Embed Size (px)
Citation preview
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
1
Electrotehnică, maşini şi acţionări electrice
Note de curs pentru studenţii Facultăţii de Utilaj Tehnologic pentru Construcţii
Autor: Şef lucrări dr. ing. Robert PECSI

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
2
Cuvânt înainte
Prezenta lucrare se adresează studenţilor facultăţii de Utilaj Tehnologic pentru Construcţii din cadrul Universităţii Tehnice de Construcţii Bucureşti şi este astfel concepută încât să vină într-o cât mai mare măsură în sprijinul asimilării informaţiilor de bază necesare pentru dobândirea aptitudinilor practice şi pentru promovarea cu succes a examinării aferente.
Lucrarea este concepută pe subiecte de examen şi este cât mai clar structurată pentru a permite o facilă asimilare a cunoştinţelor. Lucrarea conţine acele informaţii teoretice care sunt absolut necesare pentru studentul Facultăţii menţionate şi nu are pretenția de a fi o lucrare exhaustivă asupra subiectului tratat.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
3
CAPITOLUL 1 – ELECTROSTATICA
1.1. Legea conservării sarcinii electrice
În natură au loc neîncetat numeroase şi diverse fenomene. În înţelesul cel mai general, fenomenul este o manifestare exterioară a esenţei unui obiect (sistem), a unui proces etc., care este accesibilă în mod nemijlocit. În limbajul curent, fenomenul înseamnă o transformare, o evoluţie, un proces sau un efect etc. Fenomenele electric reprezintă mulţimea ordonată a stărilor pe care le are un sistem electric în momentele succesive ale unui interval de timp.
Sarcina electrică este o mărime fizică ce caracterizează din punct de vedere cantitativ proprietăţile corpurilor electrizate şi este responsabilă de interacţiunea electromagnetică a materiei. Termenii de „electrizat”, „pozitiv” şi „ negativ” au fost introduse de Benjamin Franklin, în urma experienţelor cu maşina electrostatică a lui von Guerike. Stabilirea experimentală a două tipuri de interacţiune între particulele încărcate electric – una de atracţie şi una de respingere – a dus la concluzia că sarcinile electrice sunt de două feluri (denumite de Franklin „pozitive” şi „ negative”). Corpurile încărcate cu sarcini electrice de acelaşi fel se resping iar cele cu sarcini contrare se resping.
Sarcina electrică este o mărime fizică scalară notată cu q sau Q. În SI unitatea de măsură a sarcinii electrice este 1 Coulomb (1 C).
Cq SI 1= . (1.1)
Experienţele fizice au dovedit natura discontinuă a materiei. Cele mai mici entităţi din care este formată materia sunt particulele elementare. În stadiul actual al cunoaşterii se consideră că electronii, protonii şi neutronii sunt particulele elementare care intră în compoziţia atomului şi a moleculelor ce formează materia. S-a descoperit recent că protonii şi neutronii au compoziţie internă, dar pentru considerentele legate de cursul nostru le putem considera practic indivizibile. Fiecare particulă elementară este caracterizată de proprietăţi intrinseci: masa gravitaţională, sarcina electrică, spinul, paritatea, stranietatea, etc. În fenomenele electromagnetice ce vor fi studiate de noi au importanţă doar sarcina electrică şi masa. Pentru constituenţii stabili ai atomului acestea au valorile indicate în tabelul 1.1.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
4
Particulă elementară Masa gravitaţională Sarcina electrică
Electron kgme30109,0 −⋅= Ceqe
19106,11 −⋅−=−=
Neutron kgmn2710674,1 −⋅= 0=nq
Proton kgmp2710672,1 −⋅= Ceqp
19106,11 −⋅+=+=
Tabel 1.1: Masa şi sarcina electrică pentru constituenţii stabili ai atomului
Observăm că cea mai mică valoare posibilă a sarcinii electrice este Ce 19106,1 −⋅= .
Sarcina electrică are trei proprietăţi fundamentale:
- sarcina electrică totală a unui sistem izolat din punct de vedere electric se conservă (Legea Conservării sarcinii electrice):
constqn
kk =∑
=1; (1.2)
- sarcină electrică este cuantificată, putând lua valori numai multiplii întregi ai cuantei:
Ce 19106,1 −⋅= ; (1.3)
- sarcina electrică este relativist invariantă.
Prima proprietate enunţată mai sus poartă numele de legea conservării sarcinii electrice. Ea a fost şi poate fi verificată în numeroase procese fizice. Legea conservării sarcinii electrice nu contrazice posibilitatea ca sarcina electrică să fie creată sau distrusă (anihilată), dar ea obligă ca în procesul de creare să apară simultan o pereche de sarcini elementare de semn contrar.
Tot la acest subiect, legat de sarcina electrică şi de conservarea ei se cuvine să spunem câteva cuvinte despre electrizarea corpurilor. A electriza un corp înseamnă a determina în acel corp apariţia unei sarcini electrice diferite de zero. Electrizarea se poate face fie prin transport direct de sarcini electrice, fie prin influenţă.
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
5
În primul caz, dacă un corp încărcat electric este pus în contact cu un corp fără sarcină, atunci corpul încărcat va transfera o parte din sarcina sa celuilalt. Contactul poate fi direct sau prin intermediul unui conductor electric. În cazul în care primul corp este încărcat negativ, acesta va ceda o parte din electronii lui celui de al doilea, în cazul în care primul corp este încărcat pozitiv, acesta va accepta o parte din electronii celui de al doilea, astfel încât să se stabilească un echilibru al sarcinilor electrice în sistemul nou format. Indiferent de situaţie, electrizarea prin contact duce la încărcarea cu acelaşi tip de sarcină electrică a celor două corpuri, suma sarcinilor electrice repartizate în final fiind egală cu sarcina electrică iniţială.
În cazul electrizării prin influenţă, încărcarea cu sarcini electrice a unui corp se realizează fără contactul direct al celor două corpuri. Explicaţia acestui fenomen constă în proprietatea intrinsecă a sarcinilor electrice de a se respinge dacă sunt de acelaşi semn. Astfel, dacă de un corp neutru din punct de vedere electric se apropie un alt corp încărcat, fără să vină în contact direct cu acesta, sarcina electrică de pe corpul neutru se va redistribui astfel încât faţa apropiată de corpul încărcat iniţial va căpăta o sarcină electrică de semn contrar. Dacă faţa opusă este legată la pământ, acesta fiind un bun conductor electric, excesul de sarcină electrică de pe această faţă va fi preluată. Acest mecanism nu funcţionează şi în cazul corpurilor izolatoare.
1.2. Legea lui Coulomb
Fizicianul Charles Coulomb a măsurat în anul 1785, cu ajutorul unei balanţe de torsiune, forţele care se exercită între două corpuri de probă practic punctiforme (având dimensiuni neglijabile comparativ cu distanţa dintre ele), încărcate electric. Corpurile erau izolate şi situate în vid. Variind succesiv valorile absolute ale sarcinilor, semnul acestora precum şi distanţele dintre corpuri, el a stabilit dependenţa forţelor de interacţiune electrică de aceste mărimi. Forţa de interacţiune dintre două sarcini punctiforme este proporţională cu produsul sarcinilor electrice ale corpurilor şi invers proporţională cu pătratul distanţei dintre ele.
221
rqqkF ⋅
⋅= . (1.4)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
6
In sistemul internaţional de mărimi şi unităţi (SI) constanta de proporţionalitate are expresia
r
kεεπεπ ⋅⋅⋅
=⋅⋅
=04
14
1, (1.5)
unde ε este o constantă ce caracterizează proprietăţile electrice ale mediului în care se află cele două corpuri şi se numeşte permitivitate electrică, 0ε este permitivitatea electrică a vidului, iar
0εεε =r (1.6)
este permitivitatea relativă a mediului respectiv. Permitivitatea electrică a vidului este:
mF12
0 10856,8 −⋅=ε . (1.7)
Astfel, pentru vid constanta de proporţionalitate devine:
2
29109
CmNk ⋅
⋅≅ . (1.8)
Ca orice mărime vectorială, forţa de interacţiune electrică se caracterizează nu numai printr-un modul dar şi printr-o direcţie şi un sens. Direcţia forţei de interacţiune electrică este dreapta ce uneşte cele două sarcini punctiforme. Sensul forţelor depinde de semnele sarcinilor cu care sunt încărcate cele două corpuri: sarcinile de acelaşi semn se resping, cele de semn contrar se atrag. Dacă se notează cu 12r vectorul de poziţie al punctului în care se găseşte corpul cu sarcina 2q faţă de punctul în care se găseşte sarcina 1q , expresia vectorială a forţei ce acţionează asupra corpului al doilea din partea primului este dată de formula:
12312
2112
41 r
rqqF ⋅⋅
⋅⋅⋅
=επ
. (1.9)
În cazul unor sarcini non-punctiforme, a unor distribuţii de sarcină, se consideră în spaţiul distribuţiei un element de volum infinitezimal, în

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
7
interiorul căruia sarcina se poate considera punctiformă. Vor exista practic o infinitate de forţe a căror direcţie şi sens vor fi date de ecuaţia:
12312
2112
41 r
rqdqFd ⋅⋅
⋅⋅⋅
=επ . (1.10)
In acest caz am considerat distribuită volumic numai sarcina 1q , a doua fiind punctiformă. Sarcina infinitezimală 1dq dă naştere la o forţă 12Fd . Pentru calculul forţei totale cu care sarcina distribuită volumic acţionează asupra sarcinii punctiforme 2q , se însumează toate forţele 12Fd pentru totalitatea sarcinilor infinitezimale din distribuţie:
( )∫
⋅⋅
⋅⋅=
V rrdqrqF 3
12
12112212
4 επ . (1.11)
1.3. Intensitatea câmpului electric
Câmpul electric este o formă de manifestare a materiei din vecinătatea unui ansamblu de sarcini electrice, în care îşi fac simţite prezenţa forţe de natură electrică bine determinate ca modul, direcţie şi sens. Câmpul electric se numeşte electrostatic dacă este invariabil în timp.
Din expresia forţei de interacţiune electrică putem observa că în cazul în care considerăm una dintre sarcini ca sarcină de probă, unitară, atunci forţa care acţionează asupra ei din partea celeilalte sarcini depinde numai de natura, valoarea absolută a sarcinii respective şi de distanţa la care se
află cele două sarcini reciproc. Astfel, raportul 2
12
qF exprimă o caracteristică
a modului în care sarcina 1q generează interacţiune electrică cu sarcinile electrice aflate în vecinătatea sa, adică a câmpului electric. Se poate defini atunci câmpul electric prin relaţia:
2
121
qFE = . (1.12)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
8
In SI, intensitatea câmpului electric se măsoară în mV . Fiind raportul dintre o
mărime vectorială şi una scalară, intensitatea câmpului electric va fi o mărime vectorială ale cărei direcţie şi sens coincid cu direcţia şi sensul forţei în cazul unei sarcini de probă pozitive. Intensitatea câmpului electric generat de un corp punctiform încărcat cu sarcina Q , într-un punct situat la distanţa r de acesta are expresia:
rrQE ⋅⋅
⋅⋅= 34
1επ . (1.13)
In cazul unor distribuţii (liniare, superficiale sau volumice) de sarcină intensitatea câmpului electric se calculează prin integrarea pe respectiva curbă, suprafaţă sau volum:
( ) ( )∫ ⋅
⋅⋅
⋅⋅=
C
dyr
ryrE 341 λεπ
pentru distribuţia liniară; (1.14)
( ) ( )∫ ⋅
⋅⋅
⋅⋅=
S
dar
ryrE 341 λεπ
pentru distribuţia superficială; (1.15)
( ) ( )∫ ⋅
⋅⋅
⋅⋅=
V
dvr
ryqrE 341επ
pentru distribuţia volumică. (1.16)
Fizicianul englez Michael Faraday a propus un mod intuitiv de a reprezenta grafic un câmp de forţe prin intermediul liniilor de câmp. O linie de câmp reprezintă o curbă tangentă în orice punct al său la vectorul intensitate al unui câmp vectorial. În cazul câmpului electric, liniile de câmp sunt linii deschise pornind de pe sarcinile electrice pozitive şi oprindu-se pe sarcinile electrice negative. Densitatea liniilor de câmp este proporţională cu mărimea sarcinilor electrice care generează câmpul. În cazul unor sarcini punctiforme, direcţia şi sensul intensităţii câmpului electric sunt:
- radial dinspre corp spre exterior în cazul unei sarcini punctiforme pozitive;
- radial înspre corp în cazul unei sarcini punctiforme negative.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
9
1.4. Legea lui Gauss
Numărul liniilor de câmp electric ce străbat o suprafaţă oarecare, normală la liniile de câmp se numeşte flux al câmpului electric şi se notează cu EΦ . Într-un câmp omogen numărul liniilor de câmp ce străbat o suprafaţă a , deci fluxul electric prin suprafaţa respectivă este:
aEE ⋅=Φ . (1.17)
In cazul general câmpul electric nu este omogen, iar suprafaţa nu este nici plană, nici normală la câmp. În acest caz, pentru a exprima fluxul câmpului electric, se împarte suprafaţa în elemente de suprafaţă atât de mici încât în limitele fiecărui element câmpul electric să fie constant ca valoare şi orientare, fiecare astfel de element cu aria da se reprezintă printr-un vector
ad având orientarea dată de regula burghiului drept. Se alege pe conturul care mărgineşte elementul de arie da un sens de parcurs. Rotind burghiul drept în sensul în care se parcurge conturul, acesta înaintează în direcţia vectorului ad . Dacă în limitele elementului de arie jad intensitatea câmpului electric este jE şi formează unghiul jθ cu jad , atunci elementul de flux prin elementul de arie jad este:
jjjjjj daEadEd θcos⋅⋅=⋅=Φ . (1.18)
Pentru a obţine fluxul câmpului electric prin întreaga suprafaţa de arie S , se integrează expresia (1.18) asupra întregii suprafeţe:
∫ ⋅=ΦS
E adE . (1.19)
Legea lui Gauss afirmă că fluxul câmpului electric printr-o suprafaţă închisă este egal cu sarcina din interiorul ei, împărţită la permitivitatea mediului ε . Dacă în interiorul suprafeţei închise nu există nici o sarcină, atunci fluxul electric total prin acea suprafaţă închisă este nul.
Pentru a demonstra această lege, vom calcula fluxul câmpului electric datorat unei distribuţii volumice de sarcini, printr-o suprafaţă închisă ce închide o parte sau toate sarcinile sistemului.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
10
( ) ( )∫ ∫∫ ∫ ∫ ⋅
⋅⋅
⋅⋅=⋅
⋅⋅
⋅⋅=⋅=Φ
V SS S VE dvad
rryqaddv
rryqadE 33 4
14
1επεπ . (1.20)
Pentru acele sarcini infinitezimale din distribuţia volumică ce se află în interiorul suprafeţei S ,
Ω=⋅
=⋅ d
rda
radr
23cosθ
, (1.21)
unde Ωd este elementul de unghi solid sub care se vede elementul de arie ad din locul sarcinii ( )yq . Se observă că elementul de arie ad acoperă
acelaşi unghi solid ca şi un element de arie 0ad situat pe o sferă d rază 0r :
ππ 44
0
20
20
20
0∫∫ =⋅
==ΩSS r
rr
dad . (1.22)
In cazul în care sarcina infinitezimală se află în exteriorul suprafeţei S , liniile de câmp ce pornesc de pe sarcina ( )yq străbat de două ori suprafaţa închisă – odată la intrarea în volumul mărginit de suprafaţă şi odată la ieşire. Pentru fiecare element de arie de intrare va exista corespunzător şi unul de ieşire, unghiul solid pentru aceste perechi de elemente de arie de intrare / ieşire fiind identic în modul şi de semn schimbat. Din acest motiv la integrare, fluxul total cauzat de sarcinile din exteriorul suprafeţei este nul. Înseamnă că:
int1 QadE
S
⋅=⋅∫ ε . (1.23)
Legea lui Gauss este foarte des utilizată pentru a calcula intensitatea câmpului electric generat de anumite distribuţii de sarcină.
1.5. Potenţialul electric
Câmpul electric este descris nu numai de mărimea vectorială intensitate dar şi de o mărime scalară, numită potenţial. Sensul fizic al potenţialului electric într-un punct este acela de a caracteriza nivelul electric în acel punct, sau capabilitatea punctului de a participa cu o cantitate mai mică

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
11
sau mai mare de sarcină la un regim dirijat de electroni. De fapt, definiţia potenţialului electric este cea de energie potenţială electrică a unei sarcini de probă egale cu unitatea situată în acel punct.
Pentru a deduce expresia potenţialului electric, să considerăm mai întâi o sarcină punctiformă Q şi în câmpul generat de aceasta, o sarcină q care este deplasată uniform cu ajutorul unei forţe exterioare egală şi de sens contrar cu forţa electrică, între două puncte notate cu M şi N . Pentru a calcula lucrul mecanic necesar acestei deplasări, vom alege două drumuri de parcurs între cele două puncte extreme: MAN şi MBN , conform figurii 1.1.
Pe arcele de cerc MA şi BN lucrul mecanic este nul, deoarece forţa este perpendiculară pe deplasare, produsul lor scalar fiind nul în acest caz. Pe segmentele AN şi MB lucrul mecanic este acelaşi, forţa având o simetrie radială şi segmentele fiind egale între ele. Rezultă că lucrul mecanic total pe drumurile MAN şi MBN este acelaşi, deci lucrul mecanic necesar deplasării corpurilor electrizate în câmp electric nu depind de drum (câmpul electric este conservativ).
Figura 1.1: Deplasarea unei sarcini într-un câmp electric
Lucrul mecanic necesar deplasării sarcinii q pe drumul MBN va fi deci egal cu lucrul mecanic necesar deplasării sale pe segmentul MB . Forţa electrică nefiind constantă pe acest segment, vom calcula media ei care va fi egală
+Q
M
B
N
A
F ext F
+q
E

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
12
cu media geometrică a forţelor din capetele segmentului (aceasta datorită dependenţei forţei electrice de pătratul distanţei).
BMBMBMmed rr
qQrr
qQFFF⋅⋅⋅⋅
⋅=
⋅⋅⋅⋅
=⋅=επεπ 4
14 22 . (1.24)
Lucrul mecanic efectuat este:
−⋅
⋅⋅⋅
=⋅−
⋅⋅⋅⋅
=⋅=BMBM
MBmed rr
qQrrrrqQdFL 11
44 επεπ . (1.25)
Bineînţeles, la aceeaşi expresie a lucrului mecanic pe drumul MB se poate ajunge şi calculând-o ca o integrală pe acest drum a lucrului mecanic elementar efectuat pe o deplasare elementară, pentru care forţa se poate considera constantă:
( )
−⋅
⋅⋅⋅
=
−⋅
⋅⋅⋅
=⋅⋅⋅⋅
=⋅== ∫∫∫BM
r
r
r
r
r
r
B
M rrqQ
rqQdr
rqQdrrFdLL B
M
B
M
B
M
114
14
14 2 επεπεπ
. (1.26)
Observăm că raportul qL nu depinde de valoarea şi natura corpului de
probă, deci este o mărime potrivită caracterizării câmpului electric în ceea ce priveşte deplasarea unui corp între două puncte în care se manifestă. Prin analogie cu teorema de variaţie a energiei potenţiale, care ne spune că într-un câmp de forţe conservativ – aşa cum am arătat că este şi câmpul electrostatic – variaţia energiei potenţiale este egală cu lucrul mecanic efectuat, se poate da următoarea definiţie: potenţialul câmpului electric generat de o sarcină punctiformă la distanţa r de aceasta este:
rQV 1
4⋅
⋅⋅=
επ . (1.27)
Generalizând noţiunea de potenţial la cazul câmpului creat de o distribuţie discretă oarecare de n sarcini punctiforme, obţinem:
∑=
⋅⋅⋅
=n
i i
i
rqV
141επ . (1.28)
Unitatea de măsură a potenţialului electric în SI este voltul (1 V). Definiţia potenţialului electric: Potenţialul electric este o mărime fizică scalară egală

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
13
cu raportul dintre lucrul mecanic efectuat de câmpul electric la deplasarea unui corp de probă încărcat din acel punct la infinit şi sarcina acelui corp
Potenţialul electric nu este o mărime univoc determinată, ea se exprimă mereu în funcţie de o valoare de referinţă a potenţialului unui punct particular ales, valoare care poate fi zero.
.
Diferenţa de potenţial dintre două puncte, egală cu lucrul mecanic efectuat pentru a deplasa un corp de probă încărcat între cele două puncte şi sarcina corpului de probă se numeşte tensiune electrică.
qLVVU AB
BAAB =−= . (1.29)
Tensiunea electrică se măsoară tot în V şi este o mărime univoc determinată pentru două puncte clar definite ale unui câmp electric.
În cazul unui câmp electric uniform ( tconsE tan= ) şi forţa electrică ce acţionează asupra corpului pe distanţa d va fi constantă, iar tensiunea electrică va avea expresia:
dEq
dEqq
dFU ⋅=⋅⋅
=⋅
= . (1.30)
Generalizarea relaţiei dintre intensitatea câmpului electric şi potenţialul său ne conduce la următoarea relaţie:
( ) ( ) ∫∫ ∞⋅−=+⋅−=
PP
PsdEPVsdEPV
o0 , (1.31)
unde s-a notat cu sd vectorul deplasare infinitezimală, iar potenţialul punctului de la infinit s-a considerat nul. Relaţia de mai sus se poate exprima în felul următor:
Potenţialul unui punct din câmpul electrostatic este egal cu integrala de linie a intensităţii câmpului electric pe orice drum între un punct situat la infinit şi punctul dat, luată cu semnul minus.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
14
1.6. Capacitatea electrostatică
Fiind dat un conductor izolat şi depărtat de alte corpuri, numim capacitate electrică a conductorului mărimea fizică egală cu raportul dintre sarcina Q a conductorului şi potenţialul său:
VQC = . (1.32)
Unitatea de măsură în SI a capacităţii electrice este faradul (1 F).
Un condensator electric este un ansamblu format din două conductoare numite armături, separate între ele printr-un mediu dielectric. Armăturile se încarcă atunci când sunt puse la o diferenţă de potenţial cu sarcini electrice egale şi de semn contrar ( 21 qq −= ). Se numeşte capacitate electrică a unui condensator mărimea fizică egală cu raportul dintre sarcina q a uneia dintre armături şi tensiunea electrică dintre bornele acestuia.
Uq
VVq
VVqC =
−−
=−
=12
2
21
1 . (1.33)
Valoarea capacităţii unui condensator cu dielectric liniar (permitivitatea ε independentă de câmp) este pozitivă şi independentă de sarcină şi de diferenţa de potenţial, fiind o caracteristică a respectivului condensator.
Condensatoarele pot avea diferite forme, capacităţile lor variind în funcţie de dimensiuni şi de natura dielectricului. Aceste capacităţi se calculează cu ajutorul legii lui Gauss şi a relaţiei (1.31). In prezentul curs vom indica doar capacităţile unor condensatoare mai des întâlnite:
- condensatorul plan paralel:
S - suprafata unei armaturi
e
q
dSC ⋅= ε ; (1.34)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
15
- condensatorul cilindric:
l
a
ab
lCln
2 ⋅⋅⋅=
επ ; (1.35)
- condensatorul sferic:
a
abbaC
−⋅
⋅⋅⋅= επ4 . (1.36)
Capacitatea echivalentă a unei reţele de condensatoare este capacitatea unui condensator care fiind supus la aceeaşi tensiune ca şi reţeaua dată se încarcă cu aceeaşi sarcină electrică. Cu alte cuvinte, în exteriorul sistemului nu se constată nici o schimbare la înlocuirea reţelei cu condensatorul echivalent.
Având în vederea legea conservării sarcinii electrice pentru sistemele izolate ale armăturilor legate în contact şi definiţia capacităţii electrostatice, la legarea în serie a condensatoarelor capacitatea echivalentă va fi:
∑=
= n
i i
serie
C
C
1
11
. (1.37)
În mod similar, la legarea în paralel capacitatea echivalentă este:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
16
∑=
=n
iiparalel CC
1. (1.38)
1.7. Energia electrostatică
La încărcarea unui condensator, pentru aducerea sarcinilor electrice pe fiecare armătură este necesară efectuarea unui lucru mecanic de către o sursă de energie exterioară. Condensatorul încărcat reprezintă un sistem caracterizat printr-o energie W , egală cu lucrul mecanic necesar încărcării sale. Pentru determinarea energiei trebuie calculat lucrul mecanic L necesar pentru deplasarea sarcinii Q de pe o armătură pe alta, astfel încât diferenţa de potenţial dintre armături să crească de la 0 la U .
Deoarece în timpul încărcării condensatorului, tensiunea dintre armături nu este constantă ci creşte de la 0 la U , în expresia lucrului mecanic se introduce media aritmetică a tensiunii:
2UUmediu = . (1.39)
Atunci:
2UQL ⋅= . (1.40)
Aşadar, energia electrostatică a unui condensator încărcat este:
CQUCUQW
22
21
21
21
⋅=⋅⋅=⋅⋅= . (1.41)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
17
CAPITOLUL 2 – ELECTROCINETICA
2.1. Conducţia electrică. Intensitatea curentului electric
Electrocinetica este acea ramură a electromagnetismului care se ocupă cu studiul stărilor electrice ale conductoarelor parcurse de curenţi electrici.
Toate corpurile din natură permit acumularea de sarcini electrice, dar unele permit şi deplasarea acestora. În funcţie de modul în care corpurile permit deplasarea sarcinilor electrice, acestea se împart în două mari categorii: conductoare şi izolatoare.
Corpurile conductoare permit deplasarea în interiorul lor a electronilor, pe când corpurile izolatoare nu. Diferenţa dintre corpurile conductoare şi izolatoare constă în structura lor la nivel atomic, în modul în care atomii care le compun se leagă între ei. Dacă electronii de valenţă (electronii de pe păturile exterioare ale atomilor) pot fi uşor disociaţi din structurile pe care le creează, deplasându-se liber în interiorul corpului, acel corp devine un conductor. O consecinţă importantă a faptului că sarcinile electrice se pot deplasa prin conductoare este acumularea lor numai la suprafaţa acestora. Exemple de conductoare sunt: metalele, soluţiile electrolitice, gazele ionizate, etc.
În cazul corpurilor izolatoare, numărul electronilor liberi capabili de deplasare este foarte mic, practic zero. Exemple de corpuri izolatoare sunt: hârtia, sticla, ceramica, materialele plastice, gazele uscate, vidul.
Transportul continuu de sarcini electrice în lungul unui fir conductor constituie un curent electric. Cauza care provoacă o asemenea deplasare de sarcini electrice este diferenţa de potenţial dintre corpurile pe care le punem în contact prin intermediul conductorului. Ca urmare, sarcinile pozitive aflate în exces pe corpul cu potenţial mai ridicat, se deplasează prin conductor spre corpul cu potenţial scăzut. Este important să observăm că pentru a explica curgerea curentului electric dinspre corpul cu potenţial mai ridicat către cel cu potenţial scăzut se poate admite la fel de bine că sarcinile negative aflate în exces pe corpul cu potenţial mai scăzut se deplasează prin conductor spre corpul cu potenţial ridicat. Sensul deplasării sarcinilor negative este invers celui urmat de mişcarea sarcinilor pozitive. Mai mult, pentru a explica existenţa unui curent electric este posibil să imaginăm un proces combinat în care o parte din curent se

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
18
datorează unui transport de sarcini pozitive, iar cealaltă parte rezultă din deplasarea sarcinilor negative, deplasările având loc simultan.
Pentru a sublinia faptul că oricum ne-am reprezenta suportul fizic al curentului electric consecinţele fenomenologice sunt aceleaşi, se admite prin convenţie că: Orice curent electric este rezultatul deplasării unei sarcini pozitive dinspre un corp aflat la un potenţial ridicat spre altul aflat la un potenţial mai scăzut.
Din punct de vedere cantitativ, caracterizarea transportului în interiorul conductoarelor electrice se face cu ajutorul unei mărimi fizice numită intensitate a curentului electric. Pentru conductoare liniare, intensitatea curentului se defineşte ca fiind sarcina electrică ce traversează o secţiune normală a conductorului în unitatea de timp:
dtdqI = . (2.1)
Unitatea de măsură în SI a curentului electric este Amperul (sCA
111 = ).
Printr-un conductor se menţine un curent electric atât timp cât la capetele conductorului există potenţiale diferite. Acest lucru se realizează de obicei prin legarea conductorului la o sursă de tensiune. Curentul electric se numeşte curent continuu dacă el este constant în timp ( ( ) consttI = ), condiţie ce este realizată atunci când tensiunea la capetele conductorului este constantă.
2.2. Legea lui Ohm
Este cunoscut faptul că într-o gamă foarte largă de conductori şi în limite largi de temperatură, intensitatea curentului satisface legea experimentală a lui Ohm:
UR
UGI ⋅=⋅=1
, (2.2)
unde constanta de proporţionalitate G este conductanţa electrică a segmentului de conductor considerat, iar
GR 1= este rezistenţa electrică a

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
19
sa. U este diferenţa de potenţial de la capetele respectivului capăt de conductor. Această lege a fost dedusă experimental de Georg Simon Ohm.
Pe baza legii lui Ohm se deduce că unitatea de măsură în SI a rezistenţei electrice este o mărime derivată:
[ ]AVR SI 11 =Ω= . (2.3)
Aceasta înseamnă că un ohm este rezistenţa electrică a unui conductor liniar care este străbătut de un curent de un amper atunci când la capetele sale se află o diferenţă de potenţial de un volt.
Rezistenţa şi conductanţa conductorilor sunt mărimi fizice care depind atât de natura conductorului cât şi de caracteristicile geometrice ale acestuia. Mai exact, rezistenţa electrică a unui segment de conductor cu lungimea l şi secţiunea s este direct proporţională cu lungimea şi invers proporţională cu secţiunea:
sl
slR ⋅=⋅=
σρ 1
. (2.4)
Constanta de proporţionalitate ρ este numită rezistivitate electrică sau rezistenţă specifică şi este o mărime fizică ce depinde numai de natura conductorului şi de starea fizică a acestuia (temperatură, puritate, etc.). Unitatea de măsură în SI pentru rezistivitatea electrică este [ ] mSI ⋅Ω=1ρ , unitate ce se deduce cu uşurinţă din relaţia (2.4). Mărimea reciprocă, σ este conductivitatea electrică şi se măsoară în SI în ( ) Siemensm 11 =⋅Ω − .
Scrisă sub forma ecuaţiei (2.3), legea lui Ohm descrie comportarea globală sau integrală a curentului electric în conductorii liniari. Forma locală sau diferenţială a legii lui Ohm exprimă relaţia ce există între densitatea de curent j în fiecare punct din conductor şi intensitatea câmpului electric în punctul respectiv.
Densitatea de curent se poate exprima în modul ca fiind:
sIj = . (2.5)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
20
Conform relaţiei (1.29) legătura dintre tensiune şi câmpul electric pentru cazul unui câmp uniform paralel cu axul conductorului de lungime l este:
lEU ⋅= . (2.6)
Combinând ecuaţiile de mai sus se obţine:
EEllE
sRU
sIj ⋅=⋅=
⋅⋅
=⋅
== σρρ1
. (2.7)
Aceasta este legea lui Ohm în formă locală sau diferenţială şi ea leagă densitatea de curent şi intensitatea câmpului electric definite în acelaşi punct al conductorului. Pentru a da o exprimare mai, generală, vectorială, se poate scrie:
Ej ⋅= σ . (2.8)
Până în acest punct al expunerii legii lui Ohm, s-a prezentat legea lui Ohm pentru un circuit omogen, adică pentru un circuit în care, în afara tensiunii de la bornele circuitului, conductorului, nu există alte surse de energie electrică. Există însă şi circuite neomogene, în componenţa cărora intră şi asemenea surse de energie, aşa cum este prezentat în exemplul din figura 2.1.
Figura 2.1.: Exemplu de circuit electric neomogen
Legea lui Ohm în formă integrală pentru circuitul dat ca exemplu în figura 2.1 se scrie în felul următor:
321321
321
rrrRRREEEVVI BA
++++++−+−
= , (2.9)
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
21
unde s-au notat cu AV şi BV potenţialele de la extremităţile circuitului liniar, cu kE tensiunea electromotoare debitată de sursa k, cu kR rezistenţa segmentului pasiv de circuit k, iar cu kr rezistenţa internă sursei de tensiune k.
Legea lui Ohm este o lege de bază a electromagnetismului, a cărei cunoaştere este absolut necesară pentru rezolvarea majorităţii problemelor teoretice sau practice.
2.3. Rezistenţe echivalente serie, paralel, transformări triunghi – stea
Un rezistor echivalent al unei grupări de rezistoare este acel rezistor care supus aceleiaşi tensiuni la borne ca gruparea considerată lasă să treacă acelaşi curent, înlocuirea grupării cu rezistorul echivalent ne-influenţând cu nimic comportarea restului circuitului.
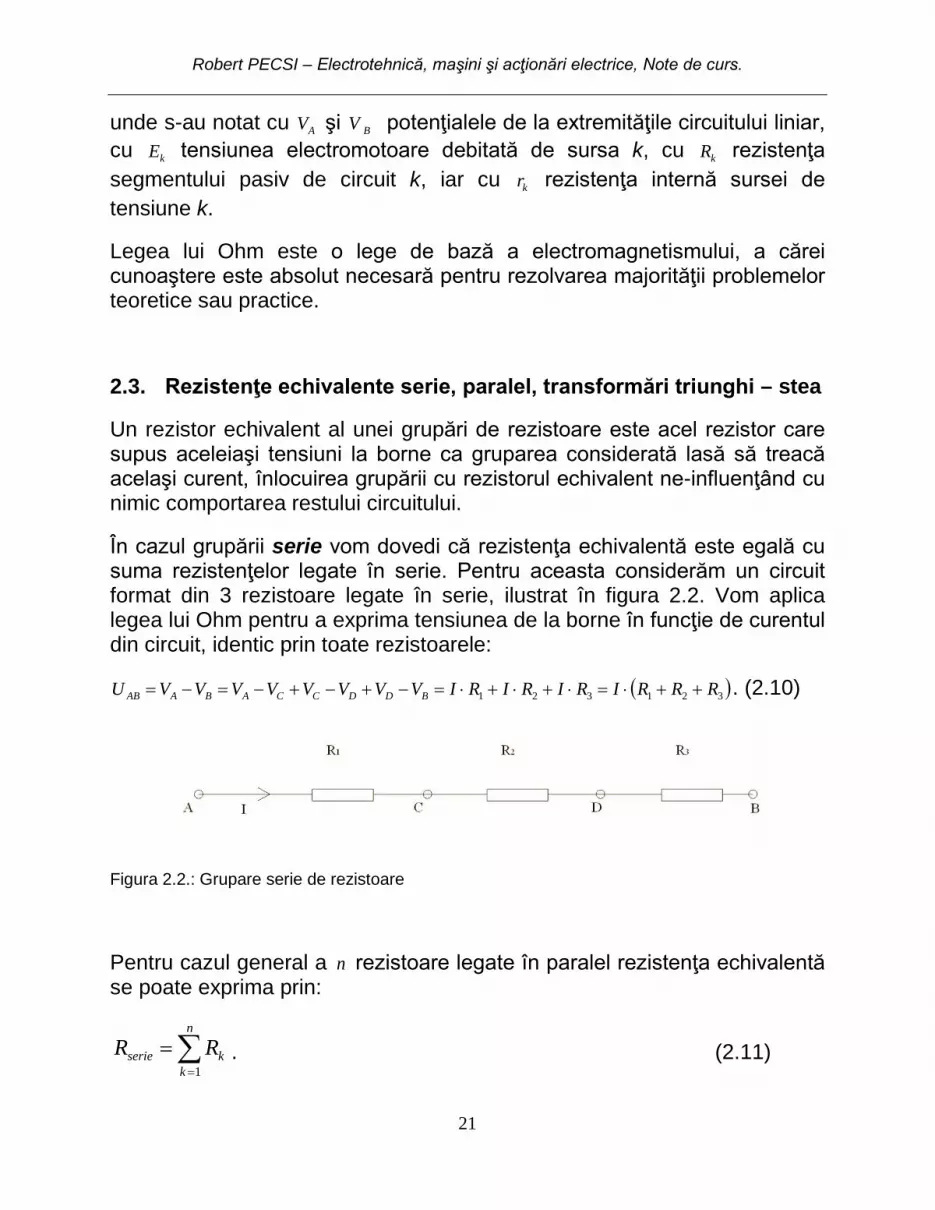
În cazul grupării serie vom dovedi că rezistenţa echivalentă este egală cu suma rezistenţelor legate în serie. Pentru aceasta considerăm un circuit format din 3 rezistoare legate în serie, ilustrat în figura 2.2. Vom aplica legea lui Ohm pentru a exprima tensiunea de la borne în funcţie de curentul din circuit, identic prin toate rezistoarele:
( )321321 RRRIRIRIRIVVVVVVVVU BDDCCABAAB ++⋅=⋅+⋅+⋅=−+−+−=−= . (2.10)
Figura 2.2.: Grupare serie de rezistoare
Pentru cazul general a n rezistoare legate în paralel rezistenţa echivalentă se poate exprima prin:
∑=
=n
kkserie RR
1. (2.11)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
22
In cazul grupării paralel de rezistenţe, tensiunea de la bornele fiecărei rezistenţe este aceeaşi, capetele fiecărui rezistor fiind legate în acelaşi punct, aşa cum indică figura 2.3. In acest caz calculul rezistenţei echivalente se realizează prin următoarele ecuaţii.
R2
A
R1
R3
B
I3
I2
I1
I
Figura 2.3.: Grupare paralel de rezistoare
În conformitate cu legea conservării sarcinii, sarcinile care circulă în unitatea de timp prin curentul I se vor împărţi prin ramurile paralele ale circuitului, astfel încât:
( )321
321321 IIIdt
dqdt
dqdtdq
dtqqqd
dtdqI ++=++=
++== . (2.12)
321 RU
RU
RU
RU ABABAB
e
AB ++= . (2.13)
321
1111RRRRe
++= . (2.14)
Astfel am obţinut relaţia care exprimă rezistenţa echivalentă a unei grupări paralel de rezistoare. În cazul general a n rezistoare conectate în paralel, relaţia este:
∑=
= n
k k
PARALEL
R
R
1
11 . (2.15)
O reţea oarecare pasivă de rezistoare se poate echivala cu un rezistor echivalent prin echivalări succesive ale grupărilor paralel şi seriem pornind de la celule mai mici către echivalarea în final a întregului circuit. Există,

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
23
însă, reţele care nu permit un calcul al rezistenţei echivalente doar prin aceste celule paralel şi serie. În asemenea cazuri este recomandabilă utilizarea unei echivalări triunghi – stea, adică a două circuite, una sub formă de stea, alta sub formă de triunghi care sunt echivalente (adică pot fi înlocuite una cu alta într-un circuit mai mare, fără să influenţeze cu ceva funcţionarea respectivului circuit) atunci când între laturile stelei şi a triunghiului există anumite relaţii bine definite.
Figura 2.4 prezintă cele două circuite – stea şi triunghi, iar ecuaţiile 2.16 şi 2.17 exprimă relaţiile ce există între laturile acestora.
R2
R1
R3
A
O
CB B
A
C
R12
R31
R23
Figura 2.4.: Circuite stea şi triunghi echivalente
++⋅
=
++⋅
=
++⋅
=
312312
31233
312312
23122
312312
31121
RRRRRR
RRRRRR
RRRRRR
(2.16)
⋅++=
⋅++=
⋅++=
2
131331
1
322223
3
212112
RRRRRR
RRRRRR
RRRRRR
. (2.17)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
24
2.4. Surse de tensiune ideale şi reale. Gruparea surselor de tensiune.
O sursă de tensiune este un dispozitiv capabil să menţină la borne o diferenţă de potenţial constantă în timp. Sursa se consideră ideală atunci când tensiunea de la bornele sursei este independentă de rezistenţa de sarcină ce se conectează la bornele sale. Caracteristica externă a unei surse de alimentare în curent continuu reprezintă dependenţa tensiunii de la bornele sursei de intensitatea curentului electric absorbit de un consumator extern conectat la sursă. Această caracteristică pentru o sursă ideală de tensiune ar fi o dreaptă paralelă cu axa tensiunilor, tensiunea la bornele sursei rămânând constantă.
Pentru o sursă independentă obişnuită, reală, datorită existenţei unei rezistenţe interne r nenule a sursei, tensiunea la bornele sale nu va mai fi constantă şi egală cu tensiunea sa electromotoare ci va depinde şi de curentul ce se stabileşte prin respective sursă, şi anume:
rIEU ⋅−= (2.18)
Această ecuaţie se va concretiza într-o caracteristică de alura unei drepte cu pantă negativă. Este util de cunoscut şi faptul că deteriorarea în timp a unei baterii electrice se produce prin mărirea gradată a valorii rezistenţei sale interne.
Mai amintim, de asemenea, şi faptul că există surse de alimentare în curent continuu cu circuite interioare de stabilizare a tensiunii, care sunt capabile să furnizeze o tensiune constantă la borne indiferent de sarcina aplicată. Unele surse au chiar facilitatea de a limita curentul care va circula prin ele, facilitate care este deosebit de importantă pentru protejarea echipamentelor electrice care urmează să fie alimentate de la respectiva sursă în faţa supracurenţilor. Astfel, asemenea surse nu vor lăsa să se stabilească în circuit un curent mai mare decât o valoare limită aleasă de utilizator, preferând să-şi reducă tensiunea atunci când în virtutea legii lui Ohm, curentul ar fi mai mare decât valoarea limită aleasă.
Sursele de tensiune se pot grupa şi ele în diferite moduri, cele mai des întâlnite cazuri fiind cele ale legării lor în serie şi în paralel.
Legarea în serie a surselor de tensiune (în curent continuu) se realizează de obicei prin conectarea bornelor de semn opus ale surselor imediat

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
25
învecinate din grupare. Dacă avem un număr de n surse, fiecare având tensiunea electromotoare kE şi rezistenţa internă kr , tensiunea electromotoare şi rezistenţa internă a grupării lor serie va fi:
∑=
=n
kkserie EE
1, ∑
=
=n
kkserie rr
1. (2.19)
La gruparea în paralel a surselor de tensiune, se grupează, de obicei, în acest mod numai surse având aceeaşi tensiune electromotoare ( jk EE = pentru njk ,1, ∈∀ ), iar tensiunea electromotoare a sursei echivalente va fi egală şi ea cu această valoare. Rezistenţele lor interne fiind legate în paralel se vor echivala conform grupării paralel a rezistoarelor pasive.
2.5. Teoremele lui Kirchhoff
In studiul unui circuit electric trebuie definite următoarele noţiuni:
- nodul care este punctul de intersecţie a cel puţin trei elemente de circuit;
- latura care este porţiunea de circuit cuprinsă între două noduri;
- ochiul sau bucla care este o succesiune de laturi ce formează un contur închis.
Kirchhoff a dat următoarele două teoreme pentru circuitele electrice:
Prima teoremă a lui Kirchhoff:
Suma algebrică a intensităţilor curenţilor electrici ce converg într-un nod oarecare al unui circuit electric este egală cu zero, în această sumă considerându-se cu semnul + curenţii ce „ies” din nod şi cu semnul – cei ce „intră” în nod.
∑=
=n
kkI
10 . (2.20)
Această teoremă este o consecinţa directă a conservării sarcinii electrice totale într-un sistem izolat din punct de vedere electric. Pentru un circuit cu

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
26
n noduri numărul ecuaţiilor independente ce se pot scrie cu prima teoremă a lui Kirchhoff este 1−n .
A doua teoremă a lui Kirchhoff
Pe orice buclă (ochi) al unui circuit electric, suma algebrică a tensiunilor electromotoare este egală cu suma algebrică a căderilor de tensiune pe elementele pasive (rezistive). Suma algebrică ţine cont de un sens de parcurgere ales pentru respectiva buclă şi atribuie semnul + oricărei tensiuni electromotoare sau căderi de tensiune ce are acelaşi sens cu sensul de parcurgere ales şi semnul – tensiunilor electromotoare şi căderilor de tensiune ce au sens contrar.
∑ ∑= =
⋅=s
j
n
kkkj IRE
1 1. (2.21)
Intr-un circuit cu n noduri şi l laturi, teorema a doua a lui Kirchhoff permite scrierea a 1+− nl ecuaţii independente.
Observăm că cele două teoreme a lui Kirchhoff permit scrierea a unui număr total de lnnl =−++− 11 ecuaţii pentru un circuit cu l laturi, adică exact atâtea ecuaţii câte intensităţi ale curenţilor există în circuit. Astfel un circuit electric se poate rezolva (se pot determina curenţii din laturi dacă se cunosc tensiunile electromotoare şi rezistenţele din circuit) prin aplicarea teoremelor lui Kirchhoff. Alte metode de rezolvare a circuitelor electrice sunt metoda curenţilor ciclici, metoda potenţialelor la noduri, metoda generatorului echivalent, etc.
2.6. Energia şi puterea electrică
Experimental s-a constatat că la trecerea curentului electric printr-un rezistor, se dezvoltă o cantitate de căldură egală cu:
tIRQ ⋅⋅= 2 . (2.22)
Acest fenomen numit efect termic al curentului electric, are următoarea explicaţie fenomenologică: electronii în mişcarea lor dirijată realizează ciocniri succesive cu suportul masic al conductorului, ciocniri în cursul cărora ei cedează din energia cinetică acumulată în timpul cursei libere o
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
27
cantitate care va contribui la amplificarea mişcării termice moleculare, deci la creşterea temperaturii conductorului.
Această căldură degajată este, de fapt, energia consumată de respectivul rezistor R şi transformată în energie termică, căci în virtutea conservării energiei ceea ce se degajă, este consumat de undeva, adică, în acest caz de la sursele de energie electrică din sistem, din circuit.
Desigur, în funcţie de natura unui receptor electric, energia electrică poate fi transformată şi în alte forme de energie (mecanică, luminoasă, etc.).
Puterea este o mărime fizică scalară ce exprimă viteza de variaţie a energiei în timp:
dtdWP = . (2.23)
In cazul în care un sistem dezvoltă energie continuu şi uniform – ceea ce înseamnă că energia respectivă va fi direct proporţională cu timpul, puterea se va putea exprima ca raportul dintre energia dezvoltată şi timp,
tWP = .
Puterea dezvoltată de un sistem oarecare reprezintă capacitatea sistemului de a produce o anumită energie în unitatea de timp. Două sisteme producătoare de energie electrică se deosebesc prin puterea pe care o au, adică prin capacitatea lor de a produce energie în unitatea de timp (sau într-un interval de timp anume).
Fenomenele energetice ce au loc în circuitele electrice se produc respectându-se principiul general al conservării energiei. Astfel, particularizând teorema generală a conservării energiei la cazul unui circuit electric izolat, putem afirma:
Într-un circuit electric izolat din punct de vedere electric energia produsă de totalitatea surselor de tensiune este egală cu energia consumată de elementele pasive ale circuitului.
OUTIN WW = . (2.24)
Energiile produse de surse sunt pozitive în cazul în care sensul curentului prin latura ce conţine sursa este acelaşi cu sensul în care sursa debitează

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
28
şi ele sunt negative în caz contrar (când sursa funcţionează, de fapt, în regim de consumator). Energiile consumate sunt întotdeauna pozitive.
Scriind acest bilanţ energetic pentru unitatea de timp, adică împărţind ecuaţia 2.24 la intervalul de timp, obţinem bilanţul puterilor într-un circuit electric:
∑ ∑ ⋅=⋅ 2IRIE . (2.25)
Acest bilanţ energetic constituie o puternică modalitate de verificare a rezultatelor unei probleme de rezolvare a circuitelor.
2.7. Transportul energiei electrice în curent continuu
Se consideră o linie de transport a energiei electrice în curent continuu de la o sursă către un consumator caracterizat de rezistenţa R . Linia este alcătuită din două conductoare confecţionate dintr-un material având rezistivitatea ρ şi secţiunea transversală S . Distanţa de la sursă la consumator este l . Fie 1U şi 2U tensiunile la bornele de intrare şi de ieşire ale liniei (figura 2.5).
Rezistenţa totală a liniei este:
SlRl ⋅⋅= ρ2 . (2.26)
Căderea de tensiune pe linia de transport:
21 UUU −=∆ . (2.27)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
29
R
l
U2
U/2
I
U/2
U1
Figura 2.5.: Transportul energiei electrice în curent continuu
Intensitatea curentului prin circuit este:
RU
RRUIl
21 =+
= , (2.28)
de unde obţinem pentru căderea de tensiune pe linie:
IRU l ⋅=∆ . (2.29)
Pierderea de putere din linie se calculează în mod similar: 2
2121 IRIUIUIUPPP l ⋅=⋅∆=⋅−⋅=−=∆ . (2.30)
Randamentul liniei de transport este:
( ) 11
1
1
22
2
1
2 1UU
UUU
UU
RRR
IRRIR
PP
ll
∆−=
∆−==
+=
⋅+⋅
==η . (2.31)
Observăm din ecuaţia (2.31) că pentru un randament cât mai bun al transportului energiei electrice, tensiunea 1U trebuie să aibă o valoare cât mai mare.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
30
2.8. Transferul maxim de putere
Se consideră un circuit simplu de curent continuu alcătuit dintr-o sursă de tensiune electromotoare E şi rezistenţă internă r şi un consumator de rezistenţă R (figura 2.6) şi se pune problema determinării valorii rezistenţei R pentru care puterea primită de aceasta este maximă.
Figura 2.6.: Circuit electric simplu format dintr-o sursă de tensiune şi un rezistor
Puterea consumată în acest consumator este:
( )2
22 E
rRRIRPR ⋅+
=⋅= . (2.32)
O funcţie are un maxim local acolo unde derivata funcţiei se anulează:
( ) ( )( ) ( )3
24
22 2
rRRrE
rRrRRrRE
dRdPR
+−
⋅=+
+⋅⋅−+⋅= . (2.33)
0=dRdPR rR =⇒ . (2.34)
Aşadar, puterea consumată de rezistor este maximă atunci când valoarea ei este egală cu rezistenţa internă a sursei. În acest caz, puterea consumată în rezistor:
rEPR 4
2
= , (2.35)
iar randamentul cu care funcţionează în acest caz circuitul este:
E, r R

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
31
5,0=+
==rR
RPPsursa
Rη . (2.36)
2.9. Metoda potenţialelor la noduri
Metoda de rezolvare a circuitelor electrice de curent continuu prin Teoremele lui Kirchhoff prezintă dezavantajul unui număr ridicat de ecuații, egal cu numărul de laturi ale circuitului. Pentru circuite complexe aceasta poate reprezenta un impediment major şi este preferabilă utilizarea unor metode de rezolvare ce permit reducerea considerabilă a numărului de ecuaţii. Una dintre aceste metode este metoda potenţialelor la noduri.
Metoda potenţialelor la noduri permite reducerea numărului de ecuaţii ale sistemului ce se impune spre rezolvare pentru aflarea curenţilor din laturile unui circuit la N-1 ecuaţii, N fiind numărul de noduri ale circuitului. Metoda apelează la o etapă anterioară în care se determină prin rezolvarea sistemului de N-1 ecuaţii potenţialele nodurilor sistemului, urmând apoi ca să determinăm curenţii din fiecare latură cu ajutorul legii conducţiei electrice (Legea lui Ohm). Sistemul de rezolvat va avea N-1 ecuaţii şi nu N deşi circuitul are N noduri, deoarece potenţialul unui nod se poate considera ca fiind nul. Acest lucru este corect pentru că potenţialul electric nu este o mărime unic determinată, el depinde întotdeauna de o referinţă, iar în cadrul circuitului nostru complet, care este aşadar un sistem închis, suntem liberi să alegem noi referinţa. Se alege un nod de potenţial 0, se determină apoi potenţialele celorlalte noduri şi apoi curenţii din laturile circuitului.
Pentru expunerea metodei vom considera un circuit de curent continuu care are cinci laturi (L=5) şi trei noduri (N=3).

