Embed Size (px)
Citation preview
Федеральное агентство морского и речного транспорта
Федеральное государственное образовательное учреждение
высшего профессионального образования
«Морской государственный университет им. адм. Г. И. Невельского»
А. Н. Пузачѐв
ИСПОЛЬЗОВАНИЕ ТЕХНИЧЕСКИХ СРЕДСТВ
ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ
СУДОВ
Учебное пособие
Издание второе, переработанное и дополненное
Рекомендовано Дальневосточным региональным отделением
учебно-методического объединения по образованию
в области эксплуатации водного транспорта (ДВ РОУМО)
в качестве учебного пособия для студентов (курсантов)
морских специальностей вузов региона
Владивосток
2011
УДК 359:656.61.052
Пузачѐв, А. Н. Использование технических средств для предотвращения
столкновений судов [Текст] : учеб. пособие. – 2-е изд., перераб. и доп. – Влади-
восток: Мор. гос. ун-т, 2011. – 232 с. Рассматриваются международные правила по предупреждению столкновений су-
дов (МППСС-72) и национальные правила плавания в водах России и Японии. К каж-
дому правилу приведены комментарии или исчерпывающие иллюстрации.
В пособии кратко приводятся основы радиолокации и передачи информации. Под-
робно рассматриваются международные и национальные требования по использованию
средств автоматической радиолокационной прокладки (САРП) и автоматической иден-
тификационной системы (АИС), а также тактико-технические данные современных
отечественных и зарубежных САРП и АИС.
Даются необходимые теоретические сведения, современные способы и алгоритмы
решения типовых задач радиолокационной прокладки, проработка которых позволит
судоводителю освоить технику их решения по предотвращению столкновений судов с
использованием средств современного ходового мостика морских судов.
Предназначено для подготовки курсантов, студентов-заочников, слушателей кур-
сов повышения квалификации судоводительской специальности и практического ис-
пользования в работе штурманским составом водного транспорта, рыболовного и воен-
но-морского флота.
Ил. 125, табл. 24, библиогр. 50 назв.
Рецензенты:
О. С. Парфентьев, капитан порта Владивосток,
д-р транспорта, к. д. п.;
П. Н. Щадин, заместитель генерального директора по
безопасности мореплавания ООО «Мега Марин Сер-
вис», капитан-наставник, к. д. п.
ISBN Пузачѐв А. Н., 2011
Морской государственный университет
им. адм. Г. И. Невельского, 2011
3
ВВЕДЕНИЕ
Закономерным следствием роста интенсивности морского судоходства, уве-
личения размеров судов является постоянное усложнение навигационной обста-
новки, которая приводит к значительным трудностям в управлении судном в от-
крытом море на переходах, в прибрежных районах, в узкостях и на подходах к
портам.
Современный флот за последние годы пополнился и продолжает пополнять-
ся большим количеством судов, оснащенных высокотехнологичным оборудова-
нием для обеспечения безопасности плавания, сохранности жизней членов эки-
пажа и материальных ценностей. Но даже при наличии на борту самой совре-
менной техники успех решают люди.
Причинами аварий и аварийных ситуаций является неправильное управление
судами и недостатки судов в части их управляемости, особенно часто это имеет ме-
сто при экстренном маневрировании судов в сложных погодных условиях. Более ⅓
общего числа столкновений судов в Российской Федерации происходит в условиях
ограниченной видимости, в мировом флоте – более ⅔ всех столкновений.
Частота аварий в течение рейса распределяется следующим образом:
– выход из порта – 40,0 %;
– вход в порт – 26,4 %;
– в рейсе – 33,6 %,
причем 59 % столкновений происходит в районах лоцманской проводки, а 40 %
столкновений – с лоцманом на борту.
Опасность отвлечений от окружающей обстановки, снижения контроля и
требовательности показывает статистика по вахтам:
четвертый (старший) помощник капитана 16.00–20.00 7 %;
третий помощник капитана (всего 19 %) 08.00–12.00 5 %;
20.00–24.00 14 %;
второй помощник капитана (всего 38 %) 12.00–16.00 13 %;
00.00–04.00 25 %;
старший помощник капитана 04.00–08.00 16 %;
при смене вахт 21 %.
В повышении безопасности мореплавания важнейшее значение имеет спо-
собность судоводителей эффективно оценивать ситуацию, складывающуюся в
процессе эксплуатации судна, и быстро принимать решения для устранения
опасных моментов при маневрировании.
Поэтому для реального снижения аварийности на судах необходимо:
– совершенствование международных правил по предупреждению
столкновений судов (МППСС-72);
– совершенствование технических средств и методов по предупрежде-
нию столкновений судов;
– эффективное регулирование движения судов на подходах к портам и в
портовых водах;
– повышение уровня квалификации всего судоводительского состава,
т. е. качества их подготовки на тренажерах различного типа.
Управление судном в условиях ограниченной видимости – наиболее слож-
ная задача для судоводителей, особенно в районах с интенсивным потоком дви-
4
жения (системы разделения движения, подходы к портам и т. п.). Как правило,
при таких условиях плавание судна осуществляется по радиолокационной стан-
ции (РЛС) или с использованием средств автоматической радиолокационной
прокладки (САРП) с обязательным снижением скорости судна.
Международные требования к качеству подготовки вахтенных помощников
капитана (ВПКМ) по обработке радиолокационной информации (РЛИ) подробно
излагались в резолюции 18 Международной конференции о подготовке и ди-
пломировании моряков 1978 года, а программа по использованию РЛС для ре-
шения задач расхождения в условиях ограниченной видимости – в резолюции
Международной морской организации (ИМО) А.483(XII). В соответствии с эти-
ми резолюциями любой ВПКМ должен был пройти курс обучения по обработке
РЛИ и получить сертификат радиолокационного наблюдателя.
Международные требования к качеству подготовки ВПКМ по использова-
нию САРП излагались в резолюции 20 вышеупомянутой конференции, а про-
грамма подготовки по использованию САРП для решения задач расхождения
при ограниченной видимости – в резолюции ИМО А.482(XII). В соответствии с
этими резолюциями любой ВПКМ, работающий на судне водоизмещением бо-
лее 10 000 тонн, должен пройти курс обучения по использованию САРП и полу-
чить сертификат оператора САРП.
Дальнейшее приобретение опыта использования РЛС и САРП, развитие тех-
нической оснащенности судов и международной нормативной документации,
измененной конференцией 1995 года (ПДМНВ-78/95), позволило создать сле-
дующие модельные курсы ИМО подготовки судоводителей:
на уровне эксплуатации – 1.07 «Радиолокационная прокладка и исполь-
зование САРП» (Model Course 1.07 «Radar Navigation, Radar Plotting and Use of
ARPA»);
на уровне управления – 1.08 «РЛС, САРП, работа в коллективе на мос-
тике при поисково-спасательных операциях» (Model Course 1.08 «Radar, ARPA,
Bridge Teamwork and Search and Rescue»).
Кроме того, при наличии на судах соответствующего оборудования судово-
дителям рекомендуется дополнительно пройти:
– модельный курс 1.27 «Эксплуатационное использование электронных
картографических и информационных систем» (Model Course 1.27. Operational
use of electronic chart display and information systems (ECDIS))
– модельный курс 1.32 «Эксплуатационное использование интегриро-
ванных систем ходового мостика (ИСХМ), включая интегрированные навигаци-
онные системы» (Model Course 1.32. Operational use of integrated bridge systems
(IBS) including Integrated Navigation Systems).
Администрация России в 2001 году разработала и утвердила на базе между-
народных национальные технико-эксплуатационные требования к тренажерным
центрам, где приводятся минимальные знания, навыки и умение, предъявляемые
к компетентности капитана (КМ), старшего помощника (СПКМ), ВПКМ и опе-
ратора систем управления движением судов (СУДС) по следующим программам
подготовки:
– «Радиолокационное наблюдение и прокладка (РЛНП)»;
– «Использование САРП»;
5
– «Радиолокационное наблюдение и прокладка и использование САРП»;
– «Электронная картография»;
– «Маневрирование и управление судном»;
– «Организация ходовой навигационной вахты»;
– «Подготовка операторов систем управления движением судов
(СУДС)».
2010 год явился новым этапом в совершенствовании ПДНВ-78. Дипломати-
ческая Конференция на Филиппинах в Маниле рассмотрела и приняла целый ряд
дополнений и резолюций, вступление в силу которых намечено на начало 2012
года после соответствующих процедур ратификаций государствами, участника-
ми конференции. Конференцией принято решение поправки к Конвенции и Ко-
дексу ПДНВ назвать Манильскими: «The Manila amendments to the International
Convention on Standards of Training, Certification and Watchkeeping for Seafarers,
1978».
Конвенцией уточнено название и дано определение следующим видам доку-
ментов, выдаваемых морякам, в соответствии с требованиями ПДНВ:
Certificate of competency – диплом лица командного состава, который вы-
дается капитанам, судовым офицерам и радиоспециалистам ГМССБ в соответст-
вии с положениями глав II, III, IV или VIII Конвенции;
Certificate of proficiency (свидетельство о профессиональной пригодно-
сти) – документ, подтверждающий, что требования Конвенции в отношении
подготовки, компетентности и плавстаже выполнены (свидетельства для работы
на танкерах, свидетельство Офицера охраны судна и др.);
Documentary evidence (документальное подтверждение) – документ, под-
тверждающий, что соответствующие требования Конвенции выполнены (свиде-
тельство о подготовке по выживаемости, персонала пассажирских судов и др.).
Определено, что документы о компетентности (дипломы), выдаваемые капи-
танам и лицам командного состава морских судов в соответствии с требования-
ми Правил II/1, II/2, II/3 (судоводителям), а также документы о подготовке в со-
ответствии с правилами V/1-1, V/1-2 (свидетельства о подготовке для работы на
танкерах) должны выдаваться только Администрацией.
Начиная с 01 января 2017 года, информация о статусе документов моряков
должна быть доступна на английском языке через электронные средства связи
для других Сторон Конвенции и компаний при проверке подлинности и дейст-
вительности этих документов с целью их признания в рамках требований Пра-
вила I/10 Конвенции.
Возложена ответственность на судоходные компании за:
– обеспечение прохождения моряками, которые направляются на суда
этой компании, курсов повышения квалификации и переподготовки (refresh and
updating training), требуемых Конвенцией;
– прохождение соответствующей подготовки капитанами, лицами ко-
мандного состава и другими членами экипажа, которым вменяются специфиче-
ские обязанности и ответственность при работе на пассажирских судах;
– обеспечение эффективного общения на рабочем языке членами экипа-
жей в течение всего времени их пребывания на судах компании (новые пункты
Правила 1/14 Конвенции и раздела I/14 части A Кодекса).
6
Уточнено, что при одобрении учебно-тренажерных центров (курсов и про-
грамм подготовки) должны соблюдаться требования соответствующих модель-
ных курсов ИМО (Раздел А-I/1 п. 6 Кодекса).
В стандарты компетентности лиц командного состава на уровнях управления
и эксплуатации введены новые компетенции, знания и умения, предусматри-
вающие различные виды подготовки, вызванные внедрением на современных
судах новых технологий и сложного современного оборудования.
Так, для судоводителей предусмотрены обязательные минимальные стандар-
ты компетентности по использованию электронно-картографических информа-
ционных систем (ECDIS), управлению ресурсами навигационного мостика, по
умению осуществлять руководство судновым персоналом, по более эффектив-
ному использованию систем регулирования движением судов (VTS).
Введены новые рекомендации в отношении подготовки персонала, рабо-
тающего на судах в полярных водах и персонала, работающего на судах с систе-
мами динамического позиционирования (разработка обязательных требований к
этим специалистам после принятия Полярного Кодекса к 2012 году – Кодекс
ПДНВ).
Введены новые требования в отношении подготовки всех членов экипажа к
действиям по обеспечению охраны судов и экипажей при плавании в водах дей-
ствия пиратов. Предусмотрено, что все члены экипажа судна, на которое распро-
страняются действия Кодекса ОСПС, должны пройти подготовку по охране суд-
на и отвечать требованиям к компетентности, предусмотренным новым Прави-
лом VI/6 Конвенции ПДНВ. Члены экипажа судна, которым предполагается по-
ручение специальных обязанностей по охране судна в районе действия пиратов
или вооруженных грабителей, должны иметь соответствующую для таких лиц
подготовку (training for designated security duties) и подтвердить компетентность,
требуемую Разделом А-VI/6-2 Кодекса.
Пересмотрены требования касательно готовности к несению вахты и часов
работы и отдыха. В частности, все лица, назначенные выполнять обязанности
вахтенного офицера или лица рядового состава, включенного в состав вахты, а
также те, чьи обязанности предусматривают ответственность за безопасность/
охрану судна, людей и предупреждение загрязнения окружающей среды, долж-
ны иметь как минимум 10 часов отдыха в течение 24-часового периода и 77 ча-
сов отдыха в течение любого 7-ми дневного периода. При этом, часы отдыха мо-
гут быть разделены не более чем на два периода, один из которых должен быть
продолжительностью не менее 6 часов и интервалы между последовательными
периодами отдыха не должны превышать 14 часов.
Все поправки к Конвенции ПДНВ и Кодексу ПДНВ вступят в силу с 01 ян-
варя 2012 года, а начиная с 01 июля 2013 года все одобренные программы обу-
чения и одобренные программы подготовки моряков должны во всех отношени-
ях отвечать требованиям пересмотренной манильской Конвенции.
7
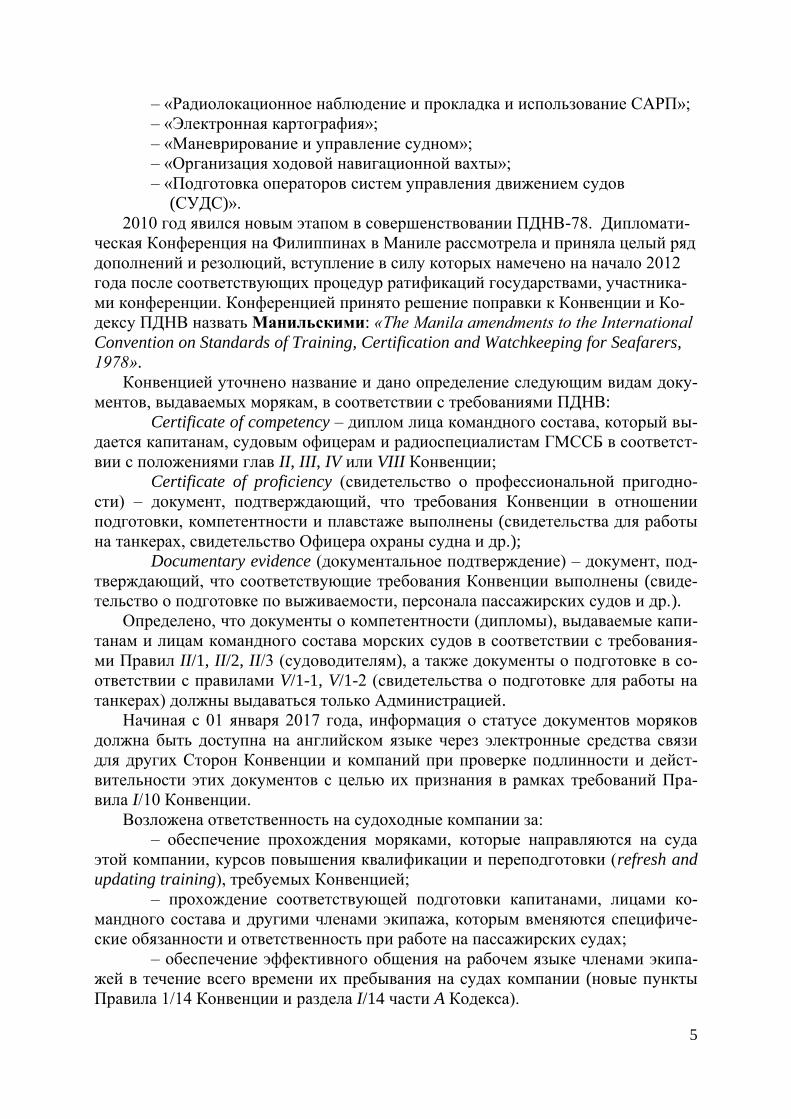
1. МЕЖДУНАРОДНЫЕ ПРАВИЛА ПО ПРЕДУПРЕЖДЕНИЮ
СТОЛКНОВЕНИЙ СУДОВ (МППСС-72)
ЧАСТЬ А. ОБЩИЕ ПОЛОЖЕНИЯ (рис. 1)
Ри
с. 1
. С
трукту
ра
МП
ПС
С-7
2
8
Правило 1 . Применение В тексте пункта (а) определено, что МППСС распространяются на все суда
в открытых морях и соединенных с ними водах, по которым могут плавать мор-
ские суда (рис. 2).
Рис. 2. Применение правила 1
Пункт (b), начинающийся со слова «ничто…», дает право национальным
властям издавать особые местные правила плавания (рис. 3), которые «не долж-
ны входить в противоречие» с МППСС-72.
Рис. 3. Национальные правила не противоречат МППСС
Пункт (с) дает разрешение правительству любой страны издавать особые
правила для военных кораблей, следующих в конвое, и судов, занятых ловом
рыбы в составе флотилии. Дополнительные огни, знаки и сигналы должны, на-
сколько это возможно, отличаться от предписанных огней и сигналов в МППСС.
9
Пункт (d) указывает на возможность установления ИМО систем (схем) раз-
деления движения судов (СРД). Плавание в СРД регулируется правилом 10
МППСС, и соблюдение его норм является обязательным для всех государств,
подписавших Международную конвенцию по охране человеческой жизни на
море 1974 года (СОЛАС) (рис. 4).
Рис. 4. Установление ИМКО (с 1982 года – ИМО) СРД
Правительства отдельных стран могут вводить в своих территориальных и
внутренних водах СРД, о которых подается информация в ИМО и через извеще-
ния мореплавателям (ИМ) в другие страны.
Пункт (е) относится к судам, которые по конструкции корпуса или по назна-
чению не могут полностью выполнить требования частей С и D настоящих
МППСС. Например, подводные лодки, авианосцы, буровые суда, суда принци-
пиально новых конструкций (рис. 5).
10
Рис. 5. Суда особой конструкции
Правило 2. Ответственность Пункт (а) говорит о том, что ничто не может освободить ни судовладельца,
ни штурманский состав судна от ответственности за нарушения МППСС-72: ни
упущения в выполнении правил; ни пренебрежение какой-либо предосторожно-
стью (рис. 6).
Рис. 6. Ответственность для всех
В пункте (b) рассматриваются нестандартные варианты, связанные с огнями,
знаками, звуковыми и световыми сигналами и в вопросах маневрирования. Здесь
возможны ситуации, изложенные в книгах № 9027 и № 4442 или в других осо-
бых национальных правилах (рис. 7).
11
Рис. 7. Опасности плавания и опасность столкновения
Правило 3. Общие определения Правило содержит определения, которые являются общими для всего текста
МППСС. Те определения, которые касаются огней, знаков и звуковых сигналов,
помещены в частях С, D и в приложениях I и III.
Рассмотрим некоторые определения и термины, которые наиболее важны
при чтении текста и нуждаются в некоторых пояснениях. В первую очередь это
относится к определению «судно», которое охватывает все виды плавучих
средств, способных перемещаться на воде (рис. 8). Эти объекты должны обозна-
чать свое присутствие на воде и характер действий путем несения соответст-
вующих знаков, огней, подачей звуковых сигналов и сигналов бедствия.
12
Рис. 8. Все виды плавучих средств
Термин «судно с механическим двигателем» (СМД) широко используется в
тексте Правил, таких, как 14, 15, 17, 18, 23, 24, 28, 34, 35, где он является опре-
деляющим (рис. 9).
Рис. 9. Судно с механическим двигателем
Термин «судно, лишенное возможности управляться» (ЛВУ) относится к су-
дам, которые из-за каких-либо исключительных обстоятельств не в состоянии
маневрировать так, как это предписано МППСС (рис. 10), и поэтому не могут
уступить дорогу (см. правило 18). Под исключительными обстоятельствами
можно понимать:
– повреждение или неисправность двигателей, движителей, устройств
рулевого управления или других механизмов, обеспечивающих движение судна
или управление им;
– повреждения корпуса, вследствие чего судно не может маневрировать;
13
Рис. 10. Судно, лишенное возможности управляться
– воздействие на судно внешних факторов, которые затрудняют или пол-
ностью лишают судно возможности выполнять правила.
В любом случае капитан судна должен доказать правомерность использова-
ния знаков и огней, предписанных правилом 27 (два черных шара – днем, два
красных огня – ночью).
Термин «судно, ограниченное в возможности маневрировать» (ОВМ) отно-
сится к следующим шести группам судов (рис. 11):
– судно, занятое постановкой, обслуживанием или снятием навигацион-
ного знака, прокладкой, осмотром или поднятием подводного кабеля или трубо-
провода;
– судно, занятое дноуглубительными, океанографическими, гидрографи-
ческими или подводными работами;
– судно, занятое на ходу пополнением снабжения или передачей людей,
продовольствия или груза;
– судно, занятое обеспечением взлета или приема летательных аппара-
тов;
– судно, занятое работами по устранению минной опасности;
– судно, занятое такой буксировочной операцией, которая значительно
ограничивает возможность буксирующего и буксируемого судов отклониться от
своего курса.
Этот перечень не является исчерпывающим и может дополняться нацио-
нальными правилами в соответствии с правилом 1(b). В этом случае все суда, за
исключением судов, лишенных возможности управляться, должны уступать до-
рогу судам ОВМ (см. правило 18).
Термин «судно, стесненное своей осадкой» (СССО) относится только к су-
дам, имеющим механический двигатель (рис. 12).
Основные факторы, которые должны учитываться судоводителем при ис-
пользовании знаков и огней СССО (руководство по единому применению неко-
торых правил МППСС-72, п. 1):
14
Рис. 11. Суда, ограниченные в возможности маневрировать
– наличие водного пространства для маневрирования, вследствие недос-
таточной глубины моря в районе плавания (мелководье);
– прохождение мелководного канала, предназначенного для крупнотон-
нажных судов с большой осадкой.
Термин «на ходу» означает соблюдение условий «трех не»:
1) судно «не» стоит на якоре;
2) судно «не» ошвартовано к берегу или к другому судну, стоящему у
причала или на якоре;
3) судно «не» стоит на мели.
15
Рис. 12. Судно, стесненное своей осадкой
Согласно п. 2 Руководства по единому применению некоторых правил
МППСС-72 и в соответствии с правилом 35 (b) термин «на ходу» может иметь
два значения (рис. 13):
Рис. 13. Судно, не имеющее хода относительно воды
1) судно на ходу, имеющее ход относительно воды (правила 26, 27, 35 (а));
2) судно на ходу и не имеющее хода относительно воды (правило 35 (b)).
ЧАСТЬ В. ПРАВИЛА ПЛАВАНИЯ И МАНЕВРИРОВАНИЯ
В этой части излагаются наиболее важные из правил, касающихся плавания
и маневрирования судов. Они применяются как при хорошей, так и при ограни-
ченной видимости. Часть В содержит три раздела:
16
– первый носит общий характер, и его правила применяются при любых
условиях видимости;
– второй содержит правила, которые относятся к судам, находящимся на
виду друг у друга;
– третий включает в себя только одно правило 19, относящееся к плава-
нию судов при ограниченной видимости.
Раздел I. Плавание судов при любых условиях видимости Этот раздел отображает организацию работы судоводителя на вахте по схе-
ме «наблюдай – анализируй ситуацию – действуй». Поэтому он и открывается
правилом, определяющим основную обязанность судоводителя на ходовом мос-
тике судна – наблюдать за обстановкой на море.
Правило 5. Наблюдение Каждое судно должно вести постоянное наблюдение всегда, т. е. независимо
от состояния видимости и района плавания.
На морском флоте существует термин «впередсмотрящий» – это человек
(один или несколько, включая вахтенного помощника), который уделяет все свое
внимание наблюдению и не принимает на себя каких-либо обязанностей, кото-
рые снижают эффективность надлежащего наблюдения в любых условиях ви-
димости.
Наблюдение должно обеспечивать не только своевременное обнаружение
судов, но и определение характера их действия.
Надлежащее наблюдение означает использование всех имеющихся для этого
возможностей, включая визуальное и слуховое наблюдение, а также наблюдение
с использованием технических средств современного мостика (рис. 14).
Рис. 14. Надлежащее наблюдение
В условиях ограниченной видимости, кроме визуального наблюдения,
должно осуществляться слуховое и радиолокационное наблюдение.
17
При наблюдении с помощью РЛС, САРП и автоматической идентификаци-
онной системы (АИС) должны учитываться их технические возможности и ог-
раничения (теневые секторы, мертвая зона, дальность обнаружения и т. п.).
Также должно осуществляться постоянное прослушивание эфира с помо-
щью УКВ-радиостанции на 16-м канале.
Правило 6. Безопасная скорость Соблюдение безопасной скорости является обязательным требованием при
всех условиях видимости. Для поддержания безопасной скорости требуется не-
прерывная оценка внешней обстановки в районе плавания, что достигается пра-
вильным наблюдением.
Вахтенный помощник капитана должен помнить, что главный двигатель на-
ходится в его распоряжении и что в случае необходимости он должен без коле-
баний прибегать к его использованию (рис. 15). Однако, если это возможно, сле-
дует своевременно предупреждать вахтенного механика о том, что возможно
изменение скорости.
Рис. 15. Соблюдение безопасной скорости
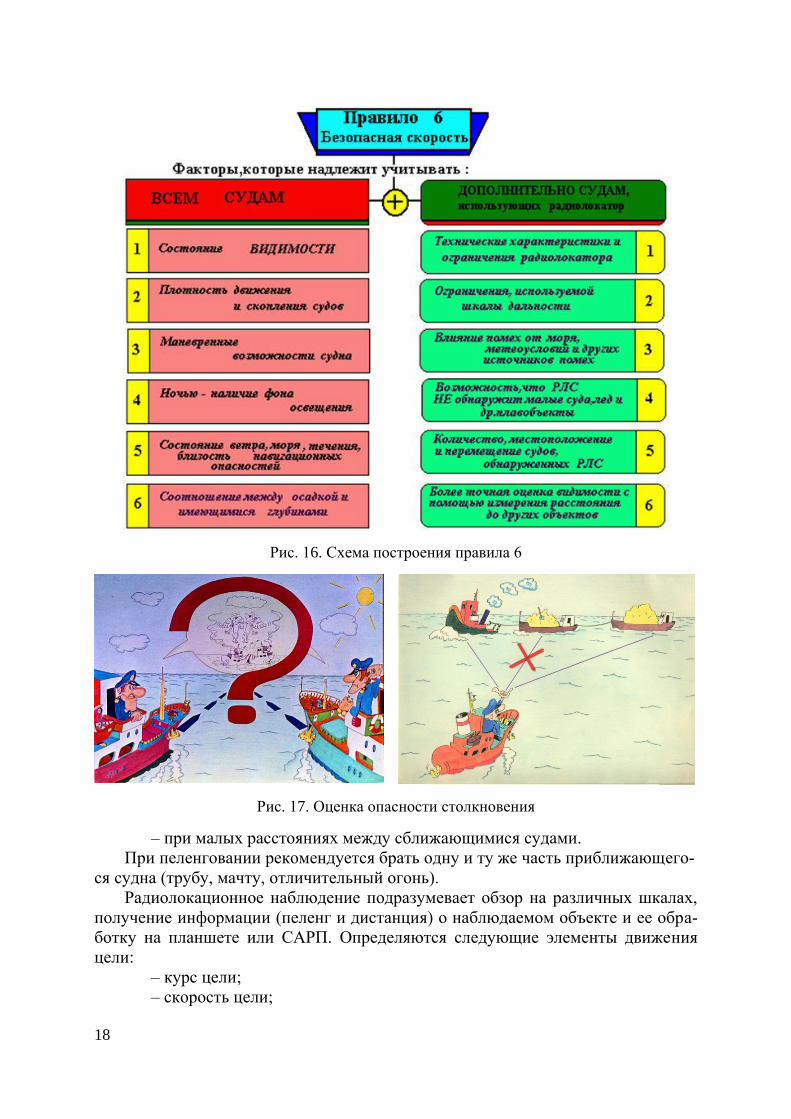
Правило 6 содержит 12 факторов (6 + 6), которые следует учитывать при оп-
ределении безопасной скорости (рис. 16).
Правило 7. Опасность столкновения Своевременная оценка опасности столкновения при встрече двух судов в
море имеет большое значение для успешного расхождения в соответствии с тре-
бованиями МППСС.
Судоводитель обязан использовать все имеющиеся в его распоряжении
средства для определения наличия опасности столкновения. Этими средствами
могут быть: визуальное и слуховое наблюдение; пеленгование объекта; наблю-
дение с помощью РЛС, САРП и АИС; информация по УКВ связи и т. д.
Правило 7 (а) рекомендует в случае сомнения в наличии опасности столкно-
вения считать, что она существует.
При обнаружении любого объекта на воде, необходимо сразу же взять на не-
го пеленг и зафиксировать его значение.
Опасность столкновения существует, если (рис. 17):
– пеленг приближающегося судна заметно не меняется;
– пеленг заметно изменяется при сближении с очень большим судном
или буксирным караваном;
18
Рис. 16. Схема построения правила 6
Рис. 17. Оценка опасности столкновения
– при малых расстояниях между сближающимися судами.
При пеленговании рекомендуется брать одну и ту же часть приближающего-
ся судна (трубу, мачту, отличительный огонь).
Радиолокационное наблюдение подразумевает обзор на различных шкалах,
получение информации (пеленг и дистанция) о наблюдаемом объекте и ее обра-
ботку на планшете или САРП. Определяются следующие элементы движения
цели:
– курс цели;
– скорость цели;
19
– линия относительного движения – ЛОД;
– дистанция кратчайшего сближения – DКР;
– время кратчайшего сближения – TКР.
Опасность столкновения определяется, в первую очередь, величиной DКР. Во
вторую очередь, степень опасности столкновения характеризует величина TКР.
При оценке опасности столкновения нельзя задаваться какой-либо опреде-
ленной допустимой величиной DКР и TКР. Все зависит от взаимного положения
судов, возможности маневра встречного судна, навигационной обстановки.
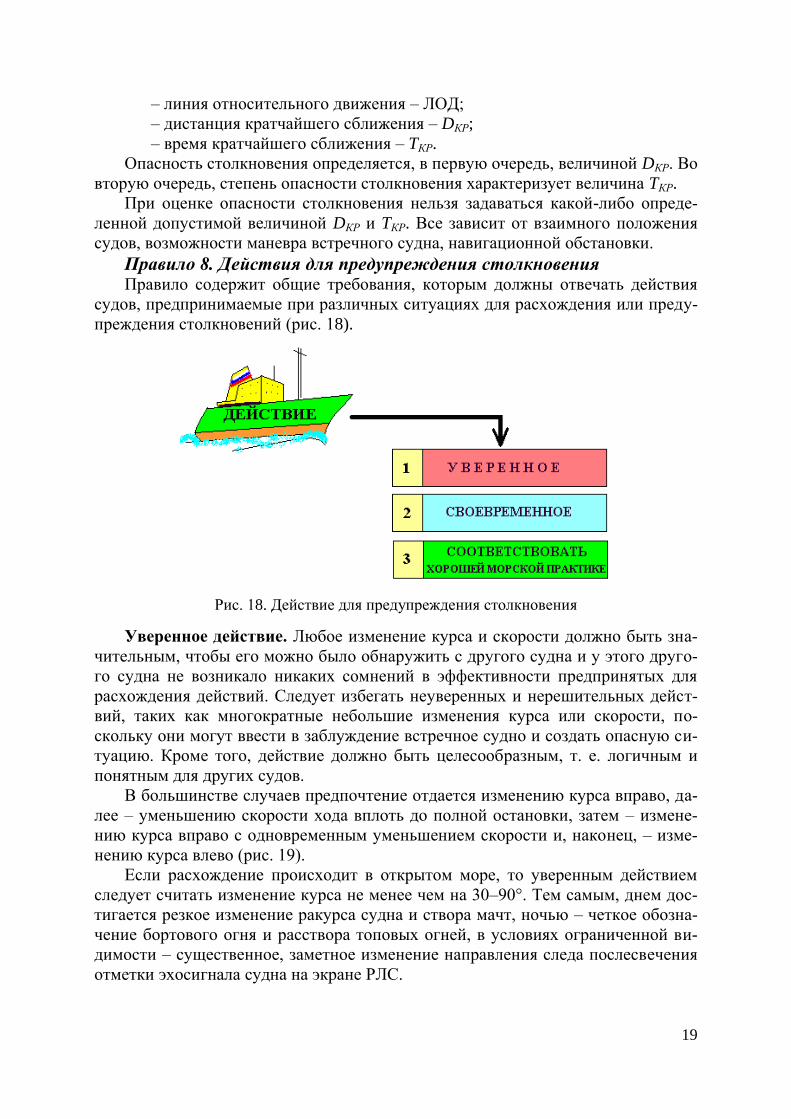
Правило 8. Действия для предупреждения столкновения Правило содержит общие требования, которым должны отвечать действия
судов, предпринимаемые при различных ситуациях для расхождения или преду-
преждения столкновений (рис. 18).
Рис. 18. Действие для предупреждения столкновения
Уверенное действие. Любое изменение курса и скорости должно быть зна-
чительным, чтобы его можно было обнаружить с другого судна и у этого друго-
го судна не возникало никаких сомнений в эффективности предпринятых для
расхождения действий. Следует избегать неуверенных и нерешительных дейст-
вий, таких как многократные небольшие изменения курса или скорости, по-
скольку они могут ввести в заблуждение встречное судно и создать опасную си-
туацию. Кроме того, действие должно быть целесообразным, т. е. логичным и
понятным для других судов.
В большинстве случаев предпочтение отдается изменению курса вправо, да-
лее – уменьшению скорости хода вплоть до полной остановки, затем – измене-
нию курса вправо с одновременным уменьшением скорости и, наконец, – изме-
нению курса влево (рис. 19).
Если расхождение происходит в открытом море, то уверенным действием
следует считать изменение курса не менее чем на 30–90°. Тем самым, днем дос-
тигается резкое изменение ракурса судна и створа мачт, ночью – четкое обозна-
чение бортового огня и расствора топовых огней, в условиях ограниченной ви-
димости – существенное, заметное изменение направления следа послесвечения
отметки эхосигнала судна на экране РЛС.
20
Рис. 19. Действия для предупреждения столкновения
Изменение скорости должно быть весьма существенным, чтобы говорить об
уверенности действий. При необходимости снижения скорости оптимальным
(уверенным) маневром можно считать быстрое снижение скорости не менее чем
в два раза. Таким образом, судоводитель будет иметь больше времени для оцен-
ки ситуации сближения судов, что вполне соответствует правилу 8 (е): «Если
необходимо предотвратить столкновение или иметь больше времени для оценки
ситуации, судно должно уменьшить ход или остановиться, застопорив свои дви-
жители или дав задний ход».
На комбинированный маневр (курсом и одновременно скоростью) распро-
страняются требования, изложенные в правиле 8 п. (а), (b) и (с). Выполнение од-
новременно двух действий уменьшает необходимое для маневра водное про-
странство по носу судна и увеличивает промежуток времени для надлежащей
оценки ситуации.
Если для расхождения выбирается маневр поворота влево, то его следует
(при прочих равных условиях) производить раньше по сравнению с возможным
изменением курса вправо.
Правило 8 содержит дополнительное требование (п. (f)) «не затруднять дви-
жение». Этот пункт предписывает любому судну по возможности не затруднять
движение судам, лишенным возможности управляться, ограниченным в возмож-
ности маневрирования, занятым ловом рыбы и т. п. Судно, обязанное не затруд-
нять движение или безопасный проход другого судна, должно, когда этого тре-
21
буют обстоятельства, предпринять заблаговременные действия с тем, чтобы ос-
тавить достаточное водное пространство для безопасного прохода.
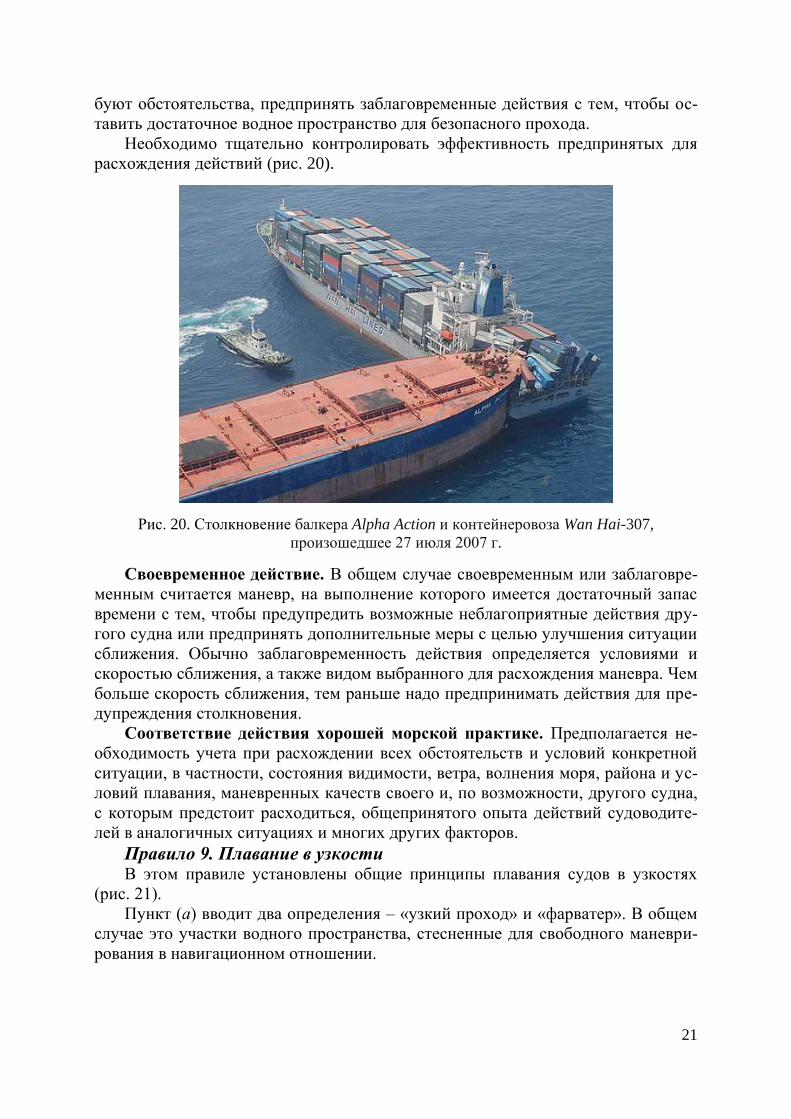
Необходимо тщательно контролировать эффективность предпринятых для
расхождения действий (рис. 20).
Рис. 20. Столкновение балкера Alpha Action и контейнеровоза Wan Hai-307,
произошедшее 27 июля 2007 г.
Своевременное действие. В общем случае своевременным или заблаговре-
менным считается маневр, на выполнение которого имеется достаточный запас
времени с тем, чтобы предупредить возможные неблагоприятные действия дру-
гого судна или предпринять дополнительные меры с целью улучшения ситуации
сближения. Обычно заблаговременность действия определяется условиями и
скоростью сближения, а также видом выбранного для расхождения маневра. Чем
больше скорость сближения, тем раньше надо предпринимать действия для пре-
дупреждения столкновения.
Соответствие действия хорошей морской практике. Предполагается не-
обходимость учета при расхождении всех обстоятельств и условий конкретной
ситуации, в частности, состояния видимости, ветра, волнения моря, района и ус-
ловий плавания, маневренных качеств своего и, по возможности, другого судна,
с которым предстоит расходиться, общепринятого опыта действий судоводите-
лей в аналогичных ситуациях и многих других факторов.
Правило 9. Плавание в узкости В этом правиле установлены общие принципы плавания судов в узкостях
(рис. 21).
Пункт (а) вводит два определения – «узкий проход» и «фарватер». В общем
случае это участки водного пространства, стесненные для свободного маневри-
рования в навигационном отношении.
22
Рис. 21. Плавание в узкостях
Термин «фарватер» означает открытый для судоходства проход, созданный
дноуглублением, на котором поддерживаются достаточные для судоходства глу-
бины. Однако при расхождении в узкостях следует учитывать, что один и тот же
проход может рассматриваться судоводителями различно.
Поэтому правило 9 устанавливает только порядок плавания в узкостях, ко-
гда судно «должно держаться внешней границы прохода или фарватера, которая
находится с его правого борта», насколько это возможно, т. е. устанавливается
правостороннее движение.
23
Определена категория судов, которые не должны затруднять движение су-
дам, идущим по фарватерам, узким проходам:
– судно длиной менее 20 м или парусное судно;
– судно, занятое ловом рыбы;
– судно не должно пересекать узкий проход или фарватер, если этим оно
может затруднить движение других судов, которые могут следовать безопасно
только в пределах прохода (например, Very Large Crude Carrier – VLCC);
– любое судно, если позволяют обстоятельства, должно избегать поста-
новки на якорь в узком проходе.
Тем не менее, правило 9 не освобождает суда от выполнения предписаний
правил 15–17 и 18. Таким образом, судно, следующее «своей» правой стороной
фарватера и наблюдающее другое судно, пересекающее его курс справа, должно,
если для этого есть время и пространство, уступить ему дорогу, действуя со-
гласно правила 8.
При плавании в районах ограниченной видимости необходимо особо тща-
тельно контролировать местоположение судна и принимать решения, исходя из
ситуации встречи.
Правило 10. Плавание по системам разделения движения Существующие на сегодняшний день системы разделения движения (СРД),
одобренные ИМО, изданы в 2008 году в книге «Ship Routing», кроме того в Рос-
сии ежегодно публикуются в ИМ № 1. В отдельном руководстве «Общие поло-
жения об установлении путей движения судов» (издание ГУНиО МО, книга №
9036) можно выбрать все сведения по навигационному использованию СРД и
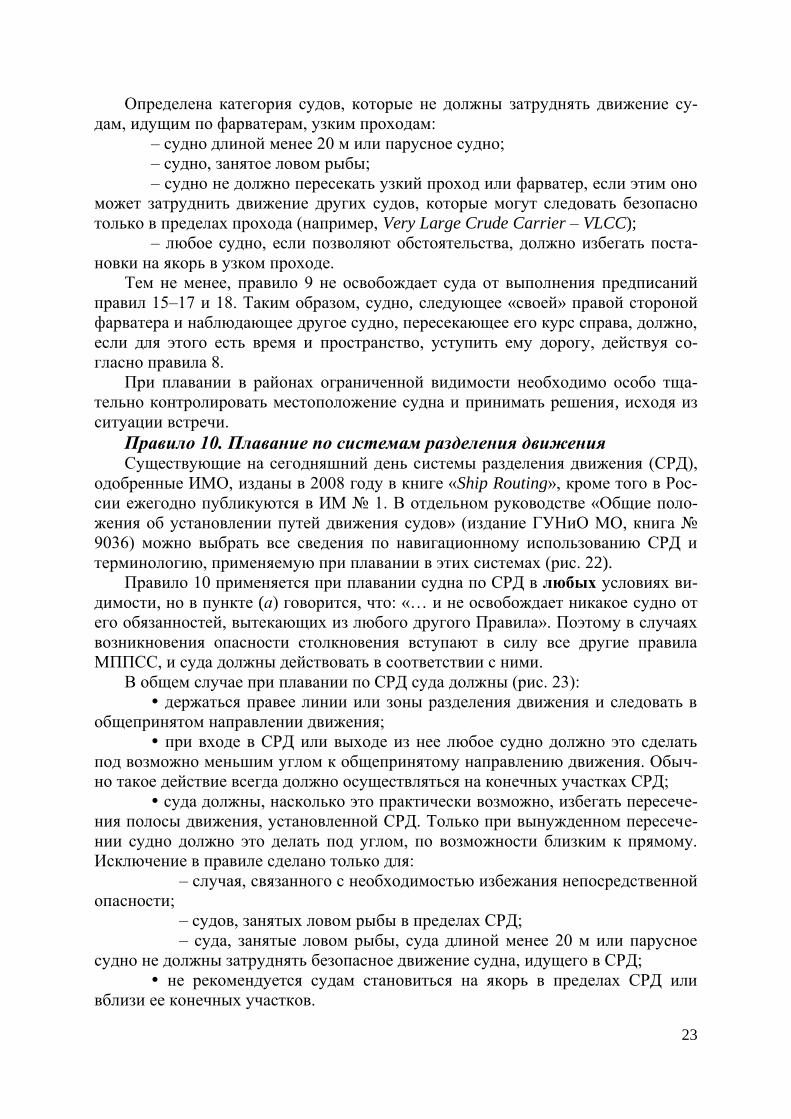
терминологию, применяемую при плавании в этих системах (рис. 22).
Правило 10 применяется при плавании судна по СРД в любых условиях ви-
димости, но в пункте (а) говорится, что: «… и не освобождает никакое судно от
его обязанностей, вытекающих из любого другого Правила». Поэтому в случаях
возникновения опасности столкновения вступают в силу все другие правила
МППСС, и суда должны действовать в соответствии с ними.
В общем случае при плавании по СРД суда должны (рис. 23):
держаться правее линии или зоны разделения движения и следовать в
общепринятом направлении движения;
при входе в СРД или выходе из нее любое судно должно это сделать
под возможно меньшим углом к общепринятому направлению движения. Обыч-
но такое действие всегда должно осуществляться на конечных участках СРД;
суда должны, насколько это практически возможно, избегать пересече-
ния полосы движения, установленной СРД. Только при вынужденном пересече-
нии судно должно это делать под углом, по возможности близким к прямому.
Исключение в правиле сделано только для:
– случая, связанного с необходимостью избежания непосредственной
опасности;
– судов, занятых ловом рыбы в пределах СРД;
– суда, занятые ловом рыбы, суда длиной менее 20 м или парусное
судно не должны затруднять безопасное движение судна, идущего в СРД;
не рекомендуется судам становиться на якорь в пределах СРД или
вблизи ее конечных участков.
24
Рис. 22. Схема системы разделения движения в проливе Па-де-Кале:
1 – зона или линия разделения движения; 4 – зона прибрежного плавания;
2 – полоса движения; 5 – глубоководный путь (ГВ)
3 – рекомендованное направление потока судов;
Судно, ограниченное в возможности маневрировать, занятое поддержанием
безопасности мореплавания или работами по прокладке, обслуживанию или
поднятию подводного кабеля, освобождается от выполнения требований правила
10 настолько, насколько это необходимо для выполнения этих работ.
Раздел II. Плавание судов, находящихся на виду друг у друга Правила этого раздела применяются к судам, находящимся на виду друг у
друга. При плавании судов в условиях, стесненных в навигационном отношении
и находящихся на виду друг у друга, необходимо своевременно обозначать свои
намерения звуковыми и световыми сигналами (табл. 1).
Правило 12. Парусные суда Парусное судно означает любое судно с парусом, под действием которого
оно и перемещается. Данное правило устанавливает общий порядок расхожде-
ния парусных судов. Здесь определено, которое из двух встречающихся судов
должно уступить дорогу в зависимости от галса и их положения по отношению
к ветру или друг к другу.
Галс – курс судна относительно ветра. Если ветер дует в левый борт – судно
идет левым галсом, если в правый – правым галсом.
Правило 12 тесным образом связано с правилами 8 и 16 в части выполнения
действий и маневра. Парусное судно, которому уступают дорогу, должно вы-
полнять требования правила 17 (а), (b).
25
Рис. 23. Плавание в системах разделения движения
26
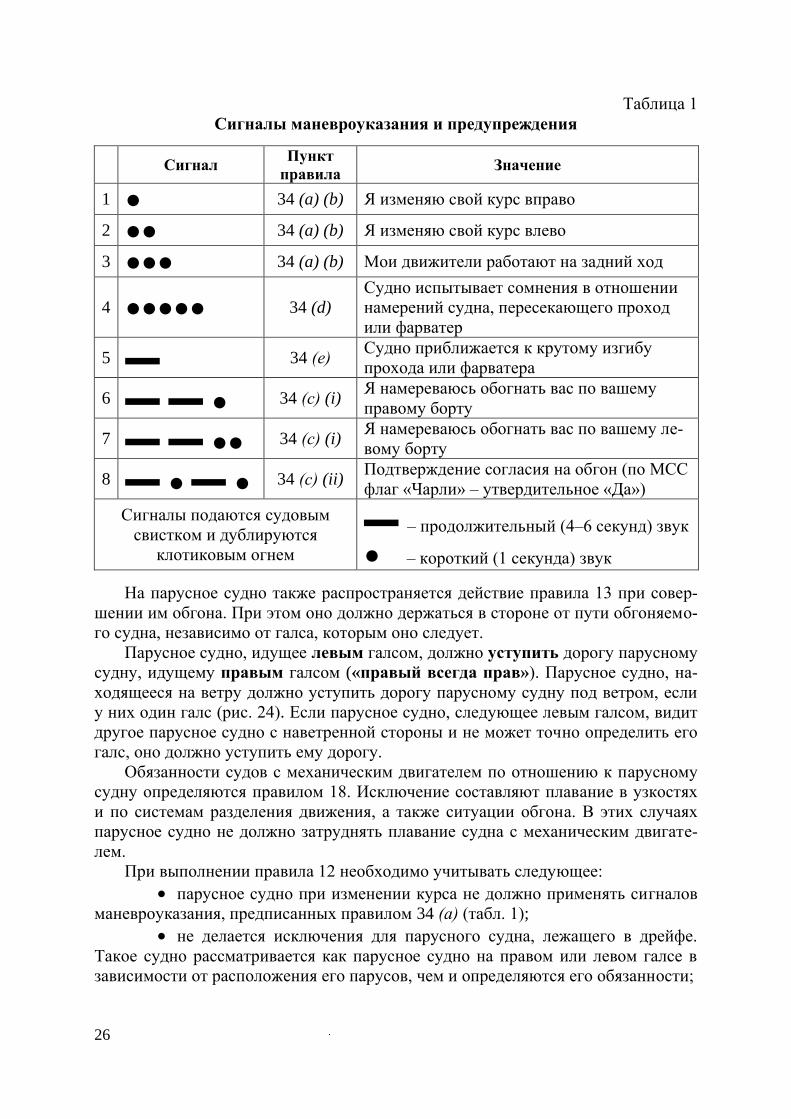
Таблица 1
Сигналы маневроуказания и предупреждения
Сигнал Пункт
правила Значение
1 ● 34 (a) (b) Я изменяю свой курс вправо
2 ●● 34 (a) (b) Я изменяю свой курс влево
3 ●●● 34 (a) (b) Мои движители работают на задний ход
4 ●●●●● 34 (d)
Судно испытывает сомнения в отношении
намерений судна, пересекающего проход
или фарватер
5 ▬ 34 (е) Судно приближается к крутому изгибу
прохода или фарватера
6 ▬ ▬ ● 34 (с) (i) Я намереваюсь обогнать вас по вашему
правому борту
7 ▬ ▬ ●● 34 (с) (i) Я намереваюсь обогнать вас по вашему ле-
вому борту
8 ▬ ● ▬ ● 34 (с) (ii) Подтверждение согласия на обгон (по МСС
флаг «Чарли» – утвердительное «Да»)
Сигналы подаются судовым
свистком и дублируются
клотиковым огнем
▬ – продолжительный (4–6 секунд) звук ● – короткий (1 секунда) звук
На парусное судно также распространяется действие правила 13 при совер-
шении им обгона. При этом оно должно держаться в стороне от пути обгоняемо-
го судна, независимо от галса, которым оно следует.
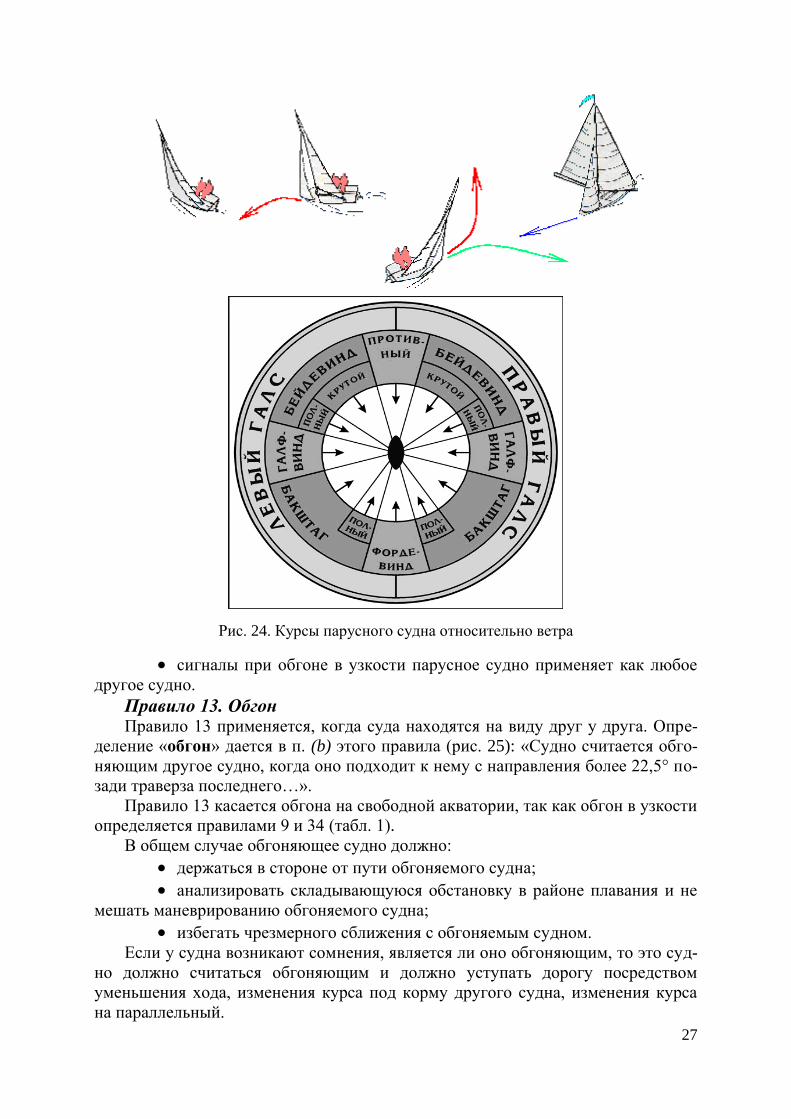
Парусное судно, идущее левым галсом, должно уступить дорогу парусному
судну, идущему правым галсом («правый всегда прав»). Парусное судно, на-
ходящееся на ветру должно уступить дорогу парусному судну под ветром, если
у них один галс (рис. 24). Если парусное судно, следующее левым галсом, видит
другое парусное судно с наветренной стороны и не может точно определить его
галс, оно должно уступить ему дорогу.
Обязанности судов с механическим двигателем по отношению к парусному
судну определяются правилом 18. Исключение составляют плавание в узкостях
и по системам разделения движения, а также ситуации обгона. В этих случаях
парусное судно не должно затруднять плавание судна с механическим двигате-
лем.
При выполнении правила 12 необходимо учитывать следующее:
парусное судно при изменении курса не должно применять сигналов
маневроуказания, предписанных правилом 34 (а) (табл. 1);
не делается исключения для парусного судна, лежащего в дрейфе.
Такое судно рассматривается как парусное судно на правом или левом галсе в
зависимости от расположения его парусов, чем и определяются его обязанности;
27
Рис. 24. Курсы парусного судна относительно ветра
сигналы при обгоне в узкости парусное судно применяет как любое
другое судно.
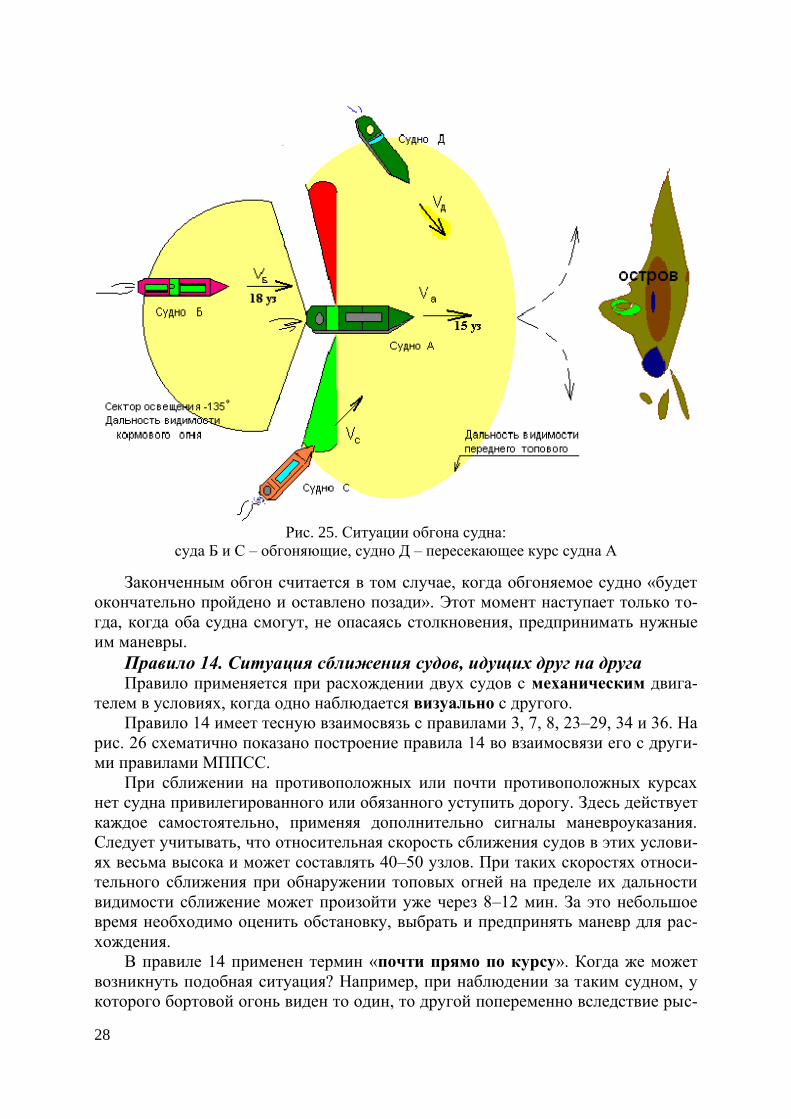
Правило 13. Обгон Правило 13 применяется, когда суда находятся на виду друг у друга. Опре-
деление «обгон» дается в п. (b) этого правила (рис. 25): «Судно считается обго-
няющим другое судно, когда оно подходит к нему с направления более 22,5° по-
зади траверза последнего…».
Правило 13 касается обгона на свободной акватории, так как обгон в узкости
определяется правилами 9 и 34 (табл. 1).
В общем случае обгоняющее судно должно:
держаться в стороне от пути обгоняемого судна;
анализировать складывающуюся обстановку в районе плавания и не
мешать маневрированию обгоняемого судна;
избегать чрезмерного сближения с обгоняемым судном.
Если у судна возникают сомнения, является ли оно обгоняющим, то это суд-
но должно считаться обгоняющим и должно уступать дорогу посредством
уменьшения хода, изменения курса под корму другого судна, изменения курса
на параллельный.
28
Рис. 25. Ситуации обгона судна:
суда Б и С – обгоняющие, судно Д – пересекающее курс судна А
Законченным обгон считается в том случае, когда обгоняемое судно «будет
окончательно пройдено и оставлено позади». Этот момент наступает только то-
гда, когда оба судна смогут, не опасаясь столкновения, предпринимать нужные
им маневры.
Правило 14. Ситуация сближения судов, идущих друг на друга Правило применяется при расхождении двух судов с механическим двига-
телем в условиях, когда одно наблюдается визуально с другого.
Правило 14 имеет тесную взаимосвязь с правилами 3, 7, 8, 23–29, 34 и 36. На
рис. 26 схематично показано построение правила 14 во взаимосвязи его с други-
ми правилами МППСС.
При сближении на противоположных или почти противоположных курсах
нет судна привилегированного или обязанного уступить дорогу. Здесь действует
каждое самостоятельно, применяя дополнительно сигналы маневроуказания.
Следует учитывать, что относительная скорость сближения судов в этих услови-
ях весьма высока и может составлять 40–50 узлов. При таких скоростях относи-
тельного сближения при обнаружении топовых огней на пределе их дальности
видимости сближение может произойти уже через 8–12 мин. За это небольшое
время необходимо оценить обстановку, выбрать и предпринять маневр для рас-
хождения.
В правиле 14 применен термин «почти прямо по курсу». Когда же может
возникнуть подобная ситуация? Например, при наблюдении за таким судном, у
которого бортовой огонь виден то один, то другой попеременно вследствие рыс-
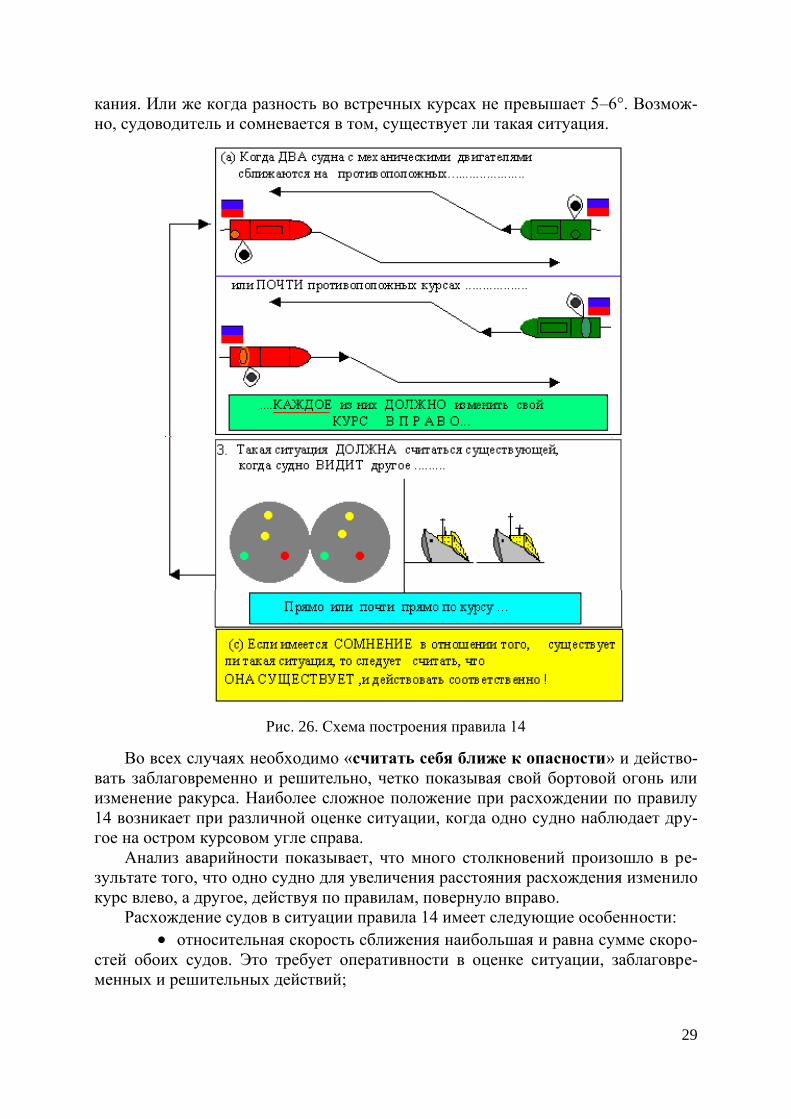
29
кания. Или же когда разность во встречных курсах не превышает 5–6°. Возмож-
но, судоводитель и сомневается в том, существует ли такая ситуация.
Рис. 26. Схема построения правила 14
Во всех случаях необходимо «считать себя ближе к опасности» и действо-
вать заблаговременно и решительно, четко показывая свой бортовой огонь или
изменение ракурса. Наиболее сложное положение при расхождении по правилу
14 возникает при различной оценке ситуации, когда одно судно наблюдает дру-
гое на остром курсовом угле справа.
Анализ аварийности показывает, что много столкновений произошло в ре-
зультате того, что одно судно для увеличения расстояния расхождения изменило
курс влево, а другое, действуя по правилам, повернуло вправо.
Расхождение судов в ситуации правила 14 имеет следующие особенности:
относительная скорость сближения наибольшая и равна сумме скоро-
стей обоих судов. Это требует оперативности в оценке ситуации, заблаговре-
менных и решительных действий;
30
оба судна имеют одинаковые обязанности – каждое должно изменить
свой курс «вправо», чтобы каждое судно прошло у другого по левому борту;
внимательно наблюдать за поведением другого судна с учетом того,
что оно может не заметить вашего маневра и сигнала поворота, неправильно их
истолковать или иметь какое-либо препятствие для выполнения своего правого
отворота. Нередко встречные суда изменяют свой курс влево;
при плавании в стесненных водах с целью достижения безопасного
расхождения необходимо привести свою скорость до безопасной, максимально
возможной при существующих условиях;
использовать радиолокатор, в том числе и радиолокационную про-
кладку, для принятия более обоснованного решения на уклонение и возможно-
сти последующего контроля маневра.
Правило 15. Ситуация пересечения курсов Правило 15 определяет обязанности по расхождению между двумя судами с
механическими двигателями, которые опасно сближаются на пересекающихся
курсах.
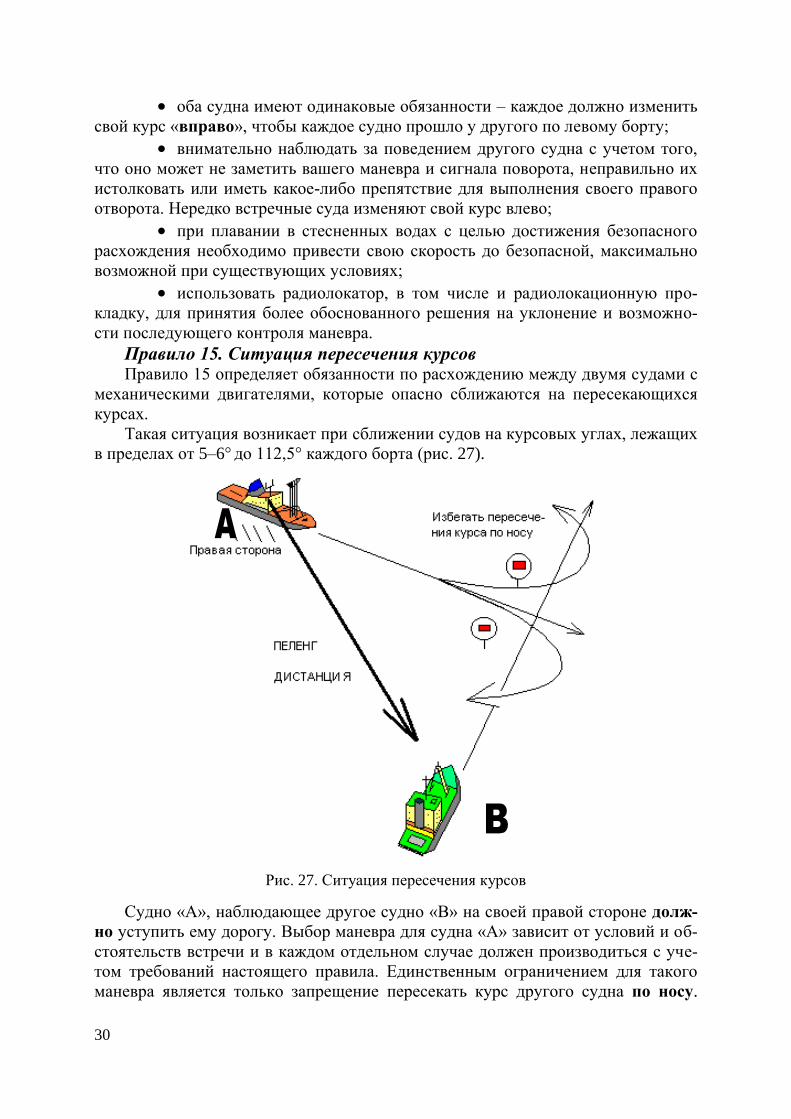
Такая ситуация возникает при сближении судов на курсовых углах, лежащих
в пределах от 5–6° до 112,5° каждого борта (рис. 27).
Рис. 27. Ситуация пересечения курсов
Судно «А», наблюдающее другое судно «В» на своей правой стороне долж-
но уступить ему дорогу. Выбор маневра для судна «А» зависит от условий и об-
стоятельств встречи и в каждом отдельном случае должен производиться с уче-
том требований настоящего правила. Единственным ограничением для такого
маневра является только запрещение пересекать курс другого судна по носу.
31
Пересечение по носу возможно, если судно «А» имеет значительное преимуще-
ство в скорости и пеленг на «В» уверенно увеличивается.
Правило 15 не применяется при встрече двух судов с механическими двига-
телями, одно из которых является ЛВУ или ОВМ или ЗЛР (см. правило 3 и 18). В
этом случае судно с механическим двигателем должно уступить дорогу этим су-
дам независимо от того, с какого борта они наблюдаются.
В общем случае при применении правила 15 выполняется правый поворот,
под корму другому судну. Такой принцип призван обеспечить более согласован-
ные действия двух судов при расхождении.
Действия, предписанные правилом 15, распространяются на судно с механи-
ческим двигателем, даже если оно лежит в дрейфе. Такое судно, если оно обна-
ружит другое судно на своей правой стороне и возникает опасность столкнове-
ния, должно предпринять действия для безопасного расхождения (если, конечно,
оно не держит сигнал судна ЛВУ или ОВМ или ЗЛР). Визуальным сигналом для
судна, лежащего в дрейфе, может быть днем поднятие флага «Майк», а в темное
время – наличие ходовых огней.
Правило 16. Действия судна, уступающего дорогу Согласно правилу 16 такие действия должны быть заблаговременными и
решительными (рис. 28). Эти требования вытекают из смысла правила 8 (а) и
тем самым усиливают его значение. Решительным действием является такой ма-
невр, который сразу обеспечивает уверенное расхождение и, в общем случае, не
потребует дополнительных действий для предупреждения столкновения. Этот
маневр должен быть значительным по величине, чтобы его можно было легко
заметить на другом судне.
Рис. 28. Действия судна, уступающего дорогу
Если судно уступает дорогу путем уменьшения скорости, то следует иметь в
виду, что такой маневр обычно протекает медленно и может быть вообще не за-
мечен другим судном. Он будет достаточно эффективен только тогда, когда ско-
рость будет уменьшена путем остановки движителей или дачи заднего хода.
32
Применять маневр изменением скорости следует с осторожностью, особенно на
крупнотоннажных судах ввиду их большой инерционности.
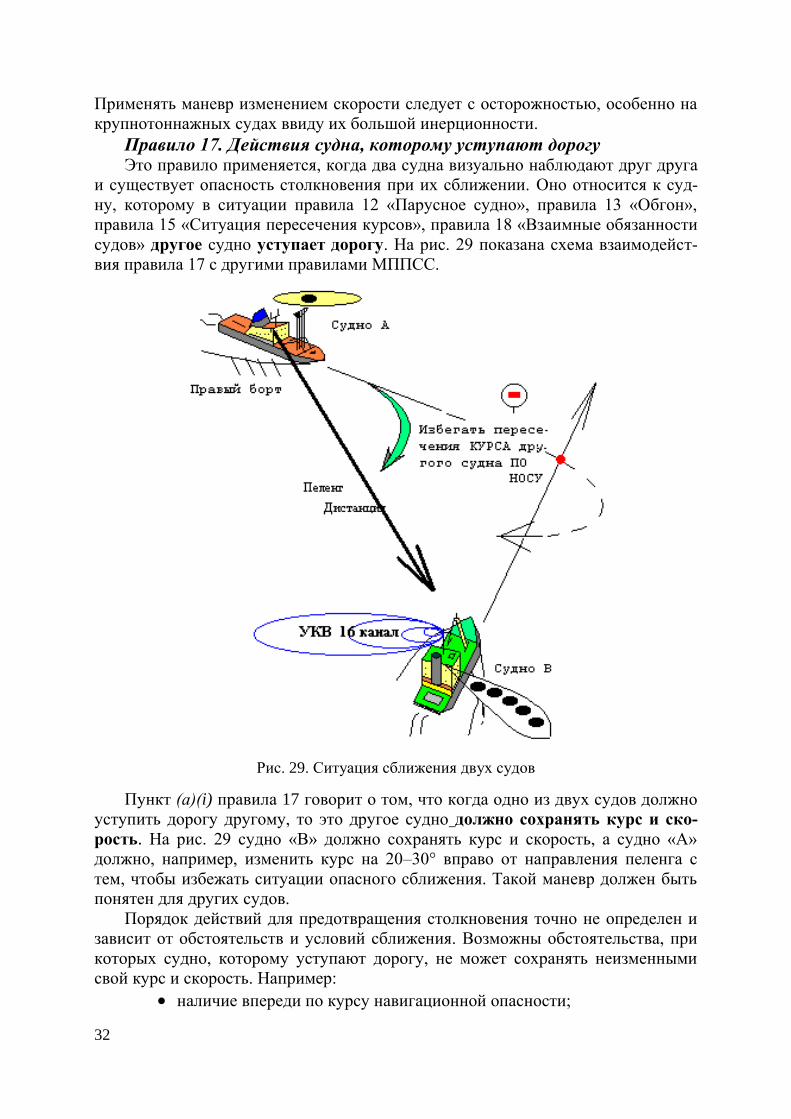
Правило 17. Действия судна, которому уступают дорогу Это правило применяется, когда два судна визуально наблюдают друг друга
и существует опасность столкновения при их сближении. Оно относится к суд-
ну, которому в ситуации правила 12 «Парусное судно», правила 13 «Обгон»,
правила 15 «Ситуация пересечения курсов», правила 18 «Взаимные обязанности
судов» другое судно уступает дорогу. На рис. 29 показана схема взаимодейст-
вия правила 17 с другими правилами МППСС.
Рис. 29. Ситуация сближения двух судов
Пункт (а)(i) правила 17 говорит о том, что когда одно из двух судов должно
уступить дорогу другому, то это другое судно должно сохранять курс и ско-
рость. На рис. 29 судно «В» должно сохранять курс и скорость, а судно «А»
должно, например, изменить курс на 20–30° вправо от направления пеленга с
тем, чтобы избежать ситуации опасного сближения. Такой маневр должен быть
понятен для других судов.
Порядок действий для предотвращения столкновения точно не определен и
зависит от обстоятельств и условий сближения. Возможны обстоятельства, при
которых судно, которому уступают дорогу, не может сохранять неизменными
свой курс и скорость. Например:
наличие впереди по курсу навигационной опасности;
33
подход к лоцманскому судну;
выполнение девиационных работ;
опасность столкновения с третьим судном;
переменное воздействие ветра и течения и т. п.
Для предупреждения опасной ситуации необходимо связаться со встречным
судном по УКВ-радиостанции или подать не менее пяти коротких гудков.
Следующий пункт правила 17 (а)(ii) гласит: «Однако это другое судно, когда
для него становится очевидным, что судно обязанное уступить дорогу, не пред-
принимает соответствующего действия, требуемого этими Правилами, может
предпринять действие, чтобы избежать столкновения только собственным ма-
невром».
Предпринимать самостоятельные действия привилегированному судну «В»
можно только в тех очевидных случаях, когда бездействие или недостаточно
эффективное действие судна «А» может привести к столкновению. Прежде всего
судно «В» должно проинформировать судно «А» всеми доступными способами
о том, что ситуация сближения опасная:
подать звуковой сигнал предупреждения согласно правилу 34 (d);
привлечь внимание подачей световых сигналов в соответствии с пра-
вилом 36 (луч прожектора);
использовать УКВ связь на канале 16, если это возможно однозначно в
сложившейся ситуации.
Если после этого судно «А» (обязанное уступить дорогу) не предпримет
действий для безопасного расхождения, то судно «В» может применить само-
стоятельный маневр для избежания столкновения. При этом следует избегать
действий, которые могут оказаться разнозначными по отношению к запоздалым
вероятным действиям судна «А». Например, суда могут одновременно изменить
свой курс вправо. Точную дистанцию начала выполнения маневра в ситуации
«может» указать невозможно, так как она зависит от многих факторов: относи-
тельная скорость сближения; маневренные характеристики судов; окружающая
обстановка и т. п.
Изменение курса в сторону увеличения пеленга (обычно вправо) является
достаточно безопасным маневром, если он выполняется заблаговременно и ре-
шительно, чтобы показать изменившийся ракурс другому судну. При этом
уменьшится относительная скорость сближения, будет больше времени на оцен-
ку развивающейся ситуации.
Пункт (b) правила 17 говорит: «Когда по какой-либо причине судно, обязан-
ное сохранять курс и скорость, обнаруживает, что оно находится настолько
близко к другому судну, что столкновения нельзя избежать только действием
судна, уступающего дорогу, оно должно предпринять такое действие, которое
наилучшим образом поможет предотвратить столкновение».
Поскольку очень трудно определить, насколько близко можно подходить
судну «В» до того, как столкновение невозможно предотвратить только его дей-
ствиями, то судно «В» (сохраняющее курс и скорость) должно предпринять дей-
ствия до наступления этой стадии.
34
Такое действие в морской практике называют маневром «последнего момен-
та». Характер этого маневра зависит от конкретных обстоятельств случая, осо-
бенно поведения другого судна, и должен отвечать цели этого маневра. Как пра-
вило, когда это произойдет, оба судна начинают предпринимать свои действия.
Когда столкновение становится неизбежным, судоводитель действует в со-
ответствии с процедурами, относящимся к чрезвычайным ситуациям. После
объявления общесудовой тревоги предпринять такой маневр, который уменьшит
последствия столкновения. Повреждения могут быть минимальными, если удар
придется по носовой части корпуса, впереди таранной переборки. При прибли-
жении судна слева по носу самым неудачным маневром может быть изменение
курса вправо.
Пункт (с): «Судно с механическим двигателем, которое в ситуации пересе-
чения курсов предпринимает в соответствие с подпунктом (а)(ii) этого Правила
действие, чтобы избежать столкновения с другим судном с механическим двига-
телем, не должно, если позволяют обстоятельства, изменять курс влево, если
другое судно находится слева от него».
Этот пункт ограничивает отворот судна с механическим двигателем влево.
Этим самым вносится предупреждение о том, что судно, находящееся слева,
может одновременно начать правый поворот, и тем самым увеличится скорость
взаимного сближения судов и ограничится время для дальнейшей оценки ситуа-
ции.
Избегая столкновения только собственным маневром, судно «В» должно
особое внимание обращать на:
то, чтобы своими действиями не затруднять вероятные маневры на-
блюдаемого судна, которому уступается дорога;
возможность и необходимость приведения судна «А» за корму, если
обстановка этого потребует;
то, чтобы такой маневр был своевременным.
В пункте (d) правила 17 особо оговорено, что все положения п. (а) (ii) этого
правила «не освобождают» судно «А» от обязанности предпринять заблаговре-
менные и решительные действия для безопасного расхождения.
