Embed Size (px)
Citation preview
Lek 5Ündsän aguulga1. Xoërdugaar ärämbiïn muruïnuud.
• Toïrog.• Ällips.• Giperbol• Parabol• Tuïlyn koordinatyn sistem• Cilindr koordinatyn sistem• Sfer koordinatyn sistem• Koordinatyn xuwirgalt
1
ToïrogTöw gäj närlägdäx bäxlägdsän näg ägääs ijil zaïnd or²ix xawtgaïn büx ägüüdiïn olonlogiïg toïrog gänä.Daraax tämdäglägääg xiïe:C(a, b)� toïrgiïn töwR� toïrgiïn ¶mar näg äg xürtälx zaïM(x, y)� toïrgiïn duryn näg ägXoër ägiïn xoorondox zaïg olox tom³ëo ësoor:
R = |CM | =√
(x − a)2 + (y − b)2 (1)buµu
(x − a)2 + (y − b)2 = R2 (2)Änd R� toïrgiïn radius.
O(0, 0) äg däär töwtäï gäwäl:
x2 + y2 = R2 (3)2
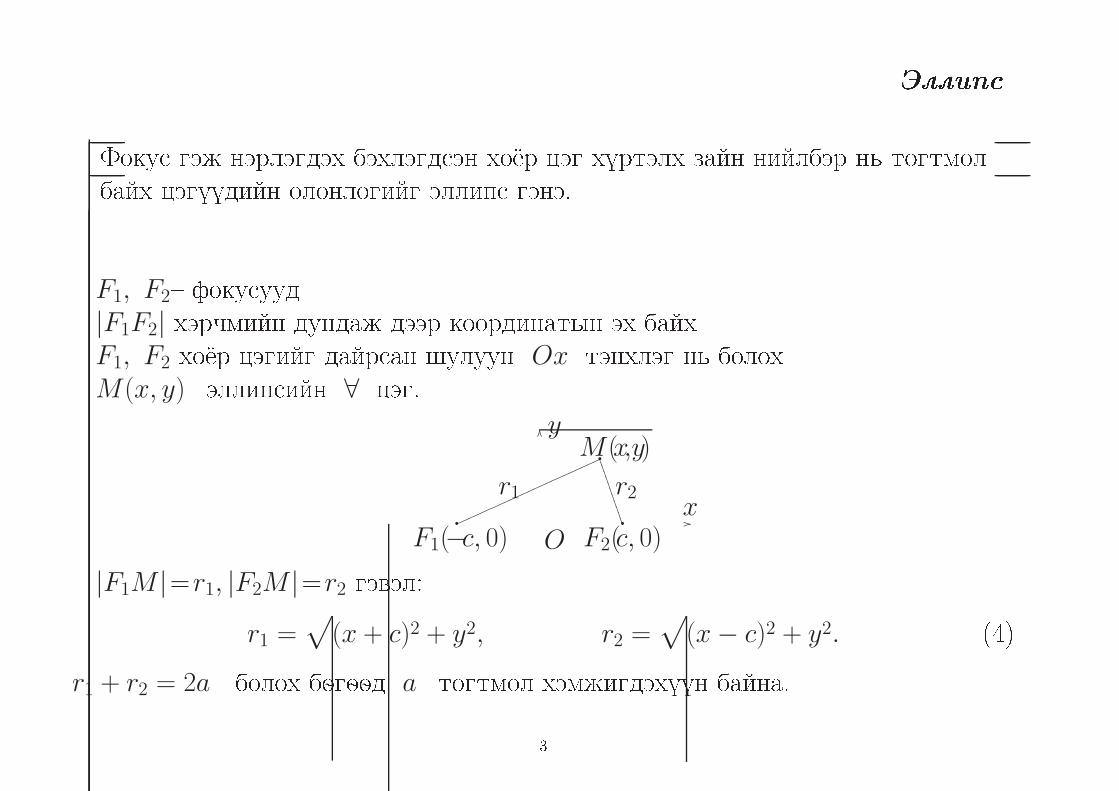
ÄllipsFokus gäj närlägdäx bäxlägdsän xoër äg xürtälx zaïn niïlbär n´ togtmolbaïx ägüüdiïn olonlogiïg ällips gänä.
F1, F2� fokusuud|F1F2| xärqmiïn dundaj däär koordinatyn äx baïx
F1, F2 xoër ägiïg daïrsan ²uluun Ox tänxläg n´ bolox
M(x, y)� ällipsiïn ∀ äg.O
OO y
//x
mmmmmmmmmmmmmmmmmmmmmmmm ****
****
***
F1(−c, 0) F2(c, 0)
r1 r2
M(x,y)
· ·
·
|F1M |=r1, |F2M |=r2 gäwäl:
r1 =√
(x + c)2 + y2, r2 =√
(x − c)2 + y2. (4)
r1 + r2 = 2a bolox bögööd a� togtmol xämjigdäxüün baïna.3
√(x + c)2 + y2 +
√(x − c)2 + y2 = 2a (5)(??)� songon awsan koordinatyn sistem däx ällipsiïn täg²itgäl bolno. (??)�gx¶lbarqilbal:
a2 − c2 = b2 (2a > 2c) tämdäglägää xiïwäl
x2
a2+
y2
b2= 1 (6)
(??) mön ällipsiïn täg²itgäl bolno. (??)� aas oroïn ägüüd x¶lbarxan oldono.
(−a; 0), (a; 0), (0;−b), (0; b), − a ≤ x ≤ a; − b ≤ y ≤ b.(??)�d x, y n´ kwadrat zärägtäï orson uqraas Ox, Oy tänxlägüüdiïn xuw´dtäg² xämtäï baïna.
