Embed Size (px)
Citation preview
Analyse par ondelettesNotes de cours
Master 2 Professionnel IMAT
Universite Paul Sabatier - Toulouse III
Jeremie BIGOT
Septembre 2009

2
Introduction
Ces notes de cours sont une presentation succinte des methodes d’analyse temps-echelles basees sur des decomposition en ondelettes. Ces techniques ont de tres nom-breuses applications dans les sciences physiques et les sciences de l’ingenieur en par-ticulier pour l’estimation et la compression de signaux. Ces notes de cours s’inspirelargement du livre de Stephane Mallat [7] qui est l’une des meilleures referencessur l’analyse de signaux par ondelettes. Les ouvrages suivants, dont on peut trou-ver les references dans la bibliographie, peuvent egalement etre consultes pour desapplications plus specificiques de l’analyse par ondelettes ou pour des complementsmathematiques :
– [1] : applications des ondelettes en statistique,– [2] : applications des ondelettes en medecine et biologie,– [3] : applications des ondelettes pour l’analyse des turbulences en physique,– [4] : applications des ondelettes en analyse numerique– [5] : un des ouvrages de reference en mathematiques appliquees sur la theorie
des ondelettes– [6] : analyse de Fourier et applications au filtrage, calcul numerique et onde-
lettes,– [7], [8] : un des ouvrages de reference sur l’analyse en ondelettes qui presente
de nombreux developpements theoriques et pratiques, il s’agit d’un livre trescomplet.
– [9] : analyse continue par ondelettes.
3

4
Table des matieres
1 Representations temps-frequence 7
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 La transformee de Fourier . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.1 Rappel de quelques proprietes . . . . . . . . . . . . . . . . . . 8
1.2.2 Transformee de Fourier Inverse . . . . . . . . . . . . . . . . . 9
1.2.3 Produit de convolution . . . . . . . . . . . . . . . . . . . . . . 10
1.2.4 Quelques exemples de transformee de Fourier . . . . . . . . . 10
1.2.5 Limitations de la transformee de Fourier . . . . . . . . . . . . 11
1.2.6 Principe d’incertitude d’Heisenberg . . . . . . . . . . . . . . . 12
1.3 La transformee de Gabor . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.1 Inversion de la transformee de Gabor . . . . . . . . . . . . . . 14
1.3.2 Redondance et noyau reproduisant . . . . . . . . . . . . . . . 15
1.3.3 Taille des boıtes d’Heisenberg . . . . . . . . . . . . . . . . . . 15
1.3.4 Quelques exemples de transformee de Gabor . . . . . . . . . . 16
1.3.5 Le probleme du choix de la fenetre . . . . . . . . . . . . . . . 18
1.4 La transformee en ondelettes continue . . . . . . . . . . . . . . . . . . 18
1.4.1 Inversion de la transformee en ondelettes continue . . . . . . . 20
1.4.2 Redondance et noyau reproduisant . . . . . . . . . . . . . . . 20
1.4.3 Taille des boıtes d’Heisenberg . . . . . . . . . . . . . . . . . . 21
1.4.4 Quelques exemples de transformee en ondelettes continue . . . 21
2 Transformee en ondelette continue et regularite d’un signal 25
2.1 Analyse de la regularite d’un signal unidimensionnel . . . . . . . . . . 25
2.1.1 Regularite Lipschitzienne . . . . . . . . . . . . . . . . . . . . . 25
2.1.2 Ondelette et nombre de moments nuls . . . . . . . . . . . . . 26
2.1.3 Amplitude des coefficients d’ondelettes et regularite d’un signal 27
2.1.4 Maxima d’ondelettes . . . . . . . . . . . . . . . . . . . . . . . 28
2.2 Analyse de la regularite d’une image . . . . . . . . . . . . . . . . . . 31
2.2.1 Extension de la transformee en ondelette pour des images . . . 31
2.2.2 Transformee en ondelette dyadique bidimensionnelle . . . . . . 31
2.2.3 Regularite Lipschitzienne . . . . . . . . . . . . . . . . . . . . . 33
2.2.4 Detecteur de Canny . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.5 Maxima d’ondelette pour des images . . . . . . . . . . . . . . 34
5

6
3 Bases d’ondelettes 37
3.1 Bases orthonormees d’ondelettes . . . . . . . . . . . . . . . . . . . . . 373.1.1 Quelques rappels sur les bases hilbertiennes . . . . . . . . . . 373.1.2 Analyse multiresolution de L2(R) . . . . . . . . . . . . . . . . 383.1.3 Filtres mirroirs conjugues . . . . . . . . . . . . . . . . . . . . 413.1.4 Ondelettes orthogonales . . . . . . . . . . . . . . . . . . . . . 42
3.2 Construction de bases d’ondelettes . . . . . . . . . . . . . . . . . . . 443.2.1 Liens entre filtres, nombre de moments nuls et regularite de
l’ondelette . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.2.2 Quelques exemples classiques d’ondelettes . . . . . . . . . . . 463.2.3 Ondelettes sur un intervalle borne . . . . . . . . . . . . . . . . 473.2.4 Ondelettes et bancs de filtres . . . . . . . . . . . . . . . . . . 51
3.3 Bases d’ondelettes pour des images . . . . . . . . . . . . . . . . . . . 533.3.1 Bases d’ondelettes separables et multiresolution en 2D . . . . 533.3.2 Algorithme rapide de transformee en ondelettes 2D . . . . . . 543.3.3 Quelques exemples de decomposition en ondelettes pour des
images . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4 Approximation, estimation et compression dans des bases d’onde-
lettes 59
4.1 Proprietes d’approximation des bases d’ondelettes . . . . . . . . . . . 594.1.1 Decroissance des coefficients d’ondelettes . . . . . . . . . . . . 594.1.2 Approximation lineaire de fonctions regulieres . . . . . . . . . 604.1.3 Approximation lineaire de fonctions non-regulieres . . . . . . . 614.1.4 Approximation non-lineaire . . . . . . . . . . . . . . . . . . . 624.1.5 Quelques exemples d’approximation de fonctions . . . . . . . . 634.1.6 Approximation d’images . . . . . . . . . . . . . . . . . . . . . 634.1.7 Quelques exemples d’approximation d’images . . . . . . . . . 64
4.2 Debruitage de fonctions 1D . . . . . . . . . . . . . . . . . . . . . . . 644.3 Compression d’images . . . . . . . . . . . . . . . . . . . . . . . . . . 674.4 Problemes inverses . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Chapitre 1
Representations temps-frequence
1.1 Introduction
Que ce soit en mathematiques ou en physique, la transformee de Fourier a etependant longtemps un des outils les plus utilises pour le traitement du signal. Cetterepresentation, basee sur la notion physique de frequence, est bien adaptee pourtraiter des signaux stationnaires c’est a dire des signaux qui possedent certainesproprietes invariantes dans le temps. Par contre, la transformee de Fourier n’est pasoptimale pour la description de phenomenes transitoires et se revele donc imparfaitepour l’analyse de la plupart signaux rencontres en pratique.
La principale limitation de la transformee de Fourier est qu’elle ne permet pasune description locale (sur une partie finie) d’un signal. Pour remedier a ces limita-tions, des representations dites temps-frequence ont ete proposees afin d’analyser unsignal a l’aide d’une transformation parametree par deux variables : le temps (ou laposition) et la frequence (ou echelle). Tout au long de ce cours, nous considereronsqu’un signal f(t) est une fonction reelle du temps (e.g. R 7→ R) ou bien de l’es-pace (e.g. R
2 7→ R). Une representation temps-frequence est une transformation quiassocie a un signal f(t) une fonction reelle de deux variables Tf(x, ξ), ou x est leparametre de temps ou de position et ξ est le parametre de frequence ou d’echelle.Les representations temps-frequence que nous verrons dans ce cours, consistent aprojeter une fonction f sur des fonctions analysantes gx,ξ, ce qui revient a calculerle produit scalaire :
Tf (x, ξ) = 〈f, gx,ξ〉 =
∫
f(t)gx,ξ(t)dt.
Les representations qui nous interessent sont celles qui permettent :
– d’avoir des proprietes d’invariance par rapport a des transformations simplesd’un signal (translation, dilatation, modulation...)
– d’obtenir des informations sur la structure locale (en temps et en frequence)d’un signal
– la reconstruction (exacte) du signal a partir des coefficients Tf(x, ξ)
7
8
Dans le cas uni-dimensionnel (x ∈ R) les valeurs de la fonction Tf (x, ξ) serontrepresentees dans le plan temps-echelle. Il s’agit d’une representation graphique quipermet de visualiser le contenu temporel (axe des abcisses) et frequentiel (axe desordonnees) des signaux etudies.
Dans ce chapitre, nous rappelerons quelques proprietes de la transformee de Fou-rier, puis nous introduirons la transformee de Gabor et la transformee en ondelettescontinue. Quelques exemples simules seront utilises pour illustrer les limitations etles avantages de chaque transformation.
1.2 La transformee de Fourier
Dans ce chapitre, nous travaillerons essentiellement avec des fonctions unidimen-sionnelles. L’espace L1(R) est l’ensemble des fonctions (reelles ou complexe) qui sontintegrables i.e. telles que
∫ +∞−∞ |f(t)|dt < +∞. De meme L2(R) est l’ensemble des
fonctions de carre integrable i.e. telles que∫ +∞−∞ |f(t)|2dt < +∞. Nous rappelons que
L2(R) est un espace de Hilbert pour le produit scalaire :
∫ +∞
−∞f(t)g(t)dt,
pour f, g ∈ L2(R), et ou g(t) denote le conjugue de g(t). La norme d’une fonction
f ∈ L2(R) sera notee ‖f‖ =√
∫ +∞−∞ |f(t)|2dt.
1.2.1 Rappel de quelques proprietes
En 1807, Fourier presente un memoire a l’Institut de France qui propose derepresenter toute fonction periodique comme une somme de sinusoıdes a differentesfrequences. C’est le debut de l’analyse de Fourier qui va avoir une importancedeterminante en analyse mathematique, en physique et dans les sciences de l’ingenieur.
Definition 1.1 La transformee de Fourier d’une fonction f ∈ L1(R) est definiepar :
f(ω) =
∫ +∞
−∞f(t)e−iωtdt.
Elle mesure la “vitesse” des oscillations de la fonction f a la frequence ω ∈ R.Cette transformation peut etre vue comme la projection de f sur des fonctionsanalysantes qui sont des “ondes pures” : gx,ξ(t) = e−iξt qui ne dependent pas duparametre de temps x. Celle-ci permet donc d’analyser le contenu frequentiel d’unsignal. Le theoreme de Rieman-Lebesgue assure que :
– f 7→ f est une application lineaire, continue de L1(R) dans L∞(R).– si f ∈ L1(R) alors f est continue sur R et limω→±∞ f(ω) = 0

9
Parmi les principales proprietes de la transformee de Fourier qui sont souventutilisees dans les calculs, on peut citer :
Propriete Fonction Transformee de Fourier
Translation f(t− t0) e−iωt0 f(ω)
Modulation eiω0tf(t) f(ω − ω0)
Dilatation/Contraction f(t/a) |a|f(aω)
Derivation f (p)(t) (iω)pf(ω)
Symetrie Hermitienne f(t) ∈ R f(−ω) = f(ω)
Si f ∈ L1(R), f ′ ∈ L1(R), . . . , f (p) ∈ L1(R) alors f(ω) = oω→±∞( 1ωp ). De plus si
∫ +∞
−∞|f(ω)|(1 + |ω|)pdω < +∞,
alors f est p fois continument differentiable et bornee. La decroissance de f en l’infiniest donc caracteristique de la regularite de f .
1.2.2 Transformee de Fourier Inverse
Il n’est pas evident de definir la transformee de Fourier inverse, car l’espaceL1(R) n’est pas invariant par cette transformation. L’espace qui est bien adapteepour definir et inverser la transformee de Fourier est l’espace L2(R). Toutefois, il n’estpas possible de definir “directement” la transformee d’une fonction dans L2(R). Il estnecessaire de se restreindre tout d’abord a L2(R)
⋂
L1(R) pour definir correctementla transformee de Fourier, puis d’utiliser la densite de L2(R)
⋂
L1(R) dans L2(R)pour etendre cette transformation et son inverse a L2(R). Le theoreme fondamentalde la transformee de Fourier dans L2(R) est le suivant (pour de plus amples detailson pourra se referer a [6]) :
Theoreme 1.1 Soit f ∈ L2(R), on definit alors formellement la transformee deFourier et son inverse par :
f(ω) =
∫ +∞
−∞f(t)e−iωtdt
f(t) =1
2π
∫ +∞
−∞f(ω)eiωtdω
Soit f, g ∈ L2(R), on obtient alors la formule de Parseval∫ +∞
−∞f(t)h(t)dt =
1
2π
∫ +∞
−∞f(ω)h(ω)dω,
et la formule de Plancherel∫ +∞
−∞|f(t)|2dt =
1
2π
∫ +∞
−∞|f(ω)|2dω.

10
Remarque : pour f ∈ L2(R)\L1(R), la transformee de Fourier et son inverse sontdefinies au sens d’une limite dans L2 (convergence forte dans L2 ) :
f(ω) =
∫ +∞
−∞f(t)e−iωtdt
limT→∞
∫ +T
−Tf(t)e−iωtdt
1.2.3 Produit de convolution
Definition 1.2 Pour f ∈ L1(R) et h ∈ L1(R) le produit de convolution de f et g,note f ⋆ h, est defini par :
f ⋆ h(t) =
∫ +∞
−∞f(t− u)h(u)du.
Alors, f ⋆ h ∈ L1(R) est defini presque partout et tel que :– f ⋆ h = h ⋆ f : commutativite– d
dt(f ⋆ h)(t) = df
dt⋆ h(t) = f ⋆ dh
dt(t) : derivabilite
– f ⋆ δt0(t) = f(t− t0) : convolution avec une masse de Dirac en t0.De plus, si l’on note g = f ⋆ h alors :
g(ω) = f(ω)h(ω).
Cette propriete est a la base du filtrage lineaire en traitement du signal. En effet,tout processus de filtrage du type Lf = f ⋆ h ou h est la reponse impulsionnelle dufiltre L, peut s’ecrire sous la forme d’un filtrage frequentiel a partir de la transformeede Fourier inverse :
Lf(t) =1
2π
∫ +∞
−∞h(ω)f(ω)eiωtdω.
Chaque composante frequentielle eiωt d’amplitude f(ω) est en effet modulee parle filtre h(ω). Ainsi, decomposer une fonction comme une integrale de fonctions si-nusoidales complexes eiωt permet de calculer directement la reponse d’un filtre Lfa partir de la donnee des coefficients h(ω).
Remarque : tous ces resultats pour le produit de convolution sont egalement va-lables pour l’extension de la transformee de Fourier a L2(R).
1.2.4 Quelques exemples de transformee de Fourier
• Soit f(t) = 11[−T,T ](t) la fonction indicatrice de l’intervalle [−T, T ]. Il s’agit d’unefonction discontinue en −T et +T qui vaut 1 sur [−T, T ] et zero en dehors de cetintervalle. Sa transformee de Fourier est une fonction non integrable :
f(ω) =2 sin(Tω)
ω.

11
• Une masse de Dirac δt0(t) au point t0 associe a une fonction sa valeur au pointt = t0 (une “integration” d’une fonction reguliere par rapport a un Dirac est telle que∫ +∞−∞ f(t)δt0(t)dt = f(t0)). La masse de Dirac δt0(t) est une fonction “tres localisee”
dans le temps (son support se reduit a t = t0) dont la transformee de Fourier estdefinie comme (voir [6] pour une definition rigoureuse a partir de la theorie desdistributions) :
δt0(ω) = e−iωt0 .
• Cosinus et Sinus. Posons cosω0(t) = cos(ω0t) et sinω0
(t) = sin(ω0t). Il s’agitde fonctions oscillantes a une frequence unique ω0 ce qui se traduit par deux Diracdans la transformee de Fourier en ω0 et −ω0 :
ˆcosω0(ω) = π
(
δω0(ω) + δ−ω0
(ω))
ˆsinω0(ω) =
π
i
(
δω0(ω) − δ−ω0
(ω))
.
• Un filtre passe-bas ideal a une fonction de transfert du type : h(ω) = 11[−ω0,ω0](ω)qui selectionne les frequences comprises entre −ω0 et ω0. Sa reponse inpulsionelleest donnee par la transformee de Fourier inverse :
h(t) =sin(ω0t)
πt.
Comme explique precedemment, la transformee de Fourier d’un signal permetd’obtenir des informations sur son contenu frequentiel. La Figure 1.1 represente unesinusoıde de frequence 200 Hz (i.e. ω0 = 400π) observee avec un bruit aleatoire quicorrespond au defaut des instruments de mesure et a la presence de parasites. Latransformee de Fourier de ce signal permet de retrouver la frequence de la sinusoıdemalgre la presence de ce bruit.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−5
−4
−3
−2
−1
0
1
2
3
4
5
(a)
0 50 100 150 200 250 300 350 400 450 5000
50
100
150
200
250
300
350
400
450
500
(b)
Fig. 1.1 – (a) Signal : sinus a 200 Hz + bruit et (b) sa transformee de Fourier pourles frequences positives (l’axe des abscisses donne ν = ω/2π)
1.2.5 Limitations de la transformee de Fourier
Le principal inconvenient de la transformee de Fourier est qu’elle ne permet pasune analyse du comportement local d’une fonction. En effet, les fonctions analy-santes sont de support infini et il est donc necessaire de connaıtre l’ensemble des

12
valeurs d’une fonction pour pouvoir calculer sa transformee de Fourier. De plus,cette transformation ne permet pas d’avoir une localisation temporelle du contenufrequentiel d’un signal. Par exemple, la Figure 1.2 represente un signal constituede deux sinusoıdes successives de frequence 10 et 30 Hz (penser a deux notes demusiques). La transformee de Fourier de ce signal permet de retrouver ces deuxfrequences, mais ne nous informe pas sur la localisation temporelle du changementde regime dans le signal. De la meme facon, la presence d’une discontinuite dansun signal affecte le comportement de sa transformee de Fourier sur l’ensemble desfrequences. Par exemple, la transformee de Fourier de la fonction indicatrice de l’in-tervalle [−T, T ] decroit en 1/ω mais ceci ne permet pas de retrouver la localisationdes deux discontinuites du signal en T et −T .
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
(a)
0 50 100 150 200 2500
50
100
150
200
250
300
(b)
Fig. 1.2 – (a) Signal : sinus a 10 Hz suivi d’un sinus a 30 Hz et (b) sa transformeede Fourier pour les frequences positives (l’axe des abscisses donne ν = ω/2π)
1.2.6 Principe d’incertitude d’Heisenberg
Il semble donc raisonnable de se demander s’il est possible de construire unefonction f qui soit bien localisee en temps et dont la transformee de Fourier f soitconcentree dans un petit intervalle de frequences. Une masse de Dirac au point t0est une fonction tres localisee en temps (son support se reduit a t = t0). Toute-fois, sa transformee de Fourier e−iωt0 est uniformement repartie sur l’ensemble desfrequences. La decroissance de la transformee de Fourier f depend de la regularitede la fonction f . Ainsi, pour construire une fonction f telle que f soit bien loca-lisee en frequence, il est necessaire que f soit suffisamment reguliere. Toutefois, lesdeux observations suivantes montrent qu’un compromis doit etre trouve entre bonnelocalisation temporelle et bonne localisation frequentielle :
– pour reduire la location temporelle d’une fonction f , il est possible de lacontracter par un facteur s < 1 tout en conservant son energie (norme L2)constante. En effet, si on pose :
fs(t) =1√sf
(
t
s
)
,
alors∫ +∞−∞ |fs(t)|2dt =
∫ +∞−∞ |f(t)|2dt. Toutefois, fs(t) =
√sf(st) ce qui montre

