Embed Size (px)
Citation preview

Aac
Aa
b
a
ARRAA
KSPMAF
1
atbmaticaeicft
0h
Progress in Organic Coatings 76 (2013) 1369–1375
Contents lists available at SciVerse ScienceDirect
Progress in Organic Coatings
journa l homepage: www.e lsev ier .com/ locate /porgcoat
comparative study between experimentally measured mechanical attributesnd users’ perception of soft feel coatings: Correlating human sense with surfaceharacteristics of polyurethane based coatings
. Mirabedinia, M. Mohsenia,∗, B. Ramezanzadeha,b
Department of Polymer Engineering and Color Technology, Amirkabir University of Technology, P.O. Box 15875-4413, Tehran, IranDepartment of Surface Coatings and Corrosion, Institute for Color Science and Technology, No. 59, Vafamanesh St., Hosainabad Sq., Lavizan, Tehran, Iran
r t i c l e i n f o
rticle history:eceived 8 November 2012eceived in revised form 9 April 2013ccepted 23 April 2013vailable online 18 May 2013
eywords:oft feel coatingolyurethane
a b s t r a c t
Different soft feel coating formulations using waterborne resins composed of soft and hard polyurethaneresins were prepared. The effects of resins mixtures on the soft feel properties were studied. Attemptswere made to find out the correlation between users perception and experimentally measured surfacecharacteristics of the coatings. To this end, 72 people were asked to touch the coatings in a similar testingenvironment and to express their feeling in order to rank them between 1 (lowest soft feel effect) and 4(highest soft feel effect). The coatings physical characteristics were studied by tensile test, micro Vickershardness, atomic force microscope (AFM) and friction coefficient measurement. It was shown that themixtures of 25:75 of soft and hard resins resulted in the best soft feel effect. Users did not consider low
icro VickersFMriction coefficient
or high hardness films as soft. Instead, those coatings having greater toughness were ranked as the bestsoft feel effect. Also, coatings with lower friction coefficient and lower surface roughness were preferredby users. However, the lowest friction coefficient did not result in the best soft feel appeal. In fact, themechanical properties, surface roughness and friction coefficient were found to play as the criteria toshow soft feel effect. It is thus concluded that by selecting appropriate surface characteristics of coatingsrelated to soft feel effect, good agreement between these properties and human feeling can be made.
© 2013 Elsevier B.V. All rights reserved.
. Introduction
Plastic materials are widely used in automotive industries. Incar body, steel parts in the passenger compartment and in cer-
ain engine components have been wholly or partially replacedy plastics. These plastic parts need to be coated to make themore pleasant. The best choice for this purpose is use of soft feel
nd leather like coatings. These coatings impart a luxurious looko hard plastic surfaces [1–6]. They are mainly matt and can alsomprove the resistance against sunlight and scratch. Applying aoating finish makes the plastic surface more appealing. Soft feelpplications began primarily with automotive interiors and thenxtended to a market for consumer electronics, cosmetics packag-ng, medical devices and also to all sorts of products like vacuum
leaner handles. The coatings used in automotive industries for softeel applications have to meet the following requirements: (a) softouch feeling and pleasant handle, (b) resistance to chemicals, acids,∗ Corresponding author. Tel.: +98 21 64542441; fax: +98 21 6468243.E-mail address: [email protected] (M. Mohseni).