4
OOy
D(0, b)
C(0,−b)
//x
A(−a,0) B(a, 0)
mmmmmmmmmmmmmmmmmmmmmmmm ****
****
***
F1(−c, 0) F2(c, 0)
r1 r2
_________M(x,y)
d
· ·· ·
·
·x= a
εx= −a
ε
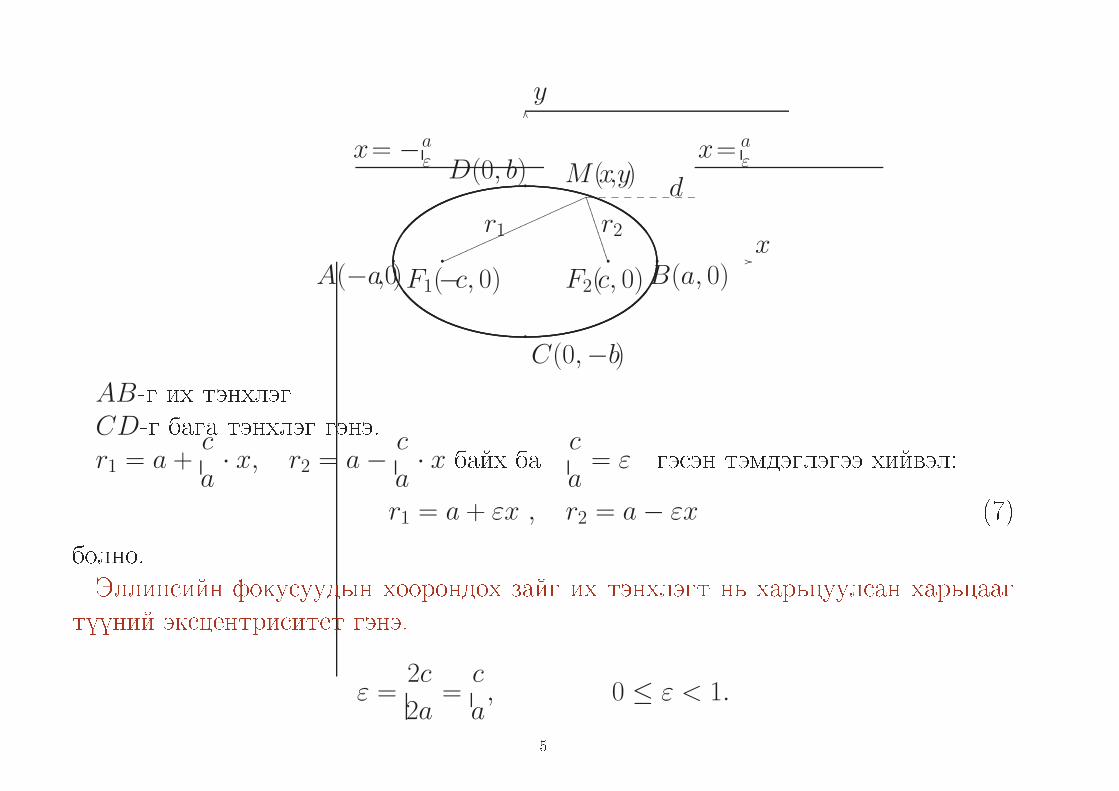
AB-g ix tänxlägCD-g baga tänxläg gänä.r1 = a +
c
a· x, r2 = a − c
a· x baïx ba c
a= ε gäsän tämdäglägää xiïwäl:
r1 = a + εx , r2 = a − εx (7)bolno.Ällipsiïn fokusuudyn xoorondox zaïg ix tänxlägt n´ xar´ uulsan xar´ aagtüüniï äks entrisitet gänä.
ε =2c
2a=
c
a, 0 ≤ ε < 1.5
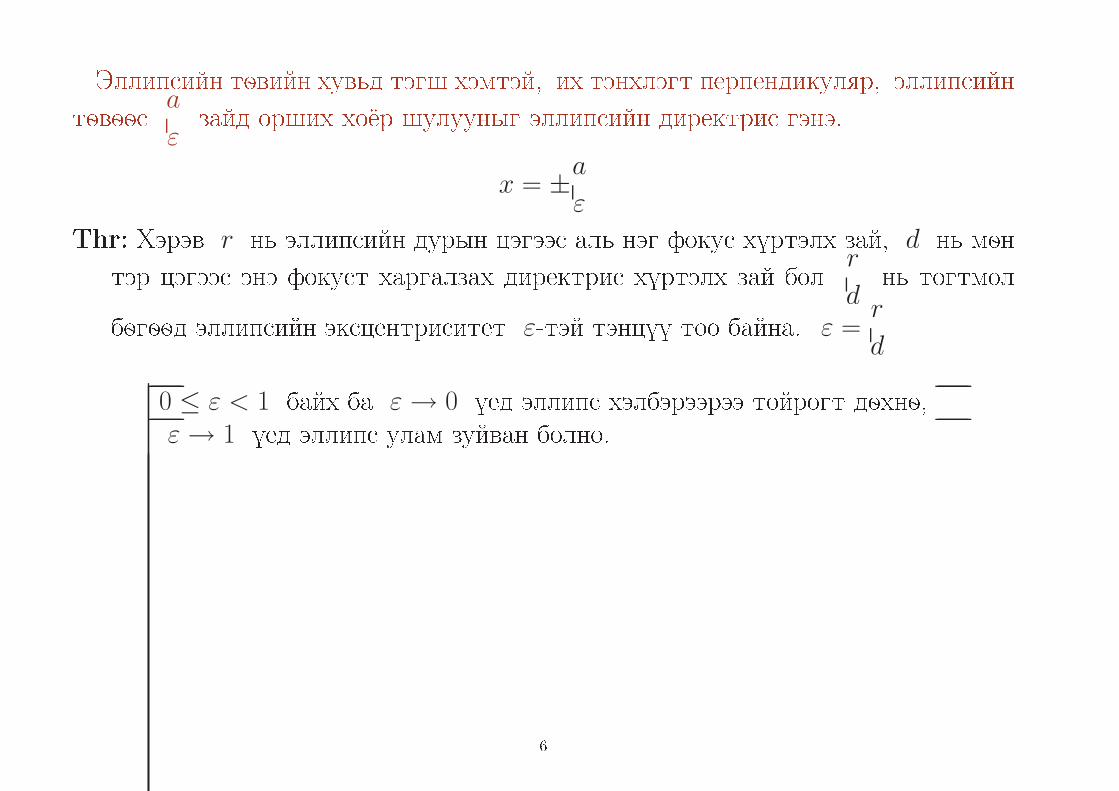
Ällipsiïn töwiïn xuw´d täg² xämtäï, ix tänxlägt perpendikul¶r, ällipsiïntöwöös a
ε
zaïd or²ix xoër ²uluunyg ällipsiïn direktris gänä.
