Embed Size (px)
Citation preview

Departamento de Ingeniería Civil Facultad de Ciencias Físicas y Matemáticas Universidad de Chile
CI 42 F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes Preliminares de Clases
Elaborado por: Juan Gmo. Valenzuela B. Basado en apuntes del profesor: Mauricio Sarrazin A.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.1
1 TEORÍA DE TENSORES CARTESIANOS
1.1 Introducción: Los conceptos fundamentales de la mecánica de medios continuos serán establecidos utilizando la notación indicial, propia del cálculo de tensores cartesianos.
Las leyes físicas, los conceptos matemáticos y los teoremas serán “re-formulados” utilizando las definiciones y convenciones del cálculo tensorial.
1.2 Definiciones Básicas
1.2.1 Notación Tensorial
Un vector en un espacio euclídeo de tres dimensiones puede representarse por iR , donde el subíndice i toma los valores 1, 2 y 3:
( )321 ,, RRRRi = ,
y los iR corresponden a los componentes del vector en un sistema cualquiera de coordenadas.
1.2.2 Producto Escalar
El producto escalar de dos vectores ia y ib viene dado por:
∑=
=++=⋅3
1332211
iiibababababa
rr.
Utilizando la convención de que dos subíndices repetidos indican siempre una suma, para todos los valores de los subíndices, queda:
iibaba =⋅rr
.
1.2.3 Tensor Delta de Kronecker Un tensor de gran utilidad en el cálculo es el llamado “Delta de Kronecker” y está definido por:
≠=
=jiparajipara
ij 01
δ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.2
Utilizando este tensor podemos escribir el producto escalar de dos vectores en la forma:
jiijii bababa δ==⋅rr
.
1.2.4 Tensor Permutación El Tensor de permutación es un tensor de tercer orden definido por:
−=
npermutacióformannosiimparnpermutacióformanijkcuandoparnpermutacióformanijkcuando
eijk
011
.
Utilizando este tensor podemos escribir el producto vectorial de dos vectores en la forma:
kjijk baeba =×rr
,
y el triple producto escalar en la forma:
kjiijk cbaecba =⋅×rrr
.
1.2.5 Orden o Rango de un Tensor Es posible definir el “orden de un tensor” como el número de subíndices que aparece asociado a la letra que identifica al tensor:
EscalarCeroOrdendeTensora ==
VectorOrdenimerdeTensorai == Pr
MatrizOrdenSegundodeTensoraij ==
""CuboOrdenTercerdeTensoraijk ==
""HipercuboOrdenCuartodeTensoraijkl ==
En un espacio tridimensional, un tensor de orden N posee N3 componentes.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.3
Ejemplo: Matriz de 3x3
=
333231
232221
131211
aaaaaaaaa
aij scomponenten N 932 =⇒=
Ejemplo: Ley Generalizada de Hooke
rsijrsij eC ⋅=σ scomponenten N 8134 =⇒=
1.2.6 Gradiente El gradiente de una función escalar viene dado por:
kz
jy
ix
grad ˆˆˆ∂∂
+∂∂
+∂∂
=∇=φφφφφ .
El operador “∇ ”recibe el nombre “Nabla”, “Delta Invertida” o “Del” y se puede operar con él como un vector. Está definido por:
zk
yj
xi
∂∂
+∂∂
+∂∂
=∇ ˆˆˆ .
En notación tensorial el gradiente se representa por:
iix
grad ,φφφ =∂∂
= .
La “coma” delante del subíndice significa diferenciación con respecto a las
coordenadas espaciales ix .
1.2.7 Divergencia La divergencia de un campo vectorial viene dada por:
zF
yF
xFF zyx
∂∂
+∂
∂+
∂∂
=∇r
.
En notación tensorial el gradiente se representa por:
jiijiii
i FFxF
,, δ==∂∂
.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.4
1.2.8 Laplaciano Si tomamos la divergencia del gradiente de una función obtenemos el Laplaciano de dicha función:
iifff ,2 =∇=∇⋅∇ .
1.2.9 Rotacional La rotación de un campo vectorial viene dada por:
kyF
xF
jxF
zFi
zF
yFFFrot xyzxyz ˆˆˆ
∂∂
−∂
∂+
∂∂
−∂
∂+
∂
∂−
∂∂
=×∇=rr
.
En notación tensorial la podemos expresar con ayuda del tensor de permutación como:
jkijkj
kijk Fe
xFeFrot ,=
∂∂
=r
.
1.2.10 Identidad “ δ−e ” En la manipulación de ciertas expresiones indiciales, es de gran utilidad hacer uso de la siguiente identidad:
krjsksjrirsijkee δδδδ −= .
Esta identidad podría verificarse considerando que, en general se tiene:
krkqkp
jrjqjp
iriqip
pqrijk
δδδδδδδδδ
ξξ =⋅ .
Si kr = :
kqkp
jqjpik
kkkp
jkjpiq
kkkq
jkjqippqkijk δδ
δδδ
δδδδ
δδδδδ
δξξ ⋅+⋅−⋅=⋅ ,
)()()( jqkpkqjpikjkkpkkjpiqjkkqkkjqip δδδδδδδδδδδδδδδ −+−−−= ,
)()()( jqkpkqjpikjpjpiqjqjqip δδδδδδδδδδδ −+−−−= ,
jqkpikkqjpik δδδδδδ −= ,
jqipjpiq δδδδ −= .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.5
1.3 Transformación de Coordenadas Un punto medular del análisis tensorial es el estudio de la transformación de un sistema de coordenadas a otro.
Si el conjunto de variables independientes ix son las coordenadas de un punto en
un sistema de referencia, y ix son las coordenadas del mismo punto en otro sistema, la transformación de un sistema a otro, esta especificada por las relaciones:
),,( 321 xxxfx ii = , y
),,( 321 xxxgx ii = .
Para asegurar que esta transformación es reversible y que existe una correspondencia biunívoca entre las variables de una Región R, es necesario que:
1 Las funciones que relacionan los dos sistemas sean únicas, continuas y que posean primeras derivadas parciales continuas en R.
2 El determinante del Jacobiano, j
i
xxJ
∂∂
= , debe ser distinto de cero para
todos los puntos de la Región R, es decir:
0
3
3
2
3
1
3
3
2
2
2
1
2
3
1
2
1
1
1
≠
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=∂∂
=
xx
xx
xx
xx
xx
xx
xx
xx
xx
xxJ
j
i
Si J es positivo la transformación es “propia”, es decir, transforma un sistema dextrógiro en otro dextrógiro, y si es negativo, se llama “impropia” y transforma un sistema dextrógiro en levógiro.
1.3.1 El Tensor Métrico Lo primero que nos interesa conocer acerca de un sistema de coordenadas es como se mide la longitud o distancia entre dos puntos. Esta información nos la da el tensor métrico del sistema.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.6
Sea una transformación admisible ),,( 321 xxxii θθ = , y sea su inversa
),,( 321 θθθii xx = .
Si las coordenadas 1x , 2x y 3x se asumen coordenadas cartesianas rectangulares, la longitud del elemento ds viene dada por:
jiijii dxdxdxdxdxdxdxds δ==++= 23
22
21
2.
Las diferenciales idx pueden expresarse en referencia al sistema iθ por:
jj
ii dxdx θ
θ∂∂
= .
Si reemplazamos esta ecuación en la anterior, se obtiene:
tkt
i
k
i ddxxds θθθθ ∂
∂∂∂
=2.
Si definimos la función:
t
i
k
ikt
xxgθθ
θθθ∂∂
∂∂
=),,( 321 ,
entonces, el cuadrado del elemento de línea en el sistema general de coordenadas
iθ se obtiene:
tkkt ddgds θθ=2.
El desarrollo de la expresión anterior establece que:
+++= 3)( 11321122
1112 θθθθθ ddgddgdgds
32232
2222121 )( θθθθθ ddgdgddg +++
233332223131 )( θθθθθ dgddgddg +++
Este tensor es siempre simétrico ya que tkkt gg = .
Las funciones ktg son llamadas las Componentes del Tensor Métrico Euclidiano en
el sistema de coordenadas iθ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.7
Sea iθ otro sistema general de coordenadas tal que la transformación de coordenadas
desde iθ hacia iθ viene dada por:
),,( 321 θθθθθ ii = .
Ahora las diferenciales pueden expresarse como:
tt
kk dd θ
θθθ
∂∂
= ,
y utilizando la expresión para 2ds , el elemento de distancia viene dado por:
nmn
t
m
kktn
n
tm
m
kkttkkt ddgddgddgds θθ
θθ
θθ
θθθ
θθθ
θθ
∂∂
∂∂
=
∂∂
∂∂
==2,
nmmn ddgds θθ=2 .
Coherentemente, llamaremos a las funciones mng las Componentes del Tensor
Métrico Euclidiano en el sistema de coordenadas iθ .
Esta última forma diferencial cuádrica es de importancia fundamental ya que define la longitud de cualquier elemento de línea en sistemas de coordenadas generales.
Se concluye que, si iθ y iθ son dos conjuntos de coordenadas generales, entonces
los Tensores Métricos Euclidianos mng y mng se relacionan por medio de Leyes Específicas de Transformación.
1.3.2 Tensor Métrico en Coordenadas Polares Determinación del Tensor Métrico Euclidiano en coordenadas polares planas
);( 21 θθθ == r y su correspondiente expresión para la longitud de un elemento de línea.
Considerando las siguientes relaciones con un sistema de coordenadas cartesianas rectangulares (ver figura):

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.8
212111 cos),( θθθθ == xx ,
212122 sin),( θθθθ == xx ,
22
212111 ),( xxxx +== θθ ,
+== −
22
21
212122 sin),(
xxxxxθθ ,
se pueden establecer las componentes del tensor métrico como:
1sincos 22
22
2
1
1
2
1
1
1
2
1
2
1
1
1
12
1 1111 =+=
∂∂
+
∂∂
=∂∂
∂∂
+∂∂
∂∂
=∂∂
∂∂
= ∑=
θθθθθθθθθθxxxxxxxxg
i
ii ,
0)cos)((sin)sin)((cos 2122122
2
1
2
2
1
1
12
1 212112 =+−=
∂∂
∂∂
+∂∂
∂∂
=∂∂
∂∂
== ∑=
θθθθθθθθθθθθxxxxxxgg
i
ii ,
21
221
221
2
2
1
2
2
1
2
2
2
2
2
1
2
12
1 2222 )cos()sin( θθθθθ
θθθθθθθθ=+−=
∂∂
+
∂∂
=∂∂
∂∂
+∂∂
∂∂
=∂∂
∂∂
= ∑=
xxxxxxxxgi
ii ,
y la longitud de un elemento de línea como:
221
212222212121121111
2 )()( θθθθθθθθθθθ ddddgddgddgddgds +=+++= .
Esta última expresión, no es sino, la familiar expresión de coordenadas polares:
222 )( θrddrds += .
1.3.3 Tensor Métrico en Coordenadas Esféricas Análogamente al ejemplo anterior, es posible establecer el Tensor Métrico Euclidiano en coordenadas esféricas y su correspondiente expresión para la longitud de un elemento de línea.
Para esto, se debe considerar la siguiente transformación directa:
23
22
211 xxx ++=θ ,

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.9
++= −
23
22
21
312 cos
xxx
xθ ,
= −
1
213 tan
xxθ ,
y su correspondiente transformación inversa:
3211 cossin θθθ=x ,
3212 sinsin θθθ=x ,
213 cosθθ=x .
La aplicación de la misma metodología de cálculo utilizada en el caso de las coordenadas polares, permite obtener las componentes del tensor métrico Euclidiano en el caso de las coordenadas esféricas, las que en este caso corresponden a:
111 =g , 2
122 )(θ=g , 2
22
133 )(sin)( θθ=g ,
con todos los otros componentes nulos ( jigij ≠∀= ;0 ). El cuadrado del elemento de línea por lo tanto es:
23
22
21
22
21
21
2 )()(sin)()()()( θθθθθθ dddds ++= .
1.4 Ley de Transformación de un Vector
1.4.1 Sistemas de Referencia “sin prima” y “con prima”
Consideremos un vector Ar
dibujado a partir de un punto arbitrario P en el espacio.
El vector Ar
puede ser descrito en función del sistema de ejes cartesianos “sin primas”, con origen en O y también en función del sistema de ejes cartesianos “con primas”, con origen en O’.
Ambos conjuntos de ejes pueden ser trasladados sin rotación al origen común en P, sin perdida de generalidad.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.10
La proyección de Ar
sobre los ejes “sin prima” da los componentes iA , y la
proyección sobre los ejes “con prima” da las componentes iA′ .
Se desea entender como se relacionan los componentes “con prima” con los componentes “sin prima” y viceversa.
1.4.2 Cosenos Directores Introduciendo la noción de cosenos directores entre los dos conjuntos de ejes como:
),,( 131211 aaa = cosenos directores del eje 1y′ respecto de los ejes ),,( 321 yyy
),,( 232221 aaa = cosenos directores del eje 2y′ respecto de los ejes ),,( 321 yyy
),,( 333231 aaa = cosenos directores del eje 3y′ respecto de los ejes ),,( 321 yyy
Resumiendo esto en forma tabular, donde el primer subíndice indica los ejes con prima y el segundo subíndice indica los ejes sin prima:
1y 2y 3y
1y′ 11a 12a 13a
2y′ 21a 22a 23a
3y′ 31a 32a 33a
Ejemplo: 31a es el coseno del ángulo entre el eje 3y′ y el eje 1y .
1.4.3 Leyes de Transformación para Componentes Cartesianos
Recordando que la proyección del vector Ar
sobre el eje 1y′ , es igual a la suma de las proyecciones de los componentes iA sobre el mismo eje:
3132121111 AaAaAaA ++=′ .
Similarmente:
3232221212 AaAaAaA ++=′ ,
3332321313 AaAaAaA ++=′ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.11
Intercambiando ahora los roles de los ejes con prima por los ejes sin prima, y repitiendo el mismo procedimiento:
3132121111 AaAaAaA ′+′+′= ,
3232221212 AaAaAaA ′+′+′= ,
3332321313 AaAaAaA ′+′+′= .
Estos dos conjuntos de ecuaciones son las leyes de transformación para los componentes cartesianos de un tensor, y pueden pensarse como la definición de un vector.
Ejemplo:
Las componentes de un vector Ar
en un sistema de ejes cartesianos “sin prima” son )0,1,1(=iA . Considere un conjunto de ejes cartesianos “con prima”, obtenido a
partir de la rotación en un ángulo de °30 alrededor del eje 1y . ¿Cuales son los
componentes “con prima” iA′r
de este vector?
Los cosenos directores ija , entre los ejes con prima y sin prima, están dados como sigue:
°°−°°=
30cos30sin030sin30cos0001
ija
Por lo tanto, a partir de la ley de transformación:
jiji AaA =′ ,
se obtiene:
113132121111 ==++=′ AAaAaAaA .
2330cos 23232221212 =°=++=′ AAaAaAaA ,
2130sin 23332321313 −=°−=++=′ AAaAaAaA .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.12
1.4.4 Leyes de Transformación en Notación Indicial Consideremos ahora, el expresar estas leyes de transformación de tensores, en notación indicial:
++=′++=′++=′
⇔++=′
3332321313
3232221212
3132121111
332211
AaAaAaAAaAaAaAAaAaAaA
AaAaAaA iiii .
Así, en su forma mas compacta:
jiji AaA =′ .
De manera similar:
srsr AaA ′= .
1.4.5 Matriz de Rotación Estas relaciones entre vectores correspondientes a dos sistemas de coordenadas, puede también pensarse como la “rotación” o “transformación” de un sistema a otro.
Esta transformación puede ser entendida como una “matriz de rotación” que “aplica” sobre un sistema y lo transforma en otro.
Lo anterior se entiende comúnmente, como que el vector original es premultiplicado por la matriz de rotación para obtener el vector “rotado”:
=
′′′
3
2
1
333231
232221
131211
3
2
1
ttt
aaaaaaaaa
ttt
.
1.4.6 Propiedades de la matriz de rotación Las matrices de rotación poseen las siguientes propiedades de ortogonalidad:
ikkjijaa δ= , (Ortogonalidad de filas)
y
ikjkjiaa δ= . (Ortogonalidad de columnas)

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.13
Esto significa en palabras, que el producto punto de cada fila (o columna) consigo misma es unitario, ya que obviamente son paralelas, y que el producto punto de una fila (o columna) con otra fila (o columna), es cero, ya que son perpendiculares.
Otra propiedad de las matrices de rotación, que se desprende de la manera en que se definen los ángulos de los cosenos directores, es que la inversa de la matriz de rotación es su traspuesta.
1.4.7 Invarianza del Producto Escalar Utilizando la ley de transformación de un vector, se puede demostrar la invarianza del producto escalar iivuw = como:
wvuvuvuaavauaw kklkkllkiliklilkik =====′ δ))(())(( .
1.4.8 Invarianza de la Forma Bilineal
Dado un tensor ijt y dos vectores ix e jy , se defina la forma bilineal F2 como:
jiij yxtF =2 .
Esta expresión es lineal en ix e jy , y es invariante para una transformación de coordenadas:
FyxtyaxataayxtF nmmnnjnmimkljlikjiij 2))()((2 ===′′′=′
1.4.9 Tensores Simétricos y Antimétricos
Un tensor ijt es simétrico si jiij tt = . Es decir, los elementos “sobre” la diagonal principal son iguales a los elementos “bajo” la diagonal principal. En el caso de tensores de segundo orden, los componentes del tensor se reducen a 6 elementos.
Este tensor cumple con la ley de transformación de coordenadas:
jilkjlikkljlikij ttaataat ′===′ .
Por otra parte, un tensor ijt es antimétrico si jiij tt −= . Este tipo de tensores tiene sólo 3 componentes diferentes, ya que los términos de la diagonal principal deben ser nulos para que se cumpla la condición de antimetría.
Es posible definir el siguiente vector equivalente al tensor antimétrico:

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.14
=−=
21
13
32
21
ttt
tet jkijki .
La relación inversa es:
−−
−=−=
00
0
12
13
23
tttt
tttet kijkij .
1.4.10 Representación gráfica de un Tensor Simétrico
Si en la forma bilineal de un tensor ijt , los vectores ix e jy se consideran dos veces
el mismo vector ix , y se toma en cuenta la simetría de éste, se obtiene la forma cuadrática:
)(22 1331322321122333
2222
2111 xxtxxtxxtxtxtxtyxtF jiij +++++==
Esta expresión corresponde a una cuádrica centrada en el origen en un espacio cartesiano tri-ortogonal, donde si se tienen las componentes del tensor y el valor de F, la superficie queda unívocamente definida.
Sobre esta superficie es posible definir un vector que siempre es normal a ésta. Este vector se denomina gradiente de F y puede ser expresado en términos del tensor y del vector posición del punto como:
jiji xtF =, .
1.4.11 Direcciones y Valores Principales Estamos interesados en encontrar las direcciones en las cuales la cuádrica quedaría orientada “justo” en las direcciones de los nuevos ejes coordenados.
Esto podría lograrse utilizando las propiedades de invarianza de la forma bilineal, de modo que las componentes del tensor original, se transformen de acuerdo a la ley de cambio de sistemas coordenados de un tensor.
Las direcciones buscadas podrían determinarse tomando en cuenta que, el vector que une el origen del sistema de coordenadas con un punto de la superficie, debe apuntar en la misma dirección, que el vector normal a la superficie en ese punto.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.15
Lo anterior significa que el vector posición de un punto sobre la superficie, debe ser colineal con el vector normal a la superficie en ese punto, lo que matemáticamente se expresa como:
jijijiji xxxtF λδλ ===, .
Reordenando la ecuación anterior se obtiene:
0)( =− iijij xt λδ .
La solución de este sistema de ecuaciones homogéneas corresponde a las 3 direcciones principales buscadas. Los correspondientes valores de λ se denominan los valores principales.
Los valores principales se obtienen de la condición para la existencia de soluciones no nulas, lo que nos conduce a establecer la ecuación característica del tensor.
1.4.12 Ecuación Característica La resolución de la ecuación anterior nos permite definir la ecuación característica de un tensor como:
322
13 IIIt ijij +−+−=− λλλλδ ,
donde los parámetros 321 ,, III son los invariantes principales del tensor, definidos a continuación.
1.4.13 Invariantes Principales Los invariantes principales de un tensor se definen como:
trazattttI ii =++== 3322111
)()()()(21)(
21 2
1222112133311
2233322
2)1()1)(1(2 ttttttttttttttttI iiiiiiijijiiii −+−+−=−=−= +++
kjiijkij tttetI 3213 ==

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.16
1.4.14 Direcciones Principales Entendidas como Problema de Valores Extremos Otra forma para encontrar las direcciones principales de un tensor, consiste en considerar la situación como un problema de valores extremos.
En este caso, consideraremos la magnitud de los valores de los elementos de la diagonal principal, como un funcional, al que debe determinársele sus valores extremos.
Esto puede realizarse mediante herramientas estándares del cálculo en varias variables, como el Método de los Multiplicadores de Lagrange. En este método se plantea el maximizar o minimizar una función objetivo, sujeta a ciertas restricciones.
Esta metodología puede resumirse como sigue:
La componente de la diagonal principal del tensor (funcional) para una nueva dirección coordenada esta dada por:
ijjikk txxt =′
donde el vector unitario ix corresponde a los términos de la matriz de rotación del nuevo eje k. La norma de este vector unitario (restricción) puede escribirse como:
1== jiijii xxxx δ .
Los valores de ix para los que kkt′ es máximo o mínimo, sujeto a la condición
1=jiij xxδ , se puede establecer utilizando los Multiplicadores de Lagrange:
)1(),( −−= jiijijjii xxtxxxF δλλ .
Resolviendo:
0=−=∂∂
jijijji
xtxxF λδ ,
01 =−=∂∂
jiij xxF δλ
,
queda:
0)(0 =−⇒=∂∂
jijiji
xtxF λδ .
Por lo tanto, los valores extremos de la diagonal principal ocurren en las direcciones principales.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.17
1.5 Ley de Transformación de un Tensor de 2do Orden Análogamente al caso de un vector o tensor de 1er orden, es posible establecer una ley de transformación para tensores de 2do orden.
Esta ley puede ser enunciada como:
kljlikij taat =′ ,
donde, de acuerdo a la convención de Einstein, se debe realizar una doble sumatoria sobre los subíndices k y l .
La transformación inversa puede ser establecida como:
klljkiij taat = .
1.6 Leyes de Transformación de Tensores cartesianos de orden N Considerando las leyes de transformación de un tensor de 1er orden (vector), y de transformación de un tensor de 2do orden (matriz), es posible generalizar estos resultados para establecer la ley de transformación de un tensor de orden cualquiera N.
En resumen, las leyes de transformación de un tensor de orden n son:
AA =′ (N = 0: Escalar)
irir AaA =′ (N = 1: Vector)
ijsjrirs AaaA =′ (N = 2: Matriz)
...... ... ijktksjrirst AaaaA =′ (N = N: Tensor de orden N)
1.7 Notación Indicial e Implementación en Ordenadores Una de las principales fortalezas de la teoría de tensores es su aplicación a la resolución de problemas prácticos de ingeniería.
En particular, esta teoría puede ser enfocada a materias como el análisis de estructuras, resistencia de materiales o a cualquier medio continuo que pueda ser modelado mediante elementos finitos.
La implementación de esta teoría se puede realizar mediante el análisis matricial con calculadoras portátiles o mediante la programación de subrutinas en lenguajes de programación de ordenadores.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.18
Algunos lenguajes clásicos de programación, en los cuales se podrían implementar la teoría de tensores y su notación indicial asociada, son: FORTRAN, PASCAL, C++, etc.
Algunos softwares más “amigables” donde estas subrutinas se pueden desarrollar con facilidad son: VISUAL BASIC, MATHCAD, MATLAB, etc.
En estos lenguajes de programación, debido a la manera en que la compilación del código fuente establece las instrucciones en lenguaje de maquina, es que la notación indicial adquiere gran potencia por ser el lenguaje “natural” de comunicación entre el programador en notación indicial y el modo en como esto se implementa a nivel de hardware.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.19
2 TENSOR DE TENSIONES
2.1 Introducción: Ahora consideraremos el estudio más detallado de un caso particular de tensor de segundo orden: el Tensor de Tensiones. Se subentenderá que lo desarrollado para este tensor en particular, será aplicable a cualquier otro tensor de segundo orden.
El tensor de tensiones es uno de los más importantes tensores en el análisis de tensiones en un medio continuo, y corresponde al concepto que le dio originalmente el nombre a esta rama de la matemática.
La característica principal de este tensor, es que permite definir el “campo de tensiones” en un punto al interior de un sólido.
En este capítulo estableceremos primero la definición y las características específicas de este tensor, y luego veremos la forma que adquieren algunas de las propiedades de los tensores de segundo orden, en este caso en particular.
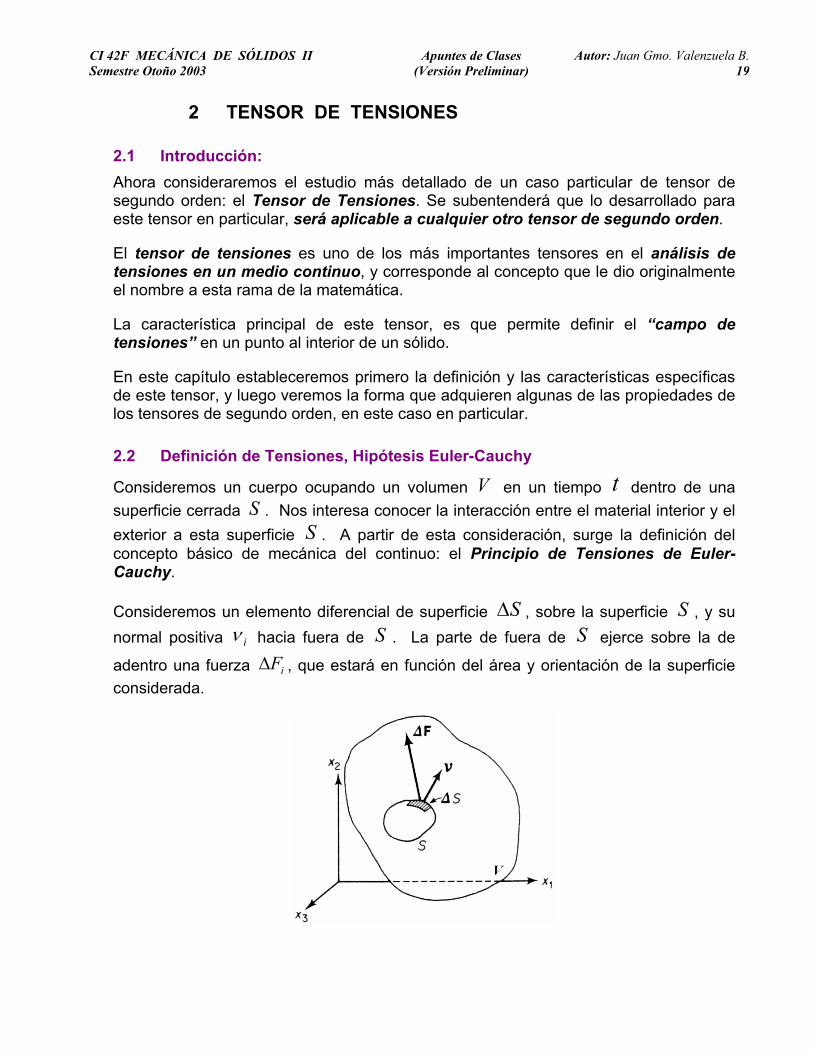
2.2 Definición de Tensiones, Hipótesis Euler-Cauchy
Consideremos un cuerpo ocupando un volumen V en un tiempo t dentro de una superficie cerrada S . Nos interesa conocer la interacción entre el material interior y el exterior a esta superficie S . A partir de esta consideración, surge la definición del concepto básico de mecánica del continuo: el Principio de Tensiones de Euler-Cauchy.
Consideremos un elemento diferencial de superficie S∆ , sobre la superficie S , y su normal positiva iν hacia fuera de S . La parte de fuera de S ejerce sobre la de
adentro una fuerza iF∆ , que estará en función del área y orientación de la superficie considerada.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.20
Si al tender 0→∆S , el cociente SFi ∆∆ tiende a un límite definido dSdFi , y si el momento de las fuerzas actuando sobre la superficie S∆ desaparece en el límite ( 0→∆∆ SMi ), entonces el límite al que tiende este cuociente se define como:
dSdF
SFLimT ii
Si =
∆∆
=→∆ 0
ν
.
Este límite recibe el nombre de “vector de tensiones” o “tracción”, y posee dimensiones de fuerza por unidad de superficie.
El vector de tensiones que representa la acción del material exterior al elemento de superficie sobre el interior, es igual en magnitud pero en dirección contraria, al que representa la acción del interior sobre el exterior.
2.3 Componentes Cartesianas de Tensiones. Fórmula de Cauchy
Consideremos ahora un caso particular, en el que las superficies planas kS∆ son
normales a los ejes cartesianos ix , o lo que es lo mismo, que sus normales iν son paralelas a los ejes dados.
En cada superficie tenemos un tensor de tensiones iT1
, iT2
, iT3
, donde el índice superior representa la superficie sobre la cual actúa. Si descomponemos este vector en sus componentes tendremos:
( )1312113
1
2
1
1
1,,,, τττ=
TTT
( )23222132
22
12
,,,, τττ=
TTT
( )3332313
3
2
3
1
3,,,, τττ=
TTT
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.21
El conjunto de las nueve componentes de los tres vectores puede considerarse, como
ya sabemos, un tensor de segundo orden, ijτ , denominado tensor de tensiones.
Si conocemos los esfuerzos a través de tres planos perpendiculares entre si, i
aT , i
bT ,
i
cT , podemos escribir el esfuerzo a través de un plano cualquiera cuya normal es iν en función de estos esfuerzos.
Si escogemos los tres planos normales a los tres ejes coordenados, ellos definen las
nueve componentes del tensor ijτ y el esfuerzo iTν
a través del plano cuya normal viene dado por:
jijiT τνν
= .
Si utilizamos la letra σ para referirnos específicamente al tensor de tensiones, y utilizamos las convenciones de notación indicial, la ecuación anterior puede ser escrita como:
kiki σνσν = .
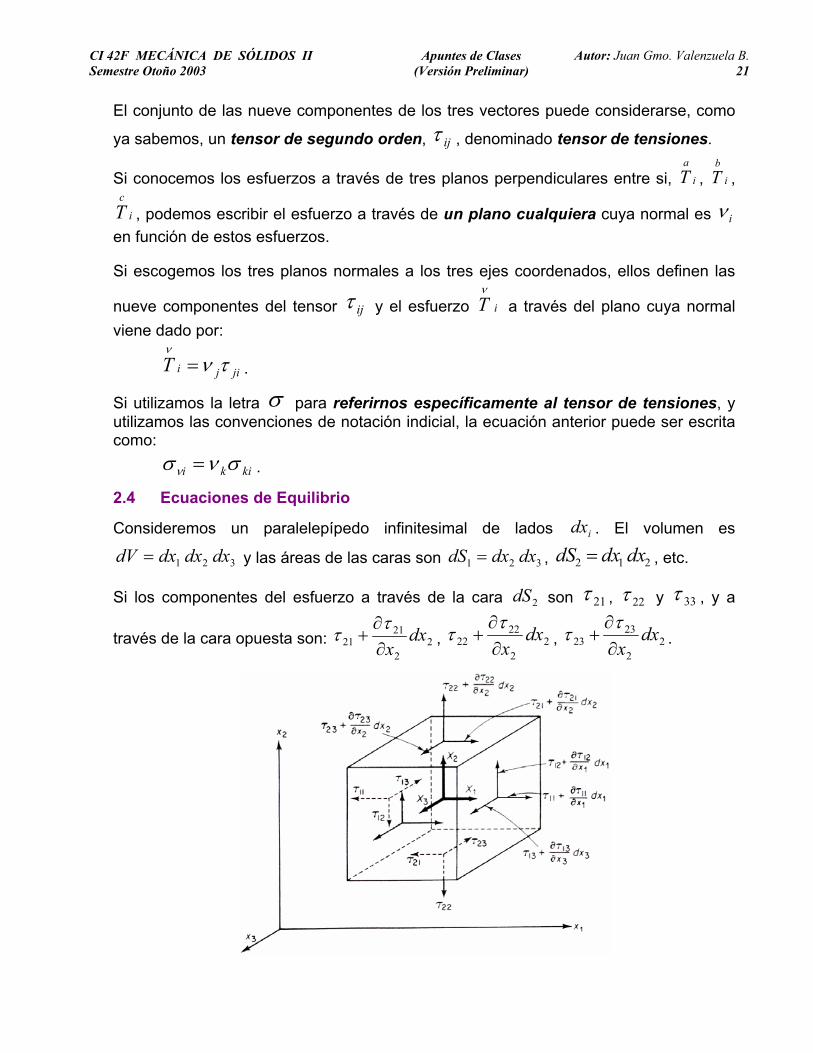
2.4 Ecuaciones de Equilibrio
Consideremos un paralelepípedo infinitesimal de lados idx . El volumen es
321 dxdxdxdV = y las áreas de las caras son 321 dxdxdS = , 212 dxdxdS = , etc.
Si los componentes del esfuerzo a través de la cara 2dS son 21τ , 22τ y 33τ , y a
través de la cara opuesta son: 22
2121 dx
x∂∂
+ττ , 2
2
2222 dx
x∂∂
+ττ , 2
2
2323 dx
x∂∂
+τ
τ .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.22
La ecuación de equilibrio del paralelepípedo, considerando que actúan fuerzas de
volumen if , puede establecerse para una de las componentes como:
013
31
2
21
1
11 =+∂∂
+∂∂
+∂∂ f
xxxτττ
,
y para las tres componentes como:
0=+∂
∂i
j
ij fxτ
.
Por tanto, la ecuación de equilibrio de fuerzas queda:
0, =+ ijij fτ .
Análogamente, puede establecerse la ecuación de equilibrio de momentos considerando el momento de las fuerzas externas en torno al centro de gravedad del cuerpo, lo que queda:
kjjkjkijkikijijk ee ττττδ =⇔=⇔= 00 .
Esta relación significa que en ausencia de momentos externos resultantes, el tensor de tensiones es simétrico.
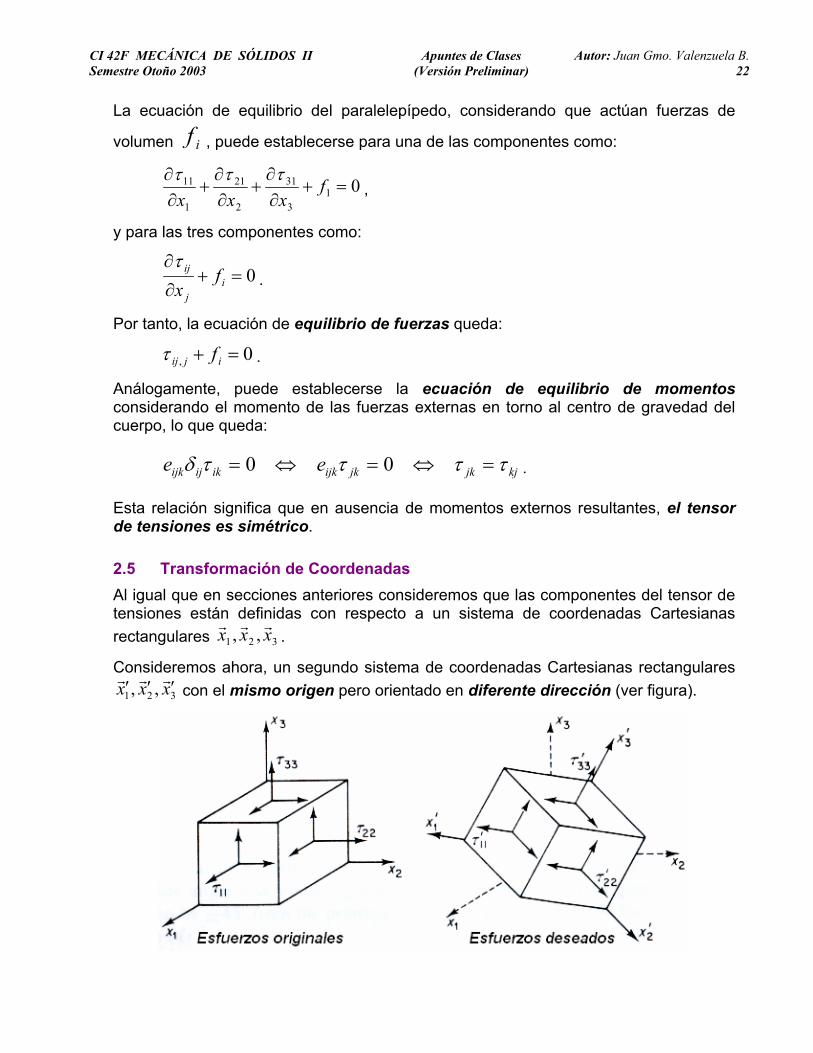
2.5 Transformación de Coordenadas Al igual que en secciones anteriores consideremos que las componentes del tensor de tensiones están definidas con respecto a un sistema de coordenadas Cartesianas rectangulares 321 ,, xxx rrr
.
Consideremos ahora, un segundo sistema de coordenadas Cartesianas rectangulares 321 ,, xxx ′′′ rrr con el mismo origen pero orientado en diferente dirección (ver figura).
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.23
Consideremos las componentes del tensor de tensiones en este nuevo sistema de referencia. Como sabemos, la relación entre los ejes de coordenadas de ambos sistemas esta dada por:
ikik xx β=′ ,
donde los ijβ son los cosenos directores del eje kx′r con respecto al eje ixr .
Dado que ijτ es un tensor, podríamos escribir inmediatamente la ley de transformación, sin embargo, para enfatizar la importancia de este resultado, vamos a derivar esta ley basándonos en la fórmula de Cauchy derivada con anterioridad.
Esta fórmula establece que si dS es un elemento de superficie cuyo vector unitario normal ν tiene componentes iν , entonces la fuerza por unidad de área actuando
sobre la superficie dS es un vector ν
Tr
con componentes:
jjiiT ντν
= .
Si la normal ν se elige paralela a los ejes kx′r , entonces:
11 kβν = , 22 kβν = , 33 kβν = ,
entonces:
kjji
k
iT βτ=′ .
Las componentes del vector k
iT ′ en la dirección del eje mx′ esta dado por el producto de k
iT ′ y miβ . De aquí, las componentes pueden escribirse como:
mi
k
ikm xsobreTdeproy ′′=′ ∑ .τ
332211 m
k
m
k
m
kTTT βββ ′+′+′=
...21121111 ++= kmkm ββτββτ , es decir:
mikjjikm ββττ =′ .
Como se puede apreciar, las componentes del tensor de tensiones se transforman como un tensor cartesiano de segundo orden. Así, el concepto físico de tensión descrito por ijτ coincide con la definición matemática de un tensor de segundo orden en un espacio Euclidiano.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.24
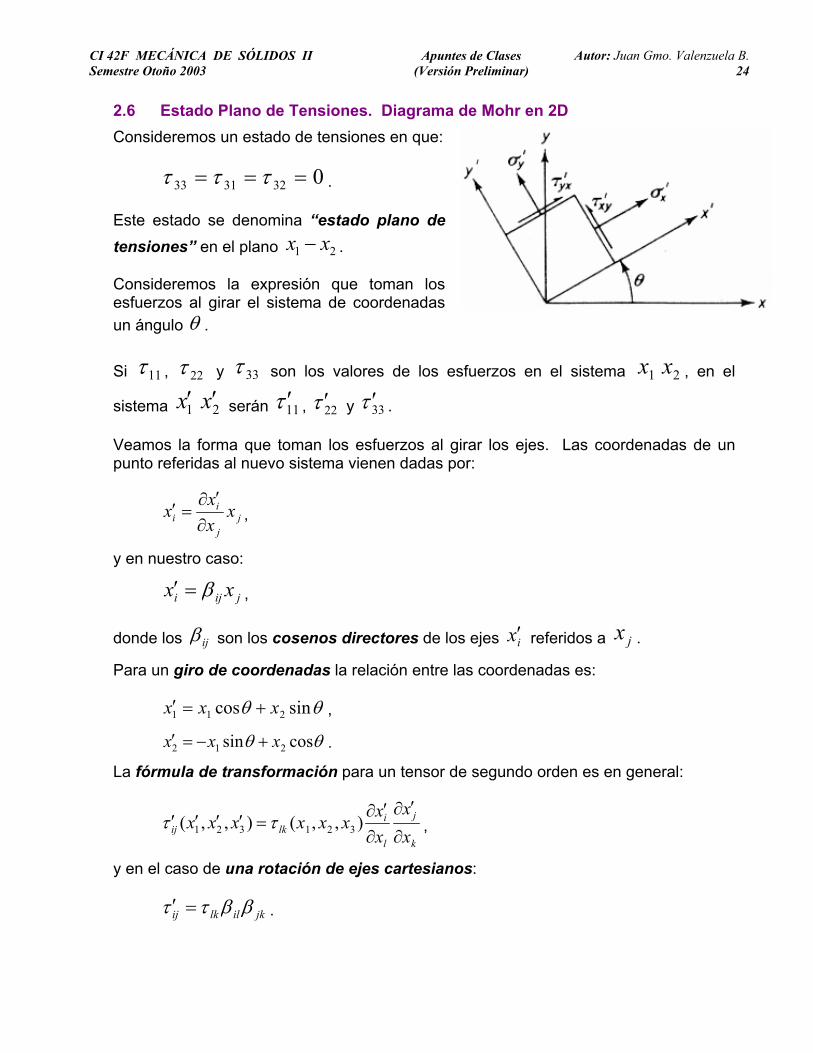
2.6 Estado Plano de Tensiones. Diagrama de Mohr en 2D Consideremos un estado de tensiones en que:
0323133 === τττ .
Este estado se denomina “estado plano de tensiones” en el plano 21 xx − .
Consideremos la expresión que toman los esfuerzos al girar el sistema de coordenadas un ángulo θ .
Si 11τ , 22τ y 33τ son los valores de los esfuerzos en el sistema 1x 2x , en el
sistema 1x′ 2x′ serán 11τ ′ , 22τ ′ y 33τ ′ .
Veamos la forma que toman los esfuerzos al girar los ejes. Las coordenadas de un punto referidas al nuevo sistema vienen dadas por:
jj
ii x
xxx
∂′∂
=′ ,
y en nuestro caso:
jiji xx β=′ ,
donde los ijβ son los cosenos directores de los ejes ix′ referidos a jx .
Para un giro de coordenadas la relación entre las coordenadas es:
θθ sincos 211 xxx +=′ ,
θθ cossin 212 xxx +−=′ .
La fórmula de transformación para un tensor de segundo orden es en general:
k
j
l
ilkij x
xxxxxxxxx
∂
′∂
∂′∂
=′′′′ ),,(),,( 321321 ττ ,
y en el caso de una rotación de ejes cartesianos:
jkillkij ββττ =′ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.25
Desarrollando y poniendo los valores de ijβ en función del ángulo θ obtenemos las siguientes expresiones para las componentes de los esfuerzos:
θθτθτθττ cossin2sincos 122
222
1111 ++=′
θθτθτθττ cossin2cossin 122
222
1122 −+=′
)sin(coscossin)( 2221221121 θθτθθτττ −++−=′
Considerando las relaciones trigonométricas para el ángulo doble, )2cos1(21sin 2 θθ −= , )2cos1(21cos2 θθ += , las ecuaciones anteriores pueden
escribirse en función del ángulo θ en la forma:
θτθτττττ 2sin2cos22 21
2211221111 +
−+
+=′ ,
θτθτττττ 2sin2cos22 21
2211221122 −
−−
+=′ ,
θτθτττ 2cos2sin2 21
221121 +
−−=′ .
Notar que, sumando las dos primeras expresiones anteriores se obtiene:
22112211 ττττ +=′+′ ,
lo que demuestra, una vez más, la invarianza de la traza del tensor ante una transformación de coordenadas.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.26
Buscamos ahora para qué valor del ángulo θ los esfuerzos normales 11τ ′ y 22τ ′ toman valores máximos o mínimos.
Para ésto derivamos 11τ ′ y 22τ ′ con respecto a θ :
2121221111 22cos22sin)( τθτθττθ
τ ′=+−−=∂
′∂,
2121221122 22cos22sin)( τθτθττ
θτ ′−=−−=∂
′∂.
La condición para un máximo o un mínimo es que la derivada sea cero, lo que implica que para este caso los esfuerzos de cizalle deben ser nulos.
El ángulo para el que se cumple ésto, lo podemos deducir de la primera expresión anterior igualándola a cero. El valor de θ que corresponde es:
2211
2122tanττ
τθ−
=∗ .
Estas relaciones nos dicen que:
a) la suma de los esfuerzos normales es invariante bajo la rotación del sistema de coordenadas.
b) existe una orientación de los ejes definida por ∗θ para la que
los esfuerzos de cizalle se anulan.
Los ejes definidos por esta orientación reciben el nombre de “ejes principales de esfuerzos” y los esfuerzos normales correspondientes son los “esfuerzos principales”.
Los valores que toman los esfuerzos en la dirección de los ejes principales son máximos, o mínimos.
2.7 Componentes Normal y Tangencial de la Tensión Consideremos ahora el problema de determinar la tensión en un punto P en una dirección determinada. Para esto, haremos pasar un plano imaginario por el punto, de modo que la normal a este plano (ν ), sea la dirección de interés.
Para establecer el vector tensión en el plano elegido, deberemos “proyectar” el tensor que define el estado tensional en el punto, “sobre” el plano. Esto se logra
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.27
“multiplicando” el tensor de tensiones ijσ , por el vector unitario direccional del plano
ν , obteniéndose el vector tensión νσr como:
=
⋅
=⋅=
3
2
1
3
2
1
333231
232221
131211 1ˆ
ν
ν
ν
νν
σσσ
ννν
νσσσσσσσσσ
νσσ ir
Este vector a su vez, puede ser “descompuesto” en sus componentes normal y
tangencial al plano ν , escribiéndose como:
tt ˆˆ νννν σνσσ +=r
La magnitud de la componente normal ννσ , puede obtenerse proyectando el vector
νσr sobre la dirección perpendicular al plano, como:
( ) ( )321321 ˆˆˆˆ νννσσσνσσ νννννν ⋅=⋅=r
,
y la magnitud de la componente tangencial puede obtenerse a partir de:
222tνννν σσσ +=
r.
2.8 Esfuerzos Principales En el caso general, el estado tensional en un punto depende de la dirección considerada en el análisis. Esta dirección determina el vector de tensiones actuando sobre este plano.
Ahora estamos interesados en encontrar la dirección de un plano, de tal modo, que la proyección tangencial del vector de tensiones sea nula, es decir, no exista esfuerzo de corte. Esta situación se produce exactamente cuando el vector de tensiones es perpendicular al plano buscado.
Los planos así determinados se denominan planos principales, y las direcciones que los definen, se denominan direcciones principales.
Los valores de las tensiones actuando sobre los planos principales se denominan tensiones o esfuerzos principales.
Como ya vimos en secciones anteriores, la expresión matemática que permite encontrar las direcciones de los planos principales buscados, se puede escribir en este caso como:

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.28
0)( =− iijij νσδσ .
Las soluciones no triviales de este sistema de ecuaciones homogéneas corresponden a las tres direcciones principales buscadas, y sus correspondientes valores de σ , a los valores principales.
Se debe recordar de la teoría de matrices que, dado que la matriz ijσ es real y simétrica, la solución de este problema de valores propios posee tres valores reales de esfuerzos principales y un conjunto ortonormal de ejes principales.
A continuación se describen algunos conceptos necesarios para resolver el sistema de de ecuaciones descrito como solución al problema de determinar los esfuerzos principales.
2.8.1 Invariantes del Tensor de Tensiones Existe un número de combinaciones escalares algebraicas de los componentes del tensor de tensiones, que no son alteradas por la rotación de los ejes coordenados. Estas combinaciones se denominan “invariantes de tensiones”.
Las invariantes principales del tensor de tensiones corresponden a:
TrazaI ii =++== 3322111 σσσσ
)()()()(21 2
1222112
1333112
2333222
)1()1)(1(2 σσσσσσσσσσσσ −+−+−=−= +++ iiiiiiI
ijkjiijkeI σσσσ == 3213
2.8.2 Ecuación Característica Considerando los valores de los invariantes principales del tensor, es posible establecer la ecuación característica de éste como:
0322
13 =+−+− III σσσ .
Esta ecuación surge de considerar las soluciones no triviales del sistema, dado por la condición del determinante nulo: 0=− ijij σδσ .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.29
2.8.3 Valores de las Tensiones Principales La resolución de la ecuación anterior, mediante métodos numéricos, permite establecer los valores propios o principales de este tensor.
Las “raíces” o soluciones de esta ecuación, corresponden siempre a 3 valores reales. El ordenamiento de estos valores de mayor a menor, permite identificar las tensiones principales como:
),,( 321 σσσ .
2.8.4 Determinación de las Direcciones Principales: Cada valor principal del tensor tiene asociado una dirección principal. Estas direcciones principales pueden ser determinadas a partir de considerar las condiciones de ortogonalidad y de magnitud unitaria de los vectores considerados:
0)( =⋅− jkijkij nδσσ ,
1=iinn .
2.9 Tensor Desviatórico Un tensor que merece especial atención debido a sus propiedades singulares, es el tensor desviatórico. Este tensor es muy importante en teoría de plasticidad. En esta sección, realizaremos una breve presentación de él.
Siempre es posible descomponer un tensor arbitrario en un término de tensión (ó compresión) uniforme (parte “esférica”) y un término de corte puro (parte “desviatoria”), como sigue:
coDesviatóriEsféricoTensor +=
dijkkijij σσδσ +=
31
El tensor desviatórico es definido por tanto como:
kkijijdij σδσσ
31
−=
donde el término kkijσδ31
se denomina a veces “estado de tensiones hidrostático
puro”.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.30
También se acostumbra utilizar la siguiente convención para establecer el tensor desviatorio:
ijoijdij δσσσ −=
donde el término oσ se denomina “tensión media” y puede expresarse como:
1332211 31)(
31
31 Ikko =++== σσσσσ .
El tensor desviatórico posee la importante propiedad de que su primera invariante es siempre nula ( 01 =dI ), y que sus otras invariantes están relacionadas de la siguiente forma con las invariantes del tensor original:
222 3 o
d II σ−= ,
3233 2 oo
d III σσ +−= .
2.10 Tensor Esférico Considerando la definición de la tensión media, el tensor esférico puede establecerse como el tensor que esta conformado por “tensiones medias” en los elementos de su diagonal principal y por valores nulos en las otras posiciones:
=
o
o
oesfij
σσ
σσ
000000
.
Ejemplo Se considerará el siguiente tensor en coordenadas cartesianas ortogonales para establecer lo que se indica:
−−−
−=
5.70.15.10.11.80.2
5.10.25.6
ijt .
Invariantes Principales:
1.2254.71.85.61 =++== iitI

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.31
)()()( 2122211
2133311
22333222 tttttttttI −⋅+−⋅+−⋅=
90.15465.4850.4675.59)0.20.21.85.6()5.15.15.75.6()0.10.15.71.8( =++=⋅−⋅+⋅−⋅+⋅−⋅=
)5.11.80.10.2(5.1)5.10.15.70.2)(0.2()0.10.15.71.8(5.63 ⋅−⋅+⋅+⋅−−−⋅−⋅== ijtI
150.346225.15000.27375.388 =−−=
Ecuación Característica:
0322
13 =+⋅−⋅+− ItItIt
0150.34690.1541.221 23 =+⋅−⋅+⋅− ttt
Valores Principales:
⇒ ( ) ( )9109.47560.64331.10321 =ttt
Direcciones Principales:
Las direcciones principales se establecen resolviendo el sistema: 0)( =⋅− jkijkij ntt δ
para cada uno de los valores propios kt (ver ejemplo resuelto a continuación). En este caso se obtiene, para las direcciones principales expresadas como vectores columnas lo siguiente:
[ ]
−−
−=
0000.13836.07466.07495.05069.00000.10037.00000.17932.0
TA .
Comprobar, usando la ley de transformación de coordenadas, que al hacer una rotación de manera que los nuevos ejes coincidan con las direcciones principales, el tensor toma su forma canónica: En general, la ley de transformación de coordenadas de un tensor puede escribirse en términos matriciales como:
[ ] [ ] [ ] [ ] TAtAt ⋅⋅=′ .
En este caso de estudio, estamos interesados en que los nuevos ejes coincidan con las direcciones principales. Para hacer esto, la matriz [ ]A debe estar confeccionada a partir de las direcciones principales como los vectores filas de la matriz

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.32
transformación, estando estos previamente normalizados, tal como se señala a continuación:
[ ]
−−
−⋅
−−−
−⋅
−−−
=′
8002.03237.05049.05997.04278.06763.00030.08440.05364.0
5.70.15.10.11.80.2
5.10.25.6
8002.05997.00030.03237.04278.08440.05049.06763.05364.0
t
[ ]
−−
−⋅
−−
−=′
8002.03237.05049.05997.04278.06763.00030.08440.05364.0
4063.55896.12677.50514.41009.20557.70204.01449.45966.5
t
[ ]
−
−=′
7558.60004.00006.00004.09115.40001.00006.00001.04334.10
t
.
A partir de este resultado, salvo errores de redondeo debido a haber trabajado con 4 cifras decimales, se aprecia que se obtiene la forma canónica del tensor, donde en la diagonal principal se encuentran los valores principales o propios, y los elementos fuera de la diagonal son nulos.
NOTA: Algunas calculadoras tienen implementados algoritmos que permiten realizar en forma rápida los cálculos realizados en este ejemplo. Por ejemplo, las calculadoras Hewlett Packard 48GX poseen las siguientes subrutinas:
Para hallar las raíces de la ecuación característica puede utilizarse el “solucionador” de raíces de un polinomio:
SOLVE POLY COEFFICIENTS [ ]01.... AAAN
En nuestro caso: [ ] [ ]4331.107560.69109.415.3469.1541.221 ⇒−−
Para hallar los valores y vectores propios de una matriz cuadrada:
MATH MATR NXT EGV, devuelve en el nivel 2 una matriz de nn× vectores propios y en el nivel 1 un vector de n elementos de valores propios. Las columnas de la matriz del nivel 2 representan los vectores propios correspondientes a los valores propios del nivel 1.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.33
Ejemplo: Considerando que en un punto dado de un continuo las componentes del tensor de esfuerzo son las que se indican, se puede calcular lo siguiente:
−−−−
−−=
43243226
43641
ijσ .
Invariantes Principales: 3432411 =++== iiI σ
)()()()(21 2
1222112133311
22333222 σσσσσσσσσσσσσ −+−+−=−= ijijiiiiI
6)621()163163()223( −=−+−+−=
8815681)2332(4
3)46463(6)223(41
3 −=−−−=−−
+−−+−== ijI σ
Ecuación Característica:
0322
13 =+⋅−⋅+− III σσσ ⇔ 0863 23 =−⋅+⋅+− σσσ
Tensiones Principales:
0863 23 =−⋅+⋅+− σσσ ⇒ ( ) ( )214321 −=σσσ
Direcciones Principales: Direcciones del esfuerzo principal para 41 =σ : 0)( 11 =⋅− jijij nδσσ
=
⋅−⋅−⋅−⋅−⋅−⋅−⋅−⋅−⋅−
=
−−−−−−
−−−
000
413243226
436415
413243226
436415
312111
312111
312111
31
21
11
nnnnnnnnn
nnn
Resolviendo el subsistema
=
⋅−⋅−⋅−⋅−⋅−⋅−
00
226436415
312111
312111
nnnnnn con 1
11=n tenemos:

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.34
=
⋅−⋅−−⋅−⋅−−
00
226436415
3121
3121
nnnn ⇔
=
⋅−⋅−⋅−⋅−
6415
22436
3121
3121
nnnn
⇒
−=
33362
31
21
nn
∴ ]333621[1 −=tin
⇒ ]633621[1 −=tin
Análogamente, para 12 =σ y 23 −=σ :
]23021[2 −=tin y ]663322[ .
NOTA: Una forma de comprobar que sus cálculos están correctos, es realizar el producto cruz entre dos cualquiera de estos vectores y verificar que se obtiene el tercero (eventualmente este podría resultar con un cambio de signo).
Esfuerzos Máximos de Cizalle:
23)2(1
21
21
2112 =−−=−= σστ
34221
21
1313 =−−=−= σστ
23)2(1
21
21
3223 =−−=−= σστ
Tensor Desviatorio o de Desviación: Descontando del tensor dado, el tensor de esfuerzo esférico, se obtiene el tensor desviatorio como:
−−−−−
−−−=
−
−−−−
−−=−=
4124321643643
100010001
4324322643641
31
kkijijij σδσσ)
.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.35
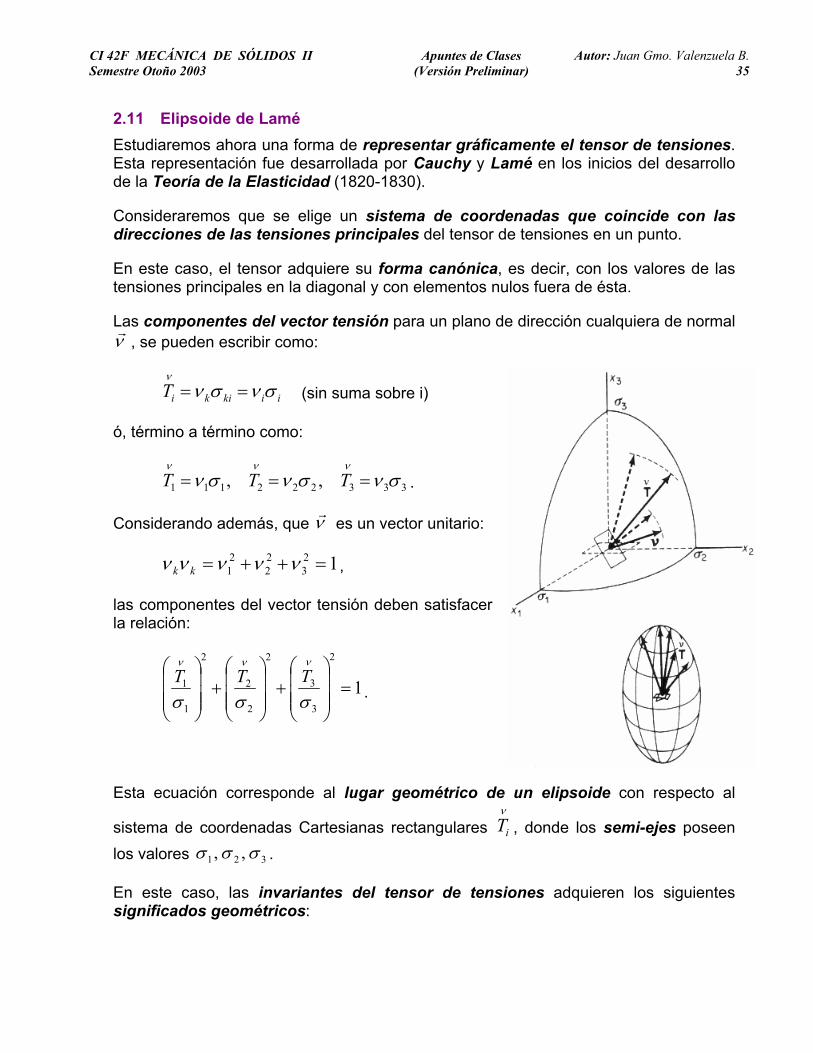
2.11 Elipsoide de Lamé Estudiaremos ahora una forma de representar gráficamente el tensor de tensiones. Esta representación fue desarrollada por Cauchy y Lamé en los inicios del desarrollo de la Teoría de la Elasticidad (1820-1830).
Consideraremos que se elige un sistema de coordenadas que coincide con las direcciones de las tensiones principales del tensor de tensiones en un punto.
En este caso, el tensor adquiere su forma canónica, es decir, con los valores de las tensiones principales en la diagonal y con elementos nulos fuera de ésta.
Las componentes del vector tensión para un plano de dirección cualquiera de normal νr
, se pueden escribir como:
iikikiT σνσνν
== (sin suma sobre i)
ó, término a término como:
333222111 ,, σνσνσνννν
=== TTT .
Considerando además, que νr
es un vector unitario:
123
22
21 =++= ννννν kk ,
las componentes del vector tensión deben satisfacer la relación:
1
2
3
3
2
2
2
2
1
1 =
+
+
σσσ
νννTTT
.
Esta ecuación corresponde al lugar geométrico de un elipsoide con respecto al
sistema de coordenadas Cartesianas rectangulares ν
iT , donde los semi-ejes poseen los valores 321 ,, σσσ .
En este caso, las invariantes del tensor de tensiones adquieren los siguientes significados geométricos:
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.36
• 3211 σσσ ++=I es la suma de los 3 principales radios del elipsoide.
• ( )32113322121 AAAI ++=++=π
σσσσσσ es proporcional a la suma de las 3
áreas de las elipses principales.
• VIπ
σσσ43
3213 == es proporcional al volumen del elipsoide.
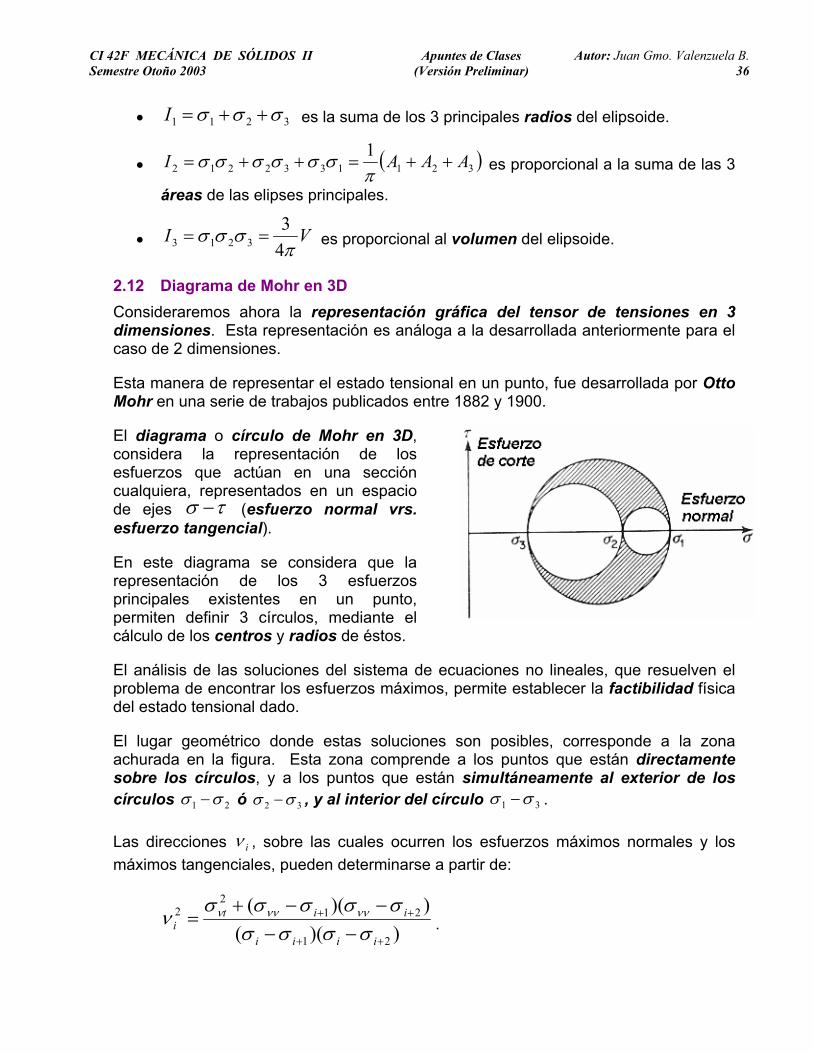
2.12 Diagrama de Mohr en 3D Consideraremos ahora la representación gráfica del tensor de tensiones en 3 dimensiones. Esta representación es análoga a la desarrollada anteriormente para el caso de 2 dimensiones.
Esta manera de representar el estado tensional en un punto, fue desarrollada por Otto Mohr en una serie de trabajos publicados entre 1882 y 1900.
El diagrama o círculo de Mohr en 3D, considera la representación de los esfuerzos que actúan en una sección cualquiera, representados en un espacio de ejes τσ − (esfuerzo normal vrs. esfuerzo tangencial).
En este diagrama se considera que la representación de los 3 esfuerzos principales existentes en un punto, permiten definir 3 círculos, mediante el cálculo de los centros y radios de éstos.
El análisis de las soluciones del sistema de ecuaciones no lineales, que resuelven el problema de encontrar los esfuerzos máximos, permite establecer la factibilidad física del estado tensional dado.
El lugar geométrico donde estas soluciones son posibles, corresponde a la zona achurada en la figura. Esta zona comprende a los puntos que están directamente sobre los círculos, y a los puntos que están simultáneamente al exterior de los círculos 21 σσ − ó 32 σσ − , y al interior del círculo 31 σσ − .
Las direcciones iν , sobre las cuales ocurren los esfuerzos máximos normales y los máximos tangenciales, pueden determinarse a partir de:
))(())((
21
212
2
++
++
−−−−+
=iiii
iiti σσσσ
σσσσσν ννννν
.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.37
3 ANÁLISIS DE DEFORMACIÓN
3.1 Introducción: En este capítulo consideraremos la deformación de un cuerpo como el “mapeo” de un cuerpo desde un estado original (Sistema I) a un estado deformado (Sistema II).
Se utilizaran los Tensores Métricos Euclidianos para definir la longitud del elemento de línea en cada sistema y se utilizará esto para medir deformaciones.
La manera de “medir” deformaciones, nos permitirá establecer dos definiciones del tensor de deformación: un tensor en Coordenadas Lagrangianas, denominado Tensor de Deformación de Green, y un tensor en Coordenadas Eulerianas, denominado Tensor de Deformación de Almansi.
3.2 Deformación
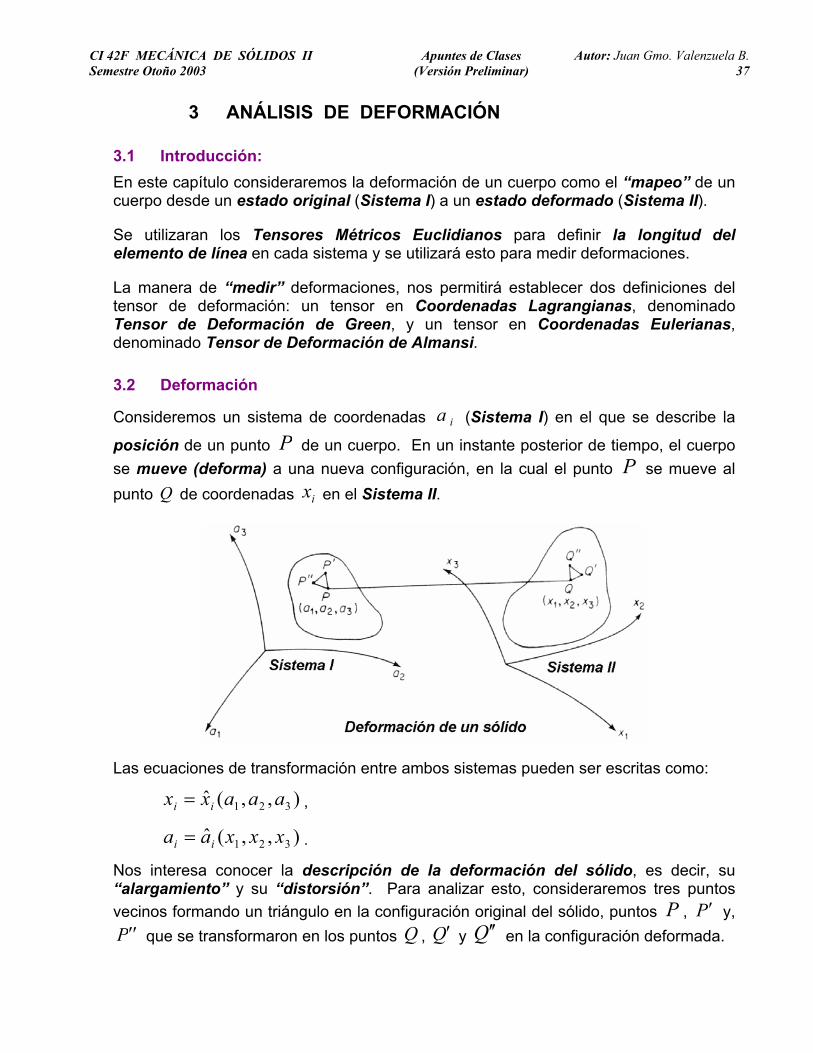
Consideremos un sistema de coordenadas ia (Sistema I) en el que se describe la
posición de un punto P de un cuerpo. En un instante posterior de tiempo, el cuerpo se mueve (deforma) a una nueva configuración, en la cual el punto P se mueve al punto Q de coordenadas ix en el Sistema II.
Las ecuaciones de transformación entre ambos sistemas pueden ser escritas como:
),,(ˆ 321 aaaxx ii = ,
),,(ˆ 321 xxxaa ii = .
Nos interesa conocer la descripción de la deformación del sólido, es decir, su “alargamiento” y su “distorsión”. Para analizar esto, consideraremos tres puntos vecinos formando un triángulo en la configuración original del sólido, puntos P , P ′ y, P ′′ que se transformaron en los puntos Q , Q′ y Q ′′ en la configuración deformada.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.38
La descripción del cambio de distancia entre dos puntos cualesquiera del cuerpo es la clave para el análisis de la deformación.
Consideremos un elemento de línea infinitesimal conectando el punto ),,( 321 aaaP
con el punto vecino ),,( 332211 daadaadaaP +++′ .
El cuadrado de la longitud ods de PP ′ en la configuración original puede escribirse como:
jiijo dadaads =2
donde ija , evaluado en el punto P , es el tensor métrico Euclidiano para el sistema
de coordinadas ia .
Cuando los puntos P y P′ se deforman a los puntos ),,( 321 xxxQ y
),,( 332211 dxxdxxdxxQ +++′ , respectivamente, el cuadrado de la longitud ds del
nuevo elemento QQ ′ es:
jiij dxdxgds =2,
donde ijg es el tensor métrico Euclidiano para el sistema de coordinadas ix .
Utilizando las ecuaciones de transformación, los cuadrados de las longitudes pueden establecerse como:
mlm
j
l
iijo dxdx
xa
xaads
∂
∂
∂∂
=2,
mlm
j
l
iij dada
ax
axgds
∂
∂
∂∂
=2.
La diferencia entre los cuadrados de los elementos de longitud puede ser escrita, luego de algunos cambios en los subíndices mudos, ya sea como:
jiijji
o dadaaax
axgdsds
−
∂∂
∂∂
=− βααβ
22,
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.39
o como:
jiji
ijo dxdxxa
xaagdsds
∂∂
∂∂
−=− βααβ
22.
Se pueden definir entonces los Tensores de Deformación de Green y de Almansi como:
−
∂∂
∂∂
= ijji
ij aax
axgE βα
αβ21
,
∂∂
∂∂
−=ji
ijij xa
xaage βα
αβ21
,
de modo que:
jiijo dadaEdsds 222 =− ,
jiijo dxdxedsds 222 =− .
Los tensores ijE y ije son tensores en los sistemas de coordenadas ia y ix , respectivamente, y satisfacen las ecuaciones de trasformación descritas en cada uno de los sistemas coordenados.
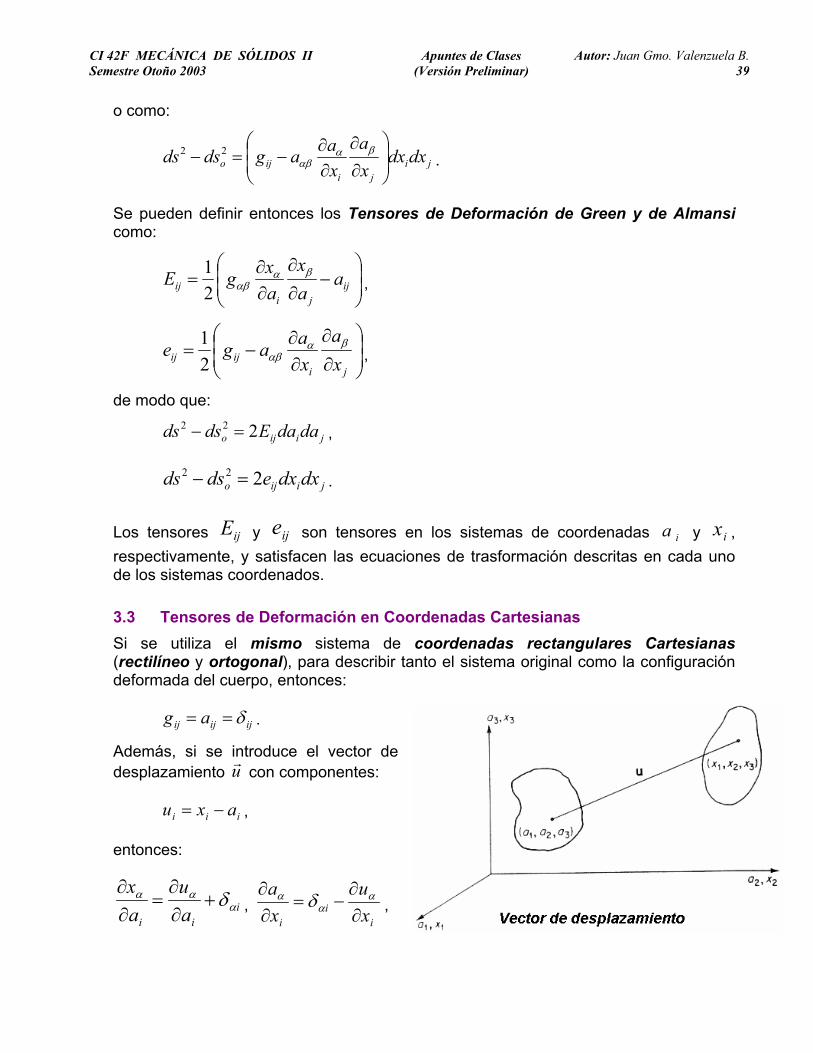
3.3 Tensores de Deformación en Coordenadas Cartesianas Si se utiliza el mismo sistema de coordenadas rectangulares Cartesianas (rectilíneo y ortogonal), para describir tanto el sistema original como la configuración deformada del cuerpo, entonces:
ijijij ag δ== .
Además, si se introduce el vector de desplazamiento u
r con componentes:
iii axu −= ,
entonces:
iii a
uax
ααα δ+
∂∂
=∂∂
, i
ii x
uxa
∂∂
−=∂∂ α
αα δ ,