Резюмируя правила плавания и маневрирования судов с механическим дви-
гателем этой части, можно схематично представить ситуации сближения судов
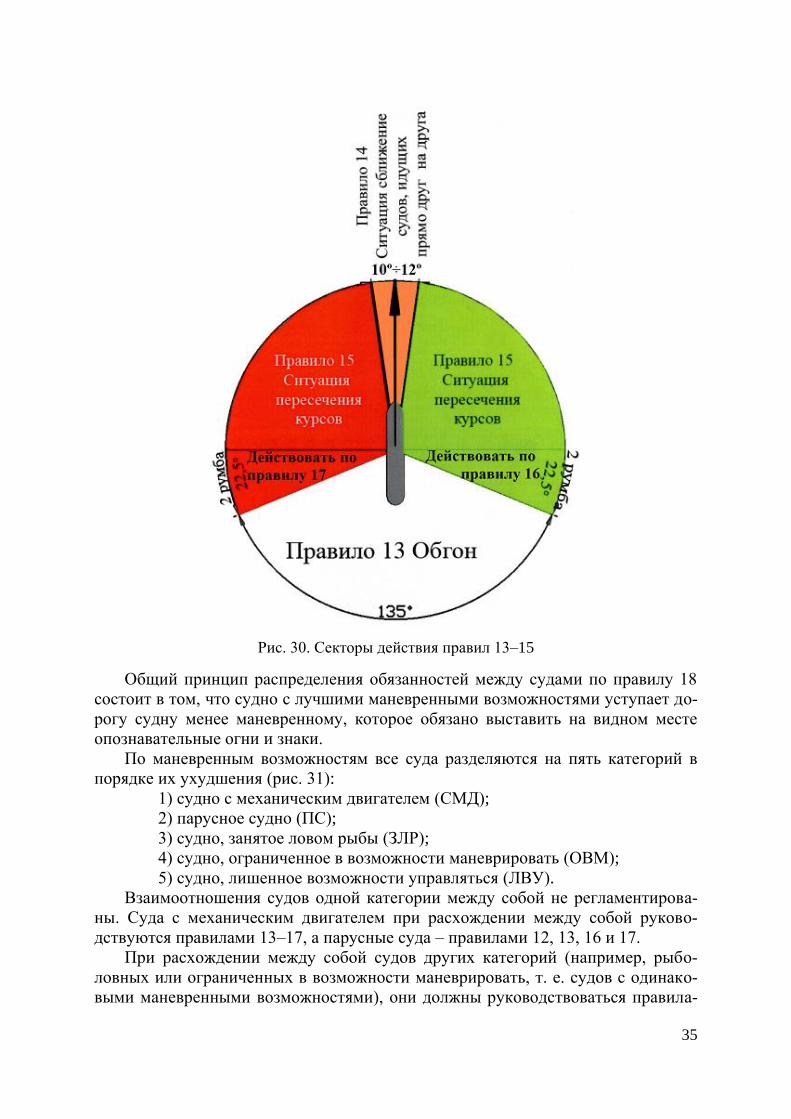
следующим образом (рис. 30):
– судоводитель указанного на рисунке судна при опасном сближении с
другим судном, находящимся в красном или белом секторе (в ситуации 15 или
13 правила), должен действовать в соответствии с правилом 17, т. е. сохранять
курс и скорость;
– при опасном сближении с другим судном, находящимся в оранжевом
или зеленом секторе (в ситуации 14 или 15 правила), должен действовать в соот-
ветствии с правилом 16, т. е. уступить дорогу.
Правило 18. Взаимные обязанности судов Это правило в зависимости от категорий судов устанавливает:
какое судно «должно» уступить дорогу другому судну;
какие суда «не должны затруднять» движение судна, стесненного
своей осадкой.
35
Рис. 30. Секторы действия правил 13–15
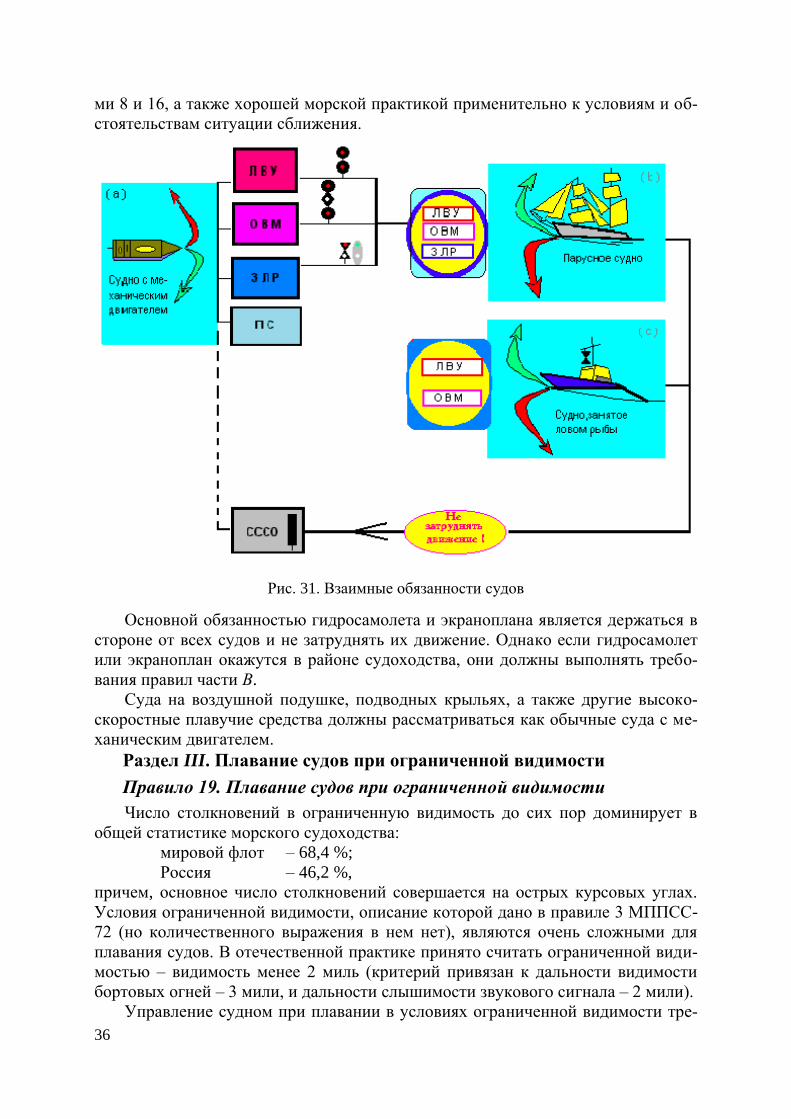
Общий принцип распределения обязанностей между судами по правилу 18
состоит в том, что судно с лучшими маневренными возможностями уступает до-
рогу судну менее маневренному, которое обязано выставить на видном месте
опознавательные огни и знаки.
По маневренным возможностям все суда разделяются на пять категорий в
порядке их ухудшения (рис. 31):
1) судно с механическим двигателем (СМД);
2) парусное судно (ПС);
3) судно, занятое ловом рыбы (ЗЛР);
4) судно, ограниченное в возможности маневрировать (ОВМ);
5) судно, лишенное возможности управляться (ЛВУ).
Взаимоотношения судов одной категории между собой не регламентирова-
ны. Суда с механическим двигателем при расхождении между собой руково-
дствуются правилами 13–17, а парусные суда – правилами 12, 13, 16 и 17.
При расхождении между собой судов других категорий (например, рыбо-
ловных или ограниченных в возможности маневрировать, т. е. судов с одинако-
выми маневренными возможностями), они должны руководствоваться правила-
36
ми 8 и 16, а также хорошей морской практикой применительно к условиям и об-
стоятельствам ситуации сближения.
Рис. 31. Взаимные обязанности судов
Основной обязанностью гидросамолета и экраноплана является держаться в
стороне от всех судов и не затруднять их движение. Однако если гидросамолет
или экраноплан окажутся в районе судоходства, они должны выполнять требо-
вания правил части В.
Суда на воздушной подушке, подводных крыльях, а также другие высоко-
скоростные плавучие средства должны рассматриваться как обычные суда с ме-
ханическим двигателем.
Раздел III. Плавание судов при ограниченной видимости
Правило 19. Плавание судов при ограниченной видимости
Число столкновений в ограниченную видимость до сих пор доминирует в
общей статистике морского судоходства:
мировой флот – 68,4 %;
Россия – 46,2 %,
причем, основное число столкновений совершается на острых курсовых углах.
Условия ограниченной видимости, описание которой дано в правиле 3 МППСС-
72 (но количественного выражения в нем нет), являются очень сложными для
плавания судов. В отечественной практике принято считать ограниченной види-
мостью – видимость менее 2 миль (критерий привязан к дальности видимости
бортовых огней – 3 мили, и дальности слышимости звукового сигнала – 2 мили).
Управление судном при плавании в условиях ограниченной видимости тре-
37
бует от судоводителей, прежде всего организации надлежащего постоянного ви-
зуального, слухового, радиолокационного наблюдения и с помощью АИС. Их
действия регламентируются рекомендациями ИМО, рекомендациями по несе-
нию штурманской службы (РШС-89), ведомственными документами, системой
управления безопасностью (СУБ) судна, которые устанавливают особый поря-
док организации вахтенной службы на ходовом мостике.
Действия судоводителей разделяются на три периода времени:
1) до входа в район ограниченной видимости;
2) при входе в район ограниченной видимости;
3) при плавании в условиях ограниченной видимости.
При подходе к зоне ограниченной видимости ВПКМ:
– предупреждает капитана;
– опробует средства звуковой туманной сигнализации;
– определяет место судна;
– управление рулѐм переводит на ручное;
– предупреждает вахтенного механика о возможных изменениях режи-
ма работы двигателей (переводит машину в маневренный режим);
– включает и готовит к работе РЛС (САРП);
– при помощи РЛС (САРП) прогнозирует развитие ситуации;
– выставляет вперѐдсмотрящего, проинструктировав его и обеспечив
надлежащей связью с мостиком;
– на малых глубинах включает эхолот, готовит якоря к отдаче;
– включает УКВ-радиостанцию на дежурный приѐм (16 канал);
– включает внутрисудовую трансляционную связь;
– включает ходовые огни и выключает или затемняет огни, мешающие
наблюдению;
– записывает в судовой журнал время входа в зону ограниченной види-
мости, дальность видимости и принятые меры предосторожности.
При входе в район ограниченной видимости:
– устанавливает скорость судна в соответствии с условиями ограничен-
ной видимости;
– на курсограмме делает отметку времени и сличает показания гиро-
скопического и магнитного компасов;
– ведет радиолокационное наблюдение и прокладку;
– подаѐт сигналы средствами звуковой туманной сигнализации соглас-
но МППСС.
При плавании в условиях ограниченной видимости ВПКМ:
– соблюдает безопасную скорость судна;
– ведѐт счисление пути и определяет место судна;
– обеспечивает визуальное и слуховое наблюдение;
– чаще контролирует работу курсоуказателей, навигационных огней,
лага;
– обеспечивает подачу туманных сигналов;
– ведѐт радиолокационное наблюдение и прокладку на планшете или
равноценное систематическое наблюдение за обнаруженными объектами;
– при расхождении с судами руководствуется правилом 19 МППСС-72;
38
– немедленно докладывает капитану об обнаружении объекта на экране
РЛС, услышанном туманном сигнале другого судна, о замеченном изменении
цвета воды, изменении характера волнения и зыби, появлении эха и т. п.
Вынужденный подход к берегу (району навигационных опасностей) при ог-
раниченной видимости выполняется на самом малом ходу, при котором сохра-
няется управляемость судна, с соблюдением мер предосторожности. Если при-
нятые меры предосторожности не обеспечивают безопасное движение судна,
следует стать на якорь, лечь в дрейф или на обратный курс.
При внезапном ухудшении видимости вахтенный помощник капитана не-
медленно выполняет меры, предусмотренные при подходе к зоне ограниченной
видимости, и до прибытия капитана на мостик руководствуется МППСС и мест-
ными правилами плавания.
Правило 19 МППСС-72 структурно располагается в части В раздела III, име-
ет такое же название, как и этот раздел, является в нем единственным правилом
и состоит из пяти пунктов:
п. а) – применение этого правила:
– к судам, не находящимся на виду друг у друга;
– при плавании в районах ограниченной видимости или вблизи
таких районов (рис. 32).
Рис. 32. Применение правила 19 МППСС-72
п. b) – безопасная скорость.
Плавание судна с безопасной скоростью устанавливает правило 6 МППСС-
72 независимо от условий видимости. Однако в этом пункте еще раз подчерки-
вается важность плавания судна с безопасной скоростью в условиях ограничен-
ной видимости, учитывая, что в таких условиях безопасная скорость должна
тщательно соблюдаться.
Этот пункт предписывает судну с механическим двигателем иметь свои ма-
шины готовыми к немедленному маневру. На дизельных судах это означает пе-
ревод двигателя в маневренный режим, т. е. перевод его на более легкий вид то-
39
плива, что позволяет производить реверсирование главным двигателем без вы-
хода его из строя.
п. с) – при выполнении правил раздела I этой же части каждое судно должно
тщательно сообразовывать свои действия с преобладающими обстоя-
тельствами и условиями ограниченной видимости.
В правилах раздела I части В МППСС-72 излагаются требования, которые
должны соблюдаться при любых условиях видимости. Понятно, что возможно-
сти и методы выполнения этих требований при хорошей и ограниченной види-
мости существенно различаются. В особенности это касается плавания судна в
узкостях и по системам разделения движения (СРД). Поэтому в этом пункте
подчеркивается необходимость при выполнении правил раздела I «тщательно
сообразовываться с обстоятельствами и условиями ограниченной видимости».
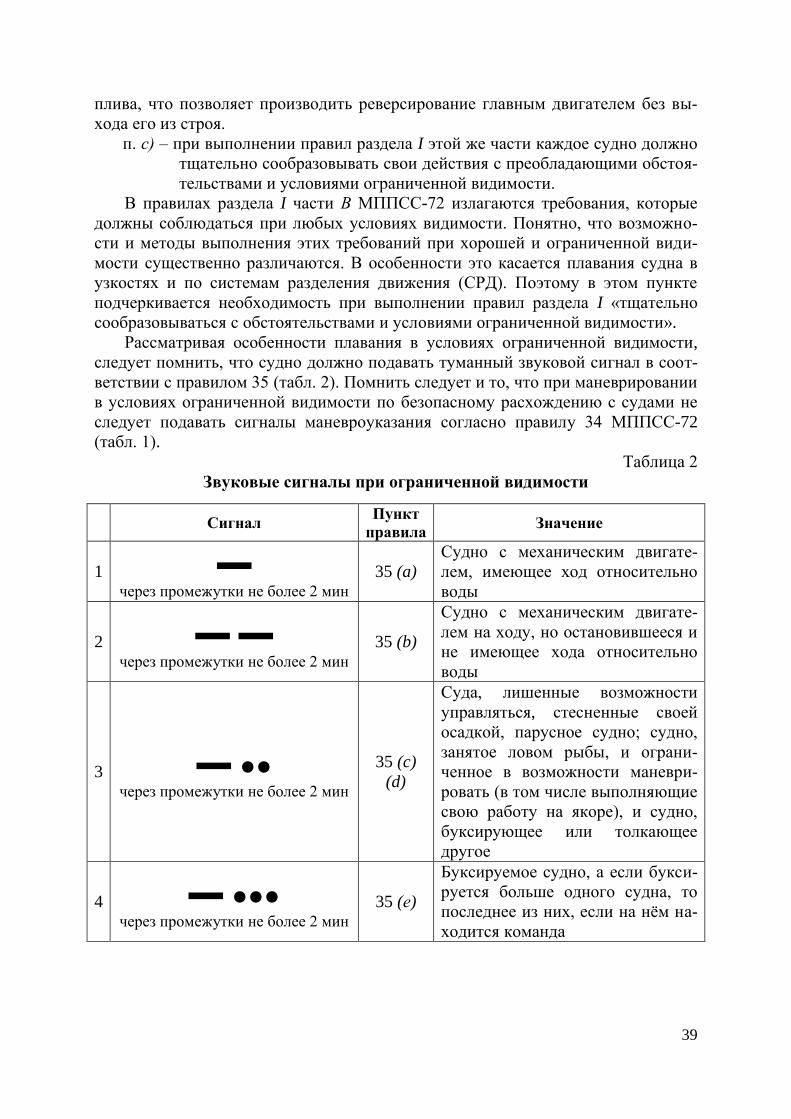
Рассматривая особенности плавания в условиях ограниченной видимости,
следует помнить, что судно должно подавать туманный звуковой сигнал в соот-
ветствии с правилом 35 (табл. 2). Помнить следует и то, что при маневрировании
в условиях ограниченной видимости по безопасному расхождению с судами не
следует подавать сигналы маневроуказания согласно правилу 34 МППСС-72
(табл. 1).
Таблица 2
Звуковые сигналы при ограниченной видимости
Сигнал Пункт
правила Значение
1 ▬
через промежутки не более 2 мин 35 (a)
Судно с механическим двигате-
лем, имеющее ход относительно
воды
2 ▬ ▬
через промежутки не более 2 мин 35 (b)
Судно с механическим двигате-
лем на ходу, но остановившееся и
не имеющее хода относительно
воды
3 ▬ ●● через промежутки не более 2 мин
35 (c)
(d)
Суда, лишенные возможности
управляться, стесненные своей
осадкой, парусное судно; судно,
занятое ловом рыбы, и ограни-
ченное в возможности маневри-
ровать (в том числе выполняющие
свою работу на якоре), и судно,
буксирующее или толкающее
другое
4 ▬ ●●● через промежутки не более 2 мин
35 (е)
Буксируемое судно, а если букси-
руется больше одного судна, то
последнее из них, если на нѐм на-
ходится команда
40
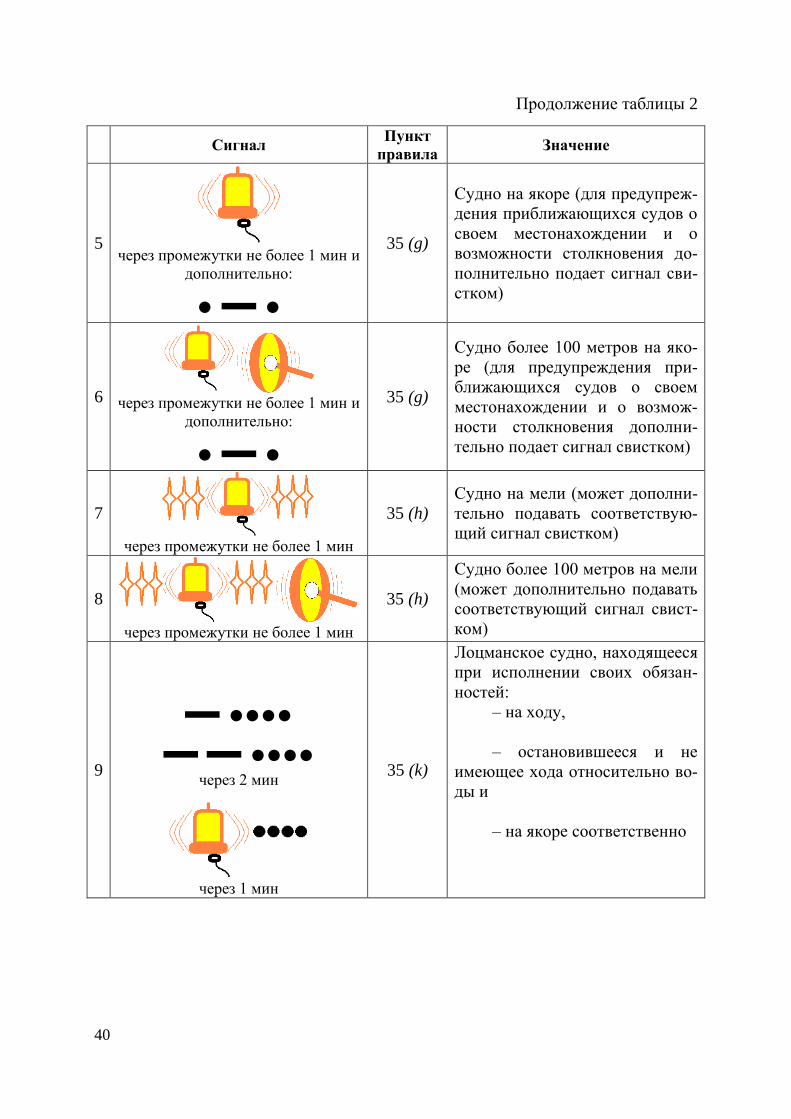
Продолжение таблицы 2
Сигнал Пункт
правила Значение
5 через промежутки не более 1 мин и
дополнительно:
● ▬ ●
35 (g)
Судно на якоре (для предупреж-
дения приближающихся судов о
своем местонахождении и о
возможности столкновения до-
полнительно подает сигнал сви-
стком)
6
через промежутки не более 1 мин и
дополнительно:
● ▬ ●
35 (g)
Судно более 100 метров на яко-
ре (для предупреждения при-
ближающихся судов о своем
местонахождении и о возмож-
ности столкновения дополни-
тельно подает сигнал свистком)
7
через промежутки не более 1 мин
35 (h)
Судно на мели (может дополни-
тельно подавать соответствую-
щий сигнал свистком)
8
через промежутки не более 1 мин
35 (h)
Судно более 100 метров на мели
(может дополнительно подавать
соответствующий сигнал свист-
ком)
9
▬ ●●●●
▬ ▬ ●●●● через 2 мин
через 1 мин
35 (k)
Лоцманское судно, находящееся
при исполнении своих обязан-
ностей:
– на ходу,
– остановившееся и не
имеющее хода относительно во-
ды и
– на якоре соответственно
41
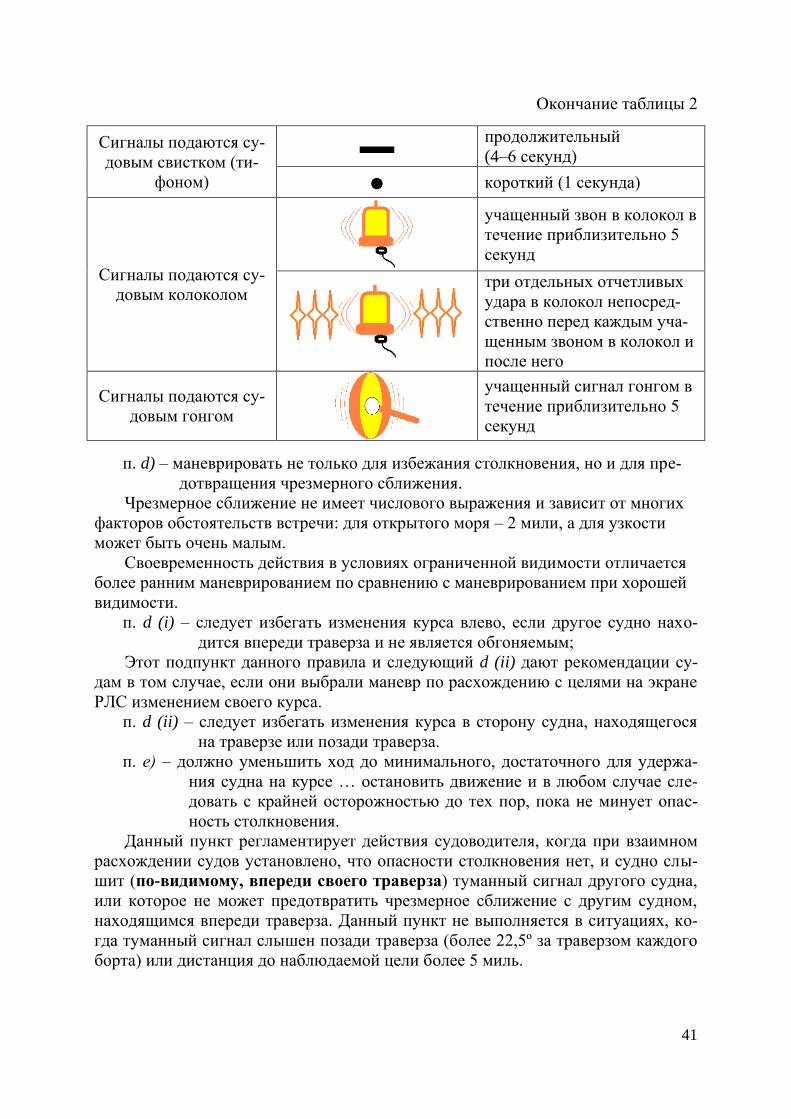
Окончание таблицы 2
Сигналы подаются су-
довым свистком (ти-
фоном)
▬ продолжительный
(4–6 секунд)
● короткий (1 секунда)
Сигналы подаются су-
довым колоколом
учащенный звон в колокол в
течение приблизительно 5
секунд
три отдельных отчетливых
удара в колокол непосред-
ственно перед каждым уча-
щенным звоном в колокол и
после него
Сигналы подаются су-
довым гонгом
учащенный сигнал гонгом в
течение приблизительно 5
секунд
п. d) – маневрировать не только для избежания столкновения, но и для пре-
дотвращения чрезмерного сближения.
Чрезмерное сближение не имеет числового выражения и зависит от многих
факторов обстоятельств встречи: для открытого моря – 2 мили, а для узкости
может быть очень малым.
Своевременность действия в условиях ограниченной видимости отличается
более ранним маневрированием по сравнению с маневрированием при хорошей
видимости.
п. d (i) – следует избегать изменения курса влево, если другое судно нахо-
дится впереди траверза и не является обгоняемым;
Этот подпункт данного правила и следующий d (ii) дают рекомендации су-
дам в том случае, если они выбрали маневр по расхождению с целями на экране
РЛС изменением своего курса.
п. d (ii) – следует избегать изменения курса в сторону судна, находящегося
на траверзе или позади траверза.
п. е) – должно уменьшить ход до минимального, достаточного для удержа-
ния судна на курсе … остановить движение и в любом случае сле-
довать с крайней осторожностью до тех пор, пока не минует опас-
ность столкновения.
Данный пункт регламентирует действия судоводителя, когда при взаимном
расхождении судов установлено, что опасности столкновения нет, и судно слы-
шит (по-видимому, впереди своего траверза) туманный сигнал другого судна,
или которое не может предотвратить чрезмерное сближение с другим судном,
находящимся впереди траверза. Данный пункт не выполняется в ситуациях, ко-
гда туманный сигнал слышен позади траверза (более 22,5º за траверзом каждого
борта) или дистанция до наблюдаемой цели более 5 миль.
42
ЧАСТЬ С. ОГНИ И ЗНАКИ
Независимо от условий погоды, навигационные огни должны выставляться
от восхода до захода солнца, а также в светлое время суток в условиях ограни-
ченной видимости. Время включения и выключения этих огней должно регист-
рироваться в судовом журнале.
Требования, касающиеся несения на судах знаков, должны соблюдаться в
дневное время. Необходимо учитывать, что огни и знаки не являются взаимоза-
меняемыми, и установленный порядок выставления огней и знаков должен стро-
го соблюдаться, даже если в дневное время в условиях ограниченной видимости
зажигаются огни.
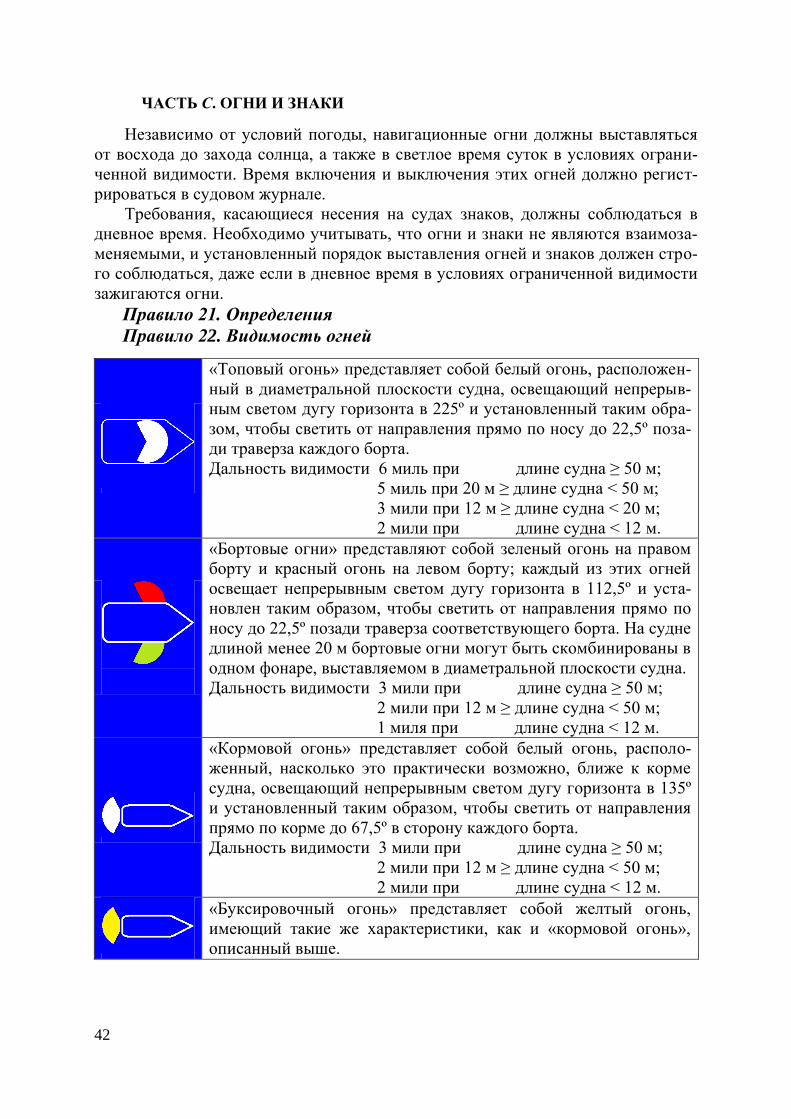
Правило 21. Определения
Правило 22. Видимость огней
«Топовый огонь» представляет собой белый огонь, расположен-
ный в диаметральной плоскости судна, освещающий непрерыв-
ным светом дугу горизонта в 225º и установленный таким обра-
зом, чтобы светить от направления прямо по носу до 22,5º поза-
ди траверза каждого борта.
Дальность видимости 6 миль при длине судна ≥ 50 м;
5 миль при 20 м ≥ длине судна < 50 м;
3 мили при 12 м ≥ длине судна < 20 м;
2 мили при длине судна < 12 м.
«Бортовые огни» представляют собой зеленый огонь на правом
борту и красный огонь на левом борту; каждый из этих огней
освещает непрерывным светом дугу горизонта в 112,5º и уста-
новлен таким образом, чтобы светить от направления прямо по
носу до 22,5º позади траверза соответствующего борта. На судне
длиной менее 20 м бортовые огни могут быть скомбинированы в
одном фонаре, выставляемом в диаметральной плоскости судна.
Дальность видимости 3 мили при длине судна ≥ 50 м;
2 мили при 12 м ≥ длине судна < 50 м;
1 миля при длине судна < 12 м.
«Кормовой огонь» представляет собой белый огонь, располо-
женный, насколько это практически возможно, ближе к корме
судна, освещающий непрерывным светом дугу горизонта в 135º
и установленный таким образом, чтобы светить от направления
прямо по корме до 67,5º в сторону каждого борта.
Дальность видимости 3 мили при длине судна ≥ 50 м;
2 мили при 12 м ≥ длине судна < 50 м;
2 мили при длине судна < 12 м.
«Буксировочный огонь» представляет собой желтый огонь,
имеющий такие же характеристики, как и «кормовой огонь»,
описанный выше.
43
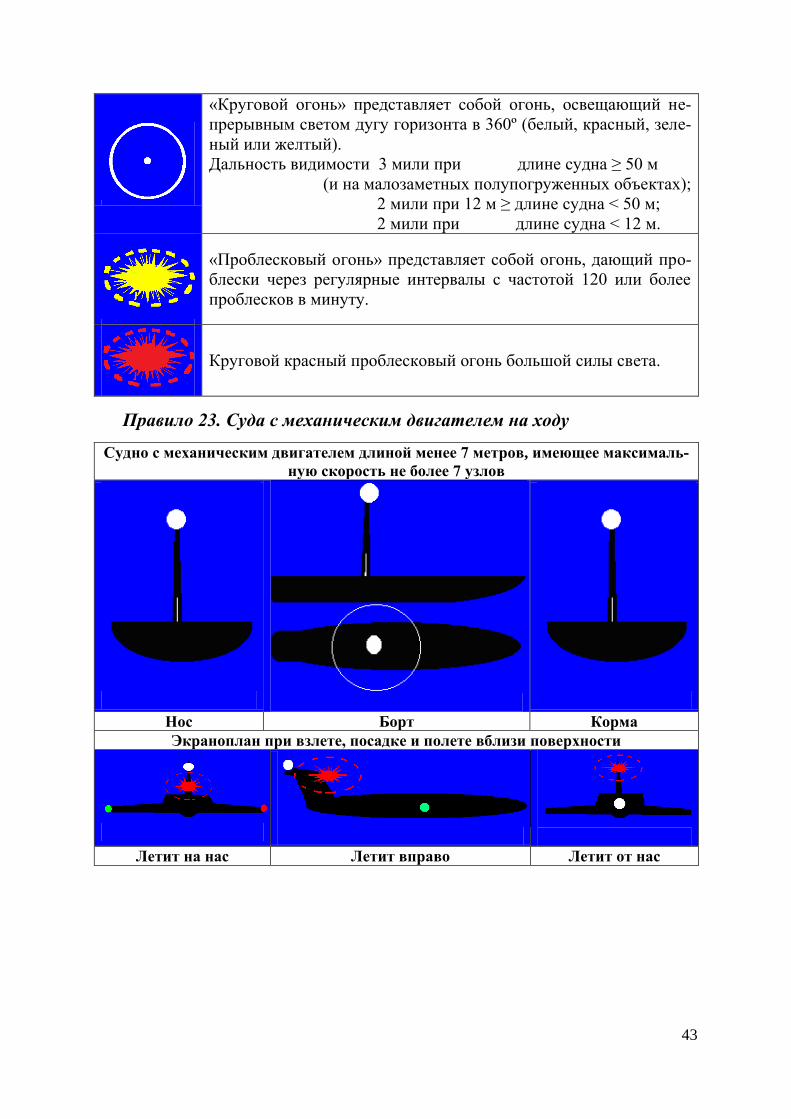
«Круговой огонь» представляет собой огонь, освещающий не-
прерывным светом дугу горизонта в 360º (белый, красный, зеле-
ный или желтый).
Дальность видимости 3 мили при длине судна ≥ 50 м
(и на малозаметных полупогруженных объектах);
2 мили при 12 м ≥ длине судна < 50 м;
2 мили при длине судна < 12 м.
«Проблесковый огонь» представляет собой огонь, дающий про-
блески через регулярные интервалы с частотой 120 или более
проблесков в минуту.
Круговой красный проблесковый огонь большой силы света.
Правило 23. Суда с механическим двигателем на ходу
Судно с механическим двигателем длиной менее 7 метров, имеющее максималь-
ную скорость не более 7 узлов
Нос Борт Корма
Экраноплан при взлете, посадке и полете вблизи поверхности
Летит на нас Летит вправо Летит от нас
44
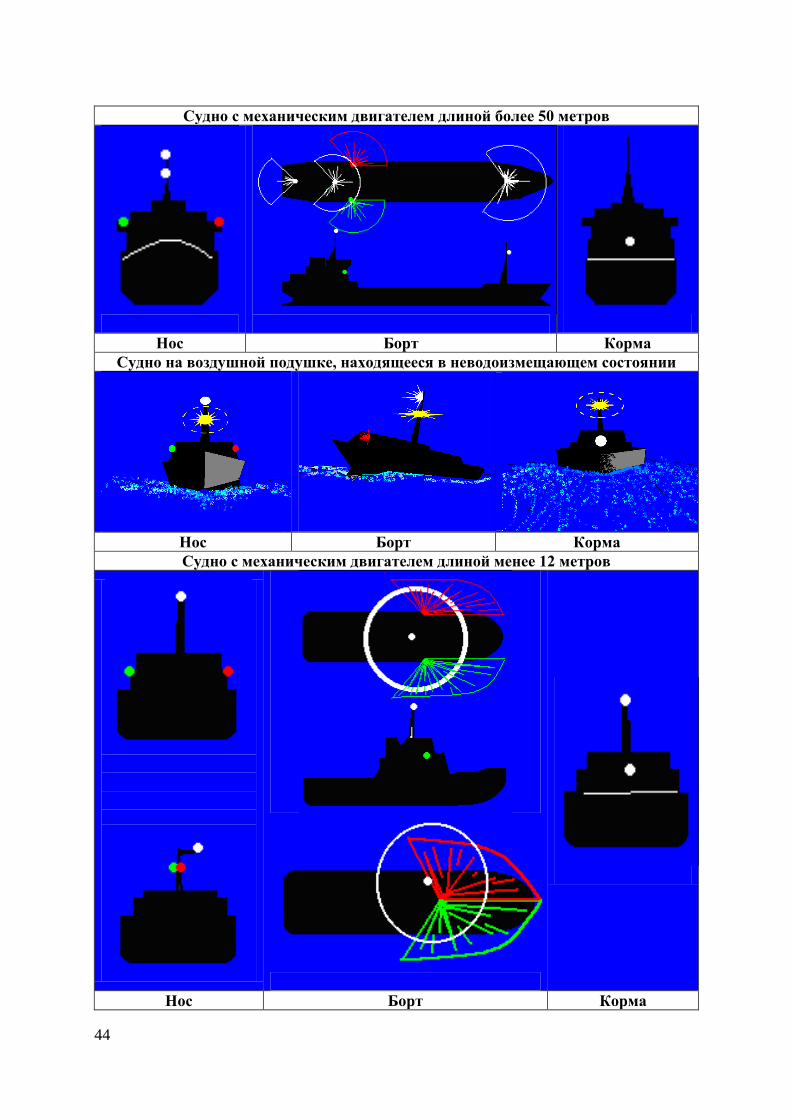
Судно с механическим двигателем длиной более 50 метров
Нос Борт Корма
Судно на воздушной подушке, находящееся в неводоизмещающем состоянии
Нос Борт Корма
Судно с механическим двигателем длиной менее 12 метров
Нос Борт Корма
45
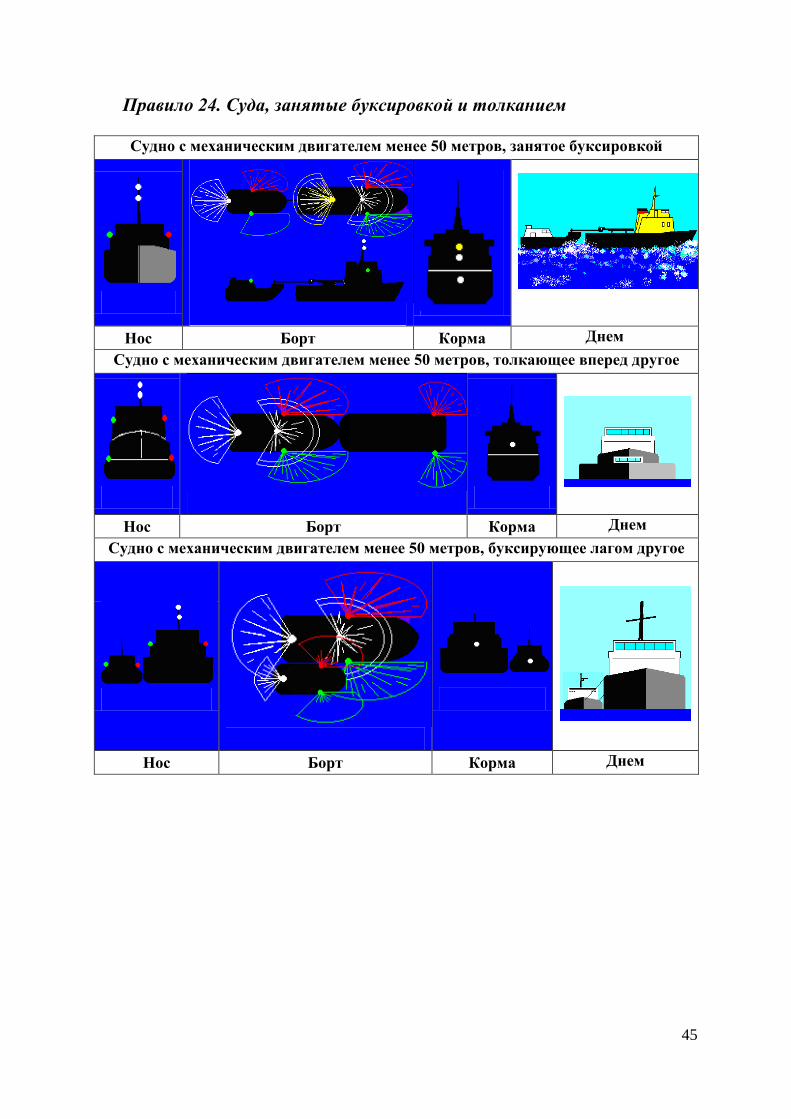
Правило 24. Суда, занятые буксировкой и толканием
Судно с механическим двигателем менее 50 метров, занятое буксировкой
Нос Борт Корма Днем
Судно с механическим двигателем менее 50 метров, толкающее вперед другое
Нос Борт Корма Днем
Судно с механическим двигателем менее 50 метров, буксирующее лагом другое
Нос Борт Корма Днем
46
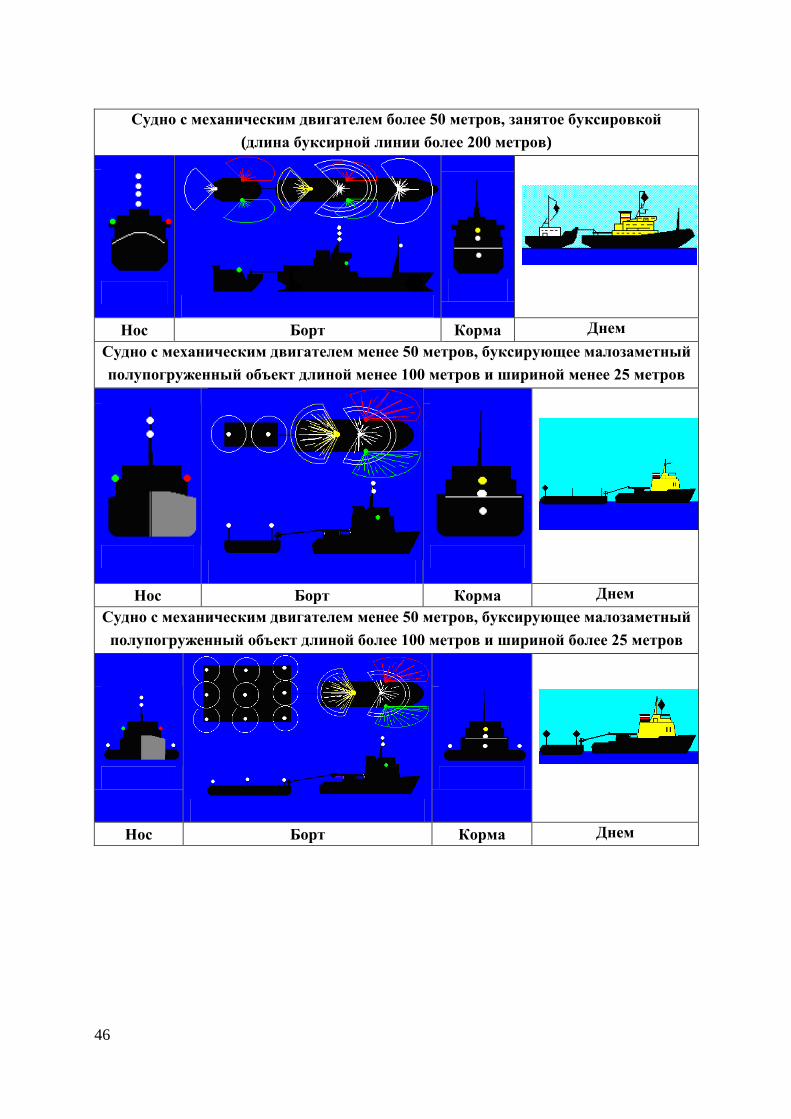
Судно с механическим двигателем более 50 метров, занятое буксировкой
(длина буксирной линии более 200 метров)
Нос Борт Корма Днем
Судно с механическим двигателем менее 50 метров, буксирующее малозаметный
полупогруженный объект длиной менее 100 метров и шириной менее 25 метров
Нос Борт Корма Днем
Судно с механическим двигателем менее 50 метров, буксирующее малозаметный
полупогруженный объект длиной более 100 метров и шириной более 25 метров
Нос Борт Корма Днем
47
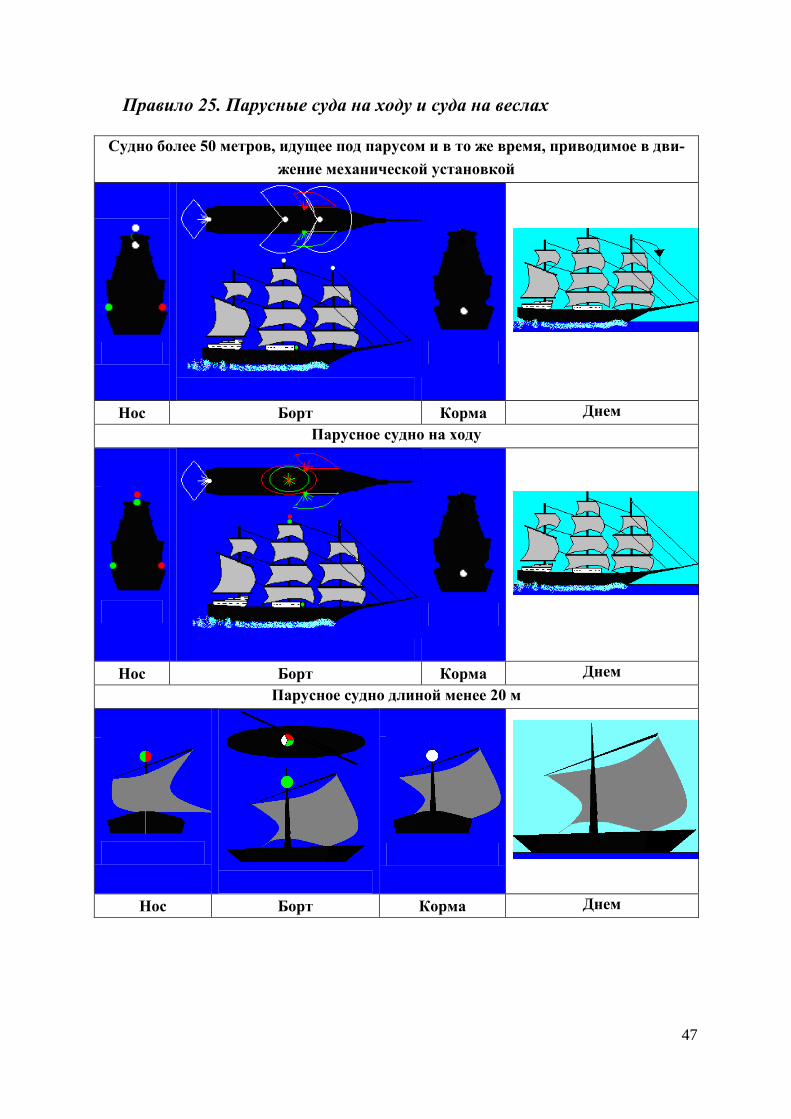
Правило 25. Парусные суда на ходу и суда на веслах
Судно более 50 метров, идущее под парусом и в то же время, приводимое в дви-
жение механической установкой
Нос Борт Корма Днем
Парусное судно на ходу
Нос Борт Корма Днем
Парусное судно длиной менее 20 м
Нос Борт Корма Днем
48
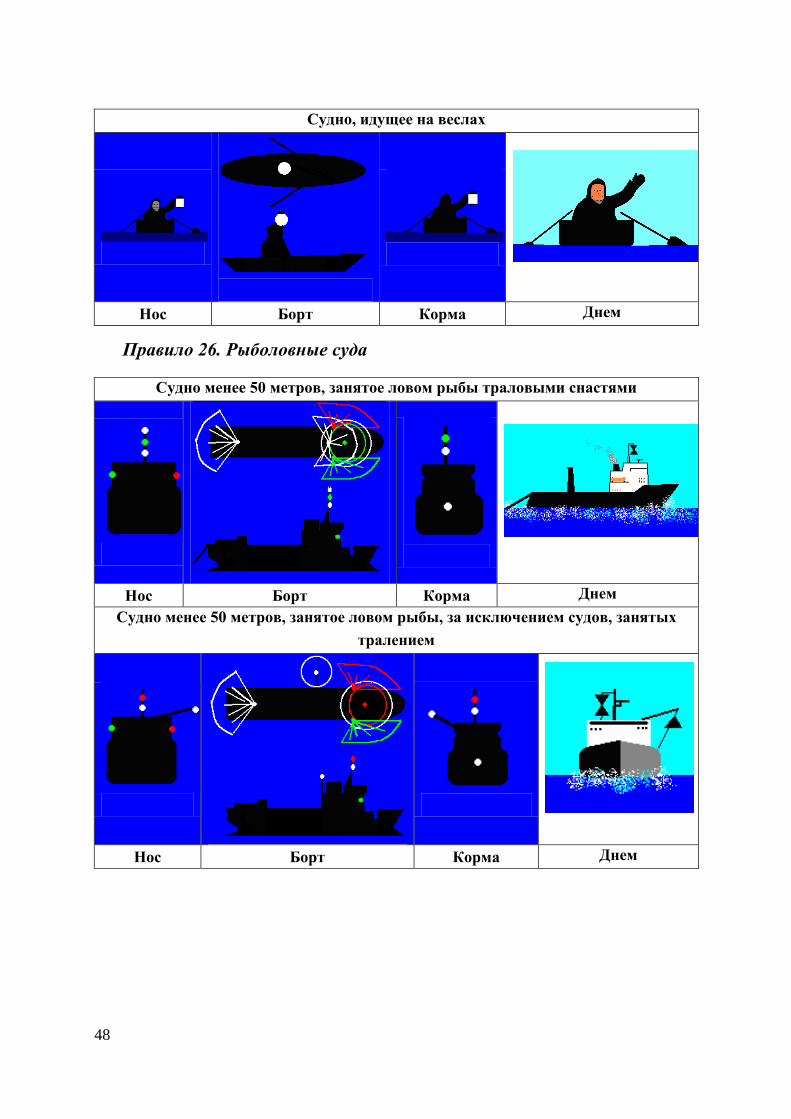
Судно, идущее на веслах
Нос Борт Корма Днем
Правило 26. Рыболовные суда
Судно менее 50 метров, занятое ловом рыбы траловыми снастями
Нос Борт Корма Днем
Судно менее 50 метров, занятое ловом рыбы, за исключением судов, занятых
тралением
Нос Борт Корма Днем
49
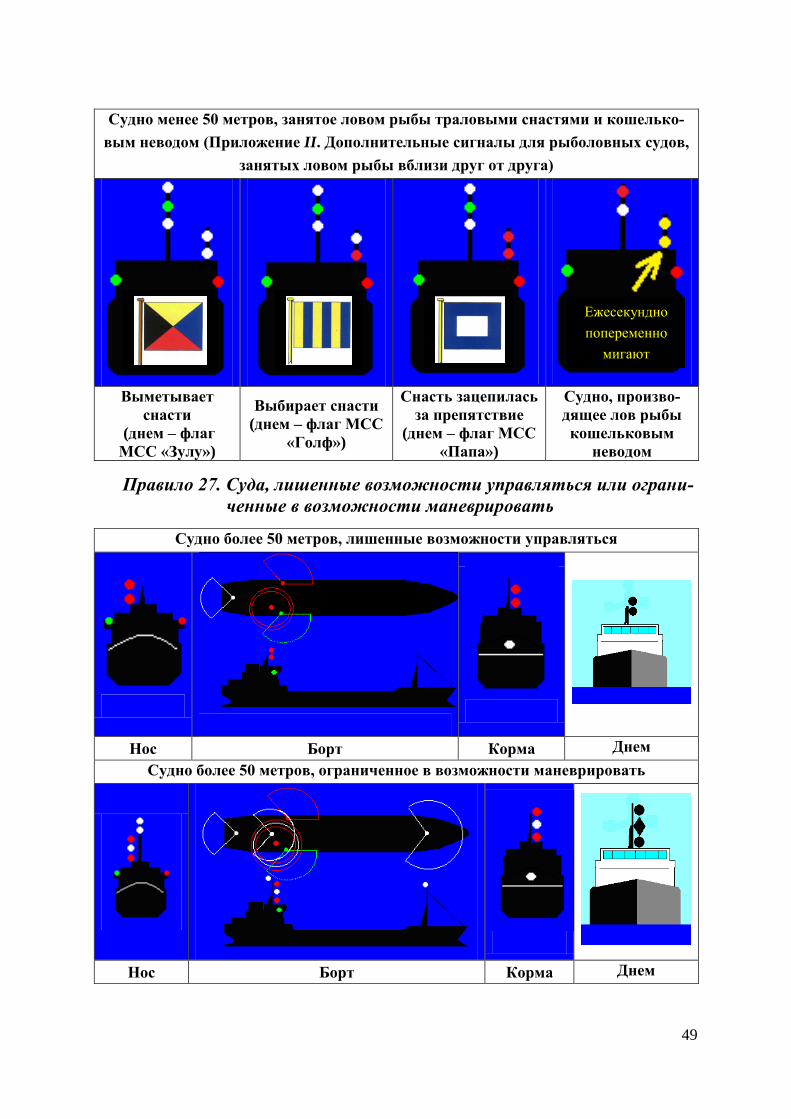
Судно менее 50 метров, занятое ловом рыбы траловыми снастями и кошелько-
вым неводом (Приложение II. Дополнительные сигналы для рыболовных судов,
занятых ловом рыбы вблизи друг от друга)
Выметывает
снасти
(днем – флаг
МСС «Зулу»)
Выбирает снасти
(днем – флаг МСС
«Голф»)
Снасть зацепилась
за препятствие
(днем – флаг МСС
«Папа»)
Судно, произво-
дящее лов рыбы
кошельковым
неводом
Правило 27. Суда, лишенные возможности управляться или ограни-
ченные в возможности маневрировать
Судно более 50 метров, лишенные возможности управляться
Нос Борт Корма Днем
Судно более 50 метров, ограниченное в возможности маневрировать
Нос Борт Корма Днем
Ежесекундно
попеременно
мигают
мигают
50
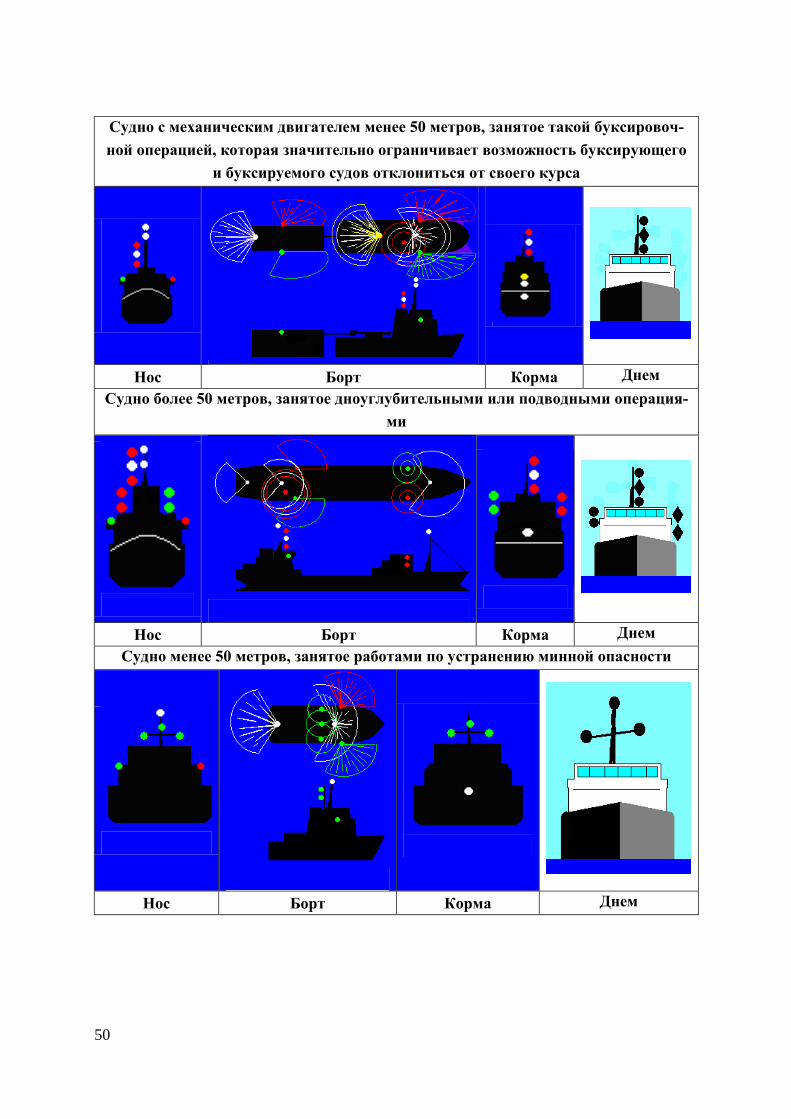
Судно с механическим двигателем менее 50 метров, занятое такой буксировоч-
ной операцией, которая значительно ограничивает возможность буксирующего
и буксируемого судов отклониться от своего курса
Нос Борт Корма Днем
Судно более 50 метров, занятое дноуглубительными или подводными операция-
ми
Нос Борт Корма Днем
Судно менее 50 метров, занятое работами по устранению минной опасности
Нос Борт Корма Днем
51
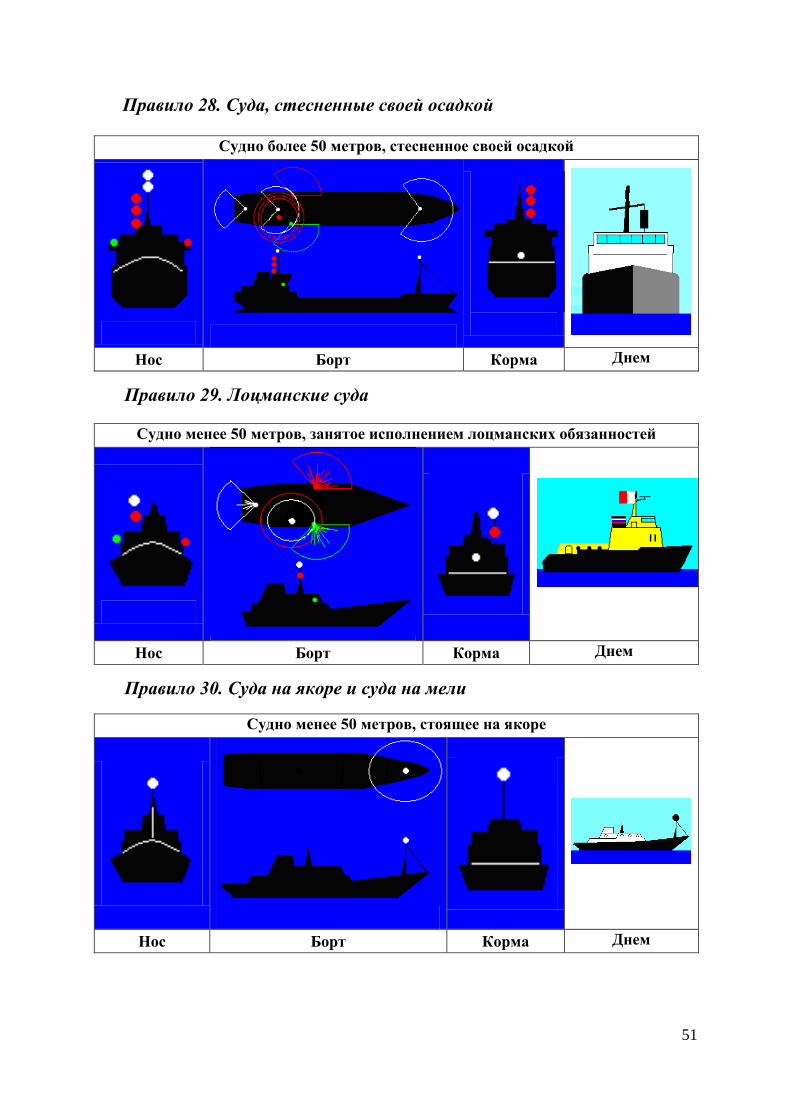
Правило 28. Суда, стесненные своей осадкой
Судно более 50 метров, стесненное своей осадкой
Нос Борт Корма Днем
Правило 29. Лоцманские суда
Судно менее 50 метров, занятое исполнением лоцманских обязанностей
Нос Борт Корма Днем
Правило 30. Суда на якоре и суда на мели
Судно менее 50 метров, стоящее на якоре
Нос Борт Корма Днем
52
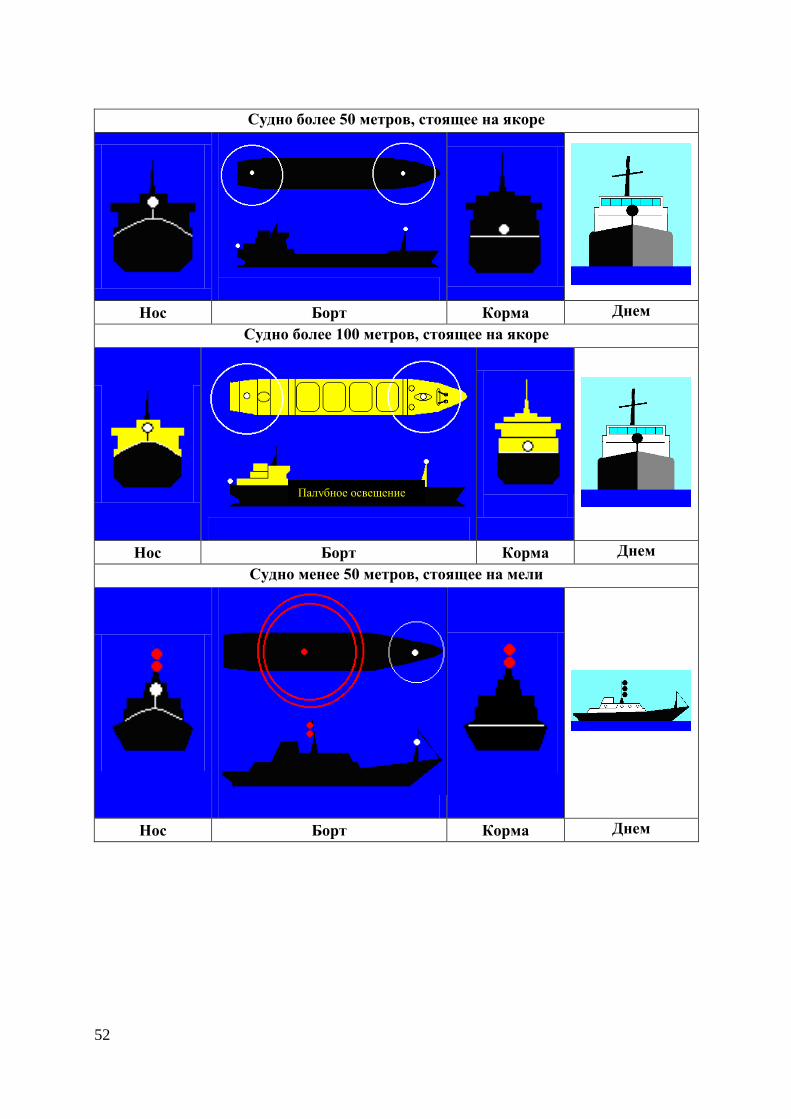
Судно более 50 метров, стоящее на якоре
Нос Борт Корма Днем
Судно более 100 метров, стоящее на якоре
Нос Борт Корма Днем
Судно менее 50 метров, стоящее на мели
Нос Борт Корма Днем
Палубное освещение
53
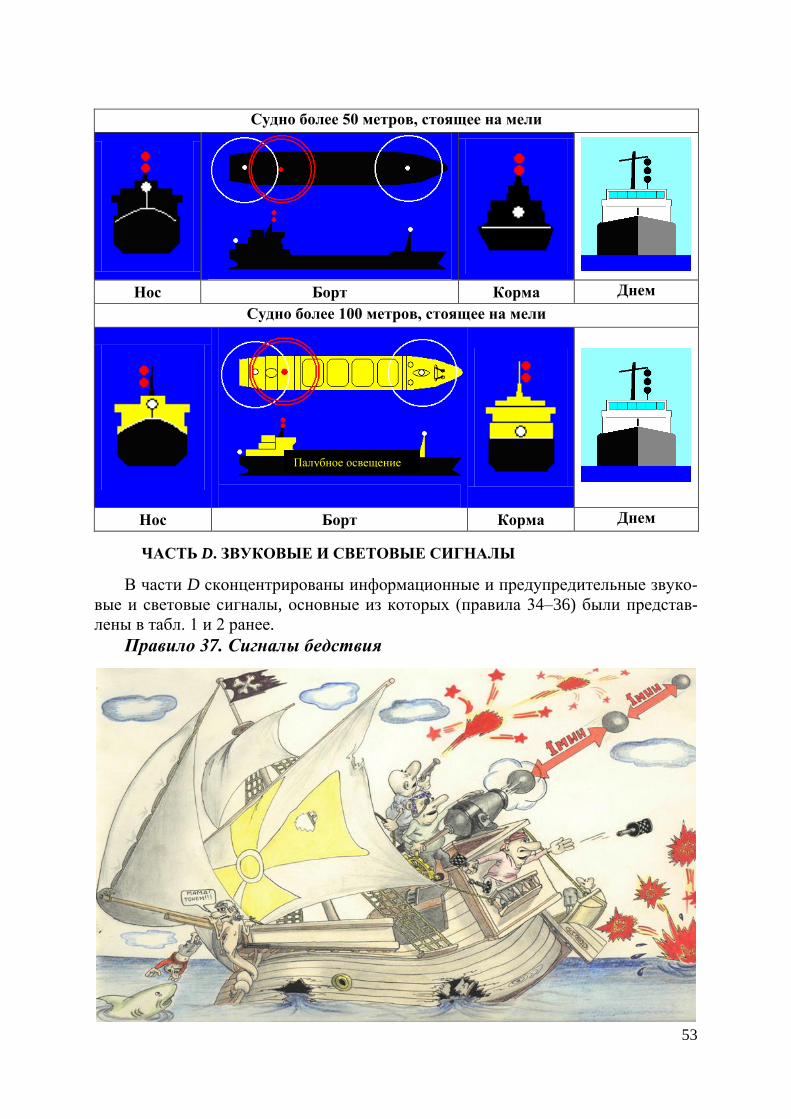
Судно более 50 метров, стоящее на мели
Нос Борт Корма Днем
Судно более 100 метров, стоящее на мели
Нос Борт Корма Днем
ЧАСТЬ D. ЗВУКОВЫЕ И СВЕТОВЫЕ СИГНАЛЫ
В части D сконцентрированы информационные и предупредительные звуко-
вые и световые сигналы, основные из которых (правила 34–36) были представ-
лены в табл. 1 и 2 ранее.
Правило 37. Сигналы бедствия
Палубное освещение
54
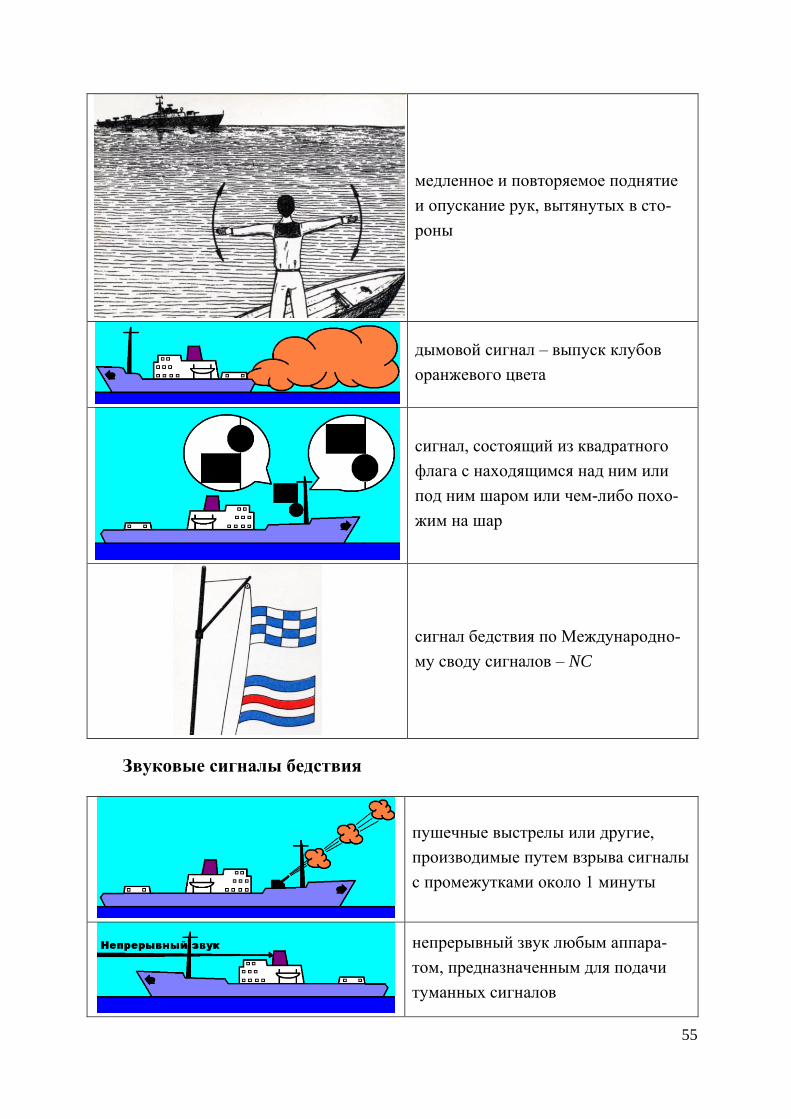
Когда судно терпит бедствие и требует помощи, оно должно использовать
или выставлять сигналы, описанные в Приложении IV к настоящим Правилам.
Следующие сигналы, используемые или выставляемые вместе либо раздель-
но, указывают, что судно терпит бедствие и нуждается в помощи:
Визуальные сигналы бедствия
полотнище оранжевого цвета с чер-
ным квадратом либо кругом или
другим соответствующим символом
(для опознавания с воздуха)
цветное пятно на воде
пламя на судне (например, от горя-
щей смоляной или мазутной бочки и
т. п.)
красный свет ракеты с парашютом
или фальшфейер красного цвета
ракеты или гранаты, выбрасываю-
щие красные звезды, выпускаемые
поодиночке через короткие проме-
жутки времени
55
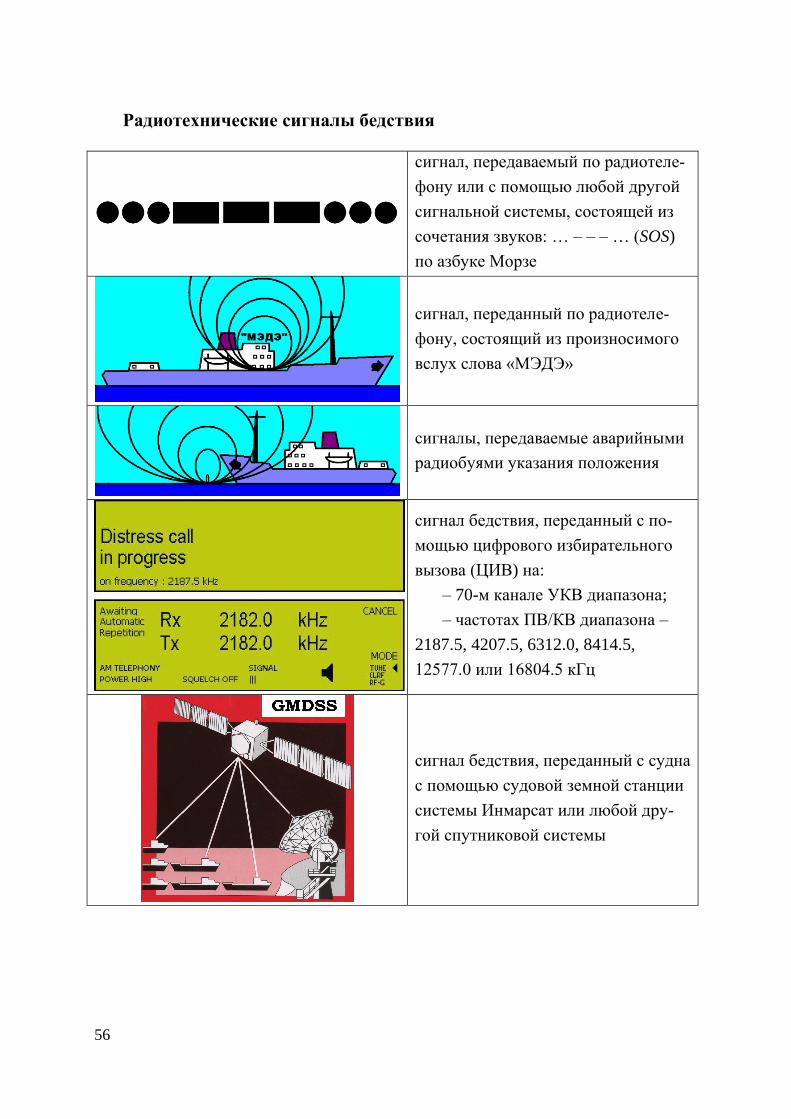
медленное и повторяемое поднятие
и опускание рук, вытянутых в сто-
роны
дымовой сигнал – выпуск клубов
оранжевого цвета
сигнал, состоящий из квадратного
флага с находящимся над ним или
под ним шаром или чем-либо похо-
жим на шар
сигнал бедствия по Международно-
му своду сигналов – NC
Звуковые сигналы бедствия
пушечные выстрелы или другие,
производимые путем взрыва сигналы
с промежутками около 1 минуты
непрерывный звук любым аппара-
том, предназначенным для подачи
туманных сигналов
56
Радиотехнические сигналы бедствия
сигнал, передаваемый по радиотеле-
фону или с помощью любой другой
сигнальной системы, состоящей из
сочетания звуков: … – – – … (SOS)
по азбуке Морзе
сигнал, переданный по радиотеле-
фону, состоящий из произносимого
вслух слова «МЭДЭ»
сигналы, передаваемые аварийными
радиобуями указания положения
сигнал бедствия, переданный с по-
мощью цифрового избирательного
вызова (ЦИВ) на:
– 70-м канале УКВ диапазона;
– частотах ПВ/КВ диапазона –
2187.5, 4207.5, 6312.0, 8414.5,
12577.0 или 16804.5 кГц
сигнал бедствия, переданный с судна
с помощью судовой земной станции
системы Инмарсат или любой дру-
гой спутниковой системы
57
установленные сигналы, передавае-
мые системами радиосвязи, включая
сигналы радиолокационных маяков-
ответчиков – на спасательных
шлюпках и плотах
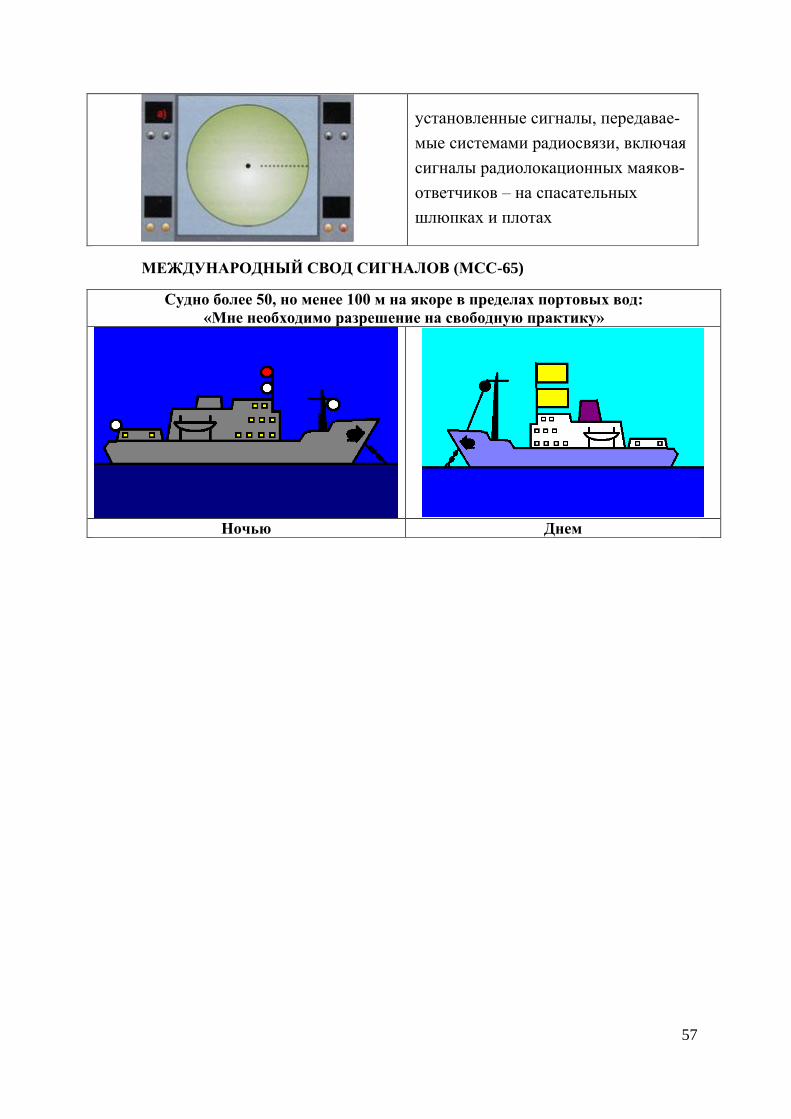
МЕЖДУНАРОДНЫЙ СВОД СИГНАЛОВ (МСС-65)
Судно более 50, но менее 100 м на якоре в пределах портовых вод:
«Мне необходимо разрешение на свободную практику»
Ночью Днем
58
2. ПРАВИЛА ПЛАВАНИЯ В ТЕРРИТОРИАЛЬНЫХ ВОДАХ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Издаваемые в России управлением навигации и океанографии министерства
обороны (ГУН и О МО) книги № 9956.01 (ИМ, выпуск № 1) и № 9027 содержат
национальные правила плавания России и предназначены для использования
мореплавателями при плавании в водах, на которые распространяется юрисдик-
ция Российской Федерации. Ниже приводятся выдержки из этих документов, ко-
торые необходимо знать судоводителям.
Правила подъема сигналов пограничными кораблями для оста-
новки невоенных судов в территориальных и внутренних водах РФ Сигнал об остановке невоенных судов в территориальных и внутренних во-
дах РФ пограничные корабли подают:
59
днем – поднятием на мачте сигнала L (Лима) по Международному
своду сигналов;
ночью – включением на мачте двух круговых зеленых огней, распо-
ложенных по вертикали.
Судно, которому дан такой сигнал, обязано остановиться, и может продол-
жать движение лишь после получения на это разрешения от пограничного ко-
рабля, его остановившего.
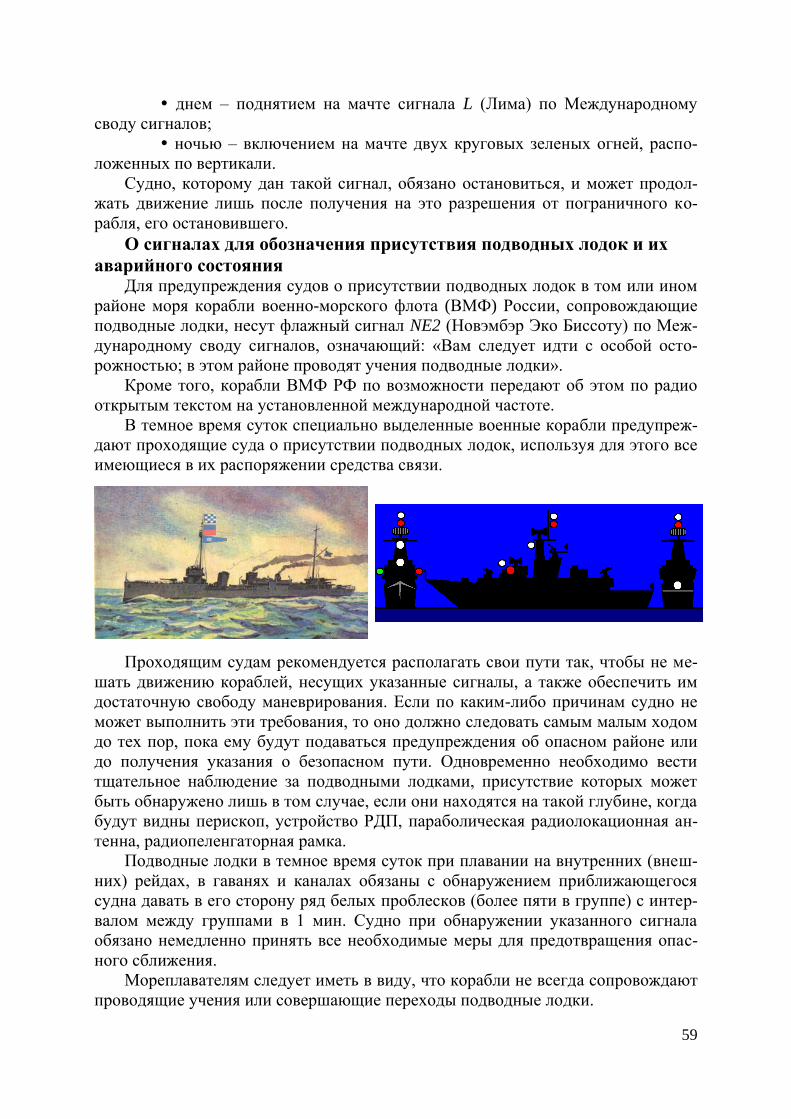
О сигналах для обозначения присутствия подводных лодок и их
аварийного состояния Для предупреждения судов о присутствии подводных лодок в том или ином
районе моря корабли военно-морского флота (ВМФ) России, сопровождающие
подводные лодки, несут флажный сигнал NE2 (Новэмбэр Эко Биссоту) по Меж-
дународному своду сигналов, означающий: «Вам следует идти с особой осто-
рожностью; в этом районе проводят учения подводные лодки».
