Embed Size (px)
Citation preview

Resumen— Este artículo presenta una nueva metodología para la obtención de modelos difusos lingüísticamente interpretables a partir de datos de entrada y salida. La metodología propuesta incluye la determinación de clases y generación de reglas, así como la partición suma 1 de las variables de entrada: forma, número y distribución de los conjuntos difusos. El aspecto más promisorio en nuestra propuesta lo representa el equilibrio entre precisión e interpretabilidad del modelo. Se presentan aplicaciones a problemas o conjuntos de datos ampliamente conocidos y se comparan los resultados con aquellos obtenidos por otros autores que emplean técnicas diferentes. Palabras claves— identificación, agrupamiento, modelo difuso, interpretabilidad.
I. INTRODUCCIÓN A lógica difusa ha demostrado ser de gran utilidad para representar el comportamiento o dinámica de los sistemas
mediante reglas difusas del tipo IF-THEN. Los primeros sistemas basados en reglas difusas se basaban en la información suministrada por expertos; sin embargo, para el caso de sistemas complejos las reglas así construidas no permitían una simulación aceptable del sistema. La búsqueda de sistemas difusos que aproximen de manera aceptable la dinámica de sistemas complejos ha conllevado al desarrollo de investigación en técnicas de extracción de reglas difusas a partir de datos de entrada y salida; es decir, al desarrollo de técnicas de identificación difusa [1].
Sin embargo, estas técnicas de identificación deben generar modelos difusos que cumplan con dos características fundamentales: una acertada precisión, lo cual se puede determinar mediante una métrica del error; y una buena interpretabilidad para que el sistema difuso resultante se asemeje a la forma como el ser humano toma decisiones. La interpretabilidad requiere de, al menos, un número no muy alto de reglas, preferiblemente no mayor a 9; no solapamiento de más de dos funciones de pertenencia; y particiones suma 1. Una de las primeras propuestas para diseño automático de sistemas difusos a partir de los datos es la denominada table look-up écheme [2]. Otros métodos importantes emplean el gradiente descendente, técnicas de agrupamiento o clustering
Juan Contreras Montes está vinculado con la facultad de Ingeniería Naval
de la Escuela Naval Almirante Padilla en Cartagena, Colombia y con la Corporación Universitaria Rafael Núñez. ([email protected])
Roger Misa Llorca está vinculado con el Instituto Superior Politécnico José Antonio Echeverría, La Habana, Cuba ([email protected])
Lisbeth Uruera Vivanco está vinculada con la Corporación Universitaria Rafael Núñez ([email protected])
y algoritmos evolutivos. Con excepción del último método, todos requieren de un diseño previo de las funciones de pertenencia. La construcción de un modelo borroso requiere de la selección de un gran número de parámetros: número, forma y distribución de las funciones de pertenencia, construcción de la base de reglas, selección de operadores lógicos, selección del método de inferencia, entre otros, lo cual requiere de criterios sistemáticos para una acertada selección [3]. Los algoritmos de agrupamiento difuso representan la técnica más adecuada para la obtención de modelos difusos, siendo los métodos de Fuzzy C-Means [4] y de Gustafson-Kessel [5] los más empleados. Se han realizado diversas variaciones a estos algoritmos de agrupamiento. Nauck y Kruse [6], [7] proponen técnicas de agrupamiento neuro-difusas; Espinosa y Vandewalle [3] presentan una metodología para extraer reglas a partir de los datos en un marco de integridad lingüística incluyendo algoritmos de fusión para agrupar conjuntos cuyos valores modales estén a una distancia muy cercana. Sala [8], [9] introduce una novedosa técnica basada en el error de inferencia para aproximar funciones empleando partición suma 1 con conjuntos triangulares; Diez et al. [10] proponen variaciones a los algoritmos de agrupamiento para mejorar la interpretabilidad y descubrir estructuras afines locales en los modelos difusos obtenidos. Paiva y Dourado [11] presentan