Embed Size (px)
DESCRIPTION
Citation preview

5 Orbital Maneuvers
5.1 Orbital Energy Any analysis of orbital maneuvers, i.e., the transfer of a satellite from one orbit
to another by means of a change in velocity, logically begins with the energy or vis-viva equation derived in Chapter 3 as
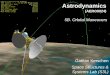
where V is the magnitude of the orbital velocity at some point, r the magnitude of the radius from the focus to that point, a the semimajor axis of the orbit, and tx the gravitational constant of the attracting body. Figure 5.1 illustrates r, V, and a.
Equation (5.1) can be rearranged as
V 2 /,/, /1, m
2 r 2a
where it is evident that
Kinetic energy Potential energy Total energy +
Satellite mass Satellite mass Satellite mass
(5.2)
Note that total energy/satellite mass is dependent only on a. As a increases, energy increases.
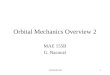
Figure 5.2 illustrates total energy/satellite mass as a function of orbit period,
P = 27r a3/2 (5.3) ,/-ff
so that the figure is really a plot of -lz/2a vs (2rc/~/-~)a 3/2. The lowest energy and period point corresponds to a Space Shuttle parking orbit, a circular orbit at an altitude of 280 km. Points corresponding to other interesting orbits are labeled on the curve.
Note that many of the orbits are circular for which a = r. When substituted into Eq. (5.2), Vc = x/~/r is the expression for the circular orbit velocity.
Note also that the total energy values for the orbits in this figure are all negative. For the Shuttle parking orbit, total orbit energy/satellite mass = - 3 0 km2/s 2. For the orbit of the moon, total orbit energy/satellite mass = - 0 . 5 2 km2/s 2. As Eq. (5.2) shows, the reference level of zero total energy is achieved as a ~ cx~, and the orbit becomes a parabola. Substituting into Eq. (5.2),
V 2 - - 0 , V---- 2 ~ for a parabola
/z
2 r ¥ r
87

8 8 O R B I T A L M E C H A N I C S
Apol
2a
Peri
e e
y : ee
Fig. 5.1 Conservation of energy relates r, V, and a.
%
/ g~
b--
O
Fig. 5.2
0, I
-0. 2 --
-0. 5 --
-I
-5
-I0
-20
-50
-I00
I ' ' I ' " ' ] I ' ' I ' ' "
DMSP
I ' ' I ' ' "
: I , , I , , , I , , I , , , , I , , I , , , 2 5 ]0 20 50 100 200 500 lO00
ORBII PERIOD ~ h r s i _
S p e c i f i c orbital energy as a function of orbit period.

Fig. 5.3
ORBITAL MANEUVERS
(2)____ V
C
For a circular orbit ge = ~ - ~ "
89
This value is called the "escape velocity" because a satellite possessing this veloc- ity will always increase its distance (after the point of closest approach) from its gravitationally attracting body approaching an infinite distance in an infinite time.
Equation (5.2) also applies to hyperbolic orbits for which semimajor axis a is by definition, negative. Therefore, ( - / z / 2a ) is positive for hyperbolas. Figure 5.4 illustrates total energy for the three kinds of orbits.
5.2 Single-Impulse Maneuvers Orbital maneuvers are characterized by a change in orbital velocity. If a velocity
increment AV, which is a vector, is added to a satellite velocity V1, also a vector, then a new satellite velocity, V2, results. If the AV is added instantaneously, the maneuver is called an impulsive maneuver. Figure 5.5 illustrates an impulsive maneuver or transfer between intersecting coplanar orbits. The transfer could have been made at point O instead of point P. The selection of transfer points may be made on the basis of I AVI, i.e., the smaller the better.
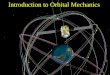
A plane change maneuver rotates the orbit plane in inertial space while holding the size and shape, a and e, fixed. Figure 5.6 illustrates a circular orbit plane change through an angle 0. The AVis applied so as to rotate the velocity, V¢1, through the angle 0. The resulting velocity triangle is isosceles, as seen in Fig. 5.7. From the right triangle,
AV/2 - - -- sin 0/2
ellipse (circle)
g ~
hyperbola
Total Energy B o
Sate l l i t e Mass 2a
Fig. 5.4 Total energy f or c o n i c s e c t i o n orbi t s .

90 ORBITAL MECHANICS
Fig. 5.5
Orbit
v I
Orbit 2
Transfer from orbits 1 to 2; vector difference A V = V 2 - V 1.
2.0
1.8
1.6
1.4
1.2
I,O
0.8
0.6 /
0.4 /
O" 2 0 e ~ 2 0 0 4O
f ~
f f
J f
FINA
INITIA] / ~
V 2 . . . ~ / ,clL
v VCl ' "1
60 80 100 120 140 I60 180
PLANE CHANGE ANGLE e ~ DEGREES
Fig. 5.6 Single impulse plane change for circular orbits.
AV
Fig. 5.7 Velocity vector triangle for circular orbit plane change.