300-9440/$ – see front matter © 2013 Elsevier B.V. All rights reserved.ttp://dx.doi.org/10.1016/j.porgcoat.2013.04.011
bases, water, and other cleaners, (c) physical durability, adhesion,impact, scratch resistance, abrasion and wear resistance, (d) lowgloss, (e) weather stability, and (f) ambient or low temperature cure[1–3]. Two-component (2 K) solvent borne polyurethanes (PUR)have been usually used as soft touch coatings on plastic materials inthe automotive industry. An appropriate soft feel coating requiresthe use of certain soft binders, e.g., aqueous hydroxyl functional dis-persions in combination with water-emulsifiable polyisocyanatesto formulate two-pack systems. It has been also understood thatthe combination of organic and inorganic compounds can furtherenhance the soft feel effect. Two different approaches have beenfollowed to prepare coatings with high soft feel properties. First,surface modifying additives can be used to modify the paint filmtexture and promote a “touch-like” feeling. One of the surfacemodifying additives is wax. Waxes are surface modifying agentswhich affect tactile property of the coating by changing surfaceroughness and unevenness [2–6]. The conventional silicones, orpolydimethylsiloxanes (PDMS), have been found suitable additives
to improve soft feel properties of the coatings. In recent years, VOC(volatile organic component) regulations have resulted in a shiftin soft feel coating chemistry toward waterborne coatings. Theseinclude waterborne polyester polyols, polyurethane dispersions
1 rganic Coatings 76 (2013) 1369–1375
(ooh
orftwcftpidawapttswtscdptt
tsmta
2
2
i
wptg
cimu
upt
2
2
ddw
Table 1Sample coding.
Resin composition
U2101/U615 U615/AS2506
SF-1 100:0 –SF-2 75:25 –SF-3 50:50 –SF-4 25:75 –SF-5 0:100 –SF-6 – 75:25
370 A. Mirabedini et al. / Progress in O
PUD), combination of polyester polyol with PUD, and combinationf acrylic polyol with PUD. The first soft feel waterborne coating wasbtained as a combination of a dispersible polyester polyol with aydrophilic aliphatic isocyanate [3].
Characterization of soft feel effects and ranking them basedn their soft feeling and correlating them to what people feel ineal conditions seem difficult. The soft feeling perception may varyrom one person to another. Everyone describes special parame-ers to consider a coating to be soft feel. This is even more difficulthen the soft feel effect is tried to be predicted based on the
oating properties. When the human fingertips contact the sur-ace of plastic/leather objects, the interaction between the skin andhe surface of object can be determined both physiologically andsychologically [7–11]. There are four modes of perception includ-
ng smooth–rough, slippery–grippy, warm–cold and soft–hard. Aesirable feeling can be obtained when a surface is less rough thanfingertip. On the other hand, undesirable feelings can be obtainedhen the surface is rougher than fingertip [12–15]. It has been
ttempted to find a correlation between self-report study (people’serception of soft feel surfaces) and the surface physical proper-ies. In the self-report, people’s perception was assessed accordingo six coating surface characteristics: warm–cold, slippery–sticky,mooth–rough, hard–soft, bumpy–flat and wet–dry. The peopleere asked to express their feeling about six mentioned charac-
eristics. The physical measurements were carried out to study theurface roughness, friction coefficient, compliance and the rate ofooling. Finally, the correlation and regression analysis were con-ucted to reveal relationships between physical properties andeople real perception [16–21]. In this study, it has been attemptedo find the main parameters influencing coating soft feel effect ando correlate them to human perception.
To do this, two main targets were aimed: the first was rankinghe soft feel effects of mixtures of different polyurethane disper-ions as assessed by the users. The second was studying the surfaceechanical properties, surface texture and friction coefficient of
he prepared coatings. The correlation between people’s perceptionnd experimentally tested properties were then discussed.
. Experimental
.1. Materials and sample preparation
Coatings were produced using three different kinds of resinsncluding U615, U2101, and AS2506 supplied from Alberding Co.
U615 is an aliphatic polycarbonate polyurethane dispersionith high flexibility and abrasion resistance. U2101 is an aliphaticolyester polyurethane dispersion with greater softness comparedo U615. AS 2506 is a styrene-acrylic copolymer dispersion. Theeneral chemical structures of the resins are shown in Fig. 1.
Different mixtures of resins were used to produce soft feeloatings. Each formulation consisted of 93 wt% resin, 0.2 wt% level-ng agent (BYK-348), 0.8 wt% antifoam (BYK-025), 0.1 wt% rheology
odifier (Borchigel L75N) and 5.9 wt% water. The resin mixturessed are shown in Table 1.
