Embed Size (px)
Citation preview
A Case for theConsideration of SystemRelated CognitiveFunctions ThroughoutDesign and DevelopmentIain S. MacLeod
Aerosystems International, West Hendford, Yeovil, Somerset BA20 2AL, United Kingdom (email:
Received August 22, 1999; revised May 16, 2000; accepted June 21, 2000SYSTEM RELATED COGNITIVE FUNCTIONS IN DESIGN AND DEVELOPMENT
ABSTRACT
Modern avionics and digital computing are rapidly advancing engineering fields. However,
associated design and development methodologies lag behind these advances. As a result,
Man-Machine Systems (MMS) are increasingly entering service with performances less than,
or different from, that required by their specification. In United Kingdom military systems
procurement, this performance-associated problem is strongly related to a gap between the
contracted system requirements and the requirements related to the system�s �Fitness for
Purpose� as determined by the elected Ministry of Defence (MoD) system acceptance
authority. �Fitness for Purpose� requirements consider the safe usage of the system, its utility,
and its ease of use. Addressing this performance problem requires an understanding of what
is being missed in the subject gap and whether what is missing is related to engineering
methods or poor consideration of functionality. The problem is based partly on incomplete
system specification, specification that emphasizes the physical engineering of the system at
the expense of the cognitive functions needed for the skilled operation of the system.
Considering these differences, traditional Human Factors (HF) / Ergonomic based techniques,
and those of other disciplines related to system design, are becoming increasingly inappro-
priate for use in the design of new avionics systems. One avenue to promote HF value to
design would be to complement systems engineering by the early integration of cognitive
functions into the requirements capture processes, both user and system. These cognitive
functions should be considered as an integral part of an MMS�s functionality and, for conven-
Regular Paper
Systems Engineering, Vol. 3, No. 3, 2000
© 2000 John Wiley & Sons, Inc.
113

ience, will be termed System Cognitive Functions (SCFs). Advocated through the use of SCFs
is a human-orientated approach to assist the logical and physical SE processes, this to assist
in defining system capabilities and expected performance. Suggested is a new emphasis on
the early capture of the differences between the specified system performance requirements
and the requirements needed to satisfy the �Fitness for Purpose� criteria met at customer�s
formal acceptance of the system. These differences are seen as particularly related to MMS
management and control, and point toward a need to discover methods suitable for the
marriage, and associated trade-offs, between MMS human-associated functions and engi-
neered functions. It is argued that the capture and use of SCFs could assist in the knowledge-
able adoption of new technologies. © 2000 John Wiley & Sons, Inc. Syst Eng 3:113�127, 2000
1. INTRODUCTION
Modern electronics and digital computation techniques
continue to promote increased levels of engineered
system functionality, efficiency, and performance. In
parallel, traditional methods of engineering and pro-
gram management are arguably not really good enough
for application to Systems Engineering (SE) or to any
subsequently evolved design and development para-
digms. (For an early argument on this theme see Ackoff,
1973.)
For example, some form of allocation related to
engineered system functions will always be required as
part of the early iterative processes integral to all forms
of design. Thus, considering SE terms, an allocation is
made when logically assigning a performance require-
ment to a physical system function. However, the sup-
posed allocation of functions between man and
machine, as advocated by many Human Factors (HF)
standards and guidelines, is certainly not viable consid-
ering burgeoning system complexity and must be chal-
lenged (MacLeod and Scaife, 1997) as many system
functions are not addressed explicitly by design proc-
esses. These missing functions reside in a gap that exists
between the specified performance requirements for the
system and the requirements on which system accep-
tance is based, these latter predominately concerned
with system �Fitness for Purpose.�
The argument of this paper will be that many of these
poorly considered or missing functions reside as cogni-
tive-based activities. By cognitive activity we refer to
system-related activities that are currently predomi-
nately thinking based and not necessarily directly
linked to any discernible operator activity. Functions
associated with these cognitive activities include the
application to system operation of an operator�s knowl-
edge, mental strategies, and judgment. For conven-
ience, these functions will be termed System Cognitive
Functions (SCFs). The concept of SCFs will be consid-
ered by this paper under the contexts of Knowledge
Based Systems (KBS), Robotics, Electronic Crewman
(EC), and Automation.
It is given that with the introduction of new technolo-
gies to system design, the operator role in system work
performance is becoming less physical and involves
more cognitive activity than physical activity. The more
complex the system, the harder it is for a system opera-
tor to fulfil the cognitive needs of his or her role. Thus,
it is argued that any improved approach must include
the specification of system performance considering
cognitive-related system functions that, where appro-
priate and possible, may well be part allocated to engi-
neered components of the Man-Machine System
(MMS). It is important to note that cognitive functions
are usually in the form of heuristics, these considered
to be expertise-associated �rules of thumb� or schema
located in an operator�s mental processes, and are not
algorithmic in nature as might be found in conventional
software programs.
This paper focuses on a practical approach to the
consideration of the cognitive aspects of MMS design.
A primary tenet of the proposed approach is its close
integration into MMS design and development engi-
neering practices. It follows that a question pertinent to
HF as well as SE is whether the system functionality
and performance under consideration has been ade-
quately specified and considered. The initial function-
ality and performance specification should be based on
user requirements, should be implementation free, and
should logically approach all the user requirements for
the MMS. In traditional engineering terms, machines
are specified where the functionality and performance
is solely concerned with functions that can be physi-
cally engineered. In contrast, by SE terms a system
specification is considered to logically encompass the
totality of MMS functional requirements and perform-
ance. However, SE currently considers the human op-
erator to be mainly a constraint on system design at the
requirement-specification stage of the design life cycle,
a constraint usually having no associated performance
requirements. It is argued that, whilst it is necessary to
114 MACLEOD

consider system constraints where appropriate, this
constraint perspective on the human operator reflects a
limited understanding of the impact of operator-based
cognitive functions on system performance and system
effectiveness.
It is important that user requirements be carefully
specified at the onset, or as early as possible in the
design and development life cycle, and include cover-
age of both operator and system capabilities and per-
formance. In addition, system certification requires
additional evidence not only that requirements have
been met but that the system is safe to use and �Fit for
Purpose.� This evidence can be supplied through high-
quality system specification, periodic appreciation of
user requirements, maintenance of a requirements trace,
iterative processes in design, and appropriate HF evalu-
ation.
2. SYSTEM PERFORMANCEREQUIREMENTS AND CERTIFICATION
In UK military avionics systems procurement, any sys-
tem performance-related problem is strongly related to
the differences between the contracted system perform-
ance requirements and the requirements related to the
system�s �Fitness for Purpose,� these as determined by
the elected MoD system acceptance authority. �Fitness
for Purpose� requirements encompass the safe usage of
the system, its manifest utility, and its ease of use. All
these requirements have pertinence to the domain of
HF. These requirements must be satisfied if a full certi-
fication of the system is to be authorized.