13
que la transformee de Fourier de fs est dilate d’un facteur s. Ainsi, lorqu’ongagne en location temporelle, on perd en localisation frequentielle.
– il n’est pas possible de construire une fonction qui soit a support compact etdont la transformee de Fourier soit egalement a support compact.
Ces deux remarques illustrent le principe d’incertitude d’Heisenberg qui limite lapossibilite d’une bonne resolution en temps et en frequence. Le theoreme suivant estune formulation du principe d’incertitude pour le cas unidimensionnel.
Theoreme 1.2 Principe d’incertitude d’Heisenberg : soit f ∈ L2(R) et ‖f‖2 =∫ +∞−∞ |f(t)|2dt. On definit la position moyenne temporelle f et la position frequentielle
moyenne ω de f par :
f =1
‖f‖2
∫ +∞
−∞t|f(t)|2dt,
ω =1
2π‖f‖2
∫ +∞
−∞ω|f(ω)|2dω.
Les variances autour de ces moyennes sont definies par :
σ2t =
1
‖f‖2
∫ +∞
−∞(t− f)2|f(t)|2dt,
σ2ω =
1
2π‖f‖2
∫ +∞
−∞(ω − ω)2|f(ω)|2dω.
Alors,
σtσω ≥ 1
2, (1.1)
et cette inegalite est une egalite si et seulement si f est une Gaussienne i.e de laforme f(t) = Aeiω0t−B(t−m0)2.
Les variances temporelles et frequentielles permettent de quantifier l’etalement(i.e. la localisation) de f et f autour de leur position moyenne. Ainsi, la relation(1.1) montre que lorsque la precision temporelle augmente, l’incertitude pour lalocalisation en frequence augmente et reciproquement. Pour remedier aux limitationsde la transformee de Fourier, il est donc necessaire de projeter un signal sur desfonctions analysantes qui sont bien localisees en temps et en frequence. Toutefois,la resolution temps-frequence de ces fonctions sera necessairement limitee par leprincipe d’Heisenberg.
1.3 La transformee de Gabor
Afin de remedier au probleme de la location temporelle de la transformee deFourier, Gabor a propose en 1946 d’utiliser une transformee de Fourier a fenetre
14
glissante. Cette transformation consiste a calculer la transformee de Fourier surune partie du signal selectionnee a l’aide d’une fenetre bien localisee en temps. Destranslations successives de cette fenetre permettent d’analyser localement le com-portement temps-frequence du signal. La transformee de Gabor revient a projeterun signal sur des fonctions analysantes de la forme :
gx,ξ(t) = eiξtg(t− x),
ou g ∈ L2(R) est une fenetre reelle et symmetrique (i.e. g(t) = g(−t)) qui esttranslatee dans le temps par x et modulee par la frequence ξ. Afin de simplifier lesnotations, nous supposerons que ‖g‖ = 1 ce qui implique que ‖gx,ξ‖ = 1.
Definition 1.3 Pour f ∈ L2(R) et (x, ξ) ∈ R2, la transformee de Fourier a fenetre
glissante est definie par
Gf(x, ξ) = 〈f, gx,ξ〉 =
∫ +∞
−∞f(t)g(t− x)e−iξtdt.
La fenetre g(t−x) permet de localiser la transformee de Fourier de f au voisinagedu point x. Lorsque la fenetre g est une Gaussienne, il s’agit de la transformee deGabor. Toutefois, dans ce qui suit, la transformee de Fourier a fenetre glissante seraappelee transformee de Gabor (TG) meme si g n’est pas une Gaussienne.
1.3.1 Inversion de la transformee de Gabor
La TG est une transformation inversible qui conserve l’energie du signal commele montre le theoreme suivant.
Theoreme 1.3 Si f ∈ L2(R) alors (le sens de la formule de reconstruction suivantedepend des conditions sur f et g) :
f(t) =1
2π
∫ +∞
−∞
∫ +∞
−∞Gf(x, ξ)g(t− x)eiξtdxdξ,
et∫ +∞
−∞|f(t)|2dt =
1
2π
∫ +∞
−∞
∫ +∞
−∞|Gf(x, ξ)|2dxdξ.
En utilisant la formule de Parseval, on peut remarquer que la TG peut egalements’ecrire sous la forme :
Gf(x, ξ) =1
2π〈f , gx,ξ〉 =
1
2π
∫ +∞
−∞f(ω)g(ω − ξ)ei(ω−ξ)xdω.
La TG peut donc egalement s’interpreter comme une transformee de Gabor (a unfacteur de phase pret) de la transformee de Fourier f . Cett remarque montre quesi la fenetre g est bien localisee en temps autour de t = 0 et si g est bien localisee
15
en frequence autour de ω = 0, alors les coefficients de la TG peuvent s’interpretercomme une analyse locale du comportement de f au voisinage du temps x et de lafrequence ξ. Il faut donc choisir pour la fenetre g une fonction suffisamment reguliereafin d’avoir a la fois une bonne localisation en temps et en frequence. Ceci exclue doncd’utiliser pour g une fonction indicatrice 11[−T,T ] qui est bien localisee en temps autourde t = 0, mais donc la localisation en frequence est tres mauvaise (decroissance en1/ω). A l’inverse, les proprietes temps-frequences de la Gaussienne sont optimalescar celle-ci “sature” l’inegalite d’Heisenberg, ce qui justifie son utilisation pour laTG.
1.3.2 Redondance et noyau reproduisant
La TG associe a une fonction f ∈ L2(R) une fonction a deux variables. D’apresla propriete de conservation de l’energie Gf(x, ξ) ∈ L2(R2). Toutefois, toute fonctiondans L2(R2) n’est pas necessairement la TG d’une fonction dans L2(R). Le theoremesuivant montre que ceci provient de la redondance de la TG.
Theoreme 1.4 Soit F ∈ L2(R2). Alors il existe une fonction f ∈ L2(R) telle queF (x, ξ) = Gf(x, ξ) si et seulement si :
F (x, ξ) =1
2π
∫ +∞
−∞
∫ +∞
−∞K(x, ξ, x′, ξ′)F (x′, ξ′)dx′dξ′,
ou est le noyau reproduisant
K(x, ξ, x′, ξ′) = 〈gx,ξ, gx′,ξ′〉,
Le noyau K(x, ξ, x′, ξ′) mesure la correlation temps-frequence entre les fonctionsanalysantes gx,ξ et gx′,ξ′. On peut montrer que l’amplitude de K(x, ξ, x′, ξ′) est unefonction decroissante de x − x′ et ξ − ξ′ qui depend uniquement de la localisationen temps et en frequence (et donc de l’energie) de g et g. Plus les distances |x− x′|et |ξ − ξ′| sont grandes, plus l’amplitude de K(x, ξ, x′, ξ′) diminue. La redondancepeut donc s’interpreter comme le “taux de repetition” de la meme information dansune transformation.
1.3.3 Taille des boıtes d’Heisenberg
On definit la variance temporelle σ2t et la variance frequentielle σ2
ω de la fonctiongx,ξ par
σ2t =
∫ +∞
−∞(t− x)2|gx,ξ(t)|2dt =
∫ +∞
−∞t2|g(t)|2dt,
σ2ω =
1
2π
∫ +∞
−∞(ω − ξ)2|gx,ξ(ω)|2dω =
1
2π
∫ +∞
−∞ω2|g(ω)|2dω.

16
Etant donne la symmetrie de g et g, on peut facilement remarquer que σ2t et σ2
ω
sont independantes de x et ξ. La representation dans le plan temps-frequence de lafonction gx,ξ correspond a une boıte d’Heisenberg centree au point (x, ξ) et d’aireσtσω (voir Figure 1.3). La taille de cette boıte est independante de la position x etde la frequence ξ, ce qui implique que la resolution temps-frequence de la TG est lameme dans tout le plan temps-frequence. La TG correspond donc a des translationssuccessives en temps et en frequence d’une boıte d’Heisenberg de taille constante.L’aire minimale de cette boıte est limitee par le principe d’incertitude d’Heisenberg :σtσω ≥ 1/2. Rappelons qu’il y a egalite si la fenetre g est une Gaussienne, ce quijustifie ce choix en pratique.
Inserer Figure
Fig. 1.3 – Boıtes d’Heisenberg pour la TG dans le plan temps-frequence pour deuxfonctions analysantes gx,ξ et gx′,ξ′
1.3.4 Quelques exemples de transformee de Gabor
L’interet de la TG est de permettre une analyse du comportement local d’unefonction. Les exemples suivants, pour lesquels la TG peut etre calculee explicitement,illustrent les avantages cette transformation par rapport a la transformee de Fourier.
• Sinusoıde : soit f(t) = sin(ω0t), on peut facilement calculer que :
Gf(x, ξ) =1
2i
(
e−i(ξ−ω0)xg(ξ − ω0) − e−i(ξ+ω0)xg(ξ + ω0))
.
Etant donnee que g est localisee autour de ω = 0, l’equation ci-dessus montre quele maximum de l’amplitude de Gf(x, ξ) se situe au voisinage de ξ = ω0 et ξ = −ω0.La phase de la TG permet egalement de retrouver la frequence du signal. Toute-fois, du fait de l’introduction d’une fenetre d’analyse, la localisation du comporte-ment temps-frequence du signal n’est pas parfaite. La TG diminue necessairementla resolution alors que pour la transformee de Fourier d’un sinus, on obtient deuxmasses de Dirac en ξ = ω0 et ξ = −ω0. Par contre, la TG permet de reperer leschangements de la frequence d’un signal au cours du temps. La Figure 1.4 donne laTG d’un signal constitue de deux sinusoıdes successives de frequence 10 et 30 Hz.L’analyse de l’amplitude et de la phase de la TG permet clairement de mettre enevidence le changement de frequence au point t = 0.5.
• Chirps : un chirp est un signal sinusoıdale, non-stationnaire dont la frequence etl’amplitude sont des fonctions qui sont dependantes du temps. Ce type de signauxpeut s’ecrire sous la forme :
f(t) = A(t) sin(φ(t)).
17
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100
(b)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100
(c)
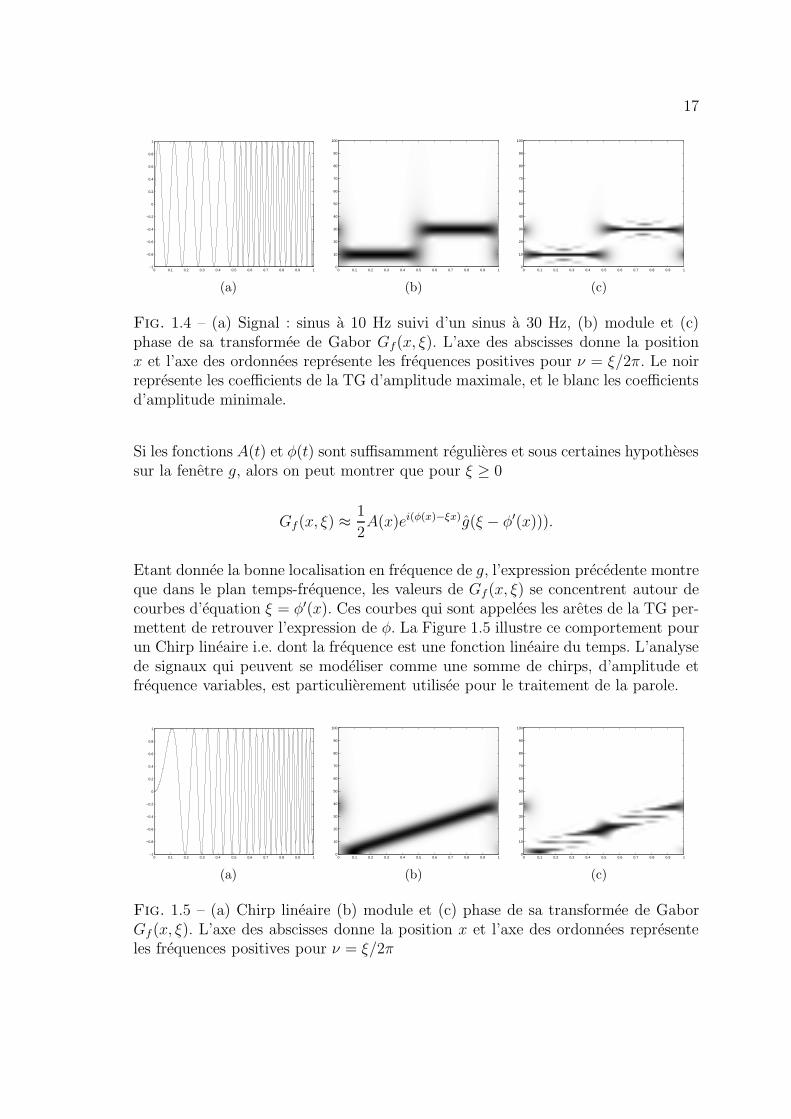
Fig. 1.4 – (a) Signal : sinus a 10 Hz suivi d’un sinus a 30 Hz, (b) module et (c)phase de sa transformee de Gabor Gf(x, ξ). L’axe des abscisses donne la positionx et l’axe des ordonnees represente les frequences positives pour ν = ξ/2π. Le noirrepresente les coefficients de la TG d’amplitude maximale, et le blanc les coefficientsd’amplitude minimale.
Si les fonctions A(t) et φ(t) sont suffisamment regulieres et sous certaines hypothesessur la fenetre g, alors on peut montrer que pour ξ ≥ 0
Gf(x, ξ) ≈1
2A(x)ei(φ(x)−ξx)g(ξ − φ′(x))).
Etant donnee la bonne localisation en frequence de g, l’expression precedente montreque dans le plan temps-frequence, les valeurs de Gf (x, ξ) se concentrent autour decourbes d’equation ξ = φ′(x). Ces courbes qui sont appelees les aretes de la TG per-mettent de retrouver l’expression de φ. La Figure 1.5 illustre ce comportement pourun Chirp lineaire i.e. dont la frequence est une fonction lineaire du temps. L’analysede signaux qui peuvent se modeliser comme une somme de chirps, d’amplitude etfrequence variables, est particulierement utilisee pour le traitement de la parole.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100
(b)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100
(c)
Fig. 1.5 – (a) Chirp lineaire (b) module et (c) phase de sa transformee de GaborGf (x, ξ). L’axe des abscisses donne la position x et l’axe des ordonnees representeles frequences positives pour ν = ξ/2π
18
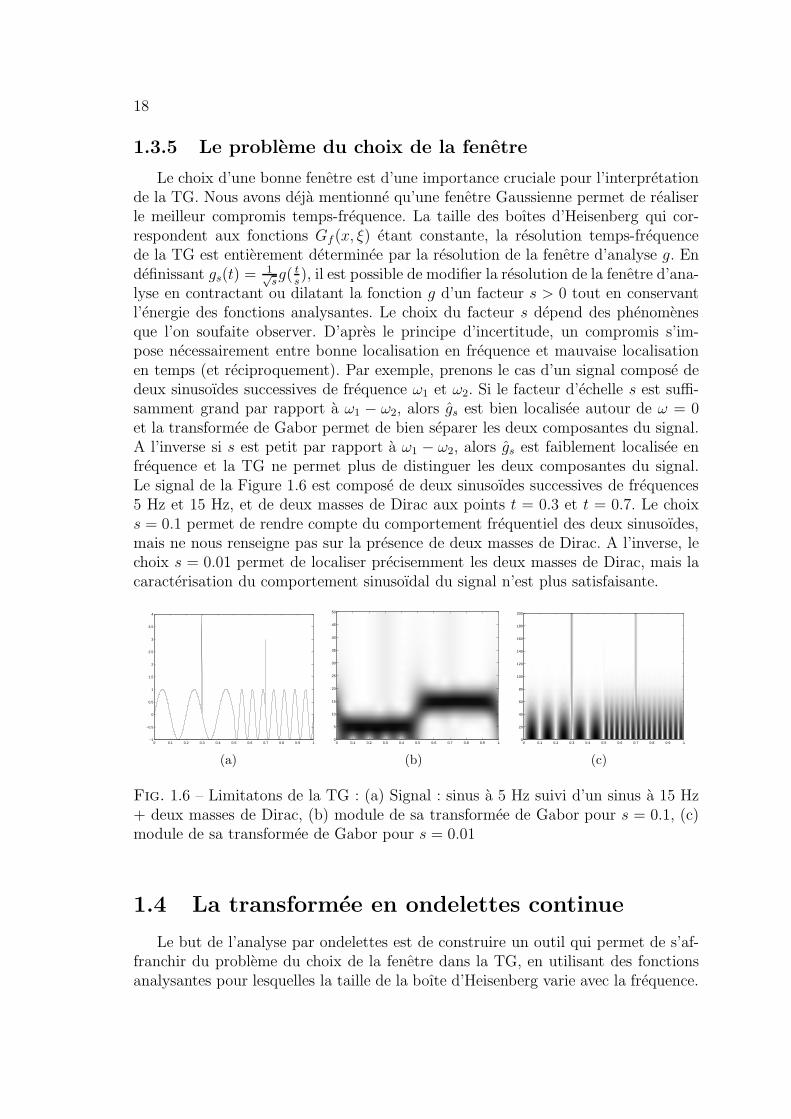
1.3.5 Le probleme du choix de la fenetre
Le choix d’une bonne fenetre est d’une importance cruciale pour l’interpretationde la TG. Nous avons deja mentionne qu’une fenetre Gaussienne permet de realiserle meilleur compromis temps-frequence. La taille des boıtes d’Heisenberg qui cor-respondent aux fonctions Gf (x, ξ) etant constante, la resolution temps-frequencede la TG est entierement determinee par la resolution de la fenetre d’analyse g. Endefinissant gs(t) = 1√
sg( t
s), il est possible de modifier la resolution de la fenetre d’ana-
lyse en contractant ou dilatant la fonction g d’un facteur s > 0 tout en conservantl’energie des fonctions analysantes. Le choix du facteur s depend des phenomenesque l’on soufaite observer. D’apres le principe d’incertitude, un compromis s’im-pose necessairement entre bonne localisation en frequence et mauvaise localisationen temps (et reciproquement). Par exemple, prenons le cas d’un signal compose dedeux sinusoıdes successives de frequence ω1 et ω2. Si le facteur d’echelle s est suffi-samment grand par rapport a ω1 − ω2, alors gs est bien localisee autour de ω = 0et la transformee de Gabor permet de bien separer les deux composantes du signal.A l’inverse si s est petit par rapport a ω1 − ω2, alors gs est faiblement localisee enfrequence et la TG ne permet plus de distinguer les deux composantes du signal.Le signal de la Figure 1.6 est compose de deux sinusoıdes successives de frequences5 Hz et 15 Hz, et de deux masses de Dirac aux points t = 0.3 et t = 0.7. Le choixs = 0.1 permet de rendre compte du comportement frequentiel des deux sinusoıdes,mais ne nous renseigne pas sur la presence de deux masses de Dirac. A l’inverse, lechoix s = 0.01 permet de localiser precisemment les deux masses de Dirac, mais lacaracterisation du comportement sinusoıdal du signal n’est plus satisfaisante.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
30
35
40
45
50
(b)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
20
40
60
80
100
120
140
160
180
200
(c)
Fig. 1.6 – Limitatons de la TG : (a) Signal : sinus a 5 Hz suivi d’un sinus a 15 Hz+ deux masses de Dirac, (b) module de sa transformee de Gabor pour s = 0.1, (c)module de sa transformee de Gabor pour s = 0.01
1.4 La transformee en ondelettes continue
Le but de l’analyse par ondelettes est de construire un outil qui permet de s’af-franchir du probleme du choix de la fenetre dans la TG, en utilisant des fonctionsanalysantes pour lesquelles la taille de la boıte d’Heisenberg varie avec la frequence.

19
Nous verrons par la suite que l’analyse par ondelettes est un outil puissant pourcaracteriser simultanement les differentes composantes temps-frequence d’un signal.
Les premiers travaux sur les ondelettes remontent au debut des annees 1980.Grossmann qui travaillait en physique theorique et Morlet un chercheur en traite-ment du signal ont ete parmi les premiers scientifiques a etudier les proprietes de latransformee en ondelettes continue. Des leur debut, les travaux sur la theorie des on-delettes sont donc caracterises par la collobaration entre des scientifiques provenantaussi bien des mathematiques, de la physique que du traitement du signal. C’estencore le cas des travaux en cours sur les ondelettes, ce qui explique le succes de cetoutil et sa tres large diffusion dans la communaute scientifique.
Une ondelette est une fonction ψ ∈ L2(R) de moyenne nulle i.e. telle que :∫ +∞
−∞ψ(t)dt = 0.
Nous supposerons de plus que l’ondelette est normalisee : ‖ψ‖ = 1.Dans l’analysepar ondelettes, les fonctions analysantes sont definies a partir de translations etdilatations/contractions de l’ondelette “mere” ψ :
ψx,s(t) =1√sψ(t− x
s),
ou x ∈ R definit la translation temporelle et s > 0 est l’echelle de dilatation/contraction.Par definition, l’energie des fonctions analysantes est constante : ‖ψx,s‖ = ‖ψ‖ = 1.
Definition 1.4 La transformee en ondelettes continue d’une fonction f ∈ L2(R)au point x ∈ R et a l’echelle s > 0 est definie par :
Wf (x, s) = 〈f, ψx,s〉 =
∫ +∞
−∞f(t)
1√sψ(t− x
s)dt.
• Ondelettes reelles et complexes : dans ce cours, nous nous limiterons a l’etudedes ondelettes a valeurs reelles dans un souci de simplification. Les ondelettes reellessont bien adaptees pour la detection de changements brusques dans un signal. Lesondelettes complexes, appelees egalement ondelettes analytiques, sont utilisees pourseparer la phase et l’amplitude des composantes d’un signal. Elles sont en particulierbien adaptees pour la detection de frequences instantanees. Pour plus de precisionssur les ondelettes analytiques, nous renvoyons a [7]. Ainsi, dans tout ce qui suit,nous supposerons que ψ(t) ∈ R pour tout t ∈ R.
• Relation entre echelle et frequence : la transformee en ondelettes continue estune analyse temps-echelle. Elle permet d’avoir des informations sur le comportementd’une fonction au voisinage du point x et a l’echelle s. Une transformee en ondelettespeut s’ecrire sous la forme d’un filtrage par convolution :
Wf(x, s) = f ⋆ ψ∗s (x),

20
ou ψ∗s(t) = 1√
sψ(−t
s). Etant donne que la transformee de Fourier de ψ∗
s est egale
a√sψ(sω) et que ψ(0) =
∫ +∞−∞ ψ(t)dt = 0, la transformee en ondelettes continue
(abregee TOC par la suite) peut s’interpreter comme un filtre passe bande. Lalargeur du filtre est determinee par le facteur d’echelle s.
1.4.1 Inversion de la transformee en ondelettes continue
Le theoreme suivant montre que la TOC est une transformation inversible quiconserve l’energie du signal si l’ondelette verifie la condition d’admissibilite suivante :
Cψ =
∫ +∞
0
|ψ(ω)|2ω
< +∞.
Si ψ verifie la condition ci-dessus, alors l’ondelette est dite admissible. On peut re-marquer que la condition d’admissibilite impose necessairement que ψ(0) =
∫ +∞−∞ ψ(t)dt =
0 c’est a dire que l’ondelette soit de moyenne nulle.
Theoreme 1.5 Soit ψ ∈ L2(R) une ondelette admissible, alors pour tout f ∈ L2(R)on a (au sens de la convergence forte dans L2(R))
f(t) =1
Cψ
∫ +∞
0
∫ +∞
−∞Wf(x, s)
1√sψ(t− x
s)dxds
s2.
De plus, la TCO conserve l’energie du signal∫ +∞
−∞|f(t)|2dt =
1
Cψ
∫ +∞
0
∫ +∞
−∞|Wf (x, s)|2
dxds
s2.
1.4.2 Redondance et noyau reproduisant
Comme la transformee de Gabor, la TOC est une transformation tres redondante.La TOC associe a une fonction f ∈ L2(R) une fonction Wf (x, s) de deux variablesappartenant a L2(R × R
+, dxdss2
). Comme pour la TG, l’ensemble des fonctions deL2(R × R
+, dxdss2
) qui sont des TOC de fonctions de L2(R) est caracterise par unnoyau reproduisant qui mesure la correlation entre les fonctions analysantes.
Theoreme 1.6 Soit F ∈ L2(R × R+, dxds
s2). Alors il existe une fonction f ∈ L2(R)
telle que F (x, s) = Wf(x, s) si et seulement si :
F (x, s) =1
Cψ
∫ +∞
−∞
∫ +∞
−∞K(x, s, x′, s′)F (x′, s′)
dx′ds′
s2,
ou K est le noyau reproduisant
K(x, s, x′, s′) = 〈ψx,s, ψx′,s′〉,
Le noyau K(x, s, x′, s′) mesure la correlation temps-frequence entre les ondelettesψx,s et ψx′,s′.

