Embed Size (px)
Citation preview

DECIDE: Applying multi-agent design and decision logicto a baggage handling system?
Kasper Hallenborg
Maersk Mc-Kinney Moller InstituteUniversity of Southern Denmark
Odense M, 5230, [email protected]
Abstract. Behind the curtains at check-in desks in airports hide someof the most complex material handling systems, which manage to getyour bag transported to the correct departure gate of your flight.The conventional control software uses a strategy primarily based on ashortest path algorithm, not taking into account dynamical changes orutilization of less packed areas of the BHS.We changed that perspective towards a decentralized multi-agent basedsolution by developing strongly collaborating agents. The agents replacethe existing control software without modifying the layout of the BHS.In this paper we describe BHS problem and the agent-based design. Wepay special attention to the impact of the local environments of theagents, and finally give examples of implemented decision strategies.
1 Introduction
Burdened by the fear of never seeing the suitcase again, you observe it disappear-ing in the back at check-in, even though is usually arrived out of nowhere at yourdestination. Looking into this ”blackbox” one will experience a complex systemunlike many others. Baggage-handling systems (BHS) of airports are shroudedin mystery due to both security reasons and the general size and complexity,which overshadows the entire air traffic industry.In this paper we will present research experiences we have conducted by apply-ing multi-agent technologies to a real BHS at a major airport hub in Asia. Theintension was not to design a MAS-based system from scratch, but to evaluatean approach of exchanging the traditional control software with a multi-agentbased solution, thus the solution described in the paper is truly mediated by theproblems and constraints of the environment in which the BHS is situated.
1.1 Handling baggage
To understand the baggage handling task of an airport, a short introduction isrequired. Handling baggage is usually not a problem in charter or minor airports,? This research was supported by The Ministry of Science, Technology and Innovation
in Denmark under the IT Cooridor Foundation

where almost all passengers are either departing or have reached their final des-tination, but sorting and routing baggage in airport hubs of modern airportswith many connecting flight ought to be handled by an automatic BHS.In principles the general task of a BHS is to bring baggage from one destinationto another, A to B, but the number of bags, the unsorted inflow, the mechanics,and the number of different destinations complicates the task. Thus the BHSapparently shares several control characteristics with routing of packages in net-work traffic, but the density of alternative routes is much lower in the BHS thana typical telecommunication network. Also the important fact that lost packagescannot be resubmitted in the BHS introduces other foci in the control of theBHS. SWARM-based approaches like Schoonderwoerd’s ant-based control [15]or Di Caro & Dorigo’s AntNet are examples of intelligent agent-based approachesfor routing in networks.
The BHS more or less covers an area similar to the basements of the terminalsof an airport, and tunnels with pathways connect the terminals. The system israther vulnerable around the tunnels, because typically there are no alternativeroutes and the tunnels only contain one or two FIFO-based lanes that could beseveral kilometers long. A BHS is a huge mechanical system, usually composedof conveyor-like modules capable of transferring totes (plastic barrels) carryingone bag each. Also a numbers of external factors influence the performance
– Arriving baggage from either flights or check-in are not sorted, but arrivesmixed from different destinations1.
– Identity and destination of bags are unknown to the system until the bag isscanned at the input facilities, thus preplanning and traditional schedulingis not an option.
– Changes in flight schedules happen all the time, due to both weater condi-tions and delayed flights.
No delayed bags are top priority criteria for a BHS, because that delays flights.Therefore the BHS must comply with the maximum allowed transfer time, whichis our case is between 8-11 minutes. Besides securing that bags reach their des-tination in time the capacity of the BHS should also be maximized, and thecontrol system should try to distributed the load and utilize the entire system,if it should be capable of handling peak times.
2 Agent-based approach
2.1 Related work
Multi-agent technologies have been applied to a number of both research andpractical cases of production systems and material handling systems, such asthe Production 2000+ project at DaimlerChrysler [4]. The Production P2000+project has a strong focus on flexibility in a more traditional shop floor manufac-turing environment, where high diversity in orders and production flow through1 baggage for baggage-claim are usually separated and handled by other systems

operational stations is the main issue. The BHS could still be considered as a pro-duction system, because we have the input facilities (toploaders), which receivebaggage from arriving planes or check-in. In production terms that would bethe procurement of the production system [3]. There are a number of processingstations in the BHS as well, but primarily they fall into the category of divertersand mergers, which split or merge conveyor pathways respectively. There ex-ists special processing stations in the system, such as manual handling stations,which are used e.g. for baggage, which have lost their tracking id. Also elementsas lifts or temporary storage elements are some specials versions elements thatform the entire conveyor system of the BHS.
