Embed Size (px)
Citation preview

MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
١
)TBM(دستگاه حفار تونل ناوبريدر MEMSکاربرد ژیروسکوپ
3مهندس امیرهوشنگ محمدي فر، 2مهندس خلیل فتحی، 1مهندس اژدر فتحی
[email protected]آزاد تبریز دانشگاهدانشجوي ارشد مکاترونیک -1
[email protected]آزاد تبریز دانشگاهالکترونیککارشناس-2
[email protected]کارشناس ارشد مکانیک دانشگاه تبریز -3
چکیدهدر سیستم هاي تعیین موقعیت واقعی اجسام متحرك و هدایت هواپیماهاي مدل مورد استفاده قرار MEMSسنسور ژیروسکوپ
جهت کنترل مجدد مسیر طی شده MEMSو با استفاده از قطعات GEO(Geography)در این مقاله طرح جدیدي با نام .می گیردمعرفی خواهد شد که با اندازه گیري میزان انحراف هد دستگاه TBM(Tunnel Boring Machine)توسط دستگاه حفار تونل
پس از معرفی روشها و ابزارهاي فعلی مورد . حفار از محور شمال واقعی مسیر صحیح را محاسبه و به سیستم کنترل ارسال می کندر از پیش طراحی شده با داده هاي استفاده در هدایت دستگاه هاي حفار تونل هاي خط یک قطار شهري تبریز ، داده هاي پروفیل مسی
.مقایسه شده و میزان خطا هاي موجود در مسیر انتخابی رسم می گرددGEOاندازه گیري و محاسبه شدة سیستم جدید
میکرو الکترو مکانیکال ، دستگاه حفار تونل ، ابزار نقشه برداري ، سیستم هدایت و راهبري ، ژیروسکوپ:واژه هاي کلیدي
مقدمه- 1یکی از مسائل مهم در حفاري تونل ها ، ناوبري دستگاه حفاري و هدایت آن در مسیر صحیح می باشد بطوریکه در حفاري تونل
روش .هاي مترو این خطا نباید از چند سانتی متر تجاوز نمایدمتدوال مورد استفاده در بیشتر پروژه ها استفاده از دوربین
ردن یک نقطه مرجع در با اختیار کTheodoliteنقشه برداري .ابتداي تونل می باشد
این نقطۀ مرجع با پیشروي دستگاه حفار مرتباً در داخل تونل به جلو انتقال یافته و پروفیل مسیر حرکت دستگاه نیز در یک
PPS(Poltinger Precisionسیستم کامپیوتري به نامsystem) با پروفیل داده شده توسط کارشناس نقشه برداري
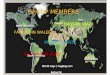
ه می گردد تا اپراتور حفاري بتواند دستگاه را در مسیر مقایساین سیستم نشان داده ) 1(در شکل شماره .صحیح هدایت نماید
.شده است
سیستم ناوبري دستگاه حفار تونل با استفاده از دوربین نقشه برداري–) 1(شکل
متر حفاري ، پروفیل مسیر 500در این سیستم به ازاي هر دستی توسط اکیپ نقشه برداري کنترل مجدد حفاري بصورت
می گردد تا از عملکرد صحیح سیستم راهبري اطمینان حاصل با افزایش طول تونل و رسیدن آن به مسافت هاي بیش از .شود
کیلومتر عمالً زمان انجام این کار افزایش یافته و روش 5/1.کنترل مجدد بسیار زمانبر و خسته کننده می شود
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
١
)TBM(دستگاه حفار تونل ناوبريدر MEMSکاربرد ژیروسکوپ
3مهندس امیرهوشنگ محمدي فر، 2مهندس خلیل فتحی، 1مهندس اژدر فتحی
[email protected]آزاد تبریز دانشگاهدانشجوي ارشد مکاترونیک -1
[email protected]آزاد تبریز دانشگاهالکترونیککارشناس-2
[email protected]کارشناس ارشد مکانیک دانشگاه تبریز -3
چکیدهدر سیستم هاي تعیین موقعیت واقعی اجسام متحرك و هدایت هواپیماهاي مدل مورد استفاده قرار MEMSسنسور ژیروسکوپ
جهت کنترل مجدد مسیر طی شده MEMSو با استفاده از قطعات GEO(Geography)در این مقاله طرح جدیدي با نام .می گیردمعرفی خواهد شد که با اندازه گیري میزان انحراف هد دستگاه TBM(Tunnel Boring Machine)توسط دستگاه حفار تونل
پس از معرفی روشها و ابزارهاي فعلی مورد . حفار از محور شمال واقعی مسیر صحیح را محاسبه و به سیستم کنترل ارسال می کندر از پیش طراحی شده با داده هاي استفاده در هدایت دستگاه هاي حفار تونل هاي خط یک قطار شهري تبریز ، داده هاي پروفیل مسی
.مقایسه شده و میزان خطا هاي موجود در مسیر انتخابی رسم می گرددGEOاندازه گیري و محاسبه شدة سیستم جدید
میکرو الکترو مکانیکال ، دستگاه حفار تونل ، ابزار نقشه برداري ، سیستم هدایت و راهبري ، ژیروسکوپ:واژه هاي کلیدي
مقدمه- 1یکی از مسائل مهم در حفاري تونل ها ، ناوبري دستگاه حفاري و هدایت آن در مسیر صحیح می باشد بطوریکه در حفاري تونل
روش .هاي مترو این خطا نباید از چند سانتی متر تجاوز نمایدمتدوال مورد استفاده در بیشتر پروژه ها استفاده از دوربین
ردن یک نقطه مرجع در با اختیار کTheodoliteنقشه برداري .ابتداي تونل می باشد
