Embed Size (px)
Citation preview
Chap
ter
1
1
Introduction to Process Control
CHAPTER 1
Chap
ter
1
2
1. Explain the importance of process control.
2. Identify and describe simple control system
3. Explain the process & instrumentation diagram (P&ID).
4. Design control system for a typical chemical process.
Topic Outcomes (TO)
Chap
ter
1
3
Basic Questions about Control
1)What is control? 2)Why is control necessary?3)What is feedback control?4)What does a feedback system
do?5)How is control done?
Chap
ter
1
4
1.What is control? Control:To maintain desired conditions in a physical system by adjusting selected variables in the system.
Control SystemThe control systems appear to have three basic elements which is
FINAL ELEMENTCONTROLLERSENSOR
Chap
ter
1
5
SENSOR
-The first task that of acquiring information about of the process outputvariables.-Sensors are usually needed for pressure, temperature, liquid level, flow and composition measurement.-thermocouple: temperature measurement -differential pressure cell: for liquid level measurements-gas/liquid chromatographs: composition measurements
CONTROLLER
-The decision maker,and hence the ‘heart’ of the control system
FINAL ELEMENT
-Pump, variable speed fans, compressor, conveyorsTransmitter: How process information acquired by the sensor get back to the controller, and the controller decision gets back to the process
Chap
ter
1
6
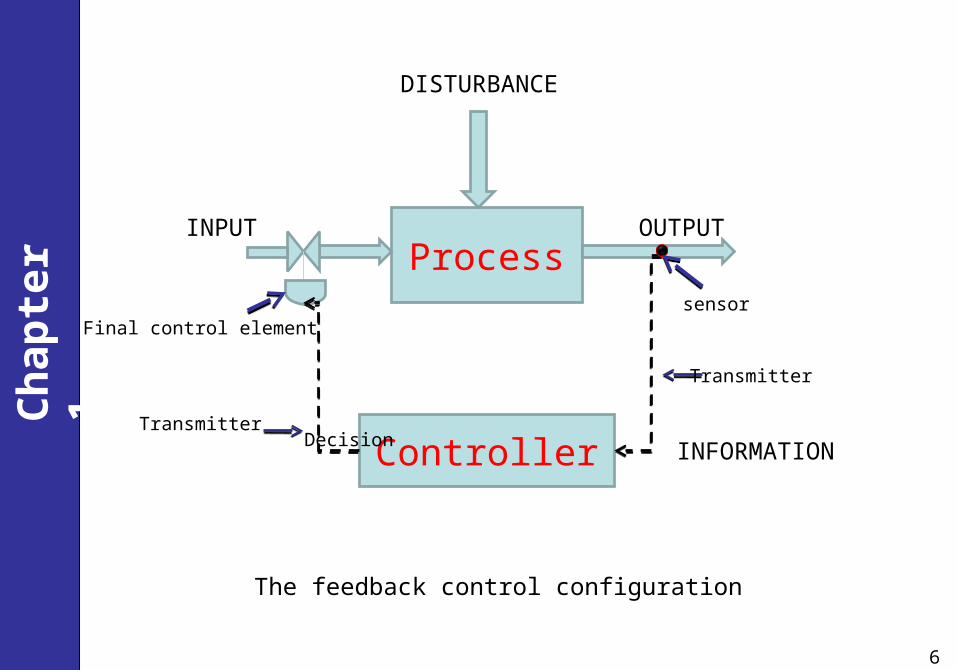
Process
Controller
OUTPUT
sensorFinal control element
INFORMATION
Transmitter
Transmitter
INPUT
Decision
DISTURBANCE
The feedback control configuration
Chap
ter
1
7
2.Why is control necessary?
One word: DISTURBANCES!

Chap
ter
1
8
Chap
ter
1
9
1.Safetya) Emergency System - to enforce bounds of variables.
b) Safety Valve - it opens to vent the excess vapor.
2.Environmental Protectiona) Safety Release System- it diverts a hydrocarbon gaseous to a flare for combustion .-it diverts a stream (water) to a holding pond for purification.
2.Why is control necessary?
Chap
ter
1
10
3. Equipment Protectiona)To maintain conditions near desired value and emergency controls.
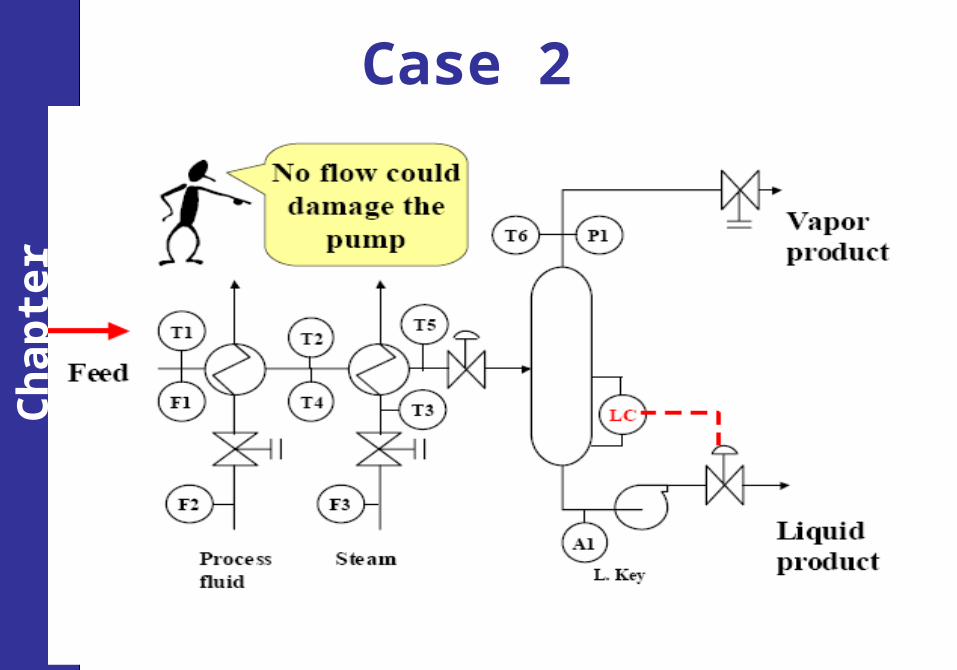
b)Level controller - protects the pump form damage.
c)Emergency Controls - shut off the pump motor when the level decreased.
4. Smooth Operation and Production Ratea) Chemical plants - complex networks / interacting processes.
b)Adjusting the feed valve (before the flash drum) - desired value.
2.Why is control necessary?
Chap
ter
1
11
5. Product Qualitya)Specifications - compositions / physical properties / performance properties / combination of all three.
b) Adjusting the flash temperature - control component A in the liquid stream.
6. Profita)Goal - to provide product at lowest cost.b)Using hot process fluid for heating instead of steam.
2.Why is control necessary?