21
1.4.3 Taille des boıtes d’Heisenberg
Supposons que l’ondelette ψ est centree en zero, ce qui implique que ψx,s estcentree au point t = x. La variance temporelle de ψx,s s’ecrit alors comme :
∫ +∞
−∞(t− x)2|ψx,s(t)|2dt = s2σ2
t ,
ou σ2t =
∫ +∞−∞ t2|ψ(t)|2dt. De meme, on peut definir la “frequence moyenne” de ψ
par :
ξ =1
2π
∫ +∞
−∞ω|ψ(ω)|2dω.
La transformee de Fourier de ψx,s s’ecrit comme : ψx,s =√sψ(sω)e−iωx. La frequence
moyenne de ψx,s est donc ξ/s et sa variance frequentielle est par consequent egale a
1
2π
∫ +∞
−∞(ω − ξ
s)2|ψx,s(ω)|2dω =
σ2ω
s2,
ou σ2ω = 1
2π
∫ +∞−∞ (ω − ξ)2|ψ(ω)|2dω. L’energie temps-frequence de l’ondelette ψx,s
correspond donc a une boıte d’Heisenberg centree au point (x, ξ/s) de taille sσtselon l’axe temporel et de taille σω/s selon l’axe frequentiel. L’aire de cette boıte σtσωreste constante a toutes les echelles, mais la resolution temps-frequence de l’ondeletteψx,s depend du niveau de resolution s (voir Figure 1.7). Contrairement a la TG quicorrespond a un pavage regulier du plan temps-frequence, la TCO permet d’ajusterle niveau d’analyse. Il s’agit d’une procedure de “zoom” qui permet d’inspecter lecomportement local d’un signal en reduisant progressivement le parametre d’echelles : de petites valeurs de s diminue l’etalement temporel de ψx,s mais augmente le
support frequentiel de ψx,s dont le centre est decale vers de plus hautes frequences.
Inserer Figure
Fig. 1.7 – Boıtes d’Heisenberg pour la TOC dans le plan temps-frequence pour deuxfonctions analysantes ψx,s et ψx′,s′ avec s < s′.
1.4.4 Quelques exemples de transformee en ondelettes conti-
nue
La TG et la TOC se comportent essentiellement de la meme facon pour l’analysetemps frequence des signaux. La TOC peut egalement etre utilisee pour caracteriserles frequences instantanees des chirps, et cette technique a ete largement employeeen traitement de la parole. L’interet de la TOC est de permettre une analyse localedes signaux et en particulier de mettre en evidence des comportements irreguliers(ou singuliers). Elle est en particulier bien adaptee pour caracteriser le degre deregularite d’une fonction. Les deux exemples suivants illustrent les bonnes proprietes

22
des ondelettes pour la detection de singularites dans des signaux (dans les deux cas,l’ondelette choisie est la derivee premiere d’une Gaussienne).
• Deux sinusoıdes successives + masses de Dirac. La Figure 1.8 donne les valeursde la TCO du signal constitue de deux sinusoıdes successives de frequences 5 Hz et15 Hz, et de deux masses de Dirac aux points t = 0.3 et t = 0.7. Ce signal a dejaete etudie pour illustrer les limitations de la TG. La TCO permet de rendre comptede toutes les composantes du signal. Les grandes echelles permettent d’analyser lapartie sinusoıdale du signal, alors que l’analyse aux fines echelles met en evidence lapresence des deux masses de Dirac.
• Le signal de la Figure 1.9 presente 3 singularites aux points t = 0.3, t = 0.5et t = 0.8. On peut constater sur la Figure 1.9 que les coefficients d’ondelettes degrande amplitude se concentrent au voisinage des trois singularites quand l’echelles diminue.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 11
2
3
4
5
6
7
8
9
10
(b)
Fig. 1.8 – (a) Signal : sinus a 5 Hz suivi d’un sinus a 15 Hz + deux masses de Dirac,(b) module de sa transformee en ondelettes continue : l’axe des abscisses representela position x, et l’axe des ordonnees l’echelle s en coordonnee logarithmique i.e.− log2(s)

23
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 15
10
15
20
25
30
35
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 15
5.5
6
6.5
7
7.5
8
8.5
9
9.5
10
(b)
Fig. 1.9 – (a) Signal presentant 3 singularites (b) module de sa transformee en on-delettes continue : l’axe des abscisses represente la position x, et l’axe des ordonneesl’echelle s en coordonnee logarithmique i.e. − log2(s)

24
Chapitre 2
Transformee en ondelette continue
et regularite d’un signal
La transformee en ondelette continue permet d’analyser le comportement locald’un signal en reduisant progressivement le parametre d’echelle s. Cette procedure dezoom est un outil puissant pour detecter et caracteriser les irregularites d’un signal.Dans ce chapitre, nous montrons que la decroissance des coefficients d’ondelettesle long des echelles est caracteristique de la regularite Lipschitzienne d’un signal.Les singularites d’un signal unidimensionnel (discontinuite, dirac, cusp...) ainsi queles contours dans une image (zones ou l’intensite des pixels change brutalement)peuvent etre detectes en suivant la propagation aux fines echelles des coefficients degrande amplitude de la transformee en ondelette continue. Dans tout ce chapıtre,nous supposerons que les signaux analyses sont des fonctions reelles de L2(R) ouL2(R2).
2.1 Analyse de la regularite d’un signal unidimen-
sionnel
2.1.1 Regularite Lipschitzienne
Definition 2.1 Une fonction f ∈ L2(R) est ponctuellement Lipschitzienne d’ordreα ≥ 0 au point x0, s’il existe une constante Cx0
et un polynome P de degre m = ⌊α⌋tels que pour tout t ∈ R
|f(t) − P (t)| ≤ Cx0|t− x0|α. (2.1)
De plus,– la regularite Lipschitizienne de f au point x0 est le supremum des α pour
lesquels f est ponctuellement Lipschitzienne d’ordre α en x0.– une fonction est dite uniformement Lipschitzienne d’ordre α, si elle satisfait
l’equation (2.1) pour tout x0 ∈ [a, b] avec une constante C qui est independantede x0.
25

26
Les exposants de Lipschitz permettent de caracteriser la regularite d’une fonc-tion. Si 0 ≤ α < 1, alors P (t) = f(x0) et l’equation (2.1) devient :
|f(t) − f(x0)| ≤ Cx0|t− x0|α.
Si la regularite Lipschitzienne de f au point x0 est 0 ≤ α < 1, alors f n’estpas derivable au point x0. Une fonction discontinue au point x0 est de regulariteLipschitzienne 0 en x0. De meme si f est m = ⌊α⌋ fois continument derivable auvoisinage de x0, alors P correspond au developpement de Taylor de f d’ordre m aupoint x0 i.e.
P (t) =m−1∑
k=0
fk(x0)
k!(t− x0)
k.
On peut egalement montrer que si f est uniformement Lipschitzienne d’ordre α > msur un intervalle [a, b], alors f est necessairement m fois continument derivable sur]a, b[.
2.1.2 Ondelette et nombre de moments nuls
L’exposant de Lipschitz permet de decomposer une fonction f au voisinage d’unpoint x0 comme la somme d’un polynome plus un terme d’erreur dont on peutcontroler l’amplitude
f(t) = P (t) + ǫ(t),
avec |ǫ(t)| ≤ |t− x0|α.Une ondelette est une fonction oscillante de moyenne nulle. Le degre d’oscillation
de l’ondelette permet d’ignorer les parties regulieres d’un signal lorsque l’on calculesa TOC. Cette propriete se traduit par le nombre de moments nuls de l’ondelette.
Definition 2.2 Une ondelette ψ ∈ L2(R) a r ∈ N∗ moments nuls si pour tout entier
0 ≤ k < r∫ +∞
−∞tkψ(t)dt = 0.
Ainsi, une transformee en ondelette permet d’ignorer les polynomes de degrestrictement inferieur a r. En effet, si P est un polynome de degre m < r alorspour tout x ∈ R et pour tout s > 0, WP (x, s) = 0. Ainsi, si une fonction estponctuellement Lipschitzienne d’ordre α au point x0 et si l’ondelette ψ a r ≥ ⌊α⌋+1moments nuls, alors au voisinage de x0
Wf(x, s) = Wǫ(x, s).
La TOC est donc caracteristique de la regularite Lipschtizienne d’une fonction carelle permet de supprimer sa composante polynomiale.

27
Pour pouvoir mesurer la regularite Lipschitzienne d’une fonction, il est necessaired’utiliser des ondelettes qui soient suffisamment regulieres et qui ont de bonnes pro-prietes de decroissance en l’infini. Nous dirons qu’une fonction f est a decroissancerapide si pour tout m ∈ N, il existe une constante Cm telle que pour tout t ∈ R
|f(t)| ≤ Cm1 + |t|m .
Il s’agit de fonctions qui decroissent en l’infini plus rapidement que n’importe quelpolynome. Dans ce qui suit, nous utiliserons des ondelettes a decroissance rapideavec exactement r moments nuls. Dans ce cas, on montre que ψ peut s’ecrire commela derivee d’ordre r d’une fonction θ, appelee noyau i.e.
ψ(t) = (−1)rdrθ(t)
dtr.
telle que θ est a decroissance rapide et∫ +∞−∞ θ(t)dt 6= 0. Pour ce choix particulier
de l’ondelette ψ et a une echelle s donnee, la TOC peut s’interpreter comme uneconvolution du signal f par le noyau θ∗s(t) = 1√
sθ(−t
s) suivi d’un operateur differentiel
d’ordre r. En effet, si on pose ψ∗s (t) = 1√
sψ(−t
s) alors on a
Wf(x, s) = f ⋆ ψ∗s (x).
Etant donne, que ψ(t) = (−1)r drθ(t)dtr
, on a alors que ψ∗s(t) = sr d
rθ∗s (t)dtr
et donc enpermutant les operateurs de convolution et de derivation
Wf(x, s) = srf ⋆drθ∗(t)
dtr(x) = sr
dr
dtr(f ⋆ θ∗s)(x).
Afin d’avoir une ondelette suffisamment reguliere, nous supposerons egalementque ψ est r fois continument derivable telle que ses derivees ψ(k) soient des fonctionsa decroissance rapide pour 1 ≤ k ≤ r. Un exemple classique pour la fonction θ estle noyau Gaussien, et dans ce cas on dira que ψ est une ondelette Gaussienne.
2.1.3 Amplitude des coefficients d’ondelettes et regularite
d’un signal
Les theoremes suivants montrent que l’evolution de l’amplitude des coefficientsd’ondelettes quand s → 0 est caracteristique de la regularite Lipschitzienne d’unsignal.
Theoreme 2.1 Soit une fonction f ∈ L2(R) uniformement Lipschitzienne d’ordreα ≤ r sur un intervalle [a, b], alors il existe une constante A telle que pour toutx ∈ [a, b] et pour tout s > 0
|Wf(x, s)| ≤ Asα+1/2 (2.2)
Reciproquement, si f est bornee et si Wf (x, s) satisfait (2.2) pour un α < r qui n’estpas un entier, alors f est uniformement Lipschitzienne d’ordre α sur [a + ǫ, b − ǫ]pour tout ǫ > 0.

28
Theoreme 2.2 Soit une fonction f ∈ L2(R) ponctuellement Lipschitzienne d’ordreα ≤ r au point x0, alors il existe une constante A telle que pour tout x ∈ R et pourtout s > 0
|Wf(x, s)| ≤ Asα+1/2
(
1 +
∣
∣
∣
∣
x− x0
s
∣
∣
∣
∣
α)
. (2.3)
Reciproquement, si α < r n’est pas un entier et s’il existe une constante A et α′ < αtels que pour tout x ∈ R et pour tout s > 0
|Wf(x, s)| ≤ Asα+1/2
(
1 +
∣
∣
∣
∣
x− x0
s
∣
∣
∣
∣
α′)
(2.4)
alors f est Lipschtizienne d’ordre α en x0.
Lorsque que l’ondelette ψ est a support compact egal a [−C,C], les conditions(2.3) et (2.4) sont plus faciles a interpreter. Le cone d’influence de l’ondelette ψ aupoint x0 est defini comme l’ensemble des points (x, s) dans le plan temps-echelle telsque |x−x0| ≤ Cs (voir Figure 2.1). Ils correspondent aux points tels que le supportdes fonctions analysantes ψx,s(t) = 1√
sψ( t−x
s) contient le point x0. Si (x, s) est dans
le cone d’influence de f au point x0 alors les valeurs de Wf (x, s) sont influencees parle comportement de f au voisinage de x0. De plus, si (x, s) est tel que |x−x0| ≤ Csalors les conditions (2.3) et (2.4) peuvent s’ecrire
Wf(x, s)| ≤ A′sα+1/2.
Le comportement de la TCO dans le cone d’influence de x0 est donc caracteristiquedu comportement de f au voisinage de ce point. Dans la Figure 2.2, on peut remar-quer que les coefficients d’ondelettes de grande amplitude sont inclus dans le coned’influence de chacune des 3 singularites.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
s
|x-x0| > Cs |x-x0| > Cs
|x-x0| < Cs
Fig. 2.1 – Zone grise : cone d’influence de l’ondelette ψ au point x0 = 0.5.
2.1.4 Maxima d’ondelettes
Le theoreme 2.2 montre que la regularite d’une fonction peut etre mesuree apartir de la decroissance de ses coefficients d’ondelettes quand s → 0. Toutefois, iln’est pas necessaire de considerer l’ensemble des coefficients Wf(x, s). La regularited’une fonction peut en effet controlee par la decroissance le long des echelles desmaxima en module de la TOC.

29
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−8
−6
−4
−2
0
2
4
6
8
10
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 15
6
7
8
9
10
11
(b)
Fig. 2.2 – (a) Signal presentant 3 singularites (b) Module de sa TOC pour la deriveeseconde d’une Gaussienne : l’axe des abscisses represente la position x, et l’axe desordonnees − log2(s)
Definition 2.3 Le terme maxima d’ondelette est utilise pour decrire tout point(m0, s0) dans le plan temps-echelle tels que x 7→ |Wf(x, s0)| est locallement maximumau point x = m0. Ce maximum local doit etre strict a droite ou a gauche de m0. Onappelle ligne de maxima d’ondelette toute courbe continue m(s) dans le plantemps-echelle telle que les points (m(s), s) soient des maxima d’ondelette.
Le theoreme suivant prouve que la propagation des maxima d’ondelettes dans leplan temps-echelle est reliee a la regularite Lipschitzienne d’une fonction.
Theoreme 2.3 Supposons que l’ondelette ψ est a support compact. S’il existe uneechelle s0 > 0 telle que |Wf(x, s)| n’a pas de maximum local pour x ∈ [a, b] et pourtout s < s0, alors f est uniformement Lipschitizienne d’ordre r sur ]a, b[.
Ce theoreme montre que si la regularite de f au point x0 est d’ordre α < r, alorsil existe necessairement une sequence de maxima d’ondelette (mp, sp) telle que
limp→+∞
mp = x0 et limp→+∞
sp = 0.
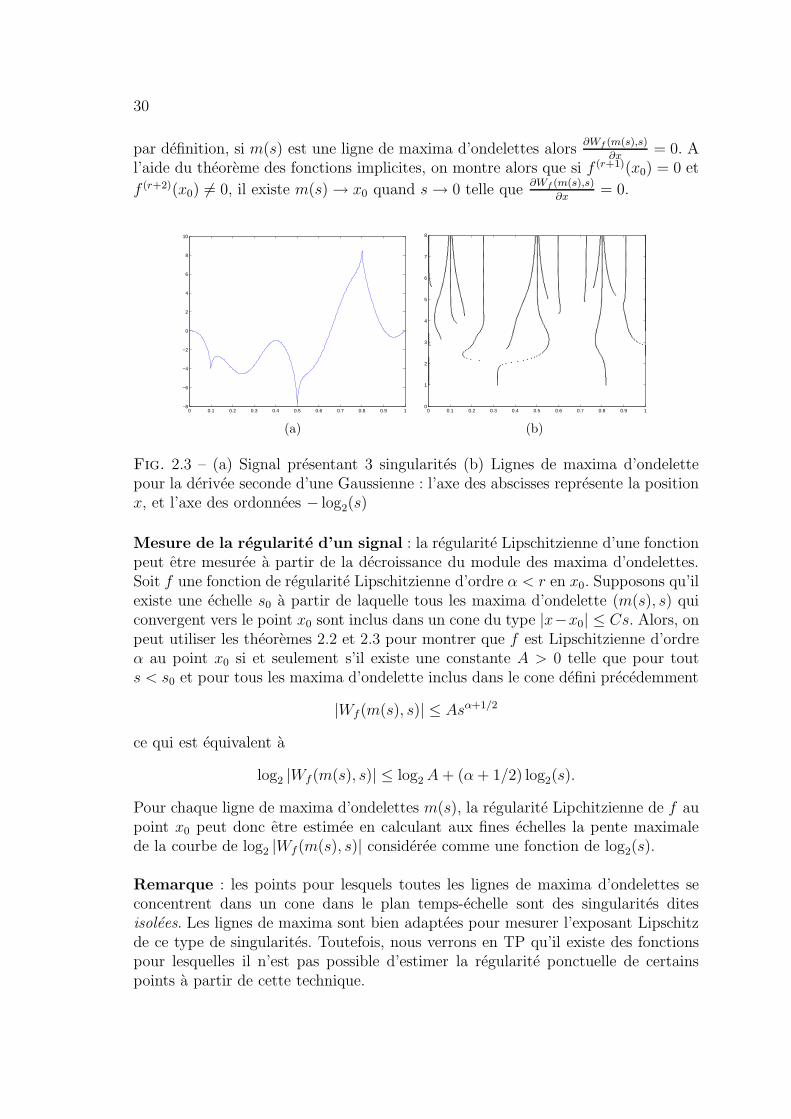
Cette propriete est illustree dans la Figure 2.3 qui represente les lignes de maximad’ondelettes d’une fonction contenant 3 singularites aux points x = 0.1, x = 0.5 etx = 0.8, ou la TOC a ete calculee pour la derivee seconde d’une Gaussienne i.e. pourr = 2. On peut constater que plusieurs lignes de maxima d’ondelettes convergentvers les singularites de la fonction. Il existe egalement d’autres lignes de maxima quiconvergent vers des parties regulieres du signal. Ces lignes sont dues a la presence dezeros dans la derivee troisieme du signal. En effet, si f est Cr+2 dans un intervalle[a, b] et si f (r+1) a zero au point x0 telle que f (r+2)(x0) 6= 0, on peut montrer qu’ilexiste une ligne de maxima d’ondelettes qui converge vers x0 quand s tend vers zero.Pour cela, on peut tout d’abord remarquer que si f est r fois continument derivale
au voisinage de x0, alors lims→0Wf (x0,s)
sr+1/2 = Kf (r)(x0) ou K =∫ +∞−∞ θ(t)dt, et que
30
par definition, si m(s) est une ligne de maxima d’ondelettes alors∂Wf (m(s),s)
∂x= 0. A
l’aide du theoreme des fonctions implicites, on montre alors que si f (r+1)(x0) = 0 et
f (r+2)(x0) 6= 0, il existe m(s) → x0 quand s→ 0 telle que∂Wf (m(s),s)
∂x= 0.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−8
−6
−4
−2
0
2
4
6
8
10
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7
8
(b)
Fig. 2.3 – (a) Signal presentant 3 singularites (b) Lignes de maxima d’ondelettepour la derivee seconde d’une Gaussienne : l’axe des abscisses represente la positionx, et l’axe des ordonnees − log2(s)
Mesure de la regularite d’un signal : la regularite Lipschitzienne d’une fonctionpeut etre mesuree a partir de la decroissance du module des maxima d’ondelettes.Soit f une fonction de regularite Lipschitzienne d’ordre α < r en x0. Supposons qu’ilexiste une echelle s0 a partir de laquelle tous les maxima d’ondelette (m(s), s) quiconvergent vers le point x0 sont inclus dans un cone du type |x−x0| ≤ Cs. Alors, onpeut utiliser les theoremes 2.2 et 2.3 pour montrer que f est Lipschitzienne d’ordreα au point x0 si et seulement s’il existe une constante A > 0 telle que pour touts < s0 et pour tous les maxima d’ondelette inclus dans le cone defini precedemment
|Wf(m(s), s)| ≤ Asα+1/2
ce qui est equivalent a
log2 |Wf(m(s), s)| ≤ log2A + (α+ 1/2) log2(s).
Pour chaque ligne de maxima d’ondelettes m(s), la regularite Lipchitzienne de f aupoint x0 peut donc etre estimee en calculant aux fines echelles la pente maximalede la courbe de log2 |Wf(m(s), s)| consideree comme une fonction de log2(s).
Remarque : les points pour lesquels toutes les lignes de maxima d’ondelettes seconcentrent dans un cone dans le plan temps-echelle sont des singularites ditesisolees. Les lignes de maxima sont bien adaptees pour mesurer l’exposant Lipschitzde ce type de singularites. Toutefois, nous verrons en TP qu’il existe des fonctionspour lesquelles il n’est pas possible d’estimer la regularite ponctuelle de certainspoints a partir de cette technique.