A number of research papers deal with agent-based manufacturing control orholonic manufacturing systems from a more general perspective, such as [13, 10].Primarily the research has focused on flexibility in scheduling and planning ofresources in the productions environment. Approaches for planning are more orless formalized, such as the Generalized Partial Global Planning (GPGP) appliede.g. for scheduling and resource optimization in [6–8]. Other general strategiesinclude the PACO planning, described in [11], and more deliberate agents usingBDI-based agents for local optimizations [9].
3 Agent design
In this section we will go into details about different tasks of the different ele-ments of the BHS, which will form the final strategies we have applied to controlthe BHS. The elements are the building block of the BHS and from an intuitivepoint of view the potential candidates for agents in the system. An alternativeapproach would be to consider the totes as “consumer” agents and the BHSas a collection of “producer” agents, as the BHS can solve the tasks that thetotes want to have performed. In principle a tote could then negotiate is waythrough the system, and if the bag was urgent it would be willing to pay ahigher price than non-urgent bags. Because the BHS generally consists of path-ways of FIFO queuing lanes with little and often no possibilities of overtakingit is more appropriate to design the agents around the flow control of the BHS.The element agents should then coordinate their activities to optimize systemperformance and should therefore be considered as collaborative agents, ratherthan competitive agents.
3.1 Toploader
The input facilities of the BHS are called toploaders, as they drop bags into thetotes from a conventional conveyor belt so they can be tracked at all times.
Basically the task of the toploader could be decomposed into id-scanning ofthe bag. Secondly it initiates the journey of the tote on the BHS. In order to startthe routing of the tote, the end-point (discharger) must be set for the tote, butseveral dischargers are often allocated to the same flight destination. Thereforethe toploader agents initiate a negotiation with the possible dischargers (a FIPA

contract net) to find the best suited discharger, the evaluation of the proposalsfrom the dischargers is not trivially choosen as the lowest offer, but weightedwith the current route length to the dischargers, which is requested from a routeagent - a mediator agent with a global focus on dynamic route lengths.The toplader can take two different approaches for routing the tote
Routing by static shortest path After the toploader has decided on the dis-charger it could instruct all diverting elements along the route to directthat specific tote along the shortest path. Then the agent system would inprinciple work as the traditional control system by sending all totes alongpredefined static shortest routes.
Routing on the way Instead of planning the entire route through the BHS,the toploader could just send the tote to the next decision point along theshortest route. A more dynamical and flexible approach, as the tote can bererouted, if the route conditions have changed.
3.2 Straight elements
Most elements of a BHS are naturally straight or curved elements that connectthe nodes of the routing graph. Straight or curved elements are not consideredas agents in our current design, because mechanically they will always forwarda tote to the next element if it free. In principle the speed of each element couldbe adjusted to give a more smooth flow and avoid queuing. In the current setupit would generate an enormous communication overhead.
3.3 Diverters
A diverter splits a conveyor lane into two, either a left or right turn and straightahead. In respect to the strategies described above the diverter would eitherjust forward the tote in the direction determined by the toploader, or it wouldreconsider alternative routes by restarting the negotiation process. A divertershould be concerned about the relevancy of reconsidering the route for a tote,because in many cases there is only one possible direction at a given diverterfor a given tote. We want to generalize the control logic of the diverter agentsinstead of customizing it according to the placement of the diverter in the BHSlayout. Thus initially it adjusts itself to different destinations based on staticroute information. As mentioned for many diverters there are no alternativedirection, for some the decision will have little impact. For a few diverters thedecision would have great impact on future decisions. In particular divertersplaced, where it is possible to change layers2.
3.4 Mergers
Mergers are the opposite of diverters, as they merge two lanes. Traditionallymergers are not controlled, as there are no alternatives to continuing on the2 The BHS is constructed as two layers of conveyor to save both space and cost.

