Embed Size (px)
Citation preview
Robotsina smart city: Consistencyprincipleasa tool fordealingwithstakeholders
ELENA SEREDKINAHeadof theCenter of TechnologyAssessment , PNRPU,PhD, Headof HRI dept, “Promobot” LLC.IGOR BEZUKLADNIKOVHeadof ITandRoboticsEngineering Center, PNRPU, PhD
Session2. «Breakthrough technologiesand theirimpact on society, technologyassessment, andsocialrobotics».

Russian Foundation for Basic Research(RFBR) - 2021/2022№ 20-411-590002 r_a_Permsky Kray "Theoretical foundations of applied anthropomorphismin robotics for the successful integration of robots into society (on the example of servicerobots Promobot in the Perm region)".Key researchers:Seredkina Elena Vladimirovna (Head)Bezukladnikov Igor IgorevichBurova Olga ArkadyevnaDolgikh Mikhail SergeevichGuest researchers from other Russian universities
Integration of robots into urbaninfrastructureIntegration of the service robots into a constantly changingsocial environment is a complex scientific problem. To getthis problem solved, it is necessary to take into account notonly the scientific, technical and economic aspects, but alsothe social and humanitarian ones. From our viewpoint, thekey, leading to successful solution, is that service robotsshould not be perceived as tools, but as social agents.Human-Robot Interaction (HRI), being an interdisciplinaryfield of research, meets this kind of requirements.
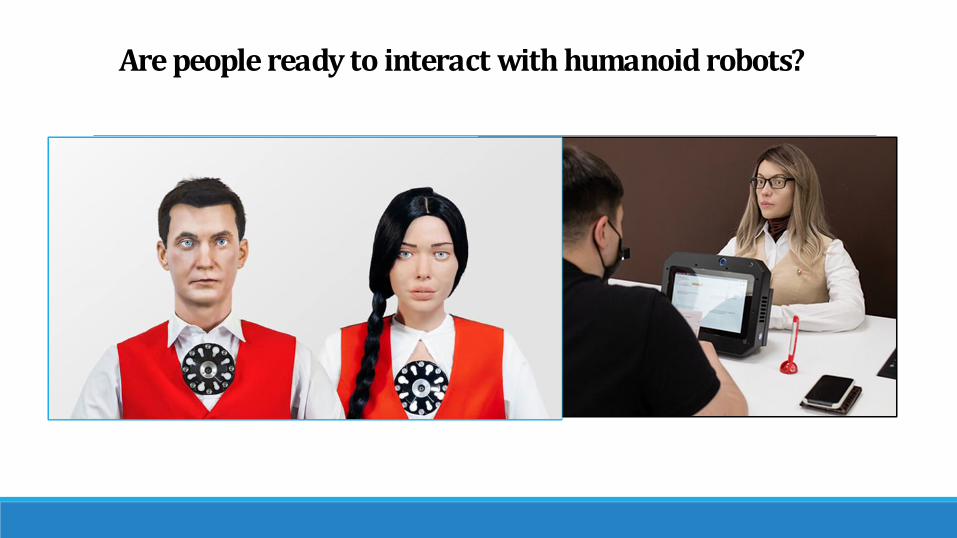
Arepeople ready to interact withhumanoidrobots?
Stakeholdersengagement approaches Technology Assessment Responsible Research and Innovation Value-Sensitive Design Customer-centric approach Socially Responsible Technology Sustainable Robotics
AppliedAnthropomorphisminSocialRobotics In recent years, research in the field of Human-Robot Interaction (HRI) has focused on theproblem of anthropomorphism, which is closely related to social robotics. In fact, humansreadily attribute intentionality and mental states to any living and nonliving entity. Traditionally,anthropomorphism was viewed as a methodological error, an obstacle to the advancement ofscientific knowledge that must be overcome. As a contrast to this traditional negative evaluation, social robotics grants anthropomorphism apositive, and plurally articulated, role. The fact is that the tendency to anthropomorphize isquite frequently manifest among humans, and thus the goal of building social robots suggeststhat it may be used as a tool to facilitate social exchange between robots and humans.