31
2.2 Analyse de la regularite d’une image
2.2.1 Extension de la transformee en ondelette pour des
images
La TOC peut etre etendue au cas bidimensionnel de plusieurs facons. L’extensionnaturelle par rapport a ce que nous avons vu en 1D consiste a prendre une ondelettereelle et isotrope i.e. une fonction ψ ∈ L2(R2) qui s’ecrit pour x = (x1, x2) sous laforme
ψ(x) = h(‖x‖),ou ‖x‖ =
√
x21 + x2
2 et h est une fonction unidimensionnelle a valeurs reelles. Dansce cas, l’ondelette est dite isotrope car ses proprietes sont les memes dans toutes lesdirections du plan 2D. La TOC d’une fonction f ∈ L2(R) a l’echelle s > 0 est alorsdefinie par
Wf(x, s) =
∫
R2
f(u)1
sψ
(
u− x
s
)
du.
Si l’ondelette ψ verifie une condition d’admissibilite similaire a celle du cas 1D,alors on peut montrer que cette transformation est inversible et qu’elle conversel’energie du signal. Comme ψ est de moyenne nulle, Wf(x, s) permet de mesurer lesvariations de l’image f dans un voisinage du point x dont la taille est proportionnellea s.
Un exemple classique pour l’ondelette ψ est le Laplacien d’une Gaussienne i.e.pour u = (u1, u2) ∈ R
2
θ(u) =1
2πe−
u21+u2
22 et ψ =
∂2θ
∂u21
+∂2θ
∂u22
.
Ce filtre est couramment utilise en vision par ordinateur. Un exemple d’utilisation duLaplacien de la Gaussienne est donne dans la Figure 2.4. A une echelle s donnee, onpeut constaster que les contours significatifs d’une image correspondent aux pointsou x 7→Wf (x, s) s’annule. Il s’agit des zero-crossing du Laplacien.
2.2.2 Transformee en ondelette dyadique bidimensionnelle
Pour pouvoir etendre la notion de maxima d’ondelettes pour la detection decontours dans des images, nous allons considerer une transformee en ondelette di-rectionnelle selon les axes verticaux et horizontaux d’une image. Une version bidi-mensionnelle de la TOC peut etre implementee a l’aide d’un noyau de convolutionθ ∈ L2(R2) qui doit etre une fonction suffisamment lisse. Un exemple classique pourθ est le noyau Gaussien.
La TOC 2D est ensuite calculee a partir de deux ondelettes qui sont les deriveespartielles de θ dans les directions verticales et horizontales
ψ1 = − ∂θ
∂u1et ψ2 = − ∂θ
∂u2

32
(a) (b)
(c) (d)
Fig. 2.4 – (a) Image d’un cameraman. TOC en 2D pour le Laplacien d’une Gaus-sienne : (b) s = 1, (c) s = 2, (d) s = 3. Le noir represente les pixels d’intensitemaximale et le blanc ceux d’intensite minimale.
Il s’agit donc d’une tranformee en ondelette avec r = 1 moment nul. Afin de simplifierles calculs numeriques il est possible de d’echantillonner le parametre de resolutions selon une echelle dyadique i.e. de prendre s = 2j pour j ∈ Z. Dans les deuxdirections indexees par k = 1, 2 et pour s = 2j , on definit alors la transformee enondelette dyadique 2D (abregee TOD 2D) d’une fonction f ∈ L2(R) comme
W kf (x, 2j) =
∫
R2
f(u)1
2jψk(
u− x
2j
)
du.
La TOD 2D peut egalement s’ecrire comme la convolution de f par le noyau θ auniveau de resolution j ∈ Z suivie d’une derivee partielle dans les directions verticaleset horizontales i.e. pour k = 1, 2
W kf (x, 2j) = 2j
∂
∂xk(f ⋆ θ∗2j )(x),
ou θ∗2j (u) = 12j θ(
−u2j ). Les composantes horizontales et verticales de la TOD 2D sont

33
donc proportionnelles au gradient de l’image f lissee par le noyau θ a l’echelle 2j :
(
W 1f (x, 2j)
W 2f (x, 2j)
)
= 2j( ∂
∂x1(f ⋆ θ∗2j )(x)
∂∂x2
(f ⋆ θ∗2j )(x)
)
= 2j∇(f ⋆ θ∗2j )(x)
2.2.3 Regularite Lipschitzienne
La decroissance des coefficients de la TOD 2D est reliee a la regularite d’uneimage. Pour 0 ≤ α < 1, une fonction f ∈ L2(R2) est dite ponctuellement Lip-schitzienne d’ordre α au point x0 s’il existe une constante C telle que pour toutu ∈ R
2
|f(u) − f(x0)| ≤ C‖u− x0‖α.Une fonction est dite uniformement Lipchitizienne d’ordre α sur un domaine Ω deR
2, si f est ponctuellement Lipschitzienne d’ordre α pour tout x ∈ Ω avec uneconstante C qui est independante de x0. Comme dans le cas 1D, on peut montrerque la decroissance des coefficients d’ondelettes est caracteristique de la regulariteLipschitzienne d’une image. En particulier si on definit le module de la TOD 2Dcomme
Mf(x, 2j) =
√
|W 1f (x, 2
j)|2 + |W 2f (x, 2j)|2,
alors on peut montrer que f est uniformement Lipchitizienne d’ordre α sur Ω si etseulement s’il existe une constante A telle que pour tout x ∈ Ω et pour tout j ∈ Z
Mf (x, 2j) ≤ A2j(α+1/2).
La Figure 2.5 donne un exemple de TOD 2D. On peut constater que les grandesvaleurs de Mf(x, 2
j) se concentrent au niveau des contours de l’image.
2.2.4 Detecteur de Canny
Les contours dans une image peuvent etre definis comme les points ou l’intensitede l’image varie brutalement. Le detecteur de Canny est un algorithme adapte a ladetection de ce type de contours. Le gradient d’une image permet de quantifier lesvariations d’intensite de ses pixels. La derivee partielle d’une fonction f ∈ L2(R)dans une direction donnee par un vecteur unite −→n = (cosα, sinα) dans le plan 2Dest egale au produit scalaire du gradient de f et de −→n
∂f
∂−→n = ∇f . −→n =∂f
∂x1
cosα +∂f
∂x2
sinα.
La derivee partielle d’une fonction permet de mesurer le taux de variation del’intensite de f dans la direction −→n . Or, le module de ∂f
∂−→n est maximum si ∇f et −→nsont colineaires. Ceci montre donc que le vecteur ∇f(x) est parallele a la direction dechangement maximum de l’intensite de f au point x. Nous dirons alors qu’un pointy ∈ R
2 fait partie d’un contour dans une image, si x 7→ ‖∇f(x)‖ est localementmaximum au point x = y pour x = y + λ∇f(y) et |λ| suffisamment petit. Ceci

34
signifie que la derivee partielle de f au voisinage de y dans une direction donneepar le gradient ∇f(y) est locallement maximum en y. Cette definition des contourscorrespond donc aux points d’inflexion dans une image.
2.2.5 Maxima d’ondelette pour des images
Rappelons que le module de la TOD 2D a l’echelle s = 2j est defini par
Mf(x, 2j) =
√
|W 1f (x, 2
j)|2 + |W 2f (x, 2j)|2.
Nous avons montre precedemment que cette quantite est proportionnelle au moduledu gradient de l’image f lissee par le noyau θ a l’echelle 2j i.e.
Mf(x, 2j) = 2j‖∇(f ⋆ θ∗2j )(x)‖.
Definissons Af(x, 2j) comme l’angle entre la composante horizontale W 1
f (x, 2j) et lacomposante verticale W 2
f (x, 2j) de la TOD 2D par
Af(x, 2j) =
α(x) si W 1f (x, 2j) ≥ 0,
π − α(x) si W 1f (x, 2j) < 0,
ou
α(x) = tan−1
(
W 2f (x, 2j)
W 1f (x, 2j)
)
.
Le vecteur unitaire −→n j(x) = (cosAf (x, 2j), sinAf (x, 2
j)) est donc colineaire augradient ∇(f ⋆ θ∗2j )(x). Un point d’un contour a l’echelle 2j est alors defini commeun point y tel que x 7→Mf (x, 2
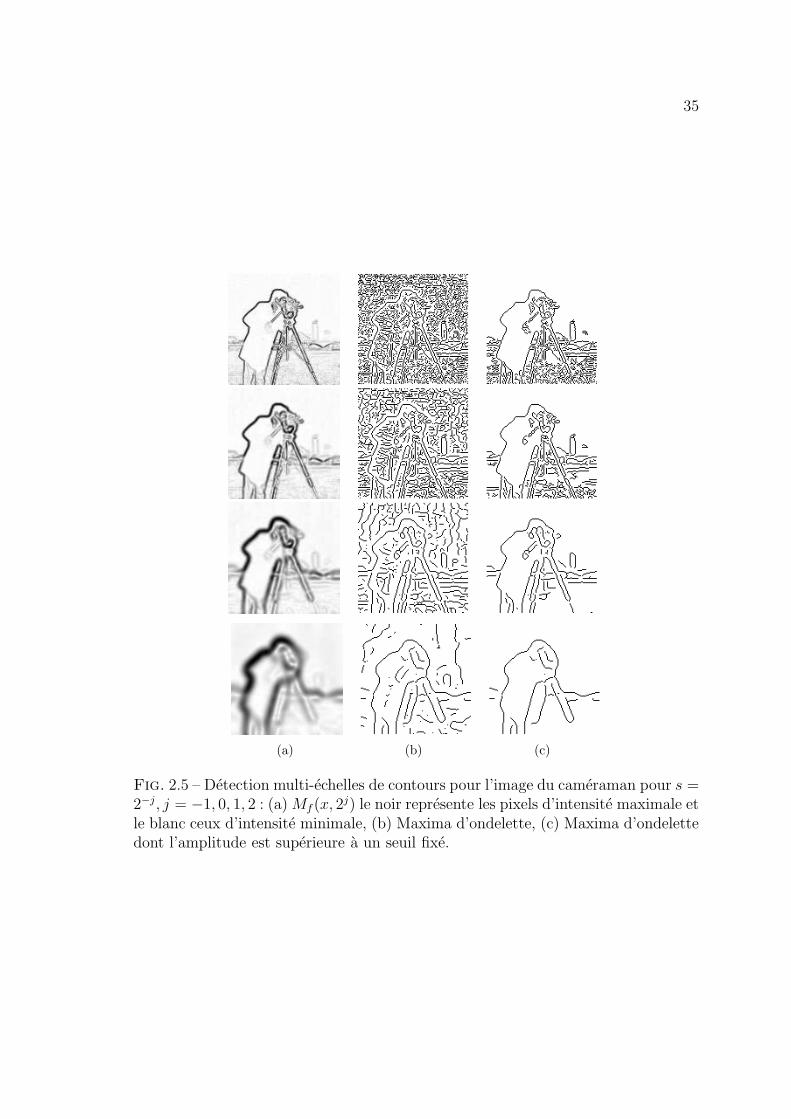
j) est localement maximum au point x = y pour x =y + λ−→n j(y) et λ suffisamment petit. Ces points sont egalement appeles les maximad’ondelettes de l’image f a l’echelle 2j . Ainsi, la detection des contours dans uneimage via les maxima d’ondelettes est equivalente a un detecteur de Canny multi-echelles. La Figure 2.5 donne un exemple de detection de contours dans une image apartir des maxima d’ondelettes pour un noyau θ Gaussien. On peut constater qu’ilest possible de detecter uniquement les contours significatifs en garder les maximad’ondelettes tels que le module de la TOD 2D en ces points est suffisamment grandpar rapport a un seuil bien choisi.
35
(a) (b) (c)
Fig. 2.5 – Detection multi-echelles de contours pour l’image du cameraman pour s =2−j, j = −1, 0, 1, 2 : (a)Mf (x, 2
j) le noir represente les pixels d’intensite maximale etle blanc ceux d’intensite minimale, (b) Maxima d’ondelette, (c) Maxima d’ondelettedont l’amplitude est superieure a un seuil fixe.

36
Chapitre 3
Bases d’ondelettes
Dans les chapitres precedents, nous avons introduit la TOC qui permet unerepresentation temps-frequence d’un signal. Nous avons montre que cette transfor-mation est inversible et qu’elle conserve l’energie du signal. Toutefois, il s’agit d’unerepresentation tres redondante qui necessite de connaıtre l’ensemble des coefficientsd’ondelettes pour pouvoir reconstruire un signal. Dans ce chapitre, nous allons nousinteresser a des representations discretes d’une fonction qui permettent de resumerl’information contenue dans un signal avec peu de coefficients. En particulier, nousallons montrer qu’il est possible de construire des ondelettes ψ telle que la famille
ψj,k(t) =1√2jψ
(
t− 2jk
2j
)
(j,k)∈Z2
soit une base orthonormee de L2(R). Pour une fonction f ∈ L2(R), les produitsscalaires 〈f, ψj,k〉 sont appelles les coefficients d’ondelettes dans la base ψj,k(j,k)∈Z2,
et tout signal pourra donc s’ecrire sous la forme f =∑+∞
j=−∞∑+∞
k=−∞〈f, ψj,k〉ψj,k. Lescoefficients d’ondelettes au niveau de resolution j caracterisent les variations d’unsignal a l’echelle 2j. Nous allons en particulier montrer que la construction de tellebases permet d’etablir un lien entre l’analyse multi-echelle de signaux (largementutilisee en vision par ordinateur), la theorie du filtrage discret en traitement dusignal et les mathematiques appliquees.
3.1 Bases orthonormees d’ondelettes
3.1.1 Quelques rappels sur les bases hilbertiennes
Definition 3.1 Un espace de Hilbert est un R espace vectoriel muni d’un produitscalaire note 〈x, y〉 (pour x, y ∈ H) qui est complet pour la norme ‖x‖ =
√
〈x, x〉(norme associee au produit scalaire).
Proposition 3.1 L’ensemble L2(R), qui est l’espace des fonctions de carre integrable,est un espace de Hilbert pour le produit scalaire 〈f, g〉 =
∫
Rf(t)g(t)dt de norme as-
sociee ‖f‖2 =∫
R|f(t)|2dt pour f, g ∈ L2(R).
37

38
SoitH un espace de Hilbert. Nous rappelons les definitions et proprietes suivantes– deux vecteurs x et y de H sont orthogonaux si 〈x, y〉 = 0– soit A une partie non vide de H . On note A⊤ l’orthogonal de A dans H defini
parA⊤ = x ∈ H, ∀y ∈ A, 〈x, y〉 = 0,
– A⊤ est un sous-espace vectoriel ferme de H– si A est un sous-espace vectoriel de H , alors A = (A⊤)⊤.
Proposition 3.2 Soit H un espace de Hilbert et F un sous-espace vectoriel fermede H. Pour tout x ∈ H, on note PFx la projection orthogonale de x sur F qui estcaracterisee comme l’unique point de F tel que ‖x−PFx‖ = infy∈F ‖x−y‖. De plus,
– pour tout y ∈ F , 〈x− PFx, y〉 = 0– PF : H → F est une application lineaire et continue,– H = F
⊕
F⊤.
Definition 3.2 Soit H un espace de Hilbert et soit (Hn)n≥0 une suite de sous-espaces vectoriels fermes de H. On dit que H est une somme hilbertienne des Hn
si– ∀m 6= n, ∀(x, y) ∈ Hm ×Hn, 〈x, y〉 = 0– l’espace vectoriel engendre par les Hn est dense dans H.
On note alors, H =⊕
n≥0Hn.
Proposition 3.3 Soit H =⊕
n≥0Hn. Si x ∈ H, on pose pour tout n ∈ N, xn =PHnx. On a alors
– x =∑
n≥0 xn, i.e. limN→∞∑N
n=0 xn = x– ‖x‖2 =
∑
n≥0 ‖xn‖2 (egalite de Bessel-Parseval)Reciproquement, soit (xn) une suite dans H telle que pour tout n, xn ∈ Hn et∑
n≥0 ‖xn‖2 < +∞, alors∑N
n=0 xn converge vers un point x ∈ H tel que pour toutn ∈ N, xn = PHnx.
Definition 3.3 On appelle base hilbertienne (ou base orthonormee) une suite (en)n≥0
d’elements de H telle que– 〈en, em〉 = δn,m– l’espace vectoriel engendre par les (en)n≥0 est dense dans H.
D’apres ce qui precede, si (en)n≥0 est une base orthonormee d’un espace deHilbert H , alors tout x ∈ H s’ecrit de maniere unique x =
∑
n≥0〈x, en〉en avec‖x‖2 =
∑
n≥0 |〈x, en〉|2.
3.1.2 Analyse multiresolution de L2(R)
La decomposition d’un signal a differents niveaux de resolution est largement uti-lisee en vision par ordinateur. Une analyse multiresolution correspond au calcul d’unensemble de coefficients qui constituent une representation plus ou moins precise