The coatings prepared were applied onto cleaned glass platessing a dip-coater apparatus at 2 mm/min withdrawal speed. Sam-les were kept at room temperature for 15 days to dry (the dryhickness of the coatings was 125 ± 5 �m).
.2. Characterization
.2.1. Users preference studies
The soft feel effect was analyzed by questionnaires given to theifferent participants. To assess the qualitative and quantitativeata for tactile perception of the soft feel coatings, 72 participantsere asked to express their feeling by rubbing their fingertips left
SF-7 – 50:50SF-8 – 25:75
and right on the coated panels. An assessment form for each of theeight formulations was given to the participants, asking them torank the coatings from 1 (the lowest softness) to 4 (the greatest soft-ness). The participants in this survey were chosen from both femaleand male who had little or no previous experience in coatings. Inthe assessment forms, the participants were asked if the surface ofthe coating they touched was soft or not. As we know, people mayhave a different feeling for the same object they touch. When peo-ple are asked to express their feeling on softness of an object, eachmay consider an existing or a real object in his/her mind, basedon what he/she desires most. So, by asking the participants whoperformed the test, to compare the coatings with real objects, itis unlikely that they have the same feeling in their mind. Thus, toavoid observing “Bias” results, participants were not asked to thinkabout a specific object nor they were given a real object to comparethe coatings with. This makes the reported feelings unbiased.
The average of the results was then reported. It has beenattempted to find the correlation between the physical character-istics of the coatings and those given by users.
2.2.2. Mechanical attributes to soft feel effectThe mechanical properties of the coatings were studied using
micro Vickers and tensile tests. The micro Vickers hardness wasmeasured using a Leica VMHTMOT instrument. The measurementwas done at 980 mN during 20 s. The tensile test was done (accord-ing to ASTM 638) in order to evaluate the Young’s modulus, yieldstress and elongation at break. The test was carried out using anInstron 5556 at strain rate of 2 mm/min at room temperature.
2.2.3. Surface characterizationThe surface slippage/roughness of the coating is an important
parameter affecting the people perception when they move theirfingertip onto the coating surface. It is expected that the increasein surface slippage or reduction of its roughness enhance the softfeeling effect. However, it cannot be said that the highest slippageleads necessarily to a better soft perception. In this study, it hasbeen attempted to correlate the surface roughness and friction withthe soft feel effect of the films. The surface texture of the coatingswas studied by means of AFM. The surface roughness values weremeasured from the AFM micrographs according to Eqs. (1)–(3). Thetest was done with a DS 95-50 atomic force microscope. The frictioncoefficient of the samples was also measured. The test was carriedout according to ASTM D 1894.
Sa =∫ ∫
a
/Z(x, y)/dx dy (1)
Sq =√∫ ∫
(Z(x, y))2dx dy (2)
aSz =∑5
1/peak heights/ +∑5
1/valley depths/
5(3)

A. Mirabedini et al. / Progress in Organic Coatings 76 (2013) 1369–1375 1371
Fig. 1. General chemical structure of (a) aliphatic polycarbonat
Table 2The quantitative and qualitative responses of participants’ feeling on the testcoatings.
Sample The number of participants expressed their feelings
Like Dislike Lowest: 1 Medium: 2 High: 3 Highest: 4
SF-1 No Yes 34 20 14 4.0SF-2 No Yes 20 23 19 10SF-3 No Yes 12 31 22 7.0SF-4 Yes No 8.0 15 28 21SF-5 Yes No 6.0 10 24 32SF-6 No Yes 18 19 20 15
3
3
UeRtewtr
T
Ff
SF-7 Yes No 15 25 14 18SF-8 Yes No 12 12 26 22
. Results and discussion
.1.1. Soft feel measurement
Soft feel coatings were produced using various mixtures of615, U2101 and AS2506 resins. It was attempted to evaluate theffective parameters influencing the soft feel effect of each coating.ecent findings show that different parameters including surfaceexture, surface hardness, elasticity and surface slippage may influ-nce the soft feel behavior. Before conducting any measurement, aide range of less trained and untrained people were asked to touch
he coatings and express their feeling. Answers were collected and
anked from 1 to 4 as shown in Table 2 and Fig. 2.Fig. 2 shows an increase in soft feel effect from SF-1 to SF-5.he lowest soft feel effect was attributed to SF-1. This observation
ig. 2. Soft feel effect (1 is the worst and 4 is best) of different samples obtainedrom 72 participants.