Кроме того, корабли ВМФ РФ по возможности передают об этом по радио
открытым текстом на установленной международной частоте.
В темное время суток специально выделенные военные корабли предупреж-
дают проходящие суда о присутствии подводных лодок, используя для этого все
имеющиеся в их распоряжении средства связи.
Проходящим судам рекомендуется располагать свои пути так, чтобы не ме-
шать движению кораблей, несущих указанные сигналы, а также обеспечить им
достаточную свободу маневрирования. Если по каким-либо причинам судно не
может выполнить эти требования, то оно должно следовать самым малым ходом
до тех пор, пока ему будут подаваться предупреждения об опасном районе или
до получения указания о безопасном пути. Одновременно необходимо вести
тщательное наблюдение за подводными лодками, присутствие которых может
быть обнаружено лишь в том случае, если они находятся на такой глубине, когда
будут видны перископ, устройство РДП, параболическая радиолокационная ан-
тенна, радиопеленгаторная рамка.
Подводные лодки в темное время суток при плавании на внутренних (внеш-
них) рейдах, в гаванях и каналах обязаны с обнаружением приближающегося
судна давать в его сторону ряд белых проблесков (более пяти в группе) с интер-
валом между группами в 1 мин. Судно при обнаружении указанного сигнала
обязано немедленно принять все необходимые меры для предотвращения опас-
ного сближения.
Мореплавателям следует иметь в виду, что корабли не всегда сопровождают
проводящие учения или совершающие переходы подводные лодки.
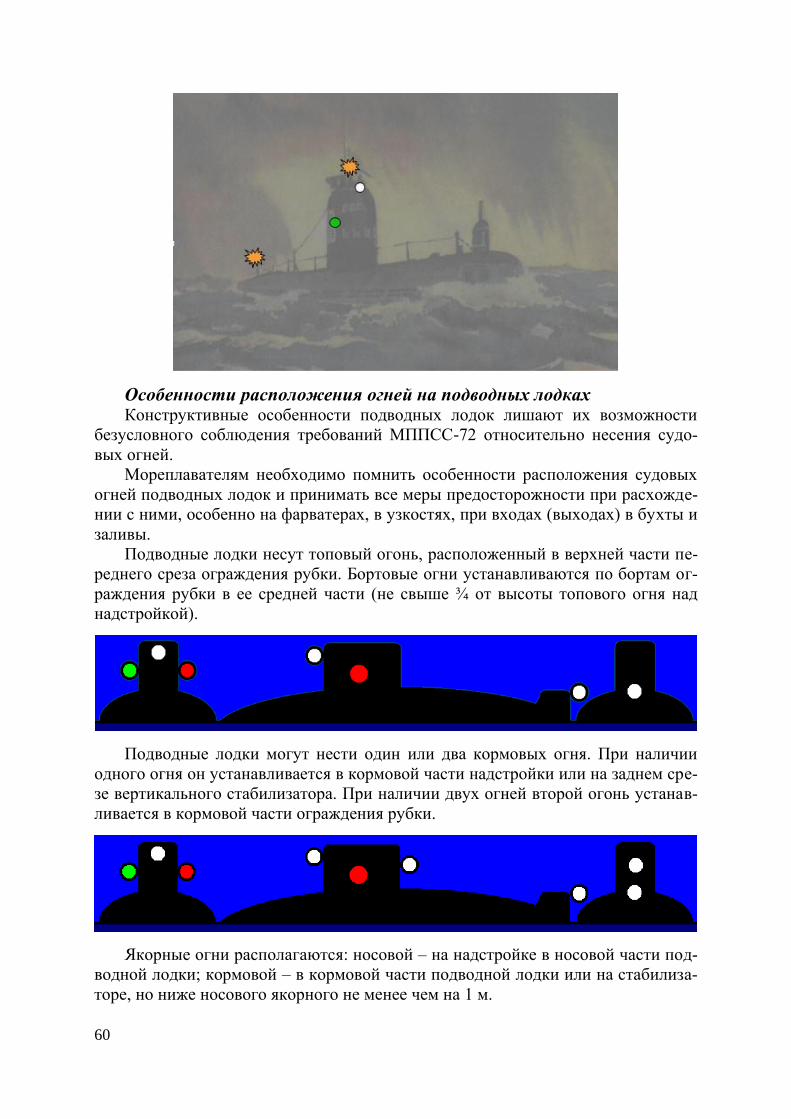
60
Особенности расположения огней на подводных лодках Конструктивные особенности подводных лодок лишают их возможности
безусловного соблюдения требований МППСС-72 относительно несения судо-
вых огней.
Мореплавателям необходимо помнить особенности расположения судовых
огней подводных лодок и принимать все меры предосторожности при расхожде-
нии с ними, особенно на фарватерах, в узкостях, при входах (выходах) в бухты и
заливы.
Подводные лодки несут топовый огонь, расположенный в верхней части пе-
реднего среза ограждения рубки. Бортовые огни устанавливаются по бортам ог-
раждения рубки в ее средней части (не свыше ¾ от высоты топового огня над
надстройкой).
Подводные лодки могут нести один или два кормовых огня. При наличии
одного огня он устанавливается в кормовой части надстройки или на заднем сре-
зе вертикального стабилизатора. При наличии двух огней второй огонь устанав-
ливается в кормовой части ограждения рубки.
Якорные огни располагаются: носовой – на надстройке в носовой части под-
водной лодки; кормовой – в кормовой части подводной лодки или на стабилиза-
торе, но ниже носового якорного не менее чем на 1 м.
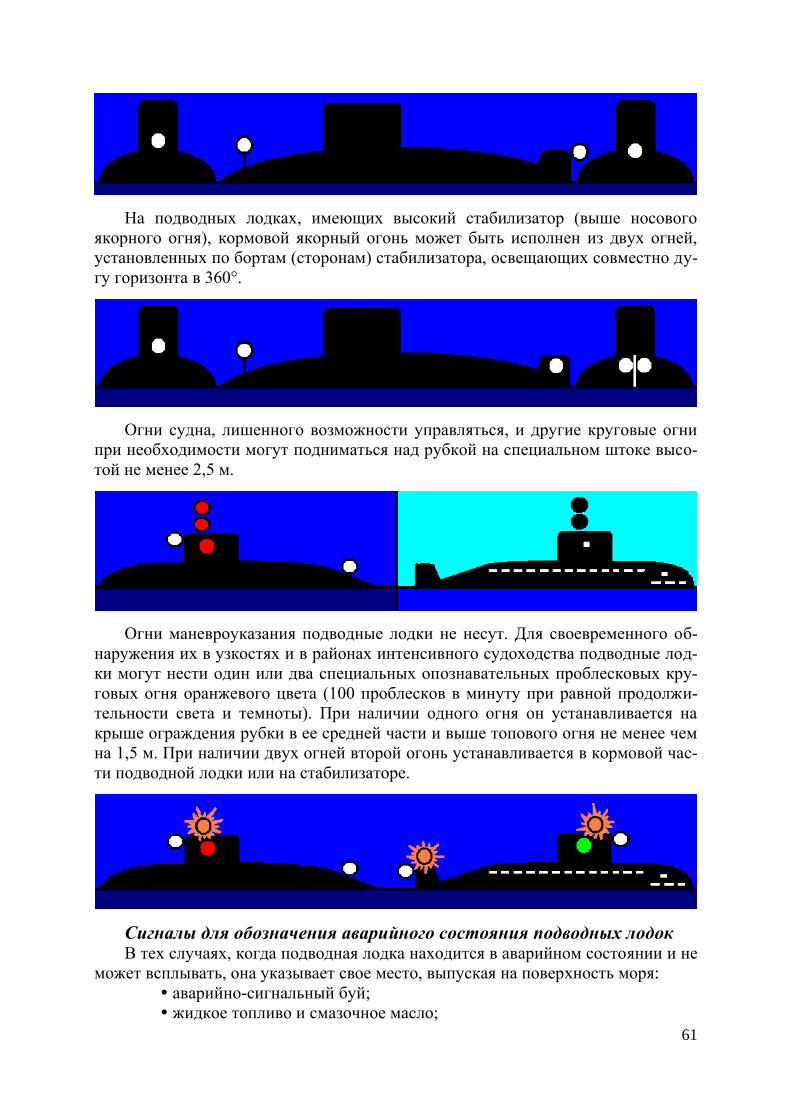
61
На подводных лодках, имеющих высокий стабилизатор (выше носового
якорного огня), кормовой якорный огонь может быть исполнен из двух огней,
установленных по бортам (сторонам) стабилизатора, освещающих совместно ду-
гу горизонта в 360°.
Огни судна, лишенного возможности управляться, и другие круговые огни
при необходимости могут подниматься над рубкой на специальном штоке высо-
той не менее 2,5 м.
Огни маневроуказания подводные лодки не несут. Для своевременного об-
наружения их в узкостях и в районах интенсивного судоходства подводные лод-
ки могут нести один или два специальных опознавательных проблесковых кру-
говых огня оранжевого цвета (100 проблесков в минуту при равной продолжи-
тельности света и темноты). При наличии одного огня он устанавливается на
крыше ограждения рубки в ее средней части и выше топового огня не менее чем
на 1,5 м. При наличии двух огней второй огонь устанавливается в кормовой час-
ти подводной лодки или на стабилизаторе.
Сигналы для обозначения аварийного состояния подводных лодок В тех случаях, когда подводная лодка находится в аварийном состоянии и не
может всплывать, она указывает свое место, выпуская на поверхность моря:
аварийно-сигнальный буй;
жидкое топливо и смазочное масло;
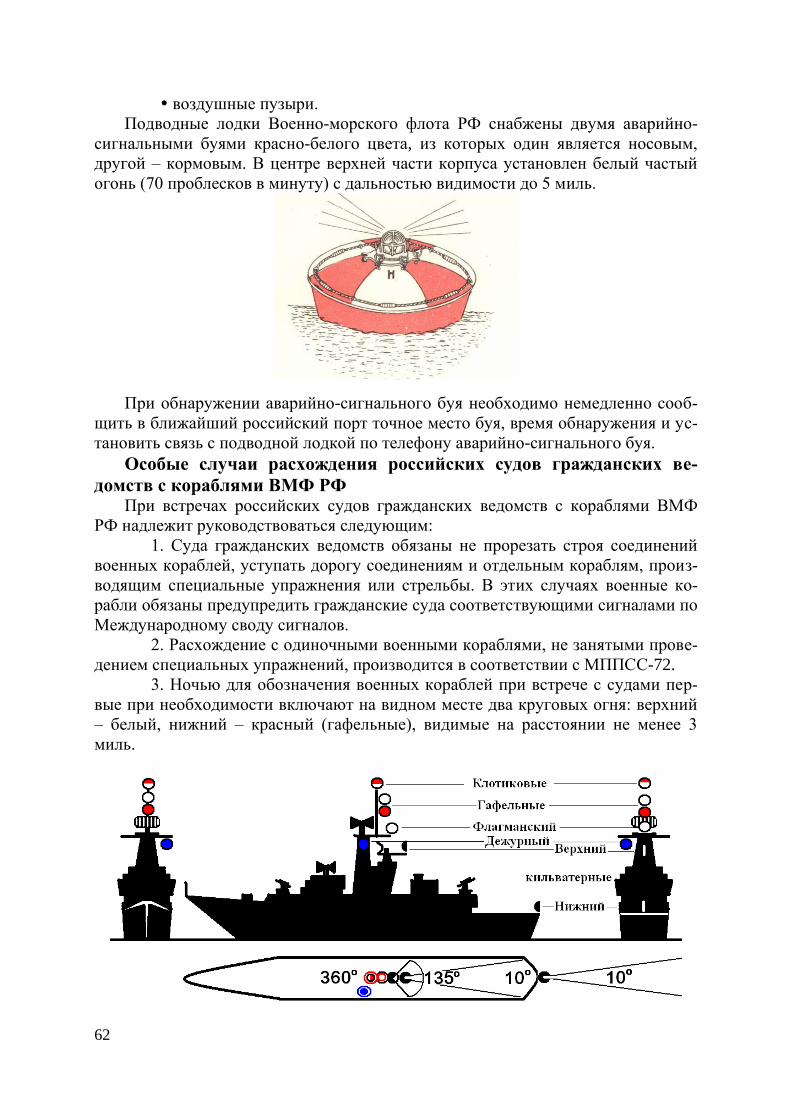
62
воздушные пузыри.
Подводные лодки Военно-морского флота РФ снабжены двумя аварийно-
сигнальными буями красно-белого цвета, из которых один является носовым,
другой – кормовым. В центре верхней части корпуса установлен белый частый
огонь (70 проблесков в минуту) с дальностью видимости до 5 миль.
При обнаружении аварийно-сигнального буя необходимо немедленно сооб-
щить в ближайший российский порт точное место буя, время обнаружения и ус-
тановить связь с подводной лодкой по телефону аварийно-сигнального буя.
Особые случаи расхождения российских судов гражданских ве-
домств с кораблями ВМФ РФ При встречах российских судов гражданских ведомств с кораблями ВМФ
РФ надлежит руководствоваться следующим:
1. Суда гражданских ведомств обязаны не прорезать строя соединений
военных кораблей, уступать дорогу соединениям и отдельным кораблям, произ-
водящим специальные упражнения или стрельбы. В этих случаях военные ко-
рабли обязаны предупредить гражданские суда соответствующими сигналами по
Международному своду сигналов.
2. Расхождение с одиночными военными кораблями, не занятыми прове-
дением специальных упражнений, производится в соответствии с МППСС-72.
3. Ночью для обозначения военных кораблей при встрече с судами пер-
вые при необходимости включают на видном месте два круговых огня: верхний
– белый, нижний – красный (гафельные), видимые на расстоянии не менее 3
миль.
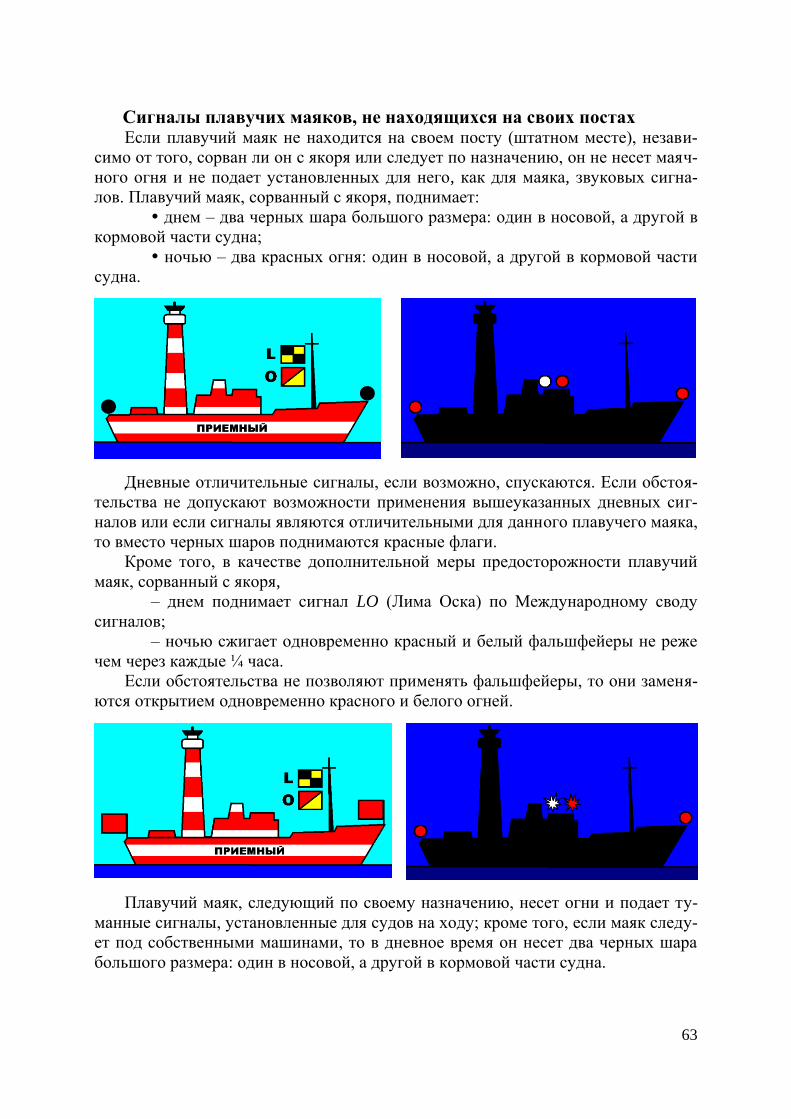
63
Сигналы плавучих маяков, не находящихся на своих постах Если плавучий маяк не находится на своем посту (штатном месте), незави-
симо от того, сорван ли он с якоря или следует по назначению, он не несет маяч-
ного огня и не подает установленных для него, как для маяка, звуковых сигна-
лов. Плавучий маяк, сорванный с якоря, поднимает:
днем – два черных шара большого размера: один в носовой, а другой в
кормовой части судна;
ночью – два красных огня: один в носовой, а другой в кормовой части
судна.
Дневные отличительные сигналы, если возможно, спускаются. Если обстоя-
тельства не допускают возможности применения вышеуказанных дневных сиг-
налов или если сигналы являются отличительными для данного плавучего маяка,
то вместо черных шаров поднимаются красные флаги.
Кроме того, в качестве дополнительной меры предосторожности плавучий
маяк, сорванный с якоря,
– днем поднимает сигнал LO (Лима Оска) по Международному своду
сигналов;
– ночью сжигает одновременно красный и белый фальшфейеры не реже
чем через каждые ¼ часа.
Если обстоятельства не позволяют применять фальшфейеры, то они заменя-
ются открытием одновременно красного и белого огней.
Плавучий маяк, следующий по своему назначению, несет огни и подает ту-
манные сигналы, установленные для судов на ходу; кроме того, если маяк следу-
ет под собственными машинами, то в дневное время он несет два черных шара
большого размера: один в носовой, а другой в кормовой части судна.
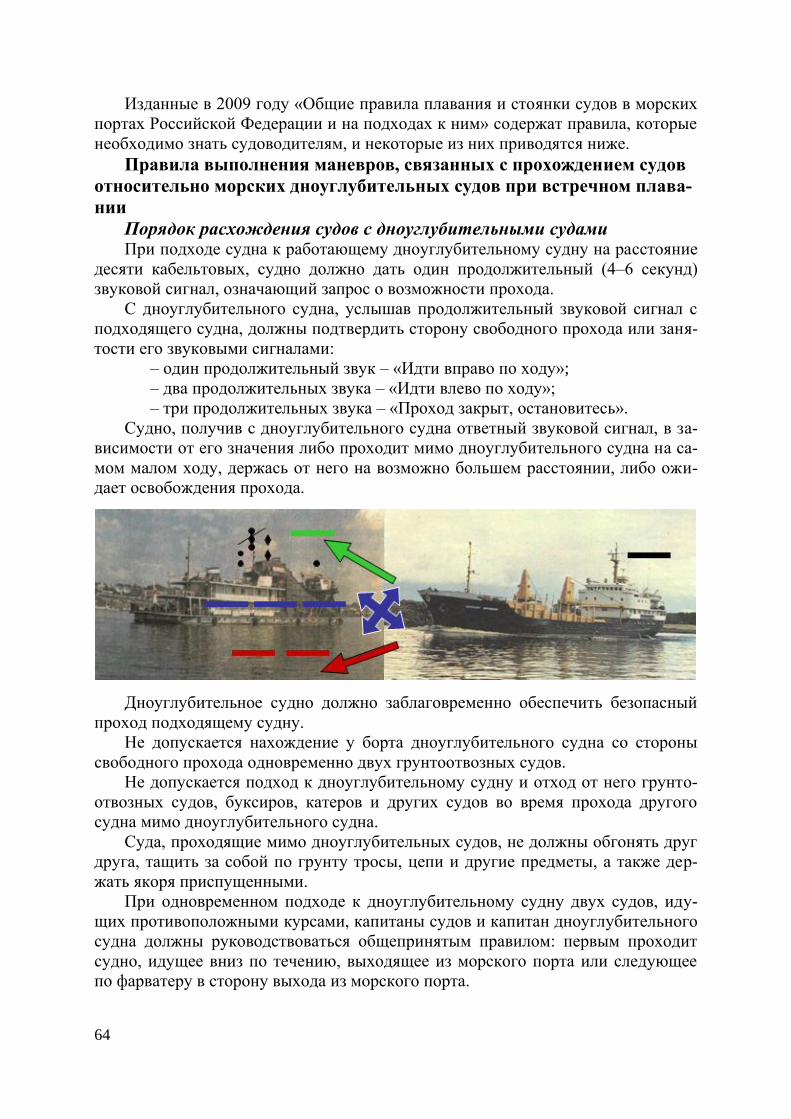
64
Изданные в 2009 году «Общие правила плавания и стоянки судов в морских
портах Российской Федерации и на подходах к ним» содержат правила, которые
необходимо знать судоводителям, и некоторые из них приводятся ниже.
Правила выполнения маневров, связанных с прохождением судов
относительно морских дноуглубительных судов при встречном плава-
нии
Порядок расхождения судов с дноуглубительными судами При подходе судна к работающему дноуглубительному судну на расстояние
десяти кабельтовых, судно должно дать один продолжительный (4–6 секунд)
звуковой сигнал, означающий запрос о возможности прохода.
С дноуглубительного судна, услышав продолжительный звуковой сигнал с
подходящего судна, должны подтвердить сторону свободного прохода или заня-
тости его звуковыми сигналами:
– один продолжительный звук – «Идти вправо по ходу»;
– два продолжительных звука – «Идти влево по ходу»;
– три продолжительных звука – «Проход закрыт, остановитесь».
Судно, получив с дноуглубительного судна ответный звуковой сигнал, в за-
висимости от его значения либо проходит мимо дноуглубительного судна на са-
мом малом ходу, держась от него на возможно большем расстоянии, либо ожи-
дает освобождения прохода.
Дноуглубительное судно должно заблаговременно обеспечить безопасный
проход подходящему судну.
Не допускается нахождение у борта дноуглубительного судна со стороны
свободного прохода одновременно двух грунтоотвозных судов.
Не допускается подход к дноуглубительному судну и отход от него грунто-
отвозных судов, буксиров, катеров и других судов во время прохода другого
судна мимо дноуглубительного судна.
Суда, проходящие мимо дноуглубительных судов, не должны обгонять друг
друга, тащить за собой по грунту тросы, цепи и другие предметы, а также дер-
жать якоря приспущенными.
При одновременном подходе к дноуглубительному судну двух судов, иду-
щих противоположными курсами, капитаны судов и капитан дноуглубительного
судна должны руководствоваться общепринятым правилом: первым проходит
судно, идущее вниз по течению, выходящее из морского порта или следующее
по фарватеру в сторону выхода из морского порта.
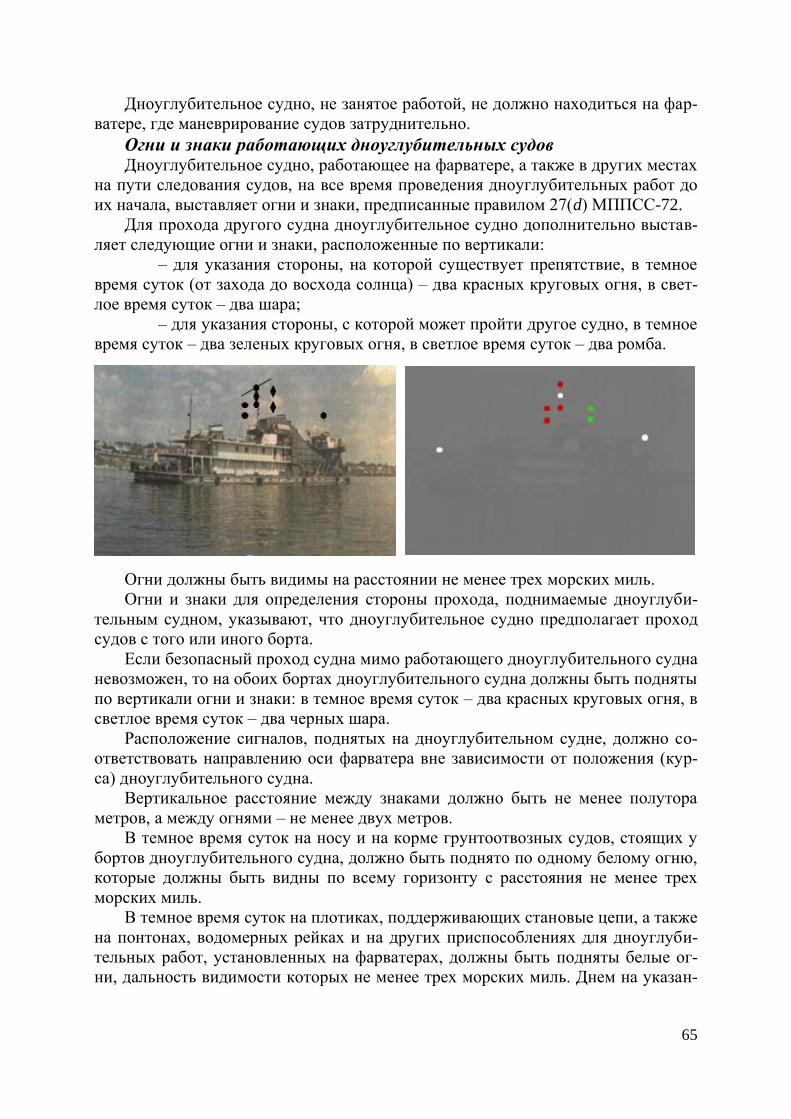
65
Дноуглубительное судно, не занятое работой, не должно находиться на фар-
ватере, где маневрирование судов затруднительно.
Огни и знаки работающих дноуглубительных судов Дноуглубительное судно, работающее на фарватере, а также в других местах
на пути следования судов, на все время проведения дноуглубительных работ до
их начала, выставляет огни и знаки, предписанные правилом 27(d) МППСС-72.
Для прохода другого судна дноуглубительное судно дополнительно выстав-
ляет следующие огни и знаки, расположенные по вертикали:
– для указания стороны, на которой существует препятствие, в темное
время суток (от захода до восхода солнца) – два красных круговых огня, в свет-
лое время суток – два шара;
– для указания стороны, с которой может пройти другое судно, в темное
время суток – два зеленых круговых огня, в светлое время суток – два ромба.
Огни должны быть видимы на расстоянии не менее трех морских миль.
Огни и знаки для определения стороны прохода, поднимаемые дноуглуби-
тельным судном, указывают, что дноуглубительное судно предполагает проход
судов с того или иного борта.
Если безопасный проход судна мимо работающего дноуглубительного судна
невозможен, то на обоих бортах дноуглубительного судна должны быть подняты
по вертикали огни и знаки: в темное время суток – два красных круговых огня, в
светлое время суток – два черных шара.
Расположение сигналов, поднятых на дноуглубительном судне, должно со-
ответствовать направлению оси фарватера вне зависимости от положения (кур-
са) дноуглубительного судна.
Вертикальное расстояние между знаками должно быть не менее полутора
метров, а между огнями – не менее двух метров.
В темное время суток на носу и на корме грунтоотвозных судов, стоящих у
бортов дноуглубительного судна, должно быть поднято по одному белому огню,
которые должны быть видны по всему горизонту с расстояния не менее трех
морских миль.
В темное время суток на плотиках, поддерживающих становые цепи, а также
на понтонах, водомерных рейках и на других приспособлениях для дноуглуби-
тельных работ, установленных на фарватерах, должны быть подняты белые ог-
ни, дальность видимости которых не менее трех морских миль. Днем на указан-
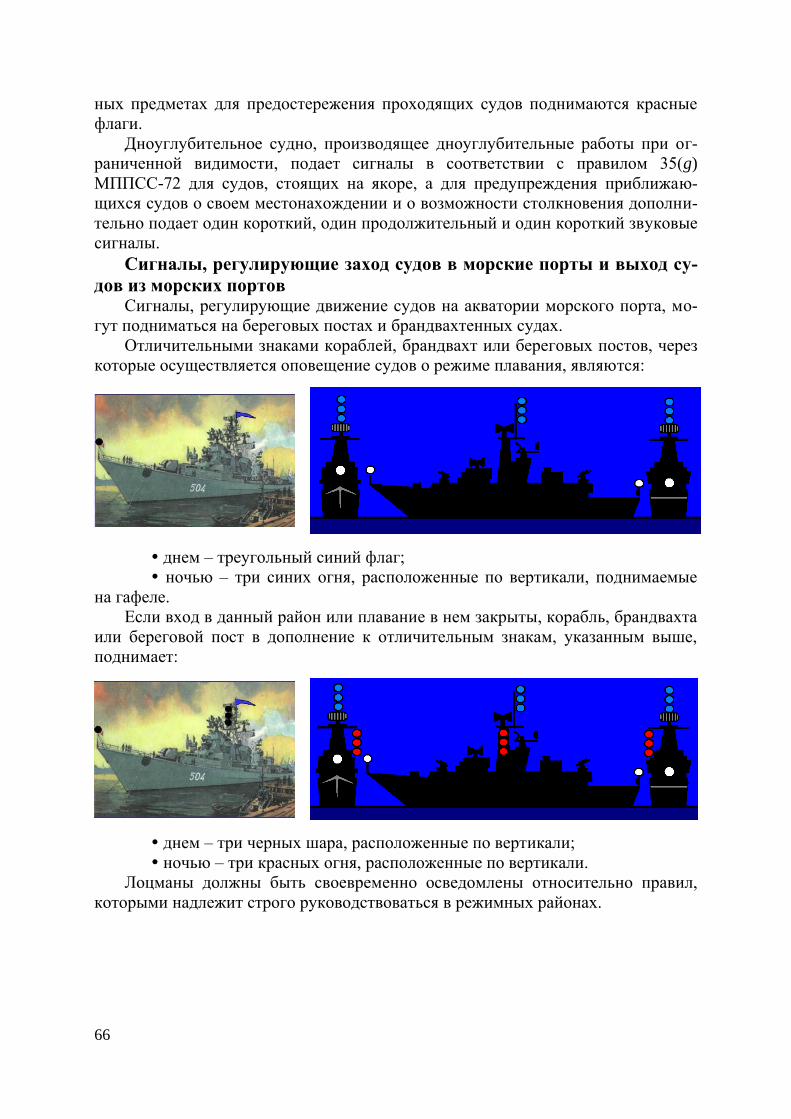
66
ных предметах для предостережения проходящих судов поднимаются красные
флаги.
Дноуглубительное судно, производящее дноуглубительные работы при ог-
раниченной видимости, подает сигналы в соответствии с правилом 35(g)
МППСС-72 для судов, стоящих на якоре, а для предупреждения приближаю-
щихся судов о своем местонахождении и о возможности столкновения дополни-
тельно подает один короткий, один продолжительный и один короткий звуковые
сигналы.
Сигналы, регулирующие заход судов в морские порты и выход су-
дов из морских портов Сигналы, регулирующие движение судов на акватории морского порта, мо-
гут подниматься на береговых постах и брандвахтенных судах.
Отличительными знаками кораблей, брандвахт или береговых постов, через
которые осуществляется оповещение судов о режиме плавания, являются:
днем – треугольный синий флаг;
ночью – три синих огня, расположенные по вертикали, поднимаемые
на гафеле.
Если вход в данный район или плавание в нем закрыты, корабль, брандвахта
или береговой пост в дополнение к отличительным знакам, указанным выше,
поднимает:
днем – три черных шара, расположенные по вертикали;
ночью – три красных огня, расположенные по вертикали.
Лоцманы должны быть своевременно осведомлены относительно правил,
которыми надлежит строго руководствоваться в режимных районах.
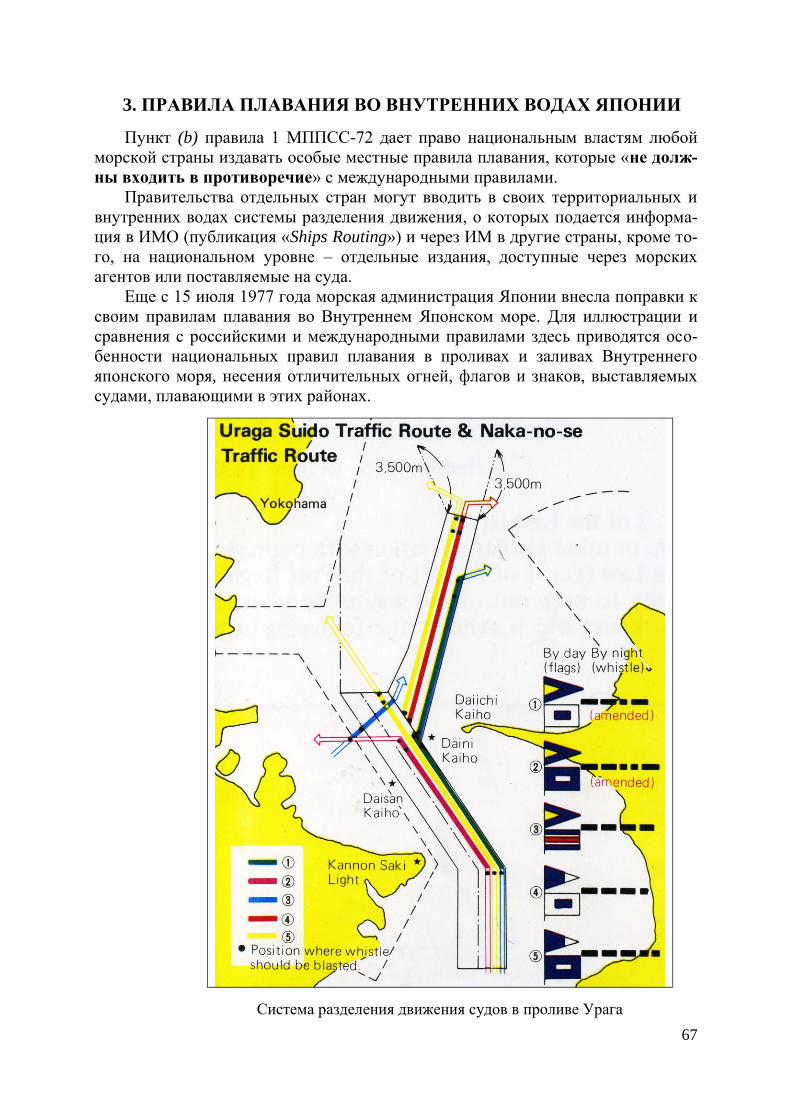
67
3. ПРАВИЛА ПЛАВАНИЯ ВО ВНУТРЕННИХ ВОДАХ ЯПОНИИ
Пункт (b) правила 1 МППСС-72 дает право национальным властям любой
морской страны издавать особые местные правила плавания, которые «не долж-
ны входить в противоречие» с международными правилами.
Правительства отдельных стран могут вводить в своих территориальных и
внутренних водах системы разделения движения, о которых подается информа-
ция в ИМО (публикация «Ships Routing») и через ИМ в другие страны, кроме то-
го, на национальном уровне – отдельные издания, доступные через морских
агентов или поставляемые на суда.
Еще с 15 июля 1977 года морская администрация Японии внесла поправки к
своим правилам плавания во Внутреннем Японском море. Для иллюстрации и
сравнения с российскими и международными правилами здесь приводятся осо-
бенности национальных правил плавания в проливах и заливах Внутреннего
японского моря, несения отличительных огней, флагов и знаков, выставляемых
судами, плавающими в этих районах.
Система разделения движения судов в проливе Урага
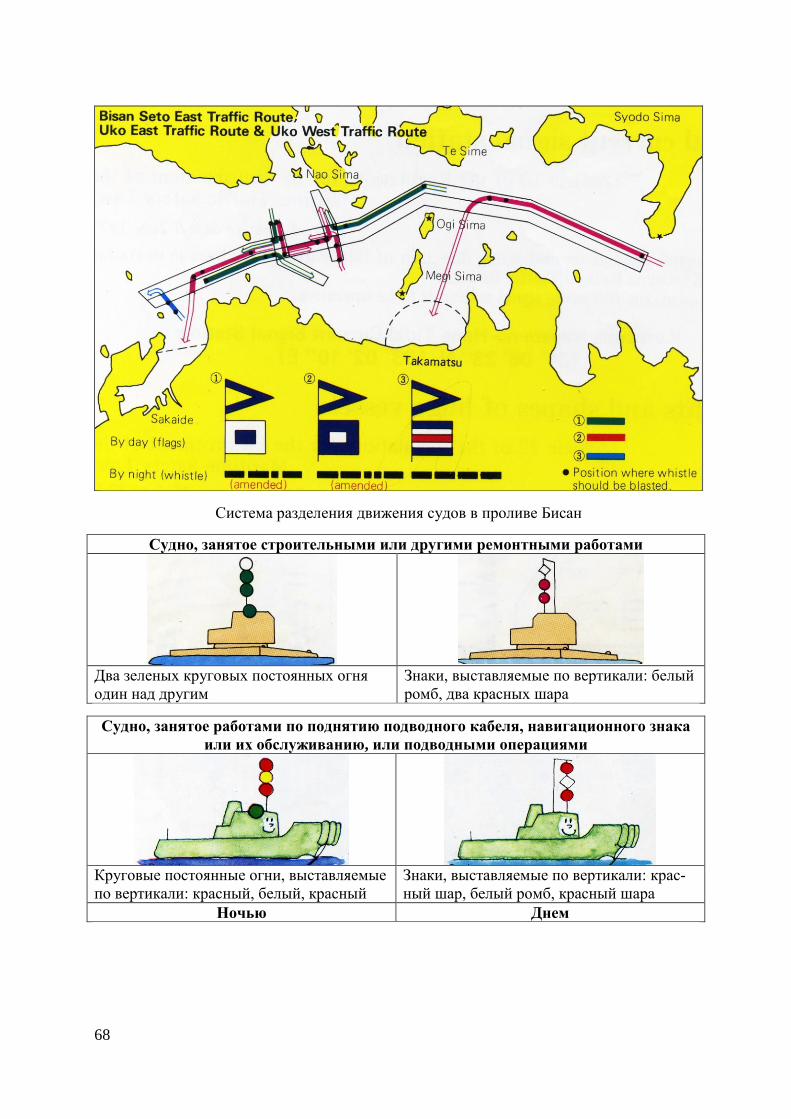
68
Система разделения движения судов в проливе Бисан
Судно, занятое строительными или другими ремонтными работами
Два зеленых круговых постоянных огня
один над другим
Знаки, выставляемые по вертикали: белый
ромб, два красных шара
Судно, занятое работами по поднятию подводного кабеля, навигационного знака
или их обслуживанию, или подводными операциями
Круговые постоянные огни, выставляемые
по вертикали: красный, белый, красный
Знаки, выставляемые по вертикали: крас-
ный шар, белый ромб, красный шара
Ночью Днем
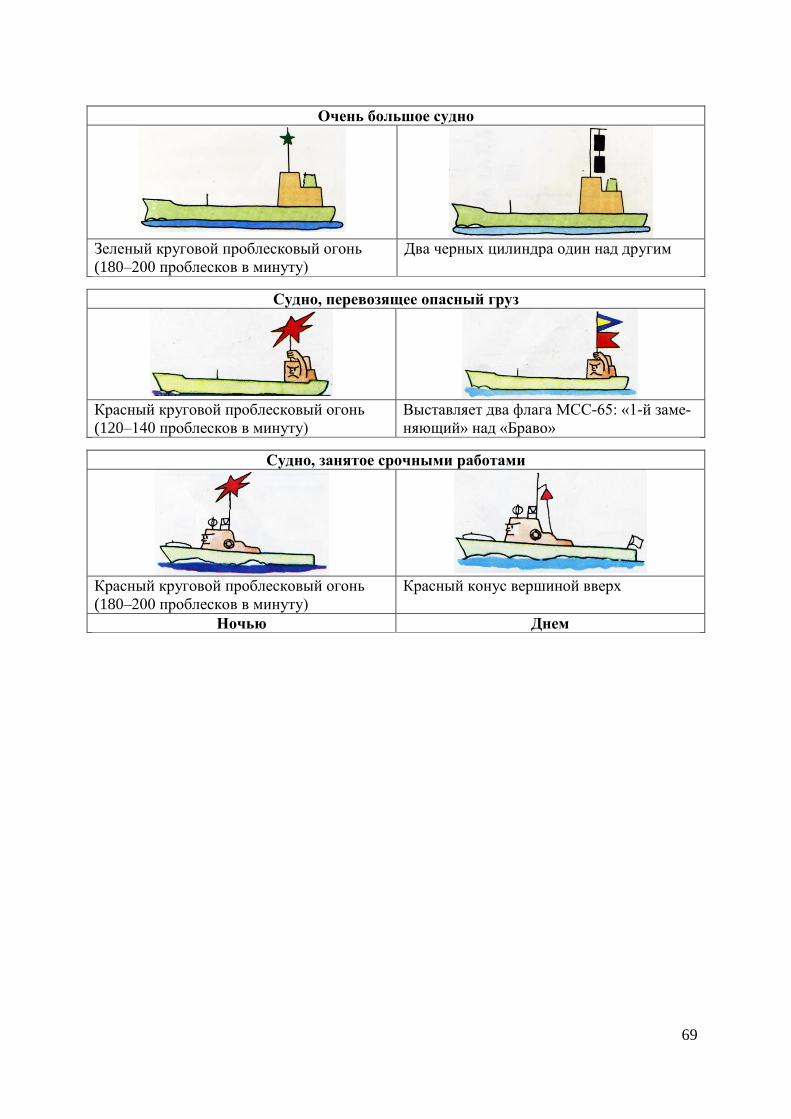
69
Очень большое судно
Зеленый круговой проблесковый огонь
(180–200 проблесков в минуту)
Два черных цилиндра один над другим
Судно, перевозящее опасный груз
Красный круговой проблесковый огонь
(120–140 проблесков в минуту)
Выставляет два флага МСС-65: «1-й заме-
няющий» над «Браво»
Судно, занятое срочными работами
Красный круговой проблесковый огонь
(180–200 проблесков в минуту)
Красный конус вершиной вверх
Ночью Днем
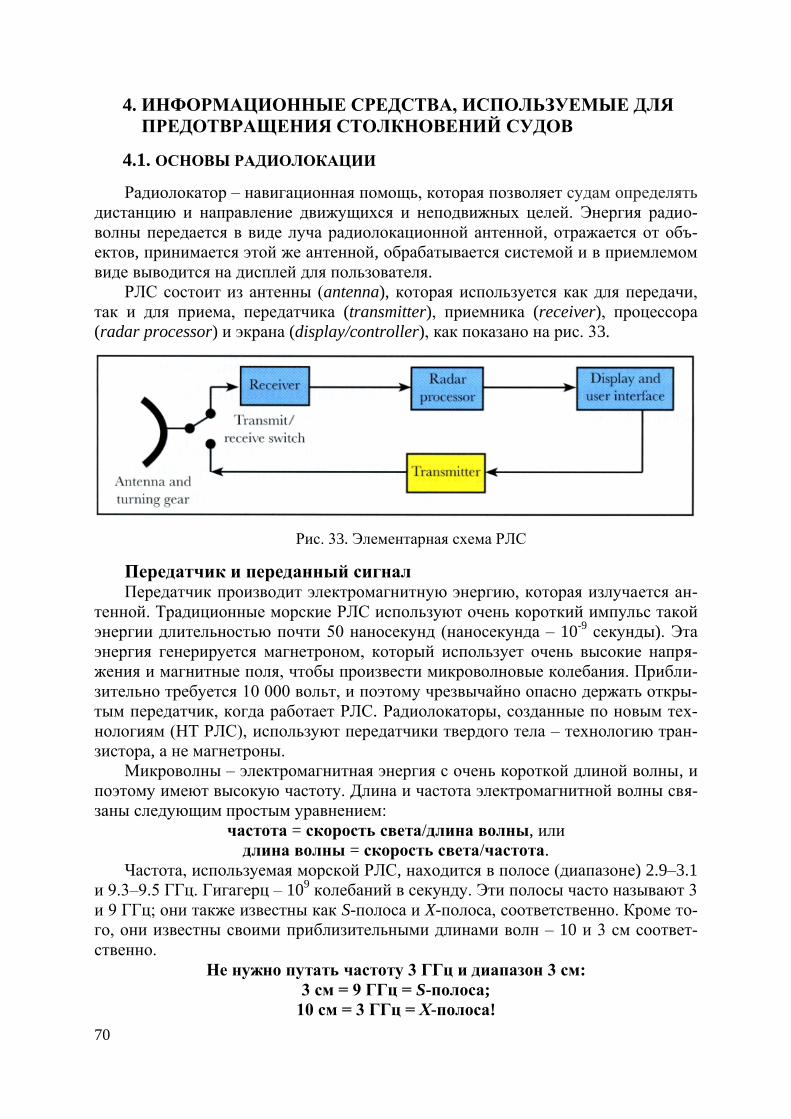
70
4. ИНФОРМАЦИОННЫЕ СРЕДСТВА, ИСПОЛЬЗУЕМЫЕ ДЛЯ
ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ СУДОВ
4.1. ОСНОВЫ РАДИОЛОКАЦИИ
Радиолокатор – навигационная помощь, которая позволяет судам определять
дистанцию и направление движущихся и неподвижных целей. Энергия радио-
волны передается в виде луча радиолокационной антенной, отражается от объ-
ектов, принимается этой же антенной, обрабатывается системой и в приемлемом
виде выводится на дисплей для пользователя.
РЛС состоит из антенны (antenna), которая используется как для передачи,
так и для приема, передатчика (transmitter), приемника (receiver), процессора
(radar processor) и экрана (display/controller), как показано на рис. 33.
Рис. 33. Элементарная схема РЛС
Передатчик и переданный сигнал Передатчик производит электромагнитную энергию, которая излучается ан-
тенной. Традиционные морские РЛС используют очень короткий импульс такой
энергии длительностью почти 50 наносекунд (наносекунда – 10-9
секунды). Эта
энергия генерируется магнетроном, который использует очень высокие напря-
жения и магнитные поля, чтобы произвести микроволновые колебания. Прибли-
зительно требуется 10 000 вольт, и поэтому чрезвычайно опасно держать откры-
тым передатчик, когда работает РЛС. Радиолокаторы, созданные по новым тех-
нологиям (НТ РЛС), используют передатчики твердого тела – технологию тран-
зистора, а не магнетроны.
Микроволны – электромагнитная энергия с очень короткой длиной волны, и
поэтому имеют высокую частоту. Длина и частота электромагнитной волны свя-
заны следующим простым уравнением:
частота = скорость света/длина волны, или
длина волны = скорость света/частота.
Частота, используемая морской РЛС, находится в полосе (диапазоне) 2.9–3.1
и 9.3–9.5 ГГц. Гигагерц – 109 колебаний в секунду. Эти полосы часто называют 3
и 9 ГГц; они также известны как S-полоса и X-полоса, соответственно. Кроме то-
го, они известны своими приблизительными длинами волн – 10 и 3 см соответ-
ственно.
Не нужно путать частоту 3 ГГц и диапазон 3 см:
3 см = 9 ГГц = S-полоса;
10 см = 3 ГГц = Х-полоса!
71
Каждый импульс обычной морской РЛС имеет высокую мощность, которая
варьируется в пределах 4–60 кВт, но более популярный диапазон 10–25 кВт для
большинства систем, используемых на судах более 3 000 тонн. Мощность опре-
деляется промежутком между передачей двух зондирующих импульсов, время
пути переданного сигнала до цели в самом большом диапазоне (дальность види-
мости) и обратно к антенне РЛС.
Время между импульсами длинно по сравнению с длиной импульса и таким
образом средняя мощность весьма низка. Обычно частота повторения импульсов
приблизительно 350–3 000 импульсов в секунду (pps). При пиковой мощности
РЛС в 25 кВт средняя мощность – приблизительно 10 ватт. Относительно низкая
мощность объясняет, почему уровни энергии радиолокатора на судне не опасны
для здоровья, кроме тех случаев, когда находишься непосредственно перед ан-
тенной. Предупреждения изготовителей относительно безопасного расстояния
до антенны РЛС должны всегда соблюдаться.
Антенна В обычной морской РЛС антенна используется для передачи и приема сиг-
налов. Ее цель состоит в том, чтобы сформировать узкий луч электромагнитной
энергии в горизонтальной плоскости (azimuth – по азимуту), обычно шириной 1–
2°, и в вертикальной – шириной луча возвышения приблизительно 20°
(elevation). Ширина луча возвышения гарантирует, что вся электромагнитная
энергия будет направлена к отдаленным целям за горизонт, когда судно испыты-
вает качку на взволнованном море. Механизм вращения (в основном электриче-
ский двигатель) непрерывно вращает антенну. Комбинацию механизма враще-
ния и антенны часто называют сканером. Теория антенны показывает, что чем
шире антенна, тем более узкая ширина луча по азимуту. Это означает, что ан-
тенна РЛС, работающей при длине волны 10 см (3 ГГц) должна быть приблизи-
тельно в три раза шире антенны 3 см диапазона (на 9 ГГц), чтобы получить ту же
самую ширину луча по азимуту. РЛС на 3 ГГц предпочтительна для работы в
неблагоприятных условиях тумана, дождя и морского волнения, как будет объ-
яснено позже.
Антенна вращается обычно со скоростью 20–30 оборотов в минуту (rpm); 40
оборотов и более – на высокоскоростных судах. На скорость вращения влияют
два противоречивых требования. Первое – скорость должна быть достаточно
низкой, чтобы даже маленькая цель была облучена несколькими импульсами
при каждом сканировании антенны. Это делает обнаружение цели намного более
вероятным. Второе требование – обновление последовательных просмотров
должно быть достаточно высоким, чтобы движущиеся цели относительно собст-
венного судна имели только небольшие перемещения по экрану РЛС. Это уве-
личивает и визуальные, и автоматические процессы, которые идентифицируют
фактическое движение цели.
Из-за физики явления антенны никогда не могут иметь узкого луча по ази-
муту. Идеальный случай – однородная чувствительность поперек требуемой ши-
рины луча и нулевая чувствительность под углами вне ширины луча. Типичный
реальный образец сигнала антенны показан на рис. 34.
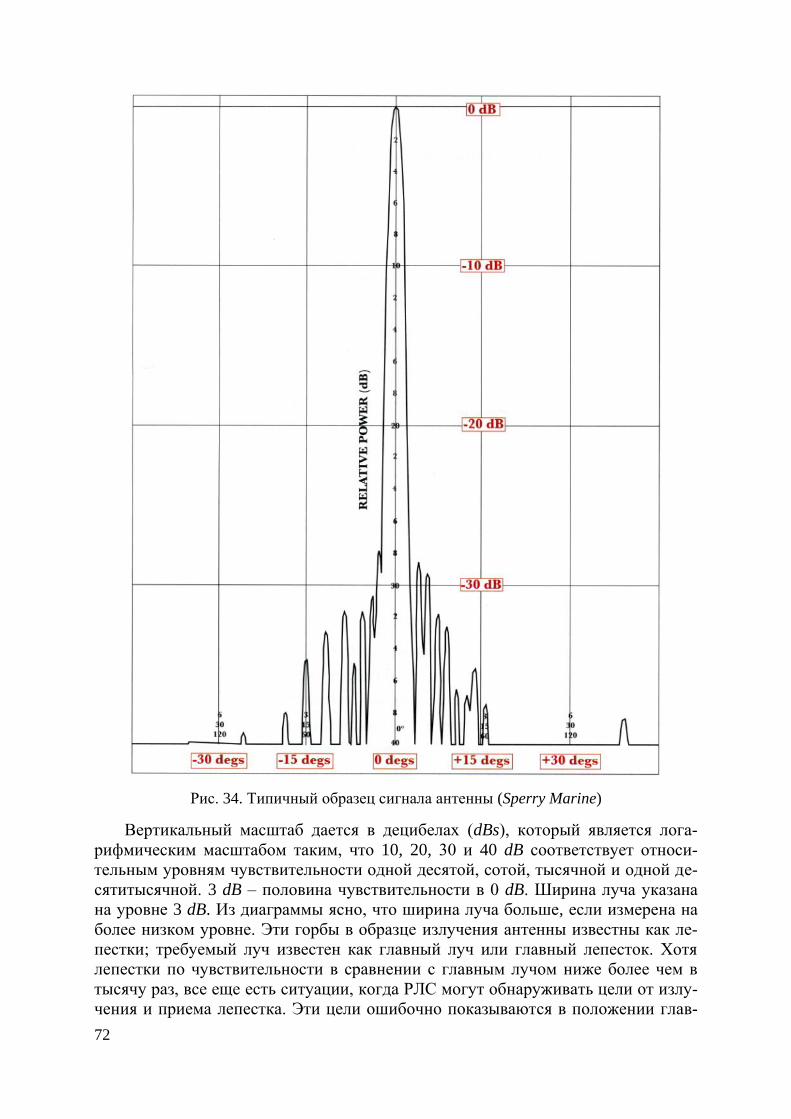
72
Рис. 34. Типичный образец сигнала антенны (Sperry Marine)
Вертикальный масштаб дается в децибелах (dBs), который является лога-
рифмическим масштабом таким, что 10, 20, 30 и 40 dB соответствует относи-
тельным уровням чувствительности одной десятой, сотой, тысячной и одной де-
сятитысячной. 3 dB – половина чувствительности в 0 dB. Ширина луча указана
на уровне 3 dB. Из диаграммы ясно, что ширина луча больше, если измерена на
более низком уровне. Эти горбы в образце излучения антенны известны как ле-
пестки; требуемый луч известен как главный луч или главный лепесток. Хотя
лепестки по чувствительности в сравнении с главным лучом ниже более чем в
тысячу раз, все еще есть ситуации, когда РЛС могут обнаруживать цели от излу-
чения и приема лепестка. Эти цели ошибочно показываются в положении глав-
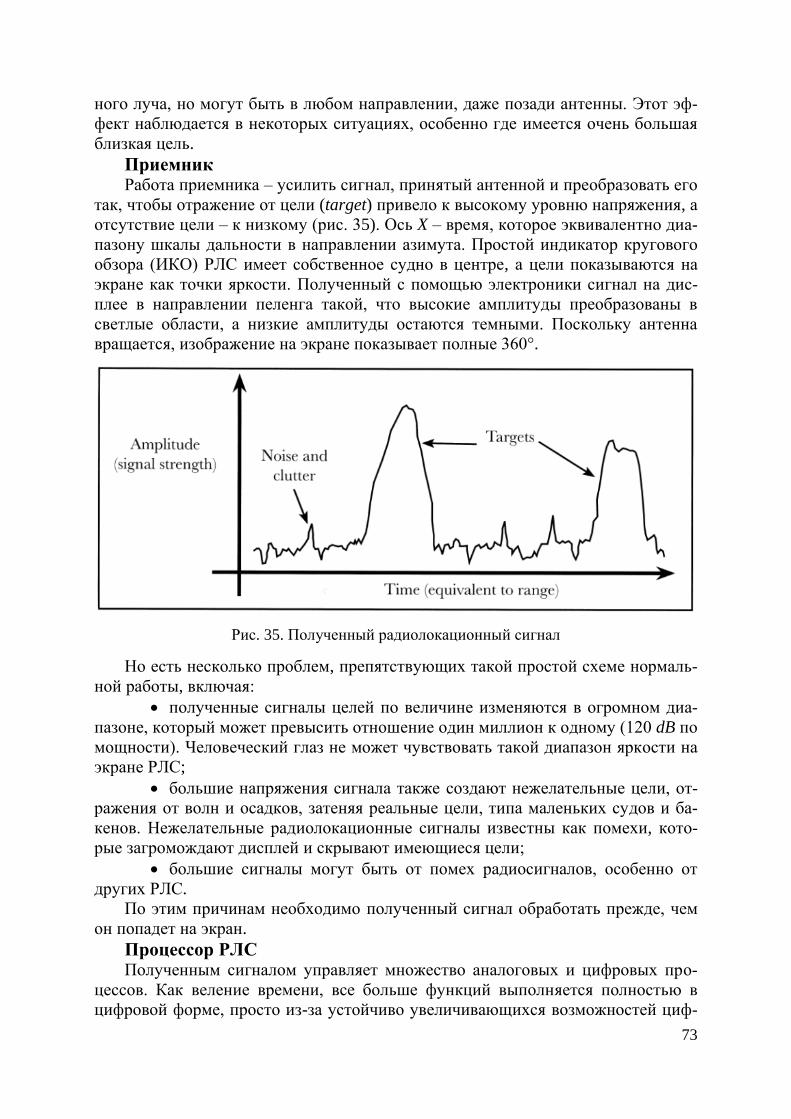
73
ного луча, но могут быть в любом направлении, даже позади антенны. Этот эф-
фект наблюдается в некоторых ситуациях, особенно где имеется очень большая
близкая цель.
Приемник Работа приемника – усилить сигнал, принятый антенной и преобразовать его
так, чтобы отражение от цели (target) привело к высокому уровню напряжения, а
отсутствие цели – к низкому (рис. 35). Ось X – время, которое эквивалентно диа-
пазону шкалы дальности в направлении азимута. Простой индикатор кругового
обзора (ИКО) РЛС имеет собственное судно в центре, а цели показываются на
экране как точки яркости. Полученный с помощью электроники сигнал на дис-
плее в направлении пеленга такой, что высокие амплитуды преобразованы в
светлые области, а низкие амплитуды остаются темными. Поскольку антенна
вращается, изображение на экране показывает полные 360°.
Рис. 35. Полученный радиолокационный сигнал
Но есть несколько проблем, препятствующих такой простой схеме нормаль-
ной работы, включая:
полученные сигналы целей по величине изменяются в огромном диа-
пазоне, который может превысить отношение один миллион к одному (120 dB по
мощности). Человеческий глаз не может чувствовать такой диапазон яркости на
экране РЛС;
большие напряжения сигнала также создают нежелательные цели, от-
ражения от волн и осадков, затеняя реальные цели, типа маленьких судов и ба-
кенов. Нежелательные радиолокационные сигналы известны как помехи, кото-
рые загромождают дисплей и скрывают имеющиеся цели;
большие сигналы могут быть от помех радиосигналов, особенно от
других РЛС.
По этим причинам необходимо полученный сигнал обработать прежде, чем
он попадет на экран.
Процессор РЛС Полученным сигналом управляет множество аналоговых и цифровых про-
цессов. Как веление времени, все больше функций выполняется полностью в
цифровой форме, просто из-за устойчиво увеличивающихся возможностей циф-
74
ровой технологии обработки. Аналоговый процесс – тот, который действует не-
посредственно на изменяющийся сигнал. Например, транзистор (основа схемы),
часто входящий в пакет интегральных схем (чип), используется, чтобы непо-
средственно увеличить размер колебаний сигнала (amplification – увеличение
или gain – усиление). Для цифровых процессов уровень напряжения сигнала
должен сначала быть автоматически измерен в очень коротких временных ин-
тервалах (кванты), и затем измеренные уровни должны быть преобразованы в
цифровой формат как число (analogue to digital conversion (ADC) – квантование).
Аналоговая обработка типична на начальной стадии обработки сигналов.
Очень маленький полученный сигнал должен, по крайней мере, быть усилен
аналоговым процессом, чтобы стать достаточно большим для управления даль-
нейшими аналоговыми и цифровыми процессами. Кроме того, огромное разно-
образие полученных сигналов обычно «сжимается» аналоговым процессом. Это
уменьшает изменение напряжения полученных сигналов от миллиона до одного,
в то время как обычно от 250 до 1. Даже сжатие может теперь быть выполнено в
цифровой форме. Цифровые процессы очень гибки и легки для воспроизведения.
Хорошие характеристики современных морских РЛС – почти полностью из-за
использования такой цифровой технологии. Например, цифровые процессы де-
лают цели более видимыми на фоне помех и шумов, удаляют влияние других
РЛС, захватывают и сопровождают цели, вычисляют дистанцию кратчайшего
сближения и выполняют многие другие задачи.
Дисплей и пользовательский интерфейс Интерфейс пользователя любой РЛС состоит из дисплея (display) и ручных
средств управления. Дисплей может быть автономным или многофункциональ-
ным (МФД или multifunction display – MFD). Радиолокационные изображения
кроме того могут показываться на дисплее электронной картографии и инфор-
мационной системы (Electronic Chart Display and Information System – ECDIS).
Основной дисплей РЛС известен как индикатор кругового обзора (ИКО –
Plan Position Indicator, PPI), потому что полученные радиолокационные изобра-
жения индицируются в форме плана, соответствующего области, сосредоточен-
ной вокруг собственного судна. Эта область может ориентироваться, например,
как на «Север» (North-Up) или «Курс» (Head-Up), означая, что вертикальная ось
дисплея представляет собой направление на север или по курсу судна, соответ-
ственно.
Эксплуатационные качества РЛС Работа РЛС по обнаружению любой цели зависит от ряда аспектов, касаю-
щихся самой станции, цели и ближайшей окружающей среды. Предназначением
РЛС обычно является ее способность обнаруживать определенную цель в опре-
деленном диапазоне, в определенных экологических условиях, типа осадков и
состояния моря (дальность первичного обнаружения).
Так, например, мы могли бы сказать, что данная РЛС при хороших погодных
условиях может обнаружить отдельный навигационный буй на расстоянии 5.3
морских миль. Однако есть множество факторов, которые влияют на эту способ-
ность при любых других отдельных реальных условиях.
75
Параметры РЛС При передаче энергии от антенны РЛС в сторону удаленной цели последняя
получает энергии меньше по сравнению с первоначальной. Кроме того, на очень
коротких дистанциях (меньше чем несколько сотен метров для обычных мор-
ских РЛС) сила переданной энергии уменьшается обратно пропорционально
квадрату шкалы дальности (1/R2 – известный обратный квадратный закон, кото-
рый относится ко всем электромагнитным источникам энергии, например солн-
цу, телевизионной станции или лампочке). Это значит, что сила сигнала быстро
уменьшается с увеличивающейся шкалой дальности (на 2 мили – четверть силы,
на 3 мили – одна девятая, а на 4 – одна шестнадцатая).
Когда переданная РЛС волновая энергия ударяется о цель, энергия отража-
ется от нее во всех направлениях, хотя некоторое количество поглощается це-
лью. Доля отраженной энергии направляется назад к антенне РЛС – снова об-
ратный квадратный закон входит в силу. Принятие во внимание этого закона и
по переданной энергии, и по отраженной энергии означает, что полученная
энергия РЛС изменяется по закону 1/R4 (энергия, полученная антенной РЛС от
цели в 2 милях, является 1/16-й от измеренной в одной морской миле; 1/81-й – в
3 и 1/256-й – в 4 милях). Иначе говоря, по обратному закону мощности, РЛС
должна иметь в 16 раз больше мощности, чтобы удвоить дальность обнаруже-
ния.
Другой важный фактор в определении радиолокационного диапазона – спо-
собность антенны РЛС сконцентрировать энергию в узкий луч на передачу и
сбор максимального количества энергии на прием. Оба параметра касаются та-
кого известного коэффициента, как коэффициент усиления антенны. Как уже
отмечалось, ширина луча возвышения должна быть, по крайней мере, 20° с уче-
том килевой и бортовой качки при установлении предела минимальной верти-
кальной ширины луча. Сужение горизонтальной ширины луча увеличивает уси-
ление антенны и также увеличивает способность РЛС различать две цели с не-
много отличающимися пеленгами. Последнее известно как разрешающая спо-
собность по азимуту/пеленгу (azimuth/bearing resolution or discrimination). ИМО
устанавливает требование, чтобы все судовые морские РЛС имели разрешаю-
щую способность по азимуту лучше, чем 2.5°, хотя обычные системы имеют
разрешение по пеленгу меньше, чем 1°.
Более узкие лучи:
• сокращают область засветки моря, таким образом, уменьшая помехи из-
за волнения моря;
• сокращают засветку от дождя и других осадков, уменьшая помехи от
осадков.
Однако более узкий луч по азимуту уменьшает время облучения цели при
каждом сканировании, если скорость вращения антенны не замедлена – это так-
же должно быть принято во внимание, определяя эффективность РЛС. Выбор
ширины луча антенны – вопрос выбора компромисса между лучшей точностью
по азимуту (разрешения по пеленгу) и характеристикой помех, увеличенной
стоимостью и трудностью в установке и вращении большой антенны.
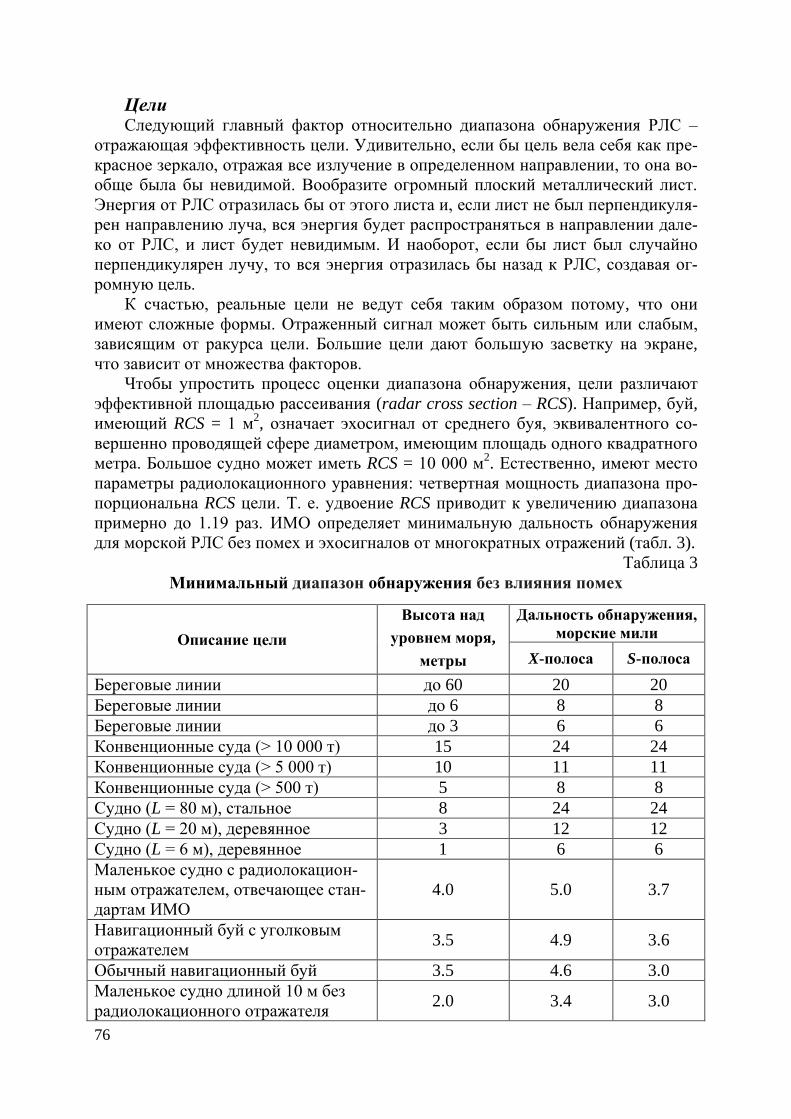
76
Цели Следующий главный фактор относительно диапазона обнаружения РЛС –
отражающая эффективность цели. Удивительно, если бы цель вела себя как пре-
красное зеркало, отражая все излучение в определенном направлении, то она во-
обще была бы невидимой. Вообразите огромный плоский металлический лист.
Энергия от РЛС отразилась бы от этого листа и, если лист не был перпендикуля-
рен направлению луча, вся энергия будет распространяться в направлении дале-
ко от РЛС, и лист будет невидимым. И наоборот, если бы лист был случайно
перпендикулярен лучу, то вся энергия отразилась бы назад к РЛС, создавая ог-
ромную цель.
К счастью, реальные цели не ведут себя таким образом потому, что они
имеют сложные формы. Отраженный сигнал может быть сильным или слабым,
зависящим от ракурса цели. Большие цели дают большую засветку на экране,
что зависит от множества факторов.
Чтобы упростить процесс оценки диапазона обнаружения, цели различают
эффективной площадью рассеивания (radar cross section – RCS). Например, буй,
имеющий RCS = 1 м2, означает эхосигнал от среднего буя, эквивалентного со-
вершенно проводящей сфере диаметром, имеющим площадь одного квадратного
метра. Большое судно может иметь RCS = 10 000 м2. Естественно, имеют место
параметры радиолокационного уравнения: четвертная мощность диапазона про-
порциональна RCS цели. Т. е. удвоение RCS приводит к увеличению диапазона
примерно до 1.19 раз. ИМО определяет минимальную дальность обнаружения
для морской РЛС без помех и эхосигналов от многократных отражений (табл. 3).
Таблица 3
Минимальный диапазон обнаружения без влияния помех
Описание цели
Высота над
уровнем моря,
метры
Дальность обнаружения,
морские мили
X-полоса S-полоса
Береговые линии до 60 20 20
Береговые линии до 6 8 8
Береговые линии до 3 6 6
Конвенционные суда (> 10 000 т) 15 24 24
Конвенционные суда (> 5 000 т) 10 11 11
Конвенционные суда (> 500 т) 5 8 8
Судно (L = 80 м), стальное 8 24 24
Судно (L = 20 м), деревянное 3 12 12
Судно (L = 6 м), деревянное 1 6 6
Маленькое судно с радиолокацион-
ным отражателем, отвечающее стан-
дартам ИМО
4.0 5.0 3.7
Навигационный буй с уголковым
отражателем 3.5 4.9 3.6
Обычный навигационный буй 3.5 4.6 3.0
Маленькое судно длиной 10 м без
радиолокационного отражателя 2.0 3.4 3.0
77
Продолжение таблицы 3
Описание цели
Высота над
уровнем моря,
метры
Дальность обнаружения,
морские мили
X-полоса S-полоса
Навигационные знаки, ограждающие
фарватер канала 1 2 1
ИМО также установила требования для морских РЛС на их минимальные
дистанции обнаружения: цель должна быть видима на расстоянии 40 метров от
собственного судна. Кроме того, если две цели находятся друг от друга на рас-
стоянии 40 метров, они должны быть отдельно различимыми. Требуется, чтобы
радиолокатор имел короткие импульсы, длина которых приблизительно 50 нано-
секунд. Также к РЛС предъявляются следующие требования точности по пелен-
гу и расстоянию:
по расстоянию – в пределах 30 метров или 1 % используемой шкалы
дальности, в зависимости от того, что больше;
по пеленгу – в пределах 1°.
Эти точностные характеристики должны всегда приниматься во внимание
при использовании данных от РЛС.
Помехи Заключительная главная характеристика РЛС – видимость целей в зависи-
мости от типа судов, небольших плавсредств, скал и буев в присутствии нежела-
тельных отражений от осадков и моря. Эти нежелательные отражения называют
помехами. Помехи от осадков иногда известны как помехи объема, потому что
они заполняют трехмерное пространство. Хотя капли дождя, хлопья снега и град
являются маленькими по сравнению с целями, в луче РЛС их может быть огром-
ное число. В любой момент радиолокатор освещает объем, который ограничен
шириной луча азимута (azimuth beam width) антенны, шириной луча возвышения
(elevation beam width) и расстоянием (effective pulse length), занятым эффектив-
ной длиной импульса (см. рис. 36). Сокращение всех этих параметров уменьшает
эффект помех от осадков. Однако только выбор длины импульса находится под
контролем оператора. Обычный радиолокатор, работающий самым коротким
импульсом, имеет длину ячейки диапазона приблизительно 16 метров. Если идет
дождь, все капли дождя в этом объеме влияют на отраженную энергию. Так как
луч возвышения антенны РЛС относительно широк, чтобы компенсировать ки-
левую и бортовую качку, очень большой объем дождя может затенить требуе-
мые цели. Например, отражения от дождя приблизительно в 80 раз (19 dB)
меньше на частоте 3 ГГц, чем на 9 ГГц для одного и того же облученного объе-
ма. Вот почему использование РЛС на 3 ГГц обычно предпочтительнее в усло-
виях сильных осадков.
Помехи от волнения моря – эффект от области волнения; уровень возвраще-
ния помех пропорционален морской области, облученной радиоволной (рис. 37).
Поэтому, подобно помехам от дождя, маленькая ширина луча по азимуту и
использование самого короткого импульса будут самыми эффективными, хотя
ширина луча возвышения не имеет никакого влияния.
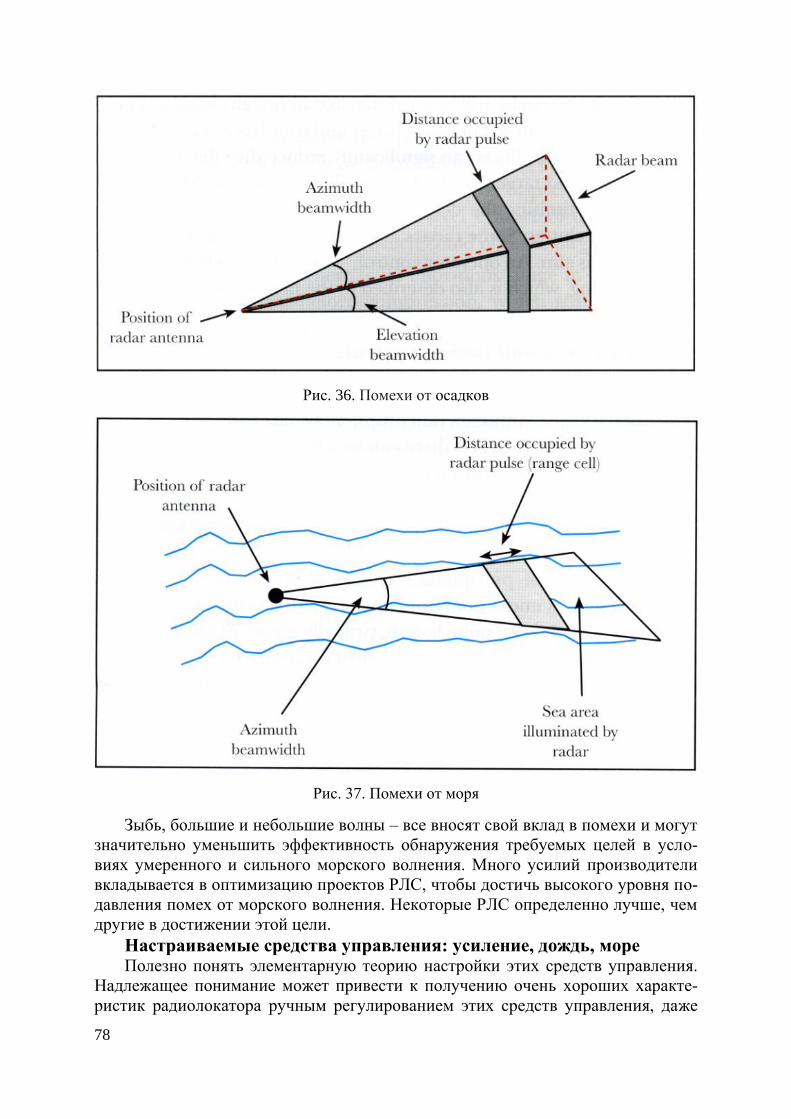
78
Рис. 36. Помехи от осадков
Рис. 37. Помехи от моря
Зыбь, большие и небольшие волны – все вносят свой вклад в помехи и могут
значительно уменьшить эффективность обнаружения требуемых целей в усло-
виях умеренного и сильного морского волнения. Много усилий производители
вкладывается в оптимизацию проектов РЛС, чтобы достичь высокого уровня по-
давления помех от морского волнения. Некоторые РЛС определенно лучше, чем
другие в достижении этой цели.
Настраиваемые средства управления: усиление, дождь, море Полезно понять элементарную теорию настройки этих средств управления.
Надлежащее понимание может привести к получению очень хороших характе-
ристик радиолокатора ручным регулированием этих средств управления, даже
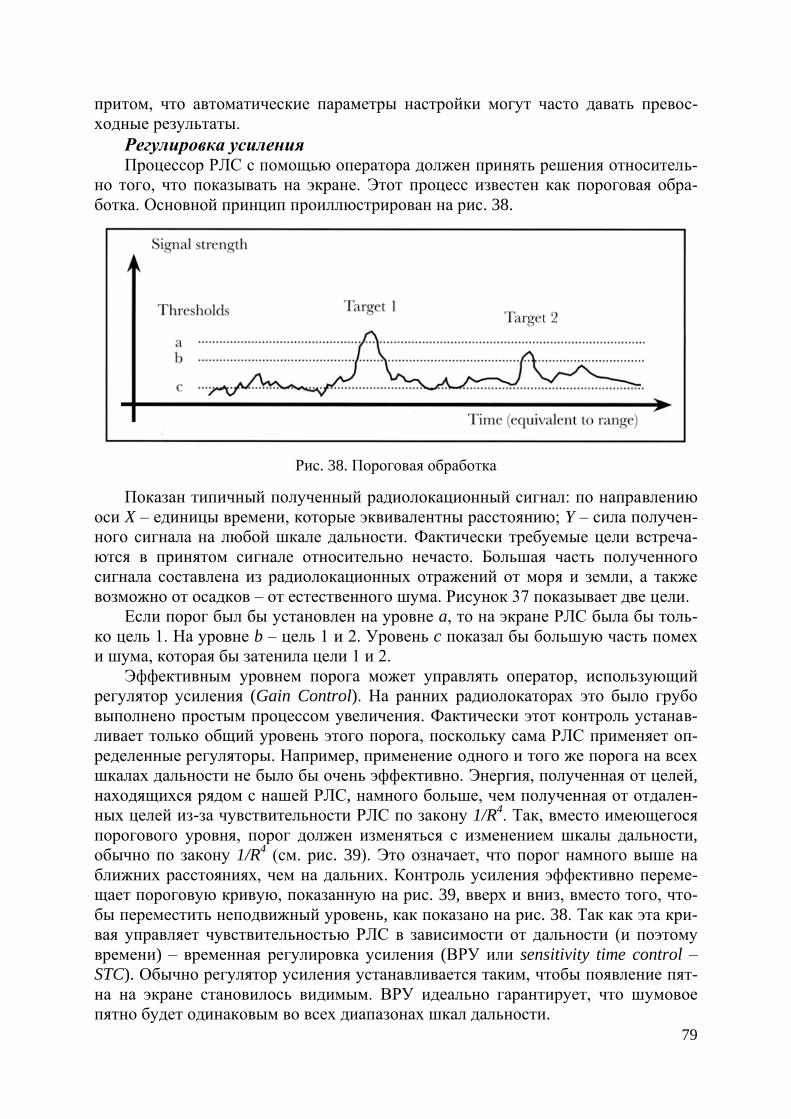
79
притом, что автоматические параметры настройки могут часто давать превос-
ходные результаты.
Регулировка усиления Процессор РЛС с помощью оператора должен принять решения относитель-
но того, что показывать на экране. Этот процесс известен как пороговая обра-
ботка. Основной принцип проиллюстрирован на рис. 38.
Рис. 38. Пороговая обработка
Показан типичный полученный радиолокационный сигнал: по направлению
оси X – единицы времени, которые эквивалентны расстоянию; Y – сила получен-
ного сигнала на любой шкале дальности. Фактически требуемые цели встреча-
ются в принятом сигнале относительно нечасто. Большая часть полученного
сигнала составлена из радиолокационных отражений от моря и земли, а также
возможно от осадков – от естественного шума. Рисунок 37 показывает две цели.
Если порог был бы установлен на уровне a, то на экране РЛС была бы толь-
ко цель 1. На уровне b – цель 1 и 2. Уровень c показал бы большую часть помех
и шума, которая бы затенила цели 1 и 2.
