Embed Size (px)
Citation preview

15
BAB 2
LANDASAN TEORI
2.1 Ruang Sampel dan Kejadian
2.1.1 Definisi Ruang Sampel
Himpunan semua hasil semua hasil (outcome) yang mungkin muncul pada suatu
percobaan disebut ruang sampel dan dinotasikan dengan S.
Tiap – tiap hasil yang mungkin dalam ruang sampel disebut unsur atau anggota
ruang sampel tersebut atau disebut juga dengan istilah titik sampel.
Contoh:
Pada percobaan melempar dua mata uang, diperoleh S = {AA, AG, GA, GG}, dengan
AA adalah kejadian muncul angka pada lemparan pertama, dan muncul angka pada
lemparan kedua; AG adalah kejadian muncul angka pada lemparan pertama, dan
muncul gambar pada lemparan kedua; GA adalah kejadian muncul gambar pada
lemparan pertama, dan muncul angka pada lemparan kedua; GG adalah kejadian
muncul gambar pada lemparan pertama, dan muncul gambar pada lemparan kedua.
Titik sampelnya adalah AA, AG, GA, dan GG.
2.1.2 Definisi Kejadian
Kejadian atau peristiwa adalah himpunan bagian dari ruang sampel.
Contoh :
Suatu percobaan yang dilakukan dengan melantunkan sebuah dadu, maka ruang
sampelnya: S = {1, 2, 3, 4, 5, 6}. Misalkan A menyatakan suatu kejadian bahwa
bilangan genap muncul, maka kejadian A = { 2, 4, 6}, sehingga A merupakan
himpunan bagian ruang sampel S, dinotasikan sebagai A ⊂ S.
Universitas Sumatera Utara
16
2.2 Definisi Peluang Suatu Kejadian
Teori peluang mempelajari tentang peluang terjadinya suatu kejadian atau peristiwa.
Peluang dinyatakan dalam pecahan atau desimal antara 0 dan 1. bila peluang suatu
kejadian bernilai 0, maka kejadian tersebut tidak akan terjadi. Sedangkan bila peluang
suatu kejadian bernilai 1, maka kejadian tersebut pasti terjadi. Dalam teori peluang
suatu kejadian adalah satu atau beberapa kemungkinan hasil dari suatu tindakan.
Tujuan teori peluang adalah menggambarkan dan menaksir rata – rata sedemikian itu
dalam bentuk peluang kejadian.
Untuk menentukan Peluang suatu kejadian A, semua bobot titik sampel dalam
A dijumlahkan. Jumlah ini dinamakan ukuran A atau peluang A dan dinyatakan
dengan P(A). jadi ukuran himpunan ∅ adalah 0 dan ukuran S adalah 1. Peluang
didefinisikan dengan menggunakan tiga pendekatan yang berbeda. Ketiga definisi
pendekatan tersebut adalah sebagai berikut.
a. Definisi Aksiomatik
Pendekatan aksiomatik peluang berdasar pada tiga postulat sebagai berikut.
Peluang P(A) kejadian A adalah bilangan non negatif yang ditetapkan pada kejadian
ini yaitu
P(A) ≥ 0.
Peluang P(B) kejadian B pasti sama dengan 1, yaitu
P(B) = 1.
Dan bila kejadian – kejadian A dan B saling asing maka
P(A+B) = P(A) + P(B)
b. Definisi Frekuensi Relatif
Pendekatan frekuensi relatif berdasar pada definisi beikut.
Peluang P(A) kejadian A adalah limit dari perbandingan n(A) dengan N, dimana n
mendekati tak hingga , sehingga dapat ditulis sebagai berikut.
𝑃 𝐴 = lim𝑛→
𝑛(𝐴)
𝑁
dimana n(A) adalah jumlah terjadinya suatu kejadian A dan N adalah jumlah
Universitas Sumatera Utara
17
c. Definisi Klasik
Menurut definisi klasik, Bila suatu percobaan dapat menghasilkan N macam hasil
yang berkemungkinan sama dan bila tepat sebanyak n dari hasil berkaitan dengan
kejadian A, maka peluang kejadian A adalah
n(A) P(A) = N
2.2.1 Definisi Peluang Suatu Kejadian A
Peluang suatu kejadian A adalah jumlah semua titik sampel yang termasuk A.
Jadi dinyatakan dengan:
0 ≤ P(A) ≤ 1, P(∅)=0, P(S)=1.
2.2.2 Definisi Peluang Bersyarat
Misalkan A dan B menyatakan dua kejadian dalam koleksi kejadian dalam ruang
sampel S, maka peluang bersyarat dari kejadian A bila diberikan kejadian B
dinotasikan dengan
P AB
P AB = dengan PB 0 P B
2.3 Variabel Random dan Distribusi Peluang
2.3.1 Defenisi Variabel Random
Suatu fungsi bernilai real yang harganya ditentukan oleh tiap anggota dalam ruang
sampel disebut suatu variabel random
Ada dua macam variabel random, yaitu variabel random diskrit dan variabel
random kontinu.
Universitas Sumatera Utara

18
2.3.2 Definisi Variabel Random Diskrit
Jika semua himpunan nilai yang mungkin dari suatu variabel random X merupakan
himpunan terbilang (countable set), yaitu { x1, x
2,, ..., x
n} atau { x
1, x
2,, ...}, maka X
disebut variabel random diskrit.
2.3.3 Definisi Variabel Random Kontinu
Jika himpunan semua nilai yang mungkin dari suatu variabel random X merupakan
selang bilangan real, maka X disebut variabel random kontinu.