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
32
Figura 2.7. Circuit de curent continuu
Sistemul de ecuaţii ce se impune spre rezolvare în cazul metodei potenţialelor la noduri are N-1 ecuaţii, în acest caz două ecuaţii :
( )
( )
−=+
−=+
∑∑
2222121
1212111
sc
sc
IVGVG
IVGVG (2.37),
unde V1 şi V2 sunt potenţialele nodurilor 1 şi 2, potenţialul celui de al treilea nod fiind ales ca referinţă nul; Gii reprezintă conductanţa nodului i şi este egală cu suma aritmetică a conductanţelor laturilor concurente în nodul i; Gij= Gji reprezintă conductanţa comună nodurilor i şi j şi este egală cu suma aritmetică, luată cu semnul minus a conductanţelor laturilor care unesc direct
cele două noduri i şi j; iar - ( )Isc i∑ reprezintă suma algebrică a curenţilor de scurtcircuit injectaţi în nodul i.
Cunoscând potenţialele nodurilor (care se obţin prin rezolvarea sistemului, curentul dintr-o latură a circuitului se determină cu relația:
IE V V
RA B=
+ −
, (2.38)
2.9. Metoda curenţilor ciclici
Metoda curenţilor ciclici permite reducerea numărului de ecuaţii ale sistemului ce se impune spre rezolvare pentru determinarea curenţilor din laturile circuitului, la numărul buclelor independente ale circuitului, care se poate dovedi uşor că este în directă relaţie cu numărul laturilor şi a nodurilor circuitului (b=l-n+1). În acest scop sistemul apelează la un pas intermediar, în cadrul căruia considerăm că toţi curenţii din laturile circuitului nostru se pot descompune în nişte curenţi ciclici care circulă doar de-a lungul unei bucle anume. Astfel, curentul printr-o latură ce aparţine unei singure bucle independente va fi egal cu acel curent ciclic care circulă prin respective buclă, iar curentul printr-o latură ce aparţine mai multor bucle independente va fi suma algebrică a curenţilor ciclici prin acele bucle ce conţin respective latură, sumă în care curenţii ciclici opuşi ca şi sens curentului din latură se iau cu semnul minus. Paşii sunt: alegerea buclelor independente şi ale sensurilor curenţilor ciclici, scrierea sistemului de ecuaţii, rezolvarea sa şi apoi, determinarea curenţilor din latură având curenţii ciclici.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
33
Sistemul de ecuaţii dat de metoda curenţilor ciclici pentru circuitului din figura 2.7 are L-N+1 ecuaţii (în acest caz trei ecuaţii) şi este:
( )
( )
( )
=++
=++
=++
∑∑∑
3333232131
2323222121
1313212111
EIRIRIR
EIRIRIR
EIRIRIR
(2.39),
în care: I1, I2, I3, sunt curenţii ciclici, figuraţi în figura 2.7; Rii reprezintă rezistenţa ochiului i şi este egală cu suma aritmetică a rezistenţelor laturilor ochiului i; Rij = Rji este rezistenţa comună ochiului i şi j, egală cu suma algebrică a rezistentelor laturilor comune celor două ochiuri (sunt pozitive rezistenţele laturilor parcurse de curenţii Ii şi Ij în acelaşi sens);
( )E i∑reprezintă suma algebrică a t.e.m. ale surselor din laturile ochiului i
(sunt pozitive t.e.m. care au acelaşi sens cu Ii).

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
34
CAPITOLUL 3 – ELECTROMAGNETISMUL
3.1. Forţa electromagnetică şi momentul electromagnetic
Se numeşte forţa electromagnetică forţa la care este supus un conductor parcurs de curent electric în prezenţa unui câmp magnetic exterior. Această forţă este perpendiculară pe cele două direcţii – ale conductorului şi ale câmpului magnetic, iar sensul său este dat de regula burghiului drept.
În cazul în care conductorul este rectiliniu de lungime l iar câmpul magnetic este omogen, forţa electromagnetică are expresia:
αsin⋅⋅⋅= lIBF . (3.1)
Mărimea B care intervine în expresia forţei electromagnetice caracterizează câmpul magnetic în care se găseşte conductorul şi se numeşte inducţie magnetică. Unitatea ei de măsură în SI este 1 Tesla (1 T). Inducţia magnetică este o mărime vectorială a cărei direcţie este tangentă în orice punct la sensul liniilor de câmp magnetic. Într-un câmp magnetic omogen, inducţia magnetică are acelaşi modul, direcţie şi sens în orice punct al câmpului. Inducţia magnetică într-un punct oarecare din spaţiul de influenţă al unui câmp magnetic produs de un curent electric depinde de:
- intensitatea curentului care produce câmpul;
- natura mediului în care este situat circuitul (prin permeabilitatea sa magnetică µ );
- forma circuitului;
- poziţia punctului respectiv.
Dacă se notează cu lI ⋅ vectorul al cărui modul este egal cu produsul dintre lungimea conductorului şi intensitatea curentului, are direcţia conductorului şi sensul curentului, forţa electromagnetică se poate exprima ca fiind un produs vectorial:
BlIF ×⋅= . (3.2)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
35
Forţa Lorentz este forţa electromagnetică ce se exercită asupra unui electron (de sarcină e ) ce se deplasează cu viteza medie mv prin secţiunea transversală S a conductorului de lungime l . Dacă înlocuim în expresia forţei electromagnetice (3.2) curentul electric cu expresia fluxului a n electroni ce se deplasează prin secţiunea transversală S , mvSenI ⋅⋅⋅= , obţinem expresia forţei Lorentz:
( ) Bven
BvlSennFf m
m ×⋅−=×⋅⋅⋅−⋅
== . (3.3)
Ţinând cont că asupra unui purtător de sarcină electrică aflat într-o zonă în care există şi câmp electric, acţionează şi o forţă electrică, forţa Lorentz ce exprimă acţiunea câmpurilor electric şi magnetic asupra unei sarcini electrice este:
( )BvEqF ×+⋅= . (3.4)
Acţiunea câmpului electromagnetic asupra unei bucle prin care trece un curent electric are ca efect apariţia unui moment de rotaţie. Momentul depinde de forma buclei şi de orientarea acesteia faţă de câmpul magnetic. Din însăşi definiţia forţei electromagnetice (3.2) se observă că acele laturi ale buclei a căror direcţie este paralelă cu cea a câmpului magnetic, nu dau nici o forţă electromagnetică, iar – în cazul unei bucle dreptunghiulare, forţele electromagnetice ce acţionează asupra laturilor neparalele cu câmpul magnetic sunt egale în modul şi opuse ca şi sens. Avem atunci de a face cu un cuplu de forţe care va tinde să răsucească bucla parcursă de curent în jurul axei sale perpendiculare pe câmpul magnetic.
Momentul cuplului electromagnetic ce acţionează din partea unui câmp magnetic asupra unei bucle dreptunghiulare de dimensiunile lL× este:
θθθ sinsinsin2
2 ⋅⋅=⋅⋅⋅⋅=⋅⋅⋅= BmBlLIlFM em (3.5)
In ecuaţia (3.5), θ este unghiul dintre B şi normala la planul buclei parcurse de curent, iar cu lLIm ⋅⋅= s-a notat momentul dipolar al circuitului. Pentru bucle de circuit de altă formă decât dreptunghiulară, acest moment dipolar are altă expresie, dar legătura dintre inducţia câmpului magnetic şi momentul electromagnetic rămâne valabilă. Momentul dipolar al unui circuit

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
36
se poate defini şi vectorial ca fiind un vector perpendicular pe planul circuitului, cu sensul dat de regula burghiului – sensul de avans al unui burghiu drept care se roteşte în sensul curentului din circuit. În acest caz, putem scrie pentru momentul cuplului electromagnetic:
BmM ×= . (3.6)
3.2. Legea Biot-Savart şi formula lui Laplace
Se consideră un conductor rectiliniu, infinit de lung, prin care îşi manifestă prezenţa un curent constant de intensitate I şi un punct M oarecare, situat la distanţa r de conductor. Biot şi Savart au stabilit pe cale experimentală că inducţia magnetică produsă de curentul din conductor în punctul considerat este:
rIB⋅
⋅=π
µ2 , (3.7)
unde permeabilitatea magnetică µ caracterizează proprietăţile magnetice
ale mediului şi are în SI unitatea de măsură
mH . Permeabilitatea
magnetică a vidului este o constantă universală şi are valoarea:
mH7
0 104 −⋅⋅= πµ . (3.8)
Raportul dintre permeabilitatea magnetică a unui mediu oarecare şi permeabilitatea magnetică a vidului este o mărime adimensională numită permeabilitate magnetică relativă:
0µµµ =r . (3.9)
Inducţia magnetică este tangentă la linia de câmp ce trece prin punctul M şi are sensul acesteia. Liniile de câmp magnetic produse de curentul printr-un conductor infinit de lung sunt cercuri concentrice, cu centrele pe axa conductorului şi situate în plane perpendiculare pe conductor. Sensul liniilor de câmp este dat de regula burghiului drept. Observăm aici că : spre deosebire de liniile de câmp electric ce pleacă de pe sarcinile pozitive

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
37
electrice şi se termină pe sarcinile negative, liniile de câmp magnetic sunt curbe închise, ce nu au început şi sfârşit. Acest lucru a condus pe mulţi fizicieni să considere că nu există o particulă elementară responsabilă de interacţiunea magnetică.
Plecând de la relaţia experimentală stabilită de Biot şi Savart, Laplace a obţinut pe cale analitică expresia inducţiei magnetice produse de un element dl al unui circuit conductor de formă oarecare ( )C , în care îşi manifestă prezenţa un curent electric de intensitate I , într-un punct M situat la distanţa r de elementul de circuit considerat, într-o direcţie ce face cu elementul de circuit dl un unghi α :
Figura 3.1.
απµ sin
4 2 ⋅⋅
⋅=r
dlIdB . (3.10)
Direcţia vectorului Bd este tangentă la linia de câmp ce trece prin punctul M şi are sensul acesteia. Vectorial se poate scrie pentru inducţia magnetică elementară:
34 rrdlIdB ×⋅
⋅=πµ
. (3.11)
Inducţia totală în punctul considerat se obţine însumând inducţiile elementare produse de fiecare element de curbă a circuitului:
( )∫=C
dBB . (3.12)
Această formulă a lui Laplace permite calculul inducţiei magnetice produse de un circuit de formă oarecare în orice punct al spaţiului.
dl
I
r
(C)
dB M
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
38
3.3. Intensitatea câmpului magnetic
Din expresia (3.7) a legii Biot Savart se observă că acelaşi curent electric ce parcurge un acelaşi conductor infinit de lung produce câmpuri magnetice diferite în funcţie de mediul în care se află conductorul. Termenul comun al acestor inducţii magnetice se numeşte intensitate a câmpului magnetic, este o mărime vectorială independentă de mediu, dependentă numai de intensitatea curentului electric ce generează câmpul magnetic, de forma şi dimensiunile circuitului şi de poziţia circuitului considerat. Pentru câmpul magnetic produs de un conductor infinit de lung prin care îşi manifestă prezenţa un curent constant de intensitate I şi un punct M oarecare, situat la distanţa r de conductor, intensitatea câmpului magnetic are valoarea:
[ ]mA
rIH⋅⋅
=π2 . (3.13)
Direcţia şi sensul intensităţii câmpului magnetic sunt aceleaşi ca cele ale inducţiei magnetice. Relaţia dintre aceste două mărimi este întotdeauna:
HB ⋅= µ . (3.14)
In mediile neferomagnetice dependenţa dintre B şi H este liniară iar permeabilitatea magnetică constantă. În mediile feromagnetice dependenţa dintre B şi H este neliniară şi este dată de curba de histerezis a materialului respectiv. Pe această curbă de histerezis (fig. 3.2.) se disting următoarele porţiuni:
- porţiunea OM, practic liniară, în care permeabilitatea magnetică este aproximativ constantă;
- porţiunea MN, numită şi cotul curbei, în care apare o dependenţă neliniară între B şi H ;
- porţiunea NP sau zona de saturaţie, în care unor creşteri mari ale intensităţii câmpului magnetic corespund variaţii mici ale inducţiei magnetice, în această zonă µ scăzând cu creşterea lui H .

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
39
Figura 3.2.: Curba de histerezis pentru materiale feromagnetice
3.4. Legea circuitului magnetic (teorema lui Ampère)
Fie n conductoare oarecare în care îşi manifestă prezenţa curenţi de intensităţile NIII ,,, 21 şi o curbă închisă ( )C care înconjoară aceste conductoare. Se numeşte curent total sau solenaţie suma algebrică a intensităţilor tuturor curenţilor care străbat suprafaţa delimitată de curba ( )C .
∑=
=Θ=n
kkt II
1. (3.15)
Semnul cu care intervin curenţii în sumă depinde de sensul de parcurgere a conturului, în funcţie de care se determină cu regula burghiului drept sensul pozitiv al normalei la suprafaţa delimitată de ( )C . Curenţii sunt pozitivi în sumă dacă au acelaşi sens cu normala şi negativi în caz contrar. De exemplu, pentru figura 3.3 solenaţia este:
I1
(C)
n I2
I3
I4 I5
Htdl
H
54321 IIIIIIt +−++−=Θ= (3.16)
N
H O
M

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
40
Figura 3.3.
Fiecare din cei n curenţi produce un câmp magnetic. Aceste câmpuri se compun în fiecare punct din spaţiul lor de influenţă, dând naştere unui câmp magnetic rezultant. Se consideră M un punct oarecare de pe curba ( )C şi dl un element de lungime de pe curbă în jurul acestui punct. Intensitatea câmpului magnetic H formează cu direcţia elementului de curbă un unghi notat cu α , iar componenta pe direcţia elementului de curbă a acestei intensităţi are valoarea:
αcos⋅= HHt . (3.17)
Conform legii circuitului magnetic, suma algebrică a produselor dlHt ⋅ dintre componentele tangenţiale ale intensităţii câmpului magnetic şi elementele de lungime corespunzătoare din componenţa unui contur închis este egală cu solenaţia sau curentul total ce străbate suprafaţa delimitată de respectivul contur. Produsele dlHt ⋅ sunt pozitive dacă vectorii tH şi dl au acelaşi sens şi sunt negative în caz contrar.
Θ==⋅∑ tt IdlH sau Θ==⋅∫ tC
IdlH)(
. (3.18)
Legea circuitului magnetic permite calculul intensităţii câmpului magnetic şi a inducţiei magnetice în orice punct din spaţiul de influenţă al unui câmp magnetic, atât în interiorul cât şi în exteriorul conductoarelor.
Produsele dlH ⋅ se numesc căderi de tensiune magnetică pe porţiunile respective ale circuitului. Solenaţia mai poate şi numele de tensiune magnetomotoare.
O aplicaţie foarte simplă a legii circuitului magnetic: calculul intensităţii câmpului magnetic prin interiorul unui miez toroidal pe care este bobinat un conductor parcurs de un curent electric I , bobinajul având N spire, iar miezul toroidal având raza R .

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
41
R
N
I
Figura 3.4.
( )RINHINRH⋅⋅
=⇒⋅=⋅⋅⋅π
π2
2 .
3.5. Inductanţa proprie a unui circuit
Fie un circuit oarecare în care îşi manifestă prezenţa un curent electric de intensitate I . Curentul produce un câmp magnetic ale cărui linii de câmp sunt cercuri concentrice cu centrul pe axul conductorului, perpendiculare în orice punct al conductorului pe axul său. Sensul liniilor de câmp se determină cu regula burghiului drept.
Fluxul magnetic printr-o suprafaţă oarecare reprezintă numărul liniilor de câmp care străbat perpendicular suprafaţa respectivă şi el este o mărime fizică scalară definită prin relaţia:
SBm ⋅=Φ . (3.19)
Unitatea sa de măsură în SI este un Weber (1 Wb).
Fluxul magnetic propriu al circuitului ( )C reprezintă totalitatea liniilor de câmp magnetic produse de curentul din acel circuit, care străbat suprafaţa delimitată de ( )C . Acest flux magnetic se poate exprima şi sub forma:
ILm ⋅=Φ , (3.20)
unde L se numeşte inductivitate sau inductanţă proprie a circuitului ( )C şi depinde de forma şi dimensiunile circuitului şi de natura mediului în care se găseşte circuitul.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
30
Inductanţa proprie a unui circuit este o constantă a circuitului atunci când acesta este nedeformabil şi se găseşte într-un mediu neferomagnetic sau într-un mediu feromagnetic dar departe de zona de saturaţie a dependenţei
( )HBB = . În SI inductanţa se măsoară în Henri (1 H).
În cazul în care circuitul este alcătuit din mai multe spire înseriate, se defineşte fluxul total ca suma fluxurilor care străbat toate spirele circuitului:
∑Φ=Φ km . (3.21)
Dacă spirele sunt identice, jkjk ,,∀Φ=Φ şi fluxul total va fi:
Φ⋅=Φ Nm , (3.22)
iar inductanţa proprie a circuitului capătă expresia:
INL Φ⋅
= . (3.23)
3.6. Inductanţa mutuală dintre două circuite
Fie două circuite oarecare în care îşi manifestă prezenţa curenţi de intensitate 1I şi, respectiv, 2I . Curentul 1I produce un câmp magnetic şi o parte din liniile de câmp ale acestuia străbat suprafaţa mărginită de circuitul al doilea. Totalitatea liniilor de câmp produse de circuitul 1 şi care străbat mărginită de circuitul 2 dau un flux magnetic 12Φ (primul indice corespunde circuitului sursă, iar al doilea suprafeţei traversate). Este evident că acest flux va fi proporţional cu intensitatea curentului electric ce îl generează:
11212 IM ⋅=Φ , (3.24)
unde factorul de proporţionalitate se numeşte inductanţa mutuală a circuitului 1 faţă de circuitul 2 şi se defineşte prin relaţia:
1
1212 I
M Φ= . (3.25)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
31
Dacă cele două circuite sunt nedeformabile, îşi păstrează poziţia relativă una faţă de cealaltă şi se găsesc într-un mediu neferomagnetic sau într-un mediu feromagnetic dar departe de zona de saturaţie a dependenţei
( )HBB = , 12M este o constantă. În caz contrar 12M depinde de 1I .
În SI inductanţa mutuală se măsoară în Henri (1 H).
În mod analog, inductanţa mutuală a circuitului 2 faţă de circuitul 1 şi se defineşte prin relaţia:
2
2121 I
M Φ= . (3.26)
Se poate demonstra că cele două inductanţe mutuale sunt egale între ele.
3.7. Legea inducţiei electromagnetice
Fenomenul inducţiei electromagnetice a fost descoperit de Faraday în 1831 pe cale experimentală: el a deplasat un circuit conductor închis faţă de un magnet permanent şi a constatat apariţia unui curent electric în respectivul circuit atâta timp cât avea loc mişcarea relativă a circuitului faţă de câmpul magnetic. Schimbând sensul de deplasare, se schimba şi sensul curentului. Aceleaşi fenomene au apărut şi în cazul deplasării magnetului faţă de circuitul menţinut fix.
Cauza apariţiei tensiunii electromotoare (t.e.m.) în circuit şi deci a curentului electric o constituie variaţia în timp a fluxului magnetic care traversează suprafaţa delimitată de circuit. Această t.e.m. a fost denumită t.e.m. indusă, iar fenomenul inducţie electromagnetică. Concluzia experimentală a fost că t.e.m. indusă este proporţională cu viteza de variaţie în timp a fluxului magnetic prin suprafaţa delimitată de circuit:
dtdke mΦ⋅= . (3.27)
Factorul de proporţionalitate are valoarea -1 şi se determină conform principiului lui Lentz, ce derivă din principiul general al acţiunii şi reacţiunii: orice efect al unui fenomen se opune cauzei care l-a produs, până la stabilirea unui echilibru.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
32
Aplicat circuitelor electrice, principiul lui Lentz se enunţă astfel: Sensul t.e.m. într-un circuit este astfel încât curentul pe care îl generează în cazul în care circuitul este închis se opune (prin câmpul magnetic generat de acest curent) modului de variaţie al fluxului magnetic inductor. Dacă fluxul inductor creşte, sensul liniilor câmpului indus va fi opus sensului liniilor de câmp inductor. Dacă fluxul inductor descreşte, câmpul indus va avea acelaşi sens cu acesta.
Ţinând seama şi de principiul lui Lentz, se poate scrie forma finală a legii inducţiei electromagnetice:
dtde mΦ
−= . (3.28)
Se defineşte şi tensiunea electromotoare autoindusă ca fiind acea tensiune electromotoare de inducţie ce apare ca urmare a variaţiei fluxului magnetic propriu al circuitului (adică al intensităţii curentului chiar prin acel circuit).
dtdIL
dtde m
L ⋅−=Φ
−= . (3.29)
3.8. Justificarea energetică a legii inducţiei electromagnetice
Se consideră două bare metalice paralele, bine şlefuite, pe care poate aluneca fără frecare un conductor rectiliniu, perpendicular pe cele două bare (fig. 3.5.). Conductorul este conectat la o sursă de energie electrică având tensiunea electromotoare E , iar rezistenţa totală a circuitului R . Atunci, conform legii lui Ohm, intensitatea curentului prin circuit are valoarea:
REI =0 . (3.30)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
33
Figura 3.5.: Conductor deplasat în câmp magnetic
Se introduce sistemul într-un câmp magnetic omogen de inducţie B perpendiculară pe planul celor două bare. Asupra conductorului se va exercita atunci o forţă electromagnetică ce are modulul:
lIBF ⋅⋅= . (3.31)
Forţa este perpendiculară pe liniile de câmp şi pe conductor, iar sensul ei este dat de regula mâinii stângi (fiind cel indicat în figura 3.5.). Sub acţiunea acestei forţe conductorul se va deplasa. Fie dx deplasarea conductorului în timpul dt . Energia debitată de sursa de tensiune va trebui să acopere energia consumată prin efect Joule şi energia mecanică necesară deplasării conductorului. Ecuaţia de bilanţ energetic, scrisă în energii şi apoi în puteri este:
mJs dWdWdW += ⇒ mJs PPP += . (3.32)
Cele trei puteri, puterea debitată de sursă, puterea consumată prin efect Joule şi puterea mecanică necesară deplasării conductorului au expresiile:
⋅⋅⋅=⋅=
⋅=
⋅=
dtdxlIBvFP
IRPIEP
mm
J
s2
. (3.33)
Înlocuind în (3.31) şi simplificând cu I , obţinem:
B E
R
F
dx
l

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
34
dtdIR
dtdsBIR
dtdxlBIRE mΦ
+⋅=⋅+⋅=⋅⋅+⋅= , (3.34)
unde ldxds ⋅= este suprafaţa descrisă de conductor în mişcarea sa iar dsBd m ⋅=Φ este fluxul magnetic prin suprafaţa descrisă de conductor.
Curentul prin circuit are expresia:
Rdt
dEI
mΦ−
= , (3.35)
unde termenul dt
de mΦ−= are dimensiunile unei tensiuni şi se numeşte
tensiune electromotoare de inducţie. Observăm că t.e.m. de inducţie are sens contrar tensiunii electromotoare E când fluxul magnetic inductor creşte şi are acelaşi sens cu E când fluxul magnetic scade.
Se poate considera problema şi invers: acelaşi sistem ca cel figurat în figura 3.5. doar că în acest caz conductorul este deplasat cu ajutorul unei forţe exterioare, iar sursa E este pasivizată, rămânând în locul ei doar un circuit electric închis cu rezistenţa totală R . În virtutea faptului că lucrul mecanic executat de forţa exterioară pentru deplasarea cu viteză constantă
dtdxv = a conductorului trebuie să se regăsească în energia electrică
consumată prin efect Joule în circuit, obţinem:
JmJm PPWW =⇒= ⇒ 2IRdtdxF ⋅=⋅ . (3.36)
Pentru ca viteza de deplasare să fie constantă, va trebui ca forţa exterioară să fie egală cu forţe electromagnetică şi putem scrie:
dtdeIR
dtdsBIR
dtdxlIB mΦ
−=⇒⋅=⋅−⇒⋅=⋅⋅⋅− 2 . (3.37)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
35
CAPITOLUL 4 – CURENTUL ALTERNATIV MONOFAZAT
4.1. Funcţii periodice, alternative şi sinusoidale
Semnalele electrice la modul cel mai general sunt variabile în timp după o funcţie oarecare ( )tf . În cazul în care valorile funcţiei se repetă după un interval de timp T , numit perioadă, acea funcţie se numeşte periodică:
( ) ( ) ( ) Ζ∈∀⋅+==+= nTntfTtftf ,... . (4.1)
Numărul de perioade din unitatea de timp se numeşte frecvenţă şi se măsoară în SI în Hertz (Hz).
Tf 1
==ν . (4.2)
O funcţie periodică este alternativă dacă valorile ei se repetă cu semn schimbat după fiecare semiperioadă:
( )
+−=
2Ttftf . (4.3)
Un caz şi mai particular de funcţie periodică, alternativă este funcţia sinusoidală, care este întotdeauna de forma:
( )0max sin ϕω +⋅⋅= tYy , (4.4)
unde s-a notat cu:
- y valoarea variabilă în timp a mărimii alternative sinusoidale, valoare ce se numeşte valoare instantanee şi indică la fiecare moment de timp ce valoare are semnalul respectiv;
- maxY amplitudinea semnalului sinusoidal;
- T
f ππω ⋅=⋅⋅=
22 pulsaţia funcţiei sinusoidale;
- 0ϕ faza iniţială a funcţiei.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
36
O mărime sinusoidală se poate reprezenta fie în funcţie de timp, fie în funcţie de produsul dintre pulsaţie şi timp. Două mărimi sinusoidale sunt în fază dacă trec simultan prin 0 şi prin valorile maxime, respectiv minime. O funcţie sinusoidală este defazată înaintea alteia dacă trece prin 0 şi prin valorile maxime, respectiv minime înaintea ei şi este defazată în urmă în caz contrar.
Diferenţa dintre fazele a două mărimi sinusoidale se numeşte defazaj:
( ) ( ) 02010201 ϕϕϕωϕωϕ −=+⋅−+⋅= tt . (4.5)
Dacă defazajul este nul se spune că mărimile sunt în fază, dacă este egal cu π se spune că sunt în opoziţie de fază.
O funcţie de timp sinusoidală, de frecvenţa dată, este complet caracterizată de două valori scalare: amplitudinea sau valoarea efectivă şi faza iniţială. Prin definiţie, valoarea efectivă a unei mărimi sinusoidale de curent alternativ este valoarea echivalentă e unei mărimi de curent continuu care manifestându-şi prezenţa prin acelaşi rezistor ca şi curentul alternativ dat, produce aceeaşi cantitate de căldură în unitatea de timp. Valoarea efectivă se notează prin litera mare corespondentă simbolului mărimii sinusoidale respective.
Este de subliniat şi de reţinut că valoarea efectivă este cea indicată de aparatele de măsură în curent alternativ, că legile electrotehnicii se verifică doar în valori instantanee, nu şi în valori efective
Conform definiţiei de mai sus putem scrie ecuaţiile pentru intervalul de timp de o perioadă a semnalului de curent alternativ:
.
( ) ( )
⋅⋅⋅=
−⋅⋅⋅=
=−
⋅⋅=⋅⋅=⋅⋅=
⋅⋅=
=
∫∫∫
TIRttIR
dttIRtIRdttiRQ
TIRQQQ
T
TTT
ca
cc
ccca
2max
0
2max
0
2max0
22max0
2
2
21
22sin
21
22cos1sin
ωω
ωω . (4.6)
Din ecuaţiile (4.6) se deduce valoarea efectivă a unei mărimi alternative sinusoidale (fie că este vorba de un curent sau de o tensiune):

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
37
2maxYY = . (4.7)
Având în vedere faptul că mărimea sinusoidală de curent alternativ ( ) ( )ϕω +⋅⋅= tYty sin2 este univoc determinată, la o frecvenţa dată, de
valoarea efectivă şi de faza iniţială, acesteia i se poate asocia un vector liber caracterizat de un modul egal cu valoarea efectivă şi de un unghi în sens trigonometric faţă de o direcţie aleasă de referinţă egal cu faza iniţială. Drept exemplu, în figura 4.1 sunt reprezentate fazorial două mărimi sinusoidale:
( )
( )
+=
+=
3100sin210
6100sin25
2
1
ππ
ππ
tty
tty
. (4.8)
Figura 4.1.: Reprezentarea fazorială a mărimilor sinusoidale
Cu ajutorul acestei reprezentări fazoriale se poate uşura efectuarea multor operaţii de adunare, scădere a mărimilor sinusoidale, ea făcându-se după regulile de adunare, scădere a vectorilor.
Construcţiile grafice realizate cu ajutorul fazorilor se numesc diagrame fazoriale.
4.2. Producerea tensiunii electromotoare alternative sinusoidale
Se consideră o spiră plană, de suprafaţă S , care se roteşte într-un câmp magnetic omogen de inducţie B , în jurul unui ax perpendicular pe direcţia laturilor de câmp, cu viteză unghiulară constantă ω (figura 4.2). La
O
60°
3O° x
Y 1
Y 2

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
38
momentul iniţial se consideră că suprafaţa spirei este perpendiculară pe direcţia liniilor de câmp magnetic, iar după un interval de timp oarecare t normala la suprafaţa spirei va face cu liniile de câmp magnetic un unghi de
t⋅ω (acest lucru se deduce direct din ecuaţia mişcării de rotaţie cu viteză unghiulară constantă t⋅+= ωαα 0 ). Fluxul magnetic care traversează suprafaţa spirei la un moment dat este:
( ) ( ) ( )ttSBSBt ⋅⋅Φ=⋅⋅⋅=⋅= ωωϕ coscos , (4.9)
unde s-a notat cu literă mică valoarea instantanee şi cu literă mare valoarea maximă a fluxului.
Figura 4.2.: Producerea tensiunii electromotoare sinusoidale
Fluxul magnetic este variabil în timp şi, conform legii inducţiei electromagnetice a lui Faraday, în spiră se induce o tensiune electromotoare indusă:
( )tdtde ⋅⋅Φ⋅=−= ωωϕ sin . (4.10)
Observăm că prin această modalitate, în spira rotită cu viteză unghiulară constantă într-un câmp magnetic constant se induce o tensiune electromotoare sinusoidală alternativă. Valoarea maximă a tensiunii electromotoare induse este:
ω⋅⋅= SBEmax . (4.11)
N
S
B n
n

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
39
Observăm, de asemenea, că tensiunea electromotoare este defazată faţă de fluxul magnetic în urmă cu
2π .
4.3. Circuite simple în regim de curent alternativ
In cadrul acestui subiect se tratează comportamentul unor elemente de circuit pasive atunci când acestea sunt supuse unei tensiuni sinusoidale de forma:
( ) ( )tUtu ⋅⋅⋅= ωsin2 . (4.12)
Pentru un element de circuit oarecare supus unui regim de lucru alternativ sinusoidal se defineşte impedanţa ca fiind raportul dintre valoarea efectivă a tensiunii de la bornele sale şi valoarea efectivă a curentului ce îl parcurge:
IUZ = . (4.13)
Unitatea de măsură în SI pentru impedanţă este Ohmul (Ω ).
Circuit de curent alternativ format dintr-un rezistor şi o sursă
Se consideră circuitul simplu din figura 4.3.
u(t) R
Figura 4.3.: Circuit cu rezistor
Acestui circuit se aplică legea lui Ohm pentru circuite omogene şi se obţine pentru expresia curentului alternativ ce parcurge rezistorul:
( ) ( ) ( )tRU
Rtuti ⋅⋅⋅== ωsin2 (4.14)
Se deduse imediat faptul că: Impedanţa unui rezistor este egală cu rezistenţa sa ohmică şi faptul că un rezistor nu defazează curentul faţă de tensiune.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
21
Puterea instantanee absorbită de rezistor este:
( ) ( ) ( ) ( )tIUtitutp ⋅⋅⋅⋅=⋅= ω2sin2 . (4.15)
Reprezentarea fazorială a tensiunii şi a curentului pentru acest circuit este redată în figura 4.4.
Figura 4.4.: Diagrama fazorială pentru circuitul simplu de curent alternativ cu rezistor
Circuit de curent alternativ format dintr-o bobină ideală şi o sursă
Se consideră circuitul simplu din figura 4.5 în care o bobină ideală – fără rezistenţă proprie şi de inductivitate L este alimentată de la o sursă de tensiune electrică alternativă. Dacă sursa ar fi de tensiune continuă, bobina ideală s-ar comporta ca un conductor ce ar scurtcircuita bornele sursei. În cazul sursei de tensiune alternativă, în circuit îşi va manifesta prezenţa un curent tot alternativ ( ) ( )ϕω +⋅⋅⋅= tIti sin2 . Acest curent va produce un câmp magnetic variabil şi el, iar conform legii inducţiei electromagnetice, în circuit va apare şi o tensiune electromotoare indusă:
( )dtdiL
dttdei ⋅−=−=
ϕ. (4.16)
u(t) L
Figura 4.5.: Circuit cu bobină ideală
Aplicând cea de a doua teoremă a lui Kirchhoff pentru acest circuit se obţine:
dtdiLueu i ⋅=⇔=+ 0 . (4.17)
Din această ecuaţie se obţine pentru curent:
( ) ( )
−⋅⋅⋅
⋅=⋅⋅⋅
⋅=⋅⋅
⋅=⋅⋅= ∫∫ 2
sin21cos21sin21 πωω
ωω
ω tUL
tUL
dttL
UdtuL
i .
(4.18)
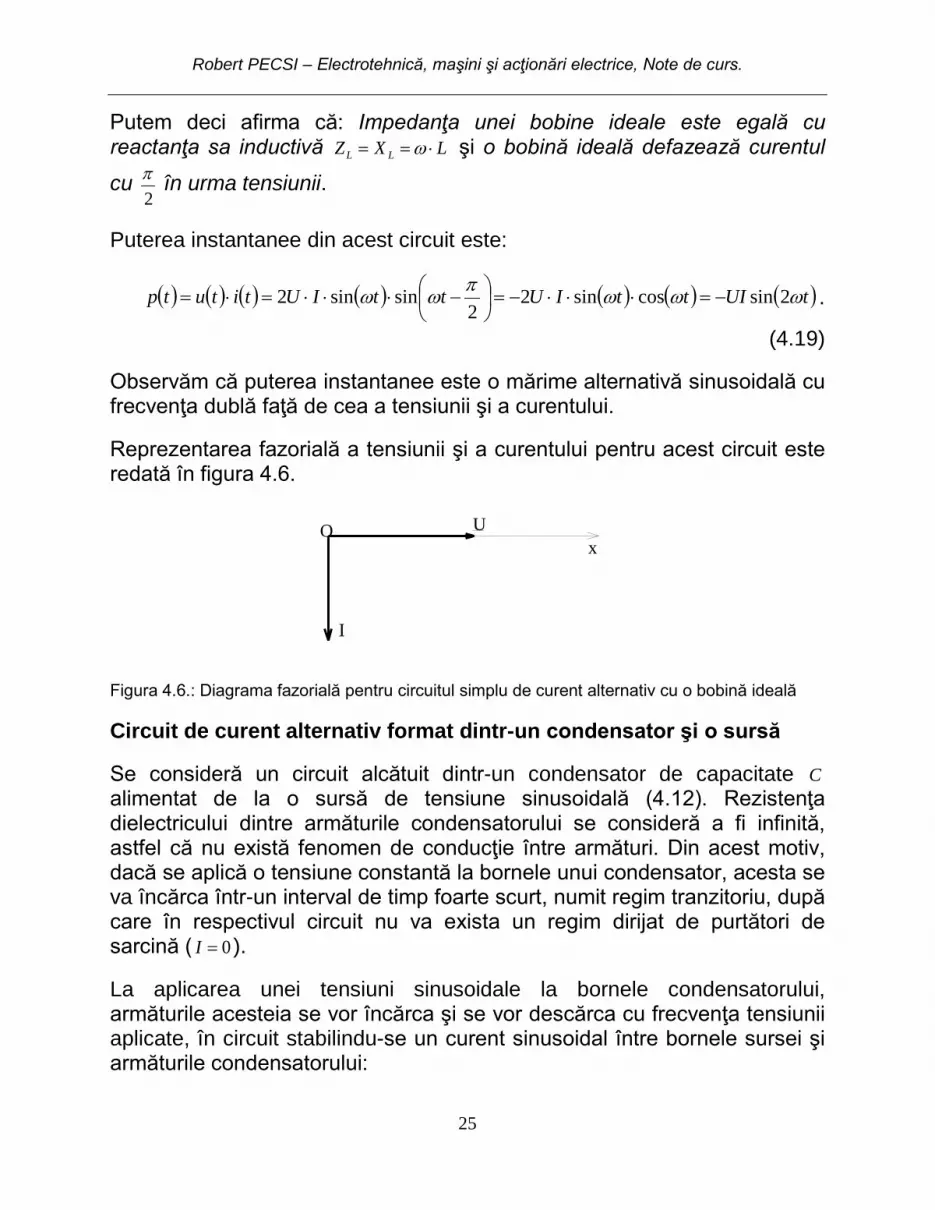
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
25
Putem deci afirma că: Impedanţa unei bobine ideale este egală cu reactanţa sa inductivă LXZ LL ⋅== ω şi o bobină ideală defazează curentul
cu 2π în urma tensiunii.
Puterea instantanee din acest circuit este:
( ) ( ) ( ) ( ) ( ) ( ) ( )tUIttIUttIUtitutp ωωωπωω 2sincossin22
sinsin2 −=⋅⋅⋅−=
−⋅⋅⋅=⋅= .
(4.19)
Observăm că puterea instantanee este o mărime alternativă sinusoidală cu frecvenţa dublă faţă de cea a tensiunii şi a curentului.
Reprezentarea fazorială a tensiunii şi a curentului pentru acest circuit este redată în figura 4.6.
Figura 4.6.: Diagrama fazorială pentru circuitul simplu de curent alternativ cu o bobină ideală
Circuit de curent alternativ format dintr-un condensator şi o sursă
Se consideră un circuit alcătuit dintr-un condensator de capacitate C alimentat de la o sursă de tensiune sinusoidală (4.12). Rezistenţa dielectricului dintre armăturile condensatorului se consideră a fi infinită, astfel că nu există fenomen de conducţie între armături. Din acest motiv, dacă se aplică o tensiune constantă la bornele unui condensator, acesta se va încărca într-un interval de timp foarte scurt, numit regim tranzitoriu, după care în respectivul circuit nu va exista un regim dirijat de purtători de sarcină ( 0=I ).
La aplicarea unei tensiuni sinusoidale la bornele condensatorului, armăturile acesteia se vor încărca şi se vor descărca cu frecvenţa tensiunii aplicate, în circuit stabilindu-se un curent sinusoidal între bornele sursei şi armăturile condensatorului:
O x
I
U

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
26
( ) ( )ϕω +⋅⋅⋅= tIti sin2 . (4.20)
Figura 4.7 ilustrează acest circuit simplu format dintr-un condensator şi o sursă de tensiune alternativă sinusoidală.
u(t) C
Figura 4.7.: Circuit simplu cu un condensator
Cantitatea de electricitate cu care se încarcă armăturile condensatorului este:
UCq ⋅= . (4.21)
Intensitatea curentului prin circuit este prin definiţie :
( )tUCdtduC
dtdqi ωω cos2 ⋅⋅⋅⋅=⋅== .
(4.22)
Apelând la relaţiile de bază ale trigonometriei, obţinem:
( ) .2
sin2
+⋅⋅⋅⋅=
πωω tUCti (4.23)
Putem deci afirma că: Impedanţa unui condensator este egală cu reactanţa sa capacitivă
CXZ CC ⋅
==ω
1 şi o bobină ideală defazează curentul cu 2π
înaintea tensiunii.
Puterea instantanee din acest circuit este:
( ) ( ) ( ) ( ) ( ) ( ) ( )tUIttIUttIUtitutp ωωωπωω 2sincossin22
sinsin2 =⋅⋅⋅=
+⋅⋅⋅=⋅= .
(4.24)
Observăm că puterea instantanee este o mărime alternativă sinusoidală cu frecvenţa dublă faţă de cea a tensiunii şi a curentului.
Reprezentarea fazorială a tensiunii şi a curentului pentru acest circuit este redată în figura 4.8.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
26
Figura 4.8.: Diagrama fazorială pentru circuitul simplu cu un condensator
4.4. Circuit de curent alternativ cu rezistor, bobină ideală şi condensator conectate în serie
Se consideră un circuit format dintr-un rezistor, o bobină ideală şi un condensator conectate în serie şi alimentate de la o sursă de tensiune (4.12). În circuit îşi va manifesta prezenţa un curent tot alternativ ( ) ( )ϕω +⋅⋅⋅= tIti sin2 .
u(t)
C
L
R
Figura 4.9.:Circuit RLC serie
Aplicând cea de a doua teoremă a lui Kirchhoff pentru acest circuit şi ţinând cont de ecuaţiile (4.14), (4.17) şi (4.22), obţinem:
∫⋅+⋅+⋅= idtCdt
diLiRu 1. (4.25)
Înlocuind expresiile sinusoidale ale tensiunii şi ale curentului se obţine:
( ) ( ) ( ) ( )ϕωω
ϕωωϕωω +⋅⋅
−+⋅⋅⋅++⋅⋅=⋅ tC
ItILtIRtU coscossinsin . (4.26)
Având în vedere că raportul dintre valoarea efectivă a tensiunii şi cea a curentului este prin definiţie impedanţa, obţinem:
O x
I
U

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
26
( ) ( ) ( ) ( )[ ]ϕωϕωω
+⋅−++⋅⋅= tXXtRt
Z CL cossinsin
1. (4.27)
Ecuaţia (4.27) este satisfăcută pentru orice moment de timp, deci în particular şi pentru 0=t , respectiv pentru
ωπ2
=t . Pentru primul moment de
timp ecuaţia devine:
( )R
XXtgXXR CLCL
−−=⇒=⋅−+⋅ ϕϕϕ 0cossin . (4.28)
Dacă acest prim moment de timp a permis determinarea defazajului curentului faţă de tensiune, cel de al doilea conduce la calculul impedanţei (deci a valorii efective a curentului):
( ) ( ) ϕϕϕπϕπ sincos2
cos2
sin ⋅−−⋅=
+⋅−+
+⋅= CLCL XXRXXRZ . (4.29)
Se înlocuiesc expresiile cosinusului şi ale sinusului în funcţie de tangenta deja cunoscută:
( )( )( )
( )( )
( )22
22
22
222
222
1sin
;1
1cos
CL
CL
CL
CL
CL
CL XXRXXR
XXRZ
XXR
XXtg
tgXXR
Rtg
−+=−+
−+=⇒
−+
−−=
+=
−+=
+=
ϕ
ϕϕ
ϕϕ
.
(4.30)
In acest mod s-au determinat impedanţa unui circuit RLC serie şi defazajul pe care un asemenea circuit îl introduce între tensiune şi curent. Se observă că în funcţie de valoarea defazajului există trei regimuri de funcţionare ale acestui circuit (regimuri a căror definiţie este valabilă şi pentru un circuit oarecare de curent alternativ):
- regimul de rezonanţă sau rezistiv în care defazajul dintre tensiune şi curent este nul 0=ϕ , regim care pentru circuitul RLC serie presupune egalitatea dintre reactanţa bobinei şi a condensatorului ( CL XX = );
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
27
- regimul inductiv în care defazajul ia valori negative, curentul fiind defazat în urma tensiunii 0<ϕ , regim care pentru circuitul RLC serie presupune ( CL XX > );
- regimul capacitiv în care defazajul ia valori pozitive, curentul fiind defazat înaintea tensiunii 0>ϕ , regim care pentru circuitul RLC serie presupune ( CL XX < ).
Se observă de asemenea faptul că defazajul dintre tensiune şi curent este pentru un circuit pasiv cuprins în intervalul
+−
2,
2ππ , un defazaj mai mare
în modul decât 2π însemnând un curent şi o putere activă negativă, deci
faptul că respectivul circuit produce energie activă în loc să consume.
Puterea instantanee din acest circuit este:
( ) ( ) ( ) ( ) ( ) ( )[ ]ϕωϕϕωω +−⋅⋅=+⋅⋅⋅=⋅= tIUttIUtitutp 2coscossinsin2 .
(4.31)
Această putere instantanee este o mărime periodică compusă din doi termeni – un termen constant şi unul de frecvenţa dublă, ce oscilează în jurul unei valori medii ϕcos⋅⋅ IU . Chiar dacă receptorul este unul pasiv – dacă el nu este unul pur rezistiv, există momente când puterea instantanee este negativă, adică ea este în acele momente cedată dinspre receptorul pasiv spre sursă. În acele momente energia acumulată în câmpul magnetic al bobinelor sau în câmpul electrostatic al condensatoarelor este parţial restituită sursei de alimentare.
Reprezentarea fazorială a tensiunii şi a curentului pentru acest circuit pentru cele trei regimuri definite mai sus este redată în figura 4.10. In aceste diagrame se alege intensitatea curentului ca axă origine de fază, deoarece în cazul circuitului considerat, curentul este elementul comun pentru toate componentele circuitului.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
28
UUC
I
Regim de rezonanta
Regim inductiv
Regim capacitiv
OIUR=U
UB
UC
O UR
UC
UB
I
U
URO
UB
Figura 4.10.: Diagramele fazoriale pentru cele trei regimuri ale unui circuit RLC serie
4.5. Puteri în regimul de curent alternativ sinusoidal
Se consideră un circuit de curent alternativ la bornele căreia se aplică o tensiune sinusoidală şi prin care se manifestă un curent de intensitatea:
( ) ( )( ) ( )
+⋅⋅=
⋅⋅=
ϕω
ω
tIti
tUtu
sin2
sin2. (4.32)
Puterea instantanee la bornele acestui circuit de curent alternativ are expresia:
( ) ( ) ( ) ( ) ( ) ( )[ ]ϕωϕϕωω +−⋅⋅=+⋅⋅⋅=⋅= tIUttIUtitutp 2coscossinsin2 .
(4.33)
Observăm că această putere instantanee este o mărime periodică compusă din doi termeni – un termen constant şi unul de frecvenţa dublă.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
29
Din expresia puterii instantanee se mai observă că aceasta oscilează cu frecvenţa dublă în jurul unei valori medii ϕcos⋅⋅ IU . Chiar dacă receptorul este unul pasiv – dacă el nu este unul pur rezistiv, există momente când puterea instantanee este negativă, adică ea este în acele momente cedată dinspre receptorul pasiv spre sursă. În acele momente energia acumulată în câmpul magnetic al bobinelor sau în câmpul electrostatic al condensatoarelor este parţial restituită sursei de alimentare.
Prin definiţie se numeşte putere activă – notată cu P , valoarea medie a puterii instantanee pe un număr întreg de perioade.
( ) ( )
( )
⋅⋅=
+⋅
⋅−⋅⋅⋅⋅
⋅=
⇒
+⋅⋅−⋅⋅⋅
⋅=⋅
⋅= ∫∫∫
ϕϕωω
ϕ
ϕωϕ
cos2sin2
cos1
2coscos11
00
000
IUtIUtIUTn
P
dttIUdtIUTn
dttpTn
P
nTnT
nTnTnT
. (4.34)
Puterea activă se măsoară în SI în waţi (W). În orice circuit electric de curent alternativ elementele care consumă puterea activă sunt rezistoarele. Puterea activă exprimă capabilitatea unui sistem de a produce lucru mecanic.
Puterea reactivă se defineşte ca produsul dintre valorile efective ale tensiunii şi ale curentului şi sinusul unghiului de defazaj dintre ele:
ϕsin⋅⋅= IUQ . (4.35)
Puterea reactivă se măsoară în SI în Volt Amperi Reactivi (VAR). Ea poate fi reactiv inductivă atunci când corespunde energiei magnetice înmagazinate în bobine sau reactiv capacitivă atunci când corespunde energiei condensatoarelor. Rezistoarele nu consumă şi nu produc putere reactivă. Energia reactivă consumată de bobine este pozitivă iar cea consumată de condensatoare este negativă, deci condensatoarele generează energie reactivă.
În zilele de azi, termenul de putere reactivă este utilizat de forte mulţi specialişti, de la fizician până la inginerul electrician. Suntem atât de obişnuiţi şi familiarizaţi cu acest termen încât nici nu mai realizăm contradicţiile care-i sunt asociate. Conceptele de putere activă şi reactivă sunt prezentate în cărţile de specialitate sau în manuale ca fiind produsul dintre tensiunea şi curentul din acelaşi punct al unui circuit. Se mai spune