Эффективным уровнем порога может управлять оператор, использующий
регулятор усиления (Gain Control). На ранних радиолокаторах это было грубо
выполнено простым процессом увеличения. Фактически этот контроль устанав-
ливает только общий уровень этого порога, поскольку сама РЛС применяет оп-
ределенные регуляторы. Например, применение одного и того же порога на всех
шкалах дальности не было бы очень эффективно. Энергия, полученная от целей,
находящихся рядом с нашей РЛС, намного больше, чем полученная от отдален-
ных целей из-за чувствительности РЛС по закону 1/R4. Так, вместо имеющегося
порогового уровня, порог должен изменяться с изменением шкалы дальности,
обычно по закону 1/R4 (см. рис. 39). Это означает, что порог намного выше на
ближних расстояниях, чем на дальних. Контроль усиления эффективно переме-
щает пороговую кривую, показанную на рис. 39, вверх и вниз, вместо того, что-
бы переместить неподвижный уровень, как показано на рис. 38. Так как эта кри-
вая управляет чувствительностью РЛС в зависимости от дальности (и поэтому
времени) – временная регулировка усиления (ВРУ или sensitivity time control –
STC). Обычно регулятор усиления устанавливается таким, чтобы появление пят-
на на экране становилось видимым. ВРУ идеально гарантирует, что шумовое
пятно будет одинаковым во всех диапазонах шкал дальности.
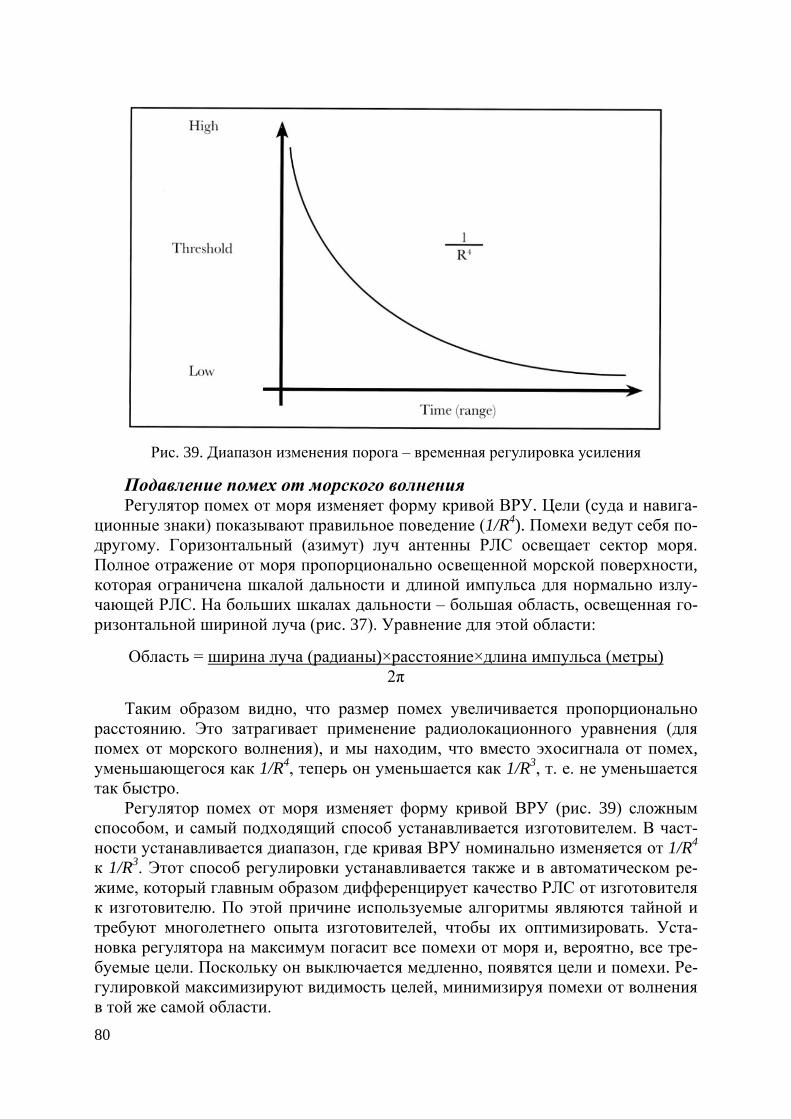
80
Рис. 39. Диапазон изменения порога – временная регулировка усиления
Подавление помех от морского волнения Регулятор помех от моря изменяет форму кривой ВРУ. Цели (суда и навига-
ционные знаки) показывают правильное поведение (1/R4). Помехи ведут себя по-
другому. Горизонтальный (азимут) луч антенны РЛС освещает сектор моря.
Полное отражение от моря пропорционально освещенной морской поверхности,
которая ограничена шкалой дальности и длиной импульса для нормально излу-
чающей РЛС. На больших шкалах дальности – большая область, освещенная го-
ризонтальной шириной луча (рис. 37). Уравнение для этой области:
Область = ширина луча (радианы)×расстояние×длина импульса (метры)
2π
Таким образом видно, что размер помех увеличивается пропорционально
расстоянию. Это затрагивает применение радиолокационного уравнения (для
помех от морского волнения), и мы находим, что вместо эхосигнала от помех,
уменьшающегося как 1/R4, теперь он уменьшается как 1/R
3, т. е. не уменьшается
так быстро.
Регулятор помех от моря изменяет форму кривой ВРУ (рис. 39) сложным
способом, и самый подходящий способ устанавливается изготовителем. В част-
ности устанавливается диапазон, где кривая ВРУ номинально изменяется от 1/R4
к 1/R3. Этот способ регулировки устанавливается также и в автоматическом ре-
жиме, который главным образом дифференцирует качество РЛС от изготовителя
к изготовителю. По этой причине используемые алгоритмы являются тайной и
требуют многолетнего опыта изготовителей, чтобы их оптимизировать. Уста-
новка регулятора на максимум погасит все помехи от моря и, вероятно, все тре-
буемые цели. Поскольку он выключается медленно, появятся цели и помехи. Ре-
гулировкой максимизируют видимость целей, минимизируя помехи от волнения
в той же самой области.
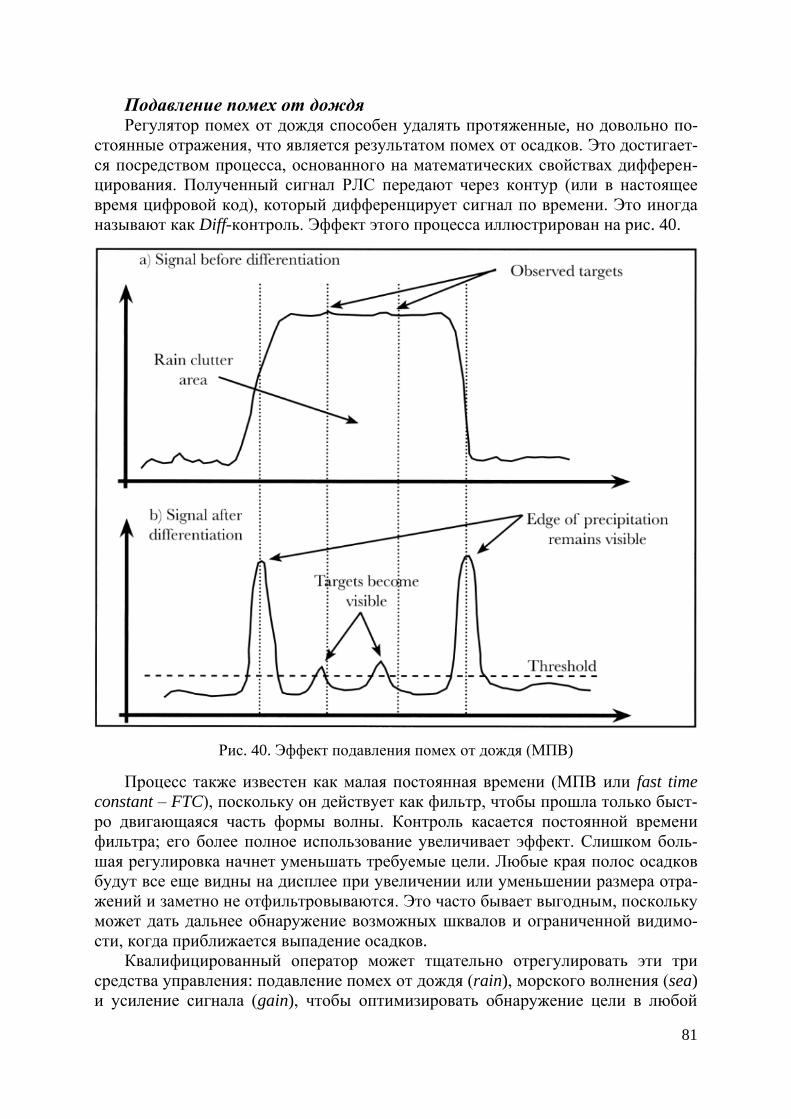
81
Подавление помех от дождя Регулятор помех от дождя способен удалять протяженные, но довольно по-
стоянные отражения, что является результатом помех от осадков. Это достигает-
ся посредством процесса, основанного на математических свойствах дифферен-
цирования. Полученный сигнал РЛС передают через контур (или в настоящее
время цифровой код), который дифференцирует сигнал по времени. Это иногда
называют как Diff-контроль. Эффект этого процесса иллюстрирован на рис. 40.
Рис. 40. Эффект подавления помех от дождя (МПВ)
Процесс также известен как малая постоянная времени (МПВ или fast time
constant – FTC), поскольку он действует как фильтр, чтобы прошла только быст-
ро двигающаяся часть формы волны. Контроль касается постоянной времени
фильтра; его более полное использование увеличивает эффект. Слишком боль-
шая регулировка начнет уменьшать требуемые цели. Любые края полос осадков
будут все еще видны на дисплее при увеличении или уменьшении размера отра-
жений и заметно не отфильтровываются. Это часто бывает выгодным, поскольку
может дать дальнее обнаружение возможных шквалов и ограниченной видимо-
сти, когда приближается выпадение осадков.
Квалифицированный оператор может тщательно отрегулировать эти три
средства управления: подавление помех от дождя (rain), морского волнения (sea)
и усиление сигнала (gain), чтобы оптимизировать обнаружение цели в любой
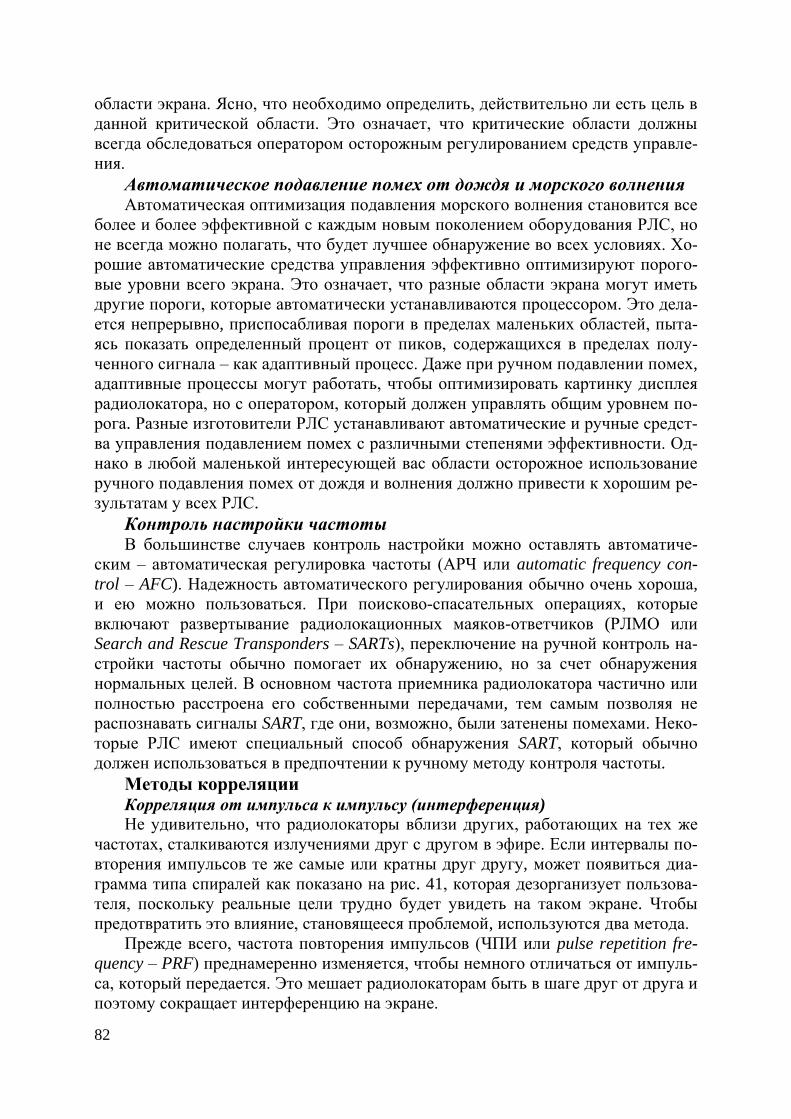
82
области экрана. Ясно, что необходимо определить, действительно ли есть цель в
данной критической области. Это означает, что критические области должны
всегда обследоваться оператором осторожным регулированием средств управле-
ния.
Автоматическое подавление помех от дождя и морского волнения Автоматическая оптимизация подавления морского волнения становится все
более и более эффективной с каждым новым поколением оборудования РЛС, но
не всегда можно полагать, что будет лучшее обнаружение во всех условиях. Хо-
рошие автоматические средства управления эффективно оптимизируют порого-
вые уровни всего экрана. Это означает, что разные области экрана могут иметь
другие пороги, которые автоматически устанавливаются процессором. Это дела-
ется непрерывно, приспосабливая пороги в пределах маленьких областей, пыта-
ясь показать определенный процент от пиков, содержащихся в пределах полу-
ченного сигнала – как адаптивный процесс. Даже при ручном подавлении помех,
адаптивные процессы могут работать, чтобы оптимизировать картинку дисплея
радиолокатора, но с оператором, который должен управлять общим уровнем по-
рога. Разные изготовители РЛС устанавливают автоматические и ручные средст-
ва управления подавлением помех с различными степенями эффективности. Од-
нако в любой маленькой интересующей вас области осторожное использование
ручного подавления помех от дождя и волнения должно привести к хорошим ре-
зультатам у всех РЛС.
Контроль настройки частоты В большинстве случаев контроль настройки можно оставлять автоматиче-
ским – автоматическая регулировка частоты (АРЧ или automatic frequency con-
trol – AFC). Надежность автоматического регулирования обычно очень хороша,
и ею можно пользоваться. При поисково-спасательных операциях, которые
включают развертывание радиолокационных маяков-ответчиков (РЛМО или
Search and Rescue Transponders – SARTs), переключение на ручной контроль на-
стройки частоты обычно помогает их обнаружению, но за счет обнаружения
нормальных целей. В основном частота приемника радиолокатора частично или
полностью расстроена его собственными передачами, тем самым позволяя не
распознавать сигналы SART, где они, возможно, были затенены помехами. Неко-
торые РЛС имеют специальный способ обнаружения SART, который обычно
должен использоваться в предпочтении к ручному методу контроля частоты.
Методы корреляции Корреляция от импульса к импульсу (интерференция) Не удивительно, что радиолокаторы вблизи других, работающих на тех же
частотах, сталкиваются излучениями друг с другом в эфире. Если интервалы по-
вторения импульсов те же самые или кратны друг другу, может появиться диа-
грамма типа спиралей как показано на рис. 41, которая дезорганизует пользова-
теля, поскольку реальные цели трудно будет увидеть на таком экране. Чтобы
предотвратить это влияние, становящееся проблемой, используются два метода.
Прежде всего, частота повторения импульсов (ЧПИ или pulse repetition fre-
quency – PRF) преднамеренно изменяется, чтобы немного отличаться от импуль-
са, который передается. Это мешает радиолокаторам быть в шаге друг от друга и
поэтому сокращает интерференцию на экране.
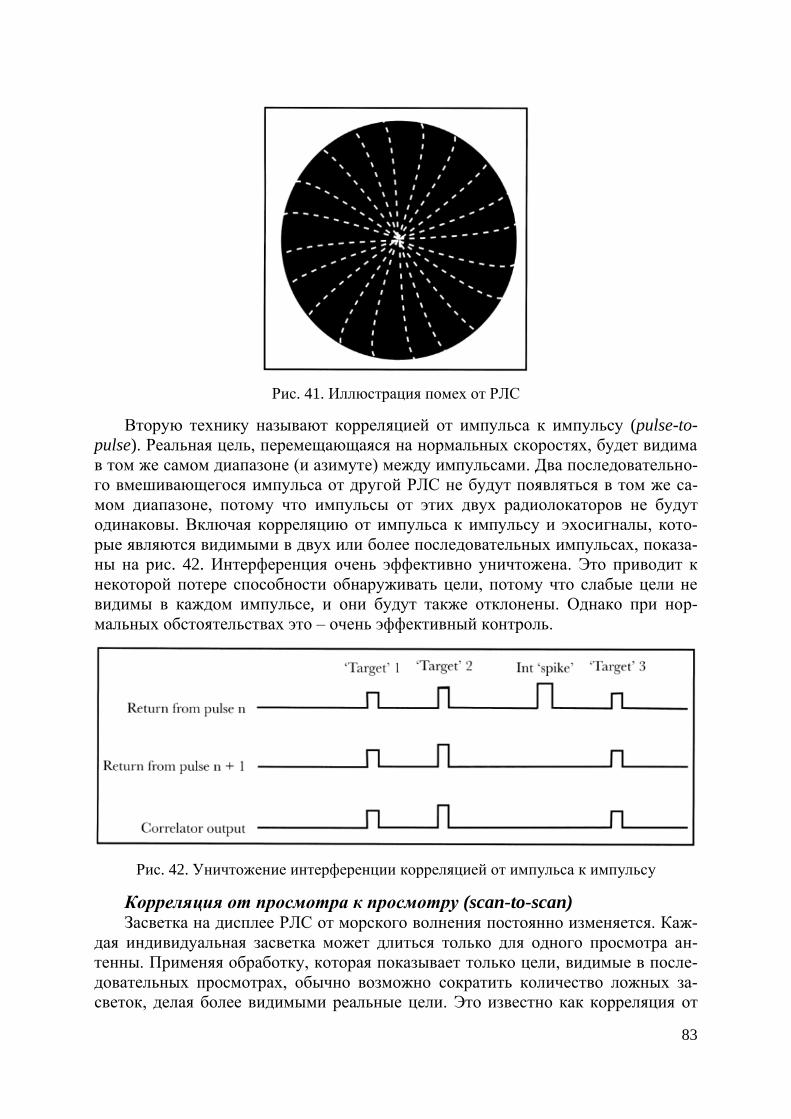
83
Рис. 41. Иллюстрация помех от РЛС
Вторую технику называют корреляцией от импульса к импульсу (pulse-to-
pulse). Реальная цель, перемещающаяся на нормальных скоростях, будет видима
в том же самом диапазоне (и азимуте) между импульсами. Два последовательно-
го вмешивающегося импульса от другой РЛС не будут появляться в том же са-
мом диапазоне, потому что импульсы от этих двух радиолокаторов не будут
одинаковы. Включая корреляцию от импульса к импульсу и эхосигналы, кото-
рые являются видимыми в двух или более последовательных импульсах, показа-
ны на рис. 42. Интерференция очень эффективно уничтожена. Это приводит к
некоторой потере способности обнаруживать цели, потому что слабые цели не
видимы в каждом импульсе, и они будут также отклонены. Однако при нор-
мальных обстоятельствах это – очень эффективный контроль.
Рис. 42. Уничтожение интерференции корреляцией от импульса к импульсу
Корреляция от просмотра к просмотру (scan-to-scan) Засветка на дисплее РЛС от морского волнения постоянно изменяется. Каж-
дая индивидуальная засветка может длиться только для одного просмотра ан-
тенны. Применяя обработку, которая показывает только цели, видимые в после-
довательных просмотрах, обычно возможно сократить количество ложных за-
светок, делая более видимыми реальные цели. Это известно как корреляция от
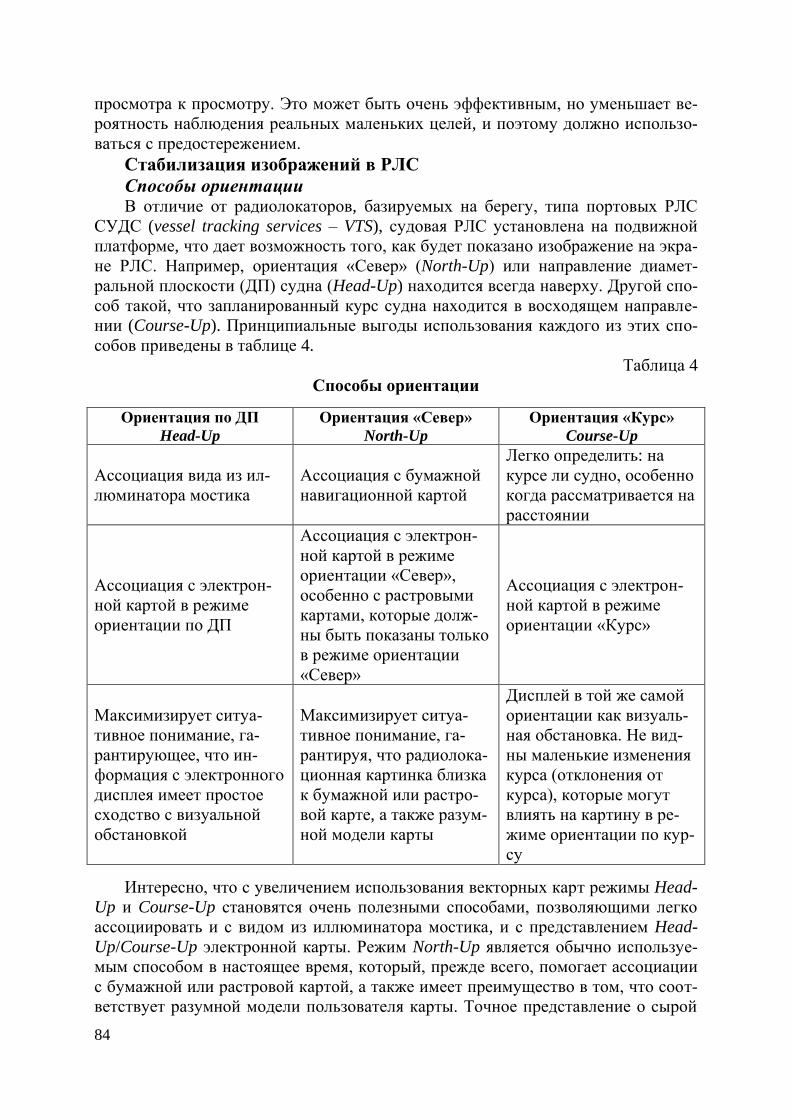
84
просмотра к просмотру. Это может быть очень эффективным, но уменьшает ве-
роятность наблюдения реальных маленьких целей, и поэтому должно использо-
ваться с предостережением.
Стабилизация изображений в РЛС
Способы ориентации В отличие от радиолокаторов, базируемых на берегу, типа портовых РЛС
СУДС (vessel tracking services – VTS), судовая РЛС установлена на подвижной
платформе, что дает возможность того, как будет показано изображение на экра-
не РЛС. Например, ориентация «Север» (North-Up) или направление диамет-
ральной плоскости (ДП) судна (Head-Up) находится всегда наверху. Другой спо-
соб такой, что запланированный курс судна находится в восходящем направле-
нии (Course-Up). Принципиальные выгоды использования каждого из этих спо-
собов приведены в таблице 4.
Таблица 4
Способы ориентации
Ориентация по ДП
Head-Up
Ориентация «Север»
North-Up
Ориентация «Курс»
Course-Up
Ассоциация вида из ил-
люминатора мостика
Ассоциация с бумажной
навигационной картой
Легко определить: на
курсе ли судно, особенно
когда рассматривается на
расстоянии
Ассоциация с электрон-
ной картой в режиме
ориентации по ДП
Ассоциация с электрон-
ной картой в режиме
ориентации «Север»,
особенно с растровыми
картами, которые долж-
ны быть показаны только
в режиме ориентации
«Север»
Ассоциация с электрон-
ной картой в режиме
ориентации «Курс»
Максимизирует ситуа-
тивное понимание, га-
рантирующее, что ин-
формация с электронного
дисплея имеет простое
сходство с визуальной
обстановкой
Максимизирует ситуа-
тивное понимание, га-
рантируя, что радиолока-
ционная картинка близка
к бумажной или растро-
вой карте, а также разум-
ной модели карты
Дисплей в той же самой
ориентации как визуаль-
ная обстановка. Не вид-
ны маленькие изменения
курса (отклонения от
курса), которые могут
влиять на картину в ре-
жиме ориентации по кур-
су
Интересно, что с увеличением использования векторных карт режимы Head-
Up и Course-Up становятся очень полезными способами, позволяющими легко
ассоциировать и с видом из иллюминатора мостика, и с представлением Head-
Up/Course-Up электронной карты. Режим North-Up является обычно используе-
мым способом в настоящее время, который, прежде всего, помогает ассоциации
с бумажной или растровой картой, а также имеет преимущество в том, что соот-
ветствует разумной модели пользователя карты. Точное представление о сырой
85
РЛ-информации в других способах, кроме Head-Up, находятся под влиянием
точности устройства курсоуказателя судна. Им может быть гирокомпас, магнит-
ный компас или компас глобальной навигационной спутниковой системы (ГНСС
или Global Navigation Satellite System – GNSS), например, компас GPS. В режиме
Head-Up отказ устройства курсоуказателя не вызовет никаких тревожащих эф-
фектов на дисплее радиолокатора, хотя, вероятно, будет неблагоприятно затро-
нута работа РЛС по сопровождению целей (описание приводится ниже).
Способы движения Есть два главных способа движения: относительное и истинное (Relative and
True Motion). При относительном движении собственное судно показывается в
неподвижном положении на дисплее, которое может быть в центре или несколь-
ко смещенным. При истинном движении собственное судно движется поперек
экрана, пока оно не достигает определенного расстояния от края дисплея, и за-
тем подскакивает к начальному стартовому положению. Также возможен ручной
сброс.
Рекомендация по стабилизации Стабилизация может быть относительно воды или земли (морское дно). Ста-
билизация относительно воды (sea stabilisation) определяется скоростными дат-
чиками, которые измеряют движение относительно воды, типа конвенционных и
доплеровских лагов. В настоящее время стабилизация относительно грунта
(ground stabilisation) обычно выполняется автоматически, используя информа-
цию о координатах от приемников ГНСС. Можно также использовать доплеров-
ский лаг для получения скорости относительно грунта. Все источники данных
нужно рассматривать с соответствующим предостережением. Например:
– доплеровские лаги относительно грунта могут быть неточными для не-
которого вида морского дна, например, жидкой грязи;
– легко неправильно идентифицировать неподвижную цель или исполь-
зовать неподходящую цель, типа буя, который привязан, а не установлен;
– данные ГНСС могут не всегда быть полностью точными.
МК СОЛАС требует, чтобы все суда водоизмещением более 50 000 т несли
оборудование, измеряющее скорость и расстояние (speed and distance measuring
equipment – SDME) относительно грунта по направлению вперед и траверзных
направлениях (обычно доплеровский лаг, одобренный как SDME). На таких су-
дах это –главное устройство, используемое для стабилизации РЛС. Однако на
практике часто находят, что по ГНСС – более подходящая стабилизация.
Радиолокационное сопровождение Рассматривать функции сопровождения морской РЛС было традиционно от-
дельно от основной функции радиолокатора. Это понятие возникло, когда авто-
матическое сопровождение нуждалось в дорогостоящем современном процессо-
ре и считалось специальным добавлением к основной РЛС. Их назвали средст-
вами автоматической радиолокационной прокладки (САРП или Automatic Radar
Plotting Aids – ARPAs). Меньшая способность сопровождения была также опре-
делена для устройства по имени средство автоматического сопровождения (САС
или Automatic Tracking Aids – ATAs). Все новые РЛС, устанавливаемые с июля
2008 года, должны соответствовать стандартам ИМО, которые требуют функ-
цию сопровождения цели (Target Tracking – TT), скорее относящуюся к САРП.
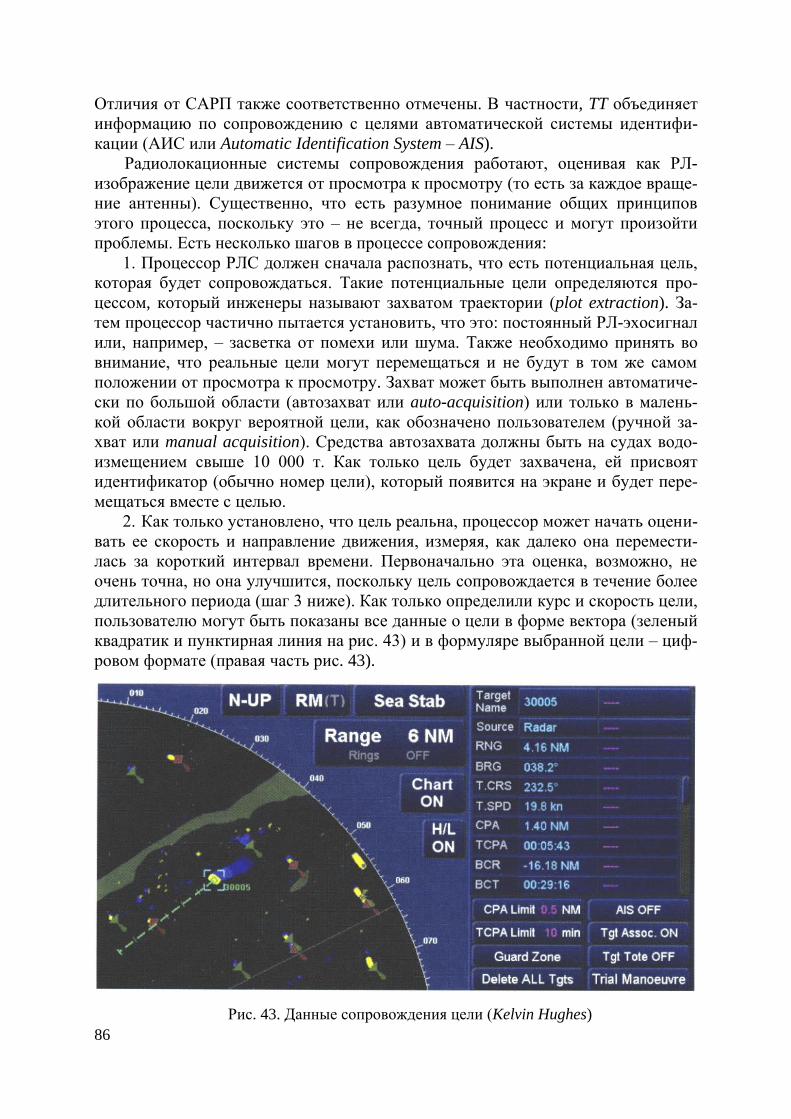
86
Отличия от САРП также соответственно отмечены. В частности, TT объединяет
информацию по сопровождению с целями автоматической системы идентифи-
кации (АИС или Automatic Identification System – AIS).
Радиолокационные системы сопровождения работают, оценивая как РЛ-
изображение цели движется от просмотра к просмотру (то есть за каждое враще-
ние антенны). Существенно, что есть разумное понимание общих принципов
этого процесса, поскольку это – не всегда, точный процесс и могут произойти
проблемы. Есть несколько шагов в процессе сопровождения:
1. Процессор РЛС должен сначала распознать, что есть потенциальная цель,
которая будет сопровождаться. Такие потенциальные цели определяются про-
цессом, который инженеры называют захватом траектории (plot extraction). За-
тем процессор частично пытается установить, что это: постоянный РЛ-эхосигнал
или, например, – засветка от помехи или шума. Также необходимо принять во
внимание, что реальные цели могут перемещаться и не будут в том же самом
положении от просмотра к просмотру. Захват может быть выполнен автоматиче-
ски по большой области (автозахват или auto-acquisition) или только в малень-
кой области вокруг вероятной цели, как обозначено пользователем (ручной за-
хват или manual acquisition). Средства автозахвата должны быть на судах водо-
измещением свыше 10 000 т. Как только цель будет захвачена, ей присвоят
идентификатор (обычно номер цели), который появится на экране и будет пере-
мещаться вместе с целью.
2. Как только установлено, что цель реальна, процессор может начать оцени-
вать ее скорость и направление движения, измеряя, как далеко она перемести-
лась за короткий интервал времени. Первоначально эта оценка, возможно, не
очень точна, но она улучшится, поскольку цель сопровождается в течение более
длительного периода (шаг 3 ниже). Как только определили курс и скорость цели,
пользователю могут быть показаны все данные о цели в форме вектора (зеленый
квадратик и пунктирная линия на рис. 43) и в формуляре выбранной цели – циф-
ровом формате (правая часть рис. 43).
Рис. 43. Данные сопровождения цели (Kelvin Hughes)
87
3. Эти данные создает специальный блок (модуль), известный как навигаци-
онный фильтр (процессор курса), который при обработке эхосигналов учитывает
все ошибки в каждом измерении и начинает формировать точный курс, что по-
лезно для процессора курса, поскольку уменьшает область (строб), определен-
ную им для следующего местоположения цели, и сокращает количество необхо-
димой обработки. Если цель изменяет свою скорость или направление движения,
то это увеличивает время обработки, чтобы показать это изменение. Данные со-
провождения точны только для целей с постоянными элементами движения, ко-
торые сопровождались достаточного долго (обычно больше, чем три минуты).
4. Если цель не будет обнаружена в пределах предвычисленного строба, то
процессор будет ее обрабатывать по старому, чтобы увидеть ее в следующем
просмотре. Если цель не найдена после нескольких просмотров, система прекра-
тит попытки, и будет инициирована тревога потерянной цели. ИМО требует,
чтобы процесс продолжал отслеживать цели, если обеспечивается ясно различи-
мая РЛ-цель в 5 из 10 последовательных просмотрах. Множество важных про-
блем возникает у работающей системы сопровождения:
– необходимо время, чтобы создать точный курс от начала захвата; ИМО
требует, чтобы тенденция движения цели давалась в течение 1 минуты и точная
оценка была доступна после трех минут;
– иногда нежелательные цели типа долговечных волн могут сформиро-
вать сопровождение при выборе автозахвата;
– процессор может потерять обрабатываемые цели, если сигнал начинает
становиться слабым или, если цель делает внезапное изменение скорости или
курса (навигационный фильтр следует по ожидаемой динамике сопровождаемых
судов и может запутаться в быстрых изменениях местоположения эхосигнала –
проектировщики РЛС должны пойти на компромисс между точностью и способ-
ностью к динамической реакции);
– когда цель изменяет скорость или курс, навигационному фильтру по-
надобится до трех минут времени, чтобы точно обновить векторы и другие дан-
ные цели;
– процессор курса может запутаться, если две цели сходятся к одному
положению, тогда может произойти обмен целей. Это означает, что идентифика-
торы целей присоединяются к неправильной цели;
– средняя точка эхосигнала РЛ-цели зависит от ее ракурса. Поскольку
цель поворачивается, это движение может быть весьма быстрым, и РЛС, отсле-
живающие относительно близкие к ним суда, могут запутаться;
– система сопровождения должна непрерывно получать динамическую
информацию собственного судна (скорость и курс), чтобы точно отследить дру-
гие суда. Эти данные гарантируют хорошее сопровождение, даже когда собст-
венное судно маневрирует. Если есть ошибки в курсе собственного судна и дат-
чиках скорости, то это приводит к погрешностям и нестабильности сопровожде-
ния целей.
Новые технологии в радиолокаторах Морская РЛС продолжала развиваться с устойчивой скоростью с тех пор,
как в конце 1940-х годов появились первые коммерческие локаторы. Многие
усовершенствования помогли воспроизвести более ясную РЛ-картинку и доба-
88
вить ценные инструменты в помощь судоводителю. Есть длинный список этих
усовершенствований, включая: САРП, стабилизацию движения, варианты ори-
ентации изображения, корреляцию от просмотра к просмотру, компенсацию ин-
терференции, цветные дисплеи с высокой разрешающей способностью даже
днем, карты, многослойные карты и интеграцию с АИС.
Хотя наблюдалось устойчивое усовершенствование технологий обнаруже-
ния целей в условиях помех, остается одна из специфических областей, где ра-
бота морской РЛС последовательно не выполняет потребности пользователя,
особенно в условиях сильного морского волнения. Фактор, ограничивающий
полную работу традиционных морских РЛС, – использование обычных передат-
чиков на основе магнетрона, вырабатывающего импульс, который является не-
сколько непостоянным по частоте. Это означает, что только амплитуда отражен-
ного сигнала используется в последующей обработке сигнала. Частотный ком-
понент сигнала не используется, а он содержит много потенциально полезной
информации.
Частоту нестабильной передачи называют несогласованной. Вообще, согла-
сованная система передает тщательно определенный сигнал, которым управляют
по частоте, фазе и амплитуде. Это позволяет соответствующему приемнику из-
влекать связанную с частотой информацию о целях и помехах, которая может
помочь разделить их, потому что любое движение в любой части РЛС отражен-
ного объекта (требуемая цель или помеха), производит маленькие изменения
частоты, известные как доплеровские в отраженном сигнале. Они видимы в со-
гласованной РЛ-системе из-за точного контроля частоты переданной формы
волны. Отраженная частота сигнала сравнивается с переданной частотой и ана-
лизируется с увеличивающимся опытом. Поскольку спектр частоты, скажем, буя
или маленького прогулочного судна, будет отличен от окружающей воды, он
может быть потенциально идентифицирован системой как цель, даже притом,
что амплитуда ближайшей помехи может быть намного выше.
Некоторые исследования показали, что при использовании согласованной
РЛС маленькая цель, типа буя в 3-х навигационных милях с помехами, связан-
ными с морским волнением в 5 баллов, будет иметь вероятность обнаружения
больше чем 80 %, по сравнению с обычной несогласованной системой (20 %).
Это, как отмечают, является существенным потенциальным усовершенствовани-
ем.
Хотя военные системы использовали согласованные технологии РЛС много
лет, они были очень дороги; выработка РЛ-сигналов было трудоемким процес-
сом, и обработка полученного сигнала нуждалась в сильных цифровых процес-
сорах. Недавно стали доступными передатчики РЛС, основанные на технологии
полупроводника, потому что подобная технология была развита в промышлен-
ности мобильных коммуникаций. Эти передатчики работают как усилитель по-
добно звуковому усилителю, но в намного более высоких частотах. Сначала ге-
нерируется полный сигнал радиолокатора на низком уровне, затем он усилива-
ется мощными полупроводниковыми устройствами и излучается антенной РЛС.
Эта техника может идеально воспроизвести очень чистые сигналы, которые со-
ответствуют согласованной передаче РЛС. Напротив, магнетрон на своих тер-
миналах производит своеобразный взрыв микроволновой энергии очень высоко-
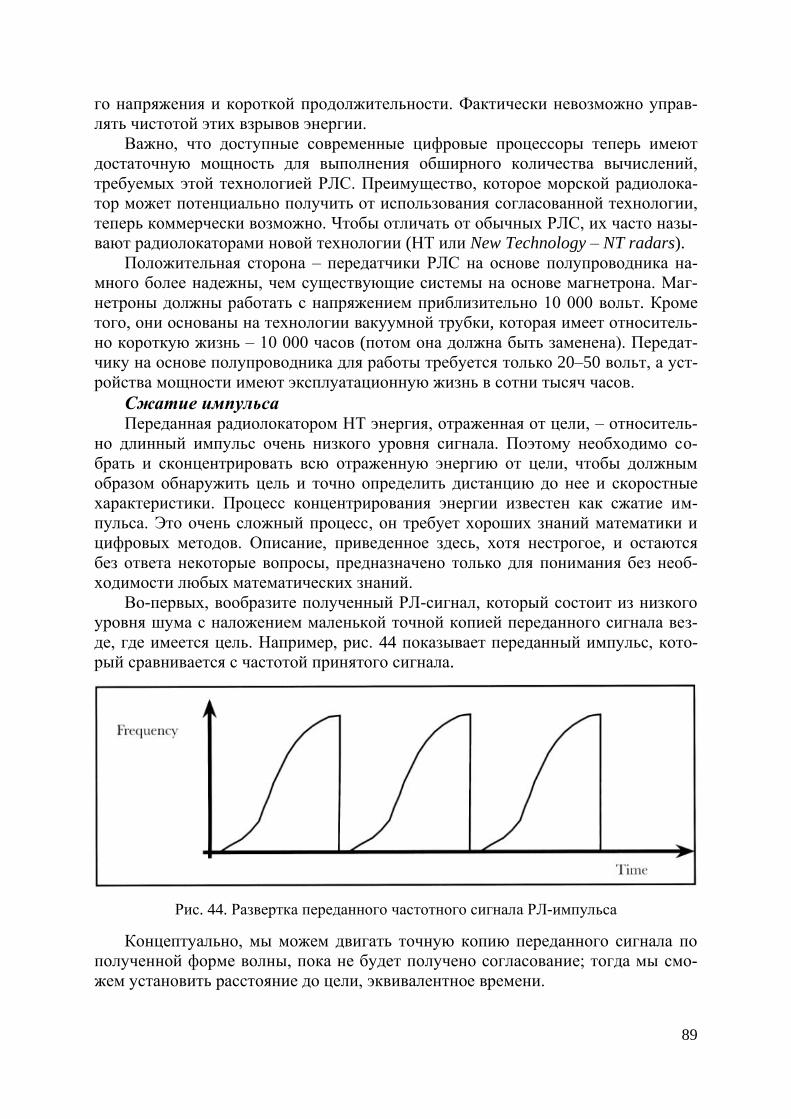
89
го напряжения и короткой продолжительности. Фактически невозможно управ-
лять чистотой этих взрывов энергии.
Важно, что доступные современные цифровые процессоры теперь имеют
достаточную мощность для выполнения обширного количества вычислений,
требуемых этой технологией РЛС. Преимущество, которое морской радиолока-
тор может потенциально получить от использования согласованной технологии,
теперь коммерчески возможно. Чтобы отличать от обычных РЛС, их часто назы-
вают радиолокаторами новой технологии (НТ или New Technology – NT radars).
Положительная сторона – передатчики РЛС на основе полупроводника на-
много более надежны, чем существующие системы на основе магнетрона. Маг-
нетроны должны работать с напряжением приблизительно 10 000 вольт. Кроме
того, они основаны на технологии вакуумной трубки, которая имеет относитель-
но короткую жизнь – 10 000 часов (потом она должна быть заменена). Передат-
чику на основе полупроводника для работы требуется только 20–50 вольт, а уст-
ройства мощности имеют эксплуатационную жизнь в сотни тысяч часов.
Сжатие импульса Переданная радиолокатором НТ энергия, отраженная от цели, – относитель-
но длинный импульс очень низкого уровня сигнала. Поэтому необходимо со-
брать и сконцентрировать всю отраженную энергию от цели, чтобы должным
образом обнаружить цель и точно определить дистанцию до нее и скоростные
характеристики. Процесс концентрирования энергии известен как сжатие им-
пульса. Это очень сложный процесс, он требует хороших знаний математики и
цифровых методов. Описание, приведенное здесь, хотя нестрогое, и остаются
без ответа некоторые вопросы, предназначено только для понимания без необ-
ходимости любых математических знаний.
Во-первых, вообразите полученный РЛ-сигнал, который состоит из низкого
уровня шума с наложением маленькой точной копией переданного сигнала вез-
де, где имеется цель. Например, рис. 44 показывает переданный импульс, кото-
рый сравнивается с частотой принятого сигнала.
Рис. 44. Развертка переданного частотного сигнала РЛ-импульса
Концептуально, мы можем двигать точную копию переданного сигнала по
полученной форме волны, пока не будет получено согласование; тогда мы смо-
жем установить расстояние до цели, эквивалентное времени.
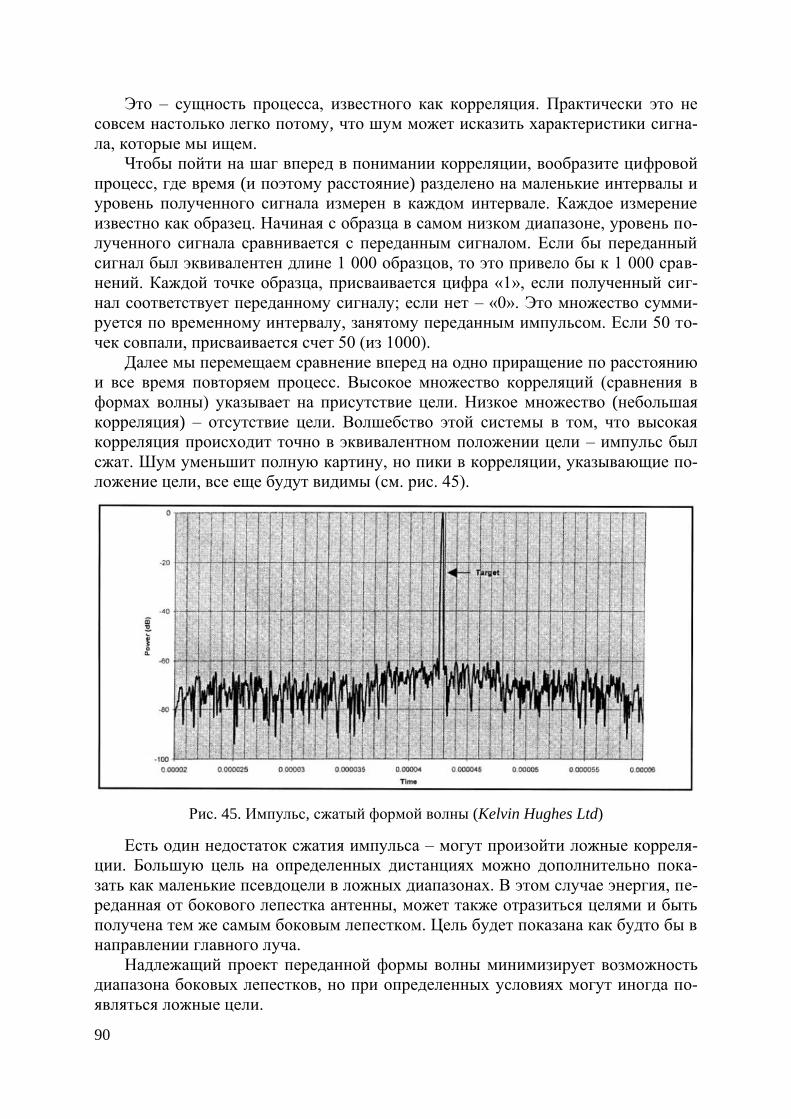
90
Это – сущность процесса, известного как корреляция. Практически это не
совсем настолько легко потому, что шум может исказить характеристики сигна-
ла, которые мы ищем.
Чтобы пойти на шаг вперед в понимании корреляции, вообразите цифровой
процесс, где время (и поэтому расстояние) разделено на маленькие интервалы и
уровень полученного сигнала измерен в каждом интервале. Каждое измерение
известно как образец. Начиная с образца в самом низком диапазоне, уровень по-
лученного сигнала сравнивается с переданным сигналом. Если бы переданный
сигнал был эквивалентен длине 1 000 образцов, то это привело бы к 1 000 срав-
нений. Каждой точке образца, присваивается цифра «1», если полученный сиг-
нал соответствует переданному сигналу; если нет – «0». Это множество сумми-
руется по временному интервалу, занятому переданным импульсом. Если 50 то-
чек совпали, присваивается счет 50 (из 1000).
Далее мы перемещаем сравнение вперед на одно приращение по расстоянию
и все время повторяем процесс. Высокое множество корреляций (сравнения в
формах волны) указывает на присутствие цели. Низкое множество (небольшая
корреляция) – отсутствие цели. Волшебство этой системы в том, что высокая
корреляция происходит точно в эквивалентном положении цели – импульс был
сжат. Шум уменьшит полную картину, но пики в корреляции, указывающие по-
ложение цели, все еще будут видимы (см. рис. 45).
Рис. 45. Импульс, сжатый формой волны (Kelvin Hughes Ltd)
Есть один недостаток сжатия импульса – могут произойти ложные корреля-
ции. Большую цель на определенных дистанциях можно дополнительно пока-
зать как маленькие псевдоцели в ложных диапазонах. В этом случае энергия, пе-
реданная от бокового лепестка антенны, может также отразиться целями и быть
получена тем же самым боковым лепестком. Цель будет показана как будто бы в
направлении главного луча.
Надлежащий проект переданной формы волны минимизирует возможность
диапазона боковых лепестков, но при определенных условиях могут иногда по-
являться ложные цели.
91
4.2. РАСХОЖДЕНИЕ С СУДАМИ С ПОМОЩЬЮ РАДИОЛОКАТОРА
Безопасность плавания судна обеспечивается тщательным счислением пути
с учѐтом влияния внешних факторов и маневренных качеств судна, определе-
ниями места, строгим выполнением МППСС и местных правил плавания и дру-
гими мерами предосторожности.
Организация радиолокационного наблюдения, в том числе в условиях хоро-
шей видимости, соответствует требованию Правила 5 МППСС-72 об использо-
вании для наблюдения всех имеющихся средств, чтобы полностью оценить си-
туацию и опасность столкновения. Всестороннее использование РЛС – важного
средства заблаговременного обнаружения других судов-целей и определения
степени опасности – является одной из мер предосторожности, пренебрежение
которой может быть поставлено в вину на основании Правила 2 МППСС-72. Ра-
диолокационное наблюдение организуется совместно с другими видами наблю-
дения – зрительным и слуховым, не заменяя, а дополняя их.
При ограниченной видимости организация радиолокационного наблюдения
обязательна. Термин «ограниченная видимость» означает любые условия, при
которых видимость ограничена из-за тумана, мглы, снегопада, сильного ливня,
песчаной бури или по каким-либо другим подобным причинам (Правило 3
МППСС-72).
Ночью, даже в условиях хорошей видимости, целесообразно использовать
судовые радиолокационные средства в прибрежных водах и при следовании
районами, где возможна встреча с малыми рыболовными судами, яхтами, буро-
выми платформами или другими сооружениями, которые не всегда освещены
надлежащим образом. При плавании в узкостях и в районах интенсивного дви-
жения судов использование РЛС обязательно в любых условиях плавания.
Каждое судно должно всегда следовать с безопасной скоростью, чтобы оно
могло предпринять надлежащее и эффективное действие для предупреждения
столкновения и могло быть остановлено в пределах расстояния, требуемого при
существующих обстоятельствах и условиях. Правило 6 МППСС-72, перечисляя
факторы, которые надлежит учитывать при выборе безопасной скорости, выде-
ляет группу факторов, связанных с использованием РЛС:
1 – характеристики, эффективность и ограничения радиолокационного
оборудования;
2 – любые ограничения, накладываемые используемой радиолокацион-
ной шкалой дальности;
3 – влияние на радиолокационное обнаружение состояния моря и ме-
теорологических факторов, а также других источников помех;
4 – возможность того, что радиолокатор может не обнаружить на доста-
точном расстоянии малые суда, лѐд и другие плавающие объекты;
5 – количество, местоположение и перемещение судов, обнаруженных
радиолокатором;
6 – более точную оценку видимости, которая может быть получена при
радиолокационном измерении расстояния до судов или других объектов, нахо-
дящихся поблизости.
92
Радиолокационное наблюдение не освобождает судоводителя от подачи зву-
ковых сигналов, предписываемых МППСС-72 (табл. 2).
В сложных условиях для графической прокладки радиолокационных изме-
рений и обработки радиолокационной информации следует привлекать свобод-
ного от вахты помощника капитана с чѐтким распределением обязанностей су-
доводителей на мостике.
Обнаружив в результате наблюдения, в том числе радиолокационного, дру-
гие суда-цели, судоводитель должен в соответствии с Правилом 7 МППСС-72
оценить наличие опасности столкновения, используя для этой цели все имею-
щиеся средства. При определении наличия опасности столкновения необходимо
прежде всего учитывать следующее:
– опасность столкновения должна считаться существующей, если пеленг
приближающегося судна заметно не изменяется;
– опасность столкновения может иногда существовать даже при замет-
ном изменении пеленга, в частности, при сближении с очень большим судном
или буксиром или при сближении судов на малое расстояние.
Неправильное использование или неиспользование РЛС для предупрежде-
ния столкновений является фактором, усугубляющим вину в случае столкнове-
ния судов. При организации радиолокационного наблюдения учитывается:
– район плавания, включая наличие навигационных опасностей, ограни-
чивающих маневрирование;
– допустимые значения DКР и ТКР сближения, а также других критериев
опасности столкновения;
– линейные и временные элементы возможных маневров судна;
– технические и эксплуатационные характеристики и ограничения судо-
вых радиолокационных средств с учѐтом влияния на их изменение конкретных
условий плавания.
Использование РЛС наиболее эффективно, если радиолокационное наблю-
дение ведѐтся непрерывно, т. е. цели обнаруживаются сразу же после появления
их на экране, в противном случае цели могут быть обнаружены на значительно
меньшем расстоянии или вовсе не обнаружены с помощью РЛС. Перерыв между
наблюдениями за экраном РЛС зависит от района плавания, скорости хода, дис-
танции обнаружения объектов, взаимного положения, относительной скорости
сближения.
Правильная организация радиолокационного наблюдения со всесторонним
использованием РЛС, а также радиолокационной прокладкой на маневренном
планшете или средствами автоматизированной радиолокационной прокладки
(САРП) позволяет:
– своевременно обнаружить цели, их положение;
– выбрать маневр для расхождения;
– контроль эффективности маневра в период его выполнения;
– вводить дополнительную корректуру в обеспечении безопасности пла-
вания при необходимости;
– безопасно вернуться на заданный или другой путь следования.
Отличительной чертой деятельности судоводителя является специфичность
ориентировки. Психофизиологические механизмы ориентировки в относитель-
93
ном движении (на экране РЛС) заметно отличаются от истинных, которые нам
привычны. В современных условиях судоводитель, управляющий судном, дол-
жен умело обобщать полученные от приборов (САРП, АИС) и путѐм визуально-
го наблюдения сведения, увязывать в одно целое происходящее событие и соз-
давать на его основе, так называемые, схемы предвидения – перед выполнением
какого-либо действия должен мысленно представить, что именно он сделает, ка-
кую команду подаст и каков будет результат.
Судовая РЛС используется для предотвращения столкновения судов и обя-
зательно – при ограниченной видимости. Капитан в общем случае руководству-
ется МППСС и рекомендациями по использованию судовой РЛС/САРП для пре-
дупреждения столкновения судов.
Радиолокационное наблюдение включает:
– систематическое наблюдение за обстановкой и обнаруженными объек-
тами с обязательным просмотром теневых секторов и периодическим наблюде-
нием на шкалах дальнего обзора;
– глазомерную оценку радиолокационной ситуации, опасности столкно-
вения и отбор объектов для радиолокационной прокладки;
– радиолокационную прокладку (ручную или с помощью автоматизиро-
ванных средств) с определением элементов сближения и движения опасных объ-
ектов и выполнение расчѐтов маневра расхождения;
– контроль за изменением радиолокационной ситуации во время маневра
до полного расхождения судов на безопасном расстоянии.
Истинное и относительное движение Эффективность использования радиолокационной информации для преду-
преждения столкновения зависит от понимания судоводителем объективно су-
ществующих закономерностей перемещения эхосигналов судов относительно
друг друга на экране РЛС (САРП), что, в свою очередь, определяет качество
ручной радиолокационной прокладки и эффективность использования САРП.
Очень важное значение для решения задачи предотвращения столкновения на
основе радиолокационной информации имеет понимание судоводителем взаи-
мосвязи требований МППСС-72 (правила 2, 3, 5–10, 19 и 35).
В большинстве случаев одной из причин столкновения является запоздалое
обнаружение одним судном другого. Судоводитель может работать на судне,
оборудованном САРП или не имеющим его. В любом случае он должен уметь
выполнять стандартные операции по оценке ситуации, определению степени ее
опасности, выбору и выполнению эффективного маневра для избежания чрез-
мерного сближения и предотвращения столкновения, причем выполняемый ма-
невр должен быть понятен другим судам. При этом не имеет значения, обраба-
тывается ли радиолокационная информация вручную или с помощью САРП.
Полная оценка ситуации – важный этап обработки радиолокационной ин-
формации, обобщающий результат визуального, слухового, радиолокационного
наблюдения и анализа данных АИС (в соответствии с правилом 5 МППСС-72),
всей первичной и вторичной радиолокационной информации, полученной из
глазомерной оценки, ручной и автоматизированной прокладки. Только после
полного анализа ситуации судоводитель обосновывает необходимость и вид ма-
невра для расхождения. Чтобы маневр был эффективен, он в соответствии с
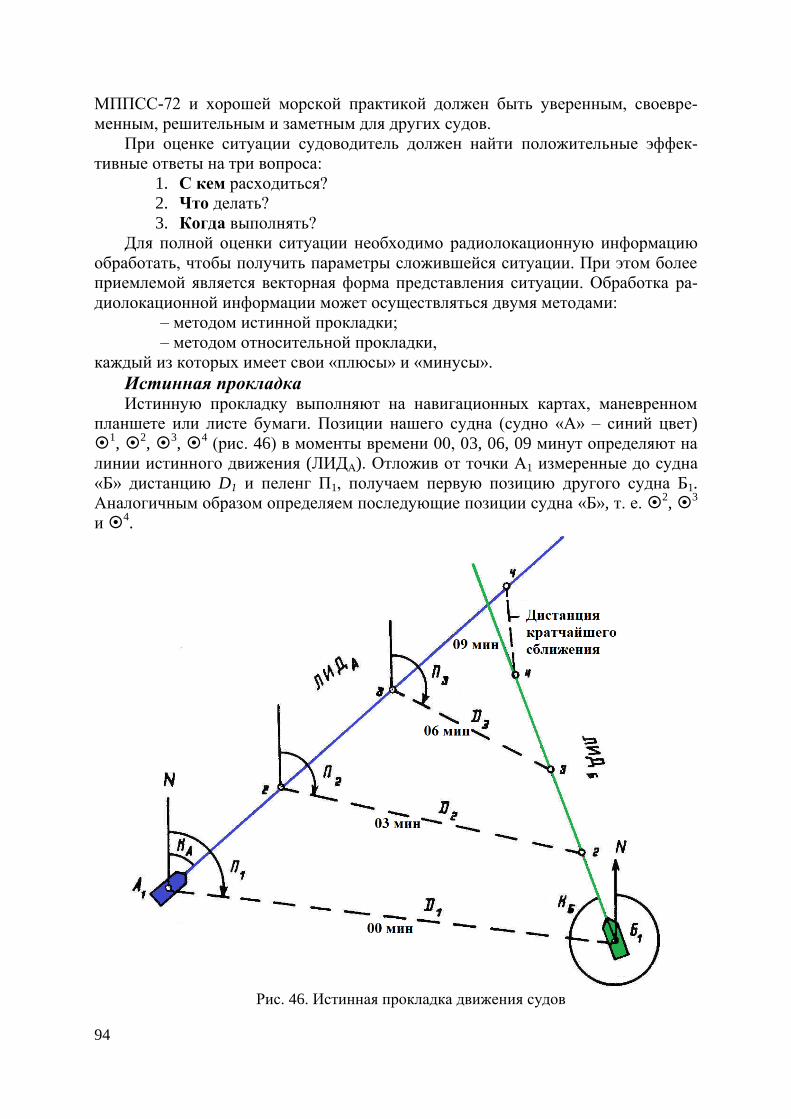
94
МППСС-72 и хорошей морской практикой должен быть уверенным, своевре-
менным, решительным и заметным для других судов.
При оценке ситуации судоводитель должен найти положительные эффек-
тивные ответы на три вопроса:
1. С кем расходиться?
2. Что делать?
3. Когда выполнять?
Для полной оценки ситуации необходимо радиолокационную информацию
обработать, чтобы получить параметры сложившейся ситуации. При этом более
приемлемой является векторная форма представления ситуации. Обработка ра-
диолокационной информации может осуществляться двумя методами:
– методом истинной прокладки;
– методом относительной прокладки,
каждый из которых имеет свои «плюсы» и «минусы».
Истинная прокладка Истинную прокладку выполняют на навигационных картах, маневренном
планшете или листе бумаги. Позиции нашего судна (судно «А» – синий цвет)
1,
2,
3,
4 (рис. 46) в моменты времени 00, 03, 06, 09 минут определяют на
линии истинного движения (ЛИДА). Отложив от точки А1 измеренные до судна
«Б» дистанцию D1 и пеленг П1, получаем первую позицию другого судна Б1.
Аналогичным образом определяем последующие позиции судна «Б», т. е. 2,
3
и 4.
Рис. 46. Истинная прокладка движения судов
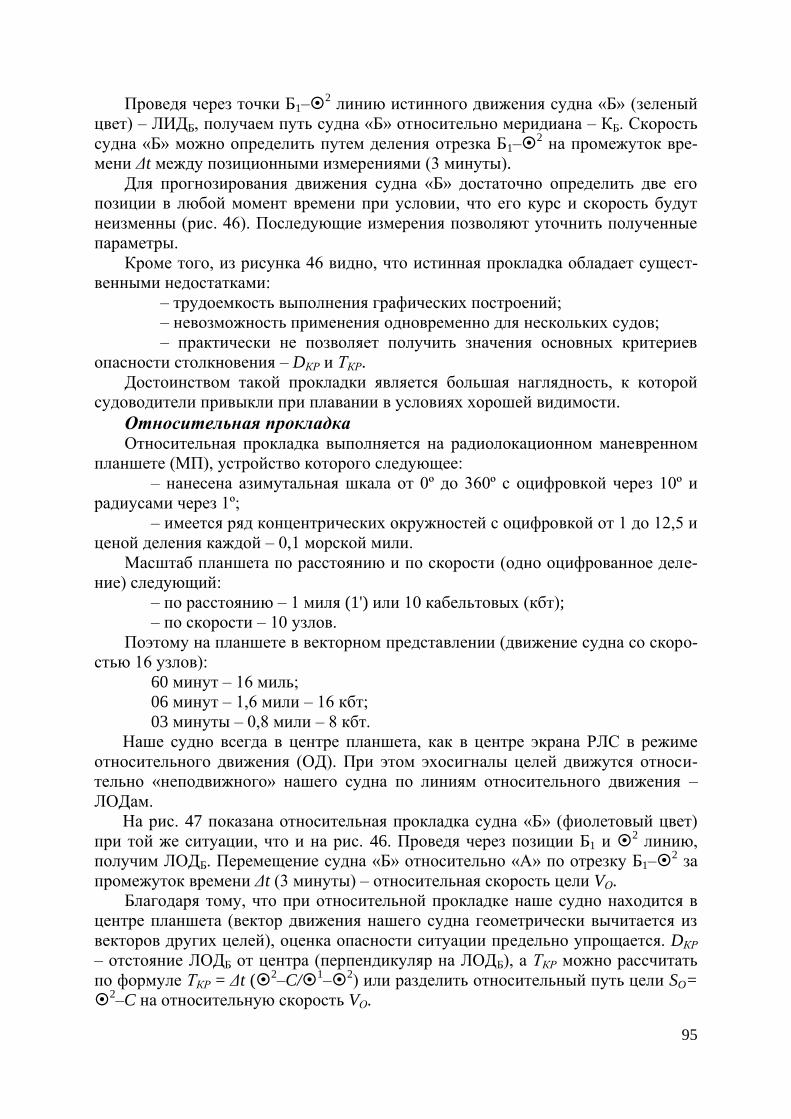
95
Проведя через точки Б1–2 линию истинного движения судна «Б» (зеленый
цвет) – ЛИДБ, получаем путь судна «Б» относительно меридиана – КБ. Скорость
судна «Б» можно определить путем деления отрезка Б1–2 на промежуток вре-
мени Δt между позиционными измерениями (3 минуты).
Для прогнозирования движения судна «Б» достаточно определить две его
позиции в любой момент времени при условии, что его курс и скорость будут
неизменны (рис. 46). Последующие измерения позволяют уточнить полученные
параметры.
Кроме того, из рисунка 46 видно, что истинная прокладка обладает сущест-
венными недостатками:
– трудоемкость выполнения графических построений;
– невозможность применения одновременно для нескольких судов;
– практически не позволяет получить значения основных критериев
опасности столкновения – DКР и ТКР.
Достоинством такой прокладки является большая наглядность, к которой
судоводители привыкли при плавании в условиях хорошей видимости.
Относительная прокладка Относительная прокладка выполняется на радиолокационном маневренном
планшете (МП), устройство которого следующее:
– нанесена азимутальная шкала от 0º до 360º с оцифровкой через 10º и
радиусами через 1º;
– имеется ряд концентрических окружностей с оцифровкой от 1 до 12,5 и
ценой деления каждой – 0,1 морской мили.
Масштаб планшета по расстоянию и по скорости (одно оцифрованное деле-
ние) следующий:
– по расстоянию – 1 миля (1') или 10 кабельтовых (кбт);
– по скорости – 10 узлов.
Поэтому на планшете в векторном представлении (движение судна со скоро-
стью 16 узлов):
60 минут – 16 миль;
06 минут – 1,6 мили – 16 кбт;
03 минуты – 0,8 мили – 8 кбт.
Наше судно всегда в центре планшета, как в центре экрана РЛС в режиме
относительного движения (ОД). При этом эхосигналы целей движутся относи-
тельно «неподвижного» нашего судна по линиям относительного движения –
ЛОДам.
На рис. 47 показана относительная прокладка судна «Б» (фиолетовый цвет)
при той же ситуации, что и на рис. 46. Проведя через позиции Б1 и 2 линию,
получим ЛОДБ. Перемещение судна «Б» относительно «А» по отрезку Б1–2 за
промежуток времени Δt (3 минуты) – относительная скорость цели VО.
Благодаря тому, что при относительной прокладке наше судно находится в
центре планшета (вектор движения нашего судна геометрически вычитается из
векторов других целей), оценка опасности ситуации предельно упрощается. DКР
– отстояние ЛОДБ от центра (перпендикуляр на ЛОДБ), а ТКР можно рассчитать
по формуле ТКР = Δt (2–C/
1–
2) или разделить относительный путь цели SO=
2–C на относительную скорость VО.
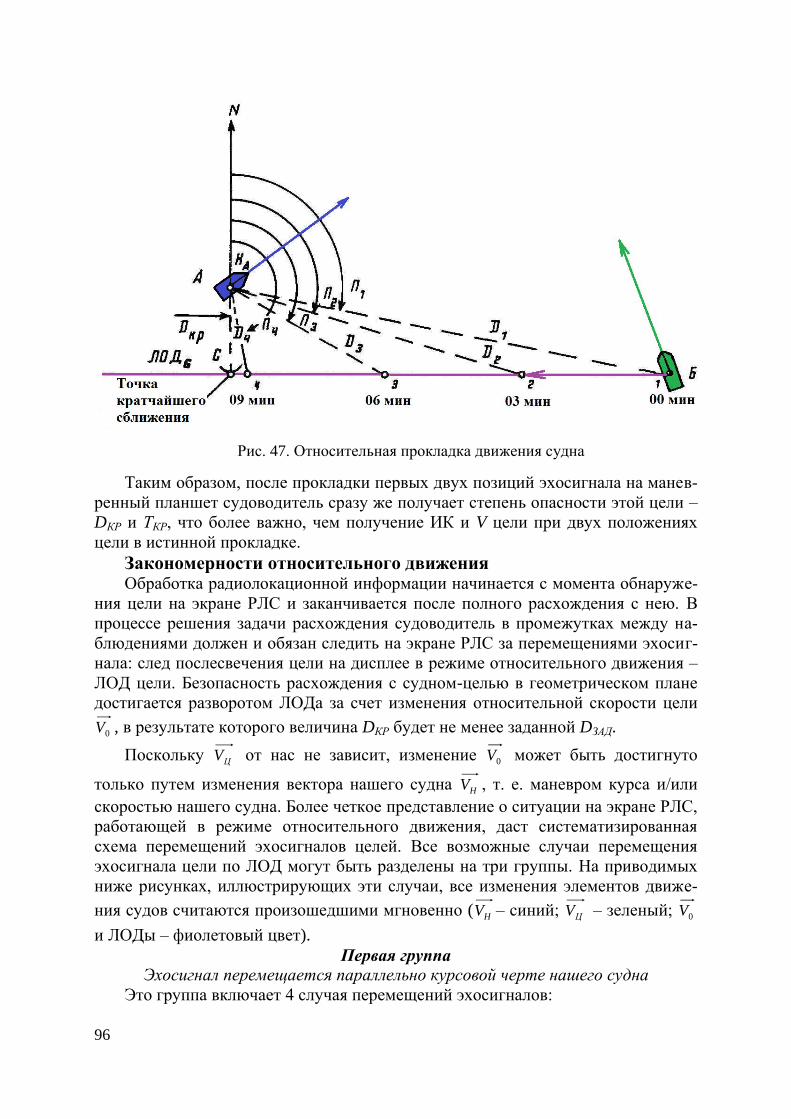
96
Рис. 47. Относительная прокладка движения судна
Таким образом, после прокладки первых двух позиций эхосигнала на манев-
ренный планшет судоводитель сразу же получает степень опасности этой цели –
DКР и ТКР, что более важно, чем получение ИК и V цели при двух положениях
цели в истинной прокладке.
Закономерности относительного движения Обработка радиолокационной информации начинается с момента обнаруже-
ния цели на экране РЛС и заканчивается после полного расхождения с нею. В
процессе решения задачи расхождения судоводитель в промежутках между на-
блюдениями должен и обязан следить на экране РЛС за перемещениями эхосиг-
нала: след послесвечения цели на дисплее в режиме относительного движения –
ЛОД цели. Безопасность расхождения с судном-целью в геометрическом плане
достигается разворотом ЛОДа за счет изменения относительной скорости цели
0V , в результате которого величина DКР будет не менее заданной DЗАД.
Поскольку ЦV от нас не зависит, изменение 0V может быть достигнуто
только путем изменения вектора нашего судна HV , т. е. маневром курса и/или
скоростью нашего судна. Более четкое представление о ситуации на экране РЛС,
работающей в режиме относительного движения, даст систематизированная
схема перемещений эхосигналов целей. Все возможные случаи перемещения
эхосигнала цели по ЛОД могут быть разделены на три группы. На приводимых
ниже рисунках, иллюстрирующих эти случаи, все изменения элементов движе-
ния судов считаются произошедшими мгновенно ( HV – синий; ЦV – зеленый; 0V
и ЛОДы – фиолетовый цвет).
Первая группа
Эхосигнал перемещается параллельно курсовой черте нашего судна
Это группа включает 4 случая перемещений эхосигналов:
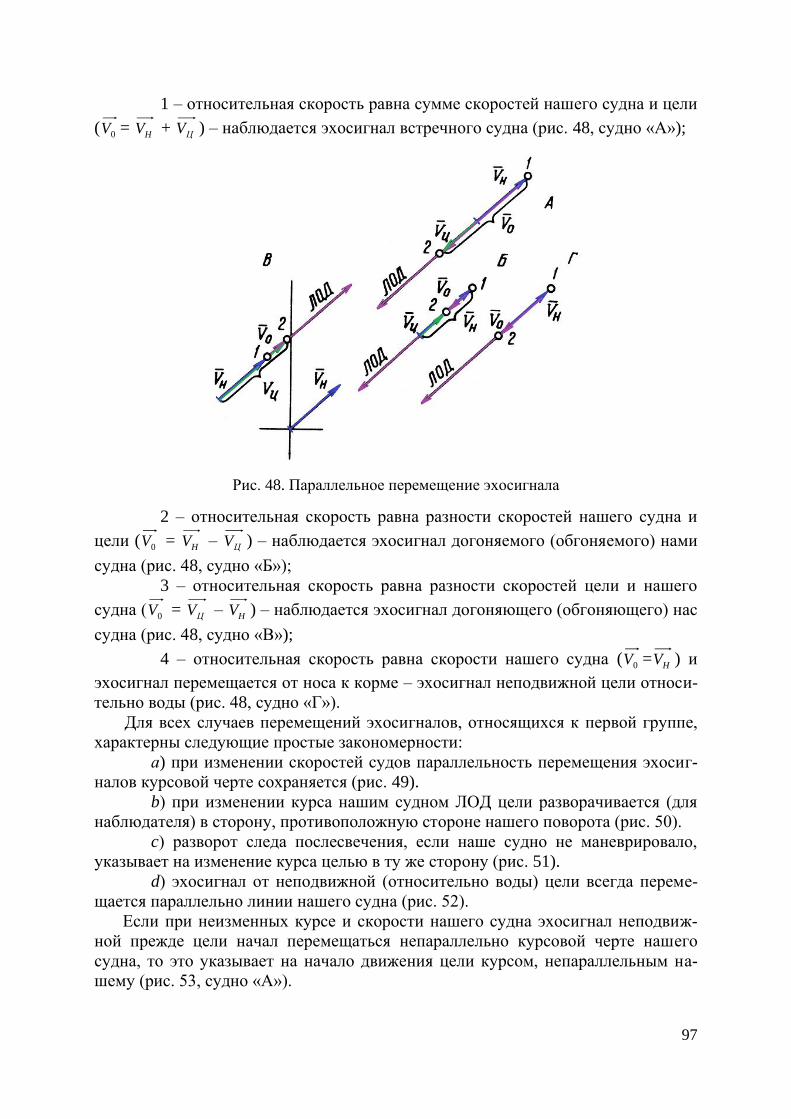
97
1 – относительная скорость равна сумме скоростей нашего судна и цели
( 0V = HV + ЦV ) – наблюдается эхосигнал встречного судна (рис. 48, судно «А»);
Рис. 48. Параллельное перемещение эхосигнала
2 – относительная скорость равна разности скоростей нашего судна и
цели ( 0V = HV – ЦV ) – наблюдается эхосигнал догоняемого (обгоняемого) нами
судна (рис. 48, судно «Б»);
3 – относительная скорость равна разности скоростей цели и нашего
судна ( 0V = ЦV – HV ) – наблюдается эхосигнал догоняющего (обгоняющего) нас
судна (рис. 48, судно «В»);
4 – относительная скорость равна скорости нашего судна ( 0V = HV ) и
эхосигнал перемещается от носа к корме – эхосигнал неподвижной цели относи-
тельно воды (рис. 48, судно «Г»).
Для всех случаев перемещений эхосигналов, относящихся к первой группе,
характерны следующие простые закономерности:
а) при изменении скоростей судов параллельность перемещения эхосиг-
налов курсовой черте сохраняется (рис. 49).
b) при изменении курса нашим судном ЛОД цели разворачивается (для
наблюдателя) в сторону, противоположную стороне нашего поворота (рис. 50).
c) разворот следа послесвечения, если наше судно не маневрировало,
указывает на изменение курса целью в ту же сторону (рис. 51).
d) эхосигнал от неподвижной (относительно воды) цели всегда переме-
щается параллельно линии нашего судна (рис. 52).
Если при неизменных курсе и скорости нашего судна эхосигнал неподвиж-
ной прежде цели начал перемещаться непараллельно курсовой черте нашего
судна, то это указывает на начало движения цели курсом, непараллельным на-
шему (рис. 53, судно «А»).
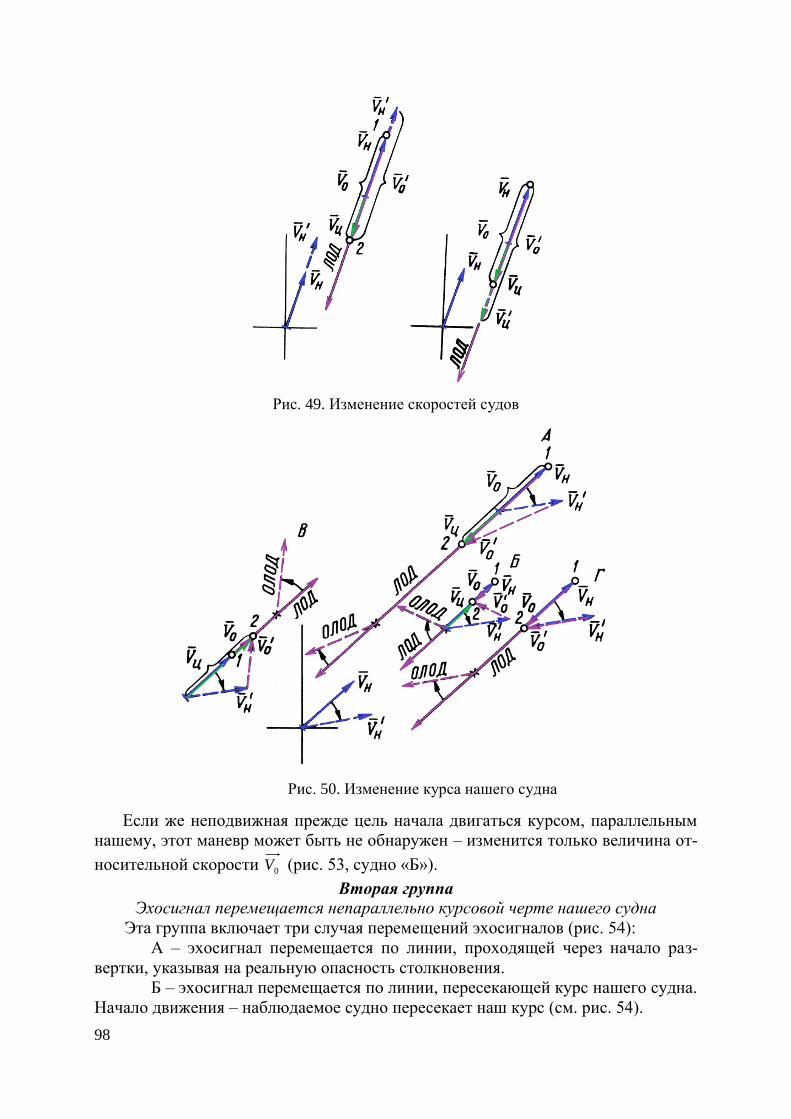
98
Рис. 49. Изменение скоростей судов
Рис. 50. Изменение курса нашего судна
Если же неподвижная прежде цель начала двигаться курсом, параллельным
нашему, этот маневр может быть не обнаружен – изменится только величина от-
носительной скорости 0V (рис. 53, судно «Б»).
Вторая группа
Эхосигнал перемещается непараллельно курсовой черте нашего судна
Эта группа включает три случая перемещений эхосигналов (рис. 54):
А – эхосигнал перемещается по линии, проходящей через начало раз-
вертки, указывая на реальную опасность столкновения.
Б – эхосигнал перемещается по линии, пересекающей курс нашего судна.
Начало движения – наблюдаемое судно пересекает наш курс (см. рис. 54).
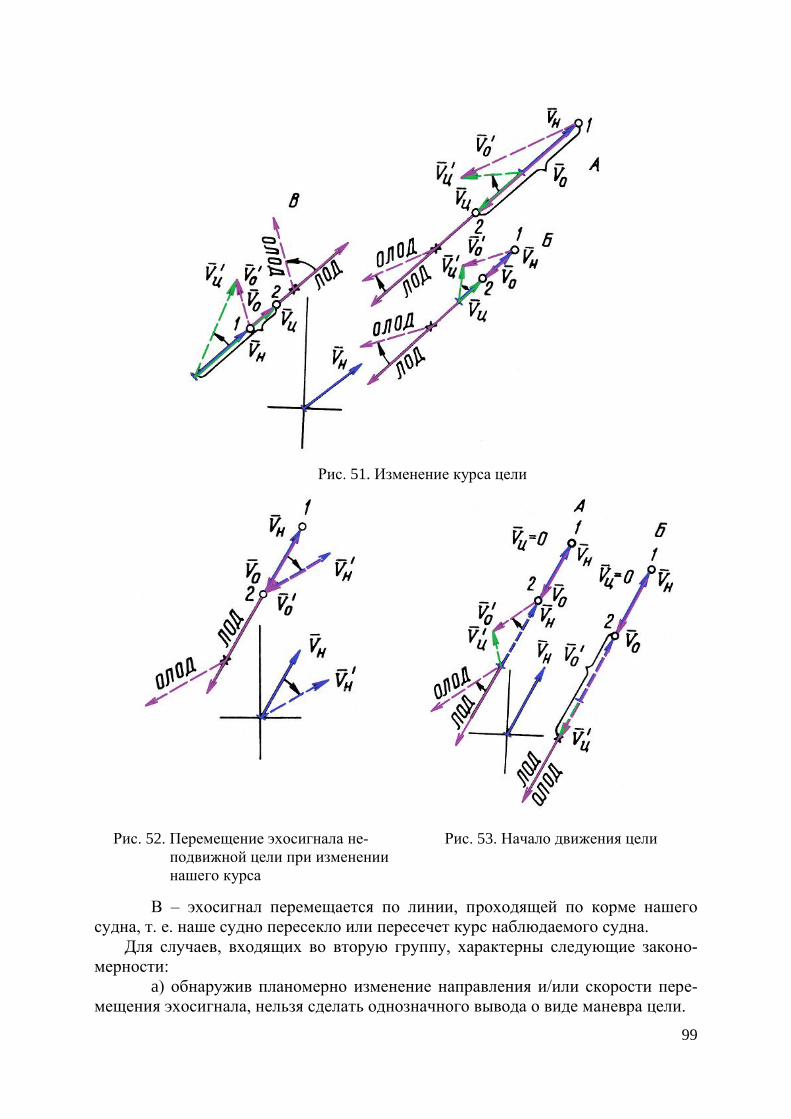
99
Рис. 51. Изменение курса цели
Рис. 52. Перемещение эхосигнала не-
подвижной цели при изменении
нашего курса
Рис. 53. Начало движения цели
В – эхосигнал перемещается по линии, проходящей по корме нашего
судна, т. е. наше судно пересекло или пересечет курс наблюдаемого судна.