Chap
ter
1
12
7. Monitoring and DiagnosisThere are 2 functions:i. The immediate safety and operation of the plant -plant operators.ii. The long term plant performance analysis -engineers
Alarm - to indicate serious maloperation.
All the categories of control objectives must be
achieved simultaneously; failure to do so leads to
unprofitable or worse, dangerous plant operation.
2.Why is control necessary?
Chap
ter
1
13
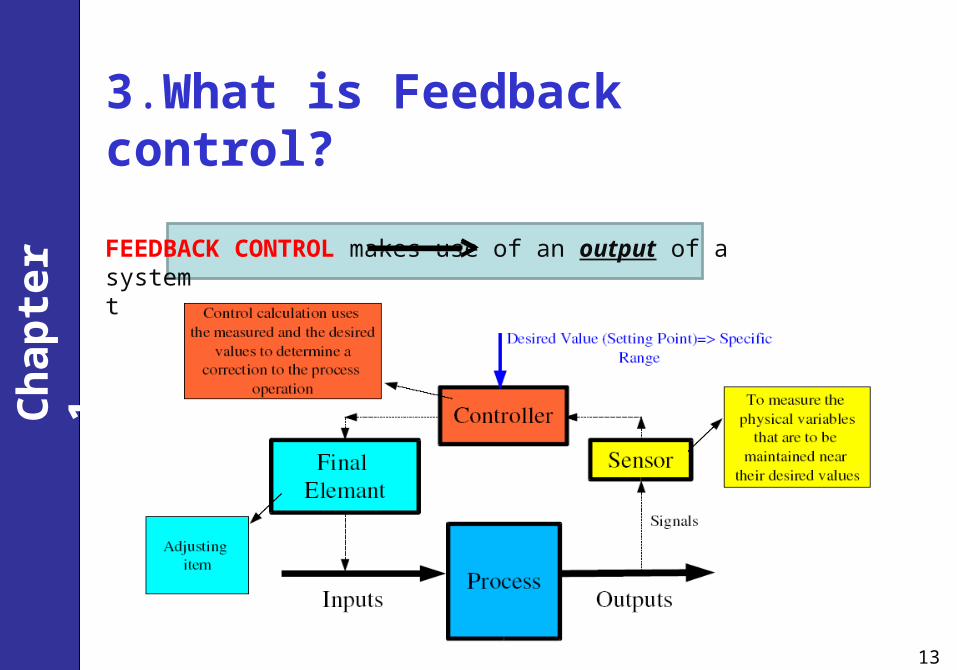
3.What is Feedback control? FEEDBACK CONTROL makes use of an output of a systemto influence an input to the same system.
input = cause output = effect
Chap
ter
1
14
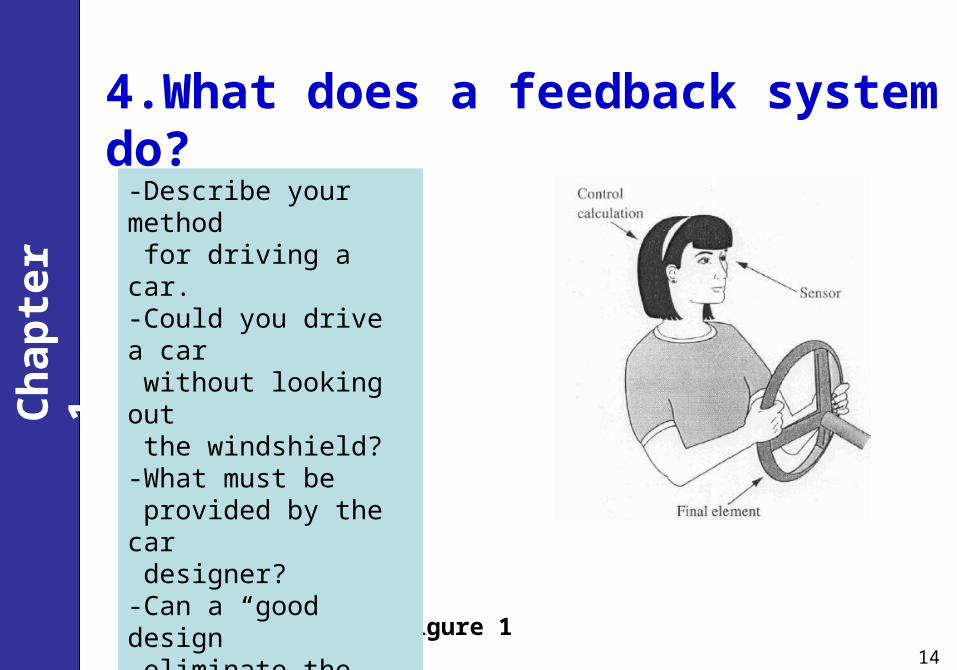
4.What does a feedback system do?
Figure 1
-Describe your method for driving a car.-Could you drive a car without looking out the windshield?-What must be provided by the car designer?-Can a “good design” eliminate the need to steer?