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
30
că puterea activă depinde de cosinusul unghiului dintre faza valorii instantaneea tensiunii şi faza valorii instantanee a curentului, iar puterea reactivă depinde de sinusul aceluiaşi unghi. Dar, în realitate, când se calculează mediile în timp a acestor puteri, se observă un comportament net diferit: media în timp a puterii active este bine definită în timp ce media în timp a puterii reactive este nulă, şi asta indiferent de particularităţile circuitului analizat. Dacă pentru puterea (energia) activă există o circulaţie de la un punct al circuitului la altul, în cazul puterii reactive putem vorbi despre un continuu dute-vino, circulaţia totală pentru o perioadă a semnalului electric fiind nulă, întrucât energia care circulă într-un sens într-o semiperioadă va circula în sens contrar în semiperioada următoare. Puterea reactivă este permanent interschimbată între diferitele elemente ale circuitului (bobine, condensatoare) dar niciodată nu este consumată sau produsă. În realitate am putea spune că această putere reactivă este produsă la momentul iniţial al punerii sub tensiune a circuitului şi ea este consumată doar la deconectarea sistemului de la sursa de energie.
Surpriza cea mare apare când se analizează ecuaţiile circulaţiei energiei în circuit. Se analizează o porţiune a circuitului (de obicei a liniei de transmisie a energiei electrice) şi se calculează puterile activă şi reactivă la cele două capete ale porţiunii respective. Contradicţia apare când se deduce că puterea reactivă de la un capăt nu este egală cu puterea reactivă de la celălalt capăt, că de fapt există pierderi de putere reactivă. Singura explicaţie în lumina teoremei conservării energiei este faptul că linia în sine produce sau consumă putere reactivă şi de aici provine respectiva diferenţă. Această afirmaţie vine, însă, în contradicţie cu afirmaţia anterioară că puterea reactivă nu se produce şi nu se consumă.
Analizând ecuaţia prin care am determinat puterea instantanee şi modul în care au fost definite puterea activă şi cea reactivă, observăm că simetria dintre puterea activă şi puterea reactivă este ruptă, lucru nespecificat de majoritatea cărţilor de specialitate. Aceasta este şi sursa interpretărilor greşite cu privire la puterea reactivă. Se poate observa imediat că puterea activă descrie o putere medie în timp ce puterea reactivă descrie valoarea maximă a mărimii instantanee asociate. Aceasta înseamnă că cele două mărimi nu pot fi tratate identic, ele nefiind similare. Media egală cu zero nu indică lipsa oricărei circulaţii de putere reactivă în circuit, ci faptul că cea ce într-o semiperioadă circulă într-un sens va circula în sens contrar în următoarea semiperioadă.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
31
Pierderile de putere reactivă se explică prin puterea reactivă consumată sau produsă de linie. Astfel, pentru o porţiune a unui circuit electric, puterea reactivă ce intră în circuit pe la un capăt va fi egal cu suma dintre puterea reactivă regăsită la celălalt capăt şi puterea reactivă produsă sau absorbită de respectiva porţiune de circuit. Această interpretare unanim acceptată vine în contradicţie cu afirmaţia unanim acceptată şi ea că puterea reactivă nu este produsă sau consumată, ea pur şi simplu există şi oscilează între diferitele părţi ale circuitului. Merită poate reamintit că nu puterea se pierde, că nu puterea circulă ci energia. Contradicţia constă în faptul că termenul de energie reactivă se referă atât la amplitudinea puterii reactive instantanee, cât şi la media sa, două concepte total diferite. Contradicţia dispare imediat prin următoarea interpretare corectă:
- media puterii reactive este nulă, ceea ce înseamnă că puterea reactivă ce circulă într-un sens o jumătate de perioadă va circula în sens opus următoarea semiperioadă. Aşa că este imposibil să avem pierderi sau amplificări ale puterii reactive medii;
- „pierderea de putere reactivă” trebuie interpretată ca o pierdere în amplitudine (aceasta şi este!), ea nefiind în realitate o pierdere reală de putere. Aşa că aşa-numita pierdere de putere reactivă este de fapt o diminuare a amplitudinii puterii reactive instantanee fără ca prin aceasta să fie o reală pierdere.
Este necesară definirea acestei pierderi în amplitudine căci, puterea reactivă medie fiind mereu aceeaşi (zero), e nevoie de o mărime care să descrie efortul depus de circuit. Această mărime este chiar amplitudinea puterii reactive, Q.
Puterea aparentă se defineşte ca fiind egală cu produsul dintre valorile efective ale tensiunii şi ale curentului ce îşi manifestă prezenţa într-un circuit. Unitatea sa de măsură în SI este Volt-amperul (VA).
În timp ce P corespunde unui transport de energie (de sarcină electrică) între sursă şi receptor, Q defineşte intensitatea variaţiei energiei înmagazinate în câmpurile magnetice şi electrice care îşi manifestă prezenţa într-un circuit.
IUS ⋅= . (4.36)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
32
Ţinând seama de definiţiile puterilor activă, reactivă şi aparentă se poate deduce relaţia dintre ele ca fiind:
222 SQP =+ . (4.37)
Se observă că această relaţia seamănă foarte mult cu teorema lui Pitagora care exprimă relaţia dintre catetele şi ipotenuza unui triunghi dreptunghic, de unde şi provine analogia şi construcţia triunghiului puterilor – un triunghi dreptunghic ce are puterea aparentă ca ipotenuză, puterea activă drept catetă orizontală şi puterea reactivă drept catetă verticală. Figura 4.11 ilustrează triunghiurile puterilor pentru circuite rezistive (rezonante), inductive şi capacitive. (Un circuit se numeşte capacitiv dacă defazajul curentului faţă de tensiunea de la bornele circuitului este capacitiv, adică pozitiv, inductiv dacă acest defazaj este negativ şi rezistiv sau rezonant dacă defazajul este nul).
Q
Circuit inductiv
Circuit capacitiv
Circuit rezistiv
P=S
P
QS
P
S
Figura 4.11.: Triunghiurile puterilor pentru circuite de curent alternativ
Factorul de putere al unui circuit se defineşte prin raportul dintre puterea activă şi cea aparentă pentru acel circuit:
SPk == ϕcos . (4.38)
Factorul de putere este adimensional şi ia valori subunitare pozitive. Pentru ca un circuit să funcţioneze cu maximum de eficiență, de putere activă cedată el trebuie să aibă un factor de putere cât mai apropiat de unitatea.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
33
4.6. Îmbunătăţirea factorului de putere
Consumul energiei electrice transportate la un factor de putere cât mai bun este una dintre problemele cele mai importante ale distribuţiei energiei electrice. Având în vedere definiţia factorului de putere (
SPk == ϕcos ),
îmbunătăţirea factorului de putere înseamnă reducerea puterii reactive din circuit.
Cea mai utilizată metodă în acest sens este conectarea în paralel cu consumatorul a unor condensatoare – asta având în vedere faptul că majoritatea consumatoarelor au o natură rezistiv – inductivă.
Conectând un condensator sau mai multe în paralel cu un consumator de impedanţă Z se observă că nu este influenţată cu nimic funcţionarea acestuia, întrucât la bornele sale rămâne aceeaşi tensiune U . Mai mult, puterea activă totală consumată de respectivul circuit va rămâne şi ea identică, întrucât condensatorul nu consumă putere activă, ea doar generează putere reactivă.
Dacă iniţial, fără condensatoare de îmbunătăţire a factorului de putere, factorul de putere al circuitului de impedanţă Z este
SPk == ϕcos ,
compensare totală a acestui factor de putere, adică legarea în paralel a unui condensator astfel încât noul circuit să aibă un factor de putere unitar se realizează alegând condensatorul în felul următor: puterea reactivă generată de condensator va trebui să fie egală în modul cu puterea activă consumată de receptor, adică:
2
2
UtgPC
tgPUXtgPQQ CZc ⋅
⋅=⇒
⋅=⇒⋅−=−=
ωϕ
ϕϕ . (4.39)
Pentru a realiza o compensare parţială, până la un factor de putere 'cos' ϕ=k , valoarea capacităţii condensatorului necesar se calculează
similar, urmărind şi ilustrarea triunghiului puterilor din figura 4.12.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
25
Circuitul initialinductiv
Circuitul imbunatatit
SQQC
P
QS
Figura 4.12.: Îmbunătăţirea factorului de putere
( )2
'U
tgtgPC⋅−⋅
=ω
ϕϕ (4.40)
Dacă valoarea condensatorului depăşeşte valoarea necesară compensării totale, circuitul devine capacitiv.
În zilele de azi, compensarea puterii reactive şi îmbunătăţirea factorului de putere se realizează cel mai adesea cu filtre active de putere, capabile să sesizeze la fiecare moment (la intervale de timp reduse, cu câteva ordine de mărime mai mici decât frecvenţa semnalului electric de alimentare) defazajul dintre curent şi tensiune şi să comute în mod automat introducerea în circuit a unei baterii de condensatoare având valoare corespunzătoare unei compensări optime, predefinite.
4.7. Reprezentarea în complex a mărimilor sinusoidale
Rezolvarea circuitelor de curent alternativ mai complexe decât cele câteva circuite simple prezentate mai sus necesită aplicarea unor teoreme şi/sau metode de lucru, cum ar fi teoremele lui Kirchhoff, metoda curenţilor ciclici, metoda potenţialelor la noduri, metoda generatorului echivalent, etc. Toate aceste teoreme, ecuaţii, metode se pot aplica numai mărimilor instantanee, de cele mai multe ori obţinându-se sisteme de ecuaţii diferenţiale cu atâtea necunoscute câte laturi are respectivul circuit. Este evident că este necesară o metodă ce uşurează considerabil rezolvarea circuitelor de curent alternativ, şi această metodă este tocmai reprezentarea mărimilor sinusoidale prin nişte numere complexe – imagini ale acestora în planul complex. Această metodă asociază printr-o funcţie bijectivă fiecărei mărimi sinusoidale un număr complex şi numai unul conform următoarei reguli:
( ) ( ) ( ) ϕϕϕϕω ⋅⋅=⋅+⋅=↔+⋅⋅= jeYjYYtYty sincossin2 . (4.41)
Imaginea în complex a mărimii sinusoidale de curent alternativ este un număr complex, se notează cu literă mare subliniată şi nu se măsoară în

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
121
unitatea de măsură a mărimii fizice asociate (este un număr complex!!!). Transformarea inversă, adică obţinerea mărimii fizice sinusoidale asociate unui număr complex oarecare jbaY ⋅+= se face cu ajutorul relaţiilor:
=
+=
abarctg
baY
ϕ
22
. (4.42)
Dacă la bornele unui circuit de curent alternativ se aplică o tensiune sinusoidală de forma ( ) ( )tUtu ⋅⋅⋅= ωsin2 , intensitatea curentului se va putea exprima prin ( ) ( )ϕω −⋅⋅⋅= tIti sin2 , presupunând că avem un curent defazat în urma tensiunii cu unghiul ϕ . Imaginile în complex ale acestor două mărimi sunt ϕ⋅−⋅== jeIIUU , .
Se defineşte, de asemenea impedanţa complexă a unui element oarecare de circuit prin relaţia:
( ) ϕϕϕϕϕ sincossincos ⋅⋅+⋅=⋅+⋅=⋅
== ⋅− ZjZjI
UeIU
IUZ j . (4.43)
Rezultă:
( )
⋅−⋅⋅+=−⋅+=
CLjRXXjRZ CL ω
ω 1. (4.44)
Se defineşte admitanţa complexă prin:
( ) ϕϕϕϕϕ
sincossincos ⋅⋅−⋅=⋅−⋅=⋅
==⋅−
YjYjUI
UeI
UIY
j
. (4.45)
Puterea aparentă are şi ea o imagine în complex de forma:
( ) QjPjSeIUIUS j ⋅+=⋅+⋅=⋅⋅=⋅= ⋅ ϕϕϕ sincos*. (4.46)
Pentru rezolvarea unui circuit de curent alternativ se urmează un algoritm de lucru de felul următor:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
122
- Se calculează imaginile în complex pentru tensiunile electromotoare (date de obicei în valori instantanee) şi pentru elementele pasive din circuit.
- Se aplică teoremele electrotehnicii numerelor complexe (lucru posibil în virtutea bijectivităţii funcţiei care asociază mărimilor sinusoidale numere complexe). Printre teoremele electrotehnicii ce merită reamintite aici sunt cele două teoreme a lui Kirchhoff:
Prima teoremă: ∑ =nod
kI 0 ; (4.47)
Cea de a doua teoremă: ∑∑ ⋅=bucla
nnbucla
k IZE ; (4.48)
- Odată determinate imaginile complexe ale curenţilor din circuit se realizează trecerea inversă la mărimile instantanee (fizice) cu ajutorul relaţiilor (4.42).
- Se verifică rezultatele obţinute prin bilanţul puterilor în curent alternativ:
∑∑∑ ⋅⋅+⋅=⋅⇔=circuit
kkcircuit
kkcircuit
kkconsumatprimit IXjIRIESS 22* . (4.49)
Metodele de rezolvare a circuitelor electrice prezentate la capitolul de curent continuu pot fi cu uşurinţă adaptate rezolvării circuitelor de curent alternativ cu următoarele menţiuni:
- Mărimile din cadrul metodelor aplicate pentru curent alternativ sunt mărimi complexe;
- Rezistenţei din cazul curentului continuu îi corespunde Impedanţa complexă în curent alternativ;
- Conductanţei din cazul curentului continuu îi corespunde admitanţa complexă de curent alternativ.
4.8. Metoda potenţialelor la noduri pentru circuitele monofazate de curent alternativ
Metoda de rezolvare a circuitelor electrice de curent de curent alternativ prin Teoremele lui Kirchhoff prezintă dezavantajul unui număr ridicat de ecuații,

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
123
egal cu numărul de laturi ale circuitului. Pentru circuite complexe aceasta poate reprezenta un impediment major şi este preferabilă utilizarea unor metode de rezolvare ce permit reducerea considerabilă a numărului de ecuaţii. Una dintre aceste metode este metoda potenţialelor la noduri.
Metoda potenţialelor la noduri permite reducerea numărului de ecuaţii ale sistemului ce se impune spre rezolvare pentru aflarea curenţilor din laturile unui circuit la N-1 ecuaţii, N fiind numărul de noduri ale circuitului. Metoda apelează la o etapă anterioară în care se determină prin rezolvarea sistemului de N-1 ecuaţii potenţialele nodurilor sistemului, urmând apoi ca să determinăm curenţii din fiecare latură cu ajutorul legii conducţiei electrice (Legea lui Ohm). Sistemul de rezolvat va avea N-1 ecuaţii şi nu N deşi circuitul are N noduri, deoarece potenţialul unui nod se poate considera ca fiind nul. Acest lucru este corect pentru că potenţialul electric nu este o mărime unic determinată, el depinde întotdeauna de o referinţă, iar în cadrul circuitului nostru complet, care este aşadar un sistem închis, suntem liberi să alegem noi referinţa. Se alege un nod de potenţial 0, se determină apoi potenţialele celorlalte noduri şi apoi curenţii din laturile circuitului.
( )
( )
( )
−=++++
−=++++
−=++++
∑
∑∑
−−−−−−
−−
−−
1111212111
2112212121
1111212111
...
...
...2
...
NscNNNNN
scNN
scNN
IVYVYVY
IVYVYVY
IVYVYVY
(4.50),
unde V1 şi V2 sunt potenţialele complexe ale nodurilor 1 şi 2, potenţialul celui de al treilea nod fiind ales ca referinţă nul; Yii reprezintă conductanţa complexă a nodului i şi este egală cu suma aritmetică a conductanţelor complexe ale laturilor concurente în nodul i; Yij= Yji reprezintă conductanţa complexă comună a nodurilor i şi j şi este egală cu suma aritmetică, luată cu semnul minus a conductanţelor complexe ale laturilor care unesc direct
cele două noduri i şi j; iar - ( )Isc i∑ reprezintă suma algebrică a curenţilor de scurtcircuit complecși, injectaţi în nodul i.
Cunoscând potenţialele nodurilor (care se obţin prin rezolvarea sistemului, curentul dintr-o latură a circuitului se determină cu rela ția:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
124
AB
BA
ZVVEI −+
= , (4.51)
4.9. Metoda curenţilor ciclici pentru circuitele monofazate de curent alternativ
Metoda curenţilor ciclici permite reducerea numărului de ecuaţii ale sistemului ce se impune spre rezolvare pentru determinarea curenţilor din laturile circuitului, la numărul buclelor independente ale circuitului, care se poate dovedi uşor că este în directă relaţie cu numărul laturilor şi a nodurilor circuitului (b=l-n+1). În acest scop sistemul apelează la un pas intermediar, în cadrul căruia considerăm că toţi curenţii din laturile circuitului nostru se pot descompune în nişte curenţi ciclici care circulă doar de-a lungul unei bucle anume. Astfel, curentul printr-o latură ce aparţine unei singure bucle independente va fi egal cu acel curent ciclic care circulă prin respective buclă, iar curentul printr-o latură ce aparţine mai multor bucle independente va fi suma algebrică a curenţilor ciclici prin acele bucle ce conţin respective latură, sumă în care curenţii ciclici opuşi ca şi sens curentului din latură se iau cu semnul minus. Paşii sunt: alegerea buclelor independente şi ale sensurilor curenţilor ciclici, scrierea sistemului de ecuaţii, rezolvarea sa şi apoi, determinarea curenţilor din latură având curenţii ciclici.
Sistemul de ecuaţii dat de metoda curenţilor ciclici este următorul:
( )
( )
( )
=+++
=+++
=+++
∑
∑∑
BBBBBB
BB
BB
EIZIZIZ
EIZIZIZR
EIZIZIZ
...
...
...
...
2211
22222121
11212111
(4.52),
în care: I1, I2, I3, sunt curenţii ciclici; Zii reprezintă impedanța complexă a ochiului i şi este egală cu suma aritmetică a impedanţelor complexe ale laturilor ochiului i; Zij = Zji este impedanţa complexă comună ochiului i şi j, egală cu suma algebrică a impedanţelor complexe ale laturilor comune celor două ochiuri (sunt pozitive impedanţele laturilor parcurse de curenţii Ii şi Ij
( )E i∑ în
acelaşi sens); reprezintă suma algebrică a t.e.m. complexe ale surselor din laturile ochiului i (sunt pozitive t.e.m. care au acelaşi sens cu Ii).

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
125
CAPITOLUL 5 – CIRCUITE ELECTRICE TRIFAZATE
5.1. Sisteme trifazate simetrice de mărimi sinusoidale
Mărimile de curent alternativ sinusoidal se pot utiliza într-un sistem trifazat. Un asemenea sistem se numeşte simetric în cazul în care el satisface următoarele condiţii:
- valorile efective ale celor trei mărimi sinusoidale din sistem sunt egale;
- pulsaţiile celor trei mărimi sinusoidale din sistem sunt egale;
- defazajul dintre oricare două dintre cele trei mărimi sinusoidale din sistem este
32π .
Dacă mărimea cu indicele 2 este în urma primei mărimi, iar mărimea cu indicele 3 este în urma celei cu indicele 2, se spune că respectivul sistem este de succesiune directă. În caz contrar sistemul este de succesiune inversă. Conform celor afirmate mai sus, cele trei mărimi ale unui sistem trifazat simetric de succesiune directă se pot exprimă în felul următor:
( ) ( )
( )
( )
+⋅⋅=
−⋅⋅=
⋅⋅=
32sin2
32sin2
sin2
1
2
1
πω
πω
ω
tYty
tYty
tYty
. (5.1)
Numerele complexe asociate acestora vor fi:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
126
⋅+−⋅=
⋅+⋅=
⋅−−⋅=
⋅−⋅=
=
23
21
32sin
32cos
23
21
32sin
32cos
3
2
1
jYjYY
jYjYY
YY
ππ
ππ. (5.2)
Pentru a uşura foarte mult lucrul cu asemenea sisteme trifazate, se utilizează foarte des lucrul în complex simplificat şi notaţia:
⋅+−=
⋅+=
23
21
32sin
32cos jja ππ
. (5.3)
Acest număr complex a este un operator complex având modulul egal cu unitatea şi are o serie de proprietăţi:
- înmulţind un număr complex cu acest operator complex a , modulul său nu se modifică, iar argumentul său se măreşte cu
32π , această
operaţie de înmulţire având, deci, efectul rotirii fazorului asociat cu
32π în sens trigonometric direct;
- *2
23
21
23
21
23
21 ajjjaaa =
⋅−−=
⋅+−⋅
⋅+−=⋅= ; (5.4)
- 1*23 =⋅=⋅= aaaaa ; (5.5)
- 023
21
23
2111 2 =
⋅−−+
⋅+−+=++ jjaa . (5.6)
Cu ajutorul operatorul complex a , numerele complexe asociate celor trei mărimi ale unui sistem trifazat simetric de succesiune directă se scriu:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
127
⋅=⋅=⋅=⋅=
=
13
122
2
1
YaaYYYaaYY
YY
. (5.7)
Diagrama fazorială pentru acest sistem trifazat este ilustrată în figura 5.1.
Figura 5.1.: Diagrama fazorială pentru un sistem trifazat simetric de succesiune directă
Se observă cu uşurinţă că din proprietatea (5.6) a operatorului complex a rezultă o proprietate specifică unui sistem trifazat simetric:
( ) 01YYY 2321 =⋅++=++ Yaa , (5.8)
adică cele trei mărimi formează un sistem închis (ca laturile unui triunghi).
5.2. Producerea unui sistem trifazat simetric de tensiuni electromotoare
Se consideră un sistem format din trei spire identice, având fiecare suprafaţa S , situate pe acelaşi ax şi formând unghiuri de defazaj spaţial între ele de
32π . Cele trei spire sunt amplasate în spaţiul de influenţă al
unui câmp magnetic omogen, de inducţie constantă B , având liniile de câmp perpendiculare pe axul comun al spirelor (figura 5.2). Ansamblul celor trei spire este rotit cu viteză unghiulară constantă ω în jurul axului comun. Dacă se presupune că la momentul iniţial spira nr. 1 are planul perpendicular pe liniile de câmp magnetic, unghiurile pe care le formează normalele la suprafeţele celor trei spire cu inducţia magnetică B sunt:
Y 1
Y 3
Y 2
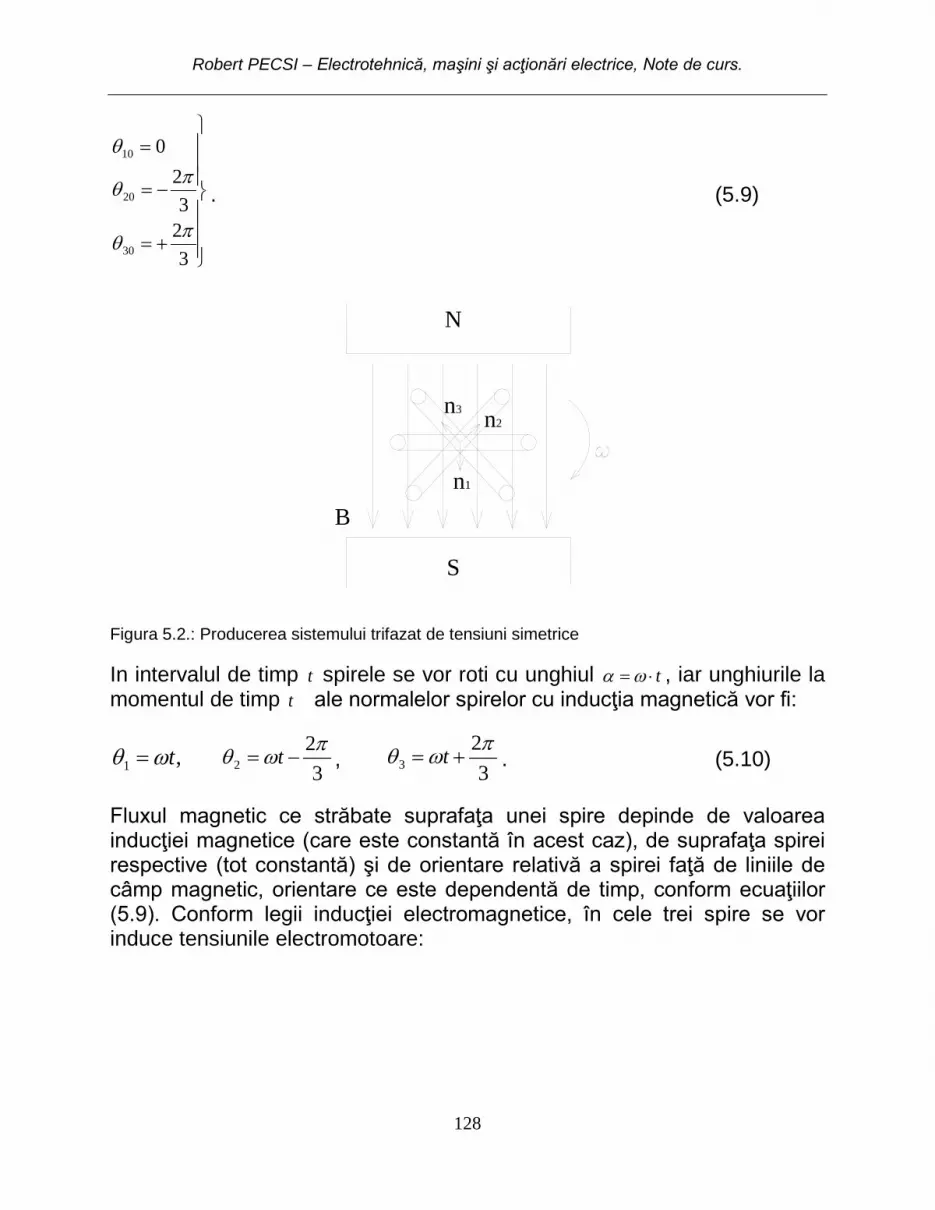
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
128
+=
−=
=
323
20
30
20
10
πθ
πθ
θ
. (5.9)
N
S
Bn1
n2n3
Figura 5.2.: Producerea sistemului trifazat de tensiuni simetrice
In intervalul de timp t spirele se vor roti cu unghiul t⋅= ωα , iar unghiurile la momentul de timp t ale normalelor spirelor cu inducţia magnetică vor fi:
,1 tωθ = 3
22
πωθ −= t , 32
3πωθ += t . (5.10)
Fluxul magnetic ce străbate suprafaţa unei spire depinde de valoarea inducţiei magnetice (care este constantă în acest caz), de suprafaţa spirei respective (tot constantă) şi de orientare relativă a spirei faţă de liniile de câmp magnetic, orientare ce este dependentă de timp, conform ecuaţiilor (5.9). Conform legii inducţiei electromagnetice, în cele trei spire se vor induce tensiunile electromotoare:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
129
( ) ( ) ( )
+⋅⋅=
+⋅⋅⋅=
+⋅⋅
−=−=
−⋅⋅=
−⋅⋅⋅=
−⋅⋅
−=−=
⋅⋅=⋅⋅⋅=⋅⋅
−=−=
32sin2
32sin
32cos
32sin2
32sin
32cos
sin2sincos
33
22
11
πωπωω
πωϕ
πωπωω
πωϕ
ωωωωϕ
tEtSBdt
tSBd
dtde
tEtSBdt
tSBd
dtde
tEtSBdt
tSBddt
de
.
(5.11)
Se observă imediat că cele trei tensiuni electromotoare induse au aceleaşi valori efective, aceeaşi pulsaţie şi sunt defazate între ele cu
32π . Ele
formează un sistem trifazat de tensiuni simetrice de succesiune directă. Cele trei imagini complexe asociate acestor tensiuni electromotoare induse sunt:
⋅=⋅=⋅=⋅=
⋅⋅==
13
122
2
1 2
EaaEEEaaEE
SBEE ω
. (5.12)
5.3. Conexiunile generatoarelor electrice trifazate
Cele trei spire, în cazul unor generatoare reale de energie electrică trifazată, sunt înlocuite cu trei bobine având impedanţele complexe
321 ,, ZZZ . Pentru ca sistemul de tensiuni electromotoare induse să fie simetric, este necesar ca:
321 ZZZ == . (5.13)
Cele trei bobine ale generatorului trifazat se pot lega în mai multe moduri: se pot lega capetele celor trei bobine laolaltă şi culege tensiunile electromotoare induse între capetele râmase libere şi punctul comun –

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
130
cazul conexiunii stea, sau se pot lega cele trei bobine într-un triunghi – conexiunea triunghi.
Conexiunea stea a generatoarelor trifazate simetrice
Conexiunea stea a generatoarelor trifazate simetrice este ilustrată în figura 5.3.
Z2
Z1
Z3
1'
O'
3'2'
1
2
3
O
U10
U20U30
U31
U12 U23
Figura 5.3.: Generatorul trifazat conexiune stea
Borna '0 , în care sunt conectate cele trei faze se numeşte bornă neutră sau de nul. Tensiunile măsurate între la bornele fiecăreia dintre cele trei bobine ale generatorului, adică 302010 ,, UUU se numesc tensiuni de fază. Tensiunile măsurate la capetele a două bobine diferite dintre cele trei, adică
312312 ,, UUU se numesc tensiuni de linie.
Relaţiile dintre tensiunile de fază şi de linie se deduc aplicând cea de a doua teoremă a lui Kirchhoff:
( )( )( )
⋅−=−=
⋅−=−=
⋅−=−=
f
f
f
UaUUUUaaUUU
UaUUU
1
1
103031
2302023
2201012
. (5.14)
Cunoscând aceste relaţii, precum şi expresia imaginilor în complex ale tensiunilor de fază, dedusă la subiectul precedent ( fff UaUUaUUU ⋅=⋅== 30
22010 ,, ) se poate figura diagrama fazorială pentru
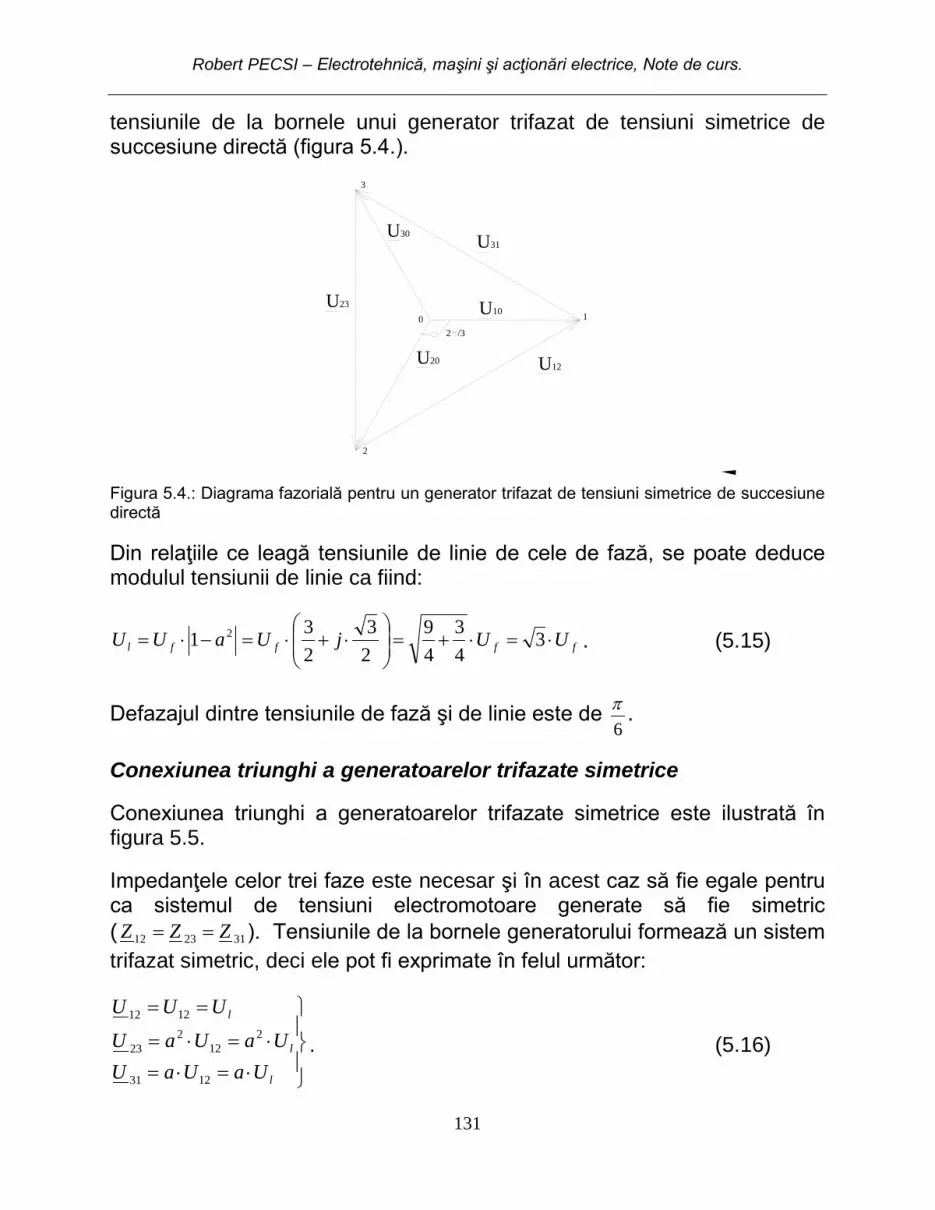
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
131
tensiunile de la bornele unui generator trifazat de tensiuni simetrice de succesiune directă (figura 5.4.).
U10
U30
U20 U12
U31
U230 1
3
2
2 /3
Figura 5.4.: Diagrama fazorială pentru un generator trifazat de tensiuni simetrice de succesiune directă
Din relaţiile ce leagă tensiunile de linie de cele de fază, se poate deduce modulul tensiunii de linie ca fiind:
ffffl UUjUaUU ⋅=⋅+=
⋅+⋅=−⋅= 3
43
49
23
231 2 . (5.15)
Defazajul dintre tensiunile de fază şi de linie este de 6π .
Conexiunea triunghi a generatoarelor trifazate simetrice
Conexiunea triunghi a generatoarelor trifazate simetrice este ilustrată în figura 5.5.
Impedanţele celor trei faze este necesar şi în acest caz să fie egale pentru ca sistemul de tensiuni electromotoare generate să fie simetric ( 312312 ZZZ == ). Tensiunile de la bornele generatorului formează un sistem trifazat simetric, deci ele pot fi exprimate în felul următor:
⋅=⋅=
⋅=⋅=
==
l
l
l
UaUaUUaUaU
UUU
1231
212
223
1212
. (5.16)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
132
Z12Z31
Z23
1'
3'2'
1
2
3U12 U23
I12
I23
U31I31
I1
I3
I2
Figura 5.5.: Generator trifazat conexiune triunghi
Având în vedere faptul că impedanţele fazelor generatorului sunt egale între ele şi că tensiunile de la bornele generatorului formează un sistem trifazat simetric, se deduce imediat şi faptul că şi sistemul curenţilor ce circulă prin fazele generatorului (numiţi curenţi de fază) formează tot un sistem trifazat simetric:
⋅=⋅
==
⋅=⋅
==
=
1212
12
31
3131
122
12
122
23
2323
12
1212
IaZUa
ZU
I
IaZ
UaZU
I
ZUI
. (5.17)
Curenţii 321 ,, III ce îşi manifestă prezenţa prin conductorii liniei de alimentare se numesc curenţi de linie şi se determină cu ajutorul primei teoreme a lui Kirchhoff în felul următor:
−=−=−=
23313
12232
31121
IIIIIIIII
. (5.18)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
133
Plecând de la relaţiile (5.17) şi (5.18) se poate construi o diagramă fazorială pentru ilustrarea curenţilor de fază şi de linie din generatorul trifazat simetric conexiune triunghi (figura 5.6).
I12
I31
I23 I2
I1
I30 1
3
2
2 /3
Figura 5.6.: Diagrama fazorială a curenţilor din generatorul trifazat simetric conexiune triunghi
Se observă că şi sistemul curenţilor de linie este tot simetric.
5.4. Studiul receptoarelor trifazate conexiune stea alimentate de la un sistem trifazat simetric de tensiuni
Fiind dat un sistem trifazat simetric de tensiuni, la bornele sale (ale generatorului trifazat) se pot conecta două mari categorii de receptoare trifazate – cele conexiune stea şi cele conexiune triunghi.
A studia conexiunea stea înseamnă a determina curenţii absorbiţi pe cele trei faze ale receptorului dacă se cunosc tensiunile de alimentare şi impedanţele receptorului. Receptorul conexiune stea este ilustrat în figura 5.7.
In figura 5.7. s-au notat cu 321 ,, ZZZ impedanţele fazelor receptorului conexiune stea, cu NZ impedanţa conductorului de nul şi cu 0NU diferenţa de potenţial dintre nulul receptorului N şi nulul generatorului trifazat 0. Pentru a afla curenţii ce sunt absorbiţi pe fiecare fază a receptorului, se observă că se poate aplica legea lui Ohm şi se obţine:
nkZ
UUZ
UI
k
Nk
k
kNk ,1,00 =∀
−== . (5.19)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
134
IN ZN
1
3
0
U30
U20
U10
UN0
Z2
2
Z1
Z3
N
I3
I2
I1
Figura 5.7.: Receptor trifazat conexiune stea
Se observă că pentru a determina complet valoarea acestor curenţi, este necesar să se calculeze tensiunea de nul 0NU . În acest sens, se mai scriu,
pe lângă ecuaţiile (5.19) şi următoarele (ţinând cont de notaţia Z
Y 1= a
admitanţei:
⇒
=
=++
N
NN
N
ZU
I
IIII
0
321
( ) ( ) ( ) ⇒⋅=⋅−+⋅−+⋅− 00303020201010 YUYUUYUUYUU NNNN (5.20)
Separând termenii şi rezolvând ecuaţia se obţine pentru tensiunea de deplasare a nulului:
NN YYYY
UYUYUYU
+++⋅+⋅+⋅
=321
3032021010 . (5.21)
Datorită tensiunii de deplasare a nulului, receptoarele de pe diferitele faze ale receptorului trifazat conexiune stea au tensiuni mai mici sau mai mari decât cea nominală, de fază a reţelei. Acest lucru se reflectă nefavorabil asupra respectivului consumator, putând duce la îmbătrânirea sa prematură, la deteriorarea sa, la funcţionarea sa incorectă. Acelaşi lucru, şi anume existenţa unei tensiuni de deplasare a nulului diferite de zero creşte

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
135
considerabil de mult pierderile de putere din reţeaua electrică. Se deduce din aceste considerente necesitatea menţinerii echilibrului între fazele receptorului trifazat conexiune stea ( 321 ZZZ == ), caz în care receptorul este echilibrat.
În acest caz se observă că tensiunea de deplasare a nulului va fi nulă:
( ) ( ) 0133
210302010
321
3032021010 =++⋅
+⋅
=++⋅+
=+++
⋅+⋅+⋅= aa
YYUY
UUUYY
YYYYY
UYUYUYU
NNNN .
(5.22)
In cazul echilibrului şi curentul prin conductorul de nul va fi zero, ceea ce înseamnă că şi conductorul de nul este inutil. Din acest motiv, receptoarele perfect echilibrate, cum sunt motoarele electrice trifazate sunt alimentate pe 3 conductoare nu pe 4.
Alte cazuri particulare pentru receptorul trifazat conexiune stea dezechilibrat sunt:
- conductor de nul inexistent, adică 0=⇒∞= NN YZ , caz în care tensiunea de deplasare a nulului devine:
321
3032021010 YYY
UYUYUYU N ++
⋅+⋅+⋅= ; (5.23)
- conductor de nul de impedanţă nulă (sau neglijabilă) ∞=⇒= NN YZ 0 , caz în care se obţine o tensiune de deplasare a
nulului tot nulă, ceea ce ar corespunde situaţiei din cazul receptorului echilibrat. Totuşi în practică acest deziderat nu poate fi atins prin conductoare de nul de impedanţă neglijabilă, deoarece energia electrică este transportată la distanţe foarte mari iar conductorul de nul are şi el o rezistenţă care obligatoriu este proporţională cu lungimea sa.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
136
5.5. Studiul receptoarelor trifazate conexiune triunghi alimentate de la un sistem trifazat simetric de tensiuni
Fiind dat un sistem trifazat simetric de tensiuni, la bornele sale (ale generatorului trifazat) se pot conecta două mari categorii de receptoare trifazate – cele conexiune stea şi cele conexiune triunghi.
A studia conexiunea triunghi înseamnă a determina curenţii de fază - absorbiţi pe cele trei faze ale receptorului, şi curenţii de linie – ce circulă pe liniile de alimentare ale receptorului trifazat, dacă se cunosc tensiunile de alimentare şi impedanţele receptorului. Receptorul conexiune triunghi este ilustrat în figura 5.8.
Curenţii de fază se deduc prin aplicarea directă a legii lui Ohm pentru receptorul de pe fiecare fază a triunghiului, iar curenţii de linie rezultă apoi din curenţii de fază prin aplicare a primei teoreme a lui Kirchhoff:
1
3
U23
U31
I12
I23
U12
Z2
2
Z1
Z3
I2
I1
Figura 5.7.: Receptor trifazat conexiune triunghi
⋅==
⋅==
=
31
12
31
3131
23
122
23
2323
12
1212
ZUa
ZU
I
ZUa
ZU
I
ZUI
. (5.24)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
137
−=−=−=
23313
12232
31121
IIIIIIIII
. (5.25)
Un caz particular de receptor trifazat conexiune triunghi este cel echilibrat ( 312312 ZZZ == ), curenţii de fază şi de linie vor forma şi ei două sisteme trifazate simetrice:
⋅=⋅
==
⋅=⋅
==
=
1212
12
31
3131
122
12
122
23
2323
12
1212
IaZUa
ZU
I
IaZ
UaZU
I
ZUI
. (5.26)
Curenţii de linie sunt în modul de 3 ori mai mari decât curenţii de fază.
5.6. Puteri în reţelele trifazate conexiune stea
Reamintim faptul că receptorul conexiune stea este ilustrat în figura 5.7., figură pe care o reproducem şi în cadrul acestui subiect:
IN ZN
1
3
0
U30
U20
U10
UN0
Z2
2
Z1
Z3
N
I3
I2
I1
Figura 5.7.: Receptor trifazat conexiune stea