un modelo generado por medio del entrenamiento de una red neuro-difusa implementado en dos fases: en la primera fase, se obtiene la estructura del modelo empleando un algoritmo clustering substractivo, lo cual permite extraer las reglas a partir de datos de entrada y salida; en la segunda fase se realiza la sintonización de los parámetros del modelo mediante una red neuronal que emplea backpropagation. Guillaume y Charnomordic [12] proponen una estrategia para generar particiones difusas interpretables a partir de los datos mediante una metodología, que denominan partición jerárquica difusa (HFP), en la que, en vez de incorporar datos en cada iteración, agrega conjuntos difusos. También presentan un algoritmo de fusión de los conjuntos difusos basado en métricas adecuadas que garanticen la interpretabilidad semántica. Joo y Lee [13], [14] proponen un aproximador universal para cualquier función continua en un conjunto compacto empleando un sistema difuso jerárquico en el que las salidas de las capas previas no se usan en las partes IF de la reglas difusas sino en las partes THEN. Los métodos mencionados generan modelos difusos con acertada precisión numérica, pero continúa siendo un problema la interpretabilidad y el gran número de parámetros que se deben sintonizar. La novedad del método propuesto en
Algoritmos para Identificación de Modelos Difusos Interpretables J. Contreras, Member IEEE, R. Misa y L. Urueta
L
346 IEEE LATIN AMERICA TRANSACTIONS, VOL. 5, NO. 5, SEPTEMBER 2007

este documento radica en la consecución de modelos difusos interpretables con alta precisión y bajo número de parámetros. El proceso seguido para la obtención del modelo difuso a partir de datos de entrada y salida está basado en el método de error de inferencia de Sala [8] y se presentan en dos fases: en la primera, se emplea el error de inferencia para generar un sistema difuso interpretable y detectar clases o agrupamientos posibles en los datos; en la segunda, mediante una revisión de la ubicación de los singleton o solitarios de salida, se detectan posibles clases o agrupamientos y, si es el caso, se fusionan los solitarios pertenecientes a una misma clase para reducir el número de conjuntos de las particiones de las variables de entrada y, por lo tanto, el número de reglas difusas.
II. ERROR DE INFERENCIA En lógica difusa es común tratar con reglas del tipo “Si u es A, entonces y es B”, donde u e y representan dos variables numéricas, y A ⊂ U y B ⊂ Y son dos conjuntos difusos de entrada y salida respectivamente, definidos en los universos U y Y. La regla mencionada es equivalente a la desigualdad
)y()u( BA uu ≤ (1)
El error de inferencia ∈ está dado por
⎩⎨⎧
>−≤
∈≈)()u()()u()()u(0
yuuyuuyuu
BABA
BA
K
L (2)
El método propuesto para crear un sistema difuso que se aproxime a una función de una entrada una salida, con un error de inferencia nulo, debe cumplir con la condición
)y()u( BA uu = (3)
en el caso de una regla del tipo “Si u es A, entonces y es B”. Si el sistema tiene p entradas se debe representar por una regla del tipo “Si u1 es A1 , u2 es A2 , …, um es Am, entonces y es B”, por lo cual el sistema generado debe cumplir con la condición
)())((...)(()((( )()(22
)(11
j
Bi
pmAi
Ai
A yuxuxuxu =∧∧∧ (4)
donde ∧ representa, en el método propuesto, un operador de combinación de la lógica difusa; k = 1,..,p indica la variable
de entrada, y j
y es el consecuente solitario asociado a la regla.
III. IDENTIFICACIÓN DIFUSA POR ERROR DE INFERENCIA
A. Estructura del modelo difuso Buscando un equilibrio entre la aproximación numérica y la interpretabilidad del sistema difuso resultante se consideran los siguientes criterios para la selección de los parámetros 1) Funciones de pertenencia
La partición de los universos de las variables de entrada se hará con conjuntos triangulares normalizados con solapamiento específico de 0,5, ya que estos permiten la reconstrucción del valor lingüístico en el mismo valor numérico, luego de aplicar
un método de defuzzyficación [15]; además, el solapamiento en 0,5 asegura que los soportes de los conjuntos difusos sean diferentes.
