Embed Size (px)
Citation preview

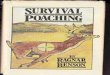
The climb towards the starsVinder strategier
G
G
G
G
G
G
time

Simplisity is the new black

Disruption is facilitated by sophisticated technology that makes processes simple and things fool proof
Experimentation & Problem solving
Pattern recognition
Rule based
COMPLEX
SIMPLE
Breaking
the market
barriers
Job Qualify
Tech/economical Feasibility
Configure
Platform Modules and architecture
Produce
Assembly, test & eLearing
Deploy
Shipping & install
Maintain
Productivity
yield
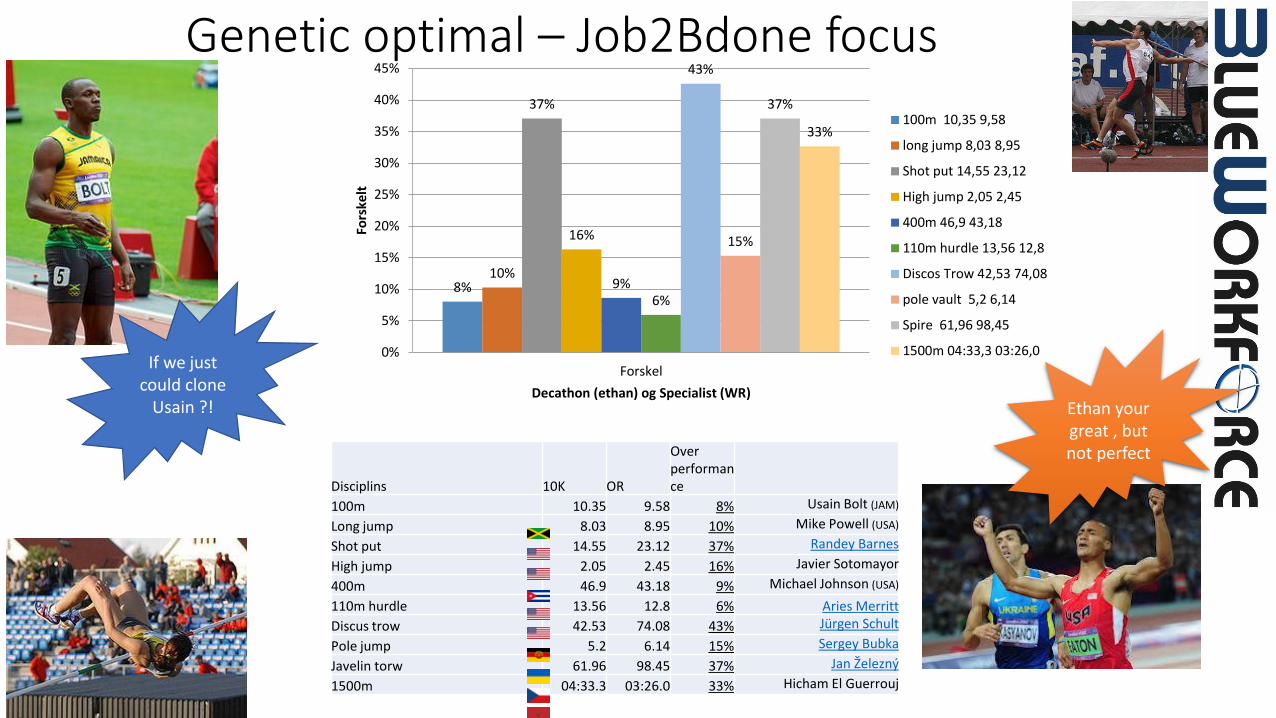
Genetic optimal – Job2Bdone focus
8%10%
37%
16%
9%6%
43%
15%
37%
33%
0%
5%
10%
15%
20%
25%
30%
35%
40%
45%
ForskelFo
rske
lt
Decathon (ethan) og Specialist (WR)
100m 10,35 9,58
long jump 8,03 8,95
Shot put 14,55 23,12
High jump 2,05 2,45
400m 46,9 43,18
110m hurdle 13,56 12,8
Discos Trow 42,53 74,08
pole vault 5,2 6,14
Spire 61,96 98,45
1500m 04:33,3 03:26,0
Disciplins 10K OR
Overperformance
100m 10.35 9.58 8% Usain Bolt (JAM)
Long jump 8.03 8.95 10% Mike Powell (USA)
Shot put 14.55 23.12 37% Randey Barnes
High jump 2.05 2.45 16% Javier Sotomayor
400m 46.9 43.18 9% Michael Johnson (USA)
110m hurdle 13.56 12.8 6% Aries Merritt
Discus trow 42.53 74.08 43% Jürgen Schult
Pole jump 5.2 6.14 15% Sergey Bubka
Javelin torw 61.96 98.45 37% Jan Železný
1500m 04:33.3 03:26.0 33% Hicham El Guerrouj
If we just could clone
Usain ?! Ethan your great , but not perfect

Industrial robotics innovation looks mostly like bodybuilding
• Not Pretty!• Odd performance
factors that does not match ANY real world problem
• But marketing keeps it alive
• And top level IEEE Robotics Researchers and Industry Innovators, helped to prove we have a new agenda to pursue ..
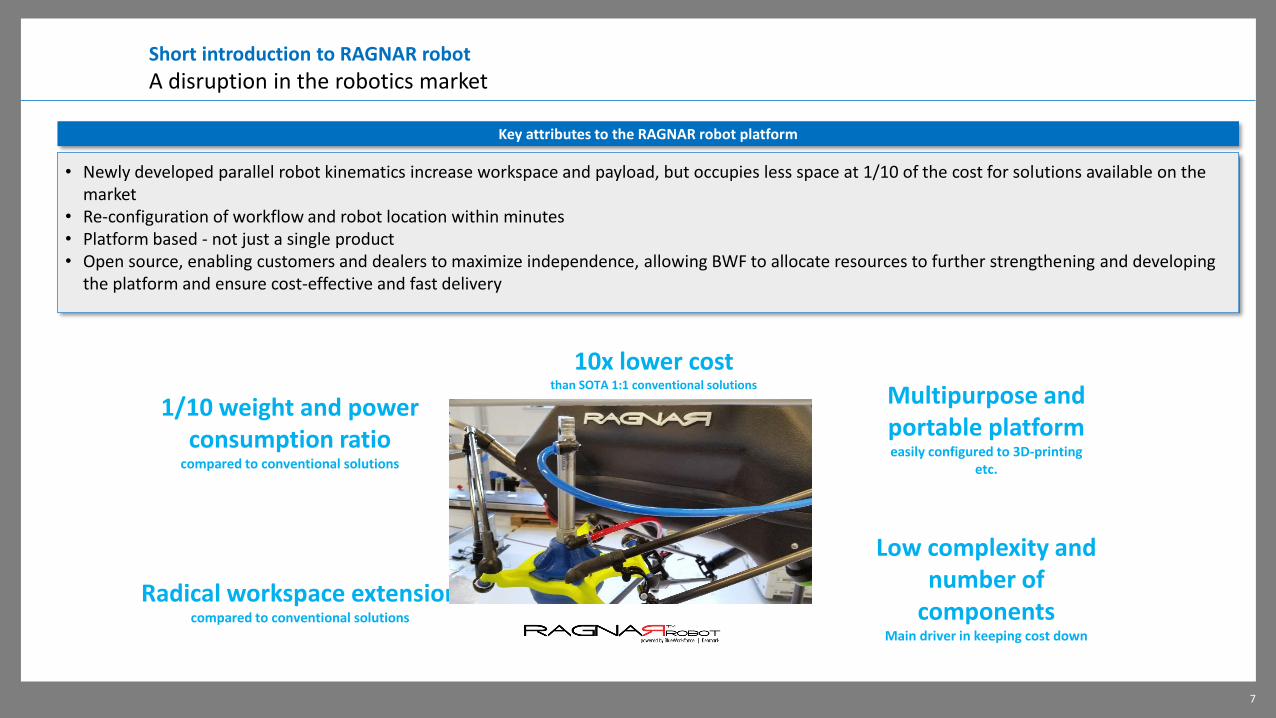
Short introduction to RAGNAR robot
A disruption in the robotics market
7
Low complexity and number of
componentsMain driver in keeping cost down
Multipurpose and portable platformeasily configured to 3D-printing
etc.
10x lower cost than SOTA 1:1 conventional solutions
Radical workspace extension compared to conventional solutions
1/10 weight and power consumption ratio
compared to conventional solutions
• Newly developed parallel robot kinematics increase workspace and payload, but occupies less space at 1/10 of the cost for solutions available on the market
• Re-configuration of workflow and robot location within minutes• Platform based - not just a single product• Open source, enabling customers and dealers to maximize independence, allowing BWF to allocate resources to further strengthening and developing
the platform and ensure cost-effective and fast delivery
Key attributes to the RAGNAR robot platform
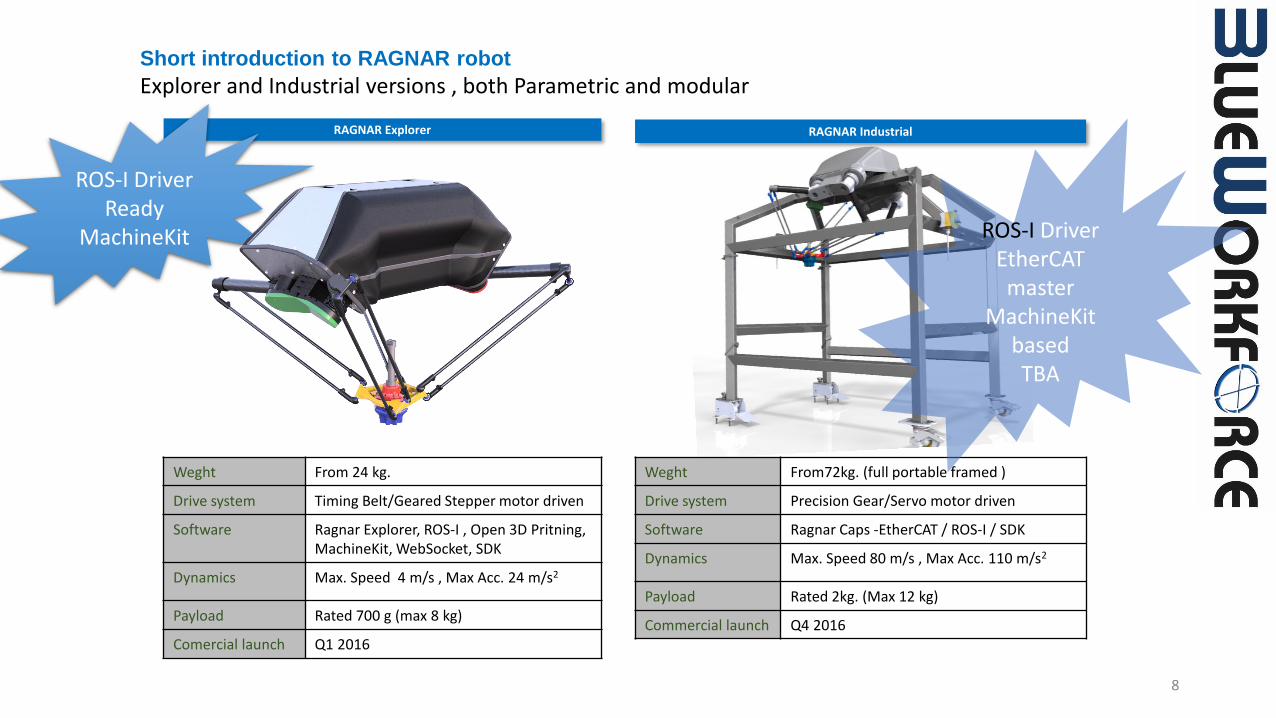
Short introduction to RAGNAR robot
Explorer and Industrial versions , both Parametric and modular
RAGNAR Explorer
8
RAGNAR Industrial
Weght From 24 kg.
Drive system Timing Belt/Geared Stepper motor driven
Software Ragnar Explorer, ROS-I , Open 3D Pritning, MachineKit, WebSocket, SDK
Dynamics Max. Speed 4 m/s , Max Acc. 24 m/s2
Payload Rated 700 g (max 8 kg)
Comercial launch Q1 2016
Weght From72kg. (full portable framed )
Drive system Precision Gear/Servo motor driven
Software Ragnar Caps -EtherCAT / ROS-I / SDK
Dynamics Max. Speed 80 m/s , Max Acc. 110 m/s2
Payload Rated 2kg. (Max 12 kg)
Commercial launch Q4 2016
ROS-I Driver Ready
MachineKit ROS-I Driver EtherCAT master
MachineKit based TBA
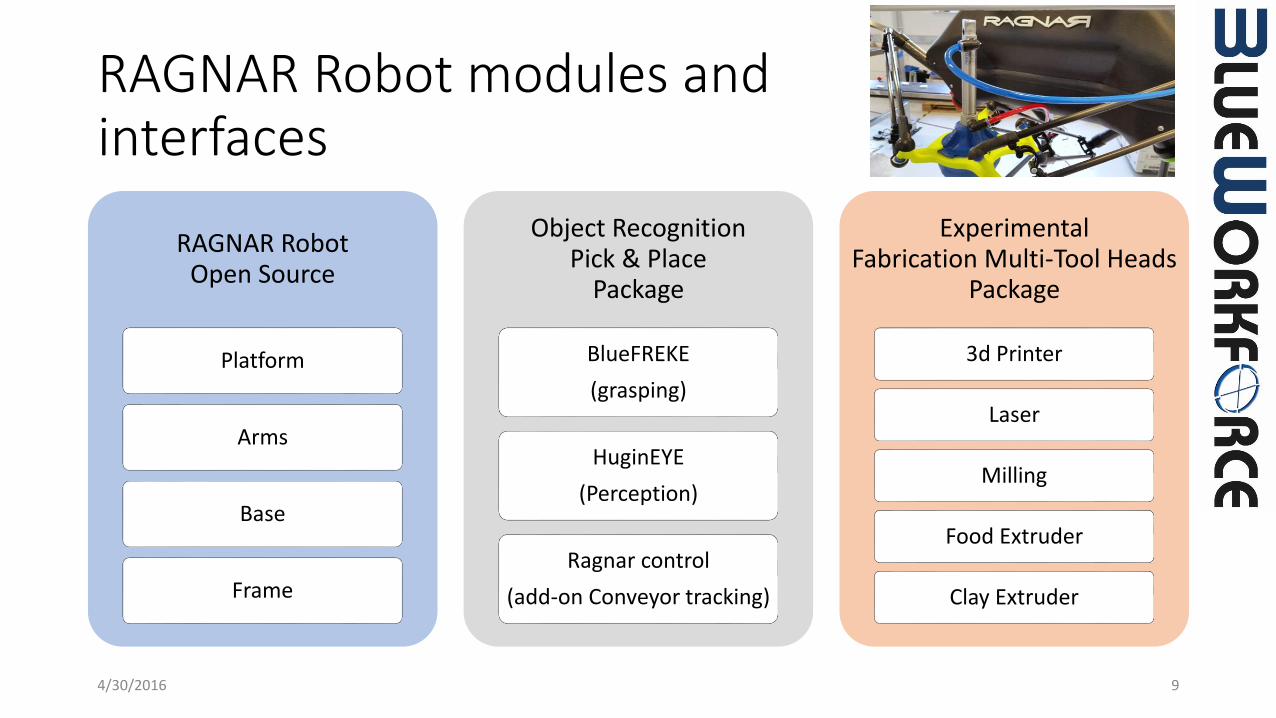
RAGNAR Robot modules and interfaces
RAGNAR RobotOpen Source
Platform
Arms
Base
Frame
Object RecognitionPick & Place
Package
BlueFREKE
(grasping)
HuginEYE
(Perception)
Ragnar control
(add-on Conveyor tracking)
ExperimentalFabrication Multi-Tool Heads
Package
3d Printer
Laser
Milling
Food Extruder
Clay Extruder
4/30/2016 9
4/30/2016 10
Object RecognitionPick & Place
Package
BlueFREKE
HuginEYE
Conveyor Belt
With these three modules, bound together by a graphical user interface, you will be able to recognize and allocate objects, such as apples or oranges, in a basket or moving along a conveyor belt, in order to perform pick and place operations on them, I.e. bin picking or conveyor tracking
A gripper end-effector made of silicon and works of compressed air. It gives the possibility of gently picking up products and precisely placing them again, while maintaining a high capacity
A combination of a 3D camera and object recognition software allows you to allocate objects in a 3 dimensional space. The software is capable of self-training vision models and guidance of the robot
A conveyor belt allows you to emulate an industrial environment and move objects through the workspace of the robot, there by utilizing the conveyor tracking and path planning software
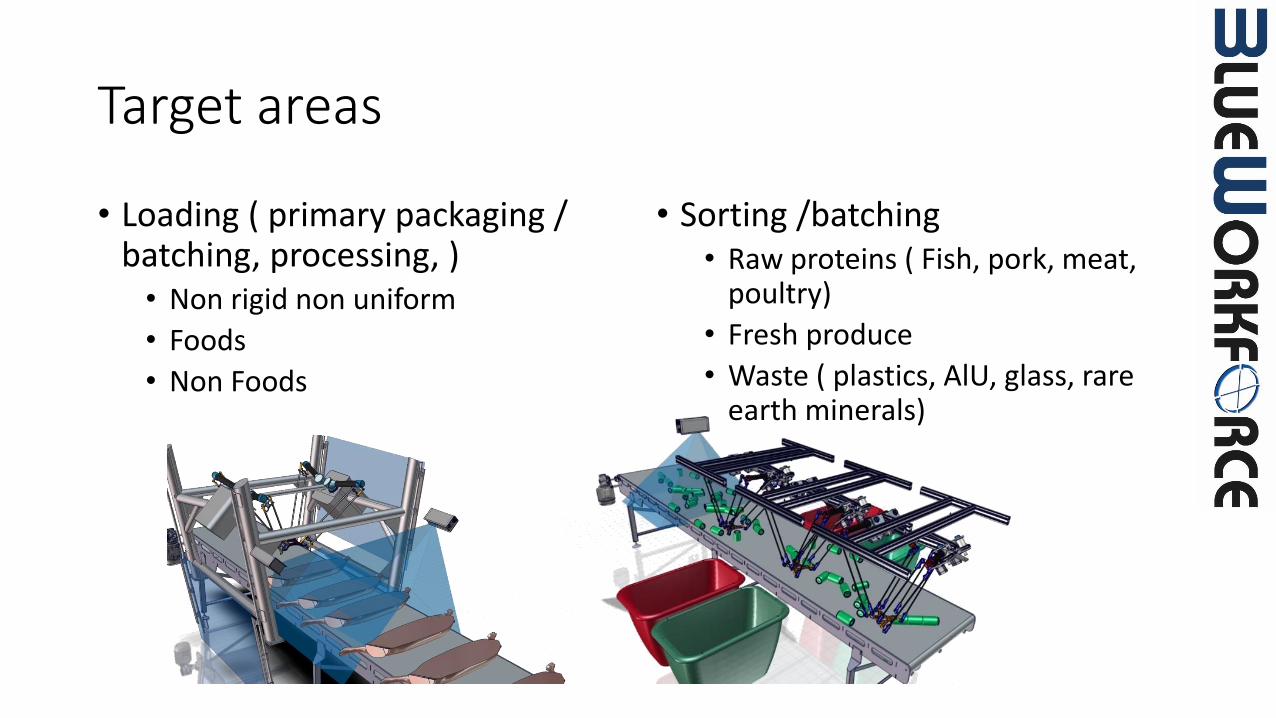
Target areas
• Loading ( primary packaging / batching, processing, )• Non rigid non uniform
• Foods
• Non Foods
• Sorting /batching• Raw proteins ( Fish, pork, meat,
poultry)
• Fresh produce
• Waste ( plastics, AlU, glass, rare earth minerals)
•
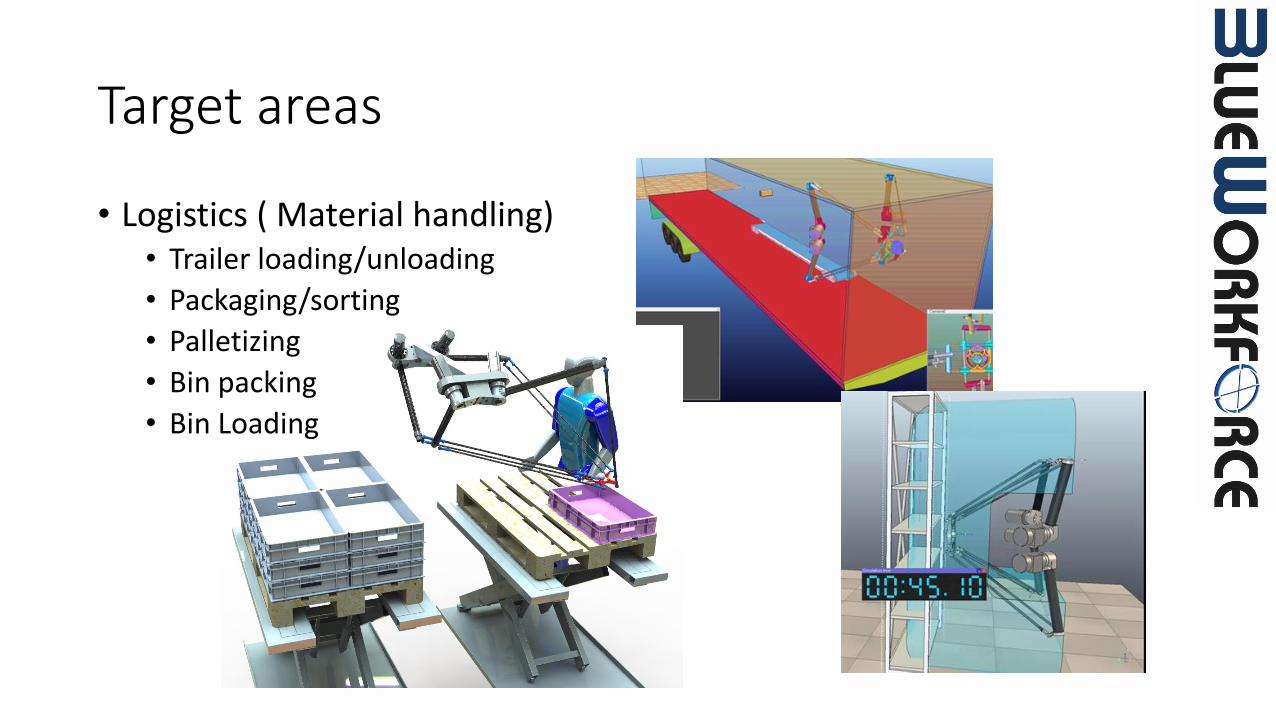
Target areas
• Logistics ( Material handling)• Trailer loading/unloading
• Packaging/sorting
• Palletizing
• Bin packing
• Bin Loading
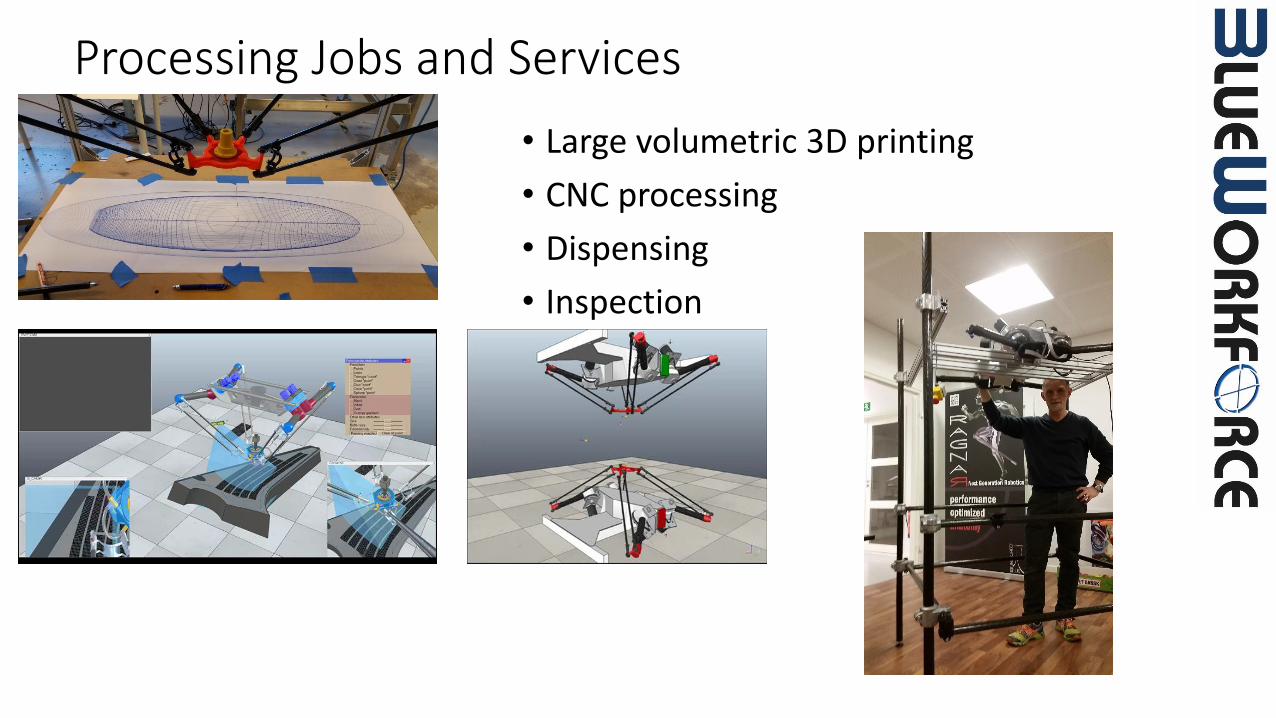
Processing Jobs and Services
• Large volumetric 3D printing
• CNC processing
• Dispensing
• Inspection
4/30/2016 14
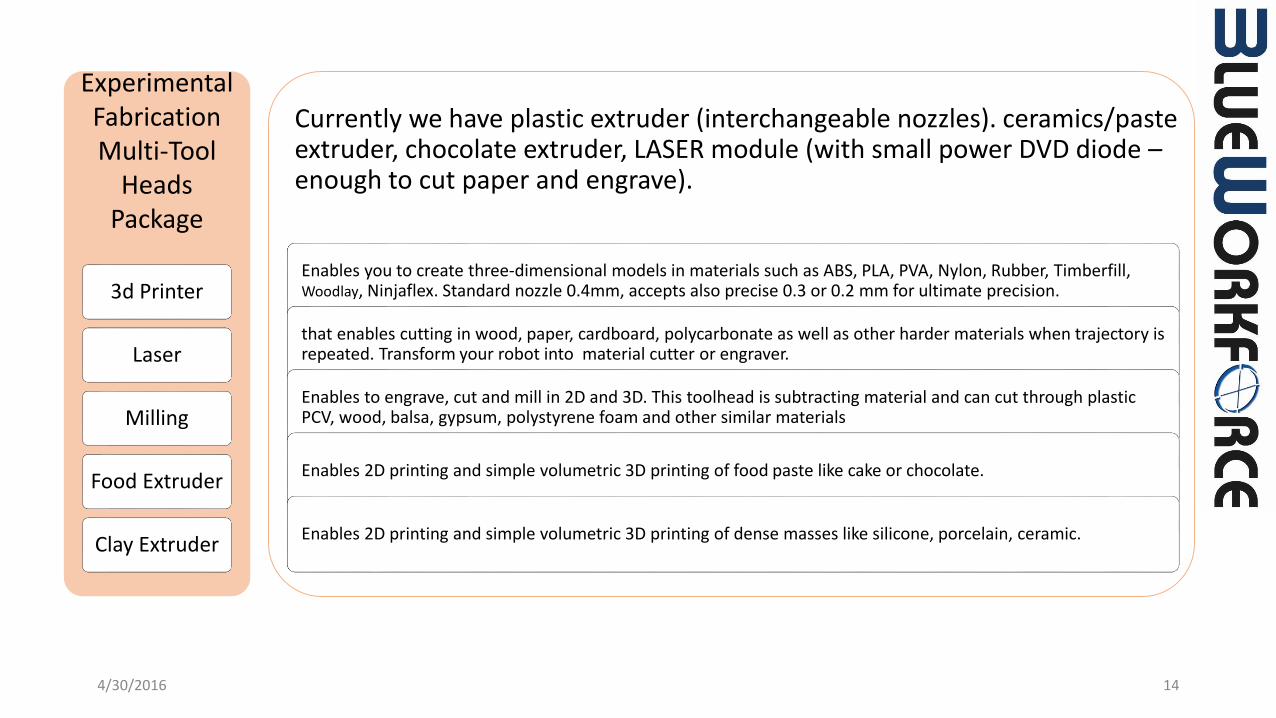
ExperimentalFabrication Multi-Tool
Heads Package
3d Printer
Laser
Milling
Food Extruder
Clay Extruder
Currently we have plastic extruder (interchangeable nozzles). ceramics/paste extruder, chocolate extruder, LASER module (with small power DVD diode –enough to cut paper and engrave).
Enables you to create three-dimensional models in materials such as ABS, PLA, PVA, Nylon, Rubber, Timberfill, Woodlay, Ninjaflex. Standard nozzle 0.4mm, accepts also precise 0.3 or 0.2 mm for ultimate precision.
that enables cutting in wood, paper, cardboard, polycarbonate as well as other harder materials when trajectory is repeated. Transform your robot into material cutter or engraver.
Enables to engrave, cut and mill in 2D and 3D. This toolhead is subtracting material and can cut through plastic PCV, wood, balsa, gypsum, polystyrene foam and other similar materials
Enables 2D printing and simple volumetric 3D printing of food paste like cake or chocolate.
Enables 2D printing and simple volumetric 3D printing of dense masses like silicone, porcelain, ceramic.
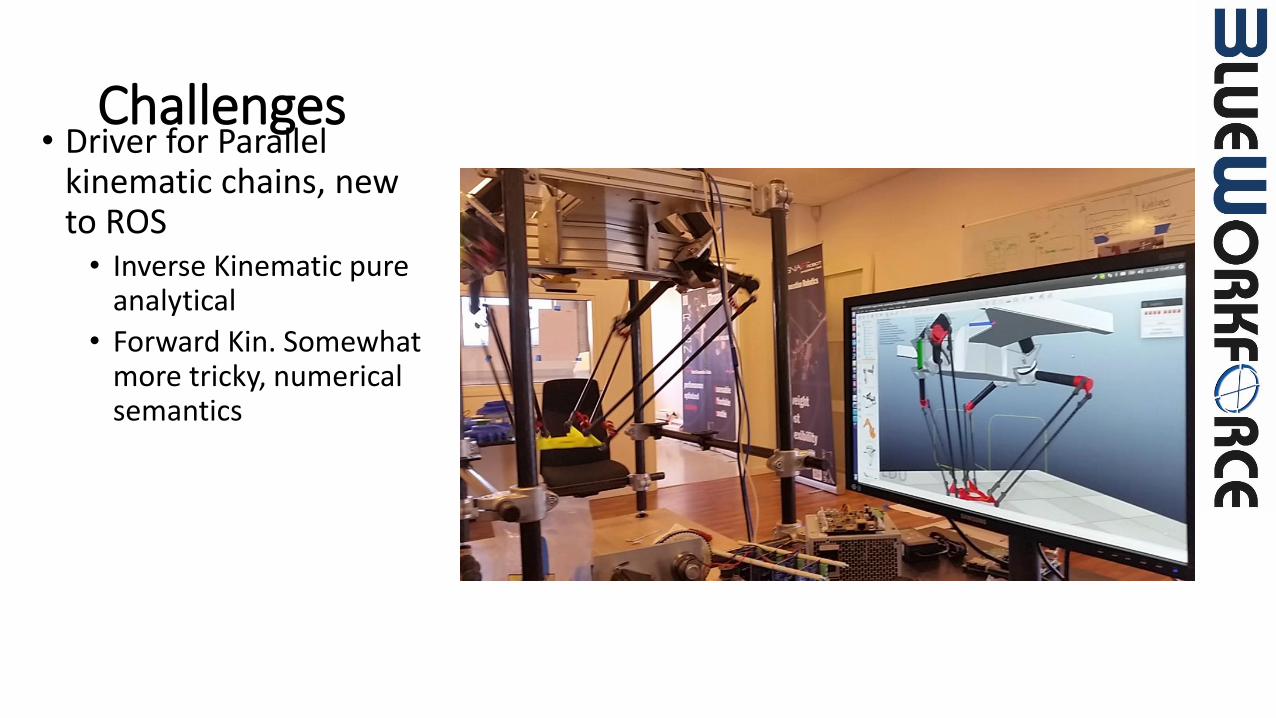
Challenges• Driver for Parallel
kinematic chains, new to ROS• Inverse Kinematic pure
analytical
• Forward Kin. Somewhat more tricky, numerical semantics

ROS-Industrial Driver