Embed Size (px)
Citation preview
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Control Systems
B.Madhuri
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
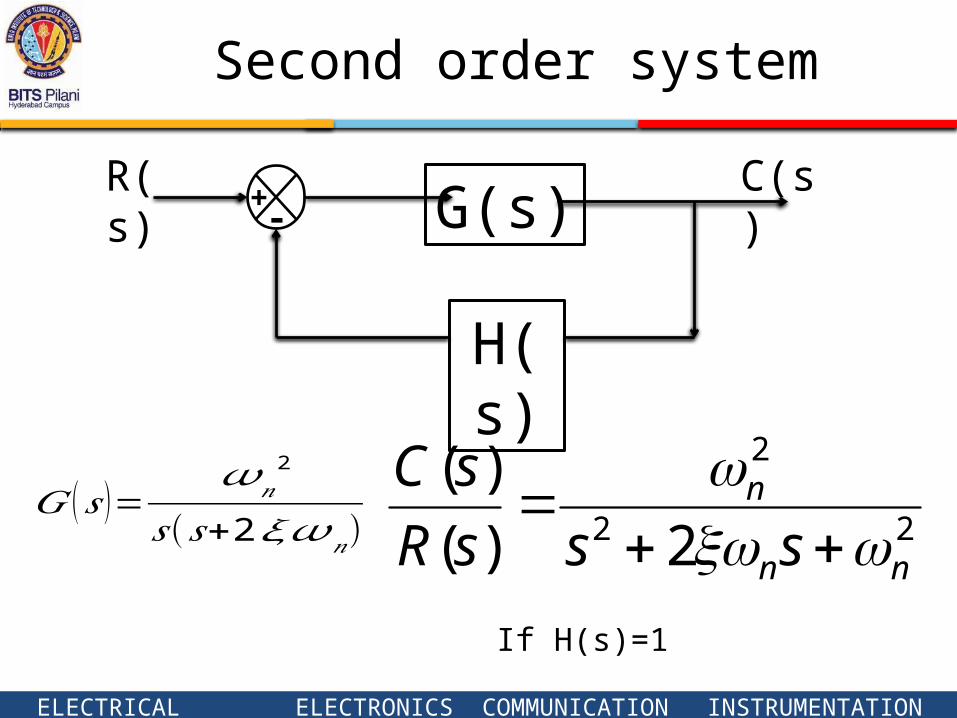
Second order system
H(s)
G(s)R(s) C(s)+ -
𝐺 (𝑠)=𝜔𝑛
2
𝑠 (𝑠+2𝜉 𝜔𝑛) 22
2
2)(
)(
nn
n
sssR
sC
If H(s)=1
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Steady-State Error Definition
Steady-state error is the difference between the
input and the output for a prescribed test input as time approaches infinity
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Steady-State Error - Test Input
1.Step input2.Ramp input3.Parabolic input
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
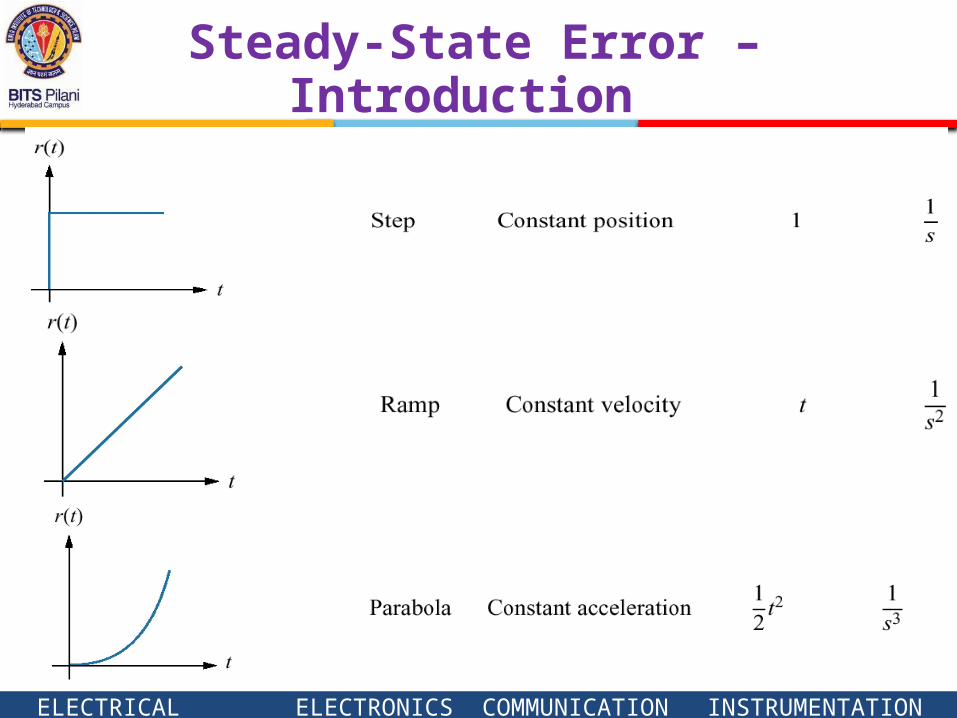
Steady-State Error – Introduction
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Evaluating Steady-State Error
Steady-state error analysis only applicable when the
system response is stable. Unstable system cannot be analyzed for steady-state
error
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
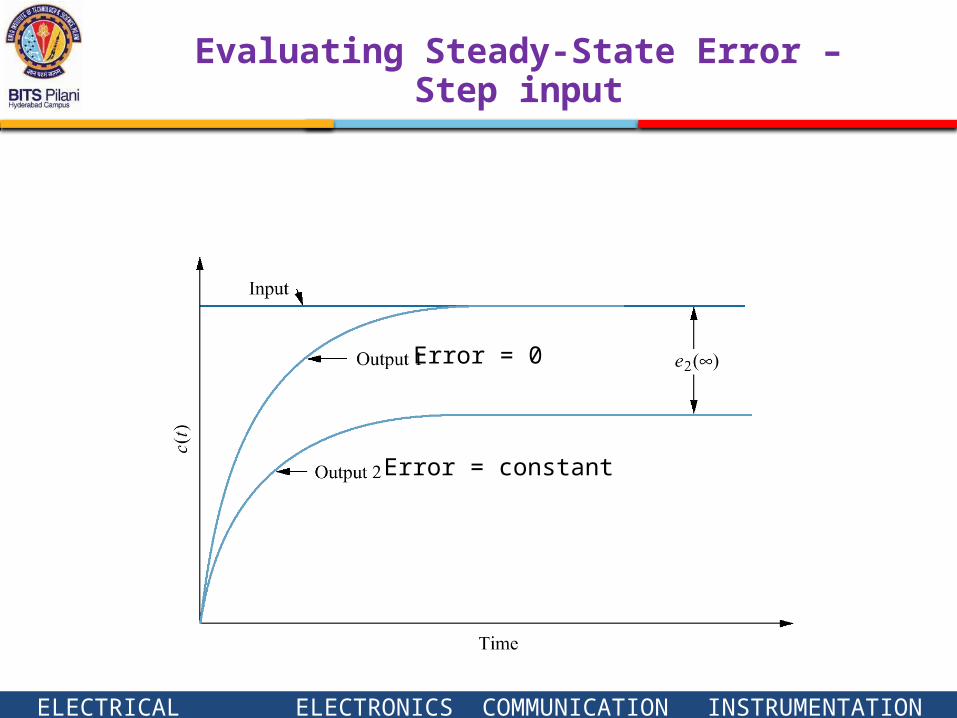
Evaluating Steady-State Error – Step input
Error = 0
Error = constant
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