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
138
Puterea complexă generată la bornele circuitului este egală, conform relaţiei (4.6) cu:
*330
*220
*110 IUIUIUS IN ⋅+⋅+⋅= . (5.27)
Puterea activă reprezintă partea reală a acestei expresii complexe:
( ) 333022201110 coscoscosRe ϕϕϕ ⋅⋅+⋅⋅+⋅⋅== IUIUIUSalPIN , (5.28)
unde 321 ,, ϕϕϕ reprezintă unghiurile de defazaj dintre tensiune şi curent pe cele trei faze.
Puterea reactivă reprezintă partea imaginară a expresiei complexe (5.27):
( ) 333022201110 sinsinsinIm ϕϕϕ ⋅⋅+⋅⋅+⋅⋅== IUIUIUSQIN . (5.29)
Puterile activă şi reactivă consumate de receptoarele de pe fazele şi de pe conductorul de nul al receptorului conexiune stea se pot scrie:
⋅+⋅+⋅+⋅=
⋅+⋅+⋅+⋅=22
33222
211
2233
222
211
NNOUT
NNOUT
IXIXIXIXQIRIRIRIRP
, (5.30)
unde prin indicii IN se sugerează că respectiva putere este adusă în circuit, în receptor de la generator, indicii OUT sugerează faptul că respectivele puteri sunt consumate de elementele pasive ale respectivului circuit, reactanţa receptorului de pe faza k se poate scrie sub forma:
kkCkLkk C
LXXX⋅
−⋅=−=ω
ω 1.
În virtutea legii conservării energiei electrice aplicate reţelei trifazate considerate, adică a bilanţului puterilor aplicat acestei reţele se poate scrie:
jQPSS OUTOUTOUTIN ⋅+== . (5.31)
Acest bilanţ al puterilor reprezintă şi în acest caz al reţelelor trifazate o metodă de verificare a rezolvării corecte a circuitului.
În cazul particular al unui receptor trifazat conexiune stea echilibrat, curenţii din fazele receptorului formează un sistem trifazat simetric şi, deci, se poate scrie:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
139
*110
*1
*10
*1
*210
2*110
*330
*220
*110 3 IUIaUaIaUaIUIUIUIUS IN ⋅⋅=⋅⋅⋅+⋅⋅⋅+⋅=⋅+⋅+⋅=
(5.32)
Puterile consumate de elementele rezistive, respectiv reactive ale receptorului sunt:
⋅⋅=⋅+⋅+⋅+⋅=
⋅⋅=⋅+⋅+⋅+⋅=2
1122
33222
211
211
2233
222
211
3
3
IXIXIXIXIXQIRIRIRIRIRP
NNOUT
NNOUT, (5.33)
relaţie la care s-a ajuns ţinând cont şi de faptul că în cazul unui receptor trifazat conexiune stea echilibrat, curentul prin conductorul de nul NI este întotdeauna nul.
5.7. Puteri în reţelele trifazate conexiune triunghi
Reamintim faptul că receptorul conexiune triunghi receptorului trifazat, dacă se cunosc tensiunile de alimentare şi impedanţele receptorului. Receptorul conexiune triunghi este ilustrat în figura 5.8.
1
3
U23
U31
I12
I23
U12
Z2
2
Z1
Z3
I2
I1
Figura 5.7.: Receptor trifazat conexiune triunghi
Puterea complexă generată la bornele circuitului este egală, conform relaţiei (4.6) cu:
*3131
*2323
*1212 IUIUIUS IN ⋅+⋅+⋅= . (5.34)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
140
Puterea activă reprezintă partea reală a acestei expresii complexe:
( ) 313131232323121212 coscoscosRe ϕϕϕ ⋅⋅+⋅⋅+⋅⋅== IUIUIUSalPIN ,(5.35)
unde 312312 ,, ϕϕϕ reprezintă unghiurile de defazaj dintre tensiune şi curent pe cele trei faze ale triunghiului.
Puterea reactivă reprezintă partea imaginară a expresiei complexe (5.34):
( ) 313131232323121212 sinsinsinIm ϕϕϕ ⋅⋅+⋅⋅+⋅⋅== IUIUIUSQIN . (5.36)
Puterile activă şi reactivă consumate de receptoarele de pe fazele receptorului conexiune triunghi se pot scrie:
⋅+⋅+⋅=
⋅+⋅+⋅=23131
22323
21212
23131
22323
21212
IXIXIXQIRIRIRP
OUT
OUT, (5.37)
unde prin indicii IN se sugerează că respectiva putere este adusă în circuit, în receptor de la generator, indicii OUT sugerează faptul că respectivele puteri sunt consumate de elementele pasive ale respectivului circuit, reactanţa receptorului de pe faza k se poate scrie sub forma:
kkCkLkk C
LXXX⋅
−⋅=−=ω
ω 1.
În virtutea legii conservării energiei electrice aplicate reţelei trifazate considerate, adică a bilanţului puterilor aplicat acestei reţele se poate scrie:
jQPSS OUTOUTOUTIN ⋅+== . (5.38)
Acest bilanţ al puterilor reprezintă şi în acest caz al reţelelor trifazate o metodă de verificare a rezolvării corecte a circuitului.
În cazul particular al unui receptor trifazat conexiune triunghi echilibrat, curenţii din fazele receptorului formează un sistem trifazat simetric şi, deci, se poate scrie:
*1212
*12
*12
*12
*212
2*1212
*3131
*2323
*1212 3 IUIaUaIaUaIUIUIUIUS IN ⋅⋅=⋅⋅⋅+⋅⋅⋅+⋅=⋅+⋅+⋅=
(5.39)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
141
Puterile consumate de elementele rezistive, respectiv reactive ale receptorului sunt:
⋅⋅=⋅+⋅+⋅=
⋅⋅=⋅+⋅+⋅=2
121223131
22323
21212
21212
23131
22323
21212
3
3
IXIXIXIXQIRIRIRIRP
OUT
OUT. (5.40)
5.8. Sisteme polifazate (în particular trifazate) echilibrate şi dezechilibrate
Sistemele polifazate (şi în particular cele trifazate) de alimentare cu energie electrică au fost concepute pentru a funcţiona în regimuri simetrice şi echilibrate. În astfel de regimuri, atât generatoarele, receptoarele, cât şi liniile care le leagă sunt distribuite echilibrat pe fazele sistemului, astfel ca parametrii lor de circuit pe fiecare fază să fie egali. În condiţii de echilibru, gestiunea puterilor şi a energiilor, ameliorarea factorului de putere se fac la fel ca în regim monofazat, o reţea polifazată echilibrată fiind de fapt o multiplicare interconectată ingenioasă a unei reţele monofazate. Regimul de lucru echilibrat al unui sistem polifazat este consecinţa prezenţei unor consumatori cu impedanţe egale pe fiecare dintre fazele sistemului, sau, cu alte cuvinte, a încărcării uniforme a celor trei faze. Dacă la bornele unui circuit polifazat echilibrat se aplică un sistem de tensiuni polifazat simetric, curenţii care vor fi absorbiţi de circuit pe la bornele de alimentare vor forma tot un sistem polifazat simetric. Figura 5.8. este un exemplu simplu de circuit m-fazat în conexiune stea. Circuitul este echilibrat dacă:
ZZZZZ m ===== ...321 . (5.41)
In acest caz, tensiunea de deplasare a nulului 0NU este nulă, iar sistemul polifazat de curenţi se poate scrie sub forma exprimată în ecuaţia 5.43.
( )0
...1
...
...
0
21
021
2
2
1
1
0 =+⋅
+++⋅=
++++
+++=
N
m
Nm
m
m
N ZZm
UUUZ
ZZZZZU
ZU
ZU
U, (5.42)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
142
IaZUa
ZU
ZUU
I kkk
k
Nkk ⋅=⋅==
−= 0
, (5.43)
unde ka pentru ,1=k ,2 ,3 m... sunt rădăcinile complexe de ordinul m ai unităţii.
Z1I 1
I 2 Z2
I 3 Z3
I m Zm
Um
U 2
U 3
U 1
... ... ......
m
...
3
2
1
0I N0 ZN0
N
Figura 5.8.: Circuit m-fazat în conexiune stea alimentat de la un sistem m-fazat de tensiuni simetric
De îndată ce cel puţin unul dintre elementele circuitului se dezechilibrează, adică prezintă parametri de circuit diferiţi pe diferite faze, regimul de lucru devine unul dezechilibrat şi se resimte cu ponderi diferite în întregul sistem. În asemenea regimuri de lucru dezechilibrate, pierderile suplimentare de putere pot fi considerabile, iar funcţionarea receptoarelor legate la reţea are loc la parametri nenominali, ceea ce duce la deteriorarea lor prematură. Receptor polifazat dezechilibrat este orice receptor care nu satisface relaţia 5.41 gradul de dezechilibru putând fi mai mic sau mai mare. Într-un asemenea caz, tensiunea de deplasare a nulului 0NU nu mai are o valoare nulă, tensiunile de la bornele receptoarelor de pe cele m faze nu mai sunt egale între ele şi cu tensiunea efectivă a reţelei, iar curenţii absorbiţi nu mai formează un sistem polifazat simetric.
IaIUUUUU kkkNkkNN ⋅≠⇒≠−=⇒≠ 0000 0 , (5.44)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
143
pentru ,1=k ,2 ,3 m... .
Sistemele trifazate dezechilibrate se caracterizează prin tensiuni şi/sau curenţi diferiţi pe cele m faze ale receptorului. Acestea au un efect deosebit de dăunător asupra maşinilor electrice alimentate de la respectiva reţea. În funcţie şi de măsura sa, dezechilibrul produce pierderi de putere suplimentare, reducerea duratei de viaţă şi chiar defectarea maşinii. Având în vedere aceste efecte ale regimurilor dezechilibrate, standardele şi recomandările internaţionale de specialitate reglementează nivelul maxim admisibil al dezechilibrelor din reţelele de alimentare cu energie electrică. Este de menţionat şi faptul că, deşi termenii de echilibru şi simetrie sunt foarte clar definiţi, dezechilibrul sarcinii electrice polifazate conduce şi la asimetria tensiunilor de la bornele receptoarelor monofazate componente, motiv pentru care de multe ori dezechilibru şi asimetrie sunt termeni utilizaţi pentru a defini aceeaşi problemă. Sistemul polifazat de tensiuni care alimentează reţeaua se presupune apriori simetric (însuşi modul de generare a acestor tensiuni garantează aceasta), aşa că asimetrie devine sinonim cu dezechilibru. Totuşi, se urmăreşte să folosească termenii de echilibru, dezechilibru, de echilibrare ori de câte ori este vorba de elementele pasive ale reţelei, rezervându-se termenii de simetrie, asimetrie, simetrizare pentru elementele active.
Dezechilibrul din reţeaua electrică polifazată conduce la două fenomene denumite nesimetrie de curent şi nesimetrie de tensiune. Nesimetria de curent are ca efect negativ producerea de încălziri suplimentare în generatoarele centralelor electrice, încălziri care pot duce la reducerea puterii debitate de aceste generatoare. Totodată, sub acţiunea câmpului invers creat de componenta simetrică inversă, unele elemente ale generatoarelor pot intra în vibraţii mecanice periculoase.
Pentru a cuantifica nesimetria de tensiune sau de curent ale unui sistem trifazat se utilizează componentele simetrice definite de Fortescue. Sistemul trifazat este descompus în aşa numitele componente de succesiune sau de secvenţă directă, de secvenţă inversă şi homopolar sau de secvenţă zero, indicate cu indicii d, i, h (în unele texte indicii utilizaţi sunt 1, 2, 0 sau +, −, 0). Ele se calculează folosind matricea de transformare a fazorilor tensiunilor sau curenţilor trifazaţi. Indicii 1, 2, 3 indică diferitele faze (uneori aceşti indici pot fi şi R, S şi T sau U, V, W.).
În practică aceste componente, în special cele de secvenţă pozitivă şi negativă, nu sunt uşor de măsurat.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
144
În general, pentru coeficientul de nesimetrie de curent, definit prin raportul dintre valorile efective ale componentei inverse şi directe a curentului:
d
ii I
I=ξ
, (5.45)
standardele şi normativele prescriu anumite limite ce variază între 5% şi 15%.
Nesimetria de tensiune, care se referă la faptul că tensiunile de la bornele receptoarelor monofazate ce formează sarcina polifazată nu formează într-un asemenea caz (al unei reţele dezechilibrate) un sistem polifazat simetric, are ca efect înrăutăţirea calităţii energiei furnizate de reţea consumatorilor din apropierea respectivei sarcini monofazate. Valorile admise pentru coeficientul de nesimetrie a tensiunilor, definit prin:
d
iU U
U=ξ
, (5.46)
se situează în intervalul 2-5%. Normativele prevăd că pentru perioade foarte scurte de timp aceste valori pot fi depăşite. Aceşti factori sunt în prezent utilizaţi în standardele de calitate a energiei electrice, cum ar fi EN-50160 sau seriile IEC-61000-3-x. De asemenea, este definit uneori un factor similar pentru componenta homopolară în raport cu componenta directă. Procedurile complete de măsurare pentru determinarea acestor parametri sunt descrise în standarde. Acestea folosesc metode statistice pentru a determina o medie pe o anumită durată. Standardele internaţionale (de exemplu EN 50160 sau seria IEC 61000-3-x) indică drept limite pentru factorul de nesimetrie din definiţia (1.10), valoarea < 2 % pentru joasă tensiune şi medie tensiune şi < 1 % pentru înaltă tensiune, măsurate ca valori pe un interval de 10 minute, cu un maxim instantaneu de 4 %. Totuşi, această limită poate fi local redusă, chiar la 0,25 %, de exemplu pe partea britanică a tunelului de sub Canalul Mânecii, unde sistemul de transport feroviar reprezintă o sarcină monofazată foarte mare. Raţiunea unei limite mai strânse în sistemele de înaltă tensiune este că ele sunt proiectate ca să fie utilizate la capacitatea lor maximă cu o sarcină trifazată echilibrată. În proiectarea sistemelor de distribuţie (tensiuni mai

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
145
joase) alimentarea unor sarcini monofazate este una dintre premize, astfel că sistemul şi sarcinile conectate trebuie să fie proiectate şi realizate cu o toleranţă mai mare la nesimetrie.
Aspecte standardizate mai detaliate se pot găsi în IEC 61000-2-x ca o parte a standardelor EMC (Compatibilitate electromagnetică) şi EN 50160, prezentând caracteristicile de tensiune în punctul comun de cuplare (PCC). Pe lângă acestea, diferite ţări din Europa şi companii de electricitate funcţionând în acestea, utilizează propriile reglementări suplimentare pentru „emisia” de curenţi nesimetrici.
5.9. Principalele cauze ale fenomenelor de dezechilibru din reţelele trifazate
O reţea electrică trifazată, care în mod normal este simetrică şi echilibrată, poate fi dezechilibrată temporar de prezenţa unuia sau a mai multor consumatori monofazaţi de mare putere sau de distribuirea neuniformă pe cele trei faze ale reţelei a multitudinii de consumatori de mică şi medie putere. Pe măsură ce puterea instalată în receptoarele monofazate se măreşte (cuptoare electrice, instalaţii de tracţiune electrică, instalaţii de sudare etc.), se pune cu tot mai multă stringenţă problema echilibrării încărcării reţelelor de alimentare.
Cauzele regimului de lucru dezechilibrat din reţelele electrice trifazate sunt – pe de o parte – numărul tot mai mare de consumatori monofazaţi de mare putere din domeniul industrial şi – pe de altă parte – distribuirea imperfect echilibrată pe cele trei faze ale reţelei a multitudinii de consumatori de mică şi medie putere.
Consumatorii de mică şi medie putere din domeniul casnic, din clădirile destinate birourilor, din locurile publice, din iluminatul stradal, din atelierele întreprinderilor mici şi mijlocii formează împreună surse ale dezechilibrelor din reţeaua trifazată de alimentare cu energie electrică. În mare parte aceşti consumatori sunt monofazaţi, iar metoda actualmente utilizată pentru distribuirea lor echilibrată pe fazele reţelei este cea tehnico - organizatorică. Aceasta constă în legarea aproximativ egală a consumatorilor pe cele trei faze ale reţelei. In mod similar se repartizează fazele şi în cazul consumatorilor necasnici de puteri similare, a circuitelor de iluminat din clădirile publice, administrative etc. Imperfecţiunea metodei

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
146
se datorează faptului că ea nu ia în calcul utilizarea inegală în timp - cu diferenţe posibil chiar foarte mari – a circuitelor electrice din cele trei grupe de consumatori repartizaţi pe câte o fază. Este posibil şi probabil, însă, ca în cazul unei asemenea repartizări statistic simetrice puterea instantanee absorbită de pe cele trei faze să fie diferită în fiecare moment. Aceasta este o metodă de simetrizare imperfectă, ea nereuşind, de fapt, să elimine regimul de lucru dezechilibrat din reţea, şi nici dezavantajele şi consecinţele sale, ci realizând doar o eliminare a dezechilibrelor mediate pe un interval de timp suficient de mare. Un asemenea echilibru mediat este, de fapt, echivalent cu un dezechilibru permanent, exact la fel cum faptul că poziţia mediată în timp a unui pendul este un punct imobil nu înseamnă că acesta nu se mişcă. Deşi este vorba de consumatori de mică şi medie putere, ei fiind în număr foarte mare, puterile implicate şi dezechilibrul cauzat au ordine de mărime considerabile.
O altă categorie de consumatori care influenţează în mod negativ echilibrul din reţeaua electrică sunt consumatorii electrici monofazaţi de mare putere, printre care merită amintite:
- cuptoarele electrice cu inducţie;
- tracţiunea electrică tot mai mult prezentă în transportul urban şi interurban;
- sudarea electrică (sudarea cu arc electric şi sudarea prin presiune).
Încălzirea prin inducţie se bazează pe pătrunderea energiei electromagnetice într-un conductor masiv situat în câmpul magnetic variabil al unei bobine numite inductor. Încălzirea conductorului are loc prin efectul Joule al curenţilor turbionari induşi. Încălzirea prin inducţie a materialelor conductoare este utilizată pentru:
- topirea metalelor (oţel, fontă, cupru, aluminiu, zinc, magneziu şi aliajele lor);
- încălzirea în volum (în profunzime) a semifabricatelor (oţel, cupru, aluminiu) ce urmează a fi prelucrate la cald prin forjare, matriţare, presare, laminare etc.;
- călirea superficială a pieselor;
- sudarea şi lipirea metalelor.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
147
Privite din punctul de vedere al efectului de dezechilibrare a reţelei electrice trifazate, cuptoarele cu inducţie sunt receptoare de mare putere care cel mai adesea funcţionează la frecvenţe ale curentului electric ce le alimentează diferite de frecvenţa industrială de 50 Hz. Există cuptoare electrice ce funcţionează la joasă frecvenţă, altele care funcţionează la frecvenţă industrială şi altele pentru frecvenţe medii şi înalte.
Un alt consumator monofazat de mare putere, unul de o foarte mare răspândire, este format din instalaţiile de tracţiune electrică care stau la baza transportului în comun cu acţionare electrică, intra- sau interurban.
În cazul tracţiunii electrice care, în raport cu sistemul energetic, se manifestă ca un consumator monofazat, apar unele particularităţi. Parametrii care caracterizează un receptor de energie electrică sunt:
- puterea,
- tensiunea,
- factorul de putere,
- modul de conectare şi
- curba de sarcină zilnică.
În cazul sistemului de tracţiune electrică de curent alternativ monofazat de 50 Hz, racordarea substaţiilor de tracţiune la sistemul energetic trifazat de alimentare se face monofazat. Acest mod de conectare are o influenţă defavorabilă asupra sistemului trifazic de alimentare cu energie electrică, producând dezechilibrarea reţelei şi toate efectele care sunt cauzate de aceasta. Locomotiva electrică monofazată echipată cu transformator, redresoare şi motoare de curent continuu reprezintă un receptor care se comportă faţă de reţeaua de alimentare cu energie electrică ca un consumator monofazat de mare putere.
Forma curbei zilnice de sarcină prezintă o importanţă majoră în cazul tracţiunii electrice, deoarece intervin puteri mari şi este caracteristică variaţia permanentă şi relativ rapidă, în limite largi a puterii absorbite. La căile ferate magistrale cu trenuri grele, variaţiile de sarcină sunt şi mai

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
148
importante decât la transportul urban, aceasta datorită variaţiilor profilului în lung, datorită vitezei şi puterii mari absorbite la pornire.
Un alt receptor monofazat de mare putere cu efecte dezechilibrante asupra reţelei trifazate este reprezentat de instalaţiile de sudare. Sudarea reprezintă o formă de îmbinare nedemontabilă a metalelor. De la realizarea sudării electrice prin presiune în 1877 (Thomson), de la aplicarea în vederea sudării în 1882 (Benardos) a arcului electric între piesă şi un electrod de cărbune şi în 1888 (Slavianov) a arcului electric cu electrod metalic, sudarea a cunoscut o dezvoltare continuă, îmbunătăţindu-se permanent şi sursele electrice de alimentare a instalaţiilor de sudare.
Există mai multe metode de sudare:
- la sudarea prin topire, marginile pieselor de sudat sunt aduse în stare lichidă prin încălzire locală, cu sau fără adaos de metal, legătura între piesele care se îmbină realizându-se prin cristalizarea într-o reţea comună a atomilor provenind din ambele piese şi din materialul de adaos;
- la sudarea prin presiune, îmbinarea se obţine sub acţiunea unei forţe de apăsare transmisă pieselor de sudat, cu sau fără încălzire locală a acestora, căldura fiind utilizată numai pentru a aduce materialul din zona sudurii în stare plastică astfel încât să se reducă la valori rezonabile forţele necesare apropierii atomilor mărginaşi ai celor două piese la distanţe suficient de mici pentru înregimentarea lor în grăunţii cristalini comuni.
Independent de natura procedeului de sudare, în marea majoritate a cazurilor, căldura necesară se obţine prin utilizarea energiei electrice, absorbite monofazat din reţeaua trifazată.
5.10. Consecinţele regimurilor de lucru dezechilibrate din reţelele electrice trifazate
Sistemele trifazate au fost concepute pentru a funcţiona în regimuri simetrice şi echilibrate. În astfel de regimuri, atât generatoarele, receptoarele, cât şi liniile care le leagă sunt realizate echilibrat, astfel ca parametrii lor de circuit pe fiecare fază să fie egali. În condiţii de echilibru, gestiunea puterilor şi a energiilor, ameliorarea factorului de putere se fac ca

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
149
în regim monofazat, o reţea trifazată echilibrată fiind de fapt o triplare interconectată, ingenioasă a unei reţele monofazate.
Imediat ce sarcinile conectate la cele trei faze ale reţelei electrice trifazate sunt diferite se ajunge la un regim de lucru dezechilibrat. În astfel de cazuri estimarea efectelor energetice se complică. În principiu se ştie că orice regim dezechilibrat are efecte energetice defavorabile în comparaţie cu unul echilibrat echivalent, dar asupra modului cum trebuie să se definească aceste efecte nu există un consens unanim.
Vom considera un generator trifazat ideal de putere infinită (cu impedanţe nule), simetric, care alimentează printr-o linie echilibrată un receptor trifazat (figura 5.9). Tensiunile electromotoare ale generatorului se presupun reglate astfel încât să asigure de fiecare dată la bornele oricărui receptor trifazat echilibrat tensiunea nominală şi în consecinţă absorbţia puterii active nominale. Pentru simplitate vom mai presupune că atât receptorul cât şi linia sunt pur rezistive. Fie P şi U puterea activă nominală şi tensiunea nominală pe fază la bornele unui asemenea receptor. Dacă R este rezistenţa unei faze a receptorului, vom avea:
IU
RUP ⋅⋅=⋅= 33
2
. (5.47)
Pierderile pe linia de alimentare vor fi:
PRr
RUrIrPl ⋅=⋅=⋅= 2
22 33
, (5.48)
unde R este rezistenţa ohmică a liniei de alimentare.
Figura 5.9.: Receptor trifazat alimentat printr-o linie de un generator ideal

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
150
Să admitem că dorim să obţinem aceeaşi putere activă, la aceeaşi tensiune nominală cu un receptor monofazat conectat pe una dintre faze (figura 5.10) şi având rezistenţa R’. Se consideră că rezistenţa conductorului neutru este neglijabilă. Vom avea atunci:
1
22
'3'
' IURU
RUP ⋅===
, (5.49)
unde 1'I este curentul absorbit de rezistenţa 'R .
Din această egalitate a puterilor active pentru cele două cazuri rezultă:
==⋅=
=
0''3'3
'
32
1
IIII
RR
. (5.50)
Pierderile pe linia de alimentare, localizate numai pe prima fază vor fi:
ll PrIIrP 33'' 22 ==⋅= . (5.51)
Concluzia este că obţinerea aceleiaşi puteri active cu un receptor monofazat, adică utilizând un receptor trifazat dezechilibrat, este însoţită de triplarea pierderilor de putere pe linie faţă de situaţia în care aceeaşi putere nominală s-ar obţine cu un receptor echilibrat. Multe asemenea exemple simple pledează pentru evitarea utilizării receptoarelor dezechilibrate.
Pentru a putea obţine sugestii pentru cazuri mai generale, este util să analizăm exemplul de mai sus şi cu ajutorul metodei componentelor simetrice. Pentru componentele directe vom folosi mai jos indicele d, pentru cele inverse – indicele i, iar pentru cele homopolare – indicele o.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
151
Figura 5.10: Receptor monofazat alimentat printr-o linie de un generator ideal
În cazul receptorului echilibrat, regimul fiind simetric direct, puterea debitată de generator va fi:
dldddddgdg PPRIrIIEPP +=+=== 22 333 . (5.52)
In cazul receptorului dezechilibrat (monofazat) toate componentele simetrice vor avea valori nenule. Având în vedere faptul că 0'' 32 == II , obţinem din metoda componentelor simetrice:
idid IIIIII ===== 10 '31'''
. (5.53)
Tensiunile la bornele receptorului dezechilibrat vor fi:
⋅==
⋅==
⋅−=⋅−==
d
d
dd
EaEUEaEU
IrEIrEUU
'''
'''
3''''
33
222
111
. (5.54)
Componentele simetrice ale acestor tensiuni vor fi:
⋅−=⋅−=
⋅−=
d
di
ddd
IrUIrU
IrEU
0''
''
. (5.55)
Puterea activă exprimată prin componentele simetrice va fi:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
152
[ ] 20
*00
** '9''3'''''3''3''3Re' dddidiidd rIIEPPPIUIUIUP −⋅=++=⋅+⋅+⋅= .(5.56)
Relaţia (5.56) mai poate fi scrisă şi sub forma:
llid PPPPPP ∆+=+−= )''('' 0 , (5.57)
unde:
26' dlll rIPPP =−=∆ . (5.58)
Indicele l se referă la linia de alimentare, iar lP∆ reprezintă pierderile suplimentare de putere din linie. Scriind conservarea puterilor în întreaga reţea, dar numai pe componente directe, se obţine:
'3' 2ddgd PrIP +=
. (5.59)
Aşadar, receptorul dezechilibrat primeşte de la generator prin componenta directă puterea activă Pd’, din care consumă numai P, iar restul lP∆ îl întoarce liniei sub formă de pierderi suplimentare. Altfel spus, receptorul dezechilibrat, deşi pasiv şi pur rezistiv, este efectiv receptor numai pentru puterea transmisă prin componenta directă şi este efectiv generator de putere activă prin componentele inversă şi homopolară. El absoarbe de la generator mai multă putere decât îi este necesar, iar surplusul ( )0''2 PPP il +⋅−=∆ îl desimetrizează şi-l introduce în reţea sub formă de pierderi suplimentare. Bineînţeles, demonstraţia de mai sus a fost făcută pe un caz particular, dar ea poate fi la fel de bine făcută şi pentru cazul general al unei reţele dezechilibrate.
Cu principiile şi metodele de măsurare utilizate în prezent în sistemele energetice, la bornele receptorului dezechilibrat se măsoară puterea P şi energia activă corespunzătoare. În consecinţă el va fi tarifat ca şi receptor echilibrat echivalent, deşi alimentarea sa este însoţită de triplarea pierderilor pe linie. Acest rezultat nu este un caz particular, ci este chiar situaţia general valabilă şi existentă.
Pierderile suplimentare de putere reprezintă un efect direct al regimurilor dezechilibrate. Desigur, s-ar putea dezvolta foarte mult subiectul consecinţelor unor pierderi de putere suplimentare, amintind nu numai

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
153
despre consecinţele economice, dar şi despre cele ce se referă la protecţia mediului înconjurător. Pierderile suplimentare datorate regimurilor de lucru dezechilibrate conduc la mai multă energie electrică consumată, deci la necesitatea de a „sacrifica” mai multe resurse naturale pentru producerea acestei energii – aceasta având efecte nefaste asupra mediului înconjurător. Pierderile de putere fiind considerabile şi efectele vor fi însemnate. Nu există până în ziua de azi o metodă eficientă şi considerabilă de producţie a energiei electrice care să nu aibă efecte nefaste asupra atât de importantului principiu de conservare şi protecţie a mediului înconjurător. Desigur, sunt luate măsuri, impuse limite, dar cea mai importantă măsură rămâne eficienţa, limitarea pierderilor şi chiar a consumurilor.
Alte efecte şi consecinţe se pot referi la îmbătrânirea prematură a aparatelor şi cablurilor electrice datorită supunerii acestora la curenţi şi tensiune mai mari decât cele nominale.
Regimurile dezechilibrate au consecinţe nefavorabile şi asupra funcţionării altor receptoare electrice conectate la reţea, tot datorită diferenţelor sesizabile faţă de parametrii nominali. Având în vedere numărul şi diversitatea foarte mare de consumatori electrici şi faptul că într-un fel sau altul toţi aceşti consumatori suferă consecinţe nefaste ca urmare a dezechilibrelor din reţeaua electrică de alimentare, în cele de mai jos se prezintă doar câteva dintre cele mai frecvent întâlnite şi importante sarcini electrice:
- maşinile electrice de inducţie (asincrone trifazate);
- generatoarele sincrone;
- transformatoarele electrice;
- cablurile de transport şi distribuţie a energiei electrice
5.11. Principalele metode de echilibrare a reţelelor electrice trifazate prin conversia energiei trifazate în energie monofazată
Ceea ce se impune a se rezolva este de fapt introducerea în sistemul format din reţeaua de alimentare trifazată şi un consumator – care în cazul cel mai dezechilibrant este unul monofazat – a unui element care să
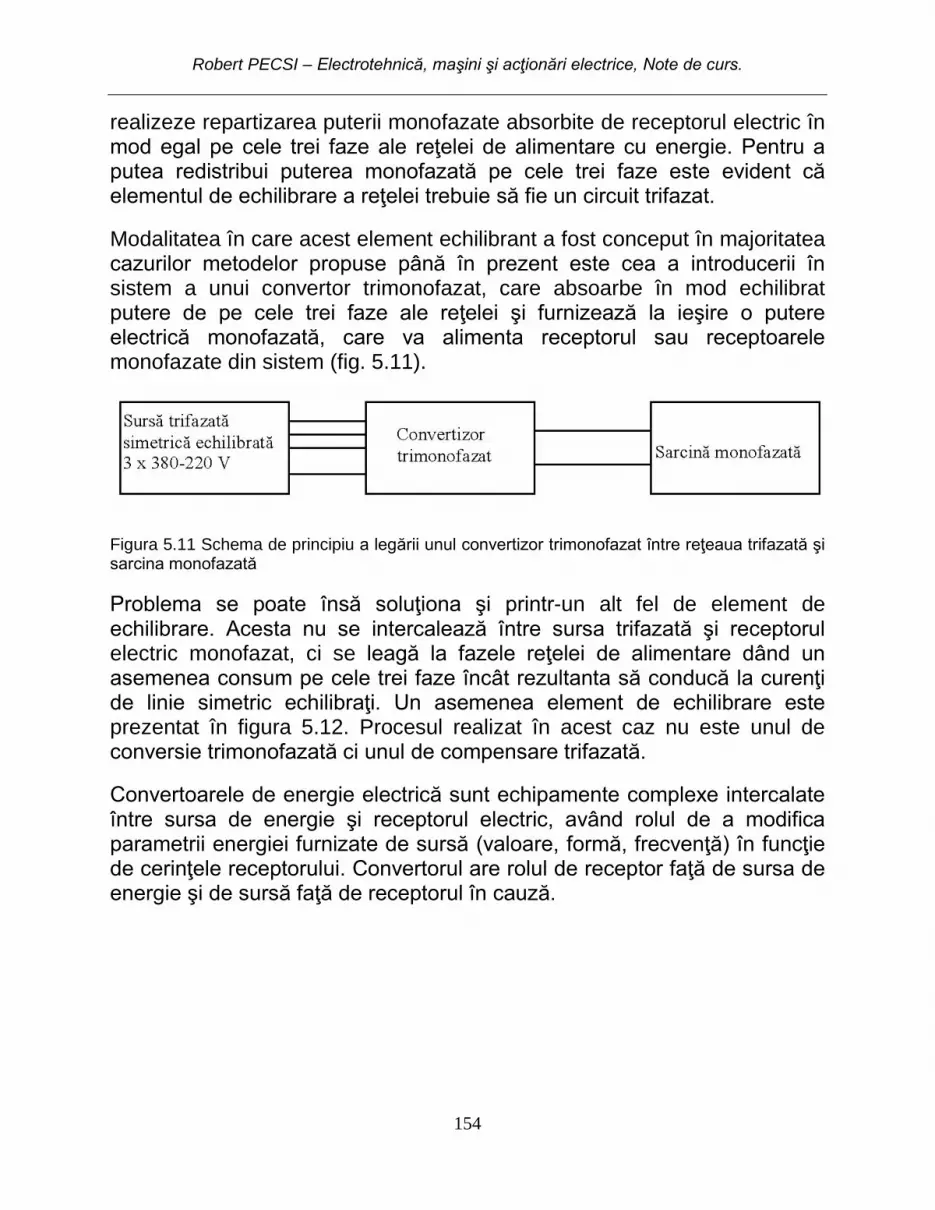
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
154
realizeze repartizarea puterii monofazate absorbite de receptorul electric în mod egal pe cele trei faze ale reţelei de alimentare cu energie. Pentru a putea redistribui puterea monofazată pe cele trei faze este evident că elementul de echilibrare a reţelei trebuie să fie un circuit trifazat.
Modalitatea în care acest element echilibrant a fost conceput în majoritatea cazurilor metodelor propuse până în prezent este cea a introducerii în sistem a unui convertor trimonofazat, care absoarbe în mod echilibrat putere de pe cele trei faze ale reţelei şi furnizează la ieşire o putere electrică monofazată, care va alimenta receptorul sau receptoarele monofazate din sistem (fig. 5.11).
Figura 5.11 Schema de principiu a legării unul convertizor trimonofazat între reţeaua trifazată şi sarcina monofazată
Problema se poate însă soluţiona şi printr-un alt fel de element de echilibrare. Acesta nu se intercalează între sursa trifazată şi receptorul electric monofazat, ci se leagă la fazele reţelei de alimentare dând un asemenea consum pe cele trei faze încât rezultanta să conducă la curenţi de linie simetric echilibraţi. Un asemenea element de echilibrare este prezentat în figura 5.12. Procesul realizat în acest caz nu este unul de conversie trimonofazată ci unul de compensare trifazată.
Convertoarele de energie electrică sunt echipamente complexe intercalate între sursa de energie şi receptorul electric, având rolul de a modifica parametrii energiei furnizate de sursă (valoare, formă, frecvenţă) în funcţie de cerinţele receptorului. Convertorul are rolul de receptor faţă de sursa de energie şi de sursă faţă de receptorul în cauză.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
155
14
233
3 3
6
7
8
5
Figura 5.12.: Schema bloc a unui dispozitiv de compensare
Convertoarele pot fi rotative sau statice.
Convertoarele rotative sunt alcătuite din combinarea unui motor electric trifazat cu un generator electric monofazat rotativ, cele două maşini fiind astfel alese încât ansamblul să realizeze modificarea parametrilor energiei furnizate de sursă (valoare, formă, frecvenţă) în funcţie de cerinţele receptorului. Ele prezintă o alternativă pentru conversia trimonofazată, în cazul în care motorul se alege a fi o maşină asincronă trifazată, iar generatorul – o maşină de curent alternativ monofazată sau, în cazuri speciale, generatorul poate fi de curent continuu. Motorul de antrenare şi generatorul se pot contopi total sau parţial. Această metodă – în special pentru generatoarele de frecvenţa mărită – permite obţinerea unui randament de transformare a energiei destul de bun – de 67-85%, dar prezintă unele dezavantaje majore, cum ar fi: un nivel permanent ridicat de zgomot, necesitatea unor dese lucrări de întreţinere şi reparaţii la componentele rotative ale celor două maşini electrice etc.
Clasificarea convertoarelor statice de putere se poate face după mai multe criterii:
- după natura proceselor ce stau la baza fenomenului de conversie;
- după caracteristicile mărimii de intrare şi ale mărimii de ieşire din convertor;
- după tipul de comutaţie.
Legendă figura 5.12: 1 – generator trifazat; 2 – sarcină dezechilibrată; 3 – linii electrice trifazate; 4 – transformator trifazat; 5 – bloc de compensare; 6 – unitate de comutaţie; 7 – unitate de înmagazinare a energiei electrice; 8 – unitate de feed-back.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
156
După natura proceselor ce stau la baza fenomenului de conversie, convertoarele trimonofazate pot fi:
- electromagnetice (în cadrul cărora energia electrică este transferată de la intrarea convertorului la ieşirea sa prin intermediul câmpului electromagnetic);
- electronice (caz în care circuitele electronice de forţă sunt cele ce realizează conversia).
Schema de principiu a unui dispozitiv electronic de echilibrare prin metoda conversiei trimonofazate este prezentat în figura 5.13. Fazele reţelei de alimentare sunt însumate în circuitul sumator de la intrarea în dispozitiv, astfel încât se obţine o singură tensiune alternativă. Această tensiune alternativă monofazată alimentează un redresor, care o transformă într-o tensiune continuă. Redresorul trebuie să fie capabil să debiteze curentul necesitat de sarcina ce urmează a fi alimentată. Semnalul de tensiune continuă intră într-un generator de tensiune alternativă, care dă naştere la o tensiune alternativă monofazată ce alimentează sarcina. Acest generator permite obţinerea unor tensiuni de frecvenţe şi valori efective variabile, ce se pot alege în mod convenabil pentru sarcina în cauză.
Figura 5.13.: Dispozitivul de echilibrare a reţelei
5.12. Metode de echilibrare a reţelelor trifazate prin compensarea dezechilibrelor – metoda lui Steinmetz
Conceptul de compensare a dezechilibrului provocat de una sau mai multe sarcini pe reţeaua trifazată se referă la acele metode şi dispozitive de echilibrare a reţelei, care nu se interpun între reţea şi sarcină şi nu presupun întreruperea alimentării pentru punerea în funcţiune. Dispozitivele de compensare se montează pe liniile reţelei, independent de sarcinile alimentate de aceste linii. La modul cel mai general, prin elemente specifice ele sesizează încărcarea celor trei faze ale reţelei, iar în cazul unui dezechilibru, ce poate fi sesizat printr-un element comparator, ele

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
157
urmăresc să echilibreze reţeaua prin alocarea unor sarcini suplimentare – cel mai adesea reactive - corespunzătoare dezechilibrului constatat. O schemă bloc oarecum generalizată a unui asemenea dispozitiv de compensare este ilustrată în figura 5.14.
În marea majoritate a cazurilor se are în vedere o sarcină monofazată de mare putere şi aproximativ constantă sau variabilă într-o plajă cunoscută.
O metodă cunoscută de compensare a sarcinilor dezechilibrate a fost propusă de Ch. P. Steinmetz. Se arată în cadrul acestei metode că o sarcină monofazată pur rezistivă, legată la una dintre tensiunile de linie ale reţelei (între două faze) poate fi compensată, în ceea ce priveşte dezechilibrul cauzat, prin legarea unui condensator şi a unei bobine convenabil alese în reţea. Steinmetz a presupus că sarcina care produce dezechilibrul este pur rezistivă. Dacă sarcina nu este pur rezistivă, situaţia se complică dar metoda permite compensarea şi în acest caz. Ideea unei sarcini compensatoare poate fi pusă în practică dacă se realizează eliminarea componentei de succesiune inversă şi se corectează şi factorul de putere. Se construieşte în acest scop un circuit de compensare triunghiular. Factorul de putere se poate corecta cu ajutorul întreruptoarelor electronice. Această metodă are însă şi dezavantajele sale, printre care trebuie menţionat faptul că pierderile de putere rămân în continuare mari şi faptul că un asemenea circuit de compensare nu permite o compensare variabilă, necesară în cazul unei sarcini dezechilibrate variabile. Pentru a realiza echilibrarea reţelei şi în cazul unei sarcini variabile, metoda Steinmetz presupune existenţa mai multor bobine şi condensatoare ce se pot interconecta, sau a unei bobine variabile şi a unui condensator variabil. Rămâne, însă, mereu prezent dezavantajul costului ridicat şi /sau al unei echilibrări inexacte, deoarece este practic imposibil ca valorile capacităţii condensatorului şi a inductanţei bobinei să fie reglabile cu o precizie foarte mare.
În conformitate cu metoda lui Steinmetz, sarcina dezechilibrată – monofazată şi rezistivă, în cel mai simplu şi des întâlnit caz – conectată între fazele R şi S, se compensează prin conectarea unei inductanţe între fazele T şi R şi a unei capacităţi între fazele S şi T (figura 5.14.). Acestea, bobina şi condensatorul de compensare, sunt alese astfel încât curentul
absorbit de ele să fie egală cu RSI
31
. Curentul TRI , dintre fazele T şi R va fi

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
158
defazat cu 2π
în urma tensiunii de fază dintre aceleaşi două faze, iar
curentul STI , dintre fazele S şi T va fi defazat cu 2π
înaintea tensiunii de fază STU . Această situaţie este ilustrată în diagrama fazorială din figura 5.15. Tot în această diagramă fazorială sunt reprezentaţi şi curenţii de linie, ce se obţin, conform primei teoreme a lui Kirchhoff, cu relaţiile:
−=−=−=
STTRT
RSSTS
TRRSR
IIIIIIIII
. (5.60)
După cum se observă şi din diagrama fazorială, cei trei curenţi de linie formează un sistem simetric echilibrat, 0=++ TSR III , ceea ce înseamnă că cele trei faze ale reţelei de alimentare cu energie electrică sunt uniform încărcate. Valoarea efectivă a curenţilor de linie este egală cu:
RSRSL III ⋅=⋅= 577,03
1
. (5.61)
Sarcina
CL
R T S
Figura 5.14: Schema electrică pentru compensarea dezechilibrului produs de o sarcină monofazată pur rezistivă prin metoda lui Steinmetz

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
159
Figura 5.15: Diagrama fazorială pentru compensarea dezechilibrului produs de o sarcină monofazată pur rezistivă prin metoda lui Steinmetz
5.13. Metode de echilibrare a reţelelor trifazate prin compensarea dezechilibrelor – distribuirea echilibrată automată a consumatorilor de mică putere pe fazele reţelei trifazate
O idee originală de dispozitiv electronic, menit să distribuie în mod echilibrat sarcinile electrice pe fazele reţelei trifazate de alimentare cu energie electrică, are la bază ideea de a conecta în mod controlat, comandat de un microcontroler, sarcinile monofazate de mică şi medie putere pe cele trei faze ale reţelei în funcţie de încărcarea acestor faze. Un asemenea dispozitiv se compune din:
- trei senzori de curent dispuşi pe cele trei faze ale reţelei de alimentare,
- un număr oarecare n de întreruptoare electronice ce permit conectarea celor n receptoare sau grupuri de receptoare monofazate la una din cele trei faze de alimentare,
- n senzori de curent dispuşi pe liniile ce leagă de sistem cele n receptoare sau grupuri de receptoare monofazate,
- un (micro)procesor legat la toate elementele de circuit mai sus enumerate, ce realizează controlul întreruptoarelor astfel încât abaterea dintre cei trei curenţi din fazele de alimentare să fie sub o anumită limită.
U TR
U RS
U ST
I T
I RS I S
I TR
I ST = I R

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
160
Figura 5.16 prezintă dispozitivul propus pentru distribuirea echilibrată pe reţeaua trifazată de alimentare cu energie electrică a cinci sarcini sau grupe de sarcini monofazate. Fazele reţelei de alimentare R, S, T, sunt trecute printr-un circuit disjunctor, de protecţie în faţa supracurenţilor (1). Senzorii 2, 3 şi 4 sunt transformatori de curenţi utilizaţi pentru a măsura intensitatea curenţilor de linie. Aceste valori sunt transmise către procesorul central al dispozitivului (5), care poate fi un microprocesor, un microcontroler sau chiar un calculator. Cei trei curenţi de linie de la ieşirea disjunctorului intră într-o matrice de întreruptoare (6, 7, 8, 9, 10). Numărul de întreruptoare din această matrice este dat de numărul de circuite monofazate de sarcină de la ieşirea dispozitivului. Fiecare întreruptor are patru porţi de intrare, trei pentru cele trei faze ale reţelei şi una pentru conexiunea vidă, prevăzută pentru cazul în care respectivul circuit nu este necesar să fie alimentat. Ieşirile întreruptoarelor intră în tot atâtea disjunctoare pentru protecţia circuitului sarcinii (11, 12, 13, 14, 15). Procesorul central trimite câte un semnal de control către fiecare întreruptor, determinând astfel poziţia fiecăruia (determinând de fapt care poartă de intrare va debita prin disjunctorul aferent către ieşirea întreruptorului, adică spre sarcina corespunzătoare). Liniile de curent ce ies din disjunctoarele de sarcină şi alimentează fiecare sarcină electrică în parte trec prin tot atâţia senzori (cleşti) de curent care monitorizează intensitatea curentului din aceste linii. Fiecare circuit de sarcină are şi linia de nul, care nu trece însă prin întreruptoare şi nu este monitorizată de procesor. Opţional, pentru un control cât mai riguros al procesului, se poate monitoriza şi starea liniei de nul comune, care în caz de echilibru interfazic trebuie să nu fie parcursă de curent.
După cum se poate observa, fiecare circuit de sarcină monofazată are asociat în dispozitivul de echilibrare a reţelei câte un întreruptor, câte un disjunctor de protecţie şi câte un senzor de curent. Dispozitivul poate fi extins la oricât de multe circuite de sarcină, limitarea fiind practic dată de natura procesorului utilizat.
Procesorul – notat în figură cu 5 - (alimentat electric de la una dintre faze şi conductorul de nul) monitorizează atât curenţii de linie ai reţelei de alimentare trifazate, cât şi curenţii absorbiţi de fiecare circuit de sarcină în parte. Perioada de achiziţie, adică intervalul de timp dintre două citiri succesive a senzorilor de curent este de ordinul milisecundelor. Rezultatele unui număr de achiziţii succesive sunt stocate într-o memorie care poate fi

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
161
internă sau externă procesorului. Pe baza acestora, procesorul determină dacă apar sau nu abateri inadmisibile (care depăşesc o limită prestabilită şi programabilă) între curenţii de linie şi comandă comutarea circuitelor de sarcină în vederea echilibrării reţelei. Această comutare este realizată de procesor ţinând cont şi de valorile curenţilor prin circuitele de sarcină.
Dispozitivul permite şi alegerea unei valori limită a curentului prin circuitele de sarcină. Această valoare limită este periodic comparată cu valorile curenţilor de ieşire, iar în cazul apariţiei unor supracurenţi se poate comanda deconectarea respectivului circuit de sarcină. Mai mult, procesorul poate fi programat chiar să prevadă condiţiile de potenţială suprasarcină, prin urmărirea vitezei de creştere a fiecărui circuit de sarcină şi a fiecărei faze de alimentare.
Întreruptoarele 6, 7, 8, 9 şi 10 se pot materializa prin relee sau întreruptoare semiconductoare. Fiecare întreruptor conectează în funcţie de semnalul de control primit de la procesor, ieşirea sa la una din cele patru porţi de intrare. Este esenţial ca această comutare să aibă loc suficient de repede pentru ca circuitele de sarcină să nu simtă nici o discontinuitate în alimentare atunci când se trece de pe o fază pe alta. Circuitele electronice actuale oferă multiple soluţii pentru asemenea întreruptoare.
Figura 5.16. şi explicaţiile de mai sus se referă toate la echilibrarea unei reţele trifazate încărcate cu un oarecare număr (mai mare decât trei) de sarcini monofazate. Ideea se poate extinde cu uşurinţă la o reţea electrică polifazată.
Dispozitivul este potrivit pentru alimentarea electrică a consumatorilor rezistivi şi liniari, casnici sau comerciali de mică putere. La sarcini neliniare sau monofazate de mare putere problema simetrizării reţelei rămâne deschisă.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
162
RSTN
6NC
CIRCUIT SARCINA 1
SEMNALE COMANDA
PROCESOR (5)
12
3
4
11
7 12CIRCUIT SARCINA 2NC
8 13CIRCUIT SARCINA 3NC
9 14CIRCUIT SARCINA 4NC
10 15CIRCUIT SARCINA 5NC
Figura 5.16: Dispozitiv de distribuire echilibrată a cinci circuite monofazate de sarcină pe fazele reţelei trifazate de alimentare cu energie electrică
5.14. Metode de echilibrare a reţelelor trifazate prin compensarea dezechilibrelor – metoda filtrului activ de putere trifazat
DISPOZITIVUL DE COMPENSARE A DEZECHILIBRELOR REŢELEI TRIFAZATE PRIN SCHIMB DE PUTERE INTERFAZIC
4.1. Prezentarea metodei
Să presupunem un exemplu foarte simplu în care o fază (de exemplu faza R) este încărcată cu o sarcină rezistivă ce absoarbe un curent IR iar celelalte două faze sunt lăsate în gol. În acest caz filtrul activ de putere trifazat – numit în cele ce urmează dispozitivul de compensare - va absorbi
de pe fazele S şi T curenţii 3'' R
TSIII ==
şi va debita în faza R curentul
RR II ⋅=32'
, fiecare în fază cu tensiunea fazei corespunzătoare. Atunci, conform primei teoreme a lui Kirchhoff, pe fiecare fază curentul absorbit de la reţea va fi suma curentului absorbit de sarcină şi a curentului absorbit de

