Embed Size (px)
Citation preview

Journal of Communication and Computer, 2 (2013) 234-251
Improving the Texture Spectrum Model Using a Compact
Texture Unit Descriptor
Abdelmounaime Safia, Dong-Chen He
Centre for Research and Applications in Remote Sensing, Sherbrooke University, Sherbrooke 2500, Canada
Received: October 22, 2012 / Accepted: November 26, 2012 / Published: February 28, 2013.
Abstract: Existing texture models tend to emphasize either the spectral properties, or the spatial organization of texture. However, both texture components are important for texture characterization. Here we have improved the texture spectrum model in order to enhance its performance for the analysis of both spectral and spatial organization texture components. This was achieved by introducing a general solution for the codification of non-ordered texture units. This improved version is computationally very efficient compared to the original model because it uses a drastically reduced number of texture units. The improved model uses a new descriptor named the Compact Texture Unit, that is rotation invariant in addition to grayscale invariance inherited from the original model. The new descriptor is very simple to generate and allows the implementation of fast algorithms. We validated the proposed descriptor for different applications, including texture classification, rotation invariant image retrieval, and rotation invariant texture classification. Results clearly showed the benefits of detailed analysis of both the spectral and spatial organization texture components, and robust texture characterization was obtained for all of experiments. Key words: Texture Spectrum, texture classification, Image retrieval, rotation invariant, grayscale Invariant
1. Introduction
Texture analysis is very active field of research
[1],[2],[3],[4] and a valuable source of information for
many applications, particularly when spectral attributes
alone are insufficient to discriminate between object of
interest in the image[5], [6], [7], [8], [9], [10]. Even if
there is no universal definition of the concept of texture
[11], there is general agreement that texture is
characterized by the spectral properties of local pixels
and the spatial organization of these pixels [12].
Conceptually, texture analysis is based on two
parameters that describe its spectral and spatial
organization aspects. The first is the spectral resolution
(M), which refers to the effective spectral range of the
pixels being used to analyze the spectral aspect of
Corresponding author: Abdelmounaime Safia, PhD candidate,
research fields: remote sensing, texture analysis and pattern recognition. Email: [email protected].
Dong-Chen He, Ph.D., professor, research fields: texture analysis, pattern recognition, geomatics and remote sensing.
texture. The second is the spatial resolution (N), which
refers to the number of pixels and directions
(orientations) being analyzed simultaneously to
characterize the spatial organization. Both of these
texture aspects are important to characterize texture, yet
existing texture analysis methods tend to emphasize one
or the other of these aspects. Based on these two
parameters, texture analysis methods can be divided into
two categories: methods that maximize the spectral
resolution (M) and methods that maximize the spatial
resolution (N).
One of the most representative texture models that
maximizes M is the Gray Level Co-occurrence Matrix
(GLCM) proposed by Haralick [12]. The GLCM uses
the full spectral range of an image to transform each
neighborhood into a 256 x 256 matrix (for an 8-bit
image) that contains the occurrence of all the pairs of
two pixels in the neighborhood separated by a fixed
distance in a given unique direction. The use of the full
spectral range provides the GLCM with a maximum

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
spectral resolution of M=256 (for an 8-bit image).
However, as only two pixels are analyzed at the same
time, the GLCM has a spatial resolution (N) equal to 2,
which is the minimum spatial resolution that a given
texture model can have. The autocorrelation and the
variogram models [13], [14] for example are very
similar to the GLCM model because texture analysis is
performed in a fixed direction and displacement step.
Signal processing based texture analysis methods such
as Fourier and wavelet transforms [6], [15] have also an
important spectral resolution compared to their spatial
resolution.
On the other hand, the texture spectrum model
proposed by He and Wang [16] is the most
representative of the models that maximize the spatial
resolution (N). In this model, texture is extracted by
analyzing all the pixels in a neighborhood
simultaneously in all directions. This strategy gives the
texture spectrum model a maximum spatial resolution N
equal to the number of pixels in the neighborhood. The
spectral resolution of the texture analysis process, in this
model, is fixed by the number of intervals used to
multi-threshold a neighborhood by the gray level value
of its central pixel. This step is a quantization of the
spectral variability of texture and the number of
threshold intervals, defines the spectral resolution (M)
of the texture spectrum model. In theory, the texture
spectrum model allows the use of any number of
thresholding intervals [17]; however, in practice, only
limited numbers can be used because of the
computational overhead. This tends to reduce the
spectral resolution of the texture spectrum model.
Another texture model that maximizes spatial resolution
is the structural element model [18], [19], which is
based on structural element matching.
In the case of texture with complex structures
(complex spatial interaction), the GLCM may fail to
capture all of its characteristics, whereas the texture
spectrum model may provide insufficient texture
characterization in the case of texture with rich spectral
variability content. A potentially important
improvement in texture analysis is to develop a new
model to take full advantage of both the spectral and
spatial resolutions. In addition to theoretical and
methodological difficulties, the computational
complexity of such a model should also be addressed.
Here, we propose a generalized solution for the texture
spectrum model which allows a detailed analysis of both
spectral and spatial texture properties. In this new
solution all the texture units that have the same codes,
regardless the position of these codes in the
neighborhood are compacted into a single texture unit
named the Compact Texture Unit (C-TU). This results on
a drastically reduced number of texture units, compared
to the original model. The proposed solution uses a new
codification system that insures unique identification for
each compact texture unit. Using these new codes we
proposed the C-TU based descriptor that allows
simultaneous maximization of spectral (M) and spatial
(N) resolutions of the texture spectrum model. Our
results indicate that even with using less texture units, the
texture spectrum model preserves its texture
discrimination capability. The reason is that the C-TU
descriptor allows increasing the spectral resolution (M),
which balances the decrease of its spatial resolution due
the fact that the order is not considered in the C-TU
codification. In addition, the new C-TU descriptor makes
the texture model rotation invariant.
The paper is organized as follows. In section 2 we
present the texture spectrum background and its limits.
Section 3 introduces the proposed Compact Texture Unit
based solution. Section 4 presents a set of three
experiments using the C-TU descriptor dealing with
texture classification, rotation invariant image retrieval
and rotation invariant texture classification. Conclusions
are drawn in Section5.
2. Texture spectrum background
In this section we presents the texture spectrum model
using a different notation that the original one. The

