Embed Size (px)
Citation preview
INSTITUTO TECNOLÓGICO METROPOLITANO
CÁTEDRA DE TOPOGRAFÍA
Profesor: Carlos Roberto Arango Gutiérrez
Cátedra de Topografía Prof: Carlos Roberto Arango G.
Página 2/50
CÁTEDRA DE TOPOGRAFÍA
PRESENTACIÓN Y PROGRAMACIÓN DE CLASES
• Presentación del programa del semestre. Contenido por clases.
• Evaluación. Se plantea el siguiente esquema de evaluación:
Quiz 1: Historia, aplicaciones, registros, elección de equipos, teoría del error y equivocaciones I.
10%
Quiz 2: Teoría del error y equivocaciones II, medición de distancias, ángulos, rumbos y azimutes.
10%
Parcial 1: Planimetría. Instrumentos electrónicos de medida
Informe prácticas de planimetría.
15%
Quiz 3: Altimetría. Procedimientos y equipos para la nivelación de puntos de control.
10%
Quiz 4: Obtención de curvas de nivel. Medición de áreas.
10%
Parcial 2: Topografía modificada, aplicaciones especializadas, GNSS, planeación.
Informe prácticas altiplanimetría.
15%
Investigación de topografía en proyectos. 10%
Final: Toda la materia 20%
TOTAL: 100%
BIBLIOGRAFÍA
• WOLF, Paul y BRINKER, Russell. Topografía. Alfaomega Grupo Editor, 9ª edición, Santafé de Bogotá, 1997. 834 p.
• TORRES, Alvaro y VILLATE, Eduardo. Topografía. Pearson Education y Escuela Colombiana de Ingeniería, 4ª edición, 2001. 460 p.
• ALCÁNTARA, Dante. Topografía. McGraw Hill, México, 1990. 583 p.
• GARCÍA M., Fernando. Curso básico de topografía. Árbol Editorial. México, 1994. 308 p.
• BALLESTEROS, Nabor. Topografía. Limusa. México, 1997. 474 p.
Cátedra de Topografía Prof: Carlos Roberto Arango G.
Página 3/50
TABLA DE CONTENIDO
1. HISTORIA, TIPOS DE LEVANTAMIENTOS Y APLICACIONES 1 1.1 DEFINICIÓN DE TOPOGRAFÍA ............................................................................... 1 1.2 HISTORIA................................................................................................................. 1 1.3 TIPOS DE LEVANTAMIENTOS ................................................................................ 2 1.4 APLICACIONES DE LOS LEVANTAMIENTOS TOPOGRÁFICOS ........................... 3 1.5 CONSIDERACIONES PARA LA ELECCIÓN DE INSTRUMENTOS Y MÉTODOS ... 4 1.6 ACTIVIDADES DE UN LEVANTAMIENTO TOPOGRÁFICO .................................... 5
2. REGISTROS DE CAMPO 5 1.1 TIPOS DE LIBRETA ................................................................................................. 5 2.1 REQUISITOS DE UN BUEN REGISTRO DE CAMPO.............................................. 6 2.2 RECOMENDACIONES GENERALES ...................................................................... 6
3. TEORÍA DEL ERROR Y LAS MEDICIONES 6 3.1 MEDICIONES DIRECTAS E INDIRECTAS .............................................................. 7 3.2 ERRORES ................................................................................................................ 7 3.3 EQUIVOCACIONES ................................................................................................. 7 3.4 CAUSAS DE ERRORES .......................................................................................... 8 3.5 TIPOS DE ERRORES .............................................................................................. 8 3.6 DISCREPANCIA, PRECISIÓN Y EXACTITUD ......................................................... 8 3.7 ELIMINACIÓN DE EQUIVOCACIONES Y ERRORES SISTEMÁTICOS .................. 9 3.8 LEYES GENERALES DE LA PROBABILIDAD ....................................................... 10
4. MEDICIÓN DE DISTANCIAS 10 4.1 MEDICIÓN A PASOS ............................................................................................. 11 4.2 MEDICIÓN CON ODÓMETRO ............................................................................... 11 4.3 TELÉMETROS ....................................................................................................... 11 4.4 TAQUIMETRÍA ....................................................................................................... 11 4.5 MEDICIÓN CON CINTA ......................................................................................... 12 4.6 MEDICIÓN CON INSTRUMENTOS ELECTRÓNICOS DE MEDIDA ...................... 14 4.7 MEDICIÓN CON MÉTODOS INERCIALES ............................................................ 14 4.8 MEDICIÓN POR SISTEMAS DE NAVEGACIÓN SATELITAL ................................ 15
5. INSTRUMENTOS ELECTRÓNICOS DE MEDIDA 15 5.1 GENERALIDADES ................................................................................................. 15 5.2 FUNCIONAMIENTO ............................................................................................... 16
6. ÁNGULOS, RUMBOS Y AZIMUT 17 6.1 INTRODUCCIÓN .................................................................................................... 17 6.2 CLASES DE ÁNGULOS HORIZONTALES ............................................................. 17 6.3 DIRECCIÓN DE UNA LÍNEA .................................................................................. 18 6.4 LA BRÚJULA .......................................................................................................... 19 6.5 POLIGONALES ...................................................................................................... 20 6.6 MEDICIÓN DE ÁNGULOS Y DIRECCIONES ......................................................... 20 6.7 ERROR DE CIERRE ANGULAR ............................................................................ 21 6.8 MEDICIÓN DE LONGITUDES EN POLIGONALES ................................................ 21
Cátedra de Topografía Prof: Carlos Roberto Arango G.
Página 4/50
6.9 SELECCIÓN DE ESTACIONES DE UNA POLIGONAL. ......................................... 22 6.10 CÁLCULO DE POLIGONALES CERRADAS .......................................................... 22 6.11 CÁLCULO DE POLIGONALES ABIERTAS ............................................................ 23
7. DETERMINACIÓN DE ÁREAS 24 1.2 ÁREAS CALCULADAS POR MEDICIÓN EN CAMPO ............................................ 24 1.3 ÁREAS CALCULADAS POR MEDICIONES EN MAPAS ........................................ 25
8. NIVELACIÓN: TEORÍA, MÉTODOS Y EQUIPO 26 8.1 DEFINICIONES ...................................................................................................... 26 8.2 MÉTODOS ............................................................................................................. 27 8.3 EQUIPOS ............................................................................................................... 28 8.4 PROCEDIMIENTOS ............................................................................................... 29
9. LEVANTAMIENTOS ALTIPLANIMÉTRICOS 32 9.1 DEFINICIÓN DE CURVAS DE NIVEL .................................................................... 32 9.2 MÉTODOS PARA DETERMINAR LAS CURVAS DE NIVEL .................................. 33
10. LEVANTAMIENTOS HIDROGRÁFICOS 34 10.1 EQUIPOS PARA SONDEO .................................................................................... 34 10.2 TIPOS DE RECONOCIMIENTO ............................................................................. 35
11. CÁLCULO DE VOLÚMENES 35 11.1 MÉTODOS DE CUBICACIÓN: ............................................................................... 36 11.2 CUBICACIÓN POR MEDIO DE LA FORMULA PRISMOIDAL: ............................... 36 11.3 PRECISIÓN QUE SE UTILIZA EN LA CUBICACIÓN DE TERRAPLENES. ........... 37
12. NOCIONES DE FOTOGRAMETRÍA 37 12.1 GENERALIDADES ................................................................................................. 38 12.2 FUNDAMENTOS GEOMÉTRICOS DE LA FOTOGRAMETRÍA .............................. 38 12.3 PROCESO FOTOGRAMÉTRICO ........................................................................... 38
13. SISTEMAS DE LOCALIZACIÓN SATELITAL 39 13.1 INTRODUCCIÓN .................................................................................................... 39 13.2 CARACTERÍSTICAS DE LOS SISTEMAS ............................................................. 40 13.3 FUNCIONAMIENTO ............................................................................................... 42 13.4 PRECISIÓN ............................................................................................................ 42 13.5 TÉCNICAS DE CORRECCIÓN .............................................................................. 44 13.6 APLICACIONES ..................................................................................................... 44 13.7 SISTEMAS DE APOYO .......................................................................................... 46
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 1/50
1. HISTORIA, TIPOS DE LEVANTAMIENTOS Y APLICACIONES
1.1 DEFINICIÓN DE TOPOGRAFÍA
Del griego: topos, lugar y graphein, describir.
• Ciencia, arte y tecnología de encontrar o determinar las posiciones relativas de puntos localizados por encima, sobre y bajo la superficie terrestre (Wolf, Paul y Brinker, Russell. Topografía. Alfaomega Grupo Editor, 9a. ed. 1997).
• Ciencia aplicada que se encarga de determinar las posiciones relativas o absolutas de puntos sobre la Tierra, así como su representación en un plano de una porción limitada de la superficie terrestre (Alcántara, Dante. Topografía. McGraw Hill, 1990).
• Ciencia que trata de los principios y métodos empleados para determinar las posiciones relativas de los puntos de la superficie terrestre, por medio de medidas, y usando los tres elementos del espacio (García M, Fernando. Curso básico de topografía. Árbol Editorial. 1994).
1.2 HISTORIA
Los primeros levantamientos topográficos de que se tiene noticia, según los relatos de Heródoto (historiador griego 484-425 a.C.), corresponden a los trabajos de replanteo requeridos por Sesostris para la restitución de los linderos y de las zonas de cultivo en Egipto, luego de las inundaciones ocasionadas por las crecientes de Nilo. Los topógrafos antiguos se denominaban estiracuerdas, debido a que empleaban para sus mediciones cuerdas con marcas unitarias establecidas a determinadas distancias (1.400 a.C.).
Un trabajo importante en la historia del dimensionamiento de la superficie terrestre lo efectuó Eratóstenes, en el año 200 a.C., cuando determinó el perímetro de la Tierra de acuerdo con sus observaciones de la posición del sol proyectada en el fondo de un pozo profundo en el solsticio de verano en la ciudad de Siena (hoy Asuán), la longitud de la sombra proyectada por una vara larga en la ciudad de Alejandría y el tiempo empleado por las caravanas que constantemente viajaban entre esas ciudades del antiguo Egipto.
Eratóstenes determinó que la circunferencia de la Tierra era de 40.000 km, de acuerdo con el resultado de la longitud del arco medido entre estas dos ciudades (5.000 estadios, aproximadamente 790 km) y el ángulo formado por la sombra de la vara en Alejandría. Hoy se conoce que este valor es asombrosamente cercano a la realidad, si se tiene en cuenta que para el elipsoide de referencia GRS80 (adoptado en la mayoría de los países como el que mejor se ajusta a su superficie), los radios de los semiejes son 6.378 y 6.357 km, que determinan perímetros de 40.074 o 39.942 km respectivamente si se considerara a la Tierra como una esfera.
El griego Herón fue uno de los primeros pensadores en aplicar sus conocimientos de geometría a la topografía en varios tratados importantes, entre los que se destaca La Dioptra, en el cual se relacionan los métodos de medición de terrenos, dibujos de planos y cálculos respectivos.
Los romanos, con un pensamiento eminentemente más práctico, contribuyeron al desarrollo de la topografía no sólo con textos, que describen las labores de los topógrafos
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 2/50
incluidos en el Códice Aceriano (uno de los manuscritos más antiguos) como los elaborados por Frontinus, sino con instrumentos como la groma (instrumento empleado para visar) y el corobates (empleado para nivel).
Se le atribuye a Tolomeo la invención del astrolabio plano, instrumento empleado para determinar la localización de las estrellas y constelaciones más importantes, lo que permitía determinar la posición relativa de quien lo operaba. En la actualidad, el más empleado es el astrolabio náutico, un instrumento similar al anterior, pero simplificado con el objeto de determinar alturas de los astros.
A partir del siglo XI se descubren los principios de la teoría magnética y se le atribuye a los Chinos la invención de la brújula, instrumento básico para la navegación y elaboración de mapas. Sólo hasta 1520 fue empleada la brújula como instrumento para levantamientos topográficos.
En el siglo XII Von Piso escribió la Práctica Geometría, el cual contenía instrucciones sobre topografía.
En el siglo XVI el matemático y astrónomo portugués Nunes inventó el nonio, el cual fue perfeccionado luego por el francés Vernier. En este siglo Galileo Galilei inventa el telescopio, lo que da a lugar a un notable avance en el desarrollo de mapas y cartas.
En 1690 el astrónomo danés Roemer construyó el primer teodolito, pero fue perfeccionado en el siglo XVIII por los ingleses Short Adams y Ramsden. Sólo hasta 1804 el alemán Reichenbach construyó un teodolito similar a los empleados actualmente en los levantamientos topográficos.
En 1851 se desarrollan los primeros métodos de restitución de un objeto a partir de dos fotografías del mismo objeto tomadas desde dos puntos de una línea denominada base: son los principios de la fotogrametría.
En 1948 el sueco Bergstrand inventa el geodímetro y hacia 1957 el inglés Wadley presenta el telurómetro. Ambos instrumentos electrónicos permitían la medición de distancias, el primero a partir de radiación visible y el segundo a partir de microondas.
En 1985 se pone en funcionamiento el Sistema de Posicionamiento Global (GPS) por parte del Departamento de Defensa del gobierno americano.
1.3 TIPOS DE LEVANTAMIENTOS
1.3.1 GEODÉSICOS
Los levantamientos geodésicos tienen en cuenta la superficie curva de la tierra, realizando los cálculos sobre un elipsoide. En la actualidad es común efectuar levantamientos geodésicos en sistemas tridimensionales en coordenadas cartesianas con centro en la Tierra debido a la implementación de sistemas coordenados globales, como sucede con los sistemas de localización satelital.
• Levantamientos con equipos de localización por satélite (GNSS: GPS-GLONASS-GALILEO)
• Levantamientos por sensores remotos (Fotogrametría – imágenes de satélite)
• Levantamientos con equipos electrónicos (IEMD) – triangulación geodésica.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 3/50
El Instituto Geográfico Agustín Codazzi es el encargado de la elaboración y actualización de la cartografía nacional, así como de la elaboración y conservación de la red geodésica. Entidades como INGEOMINAS, DANE y el IDEAM, son responsables de la elaboración y recopilación de la información geográfica colombiana, la cual es información básica para los estudios ambientales que se desarrollan en el país.
Generalmente los levantamientos geodésicos se elaboran basándose en una proyección denominada Mercator.
1.3.2 PLANOS
Supone que la superficie levantada es plana. La dirección de una plomada (y por ende, de la fuerza de la gravedad) se considera paralela en todo el levantamiento y los ángulos medidos son supuestamente planos.
Las dimensiones máximas de las zonas representadas en planos topográficos no superan en la práctica los 30 km de lado. En una línea de 8 km de longitud, la diferencia calculada entre el segmento de arco (como superficie del geoide) y la línea recta (como superficie en un plano) es de 0,006 m.
• Levantamientos de control: levantamientos horizontales o verticales que sirven de referencia a otros levantamientos (levantamientos de amarre)
• Levantamientos topográficos: ubicación y características de accidentes naturales o artificiales sobre y bajo la superficie terrestre.
• Levantamientos catastrales: levantamientos cerrados con el objeto de fijar límites de propiedad (algunos levantamientos se denominan de desenglobe o englobantes de acuerdo a si su objetivo es fraccionar o unir propiedades).
• Levantamientos hidrográficos: definen la línea costera y las profundidades de lagos, corrientes, océanos, represas y otros cuerpos de agua. Una especialización son los levantamientos marinos, que se especializan en la representación de este ambiente con fines de navegación, manejo o caracterización.
• Levantamientos de rutas: levantamientos efectuados para proyectos lineales (vías, ferrocarriles, líneas de transmisión, oleoductos, etc.).
• Levantamientos de construcción: determinan la línea, pendiente, elevaciones de control (cotas), posiciones horizontales y verticales, dimensiones y configuraciones de elementos incorporados a una construcción. Los levantamientos que definen el estado y localización final de una construcción se denominan levantamientos finales, generalmente conocidos como “as build”.
• Levantamientos de minas: se efectúan en superficie y bajo ella. Sirven de guía para la excavación de túneles y otras operaciones relacionadas con la minería, incluye levantamientos geofísicos para minerales y exploración de recursos de energía.
• Levantamientos industriales: son llamados también levantamientos ópticos debido a que requieren una altísima precisión en procesos de montaje industrial.
1.4 APLICACIONES DE LOS LEVANTAMIENTOS TOPOGRÁFICOS
• Determinación de la forma de la Tierra y medición de todo lo necesario para la establecer el tamaño, posición, forma y contorno de cualquier parte de la superficie terrestre.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 4/50
• Localización de objetos en el espacio y ubicación de sus características físicas, estructuras y trabajos de ingeniería en, sobre y bajo la superficie terrestre.
• Determinación de la localización de los límites de los terrenos públicos o privados, incluyendo las fronteras nacionales e internacionales, así como el registro de esas tierras con las autoridades competentes.