x = ±a
εThr: Xäräw r n´ ällipsiïn duryn ägääs al´ näg fokus xürtälx zaï, d n´ möntär ägääs änä fokust xargalzax direktris xürtälx zaï bol r
d
n´ togtmolbögööd ällipsiïn äks entrisitet ε-täï tän üü too baïna. ε =r
d
0 ≤ ε < 1 baïx ba ε → 0 üed ällips xälbäräärää toïrogt döxnö,
ε → 1 üed ällips ulam zuïwan bolno.6
Ji²ää: Koordinatyn tänxlägüüdiïn xuw´d täg² xämtäï ällipsiïn fokusxoorondyn zaï n´ 2c = 24, ix tänxläg n´ 2a = 30 bol täg²itgäliïg n´ biq.Bodolt: Koordinatyn xuw´d täg² xämtäï ällipsiïn täg²itgälTägwäl2a = 30 ⇒ a = 15
2c = 24 ⇒ c = 12Iïmd
b2 = a2 − c2 ⇒ b = 9gäwäl
x2
152+
y2
92= 1Ji²ää: 25x2 + 169y2 = 4225 täg²itgältäï ällipsiïn ix ba baga tänxläg,fokus xoorondyn zaï, fokusuudyn koordinat, äks entrisitetiïg ol. Direk-trisiïn täg²itgäliïg biq.Bodolt:
x2
169+
y2
25= 1
a = 13, b = 5, ⇒ c =√
a2 − b2 = 127
Ix tänxläg n´2a = 26Baga tänxläg n´2b = 10Fokus xoorondyn zaï2c = 24Fokusuudyn koordinat n´
F1(−12, 0), F2(12, 0)Äks entrisitet n´ε =
c
a=
12
13Direktrisiïn täg²itgäl n´x = −a
ε= −a2
c= −169
12, x =
a
ε=
a2
c= −169
12(
a =√
5, b =√
3, F1(−√
2, 0), F2(√
2, 0), ε =c
a=
√2√5
)
8
GiperbolFokus gäj närlägdäx bäxlägdsän xoër äg xürtälx zaïn ¶lgawar n´ togtmolxämjigdäxüün baïx xawtgaïn büx ägüüdiïn olonlogiïg giperbol gänä.(�lgawaryg absolµt xämjäägäär n´ awaxdaa fokusuudyn xoorondox zaïnaasbaga, tägääs ¶lgaataï gäj üznä.)Ällipstäï adilaar F1, F2, M ägiïg songon, F1, F2 xoër ägiïg daïrsan ²u-luunyg Ox tänxläg bolgon awq |F1F2| = 2c, |r1−r2| = 2a tämdäglägää xiïe.
|F1M | = r1 =√
(x + c)2 + y2, |F2M | = r2 =√
(x − c)2 + y2
√(x + c)2 + y2 −
√(x − c)2 + y2 = ±2a (8)X¶lbarqlan c2 − a2 = b2 (2c > 2a) tämdäglägää xiïwäl:
b2x2 − a2y2 = a2b2buµu
x2
a2− y2
b2= 1 (9)9
(??)�d x, y n´ kwadrat zärägtäï orson uqraas Ox,Oy tänxlägüüdiïn xuw´dtäg² xämtäï. Ädgäär tänxlägüüdää giperbolyn tänxlägüüd, ogtlol olyn ägiïgn´ tüüniï töw gäj närläe.y = 0 üed x = ±a tul Ox tänxlägiïg A(a; 0), B(−a; 0) ägüüdäär ogtlono.
x = 0 üed −y2
b2= 1 tul Oy tänxlägiïg ogtloxgüï.
a-g giperbolyn bodit xagas tänxläg.b-g xuurmag xagas tänxläg gänä.