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.40
y los tensores de deformación se reducen a las formas simples siguientes:
−
∂
∂
∂∂
= ijji
ij ax
axE δδ βα
αβ21
,
−
+
∂
∂
+
∂∂
= ijjj
ii
ij au
auE δδδδ β
βα
ααβ2
1,
∂∂
∂∂
+∂∂
+∂
∂=
jij
i
i
jij a
uau
au
au
E αα
21
,
y:
∂∂
∂∂
−=ji
ijij xa
xae βα
αβδδ21
,
+
∂∂
−
+
∂∂
−−= jj
ii
ijij xu
xue β
βα
ααβ δδδδ
21
,
∂∂
∂∂
+∂∂
+∂∂
=jij
i
i
jij x
uxu
xu
xu
e αα
21
.
Si consideramos el siguiente cambio de notación:
( ) ( )zyxxxx →321 ,
( ) ( )wvuuuu →321 ,
los tensores de deformación pueden escribirse como:
∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
+∂∂
+∂∂
=bw
aw
bv
av
bu
au
av
buEab 2
1,
∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
+∂∂
+∂∂
=yw
xw
yv
xv
yu
xu
xv
yuexy 2
1.
Notar que cuando el tensor de deformación Lagrangiano se evalúa, se considera que wvu ,, son funciones de cba ,, , que son la posición de los puntos en el cuerpo en la configuración no deformada, mientras que cuando se evalúa el tensor de deformación Euleriano, son funciones de zyx ,, , que son la posición de los puntos en la configuración deformada.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.41
Si se considera que las componentes del desplazamiento iu son tales que, sus primeras derivadas son pequeñas y que los cuadrados y los productos de las derivadas parciales son despreciables, el Tensor de Green se reduce al Tensor de Deformación Infinitesimal de Cauchy:
∂∂
+∂∂
=j
i
i
jij x
uxu
e21
.
En notación sin subíndices:
xuexx ∂
∂= , yxxy e
xv
yue =
∂∂
+∂∂
=21
,
yveyy ∂
∂= , zxxz e
xw
zue =
∂∂
+∂∂
=21
,
zwezz ∂
∂= , xyyz e
yw
zue =
∂∂
+∂∂
=21
.
NOTA: En el caso de desplazamientos infinitesimales, la distinción entre tensores de deformación Lagrangianos y Eulerianos, desaparece.
3.4 Interpretación Geométrica de los Componentes de Deformación Infinitesimales Sea zyx ,, un conjunto de coordenadas rectangulares Cartesianas.
Consideremos un elemento de línea de longitud dx paralelo al xeje − )0( == dzdy .
El cambio en el cuadrado de la longitud de este elemento debido a la deformación es:
222 )(2 dxedsds xxo =− ,
de aquí:
o
xxo dsds
dxedsds+
=−2)(2
,
pero dxds = en este caso, y ods difiere de ds solo en una pequeña cantidad de segundo orden, entonces:
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.42
xxo e
dsdsds
=−
.
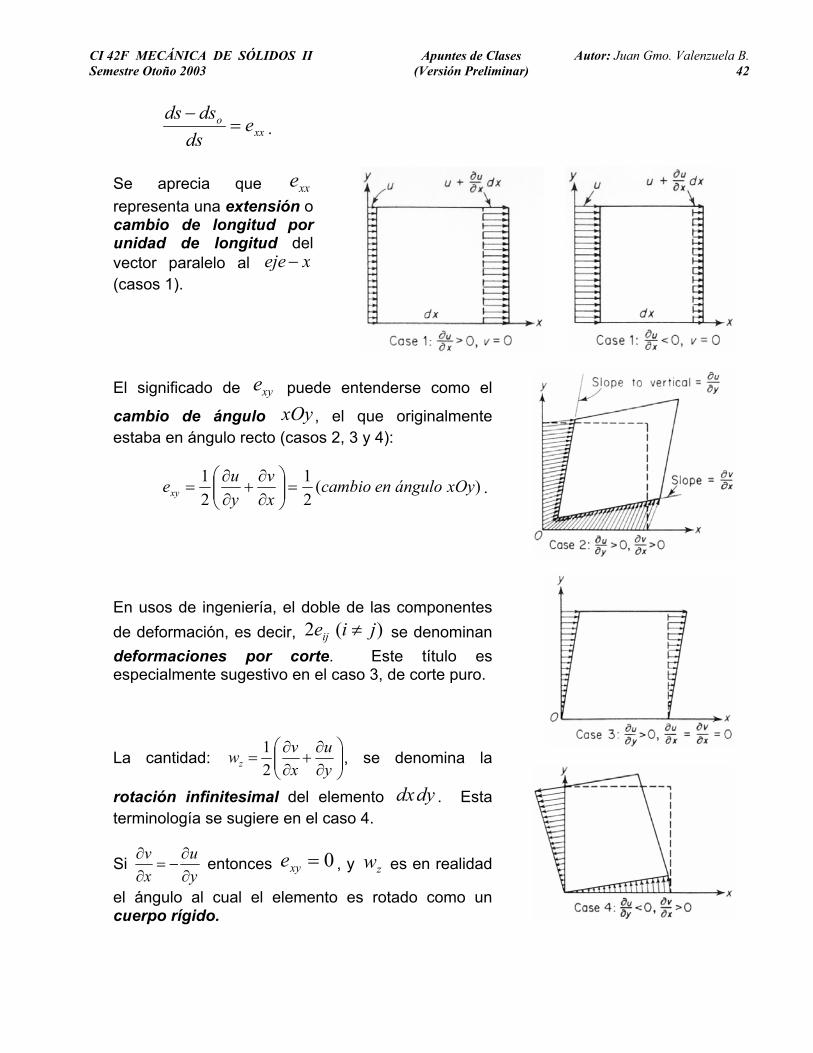
Se aprecia que xxe representa una extensión o cambio de longitud por unidad de longitud del vector paralelo al xeje − (casos 1).
El significado de xye puede entenderse como el
cambio de ángulo xOy , el que originalmente estaba en ángulo recto (casos 2, 3 y 4):
)(21
21 xOyánguloencambio
xv
yuexy =
∂∂
+∂∂
= .
En usos de ingeniería, el doble de las componentes de deformación, es decir, )(2 jieij ≠ se denominan deformaciones por corte. Este título es especialmente sugestivo en el caso 3, de corte puro.
La cantidad:
∂∂
+∂∂
=yu
xvwz 2
1, se denomina la
rotación infinitesimal del elemento dydx . Esta terminología se sugiere en el caso 4.
Si yu
xv
∂∂
−=∂∂ entonces 0=xye , y zw es en realidad
el ángulo al cual el elemento es rotado como un cuerpo rígido.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.43
3.5 Tensor de Rotación: Teorema de Helmholz
Considerando un campo de desplazamiento infinitesimal ),,( 321 xxxui , se puede definir el tensor de rotación como:
∂∂
−∂∂
=j
i
i
jij x
uxu
w21
.
Dado que este tensor es antimétrico ( jiij ww −= ), siempre es posible escribirlo en forma equivalente como:
ijkijk wew21
= ,
= urotw rr
21
,
o bien:
=
12
31
23
www
wk .
Dado que ijw es antimétrico, posee una inversa única:
−−
−==
00
0
12
13
23
wwwwww
wew kijkij .
Para entender el significado físico de estas cantidades, realizaremos el ejercicio siguiente.
Consideremos un punto )( ixP al interior de un cuerpo en equilibrio, en el cual el
corrimiento es Piu . En un punto )( ii dxxQ + cercano a P , el corrimiento será
iPi
Qi duuu += . Como )( jii xuu = , el cambio de la función corrimiento se puede
expresar como jj
ii dx
xudu
∂∂
= , con lo cual se tiene:
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.44
jijPi
Qi dxwuu +=
( ) ( ) jjiijjijjiPi dxuudxuuu ,,,, 2
121
+−++=
jijjijPi dxwdxeu −+=
jijjkijkPi dxedxweu +−=
ndeformaciógirotraslación ++=
Teorema de Helmholz: “Para pequeñas deformaciones y rotaciones, el campo de corrimientos en el entorno del punto P , se puede descomponer en una
traslación Piu , una rotación ijw y una deformación propiamente tal ije ”.
3.6 Componentes de Compatibilidad de Deformaciones Si conocemos las 6 componentes del tensor de deformación, que son función de las derivadas de las 3 componentes de corrimientos, tenemos un sistema de 6 ecuaciones para resolver 3 funciones desconocidas.
Este sistema de ecuaciones, en el caso general, no posee solución única si es que las deformaciones no satisfacen ciertas condiciones.
Las condiciones que deben poseer las deformaciones, para poder resolver este sistema de ecuaciones, se denominan relaciones de compatibilidad.
Estas relaciones de compatibilidad reflejan la integridad física del sólido, es decir, que el cuerpo no se “rompa”.
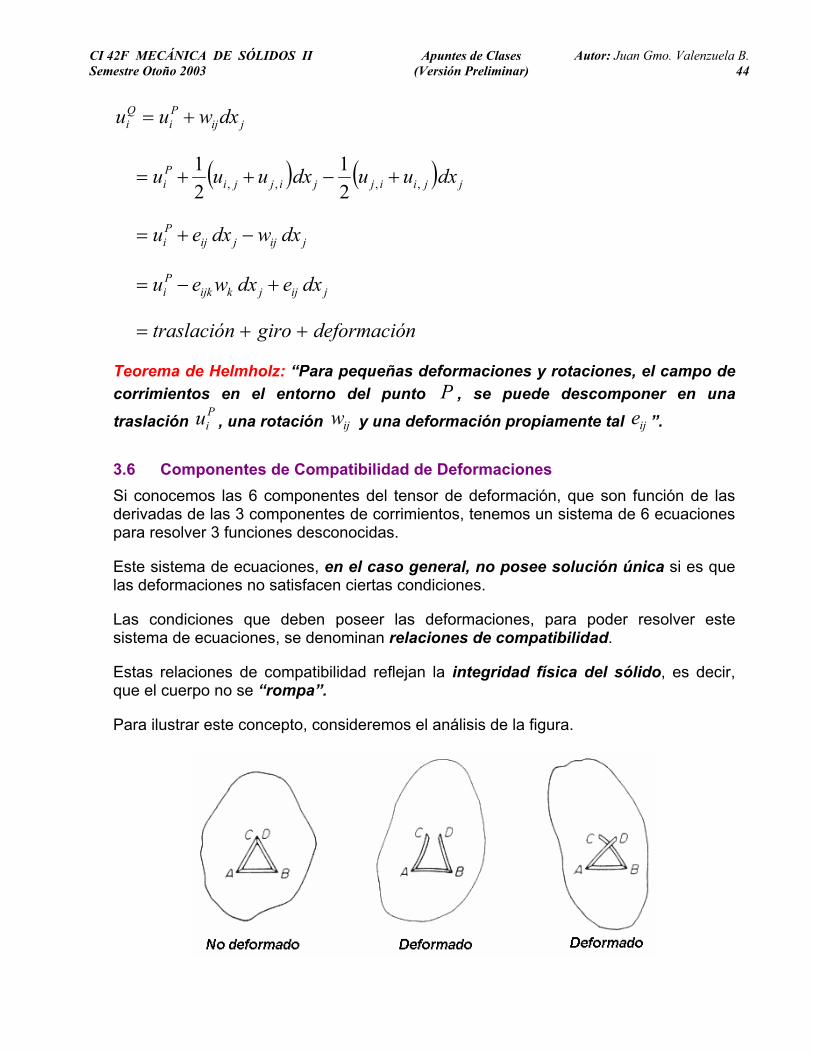
Para ilustrar este concepto, consideremos el análisis de la figura.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.45
En esta figura, se observa un triángulo continuo en un cuerpo no deformado. Si deformamos el cuerpo a través de un campo de deformación, partiendo desde el punto A, podríamos finalizar en el punto C y en el D, ya sea con un “gap” entre estos puntos, o con un “traslape” del material (posiciones deformadas en la figura).
Para que el sistema de ecuaciones planteado, posea una solución única, los puntos finales C y D deben coincidir perfectamente en la configuración deformada del cuerpo.
Lo anterior no puede ser garantizado a menos que el campo de deformaciones, a lo largo de las aristas de los triángulos, obedezcan las condiciones de compatibilidad.
Para resolver este sistema de ecuaciones (ecuaciones diferenciales no lineales), debemos considerar primero el caso de deformación lineal infinitesimal:
∂∂
+∂∂
=i
j
j
iij x
uxue
21
, ó )(21
,, ijjiij uue += .
Diferenciando la expresión anterior, e intercambiando subíndices, se puede obtener:
)(21
,,, ikljjkliklij uue += ,
)(21
,,, kijllijkijkl uue += ,
)(21
,,, jikllikjikjl uue += ,
)(21
,,, ijlkkjlijlik uue += .
El análisis de las expresiones anteriores, nos permite establecer la ecuación de compatibilidad de Saint Venant (establecida por él, en 1860) como:
0,,,, =−−+ ikjljlikijklklij eeee .
En esta ecuación, los 4 subíndices representan 81 ecuaciones, pero de éstas, solo hay 6 independientes, las demás ecuaciones corresponden a identidades, o toman en cuenta la simetría de los tensores ije y kle .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.46
Las 6 ecuaciones, escritas en notación sin subíndices, son:
∂
∂+
∂∂
+∂
∂−
∂∂
=∂∂
∂z
ey
ex
exzy
e xzzxyzxx2
,
∂
∂+
∂∂
+∂
∂−
∂∂
=∂∂
∂x
ez
ey
eyxz
e yzxyzxyy2
,
∂
∂+
∂∂
+∂
∂−
∂∂
=∂∂
∂y
ex
ez
ezyx
e zxyzxyzz2
,
2
2
2
22
2xe
ye
yxe yyxxxy
∂∂
+∂
∂=
∂∂∂
,
2
2
2
22
2ye
ze
zye zzyyyz
∂∂
+∂
∂=
∂∂∂
,
2
2
2
22
2ze
xe
xze xxzzzx
∂∂
+∂
∂=
∂∂∂
.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.47
3.7 Componentes de Deformaciones Finitas Cuando los componentes de deformación no son pequeños, ya no es posible dar interpretaciones geométricas simples de los componentes del tensor de deformaciones.
3.7.1 Deformación Extensional Consideremos un conjunto de coordenadas Cartesianas ortogonales, tal como lo hicimos al inicio de este capítulo. Sea odsda =1 , 02 =da , 03 =da un elemento de línea antes de la deformación. La deformación extensional de este elemento esta definida por:
o
o
dsdsdsE −
=1 , o odsEds )1( 1+= .
Considerando la definición del tensor de deformación de Almansi, se puede establecer que:
ooooo dsdsEdadaEdsdsEdsds 111111222
122 22)1( ==−+=− ,
lo que se transforma en:
112
1 21)1( EE =−+ , o 121 111 −+= EE .
Si se consideran pequeñas deformaciones, el término 112E es pequeño comparado
con 1 , y podemos hacer un desarrollo de Taylor de la función raíz, conservando sólo el primer término de la expansión, obteniendo:
111 EE = .
Si generalizamos este resultado considerando direcciones paralelas a los otros ejes coordenados, podemos decir que, para pequeñas deformaciones, las componentes del tensor de deformaciones representan las deformaciones extensionales en las direcciones de coordenadas.
3.7.2 Deformación Angular Consideremos ahora el caso de determinar la deformación angular en un punto de un cuerpo, cuyas direcciones originales se encontraban perpendiculares entre si.
Para esto, consideraremos dos elementos de línea osdv y osdr
que se encontraban en ángulo recto en el estado original, dados por:
osdv : odsda =1 , 02 =da , 03 =da
osdr
: 01 =da , osdda =2 , 03 =da
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.48
Después de la deformación, estos elementos de línea se transforman en sdv y sdr
. Si se realiza el producto escalar de los elementos deformados, se obtiene:
ookk
jj
ki
i
kxk sdds
ax
axad
axda
axxddxsdds
21
cos∂∂
∂∂
=∂∂
∂∂
==θ .
Considerando la expresión de la definición del tensor de deformación de Almansi, se obtiene:
oo sddsEsdds 122cos =θ ,
lo que, en conjunto con la forma que adquieren los elementos de línea en este caso:
odsEds 1121+= , osdEsd 2221+= ,
finalmente resulta:
2211
12
21212cos
EEE
++=θ .
Este ángulo θ corresponde al ángulo entre los elementos de línea sdv y sdr
después de la deformación. El cambio del ángulo entre los elementos de línea, los que en el estado original eran osdv y osd
r ortogonales, corresponde a θπα −= 212 :
2211
1212 2121
2sinEE
E++
=α .
La expresión anterior, en el caso de deformaciones infinitesimales, puede reducirse a:
1212 2E=α .
NOTA: Todas la derivaciones anteriores, de las fórmulas de deformación extensional y angular, se desarrollaron considerando el tensor de deformación de Almansi (interpretación Lagrangeana). Una interpretación completamente análoga, puede derivarse para el caso del tensor de deformación de Green (interpretación Euleriana):
La extensión 1e por unidad de longitud “deformada” puede definirse como:
dsdsdse o−
=1 ,
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.49
encontrándose que:
111 211 ee −−= .
Aún más, si la desviación a partir de un ángulo recto de dos elementos de línea en el estado original, los cuales después de la deformación son ortogonales, se denota por
12β , se tiene:
2211
1212 2121
2sinee
e−−
=β .
Esto nuevamente se puede reducir, en el caso de deformaciones infinitesimales, a los resultados conocidos de:
111 ee = y 1212 2e=β .
3.7.3 Deformación Volumétrica o Dilatación Consideremos un elemento infinitesimal de volumen como un paralelepípedo rectangular con sus lados paralelos a las direcciones principales de deformación.
Sean la longitud de sus lados antes de la deformación 321 ,, dxdxdx , y después de la
deformación 332211 )1(,)1(,)1( dxedxedxe +++ , el cambio de volumen será entonces:
321321 )]1)(1)(1[( dxdxdxeeedV +++= ,
y el cambio unitario de volumen:
321321133221321321
IIIeeeeeeeeeeeedxdxdx
dV++=++++++== θ .
Considerando que las deformaciones son pequeñas, cuando 321 ,, dxdxdx tienden a cero se obtiene:
1,321 Iudivueee kii ===++=θ .
Como 1I es invariante, para un sistema que no esté en las direcciones principales se tiene:
ijetrazaeee =++= 332211θ .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.50
4 RELACIONES CONSTITUTIVAS. LEY DE HOOKE GENERALIZADA
4.1 Introducción: En este capítulo se establecerán las relaciones constitutivas que describen el comportamiento de los materiales.
Se consideraran procesos isotérmicos y se utilizará tensores cartesianos en su descripción.
Se describirá la concepción moderna de la ley de Hooke y se analizará como su versión mas generalizada puede ser “reducida” al caso de cuerpos homogéneos e isotrópicos, estableciéndose las ecuaciones básicas de la elasticidad.
4.2 Ley de Hooke Generalizada Un medio se dice que es elástico si posee un estado natural, en el cual esfuerzos y deformaciones son cero, y al cual se puede “volver” luego de que las fuerzas aplicadas son removidas.
Bajo cargas aplicadas, los esfuerzos y las deformaciones “cambian” juntos, y las relaciones entre estos, denominadas relaciones constitutivas, son una importante característica de los medios.
Estas relaciones constitutivas iniciaron su desarrollo hace más de 300 años atrás, con las determinaciones experimentales desarrolladas por Robert Hooke sobre “cuerpos elásticos”.
Hooke concluyó que el esfuerzo es proporcional a la deformación.
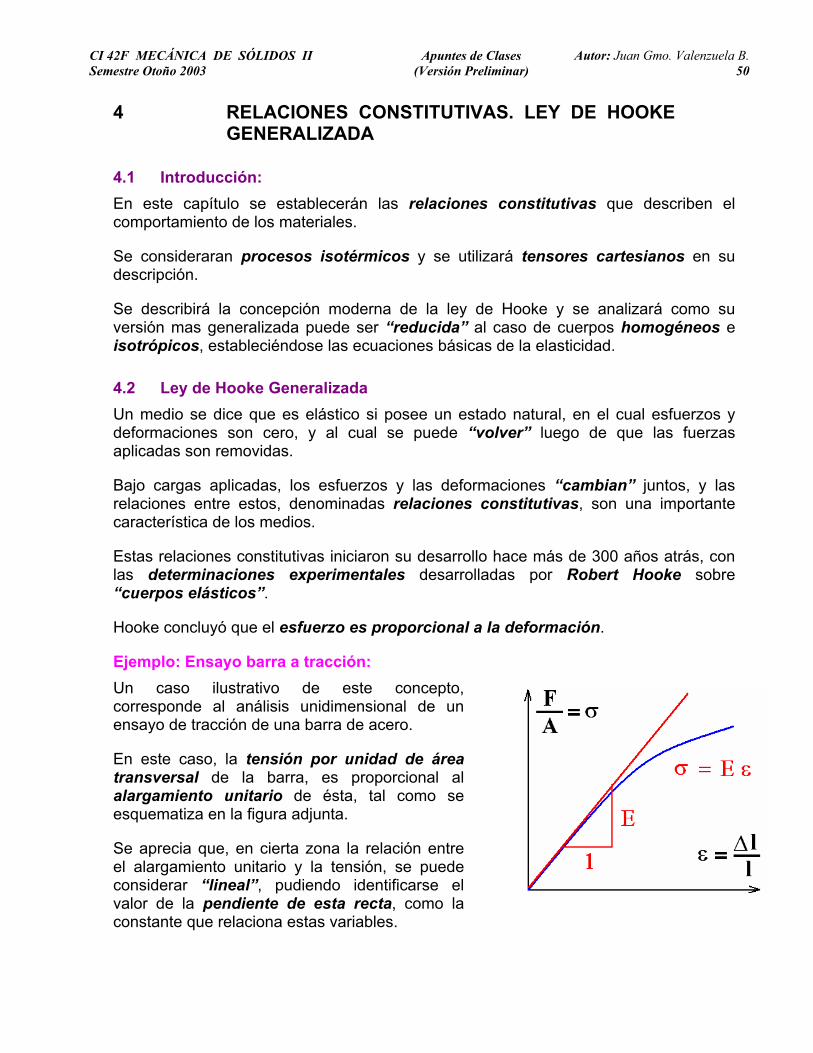
Ejemplo: Ensayo barra a tracción: Un caso ilustrativo de este concepto, corresponde al análisis unidimensional de un ensayo de tracción de una barra de acero.
En este caso, la tensión por unidad de área transversal de la barra, es proporcional al alargamiento unitario de ésta, tal como se esquematiza en la figura adjunta.
Se aprecia que, en cierta zona la relación entre el alargamiento unitario y la tensión, se puede considerar “lineal”, pudiendo identificarse el valor de la pendiente de esta recta, como la constante que relaciona estas variables.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.51
4.3 Forma Tensorial de la Ley de Hooke Generalizada La forma “moderna” de la Ley de Hooke Generalizada establece que cada componente del tensor de tensiones es una combinación lineal de todos los componentes del tensor de deformación:
klijklij ec ⋅=σ , .ctescijkl =
4.3.1 Caso general de un cuerpo linealmente elástico Se dice que un cuerpo es linealmente elástico si obedece a la relación constitutiva recién enunciada.
Como se sabe, las cantidades ijklc corresponden, a un tensor de cuarto orden, con
8134 = componentes.
4.3.2 Simetría del Tensor de Tensiones
Si se considera la simetría del tensor de tensiones ijji σσ = , se puede establecer la
siguiente simetría del tensor ijklc :
ijkljikl cc = .
4.3.3 Simetría del Tensor de Deformaciones Análogamente al caso anterior, si se considera la simetría del tensor de deformaciones
ijji ee = , se puede establecer la siguiente simetría del tensor ijklc :
ijklijlk cc = .
Considerando ambos casos, la simetría del tensor de tensiones y la simetría del tensor
de deformaciones, el número de constantes elásticas independientes del tensor ijklc se reduce a 36.
4.3.4 Existencia de una Función Energía de Deformación Adicionalmente a lo anterior, consideraremos el argumento termodinámico de la existencia de una función de energía interna por unidad de volumen.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.52
La existencia de esta función podría establecerse a partir de la primera ley de la termodinámica, que relaciona el cambio de la energía interna de un cuerpo (ya sea cinética o de deformación), con el trabajo hecho sobre él (mecánico o de calentamiento).
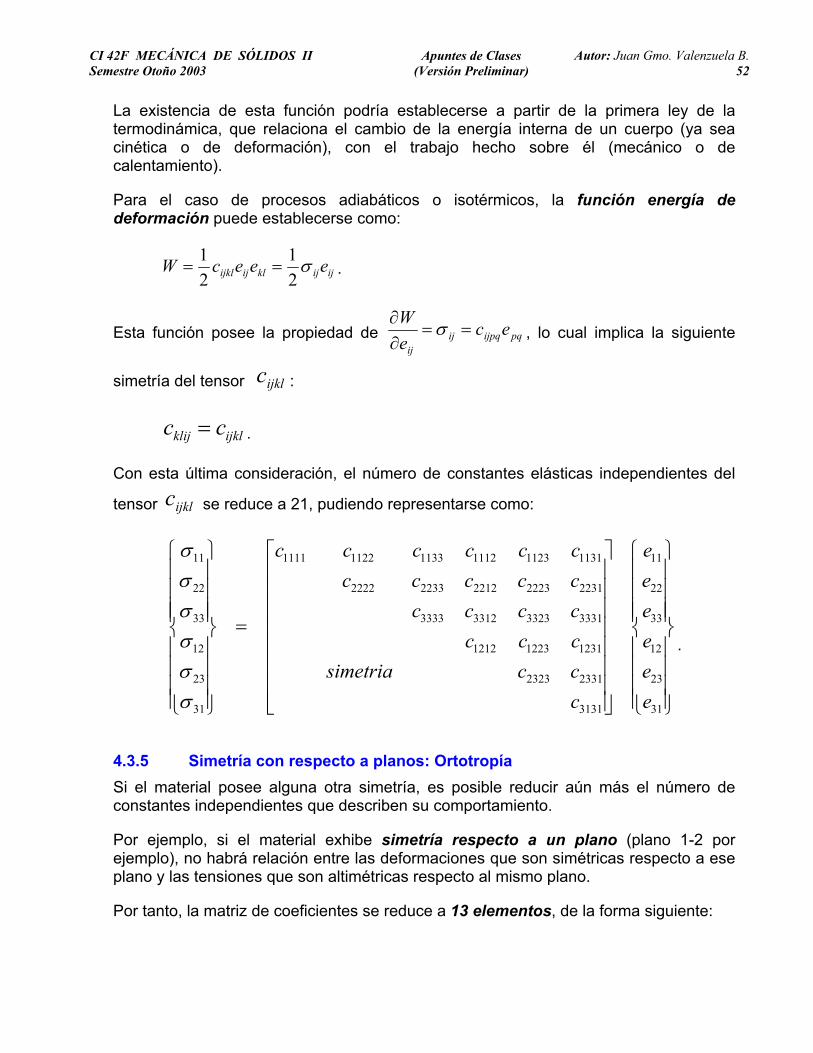
Para el caso de procesos adiabáticos o isotérmicos, la función energía de deformación puede establecerse como:
ijijklijijkl eeecW σ21
21
== .
Esta función posee la propiedad de pqijpqijij
eceW
==∂∂ σ , lo cual implica la siguiente
simetría del tensor ijklc :
ijklklij cc = .
Con esta última consideración, el número de constantes elásticas independientes del
tensor ijklc se reduce a 21, pudiendo representarse como:
=
31
23
12
33
22
11
3131
23312323
123112231212
3331332333123333
22312223221222332222
113111231112113311221111
31
23
12
33
22
11
eeeeee
cccsimetriacccccccccccccccccc
σσσσσσ
.
4.3.5 Simetría con respecto a planos: Ortotropía Si el material posee alguna otra simetría, es posible reducir aún más el número de constantes independientes que describen su comportamiento.
Por ejemplo, si el material exhibe simetría respecto a un plano (plano 1-2 por ejemplo), no habrá relación entre las deformaciones que son simétricas respecto a ese plano y las tensiones que son altimétricas respecto al mismo plano.
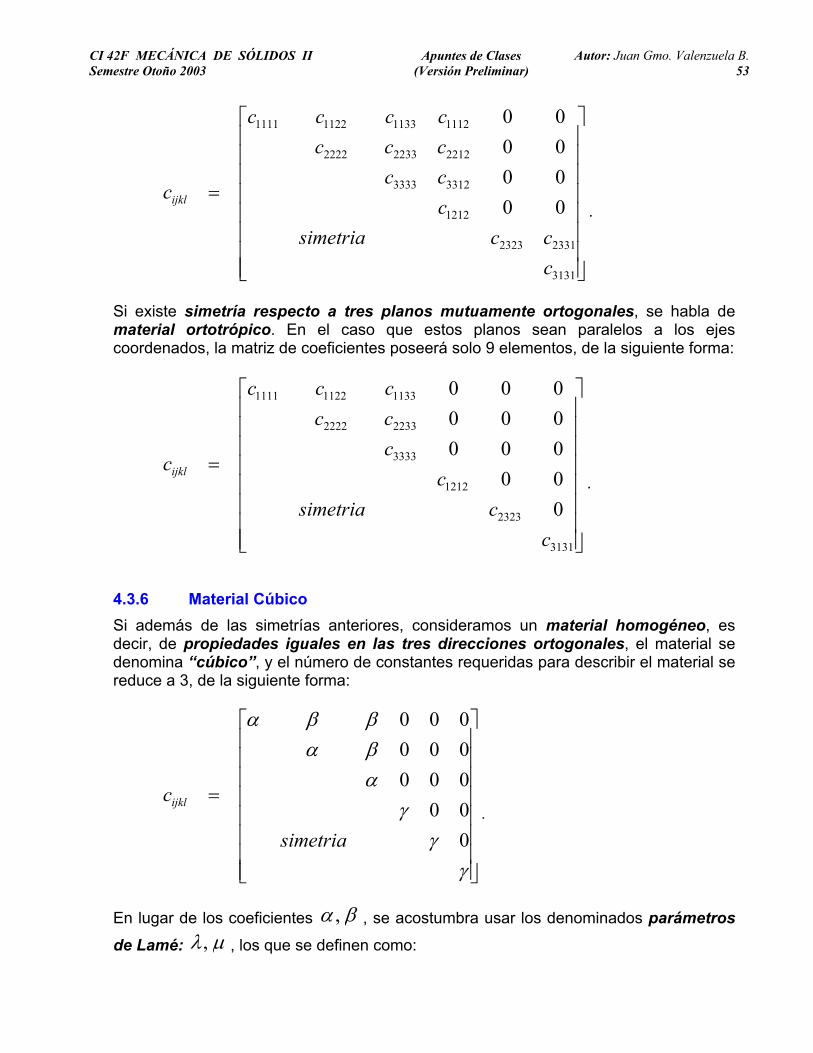
Por tanto, la matriz de coeficientes se reduce a 13 elementos, de la forma siguiente:
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.53
=
3131
23312323
1212
33123333
221222332222
1112113311221111
00000000
cccsimetria
cccccccccc
cijkl.
Si existe simetría respecto a tres planos mutuamente ortogonales, se habla de material ortotrópico. En el caso que estos planos sean paralelos a los ejes coordenados, la matriz de coeficientes poseerá solo 9 elementos, de la siguiente forma:
=
3131
2323
1212
3333
22332222
113311221111
000000000000
ccsimetria
ccccccc
cijkl.
4.3.6 Material Cúbico Si además de las simetrías anteriores, consideramos un material homogéneo, es decir, de propiedades iguales en las tres direcciones ortogonales, el material se denomina “cúbico”, y el número de constantes requeridas para describir el material se reduce a 3, de la siguiente forma:
=
γγ
γαβαββα
000000000000
simetria
cijkl.
En lugar de los coeficientes βα , , se acostumbra usar los denominados parámetros de Lamé: µλ, , los que se definen como:

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.54
µλα 2+= , λβ =
Con esto, la ley de Hooke toma la forma:
++
+
=
31
23
12
33
22
11
31
23
12
33
22
11
000000200020002
eeeeee
simetriaγ
γγ
µλλµλλλµλ
σσσσσσ
.
4.3.7 Material Isótropo Cuando en un material sus propiedades son las mismas en cualquier dirección que se considere, este material se denomina isótropo.
En este caso, existe una relación entre sus módulos elásticos, la que permite reducir finalmente el número de parámetros independientes a solo 2. La relación que se obtiene, luego de una rotación de ejes coordenados y de considerar que las deformaciones “giradas” deben ser las mismas originales, es:
µν
γ 21
=+
=E
.
En el caso de que se acostumbre utilizar los módulos elásticos en vez de las constantes de Lamé, la constante µ se denomina G , o módulo elástico para la deformación angular.
4.4 Relaciones Esfuerzo Deformación para Materiales Elásticos Isotrópicos Para un material elástico isotrópico, en el cual no existe cambio de temperatura, la ley de Hooke, referida a un sistema de coordenadas rectangulares, puede ser establecida en la forma:
αααασ Ke3= ,
dij
dij Ge2=σ ,
donde K y G son constantes y, dijσ y d
ije son los esfuerzos y las deformaciones desviatóricas, respectivamente, es decir:
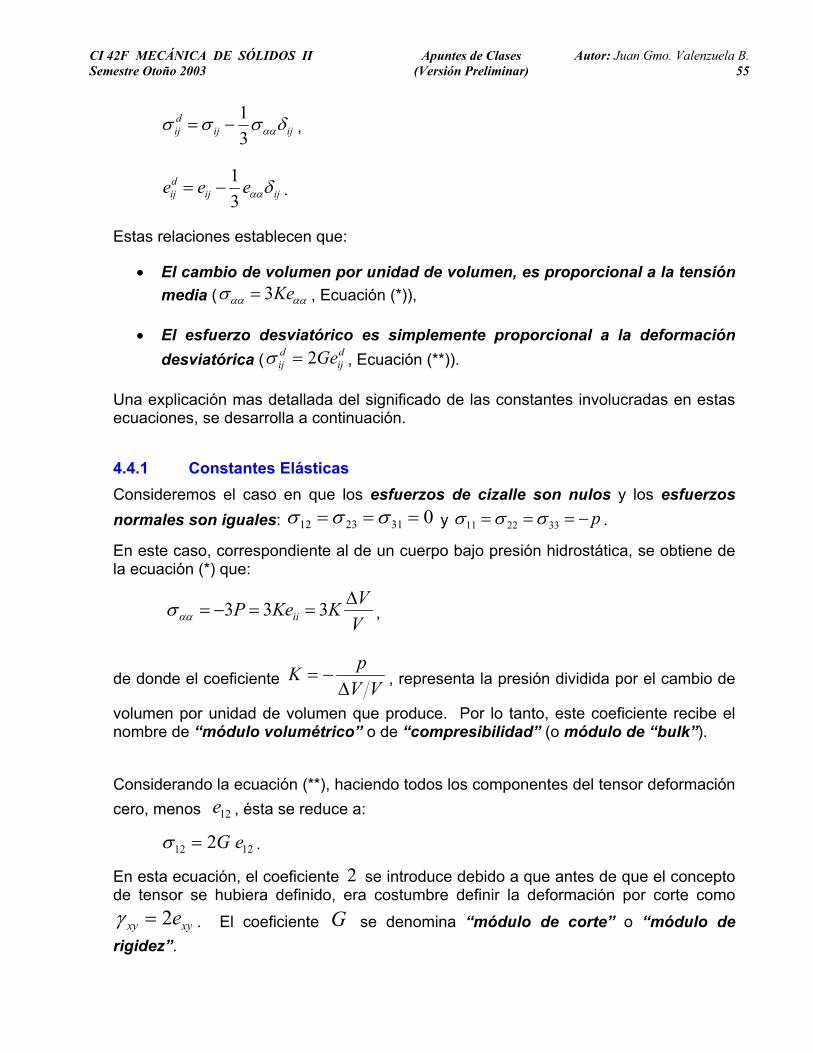
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.55
ijijdij δσσσ αα3
1−= ,
ijijdij eee δαα3
1−= .
Estas relaciones establecen que:
• El cambio de volumen por unidad de volumen, es proporcional a la tensión media ( αααασ Ke3= , Ecuación (*)),
• El esfuerzo desviatórico es simplemente proporcional a la deformación desviatórica ( d
ijdij Ge2=σ , Ecuación (**)).
Una explicación mas detallada del significado de las constantes involucradas en estas ecuaciones, se desarrolla a continuación.
4.4.1 Constantes Elásticas Consideremos el caso en que los esfuerzos de cizalle son nulos y los esfuerzos normales son iguales: 0312312 === σσσ y p−=== 332211 σσσ .
En este caso, correspondiente al de un cuerpo bajo presión hidrostática, se obtiene de la ecuación (*) que:
VVKKeP ii
∆==−= 333αασ ,
de donde el coeficiente VVpK
∆−= , representa la presión dividida por el cambio de
volumen por unidad de volumen que produce. Por lo tanto, este coeficiente recibe el nombre de “módulo volumétrico” o de “compresibilidad” (o módulo de “bulk”). Considerando la ecuación (**), haciendo todos los componentes del tensor deformación cero, menos 12e , ésta se reduce a:
1212 2 eG=σ .
En esta ecuación, el coeficiente 2 se introduce debido a que antes de que el concepto de tensor se hubiera definido, era costumbre definir la deformación por corte como
xyxy e2=γ . El coeficiente G se denomina “módulo de corte” o “módulo de rigidez”.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.56
A partir de las constantes anteriores, es posible definir una nueva constante:
µλ32
−= K . Las constantes λ y µ reciben el nombre de constantes de Lamé.
Si tomamos un cilindro orientado a lo largo del eje 1 y de muy pequeña sección, y
aplicamos esfuerzos 11σ y 11σ− a los dos extremos, la proporción entre el esfuerzo y
la deformación en su misma dirección 11e , define le llamado “módulo de Young”:
11
11
eE σ
= .
Si en el mismo caso anterior, además de considerar el cambio de longitud del cilindro lδ , consideramos también el cambio de diámetro dδ , el cuociente de los cambios por
unidad de longitud en ambas dimensiones define el “coeficiente de Poisson”:
11
22
ee
lldd
==δ
δν .
El cuociente de Poisson en función de los parámetros de Lamé es:
)(2 µλλν+
= .
Adicionalmente a las relaciones aquí presentadas, existen un gran número de otras relaciones que pueden establecerse entre los parámetros mencionados. El descubrimiento de éstas, se deja al lector.
4.4.2 Deducción de las relaciones esfuerzo deformación Consideremos ahora el establecer en una sola ecuación, la relación entre esfuerzos y deformaciones, para el caso de un sólido elástico isótropo. A partir de la ecuación (**) es posible establecer:
)31(2)
31( ijijijij eeG δδσσ αααα −=−
)31(22)3
31( ijijijij eGGeKe δδσ αααα −=−
ijijijij KeeGGe δδσ αααα +−= )31(22

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.57
ijijij eeK µδµσ αα 2)32( +−=
ijijij eµλθδσ 2+= ,
donde µλ32
−= K , ααθ e= y G=µ .
La ecuación anterior, puede también establecerse como:
)(21
ijijije λθδσµ
−=
++
−+
= ijijij KK
EEe δσ
νννσν αα
3131)(1
ijijij EEe δσνσν
αα−+
= )(1.
4.5 Ecuación de Movimiento en un Sólido Elástico, Isótropo e Infinito La ecuación general de movimiento puede establecerse a partir de la segunda ley de Newton, considerando la relación de tensiones de Cauchy y utilizando el teorema de Green, tal como se muestra a continuación:
∫∫ ∫∫∫ ∫∂∂
=+S V
iii dVvt
dVfdST ρν
∫∫ ∫∫∫ ∫∂∂
=+S V
iijij dVvt
dVfdS ρσν
∫∫∫ ∫∫∫∫ ∂∂
=++∂∂
Vii
V j
ji dVvt
dVfdVx
ρσ
0)( =
∂∂
−+∂∂
∫∫∫V
iij
ji dVvt
fx
ρσ
tvv
tf
xi
iij
ji
∂∂
=∂∂
=+∂
∂ρρ
σ)(
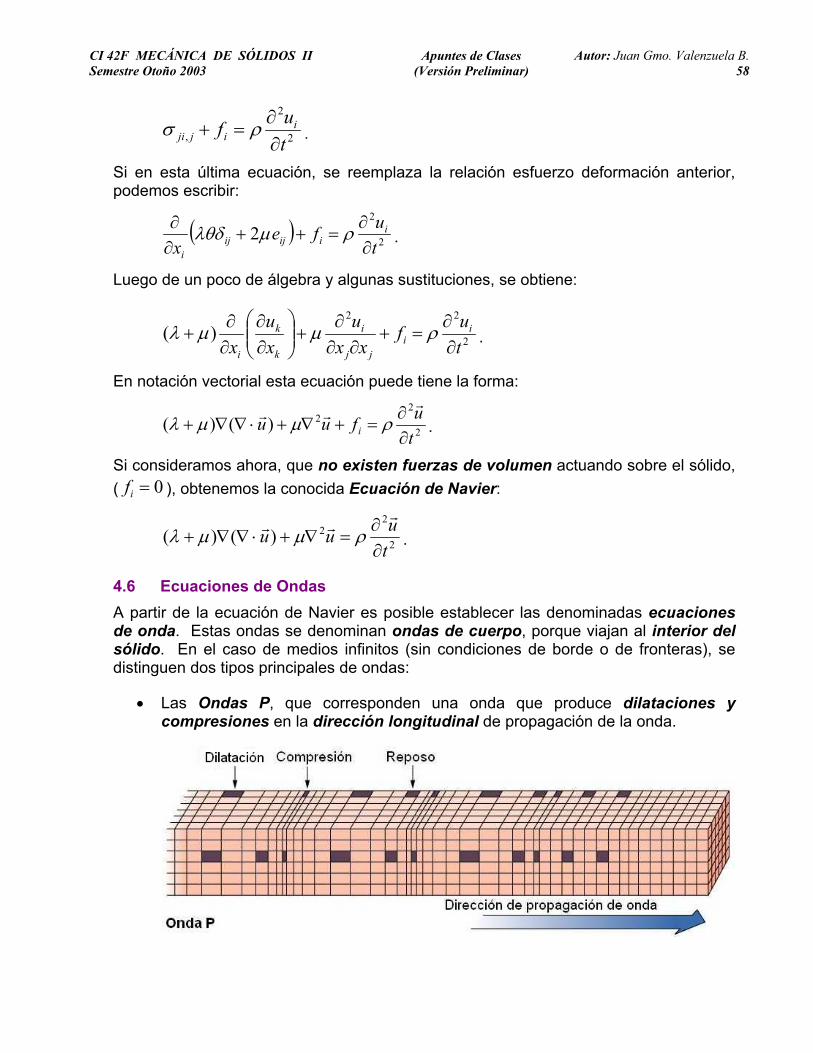
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.58
2
2
, tuf i
ijji ∂∂
=+ ρσ .
Si en esta última ecuación, se reemplaza la relación esfuerzo deformación anterior, podemos escribir:
( ) 2
2
2tufe
xi
iijiji ∂
∂=++
∂∂ ρµλθδ .
Luego de un poco de álgebra y algunas sustituciones, se obtiene:
2
22
)(tuf
xxu
xu
xi
ijj
i
k
k
i ∂∂
=+∂∂
∂+
∂∂
∂∂
+ ρµµλ .
En notación vectorial esta ecuación puede tiene la forma:
2
22)()(
tufuu i ∂
∂=+∇+⋅∇∇+
rrr ρµµλ .
Si consideramos ahora, que no existen fuerzas de volumen actuando sobre el sólido, ( 0=if ), obtenemos la conocida Ecuación de Navier:
2
22)()(
tuuu
∂∂
=∇+⋅∇∇+r
rr ρµµλ .
4.6 Ecuaciones de Ondas A partir de la ecuación de Navier es posible establecer las denominadas ecuaciones de onda. Estas ondas se denominan ondas de cuerpo, porque viajan al interior del sólido. En el caso de medios infinitos (sin condiciones de borde o de fronteras), se distinguen dos tipos principales de ondas:
• Las Ondas P, que corresponden una onda que produce dilataciones y compresiones en la dirección longitudinal de propagación de la onda.
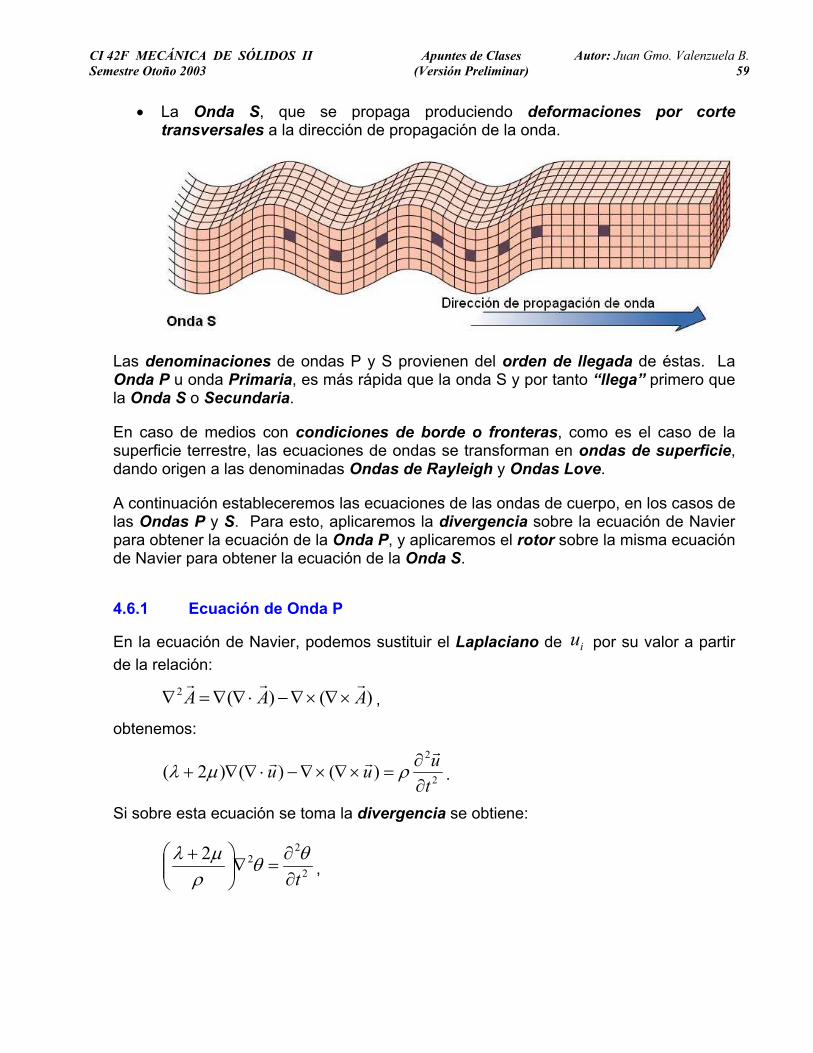
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.59
• La Onda S, que se propaga produciendo deformaciones por corte transversales a la dirección de propagación de la onda.
Las denominaciones de ondas P y S provienen del orden de llegada de éstas. La Onda P u onda Primaria, es más rápida que la onda S y por tanto “llega” primero que la Onda S o Secundaria.
En caso de medios con condiciones de borde o fronteras, como es el caso de la superficie terrestre, las ecuaciones de ondas se transforman en ondas de superficie, dando origen a las denominadas Ondas de Rayleigh y Ondas Love.
A continuación estableceremos las ecuaciones de las ondas de cuerpo, en los casos de las Ondas P y S. Para esto, aplicaremos la divergencia sobre la ecuación de Navier para obtener la ecuación de la Onda P, y aplicaremos el rotor sobre la misma ecuación de Navier para obtener la ecuación de la Onda S.
4.6.1 Ecuación de Onda P
En la ecuación de Navier, podemos sustituir el Laplaciano de iu por su valor a partir de la relación:
)()(2 AAArrr
×∇×∇−⋅∇∇=∇ ,
obtenemos:
2
2
)()()2(tuuu
∂∂
=×∇×∇−⋅∇∇+r
rr ρµλ .
Si sobre esta ecuación se toma la divergencia se obtiene:
2
222
t∂∂
=∇
+ θθρ
µλ,
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.60
lo que representa la ecuación de propagación de una onda, en términos de un escalar, denominado dilatación cúbica θ , y cuya velocidad característica de propagación esta dada por:
ρµλ 2+
=PV .
4.6.2 Ecuación de Onda S Análogamente a lo anterior, si aplicamos el rotor a la ecuación de Navier, se obtiene:
2
22
tww i
i ∂∂
=∇
ρµ
,
lo que representa la ecuación de propagación de una onda, en términos de un vector denominado vector rotación wr , y cuya velocidad característica de propagación esta dada por:
ρµ
=SV .
4.7 Método de Potenciales: Teorema de Helmholtz Otra manera de reducir la ecuación de Navier a dos ecuaciones de onda, en que la deformación elástica queda dividida en dos partes, una que lleva consigo cambio de volumen sin distorsión y otra distorsión con volumen constante, es utilizando el Teorema de Helmholtz.
Este teorema establece que para un campo vectorial el vector en un punto se puede expresar en función de un potencial escalar ϕ (leído “fi”) y otro vectorial ψ (leído “psi”), de acuerdo a la relación:
jkijkii eu ,, ψϕ +=,
o en notación vectorial:
ψϕrr
×∇+∇=u .
La condición para que iψ quede unívocamente definido es que su divergencia sea cero. Si tomamos la divergencia en los dos lados de la ecuación de definición del Teorema de Helmholtz obtenemos:
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.61
iiiiu ,, ϕθ == .
Que nos dice que el potencial escalar ϕ está asociado con la dilatación cúbica θ .
Si tomamos ahora el rotor de la misma ecuación obtenemos una relación semejante entre el potencial vectorial iψ y la rotación de iu :
kkiikjijk wue ,, 2 ψ== .
Ahora, si reemplazamos la ecuación de definición del Teorema de Helmholtz, en la ecuación de Navier en notación indicial, obtenemos:
( ) ( ) ( )jkijkirtirtijj
rtkrtkii
et
exx
exx ,,2
2
,,
2
,,)( ψϕρψϕµψϕµλ +∂∂
=+∂∂
∂++
∂∂
∂∂
+ ,
agrupando los términos en ϕ y en iψ podemos escribir la ecuación en la forma:
( )j
mmkk
ijkkki t
etx ,
,2
2
,2
2
2
−
∂∂
−=
−−
∂∂
∂∂ µψψρϕµλϕρ .
Una solución a esta ecuación la podemos obtener haciendo igual a cero las cantidades dentro de cada corchete. De esta manera obtenemos las ecuaciones:
2
222
t∂∂
=∇
+ ϕϕρ
µλ,
2
22
ti
i ∂∂
=∇
ψψρµ
.
Estas son también ecuaciones con la forma de la ecuación del movimiento ondulatorio, pero ahora no para las deformaciones elásticas sino para los potenciales. Las soluciones de estas ecuaciones tienen también la forma y poseen las mismas velocidades características que las correspondientes ecuaciones de Ondas P y S.
4.8 Ondas Elásticas Planas Para una sola dimensión podemos escribir la ecuación del movimiento ondulatorio en la forma:
2
22
2
2
xyc
ty
∂∂
=∂∂
.
La forma general de la solución de esta ecuación es:
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.62
)()( 21 ctxfctxfy ++−= ,
donde cada una de las funciones representa una configuración determinada que se mueve en una dirección: la función 1f se mueve en la dirección positiva del eje x , y
la función 2f se mueve en la dirección negativa de este eje.
En ambos casos la constante c representa la velocidad de propagación de la configuración.
Un caso de mucha utilidad en el análisis de las ondas elásticas es el de las ondas planas. En este caso, el supuesto de considerar el foco emisor en el infinito permite que las ondas esféricas y las ondas cilíndricas “degeneren” en ondas planas.
La ecuación de onda plana que viaja en la dirección positiva de la dirección definida por el vector iν , se puede escribir en la forma:
)( ctxikii
jjeAu −= ν,
donde jν son los cosenos directores de la normal al frente de onda, o sea, la dirección de propagación. Si en esta ecuación se toma solo la parte real y se simplifica para una sola dimensión, se puede escribir:
( )ε+−= )(cos ctxkAu ,
donde k es el número de onda y ε es ángulo de fase.
4.9 Relaciones Esfuerzo Deformación Temperatura Consideraremos ahora, como las relaciones esfuerzo deformación deben modificarse para considerar los esfuerzos inducidos por la variación de la temperatura de los materiales. Suponiendo que la deformación de los sólidos es directamente proporcional a la variación de temperatura (mientras que estas variaciones sean pequeñas), se puede utilizar el coeficiente de dilatación térmica del material α , para establecer la siguiente relación:
ijTij Te δα ∆=
Estas deformaciones “extras”, deben sumarse a las deformaciones “existentes”, antes del “calentamiento”, para obtener las deformaciones totales.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.63
Para seguir cumpliendo con las relaciones de compatibilidad, es necesario “descontar” de las deformaciones “existentes” ije , las deformaciones térmicas
“extras” Tije , reemplazando en las relaciones constitutivas ije por T
ijijij eee −= , quedando:
ijijijij EETe δσνσνδα αα−
+=∆− )(1
,
o bien:
ijijij TEE
e δασνσναα
∆−−
+= )(1
.
Expresando esta última relación en términos inversos:
ijijij eTK µδαλθσ 2)3( +∆−= .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.64
5 ELASTICIDAD LINEAL
5.1 Ecuaciones Básicas Cuerpos Isotrópicos Homogéneos Considerando las ecuaciones de continuidad y equilibrio, y basados en la ley de Hooke generalizada, se ha obtenido para el caso de materiales isotrópicos homogéneos lo siguiente:
ijijij eµλθδσ 2+= .
Si ahora, consideramos la “linealización” de algunos términos, como pequeños desplazamientos y pequeñas velocidades, se puede obtener la denominada ecuación de Lamé - Navier:
0)( ,2 =++++∇ T
iii ffu θµλµ r.
5.2 Ecuaciones de Compatibilidad: Beltrami - Michell Si en las ecuaciones de compatibilidad reemplazamos las relaciones constitutivas en términos de los módulos elásticos, se obtiene:
0)(11
1,,,,
2 =+−−
−=+
+∇ ijjikkijijij fffδν
νθν
σ .
Si no existen fuerzas de volumen ( 0=if ), las ecuaciones anteriores se reducen a:
01
1,
2 =+
+∇ ijij θν
σ .
Si aplicamos el operador )(2∇ sobre esta ecuación, y dado que 02 =∇ θ , se obtiene
que 04 =∇ ijσ , es decir, ijσ es una función biarmónica.
Se concluye que, cuando las fuerzas de cuerpo son cero, cada uno de los componentes de deformaciones y cada uno de los componentes de tensiones, debido a que son combinaciones lineales de las primeras derivadas de los corrimientos, son todos funciones biarmónicas:
04 =∇ ijσ,
04 =∇ ije .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.65
5.3 Condiciones de Contorno La ecuación de Navier, que combina la Ley de Hooke con la ecuación de movimiento, puede ser resuelta estableciendo adecuadas condiciones de contorno y precisando sus condiciones iniciales.
Las condiciones de contorno que usualmente se dan, corresponden a dos tipos:
• Condiciones de Desplazamiento ( dS ): Se especifica el campo de
desplazamiento oii uu = sobre el contorno.
• Condiciones de Tensiones ( tS ): Se especifican los componentes de tensiones
jijiT νσν
= como funciones conocidas sobre el contorno.
En la mayoría de los problemas de elasticidad, en algunas partes del contorno se especifican condiciones de desplazamiento y sobre otras partes se especifican condiciones de tensiones.
Adicionalmente, se puede dar el caso de tener que cumplir otras condiciones de contorno, como por ejemplo:
• Condiciones Elásticas ( eS ): Se especifican relaciones entre los desplazamientos de los apoyos y las fuerzas de reacción ejercidas
kikjij uk=νσ .
En el caso más general, pueden darse la combinación de una o más de estas condiciones de apoyo:
• Condiciones Mixtas ( mS ): Se especifican combinaciones de las condiciones
anteriores debiendo siempre cumplirse que cuerpometd SSSSS =+++ .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.66
6 ELASTICIDAD PLANA
6.1 Introducción En este capítulo estableceremos la forma que adquieren las relaciones esfuerzo deformación cuando es posible “reducir” el análisis de problemas tridimensionales (3D) a problemas bidimensionales (2D).
Los casos a considerar corresponden a dos tipos principales de problemas:
• Deformaciones Planas: Cuando una dimensión geométrica del cuerpo a analizar es mucho mayor que las otras dos y las condiciones no cambian a lo largo de la dirección longitudinal.
• Tensiones Planas: Cuando una dimensión es mucho menor que las otras dos y las cargas solo se aplican en el plano definido por las dos dimensiones mayores.
Se describe cómo, una función auxiliar denominada Función de Tensiones de Airy, permite plantear y resolver estos problemas de elasticidad plana. Esta metodología, puede ser aplicada, tanto a problemas de deformaciones planas, como a problemas de tensiones planas.
A continuación se describe como una solución a problemas de elasticidad plana puede resolverse mediante la utilización de funciones polinómicas cuyos valores paramétricos se determinarán a posteriori.
Luego, a modo de ejemplo de utilización de coordenadas cartesianas en la resolución de problemas de deformaciones planas, se presenta el caso de una viga en voladizo sujeta a cargas puntuales y distribuidas.
A continuación, para extender la aplicación a ciertos problemas planos, en los que parece ser mas adecuado la utilización de sistemas de referencias “curvos”, es que se plantea la utilización de las coordenadas polares.
Para la adecuada utilización de las coordenadas polares en la resolución de problemas planos, es necesario establecer previamente ciertos conceptos: primero es necesario definir las componentes de tensiones y las ecuaciones de equilibrio en estas coordenadas. Luego, establecer la forma que adquieren algunos operadores matemáticos y la forma que adquiere la función de tensiones de Airy en este caso. Finalmente, establecer la forma que adquiere la función de Airy y las expresiones para las tensiones, en el caso de la existencia de simetría axial.
Finalmente, a modo de ejemplo de utilización de coordenadas polares en la resolución de problemas de deformaciones planas, se presenta el caso de una barra curva con sección transversal constante.
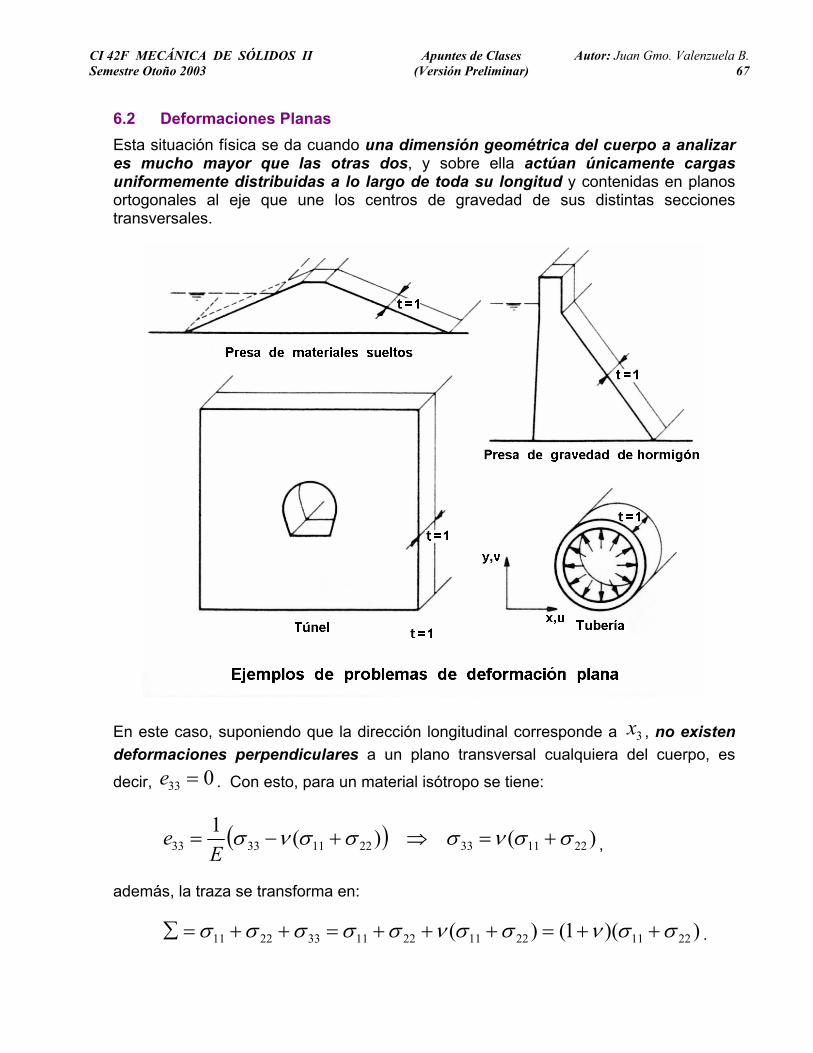
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.67
6.2 Deformaciones Planas Esta situación física se da cuando una dimensión geométrica del cuerpo a analizar es mucho mayor que las otras dos, y sobre ella actúan únicamente cargas uniformemente distribuidas a lo largo de toda su longitud y contenidas en planos ortogonales al eje que une los centros de gravedad de sus distintas secciones transversales.
En este caso, suponiendo que la dirección longitudinal corresponde a 3x , no existen deformaciones perpendiculares a un plano transversal cualquiera del cuerpo, es
decir, 033 =e . Con esto, para un material isótropo se tiene:
( ) )()(122113322113333 σσνσσσνσ +=⇒+−=
Ee ,
además, la traza se transforma en:
))(1()( 221122112211332211 σσνσσνσσσσσ ++=+++=++=∑ .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.68
Por tanto, las relaciones constitutivas pueden expresarse como:
∑−+
=EE
e ijijijνδσν1
,
))(1(122111111 σσννσν
++−+
=EE
e ,
( ) ( )22112
11111111 )1(11 σννσννσνσσ +−+−+=EE
e ,
( )221111 )1(1)1)(1(1 σννσνν +−−+=EE
e .
Análogamente:
( )112222 )1(1)1)(1(1 σννσνν +−−+=EE
e ,
12121 σν
Ee +
= .
Resumiendo en forma matricial lo anterior:
−−−−
+=
12
22
11
12
22
11
1000)1(0)1(
1
σσσ
νννν
νE
eee
.
Invirtiendo esta relación, se tiene:
−−
−
−+=
12
22
11
12
22
11
)21(000)1(0)1(
)21)(1(eee
E
ννν
νν
ννσσσ
.
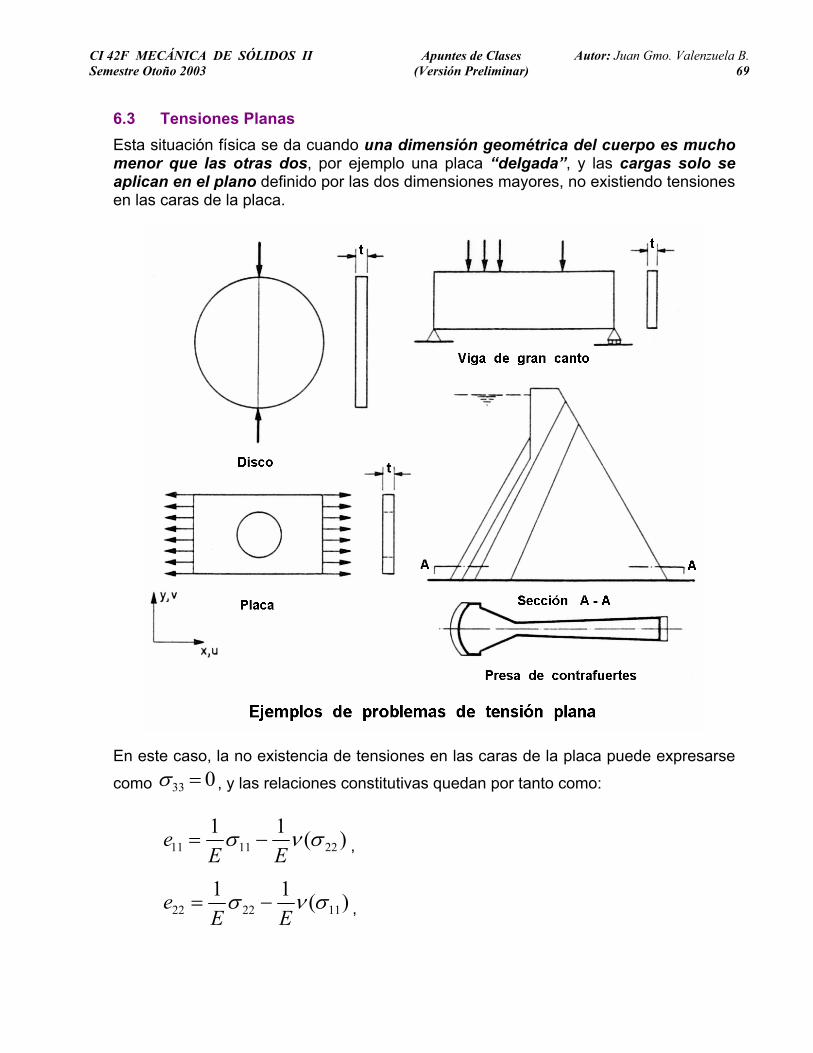
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.69
6.3 Tensiones Planas Esta situación física se da cuando una dimensión geométrica del cuerpo es mucho menor que las otras dos, por ejemplo una placa “delgada”, y las cargas solo se aplican en el plano definido por las dos dimensiones mayores, no existiendo tensiones en las caras de la placa.
En este caso, la no existencia de tensiones en las caras de la placa puede expresarse
como 033 =σ , y las relaciones constitutivas quedan por tanto como:
)(11221111 σνσ
EEe −= ,
)(11112222 σνσ
EEe −= ,
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.70
12121 σν
Ee +
= .
Resumiendo en forma matricial lo anterior:
+−
−=
12
22
11
12
22
11
)1(000101
1
σσσ
νν
ν
Eeee
.
Invirtiendo esta relación, se tiene:
−−
=
12
22
11
2
12
22
11
)1(000101
)1(eee
E
νν
ν
νσσσ
.
6.4 Solución Mediante la Función de Tensiones de Airy Las ecuaciones de equilibrio para el caso con fuerzas de volumen toman la forma:
12,121,11 f−=+ σσ ,
22,221,12 f−=+ σσ .
Estas ecuaciones pueden resolverse determinando la solución para el caso homogéneo y agregándole una solución particular.
La solución homogénea se puede obtener definiendo una función auxiliar, denominada Función de Tensiones de Airy ),( 21 xxφ , de modo que:
22,11 φσ = ,
11,22 φσ = ,
12,12 φσ −= .
Con esta definición de la Función de Airy, las ecuaciones de equilibrio homogéneas se satisfacen idénticamente.
Además, al considerar la ecuación de compatibilidad de deformaciones en el plano
21 xx − , se obtiene que la función ),( 21 xxφ debe ser biarmónica, es decir: 04 =∇ φ .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.71
La función de tensiones ),( 21 xxφ de Airy, se puede aplicar tanto a problemas de deformaciones planas como a los de tensiones planas, resultando en ambos casos que esta función debe ser biarmónica.
Debe notarse sin embargo que, en el caso de tensiones planas se utilizó implícitamente una aproximación: se supuso una relación de compatibilidad solo en el plano y no tridimensional, obteniéndose por tanto, una solución solo aproximada.
La calidad de esta aproximación depende del espesor de la placa considerada, a medida que el espesor “tienda” a cero, la solución “tenderá” a ser más exacta.
En el caso de deformaciones planas, las ecuaciones de compatibilidad en función de tensiones para fuerzas externas nulas, permite obtener directamente una solución biarmónica, por lo tanto, la solución obtenida en este caso es exacta.
6.5 Solución de 04 =∇ φ Mediante Polinomios
Una manera de resolver ciertos problemas de deformaciones o tensiones planas consiste en darse una función “genérica” que dependa de parámetros o constantes indeterminadas.
Los valores de estos parámetros se pueden determinar a “posteriori”, luego de establecer las condiciones de tensiones y las condiciones de contorno. Esto se conoce con el nombre de problema inverso, es decir, se supone una solución de cierto tipo, la cual se reemplaza en las ecuaciones constitutivas y de compatibilidad obteniéndose relaciones entre estos parámetros. Estas relaciones, en conjunto con las condiciones de contorno, permiten resolver finalmente el problema.
Las condiciones de tensiones se establecen a partir de relaciones entre las derivadas de la función incógnita ),( 21 xxφ , y de las condiciones de contorno específicas del problema.
Un caso bastante general del establecimiento de una función ),( 21 xxφ , consiste en considerar una suma de polinomios de diferentes grados como:
nq φφφφφ +++++= KK21 ,
donde cada uno de los qφ puede definirse como:
∑=
=
−=qi
i
iqiqiq yxa
0φ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.72
Esto permite obtener polinomios de distintos grados que satisfacen la ecuación biarmónica si es que los parámetros qia (constantes) se eligen adecuadamente.
Dado que las tensiones se obtienen de las segundas derivadas de la función φ , los
polinomios oφ y 1φ son triviales. Los polinomios 2φ y 3φ satisfacen idénticamente la ecuación biarmónica y por tanto, no es necesario imponer condiciones. Para los polinomios 4φ y superiores, es necesario imponer condiciones adicionales.
Ejemplo: El polinomio 4φ es:
444
343
2242
341
4404 xayxaxyaxyaya ++++=φ ,
que, reemplazado en la ecuación diferencial da:
024824 404244 =++ aaa .
Despejando el valor de 44a como )3
( 424044
aaa +−= y reemplazándolo en 4φ , se
obtiene:
yxaxxyaxyaxya 343
422
423
4144
404 )3
()( +−++−=φ ,
función que satisface idénticamente la ecuación diferencial.
6.6 Ejemplo de coordenadas cartesianas: viga en voladizo con carga puntual transversal en el extremo y carga distribuida en la sección transversal Se investiga qué problema de tensiones planas se puede resolver mediante la siguiente función de tensiones, haciéndose analogías con expresiones conocidas de resistencia de materiales. Se considera la siguiente función de tensiones:
22
3
2343 yP
cxyxy
cF
+
−=φ .
Las derivadas parciales correspondientes son:
−= 2
3
, 343
cyy
cF
xφ 00, =⇒= yyxx σφ
Pycxyx
cF
y +
−= 2
2
, 43φ
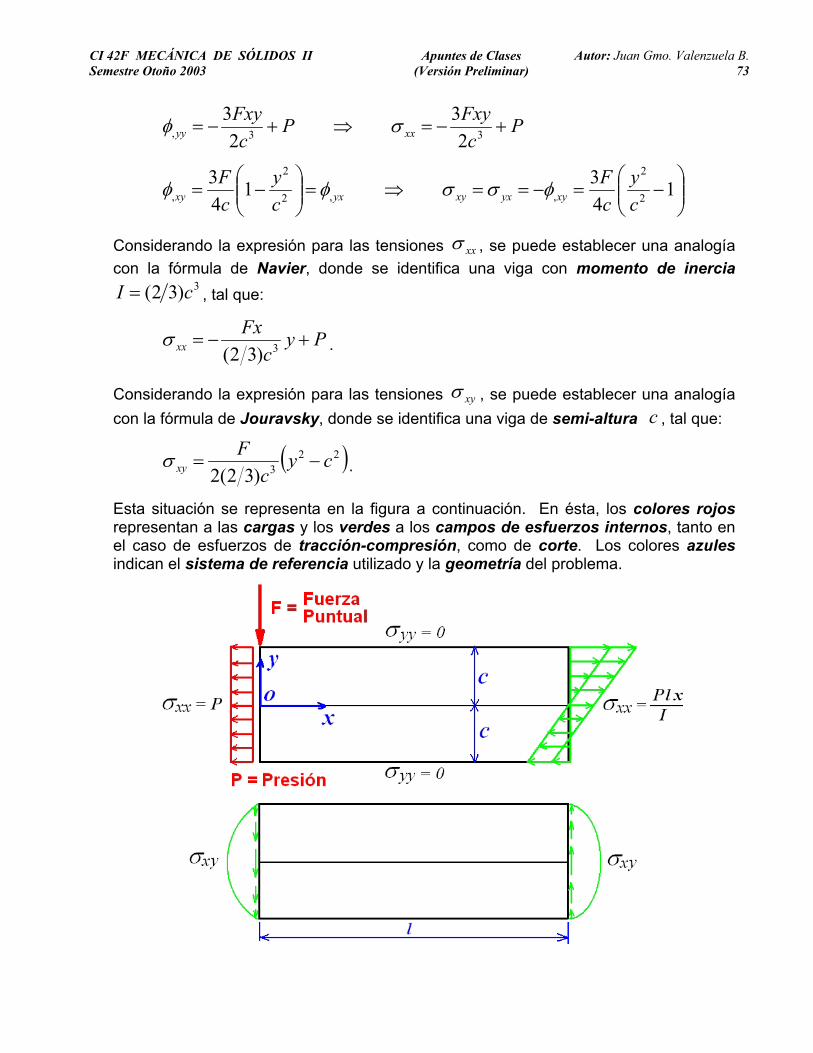
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.73
Pc
FxyPc
Fxyxxyy +−=⇒+−= 33, 2
32
3 σφ
−=−==⇒=
−= 1
431
43
2
2
,,2
2
, cy
cF
cy
cF
xyyxxyyxxy φσσφφ
Considerando la expresión para las tensiones xxσ , se puede establecer una analogía con la fórmula de Navier, donde se identifica una viga con momento de inercia
3)32( cI = , tal que:
Pyc
Fxxx +−= 3)32(
σ .
Considerando la expresión para las tensiones xyσ , se puede establecer una analogía con la fórmula de Jouravsky, donde se identifica una viga de semi-altura c , tal que:
( )223)32(2
cyc
Fxy −=σ .
Esta situación se representa en la figura a continuación. En ésta, los colores rojos representan a las cargas y los verdes a los campos de esfuerzos internos, tanto en el caso de esfuerzos de tracción-compresión, como de corte. Los colores azules indican el sistema de referencia utilizado y la geometría del problema.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.74
6.7 Coordenadas Polares Para facilitar la resolución de algunos problemas planos, donde la geometría del modelo o la geometría de las cargas, posee estructura “circular”, se sugiere la utilización de un sistema más “natural” de referencia, como las coordenadas polares.
En este caso, debe determinarse las formas particulares que adquieren las componentes de tensiones y las ecuaciones de equilibrio en estas coordenadas.
También debe determinarse, cuales son las formas que adquieren algunos operadores matemáticos, como el Laplaciano, y la forma que adquiere la función de tensiones de Airy, en este caso.
6.7.1 Componentes de Tensiones y Ecuaciones de Equilibrio A partir de un diagrama de equilibrio de un elemento infinitesimal en coordenadas polares, es posible establecer las siguientes ecuaciones vectoriales de equilibrio:
0)( ,, =++ rfr rr θθσσ .
Definiendo las componentes de tensiones como la suma de sus componentes radiales y tangenciales como:
θθσσσ tt rrrrrˆˆ += ,
θθθθθ σσσ ttrrˆˆ += ,
y considerando que las “derivadas” de los vectores unitarios correspondientes es:
θθ ttrˆˆ
, = ,
rtt ˆˆ, −=θθ ,
se obtienen las siguientes ecuaciones escalares de equilibrio:
01,, =+
+−+ r
rrrrrr f
rrθθ
θθσσσσ ,
021,, =+++ θ
θθθθθ
σσσ frr
rrr .
Además, por equilibrio de momentos se tiene que: rr θθ σσ = .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.75
6.7.2 Laplaciano en Coordenadas Polares Considerando la siguiente transformación de coordenadas:
222 yxr += ,
=
xyarctgθ ,
realizando las derivadas parciales correspondientes se tiene:
)cos(, θ==rxrx rr
yx
)sin(2,
θθ −=−=
)sin(, θ==ryr y rr
xy
)cos(2,
θθ == ,
entonces, la primera derivada parcial total es:
)sin()(1)cos()()()()()()( ,,,,,,, θθθθθ θθ r
rxx
rr rxxrx −=+=
∂∂
∂∂
+∂∂
∂∂
= ,
y la segunda derivada parcial es:
−
−= )sin()(1)cos()()sin()(1)cos()()( ,,,,, θθθθ θθ rr rrxx ,
[ ] ( ) K+
−+
−+= )sin()cos()(1)cos()sin()(1)(cos)(
,,,
,2
, θθθθθθθ r
rrr rr
( ) KK +
−+ )sin()cos()(1
,, θθθrr
−−+ )sin()sin()(11
,, θθ
θθrr
K ,
[ ] K+
−+
+= )cos()sin()(1)cos()sin()(1)(cos)( ,,2
2, θθθθθ θθ rrr rr
KK +
+
−+ )(sin)(1)sin()cos()(1 2
,, θθθθ rr rr
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.76
+
+ )sin()cos()(1)sin()sin()(1
,2,2 θθθθ θθθ rrK ,
2
2
,2,
2
,,2
,)(sin)()cos()sin()(2)(sin)()cos()sin()(2)(cos)()(
rrrr rrrrxxθθθθθθθ θθθθ +++−= .
Análogamente:
2
2
,2,
2
,,2
,)(cos)()cos()sin()(2)(cos)()cos()sin()(2)(sin)()(
rrrr rrrryyθθθθθθθ θθθθ +−++= .
Sumando ambas expresiones, finalmente se obtiene el Laplaciano en coordenadas polares como:
θθ,2,,,,2 )(1)(1)()()(
rr rrryyxx ++=+=∇ .
6.7.3 Función de Tensiones de Airy en Coordenadas Polares
Dado que las expresiones para la tensiones en función de ),( yxφ , son también válidas para las coordenadas polares, podemos establecer, mediante una adecuada transformación, expresiones para ),( θφ r .
Si en las expresiones que acabamos de obtener para las segundas derivadas en coordenadas cartesianas hacemos 0=θ , se obtienen las siguientes expresiones para las tensiones en función de las coordenadas polares:
θθφφσ ,2,11rr rrr += ,
rr,φσθθ = ,
rrr rrr ,
,,,2111
−=−= θθθθ φφφσ .
Estas expresiones satisfacen adecuadamente las ecuaciones de equilibrio en coordenadas polares.
Análogamente al caso de coordenadas cartesianas, para resolver un problema será necesario que la función de Airy cumpla con las relaciones de compatibilidad, siendo una función solución de:
( ) 0),(4 =∇ θφ r .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.77
6.7.4 Caso Axisimétrico Para el caso axisimétrico, es decir, cuando exista simetría axial, las funciones no dependerán de θ , dándose que 0)( , =θ , con lo cual el Laplaciano toma la forma:
rrrrr rrr ,,,,
2 )(1)(1)()( φ=+=∇ .
Consecuentemente, la ecuación de compatibilidad en función de ),( θφ r queda:
0)(11
,,,
224 =
=∇∇=∇
rrrr
rr
rφφφ ,
y las tensiones valen:
rrr r ,1φσ = ,
rr,φσθθ = ,
0=θσ r .
La ecuación para φ4∇ puede integrarse dos veces, multiplicando primero por r , integrando el resultado y luego dividiendo por r e integrando nuevamente, con lo que se obtiene:
( ) φφ 2,, )log(1
∇=+= BrArr rr .
Esta ecuación puede volver a integrarse dos veces, obteniéndose:
( ) DrCBrrrrA+++−= )log(
4)log(
4
222φ .
Utilizando las expresiones de definición de las tensiones en función de φ , se obtiene:
2221)log(
2 rCBrA
rr ++
−=σ ,
2221)log(
2 rCBrA
−+
+=θθσ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.78
6.8 Ejemplo en coordenadas polares: barra curva con sección transversal constante Considere el caso de una barra curva con sección transversal constante. Esta barra está solicitada por un momento de flexión M en el plano de curvatura, en los bordes de la barra, tal como se muestra en la figura.
a
bM M 1
Suponiendo una función de tensiones de Airy de la siguiente forma:
DrCrrBrA +⋅+⋅+⋅= 22 )log()log(φ (1)Las tensiones en este caso de simetría axial se pueden establecer como:
( ) CrBrA
rr 2)log(212 +++=σ (2)
( ) CrBrA 2)log(212 +++−=θθσ (3)
Se pide: a) Establecer todas las condiciones de borde del problema en forma analítica y dar
una breve explicación en palabras. b) Determinar el valor de las constantes A, B y C que resuelven el problema y
utilizarlas para establecer relaciones para las tensiones rrσ y θθσ .
Solución:
a) Condiciones de borde:
i) Los bordes cóncavos y convexos de la barra están libres de fuerzas normales: 0=rrσ en ar = y en br = .
ii) Los esfuerzos normales en los bordes de la barra deben ser iguales
solo al momento M: 0=⋅∫b
a
drθθσ y ∫ −=⋅b
a
Mdrrθθσ .
iii) No existen fuerzas tangenciales aplicadas en las barras: 0=θσ r .
b) Determinación de constantes:
Utilizando las condiciones i) en las ecuaciones (2) y (3) resulta:

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.79
( ) 02)log(212 =++⋅+ CaBaA
( ) 02)log(212 =++⋅+ CbBbA
. (4)
De la condición ii) y de la relación entre la función de Airy y las tensiones se obtiene:
0,, ==⋅=⋅ ∫∫b
ar
b
arr
b
a
drdr φφσθθ ,
donde substituyendo la definición de la función φ (ecuación (1)), se obtiene:
( ) ( ) 02)log(22)log(2 =
+++−
+++ CaaaaB
aACbbbbB
bA
.
Análogamente, se debe cumplir la segunda parte de la condición ii):
Mdrrdrrb
arr
b
a
−=⋅=⋅ ∫∫ ,φσθθ , (5)
donde, integrando por partes, se obtiene:
b
a
b
ar
b
ar
b
ar
b
arr rdrrdrr φφφφφ −=−=⋅ ∫∫ ,,,, ,
Notando de (4) que 0, =b
ar rφ y considerando (5), se encuentra que Mb
a=φ ,
reemplazando en (1), se obtiene:
( ) ( ) MabCaabbBabA =−+−+ 2222 )log()log()log( . (6)
Esta ecuación (6), en conjunto con las ecuaciones (4), determinan completamente los valores de las constantes A, B y C, los que son:
)log(4 22
abba
NMA −=
( )222 abNMB −−=
( )[ ])log()log(2 2222 aabbabNMC −+−= ,

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.80
donde por simplicidad se utilizó ( )2
22222 )log(4
−−=
abbaabN .
Finalmente, las expresiones para las tensiones quedan:
++−= )log()log()log(4 22
2
22
raa
brb
ab
rba
NM
rrσ
−+++−−= 2222
2
22
)log()log()log(4 abraa
brb
ab
rba
NM
θθσ
0=θσ r .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.81
7 TORSIÓN DE ELEMENTOS PRISMÁTICOS
7.1 Introducción En este capítulo analizaremos los esfuerzos y deformaciones para miembros sometidos a pares de torsión respecto a sus ejes longitudinales.
Primero se realizará una presentación del problema, desarrollándose las soluciones clásicas conocidas como el método semi inverso de Saint Venant y el método de la función de tensiones de Prandtl.
El método de la función de Prandtl se extenderá de secciones simplemente conexas a secciones multiconexas. Se describirá una posible interpretación geométrica y se establecerá una analogía con una membrana sometida a una tensión interna constante y a una presión normal uniforme.
Luego se estudiará la torsión de una barra de sección rectangular, resultado que se utilizara para establecer una aproximación para la evaluación de la constantes torsionales de las secciones de paredes delgadas abiertas.
Finalmente, se estudiará la torsión de perfiles cerrados de pared delgada, ya sean unicelulares o multicelulares. En este caso, se presentará una analogía con circuitos eléctricos de corriente continua.
7.2 Presentación del problema Consideraremos un cuerpo cilíndrico de material homogéneo e isotrópico limitado por dos caras perpendiculares a las generatrices rectas.
Este cuerpo está sometido a la acción de un sistema de fuerzas en equilibrio en sus caras planas, estáticamente equivalente a un momento de torsión sobre el cuerpo.
La superficie cilíndrica se encuentra libre de tensiones externas y sus puntos pueden moverse libremente. Las fuerzas de volumen son nulas en todos los puntos del cuerpo.
Condiciones de borde:
• No existen tensiones en el manto cilíndrico: 03 === νννν σσσ t .
• No existen tensiones normales en las caras planas: 033 =σ .
7.3 Método Semi-Inverso de Saint Venant Este método consiste en “suponer” parcialmente una solución al problema de torsión, y luego “completarla” de modo que satisfaga las condiciones de éste.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.82
7.3.1 Funciones de corrimientos: Supongamos una solución al problema recién planteado dada por las siguientes funciones de corrimientos:
21 xu θ−= ,
12 xu θ= ,
),( 2133 xxuu = ,
donde θ es el ángulo de rotación de la sección y ),( 2133 xxuu = se denomina función de alabeo.
El giro relativo de las secciones θ , puede determinarse a través de la constante χ , que representa el giro por unidad de longitud, del siguiente modo:
3xχθ = .
7.3.2 Deformaciones unitarias
Considerando las funciones de corrimientos supuestas ( iu ), las deformaciones unitarias resultan:
012332211 ==== eeee ,
( )21,313 21 xue χ−= ,
( )12,323 21 xue χ+= .
7.3.3 Tensiones Las tensiones correspondientes son:
012332211 ==== σσσσ
( )21,313 xuG χσ −=
( )12,323 xuG χσ += ,
Si se definen los vectores 2211ˆˆ kxkxr +=
r y 2231133
ˆˆ kk σσσ +=r
, las relaciones para las tensiones pueden resumirse vectorialmente como:
( )rkuG rr×+∇= 333
ˆχσ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.83
7.3.4 Ecuaciones de equilibrio
Las ecuaciones de equilibrio 0, =+ ijij fσ , toman en este caso la forma:
02,321,31 =+σσ .
Las correspondientes derivadas de las tensiones valen:
( ) 11,31,21,31,311,13 GuxuG =−== χσσ ,
( ) 22,32,12,32,322,23 GuxuG =+== χσσ ,
las que reemplazadas en la ecuación de equilibrio resultan:
022,311,32,321,31 =+=+ GuGuσσ .
Si simplificamos por la constante G la parte derecha de la igualdad, se reconoce el
Laplaciano de 3u :
032 =∇ u ,
es decir, la función de alabeo 3u es una función armónica.
7.3.5 Condiciones de borde Dado que la superficie cilíndrica esta libre de tensiones, se tiene que:
0ˆ 3 =⋅σν r.
Esta condición establece que la tensión de corte por flexión es tangente a la curva de borde de la sección.
Si en la ecuación anterior se reemplaza la expresión vectorial para 3σr , se obtiene:
( ) 0ˆˆˆ 333 =×+∇⋅=⋅ rkuG rr χνσν ,
donde se pueden identificar los siguientes términos:
nuu ,33ˆ =∇⋅ν , (derivada de 3u en la dirección normal a la curva)
( ) sss rrrrrrrtrkrk ,,,33 21ˆˆˆˆˆ −=⋅=⋅−=⋅−=⋅×=×⋅
rrrrrrr νν .
Con esto, la condición de borde queda:
sn rru ,,3 χ= .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.84
La determinación de la función de alabeo 3u con la condiciones 032 =∇ u y
sn rru ,,3 −= se conoce como el Problema de Neumann en la teoría de potenciales.
7.3.6 Relaciones entre Mr
, χ y 3ur
En las caras perpendiculares al manto cilíndrico, las condiciones de borde establecen el equilibrio con las tensiones internas:
)( 21,31 xuGp χ−= ,
)( 12,32 xuGp χ+= , y
03 =p .
Las tensiones sobre estas caras solo tienen por resultante un momento de torsión puro, no poseyendo resultantes de corte. La verificación de las tensiones de corte nulas se puede realizar mediante la evaluación de la siguiente integral:
∫∫ ==A
dApGQ 011 χ ,
la que, luego de algunos cálculos y sustituciones puede transformarse en:
∫∫
++
−=
A
dAxu
xxu
xGQ2,
12,3
11,
21,3
11 χχχ , ó
dsrkuxGQC∫
×⋅+
∇⋅=
rrr3
311
ˆνχ
νχ .
En esta última ecuación, el paréntesis cuadrado corresponde a la expresión para la condición de borde en el contorno, y vale cero, por lo tanto:
01 =Q .
Análogamente, se puede demostrar también que 02 =Q .
Considerando que el momento torsional esta dado por:
dArkrurGdArMA
××+
∇×=×= ∫∫ )ˆ( 3
33
rrrrrr
χχσ ,

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.85
se puede obtener una expresión para el momento en función de la inercia polar de la sección y la integral de línea de la función de alabeo, como:
⋅
−= ∫ rdruIGM
cp
rrr
χχ 3
.
Tomando solo la magnitud de la relación anterior, se puede establecer que el momento esta dado por χ veces la “rigidez torsional” GJ , donde J es la “inercia torsional”, tal como:
⋅
−== ∫ rdruIJJGM
cp
rr
χχ 3
.
Si consideramos la función
χ
3u como variable independiente, se tiene que:
• 032 =
∇
χu
, al interior de la sección, y
• sn
rru,
,
3 =
χ , en el contorno.
Algunos autores expresan la inercia torsional como una fracción del momento de inercia polar de la sección, pudiendo expresarse χ como:
pp GIM
IGM
GJMJGM β
βχχ ===⇒=
)( .
Ejemplo: Sección circular
Consideremos una barra cilíndrica circular sometida a un momento de torsión M.
La solución está dada por una función 3u tal que dentro del círculo 032 =∇ u y en
el contorno 0,,3 == sn rru χ .
La solución esta dada en este caso por 03 == cteu , por lo que la inercia torsional vale:
2
43 aIrdruIJ p
cp
πχ
==⋅
−= ∫
rr.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.86
La torsión χ de la barra vale:
42
aGM
GJM
πχ == .
La tensión de corte 3σr vale:
( ) raMrGrkuG 4333
2ˆπ
χχσ ==×+∇=rr
.
7.4 Función de Tensiones de Prandtl
7.4.1 Funciones de tensiones
Suponga una función ),( 21 xxφ tal que las tensiones estén dadas por las derivadas parciales de ésta, del siguiente modo:
)( 1,322,31 uxGG +−== χχφσ ,
)( 2,311,32 uxGG +=−= χχφσ .
Estas expresiones pueden escribirse en forma vectorial como:
φχσ ∇×−= 33 kGr.
7.4.2 Ecuaciones de equilibrio En este caso, las ecuaciones de equilibrio se satisfacen idénticamente:
0)( 12,21,2,321,31 =+=+ φφχσσ G .
7.4.3 Compatibilidad de desplazamiento
La definición de la función ),( 21 xxφ permite establecer las siguientes relaciones para las segundas derivadas:
χχφχχφχχφ +=⇒+=⇒+−= 22,12,322,1,31,322, )( uxuuxGG ,
χχφχχφχχφ −−=⇒−−=⇒+=− 11,21,311,2,32,311, )( uxuuxGG ,
las que, en conjunto con las condiciones de compatibilidad de desplazamiento
21,312,3 uu = , conducen a una ecuación para ),( 21 xxφ :
χχφχχφ −−=+⇒= 11,22,21,312,3 uu ,

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.87
o lo que es lo mismo que:
020)11()( 222,11, =+∇⇒=+++ φχφφχ .
7.4.4 Condiciones de borde Al igual que en el caso anterior, la condición de tensiones tangenciales y normales nulas sobre la superficie cilíndrica, se expresa como:
0ˆ 3 =⋅σν r.
Reemplazando en esta ecuación la expresión vectorial para 3σr se obtiene:
0)ˆ()ˆˆ()ˆˆ(ˆ ,333 ==∇⋅−−=∇⋅×−=∇×⋅−=⋅ sGtGkGkG χφφχφνχφνχσν r,
donde s,φ corresponde a la derivada espacial respecto de la trayectoria o camino
recorrido sobre la curva, por lo tanto, se concluye que φ debe ser constante sobre esta curva. Lo anterior se resume en:
• 022 =+∇ φ , al interior de la sección, y
• cte=φ , en el contorno.
7.4.5 Secciones multiconexas Las condiciones que acabamos de establecer en el punto anterior, podrían corresponder al caso de secciones simplemente conexas o al caso de secciones multiconexas.
En el caso de secciones multiconexas la función φ puede tomar diferentes valores en cada contorno, pero en cada uno de ellos su valor debe ser constante.
022 =+∇ φ
022 =+∇ φ
φ = φ1
φ = φ3φ = φ2
φ = 0
(a) (b)

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.88
7.4.6 Relaciones entre el momento Mr
y la torsión χ
Al igual que en el método semi inverso, las tensiones tangenciales en las caras normales al manto cilíndrico deben ser equivalentes a un momento de torsión
según la dirección 3k . Esta condición conduce a una relación entre el momento aplicado y el ángulo de torsión por unidad de longitud χ .
El momento torsor en este caso es:
∫∫∫∫ −=×=AA
dAxxkdArM )(ˆ31232133 σσσrrr
.
Si en esta ecuación reemplazamos las tensiones por la definición de la función φ , se tiene:
( ) ( )dAxxGdAGxGxMAA∫∫∫∫ +−=−−= 2,21,12,21,1 ()( φφχχφχφ ,
lo que se puede transformar en:
[ ]dAxxGMA∫∫ −+−= φφφχ 2)()( 2,21,1 ,
[ ] ∫∫∫∫ ++−=AA
dAGdAxxGM φχφφχ 2)()( 2,21,1 ,
[ ] ∫∫∫∫ +−−−=AA
dAGdAxxGM φχφφχ 2)()( 2,21,1 ,
y utilizando el teorema de Green:
[ ] ∫∫∫ ++−−=AC
dAGdxxdxxGM φχφφχ 2)()( 2112 ,
[ ] ∫∫∫ +−=AC
dAGdxxdxxGM φχφχ 22112 ,
∫∫∫ +⋅×−=AC
dAGkrdrGM φχφχ 23rr
.
Si ahora se discretiza esta integral de línea para considerar los n posibles contornos diferentes, en cada uno de los cuales iφφ = , se tiene:
∫∫∫∑ +⋅×−== AC
n
ii dAGrrdkGM φχφχ 23
1
rr,