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
reason is to make the notations simpler when using large
numbers of spectral and spatial resolutions. The texture
spectrum model transforms each local neighborhood Ψ
from the grayscale domain to M-tuple texture units in
the textural domain T [16]. This transformation is
conducted with a maximum spatial resolution and a
reduced spectral resolution [1]. For a given local region
of Ψ0,N=v1,v2,v3,…vN of N pixels centered on (vo), this
transformation is a multi-threshold of the (vi - vo)
measures[17].
We define Ω as the definition domain of these
differences (vi - vo). For an 8-bit image, for example, it
would be Ω = [-255,255]. We can define ∆kk=1,2…M as
a set of M regular subdivisions of Ω (disjoint
subintervals), and we associate each subinterval with a
unique code Ek:
k
kk
E
and, (1)
N in Eq. 1 is the set of natural numbers. The
multi-threshold transformation function ζ can then be
applied to each pixel (vi) in order to transform Ψ0,N from
the grayscale domain to the textural domain Ŧ:
kikii
MN
)v(vEvv
EEEE
0
321,0
if)(
...,,,:
(2)
The number of subintervals ∆k defines the spectral
resolution of the texture spectrum model.
2.1 Defining the threshold values
When the set Ω is estimated for an entire image using a
small neighborhood Ψ, it provides information related to
the spatial variation contained in the image. The way this
set (Ω) is handled defines how the process of texture
characterization is conducted for its spectral component
(spectral resolution). To illustrate this, Fig. 1 shows the
theoretical distribution of Ω for an 8-bit image. It is
centered on zero (vi-vo=0). The central value of this
distribution gives the number of pixels in the image
having exactly the same value as the central pixel in their
neighborhood Ψ. Around the zero value are pixels having
gray-level values close to their central pixels. In other
words, this region of the histogram defines pixels that
contribute to forming smooth textures. As we move from
the center to the left and right, we encounter pixels
contributing to dark-rough textures and contrasted-rough
textures, respectively.
The most obvious and comprehensive subdivision of
the set Ω is to recognize these three types of spatial
interactions (i.e., pixels contributing to dark-rough
texture, smooth textures, and contrasted-rough textures)
by subdividing Ω into three different subsets. This
defines the standard spectral resolution M=3 of the
texture spectrum model. But, as stated in [17], it is
possible to define M different subdivisions (∆) of the
spatial variation in Ω, where large values of M allow
detailed texture analysis and can help to discriminate
between similar textures. For a given value of M, one of
the simplest solutions for the definition of the threshold
values (limits of each of the M intervals) is to divide the
spectral range of Ω into equal parts (having the same
number of pixels) [20]. This avoids making an
erroneous assumption about the distribution of pixels
composing the different subdivision sets.
Fig. 1 Distribution of (vi-v0) for an entire image.
Fig. 2 shows three different ways of transforming a 3 x
3 neighborhood Ψ (N=8) from the grayscale domain into
three different texture units in the textural domain Ŧ
according to three different spectral resolutions: M=2,
M=3, and M=5. Pixels are numbered anti-clockwise
starting from the right side. The corresponding limits
were fixed by dividing the spectral range Ω into equal
intervals of 50%, ~33%, and 20% for M=2, M=3, and
M=5, respectively. The 2-tuple texture unit given in the
first row of Fig. 2 shows that the upper left side of the
studied neighborhood is brighter than the central pixel

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
whereas the lower right side is darker. As higher spectral
resolutions were used, the 3-tuple and 5-tuple texture
units given in the second and third rows revealed more
nuanced spectral information.
2.2 Labeling texture units
The texture units defined in Eq. 2 are organized in an
M-tuple system. He and Wang [16] proposed the
following equation to ensure a unique label for each
texture unit:
N
i
iiTU MvvN
1
10 )(
(3)
The last column in Fig. 2 shows how NTU can be
obtained for three spectral resolutions (2, 3, and 5). The
histogram of texture units is referred to as the texture
spectrum (TS) [16], where the abscissa indicates the NTU
and the ordinate represents its occurrence frequency.
This histogram reveals texture information similar to the
histogram of gray-level values that reveals spectral
information. TS can be estimated for an entire image for
image retrieval [21], or locally using a moving window
for image segmentation and classification [17], [22],
[23].
Fig. 2 Calculation of the original ordered texture unit for M=2, M=3, and M=5 as proposed in [16] [17].
2.3 Limitations of the M-tuple labeling system
The power-based labeling system produces very
different NTU for very similar neighborhoods. Fig. 3
shows two 2-tuple texture units in (a) and (b) and two
3-tuple texture units in (c) and (d). The two texture units
in (a) and (b) are very similar (both have only one pixel
higher than the central pixel). In a set of available labels
ranging from 0 to 255, these two texture units were
attributed very different labels: 1 and 128. The
similarity between these two texture units was not
reflected in their corresponding labels. The same effect
is observed for the 3-tuple texture units in (c) and (d).
Another drawback of the power-based labeling system
is that the number of possible texture units increases
rapidly with M and N (MN different texture units). In
theory, it is possible to label all the texture units provided
by any spectral and spatial resolution. But, in practice,
only a few combinations of M and N can be used to keep
the calculations manageable. This is a serious limitation
of the texture spectrum model.
To explore high spectral and spatial resolutions in
practice, we must reduce the number of bins for the
resulting histograms. The main drawback of reducing the
histogram bins is that there is no control on how texture
information is compressed. This is due to the fact that the

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
relative locations of the resulting texture units (NTU
values) in the histogram do not reflect their similarities.
Fig. 3 Power-based codification. 2-tuple (a, b) and 3-tuple (c, d), produce very different texture numbers (NTU) for similar texture situations.
3. Proposed Compact Texture Unit
An ordered texture unit provides information about the
occurrence of the different M threshold situations in the
neighborhood and the relative position of each of these
situations. The two 3-tuple texture units in Fig. 3(c) and
(d), for example, differ from each other by the position
of the pixel that has a value higher than the central
pixel. The occurrence of the three threshold situations is
the same for both of the 3-tuple texture units: both have
six pixels with values less than the central pixel, one
pixel close to the value of the central pixel, and, finally,
one pixel higher than the central pixel. The same
observations can be made for the 2-tuple texture units in
Fig. 3(a) and (b). If only the occurrence is retained,
these two texture unit pairs will be identical. And, if an
appropriate labeling system is adopted to identify these
non-ordered texture units, then the problem reported in
Section 2 related to the NTU value that does not reflect
texture unit similarity will be solved.
To develop this solution, we were inspired by our
previous work [20] that aimed to reduce the texture
spectrum redundancy caused by the M-tuple encoding
system reported in [24]. A solution was proposed for
labeling non-ordered texture units for the particular case
of M=3 and N=4. Here, we propose a general solution
for labeling non-ordered texture units, for different
spectral and spatial resolutions. Specifically, we
attribute to each threshold interval special codes that
change according to the spectral and spatial resolutions
being used. These codes were generated using a high
performance processing grid facility. Specifically we
used a grid of 109073 cores during 24 hours. These
codes are summarized in Fig. 4. The labeling strategy
used these special codes in a sum-based formula given
in Eq. 4. Using this solution (Fig. 4 and Eq. 4), all
texture units having the same occurrence of the different
threshold values, regardless of their positions in the
neighborhood, are identified with the same unique label
referred to as (NC-TU). In this solution, all ordered texture
units are automatically “compacted” to form a unique
non-ordered texture unit. We propose to call these
non-ordered texture units Compact Texture Units
(C-TU).
N
i iTUC vvN1 0 )(
(4)
Fig. 4 Compact Texture Units codes for different radiometric and spatial resolutions.
Table 1 Number of C-TU for different values of N and M.
Spectral resolution (M) N 2 3 5 7 9 4 5 15 70 210 495 6 7 28 210 924 3003 8 9 45 495 3003 12870 12 13 91 1820 18564 16 17 153 4845 74613 24 25 325 20475
In Fig. 4, each texture analysis scenario, which uses
fixed spectral and spatial resolutions M and N, needs to
use its specific codes to identify the M-related
thresholds. These specific codes ensure that Eq. 4 will

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
provide a unique label (NC-TU) for each of the resulting
C-TU. The total number of C-TU for each scenario is
given in Table 1. The analysis of texture using, for
example, a spectral resolution of M=3 and a
neighborhood size of N=8 needs the codes 1, 2, and 10
to attribute unique labels to the resulting 45 C-TU. If a
higher spatial resolution of N=24 is needed, the resulting
325 C-TU have to be labeled using the following codes:
1, 2, and 26.
The proposed solution (Fig. 4 and Eq. 4) attributes
different NC-TU to each of the generated C-TU.
Consequently, the NC-TU can be used exactly as
generated by Eq. 4 for texture characterization without
any post-processing. However, in order to have C-TU
labeled with successive digits to form histograms with
continuous bins, the NC-TU need to be re-coded. This
supplementary step, if needed, can be performed with a
small lookup table because it does not use the original
ordered texture units.
Fig. 5 Calculation of the proposed Compact Texture Unit for M=2, M=3, and M=5).
In Fig. 5 we showed the different steps needed to
transform a fixed neighborhood into a C-TU using the
proposed codification system. In Figs. 6(a) and 4(b), we
explicitly presented the different C-TU and their
corresponding NC-TU for two different circular
neighborhoods, N=4 and N=8, for a spectral resolution
of M=3. Viewed as compact texture units, the two
texture units in Fig. 3(c) and (d) are identical because
both have six dark pixels, one flat pixel, and one bright
pixel. These two 3-tuple texture units are represented by
a single C-TU shown in the fifth column of the first row
in Fig. 6.
For a neighborhood of N pixels and a spectral
resolution of M, there are only: (M+N-1)! / (N!*(M-1)!)
different C-TU. This greatly reduces the total number of
combinations compared to the original ordered texture
units. In Table 2 we give the reduction achieved by our
solution compared to the original M-tuple system
(number of M-tuple texture units by the number of
C-TU). It is exactly this drastic reduction that allowed
the texture analysis process to be scalable even for high
spatial and spectral resolutions.
Table 2 Ratio of the total number of ordered texture units to the number of C-TU.
Spectral resolution (M) N 2 3 5 7 9 4 3 5 9 11 13 6 9 26 74 127 177 8 28 146 789 1920 3345
12 315 5840 1.E+05 7.E+05 16 3855 281351 3.E+07 4.E+08 24 7.E+05 9.E+08 3.E+12