2.4 Distribusi Peluang Diskrit dan Kontinu
2.4.1 Defenisi Distribusi Peluang Diskrit
Fungsi f(x) adalah suatu fungsi peluang atau distribusi peluang suatu peubah acak
diskrit X bila, untuk setiap hasil x yang mungkin
a. f(x) ≥ 0
b. 𝑓 𝑥 = 1
𝑥
c.P(X = x)
Distribus kumulatif F(x) yaitu suatu variabel random diskrit X dengan distribusi
peluang f(x) dinyatakan oleh
𝐹 𝑥 = 𝑃 𝑋 ≤ 𝑥 = 𝑓(𝑡)
𝑡≤𝑥
𝑢𝑛𝑡𝑢𝑘 − ∞ < 𝑥 < ∞
2.4.2 Defenisi Distribusi Peluang Kontinu
Fungsi f(x) adalah fungsi padat peluang peubah acak kontinu X, yang didefenisikan
atas himpunan semua bilangan real R, bila
a. f(x) ≥ 0, untuk semua x di R
Universitas Sumatera Utara

19
b. 𝑓 𝑥 𝑑𝑥 = 1
∞
−∞
𝑐.𝑃 𝑎 ≤ 𝑋 ≤ 𝑏 = 𝑓 𝑥 𝑑𝑥
𝑏
𝑎
dinamakan fungsi densitas probabilitas dari variabel random kontinu X. Jika variabel
random kontinu X memiliki fungsi densitas probabilitas f(x), maka peluang suatu
kejadian atau peristiwa A, diberikan oleh
𝑃 𝐴 = 𝑓 𝑥 𝑑𝑥
𝑥𝑑𝑖𝐴
2.4.3 Definisi Fungsi densitas probabilitas kontinu
Fungsi densitas probabilitas kontinu adalah Suatu fungsi f(x) yang didefinisikan pada
selang nilai variabel random X. sehingga fungsi distribusi kumulatifnya dapat
dinyatakan sebagai.
𝐹 𝑥 = 𝑓 𝑡 𝑑𝑡
𝑥
−∞
2.5 Konsep Dasar Distribusi waktu Hidup
Fungsi-fungsi pada distribusi tahan hidup merupakan suatu fungsi yang menggunakan
variable random. Waktu hidup adalah interval waktu yang diamati dari suatu individu
saat pertama kali masuk kedalam pengamatan hingga keluar dari pengamatan.
Misalnya interval waktu sampai rusaknya suatu barang produksi, matinya suatu
makhluk hidup, kambuhnya suatu penyakit, dan lain-lain. Variable random
nonnegative waktu hidup biasanya dinotasikan dengan huruf “T’’, dan akan
membentuk suatu distribusi.
Distribusi dari waktu hidup dapat disajikan oleh tiga fungsi berikut:
Universitas Sumatera Utara

20
2.5.1.Fungsi Kepadatan Peluang
Fungsi Kepadatan Peluang adalah probabilitas suatu individu mati atau gagal dalam
interval waktu dari t sampai t + t, dengan waktu T merupakan variabel random.
Fungsi densitas Probabilitas dinyatakan dengan.
𝑓 𝑡 = lim∆𝑡→0
𝑃 𝑡 ≤ 𝑇 < 𝑡 + ∆𝑡
∆𝑡 … (2.1)
Waktu hidup merupakan variabel random non negatif, sehingga waktu hidup hanya
diukur untuk nilai t yang positif, maka diperoleh
𝑓 𝑡 = 0 𝑢𝑛𝑡𝑢𝑘 𝑡 < 0 𝑑𝑎𝑛 𝑓 𝑡 𝑑 𝑡 = 1
∞
0
2.5.2. Fungsi Tahan Hidup (Survival)
Fungsi tahan hidup (Survival) adalah probabilitas suatu individu yang masih dapat
bertahan hidup sampai dengan waktu t (t > 0). Jika T merupakan variabel random dari
waktu hidup suatu individu dalam interval [0,∞), maka fungsi distribusi kumulatif F(t)
untuk distribusi kontinu dengan fungsi densitas probabilitas f(t) dinyatakan sebagai
berikut
𝑓 𝑡 = 𝑃(𝑇 ≤ 𝑡)
atau
𝐹 𝑡 = 𝑓 𝑥 𝑑𝑥,
𝑡
0
𝑢𝑛𝑡𝑢𝑘 𝑡 > 0 (2.2)
Oleh karena itu diperoleh fungsi tahan hidup (Survival) yang didefinisikan dengan
S(t) = P (T t)
= 1- P (T t)
= 1- F(t) (2.3)
Universitas Sumatera Utara

21
Dalam beberapa hal, khususnya yang mencakup tahan hidup dari komponen-
komponen industri, S(t) ditentukan sebagai fungsi Survival.
Jadi hubungan fungsi densitas probabilitas dengan fungsi tahan hidup
(Survival) adalah
𝑓 𝑡 = lim∆𝑡→0
𝑃 𝑡 ≤ 𝑇 < 𝑡 + ∆𝑡
∆𝑡 = 𝐹 , 𝑡 = −𝑆 , 𝑡 (2.4)
Dalam hal ini fungsi tahan hidup S(t) merupakan fungsi monoton turun yang
mempunyai sifat
(i). S(0) =1, artinya peluang suatu individu bertahan hidup lebih lama dari waktu
nol adalah 1
(ii). S(∞) = 0 , artinya peluang suatu individu bertahan hidup pada waktu yang tak
terhingga adalah 0.
