Embed Size (px)
Citation preview
MCHA2000
Modelling of Mechanical Systems Part I
A/Prof Tristan PerezLeader Mechatronics Program & Robotics Research
School of Engineering
Review
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
2
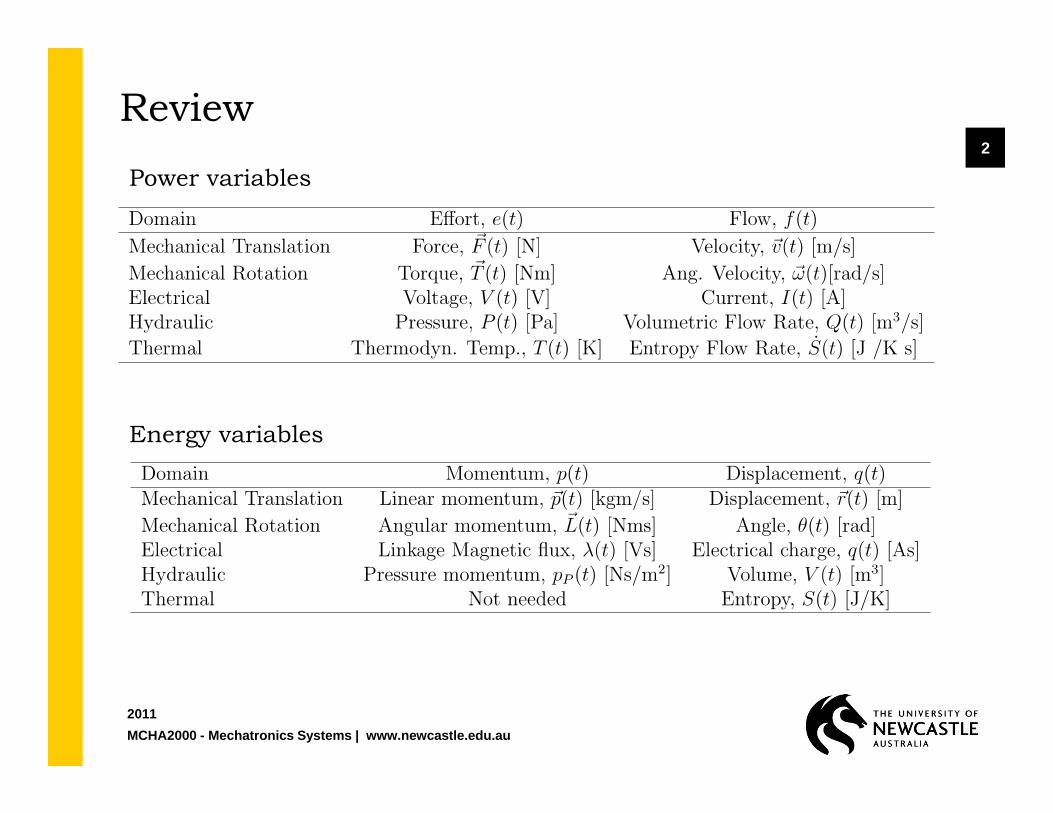
Power variables
Energy variables
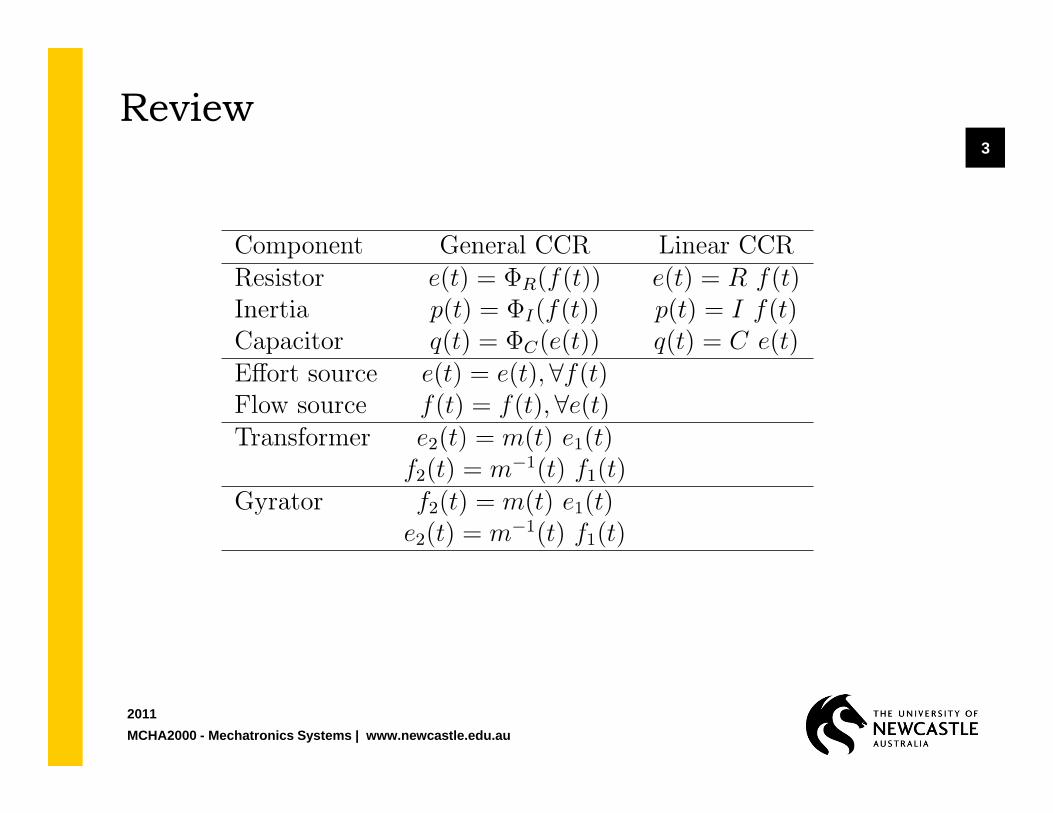
Review
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
3
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
4
Rotational Systems
Translational Systems
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
5
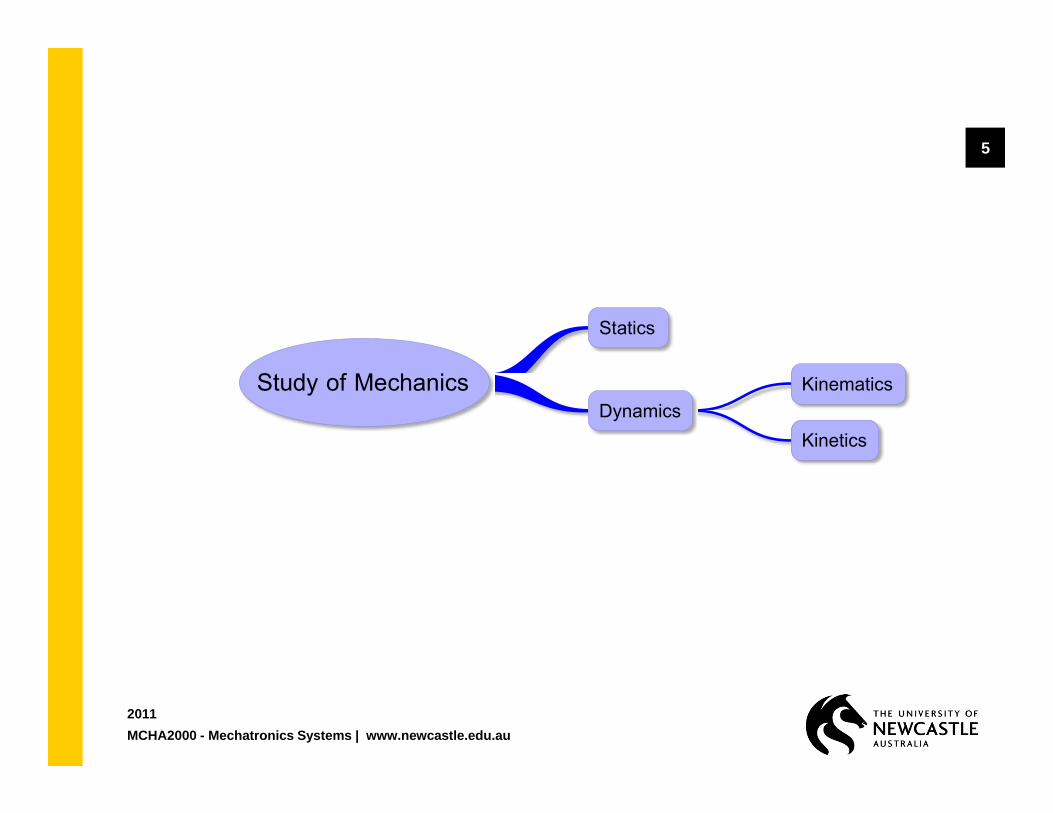
Study of Mechanics
Statics
DynamicsKinematics
Kinetics
Kinematics – Inertial Frames
Law of Inertia (Galilei-Newton): a body that is sufficiently removed from interaction with other bodies will either continue in its state of rest or uniform motion (rectilinear).