Certification problems arise partly from incomplete
system specification, specification that emphasises the
physical engineering of the system at the expense of the
SCFs needed to support the skilled operation of the
system. Furthermore, these problems also arise from a
frequent unwillingness, inability, or contractual con-
straint on review and adjustment of requirements to
meet �Fitness for Purpose.� Partly, this is a skepti-
cism in certain quarters on the value of the �Soft
Sciences,� i.e. HF and Engineering Psychology, to
assist engineering processes. This unwillingness is
also associated with contracts being placed solely on
specified requirements and, especially under fixed
price contracts, failing to allow leeway for the con-
sideration of any additional functions or design con-
siderations related to system acceptance as �Fit for
Purpose.�
To illustrate the above, the burgeoning adoption of
Commercial Off The Shelf (COTS) equipments, as
components of complex systems, has added to many of
the problems inherent in the achievement of system
�Fitness for Purpose.� The use of COTS has many
advantages. However, if a system is composed of many
diverse subsystems, there is frequently a lack of consis-
tency within the designed Human Computer Interface
(HCI) and the protocols applicable to the system�s
engineered interfaces. As operation of systems increas-
ingly becomes more of a cognitive than physical nature,
a lack of design consistency will cause quandaries in
operator understanding of system operation and ad-
versely affect the operator�s ease of use of the system.
Inconsistency within a system will affect the ease of
operating the system, decrease its overall utility, and
thus adversely affect system acceptance and certifica-
tion. Another factor introduced by COTS is the potential
for the supply of over- and under-functionality with
respect to the initial user requirements of the system,
these unwanted levels of COTS-based functionality still
having to undergo system certification.
To minimize certification effort and cost required
downstream when moving from logical concept to
physical design and development, validation and certi-
fication issues must be considered throughout the de-
sign and development lifecycle. This necessitates for
the requirements to be secure, and it is argued that the
absence of SCFs does not support such security, and that
a trace on requirement consideration is maintained
throughout. To assist such a trace, existing lifecycle
models for conventional engineering practice must be
compared to models and practices supporting the intro-
duction of new technologies and their formal accep-
tance. The new technologies associated differences and
similarities to older technologies need to be equated to
allow a convergence or accommodation to meet air-
borne certification requirements. Further investigations
are, therefore, needed into the development and integra-
tion of models, tools, and methods. This area is dis-
cussed briefly at the end of this section.
2.1. Associated Frameworks
Encompassing the above, two strongly associated
frameworks are suggested as required for the design and
development of an avionics system. These are the sys-
tem contractor�s design and development frameworks,
using as a basis the contracted performance specifica-
tion of the system, and the certification framework. The
structure and performance associated with the design
and development framework supplies the evidence
needed to support the certification framework. As such
the structure and pertinent requirements placed on one
should support the other.
Under the certification framework, certification
comprises two distinct elements:
SYSTEM RELATED COGNITIVE FUNCTIONS IN DESIGN AND DEVELOPMENT 115

1. Ensuring that the system is fit for the purpose for
which it was designed, in that it has the utility
required to perform its task and that the system�s
ease of use is acceptable;
2. Ensuring that the system has been demonstrated
to be adequately safe to reside within its opera-
tional environment.
The certification framework must be associated with
both the contracted host system and any associated
subcontract development frameworks. The purpose of
the certification framework is to support the processes
required for the production of a certification certificate.
There are three closely associated products required for
the production of a certification certificate, namely:
a. A Compliance Matrix showing evidence of �Fit-
ness for Purpose� through compliance to agreed
MMS performance requirements;
b. The Safety Case (see UK Defence Standards
00-55 and 00-56) as a document referencing all
evidence required by the Certification Authority
to enable them to assess the safety of the system;
c. The achievement of satisfactory Trial Reports on
the performance of the avionics system.
It is argued that it is essential that user and system
requirements specification should additionally consider
important system functional and performance require-
ments associated with the granting of system certifica-
tion. The achievement of the three products outlined
above requires assessment and understanding of the
work environment, system control and direction, sys-
tem management, supervision of system task perform-
ance, and teamwork. Such achievements are reached
through the application of system-related cognitive-
type functions, the application of which has been tradi-
tionally relegated to the trained application of human
skills to the system, as mediated by human cognition,
in the support of required MMS performance. It is only
recently that some of these functions can be engineered,
or support to these functions engineered, within the
context of system operational performance. This paper
argues the need to logically specify these functions,
referred to in this paper as SCFs, within future user and
system requirement specifications, and their associated
specification of systems functionality and performance.
As one illustration of the nature of SCFs, the modern
technology of KBS is considered. Until recently KBS
build was only related to laboratory-based develop-
ments, but is now being seriously considered for inclu-
sion into future avionics systems. KBS is
unconventional with relation to conventional software
based systems in that the structured use of the knowl-
edge base of the KBS is largely on heuristic principles
rather than on the use of deterministic algorithms as
employed by most conventional computer-based sys-
tems. In reality, much of the knowledge base of a KBS
is composed of SCFs in that it encompasses facets of
human cognition, such as knowledge gleaned from
Subject Matter Experts (SMEs), and application rules
for that knowledge. Many methods have been devel-
oped to capture SME knowledge in a fashion suitable
for its coding into a database. Such methods are primar-
ily developments from traditional methods of knowl-
edge elicitation and are also applicable to the capture of
knowledge on any operator task-related cognitive func-
tion. Moreover, the knowledge elicited from the SMEs
is recorded for KBS this recording is in the form of an
engineered database and, therefore, is purely MMS-
performance related. Thus it is explicit for the database
to contains SCFs.
The certification process requires evidence of good
design and development practice, and trace of system
requirements and engineering decisions, as a baseline
for granting the certification certificate. With KBS this
may be presented by a design and development model
that not only considers the requirements for quality
build of the KBS, but also considers how the KBS build
processes fit into the model adopted for the host system
development. One such model is CommonKADS
(Schreiber et al., 1998). Further expansion on this
model is considered to be out of the scope of this paper.
3. PRACTICE AND THEORY
This paper is about the principles of practice, rather than
about the theory and details of design and development.
Theory is important for the furtherance of knowledge
but is not necessarily important to the furtherance of
expertise in system design, development, or operation.
However, the knowledge of theory is important to the
designer if for no other reason than to stop design
endeavors heading down nugatory avenues.
This paper is not about the study of hypothetical
constructs concerning topics such as decision making,
judgment, leadership, or even workload. What such
constructs mean is well understood by the majority, but
they all defy a common agreed definition. Moreover,
hypotheses and theories associated with such constructs
are invariably applied or considered retrospectively
with relation to their fit to real MMS design, develop-
ment, and work. The study of hypothetical constructs is
important to the furtherance of knowledge and has
contributed to the prediction of outcomes, causes, and
effects of work. However, such study has yet to show
any great practical contribution to new MMS design
116 MACLEOD

processes except for providing theory is support of HF
system evaluation methods.