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
Fig.6 The 15 Compact Texture Units for the case of M=3, N=4 (a) and, the 45Compact Texture Units for the case of M=3 and N=8 (b). These same configurations produce 81
Another important characteristic of the C-TU
descriptor is that it is rotation invariant by definition. The
original model did not have this characteristic. It can be
useful in many applications because in the real word
textures appear with different orientations. In addition,
the C-TU descriptor keeps the grayscale invariance of the
original model. From a computational complexity point
of view, these tow invariance as well as the non-ordered
constraint, are straightforward to achieve without any
post-processing. In addition, the C-TU use a sum-based
formula (Eq. 4), which is simpler to calculate than the
power-based one (Eq. 3). All of these advantages help to
develop faster algorithms. The theoretical framework for
compact texture units, which was introduced in this
section, describes more than a new descriptor. It is a
general and practical solution for texture analysis using a
wide range of spatial and spectral resolutions. It is
probably one of the rare texture analysis solutions that
allow, in practice, the simultaneous maximization of
spatial and spectral resolutions. In this sense, it can be
seen as a combination of the co-occurrence matrix
(which maximizes M) and the texture spectrum (which
maximizes N).
4. Experiments
Different texture aspects can be revealed and analyzed
using the proposed C-TU solution. This includes: 1) the
effect of increasing the spectral resolution in relation to
intra-texture variation, 2) the effect of using different
spatial resolutions in relation to the nature of texture
(macro and micro textures), and 3) the way that these two
parameters interact when combined in order to find
optimum combinations for specific applications and a
given type of texture. Addressing all of the texture
aspects is beyond the scope of this paper. However, all
these research topics are interrelated to the two
fundamental questions: Does the drastic reduction of the
number of texture units affect texture discrimination?
How efficient is the rotation invariance of the C-TU? The
following experiments focused on these two fundamental
characteristics that make the C-TU descriptor very
attractive for texture analysis. Among the solutions
provided in Fig. 4, we tested 27 different scenarios that
used three different spectral resolutions (i.e., M=2, M=3,
and M=5) and 9 different circular neighborhoods (having
different radii and different pixel sizes). These 27
scenarios were tested in three experiments dealing with
different image analysis topics.
Experiment #1 dealt with the texture classification of a
texture mosaic. Experiment #2 dealt with rotation
invariant texture image retrieval. Finally, Experiment #3
dealt with rotation invariant texture classification. These
experiments used 22 different texture images in total
(Fig. 7) from the Brodatz album [25].
4.1 Classification algorithm
In these experiments, we used a supervised
classification scheme. Among metrics used to evaluate
the similarity between two histograms we used a simple

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
integrated absolute difference. It has the advantage of
being efficient and very simple to estimate. It is given by:
M
iSRxR iTSiTSTSTSD
1
)()(),( (5)
where M is the number of texture spectrum bins. TSR is
the reference texture spectrum of a given texture, and TSS
is the sample texture spectrum at a given position in the
processed texture using a moving window.
We note here that for all experiments we made the
choice of using the effective number of texture units
provided by each tested descriptor, without any
histogram bin reduction. The aim was to perform an
effective assessment of the discriminative value of each
of the studied descriptors without any alteration. Along
the same logic, and in order to conduct a rigorous
evaluation of the intrinsic textural value of the developed
descriptor and those used for comparison, the
classification process was conducted with only these
descriptors as input and without any additional or
complementary information.
Fig. 7 The 22 Brodatz texture images used for validation.
4.2 Experiment #1: Texture classification
4.2.1 Experimental setup
This experiment involved the classification of a
mosaic formed by 12 different textures organized as
shown in Fig. 8. Each texture image was 640 x 640
pixels. There were several aims in this experiment. The
first aim was to analyze the texture discrimination
performance of the proposed C-TU descriptor using
different values for the spectral and spatial resolutions.
The test of the new descriptor using different spectral
and spatial resolutions was practically possible because
the C-TU descriptor used a reasonable number of
combinations. The second aim was to compare the
proposed C-TU descriptor with the original texture unit
descriptor [16] in order to evaluate how the drastic
reduction of the number of texture units achieved by the
C-TU could affect the texture discrimination
performance. Finally we introduced a comparison with
the GLCM method [12]. We found this test very
interesting because it introduced a comparison between
two different principles of texture analysis. The
following GLCM features were used: mean, variance,
homogeneity, contrast, dissimilarity, entropy, second
moment, and correlation.
Fig. 8 Locations of the 12 Brodatz textures of Experiment #1.
During the classification process, the size of the
moving window used to construct TSS needs to be small
enough to avoid texture confusion, but at the same time it
needs to be large enough to contain discriminative
information. To set the size of the classification moving
window, we adopted the strategy proposed in [20]. Each
of the twelve textures was divided into 100
non-overlapping windows of a fixed size and uniformly
distributed on the image. Then, the average similarity
between these 100 windows and the whole texture image
(640 x 640 pixels) was estimated using Eq. 5. This
process was iterated for 26 different window sizes
ranging from 11 to 59 pixels (26 x 100 distances were
estimated for each texture). The window that minimized
the distance in Eq. 5 among the 26 tested sizes
corresponded to the window size that best represented the
analyzed texture. An optimum window size of 33 x 33
pixels was selected for the classification. To construct the
reference TSR for each of the 12 textures, we
systematically took a sample of about 97 x 97 pixels at
the center of each texture. Selecting a reference window

