Embed Size (px)
Citation preview
UNIVERSIDADE DO RIO GRANDE DO NORTEFEDERAL
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Controle Adaptativo Robusto para FiltrosAtivos de Potência Paralelo
Christian Cesar de Azevedo
Orientador: Prof. Dr. Ricardo Lúcio de Araújo Ribeiro
Tese de Doutoradoapresentada ao Pro-grama de Pós-Graduação em EngenhariaElétrica da UFRN(área de concentração:Automação e Sistemas) como parte dos re-quisitos para obtenção do título de Doutorem Ciências.
Número de ordem PPgEE: D067Natal, RN, novembro de 2011

Divisão de Serviços Técnicos
Catalogação da publicação na fonte. UFRN / Biblioteca Central Zila Mamede
Azevedo, Christian Cesar.Controle Adaptativo Robusto para Filtros Ativos de Potência Paralelo / Chris-
tian Cesar de Azevedo - Natal, RN, 2011224 p.
Orientador: Ricardo Lúcio de Araújo Ribeiro
Tese (doutorado) - Universidade Federal do Rio Grande do Norte. Centro deTecnologia. Programa de Pós-Graduação em Engenharia Elétrica.
1. Redação técnica - Tese. 2. LATEX- Tese. I. Azevedo, Christian Cesar de. II.Ribeiro, Ricardo Lúcio de Araújo. III. Controle Adaptativo Robusto para FiltrosAtivos de Potência Paralelo.
RN/UF/BCZM CDU 004.932(043.2)
Controle Adaptativo Robusto para FiltrosAtivos de Potência Paralelos
Christian Cesar de Azevedo
Tese de Doutorado aprovada em 04 de novembro de 2011 pela banca examinadora com-posta pelos seguintes membros:
Prof. Dr. Ricardo Lúcio de Araújo Ribeiro (orientador) . . . . . . . . . DCA/UFRN
Prof. Dr. Ing. Cursino Brandão Jacobina . . . . . . . . . . . . . . . . . . . . . . . DEE/UFCG
Prof. Dr. Marcelo Cabral Cavalcanti . . . . . . . . . . . . . . . . . . . . . . . . . . . DEE/UFPE
Prof. Dr. Andrés Ortiz Salazar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DCA/UFRN

À minha família.
Agradecimentos
Ao meu orientador, professor Ricardo Lúcio de Araújo Ribeiro, pela dedicada orientaçãoe ajuda ao longo dessa jornada.
Ao professor Cursino Brandão Jacobina pela ajuda e conselhos desde a época de iniciaçãocientífica e mestrado.
Ao professor Marcelo Cabral pela excelente revisão realizada no texto dessa tese.
Ao professor Andrés Ortiz pela contribuição técnica a esse trabalho.
Aos amigos do LEPER, em especial a Raphaell Sousa pela dedicação e companheirismo.
À minha família pelo apoio durante esta jornada.
Resumo
As estratégias de controle convencionais de filtros ativos de potência paralelos (SAPF
- Shunt Active Power Filters) empregam esquemas de detecção de harmônicos em tempo
real, usualmente implementados com filtros digitais. Isso pode resultar em altos cus-
tos devido o aumento no número de sensores na estrutura do filtro. Além disso, esses
esquemas de detecção introduzem atrasos que podem deteriorar o desempenho da com-
pensação de harmônicos. Diferentemente dos esquemas de controle convencionais, este
trabalho propõe uma nova estratégia de controle que regula indiretamente as correntes de
fase da rede elétrica. As correntes de referência do sistema são geradas pelo controle de
tensão do barramento CC e são baseadas no balanço de potência ativa do sistema SAPF.
As correntes de referência são alinhadas com o ângulo de fase do vetor tensão da rede, que
é obtido usando um PLL (Phase Locked Loop). O controle de corrente é implementado
por uma estratégia de controle adaptativo por alocação de pólos, integrada com um es-
quema de controle com estrutura variável (VS-APPC:Variable Structure - Adaptive Pole
Placement Control). No VS-APPC, o princípio do modelo interno (IMP- Internal Model
Principle) de referência é usado para eliminar o erro em regime permanente das correntes
de fase do sistema. Isso força as correntes de fase do sistema a serem senoidais e com
baixo teor de harmônicos. Além disso, os controladores de corrente são implementados
no referencial estacionário para evitar transformações nas coordenadas de referência do
vetor tensão da rede. Esta estratégia de controle de corrente melhora a performance do
SAPF com uma resposta transitória rápida e robusto a incertezas paramétricas. Resul-
tados experimentais são apresentados para demonstrar a eficácia do sistema de controle
proposto para o SAPF.
Palavras-chave: Filtros ativos, controle adaptativo, compensação de harmônicos.

Abstract
Conventional control strategies used in shunt active power filters (SAPF) employs
real-time instantaneous harmonic detection schemes which is usually implements with
digital filters. This increase the number of current sensors on the filter structure which re-
sults in high costs. Furthermore, these detection schemes introduce time delays which can
deteriorate the harmonic compensation performance. Differently from the conventional
control schemes, this paper proposes a non-standard control strategy which indirectly
regulates the phase currents of the power mains. The reference currents of system are
generated by the dc-link voltage controller and is based on the active power balance of
SAPF system. The reference currents are aligned to the phase angle of the power mains
voltage vector which is obtained by using a dq phase locked loop (PLL) system. The
current control strategy is implemented by an adaptive pole placement control strategy
integrated to a variable structure control scheme (VS-APPC). In the VS-APPC, the in-
ternal model principle (IMP) of reference currents is used for achieving the zero steady
state tracking error of the power system currents. This forces the phase current of the
system mains to be sinusoidal with low harmonics content. Moreover, the current con-
trollers are implemented on the stationary reference frame to avoid transformations to the
mains voltage vector reference coordinates. This proposed current control strategy en-
hance the performance of SAPF with fast transient response and robustness to parame-
tric uncertainties. Experimental results are showing for determining the effectiveness of
SAPF proposed control system.
Keywords: Active Filters, Adaptative Control, harmonic compensation.

Sumário
Sumário i
Lista de Figuras v
Lista de Tabelas xii
Lista de Símbolos e Abreviaturas xiv
1 Introdução 1
1.1 Normas Relacionadas aos Harmônicos . . . . . . . . . . . . . . . . . . .3
1.1.1 IEEE Std 519-1992 . . . . . . . . . . . . . . . . . . . . . . . . .3
1.1.2 EN 50160 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.3 IEC 61000 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.4 Normas Nacionais . . . . . . . . . . . . . . . . . . . . . . . . .7
1.2 Filtros Passivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
1.3 Filtros Ativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
1.3.1 Filtro ativo paralelo . . . . . . . . . . . . . . . . . . . . . . . . .12
1.3.2 Filtro ativo série . . . . . . . . . . . . . . . . . . . . . . . . . .13
1.3.3 Filtro ativo híbrido . . . . . . . . . . . . . . . . . . . . . . . . .14
1.3.4 Filtro ativo unificado . . . . . . . . . . . . . . . . . . . . . . . .16
1.4 Estado da Arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
1.5 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
1.6 Organização da Tese . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
2 Descrição e Modelagem do Filtro Ativo Paralelo 21
2.1 Descrição do SAPF . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
2.2 Modelagem do SAPF . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
2.3 Aplicação dos SAPFs . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
2.3.1 Cargas tipo fonte de corrente . . . . . . . . . . . . . . . . . . . .31
2.3.2 Cargas tipo fonte de tensão . . . . . . . . . . . . . . . . . . . . .34
i
2.4 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
3 Projeto do Circuito de Potência 37
3.1 Potência Nominal do Conversor de Potência . . . . . . . . . . . . . . . .37
3.2 Projeto dos Componentes Passivos . . . . . . . . . . . . . . . . . . . . .39
3.2.1 Projeto do capacitor do barramento CC . . . . . . . . . . . . . .39
3.2.2 Projeto do indutor de entrada do filtro . . . . . . . . . . . . . . .43
3.3 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
4 Estratégias de Controle 46
4.1 Geração de correntes de referência . . . . . . . . . . . . . . . . . . . . .47
4.1.1 Geração de corrente para o controlador SRF . . . . . . . . . . . .47
4.1.2 Geração de corrente para o controlador IPT . . . . . . . . . . . .54
4.1.3 Controle Indireto de Corrente . . . . . . . . . . . . . . . . . . .56
4.2 Controlador de Corrente . . . . . . . . . . . . . . . . . . . . . . . . . .61
4.2.1 Controlador PI de corrente . . . . . . . . . . . . . . . . . . . . .61
4.2.2 Controlador de corrente por histerese . . . . . . . . . . . . . . .62
4.2.3 Controlador de corrente de dupla sequência . . . . . . . . . . . .63
4.2.4 Controlador de corrente VS-APPC . . . . . . . . . . . . . . . . .66
4.2.5 Projeto do Controlador de Corrente . . . . . . . . . . . . . . . .69
4.3 Controlador de Tensão do Barramento CC . . . . . . . . . . . . . . . . .72
4.3.1 Critério de projeto para o controlador do barramento CC . . . . .74
4.3.2 Controle Indireto com Feed-Forward . . . . . . . . . . . . . . .74
4.4 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .76
5 Resultados de Simulação 78
5.1 Projeto dos componentes . . . . . . . . . . . . . . . . . . . . . . . . . .79
5.2 Desempenho com carga não-linear . . . . . . . . . . . . . . . . . . . . .81
5.3 Desempenho com carga desbalanceada . . . . . . . . . . . . . . . . . . .94
5.4 Desempenho com tensões da rede desbalanceadas . . . . . . . . . . . . .108
5.5 Desempenho com variação de carga . . . . . . . . . . . . . . . . . . . .121
5.6 Desempenho com variação da rede e filtro . . . . . . . . . . . . . . . . .129
5.7 Partida doSAPF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .132
5.8 Desempenho do controle indireto com feed-forward . . . . . . . . . . . .146
5.9 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .148
6 Resultados Experimentais 150
6.1 Projeto dos componentes . . . . . . . . . . . . . . . . . . . . . . . . . .152
6.2 Controle Indireto comVS−APPC . . . . . . . . . . . . . . . . . . . . .152
6.2.1 Partida suave do SAPF . . . . . . . . . . . . . . . . . . . . . . .152
6.2.2 Desempenho doSAPFcom carga não-linear balanceada . . . . .153
6.2.3 Desempenho em regime permanente doSAPFcom compensação
de harmônicos, correção do FP e balanceamento da carga . . . . .154
6.2.4 Desempenho doVS−APPCcom variação de carga . . . . . . . .157
6.2.5 Desempenho doSAPFcom tensões de alimentação desbalanceadas161
6.2.6 Adaptação doVS−APPCcom variação de parâmetros . . . . . .161
6.3 Controle indireto com Feed-forward . . . . . . . . . . . . . . . . . . . .165
6.4 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .168
7 Conclusões e Trabalhos Futuros 170
7.1 Conclusões Gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . .170
7.2 Perspectivas de Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . .172
Referências bibliográficas 173
A Modelo do Capacitor 183
B Fotos da Montagem 185
C Harmônicos 187
C.1 Análise dos Harmônicos . . . . . . . . . . . . . . . . . . . . . . . . . .189
C.2 Fontes de Harmônicos . . . . . . . . . . . . . . . . . . . . . . . . . . .191
C.2.1 Retificador monofásico . . . . . . . . . . . . . . . . . . . . . . .191
C.2.2 Motores universais . . . . . . . . . . . . . . . . . . . . . . . . .192
C.2.3 Dispositivos a arco voltaico . . . . . . . . . . . . . . . . . . . .194
C.2.4 Cargas não-lineares . . . . . . . . . . . . . . . . . . . . . . . . .194
C.3 Efeitos dos Harmônicos . . . . . . . . . . . . . . . . . . . . . . . . . . .195
C.3.1 Ressonância . . . . . . . . . . . . . . . . . . . . . . . . . . . . .195
C.3.2 Perdas em motores elétricos . . . . . . . . . . . . . . . . . . . .197
C.3.3 Perdas em transformadores . . . . . . . . . . . . . . . . . . . . .197
C.3.4 Sobrecarga no neutro . . . . . . . . . . . . . . . . . . . . . . . .197
C.3.5 Efeitos em outras cargas . . . . . . . . . . . . . . . . . . . . . .198
D Potência Elétrica 199
D.1 Condições senoidais . . . . . . . . . . . . . . . . . . . . . . . . . . . . .199
D.2 Condições Não-senoidais . . . . . . . . . . . . . . . . . . . . . . . . . .201
D.2.1 Teoria de potência de Budeanu . . . . . . . . . . . . . . . . . . .201
D.2.2 Teoria de potência de Fryze . . . . . . . . . . . . . . . . . . . .204
D.2.3 Teoriap−q . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205
Lista de Figuras
1.1 (a) Filtro de sintonia simples, (b) Diagrama de Bode da impedância. . . .10
1.2 (a) Filtro passa-alta, (b) Diagrama de Bode da impedância. . . . . . . . .10
1.3 (a) Filtro combinado, (b) Diagrama de Bode da impedância. . . . . . . .11
1.4 Filtro ativo paralelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
1.5 Filtro ativo série . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
1.6 Filtro ativo híbrido paralelo . . . . . . . . . . . . . . . . . . . . . . . . .15
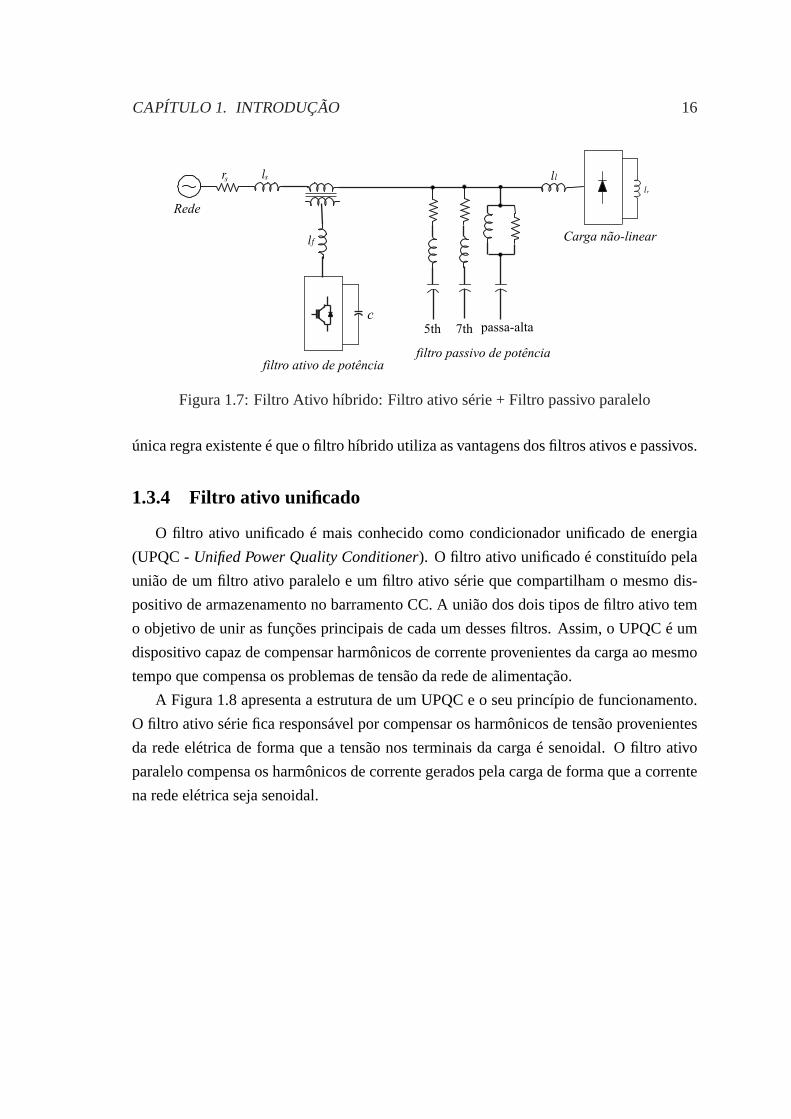
1.7 Filtro Ativo híbrido: Filtro ativo série + Filtro passivo paralelo . . . . . .16
1.8 Filtro ativo unificado . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
2.1 (a) SAPF utilizando VSI (b) SAPF utilizando CSI. . . . . . . . . . . . .22
2.2 Filtro ativo paralelo trifásico. . . . . . . . . . . . . . . . . . . . . . . . .22
2.3 Circuito equivalente do filtro ativo de potência paraZs = 0 eZl → ∞. . . . 23
2.4 Circuito equivalente do filtro ativo de potência paraZl → ∞. . . . . . . . 24
2.5 Circuito equivalente do filtro ativo de potência paraZs = 0. . . . . . . . 25
2.6 Circuito equivalente do filtro ativo de potência. . . . . . . . . . . . . . .26
2.7 Filtro ativo paralelo com carga tipo fonte de corrente. . . . . . . . . . . .31
2.8 Filtro ativo paralelo com carga tipo fonte de tensão. . . . . . . . . . . . .34
3.1 Circuito equivalente monofásico do SAPF. . . . . . . . . . . . . . . . . .40
4.1 Diagrama de controle doSAPF. . . . . . . . . . . . . . . . . . . . . . . 47
4.2 (a) Compensação de harmônicos, (b) Compensação de harmônicos e potên-
cia reativa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
4.3 Controlador SRF para compensação de harmônicos. . . . . . . . . . . . .52
4.4 Controlador SRF para compensação de harmônicos e fator de potência. .53
4.5 Potências instantâneas em um filtro ativo paralelo trifásico: (a) com com-
pensação de harmônicos, (b) com compensação de harmônicos e potência
reativa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54
4.6 Controlador IPT para compensação de harmônicos. . . . . . . . . . . . .55
4.7 Controlador IPT para compensação de harmônicos e fator de potência. . .56
v
4.8 Operação do controle indireto de corrente. . . . . . . . . . . . . . . . . .57
4.9 Diagrama de blocos do controlador indireto. . . . . . . . . . . . . . . . .59
4.10 Controlador de corrente PI para o SAPF. . . . . . . . . . . . . . . . . . .61
4.11 Controle de corrente por histerese para a fase1. . . . . . . . . . . . . . . 63
4.12 Diagrama de blocos do controle de corrente por histere. . . . . . . . . . .64
4.13 Controlador de corrente de dupla sequência. . . . . . . . . . . . . . . . .64
4.14 Diagrama de blocos do controlador de correnteVS−APPCproposto. . . 70
4.15 Diagrama de blocos da malha de controle de corrente. . . . . . . . . . . .70
4.16 Diagrama de blocos da malha de controle de tensão do barramento CC. .73
4.17 Diagrama de blocos doSAPFcom controlador feed-forward. . . . . . . .76
5.1 Desempenho doSAPFcom carga não-linear utilizando caso 1. . . . . . .82
5.2 Desempenho doSAPFcom carga não-linear utilizando caso 2. . . . . . .83
5.3 Desempenho doSAPFcom carga não-linear utilizando caso 3. . . . . . .84
5.4 Desempenho doSAPFcom carga não-linear utilizando caso 4. . . . . . .85
5.5 Desempenho doSAPFcom carga não-linear utilizando caso 5. . . . . . .86
5.6 Desempenho doSAPFcom carga não-linear utilizando caso 6. . . . . . .87
5.7 Desempenho doSAPFcom carga não-linear utilizando caso 7. . . . . . .88
5.8 Desempenho doSAPFcom carga não-linear utilizando caso 8. . . . . . .89
5.9 Desempenho doSAPFcom carga não-linear utilizando caso 9. . . . . . .90
5.10 Desempenho doSAPFcom carga não-linear utilizando caso 10. . . . . .91
5.11 Espectro de frequência da tensão no PCC para o caso 5. . . . . . . . . . .94
5.12 Carga não-linear desbalanceada. . . . . . . . . . . . . . . . . . . . . . .95
5.13 (a) Correntes nas fases; (b) Espectro de frequência das correntes; (c)
Potência ativa instantânea na carga; (d) Potência reativa instantânea na
carga. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .95
5.14 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .97
5.15 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .98
5.16 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99
5.17 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100
5.18 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101
5.19 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .102
5.20 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .103
5.21 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .104
5.22 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .105
5.23 Desempenho doSAPF com carga não-linear desbalanceada utilizando
caso 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .106
5.24 Carga não-linear alimentada por tensões desbalanceadas: (a) Correntes
nas fases; (b) Espectro de frequência das correntes; (c) Potência ativa
instantânea na carga; (d) Potência reativa instantânea na carga. . . . . . .109
5.25 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 1. . .111
5.26 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 2. . .112
5.27 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 3. . .113
5.28 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 4. . .114
5.29 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 5. . .115
5.30 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 6. . .116
5.31 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 7. . .117
5.32 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 8. . .118
5.33 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 9. . .119
5.34 Desempenho doSAPFcom tensões desbalanceadas utilizando caso 10. .120
5.35 Desempenho doSAPFcom variação de carga utilizando caso 1. . . . . .122
5.36 Desempenho doSAPFcom variação de carga utilizando caso 2. . . . . .123
5.37 Desempenho doSAPFcom variação de carga utilizando caso 3. . . . . .123
5.38 Desempenho doSAPFcom variação de carga utilizando caso 4. . . . . .124
5.39 Desempenho doSAPFcom variação de carga utilizando caso 5. . . . . .124
5.40 Desempenho doSAPFcom variação de carga utilizando caso 6. . . . . .125
5.41 Desempenho doSAPFcom variação de carga utilizando caso 7. . . . . .125
5.42 Desempenho doSAPFcom variação de carga utilizando caso 8. . . . . .126
5.43 Desempenho doSAPFcom variação de carga utilizando caso 9. . . . . .126
5.44 Desempenho doSAPFcom variação de carga utilizando caso 10. . . . . .127
5.45 Desempenho doSAPFcom variação da rede e filtro utilizando caso 1. . .129
5.46 Desempenho doSAPFcom variação da rede e filtro utilizando caso 2. . .130
5.47 Desempenho doSAPFcom variação da rede e filtro utilizando caso 3. . .130
5.48 Desempenho doSAPFcom variação da rede e filtro utilizando caso 4. . .130
5.49 Desempenho doSAPFcom variação da rede e filtro utilizando caso 5. . .130
5.50 Desempenho doSAPFcom variação da rede e filtro utilizando caso 6. . .131
5.51 Desempenho doSAPFcom variação da rede e filtro utilizando caso 7. . .131
5.52 Desempenho doSAPFcom variação da rede e filtro utilizando caso 8. . .131
5.53 Desempenho doSAPFcom variação da rede e filtro utilizando caso 9. . .131
5.54 Desempenho doSAPFcom variação da rede e filtro utilizando caso 10. .132
5.55 Partida doSAPF para o caso 1 com compensação de harmônicos após
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .134
5.56 Partida doSAPFpara o caso 1 com compensação de harmônicos durante
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .135
5.57 Partida doSAPF para o caso 2 com compensação de harmônicos após
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .135
5.58 Partida doSAPFpara o caso 2 com compensação de harmônicos durante
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .136
5.59 Partida doSAPF para o caso 3 com compensação de harmônicos após
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .136
5.60 Partida doSAPFpara o caso 3 com compensação de harmônicos durante
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .137
5.61 Partida doSAPF para o caso 4 com compensação de harmônicos após
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .137
5.62 Partida doSAPFpara o caso 4 com compensação de harmônicos durante
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .138
5.63 Partida doSAPF para o caso 5 com compensação de harmônicos após
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .138
5.64 Partida doSAPFpara o caso 5 com compensação de harmônicos durante
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .139
5.65 Partida doSAPF para o caso 6 com compensação de harmônicos após
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .139
5.66 Partida doSAPFpara o caso 6 com compensação de harmônicos durante
rampa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .140
5.67 Partida doSAPFpara o caso 7. . . . . . . . . . . . . . . . . . . . . . . .141
5.68 Partida doSAPFpara o caso 7 com inicialização de parâmetros. . . . . .141
5.69 Partida doSAPFpara o caso 8. . . . . . . . . . . . . . . . . . . . . . . .142
5.70 Partida doSAPFpara o caso 8 com inicialização de parâmetros. . . . . .142
5.71 Partida doSAPFpara o caso 9. . . . . . . . . . . . . . . . . . . . . . . .143
5.72 Partida doSAPFpara o caso 9 com inicialização de parâmetros. . . . . .143
5.73 Partida doSAPFpara o caso 10. . . . . . . . . . . . . . . . . . . . . . .144
5.74 Partida doSAPFpara o caso 10 com inicialização de parâmetros. . . . . .144
5.75 Tensão no barramento CC durante diminuição da impedância da carga. . .146
5.76 Tensão no barramento CC durante aumento da impedância da carga. . . .147
5.77 Espectro de frequência da corrente na redeis1. . . . . . . . . . . . . . . .147
6.1 Protótipo do filtro ativo paralelo trifásico. . . . . . . . . . . . . . . . . .151
6.2 Resultados experimentais da tensão no barramento CC, durante a partida
do SAPF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .153
6.3 Resultados experimentais das correntes na redeis123, antes do uso do es-
quema de compensação (escalas: 5 A/div para os canais 1 e 2. O terceiro
gráfico é obtido pelo recursomathdo osciloscópio). . . . . . . . . . . . .155
6.4 Espectro da corrente de redeis1, antes de habilitar o esquema de compen-
sação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .155
6.5 Resultados experimentais das correntes da rede balanceadasis123, antes
da partida doSAPF (escalas: 5 A/div para os canais 1 e 2. O terceiro
gráfico é obtido pelo recursomathdo osciloscópio.). . . . . . . . . . . .156
6.6 Espectro da corrente de faseis1, após habilitar o esquema de compensação.156
6.7 THD da corrente de faseis1 na rede elétrica. . . . . . . . . . . . . . . . .156
6.8 Resultados experimentais do vetor de corrente na redeis. . . . . . . . . . 157
6.9 Resultados experimentais das correntes desbalanceadas na redeis123, antes
do uso do esquema de compensação (escalas: 5 A/div para os canais 1 e
2. O terceiro gráfico é obtido pelo recursomathdo osciloscópio). . . . . .158
6.10 Resultados experimentais das correntes na redeis123, após a partida do
SAPF(escalas: 5 A/div para os canais 1 e 2. O terceiro gráfico é obtido
pelo recursomathdo osciloscópio). . . . . . . . . . . . . . . . . . . . .158
6.11 Resultados experimentais da tensão de fasevs1 da rede superposta por sua
respectiva corrente de faseis1 antes da compensação (escalas: 10 A/div
para o canal 2 e 50V/div para o canal 3). . . . . . . . . . . . . . . . . . .159
6.12 Resultados experimentais da tensão de fasevs1 da rede superposta por sua
respectiva corrente de faseis1 após a compensação (escalas: 10 A/div para
o canal 2 e 50V/div para o canal 3). . . . . . . . . . . . . . . . . . . . .159
6.13 Resultado experimental da estimativa da corrente na redeisd superposta
pela corrente de faseisd. . . . . . . . . . . . . . . . . . . . . . . . . . .160
6.14 Resultados experimentais da corrente de faseisd superposta por sua re-
spectiva referênciais∗sd. . . . . . . . . . . . . . . . . . . . . . . . . . . .160
6.15 Resultados experimentais das tensões de alimentação desbalanceadasvs123
(escalas: 100 V/div para os canais 1 e 2. O terceiro gráfico é obtido uti-
lizando o recursomathdo osciloscópio). . . . . . . . . . . . . . . . . . .161
6.16 Resultados experimentais das correntes na redeis123, antes do uso do es-
quema de compensação para tensões de alimentação desbalanceadas (es-
calas: 5 A/div para os canais 1 e 2. O terceiro gráfico é obtido pelo recurso
mathdo osciloscópio). . . . . . . . . . . . . . . . . . . . . . . . . . . .162
6.17 Resultados experimentais das correntes na redeis123, após uso do es-
quema de compensação para tensões de alimentação desbalanceadas (es-
calas: 5 A/div para os canais 1 e 2. O terceiro gráfico é obtido pelo recurso
mathdo osciloscópio). . . . . . . . . . . . . . . . . . . . . . . . . . . .162
6.18 Resultado experimental da média móvel do parâmetro estimadop0 do
controlador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .163
6.19 Resultado experimental da média móvel do parâmetro estimadop1 do
controlador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .164
6.20 Resultado experimental da média móvel do parâmetro estimadop2 do
controlador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .164
6.21 Resultados experimentais das correntes balanceadas na redeis123, antes
da partida doSAPF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .165
6.22 Resultados experimentais das correntes balanceadas na redeis123, após
partida doSAPF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .166
6.23 Tensão no barramento CC durante diminuição da impedância da carga. . .166
6.24 Tensão no barramento CC durante aumento da impedância da carga. . . .167
6.25 Espectro de frequência da corrente na redeis1. . . . . . . . . . . . . . . .168
B.1 Foto do protótipo doSAPF. . . . . . . . . . . . . . . . . . . . . . . . . .185
B.2 Foto do sistema. Da esquerda para direita: carga não-linear,SAPF e
computador com software em tempo real. . . . . . . . . . . . . . . . . .186
C.1 Correntes em cargas não-lineares . . . . . . . . . . . . . . . . . . . . . .188
C.2 Tensão distorcida no PCC . . . . . . . . . . . . . . . . . . . . . . . . . .188
C.3 Forma de onda distorcida e suas componentes harmônicas . . . . . . . .189
C.4 Espectro de Frequência da onda . . . . . . . . . . . . . . . . . . . . . .190
C.5 Retificador com ponte de diodos . . . . . . . . . . . . . . . . . . . . . .192
C.6 Corrente em uma fonte chaveada de um computador pessoal. . . . . . . .192
C.7 Corrente em uma furadeira comercial. . . . . . . . . . . . . . . . . . . .193
C.8 Corrente em uma furadeira comercial com controle de velocidade. . . . .193
C.9 (a) Componentes em paralelo, (b) Diagrama de Bode da impedância. . .196
C.10 (a) Componentes em série, (b) Diagrama de Bode da impedância. . . . .196
C.11 Corrente no neutro . . . . . . . . . . . . . . . . . . . . . . . . . . . . .198
D.1 Potências de Budeanu em diversos circuitos. . . . . . . . . . . . . . . . .203
D.2 Potências de Budeanu com tensão distorcida. . . . . . . . . . . . . . . .203
D.3 Potências instantâneas p-q em diversos circuitos. . . . . . . . . . . . . .207
D.4 Potências instantâneas p-q para tensão de alimentação distorcida. . . . . .208
Lista de Tabelas
1.1 Limites de distorção de corrente para sistemas de distribuição gerais (120
V até 69000 V) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Limites de distorção de corrente para sistemas de subtransmissão gerais
(69001 V até 161000 V) . . . . . . . . . . . . . . . . . . . . . . . . . .4
1.3 Limites de distorção de corrente para sistemas de trasmissão gerais (>
161 KV), geração espalhada e cogeração . . . . . . . . . . . . . . . . . .5
1.4 Limites de distorção de tensão . . . . . . . . . . . . . . . . . . . . . . .5
1.5 Limites das tensões harmônicas individuais . . . . . . . . . . . . . . . .5
1.6 Níveis de referência para distorções harmônicas individuais de corrente .7
1.7 Limites individuais de harmônicos de corrente em % da fundamental . . .7
1.8 Valores de referência globais das distorções harmônicas totais . . . . . .8
1.9 Níveis de referência para distorções harmônicas individuais de tensão . .9
3.1 Parâmetros da carga. . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
5.1 Parâmetros doSAPFpara simulação. . . . . . . . . . . . . . . . . . . . .79
5.2 Lista das estruturas de controle doSAPFtestadas. . . . . . . . . . . . . .79
5.3 Resumo do desempenho dosSAPF’s para uma carga não-linear. . . . . .92
5.4 Resumo do desempenho dosSAPF’s para uma carga não-linear desba-
lanceada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .107
5.5 Índices de desbalanceamento para tensões de alimentação. . . . . . . . .108
5.6 Resumo do desempenho dosSAPF’s com tensões de alimentação desba-
lanceadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .121
5.7 Resumo do desempenho dosSAPF’s com variação de carga. . . . . . . .128
5.8 Resumo do desempenho dosSAPF’s com variação da rede e filtro. . . . .132
5.9 Valores de THD para as correntes. . . . . . . . . . . . . . . . . . . . . .148
6.1 Parâmetros doSAPF. . . . . . . . . . . . . . . . . . . . . . . . . . . . .152
6.2 Valores de THD para as correntes da rede. . . . . . . . . . . . . . . . . .167
C.1 Valores de THD para formas de onda conhecidas. . . . . . . . . . . . . .190
xii
C.2 Valores médios durante horário comercial. . . . . . . . . . . . . . . . . .195
Lista de Símbolos e Abreviaturas
Abreviaturas
2S Controlador de dupla sequência
ANEEL Agência Nacional de Energia Elétrica
ASD Adjustable Speed Drive
BT: Baixa Tensão
CA: Corrente Alternada
CC: Corrente Contínua
CSI Current Source Inverter
DI: Deviation Index
GTO: Gate Turn-Off
HB Hysteresis Band
HPF High Pass Filter
IEC International Electrotechnical Commission
IEEE: Institute of Electrical and Electronic Engineers
IGBT: Insulated Gate Bipolar Transistor
IMP: Internal Model Principle
IPT Instantaneous Power Theory
LED: Light Emitter Diode
LPF Low Pass Filter
xiv
MCT: Mos-Controlled thyristor
MOSFET: Metal Oxide Semiconductor Field Effect Transistor
MT: Média Tensão
PAF: Parallel Active Filter
PCC: Point of Common Coupling
PF Power Factor
PI Controlador Proporcional Integral
PRODIST: Procedimentos de Distribuição de Energia Elétrica no Sistema Elétrico Na-
cional
PWM: Pulse Width Modulation
SAPF: Shunt Active Power Filters
SMPS: Switch Mode Power Supply
SRF Synchronous Reference Frame
TDD: Total Demand Distortion
THD: Total Harmonic Distortion
TU: Total Unbalance
UPQC: Unified Power Quality Conditioner
VDE Verband der Elektrotechnik
VS-APPC: Variable Structure - Adaptive Pole Placement Control
VSI Voltage Source Inverter
Símbolos
ε Erro
ω Frequência angular
p Parcela CC da potência ativa instantânea
q Parcela CC da potência reativa instantânea
φ Angulo de defasagem
p Parcela CA da potência ativa instantânea
q Parcela CA da potência reativa instantânea
c Função de chaveamento
D Potência de distorção
f Frequência
G Função de transferência
G(s) Função de Transferência do FAP
I Corrente eficaz
i Corrente instantânea
l Indutância
n Neutro
n′ Neutro da carga
P Potência ativa
p Potência ativa instantânea
Q Potência reativa
q Potência reativa instantânea
r Resistência
S Potência aparente
V Tensão eficaz
v Tensão instantânea
X Reatância
Z Impedância
Subscritos
io Malha aberta do sistema
m braço m
p Pico
(n) Harmônico de ordem n
0dq Referencial 0dq
0 Homopolar
3φ Trifásico
αβ0 Coordenadas no referencial estacionárioαβ0
abc Fases abc
a Ativa
conv Conversor
dc Barramento CC
F Reativa definida por Fryse
f Filtro
k Fase k
load Carga
loss Perdas
l carga
n Fase n
RMS Valor Eficaz
sap f Filtro ativo
SC Curto circuito
sw Chaveamento
s rede elétrica
Sobrescritos
+ Sequência positiva
− Sequência negativa
e Referencial síncrono
s Referencial estacionário
Outras Notações
Capítulo 1
Introdução
O crescente avanço tecnológico em sistemas de acionamento de máquinas e eletrônica
de potência tem sido motivado principalmente pela necessidade de aplicações industrias
com alto desempenho, confiabilidade e custos mais baixos. Vários fatores têm contribuído
para o desenvolvimento desta área, dentre os quais destacam-se a utilização de tecnologia
computacional e microeletrônica (microcomputadores, microprocessadores e microcon-
troladores) e a introdução de novos dispositivos de chaveamento mais eficientes (MOS-
FET, IGBT, MCT, GTO) [Bose 2006].
O aparecimento de dispositivos semicondutores de potência com chaveamento de alta
velocidade, tais como os IGBT’s, tornou possível o aumento da frequência de chavea-
mento em inversores com Modulação por Largura de Pulso (PWM- Pulse Width Mo-
dulation), obtendo assim melhores características de operação. Por exemplo, a utilização
de dispositivos modernos no acionamento de máquinas resultou no aumento de produtivi-
dade e eficiência na operação com velocidade ajustável de linhas de montagem, sistemas
de ar condicionado, estações de tratamento de água.
As melhorias contínuas nos dispositivos de eletrônica de potência contribuíram para o
uso intensivo desses equipamentos. Cada equipamento baseado nessa tecnologia comporta-
se como uma carga não-linear que pode deteriorar a qualidade da energia disponibi-
lizada na rede elétrica. Essas cargas não-lineares extraem correntes não-senoidais da
rede elétrica gerando consequentemente harmônicos de tensão ao passar por diferentes
impedâncias do sistema de distribuição [Bollen 1999], ou seja, as cargas não-lineares
geram componentes harmônicos de corrente e/ou de tensão que afetam todos os com-
ponentes do sistema. Dentre os problemas causados pelos harmônicos pode-se destacar
perturbações na amplitude da tensão, na frequência do sinal, desequilíbrios de tensão ou
de corrente em sistemas trifásicos, superaquecimento de capacitores para correção de fa-
tor de potência, além de distorções na forma de onda do sinal [Akagi et al. 2007].
A teoria convencional de potência baseada em potência ativa, reativa e aparente foi
CAPÍTULO 1. INTRODUÇÃO 2
definida considerando correntes e tensões senoidais com frequência constante. Porém,
as cargas não-lineares extraem correntes não-senoidais da rede elétrica. Portanto, nesses
casos a análise de sistemas de potência deve considerar as condições não-senoidais, tor-
nando possível definir a influência dos harmônicos na potência consumida.
Durante muitos anos, a solução para mitigar os harmônicos era quase restrita à uti-
lização de filtros passivos. Esses dispositivos são compostos de capacitores, indutores e
resistores de amortecimento, sendo relativamente baratos comparados com outras técni-
cas de mitigação [Dugan et al. 2004] e necessitam de pouca manutenção [Das 2004]. No
entanto, os filtros passivos possuem tamanho e peso elevados e podem interagir adversa-
mente com o sistema elétrico. Além disso, outro aspecto negativo dos filtros passivos é
a compensação constante que dificulta o seu projeto, uma vez que as características do
sistema podem alterar de acordo com as variações da carga.
Os filtros passivos apresentam bom desempenho na mitigação de harmônicos de alta
ordem mas não têm desempenho adequado para harmônicos de baixa frequência.
Nas últimas três décadas os filtros ativos começaram a ser utilizados para mitigação
de harmônicos, estimulados principalmente pela introdução de dispositivos de chavea-
mento mais eficientes, como já citado e, a disponibilidade de equipamentos para pro-
cessamento digital em tempo real e para conversão analógica/digital [Akagi 2006]. A
utilização dos filtros ativos foi estimulada também pelas deficiências encontradas nos fil-
tros passivos. Geralmente, os filtros são dispositivos eletrônicos complexos que custam
bem mais caro que os filtros passivos. No entanto, os filtros ativos trabalham indepen-
dentes das características de impedância do sistema podendo ser utilizados em condições
extremas nas quais os filtros passivos não operam com sucesso. Além disso, os filtros
ativos são aplicáveis à compensação de potência reativa, a compensação da corrente no
neutro e nos casos onde a fonte primária é desbalanceada. Esses fatores, somados às
quedas significativas nos custos têm influenciado fabricantes a inserir os filtros ativos no
mercado.
Existem basicamente duas topologias de filtros ativos: série e paralelo [Emadi et al.
2005]. Os filtros ativos paralelos atuam como um gerador de corrente controlada que com-
pensam as correntes da carga de forma que as correntes extraídas da rede sejam senoidais
e em fase com a tensão. Os filtros ativos série atuam como fontes de tensão controlada,
gerando tensões senoidais e balanceadas para a carga.
Atualmente, os filtros ativos de potência paralelos são os filtros mais populares pois
são utilizados por consumidores individuais para compensação de harmônicos de corrente
ou desbalanceamento de corrente produzidos por suas próprias cargas. Os filtros ativos de
potência série são aplicáveis às concessionárias de energia para compensação de harmôni-
CAPÍTULO 1. INTRODUÇÃO 3
cos de tensão e desbalanceamento de tensões. Porém, eles ainda não estão disponíveis no
mercado [Turunen 2009].
Os filtros ativos de potência paralelos (SAPF -Shunt Power Active Filters) são uma
tecnologia bem amadurecida e possuem diversas estratégias de controle [Ozkaya 2007].
No entanto, esses filtros requerem esquemas de controle robusto para ser insensíveis ao
comportamento aleatório das cargas não-lineares responsável por variações paramétri-
cas no modelo dinâmico dos SAPF’s ou distúrbios não-modelados [Ribeiro et al. 2012]
[Ribeiro et al. 2010] [Braz et al. 2008].
1.1 Normas Relacionadas aos Harmônicos
O aumento do número de cargas não-lineares nos sistemas de potência é responsável
pelo aumento de distorções harmônicas. Com elas, surgiu a necessidade de regulamen-
tações para produção e propagação desses distúrbios [Trovão et al. 2006]. Diante disso,
várias organizações internacionais em conjunto com engenheiros, fabricantes de equipa-
mentos elétricos e organizações de pesquisas criaram um conjunto de normas, manuais de
boas práticas e limites para assegurar a compatibilidade entre equipamentos, dispositivos
e sistemas de distribuição de energia.
A seguir, são apresentados os principais documentos normativos relacionados aos har-
mônicos.
1.1.1 IEEE Std 519-1992
A norma IEEE 519-1992 é aplicável a todos os tipos de conversores estáticos utiliza-
dos em sistemas de potência comerciais e industriais. A norma descreve os problemas
envolvidos no controle de harmônicos e compensação do fator de potência desses conver-
sores e fornece um guia de aplicação. Além disso, existem recomendações para os limites
dos distúrbios para os sistemas de distribuição em corrente alternada (CA) [IEE 1992].
Essa norma estabelece limites de distorção harmônica de corrente para consumidores
individuais de energia elétrica e, também, estabelece a qualidade da energia elétrica que
a concessionária deve fornecer para o consumidor.
Os limites de distorção harmônica de corrente são estabelecidos de acordo com a
impedância de curto-circuito do sistema com o objetivo de limitar em 3% a máxima dis-
torção harmônica de tensão em cada frequência e, em 5%, o THD (Total Harmonic Dis-
tortion) de tensão. Além disso, esses limites são considerados a partir da grandeza TDD
CAPÍTULO 1. INTRODUÇÃO 4
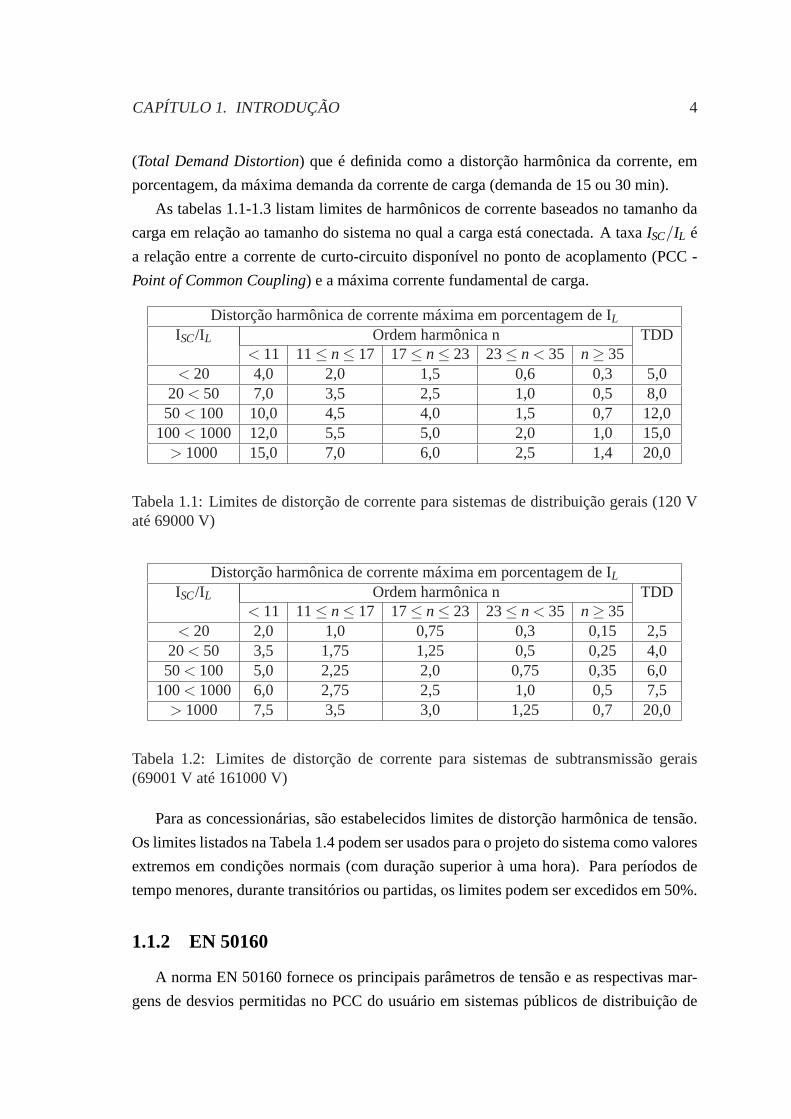
(Total Demand Distortion) que é definida como a distorção harmônica da corrente, em
porcentagem, da máxima demanda da corrente de carga (demanda de 15 ou 30 min).
As tabelas 1.1-1.3 listam limites de harmônicos de corrente baseados no tamanho da
carga em relação ao tamanho do sistema no qual a carga está conectada. A taxaISC/IL é
a relação entre a corrente de curto-circuito disponível no ponto de acoplamento (PCC -
Point of Common Coupling) e a máxima corrente fundamental de carga.
Distorção harmônica de corrente máxima em porcentagem de IL
ISC/IL Ordem harmônica n TDD< 11 11≤ n≤ 17 17≤ n≤ 23 23≤ n < 35 n≥ 35
< 20 4,0 2,0 1,5 0,6 0,3 5,020< 50 7,0 3,5 2,5 1,0 0,5 8,050< 100 10,0 4,5 4,0 1,5 0,7 12,0
100< 1000 12,0 5,5 5,0 2,0 1,0 15,0> 1000 15,0 7,0 6,0 2,5 1,4 20,0
Tabela 1.1: Limites de distorção de corrente para sistemas de distribuição gerais (120 Vaté 69000 V)
Distorção harmônica de corrente máxima em porcentagem de IL
ISC/IL Ordem harmônica n TDD< 11 11≤ n≤ 17 17≤ n≤ 23 23≤ n < 35 n≥ 35
< 20 2,0 1,0 0,75 0,3 0,15 2,520< 50 3,5 1,75 1,25 0,5 0,25 4,050< 100 5,0 2,25 2,0 0,75 0,35 6,0
100< 1000 6,0 2,75 2,5 1,0 0,5 7,5> 1000 7,5 3,5 3,0 1,25 0,7 20,0
Tabela 1.2: Limites de distorção de corrente para sistemas de subtransmissão gerais(69001 V até 161000 V)
Para as concessionárias, são estabelecidos limites de distorção harmônica de tensão.
Os limites listados na Tabela 1.4 podem ser usados para o projeto do sistema como valores
extremos em condições normais (com duração superior à uma hora). Para períodos de
tempo menores, durante transitórios ou partidas, os limites podem ser excedidos em 50%.
1.1.2 EN 50160
A norma EN 50160 fornece os principais parâmetros de tensão e as respectivas mar-
gens de desvios permitidas no PCC do usuário em sistemas públicos de distribuição de
CAPÍTULO 1. INTRODUÇÃO 5
Distorção harmônica de corrente máxima em porcentagem de IL
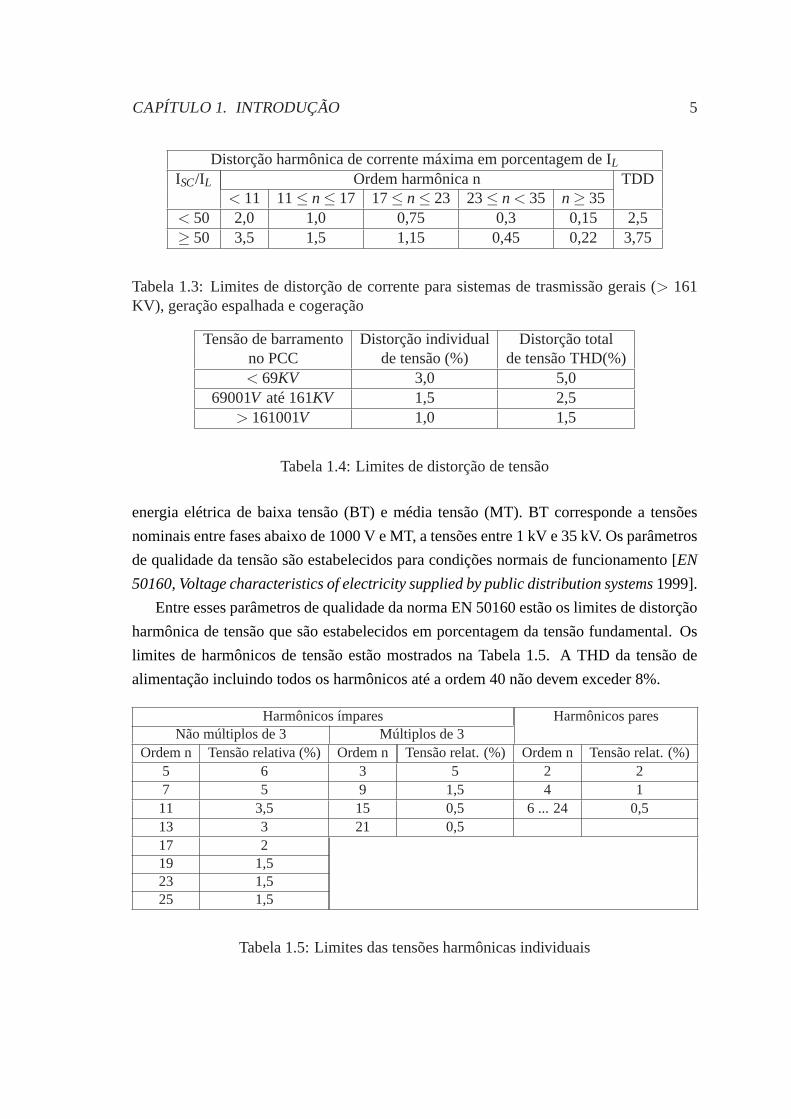
ISC/IL Ordem harmônica n TDD< 11 11≤ n≤ 17 17≤ n≤ 23 23≤ n < 35 n≥ 35
< 50 2,0 1,0 0,75 0,3 0,15 2,5≥ 50 3,5 1,5 1,15 0,45 0,22 3,75
Tabela 1.3: Limites de distorção de corrente para sistemas de trasmissão gerais (> 161KV), geração espalhada e cogeração
Tensão de barramentoDistorção individual Distorção totalno PCC de tensão (%) de tensão THD(%)< 69KV 3,0 5,0
69001V até161KV 1,5 2,5> 161001V 1,0 1,5
Tabela 1.4: Limites de distorção de tensão
energia elétrica de baixa tensão (BT) e média tensão (MT). BT corresponde a tensões
nominais entre fases abaixo de 1000 V e MT, a tensões entre 1 kV e 35 kV. Os parâmetros
de qualidade da tensão são estabelecidos para condições normais de funcionamento [EN
50160, Voltage characteristics of electricity supplied by public distribution systems1999].
Entre esses parâmetros de qualidade da norma EN 50160 estão os limites de distorção
harmônica de tensão que são estabelecidos em porcentagem da tensão fundamental. Os
limites de harmônicos de tensão estão mostrados na Tabela 1.5. A THD da tensão de
alimentação incluindo todos os harmônicos até a ordem 40 não devem exceder 8%.
Harmônicos ímpares Harmônicos paresNão múltiplos de 3 Múltiplos de 3
Ordem n Tensão relativa (%) Ordem n Tensão relat. (%) Ordem n Tensão relat. (%)5 6 3 5 2 27 5 9 1,5 4 111 3,5 15 0,5 6 ... 24 0,513 3 21 0,517 219 1,523 1,525 1,5
Tabela 1.5: Limites das tensões harmônicas individuais
CAPÍTULO 1. INTRODUÇÃO 6
1.1.3 IEC 61000
A IEC (International Electrotechnical Commission) é uma entidade internacional,
mas com abrangência essencialmente européia, que gera recomendações técnicas na área
de eletricidade. As normas da IEC relativas aos harmônicos estão contidas nas partes 2 e
3. Diferente das normas de harmônicos IEEE onde existe apenas uma única publicação
tratando dos harmônicos, as normas sobre harmônicos da IEC estão separadas em diversas
publicações.
As Normas IEC sobre harmônicos são geralmente adotadas pela comunidade europeia
(CENELEC). No caso da série IEC 61000, elas são designadas como série EN 61000.
A normaIEC 61000-3-2refere-se às limitações das harmônicas de corrente injetadas
na rede pública de alimentação. Aplica-se a equipamentos elétricos e eletrônicos que
tenham uma corrente de entrada de até 16 A por fase, conectados a uma rede pública de
baixa tensão alternada, de 50 ou 60 Hz, com tensão fase–neutro entre 220 e 240 V. Para
tensões inferiores, os limites não foram estabelecidos, pois essa norma tem aplicação
principalmente na comunidade européia, onde as tensões fase–neutro encontram-se na
faixa especificada. Os equipamentos são classificados em quatro classes:
Classe A: Equipamentos com alimentação trifásica equilibrada; aparelhos de uso
doméstico, excluindo os de classe D; ferramentas, exceto as portáteis; “dimmers” para
lâmpadas incandescentes; equipamentos de áudio; e todos os demais não incluídos nas
classes seguintes.
Classe B: Ferramentas portáteis.
Classe C: Dispositivos de iluminação.
Classe D: Equipamentos que apresentam uma forma de onda “especial” na corrente
de entrada. A potência ativa de entrada deve ser igual ou inferior a 600 W, medida esta
feita obedecendo às condições de ensaio estabelecidas na norma (que variam de acordo
com o tipo de equipamento).
Os máximos valores de harmônicos de corrente permitidos para as classes A, B, C e
D são dados em amperes medidos na corrente de entrada do equipamento. Os limites para
os valores de harmônicos de corrente de acordo com a IEC 61000-3-2 são apresentados
na Tabela 1.6. Os limites são aplicáveis a equipamentos que operam com potência de até
600W.
A norma IEC 61000-3-4é aplicável a qualquer equipamento elétrico ou eletrônico,
cuja corrente de entrada seja maior que 16 A. Sua tensão de alimentação deve ser menor
que 240 V para equipamentos monofásicos ou menor que 600 V para equipamentos
trifásicos. A frequência nominal da rede pode ser 50 Hz ou 60 Hz. A Tabela 1.7 a-
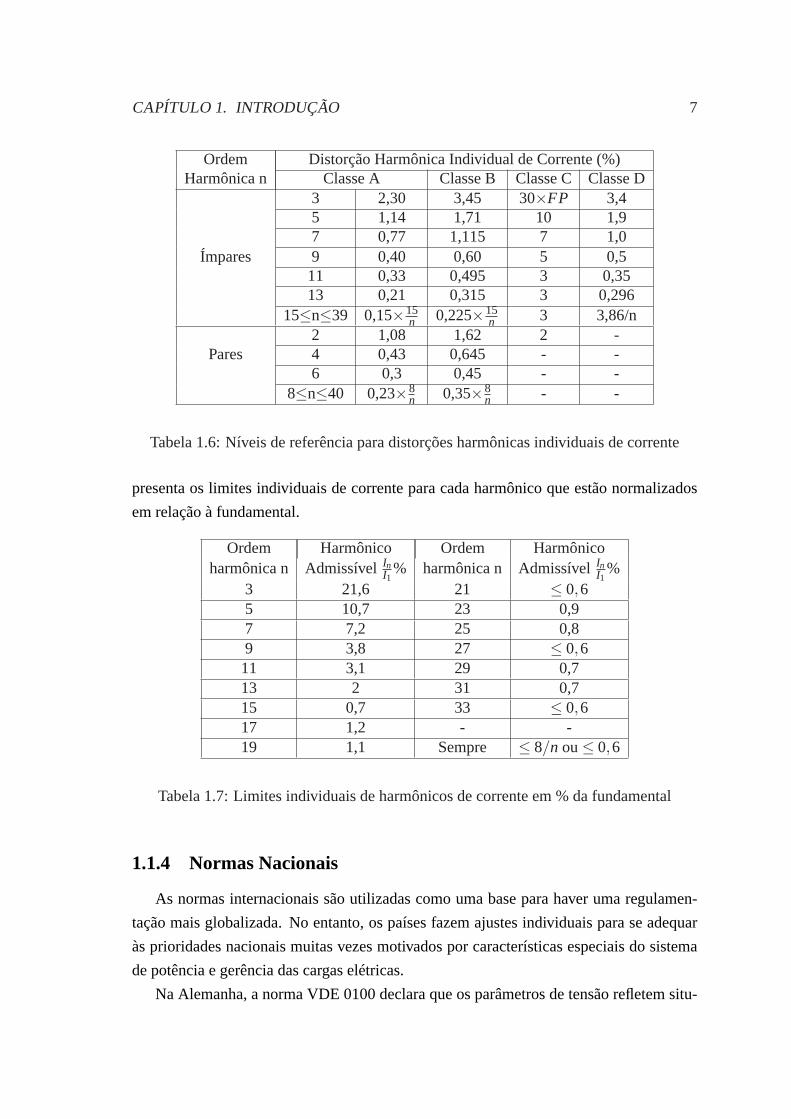
CAPÍTULO 1. INTRODUÇÃO 7
Ordem Distorção Harmônica Individual de Corrente (%)Harmônica n Classe A Classe B Classe C Classe D
3 2,30 3,45 30×FP 3,45 1,14 1,71 10 1,97 0,77 1,115 7 1,0
Ímpares 9 0,40 0,60 5 0,511 0,33 0,495 3 0,3513 0,21 0,315 3 0,296
15≤n≤39 0,15×15n 0,225×15
n 3 3,86/n2 1,08 1,62 2 -
Pares 4 0,43 0,645 - -6 0,3 0,45 - -
8≤n≤40 0,23×8n 0,35×8
n - -
Tabela 1.6: Níveis de referência para distorções harmônicas individuais de corrente
presenta os limites individuais de corrente para cada harmônico que estão normalizados
em relação à fundamental.
Ordem Harmônico Ordem Harmônicoharmônica n Admissível InI1% harmônica n Admissível InI1%
3 21,6 21 ≤ 0,65 10,7 23 0,97 7,2 25 0,89 3,8 27 ≤ 0,611 3,1 29 0,713 2 31 0,715 0,7 33 ≤ 0,617 1,2 - -19 1,1 Sempre ≤ 8/n ou≤ 0,6
Tabela 1.7: Limites individuais de harmônicos de corrente em % da fundamental
1.1.4 Normas Nacionais
As normas internacionais são utilizadas como uma base para haver uma regulamen-
tação mais globalizada. No entanto, os países fazem ajustes individuais para se adequar
às prioridades nacionais muitas vezes motivados por características especiais do sistema
de potência e gerência das cargas elétricas.
Na Alemanha, a norma VDE 0100 declara que os parâmetros de tensão refletem situ-
CAPÍTULO 1. INTRODUÇÃO 8
ações extremas na rede de energia que não são representativas para condições típicas
[Markiewicz & Klajn 2004]. Enquanto na Polônia, as normas do setor de energia elétrica
são estabelecidas pelo governo que é responsável pelos parâmetros fundamentais da ten-
são de alimentação e não faz referência à norma internacional EN50160. O valor máximo
admitido para os harmônicos é de 8% (5% para cada harmônico) para baixa tensão e de
5% (3% para cada harmônico) para média tensão.
No Brasil, a Agência Nacional de Energia Elétrica (ANEEL) estabelece procedimen-
tos relativos à qualidade da energia elétrica no documento Procedimentos de Distribuição
de Energia Elétrica no Sistema Elétrico Nacional – PRODIST [Módulo 8 Qualidade da
Energia Elétrica2010]. A Tabela 1.8 apresenta os valores de referência estabelecidos pela
ANEEL para as distorções harmônicas totais da tensão suprida. Estes valores servem para
referência do planejamento elétrico em termos de qualidade de energia elétrica.
Tensão nominal do barramentoValor THD (%)VN ≤1KV 10
1KV≤VN ≤13,8KV 813,8KV≤VN ≤69KV 669KV≤VN ≤230KV 3
Tabela 1.8: Valores de referência globais das distorções harmônicas totais
A Tabela 1.9 apresenta os valores das distorções harmônicas individuais que também
devem ser obedecidos.
CAPÍTULO 1. INTRODUÇÃO 9
Ordem Distorção Harmônica Individual de Tensão (%)Harmônica VN ≤1KV 1KV≤VN ≤13,8KV 13,8KV≤VN ≤69KV 69KV≤VN ≤230KV
5 7,5 6 4,5 2,57 6,5 5 4 211 4,5 3,5 3 1,5
Ímpares não 13 4 3 2,5 1,5múltiplas 17 2,5 2 1,5 1
de 3 19 2 1,5 1,5 123 2 1,5 1,5 125 2 1,5 1,5 1
>25 1,5 1 1 0,53 6,5 5 4 2
Ímpares 9 2 1,5 1,5 1múltiplas 15 1 0,5 0,5 0,5
de 3 21 1 0,5 0,5 0,5>21 1 0,5 0,5 0,5
2 2,5 2 1,5 1Pares 4 1,5 1 1 0,5
>4 1 0,5 0,5 0,5
Tabela 1.9: Níveis de referência para distorções harmônicas individuais de tensão
1.2 Filtros Passivos
Filtros passivos são dispositivos formados por componentes elétricos passivos: resis-
tor, indutor e capacitor, utilizados para redução de harmônicos e melhoria do fator de
potência ou, também para atender aos requisitos de normas relacionadas à qualidade de
energia.
Filtros passivos são comumente utilizados para solucionar os problemas citados ante-
riormente principalmente por apresentarem um custo baixo comparado com outras soluções
para o mesmo problema. Dentre os filtros passivos, os mais utilizados são os filtros RLC
com sintonia simples em configuração paralela e os filtros amortecidos, também conheci-
dos como filtros passa-alta.
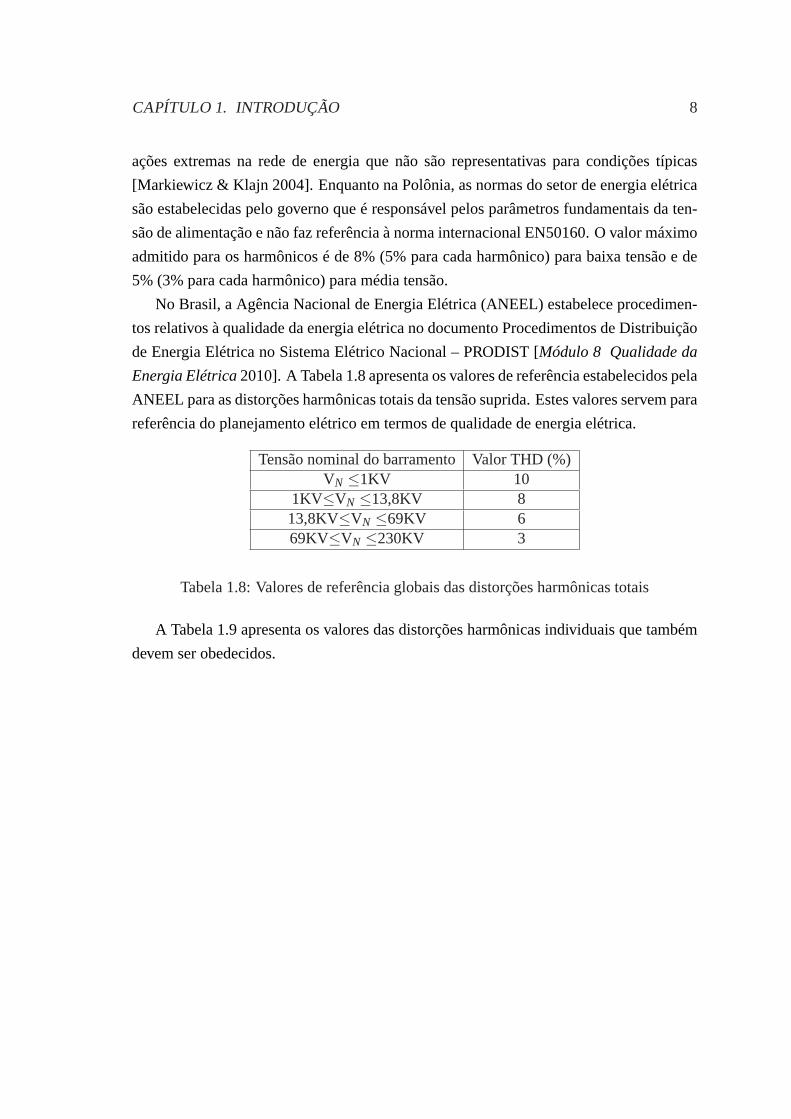
A Figura 1.1(a) apresenta um filtro RLC com sintonia simples. Esse tipo de filtro
passivo é conectado em paralelo com a rede elétrica. O filtro é sintonizado de forma
que as reatâncias do capacitor e do indutor sejam iguais e opostas na frequência a ser
filtrada (frequência de ressonância). Nessa frequência, a impedância do filtro é baixa,
conforme mostrado na Figura 1.1(b) e, as correntes harmônicas próximas à frequência de
ressonância fluem através do filtro ao invés de circularem pela rede elétrica.
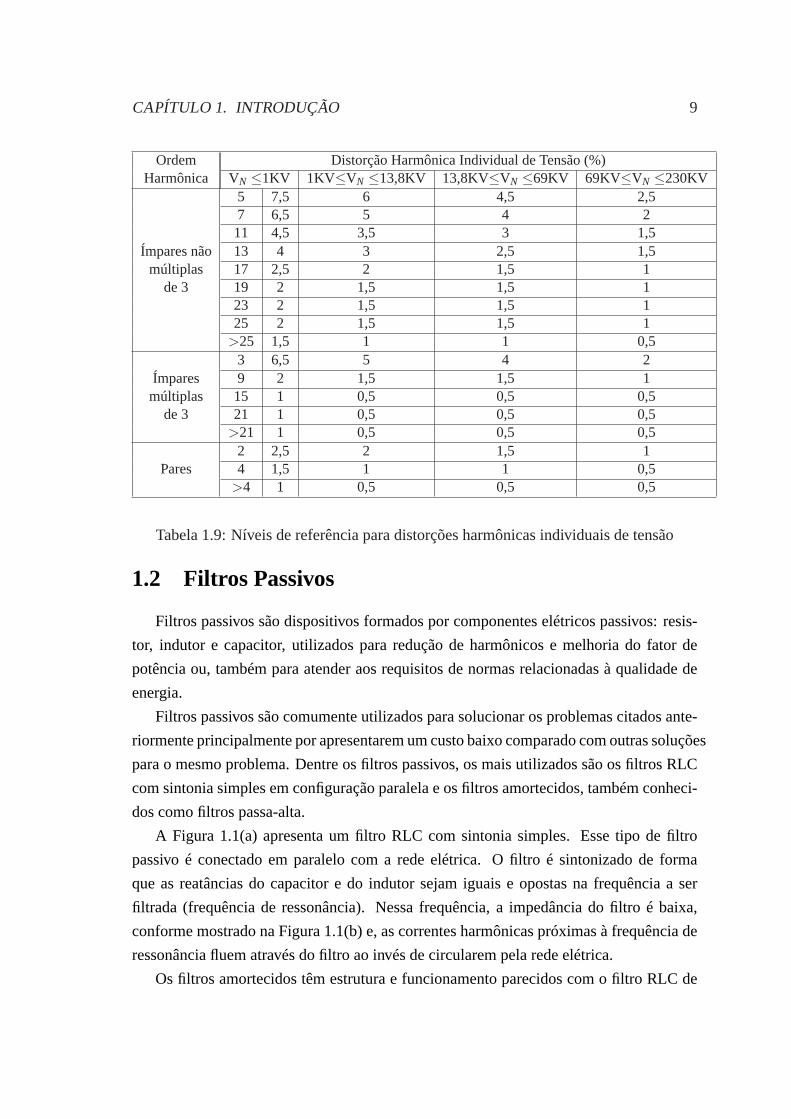
Os filtros amortecidos têm estrutura e funcionamento parecidos com o filtro RLC de
CAPÍTULO 1. INTRODUÇÃO 10
Frequência
(b)
|Z(j
)| (
dB
)w
(a)
Figura 1.1: (a) Filtro de sintonia simples, (b) Diagrama de Bode da impedância.
sintonia simples. Porém, nesses filtros, o resistor e o indutor são conectados em paralelo
de forma que a impedância do filtro seja baixa nas frequências acima da frequência de
ressonância. A Figura 1.2 apresenta a estrutura do filtro amortecido e o gráfico da sua
impedância em função da frequência. Nas frequências em que a impedância do filtro é
baixa, as correntes harmônicas fluem também pelo filtro ao invés de circularem pela rede
elétrica.
Frequência
(b)
|Z(j
)| (
dB
)w
(a)
Figura 1.2: (a) Filtro passa-alta, (b) Diagrama de Bode da impedância.
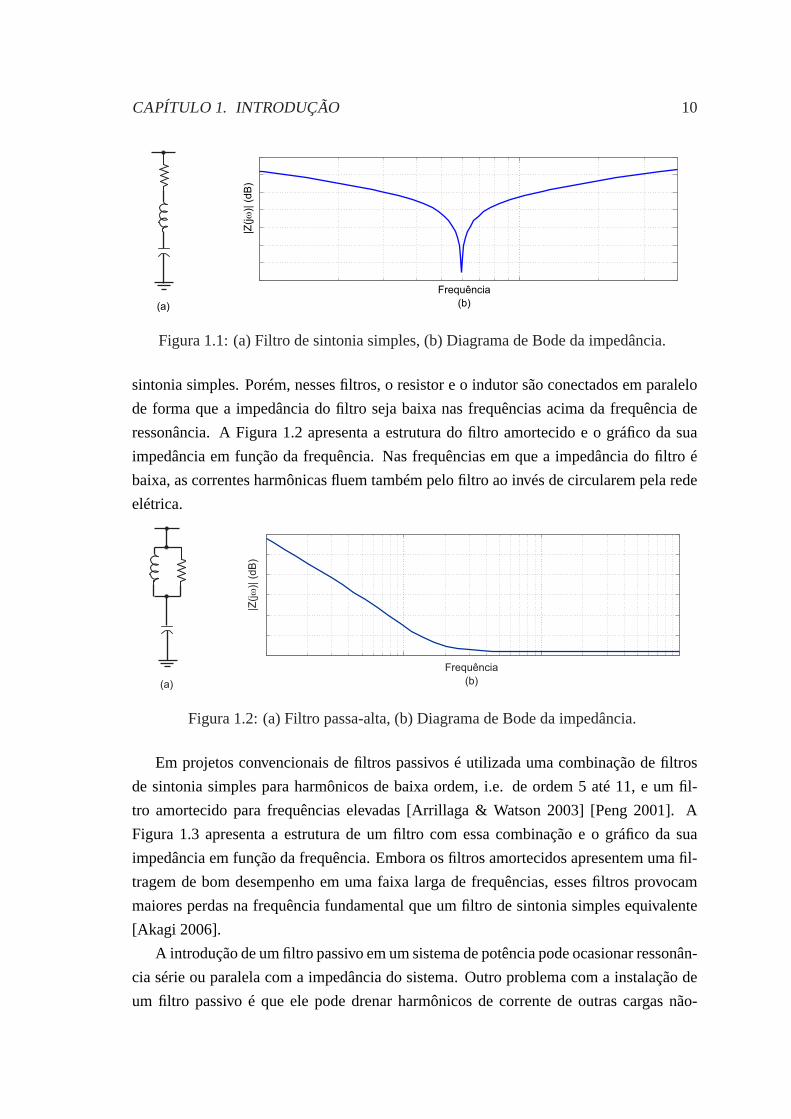
Em projetos convencionais de filtros passivos é utilizada uma combinação de filtros
de sintonia simples para harmônicos de baixa ordem, i.e. de ordem 5 até 11, e um fil-
tro amortecido para frequências elevadas [Arrillaga & Watson 2003] [Peng 2001]. A
Figura 1.3 apresenta a estrutura de um filtro com essa combinação e o gráfico da sua
impedância em função da frequência. Embora os filtros amortecidos apresentem uma fil-
tragem de bom desempenho em uma faixa larga de frequências, esses filtros provocam
maiores perdas na frequência fundamental que um filtro de sintonia simples equivalente
[Akagi 2006].
A introdução de um filtro passivo em um sistema de potência pode ocasionar ressonân-
cia série ou paralela com a impedância do sistema. Outro problema com a instalação de
um filtro passivo é que ele pode drenar harmônicos de corrente de outras cargas não-
CAPÍTULO 1. INTRODUÇÃO 11
Frequência
Figura 1.3: (a) Filtro combinado, (b) Diagrama de Bode da impedância.
lineares tornando o filtro sobrecarregado ou ineficiente.
Apesar da simplicidade, os filtros passivos possuem alta eficiência [Bhattacharya &
Divan 1996]. Em simulações realizadas por Deckman [Deckmann & Pomilio 2004], uma
configuração de filtro composta por filtros de sintonia simples e filtro passa-alta apre-
sentou uma redução de 46% na distorção de corrente. José [José et al. 2010] realizou
medições em um barramento de uma fábrica de bebidas no qual um motor de indução é
acionado por um inversor e propôs uma solução baseada em um filtro composto por dois
filtros sintonizados para o 5o e 7o harmônico.
Em simulações realizadas por Izhar [Izhar et al. 2004], os filtros passivos reduziram
as distorções de corrente em até 30% enquanto, que nas mesmas condições os filtros
ativos redurizam as distorções em até 50%. Os problemas de projeto e interferências
na rede elétrica dos filtros passivos somados ao desempenho superior dos filtros ativos
fazem desses últimos uma atraente opção para redução de harmônicos. Os filtros ativos
são apresentados a seguir.
1.3 Filtros Ativos
O aparecimento de novos dispositivos semicondutores como o GTO (Gate Turn-Off)
e o IGBT (Insulated Gate Bipolar Transistor) permitiu a idealização de novas soluções
para a compensação de harmônicos na rede elétrica. A solução tradicional era a utilização
de filtros passivos, mas por volta de 1970 começou o desenvolvimento de filtros ativos.
A primeira publicação de um trabalho sobre filtros ativos ocorreu em 1976 [Gyugyi &
Strycula 1976] no qual o termo filtro ativo de potência foi utilizado para definir um dis-
positivo compensador de harmônicos composto de chaves semicondutoras de potência.
A partir de então o termo filtro ativo de potência se refere a um dispositivo baseado
em componentes eletrônicos de potência para compensação de harmônicos. O desenvolvi-
mento desses filtros aumentou sua aplicação para correção do fator de potência [Pottker
CAPÍTULO 1. INTRODUÇÃO 12
& Barbi 1997a], do desbalanceamento de tensão [Lee et al. 2004] e de outros problemas
como afundamento e oscilação da tensão [Aredes & Fernandes 2009]. Dessa forma, a
definição de filtros ativos foi expandida para dispositivos compensadores de problemas
de qualidade da energia.
Existem diversas configurações de filtros ativos: paralelo, série, unificado (paralelo +
série) e híbrido, composto por filtros ativos e passivos. Todas essas configurações serão
apresentadas.
1.3.1 Filtro ativo paralelo
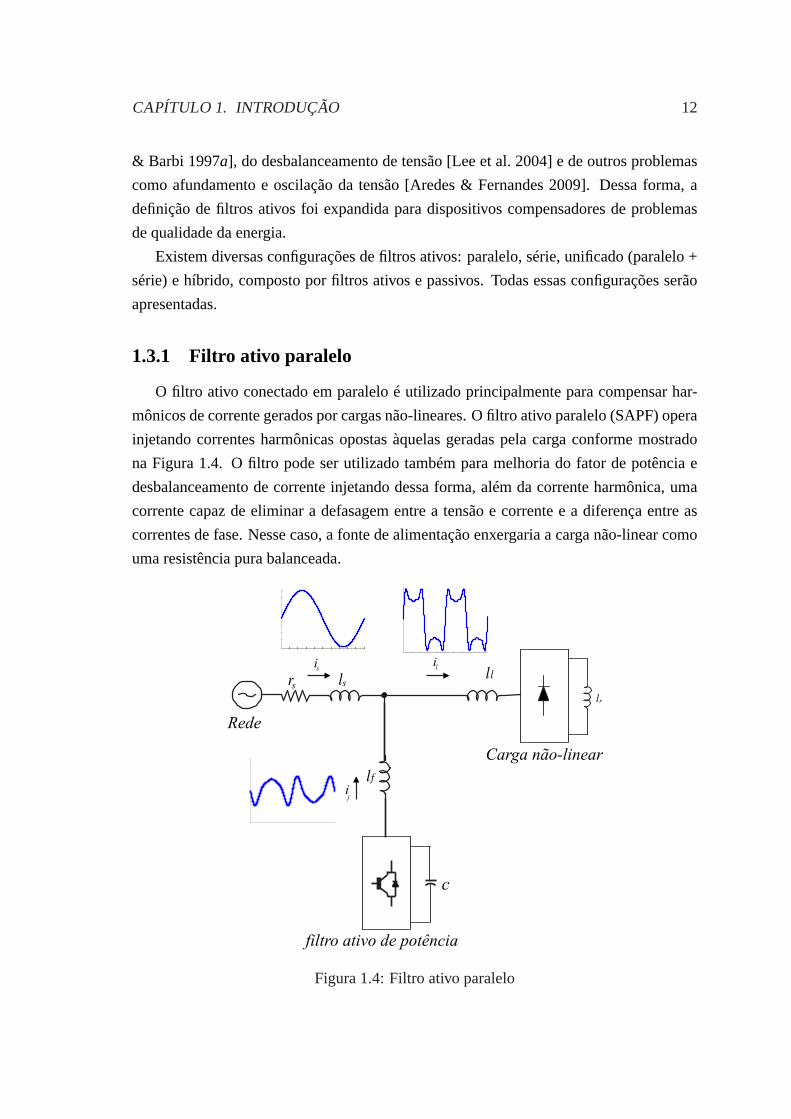
O filtro ativo conectado em paralelo é utilizado principalmente para compensar har-
mônicos de corrente gerados por cargas não-lineares. O filtro ativo paralelo (SAPF) opera
injetando correntes harmônicas opostas àquelas geradas pela carga conforme mostrado
na Figura 1.4. O filtro pode ser utilizado também para melhoria do fator de potência e
desbalanceamento de corrente injetando dessa forma, além da corrente harmônica, uma
corrente capaz de eliminar a defasagem entre a tensão e corrente e a diferença entre as
correntes de fase. Nesse caso, a fonte de alimentação enxergaria a carga não-linear como
uma resistência pura balanceada.
r
ss
is
if
il
c
filtro ativo de potência
Rede
Carga não-linear
Figura 1.4: Filtro ativo paralelo
CAPÍTULO 1. INTRODUÇÃO 13
O filtro ativo paralelo representa a configuração mais importante e mais largamente
utilizada nos processos industriais para filtragem ativa [Vaz 2006]. Para utilização desse
filtro em correntes mais elevadas, é possível conectar vários em paralelo, o que o torna
adequado para uma larga faixa de níveis de potência. Além disso, o SAPF possui outros
aspectos positivos [Omori 2007]:
• não alteram significativamente as correntes na carga, pois praticamente não altera a
tensão no ponto de acoplamento;
• a ação desse filtro permite suprir à carga toda a potência não ativa;
• maximiza o fator de potência na rede, o que implica no mínimo valor de corrente
pelo sistema, liberando a capacidade de transmissão para as linhas;
• a instalação do equipamento em derivação não interfere diretamente na operação
do sistema elétrico, restringindo defeitos no equipamento que podem interromper o
fornecimento de energia na carga.
O foco principal desse trabalho está no filtro ativo paralelo, de forma que os capítulos
2 e 4 serão dedicados à descrição do sistema e os esquemas de controle para esse tipo de
filtro.
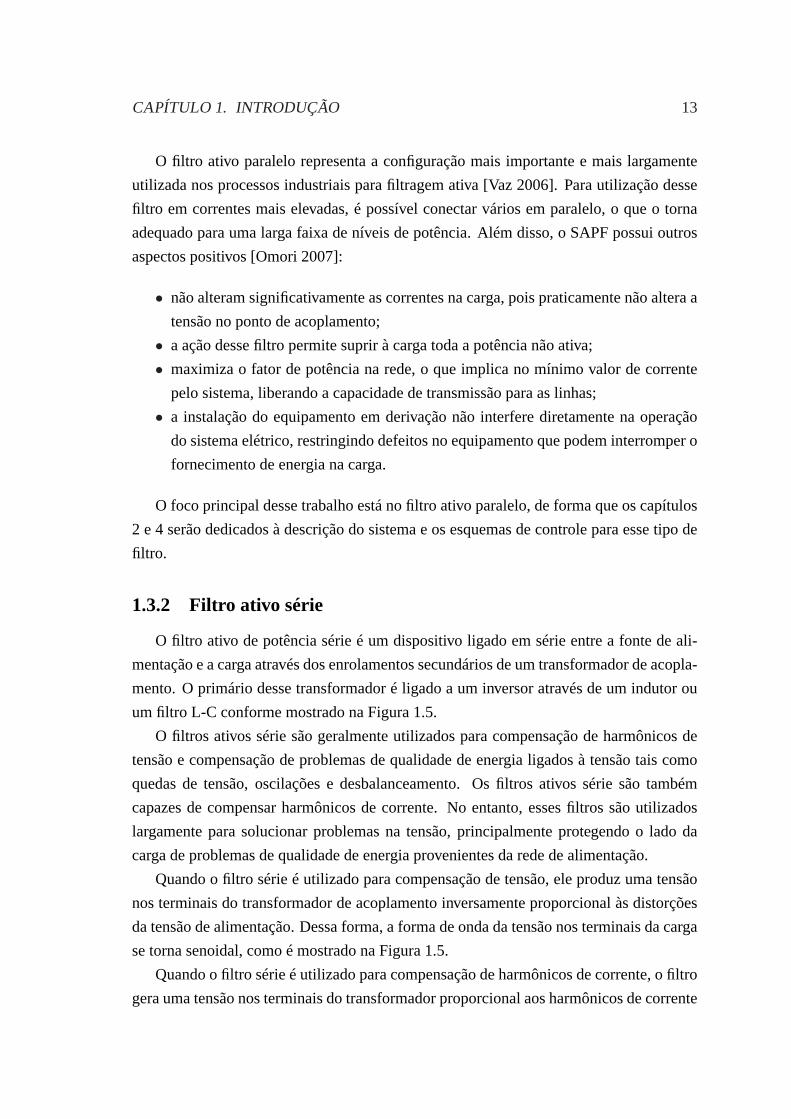
1.3.2 Filtro ativo série
O filtro ativo de potência série é um dispositivo ligado em série entre a fonte de ali-
mentação e a carga através dos enrolamentos secundários de um transformador de acopla-
mento. O primário desse transformador é ligado a um inversor através de um indutor ou
um filtro L-C conforme mostrado na Figura 1.5.
O filtros ativos série são geralmente utilizados para compensação de harmônicos de
tensão e compensação de problemas de qualidade de energia ligados à tensão tais como
quedas de tensão, oscilações e desbalanceamento. Os filtros ativos série são também
capazes de compensar harmônicos de corrente. No entanto, esses filtros são utilizados
largamente para solucionar problemas na tensão, principalmente protegendo o lado da
carga de problemas de qualidade de energia provenientes da rede de alimentação.
Quando o filtro série é utilizado para compensação de tensão, ele produz uma tensão
nos terminais do transformador de acoplamento inversamente proporcional às distorções
da tensão de alimentação. Dessa forma, a forma de onda da tensão nos terminais da carga
se torna senoidal, como é mostrado na Figura 1.5.
Quando o filtro série é utilizado para compensação de harmônicos de corrente, o filtro
gera uma tensão nos terminais do transformador proporcional aos harmônicos de corrente
CAPÍTULO 1. INTRODUÇÃO 14
r
ss
c
Rede
vs vf
vsf
filtro ativo de potência
Carga não-linear
Figura 1.5: Filtro ativo série
na rede. Dessa forma, o filtro pode ser enxergado como uma resistência (chamada re-
sitência ativa) nas frequências harmônicas devido a essa relação da tensão nos terminais
do transformador e a corrente na rede. As correntes harmônicas são compensadas pois o
efeito do filtro é similar ao aumento da impedância da rede nas frequências harmônicas.
O problema de utilizar o filtro ativo série para compensar correntes é que este tipo
de filtro necessita que a impedância do lado da carga seja baixa [Peng 1998]. Nos casos
em que a impedância da carga é alta, o filtro teria que gerar uma tensão muito alta nos
terminais do transformador de acomplamento para que a resistência ativa fosse suficiente
comparada à impedância da carga tornando assim, o filtro ativo série ineficiente nessas
condições.
1.3.3 Filtro ativo híbrido
O número de cargas não-lineares tem sofrido um forte aumento nos sistemas de potên-
cia devido aos equipamentos baseados na eletrônica de potência (ver Apêndice C). En-
quanto isso, os filtros ativos estão sendo apresentados como um dispositivo capaz de miti-
gar os harmônicos causados pelas cargas não-lineares. Esse cenário é um paradoxo pois o
próprio filtro ativo é um equipamento baseado em componentes da eletrônica de potência
responsável também por gerar harmônicos no seu funcionamento. A utilização de chaves
semicondutoras rápidas de potência como o IGBT é responsável por gerar distorções na
CAPÍTULO 1. INTRODUÇÃO 15
frequência de chaveamento que é normalmente bastante superior aos harmônicos de baixa
ordem da frequência fundamental.
Para solucionar os problemas descritos, vários pesquisadores trabalharam em confi-
gurações de filtros compostas de filtros ativos e filtros passivos [Salam et al. 2006]. O
resultado dessa composição é chamado de filtro ativo híbrido. Nesse caso, é utilizado um
filtro passivo passa-alta para compensar os harmônicos de alta ordem e um filtro ativo
para compensação de harmônicos de baixa ordem. O filtro resultante tem uma atuação
em uma larga faixa de frequências utilizando um filtro passivo de tamanho relativamente
pequeno [Routimo et al. 2003]. A Figura 1.6 apresenta um filtro ativo híbrido comumente
utilizado para esse propósito.
r
ss
c
Rede
filtro ativo de potência
Carga não-linear
filtro passivo de potência
Figura 1.6: Filtro ativo híbrido paralelo
Por outro lado, a adição de um filtro ativo pode solucionar problemas encontrados nos
filtros passivos tais como ressonância série e paralela. Essa composição de filtros também
é chamada de filtro ativo híbrido. A Figura 1.7 apresenta a estrutura de um filtro híbrido
para esse propósito. Aqui, o filtro híbrido é composto por um filtro ativo série e um filtro
passivo paralelo. O filtro passivo paralelo compensa as correntes harmônicas enquanto
que o filtro ativo série impede que haja ressonância no sistema através da impedância
ativa. A impedância ativa é descrita na seção 1.3.2. O desempenho do filtro passivo
aumenta também pois ele "vê" a impedância da fonte maior devido à impedância ativa
[Peng et al. 1990]. Como o filtro passivo realiza quase todo o trabalho de compensação de
harmônicos, a potência do filtro ativo é bastante inferior à potência da carga [Bhattacharya
& Divan 1995] tornando o custo do sistema baixo.
Existem diversas configurações diferentes de filtros ativos híbridos [Peng 2001]. A
junção de filtros ativos e passivos também tem objetivos diversos. Em todos os casos, a
CAPÍTULO 1. INTRODUÇÃO 16
r
ss
c
Rede
5th 7th passa-alta
filtro ativo de potênciafiltro passivo de potência
Carga não-linear
Figura 1.7: Filtro Ativo híbrido: Filtro ativo série + Filtro passivo paralelo
única regra existente é que o filtro híbrido utiliza as vantagens dos filtros ativos e passivos.
1.3.4 Filtro ativo unificado
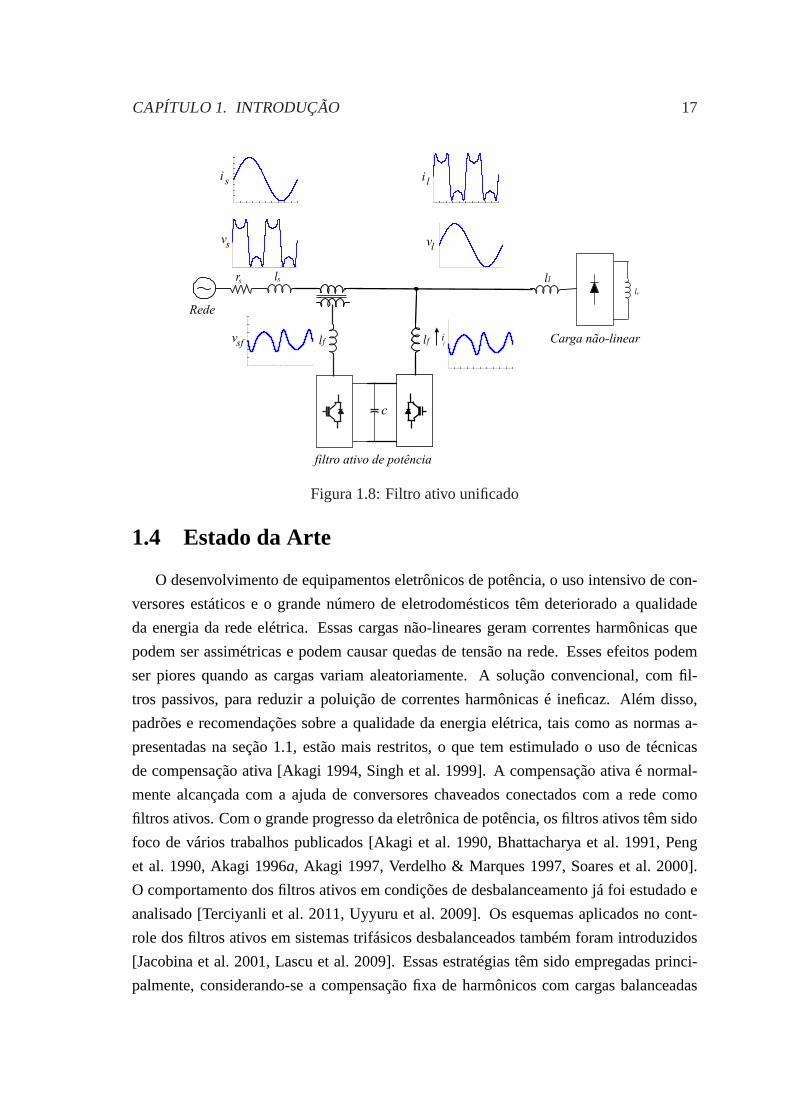
O filtro ativo unificado é mais conhecido como condicionador unificado de energia
(UPQC -Unified Power Quality Conditioner). O filtro ativo unificado é constituído pela
união de um filtro ativo paralelo e um filtro ativo série que compartilham o mesmo dis-
positivo de armazenamento no barramento CC. A união dos dois tipos de filtro ativo tem
o objetivo de unir as funções principais de cada um desses filtros. Assim, o UPQC é um
dispositivo capaz de compensar harmônicos de corrente provenientes da carga ao mesmo
tempo que compensa os problemas de tensão da rede de alimentação.
A Figura 1.8 apresenta a estrutura de um UPQC e o seu princípio de funcionamento.
O filtro ativo série fica responsável por compensar os harmônicos de tensão provenientes
da rede elétrica de forma que a tensão nos terminais da carga é senoidal. O filtro ativo
paralelo compensa os harmônicos de corrente gerados pela carga de forma que a corrente
na rede elétrica seja senoidal.
CAPÍTULO 1. INTRODUÇÃO 17
r
ss
c
Rede
vs vl
vsfif
i s i l
filtro ativo de potência
Carga não-linear
Figura 1.8: Filtro ativo unificado
1.4 Estado da Arte
O desenvolvimento de equipamentos eletrônicos de potência, o uso intensivo de con-
versores estáticos e o grande número de eletrodomésticos têm deteriorado a qualidade
da energia da rede elétrica. Essas cargas não-lineares geram correntes harmônicas que
podem ser assimétricas e podem causar quedas de tensão na rede. Esses efeitos podem
ser piores quando as cargas variam aleatoriamente. A solução convencional, com fil-
tros passivos, para reduzir a poluição de correntes harmônicas é ineficaz. Além disso,
padrões e recomendações sobre a qualidade da energia elétrica, tais como as normas a-
presentadas na seção 1.1, estão mais restritos, o que tem estimulado o uso de técnicas
de compensação ativa [Akagi 1994, Singh et al. 1999]. A compensação ativa é normal-
mente alcançada com a ajuda de conversores chaveados conectados com a rede como
filtros ativos. Com o grande progresso da eletrônica de potência, os filtros ativos têm sido
foco de vários trabalhos publicados [Akagi et al. 1990, Bhattacharya et al. 1991, Peng
et al. 1990, Akagi 1996a, Akagi 1997, Verdelho & Marques 1997, Soares et al. 2000].
O comportamento dos filtros ativos em condições de desbalanceamento já foi estudado e
analisado [Terciyanli et al. 2011, Uyyuru et al. 2009]. Os esquemas aplicados no cont-
role dos filtros ativos em sistemas trifásicos desbalanceados também foram introduzidos
[Jacobina et al. 2001, Lascu et al. 2009]. Essas estratégias têm sido empregadas princi-
palmente, considerando-se a compensação fixa de harmônicos com cargas balanceadas
CAPÍTULO 1. INTRODUÇÃO 18
ou desbalanceadas. Além dos problemas de distorção harmônica, existem também baixo
fator de potência e correntes de carga desbalanceadas no PCC devido à potencia fornecida
a cargas não-lineares. Estratégias de controle para compensação de todos esses problemas
de qualidade de energia simultaneamente foram introduzidas em [Chandra et al. 2000].
Um componente bastante importante doSAPFé o controlador de corrente, que tem
a função de fazer com que a corrente controlada siga sua respectiva referência. Em es-
tratégias de controle convencionais aplicadas aSAPF, esses controladores de corrente
são utilizados para controlar a corrente de saída do filtro. Essas correntes são com-
postas por componentes para compensação de potência reativa e componentes harmôni-
cas. A solução usual é utilizar controladores de corrente Proporcional-Integral (PI) lin-
eares [Newman et al. 2002], no entanto, o uso desses controladores tem resultado em
erros de regime permanente e, as limitações de banda passante geram qualidade de com-
pensação não satisfatória [Yuan et al. 2002]. Existem outras soluções possíveis tais como
o controlador de corrente deadbeat [Malesani et al. 1999], controle por modo deslizante
[Cardenas et al. 1999], controle ressonante [Bojoi et al. 2005] e controle repetitivo
[Matavelli 2001]. O controlador deadbeat, que tem a vantegem de ser adequado para
uma implementação completamente digital, é limitado em desempenho pelo seu inerente
atraso de cálculo [Buso et al. 1998]. O controlador ressonante tem a vantagem de compen-
sação seletiva, mas para umSAPFconvencional, é necessário o uso de um controlador
para a frequência fundamental e para outros harmônicos específicos, que pode resultar em
alto custo em termos de cálculo em tempo real [Lascu et al. 2009]. Essas soluções são
baseadas em controladores projetados paraSAPF cujo modelo dinâmico tem parâmetros
fixos. No entanto, a interação entre impedâncias de carga e da rede pode modificar o
modelo dinâmico doSAPF [Valdez et al. 2009]. Além disso, os parâmetros do modelo
podem variar, principalmente quando a carga tem comportamento aleatório. Portanto,
uma solução adequada para compensar esses problemas de qualidade de energia consiste
no uso de um controlador de corrente cujos ganhos são ajustados por adaptação.
Recentemente, técnicas adaptativas foram introduzidas para lidar com variação de
parâmetros da carga [Shyu et al. 2008, Asiminoaei et al. 2008, Freijedo et al. 2009].
Diferentemente de esquemas de controle convencionais paraSAPF, esse trabalho apre-
senta uma estratégia de controle robusto adaptativa para compensação de distorção har-
mônica, potência reativa e carga desbalanceada. A estratégia proposta não utiliza esquema
de detecção de harmônicos e os requisitos de compensação são obtidos regulando indire-
tamente as correntes da rede elétrica. Nesse caso, as correntes na rede controladas devem
ser senoidais que levam a estratégias de controle ressonantes. Nesse trabalho, as cor-
rentes de referência doSAPFsão geradas pelo controlador de tensão do barramento CC,
CAPÍTULO 1. INTRODUÇÃO 19
baseado no balanço de potência ativa do sistema. Além disso, o controlador proposto
pode ser facilmente implementado em processador digital de sinais e utiliza menos es-
forço computacional que estratégias convencionais. Devido à simplicidade da estratégia
proposta e à redução de custo, pode ser integrada a sistemas eletrônicos embarcados que
geram distorção harmônica, potência reativa e correntes de carga desbalanceadas.
1.5 Objetivos
O objetivo principal desse trabalhor é propor uma nova estratégia de controle que
regula indiretamente as correntes de fase da rede elétrica. As correntes de referência
do sistema são geradas pelo controle de tensão do barramento CC e são baseadas no
balanço de potência ativa do sistema SAPF.As correntes de referência são alinhadas com
o ângulo de fase do vetor tensão da rede, que é obtido usando um PLL. O controle de
corrente é implementado por uma estratégia de controle adaptativo por alocação de pólos,
integrada com um esquema de controle com estrutura variável (VS-APPC). No VS-APPC,
o princípio do modelo interno (IMP) de referência é usado para eliminar o erro em regime
permanente das correntes de fase do sistema. Isso força as correntes de fase do sistema
a serem senoidais e com baixo teor de harmônicos. Além disso, os controladores de
corrente são implementados no referencial estacionário para evitar transformações nas
coordenadas de referência do vetor tensão da rede.
Esse trabalho apresenta também um procedimento para o projeto dos componentes de
um SAPF baseado nos dados da carga e da fonte.
Por último, esse trabalho objetiva a proposição de uma nova estrutura para o controle
indireto de um SAPF com o intuito de diminuir as variações de tensão no barramento CC
quando há modificações da carga.
1.6 Organização da Tese
Esta tese descreve os SAPFs no capítulo 2 e apresenta sua modelagem. No capítulo 3,
é descrito o projeto dos componentes desse filtro.
A maior contribuição deste trabalho é a proposta de um controlador de corrente ro-
busto adaptativo para SAPF utilizando também o método do controle indireto de corrente
para geração das correntes de referência do filtro. Esse controlador é descrito no capítulo
4 juntamente com outras estratégias de controle para comparação de desempenho. Nesse
capítulo, é apresentado também um novo método para o controle de tensão do SAPF. Os
CAPÍTULO 1. INTRODUÇÃO 20
resultados de simulação são mostrados no capítulo 5.
No capítulo 6 são apresentados os resultados experimentais para as estratégias de
controle propostas nesse trabalho. E, por fim, o capítulo 7 apresenta as conclusões gerais
desse trabalho além de perspectivas de trabalhos futuros.
Capítulo 2
Descrição e Modelagem do Filtro Ativo
Paralelo
O filtro ativo paralelo foi apresentado no capítulo 1 juntamente com seu princípio
básico de funcionamento. Nesse capítulo serão apresentadas a descrição desse tipo de
filtro além da modelagem de um filtro ativo paralelo trifásico a três fios.
2.1 Descrição do SAPF
O filtro ativo de potência paralelo age como uma fonte de corrente para injetar cor-
rente na rede elétrica. Para fazer isso, o filtro normalmente é composto de um capacitor
no barramento CC, um inversor fonte de tensão (VSI- Voltage Source Inverter) e um in-
dutor de acoplamento. Com esses componentes, o SAPF se torna uma fonte de corrente
ao trabalhar no modo de corrente controlada via PWM. Existem também SAPF’s com
inversor fonte de corrente (CSI- Current Source Inverter) com um indutor no barramento
CC. Essas duas configurações de filtro ativo paralelo são apresentadas na Figura 2.1.
Atualmente é mais comum a utilização de inversores fonte de tensão em filtros ativos
de potência [Akagi 1996b]. Existem diversos motivos para a preferência por VSI. Os
módulos de IGBTs disponíveis no mercado são mais adequados para VSI pois o IGBT já
vem com um diodo de roda livre ligado em anti-paralelo [Akagi et al. 2007] enquanto que
o CSI necessita de um diodo de bloqueio ligado em série com o IGBT, o que aumenta as
perdas na condução. O VSI necessita de capacitores como dispositivos de armazenamento
no barramento CC, enquanto que o CSI necessita de indutores para o mesmo propósito o
que torna os filtros ativos com CSI mais volumosos e mais caros que os filtros ativos com
VSI [Routimo et al. 2007].
Os filtros ativos de potência podem ser divididos também em monofásicos e trifási-
cos. Até agora a apresentação dos filtros tinha sido realizada a partir do seu diagrama
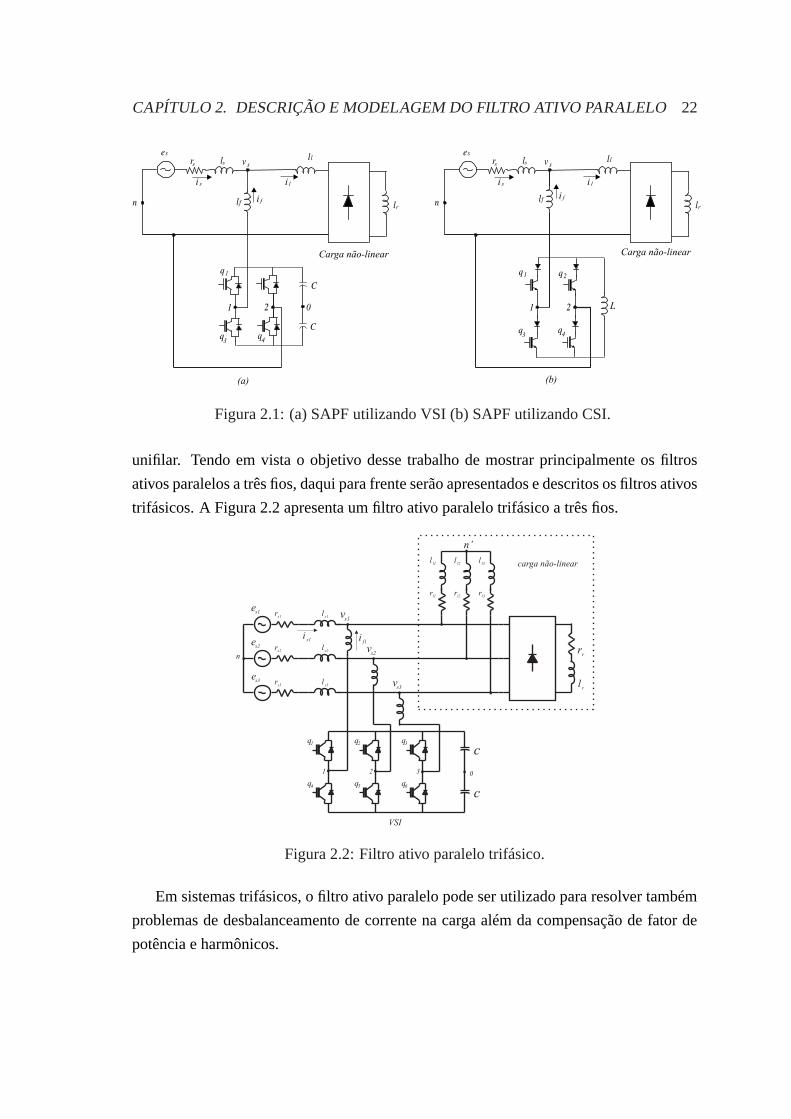
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 22
r
ss
i s i l
i f
(a)
Carga não-linearCarga não-linear
3 4
i f
3 4
Figura 2.1: (a) SAPF utilizando VSI (b) SAPF utilizando CSI.
unifilar. Tendo em vista o objetivo desse trabalho de mostrar principalmente os filtros
ativos paralelos a três fios, daqui para frente serão apresentados e descritos os filtros ativos
trifásicos. A Figura 2.2 apresenta um filtro ativo paralelo trifásico a três fios.
c
c
0
q1
q4
q2
q5
q3
q6
1 2 3
VSI
vs1
s3
s2v
v
es1
es2
es3
rs1
rs2
rs3
ls1
s2
s3
l
l
n
is1 i
f1
carga não-linear
lr
rr
rl1
rl2
rl3
ll1
ll2
ll3
n’
Figura 2.2: Filtro ativo paralelo trifásico.
Em sistemas trifásicos, o filtro ativo paralelo pode ser utilizado para resolver também
problemas de desbalanceamento de corrente na carga além da compensação de fator de
potência e harmônicos.
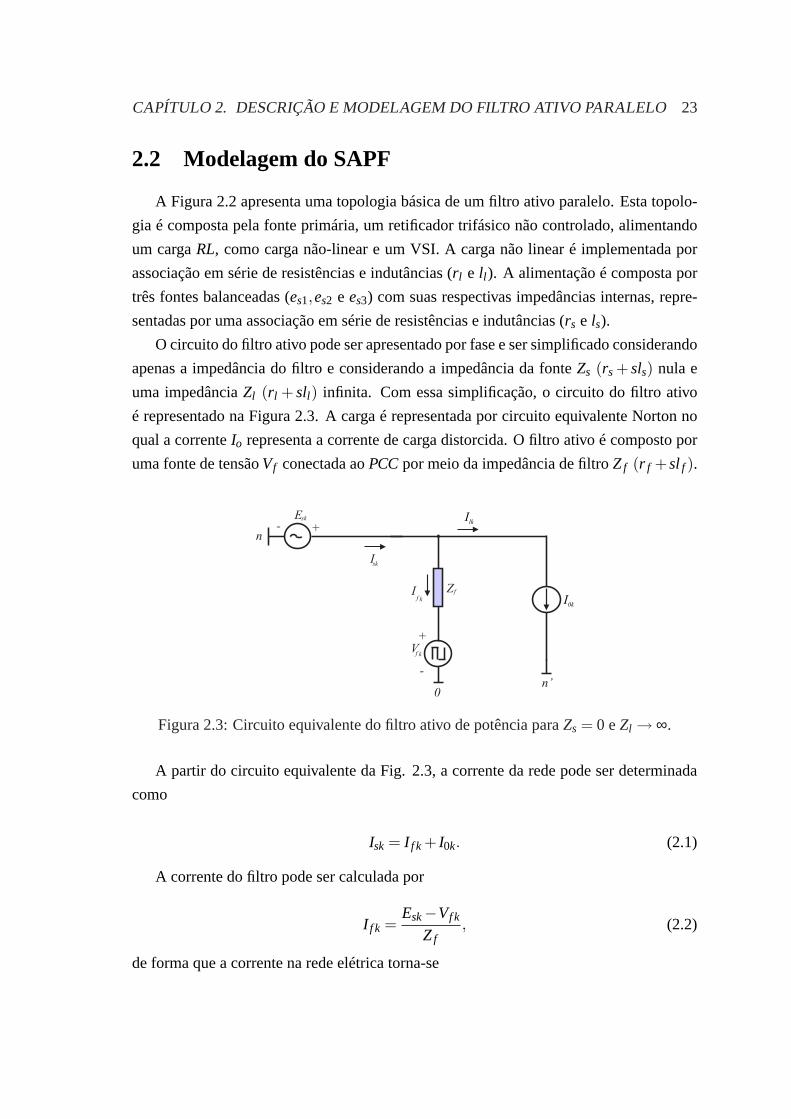
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 23
2.2 Modelagem do SAPF
A Figura 2.2 apresenta uma topologia básica de um filtro ativo paralelo. Esta topolo-
gia é composta pela fonte primária, um retificador trifásico não controlado, alimentando
um cargaRL, como carga não-linear e um VSI. A carga não linear é implementada por
associação em série de resistências e indutâncias (r l e l l ). A alimentação é composta por
três fontes balanceadas (es1,es2 e es3) com suas respectivas impedâncias internas, repre-
sentadas por uma associação em série de resistências e indutâncias (rs e ls).
O circuito do filtro ativo pode ser apresentado por fase e ser simplificado considerando
apenas a impedância do filtro e considerando a impedância da fonteZs (rs+ sls) nula e
uma impedânciaZl (r l + sll ) infinita. Com essa simplificação, o circuito do filtro ativo
é representado na Figura 2.3. A carga é representada por circuito equivalente Norton no
qual a correnteIo representa a corrente de carga distorcida. O filtro ativo é composto por
uma fonte de tensãoVf conectada aoPCCpor meio da impedância de filtroZf (r f +slf ).
E
Isk
+
+
-
-
Vf
0n’
n
sk
k
If k
Zf
I0k
Ilk
Figura 2.3: Circuito equivalente do filtro ativo de potência paraZs = 0 eZl → ∞.
A partir do circuito equivalente da Fig. 2.3, a corrente da rede pode ser determinada
como
Isk = I f k + I0k. (2.1)
A corrente do filtro pode ser calculada por
I f k =Esk−Vf k
Zf, (2.2)
de forma que a corrente na rede elétrica torna-se
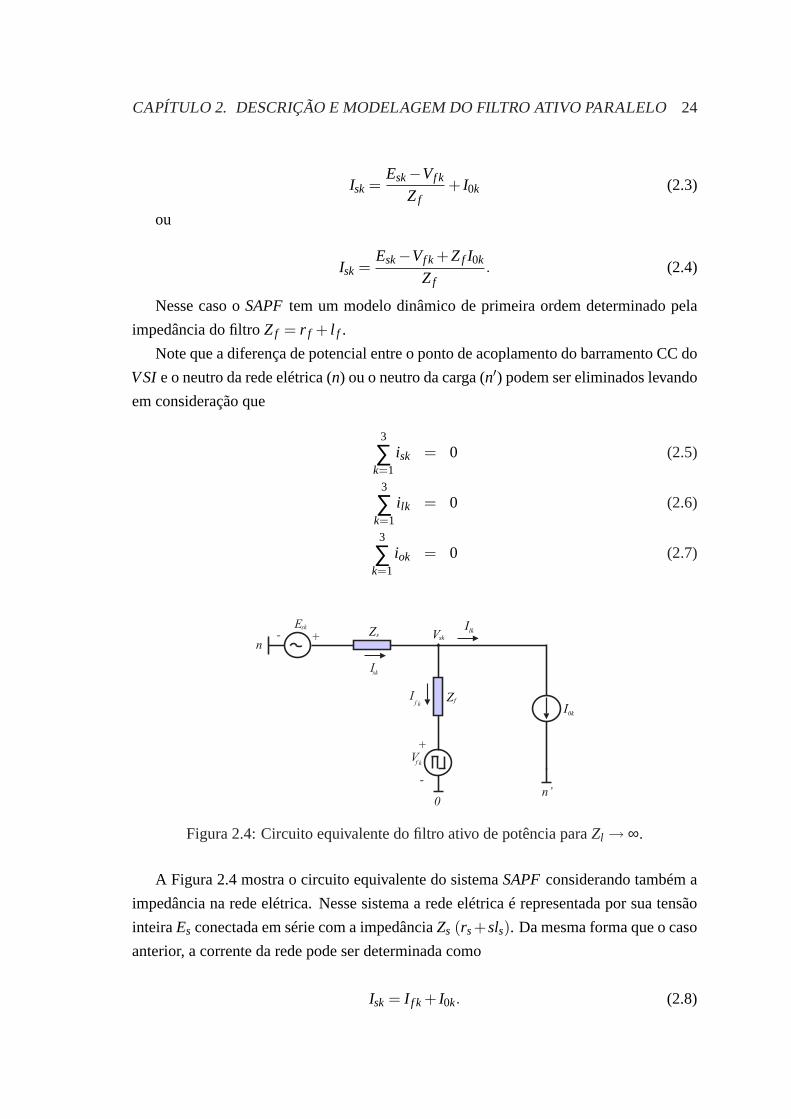
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 24
Isk =Esk−Vf k
Zf+ I0k (2.3)
ou
Isk =Esk−Vf k +Zf I0k
Zf. (2.4)
Nesse caso oSAPF tem um modelo dinâmico de primeira ordem determinado pela
impedância do filtroZf = r f + l f .
Note que a diferença de potencial entre o ponto de acoplamento do barramento CC do
VSIe o neutro da rede elétrica (n) ou o neutro da carga (n′) podem ser eliminados levando
em consideração que
3
∑k=1
isk = 0 (2.5)
3
∑k=1
i lk = 0 (2.6)
3
∑k=1
iok = 0 (2.7)
E
Isk
+
+
-
-
Vf
0n’
n
sk
k
If k
Zf
I0k
IlkZs Vsk
Figura 2.4: Circuito equivalente do filtro ativo de potência paraZl → ∞.
A Figura 2.4 mostra o circuito equivalente do sistemaSAPFconsiderando também a
impedância na rede elétrica. Nesse sistema a rede elétrica é representada por sua tensão
inteiraEs conectada em série com a impedânciaZs (rs+sls). Da mesma forma que o caso
anterior, a corrente da rede pode ser determinada como
Isk = I f k + I0k. (2.8)
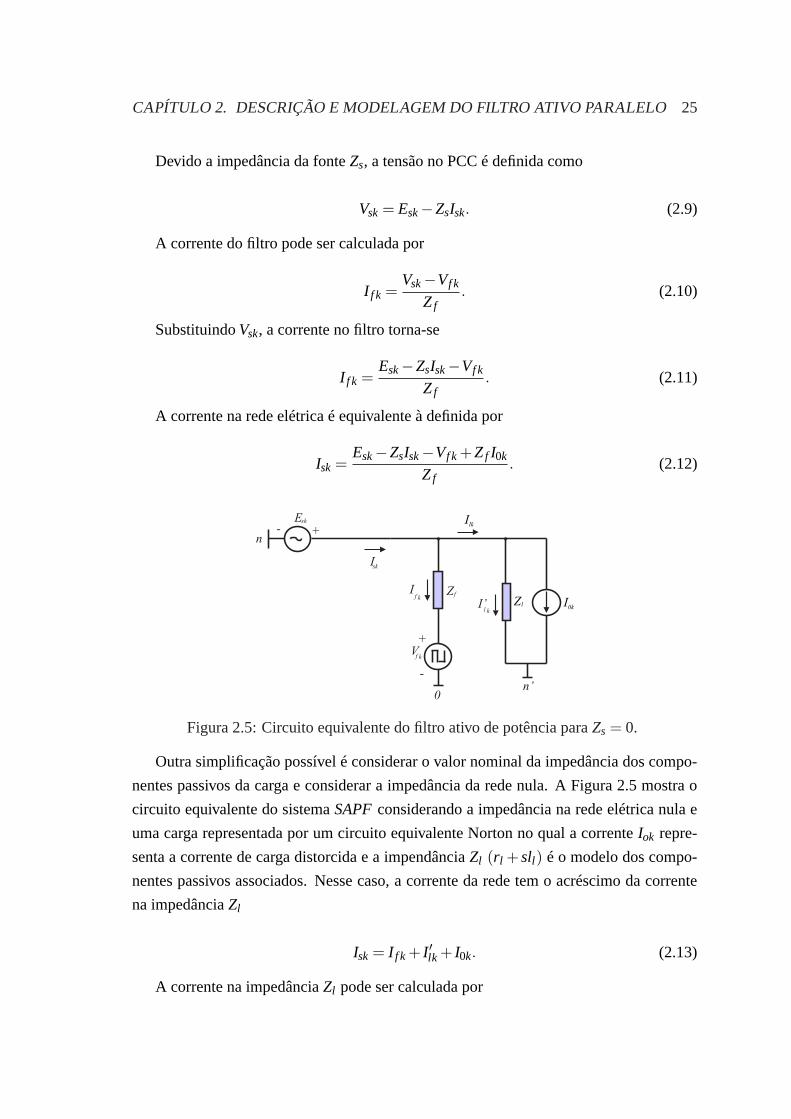
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 25
Devido a impedância da fonteZs, a tensão no PCC é definida como
Vsk = Esk−ZsIsk. (2.9)
A corrente do filtro pode ser calculada por
I f k =Vsk−Vf k
Zf. (2.10)
SubstituindoVsk, a corrente no filtro torna-se
I f k =Esk−ZsIsk−Vf k
Zf. (2.11)
A corrente na rede elétrica é equivalente à definida por
Isk =Esk−ZsIsk−Vf k +Zf I0k
Zf. (2.12)
E
Isk
+
+
-
-
Vf
0n’
n
sk
k
If k
I’l k
Zf
Zl I0k
Ilk
Figura 2.5: Circuito equivalente do filtro ativo de potência paraZs = 0.
Outra simplificação possível é considerar o valor nominal da impedância dos compo-
nentes passivos da carga e considerar a impedância da rede nula. A Figura 2.5 mostra o
circuito equivalente do sistemaSAPFconsiderando a impedância na rede elétrica nula e
uma carga representada por um circuito equivalente Norton no qual a correnteIok repre-
senta a corrente de carga distorcida e a impendânciaZl (r l +sll ) é o modelo dos compo-
nentes passivos associados. Nesse caso, a corrente da rede tem o acréscimo da corrente
na impedânciaZl
Isk = I f k + I ′lk + I0k. (2.13)
A corrente na impedânciaZl pode ser calculada por
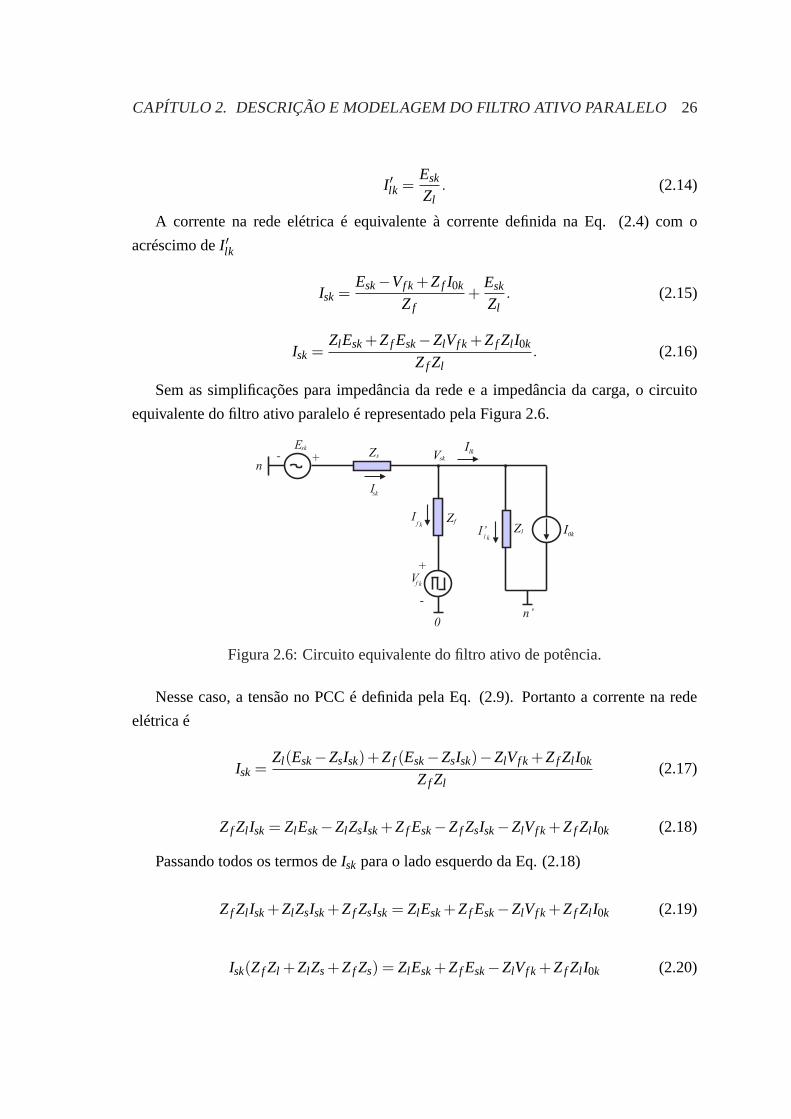
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 26
I ′lk =Esk
Zl. (2.14)
A corrente na rede elétrica é equivalente à corrente definida na Eq. (2.4) com o
acréscimo deI ′lk
Isk =Esk−Vf k +Zf I0k
Zf+
Esk
Zl. (2.15)
Isk =Zl Esk+Zf Esk−ZlVf k +Zf Zl I0k
Zf Zl. (2.16)
Sem as simplificações para impedância da rede e a impedância da carga, o circuito
equivalente do filtro ativo paralelo é representado pela Figura 2.6.
E
Isk
+
+
-
-
Vf
0n’
n
sk
k
If k
I’l k
Zf
Zl I0k
IlkZs Vsk
Figura 2.6: Circuito equivalente do filtro ativo de potência.
Nesse caso, a tensão no PCC é definida pela Eq. (2.9). Portanto a corrente na rede
elétrica é
Isk =Zl (Esk−ZsIsk)+Zf (Esk−ZsIsk)−ZlVf k +Zf Zl I0k
Zf Zl(2.17)
Zf Zl Isk = Zl Esk−ZlZsIsk+Zf Esk−Zf ZsIsk−ZlVf k +Zf Zl I0k (2.18)
Passando todos os termos deIsk para o lado esquerdo da Eq. (2.18)
Zf Zl Isk+ZlZsIsk+Zf ZsIsk = Zl Esk+Zf Esk−ZlVf k +Zf Zl I0k (2.19)
Isk(Zf Zl +ZlZs+Zf Zs) = Zl Esk+Zf Esk−ZlVf k +Zf Zl I0k (2.20)
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 27
Isk =(Zl +Zf )Esk−ZlVf k +Zf Zl I0k
Zf Zl +Zl Zs+Zf Zs. (2.21)
Assim como a Eq. (2.16), a corrente da rede dada pela Eq. (2.21) determina o compor-
tamento dinâmico de segunda ordem doSAPF. É importante enfatizar que a impedância
Zl pode variar dinamicamente como função da condição operacional da carga. Portanto
os pólos da função de transferência doSAPFpodem também variar dinamicamente. Essa
característica do sistema sugere que um controlador adequado para regular a corrente da
rede elétrica deve possuir propriedades adaptativas.
Os componentes trifásicos em (2.21) podem ser transformados nos seus componentes
ortogonaisdqequivalentes a partir da transformação conservativa0dq-123no referencial
estacionário, dado por [White & Woodson 1959]. Isso resulta no seguinte modelodqs
Issdq=
(Zl +Zf )Essdq−ZlVs
f dq+Zf Zl Is0dq
Zf Zl +Zl Zs+Zf Zs, (2.22)
onde o sobrescritos se refere ao referencial estacionário. Definindo-se o polinômio∆(s)dado por
∆(s) = Zf Zl +ZlZs+Zf Zs (2.23)
a Eq. (2.22) pode ser reescrita como:
Issdq=
(Zl +Zf )Essdq
∆(s)−
ZlVsf dq
∆(s)+
Zf Zl Is0dq
∆(s)(2.24)
Da Eq. (2.24) é possível verificar que para controlar a correnteIssdq é necessário gerar
uma tensãoVsf dq capaz de impor a correnteIs
sdq compensando as perturbações impostas
pela carga e pelo barramento CA. Os termos que representam as perturbações da carga e
do barramento CA são respectivamente
Is′0dq = Zf Zl I
s0dq (2.25)
Isedq= (Zl +Zf )Es
sdq. (2.26)
Dessa forma, substituindo os termos das perturbações na Eq. (2.24), tem-se
Issdq=
Isedq
∆(s)−
ZlVsf dq
∆(s)+
Is′0dq
∆(s). (2.27)
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 28
FazendoVs′f dq = Vs
f dq−IsedqZl− Is′
0dqZl
, a função de transferênciaIssdq
Vs′f dq
é definida por
Issdq
Vs′f dq
=− Zl
∆(s). (2.28)
Substituindo de volta as impedânciasZs = rs + sls, Zl = r l + sll e Zf = r f + slf o
modelo resultante do filtro ativo é dado por:
Issdq
Vs′f dq
=− l lγ2
(s+ r ll l)
s2 + γ1γ2
s+ γ0γ2
, (2.29)
ondeγ2 = l f l l + l f ls+ l l ls, γ1 = l f r l + l l r f + l f rs+ r f ls+ l l rs+ lsr l eγ0 = r f r l + r f rs+ r l rs.
Considerando o modelo simplificado dado pela Eq. (2.4) e usando a transformação dq
conservativa 0dq-123 no referencial estacionário, obtém-se o sequinte modelodqs
vs′sdq= rt i
ssdq+ lt
dissdq
dt, (2.30)
ondevs′sdq = vs
f dq− essdq− us
ldq e o sobrescritos significa o referencial estacionário. As
funções de transferência do modelo dado em (2.22) são
Issdq(s) =
1/l f
s+ r f /l fVs′
sdq(s) =bs
s+asVs′
sdq(s), (2.31)
ondeVs′sd(s) = £(vs
f dq−essdq−us
ldq), as = r f /l f ebs = 1/l f .
Com relação ao modelo do capacitor no barramento CC[Mendalek & Al-Haddad
2000], a tensão em seus terminais é calculada como
dVdc
dt=
1C
idc =1C
3
∑m=1
cmim, (2.32)
ondecm é a função de chaveamento do braçom do conversor definida como
cm =
1, seqm estiver ligada eqm+3 estiver desligada
0, seqm estiver desligada eqm+3 estiver ligada(2.33)
Em um sistema trifásico, a corrente em uma das fases depende da tensão em todas
as fases, portanto a função de estado de chaveamento em cada uma das fases depende
simultaneamente do chaveamento das três fases do filtro ativo. Essa função de estado
pode ser definida como:
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 29
dnm =
(cm− 1
3
3
∑m=1
cm
). (2.34)
Dessa forma, a conversão decm paradnm pode ser realizada da seguinte forma:
dn1
dn2
dn3
=
13
2 −1 −1
−1 2 −1
−1 −1 2
c1
c2
c3
. (2.35)
É possível verificar que
3
∑m=1
dnmim =3
∑m=1
cmim. (2.36)
A equação (2.32) pode ser transformada em
dVdc
dt=
1C
3
∑m=1
dnmim (2.37)
ou na sua forma matricial
dVdc
dt=
1C
dn1
dn2
dn3
T
i1i2i3
. (2.38)
Realizando a transformação0dq-123 no referencial síncrono, a equação (2.38) se
torna
dVdc
dt=
1C
dnd
dnq
dn0
T
idiqi0
. (2.39)
Para o sistema trifásico a três fios a corrente de sequência zero é nula de forma que a
equação (2.39) pode ser simplificada para:
dVdc
dt=
dndidC
+dnqiq
C. (2.40)
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 30
2.3 Aplicação dos SAPFs
Os filtros ativos paralelos têm sido largamente utilizados em aplicações industriais
para compensação de harmônicos [Akagi 2005]. Dentre essas aplicações destacam-se a
utilização do SAPF juntamente com retificadores controlados, cicloconversores e outras
cargas de alta impedância.
Atualmente existem diversos fabricantes de filtros ativos paralelos que atendem as
normas IEEE 519 e EN61000-3-4 para aplicações residenciais e industriais. São comer-
cializados filtros ativos paralelos com potência a partir de 10kVA até dezenas de MVA e
com capacidade de aumento da potência devido à tecnologia paralela. Muitos produtos
oferecem compensação dinâmica de harmônicos de corrente até a 50a ordem além da
compensação dinâmica do fator de potência e de desequilíbrios das correntes de fase. A
maioria dos SAPFs produzidos são para aplicações trifásicas a três fios.
Existem também filtros ativos paralelos para aplicações monofásicas uma vez que
muitas das cargas não-lineares presentes na rede elétrica são monofásicas. Uma aplicação
dos SAPFs em geração distribuída é a utilização desses filtros para conectar fontes de
energia alternativa à rede elétrica [Neves et al. 2009] [Sung et al. 2002]. Nesse caso, o
filtro ativo é chamado de conversorGrid-tie.
Os SAPFs são uma opção adequada para compensação de harmônicos e fator de
potência em sistemas de potência de aeronaves devido ao seu pequeno volume e baixo
peso [Hu et al. 2010].
As aplicações de SAPFs em sistemas de alta tensão são mais moderadas devido as
restrições das tensões nominais de chaves semicondutoras de potência. Nesse caso, para a
utilização de filtros ativos paralelos é necessário um transformador abaixador ou estender
a capacidade nominal de tensão das chaves via conversores multi-nível ou a conexão em
série de várias chaves [Massoud et al. 2004]. Essas modificações não são necessárias para
aplicações de média tensão pois já existem no mercado módulos de IGBT com tensão
nominal de 6,5kV [Kopta et al. 2005].
Os SAPFs são recomendados geralmente para cargas que geram harmônicos de cor-
rente. Em folhetos de produtos SAPF fornecidos por fabricantes é possível encontrar re-
comendações de aplicações para centros comerciais, hospitais, unidades de carregamento
de baterias, variadores de velocidade de motores, locais com muitos computadores e im-
pressoras. No entanto, é importante avaliar o tipo da carga a ser utilizado com o filtro. Os
filtros ativos paralelos apresentam bom desempenho com cargas de alta impedância, pois
nesses casos a corrente na carga é relativamente independente da impedância da fonte e
consequentemente não é afetada pela corrente no filtro ativo.
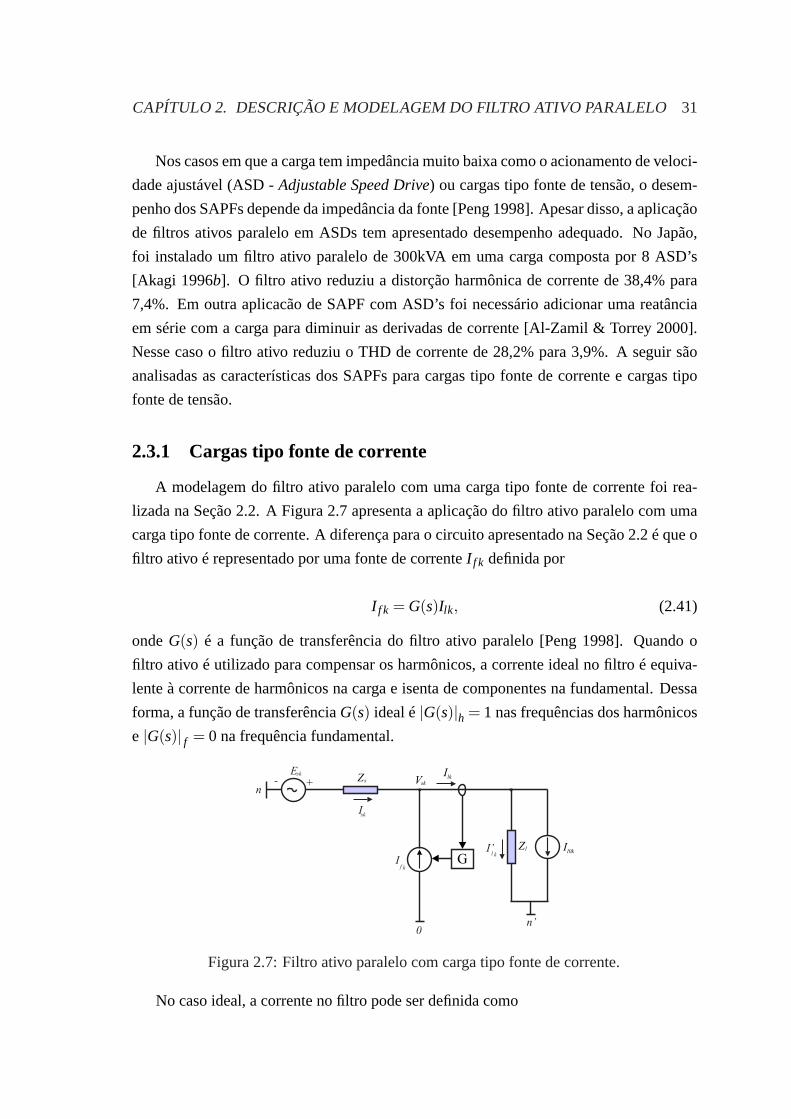
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 31
Nos casos em que a carga tem impedância muito baixa como o acionamento de veloci-
dade ajustável (ASD -Adjustable Speed Drive) ou cargas tipo fonte de tensão, o desem-
penho dos SAPFs depende da impedância da fonte [Peng 1998]. Apesar disso, a aplicação
de filtros ativos paralelo em ASDs tem apresentado desempenho adequado. No Japão,
foi instalado um filtro ativo paralelo de 300kVA em uma carga composta por 8 ASD’s
[Akagi 1996b]. O filtro ativo reduziu a distorção harmônica de corrente de 38,4% para
7,4%. Em outra aplicacão de SAPF com ASD’s foi necessário adicionar uma reatância
em série com a carga para diminuir as derivadas de corrente [Al-Zamil & Torrey 2000].
Nesse caso o filtro ativo reduziu o THD de corrente de 28,2% para 3,9%. A seguir são
analisadas as características dos SAPFs para cargas tipo fonte de corrente e cargas tipo
fonte de tensão.
2.3.1 Cargas tipo fonte de corrente
A modelagem do filtro ativo paralelo com uma carga tipo fonte de corrente foi rea-
lizada na Seção 2.2. A Figura 2.7 apresenta a aplicação do filtro ativo paralelo com uma
carga tipo fonte de corrente. A diferença para o circuito apresentado na Seção 2.2 é que o
filtro ativo é representado por uma fonte de correnteI f k definida por
I f k = G(s)Ilk, (2.41)
ondeG(s) é a função de transferência do filtro ativo paralelo [Peng 1998]. Quando o
filtro ativo é utilizado para compensar os harmônicos, a corrente ideal no filtro é equiva-
lente à corrente de harmônicos na carga e isenta de componentes na fundamental. Dessa
forma, a função de transferênciaG(s) ideal é|G(s)|h = 1 nas frequências dos harmônicos
e |G(s)| f = 0 na frequência fundamental.
E
Isk
+-
0n’
n
sk
If k
I’l k
Zl Il0k
IlkZs Vsk
G
Figura 2.7: Filtro ativo paralelo com carga tipo fonte de corrente.
No caso ideal, a corrente no filtro pode ser definida como

CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 32
I f k = Ilkh, (2.42)
ondeIlkh representa os harmônicos de corrente na carga. A corrente na fonte é
Isk = Ilk− I f k (2.43)
Isk = Ilok + I ′lk− I f k. (2.44)
A corrente que passa na impedânciaZl depende da tensão no PCC de forma que
I ′lk =Vsk
Zl=
Esk−ZsIsk
Zl. (2.45)
A corrente na carga é
Ilk = Ilok +Esk−ZsIsk
Zl. (2.46)
A corrente no filtro pode ser calculada substituindoIlk na Eq. (2.41):
I f k = G(s)(
Ilok +Esk−ZsIsk
Zl
). (2.47)
A partir das Eqs. (2.45) e (2.47), a corrente na rede se torna
Isk = Ilok +Esk−ZsIsk
Zl−G(s)
(Ilok +
Esk−ZsIsk
Zl
)(2.48)
Isk = Ilok([1−G(s)]+Esk
[1Zl− G(s)
Zl
]+ Isk
[Zs
ZlG(s)− Zs
Zl
]. (2.49)
Passando todos os termos deIsk para o lado esquerdo, tem-se
Isk
[1− Zs
ZlG(s)+
Zs
Zl
]= Ilok [1−G(s)]+Esk
[1Zl− G(s)
Zl
](2.50)
Isk
[Zl +Zs−ZsG(s)
Zl
]= Ilok [1−G(s)]+Esk
[1−G(s)
Zl
](2.51)
Isk[Zl +Zs−ZsG(s)] = IlokZl [1−G(s)]+Esk[1−G(s)] (2.52)
Isk
[Zl
1−G(s)+Zs
][1−G(s)] = IlokZl [1−G(s)]+Esk[1−G(s)] (2.53)

CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 33
Isk
[Zl
1−G(s)+Zs
]= IlokZl +Esk (2.54)
Isk = IlokZl
Zl1−G(s) +Zs
+Esk
Zl1−G(s) +Zs
. (2.55)
A corrente na carga pode ser reescrita a partir da Eq. (2.43)
Ilk = Isk+ I f k. (2.56)
SubstituindoI f k pela Eq. (2.41)
Ilk = Isk+G(s)Ilk (2.57)
Ilk [1−G(s)] = Isk (2.58)
Ilk =Isk
1−G(s). (2.59)
SubstituindoIsk pela Eq. (2.55)
Ilk =Zl
1−G(s)Ilok
Zl1−G(s) +Zs
+1
1−G(s)Esk
Zl1−G(s) +Zs
. (2.60)
Considerando as frequências dos harmônicos, é possível observar que quando a equação
∣∣∣∣Zl
1−G
∣∣∣∣hÀ |Zs| (2.61)
é satisfeita, as Eqs. (2.55) e (2.60) podem ser reescritas como
Iskh' Ilokh[1−G(s)]+Eskh
Zl[1−G(s)]' 0 (2.62)
Ilkh = Ilokh+Eskh
Zl. (2.63)
A Eq. (2.62) mostra que a corrente na rede elétrica se torna livre de harmônicos
quando a Eq. (2.61) é satisfeita já que|1−G(s)|h = 0. A condição (2.61) é portanto um
requisito para o correto funcionamento do filtro ativo paralelo utilizado para compensar
harmônicos de corrente.
Como citado anteriormente, os filtros ativos paralelos apresentam bom desempenho

CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 34
com cargas de alta impedância. Nesses casos a impedância da rede é insignificante com-
parada à impedância da rede(|Zl | À |Zs|) de forma que as Eqs. (2.55) e (2.61) podem ser
reduzidas respectivamente para
Isk
Ilok= 1−G(s) (2.64)
|1−G(s)|h¿ 1. (2.65)
A Eq. (2.64) mostra que quando a impedância da carga é muito alta, a eficiência de
compensação do filtro não depende ou não é afetada pela impedância da rede elétrica e
depende apenas da função de transferência do filtro ativo. Enquanto isso, a Eq. (2.65)
estabelece a condição para que o filtro ativo apresente uma compensação adequada de
harmônicas.
Quando a impedânciaZl é pequena, a condição(|Zl | À |Zs|) não é mais satisfeita. A
correnteI ′lk que passa pela impedânciaZl definida na Eq. (2.45) pode ser muito alta se
Vsk tiver harmônicos de tensão. Dessa forma, a corrente no filtro ativo precisa ser bastante
elevada para conseguir compensar os harmônicos.
2.3.2 Cargas tipo fonte de tensão
Para uma carga tipo fonte de tensão, o circuito equivalente do filtro ativo paralelo é
apresentado na Figura 2.8. A carga é representada por uma fonte de tensãoVlok em série
com uma impedânciaZl .
E
Isk
+-
0n’
n
sk
If k
Zl
Vl0k
IlkZs Vsk
G
+
-
Figura 2.8: Filtro ativo paralelo com carga tipo fonte de tensão.
Nesse caso, o filtro ativo paralelo é utilizado também para compensação de harmôni-
cos de corrente. A corrente no filtro ativo é definida pela Eq. (2.41), enquanto que a
corrente na carga é
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 35
Ilk =Vsk−Vlok
Zl(2.66)
Ilk =Esk−ZsIsk−Vlok
Zl, (2.67)
ondeVsk é a tensão no PCC que depende da impedância da redeZs. A corrente no filtro
pode ser calculada substituindoIlk na Eq. (2.41):
I f k = G(s)(
Esk−ZsIsk−Vlok
Zl
). (2.68)
A partir das Eqs. (2.67) e (2.68), a corrente na rede se torna
Isk = [1−G(s)](
Esk−ZsIsk−Vlok
Zl
)(2.69)
Isk+[1−G(s)]ZsIsk
Zl= [1−G(s)]
(Esk−Vlok
Zl
)(2.70)
Isk
1−G(s)+
ZsIsk
Zl=
(Esk−Vlok
Zl
)(2.71)
[Zl
1−G(s)+Zs
]Isk = Esk−Vlok (2.72)
Isk =Esk−Vlok
Zl1−G(s) +Zs
. (2.73)
SubstituindoIsk na Eq. (2.59), a corrente na carga se torna
Ilk =1
1−G(s)Esk−Vlok
Zl1−G(s) +Zs
(2.74)
Ilk =Esk−Vlok
Zl +Zs[1−G(s)]. (2.75)
Nas frequências dos harmônicos, é possível observar que quando a equação
∣∣∣∣Zl
1−G(s)+Zs
∣∣∣∣hÀ 1pu (2.76)
é satisfeita, a corrente na rede fica livre de harmônicos:
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO FILTRO ATIVO PARALELO 36
Iskh' 0. (2.77)
Considerando essa corrente da rede elétrica na Eq. (2.67), a corrente na carga é
Ilkh =Eskh−Vlokh
Zl(2.78)
O problema é que satisfazer a condição (2.76) é bastante difícil para uma carga tipo
fonte de tensão pois a impedânciaZl é muito pequena como é o caso, por exemplo, de
um retificador com um grande capacitor eletrolítico para diminuição doripple. Nesse
caso, a impedânciaZl é quase nula e não é possível satisfazer a condição (2.76) através
da impedância da redeZs, que é geralmente menor que0,1pu. Portanto, a aplicação de
filtros ativos paralelos com cargas tipo fonte de tensão não apresenta uma compensação
adequada dos harmônicos de corrente. Para esse tipo de carga, o filtro ativo série é mais
indicado para a compensação de harmônicos [Peng 1998].
2.4 Conclusão
Nesse capítulo foi desenvolvido e analisado o modelo do SAPF considerando a inte-
ração das impedâncias da carga e rede elétrica. O modelo do sistema demonstrou que seu
comportamento dinâmico é descrito por um sistema de segunda ordem no qual os pólos da
função de transferência podem variar de acordo com a aleatoriedade da carga não linear.
No entanto, para o caso mais usual da operação do SAPF, o modelo do sistema pode ser
representado por um sistema de primeira ordem.
A aplicação do SAPF foi analisada para cargas tipo fonte de corrente e fonte de ten-
são. Essa análise demonstrou que o SAPF pode compensar adequadamente os harmôni-
cos quando a impedância de carga for suficientemente maior que a impedância da rede
elétrica. Porém, o SAPF não é adequado para ser utilizado com cargas tipo fonte de
tensão.
Capítulo 3
Projeto do Circuito de Potência
O projeto do conversor de potência é determinado principalmente pelos requisitos o-
peracionais do SAPF [Ponnaluri & Brickwedde 2001]. O primeiro passo para a definição
desses requisitos é a análise da carga a ser instalada no ponto de acoplamento do filtro
ativo. As especificações da carga devem ser levadas em consideração para delimitar a
capacidade máxima de operação do conversor de potência. Além disso, é necessário es-
tabelecer o pior cenário a ser enfrentado pelo SAPF, incluindo, por exemplo, as possíveis
assimetrias da rede elétrica [Verdelho & Marques 1994].
O objetivo do projeto é obter um conversor de potência capaz de atender às normas
de compensação. Essas normas dependem da tensão nominal do barramento, da ordem
dos harmônicos, do fator de potência da carga ou mesmo da região em que o equipamento
será instalado.
A análise da carga deve fornecer os dados na Tabela 3.1 para o projeto do conversor:
Il123(rms) Valor eficaz das correntes na cargaIl123(max) Valor máximo das correntes na cargaVs123(rms) Valor eficaz da tensão de alimentaçãocosφ(min) Mínimo fator de potência da cargaSl (max) Potência aparente máxima da carga
THD(max) THD máximo das correntes de carga
Tabela 3.1: Parâmetros da carga.
3.1 Potência Nominal do Conversor de Potência
A potência nominal do conversor depende dos parâmetros da carga. Por definição, a
relação entre a potência do conversor e a potência da carga pode ser dada por:
CAPÍTULO 3. PROJETO DO CIRCUITO DE POTÊNCIA 38
Ssap f
Sload=
√Q2
load + P2load√
P2load +Q2
load + P2load
, (3.1)
ondeSsap f e Sload são as potências aparentes do filtro ativo e da carga, respectivamente.
Os outros termos de potência presentes na Equação (3.1) são:
1. a potência ativa da carga
Pload = 3VsI1cosφ1, (3.2)
ondeφ1 é a defasagem da corrente de carga;
2. a potência reativa da carga
Qload = 3VsI1sinφ1 (3.3)
3. a potência dos harmônicos da carga
Pload = 3Vs
√∞
∑k=2
I2k . (3.4)
É considerado que o barramento de tensão é ideal (infinito) e queVs é puramente
senoidal. O cálculo da potência do filtro pode também ser realizado a partir do THD das
correntes na carga. Definindo-se THD como
THD =
√∑∞
k=2 I2k
I1, (3.5)
pode-se obter a potênciaPload em função do THD, como:
Pload = 3VsI1THD. (3.6)
Substituindo o novoPload além dePload e Qload na Equação (3.1), a relação entre as
potências do SAPF e da carga pode ser dado:
Ssap f
Sload=
√sin2φ+THD2
√1+THD2
(3.7)
Portanto, a potência nominal do conversor pode ser determinada a partir da potência
aparente da carga (Sload), O THD da carga e o fator de potência da carga (cosφ).
Quando o fator de potência da carga é alto mas o THD é baixo, a potência do con-
versor será determinada principalmente pela potência reativa da carga. Se o objetivo do
CAPÍTULO 3. PROJETO DO CIRCUITO DE POTÊNCIA 39
filtro ativo for apenas compensação de harmônicos, a potência aparente do filtro pode ser
determinada fazendoQload = 0 na Equação (3.1), o que resulta em
Ssap f
Sload=
THD√1+THD2
(3.8)
3.2 Projeto dos Componentes Passivos
Os componentes passivos do SAPF são principalmente o capacitor do barramento CC
e os indutores de filtragem da entrada. O primeiro passo para o projeto dos componentes
passivos é a definição da frequência de chaveamento do conversor de potência. Essa fre-
quência deve ser alta suficiente para mitigação dos hamônicos até a máxima ordem de har-
mônica definida nas normas técnicas, que é geralmente a 50a harmônica. Teoricamente,
a frequência de chaveamento deve ser 2 vezes maior que a máxima ordem harmônica
[Huang et al. 2011], ou seja
fsw≥ 2(kh fs) (3.9)
onde fsw é frequência de chaveamento do conversor de potência,kh é a máxima ordem
dos harmônicos a serem compensados efs é a frequência fundamental da tensão da rede
elétrica.
É prudente utilizar a Equação (3.9) como ponto de partida para o valor mínimo da
frequência de chaveamento. Essa definição tem que levar em consideração a frequência
suportada pelas chaves de comutação e as perdas atreladas ao aumento da frequência de
chaveamento.
3.2.1 Projeto do capacitor do barramento CC
O primeiro passo para o projeto do capacitor é o cálculo da frequência de chaveamento
que deve ser realizado a partir da Equação (3.9). Após a definição da frequência de
chaveamento, o próximo passo é a definição do valor máximo da tensão no barramento
CC. Um valor adequado para regular a tensão do barramento CC é 10% acima da tensão
máxima de entrada [Rastogi et al. 1994]. Em [Chaoui et al. 2008] foram investigados
os efeitos de diferentes valores do barramento CC e foi observado que o aumento dessa
tensão melhorou um pouco a corrente compensada mas degradou a qualidade da tensão
de alimentação do sistema. A definição da tensão do barramento CC pode partir de 10%
acima da tensão máxima de entrada.

CAPÍTULO 3. PROJETO DO CIRCUITO DE POTÊNCIA 40
O procedimento para definir o valor do capacitor do barramento CC pode ser desen-
volvido a partir do balanço de energia no diagrama unifilar mostrado na Figura 3.1. A
extensão da simplificação pode ser realizada facilmente para o caso trifásico.
il
C
filtro ativo de potência
Rede
vs
vdc
C
0
carga não-linear
n n’
Figura 3.1: Circuito equivalente monofásico do SAPF.
Na Figura 3.1, a potência instantânea fornecida pela rede elétrica pode ser represen-
tada por
ps(t) =12VsIs− 1
2VsIscos(2ωst) = ps+ ps (3.10)
Nesse caso, é considerado que as tensões e correntes na fonte são senoidais e estão em
fase, em virtude da utilização do filtro ativo. Porém, a carga consome também potência
reativa e potência de harmônicos:
pl (t) = pl + pl , (3.11)
ondepl é a componente CC da potência instantânea e que representa a potência ativa:
pl =Vl Il(1) cosφ1
2(3.12)
ondepl é a componente CA da potência instantânea e que representa a potência reativa e
potência dos harmônicos:
pl =−VsIl(1)
2cos(2ωst+φ(1))+
∞
∑n=2
VsIl(n)
2
cos
[(n−1)ωst +φ(n)
]−cos
[(n+1)ωst +φ(n)
].
(3.13)
A potência injetada no conversor de potência pelo sistema é

CAPÍTULO 3. PROJETO DO CIRCUITO DE POTÊNCIA 41
pconv(t) = ps(t)− pl (t) = pconv+ pconv, (3.14)
ondepconve pconvsão os componentes CC e CA depconv(t) respectivamente. A partir das
Eqs. (3.10) e (3.12), a magnitude depconv pode ser dado por
pconv=12(VsIs−VsIl(1) cosφ1). (3.15)
Considerando que a perda de potência pode ser aproximada por um termo constante
ploss, a variação da energia armazenada no capacitor do barramento CC em um intervalo
de tempo∆t pode ser dado por
12C∆v2
dc = (pconv− ploss)∆t (3.16)
consequentemente, a variação de tensão no barramento CC pode ser expresso como
∆vc =
√(VsIs−VsIl(1) cosφ1−2ploss
C
)∆t. (3.17)
O valor médio deps e pl durante um ciclo da frequência fundamental é nulo, portanto
não afetam a tensão do capacitor do barramento CC. No entanto, os componentes CAps
e pl podem provocar flutuações de tensão. Dessa forma, a tensão no capacitor pode ser
representada por
vdc(t) = vdc+ vdc, (3.18)
ondevdc representa o valor médio do capacitor no barramento CC evdc, as flutuações
nessa tensão. A corrente no capacitor do barramento CC pode ser expressa como
idc(t) = idc+ idc+^i dc, (3.19)
ondeidc é a componente CC,idc representa os componentes harmônicos de baixa ordem
devido às correntes na carga e^i dc representa os harmônicos de alta ordem devido princi-
palmente à frequência de chaveamento do conversor.
Para simplificar a análise das variações da tensão no barramento CC, são realizadas
algumas considerações:
• A oscilação devdc devido à^i dc pode ser desprezada pois as componentes das altas
frequências são atenuadas em relação às componentes de harmônicos baixos e, o

CAPÍTULO 3. PROJETO DO CIRCUITO DE POTÊNCIA 42
tempo de carregamento e descarregamento é muito pequeno para alterar significati-
vamentevdc;
• A energia armazenada nos indutores do filtro de entrada é desprezível;
• Em regime permanente, a oscilação da tensão do barramento CC é menor que o
valor médio dessa tensão e
• O conversor é conservativo em potência.
Dessa forma, é considerado que o conversor não consome potência ativa em regime
permanente, ou seja, a potência ativa instantênea tem média nula (pconv= 0). Assim, a
Equação (3.14) pode ser reescrita como
pconv(t) = ps− pl = pconv(t) (3.20)
e pconv(t) pode ser representado como
pconv(t) =∞
∑n=1
pl(n) cos(nωst +φ(n)). (3.21)
Portanto, considerando o balanço de energia do sistema, a potência instantânea de
entrada deve ser representada por
vdc(t)idc(t) = pconv(t). (3.22)
Em regime permanente, a consideração de que o conversor não consome potência
ativa, implica que o capacitor do barramento CC também não consome potência ativa.
Assim, a corrente média para carregamento do capacitor (idc) é zero. Considerando tam-
bém que^i dc pode ser desprezado, os harmônicos de corrente de baixa ordem no capacitor
do barramento CC podem ser determinados como
idc(t) =pconv(t)vdc(t)
(3.23)
e a flutuação na tensão do capacitor pode ser determinada por
vdc(t) =1C
∫ t
0idc(t)dt ≈ 1
Cvdc
∞
∑n=1
pl(n)
nωssin(nωst +φn) (3.24)
Para efeitos de projeto, a Equação (3.24) pode ser aproximada por
∆vdc(%) =pl(h)
v2dcnωsC
×100 (3.25)
CAPÍTULO 3. PROJETO DO CIRCUITO DE POTÊNCIA 43
Baseado na análise apresentada, os seguintes comentários devem ser levados em con-
sideração para o procedimento de projeto do capacitor do barramento CC e nível de ten-
são:
• A oscilação de tensão do barramento CC deve ser regulada para um nível aceitável
para obter uma precisão razoável na compensação;
• A oscilação da tensão do barramento CC depende da ordem e magnitude do com-
ponente CApconv, a tensão e a capacitância do barramento CC.
3.2.2 Projeto do indutor de entrada do filtro
O projeto dos indutores de entrada é baseado nos seguintes requisitos:
• os indutores devem limitar as componentes de alta frequência das correntes inje-
tadas
• o valor di f /dtmax gerado pelo filtro ativo deve ser maior que odi/dt dos compo-
nentes harmônicos da carga que se deseja compensar.
O primeiro requisito de projeto do indutor pode ser atendido calculando-se o máximo
ripple de corrente CA. A partir desse valor é determinado o valor mínimo para o indutor
de entrada, que atende ao segundo requisito (derivada máxima de corrente). Para o cálculo
do indutor, as seguintes simplificações são aplicadas:
• A tensão da rede elétricavs(t) e a tensão de saída no conversor de potência do filtro
vf (t) são constantes durante o período de chaveamento;
• O PWM que sintetiza a tensão de saída do filtro introduz um atraso médio deτ f =τsw/2 no sistema.
Utilizando as simplificações citadas, oripple de corrente no filtro pode ser determi-
nado como
∆i f (t) =1
2l f
∫ τsw/2
0
[vf (t)−vs(t)
]dt, (3.26)
ondevf (t) = qsw(t)vdc2 e qsw(t) é a função de chaveamento que define o ciclo de trabalho
das chaves de potência no braço do conversor. Resolvendo-se a Equação (3.26) para o
pior caso (quando as tensões de fase estão passando pelo pico da senóide), o ripple de
corrente no filtro pode ser dado por
CAPÍTULO 3. PROJETO DO CIRCUITO DE POTÊNCIA 44
∆i f =π(vdc−2vsp)
2wswl f(3.27)
ou também como
∆i f (%) =π(vdc−2vsp)
2wswl f
1i f p
×100%, (3.28)
ondevsp representa o valor de pico da tensão na rede elétrica ei f p, o valor máximo
da corrente no filtro. Para o projeto do filtro, o valor da corrente máxima no filtro é
considerada igual à máxima corrente de carga.
As equações (3.27)-(3.28) correspondem ao primeiro requisito do projeto para os in-
dutores do filtro de entrada. O segundo requisito, que determina a máxima derivada de
corrente que o SAPF deve produzir, pode ser atendido a partir do seguinte cálculo:
vdc
2− l f
(dildt
)
max≥ vsp. (3.29)
A equação (3.29) pode ser reescrita em duas diferentes formas com dois diferentes
significados analíticos, como a seguir:
vdc≥ 2
[l f
(dildt
)
max+vsp
](3.30)
ou
(di f
dt
)
max=
1l f
(vdc
2−vsp
). (3.31)
A equação (3.30) encontra o valor crítico da tensão no barramento CC como função
da indutância do filtro de entrada. A máxima derivada de corrente, no pior caso, que pode
ser produzida pelo filtro ativo é determinada pela equação (3.31).
As equações (3.26)-(3.28) permitem o cálculo independente dos valores mínimos de
l f e vdc. No entanto, a seleção del f e vdc requer um compromisso. Para compensar os
harmônicos adequadamente, o filtro deve produzir um altodi f /dt, que necessita de um
valor baixo da indutância do filtro de entrada. Por outro lado, a diminuição dessa indutân-
cia resulta em um aumento do ripple de corrente e consequentemente, no aumento do
THD da corrente na rede elétrica. O mesmo efeito é observado na tensão do barramento
CC: o aumento da tensãovdc produz uma alto valor dedi f /dt, mas também resulta em
um aumento doripple de corrente gerado pelo SAPF.
CAPÍTULO 3. PROJETO DO CIRCUITO DE POTÊNCIA 45
3.3 Conclusão
Nesse capítulo foram apresentados os cálculos de projeto para os principais compo-
nentes em um SAPF. A potência nominal do conversor de potência do SAPF foi definida
em função da potência reativa e da potência dos harmônicos da carga quando o filtro ativo
compensa a corrente reativa e os harmônicos de corrente. Consequentemente, a potên-
cia nominal do conversor pode ser reduzida se o filtro não precisar compensar a potência
reativa.
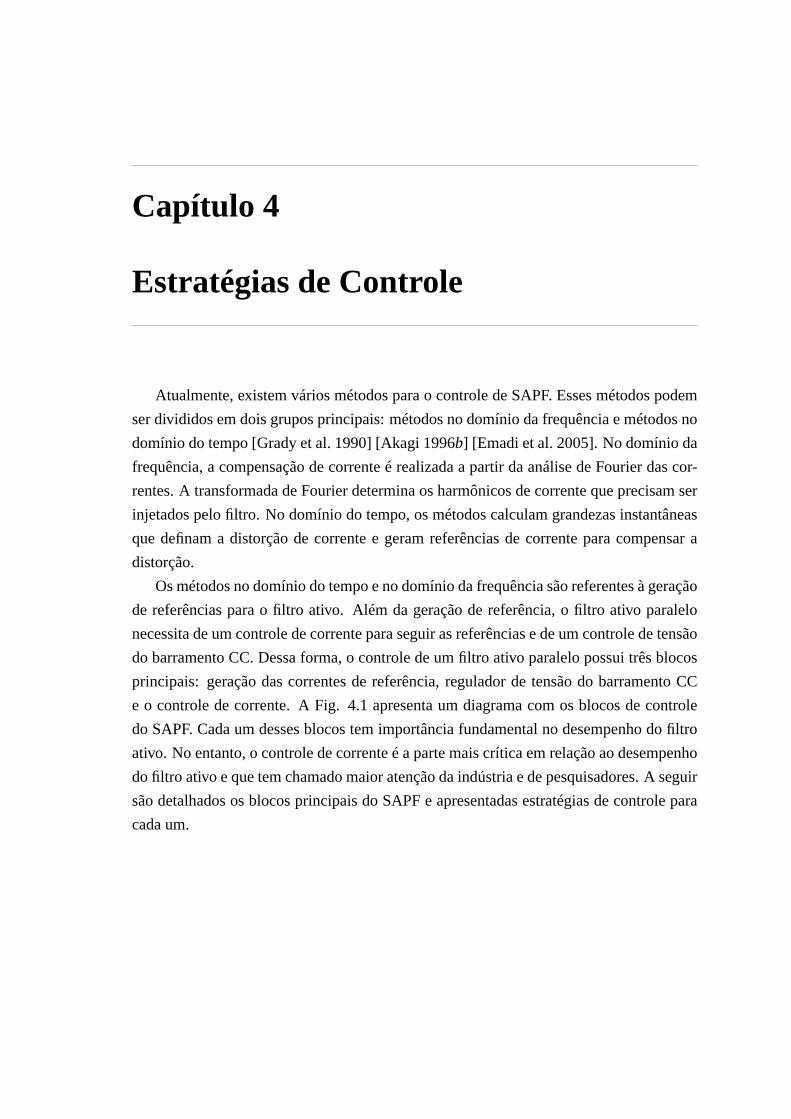
Capítulo 4
Estratégias de Controle
Atualmente, existem vários métodos para o controle de SAPF. Esses métodos podem
ser divididos em dois grupos principais: métodos no domínio da frequência e métodos no
domínio do tempo [Grady et al. 1990] [Akagi 1996b] [Emadi et al. 2005]. No domínio da
frequência, a compensação de corrente é realizada a partir da análise de Fourier das cor-
rentes. A transformada de Fourier determina os harmônicos de corrente que precisam ser
injetados pelo filtro. No domínio do tempo, os métodos calculam grandezas instantâneas
que definam a distorção de corrente e geram referências de corrente para compensar a
distorção.
Os métodos no domínio do tempo e no domínio da frequência são referentes à geração
de referências para o filtro ativo. Além da geração de referência, o filtro ativo paralelo
necessita de um controle de corrente para seguir as referências e de um controle de tensão
do barramento CC. Dessa forma, o controle de um filtro ativo paralelo possui três blocos
principais: geração das correntes de referência, regulador de tensão do barramento CC
e o controle de corrente. A Fig. 4.1 apresenta um diagrama com os blocos de controle
do SAPF. Cada um desses blocos tem importância fundamental no desempenho do filtro
ativo. No entanto, o controle de corrente é a parte mais crítica em relação ao desempenho
do filtro ativo e que tem chamado maior atenção da indústria e de pesquisadores. A seguir
são detalhados os blocos principais do SAPF e apresentadas estratégias de controle para
cada um.
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 47
c
c
0
q1
q4
q2
q5
q3
q6
1 2 3
vs1
s3
s2v
v
es1 r
sl
s
n
if1e
s2
es3
rs
rs
ls
ls
carga não-linear
lr
rr
rl
ll
n’
rl
ll
rl
ll
is1
is2
is3
il1
il2
il3
vdc
s2
q
S+
-vdc*
vdc
Controlador dobarramento CC
i*CGeração dascorrentes de
referência
ic1*
ic3*
ic2*
is1
is2s2
is3
vs1 s2
vs3
v il1
il2
il3
Controle decorrente
ic1*
ic3*
ic2*
PWMv
f3*
vf2*
vf1*
q1q q2 q3 q4 q5 q6
Figura 4.1: Diagrama de controle doSAPF.
4.1 Geração de correntes de referência
O gerador das correntes de referência determina a operação do filtro ativo paralelo.
É a partir das correntes de referência que o SAPF realiza a compensação de harmônicos
ou a compensação de fator de potência. A seguir são apresentados três métodos para a
geração das correntes de referência.
4.1.1 Geração de corrente para o controlador SRF
O funcionamento do controlador no referencial síncrono (SRF) se baseia no cálculo
das correntes de carga no referencial sícronod−q [Bhattacharya & Divan 1995]. Essas
correntes no referencial síncrono trazem consigo informações sobre o fator de potência
da carga e os harmônicos de corrente.
Com relação ao fator de potência, a corrente no referencial sícronoq define a potência
reativa consumida pela carga. Em um sistema trifásico equilibrado as tensões e correntes
podem ser definidas como
vl123 =
V√
2cos(ωt)V√
2cos(ωt− 2π3 )
V√
2cos(ωt + 2π3 )
(4.1)
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 48
i l123 =
I√
2cos(ωt +φ)I√
2cos(ωt− 2π3 +φ)
I√
2cos(ωt + 2π3 +φ)
, (4.2)
ondeV e I são respectivamente os valores eficazes da tensão e corrente eφ é a defasagem
entre corrente e tensão.
No referencial estacionárioα−β, as tensões e correntes são obtidas utilizando a trans-
formada de Clarke:
T =
√23
[1 −1
2 −12
0√
32 −
√3
2
](4.3)
vlαβ = T
V√
2cos(ωt)V√
2cos(ωt− 2π3 )
V√
2cos(ωt + 2π3 )
=
[ √3V cos(ωt)√3V sin(ωt)
](4.4)
i lαβ = T
I√
2cos(ωt +φ)I√
2cos(ωt− 2π3 +φ)
I√
2cos(ωt + 2π3 +φ)
=
[ √3I cos(ωt +φ)√3I sin(ωt +φ)
]. (4.5)
Para passar do referencial estacionácioα− β para o referencial sícrono utiliza-se a
transformadaP, conhecida como transformada de Park [Park 1929]:
P =
[cosωt sinωt
−sinωt cosωt
](4.6)
vdq = P
[ √3V sin(ωt)
−√3V cos(ωt)
]=
[ √3V
0
](4.7)
i ldq = P
[ √3I cos(ωt +φ)√3I sin(ωt +φ)
]=
[ √3I cosφ√3I sinφ
]. (4.8)
As potências ativas e reativasP eQ em um sistema trifásico são calculadas como:
P = 3VI cosφ (4.9)
Q = 3VI sinφ. (4.10)
É possível observar portanto que em um sistema trifásico equilibrado:

CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 49
P =√
3V√
3I cosφ = vdid (4.11)
Q =√
3V√
3I sinφ = vdiq. (4.12)
Dessa forma, é possível afirmar que a potência ativaP é proporcional à correntei ldenquanto que a potência reativaQ é proporcional à correntei lq. Além disso, é possível
observar que as correntes no referencial sícrono são constantes, ou seja, tem apenas com-
ponentes CC. Isso acontece pois as correntes da carga são senoidais. Quando há distorção
de corrente, aparecem componentes CA também nas correntesi ld e i lq.
Por exemplo, em um sistema trifásico com correntes harmônicas de 5a ordem, as
correntes de fases são:
i l123 =
I√
2sin(ωt +φ)+ I5√
2sin(5ωt)I√
2sin(ωt− 2π3 +φ)+ I5
√2sin(5ωt−52π
3 )I√
2sin(ωt + 2π3 +φ)+ I5
√2sin(5ωt +52π
3 )
, (4.13)
ondeI5 é o valor eficaz da corrente harmônica de 5a ordem. As correntes no referencial
estacionárioα−β são:
i lαβ = T.i l123=
√23
[1 −1
2 −12
0√
32 −
√3
2
]
I√
2sin(ωt +θ)+ I5√
2sin(5ωt)I√
2sin(ωt− 2π3 +θ)+ I5
√2sin(5ωt−52π
3 )I√
2sin(ωt + 2π3 +θ)+ I5
√2sin(5ωt +52π
3 )
(4.14)
i lαβ =
[ √3I sin(ωt +θ)+
√3I5sin(5ωt)
−√3I cos(ωt +θ)+√
3I5cos(5ωt)
](4.15)
Nesse caso, as correntes no referencial síncrono são:
idq = P.i lαβ =
[cosωt sinωt
−sinωt cosωt
][ √3I sin(ωt +θ)+
√3I5sin(5ωt)
−√3I cos(ωt +θ)+√
3I5cos(5ωt)
](4.16)
i ldq =(sinωt)
[√3I5cos(5ωt)−√3I cos(ωt +θ)
]+(costω)
[√3I5sin(5ωt)+
√3I sin(ωt +θ)
]
(cosωt)[√
3I5cos(5ωt)−√3I cos(ωt +θ)]− (sintω)
[√3I5sin(5ωt)+
√3I sin(ωt +θ)
](4.17)

CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 50
i ldq =
[ √3I cosθ−√3I5cos6ωt√3I sinθ+
√3I5sin6ωt
](4.18)
É possível observar que as correntesi ldq possuem agora componentes CA e CC. A
parte CC é referente às correntes na frequência fundamental e a parte CA corresponde aos
harmônicos.
As correntesi ldq podem ser representadas da seguinte forma:
i ld = i ld + ˜i ld (4.19)
i lq = i lq + ˜i lq, (4.20)
ondei ld representa a componente CC dei ld e ˜i ld representa a componente CA. Na prática,
a correntei ld é a corrente responsável pela potência ativaP na carga, lembrando queP
representa a potência média consumida pela carga. A correntei lq representa é corrente
responsável pela potência reativaQ. As correntesi ld e ˜i lq representam a parcela de har-
mônicos na corrente. Dessas correntes, apenasi ld contribui para a transferência de energia
entre a fonte e a carga. A potência reativa representa uma potência cuja média é zero (ver
Apêndice D). Dessa forma, qualquer parcela dei lq não contribui para transferência de
energia entre a fonte e a carga. A corrente˜i ld tem essa mesma característica, pois sendo
uma componente CA proporcional à potência ativa, a média dessa potência é nula.
O controlador SRF para o filtro ativo paralelo pode ser utilizado para compensação de
harmônicos e/ou compensação do fator de potência. Para a compensação de harmônicos,
é necessário compensar as correntes˜i ld e ˜i lq. Enquanto que para a compensação do fator
de potência é necessário compensar também a correntei lq. O princípio de funcionamento
do filtro ativo paralelo que utiliza um controle SRF é mostrado na Figura 4.2. A corrente
idc é a corrente responsável por suprir as perdas de energia no conversor e no capacitor do
barramento CC.
A implementação do controlador SRF requer a extração dos componentes CC das
correntesi ld e i lq. Essa extração é realizada por um filtro passa-baixa (LPF -Low Pass
Filter) nos eixosd eq. A vantagem de utilizar o LPF no referencial síncrono é que como
as correntes extraídas são CC, os erros de fase decorrentes da utilização do filtro não
afetami ld e i lq. Enquanto isso, a extração dos componentes CA das correntesdqpode ser
realizada a partir de um filtro passa-alta (HPF -High Pass Filter) no referencial sícrono.
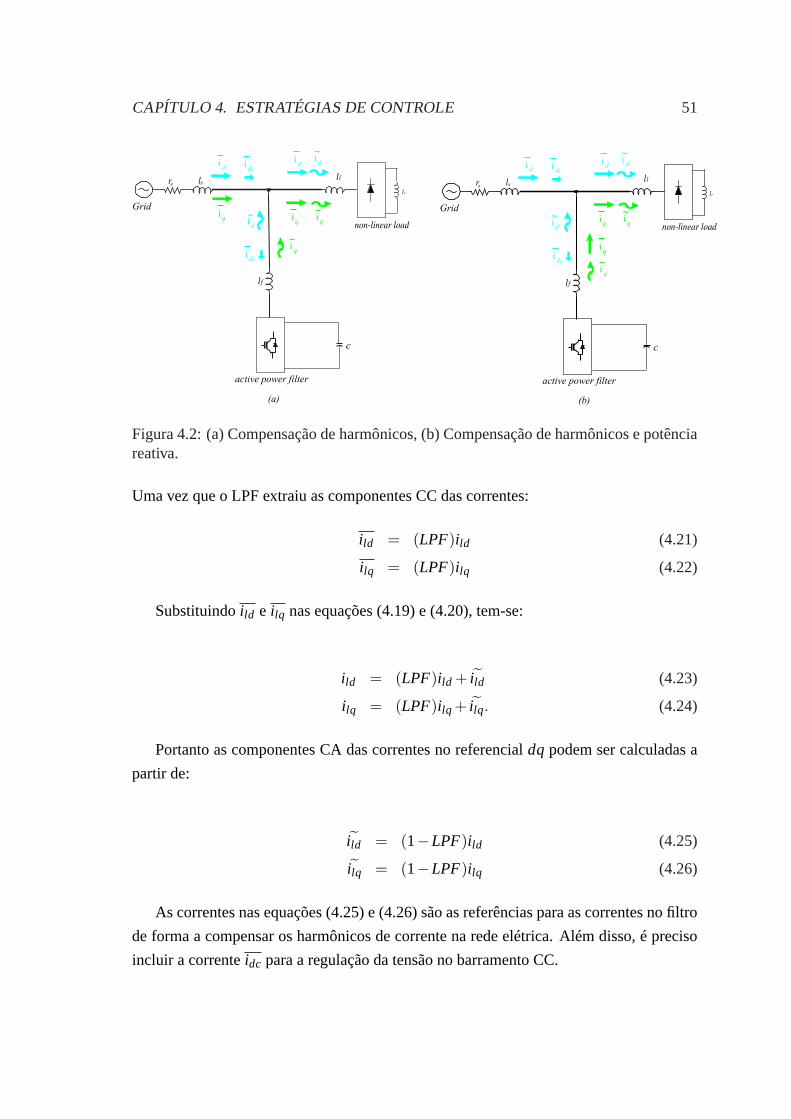
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 51
r
ss
c
active power filter
Grid
idc
idc
id
id
~i
d
iq i
q
~i
q
~i
q
(a) (b)
~i
d
Figura 4.2: (a) Compensação de harmônicos, (b) Compensação de harmônicos e potênciareativa.
Uma vez que o LPF extraiu as componentes CC das correntes:
i ld = (LPF)i ld (4.21)
i lq = (LPF)i lq (4.22)
Substituindoi ld e i lq nas equações (4.19) e (4.20), tem-se:
i ld = (LPF)i ld + ˜i ld (4.23)
i lq = (LPF)i lq + ˜i lq. (4.24)
Portanto as componentes CA das correntes no referencialdq podem ser calculadas a
partir de:
˜i ld = (1−LPF)i ld (4.25)
˜i lq = (1−LPF)i lq (4.26)
As correntes nas equações (4.25) e (4.26) são as referências para as correntes no filtro
de forma a compensar os harmônicos de corrente na rede elétrica. Além disso, é preciso
incluir a correnteidc para a regulação da tensão no barramento CC.

CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 52
123
/
S
LPF
S
SS
+
-
-
-
PLL
vC
*
vC
+
-
i l2
il1
il3
vs31
ws
xdq
e
ld
ei
ilq
e
ld
ei~ fd
si
fq
si
ws
/
xdq
e
xdq
s
vfd
s*
vfq
s*
123/
PWM
VSI
AF
+
+
vf1
*
vf3
*
vf2
*xdq
s
- Referencial síncronoxdq
e
- Referencial estacionárioxdq
s
LPF S
lq
ei~
fq
ei
*
=0
S
S+
+
+
+
efd
suld
s -
efq
sulq
s-
G (s)c
G (s)cS
S
-
-
+
+
fq
ei
*
fd
ei
*
R (s)v
fd
si
*
fq
si
*
+
+-
idc*
Figura 4.3: Controlador SRF para compensação de harmônicos.
i∗f d = −(1−LPF)i ld + idc (4.27)
i∗f q = −(1−LPF)i lq (4.28)
Essas correntes estão no referencial síncrono. A Figura 4.3 mostra que o contro-
lador de corrente trabalha com as correntes no referencial estacionário. Originalmente,
o controle de corrente no controlador SRF érealizado no referencial síncrono. Nesse tra-
balho, para realizar comparações entre os métodos de geração de correntes de referência,
foram utilizadas as mesmas estruturas de controle de corrente que estão no referencial
estacionário. Nesse referencial, as correntes de referência são:
[is∗f d
is∗f q
]=
[cosωt −sinωt
sinωt cosωt
][i∗f d
i∗f q
](4.29)
is∗f d = i∗f d cosωt− i∗f qsinωt (4.30)
is∗f q = i∗f d sinωt + i∗f qcosωt (4.31)
Para compensar o fator de potência, a correntei lq também precisa ser incluída na
referência de corrente do filtro. Dessa forma a nova corrente de referênciai∗f q para o filtro
é:
i∗f q =−(1−LPF)i lq− i lq. (4.32)

CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 53
123
/
S
LPF
S
SS
+ -
-
PLL
vC
*
vC
+
-
i l2
il1
il3
vs31
ws
xdq
e
ld
ei
ilq
e
ld
ei~ fd
si
fq
si
ws
/
xdq
e
xdq
s
vfd
s*
vfq
s*
123/
PWM
VSI
AF
+
+
vf1
*
vf3
*
vf2
*xdq
s
- Referencial síncronoxdq
e
- Referencial estacionárioxdq
s
S
S+
+
+
+
efd
suld
s -
efq
sulq
s-
G (s)c
G (s)c
S-
+
fq
ei
*
fd
ei
*
R (s)v
fd
si
*
fq
si
*
- +
+-1
idc*
Figura 4.4: Controlador SRF para compensação de harmônicos e fator de potência.
Substituindoi lq pela Eq. (4.22):
i∗f q =−(1−LPF)i lq− (LPF)i lq =−i lq. (4.33)
Portanto, nesse caso a referência de correntei∗f q é a própria correntei lq na carga sem
a necessidade de utilizar um filtro passa-baixa. A Figura 4.4 apresenta o diagrama de
blocos para esse novo caso.
Nos diagramas de blocos mostrados nas Figs. 4.3 e 4.4, é possível observar a existên-
cia de mais de um controlador em toda a malha. O controlodar SRF na realidade é apenas
responsável pelas referências de corrente no filtro. Existe uma malha externa que repre-
senta o controlador de tensão no barramento CC (capacitor) representado porRv(s) e uma
malha de controle mais interna, que é o controle de corrente representado porGc(s).Substituindo as correntes de referênciai∗f d e i∗f q nas Eqs. (4.30) e (4.31):
is∗f d =(− ˜i ld + idc
)cosωt + i lq sinωt (4.34)
is∗f q =(− ˜i ld + idc
)sinωt− i lq cosωt. (4.35)
O erro de corrente na entrada do controlador de corrente é:
εd = is∗f d− isf d (4.36)
εd = idccosωt− ˜i ld cosωt + i lq sinωt− isf d (4.37)
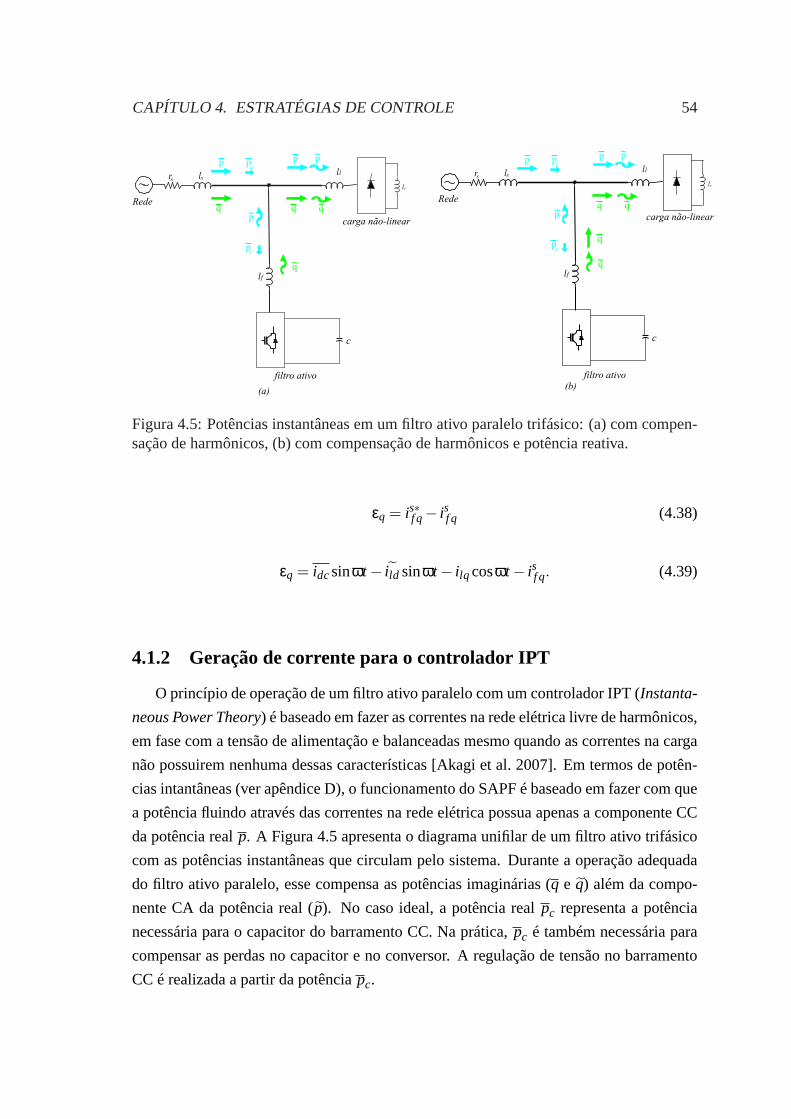
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 54
r
ss
c
filtro ativo
Rede
p p p~
q q~
p~
q~
pc
pc
r
ss
c
Rede
p p p~
q q~
p~
q
q~
pc
pc
q
(a)(b)
carga não-linear carga não-linear
filtro ativo
Figura 4.5: Potências instantâneas em um filtro ativo paralelo trifásico: (a) com compen-sação de harmônicos, (b) com compensação de harmônicos e potência reativa.
εq = is∗f q− isf q (4.38)
εq = idcsinωt− ˜i ld sinωt− i lq cosωt− isf q. (4.39)
4.1.2 Geração de corrente para o controlador IPT
O princípio de operação de um filtro ativo paralelo com um controlador IPT (Instanta-
neous Power Theory) é baseado em fazer as correntes na rede elétrica livre de harmônicos,
em fase com a tensão de alimentação e balanceadas mesmo quando as correntes na carga
não possuirem nenhuma dessas características [Akagi et al. 2007]. Em termos de potên-
cias intantâneas (ver apêndice D), o funcionamento do SAPF é baseado em fazer com que
a potência fluindo através das correntes na rede elétrica possua apenas a componente CC
da potência realp. A Figura 4.5 apresenta o diagrama unifilar de um filtro ativo trifásico
com as potências instantâneas que circulam pelo sistema. Durante a operação adequada
do filtro ativo paralelo, esse compensa as potências imaginárias (q e q) além da compo-
nente CA da potência real (p). No caso ideal, a potência realpc representa a potência
necessária para o capacitor do barramento CC. Na prática,pc é também necessária para
compensar as perdas no capacitor e no conversor. A regulação de tensão no barramento
CC é realizada a partir da potênciapc.
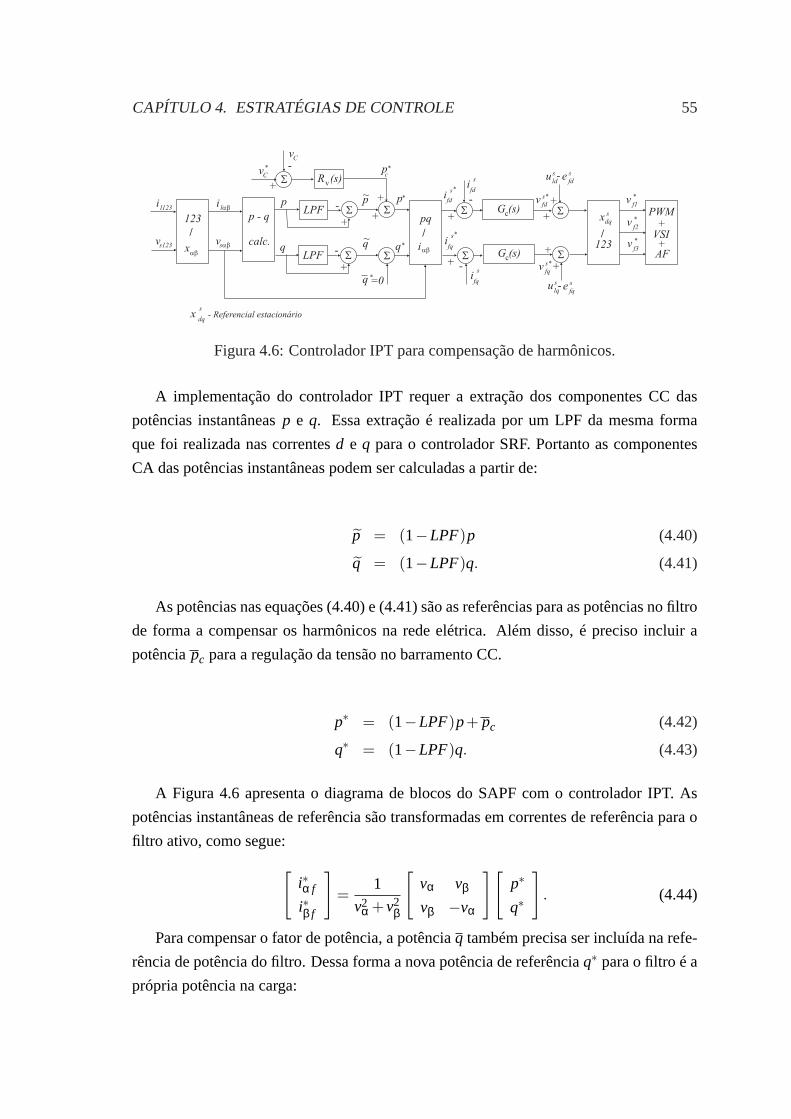
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 55
123
/
S
LPF
S
SS+
+ -
-
vC
*
vC
+
-
vs123
il123
xab
p~fd
si
fq
si
vfd
s*
vfq
s*
123/
PWM
VSI
AF
+
+
vf1
*
vf3
*
vf2
*xdq
s
- Referencial estacionárioxdq
s
pc*
LPF S
q~
S
S+
+
+
+
efd
suld
s -
efq
sulq
s-
G (s)c
G (s)cS
S
-
-
+
+
R (s)v
fd
si
*
fq
si
*
=0*q
p
q
p*
q*
pq
/
iab
p - q
calc.
ilab
vsab
+
+
Figura 4.6: Controlador IPT para compensação de harmônicos.
A implementação do controlador IPT requer a extração dos componentes CC das
potências instantâneasp e q. Essa extração é realizada por um LPF da mesma forma
que foi realizada nas correntesd e q para o controlador SRF. Portanto as componentes
CA das potências instantâneas podem ser calculadas a partir de:
p = (1−LPF)p (4.40)
q = (1−LPF)q. (4.41)
As potências nas equações (4.40) e (4.41) são as referências para as potências no filtro
de forma a compensar os harmônicos na rede elétrica. Além disso, é preciso incluir a
potênciapc para a regulação da tensão no barramento CC.
p∗ = (1−LPF)p+ pc (4.42)
q∗ = (1−LPF)q. (4.43)
A Figura 4.6 apresenta o diagrama de blocos do SAPF com o controlador IPT. As
potências instantâneas de referência são transformadas em correntes de referência para o
filtro ativo, como segue:
[i∗α f
i∗β f
]=
1
v2α +v2
β
[vα vβ
vβ −vα
][p∗
q∗
]. (4.44)
Para compensar o fator de potência, a potênciaq também precisa ser incluída na refe-
rência de potência do filtro. Dessa forma a nova potência de referênciaq∗ para o filtro é a
própria potência na carga:
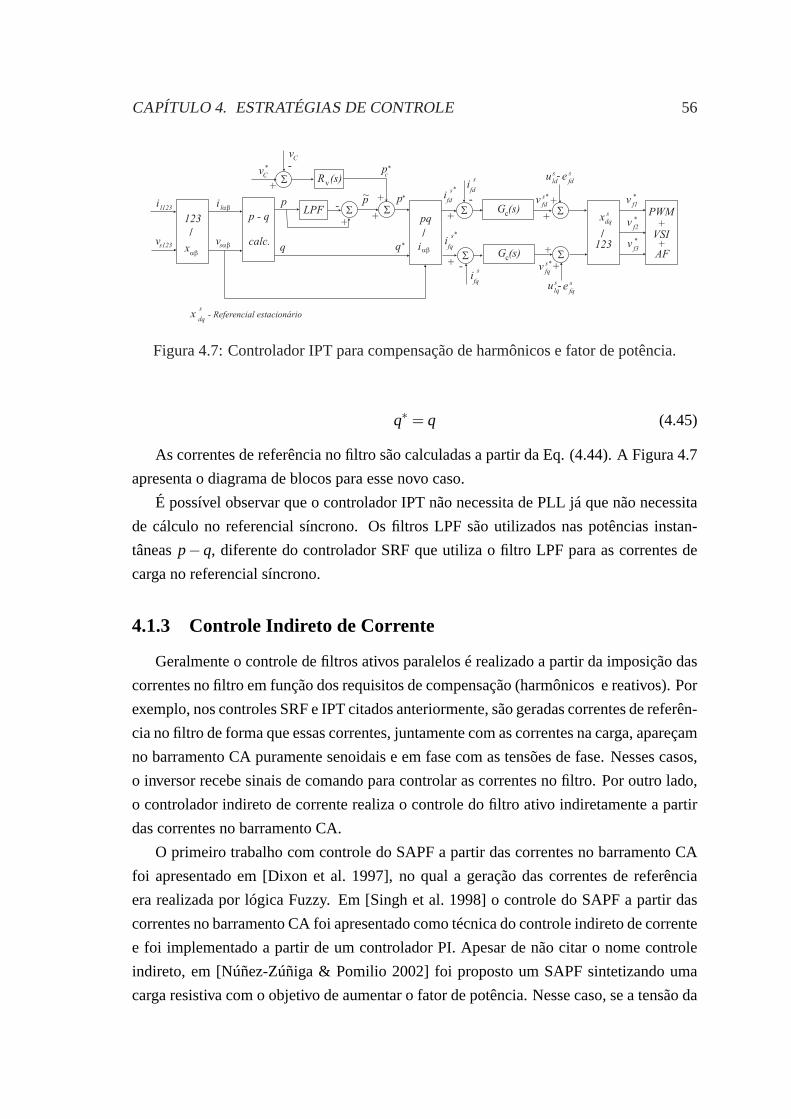
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 56
123
/
S
LPF
S
SS+
+ -
-
vC
*
vC
+
-
vs123
il123
xab
p~fd
si
fq
si
vfd
s*
vfq
s*
123/
PWM
VSI
AF
+
+
vf1
*
vf3
*
vf2
*xdq
s
- Referencial estacionárioxdq
s
pc*
S
S+
+
+
+
efd
suld
s -
efq
sulq
s-
G (s)c
G (s)c
S-
+
R (s)v
fd
si
*
fq
si
*
p
q
p*
q*
pq
/
iab
p - q
calc.
ilab
vsab
+
+
Figura 4.7: Controlador IPT para compensação de harmônicos e fator de potência.
q∗ = q (4.45)
As correntes de referência no filtro são calculadas a partir da Eq. (4.44). A Figura 4.7
apresenta o diagrama de blocos para esse novo caso.
É possível observar que o controlador IPT não necessita de PLL já que não necessita
de cálculo no referencial síncrono. Os filtros LPF são utilizados nas potências instan-
tâneasp−q, diferente do controlador SRF que utiliza o filtro LPF para as correntes de
carga no referencial síncrono.
4.1.3 Controle Indireto de Corrente
Geralmente o controle de filtros ativos paralelos é realizado a partir da imposição das
correntes no filtro em função dos requisitos de compensação (harmônicos e reativos). Por
exemplo, nos controles SRF e IPT citados anteriormente, são geradas correntes de referên-
cia no filtro de forma que essas correntes, juntamente com as correntes na carga, apareçam
no barramento CA puramente senoidais e em fase com as tensões de fase. Nesses casos,
o inversor recebe sinais de comando para controlar as correntes no filtro. Por outro lado,
o controlador indireto de corrente realiza o controle do filtro ativo indiretamente a partir
das correntes no barramento CA.
O primeiro trabalho com controle do SAPF a partir das correntes no barramento CA
foi apresentado em [Dixon et al. 1997], no qual a geração das correntes de referência
era realizada por lógica Fuzzy. Em [Singh et al. 1998] o controle do SAPF a partir das
correntes no barramento CA foi apresentado como técnica do controle indireto de corrente
e foi implementado a partir de um controlador PI. Apesar de não citar o nome controle
indireto, em [Núñez-Zúñiga & Pomilio 2002] foi proposto um SAPF sintetizando uma
carga resistiva com o objetivo de aumentar o fator de potência. Nesse caso, se a tensão da
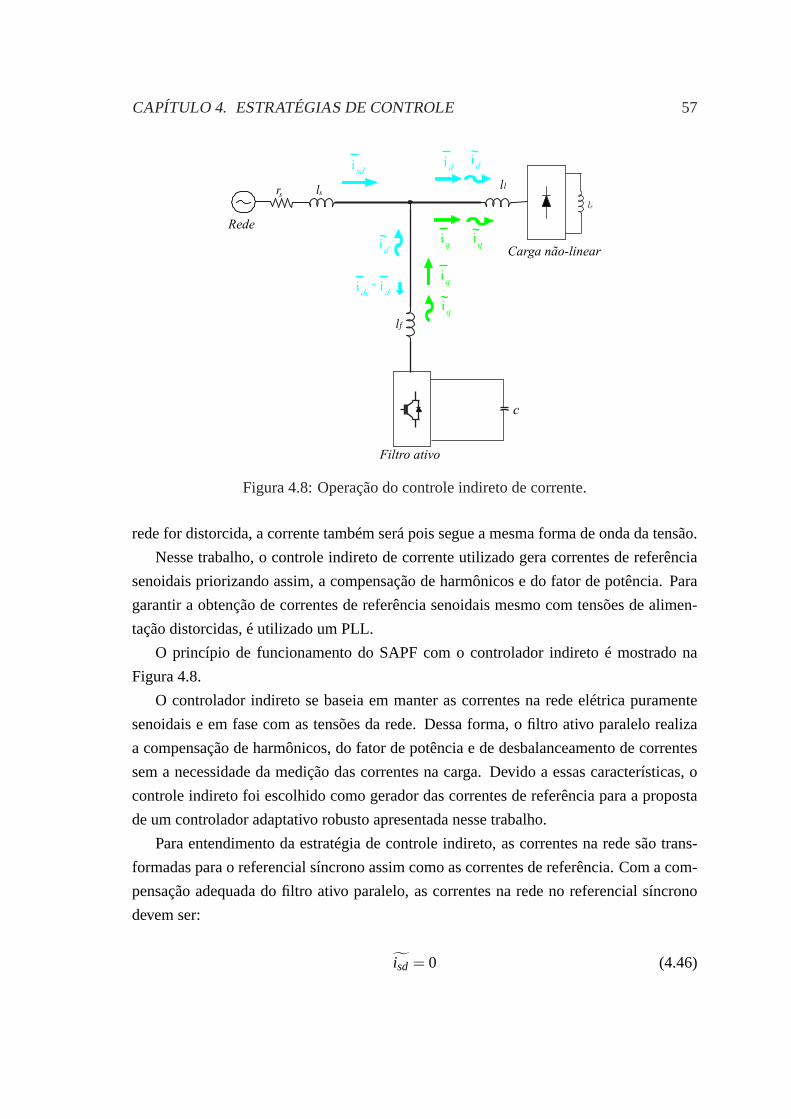
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 57
r
ss
c
Filtro ativo
Rede
isd
id
~i
d
iq
iq
~i
q
~i
q
~i
d
idc
- id
Carga não-linear
Figura 4.8: Operação do controle indireto de corrente.
rede for distorcida, a corrente também será pois segue a mesma forma de onda da tensão.
Nesse trabalho, o controle indireto de corrente utilizado gera correntes de referência
senoidais priorizando assim, a compensação de harmônicos e do fator de potência. Para
garantir a obtenção de correntes de referência senoidais mesmo com tensões de alimen-
tação distorcidas, é utilizado um PLL.
O princípio de funcionamento do SAPF com o controlador indireto é mostrado na
Figura 4.8.
O controlador indireto se baseia em manter as correntes na rede elétrica puramente
senoidais e em fase com as tensões da rede. Dessa forma, o filtro ativo paralelo realiza
a compensação de harmônicos, do fator de potência e de desbalanceamento de correntes
sem a necessidade da medição das correntes na carga. Devido a essas características, o
controle indireto foi escolhido como gerador das correntes de referência para a proposta
de um controlador adaptativo robusto apresentada nesse trabalho.
Para entendimento da estratégia de controle indireto, as correntes na rede são trans-
formadas para o referencial síncrono assim como as correntes de referência. Com a com-
pensação adequada do filtro ativo paralelo, as correntes na rede no referencial síncrono
devem ser:
isd = 0 (4.46)

CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 58
isq = isq+ ˜isq = 0 (4.47)
A parte CA das correntesisd e isq representam os harmônicos enquanto queisq re-
presenta a corrente responsável pela potência reativa. Quando essas correntes são nulas,
indica que as correntes na rede são puramente senoidais e em fase com as tensões da rede.
A única corrente circulando na rede deve serisd, que é a corrente responsável por fornecer
a potência ativa para a carga e para suprir as perdas no SAPF. Se essa corrente for maior
que a consumida pela carga e pelas perdas no SAPF, como
isd > idl + idloss, (4.48)
a potência fornecida para o sistema estará em excesso e a tensão no capacitor do barra-
mento CC aumentará. Se a corrente for menor:
isd < idl + idloss, (4.49)
o capacitor do barramento CC sofrerá queda de tensão. Portanto, quando essas correntes
se igualarem:
isd = idl + idloss (4.50)
o sistema estará em equilíbrio e a tensão no capacitor permanecerá constante.
A grande diferença nesse método é que são geradas correntes de referência na rede
elétrica e os comandos recebidos pelo inversor são para o controle dessas correntes.
Além disso, esse método dispensa a utilização de filtragem de potências ou correntes.
Em contrapartida, são conhecidas a priori que as correntes de referência para o filtro ativo
são puramente senoidais e em fase com as tensões. O único parâmetro adicional é a
amplitude das correntes que é calculada para regular a tensão no barramento CC. Essa
amplitude deve ser igual para todas as fases para a compensação de desbalanceamento
de corrente. A Figura 4.9 apresenta o diagrama de blocos do SAPF com o controlador
indireto.
É possível fazer um comparativo desse método com o controlador SRF para compen-
sação de harmônicos e fator de potência. A referência de corrente no referencial esta-
cionário para o controlador da corrente na rede é:
[is∗sd
is∗sq
]=
[cosωt −sinωt
sinωt cosωt
][i∗sd
0
](4.51)

CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 59
S PI
S
S
-
-
vC
*
vC
-
PLLv
s31
sd
s*
i
sq
si
X
Xsq
s*
i
sd
si
sinqs
qscos
- Referencial síncronoxdq
e
- Referencial estacionárioxdq
s
sd
e*
i
sd
e*
i
vfd
s*
vfq
s*
123/
PWM
VSI
AF
+
+
vf1
*
vf3
*
vf2
*xdq
sS
S+
+
+
+
efd
suld
s -
efq
sulq
s-
G (s)c
G (s)c
+
+
Figura 4.9: Diagrama de blocos do controlador indireto.
is∗sd = i∗sdcosωt (4.52)
is∗sq = i∗sdsinωt, (4.53)
ondei∗sd é o sinal de comando do controlador do barramento CC. No controlador SRF,
a saída para regular o barramento CCidc é a corrente adicional no filtro. Nesse caso, a
saídai∗sd representa a corrente na rede de forma que quando o sistema está equilibrado a
correntei∗sd é:
i∗sd = i ld + idc (4.54)
Utilizando as Eqs. (4.52) e (4.53):
is∗sd = i ld cosωt + idccosωt (4.55)
is∗sq = i ld sinωt + idcsinωt (4.56)
O sinal de erro na entrada do controlador de corrente é:
εd = is∗sd− issd (4.57)
issd = isld + isf d (4.58)

CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 60
isld = i ld cosωt− i lq sinωt (4.59)
isld = (i ld + ˜i ld)cosωt− i lq sinωt (4.60)
εd = i ld cosωt + idccosωt− (i ld + ˜i ld)cosωt + i lq sinωt− isf d (4.61)
εd = idccosωt− ˜i ld cosωt + i lq sinωt− isf d. (4.62)
O erro emq é:
εq = is∗sq− issq (4.63)
issq = islq + isf q (4.64)
islq = i ld sinωt + i lq cosωt (4.65)
islq = (i ld + ˜i ld)sinωt + i lq cosωt (4.66)
εq = i ld sinωt + idcsinωt− (i ld + ˜i ld)sinωt− i lq cosωt− isf q (4.67)
εq = idcsinωt− ˜i ld sinωt− i lq cosωt− isf q. (4.68)
É possível observar que nas entradas do controlador de corrente, os sinais de erro são
similares para o controlador SRF e para o controlador das correntes na rede. O erroεd
para o controlador SRF, dado pela Eq. (4.37) é igual ao erroεd para o controlador das
correntes na rede, dado pela Eq. (4.62). A mesma coisa acontece para o erroεq, já que
Eq. (4.39) para o erro no controle SRF é igual à Eq. (4.68) para o erro no controlador
das correntes da rede. Enquanto que o controlador SRF necessita de filtros passa-baixa
para o cálculo dei ld e ˜i lq, o método do controle das correntes na rede gera os sinais de
controle equivalentes sem a necessidade desses mesmos filtros. Consequentemente, os
sinais de controle para o controlador SRF contém maior atraso e maior imprecisão devido
a necessidade dos filtros passa-baixa, mesmo sendo utilizados no referencial síncrono. O
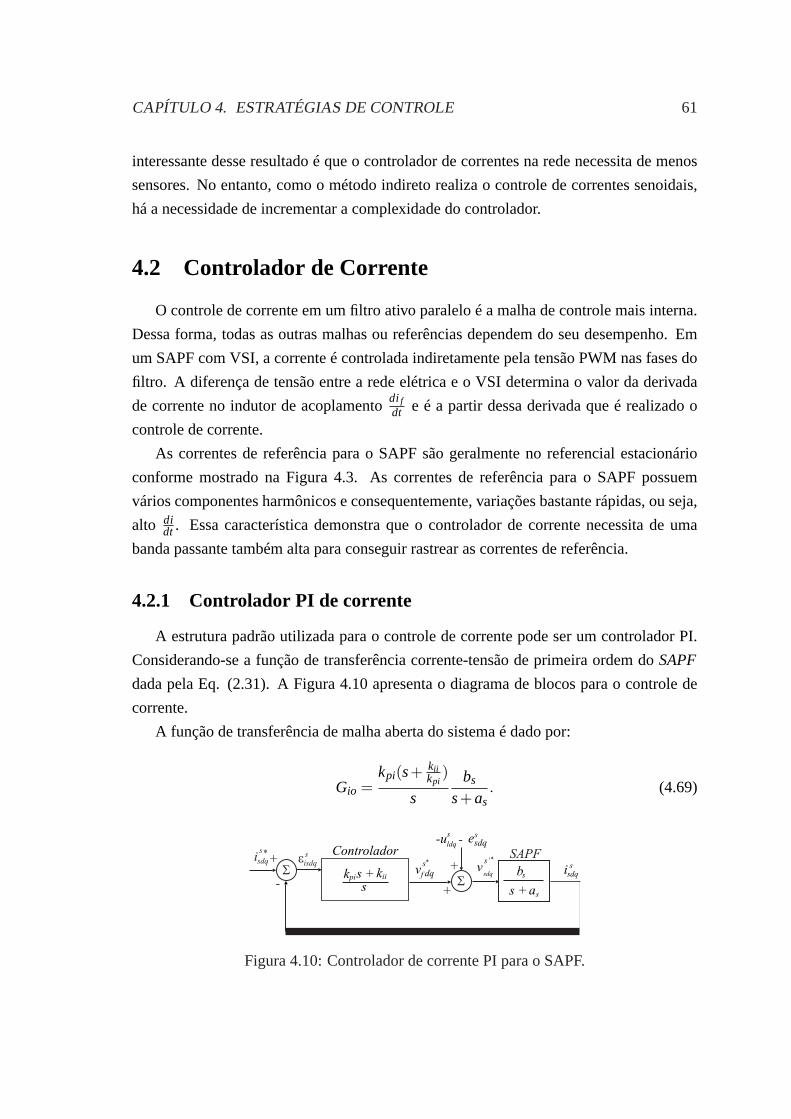
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 61
interessante desse resultado é que o controlador de correntes na rede necessita de menos
sensores. No entanto, como o método indireto realiza o controle de correntes senoidais,
há a necessidade de incrementar a complexidade do controlador.
4.2 Controlador de Corrente
O controle de corrente em um filtro ativo paralelo é a malha de controle mais interna.
Dessa forma, todas as outras malhas ou referências dependem do seu desempenho. Em
um SAPF com VSI, a corrente é controlada indiretamente pela tensão PWM nas fases do
filtro. A diferença de tensão entre a rede elétrica e o VSI determina o valor da derivada
de corrente no indutor de acoplamentodi fdt e é a partir dessa derivada que é realizado o
controle de corrente.
As correntes de referência para o SAPF são geralmente no referencial estacionário
conforme mostrado na Figura 4.3. As correntes de referência para o SAPF possuem
vários componentes harmônicos e consequentemente, variações bastante rápidas, ou seja,
alto didt . Essa característica demonstra que o controlador de corrente necessita de uma
banda passante também alta para conseguir rastrear as correntes de referência.
4.2.1 Controlador PI de corrente
A estrutura padrão utilizada para o controle de corrente pode ser um controlador PI.
Considerando-se a função de transferência corrente-tensão de primeira ordem doSAPF
dada pela Eq. (2.31). A Figura 4.10 apresenta o diagrama de blocos para o controle de
corrente.
A função de transferência de malha aberta do sistema é dado por:
Gio =kpi(s+ kii
kpi)
sbs
s+as. (4.69)
SAPF-u
ldq -
vsdq
s’*s*
f s
s
kpi kii
Controlador
Figura 4.10: Controlador de corrente PI para o SAPF.
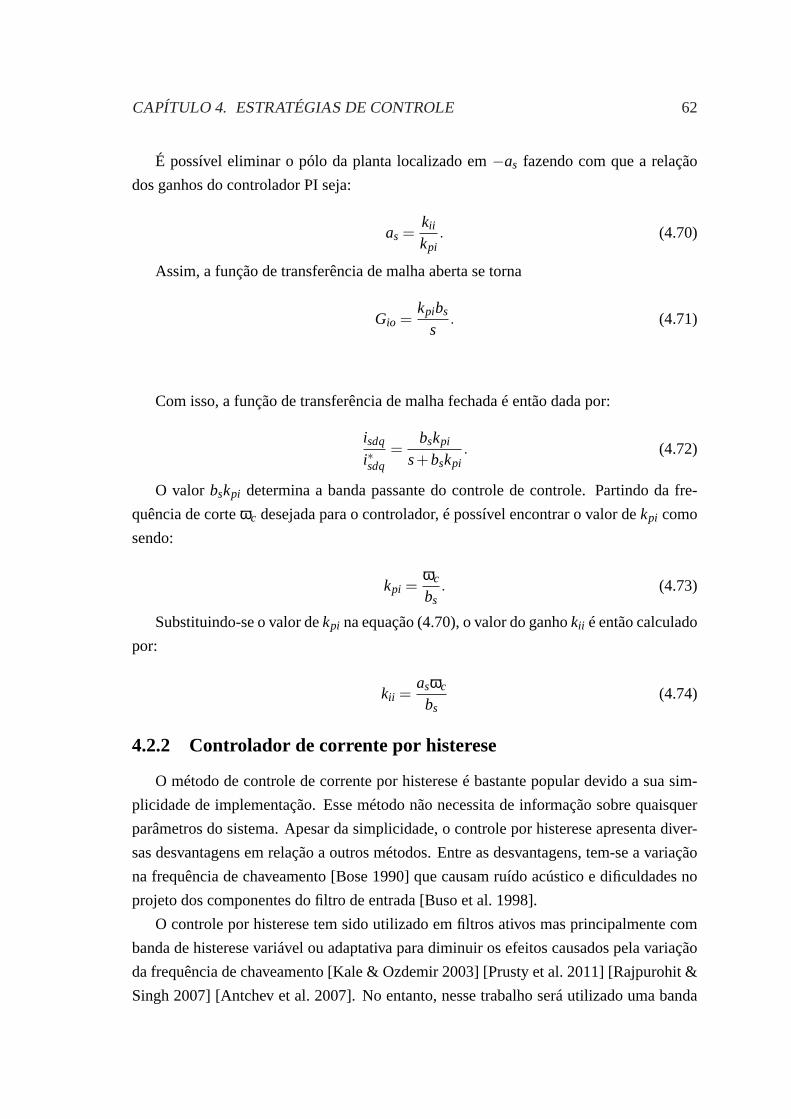
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 62
É possível eliminar o pólo da planta localizado em−as fazendo com que a relação
dos ganhos do controlador PI seja:
as =kii
kpi. (4.70)
Assim, a função de transferência de malha aberta se torna
Gio =kpibs
s. (4.71)
Com isso, a função de transferência de malha fechada é então dada por:
isdq
i∗sdq=
bskpi
s+bskpi. (4.72)
O valor bskpi determina a banda passante do controle de controle. Partindo da fre-
quência de corteωc desejada para o controlador, é possível encontrar o valor dekpi como
sendo:
kpi =ωc
bs. (4.73)
Substituindo-se o valor dekpi na equação (4.70), o valor do ganhokii é então calculado
por:
kii =asωc
bs(4.74)
4.2.2 Controlador de corrente por histerese
O método de controle de corrente por histerese é bastante popular devido a sua sim-
plicidade de implementação. Esse método não necessita de informação sobre quaisquer
parâmetros do sistema. Apesar da simplicidade, o controle por histerese apresenta diver-
sas desvantagens em relação a outros métodos. Entre as desvantagens, tem-se a variação
na frequência de chaveamento [Bose 1990] que causam ruído acústico e dificuldades no
projeto dos componentes do filtro de entrada [Buso et al. 1998].
O controle por histerese tem sido utilizado em filtros ativos mas principalmente com
banda de histerese variável ou adaptativa para diminuir os efeitos causados pela variação
da frequência de chaveamento [Kale & Ozdemir 2003] [Prusty et al. 2011] [Rajpurohit &
Singh 2007] [Antchev et al. 2007]. No entanto, nesse trabalho será utilizado uma banda
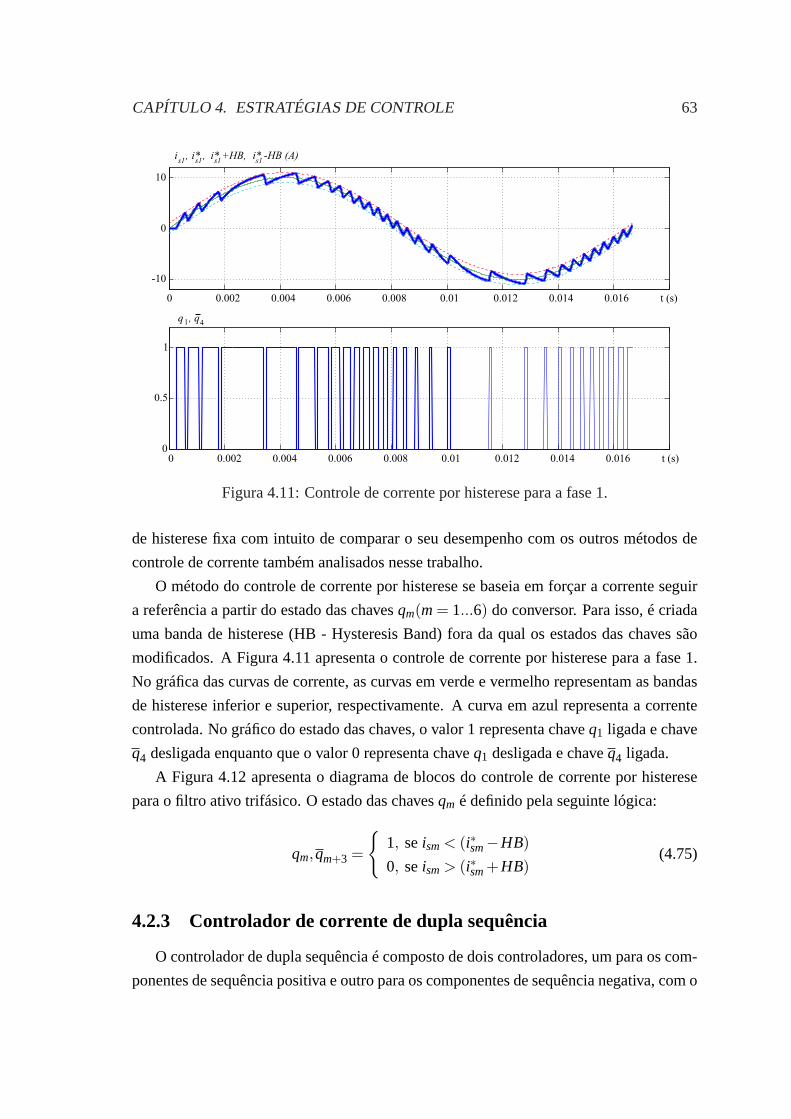
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 63
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 t (s)
-10
0
10
0
0.5
1
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 t (s)
i ,s1
i* ,s1
i* +HB,s1
i* -HB (A)s1
q , q1 4
Figura 4.11: Controle de corrente por histerese para a fase1.
de histerese fixa com intuito de comparar o seu desempenho com os outros métodos de
controle de corrente também analisados nesse trabalho.
O método do controle de corrente por histerese se baseia em forçar a corrente seguir
a referência a partir do estado das chavesqm(m= 1...6) do conversor. Para isso, é criada
uma banda de histerese (HB - Hysteresis Band) fora da qual os estados das chaves são
modificados. A Figura 4.11 apresenta o controle de corrente por histerese para a fase1.
No gráfica das curvas de corrente, as curvas em verde e vermelho representam as bandas
de histerese inferior e superior, respectivamente. A curva em azul representa a corrente
controlada. No gráfico do estado das chaves, o valor1 representa chaveq1 ligada e chave
q4 desligada enquanto que o valor0 representa chaveq1 desligada e chaveq4 ligada.
A Figura 4.12 apresenta o diagrama de blocos do controle de corrente por histerese
para o filtro ativo trifásico. O estado das chavesqm é definido pela seguinte lógica:
qm,qm+3 =
1, seism< (i∗sm−HB)0, seism> (i∗sm+HB)
(4.75)
4.2.3 Controlador de corrente de dupla sequência
O controlador de dupla sequência é composto de dois controladores, um para os com-
ponentes de sequência positiva e outro para os componentes de sequência negativa, com o
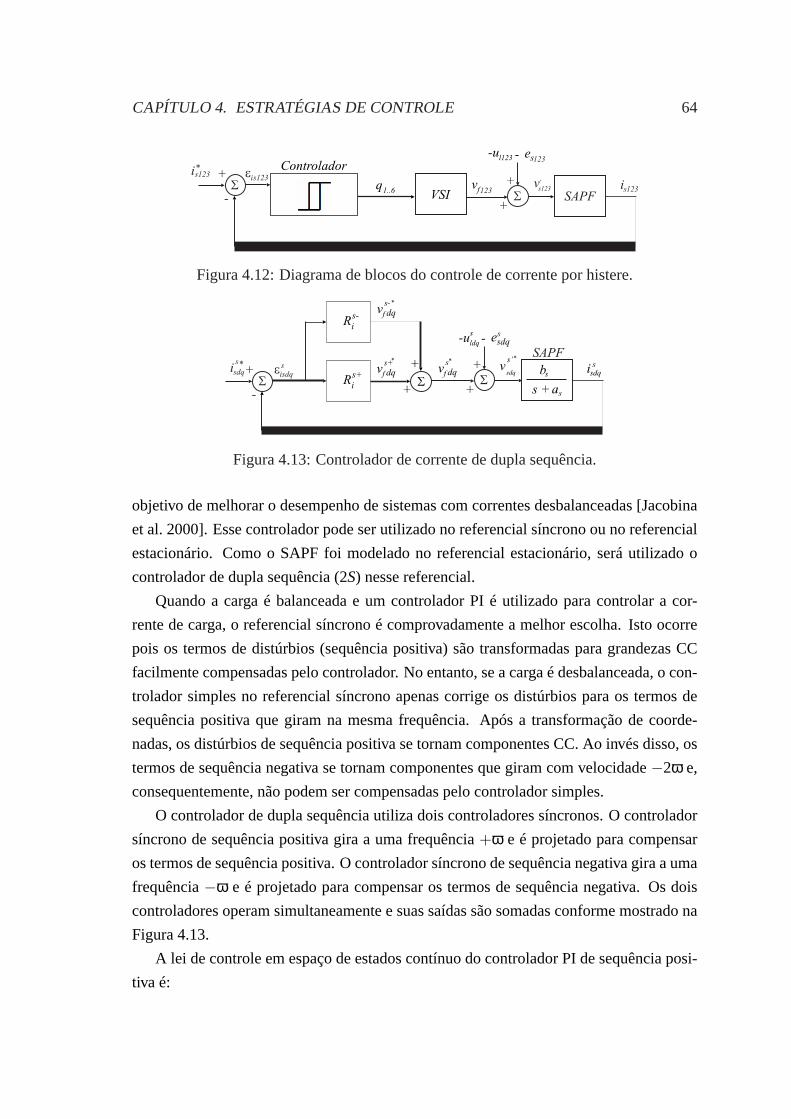
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 64
-ul123 -
f
Controladors123 s123
SAPF123
123
vs123´
123VSI
q1..6
Figura 4.12: Diagrama de blocos do controle de corrente por histere.
SAPF-u
ldq -
vsdq
s’*s*
f s
s
Ri
s+
Ri
s-
s+*
f
s-*
f
Figura 4.13: Controlador de corrente de dupla sequência.
objetivo de melhorar o desempenho de sistemas com correntes desbalanceadas [Jacobina
et al. 2000]. Esse controlador pode ser utilizado no referencial síncrono ou no referencial
estacionário. Como o SAPF foi modelado no referencial estacionário, será utilizado o
controlador de dupla sequência (2S) nesse referencial.
Quando a carga é balanceada e um controlador PI é utilizado para controlar a cor-
rente de carga, o referencial síncrono é comprovadamente a melhor escolha. Isto ocorre
pois os termos de distúrbios (sequência positiva) são transformadas para grandezas CC
facilmente compensadas pelo controlador. No entanto, se a carga é desbalanceada, o con-
trolador simples no referencial síncrono apenas corrige os distúrbios para os termos de
sequência positiva que giram na mesma frequência. Após a transformação de coorde-
nadas, os distúrbios de sequência positiva se tornam componentes CC. Ao invés disso, os
termos de sequência negativa se tornam componentes que giram com velocidade−2ω e,
consequentemente, não podem ser compensadas pelo controlador simples.
O controlador de dupla sequência utiliza dois controladores síncronos. O controlador
síncrono de sequência positiva gira a uma frequência+ω e é projetado para compensar
os termos de sequência positiva. O controlador síncrono de sequência negativa gira a uma
frequência−ω e é projetado para compensar os termos de sequência negativa. Os dois
controladores operam simultaneamente e suas saídas são somadas conforme mostrado na
Figura 4.13.
A lei de controle em espaço de estados contínuo do controlador PI de sequência posi-
tiva é:

CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 65
dxe+dqi
dt= k+
i εe+dq (4.76)
ve+∗f dq = xe+
dqi +k+p εe+
dq , (4.77)
ondeεe+dq é o erro de corrente eve+
f dq é a saída do controlador. Os parâmetrosk+p ek+
i são
os ganhos do controlador. O controlador de sequência negativa tem equações similares,
mudando apenas o sobrescrito” + ” por−” .
Fazendo o controlador no referencial estacionário emular o referencial síncrono, o
controlador de sequência positiva passa a ter a seguinte lei de controle:
dxs+dqi
dt= k+
i εs+dq + jωxs+
dqi (4.78)
vs+∗f dq = xs+
dqi +k+p εs+
dq (4.79)
Para facilitar o projeto são utilizados os mesmos ganhoskp e ki para os controladores
de sequência positiva e negativa. A lei de controle dos dois controladores juntos (contro-
lador de dupla sequência) é:
dxs+dqi
dt= kiεs
dq+ jωxs+dqi (4.80)
dxs−dqi
dt= kiεs
dq− jωxs−dqi (4.81)
vs+∗f dq = xs+
dqi +xs−dqi +2kpεs
dq. (4.82)
Fazendoxsdqi = xs+
dqi+xsdqi exs′
dqi = jω(xs+dqi−xs−
dqi), as equações do controlador de dupla
sequência se tornam
dxsdqi
dt= 2kiεs
dq+xsdqi (4.83)
dxs′dqi
dt= −ω2xs
dqi (4.84)
vs∗f dq = xs
dqi +2kpεsdq (4.85)
e, a função de transferência é:
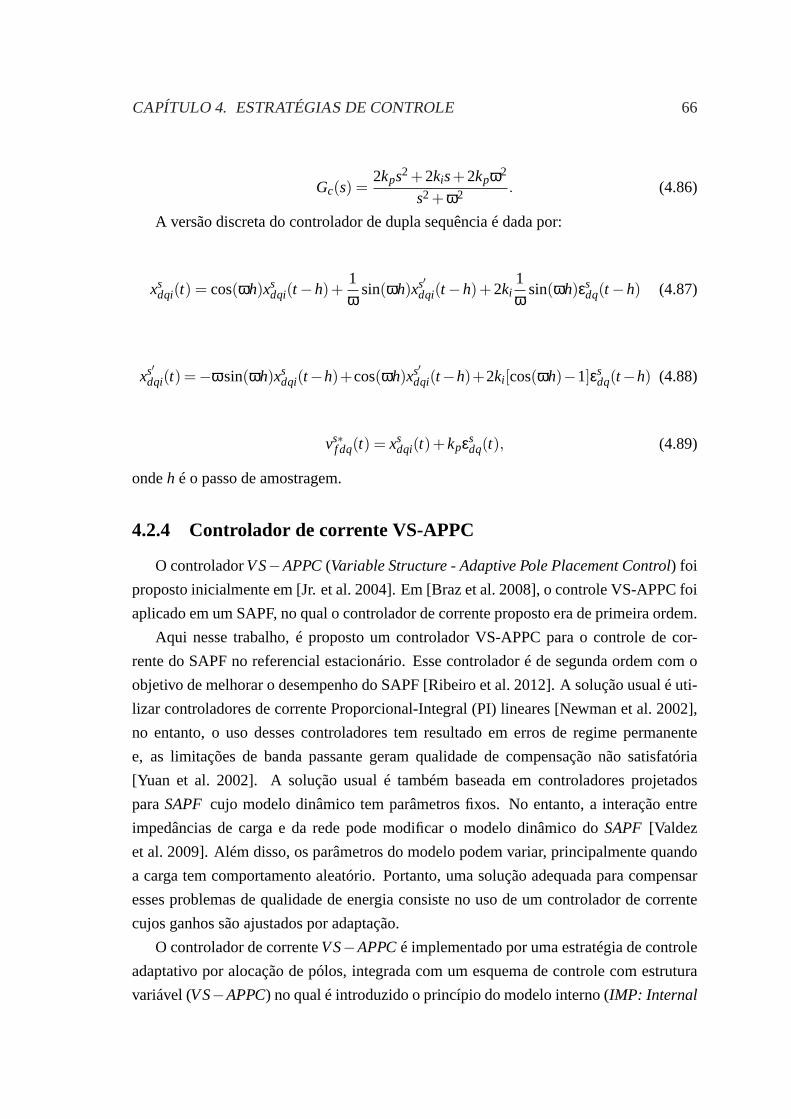
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 66
Gc(s) =2kps2 +2kis+2kpω2
s2 +ω2 . (4.86)
A versão discreta do controlador de dupla sequência é dada por:
xsdqi(t) = cos(ωh)xs
dqi(t−h)+1ω
sin(ωh)xs′dqi(t−h)+2ki
1ω
sin(ωh)εsdq(t−h) (4.87)
xs′dqi(t) =−ωsin(ωh)xs
dqi(t−h)+cos(ωh)xs′dqi(t−h)+2ki [cos(ωh)−1]εs
dq(t−h) (4.88)
vs∗f dq(t) = xs
dqi(t)+kpεsdq(t), (4.89)
ondeh é o passo de amostragem.
4.2.4 Controlador de corrente VS-APPC
O controladorVS−APPC(Variable Structure - Adaptive Pole Placement Control) foi
proposto inicialmente em [Jr. et al. 2004]. Em [Braz et al. 2008], o controle VS-APPC foi
aplicado em um SAPF, no qual o controlador de corrente proposto era de primeira ordem.
Aqui nesse trabalho, é proposto um controlador VS-APPC para o controle de cor-
rente do SAPF no referencial estacionário. Esse controlador é de segunda ordem com o
objetivo de melhorar o desempenho do SAPF [Ribeiro et al. 2012]. A solução usual é uti-
lizar controladores de corrente Proporcional-Integral (PI) lineares [Newman et al. 2002],
no entanto, o uso desses controladores tem resultado em erros de regime permanente
e, as limitações de banda passante geram qualidade de compensação não satisfatória
[Yuan et al. 2002]. A solução usual é também baseada em controladores projetados
paraSAPF cujo modelo dinâmico tem parâmetros fixos. No entanto, a interação entre
impedâncias de carga e da rede pode modificar o modelo dinâmico doSAPF [Valdez
et al. 2009]. Além disso, os parâmetros do modelo podem variar, principalmente quando
a carga tem comportamento aleatório. Portanto, uma solução adequada para compensar
esses problemas de qualidade de energia consiste no uso de um controlador de corrente
cujos ganhos são ajustados por adaptação.
O controlador de correnteVS−APPCé implementado por uma estratégia de controle
adaptativo por alocação de pólos, integrada com um esquema de controle com estrutura
variável (VS−APPC) no qual é introduzido o princípio do modelo interno (IMP: Internal
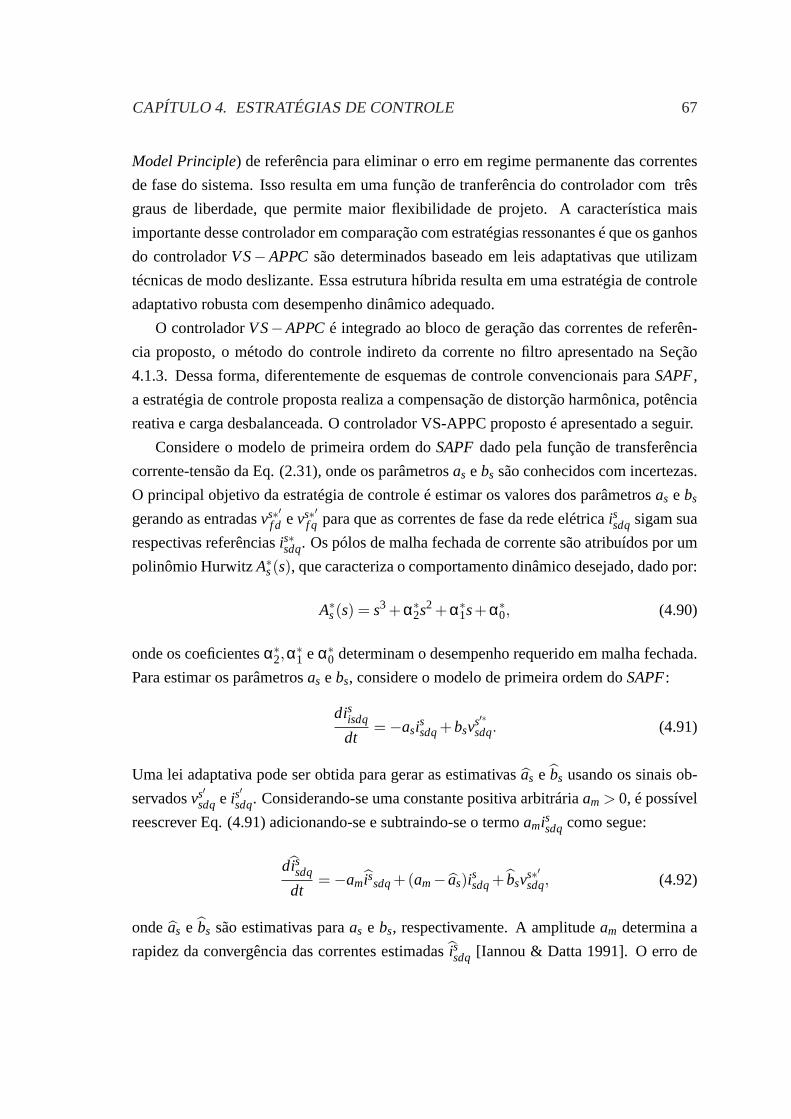
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 67
Model Principle) de referência para eliminar o erro em regime permanente das correntes
de fase do sistema. Isso resulta em uma função de tranferência do controlador com três
graus de liberdade, que permite maior flexibilidade de projeto. A característica mais
importante desse controlador em comparação com estratégias ressonantes é que os ganhos
do controladorVS−APPC são determinados baseado em leis adaptativas que utilizam
técnicas de modo deslizante. Essa estrutura híbrida resulta em uma estratégia de controle
adaptativo robusta com desempenho dinâmico adequado.
O controladorVS−APPCé integrado ao bloco de geração das correntes de referên-
cia proposto, o método do controle indireto da corrente no filtro apresentado na Seção
4.1.3. Dessa forma, diferentemente de esquemas de controle convencionais paraSAPF,
a estratégia de controle proposta realiza a compensação de distorção harmônica, potência
reativa e carga desbalanceada. O controlador VS-APPC proposto é apresentado a seguir.
Considere o modelo de primeira ordem doSAPFdado pela função de transferência
corrente-tensão da Eq. (2.31), onde os parâmetrosas ebs são conhecidos com incertezas.
O principal objetivo da estratégia de controle é estimar os valores dos parâmetrosas e bs
gerando as entradasvs∗′f d evs∗′
f q para que as correntes de fase da rede elétricaissdqsigam sua
respectivas referênciasis∗sdq. Os pólos de malha fechada de corrente são atribuídos por um
polinômio HurwitzA∗s(s), que caracteriza o comportamento dinâmico desejado, dado por:
A∗s(s) = s3 +α∗2s2 +α∗1s+α∗0, (4.90)
onde os coeficientesα∗2,α∗1 eα∗0 determinam o desempenho requerido em malha fechada.
Para estimar os parâmetrosas ebs, considere o modelo de primeira ordem doSAPF:
disisdq
dt=−asi
ssdq+bsv
s′∗sdq. (4.91)
Uma lei adaptativa pode ser obtida para gerar as estimativasas e bs usando os sinais ob-
servadosvs′sdqe is
′sdq. Considerando-se uma constante positiva arbitráriaam > 0, é possível
reescrever Eq. (4.91) adicionando-se e subtraindo-se o termoamissdq como segue:
dissdq
dt=−amissdq+(am− as)issdq+ bsv
s∗′sdq, (4.92)
ondeas e bs são estimativas paraas e bs, respectivamente. A amplitudeam determina a
rapidez da convergência das correntes estimadasissdq [Iannou & Datta 1991]. O erro de
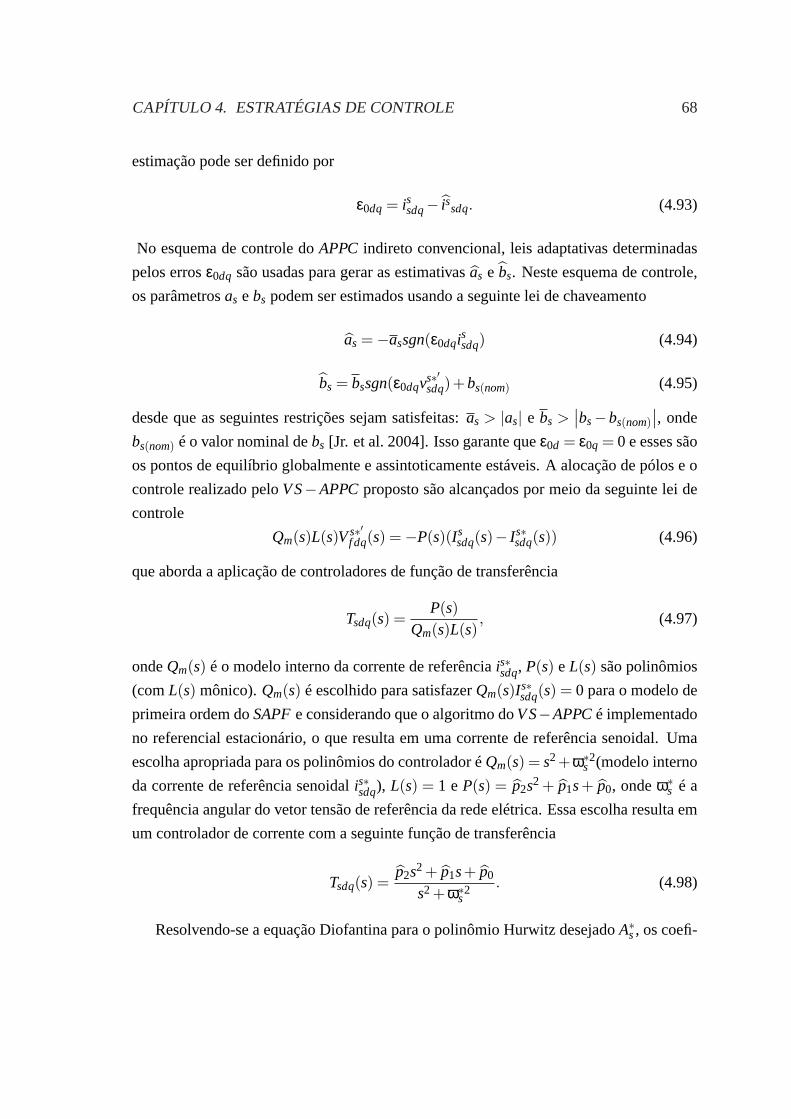
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 68
estimação pode ser definido por
ε0dq = issdq− issdq. (4.93)
No esquema de controle doAPPC indireto convencional, leis adaptativas determinadas
pelos errosε0dq são usadas para gerar as estimativasas e bs. Neste esquema de controle,
os parâmetrosas ebs podem ser estimados usando a seguinte lei de chaveamento
as =−assgn(ε0dqissdq) (4.94)
bs = bssgn(ε0dqvs∗′sdq)+bs(nom) (4.95)
desde que as seguintes restrições sejam satisfeitas:as > |as| e bs >∣∣bs−bs(nom)
∣∣, onde
bs(nom) é o valor nominal debs [Jr. et al. 2004]. Isso garante queε0d = ε0q = 0 e esses são
os pontos de equilíbrio globalmente e assintoticamente estáveis. A alocação de pólos e o
controle realizado peloVS−APPCproposto são alcançados por meio da seguinte lei de
controle
Qm(s)L(s)Vs∗′f dq(s) =−P(s)(Is
sdq(s)− Is∗sdq(s)) (4.96)
que aborda a aplicação de controladores de função de transferência
Tsdq(s) =P(s)
Qm(s)L(s), (4.97)
ondeQm(s) é o modelo interno da corrente de referênciais∗sdq, P(s) e L(s) são polinômios
(comL(s) mônico).Qm(s) é escolhido para satisfazerQm(s)Is∗sdq(s) = 0 para o modelo de
primeira ordem doSAPFe considerando que o algoritmo doVS−APPCé implementado
no referencial estacionário, o que resulta em uma corrente de referência senoidal. Uma
escolha apropriada para os polinômios do controlador éQm(s) = s2+ω∗2s (modelo interno
da corrente de referência senoidalis∗sdq), L(s) = 1 e P(s) = p2s2 + p1s+ p0, ondeω∗s é a
frequência angular do vetor tensão de referência da rede elétrica. Essa escolha resulta em
um controlador de corrente com a seguinte função de transferência
Tsdq(s) =p2s2 + p1s+ p0
s2 +ω∗2s. (4.98)
Resolvendo-se a equação Diofantina para o polinômio Hurwitz desejadoA∗s, os coefi-
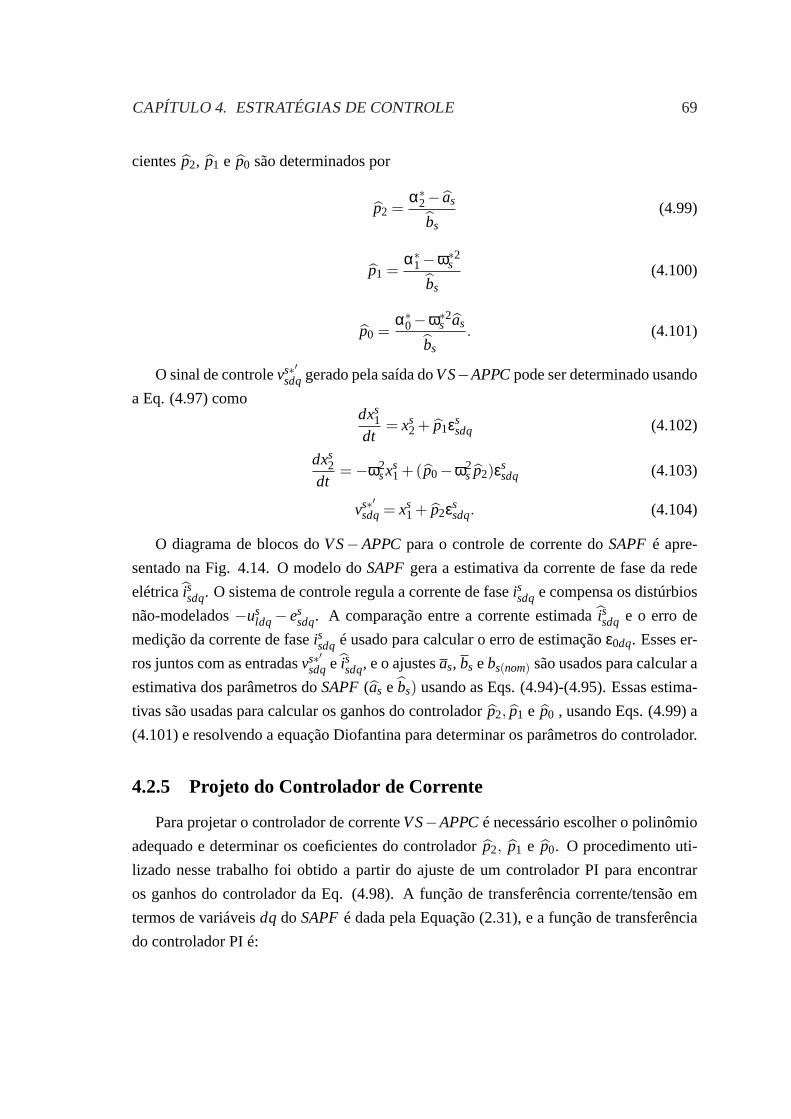
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 69
cientesp2, p1 e p0 são determinados por
p2 =α∗2− as
bs(4.99)
p1 =α∗1−ω∗2s
bs(4.100)
p0 =α∗0−ω∗2s as
bs. (4.101)
O sinal de controlevs∗′sdqgerado pela saída doVS−APPCpode ser determinado usando
a Eq. (4.97) comodxs
1
dt= xs
2 + p1εssdq (4.102)
dxs2
dt=−ω2
sxs1 +(p0−ω2
s p2)εssdq (4.103)
vs∗′sdq= xs
1 + p2εssdq. (4.104)
O diagrama de blocos doVS−APPCpara o controle de corrente doSAPF é apre-
sentado na Fig. 4.14. O modelo doSAPFgera a estimativa da corrente de fase da rede
elétricaissdq. O sistema de controle regula a corrente de faseissdqe compensa os distúrbios
não-modelados−usldq− es
sdq. A comparação entre a corrente estimadaissdq e o erro de
medição da corrente de faseissdq é usado para calcular o erro de estimaçãoε0dq. Esses er-
ros juntos com as entradasvs∗′sdqe issdq, e o ajustesas, bs ebs(nom) são usados para calcular a
estimativa dos parâmetros doSAPF(as e bs) usando as Eqs. (4.94)-(4.95). Essas estima-
tivas são usadas para calcular os ganhos do controladorp2, p1 e p0 , usando Eqs. (4.99) a
(4.101) e resolvendo a equação Diofantina para determinar os parâmetros do controlador.
4.2.5 Projeto do Controlador de Corrente
Para projetar o controlador de correnteVS−APPCé necessário escolher o polinômio
adequado e determinar os coeficientes do controladorp2, p1 e p0. O procedimento uti-
lizado nesse trabalho foi obtido a partir do ajuste de um controlador PI para encontrar
os ganhos do controlador da Eq. (4.98). A função de transferência corrente/tensão em
termos de variáveisdq do SAPFé dada pela Equação (2.31), e a função de transferência
do controlador PI é:
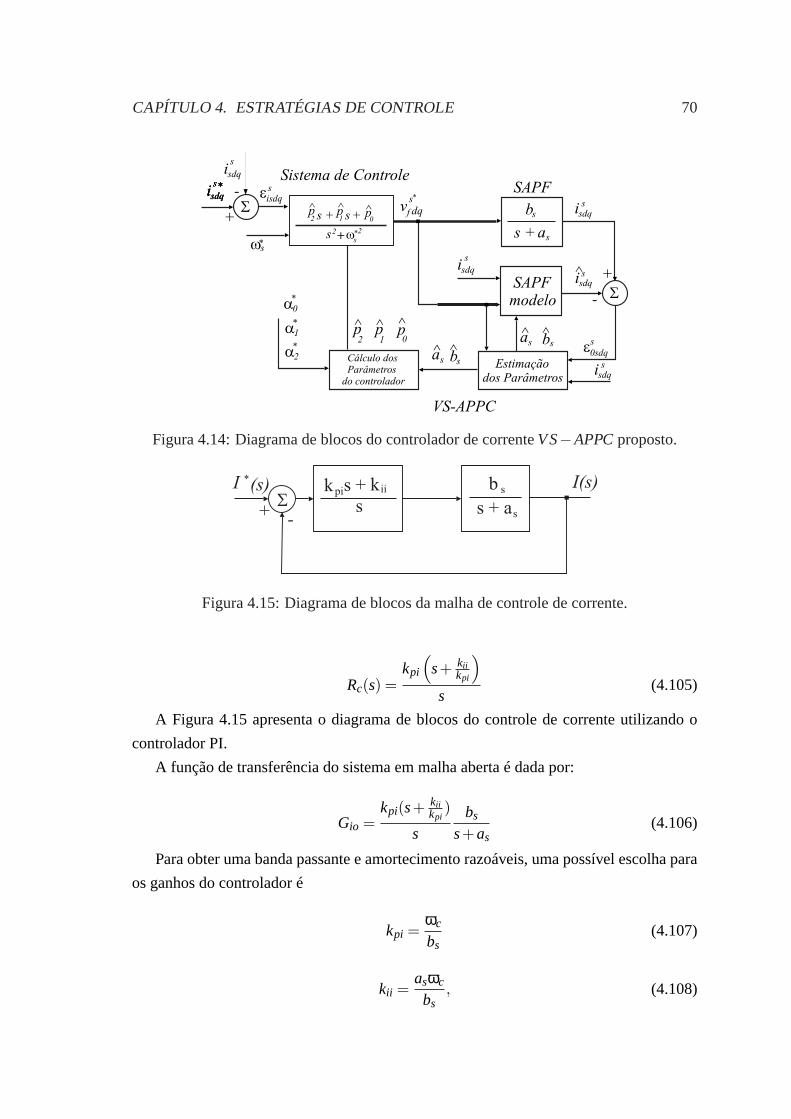
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 70
1 02
2w
s*2
+
a1*
a0*
a2*
s s
012
SAPFomodel
SAPF
s
s
s s
s
s*
f
Sistema de Controle
Cálculo dosParâmetros
do controlador
Estimaçãodos Parâmetros
Figura 4.14: Diagrama de blocos do controlador de correnteVS−APPCproposto.
S+
-
I *(s) I(s)b s
s + as
pi
sk kiis +
Figura 4.15: Diagrama de blocos da malha de controle de corrente.
Rc(s) =kpi
(s+ kii
kpi
)
s(4.105)
A Figura 4.15 apresenta o diagrama de blocos do controle de corrente utilizando o
controlador PI.
A função de transferência do sistema em malha aberta é dada por:
Gio =kpi(s+ kii
kpi)
sbs
s+as(4.106)
Para obter uma banda passante e amortecimento razoáveis, uma possível escolha para
os ganhos do controlador é
kpi =ωc
bs(4.107)
kii =asωc
bs, (4.108)

CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 71
ondeωc é a banda passante desejada para o controlador. A partir dos ganhos do contro-
lador PI e utilizando o método apresentado na Seção 4.2.3, o controlador da Eq. (4.98) se
torna:
Ri(s) =2kpis2 +2kii s+2kpiω2
s2 +ω∗2s(4.109)
e os coeficientesα∗2,α∗1 e α∗0 da Equação (4.90) são calculados por
α∗2 = as+2bskpi (4.110)
α∗1 = ω∗2s +2bskii (4.111)
α∗0 = asω∗2s +2bskpiω∗2s . (4.112)
Para o projeto de um controladorVS−APPCgenérico, são necessários os seguintes
passos:
• Passo 1: Identificar as impedâncias do sistemaZs, Zf e Zl para calcular os parâme-
trosas ebs. O modelo do sistema é obtido substituindo os valores deas ebs na Eq.
(2.31).
• Passo 2: Escolha a banda passante do controladorωc e calcule os coeficientesα∗2,α∗1
e α∗0 a partir das Eqs. (4.110)-(4.112). Substituaα∗2,α∗1 e α∗0 na Eq. (4.90) para
encontrar o polinômio HurwitzA∗s(s).• Passo 3: Escolha uma constante positivaam. Uma escolha adequada éam > ωc.
• Passo 4: Escolha o parâmetroas a ser utilizado na lei de chaveamento (4.94). O
valor as determina a faixa de estimação deas. Uma escolha adequada éas' 2as,
ondeas é o valor calculado no passo 1.
• Passo 5: Escolha os parâmetrosbs e bs(nom) a serem utilizados na lei de chavea-
mento (4.95). Esses valores determinam a faixa de estimação debs. Uma escolha
adequada ébs(nom) = bs ebs = 0,75bs, ondebs é o valor calculado na passo 1.
• Passo 6: Calcule os parâmetros do controladorp2, p1 e p0 a partir das Eqs. (4.99)-
(4.101).
Baseado em simulações e estudos teóricos, pode-se observar que a magnitude das
leis de chaveamento (as e bs) determinam a rapidez com que o controladorVS−APPC converge para suas referências. No entanto, valores maiores resultam em
altas amplitudes dos sinais de controle (vs′∗f dq), que podem levar a comportamentos
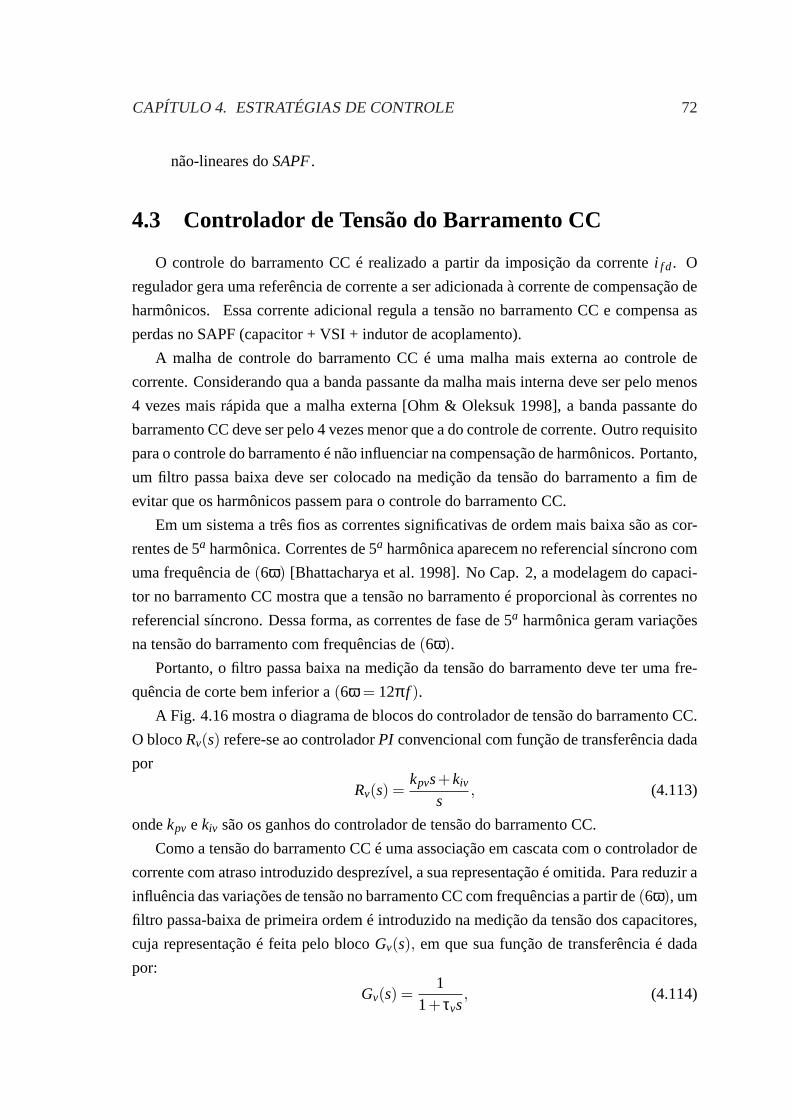
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 72
não-lineares doSAPF.
4.3 Controlador de Tensão do Barramento CC
O controle do barramento CC é realizado a partir da imposição da correntei f d. O
regulador gera uma referência de corrente a ser adicionada à corrente de compensação de
harmônicos. Essa corrente adicional regula a tensão no barramento CC e compensa as
perdas no SAPF (capacitor + VSI + indutor de acoplamento).
A malha de controle do barramento CC é uma malha mais externa ao controle de
corrente. Considerando qua a banda passante da malha mais interna deve ser pelo menos
4 vezes mais rápida que a malha externa [Ohm & Oleksuk 1998], a banda passante do
barramento CC deve ser pelo 4 vezes menor que a do controle de corrente. Outro requisito
para o controle do barramento é não influenciar na compensação de harmônicos. Portanto,
um filtro passa baixa deve ser colocado na medição da tensão do barramento a fim de
evitar que os harmônicos passem para o controle do barramento CC.
Em um sistema a três fios as correntes significativas de ordem mais baixa são as cor-
rentes de 5a harmônica. Correntes de 5a harmônica aparecem no referencial síncrono com
uma frequência de(6ω) [Bhattacharya et al. 1998]. No Cap. 2, a modelagem do capaci-
tor no barramento CC mostra que a tensão no barramento é proporcional às correntes no
referencial síncrono. Dessa forma, as correntes de fase de 5a harmônica geram variações
na tensão do barramento com frequências de(6ω).Portanto, o filtro passa baixa na medição da tensão do barramento deve ter uma fre-
quência de corte bem inferior a(6ω = 12π f ).A Fig. 4.16 mostra o diagrama de blocos do controlador de tensão do barramento CC.
O blocoRv(s) refere-se ao controladorPI convencional com função de transferência dada
por
Rv(s) =kpvs+kiv
s, (4.113)
ondekpv ekiv são os ganhos do controlador de tensão do barramento CC.
Como a tensão do barramento CC é uma associação em cascata com o controlador de
corrente com atraso introduzido desprezível, a sua representação é omitida. Para reduzir a
influência das variações de tensão no barramento CC com frequências a partir de(6ω), um
filtro passa-baixa de primeira ordem é introduzido na medição da tensão dos capacitores,
cuja representação é feita pelo blocoGv(s), em que sua função de transferência é dada
por:
Gv(s) =1
1+ τvs, (4.114)
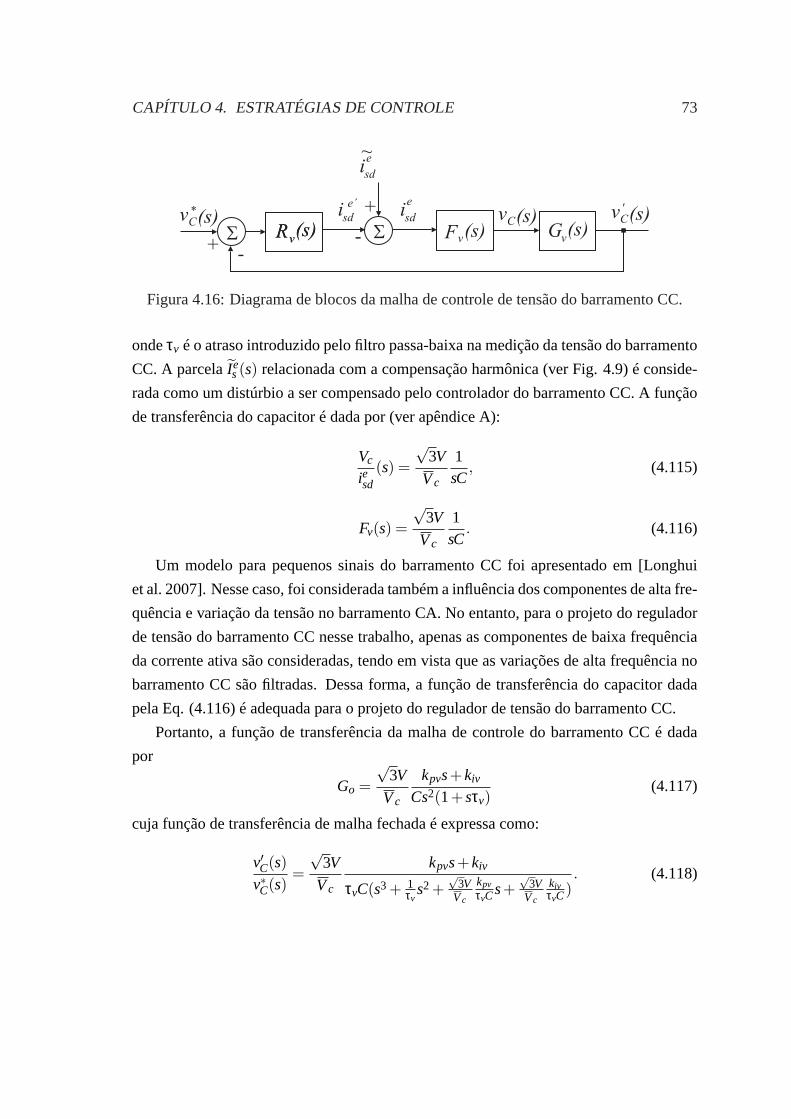
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 73
S R (s)v SR (s)v+
+
-
vC*(s)
- G (s)v
vC' (s)vC(s)i
sd
e´
~isd
e
isd
e
F (s)v
Figura 4.16: Diagrama de blocos da malha de controle de tensão do barramento CC.
ondeτv é o atraso introduzido pelo filtro passa-baixa na medição da tensão do barramento
CC. A parcelaIes(s) relacionada com a compensação harmônica (ver Fig. 4.9) é conside-
rada como um distúrbio a ser compensado pelo controlador do barramento CC. A função
de transferência do capacitor é dada por (ver apêndice A):
Vc
iesd(s) =
√3V
Vc
1sC
, (4.115)
Fv(s) =√
3V
Vc
1sC
. (4.116)
Um modelo para pequenos sinais do barramento CC foi apresentado em [Longhui
et al. 2007]. Nesse caso, foi considerada também a influência dos componentes de alta fre-
quência e variação da tensão no barramento CA. No entanto, para o projeto do regulador
de tensão do barramento CC nesse trabalho, apenas as componentes de baixa frequência
da corrente ativa são consideradas, tendo em vista que as variações de alta frequência no
barramento CC são filtradas. Dessa forma, a função de transferência do capacitor dada
pela Eq. (4.116) é adequada para o projeto do regulador de tensão do barramento CC.
Portanto, a função de transferência da malha de controle do barramento CC é dada
por
Go =√
3V
Vc
kpvs+kiv
Cs2(1+sτv)(4.117)
cuja função de transferência de malha fechada é expressa como:
v′C(s)v∗C(s)
=√
3V
Vc
kpvs+kiv
τvC(s3 + 1τv
s2 +√
3VVc
kpvτvC
s+√
3VVc
kivτvC
). (4.118)
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 74
4.3.1 Critério de projeto para o controlador do barramento CC
O projeto dos ganhos do controlador do barramento CC são obtidos usando a técnica
Symmetrical Optimum Tuning Optimization(SOTO) [Astrom & Hagglung 1995]. Este
método é baseado na idéia de encontrar um controlador que faz com que a resposta em
frequência, a partir do ponto de ajuste da saída da planta, seja a mais próxima possível
da região de baixas frequências. A função de transferência do controladorSOTOobtida
usando um controlador com dois graus de liberdade, adequado para o controle do barra-
mento CC (Go), da Eq. (4.117) pode ser reescrita como:
GSO=ω2
o(2s+ωo)s2(s+2ωo)
, (4.119)
ondeωo é a resposta em frequência deGSO. É importante salientar, que o diagrama de
Bode desta função de transferência é simétrico em torno da frequênciaω = ωo.
Para fazer a função de transferênciaGo (Eq. (4.114)) idêntica ao Symmetrical Opti-
mumGSO (Eq. (4.119)) é necessário que
ωo =1
2τv(4.120)
e que os ganhos do controlador sejam dados por:
kpv =Vc√3V
C2τv
(4.121)
kiv =kpv
4τv. (4.122)
Neste trabalho, o barramento CC é composto por um banco de capacitores deC =2200µF e o filtro passa baixa da medição da tensão, implementado com uma frequência
de corte deωv = 77rad/s. Então, baseado no procedimento de projeto mostrado anteri-
ormente, os parâmetros do controlador obtidos sãokpv = 0,35ekiv = 27,5.
4.3.2 Controle Indireto com Feed-Forward
No controle indireto para geração das correntes de referências doSAPF, as correntes
no filtro são controladas a partir das correntes na rede [Pottker & Barbi 1997b] [Huang
& Wu 1999]. A vantagem do controle indireto é a redução de sensores já que esse não
necessita da medição das correntes no filtro. Além disso, essa estratégia de controle
integra a compensação da potência reativa [Ribeiro et al. 2012].
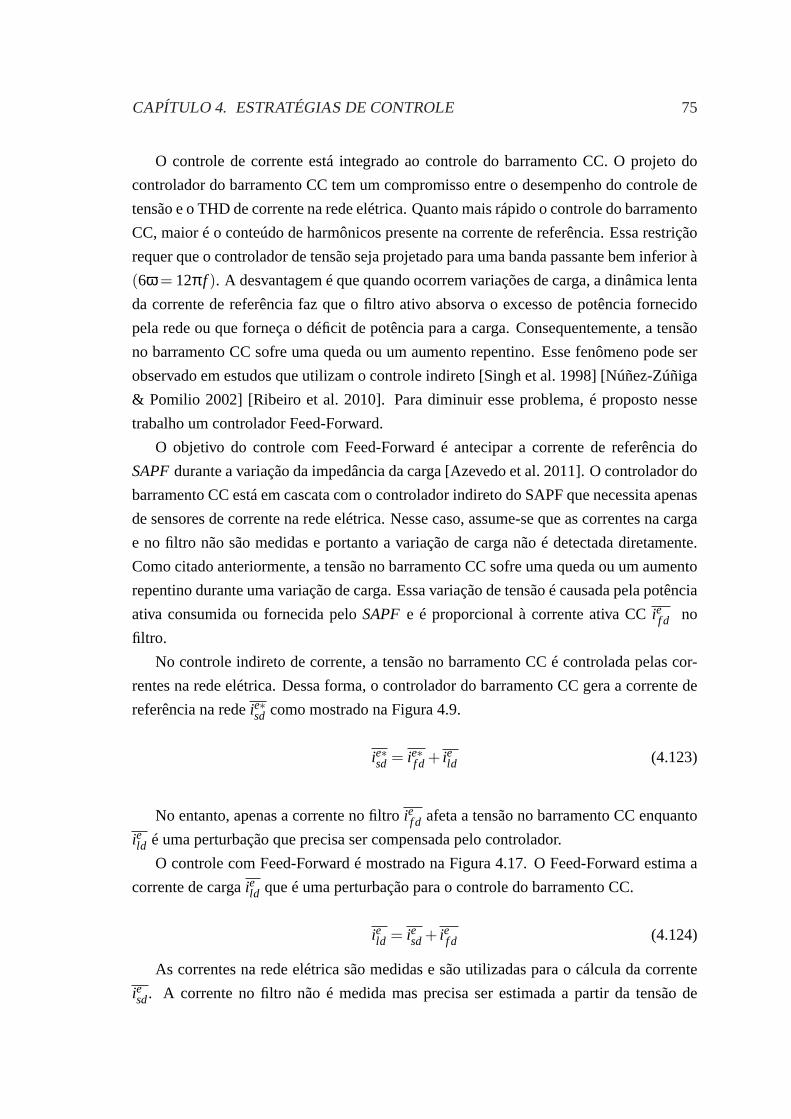
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 75
O controle de corrente está integrado ao controle do barramento CC. O projeto do
controlador do barramento CC tem um compromisso entre o desempenho do controle de
tensão e o THD de corrente na rede elétrica. Quanto mais rápido o controle do barramento
CC, maior é o conteúdo de harmônicos presente na corrente de referência. Essa restrição
requer que o controlador de tensão seja projetado para uma banda passante bem inferior à
(6ω = 12π f ). A desvantagem é que quando ocorrem variações de carga, a dinâmica lenta
da corrente de referência faz que o filtro ativo absorva o excesso de potência fornecido
pela rede ou que forneça o déficit de potência para a carga. Consequentemente, a tensão
no barramento CC sofre uma queda ou um aumento repentino. Esse fenômeno pode ser
observado em estudos que utilizam o controle indireto [Singh et al. 1998] [Núñez-Zúñiga
& Pomilio 2002] [Ribeiro et al. 2010]. Para diminuir esse problema, é proposto nesse
trabalho um controlador Feed-Forward.
O objetivo do controle com Feed-Forward é antecipar a corrente de referência do
SAPFdurante a variação da impedância da carga [Azevedo et al. 2011]. O controlador do
barramento CC está em cascata com o controlador indireto do SAPF que necessita apenas
de sensores de corrente na rede elétrica. Nesse caso, assume-se que as correntes na carga
e no filtro não são medidas e portanto a variação de carga não é detectada diretamente.
Como citado anteriormente, a tensão no barramento CC sofre uma queda ou um aumento
repentino durante uma variação de carga. Essa variação de tensão é causada pela potência
ativa consumida ou fornecida peloSAPF e é proporcional à corrente ativa CCief d no
filtro.
No controle indireto de corrente, a tensão no barramento CC é controlada pelas cor-
rentes na rede elétrica. Dessa forma, o controlador do barramento CC gera a corrente de
referência na redeie∗sd como mostrado na Figura 4.9.
ie∗sd = ie∗f d + ield (4.123)
No entanto, apenas a corrente no filtroief d afeta a tensão no barramento CC enquanto
ield é uma perturbação que precisa ser compensada pelo controlador.
O controle com Feed-Forward é mostrado na Figura 4.17. O Feed-Forward estima a
corrente de cargaield que é uma perturbação para o controle do barramento CC.
ield = iesd+ ief d (4.124)
As correntes na rede elétrica são medidas e são utilizadas para o cálcula da corrente
iesd. A corrente no filtro não é medida mas precisa ser estimada a partir da tensão de
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 76
PI
-
-
vC*
vC
-
PLLv
s31
sd
s*i
sq
si
123/
PWM+
vf1*
vf3*
vf2*x
dq
s
VS-APPC
VS-APPC
vfq
s*
X
Xsq
s*i
sd
si
- Referencial estacionárioxdq
s
vfds*
S+
cos( )qs
sin( )qs
S
S
+
+
SAPF
- Referencial síncronoxdq
e
fd
e*i
sd
e*i
S
sd
e*i
FFis31
qs
vfds*
+
+
ld
ei
Figura 4.17: Diagrama de blocos doSAPFcom controlador feed-forward.
referência no filtro:
ief d =ve∗
f d
r f(4.125)
Assim, a corrente de referênciaie∗sd para o controle de corrente se torna:
ie∗sd = ie∗f d +ve∗
f d
R(4.126)
ondeie∗f d é a saída do controlador do barramento CC.
4.4 Conclusão
Nesse capítulo foram apresentadas estratégias de controle para SAPFs, incluindo a
descrição e projeto dos controladores. Várias estratégias foram apresentadas, mas a prin-
cipal contribuição desse capítulo foi a proposta de um controlador de corrente adaptativo
robusto (VS-APPC) em conjunto com a estratégia de controle indireto para geração das
correntes de referência.
CAPÍTULO 4. ESTRATÉGIAS DE CONTROLE 77
O controle indireto foi escolhido para integração com o controle de corrente devido
a redução de sensores e as características de compensação. Apesar de utilizar menos
sensores, o controle indireto teoricamente gera as mesmas correntes de referência para
compensação de harmônicos que o controlador SRF.
Nesse capítulo foi apresentada também a proposta de um controlador indireto com
feed-forward para melhorar o desempenho do controle de tensão durante variações de
carga.
Capítulo 5
Resultados de Simulação
O Cap. 4 mostra que o controle doSAPFpossui três blocos principais: controle de
tensão do barramento CC, geração das correntes de referência e controle de corrente. Para
o bloco da geração das correntes de referência e o controlador de corrente foram apre-
sentadas mais de uma estratégia de controle. Para comparação entre o desempenho das
estratégias, os diversos métodos para geração da corrente de referência foram utilizados
em conjunto com os diversos métodos de controle de corrente. No total, 10 estruturas
diferentes para oSAPF foram testadas via simulação para uma análise de desempenho.
Todas as estruturas utilizaram o mesmo controlador do barramento CC e a mesma con-
figuração de sistema. Os parâmetros doSAPFutilizado para simulação são fornecidos
na Tabela 5.1. Entre os parâmetros, existem duas impedânciasZr para a carga que re-
presentam as duas configurações para simulação de variação da carga. A impedância
Zr é referente à carga alimentada pelo retificador trifásico conforme mostrado na Fig.
4.1. As simulações foram realizadas utilizando o software PSIM. Dentro do programa
PSIM, os controladores foram simulados a partir de um bloco de função, executado com
um tempo de amostragem de100µs. Esse valor foi escolhido para ficar compatível com
a plataforma experimental que foi utilizada, na qual a taxa de amostragem era também
100µs. A diminuição do tempo de amostragem faz com que o controlador por histerese
se torne mais eficaz [Ingram & Round 1999]. Porém, para efeito de comparação com
as outras estratégias, foi utilizado o mesmo tempo de amostragem. Via simulação, foram
testados diversos valores para a largura da histerese até encontrar o valor que apresentasse
o melhor resultado para oSAPF. Esse valor do HB (HB = 0,2A) foi utilizado para todas
as simulações que empregaram o controlador de corrente por histerese.
As estruturas utilizadas no presente estudo são definidas na Tabela 5.2. Cada caso foi
submetido a carga não-linear, carga desbalanceada, variação de carga, desbalanceamento
das tensões de alimentação da rede e, por último, a partida suave do filtro. Separada-
mente, foi testado o controlador do barramento CC com Feed-Forward. Esse controlador
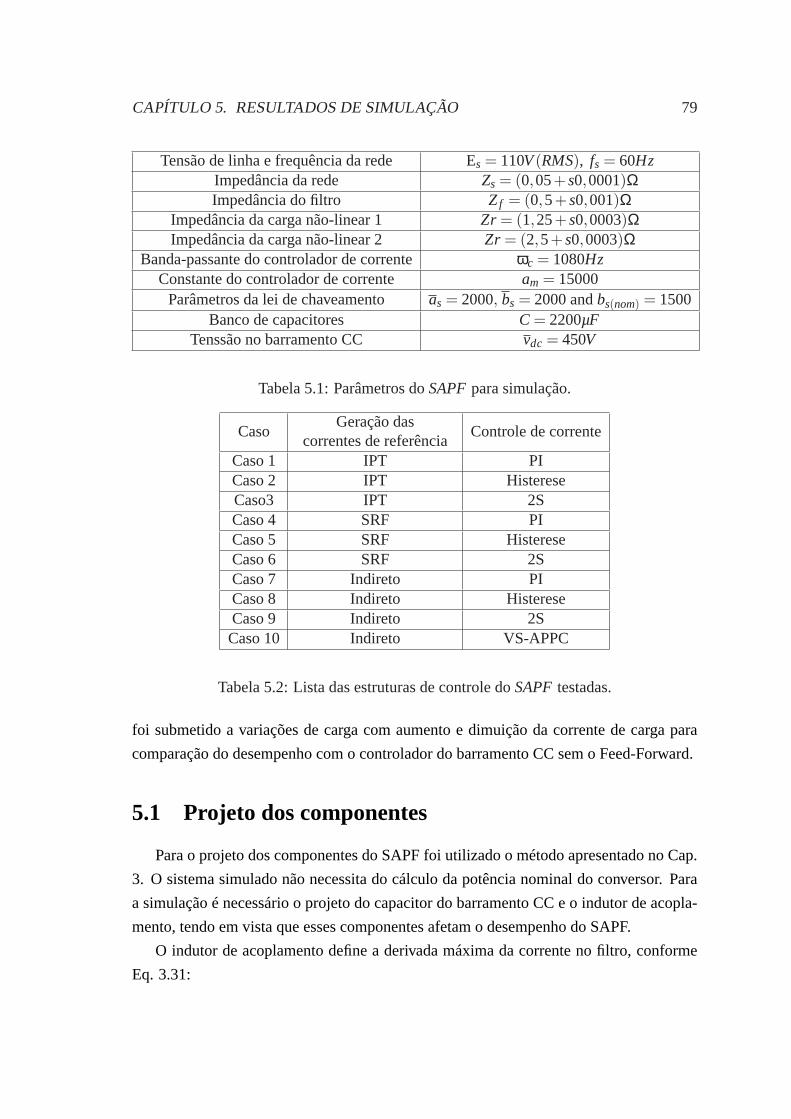
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 79
Tensão de linha e frequência da rede Es = 110V(RMS), fs = 60HzImpedância da rede Zs = (0,05+s0,0001)ΩImpedância do filtro Zf = (0,5+s0,001)Ω
Impedância da carga não-linear 1 Zr = (1,25+s0,0003)ΩImpedância da carga não-linear 2 Zr = (2,5+s0,0003)Ω
Banda-passante do controlador de corrente ωc = 1080HzConstante do controlador de corrente am = 15000
Parâmetros da lei de chaveamento as = 2000, bs = 2000andbs(nom) = 1500Banco de capacitores C = 2200µF
Tenssão no barramento CC vdc = 450V
Tabela 5.1: Parâmetros doSAPFpara simulação.
CasoGeração das
correntes de referênciaControle de corrente
Caso 1 IPT PICaso 2 IPT HistereseCaso3 IPT 2SCaso 4 SRF PICaso 5 SRF HistereseCaso 6 SRF 2SCaso 7 Indireto PICaso 8 Indireto HistereseCaso 9 Indireto 2SCaso 10 Indireto VS-APPC
Tabela 5.2: Lista das estruturas de controle doSAPFtestadas.
foi submetido a variações de carga com aumento e dimuição da corrente de carga para
comparação do desempenho com o controlador do barramento CC sem o Feed-Forward.
5.1 Projeto dos componentes
Para o projeto dos componentes do SAPF foi utilizado o método apresentado no Cap.
3. O sistema simulado não necessita do cálculo da potência nominal do conversor. Para
a simulação é necessário o projeto do capacitor do barramento CC e o indutor de acopla-
mento, tendo em vista que esses componentes afetam o desempenho do SAPF.
O indutor de acoplamento define a derivada máxima da corrente no filtro, conforme
Eq. 3.31:

CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 80
(di f
dt
)
max=
1l f
(vdc
2−vsp
). (5.1)
A partir da Tabela 5.1, os valores da tensão no barramento CC e o valor de pico da
tensão de fase são, respectivamentevdc = 450V e vsp' 90V. O indutor utilizado foi de
1mF. Dessa forma:
(di f
dt
)
max=
11×10−3
(4502−90
), (5.2)
(di f
dt
)
max= 135×103A/s. (5.3)
Com a impedância da carga não-linear 1 foi constatado que a máxima derivada de
corrente na carga foi de106× 103A/s. Portanto, a indutância de acoplamento de1mF
é adequada para o sistema simulado já que consegue impor no filtro uma derivada de
corrente superior à máxima drenada pela carga.
O capacitor do barramento CC determina a variação de tensão no barramento CC
quando o filtro ativo está compensando harmônicos. A Eq. 3.25 determina a porcentagem
de variação da tensão em função do capacitor:
∆vdc(%) =pl(h)
v2dcnωsC
×100 (5.4)
ondepl(h) é a potência ativa dos harmônicos na carga,n é o número de harmônicos com-
pensados eωs é a frequência da fundamental.
A potência dos harmônicos na carga pode ser calculada por:
pl(h) = SlTHD (5.5)
ondeSl é a potência nominal da carga. Para o sistema simulado, o valor deSl é12600VA
e o valor do THD é19,6%. Dessa forma:
pl(h) = 2480VA (5.6)
Considerando que o número de harmônicos compensados é 25, a variação de tensão
no barramento CC é:
∆vdc(%) =2480VA
4502×50×377×2200e−6 ×100 (5.7)
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 81
∆vdc(%) = 2,95×10−2%. (5.8)
Considerando que a variação na tensão do barramento CC é muito baixa, o capaci-
tor utilizado no barramento CC com valor de2200µF é adequado para ser utilizado no
sistema simulado.
5.2 Desempenho com carga não-linear
O primeiro ensaio para comparação das estruturas de controle foi a compensação de
harmônicos de corrente produzidos por uma carga não-linear. Essa carga é composta
por um retificador trifásico alimentando um circuitoRL de impedânciaZr = (1,25+s0,0003)Ω. As Figuras 5.1-5.10 apresentam o desempenho dos controladores doSAPF
submetidos a carga não-linear. Todas as figuras têm o mesmo padrão de apresentação
composto pelos seguintes gráficos:
• Tensões de fase no PCC;
• Tensão no barramento CC;
• Correntes de fase na rede e na carga: as curvas com traçado sólido representam as
correntes na rede enquanto que as tracejadas representam as correntes na carga;
• Espectro de frequência das correntes na rede e na carga: as barras em azul re-
presentam a corrente na carga e as barras em vermelho representam a corrente na
rede;
• Potência ativa instantânea na rede e na carga: a curva em azul representa a potência
na rede e a curva em verde representa a potência na carga;
• Potência reativa instantânea na rede e na carga: a curva em azul representa a potên-
cia na rede e a curva em verde representa a potência na carga.
A Tabela 5.3 apresenta um resumo do desempenho doSAPFcom carga não-linear.
São apresentados nessa tabela o THD de corrente na rede, o THD de tensão no PCC e a
precisão do controle de tensão do barramento CC. O objetivo doSAPFnão é a compen-
sação dos harmônicos de tensão mas foram calculados os valores de THD de tensão no
PCC para avaliação do efeito da compensação dos harmônicos de corrente sobre a tensão
no PCC. Apesar do controlador do barramento CC ser o mesmo para todos os casos, é
mostrada também a variação da tensão no barramento para avaliação do efeito das es-
tratégias de geração da corrente de referência e do controle de corrente sobre o controle
de tensão. Além disso, nas figuras do desempenho doSAPFcom carga não-linear são
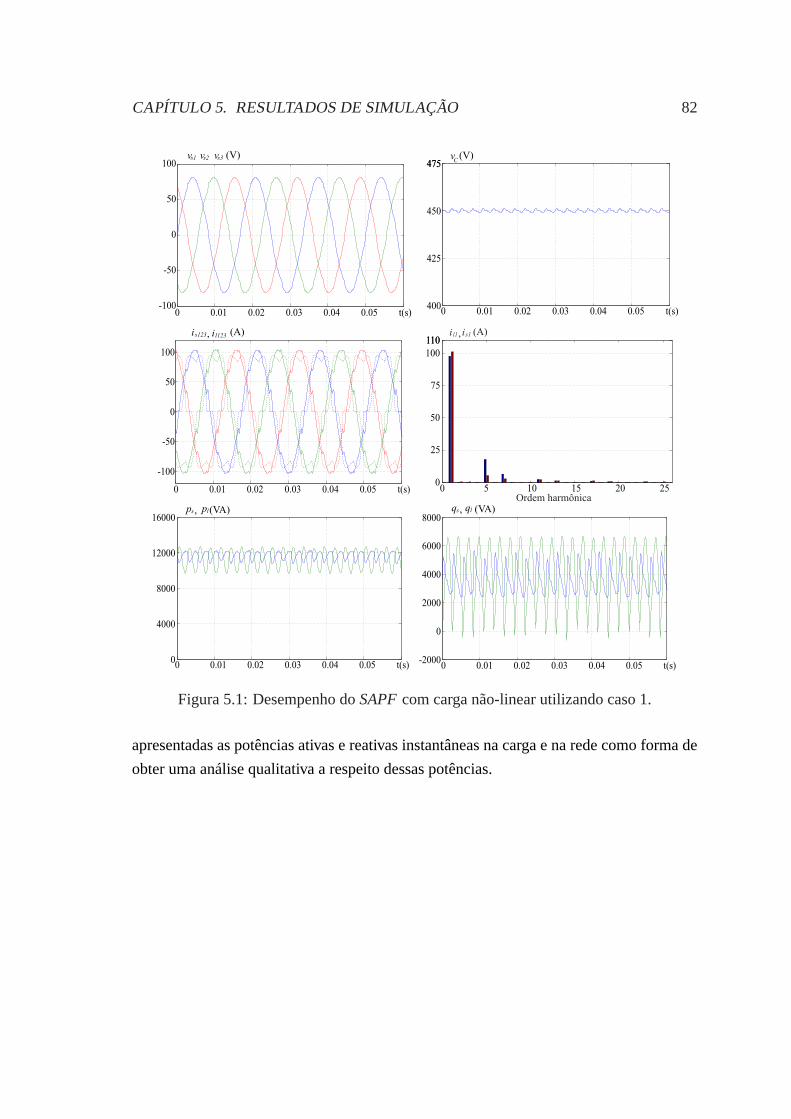
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 82
Ordem harmônica
i l1, is1 (A)
0 5 10 15 20 250
25
50
75
100
110110
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475475
is123, (A)i l123
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-2000
0
2000
4000
6000
8000
Figura 5.1: Desempenho doSAPFcom carga não-linear utilizando caso 1.
apresentadas as potências ativas e reativas instantâneas na carga e na rede como forma de
obter uma análise qualitativa a respeito dessas potências.
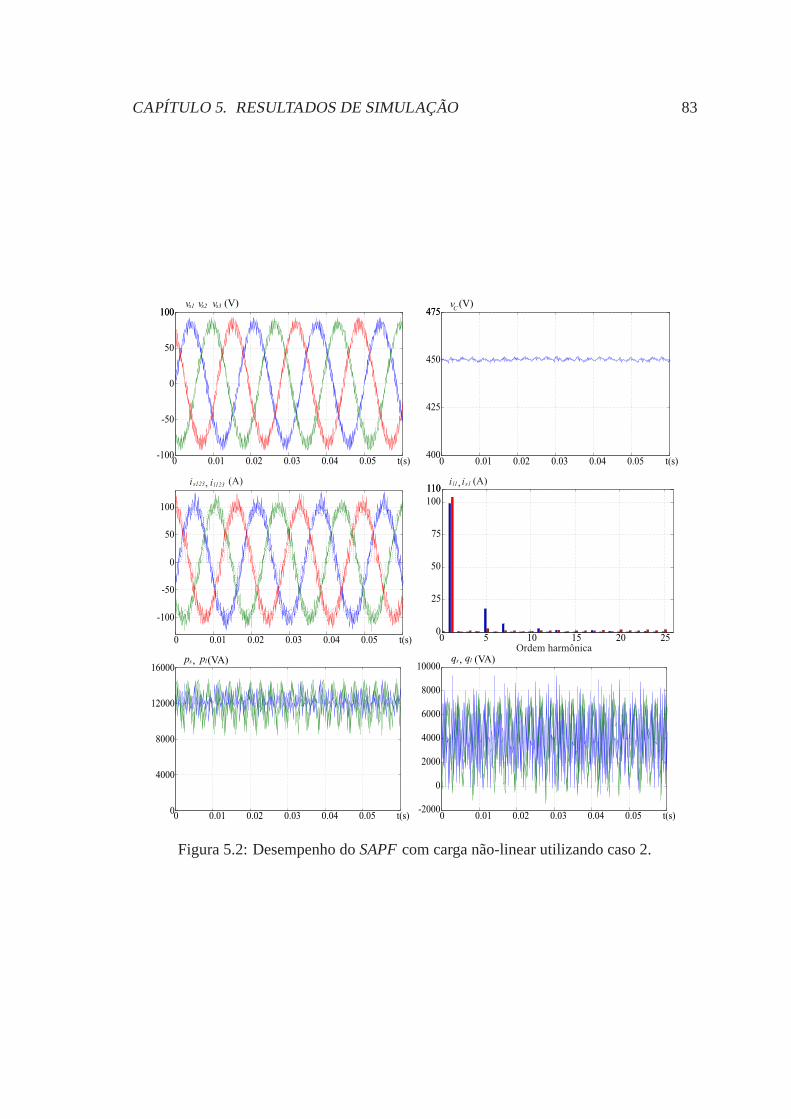
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 83
is123, (A)i l123
Ordem harmônica
i l1, is1 (A)
0 5 10 15 20 250
25
50
75
100
110110
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475475
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-2000
0
2000
4000
6000
8000
10000
Figura 5.2: Desempenho doSAPFcom carga não-linear utilizando caso 2.
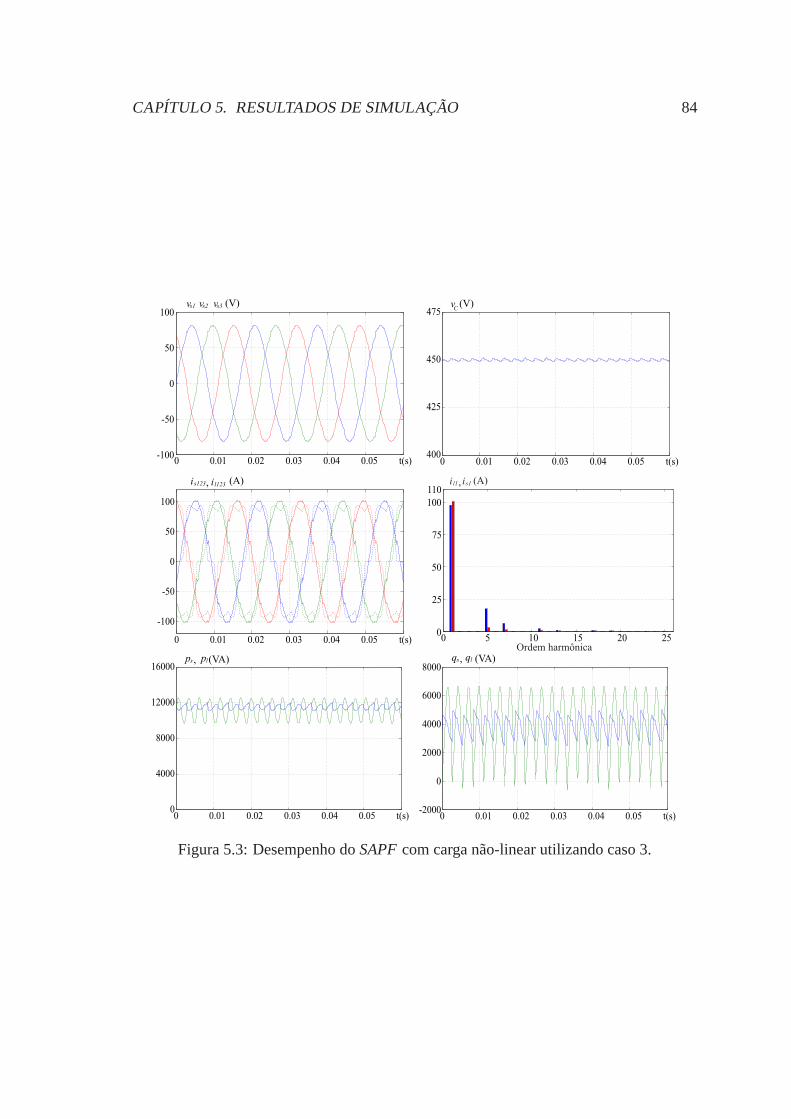
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 84
Ordem harmônica
i l1, is1 (A)
0 5 10 15 20 250
25
50
75
100
110is123, (A)i l123
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000
-2000
qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)
0
2000
4000
6000
8000
Figura 5.3: Desempenho doSAPFcom carga não-linear utilizando caso 3.
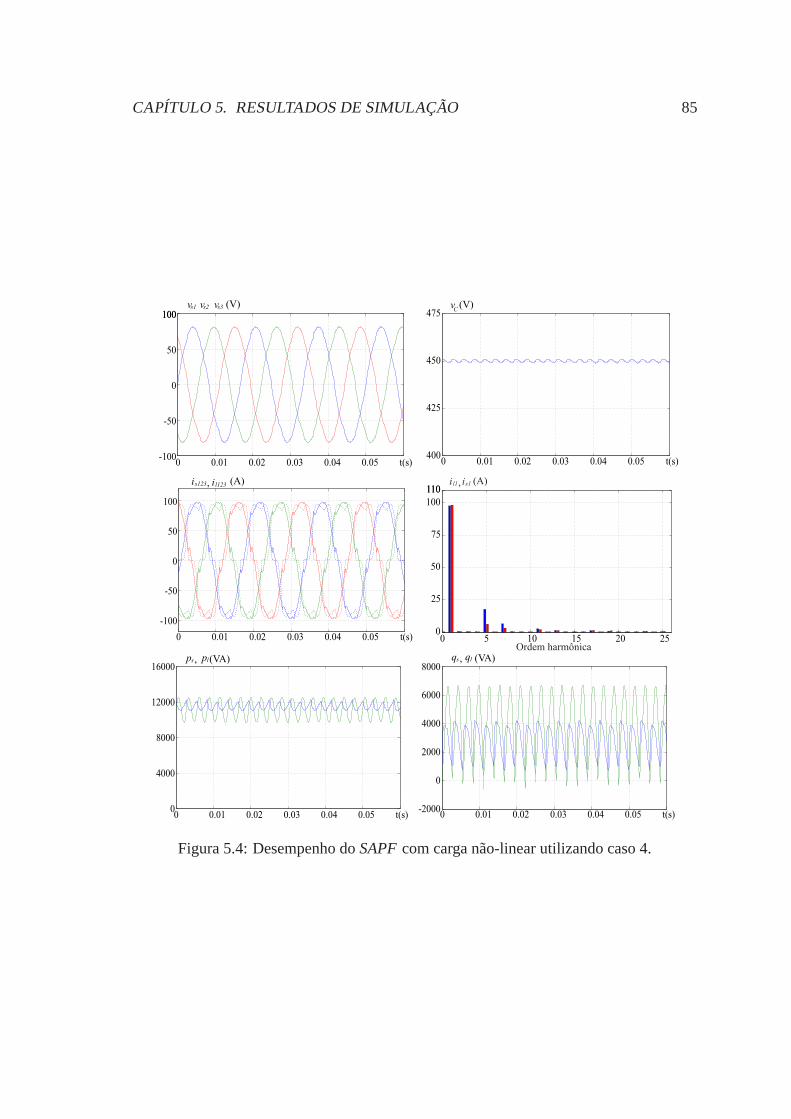
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 85
Ordem harmônica
i l1, is1 (A)
0 5 10 15 20 250
25
50
75
100
110110
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123, (A)i l123
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-2000
0
2000
4000
6000
8000
Figura 5.4: Desempenho doSAPFcom carga não-linear utilizando caso 4.
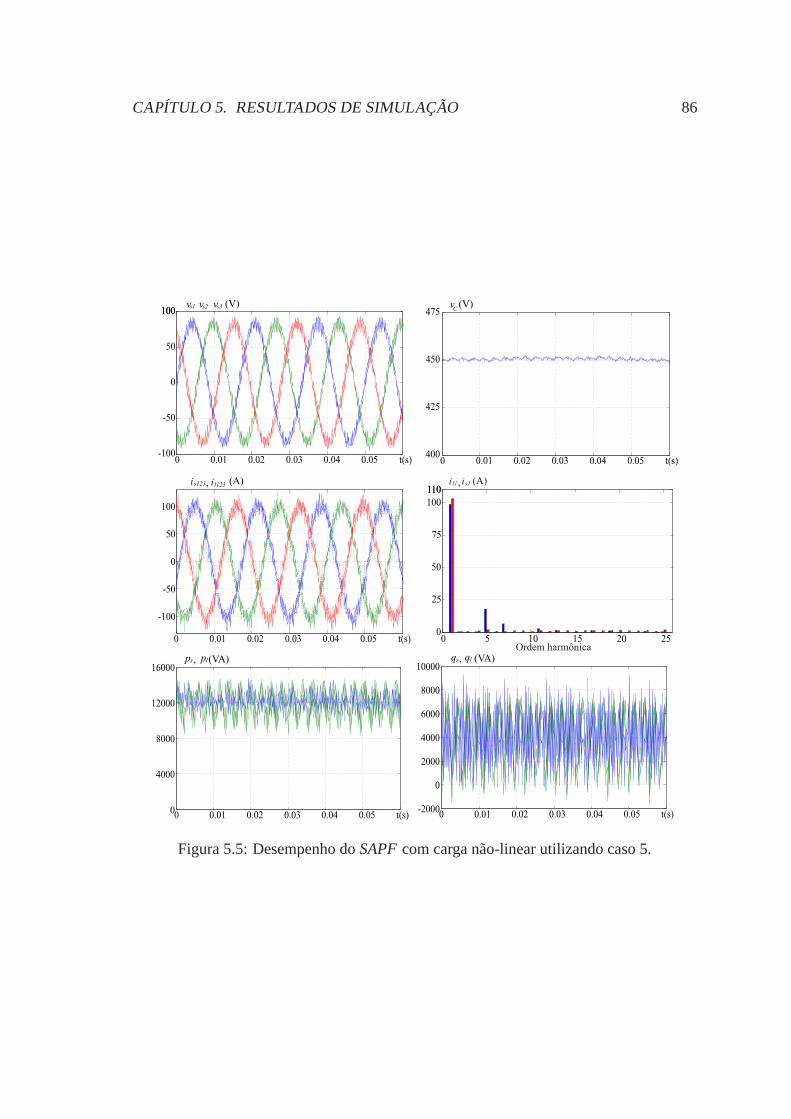
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 86
Ordem harmônica
i l1, is1 (A)
0 5 10 15 20 250
25
50
75
100
110110
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123, (A)i l123
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-2000
0
2000
4000
6000
8000
10000
Figura 5.5: Desempenho doSAPFcom carga não-linear utilizando caso 5.
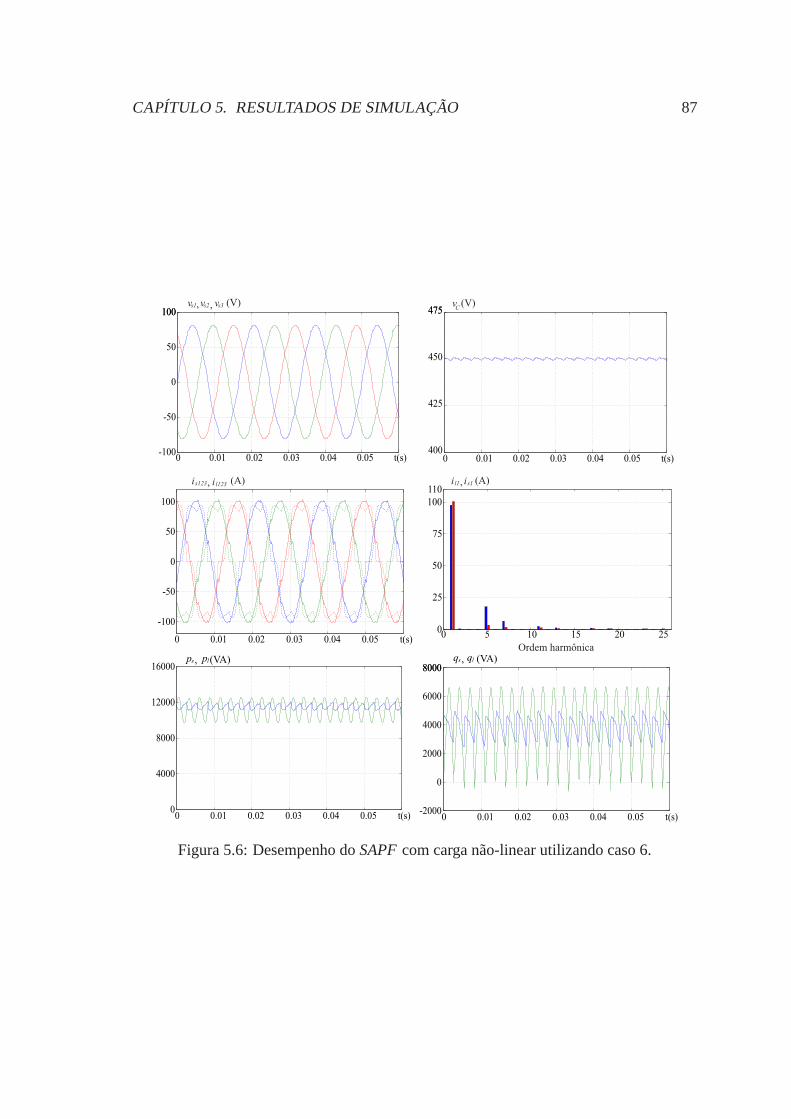
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 87
Ordem harmônica
vs1,vs2 vs3, (V) vC
(V)
is123, (A)i l123 i l1, is1 (A)
0 5 10 15 20 250
25
50
75
100
110
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475475
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-2000
0
2000
4000
6000
80008000
Figura 5.6: Desempenho doSAPFcom carga não-linear utilizando caso 6.
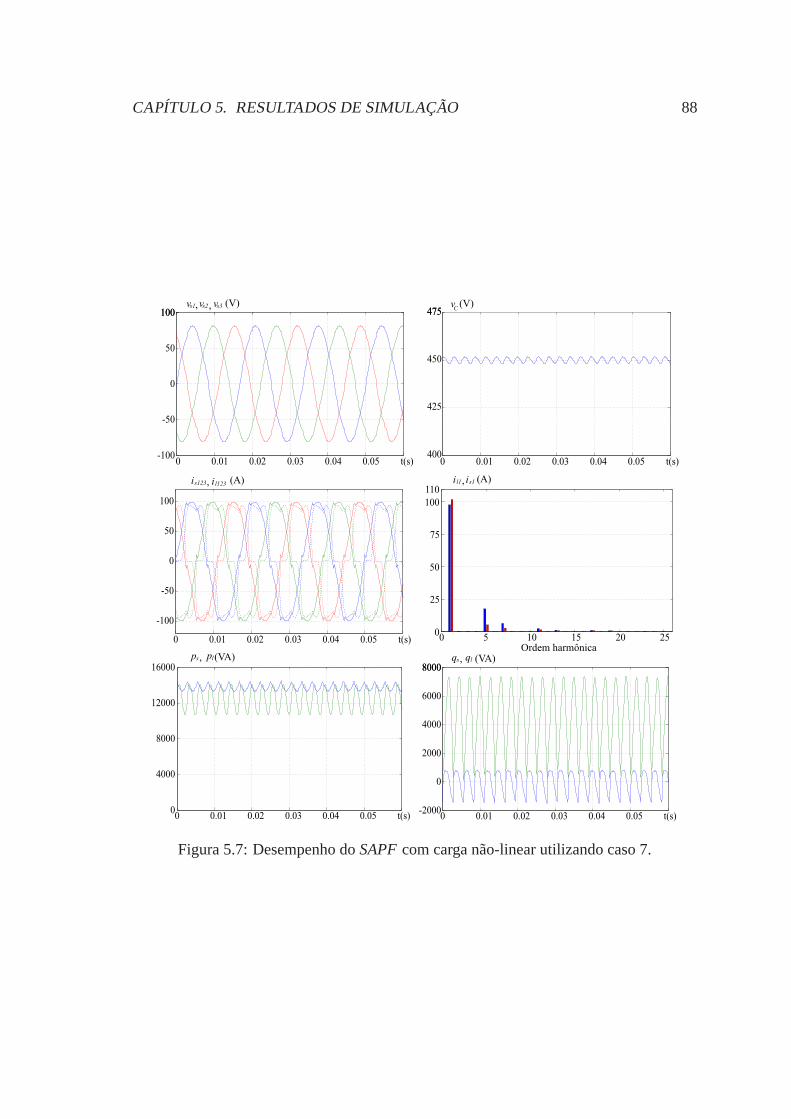
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 88
0 5 10 15 20 250
25
50
75
100
110
Ordem harmônica
i l1, is1 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100vs1,vs2 vs3, (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475475v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
is123, (A)i l123
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)-2000
0
2000
4000
6000
80008000qs, (VA)ql
Figura 5.7: Desempenho doSAPFcom carga não-linear utilizando caso 7.
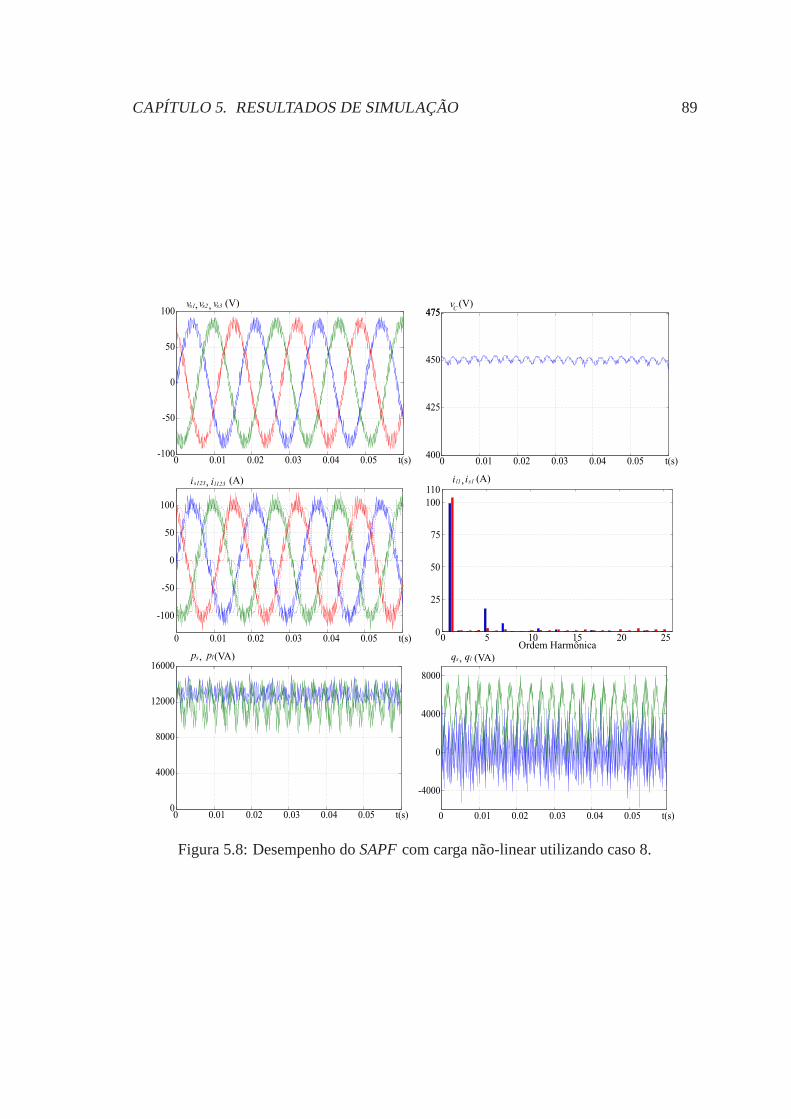
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 89
0 5 10 15 20 250
25
50
75
100
110i l1, is1 (A)
Ordem Harmônica
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100vs1,vs2 vs3, (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475475v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
is123, (A)i l123
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)
-4000
0
4000
8000
qs, (VA)ql
Figura 5.8: Desempenho doSAPFcom carga não-linear utilizando caso 8.
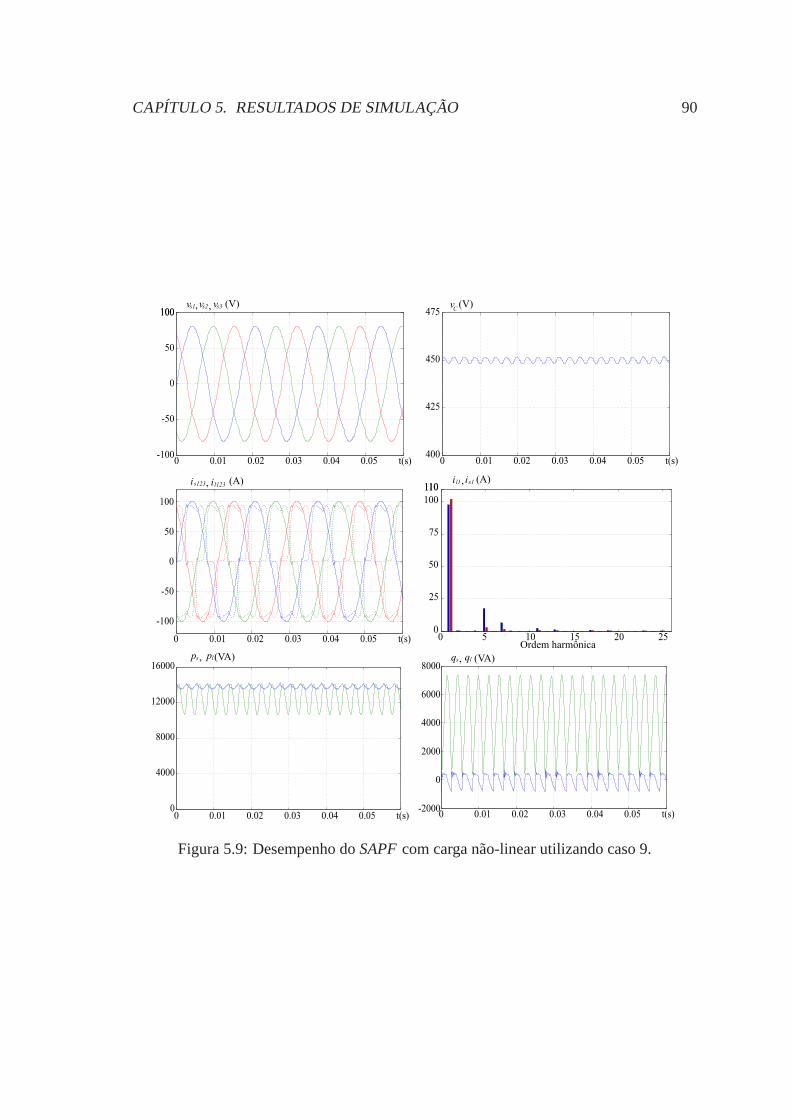
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 90
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100vs1,vs2 vs3, (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
is123, (A)i l123
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475v
C(V)
0 5 10 15 20 250
25
50
75
100
110110i l1, is1 (A)
Ordem harmônica
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)-2000
0
2000
4000
6000
8000qs, (VA)ql
Figura 5.9: Desempenho doSAPFcom carga não-linear utilizando caso 9.
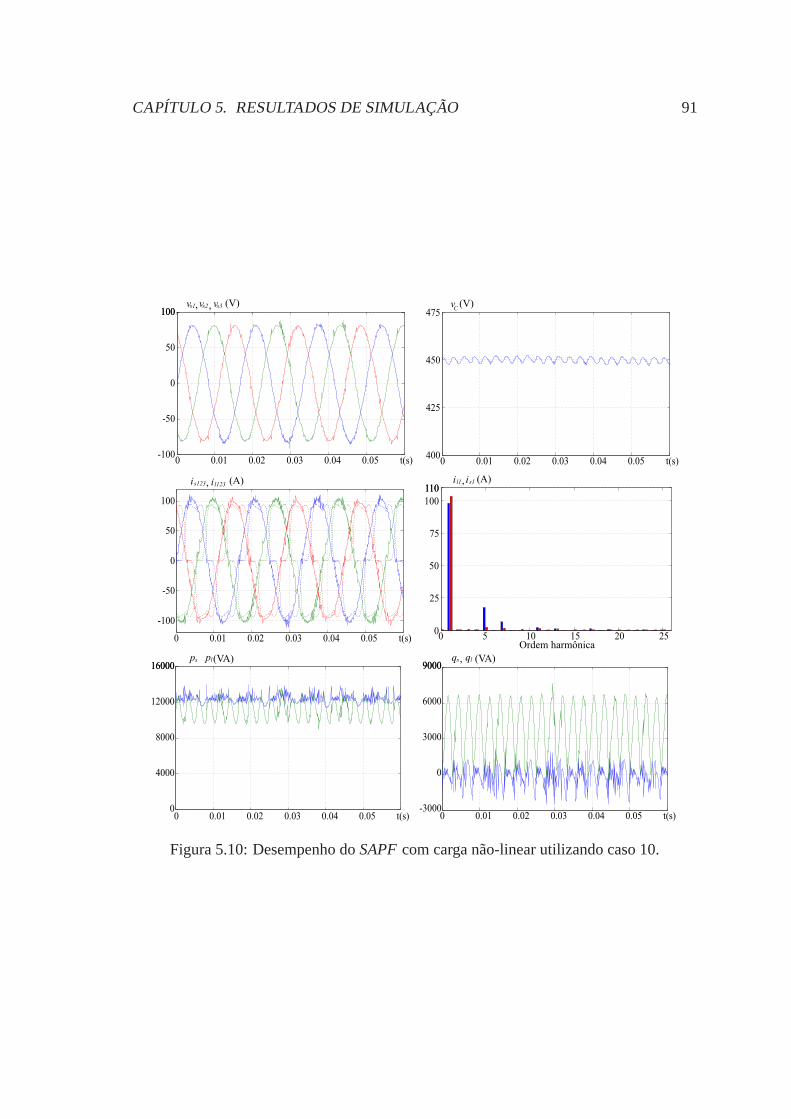
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 91
0 5 10 15 20 250
25
50
75
100
110110i l1, is1 (A)
Ordem harmônica
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100vs1,vs2 vs3, (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
is123, (A)i l123
ps (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
1600016000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-3000
0
3000
6000
90009000
Figura 5.10: Desempenho doSAPFcom carga não-linear utilizando caso 10.
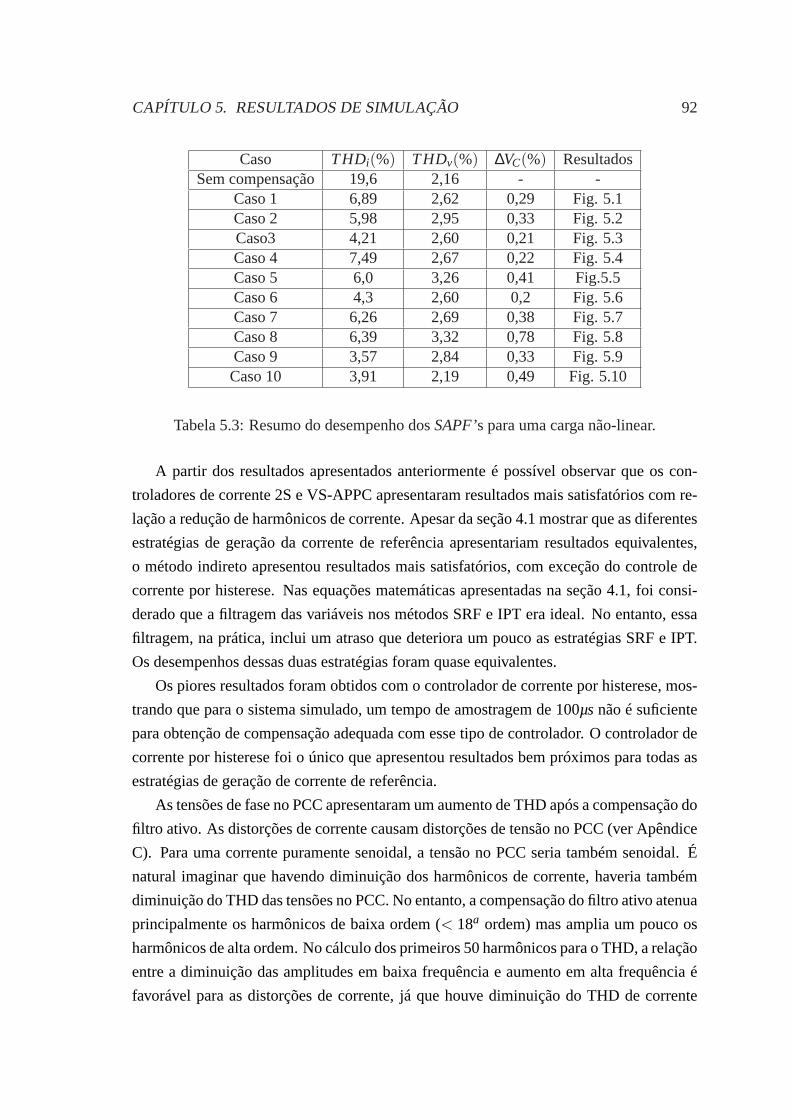
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 92
Caso THDi(%) THDv(%) ∆VC(%) ResultadosSem compensação 19,6 2,16 - -
Caso 1 6,89 2,62 0,29 Fig. 5.1Caso 2 5,98 2,95 0,33 Fig. 5.2Caso3 4,21 2,60 0,21 Fig. 5.3Caso 4 7,49 2,67 0,22 Fig. 5.4Caso 5 6,0 3,26 0,41 Fig.5.5Caso 6 4,3 2,60 0,2 Fig. 5.6Caso 7 6,26 2,69 0,38 Fig. 5.7Caso 8 6,39 3,32 0,78 Fig. 5.8Caso 9 3,57 2,84 0,33 Fig. 5.9Caso 10 3,91 2,19 0,49 Fig. 5.10
Tabela 5.3: Resumo do desempenho dosSAPF’s para uma carga não-linear.
A partir dos resultados apresentados anteriormente é possível observar que os con-
troladores de corrente 2S e VS-APPC apresentaram resultados mais satisfatórios com re-
lação a redução de harmônicos de corrente. Apesar da seção 4.1 mostrar que as diferentes
estratégias de geração da corrente de referência apresentariam resultados equivalentes,
o método indireto apresentou resultados mais satisfatórios, com exceção do controle de
corrente por histerese. Nas equações matemáticas apresentadas na seção 4.1, foi consi-
derado que a filtragem das variáveis nos métodos SRF e IPT era ideal. No entanto, essa
filtragem, na prática, inclui um atraso que deteriora um pouco as estratégias SRF e IPT.
Os desempenhos dessas duas estratégias foram quase equivalentes.
Os piores resultados foram obtidos com o controlador de corrente por histerese, mos-
trando que para o sistema simulado, um tempo de amostragem de100µsnão é suficiente
para obtenção de compensação adequada com esse tipo de controlador. O controlador de
corrente por histerese foi o único que apresentou resultados bem próximos para todas as
estratégias de geração de corrente de referência.
As tensões de fase no PCC apresentaram um aumento de THD após a compensação do
filtro ativo. As distorções de corrente causam distorções de tensão no PCC (ver Apêndice
C). Para uma corrente puramente senoidal, a tensão no PCC seria também senoidal. É
natural imaginar que havendo diminuição dos harmônicos de corrente, haveria também
diminuição do THD das tensões no PCC. No entanto, a compensação do filtro ativo atenua
principalmente os harmônicos de baixa ordem (< 18a ordem) mas amplia um pouco os
harmônicos de alta ordem. No cálculo dos primeiros 50 harmônicos para o THD, a relação
entre a diminuição das amplitudes em baixa frequência e aumento em alta frequência é
favorável para as distorções de corrente, já que houve diminuição do THD de corrente
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 93
de19,6% para no mínimo, de7,5%. Para o THD de tensão no PCC, essa diferença não
foi favorável, fazendo com que o valor do THD passasse de2,16% para um máximo
de 3,32%. Essa reversão entre os THDs de corrente e tensão é proveniente da queda
de tensão na impendância da rede. A reatância indutiva (XL = 2π f L) aumenta propor-
cionalmente com a frequência, aumentando a influência dos harmônicos de alta ordem
de corrente sobre o THD de tensão. Esse fenômeno pode ser observado, por exemplo,
no caso 5, onde é utilizado um controlador de corrente por histerese. A Fig. 5.5 mostra
o espectro de frequência de corrente até a25a ordem. É possível observar que a partir
do harmônico de ordem 14, há uma ampliação dos harmônicos. O THD diminui pois a
atenuação dos harmônicos de corrente de baixa ordem, principalmente os de ordem 5 e 7,
é forte suficiente para contrabalançar os harmônicos de alta ordem. A Fig. 5.11 mostra o
espectro de frequência da tensão no PCC para o caso 5, considerando até o harmônico de
ordem 50. As barras em azul representam a tensão no PCC quando apenas a carga está
conectada ao PCC e as barras em vermelho representam a tensão no PCC com o filtro ativo
habilitado. Os limites do eixo Y na Figura 5.11 foram ajustados para melhor visualizar os
harmônicos. Dessa forma, o valor para a frequência fundamental não está adequadamente
mostrado na figura mas têm valores de84,35V e 84,55V para a barra azul e vermelha,
respectivamente. É possível observar que os harmônicos de baixa ordem, principalmente
os de ordem 5 e 7, assim como na corrente da rede, sofrem uma atenuação. Porém, nesse
caso, essa atenuação não é suficiente para contrabalançar o aumento de amplitude dos
harmônicos de alta ordem.
As distorções das tensões no PCC não afetam o desempenho de compensação de cor-
rente doSAPF. Elas são consequência das correntes distorcidas e não a causa. O problema
é que a distorção de tensão no PCC pode afetar outras cargas ligadas também ao PCC.
Além disso, essa distorção afeta diretamente as potências instantâneas ativas e reativas. É
importante salientar que para o controle indireto, a média da potência reativa instantânea
cai para zero pois nesse método, a compensação do fator de potência é uma caracterís-
tica intrínseca do método. Nos métodos SRF e IPT não foi habilitada a compensação de
reativos apesar de ser possível adicionar essa compensação. A parte CA das potências
instantâneas são relativas aos harmônicos e a parte CC, à frequência fundamental (ver
Apêndice D). Nesse trabalho, não foram calculadas as partes CA e CC das potências
instantêneas mas foram apresentadas as suas formas de onda nas Figs. 5.1-5.10 para uma
análise qualitativa das potências na rede. Para todos os casos, com exceção daqueles que
utilizaram o controle de corrente por histerese (casos 2, 5 e 8), há uma visível diminuição
da parte CA das potências instantâneas, ou seja, das potências dos harmônicos. Nos
casos 2, 5 e 8, a diminuição da parte CA das potências não é tão perceptível apesar do
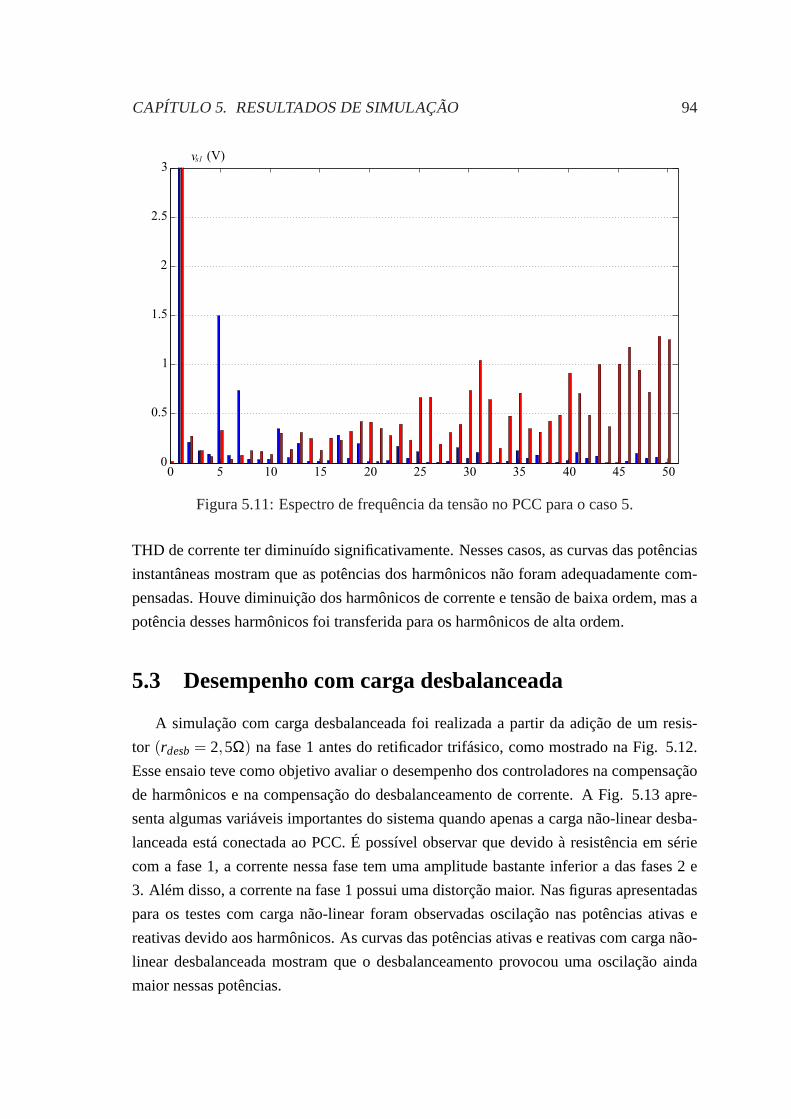
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 94
0 5 10 15 20 25 30 35 40 45 500
0.5
1
1.5
2
2.5
3vs1 (V)
Figura 5.11: Espectro de frequência da tensão no PCC para o caso 5.
THD de corrente ter diminuído significativamente. Nesses casos, as curvas das potências
instantâneas mostram que as potências dos harmônicos não foram adequadamente com-
pensadas. Houve diminuição dos harmônicos de corrente e tensão de baixa ordem, mas a
potência desses harmônicos foi transferida para os harmônicos de alta ordem.
5.3 Desempenho com carga desbalanceada
A simulação com carga desbalanceada foi realizada a partir da adição de um resis-
tor (rdesb= 2,5Ω) na fase 1 antes do retificador trifásico, como mostrado na Fig. 5.12.
Esse ensaio teve como objetivo avaliar o desempenho dos controladores na compensação
de harmônicos e na compensação do desbalanceamento de corrente. A Fig. 5.13 apre-
senta algumas variáveis importantes do sistema quando apenas a carga não-linear desba-
lanceada está conectada ao PCC. É possível observar que devido à resistência em série
com a fase 1, a corrente nessa fase tem uma amplitude bastante inferior a das fases 2 e
3. Além disso, a corrente na fase 1 possui uma distorção maior. Nas figuras apresentadas
para os testes com carga não-linear foram observadas oscilação nas potências ativas e
reativas devido aos harmônicos. As curvas das potências ativas e reativas com carga não-
linear desbalanceada mostram que o desbalanceamento provocou uma oscilação ainda
maior nessas potências.
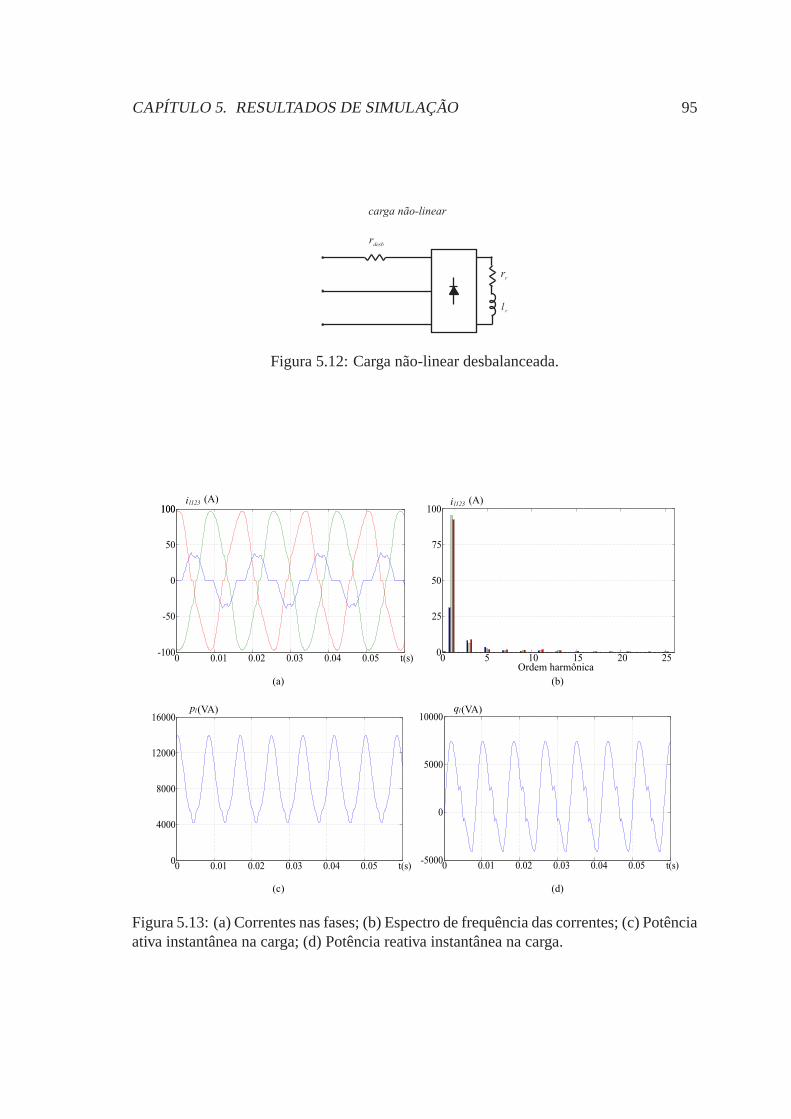
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 95
carga não-linear
lr
rr
rdesb
Figura 5.12: Carga não-linear desbalanceada.
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100(A)i l123
0 5 10 15 20 250
25
50
75
100(A)i l123
Ordem harmônica
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000(VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000(VA)ql
(a) (b)
(c) (d)
Figura 5.13: (a) Correntes nas fases; (b) Espectro de frequência das correntes; (c) Potênciaativa instantânea na carga; (d) Potência reativa instantânea na carga.
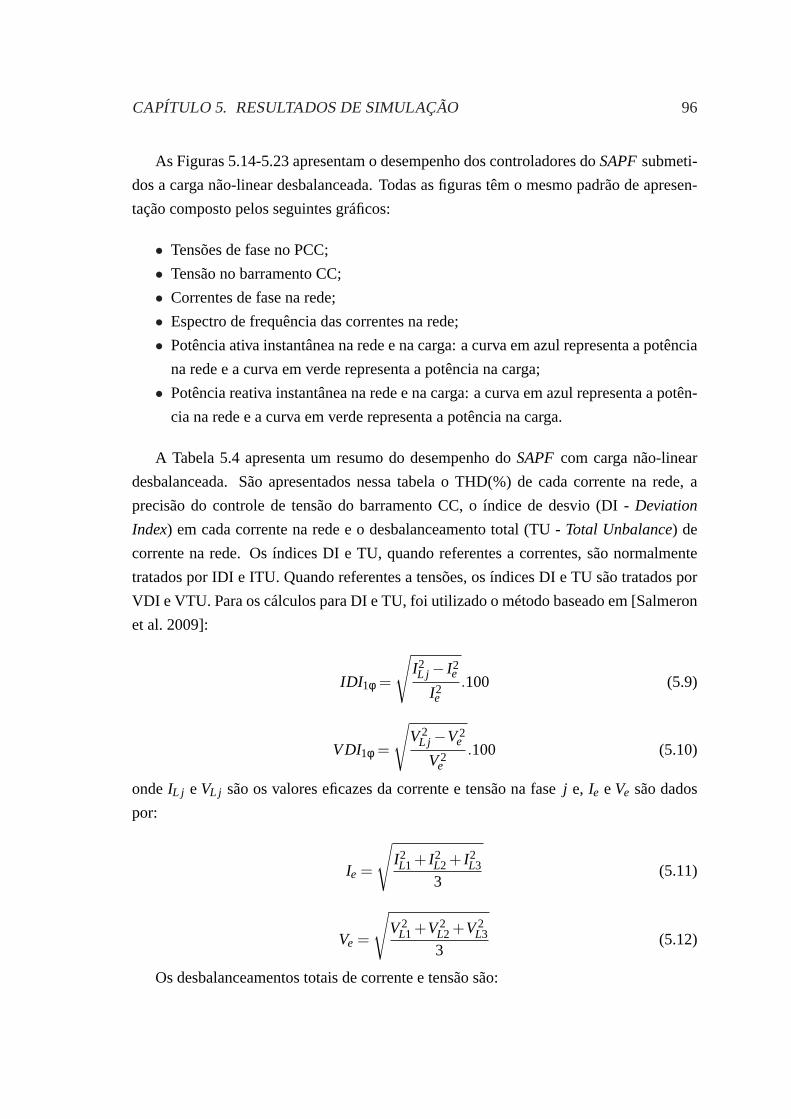
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 96
As Figuras 5.14-5.23 apresentam o desempenho dos controladores doSAPFsubmeti-
dos a carga não-linear desbalanceada. Todas as figuras têm o mesmo padrão de apresen-
tação composto pelos seguintes gráficos:
• Tensões de fase no PCC;
• Tensão no barramento CC;
• Correntes de fase na rede;
• Espectro de frequência das correntes na rede;
• Potência ativa instantânea na rede e na carga: a curva em azul representa a potência
na rede e a curva em verde representa a potência na carga;
• Potência reativa instantânea na rede e na carga: a curva em azul representa a potên-
cia na rede e a curva em verde representa a potência na carga.
A Tabela 5.4 apresenta um resumo do desempenho doSAPF com carga não-linear
desbalanceada. São apresentados nessa tabela o THD(%) de cada corrente na rede, a
precisão do controle de tensão do barramento CC, o índice de desvio (DI- Deviation
Index) em cada corrente na rede e o desbalanceamento total (TU -Total Unbalance) de
corrente na rede. Os índices DI e TU, quando referentes a correntes, são normalmente
tratados por IDI e ITU. Quando referentes a tensões, os índices DI e TU são tratados por
VDI e VTU. Para os cálculos para DI e TU, foi utilizado o método baseado em [Salmeron
et al. 2009]:
IDI1φ =
√I2L j − I2
e
I2e
.100 (5.9)
VDI1φ =
√V2
L j −V2e
V2e
.100 (5.10)
ondeIL j eVL j são os valores eficazes da corrente e tensão na fasej e, Ie eVe são dados
por:
Ie =
√I2L1 + I2
L2 + I2L3
3(5.11)
Ve =
√V2
L1 +V2L2 +V2
L3
3(5.12)
Os desbalanceamentos totais de corrente e tensão são:
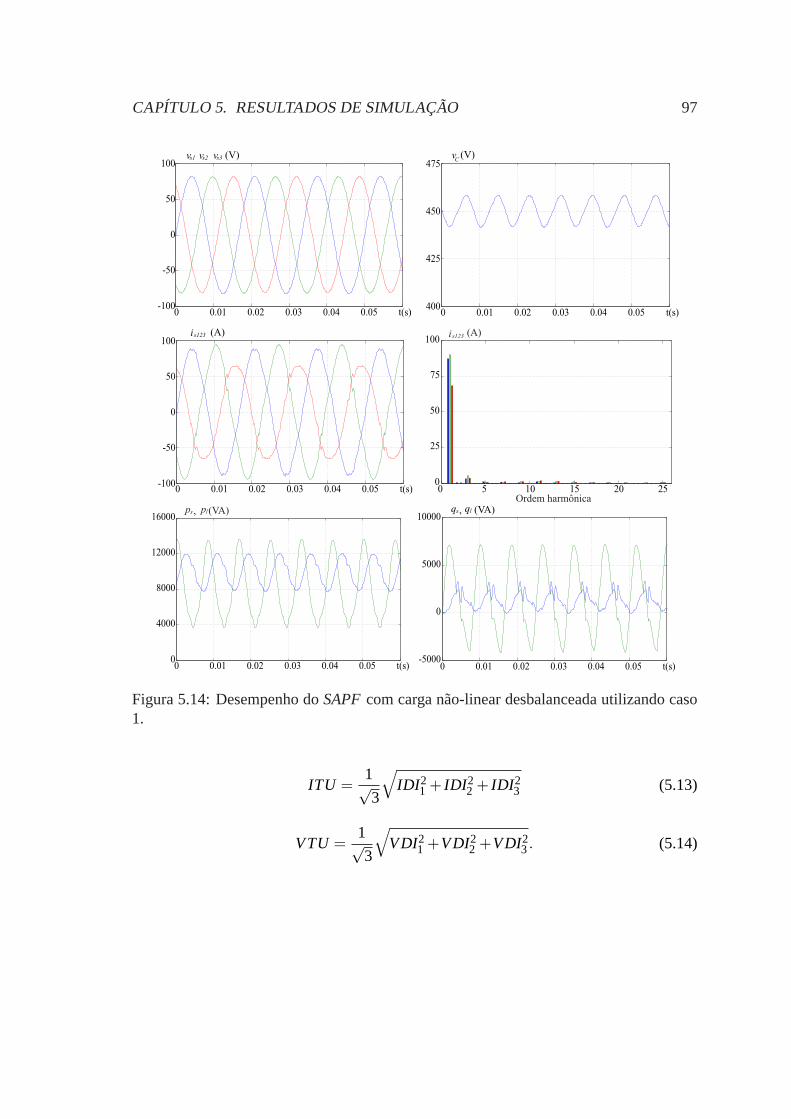
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 97
ps, (VA)pl
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.14: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso1.
ITU =1√3
√IDI 2
1 + IDI 22 + IDI 2
3 (5.13)
VTU =1√3
√VDI21 +VDI22 +VDI23. (5.14)
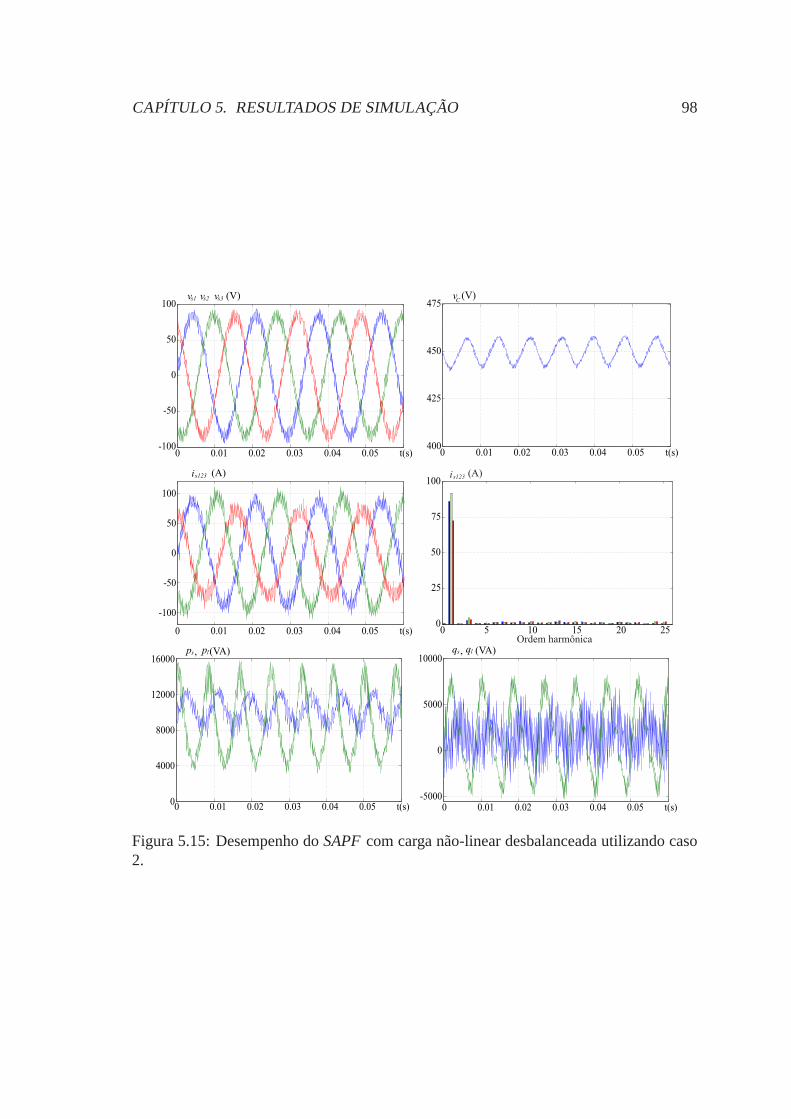
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 98
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.15: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso2.
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 99
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.16: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso3.
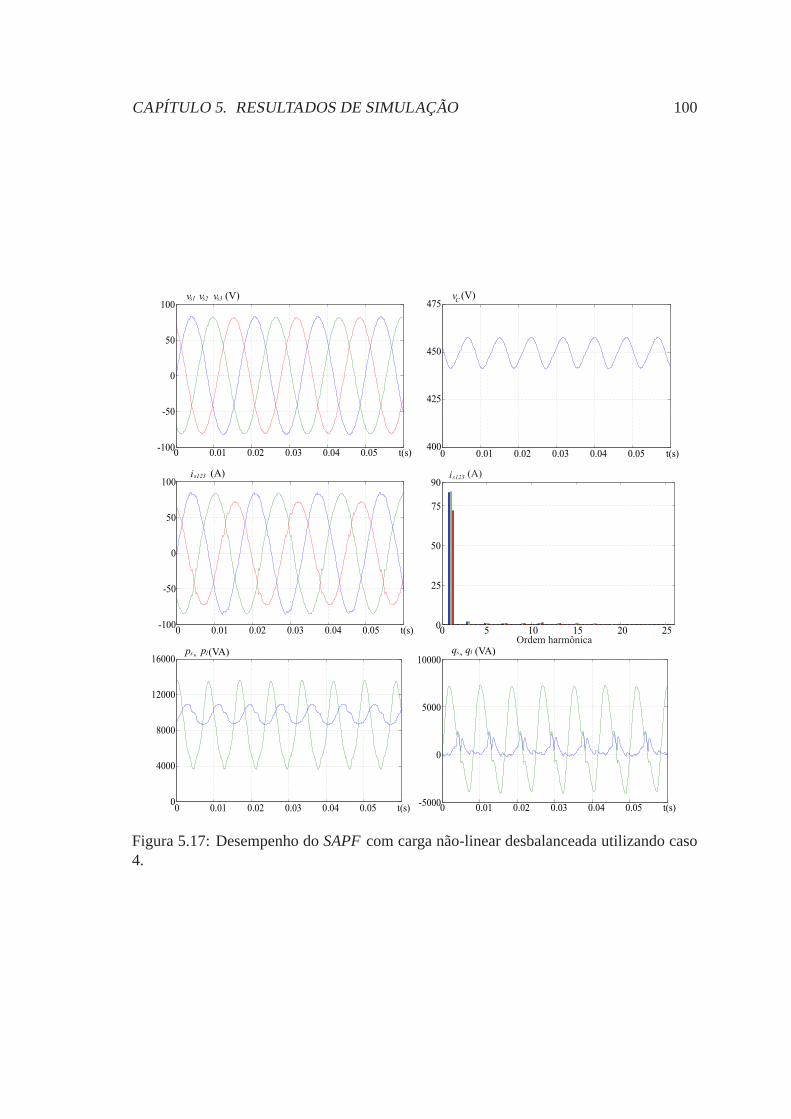
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 100
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
90
-100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.17: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso4.
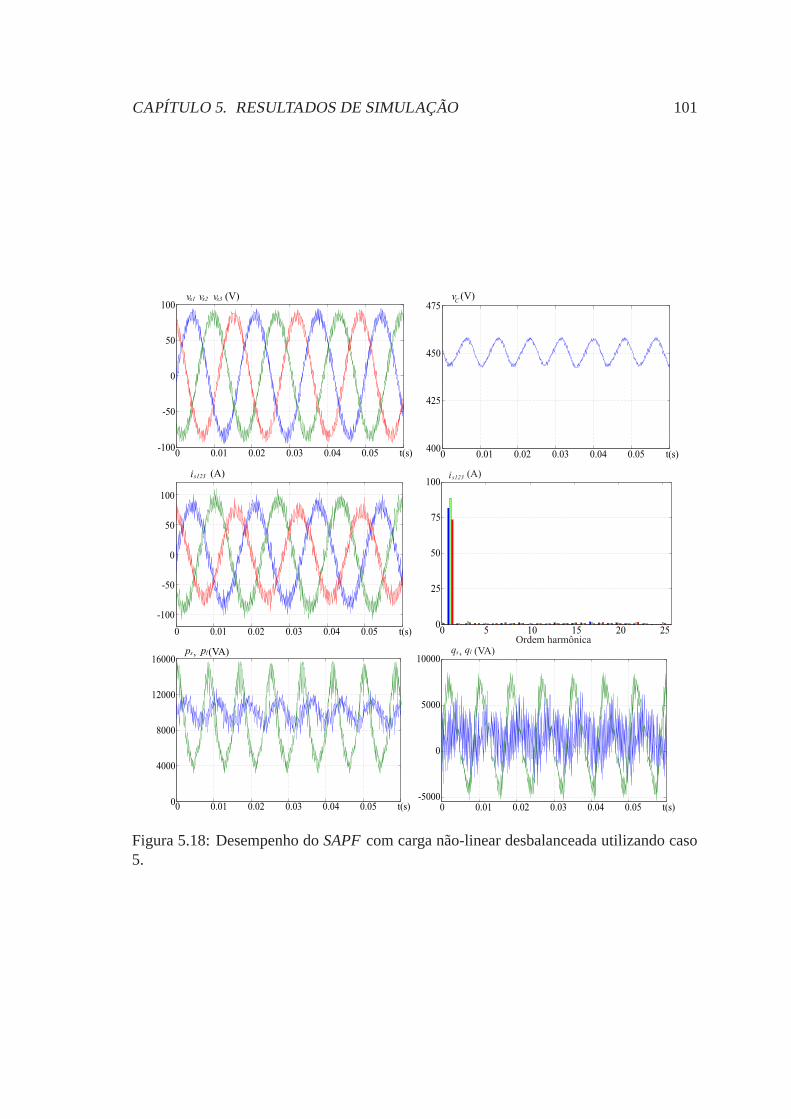
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 101
qs, (VA)ql
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.18: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso5.
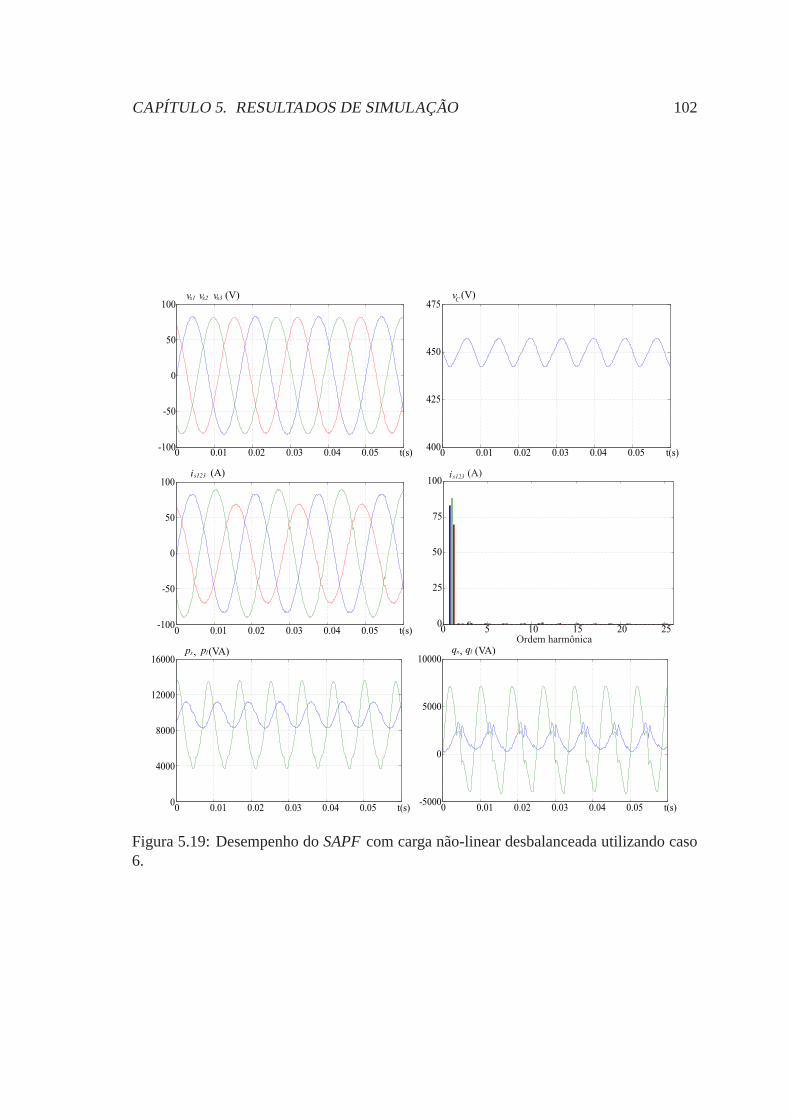
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 102
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.19: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso6.
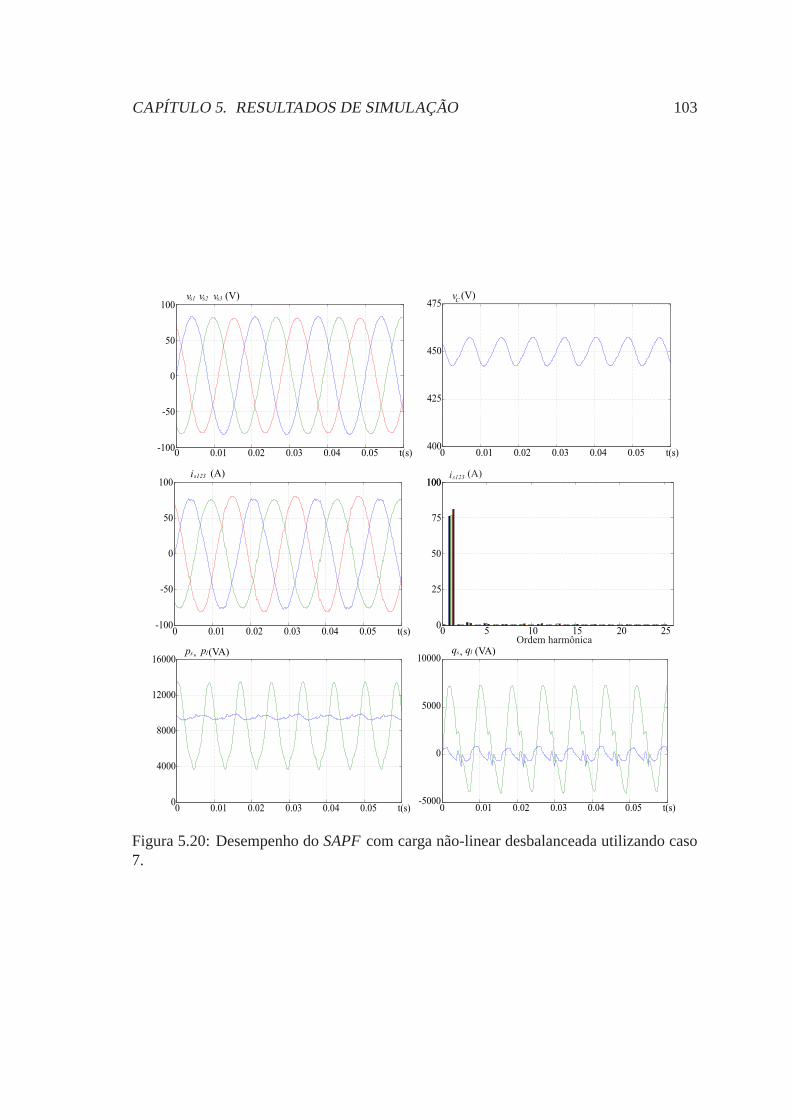
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 103
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.20: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso7.
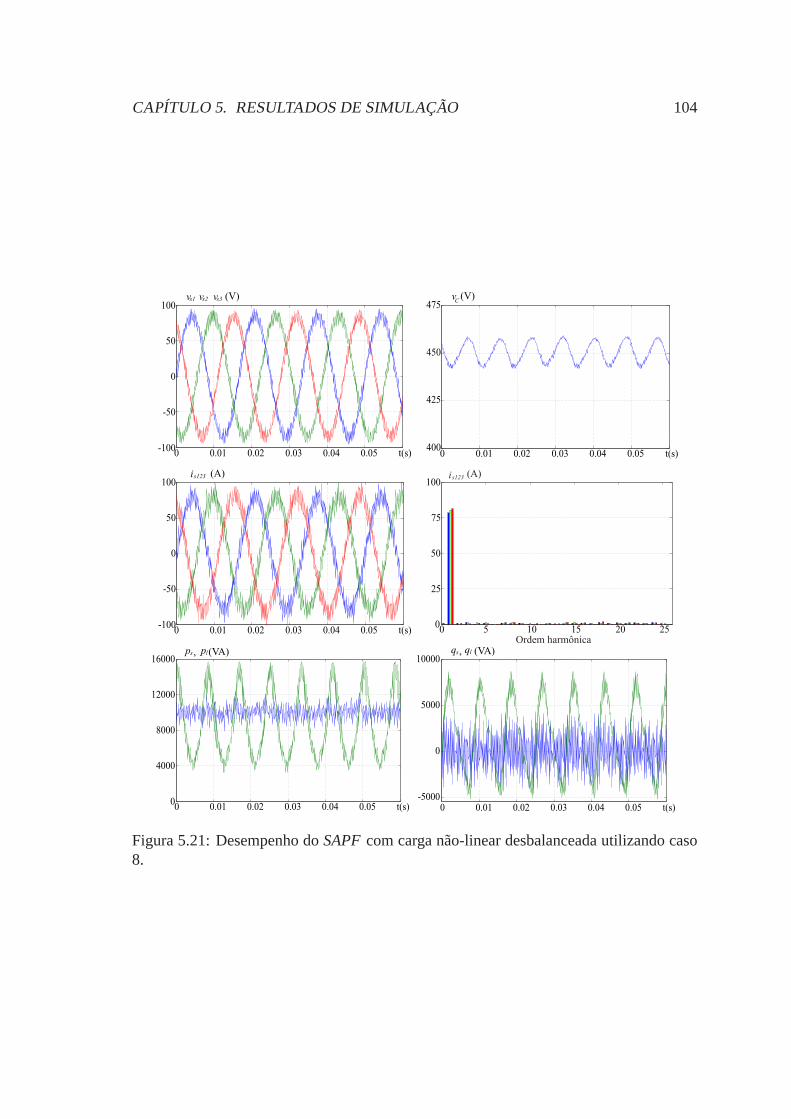
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 104
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.21: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso8.
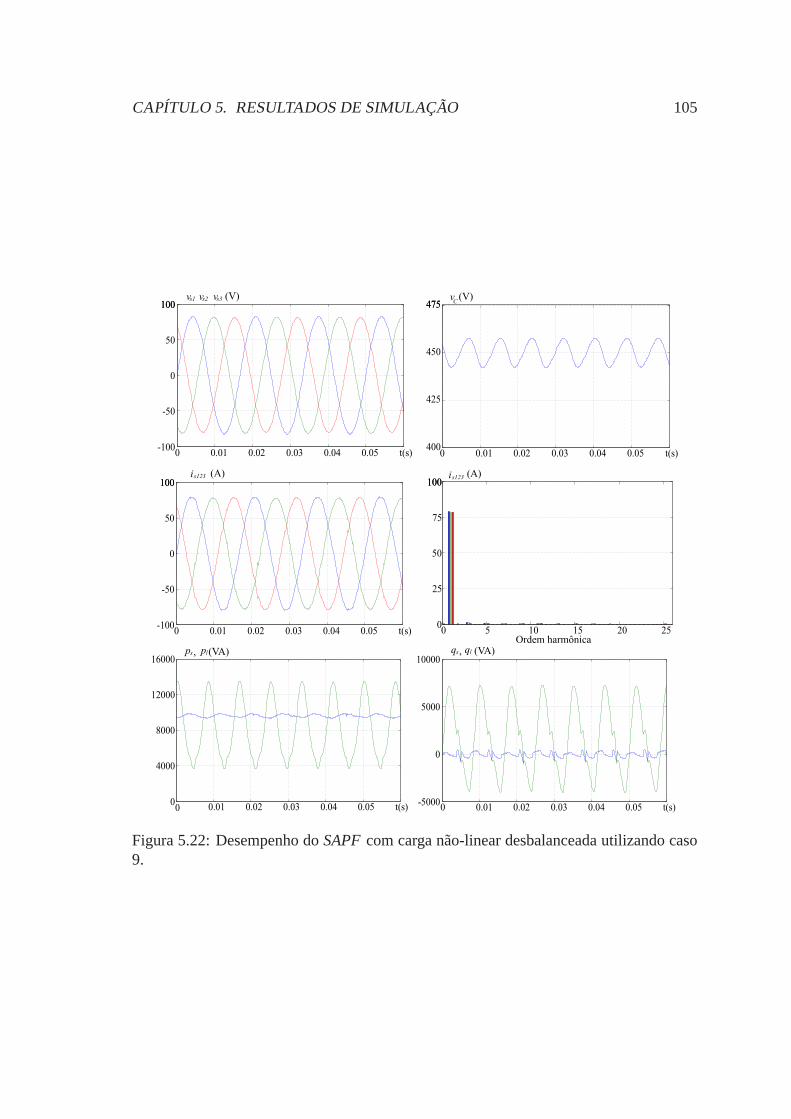
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 105
0 5 10 15 20 250
25
50
75
100100(A)is123
Ordem harmônica
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.22: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso9.
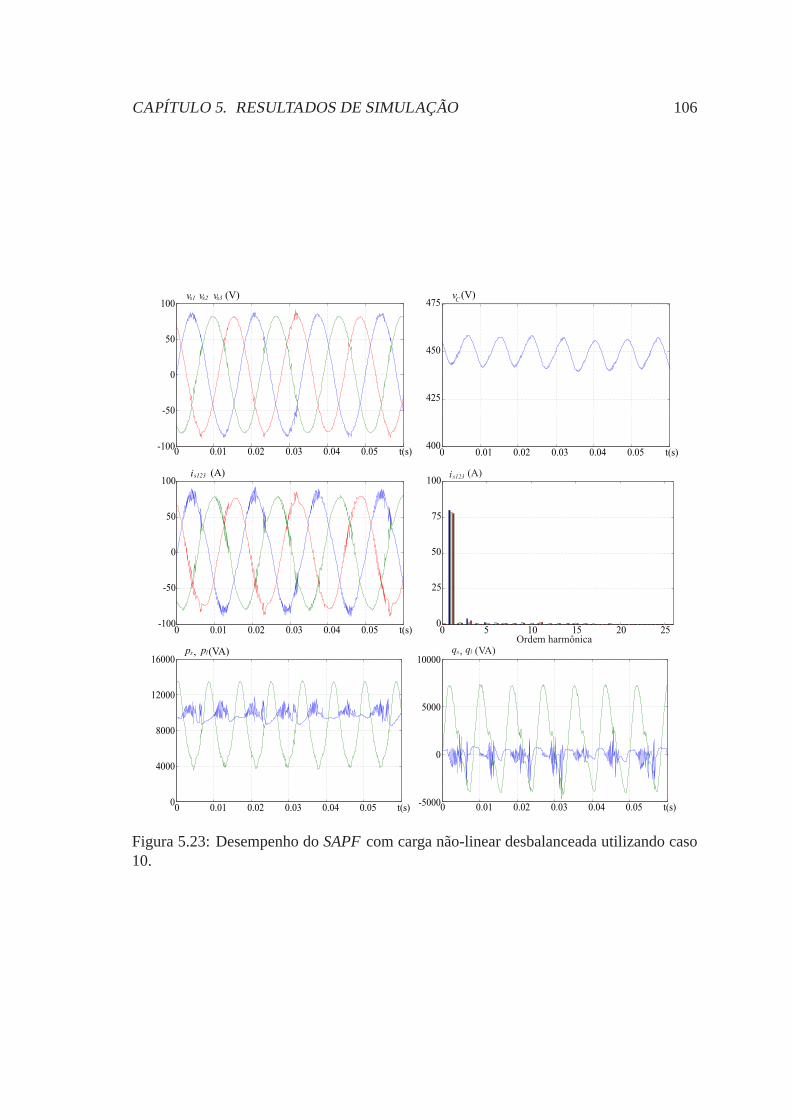
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 106
qs, (VA)ql
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.23: Desempenho doSAPFcom carga não-linear desbalanceada utilizando caso10.
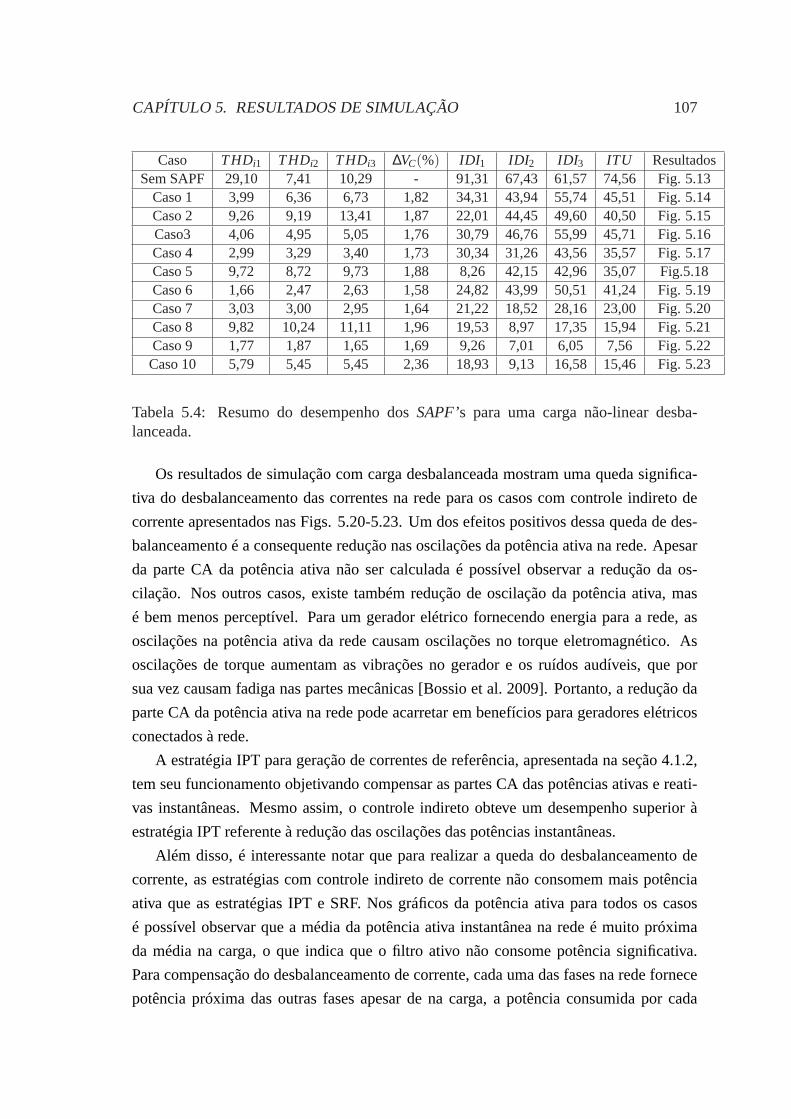
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 107
Caso THDi1 THDi2 THDi3 ∆VC(%) IDI1 IDI2 IDI3 ITU ResultadosSem SAPF 29,10 7,41 10,29 - 91,31 67,43 61,57 74,56 Fig. 5.13
Caso 1 3,99 6,36 6,73 1,82 34,31 43,94 55,74 45,51 Fig. 5.14Caso 2 9,26 9,19 13,41 1,87 22,01 44,45 49,60 40,50 Fig. 5.15Caso3 4,06 4,95 5,05 1,76 30,79 46,76 55,99 45,71 Fig. 5.16Caso 4 2,99 3,29 3,40 1,73 30,34 31,26 43,56 35,57 Fig. 5.17Caso 5 9,72 8,72 9,73 1,88 8,26 42,15 42,96 35,07 Fig.5.18Caso 6 1,66 2,47 2,63 1,58 24,82 43,99 50,51 41,24 Fig. 5.19Caso 7 3,03 3,00 2,95 1,64 21,22 18,52 28,16 23,00 Fig. 5.20Caso 8 9,82 10,24 11,11 1,96 19,53 8,97 17,35 15,94 Fig. 5.21Caso 9 1,77 1,87 1,65 1,69 9,26 7,01 6,05 7,56 Fig. 5.22Caso 10 5,79 5,45 5,45 2,36 18,93 9,13 16,58 15,46 Fig. 5.23
Tabela 5.4: Resumo do desempenho dosSAPF’s para uma carga não-linear desba-lanceada.
Os resultados de simulação com carga desbalanceada mostram uma queda significa-
tiva do desbalanceamento das correntes na rede para os casos com controle indireto de
corrente apresentados nas Figs. 5.20-5.23. Um dos efeitos positivos dessa queda de des-
balanceamento é a consequente redução nas oscilações da potência ativa na rede. Apesar
da parte CA da potência ativa não ser calculada é possível observar a redução da os-
cilação. Nos outros casos, existe também redução de oscilação da potência ativa, mas
é bem menos perceptível. Para um gerador elétrico fornecendo energia para a rede, as
oscilações na potência ativa da rede causam oscilações no torque eletromagnético. As
oscilações de torque aumentam as vibrações no gerador e os ruídos audíveis, que por
sua vez causam fadiga nas partes mecânicas [Bossio et al. 2009]. Portanto, a redução da
parte CA da potência ativa na rede pode acarretar em benefícios para geradores elétricos
conectados à rede.
A estratégia IPT para geração de correntes de referência, apresentada na seção 4.1.2,
tem seu funcionamento objetivando compensar as partes CA das potências ativas e reati-
vas instantâneas. Mesmo assim, o controle indireto obteve um desempenho superior à
estratégia IPT referente à redução das oscilações das potências instantâneas.
Além disso, é interessante notar que para realizar a queda do desbalanceamento de
corrente, as estratégias com controle indireto de corrente não consomem mais potência
ativa que as estratégias IPT e SRF. Nos gráficos da potência ativa para todos os casos
é possível observar que a média da potência ativa instantânea na rede é muito próxima
da média na carga, o que indica que o filtro ativo não consome potência significativa.
Para compensação do desbalanceamento de corrente, cada uma das fases na rede fornece
potência próxima das outras fases apesar de na carga, a potência consumida por cada
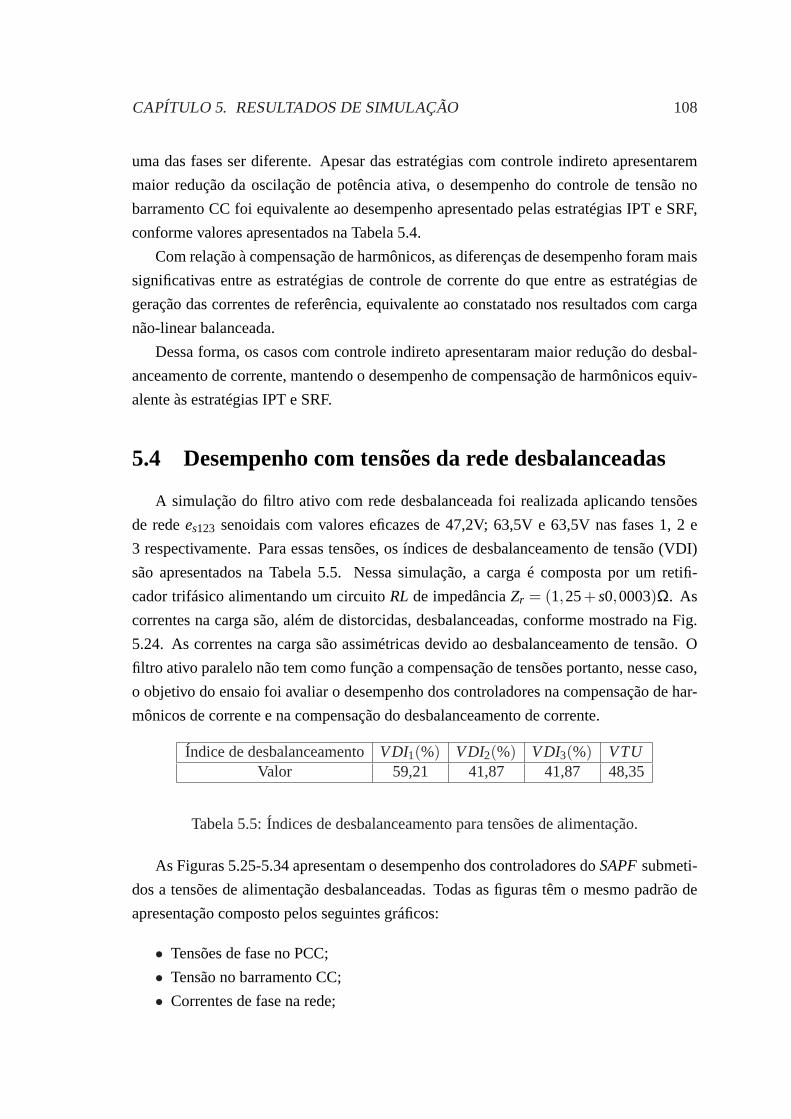
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 108
uma das fases ser diferente. Apesar das estratégias com controle indireto apresentarem
maior redução da oscilação de potência ativa, o desempenho do controle de tensão no
barramento CC foi equivalente ao desempenho apresentado pelas estratégias IPT e SRF,
conforme valores apresentados na Tabela 5.4.
Com relação à compensação de harmônicos, as diferenças de desempenho foram mais
significativas entre as estratégias de controle de corrente do que entre as estratégias de
geração das correntes de referência, equivalente ao constatado nos resultados com carga
não-linear balanceada.
Dessa forma, os casos com controle indireto apresentaram maior redução do desbal-
anceamento de corrente, mantendo o desempenho de compensação de harmônicos equiv-
alente às estratégias IPT e SRF.
5.4 Desempenho com tensões da rede desbalanceadas
A simulação do filtro ativo com rede desbalanceada foi realizada aplicando tensões
de redees123 senoidais com valores eficazes de 47,2V; 63,5V e 63,5V nas fases 1, 2 e
3 respectivamente. Para essas tensões, os índices de desbalanceamento de tensão (VDI)
são apresentados na Tabela 5.5. Nessa simulação, a carga é composta por um retifi-
cador trifásico alimentando um circuitoRL de impedânciaZr = (1,25+ s0,0003)Ω. As
correntes na carga são, além de distorcidas, desbalanceadas, conforme mostrado na Fig.
5.24. As correntes na carga são assimétricas devido ao desbalanceamento de tensão. O
filtro ativo paralelo não tem como função a compensação de tensões portanto, nesse caso,
o objetivo do ensaio foi avaliar o desempenho dos controladores na compensação de har-
mônicos de corrente e na compensação do desbalanceamento de corrente.
Índice de desbalanceamentoVDI1(%) VDI2(%) VDI3(%) VTUValor 59,21 41,87 41,87 48,35
Tabela 5.5: Índices de desbalanceamento para tensões de alimentação.
As Figuras 5.25-5.34 apresentam o desempenho dos controladores doSAPFsubmeti-
dos a tensões de alimentação desbalanceadas. Todas as figuras têm o mesmo padrão de
apresentação composto pelos seguintes gráficos:
• Tensões de fase no PCC;
• Tensão no barramento CC;
• Correntes de fase na rede;
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 109
(a) (b)
(c) (d)
(A)i l123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100(A)i l123
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
(VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000(VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.24: Carga não-linear alimentada por tensões desbalanceadas: (a) Correntes nasfases; (b) Espectro de frequência das correntes; (c) Potência ativa instantânea na carga;(d) Potência reativa instantânea na carga.
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 110
• Espectro de frequência das correntes na rede;
• Potência ativa instantânea na rede e na carga: a curva em azul representa a potência
na rede e a curva em verde representa a potência na carga;
• Potência reativa instantânea na rede e na carga: a curva em azul representa a potên-
cia na rede e a curva em verde representa a potência na carga.
A Tabela 5.6 apresenta um resumo do desempenho doSAPFcom tensões de alimen-
tação desbalanceadas. São apresentados nessa tabela o THD(%) de cada corrente na rede,
a precisão do controle de tensão do barramento CC, o IDI em cada corrente na rede e o
ITU na rede.
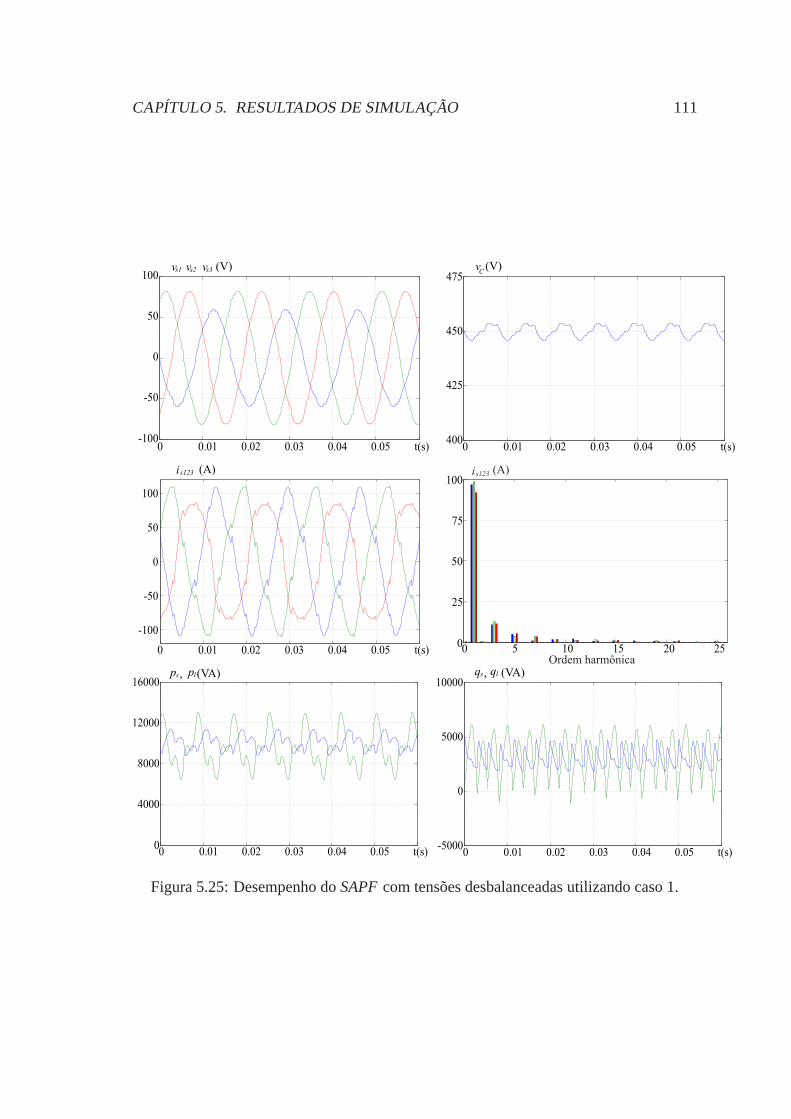
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 111
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.25: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 1.
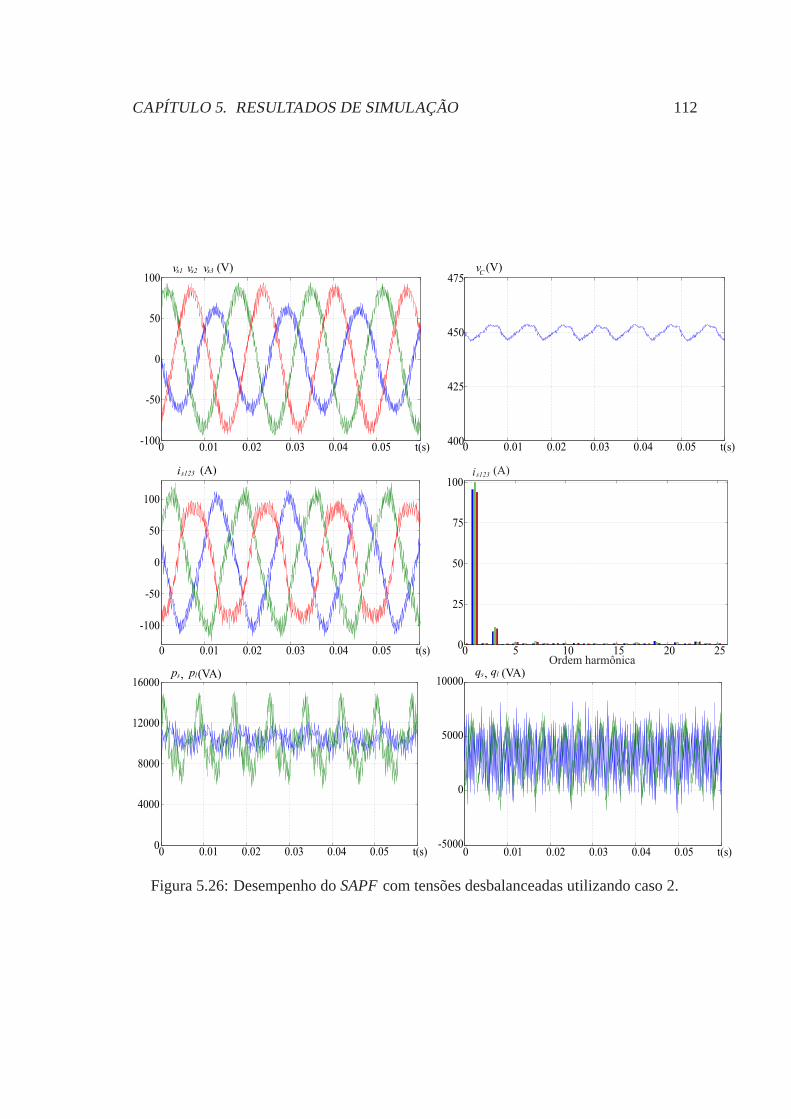
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 112
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.26: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 2.
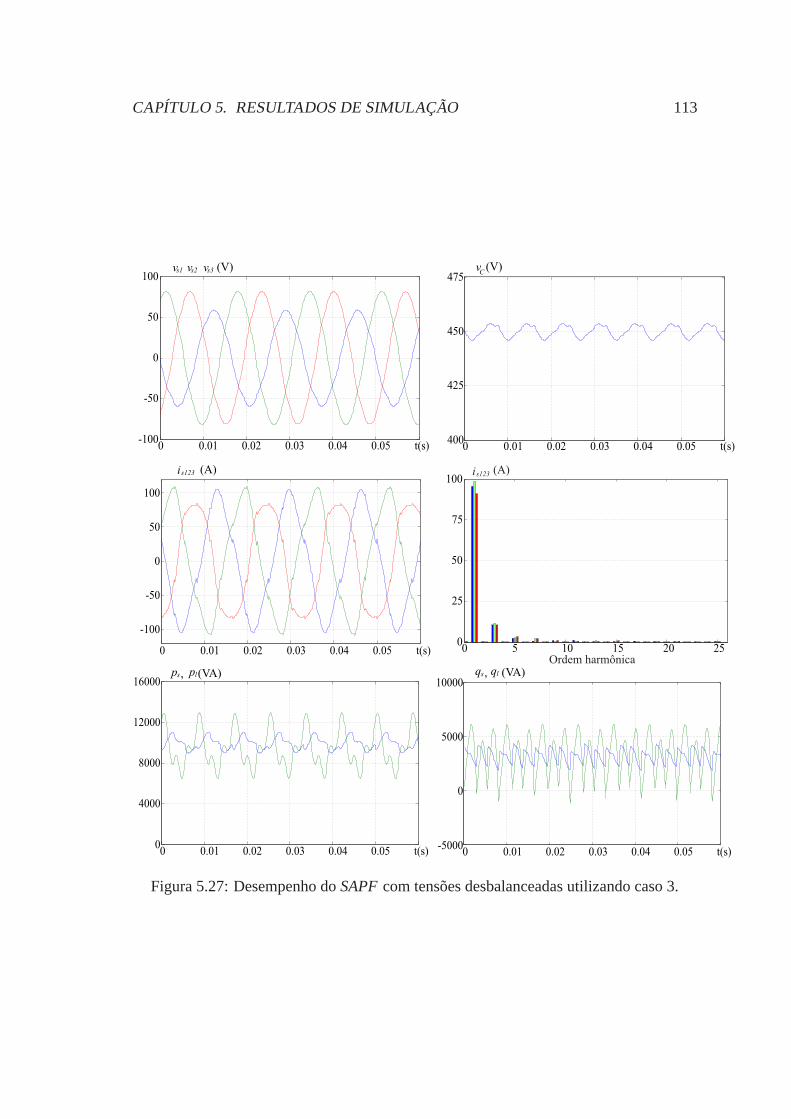
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 113
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
-100
100
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-50
0
50
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.27: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 3.
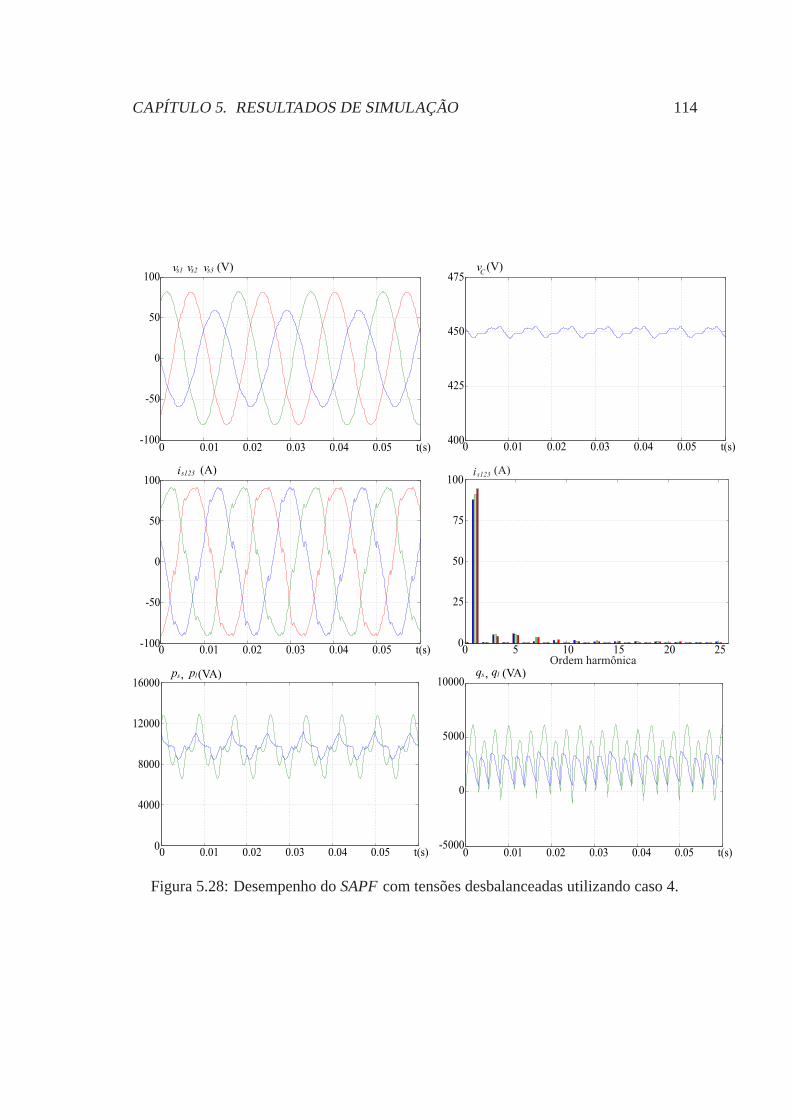
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 114
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.28: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 4.
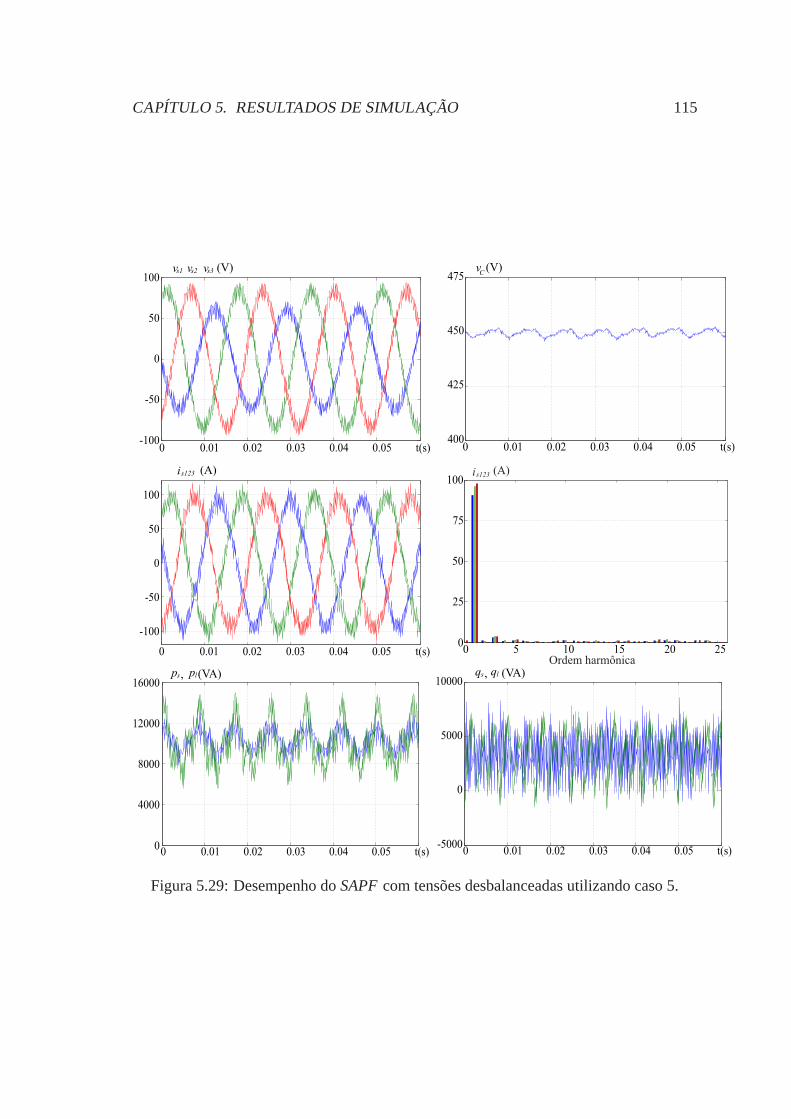
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 115
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.29: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 5.
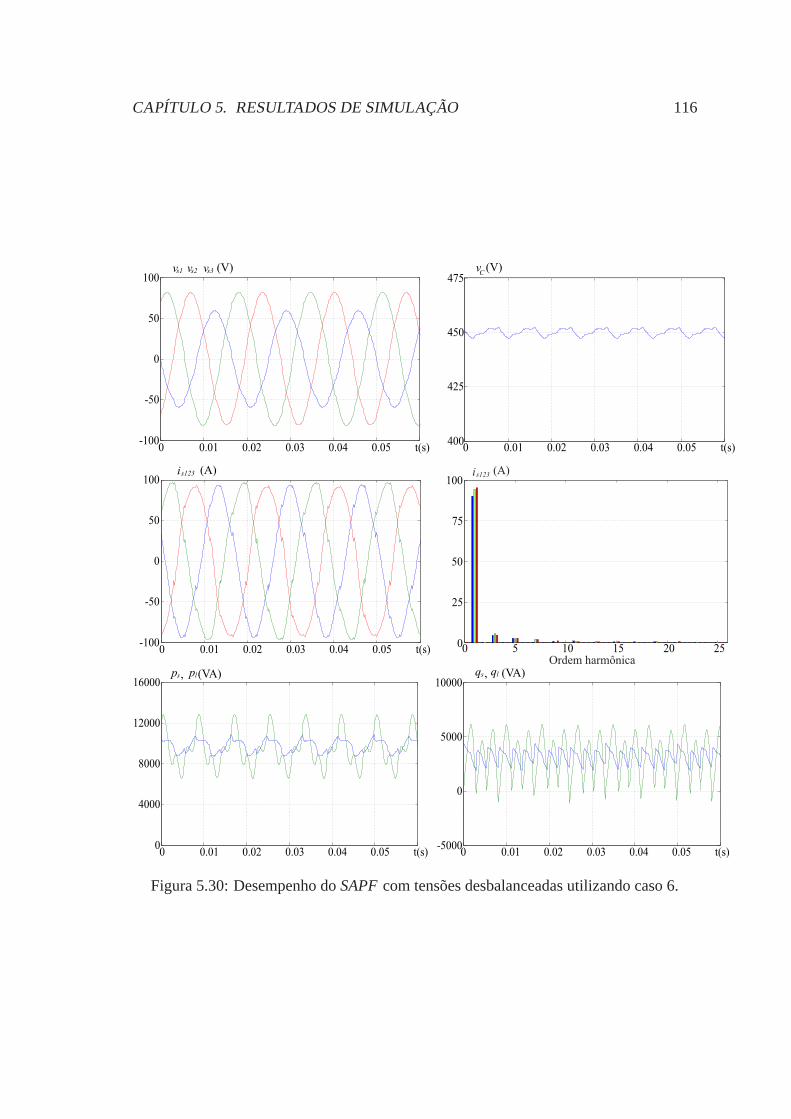
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 116
(A)is123
Ordem harmônica0 5 10 15 20 250
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.30: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 6.
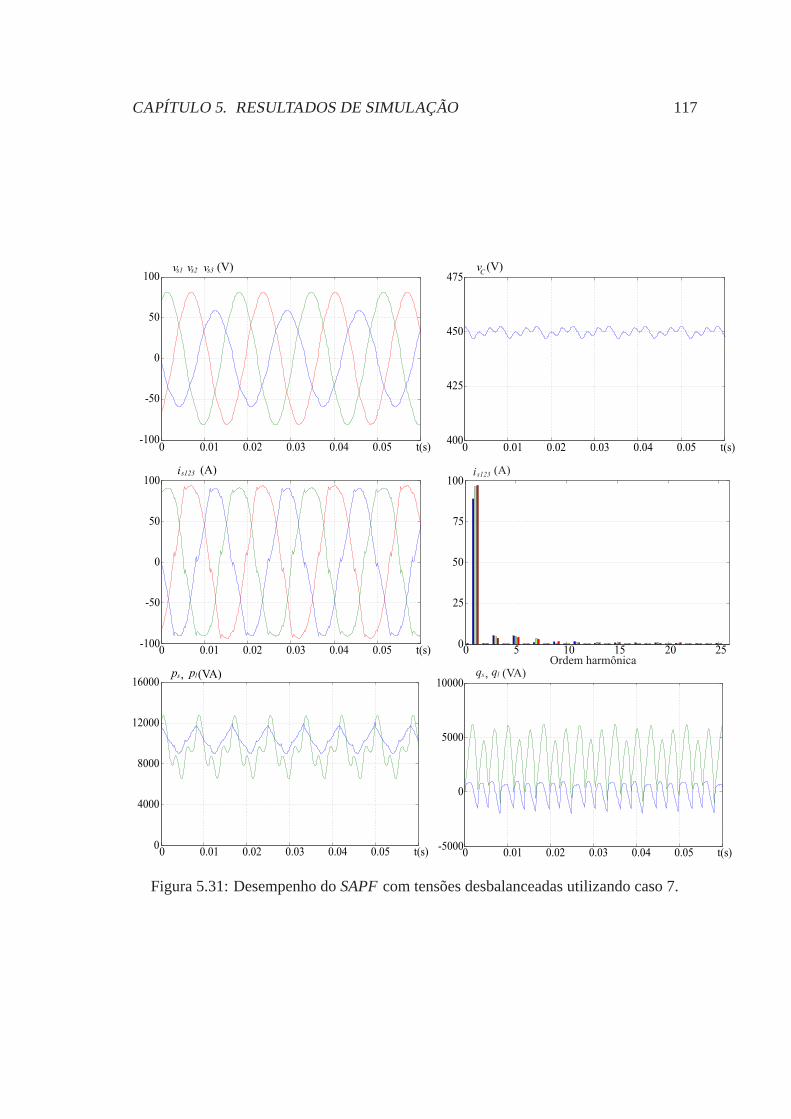
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 117
qs, (VA)ql
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000
Figura 5.31: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 7.
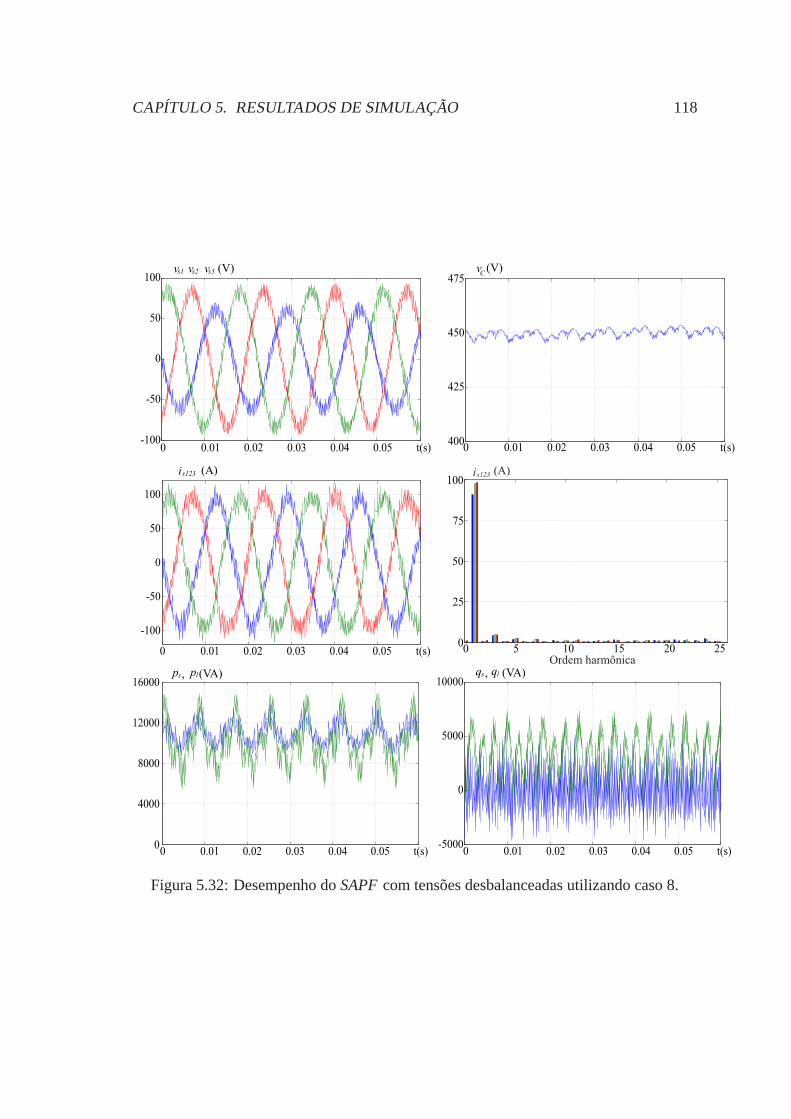
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 118
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.32: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 8.
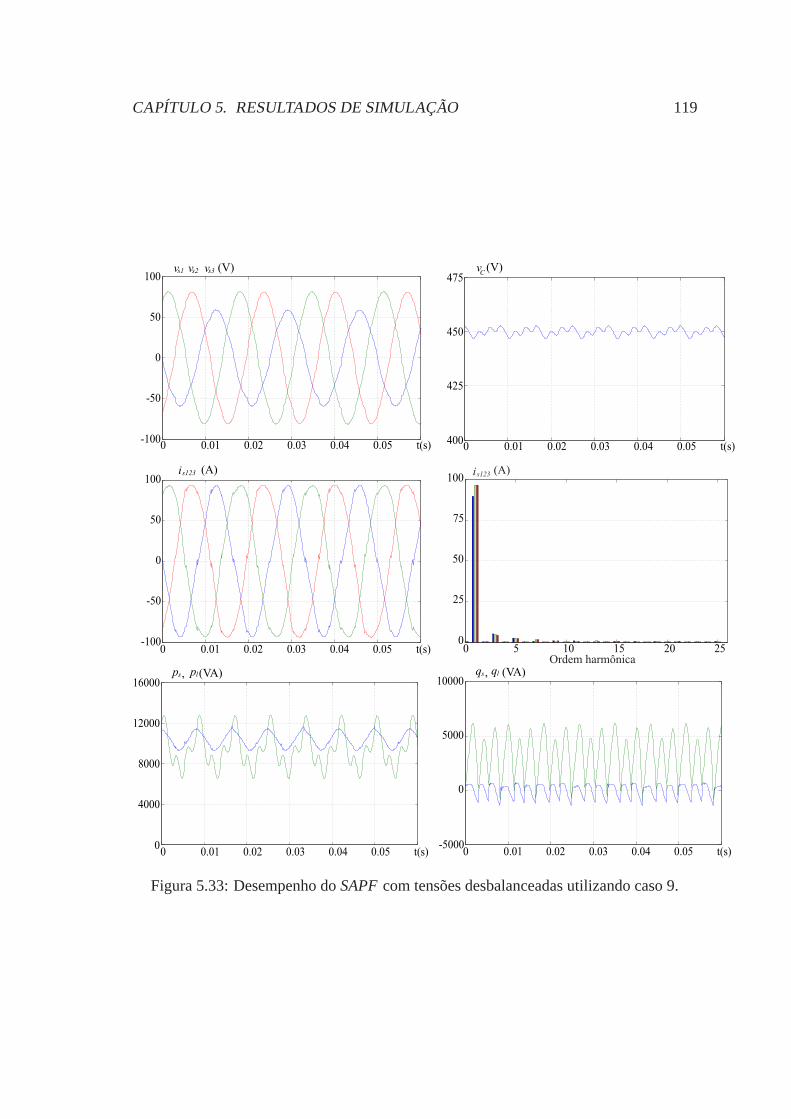
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 119
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.33: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 9.
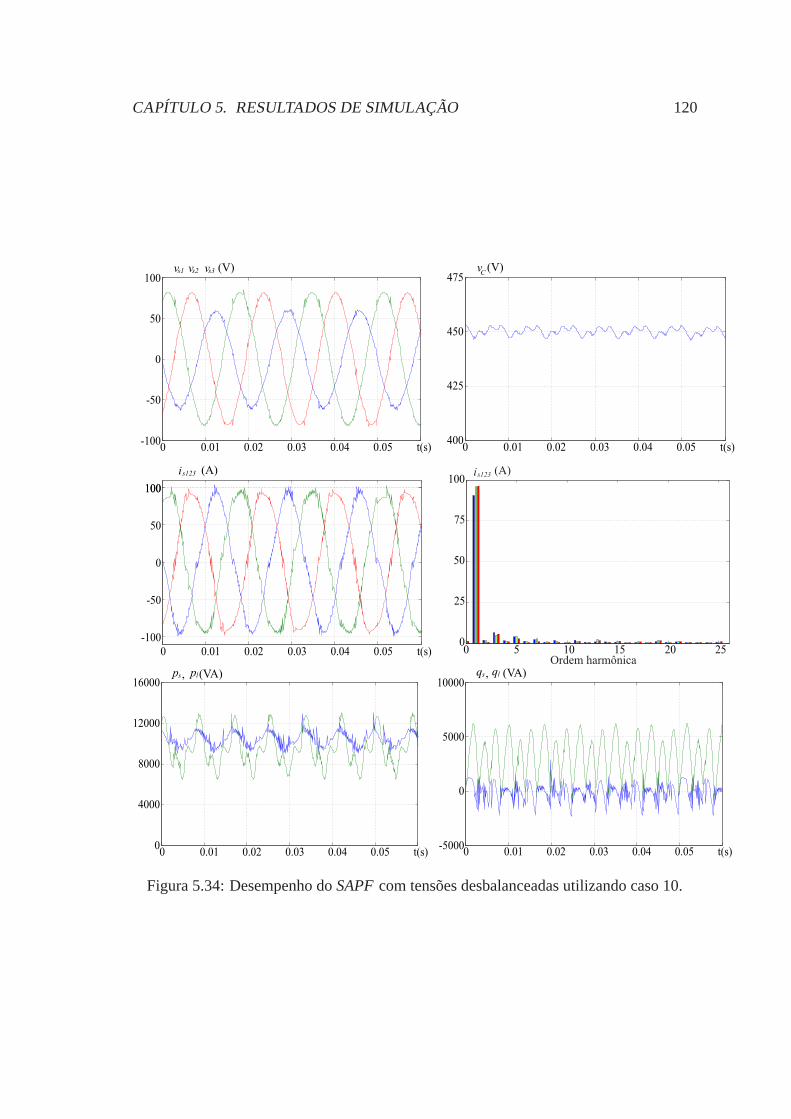
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 120
(A)is123
Ordem harmônica0 5 10 15 20 25
0
25
50
75
100
vs1 vs2 vs3 (V)
0 0.01 0.02 0.03 0.04 0.05 t(s)-100
-50
0
50
100v
C(V)
0 0.01 0.02 0.03 0.04 0.05 t(s)400
425
450
475
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
-100
-50
0
50
100100
ps, (VA)pl
0 0.01 0.02 0.03 0.04 0.05 t(s)0
4000
8000
12000
16000qs, (VA)ql
0 0.01 0.02 0.03 0.04 0.05 t(s)-5000
0
5000
10000
Figura 5.34: Desempenho doSAPFcom tensões desbalanceadas utilizando caso 10.
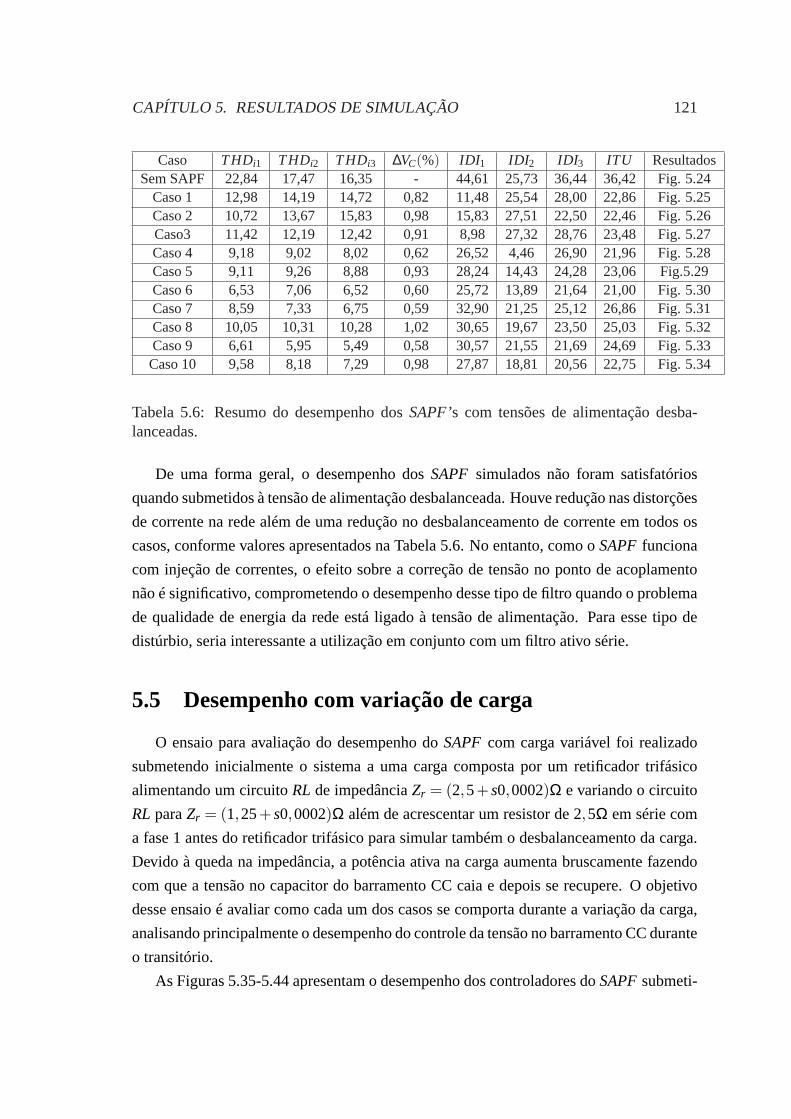
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 121
Caso THDi1 THDi2 THDi3 ∆VC(%) IDI1 IDI2 IDI3 ITU ResultadosSem SAPF 22,84 17,47 16,35 - 44,61 25,73 36,44 36,42 Fig. 5.24
Caso 1 12,98 14,19 14,72 0,82 11,48 25,54 28,00 22,86 Fig. 5.25Caso 2 10,72 13,67 15,83 0,98 15,83 27,51 22,50 22,46 Fig. 5.26Caso3 11,42 12,19 12,42 0,91 8,98 27,32 28,76 23,48 Fig. 5.27Caso 4 9,18 9,02 8,02 0,62 26,52 4,46 26,90 21,96 Fig. 5.28Caso 5 9,11 9,26 8,88 0,93 28,24 14,43 24,28 23,06 Fig.5.29Caso 6 6,53 7,06 6,52 0,60 25,72 13,89 21,64 21,00 Fig. 5.30Caso 7 8,59 7,33 6,75 0,59 32,90 21,25 25,12 26,86 Fig. 5.31Caso 8 10,05 10,31 10,28 1,02 30,65 19,67 23,50 25,03 Fig. 5.32Caso 9 6,61 5,95 5,49 0,58 30,57 21,55 21,69 24,69 Fig. 5.33Caso 10 9,58 8,18 7,29 0,98 27,87 18,81 20,56 22,75 Fig. 5.34
Tabela 5.6: Resumo do desempenho dosSAPF’s com tensões de alimentação desba-lanceadas.
De uma forma geral, o desempenho dosSAPF simulados não foram satisfatórios
quando submetidos à tensão de alimentação desbalanceada. Houve redução nas distorções
de corrente na rede além de uma redução no desbalanceamento de corrente em todos os
casos, conforme valores apresentados na Tabela 5.6. No entanto, como oSAPFfunciona
com injeção de correntes, o efeito sobre a correção de tensão no ponto de acoplamento
não é significativo, comprometendo o desempenho desse tipo de filtro quando o problema
de qualidade de energia da rede está ligado à tensão de alimentação. Para esse tipo de
distúrbio, seria interessante a utilização em conjunto com um filtro ativo série.
5.5 Desempenho com variação de carga
O ensaio para avaliação do desempenho doSAPF com carga variável foi realizado
submetendo inicialmente o sistema a uma carga composta por um retificador trifásico
alimentando um circuitoRL de impedânciaZr = (2,5+s0,0002)Ω e variando o circuito
RL paraZr = (1,25+s0,0002)Ω além de acrescentar um resistor de2,5Ω em série com
a fase 1 antes do retificador trifásico para simular também o desbalanceamento da carga.
Devido à queda na impedância, a potência ativa na carga aumenta bruscamente fazendo
com que a tensão no capacitor do barramento CC caia e depois se recupere. O objetivo
desse ensaio é avaliar como cada um dos casos se comporta durante a variação da carga,
analisando principalmente o desempenho do controle da tensão no barramento CC durante
o transitório.
As Figuras 5.35-5.44 apresentam o desempenho dos controladores doSAPFsubmeti-
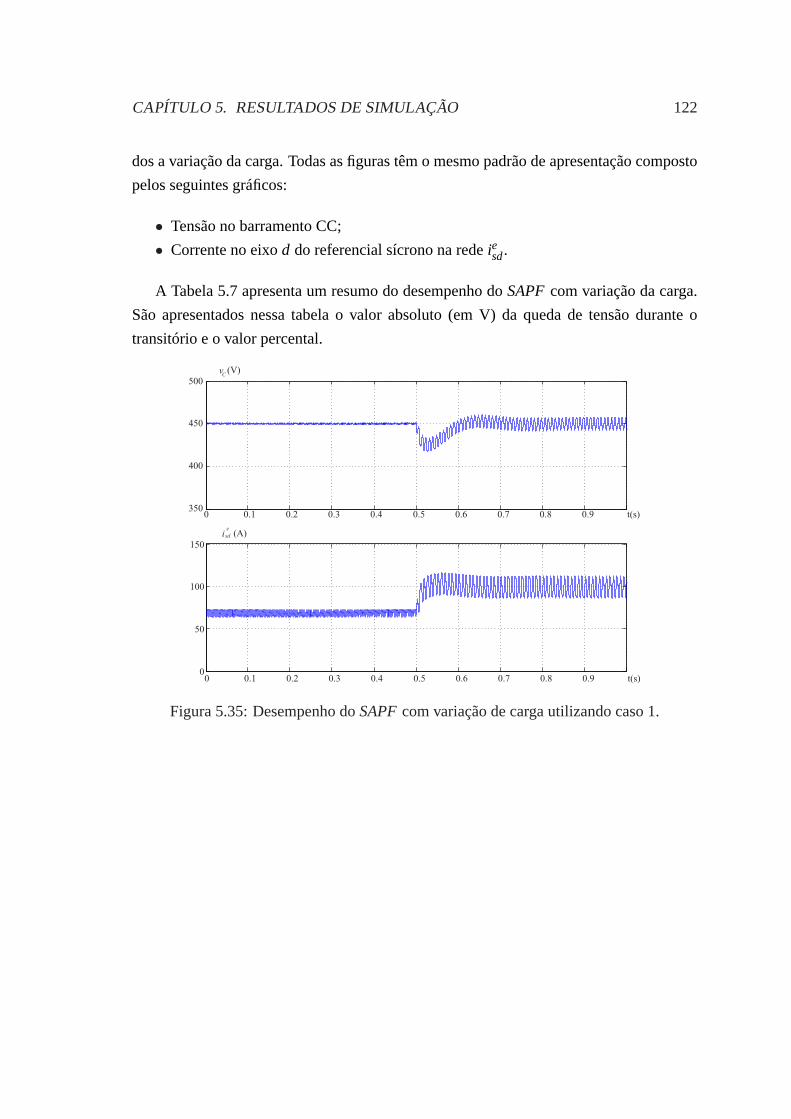
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 122
dos a variação da carga. Todas as figuras têm o mesmo padrão de apresentação composto
pelos seguintes gráficos:
• Tensão no barramento CC;
• Corrente no eixod do referencial sícrono na redeiesd.
A Tabela 5.7 apresenta um resumo do desempenho doSAPFcom variação da carga.
São apresentados nessa tabela o valor absoluto (em V) da queda de tensão durante o
transitório e o valor percental.
isd (A)e
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)350
400
450
500
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150
Figura 5.35: Desempenho doSAPFcom variação de carga utilizando caso 1.
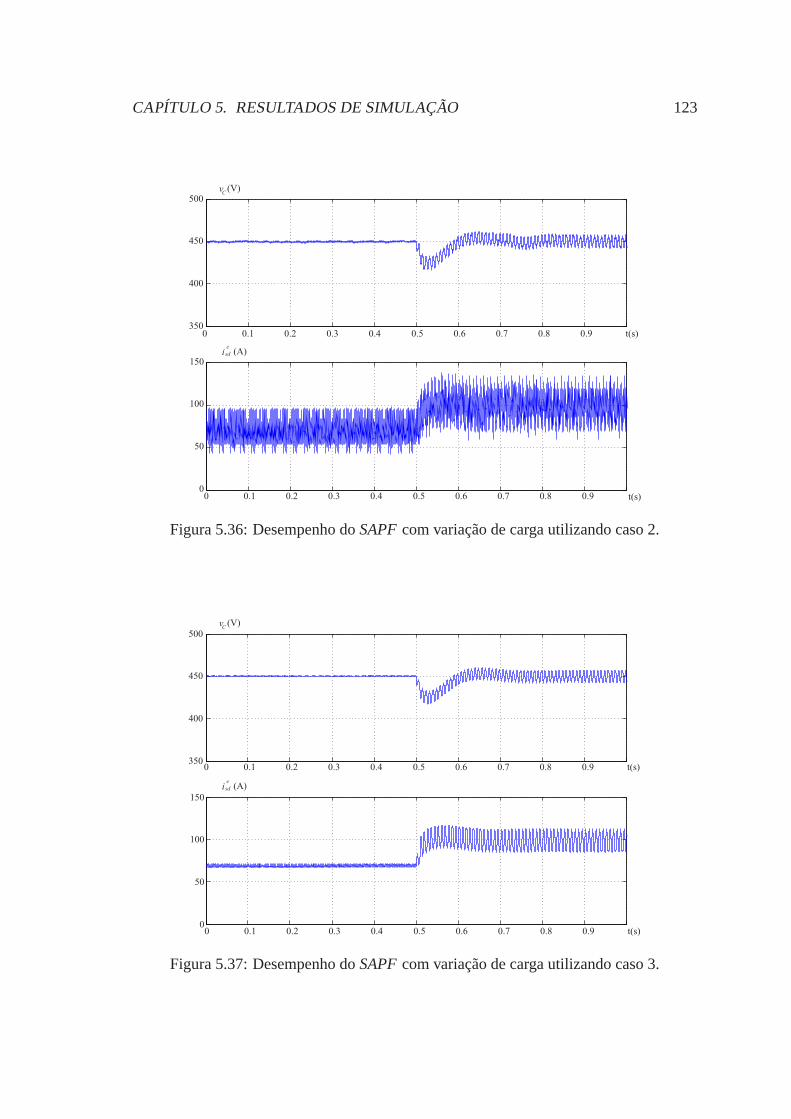
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 123
t(s)
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9350
400
450
500
isd (A)e
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150
Figura 5.36: Desempenho doSAPFcom variação de carga utilizando caso 2.
isd (A)e
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)350
400
450
500
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150
Figura 5.37: Desempenho doSAPFcom variação de carga utilizando caso 3.
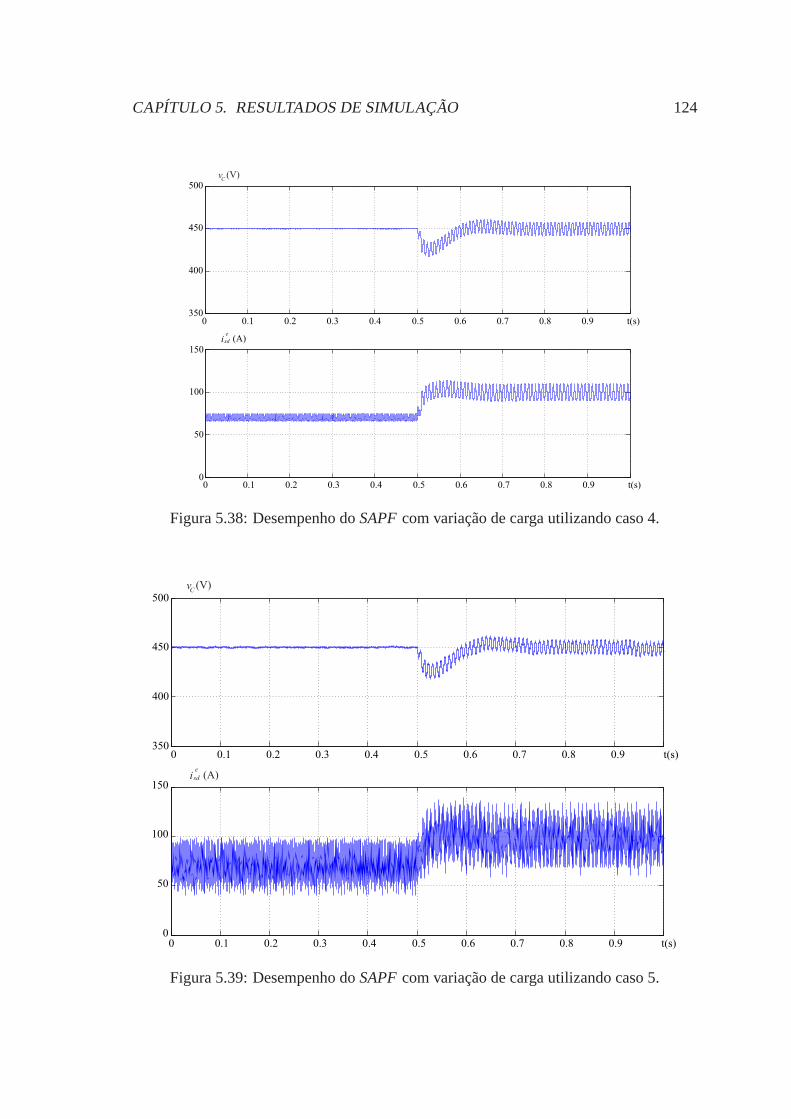
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 124
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)350
400
450
500
isd (A)e
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150
Figura 5.38: Desempenho doSAPFcom variação de carga utilizando caso 4.
isd (A)e
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)350
400
450
500
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150
Figura 5.39: Desempenho doSAPFcom variação de carga utilizando caso 5.
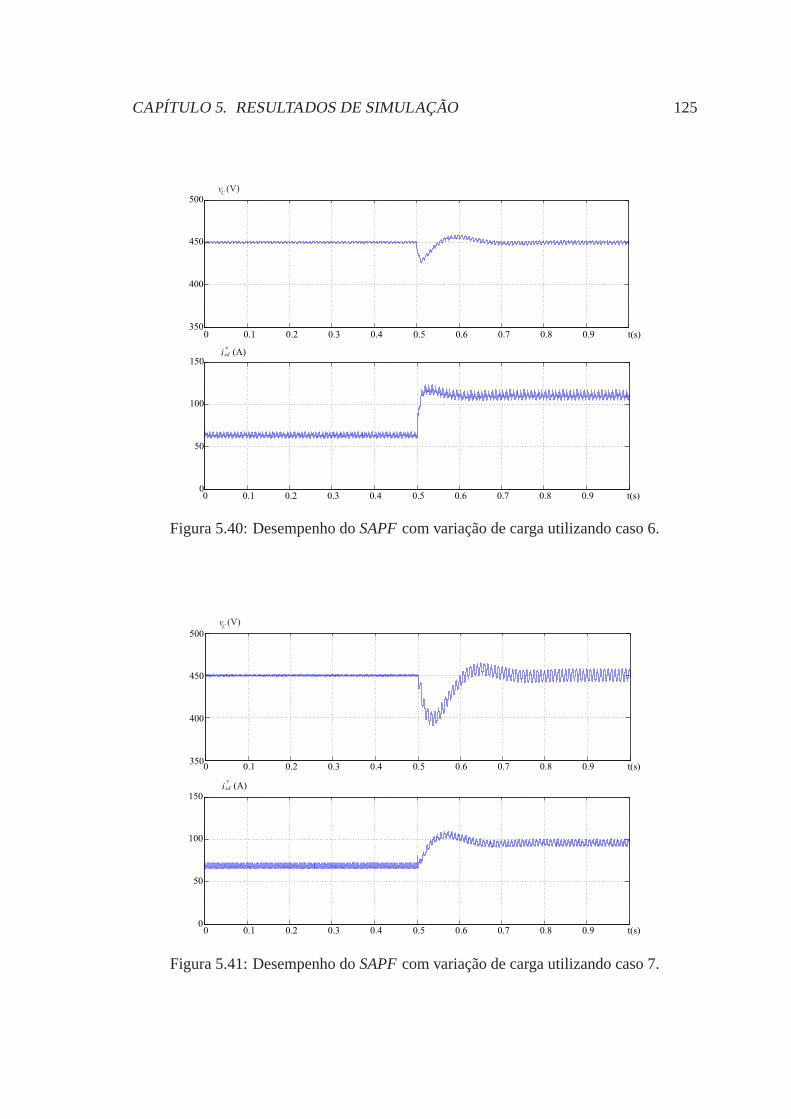
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 125
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150isd (A)
e
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)350
400
450
500
Figura 5.40: Desempenho doSAPFcom variação de carga utilizando caso 6.
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)350
400
450
500
isd (A)e
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150
Figura 5.41: Desempenho doSAPFcom variação de carga utilizando caso 7.
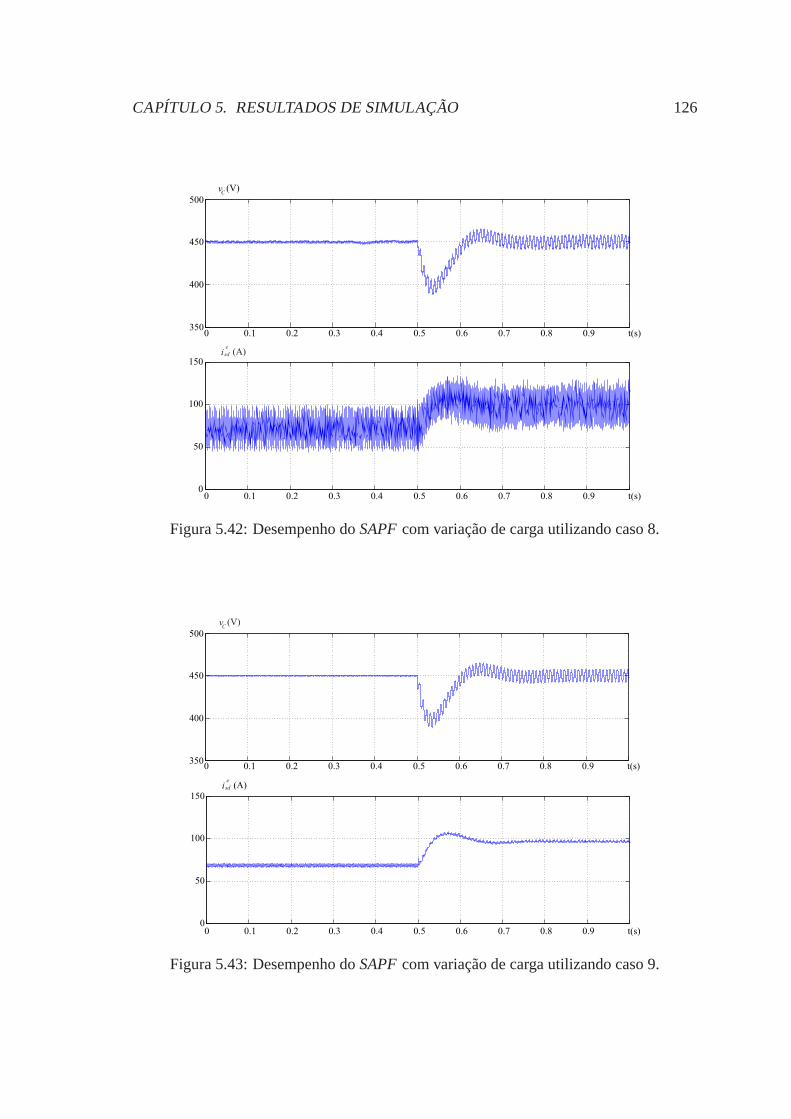
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 126
isd (A)e
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)350
400
450
500
Figura 5.42: Desempenho doSAPFcom variação de carga utilizando caso 8.
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)350
400
450
500
isd (A)e
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150
Figura 5.43: Desempenho doSAPFcom variação de carga utilizando caso 9.
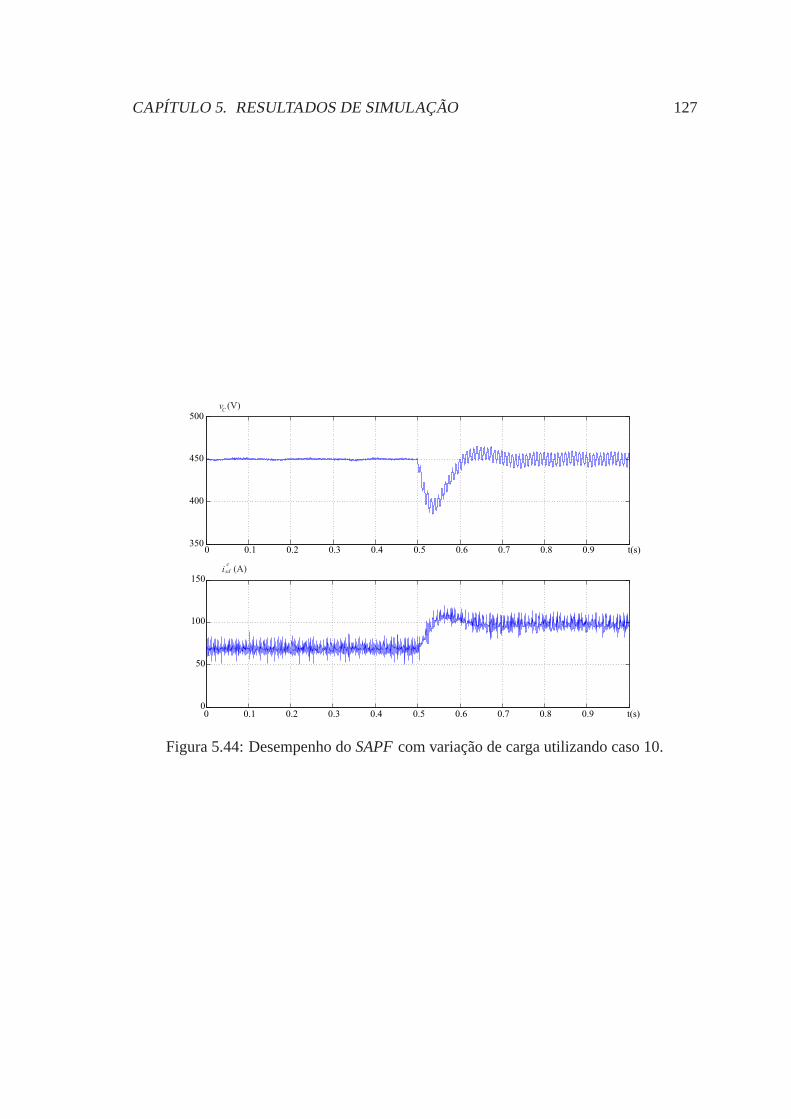
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 127
isd (A)e
vC
(V)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)350
400
450
500
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 t(s)0
50
100
150
Figura 5.44: Desempenho doSAPFcom variação de carga utilizando caso 10.
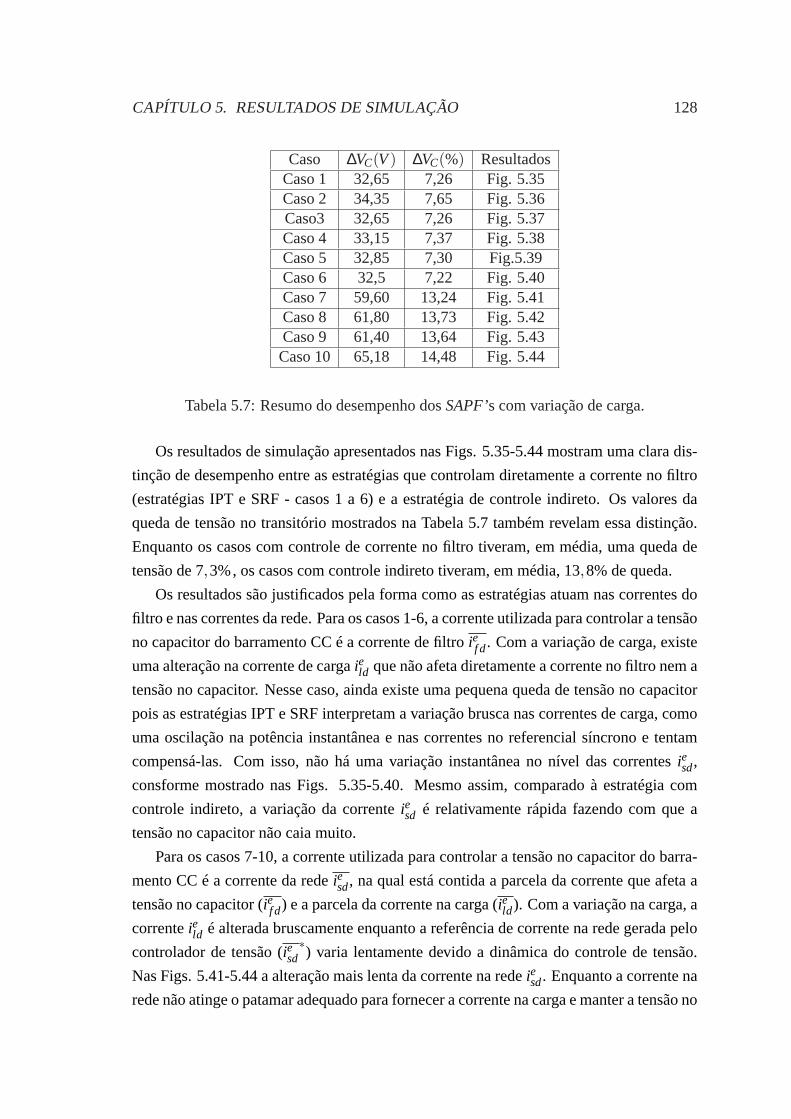
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 128
Caso ∆VC(V) ∆VC(%) ResultadosCaso 1 32,65 7,26 Fig. 5.35Caso 2 34,35 7,65 Fig. 5.36Caso3 32,65 7,26 Fig. 5.37Caso 4 33,15 7,37 Fig. 5.38Caso 5 32,85 7,30 Fig.5.39Caso 6 32,5 7,22 Fig. 5.40Caso 7 59,60 13,24 Fig. 5.41Caso 8 61,80 13,73 Fig. 5.42Caso 9 61,40 13,64 Fig. 5.43Caso 10 65,18 14,48 Fig. 5.44
Tabela 5.7: Resumo do desempenho dosSAPF’s com variação de carga.
Os resultados de simulação apresentados nas Figs. 5.35-5.44 mostram uma clara dis-
tinção de desempenho entre as estratégias que controlam diretamente a corrente no filtro
(estratégias IPT e SRF - casos 1 a 6) e a estratégia de controle indireto. Os valores da
queda de tensão no transitório mostrados na Tabela 5.7 também revelam essa distinção.
Enquanto os casos com controle de corrente no filtro tiveram, em média, uma queda de
tensão de7,3%, os casos com controle indireto tiveram, em média,13,8%de queda.
Os resultados são justificados pela forma como as estratégias atuam nas correntes do
filtro e nas correntes da rede. Para os casos 1-6, a corrente utilizada para controlar a tensão
no capacitor do barramento CC é a corrente de filtroief d. Com a variação de carga, existe
uma alteração na corrente de cargaield que não afeta diretamente a corrente no filtro nem a
tensão no capacitor. Nesse caso, ainda existe uma pequena queda de tensão no capacitor
pois as estratégias IPT e SRF interpretam a variação brusca nas correntes de carga, como
uma oscilação na potência instantânea e nas correntes no referencial síncrono e tentam
compensá-las. Com isso, não há uma variação instantânea no nível das correntesiesd,
consforme mostrado nas Figs. 5.35-5.40. Mesmo assim, comparado à estratégia com
controle indireto, a variação da correnteiesd é relativamente rápida fazendo com que a
tensão no capacitor não caia muito.
Para os casos 7-10, a corrente utilizada para controlar a tensão no capacitor do barra-
mento CC é a corrente da redeiesd, na qual está contida a parcela da corrente que afeta a
tensão no capacitor (ief d) e a parcela da corrente na carga (ield). Com a variação na carga, a
correnteield é alterada bruscamente enquanto a referência de corrente na rede gerada pelo
controlador de tensão (iesd∗) varia lentamente devido a dinâmica do controle de tensão.
Nas Figs. 5.41-5.44 a alteração mais lenta da corrente na redeiesd. Enquanto a corrente na
rede não atinge o patamar adequado para fornecer a corrente na carga e manter a tensão no
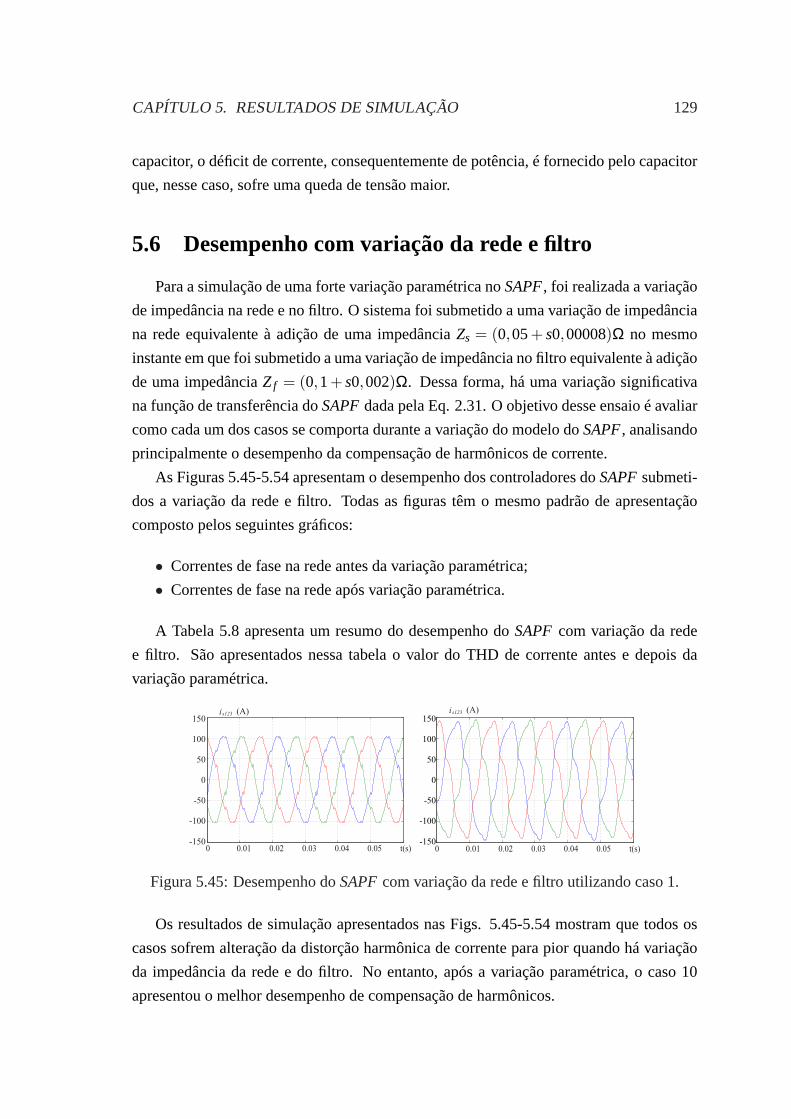
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 129
capacitor, o déficit de corrente, consequentemente de potência, é fornecido pelo capacitor
que, nesse caso, sofre uma queda de tensão maior.
5.6 Desempenho com variação da rede e filtro
Para a simulação de uma forte variação paramétrica noSAPF, foi realizada a variação
de impedância na rede e no filtro. O sistema foi submetido a uma variação de impedância
na rede equivalente à adição de uma impedânciaZs = (0,05+ s0,00008)Ω no mesmo
instante em que foi submetido a uma variação de impedância no filtro equivalente à adição
de uma impedânciaZf = (0,1+ s0,002)Ω. Dessa forma, há uma variação significativa
na função de transferência doSAPFdada pela Eq. 2.31. O objetivo desse ensaio é avaliar
como cada um dos casos se comporta durante a variação do modelo doSAPF, analisando
principalmente o desempenho da compensação de harmônicos de corrente.
As Figuras 5.45-5.54 apresentam o desempenho dos controladores doSAPFsubmeti-
dos a variação da rede e filtro. Todas as figuras têm o mesmo padrão de apresentação
composto pelos seguintes gráficos:
• Correntes de fase na rede antes da variação paramétrica;
• Correntes de fase na rede após variação paramétrica.
A Tabela 5.8 apresenta um resumo do desempenho doSAPFcom variação da rede
e filtro. São apresentados nessa tabela o valor do THD de corrente antes e depois da
variação paramétrica.
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.45: Desempenho doSAPFcom variação da rede e filtro utilizando caso 1.
Os resultados de simulação apresentados nas Figs. 5.45-5.54 mostram que todos os
casos sofrem alteração da distorção harmônica de corrente para pior quando há variação
da impedância da rede e do filtro. No entanto, após a variação paramétrica, o caso 10
apresentou o melhor desempenho de compensação de harmônicos.
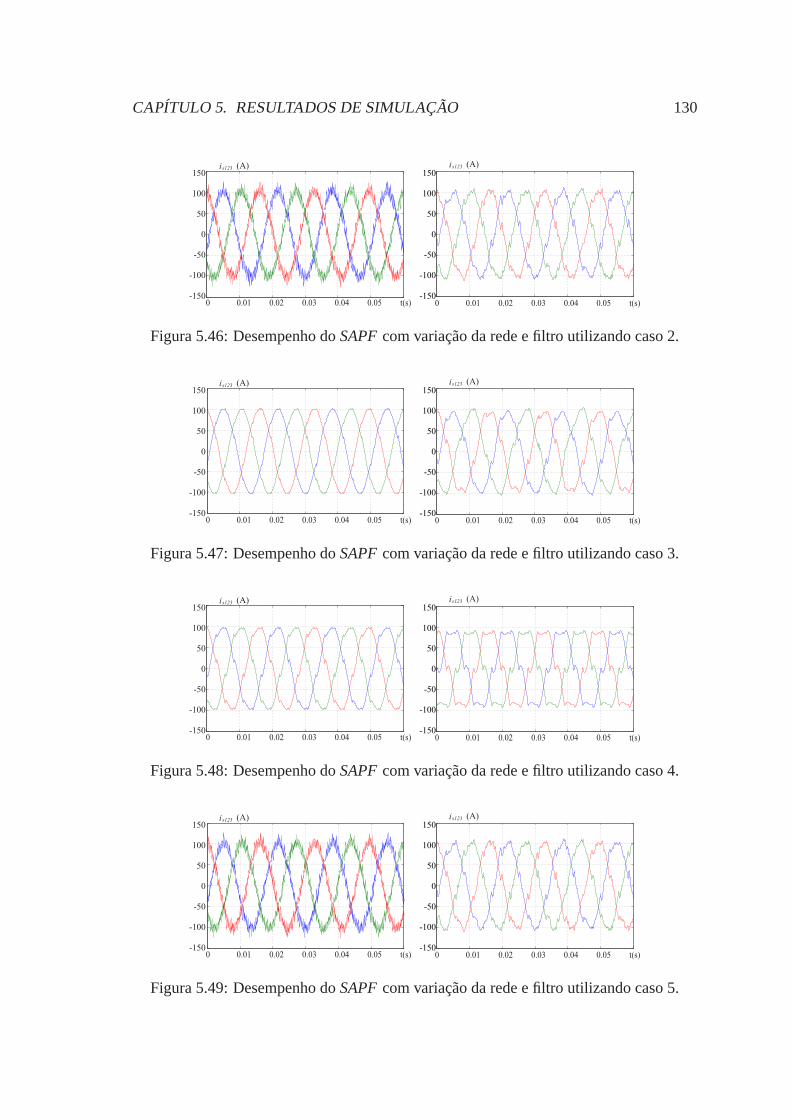
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 130
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.46: Desempenho doSAPFcom variação da rede e filtro utilizando caso 2.
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.47: Desempenho doSAPFcom variação da rede e filtro utilizando caso 3.
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.48: Desempenho doSAPFcom variação da rede e filtro utilizando caso 4.
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.49: Desempenho doSAPFcom variação da rede e filtro utilizando caso 5.
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 131
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.50: Desempenho doSAPFcom variação da rede e filtro utilizando caso 6.
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.51: Desempenho doSAPFcom variação da rede e filtro utilizando caso 7.
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.52: Desempenho doSAPFcom variação da rede e filtro utilizando caso 8.
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.53: Desempenho doSAPFcom variação da rede e filtro utilizando caso 9.
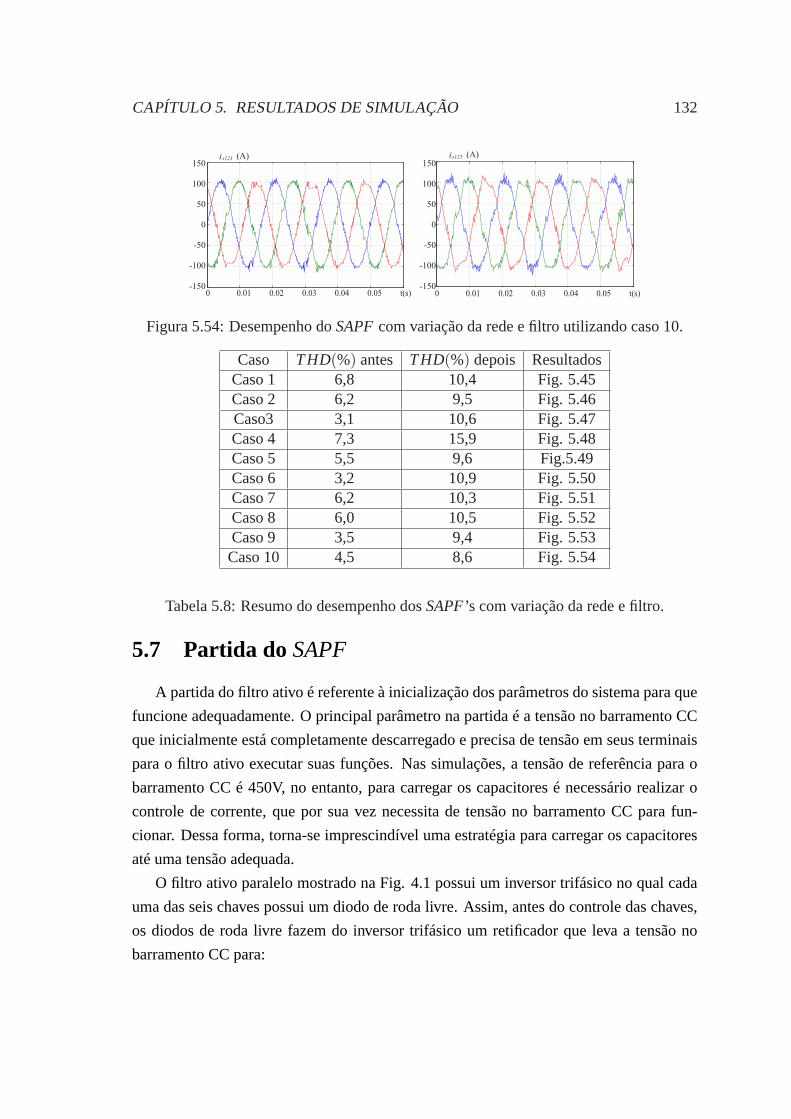
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 132
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)
is123 (A)
0 0.01 0.02 0.03 0.04 0.05 t(s)-150
-100
-50
0
50
100
150
-150
-100
-50
0
50
100
150
Figura 5.54: Desempenho doSAPFcom variação da rede e filtro utilizando caso 10.
Caso THD(%) antes THD(%) depois ResultadosCaso 1 6,8 10,4 Fig. 5.45Caso 2 6,2 9,5 Fig. 5.46Caso3 3,1 10,6 Fig. 5.47Caso 4 7,3 15,9 Fig. 5.48Caso 5 5,5 9,6 Fig.5.49Caso 6 3,2 10,9 Fig. 5.50Caso 7 6,2 10,3 Fig. 5.51Caso 8 6,0 10,5 Fig. 5.52Caso 9 3,5 9,4 Fig. 5.53Caso 10 4,5 8,6 Fig. 5.54
Tabela 5.8: Resumo do desempenho dosSAPF’s com variação da rede e filtro.
5.7 Partida doSAPF
A partida do filtro ativo é referente à inicialização dos parâmetros do sistema para que
funcione adequadamente. O principal parâmetro na partida é a tensão no barramento CC
que inicialmente está completamente descarregado e precisa de tensão em seus terminais
para o filtro ativo executar suas funções. Nas simulações, a tensão de referência para o
barramento CC é 450V, no entanto, para carregar os capacitores é necessário realizar o
controle de corrente, que por sua vez necessita de tensão no barramento CC para fun-
cionar. Dessa forma, torna-se imprescindível uma estratégia para carregar os capacitores
até uma tensão adequada.
O filtro ativo paralelo mostrado na Fig. 4.1 possui um inversor trifásico no qual cada
uma das seis chaves possui um diodo de roda livre. Assim, antes do controle das chaves,
os diodos de roda livre fazem do inversor trifásico um retificador que leva a tensão no
barramento CC para:
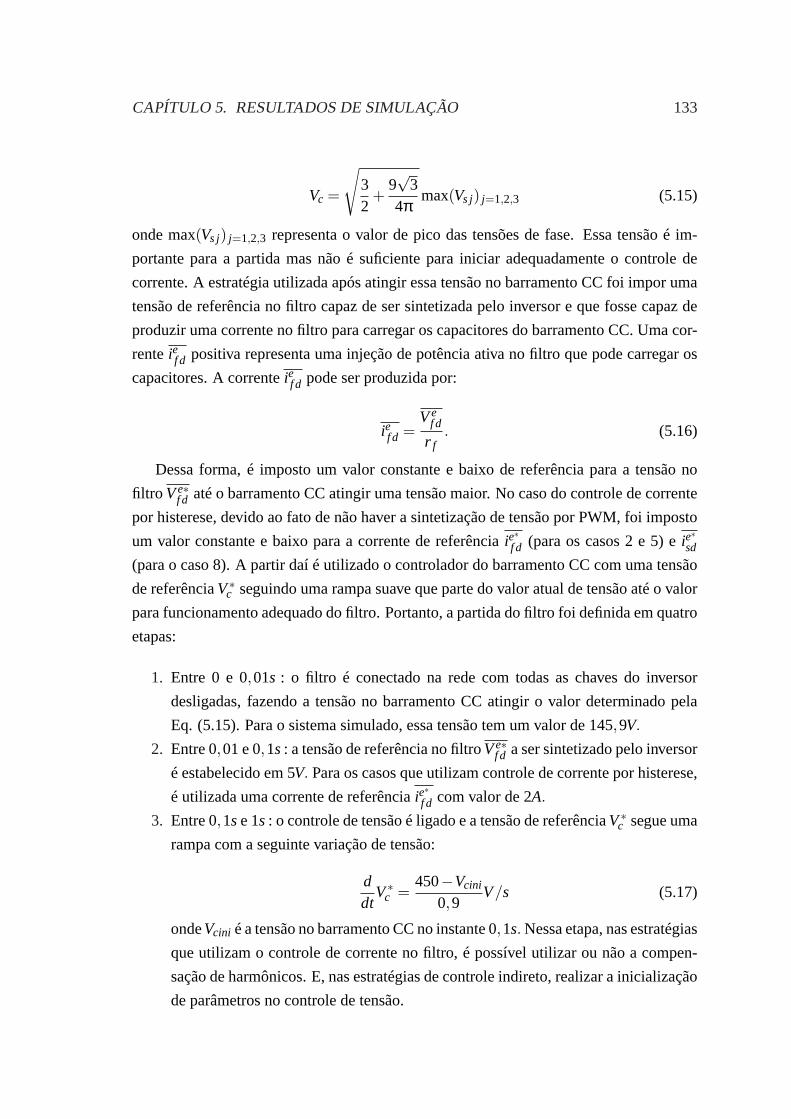
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 133
Vc =
√32
+9√
34π
max(Vs j) j=1,2,3 (5.15)
ondemax(Vs j) j=1,2,3 representa o valor de pico das tensões de fase. Essa tensão é im-
portante para a partida mas não é suficiente para iniciar adequadamente o controle de
corrente. A estratégia utilizada após atingir essa tensão no barramento CC foi impor uma
tensão de referência no filtro capaz de ser sintetizada pelo inversor e que fosse capaz de
produzir uma corrente no filtro para carregar os capacitores do barramento CC. Uma cor-
renteief d positiva representa uma injeção de potência ativa no filtro que pode carregar os
capacitores. A correnteief d pode ser produzida por:
ief d =Ve
f d
r f. (5.16)
Dessa forma, é imposto um valor constante e baixo de referência para a tensão no
filtro Ve∗f d até o barramento CC atingir uma tensão maior. No caso do controle de corrente
por histerese, devido ao fato de não haver a sintetização de tensão por PWM, foi imposto
um valor constante e baixo para a corrente de referênciaie∗
f d (para os casos 2 e 5) eie∗
sd
(para o caso 8). A partir daí é utilizado o controlador do barramento CC com uma tensão
de referênciaV∗c seguindo uma rampa suave que parte do valor atual de tensão até o valor
para funcionamento adequado do filtro. Portanto, a partida do filtro foi definida em quatro
etapas:
1. Entre 0 e 0,01s : o filtro é conectado na rede com todas as chaves do inversor
desligadas, fazendo a tensão no barramento CC atingir o valor determinado pela
Eq. (5.15). Para o sistema simulado, essa tensão tem um valor de145,9V.
2. Entre0,01e0,1s: a tensão de referência no filtroVe∗f d a ser sintetizado pelo inversor
é estabelecido em5V. Para os casos que utilizam controle de corrente por histerese,
é utilizada uma corrente de referênciaie∗
f d com valor de2A.
3. Entre0,1se1s: o controle de tensão é ligado e a tensão de referênciaV∗c segue uma
rampa com a seguinte variação de tensão:
ddt
V∗c =
450−Vcini
0,9V/s (5.17)
ondeVcini é a tensão no barramento CC no instante0,1s. Nessa etapa, nas estratégias
que utilizam o controle de corrente no filtro, é possível utilizar ou não a compen-
sação de harmônicos. E, nas estratégias de controle indireto, realizar a inicialização
de parâmetros no controle de tensão.
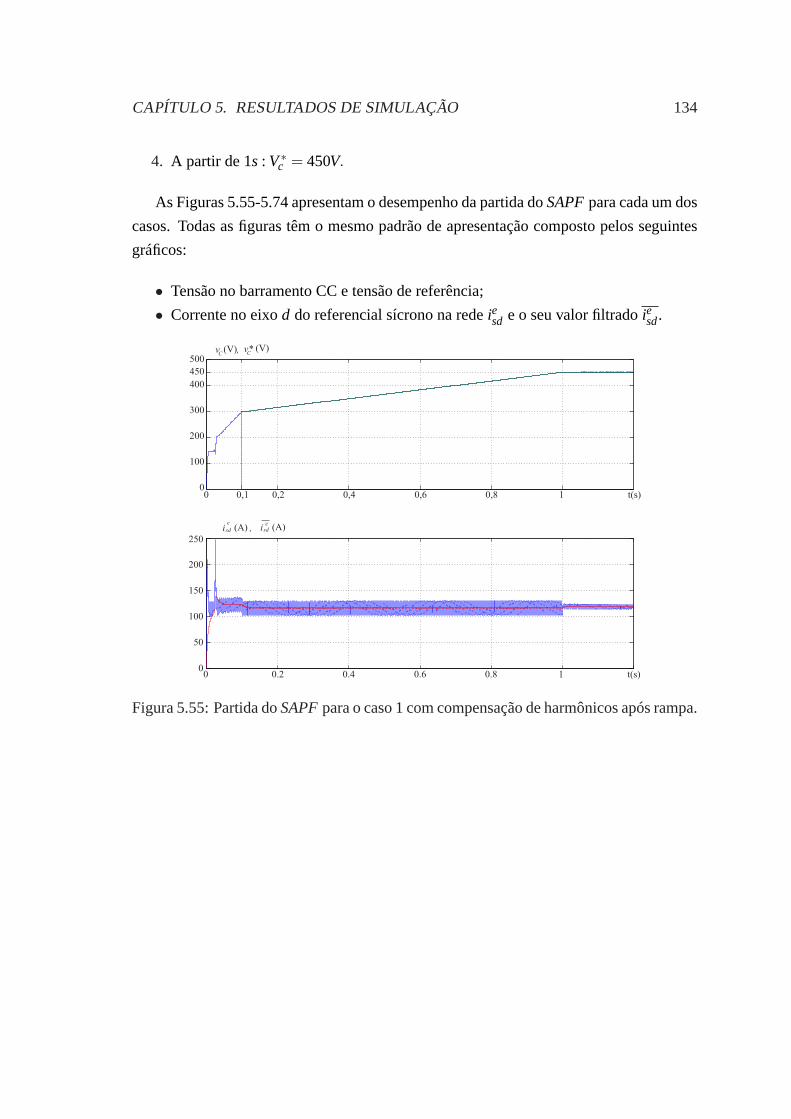
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 134
4. A partir de1s : V∗c = 450V.
As Figuras 5.55-5.74 apresentam o desempenho da partida doSAPFpara cada um dos
casos. Todas as figuras têm o mesmo padrão de apresentação composto pelos seguintes
gráficos:
• Tensão no barramento CC e tensão de referência;
• Corrente no eixod do referencial sícrono na redeiesd e o seu valor filtradoiesd.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.55: Partida doSAPFpara o caso 1 com compensação de harmônicos após rampa.
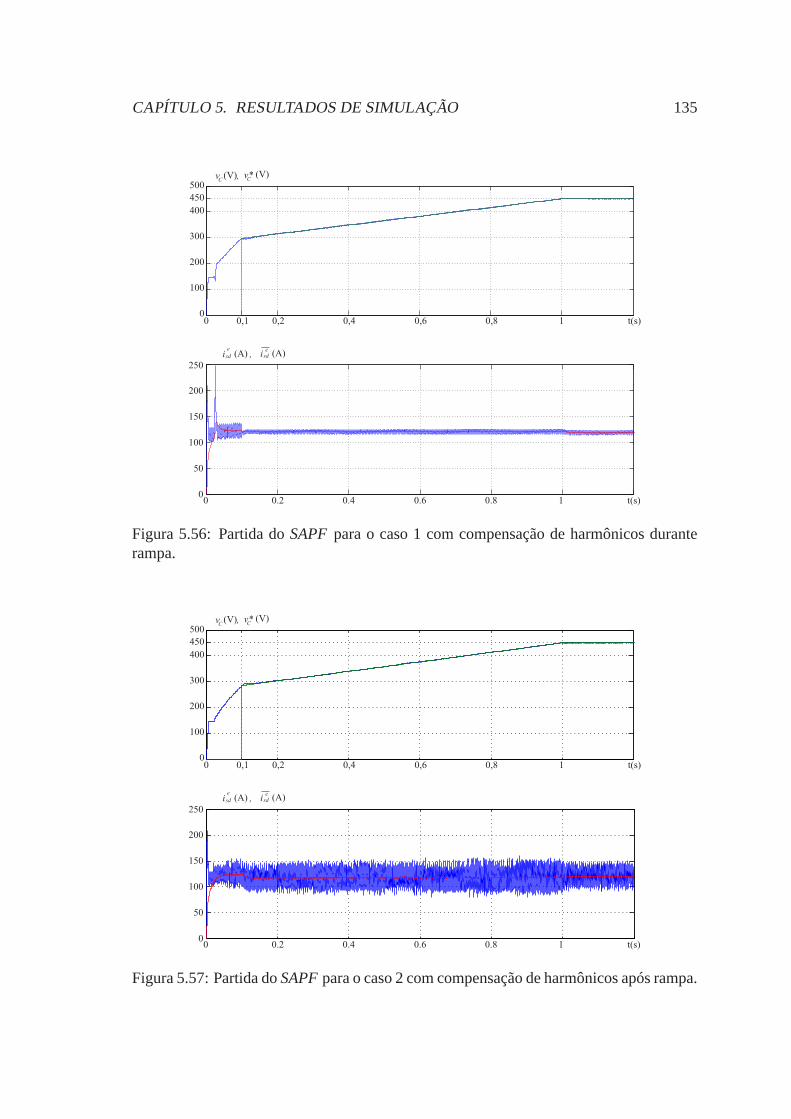
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 135
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.56: Partida doSAPFpara o caso 1 com compensação de harmônicos duranterampa.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.57: Partida doSAPFpara o caso 2 com compensação de harmônicos após rampa.
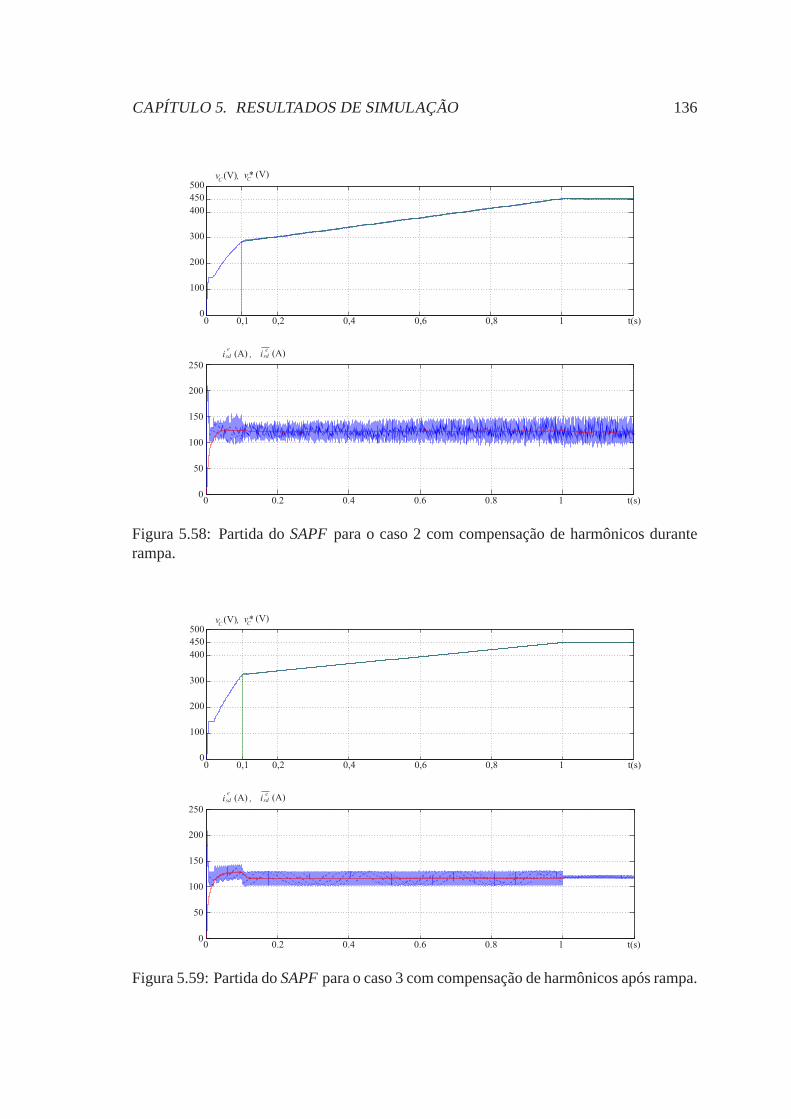
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 136
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.58: Partida doSAPFpara o caso 2 com compensação de harmônicos duranterampa.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.59: Partida doSAPFpara o caso 3 com compensação de harmônicos após rampa.
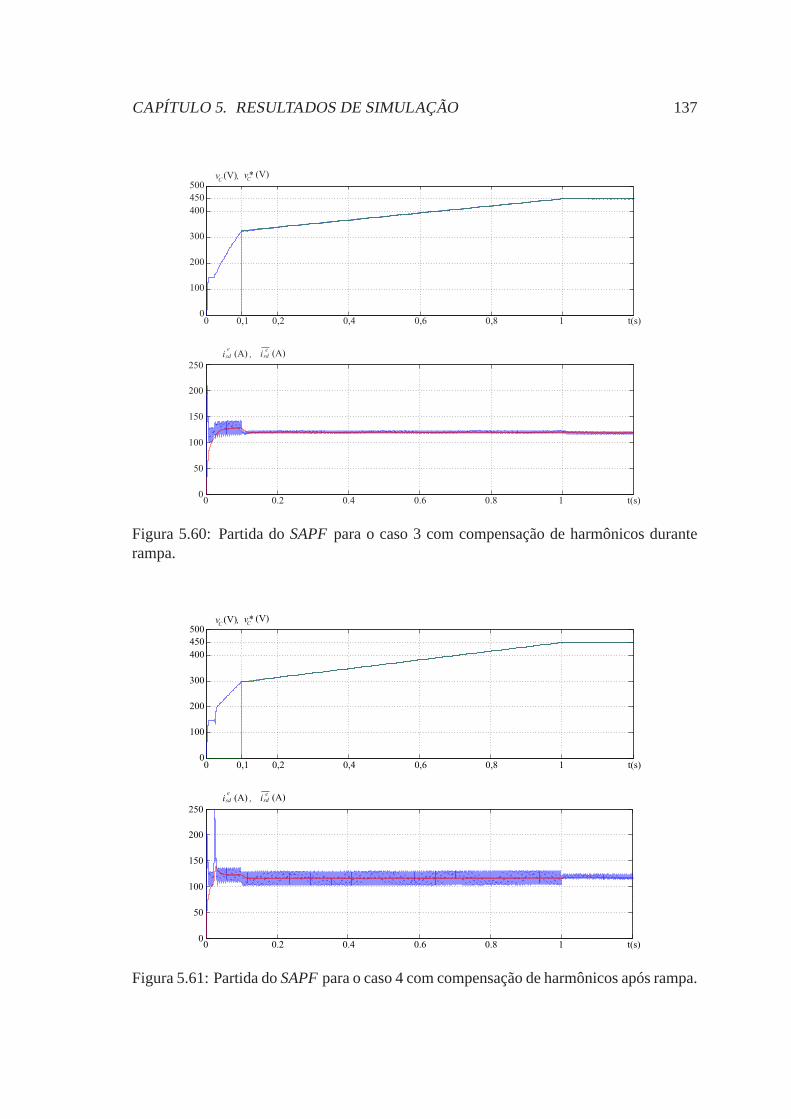
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 137
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.60: Partida doSAPFpara o caso 3 com compensação de harmônicos duranterampa.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.61: Partida doSAPFpara o caso 4 com compensação de harmônicos após rampa.
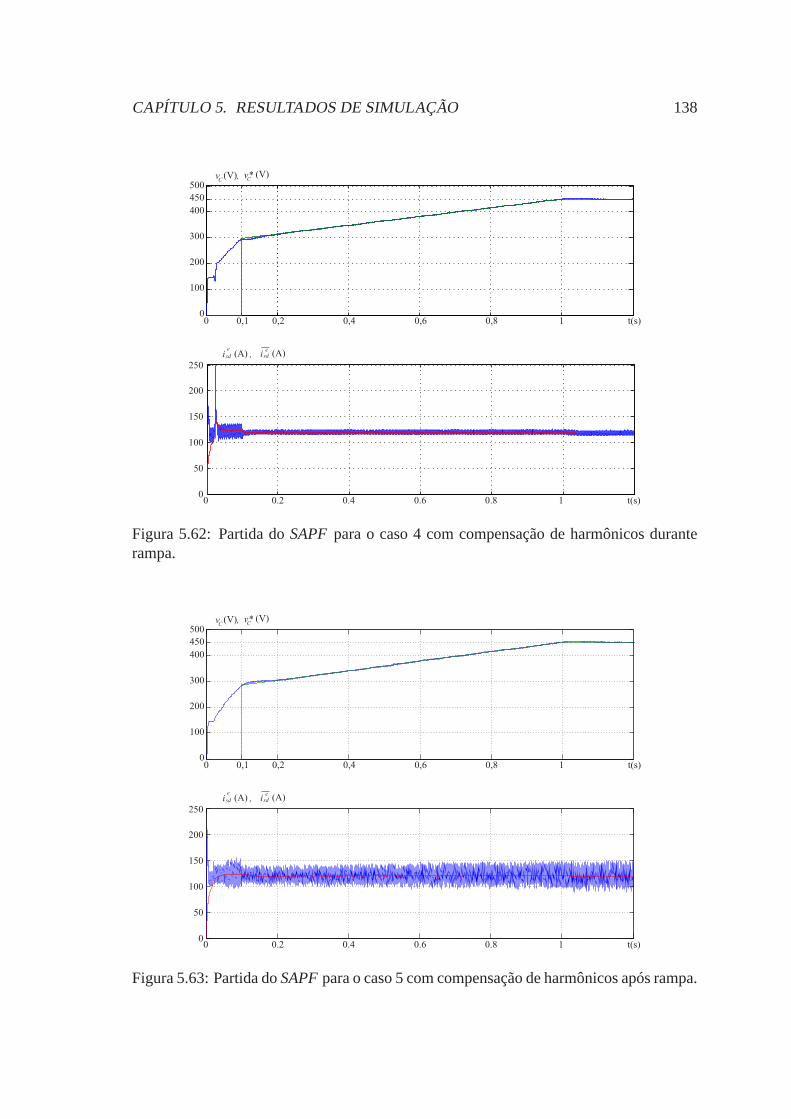
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 138
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.62: Partida doSAPFpara o caso 4 com compensação de harmônicos duranterampa.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.63: Partida doSAPFpara o caso 5 com compensação de harmônicos após rampa.
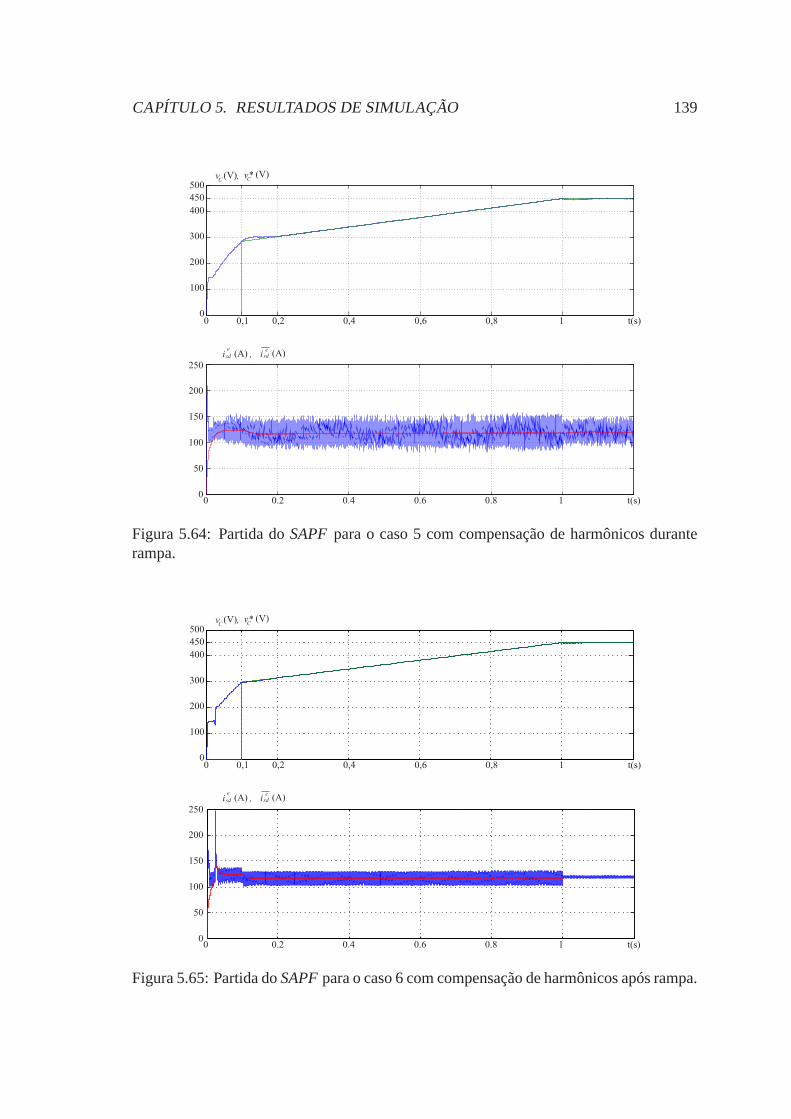
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 139
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
Figura 5.64: Partida doSAPFpara o caso 5 com compensação de harmônicos duranterampa.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.65: Partida doSAPFpara o caso 6 com compensação de harmônicos após rampa.
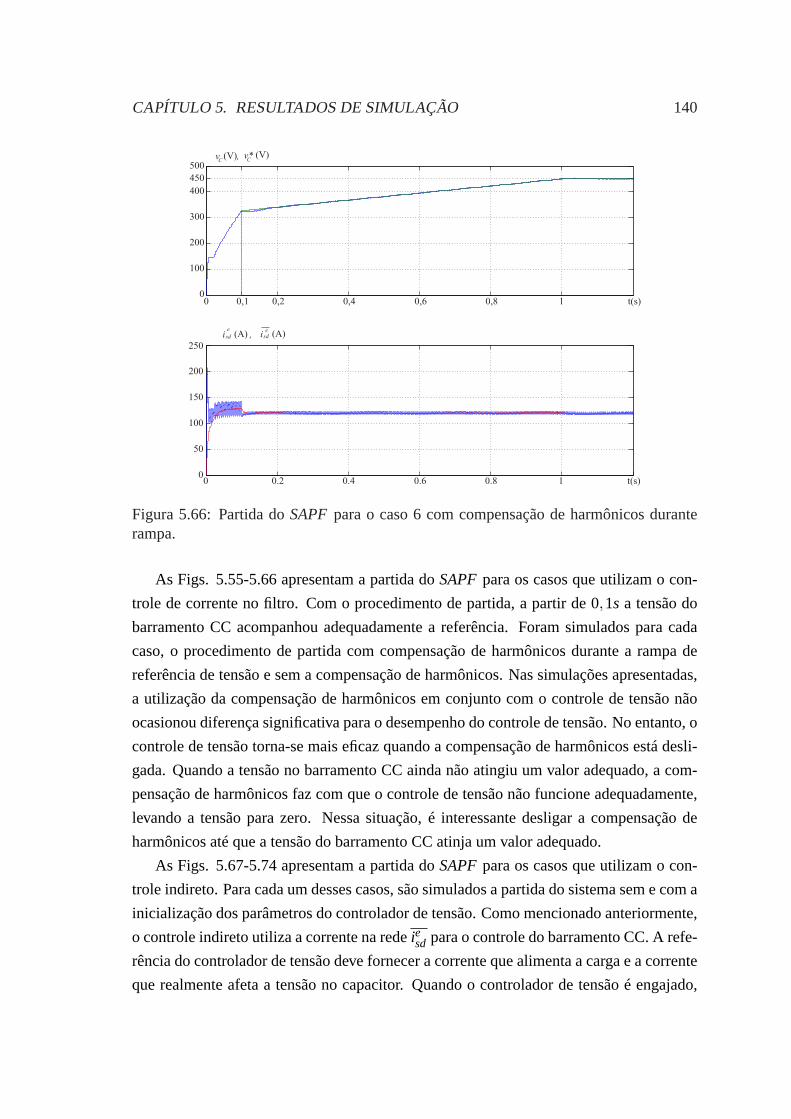
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 140
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.66: Partida doSAPFpara o caso 6 com compensação de harmônicos duranterampa.
As Figs. 5.55-5.66 apresentam a partida doSAPFpara os casos que utilizam o con-
trole de corrente no filtro. Com o procedimento de partida, a partir de0,1s a tensão do
barramento CC acompanhou adequadamente a referência. Foram simulados para cada
caso, o procedimento de partida com compensação de harmônicos durante a rampa de
referência de tensão e sem a compensação de harmônicos. Nas simulações apresentadas,
a utilização da compensação de harmônicos em conjunto com o controle de tensão não
ocasionou diferença significativa para o desempenho do controle de tensão. No entanto, o
controle de tensão torna-se mais eficaz quando a compensação de harmônicos está desli-
gada. Quando a tensão no barramento CC ainda não atingiu um valor adequado, a com-
pensação de harmônicos faz com que o controle de tensão não funcione adequadamente,
levando a tensão para zero. Nessa situação, é interessante desligar a compensação de
harmônicos até que a tensão do barramento CC atinja um valor adequado.
As Figs. 5.67-5.74 apresentam a partida doSAPFpara os casos que utilizam o con-
trole indireto. Para cada um desses casos, são simulados a partida do sistema sem e com a
inicialização dos parâmetros do controlador de tensão. Como mencionado anteriormente,
o controle indireto utiliza a corrente na redeiesd para o controle do barramento CC. A refe-
rência do controlador de tensão deve fornecer a corrente que alimenta a carga e a corrente
que realmente afeta a tensão no capacitor. Quando o controlador de tensão é engajado,
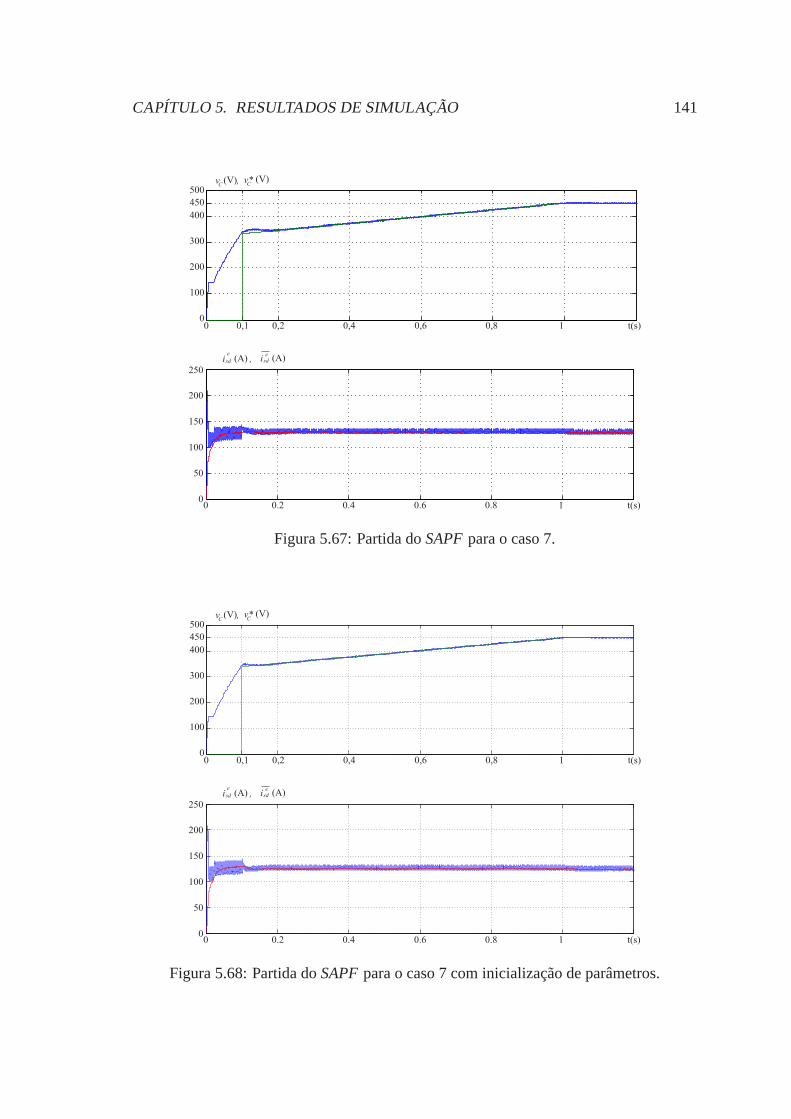
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 141
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.67: Partida doSAPFpara o caso 7.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.68: Partida doSAPFpara o caso 7 com inicialização de parâmetros.
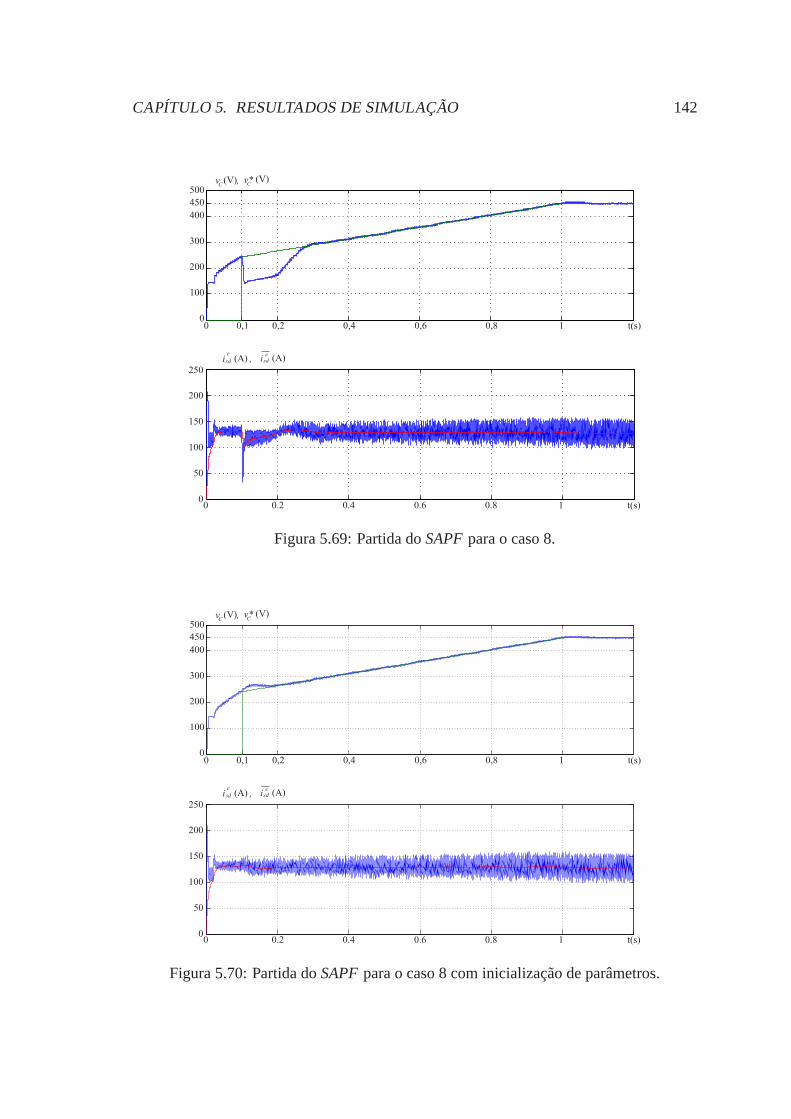
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 142
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.69: Partida doSAPFpara o caso 8.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.70: Partida doSAPFpara o caso 8 com inicialização de parâmetros.
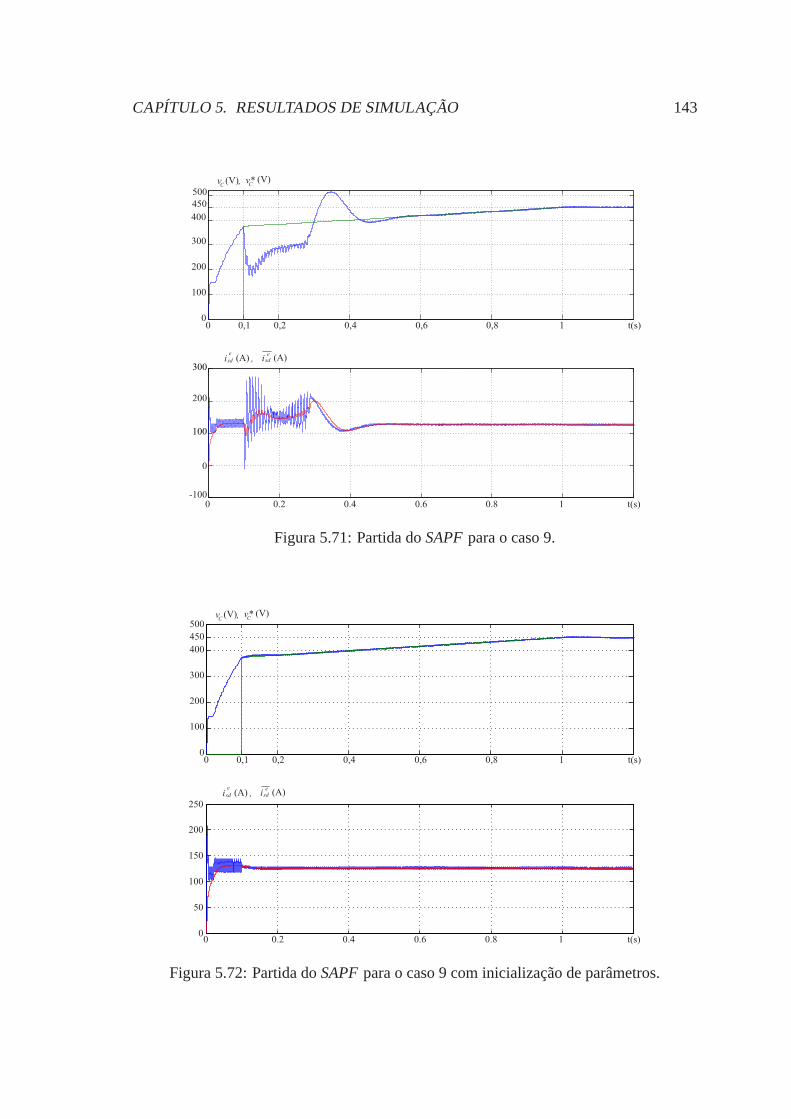
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 143
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)
0
-100
200
i ,sd (A)e
isd (A)e
300
100
Figura 5.71: Partida doSAPFpara o caso 9.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.72: Partida doSAPFpara o caso 9 com inicialização de parâmetros.
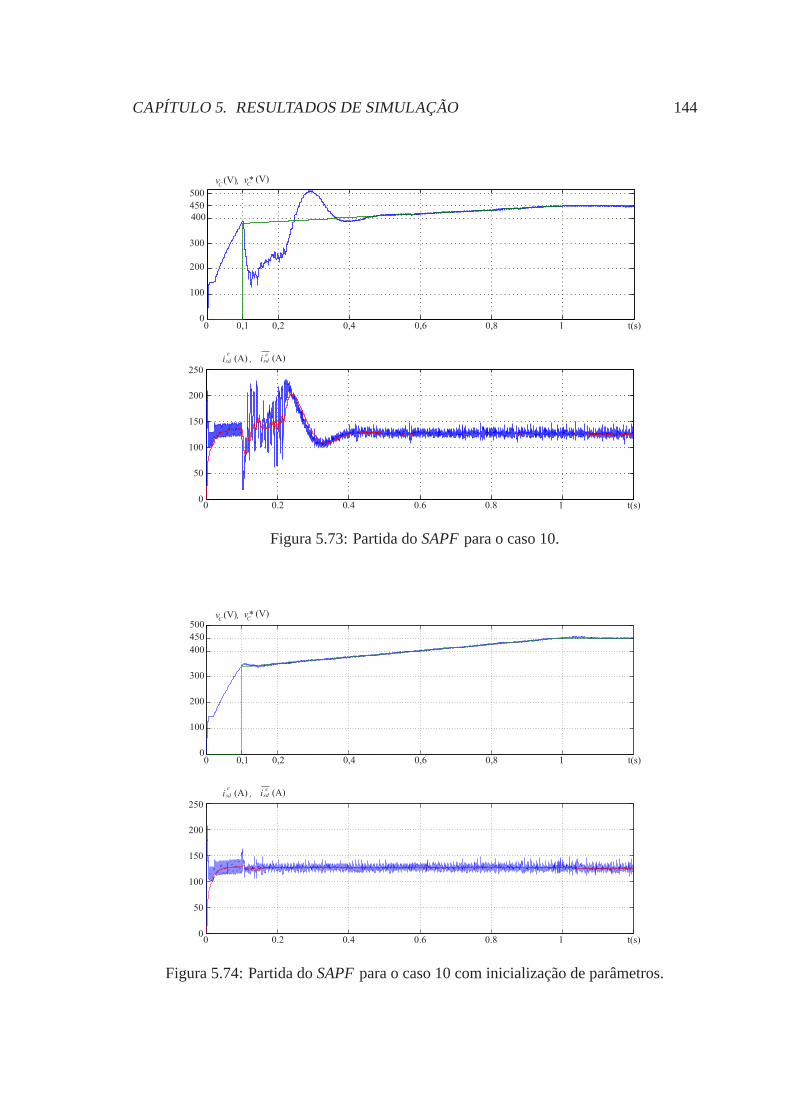
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 144
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.73: Partida doSAPFpara o caso 10.
0 0,20,1 0,4 0,6 0,8 1 t(s)0
100
200
300
400
500
450
v ,C
(V) v*C
(V)
0 0.2 0.4 0.6 0.8 1 t(s)0
50
100
150
200
250
i ,sd (A)e
isd (A)e
Figura 5.74: Partida doSAPFpara o caso 10 com inicialização de parâmetros.

CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 145
se a referência de corrente parte de zero, há uma queda de tensão até que o controlador
ajuste adequadamente a referência de corrente para suprir a corrente da carga e carregar
o capacitor. Esse efeito pode ser constatado nos resultados para o controle indireto sem
inicialização de parâmetros apresentados nas Figs. 5.69, 5.71 e 5.73.
Quando existe a inicialização de parâmetros no controlador de tensão, o desempenho
do sistema durante a partida é superior, conforme apresentado nas Figs. 5.68, 5.70, 5.72
e 5.74. Nesses casos, a referência de correnteie∗sd parte de um valor que supre a corrente
de carga:
ie∗sd(t = tini) = iesd(t = tini) (5.18)
ondetini é o instante em que o controlador de tensão é ligado.
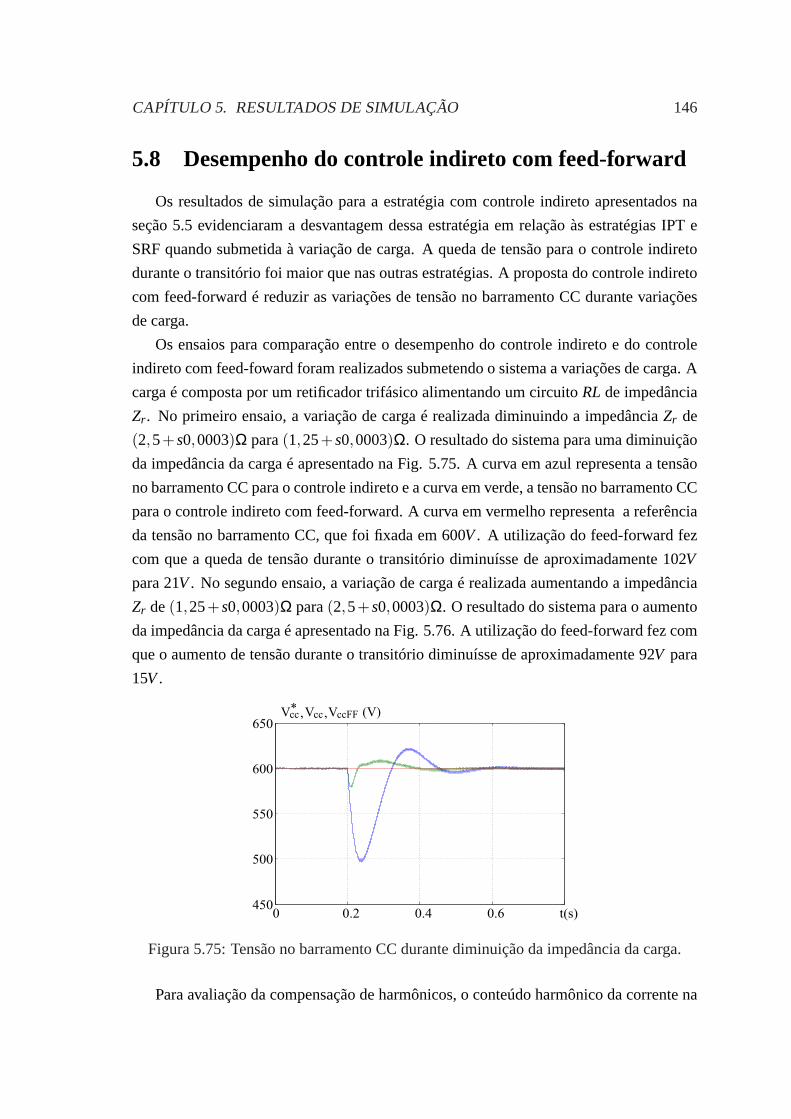
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 146
5.8 Desempenho do controle indireto com feed-forward
Os resultados de simulação para a estratégia com controle indireto apresentados na
seção 5.5 evidenciaram a desvantagem dessa estratégia em relação às estratégias IPT e
SRF quando submetida à variação de carga. A queda de tensão para o controle indireto
durante o transitório foi maior que nas outras estratégias. A proposta do controle indireto
com feed-forward é reduzir as variações de tensão no barramento CC durante variações
de carga.
Os ensaios para comparação entre o desempenho do controle indireto e do controle
indireto com feed-foward foram realizados submetendo o sistema a variações de carga. A
carga é composta por um retificador trifásico alimentando um circuitoRL de impedância
Zr . No primeiro ensaio, a variação de carga é realizada diminuindo a impedânciaZr de
(2,5+s0,0003)Ω para(1,25+s0,0003)Ω. O resultado do sistema para uma diminuição
da impedância da carga é apresentado na Fig. 5.75. A curva em azul representa a tensão
no barramento CC para o controle indireto e a curva em verde, a tensão no barramento CC
para o controle indireto com feed-forward. A curva em vermelho representa a referência
da tensão no barramento CC, que foi fixada em600V. A utilização do feed-forward fez
com que a queda de tensão durante o transitório diminuísse de aproximadamente102V
para21V. No segundo ensaio, a variação de carga é realizada aumentando a impedância
Zr de(1,25+s0,0003)Ω para(2,5+s0,0003)Ω. O resultado do sistema para o aumento
da impedância da carga é apresentado na Fig. 5.76. A utilização do feed-forward fez com
que o aumento de tensão durante o transitório diminuísse de aproximadamente92V para
15V.
0 0.2 0.4 0.6 t(s)450
500
550
600
650Vcc
* ,Vcc ,VccFF (V)
Figura 5.75: Tensão no barramento CC durante diminuição da impedância da carga.
Para avaliação da compensação de harmônicos, o conteúdo harmônico da corrente na
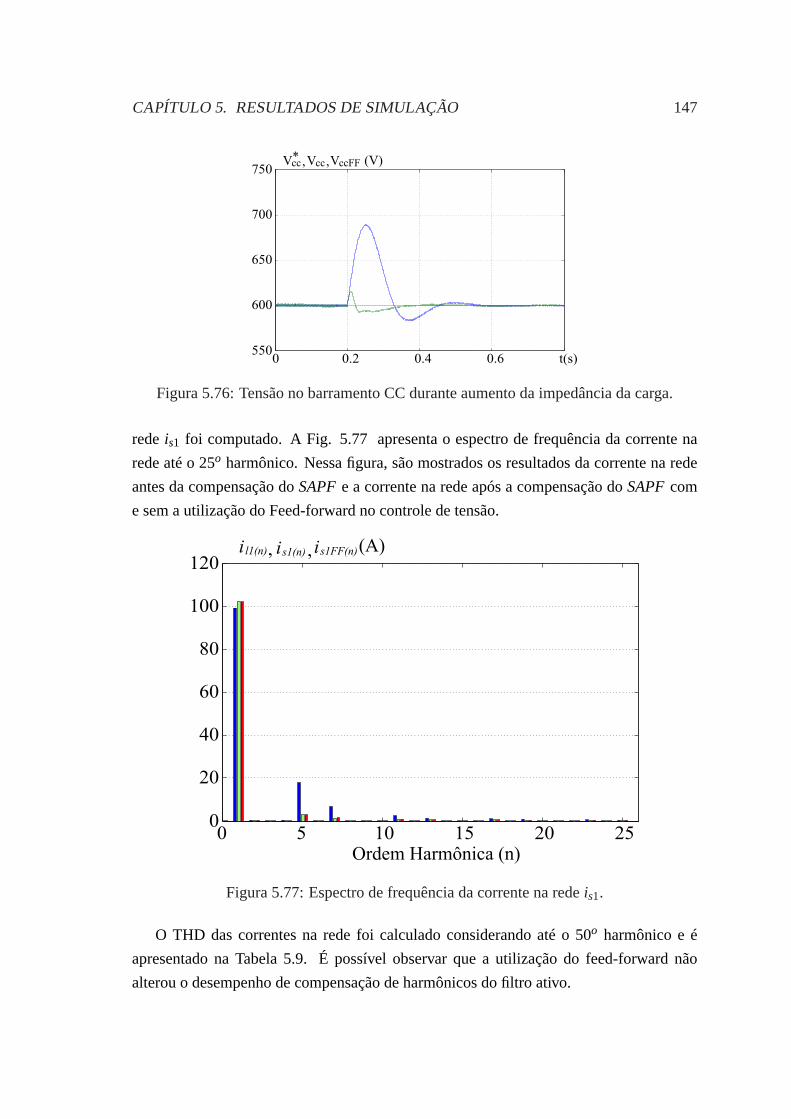
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 147
0 0.2 0.4 0.6 t(s)550
600
650
700
750Vcc
* ,Vcc ,VccFF (V)
Figura 5.76: Tensão no barramento CC durante aumento da impedância da carga.
redeis1 foi computado. A Fig. 5.77 apresenta o espectro de frequência da corrente na
rede até o25o harmônico. Nessa figura, são mostrados os resultados da corrente na rede
antes da compensação doSAPFe a corrente na rede após a compensação doSAPFcom
e sem a utilização do Feed-forward no controle de tensão.
0 5 10 15 20 250
20
40
60
80
100
120i l1(n), is1(n) is1FF(n), (A)
Ordem Harmônica (n)
Figura 5.77: Espectro de frequência da corrente na redeis1.
O THD das correntes na rede foi calculado considerando até o50o harmônico e é
apresentado na Tabela 5.9. É possível observar que a utilização do feed-forward não
alterou o desempenho de compensação de harmônicos do filtro ativo.
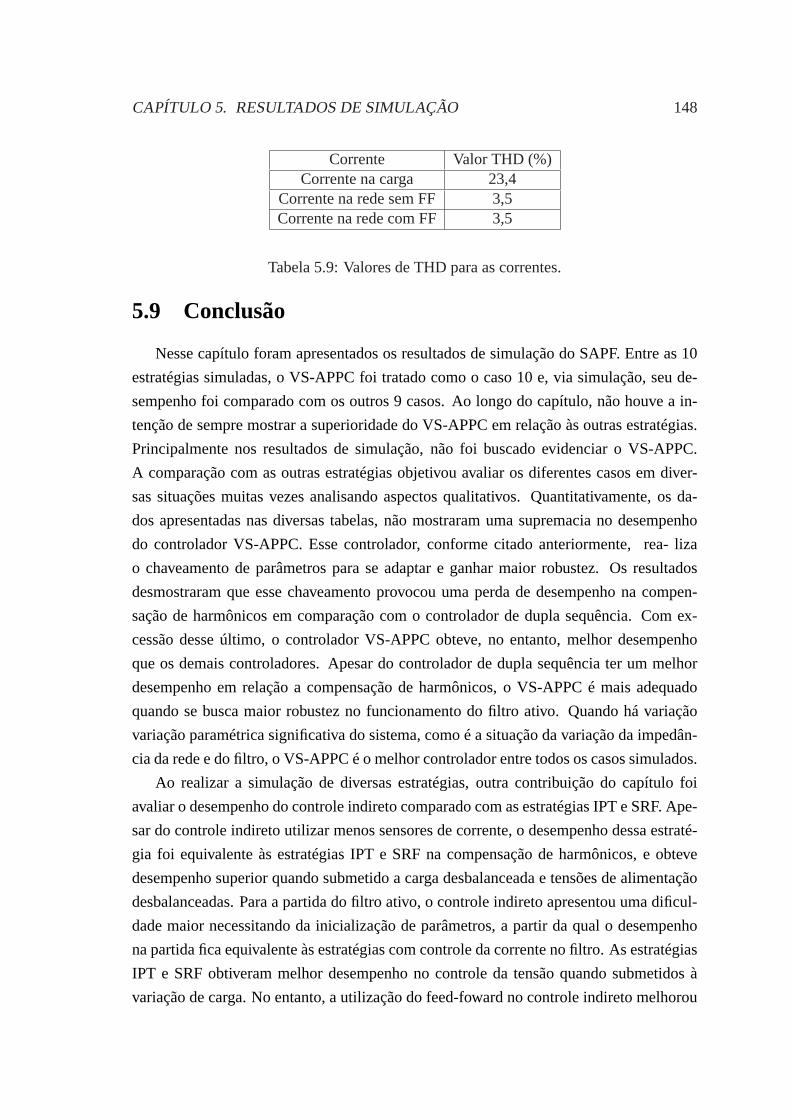
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 148
Corrente Valor THD (%)Corrente na carga 23,4
Corrente na rede sem FF 3,5Corrente na rede com FF 3,5
Tabela 5.9: Valores de THD para as correntes.
5.9 Conclusão
Nesse capítulo foram apresentados os resultados de simulação do SAPF. Entre as 10
estratégias simuladas, o VS-APPC foi tratado como o caso 10 e, via simulação, seu de-
sempenho foi comparado com os outros 9 casos. Ao longo do capítulo, não houve a in-
tenção de sempre mostrar a superioridade do VS-APPC em relação às outras estratégias.
Principalmente nos resultados de simulação, não foi buscado evidenciar o VS-APPC.
A comparação com as outras estratégias objetivou avaliar os diferentes casos em diver-
sas situações muitas vezes analisando aspectos qualitativos. Quantitativamente, os da-
dos apresentadas nas diversas tabelas, não mostraram uma supremacia no desempenho
do controlador VS-APPC. Esse controlador, conforme citado anteriormente, rea- liza
o chaveamento de parâmetros para se adaptar e ganhar maior robustez. Os resultados
desmostraram que esse chaveamento provocou uma perda de desempenho na compen-
sação de harmônicos em comparação com o controlador de dupla sequência. Com ex-
cessão desse último, o controlador VS-APPC obteve, no entanto, melhor desempenho
que os demais controladores. Apesar do controlador de dupla sequência ter um melhor
desempenho em relação a compensação de harmônicos, o VS-APPC é mais adequado
quando se busca maior robustez no funcionamento do filtro ativo. Quando há variação
variação paramétrica significativa do sistema, como é a situação da variação da impedân-
cia da rede e do filtro, o VS-APPC é o melhor controlador entre todos os casos simulados.
Ao realizar a simulação de diversas estratégias, outra contribuição do capítulo foi
avaliar o desempenho do controle indireto comparado com as estratégias IPT e SRF. Ape-
sar do controle indireto utilizar menos sensores de corrente, o desempenho dessa estraté-
gia foi equivalente às estratégias IPT e SRF na compensação de harmônicos, e obteve
desempenho superior quando submetido a carga desbalanceada e tensões de alimentação
desbalanceadas. Para a partida do filtro ativo, o controle indireto apresentou uma dificul-
dade maior necessitando da inicialização de parâmetros, a partir da qual o desempenho
na partida fica equivalente às estratégias com controle da corrente no filtro. As estratégias
IPT e SRF obtiveram melhor desempenho no controle da tensão quando submetidos à
variação de carga. No entanto, a utilização do feed-foward no controle indireto melhorou

CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 149
o desempenho com variação de carga sem alterar a compensação de harmônicos.
Capítulo 6
Resultados Experimentais
O sistema de controle robusto adaptativo da Figura 4.9 e o sistema com controle Feed-
Forward da Figura 4.17 foram testados experimentalmente usando um protótipo de filtro
ativo de potência trifásico. O barramento CC doVSI é composto por um banco de ca-
pacitores de2200µF com tensão nominalvC = 900V. Os indutores utilizados no filtro
sãol f = 1,0mH. A carga não-linear foi implementada por um retificador trifásico alimen-
tando uma cargaRL composta por um indutorL = 50mH e um resistorR= 30Ω. Esse
retificador é conectado em paralelo com uma carga RL trifásica (conectada em estrela)
utilizada para simular a condição de desbalanceamento de toda a carga não-linear. Esta
carga é conectada à rede elétrica por indutores dels= 100µH.
Os testes experimentais do sistema de controle proposto foram implementados com
uma plataforma, composta por um microcomputador, equipado com uma placa de aquisi-
ção de dados, uma placa de controle e um conversor de potência, conectado na rede por
indutores de filtro. O algoritmo de controle foi implementado emC++ e executado com
um tempo de amostragem de100µs. As medições da tensão do barramento CC e das
correntes e tensões de fase doSAPFsão efetuadas por uma placa de aquisição de dados
com conversoresA/D de 12 bits conectados a uma unidade de medição composta por
sensores de efeitohall (LEMs). O circuito de acondicionamento possui um filtro passa-
baixa com uma frequência de cortef c = 2,5kHz. A Figura 6.1 apresenta a estrutura do
protótipo doSAPFutilizado experimentalmente.
Para a apresentação dos resultados experimentais, duas formas de aquisição de dados
foram utilizadas. Na primeira foi utilizada a placa de aquisição já citada, a partir da qual
as medições são gravadas no disco rígido do computador e as curvas são plotadas usando
o software livreScilab. Na segunda opção foi utilizado um osciloscópio de quatro canais,
100MHz, 2 GSa/s Agilent MSOX2014A com o auxílio das pontas de prova de tensão e
corrente Agilent N2791A - 2MHz e 1146A/100kHz/100A, respectivamente. A decisão
de qual opção deve ser utilizada é baseada no seguinte critério. Se uma condição de
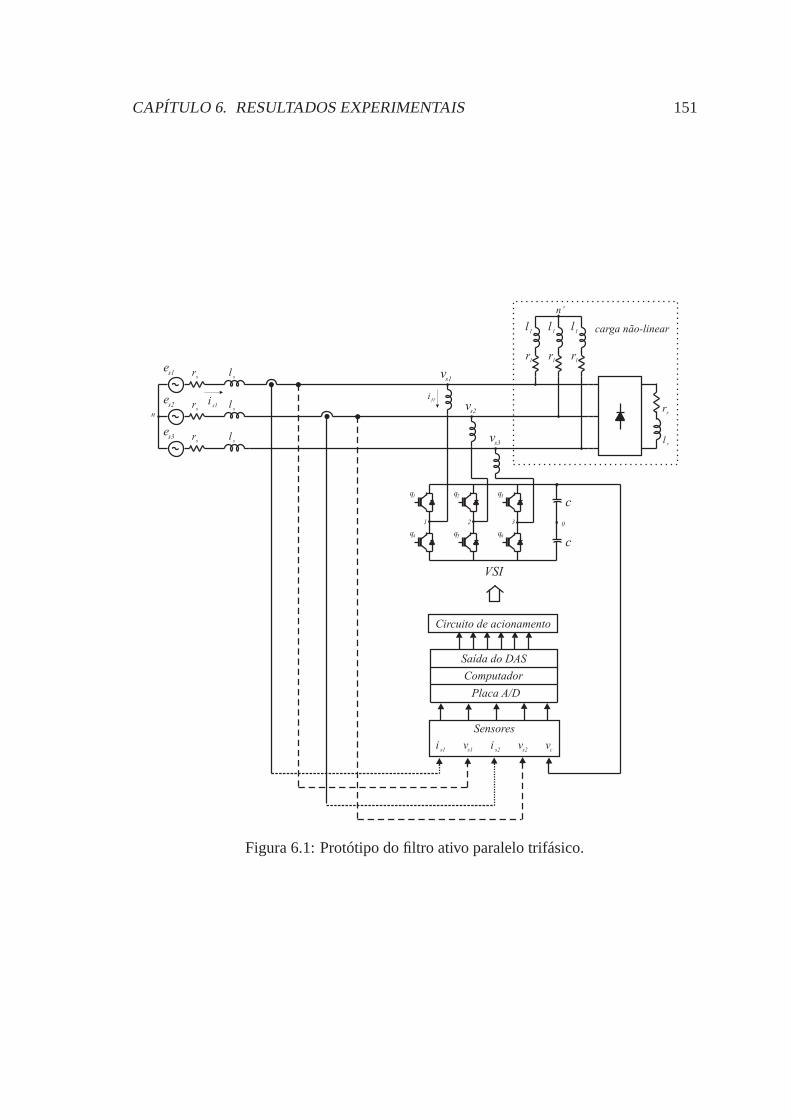
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 151
c
c
0
q1
q4
q2
q5
q3
q6
1 2 3
VSI
vs1
s3
s2v
v
es1 r
sl
s
n
is1
if1
carga não-linear
lr
rr
rl
ll
n’
es2
es3
rs
rs
ls
ls
rl
ll
rl
ll
Circuito de acionamento
Saída do DAS
Computador
Placa A/D
Sensores
is2
vs1
vs2
vc
is1
Figura 6.1: Protótipo do filtro ativo paralelo trifásico.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 152
transitório tem que ser mostrada, a primeira opção é mais adequada. Por outro lado, se
regimes permanentes devem ser apresentados, a segunda opção para medição é utilizada.
Os parâmetros doSAPFdo protótipo utilizado em laboratório são fornecidos na Tabela
6.1.
Tensão e frequência da rede Es = 110V(RMS), fs = 60HzImpedância da rede Zs = (0,2+s0,0001)ΩImpedância do filtro Zf = (2+s0,001)Ω
Impedância da carga linear Zl = (100+s0,2)ΩBanda-passante do controlador de corrente ωc = 1080Hz
Constante do controlador de corrente am = 15000Parâmetros da lei de chaveamento as = 2000, bs = 2000andbs(nom) = 1500
Banco de capacitores C = 2200µF
Tabela 6.1: Parâmetros doSAPF.
6.1 Projeto dos componentes
6.2 Controle Indireto comVS−APPC
Para avaliação do desempenho do controle indireto comVS−APPC utilizado no
SAPF, seis grupos de experimentos foram realizados. São eles: procedimento de partida
suave; regime permanente com carga balanceada; desempenho com carga desbalanceada,
correção do FP, variação de carga e; condição de desbalanceamento das tensões de ali-
mentação. Esses testes são apresentados nas Figs. 6.2-6.17.
6.2.1 Partida suave do SAPF
O esquema de controle proposto não utiliza detecção de harmônicos e um procedi-
mento não-usual deve ser utilizado para iniciar o sistema. Inicialmente, os capacitores
do barramento CC são carregados em um esquema de malha aberta até a tensão de
vC = 180V. Esse procedimento leva aproximadamente∆t = 0,02s. Após isso, a tensão
no barramento CC é regulada pela malha de controle de tensão. A referência de tensão
é composta por uma rampa de tensão iniciando no valor deVin = 280V, com uma vari-
ação de tensão dedV/dt = 17,5 V/s, até a referência de tensão de regime permanente
v∗C = 350V. Durante o procedimento em malha aberta para carregar o barramento CC,
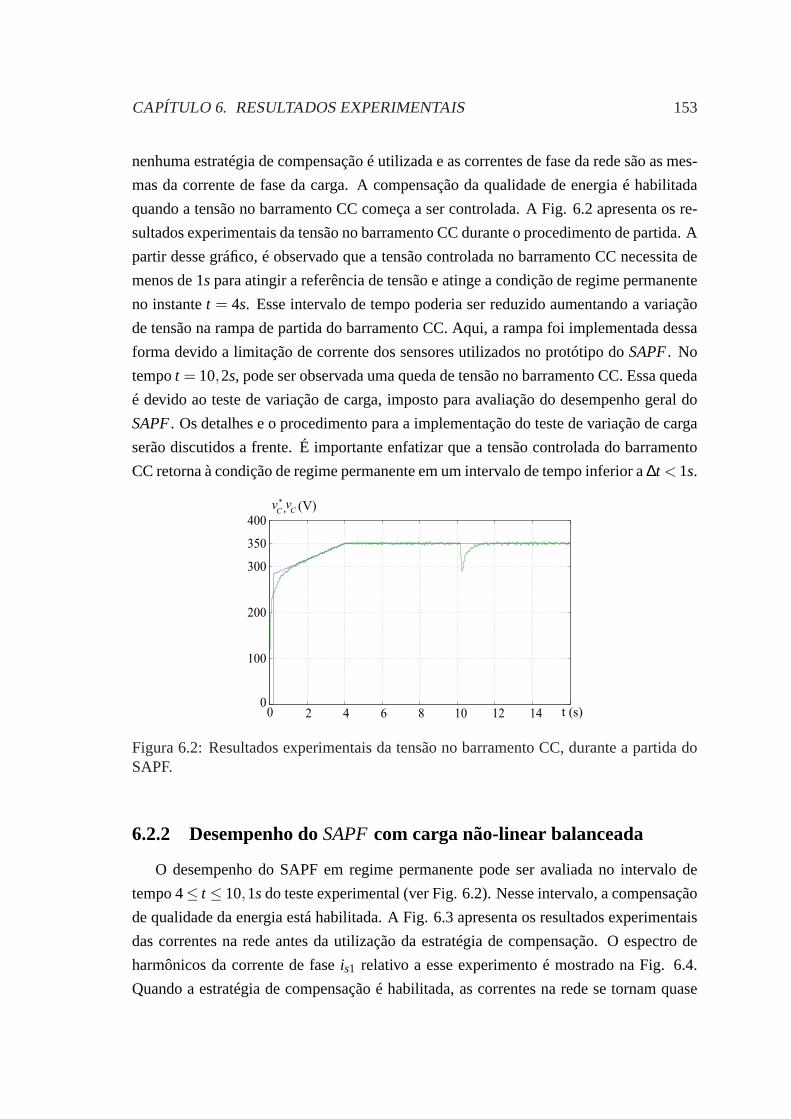
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 153
nenhuma estratégia de compensação é utilizada e as correntes de fase da rede são as mes-
mas da corrente de fase da carga. A compensação da qualidade de energia é habilitada
quando a tensão no barramento CC começa a ser controlada. A Fig. 6.2 apresenta os re-
sultados experimentais da tensão no barramento CC durante o procedimento de partida. A
partir desse gráfico, é observado que a tensão controlada no barramento CC necessita de
menos de1spara atingir a referência de tensão e atinge a condição de regime permanente
no instantet = 4s. Esse intervalo de tempo poderia ser reduzido aumentando a variação
de tensão na rampa de partida do barramento CC. Aqui, a rampa foi implementada dessa
forma devido a limitação de corrente dos sensores utilizados no protótipo doSAPF. No
tempot = 10,2s, pode ser observada uma queda de tensão no barramento CC. Essa queda
é devido ao teste de variação de carga, imposto para avaliação do desempenho geral do
SAPF. Os detalhes e o procedimento para a implementação do teste de variação de carga
serão discutidos a frente. É importante enfatizar que a tensão controlada do barramento
CC retorna à condição de regime permanente em um intervalo de tempo inferior a∆t < 1s.
2 4 6 8 10 12 140
100
200
300
350
400
0
vC
vC
*, (V)
t (s)
Figura 6.2: Resultados experimentais da tensão no barramento CC, durante a partida doSAPF.
6.2.2 Desempenho doSAPFcom carga não-linear balanceada
O desempenho do SAPF em regime permanente pode ser avaliada no intervalo de
tempo4≤ t ≤ 10,1sdo teste experimental (ver Fig. 6.2). Nesse intervalo, a compensação
de qualidade da energia está habilitada. A Fig. 6.3 apresenta os resultados experimentais
das correntes na rede antes da utilização da estratégia de compensação. O espectro de
harmônicos da corrente de faseis1 relativo a esse experimento é mostrado na Fig. 6.4.
Quando a estratégia de compensação é habilitada, as correntes na rede se tornam quase
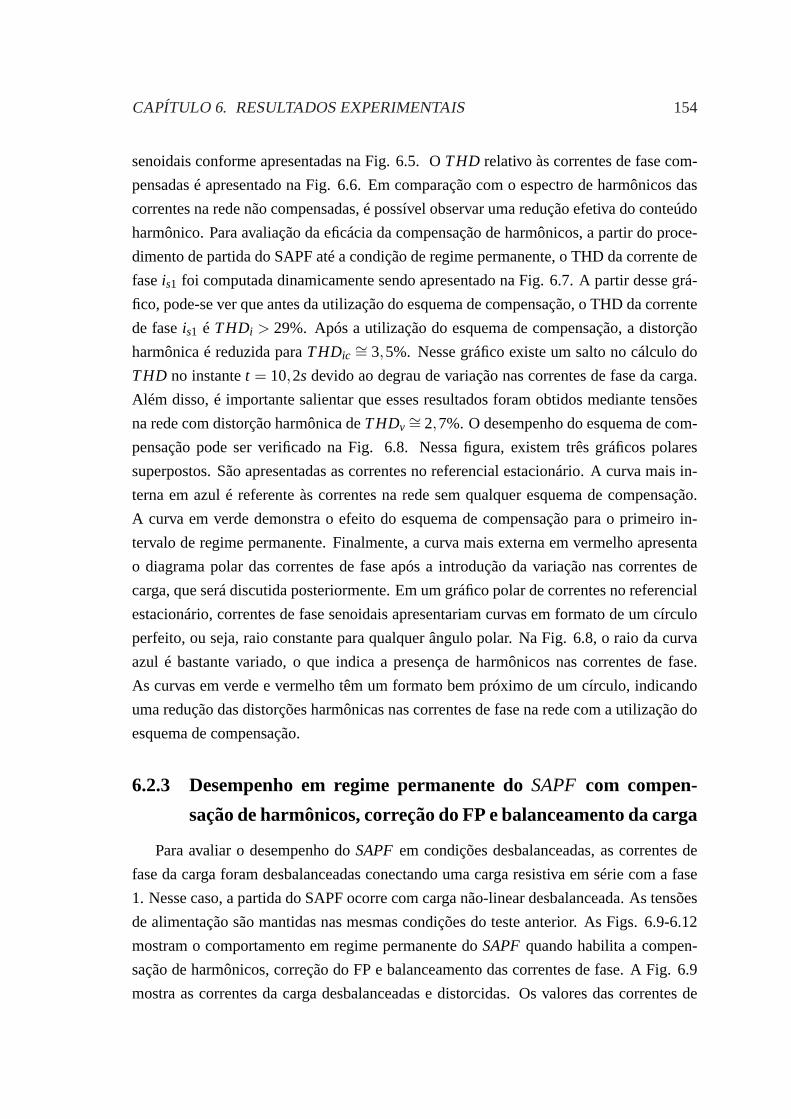
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 154
senoidais conforme apresentadas na Fig. 6.5. OTHD relativo às correntes de fase com-
pensadas é apresentado na Fig. 6.6. Em comparação com o espectro de harmônicos das
correntes na rede não compensadas, é possível observar uma redução efetiva do conteúdo
harmônico. Para avaliação da eficácia da compensação de harmônicos, a partir do proce-
dimento de partida do SAPF até a condição de regime permanente, o THD da corrente de
faseis1 foi computada dinamicamente sendo apresentado na Fig. 6.7. A partir desse grá-
fico, pode-se ver que antes da utilização do esquema de compensação, o THD da corrente
de faseis1 é THDi > 29%. Após a utilização do esquema de compensação, a distorção
harmônica é reduzida paraTHDic∼= 3,5%. Nesse gráfico existe um salto no cálculo do
THD no instantet = 10,2s devido ao degrau de variação nas correntes de fase da carga.
Além disso, é importante salientar que esses resultados foram obtidos mediante tensões
na rede com distorção harmônica deTHDv∼= 2,7%. O desempenho do esquema de com-
pensação pode ser verificado na Fig. 6.8. Nessa figura, existem três gráficos polares
superpostos. São apresentadas as correntes no referencial estacionário. A curva mais in-
terna em azul é referente às correntes na rede sem qualquer esquema de compensação.
A curva em verde demonstra o efeito do esquema de compensação para o primeiro in-
tervalo de regime permanente. Finalmente, a curva mais externa em vermelho apresenta
o diagrama polar das correntes de fase após a introdução da variação nas correntes de
carga, que será discutida posteriormente. Em um gráfico polar de correntes no referencial
estacionário, correntes de fase senoidais apresentariam curvas em formato de um círculo
perfeito, ou seja, raio constante para qualquer ângulo polar. Na Fig. 6.8, o raio da curva
azul é bastante variado, o que indica a presença de harmônicos nas correntes de fase.
As curvas em verde e vermelho têm um formato bem próximo de um círculo, indicando
uma redução das distorções harmônicas nas correntes de fase na rede com a utilização do
esquema de compensação.
6.2.3 Desempenho em regime permanente doSAPF com compen-
sação de harmônicos, correção do FP e balanceamento da carga
Para avaliar o desempenho doSAPFem condições desbalanceadas, as correntes de
fase da carga foram desbalanceadas conectando uma carga resistiva em série com a fase
1. Nesse caso, a partida do SAPF ocorre com carga não-linear desbalanceada. As tensões
de alimentação são mantidas nas mesmas condições do teste anterior. As Figs. 6.9-6.12
mostram o comportamento em regime permanente doSAPFquando habilita a compen-
sação de harmônicos, correção do FP e balanceamento das correntes de fase. A Fig. 6.9
mostra as correntes da carga desbalanceadas e distorcidas. Os valores das correntes de
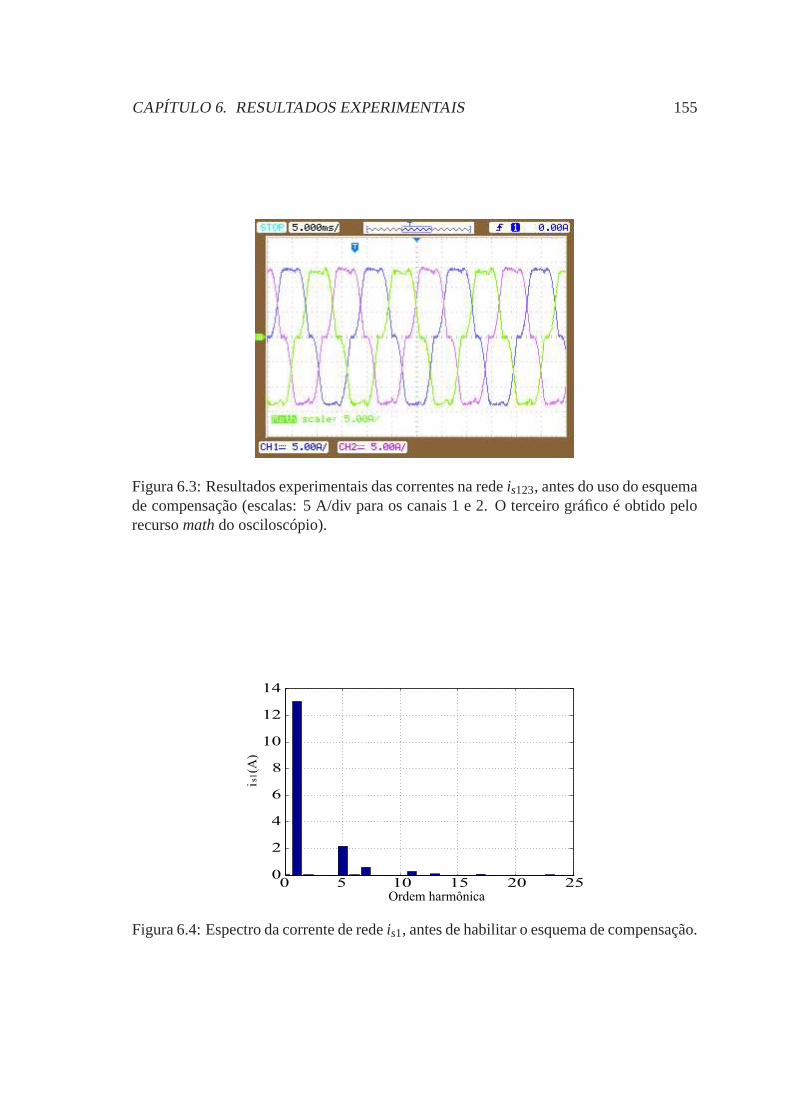
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 155
Figura 6.3: Resultados experimentais das correntes na redeis123, antes do uso do esquemade compensação (escalas: 5 A/div para os canais 1 e 2. O terceiro gráfico é obtido pelorecursomathdo osciloscópio).
0 5 10 15 20 250
2
4
6
8
10
12
14
Ordem harmônica
i (A
)s1
Figura 6.4: Espectro da corrente de redeis1, antes de habilitar o esquema de compensação.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 156
Figura 6.5: Resultados experimentais das correntes da rede balanceadasis123, antes dapartida doSAPF(escalas: 5 A/div para os canais 1 e 2. O terceiro gráfico é obtido pelorecursomathdo osciloscópio.).
0 5 10 15 20 250
5
10
15
Ordem harmônica
i (A
)s1
Figura 6.6: Espectro da corrente de faseis1, após habilitar o esquema de compensação.
0 2 4 6 8 10 12 14 t (s)0
5
10
20
30THD (%)
Figura 6.7: THD da corrente de faseis1 na rede elétrica.
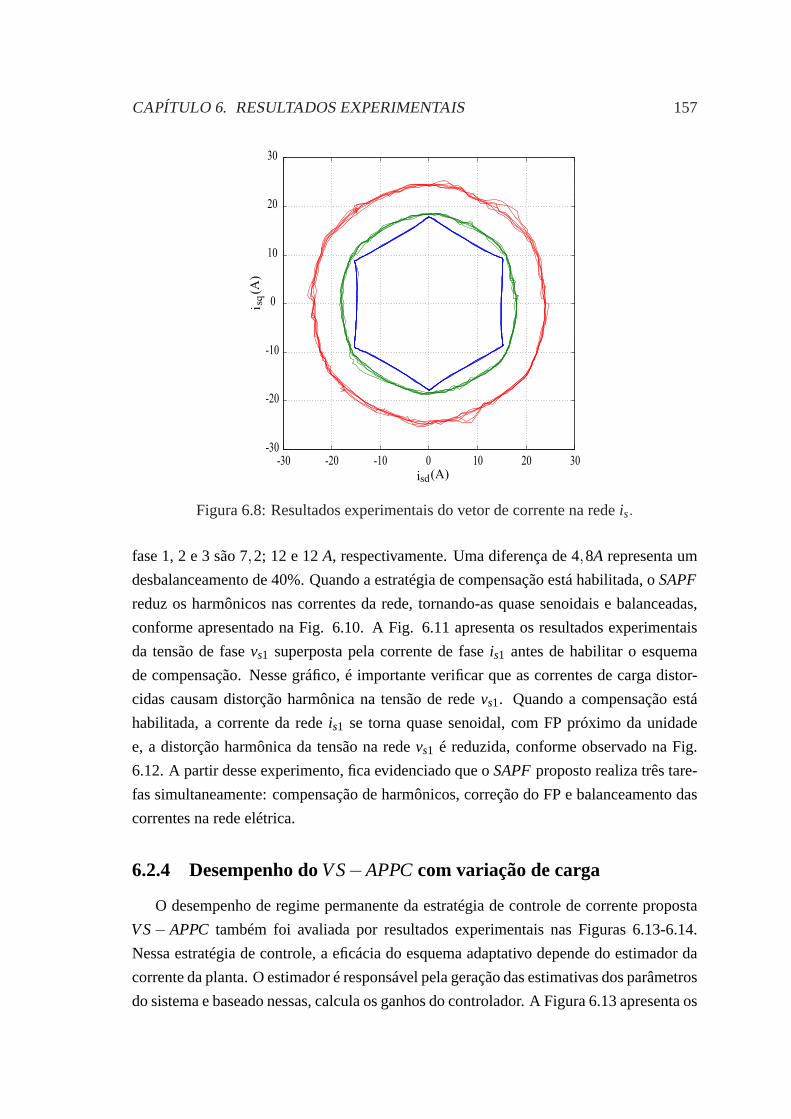
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 157
-30 -20 -10 0 10 20 30-30
-20
-10
0
10
20
30
isd(A)
i sq
(A)
Figura 6.8: Resultados experimentais do vetor de corrente na redeis.
fase1, 2 e 3 são7,2; 12 e 12 A, respectivamente. Uma diferença de4,8A representa um
desbalanceamento de40%. Quando a estratégia de compensação está habilitada, oSAPF
reduz os harmônicos nas correntes da rede, tornando-as quase senoidais e balanceadas,
conforme apresentado na Fig. 6.10. A Fig. 6.11 apresenta os resultados experimentais
da tensão de fasevs1 superposta pela corrente de faseis1 antes de habilitar o esquema
de compensação. Nesse gráfico, é importante verificar que as correntes de carga distor-
cidas causam distorção harmônica na tensão de redevs1. Quando a compensação está
habilitada, a corrente da redeis1 se torna quase senoidal, com FP próximo da unidade
e, a distorção harmônica da tensão na redevs1 é reduzida, conforme observado na Fig.
6.12. A partir desse experimento, fica evidenciado que oSAPFproposto realiza três tare-
fas simultaneamente: compensação de harmônicos, correção do FP e balanceamento das
correntes na rede elétrica.
6.2.4 Desempenho doVS−APPCcom variação de carga
O desempenho de regime permanente da estratégia de controle de corrente proposta
VS−APPC também foi avaliada por resultados experimentais nas Figuras 6.13-6.14.
Nessa estratégia de controle, a eficácia do esquema adaptativo depende do estimador da
corrente da planta. O estimador é responsável pela geração das estimativas dos parâmetros
do sistema e baseado nessas, calcula os ganhos do controlador. A Figura 6.13 apresenta os
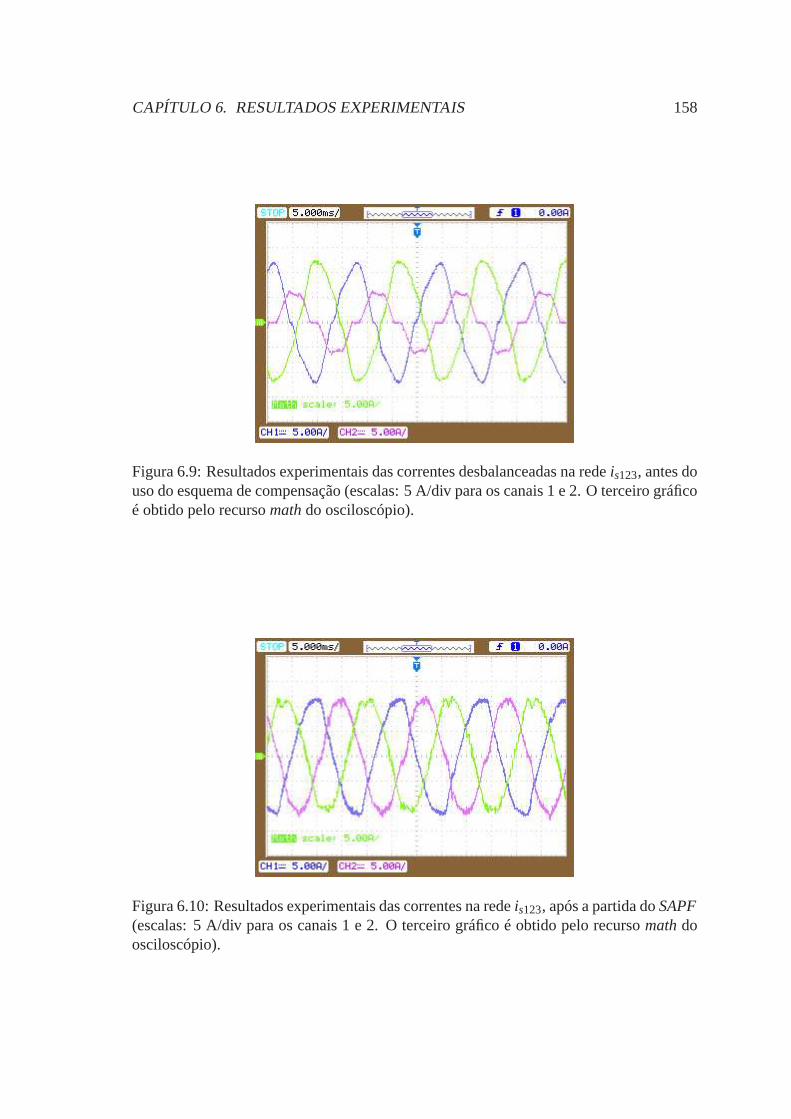
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 158
Figura 6.9: Resultados experimentais das correntes desbalanceadas na redeis123, antes douso do esquema de compensação (escalas: 5 A/div para os canais 1 e 2. O terceiro gráficoé obtido pelo recursomathdo osciloscópio).
Figura 6.10: Resultados experimentais das correntes na redeis123, após a partida doSAPF(escalas: 5 A/div para os canais 1 e 2. O terceiro gráfico é obtido pelo recursomathdoosciloscópio).
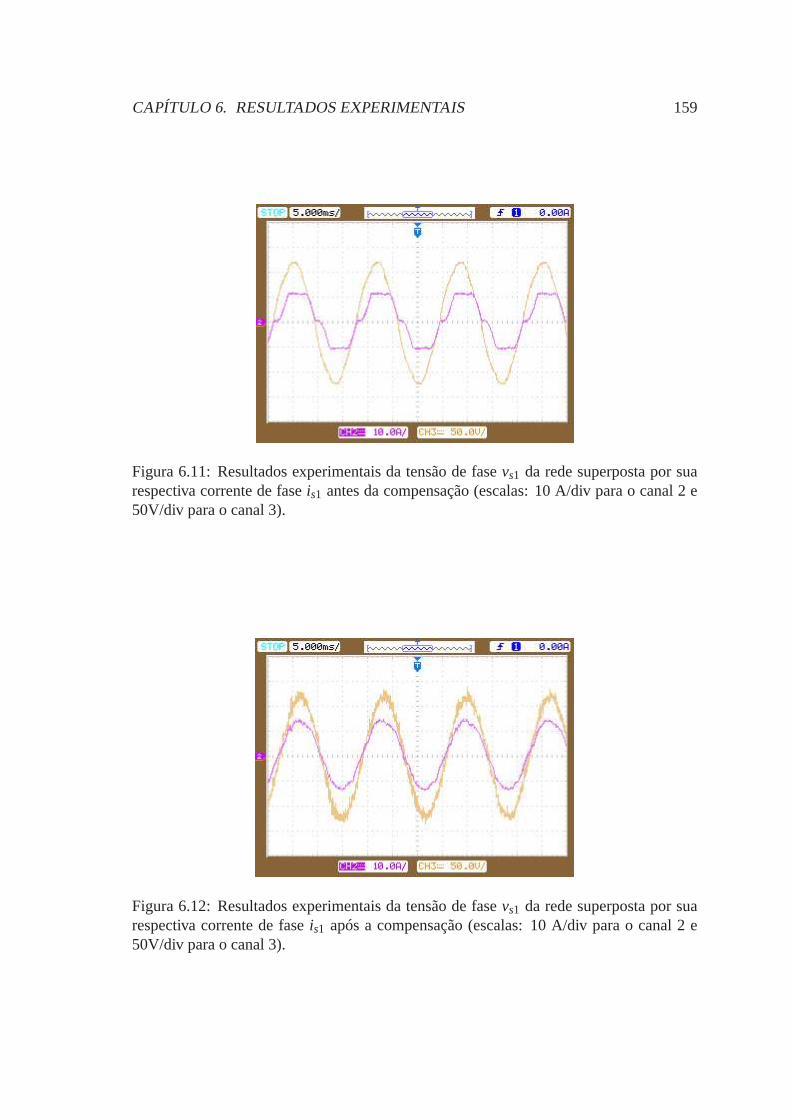
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 159
Figura 6.11: Resultados experimentais da tensão de fasevs1 da rede superposta por suarespectiva corrente de faseis1 antes da compensação (escalas: 10 A/div para o canal 2 e50V/div para o canal 3).
Figura 6.12: Resultados experimentais da tensão de fasevs1 da rede superposta por suarespectiva corrente de faseis1 após a compensação (escalas: 10 A/div para o canal 2 e50V/div para o canal 3).
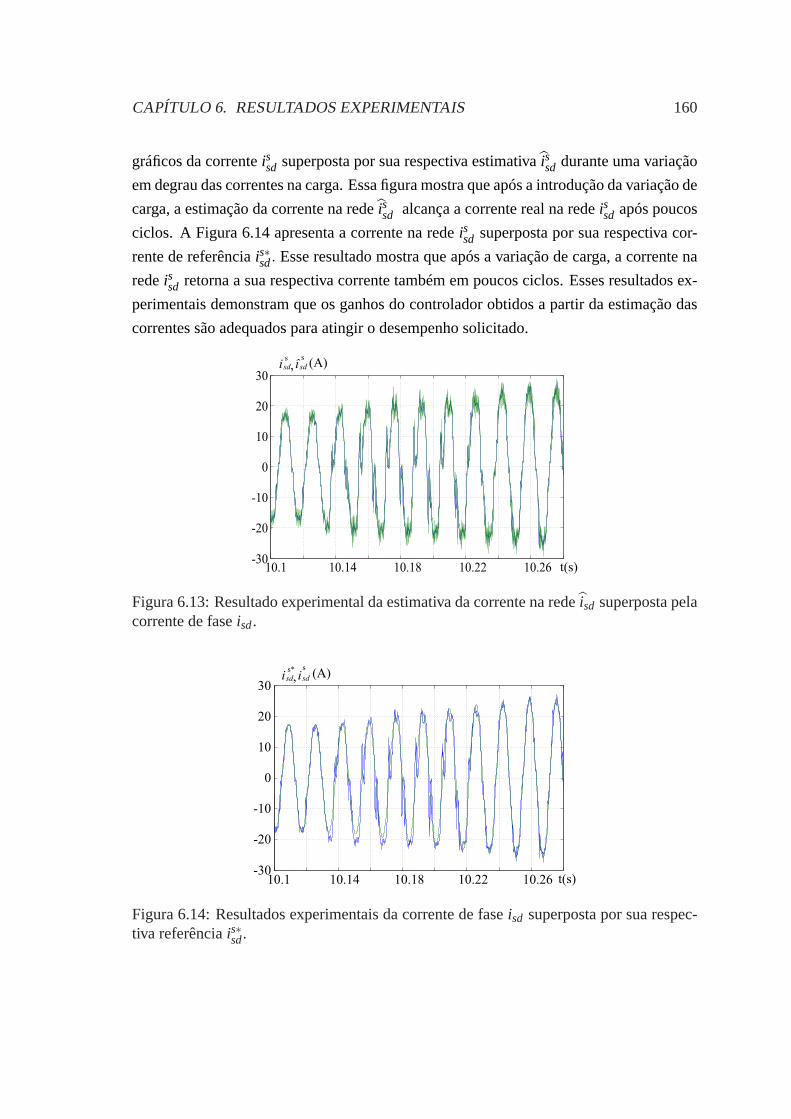
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 160
gráficos da correnteissd superposta por sua respectiva estimativaissd durante uma variação
em degrau das correntes na carga. Essa figura mostra que após a introdução da variação de
carga, a estimação da corrente na redeissd alcança a corrente real na redeissd após poucos
ciclos. A Figura 6.14 apresenta a corrente na redeissd superposta por sua respectiva cor-
rente de referênciais∗sd. Esse resultado mostra que após a variação de carga, a corrente na
redeissd retorna a sua respectiva corrente também em poucos ciclos. Esses resultados ex-
perimentais demonstram que os ganhos do controlador obtidos a partir da estimação das
correntes são adequados para atingir o desempenho solicitado.
10.1 10.14 10.18 10.22 10.26-30
-20
-10
0
10
20
30
t(s)
isd, îsd (A)s s
Figura 6.13: Resultado experimental da estimativa da corrente na redeisd superposta pelacorrente de faseisd.
10.1 10.14 10.18 10.22 10.26-30
-20
-10
0
10
20
30
t(s)
isd, isds* s
(A)
Figura 6.14: Resultados experimentais da corrente de faseisd superposta por sua respec-tiva referênciais∗sd.
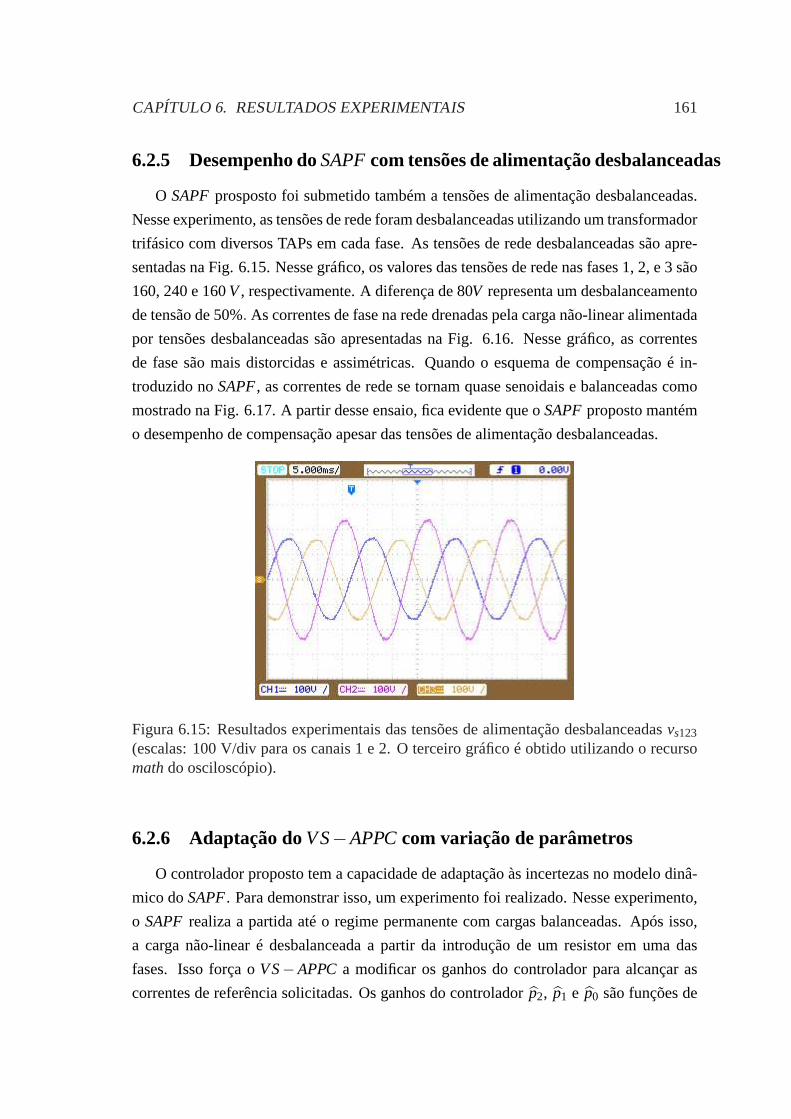
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 161
6.2.5 Desempenho doSAPFcom tensões de alimentação desbalanceadas
O SAPFprosposto foi submetido também a tensões de alimentação desbalanceadas.
Nesse experimento, as tensões de rede foram desbalanceadas utilizando um transformador
trifásico com diversos TAPs em cada fase. As tensões de rede desbalanceadas são apre-
sentadas na Fig. 6.15. Nesse gráfico, os valores das tensões de rede nas fases1, 2, e3 são
160, 240e160V, respectivamente. A diferença de80V representa um desbalanceamento
de tensão de50%. As correntes de fase na rede drenadas pela carga não-linear alimentada
por tensões desbalanceadas são apresentadas na Fig. 6.16. Nesse gráfico, as correntes
de fase são mais distorcidas e assimétricas. Quando o esquema de compensação é in-
troduzido noSAPF, as correntes de rede se tornam quase senoidais e balanceadas como
mostrado na Fig. 6.17. A partir desse ensaio, fica evidente que oSAPFproposto mantém
o desempenho de compensação apesar das tensões de alimentação desbalanceadas.
Figura 6.15: Resultados experimentais das tensões de alimentação desbalanceadasvs123
(escalas: 100 V/div para os canais 1 e 2. O terceiro gráfico é obtido utilizando o recursomathdo osciloscópio).
6.2.6 Adaptação doVS−APPCcom variação de parâmetros
O controlador proposto tem a capacidade de adaptação às incertezas no modelo dinâ-
mico doSAPF. Para demonstrar isso, um experimento foi realizado. Nesse experimento,
o SAPF realiza a partida até o regime permanente com cargas balanceadas. Após isso,
a carga não-linear é desbalanceada a partir da introdução de um resistor em uma das
fases. Isso força oVS−APPC a modificar os ganhos do controlador para alcançar as
correntes de referência solicitadas. Os ganhos do controladorp2, p1 e p0 são funções de
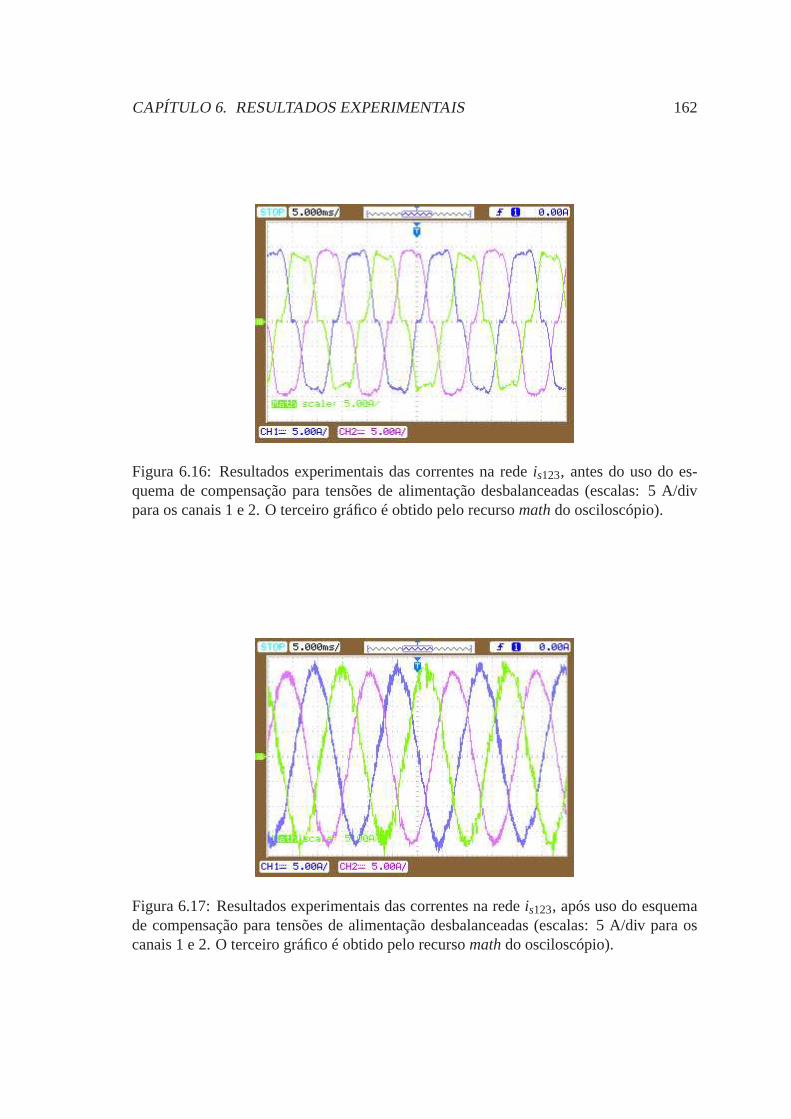
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 162
Figura 6.16: Resultados experimentais das correntes na redeis123, antes do uso do es-quema de compensação para tensões de alimentação desbalanceadas (escalas: 5 A/divpara os canais 1 e 2. O terceiro gráfico é obtido pelo recursomathdo osciloscópio).
Figura 6.17: Resultados experimentais das correntes na redeis123, após uso do esquemade compensação para tensões de alimentação desbalanceadas (escalas: 5 A/div para oscanais 1 e 2. O terceiro gráfico é obtido pelo recursomathdo osciloscópio).
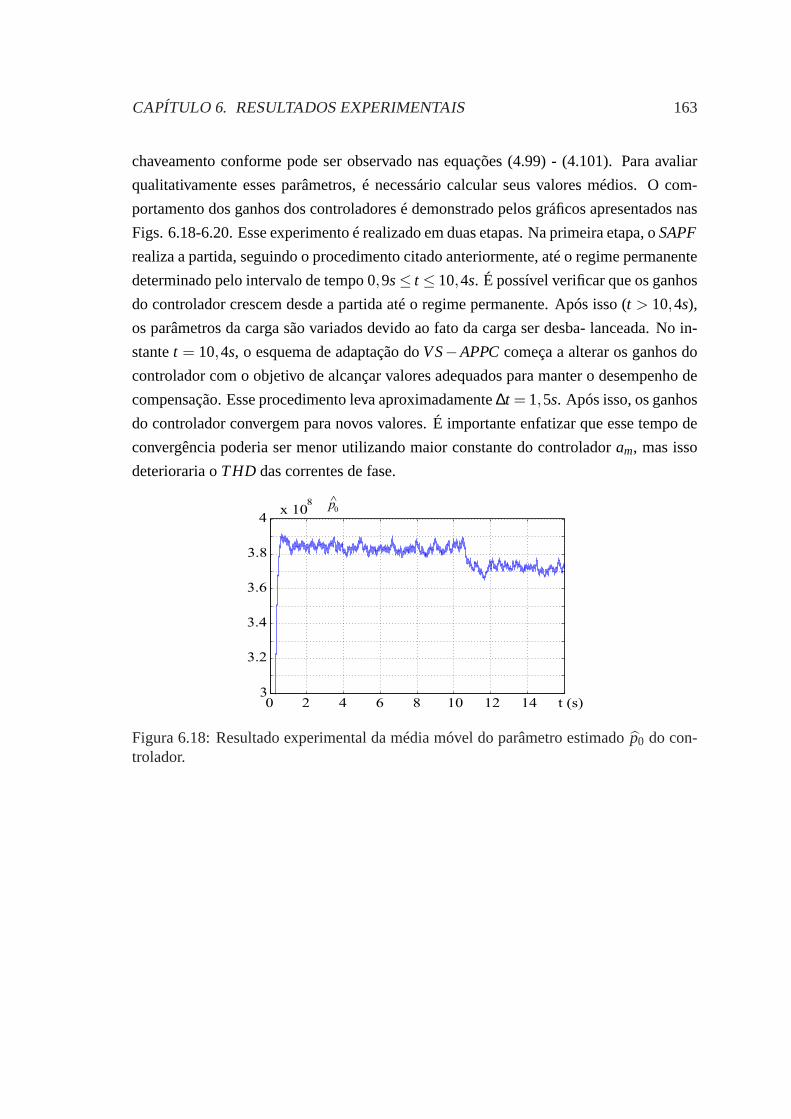
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 163
chaveamento conforme pode ser observado nas equações (4.99) - (4.101). Para avaliar
qualitativamente esses parâmetros, é necessário calcular seus valores médios. O com-
portamento dos ganhos dos controladores é demonstrado pelos gráficos apresentados nas
Figs. 6.18-6.20. Esse experimento é realizado em duas etapas. Na primeira etapa, oSAPF
realiza a partida, seguindo o procedimento citado anteriormente, até o regime permanente
determinado pelo intervalo de tempo0,9s≤ t ≤ 10,4s. É possível verificar que os ganhos
do controlador crescem desde a partida até o regime permanente. Após isso (t > 10,4s),
os parâmetros da carga são variados devido ao fato da carga ser desba- lanceada. No in-
stantet = 10,4s, o esquema de adaptação doVS−APPCcomeça a alterar os ganhos do
controlador com o objetivo de alcançar valores adequados para manter o desempenho de
compensação. Esse procedimento leva aproximadamente∆t = 1,5s. Após isso, os ganhos
do controlador convergem para novos valores. É importante enfatizar que esse tempo de
convergência poderia ser menor utilizando maior constante do controladoram, mas isso
deterioraria oTHD das correntes de fase.
0 2 4 6 8 10 12 14 t (s)3
3.2
3.4
3.6
3.8
4x 10
8 p0
Figura 6.18: Resultado experimental da média móvel do parâmetro estimadop0 do con-trolador.
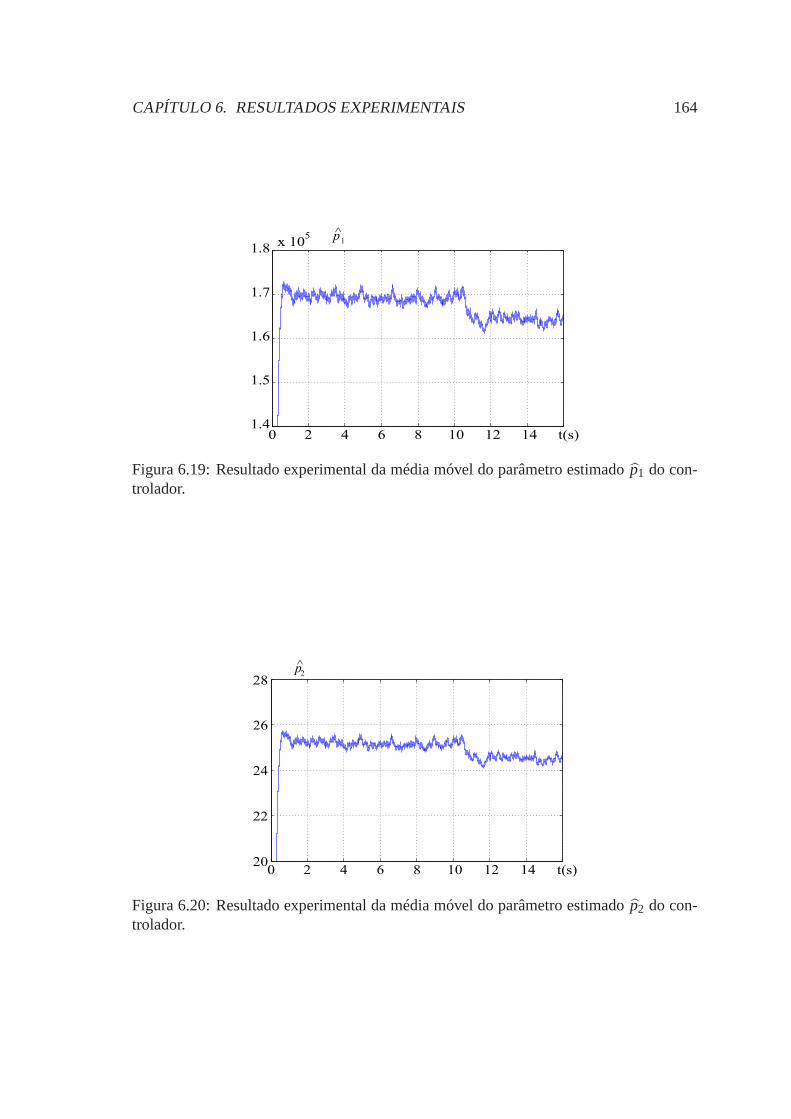
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 164
0 2 4 6 8 10 12 14 t(s)1.4
1.5
1.6
1.7
1.8x 10
5 p1
Figura 6.19: Resultado experimental da média móvel do parâmetro estimadop1 do con-trolador.
0 2 4 6 8 10 12 14 t(s)20
22
24
26
28p2
Figura 6.20: Resultado experimental da média móvel do parâmetro estimadop2 do con-trolador.
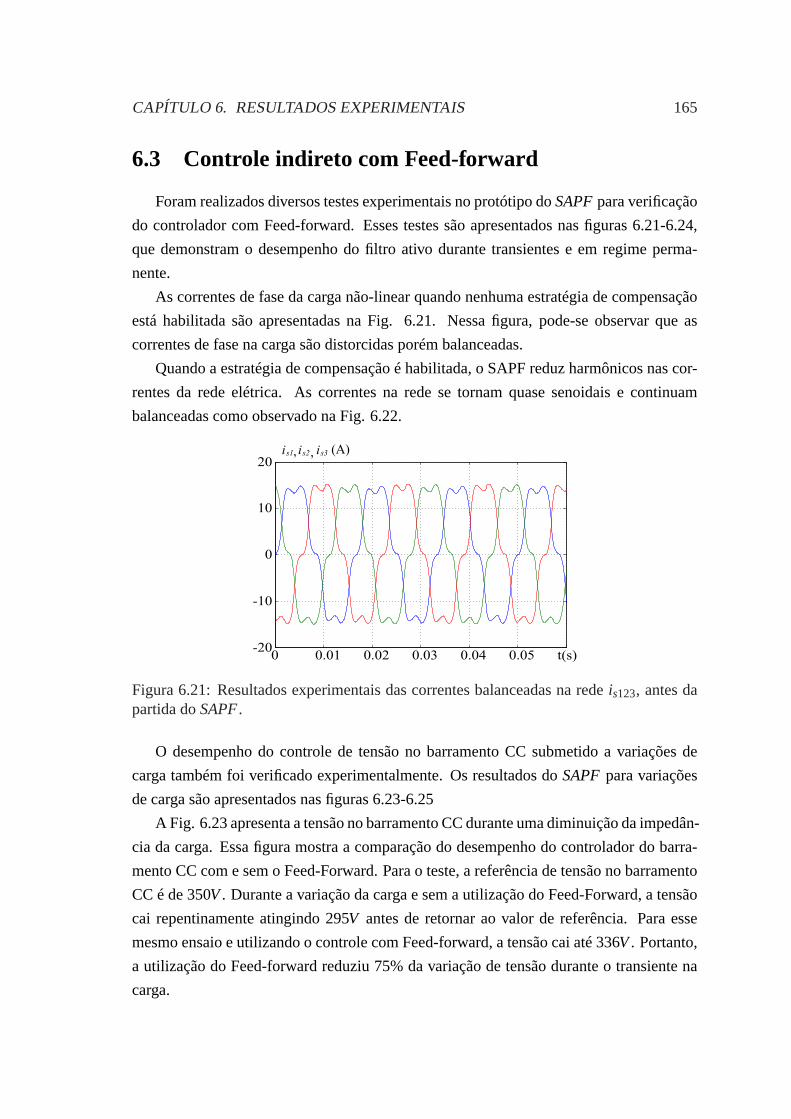
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 165
6.3 Controle indireto com Feed-forward
Foram realizados diversos testes experimentais no protótipo doSAPFpara verificação
do controlador com Feed-forward. Esses testes são apresentados nas figuras 6.21-6.24,
que demonstram o desempenho do filtro ativo durante transientes e em regime perma-
nente.
As correntes de fase da carga não-linear quando nenhuma estratégia de compensação
está habilitada são apresentadas na Fig. 6.21. Nessa figura, pode-se observar que as
correntes de fase na carga são distorcidas porém balanceadas.
Quando a estratégia de compensação é habilitada, o SAPF reduz harmônicos nas cor-
rentes da rede elétrica. As correntes na rede se tornam quase senoidais e continuam
balanceadas como observado na Fig. 6.22.
0 0.01 0.02 0.03 0.04 0.05 t(s)-20
-10
0
10
20is1, is2 is3, (A)
Figura 6.21: Resultados experimentais das correntes balanceadas na redeis123, antes dapartida doSAPF.
O desempenho do controle de tensão no barramento CC submetido a variações de
carga também foi verificado experimentalmente. Os resultados doSAPFpara variações
de carga são apresentados nas figuras 6.23-6.25
A Fig. 6.23 apresenta a tensão no barramento CC durante uma diminuição da impedân-
cia da carga. Essa figura mostra a comparação do desempenho do controlador do barra-
mento CC com e sem o Feed-Forward. Para o teste, a referência de tensão no barramento
CC é de350V. Durante a variação da carga e sem a utilização do Feed-Forward, a tensão
cai repentinamente atingindo295V antes de retornar ao valor de referência. Para esse
mesmo ensaio e utilizando o controle com Feed-forward, a tensão cai até336V. Portanto,
a utilização do Feed-forward reduziu 75% da variação de tensão durante o transiente na
carga.
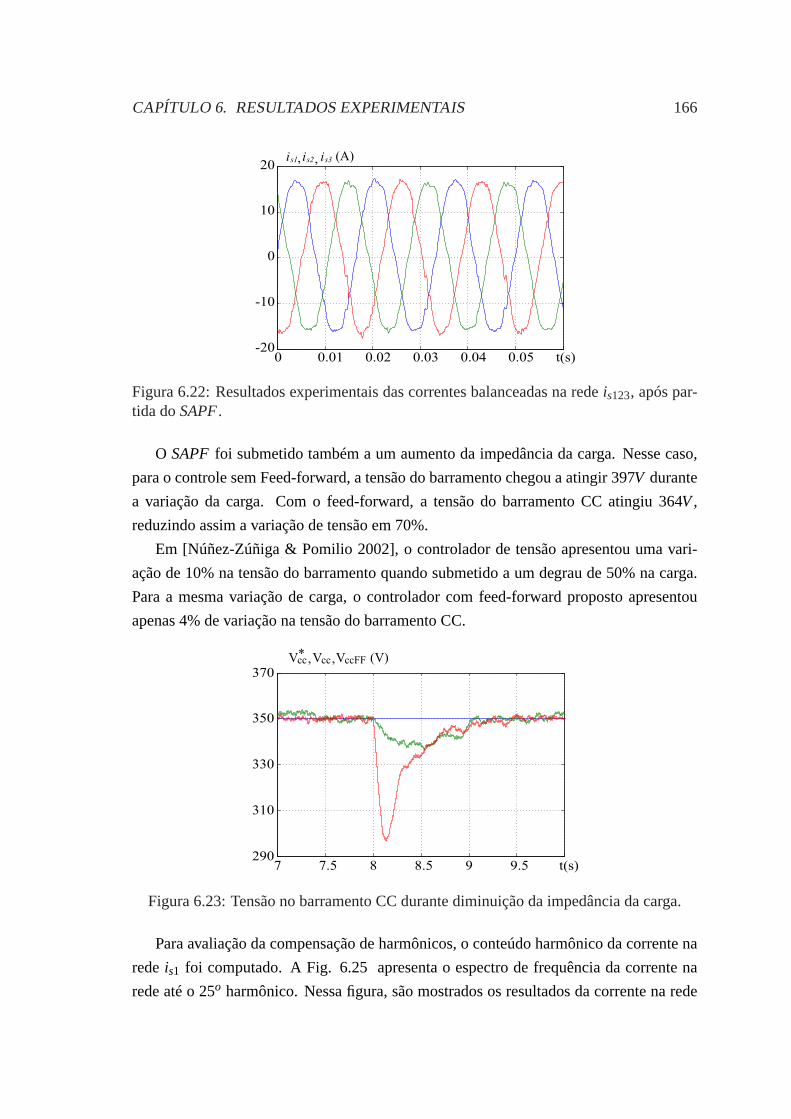
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 166
0 0.01 0.02 0.03 0.04 0.05 t(s)-20
-10
0
10
20is1, is2 is3, (A)
Figura 6.22: Resultados experimentais das correntes balanceadas na redeis123, após par-tida doSAPF.
O SAPF foi submetido também a um aumento da impedância da carga. Nesse caso,
para o controle sem Feed-forward, a tensão do barramento chegou a atingir397V durante
a variação da carga. Com o feed-forward, a tensão do barramento CC atingiu364V,
reduzindo assim a variação de tensão em 70%.
Em [Núñez-Zúñiga & Pomilio 2002], o controlador de tensão apresentou uma vari-
ação de 10% na tensão do barramento quando submetido a um degrau de 50% na carga.
Para a mesma variação de carga, o controlador com feed-forward proposto apresentou
apenas 4% de variação na tensão do barramento CC.
7 7.5 8 8.5 9 9.5 t(s)290
310
330
350
370Vcc
* ,Vcc ,VccFF (V)
Figura 6.23: Tensão no barramento CC durante diminuição da impedância da carga.
Para avaliação da compensação de harmônicos, o conteúdo harmônico da corrente na
redeis1 foi computado. A Fig. 6.25 apresenta o espectro de frequência da corrente na
rede até o25o harmônico. Nessa figura, são mostrados os resultados da corrente na rede
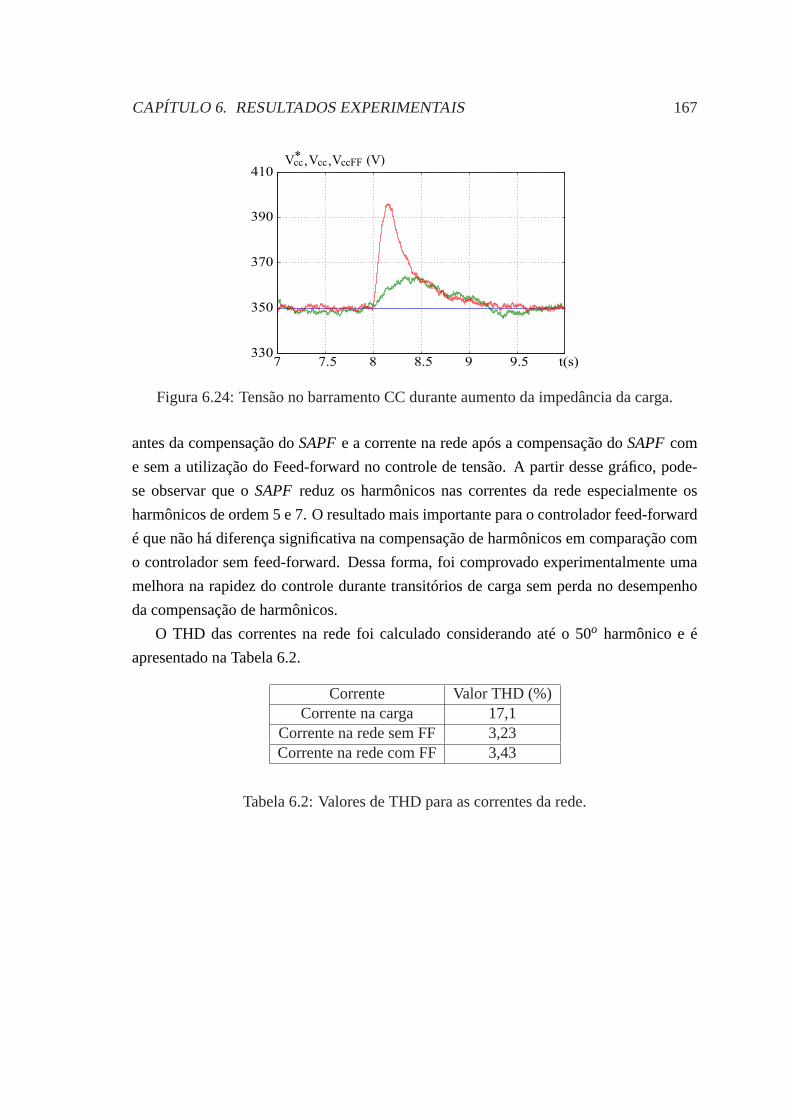
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 167
7 7.5 8 8.5 9 9.5 t(s)330
350
370
390
410Vcc
* ,Vcc ,VccFF (V)
Figura 6.24: Tensão no barramento CC durante aumento da impedância da carga.
antes da compensação doSAPFe a corrente na rede após a compensação doSAPFcom
e sem a utilização do Feed-forward no controle de tensão. A partir desse gráfico, pode-
se observar que oSAPF reduz os harmônicos nas correntes da rede especialmente os
harmônicos de ordem5 e7. O resultado mais importante para o controlador feed-forward
é que não há diferença significativa na compensação de harmônicos em comparação com
o controlador sem feed-forward. Dessa forma, foi comprovado experimentalmente uma
melhora na rapidez do controle durante transitórios de carga sem perda no desempenho
da compensação de harmônicos.
O THD das correntes na rede foi calculado considerando até o50o harmônico e é
apresentado na Tabela 6.2.
Corrente Valor THD (%)Corrente na carga 17,1
Corrente na rede sem FF 3,23Corrente na rede com FF 3,43
Tabela 6.2: Valores de THD para as correntes da rede.
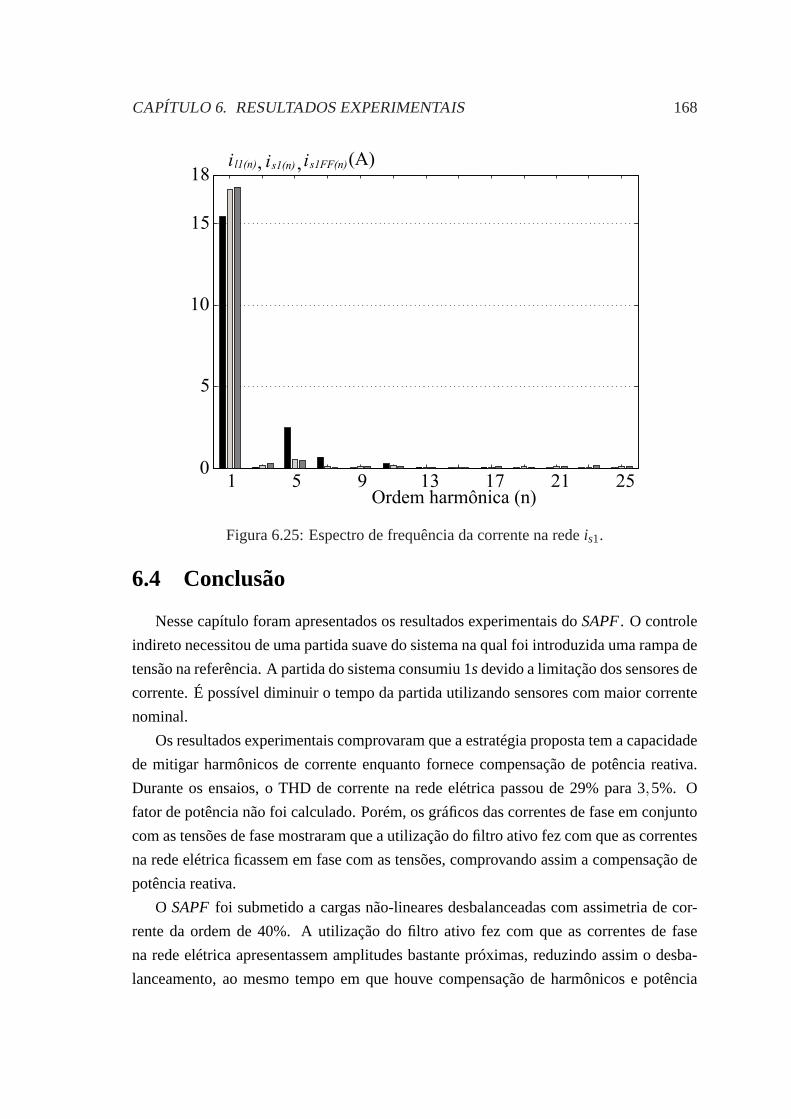
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 168
1 5 9 13 17 21 250
5
10
15
18
Ordem harmônica (n)
i l1(n), is1(n) is1FF(n), (A)
Figura 6.25: Espectro de frequência da corrente na redeis1.
6.4 Conclusão
Nesse capítulo foram apresentados os resultados experimentais doSAPF. O controle
indireto necessitou de uma partida suave do sistema na qual foi introduzida uma rampa de
tensão na referência. A partida do sistema consumiu1sdevido a limitação dos sensores de
corrente. É possível diminuir o tempo da partida utilizando sensores com maior corrente
nominal.
Os resultados experimentais comprovaram que a estratégia proposta tem a capacidade
de mitigar harmônicos de corrente enquanto fornece compensação de potência reativa.
Durante os ensaios, o THD de corrente na rede elétrica passou de29% para3,5%. O
fator de potência não foi calculado. Porém, os gráficos das correntes de fase em conjunto
com as tensões de fase mostraram que a utilização do filtro ativo fez com que as correntes
na rede elétrica ficassem em fase com as tensões, comprovando assim a compensação de
potência reativa.
O SAPF foi submetido a cargas não-lineares desbalanceadas com assimetria de cor-
rente da ordem de 40%. A utilização do filtro ativo fez com que as correntes de fase
na rede elétrica apresentassem amplitudes bastante próximas, reduzindo assim o desba-
lanceamento, ao mesmo tempo em que houve compensação de harmônicos e potência
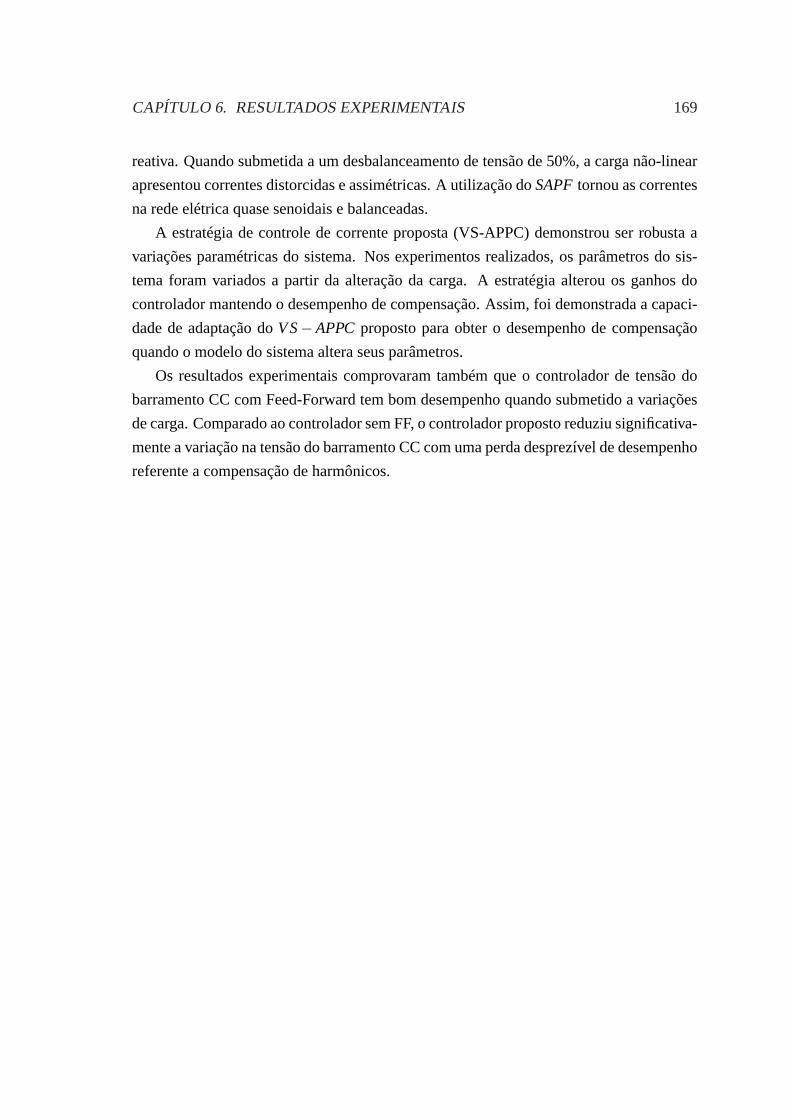
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS 169
reativa. Quando submetida a um desbalanceamento de tensão de 50%, a carga não-linear
apresentou correntes distorcidas e assimétricas. A utilização doSAPFtornou as correntes
na rede elétrica quase senoidais e balanceadas.
A estratégia de controle de corrente proposta (VS-APPC) demonstrou ser robusta a
variações paramétricas do sistema. Nos experimentos realizados, os parâmetros do sis-
tema foram variados a partir da alteração da carga. A estratégia alterou os ganhos do
controlador mantendo o desempenho de compensação. Assim, foi demonstrada a capaci-
dade de adaptação doVS−APPC proposto para obter o desempenho de compensação
quando o modelo do sistema altera seus parâmetros.
Os resultados experimentais comprovaram também que o controlador de tensão do
barramento CC com Feed-Forward tem bom desempenho quando submetido a variações
de carga. Comparado ao controlador sem FF, o controlador proposto reduziu significativa-
mente a variação na tensão do barramento CC com uma perda desprezível de desempenho
referente a compensação de harmônicos.
Capítulo 7
Conclusões e Trabalhos Futuros
7.1 Conclusões Gerais
Nesta tese foi proposta uma estratégia de controle adaptativa robusta para um SAPF
com o objetivo de compensar os harmônicos de corrente na rede elétrica, aumentar o
fator de potência e balancear as correntes em cargas não lineares. Além disso, foi pro-
posta também uma estratégia para o controlador de tensão com o objetivo de melhorar o
desempenho do controle indireto a variações da carga.
A maior contribuição desse trabalho está concentrada no controle do SAPF. A estraté-
gia de controle proposta foi implementada sem a necessidade de detecção de harmônicos
na carga e os requisitos de compensação foram atendidos controlando indiretamente as
correntes na rede elétrica. Dessa forma, a modelagem do SAPF considerou a influência
das tensões do filtro sobre as correntes na rede. Devido ao fato de não precisar de um es-
quema de detecção de harmônicos, o número de sensores de corrente utilizados no SAPF
é reduzido, diminuindo o custo efetivo para a implementação do SAPF. Além disso, existe
uma diminuição da carga computacional nesse método em comparação com os métodos
SRFe IPT. Isso pode refletir em requisitos computacionais menos exigentes para a im-
plementação prática do método. No entanto, é possível observar que o fato desse método
gerar correntes senoidais e em fase com a rede elétrica, impõe automaticamente para o
filtro ativo, a necessidade de drenar a potência reativa da carga. No projeto dos com-
ponentes do filtro ativo foi mostrado que a potência reativa drenada aumenta a potência
nominal do filtro, retirando assim a vantagem com relação à redução de peso, volume e
custo. Com base nisso, o método do controle indireto é mais indicado em aplicações que
necessitam de um equipamento único para solução de vários tipos de problemas de qua-
lidade de energia. Algumas aplicações sugeridas são sua utilização em aeronavesMEA
(More Electric Aircraft), em residências e em sistemas de baixa potência.
Para a estratégia de controle de corrente, foi proposto um controladorVS−APPC
CAPÍTULO 7. CONCLUSÕES E TRABALHOS FUTUROS 171
adaptativo robusto. Esse controlador é indicado para garantir estabilidade e desempenho
do sistema quando submetido a variações paramétricas e condições de desbalanceamento
da carga. A base teórica do controlador proposto foi detalhada e o procedimento de pro-
jeto também foi apresentado de uma forma genérica. Nesse trabalho, o controlador de
corrente foi integrado ao controle indireto para a implementação do SAPF. Todos os cál-
culos e resultados obtidos tiveram como base essa integração. Porém, nos casos em que
não for interessante utilizar o controle indireto de corrente como método de geração das
correntes de referência, é possível utilizar o controladorVS−APPCcom outros métodos,
tais como oSRFe IPT.
Para o controle do barramento CC foi utilizado um controladorPI e a técnicaSOTO,
para o projeto desse controlador. A particularidade desse controlador em relação a um
filtro ativo convencional é que a saída do controlador é uma referência de corrente na rede
elétrica e não a corrente no filtro. Com isso, o controlador do barramento CC possui uma
maior responsabilidade uma vez que a qualidade do sinal de referência afeta diretamente
a distorção de corrente na rede elétrica e o fator de potência.
Várias simulações computacionais foram realizadas para comparação dos controladores
propostos com estratégias já conhecidas. O chaveamento de parâmetros no controlador
VS-APPC causou uma pequena perda na compensação de harmônicos de corrente. Esse
chaveamento foi necessário para estimação de parâmetros a ser usada na adaptação do
controlador para aumento de robustez. As simulações também mostraram vantagens do
controle indireto em SAPFs em relação ao desempenho com carga desbalanceada e com
tensões de alimentação desbalanceadas.
O desempenho da estrutura do SAPF proposta foi comprovada a partir de resultados
experimentais. O filtro ativo apresentou resultados satisfatórios quanto à compensação de
harmônicos, aumento do fator de potência e balanceamento das correntes na rede elétrica.
Com relação à compensação de harmônicos, o filtro ativo reduziu a distorção harmônica
nas correntes da rede elétrica para um patamar abaixo de 5% deTHD.
O filtro ativo foi submetido à variação paramétrica. Nesse caso, os ganhos do contro-
lador sofreram variações nas suas médias para o desempenho do SAPF seguir o polinômio
adequadoA∗s(s).O controle da tensão do barramento CC apresentou também resultados satisfatórios,
com erro de regime permanente baixo. Pelo fato do controle de tensão gerar uma refe-
rência de corrente na rede elétrica, o transitório na partida necessita de uma estratégia de
partida suave. Nesse trabalho foi utilizada a inicialização dos estados do controlador e
uma rampa de subida na referência de tensão. O projeto do controlador do barramento
CC possui uma relação de compromisso entre desempenho do controle de tensão e o
CAPÍTULO 7. CONCLUSÕES E TRABALHOS FUTUROS 172
THD de corrente na rede elétrica. Quanto mais rápido o controle, maior a quantidade de
harmônicos presentes na referência de corrente. Essa restrição faz com que o controlador
de tensão seja projetado para uma banda passante reduzida. O inconveniente acontece
quando há variações de carga: como a dinâmica da referência de corrente é lenta, o filtro
ativo absorve a potência excedente da rede elétrica ou fornece o déficit de potência para a
carga. Consequentemente, a tensão no barramento CC sofre uma queda ou um aumento
repentino. Para superar esse problema, foi utilizado um controlador Feedforward para
antecipar a referência de corrente na rede elétrica com o objetivo de minimizar a variação
de tensão no barramento CC. Os resultados experimentais comprovaram uma melhora
significativa no controle da tensão do barramento CC com a inclusão do feed-forward.
7.2 Perspectivas de Trabalhos Futuros
Ao longo do desenvolvimento das estratégias de controle propostas surgiram alterna-
tivas e possibilidades de melhoramento que podem ser investigadas. A primeira dessas
possibilidades é o controle indireto com a compensação apenas de harmônicos. O con-
trole indireto compensa também a potência reativa podendo aumentar a potência nominal
do filtro ativo. Dessa forma, a compensação apenas dos harmônicos teria o objetivo de
diminuir a potência nominal necessária do filtro. A modificação do controle utilizando a
estimação das correntes no filtro poderia manter a vantagem do controle indireto de re-
dução de sensores. A estimação das correntes no filtro possibilitaria também acrescentar
um limitador de corrente no filtro para proteção. O controle indireto com VS-APPC pode-
ria ser extendido para aplicações como conversores trifásicos para sistemas de cogeração
e também para aplicações monofásicas.
Com o intuito de melhorar ainda mais a compensação de harmônicos em relação ao
controle VS-APPC, poderiam ser investigados métodos para identificação da impedância
da rede e realizar a adaptação do controle de corrente a partir do escalonamento de ganhos.
Com relação ao controlador de tensão do barramento CC, seria interessante utilizar
o controlador VS-APPC nessa malha para adaptação e aumento de robustez. Também
poderia ser utilizado o escalonamento de ganhos no controlador de tensão, uma vez que
o modelo de tensão no barramento CC varia principalmente em função de uma variável
conhecida, a própria tensão no capacitor.
Referências Bibliográficas
Akagi, H. (1994), ‘Trends in active power line conditioners’,IEEE Trans. Power Electron.
9(3), 263–268.
Akagi, H. (1996a), ‘New trends in active filters for power conditioning’,IEEE Trans. Ind.
Applicat.32(6), 1312–1322.
Akagi, H. (1996b), ‘New trends in active filters for power conditioning’,IEEE Trans. on
Industry Applications32(6), 1312–1322.
Akagi, H. (1997), ‘Control strategy and site selection of a shunt active filter for damping of
harmonic propagation in power distribution systems’,IEEE Trans. Power Delivery
12(1), 354–363.
Akagi, H. (2005), Active harmonic filters,em‘In Proc. of the IEEE’, Vol. 93, pp. 2128–
2141.
Akagi, H. (2006), ‘Modern active filters and traditional passive filters’,BULLETIN OF
THE POLISH ACADEMY OF SCIENCES54(3), 255–269.
Akagi, H., E. H. Watanabe & M. Aredes (2007),Instantaneous Power Theory and Appli-
cations to Power Conditioning, IEEE Press, Piscataway - NJ.
Akagi, H., Y. Kanazawa & A. Nabae (1984), ‘Instantaneous reactive power compensator
comprising switching devices without energy storage components’,IEEE Trans. In-
dustry Applications20(3), 625–630.
Akagi, H., Y. Tsukamoto & A. Nabae (1990), ‘Analysis and design of an active power
filter using quad-series voltage source pwm converters’,IEEE Trans. Ind. Applicat.
26, 93–98.
Al-Zamil, A.M. & D.A. Torrey (2000), Harmonic compensation for three-phase ad-
justable speed drives using active power line conditioner,em ‘Power Engineering
Society Summer Meeting’, Vol. 2, pp. 867–872.
173
REFERÊNCIAS BIBLIOGRÁFICAS 174
Antchev, M., M. Petkova & M. Petkov (2007), Single-phase shunt active power filter
using frequency limitation and hysteresis current control,em ‘Power Conversion
Conference’, pp. 97–102.
Aredes, M. & R.M. Fernandes (2009), A unified power quality conditioner with voltage
sag/swell compensation capability,em ‘Brazilian Power Electronics Conference -
COBEP’, pp. 218–224.
Arrillaga, J. & N. R. Watson (2003),Power System Harmonics, 2a edição, John Wiley and
Sons Ltd.
Asiminoaei, L., F. Blaabjerg, S. Hansen & P. Thogersen (2008), ‘Adaptive compensa-
tion of reactive power with shunt active power filters’,IEEE Trans. Ind. Applicat.
44(3), 867 – 877.
Astrom, K.J. & T. Hagglung (1995),PID Controllers, 2nd Edition, 2nda edição, ISA.
Azevedo, C.C., R.L.A. Ribeiro, C.B. Jacobina, A.M.N. Lima & T.M. Oliveira (2001),
Eliminating the common-mode voltage in ac drive systems using a four-phase ma-
chine,em‘Industry Applications Conference’, Vol. 2, p. 859.
Azevedo, C.C., R.L.A. Ribeiro, C.B. Jacobina & R.M. Sousa (2011), Dc-link regulator
for shunt power active filter using feed-forward control strategy,em‘Brazilian Power
Electronics Conference - COBEP’, pp. –.
Bhattacharya, S. & D. Divan (1995), Synchronous frame based controller implementa-
tion for a hybrid series active filter system,em‘Industry Applications Conference’,
Vol. 3, pp. 2531–2540.
Bhattacharya, S. & D. Divan (1996), Active filter solutions for utility interface of indus-
trial loads,em ‘International Conference on Power Electronics, Drives and Energy
Systems for Industrial Growth’, Vol. 2, pp. 1078–1084.
Bhattacharya, S., D. Divan & B. Benerjee (1991), ‘Synchronous frame harmonic isolator
using active series filter’,in Proc. EPE’91 Conf.3, 30–35.
Bhattacharya, S., T.M. Frank, D.M. Divan & B. Banerjee (1998), ‘Active filter system
implementation’,IEEE Industry Applications Magazinepp. 47–63.
Bojoi, R. I., G. Griva, V. Bostan, M Guerriero, F. Farina & F. Profumo (2005), ‘Cur-
rent control strategy for power conditioners using sinusoidal signal integrators in
synchronous reference frame’,IEEE Trans. Power Electron.20(6), 1402–1412.
REFERÊNCIAS BIBLIOGRÁFICAS 175
Bollen, M. (1999),Understanding Power Quality Problems: Voltage Sags and Interrup-
tions, John Wiley Sons, Inc., New York, USA.
Bose, B. K. (2006),Power Electronics and Motor Drives, Elsevier Inc.
Bose, B.K. (1990), ‘An adaptive hysteresis band current control technique of a voltage
feed pwm inverter for machine drive system’,IEEE Transactions on Power Elec-
tronics37(5), 402–406.
Bossio, G.R., C.H. De Angelo, P.D. Donolo, A.M. Castellino & G.O. Garcia (2009),
Effects of voltage unbalance on im power, torque and vibrations,em ‘IEEE Inter-
national Symposium on Diagnostics for Electric Machines, Power Electronics and
Drives’, pp. 1–6.
Braz, E.C., R.L.A. Ribeiro & A.C. Oliveira (2008), A robust adaptive strategy for im-
proving harmonic compensation in shunt active power filters,em‘Power Electronics
Specialists Conference’, p. 3419.
Buso, S., L. Malesani & P. Mattavelli (1998), ‘Comparison of current control tech-
niques for active filter applications’,IEEE Transactions on Industrial Electronics
45(5), 722–729.
Cardenas, V., N. Vazquez, C. Hernandez & S. Horta (1999), Analysis and design of three
phase sliding mode controller for a shunt active power filter,em ‘In Proc. IEEE
PESC, IAS Annual Meeting’, Vol. 1, pp. 219–223.
Chandra, Ambrish, B.N. Singh Bhim Singh & Kamal Al-Haddad (2000), ‘An im-
proved control algorithm of shunt active filter for voltage regulation, harmonic
elimination,power-factor-correction, and balancing of nonlinear loads’,IEEE Trans.
Power Electron.15(3), 495–507.
Chaoui, A., J.P. Gaubert, F. Krim & L. Rambault (2008), On the design of shunt active
filter for improving power quality,em‘IEEE International Symposium on Industrial
Electronics (ISIE)’, pp. 31–37.
Clarke, E. (1943),Circuit Analysis of AC Power Systems, Vol. I - Symetrical and Related
Components, Wiley.
Czarnecki, L. S. (1987), ‘What is wrong with the budeanu concept of reactive and power
and why it should be abandoned’,IEEE Trans. on Instrumentation and Measurement
IM-36 (3), 834–837.
REFERÊNCIAS BIBLIOGRÁFICAS 176
Czarnecki, L. S. (1997), ‘Budeanu and fryze: Two frameworks for interpreting power
properties of circuits with nonsinusoidal voltages and currentsmodern active filters
and traditional passive filters’,Electrical Engineering(80), 359–367.
Das, J.C. (2004), ‘Passive filterspotentialities and limitations’,IEEE Transactions on In-
dustry Applications40(1), 232–241.
Deckmann, S.M. & J.A. Pomilio (2004), Uso de filtros passivos em redes de distribuição
com cargas não-lineares,em‘XV Congresso Brasileiro de Automática’.
Dixon, J., J. Contardo & L. Moran (1997), Dc link fuzzy control for an active power
filter, sensing the line current only,em ‘Power Electronics Specialists Conference
(PESC)’, Vol. 2, p. 1109.
Dugan, R. C., M. F. MacGranagham, S. Santoso & H. W. Beaty (2004),Electrical Power
System Quality, 2a edição, McGraw-Hill.
Emadi, Ali, Abdolhosein Nasiri & Stoyan B. Bekiarov (2005),Uninterruptible Power
Supplies and Active Filters, CRC Press LLC, Chicago, IL.
EN 50160, Voltage characteristics of electricity supplied by public distribution systems
(1999).
Freijedo, F.D., J. Doval-Gandoy, O. Lopez, P. Fernandez-Comesana & C. Martinez-
Penalver (2009), ‘A signal-processing adaptive algorithm for selective current har-
monic cancellation in active power filters’,IEEE Trans. Ind. Electron.56(8), 2829 –
2840.
Grady, W.M., M.J. Samotyj & A.H. Noyola (1990), ‘Survey of active power line
co.nditioning methodologies’,IEEE Transactions on Power Delivery5(3), 1536–
1542.
Gyugyi, L. & E.C. Strycula (1976), Active power filters,em‘IEEE - IAS Ann. Meeting’,
pp. 529–535.
Hu, H., W. Shi, J. Xue, Y. Lu & Y. Xing (2010), A multi-resolution control strategy for dsp
controlled 400hz shunt active power filter in an aircraft power system,em‘Applied
Power Electronics Conference and Exposition (APEC)’, pp. 1785–1791.
Huang, J., K. Padmanabhan & O.M. Collins (2011), ‘The sampling theorem with constant
amplitude variable width pulses’,IEEE Trans. on Circuits and Systems58(3), 1178–
1190.
REFERÊNCIAS BIBLIOGRÁFICAS 177
Huang, S. & J. Wu (1999), ‘A control algorithm for three-phase three-wired active power
filters under nonideal mains voltages’,IEEE Transactions on Power Electronics
14(1), 753.
Iannou, P.A. & A. Datta (1991),Robust Adaptive Control: Design, Analysis and Robust-
ness Bounds, Grainger Lectures: Foundations of Adaptive Control, Springer-Verlag,
Nova Iorque.
IEE (1992),IEEE Std 519-1992, IEEE Recommended Practices and Requirements for
Harmonic Control in Electrical Power Systems.
Ingram, D.M.E. & S.D. Round (1999), ‘A fully digital hysteresis current controller for an
active power filter’,International Journal of Electronics86(10), 1217–1232.
Izhar, M., C.M. Hadzer, M. Syafrudin, S. Taib & S. Idris (2004), Performance for passive
and active power filter in reducing harmonics in the distribution system,em‘Power
and Energy Conference’, pp. 359–367.
Jacobina, C.B., M.B.R. Correa, R.F. Pinheiro, E.R.C da Silva & A.M.N. Lima (2001),
‘Modeling and control of unbalanced three-phase systems containing pwm convert-
ers’, IEEE Trans. Ind. Applicat.37(6), 1807–1816.
Jacobina, C.B., R.O. de Carvalho, M.B.R. Correa, A.M.N. Lima & E.R.C. da Silva
(2000), Digital current control of unbalanced three-phase power electronic systems,
em‘Power Electronics Specialists Conference (PESC)’, Vol. 2, p. 767.
Jones, J. (1997), ‘Understanding electric arc furnace operation’,TechComentary TC-
107714pp. 1–6.
José, B.D.S., A.B.Vasconcellos, A.V.Festa, C.M.S. Neto, T.V. Silva & P.N.Cocchia
(2010), Aplicação de filtros harmônicos passivos em um sistema de acionamento
de máquinas motrizes,em‘Presented as the 9th IEEE/IAS International Conference
on Industry Applications’.
Jr., F.C. Silva, A.D. Araujo & J.B. Oliveira (2004), A proposal for a variable structure
adaptive pole placement control,em ‘Conf. Rec. Workshop on Variable Structure
Systems’.
Kale, M. & E. Ozdemir (2003), A novel adaptive hysteresis band current controller for
shunt active power filter,em ‘Proceedings of the IEEE Conference on Control Ap-
plications’, Vol. 2, pp. 1118–1123.
REFERÊNCIAS BIBLIOGRÁFICAS 178
Kopta, A., M. Rahimo, D. Shneider, E. Carrol & S. Linder (2005), A 6.5 kv igbt module
with very high safe operating area,em ‘Industry Applications Conference (IAS)’,
Vol. 2, pp. 794–798.
Kosow, Irving L. (1982),Máquinas Elétricas e Transformadores, 4a edição, Editora
Globo, Porto Alegre, Brasil.
Lascu, C., L. Asiminoaei, I. Boldea & F. Blaabjerg (2009), ‘Frequency response analysis
of current controllers for selective harmonic compensation in active power filters’,
IEEE Trans. Ind. Electron.56(2), 337–347.
Lee, J.K., J.K. Seok & D.C. Lee (2004), Unified active power filters for source voltage un-
balanca/current harmonics compensation and power factor correction,em‘Industrial
Electronics Society Annual Conference - IECON’, Vol. 1, pp. 540–545.
Longhui, W., Z. Fang, Z. Pengbo, L. Hongyu & W. Zhaoan (2007), ‘Study on the influence
of supply-voltage fluctuation on shunt active power filter’,IEEE Trans. on Power
Delivery2(3), 1743–1749.
Malesani, L., P. Matavelli & S. Buso (1999), ‘Robust dead-beat current control for pwm
rectfiers and active filters’,IEEE Trans. Ind. Applicat.35(3), 613–620.
Markiewicz, Henryk & Antoni Klajn (2004), Voltage disturbances, Power quality appli-
cation guide, Copper Development Association.
Massoud, A.M., S.J. Finney & B.W. Williams (2004), Seven-level shunt active power
filter, em‘International Conference on Harmonics and Quality of Power’, pp. 136–
141.
Matavelli, P. (2001), ‘A closed-loop selective harmonic compensation for active filters’,
IEEE Trans. Ind. Applicat.37(1), 81–89.
Módulo 8 Qualidade da Energia Elétrica(2010), Procedimentos de distribuição de ener-
gia elétrica no sistema elétrico nacional prodist, ANEEL.
Mendalek, N. & H. Al-Haddad (2000), Modeling and nonlinear control of shunt active
power filter in the synchronous reference frame,em‘Proceedings on Harmonics and
Quality of Power’, pp. 30–35.
Neves, P., D. Gonçalves, J.G. Pinto, R. Alves & J.L. Afonso (2009), Single-phase shunt
active filter interfacing renewable energy sources with the power grid,em‘Industrial
Electronics Conference (IECON)’, pp. 3264–3269.
REFERÊNCIAS BIBLIOGRÁFICAS 179
Newman, M. J., D. N. Zmood & D. G. Holmes (2002), ‘Stationary frame harmonic ref-
erence generation for active filter systems’,IEEE Trans. Ind. Applicat.38(6), 1591–
1599.
Núñez-Zúñiga, T.E. & J.A. Pomilio (2002), ‘Shunt active power filter synthesizing resis-
tive loads’,IEEE Transactions on Power Electronics17(2), 273–278.
Ohm, D.Y. & R.J. Oleksuk (1998), On practical digital current regulator design for pm
synchronous motor drives,em‘APEC ’98 Conference Proceedings’, Vol. 1, pp. 56 –
63.
Omori, J.S. (2007), Aplicação de filtro ativo trifásico em sistemas de distribuição de baixa
tensão, Dissertação de mestrado, Universidade Tecnológica Federal do Paraná, Cu-
ritiba - PR.
Ozkaya, H. (2007), Parallel active filter design, control and implementation, Dissertação
de mestrado, Middle East Technical University.
Park, R.H. (1929), ‘Two-reaction theory of synchronous machinesgeneralized method of
analysispart 1’,AIEE Trans.48, 716–727.
Peng, Fang Z. (1998), ‘Application issues of active power filters’,IEEE Industry Appli-
cations Magazinepp. 21–30.
Peng, Fang Z. (2001), ‘Harmonic sources and filtering approaches’,IEEE Industry Appli-
cations Magazine(Jul-Aug), 18–25.
Peng, F.Z., H. Akagi & A. Nabae (1990), ‘A new approach to harmonic compensation in
power systems-a combined system of shunt passive and series active filters’,IEEE
Trans. on Industry Applications26(6), 834–837.
Ponnaluri, S. & A. Brickwedde (2001), Generalized system design of active filters,em
‘PESC 2001 Conference Proceedings’, Vol. 3, pp. 1414 – 1419.
Pottker, F. & I. Barbi (1997a), Power factor correction of non-linear loads employing a
single phase active power filter: control strategy, design methodology and experi-
mentation,em‘Power Electronics Specialists Conference Records - PESC’, Vol. 1,
pp. 412–417.
REFERÊNCIAS BIBLIOGRÁFICAS 180
Pottker, F. & I. Barbi (1997b), Power factor correction of non-linear loads employing a
single phase active power filter: control strategy, design methodology and experi-
mentation,em‘Power Electronics Specialists Conference (PESC)’, Vol. 1, pp. 412–
417.
Prusty, S.R., S.K. Ram, B.D. Subudhi & K.K. Mahapatra (2011), Performance analysis
of adaptive band hysteresis current controller for shunt active power filter,em‘IEEE
Conf, ICETECT’, pp. 425–429.
Rajpurohit, B.S. & S.N. Singh (2007), Performance evaluation of current control algo-
rithms used for active power filters,em‘Eurocon - The International Conference on
Computer as a Tool’, pp. 2570–2575.
Rastogi, M., R. Naik & N. Mohan (1994), ‘A comparative evaluation of harmonic re-
duction techniques in three-phase utility interface of power electronic loads’,IEEE
Transactions on Industry Applications30(5), 1149–1155.
Ribeiro, R.L.A., C.C. Azevedo & R.M. Sousa (2010), A non-standard adaptive control
for shunt active power filter without current harmonic detection,em‘Industrial Elec-
tronics Conference’, p. 2007.
Ribeiro, R.L.A., C.C. Azevedo & R.M.Sousa (2012), ‘A robust adaptive control
strategy of active power filters for power-factor correction, harmonic compen-
sation, and balancing of nonlinear loads’,IEEE Trans. Power Electron. DOI:
10.1109/TPEL.2011.216133427(2), 718–730.
Routimo, M., M. Salo & H. Tuusa (2003), A novel control method for wideband harmonic
compensation,em‘Power Electronics and Drive Systems - PEDS’, Vol. 1, pp. 799–
804.
Routimo, M., M. Salo & H. Tuusa (2007), ‘Comparison of voltage-source and current-
source shunt active power filters’,IEEE Trans. on Power Electronics22(2), 636–
643.
Salam, Z., T.P. Cheng & A. Jusoh (2006), ‘Harmonics mitigation using active power filter:
A technological review’,Elektrika - Journal of Electrical Engineering8(2), 17–26.
Salmeron, P., R.S. Herrera, A.P. Valles & J. Prieto (2009), ‘New distortion and unbal-
ance indices based on power quality analyzer measurements’,IEEE Transactions on
Power Delivery24(2), 501.
REFERÊNCIAS BIBLIOGRÁFICAS 181
Shyu, Kuo-Kai, Ming-Ji Yang, Yen-Mo Chen & Yi-Fei Lin (2008), ‘Model reference
adaptive control design for a shunt active-power-filter system’,IEEE Trans. Ind.
Electron.55(1), 97 – 106.
Singh, B., K. Al-Haddad & A. Chandra (1999), ‘A review of active filters for power
quality improvements’,IEEE Trans. Ind. Electron.46(5), 960–971.
Singh, B.N., A. Chandra & K. Al-Haddad (1998), Performance comparison of two current
control techniques applied to an active filter,em ‘Conference on Harmonics and
Quality of Power’, Vol. 1, p. 133.
Soares, V, P. Verdelho & G.D. Marques (2000), ‘An instantaneous active and reactive cur-
rent component method for active filters’,IEEE Trans. Power Electron.15(4), 660–
669.
Subjak, J.S. & J.S. McQuilkin (1990), ‘Harmonics-causes, effects, measurements, and
analysis: an update’,IEEE Transactions on Industry Applicationsp. 1034.
Sung, N., J. Lee, B. Kim, M. Park & I. Yu (2002), Novel concept of a pv power generation
system adding the function of shunt active filter,em‘Transmission and Distribution
Conference and Exhibition’, Vol. 3, pp. 1658–1663.
Terciyanli, A., M. Ermis & I. Cadirci (2011), ‘A selective harmonic amplification method
for reduction of kva rating of current source converters in shunt active power filters’,
IEEE Trans. Power Delivery26(1), 65–78.
Trovão, João Pedro, Paulo Pereirinha & Humberto Jorge (2006), Ieee standard 519-
1992 application in industrial power distribution networks with a new monitoring
approach,em ‘Proceedings of the 6th WSEAS International Conference on Power
Systems’, Lisbon, Portugal, pp. 244–249.
Turunen, J. (2009), Series Active Power Filter in Power Conditioning, Tese de doutorado,
Tampere University of Technology, Tampere.
Uyyuru, K. R., M. K. Mishra & A. Ghosh (2009), ‘An optimization-based algorithm for
shunt active filter under distorted supply voltages’,IEEE Trans. Power Electron.
24(5), 1223–1232.
Valdez, A.A., G. Escobar & R. Ortega (2009), ‘An adaptive controller for shunt active
filter considering a dynamic load and the line impedance’,IEEE Trans. Control
Systems Technol.17(2), 458–464.
REFERÊNCIAS BIBLIOGRÁFICAS 182
Vaz, A.R. (2006), Filtro Ativo de Potência Trifásico Paralelo Comandado para Várias
Funções - Aspectos Teóricos e Práticos e Reator Eletrônico Alto FP: Contribuições
a Otimização da Qualidade de Energia, Tese de doutorado, Universidade Federal de
Uberlândia, Uberlândia - MG.
Verdelho, P. & G.D. Marques (1994), Design and performance of an active power filter
and unbalanced current compensator,em ‘IECON 1994 Conference Proceedings’,
Vol. 1, pp. 422 – 427.
Verdelho, P. & G.D. Marques (1997), ‘An active power filter and unbalanced current
compensator’,IEEE Trans. Ind. Electron.44(3), 321–328.
Vervenne, I., K. Van Reusel & R. Belmans (2006), Electric arc furnace modelling from
a power quality point of view,em‘3RD IEEE Benelux Young Researchers Sympo-
sium in Electrical Power Engineering’, Ghent, Belgium.
White, D.C. & H.H. Woodson (1959),Electromechanical energy conversion, John Wiley
and Sons.
Yuan, X., W. Merk, Stemmler H & J. Allmeling (2002), ‘Stationary-frame generalized
integrators for current control of active power filters with zero steady-state error for
current harmonics of concern under unbalanced and distorted operating conditions’,
IEEE Trans. Ind. Applicat.38(2), 523–532.
Apêndice A
Modelo do Capacitor
Para o modelo dinâmico do capacitor no contexto do controle indireto doSAPF é
interessante avaliar o impacto da corrente da rede elétrica sobre a tensão no capacitor.
Fazendo inicialmento o cálculo da potência na rede elétrica para um sistema trifásico
equilibrado a três fios, tem-se:
P = vesdi
esd (A.1)
Considerando as tensões de alimentação balanceadas e senoidais, a tensãovesd é:
vesd =
√3V, (A.2)
onde V é o valor eficaz da tensão de fase na rede. Assim, a potência pode ser representada
por:
P =√
3Viesd. (A.3)
Por outro lado, no capacitor do barramento CC, a potência suprida ou absorvida
provoca variações na tensão. A energia armazenada no capacitor é:
Ec =12CV2
c . (A.4)
Portanto, a potência no capacitor pode ser calculada como
P =ddt
Ec (A.5)
P = CVcdVc
dt. (A.6)
Considerando o sistema sem perdas e sem perturbações, a potência na rede é equiva-

