Embed Size (px)
DESCRIPTION
about EMG and its applications
Citation preview

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
INTRODUCTION
Electromyogram (EMG) is the record of the electrical excitation of the skeletal muscles which is
initiated and regulated by the central and peripheral nervous system. EMGs have non-stationary
properties. Electromyography is the discipline that deals with the detection, analysis, and use of the
electrical signal that emanates from contracting muscles. This signal is referred to as the
electromyographic (EMG) signal, a term that was more appropriate in the past than in the present. In
days past, the only way to capture the signal for subsequent study was to obtain a ‘‘graphic’’
representation. Today, of course, it is possible to store the signal on magnetic tape, disks, and
electronics components. Even more means will become available in the near future. This evolution
has made the graphics aspect of the nomenclature a limited descriptor. Although a growing number
of practitioners choose to use the term ‘‘myoelectric (ME) signal’’, the term ‘‘EMG’’ still commands
dominant usage, especially in clinical environments. Here the signal begins with a low amplitude,
which when expanded reveals the individual action potentials associated with the contractile activity
of individual (or a small group) of muscle fibers. As the force output of the muscle contraction
increases, more muscle fivers are activated and the firing rate of the fibers increases.
Correspondingly, the amplitude of the signal increases taking on the appearance and characteristics
of a Gaussian distributed variable.
The novice in this field may well ask, why study electromyography? Why bother understanding the
EMG signal? There are many and varied reasons for doing so. Even a superficial acquaintance with
the scientific literature will uncover various current applications in fields such as neurophysiology,
kinesiology, motor control, psychology, rehabilitation medicine, and biomedical engineering.
Although the state of the art provides a sound and rich complement of applications, it is the potential
of future applications that generates genuine enthusiasm.
EI DEPARTMENT, SRMGPC, LUCKNOW 1

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
LITERATURE REVIEW
Movement and position of the limbs are controlled by the electrical signals travelling forward and
backward between Muscle fibers, Peripheral and Central Nervous System [1], [2]. Conscientious
Registration and interpretation of these muscle electrical potential is called as Electromyogram
(EMG). Due to the emanation of Pathological condition in motor system, whether in spinal cord, the
motor neuron, the muscle or the neuromuscular junction the characters of electrical potentials
generated during the contraction and relaxation of muscles changes [4]. Careful registration and
study of electrical signals in muscles thus can be valuable aid in discovering and diagnosis
abnormalities not only in muscles but also in the motor system as a whole [3] [5]. EMG
classification is one of the most difficult pattern recognition problems because there usually exists
small but numerous variations in EMG features, which leads to difficulty in analyzing EMG signals.
In general, the methods of feature selection can be divided into two types: the measure of
classification accuracy and the valuation using statistical criterion. After that the selection of the best
features based on the proposed statistical criterion method is investigated. For this purpose, we
evaluate different kinds of features that have been widely used in EMG diseases recognition. The
results of this evaluation and the proposed statistic method can be widely used in EMG applications
such as control of EMG robots and prostheses or the EMG diagnosis of nerve and muscle
diseases[6],[7],[8].
EMG signals have been targeted as control for flight systems.
1. The Human Senses Group at the NASA Research Center at Moffett Field, CA seeks to advance man
machine interfaces by directly connecting a person to a computer.
2. An EMG signal is used to substitute for mechanical joysticks and keyboards.
3. EMG has also been used in research towards a "wearable cockpit," which employs EMG-based
gestures to manipulate switches and control sticks necessary for flight in conjunction with a goggle
based display.
(A) (B)
FIG 1: (A) CONTROL OF AIR PLANE BY EMG (B) MONITORING OF AIRPLANE ON PC EI DEPARTMENT, SRMGPC, LUCKNOW 2