Los conjuntos difusos generados para la variable de salida serán tipo solitario.
2) Distribución de las funciones de pertenencia Los conjuntos difusos triangulares de las variables de
entrada estarán distribuidos de manera simétrica en cada universo respectivo de manera tal que cada uno de los elementos de los universos de discurso de cada variable debe pertenecer, al menos, a un conjunto difuso.
3) Operadores Para la conjunción de los antecedentes de cada regla se
empleará un operador de combinación tipo OWA, el cual promedia los grados de pertenencia de las funciones que conforman el antecedente de cada regla.
4) Método de inferencia El método de inferencia empleado está dado por
∑
∑=
== L
ji
kj
jL
ji
kjik
j
xm
yxmxy
1)(
1)(
)(
)(
)()( (5)
donde )( )(ikj xm es el grado de pertenencia del i-ésimo dato
de entrada en el antecedente j (en el caso de sistemas con más de una entrada corresponderá a la conjunción de las entradas).
jy es el valor del singleton correspondiente a la regla j.
B. Algoritmo de identificación difusa Dada una colección de datos experimentales de entrada y
salida { })()( , iik yx , i =1,...,N; k =1,…,p, donde )(i
kx es el
vector de entrada p-dimensional )()(2
)(1 ,...,, i
pii xxx e )(iy es el
vector unidimensional de salida 1 Determinación de los valores mínimos y máximos de
cada variable de los universos de entrada. 2 Distribución de las funciones de pertenencia
triangulares sobre cada universo. Se tiene como condición general que el vértice con valor de pertenencia uno (valor modal) cae en el centro de la región cubierta por la función de pertenencia mientras que los otros dos vértices, con valor de pertenencia, iguales a cero, caen en los centros de las dos regiones vecinas. Inicialmente se hace coincidir los vértices con valor de pertenencia uno de las funciones de pertenencia que cubren el inicio y final del universo de cada variable de entrada con sus valores mínimo y máximo respectivamente, como se aprecia en la figura 1. Estos vértices pueden ser modificados si se aplica el método del gradiente descendiente para disminuir el error de aproximación mediante la variación de la ubicación de los valores modales manteniendo la condición de partición suma 1. Inicialmente el número m de conjuntos por variable será de 2.
CONTRERAS MONTES et al.: DATA-DRIVEN IDENTIFICATION 347

Fig. 1. Partición triangular suma 1.
3 Cálculo de la posición de los valores modales de la(s) variable(s) de entrada. Para el caso de sistemas de una entrada y una salida se evalúa el vector de datos de entrada en cada uno de los n conjuntos de la partición
if 1)( )( =ikA xu
m
[ ]iyyj
= End
(6)
donde j
y corresponde al valor del solitario asociado al conjunto i del antecedente A. El dato del vector
)(ikx que coincide con la posición del valor modal del
conjunto Am genera un consecuente solitario, el cual es igual al valor de salida ubicado en la misma posición (orden) que el dato de entrada en mención. En el caso de sistemas con más de una entrada el solitario estará determinado por la posición correspondiente al instante en que se intersectan los valores modales de los conjuntos que conforman cada antecedente.
4 Definición de las reglas. Se asigna a cada conjunto (o combinación de conjuntos) de la variable de entrada (antecedente), el singleton (consecuente) correspondiente.
5 Ajuste de la ubicación de los singleton empleando mínimos cuadrados. Para el caso de más de una variable de entrada la ecuación (5) puede expresarse de la forma
)()( )(1
)( ikj
jL
ji
kj xwyxy ∑ =
= (7)
donde
ijL
ji
kj
ikji
kj wxm
xmxw ==
∑ =1)(
)()(
)(
)()(
(8)
Por lo tanto, el vector de datos de salida calculado por el modelo propuesto puede representarse de la forma Y = Wθ+E, que expresado en forma matricial será
En
L
W
nL
nn
L
L
Y
L e
ee
y
yy
www
wwwwww
y
yy
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
MM
K
MOMM
K
K
M
2
12
1
21
222
21
112
11
2
1
θ
(9)
donde E es el error de aproximación a los datos experimentales dados. Para minimizar el error empleamos mínimos cuadrados, de donde se obtiene la mejor ubicación de los singleton mediante
WYWWWWWY TT
T
T1)( −==θ
(10)
Esta solución es válida si )( WW T es no singular, lo que quiere decir que todas las reglas deben recibir suficiente excitación (excitación persistente) durante el entrenamiento. En la práctica esto no es siempre posible, por lo que es recomendable recurrir a la aplicación de mínimos cuadrados recursivos, buscando garantizar que la adaptación solo afecte las reglas excitadas [3].
