Embed Size (px)
Citation preview
Mecánica ClásicaMovimiento en una dimensión
Francisco Alonso Espinosa Chávez
23 de Enero de 2015
Clase #2
Objetivos de clase
Propiedades de vectores
Vectores de posición, velocidad y aceleración
Cinemática unidimensional
Movimiento con aceleración constante
Cuerpos en caída libre
Cinemática: Vectores
La importancia de los vectores para la física se debe a las características de los mismos.
Un escalar es un tipo de magnitud física que se expresa por un solo número y tiene el mismo valor para todos los observadores.
Un vector es una magnitud física definida por un punto del espacio donde se mide dicha magnitud, su dirección y su sentido (que distingue el origen del extremo).
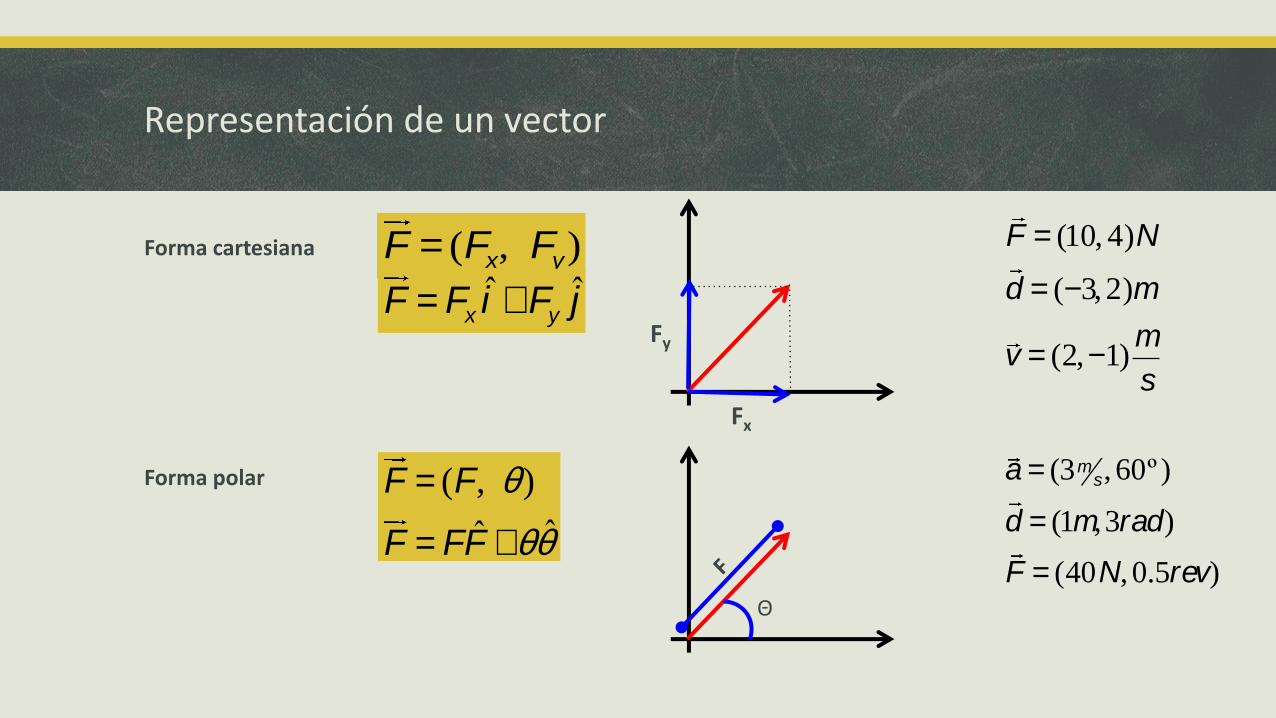
Representación de un vector
Forma cartesiana
Forma polar
F = (Fx, Fy)
F = Fx i + Fy j
F = (F, q )
F = FF +qq
Θ
Fx
Fy
F = (10, 4)N
d = (-3,2)m
v = (2,-1)m
s
a = (3ms, 60º )
d = (1m,3rad)
F = (40N, 0.5rev)
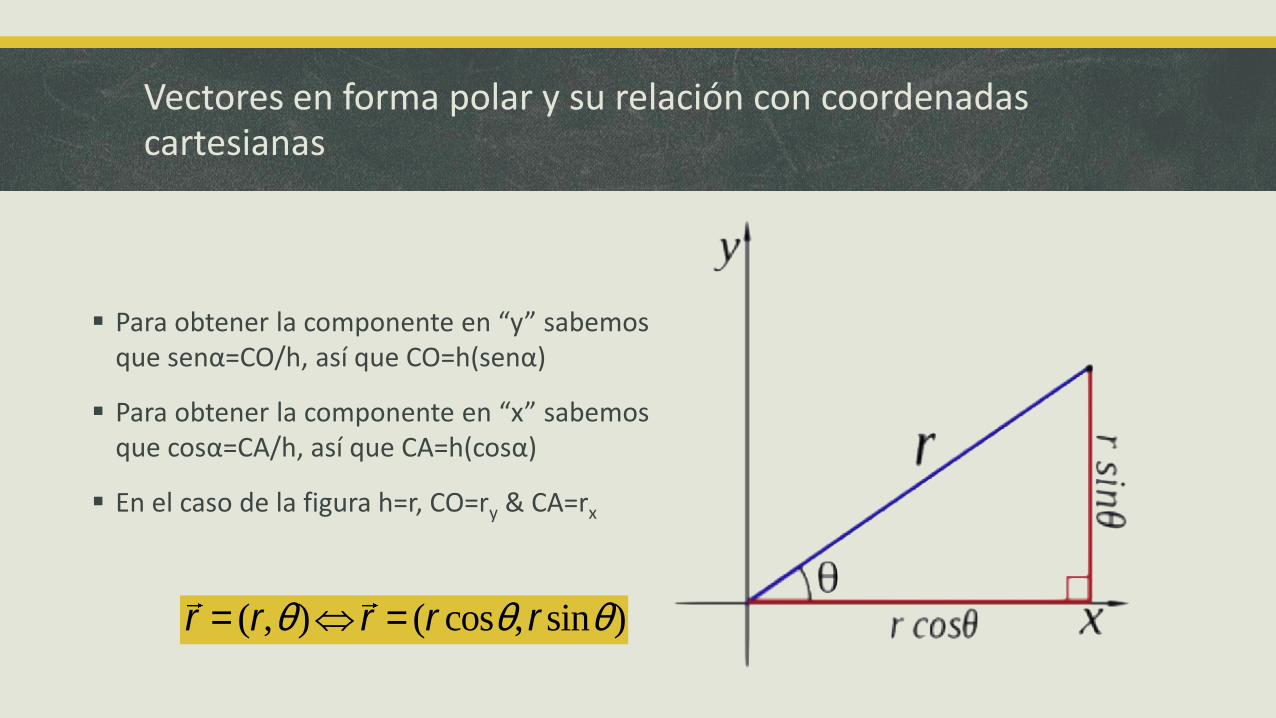
Vectores en forma polar y su relación con coordenadas cartesianas
Para obtener la componente en “y” sabemosque senα=CO/h, así que CO=h(senα)
Para obtener la componente en “x” sabemosque cosα=CA/h, así que CA=h(cosα)
En el caso de la figura h=r, CO=ry & CA=rx
r = (r,q)Û r = (r cosq, r sinq)
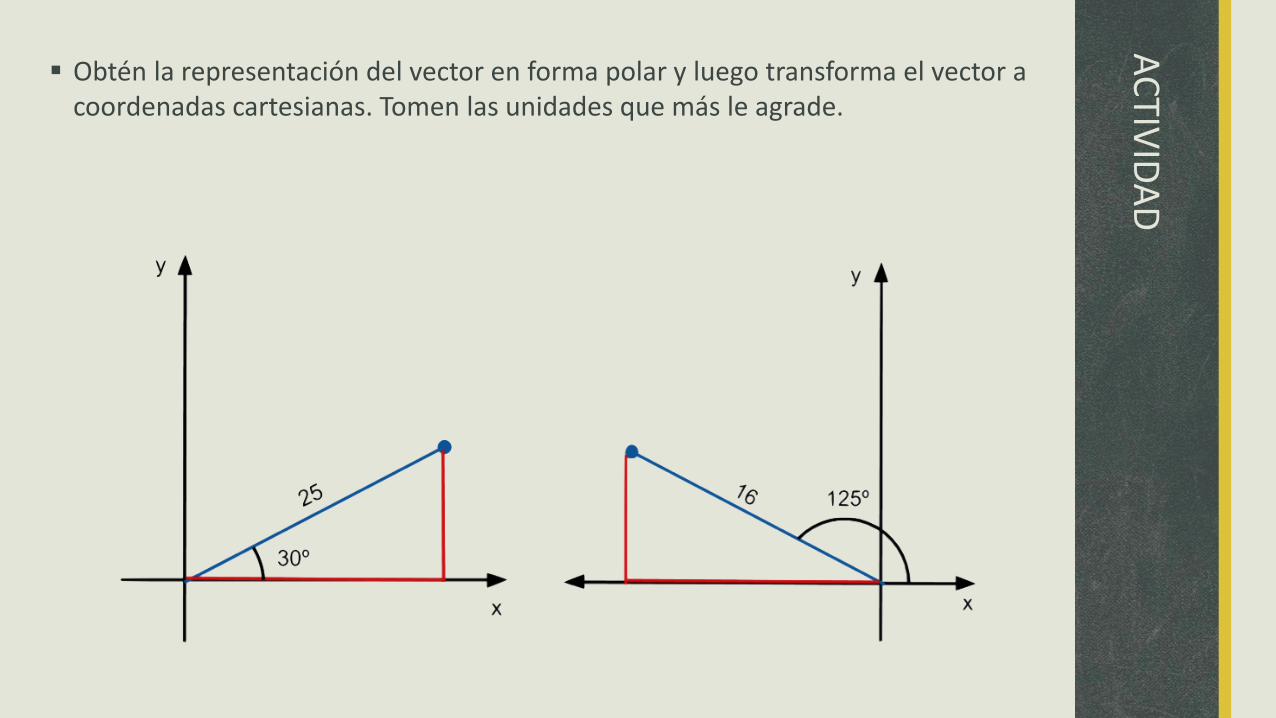
Obtén la representación del vector en forma polar y luego transforma el vector a coordenadas cartesianas. Tomen las unidades que más le agrade.