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
HISTORICAL PERSPECTIVE
Electromyography had its earliest roots in the custom practiced by the Greeks of using electric eels to
‘‘shock’’ ailments out of the body. The origin of the shock that accompanied this earliest detection
and application of the EMG signal was not appreciated until 1666 when an Italian, Francesco Redi,
realized that it originated from muscle tissue (1). This relationship was later proved by Luigi Galvani
(2) in 1791 who staunchly defended the notion. During the ensuing six decades, a few investigators
dabbled with this newly discovered phenomenon, but it remained for DuBois Raymond (3) in 1849
to prove that the EMG signal could be detected from human muscle during a voluntary contraction.
In the mid-1940s to the mid-1950s several investigations revealed a mono- tonic relationship
between the amplitude of the EMG signal and the force and velocity of a muscle contraction.
In the early 1960s, another dramatic evolution occurred in the field: myoelectric control of externally
powered prostheses. During this period, engineers from several countries developed externally
powered upper limb pros- theses that were made possible by the miniaturization of electronics
components and the development of lighter, more compact batteries that could be carried by
amputees.
The late 1970s and early 1980s saw the use of sophisticated computer algorithms and communication
theory to decompose the EMG signal into the individual electrical activities of the muscle fibers (10–
12). Today, the decomposition approach promises to revolutionize clinical electromyography and to
provide a powerful tool for investigating the detailed control schemes used by the nervous system to
produce muscle contractions.
The 1990s saw the effective application of modern signal processing techniques for the analysis and
use of the EMG signal. Some examples are the use of time and frequency analysis of the surface
EMG signal for measuring the relative contribution of low back muscles during the presence and
absence of low back pain (16)
The electromyogram (EMG) signal is an electrical voltage generated by the neural activity
commanding muscle activity. Surface electrodes pick up this neural activity by making electrical
contact through the skin. Muscle tension results in higher energy in the bio signal, in the millivolt
range and having a frequency range from DC to 2 kHz. The EMG signal has been compared in its
richness to audio, making audio signal processing and pattern recognition techniques potentially
relevant in analyzing the bio signal. However EMG is ultimately not a continuous signal, but the sum
of discrete neuron impulses. This results in an aperiodic, stochastic signal that poses challenges to
audio-based signal and information processing.
EI DEPARTMENT, SRMGPC, LUCKNOW 3

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
DESCRIPTION OF THE EMG SIGNAL
FIG 2: RELATIONSHIP AMONG THE VARIOUS FACTORS THAT AFFECT THE EMG SIGNAL.
FIG 3: BLOCK DIAGRAM OF EMG SYSTEM
EI DEPARTMENT, SRMGPC, LUCKNOW 4

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
AN EXPERIMENT
OBJECT—Microprocessor Based Control of Electromechanical Devices by Using
Electromyogram: A “Cricket Car” Model
EXPERIMENT OBJECTIVE—The Cricket Car is a remote control car that uses
electromyography (EMG) signals to drive the car. Electrodes are inserted into the legs of the
common field cricket and the myoelectric signal, also known as a motor action signal, is amplified.
This amplified signal is then acquired by the PIC16F88 processor. Using threshold detection and
conditional logic algorithms, the PIC processor sends command signals to the circuit of a remote
control car. Features such as object/collision detection, cricket stimulus, and additional signal
processing algorithms have been studied and developed. The project has been incorporated into a
neuro engineering course. Continuation of this project by undergraduate and graduate students will
serve as the impetus for further improvements.
THEORY
The applications of biological signal-processing range from neurological disorders to cognitive based
prosthetic devices. Common to all applications is acquiring the signal itself. Often, the type of
electrodes used, the design of the pre-amp, the filtering, and the algorithm used to process the
digitized signal have a combined synergy that can either enhance or degrade the overall process. To
address this problem, the biomedical engineering lab at the University of Rhode Island has
developed a microprocessor based circuit which acquires and processes electromyography signals
(EMG) from the hind legs of the common field cricket and uses those signals to drive a remote
control car.
METHODS
A. The Interface Figure 1 shows a prototype of the cricket (A), a cricket and an IC socket for the
interface (B), and a typical EMG recording from the hind leg (C). Crickets belong to the Phylum
Arthropoda, Class Insecta, and Order Orthoptera. They have a single giant nerve which runs
through the center of the femur (Figure 2). It is this nerve that is responsible for the EMG
EI DEPARTMENT, SRMGPC, LUCKNOW 5