• Diseño, establecimiento y administración de la tierra, sistemas de información geográfica, recopilación y almacenamiento de datos para estos sistemas, análisis y manejo para la producción de mapas temáticos.
• Planeación del uso y desarrollo de la propiedad y su administración, sea rural o urbana, de tierra o edificaciones.
• Estudio del medio ambiente natural o social, medición de los recursos terrestres y marinos, así como la utilización de estos datos con propósitos de planeación urbana o rural.
1.5 CONSIDERACIONES PARA LA ELECCIÓN DE INSTRUMENTOS Y MÉTODOS
La elección de los instrumentos y de los métodos para hacer las medidas depende del grado de precisión requerido en cada caso y de muchas otras circunstancias que pueden presentarse en el desarrollo del trabajo.
Lo ideal sería hacer siempre medidas con grandes precisiones, pero a todo aumento de precisión le corresponde un aumento de tiempo, de trabajo y, por lo tanto, de costos. De lo anterior resulta que lo más conveniente es proceder para obtener el grado de precisión que requiera cada levantamiento.
Para obtener un determinado grado de precisión es necesario mantener los errores dentro de ciertos límites admisibles y, para lograrlo, es indispensable conocer sus clases, sus orígenes, sus efectos en las medidas y el modo de operar para reducirlos.
Para elegir los métodos y seleccionar los instrumentos, antes de iniciar un levantamiento topográfico, algunas consideraciones que deben tenerse en cuenta son:
• Es indispensable conocer el uso o finalidad que se va a dar al levantamiento (es el ALCANCE del proyecto, el cual debe estar muy bien definido antes de hacer las labores de campo para evitar repeticiones o adiciones posteriores).
• De la finalidad del levantamiento dependerán las MAGNITUDES DE LOS ERRORES que se pueden cometer y el GRADO DE PRECISIÓN que se requiere.
• De la precisión requerida para el levantamiento dependerá la EXACTITUD con que deben hacerse las diferentes medidas.
• De la exactitud con que deben ejecutarse las medidas y por medio del análisis adecuado se determinarán los INSTRUMENTOS y los métodos posibles para ejecutar el trabajo.
• De los instrumentos y métodos posibles se eligen los que más facilitan el trabajo, considerando la posibilidad de elegir aquellos que proporcionen una mayor precisión cuando el aumento en el COSTO del trabajo no es apreciable.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 5/50
1.6 ACTIVIDADES DE UN LEVANTAMIENTO TOPOGRÁFICO
• Selección del método y elección de los instrumentos de acuerdo con el alcance del levantamiento y los resultados esperados.
• Planeación de la logística requerida para el desarrollo de los trabajos de campo.
• Realizar el trabajo de campo de la manera planeada. Verificar el cierre angular del levantamiento.
• Elaborar los cálculos a partir de los datos de campo. Verificar el cumplimento de los requisitos de precisión.
• Dibujar el levantamiento o elaborar el plano de acuerdo con los requisitos de presentación especificados en el proyecto.
• Efectuar el replanteo o la colocación de señales para marcar linderos o guiar trabajos de construcción.
2. REGISTROS DE CAMPO
Las notas de campo son un registro permanente del trabajo topográfico que se realiza en un sitio. Es fundamental que las anotaciones sean claras y legibles para cualquier persona enterada sin tener que recurrir a explicaciones verbales. El cuidado que se tenga al hacer las medidas de campo puede perderse si no se toman notas claras y legibles. Si las notas están equivocadas, incompletas o confusas se pierde tiempo y dinero y quizás se tenga que regresar al campo para repetir todo o parte del trabajo.
1.1 TIPOS DE LIBRETA
Las libretas de campo contienen datos valiosos, están expuestas a uso rudo y deben ser permanentes, por eso las más utilizadas son las empastadas que tienen sus cuadernillos cosidos y una pasta rígida de cuero, cartón o plástico.
Las libretas de hojas intercambiables son de gran aceptación por su menor costo y la facilidad que ofrecen para escribir, archivar, agregar páginas. Tiene la desventaja de que sus hojas pueden perderse más fácilmente.
En las libretas electrónicas de registro (denominadas comúnmente colectoras de datos), éstos se introducen o transfieren automáticamente a una memoria con la cual se alimentará posteriormente un computador. Por medio de una pantalla o de una impresora pueden extraerse los datos para su verificación visual. Los esquemas o croquis no pueden trazarse ni transmitirse automáticamente.
Generalmente se realizan en el campo cuatro tipos de notas:
• Tablas
• Croquis
• Descripciones
• Combinaciones de las anteriores
El tipo de anotaciones más común es el combinado, pero el más adecuado dependerá del tipo de trabajo. Una regla general es que las tablas se muestren en las páginas de la
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 6/50
izquierda y notas, croquis, etc., en las páginas de la derecha. Los estilos y formas de las notas dependerán de normas particulares, oficiales y de gustos personales.
2.1 REQUISITOS DE UN BUEN REGISTRO DE CAMPO
Un buen registro de campo debe llenar, entre otros, los siguientes requisitos:
• Exactitud: Cualidad más importante en todos los trabajos de topografía. Al anotar las medidas es necesario que se registren con el número correcto de cifras significativas, es la forma de indicar su precisión.
• Integridad: La omisión de una sola medida puede anular la utilidad de las notas para el cálculo o el dibujo. Debe verificarse cuidadosamente que las notas estén completas antes de dejar cada estación y antes de abandonar el sitio de trabajo.
• Legibilidad: Las notas servirán solo si son legibles.
• Adecuación: Se deben emplear formas de registro adecuadas para el trabajo que se adelanta. Esto contribuye al cumplimiento de los demás requisitos.
• Claridad: Los procedimientos de campo correctos y bien planeados asegurarán la claridad de los croquis y tabulaciones. Notas amontonadas, ambiguas o confusas pueden provocar costosas equivocaciones.
2.2 RECOMENDACIONES GENERALES
• Utilice un lápiz de mina dura para apuntar los datos del levantamiento.
• Emplee tipos de anotación ordenada estándar preferiblemente. Adopte una diferente para el proyecto sólo si es necesario para aumentar la claridad del mismo.
• Inicie el registro del trabajo de cada día en una hoja nueva.
• Incluya observaciones adicionales si lo considera necesario y si contribuyen a una mayor claridad del levantamiento.
• Utilice croquis en lugar de tablas en casos de duda. Haga los dibujos según proporciones reales para facilitar su comprensión.
• Indique siempre el Norte del dibujo.
• Escriba siempre el cero antes del punto decimal en caso de valores menores que 1.
• No sobreponga un número a otro ni lo escriba sobre las líneas del croquis.
• Indique siempre la precisión de la medida empleando el mismo número de cifras significativas.
• Calcule todos los cierres y relaciones de error mientras está en el campo.
3. TEORÍA DEL ERROR Y LAS MEDICIONES
Los topógrafos, ingenieros o en general el personal encargado de ordenar y planear la ejecución de un levantamiento topográfico deben conocer los tipos de errores, causas, posibles magnitudes bajo diferentes formas de trabajo y la manera de propagarse. De esta forma se podrán seleccionar los instrumentos y procedimientos necesarios para reducir la magnitud de los errores a un nivel razonable.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 7/50
Los tipos de mediciones en topografía, y en las cuales es probable que se presenten errores, son:
• Ángulos horizontales
• Distancias horizontales
• Ángulos verticales
• Distancias verticales
• Distancias inclinadas
3.1 MEDICIONES DIRECTAS E INDIRECTAS
Las mediciones directas son las que resultan de la aplicación de un elemento o un instrumento calibrado con una magnitud estandarizada a la cual se le puede hacer una trazabilidad (calibración). Por ejemplo: la aplicación de una cinta a una línea, la medición de un ángulo con un transportador o la determinación de un ángulo con un teodolito.
Las mediciones indirectas son aquellas a las cuales no se les puede aplicar directamente un instrumento a la cantidad por medirse y su respuesta se determina por su relación con otro valor u otros valores medidos. Por ejemplo: el cálculo de una distancia de acuerdo con relaciones geométricas.
En topografía se hacen muchas mediciones indirectas y, como todas tienen errores, no es posible evitar que las cantidades calculadas a partir de ellas tengan errores.
3.2 ERRORES
Un error es la diferencia entre el valor medido y el valor verdadero de una cantidad. Puede afirmarse que:
• Ninguna medida es exacta
• Toda medida tiene errores
• El valor verdadero nunca se conoce
• El error exacto que se encuentra en cualquier medida siempre será desconocido
La exactitud de las medidas dependerá del tamaño de la división de la escala, de la confiabilidad del equipo empleado y de la limitación de la capacidad humana para hacer un estimativo más allá de 1/10 de la división de una escala. Cuando se usa un mejor equipo, las mediciones se acercan a su valor real pero no son exactas (a diferencia de los conteos).
3.3 EQUIVOCACIONES
Se trata de problemas (yerros) relacionados al observador, cometidos por un concepto erróneo del problema, por descuido, por fatiga, por error de comunicación o una apreciación equivocada. Ej: transposición de números, lectura incorrecta de un ángulo, visualización de un objeto erróneo o el registro parcial o truncado de una distancia medida con cinta.
Las equivocaciones se deben detectar mediante la revisión sistemática de todo el trabajo y se deben eliminar mediante la repetición de parte del trabajo o la totalidad del mismo.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 8/50
Las equivocaciones pequeñas tienden a confundirse con los errores, por lo tanto son más difíciles de detectar.
3.4 CAUSAS DE ERRORES
Existen básicamente tres causas de error:
• Errores naturales: ocasionadas por las variaciones del viento, la temperatura, la presión atmosférica, la gravedad y la declinación magnética.
• Errores instrumentales: ocasionados por las imperfecciones en la construcción o ajuste de los instrumentos de medida empleados y del movimiento de sus partes.
• Errores personales: son los que tienen origen en las limitaciones propias de los sentidos humanos, como la vista y el tacto.
3.5 TIPOS DE ERRORES
3.5.1 ERRORES SISTEMÁTICOS (ACUMULATIVOS)
Son factores que comprenden el “sistema de medición” e incluyen el medio ambiente, los instrumentos y el observador. Cuando las condiciones en las que se efectúa la medida permanecen constantes, los errores sistemáticos permanecen constantes.
Generalmente, si se conocen las condiciones que ocasionan los errores y su magnitud, es posible calcular matemáticamente una corrección y aplicarla a los valores observados. Un ejemplo de error sistemático es la elongación que sufre una cinta metálica como producto de un aumento en la temperatura.
3.5.2 ERRORES ALEATORIOS (COMPENSATORIOS)
Son los errores resultantes luego de eliminar los errores sistemáticos. Son ocasionados por factores que quedan por fuera del control del observador y obedecen las leyes de la probabilidad.
No es posible calcularlos ni eliminarlos, pero pueden estimarse mediante procedimientos estadísticos. Se conocen como errores compensatorios porque tienden a compensarse entre sí en una serie de mediciones.
3.6 DISCREPANCIA, PRECISIÓN Y EXACTITUD
3.6.1 DISCREPANCIA
Una discrepancia es la diferencia entre dos valores medidos de la misma cantidad. Una discrepancia pequeña indica que probablemente no hay equivocaciones y que los errores aleatorios son pequeños. Sin embargo, las discrepancias pequeñas no impiden la presencia de errores sistemáticos.
3.6.2 PRECISIÓN
La precisión es el grado de refinamiento o consistencia de un grupo de mediciones. Se evalúa con base en la magnitud de las discrepancias (diferencia entre dos valores medios de la misma cantidad).
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 9/50
Varias mediciones múltiples de la misma cantidad con pequeñas discrepancias, reflejan una alta precisión. El grado de precisión depende de la sensibilidad del equipo y de la habilidad del observador.
3.6.3 EXACTITUD
La exactitud es la aproximación a los verdaderos valores de las cantidades medidas. Al igual que en un juego del tiro al blanco, un levantamiento puede ser preciso sin ser exacto. Por ejemplo: un levantamiento muy preciso con una cinta que marca 30,00 cuando en realidad la medida es 30,01, o una poligonal leída con brújula con tan sólo una aproximación de 1/4° puede tener un error de cierre angular nulo.
3.7 ELIMINACIÓN DE EQUIVOCACIONES Y ERRORES SISTEMÁTICOS
Los humanos somos falibles, aunque deseemos lo contrario. En el campo, observadores experimentados pueden minimizar las equivocaciones mediante algunos procedimientos estandarizados repetitivos. Las equivocaciones sólo pueden corregirse si se descubren; la comparación de varias medidas de la misma cantidad es una de las mejores maneras de minimizar las equivocaciones.
Cuando se detecta una equivocación, lo mejor es repetir la medición. Sin embargo, si se dispone de un número suficiente de mediciones de la misma cantidad que sí están de acuerdo, puede simplemente descartarse el resultado divergente.
En general, se supone que el cálculo del error de un levantamiento topográfico se realiza luego de eliminar equivocaciones y errores sistemáticos.
3.7.1 VALOR MÁS PROBABLE
En las mediciones físicas nunca se conoce el valor verdadero de una magnitud, pero su valor más probable puede calcularse si se efectúan mediciones redundantes para una sola incógnita, es decir, si se efectúan más mediciones que las necesarias para su determinación con el fin de aplicarle correcciones estadísticas.
Cuando se tiene una serie de mediciones redundantes de una misma variable (como una longitud), siempre y cuando se hayan efectuado en las mismas condiciones y con el mismo equipo, la primera medición determina un valor para la longitud y las demás son valores redundantes. El valor más probable en este caso es la media aritmética.
n
MM
∑=
dónde: M es el valor más probable de la longitud
∑M es la suma de las medidas individuales (M)
n es el número total de observaciones
3.7.2 RESIDUOS
Una vez calculado el valor más probable de una magnitud, es posible calcular los residuos. Un residuo es sólo la diferencia entre cualquier valor medido de una magnitud y su valor más probable, es decir:
MMv −= dónde: v es el residuo de cualquier medición
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 10/50
M es la medida individual
M es el valor más probable
3.7.3 DISTRIBUCIÓN NORMAL DE LOS ERRORES
El análisis estadístico que se le efectúa a una serie de datos de una misma medición consiste en determinar la frecuencia de cada uno de los valores medidos y construir un histograma que represente los residuos y su frecuencia de aparición. El resultado de este análisis es una curva con forma de campana conocida como la curva de distribución normal. En la topografía casi siempre ocurren distribuciones con errores normales o cerca de lo normal.
Cuando las mismas mediciones son efectuadas con mejor equipo y con más cuidado, se tienen errores más pequeños (residuos más pequeños) y, por ende, una distribución más alta y estrecha, demostrando así que un mayor porcentaje de valores tiene errores más pequeños, mientras que menos mediciones tienen errores más grandes. Así las mediciones son más precisas.
La mayoría de las mediciones de levantamientos topográficos deben satisfacer unas condiciones geométricas específicas de acuerdo con el procedimiento empleado durante el levantamiento (por ejemplo: los ángulos internos de un triángulo deben sumar 180º). Las magnitudes por las cuales las mediciones no satisfacen estas condiciones se denominan errores de cierre.
Los errores de cierre indican la presencia de errores aleatorios. Diversos procedimientos se aplican para distribuir esos errores y conseguir condiciones perfectas geométrica y matemáticamente. Algunos aplican sencillamente correcciones del mismo tamaño a todos los valores medidos; en estos casos, cada corrección es igual al error de cierre total dividido entre el número de mediciones. Otros corrigen las observaciones en proporción a las ponderaciones asignadas.
3.8 LEYES GENERALES DE LA PROBABILIDAD
• Los residuos (errores) pequeños ocurren con mayor frecuencia que los grandes, es decir, su probabilidad es mayor.
• Los errores grandes ocurren con poca frecuencia y son, por tanto, menos probables; en el caso de los errores con distribución normal, los excepcionalmente grandes pueden ser equivocaciones en lugar de errores aleatorios.
• Los errores positivos y negativos de la misma magnitud ocurren con igual frecuencia, es decir, son igualmente probables. Esto nos permite hacer una deducción: el valor más probable de un grupo de mediciones repetitivas hechas con el mismo equipo y los mismos procedimientos, es la media.
4. MEDICIÓN DE DISTANCIAS
La medición de distancias es la base de toda la topografía. Aún cuando los ángulos puedan leerse con precisión con equipo muy refinado, por lo menos tiene que medirse la
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 11/50
longitud de una de las líneas que componen el polígono para efectuar la localización de los puntos.
En topografía, las mediciones lineales se han obtenido utilizando métodos muy diversos; se mencionan entre otros los siguientes:
• Medición a pasos
• Medición con odómetro (rueda calibrada)
• Medición con telémetros
• Medición por taquimetría (estadia)
• Medición con cinta
• Medición con instrumentos electrónicos (IEMD)
• Medición con sistemas inerciales
• Medición por coordenadas basadas en sistemas satelitales
4.1 MEDICIÓN A PASOS
Las distancias evaluadas a pasos son suficientemente exactas para muchos fines en topografía, ingeniería, geología, agricultura, en el servicio forestal y en reconocimientos militares. Las medidas a pasos se usan también para detectar equivocaciones de consideración que pueden ocurrir en mediciones de distancias hechas con métodos de mayor exactitud.