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
163
dispozitivul de compensare, cu menţiunea că pe faza R, curentul fiind debitat, în sumă va căpăta semnul minus.
Un asemenea dispozitiv de compensare poate fi conceput în două topologii, în funcţie de modul de legare al acestuia la fazele reţelei.
Structura paralelă, în funcţie de modul de comandă, are posibilitatea nu numai de a realiza echilibrarea curenţilor pe cele trei faze, dar şi de a compensa armonicile de curent şi puterea reactivă. Implementarea unui asemenea dispozitiv se poate face cu invertoare de tensiune sau de curent, deosebirea constând mai ales în faptul că elementul care acumulează energie este condensatorul în cazul invertorului de tensiune şi inductanţa în cazul invertorului de curent. Figura 5.17 prezintă schema celor două topologii de dispozitiv de compensare, cel cu invertor de tensiune şi condensator ca element de stocare şi cel cu invertor de curent şi inductanţă ca element de stocare.
Figura 5.17.: Structurile dispozitivelor de compensare paralel cu invertor de curent şi de tensiune
Un avantaj foarte important al conectării în paralel este faptul că dispozitivul de compensare conduce doar curentul de compensare (plus un adaos nesemnificativ pentru compensarea pierderilor din sistem). Totodată, mai multe unităţi de acest tip se pot conecta în paralel, pentru a obţine o creştere a puterii totale a sistemului.
Dispozitivul de compensare serie este conectat în serie cu sarcina neliniară, prin intermediul unui transformator, a cărui utilizare nu este facultativă, ci obligatorie, intrinsecă acestei topologii. Strategia de comandă a compensatorului serie urmăreşte să producă asemenea tensiuni în primarul transformatorului, care însumate cu tensiunile de alimentare asigură echilibrul energetic al reţelei. Dezavantajul principal al unor asemenea dispozitive serie este că trebuie să conducă curentul de sarcină.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
164
In plus, faţă de structura paralel este necesar un element costisitor, transformatorul de adaptare. Nu în ultimul rând, sunt necesare măsuri speciale de protecţie în caz de scurtcircuit.
Pentru simplificarea explicaţiilor în ceea ce priveşte modul de funcţionare şi de echilibrare a unui dispozitiv de compensare paralel, se consideră că sarcina monofazată este pur rezistivă şi este conectată între fazele R şi S ale reţelei de alimentare cu energie electrică. Intensitatea curentului ce se stabileşte prin acest rezistor sarcină o vom nota cu RSI . Acest curent va fi în fază cu tensiunea de linie dintre fazele R şi S.
Metoda reuşeşte să realizeze chiar un schimb de putere electrică între fazele reţelei via elementul de stocare a energiei. Presupunând că între fazele R şi S ale reţelei este conectată o sarcină ce dezechilibrează puternic reţeaua, notând cu RSI ' , STI ' , TRI ' curenţii absorbiţi de dispozitivul de compensare, se obţine compunerea fazorială prezentată în figura 5.18. Curenţii de linie se obţin, conform primei teoreme a lui Kirchhoff, cu relaţiile:
( )( )
−=+−=−+=
STTRT
RSRSSTS
TRRSRSR
IIIIIIIIIII'''
. (5.62)
Din diagrama fazorială se observă că se obţine un sistem de curenţi de linie simetric echilibrat 0=++ TSR III , ceea ce înseamnă că cele trei faze ale reţelei de alimentare cu energie electrică sunt uniform încărcate.
Figura 5.18.: Diagrama fazorială pentru compensarea dezechilibrului produs de o sarcină monofazată pur rezistivă

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
165
În acest caz curenţii STI şi TRI nu sunt pur reactivi ci are loc un schimb de energie între faze. Faptul că RSI ' are sens opus lui RSI înseamnă că dispozitivul de compensare reîntoarce din energia înmagazinată în circuitul dintre fazele R şi S.
Acest dispozitiv de compensare a dezechilibrelor este la fel de eficient şi în cazul unor receptoare monofazate care nu sunt pur rezistive, el permite redistribuirea energiei între fazele sistemului trifazat de alimentare cu energie electrică. Dispozitivul poate fi cu uşurinţă extins şi la compensarea dezechilibrelor dintr-o reţea polifazată. El poate fi utilizat şi pentru altfel de compensări. De exemplu, în loc să se compenseze armonica fundamentală absorbită de un receptor monofazat, se pot compensa armonicile superioare celei fundamentale. Sunt însă necesare echipamente electronice de înaltă calitate deoarece comutarea trebuie să se realizeze în timp real, la trecerile prin anumite valori ale semnalului de curent alternativ de pe respectiva ramură de circuit. Schema dispozitivului de compensare, bazată pe un invertor de curent este cunoscută în prezent sub denumirea de filtru activ de putere şi este utilizată pentru compensarea armonicilor şi a puterii reactive. În acea utilizare, energia este redistribuită nu între faze ci pe fiecare fază în parte, refăcându-se astfel forma sinusoidală a semnalului electric.
Schema bloc a unui asemenea dispozitiv de compensare este redată în figura 5.19.
După sursa trifazată simetrică formată din cele trei generatoare conectate în conexiune stea ( aU , bU , cU ) s-a interpus un filtru pasiv pentru a elimina armonicile. Dacă este proiectat corespunzător, filtrul pasiv poate atenua armonicile superioare generate de comutaţia dispozitivului de compensare. După cum se observă, blocul de simetrizare se interpune în topologie paralel între sursa trifazată şi sarcină, curenţii absorbiţi sau injectaţi de el în linii urmând să modifice numai curenţii totali din reţea, nu şi cei ce pleacă din aceste noduri spre sarcină, şi care sunt invariabile şi impuse de natura sarcinii. Aşadar:
+=
+=
+=
sarcinacsimetrizorcreteac
sarcinabsimetrizorbreteab
sarcinaasimetrizorareteaa
IIIIIIIII
___
___
___
(5.63)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
166
ajung să fie simetrici nu prin modificarea curenţilor absorbiţi de sarcină ci prin compensarea acestora de către curenţii blocului de compensare.
Ua I a_retea I a_sarcina
Ub I b_retea I b_sarcina
Uc I c_retea I c_sarcina
FILTRU PASIV
SARC
INA
DEZ
ECH
ILIB
RATA
SUNT
Q1 Q2 Q3
Q4 Q5 Q6
C
BLOC COMANDA
Ic_sim
etrizor
Ia_sim
etrizor
Ib_sim
etrizor
Figura 5.19: Dispozitiv de compensare cu schimb de putere interfazic conectat în paralel
În figura 5.19. s-a ales o sarcină trifazată dezechilibrată care nu are legătură la punctul de nul al reţelei. Într-un asemenea caz, conform primei teoreme a lui Kirchhoff, suma curenţilor de linie este nulă, ceea ce permite compensarea sistemului cu un bloc format din trei braţe de tranzistoare de putere (în figură notate cu Q1 – Q6). În cazul în care este necesară compensarea dezechilibrelor cauzate de sarcini trifazate conectate la nul, se utilizează în blocul de tranzistoare de putere încă un braţ (deci vor fi în total patru) paralel cu celelalte trei şi legat la punctul median la linia de nul.
Având în vedere faptul că semnalele electrice de curent alternativ variază cu frecvenţa de 50 de Hz, este necesar ca un asemenea dispozitiv de simetrizare să repete anumite operaţiuni de evaluare a dezechilibrului din reţea, de calcul al curenţilor de compensare necesari şi de comandă corespunzătoare la intervale de timp suficient de mici. Ordinul de mărime al frecvenţei de eşantionare a semnalului trebuie să fie mai mare decât cel al semnalului electric cu minim două unităţi. Cu cât mai mare se alege

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
167
această frecvenţă de eşantionare cu atât mai fidel se reproduce forma semnalului în blocul de calcul şi comandă şi cu atât mai exact se pot face comenzile. Limitarea ei superioară este impusă de capacitatea elementelor de circuit utilizate de a sintetiza informaţiile necesare şi de a realiza comenzile şi comutaţiile în intervalul de timp corespunzător unei perioade a semnalului de eşantionare.
Operaţiile care sunt necesare a fi realizate sunt date de schema logică de funcţionare a acestui dispozitiv de simetrizare (figura 4.7.) şi sunt următoarele:
- citirea valorii instantanee a curenţilor de reţea ( reteaai _ , reteabi _ , reteaci _ ), a tensiunilor de reţea ( au , bu , cu ) şi a curenţilor de sarcină ( sarcinaai _ , sarcinabi _ , sarcinaci _ );
- calculul amplitudinilor pentru curenţii de sarcină ( aI , bI , cI ) şi pentru tensiunile de reţea ( aU , bU , cU );
- calculul amplitudinii medii a celor trei curenţi de sarcină, amplitudine care se doreşte să fie amplitudinea comună a celor trei curenţi de reţea echilibraţi:
3cba
mediuIIII ++
=; (5.64)
- calculul fazei fiecăreia din cele trei tensiuni de reţea:
=
=
=
c
cc
b
bb
a
aa
UuUuUu
ϕ
ϕ
ϕ
; (5.65)
- calculul celor trei curenţi de referinţă ce se doresc a fi prezenţi pe liniile reţelei, curenţi echilibraţi şi în fază cu tensiunile corespunzătoare ale reţelei:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
168
⋅=
⋅=
⋅=
cmediucx
bmediubx
amediuax
Ii
Ii
Ii
ϕ
ϕ
ϕ
; (5.66)
- calculul curenţilor pe care trebuie să îi absoarbă dispozitivul de simetrizare, pentru ca în conformitate cu prima teoremă a lui Kirchhoff, să se obţină în reţea curenţii de referinţă:
−=
−=
−=
reteaccxsimetrizorc
reteabbxsimetrizorb
reteaaaxsimetrizora
iiiiiiiii
__
__
__
; (5.67)
- calculul semnalelor de comandă pentru tranzistoarele de putere, ţinând cont totodată de necesitatea menţinerii constante a tensiunii continue de la bornele condensatorului.
Aceste operaţii permit – atunci când tensiunea de pe condensatorul de stocare a energiei este menţinută în mod controlat constantă – compensarea atât a asimetriilor dintre curenţii reţelei, cât şi a puterii reactive de pe fiecare fază.
Toată partea de calcul şi de control a aplicaţiei este realizabilă de un bloc central de comandă bazat pe microcontroler. Funcţia de transfer a unui asemenea bloc – în cazul utilizării unor blocuri de comandă specializate - poate fi transferată din softul central care modelează funcţia de transfer a simulării anterioare a comportamentului întregului sistem într-un mediu de simulare convenabil ales.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
169
CAPITOLUL 6 – TRANSFORMATORUL ELECTRIC
6.1. Generalităţi. Construcţie.
Transformatorul electric este o maşină electrică statică, de curent alternativ ce transformă energia electrică tot în energie electrică, dar cu parametrii modificaţi. Parametrii energiei electrice sunt: tensiunea, intensitatea curentului, frecvenţa, numărul de faze etc.
Transformatorul este alimentat pe bornele înfăşurării primare şi el debitează energie electrică pe la bornele înfăşurării secundare. În transformator au loc procese de natură electromagnetică, energia electrică din înfăşurarea primară fiind transformată în energie magnetică ce este apoi dirijată printr-un circuit magnetic în spaţiul înfăşurării secundare, unde în virtutea legii inducţiei electromagnetice se induce o tensiune electromotoare. Construcţia transformatorului defineşte şi parametrii săi.
Transformatoarele electrice se clasifică pe baza următoarelor criterii:
• după numărul de faze se deosebesc transformatoarele monofazate şi polifazate, cele mai răspândite transformatoare polifazate fiind cele trifazate;
• după nivelul tensiunii maxime de la bornele primarului şi a secundarului se deosebesc transformatoare de joasă, de medie şi de înaltă tensiune;
• după modul de răcire se deosebesc transformatoare răcite cu aer şi cu ulei;
• după valoarea raportului tensiunii de la bornele înfăşurării primare şi secundare se deosebesc transformatoare ridicătoare şi coborâtoare de tensiune.
În construcţia transformatorului se regăsesc două mari categorii de materiale: materiale active şi materiale auxiliare.
Materialele active sunt utilizate la construcţia acelor subansambluri care participă direct la transformările energetice din transformator. Materialele

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
170
active se pot şi ele clasifica în conductoare electrice şi conductoare magnetice.
Conductoarele electrice sunt înfăşurările dispozitivului. Ele mai sunt numite şi cuprul transformatorului şi sunt realizate din spire conductoare masive sau din conductoare elementare conectate în paralel. Conductoarele sunt izolate cu hârtie, bumbac sau materiale plastice. Pentru a realiza un consum minim de cupru, forma spirelor înfăşurărilor trebuie să fie cât mai apropiată de cea circulară.
Conductoarele magnetice, ce conduc fluxurile magnetice de la o înfăşurare electrică la alta, formează miezul magnetic executat din tole de oţel electrotehnic (un aliaj de fier cu siliciu). Tolele sunt fâşii de tablă de grosime redusă (0,35 mm) şi sunt izolate între ele cu hârtie sau lac electroizolant. Miezul magnetic este denumit şi fierul transformatorului. Motivul pentru care fierul se aliază cu siliciul este cel de a asigura o rezistivitate mare oţelului electrotehnic, iar motivul realizării miezului de fier din mai multe tole presate laolaltă şi nu dintr-o bucată masivă este acela de a reduce curenţii turbionari (Foucault) ce conduc la pierderi energetice în aceste conductoare magnetice. Laturile miezului magnetic pe care sunt montate înfăşurările sunt numite coloane, coloane ce se unesc, se închid prin juguri, zone din miezul magnetic ce nu susţin nici o înfăşurare. Spaţiul închis de coloane şi juguri alcătuieşte fereastra transformatorului. De regulă, secţiunea miezului magnetic este pătrată, pentru a asigura forma aproximativ circulară a înfăşurărilor. Miezurile magnetice se realizează de cele mai multe ori prin împachetare, un prim strat de tole fiind montat ca în figura 6.1.a, iar apoi al doilea strat ca în figura 6.1.b peste primul, apoi al treilea la fel ca primul, al patrulea la fel ca al doilea.
a. b.
Figura 6.1.: Modul de împachetare a miezurilor magnetice

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
171
Materialele auxiliare nu participă la transformările energetice din transformator, însă ele sunt necesare pentru construcţia acestuia. Printre materialele auxiliare amintim: şuruburile, piuliţele, uleiul de răcire, cuva transformatorului, dispozitivele de protecţie şi de transport, etc. Un material auxiliar de primă importanţă este izolaţia conductoarelor (electrice şi magnetice).
Principiul de funcţionare al transformatorului se poate explicita în felul următor:
• alimentând bornele înfăşurării primare cu o tensiune electromotoare de curent alternativ ( constU =1 ), prin această înfăşurare se stabileşte un curent electric sinusoidal, deci variabil în timp;
• curentul din primar, sinusoidal creează un câmp magnetic ce va fi tot variabil în timp, după o lege sinusoidală;
• liniile de câmp magnetic vor fi conduse prin circuitul magnetic al transformatorului în suprafaţa închisă de spirele înfăşurării secundare, în care – în virtutea legii inducţiei electromagnetice, va apărea o tensiune electromotoare indusă;
• această tensiune electromotoare indusă în înfăşurarea secundară va putea da naştere la un curent electric tot sinusoidal, dacă circuitul secundar este închis prin legarea bornelor sale la un consumator.
Dat fiind faptul că părţile de generator şi de receptor ale transformatorului sunt separate galvanic, parametrii ce se referă la aceste părţi primesc mereu indici diferiţi: indicele 1 pentru parametrii înfăşurării primare şi indicele 2 pentru parametrii înfăşurării secundare.
6.2. Ecuaţiile transformatorului în sarcină
Figura 6.2 prezintă transformatorul monofazat funcţionând în sarcină inductivă. Fluxul magnetic util ce se închide prin miezul transformatorului a fost notat cu ϕ , în timp ce fluxurile magnetice de dispersie al înfăşurării primare, respectiv secundare s-a notat cu 1dϕ , respectiv 2dϕ .
Se observă din figura 6.2 că în înfăşurarea primară se induc două tensiuni electromotoare – unul de către fluxul comun, util şi unul de către fluxul de

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
172
dispersie 1dϕ , şi, în mod asemănător, în înfăşurarea secundară se vor induce tot două tensiuni electromotoare - unul de către fluxul comun, util şi unul de către fluxul de dispersie 2dϕ . Dacă se notează cu 1R rezistenţa înfăşurării primare, putem scrie ecuaţia tensiunilor din această înfăşurare:
11111 iRuee d ⋅+−=+ . (6.1)
In mod similar, ecuaţia tensiunilor din înfăşurarea secundară este:
22222 iRuee d ⋅+=+ . (6.2)
Figura 6.2.: Schema electrică a transformatorului în sarcină
Tensiunile electromotoare din cele două ecuaţii de mai sus se calculează conform legii inducţiei electromagnetice, după cum urmează:
( )
( )
( ) ( )
( ) ( )
⋅−=⋅
−=Φ
=
⋅−=⋅
−=Φ
=
⋅−=⋅
−=
⋅−=⋅
−=
dtdiL
dtiLd
dtde
dtdiL
dtiLd
dtde
dtdN
dtNde
dtdN
dtNde
dd
dd
22
2222
11
1111
22
2
11
1
ϕϕ
ϕϕ
. (6.3)
u 1
i 1
u 2
i 2 R s X s
1 d2
N 1 N 2

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
173
In aceste relaţii s-a notat cu 1L inductivitatea de dispersie a înfăşurării primare (mărime practic constantă) şi cu 2L inductivitatea de dispersie a înfăşurării secundare.
La transcrierea în imagini complexe a acestor ecuaţii se ţine cont de faptul că fluxul magnetic are o variaţie sinusoidală cu tω şi se obţine:
⋅⋅−=⋅⋅⋅−=⋅⋅−=⋅⋅⋅−=
⋅Φ⋅⋅⋅−=Φ
⋅⋅⋅−=
⋅Φ⋅⋅⋅−=Φ
⋅⋅⋅−=
22222
11111
222
111
44,42
44,42
IXjILjEIXjILjE
jNfNjE
jNfNjE
d
d
ωω
ω
ω
. (6.4)
Factorul 4,44 se obţine exprimând f⋅⋅= πω 2 şi calculând 14,341,12
2⋅=
π .
În aceste relaţii 11 LX ⋅= ω şi 22 LX ⋅= ω reprezintă reactanţele de dispersie ale înfăşurărilor primară şi secundară. Înlocuind aceste expresii complexe ale tensiunilor electromotoare în ecuaţiile tensiunilor pentru cele două înfăşurări (scrise, bineînţeles şi acestea în complex de data aceasta) obţinem:
⋅−=⋅⋅⋅−⋅−=⋅+−=⋅⋅⋅+⋅+−=
222222222
111111111
IZEIXjIREUIZEIXjIREU
, (6.5)
unde 2,1, =∀⋅+= kXjRZ kkk .
În circuitul de sarcină se poate scrie:
2222 IZIXjIRU sss ⋅=⋅⋅+⋅= . (6.6)
Aceste ecuaţii permit construcţia diagramei fazoriale a transformatorului.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
174
6.3. Diagrama fazorială a transformatorului în sarcină
Prin diagrama fazorială a transformatorului se înţelege reunirea într-o singură diagramă a tuturor diagramelor simple ce se pot trasa pentru ecuaţiile transformatorului. Această diagramă permite aprecierea calitativă şi cantitativă a fenomenelor ce se petrec în transformator. Construcţia diagramei se face în mod logic, folosind într-o anumită ordine ecuaţiile deduse în subiectul anterior.
Pentru început se alege un fazor de referință – de obicei fluxul magnetic util Φ , a cărui orientare în planul complex poate fi oricare. Pentru comoditate, fazorul Φ se trasează orizontal. În continuare se trasează fazorii 1E şi 2E ,
care în conformitate cu ecuaţiile (6.4) sunt defazaţi cu 2π în urma fazorului
Φ . Aceste tensiuni sunt proporţionale cu numărul de spire din înfăşurarea corespondentă, şi de acest lucru se ţine cont la reprezentarea lor pe diagramă. Scara aleasă pentru fazorul Φ , exprimată în
Wbmm este
independentă de scara tensiunilor, exprimată în
Vmm şi de cea a curenţilor
în
Amm , dar odată alese aceste scare, ele se menţin constante pentru
toate tensiunile, respectiv pentru toţi curenţii.
Din ecuaţiile (6.5) şi (6.6) se poate deduce:
( ) ( ) 22222 IXXjIRRE ss ⋅+⋅+⋅+= . (6.7)
De aici rezultă că fazorul curentului 2I are modulul şi defazajul faţă de 2E :
( ) ( )
++
=
+++=
s
s
ss
RRXXarctg
XXRRI
2
22
22
222
ϕ. (6.8)
Astfel, se poate trasa şi fazorul 2I în diagrama curenţilor, evident la scara curenţilor. Din vârful fazorului 2E se trasează o perpendiculară pe fazorul
2I iar catetele triunghiului dreptunghic astfel format, ce are ca ipotenuză pe 2E sunt fazorii ( ) 22 IRRs ⋅+ , respectiv, ( ) 22 IXXj s ⋅+⋅ .

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
175
În continuare, de-a lungul fazorului 2I se măsoară fazorul ( ) 2IRs ⋅ , iar la vârful acesteia se adaugă fazorul ( ) 2IXj s ⋅⋅ , perpendicular pe ( ) 22 IRRs ⋅+ . Ipotenuza triunghiului dreptunghic astfel format, având catetele ( ) 2IRs ⋅ şi
( ) 2IXj s ⋅⋅ este chiar fazorul 2U - în conformitate cu ecuaţia (6.6).
Acuma se pot figura pe diagramă şi fazorii:
( ) ( ) ( )( ) ( ) ( )
⋅⋅−⋅+⋅=⋅⋅⋅−⋅+=⋅
22222
22222
IXjIXXjIXjIRIRRIR
ss
ss . (6.9)
Aceştia se trasează din vârful lui 2U , iar suma lor vectorială – adică ipotenuza triunghiului dreptunghic în care ele sunt catete este chiar ( ) 22 IZ ⋅ . În acest moment sunt reprezentate pe diagramă toate mărimile referitoare la înfăşurarea secundară.
Solenaţia primară 1Θ , solenaţia secundară 2Θ şi solenaţia de mers în gol 0Θ , precum şi legătura dintre ele sunt date de ecuaţiile:
Θ+Θ=Θ⋅=Θ⋅=Θ
210
222
111
ININ
. (6.10)
In primul rând se calculează şi se reprezintă la scara solenaţiilor solenaţia secundară 2Θ , care este în fază cu 2I . Apoi se reprezintă solenaţia de mers în gol, în conformitate cu ecuaţiile:
⋅−=⋅=Θ
Φ=Θ
Θ+Θ=Θ
Faa
a
ININ
R
11
0
2µµ
µ
. (6.11)
Solenaţia de magnetizare µΘ este în fază cu fluxul magnetic util Φ , în timp ce aΘ este perpendicular pe acesta. După ce s-a construit pe diagramă solenaţia de mers în gol, suntem în măsură să construim şi solenaţia primară 1Θ ca o diferenţă vectorială dintre solenaţia de mers în gol 0Θ şi solenaţia secundară 2Θ .

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
176
Se determină acum curentul 1I , raportând solenaţia primară 1Θ la numărul de spire din primar şi se reprezintă pe diagramă în fază cu solenaţia primară 1Θ , la scara curenţilor.
Acuma urmează reprezentarea pe diagramă a primei ecuaţii din (6.5). Întâi se desenează fazorul 1E− ca fiind egal în modul şi opus ca orientare lui 1E . La vârful lui 1E− se adaugă fazorul ( ) 11 IZ ⋅ , compus din căderea de tensiune ohmică ( ) 11 IR ⋅ , paralelă cu fazorul 1I şi căderea de tensiune reactivă ( ) 11 IXj ⋅ , perpendiculară pe fazorul 1I . Suma vectorială dintre 1E− şi ( ) 11 IZ ⋅
va reprezenta tocmai fazorul 1U .
Figura 6.3. ilustrează această diagramă fazorială.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
177
Figura 6.3.: Diagrama fazorială a transformatorului monofazat

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
178
6.4. Raportarea mărimilor secundare la primar
Cuplajul dintre circuitul primar şi cel secundar al transformatorului este de natură magnetică şi acest lucru îngreunează mult studiul acestuia. Pentru a elimina acest dezavantaj, schema reală a transformatorului se înlocuieşte printr-o schemă echivalentă în care cuplajul magnetic este modelat de un cuplaj electric. Pentru a realiza acest artificiu este necesar a se raporta în prealabil mărimile circuitului secundar la primar, toate solenaţiile din transformator fiind raportate la acelaşi număr de spire 1N . Mărimile raportate se notează cu semnul `.
Când se face raportarea, solenaţia secundară trebuie să se păstreze constantă:
221
22222122
1''' Ik
INNIININ ⋅=⋅=⇒⋅=⋅⇔Θ=Θ , (6.12)
unde k este raportul de transformare al transformatorului.
Tensiunea electromotoare indusă în secundar va fi:
21122 22'' EkENjNjE ⋅==
Φ⋅⋅⋅−=
Φ⋅⋅⋅−= ωω . (6.13)
Toate tensiunile din secundarul transformatorului redus se raportează la primar amplificând tensiunile din secundarul transformatorului real cu raportul de transformare k.
Modul de raportare a impedanţelor din secundar la primar se deduce în felul următor:
22
2
2
2
22 1'
'' ZkI
k
UkI
UZ ⋅=⋅
⋅== . (6.14)
Prin urmare, impedanţele din secundarul transformatorului redus se calculează multiplicând impedanţele din secundarul transformatorului real cu pătratul raportului de transformare.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
179
Puterea debitată de secundarul transformatorului redus va fi egală (după cum e şi cazul pentru ca să existe o echivalenţă) cu puterea debitată de secundarul transformatorului real:
2222221''' SIk
UkIUS =⋅⋅⋅=⋅= . (6.15)
Pierderile de fier, respectiv în cupru ale transformatorului raportat sunt aceleaşi cu cele din transformatorul real:
==
22
22
''
CuCu
FeFe
pppp
. (6.16)
Ecuaţiile transformatorului raportat se obţin imediat din ecuaţiile transformatorului real, după cum urmează:
⋅=⋅⋅+⋅=⋅−=⋅⋅−⋅−=⋅+−=⋅⋅⋅+⋅+−=
⋅Φ⋅⋅⋅−=Φ
⋅⋅⋅−==
2222
221222212
111111111
1121
''''''''''''''
44,42
'
IZIXjIRUIZEIXjIREU
IZEIXjIREU
jNfNjEE
sss
ω
. (6.17)
In plus, din ecuaţia (6.10) se obţine pentru mărimile raportate:
210 'III += . (6.18)
6.5. Schemele echivalente ale transformatorului
Cuplajul dintre circuitul primar şi cel secundar al transformatorului este de natură magnetică şi acest lucru îngreunează mult studiul acestuia. Pentru a elimina acest dezavantaj, schema reală a transformatorului se înlocuieşte printr-o schemă echivalentă în care cuplajul magnetic este modelat de un cuplaj electric. În general, se pot modela o infinitate de scheme echivalente, dar se utilizează numai acelea care satisfac anumite criterii de simplitate.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
180
Schemele echivalente se deduc plecând de la ecuaţiile transformatorului raportat (6.17) şi (6.18). Astfel, calculând din aceste ecuaţii curenţii 210 ',, III , se poate construi schema echivalentă în T a transformatorului precum în figura 6.4.
Figura 6.4.: Schema echivalentă în T a transformatorului monofazat
Se observă că impedanţa echivalentă a transformatorului este:
sm
Te
ZZZ
ZZZ
''11
1
2
1
++
+== . (6.19)
O altă schemă echivalentă des utilizată este schema în Γ simplificată. Ea este ilustrată în figura 6.5.
Impedanţa de scurtcircuit din această schemă se poate exprima sub forma:
21 'ZZZ sc += . (6.20)
Această schemă permite descompunerea funcţionării transformatorului în sarcină într-un regim de mers în gol ( 0Z ) peste care se suprapune un regim de scurtcircuit ( scZ ).
U 1
I 1
U' 2
I' 2
R' s
X' s X m
R m
R' 2 R 1 X' 2 X 1
E 1
I 0

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
181
Figura 6.5.: Schema echivalentă în Γ simplificată a transformatorului
6.6. Bilanţul puterilor active în transformator
Bilanţul energetic al fenomenelor ce se produc într-un transformator electric exprimă modul în care energia electrică absorbită de la reţeaua de alimentare a acestuia prin înfăşurarea sa primară este distribuită. Este evident că, atunci când transformatorul funcţionează în regim de sarcină – alimentează un receptor legat la bornele înfăşurării sale secundare, o mare parte a energiei absorbite va ajunge la aceasta. Diferenţa constă în pierderi energetice. Pierderile sunt de două mari categorii:
• de natură Joule, în înfăşurări (sau în cuprul transformatorului), pierderi ce poartă numele de pierderi în cupru;
• pierderi în fier, care, aşa cum le spune şi numele, apar datorită fenomenelor (auxiliare) ce apar în tolele de fier ale transformatorului.
Pierderile în cupru sunt prezente atât în înfăşurarea primară ( 1Cup ), cât şi în cea secundară ( 2Cup ). Bilanţul energetic se poate raporta la timp şi atunci se obţine un bilanţ al puterilor, mult mai des folosit. Expresiile lor sunt:
⋅=⋅=
⋅=222
2222
2111
'' IRIRpIRp
Cu
Cu. (6.21)
Puterea absorbită de la reţea se poate exprima sub forma:
U 1
I 1
U' 2
I' 2
X 0
R 0
R sc X sc
I 0

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
182
1111 cosϕ⋅⋅= IUP . (6.22)
Puterea absorbită de la sarcină de la secundarul transformatorului este de forma:
2222 cosϕ⋅⋅= IUP . (6.23)
Bilanţul energetic se poate exprima prin următoarea ecuaţie şi se poate ilustra prin graficul din figura 6.6.
1221 CuFeCu pppPP +++= . (6.24)
Figura 6.6.: Bilanţul puterilor într-un transformator electric în sarcină
6.7. Funcţionarea în gol a transformatorului electric monofazat
Dacă 02 =I , transformatorul funcţionează în gol, regim ce se obţine atunci când la bornele înfăşurării secundare se leagă o impedanţă de sarcină infinită. Fenomenele din transformator din timpul regimului de mers în gol se pot analiza utilizând schema echivalentă în T în care 0' =sZ . Schema echivalentă devine în acest caz cea din figura 6.7.:
u 1
i 1
u 2
i 2 R s X s
1 d2
N 1 N 2
P 1
p Cu1 p Fe p Cu2
P 2

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
183
Figura 6.7.: Schema echivalentă în T pentru transformatorul în gol
Tensiunea NU 1 are indicele N pentru a sugera că tensiunea din primar are valoare nominală. Valorile nominale ale parametrilor unui aparat sau a unei maşini electrice sunt acele valori pentru care respectivul aparat a fost proiectat să funcţioneze în bune condiţii, fără risc de deteriorare lungi perioade de timp. Atunci când transformatorul este în gol el se poate alimenta la tensiunea nominală, măsurarea în aceste condiţii a curentului absorbit ( 0I ) şi a puterii absorbite de la reţea ( 0P ) purtând chiar numele de încercare în gol a transformatorului.
Puterea de mers în gol se poate exprima sub forma:
( ) 2010 IRRP m+= , (6.25)
iar legea lui Ohm: ( ) ( )212
11
mmo
N XXRRI
U+++= . (6.26)
Din aceste două relaţii deducem expresiile pentru rezistenţa de mers în gol şi reactanţa de mers în gol a transformatorului:
−
=+=
=+=
2
20
0
2
0
110
20
010
IP
IUXXX
IPRRR
Nm
m
. (6.27)
Aceste relaţii ne permit determinarea cu o foarte bună aproximaţie a parametrilor de magnetizare ale transformatorului ( mm XR , ), întrucât mRR <<1
R 1 X 1
R m
X m
U 1N
I 0

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
184
şi mXX <<1 . De asemenea, încercarea de mers în gol permite determinarea factorului de putere la mersul în gol:
01
0
0
1
20
0
0
00cos
IUP
IU
IP
ZR
NN ⋅===ϕ . (6.28)
Puterea de mers în gol aproximează foarte bine pierderile în fier ale transformatorului. Dacă în bilanţul puterilor (6.24) se anulează puterea cedată sarcinii şi se ţine cont că pierderile în cupru depind de pătratul curentului absorbit, curent ce este cu un ordin de mărime mai mic la mersul în gol decât cel nominal, obţinem:
FeCuFeCuPppppPP ≅++==
= 120102
. (6.29)
6.8. Funcţionarea în scurtcircuit a transformatorului electric monofazat
A doua posibilitate ca puterea debitată să fie nulă este legarea între ele (scurtcircuitarea) a bornelor secundarului printr-un conductor scurt de impedanţa neglijabilă (practic nulă). Cu alte cuvinte în acest caz:
0=sZ . (6.30)
Valorile impedanţelor de magnetizare şi secundar fiind mult diferite între ele ( mZZ <<2' ),curentul de mers în gol 0I se poate neglija iar schema echivalentă în T se poate aproxima prin schema din figura 6.8.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
185
Figura 6.8.: Schema echivalentă în T pentru funcţionarea transformatorului în scurtcircuit.
În figură s-a reprezentat ca tensiune de alimentare a primarului transformatorului tensiunea Nsc UU 1< . Aici trebuie menţionat că există două feluri de scurtcircuit pentru un transformator (sau pentru o maşină electrică oarecare):
• scurtcircuitul accidental, în care primarul se alimentează de la tensiune nominală şi secundarul se scurtcircuitează. În acest caz, în înfăşurări se vor manifesta curenţi de valori mult mai mari decât valorile nominale ale acestora. O consecinţă imediată a acestor curenţi foarte mari va fi mărirea şi mai puternică a efectului termic, adică a căldurii degajate prin efect Joule (proporţionale cu pătratul curentului), ceea ce va conduce la supraîncălzire, la topirea izolaţiilor şi apoi la arderea înfăşurărilor;
• scurtcircuitul de laborator, sau încercarea în scurtcircuit, care presupune o tensiune de alimentare mai mică decât cea nominală, astfel aleasă încât prin înfăşurări să se stabilizeze un curent egal cu cel nominal, curent ce sigur nu va deteriora transformatorul. Parametrii ce se măsoară în această încercare sunt tensiunea de scurtcircuit scU şi puterea absorbită de la reţea, numită putere de scurtcircuit scP .
Deducţiile parametrilor schemei echivalente în T se realizează utilizând şi rezultatele încercării în scurtcircuit, după cum urmează. Rezistenţa şi reactanţa de scurtcircuit se exprimă:
R 1 X 1
R' 2
X' 2
U sc
I 1N

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
186
−
=+=
=+=
2
21
2
121
21
21
'
'
N
sc
N
scsc
N
scsc
IP
IUXXX
IPRRR
. (6.31)
De asemenea, încercarea de scurtcircuit permite determinarea factorului de putere la scurtcircuit:
Nsc
sc
N
sc
N
sc
sc
scsc IU
P
IU
IP
ZR
11
21cos
⋅===ϕ . (6.32)
Puterea de scurtcircuit aproximează foarte bine pierderile în cupru ale transformatorului. Dacă în bilanţul puterilor (6.24) se anulează puterea cedată sarcinii şi se ţine cont de faptul că pierderile în fier sunt neglijabile întrucât au valori mult mai mici decât în cazul funcţionării la tensiune nominală:
2112012
CuCuCuFeCuPsc pppppPP +≅++=== . (6.33)
6.9. Randamentul transformatorului electric monofazat
In general, prin randament al unui dispozitiv se înţelege raportul dintre puterea activă debitată şi puterea activă absorbită.
[ ]%1001
2 ⋅=PPη . (6.34)
Conform bilanţului puterilor (6.24), puterea absorbită se poate exprima ca fiind:
CuFe ppPpPP ++=+= 221 . (6.35)
Pierderile în fier pentru un miez magnetic dat depind numai de frecvenţa semnalului electric de alimentare şi de amplitudinea inducţiei magnetice create de acest semnal, care sunt ambele constante dacă tensiunea de
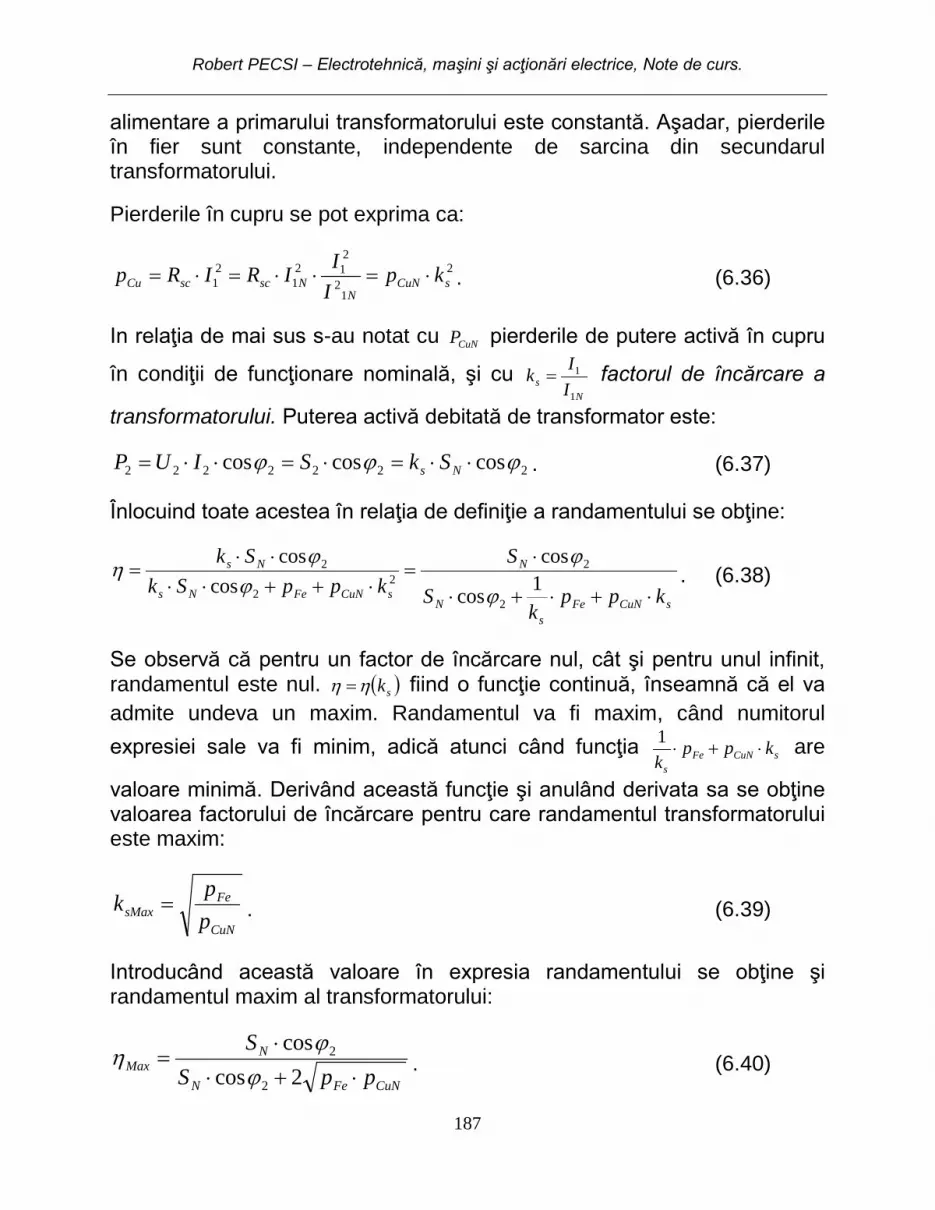
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
187
alimentare a primarului transformatorului este constantă. Aşadar, pierderile în fier sunt constante, independente de sarcina din secundarul transformatorului.
Pierderile în cupru se pot exprima ca:
2
12
212
12
1 sCuNN
NscscCu kpIIIRIRp ⋅=⋅⋅=⋅= . (6.36)
In relaţia de mai sus s-au notat cu CuNP pierderile de putere activă în cupru
în condiţii de funcţionare nominală, şi cu N
s IIk1
1= factorul de încărcare a
transformatorului. Puterea activă debitată de transformator este:
2222222 coscoscos ϕϕϕ ⋅⋅=⋅=⋅⋅= Ns SkSIUP . (6.37)
Înlocuind toate acestea în relaţia de definiţie a randamentului se obţine:
sCuNFes
N
N
sCuNFeNs
Ns
kppk
S
SkppSk
Sk
⋅+⋅+⋅
⋅=
⋅++⋅⋅⋅⋅
=1cos
coscos
cos
2
22
2
2
ϕ
ϕϕ
ϕη . (6.38)
Se observă că pentru un factor de încărcare nul, cât şi pentru unul infinit, randamentul este nul. ( )skηη = fiind o funcţie continuă, înseamnă că el va admite undeva un maxim. Randamentul va fi maxim, când numitorul expresiei sale va fi minim, adică atunci când funcţia sCuNFe
s
kppk
⋅+⋅1 are
valoare minimă. Derivând această funcţie şi anulând derivata sa se obţine valoarea factorului de încărcare pentru care randamentul transformatorului este maxim:
CuN
FesMax p
pk = . (6.39)
Introducând această valoare în expresia randamentului se obţine şi randamentul maxim al transformatorului:
CuNFeN
NMax ppS
S⋅+⋅
⋅=
2coscos
2
2
ϕϕ
η . (6.40)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
188
6.10. Transformatoare trifazate
Transportul şi distribuţia energiei electrice se realizează în principal prin reţele trifazate. Pentru modificarea valorilor tensiunilor se pot folosi 3 transformatoare monofazate montate pe fiecare fază a reţelei, soluţie ce implică un consum sporit de materiale şi pierderi mai mari de putere, sau se poate folosi un singur transformator trifazat, în care înfăşurările corespunzătoare celor trei faze sunt bobinate pe trei coloane diferite ale unui acelaşi miez magnetic (figura 6.9.). în acest caz, miezul constă din trei coloane (acele laturi ale miezului de fier pe care sunt bobinate înfăşurările) şi două juguri (acele laturi ale miezului care nu au bobinaje pe ele dar asigură închiderea fluxului magnetic util). Dezavantajul principal al miezului în coloane constă în nesimetria ce apare între circuitele magnetice ale fazelor montate pe coloanele de la margine faţă de coloana din mijloc. Urmare a acestui fapt, la funcţionarea în gol se constată o anumită nesimetrie între curenţii de pe cele trei faze, dar această nesimetrie este cu totul neglijabilă la funcţionarea în sarcină.
Figura 6.9.: Schema de principiu a transformatorului trifazat.
Dacă receptorul conectat la bornele înfăşurărilor secundare este echilibrat, curenţii ce parcurg aceste înfăşurări formează un sistem trifazat simetric. Fluxurile rezultante prin miezul magnetic al transformatorului vor forma în acest caz tot un sistem trifazat simetric. Toate fenomenele ce se produc în cazul transformatorului trifazat sunt comparabile şi asimilabile cu cele studiate în cazul unui receptor trifazat conexiune stea.
A
X
B
Y
C
Z
x y z
a b c

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
189
Principiul de funcţionare, diagramele fazoriale şi schemele echivalente ale transformatorului trifazat sunt practic identice cu cele din cazul transformatorului monofazat, cu singura diferenţa că în acest caz avem trei faze, deci schema echivalentă a transformatorului monofazat este de fapt schema echivalentă pe fază a transformatorului trifazat, la fel şi diagrama fazorială, etc.
Aşa cum se observă şi în figura 6.9., bornele de intrare ale înfăşurărilor primare se notează cu primele trei majuscule ale alfabetului (A, B şi C), bornele de ieşire ale înfăşurărilor primare se notează cu majusculele X, Y, şi Z, în timp ce bornele de intrare ale înfăşurărilor secundare se notează cu primele trei litere mici ale alfabetului (a, b şi c), bornele de ieşire ale înfăşurărilor secundare se notează cu minusculele x, y, şi z.
6.11. Grupele de conexiuni ale transformatoarelor trifazate
Înfăşurările transformatorului trifazat pot fi legate într-una din următoarele conexiuni:
• conexiunea stea, adică cea prezentată chiar în figura 6.9. Pentru această conexiune cele trei borne de ieşire ale înfășurărilor primare se leagă împreună (X-Y-Z), punctul astfel obţinut fiind punctul neutru. După cum acest punct neutru se leagă sau nu o bornă suplimentară, se deosebesc conexiunile stea cu neutrul accesibil şi stea cu neutrul izolat. Curenţii de linie sunt chiar curenţii de fază ai transformatorului iar relaţia dintre tensiunile de linie şi de fază este:
⋅=
=
fl
fl
UU
II
3 . (6.41)
• conexiunea triunghi, prezentată în figura 6.10. In acest caz, relaţiile dintre curenţii de linie şi cei de fază şi între tensiunile de linie şi cele de fază este:
=
⋅=
fl
fl
UUII 3
. (6.42)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
190
• conexiunea zig-zag, în care înfăşurarea de pe fiecare fază este împărţită în două jumătăţi şi se înseriază jumătate din bobina de pe o fază cu jumătate din bobina de pe cealaltă fază, astfel încât cele două jumătăţi din aceeaşi bobină să fie parcurse de curenţi în sensuri contrare. Bornele de ieşire ale celor trei înfăşurări sunt legate laolaltă, aşa cum se remarcă în figura 6.11.. Conexiune zig-zag se foloseşte numai pentru înfăşurarea secundară a transformatoarelor.
După modul în care înfăşurările primare şi secundare se pot lega în diferite conexiuni – o anumită conexiune din primar se poate combina cu aceeaşi sau cu alta din secundar - apar o serie de combinaţii ce poartă de fapt numele de grupe de conexiuni ale transformatorului trifazat şi sunt prezentate în figura 6.12. Se observă din figură că atât bornele primare A, B, C cât şi bornele cele secundare a, b, c pot fi rotite câte 120 grade în sens invers trigonometric. Pentru a se marca poziţia relativă între tensiunile primare şi tensiunile de linie secundare, simbolul grupei de conexiuni se completează cu un număr cuprins între 1 şi 12 – numit ordin al conexiunii – care reprezintă câtul prin 30˚ al unghiului cu care trebuie rotită în sens trigonometric o tensiune de linie secundară pentru a se suprapune peste tensiunea de linie primară omoloagă (corespunzătoare). Utilitatea conceptului de grupă de conexiuni iese în evidenţă în cazul grupării în paralel a mai multe transformatoare trifazate – o condiţie riguroasă în acest caz fiind egalitatea ordinelor grupelor de conexiuni.
A
X
B
Y
C
Z
Figura 6.10.: Conexiunea triunghi a înfăşurărilor primare

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
191
A
X
B
Y
C
Z
If=Il
Uf
Ul
Figura 6.11.: Conexiunea zig-zag
Figura 6.12.a) Grupe de conexiuni Y/y

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
192
Figura 6.12. b) Grupe de conexiuni Y/δ
6.12. Funcţionarea în paralel a transformatoarelor
Pentru alimentarea cu energie electrică a consumatorilor, se preferă utilizarea a mai multor transformatoare de putere mai mică legate în paralel în locul unui singur transformator de putere mare. Această soluţie implică

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
193
un consum mai mare de material şi pierderi mai mari dar prezintă şi unele avantaje:
• în cazul în care un transformator se defectează, consumatorul poate fi integral sau parţial alimentat de celelalte transformatoare;
• în cazul în care consumatorul nu funcţionează la sarcină nominală, se pot deconecta una sau mai multe transformatoare astfel încât cele rămase în funcţiune să aibă un randament cât mai mare.
Problema care se pune în cazul funcţionării în paralel a mai multor transformatoare este repartizarea puterii cerute de consumator proporţional cu puterea nominală a fiecărui transformator astfel încât nici unul dintre transformatoare să nu fie supraîncărcat peste puterea sa nominală. La transformatoarele identice acest lucru se rezolvă de la sine. La conectarea în paralel a unor transformatoare diferite, acestea trebuie să îndeplinească următoarele condiţii:
- să aibă aceeaşi clasă şi grupă de conexiuni şi bornele lor omoloage să fie conectate împreună. Această condiţie este absolut obligatorie, nerespectarea ei ducând la apariţia unor curenţi de circulaţie interioară foarte intenşi care determină decuplarea elementelor de protecţie de pe calea alimentării transformatoarelor;
- să aibă acelaşi raport de transformare. Inegalitatea rapoartelor de transformare determină o circulaţie de putere între transformatoarele conectate în paralel. Dacă diferenţa dintre rapoartele de transformare este mică ea poate fi acceptată;
- să aibă aceeaşi tensiune de scurtcircuit;
- raportul puterilor lor nominale să nu depăşească 31 , sau cel mult
41 .
6.13. TRANSFORMATOARE SPECIALE
Autotransformatorul este un transformator ale cărui înfăşurări (cea primară şi cea secundară) sunt cuplate între ele atât magnetic cât şi electric. O parte a spirelor celor două înfăşurări este comună. De fapt, autotransformatorul este construit dintr-un miez magnetic pe care este