ORBITAL MANEUVERS 91
Expanded t r l a n l l *
y
• E~AI"OI /----- t%-r~> ---4
Fig. 5.8 Plane change angle 0 in terms of i and f~
o r
AV -- 2 s in0 /2
Vc~
Figure 5.6 plots A V / V c l a s a function of 0 and shows that plane changes require large AV for even modest values of 0. For 0 ----- 60 deg, AV = Vcl.
Figure 5.8 displays the geometry of a plane change 0, which will, in general, change both the inclination i and the right ascension of ascending node f2 of the original orbit. The plane change will be constrained to an inclination change, i.e., no change in f2, only if the plane change maneuver is performed at an equatorial crossing. In general, the angle 0 between two planes is a function of both inclination i and right ascension of ascending node f2. Given the initial orbit elements il and f21, the plane change angle 0, and the argument of latitude ul of the plane change maneuver, the following two equations from spherical trigonometry can be solved for the final orbit elements, i2 and f22:
cosi2 ---- cosi l cosO -- s ini l sinO cosu 1
cos 0 = cos il cos ie + sin il sin ie cos(f2e - ~ ' ~ 1 )
Another common single-impulse maneuver is a tangential A V applied to a circular orbit or to an elliptical orbit at perigee. Figure 5.9 shows a A V being added in the direction of motion, i.e., along the velocity vector, to the circular orbit velocity Vc. I f the A V is relatively small, the resulting orbit is an ellipse, with perigee at the point of A V application and apogee located 180 deg away in central angle, i.e., true anomaly, v = 180 deg. Now, if the AV had been larger or if another relatively small A V is added tangentially at the next perigee passage, then the resulting orbit is a larger ellipse with the same perigee but a higher apogee. If the added AV = Vc(~/2 - 1), then the total velocity = x/2V~ = Vesc and the resulting orbit is parabolic. And if the added A V is greater than this value, then the resulting orbit is hyperbolic. It is interesting to note that, from a circular orbit,

92 ORBITAL MECHANICS
Y
Fig. 5.9
1 : o o 0
Q
m b . ~ v dv ¢
C
~V > vr2"- 1 . . . . v C
Orbits resulting from a tangential velocity addition.
considerably more A V is required to transfer to a rectilinear orbit (drop into the center along a straight line) than to escape.
5.3 Single- and Two-Impulse Transfer Comparison for Coplanar Transfers Between Elliptic Orbits That Differ Only in Their Apsidal Orientation
Single- and Two-Impulse Transfers For coplanar orbits 1 and 2 in Fig. 5.10, al = a2 and el = e2, but their lines of
apsides are rotated by Am. For single-impulse transfer at either intersection point,
AV/2 -- sin X
V
where }, is the flight-path angle. To solve, substitute the orbit equation r = p/(1 + e cos v) into the energy equation
V2 ~-~ #L[2(1 + e cos V ) a ~ _ ~-) 1 ] = # [2(l+ecosv)-(1-e2)].~__ ~ )
V 2 = # [ 2 + 2ecos v - 1 + e 2] = V 2 p[1 + 2 e c o s v + e 2] p =

ORBITAL MANEUVERS
Transfer Orbit
93
Fig. 5.10 Single- and two-impulse transfer comparison.
and substitute both into the equat ion for angular momen tum, h = r V cos ), -- x / ~ , squared,
p2 /z [1 + 2e cos v + e 2] cos 2 y = / z p (1 + e c o s 1)) 2 p
so that
1 + e c o s v
c o s y = ~ / l + 2 e c o s v + e 2 '
Substi tuting into the A V equat ion,
A V
Vcrp At the h igher intersection,
sin V =
and so
- 2e sin v
Ao) v = 180 d e g + - -
2
e sin v
~/1 + 2e cos v + e 2
A V A w -- 2e sin
Vcr=p 2
The solution is exact ly the same at the lower intersection.

94 ORBITAL MECHANICS
The solution for the optimal two-impulse cotangential transfer is
A VTOTA L A w - - -- e sin - -
Vcr~ 2
when e is assumed small. The sum of the two impulses is half the single-impulse value. The two impulses are equal in magnitude, but one is in the direction of motion while the other is opposite to the direction of motion. The optimal point of application for AV1 is at Vl = 90 deg +Aw/2 , and AV2 is applied 180 deg away (see Fig. 5.10). The optimal two-impulse transfer between these orbits is given by Lawden. 1
5.4 Hohmann Transfer
The Hohmann transfer 2 is the minimum two-impulse transfer between coplanar circular orbits. Derivations of the velocity requirements A V1 and A V2 and the transfer time, as well as a figure of the transfer and plotted results, are presented in the following pages.
Referring to Fig. 5.11, the Hohmann transfer is a relatively simple maneuver. A tangential A V1 is applied to the circular orbit velocity. The magnitude of A V1 is determined by the requirement that the apogee radius of the resulting transfer ellipse must equal the radius of the final circular orbit. When the satellite reaches apogee of the transfer orbit, another A V must be added or the satellite will remain in the transfer ellipse. This A V is the difference between the apogee velocity in the transfer orbit and the circular orbit velocity in the final orbit. After A Vf has been applied, the satellite is in the final orbit, and the transfer has been completed.
Derivation of Velocity Requirements and Transfer Time Using the vis-viva equation and referring to Fig. 5.11,
v ? = r , r :
~Vf
mv1 /z~ FINAL ORBIT
Fig. 5.11 Geometry of the Hohmann transfer.