39
d’un signal. Par exemple, l’approximation d’une fonction f au niveau de resolutionj peut etre definie par la donnee d’une suite de coefficients qui correspondent a unemoyenne locale de f sur des intervalles disjoints de longueur 2j. Lorsque que l’onpasse de la resolution j a la resolution j + 1 le niveau d’approximation est plusgrossier, alors que lorsque l’on passe du niveau j au niveau j − 1 on affine la qua-lite de l’approximation (voir Figure 3.1). De facon plus formelle, l’approximationd’une fonction f a la resolution j correspond a la projection orthogonale de f surun sous-espace Vj ⊂ L2(R) ce qui conduit a la definition suivante :
Definition 3.4 Une analyse multiresolution (AMR) de L2(R) est une successionde sous-espaces fermes (Vj)j∈Z qui satisfait les 6 proprietes suivantes
∀j ∈ Z, Vj+1 ⊂ Vj ⊂ . . . ⊂ L2(R), (3.1)
∀j ∈ Z, f(t) ∈ Vj ⇐⇒ f(t
2) ∈ Vj+1, (3.2)
⋂
j∈Z
Vj = 0, (3.3)
⋃
j∈Z
Vj = L2(R), (3.4)
∀(j, k) ∈ Z2, f(t) ∈ Vj =⇒ f(t− 2jk) ∈ Vj (3.5)
il existe φ ∈ V0 telle que φ(t− k), k ∈ Z soit une base orthonormee de V0.
Au niveau de resolution j, l’approximation d’une fonction f ∈ L2(R) corresponda la projection orthogonale PVj
f de f sur Vj. Intuitivement, on peut interpreter les6 proprietes d’une AMR de la facon suivante
– l’inclusion (3.1) des espaces Vj signifie qu’une approximation d’un signal auniveau de resolution j est plus precise que l’approximation au niveau j + 1,
– la multiresolution est definie par la propriete (3.2) : l’espace Vj+1 definit uneapproximation deux fois plus grossiere que la representation dans l’espace Vj,
– lorsque que le niveau de resolution devient de plus en plus grossier i.e. j → +∞,la propriete (3.3) implique que l’approximation de f se degrade et que l’on perdtous les details sur f i.e limj→+∞ ‖PVj
f‖ = 0,– lorsque l’echelle d’analyse 2j tend vers zero (i.e. j → −∞), la propriete (3.4)
impose que l’approximation du signal converge vers le signal original i.e.limj→−∞ ‖f − PVj
f‖ = 0,– la propriete (3.5) signifie que l’espace Vj est invariant par des translation pro-
portionnelles a l’echelle d’analyse 2j,– φ est la fonction d’echelle de l’AMR, egalement appelee fonction generatrice
de l’espace V0.Des proprietes d’une AMR, on deduit immediatement la proposition suivante
Proposition 3.4 Posons φj,k(t) = 1√2jφ(
t−2jk2j
)
. Alors pour tout j ∈ Z, φj,k, k ∈Z est une base orthonormee de Vj.
40
Dans ce qui suit, nous allons montrer que l’on peut entierement specifier uneAMR a partir de la donnee d’une fonction d’echelle φ. Les deux fonctions suivantessont des exemples classiques d’une AMR de L2(R)
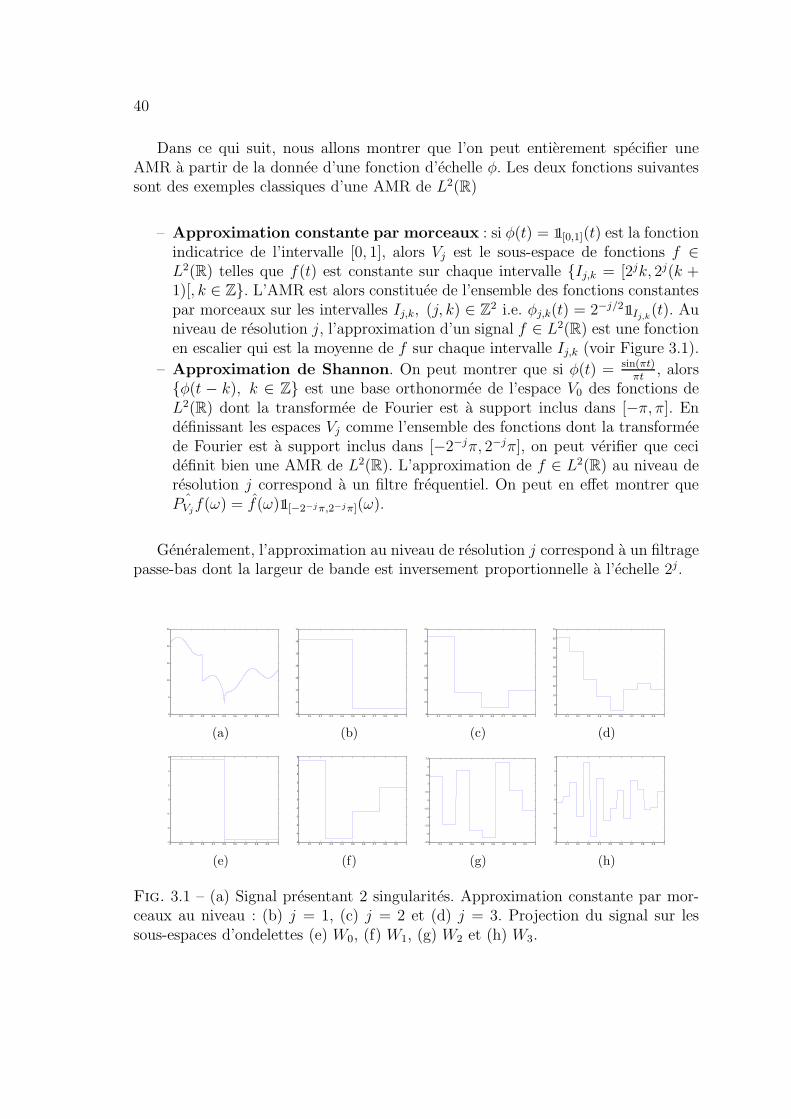
– Approximation constante par morceaux : si φ(t) = 11[0,1](t) est la fonctionindicatrice de l’intervalle [0, 1], alors Vj est le sous-espace de fonctions f ∈L2(R) telles que f(t) est constante sur chaque intervalle Ij,k = [2jk, 2j(k +1)[, k ∈ Z. L’AMR est alors constituee de l’ensemble des fonctions constantespar morceaux sur les intervalles Ij,k, (j, k) ∈ Z
2 i.e. φj,k(t) = 2−j/211Ij,k(t). Au
niveau de resolution j, l’approximation d’un signal f ∈ L2(R) est une fonctionen escalier qui est la moyenne de f sur chaque intervalle Ij,k (voir Figure 3.1).
– Approximation de Shannon. On peut montrer que si φ(t) = sin(πt)πt
, alorsφ(t − k), k ∈ Z est une base orthonormee de l’espace V0 des fonctions deL2(R) dont la transformee de Fourier est a support inclus dans [−π, π]. Endefinissant les espaces Vj comme l’ensemble des fonctions dont la transformeede Fourier est a support inclus dans [−2−jπ, 2−jπ], on peut verifier que cecidefinit bien une AMR de L2(R). L’approximation de f ∈ L2(R) au niveau deresolution j correspond a un filtre frequentiel. On peut en effet montrer que
ˆPVjf(ω) = f(ω)11[−2−jπ,2−jπ](ω).
Generalement, l’approximation au niveau de resolution j correspond a un filtragepasse-bas dont la largeur de bande est inversement proportionnelle a l’echelle 2j.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 110
11
12
13
14
15
16
17
(b)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 18
10
12
14
16
18
20
22
(c)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 16
8
10
12
14
16
18
20
22
24
(d)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−3
−2
−1
0
1
2
3
(e)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−5
−4
−3
−2
−1
0
1
2
3
4
5
(f)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
(g)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−3
−2
−1
0
1
2
3
(h)
Fig. 3.1 – (a) Signal presentant 2 singularites. Approximation constante par mor-ceaux au niveau : (b) j = 1, (c) j = 2 et (d) j = 3. Projection du signal sur lessous-espaces d’ondelettes (e) W0, (f) W1, (g) W2 et (h) W3.

41
3.1.3 Filtres mirroirs conjugues
Dans cette section, nous etudions les caracteristiques que doit verifier une fonc-tion d’echelle φ pour generer une base orthonormee de chaque espace Vj et garantirtoutes les proprietes d’une AMR. Nous montrons en particulier que toute fonctiond’echelle est entierement specifiee par un filtre discret appele filtre mirroir conjugue.
Supposons que l’on ait construit une AMR de L2(R). La propriete (3.2) imposeque 2−1/2φ(t/2) ∈ V1 ⊂ V0 et comme φ(t − k), k ∈ Z est une base orthonormeede V0, on obtient que :
1√2φ(t
2) =
k=+∞∑
k=−∞hkφ(t− k)
ou
hk = 〈2−1/2φ(t/2), φ(t− k)〉.La suite hk s’interprete comme un filtre discret dont la transformee de Fourier estdefinie par h(ω) =
∑+∞n=−∞ hke
−ikω ce qui permet d’obtenir l’expression suivante :
φ(2ω) =1√2h(ω)φ(ω).
L’equation precedente implique que l’on peut ecrire φ sous la forme :
φ(ω) =
(
p∏
i=1
h(2−iω)√2
)
φ(2−pω).
Et en prenant la limite quand p→ +∞, il est alors tentant d’ecrire que :
φ(ω) =
(
+∞∏
i=1
h(2−iω)√2
)
φ(0).
Le theoreme suivant (du a S. Mallat et Y. Meyer) donne les conditions necessaireset suffisantes sur le filtre h(ω) pour que le produit ci-dessus permette de definir uneAMR.
Theoreme 3.1 Soit φ ∈ L2(R) une fonction d’echelle d’une AMR, alors la trans-formee de Fourier du filtre defini par hk = 〈2−1/2φ(t/2), φ(t− k)〉 verifie
∀ω ∈ R, |h(ω)|2 + |h(ω + π)|2 = 2, et h(0) =√
2. (3.6)
Reciproquement, si h(ω) est une fonction 2π-periodique et continument derivable auvoisinage de ω = 0, alors si h verifie les proprietes (3.6) et si
infω∈[−π/2,π/2]
|h(ω)| > 0,

42
alors le produit
φ(ω) =
(
+∞∏
i=1
h(2−iω)√2
)
,
est la transformee de Fourier d’une fonction d’echelle φ ∈ L2(R) qui definit uneAMR.
Le theoreme precedent montre qu’il est donc equivalent de connaıtre le filtre(hk)k∈Z ou la fonction d’echelle φ, et que la construction d’une AMR de L2(R) peutse faire a partir d’un filtre qui verifie les proprietes enoncees ci-dessus. En effet, sion connait la fonction φ, on construit une AMR en definissant :
Vj = V ect 2−j/2φ(2−jx− k), k ∈ Z.
La caracterisation des fonctions d’echelles a partir de la donnee des filtres (hk)k∈Z
permet donc d’etablir un lien entre les mathematiques appliquees et la theorie dufiltrage discret en traitement du signal. Ceci va se reveler particulierement utile pourle calcul des coefficients d’ondelettes d’un signal discret comme nous le verrons parla suite. Nous avons vu precedemment que pour l’
– Approximation constante par morceaux, φ(t) = 11[0,1](t) et que φj,k(t) =2−j/211Ij,k
(t), (j, k) ∈ Z2. On obtient alors que
hk =
1√2
si k = 0, 1
0 sinon
– Approximation de Shannon, φ(ω) = 11[−π,π](ω) ce qui implique que pour
tout ω ∈ [−π, π], h(ω) =√
211[−π/2,π/2](ω). En utilisant le fait que la famille defonctions e−ikωk∈Z est une base orthonormee de L2([−π, π]) pour le produitscalaire 〈f , g〉 = 1
2π
∫ π
−π f(ω)g(ω)dω, on obtient alors que
hk =
√2
2π
∫ π/2
−π/2eikωdω =
√2sin(π
2k)
πk.
3.1.4 Ondelettes orthogonales
L’approximation d’une fonction f aux echelles 2j et 2j−1 est definie par la pro-jection orthogonale de f sur les espaces Vj et Vj−1 respectivement. Etant donne queVj ⊂ Vj−1, on definit l’espace Wj comme l’espace complementaire orthogonal de Vjdans Vj−1 i.e.
Vj−1 = Vj⊕
Wj .
L’approximation de f a l’echelle 2j−1 peut donc se decomposer sous la forme
PVj−1f = PVj
f⊕
PWjf.

43
L’espace Wj permet de calculer les details PWjf pour la fonction f qui permettent
de passer de l’approximation a l’echelle 2j a une approximation plus fine a l’echelle2j−1. De la definition d’une AMR, on deduit les proprietes suivantes (S. Mallat etY. Meyer) qui permettent de construire une base orthornormee de Wj a partir decontractions et dilatations d’une ondelette ψ :
– ∀(j, j′) ∈ Z2, j 6= j′ ⇒Wj⊥Wj′ ,
–⊕
j∈ZWj = L2(R),
– f(t) ∈Wj ⇐⇒ f( t2) ∈Wj+1
– ∀(j, k) ∈ Z2, f(t) ∈ Wj =⇒ f(t− 2jk) ∈Wj
– soit
ψ(ω) =1√2g(ω
2)φ(
ω
2), avec g(ω) = e−iωh(ω + π),
et posons ψj,k(t) = 1√2jψ(
t−2jk2j
)
. Alors pour tout j ∈ Z, ψj,k, k ∈ Z est une
base orthonormee de Wj, et donc ψj,k, (j, k) ∈ L2(R) est une base ortho-normee de L2(R). La fonction ψ est appelee ondelette mere ou plus simplementondelette de l’AMR.
Les espaces Wj sont appeles les sous-espaces de detail ou sous-espaces d’onde-lettes. Ils caracterisent la difference d’information entre les projections sur les espacesVj et Vj−1. De ce qui precede, on obtient que si l’on dispose d’une AMR de L2(R)alors toute fonction f ∈ L2(R) peut s’ecrire sous la forme d’une decomposition enondelettes
f =+∞∑
j=−∞PWj
f =+∞∑
j=−∞
+∞∑
k=−∞〈f, ψj,k〉ψj,k,
et pour tout j0 ∈ Z,
f = PVj0f +
j0∑
j=−∞PWj
f =+∞∑
k=−∞〈f, φj0,k〉φj0,k +
j0∑
j=−∞
+∞∑
k=−∞〈f, ψj,k〉ψj,k.
Comme ψ ∈ V0, l’ondelette verifie l’equation
1√2ψ(t
2) =
+∞∑
k=−∞gkφ(t− k)
et on peut alors montrer que la fonction g introduite precedemment est la trans-formee de Fourier du filtre discret (gk)k∈Z qui est donne par
gk = 〈2−1/2ψ(t/2), φ(t− k)〉.
On peut egalement montrer que (gk)k∈Z est un filtre mirroir de (hk)k∈Z i.e.
gk = (−1)1−kh1−k.

44
Cette propriete de filtre en mirroir joue un role important dans la mise au point d’al-gorithmes rapides de transformee en ondelettes. En reprenant les exemples precedentsd’AMR, on obtient que
– Approximation constante par morceaux. Le ondelettes de Haar corres-pondent au cas d’une AMR constituee des fonctions constates par morceauxet sont telles que :
ψ(t) =
−1 si 0 ≤ t < 1/21 si 1/2 ≤ t < 10 sinon
et
gk =
− 1√2
si k = 01√2
si k = 1
0 sinon
– Approximation de Shannon, φ(ω) = 11[−π,π](ω) et h(ω) =√
211[−π/2,π/2](ω)ce qui implique que
ψ =
e−iω/2 si ω ∈ [−2π,−π]⋃
[π, 2π]0 sinon,
et
ψ(t) =sin 2π(t− 1/2)
2π(t− 1/2)− sin π(t− 1/2)
π(t− 1/2).
Generalement, pour les ondelettes orthogonales, l’energie de ψ est essentiellementconcentree sur les intervalles [−2π,−π]
⋃
[π, 2π]. La projection de f sur l’espace Wj
correspond donc a un filtrage passe-bande dont la largeur depend du niveau deresolution j. La Figure 3.1 donne un exemple de projection d’une fonction dansdifferents espaces de details Wj, j = 0, 1, 2, 3 pour la base de Haar.
3.2 Construction de bases d’ondelettes
3.2.1 Liens entre filtres, nombre de moments nuls et regularite
de l’ondelette
Les ondelettes de Shanon sont des fonctions C∞ qui decroissent lentement quandt tend vers +∞ et −∞, et qui ont un nombre infini de moments nuls. Toutefois,elles ne sont pas a support compact. L’un des buts d’une decomposition en onde-lettes dans une base orthonormee, est de representer une fonction f avec peu decoefficients significatifs. Nous allons voir par la suite que les ondelettes a supportcompact sont bien adaptees pour obtenir des representations parcimonieuses (oucreuses) d’un signal. L’amplitude des coefficients d’ondelettes et le nombre de coef-ficients significatifs depend a la fois de

45
– la regularite de f– du nombre de moments nuls r– de la taille du support de ψ
Les deux dernieres proprietes ainsi que la regularite de l’ondelette ψ peuvent etrereliees aux caracteristiques du filtre (hk)k∈Z.
• Nombre de moments nuls : rappelons que si une ondelette a r moments nuls,alors elle est orthogonale a tous les polynomes de degre inferieur ou egal r−1. Dans lechapitre precedent, nous avons montre que si f est suffisamment reguliere alors l’am-plitude coefficients d’ondelettes |〈f, ψj,k〉| est d’autant plus petite aux fines echelles(j → −∞) que r est grand car |〈f, ψj,k〉| est borne par 2j(r+1/2). Soient ψ et φ lesfonctions ondelette et d’echelle d’une AMR telles que |ψ(t) = O((1 + t2)−r/2−1)|et |ψ(t) = O((1 + t2)−r/2−1)|, alors les trois assertions suivantes suivantes sontequivalents et montrent que le nombre de moments nuls depend du nombre de zerosde ψ et h aux points ω = 0 et ω = π :
– l’ondelette ψ a r moments nuls– ψ(ω) et ses r − 1 derivees sont nulles au point ω = 0– h(ω) et ses r − 1 derivees sont nulles au point ω = π
• Taille du support de l’ondelette : si f a une singularite isolee en point x0 et si lesupport de ψj,k contient le point x0 alors l’amplitude de |〈f, ψj,k〉| peut etre elevee. Siψ est a support compact de taille K, alors a l’echelle j, il y a K coefficients |〈f, ψj,k〉|qui sont influences par le comportement de f au voisinage de x0. Pour reduire lenombre de coefficients de grande amplitude, il est donc necessaire de minimiser lataille du support de ψ. La proposition suivante montre que la taille du support del’ondelette est relie a la longueur du filtre (hk)k∈Z (nombre de coefficients hk nonnuls) :
Proposition 3.5 Le filtre h et la fonction d’echelle ψ sont a support compact si etseulement si leurs supports sont egaux. Si le support de h et de la fonction d’echelleψ est [N1, N2], alors le support de ψ est [(N1 −N2 + 1)/2, (N2 −N1 + 1)/2].
• Taille du support et nombre de moments nuls : pour de ondelettes orthogo-nales, la taille du support et le nombre de moments nuls ne sont pas independants.En effet, il est possible de montrer (theoreme du a I. Daubechies) que si ψ a rmoments nuls, alors son support est au moins de taille 2r − 1. Nous verrons parla suite que les ondelettes de Daubechies sont optimales dans le sens ou elles ontune taille de support minimale pour un nombre de moments nuls donne. Lors d’unedecomposition en ondelettes, il est donc necessaire de trouver un compromis entretaille du support et nombre de moments nuls. Si le signal f a quelques singula-rites isolees et est tres regulier entre ces points, on peut choisir une ondelette avecun nombre de moments nuls eleves de sorte a produire peu de coefficients d’onde-lettes |〈f, ψj,k〉| significiatifs. Si le nombre de singularites augmente, le nombre de
46
fonctions analysantes ψj,k dont le support contient une singularite augmente et ilpeut donc etre judicieux de reduire la taille du support de ψ meme si cela diminue r.
• Regularite de l’ondelette : on peut montrer que la regularite de ψ est reliee aunombre de zeros de h en ω = π. La regularite de l’ondelette influence la qualite de re-construction ou de debruitage d’un signal. En effet, si on a f =
∑+∞j=−∞
∑+∞k=−∞〈f, ψj,k〉ψj,k,
alors une perturbation de ǫ d’un coefficent 〈f, ψj,k〉 ajoute la composante ǫψj,k. Plusl’ondelette est reguliere et moins cette perturbation sera visible.
Enfin, il est important d’insister sur le fait que l’amplitude des coefficients d’on-delettes depend du nombre de moments nuls et non de la regularite de l’ondeletteψ.
3.2.2 Quelques exemples classiques d’ondelettes
• Ondelettes de Haar : la base de Haar est obtenue a partir d’une AMR constitueede fonctions constantes par morceaux. Le filtre (hk)k∈Z a deux coefficients non nulsaux points k = 0 et k = 1, et l’ondelette de Haar a le plus petit support parmitoutes les ondelettes orthogonales. Toutefois, il s’agit d’une fonction discontinue quin’est pas bien adaptee pour representer les signaux lisses.
• Ondelettes de Daubechies : une ondelette de Daubechies a un support de tailleminimale egal a [−r + 1, r] pour un nombre de moments nuls r donne. De plus, laregularite de ces ondelettes augmente avec r. Le support de la fonction d’echelle φest [0, 2r − 1].
• Symmlets : les ondelettes de Daubechies sont tres assymetriques. Daubechies amontre que l’ondelette de Haar est la seule ondelette symmetrique. Les ondelettesSymmlets sont construites de sorte a avoir des fonctions analysantes les moins as-symetriques possibles. Il s’agit a nouveau d’ondelettes qui ont un support minimalegal a [−r + 1, r] avec r moments nuls.
• Coiflets : il s’agit d’une ondelette qui a r moments nuls et une taille de supportminimale, dont la fonction d’echelle φ verifie
∫ +∞
−∞φ(t)dt = 1, et
∫ +∞
−∞tkφ(t)dt = 0 pour 1 ≤ k < r.
Ces fonctions d’echelles sont tres utiles pour etablir des formules precises entre l’ap-proximation d’une fonction dans un espace VJ et l’echantillonnage d’une fonction. Eneffet, pour une ondelette donnee on a toujours
∫ +∞−∞ φ(t)dt = 1 et si on suppose que
f est C1 alors, en utilisant un developpement de Taylor, on obtient l’approximationsuivante entre les echantillons de f et sa projection dans le sous-espace VJ :
2−J/2〈f, φJ,k〉 ≈ f(2Jk) +O(2J).
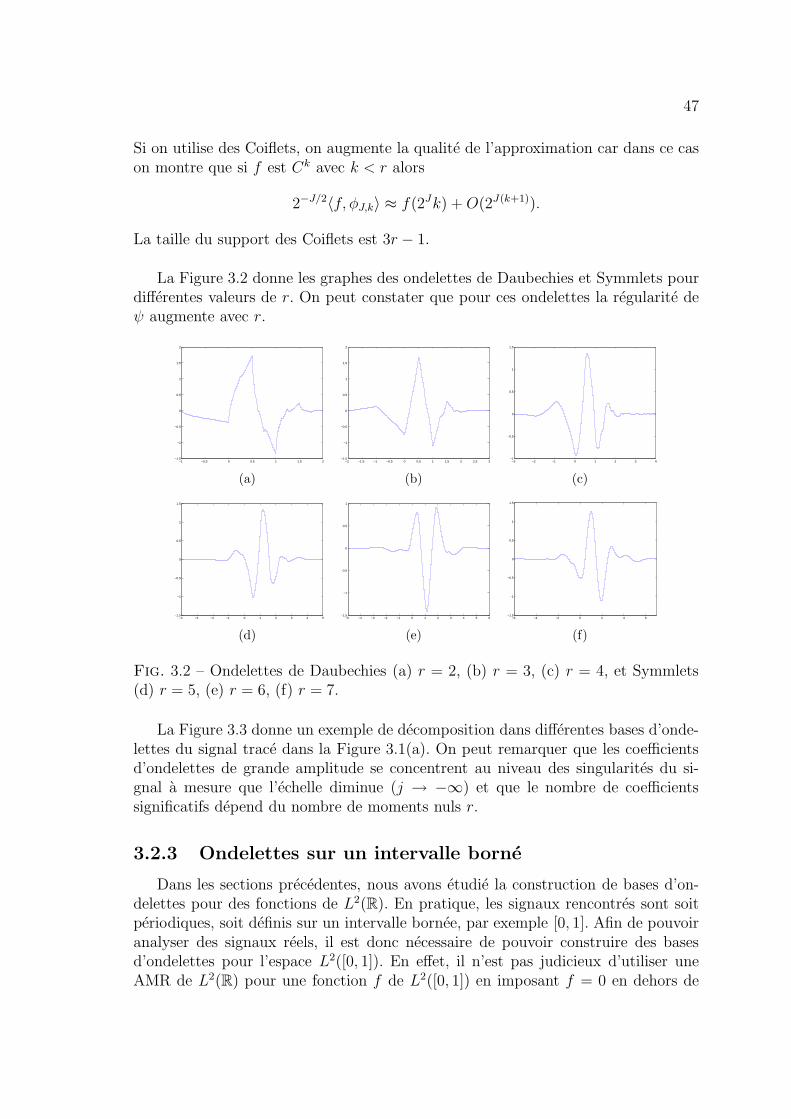
47
Si on utilise des Coiflets, on augmente la qualite de l’approximation car dans ce cason montre que si f est Ck avec k < r alors
2−J/2〈f, φJ,k〉 ≈ f(2Jk) +O(2J(k+1)).
La taille du support des Coiflets est 3r − 1.
La Figure 3.2 donne les graphes des ondelettes de Daubechies et Symmlets pourdifferentes valeurs de r. On peut constater que pour ces ondelettes la regularite deψ augmente avec r.
−1 −0.5 0 0.5 1 1.5 2−1.5
−1
−0.5
0
0.5
1
1.5
2
(a)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5 3−1.5
−1
−0.5
0
0.5
1
1.5
2
(b)
−3 −2 −1 0 1 2 3 4−1
−0.5
0
0.5
1
1.5
(c)
−4 −3 −2 −1 0 1 2 3 4 5−1.5
−1
−0.5
0
0.5
1
1.5
(d)
−5 −4 −3 −2 −1 0 1 2 3 4 5 6−1.5
−1
−0.5
0
0.5
1
(e)
−6 −4 −2 0 2 4 6−1.5
−1
−0.5
0
0.5
1
1.5
(f)
Fig. 3.2 – Ondelettes de Daubechies (a) r = 2, (b) r = 3, (c) r = 4, et Symmlets(d) r = 5, (e) r = 6, (f) r = 7.
La Figure 3.3 donne un exemple de decomposition dans differentes bases d’onde-lettes du signal trace dans la Figure 3.1(a). On peut remarquer que les coefficientsd’ondelettes de grande amplitude se concentrent au niveau des singularites du si-gnal a mesure que l’echelle diminue (j → −∞) et que le nombre de coefficientssignificatifs depend du nombre de moments nuls r.
3.2.3 Ondelettes sur un intervalle borne
Dans les sections precedentes, nous avons etudie la construction de bases d’on-delettes pour des fonctions de L2(R). En pratique, les signaux rencontres sont soitperiodiques, soit definis sur un intervalle bornee, par exemple [0, 1]. Afin de pouvoiranalyser des signaux reels, il est donc necessaire de pouvoir construire des basesd’ondelettes pour l’espace L2([0, 1]). En effet, il n’est pas judicieux d’utiliser uneAMR de L2(R) pour une fonction f de L2([0, 1]) en imposant f = 0 en dehors de
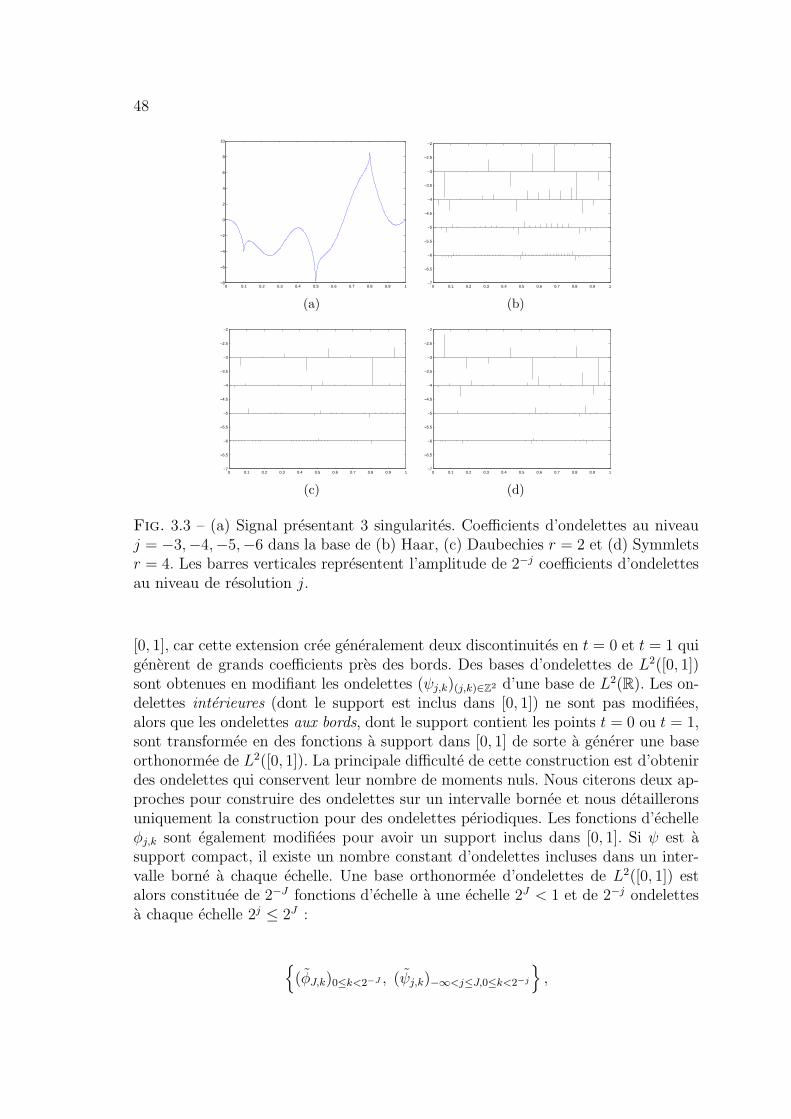
48
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−8
−6
−4
−2
0
2
4
6
8
10
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−7
−6.5
−6
−5.5
−5
−4.5
−4
−3.5
−3
−2.5
−2
(b)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−7
−6.5
−6
−5.5
−5
−4.5
−4
−3.5
−3
−2.5
−2
(c)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−7
−6.5
−6
−5.5
−5
−4.5
−4
−3.5
−3
−2.5
−2
(d)
Fig. 3.3 – (a) Signal presentant 3 singularites. Coefficients d’ondelettes au niveauj = −3,−4,−5,−6 dans la base de (b) Haar, (c) Daubechies r = 2 et (d) Symmletsr = 4. Les barres verticales representent l’amplitude de 2−j coefficients d’ondelettesau niveau de resolution j.
[0, 1], car cette extension cree generalement deux discontinuites en t = 0 et t = 1 quigenerent de grands coefficients pres des bords. Des bases d’ondelettes de L2([0, 1])sont obtenues en modifiant les ondelettes (ψj,k)(j,k)∈Z2 d’une base de L2(R). Les on-delettes interieures (dont le support est inclus dans [0, 1]) ne sont pas modifiees,alors que les ondelettes aux bords, dont le support contient les points t = 0 ou t = 1,sont transformee en des fonctions a support dans [0, 1] de sorte a generer une baseorthonormee de L2([0, 1]). La principale difficulte de cette construction est d’obtenirdes ondelettes qui conservent leur nombre de moments nuls. Nous citerons deux ap-proches pour construire des ondelettes sur un intervalle bornee et nous detailleronsuniquement la construction pour des ondelettes periodiques. Les fonctions d’echelleφj,k sont egalement modifiees pour avoir un support inclus dans [0, 1]. Si ψ est asupport compact, il existe un nombre constant d’ondelettes incluses dans un inter-valle borne a chaque echelle. Une base orthonormee d’ondelettes de L2([0, 1]) estalors constituee de 2−J fonctions d’echelle a une echelle 2J < 1 et de 2−j ondelettesa chaque echelle 2j ≤ 2J :
(φJ,k)0≤k<2−J , (ψj,k)−∞<j≤J,0≤k<2−j
,

