Embed Size (px)
Citation preview

Chaos, Solitons and Fractals 28 (2006) 527–542
www.elsevier.com/locate/chaos
A dynamical systems approach to the overturningof rocking blocks
Stefano Lenci a,*, Giuseppe Rega b
a Dipartimento di Architettura, Costruzioni e Strutture, Universita Politecnica delle Marche, via Brecce Bianche,
Monte D’Ago, 60131 Ancona, Italyb Dipartimento di Ingegneria Strutturale e Geotecnica, Universita di Roma ‘‘La Sapienza’’, via A. Gramsci 53, 00197 Roma, Italy
Accepted 25 July 2005
Abstract
A rocking block resting on a horizontal rigid foundation and excited by a periodic excitation can topple if the exci-tation amplitude is sufficiently high. This question is addressed in this work by the combined use of dynamical systemsarguments and numerical tools.
The problem is first addressed from a theoretical point of view, with the objective of analytically detecting the mostrelevant critical thresholds. We succeed in obtaining closed form and manageable criteria for overturning. Then, numer-ical computations are performed, aimed at verifying the analytical thresholds, and understanding the overall overturn-ing behavior. Furthermore, attention is paid to studying how toppling is modified by the excitation phase, whose role isvery important and was not underlined in previous works, and by other problem parameters. The analytical criteria areshown to be bounds for the first overturning, which corresponds to engineering failure of the structure: a relevantimproved upper bound is also obtained, still by means of invariant manifolds arguments.� 2005 Elsevier Ltd. All rights reserved.
1. Background and motivation
In this work we investigate the overturning of a rigid block subjected to harmonic base excitation, an issue whichdeserves interest in many branches of engineering. It is an old topic tracing back to the 19th century [1,2], whichhas been largely investigated in the past from theoretical [3,4], numerical and experimental points of view [5,6]. Severalquestions have been addressed, such as the existence and stability of periodic solutions, multistability, chaotic dynam-ics, impulsive, periodic and stochastic excitations, overturning diagrams, Melnikov analysis of invariant manifolds, andcontrol. From a practical point of view, one of the most interesting problems is the possible overturning of the rest
position, which (i) actually motivated early works, (ii) can arise in many applications, and (iii) is the principal subjectof the present work.
0960-0779/$ - see front matter � 2005 Elsevier Ltd. All rights reserved.doi:10.1016/j.chaos.2005.07.007
* Corresponding author.E-mail addresses: [email protected] (S. Lenci), [email protected] (G. Rega).

528 S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542
In studying overturning from an engineering viewpoint, two issues are of basic interest, namely (i) the detection ofanalytical criteria permitting reliable estimations of the occurrence of overturning, and (ii) the construction of overturn-ing charts characterizing the system response in parameters space.
The first criterion for overturning seems to be the static one proposed by West (see [7]), which compares themomentum of the weight with the momentum of the acceleration peak. Other criteria are given in the famouspaper by Housner [3]: in the case of constant acceleration, he assumes that the (energetic) condition for overturn-ing is that the total work done by the inertial force is equal to the difference in potential energy between the restposition and the hilltop saddles. In the case of sine-waved pulse, the (kinematic) criterion is instead that the actualposition reaches one of the hilltop saddles at the end of the pulse: this leads to the same results previously ob-tained by Kirkpatrick [8]. Energetic considerations are also used in the case of earthquake (i.e., stochastic) exci-tations. Criteria for overturning have been reviewed by Ishiyama [9–11], where also sinusoidal (harmonic)excitations are considered.
Numerical overturning charts under harmonic excitations are obtained, among others, by Spanos and Koh [12],which consider both piecewise linear and strongly nonlinear models but produce diagrams with a scarce resolution.More refined charts are constructed, e.g., by Fielder et al. [6], who also report on experimental overturning charts,for both symmetric and unsymmetric blocks, and stress the influence of the restitution coefficient.
In recent years, the problem has been addressed also from a dynamical systems point of view, and the saddle invari-ant manifolds have been suggested to play an important role in the complicated toppling mechanism. In fact, it is justthe penetration of tongues of the basin of the overturned attractor into the safe basin, driven and bounded by the stablemanifolds of some relevant (likely hilltop) saddles, which finally allows for a link between rest position and overturnedattractor, possibly after a cascade of intricate transition phenomena. In this respect, heteroclinic bifurcation thresholds,which represent the triggering point of previous mechanism, have been computed by several authors [13–15], and havebeen also utilized for controlling system dynamics [16].
It is important to stress that this problem is quite different from those—investigating regular/chaotic attractors, frac-tal basin boundaries, invariant manifolds, sensitivity to initial conditions—currently addressed in the application ofdynamical systems theory to mechanical oscillators, which are not related to a specific solution. In contrast, hereinwe pay attention to a single initial condition, and thus to a given orbit. Yet, proper application of methods of dynamicalsystems theory to this particular problem is one major element of novelty of this work, which is developed on a twofoldlevel. On one side (Sections 3 and 4), we look for approximate analytical criteria—based on invariant manifolds andother arguments—allowing us to build an overall theoretical framework for the analysis of toppling phenomena, againstwhich illustrating numerical results. On the other side (Section 4), we obtain detailed numerical overturning chartswhich extend those available in the literature and highlight generic system behaviors in given regions of parametersspace.
One further specific aim of the paper consists in emphasizing, numerically as well as analytically, the effects of theexcitation phase, which are not adequately addressed in the literature. They are found to be sometimes dramatic inmodifying the system response, occasionally well beyond common sense expectation.
2. Equations of rocking motion and general solution
The dimensionless nonlinear equations of planar motion of the homogeneous rigid block rocking around base cor-ners in a constant gravitational field (Fig. 1), subjected to horizontal harmonic base acceleration, are (see, e.g., [17]):
€u þ d _u � sinðu � aÞ þ c cosðxt þ wÞ cosðu � aÞ ¼ 0; u > 0; ð1aÞ€u þ d _u � sinðu þ aÞ þ c cosðxt þ wÞ cosðu þ aÞ ¼ 0; u < 0; ð1bÞ_uðtþÞ ¼ r _uðt�Þ; u ¼ 0; ð1cÞ
where d is the viscous damping coefficient, a is the block shape parameter (Fig. 1), and c, x and w are the amplitude,frequency and phase of the excitation, respectively. Eqs. (1) describe the well-known Housner model [3] involving onlyrocking, which is widely used in the literature for being a straightforward model which permits to investigate in depththe main characteristics of system nonlinear dynamics, although representing in some situations a too drastic simplifi-cation of the reality [18].
The phase portrait of Eqs. (1) is depicted in Fig. 2 in the conservative case. There are small nonsmooth oscillationsaround the rest position u = 0, which is a degenerate stable point, and large motions leading to overturning (here char-acterized by the condition juj = p/2). These two classes of motion are divided by the heteroclinic loop connecting thetwo saddles u1,2 = ±a.