ORBITAL MANEUVERS 95
2 V12 = ~ [ 2 l+(r f /r l )]
( r f ) 2 a = r l + r f =rl 1+
V~ = vZ[2 + 2(rf /r l)- 2] r
V1 _ / 2(rf/rl) Vcl V1 + (rf/rl)
/ AV1 _ VI - Vcl _ / 2(rf/rl) Vcl Vcl V 1 + (rf/rl)
Again, from the vis-viva equation,
rf[1 + (T/rf/rl)l] rl + r f = r f 1 +
2r,,rl] V~= 7 2 l+r f / r l
Vc2f - ~ m rf
g2f = v 2 r~ cl rf
= 2 + 2(rf/rl)-2(rf/rl)] L 1 + (rf /rl)
2 r f / r 1 "Jr-
~cl = rf/rl[1 + (rf/rl)]
Vcl Vcl r f / r I r f / r l [ 1 + ( r f / r l ) ]
The total velocity requirement is
AVToTAL = A V 1 -'l- A g f
From the equation for the orbital period,
Transfer t ime _ rc/w/-~[(r f + rl)/2] 3/2 1 ( rf'] 3/2 P1 (27r/~l~)r~/2 = 25/2 1 + rl /
where Pl is the period of the initial orbit. Referring to the plotted numerical results of Fig. 5.12, one of the interesting
features of the Hohmann transfer is that, as the radius ratio rf/rl increases, the total velocity requirements A VTOTAL/Vcl = (2xV1 + AVf)/Vcl increase to a maximum of 0.536 at rf/rl = 15.58. For larger values of rf/rl, the total velocity requirements decrease and approach ~ - 1 as rf/rl --+ ~x). This behavior can be explained somewhat by examining the behaviors of A V1/Vcl and A Vf/Vd in Fig. 5.12. The A V1 / Vcl curve monotonically increases with increasing rf / rl and approaches ~/~ - 1 as rf/rl --+ ec. However, AVf/Vd increases to a maximum of 0.19 at rf/rl = 5.88 and then decreases toward zero as rf/rl --+ oo.

96 ORBITAL MECHANICS
0 .6
0 .5
0 .4
0 .3
0 .2
0 .1
3 4 6 8
Fig. 5.12
HA)(
_ 2 - 1
I0 20 30 40 60 80 100 r f / r l
AV characteristics of the Hohmann transfer.
5.5 The Bi-elliptic Transfer The bi-elliptic transfer is completely described in Ref. 3. It is a three-impulse
transfer between coplanar circular orbits. Its geometry, A V equations, numerical results, and a comparison with the Hohmann transfer are presented in Figs. 5.13- 5.16.
The geometry of Fig. 5.13 shows that the transfer begins with a AV1 applied tangentially to the circular orbit velocity. This A V1 is larger than the first impulse of a corresponding Hohmann transfer because the apogee radius r2 of the resulting transfer ellipse is larger than the final circular orbit radius rf. At apogee in this first transfer ellipse, A V2 is added tangentially to the existing apogee velocity. The magnitude of A V2 is determined by the requirements to raise the perigee radius of the resulting transfer ellipse from rl to ry. At perigee in this second transfer ellipse, A Vy is applied tangentially but opposite to the direction of motion. The
av 2
~ O ~ I T
4V~
Fig. 5.13 Geometry of the bi-elliptic transfer.

ORBITAL MANEUVERS 97
magnitude of A Vf is the difference between the perigee velocity of the second transfer ellipse and the final circular orbit velocity.
The equations for the three AVs are presented below. Each AV is normalized by dividing by Vcl. Note that these velocity ratios are functions of rf/rl and r2/rl. The final to initial orbit radius ratio is given in any specified transfer, but the ratio r2/rl with the intermediate apogee radius r2 is open to selection. If r2/rl is selected to be equal to rf/rh a Hohmann transfer will result. Although not practical, the best value of r2 is infinitely large, i.e., r2 --+ ec
/ AV1 __ / 2(r2/rl)
VI + (r2/rl)
where Vcl = V/~/rl, and
AV2 ~ 2(rf/rl) ~ 2 ~cl (r2/rl)[(r2/rl) + (rf/rl)] -- (r2/rl)[1 + (r2/rl)]
AVf _ _ / 2(r2/rl) 1 ~cl V(rf/rl)[(rf/rl) + (r2/rl)] rf/rl
AVTOTAL : AV1 + AV2 + AVf
produces a minimum value of AVTOTAL = AM + AV2 + AVf for all values of rf/ri. The bi-elliptic transfer for which r2 --> o~ is known as the infinite bi-elliptic transfer.
Numerical values of A VTCrrAL/V¢1 for the infinite bi-elliptic transfer are plotted in Fig. 5.14, along with the Hohmann-transfer results. As rf/rl increases, the
0 .6
0 . 5
0 . 4
0 . 3
0 . 2
0 .1
~VToTA L B I - E , L I P T IC ~ ~ ~ " ~
VCl r 2 - . ~
r t
J /
/ / / -
2 3 4
J
rf MAX ~ T - - = 1 5 . 5 8
r t
J
:V T iT 1
f
g ~ - - I
r [ MA~ AI--- 5.88
__ ~ r L t w f
6 8 10 20 30 40 r f / r I
60 80 I00
Fig. 5.14 Infinite bi-elliptic and Hohmann transfers.

