Embed Size (px)
Citation preview
Tugas Persentase
Pengendalian Mutu
GRAFIK PENGENDALI SIFAT BAGIAN TAK SESUAI
KELOMPOK I
M. RIHALDY UTAMA (H12113322)
IRFAN TAUFIK (H12113025)
ALIMUN MIRZAD (H12113027)
PROGRAM STUDY STATISTIKA
JURUSAN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS HASANUDDIN
MAKASSAR
2015
KATA PENGANTAR
Puji syukur kehadirat Allah Subhanahu Wa Ta’ala tuhan semesta alam atas
limpahan rahmat dan hidayahnya, beserta ridhonya sehingga makalah
pengendalian mutu ini dapat terselesaikan tepat pada waktunya. Sholawat dan
salam semoga selalu tercurahkan kepada Nabi Muhammad Sallallahu ‘Alaihi
Wasallam beserta para keluarganya dan para sahabatnya.
Makalah ini dimaksudkan untuk memenuhi tugas mata kuliah pengendalian
mutu, makalah ini berisikan tentang grafik pengendali sifat pada pengendalian
mutu.
Keberhasilan makalah ini tidak lepas dari arahan dan bimbingan dari dosen
yang bersangkutan pada mata kuliah pengendalian mutu, beserta teman-teman
yang telah bersedia membantu, mendukung, dan memberikan sumbangsi
pendapatnya sehingga makalah ini terselesaikan.
Penulis menyadari masih terdapat banyak kesalahan dan kekurangan dalam
penulisan makalah ini, untuk itu sangat diharapkan kritik dan saran yang bersifat
membangun demi kesempurnaan makalah ini. Namun demikian, penulis tetap
berharap semoga makalah ini bermanfaat bagi para pembaca.
Makassar, 20 Oktober
2015
Penulis
DAFTAR ISI
Halaman judul i
Kata Pengantar ii
Daftar Isi iii
BAB I PENDAHULUAN
A. Latar Belakang 1
B. Rumusan Masalah 1
C. Tujuan 2
BAB II PEMBAHASAN
A. Grafik Pengendali Bagian Tak Sesuai 3
B. Pengembangan Dan Operasi Grafik Pengendali 3
C. Ukuran Sampel Berbeda-Beda 11
D. Fungsi Karakteristik Operasi 16
BAB III PENUTUP
A. Kesimpulan 19
BAB I
PENDAHULUAN
A. LATAR BELAKANG
Banyak karakteristik kualitas tidak dapat dengan mudah dinyatakan secara
numerik. Dalam hal seperti itu, biasanya tiap benda yang diperiksa kita
klasifikasi sebagai sesuai dengan spesifikasi pada karakteristik kualitas itu
atau tidak sesuai dengan spesifikasi. Istilah “cacat” dan “tidak cacat” kadang-
kadang digunakan untuk mengidentifikasi kedua klasifikasi produk ini. Baru-
baru ini istilah “sesuai” dan “tidak sesuai” menjadi populer. Karakteristik
kualitas seperti ini dinamakan sifat (atribut). Beberapa contoh karakteristik
kualitas yang merupakan sifat termasuk terjadinya tangkai penghubung mesin
mobil yang bengkok dalam suatu hari produksi, bagian keping semi konduktor
tak berfungsi dalam satu giliran produksi, dan sebagainya.
Dalam makalah ini, kita sajikan grafik yang berhubungan dengan bagian
produk yang tak sesuai atau cacat yang dproduksi oleh suatu proses produksi
yang dinamakan grafik pengendali untuk bagian tak sesuai , atau grafik p.
B. RUMUSAN MASALAH
Berdasarkan latar belakang yang telah dipaparkan diatas, dapat ditarik
beberapa rumusan masalah sebagai berikut:
1. Bagaimana cara membuat grafik pengendali sifat bagian tak sesuai ?
2. Bagaimana pengembangan dan operasi grafik pengendali ?
3. Bagaimana grafik pengendali sifat pada ukuran sampel berbeda-beda ?
4. Bagaimana fungsi karakteristik operasi ?
C. TUJUAN
1. Mengetahui cara membuat grafik pengendali sifat bagian tak sesuai.
2. Mengetahui pengembangan dan operasi grafik pengendali.
3. Mengetahui grafik pengendali sifat pada ukuran sampel berbeda-beda.
4. Mengetahui fungsi karakteristik operasi.
BAB II
PEMBAHASAN
A. GRAFIK PENGENDALI BAGIAN TAK SESUAIAsas asas statistik yang melandasi grafik pengendali untuk bagian tak
sesuai didasarkan atas distribusi binomial. Misalkan proses produksi bekerja dalam keadaan stabil, sehingga probabilitas bahwa sesuatu unit akan tidak sesuai dengan spesifikasi adalah p, dan unit yang diproduksi berturutan adalah independen. Maka tiap unit yang diproduksi merupakan realisasi suatu variable random Bernoulli dengan parameter p. Apabila sampel random dengan n unit produk dipilih, dan D adalah banyak unit produk yang tak sesuai maka D berdistribusi binomial dengan parameter n dan p, yakni
P { D=x }=(nx) px (1−p )n− x x=0,1,2,3 ,…, n (1)
Kita ketahui bahwa mean dan variansi variable random D masing-asing adalah np dan np(1 – p).
Bagian tak sesuai sampel didefenisikan sebagai perbandingan banyak unit tak sesuai dalam sampel D dengan ukuran sampel n; yakni
p̂= Dn (2)
Distribusi variable random p̂ dapat diperoleh dari distribusi binomial. Selanjutnya, mean dan variansi p̂ masing-masing adalah
μ=p (3)
Dan
σ p2= p (1−p)
n(4)
B. PENGEMBANGAN DAN OPERASI GRAFIK PENGENDALIJika w suatu statistic yang mengukur suatu karakteristik kualitas, dan jika
mean w adalah μw dan variansi w adalah σ w '2 maka model umum grafik
pengendali Shewhart adalah sebagai berikut :
BPA=μw+k σw
Garis tengah=μw (5)
BPB=μw−k σw
dengan k adalah jarak batas pengendali dari garis tengah, dalam kelipatan deviasi standar w. biasanya dipilih k=3.
Andaikan bahwa bagian tak sesuai yang sebenarnya p dalam proses produksi itu diketahui, atau nilai standar ditentukan oleh manajemen. Maka dari persamaan (5), garis tengah dan batas pengendali grafik pengendali bagian tak sesuai adalah
BPA=p+3√ p(1−p)n
Garis tengah=p (6)
BPB=p−3√ p (1−p )n
Operasi yang sebenarnya grafik ini akan terdiri dari pengambilan sampel-sampel dengan n unit berturut-turut, menghitung bagian tak sesuai sampel p̂, dan menggambarkan statistic p̂pada grafik. Selama p̂ tetap di dalam batas pengendali dan deretan titik-titik yang tergambar tidak menunjukkan pola sistematik atau tak random, kita simpulkan bahwa proses itu terkendali pada tingkat p. jika suatu titik terletak di luar batas pengendali, atau jika diamati pola tak random dalam titik-titik tergambar itu, maka kita simpulkan bahwa bagian tak sesuai proses itu telah bergeser ke tingkat yang baru dan proses itu tak terkendali.