6 Terminar si la medida del error es menor a una medida previamente establecida. De otra manera, incrementar el número n de conjuntos de la variable de entrada y volver al paso 3.
El algoritmo descrito permite hallar un sistema de reglas difusas interpretables con una buena precisión, como se verá más adelante cuando se presenten los resultados obtenidos en la solución de problemas clásicos. La proyección de los valores modales en el espacio de salida permite detectar agrupamientos o clases, con lo cual se puede reducir el número de reglas y el número de conjuntos del universo de entrada. A continuación se describirá un algoritmo que permite fusionar conjuntos que se encuentran a una distancia conceptual relativa muy pequeña con el fin de disminuir, si es posible, el número de reglas.
IV. ALGORITMO DE FUSIÓN Después de haber obtenido el modelo difuso interpretable
mediante el algoritmo anterior, es posible reducir el número de conjuntos de cada variable de entrada y, por lo tanto, del número de reglas, definiendo previamente una distancia mínima D posible entre los singleton resultantes y fusionando aquellos que se encuentren demasiado cerca sin afectar la integridad semántica ni la precisión del modelo.
1. Ordenar los n singleton de la variable de salida. 2. Calcular la distancia entre singleton sucesivos ),()1( iyiyd mmi −+= )1(,...,1 −= ni (11) 3. Seleccionar los l grupos con distancias consecutivas
menores que D (clúster) ],,...,[ 1 lqll ccC = ,1 nq << nl <<1 (12)
4. Si no existen distancias menores que D, entonces terminar. De lo contrario, continuar
5. Calcular, por cada agrupamiento, el punto equidistante
lmc entre los índices de los singleton ubicados en los
extremos.
11
2)(
lllq
m ccc
cl
+−
= (13)
348 IEEE LATIN AMERICA TRANSACTIONS, VOL. 5, NO. 5, SEPTEMBER 2007

6. Fusionar todos los singleton correspondientes a distancias consecutivas más pequeñas que D (calcular los centros de cluster). Para cada agrupamiento se calcula la ubicación del solitario mediante
∑=
−+=L
jm
j
m
jcycy
1
)(* (14)
donde jy * es la ubicación del nuevo singleton que
reemplazará a los j singleton del agrupamiento. 7. Actualizar q y regresar a 3 8. Redistribuir los conjuntos triangulares de los
antecedentes con la proyección de la nueva distribución de los singleton en cada universo de entrada.
9. Calcular una métrica del error, por ejemplo el error cuadrático medio, para determinar la afectación de la fusión a la precisión del modelo. La medida del error debe estar por debajo de la previamente establecida en el algoritmo de identificación difusa.
Fig. 2. Reducción de conjuntos empleando algoritmo de fusión.
La Fig.2 muestra el resultado de aplicar el algoritmo de fusión a un sistema difuso con una partición inicial que incluía 9 conjuntos y luego es reducida a 6.