98 ORBITAL MECHANICS
Fig. 5.15 AVTOTAL.
i0o 1
i ..... t 8 0 ,
Bi Elllpli¢
6O
~2
\ :
o i 11 12 15 i~ 15 16
q
Threshold locus of r2/r 1 for which bi-elliptic AVToTA L = Hohmann
H o h m a n n AVToTAL is less than the infinite bi-elliptic AVToTAL until r f / r l : 11.94. At this value, the two curves cross, and the infinite bi-elliptic transfer has a lower A VToTAL than the Hohmann for all greater values of r f / r l . Moreover, the authors of Ref. 3 found that as r f / r l increases beyond 11.94, the value of r2/ri that would produce a bi-elliptic AVToTAL equal to the corresponding Hohmann AVTOTAL was finite and decreasing in value. Figure 5.15 plots the threshold values of r2/ri for which bi-elliptic AVToTAL = Hohmann AVTOTAL. This curve decreases to a threshold value of r2/r 1 = 15.58 at r f / r l : 15.58. This means that all bi-elliptic transfers with r2/rl > r f / r l for r f / r l >_ 15.58 are more economical than the corresponding Hohmann transfer, i.e., bi-elliptic A VT~AL < Hohmann A VT~AL.
It is interesting to determine the maximum savings to be gained from the bi-elliptic transfer relative to the Hohmann transfer. Figure 5.16 presents the
[ 0.o,
0.03
] 0 . 0 2
0 . 0 1 jIs 0
i0 20 40 60 80 i00 200 400 600 i000
rf
r I
Fig. 5.16 Total velocity requirement difference between infinite bi-elliptic and Hohmann transfers.

ORBITAL MANEUVERS 99
difference in A VTOTAL / Vcl between the infinite bi-elliptic and Hohmann transfers. The maximum difference is about 0.0409 at rf /rl : 50. Since the Hohmann AVTcrrAL/Vcl at this rf /r l is about 0.513, the maximum difference is about 8%. Thus, in terms of A V1, the bi-elliptic transfer is not significantly better than the Hohmann transfer. However, bi-elliptic transfers are very useful when plane changes are necessary.
5.6 Restricted Three-Impulse Plane Change Maneuver for Circular Orbits
For the rotation of circular orbits, the restricted three-impulse plane change maneuver is intended to lower the total AV costs relative to the single-impulse plane change maneuver described earlier. The geometry, equations, derivation, and results for this maneuver are presented in Figs. 5.17-5.19 and 5.20-5.22. Figure 5.17 presents the geometry of the maneuver, which proceeds as follows. The first impulse AVI is added tangentially to the circular orbit velocity in order to achieve a transfer ellipse whose apogee radius is r2. At apogee, A V2 is used to rotate the apogee velocity through the desired plane change angle 0. The A V equations for this maneuver are
AVTOTAL ---- AV1 -~- AV2 -~- AV3
AV1 - - AV3 - - / 2(r2/rl) 1
Vcl V 1 + (r2/r2) Vcl
where Vcl = ~ x / ~ l ; and
I A V2 _ 2 / 2 sin 0_ Vcl V(r2/rl)[1 -+- (r2/rl)] 2
where 0 is the angle between the planes. The equation for AV2 is simply AV2 = 2VA sin0/2. The whole point of this
maneuver is to make the orbit rotation at a point where the orbital velocity is low, i.e., apogee of the transfer ellipse. After the rotation, the satellite returns via
Fig. 5.17 Geometry of restricted three-impulse plane change maneuver for circular orbits.

100 O R B I T A L M E C H A N I C S
~VToTA L
c I
2 .0
1.8
1.6
1 .4
1.2
1 .0
0 .8
t 2 --= 1.0
/
s 0 .6
o o: /J 0.2 ~ I
oY 0 20 40 60 80 I00 120 140
PLANE CHANGE ANGLE 0 ~ DEGREES
Restricted three-impulse plane change results. Fig. 5.18
160 180
a second transfer ellipse to the original point of departure. At this point, A 173 is applied tangentially in a retro direction to achieve the final circular orbit, which has the same radius as the initial circular orbit but has been rotated through the angle 0. The equations A V1 and A V3 are equal in magnitude. The first description of this maneuver with results was given in Ref. 4.
The AVs and their sum are a function of 0 and r2/rl. Figure 5.18 presents numerical results of A VTOTAL/Vcl v s 0 for various values of r2/rl. When r2/rl = 1, A Vl = A V3 = 0, and the result is the single-impulse plane change curve pre- sented in Fig. 5.6. For larger values of rz/r l , the AVT~AL is larger for small values of 0 but smaller for large values of 0. It is apparent that r2/rj -- ! is the best curve, i.e., lowest AVToTAL, for values of 0 from zero to about 38 or 39 deg and that rz/rl ~ oo is the best curve for values of 0 greater than about 60 deg. Figure 5.19 presents an expanded portion of Fig. 5.18 for intermediate values of 0, where the best AV curves correspond to many values of r2/rl.
In order to determine the envelope of these curves, minimize A Vr / V~I for given plane change angle 0, as illustrated in Fig. 5.20.
Let p = rz/rl . Then,
n ; / 2 _ 1
Now,
=0=2{j l sin°'2 sin0/2 1 [(1 + p ) 2 - }