2.5.3. Fungsi Kegagalan (Hazard Function)
Fungsi Kegagalan adalah probabilitas suatu individu mati dalam interval waktu dari t
sampai t+Δt, jika diketahui individu tersebut masih dapat bertahan hidup sampai
dengan waktu t. fungsi hazard secara matematika dinyatakan sebagai:
ℎ 𝑡 = lim∆𝑡→0
𝑃(𝑡 ≤ 𝑇 < (𝑡 + ∆𝑡)𝑇 ≥ 𝑡)
∆𝑡 (2.5)
Misalkan f(t) adalah fungsi densitas probabilitas pada waktu t, maka dari
persamaan (2.5) diperoleh:
ℎ 𝑡 = lim∆𝑡→0
𝑃 𝑡 ≤ 𝑇 < 𝑡 + ∆𝑡 𝑇 ≥ 𝑡
∆𝑡
= lim∆𝑡→0
𝑃 𝑡 ≤ 𝑇 < 𝑡 + ∆𝑡 ∩ (𝑇 ≥ 𝑡)
𝑃 𝑇 ≥ 𝑡 .∆𝑡
Universitas Sumatera Utara
22
= lim∆𝑡→0
𝑃(𝑡 ≤ 𝑇 < 𝑡 + ∆𝑡 )
𝑃 𝑇 ≥ 𝑡 .∆𝑡
= lim∆𝑡→0
1 𝐹 𝑡 + ∆𝑡 − 𝐹(𝑡)
∆𝑡 1 − 𝐹(𝑡)
= lim ∆𝑡→0
𝐹 𝑡 + ∆𝑡 − 𝐹(𝑡)
∆𝑡.
1
𝑆(𝑡)
=𝐹 ,(𝑡)
𝑆(𝑡)
ℎ 𝑡 =𝑓(𝑡)
𝑆(𝑡) (2.6)
Dari persamaan (2.4) dan (2.6) diperoleh h(t) sebagai berikut:
ℎ 𝑡 = −𝑆 ′(𝑡)
𝑆(𝑡)
= −𝑆 ′ 𝑡 .𝑑 ln 𝑆(𝑡)
𝑑𝑆(𝑡)
= −𝑑𝑆(𝑡)
𝑑𝑡.𝑑 ln𝑆(𝑡)
𝑑𝑆(𝑡)
ℎ 𝑡 = −𝑑
𝑑𝑡ln𝑆 𝑡 (2.7)
Dari persamaan (2.7) diperoleh
ℎ 𝑥 𝑑𝑥 = −𝑑
𝑑𝑥
𝑡
𝑜
𝑡
0
ln𝑆 𝑥 𝑑𝑥
− ℎ 𝑥 𝑑𝑥 = 𝑑
𝑑𝑥𝑙𝑛 𝑆 𝑥 𝑑𝑥
𝑡
0
𝑡
0
Universitas Sumatera Utara

23
⇔ − ℎ 𝑥 𝑑𝑥 = ln 𝑆(𝑥)𝟎𝐭
𝑡
0
Karena S(0)=1, maka diperoleh
− ℎ 𝑥 𝑑𝑥 = ln 𝑆 𝑡
𝑡
0
⟺ 𝑆 𝑡 = 𝑒𝑥𝑝− ℎ 𝑥 𝑑𝑥
t
0
Dari uraian di atas diperoleh hubungan antara f(t), S(t), dan h(t) sebagai berikut:
i) 𝑓 𝑡 = −𝑆 ′ 𝑡 (2.8)
ii) ℎ 𝑡 =𝑓(𝑡)
𝑆(𝑡)
iii) 𝑆 𝑡 = 𝑒𝑥𝑝− ℎ 𝑥 𝑑𝑥
t
0
Dengan demikian jika fungsi hazard h(t) dari suatu distribusi dalam tahan hidup
diketahui, maka f(t), F(t) dan S(t) dapat dicari. Sedangkan fungsi hazard kumulatif
didefinisikan dengan
H 𝑡 = ℎ 𝑥 𝑑𝑥
𝑡
0
(2.9)
melalui persamaan (2.8) fungsi hazard kumulatif yang dihubungkan dengan fungsi
tahan hidup diperoleh
𝑆 𝑡 = 𝑒𝑥𝑝 −𝐻(𝑡)
Dan dari persamaan (2.6) dan (2.8) diperoleh
Universitas Sumatera Utara

24
𝑓 𝑡 = ℎ 𝑡 𝑒𝑥𝑝− ℎ 𝑥 𝑑𝑥
t
0
(2.10)
2.6 Statistik Terurut
Himpunan variabel random 𝑋1, 𝑋2, … , 𝑋𝑛
disebut sampel random yang berukuran n
dari suatu populasi denga fungsi densitas f(x) maka fungsi densitas probabilitas
bersama dari variabel random independen akan diberikan sebagai
𝑓 𝑥1, 𝑥2, … ,𝑥𝑛 = 𝑓 𝑥1 𝑓 𝑥2 …𝑓(𝑥𝑛)
Jika sampel random yang berukuran n tersebut diurutkan dalam suatu urutan naik
maka disebut statistik terurut atau order statistik dari 𝑋1 , 𝑋2, … , 𝑋𝑛 dan dinyatakan
dengan 𝑋1.𝑛 , 𝑋2.𝑛 , … ,𝑋𝑛 .𝑛 atau 𝑌1, 𝑌2, … , 𝑌𝑛 dengan 𝑋𝑖𝑛= 𝑌𝑖 , i = 1, 2, … , n.
dan misalkan 𝑋1, 𝑋2, … ,𝑋𝑛 adalah sampel random yang berukuran n dari fungsi
densitas probabilitas, f(x), dimana untuk f(x) kontinu dan f(x) > 0; a < x < b, maka
fungsi densitas probabilitas dari statistik terurut ke-k, 𝑌𝑘 adalah
ℊ𝑘 𝑦𝑘 =𝑛!