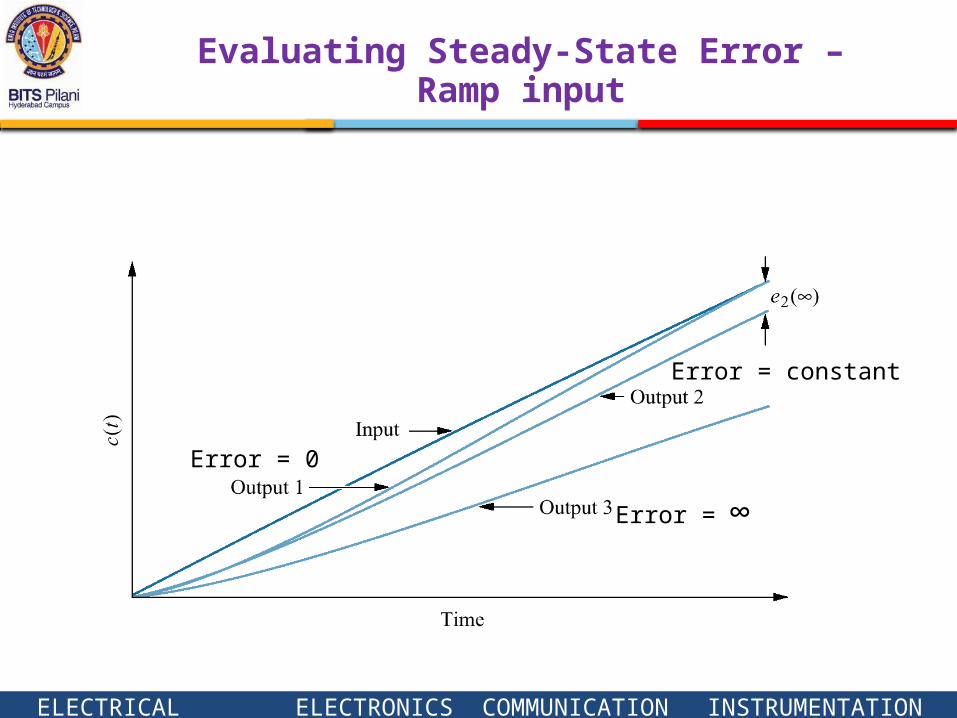
Evaluating Steady-State Error – Ramp input
Error = 0
Error = constant
Error = ∞
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
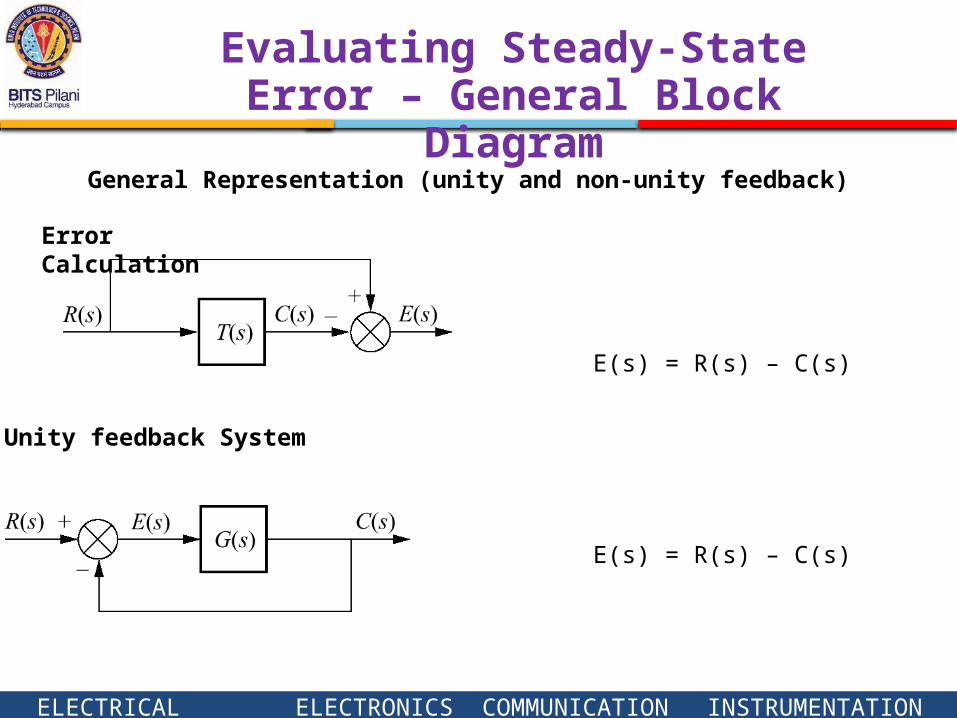
Evaluating Steady-State Error – General Block Diagram
E(s) = R(s) – C(s)
E(s) = R(s) – C(s)
General Representation (unity and non-unity feedback)
Unity feedback System
Error Calculation
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Evaluating Steady-State Error – Sources of Error
1.Non-linear elements2.System configuration3.Type of applied input
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
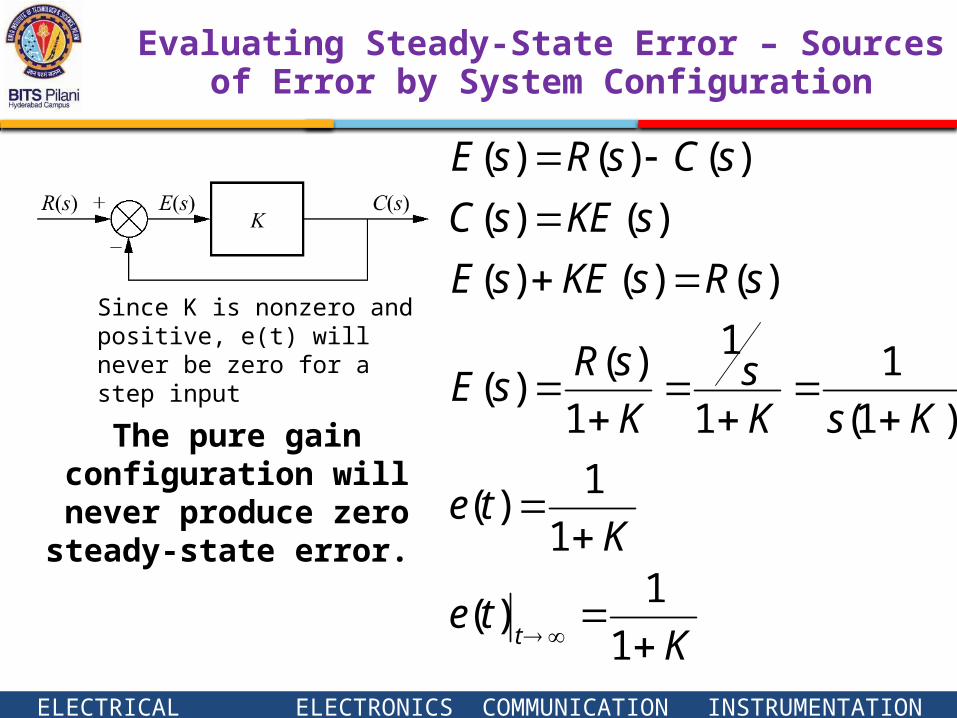
Evaluating Steady-State Error – Sources of Error by System Configuration
Since K is nonzero and positive, e(t) will never be zero for a step input
Kte
Kte
KsKs
K
sRsE
sRsKEsE
sKEsC
sCsRsE
t
1
1)(
1
1)(
)1(
1
1
1
1
)()(
)()()(
)()(
)()()(
The pure gain configuration will never
produce zero steady-state error.
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
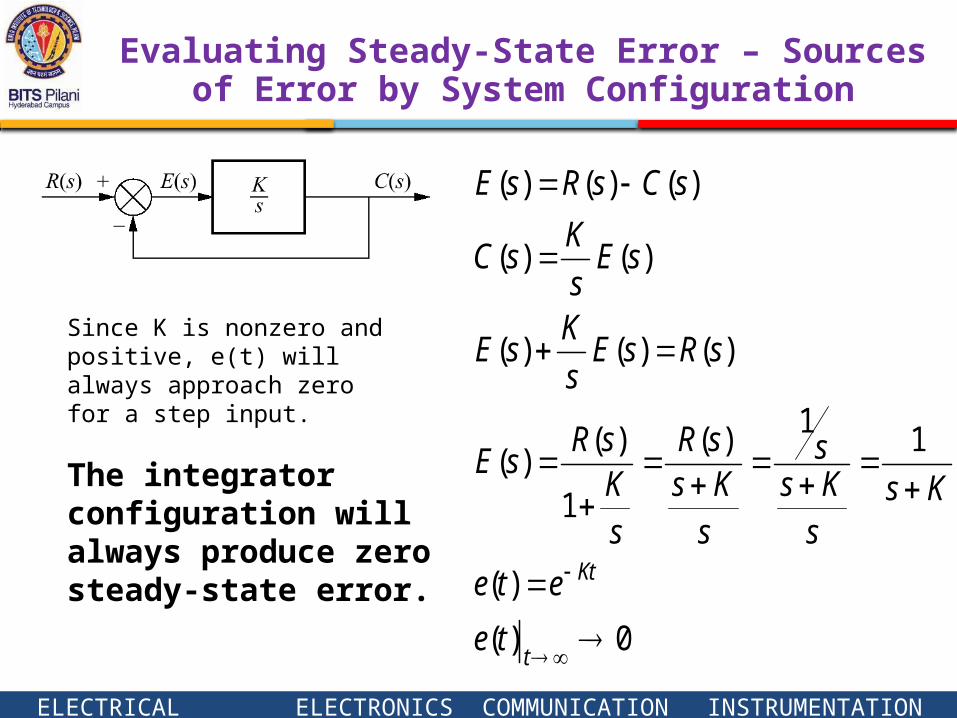
Evaluating Steady-State Error – Sources of Error by System Configuration
Since K is nonzero and positive, e(t) will always approach zero for a step input.