y =b
a·√
x2 − a2 xuw´d x = a üed y = 0 bolox ba x n´ ösöxöd y n´ ösnö.Giperbolyn grafik, koordinatyn äxääs xoldox tusam Y =b
a· x²uluund tögsgölgüï oïrtono. ö.x
Y − y =b
ax − b
a
√x2 − a2 =
ab
x +√
x2 − a2⇒Ändääs x → ∞ üed Y − y → 0. bolno. Iïm qanartaï ²uluunyg asimptotgänä. 10
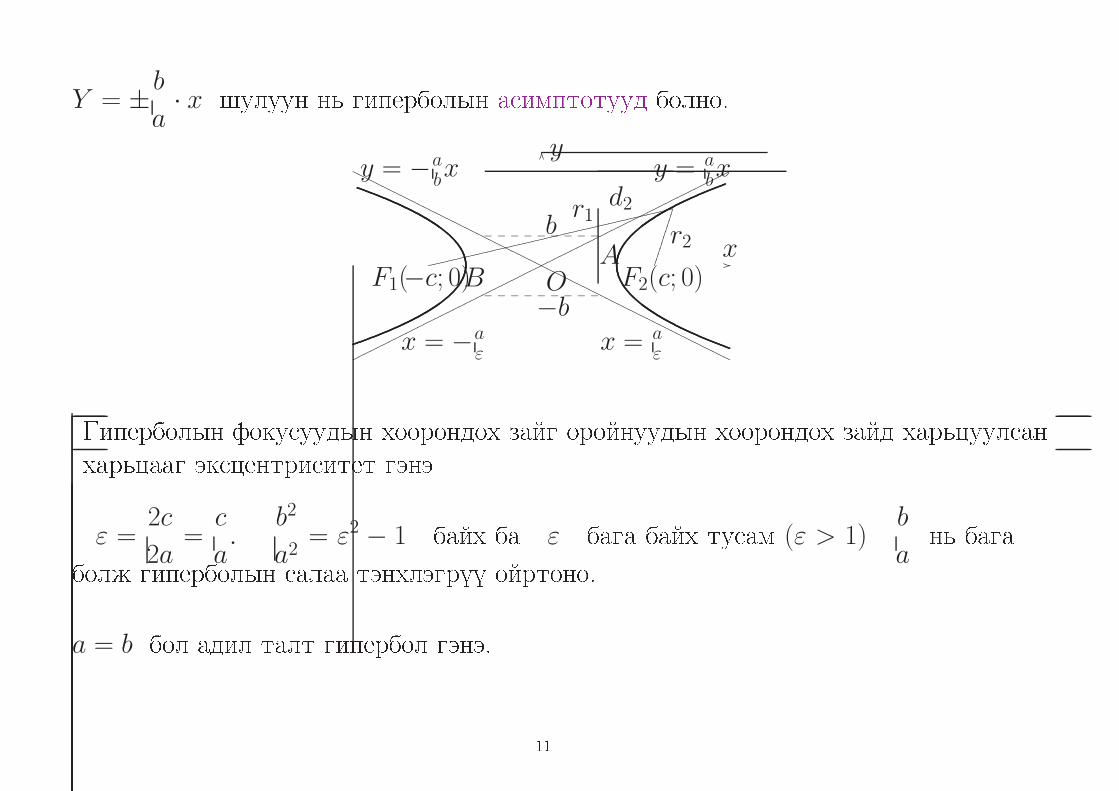
Y = ±b
a· x ²uluun n´ giperbolyn asimptotuud bolno.
O
OO y
//x
oooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooo OOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOO
ffffffffffffffffffffffffffffffffffffff ����������
_________
_________
y = abxy = −a
bx
d2
r2
r1b
−b
AF2(c; 0)BF1(−c; 0)
x = aε
x = −aε
Giperbolyn fokusuudyn xoorondox zaïg oroïnuudyn xoorondox zaïd xar´ uulsanxar´ aag äks entrisitet gänäε =
2c
2a=
c
a.
b2
a2= ε2 − 1 baïx ba ε baga baïx tusam (ε > 1)
b
a
n´ bagabolj giperbolyn salaa tänxlägrüü oïrtono.a = b bol adil talt giperbol gänä.
11
Fokusyn radiusuudyg ra ionaliar ilärxiïlbäl:
• Baruun salaany xuw´d: {r1 = εx + a
r2 = εx − a
• Züün salaany xuw´d: {r1 = −(εx + a)r2 = −(εx − a)bolno.Giperbolyn töwiïn xuw´d täg² xämtäï , bodit tänxlägt perpendikul¶r,giperbolyn töwöös a
ε
- zaïd or²ix xoër ²uluunyg giperbolyn direktris gänä.(??)�iïn xuw´d x =a
ε
n´ züün, x = −a
ε
n´ baruun salaa direktris bolno.