ORBITAL M A N E U V E R S 101
~VTOTA L F
c 1
1.0
0 . 9
0 . 8
0.7
0 .6
0 ,5
Fig. 5.19
I
J
32 36 40 44 48 52 56 60
PLANE CHANGE ANGLE e ~ DEGREES
Transition results for restricted three-impulse plane change.
~2 _ _ = r 1
1.0
1.3
1.7
2 . 2 2 . 8
12
Solving,
sin 0 / 2 1
POPT -- 1 -- 2 s i n 0 / 2 c o s 0 / 2 -- 2
Upon examination, this equation reveals that, for 0 < 0 < 38.94 deg, use
r 2 - - = 1 r l
for 38.94 deg < 0 < 60 deg, use
r 2
r l
for 60 deg < 0 < 180 deg, use
sin 0 / 2
1 - 2 s i n 0 / 2
r 2 - - - - ~ C < ) r l
AV T V c I
Fig. 5.20
L ~ e ,, constant
i r2/r I = p
Sketch of minimum A V24Vcl solution.

102 ORBITAL MECHANICS
200
I00
80
60
40
2O
r 2
r I 10
1 35
Fig. 5.21
r2 I i
/
f J
J
J ~'40 45 50 55
PLANE CHANGE ANGLE e ~ DEGREES
60
Optimum r21r 1 as a function of plane change angle.
AV TOTAL
Vc I
1.10
1.0(]
0.9(~
0.8C
0.7C
0.60
0.5(~
J J /
f
J
. J
j " . . _ _ - - - - -
'rHRF~E T 4!OllT ~ '
3O
Fig. 5.22
34 38 42 46 50 54 58 62 66 70
PLANE CHANGE ANGLE 0 ~ DEGREES
Comparison of single- and restricted three-impulse maneuvers.

ORBITAL MANEUVERS 103
100
80
60
40
r 2
r I
20
/
2 4 6 8
Fig. 5.23
/ /
/ /
j f
f
/ / r3 /~+2\ " - , @ - ]
/ J
TRANSFER TIME = T CIRCULAR ORBIT PER OD
I0 20 40 60 80 i00 200 400
Transfer t ime for the res t r ic ted three- impulse p lane change maneuver .
Figure 5.21 presents a plot of optimum r2/rl vs 0 for 38.94 deg < 0 < 60 deg. If these values are then substituted into the A Vr equation, they produce the minimum AVr/Vcl as a function of 0. These results are presented in Fig. 5.22 and compared with the single-impulse results. The two curves are the same for 0 < 0 < 38.94 deg. Figure 5.23 presents the transfer time divided by the initial orbit period as a function of r2/rl.
As an example, a plane change of 55 deg would prescribe an optimum value of rz/rl = 6 from Fig. 5.21. From Fig. 5.22, minimum AVr/Vcl = 0.820. From Fig. 5.23, transfer time/circular orbit period = 6.6.
5.7 General Three-Impulse Plane Change Maneuver for Circular Orbits
This maneuver is like the restricted maneuver just described in that the initial and final circular orbits have the same radius but are rotated through an angle and the maneuver utilizes three impulses. The general case, however, makes a plane change at each of the three A V applications. The sum of the plane changes equals the total required rotation 0. These are special cases, rf = rl, in Refs. 5 and 6. However, Ref. 7 presents an analysis that minimizes A VTcrr~aff Vcl by determining optimum values of r2/rl, i.e., intermediate apogee radius, and of plane change distribution among the three AV applications. By symmetry, the plane change performed as part of the first and third A V applications is the same.
Results from Ref. 7 are presented in Fig. 5.24 and compared with previous re- sults for the single-impulse and restricted three-impulse maneuvers. The general three-impulse maneuver provides the best results, i.e., lowest A VTCrrAL/Vcl, for all plane change angles from 0 to 60.185 deg. For small angles, the A V results are only slightly smaller than the A V results for a single-impulse maneuver. At 0 = 60.185

104 ORBITAL MECHANICS
AVToTA L
Vc I
1 . 0 0
0 . 9 0
0 . 8 0
0 , 7 0
0 . 6 0
0 . 5 0
0 . 4 0
0.30 f
14 18 22 26 30
Fig. 5.24
/
34 38 42 46 50 54
PLANE CHANGE ANGLE 8 ~ DEGREES
Comparison of circular orbit plane change maneuvers.
/ /
58 62
deg, the general results merge with the results for a transfer to infinity and return, where AVTcrrAL/Vc1 = 2 ( ~ - - 1 ) . The optimum intermediate apogee radius ratio is noted for the circled points on the general three-impulse curve of Fig. 5.24. These values are generally lower than the corresponding values in Fig. 5.21 for the restricted three-impulse maneuver. This ratio is plotted on Fig. 5.25 as a function of 0. The interesting feature of this curve is that it re- mains very close to a value of 1 for relatively large values of 0 until it increases dramatically as it approaches the value of 0 -- 60.185 deg.
Figure 5.25 also presents a curve of the first plane change angle or1 (or the third plane change angle or3 since a3 = oq) as a function of 0, which equals Otl+ or2 + or3. The value of oq reaches a maximum of about 4.85 deg at about 0 = 49 deg. For larger values of 0, oq then decreases, reaching 1.698 deg at 0 = 60.185 deg.
5.8 Hohmann Transfer with Split-Plane Change An important practical circular orbit transfer is one that requires both a plane
change and a radius change. The optimal two-impulse transfer to satisfy these requirements is the Hohmann transfer with plane change as shown in Fig. 5.26. The first A V not only produces a transfer ellipse whose apogee radius equals the final orbit radius, it also rotates the orbit plane through some angle cq. At apogee, the second A V simultaneously circularizes the orbit and rotates the orbit plane through an angle or2, where 0/2 = 0 - - 0t I .
Figure 5.27 illustrates the velocity vector geometry for Hohmann transfer with plane change 0. Rider in Ref. 5 describes this as the "Mod-2 Hohmann" transfer. Baker in Ref. 6 describes this as the Hohmann transfer with plane change. Sketch 1