4.2 MEDICIÓN CON ODÓMETRO
Un odómetro convierte el número de revoluciones o vueltas de una rueda de circunferencia conocida en una distancia. Las longitudes medidas con un odómetro instalado en un vehículo son adecuadas para ciertos levantamientos preliminares en los trabajos de ubicación de vías o caminos.
4.3 TELÉMETROS
Estos instrumentos operan con base en los mismos principios que los medidores ópticos de distancias de las cámaras reflex de una sola lente. Básicamente, al enfocarlos determinan la distancia f2 al objeto en la ecuación, donde la longitud focal f y la distancia f1 a la imagen son conocidas.
Cfff==+
1
2
1
1
1
4.4 TAQUIMETRÍA
La taquimetría es un método topográfico usado para determinar rápidamente la distancia horizontal y la elevación de un punto. Las mediciones con estadia se logran visando a través de un taquímetro o anteojo dotado de dos o más hilos reticulares horizontales, situados a una distancia conocida.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 12/50
4.5 MEDICIÓN CON CINTA
La medición de una distancia horizontal con cinta resulta de la aplicación sucesiva de un elemento graduado con una longitud conocida cierto número de veces. Esta medición se efectúa en seis (6) pasos, como son:
• Alineación: La línea debe marcarse adecuadamente en ambos extremos y en puntos intermedios. El cadenero de adelante se alinea de acuerdo con las instrucciones del cadenero de atrás o mediante el uso de un tránsito. Para este procedimiento se emplean señales manuales establecidas en la comisión.
• Aplicación de tensión: Se aplica tensión a la cinta con el fin de contrarrestar el efecto de la gravedad y el viento que ocasiona desviaciones al patrón de medida. Por lo general se aplican tensiones entre 5 y 15 kg si ambos cadeneros se encuentran en una posición cómoda y con los brazos pegados al pecho. Con los brazos extendidos difícilmente es posible aplicar una tensión superior a los 7 kg. Es preciso anotar que, si se trata de una cinta metálica no se presentará ninguna deformación en el equipo con esta tensión de trabajo, pero si se presentan “cocas” o “lazos” en la cinta y se aplica una tensión equivalente a 0,5 kg la cinta se rompe.
• Aplome: La maleza, arbustos y obstáculos, así como las irregularidades del terreno impiden que la cinta sea colocada directamente sobre la superficie para efectuar las medidas, por lo cual se emplean generalmente plomadas en ambos extremos de la cinta con el fin de trasladar adecuadamente las medidas de referencia y final a puntos de “liga” localizados en el piso.
• Marcaje: El marcaje es un procedimiento que permite acumular puntos de liga de longitudes fijas en mediciones largas sin que se presenten errores importantes en la medición total. Lo más aconsejable es emplear piquetes o “pines” metálicos que el cadenero deja en el punto de liga de adelante y el cadenero de atrás recoge al pasar a la siguiente longitud fija del proceso. Este proceso acumulará el número de tramos de longitud constante medidos según el número de “pines” recogidos por el cadenero de atrás, los cuales se multiplicarán posteriormente por la distancia fija de la medición.
• Lectura: Se trata del proceso de lectura de la lectura incompleta final de cada proceso, la cual debe efectuarse con el número adecuado de cifras significativas estipulado para el levantamiento.
• Anotación: En esta oportunidad se determina la longitud final de la línea medida de acuerdo con los tramos de longitud constante marcados y la lectura parcial tomada al final. Este es el paso en que mayor número de equivocaciones se cometen.
Los materiales en que se construyen las cintas determinan las precisiones que pueden alcanzarse con cada procedimiento. Las más empleadas para levantamientos de precisión son las fabricadas en invar (una aleación de 35% de níquel y 65% de acero) que presenta un coeficiente de expansión muy bajo y por lo tanto no se afectan como consecuencia de cambios en la temperatura durante la medición. Son muy inestables y muy costosas (generalmente 10 veces el valor de una cinta de acero).
Para trabajos normales con precisiones medias se emplean cintas de acero con longitudes de 20, 30, 60 y 100 m, siendo la más común la de 30 m. Las cintas de tela o de fibra de vidrio son preferidas para mediciones de media o baja precisión; son más livianas y durables, pero debe verificarse con frecuencia el grado de estiramiento
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 13/50
alcanzado para detectar elongaciones totales o parciales para efectuar correcciones a las medidas realizadas si se requiere aumentar la precisión.
Entre los errores que generalmente se presentan en mediciones con cinta se cuentan:
• Cinta no estándar: Ocurre cuando la cinta no tiene la longitud indicada. Se corrige mediante las ecuaciones
Ll
llCl ×
−=
'
' y L = lCL+
En donde Cl es la corrección por longitud medida, l es la longitud real de la cinta y l’ es la longitud nominal (leída) de la misma, Les la longitud total medida y L es la longitud corregida.
• Alineamiento imperfecto: Se presenta cuando el cadenero coloca un punto de “liga” por fuera del alineamiento, dando como resultado una longitud mayor. Se estima que con una cinta de 20 m de longitud, al desalinearse 0,20 m en uno de sus extremos, el error cometido es tan sólo 0,001 m.
• Inclinación de la cinta: Produce un error similar al del alineamiento imperfecto que resulta en una longitud mayor que la real. Es uno de los errores más comunes que pueden eliminarse mediante el uso de un nivel de mano (locke).
• Cambio de temperatura: Produce un mayor o menor valor en la lectura de acuerdo con la temperatura ambiente en que se realiza la medida en función de la temperatura de patronamiento de la cinta. Cuando se requiere efectuar esta corrección a las medidas para aumentar la precisión del levantamiento se aplican las siguientes ecuaciones:
)(000012,0 0ttLCt −××= y L = CtL +
En donde tC es la corrección por temperatura, en metros; t y t0 son los valores de
temperatura a la cual se hace la medición y patronamiento; Les la longitud total medida y L es la longitud corregida.
• Falta de tensión: La longitud patronada de una cinta se obtiene aplicándole una determinada tensión. Si se aplica una tensión diferente, la corrección está dada por la siguiente ecuación:
LES
TTCT ×
×−
=)( 0 y L = pCL+
En donde TC es la corrección por tensión (m);T es la tensión aplicada (kg), 0T la
tensión de patronamiento (kg), S el área de la sección transversal de la cinta (mm2); E es el módulo de elasticidad de la cinta (para el acero es 24.000 kgf/mm2); Les la longitud total medida y L es la longitud corregida.
• Catenaria: Ocurre debido al efecto de la gravedad cuando se suspende la cinta desde dos apoyos. Si se supone que la curva efectuada por la cinta es un arco de parábola, la corrección está dada por la siguiente ecuación:
2
2
24 T
LPCc ×
×= y L = cCL +
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 14/50
En donde cC es la corrección por catenaria (m); P es el peso de la cinta entre los
apoyos; Les la longitud entre soportes; T es la tensión aplicada (kg) y L es la longitud corregida.
4.6 MEDICIÓN CON INSTRUMENTOS ELECTRÓNICOS DE MEDIDA
Corresponde a un desarrollo máximo de la obtención de distancias a partir del número de longitudes de onda recorridos por un haz de luz del espectro óptico, entre una fuente emisora y una superficie de retorno (conocido como prisma). Este tema se tratará más ampliamente en el numeral 5.
4.7 MEDICIÓN CON MÉTODOS INERCIALES
Generalmente conocidos como ISS (Inertial Surveying System), su funcionamiento radica en la medición de las aceleraciones, en función del tiempo, en cada uno de tres ejes mutuamente perpendiculares. La obtención del valor de la aceleración resulta de la medición de los esfuerzos resistentes al desplazamiento de un péndulo cuya masa se conoce (de la ecuación amF ×= se despeja la aceleración requerida). Generalmente los acelerómetros miden el valor de la aceleración cada 0,02 segundos o menos, lo cual permite una altísima precisión en las longitudes medidas mediante la instalación de un sistema inercial sobre un vehículo o un helicóptero.
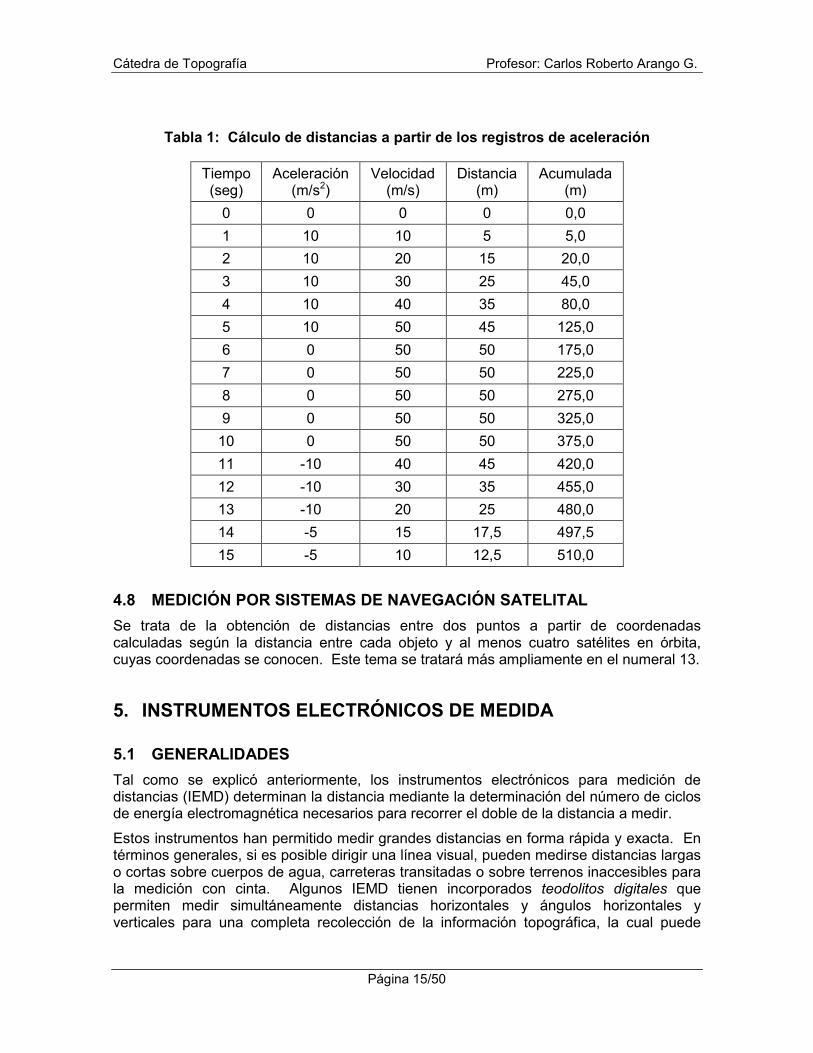
A continuación se presentan, a modo de ejemplo, los datos obtenidos por un acelerógrafo instalado en un vehículo con el fin de medir el desplazamiento efectuado a lo largo de un eje coordenado. El vehículo parte con una aceleración de 10 m/s2 durante un intervalo de 5 segundos, para continuar a velocidad constante otros 5 segundos e iniciar una frenada fuerte equivalente a una desaceleración de 10 m/s2 durante 3 segundos y luego más suave, durante 2 segundos, con una desaceleración de 5 m/s2, hasta detenerse a los 15 segundos de iniciado el recorrido
La velocidad del vehículo en cada intervalo se obtiene a partir de la aceleración registrada al final del intervalo. La distancia recorrida, por su parte, se calcula como el promedio de las velocidades al inicio y final del intervalo por el tiempo transcurrido. La distancia acumulada en cada intervalo corresponde a la distancia final requerida.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 15/50
Tabla 1: Cálculo de distancias a partir de los registros de aceleración
Tiempo (seg)
Aceleración (m/s2)
Velocidad (m/s)
Distancia (m)
Acumulada (m)
0 0 0 0 0,0
1 10 10 5 5,0
2 10 20 15 20,0
3 10 30 25 45,0
4 10 40 35 80,0
5 10 50 45 125,0
6 0 50 50 175,0
7 0 50 50 225,0
8 0 50 50 275,0
9 0 50 50 325,0
10 0 50 50 375,0
11 -10 40 45 420,0
12 -10 30 35 455,0
13 -10 20 25 480,0
14 -5 15 17,5 497,5
15 -5 10 12,5 510,0
4.8 MEDICIÓN POR SISTEMAS DE NAVEGACIÓN SATELITAL
Se trata de la obtención de distancias entre dos puntos a partir de coordenadas calculadas según la distancia entre cada objeto y al menos cuatro satélites en órbita, cuyas coordenadas se conocen. Este tema se tratará más ampliamente en el numeral 13.
5. INSTRUMENTOS ELECTRÓNICOS DE MEDIDA
5.1 GENERALIDADES
Tal como se explicó anteriormente, los instrumentos electrónicos para medición de distancias (IEMD) determinan la distancia mediante la determinación del número de ciclos de energía electromagnética necesarios para recorrer el doble de la distancia a medir.
Estos instrumentos han permitido medir grandes distancias en forma rápida y exacta. En términos generales, si es posible dirigir una línea visual, pueden medirse distancias largas o cortas sobre cuerpos de agua, carreteras transitadas o sobre terrenos inaccesibles para la medición con cinta. Algunos IEMD tienen incorporados teodolitos digitales que permiten medir simultáneamente distancias horizontales y ángulos horizontales y verticales para una completa recolección de la información topográfica, la cual puede
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 16/50
incluso ser almacenada en registros electrónicos o transmitida a otros medios para su procesamiento y dibujo.
Los IEMD se clasifican en:
• Equipos electroópticos: transmiten luz con longitud de onda en el intervalo de 0 a 1,2 µm, dentro o ligeramente por encima de la región visible del espectro.
• Equipos de microondas: transmiten microondas con frecuencias en el intervalo de 3 a 35 GHz con longitudes de onda entre 1 y 8,6 mm.
Una diferencia básica entre los dos equipos radica en que las señales emitidas por los primeros regresan nuevamente del extremo opuesto empleando un prisma. Los segundos emplean dos unidades idénticas localizados en ambos extremos de la longitud medida; la primera envía la señal y la segunda la recibe y retransmite a la primera.
5.2 FUNCIONAMIENTO
La energía electromagnética se propaga en la atmósfera de acuerdo con la ecuación:
λ×= fV dónde: V es la velocidad de la energía electromagnética
f es la frecuencia de modulación en hertz
λ es la longitud de onda en metros.
En los IEMD la frecuencia puede controlarse con toda precisión, pero la velocidad varía con la temperatura, la presión y la humedad atmosférica. La medición se realiza por medio de la medición del desplazamiento de fase.
En este sistema, la energía que se desplaza según una curva senoidal requiere un número entero de cambios de fase de 360° y un residuo p (dado que es muy poco común que la distancia sea equivalente a un número exacto de longitudes de onda), por lo cual la distancia está dada por la siguiente expresión:
2
pnL
+=
λ dónde: L es la longitud medida
λ es la longitud de onda en metros
n es el número de longitudes de onda completas
p es la parte fraccionaria de la longitud de onda
El instrumento indica la parte fraccionaria como un ángulo de fase diferente de cero (dado que no coincide el número entero de longitudes de onda), por lo cual, si conoce la longitud precisa de una onda puede convertir esta fracción en una distancia.
Con lo anterior, los IEMD detectan directamente la fracción de longitud de onda, pero no cuentan los ciclos completos por los que ha pasado la energía que regresa después de su doble recorrido. Esta ambigüedad se soluciona con la transmisión de señales adicionales de menor frecuencia y mayor longitud de onda.
Si se supone un IEMD que trabaja con cuatro frecuencias F1, F2, F3 y F4, con longitudes de onda de 14,984 MHz, 1,498 MHz, 149,8 kHz y 14,984 kHz respectivamente y se aplica a cada una la ecuación λ×= fV con la velocidad de la luz como constante y un índice de refracción (corrección por humedad y temperatura) igual a 1,0003, se tiene que las
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 17/50
longitudes de onda en la doble distancia serán respectivamente 20, 200, 2.000 y 20.000 m. Si estas longitudes de onda se emplean para medir una sola distancia y no el doble recorrido, permitirían determinar fracciones de 10, 100, 1.000 y 10.000 m de acuerdo con el residuo del ángulo de fase medido en cada una de ellas.
Si una distancia de 5.239,322 m es leída con este instrumento, la fracción 9,322 m corresponde a un residuo de la longitud de onda de 10 m (F1), la fracción 39,32 m corresponde al residuo de la longitud de onda de 100 m (F2), la fracción 239,3 m al residuo de la longitud de onda de 1.000 m (F3) y la fracción 5.239 m es el residuo de la longitud de onda de 10.000 m (F4). Combinadas así cada uno de los desfases se obtiene el valor preciso de la distancia.
