UNIVERSIDAD DE LA SALLEFACULTAD DE INGENIERIAMATERIALES Y
FUNDAMENTOS DE DISEO Estudiantes : Bryan cadir castillo Hernndez
cod:47132004 , Sebastin Grupo: 2BRAZO HIDRAULICO
1.1 Temtica a trabajar
En una tabla de 40 cm de largo ubicar un brazo manipulador , En
una de las esquinas debe ejecutarse para tomar , levantar , y
trasladar una caja grande fsforos, Desde la esquina opuesta al
manipulador hasta una esquina libre. Nota: la caja de fsforo debe
estar llena de fsforos de madera.
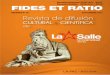
1.2 Representacin grafica del brazo y sus partes.
1.3 BRAZO ROBTICO:un brazo robticoes un tipo debrazomecnico,
normalmenteprogramable, con funciones parecidas a las de un brazo
humano; este puede ser la suma total del mecanismo o puede ser
parte de unrobotms complejo. Las partes de estos manipuladores o
brazos son interconectadas a travs de articulaciones que permiten,
tanto un movimiento rotacional (tales como los de unrobot
articulado), como un movimiento traslacional o desplazamiento
lineal.
1.4 HIDRULICA:un sistema hidrulico es el que usa el liquido como
fuerza. La fuerza aplicada en un punto se transmite a otro punto
mediante un fluido. empujar un extremo de una jeringa llena de agua
crea una reaccin igual o opuesta a la otra jeringa. Provocando una
fuerza que nos permitir mover el sistema requerido.
1.5 POSIBLE CONSTRUCCIN: se necesita un punto en que el el
organismo o sistema pueda rotar en su base o cuerpo, otra parte es
la inclinacin del hombro y el antebrazo donde se puedan unir con
alguna pieza que le permita el movimiento libre a los 2 componentes
y por ultimo las pinzas o mano de agarre que deben conectar con el
antebrazo. Todo estos elementos procuran ser hechos en madera y
materiales livianos ya que nuestro sistema requerir ser hidrulico
por medio pequeas bombas impulsadas por agua.
1.6 MATERIALES laminas de madera tornillos 8 jeringas pasadores
manguera cristal tipo torniquete bandas de caucho silicona
destornillador de estrella colorantes base de madera para el
brazo.