ϕα
g
A γ ω ψcos( )t+ B
Fig. 1. Rocking rigid block.
Fig. 2. Conservative phase portrait for a = 0.3.
S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542 529
When the block is sufficiently slender, the angle a is small and the equations of motion can be linearized, a questionwhich has been investigated by Allen and Duan [19]. This point deserves some care. In fact, if one is interested in study-ing small motion around the rest position, then the right point where to develop Eqs. (1a,b) in u-Taylor series is u = 0,getting [20]
€u þ d _u � u½1� ac cosðxt þ wÞ� þ a þ c cosðxt þ wÞ ¼ 0; u > 0; ð2aÞ€u þ d _u � u½1þ ac cosðxt þ wÞ� � a þ c cosðxt þ wÞ ¼ 0; u < 0; ð2bÞ_uðtþÞ ¼ r _uðt�Þ; u ¼ 0. ð2cÞ
If, on the other hand, one is interested in studying overturning, as in the present work, then the most interesting partof the dynamics occurs around the saddles u1,2, which constitute the energy barrier whose overcoming leads to toppling.Consequently, one develops Eqs. (1a,b) in u-Taylor series around the saddles u1,2 = ±a, yielding
€u þ d _u � u þ a þ c cosðxt þ wÞ ¼ 0; u > 0; ð3aÞ€u þ d _u � u � a þ c cosðxt þ wÞ ¼ 0; u < 0; ð3bÞ_uðtþÞ ¼ r _uðt�Þ; u ¼ 0; ð3cÞ
namely, the parametric excitation disappears. Eqs. (3) are commonly employed in the literature [4,21,22], and will beused in the sequel.

530 S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542
The reason for using piecewise linear equations (3) is basically that they can be solved in closed form through man-ageable computations. As a matter of fact, many of the results of the present work can be extended to the nonlinear case(1), but numerical computations are then required.
The general solutions of Eqs. (3a,b) are
uðtÞ ¼ aþA1ekt þB1e
lt þ vcosðxtþwþ/Þ; u> 0; ð4aÞ
uðtÞ ¼�aþA2ekt þB2e
lt þ vcosðxtþwþ/Þ; u< 0; ð4bÞ
k¼�� d�
ffiffiffiffiffiffiffiffiffiffiffiffid2 þ 4
p �=2< 0; l¼
�� dþ
ffiffiffiffiffiffiffiffiffiffiffiffid2 þ 4
p �=2> 0; v¼ cffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðdxÞ2 þð1þx2Þ2q ; tanð/Þ ¼ dx
1þx2. ð4cÞ
In the following sections we will need the solutions ensuing from the rest position, which can be determined bysolving the systems u(0) = 0 and _uð0Þ ¼ 0. This leads to
A1;2 ¼ ðk � lÞ�1fla þ v½l cosðw þ /Þ þ x sinðw þ /Þ�g; ð5aÞB1;2 ¼ ðl � kÞ�1fka þ v½k cosðw þ /Þ þ x sinðw þ /Þ�g. ð5bÞ
3. Lower and upper analytical thresholds for overturning
This section is aimed at obtaining analytical lower and upper bounds for overturning, which can be very useful bothin practical applications, where they provide simple and fast estimations, and from a theoretical point of view, becauseof permitting to investigate in detail some aspects of the overall system behaviour.
The bounds will be obtained by considering three different dynamical phenomena, namely, the stability of the restposition, the heteroclinic bifurcation of the hilltop saddles, and the occurrence of immediate overturning. They will beaddressed in terms of dynamical systems theory, and the important role played by the invariant manifolds of the hilltopsaddle will be highlighted.
3.1. Stability of the rest position
If the excitation amplitude is sufficiently small, then the external force is lesser than the gravitational force and is notable to move the body. Thus, in this range, the rest position is certainly stable for any excitation phase.
To determine analytically this bound, called cstat, we follow [17]. Since u = 0 and _u ¼ 0, the rest position is stabletowards the right (left) if €uðtÞ < 0 ð€uðtÞ > 0Þ 8t > 0, in (3a), which gives, respectively, a þ c cosðxt þ wÞ > 0 8t > 0ða � c cosðxt þ wÞ > 0 8t > 0Þ. With c > 0, these conditions are simultaneously satisfied if and only if c 6 a, whichprovides cstat = a. This is the well-known West�s formula [8], which easily generalizes to cstat ¼ tanðaÞ in the case ofnonlinear model (note that Housner [3] reports cstat ¼ sinðaÞ as a consequence of an imprecision in its nonlinearequation—bottom of p. 408). Contrary to the original derivation, which is based on static argument, here the thresholdis obtained by requiring dynamical stability.
Owing to its physical meaning (no motion), this bound does not depend on damping, impact and excitationfrequency. Of course, the region c 6 a is safe from overturning of the rest position, and thus this is a lower boundfor overturning. For c 6 a the rest position is stable, although not globally attracting as some other attractors may,and actually do, coexist [21].
3.2. Heteroclinic bifurcation threshold
The heteroclinic bifurcation of the hilltop saddles has been studied in depth in [13–16] for both linear and nonlinearmodels. Here we simply summarize the results, obtained in the framework of the piecewise linear model (3), necessaryfor the purposes of the present work.
Let us pay attention to the upper heteroclinic bifurcation; the lower heteroclinic bifurcation provides similar results.It has been shown [16] that on the after-the-impact Poincare section Rþ ¼ fðu; _u; tÞ 2 R2 � Sju ¼ 0þ; _u > 0g the dis-tance between the unstable manifold of the left hilltop saddle and the stable manifold of the right hilltop saddle is givenby

S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542 531
dupðsÞ ¼ d0 þ cd1ðxÞ cosðxs þ w þ / þ bÞ; ð6aÞ
d0 ¼ að�k � rlÞ; d1ðxÞ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffið�k þ rlÞ2 þ ð1� rÞ2x2
ðdxÞ2 þ ð1þ x2Þ2
s; tanðbÞ ¼ ð1� rÞx
�k þ rl. ð6bÞ
The condition for the heteroclinic transverse intersection is that there exists a s such that dup(s) has a simple zero [23].Since d0 and d1(x) are positive, this is possible if and only if
c >d0
d1ðxÞ1
�minsfcosðxs þ w þ / þ bÞg ¼ d0
d1ðxÞ ; ð7Þ
which implies that the heteroclinic bifurcation threshold chet is
chet ¼ d0
d1ðxÞ ¼ að�k � rlÞ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðdxÞ2 þ ð1þ x2Þ2
ð�k þ rlÞ2 þ ð1� rÞ2x2
s. ð8Þ
Among the three curves cstat, chet and cimm determined in this section, this is the only one depending on the restitu-tion coefficient r, while it does not depend on the excitation phase.
Below chet the erosion of the safe basin is prevented, so the rest position is safe from overturning, even if it may, andactually does, lose stability and change into safe, in-well, periodic and even chaotic small oscillations. Thus, chet is an-other lower bound for overturning, determined through invariant manifolds arguments.