Apabila bagian tak sesuai proses itu p tidak diketahui, maka p itu harus ditaksir dari data observasi. Prosedur yang biasa adalah memilih m sampel pendahuluan, masing-masing berukuran n. sebagai aturan umum, m haruslah 20 atau 25. Maka jika Di unit tak sesuai dalam sampel i, kita hitung bagian tak sesuai dalam sampel ke i itu sebagai
p̂i=Di
ni=1,2,3 , …, m
dan rata-rata bagian tak sesuai sampel-sampel ini adalah
p=∑i=1
m
Di
mn=∑i=1
m
p̂i
m(7)
Statistic p menaksir bagian tak sesuai p yang tidak diketahui. Garis tengah dan batas pengendali grafik pengendali untuk bagian tak sesuai dihitung sebagai
BPA=p+3√ p(1−p)n
Garis tengah=p (8)
BPB=p−3√ p (1−p )n
Kita pandang batas pengendali yang diperoleh dalam (8) sebagai batas pengendali percobaan. Batas pengendali itu memungkinkan kita untuk menentukan apakah proses dalam keadaan terkendali ketika m sampel awal tersebut dipilih.
Jika grafik pengendali didasarkan atas nilai yang diketahui atau nilai standar untuk bagian tak sesuai p, maka penghitung batas pengendali percobaan umumnya tidak diperlukan. Tetapi, orang harus hati-hati apabila bekerja dengan nilai standar p. karena dalam praktek nilai p yang sebenarnya jarang diketahui dengan pasti, kita biasanya diberi nilai standar p yang merupakan nilai yang diinginkan atau sasaran untuk bagian tak sesuai proses. Jika demikian halnya, dan sampel-sampel yang akan datang menunjukkan keadaan tak terkendali, kita harus menentukan bahwasanya proses itu tak terkendali pada nilai p yang lain.
Contoh 1 :
Sari air jeruk dingin dipak dalam kotak karton 6 ons. Kotak ini dibuat dengan mesin dengan memintalnya dari bahan karton, dan memasang lembaran metal pada bagian bawahnya. Dengan pemeriksaan kotak, kita dapat menentukan apakah kotak bocor (bila diisi) pada lipatan sisi atau atau sekeliling lipatan bawah. Ketidaksesuaian kotak itu seperti itu mempunyai tanda tak wajar bak pada lipatan sisi atau lembaran bawah. Kita ingin membuat grafik pengendali untuk memantau bagian kotak tak sesuai yang dihasilkan dengan mesin ini.
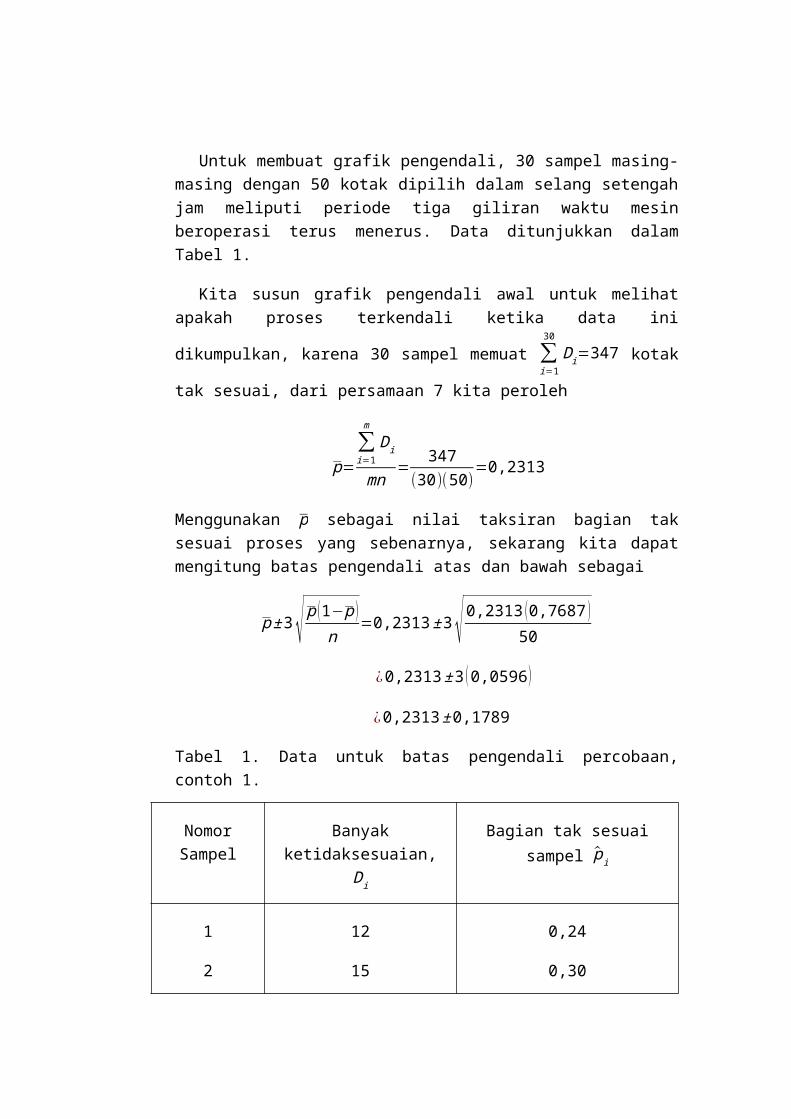
Untuk membuat grafik pengendali, 30 sampel masing-masing dengan 50 kotak dipilih dalam selang setengah jam meliputi periode tiga giliran waktu mesin beroperasi terus menerus. Data ditunjukkan dalam Tabel 1.
Kita susun grafik pengendali awal untuk melihat apakah proses terkendali
ketika data ini dikumpulkan, karena 30 sampel memuat ∑i=1
30
Di=347 kotak tak
sesuai, dari persamaan 7 kita peroleh
p=∑i=1
m
Di
mn= 347
(30)(50)=0,2313
Menggunakan p sebagai nilai taksiran bagian tak sesuai proses yang sebenarnya, sekarang kita dapat mengitung batas pengendali atas dan bawah sebagai
p ±3√ p (1−p )n
=0,2313 ±3√ 0,2313 (0,7687 )50
¿0,2313 ±3 (0,0596 )
¿0,2313 ± 0,1789
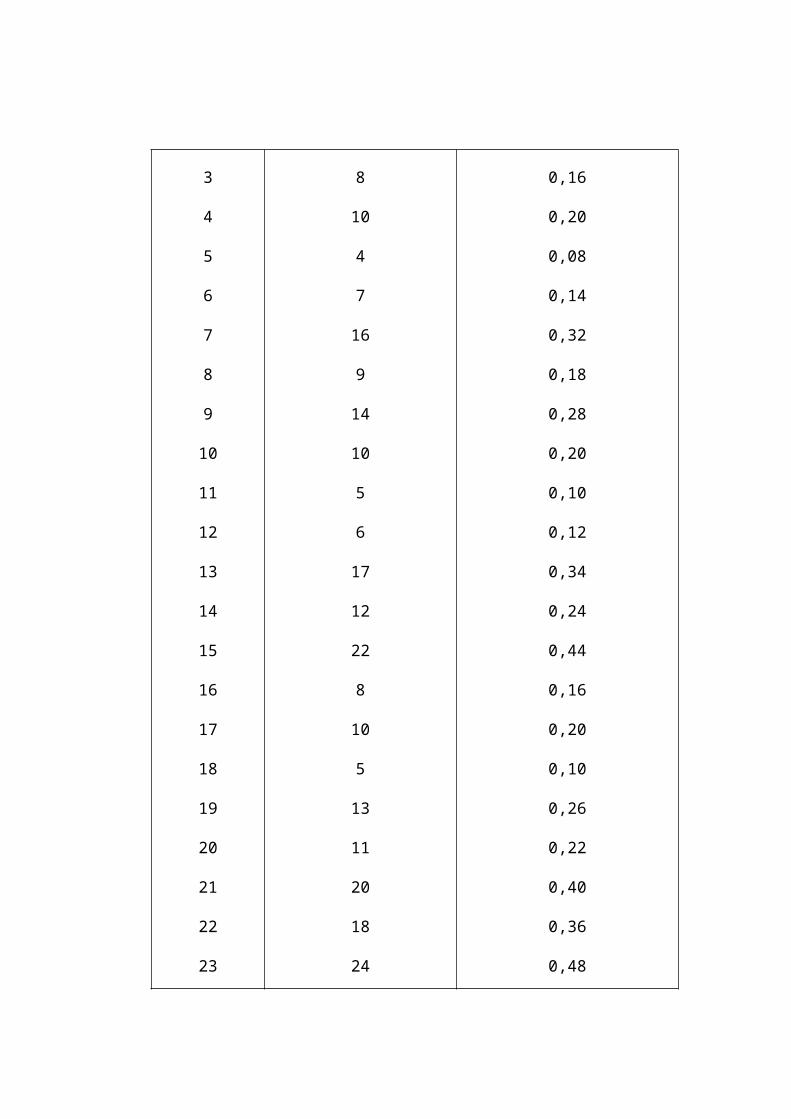
Tabel 1. Data untuk batas pengendali percobaan, contoh 1.