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
larger than the classification window helped to deal with
intra-texture variations. In our case, the use of a reference
window of 97 x 97 pixels for classifier training
physically covered only ~2.2% of the area of each
texture. The classification and reference windows
produced histograms with only 1,089 and 9,409 entries
respectively, which was fairly reasonable.
4.2.2 Experimental Results
The textural content of the mosaic in Fig. 8 was
analyzed using the proposed C-TU descriptor. We
conducted 27 different classifications with different
C-TU configurations. Table 3 summarizes the
classification rate of each of the 12 textures for the 27
classifications.
Table 3 shows that for a fixed spectral resolution,
decreasing the spatial resolution tended to increase the
overall classification rate. For example, when the spatial
resolution was reduced from N=24 to N=8, the overall
classification rate increased by 11% for M=5 and by
4.5% for M=3. This suggests that the benefit of using
small spatial resolution is more important when
combined with high spectral resolution. To the contrary,
when used with its minimum spectral resolution M=2, the
increase of the spatial resolution of the C-TU improved
the overall classification rate. This particular case of M=2
recorded the lowest classification rate compared to M=3
and M=5 for all spatial resolutions (Table 3). This is
evidence of the limitation of using minimum spectral
resolution and thus increasing the spatial resolution was a
mean to partially compensate for this limitation.
The effect of varying spatial resolution when C-TU
used high spectral resolution M=5 was very visible for
two textures D4 and D57. Indeed, the classification rates
of these textures dropped by about 50%, when the spatial
resolution was increased from N=8 to N=24. This can be
explained by the combined effects of using high spectral
and spatial resolutions in relation to the type of texture.
This effect was more visible for texture D4 where
attentive visual analysis showed that this texture has
important intra-texture variation that physically separates
roughly this texture into two parts. The combination of
high spectral and spatial resolutions revealed these
differences and one of these parts was classified as D24.
From the spectral resolution point of view, the results
showed that increasing the spectral resolution of the
texture analysis process increased the overall
classification rate. For each of the nine tested
neighborhood configurations (different sizes and radii),
the binary subdivision of the spectral variation (M=2)
provided the lowest classification rate. Increasing the
spectral resolution to M=3 provided an improvement of
the overall classification rate by 17% in average
compared with the binary subdivision. This improvement
was more than 50% for some textures such as D77, D57,
and D83. Among the 27 tested configurations, the
highest classification rate of 97.5% was achieved by the
use of N=8, r=1, and M=5. It seemed that minimum
spatial resolution and maximum spectral resolution are
the optimum parameters for the C-TU descriptor to
discriminate between different textures in the same
image. This result indicated that the C-TU descriptor
was more sensitive to the spectral resolution than the
spatial resolution for the case of mosaic classification
(local estimation of C-TU). This is in contrast to the
original model, which is more sensitive to the spatial
resolution [24].
The results of the original ordered texture unit
descriptor are summarized in Table 4. As no histogram
bin reduction was performed, only a few values of M and
N can be explored. As for the C-TU descriptor, the use of
a high spectral resolution improved the classification
rate. The best classification rate provided by the original
model was 99%. It was achieved by the use of the
classical configuration using (M=3, N=8) that produced
6,561 ordered texture units. This is equivalent to the
classification of an image of 6,561 bands. The C-TU
achieved similar classification rate using only 495
different combinations. This reduced 13 times the
computational complexity.

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
For some applications such as remote sensing the
classification rate of 95% can be judged very
satisfactory. The original model achieved this
classification rate when it used M=2 and N=24, which is
equivalent to the processing of an image of 65,536 bands
(224). The C-TU descriptor achieved this classification
rate with highly reduced complexity equivalent to the
processing of an image of only 45 bands (M=3 and N=8).
Compared to the original model, the C-TU descriptor
provided results with an excellent balance between the
classification rate and the computational efficiency.
Table 3 Experiment #1 - Classification accuracy (%) using the C-TU descriptor. Algorithm N , r M D4 D57 D24 D16 D77 D53 D83 D14 D29 D52 D22 D17 Aver
C-TU
2 49.6 79.9 59.5 99.6 47.0 96.2 56.1 90.2 85.5 97.2 91.7 64.9 76.4 8, 1 3 87.0 97.2 98.4 99.3 96.8 97.2 86.3 97.9 94.4 99.5 99.0 91.3 95.4
5 89.6 96.4 98.5 99.6 97.4 98.4 95.1 99.3 99.2 99.6 99.7 96.7 97.5 2 38.8 76.2 71.3 99.1 36.0 91.2 26.9 88.3 70.0 95.6 92.7 79.9 72.0
8, 1.5 3 79.5 96.8 95.0 99.6 97.1 96.6 80.3 94.3 92.7 99.1 99.0 90.7 93.4 5 79.8 97.5 97.3 99.6 97.6 97.1 97.1 97.3 99.3 99.4 99.6 95.0 96.4 2 40.7 73.5 87.7 99.6 45.7 93.8 49.8 89.5 70.3 96.6 94.1 81.6 76.8
12, 1.5 3 83.1 97.1 94.9 99.8 97.1 95.9 88.1 95.9 94.1 98.9 99.0 91.8 94.6 5 75.5 97.5 97.7 99.9 97.6 97.6 98.3 97.7 99.1 99.6 99.7 94.5 96.2 2 51.0 60.8 73.4 99.8 70.5 92.6 40.9 83.5 59.9 95.5 97.7 74.8 75.0
12, 2 3 80.1 97.2 93.5 99.7 96.8 95.0 83.9 95.0 94.0 97.1 99.1 90.4 93.5 5 72.3 97.4 96.2 99.9 98.0 96.6 97.5 95.7 99.7 99.3 99.6 93.7 95.5 2 48.6 66.4 86.4 99.9 64.9 93.0 51.7 90.2 53.3 96.1 96.9 71.9 76.6
16, 2 3 77.1 96.8 94.2 99.7 96.8 94.7 86.4 94.5 94.7 97.2 99.0 90.4 93.5 5 57.3 95.2 97.2 100 97.1 97.8 93.7 94.3 99.7 99.6 99.8 93.3 93.8 2 49.9 55.6 88.1 99.5 70.6 94.2 38.3 88.0 59.1 94.6 97.0 70.5 75.4
16, 2.5 3 75.8 97.3 94.3 99.5 93.6 92.4 80.6 94.1 93.5 96.0 98.9 90.0 92.2 5 56.6 93.5 97.7 99.6 87.2 97.0 92.0 93.5 99.2 99.4 99.6 93.5 92.4 2 59.0 62.4 87.2 99.8 66.8 93.6 58.3 88.2 57.9 95.4 97.3 71.5 78.1
24, 2 3 78.6 96.7 93.1 99.8 97.4 94.5 87.7 94.3 94.2 98.1 99.1 90.4 93.7 5 34.8 67.6 99.4 100 92.8 98.5 85.4 94.8 99.2 99.9 99.6 95.0 88.9 2 61.6 58.6 92.9 99.6 66.7 94.8 45.9 92.4 76.9 90.0 98.1 75.5 79.3
24, 2.5 3 74.7 97.4 94.4 99.5 95.2 93.0 82.2 93.6 91.4 97.2 99.0 90.3 92.3 5 39.2 69.7 99.0 100 77.1 98.7 79.4 92.6 98.4 99.8 99.6 94.7 87.3 2 69.0 41.4 86.2 93.2 86.7 92.2 27.3 92.9 71.1 93.4 97.3 76.7 77.2
24, 3 3 74.0 95.4 93.7 91.7 90.6 93.2 82.8 94.2 93.6 93.5 98.7 89.6 90.9 5 39.5 48.4 98.2 95.7 92.4 98.9 87.6 85.4 98.4 99.8 99.7 95.6 86.5
Table 4 Experiment #1 - Classification accuracy using the ordered texture units descriptor and using the GLCM.
Algorithm N , r M D4 D57 D24 D16 D77 D53 D83 D14 D29 D52 D22 D17 Aver
Original Texture
Spectrum model
M=2 96.2 97.3 98.5 99.8 96.6 99.4 95.3 99.4 87.4 99.7 75.9 72.0 93.2 N=8, r=1 M=3 98.5 99.7 99.9 100 99.1 100 98.7 99.5 95.1 100 99.0 98.5 99.0
M=2 97.9 97.0 97.3 100 96.6 99.4 95.1 98.0 94.4 99.1 73.2 69.1 93.2 N=8, r=1.5 M=3 98.7 99.8 99.7 100 99.4 100 98.4 98.0 93.3 100 99.4 99.5 98.8
N=12, r=1.5 M=2 98.5 96.9 98.5 100 98.0 99.8 97.0 97.3 82.5 99.5 77.3 80.9 93.9 N=12, r=2 M=2 98.0 97.7 95.0 99.9 99.4 100 98.3 97.5 76.2 100 84.0 90.2 94.7 N=16, r=2 M=2 98.0 95.5 94.4 99.9 98.7 100 97.8 97.2 57.9 100 85.1 92.5 93.1
N=16, r=2.5 M=2 97.5 96.4 93.9 99.7 99.7 100 97.2 96.9 86.2 100 88.0 95.0 95.9 GLCM 95.1 86.5 79.3 67.1 79.6 51.9 82.5 94.2 92.0 78.9 92.8 56.0 79.7
The comparison between the classification rates of the
original model and the C-TU, obtained individually for
the 12 textures revealed some interesting results. For
example, texture D29 was better identified using C-TU
with a classification rate of 99.2% than using the original
texture spectrum model which recorded a classification