3.3. Immediate overturning threshold
In this section, which along with Section 4.2 constitutes the original analytical part of this work, we look for thecondition guaranteeing that the block undergoes overturning without any transient oscillations in the potential well.Therefore, by definition, this obviously provides an upper bound for overturning.
A distinction should be made from the beginning between the case in which the excitation phase is known and fixedand the case in which it is free or unknown, as in several applications (e.g., earthquake excitations), so that one mustlook for phase independent results. The former is named immediate overturning for a given phase, and the related thresh-old is denoted by the symbol c 0(w), while we reserve the name immediate overturning, and use the symbol cimm, in thelatter case. Note that an alternative definition of cimm is the following: cimm = minw{c 0(w)}.
We initially consider the solution starting from the rest position in the half-plane u > 0, which is given by (3a) withthe coefficients given in (5). To illustrate the main ideas with easier formulas, let us consider first the undamped cased = 0, so that (4a) and (5) reduces to, respectively,
uðtÞ ¼ a þ A1e�t þ B1e
t þ cð1þ x2Þ�1 cosðxt þ wÞ; u > 0; ð9aÞA1 ¼ �ð1=2Þfa þ cð1þ x2Þ�1½cosðwÞ þ x sinðwÞ�g; ð9bÞB1 ¼ �ð1=2Þfa þ cð1þ x2Þ�1½cosðwÞ � x sinðwÞ�g. ð9cÞ
A condition for immediate overturning is that the following properties hold simultaneously: (i) u(t) > 0 "t > 0; (ii)
B1 > 0. The first implies that the block no longer returns to the base (impacts), the second that the solution finally di-verges in time toward the right (see Eq. (9a)). At least in principle, both conditions are necessary. In fact, if only (i) issatisfied, the system can approach whatever bounded solution entirely belonging to the half-plane u > 0 without endingin the overturned position (one bounded solution is actually approached in the case B1 = 0, see the following). If, on theother hand, only (ii) is verified, it can happen that the solution (9a) becomes negative for some (small!) t > 0 beforediverging and then overturning. This is what happens in the white region below cimm of forthcoming Fig. 10b. A de-tailed analysis of this phenomenon is possible in principle, but it is much more cumbersome as it requires combineduse of (4a) and (4b).
Let us characterize conditions (i) and (ii), respectively, in terms of system parameters. To this aim, it is worth rewrit-ing the solution (9a) in the form:
uðtÞ ¼ �a½coshðtÞ � 1� þ cð1þ x2Þ�1f� cosðwÞ½coshðtÞ � cosðxtÞ� þ sinðwÞ½x sinhðtÞ � sinðxtÞ�g. ð10Þ
If the term in the brace brackets is negative, we have u(t) < 0 "t > 0, and the expression (10) makes no physical sense.Thus, we restrict to
sinðwÞ > cosðwÞ coshðtÞ � cosðxtÞx sinhðtÞ � sinðxtÞ 8t > 0; ð11Þ
532 S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542
where both [cosh(t) � cos(xt)] and [x sinh(t) � sin(xt)] are positive for all x > 0 and t > 0. Note that (11) is certainlysatisfied if w 2 [p/2,p], where sin(w) > 0 and cos(w) < 0.
(i) When (11) holds, the condition u(t) > 0 "t > 0, reads
c > amaxt>0
ff ðt;w;xÞg; ð12aÞ
f ðt;w;xÞ ¼ ð1þ x2Þ½coshðtÞ � 1�cosðwÞ½cosðxtÞ � coshðtÞ� þ sinðwÞ½x sinhðtÞ � sinðxtÞ� . ð12bÞ
If w satisfying (11) is given, then Eq. (12a) gives the excitation amplitude threshold ensuring that u(t) > 0 "t > 0. If,on the contrary, it is free or unknown, then looking for the extreme condition leads to
c > aminw
maxt>0
ff ðt;w;xÞg ¼ cimm;1. ð13Þ
Thus, by definition, the curve cimm;1 represents the threshold above which there exists an excitation phase for which
u(t) > 0 "t > 0.To compute the minimax in (13), we note that maxt>0{f(t,w,x)} P max{f(0,w,x), f(1,w,x)}, i.e.,
maxt>0
ff ðt;w;xÞg P max�1
cosðwÞ ;ð1þ x2Þ
� cosðwÞ þ x sinðwÞ
� �¼ max
�1
cosðwÞ ;ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
p
cosðw � gÞ
( ); ð14Þ
where sinðgÞ ¼ x=ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
pand cosðgÞ ¼ �1=
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
p. From the last expression in (14) we have that
minw
max�1
cosðwÞ ;ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
p
cosðw � gÞ
( )¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
pð15Þ
and the minimum is attained for w = g, where the two functions between brackets coincide. Therefore,
minw
maxt>0
ff ðt;w;xÞg Pffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
p. ð16Þ
The right-hand side of (16) is therefore a lower bound for the minw problem. Indeed, the minimum is attained, be-cause for w = g we just have
maxt>0
ff ðt;w ¼ g;xÞg ¼ maxt>0
ðcoshðtÞ � 1Þð1þ x2Þ3=2
½coshðtÞ � cosðxtÞ� þ x½x sinhðtÞ � sinðxtÞ�
( )¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
pð17Þ
so that in (16) equality holds. We have thus shown that cimm;1 ¼ affiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
pand that the worst phase is
w ¼ g ¼ atanð�xÞ 2 ½p=2; p�.(ii) The second condition for overturning is easier. In fact, after rearranging Eq. (9c), B1 > 0 is equivalent to (assum-
ing cos(w � g) > 0)
c > a
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
p
cosðw � gÞ . ð18Þ
If w satisfying cos(w � g) > 0 is given, then Eq. (18) gives the excitation amplitude threshold for B1 > 0. If, on thecontrary, it is free or unknown, then looking for the extreme condition leads to
c > affiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
pmin
w
1
cosðw � gÞ
� �¼ cimm;2. ð19Þ
The function cimm;2 represents the threshold above which there exists an excitation phase for which B1 > 0.The minimum problem in (19) is trivial: we have that cimm;2 ¼ a
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
pand the minimum is again attained for
w = g.
Summarizing, we have found that, if the phase is given such that (11) and cos(w � g) > 0 are satisfied, the conditionfor immediate overturning (towards the right) is
c > c0ðwÞ ¼ amax maxt>0
ff ðt;w;xÞg;ffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
p
cosðw � gÞ
( ); ð20Þ
which clearly shows the dependence on the fixed excitation phase w. If, more interestingly, the phase is free orunknown, then, being cimm;1 = cimm;2 and w = g in both cases, the two conditions (i) and (ii), though remaining

S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542 533
conceptually distinct, practically coincide, and for the (worst) phase w = g we have immediate overturning (toward theright) if
Fig
c > affiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ x2
p¼ cimm. ð21Þ
The previous condition can be given a straightforward topological interpretation in phase space. In fact, the criticallevel corresponds to B1 = 0. In this case, the solution ensuing from the rest position asymptotically approaches (forwardin time) the particular solution uðtÞ ¼ a þ cð1þ x2Þ�1 cosðxt þ wÞ, u > 0, which is the perturbed right hilltop saddle.This means that, in this situation, the rest position belongs to the stable manifold of the right hilltop saddle. Thus, we haveimmediate overturning (toward the right) when the first branch of the stable manifold of the right saddle directlytouches the rest position, i.e., when point A touches point O for an arbitrary phase (see Fig. 3).