It should be noted that this paper is about the overall
problems associated with the practice of HF within a
UK military avionics system design and development
environment. Moreover, it is not intended to solely
represent any particular HF practice such as Cognitive
Engineering, Engineering Psychology, or Usability En-
gineering.
Neither is the paper about possible specific improve-
ments to traditional HF methodologies. Traditional ap-
plication of HF fails to allow efficient HF program
integration during the system life-cycle with the work
programs of other disciplines. Further, the main empha-
sis of current HF practice is on physical system design
and not the logical specification of system performance.
Moreover, the burgeoning advances in technology re-
sult in a poor associated applicability of many of the
well-established HF methodologies. This failure, or
inability of HF to effectively contribute to design and
development, is becoming more obvious with relation
to the manifest poor usability of many modern complex
MMS. A better approach than the traditional is required
for consideration of the human operator work within
future MMS design processes. It is important that such
an approach must evolve and complement, and be as-
sociated with, the engineering trade-off processes used
to optimize design throughout the system life-cycle
including its design and development processes. The
recently introduced Integrated Product Team (IPT) ap-
proach by UK MoD is one of many approaches to
multi-disciplinary �concurrent� systems design that
may be pertinent here.
It is believed that the details and practice of the
proposed approach can only evolve and improve in time
with practice and refinement. As a lead-in to the argu-
ment, there follows a critique of the traditional HF
approaches to system design.
4. CRITIQUE OF TRADITIONAL HFAPPROACHES TO DESIGN
4.1. Critique of Standards
An example of a traditional HF approach to systems
design is contained in the UK Ministry of Defence DEF
STAN 00-25, Part 12. This part of the standard contains
a description of the UK MOD recommended process
for applying HF to systems. It describes a serial process,
including the traditional allocation of functions be-
tween man and machine, and refers the reader to the
work of Price (1985).
Thus, DEF STAN 00-25 describes a traditional, se-
quential approach to HF including an allocation of
functions. Its consideration of iteration practices in
design, design trade-off processes, and the traceability
of design decisions, is generally poor. This critique of
the standard leads to a deeper consideration on the
drawbacks of the traditional approach.
As long ago as 1965, Chapanis (1965) cites several
problems with the application of the Colonel Fitts initi-
ated �Man is Better At, Machine is Better At� approach.
Firstly, the approach does not attempt to account for
individual differences, either in terms of the machine or
the man. For example, the statement that humans are
superior to machines in the area of error correction is
not necessarily true for all situations, all machines, or
all human operators. Basic individual differences theo-
ries dictate that some humans will posses very highly
developed error correction abilities, whilst others will
be very poor.
Secondly, Chapanis questions the usefulness of a list
that attempts to define the relative capabilities of man
and machine. He suggests that the most salient ques-
tions are which component of the man-machine system
is good enough for the job in hand and is cost effective.
Lastly, Chapanis considers the factor of trade-offs.
A system is seldom designed solely on the basis of
which component is best for the job. Most often there
is a trade off against other factors such as weight, cost,
size, quality, or safety requirements.
In general the traditional application of HF fails to
consider the complementary nature of the contributions
of man and machine to system performance because the
HF approach is too parochial (for example, providing
task analyses that can be interpreted only by an HF
practitioner). As a second example, a more recent but
still traditional HF approach to the system design proc-
ess is given in the NATO STANAG 3994 (1999). This
STANAG, as is often the case with STANAGS, is still
under draft and revision. Nevertheless, in the UK it is
regularly cited in contracts as a baseline standard on
which industries must base their HF work. Indeed, its
citing is often in association with the DEF STAN 00-25
(1997) and MIL STD 1472D (1989). It should be noted
that these standards, originating as they do from diverse
sources, manifest many contradictions one to another.
STANAG 3994 provides a simplistic model of sys-
tem design process that contains little provision for
iteration processes throughout design and development.
System requirements are relegated to history, or possi-
bly considered to be the concern of some other disci-
pline, and possibilities of HF contributions to
multi-disciplinary design trade-offs are not considered.
The STANAG is representative of the parochial nature
of many standards that over-focus on their own specific
concerns and forget the broader context of their appli-
cation. The model�s stated consideration of early design
SYSTEM RELATED COGNITIVE FUNCTIONS IN DESIGN AND DEVELOPMENT 117

progresses in a sequential fashion through to a detailed
system design stage, as illustrated in Figure 1.
4.2. Critique of Traditional Practice
The emphasis in traditional HF practice is on the physi-
cal system and does not include logical consideration
of the system as considered during the initial implemen-
tation free capture of user requirements, system require-
ments, functions, and performance. Therefore, HF
input into the design process, and particularly an under-
standing of SCFs, occurs rather late in the design life-
cycle precluding any major HF influence in the
all-important early design processes.
Moreover, in the UK, the traditional and late use of
Ergonomists or HF practitioners results in some cases
of their derogatory and fruitless naming as �Flower
Arrangers.� This term is in popular use in the UK
aircraft industry where the Ergonomist is often forced
to pick the most appropriate design from a given physi-
cal set of alternatives, even though all the designs may
be fundamentally flawed. Traditional planning of the
HF approach to systems design and development is
through the formulation of a Human Engineering Pro-
gram Plan (HEPP). This form of plan details WHAT has
to be done, but seldom considers the nature or perti-
nence of gleaned evidence, or relevant details on the
HOW and WHY aspects of the work with relation to
system design and development schedules. The HEPP
is normally associated only with physical design proc-
esses. The author believes that in order to avoid such a
situation, system functionality currently defaulted to
human work should be considered from the onset of
system design. In addition, such consideration of HF
early in the system development life cycle would allow
a proper trace of HF-related functions throughout de-
sign and development. Furthermore, it would support
effective HF allocation of time and effort. Improved HF
consideration should also support improved iteration
and consideration of how HF-related system problems
should best be addressed and HF products included in
system design related trade-off processes.
Nevertheless, poor design is a result of more than ill
advised and late use of HF; it is a result of many factors
including poorly integrated team work, bad planning,
poorly conducted trade-offs in design, and inadequate
system requirements. More cross-education is needed
within the engineering disciplines. Historically, the fre-
quent result of military system design and development
was crisis as system acceptance approached (MacLeod
& Taylor, 1993). This crisis is still equated by many
Figure 1. STANAG 3994�General Model for a Human Engineering Program.
118 MACLEOD

forms of ill-advised compromises, forms too numerous
to detail here.
