running under budget including the twenty percent contingency.
7.2 Project ManagementTo track the progress of the project, the team decided to use a Gantt chart with tasks,
milestones, and responsibilities, which can be found in Appendix E. It will be important to track the progress, to know whether or not the project is on schedule. Falling behind schedule will cause a number of issues with the sponsor, because they have their own schedule to keep. A deliverables agreement was signed by each of the team members, acknowledging the key milestones with the sponsor, advisor, and team. The responsibilities and tasks from the Gantt chart were assigned to each person based on their individual technical skills and areas of experience. The strengths of each team member can be found in the team contract, in Appendix F and in their respective resumes, in Appendix F.
7.3 Risk Plan and SafetyA vehicle of this type has never been created before, so there are many unknown or
unproven aspects regarding its functionality. With so many unknown variables, safety becomes a huge concern, and is the major risk involved in this project. The team recognized six main potential risks in this project, as shown in Table 9, and four of them were safety or construction related. Needless to say, safety is highly important, and will be iteratively address throughout the design process.
The highest risk the team was able to predict was a potentially hazardous scenario where a dancer falls from the vehicle near the wheels, which will be addressed with netting and a guide rail. The most beneficial action that can be done is to construct the vehicle as soon as possible to allow the dancers to get accustomed to its movements. This will minimize the frequency of falling, while the guide rail and netting will minimize the severity of the event.
20

Table 9. Risk Plan for the Dance VehicleRisk Level Actions to Minimize Fall Back Strategy
Dancer Falling from Wheel High
• Preliminary test with dancers• Add netting in the wheel• Larger platform for foot placement
• Guide Rail to hold on to• Fully enclose wheel
Wheel Stability Moderate
• Sufficient number of braces
• Low clearance between guide wheels and caster rail
• Extra supports stemming from inner cage• Remove a dancer
Schedule Delays Moderate
• Order parts early• Construction progress• Double check company's delivery time
• Factor in additional time• Go to manufacturer
Dancer Pinched in Between Mechanisms
Moderate
• Casing over transmission• Minimize distance between wheels and inner cage• Maximize performance area
• Transmission located outside of cage• Don’t allow dancer to transfer from wheel to inner cage
Customer Needs Not Satisfied Low
• Understand what their needs are• Watch Diavolo for inspiration• Speak with sponsor on regular basis
• Go to every 6-9 pm Friday meeting to ensure proper progress
Faulty Braking System Low
• Order a brake and wheel set to avoid frictional issues
• Have a backup braking system incase primary one fails
7.4 Ethics StatementThe team members hold each other to a high ethical standard. All members signed a team
contract, which outlines the consequences for failing to uphold this standard. As mechanical engineers, the team will adhere to the American Society of Mechanical Engineers (ASME) Code of Ethics. Recognition will be given to all external sources (including existing patents, services, or emerging technology), which have contributed to the project. When the product is delivered to the sponsor, the team will be confident in its safety and success.
7.5 Environmental StatementThe design developed by the sponsor and design team will be constructed primarily of
21