APÊNDICE A. MODELO DO CAPACITOR 184
lente à potência no capacitor:
√3Viesd = CVc
dVc
dt(A.7)
dVc
dt=√
3VCVc
iesd. (A.8)
A Eq. (A.8) mostra que a variação da tensão do capacitor em função da corrente na
rede é representado por um sistema não-linear:
·Vc = f (Vc, i
esd) (A.9)
Qualquer ponto(Vc,0) é um ponto de equilíbrio, pois
f (Vc, iesd) =
√3V
CVc0 = 0 (A.10)
Dessa forma, a linearização def (Vc, iesd) em torno do ponto de equilíbrio(Vc,0) é:
f (Vc, iesd) = f (Vc,0)+
∂ f∂Vc
∣∣∣∣(Vc,0)
(Vc−Vc)+∂ f∂iesd
∣∣∣∣(Vc,0)
(iesd) (A.11)
f (Vc, iesd) = 0+0(Vc−Vc)+
√3V
CVc(iesd) (A.12)
f (Vc, iesd) =
√3V
CVciesd. (A.13)
Dessa forma, em torno do ponto(Vc,0), o modelo para pequenos sinais pode ser
aproximado para:
·Vc =
√3V
CVciesd (A.14)
A função de transferência pode ser obtida, fazendo:
sVc =√
3V
CVciesd (A.15)
Vc
iesd=√
3V
Vc
1sC
(A.16)
Apêndice B
Fotos da Montagem
Figura B.1: Foto do protótipo doSAPF.
APÊNDICE B. FOTOS DA MONTAGEM 186
Figura B.2: Foto do sistema. Da esquerda para direita: carga não-linear,SAPFe com-putador com software em tempo real.
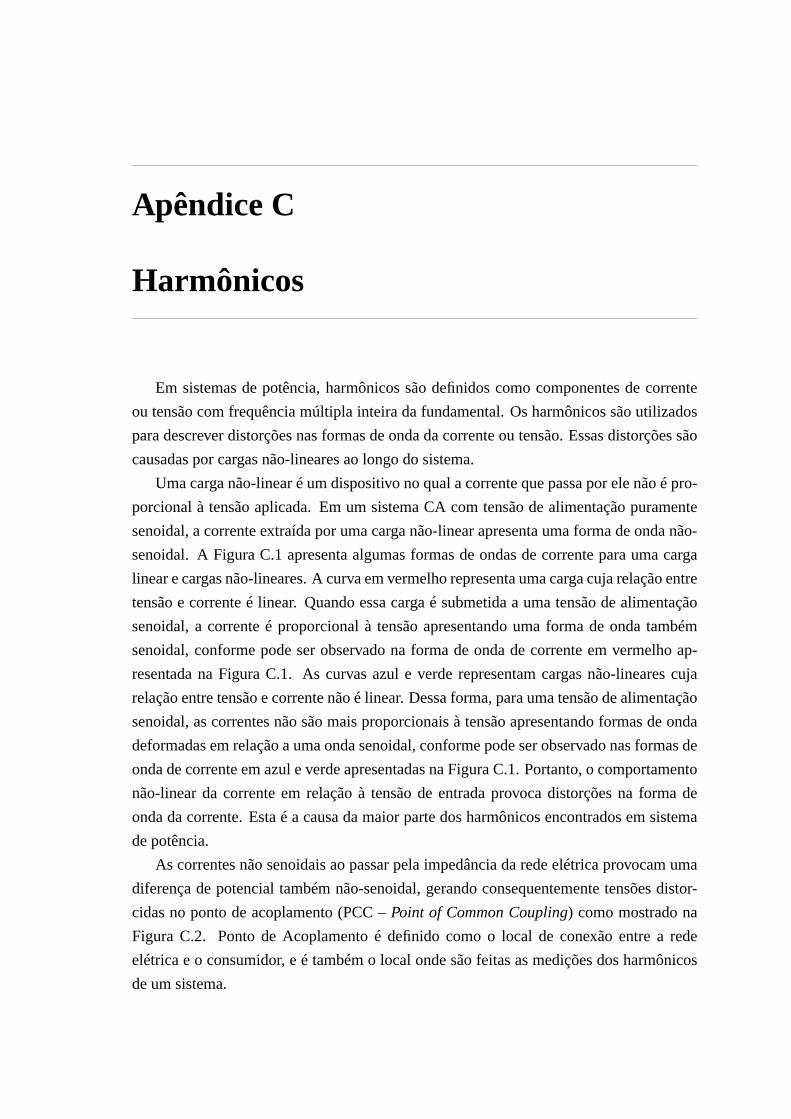
Apêndice C
Harmônicos
Em sistemas de potência, harmônicos são definidos como componentes de corrente
ou tensão com frequência múltipla inteira da fundamental. Os harmônicos são utilizados
para descrever distorções nas formas de onda da corrente ou tensão. Essas distorções são
causadas por cargas não-lineares ao longo do sistema.
Uma carga não-linear é um dispositivo no qual a corrente que passa por ele não é pro-
porcional à tensão aplicada. Em um sistema CA com tensão de alimentação puramente
senoidal, a corrente extraída por uma carga não-linear apresenta uma forma de onda não-
senoidal. A Figura C.1 apresenta algumas formas de ondas de corrente para uma carga
linear e cargas não-lineares. A curva em vermelho representa uma carga cuja relação entre
tensão e corrente é linear. Quando essa carga é submetida a uma tensão de alimentação
senoidal, a corrente é proporcional à tensão apresentando uma forma de onda também
senoidal, conforme pode ser observado na forma de onda de corrente em vermelho ap-
resentada na Figura C.1. As curvas azul e verde representam cargas não-lineares cuja
relação entre tensão e corrente não é linear. Dessa forma, para uma tensão de alimentação
senoidal, as correntes não são mais proporcionais à tensão apresentando formas de onda
deformadas em relação a uma onda senoidal, conforme pode ser observado nas formas de
onda de corrente em azul e verde apresentadas na Figura C.1. Portanto, o comportamento
não-linear da corrente em relação à tensão de entrada provoca distorções na forma de
onda da corrente. Esta é a causa da maior parte dos harmônicos encontrados em sistema
de potência.
As correntes não senoidais ao passar pela impedância da rede elétrica provocam uma
diferença de potencial também não-senoidal, gerando consequentemente tensões distor-
cidas no ponto de acoplamento (PCC –Point of Common Coupling) como mostrado na
Figura C.2. Ponto de Acoplamento é definido como o local de conexão entre a rede
elétrica e o consumidor, e é também o local onde são feitas as medições dos harmônicos
de um sistema.
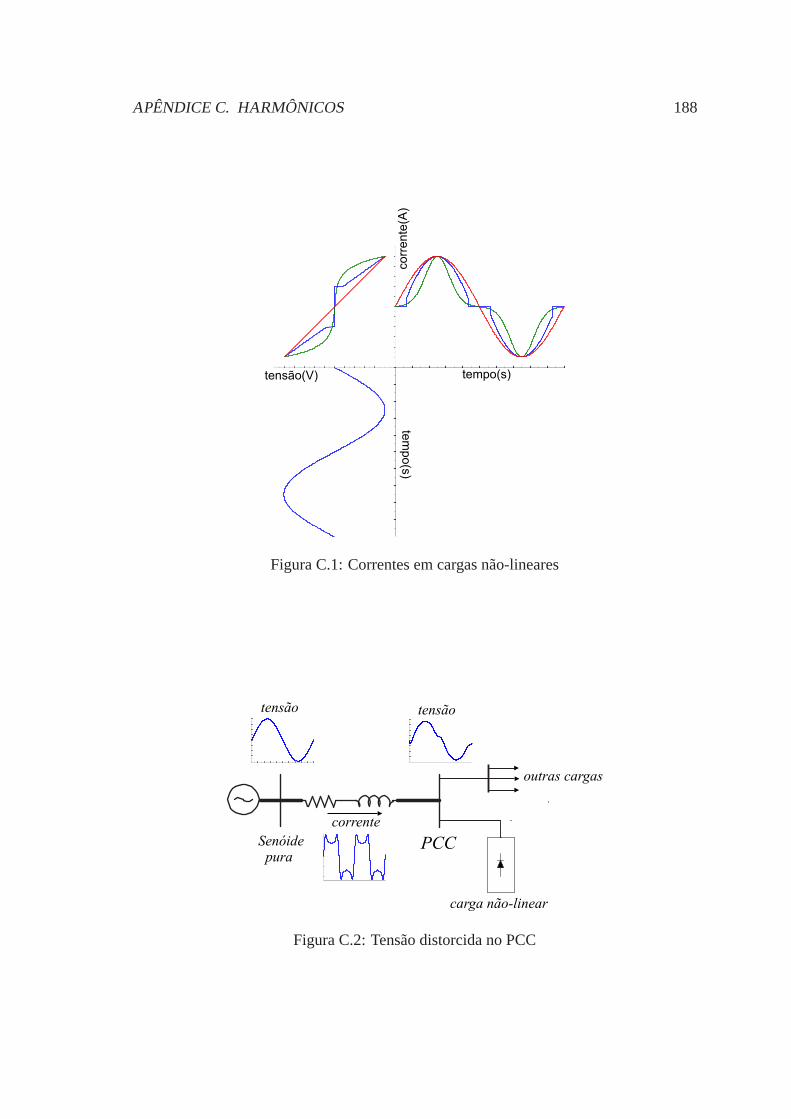
APÊNDICE C. HARMÔNICOS 188
tem
po(s
)tempo(s)tensão(V)
corr
ente
(A)
Figura C.1: Correntes em cargas não-lineares
carga não-linear
outras cargas
PCCSenóidepura
tensão tensão
corrente
Figura C.2: Tensão distorcida no PCC
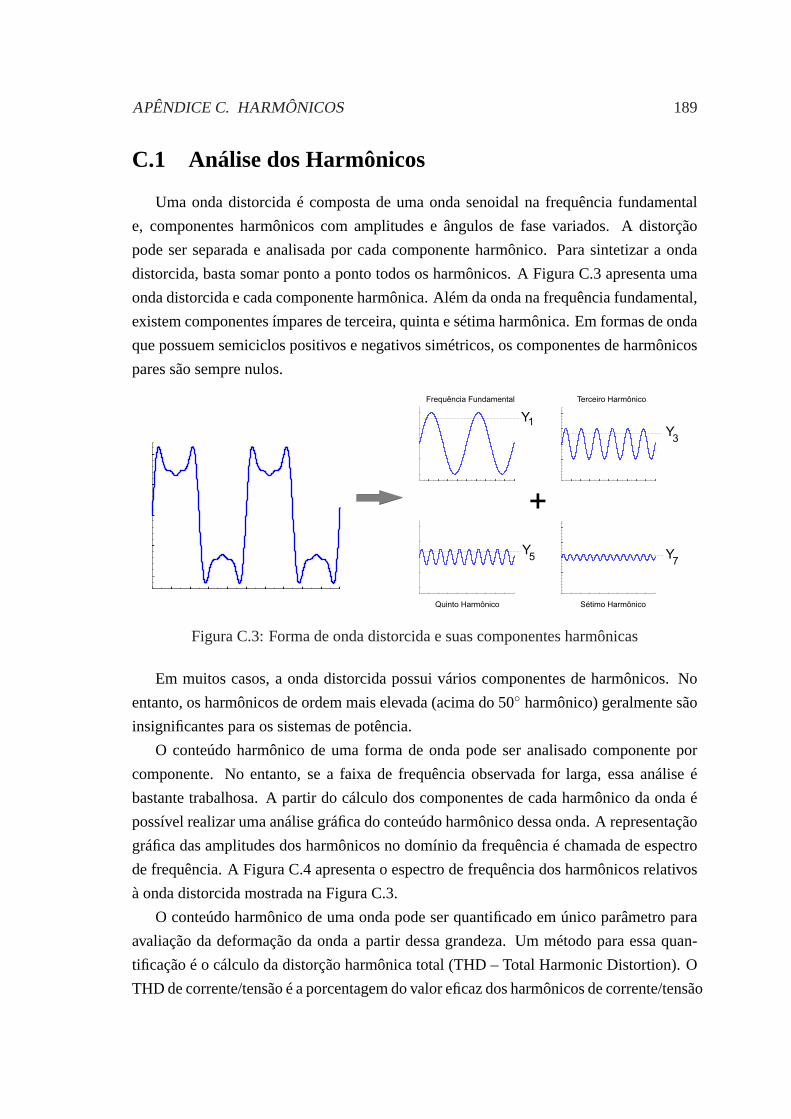
APÊNDICE C. HARMÔNICOS 189
C.1 Análise dos Harmônicos
Uma onda distorcida é composta de uma onda senoidal na frequência fundamental
e, componentes harmônicos com amplitudes e ângulos de fase variados. A distorção
pode ser separada e analisada por cada componente harmônico. Para sintetizar a onda
distorcida, basta somar ponto a ponto todos os harmônicos. A Figura C.3 apresenta uma
onda distorcida e cada componente harmônica. Além da onda na frequência fundamental,
existem componentes ímpares de terceira, quinta e sétima harmônica. Em formas de onda
que possuem semiciclos positivos e negativos simétricos, os componentes de harmônicos
pares são sempre nulos.
+
Frequência Fundamental Terceiro Harmônico
Quinto Harmônico Sétimo Harmônico
Y1Y
3
Y5 Y
7
Figura C.3: Forma de onda distorcida e suas componentes harmônicas
Em muitos casos, a onda distorcida possui vários componentes de harmônicos. No
entanto, os harmônicos de ordem mais elevada (acima do 50 harmônico) geralmente são
insignificantes para os sistemas de potência.
O conteúdo harmônico de uma forma de onda pode ser analisado componente por
componente. No entanto, se a faixa de frequência observada for larga, essa análise é
bastante trabalhosa. A partir do cálculo dos componentes de cada harmônico da onda é
possível realizar uma análise gráfica do conteúdo harmônico dessa onda. A representação
gráfica das amplitudes dos harmônicos no domínio da frequência é chamada de espectro
de frequência. A Figura C.4 apresenta o espectro de frequência dos harmônicos relativos
à onda distorcida mostrada na Figura C.3.
O conteúdo harmônico de uma onda pode ser quantificado em único parâmetro para
avaliação da deformação da onda a partir dessa grandeza. Um método para essa quan-
tificação é o cálculo da distorção harmônica total (THD – Total Harmonic Distortion). O
THD de corrente/tensão é a porcentagem do valor eficaz dos harmônicos de corrente/tensão
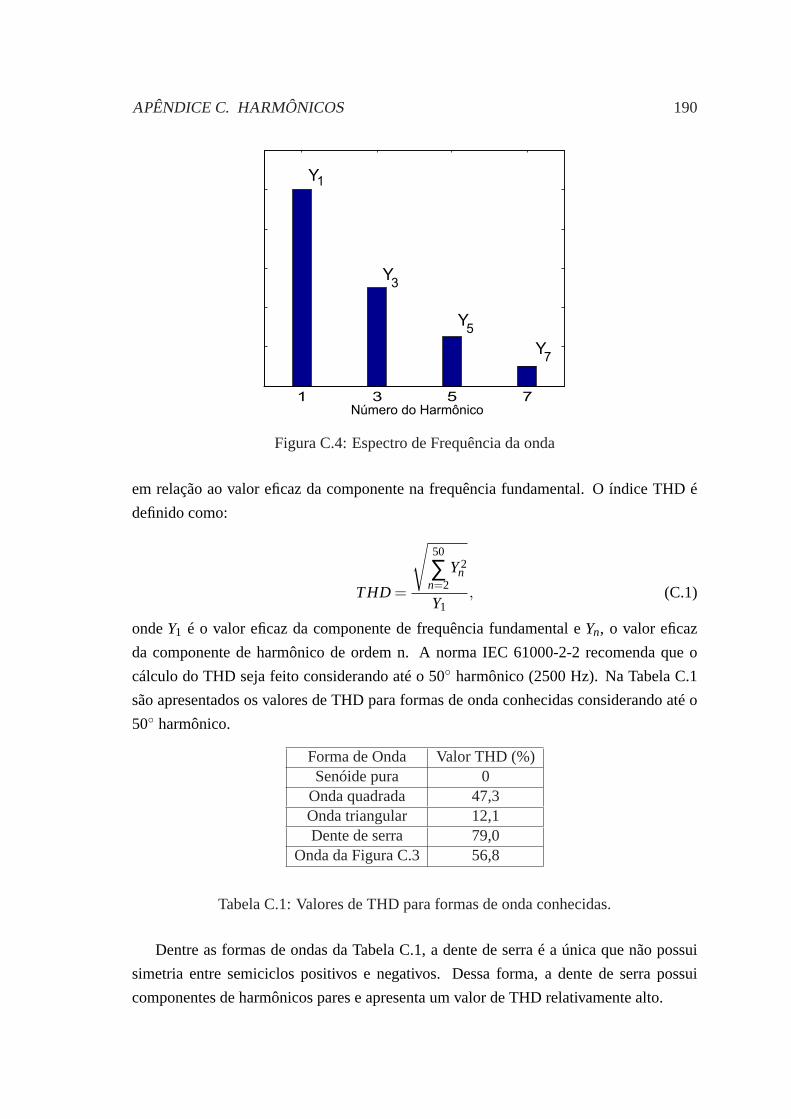
APÊNDICE C. HARMÔNICOS 190
1 3 5 7
Y1
Y3
Y5
Y7
Número do Harmônico
Figura C.4: Espectro de Frequência da onda
em relação ao valor eficaz da componente na frequência fundamental. O índice THD é
definido como:
THD =
√50
∑n=2
Y2n
Y1, (C.1)
ondeY1 é o valor eficaz da componente de frequência fundamental eYn, o valor eficaz
da componente de harmônico de ordem n. A norma IEC 61000-2-2 recomenda que o
cálculo do THD seja feito considerando até o 50 harmônico (2500 Hz). Na Tabela C.1
são apresentados os valores de THD para formas de onda conhecidas considerando até o
50 harmônico.
Forma de Onda Valor THD (%)Senóide pura 0
Onda quadrada 47,3Onda triangular 12,1Dente de serra 79,0
Onda da Figura C.3 56,8
Tabela C.1: Valores de THD para formas de onda conhecidas.
Dentre as formas de ondas da Tabela C.1, a dente de serra é a única que não possui
simetria entre semiciclos positivos e negativos. Dessa forma, a dente de serra possui
componentes de harmônicos pares e apresenta um valor de THD relativamente alto.
APÊNDICE C. HARMÔNICOS 191
C.2 Fontes de Harmônicos
Em um sistema de potência, qualquer carga não-linear é responsável pela inserção de
harmônicos na rede. Os dispositivos baseados na tecnologia de eletrônica de potência
comportam-se como cargas não-lineares. No entanto, mesmo antes da utilização em larga
escala de semicondutores de potência, já existiam cargas não-lineares injetando correntes
distorcidas na rede elétrica. Era o caso dos fornos de arco elétrico para produção de ferro,
ou mesmo máquinas e transformadores trabalhando em saturação.
O intensivo uso de semicondutores de potência foi responsável pelo aumento signi-
ficativo do número de cargas não-lineares na rede elétrica, que resultou em uma maior
preocupação com relação aos harmônicos. É possível afirmar que a grande maioria das
distorções harmônicas verificadas nas redes elétricas são causadas por dispositivos com
semicondutores de potência. Dentre esses dispositivos, o retificador monofásico tem uma
grande contribuição, pois está presente em muitos equipamentos residenciais ou comerci-
ais. Apesar de terem potência nominal reduzida, o efeito cumulativo desses equipamentos
é uma importante fonte de distorção harmônica.
As cargas industriais são em menor número que as cargas residenciais e comerciais.
Porém, essas cargas são significativas para a rede elétrica e para as distorções harmônicas,
pois possuem potência nominal elevada. Além disso, as cargas industriais apresentam
fator de potência relativamente baixo.
Na prática, até mesmo os resistores apresentam alguma não-linearidade na curva
tensão-corrente. Porém, essa não linearidade, assim como os harmônicos gerados, são
insignificantes para o sistema elétrico. A seguir são apresentadas algumas cargas não-
lineares que geram harmônicos consideráveis na rede elétrica.
C.2.1 Retificador monofásico
Atualmente existem muitos aparelhos domésticos ou comerciais que utilizam corrente
contínua para sua operação. Tendo em vista que esses aparelhos são conectados direta-
mente à rede CA, é necessária a utilização de um retificador para gerar o tipo de tensão
adequada. Normalmente, os retificadores para essas aplicações são baseados numa ponte
de diodos completa, por apresentarem baixo custo, alta inserção no mercado e robustez a
variações na rede elétrica. A Figura C.5 mostra uma ponte de diodos completa na etapa
de entrada do circuito.
Muitos dispositivos possuem internamente fontes chaveadas para a geração de diver-
sos níveis de tensão CC, com o objetivo de reduzir custos, tamanho e aumentar a eficiên-
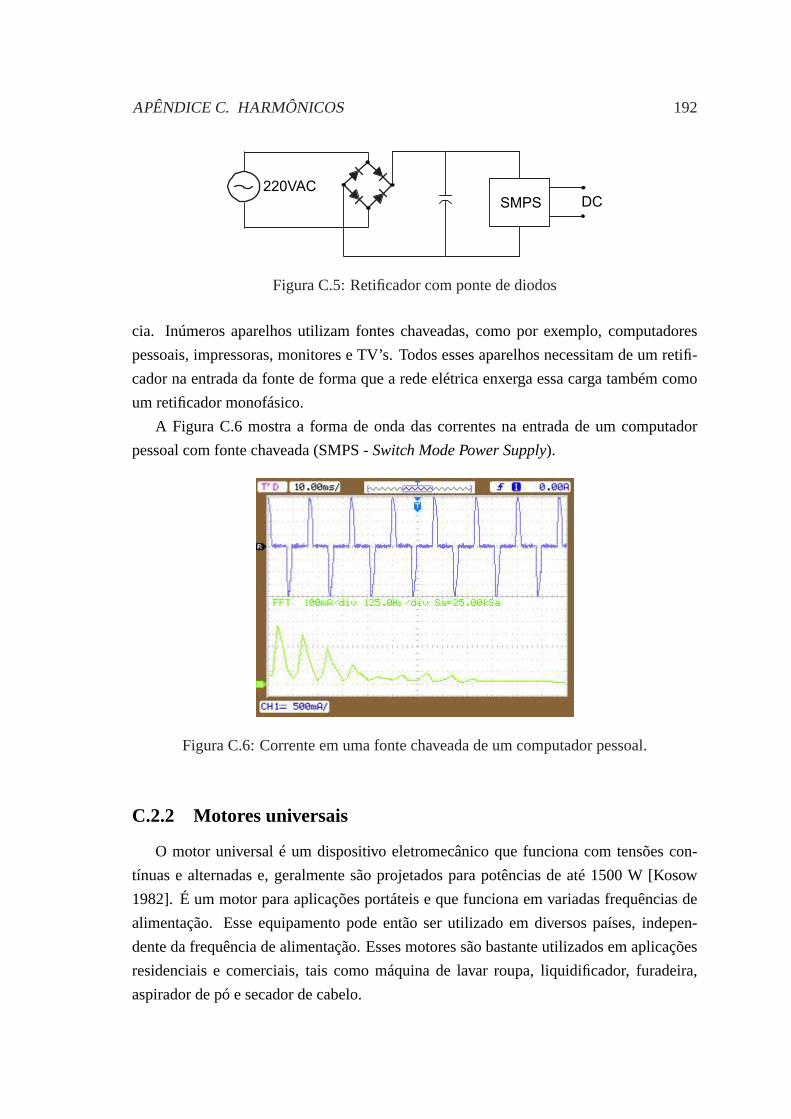
APÊNDICE C. HARMÔNICOS 192
220VACSMPS DC
Figura C.5: Retificador com ponte de diodos
cia. Inúmeros aparelhos utilizam fontes chaveadas, como por exemplo, computadores
pessoais, impressoras, monitores e TV’s. Todos esses aparelhos necessitam de um retifi-
cador na entrada da fonte de forma que a rede elétrica enxerga essa carga também como
um retificador monofásico.
A Figura C.6 mostra a forma de onda das correntes na entrada de um computador
pessoal com fonte chaveada (SMPS -Switch Mode Power Supply).
Figura C.6: Corrente em uma fonte chaveada de um computador pessoal.
C.2.2 Motores universais
O motor universal é um dispositivo eletromecânico que funciona com tensões con-
tínuas e alternadas e, geralmente são projetados para potências de até 1500 W [Kosow
1982]. É um motor para aplicações portáteis e que funciona em variadas frequências de
alimentação. Esse equipamento pode então ser utilizado em diversos países, indepen-
dente da frequência de alimentação. Esses motores são bastante utilizados em aplicações
residenciais e comerciais, tais como máquina de lavar roupa, liquidificador, furadeira,
aspirador de pó e secador de cabelo.
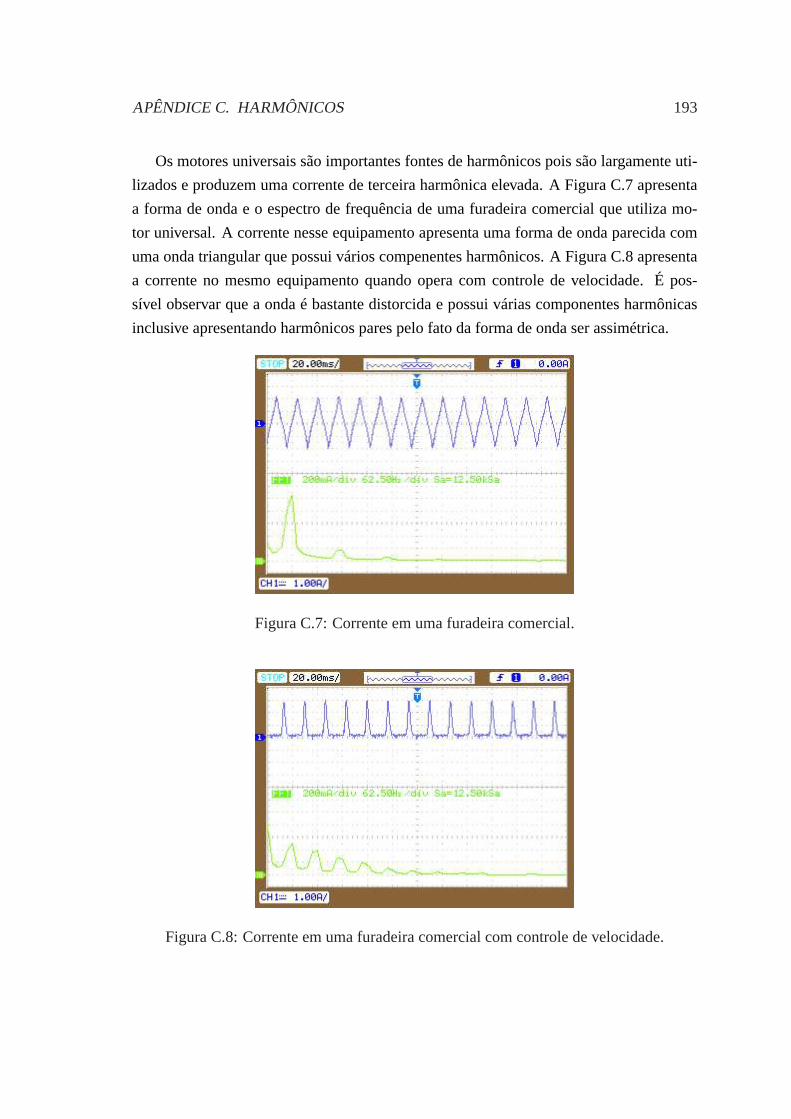
APÊNDICE C. HARMÔNICOS 193
Os motores universais são importantes fontes de harmônicos pois são largamente uti-
lizados e produzem uma corrente de terceira harmônica elevada. A Figura C.7 apresenta
a forma de onda e o espectro de frequência de uma furadeira comercial que utiliza mo-
tor universal. A corrente nesse equipamento apresenta uma forma de onda parecida com
uma onda triangular que possui vários compenentes harmônicos. A Figura C.8 apresenta
a corrente no mesmo equipamento quando opera com controle de velocidade. É pos-
sível observar que a onda é bastante distorcida e possui várias componentes harmônicas
inclusive apresentando harmônicos pares pelo fato da forma de onda ser assimétrica.
Figura C.7: Corrente em uma furadeira comercial.
Figura C.8: Corrente em uma furadeira comercial com controle de velocidade.
APÊNDICE C. HARMÔNICOS 194
C.2.3 Dispositivos a arco voltaico
Os dispositivos a arco voltaico extraem da rede elétrica correntes bastante não-lineares.
Para a formação do arco voltaico é fornecida uma corrente de curto-circuito limitada ape-
nas pela impedância do sistema de potência (cabos elétricos e o transformador). Essa
corrente de curto-circuito é responsável pela queda de tensão na rede elétrica quando
esses dispositivos são ligados.
Os principais dispositivos a arco voltaico são fornos elétricos a arco, lâmpadas com
reatores e soldadores a arco. Os fornos elétricos a arco são utilizados para o derretimento
de ferro e aço em metalúrgicas. Por serem mais eficientes que outros métodos para a
produção de aço, esses fornos apresentam números crescentes na indústria do aço [Jones
1997].
Com relação ao consumo de energia, existem fornos a arco elétrico com potência
acima de 100 MVA e que gastam cerca de 90 minutos para o processo de derretimento.
Portanto, são cargas que consomem correntes elevadas. Além disso, essas correntes não
são periódicas, apresentando harmônicos de múltiplos não inteiros. A forma de onda de
corrente varia bastante no tempo e depende do processo que está sendo executado. Valores
típicos para o THD de fornos a arco voltaico são de 24% durante o derretimento e de 16%
durante a refinação [Vervenne et al. 2006].
As lâmpadas fluorescentes com reatores são também fontes de harmônicos, porém são
cargas de baixa potência. Sua importância vem da enorme quantidade desses dispositivos
utilizados na atualidade. Apesar de que elas vêm sendo gradativamente substituídas por
lâmpadas de diodo emisson de luz (LED -Light Emitter Diode), que são mais eficientes
e têm uma vida útil maior.
As lâmpadas fluorescentes apresentam tipicamente uma corrente de terceira harmônica
elevada e consequentemente uma taxa de distorção harmônica também elevada. O THD
máximo para lâmpadas fluorescentes típicas, é de aproximadamente 64%, e o THD mín-
imo, 44% [Emadi et al. 2005].
C.2.4 Cargas não-lineares
O mais comum em uma rede elétrica é a existência de cargas tanto lineares quanto
não-lineares. O conjunto de cargas não-lineares conectadas à rede elétrica pode provocar
distorções diferentes das verificadas isoladamente por cada uma das cargas não-lineares.
Em [Deckmann & Pomilio 2004] foram realizadas medições ao longo de 7 dias em uma
rede elétrica urbana com 80% de cargas comerciais, 11% de cargas industriais e 9% de
cargas residenciais. A Tabela C.2 apresenta os resultados das medições durante horário

APÊNDICE C. HARMÔNICOS 195
comercial.
Vf 124-126VI f 140-180AIn 35-40A
DHTV 2,0-2,8%DHTI 12-18%
P 55-66kWQ 20-30VArFP 0,85-0,93Ih3 9-15%Ih5 7-9%Ih7 3-7%
Tabela C.2: Valores médios durante horário comercial.
C.3 Efeitos dos Harmônicos
Cargas CA são projetadas para receber tensões senoidais para o seu correto funciona-
mento. Em dispositivos para aquecimento que transformam toda a energia em calor a
partir de resistência, a presença de harmônicos de tensão apenas muda a quantidade de
energia a ser transformada em calor, sem impactos adicionais ao seu funcionamento. Para
outros tipos de cargas, os harmônicos podem afetar a operação gerando maiores despesas
com energia elétrica, manutenção, além de perdas na eficiência produtiva.
Cada tipo de carga reage diferente à presença de harmônicos. Os harmônicos podem
afetar também a rede elétrica. Os principais efeitos dos harmônicos são apresentados a
seguir.
C.3.1 Ressonância
Com a existência de harmônicos de corrente de alta ordem na rede elétrica, ocorre o
aumento da reatância indutiva do sistema de potência e a diminuição da reatância capaci-
tiva. Existe portanto, uma frequência de harmônicos em que as reatâncias capacitivasXC
eXL indutivas se igualam – ponto de ressonância paralela [Arrillaga & Watson 2003].
A ressonância representa realmente um problema quando existe uma fonte de har-
mônicos na frequência do ponto de ressonância. Essa ressonância pode existir entre com-
ponentes em série ou que estejam em paralelo no sistema de potência.
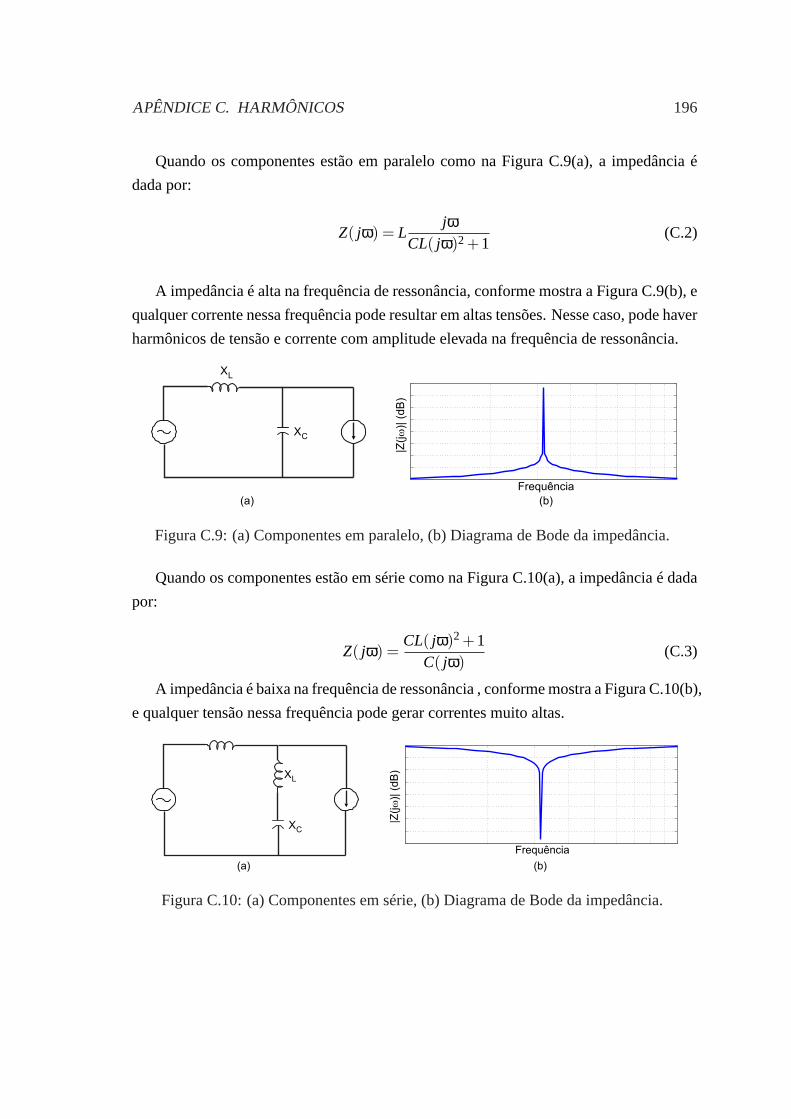
APÊNDICE C. HARMÔNICOS 196
Quando os componentes estão em paralelo como na Figura C.9(a), a impedância é
dada por:
Z( jω) = Ljω
CL( jω)2 +1(C.2)
A impedância é alta na frequência de ressonância, conforme mostra a Figura C.9(b), e
qualquer corrente nessa frequência pode resultar em altas tensões. Nesse caso, pode haver
harmônicos de tensão e corrente com amplitude elevada na frequência de ressonância.
XL
XC
|Z(j
)| (
dB
)w
Frequência
(a) (b)
Figura C.9: (a) Componentes em paralelo, (b) Diagrama de Bode da impedância.
Quando os componentes estão em série como na Figura C.10(a), a impedância é dada
por:
Z( jω) =CL( jω)2 +1
C( jω)(C.3)
A impedância é baixa na frequência de ressonância , conforme mostra a Figura C.10(b),
e qualquer tensão nessa frequência pode gerar correntes muito altas.
XL
XC
|Z(j
)| (
dB
)w
Frequência
(a) (b)
Figura C.10: (a) Componentes em série, (b) Diagrama de Bode da impedância.
APÊNDICE C. HARMÔNICOS 197
C.3.2 Perdas em motores elétricos
Os harmônicos afetam os motores elétricos basicamente de duas formas: perdas de-
vido à existência de frequências mais altas e o aumento do valor eficaz das correntes no
motor.
As frequências mais elevadas provocam o aumento das perdas por histerese e por
correntes parasitas. As perdas por histerese são proporcionais à frequência, enquanto que
as correntes parasitas são proporcionais ao quadrado da frequência. Além disso, correntes
nas frequências dos harmônicos produzem nos motores CA pulsações no torque do eixo
[Dugan et al. 2004].
A presença de componentes harmônicas de corrente é responsável pelo aumento da
corrente eficaz circulando pelo motor e, consequentemente, aumento na temperatura in-
terna do motor devido às perdas por calor [Subjak & McQuilkin 1990].
O uso de PWM também cria tensões de modo comum que resultam em aumento da
deterioração dos mancais de máquinas elétricas [Azevedo et al. 2001].
C.3.3 Perdas em transformadores
As perdas em transformadores são parecidas com os problemas relatados para os mo-
tores elétricos. O aumento do valor eficaz da corrente provoca aumento na temperatura
do transformador. A temperatura elevada nos transformadores pode gerar sobrecarga
mecânica na isolação dos enrolamentos e laminação. A presença de altas frequências
provoca perdas por histerese e correntes parasitas além de poder criar pequenas vibrações
no núcleo do transformador.
A indutância dos transformadores pode também interagir com capacitâncias do sis-
tema, provocando ressonância em uma frequência dos harmônicos.
C.3.4 Sobrecarga no neutro
Em sistemas trifásicos balanceados, as correntes de fase são defasadas de2π/3 entre
elas de forma que a soma das três fases é zero. Nesse caso, a corrente que passa pelo
neutro é zero e normalmente o fio utilizado para essa ligação é dimensionado com bitola
abaixo dos fios utilizados nas fases.
Quando o sistema possui harmônicos de correntes, especialmente de terceira har-
mônica, a soma das três fases não é mais nula e começa a passar a corrente também
pelo fio do neutro. Como resultado, as correntes no neutro podem chegar até 170% da
corrente de fase, sobrecarregando o fio utilizado no neutro.
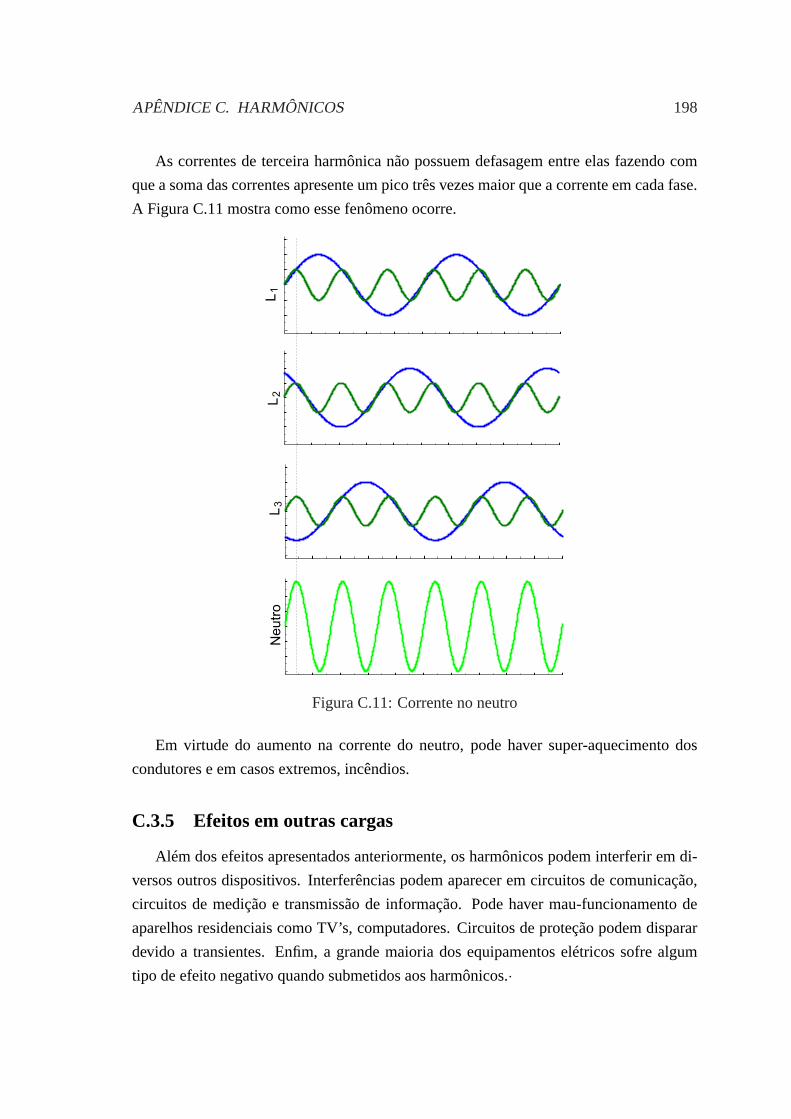
APÊNDICE C. HARMÔNICOS 198
As correntes de terceira harmônica não possuem defasagem entre elas fazendo com
que a soma das correntes apresente um pico três vezes maior que a corrente em cada fase.
A Figura C.11 mostra como esse fenômeno ocorre.
L1
L2
L3
Neutr
o
Figura C.11: Corrente no neutro
Em virtude do aumento na corrente do neutro, pode haver super-aquecimento dos
condutores e em casos extremos, incêndios.
C.3.5 Efeitos em outras cargas
Além dos efeitos apresentados anteriormente, os harmônicos podem interferir em di-
versos outros dispositivos. Interferências podem aparecer em circuitos de comunicação,
circuitos de medição e transmissão de informação. Pode haver mau-funcionamento de
aparelhos residenciais como TV’s, computadores. Circuitos de proteção podem disparar
devido a transientes. Enfim, a grande maioria dos equipamentos elétricos sofre algum
tipo de efeito negativo quando submetidos aos harmônicos.·
Apêndice D
Potência Elétrica
A teoria tradicional de potência elétrica trata de potência ativa, reativa e aparente
além de fator de potência para tensões e correntes puramente senoidais. Portanto, essas
grandezas são calculadas considerando apenas a frequência fundamental. Na presença de
distorções, aparecem tensões e correntes com frequências múltiplas da fundamental (har-
mônicos) que precisam ser levados em consideração nos cálculos de potência do sistema.
A seguir são apresentados os cálculos das variáveis do sistema elétrico para condições
senoidais e não senoidais.
D.1 Condições senoidais
Em sistemas de potência com tensões e correntes puramente senoidais o cálculo das
grandezas do sistema elétrico como valores eficazes e potência são simplificados por exi-
stir apenas a frequência fundamental.
Para um sistema monofásico com uma fonte de tensão ideal submetido a uma resistên-
cia pura e linear temos as seguintes equações para tensão e corrente:
V(t) = Vpsin(ωt) (D.1)
e
I(t) = Ipsin(ωt). (D.2)
As formas de onda da tensão e corrente são puramente senoidais e estão em fase, de
forma que a potência instantânea do sistema é:
P(t) = VpIpsin2(ωt) =VpIp
2[1−cos(2ωt)] (D.3)
A potência instantânea consumida pela resistência é sempre positiva o que indica que
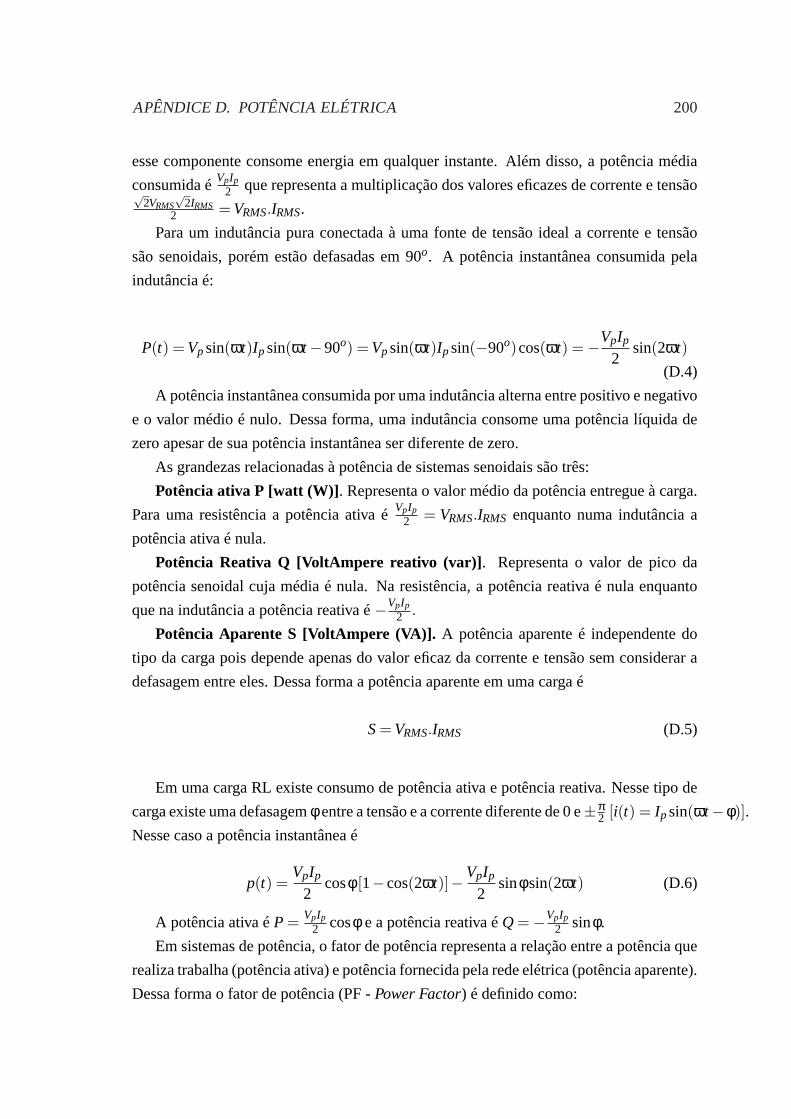
APÊNDICE D. POTÊNCIA ELÉTRICA 200
esse componente consome energia em qualquer instante. Além disso, a potência média
consumida éVpIp2 que representa a multiplicação dos valores eficazes de corrente e tensão√
2VRMS√
2IRMS2 = VRMS.IRMS.
Para um indutância pura conectada à uma fonte de tensão ideal a corrente e tensão
são senoidais, porém estão defasadas em 90o. A potência instantânea consumida pela
indutância é:
P(t) = Vpsin(ωt)Ipsin(ωt−90o) = Vpsin(ωt)Ipsin(−90o)cos(ωt) =−VpIp
2sin(2ωt)
(D.4)
A potência instantânea consumida por uma indutância alterna entre positivo e negativo
e o valor médio é nulo. Dessa forma, uma indutância consome uma potência líquida de
zero apesar de sua potência instantânea ser diferente de zero.
As grandezas relacionadas à potência de sistemas senoidais são três:
Potência ativa P [watt (W)]. Representa o valor médio da potência entregue à carga.
Para uma resistência a potência ativa éVpIp2 = VRMS.IRMS enquanto numa indutância a
potência ativa é nula.
Potência Reativa Q [VoltAmpere reativo (var)]. Representa o valor de pico da
potência senoidal cuja média é nula. Na resistência, a potência reativa é nula enquanto
que na indutância a potência reativa é−VpIp2 .
Potência Aparente S [VoltAmpere (VA)]. A potência aparente é independente do
tipo da carga pois depende apenas do valor eficaz da corrente e tensão sem considerar a
defasagem entre eles. Dessa forma a potência aparente em uma carga é
S= VRMS.IRMS (D.5)
Em uma carga RL existe consumo de potência ativa e potência reativa. Nesse tipo de
carga existe uma defasagemφ entre a tensão e a corrente diferente de 0 e±π2 [i(t) = Ipsin(ωt−φ)].
Nesse caso a potência instantânea é
p(t) =VpIp
2cosφ [1−cos(2ωt)]−VpIp
2sinφsin(2ωt) (D.6)
A potência ativa éP = VpIp2 cosφ e a potência reativa éQ =−VpIp
2 sinφ.
Em sistemas de potência, o fator de potência representa a relação entre a potência que
realiza trabalha (potência ativa) e potência fornecida pela rede elétrica (potência aparente).
Dessa forma o fator de potência (PF -Power Factor) é definido como:
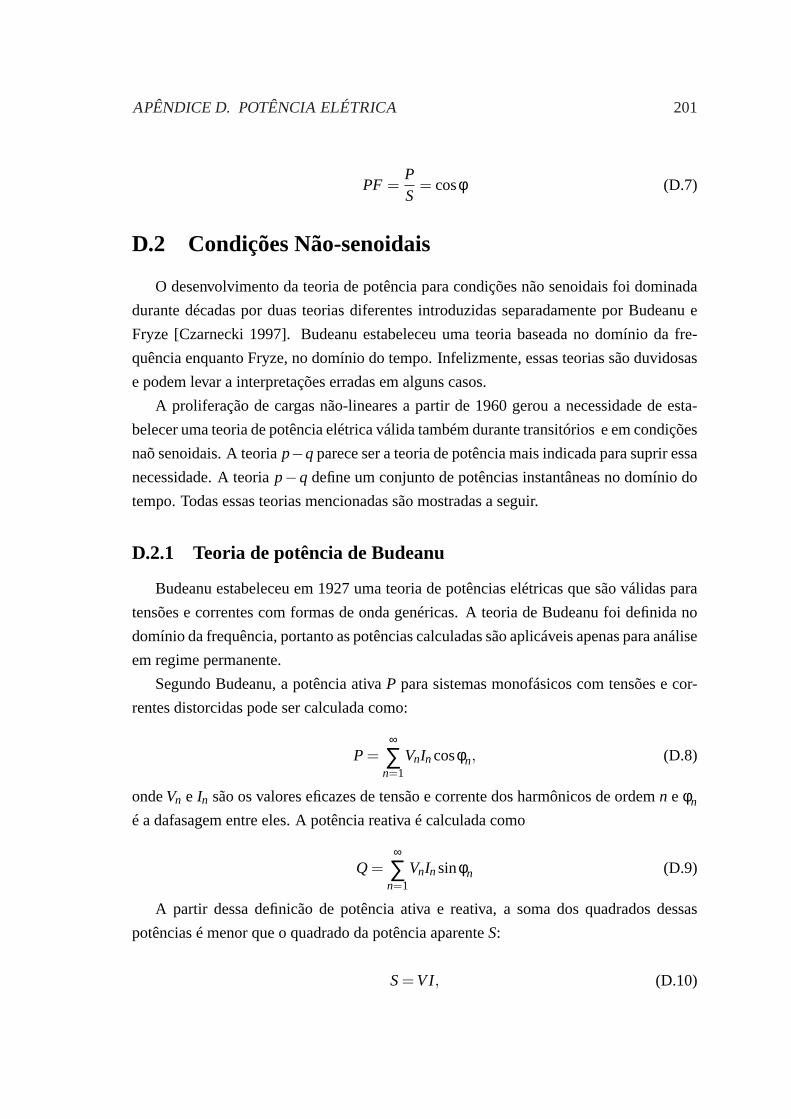
APÊNDICE D. POTÊNCIA ELÉTRICA 201
PF =PS
= cosφ (D.7)
D.2 Condições Não-senoidais
O desenvolvimento da teoria de potência para condições não senoidais foi dominada
durante décadas por duas teorias diferentes introduzidas separadamente por Budeanu e
Fryze [Czarnecki 1997]. Budeanu estabeleceu uma teoria baseada no domínio da fre-
quência enquanto Fryze, no domínio do tempo. Infelizmente, essas teorias são duvidosas
e podem levar a interpretações erradas em alguns casos.
A proliferação de cargas não-lineares a partir de 1960 gerou a necessidade de esta-
belecer uma teoria de potência elétrica válida também durante transitórios e em condições
naõ senoidais. A teoriap−q parece ser a teoria de potência mais indicada para suprir essa
necessidade. A teoriap−q define um conjunto de potências instantâneas no domínio do
tempo. Todas essas teorias mencionadas são mostradas a seguir.
D.2.1 Teoria de potência de Budeanu
Budeanu estabeleceu em 1927 uma teoria de potências elétricas que são válidas para
tensões e correntes com formas de onda genéricas. A teoria de Budeanu foi definida no
domínio da frequência, portanto as potências calculadas são aplicáveis apenas para análise
em regime permanente.
Segundo Budeanu, a potência ativaP para sistemas monofásicos com tensões e cor-
rentes distorcidas pode ser calculada como:
P =∞
∑n=1
VnIncosφn, (D.8)
ondeVn e In são os valores eficazes de tensão e corrente dos harmônicos de ordemn e φn
é a dafasagem entre eles. A potência reativa é calculada como
Q =∞
∑n=1
VnInsinφn (D.9)
A partir dessa definicão de potência ativa e reativa, a soma dos quadrados dessas
potências é menor que o quadrado da potência aparenteS:
S= VI, (D.10)

APÊNDICE D. POTÊNCIA ELÉTRICA 202
onde V e I são os valores eficazes de tensão e corrente. Como agora a tensão e corrente são
distorcidas e possuem vários componentes harmônicos, o valor eficaz deles é calculado
como
V =
√∞
∑n=1
V2n (D.11)
e
I =
√∞
∑n=1
I2n. (D.12)
Assim, o quadrado da potência aparente é
S2 =
(∞
∑n=1
V2n
)(∞
∑n=1
I2n
), (D.13)
enquanto a soma dos quadrados das potências ativas e reativas é
P2 +Q2 =
(∞
∑n=1
VnIncosφn
)2
+
(∞
∑n=1
VnInsinφn
)2
. (D.14)
A porção da potência aparente que não estava caracterizada como potência ativa nem
como reativa, foi definida por Budeanu como potência de distorçãoD, que é calculada
por
D2 = S2−P2−Q2. (D.15)
A Figura D.1 apresenta as potências de Budeanu em três circuitos diferentes: uma
resistência ligada à fonte, um circuito RL e um circuito RL em paralelo com uma carga
não-linear. Em todos os casos a tensão de alimentação é senoidal.
O problema da teoria de Budeanu é que as potências, com exceção da potência ativa
P que é a média da potência ativa instantânea, são apenas equações matemáticas sem
significado físico. Além disso, a potência de distorção não fornece nenhuma informação
sobre a distorção da forma de onda [Czarnecki 1987].
Em um circuito puramente resistivo com uma tensão de alimentação distorcida, a
corrente é proporcional à tensão e portanto distorcida. A Figura D.2 mostra a tensão
de alimentação e corrente nesse circuito. As potências de Budeanu foram calculadas e
também são mostradas na Figura D.2. A potência ativa P é igual a potência aparente S.
Nesse caso, a potência de distorção D é zero apesar da corrente ser bastante distorcida.
APÊNDICE D. POTÊNCIA ELÉTRICA 203
i s i si s
r
S
P
Q
D
Vs
is
Vs
is
S
P
Q
D
S
P
Q
D
Vs
is
S
P
Q
D
Figura D.1: Potências de Budeanu em diversos circuitos.
S
P
Q
D
Vs
is
Figura D.2: Potências de Budeanu com tensão distorcida.

APÊNDICE D. POTÊNCIA ELÉTRICA 204
Ao longo desse documento, as potências de Budeanu serão utilizadas apenas para
análise dos esquemas de controle utilizados em filtros ativos paralelo.
D.2.2 Teoria de potência de Fryze
A teoria de Fryze é baseada no domínio do tempo e realiza a decomposição da corrente
fornecida em corrente ativaia e corrente reativaiF . Sendo assim, a corrente fornecida pela
fonte é
i(t) = ia(t)+ iF(t). (D.16)
A corrente ativa representa a porção da corrente fornecida consumida pela porção
puramente resistiva da carga original. Dessa forma, a corrente ativa é calculada como
ia(t) =P
V2v(t). (D.17)
A parte restante da corrente fornecida é denominada de corrente reativa e pode ser
calculada como
iF(t) = i(t)+ ia(t). (D.18)
As correntes ativas e reativas são multuamente ortogonais de forma que seus valores
eficazes satisfazem a seguinte equação:
I2 = I2a + I2
F , (D.19)
ondeIa e IF são os valores eficazes das correntes ativas e reativas respectivamente. A
potência aparente definida pela equação (D.10) torna-se então
S2 = V2(I2a + I2
F) = P2 +Q2F . (D.20)
A grandezaQF é a potência reativa definida por Fryze. Da equação (D.20), a potência
reativa é
QF = VIF . (D.21)
As potências ativas e aparentes estabelecidas pela teoria de Fryze são as mesmas
definidas por Budeanu. No entanto, a definição de potência reativa nas duas teorias é
APÊNDICE D. POTÊNCIA ELÉTRICA 205
diferente. Na teoria de Fryze, a potência reativa tem um significado por ser composta por
toda parcela de tensão e corrente que não contribui para a potência ativa.
O cálculo das correntes ativas e reativas de Fryze não necessitam da decomposição da
tensão e corrente em séries de Fourier, mas necessitam do cálculo do valor eficaz dessas
grandezas. Dessa forma, as correntes de Fryze não são válidas durante transitórios.
D.2.3 Teoria p−q
A teoria p− q é baseada em um conjunto de potências instantâneas definidas no
domínio do tempo [Akagi et al. 1984] [Akagi et al. 2007]. Essa teoria é específica para
sistemas trifásicos e inicialmente realiza a transformação de coordenadas deabc-αβ0 para
posteriormente definir as potências instantâneas nesse último sistema de coordenadas.
Conforme mencionado anteriormente, a teoriap−q utiliza a transformaçãoαβ0 tam-
bém conhecida como transformada de Clarke [Clarke 1943], que consiste em uma matriz
real que transforma tensões e correntes trifásicas para o referencial estacionárioαβ0.
A transformação das tensões e correntesabcparaαβ0 são dadas a seguir:
v0
vα
vβ
=
√23
1√2
1√2
1√2
1 −12 −1
2
0√
32 −
√3
2
va
vb
vc
(D.22)
i0iαiβ
=
√23
1√2
1√2
1√2
1 −12 −1
2
0√
32 −
√3
2
iaibic
(D.23)
A transformação de Clarke separa a componente homopolar de tensão e corrente nas
fasesabc. Para sistemas trifásicos a três fios ou sistemas trifásicos balanceados com qua-
tro fios as componentes homopolares são nulas de forma que as componentes de faseabc
podem ser transformadas nas coordenadas de referênciaαβ sem qualquer perda. Dessa
forma as tensões e correntes trifásicas podem ser representadas nos eixosαβ da seguinte
maneira:
[vα
vβ
]=
√23
[1 −1
2 −12
0√
32 −
√3
2
]
va
vb
vc
(D.24)
APÊNDICE D. POTÊNCIA ELÉTRICA 206
[iαiβ
]=
√23
[1 −1
2 −12
0√
32 −
√3
2
]
iaibic
(D.25)
Os eixos das fasesabc são defasados espacialmente120o entre si enquanto que os
eixosαβ são ortogonais. A transformada de Clarke foi estabelecida de tal forma que o
eixoα é paralelo ao eixoa, enquanto que o eixoβ está em uma direção em que os vetores
de corrente e tensão giram no mesmo sentido nas coordenadasabcou αβ.
A potência instantânea trifásica nos eixosabcé tradicionalmente definida como
p3φ(t) = va(t)ia(t)+vb(t)ib(t)+vc(t)ic(t) (D.26)
e fazendo a transformaçãoabc−αβ0, a potência instantânea trifásica torna-se
p3φ(t) = vα(t)iα(t)+vβ(t)iβ(t)+v0(t)i0(t) (D.27)
O último termo da equação (D.27) possui apenas componentes homopolares e pode ser
separado dos primeiros termos. A potência consumida pelas componentes homopolares
é chamada de potência instantânea de sequência zero. A porção da potência trifásica
composta apenas pelas componentesαβ é chamada de potência instantânea real.
A teoria p−q define também uma potência instantânea imaginária. As três potências
instantâneas mencionadas são calculadas como
p0
p
q
=
v0 0 0
0 vα vβ
0 vβ −vα
i0iαiβ
. (D.28)
Para sistemas trifásicos com três fios as componentes homopolares são nulas de forma
que a potência instatânea de sequência zero também é nula. Portanto, o cálculo das potên-
cias instantâneasp−q é
[p
q
]=
[vα vβ
vβ −vα
][iαiβ
](D.29)
As potências ativas e reativas da equação (D.29) denominadas de potências instan-
tâneas real e imaginária, podem ser decompostas em partes CC e CA [Emadi et al. 2005].
A parte CC representa a corrente fundamental e a parte CA representa os harmônicos.
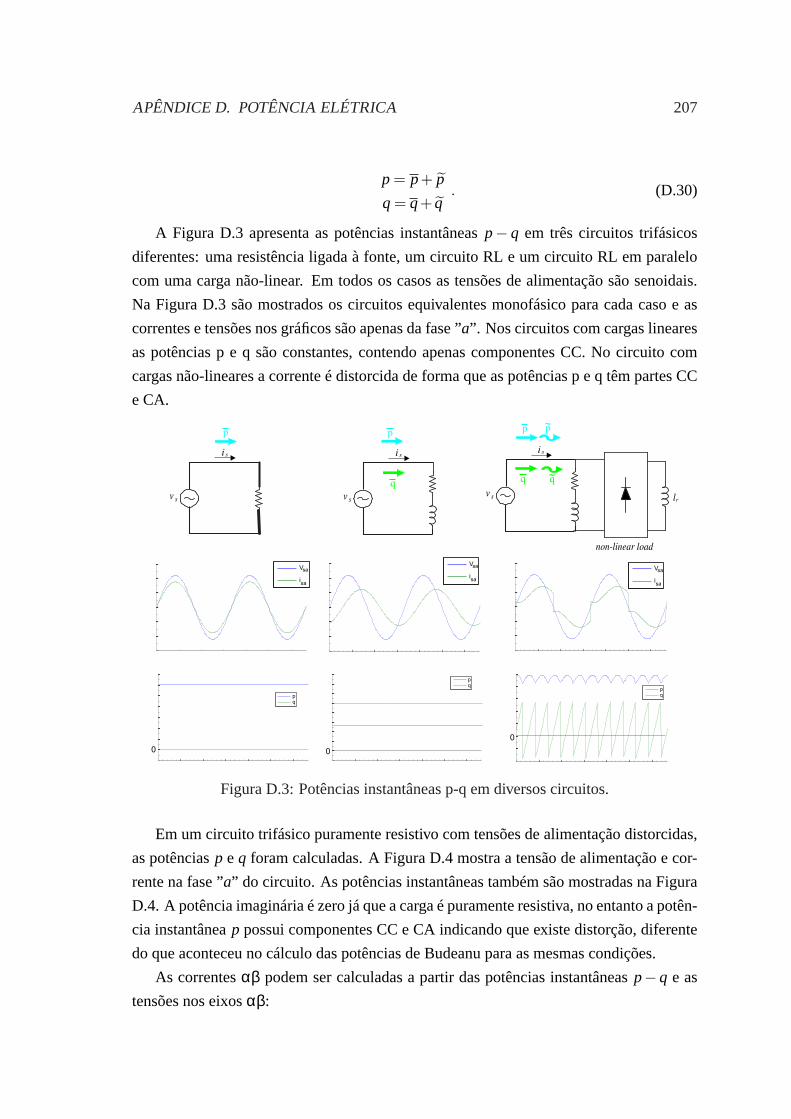
APÊNDICE D. POTÊNCIA ELÉTRICA 207
p = p+ p
q = q+ q. (D.30)
A Figura D.3 apresenta as potências instantâneasp− q em três circuitos trifásicos
diferentes: uma resistência ligada à fonte, um circuito RL e um circuito RL em paralelo
com uma carga não-linear. Em todos os casos as tensões de alimentação são senoidais.
Na Figura D.3 são mostrados os circuitos equivalentes monofásico para cada caso e as
correntes e tensões nos gráficos são apenas da fase”a” . Nos circuitos com cargas lineares
as potências p e q são constantes, contendo apenas componentes CC. No circuito com
cargas não-lineares a corrente é distorcida de forma que as potências p e q têm partes CC
e CA.
i s i si s
r
Vsa
isa
Vsa
isa
Vsa
isa
pq
pqp
q
0 0
0
p p
q
p
q
p~
q~
Figura D.3: Potências instantâneas p-q em diversos circuitos.
Em um circuito trifásico puramente resistivo com tensões de alimentação distorcidas,
as potênciasp e q foram calculadas. A Figura D.4 mostra a tensão de alimentação e cor-
rente na fase”a” do circuito. As potências instantâneas também são mostradas na Figura
D.4. A potência imaginária é zero já que a carga é puramente resistiva, no entanto a potên-
cia instantâneap possui componentes CC e CA indicando que existe distorção, diferente
do que aconteceu no cálculo das potências de Budeanu para as mesmas condições.
As correntesαβ podem ser calculadas a partir das potências instantâneasp−q e as
tensões nos eixosαβ:
APÊNDICE D. POTÊNCIA ELÉTRICA 208
Vsa
isa
pq
0
Figura D.4: Potências instantâneas p-q para tensão de alimentação distorcida.
[iαiβ
]=
1
v2α +v2
β
[vα vβ
vβ −vα
][p
q
]. (D.31)
A equação (D.31) torna-se então
[iαiβ
]=
1
v2α +v2
β
[vα vβ
vβ −vα
][p+ p
q+ q
]. (D.32)
As correntesiα e iβ definidas na equação (D.32) podem ser decompostas em com-
ponentes que dependem da potência instantânea real e componentes que dependem da
potência instantânea imaginária. Dessa forma, obtém-se as seguintes correntes
[iαp
iβp
]=
1
v2α +v2
β
[vα vβ
vβ −vα
][p+ p
0
](D.33)
[iαq
iβq
]=
1
v2α +v2
β
[vα vβ
vβ −vα
][0
q+ q
]. (D.34)
As correntes podem ainda ser decompostas pelas partes CC e CA das potências in-
stantâneas, gerando assim
APÊNDICE D. POTÊNCIA ELÉTRICA 209
[iαp
iβp
]=
[iαp
iβp
]+
[iαp
iβp
]=
1
v2α +v2
β
[vα vβ
vβ −vα
]([p
0
]+
[p
0
])(D.35)
[iαq
iβq
]=
[iαq
iβq
]+
[iαq
iβq
]=
1
v2α +v2
β
[vα vβ
vβ −vα
]([0
q
]+
[0
q
])(D.36)
Com isso, são definidas oito correntes que influenciam na potência do sistema.
A parte CC da corrente ativa instantânea no eixoα:
iαp =vα
v2α +v2
βp. (D.37)
A parte CA da corrente ativa instantânea no eixoα que corrensponde à corrente dis-
torcida:
iαp =vα
v2α +v2
βp. (D.38)
A parte CC da corrente ativa instantânea no eixoβ:
iβp =vβ
v2α +v2
βp. (D.39)
A parte CA da corrente ativa instantânea no eixoβ que corrensponde à corrente dis-
torcida:
iβp =vβ
v2α +v2
βp. (D.40)
A parte CC da corrente reativa instantânea no eixoα:
iαq =vβ
v2α +v2
βq. (D.41)
A parte CA da corrente reativa instantânea no eixoα que corrensponde à corrente
distorcida:
iαp =vβ
v2α +v2
βq. (D.42)
A parte CC da corrente reativa instantânea no eixoβ:
APÊNDICE D. POTÊNCIA ELÉTRICA 210
iβq =−vα
v2α +v2
βq. (D.43)
A parte CA da corrente reativa instantânea no eixoβ que corrensponde à corrente
distorcida:
iβp =−vα
v2α +v2
βq. (D.44)
As correntes definidas acima podem ser utilizadas para o controle de harmônicos ou
melhoria de fator de potência via filtros ativos de potência [Akagi et al. 1984].





