This interpretation strongly confirms the primary role played by the invariant manifolds of hilltop saddles in theproblem of overturning, a circumstance that will be confirmed in the sequel.
We can repeat the same reasoning for left overturning. In this case, condition (i) implies that the solution
uðtÞ ¼ a½coshðtÞ � 1� þ cð1þ x2Þ�1f� cosðwÞ½coshðtÞ � cosðxtÞ� þ sinðwÞ½x sinhðtÞ � sinðxtÞ�g ð22Þ
must be negative for all time, while condition (ii) requires that
B2 ¼ ð1=2Þ a þ cð1þ x2Þ�1½� cosðwÞ þ x sinðwÞ�n o
¼ 1
2a þ cffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1þ x2p cosðw � gÞ
� �ð23Þ
must be negative. We omit the details and only report that, in the case of free phase, for c > cimm and for the worstphase w = g + p = atan(�x) 2 [3p/2,2p] we have immediate overturning toward the left.
It is worth emphasizing that the right and left immediate overturning thresholds coincide. This is a consequence ofthe symmetry of the harmonic excitation, and no longer holds for periodic excitations with even harmonics. The opti-mal right and left phases, on the other hand, differ from each other by a half period. Thus, according to common sense,the excitation phase determines whether overturning occurs toward right or left.
The generalization of previous findings to the damped case is now straightforward. However, solving analytically theminimax problem involved in condition (i) is much more difficult (although it is relatively easy to solve it numericallyfor given system parameters). Thus, as our aim is to determine manageable analytical expressions, we consider only (ii)as an approximate condition for overturning. From an engineering point of view, it can be expected that, if the dampingis small enough, the practical coincidence of conditions (i) and (ii) is still approximately satisfied, so that the conditionB1 > 0 (or B2 < 0) is guessed to be a good approximation of the true threshold. Obviously, this is likely to no longer holdfor systems with large damping.
By standard computations we find that the critical threshold for immediate overturning under unknown excitationphase is now given by
cimm ¼ að�kÞ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðdxÞ2 þ ð1þ x2Þ2
k2 þ x2
s. ð24Þ
. 3. The first two branches of the stable manifold of the right saddle. c = 0.7, x = 5, w = 0.2, d = 0.02, r = 0.95, a = 0.2.

534 S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542
The worst phase for right overturning is w = g � /, where now
F
sinðgÞ ¼ xffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffik2 þ x2
p ; cosðgÞ ¼ kffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffik2 þ x2
p ! w ¼ p þ atanðx=kÞ � atan½dx=ð1þ x2Þ�; ð25Þ
while the worst phase for left overturning differs of p as in the undamped case. Moreover, the immediate overturning fora given phase is
c0ðwÞ ¼ak
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðdxÞ2 þ ð1þ x2Þ2
qk cosðw þ /Þ þ x sinðw þ /Þ
. ð26Þ
Before closing this section, we remark that the curve cimm is the unique, amongst the analytical thresholds of thissection, whose determination explicitly require to rule out the role of the excitation phase, or, in other words, to lookfor phase-independent arguments. Instead, it does not depend on r, because there are no rebounds during immediateoverturning.
3.4. Some properties of the analytical curves
In the previous sections we have defined lower (cstat and chet) and upper (cimm) bounds for overturning. Here we dis-cuss a little more and compare these curves.
We start by noticing that the combination of cstat and chet provides the following unique curve which overall boundsthe overturning from below:
c� ¼ maxfcstat; chetg ¼ amax 1; ð�k � rlÞ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðdxÞ2 þ ð1þ x2Þ2
ð�k þ rlÞ2 þ ð1� rÞ2x2
s( ). ð27Þ
It can be checked that c� = cstat for x < x� and c� = chet for x > x� (Fig. 4a), where x� is the frequency where cstat =chet, which depends only on d and r. For example, for d = 0.02, r = 0.95 we have x� = 5.2264 (Fig. 4a). Thus, c� is anondecreasing function starting from c�(0) = a, initially constant, then increasing and finally reaching the asymptoticvalue c� ffi a(�k � rl)/(1 � r)x as x ! 1 (Fig. 4b).
The upper bound cimm shares with c� the properties of starting from cimm(0) = a and being nondecreasing, but itsasymptotic value is cimm ffi a(�k)x as x ! 1 (Fig. 4b).
For small and medium values of x we have c� < cimm (Fig. 4a), while for excitation frequencies larger than a certainx0 = x0(r,d), which is depicted in the insert of Fig. 4b for d = 0.02, the inequality is inverted (this can be seen by notingthat �k < (�k � rl)/(1 � r)). This high-frequency region is however out of physical interest, and will not be considered.In fact, the insert clearly shows that x0 ! 1 for r! 1, and that for common values of r the value x0 is extremely large,well above the range of practical applications. For example, for d = 0.02, r = 0.95 we have x0 = 41.2342, while allworks from the literature report values of x up to 5. Furthermore, in this range overturning occurs for excitation ampli-tudes so large to be practically meaningless (for example, for d = 0.02 we have c�(x0) = cimm(x0) = 8.3321: Comparethis value with cstat = 0.2).
ig. 4. (a,b) The analytical curves for d = 0.02, r = 0.95 and a = 0.2. The insert in (b) is the curve x0 = x0(r) for d = 0.02.

S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542 535
4. Overturning charts: the first overturning threshold
In this section we study the overturning behavior in the excitation frequency/amplitude parameters space. Beforeproceeding with the numerical simulations, we note that the results of Section 3 permit to individuate three regionsof different behavior:
1) c < c�, where the block does not overturn at all, and if the amplitude is very small, not even rocks.2) c > cimm, where the block directly topples in a very short time, without transient oscillations in the safe potential
well.3) c� < c < cimm: This is the intermediate transition region, which is the most interesting one for possibly exhibiting an
involved response regime deserving a major attention.
Of course, the extent of these regions is strongly dependent on all of the system parameters apart from the excitationphase, because both c� and cimm are independent of w.