steel. By ensuring the design is fully correct before construction, weld time will be minimized, decreasing project’s carbon footprint. After the showcase, the vehicle will sit unused. If the team can reuse the materials for other projects, the University will save money and resources. Another possible option is selling the vehicle to a different creative dance team, such as Diavolo. The team will continue searching for opportunities to complete the project in an environmentally conscious manner.
7.6 Communication and Coordination with SponsorMarcus Shaffer, an assistant professor in the Stuckeman School of Arts and Architecture
will be the main point of contact for the Penn State Creative Campus 1 Team (design team). He will be contacted at least once each week by email and two personal meetings per week. The first meeting each week will be with the two architectural team members, Alex Bruce and Kyle Brown. This meeting will happen either Monday or Wednesday at 1:30pm, on the fourth floor studio of the Stuckeman Building. The second meeting each week is Friday at 6 pm in the IDEALab in the Stuckeman Building with the Penn State Creative Campus dance team. Only one design team member needs to be present for this meeting each week. These meetings will ensure the sponsor and teams are always brainstorming new ideas, while constructing the prototype.
8.0 Detailed Design
8.0.1. Modifications to Statement of WorkRevisions to the Statement of Work Proposal Sections 1 through 7 are listed as 8.0.1.X
8.0.1.1. Introduction- No changes made
8.0.1.2. Customer Needs Assessment- No changes made
8.0.1.3. External Search- No changes made
8.0.1.4. Engineering SpecificationsDue to time constraints and budget concerns the team decided that a braking system will
not be implemented into the final design of the gliding transmission mechanism for the dance vehicle. The architect team and sponsor have stressed multiple times that completing the gliding transmission mechanism is the design team’s first and foremost priority; the braking system is a secondary goal if time permits. After the team has completely finished manufacturing all six transmission components, then a braking system can be considered for implementation. The
22

sponsor has recently emphasized his concerns about covering the hazardous transmission areas on the vehicle after the team presented the completed alpha prototype. The design team continues to put safety as the primary metric when redesigning the alpha prototype for the final product. The design team has also decided to use galvanized steel instead of stainless steel for the final design. This material is cheaper than stainless steel, rust resistant, and very strong; further explanation for this chosen product can be found in the Material and Material Selection Process of the report.
8.0.1.5. Concept Generation and SelectionAs stated in the engineering specifications section of the report, the team will no longer
consider designs that have a braking system implemented in the gliding transmission mechanism. All the concepts that have been generated and provided in the report display some form of braking system. When referring back to the designs located in the 5.2 Concept Generation section, the team has chosen the concept 3 as the design without the braking system attachment.
8.0.1.6. System Level DesignAfter completing the alpha prototype, the design team was able to better understand the
manufacturing process that will be used to construct the six transmissions necessary for the project. After building the first prototype, the design was slightly altered to accommodate for ease of manufacturing for the remaining transmissions. The team determined two minor improvements that could be made to the design, which solve a respective problem that was encountered during the alpha prototype creation. These problems include a need for wheel coverings and enlarging the wheel housings.
The first improvement that was made to the design was adding a cover to the wheels in the housing of the glide system. It is imperative that the team makes these transmissions safe for the dancers to operate, so keeping hazard areas to a minimum and out of reach is crucial. As of now, the wheels in the housing are exposed, which will allow fingers and clothing to get caught, potentially causing injury. In order to cover the wheels, caps were designed out of a thin 1/32” sheet metal. These caps are attached to the housing by drilling holes similar to those for the wheels, incorporating them with the same bolts that hold the wheels in place, as shown in Figure 10, for labeled parts refer to Appendix G. This will both reduce the manufacturing time installing the caps and allow easy removal if the wheels need to be accessed for maintenance.
23

Figure 10. Exploded View of Guide Wheel Housing
The second improvement involved ease of manufacturing. The housing around each wheel was enlarged and fixed to a rectangular shape. Although it is not as aesthetically pleasing, the ease of manufacturing is greatly increased. This also allows the caps to be removable and simple to design. The new wheel housings are shown in Figure 10 as well.
8.0.1.7. Special TopicsThe Design Team Budget, Bill of Materials, and Gantt Chart in Appendices C, D, and E, respectively, have been updated to accordingly, due to the design changes and current project status.
8.1 Manufacturing Process PlanThe design of the transmission is as simple as possible to reduce number of welds and
make assembly easy. The casing is made solely out of 1/16” steel sheet metal which is very easy to bend and also easy to weld. The water jet will cut out the shape and the bolt holes which means the only other components that need to be cut is the 45° supports. The manufacturing process to assemble one transmission is given below in Table 11, for a picture of the component refer to Appendix F. There will be a total of six transmissions built for this project.
24