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
rate of 95.1%. The parts of D29 that were erroneously
classified as D52 by the original model are mainly dark
spots which are spectrally close to texture D52. The use
of a spectral resolution M=3 was probably not sufficient
for the original model to detect subtle spectral differences
between these spots and some regions in texture D52.
These spots were correctly classified by the C-TU when
using higher spectral resolution M=5. The case of the two
textures D4 and D57 was better classified by the original
model that uses a spectral resolution M=3. This
resolution seemed to be optimum to identify these two
textures as it delivered also the most stable classification
rates in case of C-TU descriptor.
The last row of Table 4 provides the results of the
GLCM feature. The C-TU recoded an improvement of
the overall classification rate of 17.8% over the GLCM.
The GLCM recorded important confusions; in particular,
40% of texture D53 was classified as D24. Another
important confusion was also caused by D17, where 20%
and 15% of this texture were classified as D53 and D29
respectively. The low classification rate of the GLCM
can be attributed to the limitation of using a minimum
spatial resolution (N=2). We show in Fig. 9 the best
classifications provided by the three tested methods.
Fig. 9 Classification results for the mosaic in Fig.8. (a) C-TU (M=5, N=8, r =1), (b) Original model (M=3, N=8, r=8), and (c) co-occurrence matrix.
4.3 Experiment #2: Rotation invariant texture
retrieval
This experiment was initially proposed by Porter and
Canagarajah [26]. In this paper, we used a modified
version of this experiment as proposed in [27], which is
referred to as Contrib_TC00001. This modified version
introduced the problem of retrieving texture images that
were rotated by angles different than those used to train
the classifier.
4.3.1 Experimental setup
This experiment involved 16 different texture classes
(the first 16 images from the top right in Fig. 7). Each of
the 16 texture classes was presented with 8 different
images called source images (180 x 180 pixels each),
where one source image was used for training and the 7
others for building the database for retrieval
performance evaluation. Each source image of a given
texture class was rotated by 10 different angles (0°, 20°,
30°, 45°, 60°, 70°, 90°, 120°, 135°, and 150°). To build
the training data set, the authors divided each of the 10
rotated versions of the selected training source image
(180 x 180 pixels) into 121 disjoint subimages (16 x 16
pixels each). This provided 10 angles for each of the
121 subimages for each texture class. To form TSR of a
given texture class at a given orientation, the histograms
of each of the 121 subimages were added to form one
big histogram. This resulted in TSR of 121 x (16-2r)2
entries, where r is the radius of the circular
neighborhood. The set of images to be classified was
formed by rotating each of the 7 other source images of
a given texture class by the same 10 different rotation
angles. This gave a total of 1,120 images (7 source
images x 10 orientations x 16 texture classes). As this
experiment dealt with image retrieval, each image in
this set was classified as a whole by estimating a unique
TS with (180-2r)2 entries. The retrieval process was
trained using one rotation angle and tested using the
nine remaining rotation angles.
4.3.2 Experimental Results
The retrieval process was applied 10 times. Each
time, we used training data from one angle to retrieve
the 1,008 images that have different rotations (7 source
images x 9 orientations x 16 texture classes). The results

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
obtained for the 10 retrieval testes are summarized in
Table 5.
Table 5 shows that when C-TU was used with M=2,
five of the nine tested neighborhood configurations
produced average retrieval rates less than 90%. When it
is used with higher spatial resolutions it provided better
results (98.2% with N=24 and r=2).
Table 5 Experiment #2 - Image retrieval accuracy (Contrib_TC00001) using the C-TU.
Training angle Algorithm N and r M 0° 20° 30° 45° 60° 70° 90° 120° 135° 150° Aver
M=2 66.6 81.4 84.5 74.5 86.5 81.8 66.3 85.3 72.2 85.7 78.5 N=8, r=1 M=3 68.7 87.5 86.3 85.0 88.3 88.5 67.8 87.1 86.0 90.3 83.5 M=5 68.0 89.7 90.9 86.6 93.0 87.6 65.3 91.8 86.1 93.2 85.2 M=2 79.3 90.1 90.7 87.4 88.2 89.8 80.3 91.7 86.0 88.4 87.2 N=8, r=1.5 M=3 91.3 92.6 93.8 92.0 97.1 92.7 92.0 96.1 93.1 97.0 93.8 M=5 93.2 94.5 95.5 92.9 96.3 92.9 91.9 96.9 91.5 97.8 94.3 M=2 80.0 93.6 95.1 88.1 94.2 91.2 79.1 94.8 87.8 94.3 89.8 N=12, r=1.5 M=3 94.5 99.0 97.9 98.9 98.1 99.0 96.3 97.5 98.3 98.0 97.8 M=5 97.6 99.7 98.1 98.5 99.5 99.1 98.0 99.0 96.7 99.7 98.6 M=2 83.5 86.6 95.9 84.0 96.8 91.2 82.8 94.9 86.8 94.2 89.7 N=12, r=2 M=3 92.4 99.6 96.8 97.8 97.3 100 91.8 95.5 97.4 97.2 96.6 M=5 92.0 100 97.8 98.4 99.3 99.1 93.8 98.0 98.4 97.6 97.5
C-TU M=2 83.5 97.2 94.0 92.9 96.2 98.5 82.6 92.6 92.9 94.8 92.5 N=16, r=2 M=3 94.2 100 98.5 98.3 100 100 94.9 98.0 97.2 99.9 98.1 M=5 95.7 100 98.4 98.5 98.6 100 95.4 98.4 98.6 98.6 98.2 M=2 93.5 95.3 92.1 92.5 96.1 98.9 94.3 92.3 88.6 95.7 93.9 N=16, r=2.5 M=3 99.0 98.9 99.4 98.9 99.5 99.6 99.2 99.3 98.4 99.4 99.2 M=5 100 99.7 99.6 99.2 99.8 99.6 100 99.3 99.4 99.4 99.6 M=2 93.8 99.7 99.9 99.8 100 98.8 93.2 99.0 97.8 100 98.2 N=24, r=2 M=3 96.8 100 99.8 99.7 99.9 100 97.4 99.5 99.3 99.8 99.2 M=5 100 100 99.9 99.8 100 100 100 99.6 99.9 100 99.9 M=2 92.5 99.6 95.7 96.4 98.7 96.8 96.8 94.9 98.4 97.8 96.8 N=24, r=2.5 M=3 98.6 100 99.8 97.9 99.8 100 100 99.3 98.8 99.8 99.4 M=5 100 99.8 99.8 99.3 99.7 99.5 100 99.4 99.6 99.4 99.7 M=2 73.1 93.4 95.3 91.9 94.2 93.7 80.9 91.6 94.3 88.8 89.7 N=24, r=3 M=3 100 98.2 98.2 97.8 98.7 99.4 100 97.6 96.8 98.6 98.5 M=5 99.9 98.9 99.0 97.0 99.4 98.9 100 99.1 99.1 98.2 99.0
The use of a higher spectral resolution, i.e., M>2
showed significant improvement and more stable
results. Indeed, eight of the nine neighborhood sizes
produced average retrieval rates higher than 93.8%.
When the C-TU descriptor was used with a
neighborhood configuration equal to or larger than
(N=16, r=2.5), it produced an excellent retrieval rate
higher than 99%. Almost a perfect retriavl rate of 99.9%
was obtained by the C-TU when used with a
neighborhood of 24 pixels and r=2.
The proposed C-TU descriptor was able to deliver
robust measures for texture characterization that can be
generalized to physically different textures and different
rotation angles. When the overall retrieval rate of
individual training angles was analyzed, we noticed that
a perfect retrieval rate of 100% was obtained 27 times,
and 24 of them were obtained when a high spectral
resolution was used (M>2).
These results showed the very good stability of the
C-TU, particularly for large neighborhoods. This helped
us to draw the partial conclusion that, in the context of
image retrieval, the use of large neighborhoods seems to
provide better results.
It is fair to compare our results with those obtained by
the LBP-riu2 descriptor using exactly the same
experimental setup with the exactly the same data
(Contrib_TC00001) and reported in [27]. We recall here
that the LBP-riu2 uses the texture spectrum model to
produce rotation invariant and uniform texture units for
the case of N=2 which is referred to in [28] as the local