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.89
y teniendo presente que el área asociada a esta integral de línea es el doble de las áreas encerradas por los contornos iA , se puede escribir:
∫∫∑ +−== A
n
iii dAGAkGM φχφχ 2ˆ2
13 .
Con esto, finalmente se puede establecer la relación entre momento aplicado M y el ángulo de torsión por unidad de longitud χ , como:
)(22 2211 nnA
AAAdAJconJGM φφφφχ ++++== ∫∫ L .
7.4.7 Distribución de las tensiones de corte La tensión de corte expresada en forma vectorial es:
φχσ ∇×−= 33 kGr.
Utilizaremos ahora coordenadas curvilíneas para establecer esta misma ecuación.
Consideremos un punto P recorriendo una trayectoria curvilínea C , sobre una sección cualquiera del cuerpo cilíndrico.
r P
νt
CO
En cada posición instantánea del punto P , es posible definir un vector unitario tangente t y otro normal ν , a la curva C . Sea s la distancia recorrida en la dirección t y n la distancia en la dirección ν , entonces es posible re-escribir la ecuación anterior en coordenadas curvilíneas como:
( )tvG nsˆˆ ,,3 φφχσ −=
r.
Esta expresión indica que la componente de 3σr según la tangente a la curva es proporcional a la derivada de φ respecto a la dirección normal a ella, y que la componente según la normal es proporcional a la derivada de φ respecto a la dirección tangente.
Un caso particular es cuando la curva corresponde a una función cte=φ . En este caso, la derivada respecto de la tangente vale cero y la tensión de corte tiene la dirección de la curva. Además, el valor de la tensión de corte es proporcional a la derivada de φ respecto de la longitud en la dirección normal.
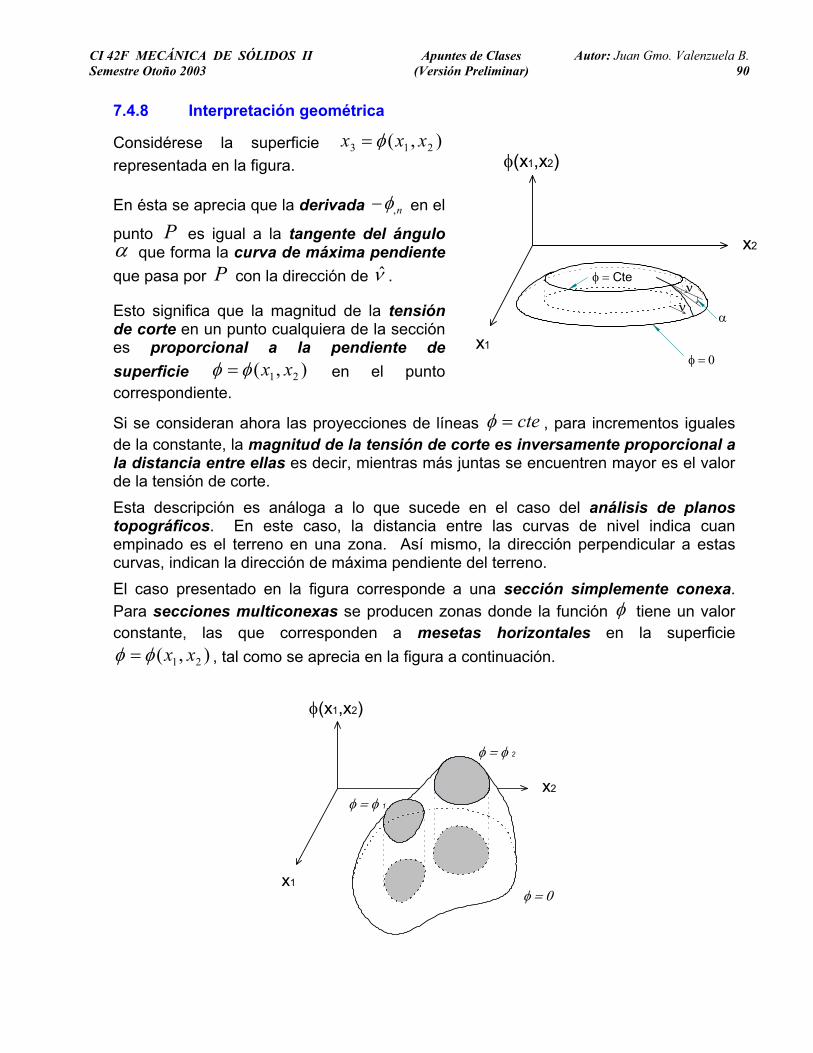
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.90
7.4.8 Interpretación geométrica
Considérese la superficie ),( 213 xxx φ= representada en la figura.
En ésta se aprecia que la derivada n,φ− en el
punto P es igual a la tangente del ángulo α que forma la curva de máxima pendiente que pasa por P con la dirección de ν .
Esto significa que la magnitud de la tensión de corte en un punto cualquiera de la sección es proporcional a la pendiente de superficie ),( 21 xxφφ = en el punto correspondiente.
νν
α
φ = 0
φ = Cte
x1
x2
φ(x1,x2)
Si se consideran ahora las proyecciones de líneas cte=φ , para incrementos iguales de la constante, la magnitud de la tensión de corte es inversamente proporcional a la distancia entre ellas es decir, mientras más juntas se encuentren mayor es el valor de la tensión de corte. Esta descripción es análoga a lo que sucede en el caso del análisis de planos topográficos. En este caso, la distancia entre las curvas de nivel indica cuan empinado es el terreno en una zona. Así mismo, la dirección perpendicular a estas curvas, indican la dirección de máxima pendiente del terreno. El caso presentado en la figura corresponde a una sección simplemente conexa. Para secciones multiconexas se producen zonas donde la función φ tiene un valor constante, las que corresponden a mesetas horizontales en la superficie
),( 21 xxφφ = , tal como se aprecia en la figura a continuación.
φ = 0x1
x2
φ(x1,x2)
φ = φ 1
φ = φ 2
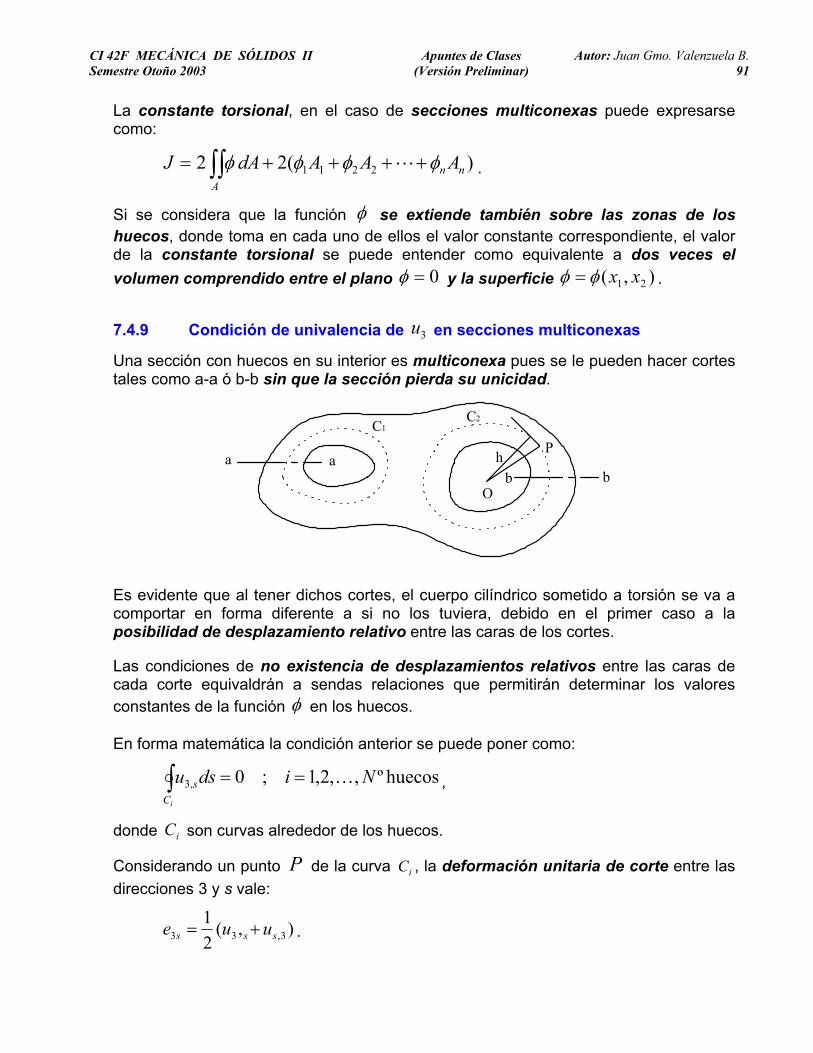
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.91
La constante torsional, en el caso de secciones multiconexas puede expresarse como:
)(22 2211 nnA
AAAdAJ φφφφ ++++= ∫∫ L .
Si se considera que la función φ se extiende también sobre las zonas de los huecos, donde toma en cada uno de ellos el valor constante correspondiente, el valor de la constante torsional se puede entender como equivalente a dos veces el volumen comprendido entre el plano 0=φ y la superficie ),( 21 xxφφ = .
7.4.9 Condición de univalencia de 3u en secciones multiconexas
Una sección con huecos en su interior es multiconexa pues se le pueden hacer cortes tales como a-a ó b-b sin que la sección pierda su unicidad.
C1C2
Ph
Ob b
a a
Es evidente que al tener dichos cortes, el cuerpo cilíndrico sometido a torsión se va a comportar en forma diferente a si no los tuviera, debido en el primer caso a la posibilidad de desplazamiento relativo entre las caras de los cortes.
Las condiciones de no existencia de desplazamientos relativos entre las caras de cada corte equivaldrán a sendas relaciones que permitirán determinar los valores constantes de la función φ en los huecos.
En forma matemática la condición anterior se puede poner como:
huecosº,,2,1;0,3 NidsuiC
s K==∫ ,
donde iC son curvas alrededor de los huecos.
Considerando un punto P de la curva iC , la deformación unitaria de corte entre las direcciones 3 y s vale:
),(21
3,33 sss uue += .
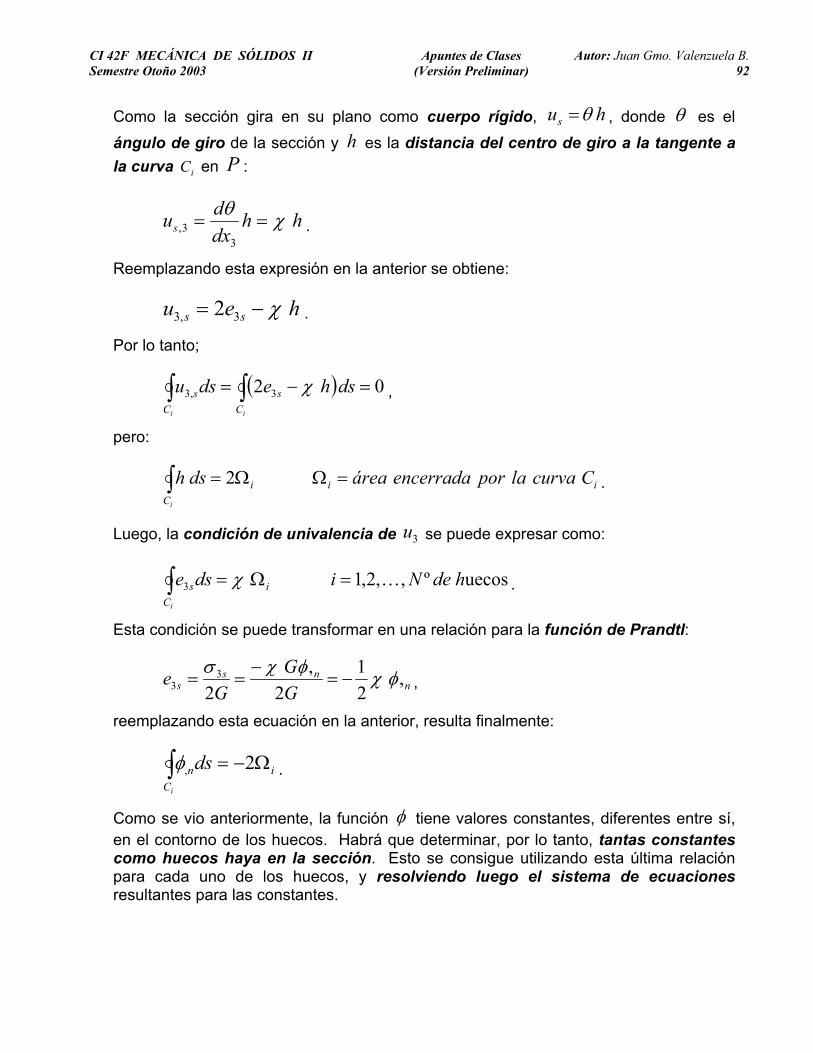
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.92
Como la sección gira en su plano como cuerpo rígido, hus θ= , donde θ es el ángulo de giro de la sección y h es la distancia del centro de giro a la tangente a la curva iC en P :
hhdxdus χθ
==3
3, .
Reemplazando esta expresión en la anterior se obtiene:
heu ss χ−= 3,3 2 .
Por lo tanto;
( ) 02 3,3 =−= ∫∫ dshedsuii C
sC
s χ ,
pero:
iiiC
Ccurvalaporencerradaáreadshi
=ΩΩ=∫ 2 .
Luego, la condición de univalencia de 3u se puede expresar como:
uecosº,,2,13 hdeNidse iC
s
i
K=Ω=∫ χ .
Esta condición se puede transformar en una relación para la función de Prandtl:
nns
s GG
Ge ,
21
2,
23
3 φχφχσ−=
−== ,
reemplazando esta ecuación en la anterior, resulta finalmente:
iC
ndsi
Ω−=∫ 2,φ .
Como se vio anteriormente, la función φ tiene valores constantes, diferentes entre sí, en el contorno de los huecos. Habrá que determinar, por lo tanto, tantas constantes como huecos haya en la sección. Esto se consigue utilizando esta última relación para cada uno de los huecos, y resolviendo luego el sistema de ecuaciones resultantes para las constantes.
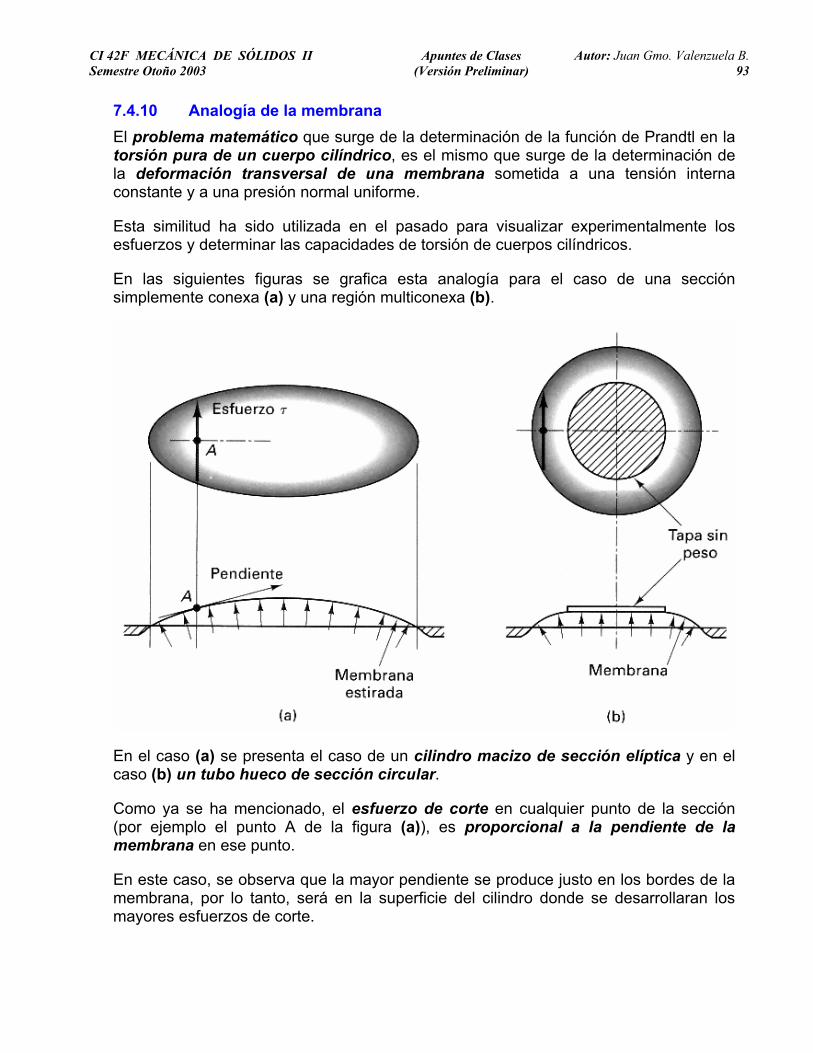
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.93
7.4.10 Analogía de la membrana El problema matemático que surge de la determinación de la función de Prandtl en la torsión pura de un cuerpo cilíndrico, es el mismo que surge de la determinación de la deformación transversal de una membrana sometida a una tensión interna constante y a una presión normal uniforme.
Esta similitud ha sido utilizada en el pasado para visualizar experimentalmente los esfuerzos y determinar las capacidades de torsión de cuerpos cilíndricos.
En las siguientes figuras se grafica esta analogía para el caso de una sección simplemente conexa (a) y una región multiconexa (b).
En el caso (a) se presenta el caso de un cilindro macizo de sección elíptica y en el caso (b) un tubo hueco de sección circular.
Como ya se ha mencionado, el esfuerzo de corte en cualquier punto de la sección (por ejemplo el punto A de la figura (a)), es proporcional a la pendiente de la membrana en ese punto.
En este caso, se observa que la mayor pendiente se produce justo en los bordes de la membrana, por lo tanto, será en la superficie del cilindro donde se desarrollaran los mayores esfuerzos de corte.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.94
Ejemplo: A continuación se estudiará el problema de Torsión de Saint Venant para el caso de cilindros con secciones elípticas. En el caso general, la función de Prandtl se puede establecer como el lugar geométrico del borde de la sección multiplicado por una constante.
Éste lugar geométrico deberá expresarse como una función idénticamente nula, es decir, una función igualada a cero.
En la practica, esta función puede corresponder a una sola ecuación que describe el contorno de la sección, o a una “pitatoria” de ellas, tal que cada una describa una parte del contorno.
La constante que multiplica a esta función, o a este producto de funciones, deberá determinarse a continuación, de modo que satisfaga la ecuación de equilibrio.
Para el caso de una sección elíptica, la función de Prandtl puede establecerse como:
−+= 12
2
2
2
by
axmφ ,
la que, reemplazada en la ecuación de equilibrio da:
22
222 0
babam+
−=⇒=∇ φ .
La constante torsional queda en este caso:
22
33
2222
2 1122babaAI
bI
abaadAJ
A ElipseXY +=
−⋅+⋅−== ∫∫
πφ ,
y por tanto puede establecerse que:
tt MbabaGJGM 33
22
πχχ +
=⇒= .
Considerando la definición de la función de tensiones, los esfuerzos de corte pueden expresarse como:
+
−=⇒
−==
jaxi
by
abM
GG
t ˆˆ2223
1,32
2,31
πσ
χφσχφσ r