این نقطۀ مرجع با پیشروي دستگاه حفار مرتباً در داخل تونل به جلو انتقال یافته و پروفیل مسیر حرکت دستگاه نیز در یک
PPS(Poltinger Precisionسیستم کامپیوتري به نامsystem) با پروفیل داده شده توسط کارشناس نقشه برداري
ه می گردد تا اپراتور حفاري بتواند دستگاه را در مسیر مقایساین سیستم نشان داده ) 1(در شکل شماره .صحیح هدایت نماید
.شده است
سیستم ناوبري دستگاه حفار تونل با استفاده از دوربین نقشه برداري–) 1(شکل
متر حفاري ، پروفیل مسیر 500در این سیستم به ازاي هر دستی توسط اکیپ نقشه برداري کنترل مجدد حفاري بصورت
می گردد تا از عملکرد صحیح سیستم راهبري اطمینان حاصل با افزایش طول تونل و رسیدن آن به مسافت هاي بیش از .شود
کیلومتر عمالً زمان انجام این کار افزایش یافته و روش 5/1.کنترل مجدد بسیار زمانبر و خسته کننده می شود
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
١
)TBM(دستگاه حفار تونل ناوبريدر MEMSکاربرد ژیروسکوپ
3مهندس امیرهوشنگ محمدي فر، 2مهندس خلیل فتحی، 1مهندس اژدر فتحی
[email protected]آزاد تبریز دانشگاهدانشجوي ارشد مکاترونیک -1
[email protected]آزاد تبریز دانشگاهالکترونیککارشناس-2
[email protected]کارشناس ارشد مکانیک دانشگاه تبریز -3
چکیدهدر سیستم هاي تعیین موقعیت واقعی اجسام متحرك و هدایت هواپیماهاي مدل مورد استفاده قرار MEMSسنسور ژیروسکوپ
جهت کنترل مجدد مسیر طی شده MEMSو با استفاده از قطعات GEO(Geography)در این مقاله طرح جدیدي با نام .می گیردمعرفی خواهد شد که با اندازه گیري میزان انحراف هد دستگاه TBM(Tunnel Boring Machine)توسط دستگاه حفار تونل
پس از معرفی روشها و ابزارهاي فعلی مورد . حفار از محور شمال واقعی مسیر صحیح را محاسبه و به سیستم کنترل ارسال می کندر از پیش طراحی شده با داده هاي استفاده در هدایت دستگاه هاي حفار تونل هاي خط یک قطار شهري تبریز ، داده هاي پروفیل مسی
.مقایسه شده و میزان خطا هاي موجود در مسیر انتخابی رسم می گرددGEOاندازه گیري و محاسبه شدة سیستم جدید
میکرو الکترو مکانیکال ، دستگاه حفار تونل ، ابزار نقشه برداري ، سیستم هدایت و راهبري ، ژیروسکوپ:واژه هاي کلیدي
مقدمه- 1یکی از مسائل مهم در حفاري تونل ها ، ناوبري دستگاه حفاري و هدایت آن در مسیر صحیح می باشد بطوریکه در حفاري تونل
روش .هاي مترو این خطا نباید از چند سانتی متر تجاوز نمایدمتدوال مورد استفاده در بیشتر پروژه ها استفاده از دوربین
ردن یک نقطه مرجع در با اختیار کTheodoliteنقشه برداري .ابتداي تونل می باشد
این نقطۀ مرجع با پیشروي دستگاه حفار مرتباً در داخل تونل به جلو انتقال یافته و پروفیل مسیر حرکت دستگاه نیز در یک
PPS(Poltinger Precisionسیستم کامپیوتري به نامsystem) با پروفیل داده شده توسط کارشناس نقشه برداري
ه می گردد تا اپراتور حفاري بتواند دستگاه را در مسیر مقایساین سیستم نشان داده ) 1(در شکل شماره .صحیح هدایت نماید
.شده است
سیستم ناوبري دستگاه حفار تونل با استفاده از دوربین نقشه برداري–) 1(شکل
متر حفاري ، پروفیل مسیر 500در این سیستم به ازاي هر دستی توسط اکیپ نقشه برداري کنترل مجدد حفاري بصورت
می گردد تا از عملکرد صحیح سیستم راهبري اطمینان حاصل با افزایش طول تونل و رسیدن آن به مسافت هاي بیش از .شود
کیلومتر عمالً زمان انجام این کار افزایش یافته و روش 5/1.کنترل مجدد بسیار زمانبر و خسته کننده می شود

MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٢
MEMSدر روش پیشنهادي با استفاده از سنسور ژیروسکوپ ، در مسافت هاي مشخصی از مسیر deg/h 0.01که با دقت
حفاري زاویه هد دستگاه نسبت به محور شمال واقعی اندازه .گیري کرده و مقادیر ثبت می گردد
تاریخچه ژیروسکوپ و شتاب سنجها-2زاویه اي را ژیروسکوپ دستگاهی است که قادر است سرعت
ژیروسکوپ نخی جهت 17در اوایل قرن . اندازه گیري نمایدناوبري کشتی ها در دریاي مه آلود و غیر قابل دید استفاده می
نیز اولین نسل ژیروسکوپ چرخان توسط 18در اوایل قرن . شدابداع 1852دانشمند فرانسوي ژان برنارد لئون فوکو در سال
ین وسیله با بهبود عملکرد در اوایل قرن نوزدهم ا. شدژیروسکوپ چرخان براي هدایت هواپیما ها نیز طراحی و بکار
