Embed Size (px)
Citation preview
15.04.2023 1www.helsinki.fi/yliopisto
Assessment of Scenario Generation Approaches for Forest Management
Planning through Stochastic Programming
Kyle Eyvindson and Annika Kangas
Kyle Eyvindson
www.helsinki.fi/yliopisto 15.04.2023 2
• Aim is to:
• Integrate uncertainty into the development of forest plans
‒ Inventory, growth models, climate change...
• Produce a robust solution which meets the demands of the decision maker(s), and can accommodate preferences towards risks
• One method is through stochastic programming
‒ issues of tractability can become an issue
Kyle Eyvindson
Introduction
www.helsinki.fi/yliopisto 15.04.2023 3
• Mathematical optimization where some parameters are uncertain.
• Depending on the structure of the problem, different problem formulation alternatives are available
‒ simple recourse
‒ two-stage (multi stage) recourse
Kyle Eyvindson
Stochastic programming:Briefly
Determine optimal time to conduct
inventory to maximize ...
Maximize First period harvest
volume, s.t. non-declining
harvest.
www.helsinki.fi/yliopisto 15.04.2023 4
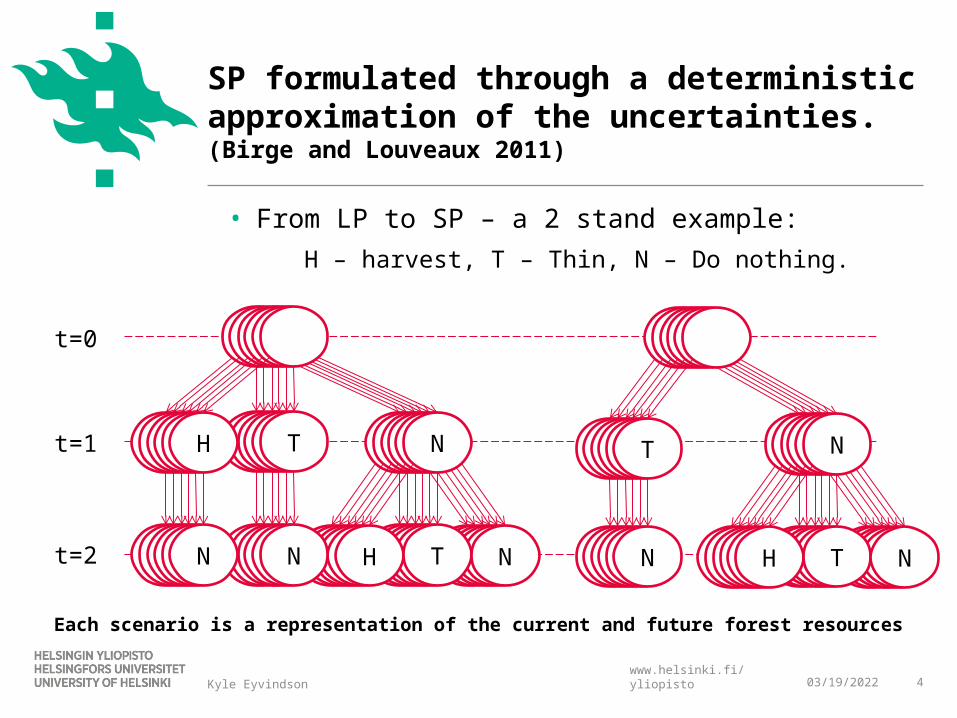
• From LP to SP – a 2 stand example:
H – harvest, T – Thin, N – Do nothing.
Kyle Eyvindson
SP formulated through a deterministic approximation of the uncertainties. (Birge and Louveaux 2011)
t=0
t=1
t=2
H NT
N N H T N
NT
N H T N
H NT
N N H T N
NT
N H T N
H NT
N N H T N
NT
N H T N
H NT
N N H T N
NT
N H T N
H NT
N N H T N
NT
N H T N
H NT
N N H T N
NT
N H T N
Each scenario is a representation of the current and future forest resources
www.helsinki.fi/yliopisto
• This requires the known (or estimated) distribution of the error.
