Embed Size (px)
Citation preview
Trabajo Práctico: Brazo RobóticoAlumnos:• Galeano, Leandro• Mendoza Tentor, Claudia• Penayo, Malena• Soler, Ezequiel
Primera Etapa: Propuesta: Realizar un dispositivo que simule los movimientos de un robot
industrial.
El mismo debe: Contar con 3 grados de libertad, en lo posible cumplir con alguna
estructura básica. Poseer impulsión hidráulica o neumática. Poseer un efector final a elección.
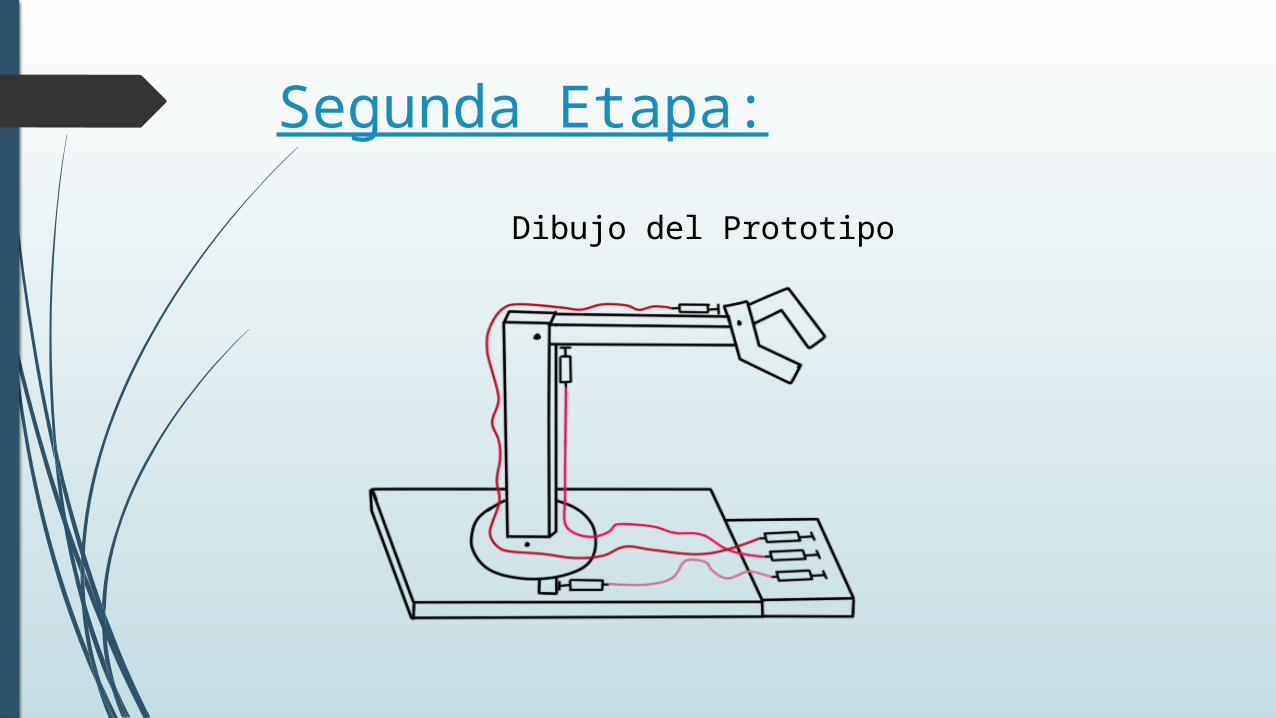
Segunda Etapa:Dibujo del Prototipo
Herramientas:
Tijeras. Cuchillo. Punzón. Pinza. Destornillador. Lápiz. Regla.
Materiales:
6 Jeringas. 1 metro de una manguera de suero. Cartón. Goma de pegar. Pegamento. Agua. Tempera. 3 Tornillos. Alambre. Cinta.