Chap
ter
1
15
Chap
ter
1
16
Chap
ter
1
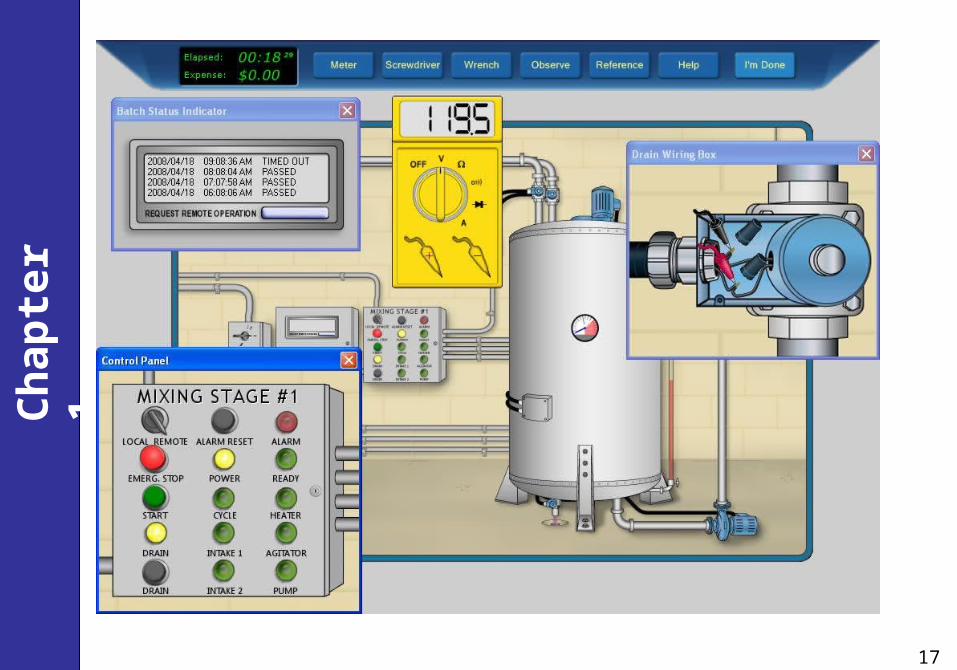
17
Chap
ter
1
18
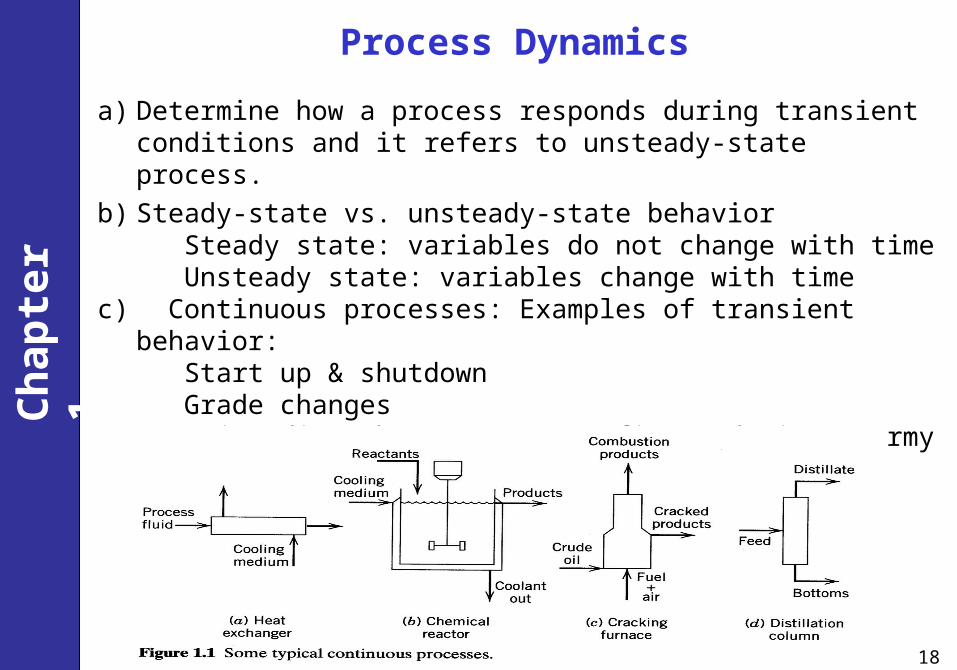
Process Dynamicsa) Determine how a process responds during transient
conditions and it refers to unsteady-state process.
b) Steady-state vs. unsteady-state behaviorSteady state: variables do not change with timeUnsteady state: variables change with time
c) Continuous processes: Examples of transient behavior:
Start up & shutdownGrade changesMajor disturbance: e.g., refinery during stormy or hurricane conditionsEquipment or instrument failure (e.g., pump failure)
Chap
ter
1
19
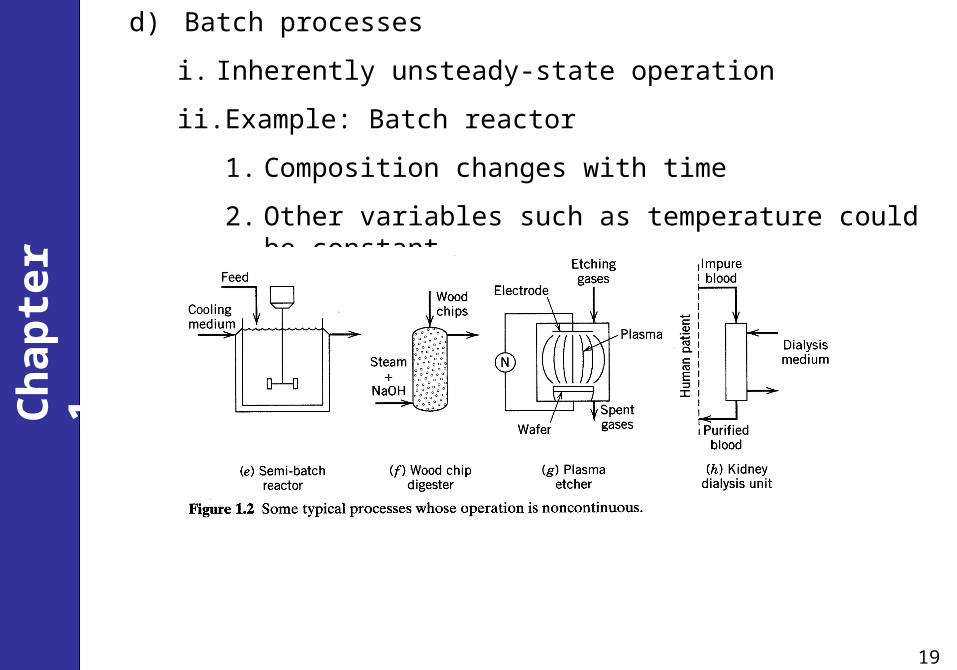
d) Batch processesi. Inherently unsteady-state operationii.Example: Batch reactor
1. Composition changes with time2. Other variables such as temperature could
be constant.
Chap
ter
1
20
Control Terminology controlled variables - these are the variables which
quantify the performance or quality of the final product, which are also called output variables.
manipulated variables - these input variables are adjusted dynamically to keep the controlled variables at their set-points.(if their value can be adjusted freely by the human operator or a control mechanism).
disturbance variables - these are also called "load" variables and represent input variables that can cause the controlled variables to deviate from their respective set points.(if their values are not the result of adjustment by an operator or a control system).
set-point change - implementing a change in the operating conditions. The set-point signal is changed and the manipulated variable is adjusted appropriately to achieve the new operating conditions. Also called servomechanism (or "servo") control.
disturbance change - the process transient behavior when a disturbance enters, also called regulatory control or load change. A control system should be able to return each controlled variable back to its set-point.
Chap
ter
1
21
FEEDBACK
Uses direct measurements of the controlled variables to adjust the values of the manipulated variables.
FEEDFORWARDUses direct measurements of the disturbances variables to adjust the values of the manipulated variables.