• A number of scenarios are developed to approximate the distribution. (King and Wallace 2012)
‒ A need for balance: too many scenarios – tractability issues
too few scenarios – problem representation issues
Kyle Eyvindson
Incorporating uncertainty into the planning problem
www.helsinki.fi/yliopisto
• It depends on:
• the formulation used,
• the risk preferences involved,
• the amount of uncertainty under consideration
• the accuracy required
• One way to determine an appropriate number of scenarios is through the sample average approximation (SAA, Kleywegt et al. 2001.)
Kyle Eyvindson
How many scenarios is enough?
www.helsinki.fi/yliopisto
• A method for evaluating the quality of a stochastic solution.
• The algorithm simply:
‒ Select the size of the samples (N and N’), and number of replications (M)
‒ For each m in M:
‒ Solve the problem
‒ This provides an estimate of the objective function (using N), and with this solution, evaluate the problem using N’
‒ Evaluate the optimality gap and variance of the estimator – if gap is too high, increase N and/or N’
Kyle Eyvindson
Sample Average Approximation(Kleywegt et al. 2001)
N’>>N
www.helsinki.fi/yliopisto 15.04.2023 8
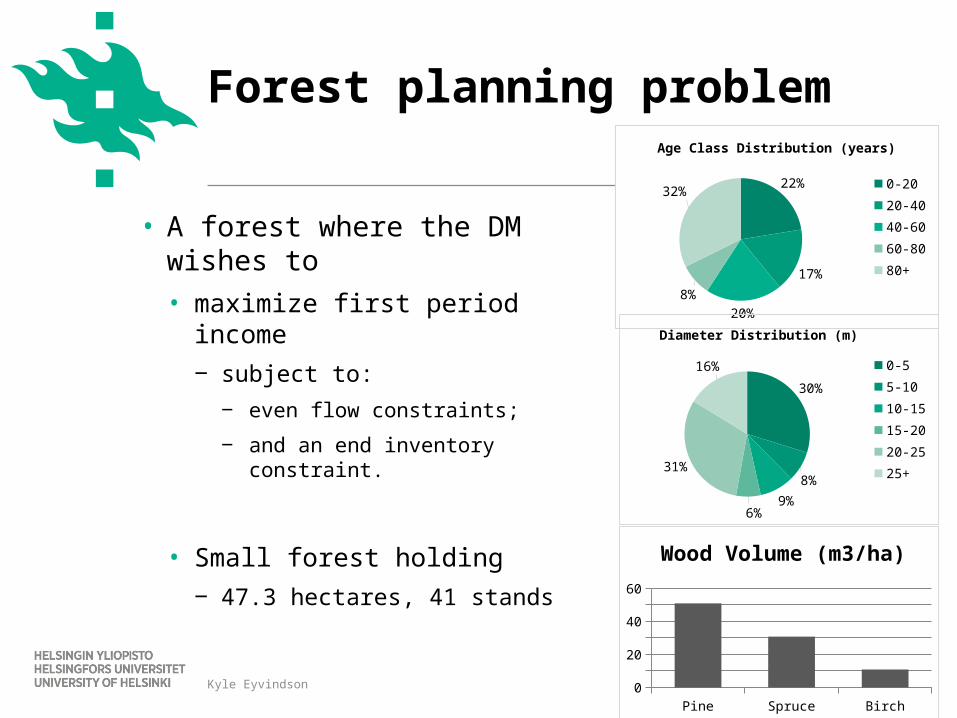
• A forest where the DM wishes to
• maximize first period income
‒ subject to:
‒ even flow constraints;
‒ and an end inventory constraint.
• Small forest holding
‒ 47.3 hectares, 41 stands
Forest planning problem
Kyle Eyvindson
22%
17%
20%
8%
32%
Age Class Distribution (years)
0-20
20-40
40-60
60-80
80+
30%
8%
9%6%
31%
16%
Diameter Distribution (m)
0-5
5-10
10-15
15-20
20-25
25+
Pine Spruce Birch0
102030405060
Wood Volume (m3/ha)
www.helsinki.fi/yliopistoKyle Eyvindson
• Two cases are studied:
• The case where only the inventory uncertainty is included
• and where both inventory uncertainty and growth model errors are included.
• A few assumptions were made:
1. A recent inventory was conducted
2. The inventory method was assumed to have an error which was normally distributed, mean zero and a standard deviation of 20% of the mean height and basal area.