از قرن بیستم به بعد با کشف لیزر و باال گرفتن . گرفته شددامنه کاربرد نور در علم ژیروسکوپهاي نوري با استفاده از لیزر معرفی شده و به زودي متوجه اهمیت استفاده تجاري در دانش
و نظامی و برنامه هاي کاربردي دیگر این دستگاه هوانورديدر طی سالهاي اخیر با پیشرفت علم و . ارزشمند شدند
با MEMSتکنولوژي راه براي ساخت ژیروسکوپهاي مبتنی بر و . دقت عملکرد بسیار باال ساخته و به بازار معرفی شده است
رهاي این در حالی است که این علم با تولید انبوه انواع سنسوژیروسکوب و شتاب سنجهاي متنوع در ایجاد محصوالت متنوع با مزایا و امکانات بیشتر به بازار رقابت گرم مابین شرکتهاي معتبر تجاري و نظامی از جمله تلفنهاي همراه و تولید کنندگان
فرآیندیک،MEMS. ادوات جنگی تبدیل شده استوسنسورهاي اسیستمهآوردنبوجودبراياست کهتکنولوژيازعناصررود، کهبکارمیخیلی کوچک) مجتمع(یکپارچه استفادهبااین سنسورها.شوندمیمکانیکی ترکیب والکتریکی
از بین کمترسایزهايدروايمرحلهتکتکنیکهاي عملیات ازاین عناصر یا .شوندمیبنديطبقهمترمیلیتامیکرومتر
کردنActuate، کنترل و همچنین Senseسیستمها قابلیت با این اوصاف . را دارندMacroمقیاس میکرو و مقیاسهاي تارا
می توان پی برد ابعاد ژیروسکوپها تا چه اندازه کاهش یافته .است
MEMSنماي میکروسکوپی سنسور : 2شکل
این تکنولوژي بـا سـاختن قطعـات وسیسـتم هـاي مکـانیکی ها بـه ICخوبی را نسبت به تکنولوژي کوچک شده مزیت هاي
سیلیسیوم یک ماده مناسب براي ساخت . نمایش گذاشته استزیرا این مـاده داراي خـواص فیزیکـی و .استMEMSقطعات
ارزان Siهمچنـین .مکانیکی خوب براي ماشـین کـاري را دارد خواص 1992در سال .قیمت و به وفور در معادن یافت می شود
ــانیکی ــط MEMSمک ــت Petersenتوس ــده اس ــام ش . انجMEMSمشخصات مفید این قطعه ها باعـث شـده اسـت، کـه
یک تکنولوژي قدرتمند در تعدادي حوزه هاي کـاربردي شـامل شتاب سنج ها، سنسور هاي فشار، میکرو اپتیک و غیـره را دارا
MEMSمکانیسم هاي تحریـک اسـتفاده شـده در . می باشند
مغناطیسـی -3الکترومغناطیسی -2الکتروستاتیکی -1: شامل.گرمایی می باشند-5پیزو الکتریک -4
سنجش میزان تغییرات مکانی توسط این سنسورها به دلیـل درو دشتاب سنج فقط شتاب خطی رو اندازه گیري میکناینکه
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٢
MEMSدر روش پیشنهادي با استفاده از سنسور ژیروسکوپ ، در مسافت هاي مشخصی از مسیر deg/h 0.01که با دقت
حفاري زاویه هد دستگاه نسبت به محور شمال واقعی اندازه .گیري کرده و مقادیر ثبت می گردد
تاریخچه ژیروسکوپ و شتاب سنجها-2زاویه اي را ژیروسکوپ دستگاهی است که قادر است سرعت
ژیروسکوپ نخی جهت 17در اوایل قرن . اندازه گیري نمایدناوبري کشتی ها در دریاي مه آلود و غیر قابل دید استفاده می
نیز اولین نسل ژیروسکوپ چرخان توسط 18در اوایل قرن . شدابداع 1852دانشمند فرانسوي ژان برنارد لئون فوکو در سال
ین وسیله با بهبود عملکرد در اوایل قرن نوزدهم ا. شدژیروسکوپ چرخان براي هدایت هواپیما ها نیز طراحی و بکار
از قرن بیستم به بعد با کشف لیزر و باال گرفتن . گرفته شددامنه کاربرد نور در علم ژیروسکوپهاي نوري با استفاده از لیزر معرفی شده و به زودي متوجه اهمیت استفاده تجاري در دانش
و نظامی و برنامه هاي کاربردي دیگر این دستگاه هوانورديدر طی سالهاي اخیر با پیشرفت علم و . ارزشمند شدند
با MEMSتکنولوژي راه براي ساخت ژیروسکوپهاي مبتنی بر و . دقت عملکرد بسیار باال ساخته و به بازار معرفی شده است
رهاي این در حالی است که این علم با تولید انبوه انواع سنسوژیروسکوب و شتاب سنجهاي متنوع در ایجاد محصوالت متنوع با مزایا و امکانات بیشتر به بازار رقابت گرم مابین شرکتهاي معتبر تجاري و نظامی از جمله تلفنهاي همراه و تولید کنندگان
فرآیندیک،MEMS. ادوات جنگی تبدیل شده استوسنسورهاي اسیستمهآوردنبوجودبراياست کهتکنولوژيازعناصررود، کهبکارمیخیلی کوچک) مجتمع(یکپارچه استفادهبااین سنسورها.شوندمیمکانیکی ترکیب والکتریکی
از بین کمترسایزهايدروايمرحلهتکتکنیکهاي عملیات ازاین عناصر یا .شوندمیبنديطبقهمترمیلیتامیکرومتر
کردنActuate، کنترل و همچنین Senseسیستمها قابلیت با این اوصاف . را دارندMacroمقیاس میکرو و مقیاسهاي تارا
می توان پی برد ابعاد ژیروسکوپها تا چه اندازه کاهش یافته .است
MEMSنماي میکروسکوپی سنسور : 2شکل
این تکنولوژي بـا سـاختن قطعـات وسیسـتم هـاي مکـانیکی ها بـه ICخوبی را نسبت به تکنولوژي کوچک شده مزیت هاي