r1 = d1ε, r2 = d2ε
Ji²ää: 16x2−9y2−144 = 0 giperbolyn xagas tänxlägüüdiïn urt, oroï, töw,fokus, äks entrisitetiïg olj, asimptot, direkt-ris, täg² xämiïn tänxlägiïntäg²itgäliïg biq. 12
16x2 − 9y2 − 144 = 0 ⇐⇒ x2
9− y2
16= 1 =⇒ a = ±3, b = ±4,
c =√
a2 + b2 =√
32 + 42 =√
25 = 5 ⇒
|a| = 3, |b| = 4, B(−3; 0), A(3; 0), ε =c
a=
5
3
y = ± bax = ±4
3x, d = ±a
ε= ±3
5
3
= ±9
5Xariu: |a| = 3, |b| = 4, B(−3; 0), A(3; 0), O(0; 0),
F1(−5; 0), F2(5; 0), ε =5
3, y = ±4
3x, d = ±9
5, y = 0
13
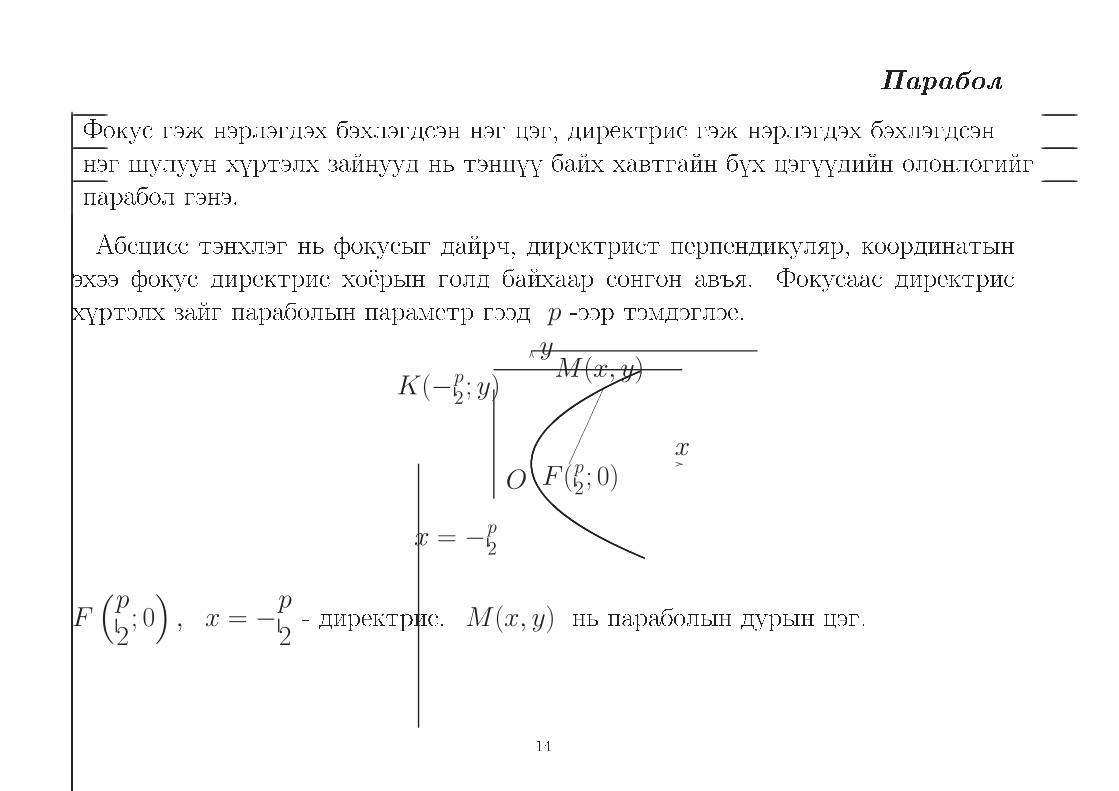
ParabolFokus gäj närlägdäx bäxlägdsän näg äg, direktris gäj närlägdäx bäxlägdsännäg ²uluun xürtälx zaïnuud n´ tän üü baïx xawtgaïn büx ägüüdiïn olonlogiïgparabol gänä.Abs iss tänxläg n´ fokusyg daïrq, direktrist perpendikul¶r, koordinatynäxää fokus direktris xoëryn gold baïxaar songon aw³¶. Fokusaas direktrisxürtälx zaïg parabolyn parametr gääd p -äär tämdägläe.
O
OO y
//x
�������������
K(−p2; y)
x = −p2
M(x, y)
F (p2; 0)
F(p
2; 0)
, x = −p
2
- direktris. M(x, y) n´ parabolyn duryn äg.
14
Tägwäl|KM | = |MF |gädgääs
K(p
2; y)
⇒√(
x+p
2
)2
=
√(x−p
2
)2
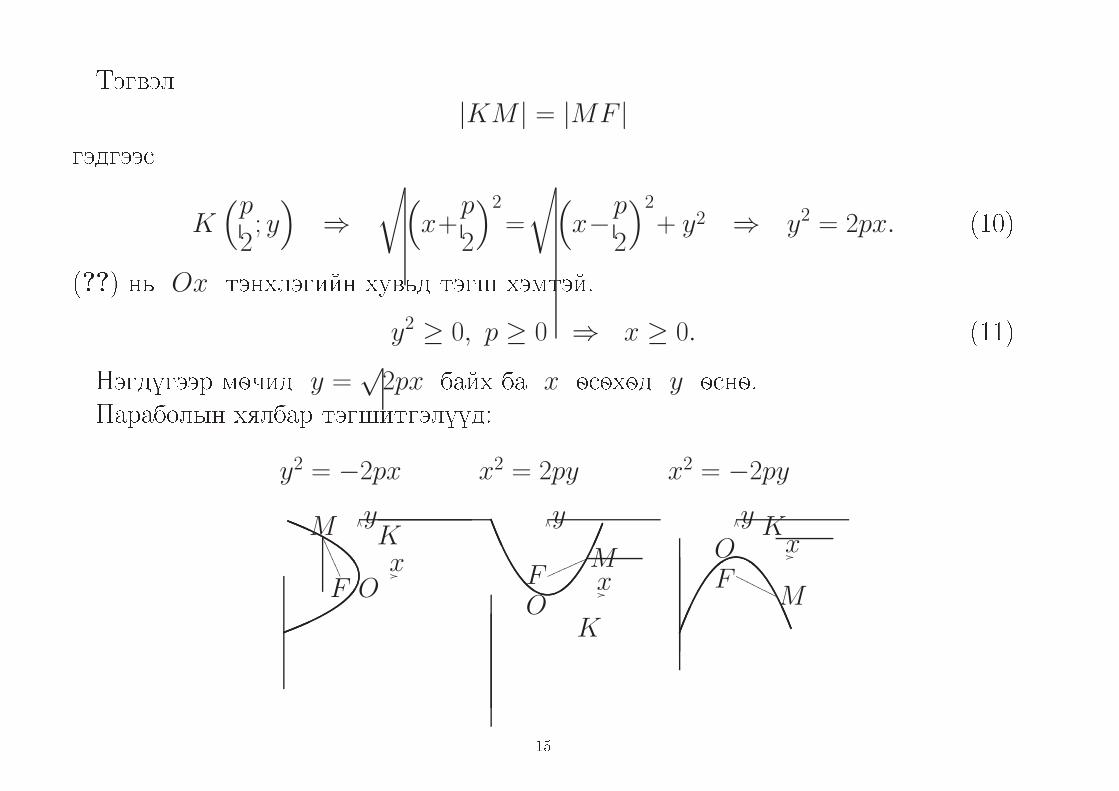
+ y2 ⇒ y2 = 2px. (10)(??) n´ Ox tänxlägiïn xuw´d täg² xämtäï.