V. GENERACIÓN DE PARTICIÓN DEL ANTECEDENTE Es posible reducir aun más el error de aproximación si se
realiza una proyección de la partición del consecuente sobre cada antecedente, lo cual puede modificar la forma triangular de los conjuntos pero sigue siendo partición suma 1. 1. Realizar una extensión cilíndrica de cada uno de los
conjuntos que conforman la partición del antecedente 2. Proyectar la imagen generada en el espacio de salida
sobre cada universo de entrada con la misma distribución espacial porcentual de los datos en el espacio de salida. Es decir, si los valores de los límites inferior y superior del espacio de salida están dados por yo e yf respectivamente y los valores de los límites inferior y
superior del espacio de entrada están dados por xo y xf respectivamente, el mapeo de cada dato del espacio de salida sobre el espacio de entrada está dado por
)(11 of
of
iiii xx
yyyyxx −⎟
⎟⎠
⎞⎜⎜⎝
⎛
−−
+= −− (15)
asociando los grados de pertenencia de los datos de salida con los de entrada, de acuerdo a (3)
VI. RESULTADOS Se presentan los resultados obtenidos al aplicar el método
propuesto a problemas clásicos como el horno de gas de Box_Jenkins [16] y el sistema no lineal multivariable dado por la ecuación
,)1( 25.12
21
−− ++= xxy 5,1 21 ≤≤ xx (16)
A. Horno de Gas de Box-Jenkins Uno de los problemas clásicos en la modelación e identificación de sistemas es el horno de gas planteado por Box y Jenkins. El conjunto de datos está compuesto de 296 pares de datos de entrada-salida. Los datos de entrada corresponden a la medida de flujo de gas que va a ser quemado y los datos de salida a la concentración de dióxido de carbono. El objetivo es predecir la salida usando valores pasados de la entrada y la salida. Varios autores han trabajado este problema con diferente número de valores pasados de entrada y salida. Gaweda y Zurada [17] emplean, en la ecuación de regresión, las variables u(k-1), u(k-2), u(k-3), y(k-1), y(k-2) y y(k-3), mientras que Paiva y Dourado [11] emplean en la ecuación de regresión solo las variables y(t-1) y u(t-4), logrando un error RMS de 0.390 en la identificación.
u(k-4)
y(k-1)
Fig. 3. Funciones de pertenencia para el ejemplo de modelación del horno Box-Jenkins.
CONTRERAS MONTES et al.: DATA-DRIVEN IDENTIFICATION 349

Fig. 4. Desempeño del modelo difuso del horno de gas de Box-Jenkins.
Con las variables propuestas por Paiva y Dourado se aplicó el método propuesto y se obtuvo la partición mostrada en la Fig. 3 y el resultado mostrado en la Fig. 4. La tabla I presenta la base de reglas del modelo difuso y la tabla II muestra una comparación con los resultados obtenidos con otros métodos. Los conjuntos de salida son del tipo solitario con ubicaciones en 44,95, 53,1 y 60,8.
TABLA I DESCRIPCIÓN LINGÜÍSTICA DEL SISTEMA DIFUSO
Regla u(k-4) ∧ y(k-1) ⇒ ym(k) 1 A B 44,95 2 M M 53,10 3 B A 60,80
TABLA II COMPARACIÓN DE RESULTADOS DE VARIOS MÉTODOS AL PROBLEMA DEL
HORNO DE GAS DE BOX-JENKINS Modelo MSE Reglas Parámetros
Modelo SI de Kim et al (1998) [19]
0,048 2 110
Modelo de Gaweda y Zurada (2003)[17]
0,055 2 38
Modelo propuesto (Contreras, Misa, Urueta)
0,056 3 11
Modelo Sugeno. Wang y Langari (1995) [20]
0,066 2 N/A
Modelo ARMA. Box-Jenkins (1976) [16]
0,202 N/A N/A
Se obtuvo un modelo difuso con un bajo número de parámetros, buena precisión y una adecuada interpretabilidad en el sentido de que un operador humano tendrá un claro significado de las reglas.
B. Sistema no lineal multivariable
El sistema no lineal descrito por (18) ha sido utilizado por autores como Sugeno y Yukasawa [1], Emami et al. [18] y Díez et al. [10] para verificar el desempeño de técnicas de identificación difusa.
Para iniciar el proceso de identificación se generaron los datos de entrada salida a partir (13). La Fig. 5 muestra a la
Fig. 5. Aproximación a una superficie no lineal. izquierda a la superficie no lineal a identificar y a la derecha el resultado obtenido del modelo difuso. El algoritmo se inició con 2 conjuntos triangulares suma 1 por cada entrada, distribuidos uniformemente sobre el espacio de entrada, definiendo 3 clases o agrupamientos en los datos.