e polyurethane and (b) aliphatic polyester polyurethane.
reveals that reducing U2101 resin content and replacing it withU615 may contribute to a greater soft feel effect. It can be seenthat most people prefer coatings made from mixtures of 25/75 and0/100 of U2101/U615 softer than other samples. On the other hand,at 25/75 ratio of U615/AS2506 an enhancement in the soft feel effectwas seen. It seems that SF-4, SF-5 and SF-8 have attracted percep-tion of users and have been found the most preferred. These arereported as the softest coatings. However, other users have differ-ent feelings, i.e. they prefer other samples.
When people move the fingertip on the surface, the coatingmovement in the forced direction may influence their soft feel per-ception. It means that the surface mechanical attributes are alsoimportant. The most important surface mechanical attributes hereare surface hardness and shear modulus. The micro hardness valuesof the samples are given in Fig. 3.
Fig. 3 shows that replacing U615 resin with U2101 (SF-4 andSF-5) increases surface hardness. It can be clearly seen that the mix-tures of U615/AS2506 have hardness values considerably greaterthan those of U2101/U615. The greatest hardness can be seen formixture ratio of 75:25 of U615/AS2506 (SF-6). The surface hardnessdepends on the hardness values of each component of the coating.U2101 is an aliphatic polyester polyurethane dispersion with lowerhardness compared with U615 which is an aliphatic polycarbonatepolyurethane dispersion. Therefore, replacing U2101 (which hasthe lowest hardness) with U615, increases the surface hardness.On the other hand, AS2506 which is a fine aqueous dispersion of
styrene-acrylic copolymer has hardness values greater than thatof U2101 but lower than that of U615. As a result, the mixtures of50/50 and 25/75 of U615/AS2506 have hardness values lower thanFig. 3. Micro hardness values of different samples measured at 980 mN.

1372 A. Mirabedini et al. / Progress in Organic Coatings 76 (2013) 1369–1375
y = 1.5609x - 1.4145R² = 0.9541
0
1
2
3
4
1 2 3 4
Vic
kers
har
dnes
s (H
V)
So� feel ranking
y = 1.2833x - 3.35R² = 0.9716
0
1
2
3
2.5 3 3.5 4 4.5
Mic
ro h
ardn
ess (
HV
)
SF-1
SF-3
SF-7
SF-6
SF-2
SF-5
SF-4
SF-8
F
tbt
ftsllftefnfwTtctba
pig
la
Table 3Young’s modulus, yield stress and elongation at break obtained from tensile test.
Parameter
Young’smodulus (MPa)
Yield strength(MPa)
Elongationat break (%)
SF-1 0.55 0.05 4.50SF-2 0.85 0.08 8.0SF-3 2.96 0.18 19.31SF-4 2.85 0.17 56.0SF-5 2.70 0.12 140.44
ness not due to the greater hardness compared to other samples.The mixture of two hard resins (U615/AS2506) cannot be effectivefor observing a soft feel effect.
So� feel ranking
ig. 4. The relationship between the soft feel effect and the coating surface hardness.
he one which contains U615 alone. The surface hardness seems toe an important parameter affecting the soft feel behavior. To revealhis, the results shown in Figs. 2 and 3 are compared in Fig. 4.
As can be seen in Fig. 3, there is a linear correlation between sur-ace hardness and soft feel effect as perceived by users. Generally,he increase in surface hardness of the coatings results in greateroft feel effects. It can be seen that SF-1 and SF-2 which have theowest hardness among other samples have been reported as theowest soft feel effect. This observation indicates that reducing sur-ace hardness leads to surfaces with lower soft feel effect. However,he results shown in Fig. 4a and b reveal that the coatings with high-st and/or lowest hardness may not necessarily lead to greater softeel perception. For example, SF-6 and SF-7 samples have hard-ess values greater than SF-4, SF-5 and SF-8 but have been selected
ewer. It seems that surface hardness may not correctly correlateith soft feel effect as far as people’s perceptions are concerned.
herefore, a balance between softness and hardness may attracthe feeling of users. Moreover, other surface characteristics of theoatings like surface texture may be important to decide whetherhe surface is soft or not. From the results shown in Figs. 1–3, it cane concluded that certain mixtures of soft and hard resins result inbetter soft feel effect.