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
194
dispusă o singură înfăşurare prevăzute cu mai multe prize sau cu un cursor. În funcţie de bornele pe la care se alimentează autotransformatorul, acesta poate fi coborâtor sau ridicător. Figura 6.13. ilustrează un autotransformator.
Figura 6.13.: Schema de principiu a autotransformatorului
Dacă alimentarea autotransformatorului se face pe la bornele (A-X) el este coborâtor, iar dacă se face pe la bornele (a-x) el este ridicător de tensiune.
Autotransformatorul se deosebeşte de transformatorul de putere echivalent prin tensiune de scurtcircuit mai mică, printr-o masă mai mică, gabarit mai mic, determinate de scăderea atât a cuprului cât şi a fierului din componenţa sa. Randamentul unui autotransformator atinge valori de ordinul 99,7%. Aceste avantaje ale autotransformatorului sunt însă contrabalansate de pericolul pe care îl poate prezenta pentru personalul de exploatare – o întrerupere a continuităţii înfăşurării sau circuitului în zona bornei x poate face ca tensiunea în circuitul din secundar (de joasă tensiune de obicei) să ajungă la aceeaşi valoare cu cea din primar. Urmare a acestor împrejurări, autotransformatoarele se construiesc numai pentru rapoarte de transformare apropiate de unitate. Ele se folosesc pentru cuplarea în staţiile electrice a liniilor cu tensiuni apropiate, pentru realizarea unor condiţii bune de pornire a motoarelor electrice şi pentru unele aplicaţii didactice.
Transformatoarele de măsură se folosesc pentru măsurarea tensiunilor şi curenţilor mari, ale căror valori depăşesc valorile maximale ale aparatelor de măsură. În cazul transformatoarelor de curent înfăşurarea primară – constând în general dintr-o singură spiră – se înseriază în circuitul în care se doreşte măsurarea intensităţii curentului, iar la bornele înfăşurării
u 1
i 1 i 2 A
X
a
x

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
195
secundare este conectat ampermetrul. Un transformator de curent este prezentat în figura 6.14.
i1 i2
N2 AN1=1R
Figura 6.14.: Schema de principiu a unui transformator de curent
Impedanţa internă a ampermetrului fiind foarte mică, regimul nominal de funcţionare al transformatorului de curent este foarte apropiat de regimul de scurtcircuit. Curenţii fiind în opoziţie de fază, fluxurile magnetice produse de aceştia vor fi tot în opoziţie de fază astfel încât, deşi curenţii prin cele două înfăşurări sunt foarte mari, fluxul magnetic total, rezultant va avea valori mici. În cazul în care la bornele înfăşurării secundare nu este conectat un ampermetru, curentul 2I va avea valoarea 0 şi fluxul magnetic rezultant va fi egal cu fluxul magnetic produs doar de curentul din înfăşurarea primară, deci va creşte. Tensiune electromotoare indusă de acest flux poate ajunge la valori foarte mari, de până la 300 V. Pentru a evita aceste valori mari ale tensiunii electromotoare induse, atunci când ampermetrul nu este conectat, bornele înfăşurării secundare se scurtcircuitează.
Raportul de transformare al transformatorului de curent este definit ca raportul dintre curenţii din primar şi secundar:
2
1
IIkI = . (6.43)
Deoarece valoarea acestui raport depinde de regimul de funcţionare, se defineşte şi raportul nominal de transformare:
n
nI I
Ikn
2
1= . (6.44)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
196
Eroarea relativă suplimentară pe care transformatorul de curent o introduce în procesul de măsurare se poate exprima ca fiind:
[ ]%100⋅−
=n
n
I
III k
kkε . (6.45)
Transformatoarele de tensiune sunt folosite pentru măsurarea tensiunilor mari. Înfăşurarea primară se leagă între punctele a căror tensiune se măsoară, iar la bornele secundare se conectează voltmetrul.
Impedanţa internă a voltmetrului fiind foarte mare, regimul nominal de funcţionare a transformatorului de tensiune este foarte apropiat de regimul de mers în gol.
Raportul de transformare al transformatorului de tensiune este definit ca raportul dintre tensiunile de la bornele înfăşurărilor primar şi secundar:
2
1
UUkU = . (6.46)
Deoarece valoarea acestui raport depinde de regimul de funcţionare, se defineşte şi raportul nominal de transformare:
n
nU U
Ukn
2
1= . (6.47)
Eroarea relativă suplimentară pe care transformatorul de tensiune o introduce în procesul de măsurare se poate exprima ca fiind:
[ ]%100⋅−
=n
n
U
UUU k
kkε . (6.48)
Tot în cadrul acestui capitol se mai pot prezenta şi alte transformatoare speciale, cum ar fi transformatoarele de sudare, cele tri-bifazate, transformatoarele de dublare şi de triplare a frecvenţei, etc.
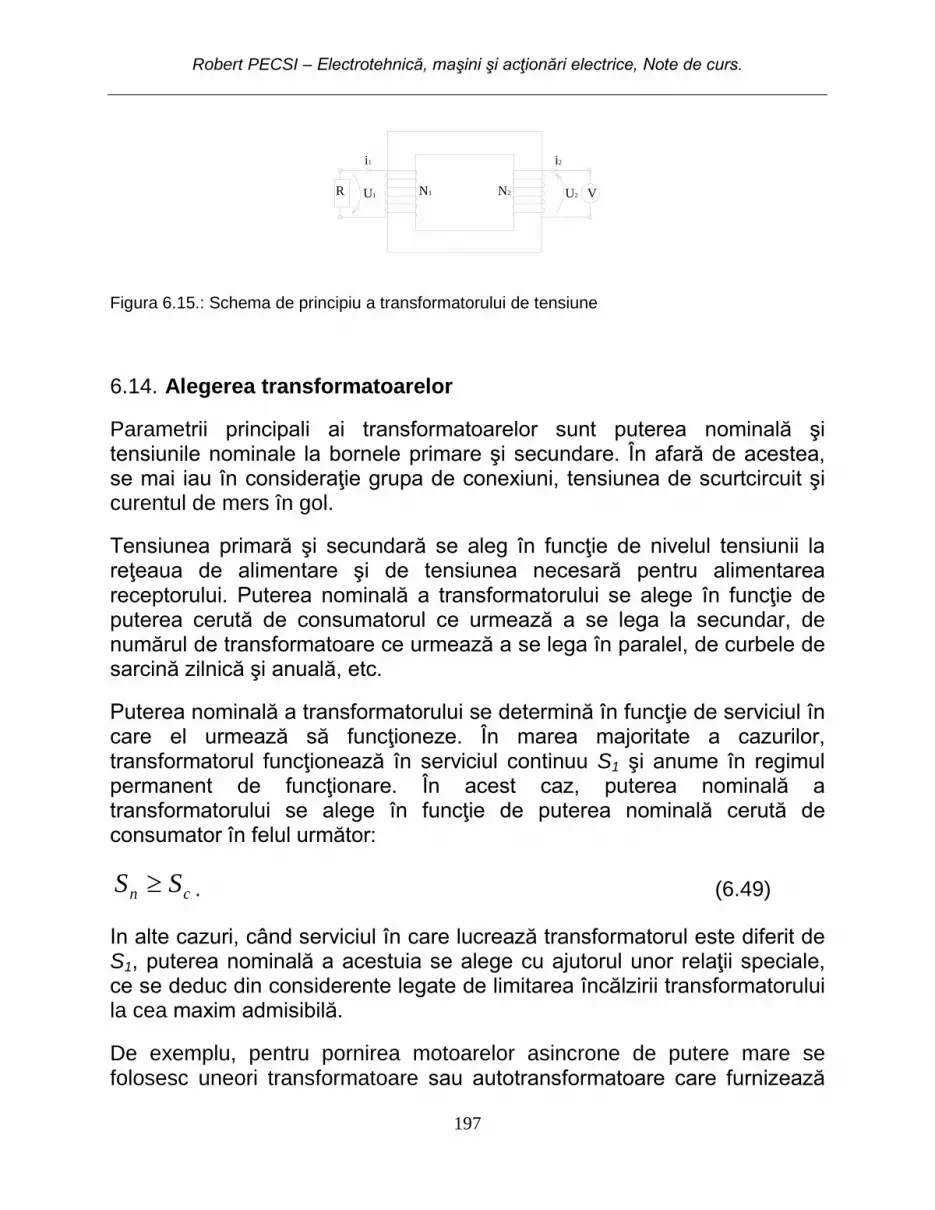
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
197
i1 i2
N2 VN1R U1 U2
Figura 6.15.: Schema de principiu a transformatorului de tensiune
6.14. Alegerea transformatoarelor
Parametrii principali ai transformatoarelor sunt puterea nominală şi tensiunile nominale la bornele primare şi secundare. În afară de acestea, se mai iau în consideraţie grupa de conexiuni, tensiunea de scurtcircuit şi curentul de mers în gol.
Tensiunea primară şi secundară se aleg în funcţie de nivelul tensiunii la reţeaua de alimentare şi de tensiunea necesară pentru alimentarea receptorului. Puterea nominală a transformatorului se alege în funcţie de puterea cerută de consumatorul ce urmează a se lega la secundar, de numărul de transformatoare ce urmează a se lega în paralel, de curbele de sarcină zilnică şi anuală, etc.
Puterea nominală a transformatorului se determină în funcţie de serviciul în care el urmează să funcţioneze. În marea majoritate a cazurilor, transformatorul funcţionează în serviciul continuu S1 şi anume în regimul permanent de funcţionare. În acest caz, puterea nominală a transformatorului se alege în funcţie de puterea nominală cerută de consumator în felul următor:
cn SS ≥ . (6.49)
In alte cazuri, când serviciul în care lucrează transformatorul este diferit de S1, puterea nominală a acestuia se alege cu ajutorul unor relaţii speciale, ce se deduc din considerente legate de limitarea încălzirii transformatorului la cea maxim admisibilă.
De exemplu, pentru pornirea motoarelor asincrone de putere mare se folosesc uneori transformatoare sau autotransformatoare care furnizează

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
198
motorului tensiune scăzută. În asemenea cazuri se poate considera că transformatorul funcţionează în serviciul S2 (serviciul de scurtă durată). Pentru acest scop se va alege un transformator care să se încălzească în cursul funcţionării până la o temperatură mai mică, aproximativ egală cu temperatura maxim admisibilă. Este evident faptul că alegând transformatorul conform serviciului S1 şi ignorând faptul că el funcţionează de fapt în regim de scurtă durată, acesta nu s-ar încălzi niciodată până la temperaturi apropiate de cea maxim admisibilă, ar funcţiona corect, dar s-ar face o risipă, o supradimensionare, care costă.
Dacă se notează cu a raportul dintre pierderile constante în fier şi valoarea
nominală a pierderilor în cupru, Cun
Fe
ppa = , cu x, raportul dintre curentul
absorbit de la bornele secundare şi cel nominal:
nn SS
IIx 2
2
2 == , (6.50)
cu:
Tt
nf
eppk
2
1
12
−−
== , (6.51)
raportul de încărcare termică, ce scoate în evidenţă de câte ori pot fi mai mari pierderile în transformatorul utilizat în serviciul de scurtă durată decât în acelaşi transformator utilizat în serviciul continuu, alegerea puterii nominale a transformatorului se face în felul următor:
( ) akaS
xSS
f
ccn
−⋅+==
1 . (6.52)
Aceste mărimi, definite mai sus, sunt de obicei trecute în cataloage şi alegerea transformatorului se realizează mereu consultând aceste cataloage.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
199
CAPITOLUL 7 – MAŞINA ASINCRONĂ
7.1. Generalităţi. Construcţie.
Maşina asincronă este un dispozitiv rotativ ce permite transformarea energiei electrice în energie mecanică de rotaţie sau invers. Ea este alcătuită din două părţi constitutive principale: statorul şi rotorul.
Statorul este confecţionat din tole de oţel electrotehnic izolate electric între ele, având grosimea de ~ 0,5 mm. Tolele sunt de forma unei coroane circulare şi sunt prevăzute pe suprafaţa interioară cu crestături axiale în care se introduce înfăşurarea statorică, în general trifazată. Cele şase capete ale celor trei înfăşurări sunt scoase la cutia de borne statorice fixată pe carcasa maşinii şi sunt conectate în stea / triunghi sau se lasă utilizatorului libertatea de a realiza conexiunea statorică dorită. În cele mai multe cazuri cutia de borne statorice are şase borne legarea în stea sau în triunghi a statorului fiind sarcina utilizatorului maşinii. Bornele de intrare, respectiv de ieşire ale statorului sunt notate cu A, B, C, respectiv X, Y, Z şi sunt amplasate pe cutia de borne statorice după cum prezintă figura 7.1. Tot figura 7.1 prezintă şi modul în care se realizează conexiune stea, respectiv triunghi pentru stator. Miezul magnetic al statorului este rigidizat în interiorul unei carcase metalice confecţionate din oţel sau fontă. Carcasa este închisă la capete prin scuturi.
A
B
C
Z
X
Y C Y
A
B
Z
X
Conexiunea stea a statorului
Conexiunea triunghi a statorului
Figura 7.1.: Conexiunile cutiei de borne statorice la maşina asincronă
Rotorul este alcătuit din tole de oţel electrotehnic de formă cilindrică, prevăzute pe suprafaţa exterioară cu crestături în care se introduce

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
200
înfăşurarea rotorică. Tolele sunt fixate fie direct, fie prin intermediul unui butuc. În funcţie de înfăşurarea rotorului, maşinile asincrone se împart în:
- maşini asincrone cu rotorul bobinat;
- maşini asincrone cu rotorul în scurtcircuit sau în colivie.
În cazul maşinii cu rotorul bobinat, în crestăturile rotorului este introdusă înfăşurarea rotorului confecţionată din conductoare de aluminiu sau de cupru, izolate faţă de crestătură. Înfăşurarea trebuie să aibă acelaşi număr de poli şi de faze ca şi înfăşurarea statorului. În cazul înfăşurării trifazate, cele trei faze sunt legate în stea, iar capetele libere sunt conectate la trei inele fixate pe axul rotorului, izolate atât faţă de ax, cât şi între ele. Cu ajutorul unor perii confecţionate din bronz şi grafit, care calcă pe cele trei inele (colectorul – figura 7.2.), circuitul rotoric este închis pe un reostat de pornire sau de reglare a turaţiei. Cutia de borne rotorice rigidizată pe carcasa maşinii are, deci, trei borne în cazul maşinii asincrone trifazate.
Figura 7.2. Colectorul în cazul maşinii asincrone trifazate cu rotorul bobinat
La motorul cu rotorul în scurtcircuit, înfăşurarea rotorică este alcătuită din bare de cupru sau de aluminiu introduse în crestăturile rotorului, fără a fi izolate faţă de acestea. Barele sunt scurtcircuitate la capete prin inele de cupru sau de aluminiu, formându-se astfel o formă geometrică asemănătoare unei colivii de veveriţă din înfăşurările rotorice (figura 7.3).

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
201
Figura 7.3. Rotor în colivie
Funcţionarea maşinii asincrone se bazează pe interacţiunea dintre câmpul magnetic creat de curenţii ce parcurg înfăşurările statorice şi curenţii induşi de acest câmp magnetic în înfăşurările rotorice. Maşina poate funcţiona în mai multe regimuri:
- regimul motor: maşina primeşte energie electrică pe la bornele statorice şi produce energie mecanică pe la axul rotorului aflat în mişcare de rotaţie;
- regimul generator: maşina primeşte energie mecanică pe la axul rotorului (învârtit de un moment rotativ exterior) şi cedează energie electrică pe la bornele statorului;
- regimul de frână electromagnetică: maşina primeşte atât energie electrică pe la bornele statorice cât şi energie mecanică pe la axul rotorului dar cele două tind să imprima acţiuni contrarii.
În regimul motor, statorul maşinii asincrone trifazate (despre care vom discuta mai detaliat în cele ce urmează) este alimentat de la reţeaua trifazată, iar curenţii statorici generează fiecare în spaţiul comun în care există statorul şi rotorul câmpuri magnetice ce au o variaţie sinusoidală (după cum şi curenţii statorici variază sinusoidal). Cele trei înfăşurări statorice sunt dispuse spaţial la unghiuri egale între ele de câte
32π .
Tensiunile de alimentare de la reţeaua trifazată simetrică sunt defazate între ele tot cu câte
32π în timp. Receptorul trifazat format din conexiunile
statorice este unul echilibrat, întrucât cele trei înfăşurări sunt întocmai

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
202
identice. Acest lucru conduce la un sistem trifazat simetric de curenţi statorici şi, implicit, la un sistem trifazat simetric de câmpuri magnetice ce urmează a se compune. Câmpul magnetic rezultant se numeşte câmp magnetic învârtitor şi are aceeaşi natură cu un câmp magnetic constant ca modul ce se roteşte cu turaţia constantă n1. numită turaţie de sincronism. Fluxul magnetic prin înfășurările rotorului va fi variabil întrucât câmpul magnetic este variabil, ceea ce – în virtutea legii inducţiei electromagnetice – va da naştere la tensiuni electromotoare induse în rotor. Înfăşurările rotorului sunt fie scurtcircuitate fie formează un circuit închis pe un reostat, astfel că apar curenţi rotorici. Interacţiunea electromagnetică dintre câmpul magnetic învârtitor şi curenţii rotorici va genera forţe electromagnetice, care vor pune în mişcare de rotaţie rotorul. Desigur, şi curenţii induşi în rotor vor genera un câmp magnetic iar compunerea acestuia cu cel generat de stator va fi de fapt rezultanta finală a câmpului magnetic.
Forţa electromagnetică generează un cuplu motor la arborele rotorului şi îl va roti în acelaşi sens cu sensul de rotaţie al câmpului magnetic învârtitor. Turaţia rotorului în regim motor este întotdeauna mai mică decât turaţia de sincronism, a câmpului magnetic învârtitor, egalitatea celor două turaţii nu este posibilă deoarece în acest caz fluxul prin spirele rotorice nu ar mai fi variabil şi nu s-ar mai induce în rotor nici o tensiune electromotoare (viteza relativă de rotaţie a câmpului magnetic învârtitor faţă de rotor ar fi nulă, fiindcă ele s-ar roti cub aceeaşi turaţie şi, ca atare tensiunea electromotoare indusă în spirele rotorice ar fi nulă). Din însumarea cuplului pentru fiecare spiră rezultă un cuplu rezultant în maşină – numit cuplu electromagnetic al maşinii. Desigur cuplul activ pe care maşina îl va ceda efectiv la arbore către sarcina sa mecanică va fi ceva mai mică decât acest cuplu electromagnetic, datorită frecărilor din lagăre şi a ventilaţiei maşinii. În regim generator, forţa exterioară ce învârte rotorul cu o turaţie mai mare decât cea de sincronism generează în stator o tensiune indusă de sens contrar.
Se defineşte alunecarea maşinii asincrone ca fiind:
1
21
nnns −
= , (7.1)
unde p
fn 11
60 ⋅= este turaţia de sincronism a câmpului magnetic învârtitor, 2n
este turaţia rotorului, 1f este frecvenţa semnalului electric ce alimentează

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
203
statorul, iar p este numărul de perechi de poli, adică de perechi de crestături / fază ai statorului. Turaţia rotorului şi alunecarea iau valori pentru cele trei regimuri de funcţionare ale maşinii asincrone în intervalele prezentate în tabelul 7.1.
Regim funcţionare Motor Generator Frână electromagnetică
Turaţie rotor n 10 nn <≤ 1nn ≥ 0<n
Alunecare s 10 ≤< s 0≤s 1>s
Tabelul 7.1.: Valorile turaţie şi alunecării pentru regimurile maşinii asincrone
7.2. Ecuaţiile motorului asincron cu rotorul calat
În situaţia în care statorul maşinii asincrone trifazate este alimentat de la reţeaua trifazată, iar rotorul este blocat cu un dispozitiv mecanic, maşina se aseamănă foarte mult cu un transformator trifazat la care cele două înfăşurări sunt dispuse pe două miezuri diferite. Înfăşurarea rotorică fiind scurtcircuitată, ceea ce corespunde regimului de scurtcircuit, tensiunea de alimentare trebuie să fie mai mică decât cea nominală, astfel încât intensităţile curenţilor prin cele două înfăşurări să nu depăşească valorile nominale. Spre deosebire de transformator, la care tensiunea de scurtcircuit este de ordinul a 12% din tensiunea nominală, la maşina asincronă tensiunea de scurtcircuit ajunge la 25% din tensiunea nominală.
Rotorul fiind blocat, 02 =n , iar alunecarea 1=s , astfel că frecvenţele curenţilor din stator şi rotor vor fi egale:
112 ffsf =⋅= . (7.2)
In mod asemănător ca la transformator, putem afirma că fluxul magnetic util induce în cele două înfăşurări tensiunile electromotoare cu valorile efective:
Φ⋅⋅⋅=Φ⋅⋅⋅=
212
111
44,444,4
NfENfE
, (7.3)
unde 21, NN sunt numerele de spire ale celor două înfăşurări.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
204
Fluxul magnetic de dispersie induce în stator şi rotor tensiunile electromotoare:
⋅⋅=⋅⋅=
2212
1111
ILEILE
d
d
ωω
, (7.4)
unde 11 2 f⋅⋅= πω este pulsaţia semnalului electric din stator iar 21, LL sunt inductanţele de dispersie ale celor două înfăşurări. La transcrierea în imagini complexe a acestor ecuaţii se ţine cont de faptul că fluxul magnetic are o variaţie sinusoidală cu tω şi se obţine:
⋅⋅−=⋅⋅⋅−=⋅⋅−=⋅⋅⋅−=
⋅Φ⋅⋅⋅−=Φ
⋅⋅⋅−=
⋅Φ⋅⋅⋅−=Φ
⋅⋅⋅−=
222212
111111
21212
11111
44,42
44,42
IXjILjEIXjILjE
jNfNjE
jNfNjE
d
d
ωω
ω
ω
. (7.5)
Astfel, se obţin ecuaţiile motorului cu rotorul calat, foarte asemănătoare cu cele ale transformatorului în scurtcircuit:
⋅−=⋅⋅⋅−⋅−==
⋅+−=⋅⋅⋅+⋅+−=
222222222
111111111
0 IZEIXjIREUIZEIXjIREU
, (7.6)
unde 2,1, =∀⋅+= kXjRZ kkk .

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
205
7.3. Ecuaţiile motorului asincron cu rotorul învârtitor
În acest caz maşina asincronă este echivalentul unui transformator generalizat, care pe lângă valorile tensiunilor şi curenţilor, modifică şi valorile frecvenţei de la o înfăşurare la alta ( )12 fsf ⋅= . Câmpul magnetic util induce în cele două înfăşurări tensiunile electromotoare cu valorile efective:
⋅=Φ⋅⋅⋅⋅=Φ⋅⋅⋅==Φ⋅⋅⋅=
221222
1111
44,444,444,4
EsNfsNfEENfE
s
s , (7.7)
unde 21, NN sunt numerele de spire ale celor două înfăşurări, iar s este alunecarea maşinii.
Fluxul magnetic de dispersie induce în stator şi rotor tensiunile electromotoare:
⋅=⋅⋅=
=⋅⋅=
22222
11111
dsd
dsd
EsILEEILE
ω
ω, (7.8)
unde 22 2 f⋅⋅= πω este pulsaţia semnalului electric din stator iar 21, LL sunt inductanţele de dispersie ale celor două înfăşurări. La transcrierea în imagini complexe a acestor ecuaţii se ţine cont de faptul că fluxul magnetic are o variaţie sinusoidală cu tω şi se obţine:
⋅⋅⋅−=⋅⋅⋅−=⋅⋅−=⋅⋅⋅−=
⋅Φ⋅⋅⋅⋅−=Φ
⋅⋅⋅−=
⋅Φ⋅⋅⋅−=Φ
⋅⋅⋅−=
222222
111111
21222
11111
44,42
44,42
IXsjILjEIXjILjE
jNfsNjE
jNfNjE
sd
sd
s
s
ωω
ω
ω
. (7.9)
Observăm că spre deosebire de transformator, unde rezistenţa înfăşurării secundare era constantă, la motorul asincron rezistenţa rotorului este echivalentă cu o rezistenţă care variază în funcţie de alunecare, deci de viteza de rotaţie, de turaţie. Ecuaţiile motorului asincron cu rotorul învârtitor devin:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
206
⋅=⋅+⋅
⋅⋅−⋅−=⋅⋅⋅⋅−⋅−⋅==
⋅+−=⋅⋅⋅+⋅+−=
012211
2222
2222222
111111111
0
INININ
IXjIs
REIXsjIREsU
IZEIXjIREU
. (7.10)
Dacă se raportează înfăşurarea rotorului la cea a statorului (se înlocuieşte rotorul cu o înfăşurare echivalentă ce are acelaşi număr de spire ca cea a statorului), şi se notează mărimile cu raportate cu „prim”, ecuaţiile devin:
=+
⋅⋅−⋅−=
⋅⋅⋅+⋅+−=
021
2222
2
111111
'
'''''0
III
IXjIs
RE
IXjIREU
. (7.11)
Diagrama fazorială pentru motorul asincron trifazat se trasează în mod asemănător cu cea pentru transformator, ţinând cont de ecuaţiile transformatorului.
7.4. Bilanţului puterilor în motorul asincron trifazat
Motorul asincron absoarbe de la reţeaua de alimentare cu energie electrică o putere activă 1P . Înfăşurarea statorică introduce pierderi de natură Joule-Lenz, numite pierderi în cupru statorice şi notate 1cup . Miezul magnetic al statorului introduce pierderi în fier 1Fep cauzate fenomenelor de magnetizare şi pierderilor prin curenţii turbionari ce se formează prin acest miez. Diferenţa – denumită putere electromagnetică şi notată cu δP este transmisă prin intermediul cuplajului magnetic dintre stator şi rotor (prin câmpul magnetic învârtitor) la rotorul maşinii. În rotor intervin pierderi în cupru, respectiv în fier rotorice 22 , FeCu pp . Deoarece frecvenţa din rotor este
12 fsf ⋅= , mult mai mică decât cea din stator, iar pierderile în fier sunt proporţionale cu frecvenţa, pierderile în fier rotorice sunt în general neglijate ( )02 ≅Fep . Diferenţa de putere este o putere mecanică MP , dar până la arborele maşinii mai apar nişte pierderi de natură mecanică vmp + . Acest bilanţ al puterilor se poate pune în următoarele ecuaţii:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
207
2211211111 PppppPpppPppP vmCuFeCuMCuFeCuFeCu ++++=+++=++= +δ
(7.12)
Evident că în această ecuaţie 2P este puterea utilă pe care motorul o cedează la arborele său. Acest bilanţ al puterilor poate lua şi forma unei reprezentări grafice, precum în figura 7.4.
P1
pCu1 pFe1 pCu2
P2
pFeu2=0 pm+v
STATOR ROTOR
Figura 7.4.: Bilanţul puterilor în motorul asincron
Puterile electromagnetică şi mecanică pot fi exprimate şi în funcţie de cuplul electromagnetic M :
⋅Ω=⋅Ω=MPMP
M
1δ, (7.13)
unde ΩΩ ,1 sunt vitezele unghiulare de rotaţie ale câmpului magnetic învârtitor, respectiv ale rotorului.
Din relaţia de bilanţ al puterilor (7.12) se observă că diferenţa dintre aceste două puteri este:
2CuM pPP =−δ . (7.14)
Din aceste relaţii se deduce, ţinând cont şi de relaţia de definiţie a alunecării şi de faptul că viteza unghiulară este o mărime cu aceeaşi semnificaţie fizică turaţiei, doar are altă unitate de măsură
⋅
=Ω60
2 nπ , se
deduce:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
208
δδδ
δ PspP
pP
PPn
nns CuCuM ⋅=⇒=
−=
ΩΩ−Ω
=−
= 22
1
1
1
1 . (7.15)
7.5. Schema echivalentă în „T” a motorului asincron trifazat
Cuplajul dintre stator şi rotor este de natură magnetică, iar sarcina maşinii este denatură mecanică şi acest lucru îngreunează mult studiul circuitelor electrice în care o maşină asincronă este inclusă în calitate de consumator (curentul absorbit de maşină depinde de sarcina mecanică legată la axul acesteia). Pentru a elimina acest dezavantaj, în schemele electrice maşina asincronă se înlocuieşte printr-o schemă echivalentă în care cuplajul magnetic şi sarcina mecanică sunt modelate de un circuit electric. În general, se pot modela o infinitate de scheme echivalente, dar se utilizează numai acelea care satisfac anumite criterii de simplitate.
Schemele echivalente se deduc plecând de la ecuaţiile motorului scrise în mărimi raportate (7.11). Astfel, calculând din aceste ecuaţii curenţii 210 ',, III , se poate construi schema echivalentă în „T”, pe fază a motorului asincron trifazat precum în figura 7.5.
Figura 7.5.: Schema echivalentă pe fază a motorului asincron trifazat
Având în vedere faptul că cele trei faze ale maşinii asincrone formează un receptor echilibrat, schema echivalentă este identică pentru fiecare fază din cele trei. Din acest motiv se figurează întotdeauna doar o schemă, presupunând cunoscut faptul că maşina trifazată este modelată de trei asemenea scheme identice alimentate de la un sistem trifazat simetric de tensiuni.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
209
Circuitul echivalent în „T” se mai utilizează şi într-o variantă uşor diferită, în care latura corespunzătoare circuitului de magnetizare este alcătuită din două elemente conectate în paralel – o rezistenţă FeR corespunzătoare pierderilor în fier şi o reactanţă de magnetizare mX . Acest mod de reprezentare este utilizat pentru a se pune în evidenţă cele două componente ale curentului de mers în gol (cea activă şi cea reactivă). Această variantă a schemei echivalente în „T” este ilustrată în figura 7.6.
U1
I1
U'2
I'2
XmRFe
R'2/sR1 X'2X1
I0
I0a I0r
Figura 7.6.: Schema echivalentă în „T” – varianta cu două elemente conectate în paralel pe latura transversală
Parametrii schemei echivalente în T se determină din încercările în gol şi în scurtcircuit ale motorului asincron trifazat (maşina funcţionând în regim motor). Aceste încercări şi determinări vor fi tratate în cadrul subiectelor referitoare la regimurile de funcţionare ale motorului.
7.6. Caracteristica cuplului electromagnetic ( )sfM = pentru motorul asincron
Pentru a determina ecuaţia acestei caracteristici se pleacă de la expresia pierderilor de putere în înfăşurările rotorice:
12 Ω⋅⋅=⋅= MsPspCu δ , (7.16)
de unde se obţine pentru momentul electromagnetic al motorului:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
210
.''3
1
222
1
2
Ω⋅⋅⋅
=Ω⋅
=s
IRspM Cu (7.17)
Din schema echivalentă a motorului, curentul 2'I se poate exprima sub forma:
( ),
''''
212
1
1
21
12
XcXjs
RcR
UZcZ
UI⋅+⋅+
⋅+
−=⋅+
−= (7.18)
de unde pătratul modulului său se deduce a fi:
( )221
22
1
212
2
'''
XcXs
RcR
UI⋅++
⋅+
= . (7.19)
Introducând această expresie în ecuaţia (7.17), obţinem pentru moment:
( ).
'''3
221
22
1
21
1
2
1
2
XcXs
RcR
Us
RspM Cu
⋅++
⋅+
⋅Ω⋅⋅
=Ω⋅
= (7.20)
Observăm din ecuaţia obţinută că momentul electromagnetic al motorului asincron depinde de:
- rezistenţa înfăşurărilor rotorice 2'R ;
- tensiunea de alimentare 1U ;
- alunecarea s .
Pentru a stabile valoarea alunecării corespunzătoare cuplului maxim, se derivează expresia acesteia în raport cu alunecarea şi derivata obţinută se egalează cu zero. Astfel se obţine alunecarea critică:
( )2212
1
2
'
'0XcXR
Rcsds
dMc
⋅++
⋅=⇒= . (7.21)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
211
Momentul maxim este chiar valoarea momentului pentru alunecarea egală cu această valoare critică:
( )2212
111
21
max'
123
XcXRRcUM
⋅+++⋅
Ω⋅⋅⋅
= . (7.22)
Din expresiile alunecării critice şi a momentului maxim se observă că în timp ce alunecarea critică depinde de valoarea rezistenţei totale a circuitului rotoric, momentul maxim nu depinde de această valoare. O expresie mai simplă pentru cuplu se obţine dacă se face raportul dintre cuplul corespunzător unei alunecări oarecare şi cuplul maxim:
cc
c
c
sRc
Rss
ss
sRc
R
MM
⋅⋅
⋅++
⋅
⋅+⋅
=
2
1
2
1
max
'2
'12
, (7.23)
expresie care se simplifică la o formă binecunoscută şi sub denumirea de ecuaţia lui Kloss, dacă se ţine cont de faptul că 1
'21 <<⋅
⋅ csRc
R :
ss
ssM
Mc
c
+=
2
max. (7.24)
Se observă în această expresie că pentru valori ale alunecării mai mici decât alunecarea critică:
ssMM
ss
ssss
c
c
cc ⋅
⋅≅⇒<<⇒< max2
, (7.25)
ceea ce înseamnă că momentul electromagnetic dezvoltat de motor creşte liniar cu alunecarea, în timp ce pentru valori ale alunecării mai mari decât alunecarea critică:
cc
cc s
sMM
ss
ssss ⋅
⋅≅⇒<<⇒> max2
, (7.26)
ceea ce exprimă o scădere liniară a momentului cu alunecarea.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
212
Caracteristica cuplului este reprezentată în figura 7.7. Pe această caracteristică se identifică regimurile de funcţionare ale maşinii asincrone:
- regimul de motor pentru 10 ≤< s ;
- regimul de frână electromagnetică pentru 1>s ;
- regimul de generator electric pentru 0≤s .
Porţiunea de caracteristică corespunzătoare regimului motor are două parţi:
- una stabilă pentru css < ;
- una instabilă pentru css > .
De asemenea se observă pe această caracteristică faptul că momentul la pornire al motorului asincron are valori relativ mici, ceea ce constituie un dezavantaj, iar momentul nominal al motorului este apropiat de momentul maxim dar întotdeauna mai mic decât acesta.
Mmax
-Mmax
sc
-sc
Mp
sp=10
GENERATOR MOTOR Frina
s
Figura 7.7.: Caracteristica cuplului maşinii asincrone trifazate

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
213
7.7. Caracteristica mecanică naturală ( )Mfn = pentru motorul asincron
Forma caracteristicii mecanice a motorului asincron se deduce din cea a caracteristicii cuplului, ţinând cont de relaţia dintre turaţie şi alunecare:
( ) 11
1 1 nsnn
nns ⋅−=⇒−
= . (7.27)
Figura 7.8. ilustrează caracteristica mecanică naturală pentru o maşină asincronă trifazată. Pe această caracteristică se poate analiza stabilitatea în funcţionare a motorului asincron.
În acest sens să considerăm că motorul funcţionează într-un punct A de pe caracteristica mecanică naturală, punct de coordonate ( )cAA nnM >, . Dacă acesta este punctul de funcţionare este evident faptul că momentul dezvoltat de motor egalează momentul rezistent al utilajului acţionat de acesta:
rAA MM = . (7.28)
Dacă dintr-un motiv oarecare, momentul rezistent creşte la o valoare mai mare rArA MM >' , turaţia motorului va scădea iar momentul dezvoltat de motor creşte până ce egalează din nou momentul rezistent al utilajului
rAA MM '' = . Maşina funcţionează apoi în regim stabil în noul punct A’ ( )AA nM ',' . Din acest motiv porţiunea din caracteristica mecanică pentru care cnn > corespunde unei zone stabile de funcţionare.
Se consideră un punct B ( )cBB nnM <, de funcţionare în cealaltă porţiune a caracteristicii mecanice corespunzătoare lui cnn < . Dacă acesta este punct de funcţionare este evident faptul că momentul dezvoltat de motor egalează momentul rezistent al utilajului acţionat de acesta:
rBB MM = . (7.29)
Dacă dintr-un motiv oarecare, momentul rezistent creşte la o valoare mai mare rBrB MM >' , turaţia motorului va scădea iar momentul dezvoltat de motor scade şi el, astfel că motorul este frânat până la oprire. Dacă momentul rezistent scade la o valoare mai mică rBrB MM <'' , turaţia motorului

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
214
va creşte, iar momentul dezvoltat de motor creşte şi el, astfel că motorul este accelerat. Astfel, porţiunea din caracteristica mecanică pentru care
cnn < corespunde unei zone instabile de funcţionare.
Figura 7.8.: Caracteristica mecanică naturală a maşinii asincrone trifazate
7.8. Caracteristica randamentului ( )2Pf=η pentru motorul asincron
Randamentul motorului asincron este definit ca raportul dintre puterea utilă transmisă utilajului acţionat şi puterea absorbită de la reţeaua electrică de alimentare:
[ ]%1001
2 ⋅=PPη . (7.30)
Caracteristica randamentului exprimă dependenţa randamentului de puterea utilă sau de raportul dintre puterea utilă şi puterea utilă nominală pentru tensiune nominală în stator şi frecvenţă constantă a tensiunii de alimentare. Conform bilanţului puterilor în motor, randamentul se poate scrie:
1001212
2 ⋅++++
=+vmFeCuCu ppppP
Pη . (7.31)
In această dependenţă randamentul ia valoare maximă atunci când pierderile de putere constante sunt egale cu cele variabile. În general, motoarele asincrone trifazate sunt astfel dimensionate încât randamentul
n 1
M p M max 0
n
M
n c
A A'
B' B

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
215
să aibă o valoare maximă pentru 75,02
2 ≅nP
P . Figura 7.9. ilustrează
caracteristica randamentului.
1
0,750 P2/P2n
0,9
Figura 7.9.: Caracteristica randamentului pentru motorul asincron trifazat
7.9. Caracteristica factorului de putere ( )2cos Pf=ϕ pentru motorul asincron
Motorul asincron este asemănător unei bobine cu miez de fier, adică are un caracter inductiv. Astfel, curentul este defazat în permanenţă în urma tensiunii de alimentare. Motorul trebuie să absoarbă de la reţea o putere reactivă necesară magnetizării miezului. Această putere reactivă practic este independentă de regimul de funcţionare, având aproximativ aceeaşi valoare atât pentru funcţionare în gol cât şi pentru funcţionarea în sarcină a motorului. La funcţionarea în gol sau la o sarcină puterea activă absorbită de la reţea are valori mici astfel că factorul de putere este mic. Pe măsură ce puterea activă creşte, sarcina se măreşte iar puterea reactivă rămâne constantă şi factorul de putere se măreşte.
Valoarea scăzută a factorului de putere pentru puteri mult mai mici decât puterea nominală este un dezavantaj care se compensează prin conectarea în paralel cu alimentarea motorului a unor baterii de condensatoare. Figura 7.10. prezintă caracteristica factorului de putere pentru motorul asincron trifazat.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
216
1
10
cos
P2/P2n
0,1
Figura 7.10.: Caracteristica factorului de putere pentru motorul asincron trifazat
7.10. Funcţionarea în gol a motorului asincron trifazat
Sarcina motorului este de natură mecanică. Funcţionarea în gol înseamnă aşadar lipsa unei sarcini mecanice la arborele motorului şi alimentarea statorului de la tensiune nominală. Curentul absorbit de la reţea în acest caz poartă numele de curent de mers în gol 01 II = , iar puterea absorbită de la reţea de putere de mers în gol 01 PP = . Funcţionarea în gol presupune o turaţie a rotorului foarte apropiată de turaţia de sincronism:
∞→⇒→⇒→s
Rsnn 212
'0 . (7.32)
Astfel, în schema echivalentă în „T” o latură este neglijabilă şi schema devine cea prezentată în figura 7.11.:
U1
I0
Xm
Rm
R1 X1
E1
I0
Figura 7.11.: Schema echivalentă în „T” pe fază pentru funcţionarea în gol a motorului asincron trifazat

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
217
Puterea activă absorbită de motor se poate scrie:
( ) 2010 3 IRRP m ⋅+⋅= , (7.33)
iar din legea lui Ohm:
( ) ( )212
10
10 mm
n XXRRI
UZ +++== . (7.34)
Din cele două relaţii de mai sus se deduc foarte uşor rezistenţa de mers în gol şi reactanţa de mers în gol a motorului asincron:
⋅
−
=+=
⋅=+=
2
20
0
2
0
110
20
010
3
3
IP
IUXXX
IPRRR
nm
m
. (7.35)
Datorită faptului că la mersul în gol curentul absorbit de la reţea este mult mai mic decât cel nominal, pierderile în cupru sunt neglijabile în cazul funcţionării în gol a motorului. Astfel, puterea utilă fiind şi ea nulă, puterea absorbită – adică cea de mers în gol – aproximează foarte bine suma dintre pierderile în fier şi pierderile mecanice şi de ventilaţie din motor:
vmFe ppP ++= 10 . (7.36)
7.11. Funcţionarea în scurtcircuit a motorului asincron trifazat
Sarcina motorului este de natură mecanică. Funcţionarea în scurtcircuit înseamnă aşadar calarea, blocarea arborelui motorului. Dacă alimentarea motorului în aceste condiţii se face la tensiune nominală avem de-a face cu nun scurtcircuit accidental care duce la curenţi foarte mari prin înfăşurări, ce pot arde izolaţia acestora şi apoi înfăşurările în sine sau pot conduce la decuplarea elementelor de protecţie de pe cale alimentării motorului. Pentru a limita curentul absorbit de la reţea la o valoare sigură pentru funcţionarea motorului, adică la valoarea nominală, motorul va trebui alimentat la o tensiune mai mică decât cea nominală, tensiune ce poartă

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
218
numele de tensiune de scurtcircuit nsc UUU 11 <= . Puterea absorbită de la reţea în acest caz poartă numele de putere de scurtcircuit scPP =1 . Acesta este cazul încercării în scurtcircuit. Funcţionarea în scurtcircuit presupune o turaţie nulă a rotorului:
22
2 ''10 Rs
Rsn =⇒=⇒= . (7.37)
Astfel, în schema echivalentă în „T” o latură este neglijabilă şi schema devine cea prezentată în figura 7.12.:
Usc
I1n
X'2
R'2
R1 X1
I1n
Figura 7.12.: Schema echivalentă în „T” pe fază pentru funcţionarea în scurtcircuit a motorului asincron trifazat
Puterea activă absorbită de motor se poate scrie:
( ) 2121 '3 nsc IRRP ⋅+⋅= , (7.38)
iar din legea lui Ohm:
( ) ( )2212
211
'' XXRRI
UZn
scsc +++== . (7.39)
Din cele două relaţii de mai sus se deduc foarte uşor rezistenţa de scurtcircuit şi reactanţa scurtcircuit a motorului asincron:
⋅
−
=+=
⋅=+=
2
21
2
121
21
21
3'
3'
n
sc
n
scsc
n
scsc
IP
IUXXX
IPRRR
. (7.40)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
219
Puterea absorbită la funcţionarea în scurtcircuit aproximează foarte bine suma dintre pierderile în cupru statorice şi cele rotorice:
21 CuCusc ppP += . (7.41)
Pornirea motorului asincron trifazat
La pornirea directă a motorului asincron apar două probleme:
- moment la pornire mic, considerabil mai mic decât momentul nominal al respectivului motor;
- curent absorbit la pornire mare, de 4-7 ori mai mare decât curentul nominal.
Pentru a elimina aceste dezavantaje se utilizează metode de pornire care se aleg în funcţie de tipul rotorului.
7.12. Pornirea motorului asincron trifazat cu rotorul bobinat
Din analiza caracteristicii cuplului se observă faptul că valoarea maximă a momentului nu depinde de rezistenţa din circuitul rotoric, în timp ce alunecarea critică creşte odată cu rezistenţa totală a circuitului rotoric. Aşadar, alegând o valoare convenabilă pentru rezistența de pornire inserată în circuitul rotoric, se poate obţine un moment la pornire egal chiar cu momentul maxim. În general, pornirea se face în trepte rezistive conectate în circuitul rotoric, trepte convenabil alese pentru ca pe tot timpul pornirii momentul dezvoltat de motor să varieze într-un interval situat deasupra momentului nominal al maşinii şi sub momentul maxim al acesteia. Se aleg cel mai adesea ca limite ale momentului de pornire:
( )( )
⋅→=
⋅→=
maxmax
min
9,08,0
4,11,1
MMMM
p
np. (7.42)
Caracteristicile obţinute pentru funcţionarea motorului cu rezistenţe suplimentare, externe în circuitul rotoric se numesc caracteristici artificiale.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
220
Pornirea în trepte reostatice conectate în circuitul rotoric se realizează după următorul algoritm:
1. Se porneşte motorul cu o rezistenţă a circuitul rotoric astfel aleasă încât la pornire momentul să fie egal cu maxpM . Calculul valorii acestei prime trepte de pornire se face ţinând cont de relaţia lui Kloos scrisă pentru punctul ( )max,1 pMMsA == . Din ecuaţia lui Kloos se determină alunecarea critică pe această primă caracteristică artificială 1cs , de unde se deduce valoarea primei trepte rezistive de pornire, ţinând cont de aproximativa proporţionalitate dintre alunecarea critică şi rezistenţa totală din circuitul rotoric.
1
11
22
max
max
max
max1
1
1
max
max −
+=⇒
+=
ppc
c
c
p
MM
MMss
sMM
, (7.43)
−= 11
21c
cp s
SRR . (7.44)
2. Motorul se va ambala pe această primă caracteristică artificială întrucât momentul dezvoltat de el este mai mare decât momentul rezistiv al utilajului acţionat (mai mic sau egal cu momentul nominal al motorului), iar atunci când momentul a scăzut la valoarea de minpM , se cuplează cea de a doua treaptă rezistivă (mai mică decât prima) în circuitul rotoric. Pentru a calcula valoarea celei de a doua trepte rezistive, se scrie relaţia lui Kloos pe prima caracteristică artificială în punctul ( )min, pB MsB pentru a afla alunecarea la care se face schimbarea treptelor rezistive Bs , după care se scrie Kloos pe cea de a caracteristică artificială în punctul ( )max, pB MsD pentru a afla alunecarea critică pe cea a doua caracteristică 2cs . De aici se deduce valoarea celei de a doua trepte rezistive.
−
+=⇒
+= 112
2
min
max
min
max
11
1
max
min
ppcB
B
c
c
B
p
MM
MM
ss
ss
ssM
M, (7.45)
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
221
−
+=⇒
+= 112
2
max
max
max
max2
2
2
max
max
ppBc
B
c
c
B
p
MM
MM
ss
ss
ssM
M (7.46)
−= 12
22c
cp s
SRR . (7.47)
3. Din nou, motorul se ambalează – de data aceasta pe cea de a doua caracteristică artificială – între punctele ( )max, pB MsD şi ( )min, pE MsE . Din Kloos în ( )min, pE MsE se deduce Es în mod similar cu ecuaţia 7.45 (de această dată locul lui sc1 va fi luat de sc2).
4. Se schimbă din nou treapta din circuitul rotoric şi se trece în punctul ( )max, pE MsF , în care scriind Kloos se află 3cs şi valoarea celei de a
trepte rezistive.
−
+=⇒
+= 112
2
max
max
max
max3
3
3
max
max
ppEc
E
c
c
E
p
MM
MM
ss
ss
ssM
M (7.48)
−= 13
23c
cp s
SRR . (7.49)
5. Acest algoritm se continuă până se ajunge la o alunecare critică mai mică decât alunecare critică de pe caracteristica mecanică naturală
cck ss < . Atunci înseamnă că algoritmul trebuie oprit şi sunt k-1 trepte de pornire.
Figurile 7.13. şi 7.14. prezintă schema electrică şi, respectiv, diagrama pornirii în trepte.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
222
k1
k2
k3
k4
Rp1
Rp2
Rp3
M3~
Figurile 7.13.: Schema electrică a pornirii în trepte a motorului asincron trifazat
Se observă că prima treaptă a pornirii este formată din înserierea tuturor rezistenţelor din schemă ( 321 ppp RRR ++ ), a doua numai din 32 pp RR + iar a treia numai din 3pR . Figura ilustrează o pornire în trei trepte rezistive în circuitul rotoric.
s0 1
M
Mmax
Mpmax
Mpmin
cmn
A
B
D
E
F
G
H
Figura 7.14.: Diagrama pornirii în trepte a motorului asincron trifazat