A pesar de que en la iteración siguiente se obtuvieron nuevamente 3 clases, se procedió a seguir incrementando el número de conjuntos hasta 5 por cada entrada manteniéndose las mismas 3 clases. Este ejercicio se hizo solo para verificar los resultados del método. En la Fig. 6 se muestra la ubicación de la extensión de los valores modales, resultados de las conjunciones de las entradas u1 y u2, en el espacio de salida. La Fig. 7 muestra la extensión de las combinaciones de los valores modales de las entradas en el espacio de salida.
Fig. 6. Clases detectadas en los datos de la superficie no lineal.
Fig. 7. Volúmenes generados por la extensión de las intersecciones de las entradas en el espacio de salida
La Fig. 8 muestra las funciones de pertenencia generadas por la proyección de los volúmenes mostrados en la Fig. 7, en el espacio de entrada. Las dos funciones de pertenencia por entrada indican un máximo de 4 reglas; sin embargo, las 3 clases detectadas en la Fig. 6 nos indican que son suficientes 3 reglas.
350 IEEE LATIN AMERICA TRANSACTIONS, VOL. 5, NO. 5, SEPTEMBER 2007
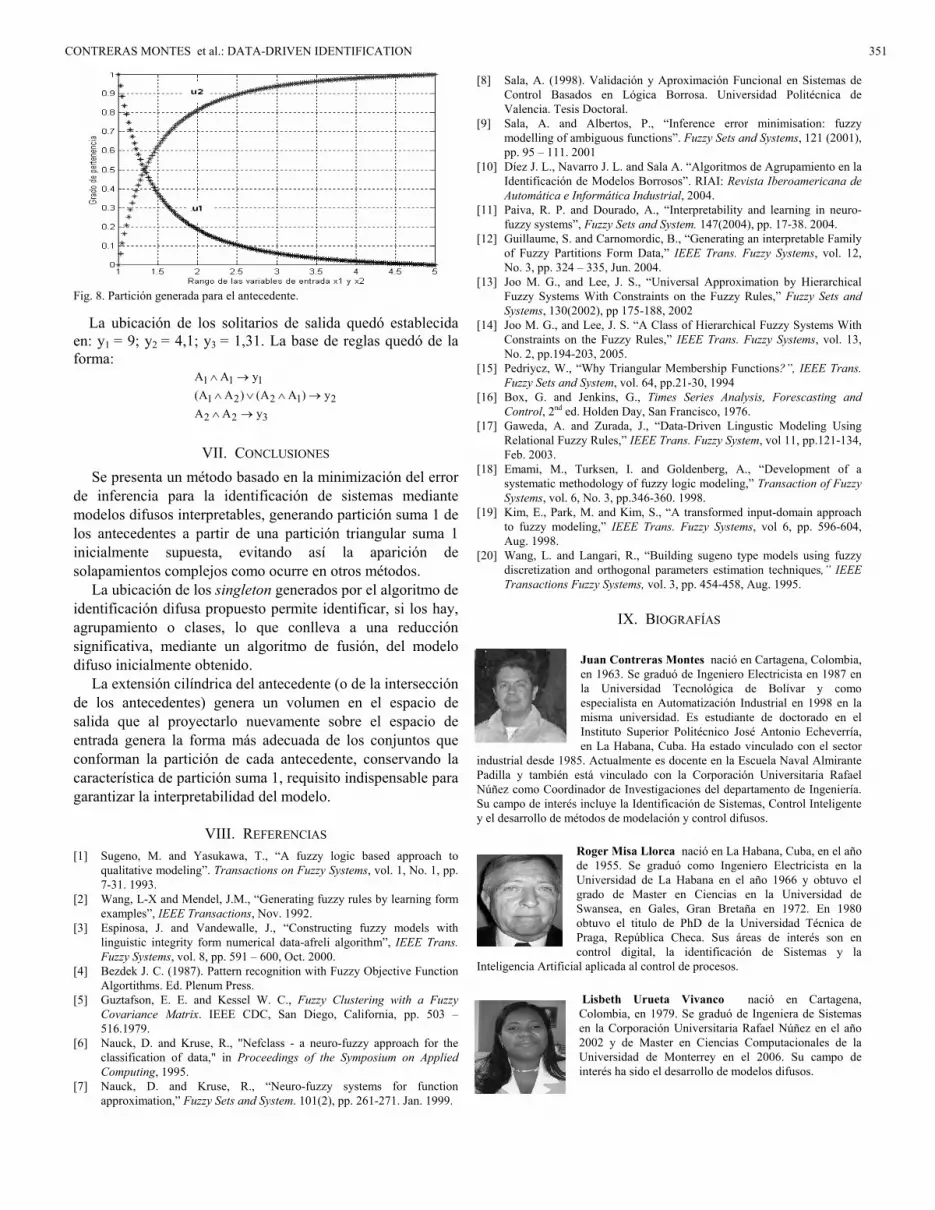
Fig. 8. Partición generada para el antecedente.
