Embed Size (px)
Citation preview
1
T.C ERCİYES ÜNİVERSİTESİ
SİVİL HAVACILIK YÜKSEKOKULU
İNSANSIZ HAVA ARAÇLARININ SİVİL
HAVACILIKTA KULLANIMI
Hazırlayanlar Salih AKAN
İbrahim BAYRAM Yakup ÇAM Halil KACAR
Danışman
Öğr. Gör. Dr. Murat AYDIN
Uçak Gövde-Motor Bölümü
Bitirme Ödevi
Haziran 2014
KAYSERİ
2
Bu çalışma, jürimiz tarafından Uçak Gövde-Motor Bölümü’nde Proje-I olarak kabul
edilmiştir.
....../……/2014
Danışman :………………………………………………
Üye :……………………………………………………
Üye :……………………………………………………
Bu tezin kabulü Sivil Havacılık Yüksekokulu Uçak Gövde-Motor Bölüm Başkanlığı
tarafındanonaylanmıştır.
……......./............./2014
Doç. Dr. İlker YILMAZ
Uçak Gövde-Motor Bölüm Başkan
i
TEŞEKKÜR
Bu çalısmamızda katkılarından dolayı tez danısmanımızErciyes Üniversitesi Uçak
Gövde-Motor Bölümü Ögr. Gör. Dr. Murat AYDIN’a, çalısmalarından yararlandığımız
Doç Dr. İlker YILMAZ’ a, arkadaşlarımız Fatih BUĞDAYCI ve Abdullah
ERYATAN’a teşekkürü bir borç bilir, saygılarımızı sunarız.
ii
ÖZET
İnsansız Hava Araç’ları(İHA) günümüzde havacılık alanında gelişim
göstermektedir.Daha çok askeri alanda kullanılmasıyla birlikte sivil havacılıktada
kullanım imkânları her geçen gün daha fazla artmaktadır.İHA’lar günümüzde askeri
alanda sınırları savunma ve gözetleme maksatlı kullanılmaktadır. İHAların birçok
avantajı var. Satın alması, kullanımı ve tamiri pilotlu taşıtlardan daha ucuz.
İHA’ların sivil havacılıktaki potansiyeli askeri kullanımın çok ötesine gidebilir.
İHA’ların sivil hayatta kullanımını engelleyen tek neden, herhangi bir düzenlemenin
olmamasıydı. Sivil havacılıktada İHA’lara olan ihtiyaç her geçen gün artmaktadır ve
İHA’ların sivil havacılıktaki payı her geçen gün büyümektedir. Ülkemizde SHGM, İHA
lrın sivil alanda kullanımına ilişkin 30.10.2013 tarihli bir talimat yayınlamıştır.Biz bu
bitirme tezimizde İHA’ların sivil havacılıktaki kullanım alanlarını araştırdık ve elde
edilen sonuçları değerlendirdik.
iii
ABSTRACT
At the present time,Unmanned Air Vehicle(UAV) is developing in aviation.As well as
UAV is used more in miltary area,facilties of UAVs in civil aviation increase more
everyday.Today in military,UAVs are used to defend and pry borders..UAVs have a lot
of advantages.Buying,using and repairing of UAVs are cheaper than vehicles having a
pilot.Potentials of UAVs in civil aviation can pass in military.Only reason blocking
using of UAVs in civil aviation there wasn’t any arrangements.In civil aviation,the need
for UAVs increase everyday and the share of UAVs raise.In Turkey,SHGM being of
authority in civil aviation published a arrangement about using of UAVs in civila
aviation in 30.10.2013.We researched using of UAVs in civil aviation and evaluated
results.
iv
İÇİNDEKİLER
TEŞEKKÜR ................................................................................................................. i
ÖZET........................................................................................................................... ii
ABSTRACT ............................................................................................................... iii
İÇİNDEKİLER .......................................................................................................... iv
ŞEKİLLER DİZİNİ ................................................................................................. viii
1.GİRİŞ ....................................................................................................................... 1
2.İNSANSIZ HAVA ARAÇLARI’NA GENEL BAKIŞ ............................................ 2
2.1 İnsansız Hava Araçlarının Tarihi ................................................................................... 2
2.1.1Avantajları ve Bugünkü Dönüşüm ......................................................................... 3
2.2 Niçin İnsansız Hava Araçları ......................................................................................... 3
2.3 İnsansız Hava Araçlarının Mesafeye Göre Sınıflandırılması ....................................... 5
2.3.1 Yakın Mesafe İHA’ları ......................................................................................... 5
2.3.2 Kısa Mesafe İHA’ları ........................................................................................... 5
2.3.3 Orta Mesafe İHA’ları ........................................................................................... 5
2.3.4 Uzun Mesafe İHA’ları .......................................................................................... 6
2.3.5 Dayanıklı İHA’lar ................................................................................................ 6
2.4 İnsansız Hava Araçlarların Kullanım Alanlarına Göre Sınıflandırılması.................... 6
2.4.1. Askeri İHA Sistemleri ......................................................................................... 6
2.4.2.Sivil İHA Sistemleri ............................................................................................. 8
2.5 Performans özelliklerine göre İHA’lar .......................................................................... 9
2.5.1. Ağırlığa göre sınıflandırma................................................................................ 10
2.6. Havada Kalış Süresi Ve Menzile Göre Sınıflandırma ................................................11
2.7. Çıkılabilen İrtifaya Göre Sınıflandırma .......................................................................13
2.8. Kanat Yüklemesine göre Sınıflandırma.......................................................................15
v
2.9. Motor tipine göre sınıflandırma ...................................................................................16
3.İNSANSIZ HAVA ARAÇLARININ SİVİL HAVACILIKTA KULLANIMI ..... 18
3.1 Yüksek İrtifa Görüntüsü ................................................................................................18
3.2 Deniz Gözetleme ............................................................................................................19
3.3 Çevresel Algılama ..........................................................................................................19
3.4 Medya ve Trafik Raporlaması .......................................................................................20
3.5 İnsansız Hava Araçlarının Demiryolu Güvenliği Çalışmalarında Kullanımı ............21
3.5.1 İHA Hava Platformu .......................................................................................... 22
3.5.2 Kullanılan Modelin Özellikleri ........................................................................... 23
3.5.3 Pozisyon Ve Yükseklik Sabitleme ...................................................................... 23
3.5.4 Akıllı Yön Kontrolü ........................................................................................... 23
3.5.5 Otomatik Geri Dönüş Ve İniş ............................................................................. 24
3.5.6 Düşük Gerilim (Voltaj) Koruması ...................................................................... 24
3.5.7 LED Uyarı Sistemi ............................................................................................. 25
3.5.9 Güç Ünitesi ........................................................................................................ 25
3.5.10 Haberleşme Sistemi .......................................................................................... 26
3.5.11 Yazılım Güncellemesi ...................................................................................... 26
3.5.12 Eş Zamanlı (On-Line) Görüntü Alma ve Aktarma ............................................ 26
3.5.13 Otopilot Sistemi ............................................................................................... 27
3.5.14 Gece Uçuşu ...................................................................................................... 28
3.5.15 Yer Kontrol İstasyonu ...................................................................................... 29
3.5.16 Test Uçuşu ....................................................................................................... 30
3.5.17.Tartışma-Sonuç Ve Öneriler ............................................................................. 31
3.5.18. Test Uçuşu Sonuçları ....................................................................................... 31
3.5.19 Yapılan Kontrolün Saptanması ......................................................................... 32
3.5.20 Model Hızı Ve Yükseklik ................................................................................. 32
3.5.21 Kontrol Edilen Alan Genişliği .......................................................................... 33

vi
3.5.22 İHA ile Demiryolu Güvenliği Kontrol Uygulaması ........................................... 34
3.5.23 Uygulama Uçuşu .............................................................................................. 34
3.5.24 Sonuçlar ve Öneriler ......................................................................................... 35
3.6 İnsansız Hava Aracının Ağaçlandırma Çalışmalarında Kullanımı .............................36
3.6.1 Tohum Dağılım Yoğunluğu ................................................................................ 36
3.6.2 Uçak Yer Hızı, İrtifa ve RPM ............................................................................. 37
3.6.3 Tohum Yayılan Alan Genişliği ........................................................................... 37
3.6.4 Toplam Tohum Ekilen Alan ............................................................................... 38
3.6.5 Aviyonik ve Uçuş Kontrolleri............................................................................. 38
3.6.6 Sonuçlar ve Öneriler........................................................................................... 39
3.7. İnsansız Hava Aracı Yardımıyla Büyük Ölçekli Fotogrametrik Harita Üretim Olanaklarının Araştırılması..................................................................................................40
3.7.1. Giriş .................................................................................................................. 40
3.7.2.Sistemin Tasarımı .............................................................................................. 41
3.7.3. Sonuçlar ve Öneriler .......................................................................................... 42
3.8. Havadan Arama Ve Kurtarma ......................................................................................44
3.9. Bilimsel Araştırma Uygulamaları ................................................................................44
3.10. Hava Fotoğrafçılığı- Havadan Video Çekimi ...........................................................45
3.11. İnsansız Hava Araçlarının Ev Güvenliğinde Kullanımı ...........................................46
3.12. İnsansız Hava Araçlarının Petrol, Gaz Ve Maden Arama Ve Üretim Sistemleri İçin Kullanımı .......................................................................................................................47
4.SONUÇ ................................................................................................................... 48
KAYNAKLAR .......................................................................................................... 49
vii
KISALTMALAR
İHA İnsansız Hava Aracı
RPV Romete Piloted Vehicle
İHMA İnsansız Hava Muharebe Aracı
NOAA Amerikan Ulusal Okyanus ve Atmosfer İdaresi
VTOL Vertical Take Off Landing
ABD Amerika Birleşik Devletleri
D-21 Amerikan İHA Projesi
YKİ Yer Kontrol İstasyonu
TAI Turkish Aerospace Industry
İSU İnsansız Savaş Uçağı
M1 İHA’nın Fırçasız Motoru
M2 Tohum Yayıcı Fırçasız Motor
NASA National Aeronautics And Space Administration
RPM Revolutions Per Minute
ESC1 İHA’nın Fırçasız Motorunun Hız Kontrol Ünitisesi
IR Infra-Red
TCDD Türkiye Cumhuriyeti Devlet Demiryolları
R/C Remote Control
GPS Global Positioning System
V-1 Vergeltungswaffle 1
J-UCAS Joint Unmanned Combat Aerial System
DC Doğru Akım
AC Alternatif Akım
EO Elektro-Optik

viii
ŞEKİLLER DİZİNİ
2.0. İha Sistemlerinin Askeri Kullanım Alanları ............................................................ 6
2.1. İha Sistemlerinin Sivil Kullanım Alanları ............................................................... 9
2.2. İha’ların Ağırlıklarının Sınıflandırılması .............................................................. 10
2.3. İha’ların Sahip Oldukları Ağırlıklar ...................................................................... 11
2.4. İha’ların Havada Kalış Süresi Ve Menzile Göre Sınıflandırılması ........................ 12
2.5. Yüksek Menzil Kapasitesine Sahip İha’lar ........................................................... 13
2.6. İha’ların Çıkabileceği Yüksekliğe Göre Sınıflandırılması ..................................... 14
2.7. İha’ların Çıkabilecekleri Maksimum İrtifalar ........................................................ 15
2.8. İha’ların Kanat Yüklemesine Göre Sınıflandırılması ............................................ 15
2.9. Kanat Yüklemelerine Göre İha’lar ........................................................................ 16
2.10.Kullanılan Motor Tipine Göre İha’lar .................................................................. 17
4.1 İha’larda Kamera Montajı ..................................................................................... 22
4.2. Djı Phantom Modeline Ait Teknik Özellikler ....................................................... 21
4.3 Led Göstergesi ...................................................................................................... 24
4.4. İha İle Yki Arasındaki Haberleşme Sistem Şeması A.) İha Üzerinde Bulunan SistemB.) Yki Üzerinde Bulunan Sistem .............................................................. 27
4.5 İha’nın Yer Kontrol İstasyonu Tarafından Kullanılan Naza – M V2 Yazılımında Gps Koordinatlarının Giriş Ekranı ............................................................................... 28
4.6. A / V Alıcı Sistem Şeması .................................................................................... 30

ix
4.7. Test Uçuş Günündeki Hava Koşulları ................................................................... 31
5.1. Test Uçuşu Verileri .............................................................................................. 32
5.2.Video Görüntülerinin Kontrol Listesi İle Karşılaştırılması ..................................... 33
5.3. Canon Eos450d Teknik Özellikleri ....................................................................... 42
1
1.GİRİŞ
Birçok görüşe bugün göre İnsansız Hava Araçları(İHA) nın durumu havacılığın ilk
zamanlarına benzemektedir.Bu zaman esnasında yaratıcı akıl,mühendislik yeteneği ve
girişimci ruhu yeni bir pazar meydana getiren ve ulaşım manzarasını değiştiren yeni
teknolojiler ve tasarımlar üretti. Bugün aynı ruh yeni ve kazançlı bir pazar olan İHA
endüstrisitine geçti.
İnsansız Hava Araçları askeri bir ürün olarak ortaya çıktı.Askeriyedeki başarısı,düşük
maliyeti ve insansız olarak uçma özelliği İHA’ların sivil havacılıkta kullanılması için
üreticilere bir ilham verdi.İHA’lar sivil alanda insanların çalışmalarının zor olduğu
bölgelerde çalışabilmekte ve insanlara büyük kolaylıklar sağlamaktadırlar.İHA’ları
saydığımız avantajlarından dolayı gelevekte daha çok göreceğiz.
Biz bu tezimizde İHA’ların sivil pazardaki yerini ve sivil alandaki kullanımını araştırdık
ve edindiğimiz neticeleri sizinle paylaşmaya çalışacağız.
2
2.İNSANSIZ HAVA ARAÇLARI’NA GENEL BAKIŞ
2.1 İnsansız Hava Araçlarının Tarihi
İlk İHA’lar A. M. Low tarafından 1916 yılında geliştirilmiştir.] Takip eden yıllarda ise
sınırlı sayıda üretilen Hewitt-Sperry otomatik uçak I. Dünya Savaşı sırasında
kullanılmıştır. 1935yılında ise film yıldızı ve model uçak tasarımcısı Reginald
Denny ilk ölçekli RPV (İngilizce Remote Piloted Vehicle Türkçesi Uzaktan Komutalı
Araç) modelini geliştirmiştir. II. Dünya Savaşı süresince çok fazla miktarda uçak
üretilmiş bunlar trenleri koruma amaçlıyla uçaksavar ve saldırı görevlerinde
kullanılmıştır. Jet motoru bulunan ilk model 1951 yılındaTeledyne Ryan firması
tarafından geliştirilen Firebee Idir. 1955 yılında ise başka bir firma Beechcraft ABD
Deniz Kuvvetleri için Model 1001 modelini üretmiştir. Bununla beraber bu
araçlar Vietnam Savaşı süresince birer uzaktan kumandalı uçak olmaktan daha ileriye
gidemediler.
1980li ve 1990lı yıllarda olgunlaşan ve küçültülen bu araçlar özellikle ABDli askeri
çevrelerin ilgisini çekmeye başlamıştır. Bunun en önemli nedeni İHA’ların uçaklara
nazaran çok daha ucuz olması ayrıca riskli görevlerde sırasında yetişmiş müretebat
kaybını sıfıra indirmesidir. Genel olarak keşif ve gözetleme amacıyla kullanılan bu
araçlar günümüzde silahlandırılmaktadır. Örneğin MQ-1 Predator modeli araçlar
üzerine AGM-114 Hellfire havadan-karaya füze takılmaktadır. Zırhlı ve silahlı bu
araçlara insansız hava muharebe aracı (İHMA) denilmektedir.
3
2.1.1Avantajları ve Bugünkü Dönüşüm
İnsansız teknolojilerin kullanımının yaygınlaşmasının altında gelişen teknolojinin
sağladığı imkanla birlikte bazı maliyetli ya da sorunlu kalemleri aşabilmenin getirisi
bulunmaktadır. İnsansız uçakların otonom ya da bir yer istasyonu aracılığıyla kontrol
edilebiliyor olması insanlı uçakların idamesi için gerekli yaşamsal sistemler ve kokpit
için gerekli yer ve mürettebatın getirdiği ağırlık yükü gibi maliyet kalemleri, insanlı
uçakların manevra ve operasyon kabiliyetinin insan kabiliyetleriyle sınırlanması
(yorgunluk / çalışma saati, G kuvveti vb.) gibi operasyonel kabiliyetle ilgili kalemler,
düşman tarafından farkedilme ya da vurulabilme olasılığının düşük olması üstünlük
ckalemleri (ilk olarak İsrail’lilerin geliştirdiği Scout ile birlikte İHA’ların bu yönüyle
operasyonel vazgeçilmezliğinin ispatlanmıştır.) İHA'ları daha tercih edilir kılmaktadır.
Daha da önemlisi, insansız hava araçlarının zaiyat maliyetidir. Tüm dünya ordularında
yetiştirilmesi en maliyetli personel gruplarından birisi pilotlardır. Bir pilotun yetişmesi
çok büyük maliyetlere karşılık gelir. Bu sebeple hava aracıyla zaiyatıyla birlikte
yetişmiş personelin de zayi olması ordular için hem maddi hem de kabiliyet olarak
büyük kayıptır. İnsansız Hava Araçları, zaiyat maliyetinin düşük olması açısından da
orduları cezbetmektedir. İHA’lar tarihte birçok kez düşman hava savunma unsurlarının
oyalanmasında, asıl taarruz unsurlarının ateş hattını geçebilmesi için yem olarak
kullanılmasında çok büyük rol oynamışlardır.
Gelecekte İHA’lar scramjet teknolojisinin sahip olduğu tüm avantajlara da sahip
olacaktır. Günümüzde scramjet modelleri, bunlara insansız modellerde dahil sadece test
amaçlıdır.
2.2 Niçin İnsansız Hava Araçları
Hava araçları belirlenmiş görevleri yerine getirmek için tasarlanmaktadırlar. Tasarımcı
bu görevler için hangi tip hava aracının en uygun olduğuna ve bu hava aracının insanlı
veya insansız olduğuna karar vermelidir. Hava aracının insanlı veya insansız olması
hava aracının yerine getireceği görevlere bağlıdır. İnsansız hava araçları genelde sıkıcı,
kirli ve tehlikeli olarak nitelendirilen görevlerde kullanılırlar. Ayrıca araştırma amaçlı,
gizliliğin korunması istenen ve çevreye duyarlı görevlerde de kullanılmaktadırlar [1].
4
Peki nedir bu sıkıcı, kirli, tehlikeli görevler?
Sıkıcı (Dull) Görevler: Uzun keşif/gözetleme gibi askeri ve sivil uygulamalarda
uçak mürettebatının uzun zaman içinde dinlenmeksizin gözetleme yapması dikkat
azalmasına yol açabilir ve görevin başarıyla yerine getirilmesini engelleyebilir.
Böyle görevlerde yüksek çözünürlüklü video kamera ve radarlarla donatılmış
İHA’ların kullanılması daha etkin ve ucuz çözümler sunabilir [1, 2].
Kirli Görevler:İnsanlar için risk teşkil eden kimyasal ve nükleer maddelerle
uğraşılması gereken durumlarda İHA’lar kolaylıkla görev yapabilir. Zehirli
kimyasallarla ekin ilaçlanması İHA’ların kullanıldığı kirli görevlere örnek
gösterilebilir [1, 2].
Tehlikeli Görevler: Taarruz ya da hava savunma gibi tehlikeli görevlerde küçük ve
görünmezlik özelliği bulunan İHA’ların kullanılması başarılı sonuçlar verebilir.
Ayrıca sivil uygulamalardan güç hattı denetlemesi ve orman yangını kontrolü gibi
tehlikeli görevlerde İHA’lar kullanılabilir [1,2].
İHA’lar sadece sıkıcı, kirli ve tehlikeli görevlermi yaparlar? Tabi ki hayır. Bir önceki
yazımda ayrıntılı olarak anlatmış olduğum gibi daha başka çokca görevlerde İHA’lar
kullanılmaktadır. İHA’ların kullanılmalarının bir sebebi de çevreye duyarlı olmaları ve
insanlı sistemlere nazaran daha ekonomik olmalıdır.