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
6
Inertial Frame: a reference frame in which the Law of Inertia holds
Kinematics
Invariance in Newtonian Mechanics: Time and relative positions are the same in different frames.
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
7
Velocity:
Acceleration:
The time-derivative of a vector is not invariant!
Position:
(in an inertial frame)
(in an inertial frame)
In this course, we only use inertial frames.
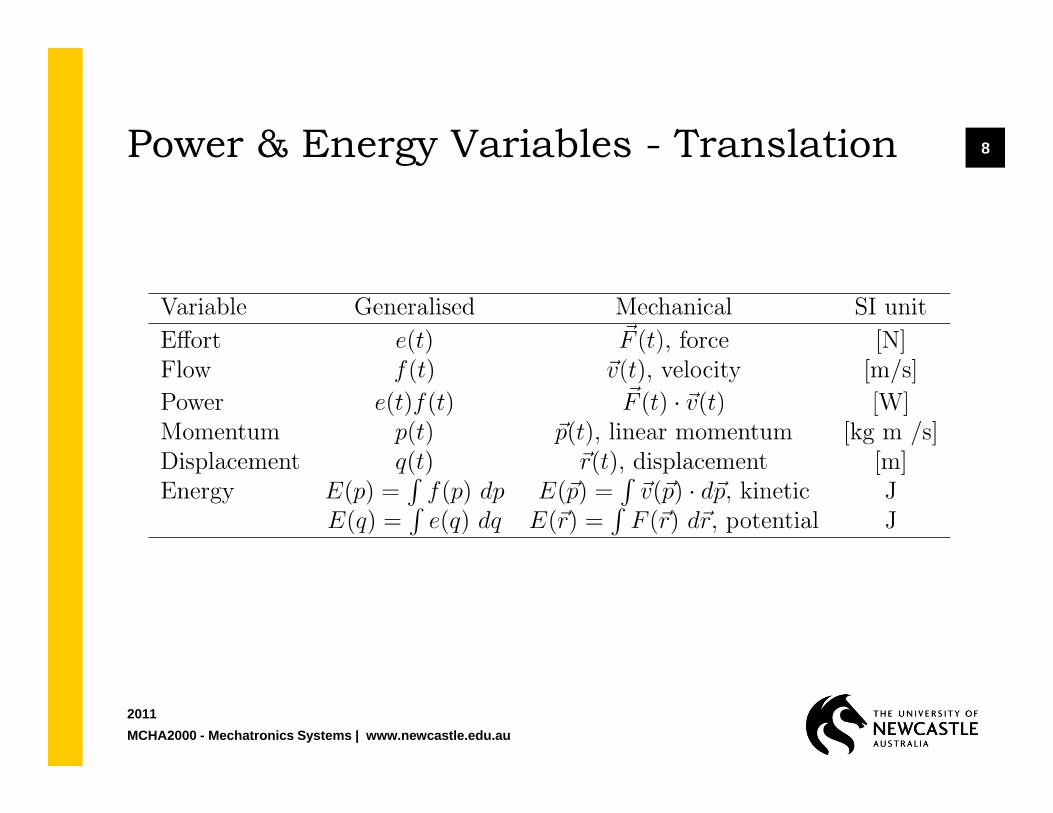
Power & Energy Variables - Translation
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
8
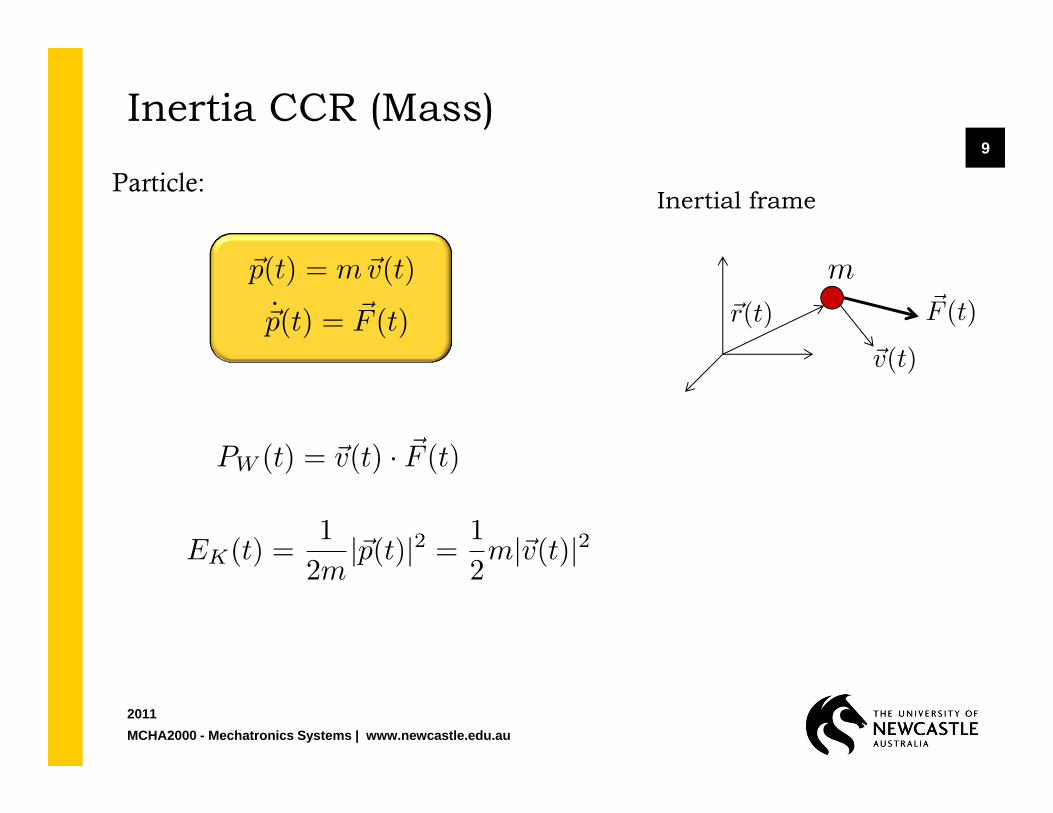