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.95
A partir de la definición de la función de alabeo y su relación con las tensiones, se pueden obtener las siguientes expresiones para los corrimientos:
)()()( 22,1,321,32,21,331 xuxuGGxuG +=⇒−=⇔−= φχχφχχσ ,
)()()( 11,2,312,31,12,332 xuxuGGxuG +−=⇒−=−⇔−= φχχφχχσ ,
)1()(2122122
2
232222
2
1,3 xfxba
axuxbaxau +
+
−=⇒
+
+−
= χχ ,
)2()(2121222
2
131222
2
2,3 xgxba
bxuxbaxbu +
+
−−=⇒
+
+−
−= χχ ,
Estas relaciones permiten realizar el siguiente desarrollo para establecer finalmente la función de alabeo de Saint Venant como:
)(21)(21)2()1( 1222
2
12122
2
2 xgxba
bxxfxba
axy +
+
−−=+
+
−⇒ χχ ,
)()(2121 2122
2
22
2
21 xfxgba
bba
axx −=
+
−++
−χ ,
0)()()()( 2121 ==∴⇒∀= xfxgxxfxg i ,
+−
−=∴ 22
22
21213 ),(babaxxxxu χ .
Como se aprecia en la figura, esta ecuación corresponde al lugar geométrico de un paraboloide hiperbólico.
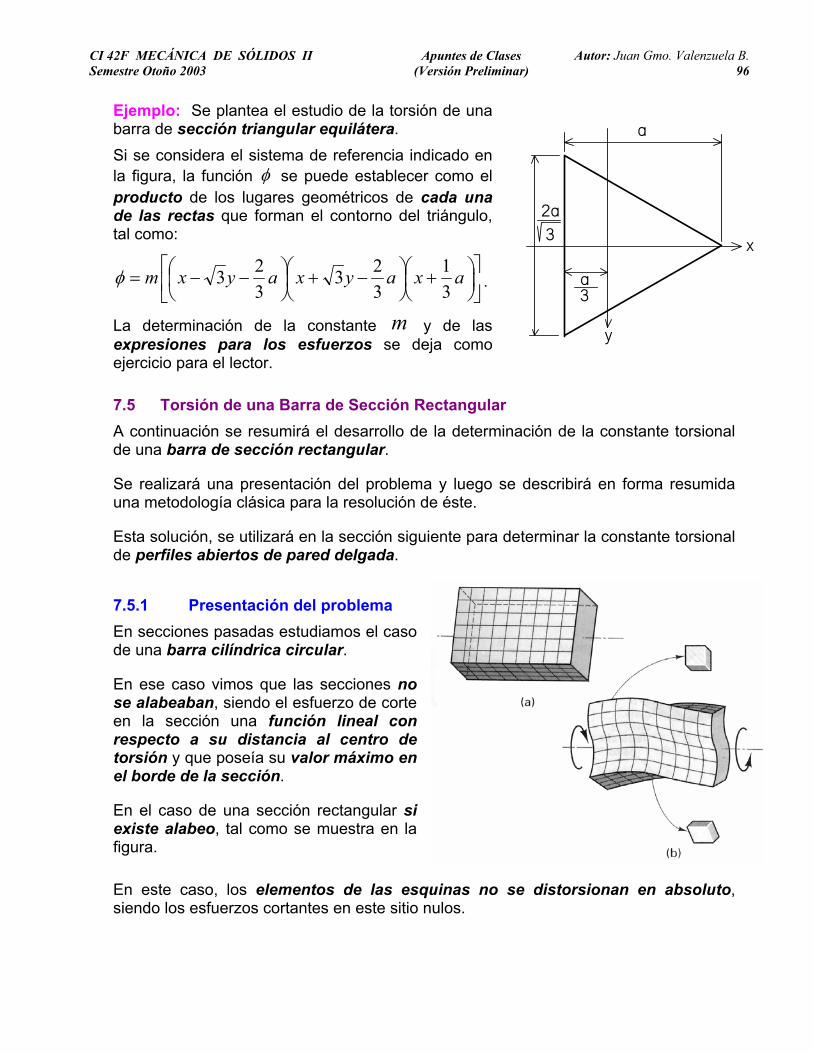
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.96
Ejemplo: Se plantea el estudio de la torsión de una barra de sección triangular equilátera. Si se considera el sistema de referencia indicado en la figura, la función φ se puede establecer como el producto de los lugares geométricos de cada una de las rectas que forman el contorno del triángulo, tal como:
+
−+
−−= axayxayxm
31
323
323φ .
La determinación de la constante m y de las expresiones para los esfuerzos se deja como ejercicio para el lector.
a
2a
a
3
3
y
x
7.5 Torsión de una Barra de Sección Rectangular A continuación se resumirá el desarrollo de la determinación de la constante torsional de una barra de sección rectangular.
Se realizará una presentación del problema y luego se describirá en forma resumida una metodología clásica para la resolución de éste.
Esta solución, se utilizará en la sección siguiente para determinar la constante torsional de perfiles abiertos de pared delgada.
7.5.1 Presentación del problema En secciones pasadas estudiamos el caso de una barra cilíndrica circular.
En ese caso vimos que las secciones no se alabeaban, siendo el esfuerzo de corte en la sección una función lineal con respecto a su distancia al centro de torsión y que poseía su valor máximo en el borde de la sección.
En el caso de una sección rectangular si existe alabeo, tal como se muestra en la figura.
En este caso, los elementos de las esquinas no se distorsionan en absoluto, siendo los esfuerzos cortantes en este sitio nulos.
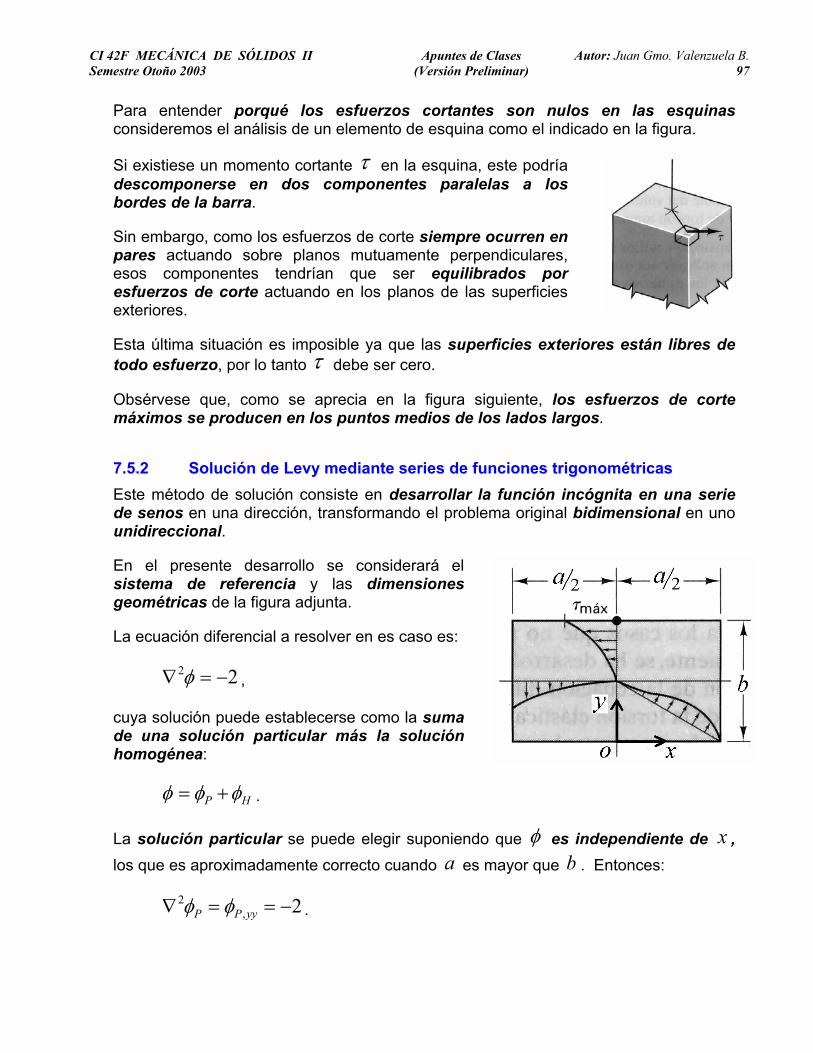
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.97
Para entender porqué los esfuerzos cortantes son nulos en las esquinas consideremos el análisis de un elemento de esquina como el indicado en la figura.
Si existiese un momento cortante τ en la esquina, este podría descomponerse en dos componentes paralelas a los bordes de la barra.
Sin embargo, como los esfuerzos de corte siempre ocurren en pares actuando sobre planos mutuamente perpendiculares, esos componentes tendrían que ser equilibrados por esfuerzos de corte actuando en los planos de las superficies exteriores.
Esta última situación es imposible ya que las superficies exteriores están libres de todo esfuerzo, por lo tanto τ debe ser cero.
Obsérvese que, como se aprecia en la figura siguiente, los esfuerzos de corte máximos se producen en los puntos medios de los lados largos.
7.5.2 Solución de Levy mediante series de funciones trigonométricas Este método de solución consiste en desarrollar la función incógnita en una serie de senos en una dirección, transformando el problema original bidimensional en uno unidireccional.
En el presente desarrollo se considerará el sistema de referencia y las dimensiones geométricas de la figura adjunta.
La ecuación diferencial a resolver en es caso es:
22 −=∇ φ ,
cuya solución puede establecerse como la suma de una solución particular más la solución homogénea:
HP φφφ += .
La solución particular se puede elegir suponiendo que φ es independiente de x , los que es aproximadamente correcto cuando a es mayor que b . Entonces:
2,2 −==∇ yyPP φφ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.98
Integrando e imponiendo las condiciones de borde 0=Pφ para by ,0= , resulta:
)( byyP −−=φ .
Como solución homogénea se elige un desarrollo en serie de senos tal como:
∑∞
=
=
1sin)(
nnH b
ynxY πφ .
Sustituyendo esta solución en la ecuación homogénea, se obtiene una ecuación cuya solución general es:
+
=
bxnB
bxnAY nnn
ππ coshsinh .
Como la función sinh es antimétrica, por simetría se tiene que 0=nA , y por tanto la función de Prandtl completa vale:
∑∞
=
+−−=
1sincosh)(),(
nn b
ynb
xnBbyyyx ππφ .
Las condiciones de borde 0=φ para 2ax ±= , permiten determinar las constantes
nB :
∑∞
=
=−
imparnn b
ynbanBbyy ππ sin
2cosh)( .
Esta ecuación puede interpretarse como el desarrollo en serie de senos de la función )( byy − en el intervalo ),0( b , tal como:
dyb
ynbyybb
anBb
n
−=
∫
ππ sin)(22
cosh0
,
de donde se obtiene:
imparncon
bann
bBn =
−=
2cosh
833
2
ππ.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.99
Luego la expresión completa para la función φ es:
∑∞
=
−−−=imparn
bann
byn
bxn
bbyyyx
2cosh
sincosh8)(),(
32
2
π
ππ
πφ .
La constante torsional J se obtiene por integración de la función φ :
dydxdAJb a
aA∫ ∫∫∫
==
−0
2
2
22 φφ ,
resultando:
−= ∑∞
=imparn nbantgh
ababJ 55
3 219213
π
π .
Cuando ab << , 3
3abJ → . En otros casos basta con unos pocos términos de la
serie, pues ésta converge rápidamente.
Por ejemplo, si consideramos la torsión de una lámina de acero, cuando el espesor de la plancha b , es mucho menor que su ancho a , la constante torsional de la plancha puede estimarse como un tercio del ancho por el cubo del espesor.
La constante torsional J puede también expresarse con bastante aproximación considerando el valor de la sumatoria de la expresión anterior igual a 1, con lo cual resulta:
−==
ababkabJ 63.01
33
3
1
3
.
La tensión máxima de corte se produce en los puntos 0=x e by ,0= :
−== ∑∞
===
imparnyx
bann
bGG
2cosh
181)(2
202,max3 ππχχφσ .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.100
Cuando ∞→ba , bGχσ →max3 .
Al igual que la constante torsional, la tensión máxima puede expresarse como
2max3 bkGχσ = , donde 2k es función ba .
Considerando que GJM
=χ , la tensión máxima de corte en función del momento
vale:
21
2max3 3
abM
kk
=σ .
7.6 Secciones de Pared Delgada Primero en esta sección utilizaremos los resultados de la sección anterior para obtener la constante torsional de perfiles abiertos de pared delgada.
Luego estudiaremos la torsión de perfiles cerrados de paredes delgada. Para esto, presentaremos una analogía con circuitos eléctricos de corriente continua, distinguiendo los casos de perfiles unicelulares y perfiles multicelulares.
7.6.1 Perfiles abiertos de pared delgada Como se vio anteriormente, cuando una sección rectangular es esbelta, se pueden hacer las siguientes aproximaciones:
3
31 abJ = ,
bGχσ =max3 .
Estas aproximaciones son equivalentes a suponer que la función de Prandtl es una superficie cilíndrica, donde se desprecia el efecto de los extremos.
En la figura siguiente se representa la correspondiente analogía con una membrana.
En la parte (a) se muestra la forma que toma la membrana, la cual es similar a un cilindro parabólico, a excepción de los extremos.
En la parte (b) de la figura se muestra una sección trasversal (sección a-a), donde aprecia que la máxima pendiente ocurre en los bordes de la membrana.
En la parte (c) se muestra la correspondiente distribución de esfuerzos de corte.
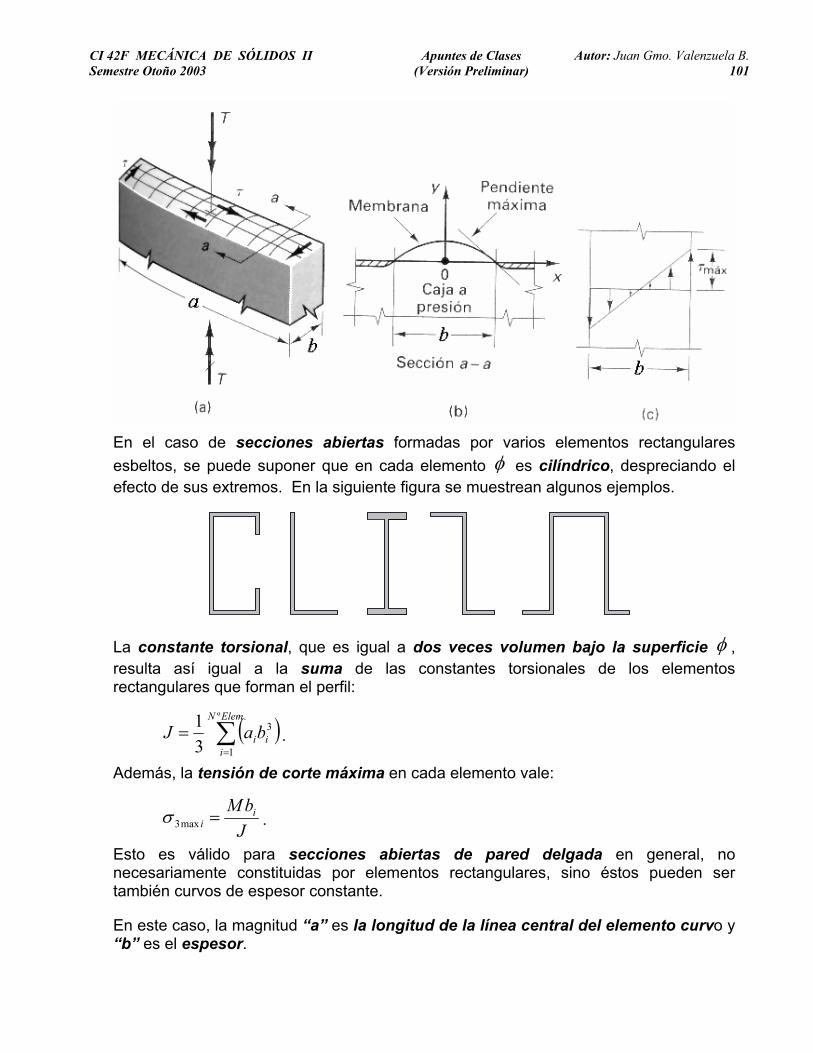
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.101
En el caso de secciones abiertas formadas por varios elementos rectangulares esbeltos, se puede suponer que en cada elemento φ es cilíndrico, despreciando el efecto de sus extremos. En la siguiente figura se muestrean algunos ejemplos.
La constante torsional, que es igual a dos veces volumen bajo la superficie φ , resulta así igual a la suma de las constantes torsionales de los elementos rectangulares que forman el perfil:
( )∑=
=.º
1
3
31 ElemN
iiibaJ .
Además, la tensión de corte máxima en cada elemento vale:
JbM i
i =max3σ .
Esto es válido para secciones abiertas de pared delgada en general, no necesariamente constituidas por elementos rectangulares, sino éstos pueden ser también curvos de espesor constante.
En este caso, la magnitud “a” es la longitud de la línea central del elemento curvo y “b” es el espesor.
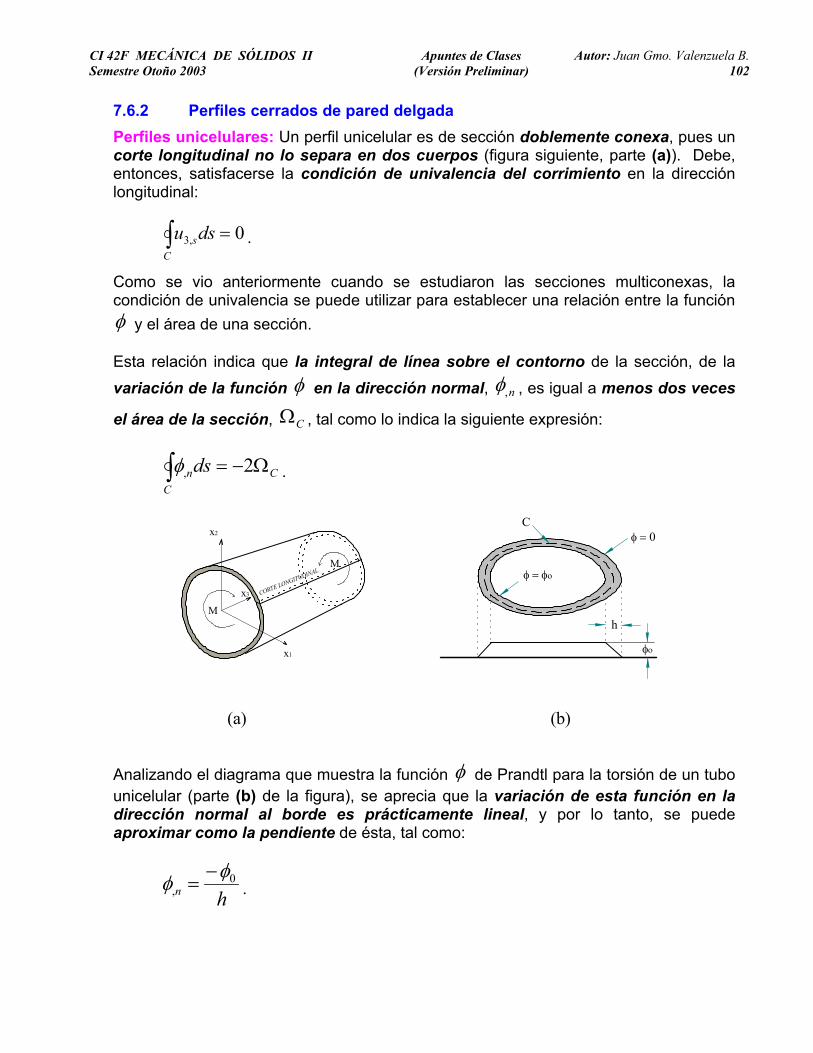
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.102
7.6.2 Perfiles cerrados de pared delgada Perfiles unicelulares: Un perfil unicelular es de sección doblemente conexa, pues un corte longitudinal no lo separa en dos cuerpos (figura siguiente, parte (a)). Debe, entonces, satisfacerse la condición de univalencia del corrimiento en la dirección longitudinal:
0,3 =∫ dsuC
s .
Como se vio anteriormente cuando se estudiaron las secciones multiconexas, la condición de univalencia se puede utilizar para establecer una relación entre la función φ y el área de una sección.
Esta relación indica que la integral de línea sobre el contorno de la sección, de la variación de la función φ en la dirección normal, n,φ , es igual a menos dos veces
el área de la sección, CΩ , tal como lo indica la siguiente expresión:
CC
nds Ω−=∫ 2,φ .
CORTE LONGITUDINAL
M
M
x1
x2
x3
φο
h
φ = 0
φ = φo
C
(a) (b)
Analizando el diagrama que muestra la función φ de Prandtl para la torsión de un tubo unicelular (parte (b) de la figura), se aprecia que la variación de esta función en la dirección normal al borde es prácticamente lineal, y por lo tanto, se puede aproximar como la pendiente de ésta, tal como:
hn0
,φφ −
= .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.103
Si reemplazamos esta expresión en la ecuación anterior, se puede establecer el valor constante que adquiere la función φ en el borde, oφ como:
∫Ω
=
C
Co
hds
2φ.
La inercia torsional en este caso puede establecerse como:
∫∫Ω
=Ω
Ω=Ω=
C
C
C
CCoC
hds
hdsJ
24222 φ,
y la tensión de corte, uniforme a través de la pared, queda:
hG
hGG ns
00,3
χφφχχφτσ =
−
−=−== .
Si se define el flujo de corte q como hq ⋅= τ , se puede escribir:
∫Ω
===⋅=
C
Co
hdsGGh
hGhq χχφχφτ 20
.
El análisis de la forma de las relaciones anteriores permite establecer una analogía con las ecuaciones que describen el comportamiento de un circuito eléctrico de corriente continua.
En esta “analogía eléctrica”, se pueden identificar las siguientes asociaciones:
• el flujo de corte q , se asocia con la intensidad de corriente i .
• dos veces el área de la sección CΩ2 , se asocia con el voltaje o caída de
tensión de la fuente V .
• la integral de línea del inverso del espesor ∫C h
ds, divido por la constante χG , se
asocia con la resistencia R del circuito.
• El momento torsional qJGM CΩ== 2χ , se asocia con la potencia iVW ⋅= desarrollada por el circuito.
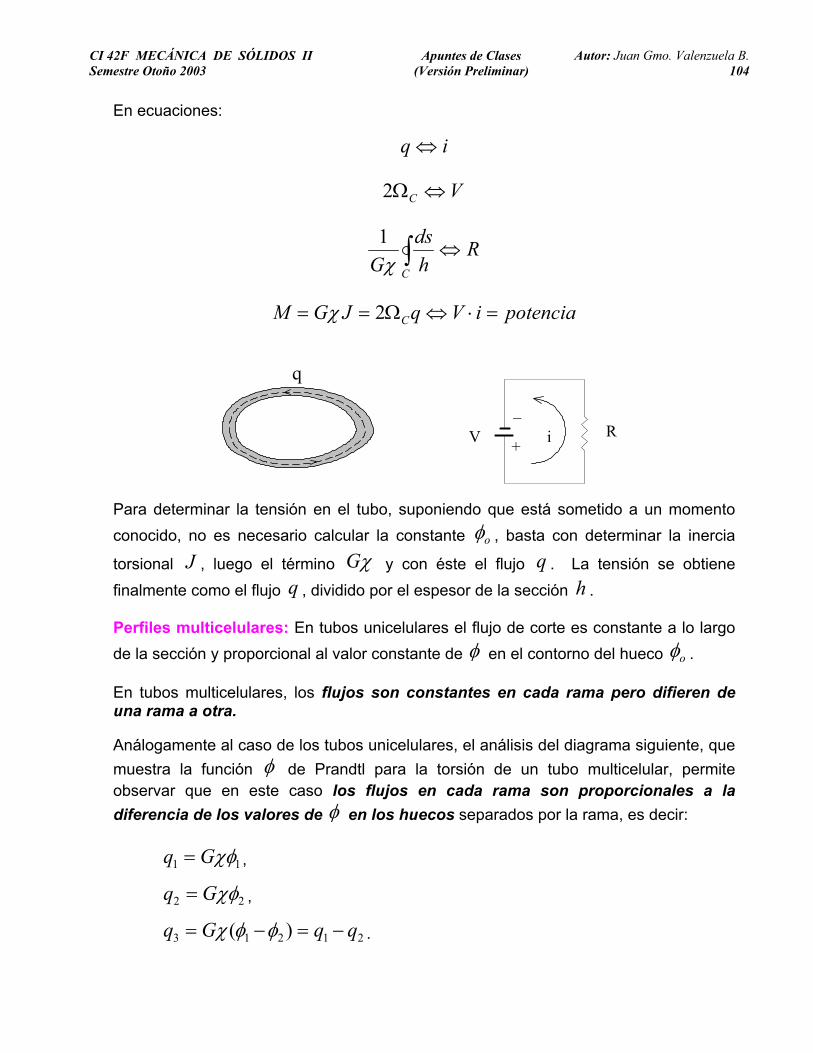
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.104
En ecuaciones:
iq ⇔
VC ⇔Ω2
Rhds
G C
⇔∫χ1
potenciaiVqJGM C =⋅⇔Ω== 2χ
+
_i RV
q
Para determinar la tensión en el tubo, suponiendo que está sometido a un momento conocido, no es necesario calcular la constante oφ , basta con determinar la inercia
torsional J , luego el término χG y con éste el flujo q . La tensión se obtiene finalmente como el flujo q , dividido por el espesor de la sección h .
Perfiles multicelulares: En tubos unicelulares el flujo de corte es constante a lo largo de la sección y proporcional al valor constante de φ en el contorno del hueco oφ .
En tubos multicelulares, los flujos son constantes en cada rama pero difieren de una rama a otra.
Análogamente al caso de los tubos unicelulares, el análisis del diagrama siguiente, que muestra la función φ de Prandtl para la torsión de un tubo multicelular, permite observar que en este caso los flujos en cada rama son proporcionales a la diferencia de los valores de φ en los huecos separados por la rama, es decir:
11 χφGq = ,
22 χφGq = ,
21213 )( qqGq −=−= φφχ .
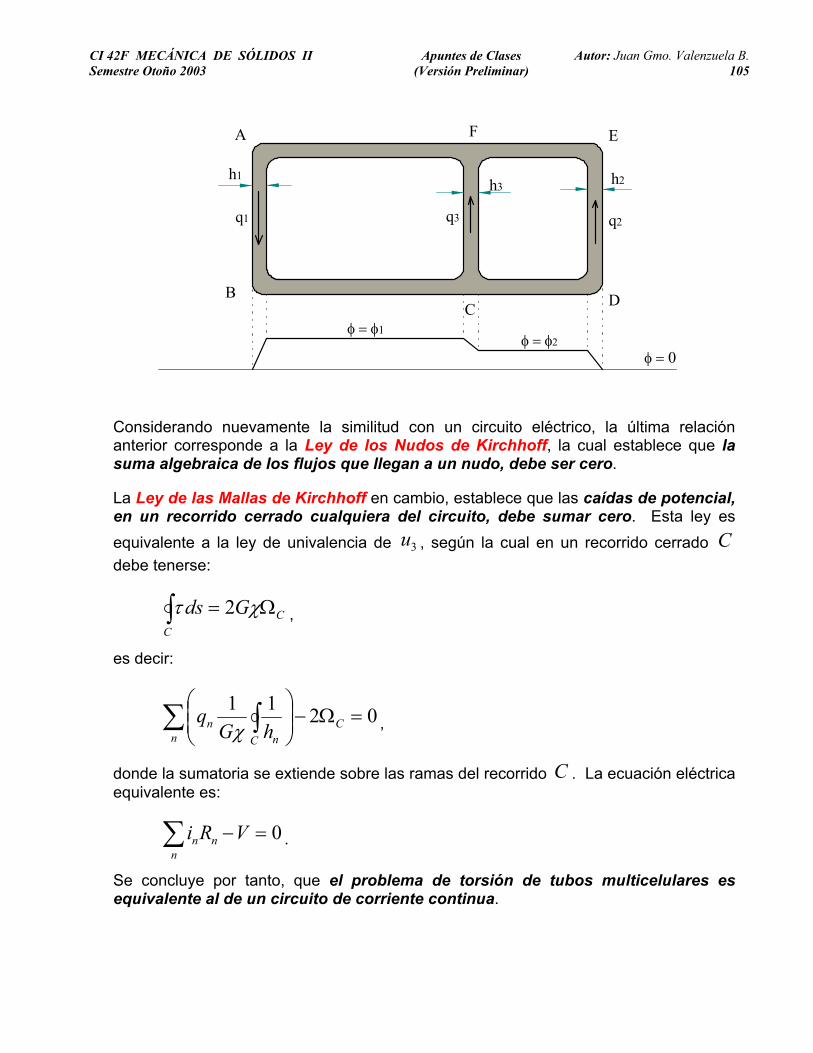
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.105
h2h3h1
q1 q3 q2
φ = φ1φ = φ2
φ = 0
A
BC D
EF
Considerando nuevamente la similitud con un circuito eléctrico, la última relación anterior corresponde a la Ley de los Nudos de Kirchhoff, la cual establece que la suma algebraica de los flujos que llegan a un nudo, debe ser cero.
La Ley de las Mallas de Kirchhoff en cambio, establece que las caídas de potencial, en un recorrido cerrado cualquiera del circuito, debe sumar cero. Esta ley es equivalente a la ley de univalencia de 3u , según la cual en un recorrido cerrado C debe tenerse:
∫ Ω=C
CGds χτ 2 ,
es decir:
0211=Ω−
∑ ∫ C
n C nn hG
qχ ,
donde la sumatoria se extiende sobre las ramas del recorrido C . La ecuación eléctrica equivalente es:
∑ =−n
nn VRi 0 .
Se concluye por tanto, que el problema de torsión de tubos multicelulares es equivalente al de un circuito de corriente continua.
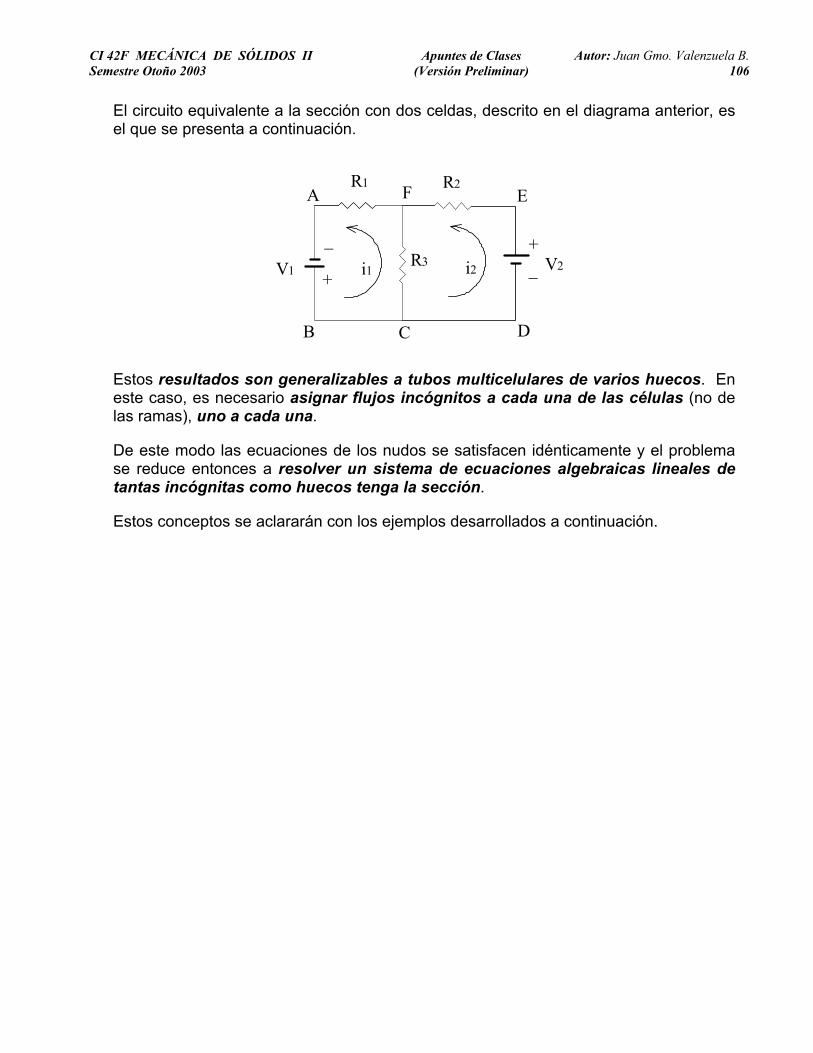
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.106
El circuito equivalente a la sección con dos celdas, descrito en el diagrama anterior, es el que se presenta a continuación.
i2
R2
V2+
_i1 R3V1
+_
R1A
B C D
EF
Estos resultados son generalizables a tubos multicelulares de varios huecos. En este caso, es necesario asignar flujos incógnitos a cada una de las células (no de las ramas), uno a cada una.
De este modo las ecuaciones de los nudos se satisfacen idénticamente y el problema se reduce entonces a resolver un sistema de ecuaciones algebraicas lineales de tantas incógnitas como huecos tenga la sección.
Estos conceptos se aclararán con los ejemplos desarrollados a continuación.
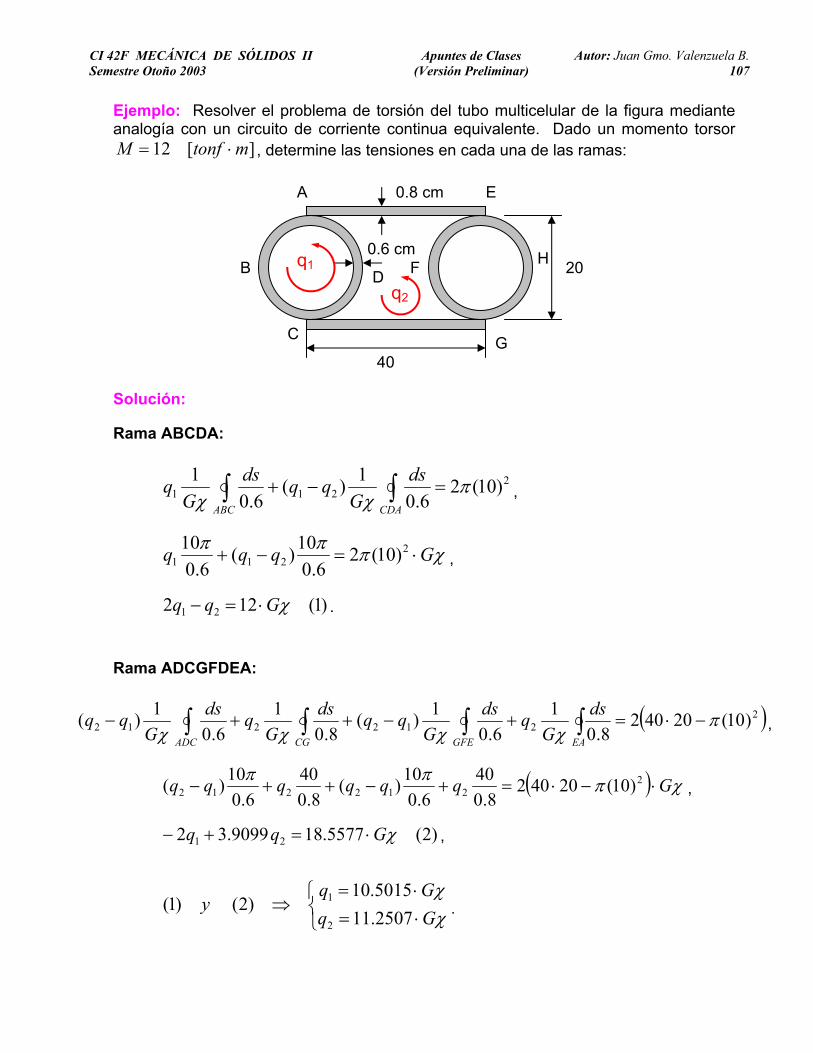
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.107
Ejemplo: Resolver el problema de torsión del tubo multicelular de la figura mediante analogía con un circuito de corriente continua equivalente. Dado un momento torsor
][12 mtonfM ⋅= , determine las tensiones en cada una de las ramas:
Solución:
Rama ABCDA:
2211 )10(2
6.01)(
6.01 π
χχ=−+ ∫∫
CDAABC
dsG
qqdsG
q ,
χπππ Gqqq ⋅=−+ 2211 )10(2
6.010)(
6.010
,
)1(122 21 χGqq ⋅=− .
Rama ADCGFDEA:
( )2212212 )10(20402
8.01
6.01)(
8.01
6.01)( π
χχχχ−⋅=+−++− ∫∫∫∫
EAGFECGADC
dsG
qdsG
qqdsG
qdsG
qq ,
( ) χπππ Gqqqqqq ⋅−⋅=+−++− 2212212 )10(20402
8.040
6.010)(
8.040
6.010)( ,
)2(5577.189099.32 21 χGqq ⋅=+− ,
⋅=⋅=
⇒χχ
GqGq
y2507.115015.10
)2()1(2
1.
A E
H
G
FD
C
B 20
40
0.6 cm
0.8 cm
q2
q1

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.108
Constante torsional (2 veces el volumen encerrado bajo la función φ ):
∑∑ Ω=Ω= iiii qG
Jχ
φ 22 ,
[ ] [ ]422 342.245051.10))10(2040(2507.11)10(22 cmGGG
J =⋅⋅−⋅+⋅⋅= χπχπχ .
Dado el momento torsional aplicado, se obtiene:
=== 330.49
342.24000.200.1
cmkg
JMGχ .
Por lo tanto los flujos de corte valen:
=⋅=cmkgq 63.55430.492507.111 ,
=⋅=cmkgq 69.51730.495015.102 .
Por lo tanto las tensiones valen:
Rama ABC y GHE:
=== 2
1
1 38.9246.063.554
cmkg
hqτ .
Rama CG y EA:
=== 2
2
2 16.6478.067.517
cmkg
hqτ ,
Rama ADC y GFE:
=
−=
−= 2
1
21 56.616.0
67.51763.554cmkg
hqqτ .
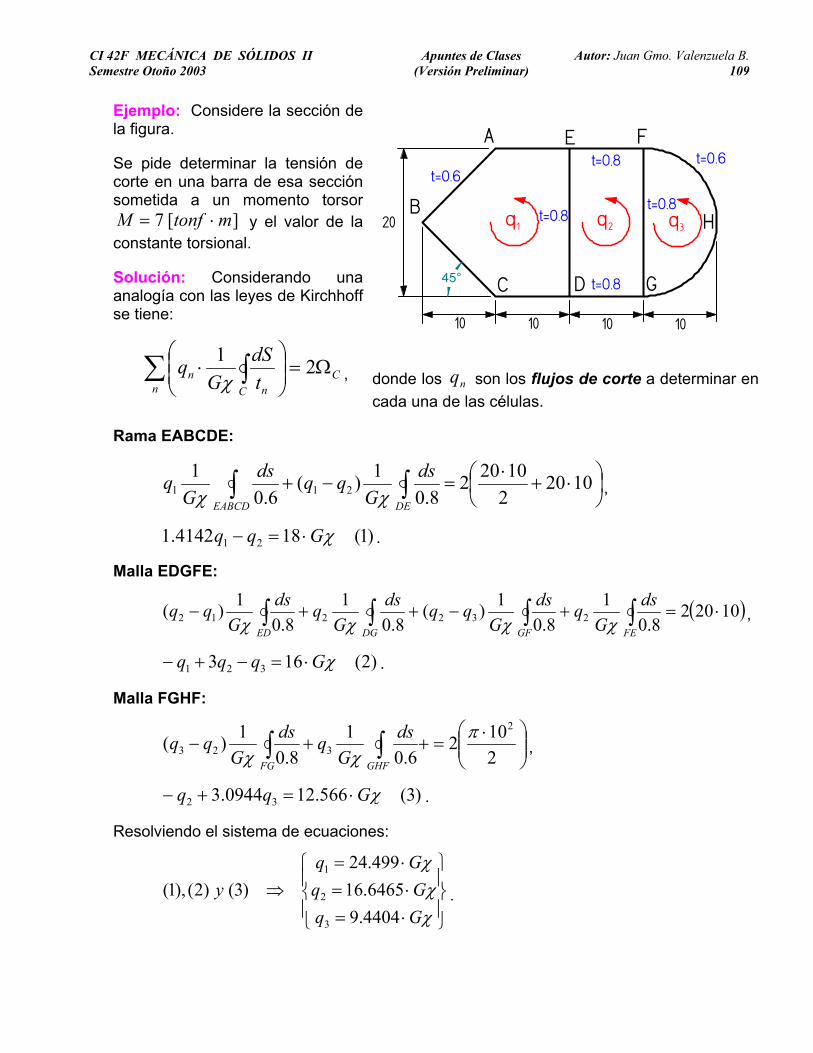
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.109
Ejemplo: Considere la sección de la figura.
Se pide determinar la tensión de corte en una barra de esa sección sometida a un momento torsor
][7 mtonfM ⋅= y el valor de la constante torsional.
Solución: Considerando una analogía con las leyes de Kirchhoff se tiene:
Cn C n
n tdS
Gq Ω=
⋅∑ ∫ 21
χ ,
10
20
G
FE
DC
B
A
H q1
101010
q2 q3
t=0.6
t=0.8t=0.8
t=0.8
t=0.8 t=0.6
45°
donde los nq son los flujos de corte a determinar en cada una de las células.
Rama EABCDE:
⋅+
⋅=−+ ∫∫ 1020
210202
8.01)(
6.01
211DEEABCD
dsG
qqdsG
qχχ ,
)1(184142.1 21 χGqq ⋅=− .
Malla EDGFE:
( )102028.0
18.0
1)(8.0
18.0
1)( 232212 ⋅=+−++− ∫∫∫∫FEGFDGED
dsG
qdsG
qqdsG
qdsG
qqχχχχ ,
)2(163 321 χGqqq ⋅=−+− .
Malla FGHF:
⋅=++− ∫∫ 2
1026.0
18.0
1)(2
323π
χχ GHFFG
dsG
qdsG
qq ,
)3(566.120944.3 32 χGqq ⋅=+− .
Resolviendo el sistema de ecuaciones:
⋅=⋅=⋅=
⇒χχχ
GqGqGq
y4404.96465.16499.24
)3()2(),1(
3
2
1
.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.110
Constante torsional (2 veces el volumen encerrado bajo la función φ ):
∑∑ Ω=Ω= iiii qG
Jχ
φ 22 .
[ ]42
243244404.92106465.161020499.241020
210202 cmGGG
GJ =
⋅
⋅+⋅⋅+⋅
⋅+
⋅= χπχχ
χ .
Dado el momento torsional aplicado se obtiene:
=== 378.28
8.24324000.700
cmkg
JMGχ .
Por lo tanto los flujos de corte valen:
=⋅=cmkgq 60.70378.28449.241 ,
=⋅=cmkgq 06.47978.286465.162 ,
=⋅=cmkgq 68.27178.284404.93 .
Por lo tanto las tensiones valen:
Rama EABCD:
=== 2
1
1 67.11726.060.703
cmkg
tqτ .
Rama DE:
=
−=
−= 2
2
21 68.2808.0
06.47960.703cmkg
tqqτ .
Rama DG y FE:
=== 2
2
2 82.5988.006.479
cmkg
tqτ .
Rama GF:
=
−=
−= 2
2
32 22.2598.0
68.27106.479cmkg
tqqτ .
Rama GHF:
=== 2
3
3 80.4526.068.271
cmkg
tq
τ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.111
8 MÉTODOS DE ENERGÍA
8.1 Introducción En los capítulos anteriores se ha planteado la teoría de elasticidad a través de ecuaciones tensionales, que relacionan las componentes de las diferentes cantidades que definen el comportamiento mecánico de un cuerpo sólido.
En este capítulo se hará un planteamiento alternativo en que las leyes de comportamiento se expresan a través de condiciones sobre cantidades escalares.
Así, las ecuaciones de equilibrio por ejemplo, quedan dadas en términos de la condición de estacionariedad de la energía potencial total, esto es, la energía de deformación del cuerpo más la energía potencial de las fuerzas externas.
Los principios básicos de este planteamiento son, como se verá a continuación el Principio de los Trabajos Virtuales y el Principio de los Trabajos Virtuales Complementarios.
8.2 Principio de los Trabajos Virtuales para un Cuerpo Indeformable Se denomina Trabajo Virtual (TV) al que realiza un sistema de fuerzas actuando sobre un cuerpo para un desplazamiento arbitrario de éste, que no guarde relación con las deformaciones provocadas por dichas fuerzas.
Así, si una fuerza F se desplaza uδ , el trabajo virtual desarrollado será
uF δ⋅ .
Para distinguir las cantidades virtuales de las reales se les antepondrá la letra griega δ .
Consideremos un cuerpo indeformable
sometido a un sistema de fuerzas fr
en (V ) y pr en ( S ), como se muestra en la figura.
(V)(S)
p
fr
δuoδωο
δu
O
P
Al ser indeformable, los corrimientos de todos los puntos del cuerpo quedan definidos, para pequeños desplazamientos, en términos del corrimiento y giro de un punto de referencia )( jxO del cuerpo, ourδ y owrδ , de la siguiente forma:
rwuu oorrrr
×+= δδδ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.112
El TV total de las fuerzas externas sobre el cuerpo vale:
( ) ( )dSrwupdVrwufWS
ooV
ooT ∫∫∫∫∫ ×+⋅+×+⋅=rrrrrrrr
δδδδδ ,
expresión que puede transformarse en:
×+×⋅+
+⋅= ∫∫∫ ∫∫∫∫∫ ∫∫
V So
V SoT dSprdVfrwdSpdVfuW rrrrrrrr δδδ
. El primer paréntesis de esta relación es igual a la resultante de todas las fuerzas externas aplicadas al cuerpo, mientras el segundo paréntesis es el momento resultante de las fuerzas externas con respecto al punto )( jxO .
Si el sistema de fuerzas está en equilibrio, ambos paréntesis son nulos y el TVTotal,
TWδ es nulo. A la inversa, si el TVTotal realizado por las fuerzas externas para desplazamientos arbitrarios ourδ y owrδ , es cero, cada paréntesis debe anularse y, en consecuencia, el cuerpo está en equilibrio.
Se puede decir entonces que:
“La condición necesaria y suficiente para que un cuerpo indeformable,
sometido a un sistema de fuerzas fr
en (V ) y pr en ( S ), esté en equilibrio, es que el trabajo de dichas fuerzas, para un desplazamiento virtual arbitrario ourδ y owrδ sea igual a cero”.
8.3 Principio de los TV para un Mecanismo Mecanismo es un sistema de cuerpos rígidos interconectados a través de puntos comunes a dos o más cuerpos. Considerando las fuerzas de interacción entre los cuerpos, se puede aplicar el principio de los TV a cada uno de los cuerpos en forma separada, con las fuerzas externas y las de interacción actuando sobre él. En cada cuerpo el trabajo virtual total de las fuerzas externas debe ser nulo, incluyendo las de interacción. Si se suma ahora el trabajo virtual sobre todos los cuerpos del mecanismo, ocurre que el trabajo de las fuerzas de interacción es nulo pues la acción de un cuerpo, digamos A, sobre otro cuerpo B es igual y contraria a la del cuerpo B sobre el A, siendo el desplazamiento virtual de ambas fuerzas el mismo, pues debe haber compatibilidad de desplazamiento en los vínculos.
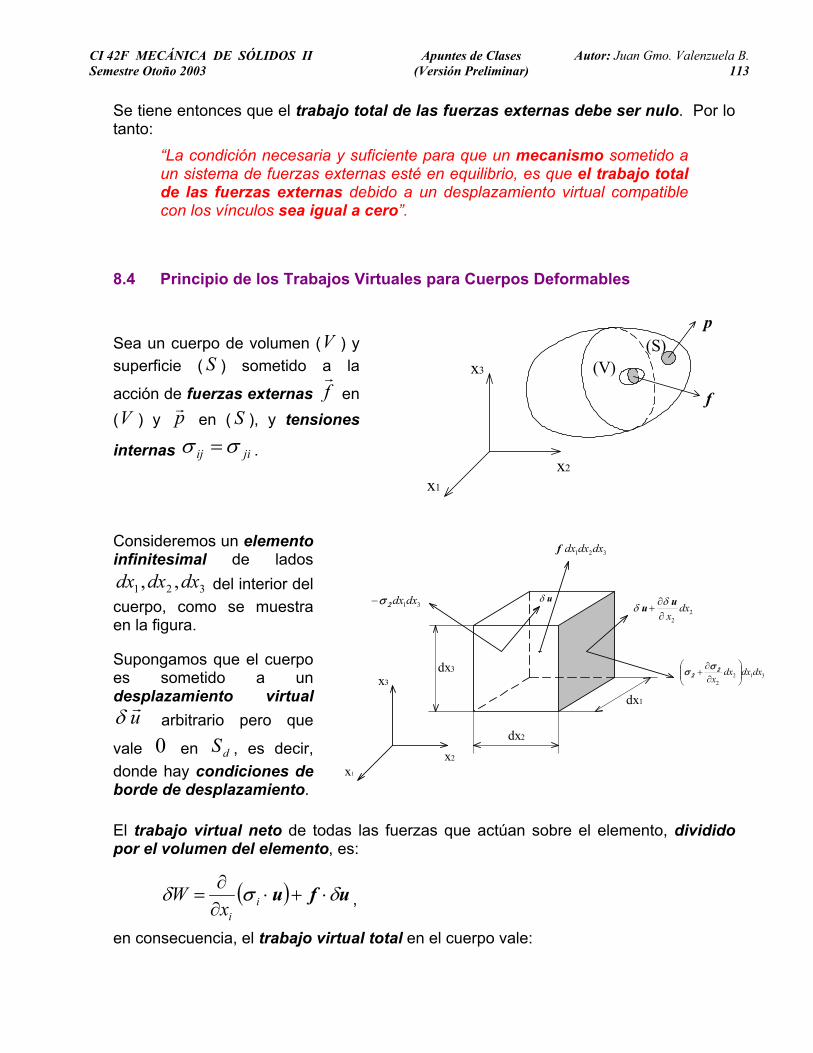
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.113
Se tiene entonces que el trabajo total de las fuerzas externas debe ser nulo. Por lo tanto:
“La condición necesaria y suficiente para que un mecanismo sometido a un sistema de fuerzas externas esté en equilibrio, es que el trabajo total de las fuerzas externas debido a un desplazamiento virtual compatible con los vínculos sea igual a cero”.
8.4 Principio de los Trabajos Virtuales para Cuerpos Deformables
Sea un cuerpo de volumen (V ) y superficie ( S ) sometido a la
acción de fuerzas externas fr
en (V ) y pr en ( S ), y tensiones
internas jiij σσ = .
(V)(S)
p
f
x1
x2
x3
Consideremos un elemento infinitesimal de lados
321 ,, dxdxdx del interior del cuerpo, como se muestra en la figura.
Supongamos que el cuerpo es sometido a un desplazamiento virtual
urδ arbitrario pero que
vale 0 en dS , es decir, donde hay condiciones de borde de desplazamiento.
x1
x2
x3
dx3
dx1
dx2
3122
dxdxdxx
∂∂+ 2
2σσ
31dxdx2σ−2
2
dxx∂
∂+ uu δδ
321 dxdxdxf
uδ
El trabajo virtual neto de todas las fuerzas que actúan sobre el elemento, dividido por el volumen del elemento, es:
( ) ufu δδ ⋅+⋅∂∂
= iix
W σ ,
en consecuencia, el trabajo virtual total en el cuerpo vale:
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.114
( ) ∫∫∫∫∫∫ ⋅+⋅∂∂
=V
iV i
T dVdVx
W ufu δδδ σ . (*)
La primera integral de volumen de esta expresión puede transformarse en una integral de superficie mediante el teorema de la divergencia, con la cual se obtiene:
∫∫∫∫∫ ⋅+⋅=V
iS
iT dVdSWt
ufu δδνδ σ ,
donde iν es el vector unitario normal a la superficie y 0=uδ en dS .
Si las fuerzas están en equilibrio, en la superficie se tiene p=iiσν , con lo cual:
EXTT
s vT WdVdSW
t
δδδδ =⋅+⋅= ∫∫ ∫∫∫ ufup .
Es decir, el trabajo virtual total en el cuerpo es igual al trabajo de las fuerzas externas.
Por otra parte, desarrollando la expresión (*) se tiene:
dVx
dVx
WV i
i
iViT ufu δδδ ⋅
+
∂∂
+∂∂
⋅= ∫∫∫∫∫∫σσ .
Si el cuerpo está en equilibrio, 0=+∂∂ f
i
i
xσ
, la expresión anterior se reduce a:
( )dVuudVudVx
W ijjiV
ijijV
ijiV
iT ,,, 21 δδσδσδδ +==
∂∂
⋅= ∫∫∫∫∫∫∫∫∫uσ (**)
es decir:
INTTij
VijT W nternoivirtualtrabajodVeW δσδ === ∫∫∫ .
En resumen, se ha demostrado que cuando se somete un cuerpo en equilibrio a un desplazamiento virtual arbitrario, el TV de las fuerzas externas es igual al TV de las tensiones internas.
A la inversa, suponiendo que si se cumple que para uδ arbitrario los trabajos totales externo e interno son iguales, entonces el cuerpo está en equilibrio.
En efecto, en este caso se tiene que:

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.115
dVedSdV ijV
ijSV
δσδδ ∫∫∫∫∫∫∫∫ =⋅+⋅ upuf ,
y transformando el segundo miembro en sentido inverso a (**), se obtiene:
dVx
dSdViV
ijSV ∂
∂⋅=⋅+⋅ ∫∫∫∫∫∫∫∫
uupuf δσδδ ,
es decir:
( ) dVx
dVx
dSdVV i
i
Vi
iSV∫∫∫∫∫∫∫∫∫∫∫ ⋅
∂∂
−⋅∂∂
=⋅+⋅ uuupuf δδδδ σσ .
Si se aplica el teorema de la divergencia para transformar la primera integral del segundo miembro, se obtiene finalmente:
( ) 0=⋅−+⋅
+
∂∂
∫∫∫∫∫ dSdVx S
iii
i upuf δνδ σσ.
Para que esta ecuación sea válida para uδ arbitrario, necesariamente los paréntesis deben anularse, de donde se concluye que:
)(
)(0
tii
i
i
Sen
Venx
σ
σ
ν=
=+∂∂
p
f.
Es decir, hay equilibrio entre fuerzas externas de volumen y tensiones internas, y entre fuerzas externas de superficie y tensiones internas en la superficie.
En resumen, se puede anunciar el siguiente principio o teorema:
“Dado un cuerpo sometido a fuerzas f en (V) y p en (St), y seis funciones de tensiones σij = σji en (V), la condición necesaria y suficiente para que esté en equilibrio es que, para desplazamientos virtuales arbitrarios δu, el trabajo virtual total externo e interno sean iguales ( )EXT
TINT
T WW δδ = ”.