سیلیسیوم یک ماده مناسب براي ساخت . نمایش گذاشته استزیرا این مـاده داراي خـواص فیزیکـی و .استMEMSقطعات
ارزان Siهمچنـین .مکانیکی خوب براي ماشـین کـاري را دارد خواص 1992در سال .قیمت و به وفور در معادن یافت می شود
ــانیکی ــط MEMSمک ــت Petersenتوس ــده اس ــام ش . انجMEMSمشخصات مفید این قطعه ها باعـث شـده اسـت، کـه
یک تکنولوژي قدرتمند در تعدادي حوزه هاي کـاربردي شـامل شتاب سنج ها، سنسور هاي فشار، میکرو اپتیک و غیـره را دارا
MEMSمکانیسم هاي تحریـک اسـتفاده شـده در . می باشند
مغناطیسـی -3الکترومغناطیسی -2الکتروستاتیکی -1: شامل.گرمایی می باشند-5پیزو الکتریک -4
سنجش میزان تغییرات مکانی توسط این سنسورها به دلیـل درو دشتاب سنج فقط شتاب خطی رو اندازه گیري میکناینکه
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٢
MEMSدر روش پیشنهادي با استفاده از سنسور ژیروسکوپ ، در مسافت هاي مشخصی از مسیر deg/h 0.01که با دقت
حفاري زاویه هد دستگاه نسبت به محور شمال واقعی اندازه .گیري کرده و مقادیر ثبت می گردد
تاریخچه ژیروسکوپ و شتاب سنجها-2زاویه اي را ژیروسکوپ دستگاهی است که قادر است سرعت
ژیروسکوپ نخی جهت 17در اوایل قرن . اندازه گیري نمایدناوبري کشتی ها در دریاي مه آلود و غیر قابل دید استفاده می
نیز اولین نسل ژیروسکوپ چرخان توسط 18در اوایل قرن . شدابداع 1852دانشمند فرانسوي ژان برنارد لئون فوکو در سال
ین وسیله با بهبود عملکرد در اوایل قرن نوزدهم ا. شدژیروسکوپ چرخان براي هدایت هواپیما ها نیز طراحی و بکار
از قرن بیستم به بعد با کشف لیزر و باال گرفتن . گرفته شددامنه کاربرد نور در علم ژیروسکوپهاي نوري با استفاده از لیزر معرفی شده و به زودي متوجه اهمیت استفاده تجاري در دانش
و نظامی و برنامه هاي کاربردي دیگر این دستگاه هوانورديدر طی سالهاي اخیر با پیشرفت علم و . ارزشمند شدند
با MEMSتکنولوژي راه براي ساخت ژیروسکوپهاي مبتنی بر و . دقت عملکرد بسیار باال ساخته و به بازار معرفی شده است
رهاي این در حالی است که این علم با تولید انبوه انواع سنسوژیروسکوب و شتاب سنجهاي متنوع در ایجاد محصوالت متنوع با مزایا و امکانات بیشتر به بازار رقابت گرم مابین شرکتهاي معتبر تجاري و نظامی از جمله تلفنهاي همراه و تولید کنندگان
فرآیندیک،MEMS. ادوات جنگی تبدیل شده استوسنسورهاي اسیستمهآوردنبوجودبراياست کهتکنولوژيازعناصررود، کهبکارمیخیلی کوچک) مجتمع(یکپارچه استفادهبااین سنسورها.شوندمیمکانیکی ترکیب والکتریکی
از بین کمترسایزهايدروايمرحلهتکتکنیکهاي عملیات ازاین عناصر یا .شوندمیبنديطبقهمترمیلیتامیکرومتر
کردنActuate، کنترل و همچنین Senseسیستمها قابلیت با این اوصاف . را دارندMacroمقیاس میکرو و مقیاسهاي تارا
می توان پی برد ابعاد ژیروسکوپها تا چه اندازه کاهش یافته .است
MEMSنماي میکروسکوپی سنسور : 2شکل
این تکنولوژي بـا سـاختن قطعـات وسیسـتم هـاي مکـانیکی ها بـه ICخوبی را نسبت به تکنولوژي کوچک شده مزیت هاي
سیلیسیوم یک ماده مناسب براي ساخت . نمایش گذاشته استزیرا این مـاده داراي خـواص فیزیکـی و .استMEMSقطعات
ارزان Siهمچنـین .مکانیکی خوب براي ماشـین کـاري را دارد خواص 1992در سال .قیمت و به وفور در معادن یافت می شود
ــانیکی ــط MEMSمک ــت Petersenتوس ــده اس ــام ش . انجMEMSمشخصات مفید این قطعه ها باعـث شـده اسـت، کـه
یک تکنولوژي قدرتمند در تعدادي حوزه هاي کـاربردي شـامل شتاب سنج ها، سنسور هاي فشار، میکرو اپتیک و غیـره را دارا
MEMSمکانیسم هاي تحریـک اسـتفاده شـده در . می باشند
مغناطیسـی -3الکترومغناطیسی -2الکتروستاتیکی -1: شامل.گرمایی می باشند-5پیزو الکتریک -4
سنجش میزان تغییرات مکانی توسط این سنسورها به دلیـل درو دشتاب سنج فقط شتاب خطی رو اندازه گیري میکناینکه

MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٣
از شــتاب ســنج و یــا ا بنـابراین ژیروسـکوپ شــتاب زاویــه اي ر دسـت آوردن سـرعت براي بودژیروسکوپ به صورت تنها نمیش
چـون . نمـود خطی یا زاویه اي و همچنین تغییر مکان استفاده ولـی از . بعد از انترال گیري از شتاب، دقـت بسـیار کـم میشـه
یـک سیسـتم ودترکیب یک شتاب سنج و یک ژیروسکوپ میش(Inertial Navigation System)نـاوبري اینرسـیایی