ORBITAL MAN EUVERS 105
J J
DEG
014
J J
J J ~
J J
/ / I
rAlrl 3
! r
I 1 = 60.1fi = 7 ~
[ 0 18 22 26 30 34 38 42 46 50 54 58 62
TOTAL PLANE CI~ANGE ANGLE 0 ~DEG
Fig. 5.25 Plane change angle and opt imum intermediate apogee radius ratio for the general three-impulse plane change maneuver.
depicts the velocity vector triangle addition of A 111.
c I AV IHOH
A V ? = V L q- Vc21- 2Vt~VclCOSOtl
Vp~ = V~I + A Vl .o .
VA~. = V~2 -- /X V2.o.
Sketch 2 depicts the velocity vector triangle addition of A V2.
e ~ a I + a 2
A V 2 = V 2 -k- VZTR -- 2Vc2VA~ cos(O - ~1)
0 = Ol 1 -{'- Ol2, AVT = AV1 q- AV2

106 ORBITAL MECHANICS
~ FINAl. p~l~n~ owa~ /ORBIT
HOHMANN TRAN,T~"ER ~ ~CONO IMl~l.~E WITH el k,N( O,a~G(-.'
Fig. 5.26 Geometry of the Hohmann transfer with plane change.
To minimize AVr, set (OAVr/Ooq) = 0
O A Vr VerR V~I sincq
OOll A V1
Expanding
Vp~ V~1 sinar
Vc2 VAT ~ s in(O- ~1) zxV2
/V~r~ + V 2 -2Ve~.Vcz cos~l
VczVArI~ sin(O - ~ )
V/2 + V2TR -- 2Vc2VATR cos(O - Oil)
= 0
Fig. 5.27
Vc 2
Optimal plane split for Hohmann transfer with plane change.

ORBITAL MANEUVERS 107
Solve iteratively for Orlon. Then ot2ovr = 0 - Otlovr. Substitute into the A V equa- tions to get AVlopr and AV2o~r. Then,
AVTMIs ----- AVlovr -[- AV2orc
5.9 Bi-elliptic Transfer with Split-Plane Change This transfer is like the bi-elliptic transfer previously described except that
plane changes are performed at each of the three A V applications. The geometry of the maneuver is presented in Fig. 5.28. Reference 5 describes this as the "Mod- 2 bi-elliptic" transfer. Reference 6 describes this as the bi-elliptic transfer with plane change. Reference 7 presents an analysis that optimizes the plane change distribution among the three A Vs and optimizes the intermediate apogee radius to minimize the total A V for a specified ratio of final to initial orbit radii and for a specified total plane change angle 0.
Results from Ref. 7 are presented in Fig. 5.29. In the space of final orbit radius/initial orbit radius and 0, Fig. 5.29 defines the best transfer modes, i.e., Hohmann transfer with plane change, bi-elliptic transfer with plane change, and parabolic transfer to infinity and return.
5.10 Transfer Between Coplanar Elliptic Orbits Figure 5.30 illustrates two coplanar elliptic orbits, initial and final, and a transfer
orbit between them. The transfer begins at a point of departure on the initial orbit. At this point, a velocity increment A V1 is applied in some direction and added vectorially to the orbital velocity at that point. Thus, the satellite achieves a transfer orbit in which it coasts until it reaches an arrival point on the final orbit. At this point, a A V2 that is the vector difference between the velocity in the final orbit and the velocity in the transfer orbit must he applied in order to complete the transfer.
/ \
FI N A ~ ~ N OAOIT SFER (LI.IPS($
Fig. 5.28 Bi-elliptic transfer with plane change.

108 ORBITAL MECHANICS
~0,185 '=
50 ~ A B O L t C
= ~ \ ~?.3 , , '=e 40
~ 3o
N
10
0 m
2 3 4 5 S 7 8 9 10 i] 11.939
FINAL ORBIT RADIUS INITIAL ORBIT RADIUS
Fig. 5.29 Optimal strategies for transfer between noncoplanar circular orbits of radius rl and r2 with optimal plane change distributions to minimize the total AV (from Ref. 7).
Orbct
Fig. 5.30 Geometry of transfer between coplanar elliptic orbits.