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.116
8.5 Aplicación del PTV: Método del Desplazamiento Unitario Ficticio (MDUF)
Sea un cuerpo cuyas tensiones internas ijσ son conocidas. Se desea saber qué
fuerza externa puntual P debe existir en un punto dado y dirección dada del cuerpo para que éste esté en equilibrio.
Para ello se puede emplear el PTV con un corrimiento virtual 1uδ , tal que la fuerza P sea la única que trabaje y que en su punto de aplicación y dirección, se tenga que
11 =uδ . Con ello, considerando que 1uδ produce deformaciones internas
( )1,
1,
1
21
ijjiij uue δδδ += , se tiene, igualando el TV externo con el TV interno:
dVeP ijV
ij1δσ∫∫∫= .
8.6 Teorema de la Energía Potencial Estacionaria (T.E.P.E.) Suponiendo un cuerpo es elástico, es decir, que un proceso de carga y descarga en él es reversible, aunque no necesariamente lineal, la energía de deformación almacenada en el cuerpo por unidad de volumen, que es igual al trabajo interno entre el inicio de la deformación y el estado final, puede ser expresado en función de la deformación final.
Esta energía es igual al área encerrada bajo la curva de la figura.
Es decir:
)(0
ijij
e
ij eWdeWij
== ∫σ ,
lo cual significa:
ijij e
W∂∂
=σ .
W
ijσ
ije
Wc
Considerando el Principio de los TV, con un desplazamiento virtual infinitesimal compatible con (Sd) y el resultado anterior, se tiene:
0=−−⋅∂∂
∫∫∫∫∫∫∫∫ dSupdVufdVeeW
iS
iiV
iijijV t
δδδ ,

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.117
lo cual es equivalente a la primera variación del funcional:
( ) dSupdVufdVeW iS
iiV
iV
ij
t
⋅−−= ∫∫∫∫∫∫∫∫∫π .
Definiendo:
( ) ( ) cuerpodelndeformaciódeenergíadVeWeWV
ijijT == ∫∫∫ ,
( ) cargaslasdepotencialenergíadSupdVufuP iS
iiV
iiT
t
=−−= ∫∫∫∫∫ ,
se tiene:
totalpotencialenergíaPW TT =+=π , y para la situación de equilibrio debe tenerse:
0=δπ . De aquí el Teorema de la Energía Potencial Estacionaria, TEPE, que dice:
“La primera variación de la energía potencial total de un cuerpo elástico en equilibrio, para un desplazamiento virtual arbitrario compatible con (Sd), es cero”.
8.7 Método de Ritz o Método Variacional Directo El método de Ritz es una aplicación directa del TEPE en la cual se reemplazan los corrimientos por funciones conocidas multiplicadas por parámetros a determinar mediante la aplicación de la condición 0=δπ .
Como los corrimientos sólo deben cumplir la condición de borde en dS , se establece la solución como:
k
n
kikoii au φφ ∑
=
+=1
,
donde oiφ son funciones conocidas que deben satisfacer las condiciones de borde en
dS , es decir, oioi u=φ en dS , con oiu conocidos, y kφ son funciones que
satisfacen la condición homogénea en dS , es decir, 0=kφ en dS .
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.118
La variación de los corrimientos está así dada por:
ik
N
kki au δφδ ∑
=
=1
.
En el caso de un material linealmente elástico la energía de deformaciones por
unidad de volumen vale ijijeW σ21
= (fórmula de Clapeyron), con lo cual:
dSupdVufe iS
iiV
iijV
ij ∫∫∫∫∫∫∫∫ −−= σπ21
.
Pero las tensiones para un material isótropo, están relacionadas con las deformaciones a través de:
kkijijij ue ,2 λδµσ += ,
la que, reemplazando en la ecuación anterior, conduce a:
dSupdVufdVeue iS
iiV
iijkkijijV
∫∫∫∫∫∫∫∫ −−+= )2(21
,λδµπ
Una vez reemplazados la aproximación de los corrimientos en esta ecuación y desarrolladas las integrales correspondientes, se obtiene una expresión cuadrática en los coeficientes ika para la energía de deformación y lineal en los ika para la energía potencial de las cargas externas.
La condición de estacionariedad de π está dada por 0=∂∂
ikaπ
, para 3,2,1=i y
nk ,..,2,1= .
La aplicación de esta condición conduce a un sistema de nn 33 × ecuaciones algebraicas para los parámetros ika , cuya resolución permite obtener los corrimientos en forma aproximada.
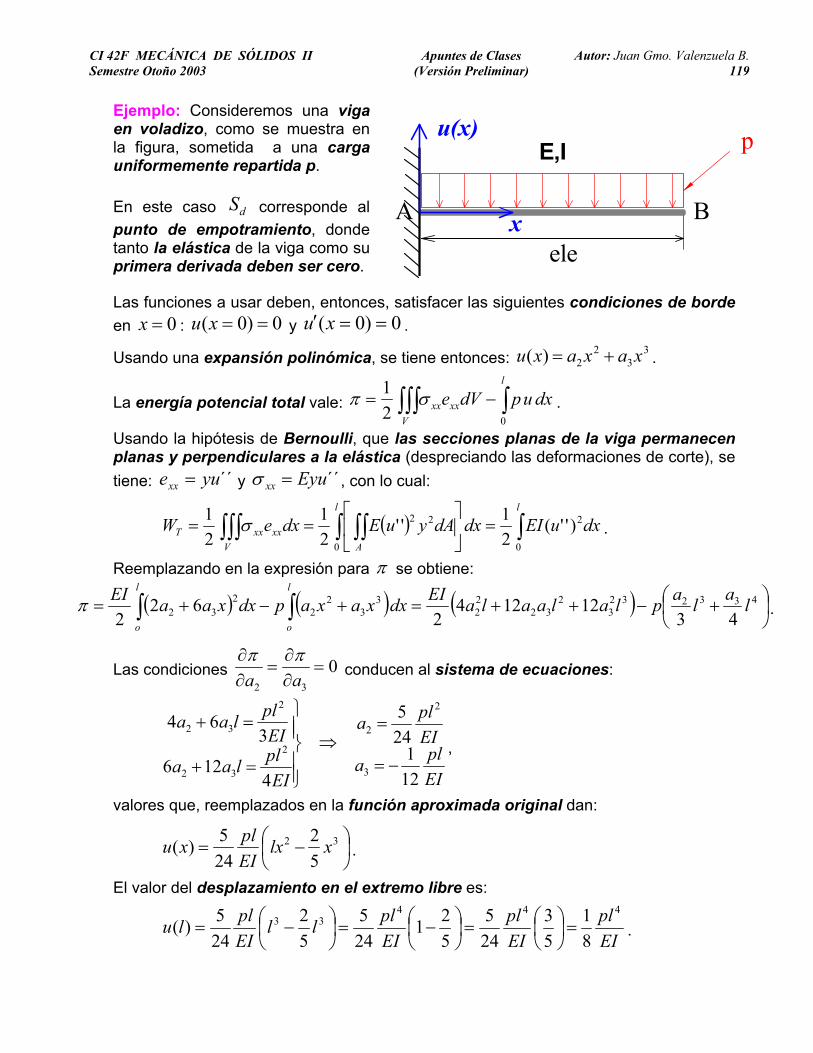
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.119
Ejemplo: Consideremos una viga en voladizo, como se muestra en la figura, sometida a una carga uniformemente repartida p.
En este caso dS corresponde al punto de empotramiento, donde tanto la elástica de la viga como su primera derivada deben ser cero. ele
p
A B
E,I
x
u(x)
Las funciones a usar deben, entonces, satisfacer las siguientes condiciones de borde en 0=x : 0)0( ==xu y 0)0( ==′ xu .
Usando una expansión polinómica, se tiene entonces: 33
22)( xaxaxu += .
La energía potencial total vale: dxupdVel
xxV
xx ∫∫∫∫ −=02
1 σπ .
Usando la hipótesis de Bernoulli, que las secciones planas de la viga permanecen planas y perpendiculares a la elástica (despreciando las deformaciones de corte), se tiene: ´´yuexx = y ´´Eyuxx =σ , con lo cual:
( ) dxuEIdxdAyuEdxeWll
Axx
VxxT ∫∫ ∫∫∫∫∫ =
==
0
2
0
22 )''(21''
21
21 σ .
Reemplazando en la expresión para π se obtiene:
( ) ( ) ( )
+−++=+−+= ∫∫ 433232
32
3222
33
22
232 43
121242
622
lalaplalaalaEIdxxaxapdxxaaEI l
o
l
o
π .
Las condiciones 032
=∂∂
=∂∂
aaππ
conducen al sistema de ecuaciones:
EIpla
EIpla
EIpllaa
EIpllaa
121
245
4126
364
3
2
2
2
32
2
32
−=
=⇒
=+
=+,
valores que, reemplazados en la función aproximada original dan:
−= 32
52
245)( xlx
EIplxu .
El valor del desplazamiento en el extremo libre es:
EIpl
EIpl
EIplll
EIpllu
44433
81
53
245
521
245
52
245)( =
=
−=
−= .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.120
Ejemplo: Consideremos una viga en voladizo con “cama” de resortes y carga puntual en el extremo libre, como indica la figura. Se determinará la elástica de la figura empleando un polinomio de dos términos, compatible con las condiciones de borde. Se supondrá propiedades constantes de la viga EI, y un apoyo elástico de constante k y sólo deformaciones por flexión.
Sea 32
21)( xaxaxu −= , las condiciones
de borde del problema son:
0)0( =u y 0)0(' =u : 0)0( =u O.K.
221 32)(' xaxaxu +=
0)0(' =u O.K.
xaaxu 21 62)('' +=
E, I
k
Pu(x)x
ele
La energía de deformación esta dada en este caso por:
∫∫ ⋅−+=ll
luPdxxukdxxuEI
0
2
0
2 )()(2
)(''2
π
∫∫ +⋅−+++=ll
lalaPdxxaxakdxxaaEI
0
32
21
232
21
0
221 )()(
2)62(
2π
)(4352
)12124(2
32
21
7226215
2132
22
2121 lalaPlalaalaklalaalaEI
+−
+++++=π
.
En la situación de equilibrio 0=πδ :
⇒=∂∂ 0
1aπ
( ) 0
31
52
2128
226
25
12
21 =−
+++ PllalaklalaEI
⇒=∂∂ 0
2aπ
( ) 0
72
31
22412
237
26
13
22
1 =−
+++ PllalaklalaEI
32
21
2
1
21
21 )()(1
xaxaxu
BCADCAPla
BCADCAPlPl
Aa
PlDaCaPlBaAa
+=∴
−−
=
−−
−=⇒
=+=+
.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.121
8.8 Principio de los Trabajos Virtuales Complementarios Se denomina Trabajo Virtual Complementario (TVC) aquél realizado por fuerzas virtuales, es decir, fuerzas de naturaleza arbitraria que no guardan relación alguna con las fuerzas reales sobre el cuerpo o con las deformaciones.
Supongamos que en un cuerpo, en lugar de tener desplazamientos virtuales y fuerzas reales, se tenga un sistema de corrimientos reales iu (con las
correspondientes deformaciones unitarias ( )ijjiij uue ,,21
+= y fuerzas virtuales en
equilibrio ifδ , ipδ , con tensiones virtuales internas ijδσ , vale decir, que cumplan las relaciones:
)()()(0,
VenpVenVenf
jiji
jiij
ijij
δδσνδσδσδδσ
==
=+
.
Mediante un desarrollo análogo al realizado en el caso de los trabajos virtuales TV, se puede ver que El TVC por unidad de volumen vale:
( ) ufu ⋅+⋅∂∂
= δδδ ii
C
xW σ . (*)
El TVC total en el cuerpo es entonces:
( ) ∫∫∫∫∫∫ ⋅+⋅∂∂
=V
iV i
CT dVdV
xW ufu δδδ σ .
Usando el teorema de la divergencia y las relaciones recién enunciadas, la expresión (*) se puede transformar en:
∫∫∫∫∫ ⋅+⋅=SV
CT dSdVW upuf δδδ = TVC de las fuerzas externas = EXTC
TW ,δ .
Por otra parte, desarrollando la expresión (*), se obtiene:
( ) dVdVW iV
iV
iiC
T ,, uuf ⋅+⋅+= ∫∫∫∫∫∫ σσ δδδδ .
La primera integral de esta relación vale 0, por las condiciones de equilibrio. La segunda integral, considerando que jiij δσδσ = , se puede desarrollar de manera que aparezcan las deformaciones unitarias, obteniéndose:
( )dVuuW ijjiV
ijT
C ,,21
+= ∫∫∫δσδ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.122
El trabajo complementario interno del cuerpo vale:
dVeW ijV
ijINTC
T ∫∫∫= δσδ ,. (**)
Por lo tanto, si ije es igual a ( )ijji uu ,,21
+ , se tiene que:
INTCT
EXTCT WW ,, δδ = .
A la inversa, suponiendo que se cumple (**) para fuerzas virtuales arbitrarias, es decir:
dVedSdV ijV S V
ij∫∫∫ ∫∫ ∫∫∫=⋅+⋅ δσδδ upuf , (***)
y considerando que ii ,σδδ −=f , se tiene que la primera integral de la ecuación anterior vale:
( )
( )∫∫ ∫∫∫
∫∫∫ ∫∫∫∫∫∫∫∫∫
++δ⋅−=
⋅+⋅−=
⋅=⋅
S Vijijji
V Viiii
Vii
V
dVuudS
dVudV
dVdV
δσ
δδ
δδδ
,,
,,
,
21pu
u
uuf
σσ
σ
.
Finalmente, substituyendo en (***) se obtiene:
( ) 021
,, =
−+∫∫∫ dVeuu ij
Vijijji δσ .
Por lo tanto debe tenerse:
( )ijjiij uue ,,21
+= .
El principio de los trabajos virtuales complementarios puede enunciarse entonces como:
“Dadas 6 funciones eij(eij=eji), una condición necesaria y suficiente para que ellas sean componentes lineales de deformación compatibles con los corrimientos ui, es que para un sistema arbitrario de fuerzas virtuales en equilibrio, el trabajo virtual complementario externo sea igual al trabajo virtual complementario interno, INTC
TEXTC
T WW ,, δδ = ”.
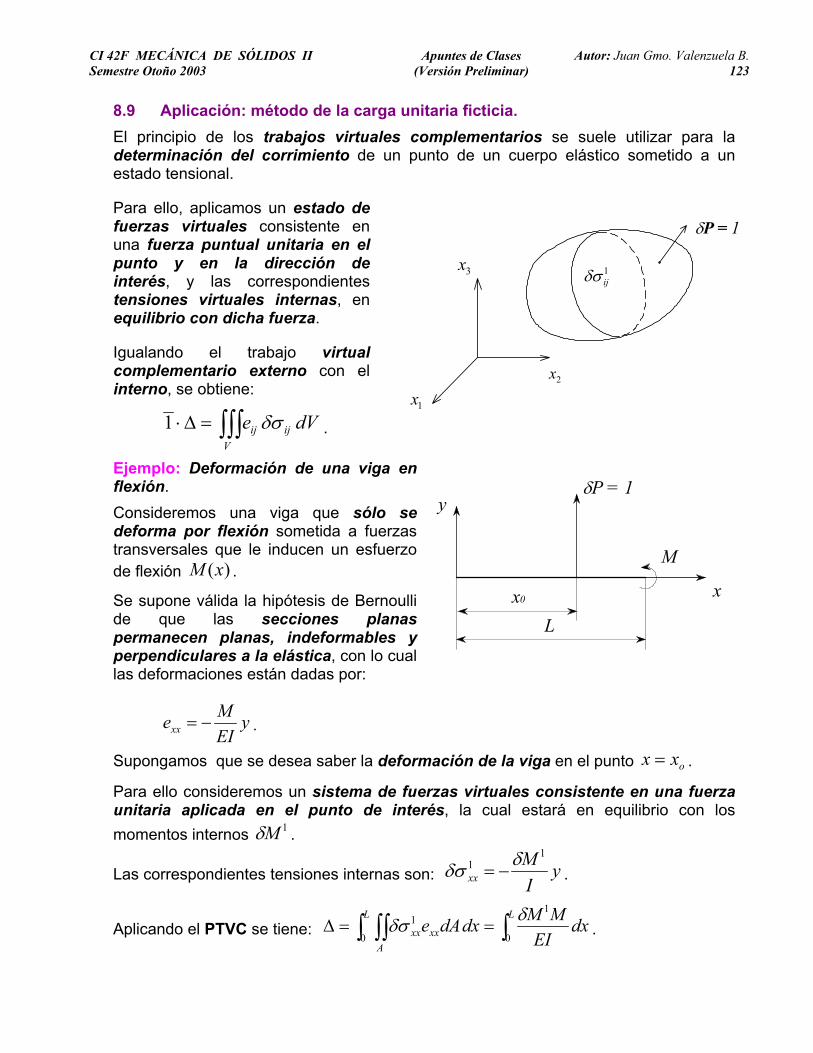
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.123
8.9 Aplicación: método de la carga unitaria ficticia. El principio de los trabajos virtuales complementarios se suele utilizar para la determinación del corrimiento de un punto de un cuerpo elástico sometido a un estado tensional.
Para ello, aplicamos un estado de fuerzas virtuales consistente en una fuerza puntual unitaria en el punto y en la dirección de interés, y las correspondientes tensiones virtuales internas, en equilibrio con dicha fuerza.
Igualando el trabajo virtual complementario externo con el interno, se obtiene:
∫∫∫=∆⋅V
ijij dVe δσ1 .
δP = 1
1ijδσ
1x2x
3x
Ejemplo: Deformación de una viga en flexión. Consideremos una viga que sólo se deforma por flexión sometida a fuerzas transversales que le inducen un esfuerzo de flexión )(xM .
Se supone válida la hipótesis de Bernoulli de que las secciones planas permanecen planas, indeformables y perpendiculares a la elástica, con lo cual las deformaciones están dadas por:
M
x0
L
y
x
δP = 1
yEIMexx −= .
Supongamos que se desea saber la deformación de la viga en el punto oxx = .
Para ello consideremos un sistema de fuerzas virtuales consistente en una fuerza unitaria aplicada en el punto de interés, la cual estará en equilibrio con los momentos internos 1Mδ .
Las correspondientes tensiones internas son: yI
Mxx
11 δδσ −= .
Aplicando el PTVC se tiene: ∫∫ ∫∫ ==∆LL
Axxxx dx
EIMMdxdAe
0
1
0
1 δδσ .

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.124
Ejemplo: Considere un enrejado plano isostático como el de la figura, sometido a las cargas que se indican (P y 2P en el nodo A). Se utilizará el PTVC para evaluar el desplazamiento horizontal del nodo B y el desplazamiento relativo AD.
A partir del enunciado general del Principio de Trabajos Virtuales Complementarios, que establece que:
∫∫∫ =⋅V
ijij dVeσδ
∫∫∫ ∫∫ ⋅+⋅=V S
iii dSupdVuf δδ ,
L
L
AE
A B
C D
P
2P
delta P
delta P
delta P
y considerando que en este caso, las únicas fuerzas que “trabajan” corresponden a los esfuerzos internos en las barras, este principio puede reformularse como:
∫∫∫ ∆⋅=⋅V
ijij dVe 11σδ ⇒ ∑ ∆⋅=⋅Barras
ijij dVe 11σδ
En esta formulación, las fuerzas virtuales unitarias, inducirán estados tensionales en las barras, los que denominaremos 1
ijσ , correspondientes al “Estado 1” (denotado por el supraíndice 1 en las ecuaciones).
El desplazamiento total en la dirección de análisis, quedará determinado por la sumatoria del producto de los esfuerzos virtuales de las barras (inducidos solo por el estado de carga virtual, “Estado 1”) con las deformaciones de las barras (inducidas solo por el estado de cargas original).
Reemplazando en la última ecuación, las expresiones para las tensiones y las deformaciones en las barras, se obtiene:
∆==
∑∑
Barras ii
iiiii
ii
i
Barras i
i
EALTTLA
EAT
AT 11
En particular, para determinar el desplazamiento horizontal del nodo B, se deberá considerar una fuerza ficticia unitaria 1=Pδ actuando sobre el nodo B, en esa dirección (dirección de deformación compatible con las ligazones del sistema).
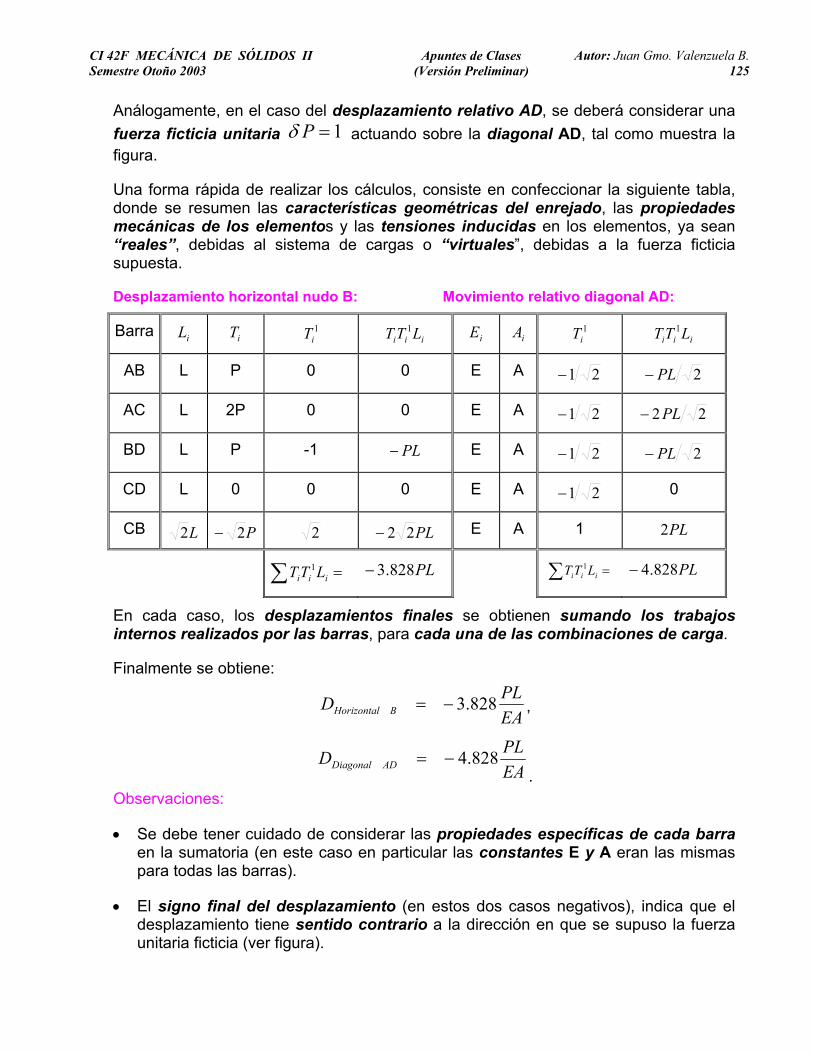
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.125
Análogamente, en el caso del desplazamiento relativo AD, se deberá considerar una fuerza ficticia unitaria 1=Pδ actuando sobre la diagonal AD, tal como muestra la figura.
Una forma rápida de realizar los cálculos, consiste en confeccionar la siguiente tabla, donde se resumen las características geométricas del enrejado, las propiedades mecánicas de los elementos y las tensiones inducidas en los elementos, ya sean “reales”, debidas al sistema de cargas o “virtuales”, debidas a la fuerza ficticia supuesta.
Desplazamiento horizontal nudo B: Movimiento relativo diagonal AD:
Barra iL iT 1
iT iii LTT 1 iE iA 1
iT iii LTT 1
AB L P 0 0 E A 21− 2PL−
AC L 2P 0 0 E A 21− 22 PL−
BD L P -1 PL− E A 21− 2PL−
CD L 0 0 0 E A 21− 0
CB L2 P2− 2 PL22− E A 1 PL2
∑ =iii LTT 1
PL828.3− ∑ =iii LTT 1
PL828.4−
En cada caso, los desplazamientos finales se obtienen sumando los trabajos internos realizados por las barras, para cada una de las combinaciones de carga.
Finalmente se obtiene:
EAPLD BHorizontal 828.3−= ,
EAPLD ADDiagonal 828.4−=
. Observaciones:
• Se debe tener cuidado de considerar las propiedades específicas de cada barra en la sumatoria (en este caso en particular las constantes E y A eran las mismas para todas las barras).
• El signo final del desplazamiento (en estos dos casos negativos), indica que el desplazamiento tiene sentido contrario a la dirección en que se supuso la fuerza unitaria ficticia (ver figura).

CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.126
8.10 Teorema de la Energía Potencial Complementaria Estacionaria.
Supongamos que un cuerpo es sometido a un estado de carga lentamente de manera que no haya un efecto dinámico y que el proceso es reversible, es decir, al retirar la carga el cuerpo vuelve a la posición inicial.
La curva tensión deformación en un punto se puede representar como en la figura.
Como se vio anteriormente, el trabajo realizado por las tensiones ijσ , a medida que se va produciendo la deformación, es el área gris de la figura, W. Complementariamente, se puede considerar el área blanca de la figura.
Se define un trabajo complementario por unidad de volumen como:
∫=finalposicion
ijijijC eW
0
)( δσσ .
W
ijσ
ije
Wc
el cual puede ser expresado en términos de las tensiones )( ijCC WW σ= , con lo cual:
ijij
CC WW δσ
σδ
∂∂
= ,
por lo tanto:
ij
C
ijWeσ∂
∂= .
Considerando un sistema de fuerzas y tensiones virtuales tales que cumplan las condiciones de equilibrio y sean nulas en tS , el Principio de los Trabajos Virtuales Complementarios se puede expresar como:
∫∫∫∫∫ =−∂
∂
dSijiiij
V ij
ijC
dSudVW
0)( 0 δσνδσ
σσ
.
Definiendo el funcional “Energía Potencial Complementaria Total” como:
∫∫∫ ∫∫−=V S
ijiiijCC
T
d
dSudVW σνσπ 0)( ,
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.127
la relación anterior es equivalente a: 0=CTδπ .
En palabras: “La primera variación de la Energía Potencial Complementaria Total de un cuerpo elástico en equilibro, debida a tensiones virtuales arbitrarias pero estáticamente admisibles, es cero”.
8.11 Teoremas de Energía para Cuerpos Sometidos a Cargas Puntuales
Supongamos un cuerpo elástico sometido a una serie de fuerzas puntuales kP ,
Nk ...,2,1= , como se muestra en la figura.
8.11.1 Primer Teorema de Castigliano Si en el punto de aplicación de una carga genérica kP , el desplazamiento en la
dirección de ella es ku , la energía potencial total puede expresarse en función de dichos corrimientos:
1F2F
3F
kF
∑=
−=N
kkkkTT uPuW
1)(π
.
La Energía Potencial Total es, entonces, función de los corrimientos.
Una primera variación de éstos conduce a la siguiente variación de la energía:
NkuPuWN
kkk
k
TT ...,2,10)(
1==−
∂∂
= ∑=
δδπ ,
de donde se concluye que:
k
Tk u
WP∂∂
= .
Luego: “La derivada de la energía de deformación de un cuerpo elástico con respecto al corrimiento del punto de aplicación de una fuerza, es igual a la fuerza” (1er Teorema de Castigliano).
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.128
8.11.2 Teorema de Engesser
La Energía Potencial Complementaria Total de un cuerpo elástico sometido a fuerzas puntuales puede ser expresada en función de dichas fuerzas:
∑=
−=N
kkkk
CT
CT uPPW
1)(π .
Haciendo ahora una variación de las fuerzas, la primera variación de la energía potencial complementaria es:
NkPuP
WN
kkk
k
CTC
T ...,2,10)(1
==−∂
∂= ∑
=
δδπ ,
de donde se desprende que:
k
CT
k PWu∂
∂= .
Luego: “La derivada de la energía potencial complementaria total respecto a una de las fuerzas es igual al corrimiento de dicha fuerza en su dirección” (Teorema de Engesser).
8.11.3 Segundo Teorema de Castigliano
En caso de un cuerpo linealmente elástico, la energía de deformación complementaria es igual a la energía de deformación, de manera que si se expresa dicha energía en función de las fuerzas, puede ponerse:
k
Tk P
Wu∂∂
= .
Luego: “En un cuerpo linealmente elástico la derivada de la energía de deformación con respecto a una fuerza es igual al corrimiento de dicha fuerza en su dirección” (2do Teorema de Castigliano).
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.129
8.11.4 Principio de Reciprocidad de Betti
Consideremos un cuerpo linealmente elástico sometido a dos sistemas de cargas diferentes, NkPk ,,2,11 K= , MlPl ,,2,12 K= .
Suponiendo que los correspondientes desplazamientos son 1lu (desplazamiento del
estado de carga 1 en el punto de aplicación y dirección de la carga 2
lP ) y 2ku
(desplazamiento del estado de carga 2 en el punto de aplicación y dirección de la carga 1kP ), podemos aplicar el principio de los trabajos virtuales al cuerpo con su estado 1
de cargas usando como desplazamiento virtual los desplazamientos del estado 2, obteniéndose:
∑ ∫∫∫ ∫∫∫=
==N
k V Vijmnijmnijijkk eecdVeuP
1
212121 σ .
En la misma forma podemos aplicar el PTV al cuerpo con su segundo estado de carga usando como desplazamientos virtuales los desplazamientos del primer estado de carga.
Se obtiene:
∑ ∫∫∫ ∫∫∫=
==M
l V Vijmnijmnijijll eecdVeuP
1
121212 σ .
Como las constantes constitutivas ijmnc son simétricas, entonces los valores de las dos ecuaciones anteriores son iguales, con lo cual:
∑ ∑= =
=N
k
M
lllkk uPuP
1 1
1221.
CI 42F MECÁNICA DE SÓLIDOS II Semestre Otoño 2003
Apuntes de Clases (Versión Preliminar)
Autor: Juan Gmo. Valenzuela B.130
8.11.5 Coeficientes de Rigidez y Flexibilidad
Consideremos un cuerpo con n fuerzas puntuales.
Se denomina coeficiente de rigidez entre dos puntos de aplicación de fuerzas al cambio en la fuerza i cuando hay un desplazamiento unitario del punto de aplicación de la carga j, permaneciendo el resto de los desplazamientos invariable.
Es decir, j
iij u
Pk∂∂
= , pero como, i
Ti u
WP∂∂
= , se tiene:
jiji
Tij k
uuWk =∂∂
∂=
2
.
Los coeficientes de rigidez forman entonces una matriz simétrica, conocida también como matriz de rigidez del cuerpo para el estado de cargas correspondiente.
En forma similar puede definirse una matriz de flexibilidad como:
jiji
CT
j
iij f
PPW
Puf =
∂∂∂
=∂∂
=2
.
Suponiendo que los desplazamientos se miden a partir del estado en que las fuerzas son nulas, se tiene que:
∑=
=n
jjiji ukP
1.
Si medimos las fuerzas a partir del momento en que los desplazamientos son nulos, se tiene:
∑ ∑ ∑ ∑∑=
===n
l l m l mmlmjlmlmjlljlj ukfukfPfu
1.
Para que de la doble sumatoria de la relación anterior se obtenga ju , debe
necesariamente tenerse que ∑ = jmlmjlkf δ ( jmδ = delta de Dirac), lo cual significa que la matriz de flexibilidad es la inversa de la matriz de rigidez.





