𝑘 − 1 ! 𝑛 − 𝑘 ! 𝐹 𝑦𝑘
𝑘−1 1 − 𝐹(𝑦𝑘 𝑛−𝑘𝑓 𝑦𝑘 jika 𝑎 < 𝑦𝑘 < 𝑏
2.7 Sistem keandalan
Dalam konsep keandalan, juga terdapat beberapa sistem yang dinyatakan untuk
membantu memutuskan apakah sistem gagal secara total atau tidak.
Dalam suatu proses, tidaklah selalu mudah untuk memutuskan kriteria-kriteria
kegagalan dalam sitem tersebut. Sebagai contoh, kita perhatikan criteria kegagalan
dalam sistem sebuah mobil. Jika tidak dapat bergerak dengan tenaganya sendiri, maka
mobil tersebut dinyatakan telah rusak atau sistemnya. Namun haruskah rusaknya
penghapus kaca pada mobil tersebut juga dihitung sebagai suatu kegagalan total,
walaupun mobil tersebut dapat digunakan pada cuaca cerah, mungkin tidak akan dapat
digunakan secara total pada waktu hujan lebat, yang berarti terjadinya kerusakan
sistem. Oleh karena itu, kerusakan sisten sering diakibatkan oleh kegagalan atau
kerusakan dari komponen-komponenya.
Universitas Sumatera Utara
25
Untuk itulah dibwah ini akandiberikan tiga system yang dapat dikatakan
sebagai sistem dasar dari keandalan sistem. Yaitu sitem seri, parallel dan gabungan
dari seri dengan paralel.
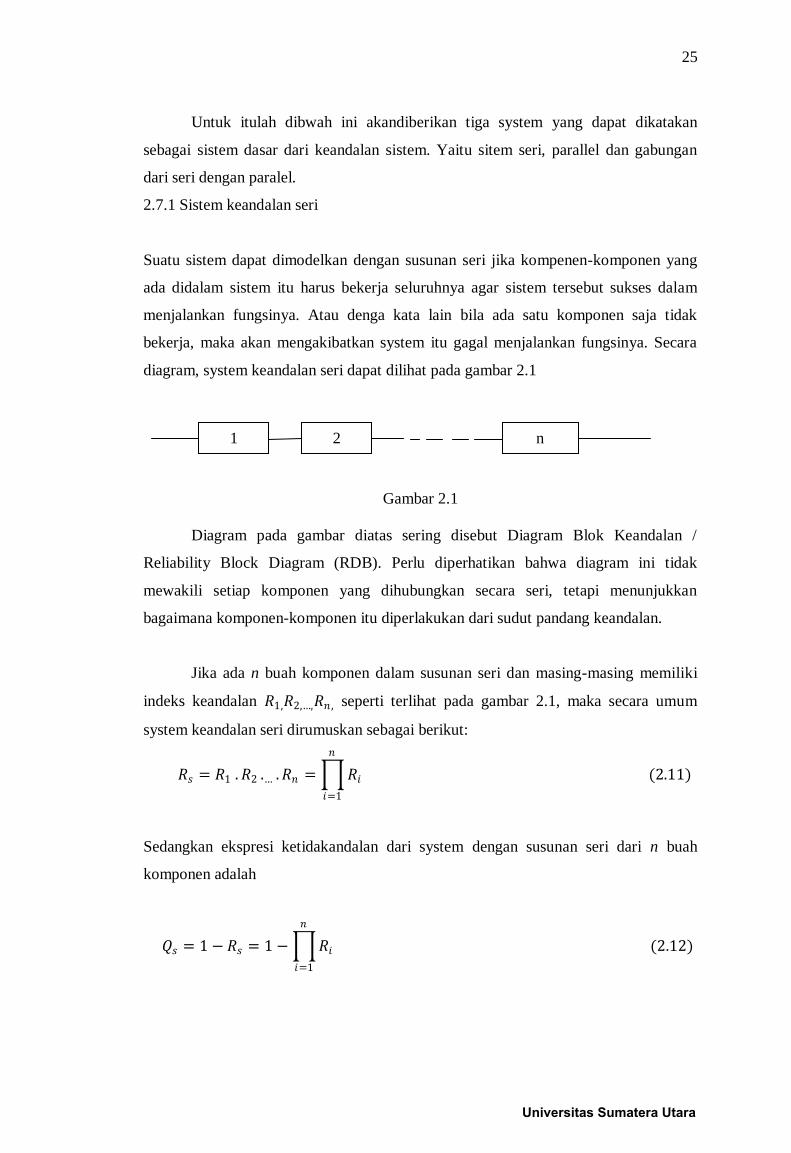
2.7.1 Sistem keandalan seri
Suatu sistem dapat dimodelkan dengan susunan seri jika kompenen-komponen yang
ada didalam sistem itu harus bekerja seluruhnya agar sistem tersebut sukses dalam
menjalankan fungsinya. Atau denga kata lain bila ada satu komponen saja tidak
bekerja, maka akan mengakibatkan system itu gagal menjalankan fungsinya. Secara
diagram, system keandalan seri dapat dilihat pada gambar 2.1
Gambar 2.1
Diagram pada gambar diatas sering disebut Diagram Blok Keandalan /
Reliability Block Diagram (RDB). Perlu diperhatikan bahwa diagram ini tidak
mewakili setiap komponen yang dihubungkan secara seri, tetapi menunjukkan
bagaimana komponen-komponen itu diperlakukan dari sudut pandang keandalan.