Nomor Sampel Banyak ketidaksesuaian, Di
Bagian tak sesuai sampel p̂i
1
2
3
4
5
6
7
8
9
12
15
8
10
4
7
16
9
14
0,24
0,30
0,16
0,20
0,08
0,14
0,32
0,18
0,28
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
10
5
6
17
12
22
8
10
5
13
11
20
18
24
15
9
12
7
13
9
6
0,20
0,10
0,12
0,34
0,24
0,44
0,16
0,20
0,10
0,26
0,22
0,40
0,36
0,48
0,30
0,18
0,24
0,14
0,26
0,18
0,12
347 p=0,2313
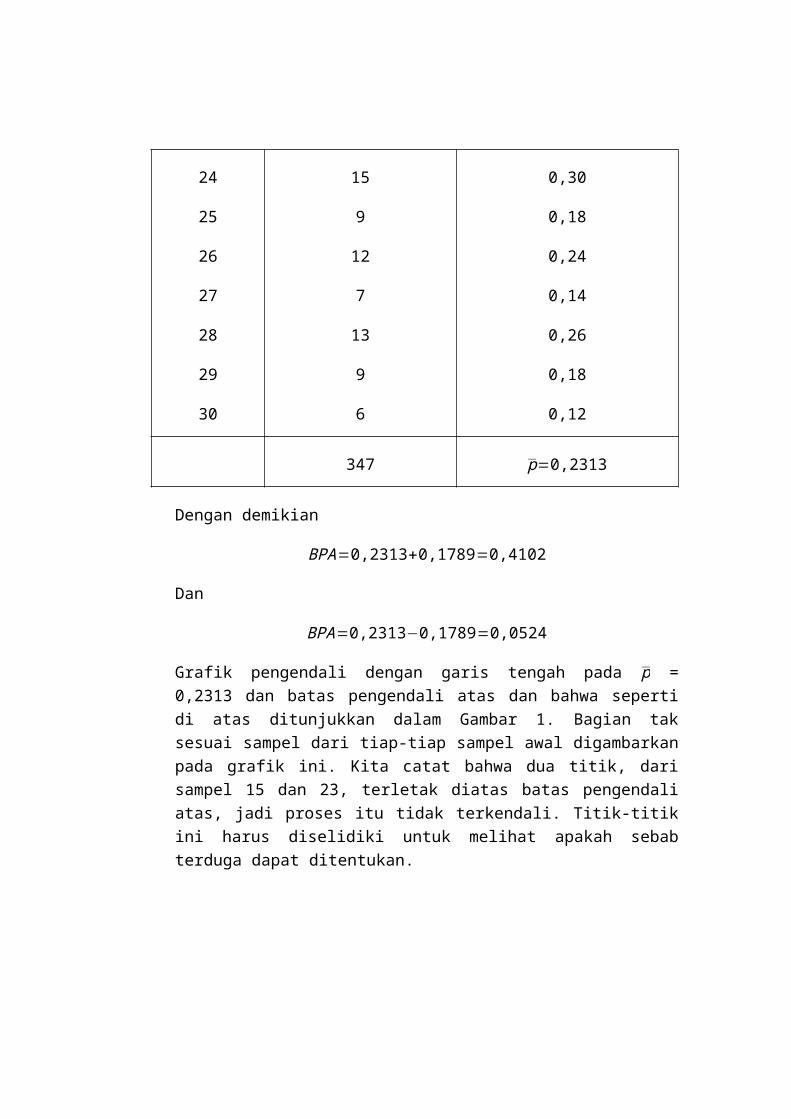
Dengan demikian
BPA=0,2313+0,1789=0,4102
Dan
BPA=0,2313−0,1789=0,0524
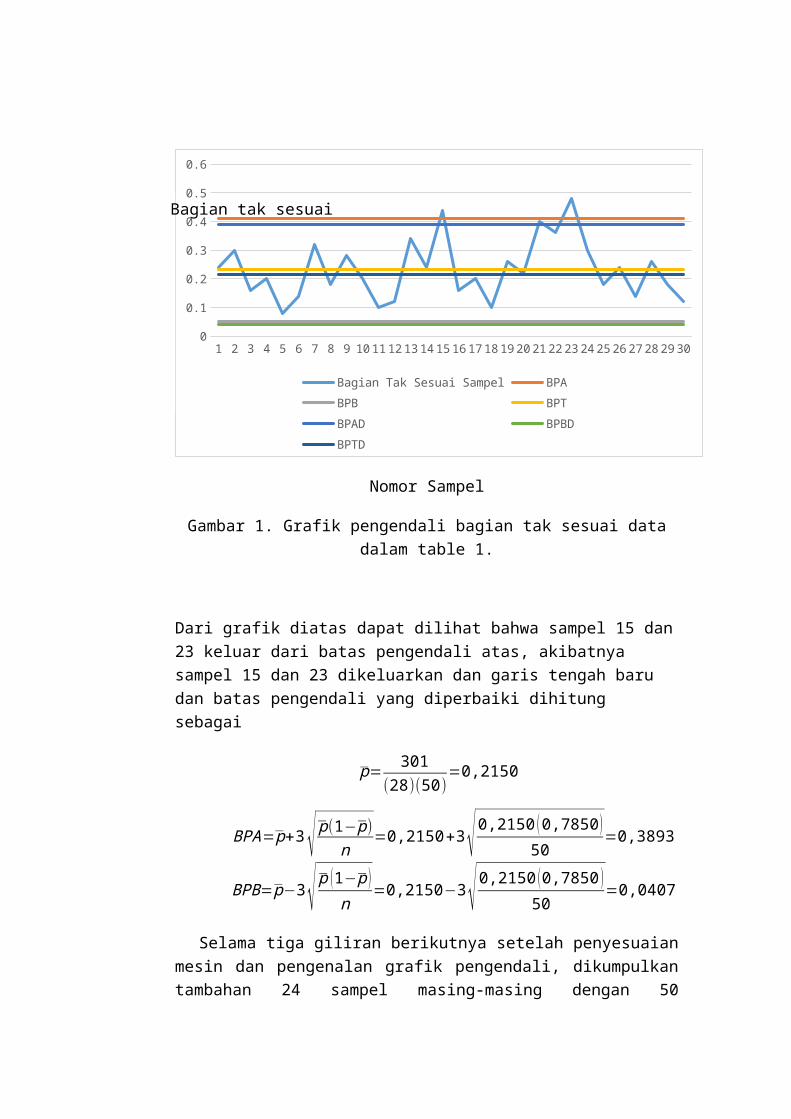
Grafik pengendali dengan garis tengah pada p = 0,2313 dan batas pengendali atas dan bahwa seperti di atas ditunjukkan dalam Gambar 1. Bagian tak sesuai sampel dari tiap-tiap sampel awal digambarkan pada grafik ini. Kita catat bahwa dua titik, dari sampel 15 dan 23, terletak diatas batas pengendali atas, jadi proses itu tidak terkendali. Titik-titik ini harus diselidiki untuk melihat apakah sebab terduga dapat ditentukan.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 300
0.1
0.2
0.3
0.4
0.5
0.6
Bagian Tak Sesuai Sampel BPA BPBBPT BPAD BPBDBPTD
Nomor Sampel
Gambar 1. Grafik pengendali bagian tak sesuai data dalam table 1.