5. SOME REASONS FOR HF ADOPTIONOF THE SE MODEL
In contrast to the traditional HF approaches presented
earlier, the generic SE model described by Figure 2,
albeit at a high level, shows a controlled and iterative
approach to system design throughout a design life-cy-
cle. All aspects of design can be subject to a multi-dis-
ciplinary process. Such an approach also provides a
mechanism for maintaining traceability of system func-
tions back to the requirements specification.
However, HF is normally only seriously considered
beyond a very basic level past the processes of Func-
tional Analysis and has little traceability to earlier
stages outside those provided by HF-related Con-
straints. Note, however, that these HF Constraints will
always need to be considered by design, e.g., human
physical space requirements plus certain human per-
formance limits.
There are many other factors involved in the poor
integration of HF alongside engineering design proc-
esses. Some factors are dictated by traditional social and
professional practices. Nevertheless, part of the engi-
neering community�s failure to see the usefulness of HF
as a complementary process to other system design
specification approaches, outside the often-parochial
nature of HF practice, is confusion of terms promoting
poor communication between different design disci-
plines. As an example, there are different meanings for
�Function� and �Task� within and between different
disciplines including HF. For the sake of clarification,
the next section considers some of the meanings as-
cribed to the terms Function and Task.
6. DIFFERENCES IN THE MEANINGS OF�FUNCTION� AND �TASK�
The word �Function� has different meanings depending
on the context of use and the profession of the user. It
is worth emphasizing these differences because the
word is used too glibly in discussions related to any
defined system design life-cycle (MacLeod & Scaife,
1997). This paper will present its own definitions in
support of its arguments. However, it is not the purpose
of the paper to suggest an all-encompassing definition
of any term. It must be emphasized that with any one
approach to questions of design, design being an inter-
disciplinary activity, there should be a good apprecia-
tion of the other approaches and definitions that also
Figure 2. Example of a generic SE process model (after IEE P1220).
SYSTEM RELATED COGNITIVE FUNCTIONS IN DESIGN AND DEVELOPMENT 119

influence the design processes�no one definition be-
ing necessarily all encompassing.
Thus, functions may solely reside within the engi-
neered system or be unique to the work performed by
the system operator. The term Function has a common
underlying theme in purpose, but its interpretation is
influenced by diverse and undefined nuances.
6.1. Definitions of Function and Task
In support of the arguments in this paper a Function is
stated to be a system property that is latent until re-
quired, has an associated level of performance, and is
appropriately evoked by engineered automation or the
system operator through a requisite application of ef-
fort.
A loose definition of a Function is that it is anything
that a system might be required to do. For a coverage
of various forms of system functions see Jackson, 1997.
A Task can be considered as a system�s planned
application of its functionality toward the satisfaction
of explicit system goals. In contrast to a Function,
consideration or performance of a Task includes an
appreciation of the requisite time and effort needed to
support that task.
Furthermore, tasks may evoke one or more system
functions. Also the form of these functions may vary
between heuristic and algorithmic bases. Thus, the
eventual task-related performance of functions by man
and/or machine, partly set during the iterative and
physical processes of design, can be represented by
tasks undertaken by the engineered system, the system
operator, or both. For example, an engineered avionics
system can be designed to automatically adjust control
surfaces and engine power to safely maneuver an air-
craft, the associated system functions predominately
algorithmic in nature. However, the initiation of that
maneuver task is directed by the operator through some
form of control activity. This control activity can be as
simple as a single physical setting of a flight parameter
on a sub system or a system input by operator voice
command. Currently, the correct selection of a system
control activity is normally supervised and managed
through the operator�s use of their cognitive functions,
these system functions being predominately heuristic in
nature.
7. THE MEANING OF COGNITION
Cognition has commonly been associated solely with
aspects of human work. However, the term cognition (a
term covering the use of knowledge, operator�s under-
standing, judgment, anticipation, directing, application
of skills, and system control) can apply to functions and
tasks resident in either man or machine or both (Holl-
nagel & Woods, 1983).
Activities and actions are necessary to the actual
performance of tasks. Mediating between operator sys-
tem tasks and activities, to effect appropriate operation
of the system, are the operator�s system-related Cogni-
tive Functions or SCFs. The �Cognitive Function� in
the process refers to the specific SCFs associated with
operator cognition and related to the translation of the
�intended task� into the �activity.� Note that all opera-
tors will also have a repertoire of nonsystem-related
cognitive functions that may or may not affect their use
of SCFs, e.g., inter-crew communications. Thus:
Intended Task >> Cognitive Function >> Activity >>System Feedback
All tasks are governed by plans devised as guides
toward the achievement of work goals. In the case of
the human operator, the proactive heuristic-driven con-
sideration of these plans produces intended operator-
based tasks associated with a system. During system
operation, these intended tasks are reactively revisited
and revised considering the system�s operating environ-
ment and the intended quality of performance. This
revisit produces the dynamics of task-related activities
involving the redirection of system effort and functions
toward the fulfillment of system work goals. The per-
formance of these task-related activities is fundamental
to the assessment of system situation and the mainte-
nance of operator Situational Awareness (SA). Detailed
discussion on the properties of SA is beyond the scope
of this paper; the reader is referred to Taylor and Selcon,
1994; and Endsley, 1996. These activities are crucial in
support of the direction and control of the MMS to-
wards the satisfaction of the system work goals.
7.1. Situation Assessment and SystemCognitive Functions (SCFs)
System Cognitive Functions (SCFs) are cognitive func-
tions that are considered to be an integral part of an
MMS�s functionality. SCFs incorporate knowledge of
the architecture of the engineered system, that of the
expected system task performance, an ability to assess
that performance throughout task execution, and as-
sessment of the influences of the overall-operating en-
vironment. They direct and sustain MMS situation
assessments to assist in the determination and control
of the quality and quantity of performance required
from the whole system. Indeed, their essential role is in
ensuring the maintenance of overall stable and pertinent
MMS management and control. They represent a fo-
cused understanding of the state of system performance
with relation to MMS work goals and are associated
120 MACLEOD

with feedback to the operator, and/or engineered sys-
tem, on assessments of both the quality of overall
system performance and the quality of operator control
of that system.
7.2. Intrinsic System Differences BetweenAwareness and Assessment
Human resident SCFs reside under mental processes
and states of attention and are different from the SCFs
as might be related to engineered systems. The human
SCFs have unique properties of awareness and assess-
ment; the machine solely has properties of assessment.
Thus the SCFs related to engineered components of
systems do not imply any awareness (an engineered
system is not sentient), but SCFs are related to a de-
signed machine knowledge of a required performance
tag placed on many system functions. SCFs assist the
maintenance of overall SA by the system through assis-
tance to the system operator; however, the SA associ-
ated with a system does require consciousness. This can
be argued to exist in two forms. One form exists as
human consciousness that requires an awareness of the
system operating environment and system goals. The
other form is arguably a form of consciousness in that
it requires an �awareness,� within and between a sys-
tem�s engineering components, this of the engineered
system operating environment and some system goals
(Haig, 1998). This paper will consider only the first
form, as the second form is still hypothetical.