Inertia CCR (Mass)
Particle:
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
9
Inertial frame
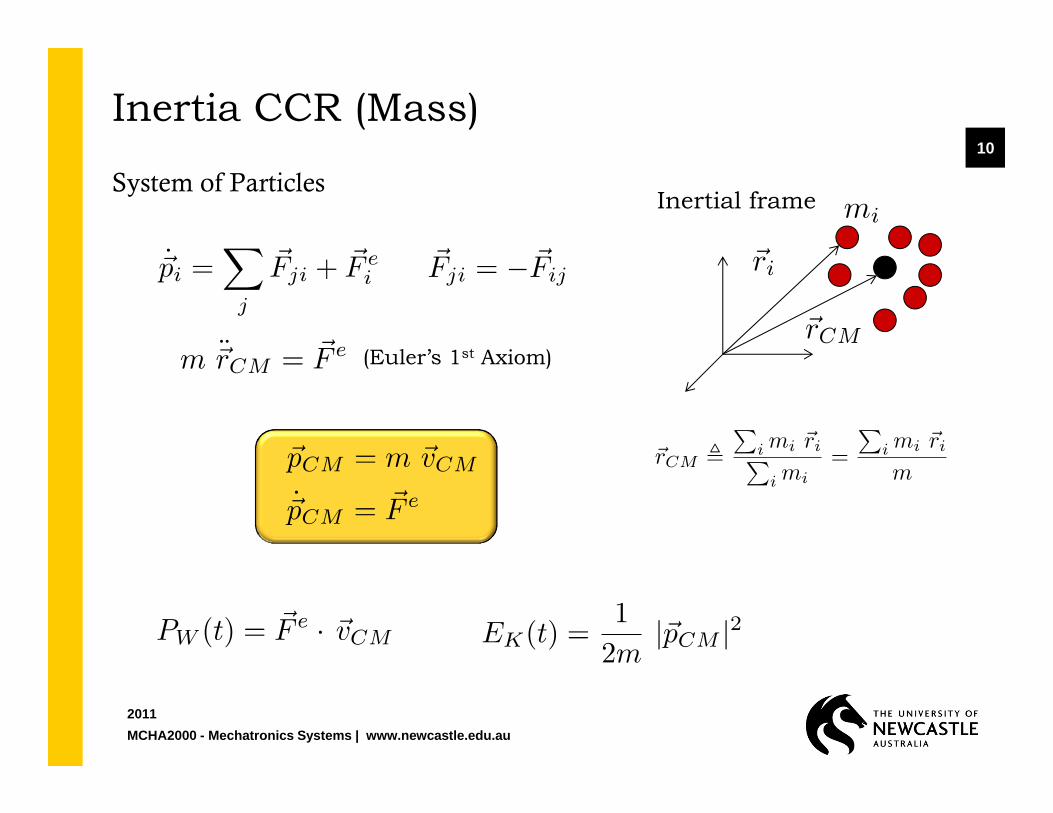
Inertia CCR (Mass)
System of Particles
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
10
Inertial frame
(Euler’s 1st Axiom)
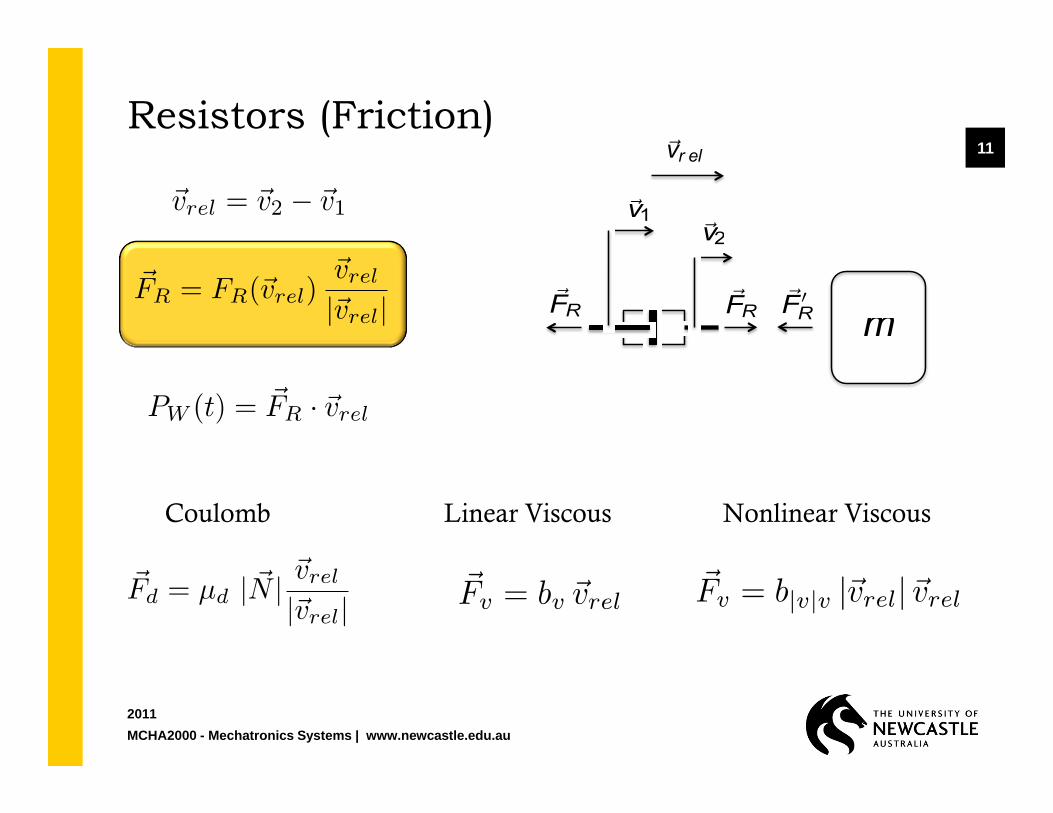
Resistors (Friction)
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
11
Coulomb Linear Viscous Nonlinear Viscous
!!!m
vr el
FR FR
v1v2
FR
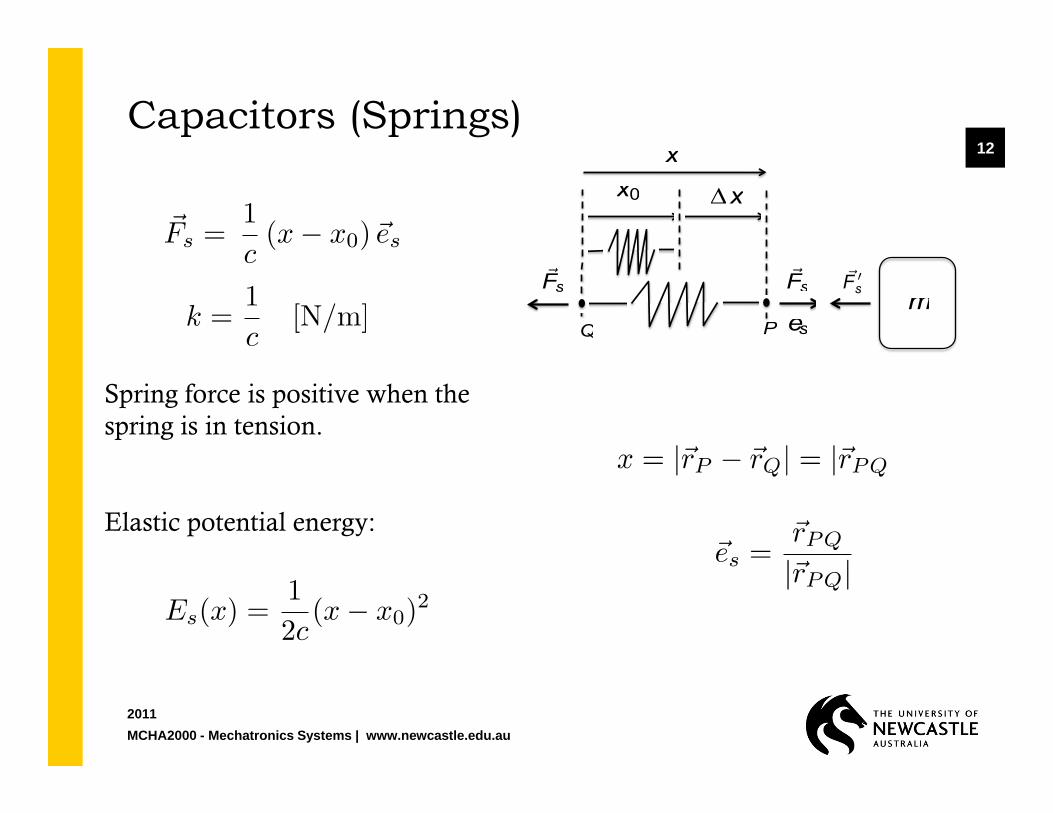
Capacitors (Springs)
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
12
Spring force is positive when the spring is in tension.