Table 11: The Manufacturing Process Plan ASSEMBLY NAME
MATERIAL TYPE
RAW STOCK SIZE OPERATIONS
# OF PARTS
Casing
Galvanized Steel Sheet Metal 2' x 2'
Water jet shape on sheet metal using SolidWorks file (red lines are cut through lines) 4Bend first line on part A 90°Bend second line on part A 45° outBend third line on part A 45° outBend first line on part B 45° outBend second line on part B 45° outBend part C on only line at 90°Bend part D on only line at 90°Weld part B to part A on the red line at 90°Weld part C to part B on the red line at 90°Weld part D to part A on the red line at 90°
Supports Steel Tubing1.5" x 1.5" x .25" Cut the steel tubing to size 2
Cut 45° degree cuts on both ends of the tubingWeld the support onto the transmission casingRepeat previous 3 steps for the 2nd support on the other side of the casing
AssemblyBolt wheels in using 3/8"-24 bolts 4 wheels
4 bolts4 nuts
8.2 AnalysisThe only weak points in the design are the bolts that attach the transmission to the cage
frame. A calculation was performed at the worst scenario to determine the factor of safety. This worst case scenario is with all the mass supported by one 3/16” bolt. By using the bolt material properties and a mass of the cage with four girls inside, the team determined that the factor of safety using the recommended bolts was 13.64. This scenario will likely never happen, but if it does, the transmission and bolts will not fail under shear. The calculations are shown below.
25

Given Information: r= 316
∈¿0.0047625 m
m=260 lbs+4(140) lbs=820 lbs=372 kg Su=800 MPa τ max=0.75 Su=600 Mpa
Shear Stress Calculation:τ= F
A=mg
A=
(320 kg )( 9.8 ms2 )
π (0.0047625 )2=44.01 Mpa
Factor of Safety Calculation: F s=τmax
τ=13.64
8.3 Material and Material Selection ProcessThis project required a number of different materials to be used on various components
throughout the whole dance vehicle. The original dance vehicle that was constructed prior to the induction of the engineering design team used wood for the twelve foot diameter wheels and steel tubing for the inner cage. After some discussion, the architects and engineering design team decided to construct the entire vehicle out of steel tubing, using no wood at all. Though this increased the weight of the vehicle, the overall strength was increased as well. The second major component of this project was the transmission (aka roller mechanism). There were several subcomponents that went into this piece of the machine and they all had to be selected very carefully. The transmission is of paramount importance because if a failure were to occur anywhere on this component, the entire dance vehicle is liable to fail as well. For this reason the engineering design team spent the majority of their time selecting the materials for this mechanism.
It was decided that 0.064” thick galvanized sheet metal was to be used for the housing of the transmission. In the alpha prototype of the transmission, stainless steel was used for the housing. The engineering design team decided to use galvanized steel instead because it is far cheaper and still highly machinable. Though stainless steel is more resistant to corrosion, given the application of this material in the context of a dance vehicle, a corrosion resistant material is not extremely important. This being said, galvanized steel still provides some corrosion resistance by using a sacrificial layer of zinc oxide. Galvanized steel is also highly weldable. In the early stages of the dance transmission vehicle project the team decided to use 1/8” thick sheet metal for the housing, however it quickly became apparent that this thickness of sheet metal was difficult to bend. Additionally, after testing the alpha prototype, it was revealed that 1/8” sheet metal was thicker than necessary. The transmission also required caps to cover the guide and load bearing wheels so that the dancers would not be at risk of accidentally getting their fingers caught. Though a final decision has not yet been made as to the material that will be used for
26