Araştırma Görevleri:Araştırma ve geliştirme çalışmaları gerçek uçaklar yerine
insansız hava araçları kullanılarak daha ucuz ve hızlı gerçekleştirilebilir. Amerikan
Ulusal Okyanus ve Atmosfer İdaresi (NOAA) bir kasırga avcısı olarak 2006 yılından
bu yana Aerosonde insansız uçak sistemini kullanmaya başlamıştır [8]. AAI
Corporation’ın iştiraki olan Aerosonde Pty Ltd Victoria (Avustralya) tarafından
tasarlanan 16kg’lık sistem bir kasırga içine girerek Florida’da bulunan Ulusal Tayfun
Merkezine gerçek zamanlı veri ve doğrudan iletişim üretmektedir. Daha önceleri
insanlı hava taşıtları ile tayfunların uzağından alınan veriler günümüzde Aerosonde
sistemi sayesinde tayfunun içerisinde kolaylıkla alınabilmektedir [3].
5
Çevreye Duyarlı Görevler: Aynı görev için İHA’lar insanlı hava araçlarına nazaran
daha az enerji harcarlar, düşük emisyon ve gürültü seviyeleriyle çevre dostudurlar
[2].
Ekonomik Sebepler: Aynı görevi üstlenen uçaklarla karşılaştırıldığında İHA’ların
ilk üretim, kullanım, bakım, yakıt, hangar masrafları daha düşüktür [2].
Yukarıda belirttiğimiz görevlerde insansız hava araçlarının kullanılması insanlı hava
araçlarına göre daha avantajlıdır. Günümüzde bu görevler için tasarlanan askeri ve sivil
uygulamalarda İnsansız Hava Araçları yaygın olarak kullanılmaktadır.
2.3 İnsansız Hava Araçlarının Mesafeye Göre Sınıflandırılması
2.3.1 Yakın Mesafe İHA’ları
25 km’den daha az hızla uçan İHA’lardır.Genellikle bu İHA’lar hafiftirler ve elle
uçurulabilirler.
2.3.2 Kısa Mesafe İHA’ları
25-100 km arası hızla uçan İHA’lardır.Bu İHA’lar sınırlı alanlarda çalışmak için
üretilmişlerdir.
2.3.3 Orta Mesafe İHA’ları
Bu İHA’lar 100-200 km arası hızla uçabilirler.Bu kategorideki İHA’lar yüksek
operasyonel performanslarından dolayı daha ileri aerodinamik dizayn ve kontrol
sistemleri ile tanımlanırlar.
6
2.3.4 Uzun Mesafe İHA’ları
200-500 km hız aralığında uçan İHA’lardır.bir önceki kategorideki İHA’lar gibi daha
ileri ve teknolojiye sahiptirler ve daha zor görevleri yapabilirler.Dünya tarafından
yaratılan aeğrilikten dolayı İHA ile GCS arasındakı problemi aşmak için uydu
bağlantısına ihtiyaç duyarlar.
2.3.5 Dayanıklı İHA’lar
500 km’den daha fazla uçabilen ve 20 saat havada kalabilen İHA’lardır. Bunlar yüksek
kağasitelerinden dolayı İHA ailesininen gelişmiş grubu olarak düşünülürler.Bunlar
büyüklükleri ve yüksek kapasitelirnden dolayı diğer İHA’lardan ayırt edilebilirler.
İlk saydğımız üç kategori içinde biz dikey kalkış iniş (VTOL) İHA’larını bulabiliriz.Bu
İHA’lar zeminde kalabildiği gibi dikey olarak iniş ve kalkış yapabilirler ama bunların
menzil yetenekleri yoktur.Ayrıca Mikro Hava Araçları’da son yıllarda etkili olmaya
başladılar.Mikro İHA’lar kanat uzunluğu ve genişiliği 15 cm’den daha büyük olmayan
hava arçlarıdır.Böyle sistemlerin gelişimi radikal fikirler ve uçuş kontrol,navigasyon ve
iletişim alanlarındaki sanatsal teknolojiler ile ilişkilendirilir.
2.4 İnsansız Hava Araçlarların Kullanım Alanlarına Göre Sınıflandırılması
İnsansız hava araçları görevlerine göre sınıflandırılırken sivil ve askeri olmak üzere 2
ana başlıkta incelenebilir.
2.4.1. Askeri İHA Sistemleri
Keşif, gözetleme ve istihbarat gibi bilhassa düşman hava sahasında yapılan temel askeri
görevlerde günümüze kadar çok sayıda can kayıpları yaşanmıştır. Bu tür görevlerin
yerine getirilmesi esnasında insan hayatının tehlikeye atılmaması düşüncesi ve insan
yapısını dayanamayacağı kadar uzun süreli görevlerde daha üst düzey bir performans
7
gerekliliği, İHA’ların bu görevlerde kullanılmasını gerekli kılmıştır. Bu sayede insanlı
uçaklarla yapılan belirtilen görevler İHA sistemleri ile yerine getirilerek yukarıda bahsi
geçen istenmeyen durumlar ortadan kaldırılmış olmaktadır.Bu tür görevlerin yerine
getirilmesinde yapılacak olan göreve göre İHA sistemleri gerekli donanımlarla
donatılmaktadır. [5]
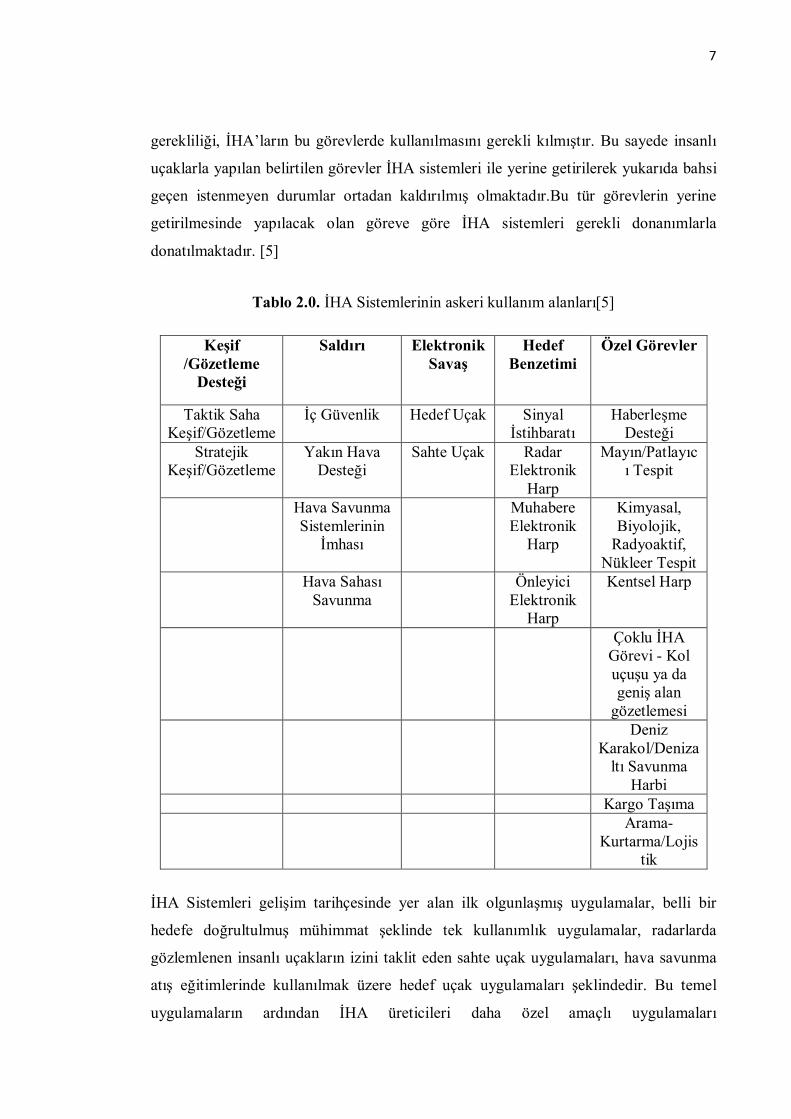
Tablo 2.0. İHA Sistemlerinin askeri kullanım alanları[5]
Keşif /Gözetleme
Desteği
Saldırı Elektronik Savaş
Hedef Benzetimi
Özel Görevler
Taktik Saha Keşif/Gözetleme
İç Güvenlik Hedef Uçak Sinyal İstihbaratı
Haberleşme Desteği
Stratejik Keşif/Gözetleme
Yakın Hava Desteği
Sahte Uçak Radar Elektronik
Harp
Mayın/Patlayıcı Tespit
Hava Savunma Sistemlerinin
İmhası
Muhabere Elektronik
Harp
Kimyasal, Biyolojik,
Radyoaktif, Nükleer Tespit
Hava Sahası Savunma
Önleyici Elektronik
Harp
Kentsel Harp
Çoklu İHA Görevi - Kol uçuşu ya da geniş alan
gözetlemesi Deniz
Karakol/Denizaltı Savunma
Harbi Kargo Taşıma Arama-
Kurtarma/Lojistik
İHA Sistemleri gelişim tarihçesinde yer alan ilk olgunlaşmış uygulamalar, belli bir
hedefe doğrultulmuş mühimmat şeklinde tek kullanımlık uygulamalar, radarlarda
gözlemlenen insanlı uçakların izini taklit eden sahte uçak uygulamaları, hava savunma
atış eğitimlerinde kullanılmak üzere hedef uçak uygulamaları şeklindedir. Bu temel
uygulamaların ardından İHA üreticileri daha özel amaçlı uygulamaları
8
gerçekleştirebilecek İHA sistemleri meydana getirmişlerdir. Bunlar arasında,
biyolojik/kimyasal/radyoaktif türü tehdit unsurlarının tespiti, mayın arama, güvenlik
koridoru açma vb. kulanım alanları ön planda sayılabilir [5]
2.4.2.Sivil İHA Sistemleri
Sivil İHA sistemlerinin uygulama alanları, askerî uygulamalarda kullanılan İHA’lara
benzer olarak görüntü toplama üzerine kuruludur.
İnsansız hava araçları sivil kullanıma açılıyor.Deprem bölgelerinde, petrol hatlarının
kontrolünde, tarım arazilerinde ve daha bir çok alanda insansız hava araçları çare
olacak.Daha çok askeri amaçlı kullanılan insansız hava araçları sivil kullanıma açılıyor.
Sivil Havacılık Genel Müdürlüğü insansız hava araçlarını sivil kullanıma açacak
mevzuatı tamamlamak üzere olduğunu açıkladı.İnsansız hava araçları bir çok
alanda çözüm üreteceğini belirten Sivil Havacılık Genel Müdürü Bilal Ekşi:"Özellikle
petrol hatlarını kontrolde,demiryolu hatlarını kontrolde, yüksekyapıları kontrolde zirai
ilaçlamada,hatta zirai ilaçlamada ürün rekoltesini tespitte, deprem anında ve benzeri bir
sürü alanda kullanım alanları var." dedi.İnsansız hava araçlarını kullanabilmek için bazı
özellikleri taşımak gerekecek. bunlar;. en az 18 yaşında ve lise mezunu olması
gerekiyor.Uçağı kumanda edebilmek için 6 aylık temel pilotluk eğitimi almak
gerekecek.Eğitimleri uçuş okulları verecek.Güvenlik soruşturmasından geçemeyenler
insansız hava araçlarını kullanamayacak.
Dört kilo ve altındaki insansız hava araçları için eğitim ve izin almak zorunlu
olmayacak.
İnsansız hava araçları belirlenen yerler dışında kullanılamayacağını belirten Sivil
Havacılık Genel Müdürü Bilal Ekşi;"Sınırlandırılmış alanlarda kullanılmasını zorunlu
tutacağız.Diyeceğiz ki nerede bunu kullanmak istiyorsan biz önce orayı diğer hava
araçlarına duyuracağız Bu alan sadece bu hava aracına tahsislidir diyeİstisnası dışında
yerleşim yerleri üzerinde insansız hava aracı uçuşuna müsaade etmeyeceğiz.Bu fotoğraf
çekme olabilir,belediyenin ihtiyacı olabilir,sınırlı olarak buna izin verilebilir."dedi
9
Sivil amaçlı insansız hava araçlarını kullanacak kişiler bu araçların yapabileceği
kazalara karşı sigorta yaptıracak.
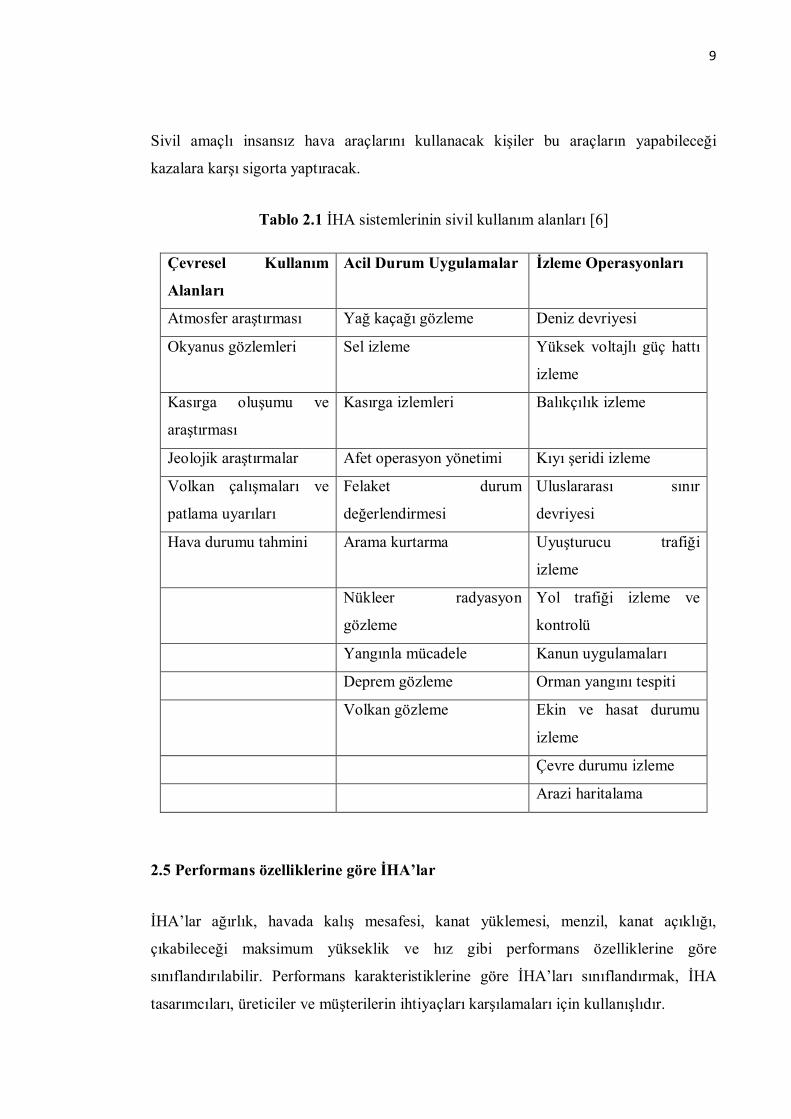
Tablo 2.1 İHA sistemlerinin sivil kullanım alanları [6]
Çevresel Kullanım
Alanları
Acil Durum Uygulamalar İzleme Operasyonları
Atmosfer araştırması Yağ kaçağı gözleme Deniz devriyesi
Okyanus gözlemleri Sel izleme Yüksek voltajlı güç hattı
izleme
Kasırga oluşumu ve
araştırması
Kasırga izlemleri Balıkçılık izleme
Jeolojik araştırmalar Afet operasyon yönetimi Kıyı şeridi izleme
Volkan çalışmaları ve
patlama uyarıları
Felaket durum
değerlendirmesi
Uluslararası sınır
devriyesi
Hava durumu tahmini Arama kurtarma Uyuşturucu trafiği
izleme
Nükleer radyasyon
gözleme
Yol trafiği izleme ve
kontrolü
Yangınla mücadele Kanun uygulamaları
Deprem gözleme Orman yangını tespiti
Volkan gözleme Ekin ve hasat durumu
izleme
Çevre durumu izleme
Arazi haritalama
2.5 Performans özelliklerine göre İHA’lar
İHA’lar ağırlık, havada kalış mesafesi, kanat yüklemesi, menzil, kanat açıklığı,
çıkabileceği maksimum yükseklik ve hız gibi performans özelliklerine göre
sınıflandırılabilir. Performans karakteristiklerine göre İHA’ları sınıflandırmak, İHA
tasarımcıları, üreticiler ve müşterilerin ihtiyaçları karşılamaları için kullanışlıdır.
10
2.5.1. Ağırlığa göre sınıflandırma
İHA’lar ağırlık açısından birkaç kilogram gelen mikro İHA’lardan, Şekil 2.1’de
gözüken 11 ton ağırlığında olan Global Hawk (Tier III) a kadar geniş bir yelpazeye
sahiptir.[6]İHA’ların ağırlıklarının sınıflandırılması yapılırken ağırlık aralıkları göz
önüne alınarak 5 şekilde sınıflandırma yapılmıştır. Bu sınıflandırma Tablo 2.2’de
verilmiştir.
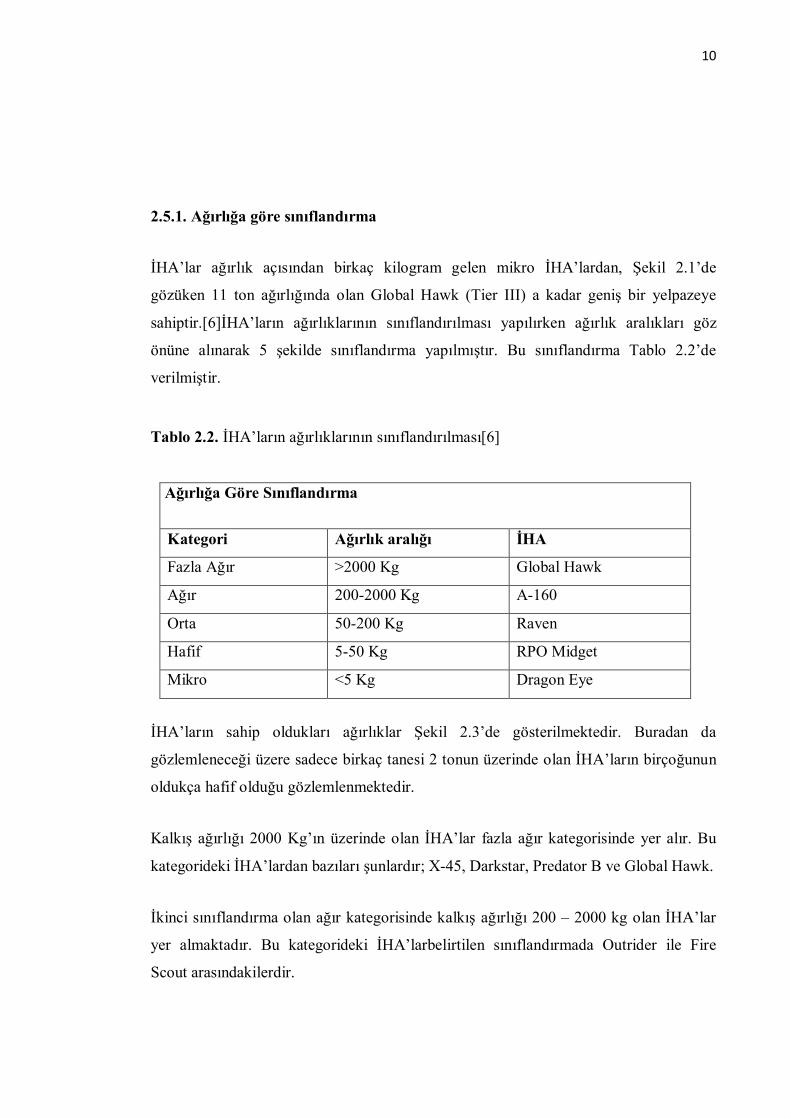
Tablo 2.2. İHA’ların ağırlıklarının sınıflandırılması[6]
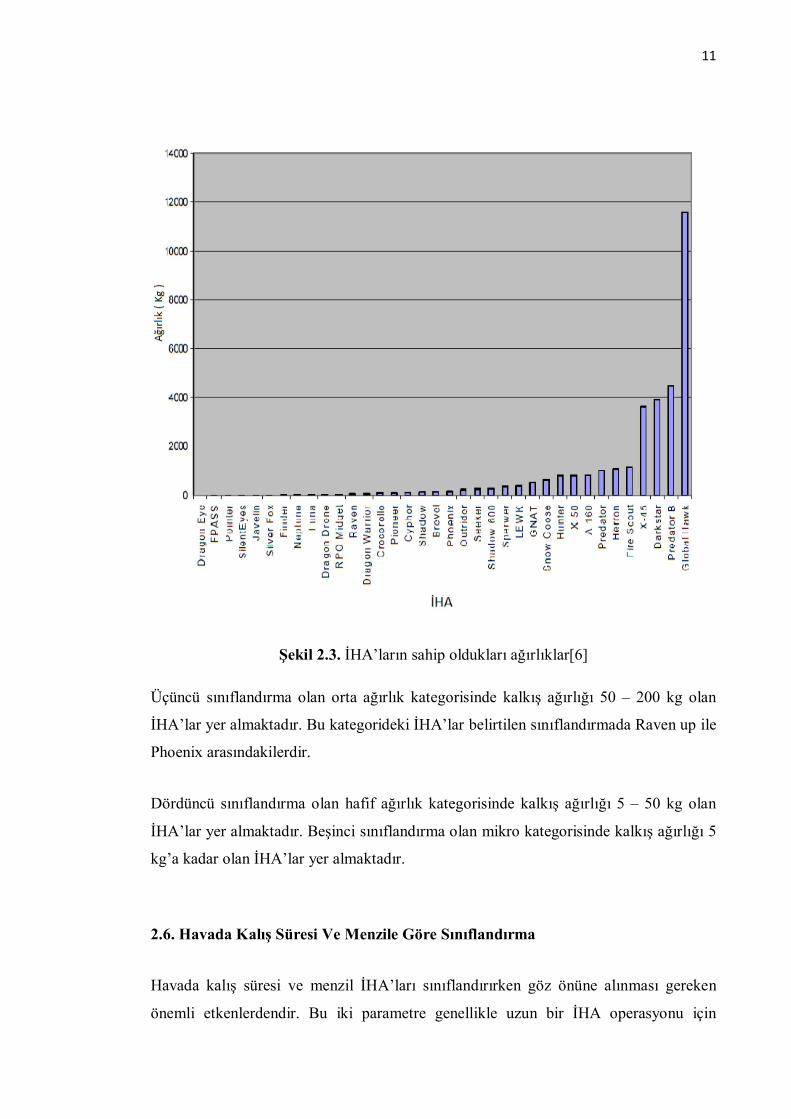
İHA’ların sahip oldukları ağırlıklar Şekil 2.3’de gösterilmektedir. Buradan da
gözlemleneceği üzere sadece birkaç tanesi 2 tonun üzerinde olan İHA’ların birçoğunun
oldukça hafif olduğu gözlemlenmektedir.