AC
TIVID
AD
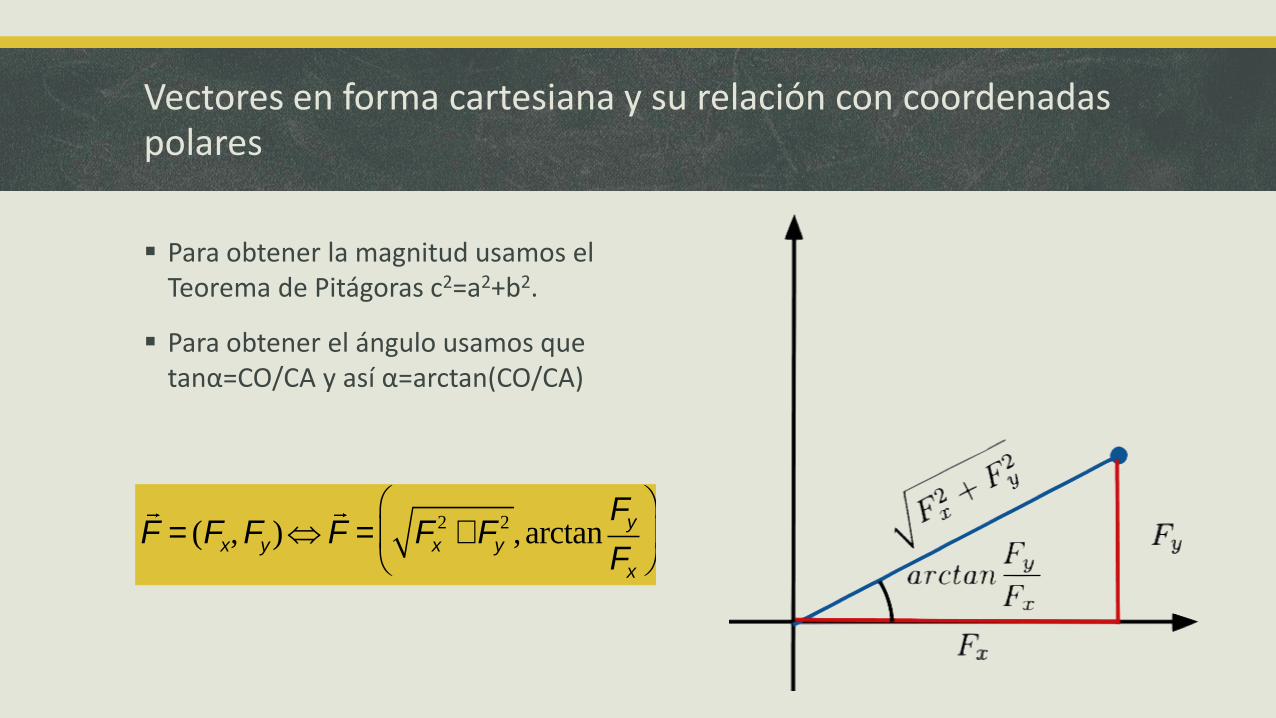
Vectores en forma cartesiana y su relación con coordenadas polares
Para obtener la magnitud usamos el Teorema de Pitágoras c2=a2+b2.
Para obtener el ángulo usamos que tanα=CO/CA y así α=arctan(CO/CA)
F = (Fx, Fy)Û F = Fx
2 + Fy
2 , arctanFy
Fx
æ
èç
ö
ø÷
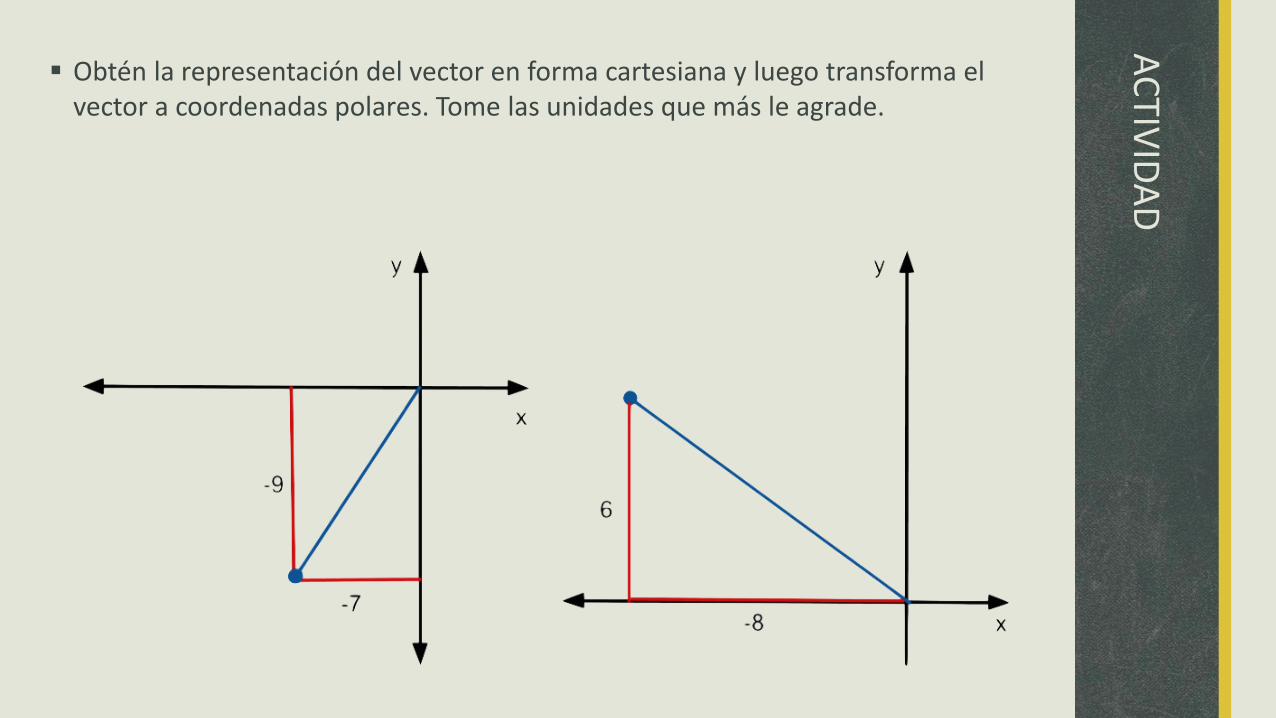
Obtén la representación del vector en forma cartesiana y luego transforma el vector a coordenadas polares. Tome las unidades que más le agrade.