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
(A) (B)
(C)
FIG 4: (A) A PROTOTYPE CRICKET CAR AT LEFT, (B) A CRICKET INTERFACE WITH AN IC SOCKET
AT TOP RIGHT, AND (C) AN EMG RECORDING FROM THE HIND LEG AT BOTTOM RIGHT.
Signals used to drive the car. Using stainless steel insect pins as electrodes, the cricket is attached to
the circuit in much the same way an IC would be - by using a socket. Two electrodes, one in each
hind leg, are used to acquire the signals while one electrode placed in the abdomen is used as a
reference. This allows for the use of a two channel preamp which is used to differentiate left and
right movements. The proximity of the cricket to the circuit serves two purposes. First, the signal
from the leg is susceptible to ambient noise unless the leads are either shielded or extremely close to
the amplifier. Second, the cricket needs to be positioned on the car so that it will have a visual
reference to its surrounding. This second benefit may sound somewhat superfluous but if the cricket
is to have any behavioral input, it is necessary that the cricket have the same field of view that it
would ordinarily have in its standard environment.
The electrodes used for the signal pickup are standard stainless steel insect pins (Fig. 1B). One issue
that has been observed as a result of using this pin is a discoloration of the pin entrance sites on the
cricket’s legs and abdomen. In [1-4], a copper or silver wire was used and no discoloration was noted
but our choice of pins helps also in the restraint of the cricket. While the pin remains intact, it is
obvious that there is some interaction between the steel and the tissue. It is hoped that the switch to
surgical grade steel pins will resolve any issues that may arise as a result of this interaction. This is a
EI DEPARTMENT, SRMGPC, LUCKNOW 6

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
precautionary action as no significant adverse effects have been observed besides the discoloration.
There may be issues related to the long term usability of any one cricket as the area most likely will
suffer some signal degradation.
FIG 5: SCHEMATIC DIAGRAM OF THE CRICKET CAR EMG ACQUISITION CIRCUIT.
EI DEPARTMENT, SRMGPC, LUCKNOW 7

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
FIG 6: SCHEMATIC DIAGRAM OF THE CRICKET CAR EMG ACQUISITION CIRCUIT.
B. THE CIRCUITMeasuring signals on the order of 0.1mA or less requires careful attention to details that ordinarily
may be overlooked when measuring stronger signals. As with many signal acquisition situations,
signal to noise ratio (SNR) is the main consideration. The difficulty here is that the signal is of such
low power that even small amounts of noise keeps the ratio low. Long, small wires, such as those
used as electrode leads, make excellent antennas and as such pick up 60Hz electrical noise. To
address this issue, the circuit was designed in such a way as to keep the signal wires short, limiting
the noise contamination. The circuit (Figure 3) is a standard two channel preamp using Analog
Devices AMP02 instrumentation amplifiers followed by National Semiconductor LM324 op-amps.
High pass filters are used to eliminate DC components and low pass filters are used for noise
reduction. Similar to [1, 2], a band- width of 300-3000Hz was chosen for the filters. The circuit is
Powered by a single 9V battery. In order to generate the -9V for the negative rails of the op-amps, a
charge pump is needed. This pump is built using National Semiconductor LMC7660 Switched
Capacitor Voltage Inverter ICs. Two LM324 Quad op-amp ICs are used for this circuit, however
only 4 of the available 8 op-amps are utilized- two from each op-amp. This leaves four op-amps for
future use as either increased gain or active filters. Each of the two channels operates independently
of the other. This is a useful feature in that any difficulties that arise in the operation of the circuit
can quickly be isolated and segmented, making debugging a much less tedious exercise.
B. COLLISION DETECTION
As an input to the PIC processor, the object/collision detection circuit has override abilities in case
the car comes close to another object or obstacle. Using an ultrasonic transmitter and receiver,
collisions are avoided by measuring the return wave from the obstacle, i.e. echo location. Beam
EI DEPARTMENT, SRMGPC, LUCKNOW 8