Kalkış ağırlığı 2000 Kg’ın üzerinde olan İHA’lar fazla ağır kategorisinde yer alır. Bu
kategorideki İHA’lardan bazıları şunlardır; X-45, Darkstar, Predator B ve Global Hawk.
İkinci sınıflandırma olan ağır kategorisinde kalkış ağırlığı 200 – 2000 kg olan İHA’lar
yer almaktadır. Bu kategorideki İHA’larbelirtilen sınıflandırmada Outrider ile Fire
Scout arasındakilerdir.
Ağırlığa Göre Sınıflandırma
Kategori Ağırlık aralığı İHA
Fazla Ağır >2000 Kg Global Hawk
Ağır 200-2000 Kg A-160
Orta 50-200 Kg Raven
Hafif 5-50 Kg RPO Midget
Mikro <5 Kg Dragon Eye
11
Şekil 2.3. İHA’ların sahip oldukları ağırlıklar[6]
Üçüncü sınıflandırma olan orta ağırlık kategorisinde kalkış ağırlığı 50 – 200 kg olan
İHA’lar yer almaktadır. Bu kategorideki İHA’lar belirtilen sınıflandırmada Raven up ile
Phoenix arasındakilerdir.
Dördüncü sınıflandırma olan hafif ağırlık kategorisinde kalkış ağırlığı 5 – 50 kg olan
İHA’lar yer almaktadır. Beşinci sınıflandırma olan mikro kategorisinde kalkış ağırlığı 5
kg’a kadar olan İHA’lar yer almaktadır.
2.6. Havada Kalış Süresi Ve Menzile Göre Sınıflandırma
Havada kalış süresi ve menzil İHA’ları sınıflandırırken göz önüne alınması gereken
önemli etkenlerdendir. Bu iki parametre genellikle uzun bir İHA operasyonu için
12
birbiriyle alakalıdır. İHA tasarımcıları için İHA türü belirlenirken bu iki parametreyi
dikkate almaları önemlidir. Ayrıca bu parametreler sayesinde İHA’nın düzenli olarak
yakıt ikmalinin ne kadar yapılacağı ve ne kadar süre görevde kalabileceğini belirlemek
mümkün olabilmektedir.
Havada kalış süresi ve menzile göre uzun, orta ve kısa olarak üç çeşit sınıflandırma
mümkündür. Tablo 2.4’de İHA’ların havada kalış süresi ve menzile göre
sınıflandırılması verilmiştir.
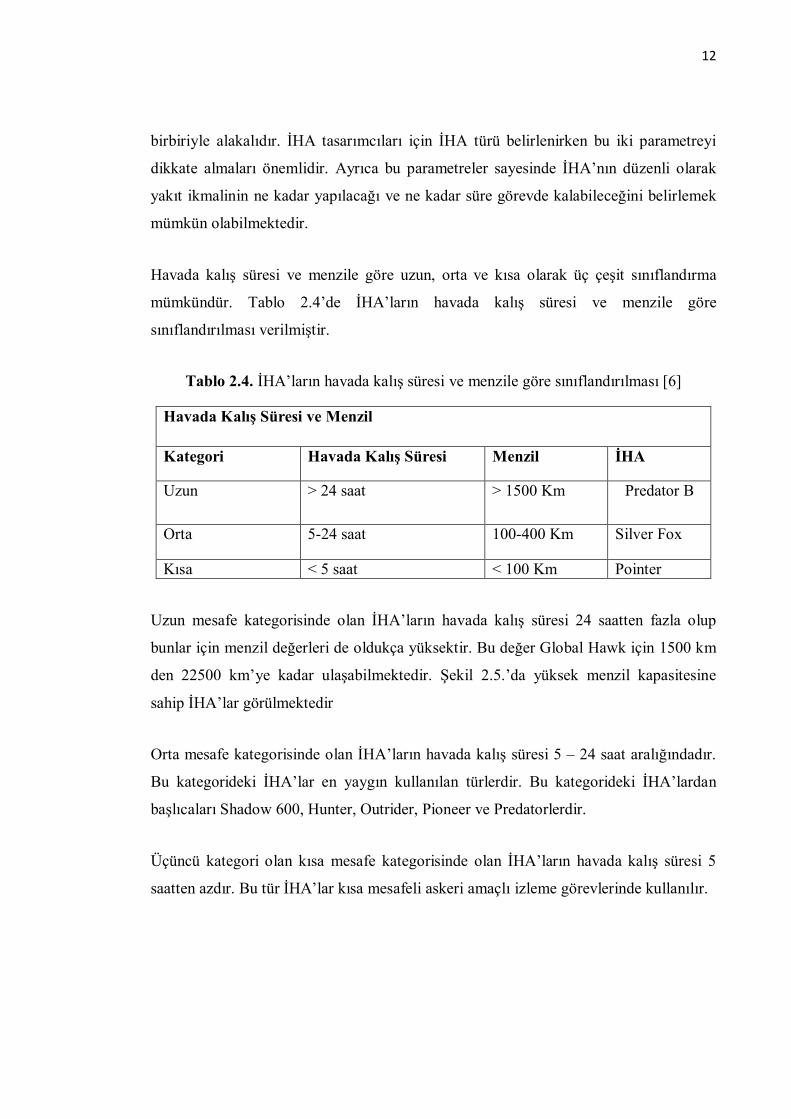
Tablo 2.4. İHA’ların havada kalış süresi ve menzile göre sınıflandırılması [6]
Havada Kalış Süresi ve Menzil
Kategori Havada Kalış Süresi Menzil İHA
Uzun > 24 saat > 1500 Km Predator B
Orta 5-24 saat 100-400 Km Silver Fox
Kısa < 5 saat < 100 Km Pointer
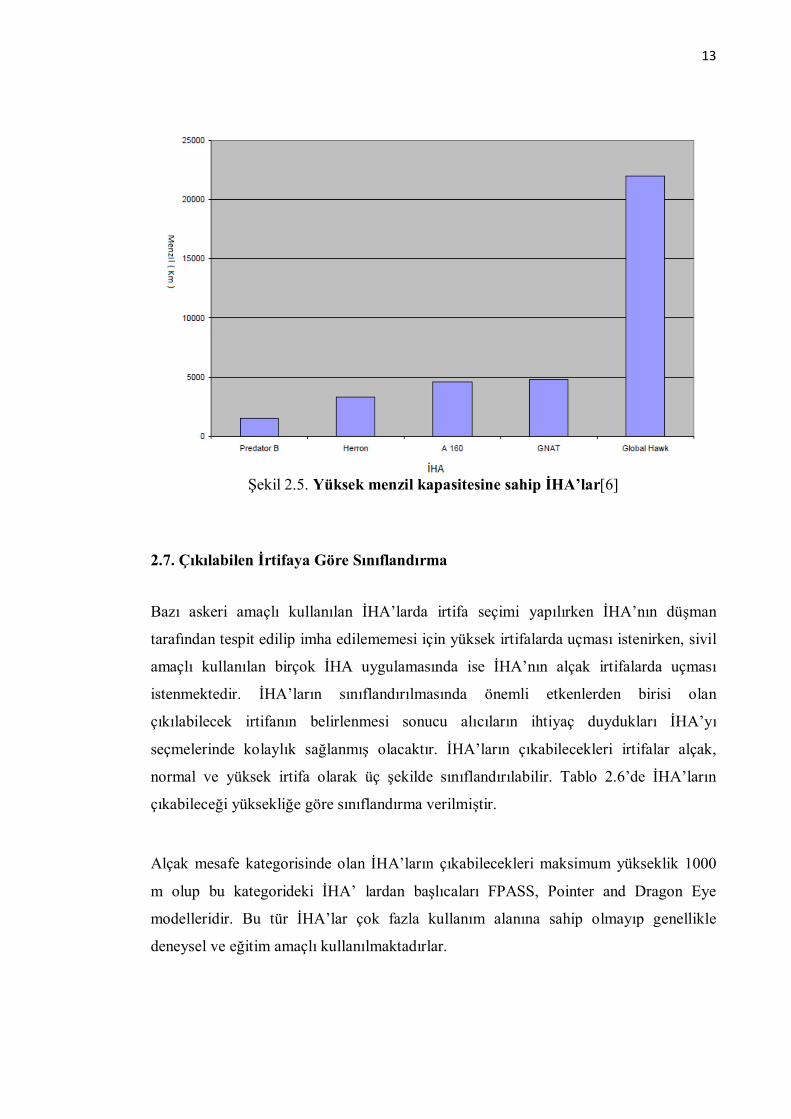
Uzun mesafe kategorisinde olan İHA’ların havada kalış süresi 24 saatten fazla olup
bunlar için menzil değerleri de oldukça yüksektir. Bu değer Global Hawk için 1500 km
den 22500 km’ye kadar ulaşabilmektedir. Şekil 2.5.’da yüksek menzil kapasitesine
sahip İHA’lar görülmektedir
Orta mesafe kategorisinde olan İHA’ların havada kalış süresi 5 – 24 saat aralığındadır.
Bu kategorideki İHA’lar en yaygın kullanılan türlerdir. Bu kategorideki İHA’lardan
başlıcaları Shadow 600, Hunter, Outrider, Pioneer ve Predatorlerdir.
Üçüncü kategori olan kısa mesafe kategorisinde olan İHA’ların havada kalış süresi 5
saatten azdır. Bu tür İHA’lar kısa mesafeli askeri amaçlı izleme görevlerinde kullanılır.
13
Şekil 2.5. Yüksek menzil kapasitesine sahip İHA’lar[6]
2.7. Çıkılabilen İrtifaya Göre Sınıflandırma
Bazı askeri amaçlı kullanılan İHA’larda irtifa seçimi yapılırken İHA’nın düşman
tarafından tespit edilip imha edilememesi için yüksek irtifalarda uçması istenirken, sivil
amaçlı kullanılan birçok İHA uygulamasında ise İHA’nın alçak irtifalarda uçması
istenmektedir. İHA’ların sınıflandırılmasında önemli etkenlerden birisi olan
çıkılabilecek irtifanın belirlenmesi sonucu alıcıların ihtiyaç duydukları İHA’yı
seçmelerinde kolaylık sağlanmış olacaktır. İHA’ların çıkabilecekleri irtifalar alçak,
normal ve yüksek irtifa olarak üç şekilde sınıflandırılabilir. Tablo 2.6’de İHA’ların
çıkabileceği yüksekliğe göre sınıflandırma verilmiştir.
Alçak mesafe kategorisinde olan İHA’ların çıkabilecekleri maksimum yükseklik 1000
m olup bu kategorideki İHA’ lardan başlıcaları FPASS, Pointer and Dragon Eye
modelleridir. Bu tür İHA’lar çok fazla kullanım alanına sahip olmayıp genellikle
deneysel ve eğitim amaçlı kullanılmaktadırlar.
14
Tablo 2.6. İHA’ların çıkabileceği yüksekliğe göre sınıflandırılması [6]
Çıkılan Yüksekliğe Göre Sınıflandırma
Kategori Maksimum Yükseklik İHA
Alçak < 1000 m Pointer
Orta 1000-10000 m Finder
Yüksek >10000 m Darkstar
Orta mesafe kategorisinde olan İHA’ların çıkabilecekleri yükseklik 1000-10000 m
aralığında olup günümüzde kullanımı en fazla yaygın olan İHA’lardır. Şekil 2.9’de
görüleceği üzere birçok İHA türü bu kategoridedir.
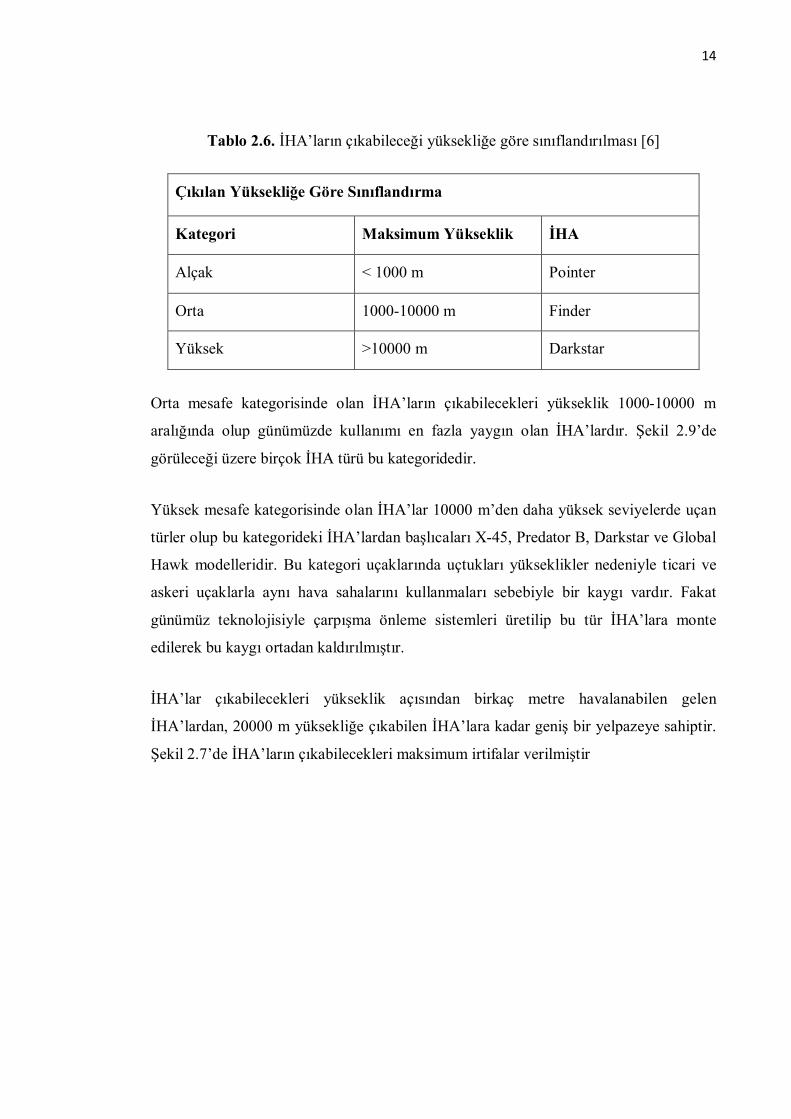
Yüksek mesafe kategorisinde olan İHA’lar 10000 m’den daha yüksek seviyelerde uçan
türler olup bu kategorideki İHA’lardan başlıcaları X-45, Predator B, Darkstar ve Global
Hawk modelleridir. Bu kategori uçaklarında uçtukları yükseklikler nedeniyle ticari ve
askeri uçaklarla aynı hava sahalarını kullanmaları sebebiyle bir kaygı vardır. Fakat
günümüz teknolojisiyle çarpışma önleme sistemleri üretilip bu tür İHA’lara monte
edilerek bu kaygı ortadan kaldırılmıştır.
İHA’lar çıkabilecekleri yükseklik açısından birkaç metre havalanabilen gelen
İHA’lardan, 20000 m yüksekliğe çıkabilen İHA’lara kadar geniş bir yelpazeye sahiptir.
Şekil 2.7’de İHA’ların çıkabilecekleri maksimum irtifalar verilmiştir
15
Şekil 2.7. İHA’ların çıkabilecekleri maksimum irtifalar[6]
2.8. Kanat Yüklemesine göre Sınıflandırma
Diğer bir sınıflandırma yöntemi olan kanat yüklemesi İHA’ların sınıflandırılmasında
önemli etkenlerden birisidir. Bir İHA için kanat yüklemesi hesabı toplam ağırlığın kanat
alanına bölünmesiyle elde edilir
Tablo 2.8. İHA’ların kanat yüklemesine göre sınıflandırılması[6]
Kanat Yüklemesine Göre Sınıflandırma
Kategori Kanat Yüklemesi(kg/m2) İHA
Düşük < 50 Seeker
Orta 50-100 X-45
Yüksek > 100 Global Hawk
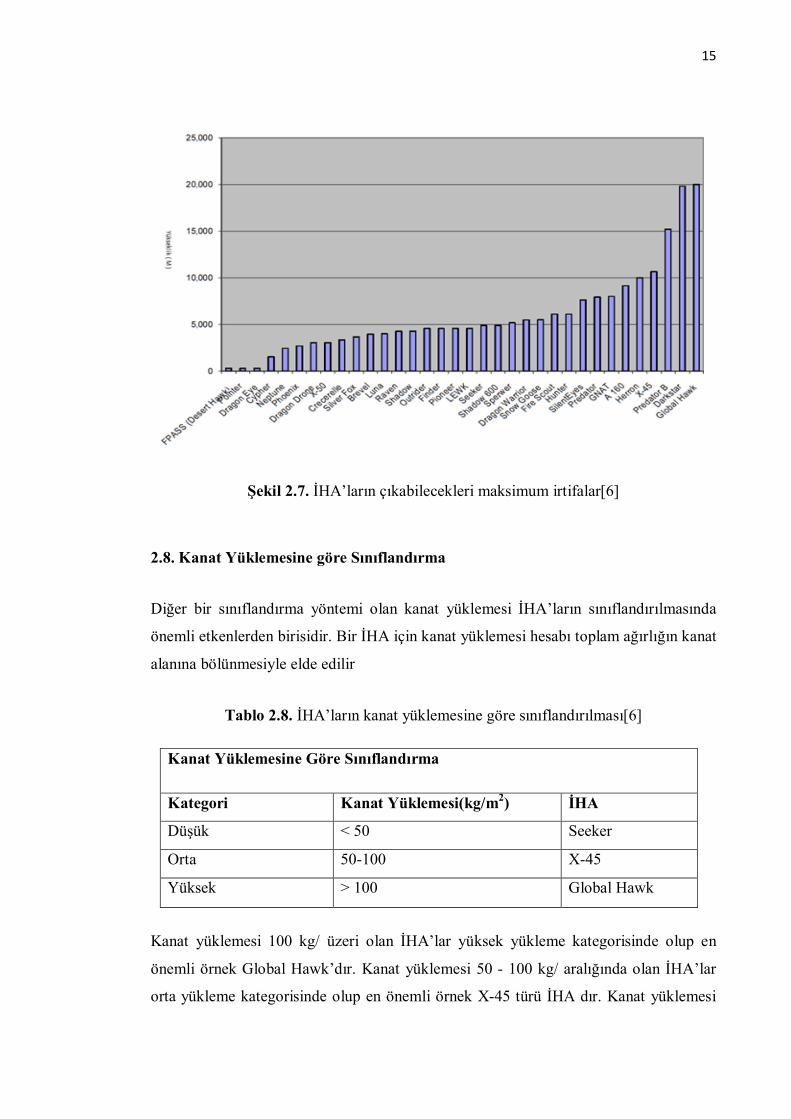
Kanat yüklemesi 100 kg/ üzeri olan İHA’lar yüksek yükleme kategorisinde olup en
önemli örnek Global Hawk’dır. Kanat yüklemesi 50 - 100 kg/ aralığında olan İHA’lar
orta yükleme kategorisinde olup en önemli örnek X-45 türü İHA dır. Kanat yüklemesi
16
50 kg/ den az olan İHA’lar düşük yükleme kategorisinde olup en önemli örnek
Seeker’dır.