Chap
ter
1
22
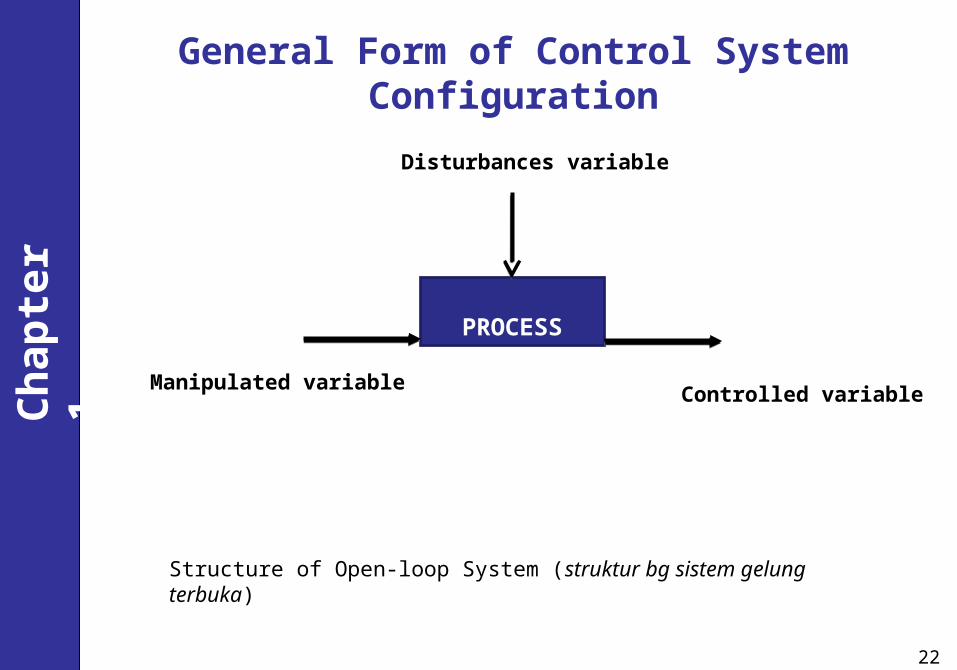
General Form of Control System Configuration
Structure of Open-loop System (struktur bg sistem gelung terbuka)
PROCESS
Disturbances variable
Manipulated variable Controlled variable
Chap
ter
1
23
Process
Disturbances variable
Manipulated variable Controll
edvariable
controller
Process
Disturbances variable
Manipulated variable
Controlled
variable
controller
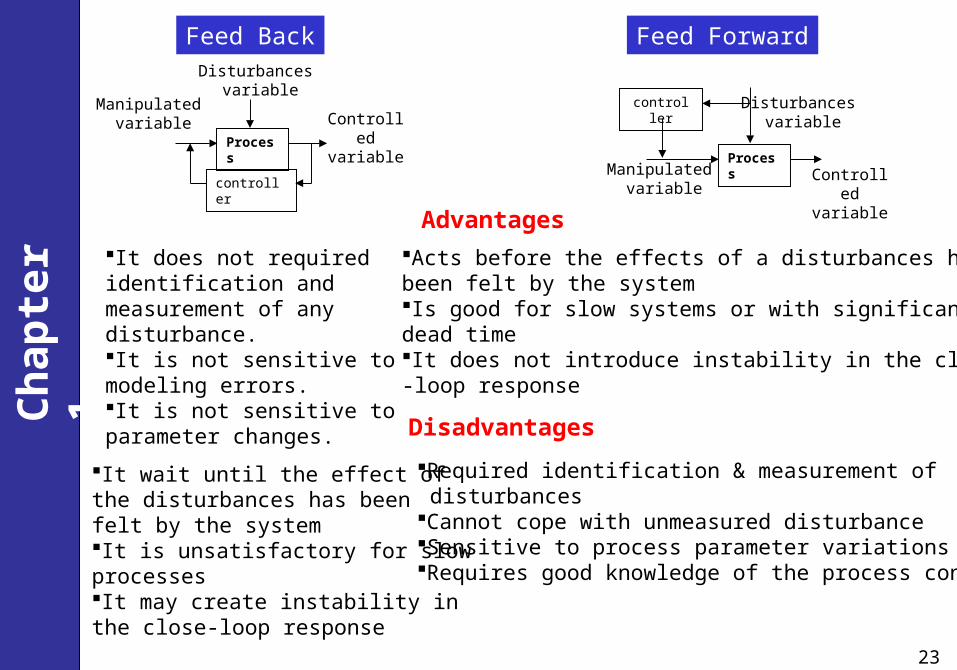
It does not required identification and measurement of any disturbance.It is not sensitive to modeling errors.It is not sensitive to parameter changes.
Advantages
Disadvantages
Acts before the effects of a disturbances has been felt by the systemIs good for slow systems or with significant dead timeIt does not introduce instability in the closed-loop response