Elastic potential energy:
x0
es
Fs
x
∆x
PQm
FsFs
Modelling Translational Systems
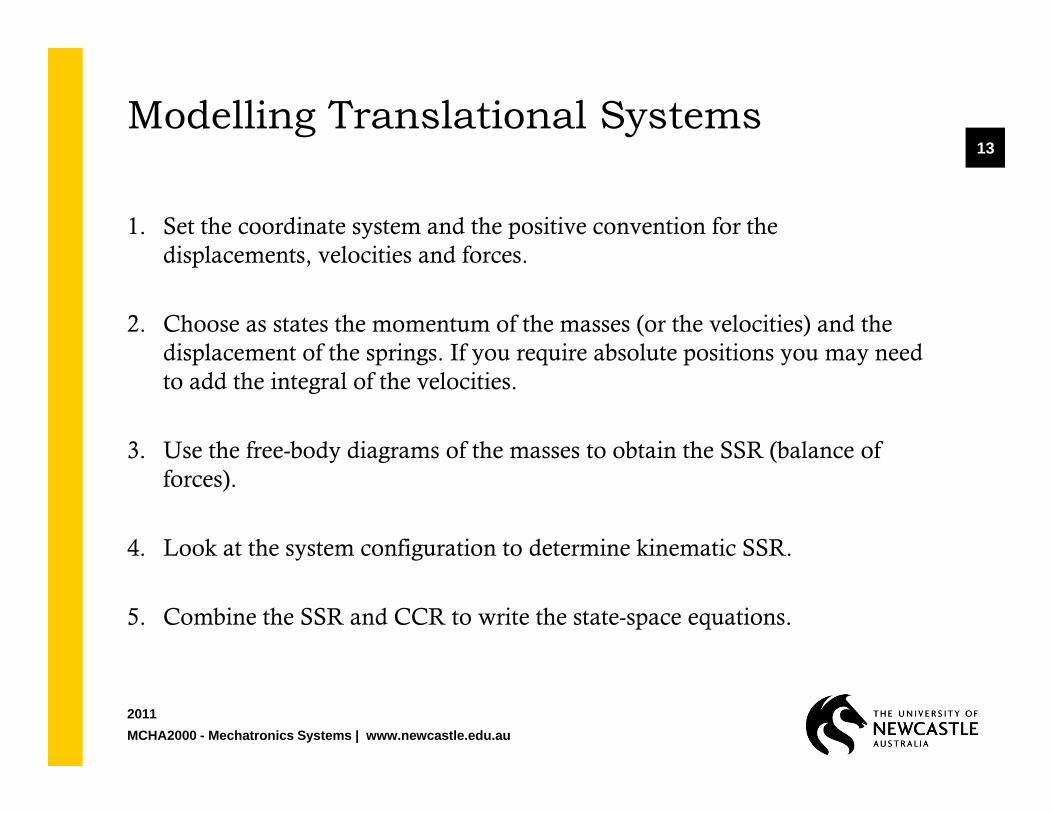
1. Set the coordinate system and the positive convention for the displacements, velocities and forces.
2. Choose as states the momentum of the masses (or the velocities) and the displacement of the springs. If you require absolute positions you may need to add the integral of the velocities.
3. Use the free-body diagrams of the masses to obtain the SSR (balance of forces).
4. Look at the system configuration to determine kinematic SSR.
5. Combine the SSR and CCR to write the state-space equations.
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
13
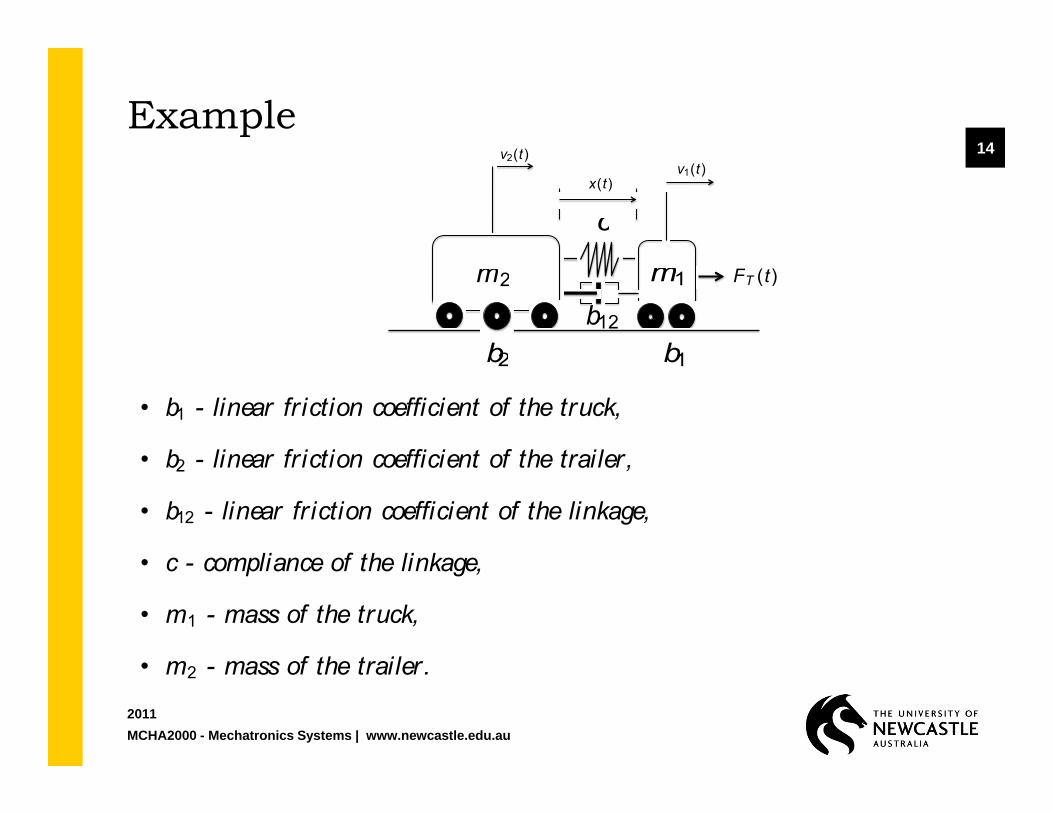
Example
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
14
c
m1m2
b1b2b12
FT (t)
x(t)v1(t)
v2(t)
• b1 - linear friction coefficient of the truck,
• b2 - linear friction coefficient of the trailer,
• b12 - linear friction coefficient of the linkage,
• c - compliance of the linkage,
• m1 - mass of the truck,
• m2 - mass of the trailer.