y2 ≥ 0, p ≥ 0 ⇒ x ≥ 0. (11)Nägdügäär möqid y =√
2px baïx ba x ösöxöd y ösnö.Parabolyn x¶lbar täg²itgälüüd:OO
y2 = −2px
y
//x
-------
OF
M KOO y
x2 = 2py
//xmmmmmmm
OF
M
K
OO y
x2 = −2py
//x
OOOOOOO
OF
M
K15
Ji²ää: Koordinatyn äx däär oroïtoï Ox tänxlägiïn xuw´d täg² xämtäïparabol M(3, 4) ägiïg daïrdag bol täg²itgäliïg zoxio.Bodolt: Ox tänxlägiïn xuw´d täg² xämtäï, M äg I möqid or²ino gädgääsolox täg²itgäliïn xälbär n´y2 = 2pxbolno. M äg parabol däär or²ino gädgääs
42 = 2p3 = 6p = 16 ⇒ p =8
3Ändääs
y2 = 2px = 28
3=
16
3xbolno.Ji²ää: y2 = 6x parabolyn parametriïn toon utga, oroï ba fokusyn koor-dinatyg olj, täg² xämiïn tänxläg ba direktrisiïn täg²itgäliïg biq.Bodolt:
y2 = 6x ⇒ y2 = 2 · 3x buµu p = 3, F
(−3
2; 0
), d = −3
2,Xariu: p = 3, F
(−3
2; 0
), O(0; 0), x = −3
2, täg² xämiïn tänxläg−Ox, y = 016
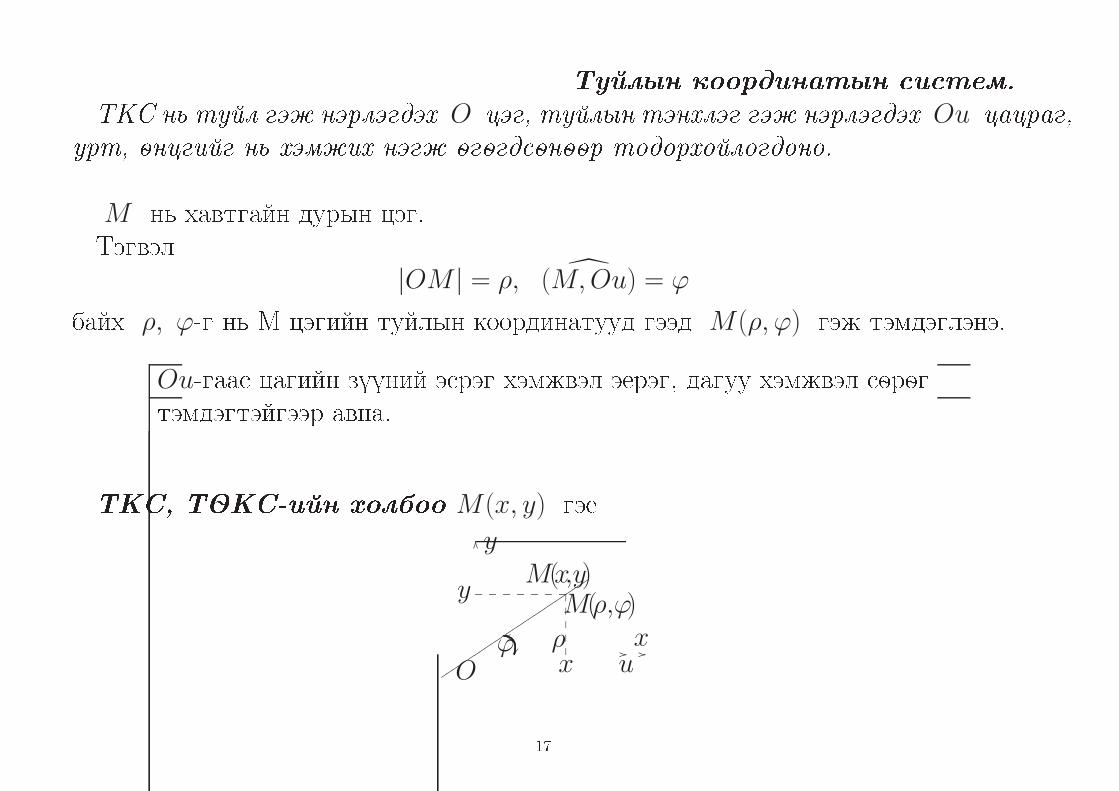
Tuïlyn koordinatyn sistem.TKS n´ tuïl gäj närlägdäx O äg, tuïlyn tänxläg gäj närlägdäx Ou a rag,urt, ön giïg n´ xämjix nägj ögögdsönöör todorxoïlogdono.