these caps, they will likely be made from 1/32” galvanized steel. They do not need to be made from material that is as thick as the sheet metal used for the housing because they have comparatively insignificant forces applied to them.
The only other materials used are small pieces and fasteners such as bolts, washers, and nuts. Other materials are part of the wheels used in the transmission component and are discussed in Section 8.4. The bolts were chosen by looking on the McMaster-Carr website and viewing the tensile strength statistics. By performing several tests the engineering design team determined that the selected bolts would be sufficient for the given application. The specific bolts used can be found in appendix D. See Section 8.6 for further details on the test procedure.
8.4 Component and Component Selection ProcessThe only components that needed to be selected for this project were the wheels to be
used on the transmission. These are the guide and load bearing wheels. There were two types of wheels that the engineering design team and architects selected initially. The first was a black phenolic wheel, 3.25” in diameter, 2.0” wide, used roller bearings, and was made of a very hard plastic. The second was a performance rubber wheel, 5.0” in diameter, 1.25” wide, used ball bearings, and was made from a softer rubber. Eventually the performance rubber wheels were selected for the final design. Though these wheels had nearly half the load capacity as the black phenolic wheels, it was determined through testing that they would be more than sufficient. Because of the softer rubber, they were much quieter when rolling along the guide rail than the harder wheels, and the larger diameter wheels also rolled more easily over imperfections along the guide rail than the phenolic wheels. Finally, they were significantly easier to integrate into the design because the ball bearing configuration allowed them to be mounted to the housing without any modification to the wheels. The only trade-off was that the selected wheels were slightly more expensive. However given the advantages, the team decided the extra expense was necessary.
8.5 CAD DrawingsThe following are several pictures from a finalized CAD model of the transmission that
was created using SolidWorks. For full dimensioned drawings see Appendix G.
27

8.6 Test ProcedureTo ensure that the customer needs are met, it is necessary to test and evaluate the guide wheel
system prototype before manufacturing of the final 6 products can be achieved. The test operation to be done will analyze if the guide wheel system can support a substantial load and still perform its purpose of rolling smoothly on the guide rail. The procedure for this test is outlined below:
1. Set 1 guide rail beam horizontally approximately 4 ft. off the ground, supported by 2 tables at each of its ends.
2. With the guide wheel system placed on top of the beam, it is pushed and observed if it freely rolls from one end of the beam to the other. This is repeated several times to determine any implications that the guide wheel system is unable to remain on the rail.
3. A mass of approximately 310 lbs. (15 lbs. below the rated support rate of a single wheel) is attached to the guide wheel system.
4. Have a team member push the guide wheel system with the mass across the beam5. Observe how the guide wheel system operates under a load, especially if the wheels on
the prototype are handling the load and are moving smoothly on the beam.
The previous test will evaluate the performance of the load bearing wheels, but tests on the guide wheels are also necessary because a much weaker load will still be applied to them. The procedure for this test will be similar to that outlined above, only changing the orientation of the guide wheel system.
28
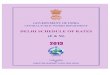
Figure 10: The transmission cap to ensure dancer safety and prevent injuries Figure 11: One 12ft diameter wheel
Figure 12: One of the six completed gliding transmission component with protective caps and mounting bar
Casing
Wheels
Supporting Bars
Bolts
Mounting Bar
Cap

8.7 Economic Analysis- Budget and Vendor Purchase InformationThe team was fortunate enough to have acquired the steel tubing for the cage and wheels
for free. Otherwise, this would have accounted for a significant portion of the budget. Without these additional costs, the total anticipated expense for this project is approximately $891.80. This includes the price of the roller mechanism wheels, sheet metal, bolts, washers, and nuts and tri-fold poster. Also included in this estimate is cost of water jet cutting. Nearly all materials have already been purchased. The only remaining expenses are for the use of the water jet machine and the poster. The team decided not to include a braking mechanism in their design, partly because of time constraints, but also largely because of budgetary constraints. The contingency was also reduced from 20% to 10% due to unexpected expenses. Both the Bill of Materials and Budget can be found in Appendices C and D.
All components and material excluding the metal tubing and sheet metal was purchased from McMaster-Carr. The sheet metal was purchased from Metals Depot, and the metal tubing was covered under the grant from the Doris Duke Foundation.
References
Diavolo.N.p., n.d. Web. 15 Jan. 2012. <http://www.diavolo.org/>.
Bicycle Brake Shoehttp://www.google.com/patents?id=xUScAAAAEBAJ&pg=PA7&dq=bicycle+brakes&hl=en&sa=X&ei=oKgxT_inMuSL0QHBycXXBw&ved=0CDQQ6AEwAA#v=onepage&q=bicycle%20brakes&f=false
Wheel Assembly for a Monorailhttp://www.google.com/patents?id=5M5sAAAAEBAJ&pg=PA4&dq=roller+coaster+wheel+assembly&hl=en&sa=X&ei=RPgyT9TuD8K10QG1-q3RBw&ved=0CD0Q6AEwAw#v=onepage&q=roller%20coaster%20wheel%20assembly&f=false
29