The integrator configuration will always produce zero steady-state error. 0)(
)(
11)(
1
)()(
)()()(
)()(
)()()(
t
Kt
te
ete
Kss
Kss
s
KssR
s
KsR
sE
sRsEs
KsE
sEs
KsC
sCsRsE
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
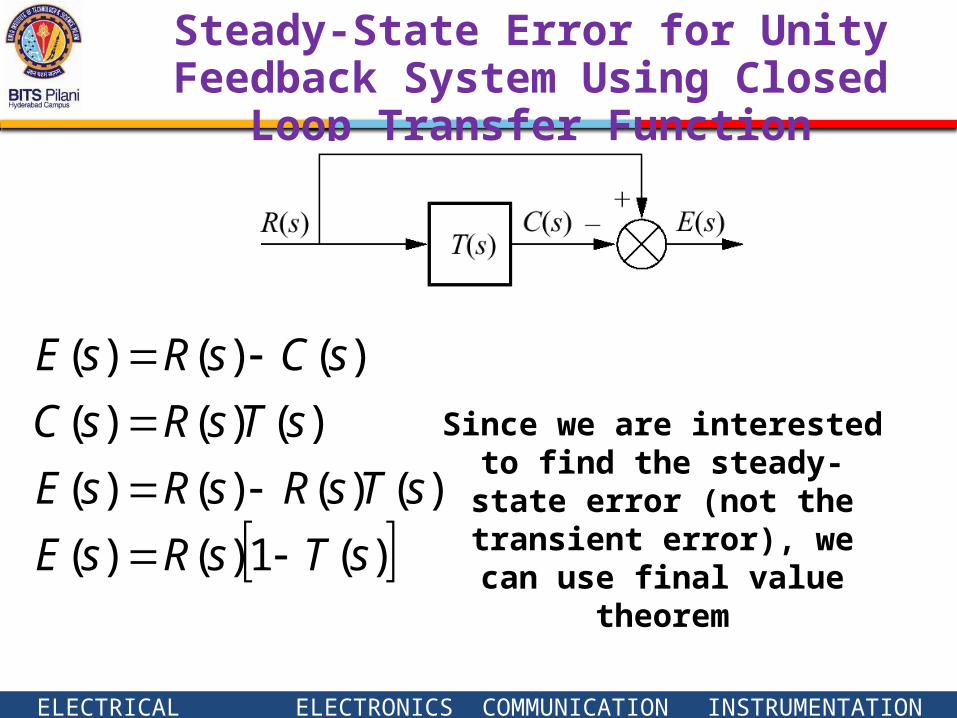
Steady-State Error for Unity Feedback System Using Closed Loop Transfer Function
)(1)()(
)()()()(
)()()(
)()()(
sTsRsE
sTsRsRsE
sTsRsC
sCsRsE
Since we are interested to find the steady-state error (not the transient error), we can use final
value theorem
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
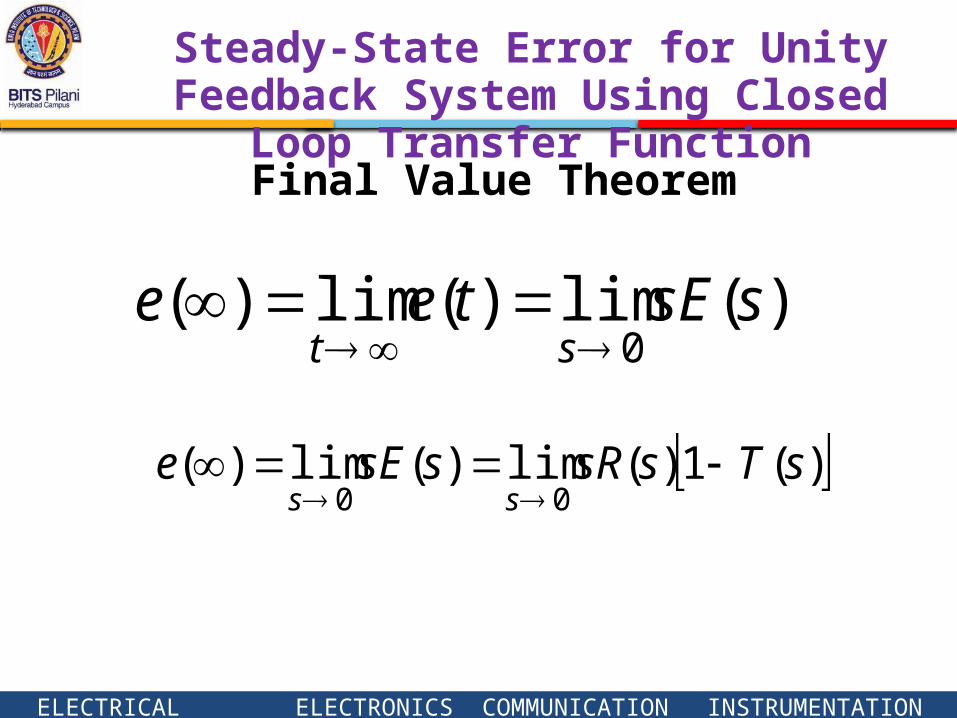
Steady-State Error for Unity Feedback System Using Closed Loop Transfer Function
)(lim)(lim)(0
ssEteest
Final Value Theorem
)(1)(lim)(lim)(00
sTssRssEess
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
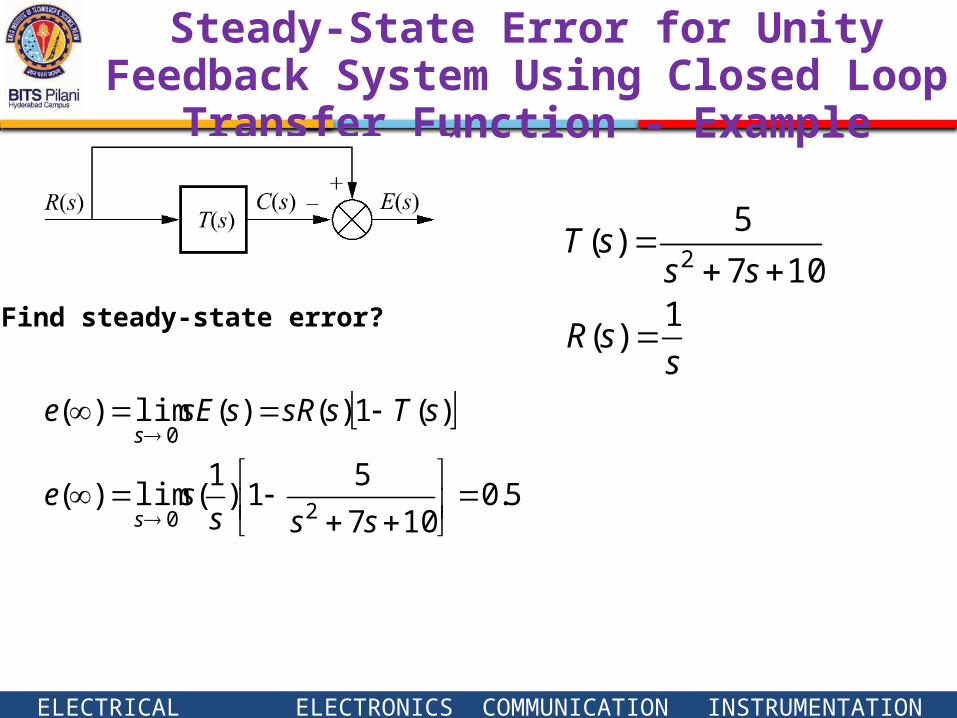
Steady-State Error for Unity Feedback System Using Closed Loop Transfer Function - Example
ssR
sssT
1)(
107
5)(
2
Find steady-state error?
