Embed Size (px)
Citation preview
UNIVERSIDAD TÉCNICA DEL NORTE
FICA – CIME
DESARRALLO DE PROYECTOS MECATRÓNICOS
ARTÍCULO CIENTÍFICO PROTOTIPO PIERNA DERECHA
TITULO:
CONSTRUCCIÓN DE UN PROTOTIPO DE PIERNA PARA LA OBSERVACIÓN
DEL MOVIMIENTO Y DESARROLLO DE POSIBLES PROTESIS
INTEGRANTES: AULESTIA ROBERTO
LEÓN ANGELA
MORILLO GEOVANNY
SANCHÉZ RICARDO
SANIPATIN JUAN PABLO
VITERI CRISTIAN
RESUMEN:
En un entorno social existen personas que, por diversos
motivos no pueden mover sus piernas o en situaciones más
lamentables han perdido una o ambas extremidades
inferiores. La política actual del gobierno está orientada
a que todas las personas sean incluidas en todos los
procesos, por lo cual se vio la necesidad de diseñar e
innovar nuevos dispositivos que ayuden a las personas con
discapacidades de una manera significativa y así dichas
personas sean tomadas en cuenta en la sociedad de una forma
activa y permanente por ende; el grupo de trabajo se tomó
como prioridad la investigación de un prototipo de pierna.
La elaboración de este proyecto permitirá establecer bases
para una posterior investigación tecnológica encaminada al
diseño, construcción y perfeccionamiento de prótesis
mioeléctricas para personas con discapacidad en las
extremidades inferiores, con el objetivo de reducir el
número de personas con problemas de discapacidad y lograr
que estas personas puedan integrarse a la sociedad y
mejorar sus actividades cotidianas de manera autónoma.
PALABRAS CLAVE:
Movilidad, Material, Amputaciones, Actuadores, Estructura,
Esfuerzos, Resistencia, Maleabilidad
INTRODUCCIÓN:
La biomecánica de pie y tobillo son complejas y ambas están
asociadas una con otra. El pie es una parte integral de las
extremidades inferiores y es utilizada para una marcha
suave y estable del cuerpo humano.
Además de actuar como una plataforma de soporte de la
estructural, que soporta las cargas del cuerpo humano, el
movimiento cinemático del pie trabajo en torno a tres ejes
y sobre tres planos el proyecto que estamos realizando va
trabajar flexión para el posicionamiento de la pierna para
poder poner en marcha la pierna tenemos que analizar dos
fases una portante y una oscilante, la fase portante se
define: cuando se asienta el pie o se encuentra en flexión;
la fase oscilante es cuando la pierna se encuentra
realizando la actividad de caminar, la rodilla participa en
el movimiento y ayuda en la conservación de las cargas de
la pierna, el movimiento de la rodilla ocurre en tres
planos y este ayuda a que el movimiento de la puesta en
marcha sea más completo, y esto ayuda a la extensión de la
pierna para una caminata correcta.
MATERIALES Y METODOS:
Los materiales usados en esta investigación fueron los
siguientes:
Perfil de aluminio
Servomotores de 24,7kg y 9kg respectivamente
Pernos avellanados
Cables de conexión UTP
Arduino UNO
Resortes
Bisagras
Materia Prima Directa
La metodología para la selección de los materiales se basó
en la comparación de varios factores como: resistencia,
peso, maleabilidad, costo de adquisición entre otros. Es
así como se logró la selección del material que fue
Aluminio para la fabricación ya que tiene una alta
resistencia a la corrosión y es de fácil mecanizado.