Kanat yükleme aralığı, kanat yükleme değeri 5.34 kg/ olan small Dragon Eye ile kanat
yükleme değeri 211.84 kg/ olan X-50 arasındadır. Şekil 2.9’da İHA’ların kanat
yüklemesine göre sınıflandırılması görülmektedir.
Şekil 2.9. Kanat yüklemelerine göre İHA’lar[6]
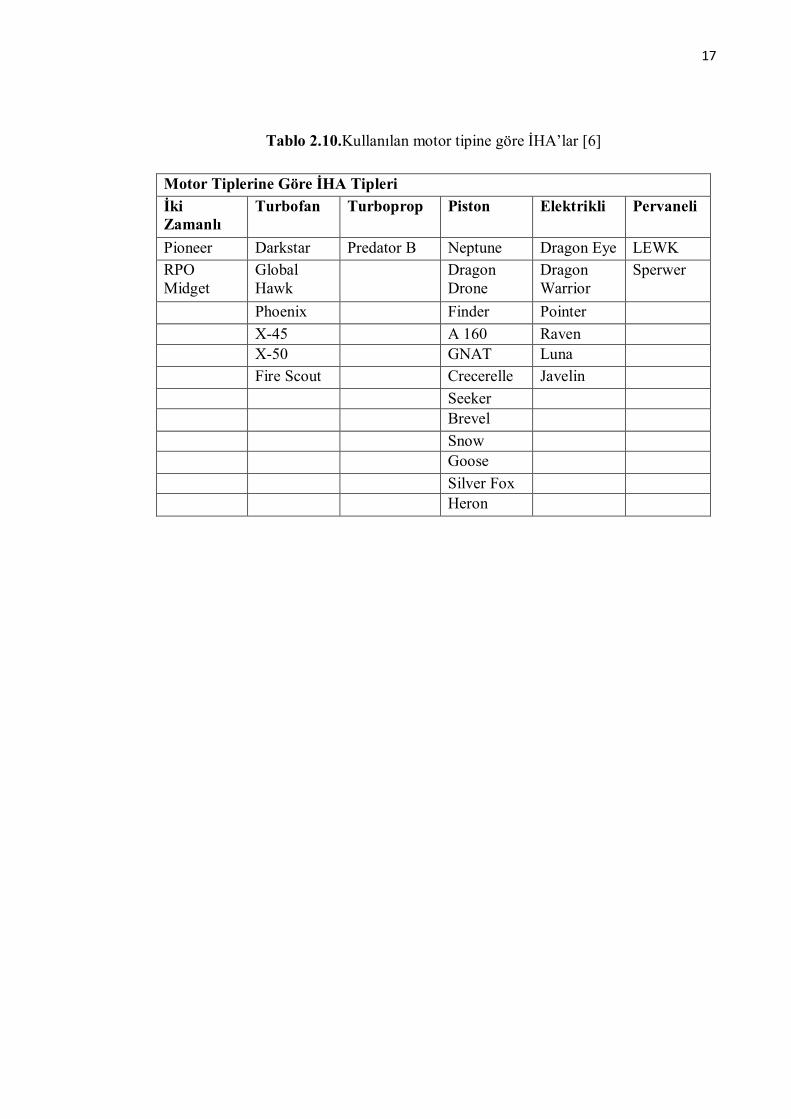
2.9. Motor tipine göre sınıflandırma
İHA’lar birçok değişik görevlerde kullanılırlar ve bu görevleri yerine getirebilmek için
kullanıldığı alana göre değişik motor tiplerine ihtiyaç duymaktadırlar.
İki zamanlı, Turbofan, Turboprop, Pistonlu, Elektrikli ve Pervaneli tipler İHA’larda
kullanılan değişik tiplerdeki motorlardır. Pistonlu ve elektrikli tip motorlar en yaygın
olarak kullanılan türlerdir. İHA’larda da insanlı uçaklardaki gibi uçak boyutları ve
ağırlıklarıyla orantılı olarak motor boyutlar ve çeşitleri de değişkenlik göstermektedir.
Elektrikli motorlar genelde hafif ve küçük modellerde kullanılırken, pistonlu motorlar
ağır ve büyük modellerde kullanılırlar
17
Tablo 2.10.Kullanılan motor tipine göre İHA’lar [6]
Motor Tiplerine Göre İHA Tipleri İki Zamanlı
Turbofan Turboprop Piston Elektrikli Pervaneli
Pioneer Darkstar Predator B Neptune Dragon Eye LEWK RPO Midget
Global Hawk
Dragon Drone
Dragon Warrior
Sperwer
Phoenix Finder Pointer X-45 A 160 Raven X-50 GNAT Luna Fire Scout Crecerelle Javelin Seeker Brevel Snow Goose Silver Fox Heron
18
3.İNSANSIZ HAVA ARAÇLARININ SİVİL HAVACILIKTA KULLANIMI
3.1 Yüksek İrtifa Görüntüsü
Bir İHA yıllık arazi kullanımı araştırması için Batı Amerika’nın büyük bir kısmının
havadan görüntüsünü alır.Bir 4-D uçuş planı 40.000 feet’in üzerinde yerleştirilmiş yol
noktaları ile belirlenen büyük bir taranmış modeli göstermek için kaydedilir.Güzergah
kırsal,kent ve sahil alanları üstünden geçer.Görev yaklaşık 36 saatte biter ve hava hızı
yaklaşık 150 knot’tur.İHA kula kontrollü havaalanına dayandırılmıştır fakat genellikle
Orta Batı’daki güvenik ofisinden yönlendirilir.
Havaalanının onayından sonra,İHA operatörü taksiye müsaade eder.Taksi işlemi
normalde otonom olarak yapılır ama havaalanındaki trafikten dolayı İHA ileri bakan bir
kamera kullanılarak manuel olarak taksi yapılır.Kalkış için ortam müsait olduktan sonra
İHA 4-D ayrılış prosedürüne öre yükselir.Yer pilotu uçuş ilerlemesini gösterir ve
yükselme esnasında sistem güvenlik kontrollerini idare eder.30.000 feet’de hava trafik
kontrol sistemi potasnsiyel bir hava trafik ayrılması anlaşmazlığı saptar ve otomatik
olarak yer pilotuna İHA’yı trafik ayrılmasından uzaklaştırması için talimatlar
gönderir.Bu talimatlar yer pilotu tarafından elektronik olarak alınır ve İHA’ya
göndderilir.Kısa bir zaman sonra İHA kendi yükselme eğilimene devam eder ve 50.000
feet’e kadar tırmanır.Bu irtifada hava ve trafik pek kayda değer olmadığı için uçuş
kaydedilmiş 4-D uçış planına göre yapılır.Görev tamamlandıktan sonra İHA kalktığı
havaalanına sıkıntısız bir şekilde geri döner
19
3.2 Deniz Gözetleme
Baltimore limanına yerleştirilmiş bir Amerikan Sahil Güvenlik gemisi yüksek irtifadan
denizdeki geniş bir alanı gözeten İHA’dan açık denizde 100 milde şüpheli bir geminin
tespit edildiği bilgisini alır.Gemide kalkamaya hazır olan düşük rakımı gözetleyen bir
İHA vardır.Bir 3-D uçış planı hava trafik sistemi ile birlikte kaydedilir.
İlk uyarının 5 dakikası içinde uçış planı kabul edilir veİHA gemiden dikey olarak
ayrılır.İHA’nın pilotu gemide bulunur ve Baltimore Havalimanındaki hava trafiğini
aksatmamak için İHA’ya vektörler ve rakımlar verir.15 dakika içerisinde İHA okyanus
üstünde 3000 feet’de 200 knot ile uçar ve görürü uçuş kuralları altında idare edilir.Bigi
yönetim sistemi tarafından sağlanan yakın trafik pozisyonları ile birleştirlmiş br
elektrooptikal bir cihaz İHA belirlenmiş yol üzerinde giderken onun öbür trafiklerden
güvenli bir şekilde ayrılması için gerekli bilgileri İHA yer pilotuna gönderir.
Belirlenmiş koordinantlar aşıldığında İHA’nın sensörleri 30 millik radyus içinde üç
gemi tespit eder.İHA 1000 feet’e iner ve ilk hedefin üstündengeçer bu esnada şüpheli
gemi ile ilgili resimleri analiz edilmek üzere Sahil Güvenlik Gemisine gönderir.Bu
kalan iki gemi içinde tekrarlanır.Kısa zamanda resimler incelenir ve İHA pilotu aracı ilk
kalktığı gemiye geri dönmesini ve sahil giüvenlik gemisi gelene kadar aktiviteleri
gözlemesi için 20 dakika o gemide beklemesini emreder.sahil güvenlik ulaşıp şüpheli
gemiyi ele geçirdikten sonr yer pilotu Baltimore limanına dönmek ve gemiye inmek için
3-D uçuş planını kaydeder.
3.3 Çevresel Algılama
Bilimsel görevin bir parçası olarak havaa kirlilik oranları hakkınd bilgi toplamak
için,dayanıklı İHA’lar santral emisyonlarının gözlenmiş olduğu kırsal ve kent çevreleri
üstünde 150 millik bir uçuş için hazırlanır.Uçuş esnasında 4.000 feet’te sıkı oluşumlar
idare edilecektir.Bu oluşum İHA yer pilotuna kendi şahsi aracını bir uçak olarak
kullanmasına izin verir.
20
İHA bir rampadan bir hava trafik tesisi tarafından kontrol edilmeyen şehre yakın bir
endüstriyel yere fırlatılır.Rotalar bütün görev boyunca 50 knot’lık hızla otomatik olarak
uçulur.Güç ve yük üretim sınırlarından dolayı,İHA onu radarlara farkettirmeyen bir
aktarıcı taşıyamaz.Bunun yerine İHA yer istasyonuna GPS bilgisi gönderir.Düşük
ağırlıklı,düşük güçülü fener etiketini içeren ek bir gözetleme sistemi İHA’ya
yerleştirilmiştir.Etiketler iletim sınırlıyken vasıta tipi,tescil numarası ve aracın sahibi
gibi bilgileri içerir.Etiketler potansiyel tehlikelerden dolayı muşriyeti ve önceden
onaylanmış operasyonları tanımlamakta ajanslara yardımcı olmak için uçakta ve uçak
gemisinde bulunan özele ekipmanlar ile sorgulanabilir.
Bir 3-D uçuş planı yüksek arakımların ilk ve son adımı için elektronik olarak kaydedilir
ve düşük rakımlarda yer alan santral aktiviteleri görsel uçuş kuralları kullanılarak
kontrol edilir.Bilgi yönetim sistemi tarafından desteklenen hava raporu,rüzgar ve uçakta
bu birikmesi riskinden dolayı dikkatlice takip edilir.İHA 3-D uçuş planı ile hiçbir
zorlukla karşılaşmadan uçar.Gözlemlenen bölgeye gelindiğinde,İHA her uçağun
kolayca uçabileceği 500,1000 ve ya 1500 feet’e kadar alçalır.Görüntüleme zamanı 16
saattir.Deneyim için neyetlenilen uçuş bölgesi bilgi yönetim sisteminde kaydedilir
böylece bölgede herhangi bir uçak planlama uçuşları için uyarı sağlanır.Görevi
tamamlama esnasında İHA yeniden oluşum modeli girer ve fırlatıldığı bölgeye 3-D uçuş
planı ile geri döner.
3.4 Medya ve Trafik Raporlaması
Bir televizyon haber merkezi İHA’yı büyük bir trafik kazası sahnesini elde etmek için
gönderir.İHA Chicago şehir merkezinin yakınıdaki bir binaya yerleştirilmiştir.Fırlatma
bölgesinin iki havalimanına yakın olmasından dolayı hava trafik açıklığı operasyonlar
için önemlidir.Uçuş görsul uçuş kuralları altında kontrol edilir ve hava trafiğini
rahatlatmak için önceden belirlenmiş bölgeler içinde uçulur.Dikey uçuş ve iniş
yapabilen İHA uçuş kontrol sisteminin uçuşu göreüntülemesi için aktarıcı ile
donatılmıştır.
İHA medya kuruluşu tarafından kiralanır ve İHA’nın kontrolü güvenlikk tesisine
yerleştirilmiş bir müteaahhit tarafından kontrol edilir.İHA yer pilotu hava trafik
21
sistemini kazayı grüntülemek için uçuşun görsel uçuş kuralları altında yapılacağını
bildirir.Uçağın şehrin tasarlanmış bölgelerindeki uçuş bilgilerini belirten bir güvenlik
kodu ayrıca hava trafik sistemine iletilir.Pilot belirlenen rotada uçması için ve bilgi
yönetim sistemi aracılığıyla hava trafik sistemine bilgi sağlaması için İHA’yı
programlar. Hava trafik kontrolü uçuşu onaylar ve ilerlemeleri görüntüler.İHA kaza
bölgesinin üstüne 400 feet alçalmadan önce kalkar ve 100 knot hızla 1000 feet’te uçar.
İHA bölgeye ulaştığında İHA’daki kameraları kontrol eden medya grubu pilotu en iyi
görüntüleme açısı için uyarır.1 dakika içinde başka bir medya grubuna ait İHA ve
insanlı kurtarma helikopteri bölgeye ulaşır. İHA helikopterin kurtarma yapabilmesi için
hava trafik kontrolü tarafından geçici bir bölgeye hareket ettirilirler.40 dakika sonra
İHA’lar bölgeden ilk kalktıkları yere geri dönerler.
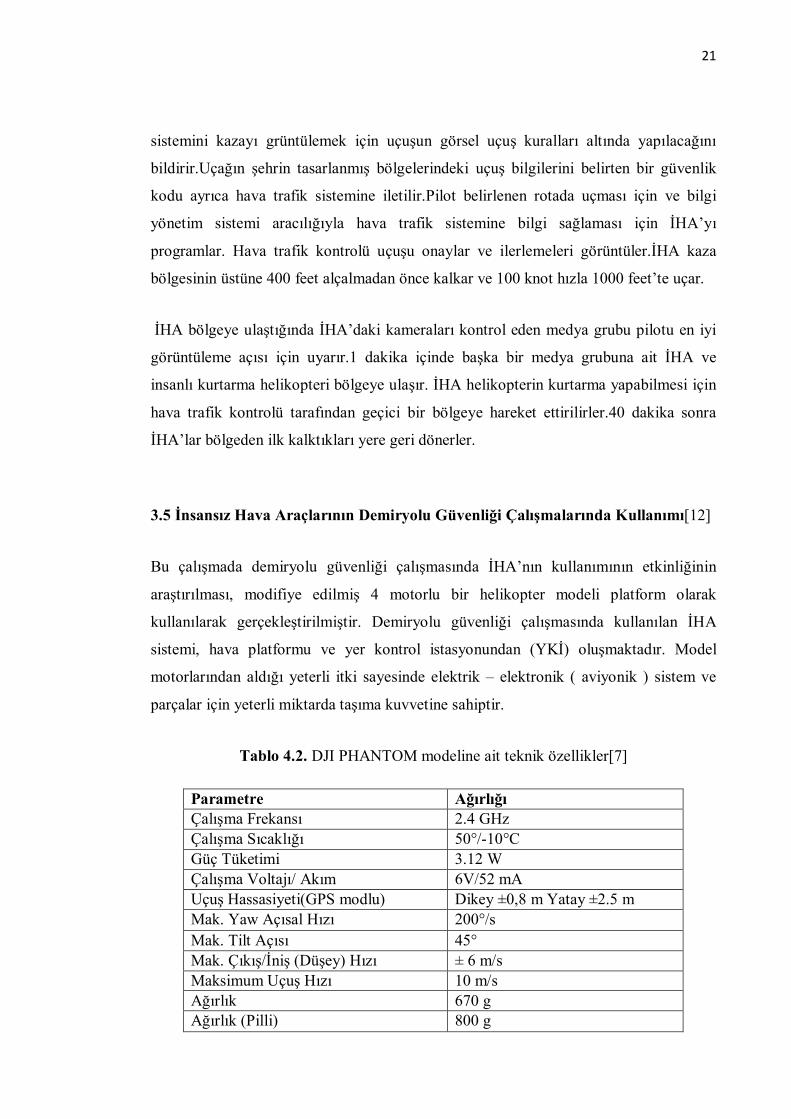
3.5 İnsansız Hava Araçlarının Demiryolu Güvenliği Çalışmalarında Kullanımı[12]
Bu çalışmada demiryolu güvenliği çalışmasında İHA’nın kullanımının etkinliğinin
araştırılması, modifiye edilmiş 4 motorlu bir helikopter modeli platform olarak
kullanılarak gerçekleştirilmiştir. Demiryolu güvenliği çalışmasında kullanılan İHA
sistemi, hava platformu ve yer kontrol istasyonundan (YKİ) oluşmaktadır. Model
motorlarından aldığı yeterli itki sayesinde elektrik – elektronik ( aviyonik ) sistem ve
parçalar için yeterli miktarda taşıma kuvvetine sahiptir.