Dari grafik diatas dapat dilihat bahwa sampel 15 dan 23 keluar dari batas pengendali atas, akibatnya sampel 15 dan 23 dikeluarkan dan garis tengah baru dan batas pengendali yang diperbaiki dihitung sebagai
p= 301(28)(50)
=0,2150
Bagian tak sesuai sampel p̂
BPA=p+3√ p(1−p)n
=0,2150+3√ 0,2150 (0,7850 )50
=0,3893
BPB=p−3√ p (1−p )n
=0,2150−3√ 0,2150 (0,7850 )50
=0,0407
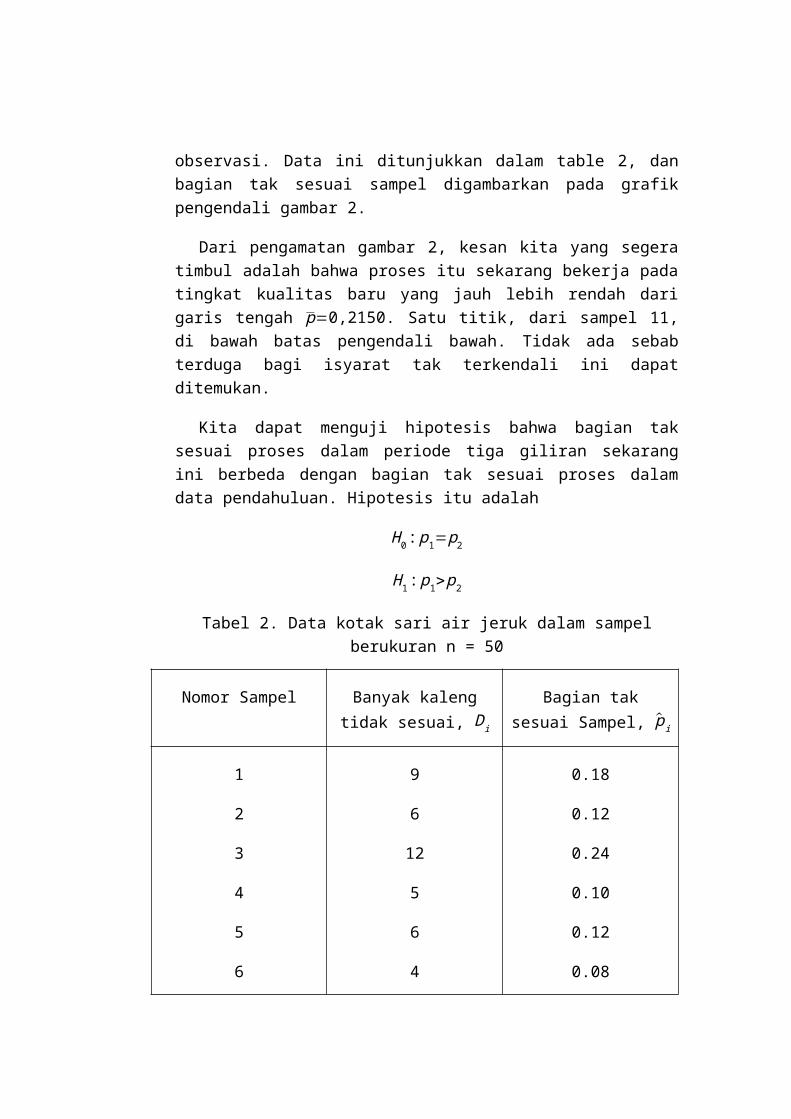
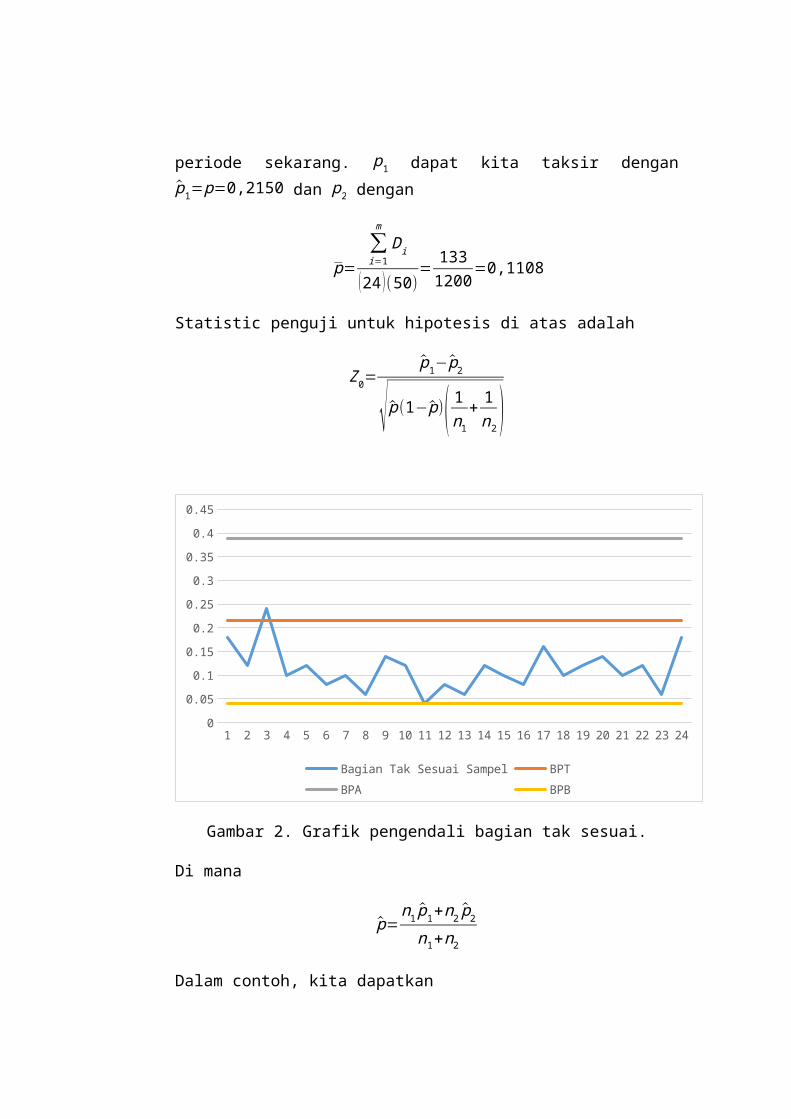
Selama tiga giliran berikutnya setelah penyesuaian mesin dan pengenalan grafik pengendali, dikumpulkan tambahan 24 sampel masing-masing dengan 50 observasi. Data ini ditunjukkan dalam table 2, dan bagian tak sesuai sampel digambarkan pada grafik pengendali gambar 2.