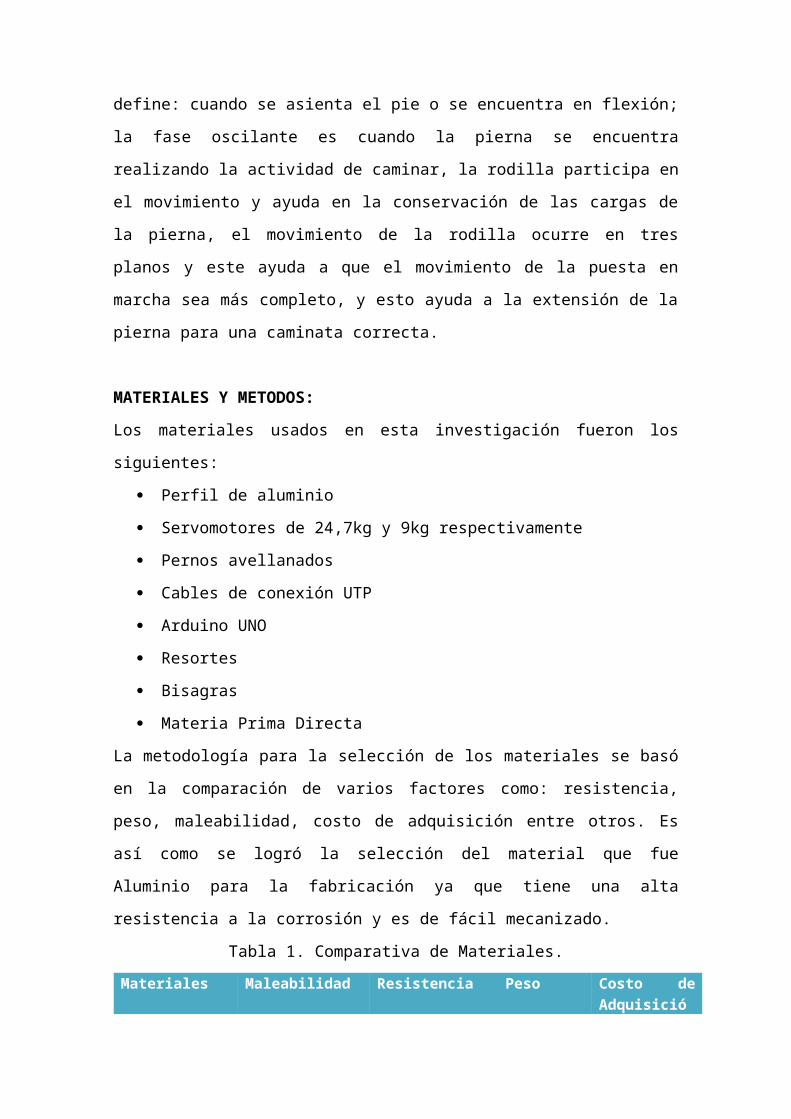
Tabla 1. Comparativa de Materiales.Materiales Maleabilidad Resistencia Peso Costo de
Adquisició
n Madera Baja Media Medio Medio Titanio Alta Alta Bajo Alto Aluminio Alta Alta Bajo Medio
En la selección de los motores se precisó el uso de los
servomotores ya que posees gran precisión y torque, lo que
es fundamental para la efectividad del trabajo
investigativo. Por lo cual se realizó la adquisición de dos
servomotores tanto de 24,7kg y 9kg respectivamente, para el
uso del movimiento de la rodilla como el movimiento del
tobillo.