Tablo 4.2. DJI PHANTOM modeline ait teknik özellikler[7]
Parametre Ağırlığı Çalışma Frekansı 2.4 GHz Çalışma Sıcaklığı 50°/-10°C Güç Tüketimi 3.12 W Çalışma Voltajı/ Akım 6V/52 mA Uçuş Hassasiyeti(GPS modlu) Dikey ±0,8 m Yatay ±2.5 m Mak. Yaw Açısal Hızı 200°/s Mak. Tilt Açısı 45° Mak. Çıkış/İniş (Düşey) Hızı ± 6 m/s Maksimum Uçuş Hızı 10 m/s Ağırlık 670 g Ağırlık (Pilli) 800 g
22
Erzincan Üniversitesi Sivil Havacılık Yüksekokulu Havacılık Kulübü Laboratuarında
montajı gerçekleştirilen model uçağın ilk test uçuşu, TCDD 4.Bölge Müdürlüğü’nden
gerekli iznin alınmasının ardından 21 Mayıs 2011 tarihinde, Erzincan – Erzurum tren
yolunun 0-15 km leri arasında yapılmıştır. Test uçuşları 8 Haziran 2013 tarihine kadar
geçen süreçte sürekli devam etmiş olup ve son uçuş 8 Haziran 2013 tarihinde İstanbul
Haydarpaşa garında farklı uçuş seviyelerinde gerçekleştirilmiştir
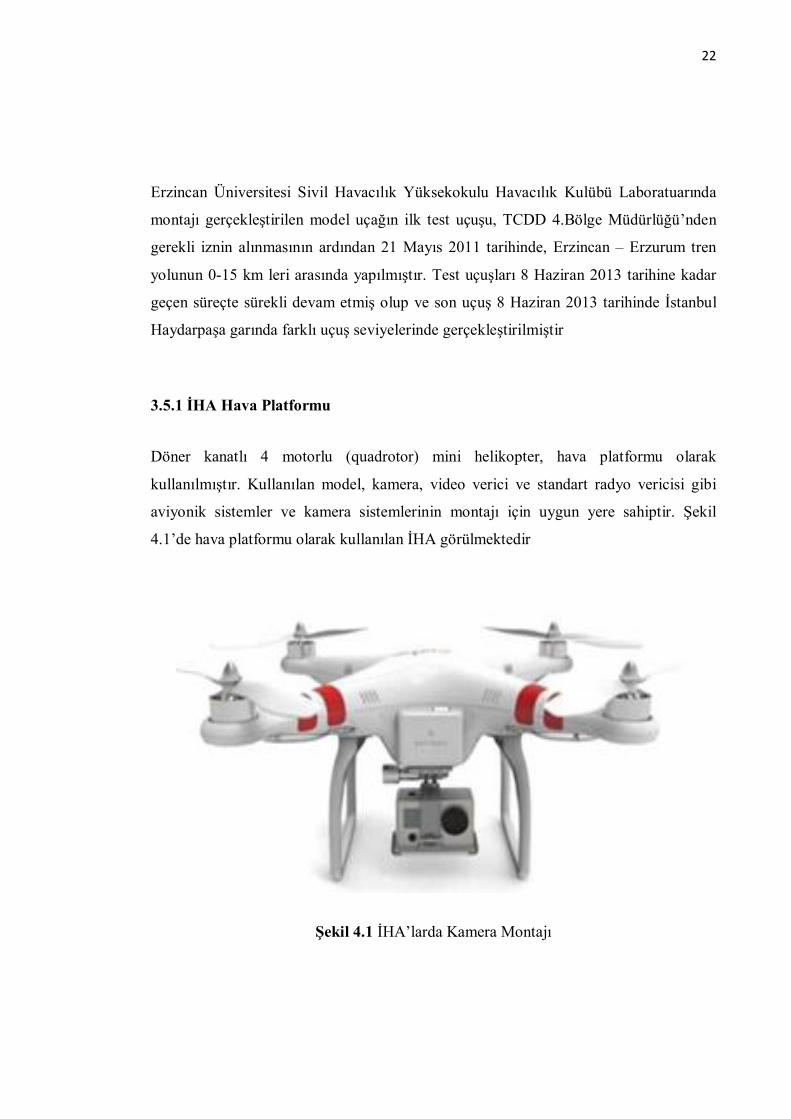
3.5.1 İHA Hava Platformu
Döner kanatlı 4 motorlu (quadrotor) mini helikopter, hava platformu olarak
kullanılmıştır. Kullanılan model, kamera, video verici ve standart radyo vericisi gibi
aviyonik sistemler ve kamera sistemlerinin montajı için uygun yere sahiptir. Şekil
4.1’de hava platformu olarak kullanılan İHA görülmektedir
Şekil 4.1 İHA’larda Kamera Montajı
23
3.5.2 Kullanılan Modelin Özellikleri
Kullanılan model Tablo 4.1’de gösterilen teknik özelliklerin pozisyon ve yükseklik
sabitleme, akıllı yön kontrolü, emniyet, otomatik geri dönüş ve iniş, düşük gerilim
(voltaj) koruması, LED uyarı sistemi, kamera çerçevesi gibi kullanımını kolaylaştırıcı
özelliklere sahiptir.
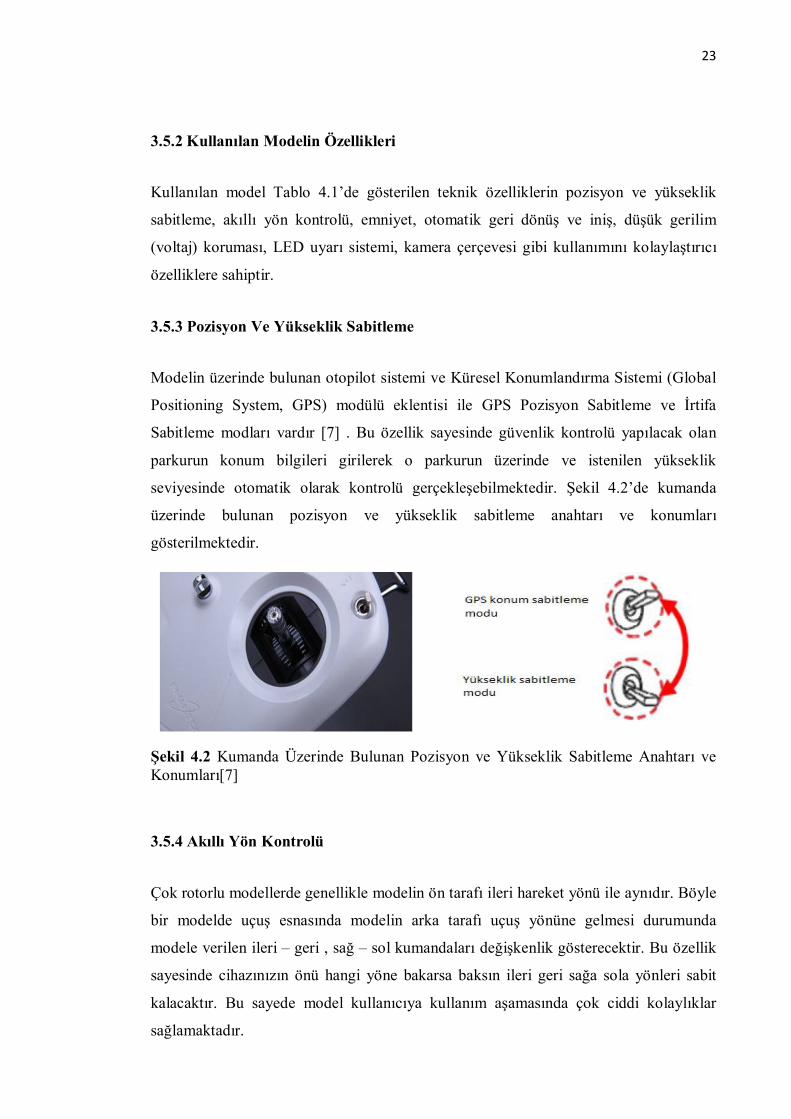
3.5.3 Pozisyon Ve Yükseklik Sabitleme
Modelin üzerinde bulunan otopilot sistemi ve Küresel Konumlandırma Sistemi (Global
Positioning System, GPS) modülü eklentisi ile GPS Pozisyon Sabitleme ve İrtifa
Sabitleme modları vardır [7] . Bu özellik sayesinde güvenlik kontrolü yapılacak olan
parkurun konum bilgileri girilerek o parkurun üzerinde ve istenilen yükseklik
seviyesinde otomatik olarak kontrolü gerçekleşebilmektedir. Şekil 4.2’de kumanda
üzerinde bulunan pozisyon ve yükseklik sabitleme anahtarı ve konumları
gösterilmektedir.
Şekil 4.2 Kumanda Üzerinde Bulunan Pozisyon ve Yükseklik Sabitleme Anahtarı ve Konumları[7]
3.5.4 Akıllı Yön Kontrolü
Çok rotorlu modellerde genellikle modelin ön tarafı ileri hareket yönü ile aynıdır. Böyle
bir modelde uçuş esnasında modelin arka tarafı uçuş yönüne gelmesi durumunda
modele verilen ileri – geri , sağ – sol kumandaları değişkenlik gösterecektir. Bu özellik
sayesinde cihazınızın önü hangi yöne bakarsa baksın ileri geri sağa sola yönleri sabit
kalacaktır. Bu sayede model kullanıcıya kullanım aşamasında çok ciddi kolaylıklar
sağlamaktadır.
24
3.5.5 Otomatik Geri Dönüş Ve İniş
Modelin otopilot sistemi sayesinde emniyet fonksiyonları vardır. Model kalkış
yapmadan önce 8 saniye içinde 6 ya da daha fazla GPS uydusu bulur ve kalkış noktasını
ilk (home) pozisyon diye kaydeder. Model kumandadan sinyal alamadığı, menzil dışına
çıktığı ve kumandanın pilinin bittiği durumlarda GPS modu açıksa ve alınan GPS
sinyali yeterli seviyede ise otomatik olarak güvenle ilk konumuna geri döner ve
otomatik iniş gerçekleştirir.
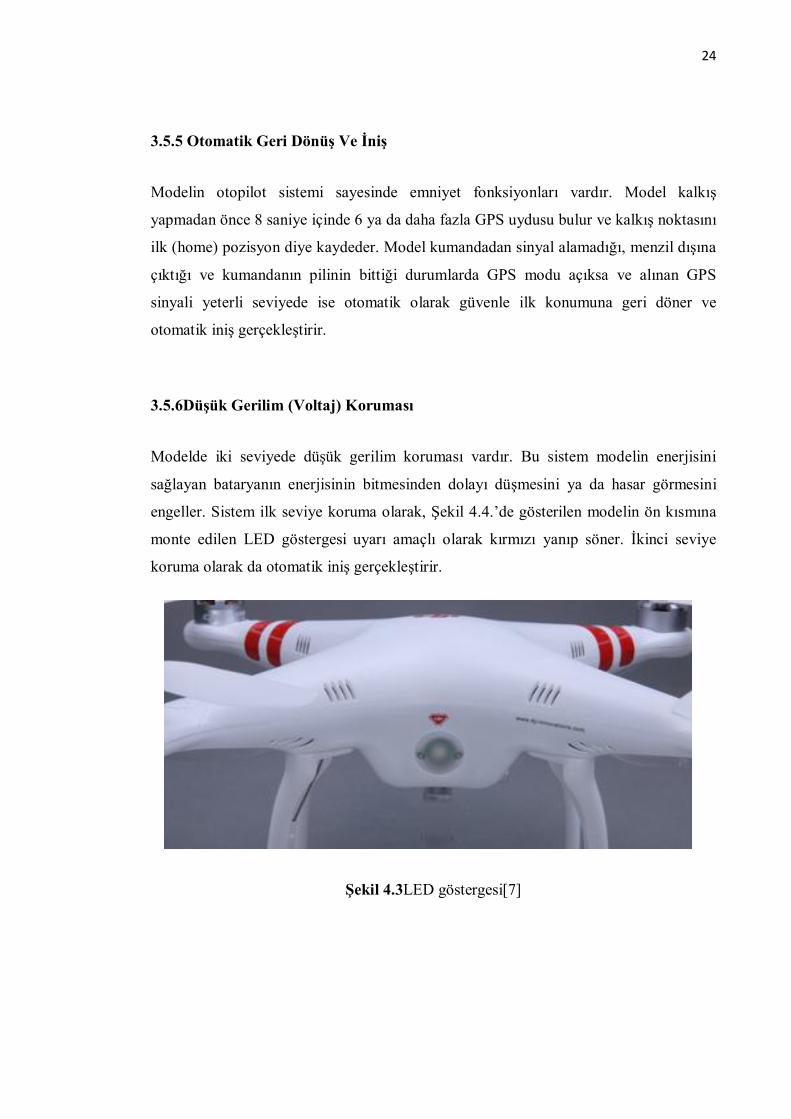
3.5.6Düşük Gerilim (Voltaj) Koruması
Modelde iki seviyede düşük gerilim koruması vardır. Bu sistem modelin enerjisini
sağlayan bataryanın enerjisinin bitmesinden dolayı düşmesini ya da hasar görmesini
engeller. Sistem ilk seviye koruma olarak, Şekil 4.4.’de gösterilen modelin ön kısmına
monte edilen LED göstergesi uyarı amaçlı olarak kırmızı yanıp söner. İkinci seviye
koruma olarak da otomatik iniş gerçekleştirir.
Şekil 4.3LED göstergesi[7]
25
3.5.7 LED Uyarı Sistemi
Modelin her kolunda bulunan yüksek parlaklı LED sistemi Şekil 4.5’de görüldüğü üzere
gece uçuşlarında cihazın önünü ve arkasını ayırt edebilmek için kullanılan sistem, ayrıca
Şekil 4.6’da gösterilen uyarılar için de kulla nılmaktadır.
3.5.8 Elektrik – Elektronik (Aviyonik) Sistemler
Model genel olarak bir gövde üzerine motorların ve diğer parçaların yerleştirilmesiyle
kolayca oluşturulabilmektedir. Genel olarak fırçasız doğru akım motoru, elektronik hız
ve kontrol birimi, mikro denetleyici, algılayıcı birimi ve Üç hücreli 2200 mah’lik
batarya olmak üzere 5 ana bileşenden meydana gelen güç ünitesine sahip model
Otopilot Sistemi, GPS ve Pusula Modülü, USB arabirimi, LED Göstergesi, 2,4 GHz-6
kanallı kumanda,video verici ve alıcısı, standart radyo vericisi ve alıcısı ve kameranın
üzerine yerleştirildiği model Şekil 4.7’de görülmektedir.
3.5.9 Güç Ünitesi
Gerekli itki kuvvetini üretmek için üç hücreli 11.1 V’luk Li-Po batarya ile enerjileri
sağlanan ve elektronik hız kontrol devresi (Electronic Speed Controller, ESC) üzerinden
çalıştırılan 4 adet fırçasız elektrik motoru kullanılmıştır.
Yüksek verimli, doğrusal moment/hız ilişkisine sahip fırçasız doğru akım motorlarının
az bakım gerektirmesi ve tehlikeli ortamlarda kullanılabiliyor olmasından dolayı tercih
edilen motorlar ve kullanılan batarya Şekil 4.8’de görülmektedir.[8]
Fırçalı motorların aksine bu tür motorlarda anahtarlama işlemi, elektronik olarak
gerçekleştirildiğinden bu işlemin gerçekleştirilmesini sağlayıcı ESC
kullanılmaktadır.[8]

26
3.5.10 Haberleşme Sistemi
Model üzerinde bulunan radyo ve video alıcı ve göndericilerinin birbirleri ile
etkileşimlerini engellemek maksadıyla farklı frekans aralıkları tercih edilmiştir. 2.4
GHz-6 kanallı radyo alıcısı ve 5.8 GHz video vericisi İHA üzerinde bulunmaktadır.
Standart radyo alıcısı modelin iniş takımına monte edilmiştir.
Yer kontrol istasyonunda, uçağın hareketlerinin kontrolü için kullanılan radyo vericisi
Modelin kumandasının ön tarafına ve model üzerine yerleştirilmiş olan kameranın
görüntüsünü almak için kullanılan video alıcısı ise monitörün alt kısmına monte
edilmiştir
3.5.11 Yazılım Güncellemesi
Model üzerinde bulunan USB girişi ile model üzerindeki sistemlerin yazılım
güncellemesi yapılabilmektedir
3.5.12 Eş Zamanlı (On-Line) Görüntü Alma ve Aktarma
Demiryolu güvenliği kontrolü çalışmalarında, bölgede oluşabilecek yol bozuklukları,
karşılaşılabilecek sabotaj durumları, toprak kayması gibi doğa olaylarından kaynaklanan
aksaklık olasılığı yüksek olan yerlerin kontrolü veya zorlu kış şartlarında risk teşkil
eden yolardaki kontrolü yapılmaktadır. Belirtilen bölgelerdeki aksaklıkların tespiti için
eş zamanlı görüntü aktarımı sağlayan kamera sistemi geliştirilerek İHA’nın üzerine
aerodinamik yapısını bozmadan en uygun şekilde monte edilmiştir.
Bu çalışmada kullanılan İHA üzerinde bulunan video göndericisi ve bir harici bellek
sayesinde alınan görüntülerin kayıt edilmesi ve eş zamanlı olarak yer kontrol
istasyonundan izlenmesine olanak tanımaktadır. Bu şekilde normal yöntemle yapılan
kontrollerde gözden kaçabilecek detayların yakalanabilmesi mümkündür Şekil 4.4’de
görüntü alma ve aktarma işleminin şematik gösterimi verilmektedir.
27
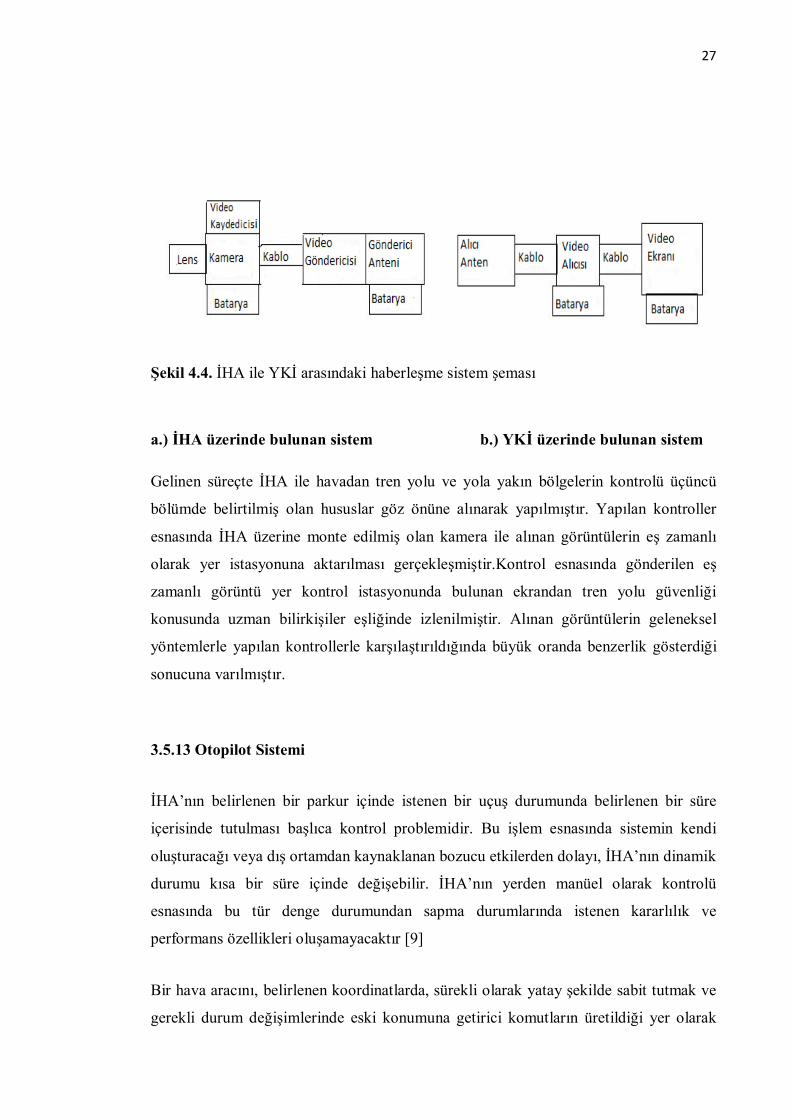
Şekil 4.4. İHA ile YKİ arasındaki haberleşme sistem şeması
a.) İHA üzerinde bulunan sistem b.) YKİ üzerinde bulunan sistem
Gelinen süreçte İHA ile havadan tren yolu ve yola yakın bölgelerin kontrolü üçüncü
bölümde belirtilmiş olan hususlar göz önüne alınarak yapılmıştır. Yapılan kontroller
esnasında İHA üzerine monte edilmiş olan kamera ile alınan görüntülerin eş zamanlı
olarak yer istasyonuna aktarılması gerçekleşmiştir.Kontrol esnasında gönderilen eş
zamanlı görüntü yer kontrol istasyonunda bulunan ekrandan tren yolu güvenliği
konusunda uzman bilirkişiler eşliğinde izlenilmiştir. Alınan görüntülerin geleneksel
yöntemlerle yapılan kontrollerle karşılaştırıldığında büyük oranda benzerlik gösterdiği
sonucuna varılmıştır.
3.5.13 Otopilot Sistemi
İHA’nın belirlenen bir parkur içinde istenen bir uçuş durumunda belirlenen bir süre
içerisinde tutulması başlıca kontrol problemidir. Bu işlem esnasında sistemin kendi
oluşturacağı veya dış ortamdan kaynaklanan bozucu etkilerden dolayı, İHA’nın dinamik
durumu kısa bir süre içinde değişebilir. İHA’nın yerden manüel olarak kontrolü
esnasında bu tür denge durumundan sapma durumlarında istenen kararlılık ve
performans özellikleri oluşamayacaktır [9]
Bir hava aracını, belirlenen koordinatlarda, sürekli olarak yatay şekilde sabit tutmak ve
gerekli durum değişimlerinde eski konumuna getirici komutların üretildiği yer olarak
28
tasarlanan seri kontrol mekanizmaları "Otomatik Pilot" ya da "Oto pilot" olarak
adlandırılır [10].