Scenario generation approach:
www.helsinki.fi/yliopisto 15.04.2023 10
• For each inventory error, a set of 50 growth model error scenarios were simulated.
• The growth model errors were generated using a one period autoregressive process [AR(1)], using the same models as Pietilä et al. 2010.
• Forest simulation was done using SIMO (Rasinmäki et al. 2009)
• Created a set of 528 schedules for the 41 stands (~13 schedules per stand) for each scenario.
Kyle Eyvindson
Scenario generation approach: (2)
www.helsinki.fi/yliopistoKyle Eyvindson
• A standard even flow problem.
• Maximize: 1st period incomes
‒ subject to even flow and end inventory constraints Using both hard and soft constraints
• For application in a stochastic setting this problem needs slight modification:
• Maximize: Expected 1st period incomes – sum of scenario based negative deviations
‒ subject to soft even flow an end inventory constraints Having strict constraints is not the real intention behind the even-flow
problem.
The soft constraints allow for a ‘more or less’ even flow in all scenarios.
Sample problem:
www.helsinki.fi/yliopisto
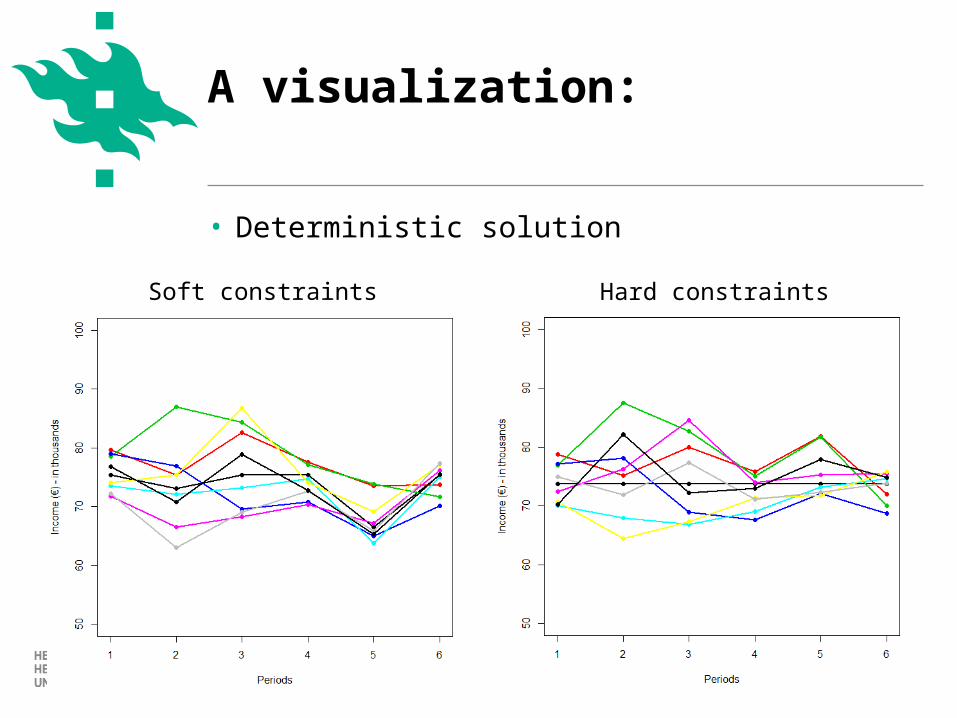