Для случаев, входящих во вторую группу, характерны следующие законо-
мерности:
a) обнаружив планомерно изменение направления и/или скорости пере-
мещения эхосигнала, нельзя сделать однозначного вывода о виде маневра цели.
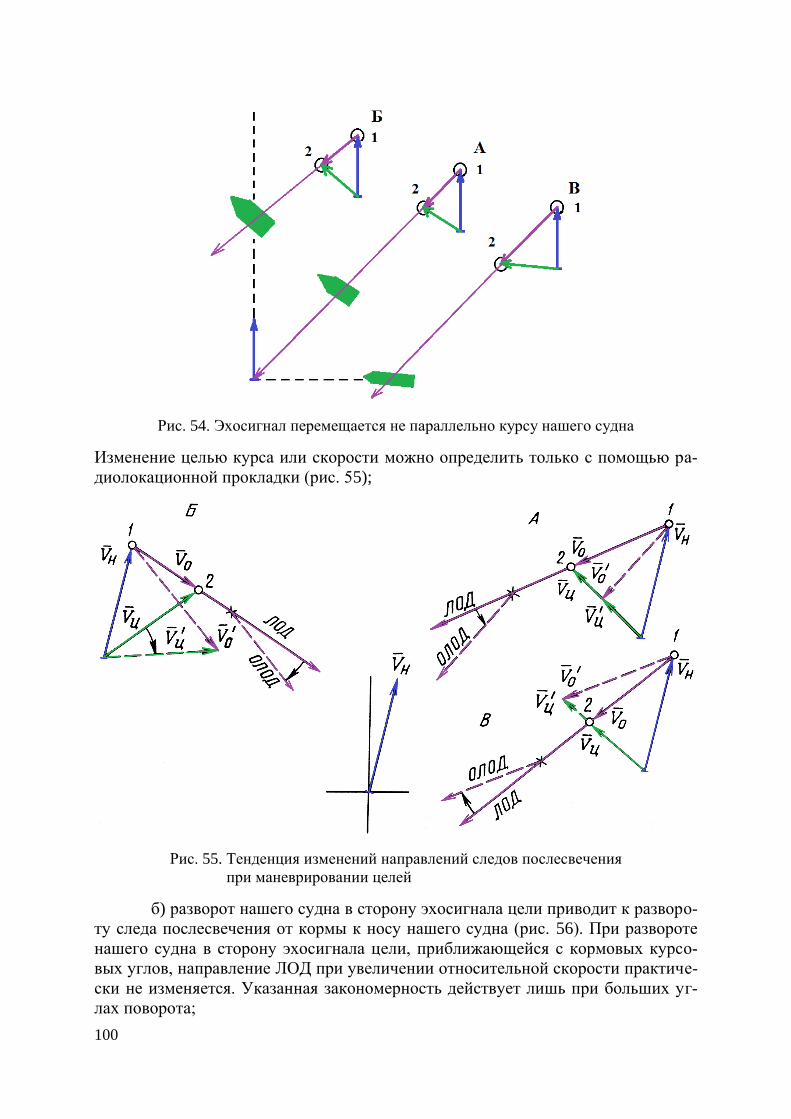
100
Рис. 54. Эхосигнал перемещается не параллельно курсу нашего судна
Изменение целью курса или скорости можно определить только с помощью ра-
диолокационной прокладки (рис. 55);
Рис. 55. Тенденция изменений направлений следов послесвечения
при маневрировании целей
б) разворот нашего судна в сторону эхосигнала цели приводит к разворо-
ту следа послесвечения от кормы к носу нашего судна (рис. 56). При развороте
нашего судна в сторону эхосигнала цели, приближающейся с кормовых курсо-
вых углов, направление ЛОД при увеличении относительной скорости практиче-
ски не изменяется. Указанная закономерность действует лишь при больших уг-
лах поворота;
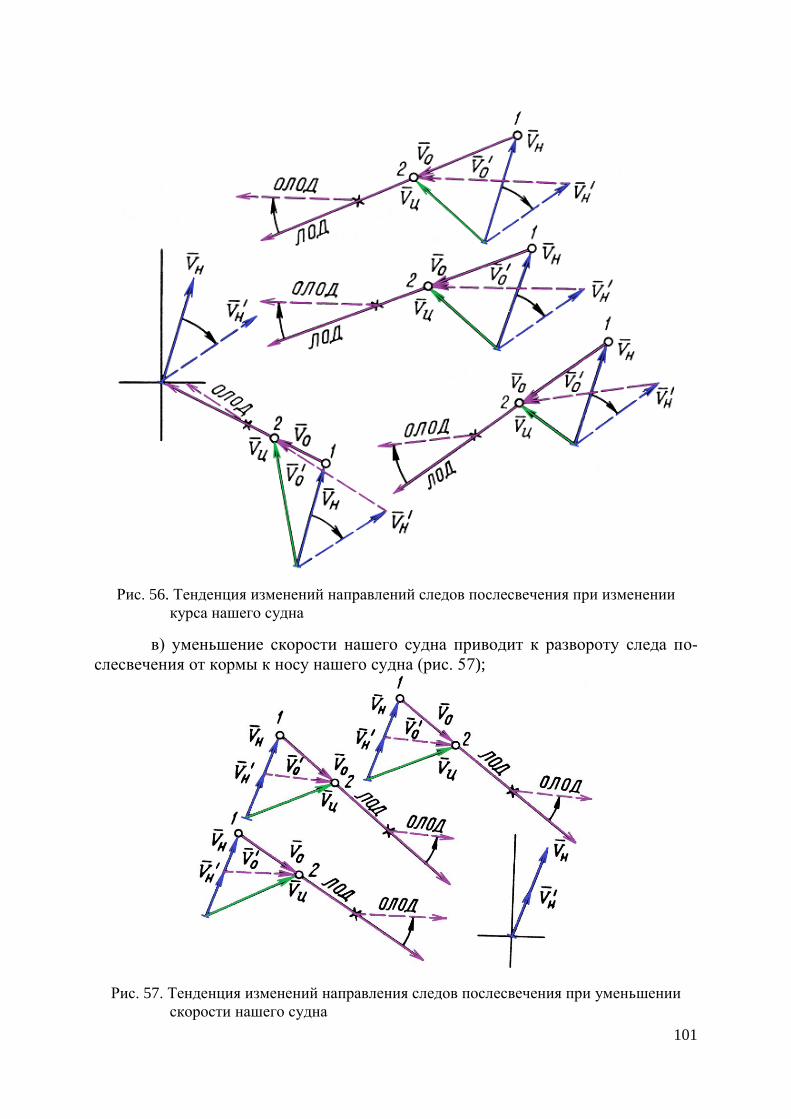
101
Рис. 56. Тенденция изменений направлений следов послесвечения при изменении
курса нашего судна
в) уменьшение скорости нашего судна приводит к развороту следа по-
слесвечения от кормы к носу нашего судна (рис. 57);
Рис. 57. Тенденция изменений направления следов послесвечения при уменьшении
скорости нашего судна
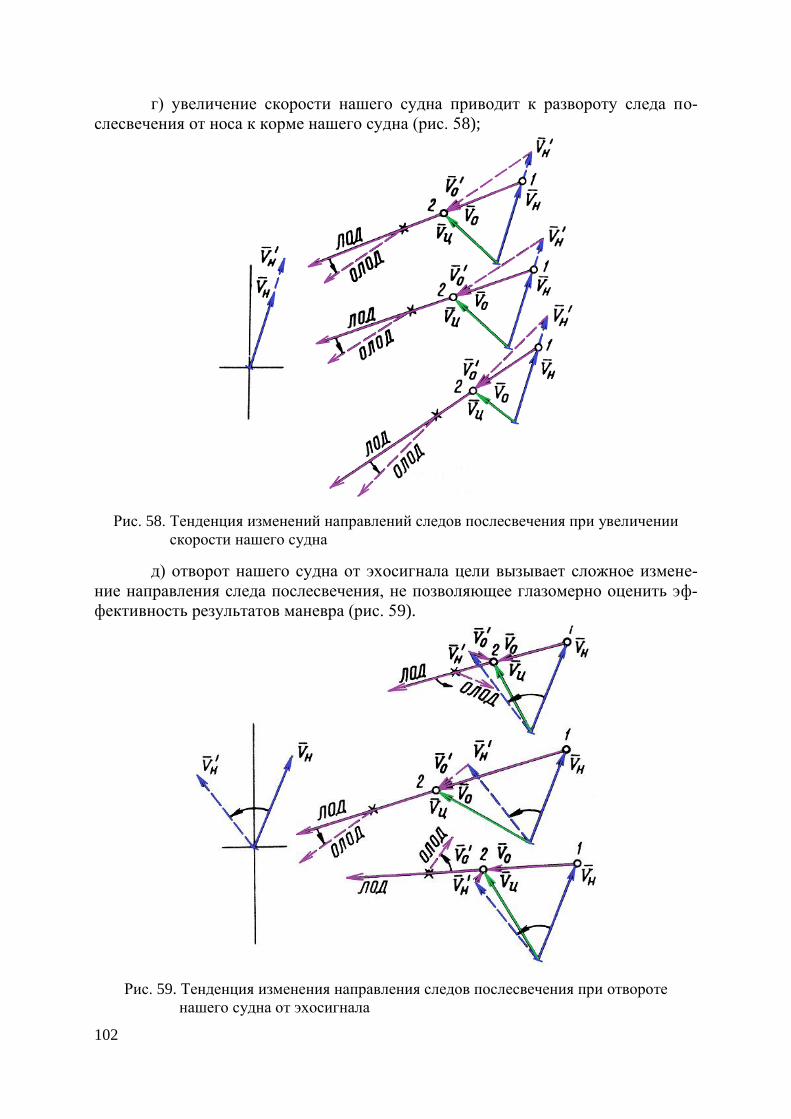
102
г) увеличение скорости нашего судна приводит к развороту следа по-
слесвечения от носа к корме нашего судна (рис. 58);
Рис. 58. Тенденция изменений направлений следов послесвечения при увеличении
скорости нашего судна
д) отворот нашего судна от эхосигнала цели вызывает сложное измене-
ние направления следа послесвечения, не позволяющее глазомерно оценить эф-
фективность результатов маневра (рис. 59).
Рис. 59. Тенденция изменения направления следов послесвечения при отвороте
нашего судна от эхосигнала
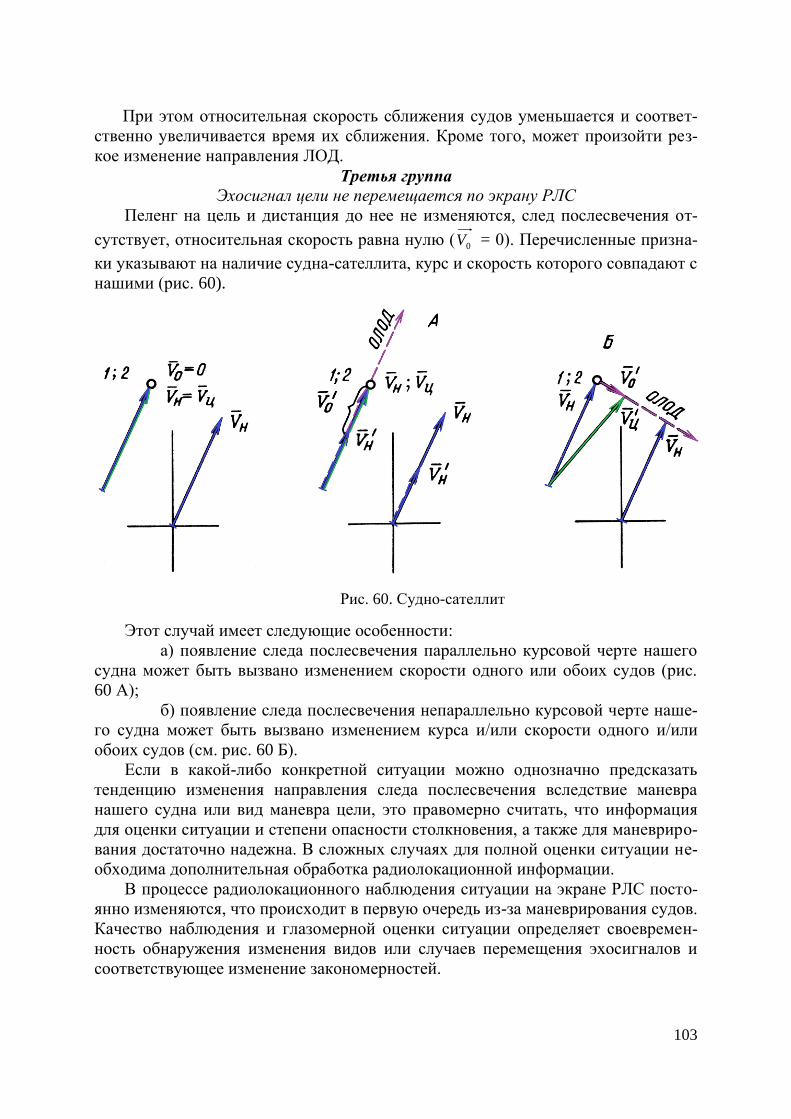
103
При этом относительная скорость сближения судов уменьшается и соответ-
ственно увеличивается время их сближения. Кроме того, может произойти рез-
кое изменение направления ЛОД.
Третья группа
Эхосигнал цели не перемещается по экрану РЛС
Пеленг на цель и дистанция до нее не изменяются, след послесвечения от-
сутствует, относительная скорость равна нулю ( 0V = 0). Перечисленные призна-
ки указывают на наличие судна-сателлита, курс и скорость которого совпадают с
нашими (рис. 60).
Рис. 60. Судно-сателлит
Этот случай имеет следующие особенности:
а) появление следа послесвечения параллельно курсовой черте нашего
судна может быть вызвано изменением скорости одного или обоих судов (рис.
60 А);
б) появление следа послесвечения непараллельно курсовой черте наше-
го судна может быть вызвано изменением курса и/или скорости одного и/или
обоих судов (см. рис. 60 Б).
Если в какой-либо конкретной ситуации можно однозначно предсказать
тенденцию изменения направления следа послесвечения вследствие маневра
нашего судна или вид маневра цели, это правомерно считать, что информация
для оценки ситуации и степени опасности столкновения, а также для маневриро-
вания достаточно надежна. В сложных случаях для полной оценки ситуации не-
обходима дополнительная обработка радиолокационной информации.
В процессе радиолокационного наблюдения ситуации на экране РЛС посто-
янно изменяются, что происходит в первую очередь из-за маневрирования судов.
Качество наблюдения и глазомерной оценки ситуации определяет своевремен-
ность обнаружения изменения видов или случаев перемещения эхосигналов и
соответствующее изменение закономерностей.
104
4.2.1. Ведение радиолокационного наблюдения и прокладки
При ведении на судне радиолокационного наблюдения (РЛН) и радиолока-
ционной прокладки (РЛП) используют следующие инструменты, приборы и
канцелярские принадлежности: радиолокационная станция (РЛС), судовой се-
кундомер (либо другой хронометр, позволяющий снимать отсчеты времени с
точностью до одной секунды), штурманский измеритель, хорошо отточенный
карандаш (желательно иметь два или автоматический карандаш с запасными
стержнями на случай поломки), стирательная резинка и палетка-сетка.
Для обработки относительных перемещений целей вместо штурманской па-
раллельной линейки используется палетка-сетка (ниже – палетка). Палетка
обычно изготавливается из прозрачного тонкого пластика или прочной полиэти-
леновой пленки размером 300440 мм (1522 морские мили соответственно в
масштабе маневренного планшета М-78). Поле палетки разбивается взаимно
перпендикулярными линиями на квадраты со стороной 2 см: каждая линия акку-
ратно процарапывается иглой и в них втирается графит или любая паста темного
цвета, чтобы линии были хорошо заметны на фоне планшета. Возможно изгото-
вить и другим способом: на компьютере в любом редакторе создать таблицу-
сетку (ячейка – 2020 мм) формата А3, распечатать ее на пленке и заламиниро-
вать. Сторона каждого квадрата на палетке равна одной миле или 10 узлам шес-
тиминутного вектора скорости (но 20 узлам – трехминутного вектора). На рис.
61 приведен общий вид палетки и показан ее масштаб. По всему периметру па-
летки наносятся трафареты-окружности диаметром примерно 5 мм (аккуратно
пробиваются дыроколом), которые удобно использовать для обозначения на ма-
невренном планшете относительного местоположения (точек) обрабатываемых
целей.
Используя данный метод обработки эхосигналов целей, необходимо учиты-
вать, что из-за графических построений относительных траекторий движения
целей с помощью палетки и инструментальных ошибок современных РЛС будут
возникать погрешности в определении элементов движения (ЭД) обрабатывае-
мых целей, которые не превышают следующих пределов: по курсу – К = 10,
по скорости – V = 2 узла.
В связи с этим, ЭД цели (курс и скорость) считаются стабильными, если
точки ее относительного местоположения ложатся на планшет более или менее
равномерно при условии неизменности курса и скорости нашего судна. Если по-
следующее местоположение цели не попадает в площадь, ограниченную выше-
указанными допусками (рис. 62 а), то следует считать, что цель изменила свои
параметры движения, и необходимо срочно вновь определить ЭД цели внесени-
ем нашего вектора скорости в предыдущее местоположение цели (рис. 62 б).
При выполнении маневров курсом и/или скоростью обязательно необходимо
грамотно использовать таблицу маневренных элементов (ТМЭ) нашего судна.
Нужно учесть маневренные характеристики таким образом, чтобы к момен-
ту времени, когда цель фактически подойдет к расчетной точке на планшете,
наше судно должно иметь уже стабильные новые (т. е. расчетные) ЭД. Необхо-
димо помнить, что маневрирование курсом и/или скоростью будет соответство-
вать нашему расчету, если управление рулем будет ручным (без авторулевого).
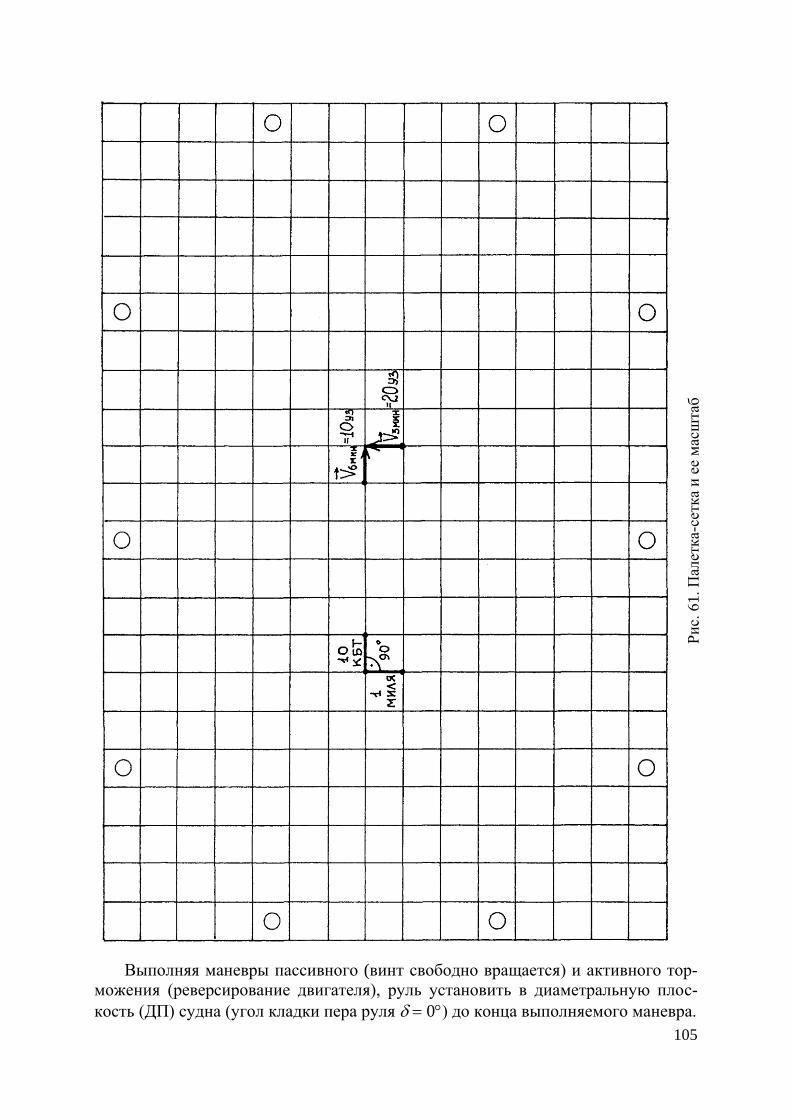
105
Ри
с. 6
1. П
алет
ка-
сетк
а и
ее
мас
шта
б
Выполняя маневры пассивного (винт свободно вращается) и активного тор-
можения (реверсирование двигателя), руль установить в диаметральную плос-
кость (ДП) судна (угол кладки пера руля 0) до конца выполняемого маневра.
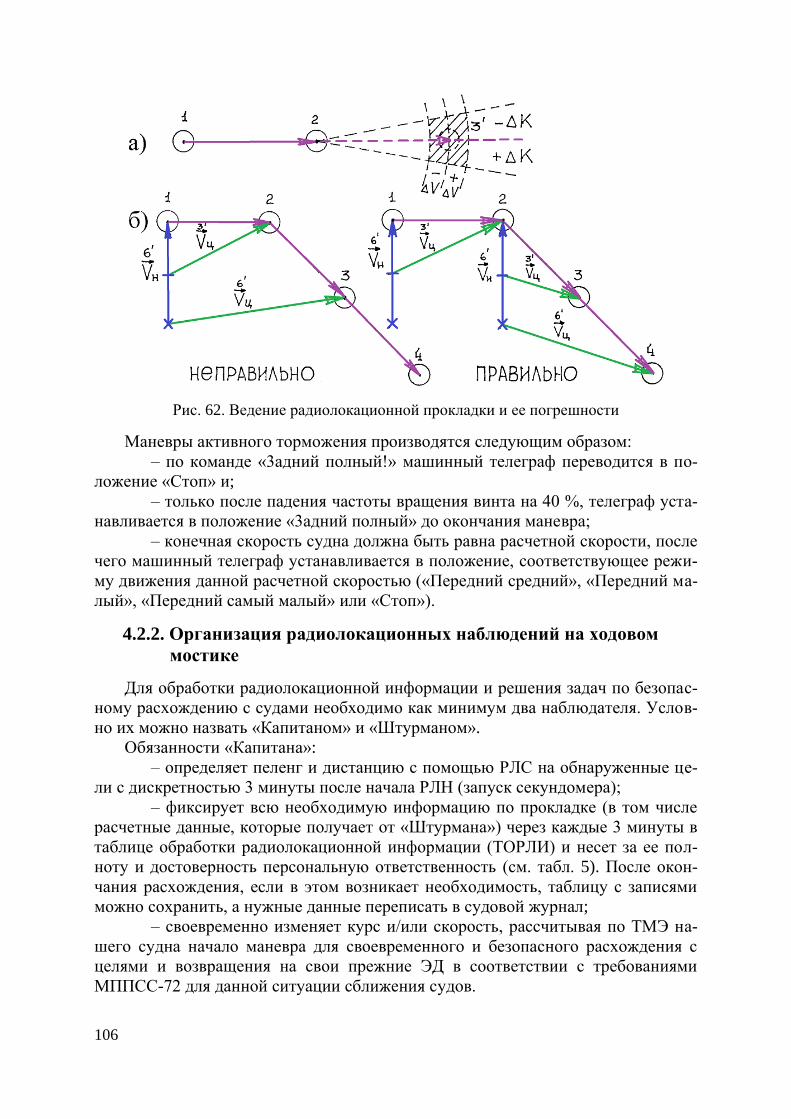
106
Рис. 62. Ведение радиолокационной прокладки и ее погрешности
Маневры активного торможения производятся следующим образом:
– по команде «3адний полный!» машинный телеграф переводится в по-
ложение «Стоп» и;
– только после падения частоты вращения винта на 40 %, телеграф уста-
навливается в положение «3адний полный» до окончания маневра;
– конечная скорость судна должна быть равна расчетной скорости, после
чего машинный телеграф устанавливается в положение, соответствующее режи-
му движения данной расчетной скоростью («Передний средний», «Передний ма-
лый», «Передний самый малый» или «Стоп»).
4.2.2. Организация радиолокационных наблюдений на ходовом
мостике
Для обработки радиолокационной информации и решения задач по безопас-
ному расхождению с судами необходимо как минимум два наблюдателя. Услов-
но их можно назвать «Капитаном» и «Штурманом».
Обязанности «Капитана»:
– определяет пеленг и дистанцию с помощью РЛС на обнаруженные це-
ли с дискретностью 3 минуты после начала РЛН (запуск секундомера);
– фиксирует всю необходимую информацию по прокладке (в том числе
расчетные данные, которые получает от «Штурмана») через каждые 3 минуты в
таблице обработки радиолокационной информации (ТОРЛИ) и несет за ее пол-
ноту и достоверность персональную ответственность (см. табл. 5). После окон-
чания расхождения, если в этом возникает необходимость, таблицу с записями
можно сохранить, а нужные данные переписать в судовой журнал;
– своевременно изменяет курс и/или скорость, рассчитывая по ТМЭ на-
шего судна начало маневра для своевременного и безопасного расхождения с
целями и возвращения на свои прежние ЭД в соответствии с требованиями
МППСС-72 для данной ситуации сближения судов.
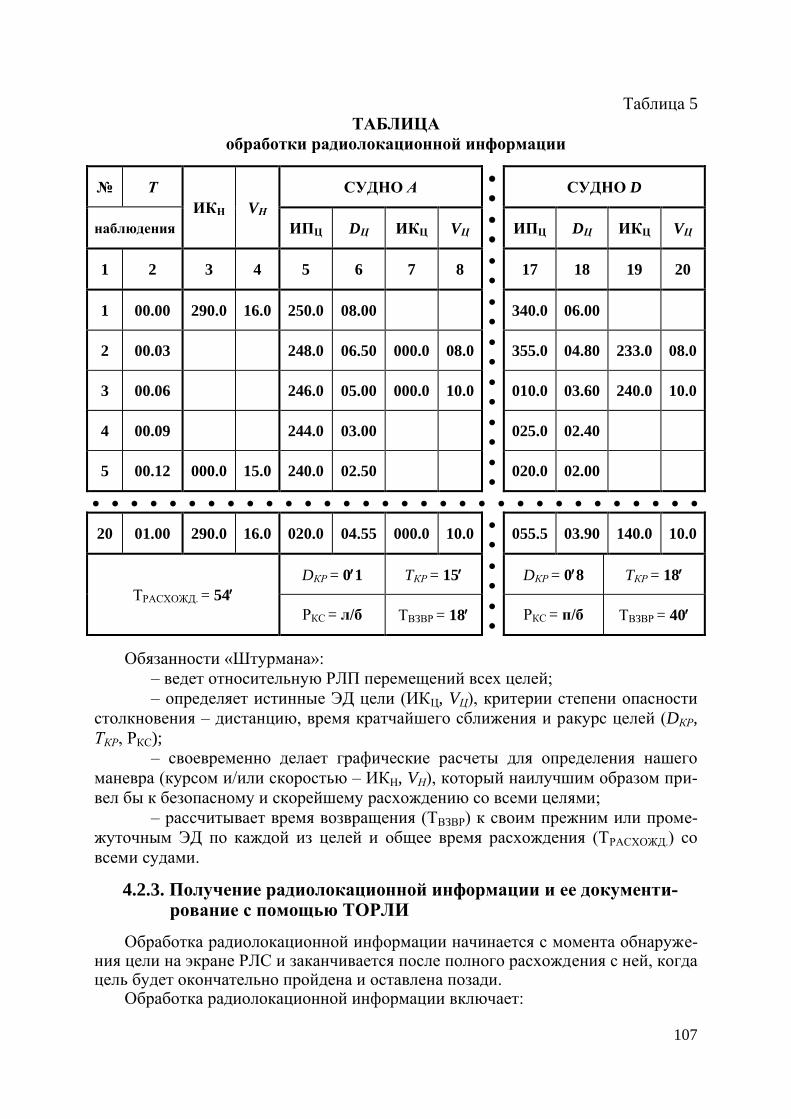
107
Таблица 5
ТАБЛИЦА
обработки радиолокационной информации
№ Т
ИКН VН
СУДНО А
СУДНО D
наблюдения ИПЦ DЦ ИКЦ VЦ
ИПЦ DЦ ИКЦ VЦ
1 2 3 4 5 6 7 8
17 18 19 20
1 00.00 290.0 16.0 250.0 08.00
340.0 06.00
2 00.03 248.0 06.50 000.0 08.0
355.0 04.80 233.0 08.0
3 00.06 246.0 05.00 000.0 10.0
010.0 03.60 240.0 10.0
4 00.09 244.0 03.00
025.0 02.40
5 00.12 000.0 15.0 240.0 02.50
020.0 02.00
20 01.00 290.0 16.0 020.0 04.55 000.0 10.0
055.5 03.90 140.0 10.0
ТРАСХОЖД. = 54
DКР = 01 TКР = 15
DКР = 08 TКР = 18
РКС = л/б ТВЗВР = 18
РКС = п/б ТВЗВР = 40
Обязанности «Штурмана»:
– ведет относительную РЛП перемещений всех целей;
– определяет истинные ЭД цели (ИКЦ, VЦ), критерии степени опасности
столкновения – дистанцию, время кратчайшего сближения и ракурс целей (DКР,
ТКР, РКС);
– своевременно делает графические расчеты для определения нашего
маневра (курсом и/или скоростью – ИКН, VН), который наилучшим образом при-
вел бы к безопасному и скорейшему расхождению со всеми целями;
– рассчитывает время возвращения (ТВЗВР) к своим прежним или проме-
жуточным ЭД по каждой из целей и общее время расхождения (ТРАСХОЖД.) со
всеми судами.
4.2.3. Получение радиолокационной информации и ее документи-рование с помощью ТОРЛИ
Обработка радиолокационной информации начинается с момента обнаруже-ния цели на экране РЛС и заканчивается после полного расхождения с ней, когда цель будет окончательно пройдена и оставлена позади.
Обработка радиолокационной информации включает:
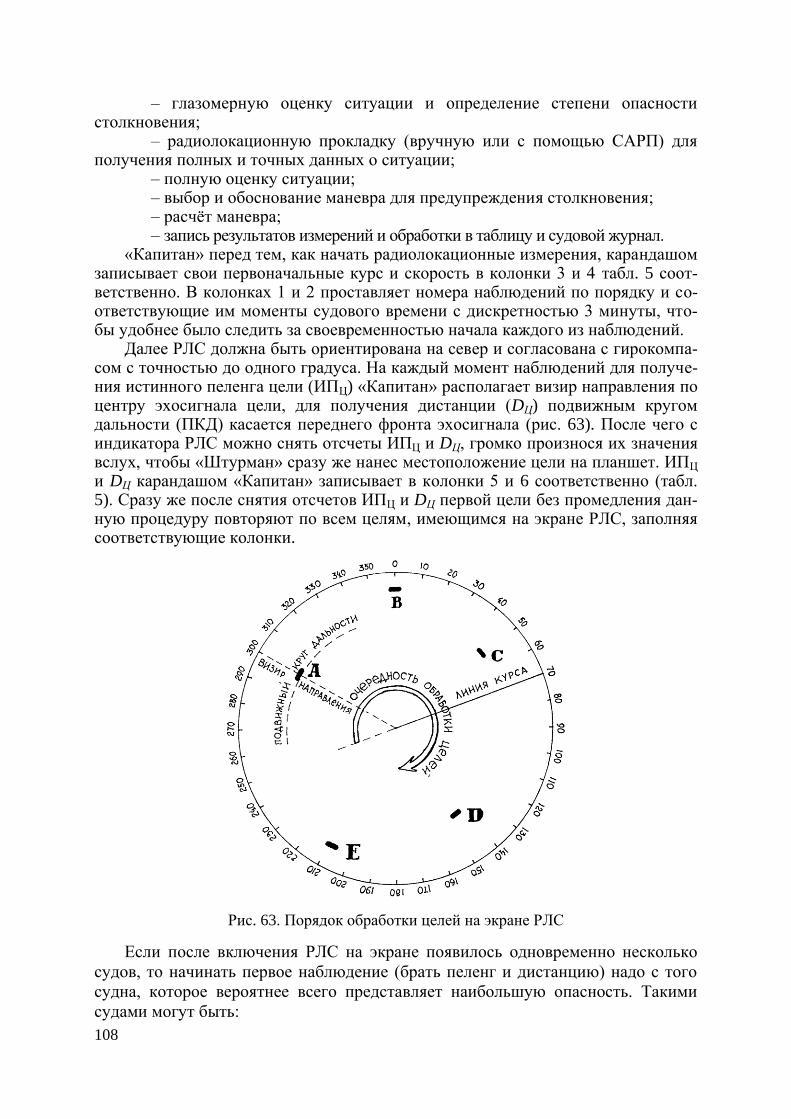
108
– глазомерную оценку ситуации и определение степени опасности столкновения;
– радиолокационную прокладку (вручную или с помощью САРП) для получения полных и точных данных о ситуации;
– полную оценку ситуации; – выбор и обоснование маневра для предупреждения столкновения; – расчѐт маневра; – запись результатов измерений и обработки в таблицу и судовой журнал.
«Капитан» перед тем, как начать радиолокационные измерения, карандашом записывает свои первоначальные курс и скорость в колонки 3 и 4 табл. 5 соот-ветственно. В колонках 1 и 2 проставляет номера наблюдений по порядку и со-ответствующие им моменты судового времени с дискретностью 3 минуты, что-бы удобнее было следить за своевременностью начала каждого из наблюдений.
Далее РЛС должна быть ориентирована на север и согласована с гирокомпа-сом с точностью до одного градуса. На каждый момент наблюдений для получе-ния истинного пеленга цели (ИПЦ) «Капитан» располагает визир направления по центру эхосигнала цели, для получения дистанции (DЦ) подвижным кругом дальности (ПКД) касается переднего фронта эхосигнала (рис. 63). После чего с индикатора РЛС можно снять отсчеты ИПЦ и DЦ, громко произнося их значения вслух, чтобы «Штурман» сразу же нанес местоположение цели на планшет. ИПЦ и DЦ карандашом «Капитан» записывает в колонки 5 и 6 соответственно (табл. 5). Сразу же после снятия отсчетов ИПЦ и DЦ первой цели без промедления дан-ную процедуру повторяют по всем целям, имеющимся на экране РЛС, заполняя соответствующие колонки.
Рис. 63. Порядок обработки целей на экране РЛС
Если после включения РЛС на экране появилось одновременно несколько
судов, то начинать первое наблюдение (брать пеленг и дистанцию) надо с того
судна, которое вероятнее всего представляет наибольшую опасность. Такими
судами могут быть:
109
а) самое ближайшее судно, которое своим неблагоприятным маневром
может быстрее других ухудшить обстановку безопасного плавания, сделать еѐ
опасной или даже угрожающей;
б) находящееся на острых курсовых носовых углах, возможно идущее
прямо или почти прямо навстречу – оно может находиться в дрейфе вблизи кур-
са или на линии курса;
в) судно с ярким следом послесвечения на экране – происходит чрезвы-
чайно быстрое относительное сближение между судами.
Если перечисленных выше судов нет, то обычно цели начинают обрабаты-
вать по порядку слева направо (по часовой стрелке), начиная с кормы левого
борта нашего судна (рис. 63), и на планшете и в ТОРЛИ их обозначают латин-
скими буквами.
Закончив снятие отсчетов ИПЦ и DЦ всех целей, «Капитан» обязан прокон-
тролировать правильное нанесение местоположений целей на поле планшета
«Штурманом» для исключения грубых ошибок, сравнив их со своими записями
в ТОРЛИ. В ходе решения задачи по безопасному расхождению «Капитан» по-
лучает от «Штурмана» и записывает в соответствующие колонки, а также в две
последние строки ТОРЛИ (табл. 5) следующую информацию: ИКЦ, VЦ, DКР, TКР,
РКС, расчетное время возвращения на свои прежние ЭД с каждой из целей (ТВЗВР)
и общее время расхождения со всеми целями (ТРАСХОЖД.) в моменты времени, ко-
гда это необходимо.
По полученным «Штурманом» расчетным данным и геометрии сближения
судов «Капитан» совместно со «Штурманом» анализируют ситуацию, выбирают
и рассчитывают маневр на планшете по безопасному расхождению в соответст-
вии с МППСС-72. Затем «Капитан» должен рассчитать по ТМЭ судовое время
начала маневра для безопасного расхождения и возвращения на свои прежние
ЭД, своевременно и правильно начать маневрирование. Кроме того, на «Капита-
на» возлагается вся ответственность за правильную организацию РЛН, ведение
надлежащей РЛП по всем судам до тех пор, пока они не будут окончательно
пройдены и оставлены позади.
4.2.4. Ручная обработка радиолокационной информации на манев-
ренном планшете с помощью палетки
Прежде чем приступить к обработке РЛИ, «Штурман» карандашом заносит
свой вектор скорости HV в центр планшета (рис. 64), причем, его начало обозна-
чается крестиком, середина – засечкой (чтобы всегда иметь под рукой величину
трехминутного вектора скорости), направление и конец вектора – обязательно
стрелочкой. Величина вектора скорости HV будет равна расстоянию, которое
пройдет наше судно данной скоростью за шесть минут в масштабе планшета (на
рисунке – 20 узлов).
4.2.4.1. Нанесение относительных местоположений целей «Штурман», получив от «Капитана» пеленг и дистанцию до цели, наносит ее
относительные координаты на планшет следующим образом: ставит конец ка-
рандаша в центр планшета и, используя карандаш как ось, двигает край палетки
так, пока он не совпадет с ИПЦ.
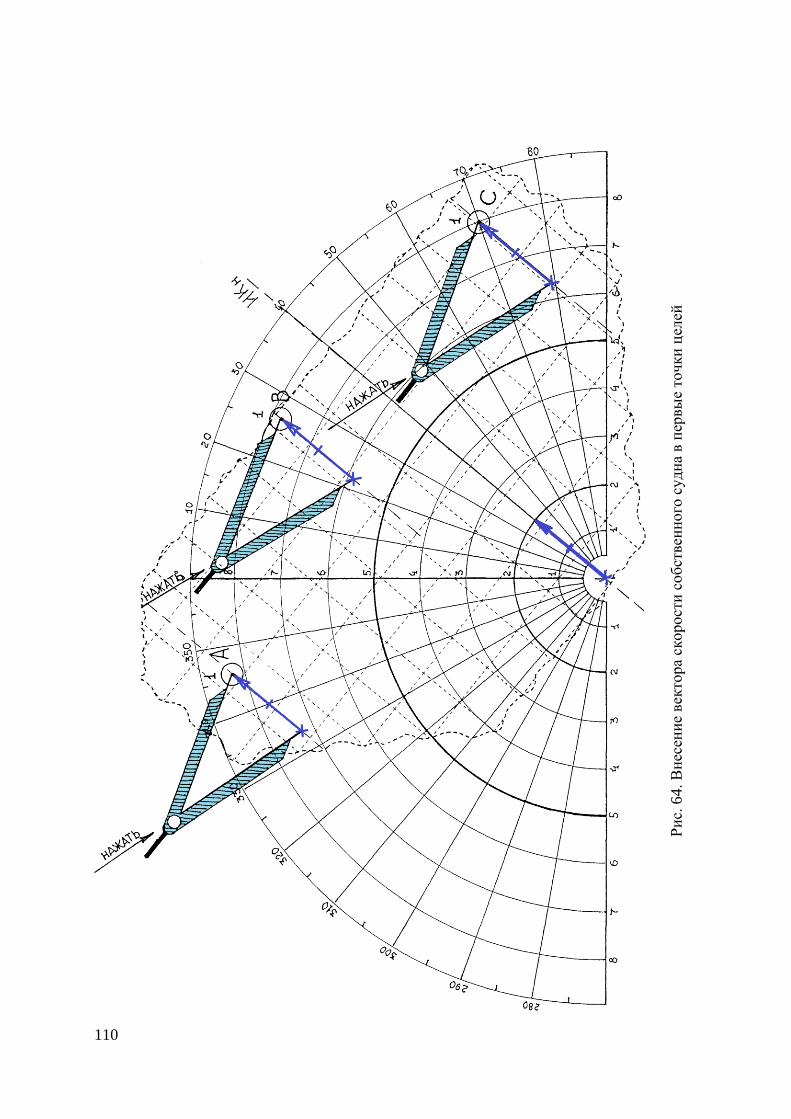
110
Ри
с. 6
4. В
нес
ени
е век
тора
скорост
и с
об
ствен
ного
суд
на
в п
ервы
е то
чки
цел
ей
111
Затем от центра планшета, перемещаясь по краю палетки, находит на план-
шете значение DЦ. Карандашом наносит местоположение цели (далее точку), об-
водит ее кружком с помощью трафарета на палетке и рядом ставит порядковый
номер точки (например, 1).
Если это не первая точка, то обязательно соединяет ее с предыдущей точкой
обрабатываемой цели сплошной отчетливой линией для того, чтобы в дальней-
шем не допустить обмена траекторий целей (в случае, когда точки нескольких
целей располагаются в непосредственной близости друг от друга). Таким же об-
разом наносятся на планшет все имеющиеся на экране РЛС цели.
4.2.4.2. Внесение вектора скорости судна в точки относительного
местоположения целей Нанеся таким образом все цели на начальный момент времени наблюдений,
необходимо обозначить их по порядку латинскими буквами слева направо (А, В,
С, D и т. д.) и внести свой вектор скорости VН во все первые точки (1) для
дальнейших графических построений и вычислений. С этой целью накладываем
палетку на планшет так, чтобы поле палетки перекрывало центр планшета и пер-
вые точки 1 всех целей, а линии на палетке были бы параллельны направлению
нашего вектора HV (рис. 64).
В раствор измерителя берут величину HV за шесть минут (вектор всегда на-
ходится в центре планшета). Его располагают так, чтобы одна его игла находи-
лась в точке 1, например, цели «А», линия, соединяющая иглы измерителя, бы-
ла параллельна ближайшим линиям на палетке по направлению HV , а второй иг-
лой делается прокол планшета через палетку – обозначили начало вектора HV в
точке 1 цели «А». Данная операция производится по всем целям, причем до
конца процедуры палетку не двигать относительно планшета.
После этого палетка убирается в сторону, проколы от измерителя на план-
шете карандашом соединяются с соответствующими первыми точками целей –
векторы HV внесены во все цели. Теперь только наши векторы HV необходимо
обозначить, как описано выше в п. 4.2.4 (рис. 64).
4.2.4.3. Определение степени опасности (DКР, ТКР) целей Получив через три минуты следующие местоположения целей (точки обо-
значить 2), как описано в п. 4.2.4.1, необходимо произвести вычисления для
определения критериев степени опасности столкновения. Чтобы получить ЛОД
любой цели, палеткой перекрываем центр планшета так, чтобы ее край соединил
точку 2 с точкой
1, как показано на рис. 65 (точку
2 совмещают с перекре-
стием линий палетки). Тогда величина перпендикуляра, опущенного из центра
планшета на край палетки, – дистанция кратчайшего сближения DКР (по рисунку
цель пройдет относительно нас, если ни мы и ни цель не изменят свои ЭД, на
дистанции 14 кбт), а время ТКР можно определить двумя способами:
1) в раствор измерителя берется величина вектора относительной скоро-
сти цели 0V (расстояние между 1 и
2) и от точки
2 считают, сколько пол-
ных растворов измерителя поместится в отрезке между 2 и перпендикуляром
из центра планшета (рис. 65).
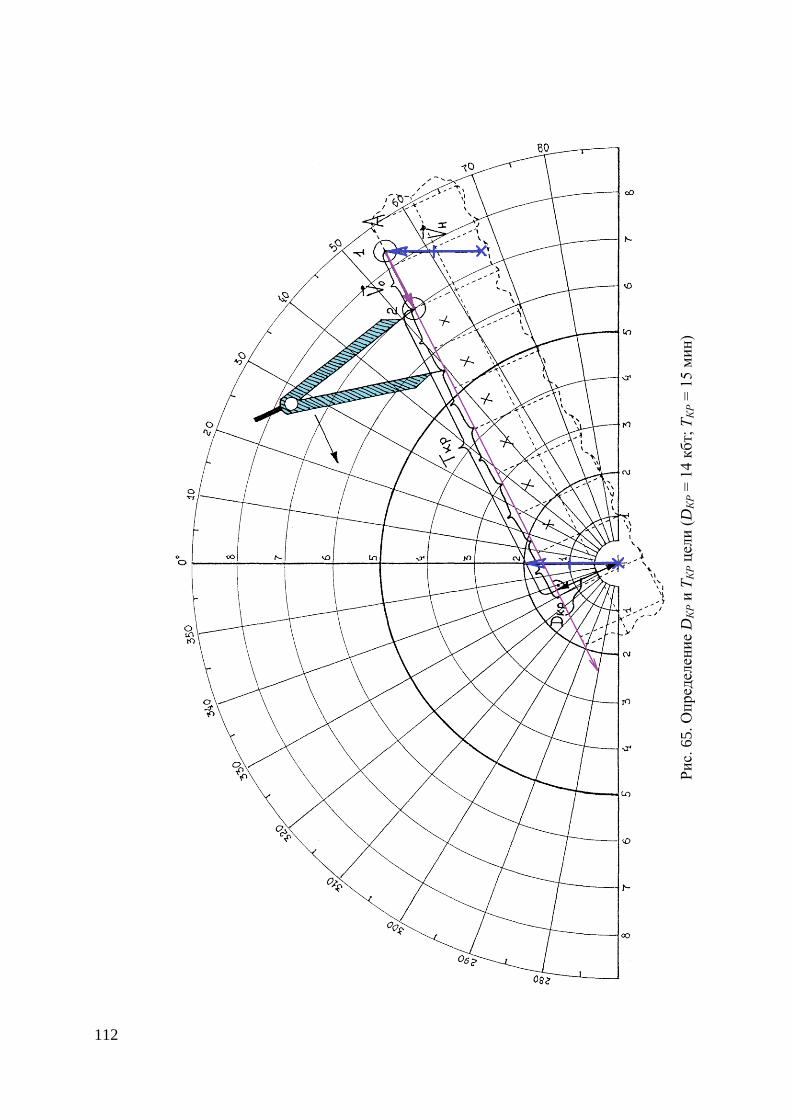
112
Ри
с. 6
5. О
пред
елен
ие
DК
Р и
ТК
Р ц
ели
(D
КР =
14 к
бт;
ТК
Р =
15 м
ин
)
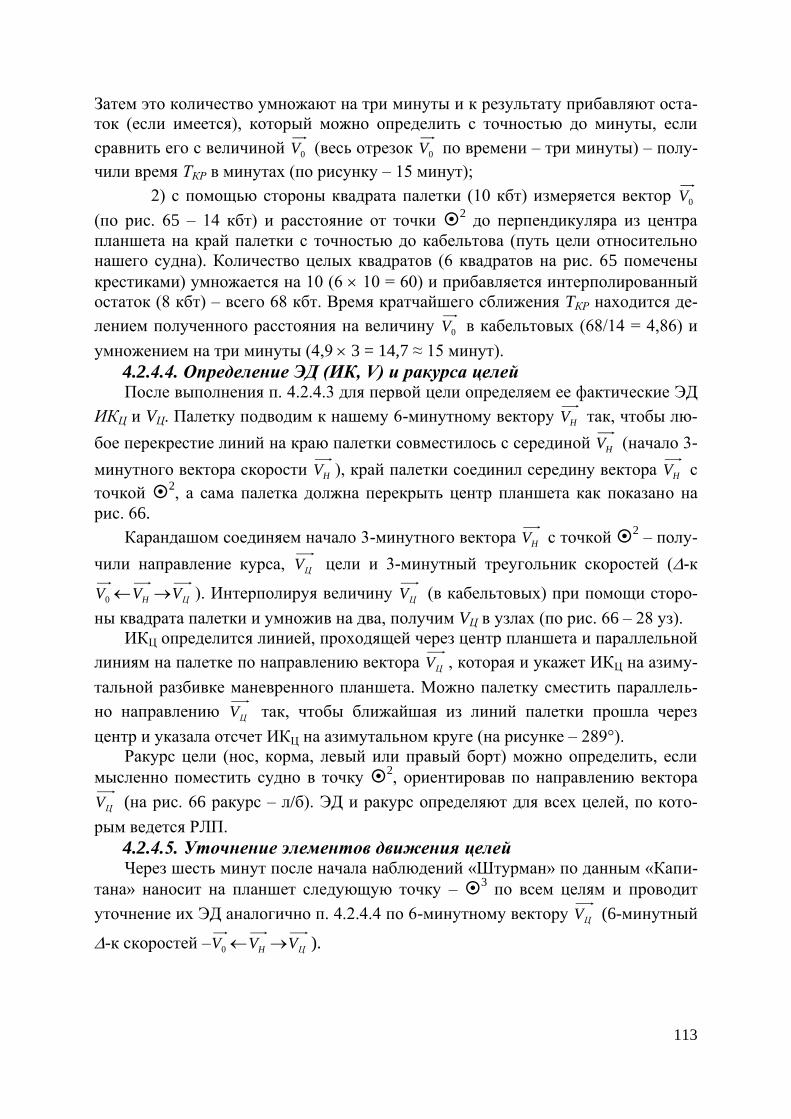
113
Затем это количество умножают на три минуты и к результату прибавляют оста-
ток (если имеется), который можно определить с точностью до минуты, если
сравнить его с величиной 0V (весь отрезок 0V по времени – три минуты) – полу-
чили время ТКР в минутах (по рисунку – 15 минут);
2) с помощью стороны квадрата палетки (10 кбт) измеряется вектор 0V
(по рис. 65 – 14 кбт) и расстояние от точки 2 до перпендикуляра из центра
планшета на край палетки с точностью до кабельтова (путь цели относительно
нашего судна). Количество целых квадратов (6 квадратов на рис. 65 помечены
крестиками) умножается на 10 (6 10 = 60) и прибавляется интерполированный
остаток (8 кбт) – всего 68 кбт. Время кратчайшего сближения TКР находится де-
лением полученного расстояния на величину 0V в кабельтовых (68/14 = 4,86) и
умножением на три минуты (4,9 3 = 14,7 ≈ 15 минут).
4.2.4.4. Определение ЭД (ИК, V) и ракурса целей После выполнения п. 4.2.4.3 для первой цели определяем ее фактические ЭД
ИКЦ и VЦ. Палетку подводим к нашему 6-минутному вектору HV так, чтобы лю-
бое перекрестие линий на краю палетки совместилось с серединой HV (начало 3-
минутного вектора скорости HV ), край палетки соединил середину вектора HV с
точкой 2, а сама палетка должна перекрыть центр планшета как показано на
рис. 66.
Карандашом соединяем начало 3-минутного вектора HV с точкой 2 – полу-
чили направление курса, ЦV цели и 3-минутный треугольник скоростей (-к
0V HV ЦV ). Интерполируя величину ЦV (в кабельтовых) при помощи сторо-
ны квадрата палетки и умножив на два, получим VЦ в узлах (по рис. 66 – 28 уз).
ИКЦ определится линией, проходящей через центр планшета и параллельной
линиям на палетке по направлению вектора ЦV , которая и укажет ИКЦ на азиму-
тальной разбивке маневренного планшета. Можно палетку сместить параллель-
но направлению ЦV так, чтобы ближайшая из линий палетки прошла через
центр и указала отсчет ИКЦ на азимутальном круге (на рисунке – 289°).
Ракурс цели (нос, корма, левый или правый борт) можно определить, если
мысленно поместить судно в точку 2, ориентировав по направлению вектора
ЦV (на рис. 66 ракурс – л/б). ЭД и ракурс определяют для всех целей, по кото-
рым ведется РЛП.
4.2.4.5. Уточнение элементов движения целей Через шесть минут после начала наблюдений «Штурман» по данным «Капи-
тана» наносит на планшет следующую точку – 3 по всем целям и проводит
уточнение их ЭД аналогично п. 4.2.4.4 по 6-минутному вектору ЦV (6-минутный
-к скоростей – 0V HV ЦV ).
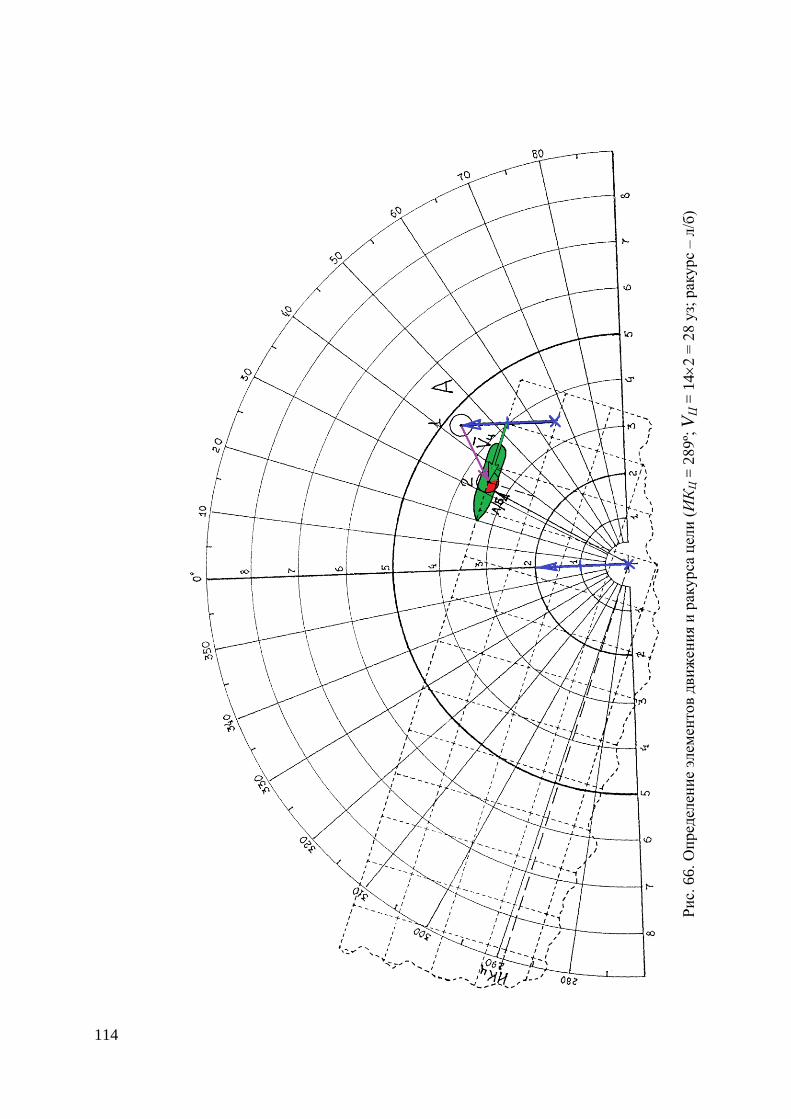
114
Ри
с. 6
6. О
пред
елен
ие
элем
енто
в д
ви
жен
ия и
рак
ур
са ц
ели
(И
КЦ =
289º;
VЦ
= 1
4
2 =
28 у
з; р
акурс
– л
/б)
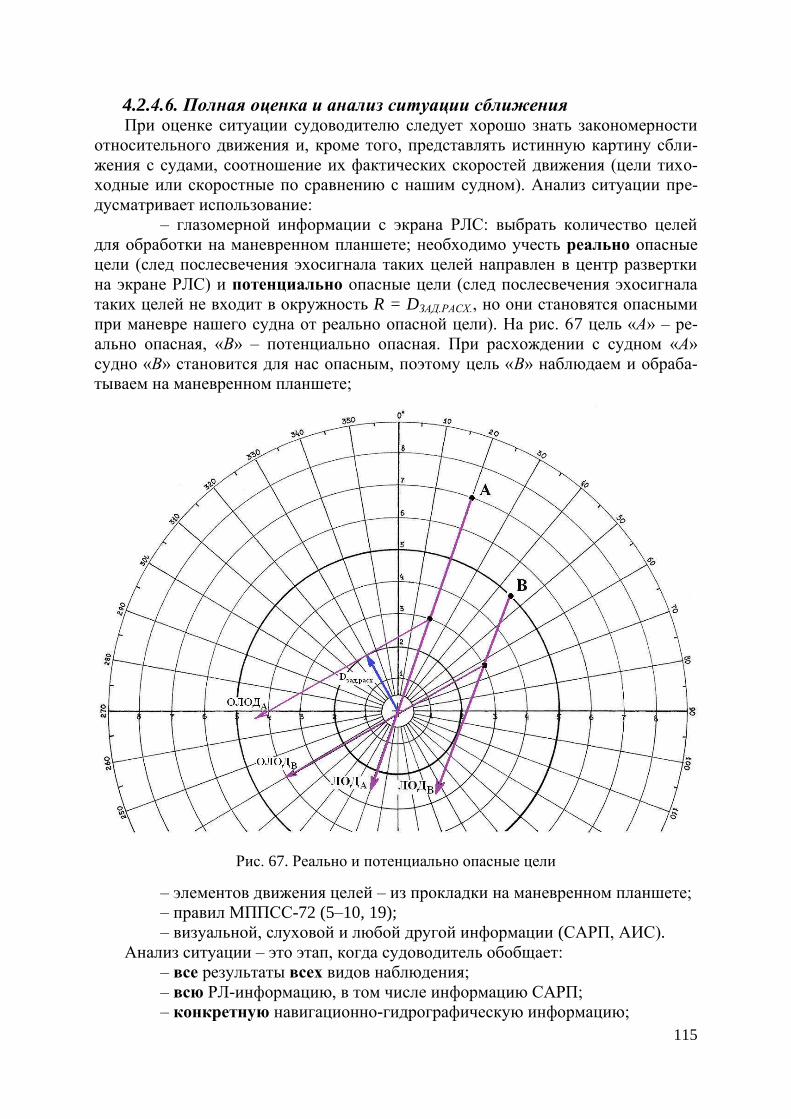
115
4.2.4.6. Полная оценка и анализ ситуации сближения При оценке ситуации судоводителю следует хорошо знать закономерности
относительного движения и, кроме того, представлять истинную картину сбли-
жения с судами, соотношение их фактических скоростей движения (цели тихо-
ходные или скоростные по сравнению с нашим судном). Анализ ситуации пре-
дусматривает использование:
– глазомерной информации с экрана РЛС: выбрать количество целей
для обработки на маневренном планшете; необходимо учесть реально опасные
цели (след послесвечения эхосигнала таких целей направлен в центр развертки
на экране РЛС) и потенциально опасные цели (след послесвечения эхосигнала
таких целей не входит в окружность R = DЗАД.РАСХ., но они становятся опасными
при маневре нашего судна от реально опасной цели). На рис. 67 цель «А» – ре-
ально опасная, «В» – потенциально опасная. При расхождении с судном «А»
судно «В» становится для нас опасным, поэтому цель «В» наблюдаем и обраба-
тываем на маневренном планшете;
Рис. 67. Реально и потенциально опасные цели
– элементов движения целей – из прокладки на маневренном планшете;
– правил МППСС-72 (5–10, 19);
– визуальной, слуховой и любой другой информации (САРП, АИС).
Анализ ситуации – это этап, когда судоводитель обобщает:
– все результаты всех видов наблюдения;
– всю РЛ-информацию, в том числе информацию САРП;
– конкретную навигационно-гидрографическую информацию;
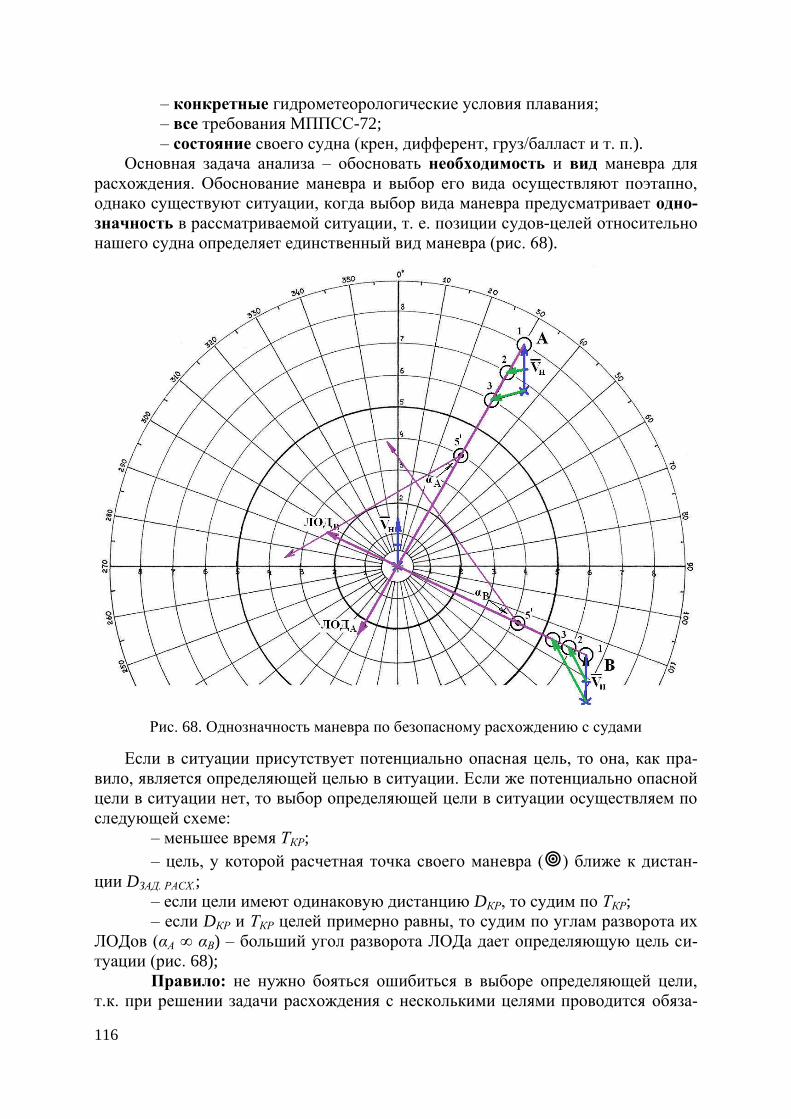
116
– конкретные гидрометеорологические условия плавания;
– все требования МППСС-72;
– состояние своего судна (крен, дифферент, груз/балласт и т. п.).
Основная задача анализа – обосновать необходимость и вид маневра для
расхождения. Обоснование маневра и выбор его вида осуществляют поэтапно,
однако существуют ситуации, когда выбор вида маневра предусматривает одно-
значность в рассматриваемой ситуации, т. е. позиции судов-целей относительно
нашего судна определяет единственный вид маневра (рис. 68).
Рис. 68. Однозначность маневра по безопасному расхождению с судами
Если в ситуации присутствует потенциально опасная цель, то она, как пра-
вило, является определяющей целью в ситуации. Если же потенциально опасной
цели в ситуации нет, то выбор определяющей цели в ситуации осуществляем по
следующей схеме:
– меньшее время ТКР;
– цель, у которой расчетная точка своего маневра () ближе к дистан-
ции DЗАД. РАСХ.;
– если цели имеют одинаковую дистанцию DКР, то судим по ТКР;
– если DКР и ТКР целей примерно равны, то судим по углам разворота их
ЛОДов (αА ∞ αВ) – больший угол разворота ЛОДа дает определяющую цель си-
туации (рис. 68);
Правило: не нужно бояться ошибиться в выборе определяющей цели,
т.к. при решении задачи расхождения с несколькими целями проводится обяза-
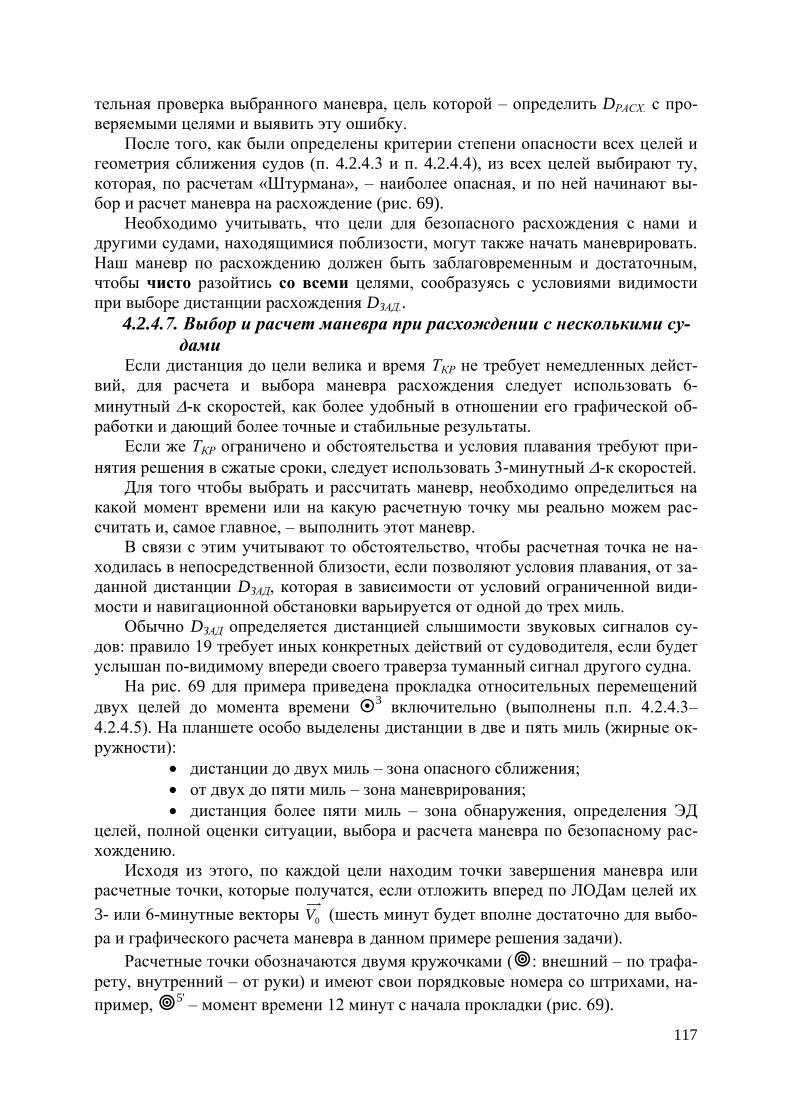
117
тельная проверка выбранного маневра, цель которой – определить DРАСХ. с про-
веряемыми целями и выявить эту ошибку.
После того, как были определены критерии степени опасности всех целей и
геометрия сближения судов (п. 4.2.4.3 и п. 4.2.4.4), из всех целей выбирают ту,
которая, по расчетам «Штурмана», – наиболее опасная, и по ней начинают вы-
бор и расчет маневра на расхождение (рис. 69).
Необходимо учитывать, что цели для безопасного расхождения с нами и
другими судами, находящимися поблизости, могут также начать маневрировать.
Наш маневр по расхождению должен быть заблаговременным и достаточным,
чтобы чисто разойтись со всеми целями, сообразуясь с условиями видимости
при выборе дистанции расхождения DЗАД..
4.2.4.7. Выбор и расчет маневра при расхождении с несколькими су-
дами Если дистанция до цели велика и время ТКР не требует немедленных дейст-
вий, для расчета и выбора маневра расхождения следует использовать 6-
минутный -к скоростей, как более удобный в отношении его графической об-
работки и дающий более точные и стабильные результаты.
Если же ТКР ограничено и обстоятельства и условия плавания требуют при-
нятия решения в сжатые сроки, следует использовать 3-минутный -к скоростей.
Для того чтобы выбрать и рассчитать маневр, необходимо определиться на
какой момент времени или на какую расчетную точку мы реально можем рас-
считать и, самое главное, – выполнить этот маневр.
В связи с этим учитывают то обстоятельство, чтобы расчетная точка не на-
ходилась в непосредственной близости, если позволяют условия плавания, от за-
данной дистанции DЗАД, которая в зависимости от условий ограниченной види-
мости и навигационной обстановки варьируется от одной до трех миль.
Обычно DЗАД определяется дистанцией слышимости звуковых сигналов су-
дов: правило 19 требует иных конкретных действий от судоводителя, если будет
услышан по-видимому впереди своего траверза туманный сигнал другого судна.
На рис. 69 для примера приведена прокладка относительных перемещений
двух целей до момента времени 3 включительно (выполнены п.п. 4.2.4.3–
4.2.4.5). На планшете особо выделены дистанции в две и пять миль (жирные ок-
ружности):
дистанции до двух миль – зона опасного сближения;
от двух до пяти миль – зона маневрирования;
дистанция более пяти миль – зона обнаружения, определения ЭД
целей, полной оценки ситуации, выбора и расчета маневра по безопасному рас-
хождению.
Исходя из этого, по каждой цели находим точки завершения маневра или
расчетные точки, которые получатся, если отложить вперед по ЛОДам целей их
3- или 6-минутные векторы 0V (шесть минут будет вполне достаточно для выбо-
ра и графического расчета маневра в данном примере решения задачи).
Расчетные точки обозначаются двумя кружочками (: внешний – по трафа-
рету, внутренний – от руки) и имеют свои порядковые номера со штрихами, на-
пример, 5' – момент времени 12 минут с начала прокладки (рис. 69).
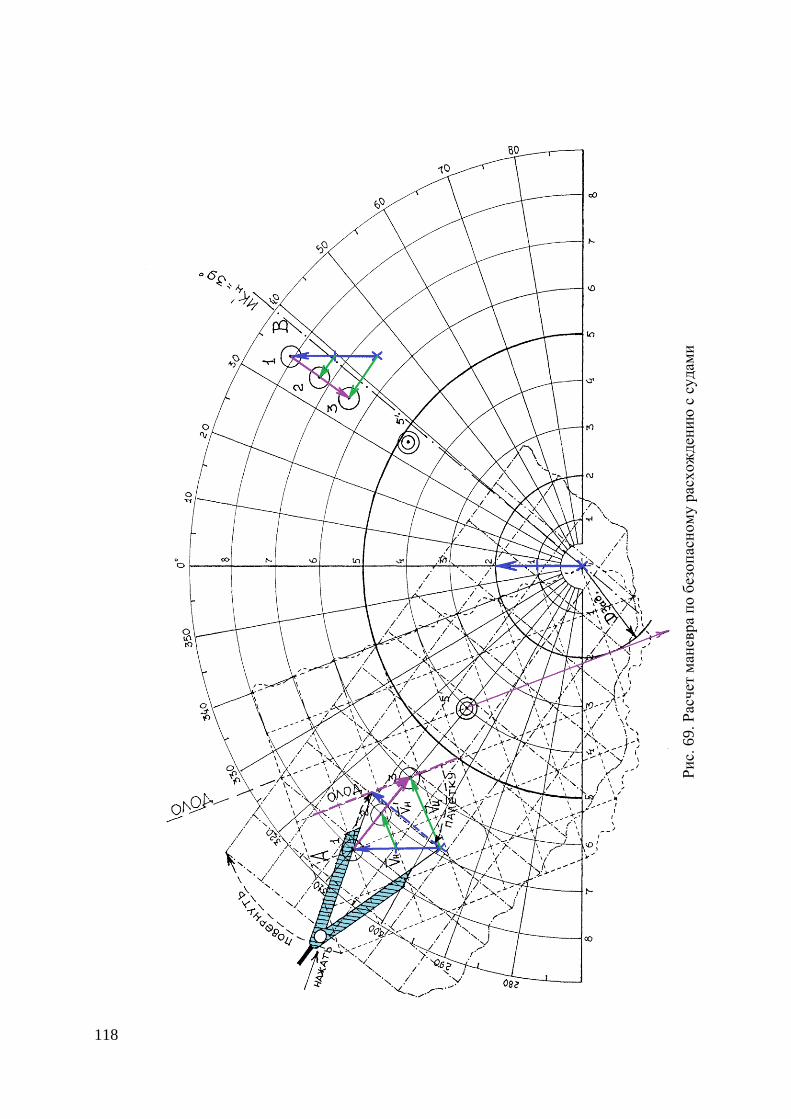
118
Ри
с. 6
9. Р
асчет
ман
евра
по б
езоп
асн
ом
у р
асхо
жд
ени
ю с
су
дам
и
119
Необходимо запомнить: при решении задач на расхождение все расчетные
точки не стираются с планшета для того, чтобы можно было проконтролировать
наш расчет и своевременность выполнения маневра.
Учитывая то обстоятельство, что скорость нашего судна больше скоростей
встречных судов (для данного примера), имеется реальная возможность обойти их
справа и безопасно оставить по корме, изменив свой курс вправо. Примем DЗАД
равную двум милям. Из двух целей цель «А» – наиболее опасна (ТКР меньше, чем
у цели «В»), поэтому расчет маневра будем производить по цели «А».
Наша задача – из расчетной точки направить опасную ЛОД цели так, чтобы
эта цель прошла от нас на дистанции DЗАД или ожидаемая ЛОД (ОЛОД) только
коснулась окружности, образованной DЗАД. Для этого, фиксируем палетку на
планшете так, чтобы она одновременно перекрывала точки цели «А» и центр
планшета, и любая из параллельных линий проходила через расчетную точку
5' и касалась DЗАД; получим ОЛОД цели «А», которая направлена от точки
5'
в нашу сторону по левому борту.
Теперь в раствор измерителя берем 6-минутный вектор HV (фактический
вектор скорости всегда имеется в центре планшета, поэтому для пользы дела
раствор измерителя, равный вектору HV , всегда должен находиться под рукой
судоводителя). Одну его иглу ставим в начало 6-минутного вектора HV (крестик
вектора HV , внесенного в точку 1). Вторую иглу поворачиваем так, чтобы ли-
ния, образованная второй иглой и точкой 3 цели «А», была параллельна най-
денному ОЛОДу (на рис. 69 выделена фиолетовой пунктирной линией). Делаем
второй иглой прокол через палетку и планшет – наш новый вектор HV (на ри-
сунке обозначен пунктирной синей линией). Измеритель не вынимать.
Поворачиваем палетку вокруг второй иглы измерителя, используя ее как ось,
чтобы полученная фиолетовая пунктирная линия (ОЛОД) прошла через начало
6-минутного HV (новое положение палетки на рис. 69 показано штрихпунктир-
ной линией) – получили направление нашего нового вектора HV , курс которого
можно определить аналогично п. 4.2.4.5 (на рисунке новый курс обозначен
штрихпунктирной линией ИК = 39).
Таким образом, мы выбрали и рассчитали маневр курсом для цели «А», не-
обходимо только оставшийся прокол от иглы на планшете сплошной линией со-
единить с началом старого вектора HV , а пунктирной – с точкой 3, как показа-
но на рис. 70. Расчет маневра скоростью и комбинированного маневра (изменя-
ют курс и снижают или увеличивают скорость одновременно), если геометрия
сближения этого требует, делается аналогично и здесь подробно не рассматрива-
ется (далее по тексту на рис. 73–76 даются образцы РЛП по всем трем разновид-
ностям расчетных маневров – курсом, скоростью и комбинированный).
4.2.4.8. Проверка расчетного маневра по другим судам Чтобы произвести проверку рассчитанного нами маневра, необходимо про-
делать операцию, обратную п. 4.2.4.7: по известному вектору скорости HV най-
ти ОЛОД цели.
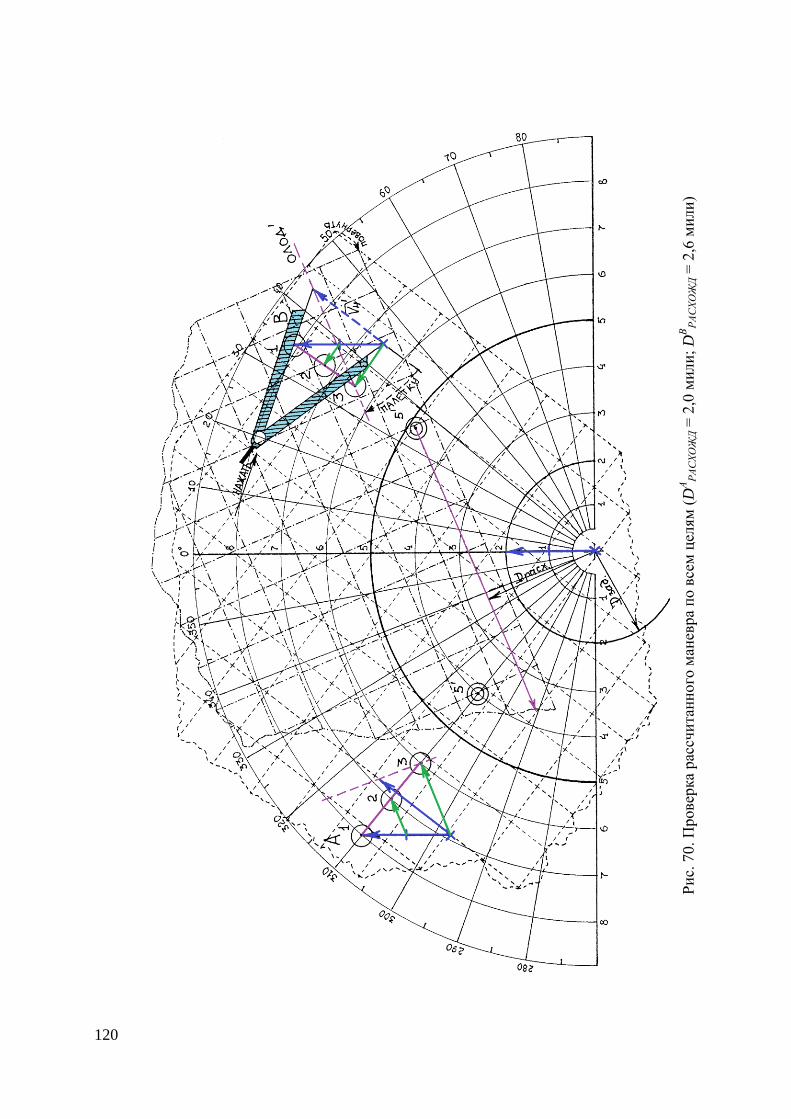
120
Ри
с. 7
0. П
ровер
ка
рас
счи
тан
но
го м
анев
ра
по в
сем
цел
ям
(D
АР
АС
ХО
ЖД =
2,0
ми
ли
; D
ВР
АС
ХО
ЖД =
2,6
ми
ли
)
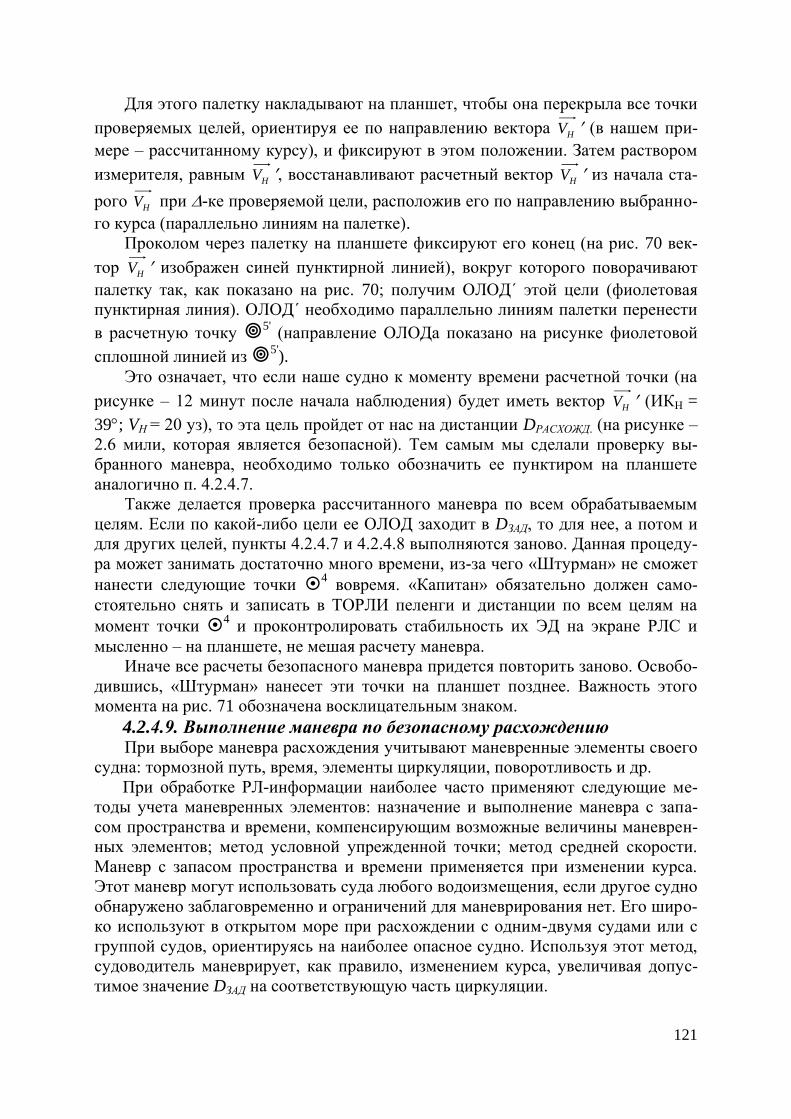
121
Для этого палетку накладывают на планшет, чтобы она перекрыла все точки
проверяемых целей, ориентируя ее по направлению вектора HV (в нашем при-
мере – рассчитанному курсу), и фиксируют в этом положении. Затем раствором
измерителя, равным HV , восстанавливают расчетный вектор HV из начала ста-
рого HV при -ке проверяемой цели, расположив его по направлению выбранно-
го курса (параллельно линиям на палетке).