Roller Coasterhttp://www.google.com/patents?id=eIM8AAAAEBAJ&pg=PA5&dq=roller+coaster+wheel+assembly&hl=en&sa=X&ei=LfgyT5_mGeTn0QGx6OGMCA&ved=0CEwQ6AEwCA#v=onepage&q=roller%20coaster%20wheel%20assembly&f=false
Wheel Hub Rider Conveyancehttp://www.google.com/patents?id=ZNbIAAAAEBAJ&pg=PA30&dq=roller+coaster+wheel+assembly&hl=en&sa=X&ei=5vsyT5r5OsXj0QGQ973OBw&ved=0CEkQ6AEwBw#v=onepage&q=roller%20coaster%20wheel%20assembly&f=false
30

Bicycle Hydraulic Brake (216289)http://www.google.com/patents?id=hEdsAAAAEBAJ&pg=PA1&dq=hydraulic+bicycle+brake&source=gbs_selected_pages&cad=1#v=onepage&q=hydraulic%20bicycle%20brake&f=false
Train Railroad (3199463)http://www.google.com/patents?id=wZtPAAAAEBAJ&pg=PA5&dq=train+railroad&hl=en&sa=X&ei=K_YzT8KpB6f20gGHiei6Ag&ved=0CDUQ6AEwAQ#v=onepage&q=train%20railroad&f=false
Cantilever Brake Device (0229929)http://www.google.com/patents?id=mr7IAAAAEBAJ&pg=PA6&dq=V+brakes&hl=en&sa=X&ei=wPczT93nFJKz0QGxlMGyAg&ved=0CDQQ6AEwAA#v=onepage&q=V%20brakes&f=fals
Trolley (1318418)http://www.google.com/patents?id=H8BjAAAAEBAJ&pg=PA1&dq=trolley&source=gbs_selected_pages&cad=1#v=onepage&q=trolley&f=false
Ball Bearings (3265449)http://www.google.com/patents?id=JpdKAAAAEBAJ&pg=PA1&dq=ball+bearings&source=gbs_selected_pages&cad=2#v=onepage&q=ball%20bearings&f=false
31

Roller Bearings (3675978)http://www.google.com/patents?id=M6ksAAAAEBAJ&pg=PA2&dq=roller+bearings&source=gbs_selected_pages&cad=2#v=onepage&q=roller%20bearings&f=false
Appendices
Appendix A: Full Customer Needs List Redesign the dance vehicle to ensure stability
o Lightweighto Minimal material usageo Simple Mechanical Design
Durable enough to withstand six dancers Safe for dancers to move around in machine and not get pinned or cut
o To design handle bars or guide rail for dancers to hold on too To design extra footing to prevent slipping and falling through vehicle
Maximal visibility through and within structure Aesthetically pleasing to the audience Redesign and improve the gearing system Redesign and improve transmission elements
o Allow the inner cage to spin freely from the outer two wheelso Minimize frictiono Make the vehicle more robust
Additional Dancer Needs includeo Want to explore inside the vehicle (big enough to dance in)o Be able to play with the componentso Platforms to sit and walk on
32