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
15
Rotational Systems
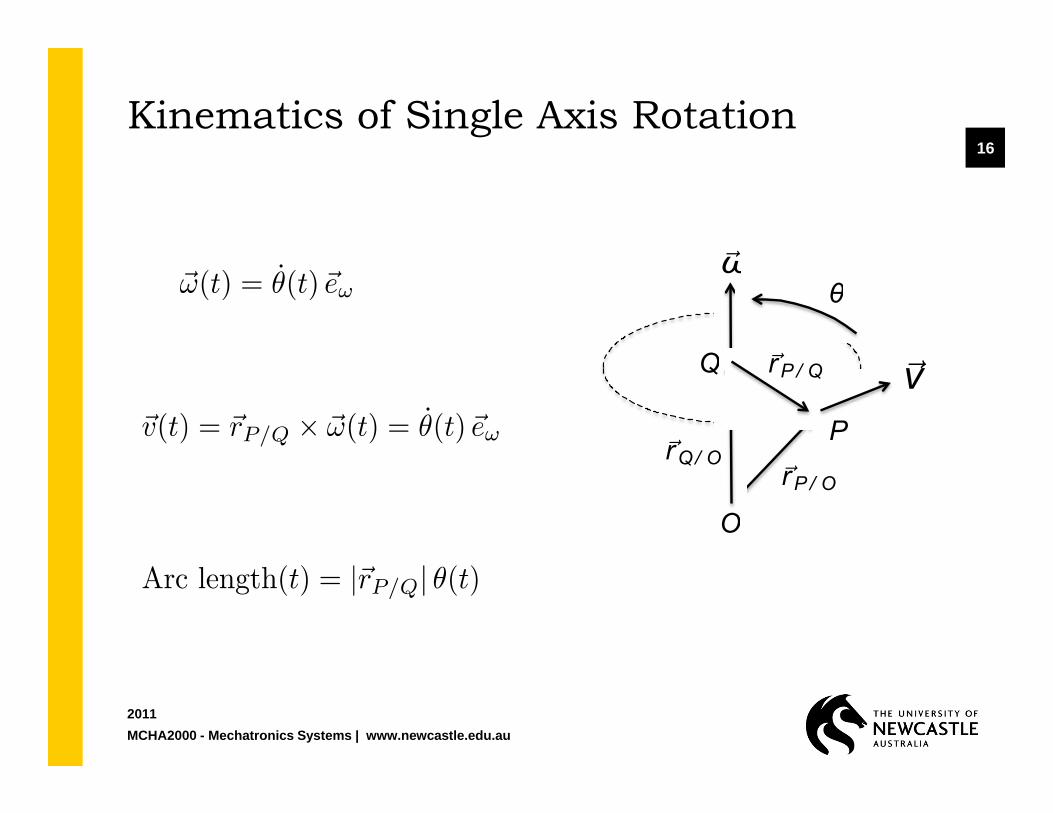
Kinematics of Single Axis Rotation
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
16
v
ω
O
P
Q
rP / OrQ/ O
rP / Q
θ
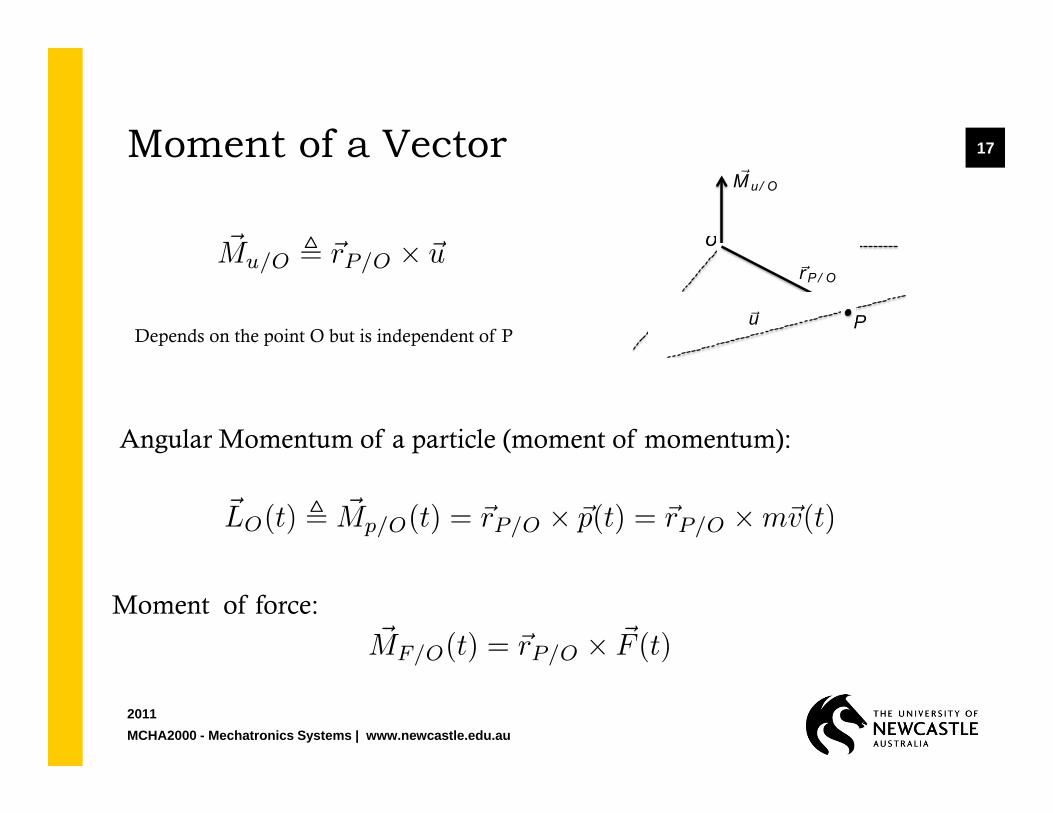
Moment of a Vector
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
17
o
u
rP / O
Mu/ O
P
Angular Momentum of a particle (moment of momentum):
Moment of force:
Depends on the point O but is independent of P
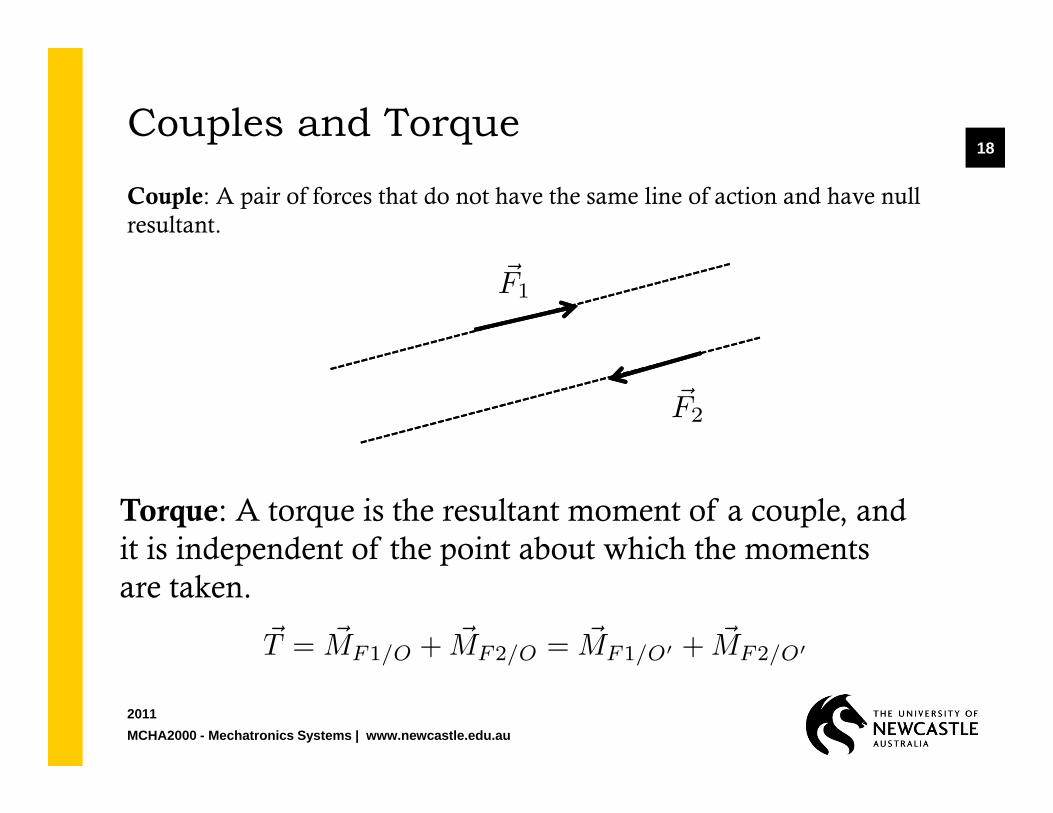
Couples and Torque
Couple: A pair of forces that do not have the same line of action and have null resultant.
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
18