Проколом через палетку на планшете фиксируют его конец (на рис. 70 век-
тор HV изображен синей пунктирной линией), вокруг которого поворачивают
палетку так, как показано на рис. 70; получим ОЛОД´ этой цели (фиолетовая
пунктирная линия). ОЛОД´ необходимо параллельно линиям палетки перенести
в расчетную точку 5' (направление ОЛОДа показано на рисунке фиолетовой
сплошной линией из 5').
Это означает, что если наше судно к моменту времени расчетной точки (на
рисунке – 12 минут после начала наблюдения) будет иметь вектор HV (ИКН =
39; VН = 20 уз), то эта цель пройдет от нас на дистанции DРАСХОЖД. (на рисунке –
2.6 мили, которая является безопасной). Тем самым мы сделали проверку вы-
бранного маневра, необходимо только обозначить ее пунктиром на планшете
аналогично п. 4.2.4.7.
Также делается проверка рассчитанного маневра по всем обрабатываемым
целям. Если по какой-либо цели ее ОЛОД заходит в DЗАД, то для нее, а потом и
для других целей, пункты 4.2.4.7 и 4.2.4.8 выполняются заново. Данная процеду-
ра может занимать достаточно много времени, из-за чего «Штурман» не сможет
нанести следующие точки 4 вовремя. «Капитан» обязательно должен само-
стоятельно снять и записать в ТОРЛИ пеленги и дистанции по всем целям на
момент точки 4 и проконтролировать стабильность их ЭД на экране РЛС и
мысленно – на планшете, не мешая расчету маневра.
Иначе все расчеты безопасного маневра придется повторить заново. Освобо-
дившись, «Штурман» нанесет эти точки на планшет позднее. Важность этого
момента на рис. 71 обозначена восклицательным знаком.
4.2.4.9. Выполнение маневра по безопасному расхождению При выборе маневра расхождения учитывают маневренные элементы своего
судна: тормозной путь, время, элементы циркуляции, поворотливость и др.
При обработке РЛ-информации наиболее часто применяют следующие ме-
тоды учета маневренных элементов: назначение и выполнение маневра с запа-
сом пространства и времени, компенсирующим возможные величины маневрен-
ных элементов; метод условной упрежденной точки; метод средней скорости.
Маневр с запасом пространства и времени применяется при изменении курса.
Этот маневр могут использовать суда любого водоизмещения, если другое судно
обнаружено заблаговременно и ограничений для маневрирования нет. Его широ-
ко используют в открытом море при расхождении с одним-двумя судами или с
группой судов, ориентируясь на наиболее опасное судно. Используя этот метод,
судоводитель маневрирует, как правило, изменением курса, увеличивая допус-
тимое значение DЗАД на соответствующую часть циркуляции.
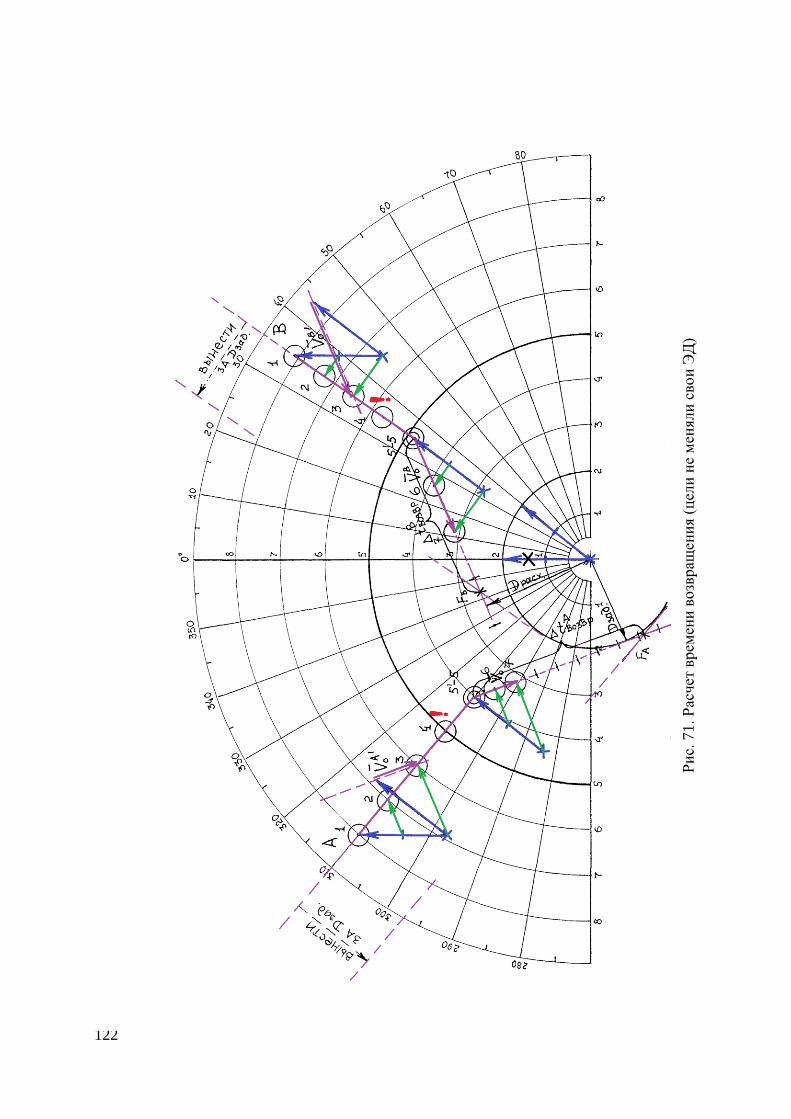
122
Ри
с. 7
1. Р
асчет
врем
ени
возв
ращ
ени
я (
цел
и н
е м
еняли
сво
и Э
Д)
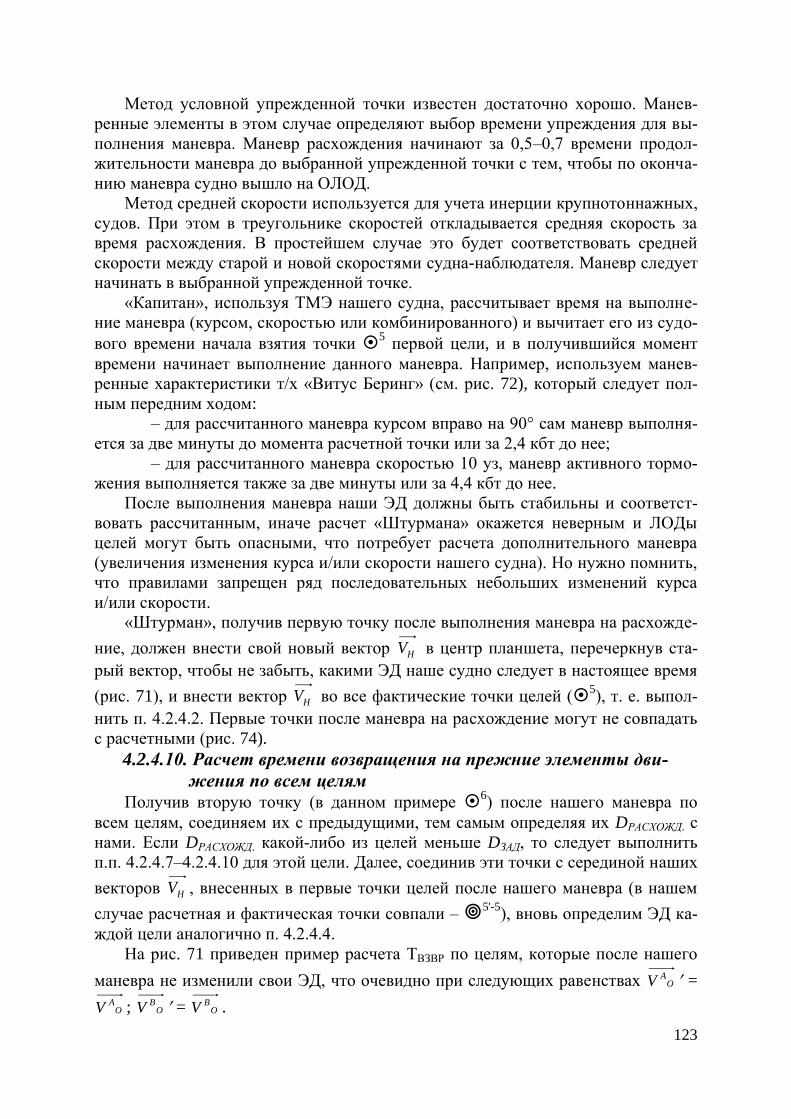
123
Метод условной упрежденной точки известен достаточно хорошо. Манев-
ренные элементы в этом случае определяют выбор времени упреждения для вы-
полнения маневра. Маневр расхождения начинают за 0,5–0,7 времени продол-
жительности маневра до выбранной упрежденной точки с тем, чтобы по оконча-
нию маневра судно вышло на ОЛОД.
Метод средней скорости используется для учета инерции крупнотоннажных,
судов. При этом в треугольнике скоростей откладывается средняя скорость за
время расхождения. В простейшем случае это будет соответствовать средней
скорости между старой и новой скоростями судна-наблюдателя. Маневр следует
начинать в выбранной упрежденной точке.
«Капитан», используя ТМЭ нашего судна, рассчитывает время на выполне-
ние маневра (курсом, скоростью или комбинированного) и вычитает его из судо-
вого времени начала взятия точки 5 первой цели, и в получившийся момент
времени начинает выполнение данного маневра. Например, используем манев-
ренные характеристики т/х «Витус Беринг» (см. рис. 72), который следует пол-
ным передним ходом:
– для рассчитанного маневра курсом вправо на 90° сам маневр выполня-
ется за две минуты до момента расчетной точки или за 2,4 кбт до нее;
– для рассчитанного маневра скоростью 10 уз, маневр активного тормо-
жения выполняется также за две минуты или за 4,4 кбт до нее.
После выполнения маневра наши ЭД должны быть стабильны и соответст-
вовать рассчитанным, иначе расчет «Штурмана» окажется неверным и ЛОДы
целей могут быть опасными, что потребует расчета дополнительного маневра
(увеличения изменения курса и/или скорости нашего судна). Но нужно помнить,
что правилами запрещен ряд последовательных небольших изменений курса
и/или скорости.
«Штурман», получив первую точку после выполнения маневра на расхожде-
ние, должен внести свой новый вектор HV в центр планшета, перечеркнув ста-
рый вектор, чтобы не забыть, какими ЭД наше судно следует в настоящее время
(рис. 71), и внести вектор HV во все фактические точки целей (5), т. е. выпол-
нить п. 4.2.4.2. Первые точки после маневра на расхождение могут не совпадать
с расчетными (рис. 74).
4.2.4.10. Расчет времени возвращения на прежние элементы дви-
жения по всем целям
Получив вторую точку (в данном примере 6) после нашего маневра по
всем целям, соединяем их с предыдущими, тем самым определяя их DРАСХОЖД. с
нами. Если DРАСХОЖД. какой-либо из целей меньше DЗАД, то следует выполнить
п.п. 4.2.4.7–4.2.4.10 для этой цели. Далее, соединив эти точки с серединой наших
векторов HV , внесенных в первые точки целей после нашего маневра (в нашем
случае расчетная и фактическая точки совпали – 5'-5
), вновь определим ЭД ка-
ждой цели аналогично п. 4.2.4.4.
На рис. 71 приведен пример расчета ТВЗВР по целям, которые после нашего
маневра не изменили свои ЭД, что очевидно при следующих равенствах OAV =
OAV ; O
BV = OBV .
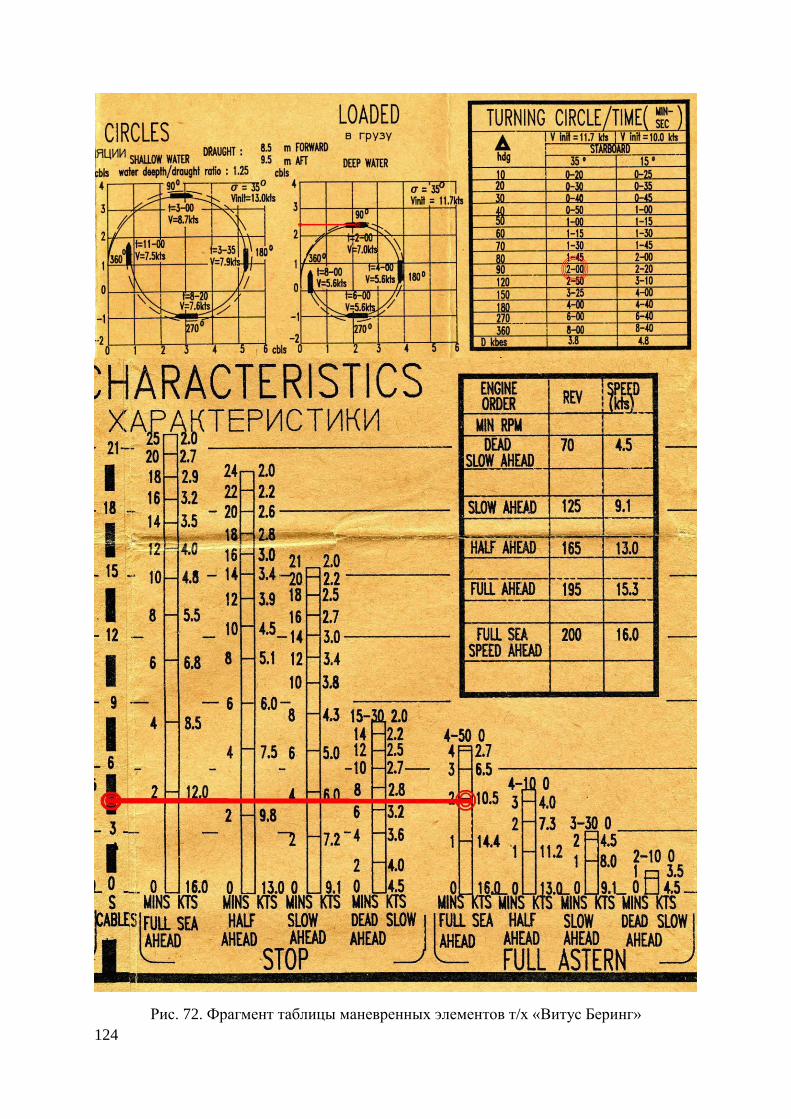
124
Рис. 72. Фрагмент таблицы маневренных элементов т/х «Витус Беринг»
125
Момент возвращения на прежние элементы движения ТВЗВР рассчитывается
пересечением фактических ЛОДов целей (после выполнения нашего маневра по
безопасному расхождению) со старыми ЛОДами (до выполнения нами маневра),
как показано на рис. 71.
Время возвращения на прежние ЭД всегда считается от первых точек после
выполнения маневра на расхождение (в нашем примере от 5'-5
) до расчетных
точек возвращения «F» по каждой цели. Расчет ТВЗВР в минутах делается анало-
гично расчету ТКР, описанному в п. 4.2.4.3, только до соответствующих точек FА
и FВ (см. рис. 71).
Если цели тоже предприняли маневр для расхождения (рис. 73), то старые
ЛОДы целей не будут действовать после нашего возвращения и необходимо с
новыми векторами истинных скоростей целей рассчитать их новые ЛОДы после
нашего возвращения на прежние ЭД, как показано ниже на рис. 73.
Алгоритм расчета точек возвращения FА и FВ и ТВЗВР по всем целям аналоги-
чен тому, который был описан по рис. 71.
После анализа ситуации и всех расчетов по безопасному возвращению на
свои прежние ЭД «Капитан» своевременно должен предпринять маневр (обычно
после взятия очередной точки, следующей за точкой «F» цели, у которой ТВЗВР.
максимальное), а «Штурман» произвести все графические построения аналогич-
но п. 4.2.4.9 (см. рис. 71 и 73).
Вести прокладку и обрабатывать цели необходимо до тех пор, пока, говоря
словами МППСС-72, они не будут окончательно пройдены и оставлены позади.
Иными словами, пока безопасно следующая цель не войдет в сектор осве-
щения нашего кормового огня или не удалится на дистанцию более пяти миль
(данная зона обозначена красным и волнистой линией на рис. 74). -ков скоро-
стей (6-минутных) с определениями ЭД цели и, если необходимо, дополнитель-
ными построениями по расчету маневров и другой информации, должно быть
как минимум четыре по каждой цели (рис. 74–76):
первый – при первом обнаружении целей и полной оценки ситуации;
второй – сразу же после выполнения маневра по безопасному расхожде-
нию со всеми целями;
третий – сразу же после возвращения на свои прежние ЭД;
четвертый – когда цель будет окончательно пройдена и оставлена позади.
При необходимости (в случаях опасного изменения ЭД целей относительно
нас, особенно при следовании цели в непосредственной близости от DЗАД) коли-
чество -ков должно быть увеличено до требуемого ситуацией.
4.2.4.11. Возвращение на прежние элементы движения Исходя из анализа получившихся расчетных tВЗВР по всем целям, общее
tРАСХОЖД. выбирают такое, чтобы при выполнении маневра для возвращения на
прежние ЭД, ЛОДы всех целей прошли на дистанции, не менее DЗАД, т.е. обычно
tРАСХОЖД. равно большему tВЗВР. Если tРАСХОЖД. оказывается очень большим, необ-
ходимо выполнить п.п. 4.6–4.10, чтобы рассчитать и выполнить маневр, который
бы привел к безопасному расхождению в самый короткий срок в данной сло-
жившейся ситуации сближения.
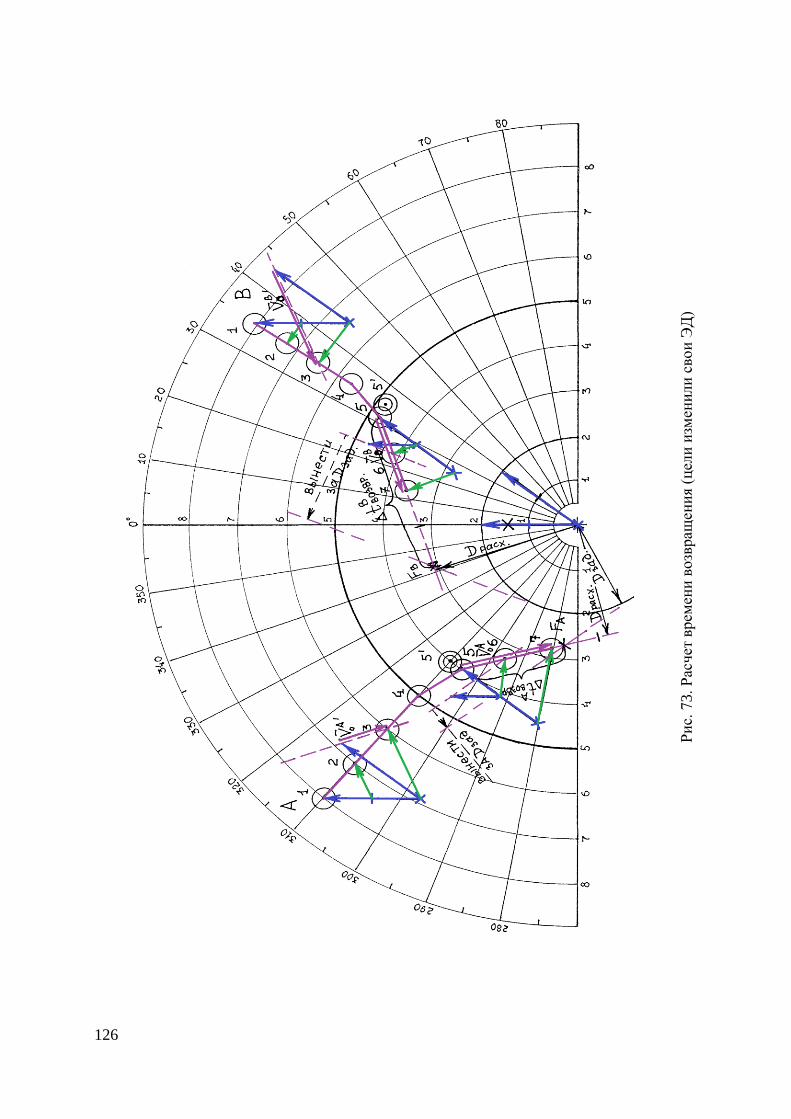
126
Ри
с. 7
3. Р
асчет
врем
ени
возв
ращ
ени
я (
цел
и и
змен
или
сво
и Э
Д)
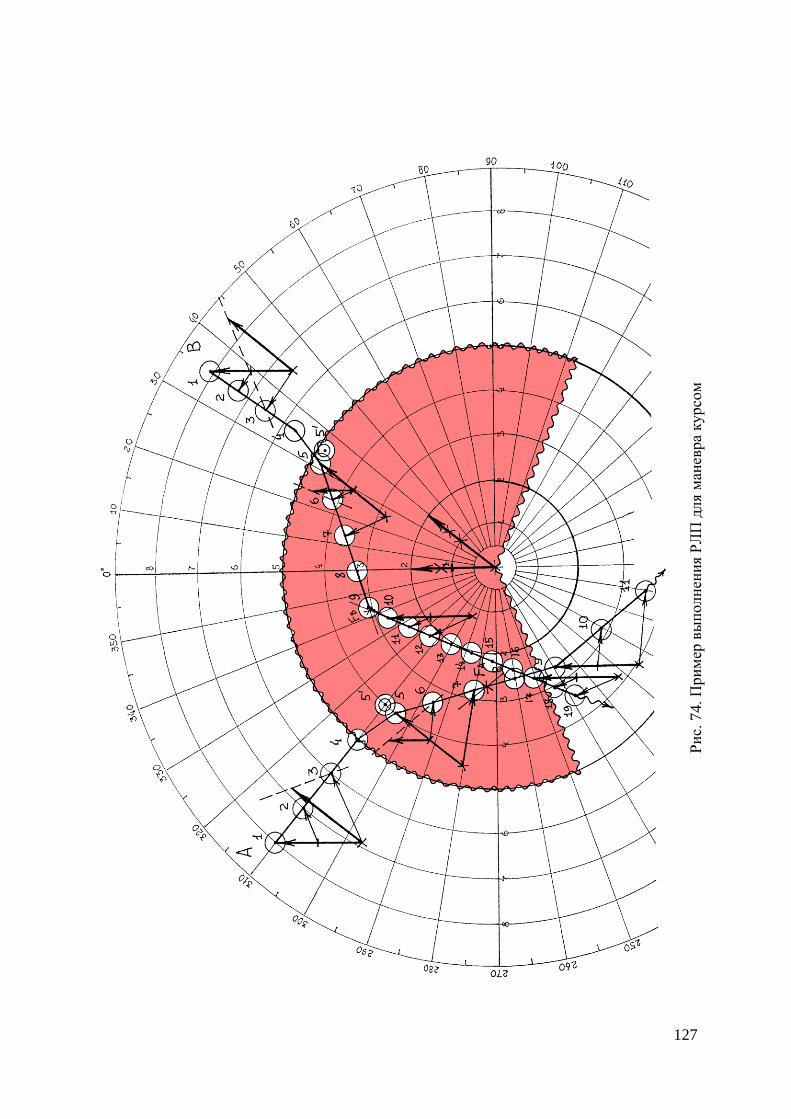
127
Ри
с. 7
4. П
ри
мер
вы
полн
ени
я Р
ЛП
для м
анев
ра
курсо
м
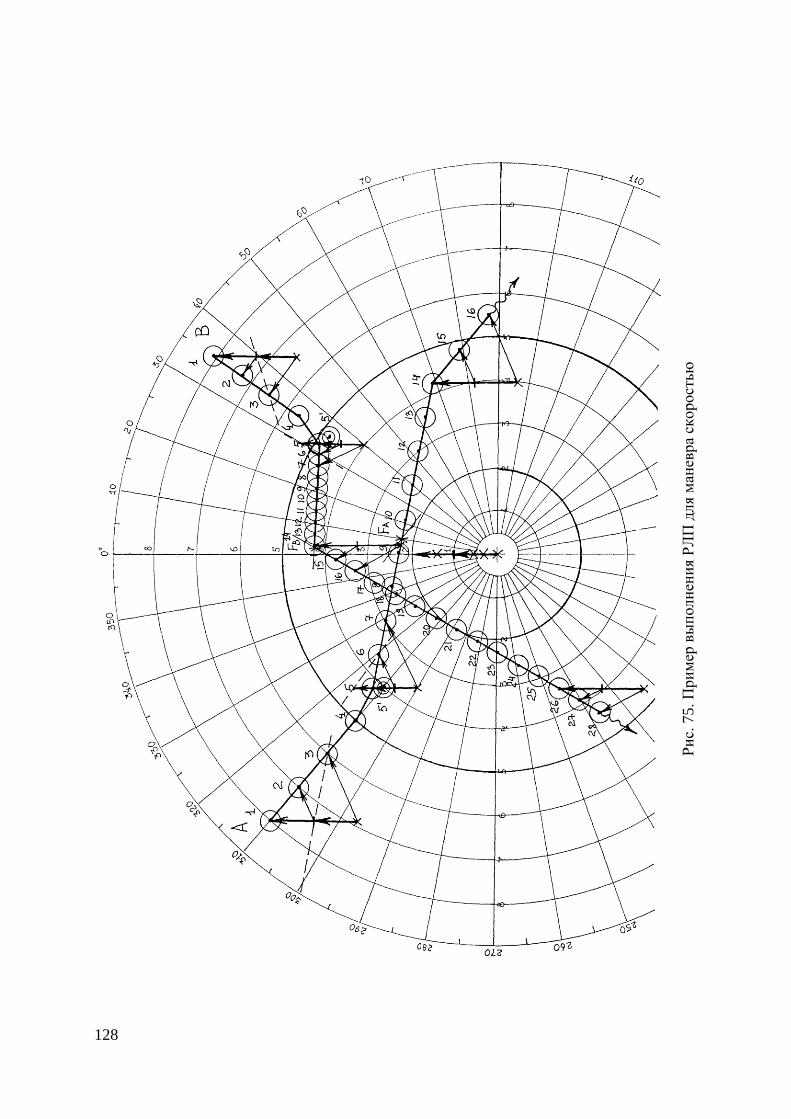
128
Ри
с. 7
5. П
ри
мер
вы
полн
ени
я Р
ЛП
для м
анев
ра
скорост
ью
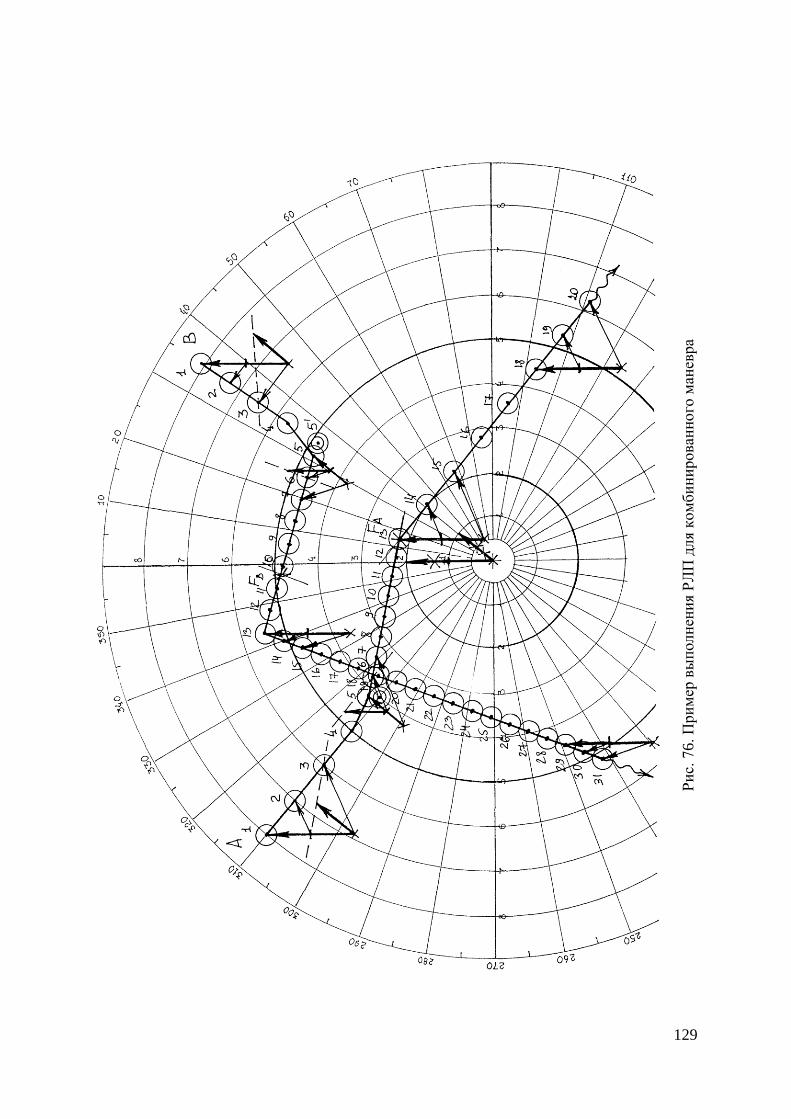
129
Ри
с. 7
6. П
ри
мер
вы
полн
ени
я Р
ЛП
для к
ом
би
ни
рован
но
го м
анев
ра
130
Т.е. необходимо максимально увеличить векторы относительного расхожде-
ния со всеми опасными (потенциально опасными) целями – лечь на контркурс
опасного судна, остановиться или выбрать подходящий комбинированный ма-
невр.
4.2.5. Алгоритм решения задачи по расхождению с судами
Ход решения задачи на расхождение с несколькими судами при помощи
РЛС (имеется в виду выполнение всего п. 4.2.4) коротко можно представить в
виде следующего алгоритма:
Шаг Обозначение Описание действий
ПОС
Полная оценка ситуации (необходимо выполнить п.п.
4.2.4.1– 4.2.4.6 и найти по каждой из целей):
на точку 2 – DКР, TКР, ИКЦ, VЦ, РКС
на точку 3 – уточнить ИКЦ, VЦ
ВМ Выбор маневра (выполнить п. 4.2.4.7 для DЗАД)
ПМ Проверка маневра (выполнить п. 4.2.4.8, 4.2.4.9)
ТВЗВР Время возвращения (выполнить п. 4.2.4.10)
ТРАСХОЖД. Время расхождения (выполнить п. 4.2.4.11)
Данный алгоритм, в зависимости от геометрии встречи с целями и конкрет-
ной ситуации расхождения, а также дистанции обнаружения целей, может час-
тично сокращаться, расширяться по времени, но будет всегда являться основой
решения любых задач по расхождению с судами.
4.3. ПЛАВАНИЕ В ПОТОКЕ СУДОВ ПО СИСТЕМАМ РАЗДЕЛЕНИЯ
ДВИЖЕНИЯ
С целью уменьшения количества столкновений в районах интенсивного
движения судов ИМО и правительства морских стран установили системы раз-
деления движения (СРД). Цели введения СРД следующие:
– разделение встречных потоков судов;
– уменьшение опасности столкновения судов, идущих в одном направле-
нии с теми судами, которые пересекают это направление;
– упрощение организации движения в районах, где сходятся различные
направления потоков судов;
– организация безопасного движения в районах, где проводятся про-
мышленные, океанографические, геологические и другие работы;
– организация потока судов в районах или вокруг районов, где плавание
всех судов или определенного типа небезопасно или нежелательно (суда на воз-
душной подушке – СВП, на подводных крыльях – СПК);
– установление специальной организации движения судов в тех районах,
где глубины соизмеримы с осадкой, где они недостаточны, где сильное влияние
приливо-отливных явлений;
– организация движения судов в районах рыболовства или в стороне от
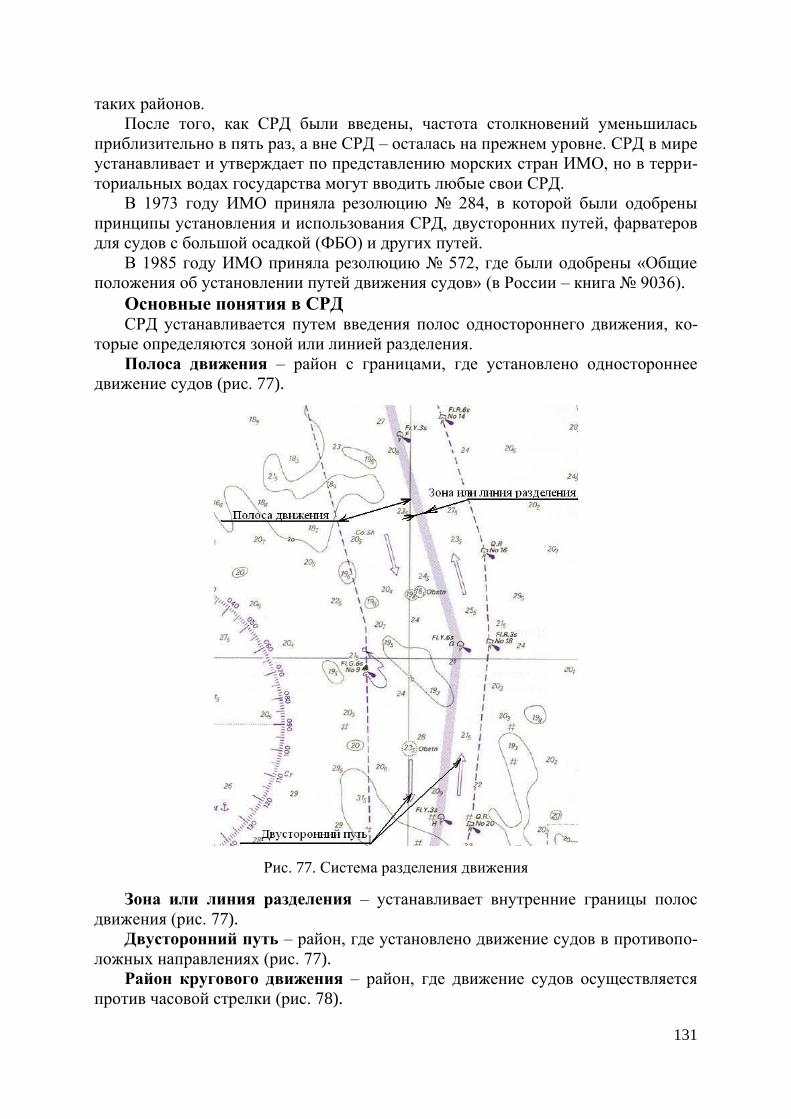
131
таких районов.
После того, как СРД были введены, частота столкновений уменьшилась
приблизительно в пять раз, а вне СРД – осталась на прежнем уровне. СРД в мире
устанавливает и утверждает по представлению морских стран ИМО, но в терри-
ториальных водах государства могут вводить любые свои СРД.
В 1973 году ИМО приняла резолюцию № 284, в которой были одобрены
принципы установления и использования СРД, двусторонних путей, фарватеров
для судов с большой осадкой (ФБО) и других путей.
В 1985 году ИМО приняла резолюцию № 572, где были одобрены «Общие
положения об установлении путей движения судов» (в России – книга № 9036).
Основные понятия в СРД СРД устанавливается путем введения полос одностороннего движения, ко-
торые определяются зоной или линией разделения.
Полоса движения – район с границами, где установлено одностороннее
движение судов (рис. 77).
Рис. 77. Система разделения движения
Зона или линия разделения – устанавливает внутренние границы полос
движения (рис. 77).
Двусторонний путь – район, где установлено движение судов в противопо-
ложных направлениях (рис. 77).
Район кругового движения – район, где движение судов осуществляется
против часовой стрелки (рис. 78).
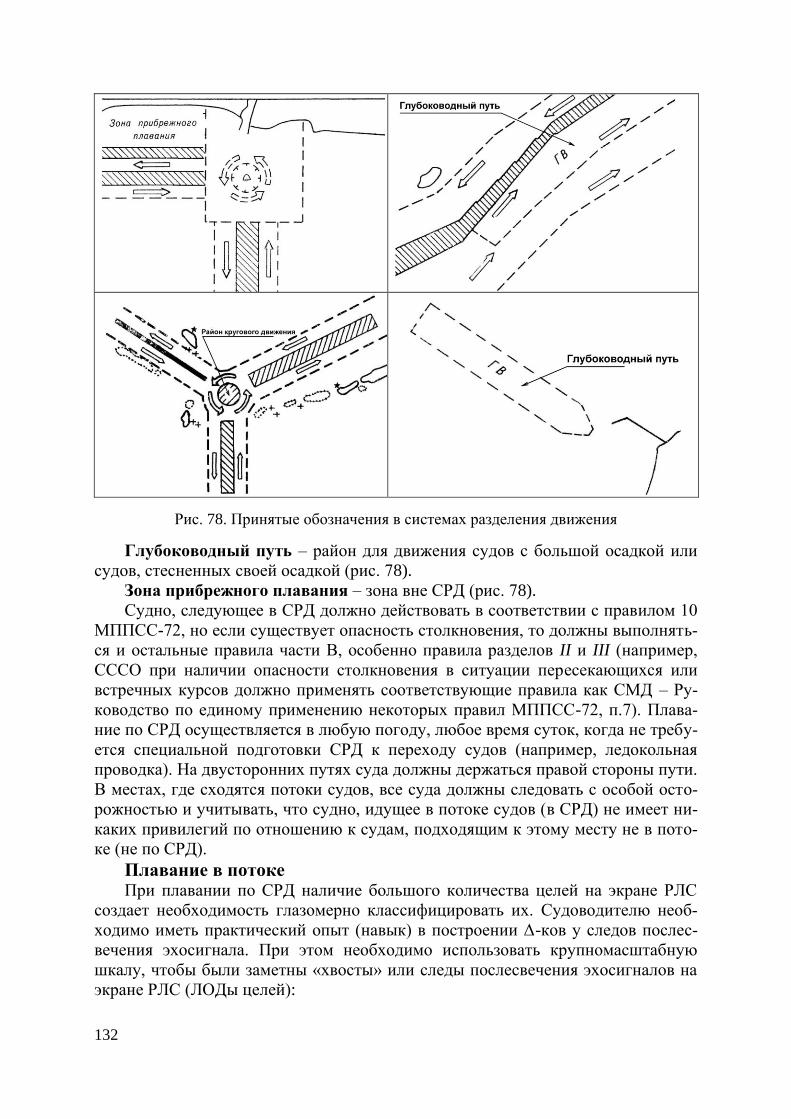
132
Рис. 78. Принятые обозначения в системах разделения движения
Глубоководный путь – район для движения судов с большой осадкой или
судов, стесненных своей осадкой (рис. 78).
Зона прибрежного плавания – зона вне СРД (рис. 78).
Судно, следующее в СРД должно действовать в соответствии с правилом 10
МППСС-72, но если существует опасность столкновения, то должны выполнять-
ся и остальные правила части В, особенно правила разделов II и III (например,
СССО при наличии опасности столкновения в ситуации пересекающихся или
встречных курсов должно применять соответствующие правила как СМД – Ру-
ководство по единому применению некоторых правил МППСС-72, п.7). Плава-
ние по СРД осуществляется в любую погоду, любое время суток, когда не требу-
ется специальной подготовки СРД к переходу судов (например, ледокольная
проводка). На двусторонних путях суда должны держаться правой стороны пути.
В местах, где сходятся потоки судов, все суда должны следовать с особой осто-
рожностью и учитывать, что судно, идущее в потоке судов (в СРД) не имеет ни-
каких привилегий по отношению к судам, подходящим к этому месту не в пото-
ке (не по СРД).
Плавание в потоке При плавании по СРД наличие большого количества целей на экране РЛС
создает необходимость глазомерно классифицировать их. Судоводителю необ-
ходимо иметь практический опыт (навык) в построении Δ-ков у следов послес-
вечения эхосигнала. При этом необходимо использовать крупномасштабную
шкалу, чтобы были заметны «хвосты» или следы послесвечения эхосигналов на
экране РЛС (ЛОДы целей):
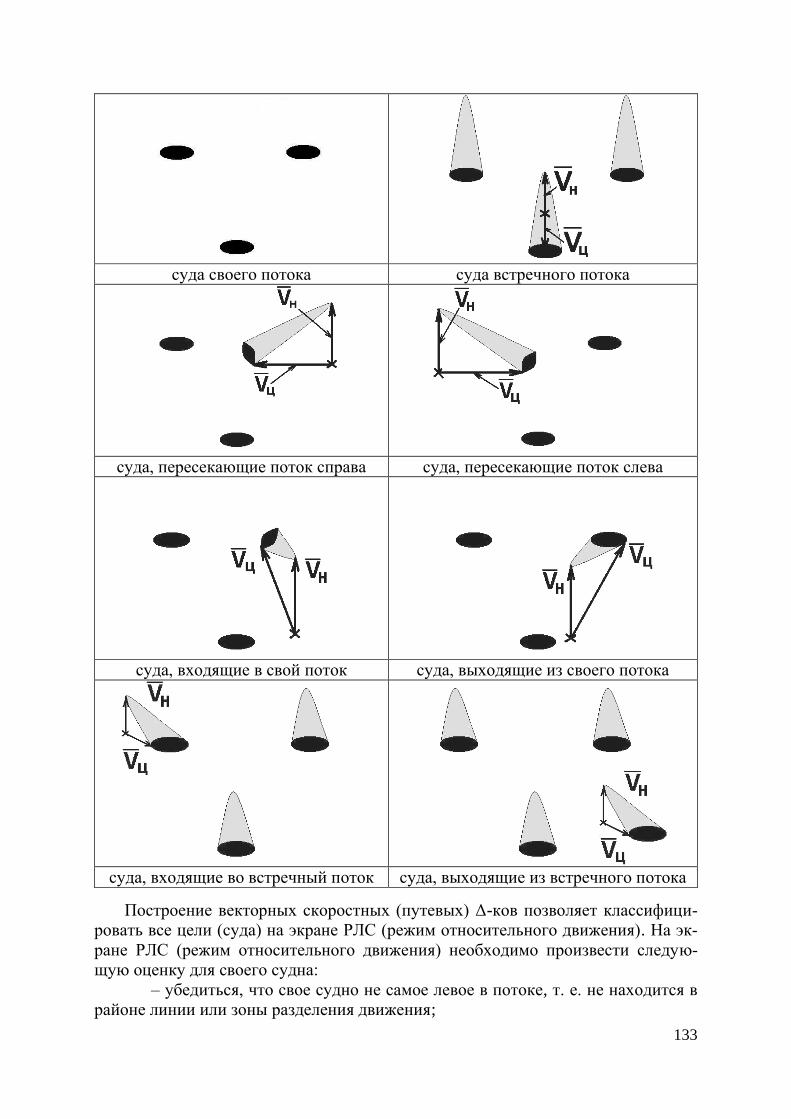
133
суда своего потока суда встречного потока
суда, пересекающие поток справа суда, пересекающие поток слева
суда, входящие в свой поток суда, выходящие из своего потока
суда, входящие во встречный поток суда, выходящие из встречного потока
Построение векторных скоростных (путевых) Δ-ков позволяет классифици-
ровать все цели (суда) на экране РЛС (режим относительного движения). На эк-
ране РЛС (режим относительного движения) необходимо произвести следую-
щую оценку для своего судна:
– убедиться, что свое судно не самое левое в потоке, т. е. не находится в
районе линии или зоны разделения движения;
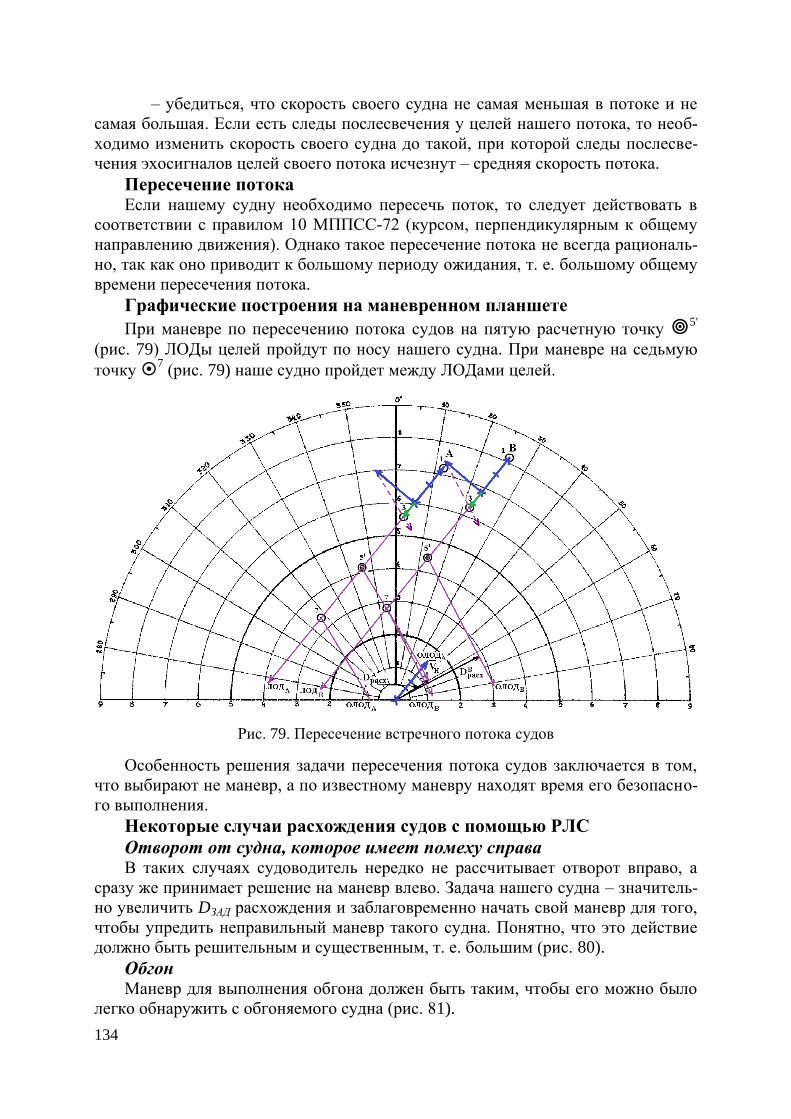
134
– убедиться, что скорость своего судна не самая меньшая в потоке и не
самая большая. Если есть следы послесвечения у целей нашего потока, то необ-
ходимо изменить скорость своего судна до такой, при которой следы послесве-
чения эхосигналов целей своего потока исчезнут – средняя скорость потока.
Пересечение потока Если нашему судну необходимо пересечь поток, то следует действовать в
соответствии с правилом 10 МППСС-72 (курсом, перпендикулярным к общему
направлению движения). Однако такое пересечение потока не всегда рациональ-
но, так как оно приводит к большому периоду ожидания, т. е. большому общему
времени пересечения потока.
Графические построения на маневренном планшете
При маневре по пересечению потока судов на пятую расчетную точку 5'
(рис. 79) ЛОДы целей пройдут по носу нашего судна. При маневре на седьмую
точку 7 (рис. 79) наше судно пройдет между ЛОДами целей.
Рис. 79. Пересечение встречного потока судов
Особенность решения задачи пересечения потока судов заключается в том,
что выбирают не маневр, а по известному маневру находят время его безопасно-
го выполнения.
Некоторые случаи расхождения судов с помощью РЛС
Отворот от судна, которое имеет помеху справа В таких случаях судоводитель нередко не рассчитывает отворот вправо, а
сразу же принимает решение на маневр влево. Задача нашего судна – значитель-
но увеличить DЗАД расхождения и заблаговременно начать свой маневр для того,
чтобы упредить неправильный маневр такого судна. Понятно, что это действие
должно быть решительным и существенным, т. е. большим (рис. 80).
Обгон Маневр для выполнения обгона должен быть таким, чтобы его можно было
легко обнаружить с обгоняемого судна (рис. 81).
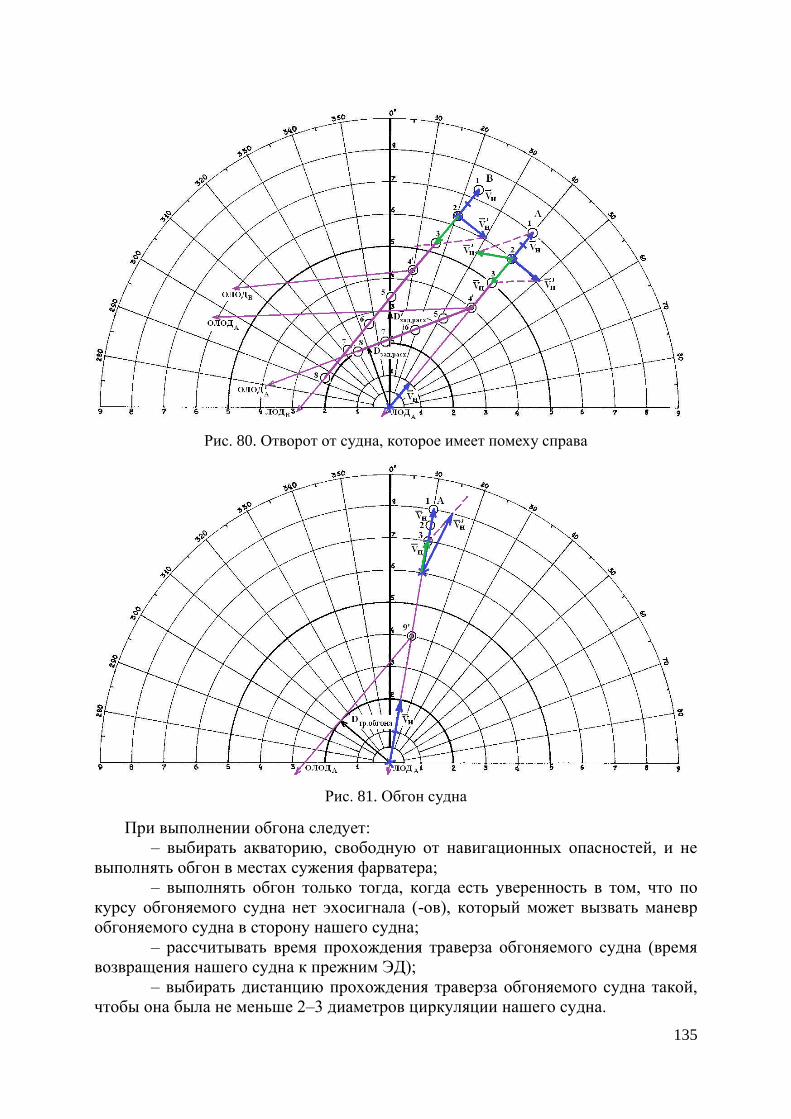
135
Рис. 80. Отворот от судна, которое имеет помеху справа
Рис. 81. Обгон судна
При выполнении обгона следует:
– выбирать акваторию, свободную от навигационных опасностей, и не
выполнять обгон в местах сужения фарватера;
– выполнять обгон только тогда, когда есть уверенность в том, что по
курсу обгоняемого судна нет эхосигнала (-ов), который может вызвать маневр
обгоняемого судна в сторону нашего судна;
– рассчитывать время прохождения траверза обгоняемого судна (время
возвращения нашего судна к прежним ЭД);
– выбирать дистанцию прохождения траверза обгоняемого судна такой,
чтобы она была не меньше 2–3 диаметров циркуляции нашего судна.
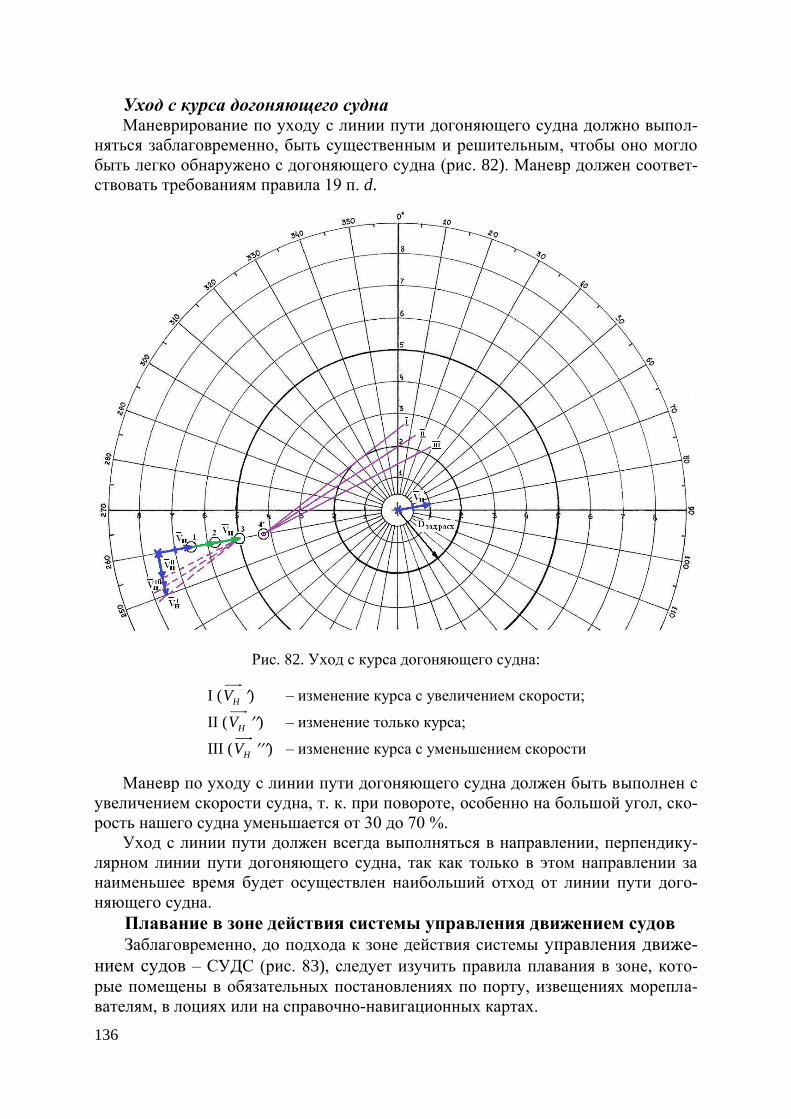
136
Уход с курса догоняющего судна Маневрирование по уходу с линии пути догоняющего судна должно выпол-
няться заблаговременно, быть существенным и решительным, чтобы оно могло
быть легко обнаружено с догоняющего судна (рис. 82). Маневр должен соответ-
ствовать требованиям правила 19 п. d.
Рис. 82. Уход с курса догоняющего судна:
I ( HV ) – изменение курса с увеличением скорости;
II ( HV ) – изменение только курса;
III ( HV ) – изменение курса с уменьшением скорости
Маневр по уходу с линии пути догоняющего судна должен быть выполнен с
увеличением скорости судна, т. к. при повороте, особенно на большой угол, ско-
рость нашего судна уменьшается от 30 до 70 %.
Уход с линии пути должен всегда выполняться в направлении, перпендику-
лярном линии пути догоняющего судна, так как только в этом направлении за
наименьшее время будет осуществлен наибольший отход от линии пути дого-
няющего судна.
Плавание в зоне действия системы управления движением судов
Заблаговременно, до подхода к зоне действия системы управления движе-
нием судов – СУДС (рис. 83), следует изучить правила плавания в зоне, кото-
рые помещены в обязательных постановлениях по порту, извещениях морепла-
вателям, в лоциях или на справочно-навигационных картах.

137
Рис. 83. Центр управления движением судов на мысе Назимова (порт Владивосток)
При необходимости и возможности используют две УКВ-радиостанции: од-
ну – для связи на дежурном 16-м канале, вторую – для связи на рабочем канале
оператора системы УДС.
Плавание в зонах действия СУДС осуществляется в соответствии с МППСС,
если местные правила не требуют иного. В случае нарушения правил движения
следует немедленно информировать о факте и причинах нарушения оператора
центра УДС (ЦУДС).
Вход в зону разрешается оператором ЦУДС, который вправе давать указа-
ния судну о порядке и очередности движения, якорной стоянке и действиях для
предотвращения непосредственной опасности. В свою очередь, капитан судна
обязан репетовать указания поста, направленные непосредственно его судну, а в
случае невозможности их выполнения – сообщать причины и дальнейшие наме-
рения. Следует помнить, что точность глазомерного определения бокового сме-
щения судна с оси канала или фарватера с помощью береговой РЛС составляет
10–20 м, что обычно бывает достаточно для обеспечения безопасной проводки.
Если при плавании в системе разделения движения другое судно, по нашему
мнению, следует не по своей стороне, необходимо перепроверить место своего
судна и, даже если оно подтвердится, следовать дальше с повышенной осторож-
ностью. Для решения практических вопросов управления судном в особых усло-
виях судоводителю необходимо знать теоретические основы поведения судна в
узкостях и на мелководье. Опасность представляют малые суда, следующие без
связи с оператором СУДС и зачастую остающиеся вне его контроля.
4.4. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СОВРЕМЕННЫХ САРП
Пересмотренные ИМО стандарты работы РЛС/САРП, которые вступили в
силу в 2008 году, учли возможности радиолокаторов новых технологий (НТ),
используемых на морском флоте. Морские РЛС НТ становятся все более и более
обычными в 21-м столетии. Их пользовательские средства управления и функ-
ции дисплея подобны существующим ранее РЛС. На современном судне с ра-
диолокатором НТ, работающем на частоте 3 ГГц необходимо использовать РЛС
138
с частотой 9 ГГц (длина радиоволны – 3 см ), чтобы обнаруживать радиолокаци-
онные маяки-ответчики: раконы (рис. 84) и SARTs (рис. 85).
Рис. 84. На экране РЛС – racon Рис. 85. Радиолокационный
маяк-ответчик (SART)
Радиолокатор на интегрированном мостике Чтобы объяснять использование РЛС/САРП необходимо знать конфигура-
ции РЛС, которые возможны на полностью или частично интегрированных сис-
темах мостика (ИСМ). Современная РЛС может быть связана с разным навига-
ционным оборудованием и датчиками и на стандартном судне может работать,
до некоторой степени, как частичная интегрированная навигационная система.
Список навигационных датчиков, которые обычно сопрягаются с РЛС, дается в
табл. 6.
Таблица 6
Навигационные датчики, обычно сопрягаемые с РЛС
Датчик Ввод данных на РЛС
Стандартный лаг Скорость относительно воды
Доплеровский лаг Скорость относительно воды и грунта
ГНСС (GPS, Глонасс и Галилео) и
ДГНСС (дифференциальная)
Координаты
Курс и скорость относительно грунта
Скорость поворота
Магнитный компас Курс
Гирокомпас Курс и скорость поворота
Курсоуказатель ГНСС Курс и скорость поворота
АИС Данные цели и собственного судна
Эхолот Глубина (только для индикации на экране
РЛС)
Так же, как информация от датчиков, приведенных из таблицы, данные ра-
диолокатора могут быть доступны другому навигационному оборудованию,
особенно электронной картографии.
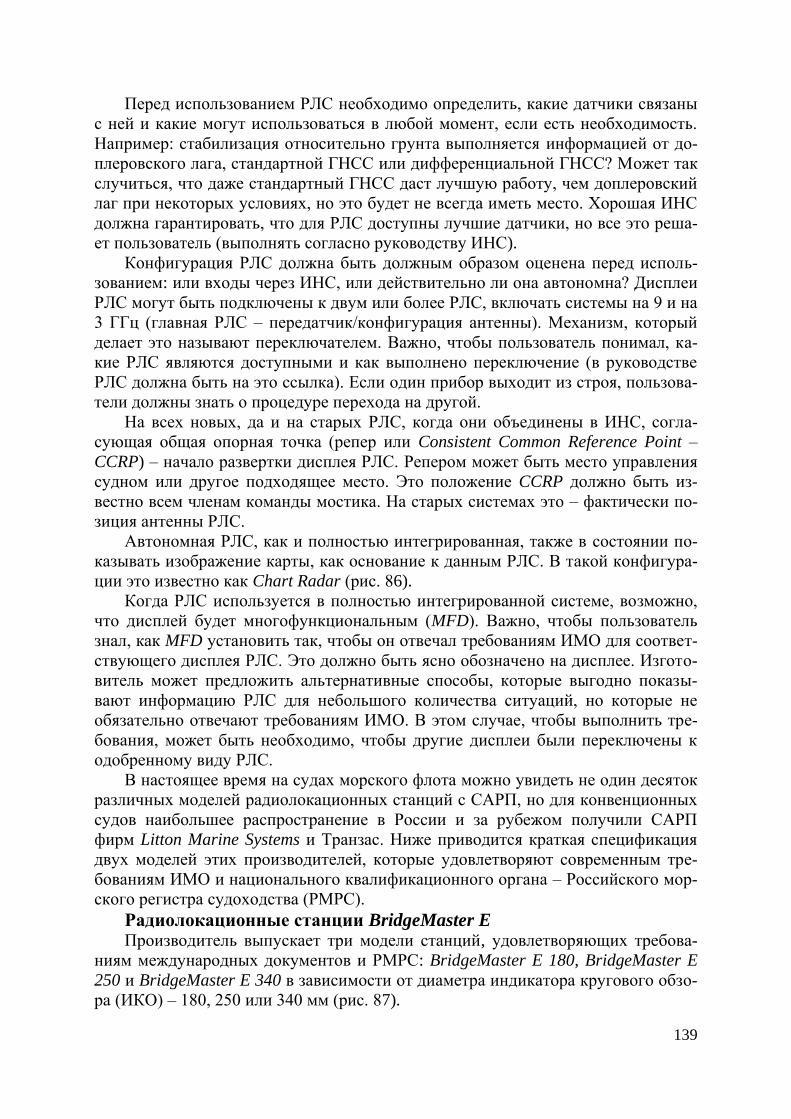
139
Перед использованием РЛС необходимо определить, какие датчики связаны
с ней и какие могут использоваться в любой момент, если есть необходимость.
Например: стабилизация относительно грунта выполняется информацией от до-
плеровского лага, стандартной ГНСС или дифференциальной ГНСС? Может так
случиться, что даже стандартный ГНСС даст лучшую работу, чем доплеровский
лаг при некоторых условиях, но это будет не всегда иметь место. Хорошая ИНС
должна гарантировать, что для РЛС доступны лучшие датчики, но все это реша-
ет пользователь (выполнять согласно руководству ИНС).
Конфигурация РЛС должна быть должным образом оценена перед исполь-
зованием: или входы через ИНС, или действительно ли она автономна? Дисплеи
РЛС могут быть подключены к двум или более РЛС, включать системы на 9 и на
3 ГГц (главная РЛС – передатчик/конфигурация антенны). Механизм, который
делает это называют переключателем. Важно, чтобы пользователь понимал, ка-
кие РЛС являются доступными и как выполнено переключение (в руководстве
РЛС должна быть на это ссылка). Если один прибор выходит из строя, пользова-
тели должны знать о процедуре перехода на другой.
На всех новых, да и на старых РЛС, когда они объединены в ИНС, согла-
сующая общая опорная точка (репер или Consistent Common Reference Point –
CCRP) – начало развертки дисплея РЛС. Репером может быть место управления
судном или другое подходящее место. Это положение CCRP должно быть из-
вестно всем членам команды мостика. На старых системах это – фактически по-
зиция антенны РЛС.
Автономная РЛС, как и полностью интегрированная, также в состоянии по-
казывать изображение карты, как основание к данным РЛС. В такой конфигура-
ции это известно как Chart Radar (рис. 86).
Когда РЛС используется в полностью интегрированной системе, возможно,
что дисплей будет многофункциональным (MFD). Важно, чтобы пользователь
знал, как MFD установить так, чтобы он отвечал требованиям ИМО для соответ-
ствующего дисплея РЛС. Это должно быть ясно обозначено на дисплее. Изгото-
витель может предложить альтернативные способы, которые выгодно показы-
вают информацию РЛС для небольшого количества ситуаций, но которые не
обязательно отвечают требованиям ИМО. В этом случае, чтобы выполнить тре-
бования, может быть необходимо, чтобы другие дисплеи были переключены к
одобренному виду РЛС.
В настоящее время на судах морского флота можно увидеть не один десяток
различных моделей радиолокационных станций с САРП, но для конвенционных
судов наибольшее распространение в России и за рубежом получили САРП
фирм Litton Marine Systems и Транзас. Ниже приводится краткая спецификация
двух моделей этих производителей, которые удовлетворяют современным тре-
бованиям ИМО и национального квалификационного органа – Российского мор-
ского регистра судоходства (РМРС).
Радиолокационные станции BridgeMaster E Производитель выпускает три модели станций, удовлетворяющих требова-
ниям международных документов и РМРС: BridgeMaster E 180, BridgeMaster E
250 и BridgeMaster E 340 в зависимости от диаметра индикатора кругового обзо-
ра (ИКО) – 180, 250 или 340 мм (рис. 87).
140
Рис. 86. Дисплей РЛС с картографией (Sperry Marine)
Рис. 87. РЛС BridgeMaster E 340
141
Ниже в табл. 7–10 приводятся основные параметры станций и их функцио-
нальные возможности.
Таблица 7
Основные характеристики BridgeMaster E 340
Представление видеосиг-
налов
16 уровней яркости в цифровом формате, уни-
кальная система подавления помех от моря, рас-
ширение видеосигналов судов-целей
Стабилизация изображе-
ния
Стабилизация изображения по северу и курсу
Сопряжение с большинством гирокомпасов
Истинное движение Режим истинного движения реализован на шкалах
от 0,5 до 48 миль
Маркеры видеосигналов Доступны 20 настраиваемых символов для марки-
ровки видеосигналов
Навигационный интер-
фейс
Координаты судна, подключенный GPS, точки по-
ворота
Радиолокационные карты
Создание карт и загрузка их в платы памяти/ кар-
триджи (стандартные модели) или встроенную
энергонезависимую память
Смещение центра раз-
вертки
До двух третей радиуса на всех шкалах, кроме 96
миль
Диапазон дальности об-
наружения От 0,125 до 96 миль
Послесвечение
Регулируемые следы послесвечения в истинном и
относительном режимах. В режиме относительно-
го движения возможна индикация истинных сле-
дов послесвечения
Подвижные круги дально-
сти (ПКД)
Два ПКД от 0,01 до 96 миль. Точность каждого
лучше 1 % от шкалы дальности. Один ПКД имеет
смещение центра развертки
Электронные визиры Два электронных визира с шагом 0,1°, точность
±1º. Один визир имеет смещение центра развертки
Линии индекса Четыре линии, полностью настраиваемые по пе-
ленгу и дистанции
Дневной/ночной режимы
Четыре комбинации цвета и яркости. Независимая
регулировка эхосигналов. Установки хранятся в
энергонезависимой памяти
Электронный курсор Индицирует либо координаты объекта, либо пе-
ленг и дистанцию
Азимутальный круг Электронные метки 1,5° и 10°; цифровые значения
через каждые 10° от 0° до 360°
Теневые сектора
Излучение антенны может быть подавлено в двух
секторах, отображаемых на экране. Суммарная ве-
личина секторов до 340°
Автоматическая под-
стройка частоты
Полностью автоматическая с регулируемой об-
ратной связью
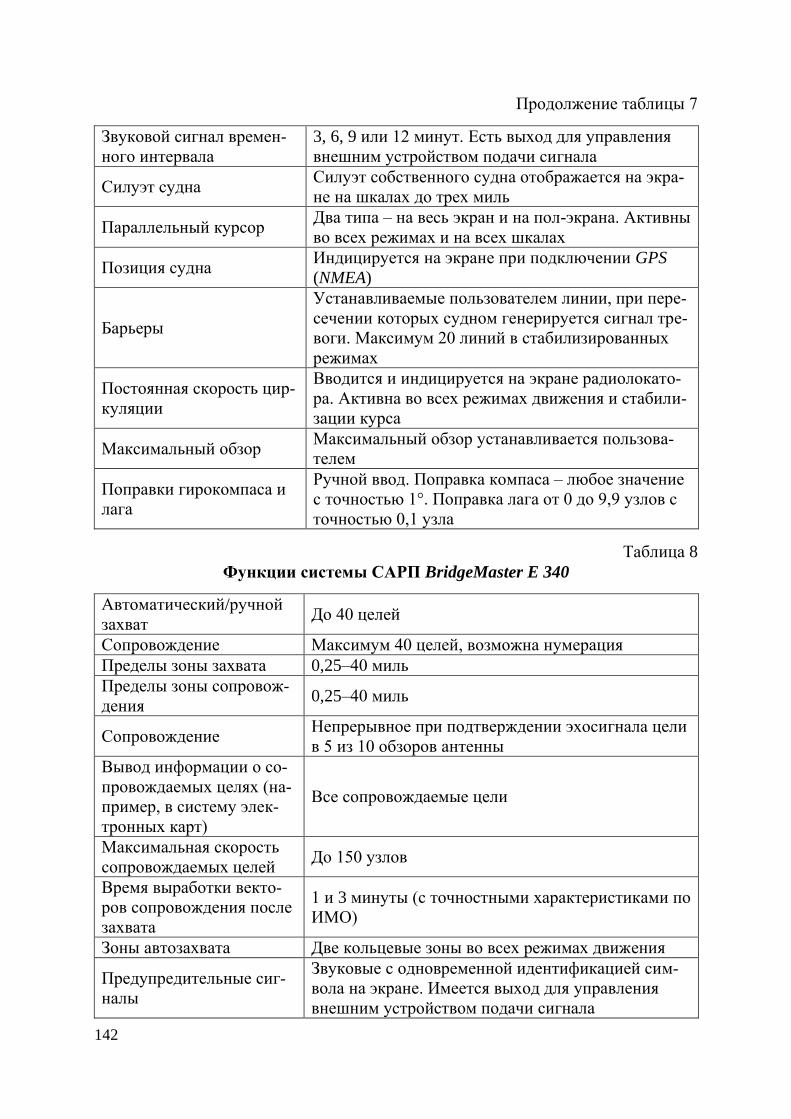
142
Продолжение таблицы 7
Звуковой сигнал времен-
ного интервала
3, 6, 9 или 12 минут. Есть выход для управления
внешним устройством подачи сигнала
Силуэт судна Силуэт собственного судна отображается на экра-
не на шкалах до трех миль
Параллельный курсор Два типа – на весь экран и на пол-экрана. Активны
во всех режимах и на всех шкалах
Позиция судна Индицируется на экране при подключении GPS
(NMEA)
Барьеры
Устанавливаемые пользователем линии, при пере-
сечении которых судном генерируется сигнал тре-
воги. Максимум 20 линий в стабилизированных
режимах
Постоянная скорость цир-
куляции
Вводится и индицируется на экране радиолокато-
ра. Активна во всех режимах движения и стабили-
зации курса
Максимальный обзор Максимальный обзор устанавливается пользова-
телем
Поправки гирокомпаса и
лага
Ручной ввод. Поправка компаса – любое значение
с точностью 1°. Поправка лага от 0 до 9,9 узлов с
точностью 0,1 узла
Таблица 8
Функции системы САРП BridgeMaster E 340
Автоматический/ручной
захват До 40 целей
Сопровождение Максимум 40 целей, возможна нумерация
Пределы зоны захвата 0,25–40 миль
Пределы зоны сопровож-
дения 0,25–40 миль
Сопровождение Непрерывное при подтверждении эхосигнала цели
в 5 из 10 обзоров антенны
Вывод информации о со-
провождаемых целях (на-
пример, в систему элек-
тронных карт)
Все сопровождаемые цели
Максимальная скорость
сопровождаемых целей До 150 узлов
Время выработки векто-
ров сопровождения после
захвата
1 и 3 минуты (с точностными характеристиками по
ИМО)
Зоны автозахвата Две кольцевые зоны во всех режимах движения
Предупредительные сиг-
налы
Звуковые с одновременной идентификацией сим-
вола на экране. Имеется выход для управления
внешним устройством подачи сигнала
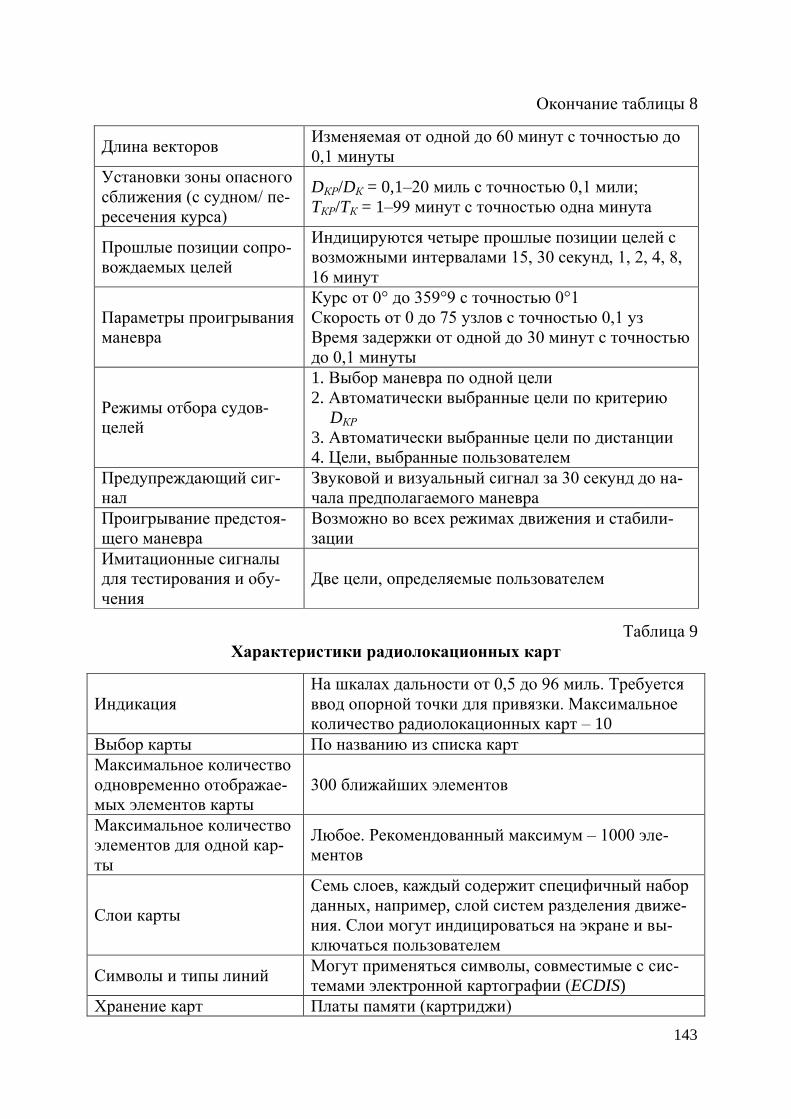
143
Окончание таблицы 8
Длина векторов Изменяемая от одной до 60 минут с точностью до
0,1 минуты
Установки зоны опасного
сближения (с судном/ пе-
ресечения курса)
DКР/DК = 0,1–20 миль с точностью 0,1 мили;
TКР/TК = 1–99 минут с точностью одна минута
Прошлые позиции сопро-
вождаемых целей
Индицируются четыре прошлые позиции целей с
возможными интервалами 15, 30 секунд, 1, 2, 4, 8,
16 минут
Параметры проигрывания
маневра
Курс от 0° до 359°9 с точностью 0°1
Скорость от 0 до 75 узлов с точностью 0,1 уз
Время задержки от одной до 30 минут с точностью
до 0,1 минуты
Режимы отбора судов-
целей
1. Выбор маневра по одной цели
2. Автоматически выбранные цели по критерию
DКР
3. Автоматически выбранные цели по дистанции
4. Цели, выбранные пользователем
Предупреждающий сиг-
нал
Звуковой и визуальный сигнал за 30 секунд до на-
чала предполагаемого маневра
Проигрывание предстоя-
щего маневра
Возможно во всех режимах движения и стабили-
зации
Имитационные сигналы
для тестирования и обу-
чения
Две цели, определяемые пользователем
Таблица 9
Характеристики радиолокационных карт
Индикация
На шкалах дальности от 0,5 до 96 миль. Требуется
ввод опорной точки для привязки. Максимальное
количество радиолокационных карт – 10
Выбор карты По названию из списка карт
Максимальное количество
одновременно отображае-
мых элементов карты
300 ближайших элементов
Максимальное количество
элементов для одной кар-
ты
Любое. Рекомендованный максимум – 1000 эле-
ментов
Слои карты
Семь слоев, каждый содержит специфичный набор
данных, например, слой систем разделения движе-
ния. Слои могут индицироваться на экране и вы-
ключаться пользователем
Символы и типы линий Могут применяться символы, совместимые с сис-
темами электронной картографии (ECDIS)
Хранение карт Платы памяти (картриджи)
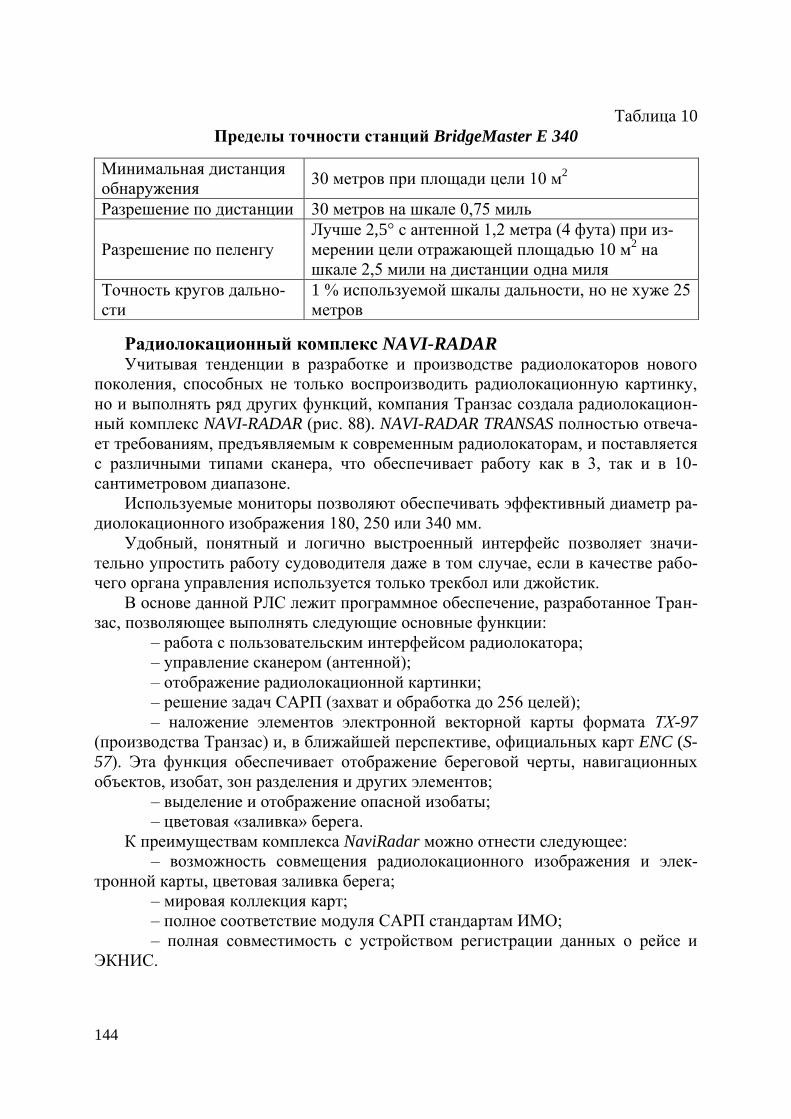
144
Таблица 10
Пределы точности станций BridgeMaster E 340
Минимальная дистанция
обнаружения 30 метров при площади цели 10 м
2
Разрешение по дистанции 30 метров на шкале 0,75 миль
Разрешение по пеленгу
Лучше 2,5° с антенной 1,2 метра (4 фута) при из-
мерении цели отражающей площадью 10 м2 на
шкале 2,5 мили на дистанции одна миля
Точность кругов дально-
сти
1 % используемой шкалы дальности, но не хуже 25
метров
Радиолокационный комплекс NAVI-RADAR Учитывая тенденции в разработке и производстве радиолокаторов нового
поколения, способных не только воспроизводить радиолокационную картинку,
но и выполнять ряд других функций, компания Транзас создала радиолокацион-
ный комплекс NAVI-RADAR (рис. 88). NAVI-RADAR TRANSAS полностью отвеча-
ет требованиям, предъявляемым к современным радиолокаторам, и поставляется
с различными типами сканера, что обеспечивает работу как в 3, так и в 10-
сантиметровом диапазоне.