Appendix B: Engineering Parameters
Engineering Parameters Design Principles1 Weight of moving object 1 Segmentation2 Weight of stationary object 2 Separation or extraction3 Length of moving object 3 Local quality4 Length of stationary object 4 Asymmetry5 Area of moving object 5 Merging or combining6 Area of stationary object 6 Universality7 Volume of moving object 7 Nesting dolls8 Volume of stationary object 8 Counter-weight9 Speed 9 Preliminary counter-action
10 Force 10 Preliminary action11 Tension, pressure 11 Previously placed pillow12 Shape 12 Equipotential13 Stability of object 13 Other way around14 Strength 14 Spherical shapes15 Durability of moving object 15 Dynamism16 Durability of stationary object 16 Partial or excessive action17 Temperature 17 Moving to another dimension18 Brightness 18 Mechanical vibration19 Energy spent by stationary object 19 Periodic action20 Energy spent by stationary object 20 Continuity of useful action21 Power 21 Rushing through22 Waste of energy 22 Blessing in disguise (harm to benefit)23 Waste of substance 23 Feedback24 Loss of information 24 Intermediary25 Waste of time 25 Self-service26 Amount of substance 26 Copying27 Reliability 27 Cheap disposable28 Accuracy of measurement 28 Replace a mechanical system29 Accuracy of manufacturing 29 Pneumatics or hydraulics30 Harmful factors acting on object 30 Flexible films or membranes31 Harmful side effects 31 Porous materials32 Manufacturability 32 Optical changes33 Convenience of use 33 Homogeneity34 Reparability 34 Recycling (rejecting and regenerating)35 Adaptability 35 Physical or chemical properties36 Complexity of device 36 Use phase changes37 Complexity of control 37 Thermal expansion38 Level of automation 38 Strong oxidants39 Productivity 39 Inert environment
40 Composite materials
33

Appendix C: Design Team Budget
Item Cost ($)Materials: $249.51
Steel tubing $0.00Sheet metal $178.94
Fasteners $70.57Components: $335.95
Wheels $335.95Other: $406.34
Machining Services $253.34
Travel $0.00
Contingency (10%) $100.00
Poster $53.00
Total: $991.80
34

Appendix D: Bill of Materials
Date Item No.
Description Vendor Price Per Item ($)
Number of
Items Purcha
sed
Total Amount With 6% Tax
($)
Shipping ($)
Balance ($)
Jan 10, 12 $1,000Jan 14, 12 N/A Steel Tubing N/A $0.00 1 $0.00 $0.00 $1,000Jan 23, 12 2829T74 Performance
Rubber-Tread Wheel5” X 1-1/4”, 3/8” Axle,Ball Bearing, 325#Capacity
McMaster-Carr
$12.30 4 $52.15 $5.00 $943
Feb 27, 12
N/A Water jetcutting
LearningFactory
$27.00 1 $28.62 $0.00 $914
March 1, 2012
91241A432
Black-Oxide AlloySteel Socket HeadCap Screw 3/8"-24Thread, 2" Length
McMaster-Carr
$12.39 1 $13.13 $5.00 $896
March 1, 2012
2829T74 PerformanceRubber-Tread Wheel5” X 1-1/4”, 3/8” Axle,Ball Bearing, 325#Capacity
McMaster-Carr
$12.30 21 $273.80 $5.00 $617
March 2, 2012
93852A103
18-8 SS Type A USSFlat Washer 5/16"Screw Size, 7/8" OD,.06"-.11" Thick
McMaster-Carr
$5.60 1 $5.94 $5.00 $606
March 3, 2012
91845A125
18-8 Stainless SteelHex Nut 3/8"-24Thread Size, 9/16"
McMaster-Carr
$6.05 1 $6.41 $5.00 $595
35