single lane ahead, and the merger simply alters between taking one tote fromeither input lane, if both are occupied.
Obviously, more intelligent decisions could be considered than just switchingbetween the input lanes. The ratio between merging totes from the input lanesshould be determined by the aggregated data of the totes in either of the twolanes. E.g. if the number of urgent totes waiting to be merged are higher in onelane that lane should be given higher priority.
3.5 Dischargers
Dischargers are responsible for unloading bags from the totes, when the totereaches its destination. Dischargers also have to take care of the empty totes.Some BHSs have separate conveyor system for the empty totes, but many sys-tems including the researched BHS use the same lanes for routing the emptytotes back to the tote stackers at the toploaders.The task is similar to routing full totes, but actually much more complex, dueto several considerations that must be taken into account.
– The number of destinations (tote stackers) is larger than alternative dis-chargers for full totes (typically 2), whereas the number of tote stackers isequal to the number of toploaders, which is 12 in our case.
– The status of empty tote stackers. If a stacker runs empty, no totes will beavailable at the toploaders for new bags.
– The distance to the stackers. It is more appropriate to return the empty toteto a stacker nearby than sending it half way through the system.
4 Agent strategies
In this section we present some of the implemented strategies for the agentsevolved from the tasks and considerations mentioned in the previous section. Thestrategies includes basic local observations, which are used partly in some of thestrategies. The strategies are highly influenced and mediated by the environment.
Three strategies will be described in the following subsections to give exam-ples of the formulated problems above. The described examples do not completethe picture of the entire agent system.
4.1 Choosing a tote stacker for empty totes
Considering tote stackers in the return strategy for empty totes take the fullstatus of stackers, the number of stackers, and the distance to each stacker intoaccount. The full status of stackers are defined as ration between the full capacityand the current content. The status is converted into a priority for extra totesusing a standard indeed fuzzy hedge [14]
si ={
2r2i 0 ≤ ri <12
1− 2(1− ri)2 12 ≤ ri ≤ 1 (1)
where ri is the full-ratio for the i’th stacker, and si is its priority for requstingextra totes. The priority determined are used to scale the dynamic route lengthto each tote stacker, so an almost empty stacker will have a very low value,whereas a full stacker will be evaluated on its full route length.