Anthropomorphisminrobotics
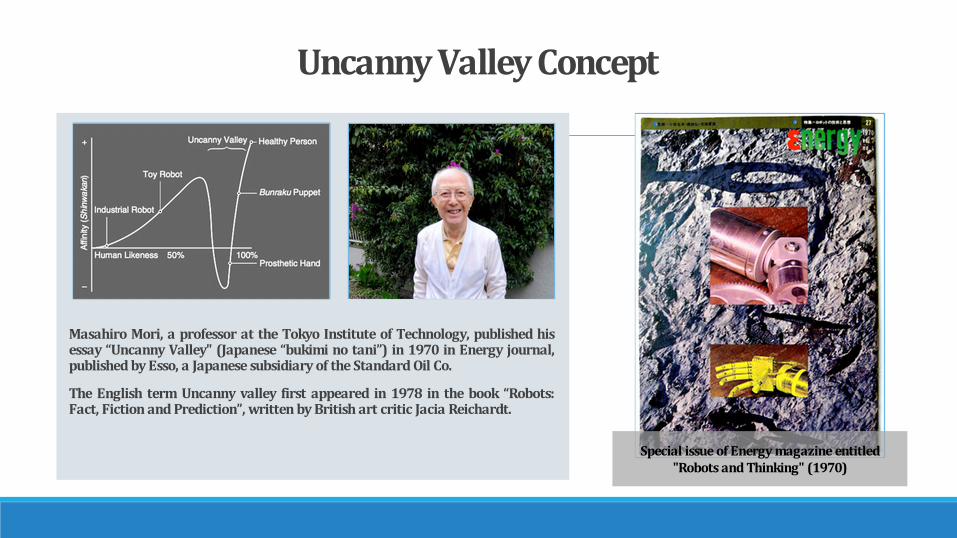
UncannyValleyConcept
Masahiro Mori, a professor at the Tokyo Institute of Technology, published hisessay “Uncanny Valley" (Japanese “bukimi no tani”) in 1970 in Energy journal,publishedbyEsso, a Japanese subsidiaryof theStandardOil Co.The English term Uncanny valley first appeared in 1978 in the book “Robots:Fact, FictionandPrediction”, writtenbyBritishart critic Jacia Reichardt.
Special issueof Energymagazineentitled"RobotsandThinking" (1970)
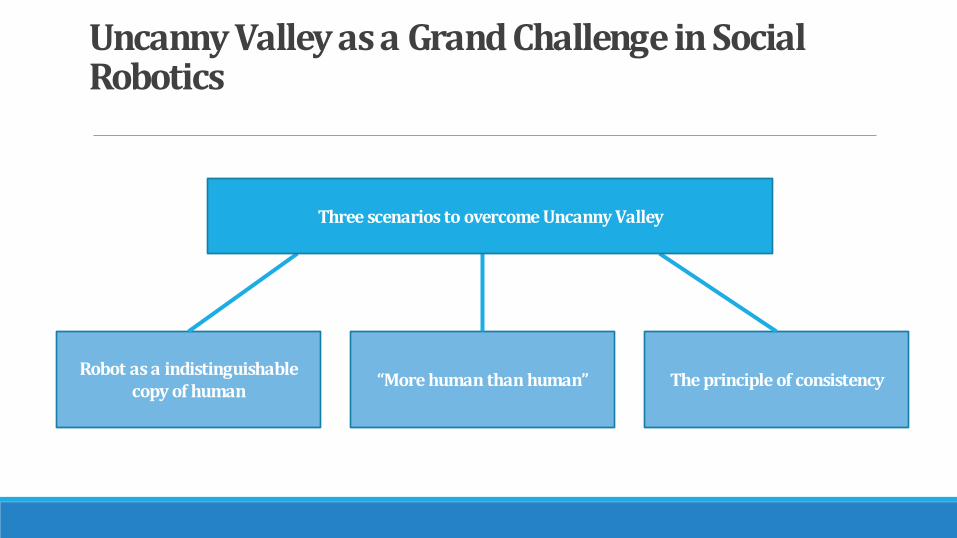
UncannyValleyasa GrandChallengeinSocialRobotics
Robot asa indistinguishablecopyof human “Morehuman thanhuman” Theprincipleof consistency