AC
TIVID
AD
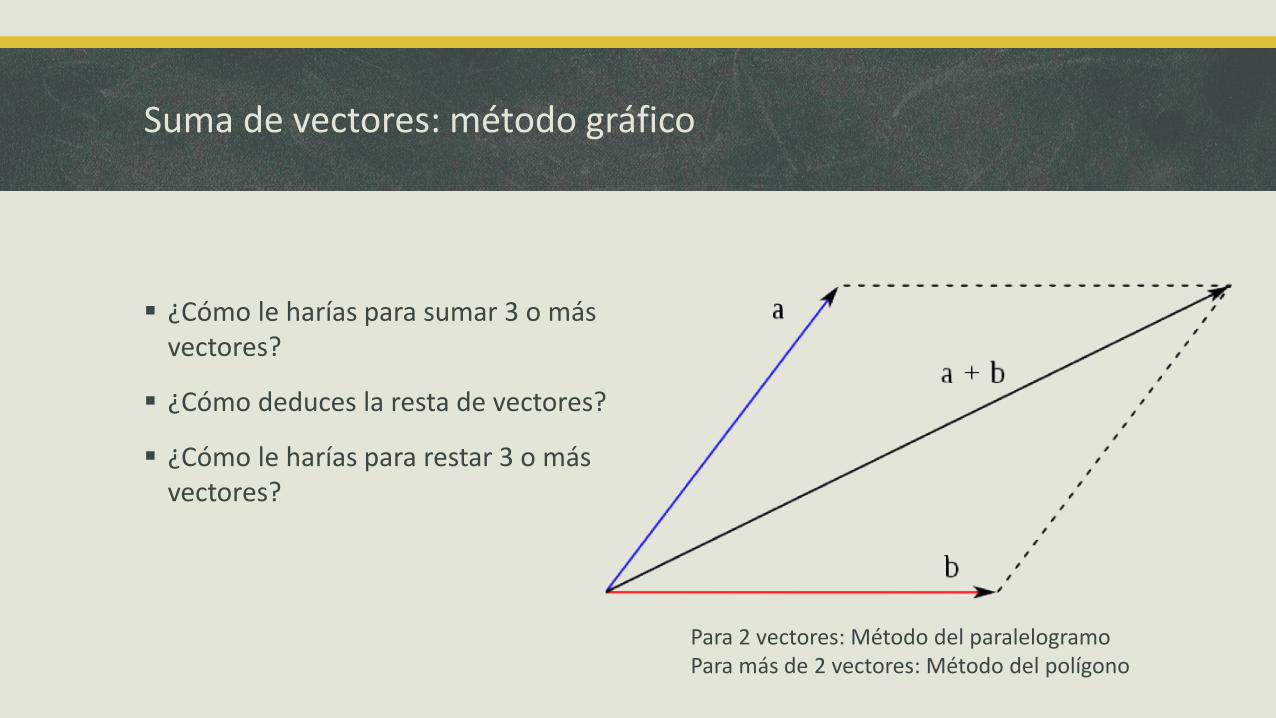
Suma de vectores: método gráfico
¿Cómo le harías para sumar 3 o más vectores?
¿Cómo deduces la resta de vectores?
¿Cómo le harías para restar 3 o más vectores?
Para 2 vectores: Método del paralelogramoPara más de 2 vectores: Método del polígono
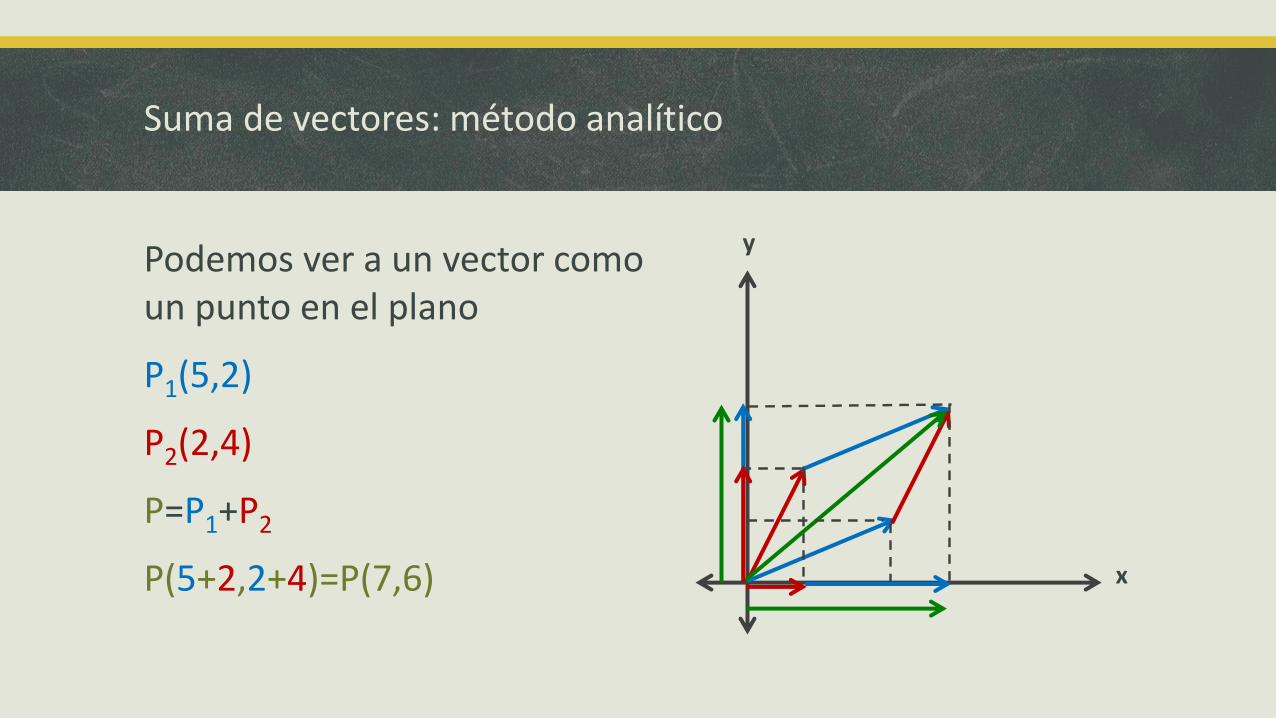
Suma de vectores: método analítico
Podemos ver a un vector como un punto en el plano
P1(5,2)
P2(2,4)
P=P1+P2
P(5+2,2+4)=P(7,6)
y
x
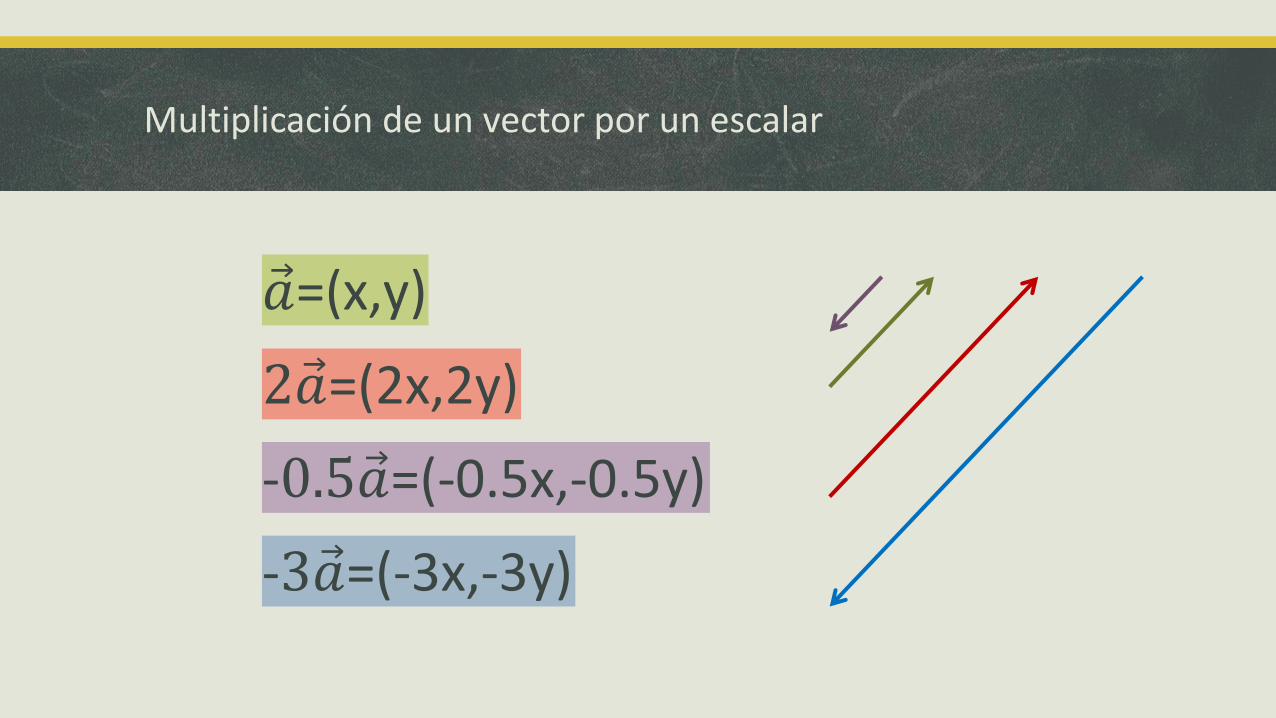
Multiplicación de un vector por un escalar
𝑎=(x,y)
2 𝑎=(2x,2y)