M n´ xawtgaïn duryn äg.Tägwäl|OM | = ρ, (M,Ou) = ϕbaïx ρ, ϕ-g n´ M ägiïn tuïlyn koordinatuud gääd M(ρ, ϕ) gäj tämdäglänä.
Ou-gaas agiïn züüniï äsräg xämjwäl äeräg, daguu xämjwäl sörögtämdägtäïgäär awna.
TKS, TÖKS-iïn xolboo M(x, y) gäeO
OO y
//x
ttttttttttttttttttttttttttt
_______ �����
yM(x,y)
M(ρ,ϕ)ρx u
//ϕ ��
mm
17
{x = ρ cos ϕ
y = ρ sin ϕ
(12)
{ρ =
√x2 + y2
tgϕ =y
x
(13)Ji²ää: A(2;−2) ägiïn TK-yg ol.Bodolt:ρ =
√4 + 4 = 2
√2 , tgϕ =
−2
2= −1 ⇒ ϕ1 =
π
4, ϕ2 =
7π
4
A(2;−2) äg n´ IV möqid or²ij tul ϕ =7π
4⇒
[A
(2√
2;7π
4
)]
18
Cilindr koordinatyn sistem.Ogtorguïd P xawtgaï, tüünd perpendikul¶r Oz tänxläg aw³¶. TägwälP xawtgaï däär O ägt tuïltaï TKS awsnaar CKS todorxoïlogdono.
M� ogtorguïn duryn äg.N� n´ M ägiïn P xawtgaï däärx proek .
N� n´ N(ρ, ϕ)Mz� n´ M ägiïn Oz tänxläg däär proek
z� g ~OMz qiglält xärqmiïn xämjää gäe.gäj todorxoïlogdson ρ, ϕ, z toonuudyg M ägiïn CK-uud gänä.
M(ρ, ϕ, z) , 0 ≤ ρ < ∞ , 0 ≤ ϕ < 2π , −∞ < z < ∞ρ� togtmol baïxad ilindr üüsnä.ϕ� togtmol bol xagas xawtgaïz� togtmol bol P xawtgaïtaï perpendikul¶r xawtgaï üüsnä.
19
M(x, y, z) gäwäl x = ρ cos ϕ , y = ρ sin ϕ , z = z bolno.
x = ρ cos ϕ
y = ρ sin ϕ
z = z
ρ =√
x2 + y2
tgϕ =y
xz = z
(14)
20
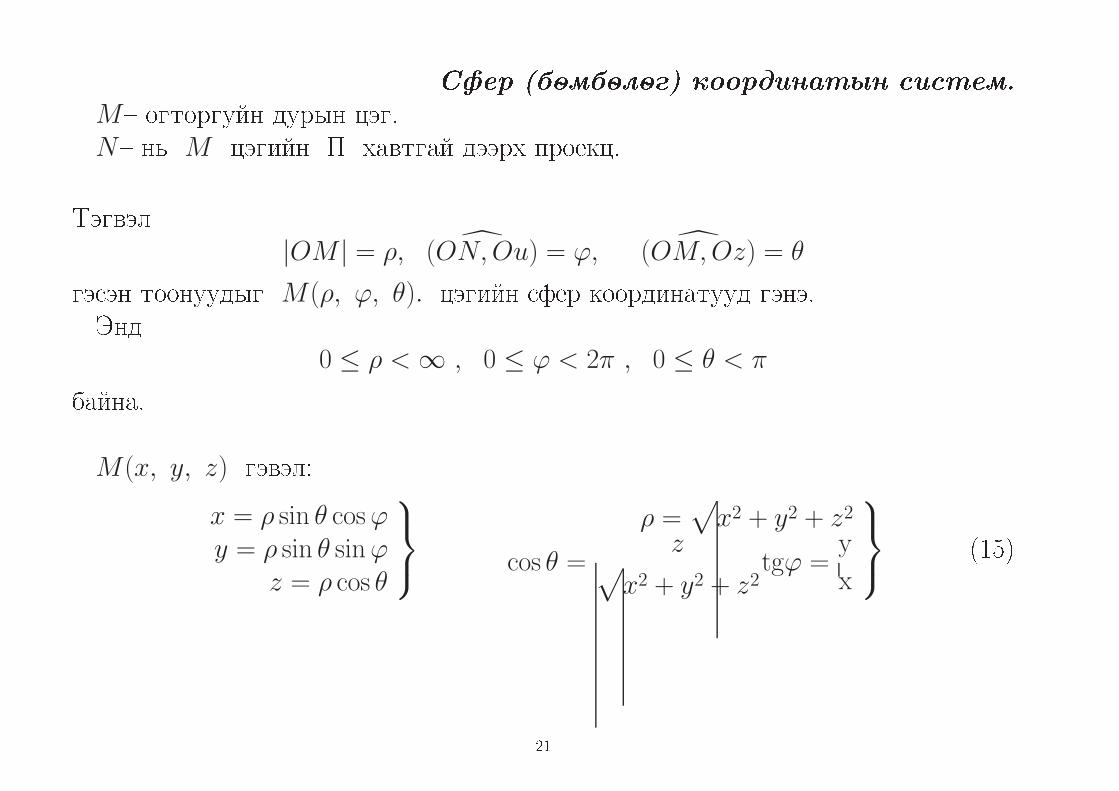
Sfer (bömbölög) koordinatyn sistem.
M� ogtorguïn duryn äg.