از ودمیشااویه ردرست کرد که با دقت باالیی شتاب، سرعت و ز.بدست آوردآن
استفاده شـده بـه ADIS16080با کد MEMSدر سنسورجهـت تشـخیص Self-Testمنظور کاهش خطـا از تکنیـک
خطاي اندازه گیري مورد استفاده قرار گرفتـه اسـت کـه بـدین منظور پاسخ به ورودي پله ایـن سنسـور جهـت تعیـین میـزان
در عرض باند سنسور از یک فیلتر پایین گـذر بـا Yawانحراف ژیروسـکوپ ایـن نـرخ . هرتز اسـتفاده شـده اسـت 40فرکانس
انحرف از مسیر را توسط این فیلتر پایین گذر براي ورودي پلـه : اعمال شده محاسبه می نماید
پهناي باند سیستم fکه در آن -R (t) = 1.می باشد e-2πf
پله سنسور به با پهنـاي بانـد فـوق این رابطه ساده جهت پاسخ. می تواند روند درست تشخیص انحراف را تعیین و تایید نمایـد
ثابت زمانی پاسخ نمایی زمانی مقدار خروجی را تغییر می دهـد بـراي . درصد تغییـرات نهـایی خـود برسـد 63.2که به مقدار
هـزارم 4هرتز، سیستم تک قطبـی فـوق، حـدود 40فرکانس.کشد تا به ورودي پله پاسخ صادر نمایدثانیه طول می
این متد باعث از بین بردن نوسانات ناخواسته با سرعت باال شده . را نداردsenseو هیچ نیازي به تحریک مکانیکی خاصی جهت
آن ،یابیعیبسپسوساخت بر روي برد آزمایشیازپسضبطبه منظورگوناگونشرایطتحتبرد فوقتستبهاقدام
شدهگزارشنتایج. گردید نقشهترسیمبرايضرورياطالعاتنموداربه صورتکهآمدهبدستطبیعیکامالشرایطدرزیردر
.استگردیدهارائه
و بدون اعمال آنSelf-Testپاسخ پله سیستم با اعمال :3شکلهرتز100در فرکانس
انتخاب مسیر داخل تونل و انجام اندازه گیري - 3:Yawو Pitch ,Rollزوایاي
Yawو Roll ،Pitchزاویهسهگیرياندازهبرايماژولاینهمبرعمودبه صورتفوقسنسورنوعسهازمحورسهدر
یکژیروسکوپ،سنسوریکمحورهردرکه.کندمیاستفادهاستفاده مغناطیسیمیدانیک سنسورسنج،شتابسنسور
سنسورهاي ترکیبازحاصلاطالعاتحسگرماژول.استشدهراشیبوآزیموتزوایايفیلترکالمنازاستفادهبارافوق
.کندمیمحاسبه
MEMSنحوه تعیین موقعیت توسط سنسور : 4شکل
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٣
از شــتاب ســنج و یــا ا بنـابراین ژیروسـکوپ شــتاب زاویــه اي ر دسـت آوردن سـرعت براي بودژیروسکوپ به صورت تنها نمیش
چـون . نمـود خطی یا زاویه اي و همچنین تغییر مکان استفاده ولـی از . بعد از انترال گیري از شتاب، دقـت بسـیار کـم میشـه
یـک سیسـتم ودترکیب یک شتاب سنج و یک ژیروسکوپ میش(Inertial Navigation System)نـاوبري اینرسـیایی
از ودمیشااویه ردرست کرد که با دقت باالیی شتاب، سرعت و ز.بدست آوردآن
استفاده شـده بـه ADIS16080با کد MEMSدر سنسورجهـت تشـخیص Self-Testمنظور کاهش خطـا از تکنیـک
خطاي اندازه گیري مورد استفاده قرار گرفتـه اسـت کـه بـدین منظور پاسخ به ورودي پله ایـن سنسـور جهـت تعیـین میـزان
در عرض باند سنسور از یک فیلتر پایین گـذر بـا Yawانحراف ژیروسـکوپ ایـن نـرخ . هرتز اسـتفاده شـده اسـت 40فرکانس
انحرف از مسیر را توسط این فیلتر پایین گذر براي ورودي پلـه : اعمال شده محاسبه می نماید
پهناي باند سیستم fکه در آن -R (t) = 1.می باشد e-2πf
پله سنسور به با پهنـاي بانـد فـوق این رابطه ساده جهت پاسخ. می تواند روند درست تشخیص انحراف را تعیین و تایید نمایـد
ثابت زمانی پاسخ نمایی زمانی مقدار خروجی را تغییر می دهـد بـراي . درصد تغییـرات نهـایی خـود برسـد 63.2که به مقدار
هـزارم 4هرتز، سیستم تک قطبـی فـوق، حـدود 40فرکانس.کشد تا به ورودي پله پاسخ صادر نمایدثانیه طول می
این متد باعث از بین بردن نوسانات ناخواسته با سرعت باال شده . را نداردsenseو هیچ نیازي به تحریک مکانیکی خاصی جهت
آن ،یابیعیبسپسوساخت بر روي برد آزمایشیازپسضبطبه منظورگوناگونشرایطتحتبرد فوقتستبهاقدام
شدهگزارشنتایج. گردید نقشهترسیمبرايضرورياطالعاتنموداربه صورتکهآمدهبدستطبیعیکامالشرایطدرزیردر
.استگردیدهارائه
و بدون اعمال آنSelf-Testپاسخ پله سیستم با اعمال :3شکلهرتز100در فرکانس
انتخاب مسیر داخل تونل و انجام اندازه گیري - 3:Yawو Pitch ,Rollزوایاي
Yawو Roll ،Pitchزاویهسهگیرياندازهبرايماژولاینهمبرعمودبه صورتفوقسنسورنوعسهازمحورسهدر
یکژیروسکوپ،سنسوریکمحورهردرکه.کندمیاستفادهاستفاده مغناطیسیمیدانیک سنسورسنج،شتابسنسور
سنسورهاي ترکیبازحاصلاطالعاتحسگرماژول.استشدهراشیبوآزیموتزوایايفیلترکالمنازاستفادهبارافوق
.کندمیمحاسبه
MEMSنحوه تعیین موقعیت توسط سنسور : 4شکل