The relationship between the coating elasticity and soft feelroperties was also studied. The results obtained from tensile test
ncluding Young’s modulus, yield stress and elongation at break are
iven in Table 3.The soft feel coating can be described based on the elastic modu-us and friction coefficient of the surface. When the fingertips movelong the surface of a soft feel coating, a shift of the film surface
SF-6 36.4 0.87 12.50SF-7 17.36 0.59 27.43SF-8 11.30 0.34 7.5
versus the lower face bonded to the substrate occurs. In fact, insteadof elastic modulus, the shear modulus is what a human feels whentouching the coating surface. The shear modulus can be calculatedfrom the tensile modulus according to Eq. (4):
Et = 2(1 + P)E′ (4)
where Et, P and E′ are tensile modulus, Poisson’s constant and shearmodulus, respectively. The shear moduli calculated are shown inFig. 5.
Table 2 and Fig. 5 show the increase in Young’s modulus, shearmodulus (E′), and yield stress and elongation at break by replacingsoft U2101 resin with hard U615 resin in the coating formulations.In fact, the mixtures of 25/75 and 0/100 of U2101/U615 resultsin greater coating toughness. On the other hand, the mixture ofU615/AS2506 results in a significant increase in the coating shearand elastic modulus, and yield stress. Samples SF-6, SF-7 and SF-8have moduli and yield stresses much greater and elongation lowerthan those of SF-4 and SF-5 samples. This shows that mixtures ofU2101/U615 (SF-1 to SF-5) are tougher than U615/AS2506 (SF-6 toSF-8). These observations are in agreement with the surface hard-ness variations of the samples. Comparing the results shown inTable 2 and Fig. 4 shows that hardness and/or modulus are not theonly mechanical attributes describing the soft feel effect of the sam-ples. It seems that samples with the highest modulus and hardnessdo not result in greater soft feel effect. However, considering elon-gation at break and hardness or modulus simultaneously helps tobetter describe the coating soft feel effect. It seems that hard or softcoatings according to mechanical testing do not reflect the greatestsoft feel appeal. Instead, coatings with tougher behavior are show-ing soft feel effects more effectively. Therefore, it can be said thatSF-4 and SF-5 have better soft feel effect due to their higher tough-
Fig. 5. The shear moduli of different samples calculated from the tensile modulus.