Torque: A torque is the resultant moment of a couple, and it is independent of the point about which the moments are taken.
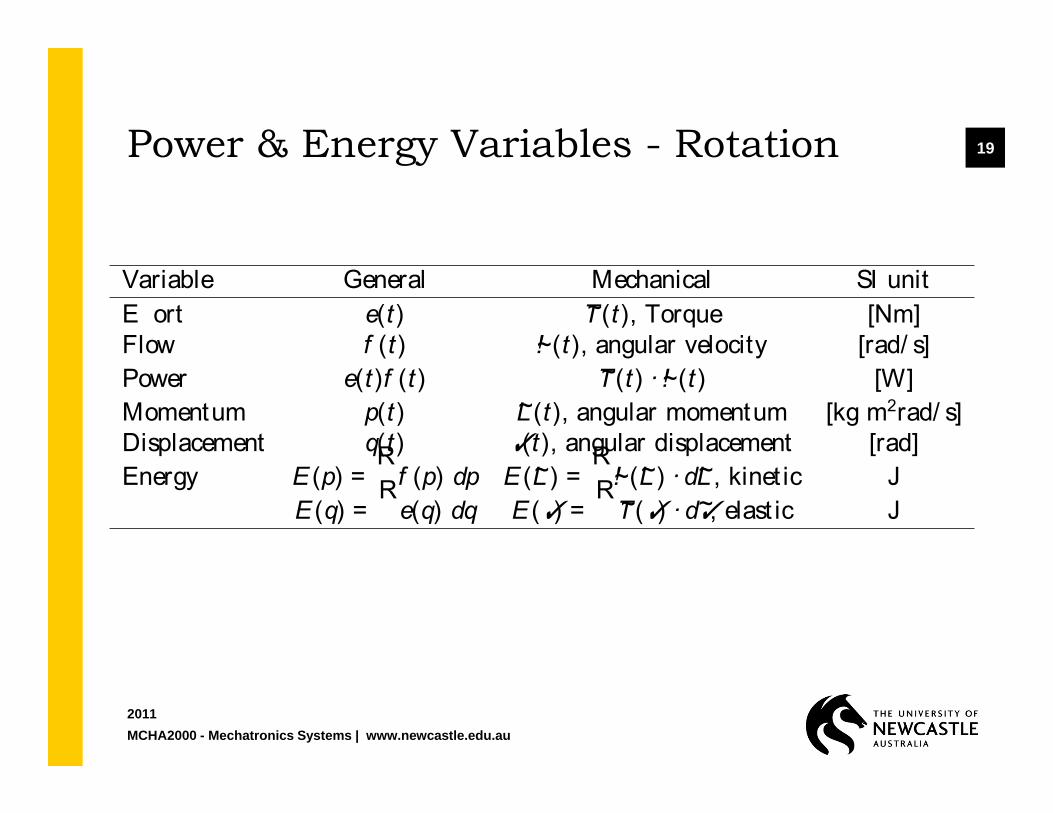
Power & Energy Variables - Rotation
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
19
Variable General Mechanical SI unitE�ort e(t) ~T (t), Torque [Nm]Flow f (t) ~! (t), angular velocity [rad/ s]Power e(t)f (t) ~T (t) · ~! (t) [W]Momentum p(t) ~L (t), angular momentum [kg m2rad/ s]Displacement q(t) ✓(t), angular displacement [rad]Energy E (p) =
Rf (p) dp E (~L ) =
R~! (~L ) · d~L , kinet ic J
E (q) =Re(q) dq E (✓) =
R ~T (✓) · d~✓, elast ic J
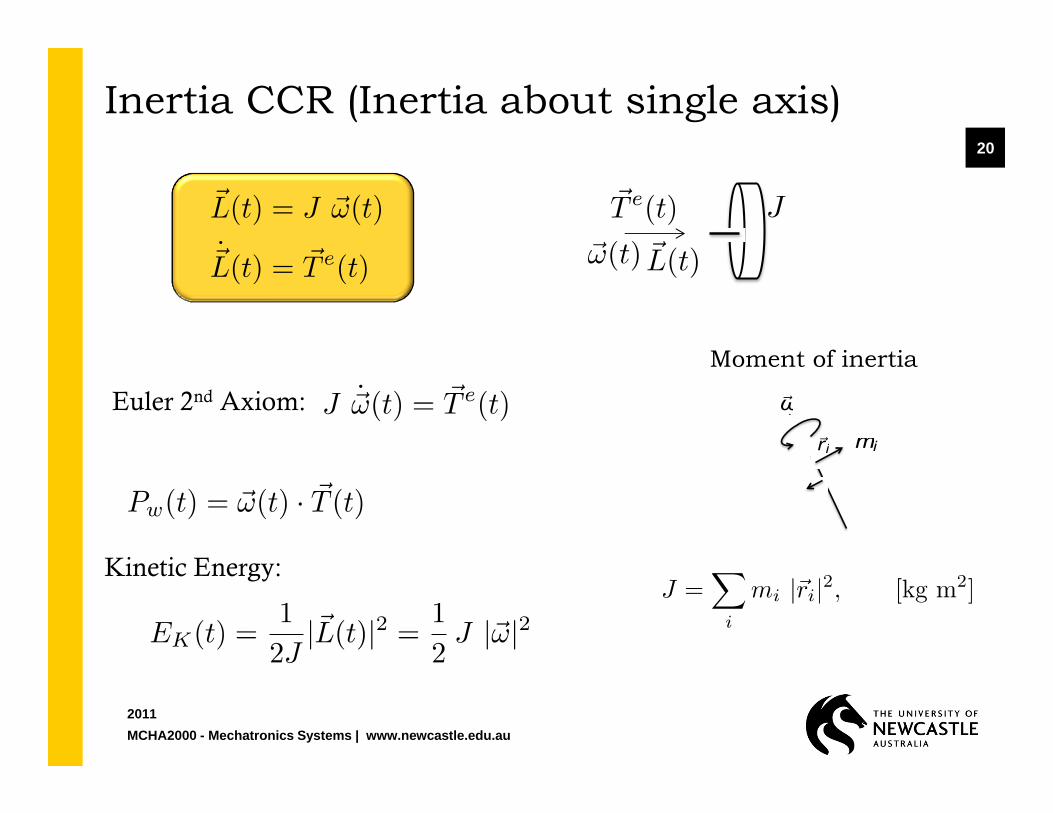
Inertia CCR (Inertia about single axis)
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
20
Moment of inertia
Euler 2nd Axiom: ω