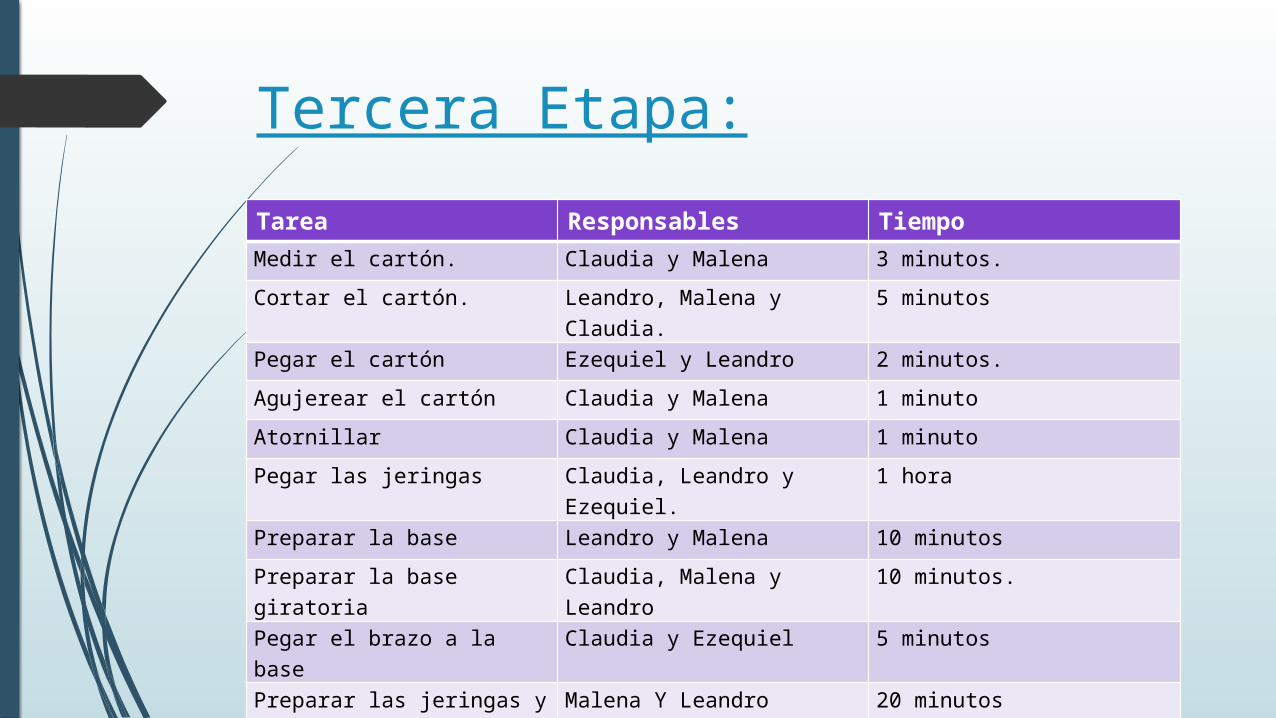
Tercera Etapa:Tarea Responsables TiempoMedir el cartón. Claudia y Malena 3 minutos.Cortar el cartón. Leandro, Malena y Claudia. 5 minutosPegar el cartón Ezequiel y Leandro 2 minutos.Agujerear el cartón Claudia y Malena 1 minutoAtornillar Claudia y Malena 1 minutoPegar las jeringas Claudia, Leandro y
Ezequiel.1 hora
Preparar la base Leandro y Malena 10 minutosPreparar la base giratoria Claudia, Malena y Leandro 10 minutos.Pegar el brazo a la base Claudia y Ezequiel 5 minutosPreparar las jeringas y manguera
Malena Y Leandro 20 minutos