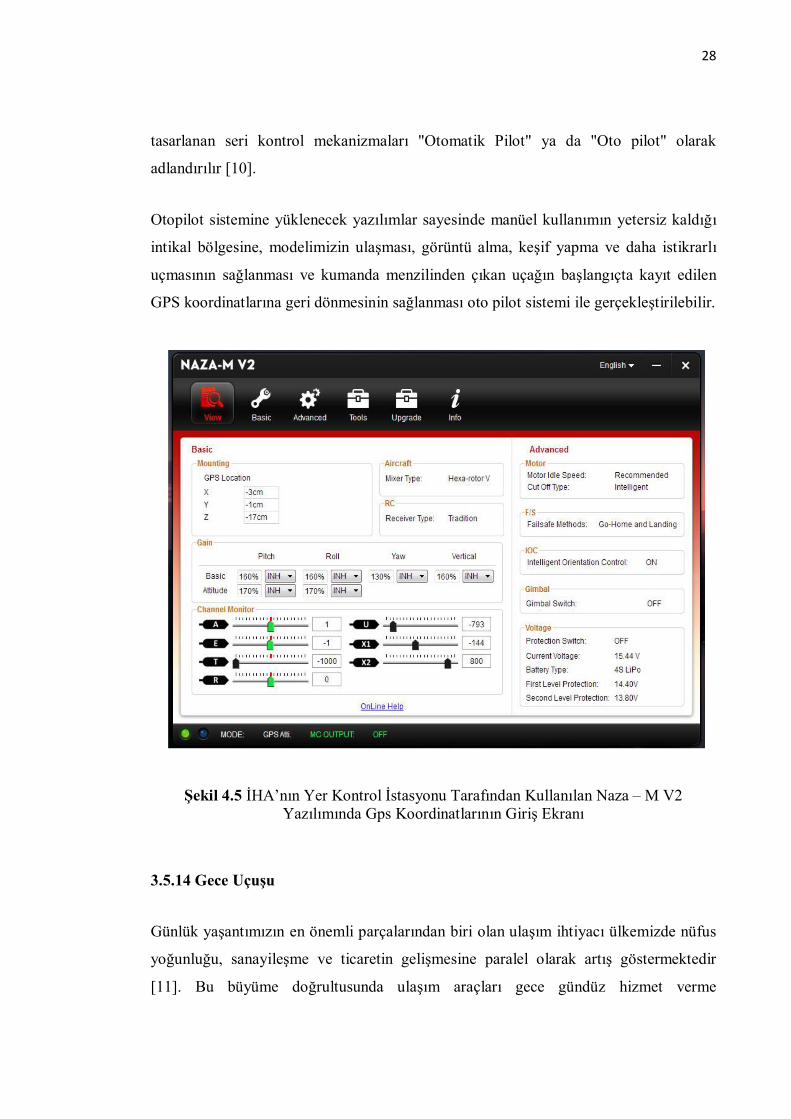
Otopilot sistemine yüklenecek yazılımlar sayesinde manüel kullanımın yetersiz kaldığı
intikal bölgesine, modelimizin ulaşması, görüntü alma, keşif yapma ve daha istikrarlı
uçmasının sağlanması ve kumanda menzilinden çıkan uçağın başlangıçta kayıt edilen
GPS koordinatlarına geri dönmesinin sağlanması oto pilot sistemi ile gerçekleştirilebilir.
Şekil 4.5 İHA’nın Yer Kontrol İstasyonu Tarafından Kullanılan Naza – M V2 Yazılımında Gps Koordinatlarının Giriş Ekranı
3.5.14 Gece Uçuşu
Günlük yaşantımızın en önemli parçalarından biri olan ulaşım ihtiyacı ülkemizde nüfus
yoğunluğu, sanayileşme ve ticaretin gelişmesine paralel olarak artış göstermektedir
[11]. Bu büyüme doğrultusunda ulaşım araçları gece gündüz hizmet verme
29
durumundadırlar. Tüm gün boyunca hizmet veren demiryolu araçlarının kullanmış
oldukları yolların da aynı doğrultuda kontrol ediliyor olması gerekmektedir.
Tren yolu güvenliğinde kullanılan İHA’lar ile gece uçuşu yapabilmek ve gece görüntü
alabilmek için gece görüş kamerası model üzerine takılmış olup gece görüş
kamerasından alınan görüntü verilmektedir.
Modelin yerde gözle görülebilmesi için LED uyarı ışıkları takılarak gece uçuşu için
sistem geliştirilmiştir..
3.5.15 Yer Kontrol İstasyonu
İHA görsel kullanımın yanında uzak mesafelerde kullanımı esnasında İHA üzerinde
bulunan kameradan alınan görüntülerin YKİ’deki bir video alıcısıyla alınıp monitöre
aktarılmasıyla da kontrol edilmektedir. Bu sistem kullanılarak önceden de bahsedildiği
üzere İHA’dan gelen video ve ses bilgilerinin alınarak, uçağı yönlendirme ve tren yolu
kontrolünün yapılması ekrandaki görüntüler sayesinde yapılabilmektedir. YKİ, 6 kanallı
bir standart verici (kontrol ünitesi), bir izleme ünitesi (monitör) ve bir video alıcısında
oluşmaktadır. YKİ’nin parçalarından biri olan kontrol ünitesi 6 kanallı bir standart
verici olup modelin yerden kontrolü bu ünite ile yapılır.YKİ’nin diğer bir parçası olan
görüntüleme sistemi, ses – video (audio–video, A/V) alıcısı, alıcı anteni, batarya, güç
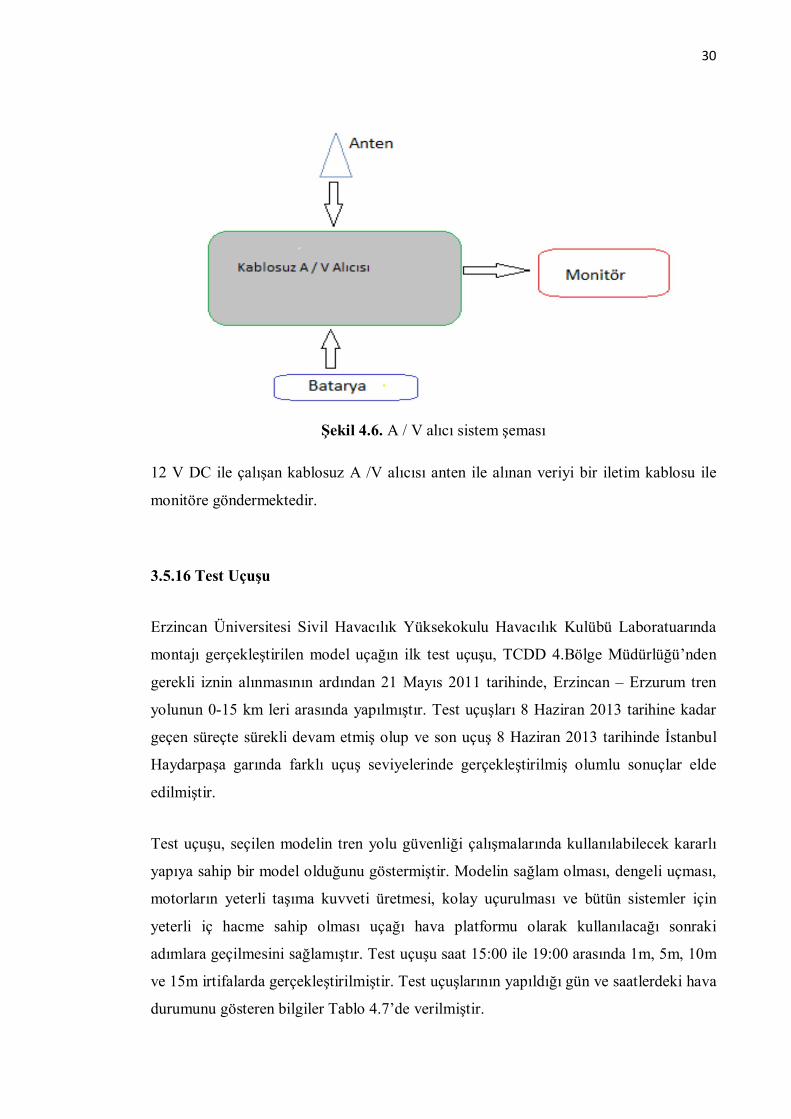
çoklayıcı, monitör, üç ayaklı monitör sehpası (tripod) ve iletim kablolarından oluşur.
30
Şekil 4.6. A / V alıcı sistem şeması
12 V DC ile çalışan kablosuz A /V alıcısı anten ile alınan veriyi bir iletim kablosu ile
monitöre göndermektedir.
3.5.16 Test Uçuşu
Erzincan Üniversitesi Sivil Havacılık Yüksekokulu Havacılık Kulübü Laboratuarında
montajı gerçekleştirilen model uçağın ilk test uçuşu, TCDD 4.Bölge Müdürlüğü’nden
gerekli iznin alınmasının ardından 21 Mayıs 2011 tarihinde, Erzincan – Erzurum tren
yolunun 0-15 km leri arasında yapılmıştır. Test uçuşları 8 Haziran 2013 tarihine kadar
geçen süreçte sürekli devam etmiş olup ve son uçuş 8 Haziran 2013 tarihinde İstanbul
Haydarpaşa garında farklı uçuş seviyelerinde gerçekleştirilmiş olumlu sonuçlar elde
edilmiştir.
Test uçuşu, seçilen modelin tren yolu güvenliği çalışmalarında kullanılabilecek kararlı
yapıya sahip bir model olduğunu göstermiştir. Modelin sağlam olması, dengeli uçması,
motorların yeterli taşıma kuvveti üretmesi, kolay uçurulması ve bütün sistemler için
yeterli iç hacme sahip olması uçağı hava platformu olarak kullanılacağı sonraki
adımlara geçilmesini sağlamıştır. Test uçuşu saat 15:00 ile 19:00 arasında 1m, 5m, 10m
ve 15m irtifalarda gerçekleştirilmiştir. Test uçuşlarının yapıldığı gün ve saatlerdeki hava
durumunu gösteren bilgiler Tablo 4.7’de verilmiştir.
31
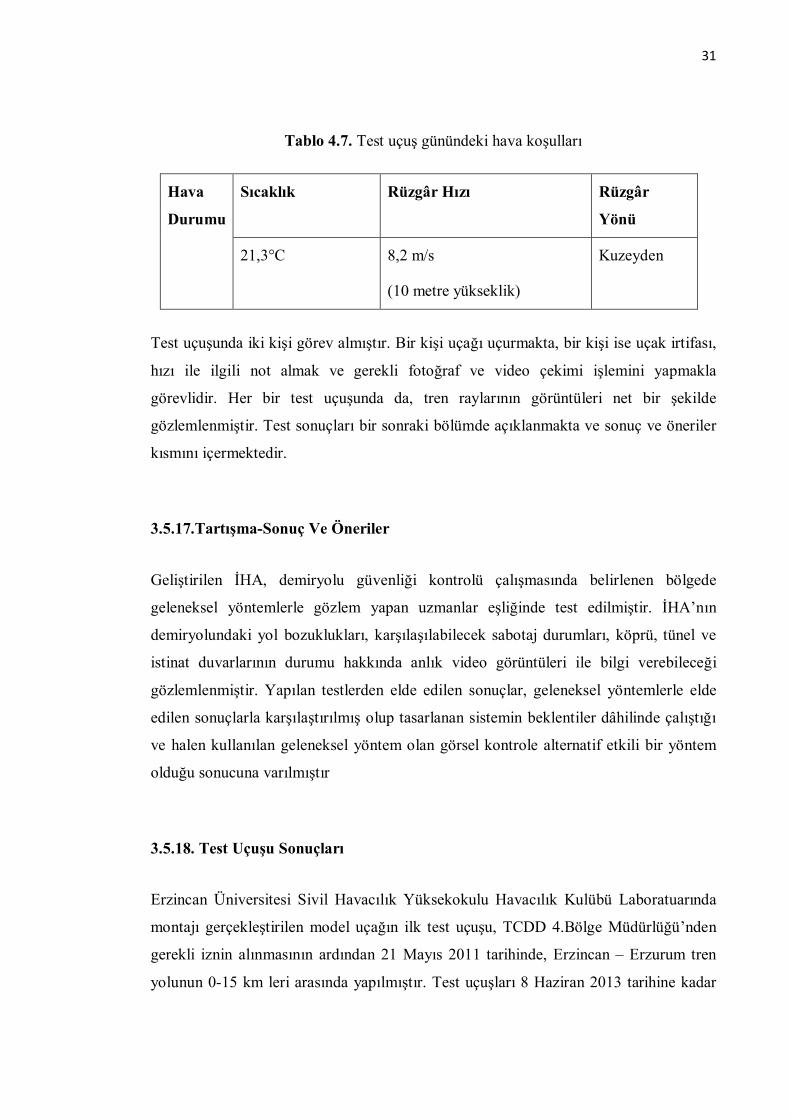
Tablo 4.7. Test uçuş günündeki hava koşulları
Hava
Durumu
Sıcaklık Rüzgâr Hızı Rüzgâr
Yönü
21,3°C 8,2 m/s
(10 metre yükseklik)
Kuzeyden
Test uçuşunda iki kişi görev almıştır. Bir kişi uçağı uçurmakta, bir kişi ise uçak irtifası,
hızı ile ilgili not almak ve gerekli fotoğraf ve video çekimi işlemini yapmakla
görevlidir. Her bir test uçuşunda da, tren raylarının görüntüleri net bir şekilde
gözlemlenmiştir. Test sonuçları bir sonraki bölümde açıklanmakta ve sonuç ve öneriler
kısmını içermektedir.
3.5.17.Tartışma-Sonuç Ve Öneriler
Geliştirilen İHA, demiryolu güvenliği kontrolü çalışmasında belirlenen bölgede
geleneksel yöntemlerle gözlem yapan uzmanlar eşliğinde test edilmiştir. İHA’nın
demiryolundaki yol bozuklukları, karşılaşılabilecek sabotaj durumları, köprü, tünel ve
istinat duvarlarının durumu hakkında anlık video görüntüleri ile bilgi verebileceği
gözlemlenmiştir. Yapılan testlerden elde edilen sonuçlar, geleneksel yöntemlerle elde
edilen sonuçlarla karşılaştırılmış olup tasarlanan sistemin beklentiler dâhilinde çalıştığı
ve halen kullanılan geleneksel yöntem olan görsel kontrole alternatif etkili bir yöntem
olduğu sonucuna varılmıştır
3.5.18. Test Uçuşu Sonuçları
Erzincan Üniversitesi Sivil Havacılık Yüksekokulu Havacılık Kulübü Laboratuarında
montajı gerçekleştirilen model uçağın ilk test uçuşu, TCDD 4.Bölge Müdürlüğü’nden
gerekli iznin alınmasının ardından 21 Mayıs 2011 tarihinde, Erzincan – Erzurum tren
yolunun 0-15 km leri arasında yapılmıştır. Test uçuşları 8 Haziran 2013 tarihine kadar
32
geçen süreçte sürekli devam etmiş olup ve son uçuş 8 Haziran 2013 tarihinde İstanbul
Haydarpaşa garında farklı uçuş seviyelerinde gerçekleştirilmiş
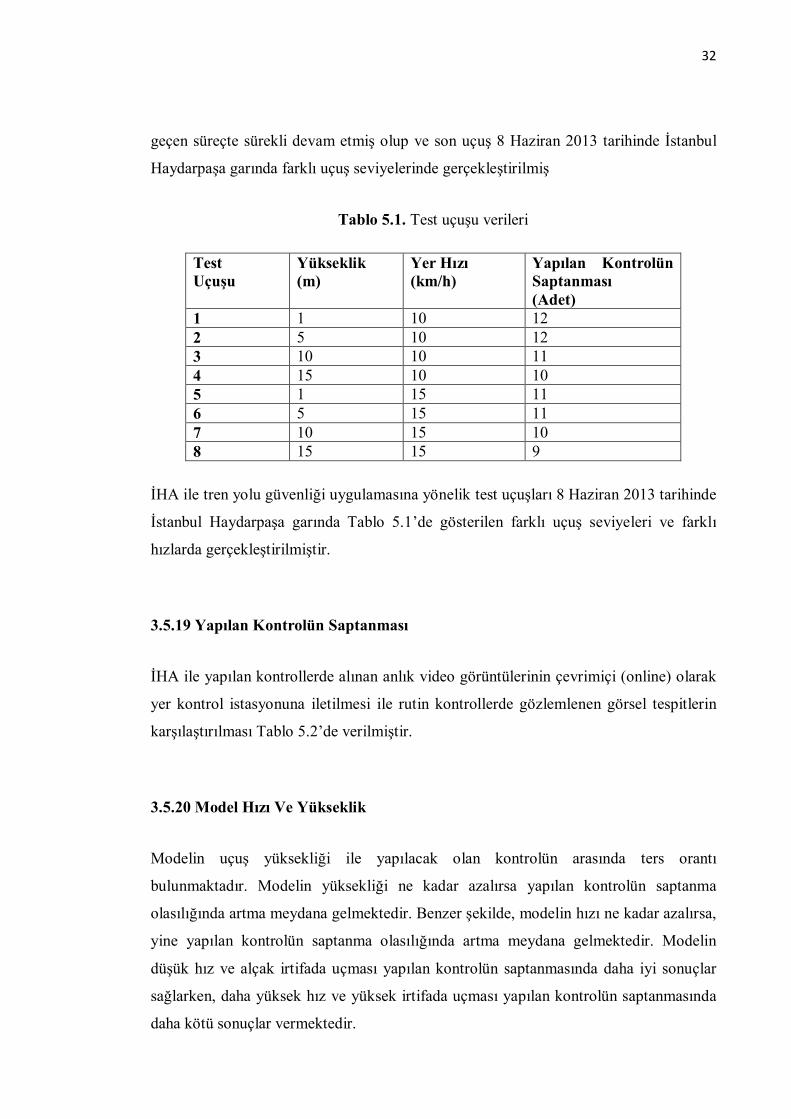
Tablo 5.1. Test uçuşu verileri
Test Uçuşu
Yükseklik (m)
Yer Hızı (km/h)
Yapılan Kontrolün Saptanması (Adet)
1 1 10 12 2 5 10 12 3 10 10 11 4 15 10 10 5 1 15 11 6 5 15 11 7 10 15 10 8 15 15 9
İHA ile tren yolu güvenliği uygulamasına yönelik test uçuşları 8 Haziran 2013 tarihinde
İstanbul Haydarpaşa garında Tablo 5.1’de gösterilen farklı uçuş seviyeleri ve farklı
hızlarda gerçekleştirilmiştir.
3.5.19 Yapılan Kontrolün Saptanması
İHA ile yapılan kontrollerde alınan anlık video görüntülerinin çevrimiçi (online) olarak
yer kontrol istasyonuna iletilmesi ile rutin kontrollerde gözlemlenen görsel tespitlerin
karşılaştırılması Tablo 5.2’de verilmiştir.
3.5.20 Model Hızı Ve Yükseklik
Modelin uçuş yüksekliği ile yapılacak olan kontrolün arasında ters orantı
bulunmaktadır. Modelin yüksekliği ne kadar azalırsa yapılan kontrolün saptanma
olasılığında artma meydana gelmektedir. Benzer şekilde, modelin hızı ne kadar azalırsa,
yine yapılan kontrolün saptanma olasılığında artma meydana gelmektedir. Modelin
düşük hız ve alçak irtifada uçması yapılan kontrolün saptanmasında daha iyi sonuçlar
sağlarken, daha yüksek hız ve yüksek irtifada uçması yapılan kontrolün saptanmasında
daha kötü sonuçlar vermektedir.