La ubicación de los solitarios de salida quedó establecida en: y1 = 9; y2 = 4,1; y3 = 1,31. La base de reglas quedó de la forma:
322
21221
111
yAAy)AA()AA(
yAA
→∧→∧∨∧
→∧
VII. CONCLUSIONES Se presenta un método basado en la minimización del error
de inferencia para la identificación de sistemas mediante modelos difusos interpretables, generando partición suma 1 de los antecedentes a partir de una partición triangular suma 1 inicialmente supuesta, evitando así la aparición de solapamientos complejos como ocurre en otros métodos.
La ubicación de los singleton generados por el algoritmo de identificación difusa propuesto permite identificar, si los hay, agrupamiento o clases, lo que conlleva a una reducción significativa, mediante un algoritmo de fusión, del modelo difuso inicialmente obtenido.
La extensión cilíndrica del antecedente (o de la intersección de los antecedentes) genera un volumen en el espacio de salida que al proyectarlo nuevamente sobre el espacio de entrada genera la forma más adecuada de los conjuntos que conforman la partición de cada antecedente, conservando la característica de partición suma 1, requisito indispensable para garantizar la interpretabilidad del modelo.
VIII. REFERENCIAS [1] Sugeno, M. and Yasukawa, T., “A fuzzy logic based approach to
qualitative modeling”. Transactions on Fuzzy Systems, vol. 1, No. 1, pp. 7-31. 1993.
[2] Wang, L-X and Mendel, J.M., “Generating fuzzy rules by learning form examples”, IEEE Transactions, Nov. 1992.
[3] Espinosa, J. and Vandewalle, J., “Constructing fuzzy models with linguistic integrity form numerical data-afreli algorithm”, IEEE Trans. Fuzzy Systems, vol. 8, pp. 591 – 600, Oct. 2000.
[4] Bezdek J. C. (1987). Pattern recognition with Fuzzy Objective Function Algortithms. Ed. Plenum Press.
[5] Guztafson, E. E. and Kessel W. C., Fuzzy Clustering with a Fuzzy Covariance Matrix. IEEE CDC, San Diego, California, pp. 503 – 516.1979.
[6] Nauck, D. and Kruse, R., "Nefclass - a neuro-fuzzy approach for the classification of data," in Proceedings of the Symposium on Applied Computing, 1995.
[7] Nauck, D. and Kruse, R., “Neuro-fuzzy systems for function approximation,” Fuzzy Sets and System. 101(2), pp. 261-271. Jan. 1999.
[8] Sala, A. (1998). Validación y Aproximación Funcional en Sistemas de Control Basados en Lógica Borrosa. Universidad Politécnica de Valencia. Tesis Doctoral.
[9] Sala, A. and Albertos, P., “Inference error minimisation: fuzzy modelling of ambiguous functions”. Fuzzy Sets and Systems, 121 (2001), pp. 95 – 111. 2001
[10] Díez J. L., Navarro J. L. and Sala A. “Algoritmos de Agrupamiento en la Identificación de Modelos Borrosos”. RIAI: Revista Iberoamericana de Automática e Informática Industrial, 2004.