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
angle for these devices is measured at 60and as such one transmitter is incapable of providing front-
end collision detection. The decision was made to include two transmitters, one on each front corner
of the car. This will provide effective overlap in the center of the front-end as well as providing
sufficient protection to the corners. The frequency, 40 KHz, is controlled by a network of resistors
and capacitors with National Semiconductors LM555 timer while the transmitter is driven by the
Texas Instruments CD4049UB inverting hex buffers. Each buffer is capable of delivering 10mA of
current. Two buffers are used in parallel to supply 20mA of uninterrupted current, more than enough
to drive the transmitter.
DISCUSSION
A remote control car that is driven by a cricket has been proposed. Further research is being
performed into the stimulation of the cricket to increase activity, behavioral examination to
prolonged car use in an environment, and human EMG acquisition for electromechanical device
control. In addition to further graduate research, the project should serve as a model to build
undergraduate courses in biomedical engineering. Using a commercially available RC car, students
will be required to demonstrate an ability to 1) understand basic electrophysiological processes as
well as insect anatomy 2) understand, construct and improve signal amplifiers and filters and 3)
formulate an algorithm in the C++ programming language capable of detecting, differentiating and
interpreting different myoelectric signals. Pass filters are used to eliminate DC components and low
pass filters are used for noise reduction. Similar to [1, 2], a band- width of 300-3000Hz was chosen
for the filters. The circuit is powered by a single 9V battery. In order to generate the -9V for the
negative rails of the op-amps, a charge pump is needed. This pump is built using National
Semiconductor LMC7660 Switched Capacitor Voltage Inverter ICs. Two LM324 Quad op-amp ICs
Are used for this circuit, however only 4 of the available 8 op-amps are utilized- two from each op-
amp. This leaves four op-amps for future use as either increased gain or active filters. Each of the
two channels operates independently of the other. This is a useful feature in that any difficulties that
arise in the operation of the circuit can quickly be isolated and segmented, making debugging a much
less tedious exercise.
EI DEPARTMENT, SRMGPC, LUCKNOW 9

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
FIG 7: EMG AND GYRO BASED POSITION CONTROLLER ARM BANDS, HEAD BANDS AND BASE
ADVANTAGES
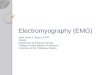
ANALYSIS OF SURFACE ELECTROMYOGRAM SIGNALS DURING HUMAN FINGER
MOVEMENTS
In the anatomy of the human hand, the hand is distal to the forearm, and its includes the carpus or
wrist. The wrist is used for the distal end of the forearm, a wrist-watch being worn over the lower
ends of the radius and ulna. The fingers (or digits of the hand) are numbered from one to five,
beginning with the thumb. The fingers should be identified by name rather than by number: thumb
(pollex), and index, middle, ring, and little fingers. The thenar and hypothenar are adjectives
referring to the thumb and little finger, respectively. The finger of the hand are movable in four
direction Flexion (bending), Extension (straightening), abduction (moving sideways from the body),
adduction (moving sideways towards the body). [3]
The paper consists study of joints and muscles that are required for the movements of hand.
Movement of the hand is carried out by several groups of muscles. The muscles that flex the fingers,
primarily flexor digitorum superficialis and flexor digitorum profundus, are located in the palmar
aspect of the forearm. The muscles that extend the finger, primarily the extensor digitorum, are
located in the dorsal aspect of the forearm. The most technological advanced and common method
employed for prosthesis control is based on Electromyogram signal processing; to my electrically
controlled a Dexterous prosthesis. It is necessary to map Electromyogram signal corresponding to
different muscle contraction of different finger movements.
EI DEPARTMENT, SRMGPC, LUCKNOW 10

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
FIG 8: MUSCLES OF FOREARM
MATERIAL AND METHOD
A. SURFACE ELECTROMYOGRAM (SEMG)
The movement of the hand, either the thumb faces the other fingers, or all the fingers move
independently. The muscles that operate the fingers have complicated structure. The muscles
operating the joints of different fingers are normally generated from the arm or hand. Three kinds of
muscles that generated from the arm participate in flexure of fingers. They are flexure digitorum
superficialis muscle, flexure digitorum profundus muscle and flexure pollicis longus muscle.
B. METHOD
In this paper the data was collected from five subjects and the Surface Electromyogram signal were
acquired using an in-house built amplification and acquisition system cRIO (Compaq reconfigure
input/output) .A custom-built Lab View application was used to store and record the data. Surface
Electrode were used, the electrode were placed at different muscle sites so as to take the different
finger movements [5].
RESUTS AND DISCUSSION
The result consists of flexion and extension of the index and middle finger individually as well as
thumb and a hand at rest. These movements would account for individual control of each digit of a
multi fingered and helping for recording Surface Electromyogram signals. The results for different
movements of finger and thumb are shown below:
EI DEPARTMENT, SRMGPC, LUCKNOW 11

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
FIG 9: POSITION OF ELECTRODES PLACEMENT
By comparing the outcome of different movement of hand and fingers it can be noted that there is a
little to no change in the waveform. It is noticed that the finger movements are largely controlled by
two muscles system. The first system, the Flexor Digitorium system, is located in the upper part of
the forearm near the elbow.
1) The below graph shows the hand position when it is completely in rest.
FIG 10: HAND IS IN RESTING POSITION
2) The below graph shows the hand position when it is closed.
EI DEPARTMENT, SRMGPC, LUCKNOW 12