In the intermediate region there certainly exists an overturning threshold such that, by increasing the excitationamplitude for each fixed excitation frequency, the block topples down for the first time. For a fixed phase, this isfor example the curve in Fig. 6 of [17] and that in Fig. 6 of [6], where experimental results are also reported. This thresh-old is important from an engineering viewpoint because no overturning occurs below it, so that the structure is safe,although with a variable degree of reliability. Above the curve, on the other hand, there may be alternation of overturn-ing and nonoverturning zones in parameters space, with a possibly fractal nature (see [6,17] and forthcoming figures).This last issue is not actually investigated in this paper, though it appears of interest from both a practical point of view(for the associated response sensitivity to small variations of excitation parameters) and a theoretical point of view (forcomplementing the investigation of fractality in phase space usually made in the dynamical systems environment).
According to the arguments introduced in Section 3.3, it is necessary to distinguish between phase-dependent andphase-independent cases. Thus, we call first overturning for a given phase the situation where the phase is fixed, and de-fine first overturning threshold cfirst the excitation amplitude above which there exists an excitation phase w such thatthe block finally topples, irrespective of the length of the transient and of the number of oscillations in the potentialwell. In spite of its simplicity and relevance, this definition entails that only numerical evaluations of cfirst are possible,although the inequalities c� < cfirst < cimm provide useful analytical estimates.
To confirm the previous ‘‘three region’’ scenario, determine cfirst and get more information on the intermediate re-gion, in the following sections we will make use of numerically determined overturning charts. These are built by sub-diving the (x,c) parameter space in a grid of points (640 · 480 in this particular instance). For every (x,c) couple weintegrate the equation of motion starting from the rest position (actually, we start from u = 0.0001 and _u ¼ 0:0 to avoidnumerical drawbacks) up to 30T (T being the forcing period) and draw a white point if the block is toppled (i.e., if u hasreached the values ±p/2), a gray point otherwise. Note that here, as in [6], 30T is assumed as a measure of the length ofthe transient within which overturning occurs, if any. This choice accounts for a number of nonsystematically observedresults, and seems to balance the opposite requirements of accuracy and time-saving of the analysis. Furthermore, it issupported by the consideration that, in the case of an earthquake, the excitation—although not periodic—has only afinite number of oscillations, usually not greater than the considered transient length.
4.1. Numerical results vs analytical thresholds
In Fig. 5, we report the numerical overturning chart against the analytical thresholds. The chart is obtained ford = 0.02, r = 0.95, a = 0.2, and w ¼ p þ atanðx=kÞ � atan½dx=ð1þ x2Þ�, the expression (25) of the optimal excitationphase for immediate overturning (toward the right) being adopted. Strictly speaking, this does not necessarily corre-spond to the optimal excitation for first overturning, so that the name cfirst used in Fig. 5 is rigorously inaccurate. How-ever, determining the exact cfirst would require a huge computational effort (for each (x,c) values in the grid, numericalintegrations should be repeated for ‘‘all’’ excitation phases), while some isolated tests have shown that the exact curve isonly slightly lower. Thus, the curve cfirst of Fig. 5 can be considered as a reliable engineering threshold of firstoverturning.
Fig. 5 confirms expectations, and indeed shows that the intermediate region c� < c < cimm is divided in two subre-gions. The upper one is the strip cfirst < c < cimm of fractal behavior where toppling is highly sensitive to small parametervariations (as well as to initial conditions and to numerical algorithm parameters). This is very likely related to a fractalbehavior in phase space, but a detailed analysis of this aspect is out the scope of the present work.

Fig. 5. The numerical overturning chart for the piecewise linear model (3). d = 0.02, r = 0.95, a = 0.2, w ¼ p þ atanðx=kÞ�atan½dx=ð1þ x2Þ� (this implies that the overturning is toward the right).
536 S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542
The lower one c� < c < cfirst is certainly protected against overturning, but with a variable degree of confidence, andcan thus be named region of impending overturning. Here, a detailed analysis of the dynamical integrity [24], entailingthe study of features of safe basin erosion, is required to assess reliability. We simply observe that the gap between cfirst
and chet, which in fact originates this subregion, is due to the fact that chet represents just the triggering of penetration ofunsafe tongues into the safe basin. Accordingly, a somewhat greater excitation amplitude is needed to enhance pene-tration and allow for the tongues to reach the rest position, thus giving rise to a sequence of complex topological eventsending with overturning. The magnitude of this subregion varies with the system parameters and can be very small, seeSection 4.3 and in particular Fig. 9a.
One important result of Fig. 5 is the perfect agreement between numerical and theoretical results for what concernsimmediate overturning, which clearly constitutes the limit upper threshold of the fractal region of uncertain response.
For very low values of excitation frequencies, the system response is basically ‘‘static’’ and West reasoning providesexact results. Indeed, we see from Fig. 5 that in this range the curves cimm and cfirst coincide with cstat. However, asshown in Section 3.1, the curve cstat has also a dynamical meaning, and this justifies why it is accurate also for nottoo small frequencies. In fact, we see from Fig. 5 that cfirst and cstat coincide up to about x = 3.
For larger xs, cfirst becomes an increasing function, approximately parallel to cimm, which at x = x� = 5.2264 be-comes better bounded from below by chet.
4.2. An improved analytical upper bound of first overturning
As already said, the curve cfirst is very important from a practical point of view, but unfortunately it can be determinedonly numerically. Thus, it is worth looking for further analytical bounds, to be added to those in Section 3, permitting toreduce this drawback. This is the object of this section, where a closer upper bound of cfirst than cimm is determined.
The idea is to push ahead the dynamical systems-based interpretation of cimm pursued in Section 3.3 by looking forthe analytical condition corresponding to touching of point B of the invariant manifold, instead of A, with the rest po-sition O (Fig. 3). This will provide the searched upper bound of cfirst.