7.3. Consciousness, Intelligence,Cognition, and Expertise
�Consciousness� is the basic ingredient of awareness
and is the property that links the object that has con-
sciousness with its environment and community. The
quality of conscious behavior depends on intelligence.
�Intelligence� has many definitions but can be de-
scribed as an ability to adapt to different and changing
environments. �Cognition� encompasses the processes,
analysis, and knowledge/experience basis, currently as-
sumed to reside in the mind, that are sustained and
supported by intelligence and consciousness. Quality
manifestation of cognition, the product of many diverse
cognitive activities, is represented by high operator
expertise in work performance.
Currently, the fusion of the areas encompassed by
cognition requires the application of human expertise
in the workplace. The machine can accurately assess
situations and conditions within its immediate remit,
and can perform quality and timely work. Currently, the
machine on its own has no consciousness, knowledge
of the purpose of its inbuilt processes, or of the reasons
supporting its performance goals. The ultimate man-
agement, control, and direction of the machine reside
with trained human operators, supervisors, or manag-
ers.
8. AUTOMATION AND ROBOTICS
As the capabilities of technologies improve, and with it
an associated capability to use that technology, the share
of the technology in the control of the overall system
increases. It is a truism that new technology introduces
new and more numerous forms of system automation
which in turn change the nature of operator work within
an MMS. New technologies can also support Robotics.
8.1. Differences Between Robotics andAutomation
Robotics can be seen as different from automation in
that automation may be expressed as the designed ap-
plication of technology to engineered system work
tasks, whereas Robotics is purely concerned with the
application of technology to work tasks associated with
human machine systems. Further, Robotics is normally
seen as being concerned with the application of tech-
nology to work tasks previously performed by human
operators.
Robots require an integral understanding of human
work, or work related requirements, to perform effec-
tively. Most current Robots, e.g. as used in car assembly
lines, consist of algorithmic-based automation of activi-
ties previously undertaken by the use of human work
skills that showed a high physical component. How-
ever, increasingly fault detection systems are being
employed, replacing the human inspector, and such
systems need to be built with a knowledge of SCFs
through an understanding of pertinent operator heuris-
tics. Future intelligent systems, which may go beyond
the current definition of a Robot in that they perform
forms of work not previously performed by a human or
machine, will require a knowledge of SCFs as well as
an engineered emulation of other relevant properties
approaching consciousness, intelligence, and cogni-
tion. In the future, automation and robotics may become
synonymous.
8.2. Automation, Assessment, Awareness,and SCFs
Automation uses system situation assessment from the
standpoint of that system�s engineered design. How-
ever, the assessment of overall system performance
with relation to the achievement of goals still requires
system feedback to the operator to maintain the opera-
tor�s and, therefore, the MMS�s SA. Good SA is argued
SYSTEM RELATED COGNITIVE FUNCTIONS IN DESIGN AND DEVELOPMENT 121
to be an intrinsic part of complex human skills and is
necessary for the operator�s effective direction of the
system toward the satisfaction of work goals and the
maintenance of those skills (MacLeod, Taylor, and
Davies, 1995).
It is suggested that human functions cannot be de-
scribed or captured in the deterministic fashion cur-
rently required by mainstream engineering disciplines.
Human system-related functions must be described in
a fashion that is equitable to their nature and yet allows
their complementary specification within the engineer-
ing process, or to any equivalent specification and de-
sign process. The evocation of such functions to assist
human task and system task performance must rely on
human skill, expertise, and SA within the context of
both overall system design and its later operational
performance. Thus, it is not only the specific skills and
anthropometrics of the human operator that must be
specified during early requirements capture for a sys-
tem (i.e., as contained in a Target Audience Description
[TAD]), but also the necessary SCFs required by the
MMS.
The form that would be required of these SCFs
would logically depend on the associated suite of sys-
tem functions and their intended performance and ap-
plication. Additionally, an operator�s full suite of
cognitive functions will still be required to assist the
safe and effective direction and control of the system
and deal with the uncertainties of the environment. An
example of these latter functions would be those sup-
porting recovery from MMS-related operational errors.
Following from the above, the physical design of an
MMS would be performed by iteratively approaching a
refinement on the logically specified user, system, and
performance requirements, this as a means of optimiz-
ing the complementary contributions of man and ma-
chine to support an achievement of expected system
performance. Throughout the physical design phase,
the suite of system functions would be refined through
a series of controlled multi-disciplinary trade-offs. In
any sense of allocation of functionality to man and
machine during physical design, this would be mainly
an allocation of levels of control considering the de-
signed level of automation and the control/feedback
needs of the human in command of the system.
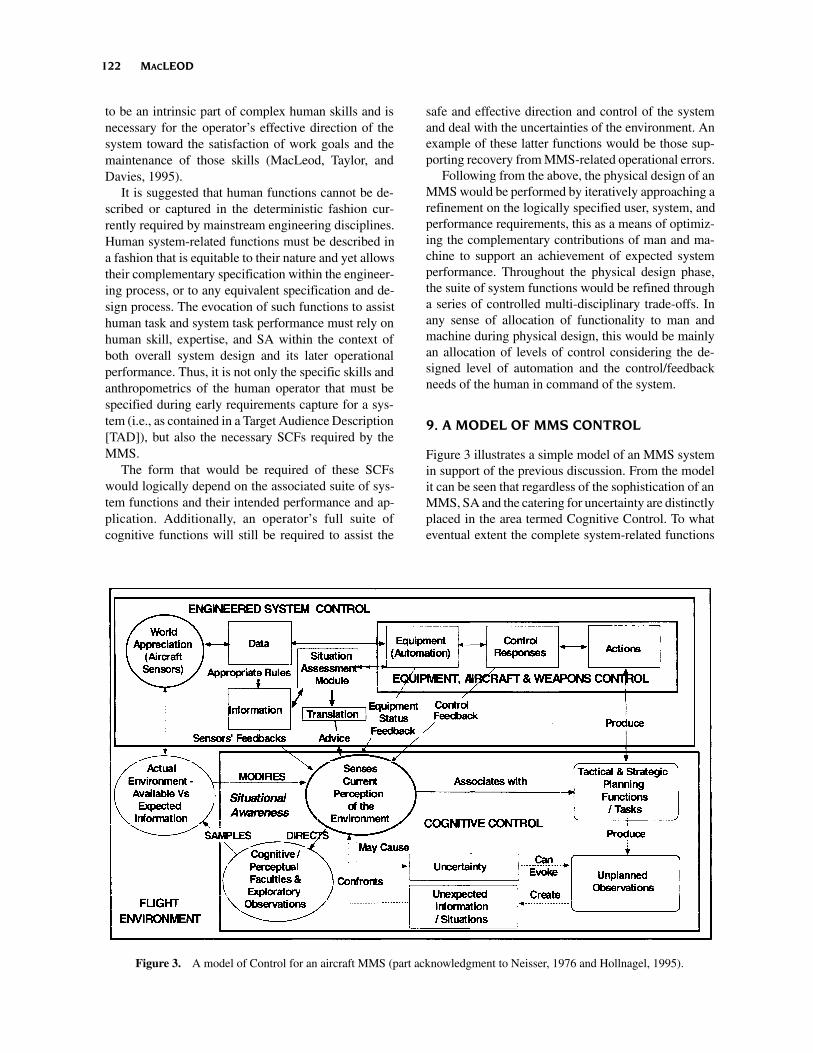
9. A MODEL OF MMS CONTROL
Figure 3 illustrates a simple model of an MMS system
in support of the previous discussion. From the model
it can be seen that regardless of the sophistication of an
MMS, SA and the catering for uncertainty are distinctly
placed in the area termed Cognitive Control. To what
eventual extent the complete system-related functions
Figure 3. A model of Control for an aircraft MMS (part acknowledgment to Neisser, 1976 and Hollnagel, 1995).