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
binary pattern (LBP). The results in this study [27],
reported that the LBP-riu2 recorded a maximum retrieval
rate of 98.5%, which was achieved by using a
neighborhood of 24 pixels. To further improve their
results, the authors combined three LBP-riu2 descriptors
estimated on three different neighborhoods (8, 16, and
24), and each of them was combined with local variance
as an additional local measure of contrast. Even with
these additional features, the C-TU descriptor had a
higher retrieval rate based on its basic form without any
additional information.
4.4 Experiment #3: Rotation invariant texture
classification
This experiment tested the ability of the proposed
C-TU descriptor to recognize texture that appears in the
same image in different orientations. This kind of
problem is in fact very common in various fields, such as
the earth sciences where the same land cover theme can
appear in a satellite image with random orientations. This
is a challenging problem as it deals with both
intra-texture and inter-texture variations combined with
the rotation invariance effect. In addition, texture
descriptors should be generated locally using a moving
window which brings the problem of histograms
stability.
4.4.1 Experimental setup
In this experiment, we used the 12 textures in Fig. 8. These textures were rotated by six different angles: 0°, 15°, 30°, 45°, 60°, and 75° resulting on a data set of 72 images. Each rotated image was 400 x 400 pixels. These images were than grouped into a single big mosaic of 4,800 x 2,400 pixels. As the six rotated images of each texture needed to be recognized as the same texture, they were placed in a way that they did not have common borders. This made the problem of texture recognition more difficult at texture borders as these borders need to be identified. Fig. 10. shows the location of each of the 72 images in the mosaic. The classification process was conducted as in Experiment #1. To increase the
difficulty, the classifier was trained at each time using only one orientation angle among the six orientations.
Fig.10 Location of the 72 images in the mosaic used in Experiment #3.
4.4.2 Experimental Results
Table 6 shows that the case of C-TU using a minimum
spectral resolution (M=2) provided the lowest rates. The
use of a minimum spectral resolution made this case
special, and it needed to be analyzed differently than the
other spectral resolutions. Indeed, for this case,
increasing the spatial resolution partially balanced the
lack of spectral resolution. Table 6 shows that the lowest
overall classification rate of 44% was recorded by the use
of the standard neighborhood configuration (N=8), and
increasing the neighborhood size improved the overall
classification rate. But even with the large neighborhood,
the classification rate still remained relatively low at only
72.9%. Experiment #3, as well as the other two
experiments, showed the limitations of using a minimum
spectral resolution in complex texture analysis problems.
From Fig. 11 (derived from Table 6) we can notice that
the advantage of increasing the spectral resolution (M) of
the C-TU descriptor was very significant. Indeed, an
average improvement of 22.7% was obtained when
increasing M=2 to M=3. For this case (M=3) the
maximum improvement (37%) was obtained using the
standard neighborhood configuration (N=8 and r=1).
This standard neighborhood recorded also the maximum
improvement when the spectral resolution increased
from M=3 to M=5.
The effect of increasing the spatial resolution (in terms
of the number of pixels and radii), in the context of