Sacar fotos Ezequiel segundos
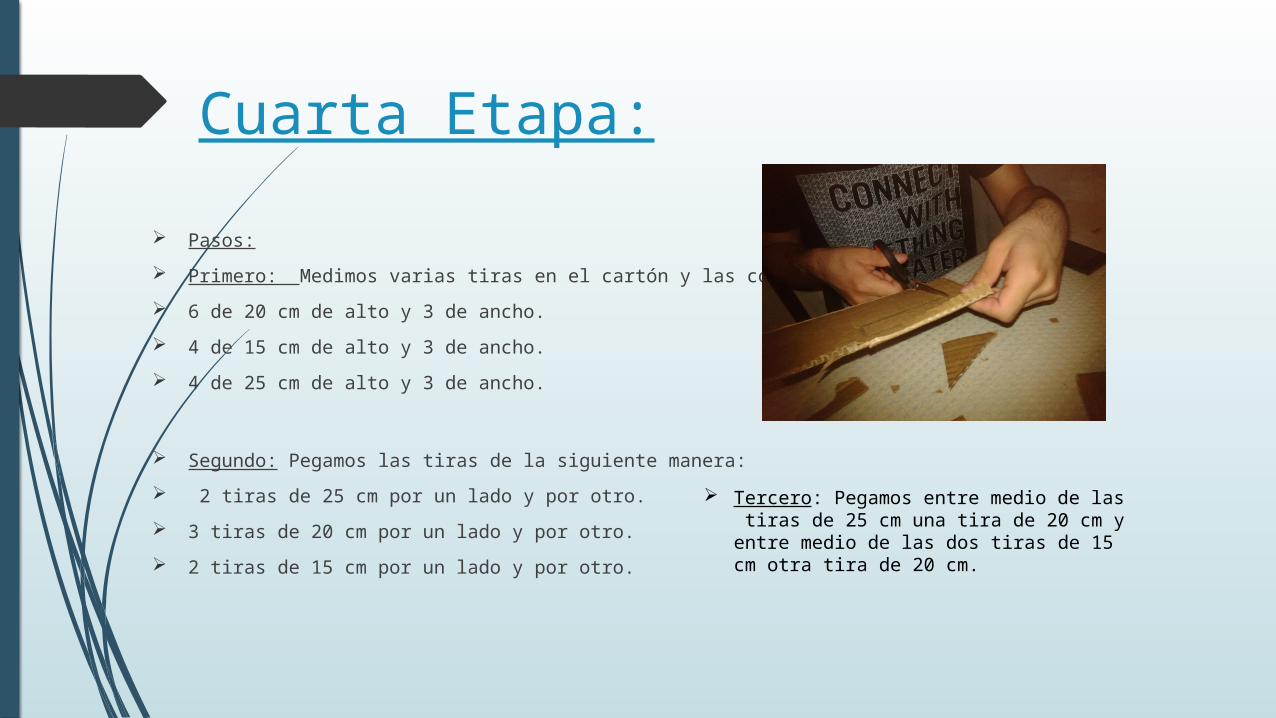
Cuarta Etapa: Pasos: Primero: Medimos varias tiras en el cartón y las cortamos: 6 de 20 cm de alto y 3 de ancho. 4 de 15 cm de alto y 3 de ancho. 4 de 25 cm de alto y 3 de ancho.
Segundo: Pegamos las tiras de la siguiente manera: 2 tiras de 25 cm por un lado y por otro. 3 tiras de 20 cm por un lado y por otro. 2 tiras de 15 cm por un lado y por otro.
Tercero: Pegamos entre medio de las tiras de 25 cm una tira de 20 cm y entre medio de las dos tiras de 15 cm otra tira de 20 cm.