It wait until the effect of the disturbances has been felt by the systemIt is unsatisfactory for slow processesIt may create instability in the close-loop response
Required identification & measurement of disturbancesCannot cope with unmeasured disturbanceSensitive to process parameter variationsRequires good knowledge of the process control
Feed Back Feed Forward
Chap
ter
1
24
Instrumentation Symbols
Symbols of instruments used in process controls drawings:
A: AnalyzerF: Flow rateL: Level of liquid or solids in
a vesselP: PressureT: Temperature
C: Controller V: Valve
Chap
ter
1
Case Study
Chap
ter
1
Chap
ter
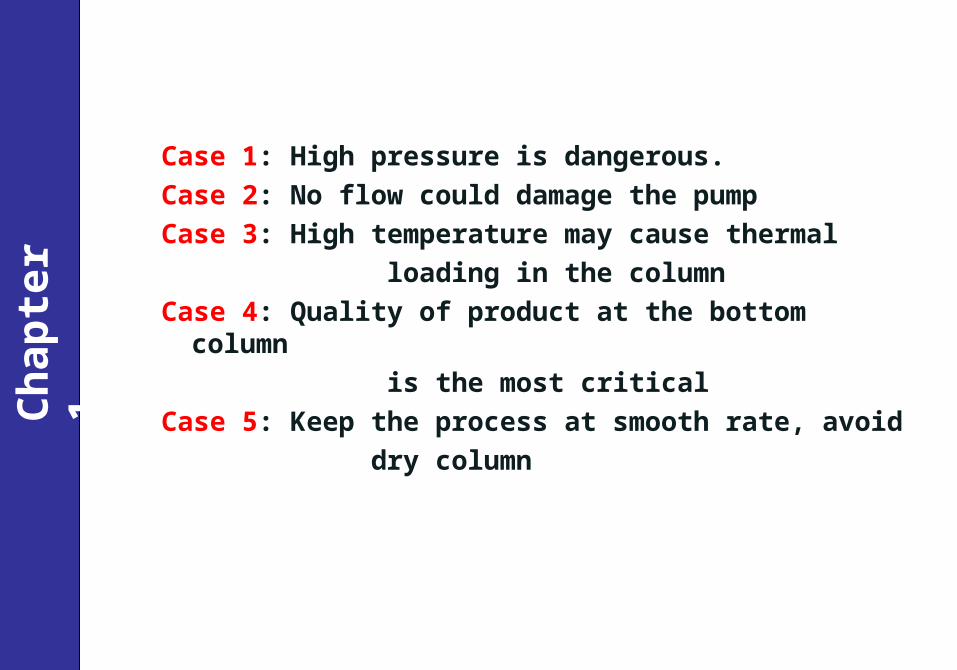
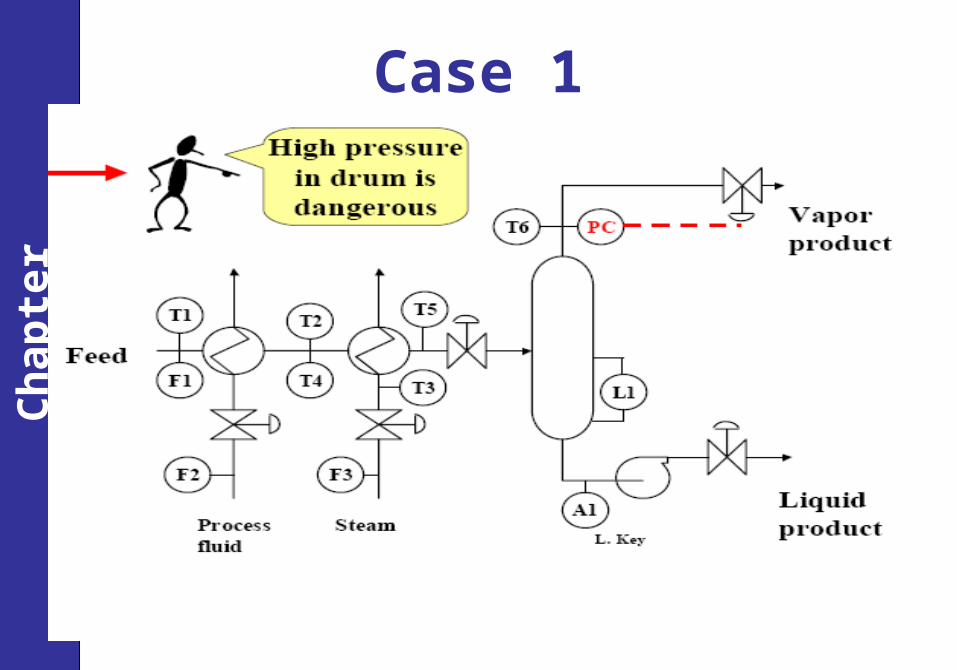
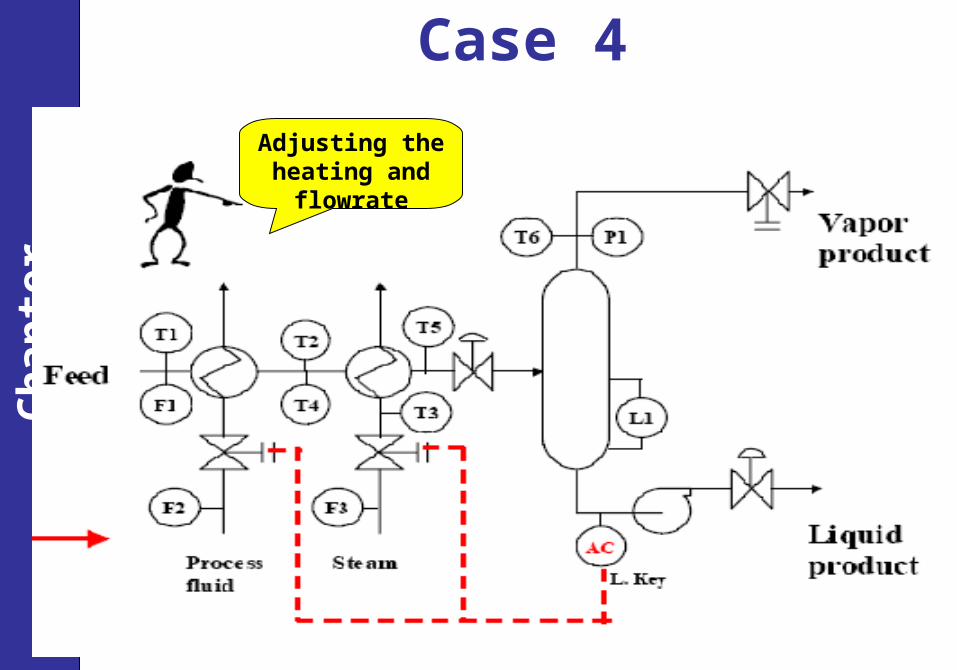