Jika ada n buah komponen dalam susunan seri dan masing-masing memiliki
indeks keandalan 𝑅1,𝑅2,…,𝑅𝑛 , seperti terlihat pada gambar 2.1, maka secara umum
system keandalan seri dirumuskan sebagai berikut:
𝑅𝑠 = 𝑅1 . 𝑅2 .… . 𝑅𝑛 = 𝑅𝑖 (2.11)
𝑛
𝑖=1
Sedangkan ekspresi ketidakandalan dari system dengan susunan seri dari n buah
komponen adalah
𝑄𝑠 = 1 − 𝑅𝑠 = 1 − 𝑅𝑖 (2.12)
𝑛
𝑖=1
1 2 n
Universitas Sumatera Utara
26
Contoh 2.1
Sebuah sistem control terdiri dari lima buah unit dimana semua unit pendukungnya
bekerja seluruhnya agar system control tersebut dapat berfungsi. Jika indeks
keandalan dari kelima unit masing-masing adalah 0,90; 0,95; 0,87; 0,93; dan 0,90
tentukan indeks keandalan dari sistem kontrol tersebut.
Penyelesaian :
Blok diagram keandalan yang paling mewakili dari system control tersebut adalah
blok diagram keandalan dengan susunan seri. Jika keandalan dari masing-masing unit
disimbolkan dengan 𝑅𝑖 maka keandalan dari system control itu adalah
𝑅𝑠 = 𝑅𝑖 = 0,90 0,95 0,87 0,93 0,90 = 0,622602
5
𝑖=1
Jadi keandalan dari sistem control tersebut adalah 0,622602
2.7.2 Sistem Keandalan Paralel
Pada sistem ini setiap komponen yang mungkin mengalami kerusakan tidak akan
mengakibatkan kerusakan sistem secara keseluruhan, dan sering dinamakan fault
tolerant( kerusakan yang dapat ditolerir).
Ada dua jenis dari system kendalan paralel ini, yakni kelebihan redundant aktif
dan kelebihan pasif.
Pada kelebihan aktif, dua atau lebih unit diletakkan dalam system keandalan
paralel dimana secara normal pembagian fungsi dilakukan tetapi unit-unit atersebaut
diatur sedemikian hingga jika satu unit atau lebih mengalami kerusakan, maka sisanya
dapat menggantikan possisinya. Sebagai contoh adalah dua mesin pesawat terbang
yang diaktifkan tetapi tidak menutup kemungkinan pesawat untuk terbang dengan satu
mesin, apabila mesin yang satunya mengalami kerusakan.
Pada kelebihan pasif, satu unit secara normal memegang fungsi secara penuh