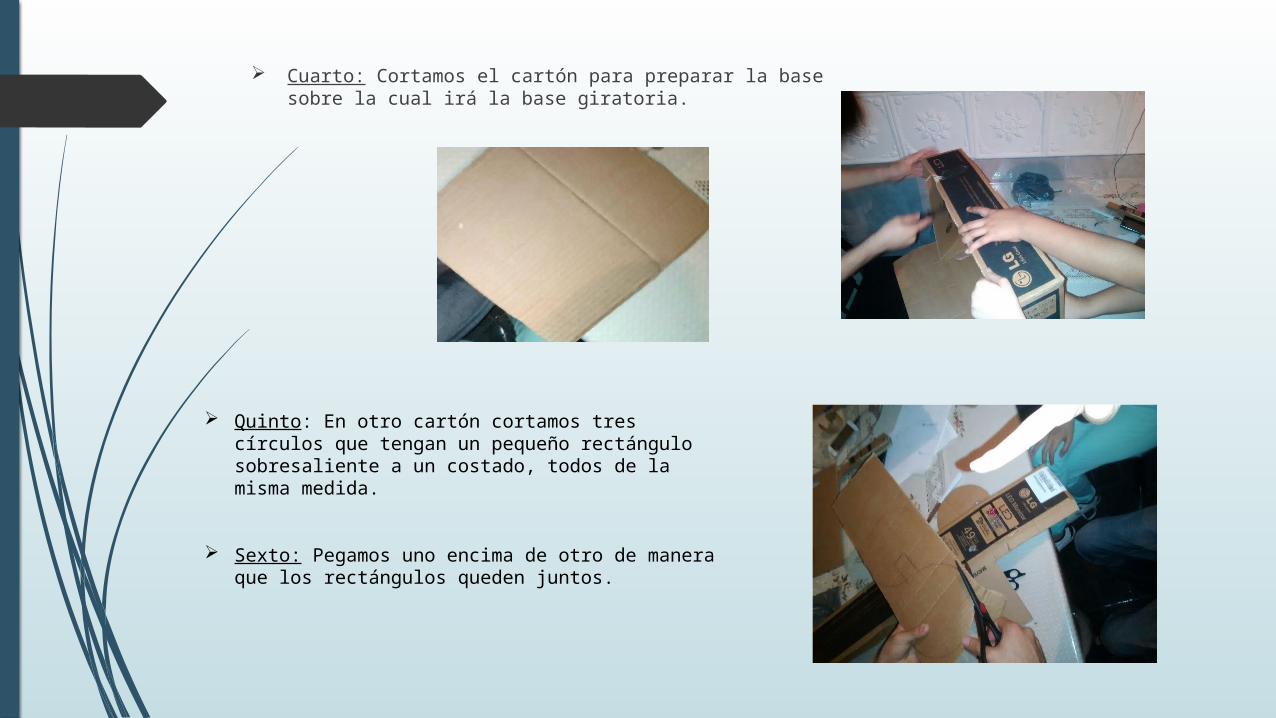
Cuarto: Cortamos el cartón para preparar la base sobre la cual irá la base giratoria.
Quinto: En otro cartón cortamos tres círculos que tengan un pequeño rectángulo sobresaliente a un costado, todos de la misma medida.
Sexto: Pegamos uno encima de otro de manera que los rectángulos queden juntos.
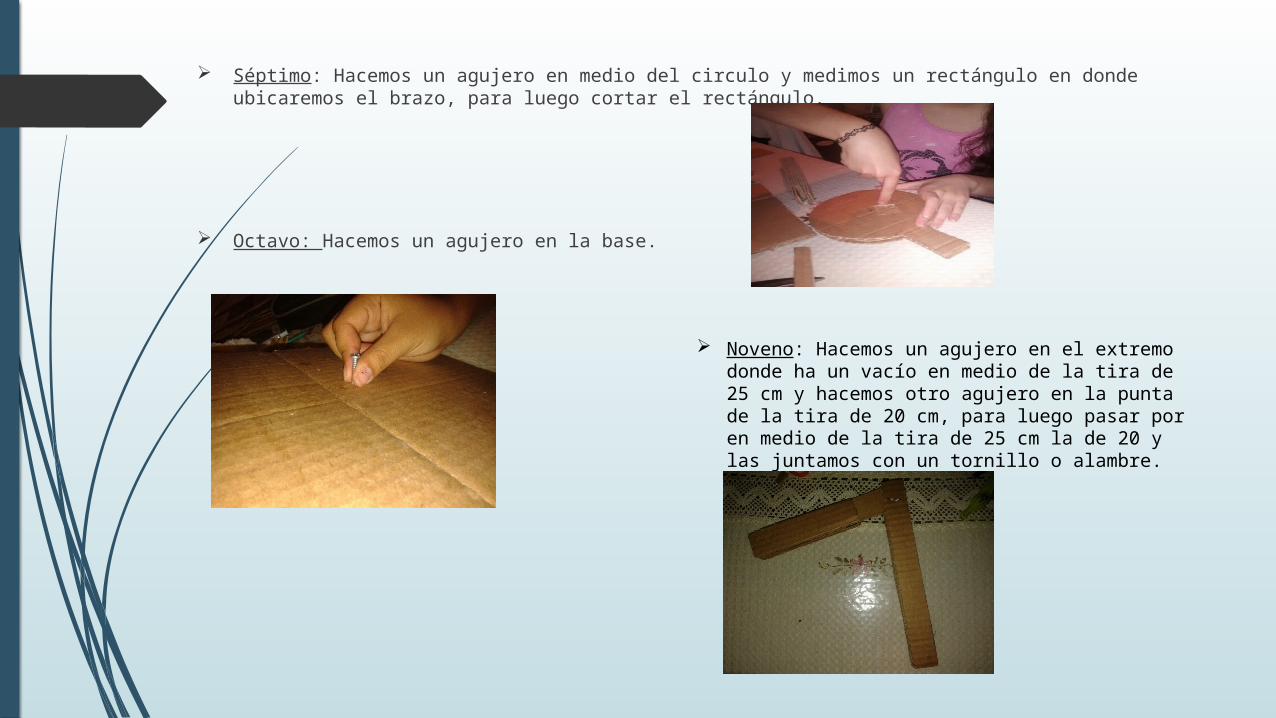
Séptimo: Hacemos un agujero en medio del circulo y medimos un rectángulo en donde ubicaremos el brazo, para luego cortar el rectángulo.