Las precisiones de los IEMD se indican en dos partes: un error constante y un valor proporcional a la distancia medida. En primero es más importante en distancias cortas, mientras que el segundo cobra mayor importancia en distancias largas. Es preciso recalcar que las mediciones efectuadas con estos equipos son inclinadas, por lo tanto, pueden reducirse en sus componentes horizontales y verticales a partir del ángulo vertical medido.
6. ÁNGULOS, RUMBOS Y AZIMUT
6.1 INTRODUCCIÓN
Los ángulos que se miden en topografía se clasifican en horizontales y verticales, dependiendo en el plano en que se midan. Los ángulos horizontales son las medidas básicas que se necesitan para determinar rumbos y azimut. Los ángulos verticales (o cenitales) se usan en la nivelación trigonométrica, hacia la mira (estadal) o un bastón calibrado para reducir distancias inclinadas con respecto a la horizontal.
Comúnmente los ángulos se miden directamente en el campo empleando una estación total, un teodolito o un tránsito, aunque también se unas brújulas y sextantes para este fin.
Un ángulo también puede medirse de forma indirecta por el método de la cinta, y calcularse su valor por la relación de cantidades conocidas de un triángulo o de otra figura geométrica simple.
Existen tres condiciones básicas que determinan un ángulo, estas son:
• La línea de referencia
• La amplitud o magnitud (valor del ángulo o distancia angular)
• El sentido del giro
El sistema sexagesimal, que se utiliza comúnmente para determinar la amplitud del giro se basa en las unidades llamadas grados, minutos y segundos y subdivisiones decimales de los segundos.
6.2 CLASES DE ÁNGULOS HORIZONTALES
Los ángulos horizontales que se miden más a menudo en topografía son:
• Ángulos interiores o exteriores
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 18/50
• Ángulos a la derecha
• Ángulos de deflexión
Los ángulos interiores o exteriores, son los ángulos que quedan dentro o fuera de un polígono cerrado. Normalmente se mide el ángulo en cada vértice del polígono. Luego, puede efectuarse una verificación de los valores obtenidos, dado que la suma de todos los ángulos en cualquier polígono debe ser igual a 180º (n-2) o 180º (n+2) según sean interiores o exteriores, donde n es el número de grados.
Los ángulos hacia la derecha se miden en el sentido de las manecillas y de la estación de atrás a la estación de adelante. Conforme avanza el levantamiento, las estaciones se identifican comúnmente con números en orden creciente o letras consecutivas según el alfabeto.
Los ángulos de deflexión se miden hacia la derecha (en el sentido de las manecillas se considera positivo) o hacia la izquierda (sentido opuesto a las manecillas, considerado como negativo) a partir de la prolongación de la línea de atrás y hacia la estación de adelante. Los ángulos de deflexión son siempre menores de 180º y el sentido de giro se define anexando una “D” o una “I” al valor numérico.
6.3 DIRECCIÓN DE UNA LÍNEA
La dirección de una línea es su ángulo horizontal medido desde una línea de referencia arbitrariamente escogida, llamada meridiano de referencia.
Un meridiano astronómico (llamado a veces verdadero, geográfico o geodético) es la línea de referencia Norte-Sur que pasa por los polos geográficos de la tierra.
La dirección de un meridiano magnético se define utilizando una aguja magnética suspendida libremente y que solo se encuentra bajo la influencia del campo magnético de la tierra.
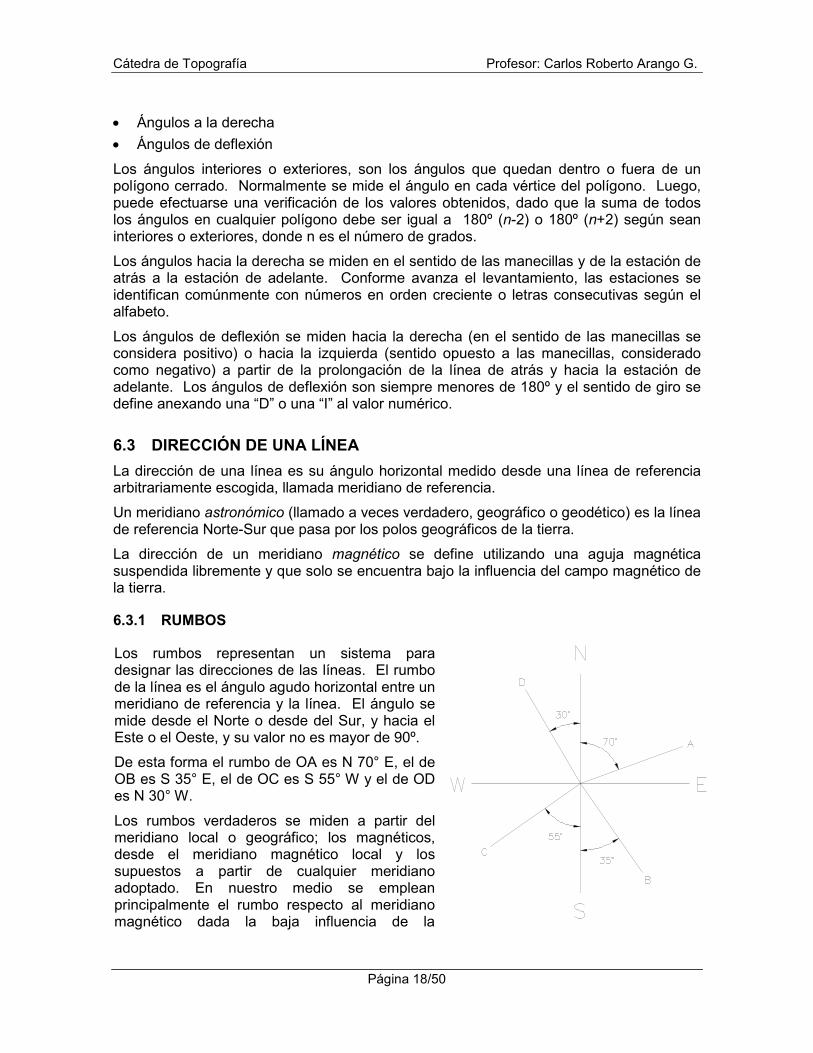
6.3.1 RUMBOS
Los rumbos representan un sistema para designar las direcciones de las líneas. El rumbo de la línea es el ángulo agudo horizontal entre un meridiano de referencia y la línea. El ángulo se mide desde el Norte o desde del Sur, y hacia el Este o el Oeste, y su valor no es mayor de 90º.
De esta forma el rumbo de OA es N 70° E, el de OB es S 35° E, el de OC es S 55° W y el de OD es N 30° W.
Los rumbos verdaderos se miden a partir del meridiano local o geográfico; los magnéticos, desde el meridiano magnético local y los supuestos a partir de cualquier meridiano adoptado. En nuestro medio se emplean principalmente el rumbo respecto al meridiano magnético dada la baja influencia de la
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 19/50
desviación magnética a nivel ecuatorial.
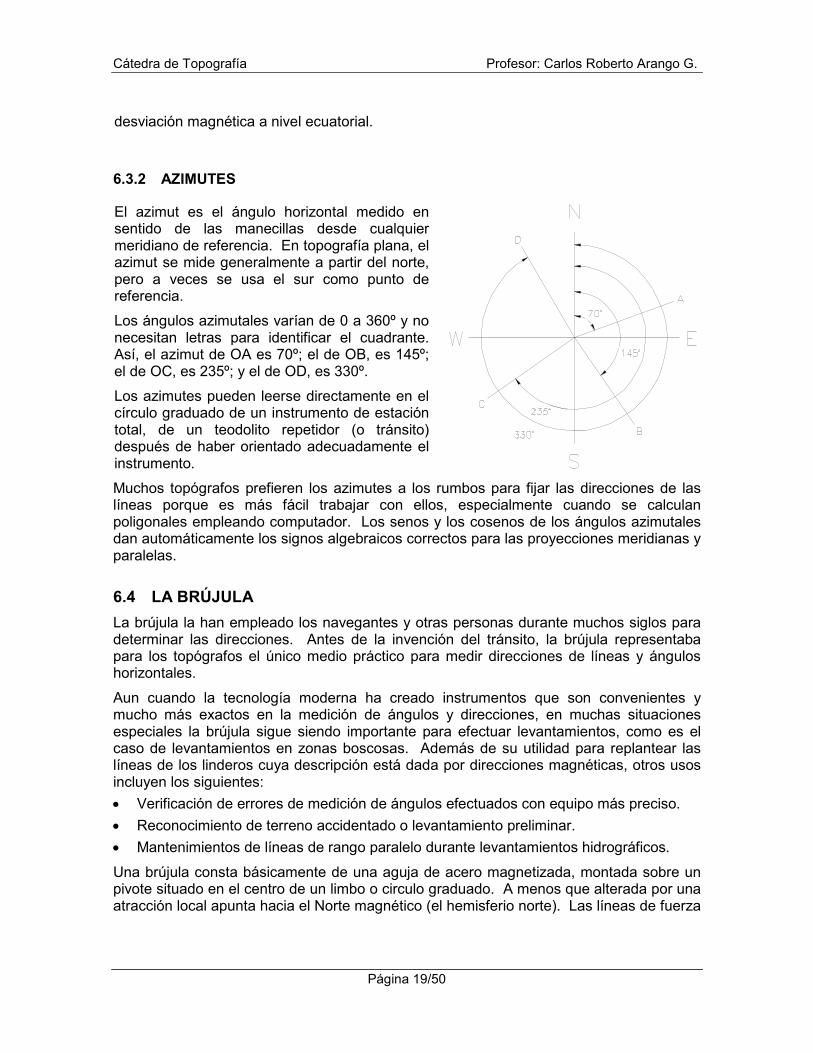
6.3.2 AZIMUTES
El azimut es el ángulo horizontal medido en sentido de las manecillas desde cualquier meridiano de referencia. En topografía plana, el azimut se mide generalmente a partir del norte, pero a veces se usa el sur como punto de referencia.
Los ángulos azimutales varían de 0 a 360º y no necesitan letras para identificar el cuadrante. Así, el azimut de OA es 70º; el de OB, es 145º; el de OC, es 235º; y el de OD, es 330º.
Los azimutes pueden leerse directamente en el círculo graduado de un instrumento de estación total, de un teodolito repetidor (o tránsito) después de haber orientado adecuadamente el instrumento.
Muchos topógrafos prefieren los azimutes a los rumbos para fijar las direcciones de las líneas porque es más fácil trabajar con ellos, especialmente cuando se calculan poligonales empleando computador. Los senos y los cosenos de los ángulos azimutales dan automáticamente los signos algebraicos correctos para las proyecciones meridianas y paralelas.
6.4 LA BRÚJULA
La brújula la han empleado los navegantes y otras personas durante muchos siglos para determinar las direcciones. Antes de la invención del tránsito, la brújula representaba para los topógrafos el único medio práctico para medir direcciones de líneas y ángulos horizontales.
Aun cuando la tecnología moderna ha creado instrumentos que son convenientes y mucho más exactos en la medición de ángulos y direcciones, en muchas situaciones especiales la brújula sigue siendo importante para efectuar levantamientos, como es el caso de levantamientos en zonas boscosas. Además de su utilidad para replantear las líneas de los linderos cuya descripción está dada por direcciones magnéticas, otros usos incluyen los siguientes:
• Verificación de errores de medición de ángulos efectuados con equipo más preciso.
• Reconocimiento de terreno accidentado o levantamiento preliminar.
• Mantenimientos de líneas de rango paralelo durante levantamientos hidrográficos.
Una brújula consta básicamente de una aguja de acero magnetizada, montada sobre un pivote situado en el centro de un limbo o circulo graduado. A menos que alterada por una atracción local apunta hacia el Norte magnético (el hemisferio norte). Las líneas de fuerza
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 20/50
magnética terrestre que alinean la aguja atraen un extremo de ésta y la hacen quedar hacia abajo de la posición horizontal.
El ángulo de esta inclinación magnética varía de 0º en el Ecuador a 90º en los polos magnéticos. Para compensar en el hemisferio norte el efecto de la inclinación y mantener horizontal la aguja, se colocan en su extremo sur unas vueltas de alambre muy delgado, a manera de contrapeso.
Al girar la caja de la brújula la aguja continúa apuntando al norte magnético y da una lectura que depende de su posición respecto el círculo graduado.
6.5 POLIGONALES
Una poligonal es una serie de líneas consecutivas que unen estaciones sucesivas del instrumento, cuyas longitudes y direcciones se han determinado a partir de direcciones en el campo; es decir, es una serie de distancias y ángulos, o distancias y rumbos, o distancias y azimut.
El trazo de una poligonal, que es la operación de establecer la localización de las estaciones y hacer las mediciones necesarias, es un procedimiento fundamental en la práctica para determinar la ubicación relativa entre puntos en el terreno.
Hay dos tipos básicos de poligonales: la cerrada y la abierta.
En una poligonal cerrada las líneas regresan al punto de partida, formándose así un polígono geométrica y analíticamente cerrado. Las poligonales cerradas proporcionan comprobaciones de los ángulos y de las distancias medidas, consideración esta en extremo importante. Así mismo, se emplean en levantamientos de control, para la construcción, de propiedades y de configuración.
En una poligonal abierta las líneas no regresan al punto de partida, pero pueden llegar a un punto con una exactitud de posición igual o mayor que la del punto de partida. Las poligonales de este tipo (geométricamente abiertas, pero analíticamente cerradas) deben tener una dirección de referencia para el inicio y el cierre. Son las más empleadas para la ejecución de poligonales de amarre, que corresponden a la base de levantamientos topográficos.
Una poligonal abierta geométrica y analíticamente consta de una serie de líneas unidas, pero no regresan al punto de partida ni cierran en un punto con igual o mayor orden de exactitud. Las poligonales abiertas se usan en los levantamientos de vías terrestres, pero, en general, deben evitarse porque no ofrecen medio alguno de verificación por errores y equivocaciones. En las poligonales abiertas deben repetirse las medidas para evitar las equivocaciones.
6.6 MEDICIÓN DE ÁNGULOS Y DIRECCIONES
Los métodos que se usan para medir ángulos o direcciones de las líneas poligonales son:
• De rumbos o de azimut
• El de ángulos interiores
• El de deflexiones
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 21/50
6.6.1 POLIGONALES POR RUMBOS O POR AZIMUT
Los levantamientos topográficos se trazan a menudo por azimut. El proceso permite la lectura de los azimutes de todas las líneas directamente, eliminando así la necesidad de calcularlos.
Los rumbos se leen en la brújula a medida que se dirigen las visuales según las líneas (o los lados) de la poligonal. También pueden emplearse los tránsitos con brújulas para leer rumbos o azimutes en forma directa.
6.6.2 POLIGONALES POR ÁNGULOS INTERIORES O EXTERIORES
Este tipo de poligonales se usa en la mayoría de los levantamientos topográficos catastrales, propiedades o lotes. Los ángulos pueden leerse en el sentido del movimiento de las manecillas del reloj o en sentido contrario, siendo más común el primero. Es conveniente medir todos los ángulos interiores siempre en el mismo sentido, porque así se reducen los errores de lectura, registro y trazo final.
Los ángulos medidos en el sentido del movimiento de las manecillas del reloj desde un visual hacia atrás, según la línea interior, se llaman ángulos a la derecha. El procedimiento es similar a una poligonal por azimut, excepto que la visual hacia atrás se dirige con los platos ajustados a cero, en vez de usarlo al azimut inverso. Los ángulos pueden comprobarse (y precisarse más) duplicándolos, o bien, comprobándose en forma aproximada por medio de lectura de brújula, cuando se use un tránsito.
6.6.3 POLIGONALES POR ÁNGULOS DE DEFLEXIÓN
Los levantamientos para vías terrestres se hacen comúnmente por deflexiones medidas hacia la derecha o hacia la izquierda desde las prolongaciones de las líneas. Un ángulo de deflexión no está especificado por completo sin la designación D o I, y, por su puesto su valor no puede ser mayor de 180º.
6.7 ERROR DE CIERRE ANGULAR
El cierre (o error de cierre) angular para una poligonal trazada es la diferencia entre la suma de los ángulos medidos en la poligonal y el total geométricamente correcto para el polígono.
• La suma de los ángulos interiores de un polígono cerrado es igual a °− 180)2( xn
• La suma de los ángulos exteriores de un polígono cerrado es igual a °+ 180)2( xn
En donde n el número de lados o de ángulos en el polígono.
Cuando se trata de una poligonal abierta, el error angular sólo se puede determinar si se conoce el azimut de la línea final de la poligonal (línea de referencia final). En este caso, el error angular es la diferencia entre el valor del azimut obtenido en la poligonal contra el azimut real de la línea de referencia a la cual se cierra.