vi = di · si (2)
where di is the dynamic distance to the stacker from the decision point, and isrequested from the route agent.
4.2 Overtaking totes within a group of diverters and mergers
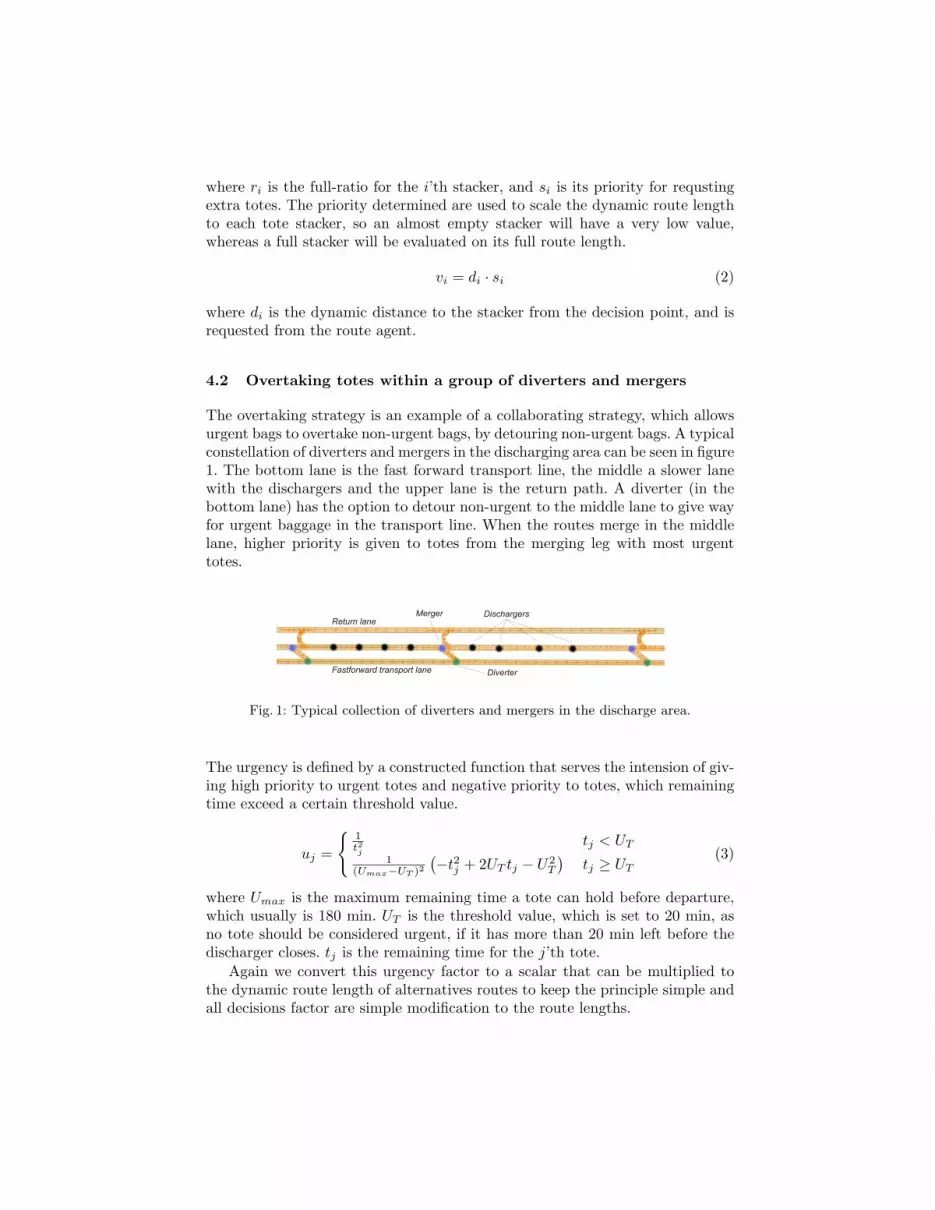
The overtaking strategy is an example of a collaborating strategy, which allowsurgent bags to overtake non-urgent bags, by detouring non-urgent bags. A typicalconstellation of diverters and mergers in the discharging area can be seen in figure1. The bottom lane is the fast forward transport line, the middle a slower lanewith the dischargers and the upper lane is the return path. A diverter (in thebottom lane) has the option to detour non-urgent to the middle lane to give wayfor urgent baggage in the transport line. When the routes merge in the middlelane, higher priority is given to totes from the merging leg with most urgenttotes.
Fastforward transport lane
Return laneDischargers
Diverter
Merger
Fig. 1: Typical collection of diverters and mergers in the discharge area.
The urgency is defined by a constructed function that serves the intension of giv-ing high priority to urgent totes and negative priority to totes, which remainingtime exceed a certain threshold value.
uj =
{1t2j
tj < UT1
(Umax−UT )2
(−t2j + 2UT tj − U2
T
)tj ≥ UT
(3)
where Umax is the maximum remaining time a tote can hold before departure,which usually is 180 min. UT is the threshold value, which is set to 20 min, asno tote should be considered urgent, if it has more than 20 min left before thedischarger closes. tj is the remaining time for the j’th tote.
Again we convert this urgency factor to a scalar that can be multiplied tothe dynamic route length of alternatives routes to keep the principle simple andall decisions factor are simple modification to the route lengths.

sj ={
(1− uj)(1 + vk+1) uj < 0 (non-urgent tote)(1− uj)(1− vk+1) uj ≥ 0 (urgent tote) (4)
where vk+1 is the aggregated urgency value for the next decision point along theroute, which is requested from the divert agent. Using this formula secures thaturgent totes will group along the shortest route (as vk+1 is close to 1), whereasnon-urgent are punished with a detour. If there are no queues on the routes thevk+1 is 0, and the scale factor has no effect.
The mergers in the discharger lane, then simply give higher priority to inputlanes with more urgent totes. The ratio between the aggregated urgency factorsof the input lanes becomes the ratio for merging totes from the input lanes.