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
rotation invariant texture classification, was very
informative (see C-TU curves in Fig. 12). Indeed, outside
the particular case of the M=2, large neighborhoods gave
relatively low classification rates. Increasing, for
example, the neighborhood size from N=16 pixels with
r=2 to N=24 with r=3 decreased the classification rate.
Also, for large neighborhoods, even when increasing
only the radius, the classification rate decreased. This
was the case, for example, for the (M=3, N=16) and
(M=5, N=16) configurations when tested for r=2 and
r=2.5. The same effect was also observed for the (M=3,
N=24) and (M=5, N=24) configurations when tested for
r=2, r=2.5, and r=3.
Table 6 Experiment #3 - Classification rate using the C-TU.
Algorithm N and r M 0° 15° 30° 45° 60° 75° Aver M=2 30.3 49.4 51.4 37.4 46.9 48.8 44.0 8 pixels, r=1 M=3 69.2 82.6 85.9 78.4 86.5 83.7 81.1 M=5 75.3 90.1 92.6 84.5 91.6 90.2 87.4 M=2 46.6 64.8 62.9 62.3 62.6 63.4 60.4 8 pixels, r=1.5 M=3 78.0 90.2 91.7 89.7 91.3 91.1 88.6 M=5 80.9 93.6 94.3 92.9 94.1 94.1 91.6 M=2 47.8 69.9 67.8 64.6 68.2 68.4 64.4 12 pixels, r=1.5 M=3 79.7 91.3 91.8 90.3 91.7 91.8 89.5 M=5 82.3 94.0 94.0 92.8 94.1 93.9 91.9 M=2 59.6 68.8 69.5 66.7 69.3 69.0 67.2 12 pixels, r=2 M=3 79.0 90.4 91.3 90.3 90.8 91.2 88.9 M=5 81.0 93.4 93.9 93.1 93.9 93.4 91.4
C-TU M=2 57.2 68.7 67.1 64.9 66.6 67.5 65.3 16 pixels, r=2 M=3 79.9 90.7 90.6 90.2 91.0 91.3 88.9 M=5 81.1 91.3 93.0 92.3 92.4 91.8 90.3 M=2 58.1 73.0 73.3 72.5 74.7 73.3 70.8 16 pixels, r=2.5 M=3 78.2 89.4 90.0 89.4 90.0 90.2 87.9 M=5 78.0 90.2 90.8 90.8 90.9 90.1 88.5 M=2 63.2 72.7 72.0 69.6 72.2 72.4 70.4 24 pixels, r=2 M=3 80.9 91.3 91.2 91.2 91.6 91.6 89.6 M=5 80.9 86.6 88.3 88.6 88.4 87.1 86.7 M=2 62.7 74.7 74.4 75.8 74.1 75.8 72.9 24 pixels, r=2.5 M=3 81.9 89.7 90.4 89.8 90.2 90.4 88.7 M=5 76.6 86.9 89.4 89.5 88.9 87.6 86.5 M=2 58.5 70.0 72.8 71.3 74.0 71.7 69.7 24 pixels, r=3 M=3 77.8 87.7 88.3 88.3 88.8 89.1 86.7 M=5 76.2 87.5 88.7 88.6 89.1 87.9 86.3
Table 7 Experiment #3 - Classification rate using the LBP-riu2.
Algorithm N and r 0° 15° 30° 45° 60° 75° Aver 8 pixels, r=1 28.0 46.0 47.5 38.0 49.7 45.6 42.5 8 pixels, r=1.5 52.2 66.1 65.3 63.7 63.7 65.4 62.7 12 pixels, r=1.5 51.1 68.3 67.4 64.1 67.1 66.7 64.1 12 pixels, r=2 63.7 69.9 70.0 67.8 68.3 68.2 68.0
LBP-riu2 16 pixels, r=2 59.2 70.6 70.1 69.2 69.4 67.9 67.8 16 pixels, r=2.5 67.2 70.6 71.4 71.8 73.6 70.7 70.9 24 pixels, r=2 60.6 72.3 71.6 71.1 70.4 70.6 69.4 24 pixels, r=2.5 68.1 73.0 73.1 75.4 75.1 73.3 73.0 24 pixels, r=3 66.1 73.6 74.0 74.8 74.3 73.7 72.8
Journal of Communication and Computer, 2 (2013) 234-251
Fig. 11 Effect of increasing the spectral resolution (M) on
the classification rate of the mosaic in Fig. 10. This Figure
was derived from Table 6.
The high classification rate obtained by small
neighborhood was in agreement with Experiment #1,
but was in contrast to Experiment #2. The reason is
related to the bases of the texture spectrum model,
particularly that this model uses two different windows
at two different levels. The first window is used to
estimate the texture numbers (Eq. 3 for ordered texture
units and Eq. 4 for C-TU), which are the cornerstones
of texture characterization. This window can be seen as
a tool for sampling texture (sampling step). The second
window (larger than the first one) is used to estimate
the distribution of these cornerstones. The size of the
first window is linked to the second one in such a way
that the first window must deliver representative entries
(texture units) to the second one. In image retrieval as
in Experiment #2, texture analysis is performed at the
macro level as the second window is taken as the whole
image. Consequently, the use of relatively large
windows to build these cornerstones tends to produce
representative entries to the second window. By
contrast, in texture classification, as in Experiments# 1
and 3, the second window is exactly the moving local
window used for classification. Consequently,
extraction of representative texture cornerstones is
better achieved using small windows.
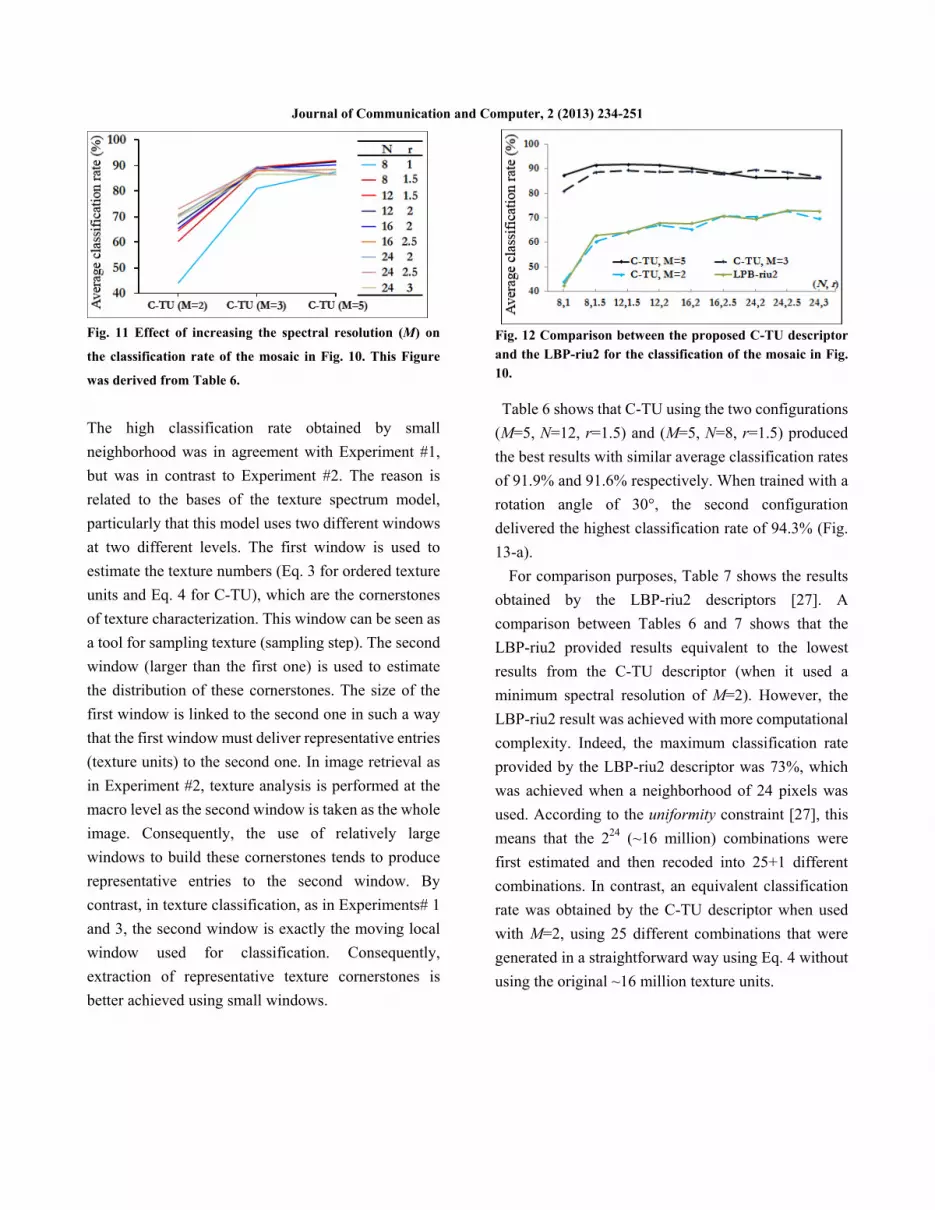
Fig. 12 Comparison between the proposed C-TU descriptor and the LBP-riu2 for the classification of the mosaic in Fig. 10.
Table 6 shows that C-TU using the two configurations
(M=5, N=12, r=1.5) and (M=5, N=8, r=1.5) produced
the best results with similar average classification rates
of 91.9% and 91.6% respectively. When trained with a
rotation angle of 30°, the second configuration
delivered the highest classification rate of 94.3% (Fig.
13-a).
For comparison purposes, Table 7 shows the results
obtained by the LBP-riu2 descriptors [27]. A
comparison between Tables 6 and 7 shows that the
LBP-riu2 provided results equivalent to the lowest
results from the C-TU descriptor (when it used a
minimum spectral resolution of M=2). However, the
LBP-riu2 result was achieved with more computational
complexity. Indeed, the maximum classification rate
provided by the LBP-riu2 descriptor was 73%, which
was achieved when a neighborhood of 24 pixels was
used. According to the uniformity constraint [27], this
means that the 224 (~16 million) combinations were
first estimated and then recoded into 25+1 different
combinations. In contrast, an equivalent classification
rate was obtained by the C-TU descriptor when used
with M=2, using 25 different combinations that were
generated in a straightforward way using Eq. 4 without
using the original ~16 million texture units.

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
Fig. 13 Classification of Fig.10: (a) C-TU (M=5, N=8, r =1, angle 30°), (b) LBP-riu2 (N=24, r=2.5, angle 45°)
When the C-TU was computed with a higher spectral
resolution, Tables 6 and 7 clearly show that the C-TU
descriptor outperformed the LBP-riu2 descriptor. For
example, when the C-TU used a spectral resolution of
M=3 it provided an important improvement of 38.5 %
over the LBP-riu2. This improvement reached 44.9%
when the C-TU was used with M=5. In Fig. 12 we
summarize the average classification rates obtained by
the C-TU and the LBP-riu2 descriptors for the six
orientations and for the nine neighborhood
configurations. For visual comparison, Fig. 13 shows
the best-classified mosaic provided by the C-TU and
LBP-riu2 descriptors.
5. Discussion and conclusion
We presented an improvement to the texture
spectrum model [16] in order to allow the analysis of
both spectral properties and spatial organization
components of texture information. This improvement
allowed texture analysis using high spectral and
spatial resolutions. To the best of our knowledge,
among existing texture models, this improved version
is probably the only one that provides practical tools
for the simultaneous analysis of texture with high
spectral and spatial resolutions.
This improved version was based on Compact
Texture Units (C-TU), which are non-ordered texture
units. The number of compact texture units needed to
describe texture is drastically reduced compared to the
original model.
The improved model used a new descriptor, referred
to as C-TU. This new descriptor can be generated
using a simple sum-based formula. It inherited from
the original model a robust invariance to grayscale
[29]. In addition it was also rotation invariant by
definition. The grayscale and rotation invariance was
achieved using the process of generating the C-TU
descriptor itself, without any additional
post-processing. This makes the proposed solution
computationally very attractive particularly for
applications using large volumes data, such as the
geosciences and applications performing real-time
analyses.
This new descriptor was extensively tested in
different applications, including texture classification
(Experiments #1), rotation invariant texture image
retrieval (Experiment #2), and rotation invariant
texture classification (Experiment #3).
The comparison with the original texture spectrum
model and the co-occurrence matrix features
confirmed that the C-TU was a valuable improvement
to the original model. It effectively reduced its
complexity and preserved its texture discrimination
performance. The different experiments showed also
excellent ability of the proposed C-TU descriptor to
produce discriminative information for physically
different textures.
The three experiments showed the benefit of using a
descriptor that allows a flexible analysis of texture
with a wide range of spectral and spatial resolutions.
Experiment #3, in particular, confirmed what was
observed in the two first experiments concerning the
advantage of using a high spectral resolution in texture