N� n´ M ägiïn P xawtgaï däärx proek .Tägwäl|OM | = ρ, (ON,Ou) = ϕ, (OM,Oz) = θgäsän toonuudyg M(ρ, ϕ, θ). ägiïn sfer koordinatuud gänä.Änd
0 ≤ ρ < ∞ , 0 ≤ ϕ < 2π , 0 ≤ θ < πbaïna.
M(x, y, z) gäwäl:
x = ρ sin θ cos ϕ
y = ρ sin θ sin ϕ
z = ρ cos θ
ρ =√
x2 + y2 + z2
cos θ =z√
x2 + y2 + z2tgϕ =
y
x
(15)
21
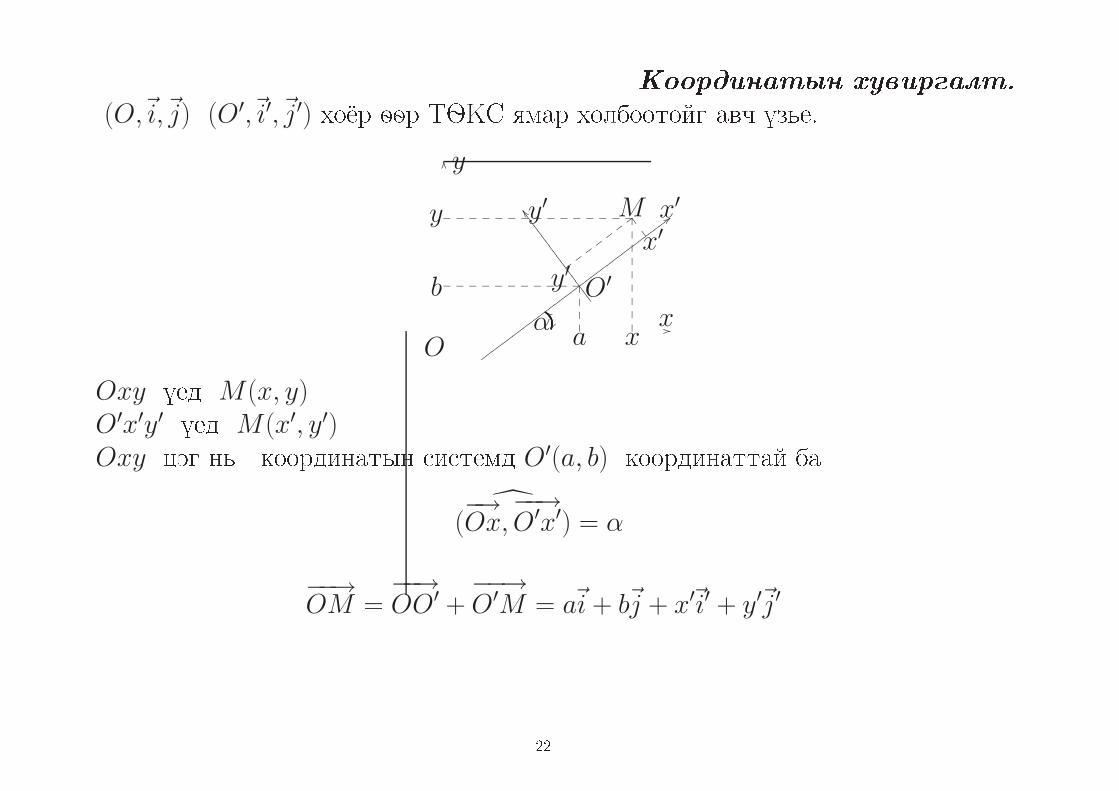
Koordinatyn xuwirgalt.
(O,~i,~j) (O′,~i′,~j ′) xoër öör TÖKS ¶mar xolbootoïg awq üz´e.
O
OO y
//x
wwwwwwwwwwwwwwwwwwwwwwwwwwwwwwwwwwww
;;x′777777777777777777
[[ y′
dd
α
___________ ����
_______________ ���������
77
ww
ww
ww
w
b
y
a x
O′
x′
y′
M
Oxy üed M(x, y)O′x′y′ üed M(x′, y′)Oxy äg n´ koordinatyn sistemd O′(a, b) koordinattaï ba
(−→Ox,
−−→O′x′) = α
−−→OM =
−−→OO′ +
−−→O′M = a~i + b~j + x′~i′ + y′~j ′
22
Tägwäl daraax tom³ëo xüqintäï baïna. ( gargalgaag üldääw, bie daajun²) {x = x′ cos α − y′ sin α + a
y = x′ sin α + y′ cos α + b
(16)äswäl {x′ = (x − a) cos α + (y − b) sin α
y′ = −(x − a) sin α + (y − b) cos α
(17)bolno.(??)�(??) tom³ëog xawtgaï däärx koordinatyg xuwirgax erönxiï tom³ëo gänä.Ändääs1. α = 0 gäj üz´e. α = 0 ⇐⇒ (~i,~i′) = 0◦(??)�aas
x = x′ + a
y = y′ + b
} (18)(??)�oos
x′ = x − a
y′ = y − b
} (19)23
(??)�(??)�g parallel´ zööltiïn tom³ëo2. O = O′ =⇒ a = b = 0 bol(??)�aas {x = x′ cos α − y′ sin α
y = x′ sin α + y′ cos α
(20)(??)�oos {x′ = x cos α + y sin α
y′ = −x sin α + y cos α
(21)(??)�(??)�g ärgüülältiïn tom³ëo gänä.24





