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
223
7.13. Pornirea motorului asincron trifazat cu rotorul în colivie
În acest caz metodele de pornire sunt diferite de cele ale motorului asincron cu rotorul bobinat deoarece la acest tip de motor nu se pot înseria rezistenţe în circuitul rotoric. Pornirea directă – constând din cuplarea directă a motorului la reţeaua de alimentare fără utilizarea unor instalaţii auxiliare – se aplică numai motoarelor cu puteri de până la 5,5 kW. În rest se utilizează una dintre metodele de pornire indirectă:
A) Pornirea cu bobine în circuitul statoric
Datorită căderilor de tensiune pe aceste bobine introduse în circuitul statoric, tensiunea de la bornele motorului va avea valori reduse. După ce motorul ajunge la turaţie nominală, bobinele se scurtcircuitează şi motorul funcţionează la tensiune nominală. Un dezavantaj al acestei metode este faptul că odată cu limitarea curentului la pornire, se scade considerabil şi momentul la pornire (astfel de exemplu, pentru un curent de pornire scăzut la np II ⋅= 3 , momentul la pornire ajunge la np MM ⋅= 4,0
B) Pornirea cu autotransformator
In circuitul de alimentare al statorului este introdus un autotransformator. Tensiunea de alimentare se variază în mai multe trepte de la 0 la tensiunea nominală, iar la final autotransformatorul se scoate din circuit, motorul ajungând să fie alimentat direct de la reţea. Avantajul faţă de metoda cu bobine este un moment la pornire ceva mai mare, iar dezavantajul este preţul mai ridicat.
C) Pornirea prin comutare stea-triunghi
Se utilizează numai în cazul motoarelor care în regim normal funcţionează în conexiune triunghi a statorului. La pornire, statorul se conectează în stea iar apoi, după ce motorul ajunge la turaţie nominală, se schimbă conexiunea statorului în triunghi. Schema electrică a acestei porniri este redată în figura 7.15. Metoda permite reducerea curentului la pornire de trei ori, dar şi momentul la pornire scade în acelaşi raport.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
224
M3~
AB
C
Y
Z
X
Figura 7.15.: Schema electrică a pornirii prin comutare stea-triunghi a alimentării statorului
7.14. Reglarea turaţiei motorului asincron trifazat
In acţionările electrice procesele tehnologice impun funcţionarea utilajelor la diverse turaţii, ceea ce conduce la necesitatea reglării turaţiei motoarelor de acţionare a acestor utilaje. Cele mai des utilizate metode de reglare a turaţiei motoarelor asincrone sunt:
- reglarea turaţiei prin introducerea unor rezistenţe în circuitul rotoric;
- reglarea turaţiei prin modificarea tensiunii de alimentare;
- reglarea turaţiei prin schimbarea numărului de poli;
- reglarea turaţiei prin schimbarea frecvenţei tensiunii de alimentare.
REGLAREA TURAŢIEI PRIN INTRODUCEREA UNOR REZISTENŢE ÎN CIRCUITUL ROTORIC
Din analiza caracteristicii cuplului electromagnetic ( )sfM = , se observă că pentru diferite valori ale rezistenţei totale a circuitului rotoric corespund aceleaşi valori ale momentului maxim al maşinii, dar alunecări diferite. Pe măsură ce rezistenţa creşte, alunecarea creşte, deci turaţia scade. Această metodă permite reducerea turaţiei faţă de cea de pe caracteristica

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
225
mecanică naturală de maxim trei ori. Fineţea reglării turaţiei depinde de numărul de trepte rezistive ce se intercalează în circuitul rotoric. Randamentul metodei este însă scăzut, deoarece apare un consum suplimentar de energie în aceste rezistenţe suplimentare din circuitul rotoric. Figura 7.16. ilustrează diagrama modificării frecvenţei motorului asincron prin introducerea unor rezistenţe în circuitul rotoric.
s0 1
M
Mmax
cmn
M
sa sb sc sd se
A B C D E
Figura 7.16.: Diagrama modificării frecvenţei motorului asincron prin introducerea unor rezistenţe în circuitul rotoric
Fineţea reglajului de turaţie în acest caz depinde de numărul de trepte rezistive din circuitul rotoric. Această reglare a turaţiei prin introducerea unor rezistenţe în circuitul rotoric este chiar o modalitate de frânare.
REGLAREA TURAŢIEI PRIN MODIFICAREA TENSIUNII DE ALIMENTARE
Din analiza caracteristicii cuplului electromagnetic ( )sfM = , se observă că momentul maxim este proporţional cu pătratul tensiunii de alimentare, iar alunecarea critică nu depinde de valoarea efectivă a acestei tensiuni. O familie de caracteristici de tensiune arată ca în figura 7.17., de unde se observă metoda că permite reglarea turaţiei în limite destul de reduse. În cazul motorului cu rotorul bobinat, deseori se combină această metodă cu introducerea treptelor rezistive în circuitul rotoric, ceea ce conduce la mărirea domeniului de reglare a turaţiei.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
226
s0 1
M
Mmax
cnc
A
sc
B
C
U1n
U1<U1n
U2<U1
M
sA sB sC
Figura 7.17.: Familia de caracteristici de tensiune pentru motorul asincron trifazat
REGLAREA TURAŢIEI PRIN INTRODUCEREA SCHIMBAREA NUMĂRULUI DE POLI
Din definiţia alunecării, turaţia rotorului se deduce a fi:
( ) ( )p
fsnsn 11
6011 ⋅⋅−=⋅−= , (7.50)
unde p este numărul de perechi de poli ai maşinii. Întrucât numărul de perechi de poli ai rotorului trebuie să fie egal cu cel ai statorului, metoda se aplică numai la motoarele cu rotorul în colivie. Schimbarea numărului de poli din stator se realizează prin modificarea conexiunilor înfăşurărilor. De exemplu pentru înjumătăţirea numărului de perechi de poli, se scoate o bornă mediană a fiecărei înfăşurări de pe fiecare fază şi se conectează alimentarea la capetele înfăşurării legate împreună şi la borna mediană.
7.15. Frânarea motorului asincron trifazat
Frânarea motorului asincron trifazat prin funcţionarea în regim de generator cu recuperare
Se consideră că maşina funcţionează în regim de motor la o turaţie 1nn < . Dintr-un motiv oarecare, exterior maşinii asincrone studiate (sarcină activă, un alt motor legat la arborele maşinii etc.), turaţia creşte la o valoare superioară turaţiei de sincronism. În acest caz – se observă pe

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
227
caracteristica mecanică – momentul devine negativ, adică de sens opus rotaţiei rotorului, deci are caracterul unui cuplu de frânare. Astfel, maşina va funcţiona în regim de generator, debitând energie în reţea şi îşi va reduce turaţia până la o valoare mai mică decât turaţia de sincronism. Figura 7.18. prezintă această metodă de frânare. Ecuaţia caracteristicii cuplului a maşinii asincrone trifazate asincrone în regim de frână cu recuperare este aceeaşi cu cea din regim motor (ecuaţia 7.24), cu menţiunea că pentru valori ale turaţiei mai mari decât turaţia de sincronism, valorile momentului devin negative.
n1
Mp Mmax0
n
M
nc
nB>n1
-MB
Figura 7.18.: Frânarea cu recuperare a motorului asincron trifazat
Frânarea dinamică a motorului asincron trifazat
Frânarea dinamică a motorului asincron trifazat constă în deconectarea statorului de la alimentarea sa trifazată şi în alimentara de la o sursă de tensiune continuă a două dintre bornele acesteia. Curentul continuu ce se stabileşte prin înfăşurările statorice va genera un câmp magnetic de inducţie constantă ca modul şi ca orientare. În rotorul care se roteşte în virtutea inerţiei în spaţiul în care se manifestă această inducţie magnetică continuă se va induce o tensiune electromotoare, care va da naştere la un curent rotoric. Forţa electromagnetică rezultată în urma interacţiunii dintre câmpul magnetic continuu şi curentul rotoric va frâna rotorul, întrucât de data aceasta rotorul se roteşte faţă de câmpul magnetic, nu invers cum era cazul câmpului magnetic învârtitor, şi curenţii rotorici vor avea sens opus celor din cazul funcţionării în regim motor. Astfel, şi forţa şi momentul forţei va fi de sens opus, adică de frânare.
Figura 7.19. prezintă caracteristica frânării dinamice a motorului asincron.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
228
n1
Mp Mmax0
n
M
nc
-MB
AB
MA
Figura 7.19.: Frânarea dinamică a motorului asincron trifazat
Frânarea în contracurent a motorului asincron trifazat
In acest caz se inversează două dintre fazele de alimentare a statorului între ele, ceea ce inversează sensul câmpului magnetic învârtitor. Turaţia de sincronism devine 1n− , cuplul electromagnetic îşi schimbă sensul, iar faţă de rotor în momentul iniţial al frânării, câmpul magnetic învârtitor se roteşte cu turaţia ( )21 nn +− . Pe caracteristica frânării în contracurent se observă că simpla inversare a două faze din stator, conduce la un moment de frânare foarte mic, chiar considerabil mai mic şi decât momentul de pornire pe c.m.n., şi la un curent de frânare foarte mare, mai mare decât curentul de pornire. Pentru a evita aceste dezavantaje majore, se introduce - simultan cu inversarea fazelor – o rezistenţa convenabilă în circuitul rotoric, rezistenţa care deplasează caracteristica de frânare, crescând momentul la frânare şi micşorând curentul. Figura 7.20. prezintă caracteristica frânării în contracurent.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
229
n1
Mp Mmax0
n
M
A
MA
-Mmax
B B'
-MB'-MB
R'2
R'2+RBMotor dreapta
Motor stanga
Frana dreapta
Figura 7.20.: Caracteristica frânării în contracurent a motorului asincron trifazat

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
230
CAPITOLUL 8 – MAŞINA DE CURENT CONTINUU
8.1. Generalităţi. Construcţie.
Maşina de curent continuu se compune din punct de vedere constructiv din următoarele componente de bază:
- Statorul format din miezul magnetic în care sunt fixaţi polii de excitaţie ai maşinii, poli prin care sunt înfăşurate bobinele de excitaţie, statorice. Aceste bobine, alimentate în curent continuu au menirea de a genera un câmp magnetic constant în spaţiul în care se află rotorul maşinii. În unele cazuri – mai ales al motoarelor de curent continuu foarte mici, de putere mică (motoraşele din aparatele electronice, din jucării, etc.) statorul nu se compune din înfăşurări alimentate în curent continuu, ci din magneţi permanenţi.
- Rotorul confecţionat din tole de oţel electrotehnic, de forma unui cilindru prevăzut cu crestături la periferia exterioară, prin care sunt trecute conductoarele înfăşurării rotorice. Înfăşurarea rotorică este cea care este poarta de energie electrică a maşinii de curent continuu. În regim motor pe la bornele rotorului primeşte maşina energie electrică, iar prin interacţiunea curentului rotoric cu inducţia magnetică statorică constantă, apare transformarea acesteia în energie mecanică de rotaţie.
- Colectorul maşinii, piesă ce permite scoaterea pe carcasa fixă a maşinii a capetelor înfăşurării rotorice ce se află în rotaţie în timpul funcţionării maşinii. Inelele dispuse în simetrie de rotaţie pe arborele rotorului sunt în contact alunecător cu perii de grafit ce apasă pe aceste inele datorită unor arcuri dispuse corespunzător.
Maşina de curent continuu prezintă mai multe regimuri de lucru:
- regimul motor: rotorul este alimentat cu energie electrică iar la arbore maşina cedează lucru mecanic (exemplu: motoraşele de la orice casetofon, cd-player);
- regimul generator: arborele maşinii este rotit din exterior, primind un lucru mecanic pe care îl transformă în energie electrică (exemplu: dinamul de la bicicletă, alternatorul de la automobile);

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
231
- regimul frână electromagnetică: arborele maşinii primeşte energie mecanică şi maşina este alimentată şi electric, dar cele două energii tind să imprime mişcări opuse maşinii.
În funcţie de modul de alimentare a circuitului statoric, de excitaţie, maşinile de curent continuu se clasifică în:
- maşina de curent continuu cu excitaţie independentă, la care înfăşurarea de excitaţie (statorică) este alimentată separat, de la o altă sursă de curent continuu decât circuitul rotoric;
- maşina de curent continuu cu excitaţie derivaţie, la care circuitul statoric este conectat în paralel cu cel rotoric;
- maşina de curent continuu cu excitaţia serie, la care circuitul statoric este conectat în serie cu cel rotoric;
- maşina de curent continuu cu excitaţia mixtă, la care rotorul este legat în paralel cu jumătate din înfăşurarea statorică şi această grupare paralel apoi în serie cu restul înfăşurării statorice.
Figura 8.1. ilustrează modul de simbolizare a circuitului rotoric (Ra) şi a circuitului de excitaţie (Rex), precum şi diferitele posibilităţi de legare a circuitului de excitaţie faţă de circuitul rotoric.
Figura 8.1. Conexiunile maşinii de curent continuu

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
232
8.2. Bilanţul puterilor în maşina de curent continuu
Vom examina bilanţul puterilor şi modalitatea de transformare a energiei în maşina de curent continuu, întâi în regimul de generator cu excitaţie independentă, antrenat cu turaţie constantă. Figura 8.2 prezintă schema electrică a unui asemenea generator, iar figura 8.3 este o ilustrare a fluxului de transformare a puterii în maşină.
O parte din puterea mecanică 1P furnizată generatorului trebuie să acopere pierderile mecanice şi pierderile în fier, restul fiind transformat în putere electromagnetică emP . Din puterea electromagnetică, o parte acoperă pierderile din înfăşurările rotorice – pierderile în cupru, iar o altă parte acoperă pierderile de contact perii-colector:
⋅∆=⋅=
abb
acCu
IUpIRp 2
, (8.1)
unde bU∆ reprezintă căderea de tensiune de contact. Ceea ce rămâne în urma acestor pierderi este puterea utilă:
( )abacabCuemaa IUIRIEppPIUP ⋅∆+⋅−⋅=−−=⋅= 22 . (8.2)
Împărţind ecuaţia 8.2 cu aI , se obţine pentru tensiunea electromotoare relaţia:
( ) aaabaca IRUUIRUE ⋅+=∆+⋅+= , (8.3)
unde s-a notat cu a
bca I
URR ∆+= rezistenţa totală a înfăşurării rotorice şi a
contactelor din colector. Ecuaţia 8.3. arată că la funcţionarea la turaţie constantă, tensiunea electromotoare are două componente: tensiunea la bornele generatorului şi căderea de tensiune pe rotor.
Pentru a examina bilanţul puterilor în regim motor cu excitaţia derivaţie, la turaţie constantă, vom considera de această dată că puterea 1P este puterea electrică absorbită de motor de la reţea:
( )exaaa IIUIUP +⋅=⋅=1 . (8.4)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
233
O parte din această putere acoperă pierderile din circuitul de excitaţie iar o altă parte pierderile din circuitul rotoric (înfăşurări + contact la colector):
⋅=⋅∆+⋅=+
⋅=22aaabacbc
exaex
IRIUIRppIUp
. (8.5)
Restul este puterea electromagnetică transferată părţii mecanice a motorului. Din aceasta o parte reprezintă pierderile în fierul rotoric iar alta pierderile mecanice. Diferenţa este puterea utilă furnizată la arborele motorului:
( ) ( )mFebcexmFeem pppppPppPP −−−−−=+−= 12 . (8.6)
Împărţind ecuaţia 8.5 cu aI , se obţine pentru tensiunea electromotoare relaţia:
( ) aaabaca IRUUIRUE ⋅+=∆+⋅+= , (8.7)
unde s-a notat cu a
bca I
URR ∆+= rezistenţa totală a înfăşurării rotorice şi a
contactelor din colector. Ecuaţia 8.7. arată că la funcţionarea la turaţie constantă, tensiunea electromotoare are două componente: tensiunea la bornele motorului şi căderea de tensiune pe rotor. Figura 8.4. prezintă schema electrică a unui motor de curent continuu cu excitaţia derivaţie iar figura 8.5 diagrama transferului de putere într-un asemenea motor.
Ra
Rex
Iex
I=Ia
Ua
Figura 8.2.: Schema electrică a unui generator cu excitaţie independentă

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
234
P1
pm pFe pCu
P2
pb
Pem
Figura 8.3.: Bilanţul puterilor pentru un generator cu excitaţie independentă
Ra
Rex
Iex
Ia
Ua
I=Ia+Iex
Figura 8.4.: Schema electrică a unui motor cu excitaţie derivaţie
P1
pex pCu+pb pFe
P2
pm
Pem
Figura 8.5.: Bilanţul puterilor pentru un motor cu excitaţie derivaţie

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
235
8.3. Caracteristicile generatoarelor de curent continuu cu excitaţia independentă
Figura 8.2. prezintă schema electrică a unei maşini de curent continuu cu excitaţia independentă. În situaţia în care maşina primeşte energie mecanică din exterior şi cedează energie electrică circuitului electric cuplat la bornele rotorului, ea funcţionează ca generator electric. Proprietăţile generatoarelor sunt analizate cu ajutorul unor caracteristici care stabilesc relaţiile între principalele mărimi care caracterizează funcţionarea acestora, şi anume: tensiunea la bornele rotorice aU , curentul în circuitul exterior I , curentul de excitaţie (statoric) exI , curentul rotoric aI , turaţia de rotaţie n . Deoarece generatoarele funcţionează în general la turaţie constantă, principalele caracteristici sunt ridicate presupunând acest parametru de valoare constantă ( )constn = .
Caracteristica de mers în gol este dependenţa ( )exa IfUU == 0 la constnIa == ;0 . Alura caracteristicii de mers în gol este ilustrată de figura 8.6.
0
0
Iex
Figura 8.6.: Caracteristica de mers în gol a generatorului de curent continuu cu excitaţia independentă
Determinarea experimentală a acestei caracteristici se începe de la o valoare pozitivă a curentului de excitaţie şi se micşorează curentul până la 0, după care se inversează sensul său şi se creşte din nou până la valoarea de la care s-a început determinarea. Astfel se obţine ramura coborâtoare a caracteristicii. Apoi se repetă procesul în sens invers şi se obţine ramura ascendentă.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
236
Caracteristica de funcţionare în sarcină reprezintă dependenţa ( )exa IfU = la constnconstIa =≠= ;0 . Alura caracteristicii este ilustrată în figura 8.7.
0
a
Iex
U0
Figura 8.7.: Caracteristica de sarcină a generatorului de curent continuu cu excitaţia independentă
Caracteristica externă reprezintă dependenţa ( )aa IfU = la constnconstIex =≠= ;0 . Alura caracteristicii este ilustrată în figura 8.8.
Caracteristica externă a unui generator electric exprimă capacitatea sa de a menţine constantă tensiunea de la bornele sale atunci când sarcina variază.
0
a
Ia
E
Inominal
Unominal
Figura 8.8.: Caracteristica externă a generatorului de curent continuu cu excitaţia independentă

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
237
Caracteristica de scurtcircuit reprezintă dependenţa ( )exsc IfI = la constnU a == ;0 . Alura caracteristicii este ilustrată în figura 8.9.
0
sc
Iex
Figura 8.9.: Caracteristica de scurtcircuit a generatorului de curent continuu cu excitaţia independentă
Caracteristica de reglaj reprezintă dependenţa ( )exa IfI = la constnconstU a == ; . Alura caracteristicii este ilustrată în figura 8.10.
Caracteristica de reglaj arată în ce sens şi cum trebuie variat curentul de excitaţie pentru ca la o sarcină variabilă să se menţină tensiunea la bornele generatorului constantă.
0
a
Iex
Figura 8.10.: Caracteristica de reglaj a generatorului de curent continuu cu excitaţia independentă

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
238
8.4. Caracteristicile generatoarelor de curent continuu cu excitaţia derivaţie
Figura 8.4. prezintă schema electrică a unei maşini de curent continuu cu excitaţia derivaţie. În situaţia în care maşina primeşte energie mecanică din exterior şi cedează energie electrică circuitului electric cuplat la bornele rotorului, ea funcţionează ca generator electric. Proprietăţile generatoarelor sunt analizate cu ajutorul unor caracteristici care stabilesc relaţiile între principalele mărimi care determină funcţionarea acestora, şi anume: tensiunea la bornele rotorice aU , curentul în circuitul exterior I , curentul de excitaţie (statoric) exI , curentul rotoric aI , turaţia de rotaţie n . Deoarece generatoarele funcţionează în general la turaţie constantă, principalele caracteristici sunt ridicate presupunând acest parametru de valoare constantă ( )constn = . Generatorul cu excitaţia derivaţie este un generator autoexcitat, înfăşurarea sa de excitaţie fiind alimentată din înfăşurarea rotorică. Maşina se autoexcită la pornire prin câmpul remanent al polilor de excitaţie. Astfel pornirea este posibilă dacă sensul de rotaţie este astfel ales încât câmpul de excitaţie să întărească câmpul remanent.
Caracteristica de mers în gol este dependenţa ( )exa IfUU == 0 la constnIa == ;0 . Alura caracteristicii de mers în gol este ilustrată de figura
8.11. Si la acest tip de generator caracteristica de mers în gol reprezintă curba de magnetizare a circuitului feromagnetic. Deoarece autoexcitarea este posibilă numai într-un singur sens, caracteristica va avea şi ea doar un singur sens (semn) al curentului de excitaţie.
0
U0
Iex
Figura 8.11.: Caracteristica de mers în gol a generatorului de curent continuu cu excitaţia derivaţie

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
239
Caracteristica de funcţionare în sarcină reprezintă dependenţa ( )exa IfU = la constnconstIa =≠= ;0 . Alura caracteristicii este ilustrată în figura 8.12.
0
a
Iex
U0
Figura 8.12.: Caracteristica de sarcină a generatorului de curent continuu cu excitaţia derivaţie
Caracteristica externă reprezintă dependenţa ( )aa IfU = la constnconstIex =≠= ;0 . Alura caracteristicii este ilustrată în figura 8.13.
Caracteristica externă a unui generator electric exprimă capacitatea sa de a menţine constantă tensiunea de la bornele sale atunci când sarcina variază. Caracteristica este mai căzătoare decât la generatorul cu excitaţie independentă deoarece la scăderea tensiunii contribuie şi căderea datorată curentului de excitaţie. Se observă că pe măsură ce rezistenţa de sarcină, tensiunea la borne scade, curentul creşte până la o valoare maximă denumită curent critic crI . Dacă se micşorează în continuare sarcina, creşte curentul din rotor cu creşterea tensiunii rotorice.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
240
0
Ua
Ia
E
Inominal
Unominal
Icr
Figura 8.13.: Caracteristica externă a generatorului de curent continuu cu excitaţia derivaţie
Caracteristica de scurtcircuit reprezintă dependenţa ( )exsc IfI = la constnU a == ;0 . Pentru generatorul cu excitaţia derivaţie această
caracteristică nu se poate ridica experimental deoarece excitaţia nu este separată, curentul de excitaţie depinde direct proporţional de tensiunea de la bornele rotorului. Aceasta fiind nulă şi curentul de excitaţie va fi nul.
Caracteristica de reglaj reprezintă dependenţa ( )exa IfI = la constnconstU a == ; . Alura caracteristicii este ilustrată în figura 8.14.
Caracteristica de reglaj arată în ce sens şi cum trebuie variat curentul de excitaţie pentru ca la o sarcină variabilă să se menţină tensiunea la bornele generatorului constantă.
0
a
Iex
Figura 8.14.: Caracteristica de reglaj a generatorului de curent continuu cu excitaţia derivaţie

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
241
8.5. Caracteristicile generatoarelor de curent continuu cu excitaţia serie
Figura 8.15. prezintă schema electrică a unei maşini de curent continuu cu excitaţia serie. În situaţia în care maşina primeşte energie mecanică din exterior şi cedează circuitului electric cuplat la bornele rotorului energie electrică, ea funcţionează ca generator electric. Proprietăţile generatoarelor sunt analizate cu ajutorul unor caracteristici care stabilesc relaţiile între principalele mărimi care determină funcţionarea acestora, şi anume: tensiunea la bornele rotorice aU , curentul în circuitul exterior I , curentul de excitaţie (statoric) exI , curentul rotoric aI , turaţia de rotaţie n . Deoarece generatoarele funcţionează în general la turaţie constantă, principalele caracteristici sunt ridicate presupunând acest parametru de valoare constantă ( )constn = . Generatorul cu excitaţia serie are statorul legat în serie cu rotorul, astfel că:
exa II = . (8.8)
Din această cauză, caracteristicile de funcţionare în gol, în scurtcircuit şi în sarcină nu se pot trasa, deoarece acestea presupun pe de o parte menţinerea constantă a curentului rotoric şi modificarea celui de excitaţie, sau, respectiv, trasarea dependenţei curentului rotoric de cel de excitaţie.
Caracteristica externă reprezintă dependenţa ( )aa IfU = la constnconstIex =≠= ;0 . Alura caracteristicii este ilustrată în figura 8.16.
Caracteristica externă a unui generator electric exprimă capacitatea sa de a menţine constantă tensiunea de la bornele sale atunci când sarcina variază. În acest caz, odată cu aI creşte şi exI , astfel că până la anumite valori ale curentului absorbit de la generator, tensiunea creşte cu acesta, iar apoi – după ce se atinge o saturaţie a circuitului magnetic – apare scăderea tensiuni de la borne odată cu creşterea curentului absorbit.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
242
Ra
Rex
Iex
Ia
Ua
I=Ia=Iex
Figura 8.15.: Schema electrică a generatorului de curent continuu cu excitaţia serie
0
Ua
Ia Figura 8.16.: Caracteristica externă a generatorului de curent continuu cu excitaţia serie
8.6. Cuplul de rotaţie al motorului de curent continuu
Se consideră o maşină de curent continuu având p2 poli, a2 căi de curent, iar diametrul rotorului D . Notând cu a
Ii aa 2= intensitatea curentului electric
prin conductorul unei spire rotorice şi cu fB inducţia magnetică de excitaţie în întrefier, asupra conductorului se va exercita o forţă electromagnetică:
liBF afem ⋅⋅= . (8.9)
Această forţă dezvoltă un cuplu asupra respectivei spire din înfăşurarea rotorică:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
243
2DFM emc ⋅= . (8.10)
Inducţia magnetică în întrefier se poate exprima în felul următor:
lDp
lpDlS
B f ⋅⋅Φ⋅
=⋅
⋅Φ
=⋅Φ
=Φ
=ππτ2
2
. (8.11)
Înlocuind în expresia cuplului, obţinem:
aa
c Ia
pDla
IlD
pM ⋅Φ⋅⋅⋅
=⋅⋅⋅⋅⋅Φ⋅
=ππ 222
2 . (8.12)
Considerând că înfăşurarea rotorului conţine N conductoare active, cuplul total ce se exercită asupra acestora va fi:
ac Ia
NpNMM ⋅Φ⋅⋅⋅
⋅=⋅=
π2 . (8.13)
aNpkM ⋅⋅⋅
=π2 (8.14)
este o constantă constructivă a maşinii. Astfel relaţia devine:
aMc IkNMM ⋅Φ⋅=⋅= . (8.15)
8.7. Tensiunea electromotoare indusă în înfăşurările motorului de curent continuu
În conductoarele înfăşurării rotorice care se deplasează în câmpul magnetic de excitaţie, se induce o tensiune electromotoare. Conform legii lui Lentz, tensiunea electromotoare indusă are sens opus tensiunii de alimentare rotorice. Din această cauză ea deseori se numeşte tensiune contra-electromotoare. Tensiunea de alimentare aplicată la bornele rotorului trebuie să acopere atât tensiunea contra-electromotoare cât şi căderea de tensiune pe rotor:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
244
aa IREU ⋅+= , (8.16)
unde tensiunea electromotoare se poate exprima sun forma:
Φ⋅⋅=Φ⋅⋅⋅⋅
= nkna
NpE E60 . (8.17)
Se consideră maşina de curent continuu are p2 poli şi a2 căi de curent. Ek este o constantă electrică a maşinii.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
245
8.8. Caracteristicile motoarelor de curent continuu cu excitaţia derivaţie
Figura 8.4. prezintă schema electrică a unei maşini de curent continuu cu excitaţia derivaţie. În situaţia în care maşina primeşte energie electrică de la reţea şi cedează la arbore energie mecanică, ea funcţionează în regim motor.
Caracteristica turaţiei (curentului) reprezintă dependenţa ( )aIfn = la constIconstUU exna === ; . Din ecuaţiile 8.16. şi 8.17. se deduce valoarea
turaţiei:
aE
a
E
n Ik
Rk
Un ⋅Φ⋅
−Φ⋅
= . (8.18)
Primul termen reprezintă turaţia de mers în gol ideală:
Φ⋅=
E
n
kUn0 . (8.19)
Caracteristica curentului este uşor căzătoare, iar căderea de turaţie la funcţionarea în regim nominal este cuprinsă în intervalul de [ ]%82÷ :
[ ]%1000
0 ⋅−
=∆n
nnn nn . (8.20)
Figura 8.17 prezintă alura caracteristicii curentului pentru un motor de curent continuu cu excitaţia derivaţie.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
246
nn
0
n
IaIn
nn
n0
Figura 8.17: Alura caracteristicii curentului pentru un motor de curent continuu cu excitaţia derivaţie
Caracteristica mecanică reprezintă dependenţa ( )Mfn = la constIconstUU exna === ; . Ţinând seama de expresia cuplului (8.15):
Φ⋅=⇒⋅Φ⋅=⋅=
MaaMc k
MIIkNMM (8.21)
Înlocuind această expresie a curentului rotoric în ecuaţia caracteristicii curentului (8.18): a
E
a
E
n Ik
Rk
Un ⋅Φ⋅
−Φ⋅
= se obţine ecuaţia caracteristicii
mecanice:
MkkR
kUn
ME
a
E
n ⋅Φ⋅⋅
−Φ⋅
= 2 (8.22)
Primul termen reprezintă turaţia de mers în gol ideală:
Φ⋅=
E
n
kUn0 . (8.23)
Caracteristica mecanică este uşor căzătoare, iar căderea de turaţie la funcţionarea în regim nominal este cuprinsă în intervalul de [ ]%82÷ :
[ ]%1000
0 ⋅−
=∆n
nnn nn . (8.24)
Figura 8.18 prezintă alura caracteristicii mecanice pentru un motor de curent continuu cu excitaţia derivaţie.

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
247
nn
AA'
0 MMn
nn
n0
Figura 8.18: Alura caracteristicii mecanice pentru un motor de curent continuu cu excitaţia derivaţie
Pe caracteristica mecanică se poate analiza stabilitatea de funcţionare a motorului de curent continuu. În acest scop se consideră motorul funcţionând în regim stabil într-un punct ( )AA nMA , . Funcţionarea fiind stabilă, înseamnă că momentul dezvoltat de motor este egal cu momentul rezistent al utilajului acţionat. Dacă dintr-un motiv oarecare, cuplul rezistent se măreşte, turaţia motorului vă scădea astfel încât noul cuplu activ al motorului se egaleze noul cuplu rezistent în punctul ( )'' ,' AA nMA . Astfel maşina intră într-un nou regim stabil de funcţionare, ceea ce reflectă stabilitatea curbei acestei caracteristici. Desigur, dacă dintr-un motiv oarecare, cuplul rezistent se micşorează, turaţia motorului va creşte astfel încât noul cuplu activ al motorului se egaleze noul cuplu rezistent.
Caracteristica randamentului
Randamentul motorului de curent continuu este definit ca raportul dintre puterea utilă transmisă utilajului acţionat şi puterea absorbită de la reţeaua electrică de alimentare:
[ ]%1001
2 ⋅=PPη . (8.25)
Caracteristica randamentului exprimă dependenţa randamentului de puterea utilă sau de raportul dintre puterea utilă şi puterea utilă nominală pentru tensiune nominală în stator. Conform bilanţului puterilor în motor, randamentul se poate scrie:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
248
1002
2 ⋅++++
=+vmFeexCu ppppP
Pη . (8.26)
In această dependenţă randamentul ia valoare maximă atunci când pierderile de putere constante sunt egale cu cele variabile. În general, motoarele asincrone trifazate sunt astfel dimensionate încât randamentul să aibă o valoare maximă pentru 75,0
2
2 ≅nP
P . Figura 8.19 ilustrează
caracteristica randamentului.
1
0,750 P2/P2n
0,9
Figura 8.19.: Caracteristica randamentului pentru motorul de curent continuu cu excitaţia derivaţie
8.9. Caracteristica mecanică naturală şi caracteristicile artificiale ale motorului de curent continuu cu excitaţia în derivaţie
Ecuaţia 8.22 şi figura 8.18. reprezintă caracteristica mecanică naturală – adică acea caracteristică mecanică care este exprimată, respectiv trasată pentru valorile nominale (naturale) ale parametrilor ce intervin în ecuaţie:
( )( )
=
=
=
naa
nexex
p
UUII
R 0. (8.27)
Caracteristica poate fi însă trasată şi pentru acele regimuri de funcţionare ale maşinii care nu sunt nominale. Aceste regimuri se caracterizează toate prin faptul că parametrii enumeraţi la 8.27 diferă de valorile lor nominale şi sunt ca atare denumite caracteristici mecanice artificiale (de la opusul
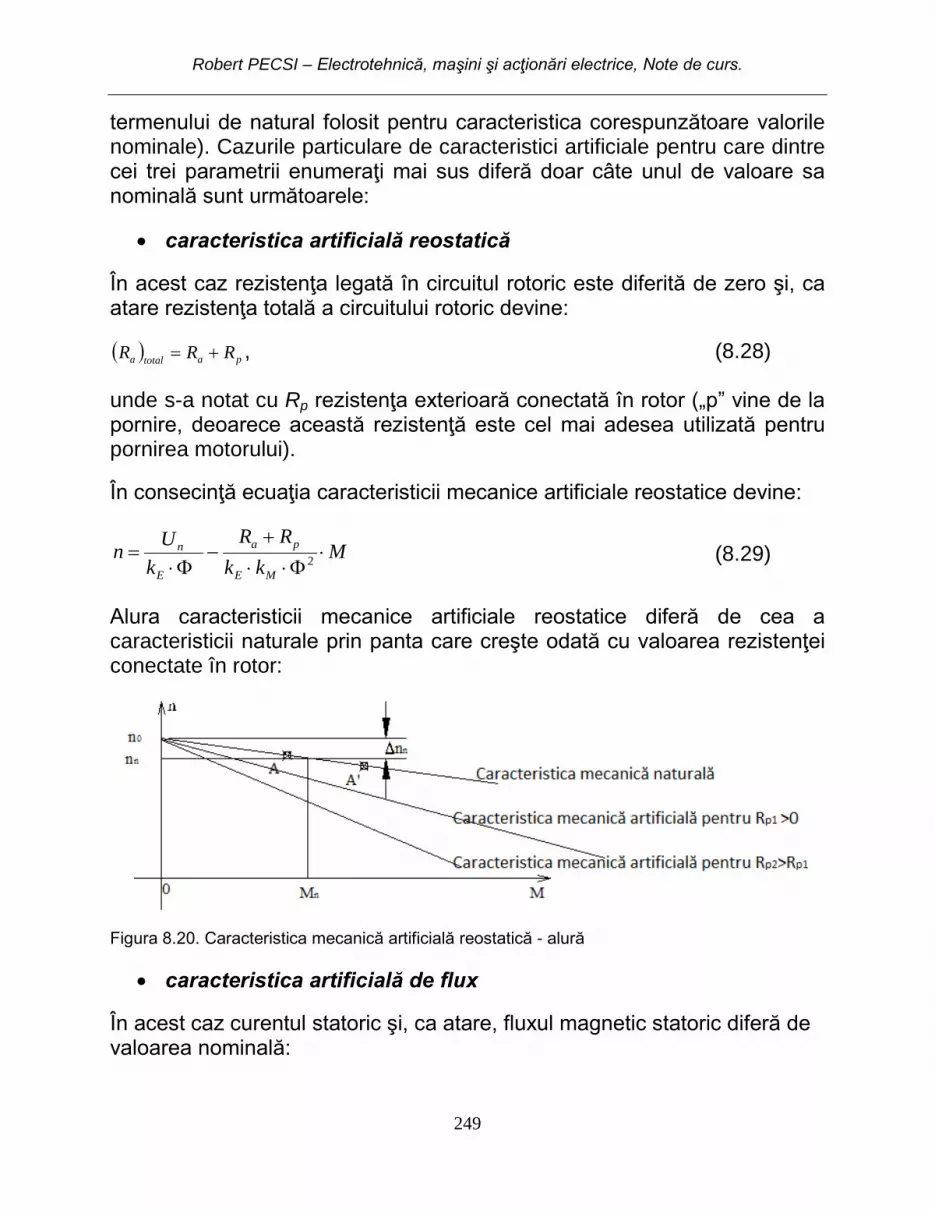
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
249
termenului de natural folosit pentru caracteristica corespunzătoare valorile nominale). Cazurile particulare de caracteristici artificiale pentru care dintre cei trei parametrii enumeraţi mai sus diferă doar câte unul de valoare sa nominală sunt următoarele:
• caracteristica artificială reostatică
În acest caz rezistenţa legată în circuitul rotoric este diferită de zero şi, ca atare rezistenţa totală a circuitului rotoric devine:
( ) patotala RRR += , (8.28)
unde s-a notat cu Rp rezistenţa exterioară conectată în rotor („p” vine de la pornire, deoarece această rezistenţă este cel mai adesea utilizată pentru pornirea motorului).
În consecinţă ecuaţia caracteristicii mecanice artificiale reostatice devine:
Mkk
RRk
UnME
pa
E
n ⋅Φ⋅⋅
+−
Φ⋅= 2 (8.29)
Alura caracteristicii mecanice artificiale reostatice diferă de cea a caracteristicii naturale prin panta care creşte odată cu valoarea rezistenţei conectate în rotor:
Figura 8.20. Caracteristica mecanică artificială reostatică - alură
• caracteristica artificială de flux
În acest caz curentul statoric şi, ca atare, fluxul magnetic statoric diferă de valoarea nominală:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
250
( ) ( )nexexnexex II Φ<Φ⇒< (8.30)
Analizând ecuaţia 9.22 se observă că în acest caz vor diferi faţă de caracteristica naturală atât turaţia de mers în gol ideală, cât şi panta:
( )
( )
Φ>
Φ
Φ⋅>
Φ⋅
22nexme
a
exme
a
nexE
n
exE
n
kkR
kkR
kU
kU
. (8.31)
Alura caracteristicii mecanice artificiale de flux este ilustrată comparativ cu alura caracteristicii mecanice naturale în figura 8.21.
Figura 8.21. Alura caracteristicii artificiale de flux comparativ cu caracteristica naturală
• caracteristica artificială de tensiune
În acest caz tensiunea de alimentare a motorului du curent continuu cu excitaţia în derivaţie diferă de valoarea sa nominală:
( )naa UU < . (8.32)
Această modificare de parametru nu atinge panta caracteristicii, ci numai valoarea turaţiei de mers în gol, care descreşte proporţional cu descreşterea tensiunii de alimentare:
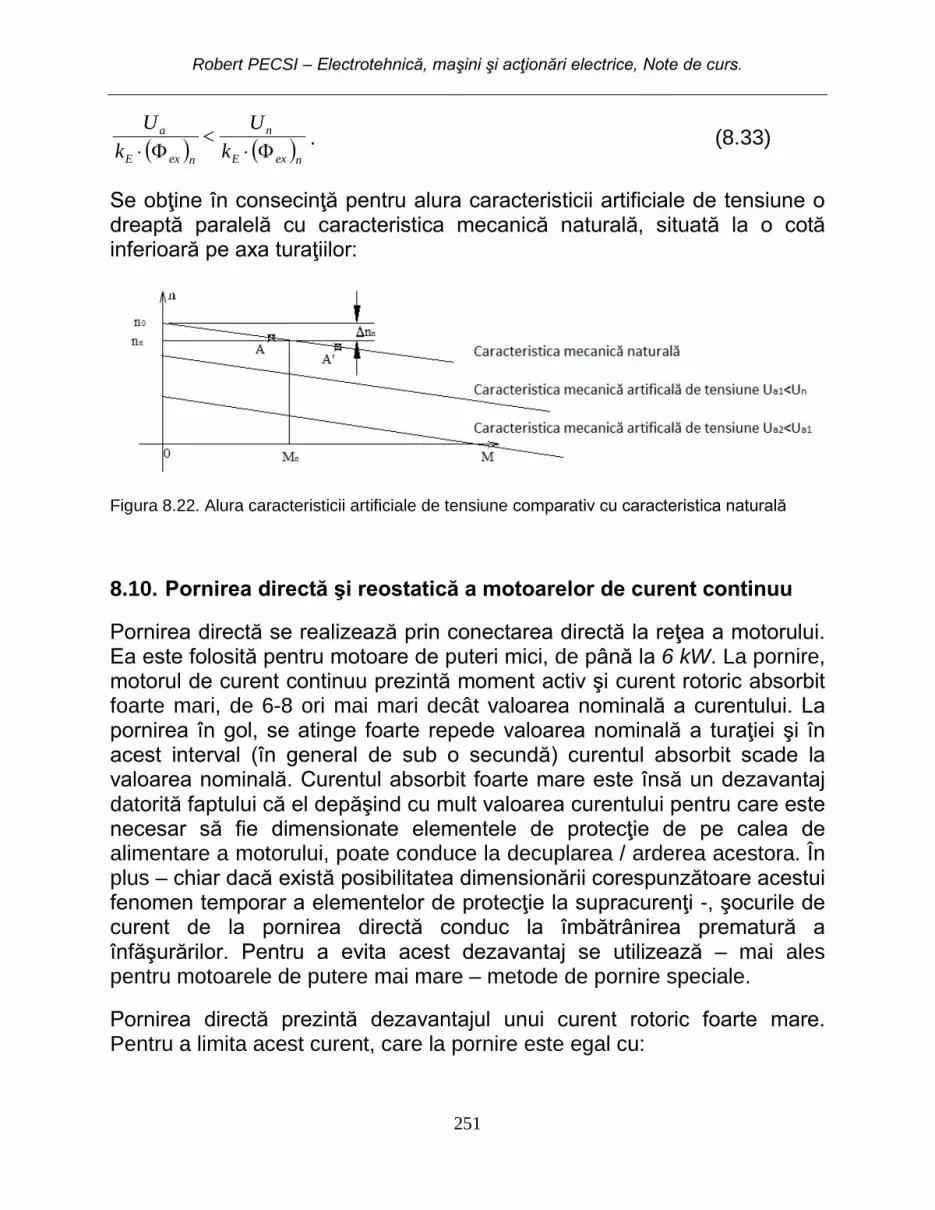
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
251
( ) ( )nexE
n
nexE
a
kU
kU
Φ⋅<
Φ⋅. (8.33)
Se obţine în consecinţă pentru alura caracteristicii artificiale de tensiune o dreaptă paralelă cu caracteristica mecanică naturală, situată la o cotă inferioară pe axa turaţiilor:
Figura 8.22. Alura caracteristicii artificiale de tensiune comparativ cu caracteristica naturală
8.10. Pornirea directă şi reostatică a motoarelor de curent continuu
Pornirea directă se realizează prin conectarea directă la reţea a motorului. Ea este folosită pentru motoare de puteri mici, de până la 6 kW. La pornire, motorul de curent continuu prezintă moment activ şi curent rotoric absorbit foarte mari, de 6-8 ori mai mari decât valoarea nominală a curentului. La pornirea în gol, se atinge foarte repede valoarea nominală a turaţiei şi în acest interval (în general de sub o secundă) curentul absorbit scade la valoarea nominală. Curentul absorbit foarte mare este însă un dezavantaj datorită faptului că el depăşind cu mult valoarea curentului pentru care este necesar să fie dimensionate elementele de protecţie de pe calea de alimentare a motorului, poate conduce la decuplarea / arderea acestora. În plus – chiar dacă există posibilitatea dimensionării corespunzătoare acestui fenomen temporar a elementelor de protecţie la supracurenţi -, şocurile de curent de la pornirea directă conduc la îmbătrânirea prematură a înfăşurărilor. Pentru a evita acest dezavantaj se utilizează – mai ales pentru motoarele de putere mai mare – metode de pornire speciale.
Pornirea directă prezintă dezavantajul unui curent rotoric foarte mare. Pentru a limita acest curent, care la pornire este egal cu:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
252
aaap R
UR
EUI =−
= , (8.34)
se măreşte rezistenţa circuitului rotoric de la aR la pa RR + prin introducerea în serie cu rotorul a unei rezistenţe de pornire pR . Astfel, curentul la pornire se diminuează la valoarea:
paap RR
UI+
= . (8.35)
Printr-o dimensionare corespunzătoare a reostatului de pornire, valoarea curentului rotoric se limitează la [ ]nnap III 5,2;8,1 ⋅∈ . Micşorând curentul la pornire, se micşorează proporţional şi cuplul la pornire, motiv pentru care este necesar ca intervalul ales pentru pornire să fie superior valorii nominale, de obicei egale cu valoarea cuplului rezistent al utilajului acţionat.
Pe măsură ce turaţia creşte, contra-tensiunea electromotoare se măreşte astfel încât curentul scade. Pentru a menţine constantă valoarea curentului în timpul pornirii, se modifică în mod corespunzător valoarea reostatului de pornire, liniar sau în trepte de la valoarea iniţială până la zero. Astfel, când rotorul ajunge la turaţie nominală, reostatul de pornire este scurtcircuitat.
8.11. Reglarea turaţiei motoarelor de curent continuu
In acţionările electrice procesele tehnologice impun funcţionarea utilajelor la diverse turaţii, ceea ce conduce la necesitatea reglării turaţiei motoarelor de acţionare a acestor utilaje. Cele mai des utilizate metode de reglare a turaţiei motoarelor asincrone sunt:
- reglarea turaţiei prin modificarea tensiunii de alimentare;
- reglarea turaţiei prin introducerea unor rezistenţe în circuitul rotoric;
- reglarea turaţiei prin schimbarea fluxului şi a curentului de excitaţie;
- reglarea turaţiei prin şuntarea rotorului.
Reglarea turaţiei motoarelor de curent continuu prin modificarea

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
253
tensiunii de alimentare
Din ecuaţia caracteristicii curentului (8.18): aE
a
E
n Ik
Rk
Un ⋅Φ⋅
−Φ⋅
= se observă
faptul că modificarea tensiuni de alimentare schimbă turaţia de mers în gol ideală, proporţional cu valoarea tensiunii, lăsând panta dreptei constantă. Acest lucru înseamnă că se obţine o familie de caracteristici ce sunt drepte paralele, aşa cum este ilustrat şi în figura 8.19. Se observă pe această familie de caracteristici că la sarcină constantă, turaţia motorului este proporţională cu valoarea tensiunii de alimentare. Metoda este folosită pentru diminuarea turaţiei faţă de valoarea sa nominală, deoarece nu se poate depăşi valoarea nominală a tensiunii de alimentare.
Figura 8.23.: Familia de caracteristici de tensiune
Reglarea turaţiei motoarelor de curent continuu prin introducerea unor
rezistenţe în circuitul rotoric
Din ecuaţia caracteristicii curentului (8.18): aE
a
E
n Ik
Rk
Un ⋅Φ⋅
−Φ⋅
= se observă
faptul că modificarea rezistenţei totale a circuitului rotoric de la aR la pa RR + prin introducerea în serie cu rotorul a unei rezistenţe de pornire pR , măreşte panta caracteristicii, păstrând constantă valoarea turaţiei de mers în gol ideală. Acest lucru înseamnă că se obţine o familie de caracteristici ce sunt drepte secante, aşa cum este ilustrat şi în figura 8.23. Metoda este folosită pentru diminuarea turaţiei faţă de valoarea sa nominală, deoarece nu se poate depăşi valoarea nominală a tensiunii de alimentare. Metoda
n 2
n 3
U 1 =U n
U 2 <U n
U 3 <U 2
0
n
M M n =M r
n n n 0

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
254
prezintă avantajul simplităţii, ea ne-necesitând prezenţa unor echipamente speciale, dar şi dezavantajul unor pierderi suplimentare de putere considerabile.
Caracteristica trasată pentru parametrii nominali poartă numele de caracteristică naturală, următoarele sunt caracteristici artificiale.
Figura 8.24.: Familia de caracteristici reostatice
Reglarea turaţiei motoarelor de curent continuu prin modificarea
curentului de excitaţie
Din ecuaţia caracteristicii curentului (8.18): aE
a
E
n Ik
Rk
Un ⋅Φ⋅
−Φ⋅
= se observă
faptul că modificarea curentului şi implicit a fluxului magnetic statoric conduce la modificarea atât a turaţiei de mers în gol ideale cât şi a pantei dreptei. Se obţine astfel familia de caracteristici de flux, ilustrată în figura 8.24. Întrucât fluxul de excitaţie poate fi în general micşorat, această metodă permite creşterea turaţiei motorului. Metoda se foloseşte doar pentru o mărire de maxim 3 ori a turaţiei. Avantajul metodei constă în faptul că reglarea se face în circuitul de excitaţie, unde curentul are valori mici, deci pierderile de putere suplimentare sunt şi ele mici.
n 2
n 3
R p1 =0
R p2 >0
R p3 >R p2
0
n
M M n =M r
n n
n 0