DISCUSION DE LOS RESULTADOS:
El análisis cinemático describe los movimientos del cuerpo
en conjunto y los movimientos relativos de las partes
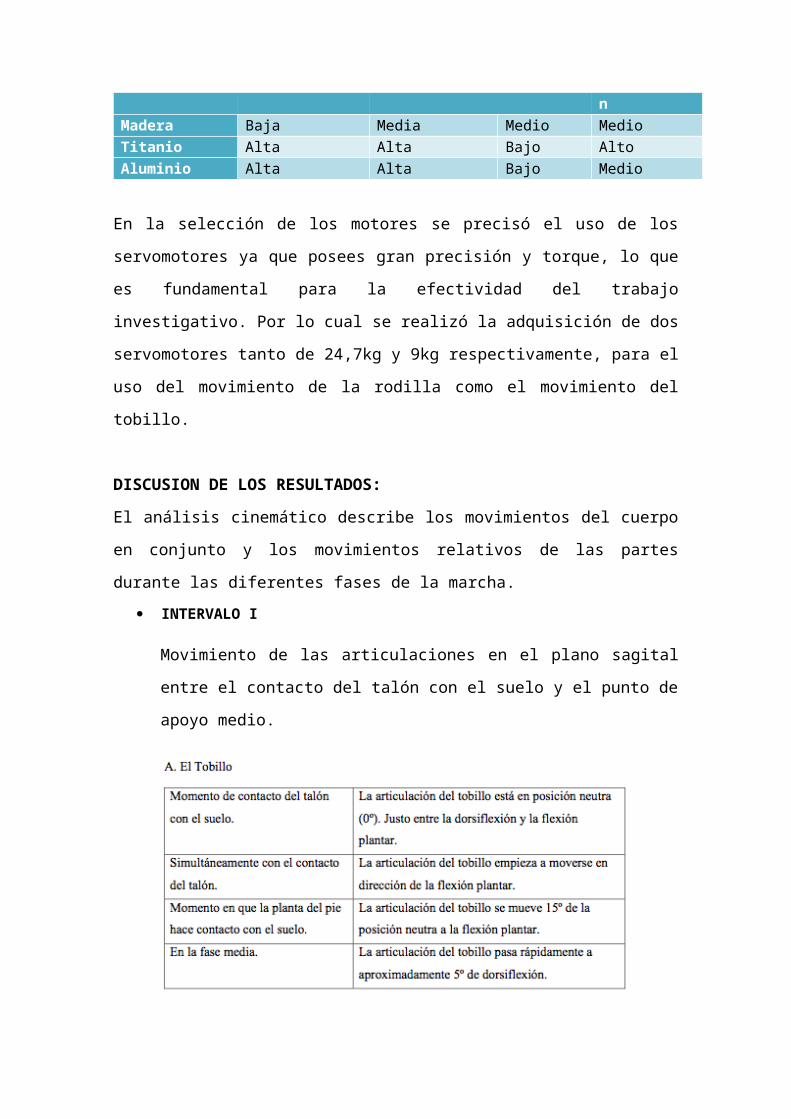
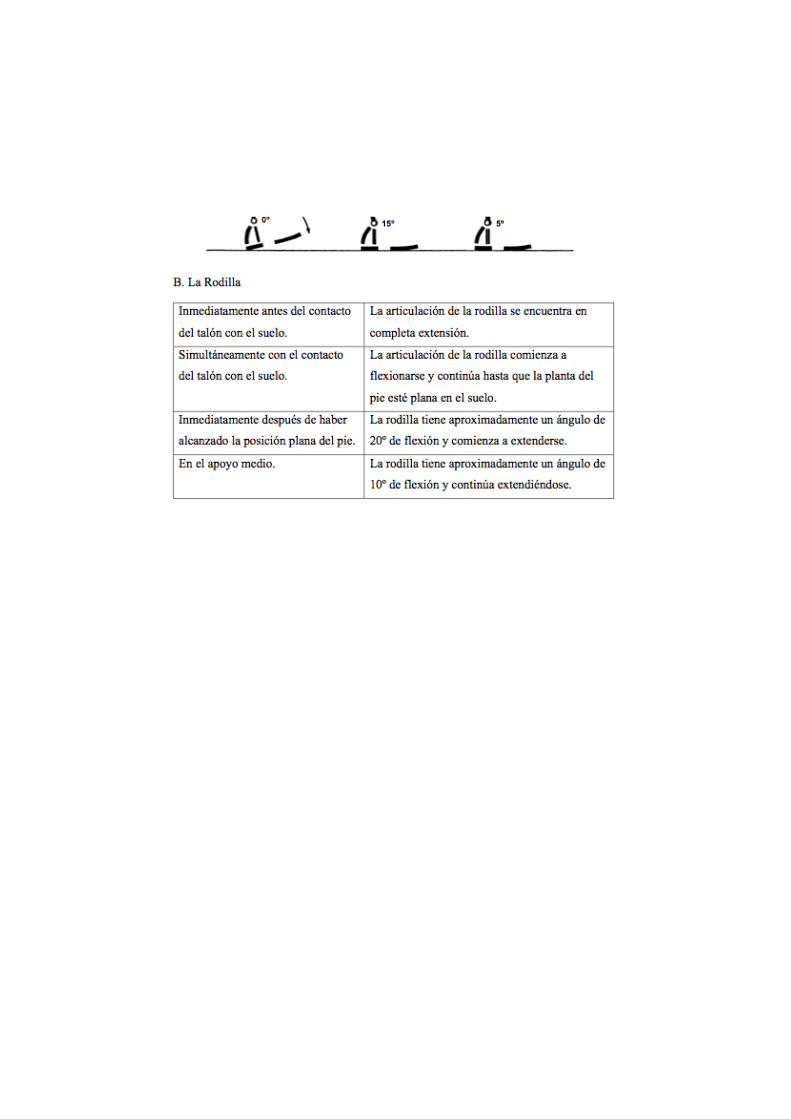
durante las diferentes fases de la marcha. INTERVALO I