122 MACLEOD

in that area can be eventually imbued into the engi-
neered machine is problematical. However, many sim-
pler cognit ive functions can already be
engineered�for example, as shown in aircraft colli-
sion-warning systems, in Fault Detection, Inspection,
and Rectification (FDIR) systems, and in sophisticated
fighter fly-by-wire systems. The �Situation Assessment
Module� represents these simpler functions in the
model. Currently, a simple rule-based program, a more
sophisticated Knowledge Based System (KBS), a neu-
ral net, or/and some fuzzy logic routines might reside
in this module. For discussion on one use of a �Situation
Assessment Module� see Scaife and MacLeod, 1998.
The difficulty in communication between the Sensor
Control area and the Cognitive Control area relies on
the form, timeliness, and appropriateness of informa-
tion, advice, and feedback one to another. If properly
designed, the creation of SCFs should assist the design
of communication by bridging between, and alleviating
differences between, the viewpoints of the engineered
machine and the operator. An example is the advice
produced by a high quality KBS.
The greater the degree of system automation, the
greater will become the importance of system feedback
to the operator for the maintenance of correctly directed
system effort. With the burgeoning system complexity
associated with each new system, it is important that the
feedback to the operator be based on a system function-
ality that has embedded cognitive functions in its suite.
The engineered design must allow a degree of assess-
ment by the machine of the working environment, the
situation, and the quality of the performance of the
MMS components�including the system operator
where possible. Such SCFs are needed in order that a
system can include situation assessment as an integral
part of the engineered control of the system. Thus
system related SA could include an anticipation of
future events in the form of advice, and an associated
timely and effective feedback to the operator of the
implications and consequences of ongoing control
processes on system performance.
Certification standards for computer aircraft sys-
tems, such as ARP 4754 (1996), point out that require-
ments are allocated to people, as well as systems.
However, this allocation is the very area where engi-
neering design is flawed. As already argued, SE often
fails because in that it does not encompass system
pertinent human functionality within a system to allow
such a requirements allocation, although it effectively
supports the transition from system �logical� require-
ments to an allocation of �physical� engineering re-
quirements.
10. CONSIDERATIONS ON THESPECIFICATION OF MMS SCF
The level at which the SCFs must be considered by a
system specification, particularly at different stages of
the system design and development, will in itself be a
difficult task. However, there are many other issues
associated with the adoption of cognitive functions
within design processes. Some of these issues can be
amplified by considering future concepts such as the
EC.
The concept of the future Electronic Crewman (EC),
or Pilot Associate, is that the EC will perform many of
the tasks currently performed by the pilot. These tasks
will include aircraft and system control, under the tute-
lage of the pilot, but the EC would also aid the pilot with
the usage and interpretation of sensor data, the handling
of equipment faults, advice on the criticality of situ-
ations, and assistance to the operator when required in
the form of pertinent advice. All these tasks raise issues
related to the specification of SCFs. Taking the case of
the EC, how can it be made to appear aware of the pilot,
how can it present information or advice that comple-
ments the pilot�s own situation assessment, how is its
use validated, how is such a system debriefed after a
flight and then refined (trained), how can such a system
be certified for airborne use? (MacLeod, 1997).
There are many problem areas associated with the
concept of SCF specification of any advance avionics
system. However, the automation/robotics/EC created
by new technology cannot be sensibly introduced as
part of a quality product if its purpose in an MMS
cannot be adequately specified with relation to the
nature of the system functions of both the technology
and the human operator. As an associated example, a
current simple avenue for selecting system functional-
ity, appropriate for inclusion in Human Computer In-
terface (HCI) design, would be to ensure that in the
designed information forms are not confused and that
the operator is presented with information that is related
to the performance of current tasks. One information
classification scheme considers HCI functionality un-
der what the operator �Requires Constantly,� �Requires
as Appropriate,� �Requires by Request,� and �Never
Requires.�
10.1. Specification of SCFs
This short paper cannot fully delineate how SCFs can
be specified, although some suggested avenues have
been discussed. However, they must complement engi-
neered system functions. It has been argued that they
fill the gap, if any, between system-specified require-
ments and the requirements that have to be met to
SYSTEM RELATED COGNITIVE FUNCTIONS IN DESIGN AND DEVELOPMENT 123

support system certification. Examples of prospective
systems have been considered in the paper, e.g., KBS
and EC.
However, asking what contribution the human needs
to make to support MMS-specified performance re-
quirements must govern the approach to specifying
SCFs. Human support to a system is supplied by the
dynamic and goal-driven application of human cogni-
tive functions, behind which are the heuristic-based
processes of expertise not considered to be within the
context of this discussion. Generally this human sup-
port can be classified as residing in forms of analysis,
anticipation, direction, control, and management/su-
pervision of MMS tasks and their performance. All
these forms of human support involve anticipation or
prediction of the meaning of understood current system
performance to the future goal-associated operation and
performance of the system, often in the context of an
uncertain operating environment. Thus the contribu-
tions also involve an understanding of system function-
ality, at an appropriate level, and the level of system
effort required to convert that functionality into the
system activities necessary to achieve a desired per-
formance from the system.
It follows that particular levels of engineered, or
�hard,� system functions, when dynamically evoked as
activities, require specific forms of cognitive function-
ality in support of their associated performance. As a
simple example, considering a high level customer/user
requirement of: �The MMS shall be capable of (Pro-
vide) computation of aircraft position to aaa accuracy,
within lll limits, at rrr rate, within lll bands of Latitude�
gives no indication of the use and means of interpreting
the required computation. A high-level cognitive func-
tion might be used to fill this gap as: �The system shall
be capable of assisting and complementing (Provide)
aircrew interpretation, supervision, management, and
control of navigation systems.� From high-level func-
tion descriptions, the need for lower-level MMS-related
cognitive type functions can be made explicit when
considered alongside their associated �hard� MMS re-
quirement. Further illustration is given by some decom-
position examples shown in Table I.