6.8 MEDICIÓN DE LONGITUDES EN POLIGONALES
La longitud de cada línea de la poligonal se obtiene generalmente por el método más simple y económico capaz de satisfacer la presión exigida en un proyecto dado. Los
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 22/50
métodos que se emplean con mayor frecuencia son los de medición con cinta y los que utilizan dispositivos electrónicos, por ser los que proporcionan el orden más alto de precisión. Cuando se emplean los IEMD, se dice que el procedimiento es de trazo electrónico de poligonales.
6.9 SELECCIÓN DE ESTACIONES DE UNA POLIGONAL.
Las posiciones seleccionadas para emplazar las estaciones de una poligonal varían con el tipo de levantamiento. En los levantamientos de propiedades, se sitúa la estaca en cada vértice si las líneas reales de lindero no están obstruidas y si los vértices pueden ocuparse. Si es necesario recurrir a líneas auxiliares desplazadas, se sitúa una estaca cerca de cada vértice para simplificar las medidas y los calculas. Las líneas muy largas y el terreno accidentado pueden necesitar de estaciones adicionales.
6.10 CÁLCULO DE POLIGONALES CERRADAS
Las poligonales cerradas permiten evaluar directamente en el campo la calidad de las lecturas angulares efectuadas sin que sea necesario recurrir a complicados cálculos o programas de cálculo específicos, lo que representa una gran ventaja para la confiabilidad del levantamiento.
Generalmente son empleadas como base para levantamientos topográficos complejos, amarrados o no. En el primero de los casos al menos uno de sus lados hace parte de la poligonal de amarre inicial.
Las poligonales cerradas deben cumplir simultáneamente tres requisitos básicos:
• La sumatoria de ángulos (internos o externos) es igual a °180)2( xn m con el fin de hacer coincidir geométricamente el levantamiento con un polígono regular.
• La sumatoria de las proyecciones norte (eje Y) deben ser iguales a cero, con el fin de garantizar que no hay desplazamientos en el eje vertical entre el punto de inicio y el punto final de la poligonal.
• La sumatoria de las proyecciones este (eje X) deben ser iguales a cero, con el fin de garantizar que no hay desplazamientos en el eje horizontal entre el punto de inicio y el punto final de la poligonal.
Los pasos para el cálculo de una poligonal cerrada son:
1. Evaluación del cierre angular del polígono
2. Corrección de los ángulos interno o externos del polígono (si el error angular se encuentra dentro del margen de error admisible)
3. Cálculo de los azimutes de las líneas del polígono
4. Cálculo de las proyecciones ortogonales a partir de los azimutes del polígono y las distancias horizontales
5. Evaluación de la precisión del levantamiento de acuerdo con los errores obtenidos en las proyecciones ortogonales
6. Corrección longitudinal de la poligonal
7. Cálculo de las coordenadas de las estaciones
8. Cálculo de las coordenadas de los detalles
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 23/50
Cuando se emplean programas o aplicaciones de software especializadas para el cálculo de las poligonales no se efectúa la evaluación de la precisión del levantamiento (paso 5) sino hasta que se ha terminado el cálculo de las coordenadas de las estaciones, lo que no representa para el operador un desperdicio de tiempo en caso que no se cumplan los requisitos de calidad exigidos para la poligonal.
6.11 CÁLCULO DE POLIGONALES ABIERTAS
6.11.1 CORREGIDAS
En el cálculo de las poligonales abiertas corregidas el cierre angular está dado por la diferencia angular entre el azimut obtenido a partir de los datos del levantamiento para una línea de referencia desde la estación final y el azimut verdadero de esa referencia. La evaluación de la precisión angular se efectúa con los mismos criterios de aceptación o rechazo para una poligonal cerrada.
Por su parte, el error longitudinal y el ajuste de la poligonal se efectúan con relación a la diferencia de coordenadas en los ejes verticales y horizontales (norte y este) entre la estación inicial y final. La precisión longitudinal se calcula como el error unitario obtenido de acuerdo con la relación entre el error lineal total y la longitud de la poligonal.
Los pasos para el cálculo de una poligonal abierta corregida son:
1. Cálculo de los azimutes de la poligonal
2. Evaluación del cierre angular del polígono
3. Corrección de los ángulos interno o externos del polígono (si el error angular se encuentra dentro del margen de error admisible)
4. Cálculo de los azimutes corregidos de las líneas del polígono
5. Cálculo de las proyecciones ortogonales
6. Evaluación de la precisión del levantamiento
7. Corrección longitudinal de la poligonal
8. Cálculo de las coordenadas de las estaciones
9. Cálculo de las coordenadas de los detalles
6.11.2 SIN CORREGIR
Para el cálculo de las poligonales abiertas sin corregir no se emplean ajustes angulares o longitudinales, razón por la cual se debe evitar al máximo la presencia de equivocaciones.
Los pasos para el cálculo de una poligonal abierta sin corregir son:
1. Cálculo de los azimutes de las líneas del polígono
2. Cálculo de las proyecciones ortogonales a partir de los azimutes del polígono y las distancias horizontales
3. Cálculo de las coordenadas de las estaciones
4. Cálculo de las coordenadas de los detalles
Este tipo de poligonales es empleado como apoyo de levantamientos topográficos realizados con combinación de poligonales cerradas y/o abiertas corregidas
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 24/50
7. DETERMINACIÓN DE ÁREAS
Una aplicación especial es la determinación de áreas para el cálculo de volúmenes en los movimientos de tierra.
Los métodos de medición el campo son los más precisos e incluyen:
• División de la superficie en figuras simples (triángulos, rectángulos y trapecios)
• División por referencias normales desde la línea recta
• Por coordenadas
Los métodos para determinar áreas con base en medición de mapas son:
• Conteo de cuadrados unitarios
• División de la superficie figuras geométricas regulares
• Digitación de coordenadas
• Mediante un planímetro que corra las líneas que delimitan la superficie.
1.2 ÁREAS CALCULADAS POR MEDICIÓN EN CAMPO
1.2.1 DIVISIÓN EN TRIÁNGULOS
Un terreno puede generalmente dividirse en figuras geométricas tales como triángulos, rectángulos o trapecios. Los lados y los ángulos de estas figuras pueden medirse en el campo, luego se calculan las áreas individualmente y se suman.
La figura geométrica más empleada es el triángulo, cuya área en función de los lados está dada por la siguiente ecuación:
))()(( cSbSaSSA −−−= ,
en donde S es el semiperímetro 2/)( cbaS ++= y a, b y c son los lados del triángulo.
1.2.2 NORMALES DESDE UNA LÍNEA RECTA
Los contornos de las áreas pueden reducirse ha una serie de trapecios, por medio de normales trazadas desde puntos situados a intervalos regulares o irregulares en una línea recta común.
En este caso se cumple que:
)2/....2/( 10 nhhhbA +++=
en donde h0, h12 hn son las magnitudes de las normales medidas desde la recta común al contorno espaciadas a una distancia constante b.
Cuando los intervalos son irregulares, las separaciones deben seleccionarse de tal manera que el lindero curvo quede definido con precisión una vez los puntos adyacentes de las normales sobre la curva se conecten con líneas rectas.
En este caso el área está dada por la ecuación:
2/))(....)()(( )1(212101 nn hhanhhahhaA ++++++= −
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 25/50
en donde h0, h12 hn son las magnitudes de las normales medidas desde la recta común al contorno espaciadas a una distancia a1, a22an.
1.2.3 MÉTODO DE LAS COORDENADAS
El cálculo de áreas por coordenadas se efectúa generalmente usando levantamientos topográficos compuestos por poligonales cerradas o abiertas corregidas. En este procedimiento, las coordenadas de cada vértice deben conocerse como producto del cálculo de la poligonal y los detalles.
El método de las coordenadas se puede visualizar fácilmente si se reduce a una ecuación aplicable a todas las figuras geométricas y se puede programar para obtener una solución por computador o calculadora programable.
Es conveniente (pero no necesario) adoptar un sistema coordenado de referencia con los ejes X y Y localizados sobre la estación más al Sur y más al Oeste, respectivamente. Las líneas desde cada vértice hasta su proyección se trazan perpendicularmente a los ejes coordenados, creándose así una serie de trapezoides y triángulos.
El procedimiento para calcular el área de un polígono a partir de las coordenadas de los detalles requiere que éstos se ordenen de forma consecutiva, bien sea en el sentido de las manecillas del reloj o en sentido contrario. Posteriormente, se repite al inicio las coordenadas del último detalle y al final las del primer detalle. A las coordenadas así ordenadas se aplica la siguiente ecuación:
∑ −= )(2 EpEaNA en donde Ea y Ep son las coordenadas Este anterior y posterior, y
∑ −= )(2 NpNaEA en donde Na y Np son las coordenadas Norte anterior y posterior.
Ambos valores deberán coincidir en magnitud si el procedimiento está correcto. El área de la poligonal es la mitad valor absoluto obtenido por las ecuaciones anteriores.
1.3 ÁREAS CALCULADAS POR MEDICIONES EN MAPAS
La precisión obtenida al ejecutar determinaciones de área con mediciones en mapas esta relacionada directamente con la exactitud de los mapas usados; ésta depende a su vez de la calidad de los datos del levantamiento y también de la precisión del proceso de dibujo. Por lo tanto, si se usan mapas existentes para determinar áreas, sus calidades deben verificarse primero.
Por lo general, aún con mapas de buena calidad, las áreas medidas con ellas no serán tan exactas como las calculadas directamente con base en un levantamiento. Las escala del mapa de los dispositivos usados para obtener las medidas son los factores principales que afectan la precisión obtenida en el área.
1.3.1 MEDIANTE CUADRICULACIÓN
El método más sencillo es mediante un papel cuadriculado transparente con cierta escala. Se aplica luego el papel sobre la poligonal en el plano y se encuentra el número de los cuadros enteros y de cuadros parciales.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 26/50
1.3.2 POR LONGITUDES A ESCALA
Si los linderos de un terreno se identifican en el mapa, el terreno puede dividirse en triángulos, rectángulos y otras figuras regulares, medirse luego los lados, calcularse las áreas individuales y sumarlas para obtener el área total.
1.3.3 POR DIGITALIZACIÓN DE LAS COORDENADAS
Un terreno trazado en un mapa puede colocarse sobre una mesa digitalizadora en interfaz con una computadora y registrarse rápidamente las coordenadas de sus vértices. La determinación de áreas por digitalización de mapas existentes se ésta actualmente en forma amplia para crear base de datos para los sistemas de información geográfica.
El valor que se obtiene por este método es el resultado de la automatización de la interpretación de coordenadas de los vértices digitalizados y el correspondiente cálculo del área por coordenadas presentado anteriormente.
1.3.4 MEDIDA DE ÁREAS CON PLANÍMETRO
Existen dos tipos de planímetros: el mecánico y el electrónico. Las partes principales de un planímetro mecánico polar son el escalímetro, el tambor rodante y el disco graduado, el vernier, la punta delineadora y su guarda, el brazo polar y el polo (con su contrapeso de anclaje). En el caso de un planímetro de brazo fijo, una revolución del disco (indicador) representa, por ejemplo, 100 unidades cuadradas y una vuelta del tambor (integrador) representa 10 unidades cuadradas.
El planímetro electrónico, trabaja en forma singular que el mecánico, excepto que los resultados aparecen en forma digital en una pantalla.
8. NIVELACIÓN: TEORÍA, MÉTODOS Y EQUIPO
Nivelación es el término genérico que se aplica a cualquiera de los diversos procedimientos a través de los cuales se determinan elevaciones o diferencias entre las mismas. Es una operación fundamental para tener datos necesarios para la elaboración de mapas o planos de configuración y en proyectos de obras de ingeniería y de construcción.
8.1 DEFINICIONES
8.1.1 SUPERFICIE DE NIVEL
Superficie curva que en cada punto es perpendicular a la línea de una plomada (la dirección en que actúa la gravedad). Las superficies de nivel son de forma esferoidal.
8.1.2 PLANO DE REFERENCIA
Superficie de nivel a la cual se refieren las elevaciones (por ejemplo el nivel del mar). Se llama a veces plano de referencia vertical o plano de comparación, aunque en realidad no sea un plano.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 27/50
8.1.3 NIVEL MEDIO DEL MAR
Es la altura promedio de la superficie del mar según todas las etapas de la marea en un periodo de 19 años.
8.1.4 ELEVACIÓN O COTA
Distancia vertical desde un plano de referencia hasta un punto u objeto dado. Si la elevación (cota) del punto A es de 100,25 m, se dice que la cota de A es de 100,25 m respecto a algún plano de referencia (no necesariamente el nivel del mar).
8.1.5 BANCO DE NIVEL
Objeto natural o artificial relativamente permanente, que tiene un punto fijo marcado cuya elevación arriba o debajo de un plano de referencia adoptado se conoce o se supone. Algunos ejemplos comunes de bancos de nivel (BM o BN) son discos de metal fijados en concreto, rocas grandes, partes no movibles de hidrantes contra incendio y bordes de aceras o bancas.
8.1.6 NIVELACIÓN
Proceso de altimetría que se sigue para determinar elevaciones de puntos o bien, diferencias de elevación entre puntos.
8.2 MÉTODOS
Las diferencias de elevación se han determinado tradicionalmente empleando cintas, por nivelación diferencial, por nivelación barométrica y por nivelación trigonométrica.
8.2.1 NIVELACIÓN CON CINTA
A veces es posible aplicar una cinta a la línea vertical que une dos puntos. Este método se utiliza para determinar profundidades en pozos, para determinar las elevaciones del suelo en los levantamientos para urbanizaciones y en la construcción de edificios de varios pisos.
8.2.2 NIVELACIÓN DIFERENCIAL
En este método, que es el de uso más común, se determina una línea visual horizontal un nivel óptico o compensador automático. Se usa un anteojo telescópico con una amplificación adecuada para leer estadales graduados (o miras graduadas), situados sobre puntos fijos.
Una lectura ADITIVA (V+), también llamada lectura hacia atrás (LA), es la que toma sobre un estadal colocado sobre un punto de elevación conocida o supuesta. Esta lectura se utiliza para determinar la altura del instrumento (AI), que se define como la distancia vertical del plano de referencia a la línea visual del nivel. La dirección de la visual, sea hacia adelante, hacia atrás o hacia los lados, no tiene importancia.
Si luego se gira el nivel de manera que quede en su campo visual la mira puesta sobre el punto de interés X, se tiene una lectura sustractiva (V-), llamada también lectura hacia el frente o hacia adelante (LF).
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 28/50
En consecuencia, la teoría básica de la nivelación diferencial y sus aplicaciones puede expresarse por las dos ecuaciones siguientes, empleadas una y otra vez:
• AI = Cota + V+
• Cota = AI – V-
8.2.3 NIVELACIÓN BAROMÉTRICA
El barómetro es un instrumento para medir la presión del aire atmosférico que puede usarse para determinar alturas relativas de puntos situados sobre la superficie de la tierra.
La presión atmosférica también es afectada por otras circunstancias, además de la altitud, como por ejemplo cambios súbitos de temperatura y condiciones variables de la atmósfera debidas ha tormentas. Además, durante el día hay una variación normal de la presión barométrica que equivale a unos 30 m de diferencia de altitud. A esta variación se le conoce como oscilación diurna de la presión atmosférica.
8.2.4 NIVELACIÓN TRIGONOMÉTRICA
La diferencia de elevación o desnivel entre dos puntos puede determinarse midiendo:
• La distancia inclinada entre dos puntos
• El ángulo cenital o el ángulo vertical entre dos puntos.
8.3 EQUIPOS
8.3.1 NIVELES AUTOMÁTICOS
Los niveles automáticos cuentan con un dispositivo de autonivelación. En la mayoría de estos instrumentos se logra fácilmente una nivelación aproximada usando una base con tres tornillos niveladores que centran una burbuja circular. Algunos modelos tienen una articulación esférica o de rótula.
Después de centrar manualmente la burbuja, un compensador automático nivela la visual y la mantiene con toda precisión.
El nivel digital electrónico es el tipo más moderno de nivel automático. Se denomina automático porque usa un compensador pendular para autonivelarse, después que el operador ha efectuado una nivelación previa aproximada por medio de una brújula. Con un telescopio y su retícula de hilos, el instrumento se puede utilizar para obtener lecturas manualmente, como en cualquier otro nivel automático.
8.3.2 NIVELES DE MANO
El nivel de mano es un instrumento óptico que se sostiene con una sola mano y se usa en trabajos de poca precisión y para fines de verificación rápida. Su anteojo es un tubo metálico de unos 15 cm de largo, con un objetivo de vidrio simple y un ocular. Tiene un pequeño nivel de brújula montado sobre una ranura en la parte superior del tubo y se ve a través del ocular utilizando un prisma o un espejo inclinado a 45°. Tiene un hilo horizontal que cruza el centro del tubo.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 29/50
El nivel de mano y clinómetro ABNEY, el cual posee una escala graduada en la parte superior en la cual se localiza el nivel de burbuja, permite efectuar medidas aproximadas de ángulos verticales y pendientes.