ORBITAL MANEUVERS 109
Lawden, in Ref. 1, derives the equations for the optimal, i.e., minimum total A V, two-impulse transfer between coplanar elliptic orbits. These equations cannot be analytically solved in general. However, Lawden solved the special case of transfer between identical elliptic orbits that differ only in their orientation, as described in Sec. 5.3.
Other investigators have tried to solve this transfer problem by specializing the transfer to be a 180-dee transfer or to be cotangential. The 180-dee transfer restricts the departure and arrival points to be separated by 180 dee in central angle. The cotangential transfer requires the impulses to be tangent to the orbits at the points of application. These restrictions tend to simplify the problem of finding a minimum total A V solution. However, these solutions may not be as good as the general optimal solution and also are not easy to determine.
Bender, in Ref. 8, describes the theory and equations for the 180-dee transfer and the cotangential transfer. He also formulates a "practically optimum" trans- fer, which is a 180-dee circumferential transfer. Circumferential means that the AVs are applied in the circumferential direction, i.e., perpendicular to the radius vector. This maneuver is simple and easy to evaluate and provides good results. Comparisons of results of several transfer methods are presented in Ref. 8.
A very comprehensive survey of impulsive transfers is given in Ref. 9, which includes a listing of 316 references.
References
1Lawden, D. E, "Impulsive Transfer Between Elliptical Orbits," Optimization Tech- niques, edited by G. Leitmann, Academic, New York, 1962, Chap. 11.
aHohmann, W., "Die Ereichbarkeit der Himrnelskorper (The Attainability of Heavenly Bodies)," NASA, Technical Translations F-44, 1960.
3Hoelker, R. E, and Silber, R., "The Bi-Elliptical Transfer Between Coplanar Circular Orbits" Proceedings of the 4th Symposium on Ballistic Missiles and Space Technology, Vol. III, Pergamon, New York, 1961, pp. 164-175.
4Rider, L. A., "Characteristic Velocity for Changing the Incfination of a Circular Orbit to the Equator," ARS Journal, Vol. 29, Jan. 1959, pp. 48--49.
5Rider, L. A., "Characteristic Velocity Requirements for Impulsive Thrust Transfers Between Non-Coplanar Circular Orbits," ARS Journal, Vol. 31, March 1961, pp. 345-351.
6Baker, J. M., "Orbit Transfer and Rendezvous Maneuvers Between Inclined Circular Orbits," Journal ofSpacecrafis and Rockets, Vol. 3, 1966, pp. 1216-1220.
7Hanson, J. H., "Optimal Maneuvers of Orbital Transfer Vehicles" Ph.D. Dissertation, Univ. of Michigan, Ann Arbor, MI, 1983.
8Bender, D. E, "Optimum Coplanar Two-Impulse Transfers Between Elliptic Orbits" Aerospace Engineering, Vol. 21, Oct. 1962, pp. 44-52.
9Gobetz, F. W., and Doll, J. R., "A Survey of Impulsive Transfers," AIAA Journal, Vol. 7, May 1969, pp. 801-834.
Problems 5.1. Given two circular orbits:
Initial rl = 6660 km (hi = 282 krn)
i = 30 dee
Final
r f = 133,200 km i = 0 (equatorial)

110 ORBITAL MECHANICS
calculate the component and total A Vs for the following transfer techniques from the initial orbit to the final orbit:
a) Plane change and then Hohmann transfer:
v Descend±hE ¢I dV2 VAI~ ~ ~ -~ Equanor n o d e O" - A p o g e e
V 1
~v 3
b) Hohmann transfer and then plane change:
o~v~ o. Equator Av~~ c£ ~ V 3 c i
~- V ~ c~
c) Hohmann transfer with plane change at apogee in a vectorial combination (two impulses):
d) Bi-elliptic transfer with vectorial plane change at rt = 266,400 km (three impulses):
v~
V c£ ~V 3
VPTK 2
e) Hohmann transfer with optimally split-plane changes (two impulses)

ORBITAL MANEUVERS 111
5.2. The sketch illustrates three circular orbits about the Earth. The radii, as shown, are 9, 16, and 25 Earth radii. Determine the characteristic velocity in meters per second. (AVr = sum of AV) for a double Hohmann transfer from the inner orbit to the outer orbit (A - B - C - D). Calculate AVrin meters per second for a single Hohmann transfer (A - D). Finally, determine A Vr for an intermediate bi-elliptic transfer (A - B - E).
D
/ 5.3. Given an elliptical orbit whose apogee radius rA = 9r0 and perigee radius rp = 3r0 (where r0 is the radius of the assumed spherical Earth), compute the velocity requirements for two modes of transfer from the surface of the Earth to the ellipse. The first mode is an impulsive launch into a bitangential transfer ellipse that is tangent to the Earth's surface and to the target ellipse at perigee of the target ellipse. At this point, the vehicle impulsively achieves the target orbit. The second mode is via a bitangential transfer ellipse that is tangent to the Earth's surface and the target ellipse at its apogee.
a) Calculate four velocity increments in meters per second. b) Determine the most economical mode.
5.4. A satellite is in a circular polar orbit. If, at the ascending node, the velocity vector is rotated counterclockwise 90 deg, what is the new orbit inclination? If the rotation is clockwise 90 deg, what is the new i ? If the same rotations occur after the satellite has moved 60 deg and 90 deg from the ascending node, what are the new inclinations?
5.5. Given a set of injection conditions corresponding to the sketch, determine the true anomaly of the injection point as a function only of y (and perhaps constants), and determine the eccentricity of the resulting orbit as a function only