Octavo: Hacemos un agujero en la base.
Noveno: Hacemos un agujero en el extremo donde ha un vacío en medio de la tira de 25 cm y hacemos otro agujero en la punta de la tira de 20 cm, para luego pasar por en medio de la tira de 25 cm la de 20 y las juntamos con un tornillo o alambre.
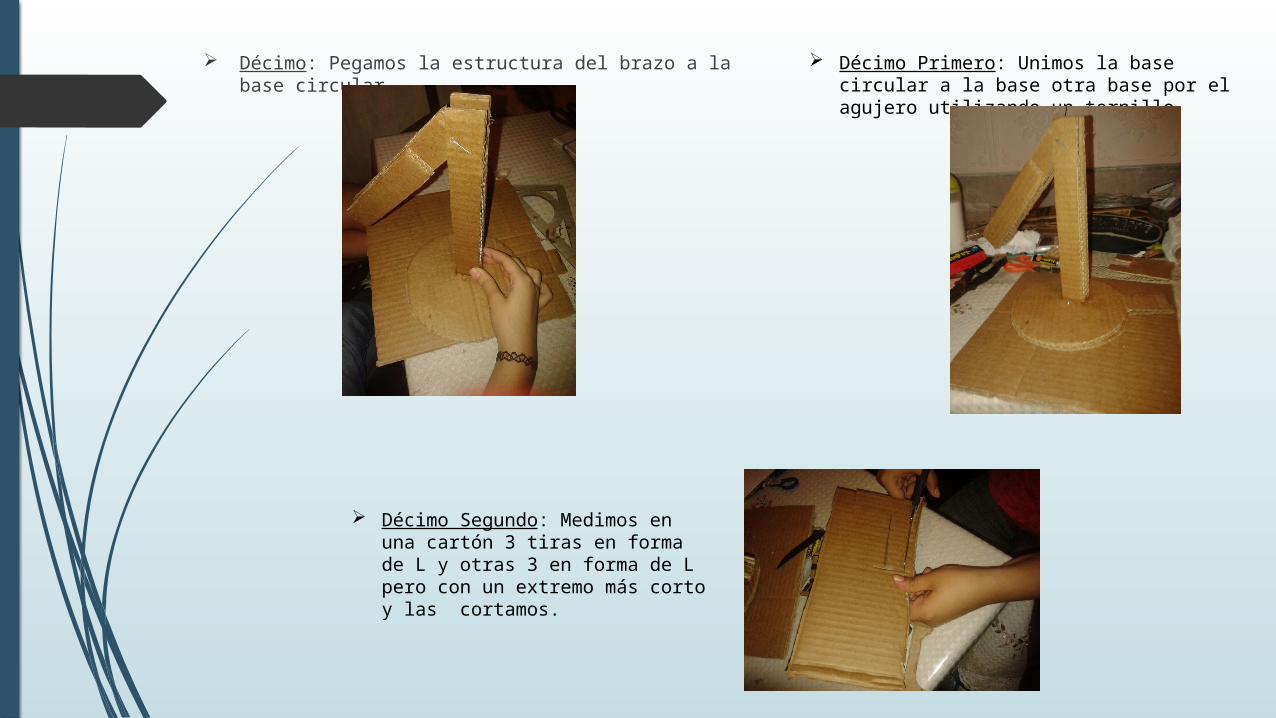
Décimo: Pegamos la estructura del brazo a la base circular.
Décimo Primero: Unimos la base circular a la base otra base por el agujero utilizando un tornillo.
Décimo Segundo: Medimos en una cartón 3 tiras en forma de L y otras 3 en forma de L pero con un extremo más corto y las cortamos.
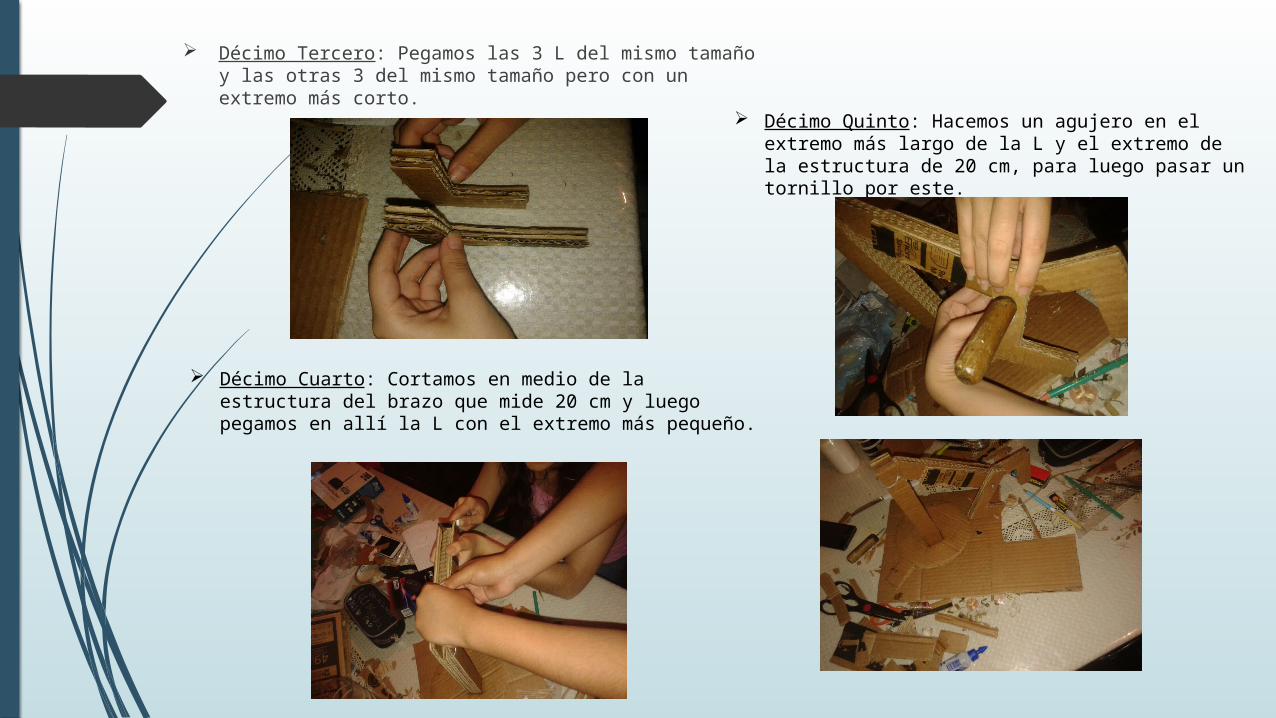
Décimo Tercero: Pegamos las 3 L del mismo tamaño y las otras 3 del mismo tamaño pero con un extremo más corto.
Décimo Cuarto: Cortamos en medio de la estructura del brazo que mide 20 cm y luego pegamos en allí la L con el extremo más pequeño.
Décimo Quinto: Hacemos un agujero en el extremo más largo de la L y el extremo de la estructura de 20 cm, para luego pasar un tornillo por este.

Décimo sextos: cortamos 3 tiras de la manguera, la luego juntarlas con las jeringas.
Décimo séptimo: En un vaso mezclamos agua con témpera, luego llenamos las jeringas con la mezcla y las juntamos con el extremo sobrante de la manguera.
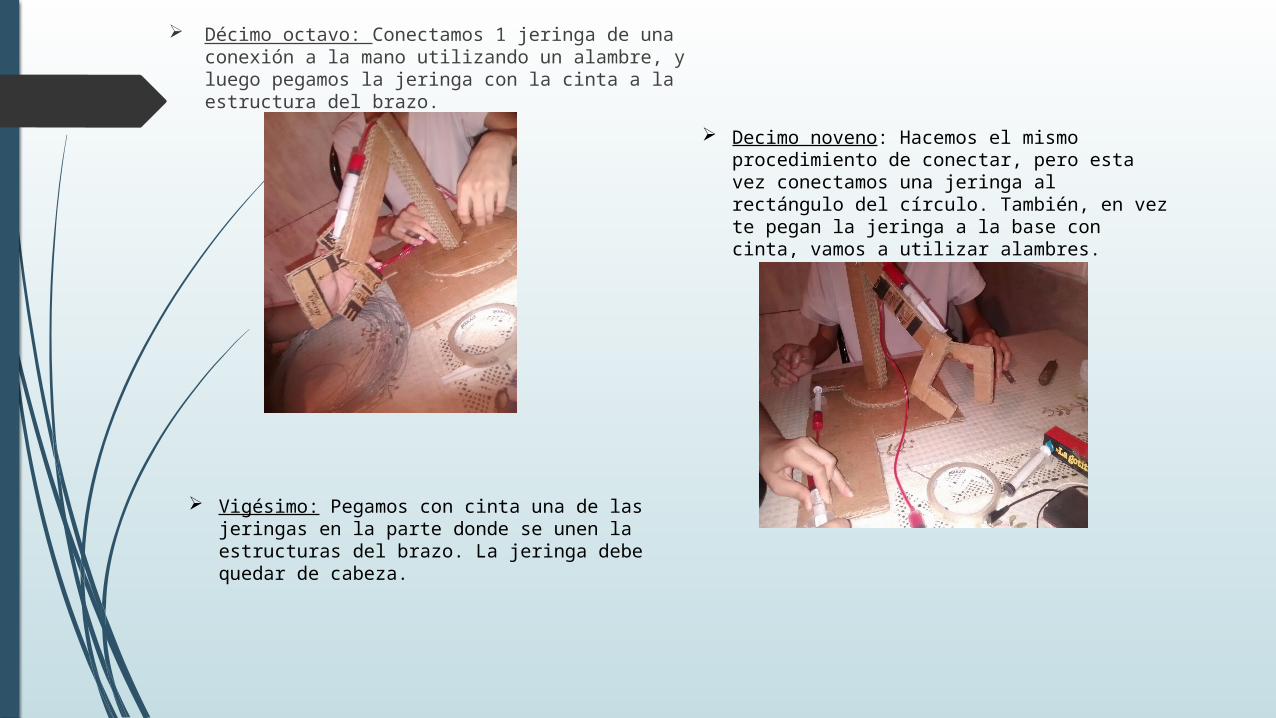
Décimo octavo: Conectamos 1 jeringa de una conexión a la mano utilizando un alambre, y luego pegamos la jeringa con la cinta a la estructura del brazo.
Decimo noveno: Hacemos el mismo procedimiento de conectar, pero esta vez conectamos una jeringa al rectángulo del círculo. También, en vez te pegan la jeringa a la base con cinta, vamos a utilizar alambres.
Vigésimo: Pegamos con cinta una de las jeringas en la parte donde se unen la estructuras del brazo. La jeringa debe quedar de cabeza.