5.0107
51)
1(lim)(
)(1)()(lim)(
20
0
sssse
sTssRssEe
s
s
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
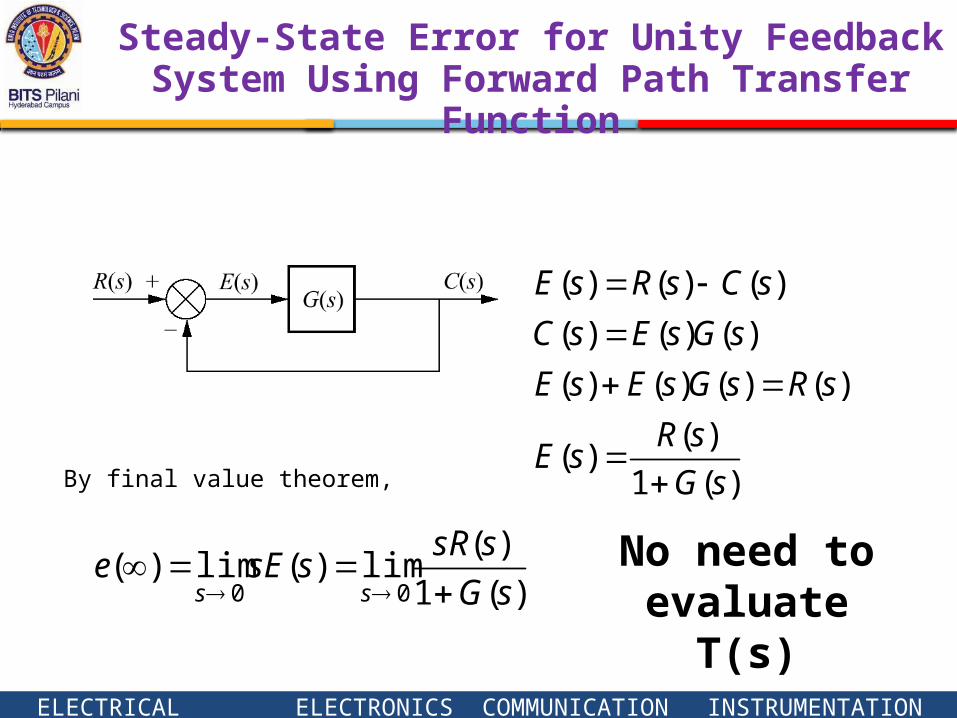
Steady-State Error for Unity Feedback System Using Forward Path Transfer Function
)(1
)()(
)()()()(
)()()(
)()()(
sG
sRsE
sRsGsEsE
sGsEsC
sCsRsE
By final value theorem,
)(1
)(lim)(lim)(00 sG
ssRssEe
ss
No need to evaluate
T(s)
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
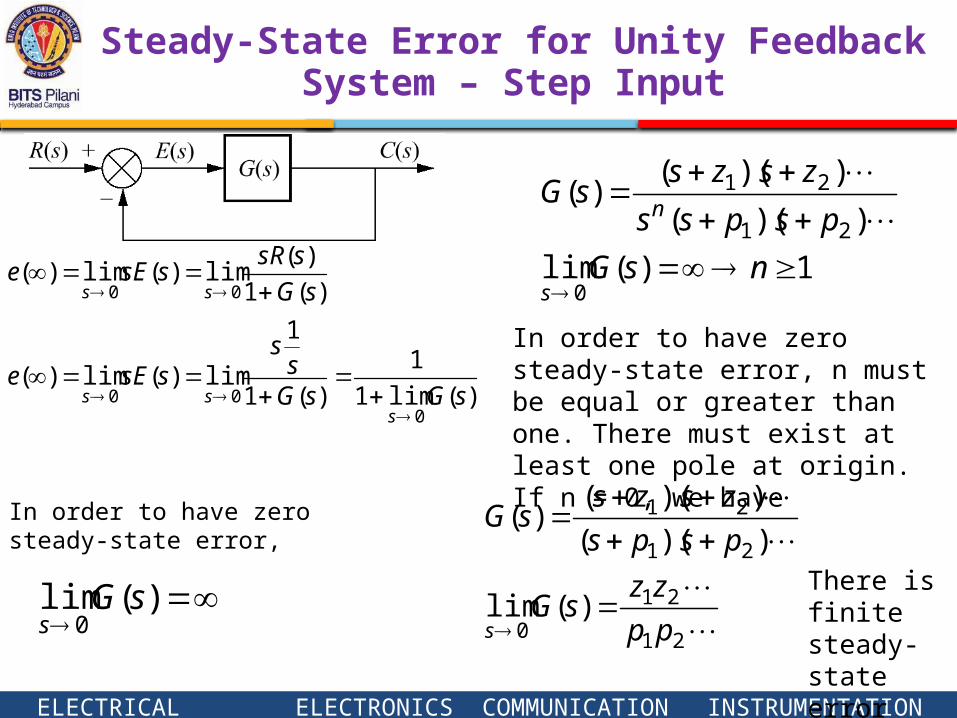
Steady-State Error for Unity Feedback System – Step Input
)(lim1
1
)(1
1
lim)(lim)(
)(1
)(lim)(lim)(
000
00
sGsGss
ssEe
sG
ssRssEe
sss
ss
In order to have zero steady-state error,
)(lim0
sGs
1)(lim
))((
))(()(
0
21
21
nsG
pspss
zszssG
s
n
In order to have zero steady-state error, n must be equal or greater than one. There must exist at least one pole at origin. If n = 0, we have
21
21
0
21
21
)(lim
))((
))(()(
pp
zzsG
psps
zszssG
s
There is finite steady-state error
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
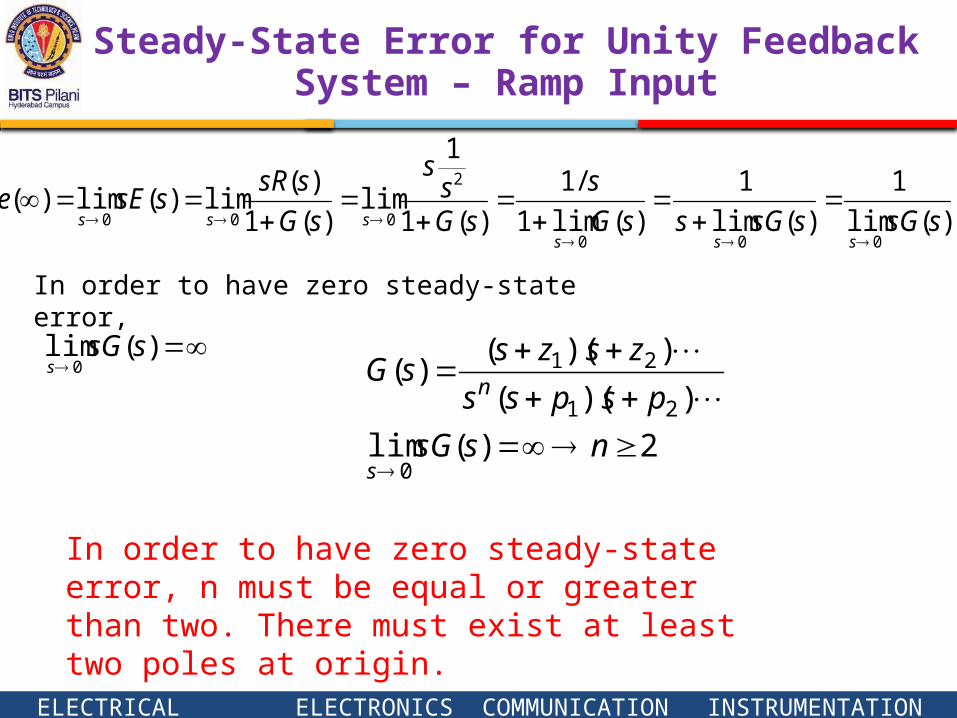
Steady-State Error for Unity Feedback System – Ramp Input
)(lim
1
)(lim
1
)(lim1
/1
)(1
1
lim)(1
)(lim)(lim)(
000
2
000 ssGssGssG
s
sGss
sG
ssRssEe
ssssss
In order to have zero steady-state error,
)(lim0
ssGs
2)(lim
))((
))(()(
0
21
21
nssG
pspss
zszssG
s
n
In order to have zero steady-state error, n must be equal or greater than two. There must exist at least two poles at origin.