49
et une fonction f ∈ L2([0, 1]) se decompose alors sous la forme
f =2−J−1∑
k=0
〈f, φJ,k〉φJ,k +J∑
j=−∞
2−j−1∑
k=0
〈f, ψj,k〉ψj,k.
Sur un intervalle [a, b], une base orthonormee d’ondelettes de L2([a, b]) peut alorsse construire par translation de a et dilatation par b− a d’ondelettes sur l’intervalle[0, 1].
• Ondelettes periodiques : une base d’ondelettes de L2([0, 1]) peut etre obtenueen periodisant une AMR de L2(R) i.e. en posant
φJ,k(t) = 2−J/2+∞∑
l=−∞φJ,k (t+ l) et ψj,k(t) = 2−j/2
+∞∑
l=−∞ψj,k (t+ l) .
Pour j ≤ 0, il y a 2−j ondelettes differentes ψj,k indexee par 0 ≤ k < 2−j. Si lesupport de ψj,k est inclus dans [0, 1] alors ψj,k = ψj,k. Sinon l’ondelette ψj,k esttransformee en une fonction qui a deux composantes disjointes au voisinage de t = 0et t = 1 (voir Figure 3.4).
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1.5
−1
−0.5
0
0.5
1
1.5
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1.5
−1
−0.5
0
0.5
1
(b)
Fig. 3.4 – Ondelettes periodiques sur [0, 1] pour j = −3, k = 0 (a) Daubechies , (b)Symmlets (r = 6).
En notant Vj et Wj les sous-espaces vectoriels engendres par
φj,k, 0 ≤ k < 2−j
et
ψj,k, 0 ≤ k < 2−j
respectivement, on montre que les ondelettes periodiques
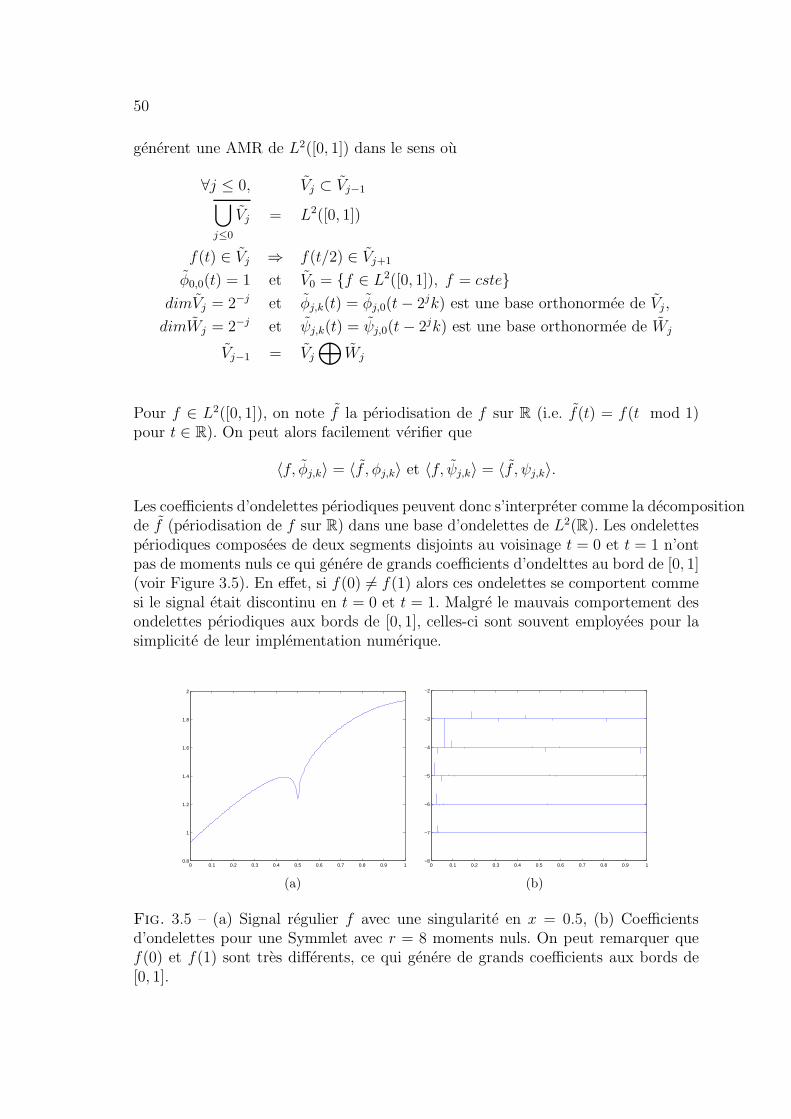
50
generent une AMR de L2([0, 1]) dans le sens ou
∀j ≤ 0, Vj ⊂ Vj−1⋃
j≤0
Vj = L2([0, 1])
f(t) ∈ Vj ⇒ f(t/2) ∈ Vj+1
φ0,0(t) = 1 et V0 = f ∈ L2([0, 1]), f = cstedimVj = 2−j et φj,k(t) = φj,0(t− 2jk) est une base orthonormee de Vj,
dimWj = 2−j et ψj,k(t) = ψj,0(t− 2jk) est une base orthonormee de Wj
Vj−1 = Vj⊕
Wj
Pour f ∈ L2([0, 1]), on note f la periodisation de f sur R (i.e. f(t) = f(t mod 1)pour t ∈ R). On peut alors facilement verifier que
〈f, φj,k〉 = 〈f , φj,k〉 et 〈f, ψj,k〉 = 〈f , ψj,k〉.
Les coefficients d’ondelettes periodiques peuvent donc s’interpreter comme la decompositionde f (periodisation de f sur R) dans une base d’ondelettes de L2(R). Les ondelettesperiodiques composees de deux segments disjoints au voisinage t = 0 et t = 1 n’ontpas de moments nuls ce qui genere de grands coefficients d’ondelttes au bord de [0, 1](voir Figure 3.5). En effet, si f(0) 6= f(1) alors ces ondelettes se comportent commesi le signal etait discontinu en t = 0 et t = 1. Malgre le mauvais comportement desondelettes periodiques aux bords de [0, 1], celles-ci sont souvent employees pour lasimplicite de leur implementation numerique.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.8
1
1.2
1.4
1.6
1.8
2
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−8
−7
−6
−5
−4
−3
−2
(b)
Fig. 3.5 – (a) Signal regulier f avec une singularite en x = 0.5, (b) Coefficientsd’ondelettes pour une Symmlet avec r = 8 moments nuls. On peut remarquer quef(0) et f(1) sont tres differents, ce qui genere de grands coefficients aux bords de[0, 1].

51
• Ondelettes sur l’intervalle : comme nous l’avons vu precededemment, les co-efficients d’ondelettes sont de faible amplitude dans les regions ou le signal estregulier si les ondelettes analysantes ont suffisamment de moments nuls. Les on-delettes periodiques localisees au voisinage de t = 0 et t = 1 n’ont pas de momentnul, et ne peuvent donc pas prendre en compte la regularite d’un signal aux bornesde [0, 1]. Ce comportement genere des coefficients de grande amplitude qui ne cor-respondent pas a la presence de singularites. Cohen, Daubechies et Vial ont proposeune technique pour obtenir des ondelettes sur l’intervalle [0, 1] qui ont autant de mo-ments nuls que l’ondelette orginale ψ. Toutefois, cette construction est plus longueet plus compliquee a decrire que celle des des ondelettes periodiques, et nous ren-voyons a Mallat [7] pour une presentation detaillee. Nous verrons en TP l’interetd’utiliser des ondelettes sur l’intervalle par rapport aux ondelettes periodiques.
3.2.4 Ondelettes et bancs de filtres
Soit f ∈ L2(R) et φ, ψ les fonctions d’echelle et d’ondelette d’une AMR deL2(R). Nous avons vu que la projection orthogonale PVj
f de f dans l’espace Vj peuts’exprimer comme la somme des projections orthogonales de f dans les sous-espacesVj+1 et Wj+1 ou
PVjf =
∑
k∈Z
aj,kφj,k et aj,k = 〈f, φj,k〉
PVj+1f =
∑
k∈Z
aj+1,kφj+1,k et aj+1,k = 〈f, φj+1,k〉
PWj+1f =
∑
k∈Z
dj+1,kψj+1,k et dj+1,k = 〈f, ψj+1,k〉
Soient (hk)k∈ZZ et (gk)k∈ZZ les filtres conjugues en miroir associes aux fonctionsφ et ψ. On montre alors que
• Formule de decomposition : le cadre de l’AMR conduit naturellement a unalgorithme rapide de calcul des coefficients d’ondelettes a partir de l’approximationd’une fonction dans un espace VL = VJ
⊕L−1j=J Wj qui est basee sur la decomposition
Vj = Vj+1
⊕
Wj+1 et la definition des filtres conjugues en miroir :
aj+1,k =∑
n∈Z
hn−2kaj,n et dj+1,k =∑
n∈Z
gn−2kaj,n
Pour une suite (xk)k∈Z, on note (xk)k∈Z la suite obtenue en inversant les elementsde la suite x i.e. xk = x−k. Les formules de decomposition ci-dessus peuvent alorss’exprimer a l’aide de convolutions discretes suivies par un sous-echantillonnage d’unfacteur 2 :
aj+1,k = aj ⋆ h[2k] et dj+1,k = aj ⋆ g[2k].

52
La decomposition d’un signal dans une base d’ondelettes fait donc intervenir unesuccession de convolutions discretes avec le filtre passe-bas h et le filtre passe-haut g.La decomposition d’une suite aL = 〈f, φL,k〉, k ∈ Z dans une base orthonormee d’on-delette est donc composee des coefficients d’ondelettes de f aux echelles 2L < 2j ≤ 2J
plus les coefficients d’echelles a l’echelle la plus grossiere 2J i.e. l’ensemble de co-efficients (dj)L<j≤J , aJ qui est calcule a l’aide des formules de decompositionci-dessus.
• Formule de reconstruction : la reconstruction ou synthese des coefficientsd’ondelettes consiste a retrouver la suite aL a partir de l’ensemble de coefficients(dj)L<j≤J , aJ. On utilise alors la recurrence ascendante suivante
aj,k =∑
n∈Z
hk−2naj+1,n +∑
n∈Z
gk−2ndj+1,n
Pour une suite (xk)k∈Z, on note (xk)k∈Z la suite obtenue en inserant un zero entrechaque element de la suite x i.e. xk = xp si k = 2p et xk = 0 si k = 2p + 1. Lesformules de decomposition ci-dessus peuvent alors s’exprimer a l’aide de convolutionsdiscretes
aj,k = aj+1 ⋆ h[k] + dj+1 ⋆ g[k].
• Initialisation de l’algorithme : en pratique, on doit determiner les coefficientsd’echelle aL a partir de la discretisation d’un signal
(
f( kN
))
k∈Zou 1/N est le pas
d’echantillonnage. On doit donc pouvoir associer a la suite(
f( kN
))
k∈Zun ensemble
de coefficients qui soit une bonne approximation de la projection de f dans VL. Nousavons vu precedemment que si f est C1 alors 2−L/2aL,k = f(2Lk) + O(2L) et si fest Ck, en utilisant des Coiflets, on obtient que 2−L/2aL,k = f(2Lk) + O(2L(k+1)).Donc, si N = 2−L, on pourra considerer que aL,k ≈ N−1/2f( k
N) constitue une bonne
approximation de PVLf pour initialiser l’algorithme de decomposition dans une base
d’ondelettes.
• Complexite de l’algorithme : supposons que les filtres h et g sont de longueurfinie K (cas des ondelettes a support compact). Si aL est une suite de longueurN = 2−L, alors les suites aj et dj sont de longueur 2−j pour L < j ≤ J . Les formulesde decomposition ci-dessus impliquent donc que aj+1 et dj+1 sont calculees avec auplus 2−jK additions et multiplications, et les formules de reconstruction montrentque aj est obtenue a partir de aj+1 et dj+1 avec au plus 2−jK operations. Le cout dela decomposition ou de la reconstruction de la suite aL dans une base d’ondelettesorthogonales est donc en O(n).
• Signaux finis et ondelettes periodiques : supposons que le signal f est observesur [0, 1] et que l’on dispose d’un echantillon f( k
N), k = 0, . . . , N−1. Notons aL,k, k =
0, . . . , N−1 l’approximation de f dans l’espace VL obtenue a partir de cet echantillon.Les formules de decomposition impliquent de connaıtre les valeurs de aL au dela des

53
bornes k = 0 et k = N − 1. Nous avons vu precedemment que la decompositiondans une base d’ondelettes periodiques d’une fonction f ∈ L2([0, 1]) est equivalentea la decomposition dans une base d’ondelettes de L2(R) de la periodisation de f surR. Ainsi pour calculer les coefficients d’ondelettes de f dans une base d’ondelettesperiodiques de L2([0, 1]), il suffit de periodiser la suite aL,k, k = 0, . . . , N − 1 enposant aL,k = aL,k mod N .
3.3 Bases d’ondelettes pour des images
3.3.1 Bases d’ondelettes separables et multiresolution en 2D
Une base d’ondelettes de L2(R2) peut etre construite a partir d’une base d’on-delettes de L2(R). Soient φ la fonction d’echelle et ψ la fonction d’ondelette d’uneAMR de L2(R), et notons Vj et Wj les sous-espaces d’approximation et de detailsassocies. Une analyse multiresolution separable de L2(R2) est definie a l’aide duproduit tensoriel des espaces d’approximation 1D
V 2j = Vj ⊗ Vj
Les espaces V 2j verifient les proprietes de l’extension de la definition d’une AMR
de L2(R) au cas des images (relation d’echelle, suite emboıtee, approximation...).L’espace V 2
j est l’ensemble des fonctions f ∈ L2(R2) qui s’ecrivent comme des com-binaisons lineaires de fonctions separables 1D
f(x1, x2) =∑
k∈Z
akhk(x1)gk(x2) avec hk ∈ Vj, gk ∈ Vj.
L’ensemble de fonctions
φ2j,k(x1, x2) = φj,k1(x1)φj,k2(x2)
k=(k1,k2)∈Z2constitue
une base orthonormee de V 2j obtenue en dilatant la fonction d’echelle φ2(x1, x2) =
φ(x1)φ(x2) d’un facteur 2j et en la translatant sur une grille 2D de cote 2j.
• Approximation constante par morceaux : soient Vj l’espace des fonctionsde L2(R) qui sont constantes sur les intervalles [2jk, 2j(k + 1)[, k ∈ Z. Une AMRconstituee de fonctions constantes par morceaux en 2D est alors construite a l’aidedes sous-espaces d’approximation V 2
j constitues des images constantes sur les carres[2jk1, 2
j(k1 + 1)[×[2jk2, 2j(k2 + 1)[, (k1, k2) ∈ Z
2.
Soit W 2j+1 le complement orthogonal de V 2
j+1 dans V 2j i.e.
V 2j = V 2
j+1
⊕
W 2j+1.
Une base d’ondelettes orthogonales de W 2j peut etre construite en definissant trois
ondelettes
ψ1(x1, x2) = φ(x1)ψ(x2)
ψ2(x1, x2) = ψ(x1)φ(x2)
ψ3(x1, x2) = ψ(x1)ψ(x2).