When the amplitude c is zero, the second, left, branch of the perturbed stable manifold W s;2r of the right saddle
(Fig. 3) is a straight line. When c increases, W s;2r starts to oscillate, initially slowly but with increasing amplitude of
the peaks. The first point of tangential intersection of a peak of W s;2r with the rest position u = 0, _u ¼ 0, for a varying
excitation phase, is certainly that having the maximum value of u. To apply these considerations, we need to analyt-ically detect W s;2
r , a question which was investigated in Section 4 of [25]. In particular, we need the coordinates of thegeneric point (u, _u) of W s;2
r , which can be better computed by the following form of the solutions of (3a,b), which isequivalent to (4):
uðtÞ ¼ a þ A1ekðt�bÞ þ B1e
lðt�bÞ þ v cosðxt þ w þ /Þ; u > 0; ð28aÞuðtÞ ¼ �a þ A2e
kðt�bÞ þ B2elðt�bÞ þ v cosðxt þ w þ /Þ; u < 0. ð28bÞ
By (28b), the solution starting from the initial conditions u < 0 and _u which reaches the before-the-impact Poincaresection R� ¼ fðu; _u; tÞ 2 R2 � Sju ¼ 0�; _u > 0g in an unknown time b satisfies
S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542 537
0 ¼ uðbÞ ¼ �a þ A2 þ B2 þ v cosðxb þ w þ /Þ; ð29Þ
while the impacting velocity is _uðbÞ� ¼ kA2 þ lB2 � vx sinðxb þ w þ /Þ. By the Newton law (3c), on the after-the-impact Poincare section R+ the velocity is _uðbÞþ ¼ r _uðbÞ�. Then, the successive path of the solution belonging tothe half-plane u > 0 is obtained by (28a) with initial conditions0 ¼ uðbÞ ¼ a þ A1 þ B1 þ v cosðxb þ w þ /Þ; ð30aÞr½kA2 þ lB2 � vx sinðxb þ w þ /Þ� ¼ _uðbÞþ ¼ _uðbÞ ¼ kA1 þ lB1 � vx sinðxb þ w þ /Þ. ð30bÞ
If we require that ðu; _uÞ belongs to W s;2r , then the solution starting from (30) must approach the right saddle for
t! +1, and by (28a) this occurs if and only if B1 = 0 (remember that k < 0 and l > 0). Thus, the remaining three un-knowns A1, A2 and B2 can be determined by the (linear) system given by Eqs. (29), (30a) and (30b). After solving it, wecan rearrange the expressions u ¼ uð0Þ ¼ �a þ A2e
�kb þ B2e�lb þ v cosðw þ /Þ and _u ¼ _uð0Þ ¼ kA2e
�kb þ lB2e�lb�
vx sinðw þ /Þ to get
u ¼ aE1ðbÞ þ v½E2ðbÞ cosðwÞ þ E3ðbÞ sinðwÞ�; ð31aÞ_u ¼ aE4ðbÞ þ v½E5ðbÞ cosðwÞ þ E6ðbÞ sinðwÞ�; ð31bÞ
E1ðbÞ ¼ �1� e�kb
k � ll þ k
r
� �� e�lb
l � kk þ k
r
� �; E4ðbÞ ¼ � ke�kb
k � ll þ k
r
� �� le�lb
l � kk þ k
r
� �; ð31cÞ
E2ðbÞ ¼ c2 cosðxb þ /Þ þ c3 sinðxb þ /Þ þ cosð/Þ; E5ðbÞ ¼ c5 cosðxb þ /Þ þ c6 sinðxb þ /Þ � x sinð/Þ;ð31dÞ
E3ðbÞ ¼ �c2 sinðxb þ /Þ þ c3 cosðxb þ /Þ � sinð/Þ; E6ðbÞ ¼ �c5 sinðxb þ /Þ þ c6 cosðxb þ /Þ � x cosð/Þ;ð31eÞ
c2 ¼e�kb
k � ll � k
r
� �þ e�lb
l � kk � k
r
� �; c5 ¼
ke�kb
k � ll � k
r
� �þ le�lb
l � kk � k
r
� �; ð31fÞ
c3 ¼ x 1� 1
r
� �e�kb � e�lb
k � l; c6 ¼ x 1� 1
r
� �ke�kb � le�lb
k � l. ð31gÞ
As Eqs. (31) emphasize, the coordinates (u, _u) depend on the unknown time of impact b and on the phase w (as wellas, of course, on the others parameters a, d, r, x, c). If we fix b and permits w to vary, the point (31a,b) describes anellipse in the pseudo-phase space, and the point having the maximum value of u(w), that will reach the rest position forthe minimum value of the excitation amplitude, is given by
umax ¼ aE1 þ vffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiE22 þ E2
3
q; _umax ¼ aE4 þ v
E2E5 þ E3E6ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiE22 þ E2
3
q ; w ¼ atanE3
E2
� �. ð32Þ
The critical condition corresponding to touching of B with O is then mathematically given by umax = 0 and_umax ¼ 0. When a, d, r, x are fixed, this is a system of two equations in the two unknowns v and b, which can be rear-ranged in the following form:
v ¼ �aE1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiE22 þ E2
3
q ; E4ðE22 þ E2
3Þ ¼ E1ðE2E5 þ E3E6Þ. ð33a; bÞ
Eq. (33b) is the final single nonlinear algebraic equation in the unique left unknown b. Once it has been solved, therelated excitation amplitude and phase can be computed in cascade by the previous formulas. We denote by~c ¼ ~cðxÞ the amplitude threshold for this critical event.
As an example, we note that for d = 0.02, r = 0.95, a = 0.2, x = 5 the lowest solution of (33b) is ~c ¼ 0:8492 and~w ¼ 0:6476, and the corresponding manifold-phase-portrait is reported in Fig. 6, which clearly shows the tangencyof W s;2
r with the rest position. Note that ~c is below cimm = 1.0297 (Fig. 7).The solutions ~c ¼ ~cðxÞ of the previous system for fixed values of d, r and a are depicted in Fig. 7. They consist of
several V-shaped branches, each one likely corresponding—with variable ~w values—to first tangency of one of the sev-eral peaks of W s;2
r with the rest position. The most important seems to be the lower one, which, as anticipated, repre-sents a better (with respect to cimm) analytical upper bound of cfirst.
4.3. Influence of nonlinearity, restitution coefficient and excitation phase
To show the effects of nonlinearity, restitution coefficient r, and excitation phase w, we construct in this section var-ious overturning charts and compare them with the reference one in Fig. 5.

Fig. 6. The first two branches of the stable manifold of the right saddle (compare with Fig. 3). c ¼ ~c ¼ 0:8492;x ¼ 5; ~w ¼ 0:6476,d = 0.02, r = 0.95, a = 0.2.
Fig. 7. The solutions ~c ¼ ~cðxÞ for d = 0.02, r = 0.95, a = 0.2 (same data as Fig. 5 apart from w).
Fig. 8. As Fig. 5, but with the nonlinear model (1).
538 S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542
S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542 539
We start by reporting in Fig. 8 the overturning diagram with the same parameters as in Fig. 5, but now obtainedwith the nonlinear model (1). Comparison of the two figures clearly shows that for the considered slender block (whoseheight is five times the width), the differences between piecewise linear and nonlinear models are very low and occurmostly in the fractal regions, where the system is obviously sensitive to even small model changes. This guaranteesthe reliability of the analyses based on piecewise linear approximations for slender blocks. The noncoincidence ofthe analytical curve cimm with the actual (numerical) immediate overturning threshold for large x is due to the fact thatcimm is computed with the piecewise linear model (see Section 3.3). Perfect agreement would be likely observed, as inFig. 5, should cimm be computed by the nonlinear model, a point possible in principle but not pursued in this work.