Width, 21/64" Height
March 4, 2012
S216 16 GA. (.064 thick)Steel Sheet 2x2ft
Metals Depot
$27.32 4 $115.84 $18.00 $461
March 14, 2012
91251A472
Black-Oxide AlloySteel Socket HeadCap Screw 3/8"-24Thread, 2-3/4" Length
McMaster-Carr
$7.89 3 $25.09 $5.00 $431
N/A N/A Tri-fold Poster TBD $50.00 1 $53.00 $0.00 $378N/A N/A Water jet
cuttingLearningFactory
$212.00 1 $224.72 $0.00 $153
N/A N/A Welding Learning Factory
$0.00 1 $0.00 $0.00 $153
N/A N/A Sheet metal Metals Depot
$35 1 $37.10 $8.00 $108
TotalExpenditure:
$891.80
36

Appendix E: Gantt Chart
37

Appendix F: Layout of transmission piece for water jetting
This is a picture of one gliding transmission a one complete piece. This is what the transmission component looks like before it is water jetted, bent, and welded for manufacturing.
38

Appendix G: Dimensioned drawings of transmission components
39
Labeled exploded view of all components in the gliding transmission mechanism

40
Front View of Dance Vehicle Side View of Dance Vehicle
Isometric View of Dance Vehicle Trimetric View of Dance Vehicle
Mounting Bar connecting the inner cage to the lower part of the transmission component
Mounting Bar connecting the inner cage to the upper guide wheel of the transmission component

41
Mounting Bar connecting the inner cage to the lower part of the transmission component
Large cap to cover guide wheel
Small cap to cover guide wheel

42
Dimensioned housing for one of the six gliding transmission mechanisms

Appendix H: Team Resumes
Steven A. [email protected]
224 South Burrowes Street,State College, PA 16801(215)858-3596
Objective To gain valuable work experience by applying my skills and knowledgein engineering theory
Education Bachelor of Science in Mechanical EngineeringThe Pennsylvania State University, Expected Graduation date May 2012GPA 3.39
Relevant Courses Mechanical Engineering Design Methodology Machine DesignMechanical Responses of Engineering Materials
Strength of Materials
Vibration of Mechanical Systems DynamicsTechnical Writing Fluid Flow
Skills Proficient in Microsoft Excel and Word MATLABPublic Speaking Self Motivated
Lab Experience Mechanical Engineering Design Methodology Lab Built a functioning automatic jar opener using drill components Gained experience with abrasive machinery
Spring 2011
Industrial Engineering Lab Experience testing engineering materials Processes include casting, joining, plastic molding,
welding
Spring 2011
Work Experience Position: Engineering Scientific & Technical InternPenn DOT, Clearfield PA
Inspected bridge construction progress Recorded material properties and delivery processes
May 20011- Aug 2011
Position: Busser, Host, Food Runner, ServerHoulihan’s Restaurant, Warrington, Pa
Trained 5 new employees; provided feedback on performance Assisted guests with their concerns, managed hospitality
May 2005- Oct 2010
Leadership President of High School Class; sophomore, junior, senior yearsPresident of Student Government
Aug 2005-June2008Sept 2007-June 2008
Attended the Rotary International Camp (rewarded outstanding Leader)
June 2006
Attended National Student Leadership Camp July 2005Weekend Warrior for Penn State THON weekend Feb 2011
43

Activities &Awards
Dean’s List Spring 2011, Fall 2010
Tenor Saxophonist in Penn State Marching Blue Band Aug 20080-PresentMember, Morale committee for THON Aug 2009-PresentAwarded Mr. Engineer Spring 2009Won “Best Innovation” for solar clothes dryer competition in engineering Design and Graphics
Fall 2008
Member of Penn State Engineering House Social Committee Organized social event for the committee
Aug 2008-May 2009
Community Service
Red Cross Donate Blood, deliver packages, communicate with donors
Jan 2011-Feb 2011
44