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٣
از شــتاب ســنج و یــا ا بنـابراین ژیروسـکوپ شــتاب زاویــه اي ر دسـت آوردن سـرعت براي بودژیروسکوپ به صورت تنها نمیش
چـون . نمـود خطی یا زاویه اي و همچنین تغییر مکان استفاده ولـی از . بعد از انترال گیري از شتاب، دقـت بسـیار کـم میشـه
یـک سیسـتم ودترکیب یک شتاب سنج و یک ژیروسکوپ میش(Inertial Navigation System)نـاوبري اینرسـیایی
از ودمیشااویه ردرست کرد که با دقت باالیی شتاب، سرعت و ز.بدست آوردآن
استفاده شـده بـه ADIS16080با کد MEMSدر سنسورجهـت تشـخیص Self-Testمنظور کاهش خطـا از تکنیـک
خطاي اندازه گیري مورد استفاده قرار گرفتـه اسـت کـه بـدین منظور پاسخ به ورودي پله ایـن سنسـور جهـت تعیـین میـزان
در عرض باند سنسور از یک فیلتر پایین گـذر بـا Yawانحراف ژیروسـکوپ ایـن نـرخ . هرتز اسـتفاده شـده اسـت 40فرکانس
انحرف از مسیر را توسط این فیلتر پایین گذر براي ورودي پلـه : اعمال شده محاسبه می نماید
پهناي باند سیستم fکه در آن -R (t) = 1.می باشد e-2πf
پله سنسور به با پهنـاي بانـد فـوق این رابطه ساده جهت پاسخ. می تواند روند درست تشخیص انحراف را تعیین و تایید نمایـد
ثابت زمانی پاسخ نمایی زمانی مقدار خروجی را تغییر می دهـد بـراي . درصد تغییـرات نهـایی خـود برسـد 63.2که به مقدار
هـزارم 4هرتز، سیستم تک قطبـی فـوق، حـدود 40فرکانس.کشد تا به ورودي پله پاسخ صادر نمایدثانیه طول می
این متد باعث از بین بردن نوسانات ناخواسته با سرعت باال شده . را نداردsenseو هیچ نیازي به تحریک مکانیکی خاصی جهت
آن ،یابیعیبسپسوساخت بر روي برد آزمایشیازپسضبطبه منظورگوناگونشرایطتحتبرد فوقتستبهاقدام
شدهگزارشنتایج. گردید نقشهترسیمبرايضرورياطالعاتنموداربه صورتکهآمدهبدستطبیعیکامالشرایطدرزیردر
.استگردیدهارائه
و بدون اعمال آنSelf-Testپاسخ پله سیستم با اعمال :3شکلهرتز100در فرکانس
انتخاب مسیر داخل تونل و انجام اندازه گیري - 3:Yawو Pitch ,Rollزوایاي
Yawو Roll ،Pitchزاویهسهگیرياندازهبرايماژولاینهمبرعمودبه صورتفوقسنسورنوعسهازمحورسهدر
یکژیروسکوپ،سنسوریکمحورهردرکه.کندمیاستفادهاستفاده مغناطیسیمیدانیک سنسورسنج،شتابسنسور
سنسورهاي ترکیبازحاصلاطالعاتحسگرماژول.استشدهراشیبوآزیموتزوایايفیلترکالمنازاستفادهبارافوق
.کندمیمحاسبه
MEMSنحوه تعیین موقعیت توسط سنسور : 4شکل

MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٤
روش تحقیق- 4تبریز در حوالی میدان ساعت با داده هاي اندازه گیري شده توسط ژیروسکوپ ساخته شده توسط سنسورهاي ) مترو(در پروژه قطار شهري
MEMS اندازه گیري شده و این مقادیر با داده هاي دوربینPPSمقایسه شده است.
نقشه مسیر حفاري حوالی میدان ساعت تبریز: 5شکل
این نقاط نسبت به نقطۀ . میلی متر می باشد9993و به اندازه 998/9909الی نقطه 005/9900اندازه گیري شده از نقطه داده هاي منحنی هاي خطاي حاصل از اندازه گیري در مسیر فوق براي محور افقی ، .ائل گلی انتخاب شده است1مرجع واقع در ایستگاه شماره
.:یر دیده می شوددر شکل هاي زRollوPitchقائم ،
مقادیر بدست آمده از خطاي محور افقی: 6شکل
-0.01
-0.005
0
0.005
0.01
Der
avia
tion
[m]
Horizantal deriviation
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٤
روش تحقیق- 4تبریز در حوالی میدان ساعت با داده هاي اندازه گیري شده توسط ژیروسکوپ ساخته شده توسط سنسورهاي ) مترو(در پروژه قطار شهري
MEMS اندازه گیري شده و این مقادیر با داده هاي دوربینPPSمقایسه شده است.
نقشه مسیر حفاري حوالی میدان ساعت تبریز: 5شکل
این نقاط نسبت به نقطۀ . میلی متر می باشد9993و به اندازه 998/9909الی نقطه 005/9900اندازه گیري شده از نقطه داده هاي منحنی هاي خطاي حاصل از اندازه گیري در مسیر فوق براي محور افقی ، .ائل گلی انتخاب شده است1مرجع واقع در ایستگاه شماره
.:یر دیده می شوددر شکل هاي زRollوPitchقائم ،
مقادیر بدست آمده از خطاي محور افقی: 6شکل
Horizantal deriviation
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٤
روش تحقیق- 4تبریز در حوالی میدان ساعت با داده هاي اندازه گیري شده توسط ژیروسکوپ ساخته شده توسط سنسورهاي ) مترو(در پروژه قطار شهري
MEMS اندازه گیري شده و این مقادیر با داده هاي دوربینPPSمقایسه شده است.