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
FIG 11: HAND IS IN CLOSING POSITION
3) The below graph shows the movement of fingers and thumb when it is flexed.
A)
B)
FIG 12: A) FINGER MOVEMENT B) THUMB MOVEMENT
SOME SPECIFICS FOR USE OF SURFACE AND FINE WIRE ELECTRODES
I. Surface EMG
A. Skin Preparation
1. Alcohol removal of dirt, oil, and dead skin.
2. Shave excess hair if necessary. (Under ideal conditions this should always be done. However, it is not feasible in many cases.)
3. If the skin is dry, some electrode gel rubbed into the skin can help.
EI DEPARTMENT, SRMGPC, LUCKNOW 13

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
4. If the person is going to be sweating, spray an antiperspirant on the skin after cleaning with alcohol.
B. Placement of Electrodes
1. There are specific references for different ways to measure for placement. (Norris, Johnson, Perotto) 2. General guidelines for large muscle groups:
a) Best if over the largest mass of the muscle and align electrodes with muscle fibers
b) Use motor point and motor point finder to locate (general location charts are available)
C. Cross Talk
1. Not a real problem with large muscle groups.
2. Can sometimes be avoided my adjusting the electrode size, inter-electrode distance (if an option on your brand of electrode), or by use of fine wires.
D. Application
1. Skin placement.
2. Avoid movement of electrodes by using straps or tape to firmly secure electrode in place.
3. Avoid bending of leads, place leads pointing in the direction that you want the wire to continue in. (e.g., for electrodes placed on an extremity, have the lead pointing towards the proximal end of the extremity so that the wire will not have to be bent in order to go in the proximal direction.)
4. Avoid any stress on the wires by making sure that the wires are loose underneath the tape or wrap that is holding them in place. Be sure to check when the wires cross the joint that once the joint is fully extended the wires are not drawn taunt.
5. Avoid placing electrodes over scars.
E. Testing
1. Do manual muscle tests to assure that you are getting a signal and that you are over the intended muscle.
2. Do trial session to check signal and to get subject used to the setup and how instrumented.
II. Fine Wire EMG
A. Indications
EMG APPLICATIONS
EI DEPARTMENT, SRMGPC, LUCKNOW 14

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
FIG 13: EMG USED IN MEDICAL SCIENCES
a) EMG is used as a diagnostics tool for identifying:
a. Neuromuscular diseases, assessing low-back pain
b. Disorders of motor control.
b) EMG signals are also used as:
a. A control signal for prosthetic devices such as prosthetic hands, arms, and lower limbs.
b. To sense isometric muscular activity where no movement is produced. And can be used:
i. To control interfaces without being noticed and without disrupting the surrounding environment.
ii. To control an electronic device such as a mobile phone or PDA.
FUTURE WORK
Our work will continue with the migration of the prototype to a mobile device. We intend to continue
our development in the Accessibility area, focusing on quadriplegic individuals. Our goal is to give
quadriplegic the basic control of a cell phone, including messaging, with and EMG device and a
mobile device attached to a wheel chair. Further user studies will be executed in that context. We
also intend to make efforts in the signal processing so we can recognize more movements with the
same monitorized muscles. This will improve the interaction possibilities and number of emulated
events.
EI DEPARTMENT, SRMGPC, LUCKNOW 15

MICROPROCESSOR BASED CONTROL OF ELECTROMECHANICALDEVICES BY USING ELECTROMYOGRAM
FIG 14: EMG ESTABLISHMENT IN A BODY MUSSELS
CONCLUSIONS
a) The bioelectric potential associated with muscle activity constitute the electromyogram (EMG).
b) Muscle is organized functionally on the basis of the motor unit.
c) A motor unit is defined as one motor neuron and all of the muscle fibers it innervates.
d) When a motor unit fires, the impulse (action potential) is carried down the motor neuron to the
muscle. The area where the nerve contacts the muscle is called the neuromuscular junction, or
the motor end plate.
e) The potentials are measured at the surface of the body, near a muscle of interest or directly from
the muscle by penetrating the skin with needle electrodes.
f) EMG potentials range between less than 50 μV and up to 20 to 30 mV, depending on the muscle
under observation.
EI DEPARTMENT, SRMGPC, LUCKNOW 16