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Steady-State Error for Unity Feedback System – Ramp Input
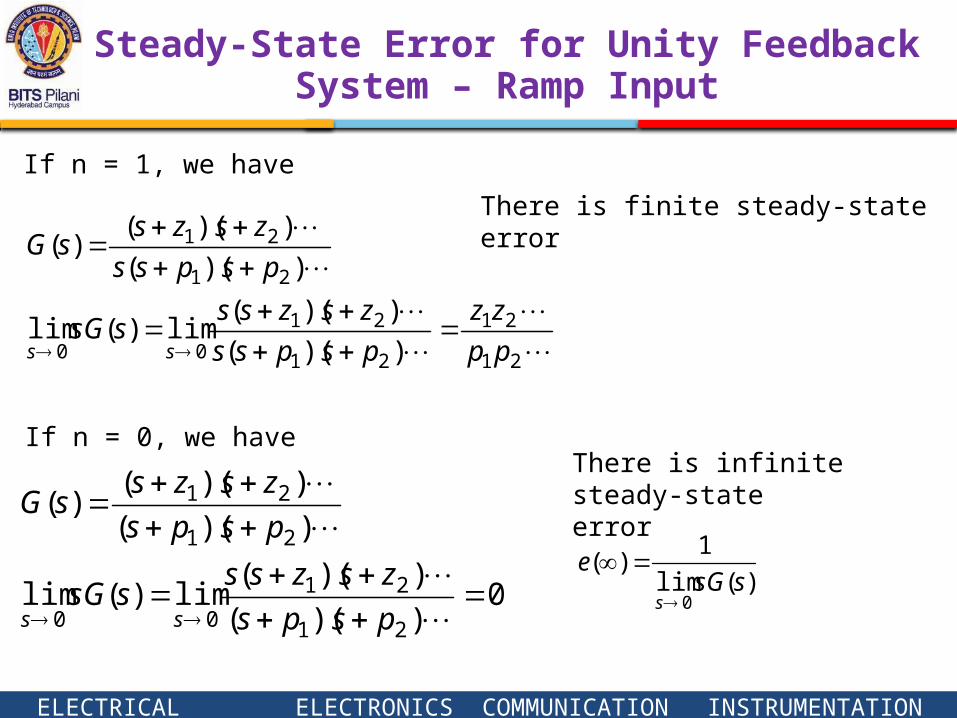
If n = 1, we have
21
21
21
21
00
21
21
))((
))((lim)(lim
))((
))(()(
pp
zz
pspss
zszssssG
pspss
zszssG
ss
There is finite steady-state error
If n = 0, we have
0))((
))((lim)(lim
))((
))(()(
21
21
00
21
21
psps
zszssssG
psps
zszssG
ss
There is infinite steady-state error
)(lim
1)(
0ssG
e
s
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
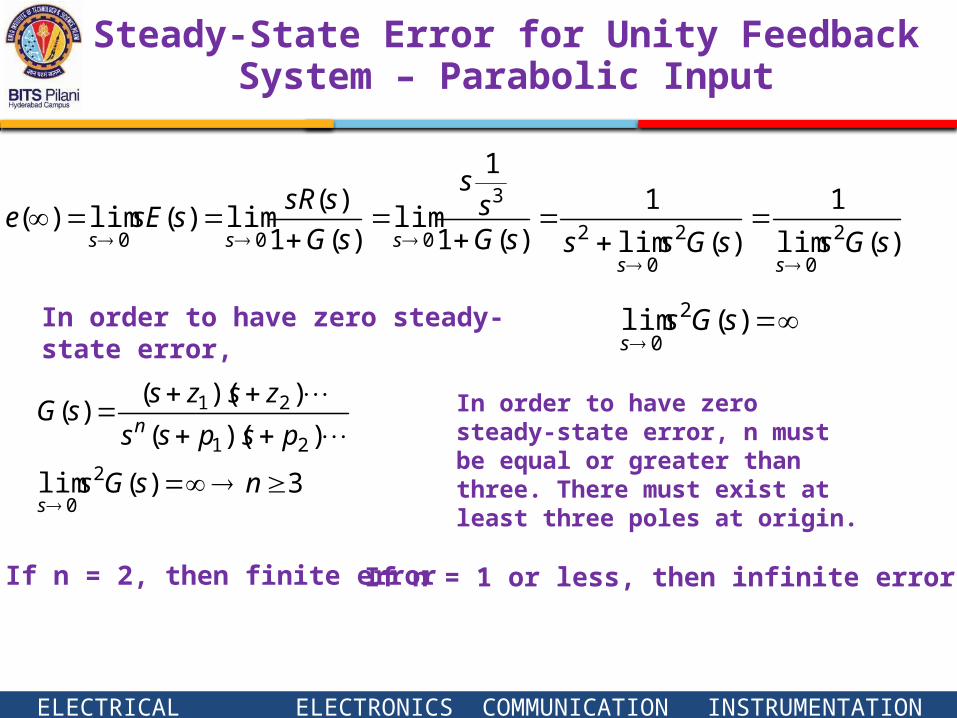
Steady-State Error for Unity Feedback System – Parabolic Input
)(lim
1
)(lim
1
)(1
1
lim)(1
)(lim)(lim)(
2
0
2
0
2
3
000 sGssGsssGss
sG
ssRssEe
sssss
In order to have zero steady-state error,
)(lim 2
0sGs
s
3)(lim
))((
))(()(
2
0
21
21
nsGs
pspss
zszssG
s
n In order to have zero steady-
state error, n must be equal or greater than three. There must exist at least three poles at origin.
If n = 2, then finite errorIf n = 1 or less, then infinite error
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
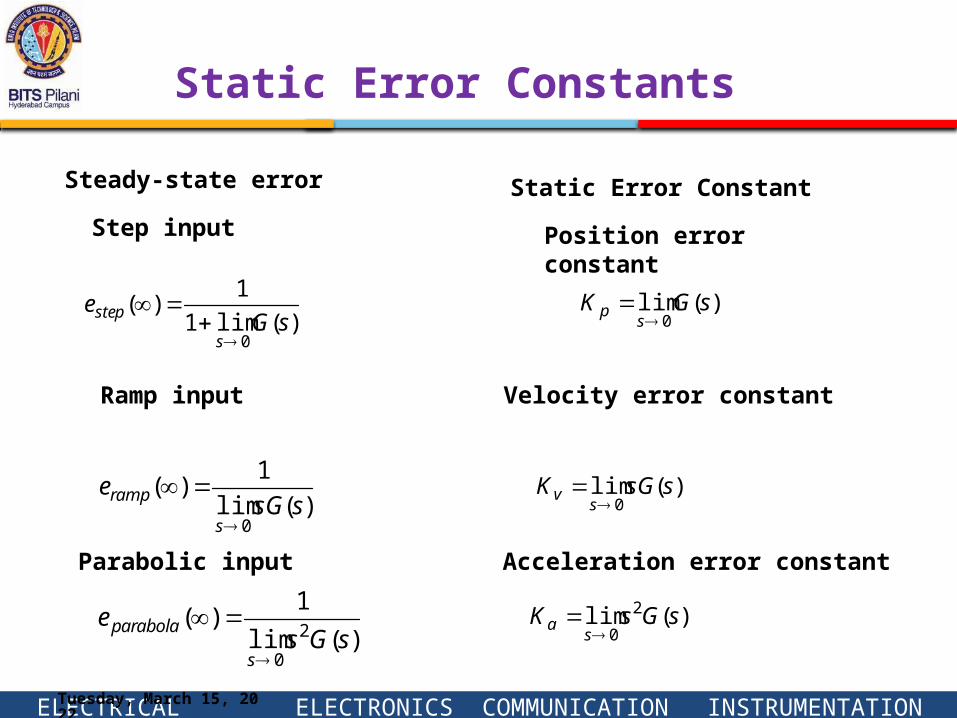
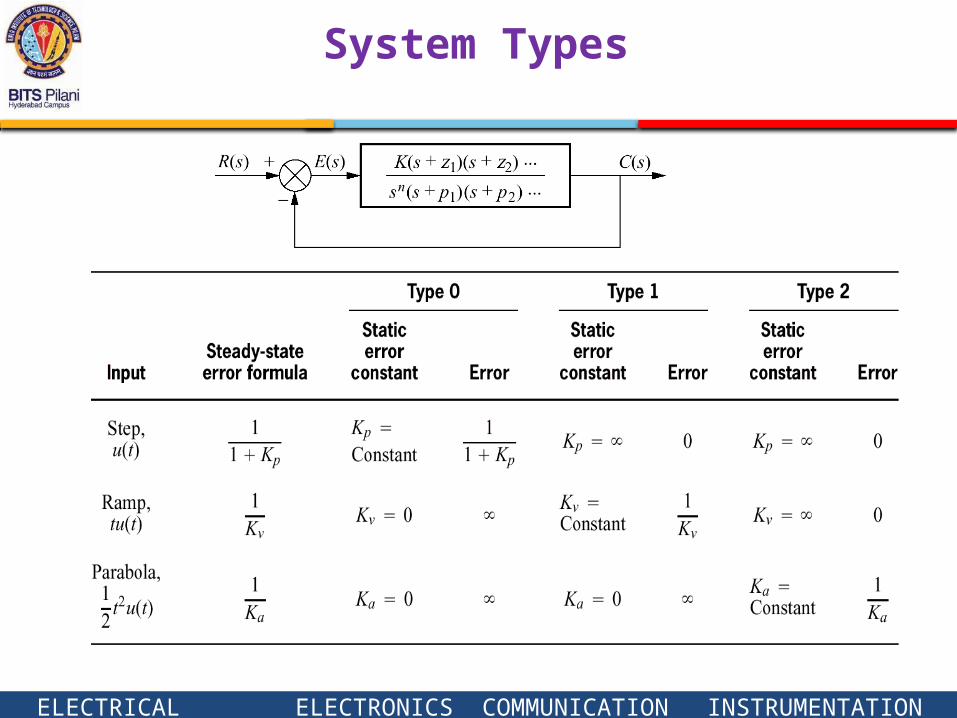
Static Error Constants
)(lim1
1)(
0sG
e
s
step
Step input
)(lim
1)(
0ssG
e
s
ramp
Ramp input
)(lim
1)(
2
0sGs
e
s
parabola
Parabolic input
Static Error ConstantSteady-state error