tetapi jika unit tersebut mengalami kerusakan, maka unit yang lain akan diaktifkan
untuk mengambil alih perannya.
Universitas Sumatera Utara

27
2.7.2.1 Sistem Keandalan Paralel Kelebihan Aktif
Misalkan ada dua unit (1) dan (2) dihubungkan dalam system parallel seperti gambar
dibawah ini.
Gambar 2.2
Sistem akan rusak apabila kedua-duanya mengalami kerusakan. Keandalan system
dikalkulasikan sebagai berikut, jika didefenisikan bahwa
𝑄𝑠 = ketidakandalan sistem
Maka
𝑄𝑠 = 𝑃 𝐸1 ∩ 𝐸2
Dimana 𝐸 adalah kejadian komplemen bebas sehingga diperoleh
𝑄𝑠 = 1 − 𝑅𝑖 (2.13)
𝑛
𝑖=1
Jika peluang dari kegagalan adalah independent, maka fungsi system keandalannya
adalah
𝑅𝑠 = 1 − (1 − 𝑅1)
𝑛
𝑖=1
(2.14)
2.7.2.2 Sistem Keandalan Paralel Kelebihan Pasif
1
2
Universitas Sumatera Utara
28
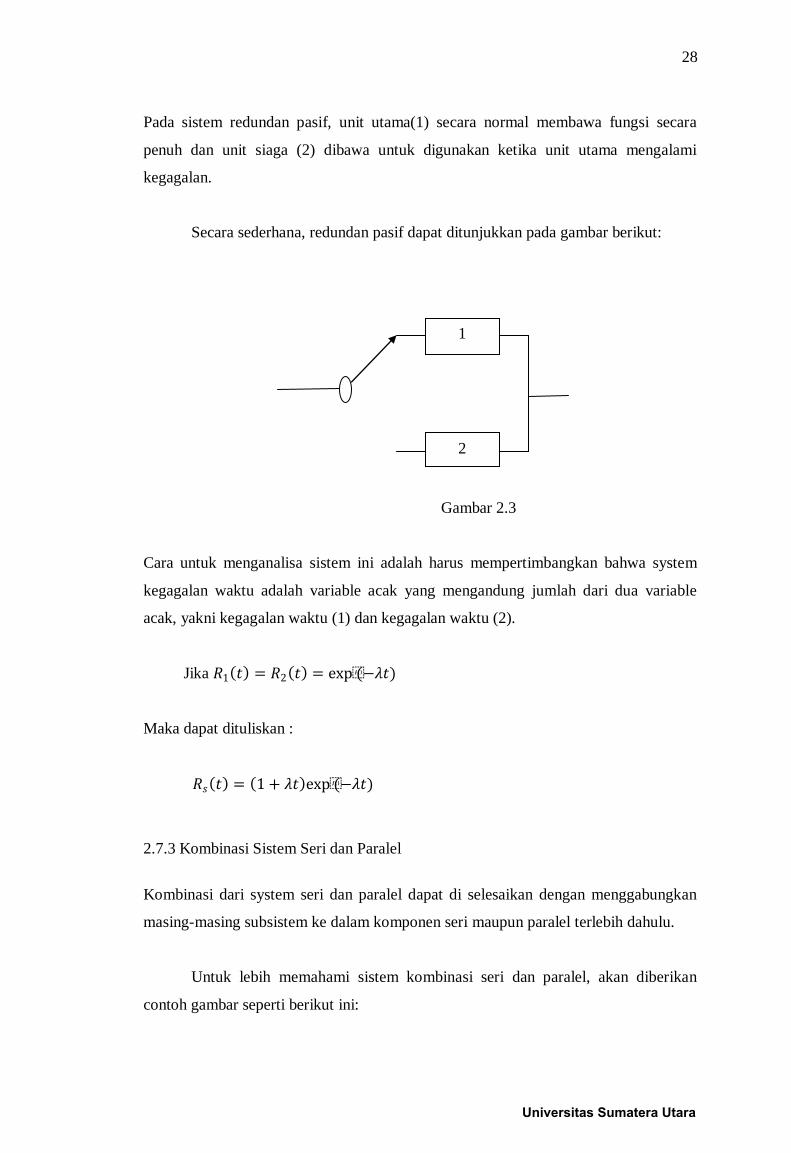
Pada sistem redundan pasif, unit utama(1) secara normal membawa fungsi secara
penuh dan unit siaga (2) dibawa untuk digunakan ketika unit utama mengalami
kegagalan.
Secara sederhana, redundan pasif dapat ditunjukkan pada gambar berikut:
Gambar 2.3
Cara untuk menganalisa sistem ini adalah harus mempertimbangkan bahwa system
kegagalan waktu adalah variable acak yang mengandung jumlah dari dua variable
acak, yakni kegagalan waktu (1) dan kegagalan waktu (2).
Jika 𝑅1 𝑡 = 𝑅2 𝑡 = exp(−𝜆𝑡)
Maka dapat dituliskan :
𝑅𝑠 𝑡 = 1 + 𝜆𝑡 exp(−𝜆𝑡)
2.7.3 Kombinasi Sistem Seri dan Paralel
Kombinasi dari system seri dan paralel dapat di selesaikan dengan menggabungkan
masing-masing subsistem ke dalam komponen seri maupun paralel terlebih dahulu.
Untuk lebih memahami sistem kombinasi seri dan paralel, akan diberikan
contoh gambar seperti berikut ini:
1
2
Universitas Sumatera Utara
29
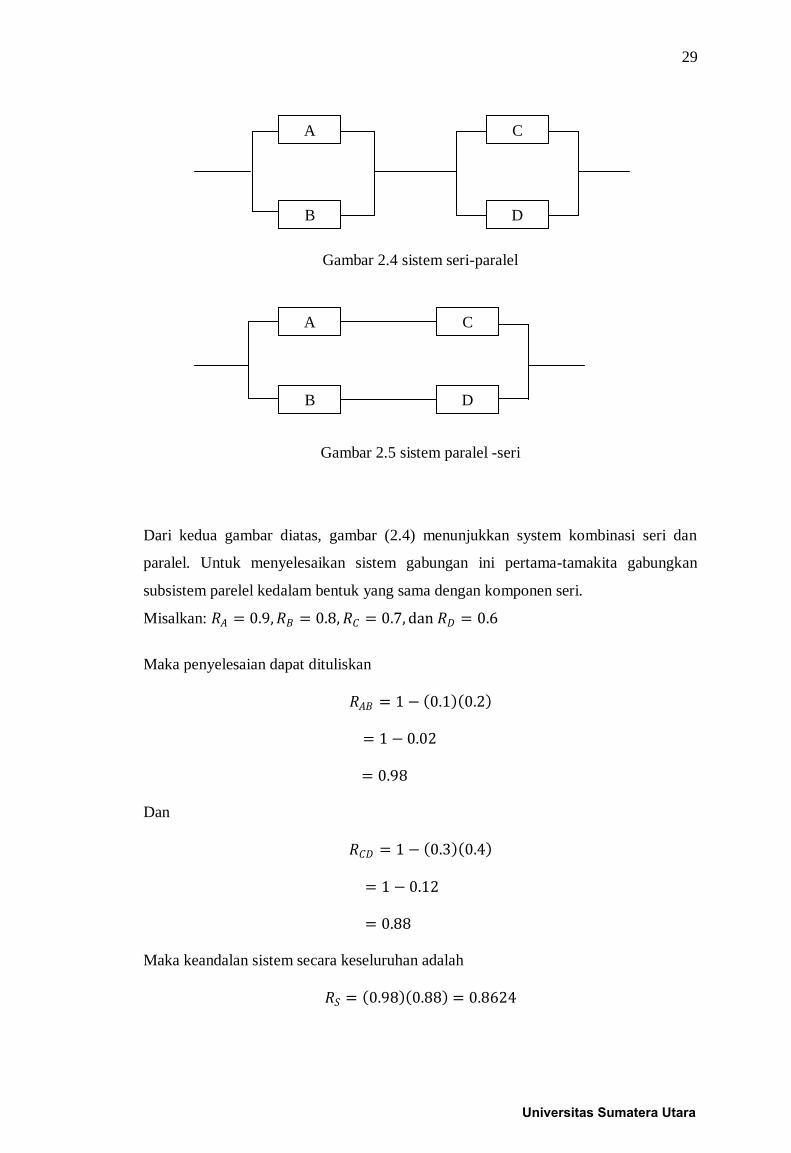
Gambar 2.4 sistem seri-paralel
Gambar 2.5 sistem paralel -seri
Dari kedua gambar diatas, gambar (2.4) menunjukkan system kombinasi seri dan
paralel. Untuk menyelesaikan sistem gabungan ini pertama-tamakita gabungkan
subsistem parelel kedalam bentuk yang sama dengan komponen seri.