ri mi
Kinetic Energy:
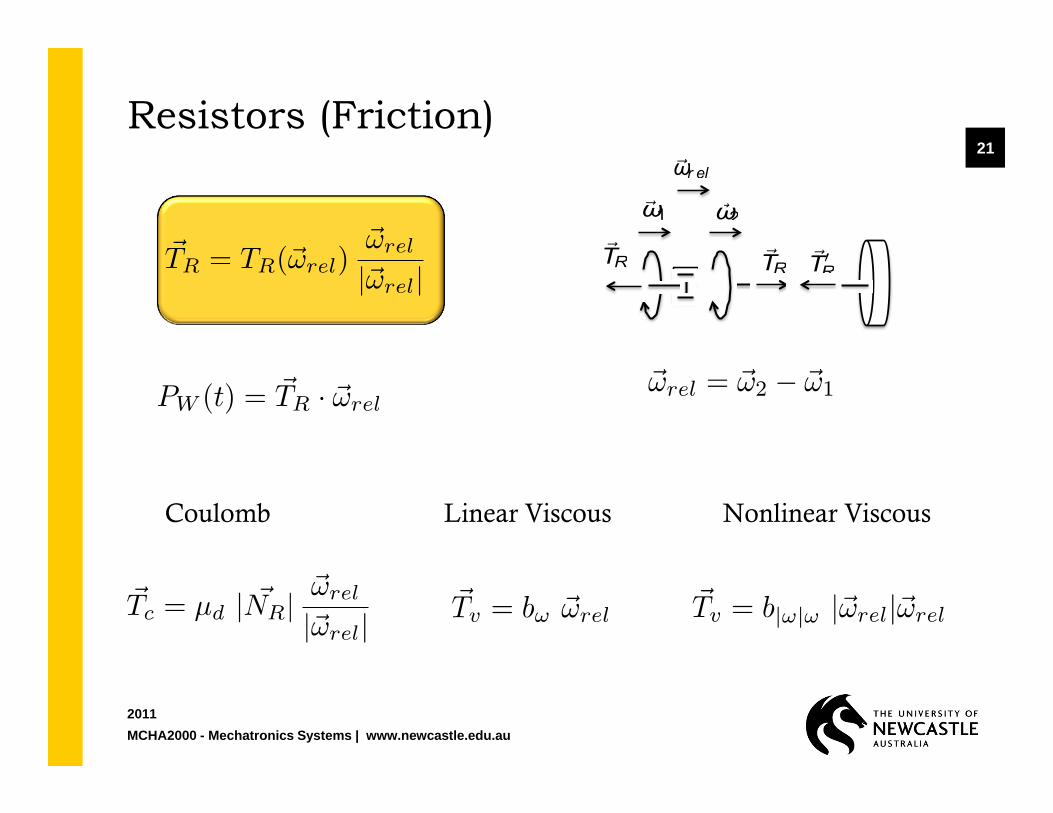
Resistors (Friction)
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
21
Coulomb Linear Viscous Nonlinear Viscous
ωr el
TR TR
ω1 ω2
TR
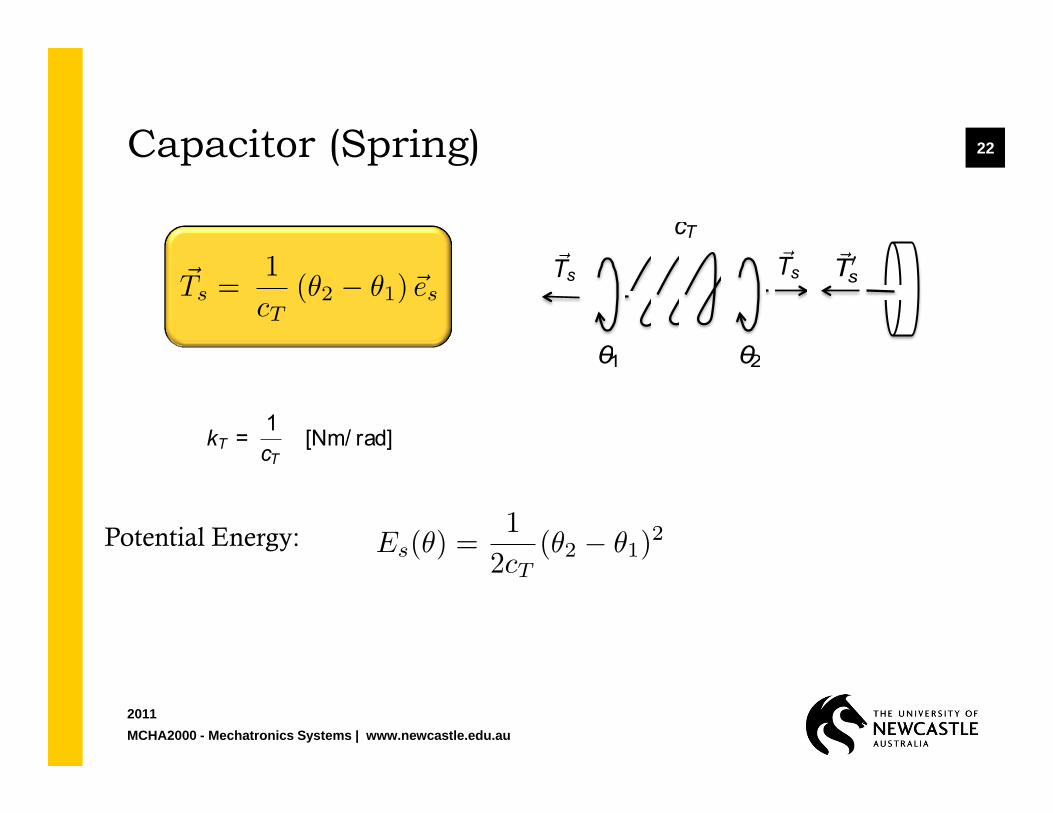
Capacitor (Spring)
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
22
kT =1cT
[Nm/ rad]
Potential Energy:
TsTs
θ1 θ2
cTTs
Modelling Rotational Systems
1. Set the coordinate system and the positive convention for the angular displacements, angular velocities and torques.
2. Choose as states the angular momentum of masses (or the angular velocities) and the angular displacement of the springs. If you require absolute angles you may need to add the integral of the angular velocities.