-0.5 𝑎=(-0.5x,-0.5y)
-3 𝑎=(-3x,-3y)
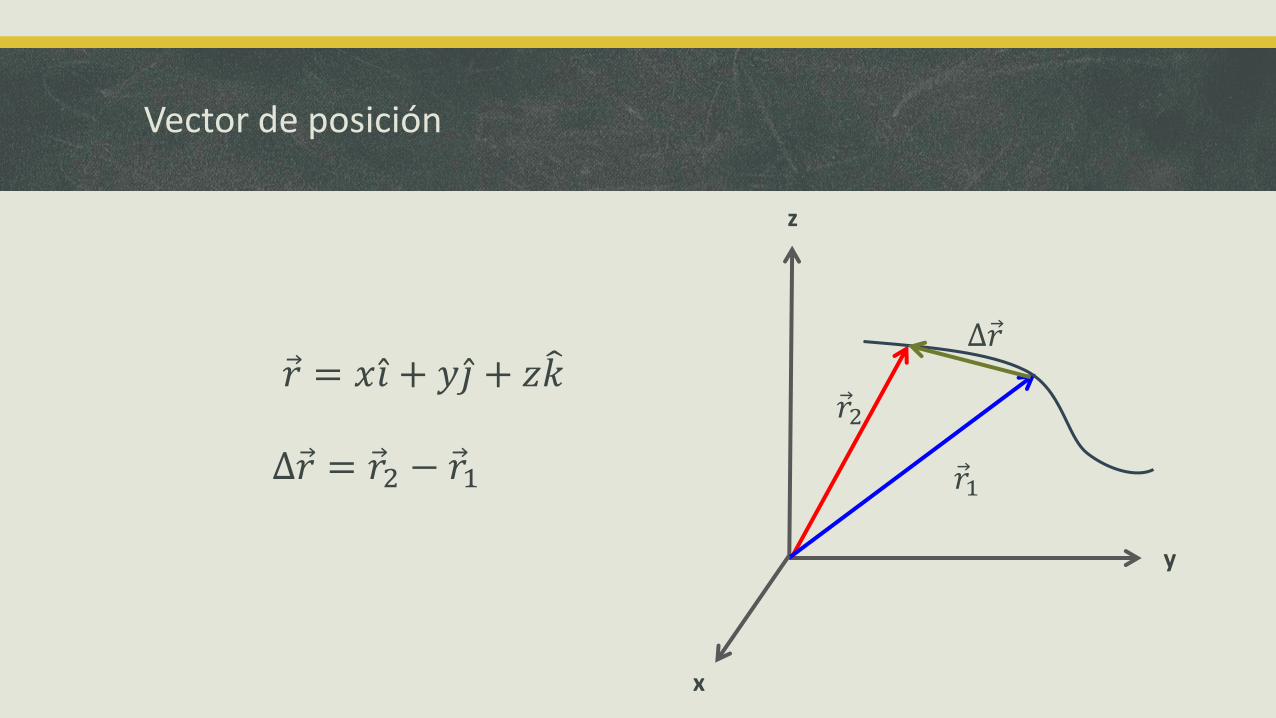
Vector de posición
𝑟 = 𝑥 𝑖 + 𝑦 𝑗 + 𝑧 𝑘
∆ 𝑟 = 𝑟2 − 𝑟1
z
x
y
∆ 𝑟
𝑟2
𝑟1
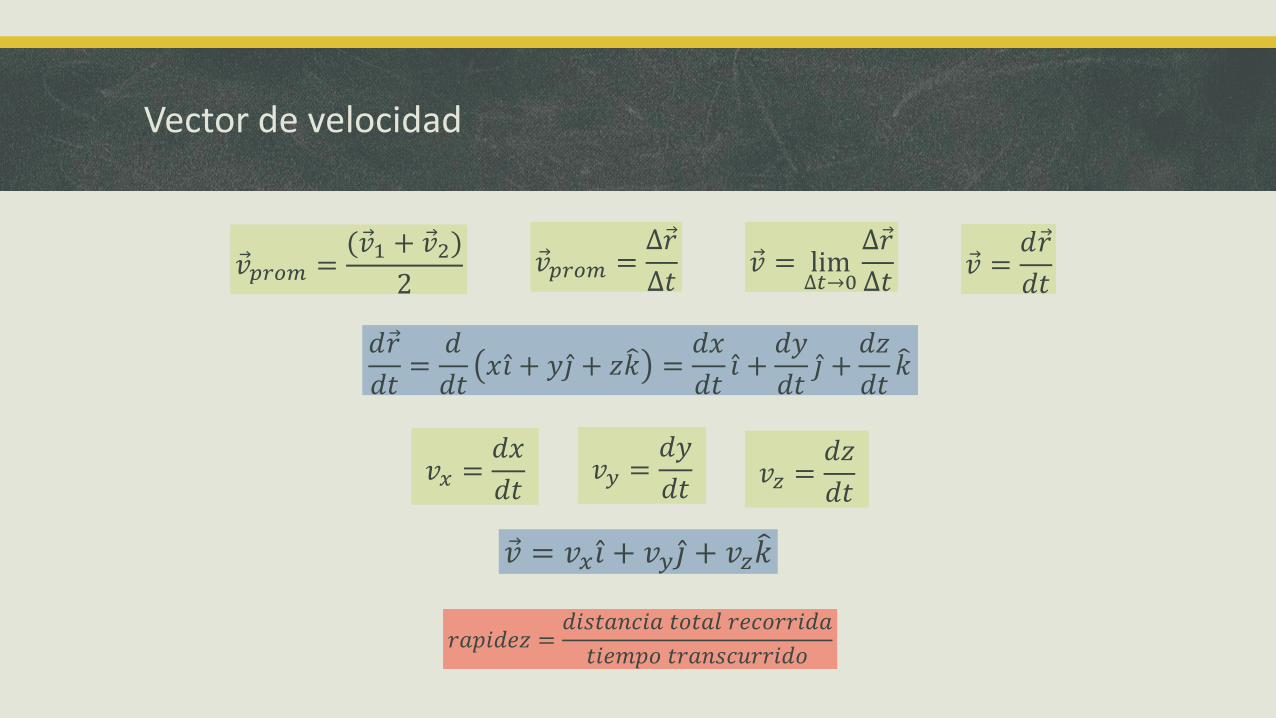
Vector de velocidad
𝑣𝑝𝑟𝑜𝑚 =∆ 𝑟
∆𝑡 𝑣 = lim
∆𝑡→0
∆ 𝑟
∆𝑡 𝑣 =
𝑑 𝑟
𝑑𝑡
𝑑 𝑟
𝑑𝑡=
𝑑
𝑑𝑡𝑥 𝑖 + 𝑦 𝑗 + 𝑧 𝑘 =
𝑑𝑥
𝑑𝑡 𝑖 +
𝑑𝑦
𝑑𝑡 𝑗 +
𝑑𝑧
𝑑𝑡 𝑘
𝑣𝑦 =𝑑𝑦
𝑑𝑡𝑣𝑧 =
𝑑𝑧
𝑑𝑡𝑣𝑥 =
𝑑𝑥
𝑑𝑡
𝑟𝑎𝑝𝑖𝑑𝑒𝑧 =𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑡𝑜𝑡𝑎𝑙 𝑟𝑒𝑐𝑜𝑟𝑟𝑖𝑑𝑎
𝑡𝑖𝑒𝑚𝑝𝑜 𝑡𝑟𝑎𝑛𝑠𝑐𝑢𝑟𝑟𝑖𝑑𝑜
𝑣 = 𝑣𝑥 𝑖 + 𝑣𝑦 𝑗 + 𝑣𝑧 𝑘
𝑣𝑝𝑟𝑜𝑚 =( 𝑣1 + 𝑣2)
2
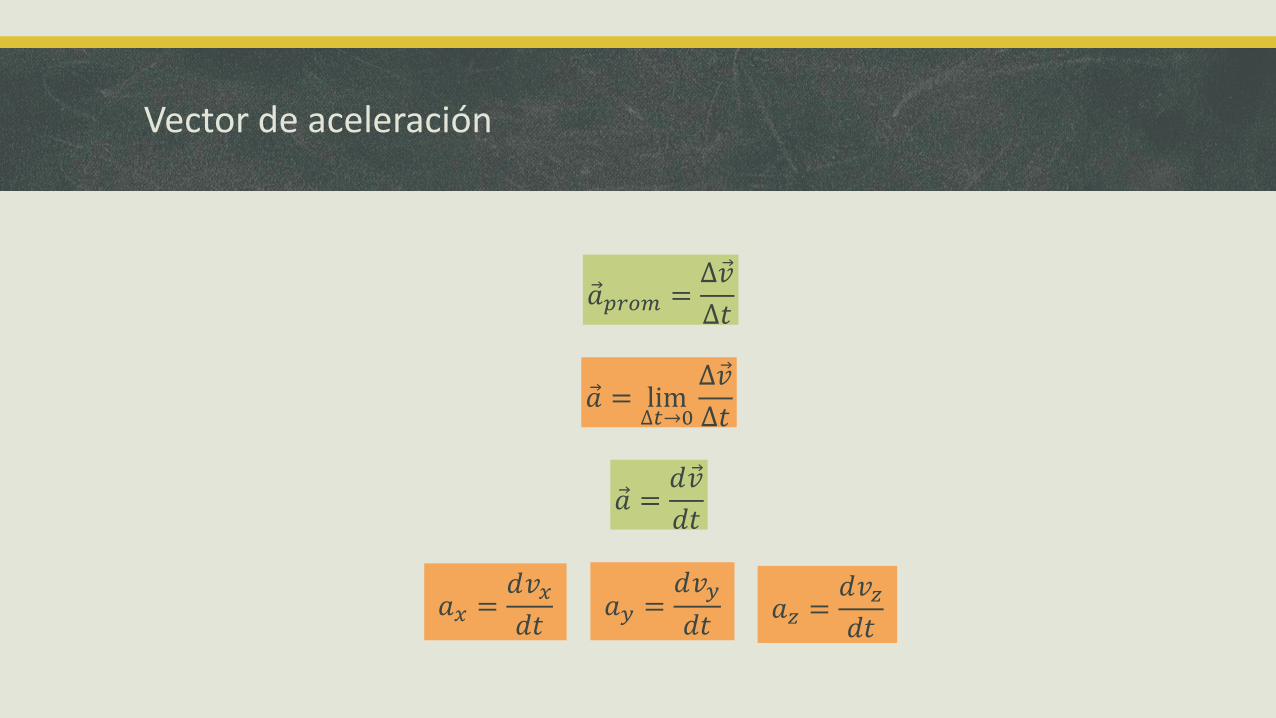
Vector de aceleración
𝑎𝑝𝑟𝑜𝑚 =∆ 𝑣
∆𝑡
𝑎 = lim∆𝑡→0
∆ 𝑣
∆𝑡
𝑎 =𝑑 𝑣