A. Mirabedini et al. / Progress in Organic Coatings 76 (2013) 1369–1375 1373
crogra
cscs
scU
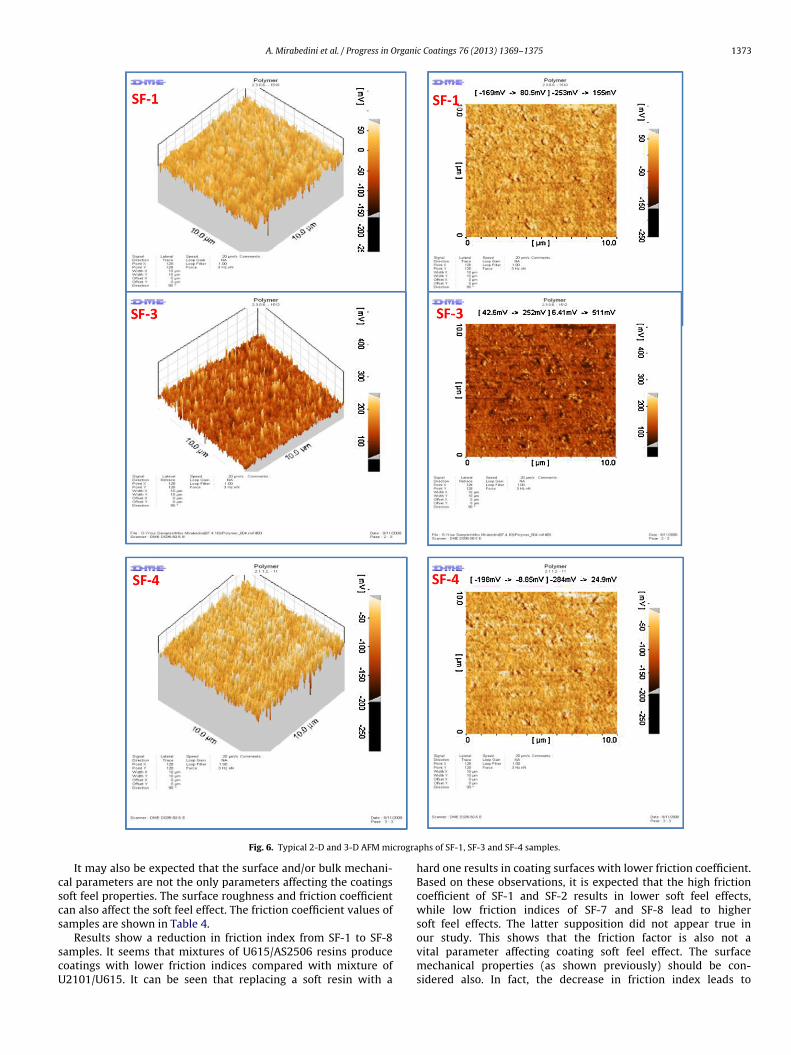
Fig. 6. Typical 2-D and 3-D AFM mi
It may also be expected that the surface and/or bulk mechani-al parameters are not the only parameters affecting the coatingsoft feel properties. The surface roughness and friction coefficientan also affect the soft feel effect. The friction coefficient values ofamples are shown in Table 4.
Results show a reduction in friction index from SF-1 to SF-8amples. It seems that mixtures of U615/AS2506 resins produceoatings with lower friction indices compared with mixture of2101/U615. It can be seen that replacing a soft resin with a
phs of SF-1, SF-3 and SF-4 samples.
hard one results in coating surfaces with lower friction coefficient.Based on these observations, it is expected that the high frictioncoefficient of SF-1 and SF-2 results in lower soft feel effects,while low friction indices of SF-7 and SF-8 lead to highersoft feel effects. The latter supposition did not appear true in
our study. This shows that the friction factor is also not avital parameter affecting coating soft feel effect. The surfacemechanical properties (as shown previously) should be con-sidered also. In fact, the decrease in friction index leads to
1374 A. Mirabedini et al. / Progress in Organic Coatings 76 (2013) 1369–1375
Table 4Dynamic and static friction indexes of different samples.
Parameter
Friction index (dynamic force) Friction index (static force)
SF-1 0.98 0.58SF-2 0.90 0.49SF-3 0.76 0.39SF-4 0.71 0.27SF-5 0.66 0.19
ch
ca
rnUl4
TR
y = -98.39x + 487.9R² = 0.9531
0
100
200
300
400
500
0 1 2 3 4 5
Roug
hnes
(nm
)
So� feel effect
SF-5
SF-4
SF-6
SF-7
SF-1
SF-6 0.63 0.18SF-7 0.41 0.20SF-8 0.24 0.12
oatings with a better soft feel effect when the film is not tooard.
The surface texture, especially roughness, can also affect theoating soft feel behavior. The surface roughness was studied byn AFM technique and the results are given in Fig. 6 and in Table 5.
Results shown in Table 5 reveal that surface roughness iseduced by replacing U2101 with U615. The reduction is more pro-ounced for SF-4 and SF-5 samples. Moreover, the replacement of
615 with AS2506 resulted in surface roughness reduction. Theowest surface roughness values were obtained for the samples SF-, SF-5 and SF-8. It is expected that the coating surface roughness
able 5oughness values obtained from AFM micrographs.