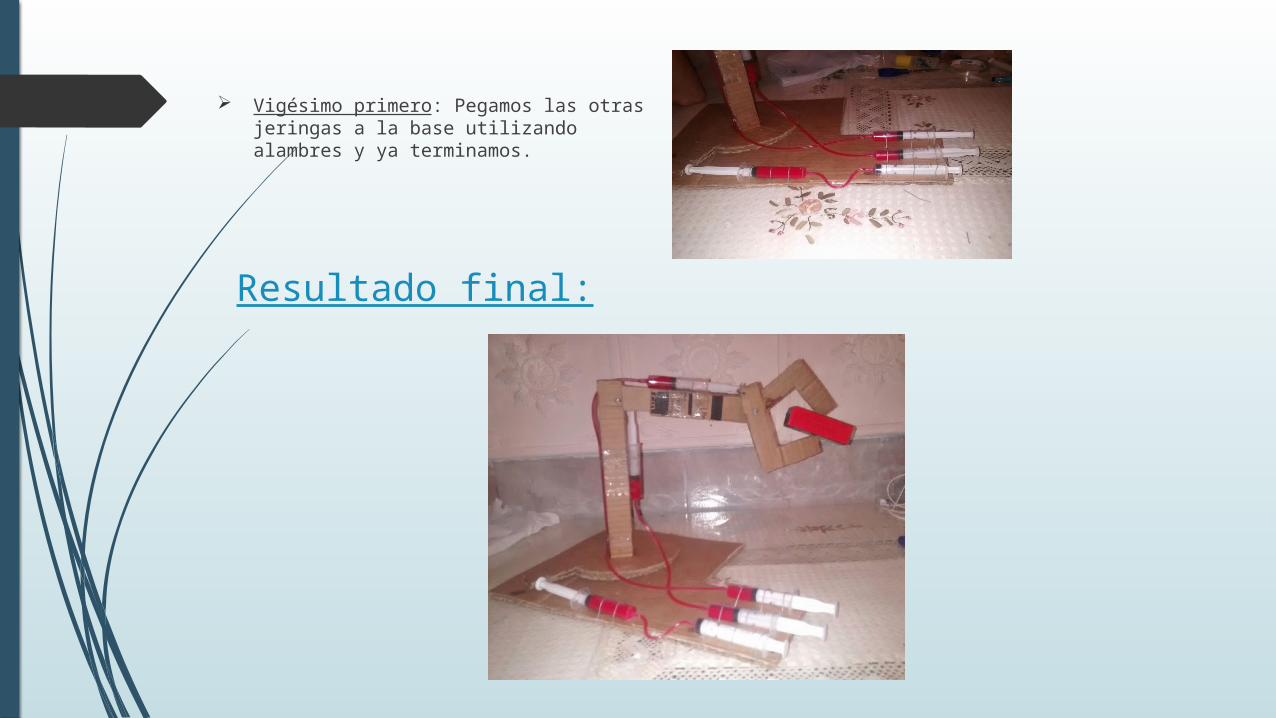
Vigésimo primero: Pegamos las otras jeringas a la base utilizando alambres y ya terminamos.
Resultado final:
Dificultades: Una fue la mano, nos costó mucho la forma de ver en la que haríamos el
diseño de esta. Estuvimos pensando por mucho tiempo hasta que pudimos llegar a el diseño adecuado, el cual es el que realizamos.
Otra fue el de pegar las jeringas a la base, ya que al principio intentamos con cinta y no quedo; luego decidimos utilizar pegamento pero la jeringa se despegaba fácilmente. Al final, nos decidimos por utilizar alambres, el cual terminó resultando bien.
Y por último fue que mientras estábamos cortando el cartón, uno de los integrantes del grupo de cortó la mano con el cuchillo, aunque le habíamos advertido muchas veces que tenga cuidado con este porque era filosos. Pero eso no sirvió y bueno, tuvimos que ponerle alcohol en la herida. Podría escribir el nombre de la persona distraída, pero prefiero mantener la duda de quién es.
Quinta Etapa:
Mejoras: Podríamos hacer la base un poco más grande, para que tenga mayor
espacio para colocarse las jeringas. Hacer un poco más pequeña la base giratoria, para que esta pueda
moverse mejor y sea más ligera. Buscar una forma de mejorar la estructura de la mano para que sea más
eficaz a la hora de agarrar los objetos. Podemos cambiar de material por uno que sea más duradero que el
cartón, un ejemplo puede ser la madera.





