8.3.3 ESTADALES O MIRAS DE NIVELACIÓN
Las miras o estadales para nivelación se fabrican de madera, de fibra de vidrio o de metal, y tienen graduaciones en metros y decimales, o bien, en pies y decimales. Existe una gran variedad de modelos, colores y graduaciones en miras de una sola pieza, de dos o tres secciones.
8.4 PROCEDIMIENTOS
A continuación se estudia el equipo, método de trabajo y ajuste de circuitos de nivelación sencillos, así como la ejecución de algunos levantamientos para tener datos de uso en campo y oficina.
8.4.1 TRANSPORTE Y COLOCACIÓN DEL NIVEL
Un nivel debe sacarse de su estuche levantándolo por la regla del nivel o la plataforma de asiento, pero nunca tomándolo por el anteojo. La base nivelante debe atornillarse firmemente en la cabeza del trípode. Si la base queda floja, el instrumento quedará inestable; si se ajusta demasiado puede aferrarse al trípode.
Los tornillos niveladores se hacen girar en sentido opuesto y a la misma velocidad con ambas manos, a no ser que se intente apretar o nivelar la base nivelante. Una regla sencilla pero práctica para centrar la burbuja es que ésta siga al pulgar de la mano izquierda. El ajuste final de precisión puede hacerse con un solo tornillo. Los tornillos niveladores deben quedar lo suficientemente apretados, pero no demasiado, para ahorrar tiempo y evitar hacer daño a las roscas y al plato de asiento.
La mira (estadal) debe estar aplomada (vertical) para obtener lecturas correctas. Generalmente se aplica el procedimiento de balanceo de la mira para asegurarse que se encuentre a plomo cuando se toma una lectura. El método consiste en inclinar lentamente la mira de nivelación, primero hacia el instrumento y luego alejándolo de éste; el operador observa las lecturas alternamente crecientes y decrecientes, y selecciona el valor mínimo, el cual es el correcto.
Un nivel para estadal se asegura a un aplome rápido y concreto. Su forma en L permite ajustarse a las caras trasera y lateral de la mira; su nivel esférico de burbuja permite lograr el aplome de la mira en ambas direcciones.
8.4.2 NIVELACIÓN DIFERENCIAL
En el procedimiento de la nivelación diferencial debe notarse que se necesitaron varias estaciones del instrumento para recorrer el tramo. A los lugares en los que se sostiene la mira para llevar la línea de una estación a la siguiente se les llama punto de cambio. Un punto de cambio se define como un punto fijo en el cual se toma una lectura aditiva y una sustractiva en una línea de niveles.
Las distancias horizontales para ambas visuales deben ser aproximadamente iguales, midiéndolas a pasos, por taquimetría, contando los tramos del riel si se trabaja a lo largo de una vía férrea, contando las juntas de pavimentación si se trabaja a lo largo de una
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 30/50
carretera, o por algún otro método fácil. Al hacerlo se eliminan los efectos debidos a un mal ajuste del instrumento, así como los efectos combinados de la curvatura de la Tierra y la refracción atmosférica.
Si el instrumento no está bien ajustado pueden tenerse errores serios en la lectura de la mira, pero éstos se cancelaran en la nivelación diferencial si las longitudes horizontales de las visuales positivas y negativas se mantienen iguales. El error es sistemático y puede ser serio al subir o bajar por una pendiente empinada, en las que todas las lecturas positivas son mayores o menores que todas las lecturas negativas, excepto si se tiene cuidado de llevar la línea en zigzag.
Cuando sea factible conviene seleccionar puntos de cambio que puedan replantearse, de modo que en el caso de tener que repetir un trazo por errores cometidos previamente se reduzca al trabajo de campo.
Antes que una comisión de nivelación deje el campo, se deben efectuar y anotar todas las comprobaciones posibles para detectar equivocaciones en los cálculos aritméticos y verificar un cierre aceptable. La suma algebraica de las lecturas positivas y negativas aplicada a la primera elevación debe dar la última cota.
Nótese que debe tenerse una nueva estación del instrumento antes de iniciar el recorrido de regreso para tener una verificación completa.
Si se conoce la nivelación sobre el nivel medio del mar del banco de nivel inicial, las elevaciones determinadas para todos los puntos intermedios a lo largo del circuito también quedarán relacionadas con el nivel medio del mar. Sin embargo, si no se conoce la elevación sobre el nivel medio del mar del banco inicial, puede usarse un valor supuesto y todas las elevaciones convertirse posteriormente al nivel del mar a través de una constante.
En trabajos importantes se utilizan a veces recorridos de nivelación con dobles lecturas de la mira. Las lecturas positivas y negativas se toman en dos puntos de cambio, empleando dos miras desde cada estación del instrumento, y se denotan en columnas separadas en la libreta de registro.
8.4.3 PRECISIÓN
En nivelación se incrementa la precisión repitiendo las medidas, amarrándolas con frecuencia a puntos de control (bancos de nivel), usando equipo de alta calidad, manteniéndolo correctamente ajustado y efectuando las mediciones cuidadosamente. Aun así, haciendo las mediciones con mucho cuidado, siempre se tendrán errores en el cierre de los circuitos.
Para determinar si el trabajo realizado es o no aceptable, el valor se compara con valores admisibles con base en el número de estaciones o con la distancia recorrida. Cuando la distancia nivelada es proporcional al número de desplazamientos del instrumento, el criterio para el error de cierre puede especificarse usando esa variable. Por ejemplo, si se dirigen visuales de unos 60 m con emplazamientos a cada 120 m, se tendrá aproximadamente 8,2 emplazamientos por km. Para una nivelación clase II de segundo orden, el error permisible de cierre será, de acuerdo con la ecuación:
nCe =
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 31/50
En donde C es el error de cierre permisible en mm y n el número de emplazamientos del instrumento.
8.4.4 AJUSTE DE LOS CIRCUITOS DE NIVELACIÓN
Como los errores de cierre permisibles se basan en la longitud de las líneas o en el número de estaciones del nivel, es lógico ajustar las cotas de acuerdo con estos valores.
El error de cierre, determinado por la suma algebraica de las diferencias de elevación, es de +0,07 m. Si se suman las longitudes de las 6 líneas se alcanza una longitud total del circuito de 4,8 km. Los ajustes de elevación son entonces igual al producto de (0,07 m/4,8) por las longitudes correspondientes en kilómetros.
Las diferencias de elevación ajustadas se usan para determinar las elevaciones finales de los bancos de nivel. Un cierre inferior al tercer orden puede necesitar la repetición de la nivelación en vez de hacer un ajuste simple.
Entonces, después de verificar que el error de cierre de 0,07 m quedó dentro de la tolerancia especificada, la corrección por estación aparece de 0,07/7 = 0.01 m. Como los errores de nivelación se acumulan, la primera estación recibe una corrección de 1x 0,01, la segunda 2x0,01, etc. Sin embargo, las elevaciones corregidas se redondean al centésimo más cercano a 1 cm en este caso.
Al correr circuitos de nivelación, especialmente los largos, se recomienda usar algunos de los puntos de cambio o de los bancos de nivel de la primera parte del circuito en la corrida de retorno. Esto crea un circuito multienlazado, de manera que si se tienen grandes errores o equivocaciones, éstos se pueden localizar refiriéndose a uno de los lazos más pequeños. Así se ahorra tiempo, ya que solo necesita recorrerse de nuevo el lazo que contiene el error.
8.4.5 NIVELACIÓN RECÍPROCA
Los accidentes topográficos como los ríos, lagos y cañadas, hacen difícil o imposible mantener cortas e iguales las longitudes de las visuales positivas o negativas. En tales casos se puede utilizar la nivelación recíproca.
El nivel se sitúa sobre una de las márgenes de una corriente, en X, cerca de A y se toman lecturas de estadal en los puntos A y B. Como la visual XB es muy larga, se hacen varias lecturas para promediarlas. Se realiza lo anterior tomando una lectura girando los tornillos niveladores de manera que se desnivele el instrumento; luego se vuelve a nivelar y se toma nuevamente otra lectura. Se repite el procedimiento dos, tres, cuatro o más veces, y luego se traslada el instrumento a Y, en donde se sigue el mismo método.
8.4.6 NIVELACIÓN DE PERFIL
En los levantamientos de caminos o vías terrestres para carreteras o tuberías son indispensables elevaciones en cada estación situada a 30 m de la anterior, en los puntos de dirección, en los quiebres o cambios de pendiente del terreno y en puntos críticos, como son los cruces de caminos, puentes y alcantarillas.
Al llevar estas elevaciones a la representación gráfica, se tiene un perfil, es decir, una sección vertical de la superficie del terreno según una línea fija. En la mayor parte de los proyectos de esta clase se toma el perfil a lo largo de la línea de centros y se marca con estacas cada 30 m, o si es necesario, a cada 15 o 10 m.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 32/50
Se toma una lectura positiva a un banco de nivel y lecturas intermedias en las estaciones, quiebres de la superficie del terreno y puntos críticos, hasta alcanzar el límite de distancia visual precisa. Luego se elige un punto de cambio, se traslada el instrumento hacia delante y se repite e procedimiento.
8.4.7 TRAZO Y UTILIZACIÓN DE LA NIVELACIÓN DE PERFIL
Antes de trazar el perfil, es necesario calcular las elevaciones a lo largo de la línea de referencia a partir de las notas de campo. Sin embargo, esto no se puede hacer sin antes haber hecho la distribución de cualquier error de cierre en el circuito de nivelación. En el proceso de ajuste, las AI son ajustadas debido a que éstas afectarán las elevaciones calculadas de perfil.
Después de ajustar las AI, las elevaciones del perfil se calculan restando las lecturas sustractivas intermedias de sus correspondientes AI ajustadas.
8.4.8 USO DEL NIVEL DE MANO
El nivel de mano puede usarse en algunos tipos de trabajos, incluso en nivelación diferencial, cuando no es indispensable una precisión de mayor orden. El observador toma una lectura positiva y una negativa estando en una ubicación dada, y luego se desplaza hacia delante para repetir el procedimiento. Un nivel de mano es útil en levantamiento de secciones transversales, por ejemplo, para determinar algunas lecturas de mira adicionales sobre un terreno inclinado, en donde podría necesitarse un punto de cambio.
9. LEVANTAMIENTOS ALTIPLANIMÉTRICOS
Este tipo de levantamientos permiten representar sobre un plano la orografía o relieve de un sector en particular a partir de los datos de un levantamiento. La información de este tipo de levantamientos es empleada para la planeación y cuantificación de volúmenes en proyectos de ingeniería, para la evaluación de las características hidráulicas de cuencas, proyección de cultivos forestales, etc.
Para efectuar este tipo de levantamientos se conjugan los procedimientos especificados para levantamientos planimétricos con su correspondiente control vertical, elaborado con un procedimiento de nivelación, bien sea diferencial o trigonométrica, según los requisitos de precisión de la información obtenida así:
• Brújula y secciones transversales con nivel locke
• Tránsito y secciones transversales con nivel de precisión
• Planimetría y nivelación trigonométrica con estación total
• Planimetría con estación total y nivelación diferencial con nivel de precisión
9.1 DEFINICIÓN DE CURVAS DE NIVEL
Por definición, una curva de nivel es el conjunto de todos los puntos que se encuentran a una misma altura de una superficie de nivel determinada. Todos los puntos que están representados en la curva cumplen el parámetro mencionado y todos los que cumplen este criterio se encuentran sobre la curva.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 33/50
El intervalo entre las curvas de nivel depende de la finalidad del plano, de su escala y de la diversidad del relieve en el área por levantar. La reducción del intervalo exige un trabajo de campo más elaborado, preciso y costoso.
Entre las propiedades de las curvas de nivel se destacan las siguientes:
• Cierran sobre sí mismas, bien sea dentro o fuera del mapa o del plano.
• Son perpendiculares a la dirección de máxima pendiente.
• Nunca se tocan o encuentran excepto cuando se trata de una superficie vertical.
• Nunca se cruzan.
• Nunca se ramifican en otras dos de la misma elevación.
• Indican la magnitud de la pendiente. Mayor distancia entre curvas de nivel sucesivas indica menor pendiente y viceversa. Un espaciamiento uniforme indica una pendiente constante (típico de corte o llenos artificiales).
• Curvas irregulares indican terreno accidentado. Curvas regulares indican pendientes y cambios graduales.
Para visualizar fácilmente el relieve a partir de las curvas de nivel de un plano o un mapa, conviene tener en cuenta los siguientes criterios:
• La elevación indicada en curvas concéntricas y cerradas es el único elemento para determinar si representan una prominencia o una depresión del terreno. Las elevaciones de las curvas deben indicarse cuando menos cada quinta curva.
• El vértice de las curvas de nivel se retrasa en las depresiones, como es el caso de cañadas, quebradas, corrientes, etc.
• El vértice de las curvas de nivel se adelanta en los filos, bordes de vertiente o divisorias de aguas.
9.2 MÉTODOS PARA DETERMINAR LAS CURVAS DE NIVEL
• Las curvas de nivel pueden determinarse mediante dos métodos:
• Método directo o de cota definida
• Método indirecto o de puntos notables
9.2.1 MÉTODO DIRECTO O DE COTAS CONOCIDAS
En este método se establece la cota del punto en el cual se estaciona el tránsito, se lee la altura del instrumento y se determina la altura de la superficie de nivel a la cual se encuentra el anteojo y la lectura que se debe obtener en la mira para localizar la curva de nivel deseada. Con la ayuda de la mira y por tanteo se localizan el punto que cumple con la lectura mencionada y se lee la distancia y azimut correspondiente y se repite el procedimiento.
Las curvas de nivel se trazan uniendo los puntos levantados de acuerdo con este procedimiento. No se recomienda este método para la obtención de datos que serán procesados con la ayuda de sistemas automáticos para la elaboración de curvas de nivel. Es práctico sólo cuando se aplica en terrenos relativamente planos.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 34/50
9.2.2 MÉTODO INDIRECTO O DE PUNTOS NOTABLES
En este método la mira se localiza en puntos de control que sean críticos para la definición de la orografía del terreno, tales como puntos altos y bajos, puntos donde cambie la pendiente, canales de drenaje y líneas de crestas. Las coordenadas de estos puntos se obtienen midiendo el azimut y la distancia, las elevaciones de estos puntos se obtienen mediante teodolito o estación total y nivelación trigonométrica o diferencial.
Las curvas de nivel se trazan mediante interpolación de las cotas redondas a partir de las cotas calculadas en puntos adyacentes. No se recomienda la interpolación entre puntos que crucen accidentes de control como barrancos, corrientes o caminos, etc.
9.2.3 MODELOS DE ELEVACIÓN DIGITAL
Los datos recolectados pueden emplearse en sistemas automáticos para el trazo de curvas de nivel a partir de las coordenadas X, Y y Z de los puntos que conforman en levantamiento topográfico.
El modelo elabora una red triangular irregular (RTI) sobre la cual se efectúan las interpolaciones de acuerdo con los siguientes criterios:
• Todos los lados del triángulo tienen pendiente constante
• La superficie de todo triángulo es un plano
Sin embargo, con el fin de evitar falsas interpretaciones del modelo RTI es preciso determinar e involucrar en el análisis las líneas de discontinuidad entre las cuales el programa no debe efectuar interpolaciones. Las líneas de discontinuidad se considerarán como lados obligados de la RTI.
10. LEVANTAMIENTOS HIDROGRÁFICOS
Este tipo de levantamientos determina el relieve de los cuerpos de agua. Los procedimientos son similares a los del trabajo topográfico, pero existen algunas diferencias en cuanto a que la superficie a levantar no se puede observar directamente, por lo que es preciso efectuar sondeos en el agua.
10.1 EQUIPOS PARA SONDEO
El tamaño y profundidad del cuerpo de agua determina al tipo de equipo a emplear en el sondeo.
En áreas poco profundas de tamaño reducido se emplea un estadal de sondeo, el cual tiene unos 5 m de longitud y está construido de madera o fibra de vidrio, similar a las miras para nivelación. Las mediciones directas se obtienen introduciendo la mira y leyendo la graduación en la superficie libre.
Las líneas plomeadas pueden usarse cuando las profundidades son mayores que las que pueden alcanzarse con las miras. Constan de una cuerda resistente al estiramiento, de longitud adecuada y en la cual se cuelga un trozo de plomo de mayor o menor peso según la velocidad de la corriente o la profundidad del cuerpo de agua. La cuerda se marca gradualmente en decímetros y centímetros, pero debe verificarse periódicamente
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 35/50
respecto a una cinta confiable. La lectura se realiza en la superficie libre una vez el plomo toca fondo.
En levantamientos hidrográficos de aguas profundas o grandes extensiones se usan sondas acústicas para la determinación de las profundidades. Los equipos emiten un pulso acústico verticalmente hacia abajo y miden el tiempo que tarda el pulso en alcanzar el fondo, reflejarse y retornar. El tiempo transcurrido se convierte en una profundidad equivalente y se exhibe en forma digital o gráfica. Se prefiere generalmente un perfil gráfico porque proporciona un registro visual en el cual pueden determinarse las profundidades y pueden usarse repetidamente para trazos y verificaciones.