Dari pengamatan gambar 2, kesan kita yang segera timbul adalah bahwa proses itu sekarang bekerja pada tingkat kualitas baru yang jauh lebih rendah dari garis tengah p=0,2150. Satu titik, dari sampel 11, di bawah batas pengendali bawah. Tidak ada sebab terduga bagi isyarat tak terkendali ini dapat ditemukan.
Kita dapat menguji hipotesis bahwa bagian tak sesuai proses dalam periode tiga giliran sekarang ini berbeda dengan bagian tak sesuai proses dalam data pendahuluan. Hipotesis itu adalah
H 0 : p1=p2
H 1: p1> p2
Tabel 2. Data kotak sari air jeruk dalam sampel berukuran n = 50
Nomor Sampel Banyak kaleng tidak sesuai, Di
Bagian tak sesuai Sampel, p̂i
1
2
3
4
5
6
7
9
6
12
5
6
4
5
0.18
0.12
0.24
0.10
0.12
0.08
0.10
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
3
7
6
2
4
3
6
5
4
8
5
6
7
5
6
3
4
0.06
0.14
0.12
0.04
0.08
0.06
0.12
0.10
0.08
0.16
0.10
0.12
0.14
0.10
0.12
0.06
0.18
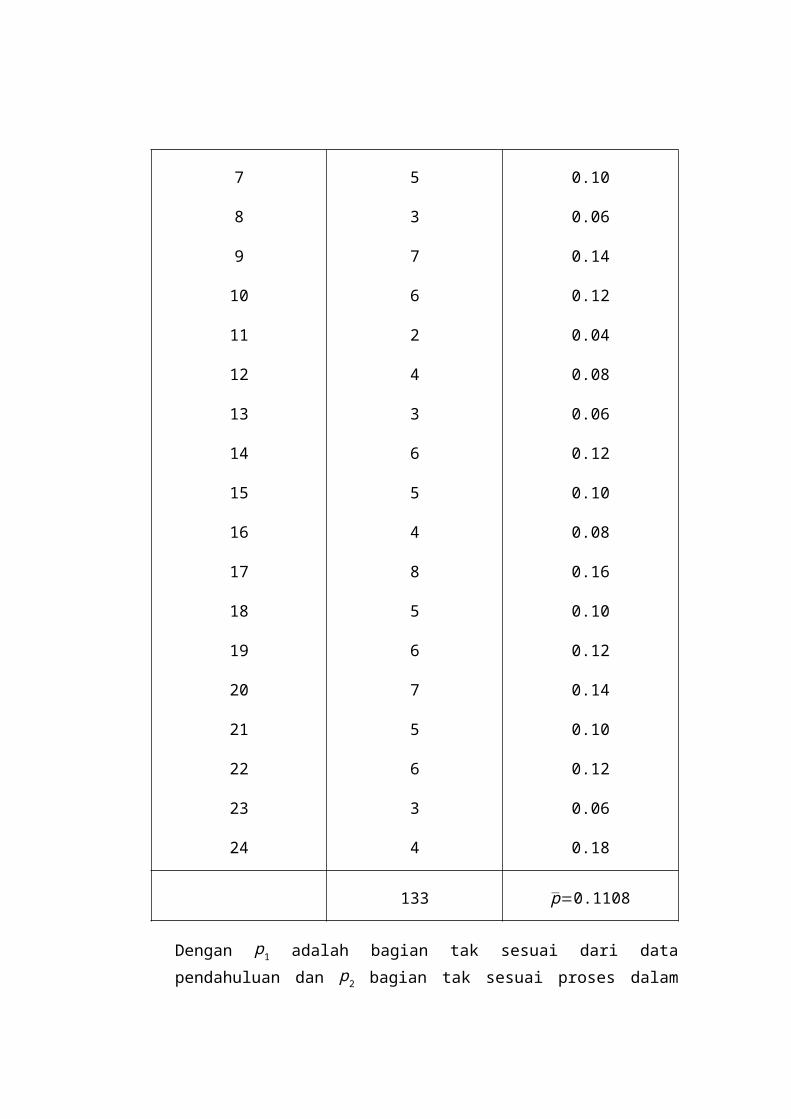
133 p=0.1108
Dengan p1 adalah bagian tak sesuai dari data pendahuluan dan p2 bagian tak sesuai proses dalam periode sekarang. p1 dapat kita taksir dengan p̂1=p=0,2150 dan p2 dengan
p=∑i=1
m
Di
(24 )(50)= 133
1200=0,1108
Statistic penguji untuk hipotesis di atas adalah
Z0=p̂1− p̂2
√ p̂(1− p̂)( 1n1
+1n2 )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 240
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Bagian Tak Sesuai Sampel BPTBPA BPB
Gambar 2. Grafik pengendali bagian tak sesuai.
Di mana
p̂=n1 p̂1+n2 p̂2
n1+n2
Dalam contoh, kita dapatkan
p̂=(1400 ) (0.2150 )+(1200)(0.1108)
1400+1200 =0.1669
Z0=0.2150−0.1108
√(0.1669)(0.8331)( 11400
+ 11200 )
=7.22
Membandingkan ini dengan titik 0.05 atas distribusi normal standar, kita peroleh Z0>Z0 .05. kesimpulannya, kita menolak H 0 dan menyimpulkan telah ada penurunan yang signifikan dalam ketidaksesuaian proses.
C. UKURAN SAMPEL BERBEDA-BEDAKarena dalam tiap periode dapat diproduksi banyak unit yang berbeda,
maka grafik pengendali itu akan mempunyai ukuran sampel yang berbeda-beda. Ada beberapa pendekatan dalam pembentukan dan pengoperasian grafik pengendali dengan ukuran sampel berbeda-beda.