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
analysis. Our results showed that it was advantageous
to maximize the spatial resolution in the context of
image retrieval. And, when it comes to recognizing
textures in the same image, it was advantageous to
minimize the spatial resolution.
The rotation invariance of the C-TU was extensively
tested for both image retrieval and texture
classification. The descriptor showed a robust
performance when recognizing textures that were
rotated with different angles from the one used to
generate the descriptor.
This paper presents the first evaluation of the
proposed C-TU descriptor. This descriptor introduced
here has been tested using basic conditions. Its
performance can be improved by using simple
schemes, including the combination of multiple spatial
and spectral resolutions in the same texture
discrimination process. For more fundamental texture
analysis issues, understanding how the spectral and
spatial resolutions interact with each other in relation
to the texture types being analyzed is an important
area to be explored.
Acknowledgment
The authors are grateful to the Natural Sciences and
Engineering Research Council of Canada (NSERC) for
sponsoring this research through the Postgraduate
Scholarship (PhD) awarded to Abdelmounaime Safia
and the Discovery Grant awarded to Dong-Chen He.
The authors are grateful to Huizhong Lu, for using
high-performance computing facility.
References
[1] D.E. Ilea, P.F. Whelan, Image segmentation based on the
integration of colour–texture descriptors—A review.
Pattern Recognit 44 (2011) 2479-2501. doi: DOI:
10.1016/j.patcog.2011.03.005.
[2] D. Cremers, M. Rousson, R. Deriche, A Review of
Statistical Approaches to Level Set Segmentation:
Integrating Color, Texture, Motion and Shape. 72 (2007)
195-215. doi: 10.1007/s11263-006-8711-1.
[3] J. Zhang, T. Tan, Brief review of invariant texture analysis
methods. Pattern Recognit 35 (2002) 735-747. doi: DOI:
10.1016/S0031-3203(01)00074-7.
[4] T.R. Reed, J.M.H. Dubuf, A Review of Recent Texture
Segmentation and Feature Extraction Techniques.
CVGIP: Image Understanding 57 (1993) 359-372. doi:
DOI: 10.1006/ciun.1993.1024.
[5] L.R. Sarker, J.E. Nichol, Improved forest biomass estimates
using ALOS AVNIR-2 texture indices. Remote Sens.
Environ. 115 (2011) 968-977. doi: DOI:
10.1016/j.rse.2010.11.010.
[6] Xin Wang, N.D. Georganas, E.M. Petriu, Fabric Texture
Analysis Using Computer Vision Techniques.
Instrumentation and Measurement, IEEE Transactions on
60 (2011) 44-56.
[7] Kassnera,A. b. and Thornhilla, b., Texture Analysis: A
Review of Neurologic MR Imaging Applications. AJNR
31 (2010) 816. doi: 10.3174/ajnr.A2061.
[8] J.R. Smith, Ching-Yung Lin, M. Naphade, Video texture
indexing using spatio-temporal wavelets. Image
Processing. 2002. Proceedings. 2002 International
Conference on 2 (2002) II-437-II-440 vol.2.
[9] W. Phillips III, M. Shah, N. da Vitoria Lobo, Flame
recognition in video. Pattern Recog. Lett. 23 (2002)
319-327. doi: 10.1016/S0167-8655(01)00135-0.
[10] R.C. Nelson, R. Polana, Qualitative recognition of motion
using temporal texture. CVGIP: Image Understanding 56
(1992) 78-89. doi: 10.1016/1049-9660(92)90087-J.
[11] R.M. Haralick, Statistical and structural approaches to
texture. Proc IEEE 67 (1979) 786-804.
[12] R.M. Haralick, K. Shanmugam, I. Dinstein, Textural
Features For Image Classification. IEEE Transactions on
Systems, Man and Cybernetics SMC-3 (1973) 610-621.
[13] A. Rosenfeld, E.B. Troy, Visual texture analysis. (1970).
[14] C.E. Woodcock, A.H. Strahler, D.L.B. Jupp, The use of
variograms in remote sensing: I. Scene models and
simulated images. Remote Sens. Environ. 25 (1988)
323-348. doi: 10.1016/0034-4257(88)90108-3.

Improving the Texture Spectrum Model Using a Compact Texture Unit Descriptor
[15] I.J. Sumana, Guojun Lu, Dengsheng Zhang, Comparison
of Curvelet and Wavelet Texture Features for Content
Based Image Retrieval. Multimedia and Expo (ICME),
2012 IEEE International Conference on (2012) 290-295.
[16] D. He, L. Wang, Texture Unit, Texture Spectrum, And
Texture Analysis. Geoscience and Remote Sensing, IEEE
Transactions on 28 (1990) 509-512.
[17] D. He, L. Wang, Unsupervised textural classification of
images using the texture spectrum. Pattern Recognit 25
(1992) 247-255. doi: DOI:
10.1016/0031-3203(92)90108-U.
[18] L. Vincent, Morphological grayscale reconstruction in
image analysis: Applications and efficient algorithms.
Image Processing, IEEE Transactions on 2 (1993)
176-201.
[19] Yong Xia, Dagan Feng, Rongchun Zhao,
Morphology-based multifractal estimation for texture
segmentation. Image Processing, IEEE Transactions on
15 (2006) 614-623.
[20] D. He, L. Wang, Simplified texture spectrum for texture
analysis. Journal of Communication and Computer 7
(2010) 44-53.
[21] L. Wang, D. He, A New Statistical Approach for Texture
Analysis. PE&RS 56 (1990) 61247-66.
[22] D. He, L. Wang, Texture features based on texture
spectrum. Pattern Recognit 24 (1991) 391-399. doi: DOI:
10.1016/0031-3203(91)90052-7.
[23] D. He, L. Wang, Textural filters based on the texture
spectrum. Pattern Recognit 24 (1991) 1187-1195. doi:
DOI: 10.1016/0031-3203(91)90144-T.
[24] L. Wang, Vector choice in the texture spectrum approach.
Int. J. Remote Sens. 15 (1994) 3823.
[25] P. Brodatz, Testures: A Photographic Album for Artists &
Designers, Dover Publications, New York, 1966.
[26] R. Porter, N. Canagarajah, Robust rotation-invariant
texture classification: wavelet, Gabor filter and GMRF
based schemes. Vision, Image and Signal Processing,
IEE Proceedings - 144 (1997) 180-188.
[27] T. Ojala, M. Pietikainen, T. Maenpaa, Multiresolution
gray-scale and rotation invariant texture classification
with local binary patterns. Pattern Analysis and Machine
Intelligence, IEEE Transactions on 24 (2002) 971-987.
[28] T. Ojala, M. Pietikäinen, D. Harwood, A comparative
study of texture measures with classification based on
featured distributions. Pattern Recognit 29 (1996) 51-59.
[29] W. Li, D. He, Texture classification using texture
spectrum. Pattern Recognit 23 (1990) 905-910. doi: DOI:
10.1016/0031-3203(90)90135-8.





