33
3.5.21 Kontrol Edilen Alan Genişliği
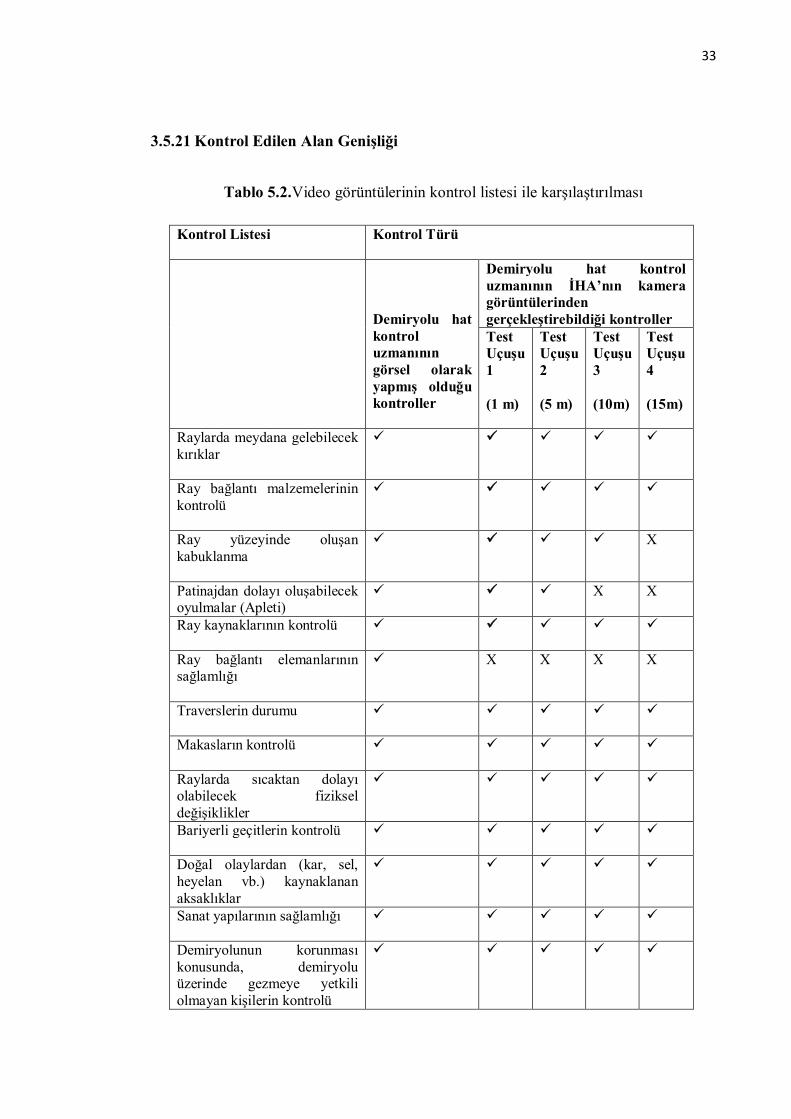
Tablo 5.2.Video görüntülerinin kontrol listesi ile karşılaştırılması
Kontrol Listesi Kontrol Türü
Demiryolu hat kontrol uzmanının görsel olarak yapmış olduğu kontroller
Demiryolu hat kontrol uzmanının İHA’nın kamera görüntülerinden gerçekleştirebildiği kontroller Test Uçuşu 1 (1 m)
Test Uçuşu 2 (5 m)
Test Uçuşu 3 (10m)
Test Uçuşu 4 (15m)
Raylarda meydana gelebilecek kırıklar
Ray bağlantı malzemelerinin kontrolü
Ray yüzeyinde oluşan kabuklanma
X
Patinajdan dolayı oluşabilecek oyulmalar (Apleti)
X X
Ray kaynaklarının kontrolü
Ray bağlantı elemanlarının sağlamlığı
X X X X
Traverslerin durumu
Makasların kontrolü
Raylarda sıcaktan dolayı olabilecek fiziksel değişiklikler
Bariyerli geçitlerin kontrolü
Doğal olaylardan (kar, sel, heyelan vb.) kaynaklanan aksaklıklar
Sanat yapılarının sağlamlığı
Demiryolunun korunması konusunda, demiryolu üzerinde gezmeye yetkili olmayan kişilerin kontrolü
34
Modelin kontrol edebileceği alanın mesafesi, gerekli itki gücünü üretmek için kullanılan
batarya ömrü ve eş zamanlı görüntü aktarımı sağlayan video vericisinin menziline
bağlıdır. Bu çalışmada kullanılan İHA üzerinde bulunan video göndericisinin menzili 1
km’den, üzerine monte edilen menzil artırıcı radyo kontrol ünitesi sayesinde 60 km’ye
kadar uzatılmıştır.
Gerekli itki kuvvetini üretmek için kullanılan üç hücreli 11.1 V’luk Li-Po batarya ile
model 15 – 25 dakika arasında havada kalabilmektedir. Kullanılan bataryanın amper /
saat değerine bağlı olarak bu süre artırılabilmektedir.
3.5.22 İHA ile Demiryolu Güvenliği Kontrol Uygulaması
İHA ile tren yolu güvenliğine yönelik test uçuşlarının yapılmasının ardından 8 Haziran
2013 tarihinde İstanbul Haydarpaşa Gar’ında gerekli izinlerin alınmasından sonra
yapılan test uçuşlarının bitirilmesinden sonra sistemin güvenilirliliğini ölçmek amacıyla
uzman yol kontrol memurları eşliğinde İHA ile kontrol uygulaması yapılmıştır.
3.5.23 Uygulama Uçuşu
8 Haziran 2013 tarihinde İstanbul Haydarpaşa Gar’ında saat 15:00 da yapılan uygulama
uçuşunda 3 kişi görev almıştır. Bir kişi uçağı uçurmakta, bir kişi ise uçak irtifası, hızı ile
ilgili not almakta ve gerekli fotoğraf ve video çekimi işlemini yapmakla, diğer bir kişi
ise YKİ’de bulunan monitöre çevrimiçi olarak gelen görüntülerin kontrolünü yapmakla
görevlidir.
Yapılan çalışmada yer kontrol istasyonunda bulunan uzmanlar tarafından izlenen
İHA’nın çevrimiçi olarak göndermiş olduğu görüntülerde demiryolu üzerinde aşağıda
belirtilen aksaklıklar gözlemlenmiştir.

35
Uygulama uçuşu 15:00’da başlamış olup modelin uçuş için gerekli testlerinin
yapılmasının ardından 15:08’ de belirlenen bölgenin üstünden uçuşuna başlamıştır.
3.5.24 Sonuçlar ve Öneriler
Ülkemizde nüfus yoğunluğuna paralel olarak artış gösteren trafik yoğunluğunun fazla
olduğu şehirlerde yaşanan trafik sıkışıklığı ve kara araçlarından kaynaklanan hava
kirlenmesi etmenlerini azaltmak için kent içi ve şehirlerarası raylı sistemlere önem
verilmektedir.
Demiryolu ulaşımının ekonomik ve hızlı olmasının yanında en fazla güvenli olması
istenmektedir. Demiryolu ulaşımında sıkça karşılaşılan demiryolundaki yol
bozuklukları ve karşılaşılabilecek sabotaj durumları gibi güvenliği tehdit edici olayların
bir program dahilinde kontrol edilmesi gerekmektedir. Tren raylarında oluşabilecek hat
kesintilerinin uyarılması için geliştirilen sinyalizasyon ve elektrifikasyona yönelik
çalışmalar olmasına rağmen bu uygulamalar demiryolu üzerinde, özellikle gözlemsel
yöntemlerle gerçekleştirilen kontrollerde belirlenebilecek olan arızaların bulunmasında
etkili değillerdir. Bu nedenle bu işlem yol kontrol memuru unvanına sahip kişilerce
belirli bir program dâhilinde sürekli bir şekilde gözlemsel olarak yapılmaktadır.
Bu çalışmada, demiryolu hat kontrol ekibi tarafından rutin olarak yapılan demiryolu
güvenliği kontrolünü daha kısa sürede, daha az maliyetle ve daha güvenli bir şekilde
yapılmasını sağlamak amacı ile bir İnsansız Hava Aracı geliştirilmiş ve geliştirilen bu
İHA ile demiryolu kontrolü için deneysel çalışmalar yapılmıştır.
Gerçekleştirilen projeyle modelin üzerine eklenen otopilot sistemi, görüntüleme sistemi
ve gündüz ve gece görüş sistemi olan kamera kullanılarak insansız hava aracı keşif,
gözetleme ve operasyonel amaçlarla kullanılabilecek bir duruma getirilmiştir.
Geliştirilen İHA ile demiryolu güvenliği kontrolü çalışmasında belirlenen bölgede test
uçuşları gerçekleştirilerek gerekli veriler alınmıştır. Test uçuşunun yapıldığı bölgede
geleneksel yöntemlerle gözlem yapan uzmanlar eşliğinde gerekli rutin kontroller
yapılarak sorun teşkil edecek noktalar belirlenmiş olup test uçuşu verileri ile
36
karşılaştırılması yapılarak İHA’nın demiryolu güvenliğinde uygulanabilirliği sonucuna
varılmıştır.
Tez çalışmasında kullanılan İHA, mini İHA olduğundan kaldırabileceği yük miktarı göz
önüne alınarak kullanılan batarya ve görüntüleme sistemlerinden dolayı sınırlı bir
alanda ve sürede kontrol yapılabilmesi mümkün olmuştur.
Fiziksel özellikleri ve taşıma kapasitesi artırılmış bir İHA' nın kullanılması durumunda
daha gelişmiş sensör ve faydalı yüklerin taşınması sağlanarak tek operasyonda büyük
bir alanın kontrol edilebilmesi mümkün olacaktır.
Tez çalışmasında kullanılan İHA’nın radyo kontrollü bir sistem ile yönetilmesi ve
sadece uçuş esnasında herhangi bir şekilde problem durumunda otonom olarak geri
dönüşünün uygulanması yapılmıştır. İHA'nın tamamen kalkış, uçuş ve iniş aşamalarında
otonom ve programlanabilir olması düşünülmüş ancak tez çalışması süresinde bu
çalışmaya geçilememiş olup ileride yapılacak çalışmalarda uygulanması planlanmıştır.
İHA’nın bu tür uçuş sağlayacak şekilde tasarlanması, YKİ' de bulunan pilotun is yükünü
önemli ölçüde azaltacaktır.
3.6 İnsansız Hava Aracının Ağaçlandırma Çalışmalarında Kullanımı[13]
Bu tez çalışmasında başarılı ve sürdürülebilir ağaçlandırma çalışmalarına uygun olarak
Toros Sedir tohumunun serpme tohumlaması için özel olarak geliştirilmiş bir İHA
çalışması gerçekleştirilmiş, elde edilen test sonuçları, tasarlanan sistemin beklentilere
göre çalıştığını ve halen kullanılan elle ve helikopterle ekime alternatif etkili bir yöntem
olduğunu göstermiştir.
3.6.1 Tohum Dağılım Yoğunluğu
Birinci test uçuşunda tohumlar arası mesafe genellikle 20 ile 70 cm arasında iken ikinci
test uçuşunda dağılım genellikle 10 ile 40 cm arasındadır. Tohumlar arası mesafe ±45
37
cm idealolarak düşünüldüğünde, bu oranın her iki uçuş içinde başarıldığı görülmektedir.
Her iki test
uçuşunda da, ölçülen dağılım oranı, tohum dağılımı için uygun görülen parametre
sınırları içerisinde olmuştur.
Geleneksel ağaçlandırma yöntemlerinde çimlenme sonrası fidanların olgun bireyler
olması için yeterli alanı sağlamak amacıyla sık sık elle seyreltme işlemi yapıldığı göz
önünde bulundurulmalıdır.
3.6.2 Uçak Yer Hızı, İrtifa ve RPM
Birinci test uçuşunda, uçağın yer hızı 45 km/h, irtifa 9 metre ve tohum yayıcının devri
1800 rpm iken ikinci test uçuşunda hız 60 km/h, irtifa 6 metre ve devir 2200 rpm’dir.
Uçağın yer hızı, irtifası ve tohum yayıcının devir sayısı ile tohum dağılım yoğunluğu
arasında ters orantı bulunmaktadır. Uçağın yer hızı ne kadar artarsa tohum dağılım
yoğunluğunda o kadar azalma meydana gelmektedir. Benzer şekilde, uçağın yüksekliği
ne kadar artarsa, tohum dağılımında o kadar azalma meydana gelmektedir. Son olarak,
tohum yayıcının devri ne kadar artarsa tohum dağılım yoğunluğunda o kadar azalma
olmakta, fakat bu durum daha fazla tohum dağıtma genişliği anlamına gelmektedir.
Böylece, tohumların dağılım yoğunluğu, bu üç faktörün doğru olarak bilinmesiyle,
önceden tahmin edilebilir ve kontrol edilebilir. Daha düşük hız/irtifa/rpm daha iyi bir
tohum yoğunluğu sağlarken daha az miktarda alana tohum dağılmasına neden olur ve
yüksek hız/irtifa/rpm daha düşük bir
tohum yoğunluğu ile sonuçlanırken daha fazla genişlikteki bir alana tohum
dağıtılmasına olanak vermektedir.
3.6.3 Tohum Yayılan Alan Genişliği
Birinci test uçuşunda tohum yayılma genişliği 45 metre iken, ikinci test uçuşunda 30
metre olarak ölçülmüştür. Uçuş yüksekliği tohumların yayılma genişliği üzerinde

38
oldukça büyük bir rol almaktadır. Uçuş yüksekliğinin artması tohum yayılma genişliğini
artırmaktadır.
3.6.4 Toplam Tohum Ekilen Alan
Toplam tohum yayılan alan, tank içerisinde bulunan tohum akış miktarını ayarlayan
açmakapama mekanizmasının pozisyonuna ve uçuş hızına bağlıdır. Her iki test
uçuşunda açma kapama mekanizması tamamıyla açık konumdadır ve İHA’nın
etkinliğini ölçmeye yetecek kadar uçuş süresi olması sağlanmıştır. Uçuş süresi sınırlı
miktardaki sedir tohumlarıyla
birden fazla test uçuşu yapmayı sağlamıştır. Birinci test uçuşunda tohum yayılan toplam
alan 1700 m2 iken ikinci test uçuşunda bu alan 1500 m2’dir. Yüksek irtifa ve hız,
tohumunyayıldığı alan miktarını artırmaktadır.
Toplam ekilen araziyi etkileyen bir önemli faktör ise tohum tankının tohum alma
kapasitesidir.Birinci test uçuş bilgileri için tohumlar arası mesafe ortalama 50 cm olarak
varsayıldığında ve tank kapasitesi düşünüldüğünde, tohum tankı yaklaşık 4 saniyede
bitecek ve ekilen alan 2250 m2 olacaktı.
3.6.5 Aviyonik ve Uçuş Kontrolleri
Test uçağı, tohum dağıtma işlemini kolaylaştırmak için yer istasyonu ile veri aktarımını
yapan aviyonik komponentler ile uyumlu bir performans sergilemiştir. İHA ve standart
radyo kumanda vericisi arasındaki iletişimle kanatçık, istikamet dümeni, irtifa dümeni,
kamera, tohum dağıtıcısı ve pan/tilt mekanizması aynı anda kontrol edilmiştir. Her iki
test uçuşu sırasında aviyonik ve uçuş kontrolleri arasında herhangi bir olumsuz
etkileşim olmamıştır.
39
3.6.6 Sonuçlar ve Öneriler
Model uçağın üzerine eklenen tohum yayıcı sistem, görüntüleme sistemi ve bu
sistemlerin tamamının yerden kontrolü ile Toros Sediri tohumları başarılı bir şekilde
serpilerek bir insansız hava aracı ile Toros Sediri ağaçlandırmasının
gerçekleştirilebileceği gözlenmiş, bir İHA'nın ağaçlandırma çalışmalarında
kullanılabileceği gösterilmiştir.
Ödev çalışmasında kullanılan İHA, mini İHA olduğundan ancak sınırlı sayıda tohum
yayması mümkün olmuştur. Tez çalışmasında kullanılan İHA yerine fiziksel özellikleri
ve kapasitesi artırılmış bir İHA'nın kullanımı tohum tankının kapasitesini de artırmayı
mümkün kılacak, bu sayede tek operasyonda büyük bir alanın ağaçlandırılması mümkün
olacaktır. Tohum tankının büyük olması çok miktarda tohumu bir araya getireceğinden
Toros Sediri tohumunun doğasında bulunan reçine, tohumların yapışması, tıkanıklık ve
tohum yayıcı sistemin işlevini yerine getirememesi gibi sorunları beraberinde
getirebilecektir. Bu durumun ortadan kaldırılması amacı ile tohum tankı içerisine
akışkanlığı sağlayıp, tohumları tohum yayma sistemine kolaylıkla ulaştıracak tohum
karıştırma sistemi eklenebilecektir.
Ödev çalışmasında radyo kontrollü bir sistem ile yönetilen İHA'nın otonom ve
programlanabilir uçuş sağlayacak şekilde tasarlanması, otonom kalkış-iniş sistemine
sahip olması, YKİ'de bulunan pilotun iş yükünü önemli ölçüde azaltacaktır.
Sabit kanatlı bir İHA yerine döner kanatlı İHA kullanılarak ağaçlandırma çalışması
yapılması düşünülmüş ancak tez çalışması süresinde bu çalışmaya geçilememiş, ileride
yapılacak çalışmalarda yapılması planlanmıştır. Bu ödev çalışmasından yola çıkılarak
yapılacak her türlü İHA çalışması sadece Toros Sediri ağaçlandırması için değil,
ülkemiz için büyük öneme sahip diğer ağaç türleri için de ağaçlandırma çalışmaları
yapılabilecektir.
40
3.7. İnsansız Hava Aracı Yardımıyla Büyük Ölçekli Fotogrametrik Harita Üretim
Olanaklarının Araştırılması
Günümüz haritacılık alanında fotogrametri ve uzaktan algılama, gelişen teknolojilerle
birlikte vazgeçilmez bir hal almıştır. Kullanılan görüntüleme sistemleri ve taşıyıcı
platformların olabildiğince gelişmesi ve bir o kadar da karışık hal alması sebebiyle
uygulamalarda değişik güçlükler yaşanmaktadır. Bu bağlamda maliyetler de
düşünüldüğünde, basit sistemlerle en uygun haritalama platformunun kullanılması ve
bununla birlikte istenilen hassasiyetin de yakalanabilmesiyle ihtiyaçların daha kısa
şekilde karşılanması, kuşkusuz insan fikrinin kabul edeceği bir yaklaşımdır. Bu nedenle
çalışma kapsamında, İnsansız Hava Aracı (İHA) olarak bir model uçağın kullanılması,
bunun üzerine yerleştirilecek metrik olmayan bir kameranın ve görüntülerinin
haritalama amacına yönelik kullanılabilirliğinin araştırılması amaçlanmıştır.
3.7.1. Giriş
Fotogrametrinin etkin bir şekilde kullanılmaya başlanmasından bu yana çok çeşitli
taşıyıcı platform ve görüntüleme sistemleri kullanılmıştır. Helikopterlerden uçaklara,
uzay mekiklerinden uydulara kadar bir çok taşıyıcı platform, yapılan projeye
uygunluğuna göre literatürdeki yerlerini almıştır. Son zamanlarda bu anlamda en çok
kendinden söz ettiren taşıyıcı platformlardan birisi de kuşkusuz insansız hava aracı
(İHA) dır (Karakış 2011).
Blyenburgh, 1999’da İHA’ları “Yerine getireceği göreve bağlı olarak, yarı otomatik,
otomatik veya bunların kombinasyonuyla uzaktan kontrol edilen, çeşitli yüklemelerle,
atmosferde veya dışında belirli bir süre aralığında özel görevleri yerine getiren, insansız,
tekrar kullanılabilir motorize hava araçları” olarak tanımlamıştır (Blyenburgh 1999).
Günümüzde birçok farklı amaç için kullanılabilen İHA’lar fotogrametri için de taşıyıcı
platform olarak kullanılmaktadır. Uçak, helikopter veya zeplin şeklinde farklı uçuş
şartlarına sahip birçok İHA’dan bahsetmek mümkündür (Eisenbeiss 2009). Farklı boyut
ve motor seçenekleriyle üretilen İHA’lar için göz önünde bulundurulması gereken
konulardan biri de taşıyacağı yük olarak karşımıza çıkmaktadır. Günümüz fotogrametrik
41
ihtiyaçları içinde uçakları ele aldığımızda, uçuş ve fotogrametri ekibini ve bunun
yanında görüntüleme sistemini üzerinde taşıyabilecek tonajlı uçaklardan söz etmek
yerinde olacaktır. Böyle bir uçak üzerinde ekibi oluşturan insanların ağırlığı ve yaklaşık
50kg civarındaki fotogrametrik görüntüleme sisteminin ağırlığı düşünüldüğünde
İHA’lar için, insan faktörünün dışında, görüntüleme sisteminin boyut ve ağırlığı,
kullanılacak sistemi kısıtlayıcı en büyük etken olmaktadır
3.7.2.Sistemin Tasarımı
Çalışma kapsamında kullanılan İHA 60 (0.60 in3) lık patlarlı motora sahip yakıtlı bir
model uçaktır. Kanat açıklığı 1.90m olan aracın iniş takımları arasında kameranın
yerleştirilebileceği uygun bir kısım mevcuttur. Bu kısmın iniş takımları arasında olması,
hem ağırlık merkezi açısından hem de herhangi bir düşme yaşanması durumunda
kameranın korunması açısından uygun bir ortam sağlamaktadır.