3. Use the free-body diagrams of the masses to obtain the SSR (balance of torques).
4. Look at the system configuration to determine kinematic SSR.
5. Combine the SSR and CCR to write the state-space equations.
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
23
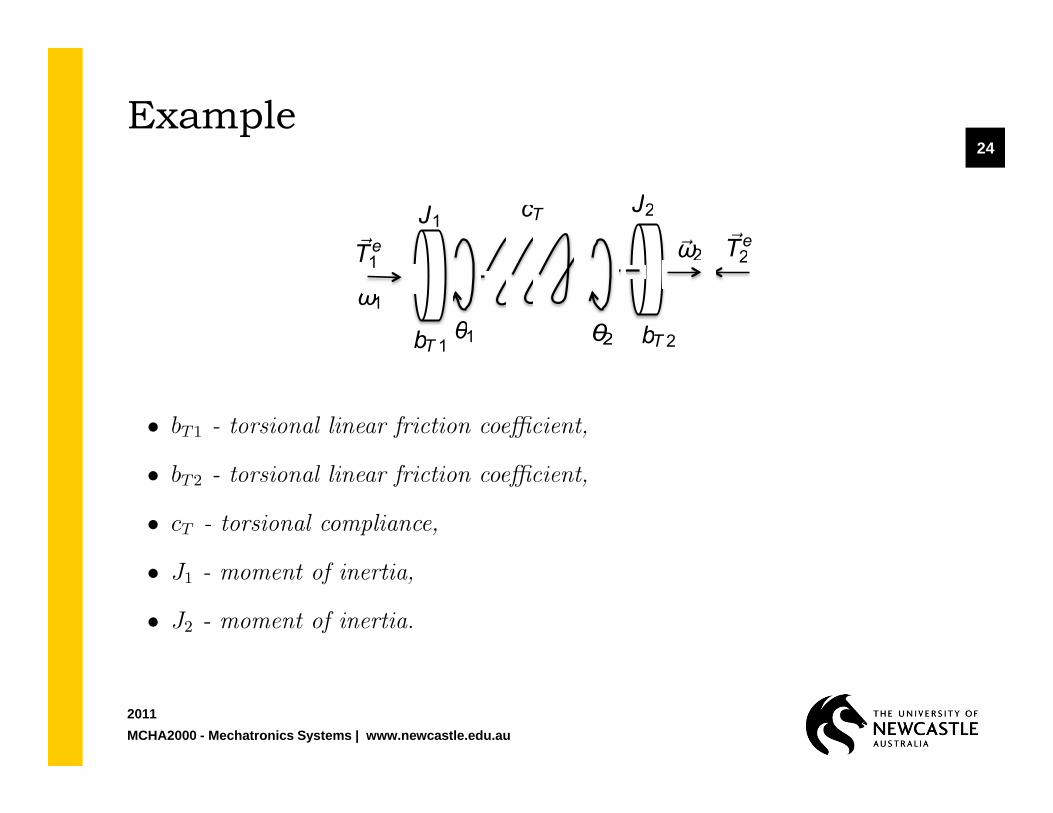
Example
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
24
θ1 θ2
J1J2
ω1
ω2
bT 2bT 1
cT
Te1 Te2
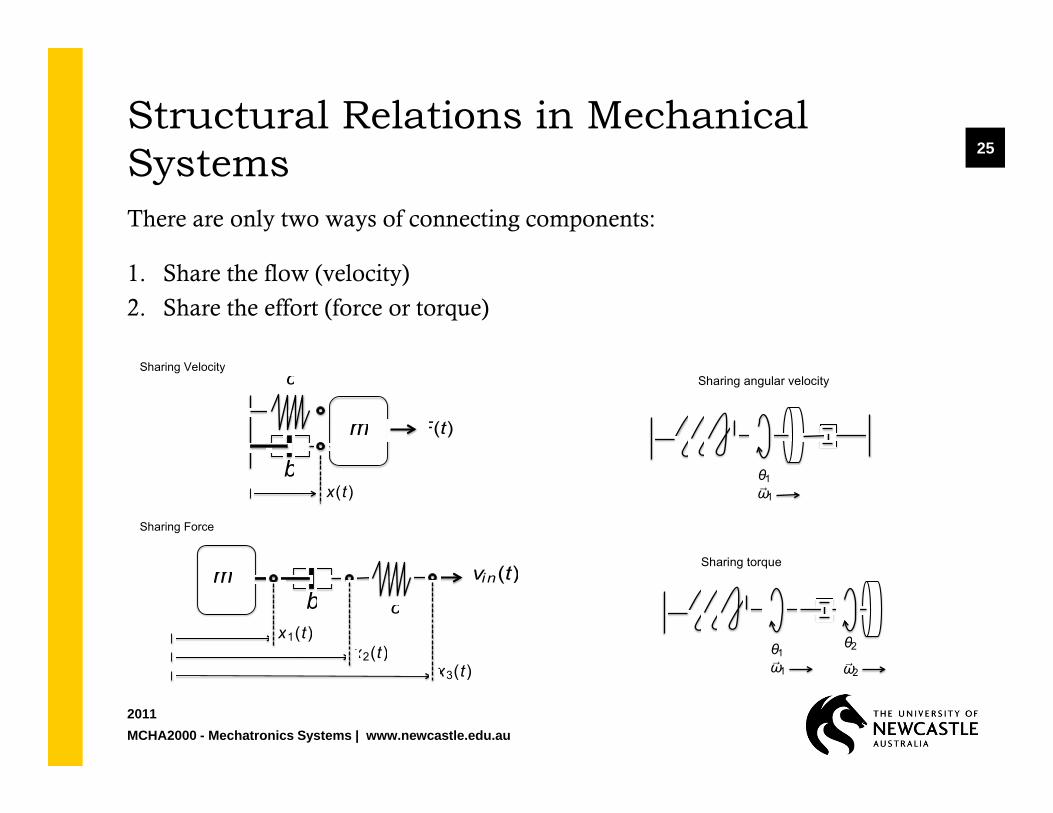
Structural Relations in Mechanical SystemsThere are only two ways of connecting components:
1. Share the flow (velocity)
2. Share the effort (force or torque)
2011MCHA2000 - Mechatronics Systems | www.newcastle.edu.au
25
b
m F(t)
cSharing Velocity
bm
cx1(t)
x2(t)x3(t)
Sharing Force
x(t)
vin(t)
θ1ω1
θ1ω1 ω2
θ2
Sharing angular velocity
Sharing torque





