Movimiento de las articulaciones en el plano sagital
entre el contacto del talón con el suelo y el punto de
apoyo medio.
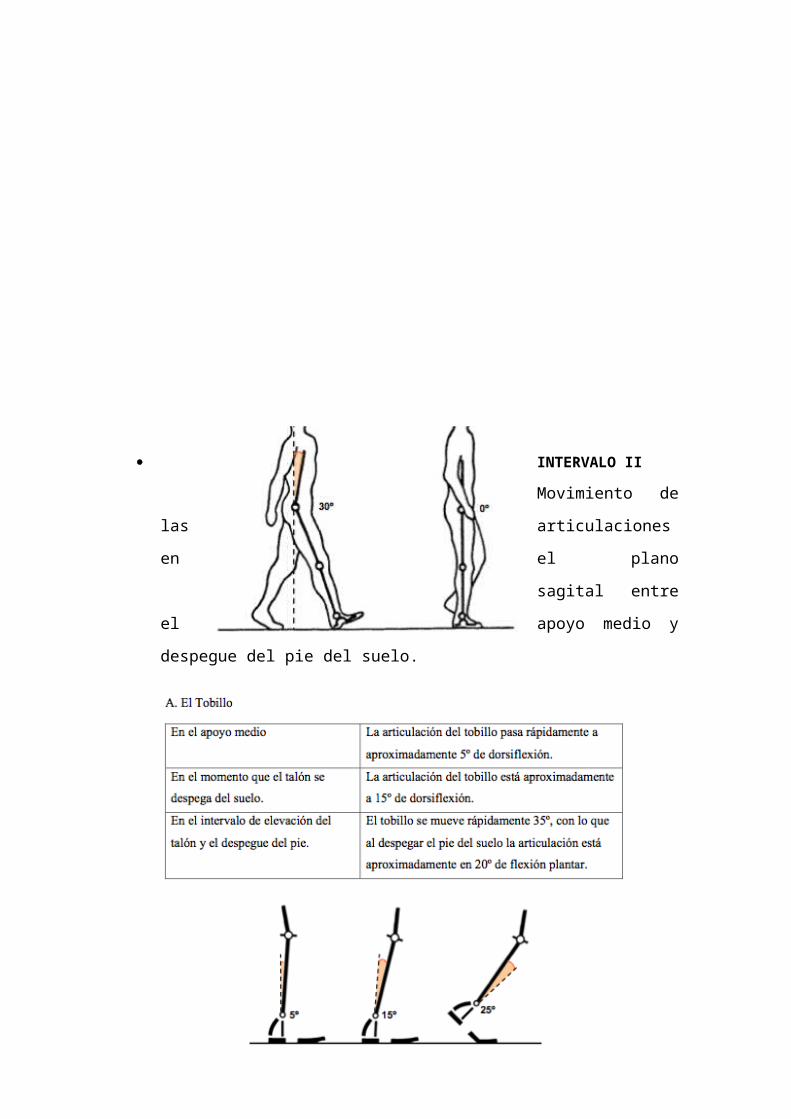
INTERVALO II
Movimiento de
las articulaciones
en el plano
sagital entre
el apoyo medio y
despegue del pie del suelo.