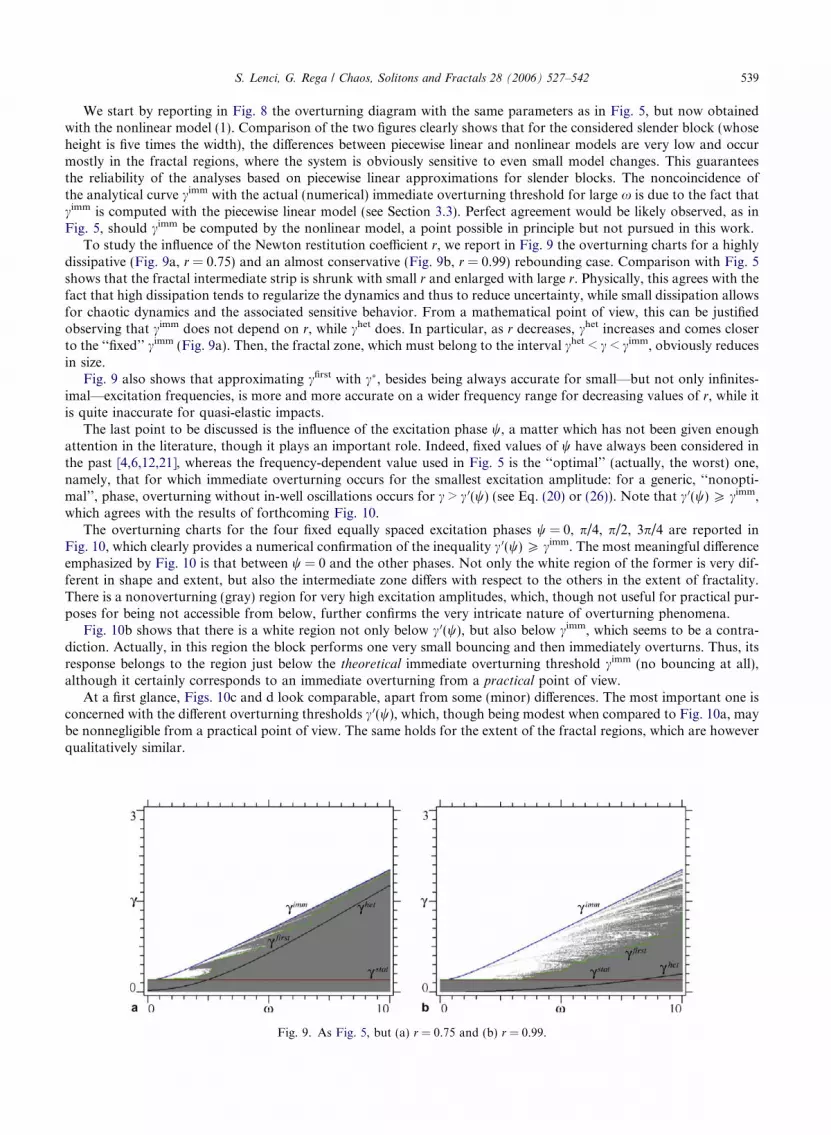
To study the influence of the Newton restitution coefficient r, we report in Fig. 9 the overturning charts for a highlydissipative (Fig. 9a, r = 0.75) and an almost conservative (Fig. 9b, r = 0.99) rebounding case. Comparison with Fig. 5shows that the fractal intermediate strip is shrunk with small r and enlarged with large r. Physically, this agrees with thefact that high dissipation tends to regularize the dynamics and thus to reduce uncertainty, while small dissipation allowsfor chaotic dynamics and the associated sensitive behavior. From a mathematical point of view, this can be justifiedobserving that cimm does not depend on r, while chet does. In particular, as r decreases, chet increases and comes closerto the ‘‘fixed’’ cimm (Fig. 9a). Then, the fractal zone, which must belong to the interval chet < c < cimm, obviously reducesin size.
Fig. 9 also shows that approximating cfirst with c�, besides being always accurate for small—but not only infinites-imal—excitation frequencies, is more and more accurate on a wider frequency range for decreasing values of r, while itis quite inaccurate for quasi-elastic impacts.
The last point to be discussed is the influence of the excitation phase w, a matter which has not been given enoughattention in the literature, though it plays an important role. Indeed, fixed values of w have always been considered inthe past [4,6,12,21], whereas the frequency-dependent value used in Fig. 5 is the ‘‘optimal’’ (actually, the worst) one,namely, that for which immediate overturning occurs for the smallest excitation amplitude: for a generic, ‘‘nonopti-mal’’, phase, overturning without in-well oscillations occurs for c > c 0(w) (see Eq. (20) or (26)). Note that c 0(w) P cimm,which agrees with the results of forthcoming Fig. 10.
The overturning charts for the four fixed equally spaced excitation phases w = 0, p/4, p/2, 3p/4 are reported inFig. 10, which clearly provides a numerical confirmation of the inequality c 0(w) P cimm. The most meaningful differenceemphasized by Fig. 10 is that between w = 0 and the other phases. Not only the white region of the former is very dif-ferent in shape and extent, but also the intermediate zone differs with respect to the others in the extent of fractality.There is a nonoverturning (gray) region for very high excitation amplitudes, which, though not useful for practical pur-poses for being not accessible from below, further confirms the very intricate nature of overturning phenomena.
Fig. 10b shows that there is a white region not only below c 0(w), but also below cimm, which seems to be a contra-diction. Actually, in this region the block performs one very small bouncing and then immediately overturns. Thus, itsresponse belongs to the region just below the theoretical immediate overturning threshold cimm (no bouncing at all),although it certainly corresponds to an immediate overturning from a practical point of view.
At a first glance, Figs. 10c and d look comparable, apart from some (minor) differences. The most important one isconcerned with the different overturning thresholds c 0(w), which, though being modest when compared to Fig. 10a, maybe nonnegligible from a practical point of view. The same holds for the extent of the fractal regions, which are howeverqualitatively similar.
Fig. 9. As Fig. 5, but (a) r = 0.75 and (b) r = 0.99.

Fig. 10. As Fig. 5, but (a) w = 0, (b) w = p/4, (c) w = p/2 and (d) w = 3p/4.
540 S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542
Concerning the numerical first overturning curves for a given phase (lower envelops of the white regions), they seemto be very close to each other and to that of Fig. 5, thus supporting a posteriori that the curve of Fig. 5 is indeed anacceptable engineering first overturning threshold.
Summarizing, the numerical investigations have shown that the excitation phase has (i) strong influence on ‘‘actual’’immediate overturning, (ii) a certain influence on the fractal transition region and (iii) minor influence on first overturn-ing. This agrees with the analytical results in Sections 3 and 4.2, where it has been shown that the analytical upperbounds of cfirst are influenced by w, while the lower bounds are not influenced. Furthermore, the phase has scarce effectsin a neighborhood of the interval w 2 [p/2,3p/4], and is more marked elsewhere.
As a final comment, we note that one basic difference between Figs. 5 and 10c, namely that the former has beenobtained with a frequency-dependent phase while the latter for a fixed phase, is not revealed by the numerical simula-tions, as c 0(w) and cimm are quite close. This heuristically means that the ‘‘optimality’’ of the phase adds only few per-cents to the practically optimal constant phase w = p/2, at least in the considered range of frequencies and with theassumed d value.
5. Summary and conclusions
The overturning of a rocking rigid block on a horizontally oscillating foundation has been investigated by combineduse of dynamical systems arguments and computer simulations.