[11] Paiva, R. P. and Dourado, A., “Interpretability and learning in neuro-fuzzy systems”, Fuzzy Sets and System. 147(2004), pp. 17-38. 2004.
[12] Guillaume, S. and Carnomordic, B., “Generating an interpretable Family of Fuzzy Partitions Form Data,” IEEE Trans. Fuzzy Systems, vol. 12, No. 3, pp. 324 – 335, Jun. 2004.
[13] Joo M. G., and Lee, J. S., “Universal Approximation by Hierarchical Fuzzy Systems With Constraints on the Fuzzy Rules,” Fuzzy Sets and Systems, 130(2002), pp 175-188, 2002
[14] Joo M. G., and Lee, J. S. “A Class of Hierarchical Fuzzy Systems With Constraints on the Fuzzy Rules,” IEEE Trans. Fuzzy Systems, vol. 13, No. 2, pp.194-203, 2005.
[15] Pedriycz, W., “Why Triangular Membership Functions?”, IEEE Trans. Fuzzy Sets and System, vol. 64, pp.21-30, 1994
[16] Box, G. and Jenkins, G., Times Series Analysis, Forescasting and Control, 2nd ed. Holden Day, San Francisco, 1976.
[17] Gaweda, A. and Zurada, J., “Data-Driven Lingustic Modeling Using Relational Fuzzy Rules,” IEEE Trans. Fuzzy System, vol 11, pp.121-134, Feb. 2003.
[18] Emami, M., Turksen, I. and Goldenberg, A., “Development of a systematic methodology of fuzzy logic modeling,” Transaction of Fuzzy Systems, vol. 6, No. 3, pp.346-360. 1998.
[19] Kim, E., Park, M. and Kim, S., “A transformed input-domain approach to fuzzy modeling,” IEEE Trans. Fuzzy Systems, vol 6, pp. 596-604, Aug. 1998.
[20] Wang, L. and Langari, R., “Building sugeno type models using fuzzy discretization and orthogonal parameters estimation techniques,” IEEE Transactions Fuzzy Systems, vol. 3, pp. 454-458, Aug. 1995.
IX. BIOGRAFÍAS
Juan Contreras Montes nació en Cartagena, Colombia, en 1963. Se graduó de Ingeniero Electricista en 1987 en la Universidad Tecnológica de Bolívar y como especialista en Automatización Industrial en 1998 en la misma universidad. Es estudiante de doctorado en el Instituto Superior Politécnico José Antonio Echeverría, en La Habana, Cuba. Ha estado vinculado con el sector
industrial desde 1985. Actualmente es docente en la Escuela Naval Almirante Padilla y también está vinculado con la Corporación Universitaria Rafael Núñez como Coordinador de Investigaciones del departamento de Ingeniería. Su campo de interés incluye la Identificación de Sistemas, Control Inteligente y el desarrollo de métodos de modelación y control difusos.
Roger Misa Llorca nació en La Habana, Cuba, en el año de 1955. Se graduó como Ingeniero Electricista en la Universidad de La Habana en el año 1966 y obtuvo el grado de Master en Ciencias en la Universidad de Swansea, en Gales, Gran Bretaña en 1972. En 1980 obtuvo el titulo de PhD de la Universidad Técnica de Praga, República Checa. Sus áreas de interés son en control digital, la identificación de Sistemas y la
Inteligencia Artificial aplicada al control de procesos.
Lisbeth Urueta Vivanco nació en Cartagena, Colombia, en 1979. Se graduó de Ingeniera de Sistemas en la Corporación Universitaria Rafael Núñez en el año 2002 y de Master en Ciencias Computacionales de la Universidad de Monterrey en el 2006. Su campo de interés ha sido el desarrollo de modelos difusos.
CONTRERAS MONTES et al.: DATA-DRIVEN IDENTIFICATION 351





