Pendekatan pertama, dan mungkin yang paling sederhana adalah menentukan batas pengendali untuk tiap-tiap sampel yang didasarkan atas ukuran sampel tertentu. Yakni, jika sampel ke i berukuran ni, maka batas atas
dan bawahnya adalah p ±3√ p (1−p )ni
. Perhatikan bahwa lebar batas
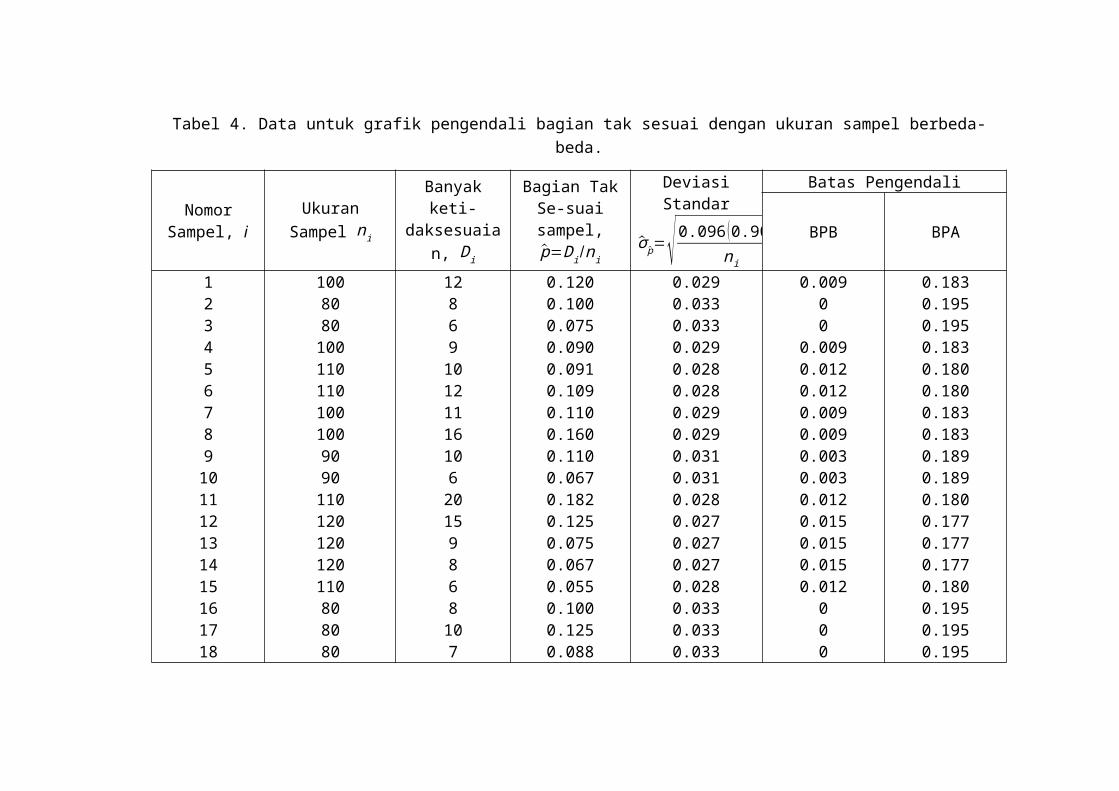
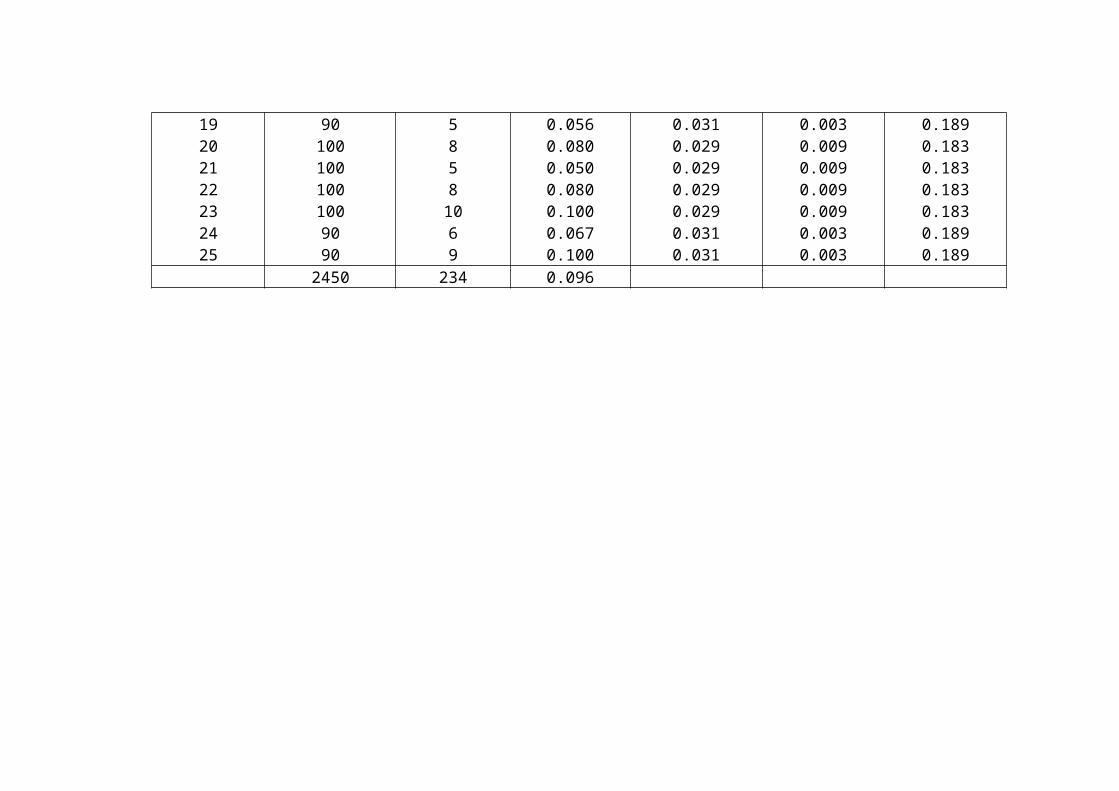
pengendali berbanding terbalik dengan ukuran sampel. Untuk melukiskan pendekatan ini, pandang table 4. Untuk 25 sampel itu, kita hitung
p=∑i=1
25
Di
∑i=1
25
ni
= 2342450
=0,096
Maka, garis tengah pada 0.096 dan batas pengendali
BPA=p+3√ p(1−p)n
=0,096+3√ 0.096 (0.904 )ni
BPB=p−3√ p (1−p )n
=0,096−3√ 0.096 (0.904 )n i
Dengan σ̂ p̂ adalah taksiran deviasi standar bagian tak sesuai sampel p̂. Perhitungan untuk menentukan batas pengendali disajikan dalam tiga kolom terakhir table 4. Grafik pengendali itu dilukiskan dalam gambar 4.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 250
0.05
0.1
0.15
0.2
0.25
Bagian Tak Sesuai Sampel BPBBPA BPT
Tabel 4. Data untuk grafik pengendali bagian tak sesuai dengan ukuran sampel berbeda-beda.