• Deterministic solution
Kyle Eyvindson
A visualization:
Soft constraints Hard constraints
www.helsinki.fi/yliopisto
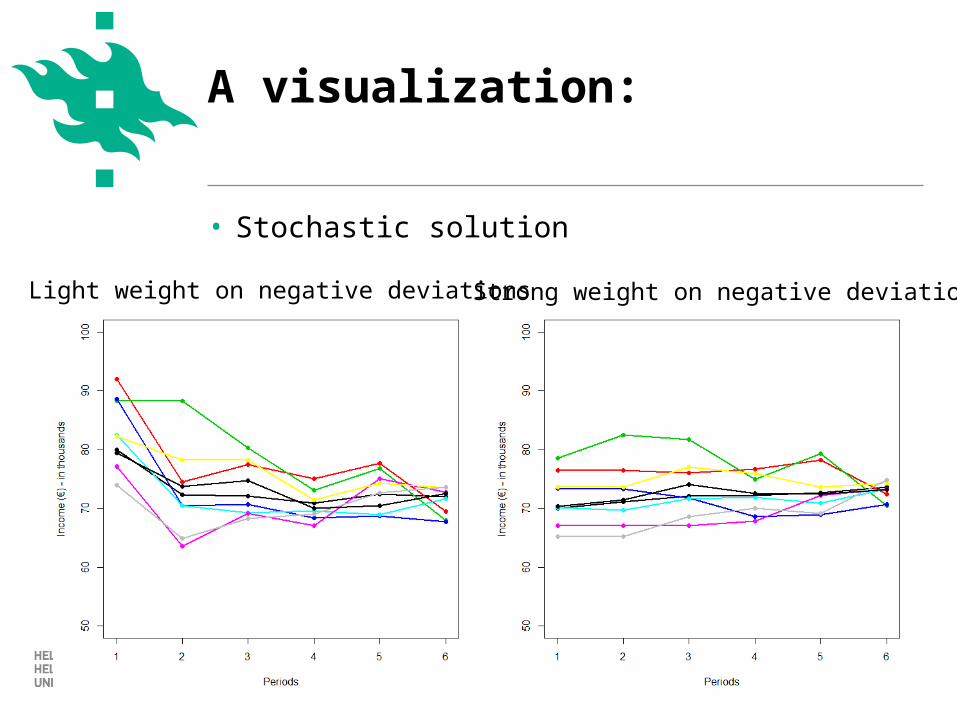
• Stochastic solution
Kyle Eyvindson
A visualization:
Light weight on negative deviations Strong weight on negative deviations
www.helsinki.fi/yliopistoKyle Eyvindson
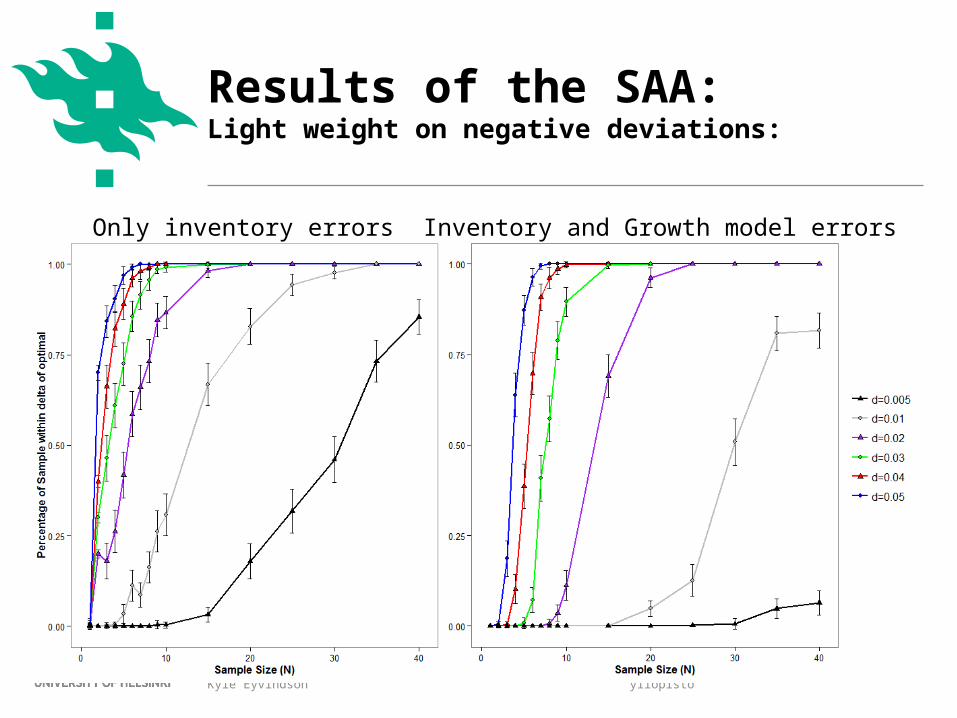
Results of the SAA:Light weight on negative deviations:
Only inventory errors Inventory and Growth model errors
www.helsinki.fi/yliopistoKyle Eyvindson
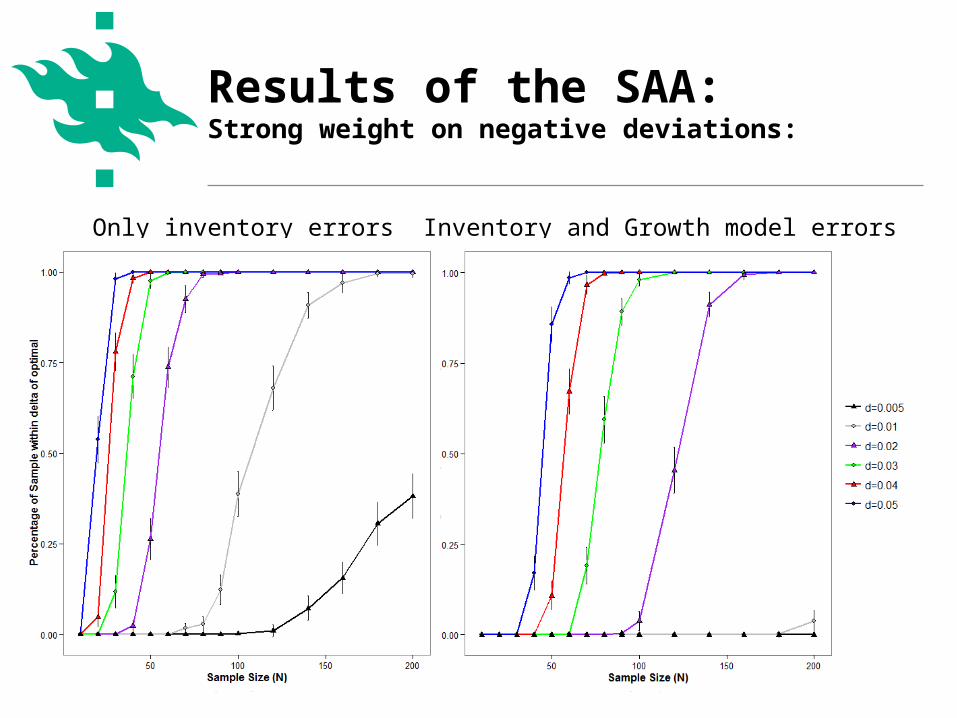
Results of the SAA:Strong weight on negative deviations:
Only inventory errors Inventory and Growth model errors
www.helsinki.fi/yliopisto 15.04.2023 16
• The size of the stochastic problem need not be enormous.
• The size of the problem depends upon:
‒ the amount of uncertainty under consideration,
‒ the importance the uncertainty has in the problem formulation, and
‒ the acceptability of selecting a ‘sub-optimal’ solution.
• A stochastic program with a sizable optimality gap still outperform the deterministic equivalent.
Kyle Eyvindson
Conclusions:
www.helsinki.fi/yliopisto 15.04.2023 17
• Birge, J.R., and Louveaux, F. 2011. Introduction to stochastic programming. Second edition. Springer, New York. 499 p.
• Kangas, A., Hartikainen, M., and Miettinen, K. 2013. Simultaneous optimization of harvest schedule and measurement strategy. Scand. J. Forest Res.(ahead-of-print), 1-10. doi: 10.1080/02827581.2013.823237.
• Kleywegt, Shapiro, Homem-de-Mello. 2001. The sample average approximation for stochastic discrete optimization. SIAM. J. OPTIM. (12:2) 479-502.
• King, A.J., and Wallace, S.W. 2012 Modeling with Stochastic Programming, Springer, New York
• Krzemienowski, A. & Ogryczak W. 2005. On extending the LP computable risk measures to account downside risk. Computational Optimization and Applications 32:133-160.
• Rasinmäki, J., Mäkinen, A., and Kalliovirta, J. 2009. SIMO: an adaptable simulation framework for multiscale forest resource data. Comput. Electron. Agric. 66(1): 76–84. doi: 10.1016/j.compag.2008.12.007.
• Pietilä, Kangas, Mäkinen, Mehtätalo. 2010. Influence of Growth Prediction Errors on the Expeced Loses from Forest Decisions. Silva Fennica 44(5). 829:843.
Kyle Eyvindson
References: