Embed Size (px)
Citation preview

J. Petit - Automated Vehicles Symposium - July 20, 2016 2
Technical Challenges
Governance Challenges

J. Petit - Automated Vehicles Symposium - July 20, 2016 3
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
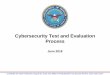
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.

J. Petit - Automated Vehicles Symposium - July 20, 2016 3
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.
credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
On-Board Unit
Datastorage

J. Petit - Automated Vehicles Symposium - July 20, 2016
Vehicle
3
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.
credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Cloudservices
On-Board Unit
Datastorage

J. Petit - Automated Vehicles Symposium - July 20, 2016
Vehicle
3
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.
credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Cloudservices
On-Board Unit
Datastorage
Infrastructure

J. Petit - Automated Vehicles Symposium - July 20, 2016
Vehicle
3
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.
credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Cloudservices
On-Board Unit
Datastorage
Infrastructure
Constraints • Cost (money)• Computation overhead• Space• Energy• Communication overhead

J. Petit - Automated Vehicles Symposium - July 20, 2016
Vehicle
3
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.
credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Cloudservices
On-Board Unit
Datastorage Challenges • HW security• SW security• OS security• Network security• Privacy
Infrastructure
Constraints • Cost (money)• Computation overhead• Space• Energy• Communication overhead

J. Petit - Automated Vehicles Symposium - July 20, 2016 4
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Cloudservices
Datastorage
Challenges• Pen-testing: assess security level / “score”• Protection: learn from military applications• Software/Firmware OTA update is critical• Can the sensors play an active role in the defense
system?

J. Petit - Automated Vehicles Symposium - July 20, 2016 5
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Cloudservices
Datastorage
• Processing: filtering, normalization• Sometimes integrated to the sensor itself,
otherwise data sent on the bus
Challenges • HW-based security, host-based security
with minimal overhead• Side-channel protection• Middleware security• Sensor authentication• In-vehicle network security

J. Petit - Automated Vehicles Symposium - July 20, 2016 6
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Cloudservices
Datastorage
Challenges• Often performed on fast
CPU/GPU g HW security• Proposal: use “sensor
security score”• How to harden adversarial
input • How to differentiate attacks
from faulty sensor?• How to obfuscate
“weights”?

J. Petit - Automated Vehicles Symposium - July 20, 2016 7
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.
Cloudservices
credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Datastorage
External data• V2X• Maps• Cloud service
Challenges• How much trust in external
data?• Consensus in V2X network• Maps integrity and freshness• Secure cloud services

J. Petit - Automated Vehicles Symposium - July 20, 2016 8
Technical Challenges
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.
Cloudservices
credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
DatastorageChallenges• Decide what is best for the ego
vehicle and the community (game theory)
• Build a context-aware misbehavior engine (prediction, detection, reaction)

J. Petit - Automated Vehicles Symposium - July 20, 2016 9
Technical Challenges
Governance Challenges

J. Petit - Automated Vehicles Symposium - July 20, 2016 10
Governance Challenges
Encourage security by design (upgradability, crypto-agility), security testing (C/I/A analysis, security rating)
Data ownership will affect privacy and security
Forensicsability
Role of road operators

J. Petit - Automated Vehicles Symposium - July 20, 2016 11
Scalable electronics driving autonomous vehicle technologies 5 April 2014
to-infrastructure (V2I) communications. On-board
maps and associated cloud-based systems offer
additional inputs via cellular communications.
The outputs from all the sensor blocks are used to
produce a 3D map of the environment around the
vehicle. The map includes curbs and lane markers,
vehicles, pedestrians, street signs and traffic lights,
the car’s position in a larger map of the area and
other items that must be recognized for safe driving.
This information is used by an “action engine,” which
serves as the decision maker for the entire system.
The action engine determines what the car needs
to do and sends activation signals to the lock-step,
dual-core MCUs controlling the car’s mechanical
functions and messages to the driver. Other inputs
come from sensors within the car that monitor the
state of the driver, in case there is a need for an
emergency override of the rest of the system.
Finally, it is important to inform the driver
visually about what the car “understands” of its
environment. Displays that help the driver visualize
the car and its environment can warn about road
conditions and play a role in gaining acceptance of
new technology. For instance, when drivers can see
a 3D map that the vehicle uses for its operations,
they will become more confident about the vehicle’s
automated control, and begin to rely on it.
Algorithms and system scaling
With its heavy reliance on cameras, radar, lidar and
other sensors, autonomous vehicle control requires
a great deal of high-performance processing, which
by nature is heterogeneous. Low-level sensor
processing, which handles massive amounts of
input data, tends to use relatively simple repetitive
algorithms that operate in parallel. High-level
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
Autonomous vehicle platform: a functional diagram
Figure 1. A functional view of the data flow in an autonomous car’s sensing and control system.credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Cloudservices
1. Pen-testingsensors andharden them
2. HW/Host-based security
3. Use“security level”
as weight
4. Secureexternal
(contextual) data
5. Misbehavior Detection

J. Petit - Automated Vehicles Symposium - July 20, 2016 11
Cameras
Radars
Sensor Processing
Sensor Processing
Sensor Fusion
3D Scanning Lidars
Ultrasoundsensors
Sensor Processing
Sensor Processing
Action Engine
Vehicle Controls- Brake/acc- Steering- etc.
Visualization/DisplaySub-system
Raw data Object parameters- Time stamp- Dimensions- Position/velocity
3D Map Actions- Do nothing- Warn- Complement- Control
Compressed data
V2V / V2Icomm.
Sense Understand Act
GPSIMS
“Maps”a priori info
Driver state
credit: F. Mujica. Scalable electronics driving autonomous vehicle technologies. Technical report, Autonomous Vehicles R&D, Kilby Labs, Texas Instruments, 2014.
Cloudservices
1. Pen-testing sensors and harden them
2. HW/Host-based security
3. Use“security level”
as weight
4. Secureexternal
(contextual) data
5. Misbehavior Detection
Plan for Actions
1. Organize workshops with subject matter experts to establish cybersecurity guidelines for AV
2. Address technical challenges: HW, SW, system,network, privacy AND build a full automationsystem simulator (open source)
3. Address governance challenges: policies, forensics, data ownership, data sharing, security rating

Questions & AnswersJonathan Petit
For more info, check my ESCAR US 2016 presentation and publications list!
Security Innovation Automotive Offerings:• Aerolink Security for Vehicles• Automotive Training Courses• Automotive Consulting Learn more about our automotive expertise!