Nomor Sampel, i Ukuran Sampel ni
Banyak keti-daksesuaian,
Di
Bagian Tak Se-suai sampel,
p̂=D i /n i
Deviasi Standar
σ̂ p̂=√ 0.096 ( 0.904 )ni
Batas Pengendali
BPB BPA
12345678910111213141516171819202122232425
10080801001101101001009090110120120120110808080901001001001009090
12869101211161062015986810758581069
0.1200.1000.0750.0900.0910.1090.1100.1600.1100.0670.1820.1250.0750.0670.0550.1000.1250.0880.0560.0800.0500.0800.1000.0670.100
0.0290.0330.0330.0290.0280.0280.0290.0290.0310.0310.0280.0270.0270.0270.0280.0330.0330.0330.0310.0290.0290.0290.0290.0310.031
0.00900
0.0090.0120.0120.0090.0090.0030.0030.0120.0150.0150.0150.012
000
0.0030.0090.0090.0090.0090.0030.003
0.1830.1950.1950.1830.1800.1800.1830.1830.1890.1890.1800.1770.1770.1770.1800.1950.1950.1950.1890.1830.1830.1830.1830.1890.189

2450 234 0.096

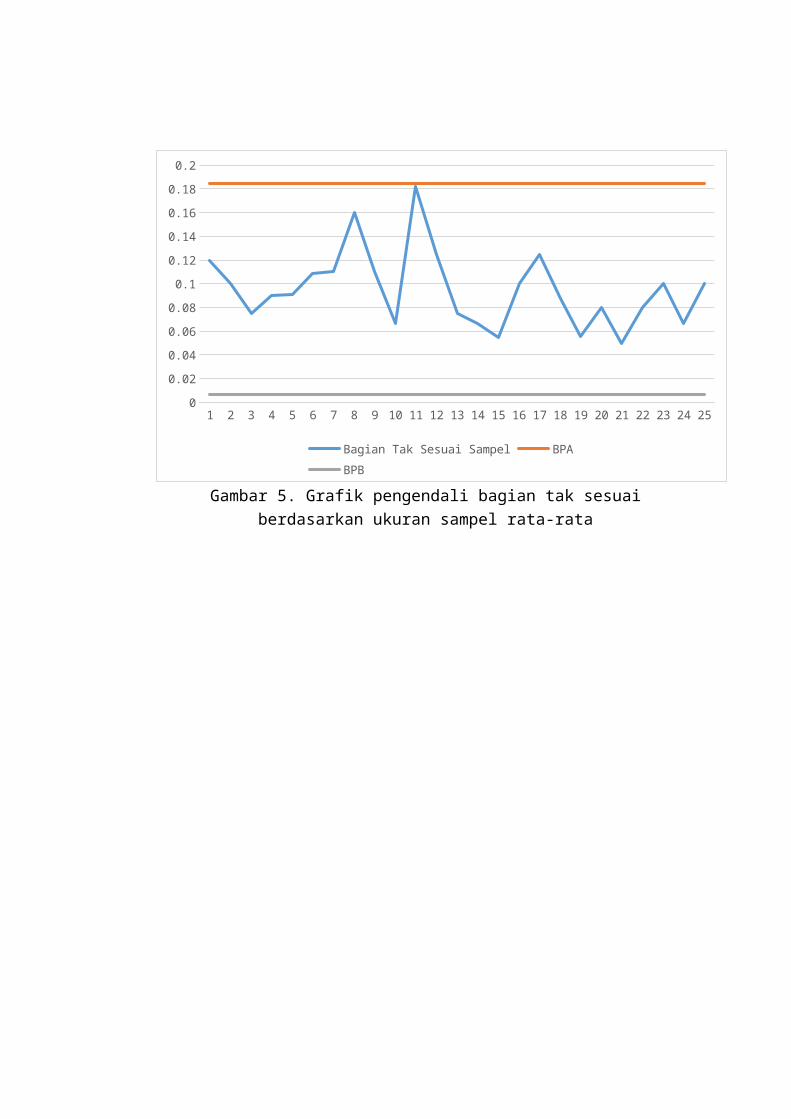
Pendekatan kedua adalah mendasarkan grafik pengendali pada ukuran sampel rata-rata yang menghasilkan himpunan batas pengendali pendekatan. Ini menganggap bahwa ukuran sampel yang akan dating tidak akan besar bedanya dari yang diamati sebelumnya.
Untuk data table 4, kita peroleh sampel rata-rata adalah
n=∑i=1
25
ni
25=2450
25=98
Maka batas atas pengendali pendekatan adalah
BPA=p+3√ p(1−p)n
=0,096+3√ 0.096 (0.904 )98
=0.185
BPB=p−3√ p (1−p )n
=0,096−3√ 0.096 (0.904 )98
=0.007
Grafik pengendali hasilnya ditunjukkan dalam gambar 5.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 250
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Bagian Tak Sesuai Sampel BPA BPB
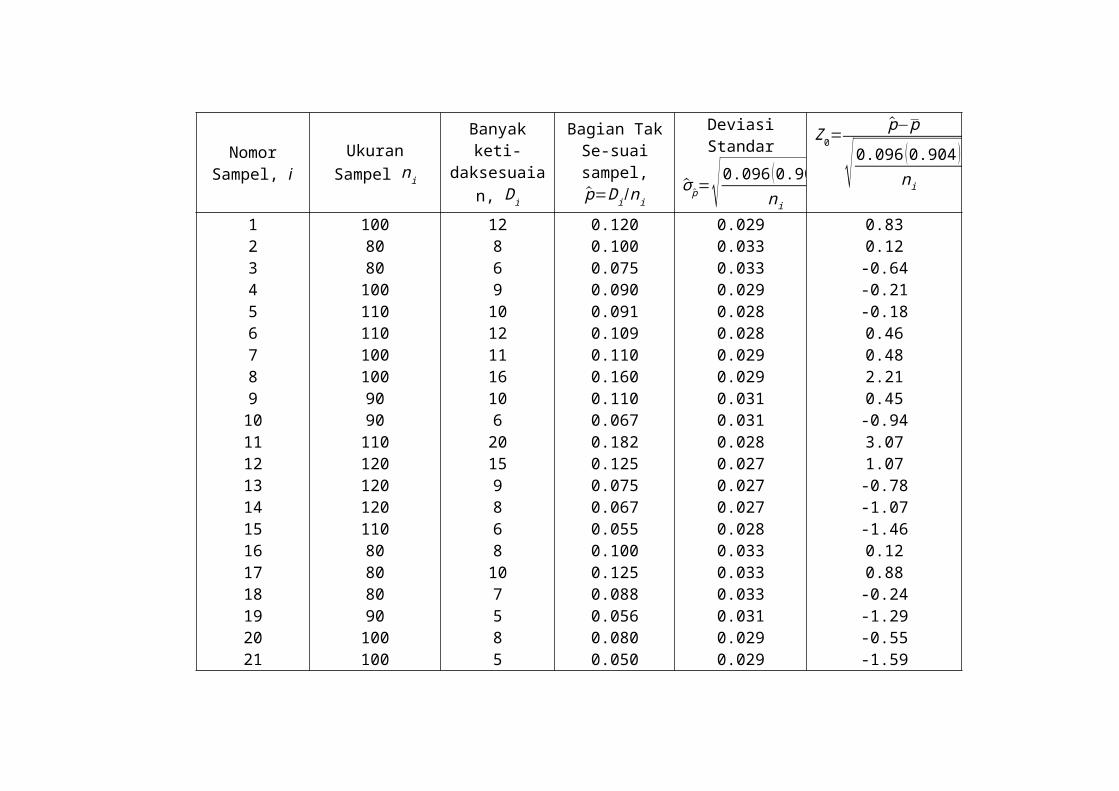
Gambar 5. Grafik pengendali bagian tak sesuai berdasarkan ukuran sampel rata-rata
Nomor Sampel, i Ukuran Sampel ni
Banyak keti-daksesuaian,
Di
Bagian Tak Se-suai sampel,
p̂=D i /n i
Deviasi Standar
σ̂ p̂=√ 0.096 ( 0.904 )ni
Z0=p̂−p
√ 0.096 (0.904 )ni
12345678910111213141516171819202122232425
10080801001101101001009090110120120120110808080901001001001009090
12869101211161062015986810758581069
0.1200.1000.0750.0900.0910.1090.1100.1600.1100.0670.1820.1250.0750.0670.0550.1000.1250.0880.0560.0800.0500.0800.1000.0670.100
0.0290.0330.0330.0290.0280.0280.0290.0290.0310.0310.0280.0270.0270.0270.0280.0330.0330.0330.0310.0290.0290.0290.0290.0310.031
0.830.12-0.64-0.21-0.180.460.482.210.45-0.943.071.07-0.78-1.07-1.460.120.88-0.24-1.29-0.55-1.59-0.550.14-0.940.13
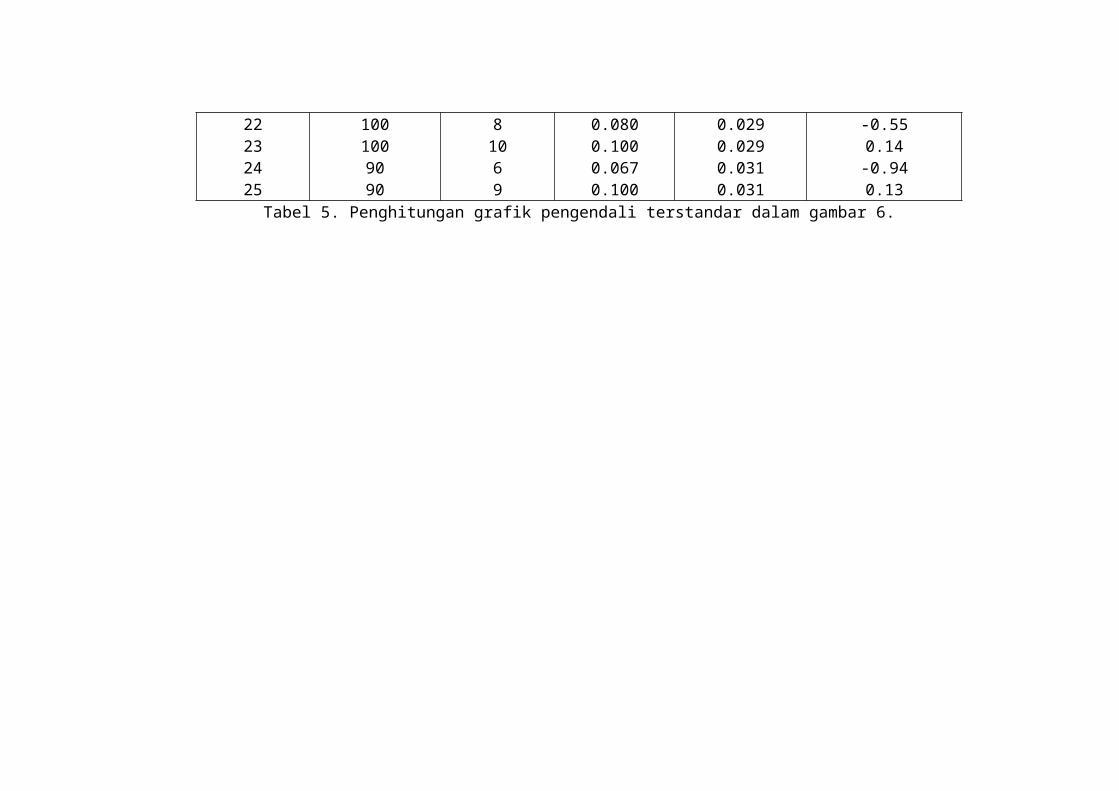
Tabel 5. Penghitungan grafik pengendali terstandar dalam gambar 6.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
-4
-3
-2
-1
0
1
2
3
4
Zi BPA BPB
Gambar 6. Grafik Pengendali bagian tak sesuai terstandarisasi
Satu penyelesaian untuk suatu masalah adalah dengan menggunakan grafik pengendali “terstandar”, dengan titik-titik digambarkan dalam unit deviasi standar. Grafik pengendali seperti itu mempunyai garis tengah pada nol, serta batas pengendali atas dan bawah masing-masing +3 dan -3. Variable yang digambarkan dalam grafik adalah
Zi=p̂ i−p
√ p (1−p)ni
Dengan p (atau p̂ jika nilai standar tidak diberikan) adalah bagian tak sesuai proses dalam keadaan terkendali. Grafik pengendali terstandar untuk data table 4 ditunjukkan dalam gambar 6. Penghitungan yang berkaitan dengan grafik pengendali ini ditunjukkan dalam table 5.