Threescenarios toovercomeUncannyValley
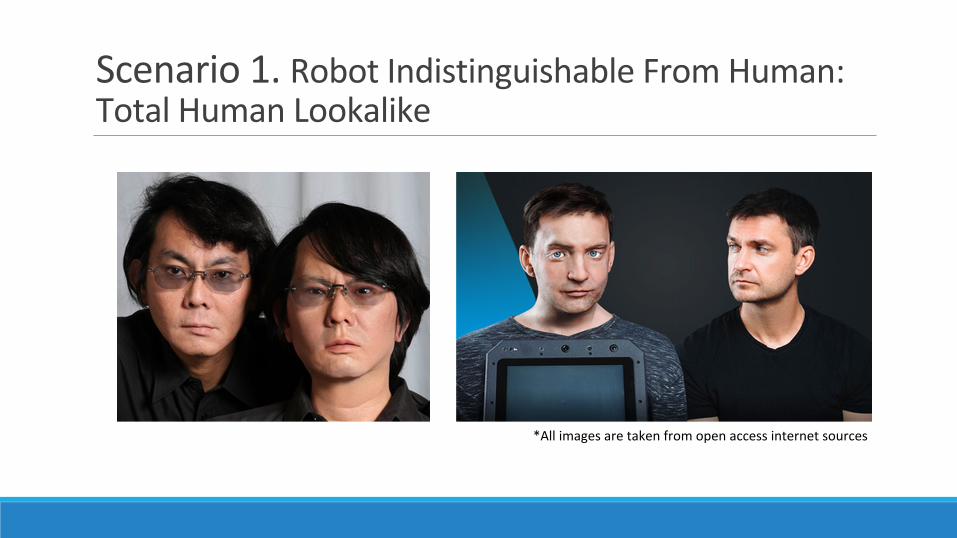
Scenario 1. Robot Indistinguishable From Human:Total Human Lookalike
*All images are taken from open access internet sources
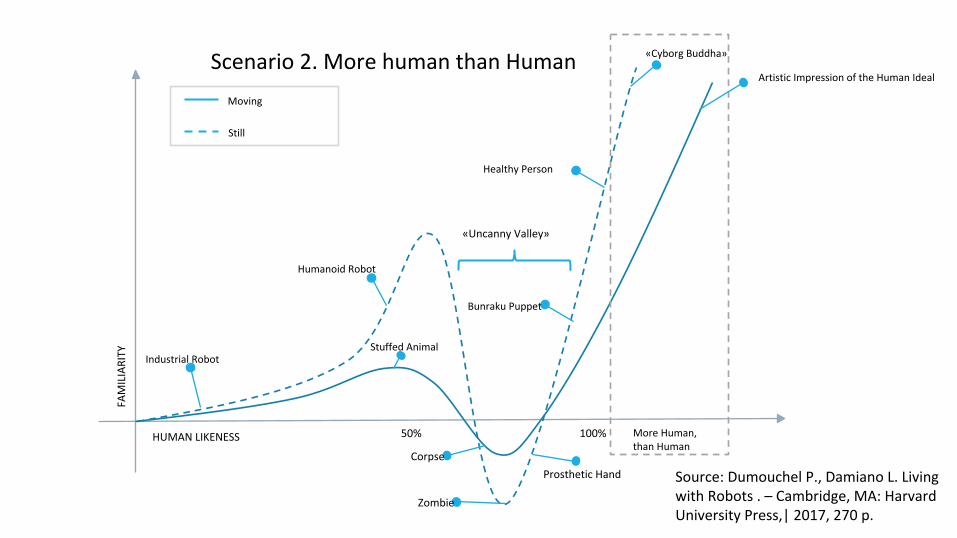
«Uncanny Valley»
Industrial Robot Stuffed Animal
Corpse
ZombieProsthetic Hand
Humanoid Robot
Healthy Person
More Human,than HumanHUMAN LIKENESS
FAMILIA
RITY
50% 100%
«Cyborg Buddha»Artistic Impression of the Human Ideal
MovingStill
Bunraku Puppet
Scenario 2. More human than Human
Source: Dumouchel P., Damiano L. Livingwith Robots . – Cambridge, MA: HarvardUniversity Press,| 2017, 270 p.