1Case 1: High pressure is dangerous. Case 2: No flow could damage the pumpCase 3: High temperature may cause thermal loading in the columnCase 4: Quality of product at the bottom column
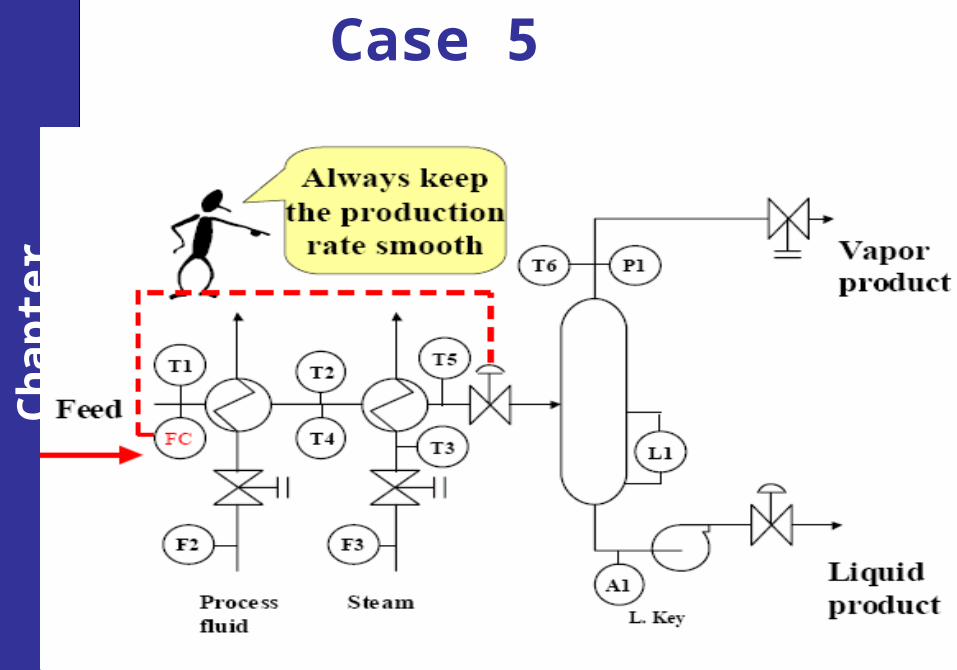
is the most criticalCase 5: Keep the process at smooth rate, avoid dry column
Chap
ter
1Case 1
Chap
ter
1Case 2
Chap
ter
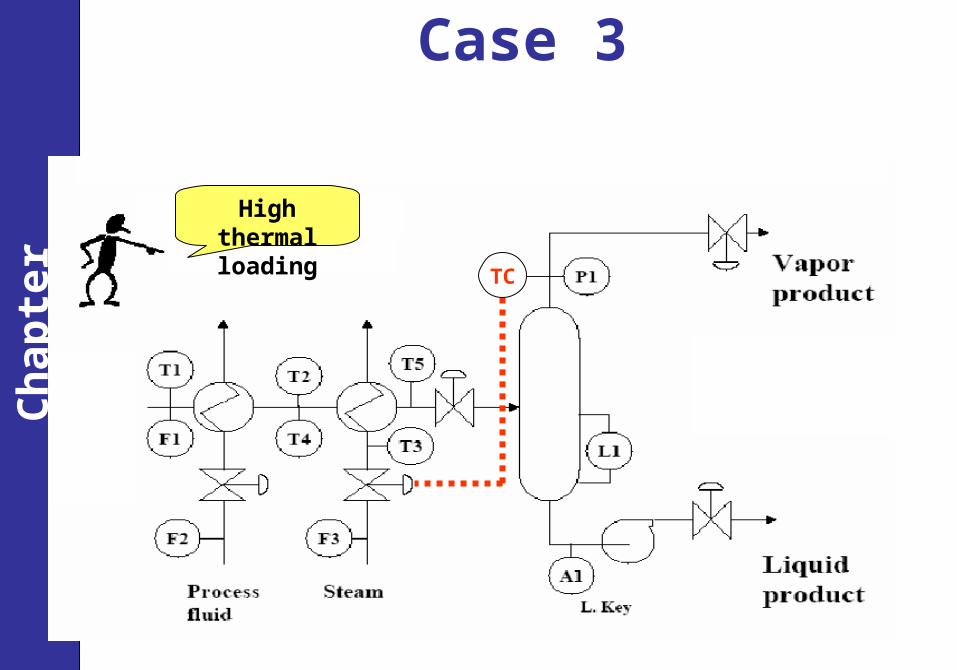
1Case 3
High thermal loading TC
Chap
ter
1Case 4
Adjusting the heating and flowrate
Chap
ter
1Case 5
Chap
ter
1
33
TASK 1
Chap
ter
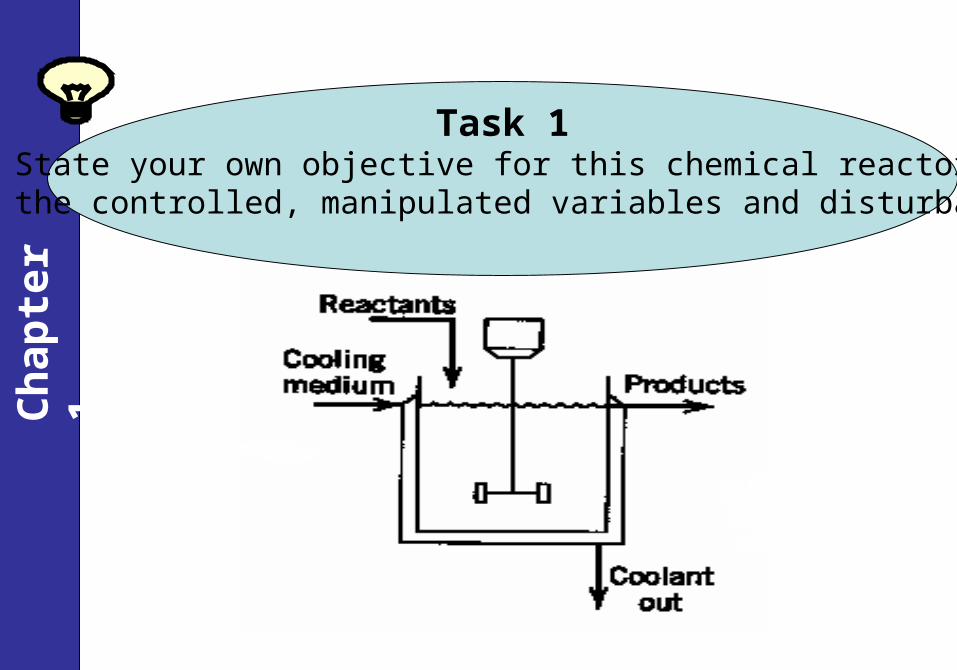
1Task 1
State your own objective for this chemical reactor.List the controlled, manipulated variables and disturbance(s)
Chap
ter
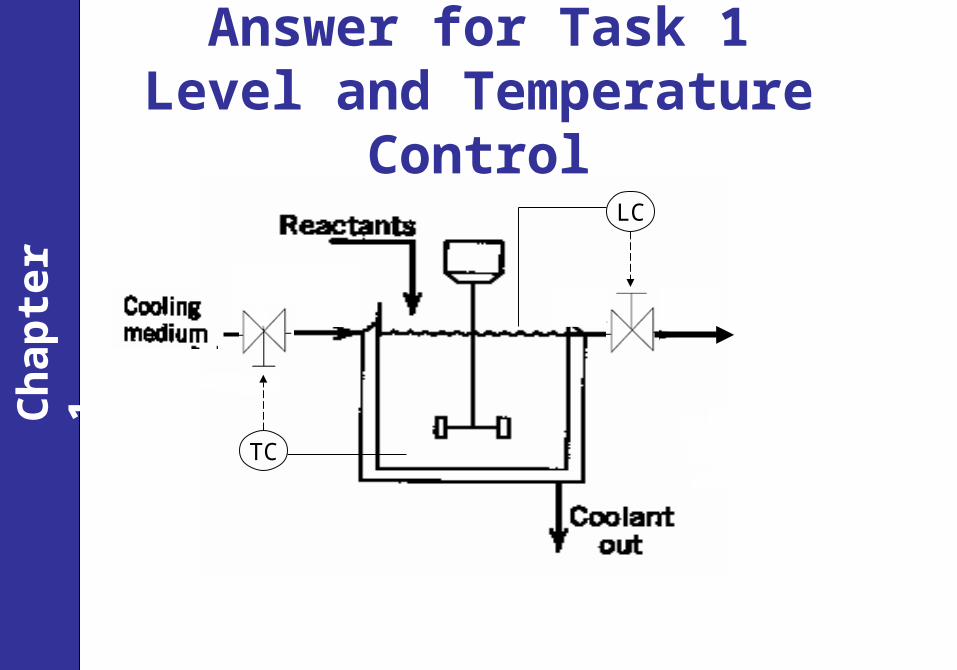
1Answer for Task 1
Level and Temperature Control
LC
TC
Chap
ter
1
36
QuestionHow do we control
processes?