Misalkan: 𝑅𝐴 = 0.9,𝑅𝐵 = 0.8, 𝑅𝐶 = 0.7, dan 𝑅𝐷 = 0.6
Maka penyelesaian dapat dituliskan
𝑅𝐴𝐵 = 1 − 0.1 0.2
= 1 − 0.02
= 0.98
Dan
𝑅𝐶𝐷 = 1 − 0.3 0.4
= 1 − 0.12
= 0.88
Maka keandalan sistem secara keseluruhan adalah
𝑅𝑆 = 0.98 0.88 = 0.8624
A
A C
B D
C
B D
Universitas Sumatera Utara

30
Untuk gambar (2.5) seperti yang ditunjukkan, merupakan system kombinasi paralel-
seri. Untuk menyelasaikannya, pertama-tama kita gabungkan subsistem seri ke dalam
bentuk yang sama dengan komponen paralel. Untuk pemisalan yang sama dengan
diatas, maka diperoleh penyelesaiannya sebagi berikut:
𝑅𝐴𝐶 = 0.9 0.7
= 0.63
Dan
𝑅𝐵𝐷 = 0.8 0.6
= 0.48
Sehingga keandalan sistem secara keseluruhan adalah
𝑅𝑆 = 1 − 1 − 𝑅𝐴𝐶 (1 − 𝑅𝐵𝐷)
= 1 − 1 − 0.63 (1 − 0.48)
= 1 − 0.37 (0.52)
= 1 − 0.1924
= 0.8076
2.8 Data Tersensor
Dalam penyensoran sering terjadi individu yang diamati tersensor. Masalah
penyensoran ini merupakan suatu hal yang membedakan antara uji hidup dengan
bidang ilmu statistik yang lain. Data tersensor adalah data yang diperoleh sebelum
hasil yang diinginkan dari pengamatan terjadi, sedangkan waktu pengamatan telah
berakhir atau oleh sebab lain. Data yang mengalami penyensoran hanya memuat
sebagian informasi mengenai variabel random yang diperhatikan, namun berpengaruh
terhadap pengertian-pengertian dan perhitungan statistik.
Ada tiga macam metode yang sering digunakan dalam eksperimen uji hidup,
yaitu sebagai berikut:
Universitas Sumatera Utara
31
1. Sampel lengkap, dalam uji sampel lengkap eksperimen akan dihentikan jika
semua komponen yang diuji telah mati atau gagal. Cara seperti ini mempunyai
keuntungan yaitu dapat dihasilkan observasi terurut dari semua komponen
yang diuji.
2. Sensor tipe I, semua objek yang diteliti (n) masuk pengujian dalam waktu yang
bersamaan, dan pengujian dihentikan setelah batas waktu 𝑡0 yang ditentukan.
Kelemahan dari sensor tipe I ini bias terjadi sampai batas waktu 𝑡0 yang
ditentukan semua objek masih hidup sehingga tidak diperoleh data tahan hidup
dari objek yang diuji.
3. Sensor tipe II, bila uji dihentikan setelah diperoleh sejumlah kegagalan
tertentu. data tersensor tipe II merupakan data kematian atau kegagalan yang
tidak lengkap (incomplete mortality data) yaitu data waktu kematian atau
kegagalan dari r observasi terkecil dalam sampel random yang berukuran n
dengan 1 ≤ r ≤ n. Dalam eksperimen menunjukkan penyensoran tipe II lebih
sering digunakan sebagai contoh dalam uji hidup dari total observasi sebanyak
n, tetapi uji hidup akan berhenti pada waktu observasi sampel mempunyai
waktu kematian atau kegagalan ke-r. Oleh karena itu uji hidup ini dapat
menghemat waktu dan biaya, karena uji hidup memakan waktu yang lama
untuk penyensoran terhadap kegagalan dari observasi. Data tersensor tipe II
diperoleh dari penyelidikan terhadap n observasi, sehingga penyensoran
berhenti sampai observasi sampel yang mempunyai waktu kematian atau
kegagalan ke- r objek tersebut.
2.9 Distribusi Weibull
Teknologi modern telah memungkinkan orang merancang banyak system yang rumit
penggunaannya, atau barangkali keamanannya, bergantung pada keandalan berbagai
komponen dalam system tersebut. Sebagai contoh, suatu sekering mungkin putus,
tiang baja melengkung, alat pengindra panas tidak bekerja. Komponen yang sama
dalam lingkungan yang sama akan rusak dalam waktu yang berlainan yang tidak dapat
diramalkan.waktu sampai rusak atau umur suatu komponen, diukur dari suatu waktu
sampai rusak, dinyatakan dengan peubah acak kontinu T dengan fungsi padat peluang
f(t). Misalkan variabel random kontinu T berdistribusi Weibull, dengan parameter θ
dan β, disingkat T ~ WEI (θ, β) maka fungsi densitas probabilitasnya adalah
Universitas Sumatera Utara
32
𝑓 𝑡 = 𝛽𝜃𝛽 𝑡 𝛽−1exp − 𝜃𝑡 𝛽 𝑡 > 0,𝜃 > 0,𝛽 > 0. 2.14
Adapun fungsi tahan hidup dan fungsi hazard dari distribusi weibull adalah
𝑆 𝑡 = exp −(𝜃𝑡)𝛽 , 𝑡 > 0 (2.15)
Dan
ℎ 𝑡 = 𝜃𝛽(𝜃𝑡)𝛽−1 (2.16)
dimana 𝜃 > 0, 𝛽 > 0, 𝑡 > 0.