)(lim0
sGKs
p
Position error constant
Velocity error constant
Acceleration error constant
)(lim 2
0sGsK
sa
)(lim0
ssGKs
v
April 14, 2023
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
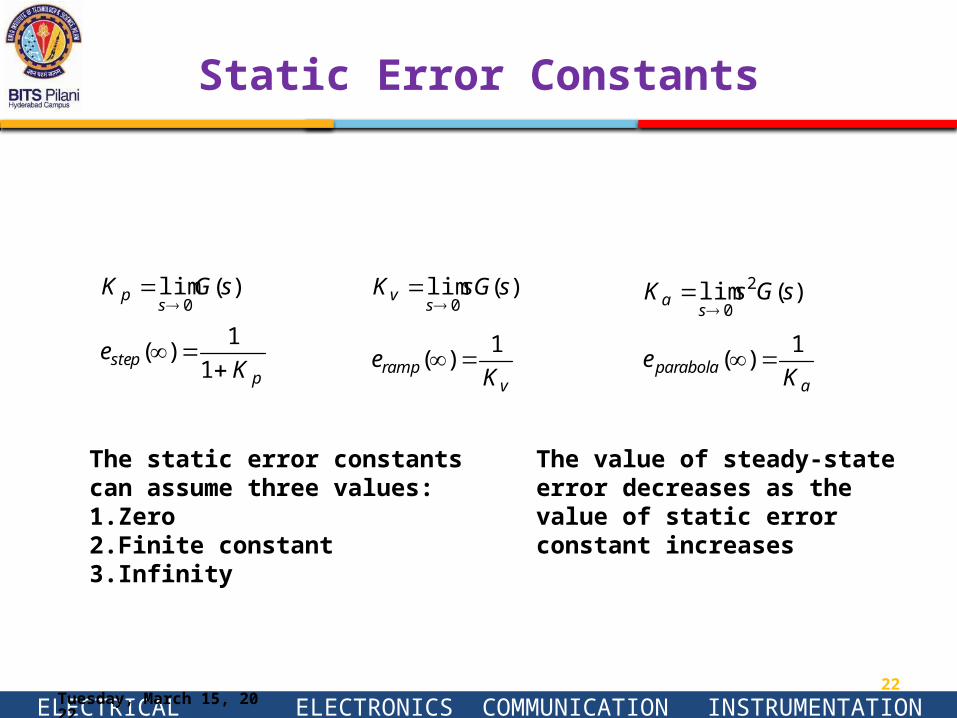
Static Error Constants
22
)(lim0
sGKs
p
The static error constants can assume three values:1.Zero2.Finite constant3.Infinity
)(lim 2
0sGsK
sa
)(lim
0ssGK
sv
The value of steady-state error decreases as the value of static error constant increases
pstep Ke
1
1)(
vramp Ke
1)(
aparabola Ke
1)(
April 14, 2023
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATIONApril 14, 2023
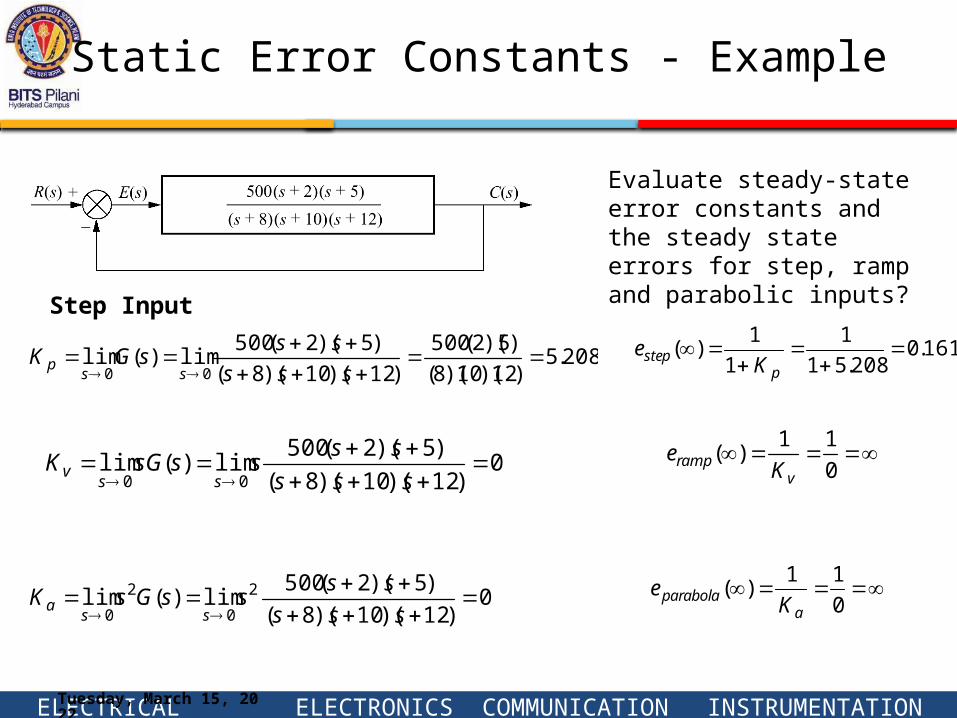
Static Error Constants - Example
Evaluate steady-state error constants and the steady state errors for step, ramp and parabolic inputs?
208.5)12)(10)(8(
)5)(2(500
)12)(10)(8(
)5)(2(500lim)(lim00
sss
sssGK
ssp
161.0208.51
1
1
1)(
pstep Ke
0)12)(10)(8(
)5)(2(500lim)(lim00
sss
sssssGK
ssv
0)12)(10)(8(
)5)(2(500lim)(lim 2
0
2
0
sss
ssssGsK
ssa
0
11)(
aparabola Ke
0
11)(
vramp Ke
Step Input
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
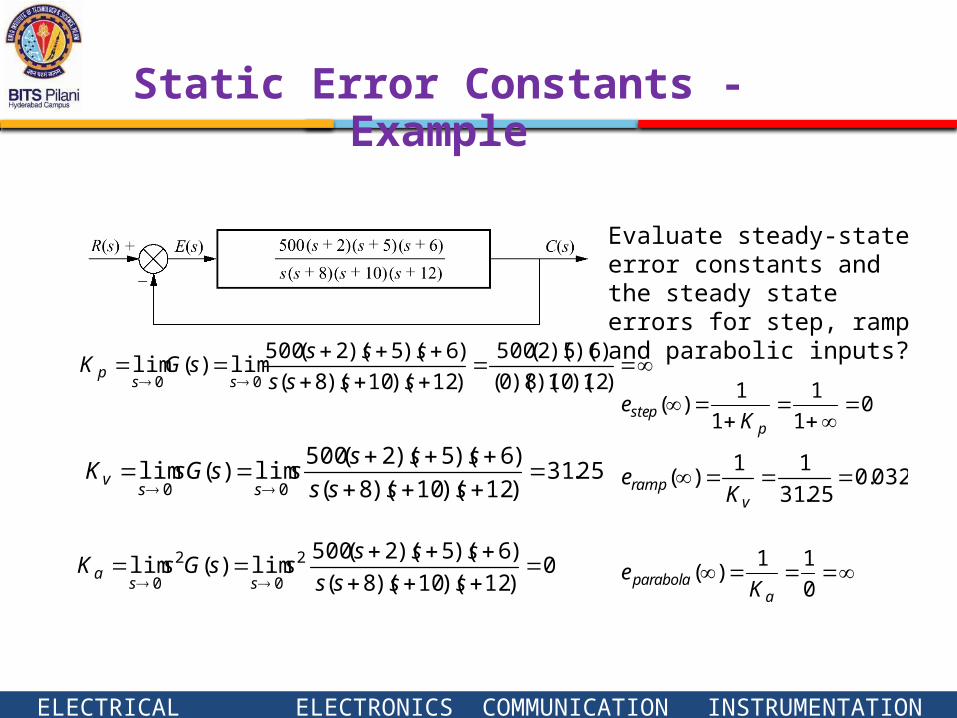
Static Error Constants - Example
Evaluate steady-state error constants and the steady state errors for step, ramp and parabolic inputs?