Parameter
Sy (nm) Sa (nm) Sq (nm)
SF-1 408 22.6 32.0SF-2 356 15.3 20.0SF-3 158 9.80 12.40SF-4 105 7.4 10.0SF-5 100 8.3 9.20SF-6 145 11.5 13.5SF-7 185 14.0 17.0SF-8 115 7.5 11.0
Fig. 8. Map of soft feel ranking based on hardne
Fig. 7. Correlation between the coating surface roughness and the soft feel effect.
reduction leads to a better soft feel effect. The relationship betweensurface roughness and soft feel index is represented in Fig. 7.
As can be seen in Fig. 7, surface roughness is inversely propor-tional to the soft feel perception. This means that higher surfaceroughness can reduce the soft feel effect.
Based on the above explanations, the soft feel effect dependson many parameters mainly surface mechanical properties, sur-face roughness and friction coefficient. Samples SF-4 and SF-5 havethe greatest soft feel effect due to their low surface friction index,low surface roughness and high surface toughness. It can be seenthat one parameter only, i.e. friction index, surface roughness or
surface mechanical properties cannot be used to describe the softfeel perception. An optimization of all these mechanical attributesseems required to realistically consider the coatings to be soft feel.ss, modulus, roughness and friction index.

rgani
cwo
ttcarfiseoamu
4
mtefwcmsigIsfpttonittc
A
w
[
[
[
[
[
[
[
[
[
[
[perception on automotive interiors by a multi-function tribological probemicroscope, J. Phys.: Conf. Ser. 13 (2005) 357–361.
A. Mirabedini et al. / Progress in O
Finally, the correlation between people’s perception, mechani-al attributes and coating surface morphology were studied in Fig. 8here hardness, roughness, modulus and friction coefficient values
f SF-1 to SF-8 are ranked against the soft feel index of each sample.From the results shown in Fig. 8, it can be difficult to find
he exact correlation between people perception (soft feel) andhe physical characteristics of the coating surface. However, itan be seen that the coatings with the highest soft feel effectre those having low friction coefficient, medium modulus, lowoughness and high hardness. These observations show thatnding a logical correlation among all factors influencing coatingoft feel effect seems difficult but a balance between roughness,lastic modulus, friction coefficient and hardness is needed forbtaining a soft touch effect. It seems that roughness–smoothnessnd hardness–softness as well as elasticity or springiness are theost important surface physical characteristics which should be
sed to compare soft touch coatings.
. Conclusion
It has been attempted to evaluate the soft feel properties ofixtures of three different kinds of resins. The soft feel effect was
ested by 72 participants. The correlation between real soft feelffect and the physical characteristics of the coatings including sur-ace roughness, friction coefficient, hardness and elastic modulusas investigated. The coatings used for this purpose had different
hemical structures and softness. Results showed that an optimumixture of soft and hard resins can produce a coating with better
oft feel properties. It was shown that although the hardness is anmportant parameter affecting the coating soft feel properties, areater hardness cannot necessarily lead to a better soft feel effect.t was shown that coatings with a greater toughness had betteroft feel effects. Reducing the friction coefficient led to a better softeel effect but there was no linear relationship between these twoarameters. It was shown that reducing the friction coefficient andhe surface hardness simultaneously produced coatings with bet-er soft feel effects. Generally, results showed that an optimizationf surface roughness, hardness, elasticity and friction coefficient isecessary to obtain a good soft feel effect. It has been shown that
t is impossible to rank soft feel coatings considering only one ofhe properties, i.e. surface roughness, hardness, elasticity or fric-ion coefficient. The combination of hard and soft resins producesoatings with a better soft feel effect.
cknowledgments
We would like to thank Resinfam Co. (Iran) and Mr. Ehsan Mafiho helped us to obtain the materials used in this work.
[
c Coatings 76 (2013) 1369–1375 1375
References
[1] A.L. Yahkind, D.A. Paquet Jr., D.V. Parekh, C.L. Stine, L.G.J. van der Ven, Poly-ols based on isocyanates and melamines and their applications in 1 K and 2 Kcoatings, Prog. Org. Coat. 67 (2010) 137–145.