54
En posant pour 1 ≤ p ≤ 3 et k = (k1, k2) ∈ Z2, ψpj,k(x) = 1
2jψp(
x1−2jk12j , x2−2jk2
2j
)
, on
montre que la famille d’ondelettes ψ1j,k, ψ
2j,k, ψ
3j,kk∈Z2 est une base orthogonale de
W 2j et que ψ1
j,k, ψ2j,k, ψ
3j,kj∈Z,k∈Z2 est une base d’ondelettes orthogonales de L2(R2).
Nous verrons par la suite que les coefficients d’ondelettes calcules avec
– ψ1 sont larges le long des contours horizontaux,– ψ2 sont larges le long des contours verticaux,– ψ3 sont larges le long des contours diagonaux dans une image.
3.3.2 Algorithme rapide de transformee en ondelettes 2D
Les algorithmes de decomposition et de reconstruction pour une base d’ondelettesde L2(R) peuvent etre etendus au cas des images pour construire des algorithmesrapides de calculs des coefficients d’ondelettes en 2D. Pour j ∈ Z et k ∈ Z
2, ondefinit les coefficients d’approximation et de details en 2D pour f ∈ L2(R2) par
aj,k = 〈f, φ2j,k〉 et dpj,k = 〈f, ψpj,k〉, 1 ≤ p ≤ 3.
Soient (hk)k∈Z et (gk)k∈Z les filtres associes a l’ondelette ψ. On a alors les rela-tions suivantes :
• Formule de decomposition : les coefficients d’approximation et de details al’echelle 2j+1 sont obtenus a partir des coefficients d’approximation a l’echelle 2j al’aide de six groupes de convolutions discretes uni-dimensionnelles combinees avecdes sous-echantillonnages d’un facteur 2 le long des colonnes et des lignes de l’imageaj
aj →lignes ⋆h ↓ 2
→colonnes ⋆h ↓ 2 → aj+1
→colonnes ⋆g ↓ 2 → d1j+1
aj →lignes ⋆g ↓ 2
→colonnes ⋆h ↓ 2 → d2j+1
→colonnes ⋆g ↓ 2 → d3j+1
• Formule de reconstruction : de meme la reconstruction des coefficients d’on-delettes a l’echelle 2j peut se faire a partir des coefficients d’echelles aj+1 et d’on-delettes d1
j+1, d2j+1, d
3j+1 a l’echelle 2j+1. Cette reconstruction peut egalement s’ex-
primer a partir de six groupes de convolutions discretes uni-dimensionnelles com-binees avec des insertions de zeros le long des lignes et des colonnes des imagesaj+1, d
1j+1, d
2j+1, d
3j+1
aj+1 →colonnes↑ 2 ⋆ hd1j+1 →colonnes↑ 2 ⋆ g
⊕ →lignes↑ 2 ⋆ h
d2j+1 →colonnes↑ 2 ⋆ hd3j+1 →colonnes↑ 2 ⋆ g
⊕ →lignes↑ 2 ⋆ g
⊕ → aj
55
Soit f ∈ L2(R) une image dont on connaıt une discretisation de pasN−1 = 2L. Laprojection de f dans l’espace VL peut etre approximee par aL,k = N−1f(k1
N, k2N
) pourk = (k1, k2) ∈ Z
2. La representation de f dans une base d’ondelettes est calculeeen iterant la formule de decomposition ci-dessus pour obtenir pour L < j ≤ Jl’ensemble d’images :
aJ , (d1j , d
2j , d
3j)L<j≤J
• Cas des images de taille finie : supposons que l’on dispose d’une image carreeaL de taille finie contenant N2 = 2−2L pixels. Comme dans le cas uni-dimensionnelsla decomposition en ondelettes de aL peut etre obtenue en utilisant des ondelettesperiodiques 1D ce qui revient a calculer a periodiser l’image aL dans R
2 puis a utiliserles formules de decomposition et reconstruction 2D ci-dessus. Pour L < j ≤ J , lesimages aj , d
1j , d
2j et d3
j sont constituees de 2−2j coefficients. Si les filtres h et g sontde longueur finie, on peut verifier que le cout des l’algorithmes de decomposition etde reconstruction en ondelettes 2D est en 0(N2).
3.3.3 Quelques exemples de decomposition en ondelettes
pour des images
• Approximation dans les espaces Vj : la Figure 3.6 donne un exemple deprojection d’une image de taille 256 × 256 dans plusieurs espaces d’approximationVj , j = −6,−5,−4 pour des ondelettes de Haar et des Symmlets avec r = 8 mo-ments nuls. On peut constater que la qualite de l’approximation se degrade plusrapidement avec les ondelettes de Haar a mesure que l’echelle d’analyse augmente.Dans les Figures 3.6(b-c-d) l’approximation est constituee d’images constantes parmorceaux sur des carres de cote 2j, j = −6,−5,−4, alors que les approximationsobtenues avec des Symmlets representees dans les Figures 3.6(e-f-g) sont nettementplus lisses.
• Representation des coefficients d’ondelettes en 2D : l’ensemble des coef-ficients d’echelle et de details en 2D est de meme taille que le nombre de pixelsde l’image originale et peut se representer sous la forme d’une image organisee defacon hierarchique (voir Figure 3.7) dont les pixels les plus noirs representent lescoefficients de grande amplitude alors que les pixels blancs representent les coeff-ciients d’ondelettes les moins significatifs. La Figures 3.8 donne des exemples dedecomposition en ondelettes de trois images de taille 256 × 256 pixels. On peutconstater qu’aux petites echelles, les coefficients d’ondelettes de grande amplitudese concentrent au voisinage des points ou l’intensite des pixels des images changerapidement. Ils correspondent soit aux contours horizontaux (d1
j), soit aux contoursverticaux (d2
j) ou soit aux contours diagonaux d’une image (d3j).

56
(a)
(b) (c) (d)
(e) (f) (g)
Fig. 3.6 – (a) Image de Lenna, 256×256 pixels. Approximation avec des ondelettesde Haar dans les espaces Vj : (b) j = −6, (c) j = −5, (d) j = −4. Approximationavec des ondelettes Symmlets avec r = 8 moments nuls dans les espaces Vj : (e)j = −6, (f) j = −5, (g) j = −4.
Inserer Figure
Fig. 3.7 – Representation des coefficients de details et d’echelle en 2D.
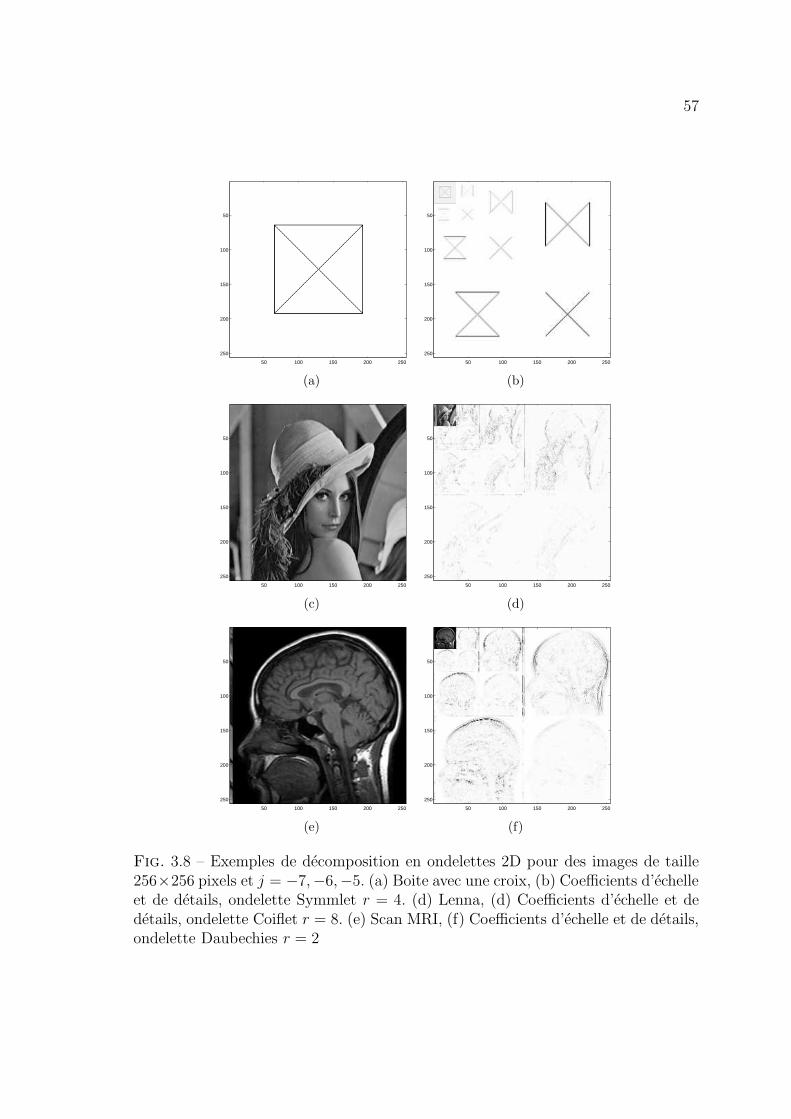
57
50 100 150 200 250
50
100
150
200
250
(a)
50 100 150 200 250
50
100
150
200
250
(b)
50 100 150 200 250
50
100
150
200
250
(c)
50 100 150 200 250
50
100
150
200
250
(d)
50 100 150 200 250
50
100
150
200
250
(e)
50 100 150 200 250
50
100
150
200
250
(f)
Fig. 3.8 – Exemples de decomposition en ondelettes 2D pour des images de taille256×256 pixels et j = −7,−6,−5. (a) Boite avec une croix, (b) Coefficients d’echelleet de details, ondelette Symmlet r = 4. (d) Lenna, (d) Coefficients d’echelle et dedetails, ondelette Coiflet r = 8. (e) Scan MRI, (f) Coefficients d’echelle et de details,ondelette Daubechies r = 2

58
Chapitre 4
Approximation, estimation et
compression dans des bases
d’ondelettes
Nous avons vu precedemment que la decroissance de l’amplitude de la TOC auxfines echelles permet de caracteriser la regularite globale ou locale d’un signal. De lameme facon, il est possible sous certaines hypotheses, de relier la decroissance descoefficients dans une base d’ondelettes a la regularite d’un signal. Dans ce chapitre,nous allons voir que cette propriete permet d’approximer un signal en gardant uni-quement les coefficients d’ondelettes qui sont les plus significatifs. Cette proprieted’approximation permet de representer efficacement des signaux qui ne sont pas ho-mogenes c’est a dire qui ne sont pas uniformement reguliers. Nous verrons egalementque cette propriete a des consequences importantes sur les qualites d’estimation etde compression des bases d’ondelettes.
4.1 Proprietes d’approximation des bases d’onde-
lettes
4.1.1 Decroissance des coefficients d’ondelettes
Definition 4.1 Les espaces de Holder Cα(R) sont definis par :
– si 0 < α < 1, Cα(R) = f ∈ L∞(R); supx∈R,h>0|f(x+h)−f(x)|
|h|α < +∞– si α = n+ α′, avec 0 < α′ < 1, Cα(R) = f ∈ Cn(R); dnf
dxn ∈ Cα′
(R)
Definition 4.2 Les espaces de Holder ponctuels Cα(x0) sont definis par :
– si 0 < α < 1, Cα(x0) = f ∈ L∞(R); suph>0|f(x0+h)−f(x0)|
|h|α < +∞– si α = n+ α′, avec 0 < α′ < 1, Cα(x0) = f ∈ Cn(x0); dnf
dxn ∈ Cα′
(x0)
Theoreme 4.1 Soit f ∈ Cα(R) et ψ une ondelette r fois continument differentiableavec r moments nuls, associee a une AMR de L2(R). Si r > α, on a alors l’equivalence
59
60
suivante
f ∈ Cα(R) ⇔ |〈f, ψj,k〉| ≤ K2−j(α+1/2) pour tout (j, k) ∈ Z2,
et localement nous avons l’equivalence suivante
f ∈ Cα(x0) ⇔ |〈f, ψj,k〉| ≤ K2−j(α+1/2)(1 + |2jx0 − k|)α pour tout (j, k) ∈ Z2,
ou K > 0 est une constante independante de j et k.
En pratique, de nombreux signaux analyses sont des fonctions regulieres quipresentent des singularites isolees (par exemple des fonctions C∞ par morceaux).Le theoreme 4.1 montre alors que pour ce type de signaux de nombreux coefficientsd’ondelettes seront negligeables. Nous allons voir par la suite que les coefficients quisont les plus significatifs permettent une bonne reconstruction d’un signal.
4.1.2 Approximation lineaire de fonctions regulieres
Il existe de nombreux espaces fonctionnels pour caracteriser la regularite d’unefonction. Le nombre de derivees d’un signal permet en particulier de mesurer saregularite. Afin de caracteriser la regularite des fonctions qui sont n− 1 fois contin-ment derivables mais par n fois, il est possible d’utiliser des espaces de Sobolevd’ordre s > 0 notes W s(R) et qui sont tels que
f ∈W s(R) ⇔∫ +∞
−∞|ω|2s|f(ω)|2dω < +∞.
Si s > n + 1/2 alors on peut verifier que si f ∈ W s(R) alors f est necessairementn fois continument derivable. Dans ce qui suit, nous allons etudier des fonctionsdefinies sur l’intervalle [0, 1]. L’espace de Sobolev W s([0, 1]) est alors defini commel’ensemble des fonctions de L2([0, 1]) qu’on peut etendre en dehors de [0, 1] en desfonctions de W s(R).
Nous avons vu precedemment qu’il est possible de construire des bases d’onde-lettes orthogonales de L2([0, 1]). Afin de presenter les proprietes d’approximation desondelettes, nous supposerons que l’on dispose d’une AMR de L2([0, 1]) constituee de2−j0 fonctions d’echelles φj0,k0≤k<2−j0 (avec 2−j0 > 1 et d’un ensemble de fonctionsondelettes ψj,k−∞<j≤j0,0≤k<2−j . Nous supposerons de plus que les ondelettes ψj,kpossedent r moments nuls (rappelons que la construction de telles ondelettes a eteproposee par Cohen et al). Notons que cette hypothese exclue l’utilisation des onde-lettes periodiques car dans ce cas les ondelettes aux bords de l’intervalle [0, 1] n’ontpas de moments nuls. Les resultats indiques dans la suite restent toutefois valableavec des ondelettes periodiques si on impose que le support du signal analyse eststrictement inclus dans [0, 1] afin d’eviter la creation de grands coefficients d’onde-lettes aux bords dus a la periodisation du signal.

61
L’approximation de f sur les M = 2−J premieres fonctions d’echelles et d’onde-lettes (avec J < j0) est donnee par la projection orthogonale de f sur VJ :
fM = PVJf =
2−j0−1∑
k=0
〈f, φj0,k〉φj0,k +
j0∑
j=J+1
2−j−1∑
k=0
〈f, ψj,k〉ψj,k.
L’erreur d’approximation lineaire correspond alors a l’energie des coefficientsd’ondelettes aux echelles plus petites que 2−J :
ǫ(M) = ‖f − fM‖2 =J∑
j=−∞
2−j−1∑
k=0
|〈f, ψj,k〉|2
Si 2−J < M < 2−J+1 n’est pas une puissance de deux, on choisit d’inclureuniquement a l’echelle 2J les coefficients correspondant aux M − 2−J ondelettesψJ,k0≤k<M−2−J . Une mesure de l’erreur d’approximation lineaire en fonction de laregularite du signal est alors donnee par le theoreme suivant :
Theoreme 4.2 Soit 0 < s < r un exposant de Sobolev ou r est le nombre demoments nuls de l’ondelette ψ. Alors, si f ∈W s([0, 1])
ǫ(M) = o(M−2s).
Il s’agit d’un resultat classique pour l’erreur d’approximation lineaire de fonctionsregulieres. Les memes taux d’erreur peuvent etre obtenus a l’aide de series de Fourierou bien avec des Splines.
4.1.3 Approximation lineaire de fonctions non-regulieres
Supposons qu’une fonction de L2([0, 1]) possede une discontinuite en un pointx0 ∈]0, 1[. Alors, d’apres les proprites des espaces de Sobolev, f ne peut pas appar-tenir a W s([0, 1]) pour s > 1/2, ce qui implique :
Theoreme 4.3 Supposons qu’une fonction f ∈ L2([0, 1]) soit discontinue en unpoint x0 ∈]0, 1[, alors pour α > 1 on ne peut pas avoir
ǫ(M) = O(M−α).
Ce resultat nous montre que meme si la fonction en tres reguliere a gauche et adroite de x0 (par exemple Cs), l’erreur d’approximation se comporte au mieux enO(M−1). Il s’agit d’un des inconvenients majeurs des techniques d’approximationlineaire.

62
4.1.4 Approximation non-lineaire
Afin de simplifier les notations nous noterons φj0,k = ψj0+1,k pour 0 ≤ k < 2−j0.L’approximation non-lineaire d’une fonction f ∈ L2([0, 1]) est obtenue a partir desM plus grands coefficients d’ondelettes i.e.
f ∗M =
∑
(j,k)∈IM
〈f, ψj,k〉ψj,k,
ou IM representent les indices des M coefficients d’ondelettes de plus grande am-plitude |〈f, ψj,k〉|. Une approximation non-lineaire peut egalement etre calculee apartir d’une procedure de seuillage. Soit λ ≥ 0 et Tλ la fonction telle que :
Tλ(x) =
x si |x| ≥ λ0 si |x| < λ
Si l’on choisi le seuil λ de sorte que pour tout (j, k) ∈ IM , |〈f, ψj,k〉| ≥ λ et pourtout (j, k) /∈ IM , |〈f, ψj,k〉| < λ alors l’approximation non-lineaire de f peut s’ecrirecomme
f ∗M =
j0+1∑
j=−∞
2−j−1∑
k=0
Tλ(〈f, ψj,k〉)ψj,k.
L’erreur d’approximation non-lineaire est definie par
ǫ∗(M) = ‖f − f ∗M‖2 =
∑
(j,k)/∈IM
|〈f, ψj,k〉|2
Une mesure de l’erreur d’approximation non-lineaire pour certaines fonctionsnon-regulieres est alors donnee par le theoreme suivant :
Theoreme 4.4 Soit f ∈ L2([0, 1]) une fonction qui possede un nombre fini de dis-continuites et qui est Cs (ou uniformement Lipchitizienne d’ordre s) entre ces dis-continuites. Si s < r ou r est le nombre de moments nuls de l’ondelette ψ, alors
ǫ∗(M) = o(M−2s)
Le theoreme 4.4 montre que l’erreur d’approximation non-lineaire depend de laregularite uniforme de la fonction entre les discontinuites. Ainsi si s > 1/2, alorsl’erreur d’approximation non-lineaire ǫ∗(M) decroit plus vite que l’erreur d’approxi-mation lineaire ǫ(M) et ceci d’autant plus rapidement que s est grand. En effet,en presence de discontuites ǫ(M) decroit au mieux en O(M−1). Une approximationnon-lineaire correspond a une approximation adaptative. Aux fines echelles, l’ap-proximation se concentre sur les coefficients d’ondelettes de grande amplitude quisont localises au voisinage des discontinuites du signal. Ceci permet une bonne re-construction des parties irregulieres d’une fonction tout en conservant une bonnequalite d’approximation des parties regulieres du signal.
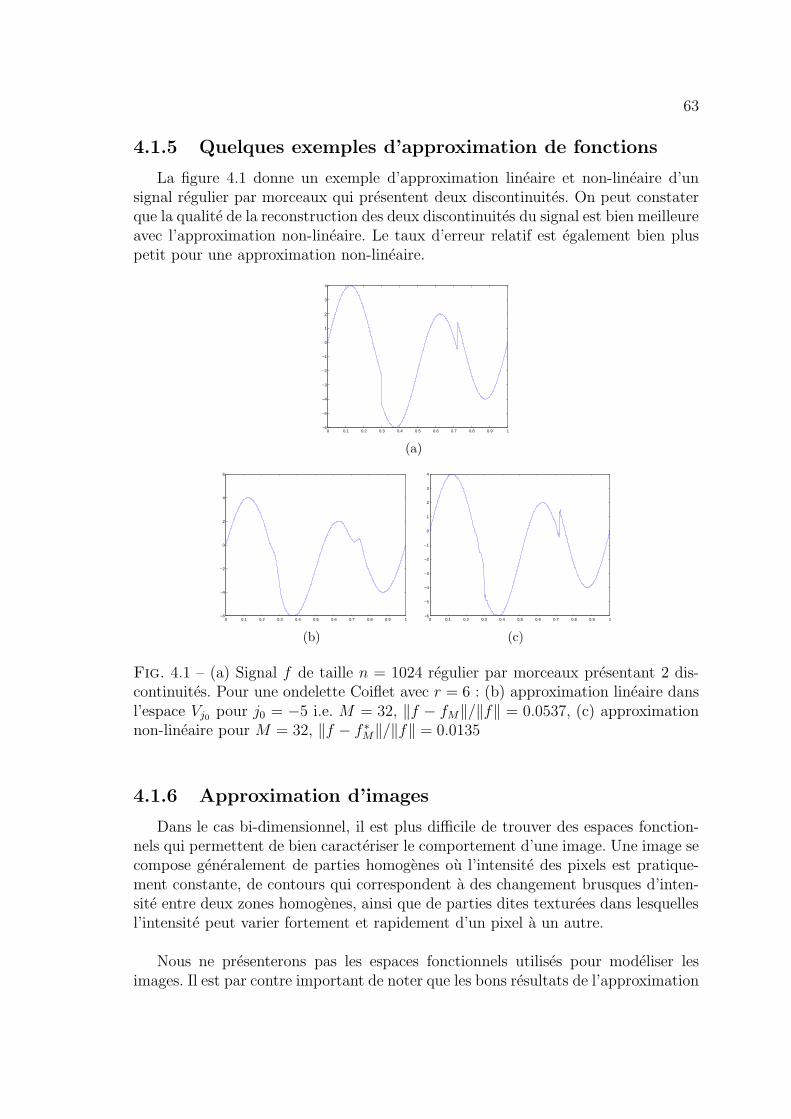
63
4.1.5 Quelques exemples d’approximation de fonctions
La figure 4.1 donne un exemple d’approximation lineaire et non-lineaire d’unsignal regulier par morceaux qui presentent deux discontinuites. On peut constaterque la qualite de la reconstruction des deux discontinuites du signal est bien meilleureavec l’approximation non-lineaire. Le taux d’erreur relatif est egalement bien pluspetit pour une approximation non-lineaire.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−6
−5
−4
−3
−2
−1
0
1
2
3
4
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−6
−4
−2
0
2
4
6
(b)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−6
−5
−4
−3
−2
−1
0
1
2
3
4
(c)
Fig. 4.1 – (a) Signal f de taille n = 1024 regulier par morceaux presentant 2 dis-continuites. Pour une ondelette Coiflet avec r = 6 : (b) approximation lineaire dansl’espace Vj0 pour j0 = −5 i.e. M = 32, ‖f − fM‖/‖f‖ = 0.0537, (c) approximationnon-lineaire pour M = 32, ‖f − f ∗
M‖/‖f‖ = 0.0135
4.1.6 Approximation d’images
Dans le cas bi-dimensionnel, il est plus difficile de trouver des espaces fonction-nels qui permettent de bien caracteriser le comportement d’une image. Une image secompose generalement de parties homogenes ou l’intensite des pixels est pratique-ment constante, de contours qui correspondent a des changement brusques d’inten-site entre deux zones homogenes, ainsi que de parties dites texturees dans lesquellesl’intensite peut varier fortement et rapidement d’un pixel a un autre.
Nous ne presenterons pas les espaces fonctionnels utilises pour modeliser lesimages. Il est par contre important de noter que les bons resultats de l’approximation