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
255
Figura 8.24.: Familia de caracteristici de flux
Reglarea turaţiei motoarelor de curent continuu prin şuntarea rotorului
În cazul reglării turaţiei prin înserierea unor rezistenţe în circuitul rotoric, pe măsură ce rezistenţa totală a circuitului rotoric creşte, deci pe măsură ce turaţia scade, rigiditatea caracteristicii obţinute scade, aceasta devenind din ce în ce mai instabilă. Simultan scade şi stabilitatea de funcţionare pe caracteristica respectivă artificială, aceasta fiind cu atât mai mică cu cât turaţia este mai redusă.
Pentru a obţine o funcţionare mai stabilă la viteze reduse ale motorului se foloseşte metoda şuntării rotorului. Schema electrică a alimentării motorului este în acest caz cea din figura 8.25.
0
n
M M n =M r
n n n 0
n 2
n 3
R p1 =0
R p2 >0
R p3 >R p2

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
256
Ra
Rex
Iex
Ia
Ua
I=Ia+Iex
Rp
Rs
Figura 8.25.: Schema electrică a alimentării motorului în cazul metodei de reglare a turaţiei prin şuntarea rotorului
8.12. Frânarea motoarelor de curent continuu prin funcţionarea ca generator cu recuperare
Maşina de curent continuu cu excitaţia derivaţie este reversibilă, putând funcţiona atât ca motor cât şi ca generator. Dacă motorul este antrenat din exterior de o sarcină la o turaţie superioară turaţiei de mers în gol ideale, ea va produce energie electrică pe care o va debita în reţeaua electrică de alimentare.
Se consideră cazul unui motor de macara cuplat pentru coborârea unei sarcini. După pornirea sistemului, punctul de funcţionare se găseşte la un moment dat în punctul A (fig. 8.26.) pe caracteristica mecanică naturală a motorului. În acest punct motorul funcţionează în regim stabilizat numai dacă, sarcina fiind mică, motorul dezvoltă la arbore un cuplu pozitiv necesar învingerii momentului static rezistent datorat frecărilor. Dacă se coboară sarcini mari, cuplul rezistent devine negativ, deoarece acţionează în sensul coborârii sarcinii, ajutând mişcarea şi fiind mai mare decât cuplul datorat frecărilor. Punctul de funcţionare nu se mai stabilizează în A, sistemul se accelerează sub acţiunea celor două cupluri (motor şi rezistent). Creşterea vitezei de coborâre deplasează punctul de funcţionare către B. Dacă acceleraţia continuă, cuplul total îşi schimbă semnul,

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
257
devenind negativ. Astfel, regimul de funcţionare se stabilizează într-un punct în care cuplul dat de motor egalează cuplul rezistent.
Deoarece, aşa cum s-a presupus iniţial, motorul este cuplat la reţea în sensul coborârii sarcinii, iar în punctul C 0<CM , acest cuplu va acţiona în sens invers mişcării, fiind deci un cuplu de frânare. Momentul fiind negativ, înseamnă că şi curentul corespunzător va fi negativ, cu alte cuvinte în această situaţie motorul debitează un curent în reţeaua electrică de alimentare.
Figura 8.26.: Caracteristica frânării cu recuperare
Ecuaţia caracteristicii mecanice a maşinii de curent continuu în regim de frână cu recuperare este aceeaşi ca cea în regim motor, doar că momentul ia valori negative şi, corespunzător, valorile turaţiei sunt superioare turaţiei de mers în gol ideale:
MkkR
kUn
ME
a
E
n ⋅Φ⋅⋅
−Φ⋅
= 2 (8.36)
Odată cu coborârea sarcinii legate la macara, datorită cablului care se desfăşoară cuplul rezistent al sarcinii se măreşte, turaţia ca urmare creşte dar, în acelaşi timp creşte şi cuplul de frânare, astfel încât se intră într-un regim stabil de funcţionare într-un alt punct C’. Se poate, aşadar, considera că regimul de funcţionare ca generator cu recuperare este stabil.
Un dezavantaj al acestei metode de frânare este faptul că ea realizează frânarea numai la turaţii mai mari decât turaţia de mers în gol ideală. Ea nu
0
n
M M A
n 0 A B
C
M C

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
258
poate fi utilizată pentru oprirea motorului. Pentru a diminua viteza de coborâre, respectiv turaţia la care să se realizeze frânarea cu recuperare, este necesar să funcţioneze maşina pe o caracteristică artificială, de tensiune sau reostatică.
8.13. Frânarea dinamică a motoarelor de curent continuu
Frânarea dinamică a motorului de curent continuu cu excitaţia derivaţie se realizează prin decuplarea rotorului de la reţea şi cuplarea lui la o rezistenţă de frânare fR , înfăşurarea de excitaţie (statorul) rămânând alimentată în continuare. Figura 8.27 prezintă schema electrică a frânării dinamice.
Ra
Rex
Iex
UaRf
Figura 8.27: Schema electrică a frânării dinamice
Rotorul continuă să se rotească sub acţiunea energiei cinetice înmagazinate de masele în mişcare, din inerţia proprie şi a sarcinii cuplate la arbore. Statorul fiind alimentat în continuare, din interacţiunea dintre câmpul magnetic statoric şi rotaţia spirelor rotorice în acest câmp magnetic apare, datorită fenomenului de inducţie electromagnetică, o tensiune electromotoare în rotor, ce dă naştere la un curent prin rezistenţa de frânare. Maşina intră în regim de generator cu excitaţia separată debitând pe fR . Curentul rotoric interacţionează la rândul său cu inducţia magnetică statorică şi apare un cuplu de frânare, sun acţiunea căreia rotorul îşi încetineşte mişcarea.
Tensiunea de alimentare a rotorului fiind nulă, ecuaţia caracteristicii frânării dinamice este:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
259
Mkk
RRM
kkRR
kUn
ME
fa
ME
fa
E
n ⋅Φ⋅⋅
+−=⋅
Φ⋅⋅
+−
Φ⋅= 22 . (8.37)
Familia de caracteristici de frânare dinamică, ce se obţin pentru diferite valori ale rezistenţei de frânare, este prezentată în figura 8.28. Se observă că pentru aceeaşi turaţie, cuplul de frânare este cu atât mai mare cu cât rezistenţă de frânare este mai mică. Valoarea acestei rezistenţe nu poate fi coborâtă sub o anumită valoare, prin aceasta limitându-se valoarea momentului şi implicit a curentului pe timpul frânării.
Frânarea dinamică conduce la oprirea motorului în cazul în care sarcina legată pe arborele acestuia nu dezvoltă un cuplu rezistent activ, cum este cazul sarcinii coborâte de o macara. Frânarea dinamică nu poate, însă, fi utilizată pentru oprirea completă a sistemului la coborârea unei sarcini cu o macara, deoarece în momentul când cuplul de frânare dat de motor devine egal cu cel al sarcinii, funcţionare ase stabilizează la o turaţie anume. Pentru o micşora turaţia şi implicit viteza de coborâre se aplică în general fie frânarea prin conectare inversă, fie frânarea mecanică pe ultima porţiune a coborârii.
Figura 8.28.: Familia de caracteristici de frânare dinamică
0
n
M
n 2
R f1 =0
R f2 >0 R f3 >R f2

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
260
8.14. Frânarea prin conectare inversă a motoarelor de curent continuu
Frânarea prin conectare inversă se realizează în două moduri distincte:
a) prin inversarea polarităţii tensiunii la bornele rotorului;
b) prin inversarea polarităţii tensiunii la bornele statorului.
a) Frânarea prin conectarea inversă a rotorului
In acest caz, curentul prin rotor îşi schimbă sensul şi ca atare se va schimba şi sensul cuplului, acesta devenind unul de frânare. Ecuaţia caracteristicii de frânare devine:
⋅
Φ⋅⋅+
+Φ⋅
−=⋅Φ⋅⋅
+−
Φ⋅−= M
kkRR
kUM
kkRR
kUn
ME
cia
E
n
ME
cia
E
n22 . (8.38)
Deoarece inversarea polarităţii tensiunii la bornele rotorice în timpul funcţionării maşinii este însoţită de o creştere importantă a curentului rotoric, odată cu inversarea polarităţii se introduc rezistenţe de cuplare inversă ciR în circuitul rotoric, tocmai pentru a limita valoarea acestui curent. În acest fel, la momentul iniţial al frânării prin conectare inversă, funcţionarea maşinii trece de pe caracteristica mecanică naturală pe una artificială, pe care curentul corespunzător turaţiei iniţiale a motorului să aibă o valoare acceptabilă. Figura 8.29 ilustrează caracteristica frânării prin conectarea inversă a rotorului. Se observă că în punctul C turaţia este nulă, iar dacă în acest moment nu se decuplează maşina de la reţea, ea se va ambala în mişcare de sens opus, devenind din motor de stânga”, „motor de dreapta”.
b) Frânarea prin conectarea inversă a statorului
In acest caz, curentul prin stator şi fluxul magnetic de excitaţie îşi schimbă sensul şi ca atare se va schimba şi sensul cuplului, acesta devenind unul de frânare. Ecuaţia caracteristicii de frânare devine:
⋅
Φ⋅⋅+
+Φ⋅
−=⋅Φ⋅⋅
+−
Φ⋅−= M
kkRR
kUM
kkRR
kUn
ME
cia
E
n
ME
cia
E
n22 . (8.39)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
261
Se observă că ecuaţia este aceeaşi cu cea din cazul conectării inverse a rotorului şi toate fenomenele, caracteristica, necesitatea legării simultane a unui rezistor în serie cu rotorul sunt identice.
Figura 8.29.: Caracteristica frânării prin conectarea inversă a rotorului (sau a statorului)
8.15. Frânarea motoarelor de curent continuu prin depăşirea momentului de scurtcircuit
Frânarea prin depăşirea momentului de scurtcircuit constă în introducerea în serie cu rotorul a unor rezistenţe de valori convenabil de mari, astfel încât funcţionare a maşinii să se mute de pe caracteristica mecanică naturală pe una artificială reostatică pe care momentul dezvoltat de motor corespunzător turaţiei la care el se roteşte atunci să fie mai mic decât cuplul rezistent al sarcinii. Acest lucru conduce automat la scăderea turaţiei maşinii, până ce se realizează echilibrul între momentul activ al motorului şi cel pasiv rezistent al sarcinii. Acest lucru înseamnă că se obţine o familie de caracteristici ce sunt drepte secante, aşa cum este ilustrat şi în figura 8.30. Metoda este folosită pentru diminuarea turaţiei faţă de valoarea sa nominală, deoarece nu se poate depăşi valoarea nominală a tensiunii de alimentare şi ea permite de asemenea diminuarea turaţiei până la valoarea 0. Metoda prezintă avantajul simplităţii, ea ne-necesitând prezenţa unor
0
n
M
R ci >0
n 0
-n 0
A A'
B
C
cmn
cmar
cmar
Motor dreapta
Motor stinga Frina stinga
cmn
M B
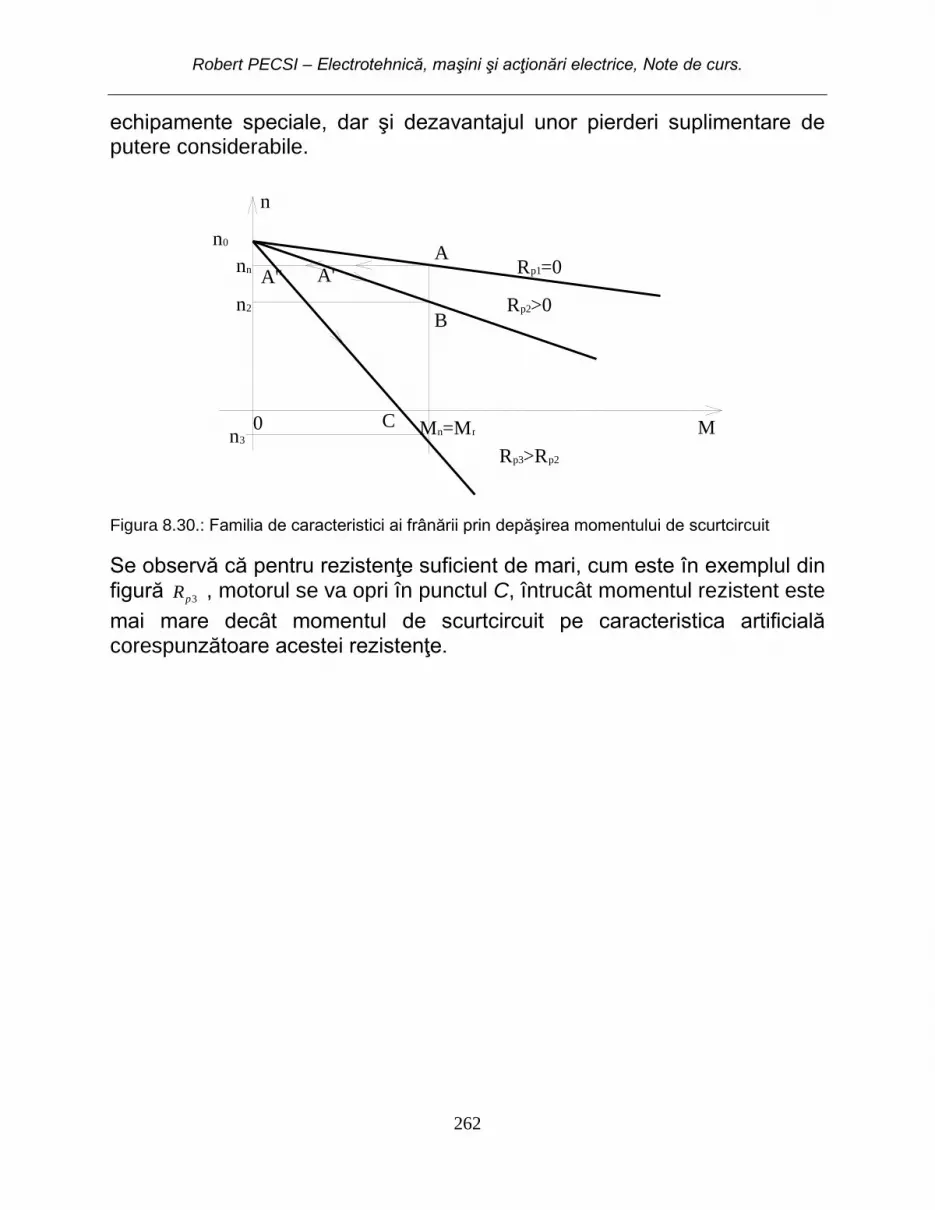
Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
262
echipamente speciale, dar şi dezavantajul unor pierderi suplimentare de putere considerabile.
Figura 8.30.: Familia de caracteristici ai frânării prin depăşirea momentului de scurtcircuit
Se observă că pentru rezistenţe suficient de mari, cum este în exemplul din figură 3pR , motorul se va opri în punctul C, întrucât momentul rezistent este mai mare decât momentul de scurtcircuit pe caracteristica artificială corespunzătoare acestei rezistenţe.
0
n
M M n =M r
n n n 0
n 2
n 3
R p1 =0
R p2 >0
R p3 >R p2
C
A
B
A' A''

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
263
CAPITOLUL 9 – ALEGEREA PUTERII MOTOARELOR ELECTRICE
9.1. Generalităţi.
Alegerea puterii motoarelor electrice constituie o problemă deosebit de importantă în proiectarea şi echiparea unui utilaj. Alegerea unui motor de putere prea mică atrage supraîncărcarea acestuia, încălzirea sa peste limitele admisibile şi, datorită acestui fapt, reducerea timpului său de viaţă, defectarea sa prematură. Alegerea unui motor de putere prea mare presupune un randament şi un factor de putere scăzute.
Alegerea corespunzătoare a puterii motoarelor electrice se face luând în considerare necesarul de putere cerut de utilajul acţionat, cuplul de pornire necesar şi caracteristica mecanică a motorului. Motorul trebuie să lucreze în marea majoritate a timpului său de funcţionare la puterea sa nominală, el nu trebuie să se încălzească peste limitele admisibile
Când se pune problema alegerii unui motor electric pentru un utilaj, înainte de toate se analizează diagrama de sarcină a acestuia. Diagrama de sarcină constă în reprezentarea variaţiei în timp a momentului rezistent al utilajului, al sarcinii. În funcţie de aceasta se alege cea mai potrivită caracteristică mecanică a motorului. În unele cazuri este de preferat echiparea cu un motor de curent continuu, care prezintă moment mare la pornire şi o dependenţă liniară şi sensibilă a turaţiei cu sarcina, iar în alte cazuri sunt de preferat motoarele asincrone care prezintă o funcţionare la o turaţie relativ constantă, a cărei variaţie cu sarcina este neglijabilă într-un interval anume. Alţi factori care se iau în consideraţie la alegerea unui motor electric sunt:
, trebuie să dezvolte cuplul necesar acţionării agregatului respectiv şi el trebuie să fie capabil să suporte suprasarcini pe perioade scurte de timp.
- posibilitatea reglării rapide a turaţiei;
- posibilitatea frânărilor electrice;
- calităţile dinamice necesare (rapiditatea regimurilor tranzitorii);
- condiţiile impuse de reţeaua electrică de alimentare disponibilă;

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
264
- condiţiile impuse de locul de montaj şi de exploatare (altitudine, temperatură, umiditate, spaţiu, etc.);
- necesitatea limitării poluării fonice a mediului.
În cele de mai jos enumerăm câteva dintre consideraţiile referitoare la alegerea tipului de motor în funcţie de utilajul ce urmează a fi acţionat:
• Motorul asincron trifazat cu rotorul în colivie este cel mai robust şi se alege în cazul în care nu se cere pornirea în sarcină şi nu este necesară modificarea sau reglarea turaţiei. Datorită faptului că nu are colector, el poate fi folosit şi chiar este recomandat pentru mediile explozive, cu un pericol ridicat de explozie. Pentru obţinerea unui cuplu de pornire mai mare, se pot folosi motoare asincrone cu rotorul în colivie, cu bare înalte, cu dublă colivie. Modificarea în trepte a turaţiei se poate realiza în acest caz prin schimbarea numărului de perechi de poli. Aceste motoare acţionează de obicei maşini unelte, instalaţii de pompare, compresoare mici şi mijloci cu debit constant.
• Motorul asincron trifazat cu rotorul bobinat permite obţinerea unui cuplu de pornire mai mare prin introducerea unor reostate de pornire în rotor, reglarea turaţiei prin modificarea în timpul funcţionării a reostatului cuplat în circuitul rotoric. El este deseori folosit la acţionarea maşinilor de ridicat, a ascensoarelor, a centrifugelor, a instalaţiilor de foraj şi de pompare reglabile.
• Motorul de curent continuu este mai scump decât cel asincron, prezintă condiţii de exploatare deosebite, întreţinerea permanentă a periilor din colector, dar permite reglarea foarte simplă a turaţiei. Motorul de curent continuu cu excitaţia serie este utilizat la tracţiunea electrică feroviară şi urbană, în timp ce motorul de curent continuu cu excitaţia derivaţie este utilizat la acţionarea maşinilor unelte cu comandă după program.
9.2. Încălzirea motoarelor electrice
Pierderile de putere care apar într-o maşină electrică în timpul funcţionării sale duc la încălzirea acesteia. Din momentul iniţial al pornirii, când diferitele părţi componente ale maşinii se află la temperatura mediului înconjurător, maşina începe să se încălzească şi după un timp de ordinul

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
265
zecilor de minute sau al orelor, întreaga cantitate de căldură degajată este evacuată în mediul înconjurător, schimbul termic atingând un echilibru dinamic în care temperatura motorului nu se mai modifică. Încălzirea maximă atinsă de maşină depinde de nivelul de încărcare cu sarcină a motorului.
În timpul procesului tranzitoriu de creştere a temperaturii maşinii, are loc un continuu schimb de căldură între diferitele părţi componente ale maşinii şi mediul înconjurător. O parte din căldura degajată de maşină conduce la încălzirea acesteia, iar alta se degajă în mediul înconjurător. Astfel, în orice moment al acestui proces de încălzire sistemul este într-un echilibru termic ce există între cantitatea de căldură degajată de motor, cantitatea de căldură absorbită de diferitele ei părţi componente şi cantitatea de căldură evacuată în mediul înconjurător.
Datorită neomogenităţii constructive şi a complexităţii materialelor utilizate într-un motor electric, procesele termice tranzitorii sunt foarte complexe. Pentru simplificarea studiului acestui regim se emit o serie de ipoteze simplificatoare:
1. Maşinile electrice se consideră corpuri omogene cu o anumită capacitate calorică c;
2. Cedarea de căldură se face prin convecţie, neglijându-se cedările prin conducţie şi radiaţie. Căldura degajată este, aşadar, proporţională cu diferenţa de temperatură dintre maşină şi mediul înconjurător. Ţinând seama de acestea ecuaţia echilibrului termic devine:
θθ dcdtAdtQ ⋅+⋅⋅=⋅ , (9.1)
unde c este capacitate calorică a maşinii, A este capacitatea de cedare a căldurii de către maşină, respectiv cantitatea de căldură pe care o cedează maşina mediului în unitatea de timp, la o diferenţă de temperatură de un grad, iar θ este creşterea de temperatură a maşinii fată de mediul înconjurător, numită supratemperatură. Ecuaţia (9.1) ne spune că valoarea cantităţii de căldură degajate de maşină în timpul dt este egală cu cantitatea de căldură cedată în acelaşi timp de maşină pentru o diferenţă de temperatură între maşină şi mediu de θ ( dtA ⋅⋅θ ) plus cantitatea de căldură absorbită de maşină ( θdc ⋅ ). Dacă în ecuaţia de mai sus se separă variabilele şi se integrează se obţine:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
266
( ) 0ln kAQAct +⋅−⋅−= θ . (9.2)
Constanta de integrare 0k se determină din condiţiile iniţiale, când pentru 0=t temperatura maşinii este 0θ :
( ) ( )0000 lnln0 θθ ⋅−⋅=⇒+⋅−⋅−= AQAckkAQ
Ac
. (9.3)
Înlocuind acum valoarea acestei constante de integrare se obţine:
( ) tcAt
cA
eAQAQeAQAQ
AQAQ
Act
⋅⋅⋅⋅−=⋅−⇒=
⋅−⋅−
⇒⋅−⋅−
⋅= θθθθ
θθ
000ln . (9.4)
Prelucrând în continuare această ecuaţie, se obţine ecuaţia încălzirii maşinilor electrice:
Act
Act
eeAQ −−
⋅+
−⋅= 01 θθ . (9.5)
Se observă că variaţia temperaturii maşinii electrice are loc după o lege exponenţială. Dacă temperatura iniţială corespunde cu temperatura mediului înconjurător, adică supratemperatura iniţială este nulă ( 00 =θ ), ecuaţia se simplifică şi devine:
−⋅=
−A
ct
eAQ 1θ . (9.6)
Alura acestei variaţii este ilustrată în figura 9.1. Raportul dintre capacitatea calorică şi capacitatea de cedare a căldurii de către maşină este constantă pentru fiecare maşină, nu depinde de încărcarea maşinii şi se numeşte constantă de timp a încălzirii:
Ac
=θτ . (9.7)
Constanta de timp a încălzirii se poate defini şi ca timpul în care maşina, cedând căldură în mediul înconjurător, atinge o temperatură de

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
267
AQ⋅=⋅= 632,0632,0 maxθθ . Grafic, constanta de timp a încălzirii se determină
ca fiind abscisa punctului de intersecţie dintre orizontala dusă prin maxθ şi tangenta în origine la curba de încălzire.
Figura 9.1.: Caracteristica încălzirii maşinilor electrice
9.3. Răcirea motoarelor electrice
După ce motorul acţionează un utilaj sau agregat un timp anume el urmează să fie decuplat de la reţea şi, în această stare de repaus, pierderile de putere fiind nule, nu va mai exista nici o cantitate de căldură degajată de către motor ( )0=Q . Schimbul termic cu mediul înconjurător ca duce la răcirea treptată a motorului. Motorul fiind oprit, condiţiile de ventilare sunt mai slabe şi, prin urmare, capacitatea de cedare a căldurii în mediul înconjurător este mai mică ( )AA <' .
Ecuaţia echilibrului termic devine atunci:
θθ dcdtA ⋅+⋅⋅= '0 . (9.8)
Integrând ecuaţia şi notând '
'Ac
=θτ constanta de timp a răcirii (mai mare
decât constanta de timp a încălzirii), obţinem ecuaţia răcirii maşinilor electrice:
0
θ
t
θ 0
θ max

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
268
θτθθ 'max
t
e−
⋅= . (9.9)
In această ecuaţie maxθ este supratemperatura iniţială, la începutul procesului de răcire a maşinii. Alura curbei de răcire este ilustrată în figura 9.2.
Figura 9.2.: Caracteristica răcirii maşinilor electrice
9.4. Serviciile de funcţionare ale motoarelor electrice
Regimul de funcţionare al unei maşini electrice este indicat prin precizarea valorilor mărimilor electrice şi mecanice care caracterizează funcţionarea maşinii la un moment dat. Setul de mărimi caracteristice pentru funcţionarea unei maşini electrice este: npPMI ,,,, . Regimul nominal implică valori nominale pentru aceşti parametrii.
Maşinile electrice nu funcţionează însă (decât rareori) într-un regim constant, de multe ori procesele tehnologice, utilajele acţionate necesitând succesiunea bine definită a mai multe regimuri. Serviciul de funcţionare este precizat prin indicarea succesiunii şi a duratei diferitelor regimuri ce intervin în funcţionarea maşinii. Se definesc anumite servicii tip de funcţionare prin succesiunea standardizată a unor regimuri specifice de funcţionare. Serviciul nominal tip al unei maşini este stabilit de producător şi este indicat pe plăcuţa indicatoare a maşinii cu majuscula S urmată de o cifră de la 0 la 8, corespunzătoare celor 8 servicii tip standardizate. Aceste 8 servicii tip corespund celor mai frecvente servicii impuse de utilaje motoarelor de acţionare. În definirea acestor servicii intervin următoarele
0
θ
t
θ max

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
269
notaţii referitoare la durata unor regimuri: dt durata de pornire; at durata de funcţionare la sarcină constantă; ft durata de frânare; 0t durata de mers în gol; pt durata de repaus în care motorul este deconectat.
In continuare se prezintă pe scurt definirea celor 8 servicii tip de funcţionare a maşinilor electrice:
SERVICIUL DE FUNCŢIONARE S1 – SERVICIUL CONTINUU
θτ⋅>> 4at
P, n constante în timp
În cursul funcţionării se atinge temperatura de saturaţie maxθ .
În cazul acestui serviciu, motorul funcţionează aperiodic, cu o sarcină constantă menţinută un interval de timp suficient de mare pentru atingerea echilibrului termic şi a temperaturii constante (de saturaţie). Motoarele fabricate conform acestui serviciu de funcţionare sunt utilizate cel mai adesea pentru acţionarea ventilatoarelor cu debit constant, a transportatoarelor cu bandă cu sarcină constantă etc.
SERVICIUL DE FUNCŢIONARE S2 – SERVICIUL DE SCURTĂ DURATĂ
θτ⋅<< 4at
Pe toată durata timpului de funcţionare, puterea şi turaţia sunt constante.
pt este nelimitat, durată în care puterea şi turaţia sunt nule.
În cazul acestui serviciu de funcţionare, motorul are o funcţionare aperiodică cu sarcină constantă, menţinută însă un interval de timp redus,
0
θ
t
θ 0
θ max
P n
0
θ
t
θ 0
θ max
P n

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
35
insuficient pentru atingerea echilibrului termic şi a temperaturii de saturaţie. Apoi, motorul este deconectat de la reţea şi nu mai este utilizat decât după răcirea sa completă. Motoarele fabricate pentru serviciul de funcţionare S2 sunt fabricate cu durate standardizate ale timpului de acţionare (de 10, 30, 60, 90 minute). Utilizările cele mai frecvente ale motoarelor fabricate pentru acest serviciu de funcţionare sunt: acţionarea ecluzelor, acţionarea aparatelor electrocasnice (doar a celora pentru uz strict casnic!), acţionarea mecanismelor auxiliare ale laminoarelor etc.
SERVICIUL DE FUNCŢIONARE S3 – SERVICIUL INTERMITENT PERIODIC
θτ⋅<< 4at
Pe toată durata timpului de funcţionare, puterea şi turaţia sunt constante.
pt este finit, durată în care puterea şi turaţia sunt nule.
0, minmax >< θθθ s
În cazul acestui serviciu, motorul funcţionează periodic cu un ciclu de durată tc, care conţine un interval de acţionare ta în care motorul este încărcat cu o sarcină constantă, urmat de un interval de repaus tp. Având în vedere faptul că timpul de acţionare este considerabil mai mic decât timpul necesar atingerii echilibrului termic, nu se atinge temperatura de saturaţie în cadrul unui singur ciclu de acţionare-repaus. Motoarele fabricate pentru acest serviciu de funcţionare sunt utilizate printre altele pentru acţionarea maşinilor de ridicat.
0
θ
t
θ min
θ max
P n

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
35
SERVICIUL DE FUNCŢIONARE S4 – SERVICIUL INTERMITENT PERIODIC CU DURATĂ DE PORNIRE
θτ⋅<< 4at
În cadrul duratei timpului de funcţionare, există o perioadă de pornire, în care puterea şi turaţia se modifică, apoi puterea şi turaţia sunt constante.
pt este finit, durată în care puterea şi turaţia sunt nule.
0, minmax >< θθθ s
SERVICIUL DE FUNCŢIONARE S5 – SERVICIUL INTERMITENT PERIODIC CU DURATĂ DE PORNIRE Şi DE FRÂNARE ELECTRICĂ
În cadrul duratei timpului de funcţionare, există o perioadă de pornire, în care puterea şi turaţia se modifică, apoi puterea şi turaţia sunt constante, iar apoi urmează o perioadă de frânare, în care din nou puterea şi turaţia variază.
θτ⋅<< 4at
este finit, durată în care puterea şi turaţia sunt nule.
0, minmax >< θθθ s
In intervalul de frânare, pierderile de putere sunt mai mari.
0 t
θ 0
θ max
P
θ 0
n
t d t a t p t f
0 t
θ 0
θ max
P
θ n
t d t a t p

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
35
SERVICIUL DE FUNCŢIONARE S6 – SERVICIUL NEÎNTRERUPT CU SARCINĂ INTERMITENTĂ PERIODIC
In intervalul de sarcină constantă, puterea şi turaţia sunt constante, iar supratemperatura creşte.
In intervalul de mers în gol, puterea este egală cu puterea de mers în gol, iar turaţia cu turaţia de mers în gol. Timpul total al unei perioade este mult mai mic decât timpul necesar atingerii temperaturii de saturaţie: θτ⋅<< 4ct .
0, minmax >< θθθ s
SERVICIUL DE FUNCŢIONARE S7 – SERVICIUL NEÎNTRERUPT CU FRÂNĂRI ELECTRICE PERIODICE
In intervalul de sarcină constantă, puterea şi turaţia sunt constante, iar în cele de pornire şi frânare puterea depăşeşte valoarea din timpul regimului constant.
Timpul total al unei perioade este mult mai mic decât timpul necesar atingerii temperaturii de saturaţie:
θτ⋅<< 4ct .
0, minmax >< θθθ s
SERVICIUL DE FUNCŢIONARE S8 – SERVICIUL NEÎNTRERUPT CU MODIFICĂRI PERIODICE ALE TURAŢIEI
0 t
θ 0
θ max
P
θ
n
t d t a t f
0 t
θ 0
θ max
P
θ
n
t a t 0

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
34
Ciclul serviciului S8 se compune din intervale de diferite sarcini constante la care corespund turaţii diferite, intercalate cu intervale de accelerare sau frânare electrică. θτ⋅<< 4ct . 0, minmax >< θθθ s .
Serviciile S1 şi S2 sunt aperiodice, iar S3-S8 sunt periodice.
9.5. Alegerea puterii motoarelor electrice în serviciul S1
In cazul funcţionării în acest serviciu tip, motorul atinge supratemperatura de saturaţie, întrucât timpul de funcţionare depăşeşte pe cel necesar stabilizării unui regim termic staţionar. Graficul variaţiei puterii, turaţiei şi supratemperaturii în acest serviciu este ilustrat în figura 9.3.
0 t
θ 0
θ max P
θ
n
t d t a1 t f1 t f2 t a2
n
t f3 t a3
n

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
35
0
theta
t
theta0
thetamax
P
n
Figura 9.3.: Graficul variaţiei puterii, turaţiei şi supratemperaturii în serviciul S1
In acest caz este necesar ca motorul pe care îl alegem din cataloagele producătorului să aibă o putere nominală egală sau puţin mai mare decât puterea constantă ce intervine în graficul serviciului utilajului ce urmează a fi acţionat de acel motor. Altfel, dacă puterea nominală a motorului ar fi mai mică decât această valoare, atunci, el s-ar încălzi la o temperatură mai mare decât cea maxim admisibilă şi s-ar risca deteriorarea sa. Dacă puterea nominală a motorului ales este mult mai mare decât valoarea din grafic atunci randamentul de acţionare este mult scăzut. Relativ la constanţa sarcinii se admit abateri de ordinul:
%30±= mediuPP . (9.10)
9.6. Alegerea puterii motoarelor electrice în serviciul de scurtă durată S2
In acest caz motorul are o funcţionare aperiodică, cu sarcină constantă o perioadă de timp mult inferioară celei necesare atingerii echilibrului termic:
( ) θτ⋅÷<< 43at . (9.11)
Apoi motorul este deconectat de la reţea iar o nouă funcţionare are loc după completa răcire. Există chiar şi nişte durate standardizate pentru durata de acţionare la 10, 30, 60 sau 90 minute.
Utilizări posibile ale acestui serviciu de funcţionare sunt ecluzele, maşinile electrocasnice de bucătărie, mecanismele auxiliare, etc. Graficul variaţiei

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
36
puterii, turaţiei şi supratemperaturii în acest serviciu este ilustrat în figura 9.4.
Figura 9.4.: Graficul variaţiei puterii, turaţiei şi supratemperaturii în serviciul S2
Dacă motorul pe care îl alegem din tabele aparţine serviciului S2 din fabricaţie, alegerea se va face astfel încât puterea nominală şi timpul de acţionare a motorului ales să fie mai mare sau egală ca cele cerute de procesul tehnologic. Dacă urmărim să utilizăm un motor fabricat pentru a funcţiona continuu (serviciul S1) pentru o asemenea utilizare de serviciu de scurtă durată, atunci este evident că se poate alege un motor cu o putere chiar inferioară celei cerute de utilajul ce urmează a fi acţionat, deoarece – aşa cum se observă şi din grafic – temperatura nu ajunge la cea maxim admisibilă. Astfel condiţia PPn ≥ ar fi prea largă. Condiţia care trebuie impusă este ca temperatura maximă la care se ajunge să fie inferioară celei maxim admisibile:
admθθ <max . (9.12)
Supratemperatura este proporţională cu pierderile de putere, întrucât încălzirea motorului are loc datorită acestor pierderi. Astfel, putem spune că supratemperatura maxim admisibilă trebuie să fie proporţională cu pierderea nominală de putere a motorului pe care urmează să-l alegem, iar supratemperatura de saturaţie la care s-ar ajunge este proporţională cu pierderea de putere ce reiese din graficul serviciului de funcţionare :
0
θ
t
θ 0
θ adm
P
n

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
37
=
=
Ap
Ap
s
nadm
2θ
θ
. (9.13)
Dar supratemperatura de saturaţie este legată de supratemperatura maximă la care se ajunge prin ecuaţia încălzirii în următorul mod:
−⋅=
−τθθat
s e1max . (9.14)
Din aceste relaţii înlocuite în inegalitatea 9.12 se obţine:
ttn
ke
pp
a=
−<
−τ1
12 , (9.15)
unde tk reprezintă factorul de încărcare termică, ce are o valoare supraunitară. Astfel condiţia devine ecuaţia 9.15.
Pierderile de putere au o componentă constantă (pierderile în fier şi cele mecanice), independente de sarcina de pe axul motorului şi o componentă variabilă, proporţională cu pătratul intensităţii curentului absorbit de motor. Aşadar:
+=
⋅+=+=
nconstn
nnconstconst
pppIIppppp
var
2
varvar . (9.16)
Condiţia 9.15 devine atunci:
⋅+⋅>+
2
varvar1
nnconst
tnconst I
Ippk
pp . (9.17)
Se notează:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
38
=
=
xII
app
n
n
const
var
. (9.18)
Condiţia devine:
( ) ( ) ( ) ( ) mttt
nn kakaxxaka
kxapap =−⋅+<⇒+>⋅+⇒
+⋅>+⋅ 111 2
2var
var ,(9.19)
unde s-a notat ( ) mt kaka =−⋅+1 factorul de încărcare mecanică. Observăm că faptul că factorul de încărcare termică este supraunitar determină şi un factor de încărcare mecanică supraunitar.
Se obţine condiţia de alegere a puterii în serviciul S2:
≥
≥
mn
mn
kPP
kII
2
2
, (9.20)
unde factorul de încărcare mecanică se poate exprima:
τ
τ
a
a
t
t
m
ea
eak−
−
⋅−
⋅+=
1
1. (9.21)
9.7. Alegerea puterii motoarelor electrice în serviciul intermediar periodic S3
In acest caz motorul funcţionează periodic cu un ciclu de durată ct ce conţine un interval de acţionare at în care motorul este încărcat cu o sarcină constantă, interval urmat de un altul de repaus pt . Aceste intervale sunt mai mici decât timpul necesar atingerii echilibrului termic, în cursul unui ciclu de funcţionare. Utilizările acestui serviciu de funcţionare sunt

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
39
foarte des întâlnite la maşinile de ridicat. Figura 9.5 prezintă diagrama de variaţie a puterii, turaţiei şi supratemperaturii în acest serviciu.
Figura 9.5.: Diagrama de variaţie a puterii, turaţiei şi supratemperaturii în serviciul S3
În primul ciclu, în timpul acţionării, maşina se încălzeşte până la o supratemperatură şi apoi, în timpul repausului ea se răceşte, dar nu până la supratemperatură nulă. Aşadar, al doilea ciclu surprinde maşina la o supratemperatură mai mare decât zero, astfel că la sfârşitul celui de al doilea ciclu de acţionare supratemperatura va fi mai mare decât la sfârşitul primeia. Acest proces de ridicare gradată a limitelor între care variază supratemperatura se continuă până ce se ajunge la o saturaţie:
====
m
M
θθθθθθ
42
31. (9.22)
Aplicând ecuaţiile încălzirii şi ale răcirii deduse anterior, obţinem:
⋅+
−⋅=
⋅=
−
−
ττ
τ
θθθ
θθaa
p
tt
s
t
ee
e
23
12
1. (9.23)
Înlocuind 9.22. în 9.23, se obţine:
ssc
ast
t
M
t
M
t
sM DAtt
e
eeec
aca
θθθθθθθτ
τττ ⋅=⋅≅⋅
−
−=⇒⋅+
−⋅=
−
−−
1
11 . (9.24)
0
θ
t
θ min
θ max
P n

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
40
S-a notat în ecuaţia 9.24 durata relativă de acţionare c
a
ttDA = . Această
durată relativă de acţionare are valori standardizate de 15%, 25%, 40%, 60%. Dacă durata de acţionare este mai mare decât 60%, atunci ea se rotunjeşte la 100% şi practic se ajunge la serviciul S1. Condiţia ce se impune din nou este ca această limită superioară a supratemperaturii să fie mai mică decât supratemperatura maxim admisibilă :
admM θθ < . (9.25)
Supratemperatura este proporţională cu pierderile de putere, întrucât încălzirea motorului are loc datorită acestor pierderi. Astfel, putem spune că supratemperatura maxim admisibilă trebuie să fie proporţională cu pierderea nominală de putere a motorului pe care urmează să-l alegem, iar supratemperatura de saturaţie la care s-ar ajunge este proporţională cu pierderea de putere ce reiese din graficul serviciului de funcţionare :
=
=
Ap
Ap
s
nadm
2θ
θ
. (9.26)
Dar, conform ecuaţiei 9.24, 9.25 şi 9.26 se obţine:
nppDA <⋅ 2 . (9.27)
Pierderile de putere au o componentă constantă (pierderile în fier şi cele mecanice), independente de sarcina de pe axul motorului şi o componentă variabilă, proporţională cu pătratul intensităţii curentului absorbit de motor. Aşadar:
+=
⋅+=+=
nconstn
nnconstconst
pppIIppppp
var
2
varvar. (9.28)
Condiţia 9.27 devine atunci:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
41
⋅+⋅>+
2
varvarn
nconstnconst IIppDApp . (9.29)
Se notează:
=
=
xII
app
n
n
const
var. (9.30)
Condiţia devine:
( ) ( ) ( ) ( )DA
DAaaxxaDA
axapDAap nn⋅−+
<⇒+>⋅+⇒+⋅⋅>+⋅1111 22
varvar .
(9.31)
Astfel, condiţia de alegere devine:
aDAaDAIIn ⋅−+
⋅>1 . (9.32)
Dacă 0→a , condiţia devine:
DAIIn ⋅> . (9.33)
Similar se deduc şi relaţiile, condiţiile pentru putere şi moment:
⋅>⋅>
DAMMDAPP
n
n. (9.34)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
42
9.8. Alegerea puterii motoarelor electrice în serviciul neîntrerupt cu sarcină intermitentă periodic, S6
In acest caz motorul funcţionează periodic, fiecare ciclu conţinând un timp de funcţionare la o putere constantă AP şi un alt interval de funcţionare la o altă putere constantă BP , fără a interveni repausul. În mod particular intervalul Bt poate fi şi unul de mers în gol. Utilizări dese ale acestui serviciu se întâlnesc în acţionarea unor maşini unelte la care sarcina se aplică şi se elimină periodic. Timpii de acţionare At şi Bt sunt inferiori timpului necesar atingerii echilibrului termic. Figura 9.6 ilustrează graficul de variaţie a puterii, turaţiei şi supratemperaturii în acest serviciu.
Figura 9.6.: Graficul de variaţie a puterii, turaţiei şi supratemperaturii în serviciul S6
Acest serviciu se poate considera ca fiind o suprapunere a două servicii S3, unul cu Aa tt = şi Bp tt = şi celălalt cu Ba tt = şi Ap tt = . Definind cele două durate relative de acţionare:
=
=
c
BB
c
AA
ttDA
ttDA
, (9.35)
0 t
θ 0
θ max
P
θ
n
t A t B

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
35
şi făcând un raţionament similar cu cel de la serviciul S3, putem scrie pentru cele două limite superioare la care ajung supratemperaturile în cele două servicii S3 ce se suprapun ca fiind:
⋅=⋅=
⋅=⋅=
ApDADA
ApDADA
BBsBBMB
AAsAAMA
θθ
θθ. (9.36)
Încălzirea motorului funcţionând în serviciul S6 se poate considera ca fiind suma încălzirilor datorate celor două servicii S3 ce se suprapun în cadrul lui. Astfel, supratemperatura limită superioară la care se ajunge este:
( )BBAAMBMAM pDApDAA
⋅+⋅⋅=+=1θθθ . (9.37)
Se impune condiţia este ca supratemperatura maximă la care se ajunge să fie inferioară celei maxim admisibile:
admM θθ < . (9.38)
Supratemperatura este proporţională cu pierderile de putere, întrucât încălzirea motorului are loc datorită acestor pierderi. Astfel, putem spune că supratemperatura maxim admisibilă trebuie să fie proporţională cu pierderea nominală de putere a motorului pe care urmează să-l alegem
Apn
adm =θ . Înlocuind acestea în condiţia 9.38 se obţine:
( )BBAAn pDApDAp ⋅+⋅> . (9.39)
Pierderile de putere au o componentă constantă (pierderile în fier şi cele mecanice), independente de sarcina de pe axul motorului şi o componentă variabilă, proporţională cu pătratul intensităţii curentului absorbit de motor. Aşadar:

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
36
+=
⋅+=
⋅+=+=
⋅+=
⋅+=+=
nconstn
Bnconstn
BnconstconstB
Anconstn
AnconstconstA
ppp
xppIIppppp
xppIIppppp
var
2var
2
varvar
2var
2
varvar
. (9.40)
Condiţia 9.39 devine atunci:
( )( ) ( )( )2var
2varvar BnconstBAnconstAnconst xppDAxppDApp ⋅+⋅+⋅+⋅>+ .(9.41)
Se notează app
n
const =var
şi dacă se presupune că acest raport tinde către zero,
se obţine:
BBAAn DAIDAII ⋅+⋅> 22 . (9.42)
In mod similar se obţin condiţiile şi pentru alegerea puterii şi a cuplului maşinii:
⋅+⋅>
⋅+⋅>
BBAAn
BBAAn
DAMDAMM
DAPDAPP22
22
. (9.43)
9. 9. Alegerea motoarelor electrice pentru sarcini variabile
In această situaţie sarcina de pe arborele motorului are o variaţie cu mai multe intervale de sarcini constante şi cu perioade de trecere de la o sarcină ala alta. Rezolvarea riguroasă a problemei, adică determinarea riguroasă a puterii nominale minime pe care trebuie să o prezinte motorul pentru o asemenea acţionare presupune calcule complicate şi anevoioase, astfel că se apelează la aproximări ce presupun trepte de sarcină constantă între care trecerea are loc instantaneu şi turaţii aproximativ constante pe durata intervalelor de sarcină constantă. Există mai multe metode de determinare a puterii echivalente, a momentului echivalent,

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
37
respectiv a curentului echivalent. Acestea conduc la următoarele criterii de alegere:
++++⋅++⋅+⋅+⋅
≥
++++⋅++⋅+⋅+⋅
≥
++++⋅++⋅+⋅+⋅
≥
k
kkn
k
kkn
k
kkn
tttttMtMtMtMM
tttttItItItII
tttttPtPtPtPP
......
......
......
321
23
232
221
21
321
23
232
221
21
321
23
232
221
21
. (9.44)

Robert PECSI – Electrotehnică, maşini şi acţionări electrice, Note de curs.
38
Bibliografie
[1.] Centea, O.; Petrescu, C.: Studiul convertizorului static cu saturaţie trimonofazat destinat repartizării echilibrate a sarcinilor monofazate pe fazele reţelei trifazate de alimentare. Contract cercetare 81/1991, ICB
[2.] Covrig, M., Pârlog-Cristian, R., Cepişcă, C., Ochiană, L., Vasile, N., Lecţii de electrotehnică, Ed. ICPE, Bucureşti, 2001
[3.] Măgureanu, R., Ambrosi, S., Creangă, D., Bratosin, L., Drăghici, A., Active Power Filters Advanced Control, Conference “Advanced Topics in Electrical Engineering”, Bucharest, Nov. 2002
[4.] Măgureanu, R., Creangă, D., Ambrosi, S., Bostan, V., Particular Aspects of Shunt Power Active Filters Control, Proceedings of the 9th International Conference on Optimization of Electrical and Electronic Equipment “Op-tim’04”, Braşov, May 2004
[5.] Pécsi, R., Contribuţii la studiul metodelor de repartizare simetrică a sarcinilor monofazate pe cele trei faze de alimentare ale reţelei, Teză de doctorat, 2006
[6.] Pécsi, Robert, Puterea reactivă din reţelele electrice trifazate şi compensarea acesteia, Buletin ştiinţific UTCB, 2006;
[7.] Pécsi, Robert, Dispozitiv de echilibrirare a rețelei trifazate bazat pe schimbul de putere intre faze, Facultatea de Utilaj, 2005 ;
[8.] Pécsi, Robert, Curentul de natură reactivă din reţelele electrice de forţă, articol publicat în Buletinul Ştiinţific al UTCB, 2005 ;
[9.] Pécsi, Robert, Sanda, E., Tănase, N., Problema soluţiilor multiple în analiza sistemelor trifazate dezechilibrate, Sinaia, 2005;
[10.] Pécsi, Robert, O metodă de compensare a dezechilibrelor din rețeaua de distribuție a energiei electrice, Cluj, 2004 ;
[11.] Pécsi, Robert, A method and device for balancing a three-phase power system, ICATE, 2004;
[12.] Pécsi, Robert, A few considerations on the pipelines’ safety nearby the electric transmission lines, ICOLIM, 2004;
[13.] Pécsi, Robert, Sanda, E., Tănase, N., Conversia statică a frecvenţei energiei electrice, SIGPROT 2004;
[14.] Pécsi, Robert, Tănase, N., O scurtă analiză a conceptului de putere reactivă – articol publicat în Buletinul Ştiinţific al UTCB nr. 12 din 2003;
[15.] Pecsi, Robert, High Power Factor Single-Phase Rectifier, articol prezentat la Conferinţa Facultăţii de Utilaj Tehnologic, 12 decembrie 2003;
[16.] Pécsi, Robert, Dispozitiv de distribuire echilibrată a puterii electrice absorbite de un receptor monofazat de mare putere pe fazele reţelei trifazate de alimentare cu energie electrică, Conferinţa Facultăţii de Utilaj Tehnologic, 12 decembrie 2003;





