sedangkan fungsi distribusi dari distribusi weibull adalah
𝐹 𝑡 = 1 − 𝑒𝑥𝑝 −(𝜃𝑡)2 (2.17)
Dimana 𝜃 > 0, 𝑡 > 0.
2.10 Distribusi Rayleigh
Dalam beberapa kasus khusus parameter bentuk, β, dari distribusi Weibull diberi
harga β = 2, dikenal sebagai distribusi Rayleigh. Sehingga diperoleh fungsi tahan
hidup dari distribusi Rayleigh sebagai berikut.
𝑆 𝑡 = 𝑒𝑥𝑝 −(𝜃𝑡)2 𝑑𝑖𝑚𝑎𝑛𝑎 𝜃 > 0, 𝑡 > 0. (2.18)
Dan diperoleh fungsi hazard dari distribusi Rayleigh yaitu:
ℎ 𝑡 = 2𝜃2𝑡 (2.19)
dimana 𝑡 > 0,𝜃 > 0, dan t menunjukkan waktu hidup dari individu uang diobservasi.
Dari fungsi tahan hidup, persamaan (2.18), dapat ditentukan fungsi distribusi
kegagalan dari data waktu hidup yang berdistribusi Rayleigh,
Universitas Sumatera Utara
33
𝐹 𝑡 = 1 − 𝑆(𝑡)
= 1 − exp −(𝜃𝑡)2
1 − 𝐹 𝑡 = 𝑒𝑥𝑝 −(𝜃𝑡)2
Dari persamaan (2.8) dan (2.18) diperoleh persamaan
𝑓 𝑡 = −𝑑𝑆(𝑡)
𝑑𝑡= −
𝑑(𝑒𝑥𝑝 − 𝜃𝑡 2 )
𝑑𝑡 (2.20)
Sehingga diperoleh fungsi densitas probabilitas dari distribusi Rayleigh adalah sebagai
berikut:
𝑓 𝑡 = 2𝜃2𝑡 𝑒𝑥𝑝 −(𝜃𝑡)2 𝑢𝑛𝑡𝑢𝑘 𝑡 > 0,𝜃 > 0.
2.11 Prinsip Dasar Metode Maksimum Likelihood
Metode untuk mengestimasi harga parameter distribusi dari data dalam fungsi tahan
hidup (Survival) adalah dengan menggunakan metode maksimum likelihood. Metode
maksimum likelihood menggunakan nilai dalam ruang parameter Ω yang bersesuaian
dengan harga kemungkinan maksimum dari data observasi sebagai estimasi dari
parameter yang tidak diketahui.
Dalam aplikasinya L(θ) menunjukkan fungsi densitas probabilitas bersama dari
sampel random. Jika Ω ruang parameter yang merupakan interval terbuka dan L(θ)
merupakan fungsi yang dapat diturunkan serta diasumsikan maksimum pada Ω maka
persamaan maksimum likelihoodnya adalah
𝑑
𝑑𝜃𝐿 𝜃 = 0 (2.21)
Jika penyelesaian dari persamaan tersebut ada, maka maksimum dari L(θ)
dapat terpenuhi. Apabila penyelesaian dari persamaan (2.19) sukar diselesaikan maka
Universitas Sumatera Utara

34
fungsi L(θ) dapat dibuat logaritma naturalnya, dengan ketentuan memaksimumkan
lnL(θ), sehingga persamaan logaritma natural likelihoodnya adalah
𝑑
𝑑𝜃ln𝐿 𝜃 = 0 (2.22)
Jika fungsi densitas probabilitas bersama dari n variabel random 𝑋1, 𝑋2, … , 𝑋𝑛 ,yang
diobservasi pada 𝑋1, 𝑋2, … , 𝑋𝑛 ,
dinotasikan dengan f(.𝑋1, 𝑋2, … ,𝑋𝑛 ,) maka fungsi
liklelihood dari himpunan pengamatan 𝑋1, 𝑋2, … ,𝑋𝑛 , dinyatakan sebagai
𝐿 𝜃 = 𝑓 𝑥1;𝜃 𝑓 𝑥2;𝜃 …𝑓 𝑥𝑛 ;𝜃 = 𝑓 𝑥1;𝜃
𝑛
𝑖=1
(2.23)
Dengan parameter yang tidak diketahui
Penduga maksimum likelihood dari θ didapat dengan menyelesaikan
persamaan𝑑
𝑑𝜃ln𝐿 𝜃 = 0, misalkan ada k parameter yang tidak diketahui, ma
ka penduga parameter likelihood dari 𝜃𝑖 didapat dengan menyelesaikan
𝑑
𝑑𝜃𝑖ln𝐿 𝜃1 ,𝜃2 , … ,𝜃𝑘 = 0, dengan 𝑖 = 1, 2, 3, … , 𝑘.
Universitas Sumatera Utara





