Используемые мониторы позволяют обеспечивать эффективный диаметр ра-
диолокационного изображения 180, 250 или 340 мм.
Удобный, понятный и логично выстроенный интерфейс позволяет значи-
тельно упростить работу судоводителя даже в том случае, если в качестве рабо-
чего органа управления используется только трекбол или джойстик.
В основе данной РЛС лежит программное обеспечение, разработанное Тран-
зас, позволяющее выполнять следующие основные функции:
– работа с пользовательским интерфейсом радиолокатора;
– управление сканером (антенной);
– отображение радиолокационной картинки;
– решение задач САРП (захват и обработка до 256 целей);
– наложение элементов электронной векторной карты формата ТХ-97
(производства Транзас) и, в ближайшей перспективе, официальных карт ENC (S-
57). Эта функция обеспечивает отображение береговой черты, навигационных
объектов, изобат, зон разделения и других элементов;
– выделение и отображение опасной изобаты;
– цветовая «заливка» берега.
К преимуществам комплекса NaviRadar можно отнести следующее:
– возможность совмещения радиолокационного изображения и элек-
тронной карты, цветовая заливка берега;
– мировая коллекция карт;
– полное соответствие модуля САРП стандартам ИМО;
– полная совместимость с устройством регистрации данных о рейсе и
ЭКНИС.
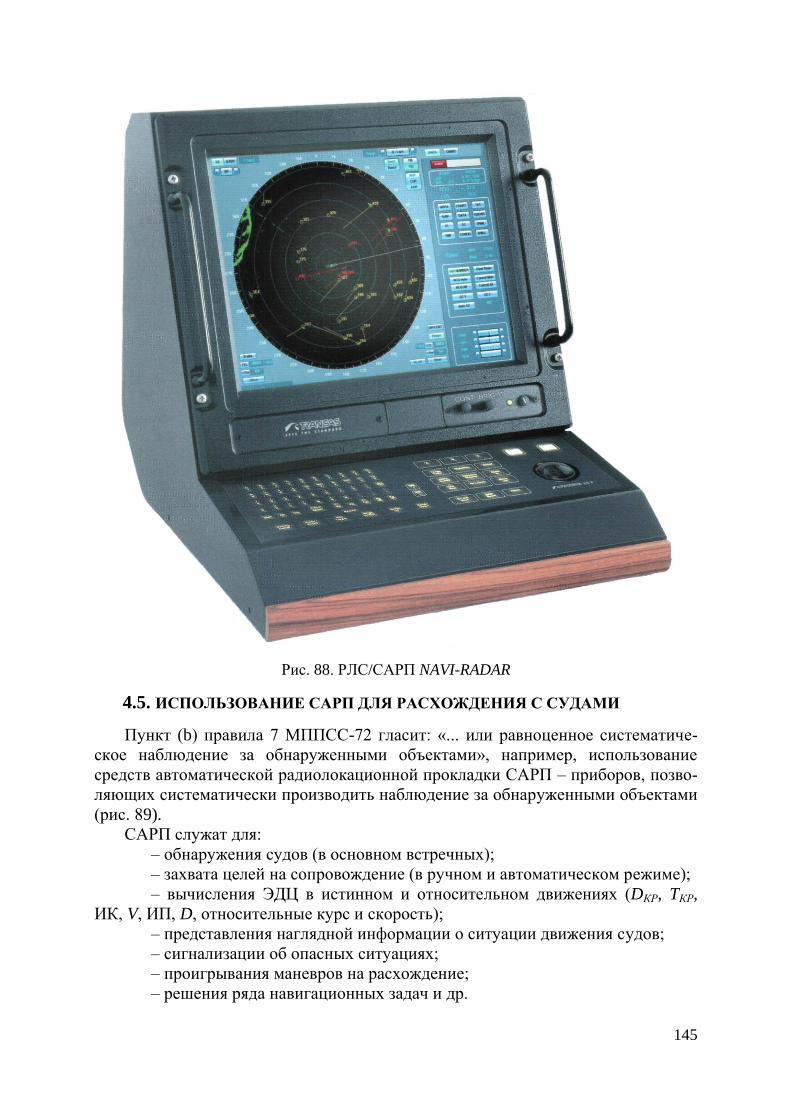
145
Рис. 88. РЛС/САРП NAVI-RADAR
4.5. ИСПОЛЬЗОВАНИЕ САРП ДЛЯ РАСХОЖДЕНИЯ С СУДАМИ
Пункт (b) правила 7 МППСС-72 гласит: «... или равноценное систематиче-
ское наблюдение за обнаруженными объектами», например, использование
средств автоматической радиолокационной прокладки САРП – приборов, позво-
ляющих систематически производить наблюдение за обнаруженными объектами
(рис. 89).
САРП служат для:
– обнаружения судов (в основном встречных);
– захвата целей на сопровождение (в ручном и автоматическом режиме);
– вычисления ЭДЦ в истинном и относительном движениях (DКР, TКР,
ИК, V, ИП, D, относительные курс и скорость);
– представления наглядной информации о ситуации движения судов;
– сигнализации об опасных ситуациях;
– проигрывания маневров на расхождение;
– решения ряда навигационных задач и др.
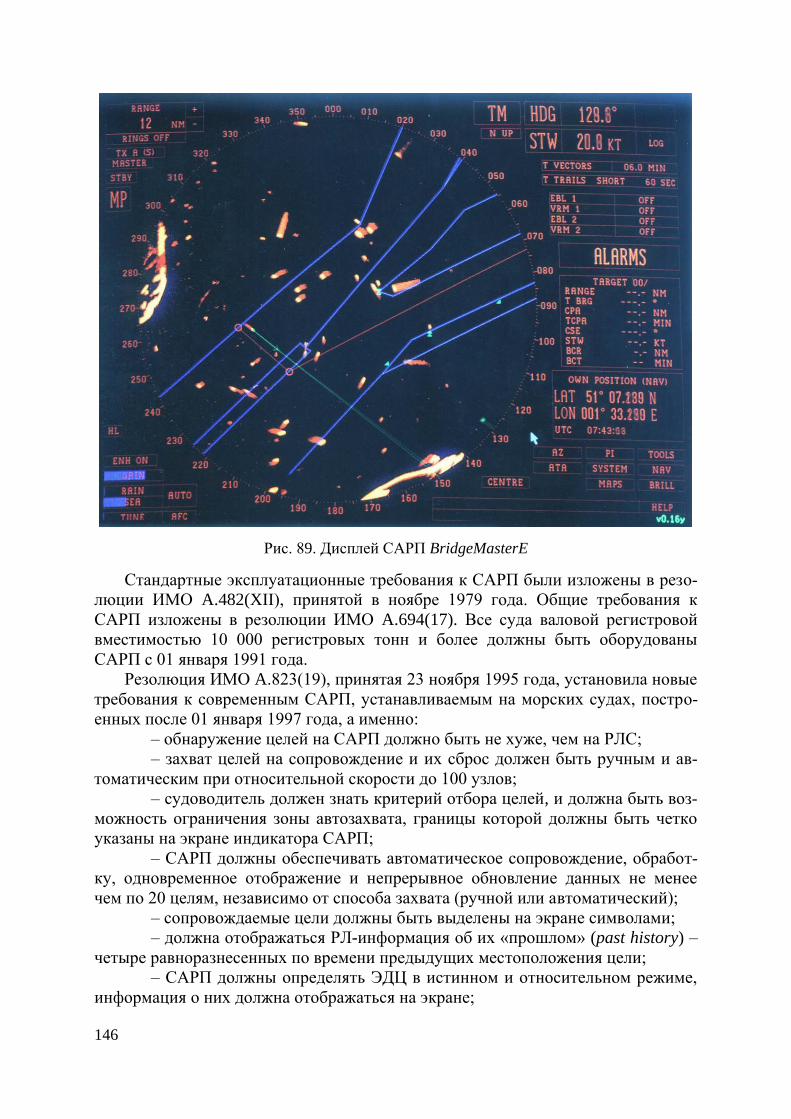
146
Рис. 89. Дисплей САРП BridgeMasterE
Стандартные эксплуатационные требования к САРП были изложены в резо-
люции ИМО A.482(XII), принятой в ноябре 1979 года. Общие требования к
САРП изложены в резолюции ИМО A.694(17). Все суда валовой регистровой
вместимостью 10 000 регистровых тонн и более должны быть оборудованы
САРП с 01 января 1991 года.
Резолюция ИМО A.823(19), принятая 23 ноября 1995 года, установила новые
требования к современным САРП, устанавливаемым на морских судах, постро-
енных после 01 января 1997 года, а именно:
– обнаружение целей на САРП должно быть не хуже, чем на РЛС;
– захват целей на сопровождение и их сброс должен быть ручным и ав-
томатическим при относительной скорости до 100 узлов;
– судоводитель должен знать критерий отбора целей, и должна быть воз-
можность ограничения зоны автозахвата, границы которой должны быть четко
указаны на экране индикатора САРП;
– САРП должны обеспечивать автоматическое сопровождение, обработ-
ку, одновременное отображение и непрерывное обновление данных не менее
чем по 20 целям, независимо от способа захвата (ручной или автоматический);
– сопровождаемые цели должны быть выделены на экране символами;
– должна отображаться РЛ-информация об их «прошлом» (past history) –
четыре равноразнесенных по времени предыдущих местоположения цели;
– САРП должны определять ЭДЦ в истинном и относительном режиме,
информация о них должна отображаться на экране;
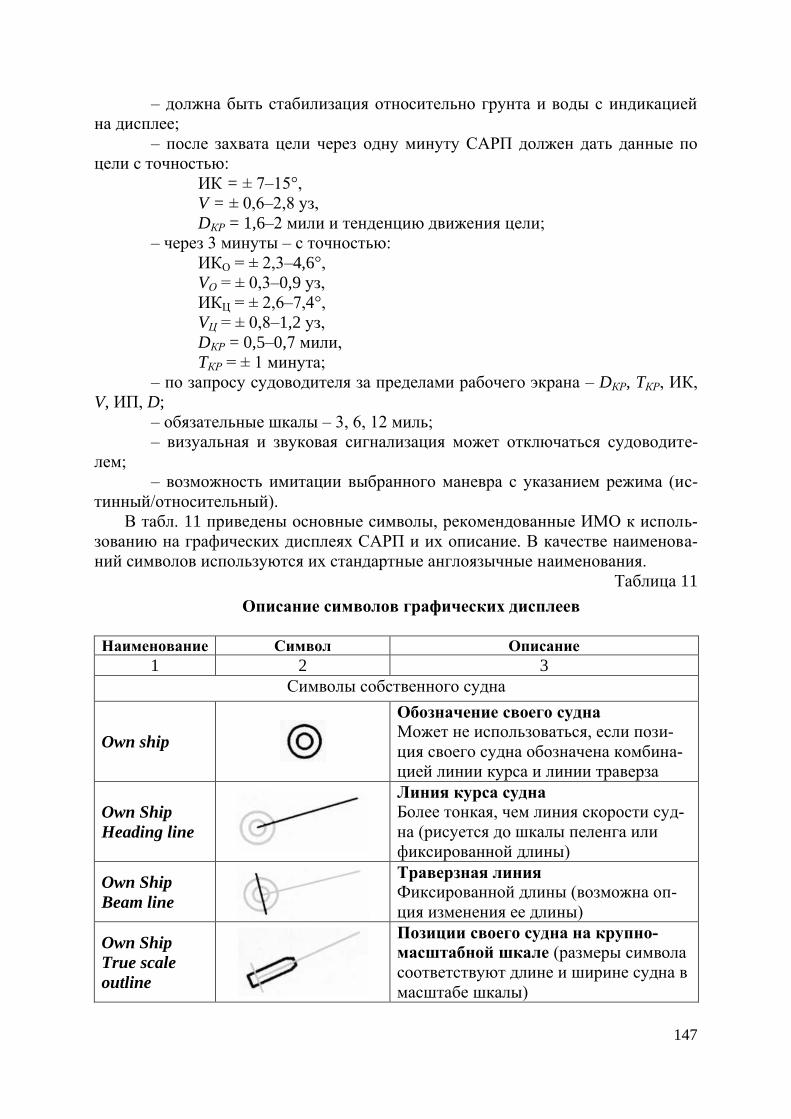
147
– должна быть стабилизация относительно грунта и воды с индикацией
на дисплее;
– после захвата цели через одну минуту САРП должен дать данные по
цели с точностью:
ИК = ± 7–15°,
V = ± 0,6–2,8 уз,
DКР = 1,6–2 мили и тенденцию движения цели;
– через 3 минуты – с точностью:
ИКО = ± 2,3–4,6°,
VО = ± 0,3–0,9 уз,
ИКЦ = ± 2,6–7,4°,
VЦ = ± 0,8–1,2 уз,
DКР = 0,5–0,7 мили,
TКР = ± 1 минута;
– по запросу судоводителя за пределами рабочего экрана – DКР, TКР, ИК,
V, ИП, D;
– обязательные шкалы – 3, 6, 12 миль;
– визуальная и звуковая сигнализация может отключаться судоводите-
лем;
– возможность имитации выбранного маневра с указанием режима (ис-
тинный/относительный).
В табл. 11 приведены основные символы, рекомендованные ИМО к исполь-
зованию на графических дисплеях САРП и их описание. В качестве наименова-
ний символов используются их стандартные англоязычные наименования.
Таблица 11
Описание символов графических дисплеев
Наименование Символ Описание
1 2 3
Символы собственного судна
Own ship
Обозначение своего судна
Может не использоваться, если пози-
ция своего судна обозначена комбина-
цией линии курса и линии траверза
Own Ship
Heading line
Линия курса судна
Более тонкая, чем линия скорости суд-
на (рисуется до шкалы пеленга или
фиксированной длины)
Own Ship
Beam line
Траверзная линия
Фиксированной длины (возможна оп-
ция изменения ее длины)
Own Ship
True scale
outline
Позиции своего судна на крупно-
масштабной шкале (размеры символа
соответствуют длине и ширине судна в
масштабе шкалы)
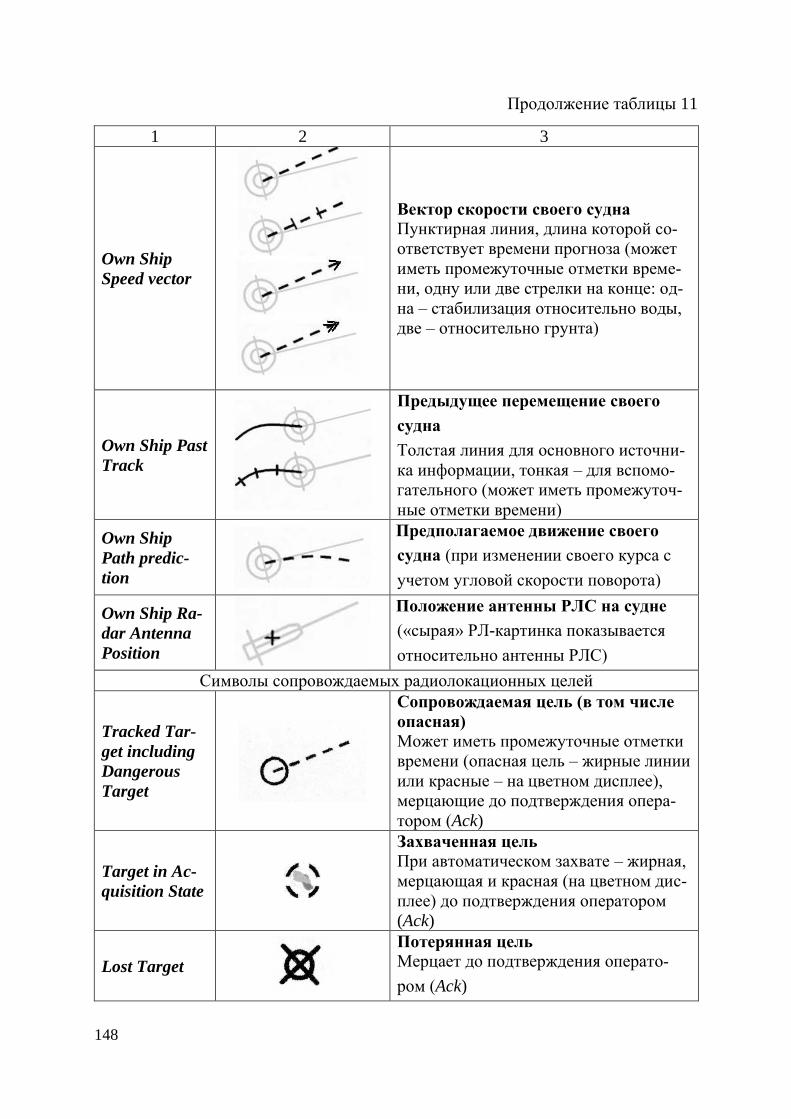
148
Продолжение таблицы 11
1 2 3
Own Ship
Speed vector
Вектор скорости своего судна
Пунктирная линия, длина которой со-
ответствует времени прогноза (может
иметь промежуточные отметки време-
ни, одну или две стрелки на конце: од-
на – стабилизация относительно воды,
две – относительно грунта)
Own Ship Past
Track
Предыдущее перемещение своего
судна
Толстая линия для основного источни-
ка информации, тонкая – для вспомо-
гательного (может иметь промежуточ-
ные отметки времени)
Own Ship
Path predic-
tion
Предполагаемое движение своего
судна (при изменении своего курса с
учетом угловой скорости поворота)
Own Ship Ra-
dar Antenna
Position
Положение антенны РЛС на судне
(«сырая» РЛ-картинка показывается
относительно антенны РЛС)
Символы сопровождаемых радиолокационных целей
Tracked Tar-
get including
Dangerous
Target
Сопровождаемая цель (в том числе
опасная)
Может иметь промежуточные отметки
времени (опасная цель – жирные линии
или красные – на цветном дисплее),
мерцающие до подтверждения опера-
тором (Ack)
Target in Ac-
quisition State
Захваченная цель
При автоматическом захвате – жирная,
мерцающая и красная (на цветном дис-
плее) до подтверждения оператором
(Ack)
Lost Target
Потерянная цель
Мерцает до подтверждения операто-
ром (Ack)
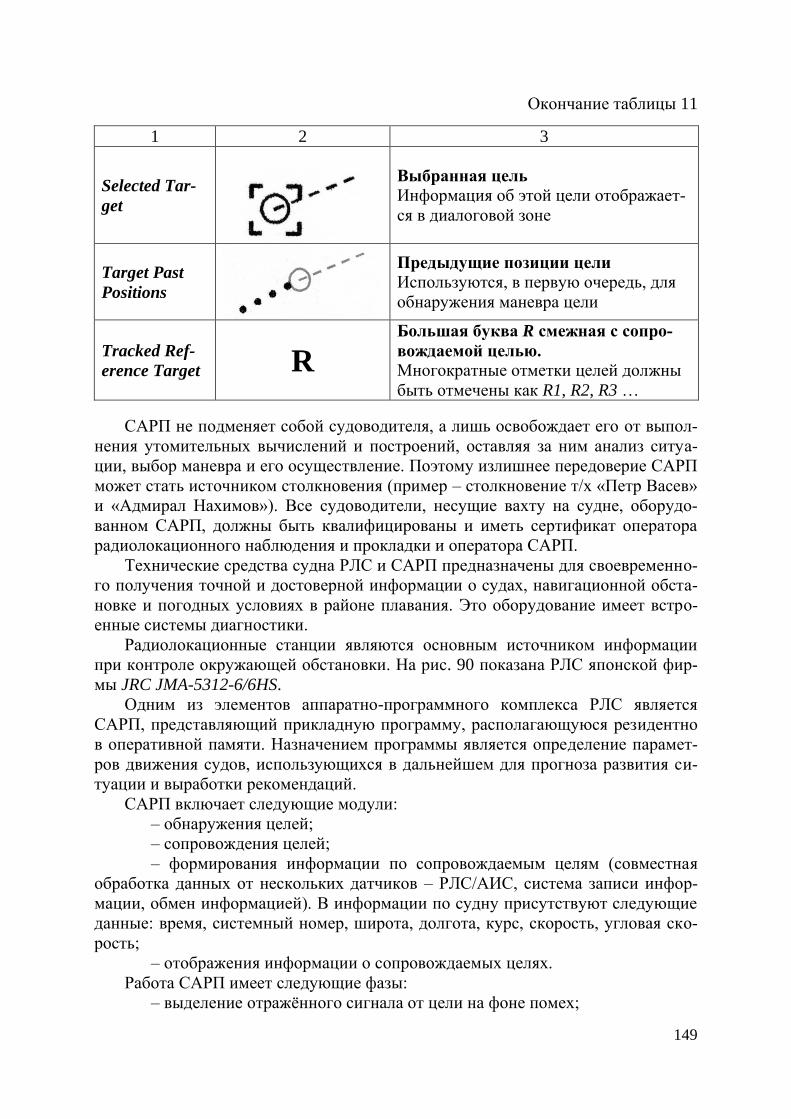
149
Окончание таблицы 11
1 2 3
Selected Tar-
get
Выбранная цель
Информация об этой цели отображает-
ся в диалоговой зоне
Target Past
Positions
Предыдущие позиции цели
Используются, в первую очередь, для
обнаружения маневра цели
Tracked Ref-
erence Target R Большая буква R смежная с сопро-
вождаемой целью.
Многократные отметки целей должны
быть отмечены как R1, R2, R3 …
САРП не подменяет собой судоводителя, а лишь освобождает его от выпол-
нения утомительных вычислений и построений, оставляя за ним анализ ситуа-
ции, выбор маневра и его осуществление. Поэтому излишнее передоверие САРП
может стать источником столкновения (пример – столкновение т/х «Петр Васев»
и «Адмирал Нахимов»). Все судоводители, несущие вахту на судне, оборудо-
ванном САРП, должны быть квалифицированы и иметь сертификат оператора
радиолокационного наблюдения и прокладки и оператора САРП.
Технические средства судна РЛС и САРП предназначены для своевременно-
го получения точной и достоверной информации о судах, навигационной обста-
новке и погодных условиях в районе плавания. Это оборудование имеет встро-
енные системы диагностики.
Радиолокационные станции являются основным источником информации
при контроле окружающей обстановки. На рис. 90 показана РЛС японской фир-
мы JRC JMA-5312-6/6HS.
Одним из элементов аппаратно-программного комплекса РЛС является
САРП, представляющий прикладную программу, располагающуюся резидентно
в оперативной памяти. Назначением программы является определение парамет-
ров движения судов, использующихся в дальнейшем для прогноза развития си-
туации и выработки рекомендаций.
САРП включает следующие модули:
– обнаружения целей;
– сопровождения целей;
– формирования информации по сопровождаемым целям (совместная
обработка данных от нескольких датчиков – РЛС/АИС, система записи инфор-
мации, обмен информацией). В информации по судну присутствуют следующие
данные: время, системный номер, широта, долгота, курс, скорость, угловая ско-
рость;
– отображения информации о сопровождаемых целях.
Работа САРП имеет следующие фазы:
– выделение отражѐнного сигнала от цели на фоне помех;
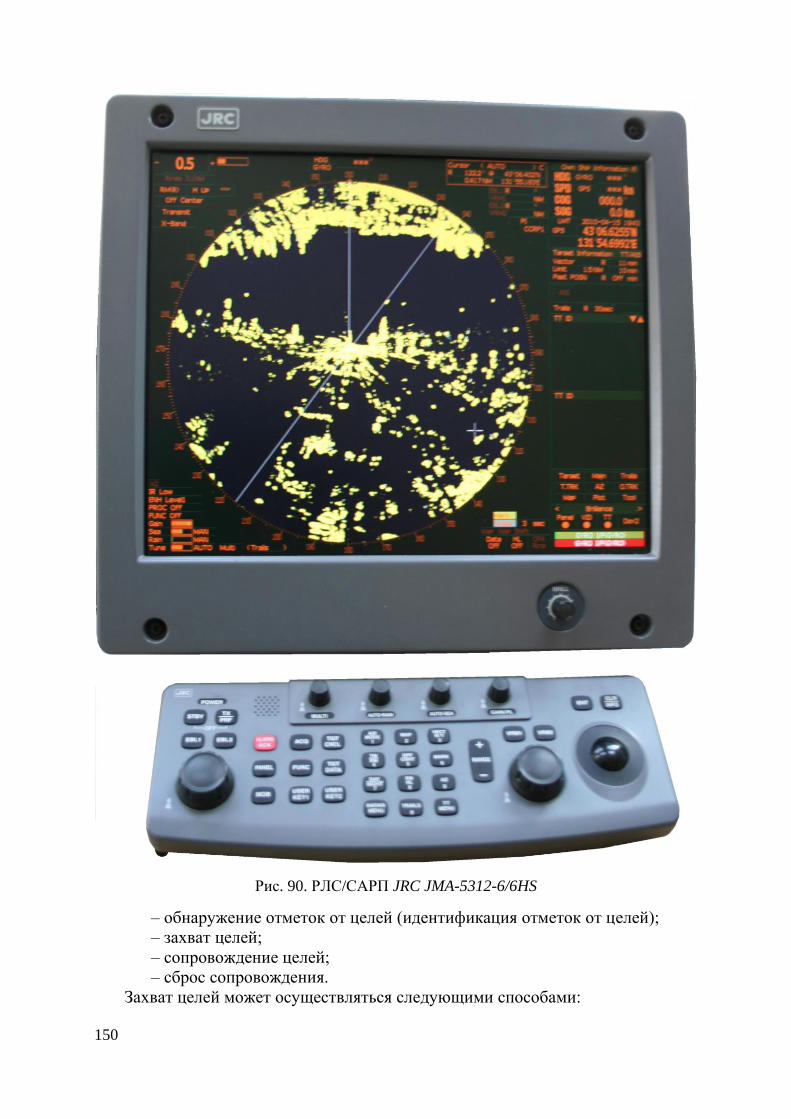
150
Рис. 90. РЛС/САРП JRC JMA-5312-6/6HS
– обнаружение отметок от целей (идентификация отметок от целей);
– захват целей;
– сопровождение целей;
– сброс сопровождения.
Захват целей может осуществляться следующими способами:
151
– ручной захват (строб набрасывается по положению курсора);
– автоматический захват в установленных зонах (зоны автозахвата долж-
ны быть обозначены на мониторе);
– автоматический захват во всей зоне наблюдения.
Захват цели должен быть успешным даже при флуктуирующей отметке (Р =
50 %). РЛС должна обеспечить захват и сопровождение цели при появлении эхо-
сигнала в пяти обзорах из десяти в течение 2 мин. Захват должен осуществляться
при скорости целей до 70 уз. В случае выполнения условий захвата заполняется
свободная информационная структура в памяти ЭВМ, отведѐнная под цель. По-
сле выполнения процедуры захвата цель должна отобразиться на экране в тече-
ние трех секунд. Устанавливается признак активности (в структуре находится
информация по судну, которое сопровождается), записываются значения пеленга
и расстояния, нулевое значение вектора скорости. Массив структур определяется
числом целей, которые система может сопровождать.
При сопровождении цели положение строба прогнозируется по значениям
курса и скорости. Сопровождение должно быть устойчивым даже для скорост-
ных целей (до 50 уз). Выдача данных о сопровождаемом судне осуществляется
не позднее 1 мин после захвата. Возможна потеря цели в 10–15 % случаев. Это
обычно происходит при сопровождении скоростных маневренных целей. В про-
цессе сопровождения вырабатываются текущие координаты судна, курс, ско-
рость. Размеры строба адаптируются по размерам отметки с учѐтом случайных
ошибок измерений. При каждом обновлении первичной информации (по каждо-
му обороту антенны) происходит обновление информации по целям (координа-
ты, курс, скорость и др.). Рассчитываются параметры расхождения с другими
целями, в качестве которых могут приниматься другие суда или любые объекты
на электронной карте. Параметры расхождения могут иметь графическое ото-
бражение. Параметры движения целей отображаются в формулярах по каждому
судну. Погрешности определения параметров движения цели (цель движется
перпендикулярно направлению на РЛС на расстоянии 6 миль со скоростью 10
уз): по дальности – 30 м; по азимуту – 0,6°; по курсу – 2°; по скорости – 1,2 уз.
Тревожные сообщения вырабатываются при выходе параметров сопровождения
за установленные границы и имеют аудио- и видеопредставление. Окончание
сопровождения осуществляется в следующих случаях:
– по команде оператора РЛС/САРП;
– при пропадании радиолокационного сигнала и выполнении условий
сброса сопровождения (в случае потери эхосигнала на шести последовательных
оборотах цель снимается с сопровождения, но отметка на экране остаѐтся с про-
должением экстраполяции позиции по вектору скорости).
При использовании информации САРП следует учитывать следующие огра-
ничения:
– даже в установившемся режиме сопровождения точность САРП только
в 1,5–2 раза выше точности ручной прокладки;
– только через 3 минуты обеспечивается достаточная точность данных по
цели в случае ее маневра и маневра собственного судна;
– маневрирование цели замечается приблизительно через одну минуту и
с очень большими погрешностями; последовательные незначительные измене-
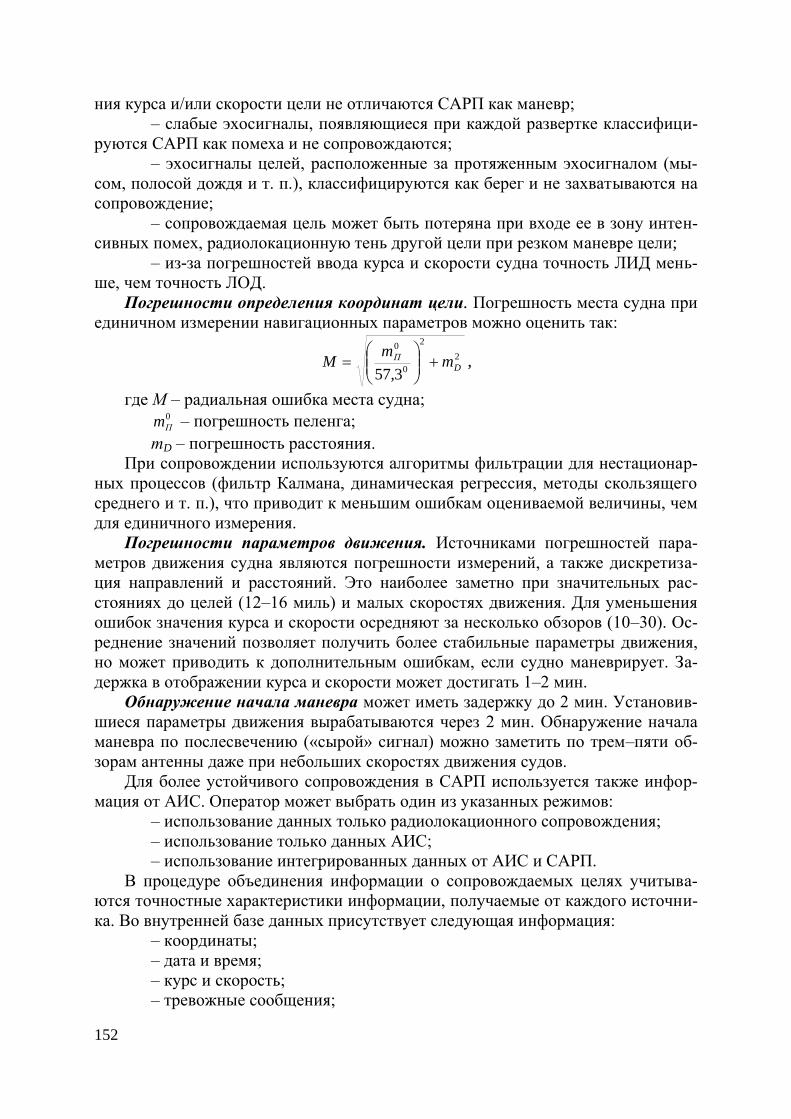
152
ния курса и/или скорости цели не отличаются САРП как маневр;
– слабые эхосигналы, появляющиеся при каждой развертке классифици-
руются САРП как помеха и не сопровождаются;
– эхосигналы целей, расположенные за протяженным эхосигналом (мы-
сом, полосой дождя и т. п.), классифицируются как берег и не захватываются на
сопровождение;
– сопровождаемая цель может быть потеряна при входе ее в зону интен-
сивных помех, радиолокационную тень другой цели при резком маневре цели;
– из-за погрешностей ввода курса и скорости судна точность ЛИД мень-
ше, чем точность ЛОД.
Погрешности определения координат цели. Погрешность места судна при
единичном измерении навигационных параметров можно оценить так:
2
2
0
0
3,57D
П mm
M
,
где М – радиальная ошибка места судна; 0
Пm – погрешность пеленга;
тD – погрешность расстояния.
При сопровождении используются алгоритмы фильтрации для нестационар-
ных процессов (фильтр Калмана, динамическая регрессия, методы скользящего
среднего и т. п.), что приводит к меньшим ошибкам оцениваемой величины, чем
для единичного измерения.
Погрешности параметров движения. Источниками погрешностей пара-
метров движения судна являются погрешности измерений, а также дискретиза-
ция направлений и расстояний. Это наиболее заметно при значительных рас-
стояниях до целей (12–16 миль) и малых скоростях движения. Для уменьшения
ошибок значения курса и скорости осредняют за несколько обзоров (10–30). Ос-
реднение значений позволяет получить более стабильные параметры движения,
но может приводить к дополнительным ошибкам, если судно маневрирует. За-
держка в отображении курса и скорости может достигать 1–2 мин.
Обнаружение начала маневра может иметь задержку до 2 мин. Установив-
шиеся параметры движения вырабатываются через 2 мин. Обнаружение начала
маневра по послесвечению («сырой» сигнал) можно заметить по трем–пяти об-
зорам антенны даже при небольших скоростях движения судов.
Для более устойчивого сопровождения в САРП используется также инфор-
мация от АИС. Оператор может выбрать один из указанных режимов:
– использование данных только радиолокационного сопровождения;
– использование только данных АИС;
– использование интегрированных данных от АИС и САРП.
В процедуре объединения информации о сопровождаемых целях учитыва-
ются точностные характеристики информации, получаемые от каждого источни-
ка. Во внутренней базе данных присутствует следующая информация:
– координаты;
– дата и время;
– курс и скорость;
– тревожные сообщения;
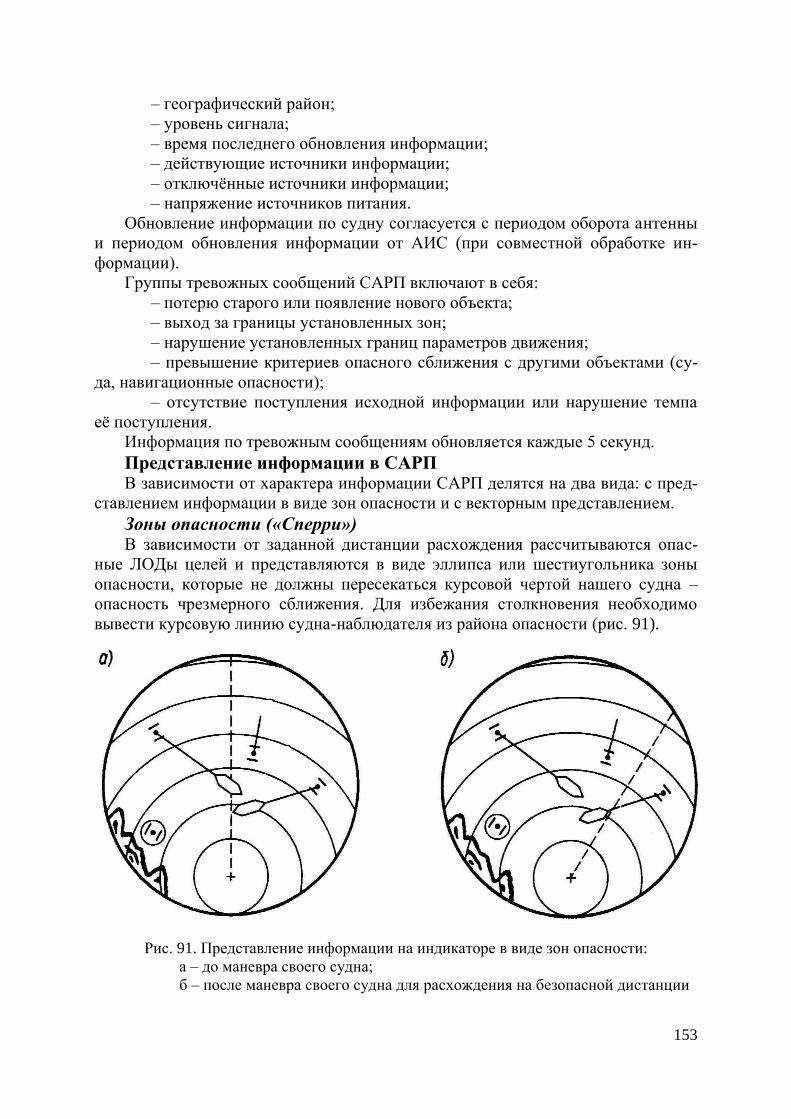
153
– географический район;
– уровень сигнала;
– время последнего обновления информации;
– действующие источники информации;
– отключѐнные источники информации;
– напряжение источников питания.
Обновление информации по судну согласуется с периодом оборота антенны
и периодом обновления информации от АИС (при совместной обработке ин-
формации).
Группы тревожных сообщений САРП включают в себя:
– потерю старого или появление нового объекта;
– выход за границы установленных зон;
– нарушение установленных границ параметров движения;
– превышение критериев опасного сближения с другими объектами (су-
да, навигационные опасности);
– отсутствие поступления исходной информации или нарушение темпа
еѐ поступления.
Информация по тревожным сообщениям обновляется каждые 5 секунд.
Представление информации в САРП В зависимости от характера информации САРП делятся на два вида: с пред-
ставлением информации в виде зон опасности и с векторным представлением.
Зоны опасности («Сперри») В зависимости от заданной дистанции расхождения рассчитываются опас-
ные ЛОДы целей и представляются в виде эллипса или шестиугольника зоны
опасности, которые не должны пересекаться курсовой чертой нашего судна –
опасность чрезмерного сближения. Для избежания столкновения необходимо
вывести курсовую линию судна-наблюдателя из района опасности (рис. 91).
Рис. 91. Представление информации на индикаторе в виде зон опасности:
а – до маневра своего судна;
б – после маневра своего судна для расхождения на безопасной дистанции
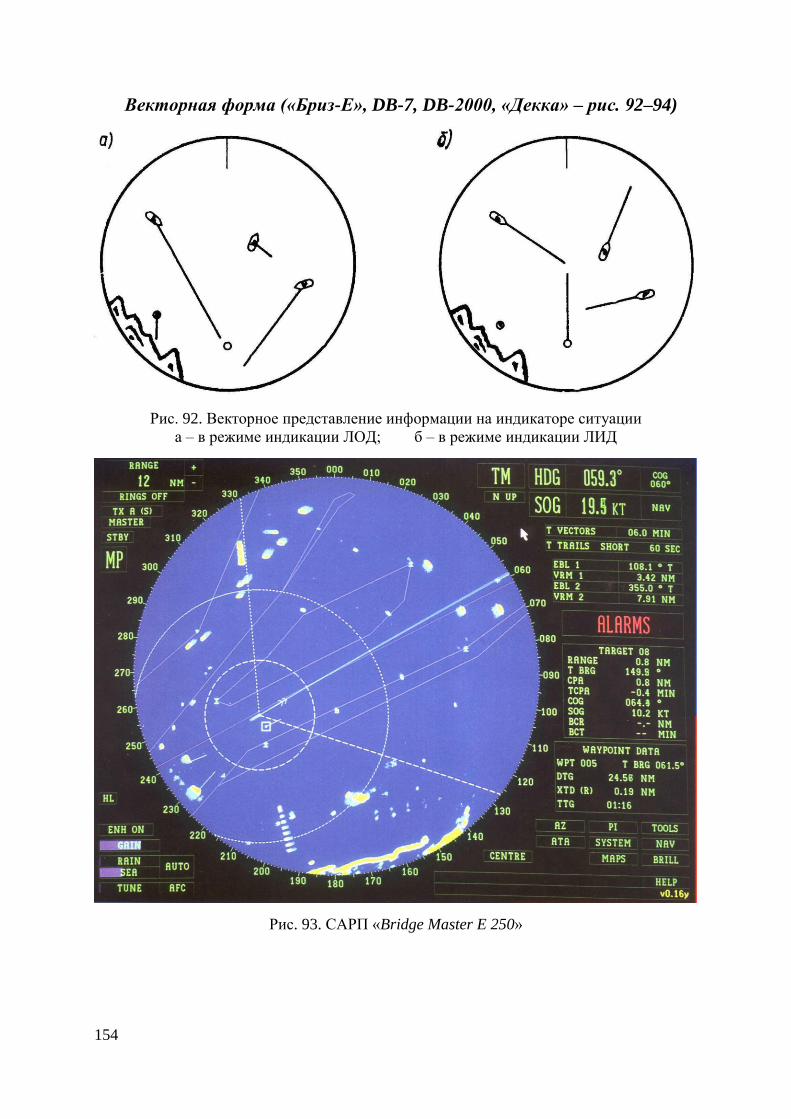
154
Векторная форма («Бриз-Е», DB-7, DB-2000, «Декка» – рис. 92–94)
Рис. 92. Векторное представление информации на индикаторе ситуации
а – в режиме индикации ЛОД; б – в режиме индикации ЛИД
Рис. 93. САРП «Bridge Master E 250»
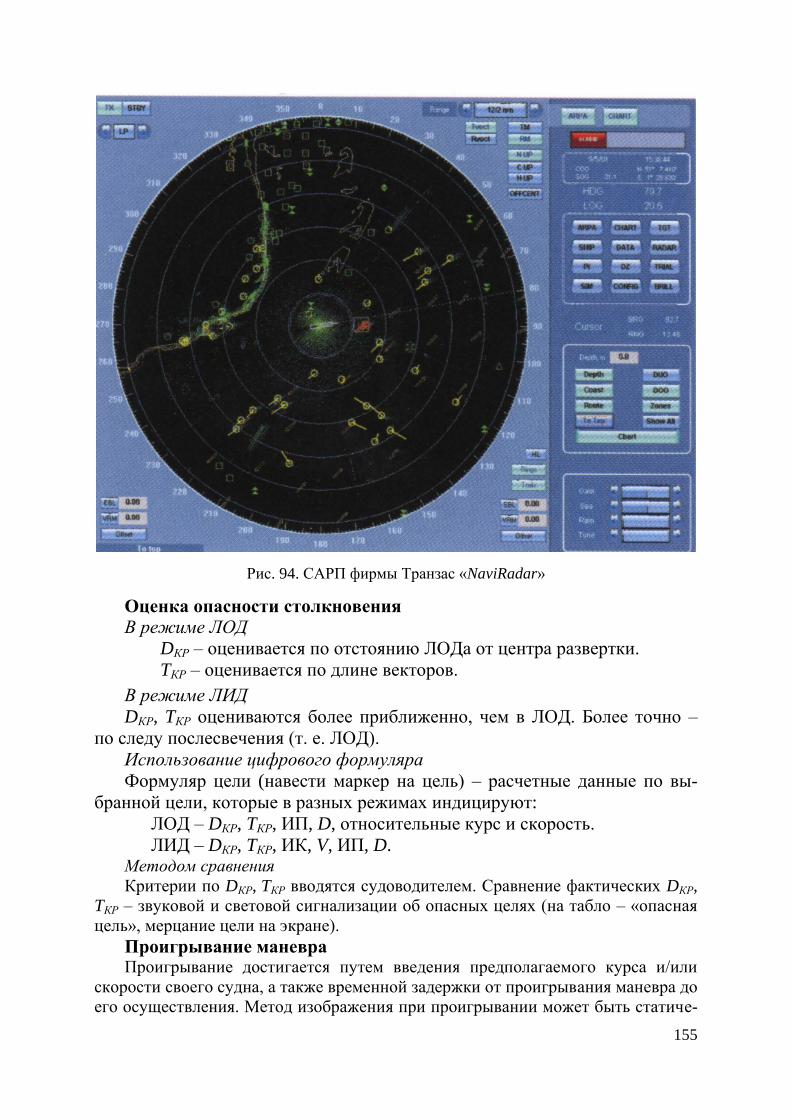
155
Рис. 94. САРП фирмы Транзас «NaviRadar»
Оценка опасности столкновения
В режиме ЛОД
DКР – оценивается по отстоянию ЛОДа от центра развертки.
TКР – оценивается по длине векторов.
В режиме ЛИД
DКР, TКР оцениваются более приближенно, чем в ЛОД. Более точно –
по следу послесвечения (т. е. ЛОД).
Использование цифрового формуляра
Формуляр цели (навести маркер на цель) – расчетные данные по вы-
бранной цели, которые в разных режимах индицируют:
ЛОД – DКР, TКР, ИП, D, относительные курс и скорость.
ЛИД – DКР, TКР, ИК, V, ИП, D. Методом сравнения
Критерии по DКР, TКР вводятся судоводителем. Сравнение фактических DКР,
TКР – звуковой и световой сигнализации об опасных целях (на табло – «опасная
цель», мерцание цели на экране).
Проигрывание маневра Проигрывание достигается путем введения предполагаемого курса и/или
скорости своего судна, а также временной задержки от проигрывания маневра до
его осуществления. Метод изображения при проигрывании может быть статиче-
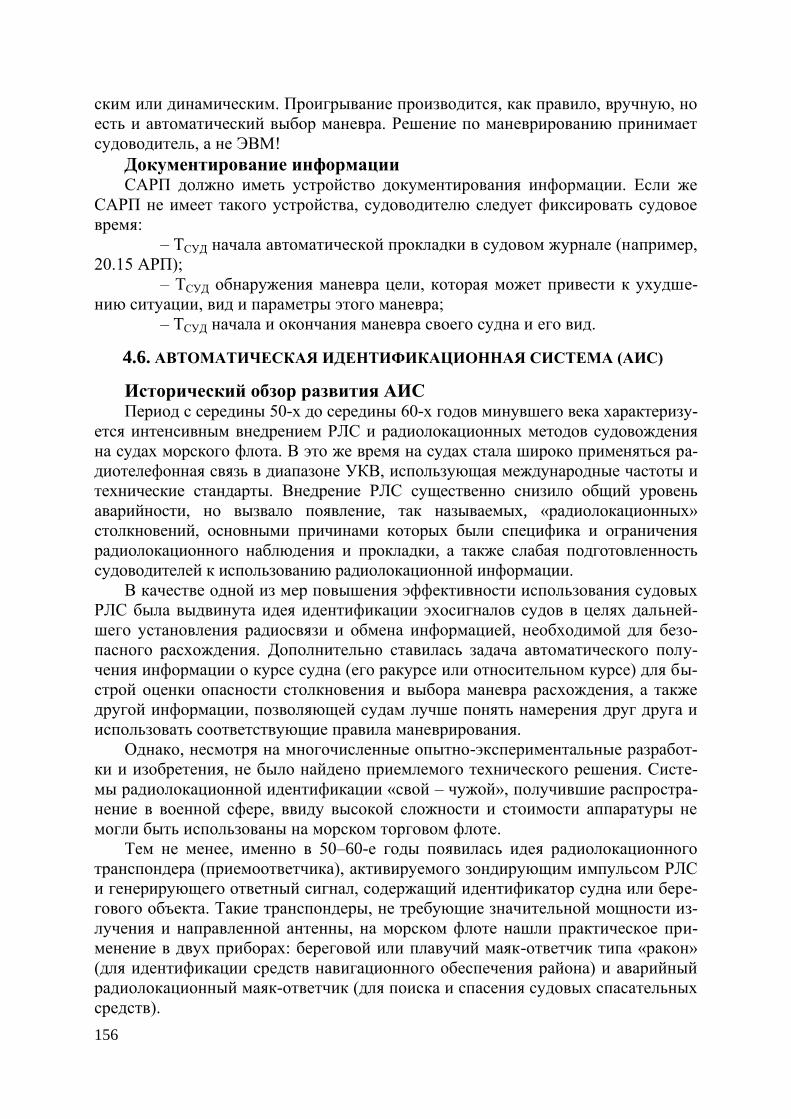
156
ским или динамическим. Проигрывание производится, как правило, вручную, но
есть и автоматический выбор маневра. Решение по маневрированию принимает
судоводитель, а не ЭВМ!
Документирование информации САРП должно иметь устройство документирования информации. Если же
САРП не имеет такого устройства, судоводителю следует фиксировать судовое
время:
– ТСУД начала автоматической прокладки в судовом журнале (например,
20.15 АРП);
– ТСУД обнаружения маневра цели, которая может привести к ухудше-
нию ситуации, вид и параметры этого маневра;
– ТСУД начала и окончания маневра своего судна и его вид.
4.6. АВТОМАТИЧЕСКАЯ ИДЕНТИФИКАЦИОННАЯ СИСТЕМА (АИС)
Исторический обзор развития АИС Период с середины 50-х до середины 60-х годов минувшего века характеризу-
ется интенсивным внедрением РЛС и радиолокационных методов судовождения
на судах морского флота. В это же время на судах стала широко применяться ра-
диотелефонная связь в диапазоне УКВ, использующая международные частоты и
технические стандарты. Внедрение РЛС существенно снизило общий уровень
аварийности, но вызвало появление, так называемых, «радиолокационных»
столкновений, основными причинами которых были специфика и ограничения
радиолокационного наблюдения и прокладки, а также слабая подготовленность
судоводителей к использованию радиолокационной информации.
В качестве одной из мер повышения эффективности использования судовых
РЛС была выдвинута идея идентификации эхосигналов судов в целях дальней-
шего установления радиосвязи и обмена информацией, необходимой для безо-
пасного расхождения. Дополнительно ставилась задача автоматического полу-
чения информации о курсе судна (его ракурсе или относительном курсе) для бы-
строй оценки опасности столкновения и выбора маневра расхождения, а также
другой информации, позволяющей судам лучше понять намерения друг друга и
использовать соответствующие правила маневрирования.
Однако, несмотря на многочисленные опытно-экспериментальные разработ-
ки и изобретения, не было найдено приемлемого технического решения. Систе-
мы радиолокационной идентификации «свой – чужой», получившие распростра-
нение в военной сфере, ввиду высокой сложности и стоимости аппаратуры не
могли быть использованы на морском торговом флоте.
Тем не менее, именно в 50–60-е годы появилась идея радиолокационного
транспондера (приемоответчика), активируемого зондирующим импульсом РЛС
и генерирующего ответный сигнал, содержащий идентификатор судна или бере-
гового объекта. Такие транспондеры, не требующие значительной мощности из-
лучения и направленной антенны, на морском флоте нашли практическое при-
менение в двух приборах: береговой или плавучий маяк-ответчик типа «ракон»
(для идентификации средств навигационного обеспечения района) и аварийный
радиолокационный маяк-ответчик (для поиска и спасения судовых спасательных
средств).
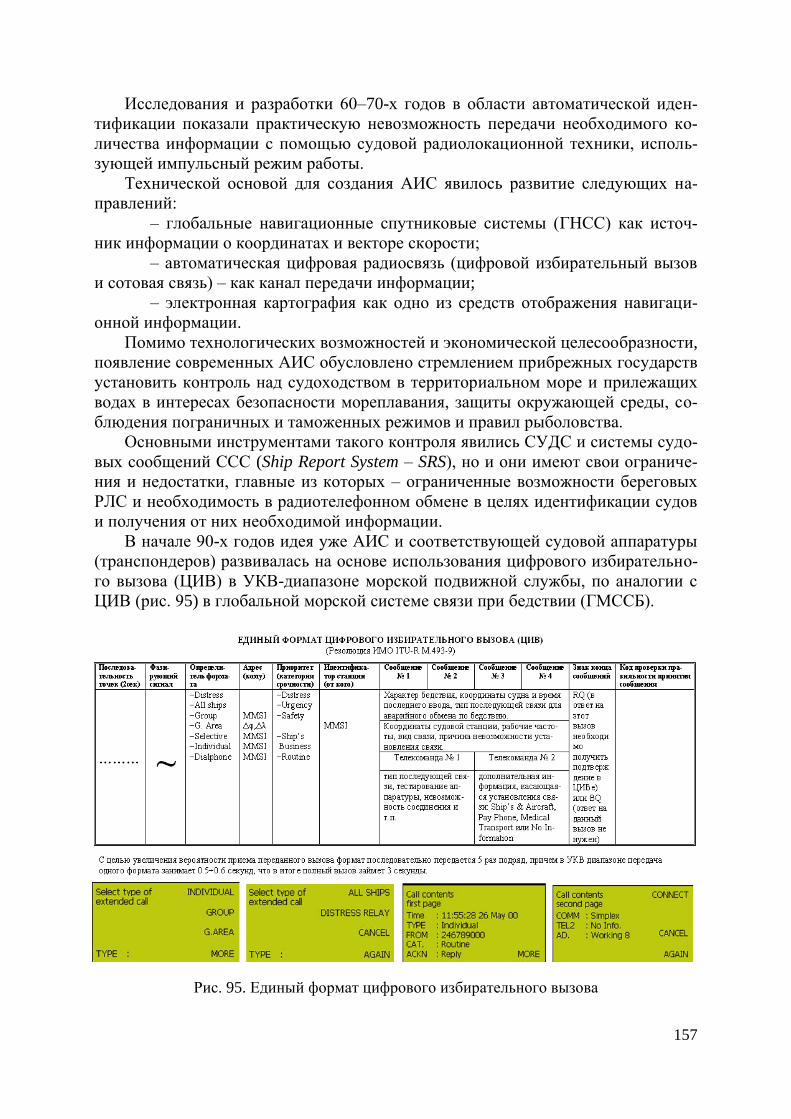
157
Исследования и разработки 60–70-х годов в области автоматической иден-
тификации показали практическую невозможность передачи необходимого ко-
личества информации с помощью судовой радиолокационной техники, исполь-
зующей импульсный режим работы.
Технической основой для создания АИС явилось развитие следующих на-
правлений:
– глобальные навигационные спутниковые системы (ГНСС) как источ-
ник информации о координатах и векторе скорости;
– автоматическая цифровая радиосвязь (цифровой избирательный вызов
и сотовая связь) – как канал передачи информации;
– электронная картография как одно из средств отображения навигаци-
онной информации.
Помимо технологических возможностей и экономической целесообразности,
появление современных АИС обусловлено стремлением прибрежных государств
установить контроль над судоходством в территориальном море и прилежащих
водах в интересах безопасности мореплавания, защиты окружающей среды, со-
блюдения пограничных и таможенных режимов и правил рыболовства.
Основными инструментами такого контроля явились СУДС и системы судо-
вых сообщений ССС (Ship Report System – SRS), но и они имеют свои ограниче-
ния и недостатки, главные из которых – ограниченные возможности береговых
РЛС и необходимость в радиотелефонном обмене в целях идентификации судов
и получения от них необходимой информации.
В начале 90-х годов идея уже АИС и соответствующей судовой аппаратуры
(транспондеров) развивалась на основе использования цифрового избирательно-
го вызова (ЦИВ) в УКВ-диапазоне морской подвижной службы, по аналогии с
ЦИВ (рис. 95) в глобальной морской системе связи при бедствии (ГМССБ).
Рис. 95. Единый формат цифрового избирательного вызова
158
Впервые АИС с использованием ЦИВ (ЦИВ АИС) была практически приме-
нена в 1993 году в СУДС пролива Принц Уильямс на подходах к порту Валдез
(Аляска).
Катастрофическая по своим экологическим последствиям авария танкера
«Exxon Valdez» в 1989 году привела к необходимости непрерывного контроля за
движением танкеров на всем протяжении пролива Принц Уильямс.
Положительный опыт использования ЦИВ АИС в проливе Принц Уильямс
способствовал продолжению исследовательских и экспериментальных работ по
ЦИВ АИС в Америке и Канаде, где они получили название «Автоматизирован-
ные системы зависимого контроля» (АСЗК). Работы по ЦИВ АИС выявили и ряд
недостатков этих систем. К таким недостаткам следует отнести низкую скорость
передачи данных, что обусловлено особенностями протокола ЦИВ, и, как след-
ствие, ограничение количества судов несколькими десятками.
В июле 1994 года Швеция внесла предложение (NAV 40/7/15) о внедрении
транспондеров с использованием нового протокола доступа к радиоканалу.
Применение этого протокола (СОМДВР – самоорганизующегося множест-
венного доступа с временным разделением – Self-Organized Time Division Mul-
tiple Access – SOTDMA) и «вещательный» режим передачи сообщений позволяют
с высокой надежностью (более 95 %) использовать один частотный канал для
передачи информации о местоположении нескольких сотен судов.
Всемирная конференция по радиосвязи (World Radio communication Confe-
rence), проведенная МСЭ в 1997 году (WRC97), выделила для использования в
АИС два канала в морском УКВ-диапазоне: канал 87В (161,975 МГц – АИС 1) и
канал 88В (162,025 МГц – АИС 2). В некоторых странах эти каналы являются
частными, поэтому установлены другие частотные каналы АИС, отличающиеся
от международных – 2087В и 2088В. Кроме того, канал 70 УКВ ЦИВ также ос-
тавлен для работы в АИС. Использование этих каналов для голосовой связи об-
щего назначения регламентом радиосвязи запрещено.
Важной особенностью универсальной АИС по сравнению с ЦИВ АИС явля-
ется возможность работы в автономном судовом варианте (без наличия берего-
вых станций). Судовой транспондер, подключенный к цифровому дисплею
РЛС/САРП или к интегрированному дисплею ЭКНИС/САРП, может служить
уникальным средством безопасности мореплавания, существенно превосходя-
щим по своим характеристикам традиционные РЛС и САРП. При условии, что
все окружающие суда оснащены аналогичными транспондерами, судоводитель
получает возможность наблюдать полную картину движения судов без специ-
фических ограничений и погрешностей, свойственных радиолокационному об-
наружению и автосопровождению, не говоря уже о расширении радиуса дейст-
вия (25–30 против 10–15 миль).
Следующей особенностью УАИС является более высокая скорость передачи
(9600 бит/с против 1200 бит/с в ЦИВ) и более эффективное использование стан-
дартного канала связи в УКВ-диапазоне (для нескольких сотен судов против не-
скольких десятков). Одновременный доступ к радиоканалу сотен судовых
транспондеров обеспечивается использованием протокола самоорганизующего-
ся множественного доступа с разделением времени. Работа судовых транспонде-
ров автоматически синхронизируется по всемирному скоординированному вре-
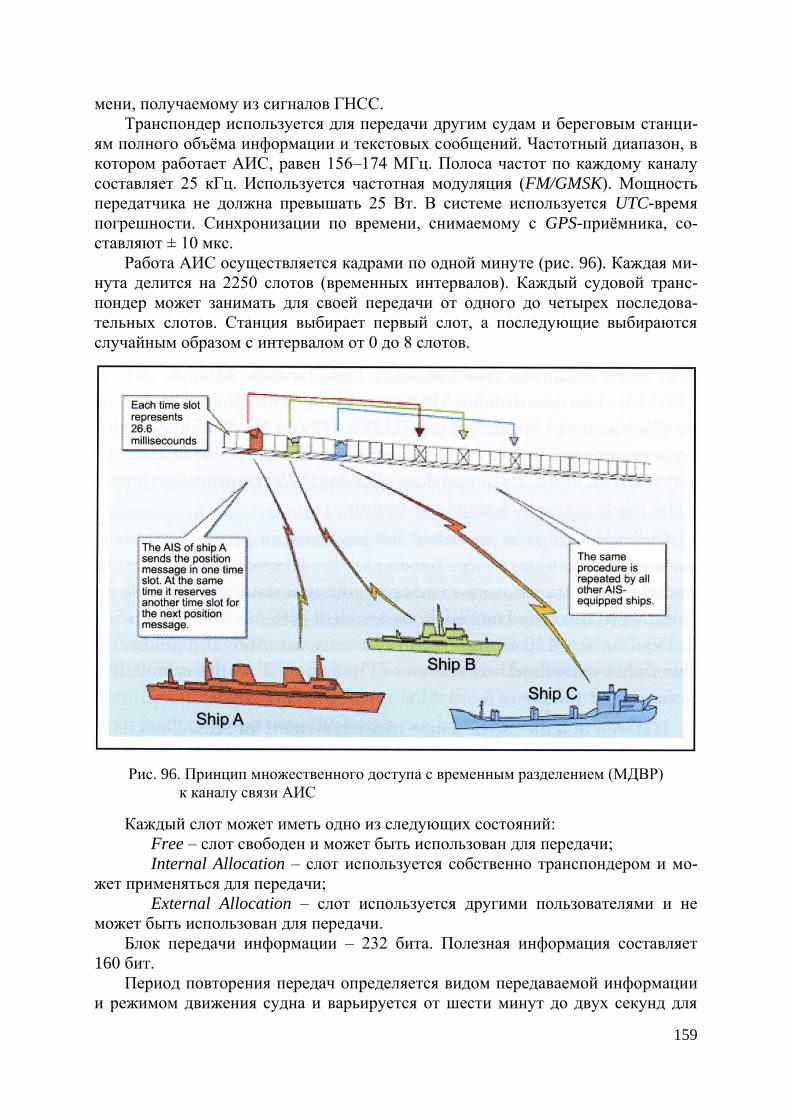
159
мени, получаемому из сигналов ГНСС.
Транспондер используется для передачи другим судам и береговым станци-
ям полного объѐма информации и текстовых сообщений. Частотный диапазон, в
котором работает АИС, равен 156–174 МГц. Полоса частот по каждому каналу
составляет 25 кГц. Используется частотная модуляция (FM/GMSK). Мощность
передатчика не должна превышать 25 Вт. В системе используется UTC-время
погрешности. Синхронизации по времени, снимаемому с GPS-приѐмника, со-
ставляют ± 10 мкс.
Работа АИС осуществляется кадрами по одной минуте (рис. 96). Каждая ми-
нута делится на 2250 слотов (временных интервалов). Каждый судовой транс-
пондер может занимать для своей передачи от одного до четырех последова-
тельных слотов. Станция выбирает первый слот, а последующие выбираются
случайным образом с интервалом от 0 до 8 слотов.
Рис. 96. Принцип множественного доступа с временным разделением (МДВР)
к каналу связи АИС
Каждый слот может иметь одно из следующих состояний:
Free – слот свободен и может быть использован для передачи;
Internal Allocation – слот используется собственно транспондером и мо-
жет применяться для передачи;
External Allocation – слот используется другими пользователями и не
может быть использован для передачи.
Блок передачи информации – 232 бита. Полезная информация составляет
160 бит.
Период повторения передач определяется видом передаваемой информации
и режимом движения судна и варьируется от шести минут до двух секунд для
160
маневрирующего судна со скоростью свыше 23 узлов. В промежутках между
своими передачами транспондер ведет прием сообщений, передаваемых транс-
пондерами других судов в радиусе действия УКВ радиосвязи. Принятые от дру-
гих судов сообщения декодируются и отображаются в графической и символь-
ной форме на экране дисплея, к которому подключен транспондер. Как следст-
вие, появляется возможность включения в судовые сообщения более обширной
информации по сравнению с ЦИВ АИС: рейсовые данные судна (порты отхода и
назначения, ожидаемое время прихода (ОВП), осадка, груз, и др.), а также про-
извольные текстовые сообщения длиной до 158 символов.
И, наконец, самое главное: УАИС имеет возможность передавать дифферен-
циальные поправки для спутниковых глобальных навигационных систем
(GPS/ГЛОНАСС). Спутниковые навигационные системы GPS, ГЛОНАСС явля-
ются системами второго поколения. Навигационным параметром служит рас-
стояние от спутника до судна (антенны приѐмника). Для определения места не-
обходимо знать четыре навигационных параметра, которые позволят определить
четыре искомых величины. Это – три координаты в трехмерном пространстве и
поправка за рассогласование временных шкал аппаратуры на спутнике и борто-
вом ПИ. Для морской навигации число измеренных параметров может быть
уменьшено на единицу. Таким образом, для определения места судна необходи-
мо знать три навигационных параметра.
Судовые ПИ в автоматическом режиме определяют наиболее подходящее
созвездие спутников на текущий момент (по альманаху, передаваемому со спут-
ника), используя их для определения места. Обычно на судах используются 8-–
12-канальные ПИ, что позволяет одновременно работать с соответствующим ко-
личеством спутников.
Координаты, вырабатываемые ПИ, даются для эллипсоида WGS-84. При
отображении места судна на карте учитываются возможные расхождения систем
координат, в которых представлено место судна и построена карта.
Погрешность места при обычном режиме работы ПИ для 95 % вероятности
составляет примерно 70–100 м. При плавании в прибрежных районах указанная
точность является недостаточной, что вызывает необходимость использования
дифференциального режима работы системы. Фактические поправки за распро-
странение радиоволн на текущий момент определяются с помощью береговых
станций и передаются в автоматическом режиме всем потребителям. Считается,
что поправки соответствуют реальным в радиусе 200 миль от станции. Если бор-
товой приѐмник осуществляет приѐм поправок и использует их в процедуре оп-
ределения координат, то говорят, что он работает в дифференциальном режиме
(DGPS). Дифференциальные поправки могут приниматься непосредственно от
станций дифференциальных поправок или от базовых станций (ретрансляция).
Работа в режиме DGPS позволяет определять координаты с погрешностью до 5–
6 м.
Судовые транспондеры универсальной АИС, в состав которых входит нави-
гационный приемник GPS/ГЛОНАСС, получают эти поправки по каналу очень
высоких частот (ОВЧ) и затем используют для повышения точности своих нави-
гационных данных (координат, курса и скорости). Таким образом, базовая стан-
ция УАИС может выполнять функции радиомаяка ДГНСС.
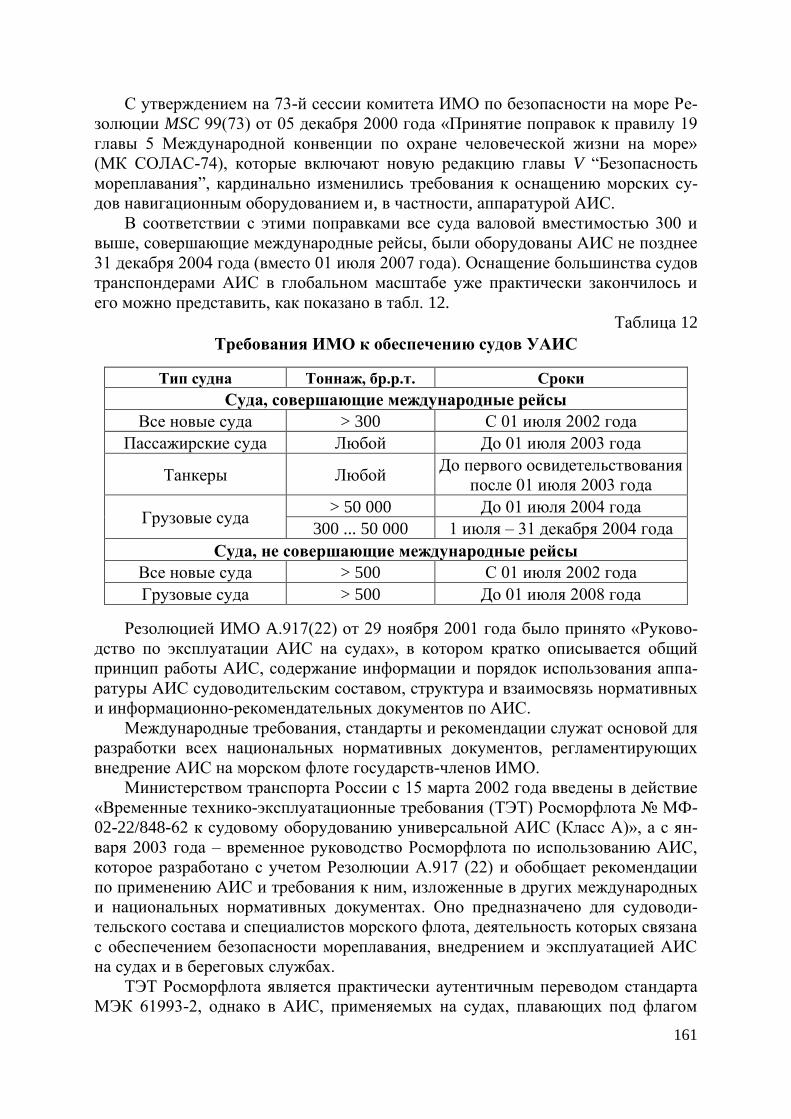
161
С утверждением на 73-й сессии комитета ИМО по безопасности на море Ре-
золюции MSC 99(73) от 05 декабря 2000 года «Принятие поправок к правилу 19
главы 5 Международной конвенции по охране человеческой жизни на море»
(МК СОЛАС-74), которые включают новую редакцию главы V “Безопасность
мореплавания”, кардинально изменились требования к оснащению морских су-
дов навигационным оборудованием и, в частности, аппаратурой АИС.
В соответствии с этими поправками все суда валовой вместимостью 300 и
выше, совершающие международные рейсы, были оборудованы АИС не позднее
31 декабря 2004 года (вместо 01 июля 2007 года). Оснащение большинства судов
транспондерами АИС в глобальном масштабе уже практически закончилось и
его можно представить, как показано в табл. 12.
Таблица 12
Требования ИМО к обеспечению судов УАИС
Тип судна Тоннаж, бр.р.т. Сроки
Суда, совершающие международные рейсы
Все новые суда > 300 С 01 июля 2002 года
Пассажирские суда Любой До 01 июля 2003 года
Танкеры Любой До первого освидетельствования
после 01 июля 2003 года
Грузовые суда > 50 000 До 01 июля 2004 года
300 ... 50 000 1 июля – 31 декабря 2004 года
Суда, не совершающие международные рейсы
Все новые суда > 500 С 01 июля 2002 года
Грузовые суда > 500 До 01 июля 2008 года
Резолюцией ИМО A.917(22) от 29 ноября 2001 года было принято «Руково-
дство по эксплуатации АИС на судах», в котором кратко описывается общий
принцип работы АИС, содержание информации и порядок использования аппа-
ратуры АИС судоводительским составом, структура и взаимосвязь нормативных
и информационно-рекомендательных документов по АИС.
Международные требования, стандарты и рекомендации служат основой для
разработки всех национальных нормативных документов, регламентирующих
внедрение АИС на морском флоте государств-членов ИМО.
Министерством транспорта России с 15 марта 2002 года введены в действие
«Временные технико-эксплуатационные требования (ТЭТ) Росморфлота № МФ-
02-22/848-62 к судовому оборудованию универсальной АИС (Класс А)», а с ян-
варя 2003 года – временное руководство Росморфлота по использованию АИС,
которое разработано с учетом Резолюции А.917 (22) и обобщает рекомендации
по применению АИС и требования к ним, изложенные в других международных
и национальных нормативных документах. Оно предназначено для судоводи-
тельского состава и специалистов морского флота, деятельность которых связана
с обеспечением безопасности мореплавания, внедрением и эксплуатацией АИС
на судах и в береговых службах.
ТЭТ Росморфлота является практически аутентичным переводом стандарта
МЭК 61993-2, однако в АИС, применяемых на судах, плавающих под флагом
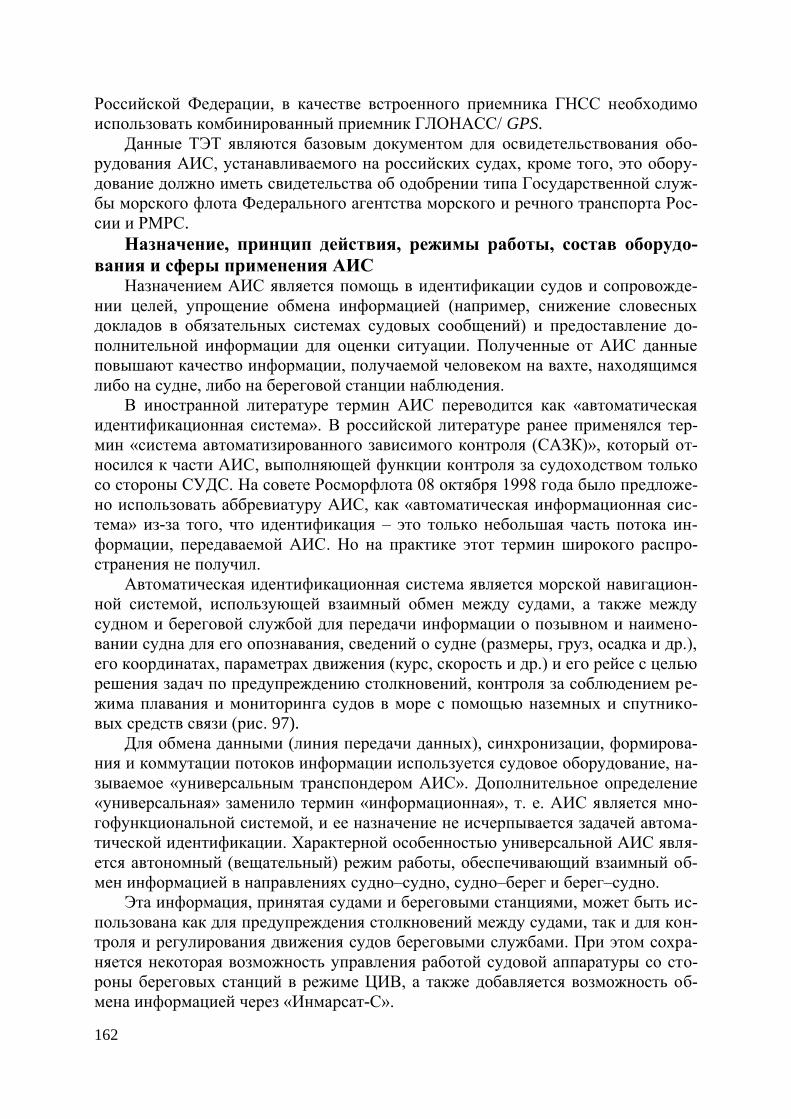
162
Российской Федерации, в качестве встроенного приемника ГНСС необходимо
использовать комбинированный приемник ГЛОНАСС/ GPS.
Данные ТЭТ являются базовым документом для освидетельствования обо-
рудования АИС, устанавливаемого на российских судах, кроме того, это обору-
дование должно иметь свидетельства об одобрении типа Государственной служ-
бы морского флота Федерального агентства морского и речного транспорта Рос-
сии и РМРС.
Назначение, принцип действия, режимы работы, состав оборудо-
вания и сферы применения АИС Назначением АИС является помощь в идентификации судов и сопровожде-
нии целей, упрощение обмена информацией (например, снижение словесных
докладов в обязательных системах судовых сообщений) и предоставление до-
полнительной информации для оценки ситуации. Полученные от АИС данные
повышают качество информации, получаемой человеком на вахте, находящимся
либо на судне, либо на береговой станции наблюдения.
В иностранной литературе термин АИС переводится как «автоматическая
идентификационная система». В российской литературе ранее применялся тер-
мин «система автоматизированного зависимого контроля (САЗК)», который от-
носился к части АИС, выполняющей функции контроля за судоходством только
со стороны СУДС. На совете Росморфлота 08 октября 1998 года было предложе-
но использовать аббревиатуру АИС, как «автоматическая информационная сис-
тема» из-за того, что идентификация – это только небольшая часть потока ин-
формации, передаваемой АИС. Но на практике этот термин широкого распро-
странения не получил.
Автоматическая идентификационная система является морской навигацион-
ной системой, использующей взаимный обмен между судами, а также между
судном и береговой службой для передачи информации о позывном и наимено-
вании судна для его опознавания, сведений о судне (размеры, груз, осадка и др.),
его координатах, параметрах движения (курс, скорость и др.) и его рейсе с целью
решения задач по предупреждению столкновений, контроля за соблюдением ре-
жима плавания и мониторинга судов в море с помощью наземных и спутнико-
вых средств связи (рис. 97).
Для обмена данными (линия передачи данных), синхронизации, формирова-
ния и коммутации потоков информации используется судовое оборудование, на-
зываемое «универсальным транспондером АИС». Дополнительное определение
«универсальная» заменило термин «информационная», т. е. АИС является мно-
гофункциональной системой, и ее назначение не исчерпывается задачей автома-
тической идентификации. Характерной особенностью универсальной АИС явля-
ется автономный (вещательный) режим работы, обеспечивающий взаимный об-
мен информацией в направлениях судно–судно, судно–берег и берег–судно.
Эта информация, принятая судами и береговыми станциями, может быть ис-
пользована как для предупреждения столкновений между судами, так и для кон-
троля и регулирования движения судов береговыми службами. При этом сохра-
няется некоторая возможность управления работой судовой аппаратуры со сто-
роны береговых станций в режиме ЦИВ, а также добавляется возможность об-
мена информацией через «Инмарсат-С».