𝑑𝑡
𝑎𝑦 =𝑑𝑣𝑦
𝑑𝑡𝑎𝑧 =
𝑑𝑣𝑧
𝑑𝑡𝑎𝑥 =
𝑑𝑣𝑥
𝑑𝑡
Ejemplos
Conducimos un coche por una carretera por 5.2km a 43km/hr, y en ese momentose os acaba la gasolina. En 27min caminamos 1.2km más hasta la estación máscercana. ¿Cuál es nuestra velocidad promedio desde el momento en quellegamos a la estación de gasolina?
Una partícula se desplaza en el plano xy, de modo que sus coordenadas x & yvarían con el tiempo según:
x(t)=At3+Bt
y(t)=Ct2+D
donde A=1.00m/a3, B=-32.0m/s, C=5.0m/s2 y D=12.0m. Calcular su posición,velocidad y aceleración cuando t=3s.
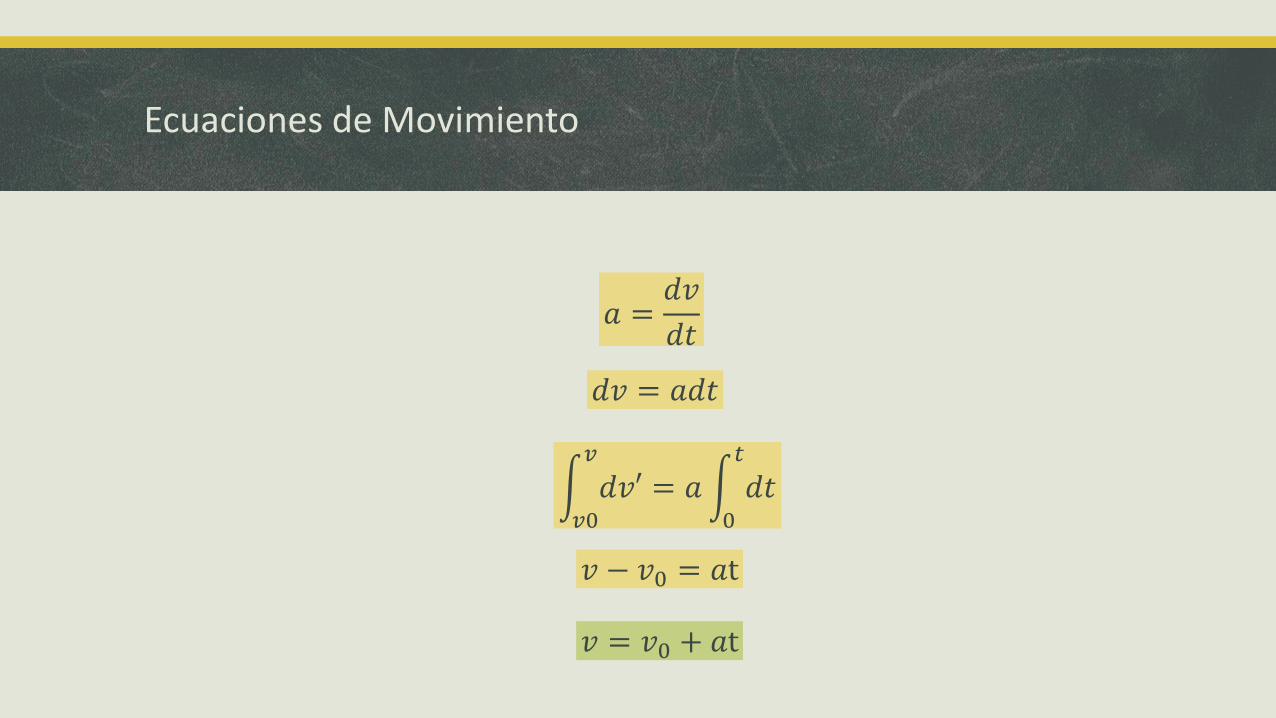