64
non-lineaire obtenus dans le cas 1D ne peuvent pas s’etendre au cas 2D en utilisantdes produits tensoriels de bases d’ondelettes uni-dimensionnelles. En effet, supposonsque l’on ait construit une base d’ondelettes orthogonales adaptees a l’espace L2(R2).Si f est une image reguliere sur deux morceaux qui sont separes par un contourΩ de longueur finie L > 0 (e.g. f = C11Ω) alors l’erreur d’approximation non-lineaire ǫ∗(M) d’ordre M (calculee comme dans le cas 1D a l’aide des M plus grandscoefficients d’ondelettes) est telle que
ǫ∗(M) ∼ KM−1,
ou K est une constante qui depend du contour Ω.
Ainsi, contrairement au cas 1D, une approximation non-lineaire d’une imagedans une base d’ondelettes ne decroit pas en fonction de la regularite uniforme del’image sur chacun des morceaux. Il s’agit d’un des desavantages des bases d’on-delettes en deux dimensions. Pour des images, il est necessaire d’utiliser de nom-breuses ondelettes pour representer un contour ce qui explique la limitation de lavitesse de convergence de ǫ∗(M). La recherche de nouvelles representations multi-echelles qui sont adaptees a la geometrie des images fait actuellement l’objet denombreux travaux (Donoho [], Candes et Donoho [], Donoho et Huo [], Willet etNowak [], Le Pennec et Mallat [], Cohen et Matei [].) . Ceci permetterait d’ameliorerconsiderablement la qualite de l’approximation de fonctions en 2D ce qui aurait denombreux avantages en debruitage et compression d’images.
4.1.7 Quelques exemples d’approximation d’images
La figure 4.2 donne un exemple d’approximation lineaire et non-lineaire de l’imagedu cameraman. On peut constater que la qualite de la reconstruction des contoursde l’image est bien meilleure avec l’approximation non-lineaire. Le taux d’erreurrelatif est egalement plus petit pour une approximation non-lineaire.
4.2 Debruitage de fonctions 1D
Le probleme du debruitage de fonctions 1D peut se formuler comme un problemede regression nonparametrique en statistique. On suppose que l’on dispose de n = 2J
observations bruitees d’une fonction inconnue f ∈ L2([0, 1]) a des instants regulierementespaces ti = i
nde l’intervalle [0, 1] :
yi = f(ti) + σǫi, i = 1, . . . , n, (4.1)
ou les ǫi sont des realisations independantes et identiquement distribuees (i.i.d.)de la loi normale de moyenne 0 et de variance 1 (N(0, 1)), et σ est un parametrequi represente le niveau de bruit (σ2 correspond donc a la variance du bruit dansce modele). L’equation (4.1) correspond au modele standard de regression non-parametrique avec un bruit Gaussien. Il s’agit d’un modele nonparametrique car,

65
(a)
(b) (c)
Fig. 4.2 – (a) Image f du cameraman de taille n × n avec n = 256. Pour uneondelette Symmlet avec r = 8 : (b) approximation lineaire dans l’espace Vj0 pourj0 = −6 i.e. M = 4096, ‖f − fM‖/‖f‖ = 0.1354, (c) approximation non-lineairepour M = 4096, ‖f − f ∗
M‖/‖f‖ = 0.0620
comme nous allons le voir par la suite, aucune hypothese restrictive n’est faite sur laforme de la fonction f . Le but du debruitage de fonctions est de trouver un estima-teur f qui approche au mieux la fonction f . La qualite du debruitage est mesuree apartir de l’erreur quadratique empirique :
E =1
n
n∑
i=1
(f(ti) − f(ti))2,
pour f appartenant a une certaine classe de fonctions (par exemple f ∈W s([0, 1])(M) =f ∈ L2([0, 1]), ‖f‖W s ≤ M, ou bien pour f appartenant a une classe de fonctionsplus irregulieres).
Rappelons que la decomposition en ondelettes d’une fonction f ∈ L2([0, 1]) dans

66
une base d’ondelettes periodiques s’ecrit sous la forme
f =
2−j0−1∑
k=0
〈f, φj0,k〉φj0,k +
j0∑
j=−∞
2−j−1∑
k=0
〈f, ψj,k〉ψj,k.
Le calcul des coefficients d’echelle et des coefficients d’ondelette empiriques peuts’exprimer a l’aide d’une matrice W de taille n×n dont les lignes correspondent a ladiscretisation des fonctions d’echelle et d’ondelette a differents niveaux de resolution.Ainsi, si on note f = [f(t1), . . . , f(tn)] le vecteur des valeurs de f aux points dudesign, les coefficients d’echelle et d’ondelette empiriques au niveau j0 sont donnespar
d = W f ,
ou d = [(αj0,k)k=0,...,2−j0−1, (βj,k)j=−J+1,...,j0,k=0,...,2−j−1]. Rappelons toutefois qu’ils’agit seulement d’une facon formelle d’ecrire la transformee en ondelette empiriquecar en pratique on utilise l’algorithme pyramidal en O(n) et non pas un produitmatriciel (cout en O(n2)). De plus, nous avons vu precedemment que :
αj0,k ≈√n〈f, φj0,k〉 et βj,k ≈
√n〈f, ψj,k〉.
On peut montrer que W est une matrice orthogonale i.e. W tW = In ce qui impliqueque la transformee en ondelette inverse peut s’exprimer comme
f = W td.
La matrice W etant une matrice orthogonale, on peut montrer que la transformeeen ondelette d’un vecteur Gaussien est a nouveau un vecteur Gaussien de mememoyenne et de meme matrice de covariance. Ainsi, les coefficients d’echelle et d’on-delette bruites peuvent s’ecrire comme (avec y = [y1, . . . , yn]) :
d = Wy,
avec
αj0,k = αj0,k + σzj0,k, k = 0, . . . , 2−j0 − 1
βj,k = βj,k + σzj,k, j = −J + 1, . . . , j0, k = 0, . . . , 2j − 1,
ou les zj,k sont des variables aleatoires i.i.d. N(0, 1).
Nous avons vu precedemment que pour des fonctions qui sont regulieres parmorceaux, la plupart des coefficients d’ondelette sont nuls aux fines echelles, et queles coefficients d’ondelette de grande amplitude se concentrent aux voisinages deseventuelles singularites du signal. Aux fines echelles, les coefficients d’ondelette d’unefonction bruitee correspondent donc principalement au bruit et seuls quelques co-efficients correspondent effectivement au signal. Le debruitage par ondelette d’unefonction est donc obtenu par une procedure de seuillage des coefficients d’ondelettesbruites pour un seuil λ ≥ 0 bien choisi. On distingue en particulier

67
– le seuillage dur (Hard Thresholding) :
δHλ (βj,k) =
0 si |βj,k| ≤ λ
βj,k si |βj,k| > λ
– le seuillage doux (Soft Thresholding) :
δSλ (βj,k) =
0 si |βj,k| ≤ λ
βj,k − λ si βj,k > λ
βj,k + λ si βj,k < −λ
En general, on choisit de ne pas modifier les coefficients d’echelles αj0,k car ceux-ci sont tres peu influences par le bruit et correspondent au comportement du signalaux basses frequences. Prendre j0 = −2 ou j0 = −3 donne generalement de bonsresultats. L’estimation de f est alors donnee par
fλ =
2−j0−1∑
k=0
αj0,k√nφj0,k +
j0∑
j=−J+1
2−j−1∑
k=0
δλ(βj,k)√n
ψj,k.
Au point du design, on calcule l’estimation de f selon le schema suivant :
y FWT−−−→ αj0,k, βj,k Seuillage−−−−−−→ αj0,k, δλ(βj,k) IWT−−−→ fλ
Il a ete developpe de nombreuses techniques pour determiner un seuil λ optimal.L’un des methodes les plus utilisees, car tres simple a implementer, consiste a choisirle seuillage universel :
λ = σ√
2 logn,
ou σ est une estimation du niveau du bruit a partir des coefficients d’ondelettes al’echelle la plus fine :
σ =median(|β−J+1,k|, k = 0, . . . , 2−J+1 − 1)
0.6745.
La Figure 4.3 donne un exemple de debruitage par ondelettes avec un seuillagedur universel. On peut constater que la procedure de seuillage conserve uniquementles coefficients significatifs du signal bruite.
4.3 Compression d’images
Nous presentons ici quelques principes de la compression d’images. Une presentationdetaillee du probleme de la compression de signaux depasse tres largement le cadrede ce cours. Les methodes de compression des images par ondelettes sont basees surle fait que les decompositions en ondelettes permettent des representations creusesdes images (c’est a dire avec peu de coefficients). C’est l’une des raisons qui expliquele succes du nouveau standard de compression d’images JPEG2000 qui est base sur
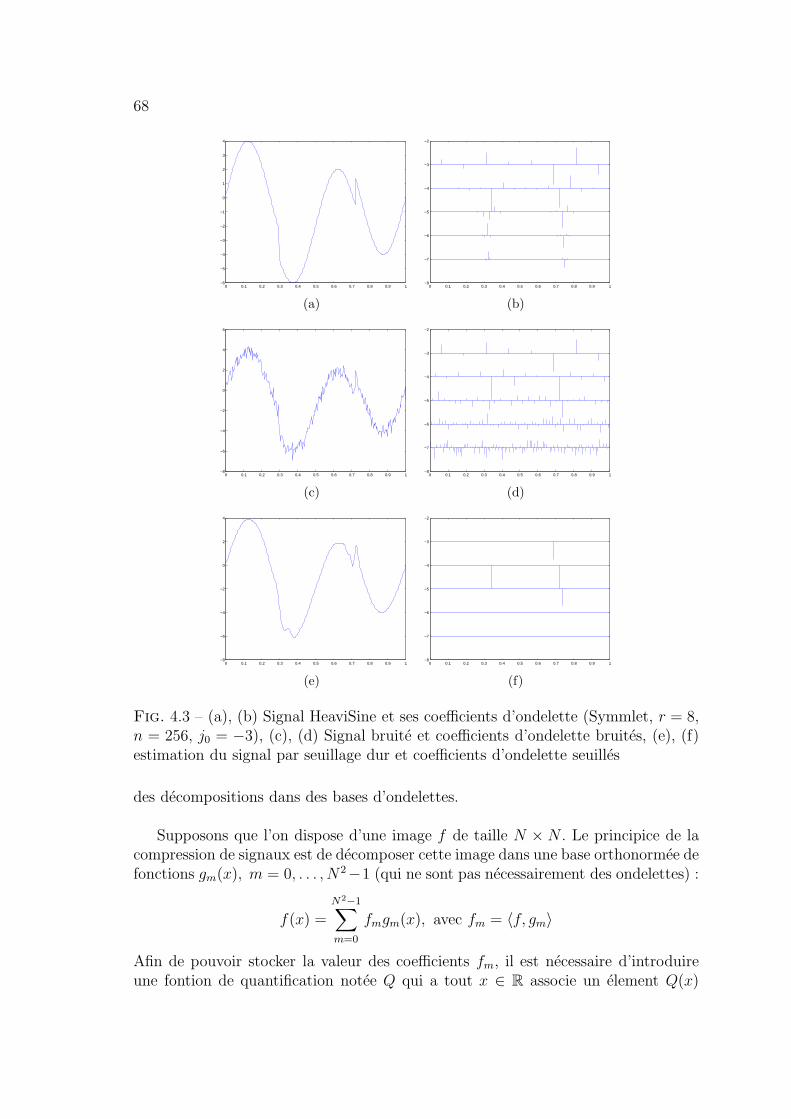
68
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−6
−5
−4
−3
−2
−1
0
1
2
3
4
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−8
−7
−6
−5
−4
−3
−2
(b)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−8
−6
−4
−2
0
2
4
6
(c)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−8
−7
−6
−5
−4
−3
−2
(d)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−8
−6
−4
−2
0
2
4
(e)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−8
−7
−6
−5
−4
−3
−2
(f)
Fig. 4.3 – (a), (b) Signal HeaviSine et ses coefficients d’ondelette (Symmlet, r = 8,n = 256, j0 = −3), (c), (d) Signal bruite et coefficients d’ondelette bruites, (e), (f)estimation du signal par seuillage dur et coefficients d’ondelette seuilles
des decompositions dans des bases d’ondelettes.
Supposons que l’on dispose d’une image f de taille N × N . Le principice de lacompression de signaux est de decomposer cette image dans une base orthonormee defonctions gm(x), m = 0, . . . , N2−1 (qui ne sont pas necessairement des ondelettes) :
f(x) =
N2−1∑
m=0
fmgm(x), avec fm = 〈f, gm〉
Afin de pouvoir stocker la valeur des coefficients fm, il est necessaire d’introduireune fontion de quantification notee Q qui a tout x ∈ R associe un element Q(x)

69
dans un ensemble de cardinal fini X = x1, . . . , xK. La reconstruction de l’imageest alors definie par
f(x) =N2−1∑
m=0
Q(fm)gm(x)
et l’erreur (ou taux de distorsion) qui est introduite par cette quantification estmesuree par
d(f) =N2−1∑
m=0
(fm −Q(fm))2.
Afin de determiner une fonction Q qui soit bien adaptee aux donnees, on peututiliser la methode suivante : soit p(x) l’histogramme des N2 coefficients fm. Il s’agitd’une densite de probabilite (
∫
p(x)dx = 1) qui permet de connaıtre la repartitiondes coeffcients fm. En particulier, on peut definir la proportion de coefficients dansl’intervalle [yk, yk+1[ par pk =
∫ yk+1
ykp(x)dx, ou [yk, yk+1[, k = 1, . . . , K correspond a
une partition du support [a, b] de p(x). On definit alors le codage par
Q(x) = xk =1
2(yk + yk+1) si x ∈ [yk, yk+1[.
Chaque quantite xk est ensuite codee par lk bits, et le nombre total R de bitsnecessaires pour coder l’image est donne par
R = N2K∑
k=1
pklk.
Un codage de taille constante correspond a : lk = log2(K) et dans ce cas R =N2 log2(K). Le nombre minimal de bits est minore par l’entropie de Shanon quicorrespond au choix lk = − log2(pk) :
R ≥ −N2
K∑
k=1
pk log2(pk).
Le probleme de la compression d’image est de determiner une quantification op-timale Q qui minimise l’erreur d(f) lorque l’on se fixe un nombre de bits par pixelsR = R/N2. Le choix de Q depend de la forme de l’histogramme p(x). Si p(x) estapproximativement constant sur les intervalles [yk, yk+1[, alors on peut montrer quele quantificateur optimal est donne par [yk, yk+1[= ∆ = b−a
K, k = 1, . . . , K : il s’agit
du quantificateur uniforme.
Par contre si l’on choisit une base de fonctions gm(x) de sorte que de nombreuxcoefficients fm sont nuls (par exemple une base d’ondelettes), alors on ne peut plusconsiderer que p(x) est constant au voisinage de zero, et le quantificateur uniformen’est plus optimal, en particulier si R est petit. Il faut donc distinguer les coefficientssignificatifs de ceux que l’on peut considerer comme negligeagles pour pouvoir obte-nir une bonne compression. Soit λ un seuil bien choisi et M le nombre de coefficients

70
tels que |fm| > λ. Soit R0 le nombre de bits necessaires pour coder la position deces coefficients significatifs et R1 le nombre de bits necessaires pour coder la valeurde ces coefficients. Le nombre total de bits pour coder l’image est alors donne parR = R0 +R1. Le taux de distorsion est egal a
d(f) =∑
|fm|<λ|fm|2 +
∑
|fm|≥λ(fm −Q(fm))2
Il est alors possible de determiner une quantification optimale en fonction de ladecroissance en module des plus grands coefficients fm (voir [7] pour plus de details).
4.4 Problemes inverses
Lorsqu’un signal ou une image n’est pas directement mesurable, il est courantde proceder a l’observation d’autres quantites qui sont reliees a la fonction que l’onvoudrait estimer. Le principe d’un probleme inverse est la recherche d’une methodepour inverser le processus que l’on observe afin de retrouver le signal ou l’imaged’interet. Il existe de nombreuses applications qui peuvent se modeliser comme unprobleme inverse : tomographie, deconvolution d’image, estimation de la deriveed’une fonction...
Formellement, un probleme inverse peut se formuler a l’aide d’un operateur Kqui represente le processus que l’on voudrait inverser et ou les donnees qu’on observesont de la forme
g = Kf + ǫ,
ou f est le signal ou l’image que l’on voudrait estimer et ǫ represente un bruit de me-sure. Par exemple si l’on suppose que l’on se place dans un modele de regression non-parametrique, le probleme de l’estimation de la derivee d’une fonction peut s’ecriresous la forme (dans ce cas, K est l’operateur d’integration : Kf(t) =
∫ t
0f(u)du) :
gi =
∫ ti
0
f(u)du+ ǫi, i = 1, . . . , n.
Dans la plupart des applications, le probleme est mal-pose dans le sens ou il n’estpas possible d’estimer f en inversant directement l’operateur K. En effet, l’operateurinverse K−1 n’est en general pas borne ce qui entraıne une amplification du bruit etimplique que l’estimateur f = K−1g n’est pas une bonne estimation de f .
Lorque les fonctions que l’on souhaite estimer sont irregulieres (ce qui est le casdes images par exemple), les ondelettes sont un outil bien adapte pour estimer lafonction f . L’estimation est basee sur une decomposition temps-echelle des observa-tions g, puis sur un seuillage bien adapte des coefficients et une methode d’inversiona base d’ondelettes (qui prend en compte l’amplification du bruit par le processusd’inversion). Le lecteur interesse pourra consulter [7], pour de plus amples details.
Bibliographie
[1] Antoniadis, A. et Oppenheim, G. (Eds.) (1995) Wavelets and Statistics, Lect.Notes Statist., New York : Springer-Verlag.
[2] Aldroudi, A. et Unser, M. (1996) Wavelets in Medecine and Biologoy, CRCPress.
[3] Abry, P. (1997) Ondelettes et turbulences, Nouveaux essais, arts et sciences,Diderot.
[4] Cohen, A. (2003) Numerical Analysis of Wavelet Methods, Studies in Mathe-matics and Its Applications, V. 32, Elsevier.
[5] Daubechies, I. (1992) Ten lectures on Wavelets, SIAM, Philadelphia.
[6] Gasquet, C. et Witomski, P. (2000) Analyse de Fourier et applications. Filtrage,calcul numerique et ondelettes, Dunod.
[7] Mallat, S. (1998). A Wavelet Tour of Signal Processing, Academic Press.
[8] Mallat, S. (2000). Une exploration des signaux en ondelettes, Les Editions del’Ecole Polytechnique.
[9] Torresani, B. (1995). Analyse continue par ondelettes , Savoir actuels - In-tereditions/CNRS editions.
71





