112 ORBITAL MECHANICS
of F (and perhaps constants).
' - 5
r
5.6. A space vehicle at the South Pole is instantaneously launched, AV1, in a horizontal direction into a parabolic orbit. When the vehicle crosses the equator, point 2, a velocity increment A V2 is applied that instantaneously places the vehicle into a polar, circular orbit. Assuming a spherical Earth of radius r0 = 6371 km, determine the magnitudes of A V1, V2, Vc2, and A V2 in meters per second, and determine the values of F2 and ~ in degrees.
• V e 2 ~
V 2
5.7. An astronaut is heading east in a circular equatorial orbit about the Earth at an altitude h ---- 3r0. At 0 ° longitude, he applies a velocity increment A V1, which places him in a polar orbit whose perigee grazes the Earth's surface 180 deg away in central angle on the equator.
a) What is the magnitude of A V1 ? b) What is the angle between A V1 and the original circular orbit velocity?

ORBITAL MANEUVERS 113
c) What is the retro velocity increment A V2 at perigee that will reduce his total velocity to zero (soft-land)?
-Orb i t
5.8. A satellite is in a polar orbit (orbit 1 on the sketch) about a spherical Earth with no atmosphere. Its perigee and apogee are in the equatorial plane. The perigee altitude is 400 n.mi.; the apogee altitude is 2000 n.mi. Transfer from orbit 2 to orbit i can occur in several ways. Determine the total A V for transfer via circular orbit 3 from apogee to apogee. Determine the total A V for transfer via circular orbit 4 from perigee to perigee. Determine the single A V at point X to accomplish the transfer. Would the AV at point Ybe identical in magnitude? In direction?
A A
5.9. At an arbitrary point, 1, in an initial orbit i, a velocity increment A V is added in the radial direction. A final orbitf is thus achieved. Compare the angular momenta h and the semilatus rectap in the two orbits. Determine the radius in the

114 ORBITAL MECHANICS
final orbit at the point that is 180 deg in central angle away from point 1.
i f
v I
5.10. Boris, a Russian cosmonaut, is in a circular equatorial orbit of radius r = 1.44r0 about the moon (see sketch). He decides to pay a surprise visit to his American friends camped at the North Pole by transferring with A I/1 into a polar elliptical orbit whose pericenter is at the camp. When Boris reaches the camp, he retrofires with AV: to reduce his total velocity to 0. Determine AV1 and AV2 in meters per second. For the moon
Vco = g/-~o = 1679 m/s
P.Q U A T O R I A L O R B I T
5.11. "We've got him surrounded," radios Buck to Doc, referring to Black Bart, intergalactic badman supreme. "We're now all in the same circular orbit that has a period of 90 minutes. I 'm 600 km behind him, and you, Doc, are 600 km ahead of him. When I give the word (t = 0), we'll both supply circumferential AV s to our satellites so that we catch Black Bart after one revolution in our phasing orbits. Since I ' l l reach Bart before you, I ' l l have him in handcuffs when you reach us."
Determine the altitude in kilometers of the circular orbit. Calculate the magni- tude in meters per second and the direction of A VBUCK and A VDOC. Determine,

ORBITAL MANEUVERS 115
to the nearest kilometer, Buck's minimum altitude during catch-up and Doc 's maximum altitude during catch-up. How much time, in minutes, will Buck have to subdue Bart before Doc reaches them? Assume Venus to be spherical and at- mosphereless. Assume the radius of Venus to be 6100 km and the circular orbit velocity at the surface of Venus to be 7210 m/s.
A t t = O
( BLACK
DOG BART BUCK HIIER ROGERS
CIRCULAR O R B I T
5.1. a) AV1
AV2
~V3 AVr
b) AV1
AV2
AV3
AVr c) AV~
AV2
AVr d) AV1
AV2
AV3
AVr
= 4002
= 2939
= 1195
= 8136 = 2939
= 1195
= 895
= 5029 = 2939
= 1295
= 4234 = 3068
= 776
= 267
= 4112
m/s m/s
m/s
rrds m/s
ngs
m/s
m/s m/s
m/s
m/s m/s
rrds
rrds
m/s
Selected Solutions

116 ORBITAL MECHANICS
e) al/OPT : 0.7 deg
a2/OPT = 29.3 deg
AVT = 4 2 3 2 m/s
AV1 = 2941 m/s
AV2 = 1291 m/s
5.2. AVABcD = 1036 m/s AVAD = 991 m / s AVABE = 1036 m/s
5.5.
5.6.
5.9.
a : F
c o s u ~ - e
e = sin y
AV1 = 11,180 m/s V2 = 7905 m/s go2 = 5590 m / s AV2 = 5590 m / s ~'2 = 45 deg ot = 90 deg
s a m e
s a m e
?'2i : F2 f
5.10. AV1 = 2073 m / s
AV2 = 2015 m / s
5.11. Alt i tude = 64 .2 k m A VBUCK = 37.6 m/s retro A V o o c = 36.5 m/s fo rward B u c k ' s m i n i m u m al t i tude = - 6 3 . 5 k m (unde rg round) D o c ' s m a x i m u m al t i tude = 191.2 k m t ime = 2.8 m i n if B u c k ' s m i n i m u m al t i tude co inc ides wi th a deep canyon.