Ecuaciones de Movimiento
𝑎 =𝑑𝑣
𝑑𝑡
𝑑𝑣 = 𝑎𝑑𝑡
𝑣0
𝑣
𝑑𝑣′ = 𝑎 0
𝑡
𝑑𝑡
𝑣 − 𝑣0 = 𝑎t
𝑣 = 𝑣0 + 𝑎t
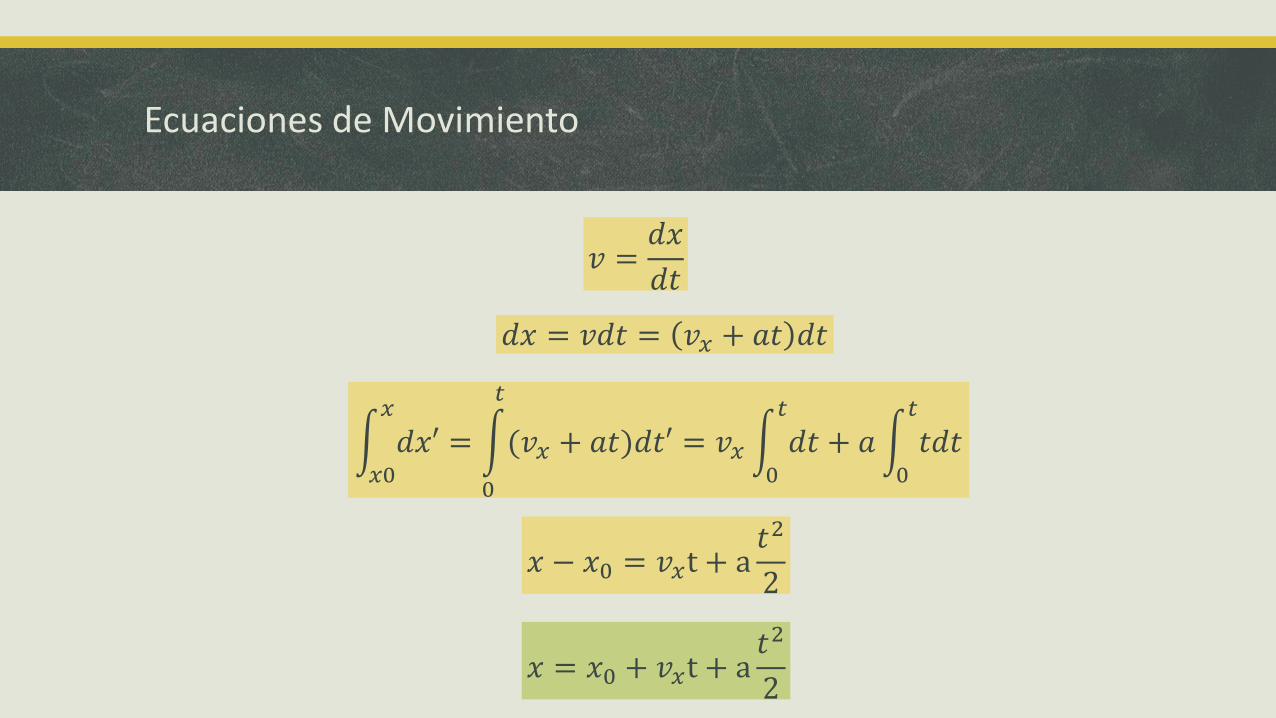
Ecuaciones de Movimiento
𝑣 =𝑑𝑥
𝑑𝑡
𝑑𝑥 = 𝑣𝑑𝑡 = 𝑣𝑥 + 𝑎𝑡 𝑑𝑡
𝑥0
𝑥
𝑑𝑥′ =
0
𝑡
(𝑣𝑥 + 𝑎𝑡)𝑑𝑡′ = 𝑣𝑥 0
𝑡
𝑑𝑡 + 𝑎 0
𝑡
𝑡𝑑𝑡
𝑥 − 𝑥0 = 𝑣𝑥t + a𝑡2
2
𝑥 = 𝑥0 + 𝑣𝑥t + a𝑡2
2
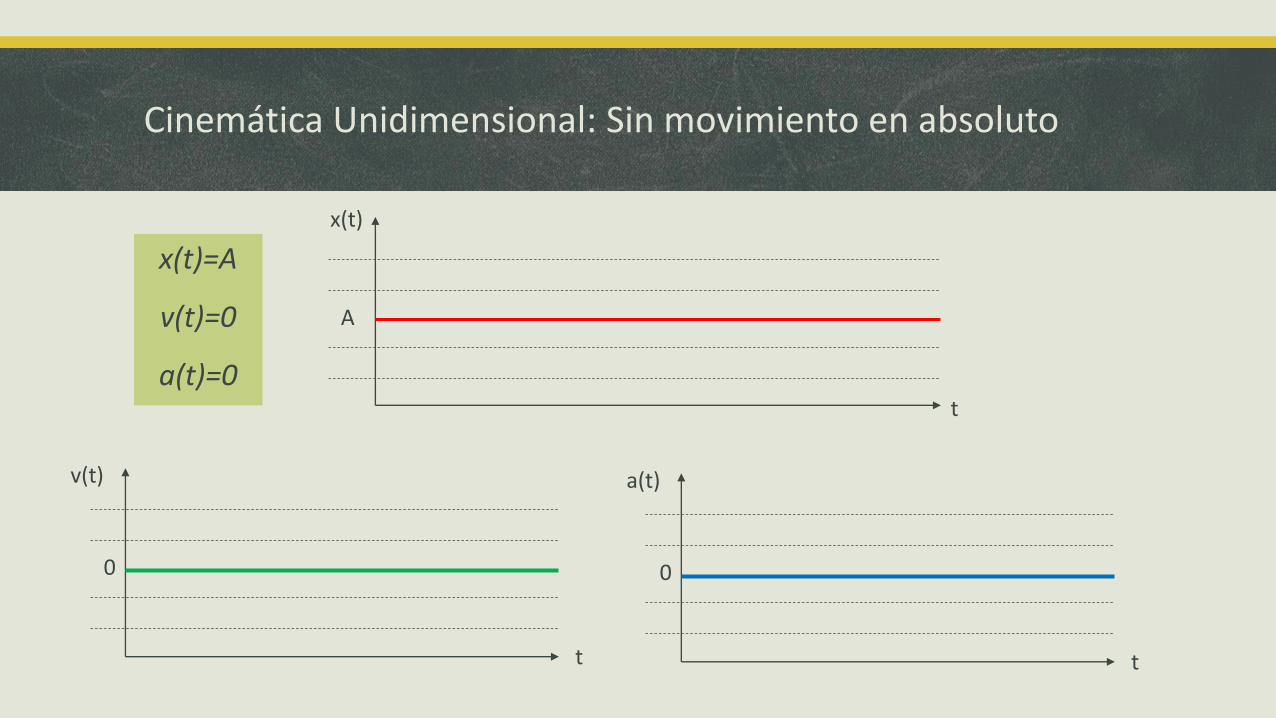
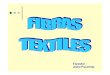
Cinemática Unidimensional: Sin movimiento en absoluto
x(t)=A
v(t)=0
a(t)=0
A
x(t)
t
0
v(t)
t
0
a(t)
t
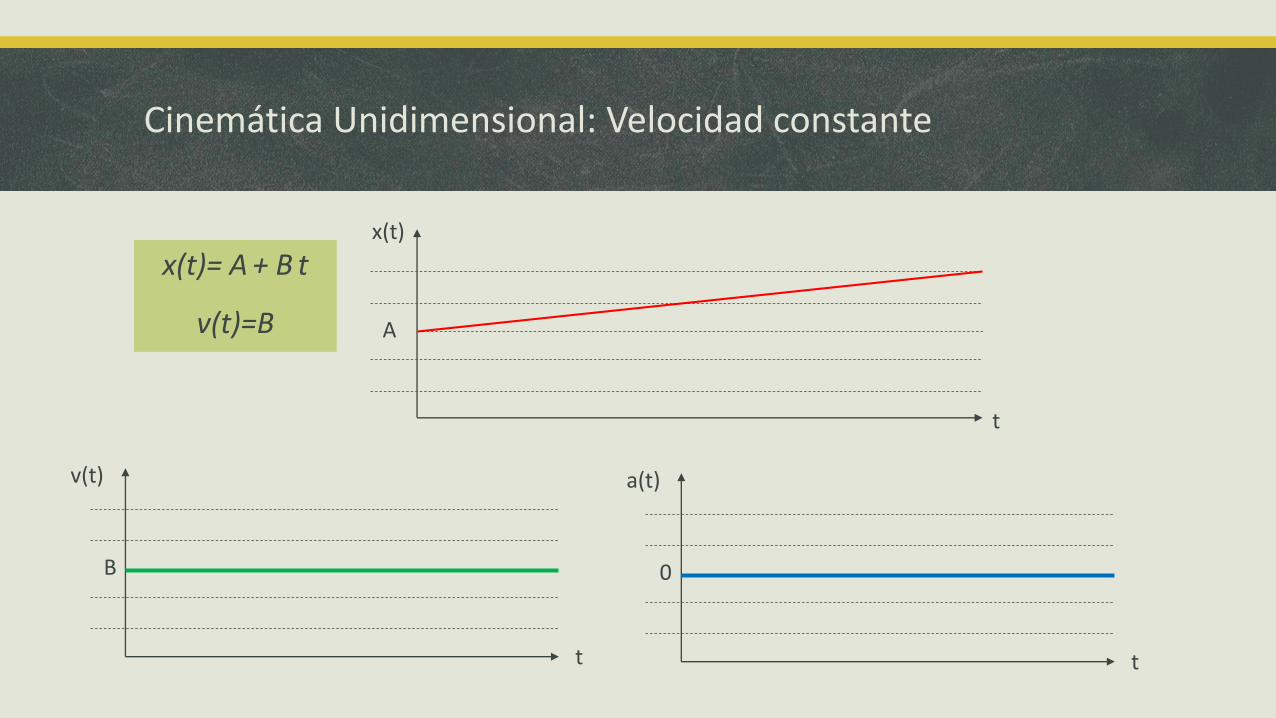
Cinemática Unidimensional: Velocidad constante
x(t)= A + B t
v(t)=B A
x(t)
t
0
a(t)
t
B
v(t)
t
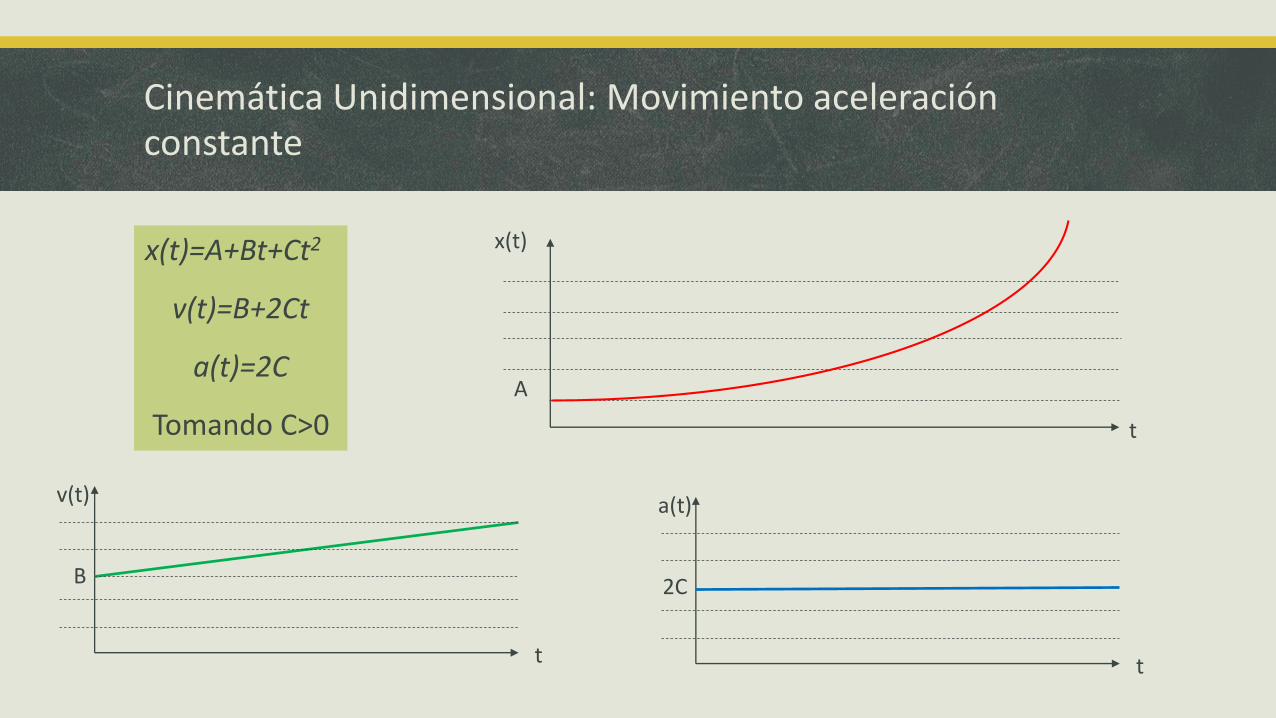
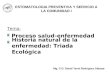
Cinemática Unidimensional: Movimiento aceleración constante
x(t)=A+Bt+Ct2
v(t)=B+2Ct
a(t)=2C
Tomando C>0
B
v(t)
t
A
x(t)
t
2C
a(t)
t
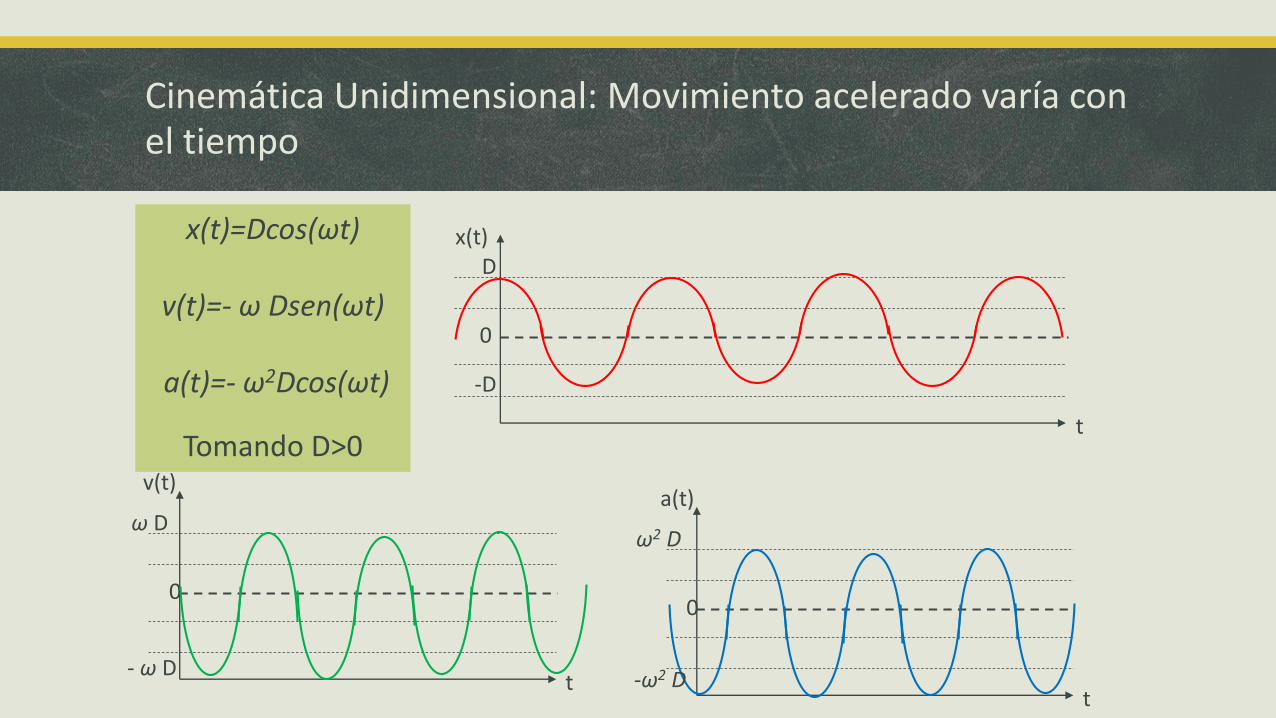
Cinemática Unidimensional: Movimiento acelerado varía con el tiempo
x(t)=Dcos(ωt)
v(t)=- ω Dsen(ωt)
a(t)=- ω2Dcos(ωt)
Tomando D>0
0
x(t)
t
D
-D
0
v(t)
t
ω D
- ω D
0
a(t)
t
ω2 D
-ω2 D
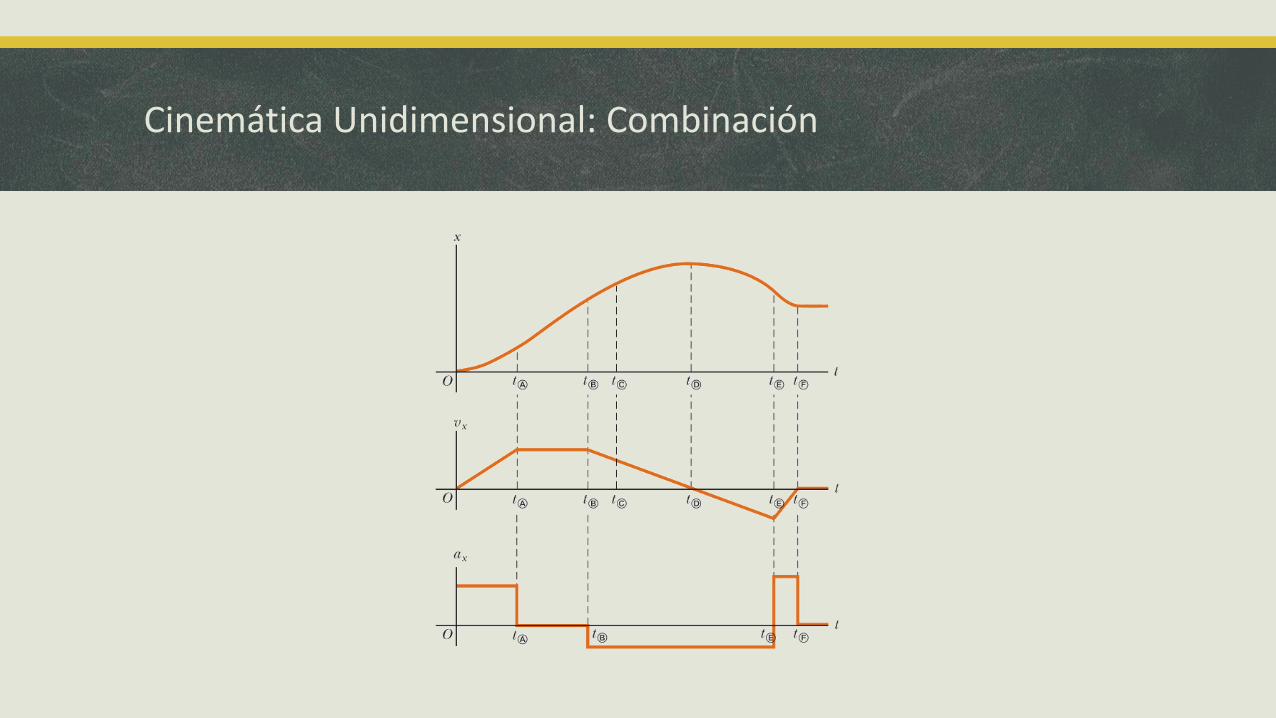
Cinemática Unidimensional: Combinación
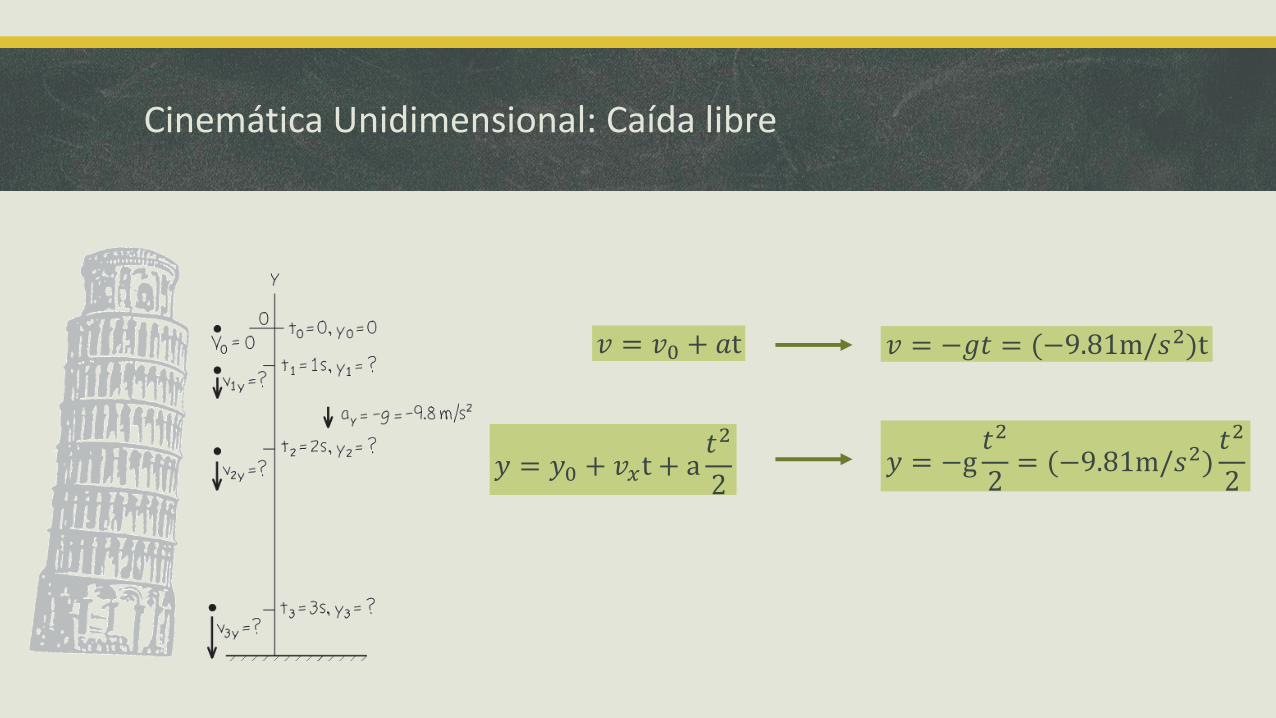
Cinemática Unidimensional: Caída libre
𝑦 = −g𝑡2
2= (−9.81m/𝑠2)
𝑡2
2
𝑣 = −𝑔𝑡 = (−9.81m/𝑠2)t𝑣 = 𝑣0 + 𝑎t
𝑦 = 𝑦0 + 𝑣𝑥t + a𝑡2
2
t
a(t)
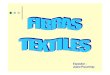
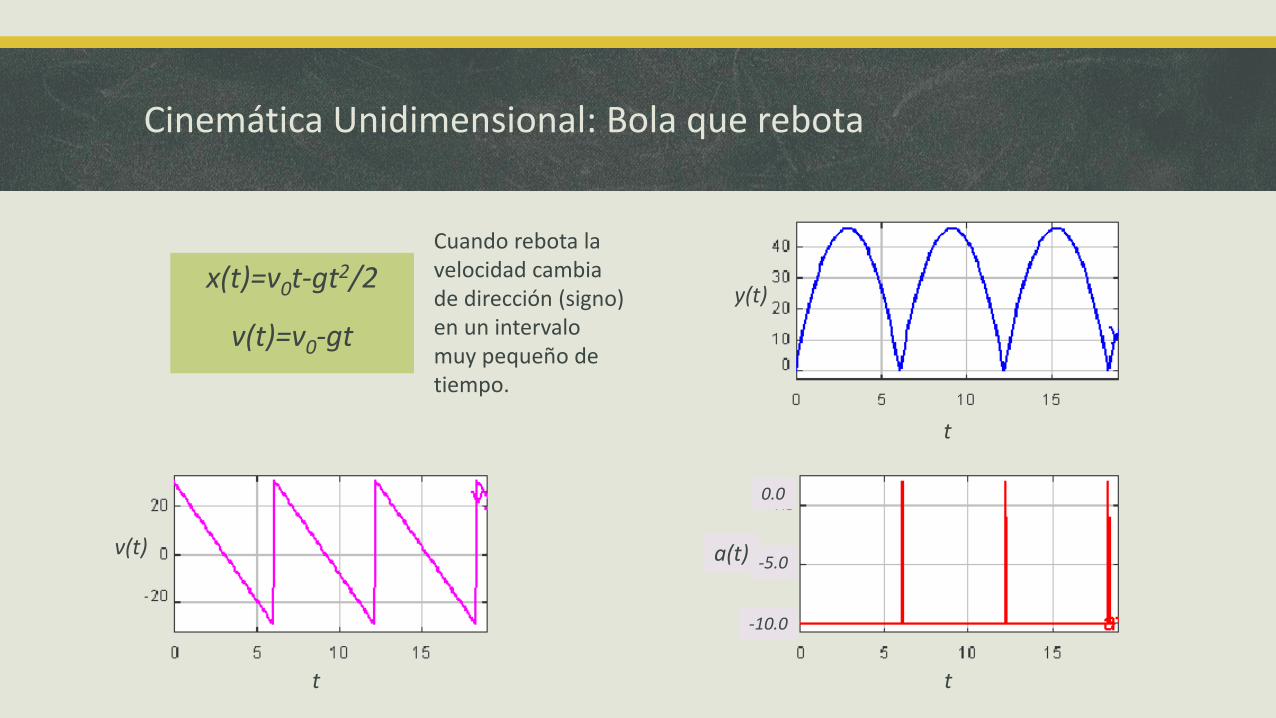
Cinemática Unidimensional: Bola que rebota
y(t)
t
t
v(t)
x(t)=v0t-gt2/2
v(t)=v0-gt
Cuando rebota la velocidad cambia de dirección (signo) en un intervalo muy pequeño de tiempo.
-10.0
-5.0
0.0
Análisis de clase
Repaso de vectores y sus propiedades
Vectores posición, velocidad y aceleración
Movimiento en 1D:
En reposo
A velocidad constante
Acelerado
Ecuaciones de movimiento