Stephen Thor954 Grace Street
[email protected] College, PA 16801 cell: 814-574-3587
Objective To obtain a full time position in the fields of Industrial Design or in Mechanical Engineering
with a focus in product design. Education The Pennsylvania State University University Park, PA
2008 - presentBachelor of Science in Mechanical EngineeringCertificate in Engineering Design ProgramCurrent GPA of 3.23 / 4.0 Expected graduation: May
2012
École Centrale de Nantes Nantes, France Summer 2011
Summer Design AcademyFinal GPA of 4.0 / 4.0
Experience Penn State Applied Research Labs State College, PA Summer 2010 - present
Assisted in design of embedded system controllers and component housing
Assembled and operated test rigs for diesel fuel pump health monitoring system
Used DAQ to collect pressure data and flow information and analyze it with MATLAB
Installed and replaced fuel pumps, accelerometers, and throttle position sensors on medium
tactical vehicle replacement (MTVR) for US Marines
New Leaf Initiative Intern Coordinator State College, PA Fall 2011 - present
Supervised a team of 8 interns as a project head and coordinatorDrew up business plans, marketing strategies, grant proposals, and
sponsorship contractsAssisted in creating a Leadership Development Program with Penn
State
Microcomputer Interfacing Design Project University Park, PA Fall 2011Designed and constructed semi-autonomous vehicleCreated C code for PIC microcontroller to interact with multiple
sensors
45

Design Methodology Class Design Project University Park, PA Spring 2011Participated in a small group to design and construct a functional
electric jar openerGenerated concepts based upon customer needs data gathered
through external researchConducted cost analysis for product ramp-up
BAE Systems Sponsored Design Project University Park, PA Fall 2008Effectively worked in a group of four to research prices, create model
in SolidWorks and scale prototype, and complete design process
Awarded “Best Design” by class for cost-effectiveness, usability, and functionalityRelevant Courses
Design Methodology Mechanical DesignSolidWorksEngineering Design Vibration Analysis Rapid
Prototyping Thermodynamics MATLAB Fluid MechanicsSkills Certified SolidWorks Professional Microsoft Office Suite
MATLAB, AutoCAD, CATIA Public Speaking
JASON KURUC2657 Nixon Street ♦ Lower Burrell, PA 15068 ♦ 724-337-1070 ♦ [email protected]
OBJECTIVE
To acquire a position that will allow me to expand my knowledge in mechanical engineering while gaining experience in the work field.
EDUCATIONThe Pennsylvania State University – Erie, The Behrend College/University Park
Expected Graduation Date: May 2012Major: Mechanical Engineering
Dean’s List Fall 2008Current CGPA 3.2
WORK EXPERIENCE Siemens ♦ New Kensington, PA ♦ Summer 2010 and 2011
Assembled a variety of products used in HV/MV variable frequency drives by following engineering schematics and drawings
Practiced with 5S method of organizing work area Worked with teams to improve flow of assembly lines using one-piece flow
concepts
46

Contributed to $100K sub assembly department relocation project, moving a 30,000 square foot work area to a 20,000 square foot area.
Organized tool cabinets and production floor Contributed during team meetings to improve team efficiency
Burrell Rentals ♦ Lower Burrell, PA ♦ Summer 2009 Answered customer support phone calls Organized display yard to help promote and improve sales Performed maintenance on machinery such as oil changes, hydraulic fluid
changes, etc. Delivered and operated machinery for customers Assisted head mechanic on service calls fixing any on problems with the
machinery on the flyAK Tent Rental ♦ Lower Burrell, PA ♦ Summer 2008
Delivered and set up party supplies and tents quickly and efficiently Drove company vehicles to customer sites and performed weekly maintenance on
them Worked with team to coordinate large parties up to a 1000 person graduation
party
Valley Sports Complex ♦ Lower Burrell, PA ♦ November 2007 to June 2008 Worked after school hours Patrolled free skates ensuring the safety of all customers Serviced Zamboni by checking water levels, changing oil, etc. Worked front desk dealing with paying customers at the cash register
47

48

49
Recommended