Image from open access internet sources
Scenario 3.Appliedanthropomorphismandtheprincipleofconsistency
Success in activating of the anthropomorphic projectionsinside user’s brain fully depends on the following twofactors:1) humanoidappearance (A);2) autonomousmovement / behavioral realism(B)
Theprincipleof asymmetry Behavioral realismismore important thanhighlyanthropomorphic appearance (!) A>B leads to: “UncannyValley”
A<B leads to: Generallypositive feedback
Lower thedegreeof anthropomorphismImprove thebehavioral realismHowtoovercome:
Theprincipleof consistency
a) Despiteall the casesof (A<B) producesgenerallypositive feedback, inorder tomaximize sucha positivereaction, bothappearanceandbehavior of the robotshouldbe in sync (A=B). b) All casesof (A>B) inevitably leads to the ”UncannyValley” situation, and, therefore,must beavoided
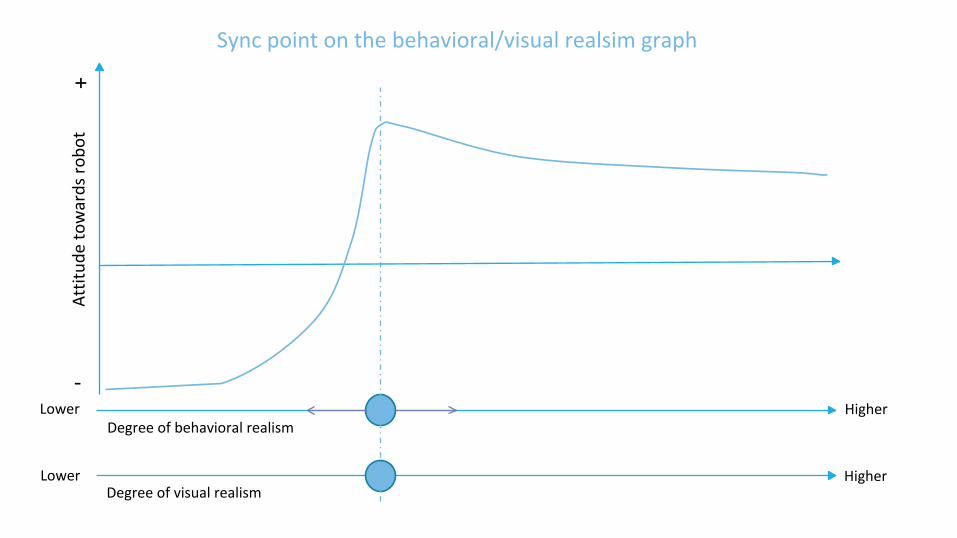
Degree of visual realism
Degree of behavioral realismLower
Lower
Higher
Higher
Attitud
etowa
rdsrob
ot+
-
Sync point on the behavioral/visual realsim graph

Reducing anthropomorphization as theway to improve user impression
Research of the people’s attitude towards service robots (based on the current line-up of the service robotsproduced by Probomot company) was carried on in May 2021 at Perm Tech UniversityOn of the main objectives of the study is to clarify the viability of the proposed applied anthropomorphismconcept, namely:1. Formulate and proof the conditions for the successful activation of anthropomorphic projections,
attributing human mental and emotional states to robots: a) based on their appearance ("passiveascribing"), b) based on their behavior ("dynamic realism")
2. Study the formation of the readiness (or unavailability) of users to interact with robots with varyingdegrees of anthropomorphism
3. Compare the opinions in a different user groups: with a technical and humanitarian profile of educationResearch method: focus group (guided group discussion) using stimulus materials: videos that show serviceanthropomorphic robots in real situations of human interaction.3 focus groups were held in May 2021 at Perm Polytechnic University.
Attitude towards service robots: A social study
Thanksforattention!

![E. Tatasciore, “Alle soglie”: Elena Salibra e Gozzano, in «...forse i campi / elisi sono qui entro la radura». Atti della Giornata di studi in ricordo di Elena Salibra, [...],](https://img.pdfslide.net/doc/110x75/63623fd9a514f501cd0d272b/e-tatasciore-alle-soglie-elena-salibra-e-gozzano-in-forse-i-campi.jpg)



