10.2 TIPOS DE RECONOCIMIENTO
Los métodos más empleados para la determinación de la posición de las embarcaciones desde las cuales se efectúan los sondeos son:
• Reconocimiento por radiaciones
• Intersección de ángulos
• Rectas de alineación
10.2.1 RECONOCIMIENTO POR RADIACIONES
Este método es muy eficiente cuando se emplean estaciones totales debido a que sólo se requiere un operador en tierra para orientar la embarcación . Después de centrar una estación de control y visar a otra, se mide una distancia y un ángulo para localizar cada embarcación. Con los ángulos y distancias se determinan las coordenadas del sondeo para luego efectuar u cruce de información con las lecturas obtenidas en el sondeo de la embarcación.
10.2.2 RECONOCIMIENTO POR INTERSECCIÓN DE ÁNGULOS
La localización de las embarcaciones se efectúa a partir de dos o más puntos fijos en la costa a una distancia conocida, en la cual se encuentra instalado un tránsito. Desde la embarcación se coordina el momento en el cual se deben leer los ángulos desde el litoral para efectuar el cálculo de las coordenadas del sondeo.
10.2.3 RECTAS DE ALINEACIÓN
En este método la embarcación se desplaza por rectas previamente establecidas y efectúa sondeos a distancias preestablecidas o elabora perfiles gráficos a partir de los cuales se evalúa la conformación del fondo. Si se efectúan rectas de alineación en un sentido y se complementan con rectas de alineación perpendiculares se obtiene una retícula de perfiles a partir de los cuales pueden dibujarse curvas de nivel. La precisión necesaria determina la separación entre las rectas de alineación.
11. CÁLCULO DE VOLÚMENES
Algunas veces en topografía se requiere de la determinación de volúmenes de terraplenes y de concreto en diferentes trabajos de construcción. También se requieren cálculos volumétricos para determinar la capacidad de tolvas, tanques, embalses, silos,
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 36/50
edificaciones especiales, etc., así como para evaluar la cantidad de materiales apilados o almacenados a granel.
11.1 MÉTODOS DE CUBICACIÓN:
La medición directa de volúmenes rara vez se efectúa en topografía, sino que se efectúa determinaciones indirectas determinando líneas y áreas que tengan relación con el volumen deseado.
Se utilizan 3 procedimientos especiales:
11.1.1 CUBICACIÓN POR MEDIO DE ÁREAS MEDIAS:
Cuando se aplica este procedimiento para medir terraplenes se determinan perfiles del terreno (y el área delimitada) en planos perpendiculares a la línea eje del camino, usualmente a intervalos de 10 a 30 metros.
El área de una sección transversal se determina por cálculos a partir de los datos de campo, o bien, siguiendo con planímetro la sección dibujada a escala. El volumen entre dos secciones sucesivas es el promedio de sus áreas multiplicado por la distancia entre sí misma; para esto se aplica la fórmula del promedio.
El volumen Vm entre dos secciones transversales A1 y A2 de un sólido es igual al promedio de las áreas transversales multiplicado por la distancia L que las separa, entonces:
Vm = L * ( A1+A2)/2
Tal forma es aproximada y da respuestas que por lo general son ligeramente mayores que los volúmenes prismáticos reales. Se emplea en la práctica solo por su sencillez. Es posible obtener mayor precisión disminuyendo la distancia L entre las secciones. Cuando el sólido es muy irregular dichas secciones transversales deben tomarse cercanas entre sí.
11.2 CUBICACIÓN POR MEDIO DE LA FORMULA PRISMOIDAL:
La fórmula del prismoide se aplica a sólidos geométricos de forma prismoidal, o prismática irregular. La mayor parte de los volúmenes de terraplenes se ajustan a esta definición, pero relativamente pocas ameritan la precisión de esta fórmula.
Vp = L * (A1 + 4Am + A2)/6
Dónde:
Vp = Volumen.
A1 y A2 = Áreas transversales sucesivas determinadas por datos de campo.
Am = Área transversal de una sección considerada a la mitad entre A1 y A2.
L = Distancia entre A1 y A2.
Para emplear esta fórmula es necesario evaluar el área de la sección intermedia Am, lo cual se realiza de la manera usual obteniendo primero los valores de las distancias o dimensiones respectivas de las secciones A1 y A2. Es evidente que Am no es el promedio de A1 y A2 debido a que no habría diferencia alguna entre las fórmulas de Vm y Vp.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 37/50
La formula prismoidal da generalmente un volumen menor que es determinado con la del promedio. Se pueden tener algunas excepciones cuando la altura del centro de una sección vertical es grande pero el ancho es pequeño en una estación dada, y la altura del centro es pequeña y el ancho grande en la estación siguiente. La diferencia entre el Vm y Vp se llama corrección prismoidal.
El diagrama de volúmenes se emplea para calcular las cantidades de material a mover en trabajos de explanación. El volumen total se representa en cada estación a partir del punto inicial de la obra. Las líneas horizontales (de compensación o compensadoras) determinan el límite del acarreo económico y el sentido del movimiento o traslado del material.
11.2.1 CUBICACIÓN CON LOS PERFILES DE LOS CAMINOS:
Para hacer estimaciones preliminares de los terraplenes de los caminos, ferrocarriles y canales, se utiliza el perfil de la preliminar. Como los taludes laterales son inclinados, el área que representa corte o perfil en el camino no puede tomarse como medida directa del volumen, como seria en el caso de una fundación o un pozo.
Para realizar una estimación muy aproximada, se puede medir el área en corte o en terraplén con el planímetro y dividirse por la longitud para obtener el espesor medio del corte en la línea central. El área de una sección a nivel que tenga este espesor en el centro del corte se calcula, y luego esta área se multiplica por la longitud del corte, para obtener el volumen.
Para cálculos menos aproximados se toma a escala el espesor en cada estación completa del perfil, y se calcula el volumen correspondiente por estación; el volumen se calcula sumando los volúmenes unitarios.
11.3 PRECISIÓN QUE SE UTILIZA EN LA CUBICACIÓN DE TERRAPLENES.
Generalmente cuando se hace una nivelación para construir un terraplén, los errores principales son accidentales y se cometen al marcar los extremos de la cinta, al leer la mira, y especialmente a las irregularidades del terreno que no se toman en cuenta. El porcentaje de error en las dimensiones horizontales es mucho menor que en las dimensiones verticales; por lo tanto, los errores en la cubicación provienen, en su mayor parte, de los espesores de corte o terraplén.
El porcentaje de error en el resultado final es mayor para los cortes y terraplenes pequeños que para los grandes, variando quizás el 1% para un corte medio de 0,60 m, o 2% para un corte medio de 3,50 m. Por lo tanto, resultara compatible tomar un decimal en los cálculos intermedios de las áreas y volúmenes.
12. NOCIONES DE FOTOGRAMETRÍA
La fotogrametría puede definirse como la técnica para obtener información cuantitativa y cualitativamente válida a partir de fotografías aéreas [Brinker, 1997]. En términos generales, se divide en dos áreas con aplicación específica en el tipo de información que se quiere obtener de las fotografías:
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 38/50
• Fotogrametría métrica: cuando se determinan distancias, elevaciones, áreas, volúmenes, secciones transversales y se elaboran levantamientos altiplanimétricos con base en las mediciones realizadas sobre las fotografías
• Fotogrametría interpretativa: cuando se interpretan los objetos a partir de sus imágenes fotográficas y la apreciación de su significado; se localizan cuerpos de agua, se determinan densidades boscosas, fenómenos erosivos, etc. En la actualidad suele aplicársele a esta especialidad de la fotogrametría el término Percepción Remota.
Alunas de las ventajas de este método de levantamiento de información cartográfica son:
• La rapidez de cobertura de una zona o región
• Costo relativamente bajo
• Facilidad para lograr detalles topográficos, principalmente en zonas inaccesibles
• Menor probabilidad de omitir datos, debido a la enorme cantidad de detalles que se indican en las fotos.
12.1 GENERALIDADES
Las fotografías aéreas se clasifican como verticales (tomadas con el eje de la cámara vertical o con una inclinación inferior a 3°) u oblicuas (tomadas con un ángulo intencional). Las fotos verticales son las más empleadas para el trabajo de fotogrametría métrica mientras que las oblicuas con muy útiles en trabajos de interpretación.
Las fotografías se toman en fajas (o bandas) siguiendo una dirección específica predeterminada según las necesidades del proyecto. Estas bandas tienen comúnmente una superposición lateral (traslapo entre bandas adyacentes) del 30% y una superposición longitudinal (entre fotografías de una misma banda) del 60%.
12.2 FUNDAMENTOS GEOMÉTRICOS DE LA FOTOGRAMETRÍA
La escala de un plano corresponde a la razón entre una distancia determinada en el plano y su magnitud real en el campo; esta relación es uniforme en todo punto porque se trata de una proyección ortogonal. Sin embargo, una fotografía aérea es una vista en perspectiva, y por lo tanto, la escala varía de un punto a otro al variar las elevaciones del terreno. Se habla entonces que las fotografías aéreas poseen una escala media mientras no se hagan los ajustes ortogonales pertinentes en equipos especiales, denominados restituidores.
La escala media de una fotografía aérea está dada por la expresión:
MMM hH
f
E −=
1
en donde: f es la distancia focal de la cámara
MH es la altura media del vuelo
Mh es la cota media del terreno levantado
12.3 PROCESO FOTOGRAMÉTRICO
Para efectuar un levantamiento altiplanimétrico mediante fotografía aérea es preciso efectuar una correcta planeación de acuerdo con los siguientes pasos:
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 39/50
• Identificación del área del proyecto mediante el estudio de los planos topográficos existentes. En este paso se tiene en cuenta la localización del sitio de estudio y la de la base de operaciones de forma que sea posible efectuar los vuelos con mayor eficiencia.
• Conformación de los planes de vuelo con la programación de las rutas (o líneas de vuelo), de acuerdo con la distancia focal de la cámara, escala de la fotografía, cubrimiento y superposición lateral y longitudinal requeridas. En este paso se evalúa el intervalo de tiempo necesario entre fotografías y el número de fotografías por faja o banda.
• Recorrido del área que se va a fotografiar con el fin de localizar referencias de ajuste ortogonal y verificar que las cotas del terreno se ajusten a la escala seleccionada.
• Toma de las fotografías de acuerdo con el plan efectuado previamente.
• Revelado, organización y archivo de las fotografías por fajas.
A partir de este punto se separa el proceso de acuerdo con la aplicación específica del proyecto, si se trata de fotogrametría métrica o fotogrametría interpretativa. Para el primero ser realizan adicionalmente los siguientes pasos:
• Elaboración del modelo estereoscópico del terreno con cada los pares de fotografías tomados (aquellos que presentan superposición longitudinal).
• Corrección de las variaciones de escala mediante la orientación y/o desplazamiento de cada una de las fotografías según los puntos de control levantados en campo.
• Dibujo de las curvas de nivel mediante el seguimiento de una marca flotante que permanezca en contacto con la superficie modelada a una altura determinada.
13. SISTEMAS DE LOCALIZACIÓN SATELITAL
13.1 INTRODUCCIÓN
Los antiguos marinos dominaron un sistema de localización geográfica basado en el conocimiento de la posición relativa de las estrellas con respecto a la tierra y la ruta por la cual navegaban. Basaron la determinación de posición en los mares de acuerdo con los ángulos medidos entre una estrella y otra mediante el uso del sextante. El sistema de posicionamiento geográfico satelital es, en sí, la localización del observador basado en su posición con respecto a una constelación artificial adicional.
La idea es tener a estos satélites como puntos de referencia para calcular posiciones (latitud, longitud y altitud). La densidad y localización de la red de satélites garantiza la cobertura del sistema, durabilidad de los equipos y precisión de las estimaciones de posición
13.1.1 LA CONSTELACIÓN NAVSTAR
La constelación llamada NAVSTAR GPS (Global Positioning System) está compuesta por 24 satélites de órbita media (MEO), 21 de ellos operativos y 3 de repuesto, distribuidos en 6 planos orbitales alrededor de la tierra a una altura de 20.200 km, girando a una velocidad de una revolución cada 12 horas (dos vueltas a la tierra por día).
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 40/50
A principios de la década de los 70, el Departamento de la Defensa de Estados Unidos comenzó a diseñar un nuevo proyecto de localización mundial por medio de tecnología satelital con un presupuesto de US $12.000’000.000. Surgió principalmente como una necesidad de establecer un sistema de posicionamiento preciso para los submarinos nucleares, aunque cabe anotar que para obtener su aprobación del presupuesto por parte del congreso fue necesario destacar las aplicaciones civiles del sistema. Para este propósito se requería un sistema de precisión centimétrica en tiempo real, es decir, con un error mínimo y en el mismo instante en que se necesita conocer la posición en que se encuentra el receptor.
13.1.2 LA CONSTELACIÓN GLONASS
La constelación de satélites GLONASS (Global Navigation Satellite System) del Gobierno Ruso está formada por 24 satélites (21 satélites activos y 3 de reserva) situados en tres planos orbitales separados 120º. Esto permite que sobre el 97% de la superficie terrestre se vean al menos 4 satélites de forma continua, frente a los 5 satélites (al menos) que pueden ser vistos en el 99% de la superficie terrestre si la constelación es de 24 satélites (GPS).
De los 24 satélites de la constelación GLONASS, periódicamente se seleccionan los 21 que resultan dar la combinación más eficiente y los 3 restantes son dejados en reserva. Se ha planteado la posibilidad de aumentar la constelación a 27 satélites, de los cuales 24 estarían activos. Si uno de los 21 satélites operativos sale de operación, el sistema baja al 94.7% su probabilidad de éxito.
El sistema de mantenimiento de la constelación prevé la activación de uno de los satélites en reserva o el lanzamiento de 3 satélites para sustituir a los averiados o ser dejados en reserva para usos futuros.
La primera nave tipo GLONASS (el COSMOS 1413) fue lanzada el 12 de octubre de 1982, y el sistema GLONASS comenzó a operar oficialmente el 24 de septiembre de 1993 por decreto del presidente de la Federación Rusa, Boris Yeltsin. Cada satélite GLONASS describe una órbita circular a 19.100 km respecto a la superficie terrestre con una inclinación de 64.8º. El periodo orbital es de 11 horas y 15 minutos. La configuración del sistema GLONASS proporciona datos de navegación a usuarios que se encuentren incluso por encima de los 2.000 km sobre la superficie terrestre.
13.2 CARACTERÍSTICAS DE LOS SISTEMAS
Existe una similitud en los componentes de la constelación NAVSTAR y GLONASS: Ambos están constituidos por tres segmentos:
• Segmento espacial,
• Segmento de control, y
• Segmento del usuario
13.2.1 SEGMENTO ESPACIAL
Los satélites son una parte esencial del sistema, ya que éstos son los que emiten constantemente las señales hacia los receptores GPS, cubriendo todo el globo terrestre. En la Tabla 1 se presentan algunas de las especificaciones de los satélites que componen cada sistema.
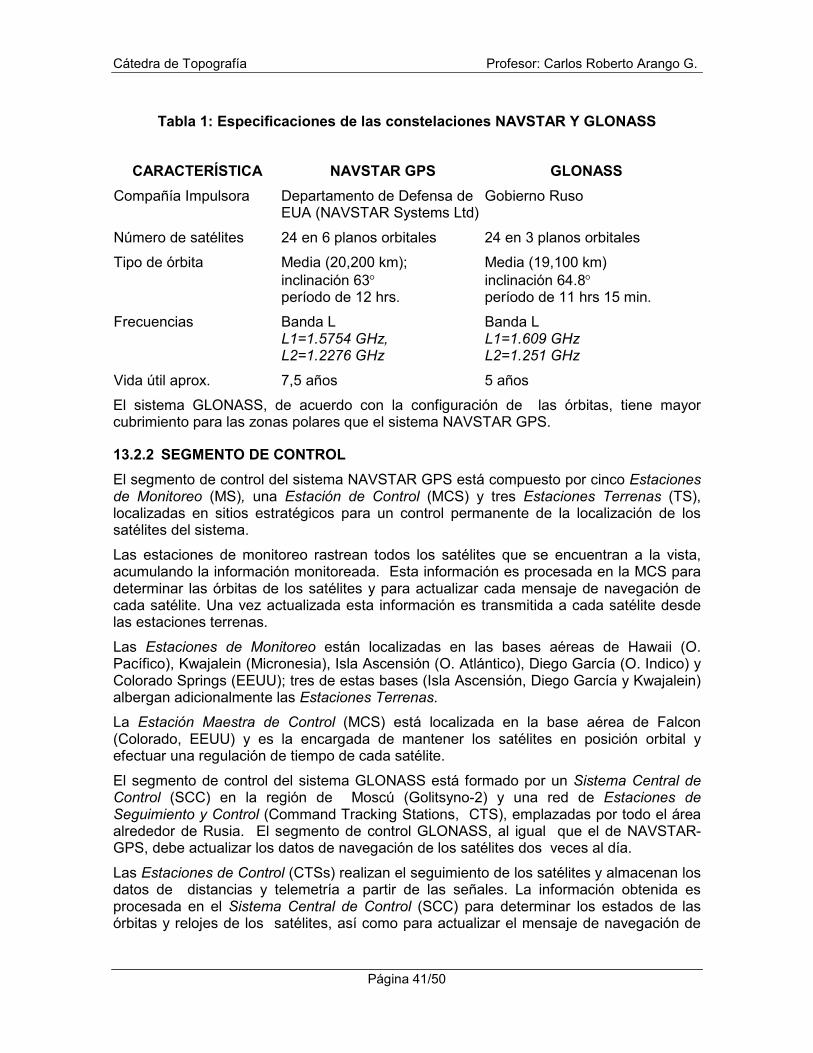
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 41/50
Tabla 1: Especificaciones de las constelaciones NAVSTAR Y GLONASS
CARACTERÍSTICA NAVSTAR GPS GLONASS
Compañía Impulsora Departamento de Defensa de EUA (NAVSTAR Systems Ltd)
Gobierno Ruso
Número de satélites 24 en 6 planos orbitales 24 en 3 planos orbitales
Tipo de órbita Media (20,200 km); inclinación 63° período de 12 hrs.