4.3 Saturation management
Saturation management is a strategy intended for avoiding queues at all byminimizing the load on the system in critical areas. Acceleration ramps andreaction times result in a typical characteristic of a flexible manufacturing system(FMS) known as the work in-progress against capacity curve (WIPAC), which isfurther described in [12]. By principle it states that the capacity of the systemsgoes dramatically down, if the load on the system exceeds a certain thresholdvalue - almost a deadlock situation. The strategy is simply to block a toploader ifthe routes from the toploader are overloaded and let the system resolve. Queuesclose to the toploader are most critical, as the toploader have great impact onfilling up those queues, whereas the parts of the route far from the toploadercould be resolved before the new totes arrive. Instead of blocking the toploadercompletely, we can just slow down the release of new totes using the followingfraction of full speed for the toploader.
vt =∑i wiqi∑i wi
=
∑iαdiqi∑
iαdi
(5)
where vt is the full speed of the toploader, and wi are weights of the queuestatues, qi, along the routes. The weight is given by a fitted coefficient, α, and thedistance from the toploader di. Queue statuses, qi, are always a number between0 and 1, where 1 indicates no queue. The effect of the saturation managementstrategy is clearly documented by the graph in figure 2.
5 Conclusion
Is this paper we have presented important research contributions from a baggagehandling system (BHS) in a major airport hub in Asia. Agents were intended tosubstitute existing control logic, but not change the layout of the BHS, thereforedesign of the agent-based control software is highly influenced by the environ-ment of the BHS, and the control logic of each individual agent constantly adaptto the current situation of the local neighborhood of the agent.

Saturation management
No saturation management
Time
Through-put
Fig. 2: Result of a test scenario with and without the saturation management strategy.
References
1. FKI logistex. http://www.fkilogistex.com/, 2006.2. Simcon. http://www.simcon.dk/, 2006.3. S. Bussmann, N. R. Jennings, and M. Wooldridge. Multiagent Systems for Manu-
facturing Control. Springer, 2004.4. S. Bussmann and K. Schild. An agent-based approach to the control of flexible
production systems. In 8th IEEE Int. Conf. on Emerging Technologies and FactoryAutomation (ETFA 2001), pages 169–174, Antibes Juan-les-pins, France, 2001.
5. G. D. Caro and M. Dorigo. Antnet: A mobile angents approach to adaptive routing.Technical Report IRIDIA/97-12, Universite Libre de Bruxelles, Belgium, 1997.
6. K. Decker and J. Li. Coordinated hospital patient scheduling. In In Proceedingsof the Third International Conference on Multi-Agent Systems (ICMAS98), pages104–111, 1998.
7. K. Decker and J. Li. Coordinating mutually exclusive resources using GPGP.Autonomous Agents and Multi-Agent Systems, 3(2):133–157, 2000.
8. K. S. Decker. Environment Centered Analysis and Design og Coordination Mecha-nisms. PhD thesis, Department of Computer Science, University of Massachusetts,May 1995.
9. S. Flake, C. Geiger, G. Lehrenfeld, W. Mueller, and V. Paelke. Agent-based mod-eling for holonic manufacturing systems with fuzzy control. In NAFIPS’99, 18thInternational Conference of the North American Fuzzy Information Processing So-ciety, New York, USA, 6 1999.
10. A. Giret and V. Botti. Analysis and design of holonic manufacturing systems. In18th International Conference on Production Research (ICPR2005), 2005.
11. Y. Gufflet and Y. Demazeau. Applying the paco paradigm to a three-dimensionalartistic creation. In 5th International Workshop on Agent-Based Simulation,ABS’04, pages 121–126, Lisbon, PortugalA, 5 2004.
12. A. Kragh. K-Netvrksmodeller til Analyse af FMS Anlg. PhD thesis, Informaticsand Mathematical Modelling, Technical University of Denmark, 1990.
13. G. Maionea and D. Naso. A soft computing approach for task contracting inmulti-agent manufacturing control. Computers in Industry, 52(3):199–219, 1996.
14. M. Negnevitsky. Artificial Intelligence A Guide to Intelligent Systems. AddisonWesley, 2 edition, 2005.
15. R. Schoonderwoerd, O. Holland, J. Bruten, and L. Rothkrantz. Ant-based loadbalancing in telecommunication networks. Adaptive Behaviour, (5):169–207, 1996.




