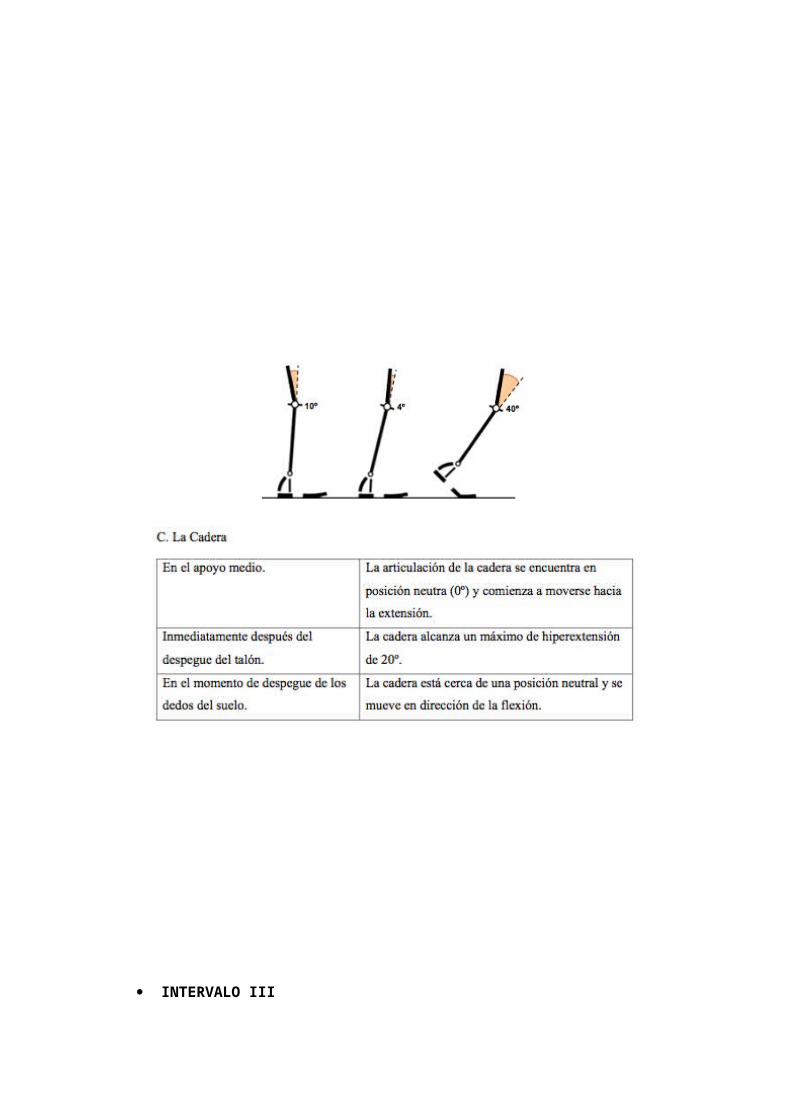
INTERVALO III
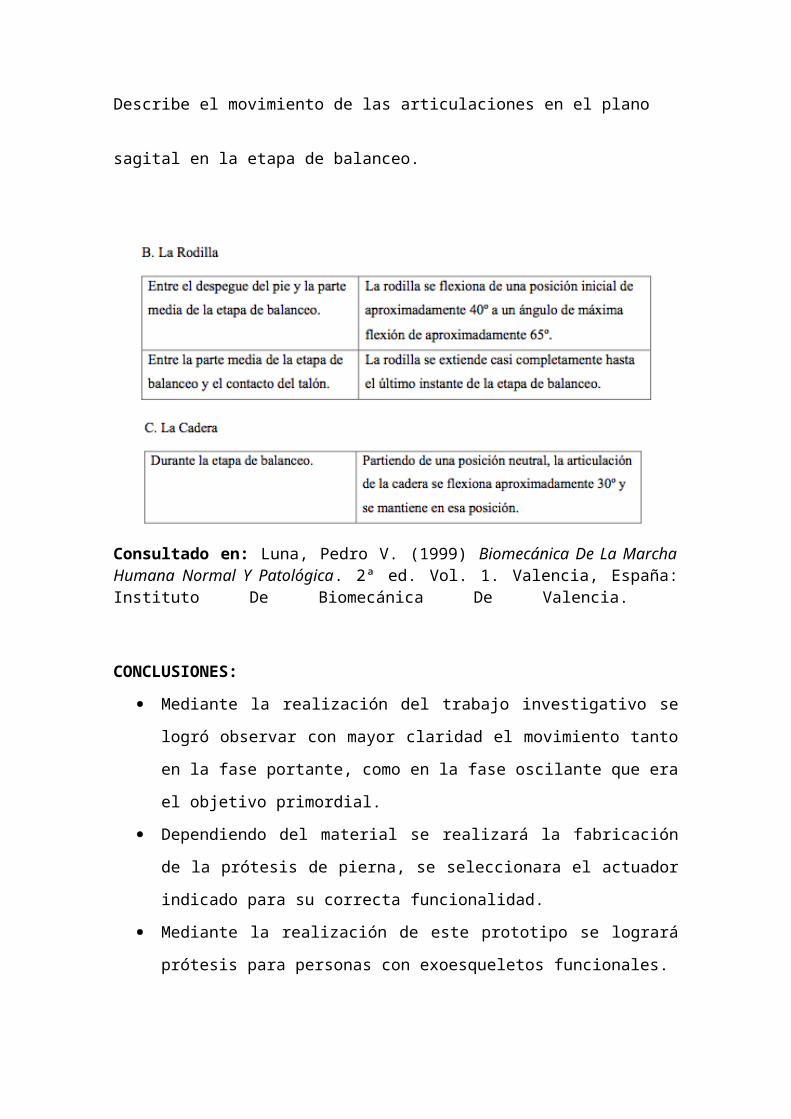
Describe el movimiento de las articulaciones en el plano
sagital en la etapa de balanceo.
Consultado en: Luna, Pedro V. (1999) Biomecánica De La MarchaHumana Normal Y Patológica. 2ª ed. Vol. 1. Valencia, España:Instituto De Biomecánica De Valencia.
CONCLUSIONES:
Mediante la realización del trabajo investigativo se
logró observar con mayor claridad el movimiento tanto
en la fase portante, como en la fase oscilante que era
el objetivo primordial.
Dependiendo del material se realizará la fabricación
de la prótesis de pierna, se seleccionara el actuador
indicado para su correcta funcionalidad.
Mediante la realización de este prototipo se logrará
prótesis para personas con exoesqueletos funcionales.
Mediante este proyecto hemos concluido que se necesita
un estudio muy amplio del material y movilidad de las
piernas de la persona, para poder lograr realizar un
sistema óptimo para un desempeño viable para la
sociedad.