نقشه مسیر حفاري حوالی میدان ساعت تبریز: 5شکل
این نقاط نسبت به نقطۀ . میلی متر می باشد9993و به اندازه 998/9909الی نقطه 005/9900اندازه گیري شده از نقطه داده هاي منحنی هاي خطاي حاصل از اندازه گیري در مسیر فوق براي محور افقی ، .ائل گلی انتخاب شده است1مرجع واقع در ایستگاه شماره
.:یر دیده می شوددر شکل هاي زRollوPitchقائم ،
مقادیر بدست آمده از خطاي محور افقی: 6شکل
Horizantal

MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٥
مقادیر بدست آمده از خطاي محور افقی: 7شکل
مقادیر بدست آمده از خطاي محور افقی:8شکل
مقادیر بدست آمده از خطاي محور افقی: 9شکل
0
0.005
0.01
0.015
Der
avia
tion
[m]
-2.5
-2.4
-2.3
-2.2
-2.1
-2
-1.9
Der
avia
tion
[%]
0
0.2
0.4
0.6
0.8
1
1.2
Der
avia
tion
[%]
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٥
مقادیر بدست آمده از خطاي محور افقی: 7شکل
مقادیر بدست آمده از خطاي محور افقی:8شکل
مقادیر بدست آمده از خطاي محور افقی: 9شکل
Vertical deriviation
Pich deriviation
Roll deriviation
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٥
مقادیر بدست آمده از خطاي محور افقی: 7شکل
مقادیر بدست آمده از خطاي محور افقی:8شکل
مقادیر بدست آمده از خطاي محور افقی: 9شکل
Vertical
Pich
Roll

MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٦
گیرينتیجه-5یـک ازسنسـور ژیروسـکوپ وطراحـی اسـتفاده بامقالهایندر
کـه زیرزمینـی بـرداري نقشهبرايدستگاهیافزارينرمبرنامهاکتشـافی هـاي حفـاري درحفـاري قطـار شـهري و معـادن،
نتـایج . اسـت گردیدهدارد تهیهفراوانیکاربردهايوسدسازينشان داده شده حاکی از این اسـت گوناگونمیدانیهايتست
اطالعـات گـردآوري برايالزمکارآئیازشدهتهیهدستگاهکهبـه میتوانـد مورد استفاده در کاربردهاي فوقهاينقشهوتهیهبـه مهندسـی هـاي فعالیـت اینگونهدروريوبهرهبازدهبهبود
.کندکمکاییمالحظهطورقابل
با توجه به نتایج حاصل مشاهده مـی شـود کـه خطـاي انـدازه میلی متر بوده و می تـوان 20کمتر از گیري در مسیر انتخابی
با نصب تجهیزات مناسب اندازه گیري بر روي دسـتگاه زوایـاي مورد نیاز و نیز اندازة انحراف از محور شمال واقعی را در تمامی مسیر حفاري استخراج کرده و با پروفیل طراحی شـده مقایسـه
که با این عمل هم دقت و هم زمان کمتري صـرف انـدازه . نمود.گیري هاي فوق می گردد
شکر و قدردانیتبا تشکر از مدیریت وبهره برداري از پروژه قطار شهري تبریز که در راستاي این تحقیق کمک شایانی را براي ما انجام و
.مساعدتهاي الزم را فراهم نمودندمراجع
[1] SYSTEM AND CIRCUIT DESIGN FOR ACAPACITIVE MEMS GYROSCOPE DoctoralDissertation Helsinki University of Technology Faculty ofElectronics, Communications and Automation,Department of Micro and Nanosciences Mikko Saukoski
[2] Petersen K E 1982 Silicon as a mechanicalmaterialProc.IEEE 70 42057
[3] Construction of water tunnels by herrenkenechtmicrotunneling equipment, Dipl. Ing. Werner ShumWorkshop of Tehran, 31stAugest 2003
[4] USING LOW-COST MEMS 3D ACCELEROMETERAND ONE GYRO TO ASSIST GPS BASED CARNAVIGATION SYSTEM Pavel Davidson, JaniHautamäki, Jussi Collin Tampere University ofTechnology, Finland Tel: +358 3 3115 11, e-mail:[email protected]
[5] MODULAR CONCEPT GUIDANCE SYSTEM FORFULL COVERAGE OF PIPEJACKING APPLICATIONS
, NOD CLARKE Hackston, Jürgen G ِ◌ckel & ManfredMessing VMT GmbH, Bruchsal Germany , InternationalConference and Exhibition on Tunnelling and TrenchlessTechnology
[6] Analog Devices ,ADXRS300 ,±300°/s Single Chip YawRate Gyro with Signal Conditioning
[7] Analog Devices ,ADXRS453 High Performance, DigitalOutput Gyroscope
حرکت ، مھدی ھمتی و حالدرکشتیبرایاینرسییابیشماللگوریتما]٨[شریفصنعتیدانشگاه-محمد علی معصوم نیا
کاربرد ”. ١٣٩٠فتحی،خلیل،،.امیرھوشنگ، محمدی فر، .اژدر، فتحی]٩[، “)TBM(در ناوبری دستگاه حفار تونل MEMSژیروسکوپ
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٦
گیرينتیجه-5یـک ازسنسـور ژیروسـکوپ وطراحـی اسـتفاده بامقالهایندر
کـه زیرزمینـی بـرداري نقشهبرايدستگاهیافزارينرمبرنامهاکتشـافی هـاي حفـاري درحفـاري قطـار شـهري و معـادن،
نتـایج . اسـت گردیدهدارد تهیهفراوانیکاربردهايوسدسازينشان داده شده حاکی از این اسـت گوناگونمیدانیهايتست
اطالعـات گـردآوري برايالزمکارآئیازشدهتهیهدستگاهکهبـه میتوانـد مورد استفاده در کاربردهاي فوقهاينقشهوتهیهبـه مهندسـی هـاي فعالیـت اینگونهدروريوبهرهبازدهبهبود
.کندکمکاییمالحظهطورقابل
با توجه به نتایج حاصل مشاهده مـی شـود کـه خطـاي انـدازه میلی متر بوده و می تـوان 20کمتر از گیري در مسیر انتخابی