Şekil 1 (a)’da fotogrametrik amaçla donatılmış Cessna tipi bir uçak ve Şekil 1 (b)’de
çalışmada kullanılan model uçak gösterilmiştir.
Model uçak FM sinyali kullanarak veri transferi yapan 8 kanallı bir kumanda tarafından
yönetilmektedir . Her bir kanal model uçağa hareket çeşitliliğini aktarmaktadır. Bu
çalışmada kullanılan model uçakta motor devri, yükseliş, kanat ve kuyruk dümenleri
olmak üzere 4 kanal kullanılmaktadır. Geri kalan kanallar fotoğraf çekimi ve diğer
işlemler için kullanılabilmektedir.
Çalışmada Canon EOS450D DSLR kamera kullanılmıştır. Boyutlarıyla model uçağın
gövdesine tam olarak yerleştirilebilen kamera 12MP çözünürlüğe sahiptir. Kameranın
teknik özellikleri Tablo 5.3’de verilmiştir.
Kamera 1/4000 sn maksimum perde hızına sahiptir. Bu hız çekim anında uçağın
hareketinden kaynaklanacak olası sürüklenme hatalarında önemli rol oynamaktadır.
Uçağın en düşük ~60 km/h hızı düşünüldüğünde, bir görüntü alımının başlangıcı ve
bitişi arasında uçak uçuş doğrultusunda belirli bir mesafe ilerlemiş olacaktır. Bu
hareketin belirli bir değere ulaşması görüntü üzerinde yürümelere (piksellerin birbirine
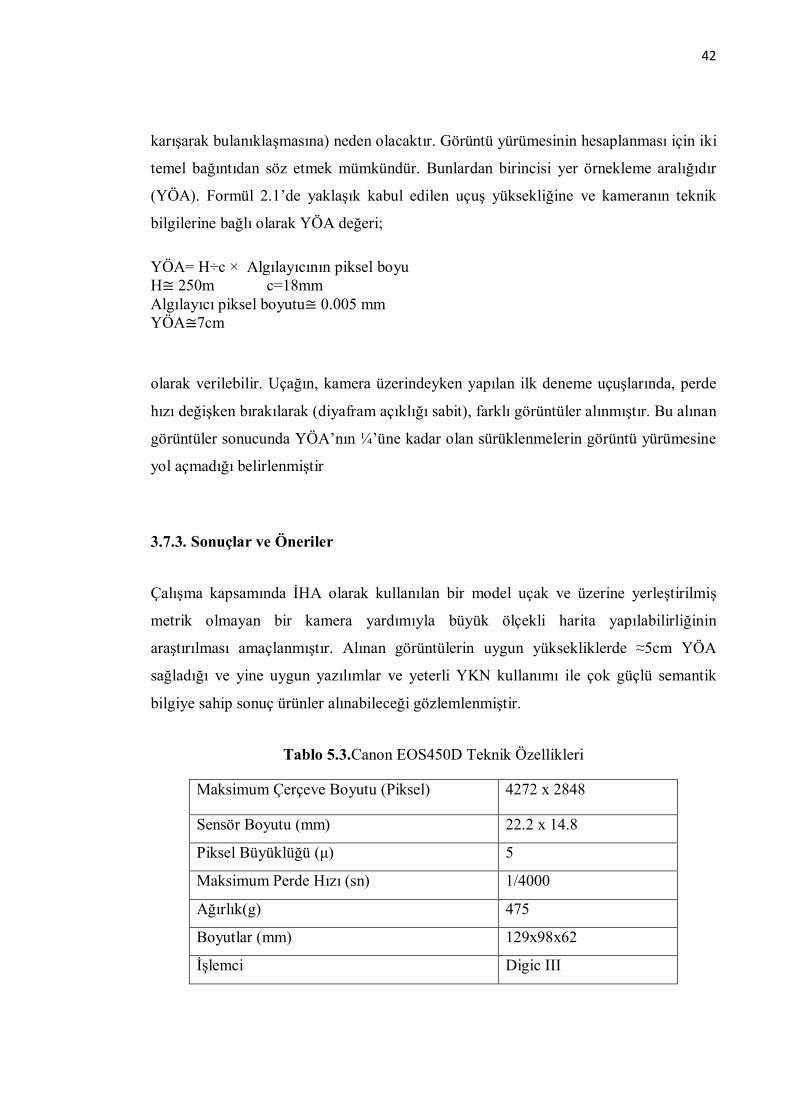
42
karışarak bulanıklaşmasına) neden olacaktır. Görüntü yürümesinin hesaplanması için iki
temel bağıntıdan söz etmek mümkündür. Bunlardan birincisi yer örnekleme aralığıdır
(YÖA). Formül 2.1’de yaklaşık kabul edilen uçuş yüksekliğine ve kameranın teknik
bilgilerine bağlı olarak YÖA değeri;
YÖA= H÷c × Algılayıcının piksel boyu H≅ 250m c=18mm Algılayıcı piksel boyutu≅ 0.005 mm YÖA≅7cm
olarak verilebilir. Uçağın, kamera üzerindeyken yapılan ilk deneme uçuşlarında, perde
hızı değişken bırakılarak (diyafram açıklığı sabit), farklı görüntüler alınmıştır. Bu alınan
görüntüler sonucunda YÖA’nın ¼’üne kadar olan sürüklenmelerin görüntü yürümesine
yol açmadığı belirlenmiştir
3.7.3. Sonuçlar ve Öneriler
Çalışma kapsamında İHA olarak kullanılan bir model uçak ve üzerine yerleştirilmiş
metrik olmayan bir kamera yardımıyla büyük ölçekli harita yapılabilirliğinin
araştırılması amaçlanmıştır. Alınan görüntülerin uygun yüksekliklerde ≈5cm YÖA
sağladığı ve yine uygun yazılımlar ve yeterli YKN kullanımı ile çok güçlü semantik
bilgiye sahip sonuç ürünler alınabileceği gözlemlenmiştir.
Tablo 5.3.Canon EOS450D Teknik Özellikleri
Maksimum Çerçeve Boyutu (Piksel) 4272 x 2848
Sensör Boyutu (mm) 22.2 x 14.8
Piksel Büyüklüğü (μ) 5
Maksimum Perde Hızı (sn) 1/4000
Ağırlık(g) 475
Boyutlar (mm) 129x98x62
İşlemci Digic III
43
Test alanı ve 2010 yılı orto görüntüleri arasında yapılan karşılaştırmada fark vektör
bileşenlerinin en büyüğü Y yönünde olmak üzere ±22cm’yi geçmediği gözlemlenmiştir.
Kamera objektifinin değişken odak uzaklığına sahip olması ve sonsuza netlemenin tam
düzgün çalışmamasından dolayı görüntülerin otomatik netleme modunda alınması,
görüntü üzerinde özellikle farklı yüksekliklere sahip detaylarda bulanıklaşma
oluşmasına yol açmaktadır. Bu da yukarıda bahsedilen hata vektörlerinin 1-2 desimetre
civarında oluşmasına neden olmaktadır.
Kullanılacak kamera ve uygun uçuş yüksekliğine bağlı olarak, istenilen ölçekte büyük
ölçekli harita üretimine olanak sağlayacak veriler İHA yardımıyla üretilebilecektir.
Yukarıda bahsedilen tüm sorun ve çıkarımlara bağlı olarak aşağıda maddeler halinde
verilen önerilerin yapılması uygun olacaktır;
• İHA olarak kullanılacak modelin kullanım alanına ve buna bağlı olarak büyüklüğünü
dikkate alarak uygun kamera seçimi yapılmalıdır.
• Günümüz kameralarıyla kit olarak verilen objektifler odaklama problemlerinden
dolayı görüntülerde bozulmalara neden olmaktadır. Bu nedenle kamera için üretilmiş
daha profesyonel bir objektifin kullanılması uygun olacaktır. Sabit 35mm odak
uzaklığına sahip farklı bir lensle, farklı bir bölge için alınan görüntülerde hata oranları
piksel altı değerlere düştüğü belirlenmiştir.
• Elle deklanşör müdahalesinin kumanda yardımıyla da olsa zamanlama sorunlarını
beraberinde getirmesinden dolayı elektronik bir zamanlayıcının sistemin içine dahil
edilmesi gerekmektedir.
• Kullanılacak modele bağlı olarak uygun pist bulunması günümüz yapılaşmasında
oldukça büyük sorunlar oluşturmaktadır. Özellikle dar alanlarda kullanımın,
çevredekilere zarar vermemesi için operatörün oldukça sıkı bir eğitimden geçmesi
kaçınılmazdır.
44
3.8. Havadan Arama Ve Kurtarma[14]
Arama-Kurtarma faliyetlerinden en etkili yöntem havadan izlemedir. Denizde veya
karada yer seviyesinde görüş açısı azalır ve mesafe arttka görüş sıfıra iner. Havadan
görüntülemede ise tercih edilen yüksekliğe bağlı olarak çok geniş bir alan kısa sürede
çok daha etkin bir biçimde taranabilir. Işığın kırılma prensiplerinden dolayı özellikle
deniz ve gölde kaybolma boğulma vb. vakalarda yer seviyesi taramalarında suyun altı
yalnızca belirli derinlikler kadar görülmesine imkân vereceğinden dolayı havadan
gözetleme ile deniz seviyesinden yapılan taramalara göre çok daha verimli sonuçlar
alınır.
İHA’lar ABD topraklarında içerisinde en çok arama ve kurtarma görevlerinde
kullanılmaktadır. Örneğin 2008 yılındaki Louisiana ve Texas da meydana gelen
tayfunlar sırasında çok başarılı olmuşlardır.
Örneğin deniz seviyesinden 18,000 ila 29,000 feet üzerindeki bir irtifa da uçan
Predatorlar arama,kurtarma ve hasar tespitinde kullanılmaktadır. Üzerlerinde görsel
algılayıcılar (bunlar gündüz ve kızılötesi kameralar), ve sentetik diyafram radarı (SAR)
bulunur. Predatora ait SAR her türlü havada (bulutlu,yağmurlu veya sisli) gece veya
gündüz süresünde gerçek zamanlı çok başarılı çekimler yapabilmektedir. SAR
görüntüleri içindeki tutarlı değişim algılaması istisnai arama ve kurtarma yeteneği
sağlar : tayfundan önce ve sonra çekilen resimler bilgisayar tarafından işaretlenerek
hasar tespiti yapılır.
3.9. Bilimsel Araştırma Uygulamaları[15]
İnsansız hava araçları pilotlu araçları uçamayacağı çok teklikeli görevlerde rahatlıkla
kullanılabilir. Amerikan Ulusal Okyanus ve Atmosfer İdaresi (NOAA) bir kasırga avcısı
olarak 2006 yılından bu yana Aerosonde insansız uçak sistemini kullanmaya başladı.
AAI Corporation'ın iştiraki olan Aerosonde Pty Ltd Victoria (Avustralya) tarafından
tasarlanan ve 35-poundluk sistem bir kasırga içine girerek Florida’da bulunan Ulusal
Tayfun Merkezine gerçek zamanlı veri ve doğrudan iletişim üretmektedir. Daha
45
önceleri insanlı hava taşıtları ile tayfunların uzağından alınan veriler günümüzde
Aerosonde sistemi sayesinde tayfunun içerisinde kolaylıkla alınabilmektedir.
Araştırmacılar ayrıca diğer gezegenler keşfetmek için insansız hava araçları
geliştiriyorlar. Örneğin, insansız hava aracı adında bir "Entomopter", kanatlarını
çırparak kullanır. Ile NASA tarafından finanse edileni araştırma, olabilir Mars keşif için
bir gün bir Entomopter den sonuçlanabilir.
3.10. Hava Fotoğrafçılığı- Havadan Video Çekimi[16]
Ülkemizde gittikçe büyüyen bir sektör olan hava fotoğrafçılığı bir çok farklı yöntem ile
yapılmaktadır. Bunların içinde uçak ve helikopterden atlayarak paraşüt ile çekenden
tutun model helikoptere hatta büyük vinçler kullanarak çeken bir çok kişiye
rastlayabilirsiniz. Hava çekimi yapmak için gerçek helikopter kullanmak oldukça
zordur. Bu yüzden model uçaklar yada helikopterler kullanmak daha mantıklıdır.
Günümüzde yeni bir hava aracı olan multikopter kullanılmaktadır.
Multicopter (multikopter, multirotor, çok rotorlu ; Dikine iniş kalkış yapabilen, 3
eksende hareket edebilen, motor yada motorlara bağlı pervanelerin ürettiği hava itişi
sayesinde havalanan uçan ve havada durabilen makinelerdir.
Multicopterde kullanılan sensörler ve işlevleri
(ACC), akselerometre, ivme sensörü, sayesinde kendi kendine dengeleme
(autolevel,self stabilization) özelliği kazandırılır. Yani dış etkenler (rüzgar,dengesiz
yük vs) nedeniyle multicopterin dengesi bozulunca devamlı surette yere paralel hale
gelmek için gerekli düzeltme komutlarını verir.
Basınç sensörü, Barometre, sayesinde hava basıncı ölçümü ile multikopterin
yüksekliğinin sabitlenmesi sağlanır bu sayede gaz kontrolü kolaylaşır, belli bir
yükseklikde otomatik olarak sabitlenmesi sağlanabilir.
46
GPS alıcısı ile multicopter dünya üzerinde bulunduğu enlem boylam bilgisini alır ve
bu sayede belli bir enlem boylamda sabitleme yapılabilir. İstenilen koordinatlarda
(waypoint) uçması sağlanabilir. Bulunduğu noktadan ilk kalkış yaptığı yere geri
dönmesi sağlanabilir ( return to home özelliği)
Ultrasonic sensör, Sonar, bu sensör sayesinde multicopterin altına sağına soluna
yerleştirilen ultrasonic sensörler alt yada yanlarda herhangi bir nesneyi algıladıkları
zaman multicopterin bu cisime çarpmaması için gerekli manevra komutunu verebilir.
Ultrasonic sensörlerin 5-6 metre civarında bir algılama mesafeleri vardır.
3.11. İnsansız Hava Araçlarının Ev Güvenliğinde Kullanımı[17]
Son dönemin dikkat çeken gelişmelerinden insansız hava araçları, bildiğiniz üzere
birçok farklı alanda aktif olarak kullanılmaya başlandı. Bu alanı evler içerisine
genişletmek isteyen Chaotic Moon Studios ise, kişisel güvenlik amacıyla hazırladığı altı
pervaneli Cupid isimli hava aracı üzerine elektroşok cihazı yerleştirmiş durumda.
Dış görünüş itibariyle standart bir çizgide gelen Cupid insansız hava aracı, esas farkını
üzerinde yer alan elektroşok cihazı ile koyuyor. Temel kullanım yeri olarak ev güvenliği
gösterilen araç, örneğin bizden izinsiz eve giriş yapan davetsiz misafirlerin fotoğrafını
çekerek ev sahibine gönderiyor ve eğer ev sahibi bu kişiyi tanımıyorsa üzerinde yer alan
elektroşok cihazıyla (80,000 volt) bu kişiyi polis gelene kadar etiksiz hale getirebiliyor,
kaçma durumlarında da takip edebiliyor. Bünyesinde taşıdığı hoparlör sistemiyle atış
öncesi uyarı yapılmasına imkan verdiği belirtilen araç, özel uygulaması temelinde
çalışma göstererek yüz tanıma sistemiyle de otonom şekilde hareket edebiliyor.
Üzerinde çalışmalar devam eden Cupid insansız hava aracı için akıllarda birçok soru
işareti bulunuyor. Sistemin özellikle internet korsanları tarafından ele geçirilmesi
durumunda çok kötü sonuçlara yol açabileceği belirtiliyor ve kısa zaman içerisinde
ticari kullanıma geçmesi beklenmiyor.
47
3.12. İnsansız Hava Araçlarının Petrol, Gaz Ve Maden Arama Ve Üretim
Sistemleri İçin Kullanımı[18]
Jeofizikçilerinde ortak çalışmasıyla insansız hava araçlarına üretim esnasında eklenen
sistemlerle petrol ve gaz arayıp, üretmek; petrol ve gaz boru hatları ile ilgili tesislerin
bütünlüğünü izlemeyi sağlamak mümkün hale gelmiştir. Yerüstü boru hatları için, bu
izleme faaliyeti, dijital biri üzerinde monte edilmiş kameralar ya da daha fazlası ile
yapılabilir.

48
4.SONUÇ
İnsansız Hava Araçları sivil alanda çok ihtiyaç duyulmaktadır bu yüzden İHA
imalatçıları hızla sivil alanda kullanım maksadıyla İHA’lar üretmektedir.Yukarıda
anlatıldığı gibi İHA’ların sivil havacılıkta yaptığı çalışmalar insan hayatı için büyük
kolaylıklar sağlamaktadır.Gelecekte İHA’ların sivil alanda kullanımı daha da fazla
olacak ve neredeyse herkes bir araba alır gibi İHA almaya başlayacak.
49
KAYNAKLAR
1. Royal Air Force, Directorate of Defence Studies, Air Power-UAVs: The Wider
Context, Ed. Owen Bomes, 2009
2. “Tactical Unmanned Aerial Vehicle (TUAV) – Close Range Tactical
unmanned Aerial Vehicle (CR-TUAV) ”
3. Altunok, T., “Türkiye’nin İHA Serüveni,” Bilim ve Teknik, Aralık 2010.
4. Ataç, S., 2006, GPS Based Altitude Control of an Unmanned Air Vehicle
Using DigitalTerrain Elevation Data, The Graduate School of Natural and
Applied Sciences,Middle East Technical University, M.Sc. Thesis, Ankara,
160 pp.
5. İnsansız Hava Araçları ( Web sayfası:
http://www.ssm.gov.tr/_layouts/images/iha_ekatalog_web/files/assets/seo/page
63.html)(Erişim:mayıs 2013).
6. Arlomandi,M., Classification of Unmanned Aerial Vehicles, MECH ENG 3016
course note.
7. DJI PHANTOM modeline ait kullanım kılavuzu
8. Merç,Y. ve Bayılmış,C., Dört Rotorlu İnsansız Hava Aracı
(Quadrotor)Uygulaması, 6th International Advanced Technologies Symposium
(IATS’11), 16-18 May 2011, Elazığ, Turkey.
9. Kahvecioğlu,A,Parlaktuna,O.,Korul,H.,Işık,Y. Bir Uçağın İrtifa Kontrolünde
Klasik ve Bulanık PD Denetleyici Performanslarının Karşılaştırılması,
Havacılık ve Uzay Teknolojileri Dergisi, 2 (3), 9-20 , Ocak 2006.
10. Dönmez N. Uçaklarda Otomatik Uçuş Kontrol Sistemleri ve Otopilot Tasarımı,
yüksek lisans tezi, Yıldız Teknik Üniversitesi, Fen Bilimleri Enstitüsü,
İstanbul,2005.
11. Global Hawk (Tier III) (Web sayfası: A= www.worldwide-military.com) (
Erişim mayıs 2013 ).
50
12. Masat M. Otopilot sistemine sahip döner kanatlı mini insansız hava aracının
demiryolu güvenliği çalışmalarında kullanımı, sivil havacılık ana bilim dalı
yüksek lisans tezi, Agustos 2013
13. Şahin M. Sabit Kanatlı Mini İnsansız Hava Aracının Geliştirilmesi ve
Ağaçlandırma Çalışmalarında Kullanımı, Yüksek Lisans Tezi, Ağustos 2011
14. http://www.fgair.com/sayfa/faaliyetlerimiz/hava-takip-ve-gozetleme/arama-
kurtarma.html
15. http://en.wikipedia.org/wiki/Entomopter Entomopter
16. http://www.aytekinguclu.com/hava-fotografciligi/
17. http://www.pocket-lint.com/news/127786-run-to-the-hills-the-cupid-flying-
taser-drone-is-coming
18. http://www.habergazete.com/mobil/index.php?section=haber&id=47631
19. Wong K.. Survey of Regıonal Developments:Civil Applications. Australian
UAV Special Interest Group Coordinator School of Aerospace, Mechanical
and Mechatronic Engineering University of Sydney.February 2001
20. Sarris Z. STN ATLAS-3Sigma AE andTechnical University of CreteDPEM,
73100 Chania, Crete, Greece.June 2001.
21. De Garmo M. and Nelson G.Prospective Unmanned Aerial Vehicle Operations
in the Future National Airspace System





