Chap
ter
1
37
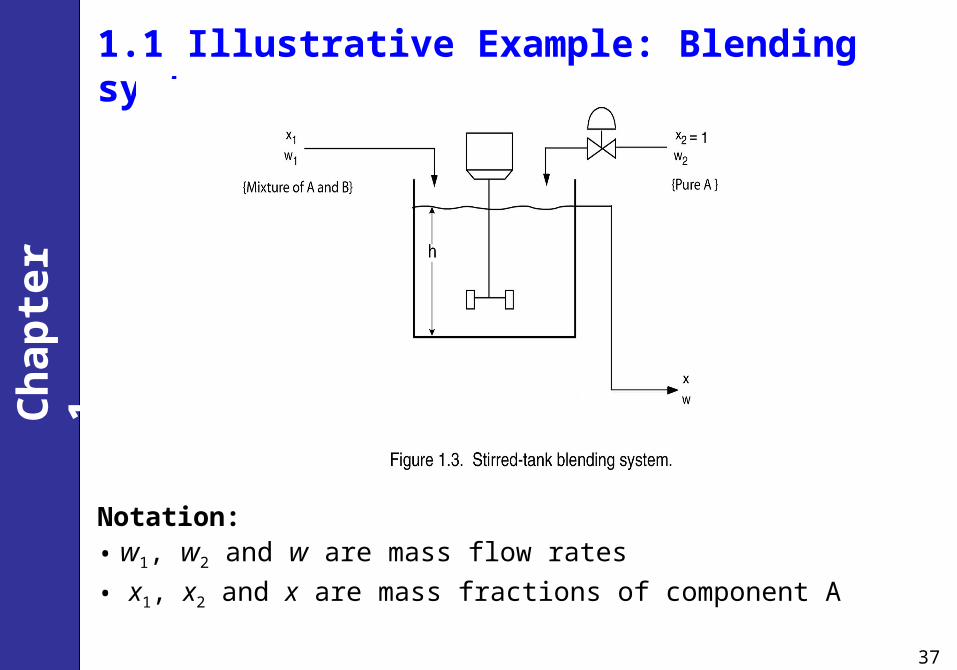
1.1 Illustrative Example: Blending system
Notation:• w1, w2 and w are mass flow rates• x1, x2 and x are mass fractions of component A
Chap
ter
1
38
Assumptions: 1. w1 is constant
2. x2 = constant = 1 (stream 2 is pure A)
3. Perfect mixing in the tank
Control Objective:Keep x at a desired value (or “set point”) xsp, despite variations in x1(t). Flow rate w2 can be adjusted for this purpose.Terminology:• Controlled variable (or “output variable”): x
• Manipulated variable (or “input variable”): w2
• Disturbance variable (or “load variable”): x1
Chap
ter
1
39
Design Question. What value of is required to have
2w ?SPx x
Overall balance:
Component A balance:1 20 (1-1)w w w
1 1 2 2 0 (1-2)w x w x wx
(The overbars denote nominal steady-state design values.)• At the design conditions, . Substitute Eq. 1-2, and , then solve Eq. 1-2 for :
SPx x SPx x
2 1x 2w
12 1 (1-3)1
SP
SP
x xw wx
Chap
ter
1
40
•Equation 1-3 is the design equation for the blending system.
•If our assumptions are correct, then this value of will keep at . But what if conditions change?
xSPx
Control Question. Suppose that the inlet concentration x1 changes with time. How can we ensure that x remains at or near the set point ?As a specific example, if and , then x > xSP.
SPx
1 1x x 2 2w w
2w
Chap
ter
1
41
Some Possible Control Strategies:Method 1. Measure x and adjust w2.
• Intuitively, if x is too high, we should reduce w2;
•Intuitively, if x is too low, we should increase w2;•Manual control vs. automatic control Proportional feedback control law, 2 2 (1-4)c SPw t w K x x t
1.where Kc is called the controller gain.
2. w2(t) and x(t) denote variables that change with time t.
3.The change in the flow rate, is proportional to the deviation from the set point, xSP – x(t).
2 2,w t w
Chap
ter
1
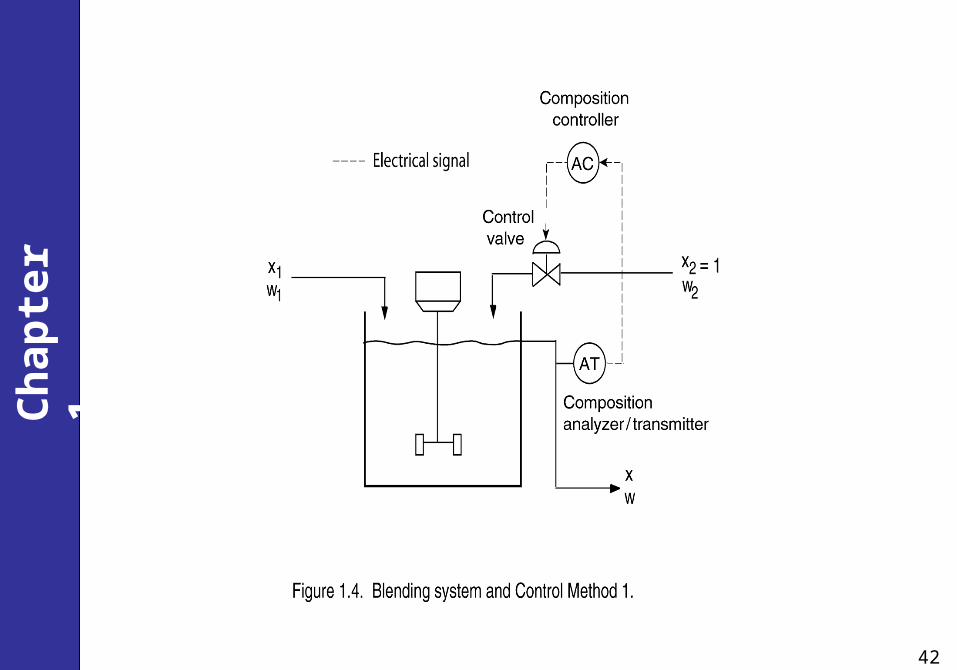
42
Chap
ter
1
43
Method 2. Measure x1 and adjust w2.
•Thus, if x1 is greater than , we would decrease w2 so that
•One approach: Consider Eq. (1-3) and replace and with x1(t) and w2(t) to get a control law:
1x2 2;w w
1x 2w
12 1 (1-5)1
SP
SP
x x tw t wx

Chap
ter
1
44
•Because Eq. (1-3) applies only at steady state, it is not clear how effective the control law in (1-5) will be for transient conditions.
Chap
ter
1
45
Method 3. Measure x1 and x, adjust w2.
• This approach is a combination of Methods 1 and 2.Method 4. Use a larger tank.
•If a larger tank is used, fluctuations in x1 will tend to be damped out due to the larger capacitance of the tank contents.•However, a larger tank means an increased capital cost.