D. FUNGSI KARAKTERISTIK OPERASIFungsi karakteristik operasi (atau KO) grafik pengendali bagian tak sesuai
adalah penyajian grafis probabilitas menerima secara salah hipotesis keadaan terkendali statistic (yakni kesalahan tipe II atau β) terhadap bagian tak sesuai proses. Kurva KO memberikan ukuran kepekaan grafik pengendali; yakni, kemampuannya menyidik suatu pergesaran dalam bagian tak sesuai proses
dari nilai nominal p ke suatu nilai lain p. probabilitas, kesalahan tipe II untuk grafik pengendali bagian tak sesuai dapat dihitung dari
β=P [ p̂<BPA∨p ]−P [ p̂ ≤ BPB∨p ]¿ P [ D<nBPA∨p ]−P [ D≤ nBPB∨p ] (9)
p P [ D ≤ 18 | p ]
P [ D ≤ 2 |p ] Β = P [ D < 2 | p ] – P[ D ≤ 2 | p ]
0.010.030.050.100.150.200.250.300.350.400.450.500.55
1.00001.00001.00001.00000.99990.99750.97130.85940.62160.33560.12730.03250.0053
0.98620.81080.54050.11170.01420.00130.00010.00000.00000.00000.00000.00000.0000
0.01380.18920.45950.88830.98570.99620.97120.85940.62160.33560.12730.03250.0053
Tabel 6. Penghitungan bagi penyusunan kurva KO grafik pengendali bagian tak sesuai dengan n = 50, BPB = 0.0303 dan BPA = 0.3697
Karena D variable random binomial dengan parameter n dan p, kesalahan yang didefenisiskan dalam (9) dapat diperoleh dari distribusi binomial kumulatif.
Menggunakan parameter pada table 6, persamaan (9) menjadi
β=P [ D<(50)(0.3697)∨p ]−P [ D≤(50)(0.0303)∨p ]
¿ P [ D<18.49∨p ]−P [ D≤ 1.52∨p ]
Tetapi, karena D harus merupakan bilangan bulat maka kita peroleh
β=P [ D<18∨p ]−P [ D ≤2∨p ]
Kurva KO dilukiskan dalam gambar 7.
0.01 0.03 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.550
0.2
0.4
0.6
0.8
1
1.2
B Series 2 Series 3
Gambar 7. Kurva karakteristik operasi grafik pengendali bagian tak sesuai.
BAB III
PENUTUP
A. KESIMPULAN1. Asas asas statistik yang melandasi grafik pengendali untuk bagian tak sesuai
didasarkan atas distribusi binomial. Misalkan proses produksi bekerja dalam keadaan stabil, sehingga probabilitas bahwa sesuatu unit akan tidak sesuai dengan spesifikasi adalah p, dan unit yang diproduksi berturutan adalah independen.
2. Operasi yang sebenarnya grafik pengendali tak sesuai sampel akan terdiri dari pengambilan sampel-sampel dengan n unit berturut-turut, menghitung bagian tak sesuai sampel p̂, dan menggambarkan statistic p̂pada grafik. Selama p̂ tetap di dalam batas pengendali dan deretan titik-titik yang tergambar tidak menunjukkan pola sistematik atau tak random, kita simpulkan bahwa proses itu terkendali pada tingkat p. jika suatu titik terletak di luar batas pengendali, atau jika diamati pola tak random dalam titik-titik tergambar itu, maka kita simpulkan bahwa bagian tak sesuai proses itu telah bergeser ke tingkat yang baru dan proses itu tak terkendali.
3. Dalam tiap periode dapat diproduksi banyak unit yang berbeda, maka grafik pengendali itu akan mempunyai ukuran sampel yang berbeda-beda. Ada beberapa pendekatan dalam pembentukan dan pengoperasian grafik pengendali dengan ukuran sampel berbeda-beda.
4. Fungsi karakteristik operasi (atau KO) grafik pengendali bagian tak sesuai adalah penyajian grafis probabilitas menerima secara salah hipotesis keadaan terkendali statistic (yakni kesalahan tipe II atau β) terhadap bagian tak sesuai proses.





