با نصب تجهیزات مناسب اندازه گیري بر روي دسـتگاه زوایـاي مورد نیاز و نیز اندازة انحراف از محور شمال واقعی را در تمامی مسیر حفاري استخراج کرده و با پروفیل طراحی شـده مقایسـه
که با این عمل هم دقت و هم زمان کمتري صـرف انـدازه . نمود.گیري هاي فوق می گردد
شکر و قدردانیتبا تشکر از مدیریت وبهره برداري از پروژه قطار شهري تبریز که در راستاي این تحقیق کمک شایانی را براي ما انجام و
.مساعدتهاي الزم را فراهم نمودندمراجع
[1] SYSTEM AND CIRCUIT DESIGN FOR ACAPACITIVE MEMS GYROSCOPE DoctoralDissertation Helsinki University of Technology Faculty ofElectronics, Communications and Automation,Department of Micro and Nanosciences Mikko Saukoski
[2] Petersen K E 1982 Silicon as a mechanicalmaterialProc.IEEE 70 42057
[3] Construction of water tunnels by herrenkenechtmicrotunneling equipment, Dipl. Ing. Werner ShumWorkshop of Tehran, 31stAugest 2003
[4] USING LOW-COST MEMS 3D ACCELEROMETERAND ONE GYRO TO ASSIST GPS BASED CARNAVIGATION SYSTEM Pavel Davidson, JaniHautamäki, Jussi Collin Tampere University ofTechnology, Finland Tel: +358 3 3115 11, e-mail:[email protected]
[5] MODULAR CONCEPT GUIDANCE SYSTEM FORFULL COVERAGE OF PIPEJACKING APPLICATIONS
, NOD CLARKE Hackston, Jürgen G ِ◌ckel & ManfredMessing VMT GmbH, Bruchsal Germany , InternationalConference and Exhibition on Tunnelling and TrenchlessTechnology
[6] Analog Devices ,ADXRS300 ,±300°/s Single Chip YawRate Gyro with Signal Conditioning
[7] Analog Devices ,ADXRS453 High Performance, DigitalOutput Gyroscope
حرکت ، مھدی ھمتی و حالدرکشتیبرایاینرسییابیشماللگوریتما]٨[شریفصنعتیدانشگاه-محمد علی معصوم نیا
کاربرد ”. ١٣٩٠فتحی،خلیل،،.امیرھوشنگ، محمدی فر، .اژدر، فتحی]٩[، “)TBM(در ناوبری دستگاه حفار تونل MEMSژیروسکوپ
MEMSاولین کنفزانس ملی
دانشگاه آزاد اسالمی واحد خوي-90آبان 26و 25
٦
گیرينتیجه-5یـک ازسنسـور ژیروسـکوپ وطراحـی اسـتفاده بامقالهایندر
کـه زیرزمینـی بـرداري نقشهبرايدستگاهیافزارينرمبرنامهاکتشـافی هـاي حفـاري درحفـاري قطـار شـهري و معـادن،
نتـایج . اسـت گردیدهدارد تهیهفراوانیکاربردهايوسدسازينشان داده شده حاکی از این اسـت گوناگونمیدانیهايتست
اطالعـات گـردآوري برايالزمکارآئیازشدهتهیهدستگاهکهبـه میتوانـد مورد استفاده در کاربردهاي فوقهاينقشهوتهیهبـه مهندسـی هـاي فعالیـت اینگونهدروريوبهرهبازدهبهبود
.کندکمکاییمالحظهطورقابل
با توجه به نتایج حاصل مشاهده مـی شـود کـه خطـاي انـدازه میلی متر بوده و می تـوان 20کمتر از گیري در مسیر انتخابی
با نصب تجهیزات مناسب اندازه گیري بر روي دسـتگاه زوایـاي مورد نیاز و نیز اندازة انحراف از محور شمال واقعی را در تمامی مسیر حفاري استخراج کرده و با پروفیل طراحی شـده مقایسـه
که با این عمل هم دقت و هم زمان کمتري صـرف انـدازه . نمود.گیري هاي فوق می گردد
شکر و قدردانیتبا تشکر از مدیریت وبهره برداري از پروژه قطار شهري تبریز که در راستاي این تحقیق کمک شایانی را براي ما انجام و
.مساعدتهاي الزم را فراهم نمودندمراجع
[1] SYSTEM AND CIRCUIT DESIGN FOR ACAPACITIVE MEMS GYROSCOPE DoctoralDissertation Helsinki University of Technology Faculty ofElectronics, Communications and Automation,Department of Micro and Nanosciences Mikko Saukoski
[2] Petersen K E 1982 Silicon as a mechanicalmaterialProc.IEEE 70 42057
[3] Construction of water tunnels by herrenkenechtmicrotunneling equipment, Dipl. Ing. Werner ShumWorkshop of Tehran, 31stAugest 2003
[4] USING LOW-COST MEMS 3D ACCELEROMETERAND ONE GYRO TO ASSIST GPS BASED CARNAVIGATION SYSTEM Pavel Davidson, JaniHautamäki, Jussi Collin Tampere University ofTechnology, Finland Tel: +358 3 3115 11, e-mail:[email protected]
[5] MODULAR CONCEPT GUIDANCE SYSTEM FORFULL COVERAGE OF PIPEJACKING APPLICATIONS
, NOD CLARKE Hackston, Jürgen G ِ◌ckel & ManfredMessing VMT GmbH, Bruchsal Germany , InternationalConference and Exhibition on Tunnelling and TrenchlessTechnology
[6] Analog Devices ,ADXRS300 ,±300°/s Single Chip YawRate Gyro with Signal Conditioning
[7] Analog Devices ,ADXRS453 High Performance, DigitalOutput Gyroscope
حرکت ، مھدی ھمتی و حالدرکشتیبرایاینرسییابیشماللگوریتما]٨[شریفصنعتیدانشگاه-محمد علی معصوم نیا
کاربرد ”. ١٣٩٠فتحی،خلیل،،.امیرھوشنگ، محمدی فر، .اژدر، فتحی]٩[، “)TBM(در ناوبری دستگاه حفار تونل MEMSژیروسکوپ