11. FUTURE ASSOCIATED ISSUES
As previously argued, the more hidden and complex the
processes involved in a system�s software, and the
interfacing and interaction between systems, the more
difficult it is to present analogues of the processes to the
operator as adequate feedback in support of the desired
operator levels of control of the system. In current
aircraft systems, we are approaching the limits of the
aircrew ability to remain in control of the aircraft far
less for them to direct its employment (Burrett, 1996).
Technology is advancing at a fast pace, but the human�s
ability to properly utilize it follows far behind.
One possible avenue for giving technological assis-
tance and advice to the system operator, and to amelio-
rate operator problems in control, is for the technology
Table I. A Comparison of Complementary System Cognitive and System �Hard� Functions
124 MACLEOD

not only to be designed as a tool for the operator but
also to be engineered to assist the operator. KBS is one
of many currently mooted technologies intended to
provide assistance through advice to operators� skilled
use of their cognitive functions. A concept for such
assistance is encapsulated in the concept of an aircraft
EC in which the operator is assisted by technology that
emulates some of the teaming functions of an extra
crewman. However, within the context of system opera-
tion, advice has some important differences to the mere
presentation of information. It is argued that the devel-
opment of methods and tools to capture SCFs will
promote the appropriate specification/presentation of
advice.
11.1. Natures of Information and Advice
Firstly, to consider information. Currently engineering
design performs system tasks related to specified sys-
tem functions, and presents the results or status of these
tasks as a required feedback of data and information to
engineered subsystems and to the human operator of the
system. Engineered system data can be said to be a
collection of facts and figures that, by the application
of appropriate rules, is transformed into information.
Information in itself is primarily system function re-
lated and situation independent. Only in its timely HCI
presentation as task feedback has it any situation rele-
vance. However, system-generated advice is informa-
tion that is considered within a specified context and
translated into tips to the operator on the effective
present and future employment of the system, this from
the �point of view� of the engineered system. Moreover,
whereas an operator had to validate data and informa-
tion against certain rules and measures, advice will
additionally have to be critiqued by the operator with
relation to its operating context, its pertinence, and its
usefulness. Thus, advice must not only be related to the
designed intention of the advice, but also must consider
the recipients� range of expertise and the form of train-
ing required. Furthermore, advice must contain both
extensional and intensional meaning to make sense to
the operator (Hayakawa & Hayakawa, 1990). Table II
illustrates the basic differences between the intensional
and extensional worlds and the bridging nature of ad-
vice between these worlds. The intensional world con-
sists of knowledge and beliefs mainly received though
communication of the written or verbalized word. The
extensional world is the world as experienced physi-
cally by the system operator. Each world strongly ef-
fects changes on the other.
Thus, it is suggested that good advice can comple-
ment operator expertise to promote an overall system
SA. Moreover, it can be a means of reducing the bias of
operator beliefs and heuristics (Tversky & Kahneman,
1974) whilst supporting the work of differently skilled
operators than hitherto employed by the organization
utilizing the new system.
11.2. Comparisons Between Informationand Advice
Operator understanding and use of information and
advice is generated through cognitive activity and, with
relation to system operation, more specifically by SCFs.
Information and advice are both meant to provide inputs
to the operator assessment of the flight situation and
thus enhance SA, operator system-related work per-
formance, and the development of operator skills. How-
ever, advice is information that has been transformed to
present not only a timely situation assessment but also
an extrapolation from that assessment into a recommen-
dation to the operator on future action. Whilst informa-
tion can be said to sustain the operator�s mental model
of the current environment and be a basis for the opera-
tor�s anticipation of future activity requirements, sys-
tem advice additionally encompasses readiness and/or
prediction for future system activity. Such prediction
implies a good system-based knowledge of the current
Table II. Advice as the Mediator Between Intensional and Extensional World
SYSTEM RELATED COGNITIVE FUNCTIONS IN DESIGN AND DEVELOPMENT 125

situation and appropriate operational tactics (MacLeod,
1998).
Like information, advice should be presented
through a specified HCI dialogue and format. The qual-
ity of generated advice will not only depend on the
efficacy of the designed system, it will depend also on
the effectiveness of the HCI dialogue, format, and tim-
ing in the proffering of that advice. The HCI dialogue
will have to be devised to prevent ambiguity in its
interpretation by the operator�it should require mini-
mum translation by the operator and must not mislead.
It must be specific, pertinent, constructive, and not
�chatty� or cause annoyance. Following the require-
ments of all good advice or instruction, the advice must
be given in an active and positive form.
Advice can also be considered to reside in different
categories, each of which may deserve a separate con-
sideration on their quality. As an example, it can be
argued that generated advice could be assigned to the
following categories:
1. Reminders of important details related to antici-
pated future actions.
2. Timely predictions of required operator activi-
ties.
3. General work or tactical guidance.
4. Situation assessments.
5. Advice on recovery from consequences of imper-
fect operator or system actions.
6. Handling and feedback to the operator of routine
but onerous system management tasks.
The important differences between the nature of
advice and information imply that this topic area re-
quires investigation to determine its importance to fu-
ture aircraft system certification.
11.3. Advice-Associated CertificationQuestions
One issue related to system-generated advice that is
certain to be important in system certification is the
generation of hazards from advice. Could the system
provide advice that, if acted upon, would in some
conditions result in a hazard? Showing that this could
not occur may be essential to the production of the
System Safety Case in support of system certification.
In this case the �Fitness for Purpose� of the advice could
be adversely affected by the contents of the Safety Case.
Reduction of the probability of occurrence could be
tackled by training of the operators or by restrictions on
the use of the advice, but neither present an optimal
solution.
11.4. Section Summary
Future systems will need to be specified before they can
be accepted by the customer and certified as fit and safe
for use. However, the model for specification and the
design life-cycle is unlikely to stay with the traditional
waterfall model as manifest by most HF standards and
guidelines. More likely, the model used will be near the
general SE model modified to allow specification up-
date in the case of systems utilizing a large amount of
SCFs such as postulated for the EC
12. FINAL NOTES ON THE ARGUEDAPPROACH
The above arguments advocate a human-orientated
contribution that complements and arguably improves
the logical SE specification processes and subsequent
system design and development life-cycle processes.