)12)(10)(8)(0(
)6)(5)(2(500
)12)(10)(8(
)6)(5)(2(500lim)(lim00 ssss
ssssGK
ssp
01
1
1
1)(
pstep Ke
25.31)12)(10)(8(
)6)(5)(2(500lim)(lim00
ssss
ssssssGK
ssv
0)12)(10)(8(
)6)(5)(2(500lim)(lim 2
0
2
0
ssss
sssssGsK
ssa
0
11)(
aparabola Ke
032.025.31
11)(
vramp Ke
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
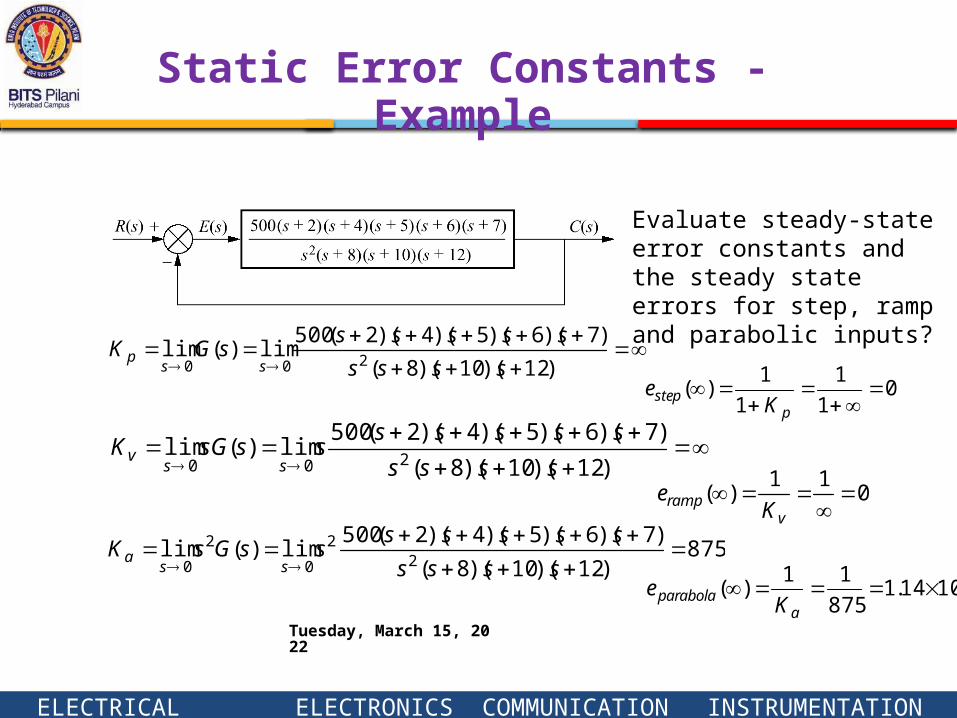
Static Error Constants - Example
Evaluate steady-state error constants and the steady state errors for step, ramp and parabolic inputs?
)12)(10)(8(
)7)(6)(5)(4)(2(500lim)(lim
200 ssss
ssssssGK
ssp
01
1
1
1)(
pstep Ke
)12)(10)(8(
)7)(6)(5)(4)(2(500lim)(lim
200 ssss
ssssssssGK
ssv
875)12)(10)(8(
)7)(6)(5)(4)(2(500lim)(lim
22
0
2
0
ssss
sssssssGsK
ssa
31014.1875
11)(
aparabola Ke
011
)(
v
ramp Ke
April 14, 2023
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
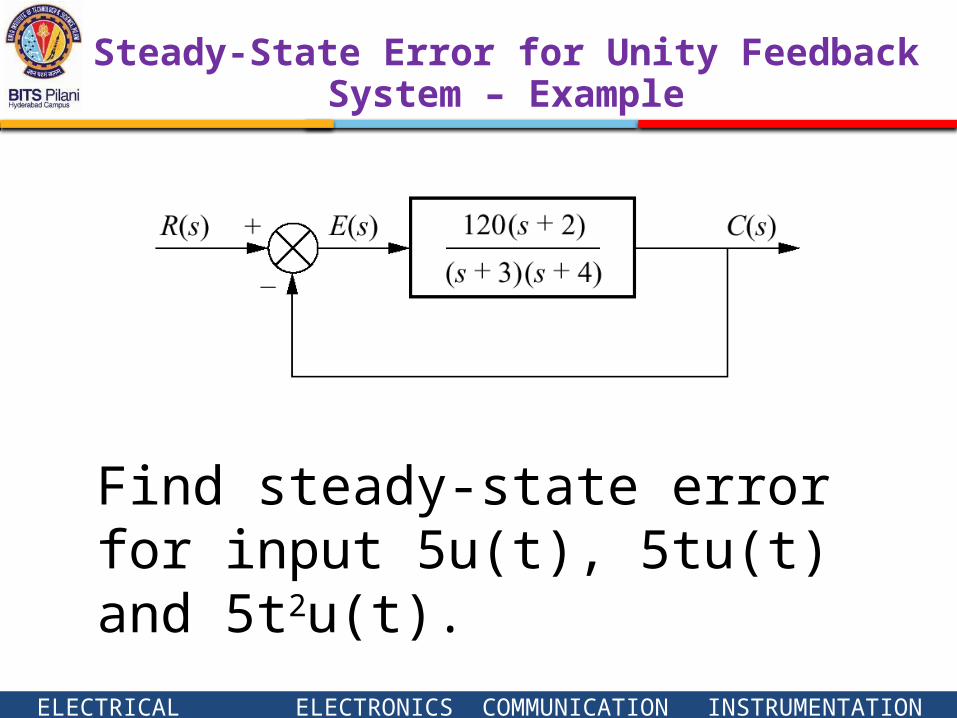
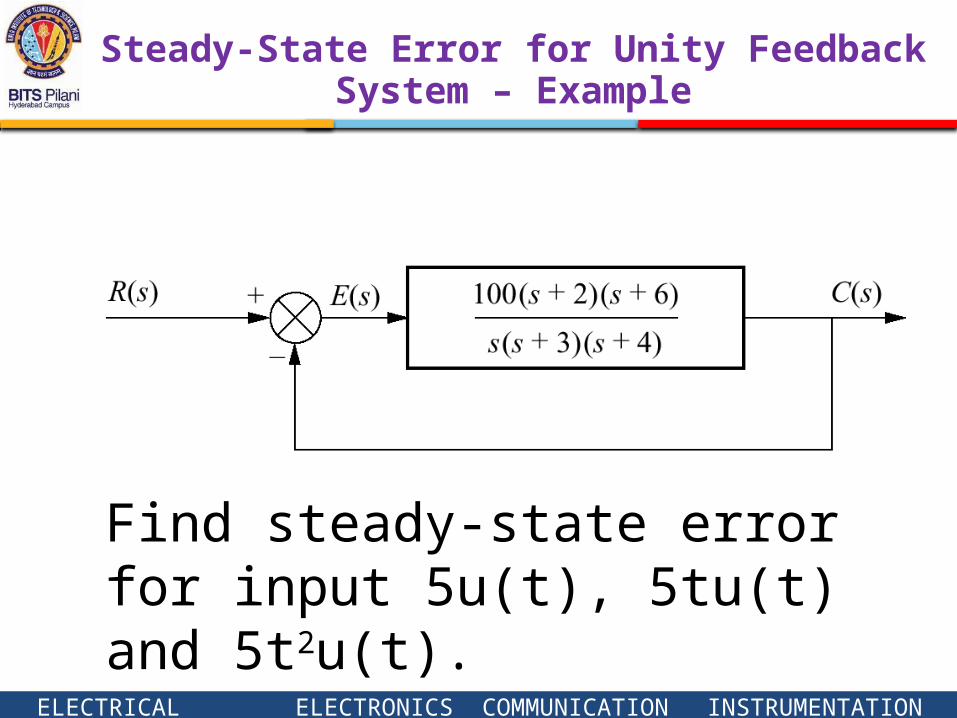
Steady-State Error for Unity Feedback System – Example
Find steady-state error for input 5u(t), 5tu(t) and 5t2u(t).