Chap
ter
1
46
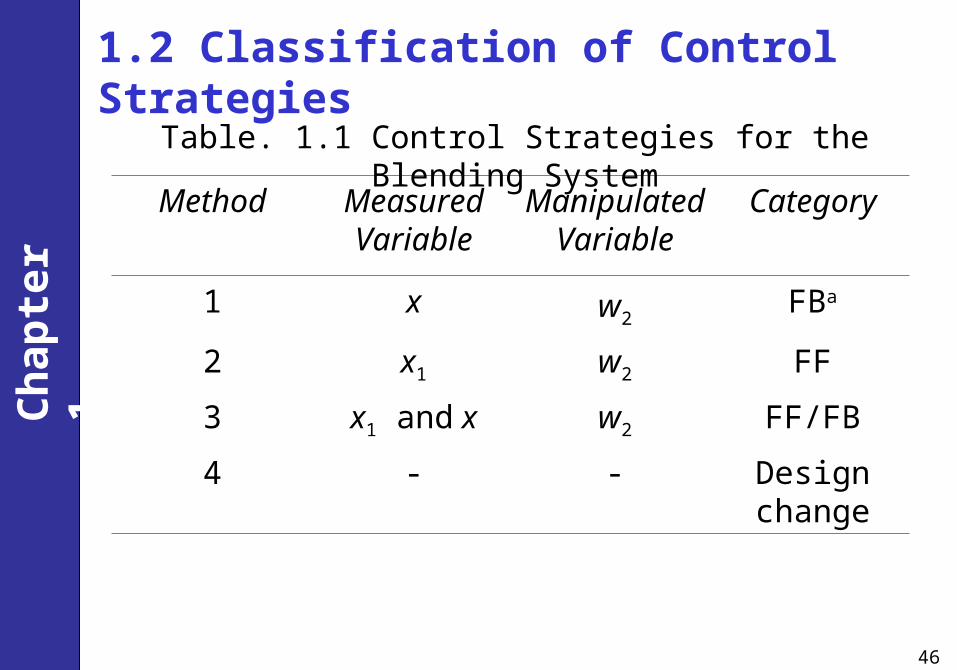
1.2 Classification of Control Strategies
Method Measured Variable
Manipulated Variable
Category
1 x w2 FBa
2 x1 w2 FF3 x1 and x w2 FF/FB4 - - Design
change
Table. 1.1 Control Strategies for the Blending System
Chap
ter
1
47
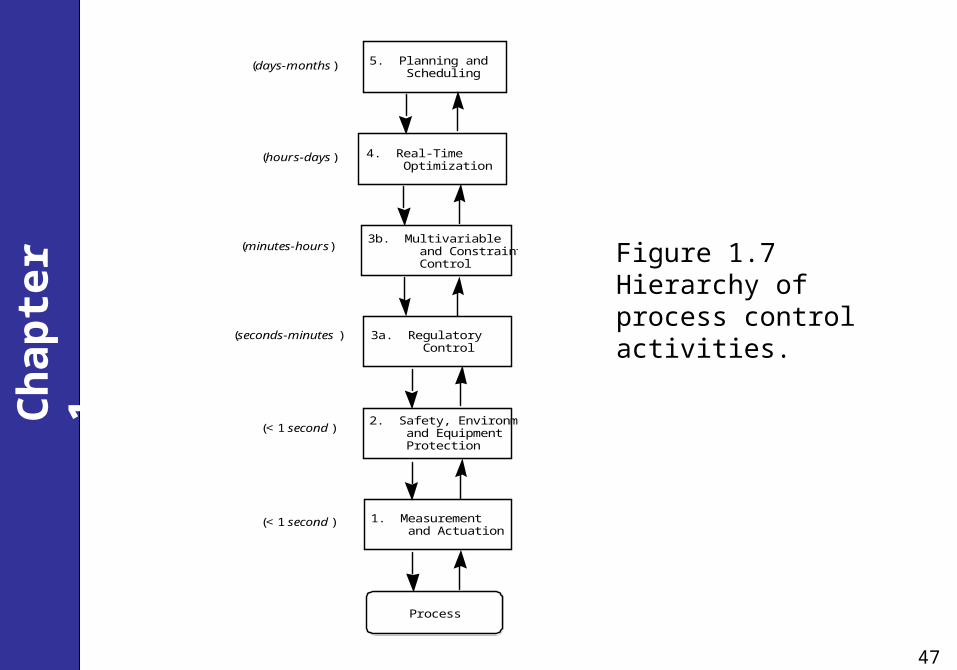
1. Measurement and Actuation
2. Safety, Environment and Equipment Protection
3a. Regulatory Control
4. Real-Time Optimization
5. Planning and Scheduling
Process
3b. Multivariable and Constraint Control
(days-months)
(< 1 second )
(< 1 second )
(seconds-minutes )
(minutes-hours)
(hours-days)
Figure 1.7 Hierarchy of process control activities.
Chap
ter
1
48
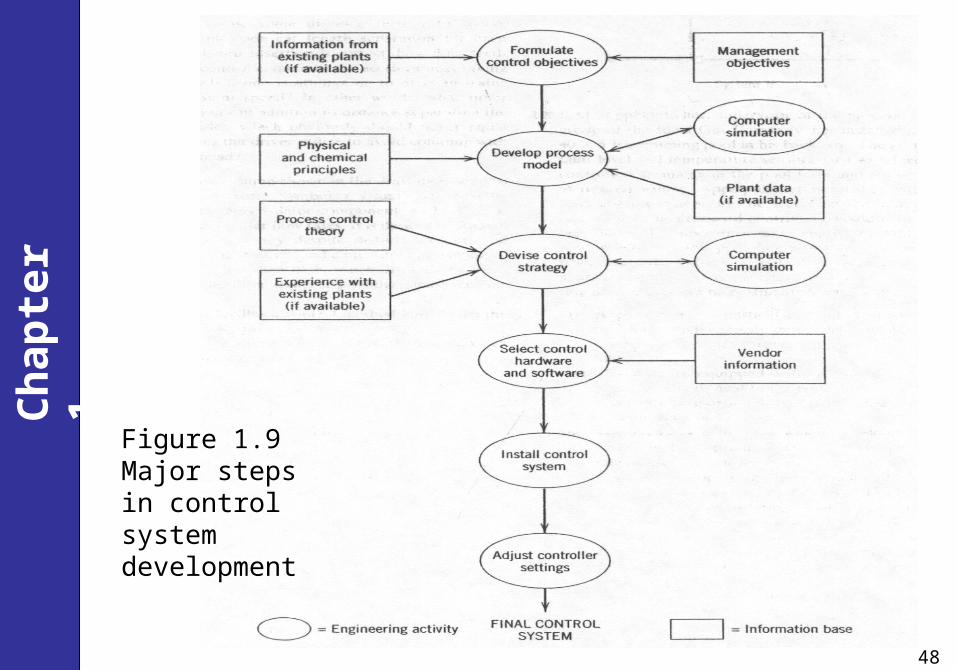
Figure 1.9 Major steps in control system development