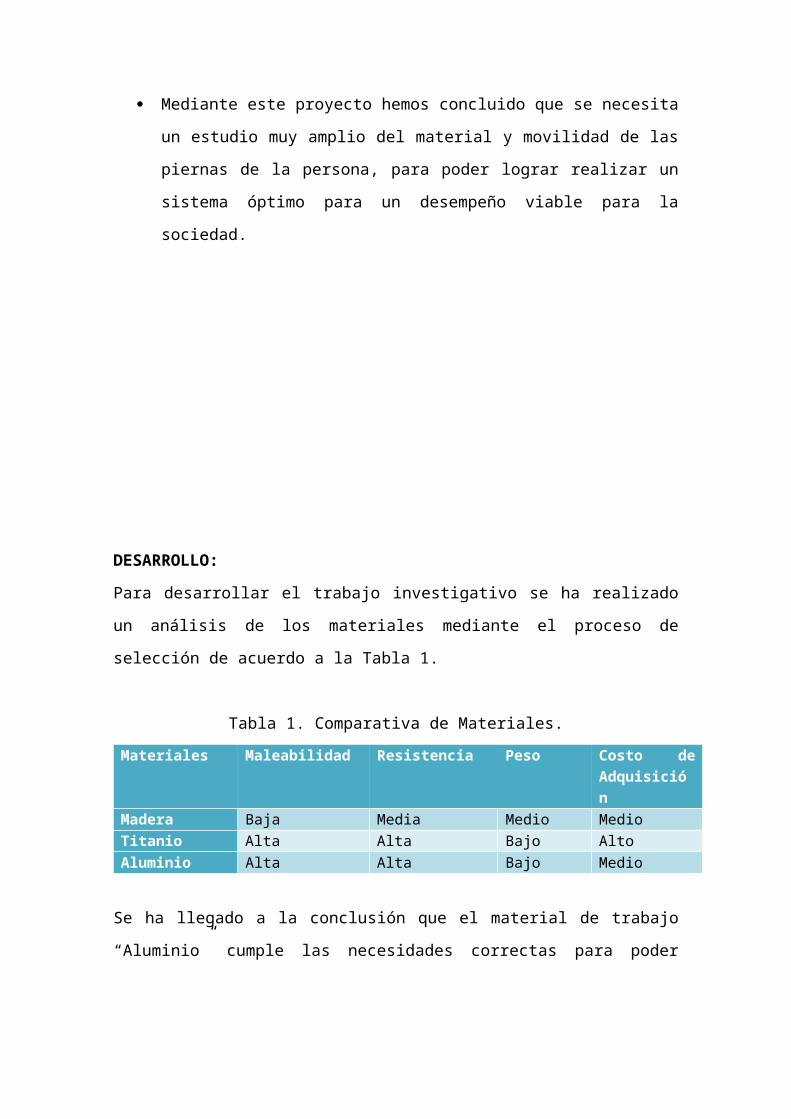
DESARROLLO:
Para desarrollar el trabajo investigativo se ha realizado
un análisis de los materiales mediante el proceso de
selección de acuerdo a la Tabla 1.
Tabla 1. Comparativa de Materiales.Materiales Maleabilidad Resistencia Peso Costo de
Adquisición
Madera Baja Media Medio Medio Titanio Alta Alta Bajo Alto Aluminio Alta Alta Bajo Medio
Se ha llegado a la conclusión que el material de trabajo
“Aluminio” cumple las necesidades correctas para poder
realizar el trabajo, ya que se encuentra en el medio en el
cual se está realizando la investigación.
Posteriormente se ha visto la necesidad de seleccionar el
actuador para las fases de la pierna tanto la portante y
como la oscilante.
Obteniendo dichos elementos de trabajo se procedió al
diseño estructural de las piezas mecánicas de la pierna
basándose en la antropometría del cuerpo humana, todo esto
se lo realizo mediante el Software CAD (SolidWorks).
Paulatinamente se hizo una previa simulación para observar
los movimientos con sus distintos ángulos de flexión y
oscilación. Después de realizar todas las pruebas
respectivas se procedió al ensamblaje de cada una de las
piezas y actuadores para poder realizar las pruebas de
funcionamiento y obtener un análisis de resultado para
observar el error en sus ángulos de movimiento.





