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Steady-State Error for Unity Feedback System – Example
Find steady-state error for input 5u(t), 5tu(t) and 5t2u(t).
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
H(s)
G(s)R(s) C(s)+ -
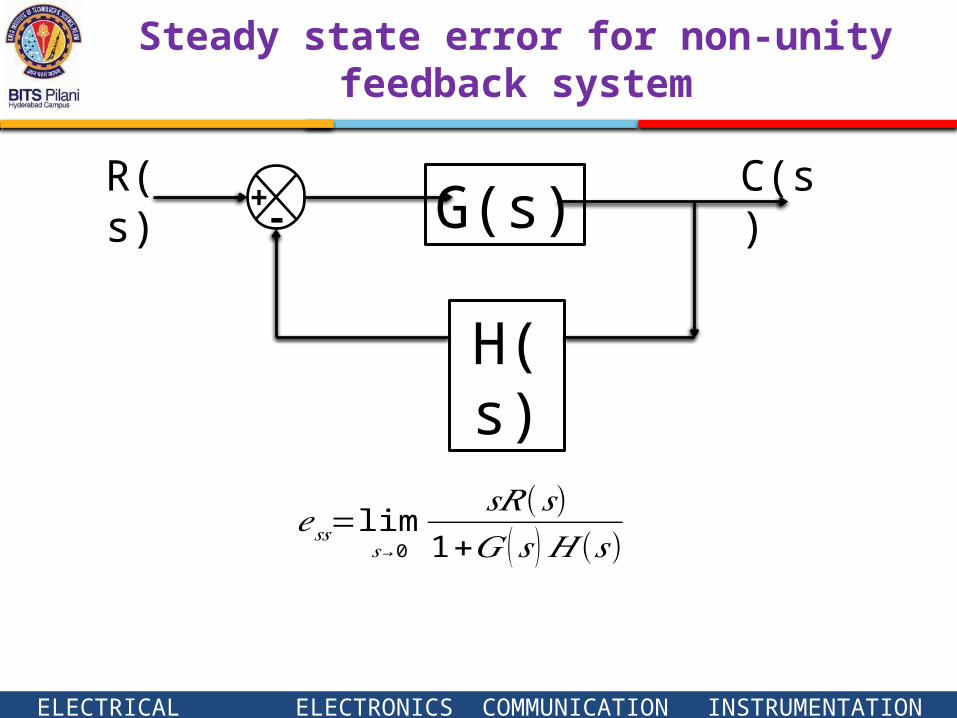
Steady state error for non-unity feedback system
𝑒𝑠𝑠=lim𝑠→0
𝑠𝑅 (𝑠)1+𝐺 (𝑠 )𝐻 (𝑠)
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
April 14, 2023
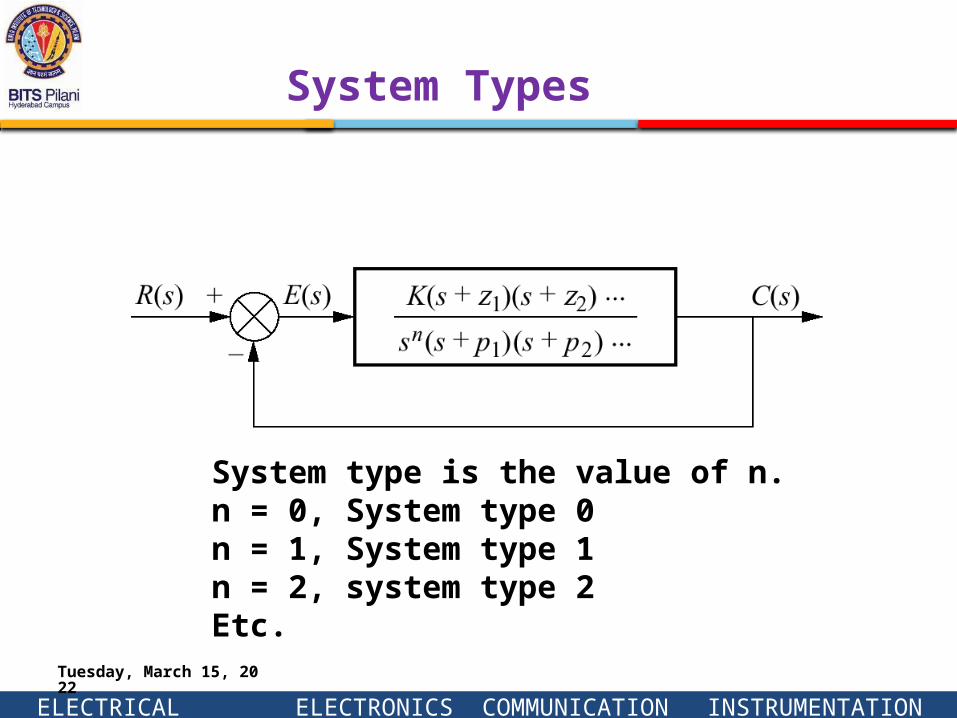
System Types
System type is the value of n.n = 0, System type 0n = 1, System type 1n = 2, system type 2Etc.
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
System Types
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
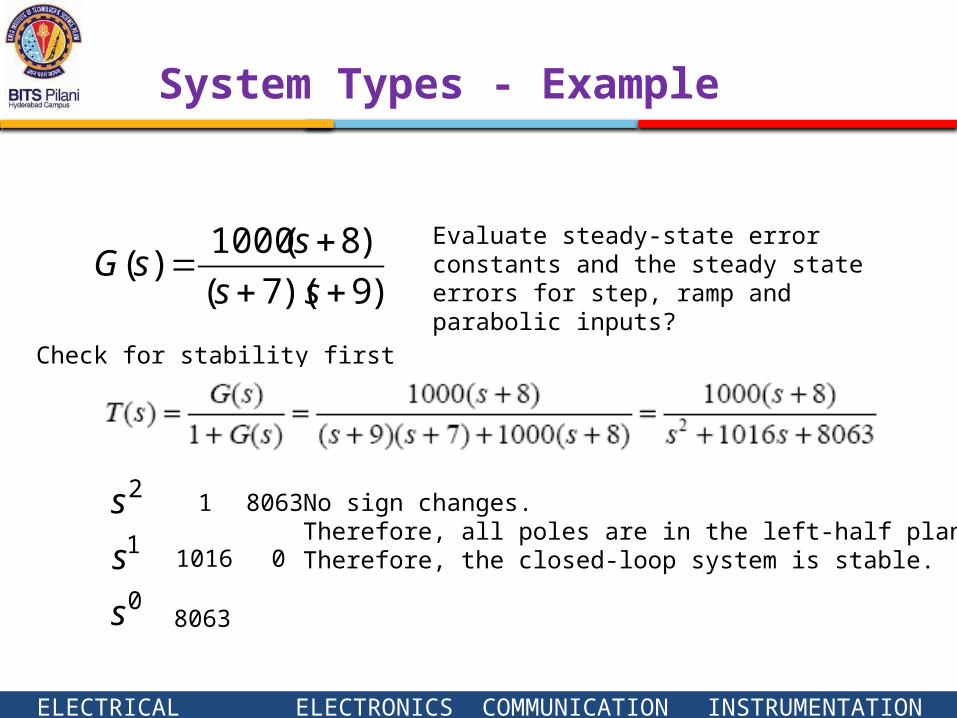
System Types - Example
Evaluate steady-state error constants and the steady state errors for step, ramp and parabolic inputs?
Check for stability first
)9)(7(
)8(1000)(
ss
ssG
2s1s0s
1 8063
1016 0
8063
No sign changes.Therefore, all poles are in the left-half plane.Therefore, the closed-loop system is stable.