MMS are increasingly entering service with perform-
ance capabilities less than those required. This problem
is partly the fault of current HF approaches to MMS
design, approaches that lack any sensible justification,
rigor, and purpose with relation to their application to
new technologies and systems. One possible avenue to
promote HF value to design is to complement systems
engineering by the early integration of SCFs into the
logical and implementation-free user and system re-
quirements capture processes. This would promote a
new emphasis on the capture of the heuristics of system
cognitive functions related to MMS direction and con-
trol, and highlight a need to discover effective methods
for the marriage of MMS human-associated functions
with engineered functions throughout a system�s design
and development life-cycle. It has been argued that the
mooted approach would assist in the knowledgeable
adoption of new technologies and allow a more user-
centered approach to system automation. Finally, if the
outlined approach were sensibly developed and ap-
plied, it is suggested that it would be less likely that the
operator would be left to somehow cater for necessary
system functions and tasks that the designer could not
see how to automate (Bainbridge, 1987).
REFERENCES
R. Ackoff, Science in the systems age: Beyond IE, OR, and
MS, Operations Research, vol. 21, 1973, pp. 661�671.
L. Bainbridge, �Ironies of automation,� in: New technology
and human error, J. Rasmussen, K. Duncan, and J. Leplat
(Editors), John Wiley & Sons, Chichester, 1987, pp. 276�
283.
126 MACLEOD

I. Burrett, A test pilot�s perspective on advanced avionics,
Contemporary Ergonomics 1996, Taylor & Francis, Lon-
don, 1996, pp. 20�24.
A. Chapanis, On the allocation of functions between man and
machines, Occupational Psychology, vol. 39 (1965), 1�
11.
M. R. Endsley, Theoretical underpinnings of situation aware-
ness: A critical review, in Experimental analysis and meas-
urement of situation awareness, D.J. Garland and M.R.
Endsley (Editors), Embry-Riddle University Press, Fla.,
1996, pp. 17�23.
N. Haig, The possible value of consciousness to guided
weapons and other unmanned platforms, Journal of De-
fence Science, DERA Technical Directorate, Farnbor-
ough, UK, 3 (1998), 451�454.
S.I. Hayakawa and A.R. Hayakawa, Language in thought and
action, 5th edition, Harcourt Brace Jovanovich College
Publishers, Florida, 1990.
E. Hollnagel and D.D. Woods, Cognitive systems engineer-
ing: New wine in new bottles, International Journal of
Man-Machine Studies, 18 (1983), 583�600.
E. Hollnagel, Lecture notes from Industrial Summer School
on Human-Centered Automation, August 21�25 1995,
Saint-Lary, Pyrenees, France.
IEE P1220, Standard for the Application and Management of
the SE Process, IEEE Standards Department, Piscataway,
NJ, 1994.
S. Jackson, Systems engineering for commercial aircraft,
Ashgate Publishing Ltd., England, 1997.
I.S. MacLeod and R. Scaife, What is functionality to be
allocated?, Proceedings of Allocation of Functions Con-
ference (ALLFN �97), Galway, Ireland, October 1�3,
1997, pp. 125�134.
I.S. MacLeod, Information and advice: Considerations on
their forms and differences in future aircraft systems, in
Proceedings of the Global Ergonomics Conference,
P.A.Scott, R.S.Bridger, and J. Charteris (Editors), Cape
Town, Elsevier Science, 1998, pp. 667�672.
I.S. MacLeod and R.M. Taylor, Does human cognition allow
human factors (HF) certification of advanced aircrew sys-
tems? in J.A. Wise and D.V. Hopkin (Editors), Human
factors in certification, Embry-Riddle University Press,
Fla., 1993, pp. 163�186.
I.S. MacLeod, Certification of the EC/aircrew team�A cog-
nitive control loop, Proceedings of 4th Human Electronic
Crew Conference, Kreuth, Germany, September 23�26,
1997 (in press).
I.S. MacLeod, R.M. Taylor, and C.L Davies, Perspectives on
the appreciation of team situational awareness, in D.J.
Garland and M.R. Endsley (Editors), Experimental analy-
sis and measurement of situational awareness, Embry
Riddle University Press, Fla. 1997, pp. 305�312.
MILitary STandardD (MIL-STD) 1472D, Human engineer-
ing design criteria for military systems, equipment and
facilities, US Government Printing Office, March 1989.
NATO STANdardisation AGreement (STANAG) 3994AI
First Draft, The application of human engineering to ad-
vanced aircrew systems, Edition 2, Notification Draft 1,
June 1999.
U. Neisser, Cognition and reality: Principles and implications
of cognitive psychology, W.H. Freeman and Company,
San Francisco, 1976, pp. 172.
H.E. Price, The allocation of functions in systems, Human
Factors, 27 (1985), 33�45.
R. Scaife and I.S. MacLeod, A KBS based safety engineering
and engineering psychology contribution to flight deck
safety, in Conference Volume of 1998 ERA Avionics
Conference, Heathrow, UK, November 18�19, 1998, pp.
3.2.1�3.2.11.
G. Schreiber, J. Akkermans, S. Anjewierden, R de Hoog, N.
Shadbolt, W van de Velde, and B. Wielinga, Engineering
and managing Knowledge: The CommonKADS Method-
ology version 1.0., Technical Report, Department of So-
cial Science Informatics, University of Amsterdam, 1998.
Society of Automotive Engineers (SAE) in cooperation with
the Federal Aviation Administration (FAA), Guidelines
for the certification of highly-integrated and complex
aircraft systems, ARP 4754, 1996.
R.M. Taylor, and S.J. Selcon, Situation in mind: Theory,
application and measurement of situational awareness, in
D. Gilson, D.J. Garland, and J.M. Koonce (Editors), Situ-
ational awareness in complex settings, Embry-Riddle Uni-
versity Press, Fla., 1994, pp. 67�98.
A. Tversky, and D. Kahneman, Judgement under uncertainty:
heuristics and biases, Science, 185 (1974), 1124�1131.
UK Defence Standard 00-25 (DEF STAN), Human factors for
designers of equipment, Part 12: Systems, issue 1, dated
15 July 1989.
UK Defence Standard 00-55/2, The requirements for safety
related software in defence equipment, part 1: Require-
ments and Part 2: Guidance, dated 1 August 1997.
UK Defence Standard 00-56/2, Safety management require-
ments for defence systems, part 1: Requirements and part
2: Guidance, dated 13 December 1996.
Iain S. McLeod was born in Scotland, has been a United Kingdom military aviator, a data processing
manager of a signal processing laboratory, and is now working as a Principal Consultant at Aerosystems
International Ltd, a UK information technology and systems house. He holds an MSc in Industrial
Psychology from Hull University. Mr. McLeod has worked in Aerospace for more than 35 years. He is a
UK Chartered Occupational Psychologist, a UK Chartered Engineer, and is also a Registered European
Ergonomist through the Council for Registration of European Ergonomists.
SYSTEM RELATED COGNITIVE FUNCTIONS IN DESIGN AND DEVELOPMENT 127





