[2] M. Melchiors, M. Sonntag, C. Kobusch, E. Jürgens, Recent developments in aque-ous two-component polyurethane (2K-PUR) coatings, Prog. Org. Coat. 40 (2000)99–109.
[3] J. Weikard, The New Frontier: Waterborne UV Coatings for Plastics, 2007.[4] L.E. Krueger, in: W. Foulke, E. Schiff (Eds.), Tactual Perception: A Source Book,
Cambridge University Press, Cambridge, 1982.[5] M. Nagamachi, Kensei engineering—a new ergonomic consumer-orientated
technology for product development, Int. J. Ind. Ergon. 15 (1995)3–11.
[6] M. Nagamachi, Kansei engineering as a powerful consumer-oriented technol-ogy for product development, Appl. Ergon. 33 (2002) 289–294.
[7] K. Kawazu, M. Kai, K. Koike, M. Imada, K. Yasuda, Study of Favourable PaintQuantifying the Sense of Touch for Painted Panels SAE 2000 World Congr.,Detroit, MI, 6–9 March, 2000-01-1362.
[8] X. Liu, Z. Yue, Z. Cai, D.G. Chetwynd, S.T. Smith, Quantifying touch–feel percep-tion: tribological aspects, Meas. Sci. Technol. 19 (2008) 1–9.
[9] X. Chen, F. Shao, C. Barnes, T. Childs, B. Henson, Exploring relationships betweentouch perception and surface physical properties, Int. J. Des. 3 (2) (2009)67–76.
10] T.H.C. Childs, B. Henson, Human tactile perception of screen-printed surfaces:self-report and contact mechanics experiments, J. Eng. Tribol. 221 (3) (2007)421–441.
11] W.M.B. Tiest, A.M.L. Kappers, Analysis of haptic perception of mate-rials by multidimensional scaling and physical measurements ofroughness and compressibility, Acta Psychol. (Amst.) 121 (1) (2006)1–20.
12] A.M. Smith, C.E. Chapman, M. Deslandes, J.-S. Langlais, M.-P. Thibodeau, Roleof friction and tangential force variation in the subjective scaling of tactileroughness, Exp. Brain Res. 144 (2) (2002) 211–223.
13] C.J. Barns, T.H.C. Childs, B. Henson, C.H. Southee, Surface finish and touch—acase study in a new human factors tribology, Wear 257 (2004) 740–750.
14] X. Liu, F. Gao, A novel multi-function tribological probe microscope for mappingsurface properties, Meas. Sci. Technol. 15 (2004) 91–102.
15] X. Liu, T. Bell, D.G. Chetwynd, X.Y. Li, Characterization of engineered surfacesby a novel four-in-one tribological probe microscope, Wear 255 (2003) 385–394.
16] H.-I. Hsiang, Y.-L. Chang, C.-Y. Chen, F.-S. Yen, Silane effects on thesurface morphology and abrasion resistance of transparent SiO2/UV-curable resin nano-composites, Appl. Surf. Sci. 257 (2011) 3451–3454.
17] E. Ncube, M. Meincken, Surface characteristics of coated soft- andhardwoods due to UV-B ageing, Appl. Surf. Sci. 256 (2010) 7504–7509.
18] M. Barletta, A. Gisario, The role of the substrate in micro-scalescratching of epoxy–polyester films, Appl. Surf. Sci. 257 (2011) 4449–4463.
19] X. Liu, V. Piotter, Mapping micro-mechanical properties of carbon filled poly-mer composites by TPM, Precis. Eng. 31 (2007) 162–168.
20] X. Liu, M.K. Chan, B. Hennessey, T. Rübenach, A. Güray, Quantifying touch–feel
21] B. Hennessey, The Subjective Tactile Perception of Passenger Vehicle InteriorSurfaces and Their Objective Physical Measurement, Surrey University, 2006(M.Sc. Dissertation).





