Media (19,100 km) inclinación 64.8° período de 11 hrs 15 min.
Frecuencias Banda L L1=1.5754 GHz, L2=1.2276 GHz
Banda L L1=1.609 GHz L2=1.251 GHz
Vida útil aprox. 7,5 años 5 años
El sistema GLONASS, de acuerdo con la configuración de las órbitas, tiene mayor cubrimiento para las zonas polares que el sistema NAVSTAR GPS.
13.2.2 SEGMENTO DE CONTROL
El segmento de control del sistema NAVSTAR GPS está compuesto por cinco Estaciones de Monitoreo (MS), una Estación de Control (MCS) y tres Estaciones Terrenas (TS), localizadas en sitios estratégicos para un control permanente de la localización de los satélites del sistema.
Las estaciones de monitoreo rastrean todos los satélites que se encuentran a la vista, acumulando la información monitoreada. Esta información es procesada en la MCS para determinar las órbitas de los satélites y para actualizar cada mensaje de navegación de cada satélite. Una vez actualizada esta información es transmitida a cada satélite desde las estaciones terrenas.
Las Estaciones de Monitoreo están localizadas en las bases aéreas de Hawaii (O. Pacífico), Kwajalein (Micronesia), Isla Ascensión (O. Atlántico), Diego García (O. Indico) y Colorado Springs (EEUU); tres de estas bases (Isla Ascensión, Diego García y Kwajalein) albergan adicionalmente las Estaciones Terrenas.
La Estación Maestra de Control (MCS) está localizada en la base aérea de Falcon (Colorado, EEUU) y es la encargada de mantener los satélites en posición orbital y efectuar una regulación de tiempo de cada satélite.
El segmento de control del sistema GLONASS está formado por un Sistema Central de Control (SCC) en la región de Moscú (Golitsyno-2) y una red de Estaciones de Seguimiento y Control (Command Tracking Stations, CTS), emplazadas por todo el área alrededor de Rusia. El segmento de control GLONASS, al igual que el de NAVSTAR-GPS, debe actualizar los datos de navegación de los satélites dos veces al día.
Las Estaciones de Control (CTSs) realizan el seguimiento de los satélites y almacenan los datos de distancias y telemetría a partir de las señales. La información obtenida es procesada en el Sistema Central de Control (SCC) para determinar los estados de las órbitas y relojes de los satélites, así como para actualizar el mensaje de navegación de
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 42/50
cada satélite. Esta información es enviada a cada satélite por medio de las CTSs, las cuales calibran periódicamente los datos de distancias a los satélites mediante láser gracias a reflectores especiales.
13.2.3 SEGMENTO DE USUARIO
El segmento del usuario lo componen los receptores, que proporcionan la posición, altitud, velocidad y tiempo preciso al usuario desde cualquier parte del mundo las 24 horas del día. Varían en precios, tamaños y precisión, desde los más sencillos como los que se usan para la localización de vehículos o los más sofisticados, como los empleados en levantamientos topográficos.
13.3 FUNCIONAMIENTO
Cada uno de los satélites artificiales corresponde a un punto con coordenadas conocidas (efemérides), calculadas a partir de la trayectoria, velocidad y hora. El funcionamiento y precisión obtenida por cada uno de los sistemas (GPS y GLONASS) es similar en términos generales, pero presenta algunas diferencias en cuanto a correcciones y cubrimiento.
Estos satélites emiten cada milisegundo información acerca de su identificación, efemérides y tiempo en dos frecuencias básicas (L1 y L2) y tres códigos de información C/A (Civil), P (Preciso) y D (Navegación del sistema). Las señales son emitidas sincrónicamente por todos los satélites con tal intensidad y frecuencia que son capaces de atravesar cualquier condición climática adversa. La señal contiene la identificación del satélite, efemérides (coordenadas de posición) y hora en la cual es emitida.
Cada receptor interpreta la señal recibida desde el satélite y compara el tiempo que demora desde su emisión (en el satélite) hasta su recepción. Este tiempo de viaje, multiplicado por la velocidad de la luz determina la distancia del receptor al satélite. Esta distancia se denomina ALCANCE.
La señal recibida desde un satélite determina una esfera de posibles localizaciones del receptor; dos satélites reducen las posibilidades a un círculo y tres satélites determinan dos puntos posibles en el espacio. Para efectuar una corrección en el tiempo de viaje de todas las señales se requiere un cuarto satélite. Mientras más señales de satélites sean captadas, más precisa es la determinación de la localización del receptor.
13.4 PRECISIÓN
La precisión en la determinación de la posición del receptor depende de muchas variables, algunas de ellas controladas y otras no, lo que determinan dos tipos de usuarios del servicio:
SPS (Standard Position Service): Utilizado para navegación en o posicionamiento de baja precisión general las veinticuatro horas del día y sin cobro alguno. Intencionalmente la defensa americana introduce un error para bajar la exactitud del sistema. SPS provee una probabilidad de error predecible de 100 m horizontalmente y de 156 m verticalmente y con 340 nanosegundos en tiempo.
PPS (Precise Position Service): Utilizado para posicionamiento submétrico (errores inferiores al metro), controlado por el gobierno, para uso militar o restringido. Para
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 43/50
usos civiles, ya sea domésticos y extranjeros pueden ser considerados solicitando un permiso especial. Este servicio provee una precisión predecible de 22 m horizontalmente y 27,7 m verticalmente y 200 nanosegundos en tiempo. Este servicio no está disponible a los usuarios civiles, ya que los mensajes están encriptados.
Entre las variables que determinan la precisión del equipo se cuentan:
Diseño del receptor: Incluye la potencia del receptor en sí de forma que sea capaz de interpretar en el menor tiempo posible la señal recibida del satélite y almacenar la información decodificada hasta lograr el mayor número de satélites posible. A mayor potencia, mayor cantidad de satélites puede captar y con mayor precisión es la determinación de la posición.
Cuando se requiera comprar algún receptor GPS o GLONASS se recomienda que tenga un número adecuado de canales. Los receptores de un sólo canal buscan su posición por medio de señales emitidas constantemente hacia el espacio buscando las señales de los satélites. Tan pronto como éstos sean localizados, el receptor proporciona cálculos de localización y la precisión es determinada por la rapidez con que el receptor pueda encontrar las señales de los satélites. Existen algunos receptores que cuentan con 6 canales, de los cuales 4 rastrean satélites para tener una constante localización por si algún canal es bloqueado, así como receptores aún más sofisticados que cuentan con8 o 12 canales.
En cuanto al tiempo de recepción y demora hablamos de posicionamiento en tiempo real o posicionamiento post-procesado (el receptor ya no se encuentra en el sitio cuando se conocen sus coordenadas). El segundo es muy utilizado en sistemas de información geográfica en los cuales se interpretan rutas y alineamientos con gran precisión, pero sin requerimientos específicos para la prontitud de la información.
Hora y posición relativa de los satélites (efemérides): Los datos de la hora y posición de los satélites al momento de salir del satélite es información codificada en la señal. La desviación de los relojes del receptor y el satélite provoca que el tiempo de travesía de la señal no sea calculado de manera precisa, sumándole a esto la velocidad de la luz que cual se usa para efectuar los cálculos, es constante sólo en el vacío (aproximadamente 2.9979x108 m/s). Los relojes que traen internamente los receptores GPS no son atómicos como los de los satélites, pues el costo de cada uno puede oscilar cerca a los US $ 50,000).
La posición de los satélites con respecto al receptor es un criterio de aceptación o rechazo de la señal para ser empleada en la determinación de las coordenadas. A cada receptor se le pueden programar la inclinación mínima aceptable con respecto al horizonte (10° o 15° según el equipo), lo que se conoce como Máscara de Elevación. El receptor seleccionará adicionalmente las señales de los satélites que presenten mayor Relación Señal/Ruido (SNR) y una menor Dilusión de Precisión (PDOP), consistente en el rango geométrico confiable de la posición.
Demora ionosférica y troposférica (Iono/Tropo): Es la demora al tiempo de viaje de la señal del satélite, que debe corregir el receptor, debido a la influencia de las capas de la atmósfera terrestre. Las señales de satélites localizados a un ángulo bajo con respecto al horizonte tendrán un mayor tiempo de viaje por estas capas, por lo tanto sufren una
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 44/50
mayor demora. Los parámetros para que el receptor efectúe esta corrección también están incluidos en la señal recibida.
Disponibilidad Selectiva (S/A Selective Availability): Es la más influyente de las variables en la precisión final del receptor. Con este factor el Departamento de Defensa de los Estados Unidos previene el uso de este sistema en contra de sus intereses. Con esta variable se controla el tipo de usuario del servicio y las actividades desarrolladas con la información recibida. Controla las técnicas de corrección de medida para posicionamiento preciso (no es aplicada a la señal a partir del 1 de mayo de 2000 según orden de la presidencia de los Estados Unidos).
13.5 TÉCNICAS DE CORRECCIÓN
Están relacionadas con las necesidades propias del usuario. Cuando el usuario no requiere una precisión mayor a los 50 m de error, la determinación de posicionamiento del receptor no necesita más que la corrección Iono/Tropo. Los equipos empleados para este nivel de posicionamiento se denominan de PRECISIÓN AUTÓNOMA.
Si el posicionamiento requerido por el usuario debe ser preciso, debe aplicarse una Corrección Diferencial (DGPS) en la cual el receptor capta, además de las señales de los satélites, una señal adicional en un formato diferente, proveniente de otro equipo GPS fijo o de una estación fija, conocido como RTCM-SC-104 o RTK según el equipo que se esté operando. Al tratarse de una posición fija del emisor corresponde una buena referencia para las correcciones de hora e Iono/Tropo para la señal recibida desde el satélite.
La idea principal de DGPS se basa en el hecho de que los satélites están a una altura considerable, por lo que si tomamos dos objetos separados uno del otro 200 km, el tiempo de travesía de un satélite en particular a cada objeto tienen virtualmente los mismos errores, aunque las posiciones de los objetos son totalmente diferentes.
DGPS trabaja ayudándose con estaciones terrenas de referencia. La Estación de Referencia (con sus coordenadas geográficas exactas, ya conocidas) calcula, en lugar de su posición, el tiempo de travesía (Tc) para cada uno de los satélites que tiene a la vista y los compara con los tiempos de travesía para cada satélite (Ts). La diferencia entre Tc y Ts se le conoce como Error de Corrección (EC), el cual es emitido por la estación en las frecuencias mencionadas anteriormente.
Con DGPS se pueden determinar posiciones con un alto grado de aproximación en el orden de metros, inclusive centímetros. Muchos de los nuevos receptores GPS están siendo diseñados para aceptar correcciones, y algunos casos, con radio receptores en su interior para captar por si mismos las señales de corrección.
13.6 APLICACIONES
Las aplicaciones de tipo militar fueron el principal motivo por lo que GPS se concibió. En la pasada guerra del Golfo Pérsico, la operación conocida como Tormenta del Desierto fue una prueba de fuego para el Departamento de Defensa de Estados Unidos para probar sus sistemas de localización.
El sistema GPS se emplea para determinar la distribución adecuada de tropas en tierra, aviones, barcos, submarinos, tanques, etc., así como para guiar misiles hacia objetivos cuyas coordenadas son conocidas. Los misiles Patriot que usaron las tropas en esta
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 45/50
operación para la destrucción de los misiles de Irak, es un claro ejemplo de la utilización al máximo de GPS.
Las aplicaciones civiles de GPS son muy diversas y se pueden clasificar en cinco categorías:
13.6.1 LOCALIZACIÓN
En aplicaciones de localización (determinar una posición) las más empleadas son para la localización de vehículos. Dado el alto índice de robos de vehículos, algunas compañías fabricantes de automóviles y compañías aseguradoras han empezado a instalar este tipo de aparatos en lugares ocultos dentro de los automóviles. También muchos de los taxis y camiones de carga utilizan GPS en sus vehículos para que estos sean localizados desde sus oficinas.
13.6.2 NAVEGACIÓN
La navegación (obtener una posición a partir de la anterior y siguiendo una ruta determinada) es una aplicación que requiere de mucha precisión, razón por la cual las compañías de aviación utilizan GPS para guiar a las aeronaves en climas inhóspitos como sistema de apoyo. Sin embargo la legislación mundial (según recomendaciones de la FAA) no permite aún despegar y aterrizar este tipo de vehículos siguiendo las indicaciones de GPS o GLONASS sino basándose en sistemas inerciales de navegación, radio (ILS) o microondas (MLS).
En Colombia es obligatorio el uso de GPS a partir del accidente del avión de Sam en el Cerro El Burro, como complemento del sistema tradicional de navegación basado en radioayudas.
13.6.3 RASTREO
El rastreo también es otra aplicación muy importante, por ejemplo algunas compañías de flotillas de vehículos utilizan un programa de computadora provisto con un mapa de una ciudad o de una región, para rastrear todos sus vehículos. Algunas universidades y centros de investigación les ponen unos diminutos receptores GPS a animales en peligro de extinción o aves para conocer y estudiar sus trayectorias.
13.6.4 CARTOGRAFÍA
La cartografía es otra aplicación de mucha importancia dentro de las aplicaciones de GNSS, al determinar con precisión la posición de ríos, bosques, montañas, carreteras y otros puntos es posible la elaboración de mapas muy precisos; con la ayuda de otras técnicas como la fotogrametría, topografía y planimetría es posible la elaboración de sistemas de información geográfica.
13.6.5 TIEMPO EXACTO
El tiempo exacto que nos brinda el sistema GPS, es utilizado por las cadenas nacionales de televisión para sincronizar las transmisiones a nivel nacional y para sincronizar los comerciales y programas. La puesta en órbita de satélites es otra aplicación que requiere de una finísima precisión debido a que se necesita poner un satélite en una posición exacta en un tiempo exacto, y evitar así posibles colisiones.
Cátedra de Topografía Profesor: Carlos Roberto Arango G.
Página 46/50
13.6.6 OTRAS
Existen muchas aplicaciones más benéficas de la utilización de este sistema de localización; con GPS es posible guiar ambulancias, bomberos, policía o grupos de rescate para que estos lleguen en cuestión de minutos al sitio donde está la emergencia. Con GPS es posible que cualquier persona puedan guiase en una ciudad, apoyándose en una detallada base de datos dentro del receptor.
Otras áreas de aplicación de la tecnología GPS es la agricultura, minería, arqueología, construcción, exploración, cinematografía, pesca deportiva, entre otras.
13.7 SISTEMAS DE APOYO
La Comunidad Europea estima poner en funcionamiento para el año 2014 otro sistema de posicionamiento global de satélites de órbita media, denominado Galileo, el cual liberaría a los gobiernos de las naciones que la componen de la dependencia de los sistemas GPS y GLONASS.
En la actualidad existen otros sistemas satelitales que ofrecen el servicio de localización, como Inmarsat, AMSC (American Mobile Satellite Corp.), y OmniTRACS de Qualcomm, basándose en GPS y apoyándose en satélites geoestacionarios (GEOs) y sus respectivas estaciones terrenas de monitoreo.
Con el lanzamiento de los satélites de órbita baja (LEO) y su puesta en operación en los próximos años, como por ejemplo Iridium, GlobalStar, Orbcomm, ODYSSEY, entre otros, habrá más opciones para aplicaciones en el área de la determinación de la posición. El futuro de está tecnología es muy prometedor, todos de alguna manera nos vamos a ver beneficiados por las bondades del sistema mundial de localización.





