The problem has been first addressed theoretically, obtaining analytical upper and lower bounds for overturning inthe excitation parameters space. Besides shortly addressing the well-known statical and heteroclinic bifurcation criteria,which stand as lower bounds, we have investigated in detail the immediate overturning threshold, never considered be-fore, which corresponds to the fastest toppling down of the block and is thus an upper bound. It has been shown how itmarkedly depends on the excitation phase, and how to obtain phase-independent results. This last issue is of fundamen-tal interest when the excitation phase is free or unknown, as it happens, for instance, with a seismic excitation: in such a

S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542 541
case, there is a clear need to compute the ‘‘worst’’ phase, defined as the one giving the lower immediate threshold whichidentifies a situation of definite system escape.
The set of all analytical thresholds permit to roughly identify three main regions of overturning regimes: (i) for smallexcitation amplitude, the block is safe from overturning; (ii) for large amplitude, it directly topples without oscillations;(iii) for medium amplitudes, overturning may or may not occur, with a possibly bounded transient. This region appearsthe most interesting one from both a practical viewpoint (for the associated response sensitivity to variations of exci-tation parameters) and a dynamical systems viewpoint (for its possibly fractal nature). It requires a more precisecharacterization.
Accordingly, extensive numerical simulations have been performed: (i) to confirm theoretical predictions about over-turning regimes, (ii) to better characterize the intermediate region, and (iii) to determine a relevant lower threshold,named first overturning, which is actually the most important one from a practical point of view.
The numerical simulations have shown how the change of excitation phase actually produces different—sometimesdramatically different—overturning charts. It is important to notice that the analytical phase-independent threshold ofimmediate overturning shows to be a substantially conservative approximation of the upper threshold of numericalintermediate fractal region, with respect to phase variations. However, being the first overturning the most importantthreshold for evaluation of system integrity or for its safe design, a new relevant analytical upper bound, lower than thephase-independent immediate threshold, has been obtained, by exploiting and improving the invariant manifold inter-pretation of the immediate overturning event.
Further interesting outcomes of the computer simulations are: (i) the substantial agreement of the dynamic regimesobserved when using the fully nonlinear equations of rocking motion instead of the piecewise linear reference ones,which highlights negligible differences for a slender block; (ii) the regularizing effect (reduction of fractal intermediateregion) of large energy dissipations at impacts versus the augmented unpredictability (increase of fractal intermediateregion) associated with nearly elastic rebounds.
Overall, one major achievement of the paper consists in showing how the phenomenon of overturning can be suc-cessfully addressed and reliably characterized in terms of dynamics of the invariant manifolds of hilltop saddles. Thisissue seems to be very promising, also because it allows for a further possible understanding of the complicated responsefeatures occurring in the intermediate region. Its investigation is left for future works.
Acknowledgment
The financial support of the COFIN research program of MIUR, Italy is gratefully acknowledged.
References
[1] Milne J. Experiments in observational seismology. Trans Seism Soc Jpn 1881;3:12–24.[2] Perry J. Note on the rocking of a column. Trans Seism Soc Jpn 1881;3:103–6.[3] Housner GW. The behaviour of inverted pendulum structures during earthquakes. Bull Seism Soc Am 1963;53:403–17.[4] Hogan SJ. On the dynamics of rigid-block motion under harmonic forcing. Proc R Soc Lond A 1989;425:441–76.[5] Wong CM, Tso WK. Steady state rocking response of rigid blocks. Part 2: Experiments. Earthquake Engng Struct Dyn
1989;18:107–20.[6] Fielder WT, Virgin LN, Plaut RH. Experiments and simulation of overturning of an asymmetric rocking block on an oscillating
foundation. Eur J Mech A/Solids 1997;16:905–23.[7] Milne J, Omori F. On the overturnig and fracturing of brick and other columns by horizontally applied motion. Seism J Jpn
1893;17:59–86.[8] Kirkpatrick P. Seismic measurements by the overthrow of columns. Bull Seism Soc Am 1927;17:95–109.[9] Ishiyama Y. Review and discussion of overturning of bodies by earthquake motions. BRI Research Paper No. 85, Building
Research Institute, Ministry of Construction, Japan, 1980.[10] Ishiyama Y. Motion of rigid bodies and criteria for overturning by earthquake excitations. Earthquake Engng Struct Dyn
1982;10:635–50.[11] Ishiyama Y. Criteria for overturning of rigid bodies by sinusoidal and earthquake excitations. In: Proc 8th World Conf
Earthquake Engng. Englewood Cliffs, New Jersey, USA: Prentice-Hall; 1984. p. 267–74.[12] Spanos PD, Koh A-S. Rocking of rigid blocks due to harmonic excitation. ASCE J Engng Mech 1984;110:1627–42.[13] Bruhn B, Koch BP. Heteroclinic bifurcations and invariant manifolds in rocking block dynamics. Z Naturforsch A
1991;46:481–90.[14] Lin H, Yim SCS. Deterministic and stochastic analysis of chaotic and overturning responses of a slender rocking object. Nonlinear
Dyn 1996;11:83–106.

542 S. Lenci, G. Rega / Chaos, Solitons and Fractals 28 (2006) 527–542
[15] Iyengar RN, Roy D. Nonlinear dynamics of a rigid block on a rigid base. ASME J Appl Mech 1996;63:55–61.[16] Lenci S, Rega G. Heteroclinic bifurcations and optimal control in the nonlinear rocking dynamics of generic and slender rigid
blocks. Int J Bifur Chaos 2005;15:1901–18.[17] Plaut RH, Fielder WT, Virgin LN. Fractal behaviour of an asymmetric rigid block overturning due to harmonic motion of a tilted
foundation. Chaos, Solitons & Fractals 1996;7:177–96.[18] Lipscombe PR, Pellegrino S. Free rocking of prismatic blocks. ASCE J Engng Mech 1993;119:1387–410.[19] Allen RH, Duan X. Effects of linearizing on rocking-block toppling. ASCE J Engng Mech 1995;121:1146–9.[20] Plaut RH. Slender rigid block motion. ASCE J Engng Mech 1995;121:583.[21] Hogan SJ. The many steady state responses of a rigid block under harmonic forcing. Earthquake Engng Struct Dyn
1990;19:1057–71.[22] Hogan SJ. The effect of damping on rigid block motion under harmonic forcing. Proc R Soc Lond A 1992;437:97–108.[23] Wiggins S. Introduction to applied nonlinear dynamical systems and chaos. New York: Springer-Verlag; 1990.[24] Lenci S, Rega G, Identifying, evaluating, and controlling dynamical integrity measures in nonlinear mechanical oscillators.
Nonlinear Anal, in press.[25] Hogan SJ. Heteroclinic bifurcations in damped rigid block motion. Proc R Soc Lond A 1992;439:155–62.





