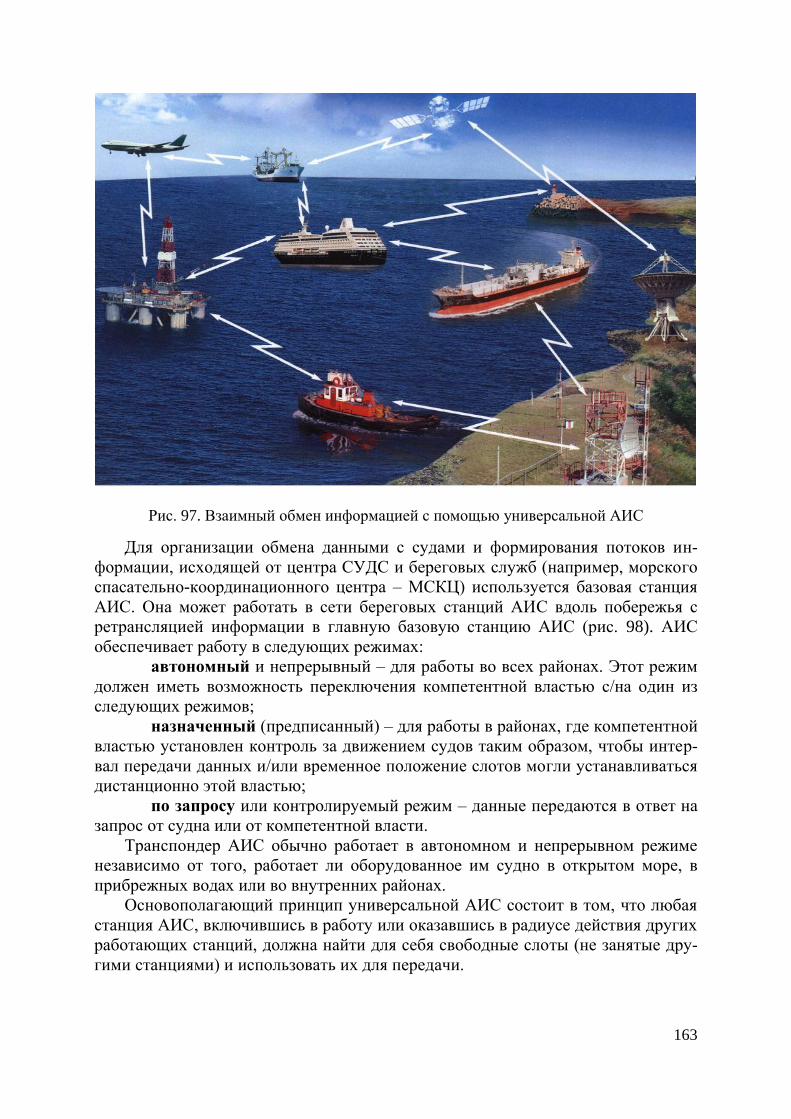
163
Рис. 97. Взаимный обмен информацией с помощью универсальной АИС
Для организации обмена данными с судами и формирования потоков ин-
формации, исходящей от центра СУДС и береговых служб (например, морского
спасательно-координационного центра – МСКЦ) используется базовая станция
АИС. Она может работать в сети береговых станций АИС вдоль побережья с
ретрансляцией информации в главную базовую станцию АИС (рис. 98). АИС
обеспечивает работу в следующих режимах:
автономный и непрерывный – для работы во всех районах. Этот режим
должен иметь возможность переключения компетентной властью с/на один из
следующих режимов;
назначенный (предписанный) – для работы в районах, где компетентной
властью установлен контроль за движением судов таким образом, чтобы интер-
вал передачи данных и/или временное положение слотов могли устанавливаться
дистанционно этой властью;
по запросу или контролируемый режим – данные передаются в ответ на
запрос от судна или от компетентной власти.
Транспондер АИС обычно работает в автономном и непрерывном режиме
независимо от того, работает ли оборудованное им судно в открытом море, в
прибрежных водах или во внутренних районах.
Основополагающий принцип универсальной АИС состоит в том, что любая
станция АИС, включившись в работу или оказавшись в радиусе действия других
работающих станций, должна найти для себя свободные слоты (не занятые дру-
гими станциями) и использовать их для передачи.
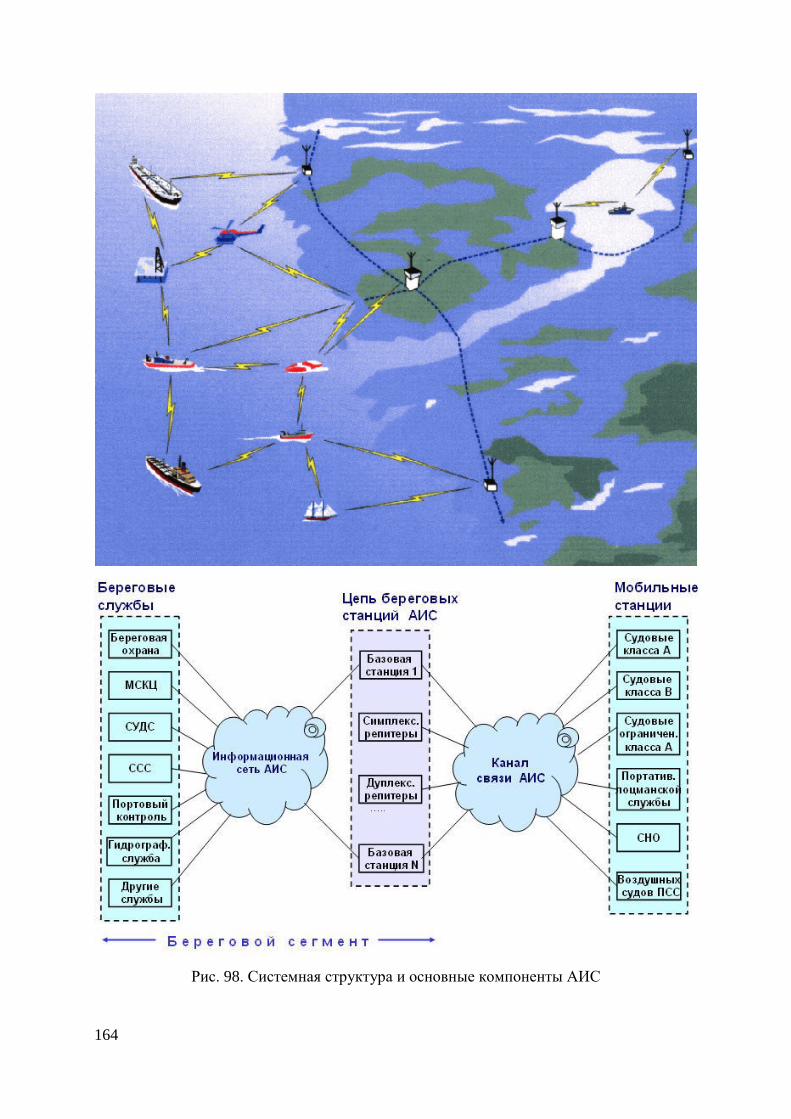
164
Рис. 98. Системная структура и основные компоненты АИС
165
Методом, позволяющим множеству станций АИС находить свободные сло-
ты для передачи и избежать блокирования системы при перегрузках, является
специальный метод доступа к каналу УКВ-связи – множественный доступ с
временным разделением (МДВР). Строго говоря, в АИС используется несколько
разновидностей (протоколов) МДВР:
RATDMA (Random – случайный; СМДВР) – используется для выбора
первого слота после включения станции в работу, а также при начале передачи
нерегулярных сообщений, например, связанных с безопасностью мореплавания;
ITDMA (Incremental – инкрементный; ИМДВР) – используется для резер-
вирования слотов в первом минутном кадре, например, после включения стан-
ции в работу, а также, когда судно должно увеличить частоту передачи элемен-
тов движения при изменении курса;
SOTDMA (Self-Organized – самоорганизующийся; СОМДВР) – использу-
ется как продолжение ИМДВР для резервирования слотов для передачи в после-
дующих 3–7-минутных кадрах;
FATDMA (Fixed – фиксированный; ФМДВР) – используется базовыми
станциями в целях обеспечения их работы с установленным периодом повторе-
ния и в фиксированных объявленных слотах, которые не могут занимать мо-
бильные станции.
АИС состоит из судовых транспондеров, выводящих информацию на:
– консоль или средства минимальной клавиатуры и дисплея (МКД – Min-
imum Keyboard And Display, MKD);
– ЭКНИС или интегрированную навигационную систему (ИНС – Inte-
grated Navigating System, INS);
– РЛС/САРП;
– береговые базовые станции;
– системы отображения на экранах консолей операторов СУДС;
– персональные компьютеры береговых служб.
Станции АИС в зависимости от назначения и места установки подразделяет-
ся на следующие виды:
– судовые станции класса «А»;
– судовые станции класса «В»;
– портативные (носимые) станции, используемые лоцманами на борту
судна;
– станции, устанавливаемые на средствах навигационного оборудования
(СНО);
– станции, устанавливаемые на воздушных судах, участвующих в поис-
ково-спасательных операциях;
– АИС-САРТ, используемые в поисково-спасательных операциях, уста-
навливаемые на судах с 1 января 2009 года.
Обычно судовая АИС класса «А» состоит из (рис. 99):
– антенны ГНСС и УКВ-антенны;
– одного передатчика УКВ;
– двух многоканальных приемников УКВ;
– одного приемника УКВ на 70 канале для управления каналами;
– центрального процессора;
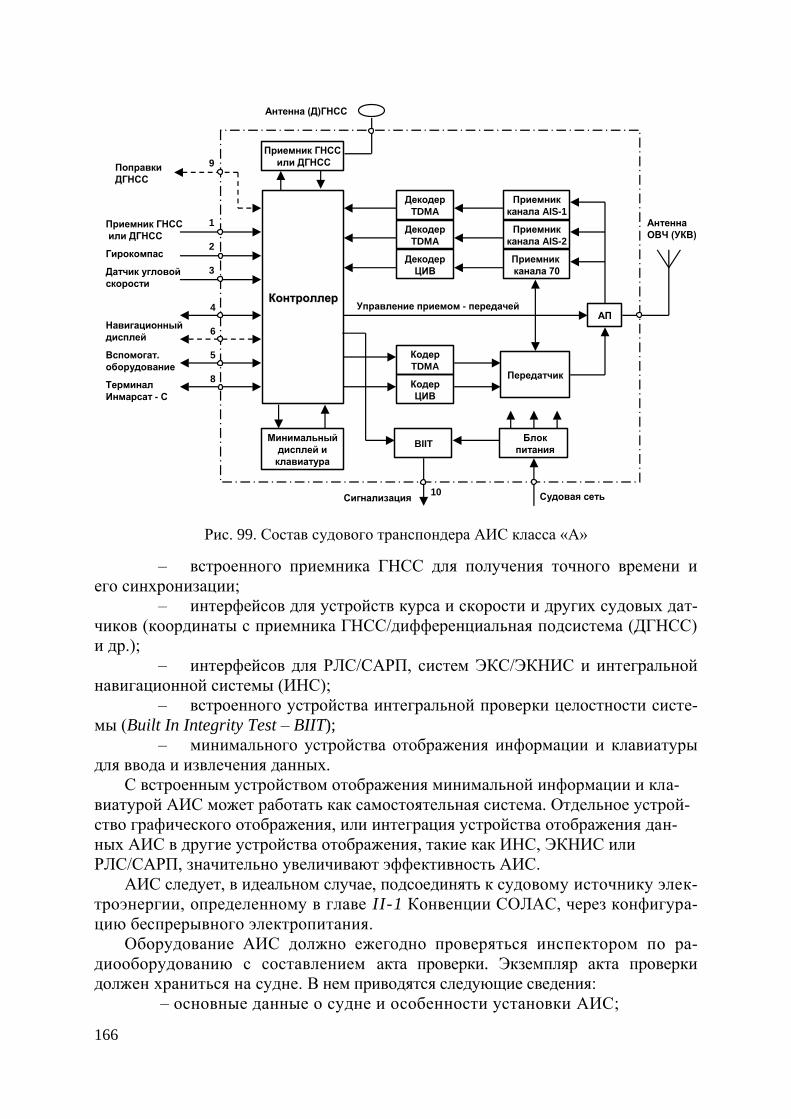
166
КонтроллерКонтроллер
Декодер
TDMA
Декодер
TDMA
Декодер
ЦИВ
Приемник
канала AIS-1
Приемник
канала AIS-2
Приемник
канала 70
Кодер
TDMA
Кодер
ЦИВ
Передатчик
АПУправление приемом - передачей
Приемник ГНСС
или ДГНССПоправки
ДГНСС
Приемник ГНСС
или ДГНСС
Гирокомпас
Датчик угловой
скорости
Навигационный
дисплей
Вспомогат.
оборудование
Терминал
Инмарсат - С
Минимальный
дисплей и
клавиатура
BIITБлок
питания
1
2
3
4
5
8
10
9
6
Судовая сетьСигнализация
Антенна (Д)ГНСС
Антенна
ОВЧ (УКВ)
Рис. 99. Состав судового транспондера АИС класса «А»
– встроенного приемника ГНСС для получения точного времени и
его синхронизации;
– интерфейсов для устройств курса и скорости и других судовых дат-
чиков (координаты с приемника ГНСС/дифференциальная подсистема (ДГНСС)
и др.);
– интерфейсов для РЛС/САРП, систем ЭКС/ЭКНИС и интегральной
навигационной системы (ИНС);
– встроенного устройства интегральной проверки целостности систе-
мы (Built In Integrity Test – BIIT);
– минимального устройства отображения информации и клавиатуры
для ввода и извлечения данных.
С встроенным устройством отображения минимальной информации и кла-
виатурой АИС может работать как самостоятельная система. Отдельное устрой-
ство графического отображения, или интеграция устройства отображения дан-
ных АИС в другие устройства отображения, такие как ИНС, ЭКНИС или
РЛС/САРП, значительно увеличивают эффективность АИС.
АИС следует, в идеальном случае, подсоединять к судовому источнику элек-
троэнергии, определенному в главе II-1 Конвенции СОЛАС, через конфигура-
цию беспрерывного электропитания.
Оборудование АИС должно ежегодно проверяться инспектором по ра-
диооборудованию с составлением акта проверки. Экземпляр акта проверки
должен храниться на судне. В нем приводятся следующие сведения:
– основные данные о судне и особенности установки АИС;
167
– программирование в АИС статической, динамической, рейсовой
информации;
– проверка эксплуатационных характеристик, используя измери-
тельные инструменты, и в работе.
Оборудование АИС класса «Б», предназначенное для установки на некон-
венционных судах, может не соответствовать в полной мере международным
требованиям и имеет значительные отличия от АИС класса «А» на уровне ин-
терфейса при сопряжении с датчиками информации.
Формат сообщений и интервалы передачи динамической и статической ин-
формации в АИС класса «Б» отличаются от форматов сообщений и интервалов
передачи информации, предусмотренных стандартами для АИС класса «А». В
качестве основного средства позиционирования в АИС класса «Б» используется
встроенный приемник ГНСС. Минимальные клавиатура и дисплей, обязатель-
ные для АИС класса «А», являются опциональными для АИС класса «Б», кото-
рая может использоваться на неконвенционных судах как «черный ящик» (т. е.
без вывода данных на экран), или может быть подключена к какому-либо нави-
гационному устройству (ЭКС/ЭКНИС) для представления данных о собствен-
ном местоположении и информации о других целях АИС. Однако при этом ап-
паратура АИС класса «Б» должна иметь устройство для ее программирования и
ввода статических данных при первичном конфигурировании.
Портативная (носимая) аппаратура, доставляемая на борт судна и исполь-
зуемая лоцманами, выполняется в двух вариантах:
– портативного компьютера (ноутбука) с электронной картой района
лоцманского обслуживания, который подключается к судовой станции АИС (ис-
пользуется на судне, где установлен полный комплект оборудования АИС);
– лоцманского комплекта судовой аппаратуры АИС (предназначен для
использования на судах, не оснащенных АИС), который состоит из (рис. 100):
Рис. 100. Лоцманские АИС R3 Pilot компании SAAB TransponderTech и
«L-3 Communications»
приемопередающей части аппаратуры – прибора защищенного испол-
нения, снабженного встроенными в крышку антеннами ДГНСС и УКВ; устанав-
ливается на крыле мостика (верхнем мостике);
индикаторной части аппаратуры – портативного компьютера (ноутбу-
ка); размещается на ходовом мостике и взаимодействует с приемопередающей
168
частью посредством беспроводного канала связи. Связь с гирокомпасом и дат-
чиком угловой скорости в большинстве случаев не выполняется.
Транспондеры АИС, установленные на выбранных стационарных и плаву-
чих средствах навигационного оборудования морей, предоставляют мореплава-
телям такую информацию, как:
– координаты;
– статус средства;
– данные о постоянных и приливо-отливных течениях;
– состояние погоды и видимости.
Станции АИС, устанавливаемые на воздушных судах, используются в опе-
рациях по поиску и спасанию, особенно при совместном поиске вертолетом и
плавсредствами. АИС позволяет напрямую представлять координаты судна, тер-
пящего бедствие, на иных средствах отображения, таких как РЛС или
ЭКС/ЭКНИС, что облегчает задачу средства, осуществляющего поиск и спаса-
ние. Для судна, терпящего бедствие и необорудованного АИС, координатор на
месте действия может составить псевдоцель АИС и дать возможность взаимо-
действия (обмена информацией) с вертолетами, участвующими в поисково-
спасательных операциях, и другими судами в районе бедствия.
Благодаря непрерывной работе транспондера на любом судне (морском или
воздушном) создается возможность передачи ближайшим судам и береговым
службам, включенным как в систему ГМССБ, так и в АИС, сигналов бедствия
или срочности, содержащих необходимые сведения о происшествии.
Знание позиций воздушных и морских судов и их отображение на экране в
зоне ответственности МСКЦ, а также их наименования, характеристик, наличия
опасного груза и навигационных данных (местоположение, курс, скорость и др.),
способствует более полной оценке ситуации при оказании помощи в случае бед-
ствия.
АИС-САРТ должен обеспечивать передачу сообщений, содержащих коор-
динаты, статическую информацию и информацию, связанную с безопасностью
средства, терпящего бедствие. Передаваемые сообщения должны распознаваться
и отображаться на средствах, оказывающих помощь в пределах дальности дей-
ствия АИС-САРТ. Прибор должен:
– начинать передачу в течение 1 минуты после включения, легко приво-
диться в действие неподготовленным персоналом, но с защитой от непреднаме-
ренного включения;
– обеспечивать ручное/автоматическое включение и выключение и иметь
частоту повторения передач 1 мин или менее, даже если координаты и синхро-
низация времени от ГНСС вышли из строя;
– выдерживать падение в воду с высоты 20 м и быть водонепроницаемым
на глубине 10 м, по крайней мере, в течение 5 мин;
– поднимать антенну АИС-САРТ на высоту не менее 1 м над уровнем
моря;
– быть оборудован встроенным источником координат и питания (ем-
кость батареи для работы в течение 96 часов).
АИС-САРТ должен иметь свой идентификатор для обеспечения целостности
связи данных УКВ, обнаруживаться на расстоянии, по меньшей мере, 5 миль. На
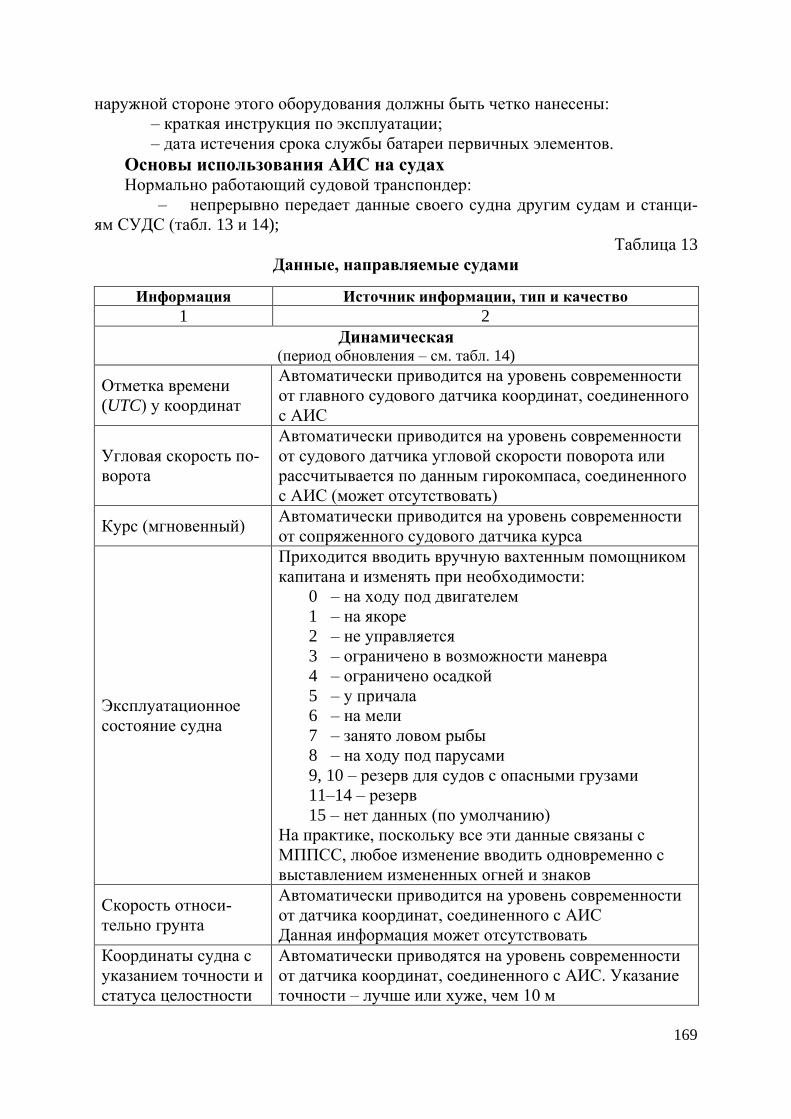
169
наружной стороне этого оборудования должны быть четко нанесены:
– краткая инструкция по эксплуатации;
– дата истечения срока службы батареи первичных элементов.
Основы использования АИС на судах Нормально работающий судовой транспондер:
– непрерывно передает данные своего судна другим судам и станци-
ям СУДС (табл. 13 и 14);
Таблица 13
Данные, направляемые судами
Информация Источник информации, тип и качество
1 2
Динамическая (период обновления – см. табл. 14)
Отметка времени
(UTC) у координат
Автоматически приводится на уровень современности
от главного судового датчика координат, соединенного
с АИС
Угловая скорость по-
ворота
Автоматически приводится на уровень современности
от судового датчика угловой скорости поворота или
рассчитывается по данным гирокомпаса, соединенного
с АИС (может отсутствовать)
Курс (мгновенный) Автоматически приводится на уровень современности
от сопряженного судового датчика курса
Эксплуатационное
состояние судна
Приходится вводить вручную вахтенным помощником
капитана и изменять при необходимости:
0 – на ходу под двигателем
1 – на якоре
2 – не управляется
3 – ограничено в возможности маневра
4 – ограничено осадкой
5 – у причала
6 – на мели
7 – занято ловом рыбы
8 – на ходу под парусами
9, 10 – резерв для судов с опасными грузами
11–14 – резерв
15 – нет данных (по умолчанию)
На практике, поскольку все эти данные связаны с
МППСС, любое изменение вводить одновременно с
выставлением измененных огней и знаков
Скорость относи-
тельно грунта
Автоматически приводится на уровень современности
от датчика координат, соединенного с АИС
Данная информация может отсутствовать
Координаты судна с
указанием точности и
статуса целостности
Автоматически приводятся на уровень современности
от датчика координат, соединенного с АИС. Указание
точности – лучше или хуже, чем 10 м
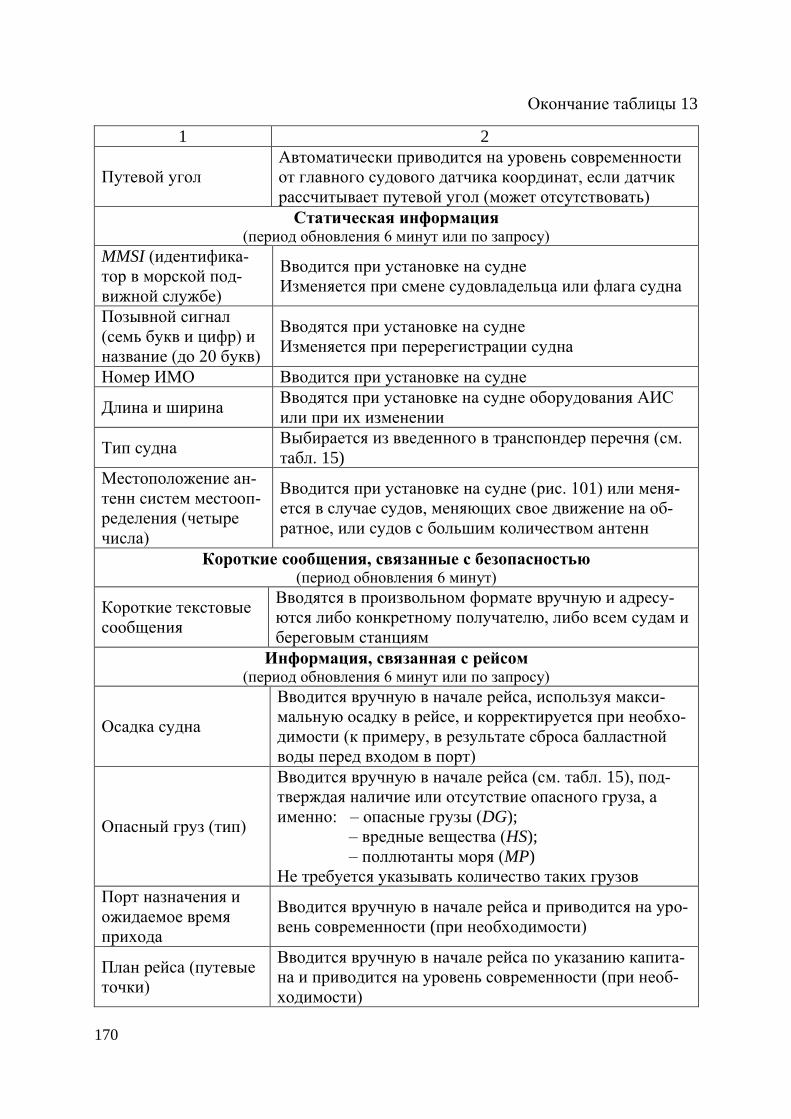
170
Окончание таблицы 13
1 2
Путевой угол
Автоматически приводится на уровень современности
от главного судового датчика координат, если датчик
рассчитывает путевой угол (может отсутствовать)
Статическая информация (период обновления 6 минут или по запросу)
MMSI (идентифика-
тор в морской под-
вижной службе)
Вводится при установке на судне
Изменяется при смене судовладельца или флага судна
Позывной сигнал
(семь букв и цифр) и
название (до 20 букв)
Вводятся при установке на судне
Изменяется при перерегистрации судна
Номер ИМО Вводится при установке на судне
Длина и ширина Вводятся при установке на судне оборудования АИС
или при их изменении
Тип судна Выбирается из введенного в транспондер перечня (см.
табл. 15)
Местоположение ан-
тенн систем местооп-
ределения (четыре
числа)
Вводится при установке на судне (рис. 101) или меня-
ется в случае судов, меняющих свое движение на об-
ратное, или судов с большим количеством антенн
Короткие сообщения, связанные с безопасностью (период обновления 6 минут)
Короткие текстовые
сообщения
Вводятся в произвольном формате вручную и адресу-
ются либо конкретному получателю, либо всем судам и
береговым станциям
Информация, связанная с рейсом (период обновления 6 минут или по запросу)
Осадка судна
Вводится вручную в начале рейса, используя макси-
мальную осадку в рейсе, и корректируется при необхо-
димости (к примеру, в результате сброса балластной
воды перед входом в порт)
Опасный груз (тип)
Вводится вручную в начале рейса (см. табл. 15), под-
тверждая наличие или отсутствие опасного груза, а
именно: – опасные грузы (DG);
– вредные вещества (HS);
– поллютанты моря (MP)
Не требуется указывать количество таких грузов
Порт назначения и
ожидаемое время
прихода
Вводится вручную в начале рейса и приводится на уро-
вень современности (при необходимости)
План рейса (путевые
точки)
Вводится вручную в начале рейса по указанию капита-
на и приводится на уровень современности (при необ-
ходимости)
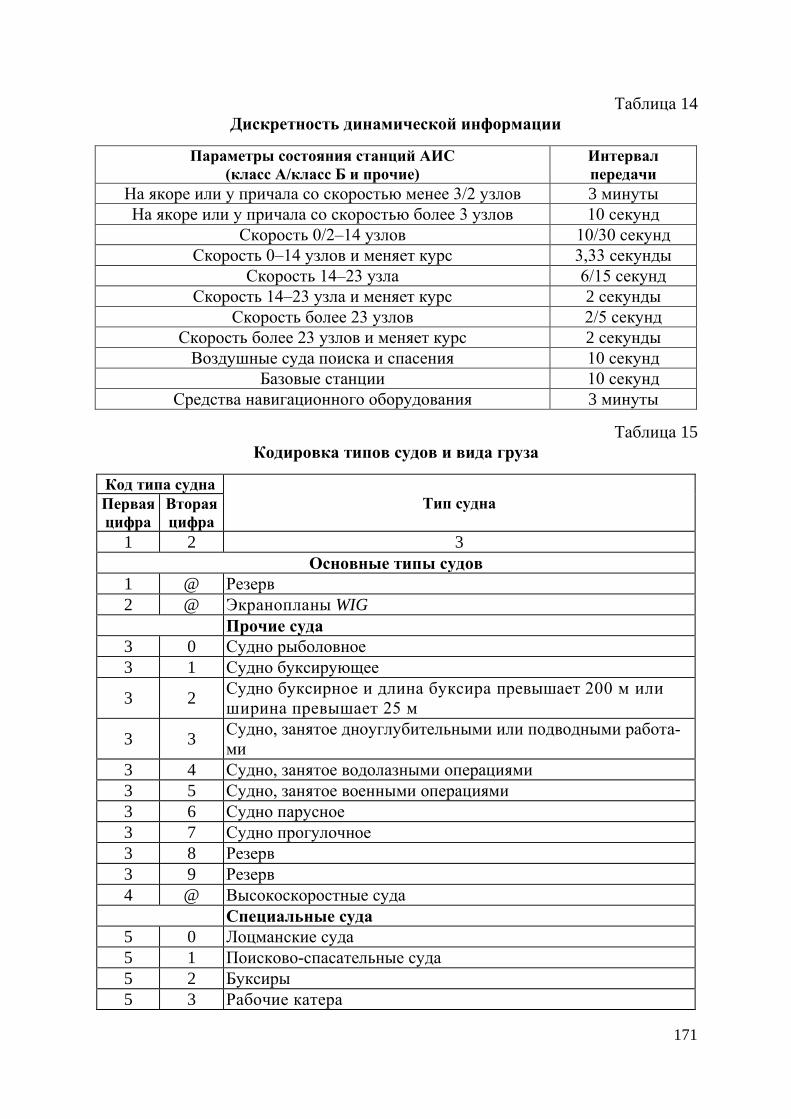
171
Таблица 14
Дискретность динамической информации
Параметры состояния станций АИС
(класс А/класс Б и прочие)
Интервал
передачи
На якоре или у причала со скоростью менее 3/2 узлов 3 минуты
На якоре или у причала со скоростью более 3 узлов 10 секунд
Скорость 0/2–14 узлов 10/30 секунд
Скорость 0–14 узлов и меняет курс 3,33 секунды
Скорость 14–23 узла 6/15 секунд
Скорость 14–23 узла и меняет курс 2 секунды
Скорость более 23 узлов 2/5 секунд
Скорость более 23 узлов и меняет курс 2 секунды
Воздушные суда поиска и спасения 10 секунд
Базовые станции 10 секунд
Средства навигационного оборудования 3 минуты
Таблица 15
Кодировка типов судов и вида груза
Код типа судна
Тип судна Первая
цифра
Вторая
цифра
1 2 3
Основные типы судов
1 @ Резерв
2 @ Экранопланы WIG
Прочие суда
3 0 Судно рыболовное
3 1 Судно буксирующее
3 2 Судно буксирное и длина буксира превышает 200 м или
ширина превышает 25 м
3 3 Судно, занятое дноуглубительными или подводными работа-
ми
3 4 Судно, занятое водолазными операциями
3 5 Судно, занятое военными операциями
3 6 Судно парусное
3 7 Судно прогулочное
3 8 Резерв
3 9 Резерв
4 @ Высокоскоростные суда
Специальные суда
5 0 Лоцманские суда
5 1 Поисково-спасательные суда
5 2 Буксиры
5 3 Рабочие катера
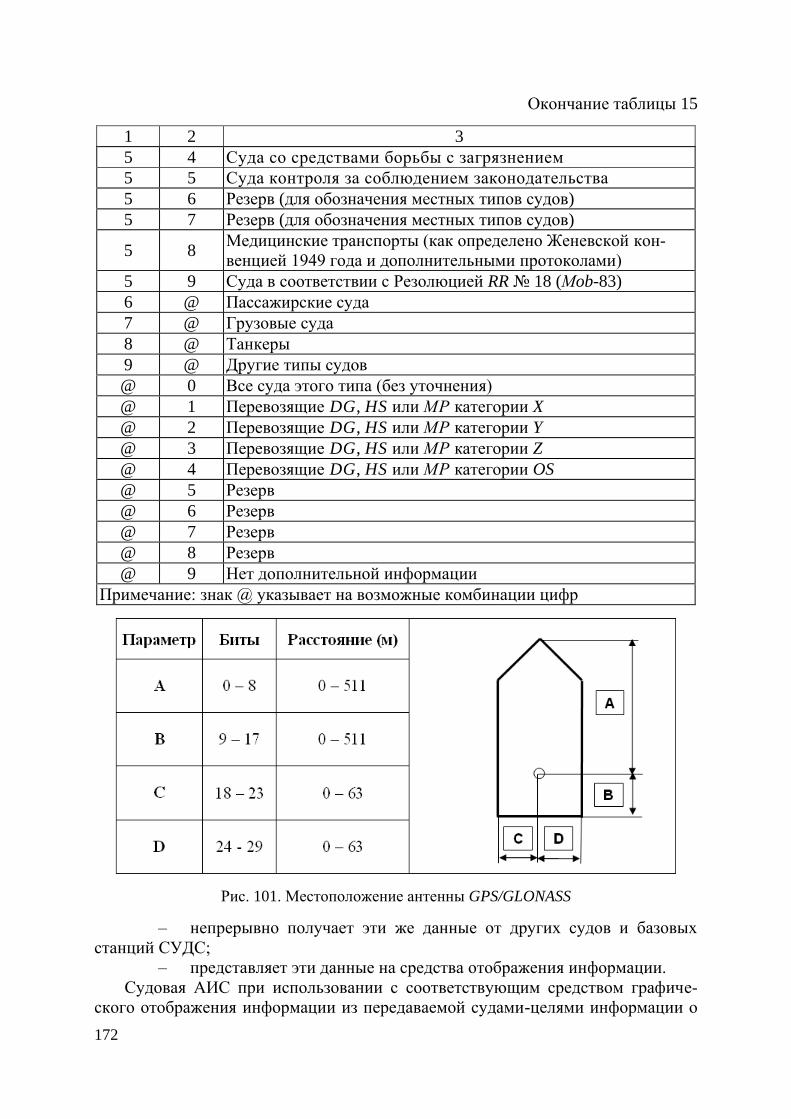
172
Окончание таблицы 15
1 2 3
5 4 Суда со средствами борьбы с загрязнением
5 5 Суда контроля за соблюдением законодательства
5 6 Резерв (для обозначения местных типов судов)
5 7 Резерв (для обозначения местных типов судов)
5 8 Медицинские транспорты (как определено Женевской кон-
венцией 1949 года и дополнительными протоколами)
5 9 Суда в соответствии с Резолюцией RR № 18 (Мob-83)
6 @ Пассажирские суда
7 @ Грузовые суда
8 @ Танкеры
9 @ Другие типы судов
@ 0 Все суда этого типа (без уточнения)
@ 1 Перевозящие DG, HS или МР категории X
@ 2 Перевозящие DG, HS или МР категории Y
@ 3 Перевозящие DG, HS или МР категории Z
@ 4 Перевозящие DG, HS или МР категории OS
@ 5 Резерв
@ 6 Резерв
@ 7 Резерв
@ 8 Резерв
@ 9 Нет дополнительной информации
Примечание: знак @ указывает на возможные комбинации цифр
Рис. 101. Местоположение антенны GPS/GLONASS
– непрерывно получает эти же данные от других судов и базовых
станций СУДС;
– представляет эти данные на средства отображения информации.
Судовая АИС при использовании с соответствующим средством графиче-
ского отображения информации из передаваемой судами-целями информации о
173
координатах путем расчета дистанции кратчайшего сближения DКР и времени
кратчайшего сближения ТКР позволяет быстро, автоматически и точно получить
информацию относительно опасности столкновения.
Станция АИС работает главным образом на трех специально выделенных
каналах УКВ. Там, где эти каналы регионально отсутствуют, АИС способна ав-
томатически переключаться на выделенные альтернативные каналы посредством
сообщения с берега. Если отсутствует береговая АИС, судовая АИС переключа-
ется вручную судоводителем.
Транспондер АИС способен обнаруживать суда в пределах УКВ-диапазона
за изгибами побережья и за островами, если берег не слишком высок. Обычная
дальность действия в море – 25–30 морских миль в зависимости от высоты ан-
тенны. С помощью береговых ретрансляторов дальность действия как судовой
станции, так и базовой станции СУДС может быть намного увеличена.
Информация от работающей судовой АИС передается непрерывно и автома-
тически без какого-либо вмешательства и участия вахтенного помощника капи-
тана. Береговой станции АИС может потребоваться приведенная на уровень со-
временности информация какого-либо конкретного судна или может появиться
необходимость выбрать для вызова все суда в определенном районе моря. Одна-
ко она может только увеличить частоту опроса, но не снизить ее.
Статическая информация и информация, связанная с рейсом, передается
также автоматически, без вмешательства оператора каждые, 6 минут или по за-
просу.
Короткие сообщения, связанные с безопасностью, являются текстовыми со-
общениями фиксированного или произвольного формата, адресованными кон-
кретному получателю (MMSI) или всем судам в районе. Их содержание должно
быть связано с безопасностью судовождения, к примеру, замеченный айсберг
или буй, не находящийся на штатном месте. Сообщения должны быть как можно
короче. Эта система позволяет включать в сообщение до 158 знаков, но чем ко-
роче сообщение, тем легче ему будет найти свободное место в передаче. В на-
стоящее время эти сообщения не имеют других ограничений, чтобы позволить
внести в будущем возможные правила в этом отношении.
При вводе любых данных вручную, следует рассматривать вопрос о конфи-
денциальности данной информации, особенно когда международными соглаше-
ниями, правилами или стандартами предусматривается защита навигационной
информации.
АИС должна всегда быть в работе, когда судно находится на ходу или на
якоре. Если капитан убежден в том, что непрерывная работа АИС может отрица-
тельно повлиять на безопасность или защиту судна, он может выключить АИС.
Это может иметь место в районах моря, где, как известно, могут находиться пи-
раты и вооруженные грабители. Действия такого рода должны всегда заноситься
в судовой журнал с объяснением причин. Капитан должен, однако, вновь вклю-
чить АИС, как только источник опасности исчезнет. Если АИС выключена, не
изменяющиеся (статические) данные и данные, связанные с рейсом, должны со-
храняться в памяти устройства.

174
Обязанности ВПКМ по обслуживанию судовой станции АИС Установка на судне станции АИС (рис. 102) возложила дополнительные обя-
занности на вахтенного помощника капитана (ВПКМ), не уменьшив ни одной из
существовавших до этого обязанностей. Время, затрачиваемое на обслуживание
АИС, просмотр информации АИС и ее анализ – время, отнятое от получения и
анализа других видов информации. Значительное увеличение количества полу-
чаемой информации может приводить к информационной перегрузке.
Рис. 102. Судовая УАИС
Прежде чем использовать судовую станцию АИС для целей предотвращения
столкновений судов, оператор должен:
– изучить и знать принципы работы АИС, достоинства, недостатки и
ограничения информации АИС и способы ее представления;
– практически отработать ввод и просмотр информации судовой
станции АИС;
– изучить Руководство пользователя судовой станции АИС, состав-
ленное фирмой-производителем установленной на судне аппаратуры АИС, об-
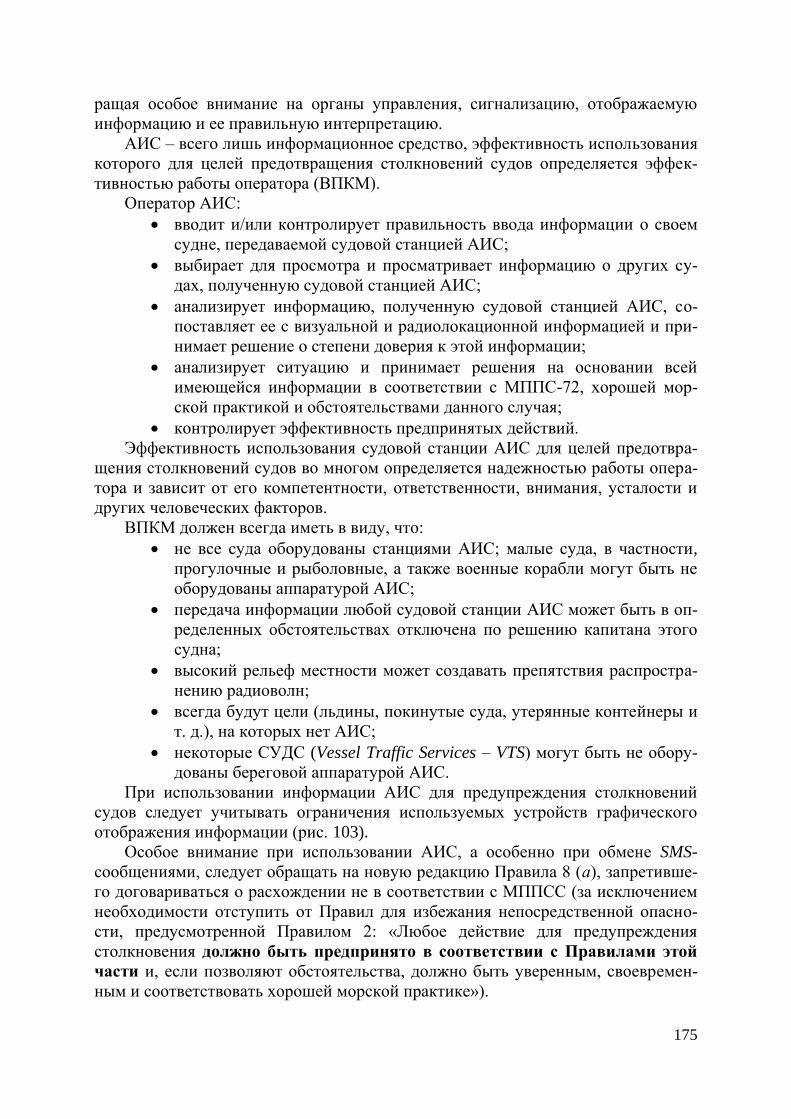
175
ращая особое внимание на органы управления, сигнализацию, отображаемую
информацию и ее правильную интерпретацию.
АИС – всего лишь информационное средство, эффективность использования
которого для целей предотвращения столкновений судов определяется эффек-
тивностью работы оператора (ВПКМ).
Оператор АИС:
вводит и/или контролирует правильность ввода информации о своем
судне, передаваемой судовой станцией АИС;
выбирает для просмотра и просматривает информацию о других су-
дах, полученную судовой станцией АИС;
анализирует информацию, полученную судовой станцией АИС, со-
поставляет ее с визуальной и радиолокационной информацией и при-
нимает решение о степени доверия к этой информации;
анализирует ситуацию и принимает решения на основании всей
имеющейся информации в соответствии с МППС-72, хорошей мор-
ской практикой и обстоятельствами данного случая;
контролирует эффективность предпринятых действий.
Эффективность использования судовой станции АИС для целей предотвра-
щения столкновений судов во многом определяется надежностью работы опера-
тора и зависит от его компетентности, ответственности, внимания, усталости и
других человеческих факторов.
ВПКМ должен всегда иметь в виду, что:
не все суда оборудованы станциями АИС; малые суда, в частности,
прогулочные и рыболовные, а также военные корабли могут быть не
оборудованы аппаратурой АИС;
передача информации любой судовой станции АИС может быть в оп-
ределенных обстоятельствах отключена по решению капитана этого
судна;
высокий рельеф местности может создавать препятствия распростра-
нению радиоволн;
всегда будут цели (льдины, покинутые суда, утерянные контейнеры и
т. д.), на которых нет АИС;
некоторые СУДС (Vessel Traffic Services – VTS) могут быть не обору-
дованы береговой аппаратурой АИС.
При использовании информации АИС для предупреждения столкновений
судов следует учитывать ограничения используемых устройств графического
отображения информации (рис. 103).
Особое внимание при использовании АИС, а особенно при обмене SMS-
сообщениями, следует обращать на новую редакцию Правила 8 (а), запретивше-
го договариваться о расхождении не в соответствии с МППСС (за исключением
необходимости отступить от Правил для избежания непосредственной опасно-
сти, предусмотренной Правилом 2: «Любое действие для предупреждения
столкновения должно быть предпринято в соответствии с Правилами этой
части и, если позволяют обстоятельства, должно быть уверенным, своевремен-
ным и соответствовать хорошей морской практике»).
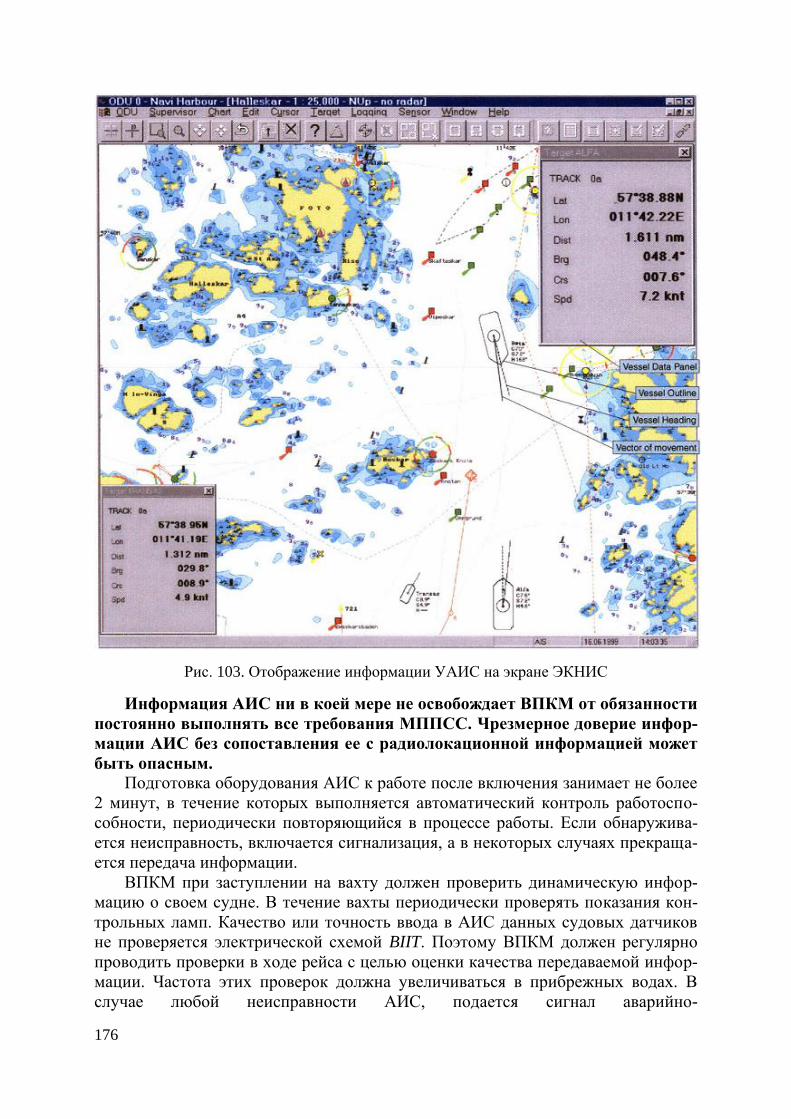
176
Рис. 103. Отображение информации УАИС на экране ЭКНИС
Информация АИС ни в коей мере не освобождает ВПКМ от обязанности
постоянно выполнять все требования МППСС. Чрезмерное доверие инфор-
мации АИС без сопоставления ее с радиолокационной информацией может
быть опасным.
Подготовка оборудования АИС к работе после включения занимает не более
2 минут, в течение которых выполняется автоматический контроль работоспо-
собности, периодически повторяющийся в процессе работы. Если обнаружива-
ется неисправность, включается сигнализация, а в некоторых случаях прекраща-
ется передача информации.
ВПКМ при заступлении на вахту должен проверить динамическую инфор-
мацию о своем судне. В течение вахты периодически проверять показания кон-
трольных ламп. Качество или точность ввода в АИС данных судовых датчиков
не проверяется электрической схемой BIIT. Поэтому ВПКМ должен регулярно
проводить проверки в ходе рейса с целью оценки качества передаваемой инфор-
мации. Частота этих проверок должна увеличиваться в прибрежных водах. В
случае любой неисправности АИС, подается сигнал аварийно-
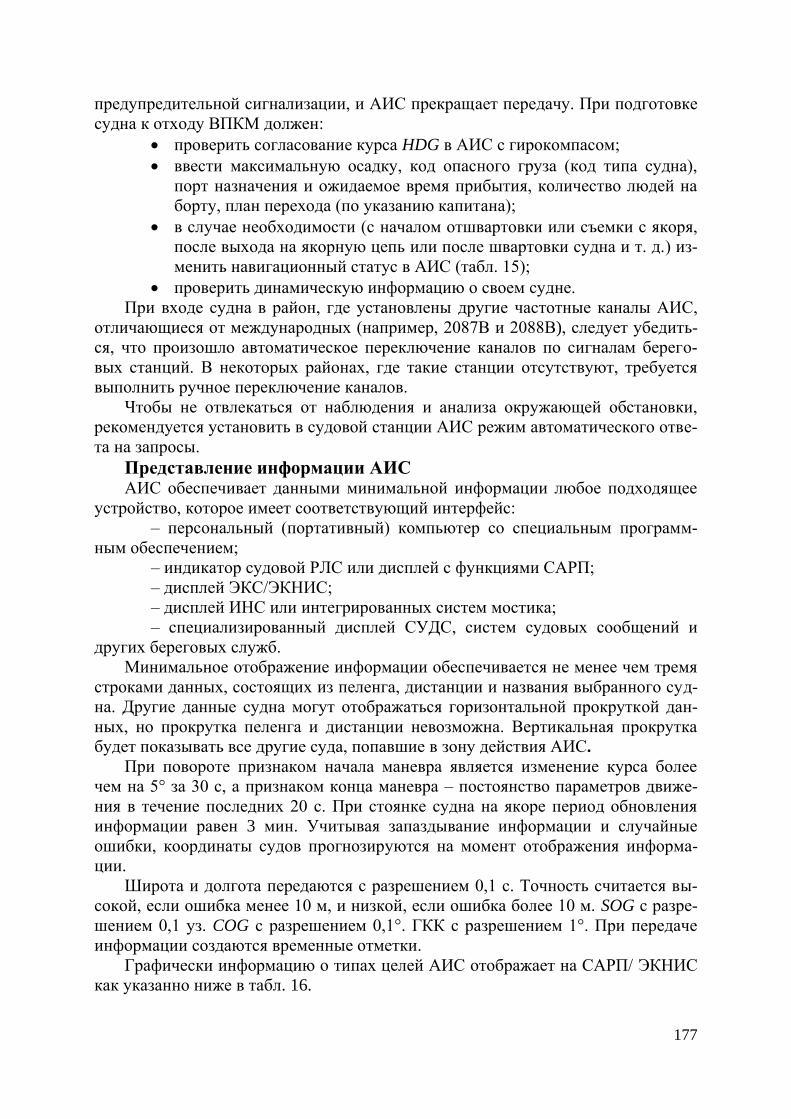
177
предупредительной сигнализации, и АИС прекращает передачу. При подготовке
судна к отходу ВПКМ должен:
проверить согласование курса HDG в АИС с гирокомпасом;
ввести максимальную осадку, код опасного груза (код типа судна),
порт назначения и ожидаемое время прибытия, количество людей на
борту, план перехода (по указанию капитана);
в случае необходимости (с началом отшвартовки или съемки с якоря,
после выхода на якорную цепь или после швартовки судна и т. д.) из-
менить навигационный статус в АИС (табл. 15);
проверить динамическую информацию о своем судне.
При входе судна в район, где установлены другие частотные каналы АИС,
отличающиеся от международных (например, 2087В и 2088В), следует убедить-
ся, что произошло автоматическое переключение каналов по сигналам берего-
вых станций. В некоторых районах, где такие станции отсутствуют, требуется
выполнить ручное переключение каналов.
Чтобы не отвлекаться от наблюдения и анализа окружающей обстановки,
рекомендуется установить в судовой станции АИС режим автоматического отве-
та на запросы.
Представление информации АИС АИС обеспечивает данными минимальной информации любое подходящее
устройство, которое имеет соответствующий интерфейс:
– персональный (портативный) компьютер со специальным программ-
ным обеспечением;
– индикатор судовой РЛС или дисплей с функциями САРП;
– дисплей ЭКС/ЭКНИС;
– дисплей ИНС или интегрированных систем мостика;
– специализированный дисплей СУДС, систем судовых сообщений и
других береговых служб.
Минимальное отображение информации обеспечивается не менее чем тремя
строками данных, состоящих из пеленга, дистанции и названия выбранного суд-
на. Другие данные судна могут отображаться горизонтальной прокруткой дан-
ных, но прокрутка пеленга и дистанции невозможна. Вертикальная прокрутка
будет показывать все другие суда, попавшие в зону действия АИС.
При повороте признаком начала маневра является изменение курса более
чем на 5° за 30 с, а признаком конца маневра – постоянство параметров движе-
ния в течение последних 20 с. При стоянке судна на якоре период обновления
информации равен 3 мин. Учитывая запаздывание информации и случайные
ошибки, координаты судов прогнозируются на момент отображения информа-
ции.
Широта и долгота передаются с разрешением 0,1 с. Точность считается вы-
сокой, если ошибка менее 10 м, и низкой, если ошибка более 10 м. SOG с разре-
шением 0,1 уз. COG с разрешением 0,1°. ГКК с разрешением 1°. При передаче
информации создаются временные отметки.
Графически информацию о типах целей АИС отображает на САРП/ ЭКНИС
как указанно ниже в табл. 16.
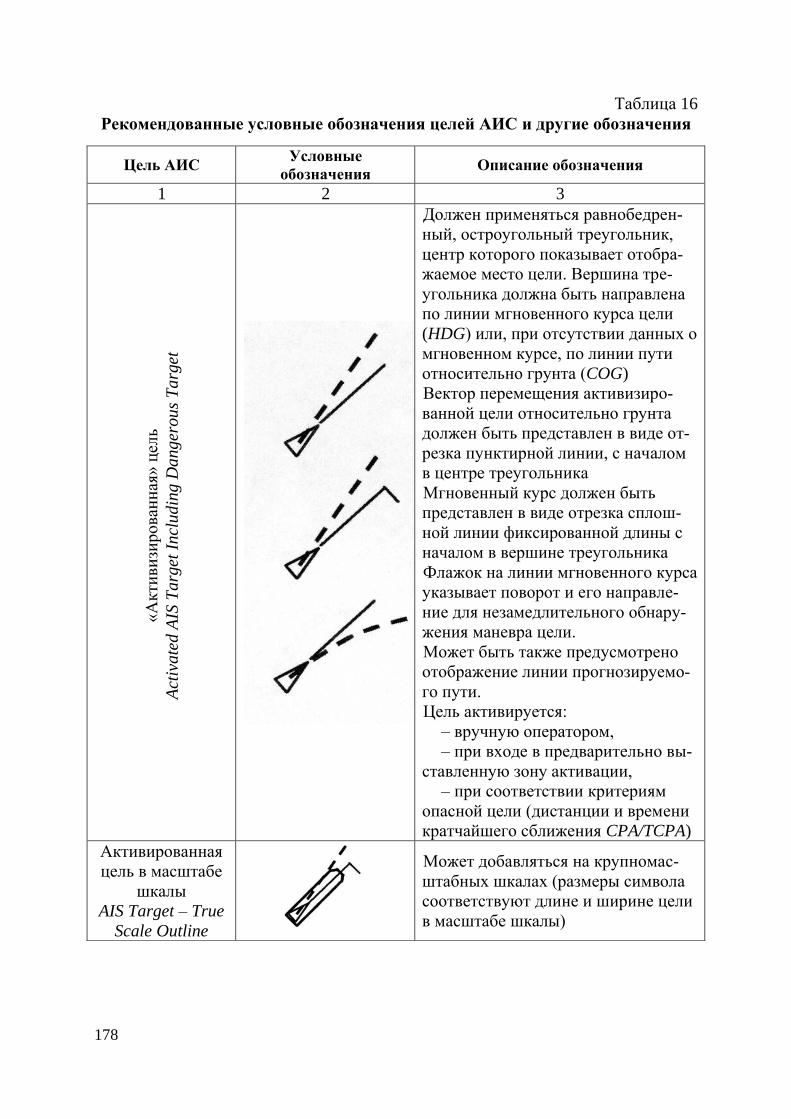
178
Таблица 16
Рекомендованные условные обозначения целей АИС и другие обозначения
Цель АИС Условные
обозначения Описание обозначения
1 2 3
«А
кти
ви
зир
ован
ная
» ц
ель
Act
ivate
d A
IS T
arg
et I
ncl
udin
g D
anger
ous
Ta
rget
Должен применяться равнобедрен-
ный, остроугольный треугольник,
центр которого показывает отобра-
жаемое место цели. Вершина тре-
угольника должна быть направлена
по линии мгновенного курса цели
(HDG) или, при отсутствии данных о
мгновенном курсе, по линии пути
относительно грунта (COG)
Вектор перемещения активизиро-
ванной цели относительно грунта
должен быть представлен в виде от-
резка пунктирной линии, с началом
в центре треугольника
Мгновенный курс должен быть
представлен в виде отрезка сплош-
ной линии фиксированной длины с
началом в вершине треугольника
Флажок на линии мгновенного курса
указывает поворот и его направле-
ние для незамедлительного обнару-
жения маневра цели.
Может быть также предусмотрено
отображение линии прогнозируемо-
го пути.
Цель активируется:
– вручную оператором,
– при входе в предварительно вы-
ставленную зону активации,
– при соответствии критериям
опасной цели (дистанции и времени
кратчайшего сближения CPA/TCPA)
Активированная
цель в масштабе
шкалы
AIS Target – True
Scale Outline
Может добавляться на крупномас-
штабных шкалах (размеры символа
соответствуют длине и ширине цели
в масштабе шкалы)
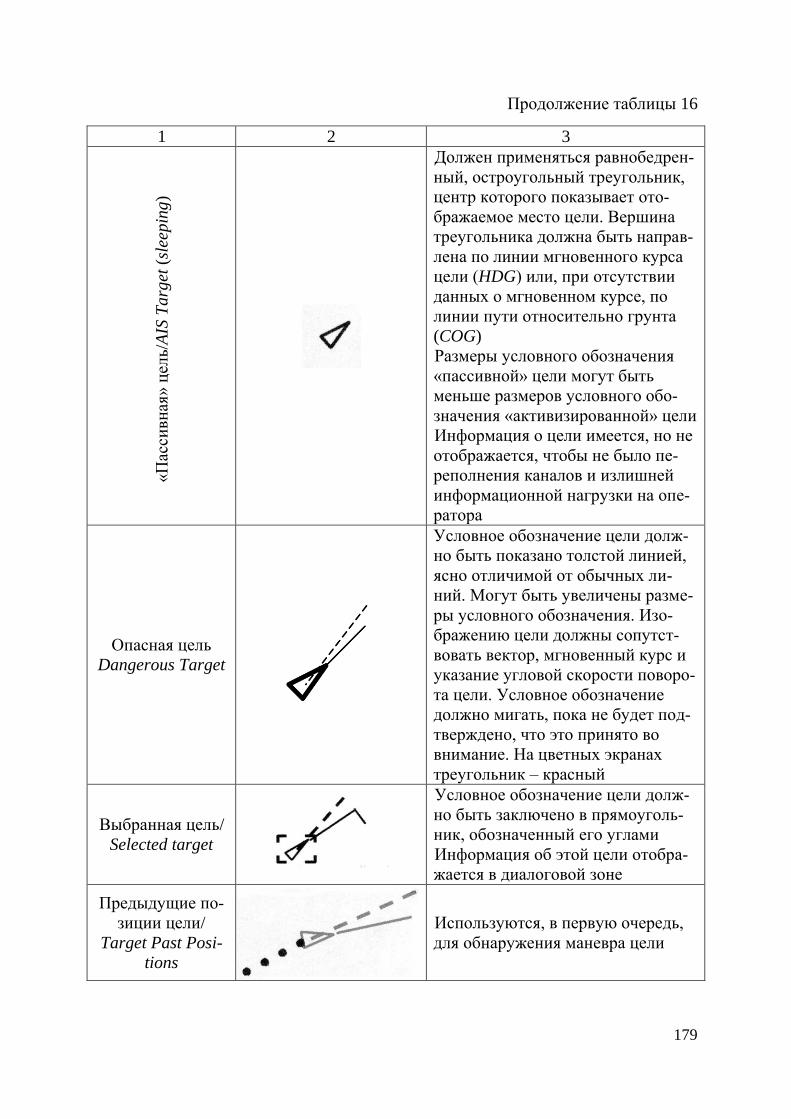
179
Продолжение таблицы 16
1 2 3
«П
асси
вн
ая» ц
ель/
AIS
Targ
et (
slee
pin
g)
Должен применяться равнобедрен-
ный, остроугольный треугольник,
центр которого показывает ото-
бражаемое место цели. Вершина
треугольника должна быть направ-
лена по линии мгновенного курса
цели (HDG) или, при отсутствии
данных о мгновенном курсе, по
линии пути относительно грунта
(COG)
Размеры условного обозначения
«пассивной» цели могут быть
меньше размеров условного обо-
значения «активизированной» цели
Информация о цели имеется, но не
отображается, чтобы не было пе-
реполнения каналов и излишней
информационной нагрузки на опе-
ратора
Опасная цель
Dangerous Target
Условное обозначение цели долж-
но быть показано толстой линией,
ясно отличимой от обычных ли-
ний. Могут быть увеличены разме-
ры условного обозначения. Изо-
бражению цели должны сопутст-
вовать вектор, мгновенный курс и
указание угловой скорости поворо-
та цели. Условное обозначение
должно мигать, пока не будет под-
тверждено, что это принято во
внимание. На цветных экранах
треугольник – красный
Выбранная цель/
Selected target
Условное обозначение цели долж-
но быть заключено в прямоуголь-
ник, обозначенный его углами
Информация об этой цели отобра-
жается в диалоговой зоне
Предыдущие по-
зиции цели/
Target Past Posi-
tions
Используются, в первую очередь,
для обнаружения маневра цели
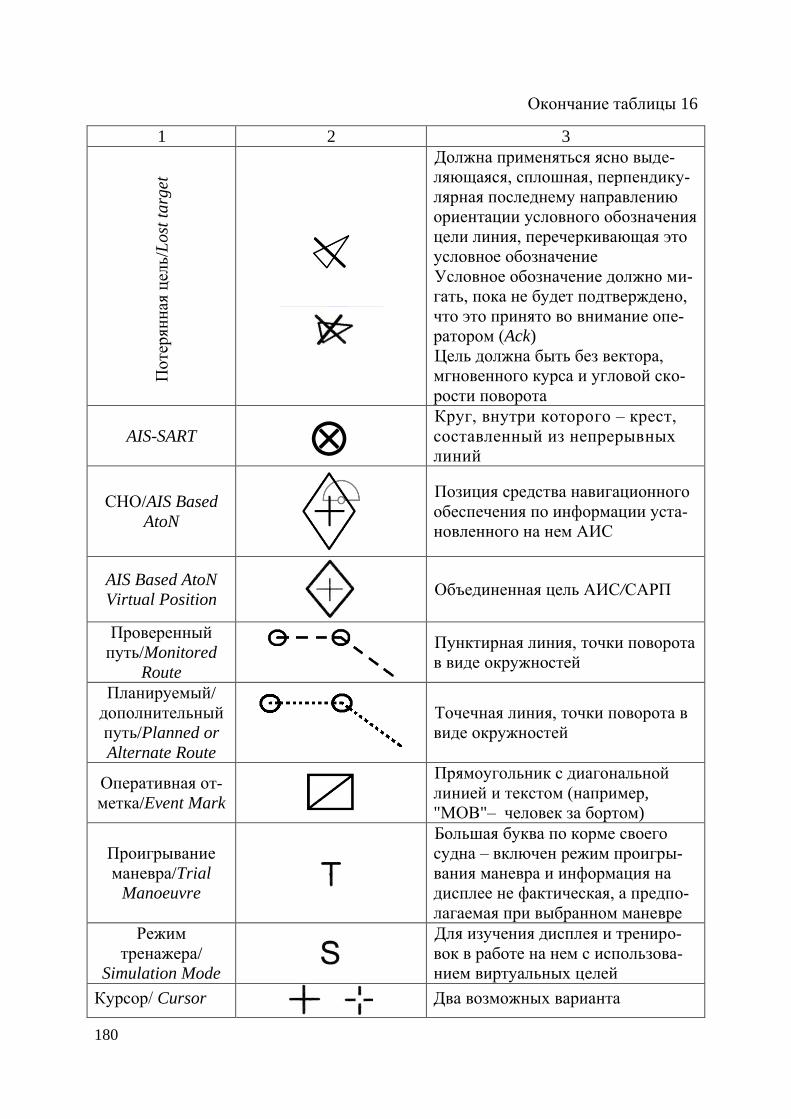
180
Окончание таблицы 16
1 2 3
Поте
рян
ная
цел
ь/L
ost
targ
et
Должна применяться ясно выде-
ляющаяся, сплошная, перпендику-
лярная последнему направлению
ориентации условного обозначения
цели линия, перечеркивающая это
условное обозначение
Условное обозначение должно ми-
гать, пока не будет подтверждено,
что это принято во внимание опе-
ратором (Ack)
Цель должна быть без вектора,
мгновенного курса и угловой ско-
рости поворота
AIS-SART Круг, внутри которого – крест,
составленный из непрерывных
линий
СНО/AIS Based
AtoN
Позиция средства навигационного
обеспечения по информации уста-
новленного на нем АИС
AIS Based AtoN
Virtual Position
Объединенная цель АИС/САРП
Проверенный
путь/Monitored
Route
Пунктирная линия, точки поворота
в виде окружностей
Планируемый/
дополнительный
путь/Planned or
Alternate Route
Точечная линия, точки поворота в
виде окружностей
Оперативная от-
метка/Event Mark
Прямоугольник с диагональной
линией и текстом (например,
"МОВ"– человек за бортом)
Проигрывание
маневра/Trial
Manoeuvre
Большая буква по корме своего
судна – включен режим проигры-
вания маневра и информация на
дисплее не фактическая, а предпо-
лагаемая при выбранном маневре
Режим
тренажера/
Simulation Mode
Для изучения дисплея и трениро-
вок в работе на нем с использова-
нием виртуальных целей
Курсор/ Cursor
Два возможных варианта
181
Суда в пределах зон радиолокационного наблюдения отображаются симво-
лом «активной цели» – с вектором путевой скорости и меткой курса. Суда, от-
слеживаемые АИС за пределами зон радиолокационного отображения, должны
обозначаться символом «спящей цели» – без вектора путевой скорости и метки
курса. Должны быть предусмотрены средства, позволяющие сделать активной
любую «спящую цель».
Если масштаб отображения 1:10000 и крупнее, то символ судна, сопровож-
даемого по данным АИС, должен заменяться изображением контура судна, со-
ответствующим длине, ширине судна и масштабу изображения. При одновре-
менном сопровождении по данным РЛС символ судна не меняется.
Данные любой выбранной активированной цели представляются в буквенно-
цифровом виде в зоне диалога вне рабочей зоны индикатора:
– источник информации;
– идентификатор судна (номер ИМО/название/позывные);
– координаты и их качество;
– рассчитанная дальность (Distance – DIST);
– рассчитанный пеленг (Bearing – BRG);
– дистанция кратчайшего сближения (Closest Point of Approach – CPA);
– время до кратчайшего сближения (Time to Closest Point of Approach
– TCPA);
– путь относительно грунта (Course Over Ground – COG);
– скорость относительно грунта (Speed Over Ground – SOG);
– навигационный статус.
Если принятая от АИС информация является неполной, она указывается в
соответствующем поле как «отсутствующая».
Пеленг, дальность, дистанция и время до кратчайшего сближения должны
быть даны относительно единой опорной точки (обычно это место, с которого
осуществляется управление судном – ходовой мостик).
Возможно добавление следующих данных: курс судна (Heading – HDG), уг-
ловая скорость поворота (Rate of turn – ROT). Дополнительная информация о це-
ли должна представляться по требованию.
Оператором могут быть заданы критерии сигнализации о потерянной цели
АИС (дистанция до цели, CPA/TCPA, класс станций «A/B»). Функция сигнали-
зации о потерянной цели АИС может быть включена/выключена оператором.
Если включена сигнализация о потерянной цели, цель представляет интерес
согласно заданным критериям фильтрации и сообщение от цели не получено за
установленное время, зависящее от номинального интервала передач, то:
– подается сигнал аварийно-предупредительной сигнализации;
– на дисплее символом «потерянная цель» указывается последнее из-
вестное местоположение цели.
Функция автоматического выбора символа отображения цели, основанная на
общих критериях, позволяет избежать представления двух символов для одной и
той же физической цели. Если имеются данные о цели от АИС и от радиолока-
ционного сопровождения и, если критерии выбора символа (например, коорди-
наты, перемещение) удовлетворены таким образом, что, согласно информации
от АИС и от радиолокатора (САРП), цель считается одной физической целью,
182
тогда автоматически выбирается и отображается символ активизированной цели
АИС и буквенно-цифровые данные цели АИС (по умолчанию).
Если РЛ информация и информация АИС становятся существенно различ-
ными, они рассматриваются как информация от двух раздельных целей и ото-
бражаются как одна активизированная цель АИС и одна сопровождаемая РЛ
цель.
Оператор имеет возможность изменять состояния «по умолчанию» для це-
лей, от которых имеется АИС-информация и сопровождаются САРП, и выбирать
либо РЛ сопровождение, либо данные АИС.
Ограничения, присущие АИС ВПКМ должен помнить, что информация, предоставляемая АИС, может
быть не полной картиной обстановки вокруг судна по следующим причинам:
– эффективное использование АИС возможно только при оснащении
всех судов конвенционной аппаратурой отображения интегрированной инфор-
мации от АИС и РЛС, позволяющей решать задачи предупреждения столкнове-
ний судов. До этого АИС может использоваться только как средство дополни-
тельной информации к информации, полученной от РЛС и САРП. Радиолокаци-
онными станциями нового поколения, в которых реализована функция отобра-
жения информации от АИС, пока оборудовано мало судов. Большая часть суще-
ствующего радиолокационного оборудования, установленного на судах, не мо-
жет отображать информацию от АИС;
– прогулочные, рыболовные, военные корабли и некоторые береговые
станции, включая центры СУДС, могут не оборудоваться АИС и не будут обна-
руживаться;
– судоводители – операторы АИС должны принимать во внимание тот
фактор, что АИС может выйти из строя или быть выключенным по профессио-
нальному суждению капитана при определенных обстоятельствах (нахождение
судна в районе военных или террористических действий);
– заменить в будущем радиолокационные средства на АИС просто не-
возможно, поскольку ее информация относится только к субъектам, на которых
установлена аппаратура АИС. В то время как радиолокатор позволяет наблюдать
любые объекты на поверхности воды, отражающие радиоволны (льдины, поки-
нутые суда, утерянные контейнеры, плавающие предметы, представляющие
опасность для плавания, плавучие СНО, знаки навигационного ограждения, бе-
реговая черта и многое другое);
– высокий рельеф местности может создавать препятствия распростра-
нению радиоволн; суда, находящиеся за гористым мысом, могут быть не обна-
ружены, даже если их АИС регулярно передают сообщения;
– в районах с очень высокой интенсивностью судоходства возможно
уменьшение реальной дальности действия АИС до 10–12 миль;
– сильные радиопомехи, например, во время грозы, аномальных явле-
ний или других форс-мажорных обстоятельств, могут вызвать кратковременные
нарушения в работе АИС;
– если послано сообщение на другое судно, то оно необязательно будет
просмотрено ВПКМ этого судна;
– судовая аппаратура АИС различных фирм-производителей сущест-
183
венно отличается по своим характеристикам и возможностям;
– не накоплен опыт использования АИС для предупреждения столкно-
вений судов, и он не отражен в МППСС;
– до окончания разработки и принятия всех международных и нацио-
нальных документов, необходимых для применения судовых и береговых АИС,
и появления специализированных навигационных дисплеев, на которых может
отображаться и применяться интегрированная информация от РЛС и АИС, ин-
формация от АИС должна использоваться в качестве вспомогательной.
Следует также помнить, что передача ошибочной информации влечет риск
для других судов, также как и для собственного судна. Пользователи остаются
ответственными за всю ими введенную информацию и информацию от судовых
датчиков. Точность принятой АИС информации является такой же, как и точ-
ность переданной АИС информации.
ВПКМ в начале каждого рейса вносит в АИС данные о пункте назначения
судна и поддерживает эту информацию на уровне современности. Из опыта из-
вестно, что при внесении информации о пункте назначения, используют различ-
ные названия для обозначения одного и того же места (например: LONDON–
LONDRES–LONDRA–Лондон; WARSAW–VARSOVIE–WARSZAWA–Варшава). Это
приводит к путанице и делает обмен информацией неэффективным. Лучше это
делать с помощью «UN/LOCODE – Коды для портов и других мест» (полную
информацию по вопросам кодировки можно найти в интернете на сайте:
www.unece.org/cefact/locode/service/main.htm). Например:
Судно выходит из порта Дубай и направляется в Роттердам:
АЕ DXB>NL RTM,
если следующий порт захода не известен: АЕ DXB>?? ???,
если порт не имеет кода UN/LOCODE: АЕ DXB>XX XXX,
если порт не имеет кода UN/LOCODE, но есть общепринятое английское
или местное название порта: АЕ DXB>=== Orrviken,
если известно только то, в какой район направляется судно, то следует
внести название или принятую аббревиатуру этого района:
АЕ DXB>=== US WC. Рекомендуемый формат и обозначения использу-
ются для указания как порта отправления, так и порта захода (шесть позиций
кода порта отхода – разделитель – шесть позиций кода порта захода).
Вахтенный помощник капитана должен помнить, что плохо устроенные или
невыверенные судовые датчики информации (координат, скорости и курса) мо-
гут привести к ее неверной передаче. Неверная информация об одном судне,
представленная на мостике другого, может опасным образом запутать ситуацию.
Если какой-либо датчик отсутствует или датчик (например, гирокомпас) не
выдает этих данных, АИС автоматически передает эти данные как «отсутству-
ют». Однако встроенное устройство проверки целостности не может оценивать
содержимое данных, обработанных АИС.
С разумной осторожностью вахтенный помощник капитана не должен вос-
принимать, что принятая от другого судна информация является подобным об-
разом по качеству и точности сравнима с той, которая может быть на его судне.
184
Использование АИС для предотвращения столкновений судов Каждое второе столкновение морских судов в мире (на виду друг у друга) и
более 70 % столкновений (в условиях ограниченной видимости) произошли в
условиях запоздалого обнаружения цели.
В настоящее время в МППСС ничего не говорится конкретно про АИС. Од-
нако требования Правила 5 «Наблюдение» («постоянно вести наблюдение … с
помощью всех имеющихся технических средств, применительно к преобла-
дающим обстоятельствам и условиям, с тем, чтобы полностью оценить ситуа-
цию и опасность столкновения») и Правила 7 «Опасность столкновения» («…
должно использовать все имеющиеся средства в соответствии с преобладаю-
щими обстоятельствами и условиями для определения опасности столкнове-
ния») вменяют в обязанность ВПКМ использовать судовую станцию АИС для
целей предотвращения столкновений судов.
Визуальное наблюдение не должно прерываться длительным отвлечением
на информацию АИС, особенно при наличии единственного наблюдателя на
мостике. В ночное время обязательно использование ночного режима индикации
(светлые символы на темном фоне), чтобы не нарушать адаптацию глаз ВПКМ в
условиях темного времени суток.
Принципы использования АИС в целях предупреждения столкновений во
многом аналогичны принципам использования РЛС и САРП. Общими для двух
видов оборудования являются графическое отображение местоположения дру-
гих судов, экстраполяция взаимного движения с помощью векторов скорости,
оценка опасности сближения по дистанции до точки кратчайшего сближения
(DКР) и по времени – до точки кратчайшего сближения (ТКР).
Предположения не должны делаться на основании неполной информации, в
том числе неполной АИС-информации. Полная информация о цели включает в
себя две составляющие:
1) информация об относительном движении цели – как (справа, слева,
по носу, по корме) проходит ЛОД и в каком расстоянии CPA;
2) информация об истинном движении цели – ее ракурс (курс).
Действия, предпринятые на основании неполной информации, могут быть
опасными, как например:
– сбавление хода, предпринятое для расхождения с целью, идущей пе-
ресекающим курсом, если ЛОД ее проходит по корме;
– поворот для расхождения с потенциально опасной целю, предприня-
тый после пересечения линии ее курса, приводящий к повторному пересечению
курса цели у нее по носу.
При использовании АИС в режиме «судно–судно» для целей предотвраще-
ния столкновений, следует иметь в виду следующие предосторожности:
судовой транспондер – дополнительный источник навигационной ин-
формации. АИС не заменяет, а сопутствует навигационным системам, таким как
радиолокационное сопровождение целей и СУДС;
до тех пор, пока опыт использования АИС для предотвращения
столкновений судов не приведет к принятию поправок к МППСС, при плавании
в условиях ограниченной видимости рекомендуется пользоваться следующим
толкованием Правила 19:
185
– если другое судно обнаружено с помощью как радиолокатора, так
и с помощью АИС – руководствоваться Правилом 19 (d) как «судно, которое об-
наружило присутствие другого судна только с помощью радиолокатора», и дей-
ствовать соответственно;
– если судно обнаружено только с помощью АИС, но не обнаруже-
но с помощью радиолокатора и не наблюдается визуально, также руководство-
ваться Правилом 19 (d);
Правило 18 «Взаимные обязанности судов» действует только для су-
дов, находящихся на виду друг у друга. Правило 19 «Плавание судов при огра-
ниченной видимости» не обязывает никакое судно уступить дорогу другому
судну и предусматривает равные обязанности для всех судов. Однако, в соответ-
ствие с Правилом 2 (b) «Ответственность», «при толковании и применении этих
Правил следует обращать внимание на … особенности судов (limitations of the
vessels involved), которые могут вызвать необходимость отступить от этих Пра-
вил для избежания непосредственной опасности». Поэтому при анализе ситуа-
ции и выборе вида, величины и времени маневра для предотвращения столкно-
вений судов ВПКМ не вправе игнорировать полученную информацию АИС о
типе судна, с которым осуществляется расхождение, и должен учитывать свой-
ственные этому типу судов ограничения;
особенности использования судовой станции АИС, оснащенной только
МКД с минимальными данными о целях (рис. 104):
– дисплей должен быть установлен в непосредственной близости от
индикатора САРП с тем, чтобы обращение к нему сопровождалось минималь-
ным отвлечением от информации САРП – при большой плотности движения и
невозможности усиления ходовой навигационной вахты игнорирование инфор-
мации АИС может быть меньшим злом, чем отвлечение от САРП для ее получе-
ния и анализа;
– судовая станция АИС может быть использована для заблаговре-
менного обнаружения малых целей, передающих информацию в сети АИС, и
получения предварительной качественной оценки ситуации расхождения с ними
(пеленг не меняется, меняется на нос, меняется в корму) – сортировка информа-
ции по дистанции может быть предпочтительной;
– когда впереди траверза имеются теневые радиолокационные сек-
торы (острова, мысы, близко идущие цели с высокой надстройкой), судовая
станция АИС может быть использована для заблаговременного обнаружения це-
лей, находящихся в этих секторах и передающих информацию в сети АИС –
сортировка информации по пеленгу может быть предпочтительной;
– следует обращать внимание на то, что опасность столкновения
может существовать и при заметном изменении пеленга (с антенны GNSS своего
судна на антенну GNSS цели!) – при малой дистанции до цели или при расхож-
дении с судном, занятым буксировкой или ловом рыбы;
– если информация АИС свидетельствует о наличии опасности
столкновения, то следует проверить эту информацию другими средствами (визу-
альное или радиолокационное наблюдение), однако для избежания непосред-
ственной опасности должны быть предприняты действия на основании ин-
формации АИС, не дожидаясь подтверждения ее другими средствами;

186
Рис. 104. Судовая УАИС и САРП
использование судовой станции АИС, оснащенной только минималь-
ным дисплеем с расширенными данными о целях (enhanced), дополнительно к
предыдущему пункту позволяет контролировать неизменность параметров дви-
жения цели и оперативно обнаруживать ее маневр. Для этого:
– вывести на формуляр САРП (САС) расширенные данные цели, с
которой осуществляется расхождение;
– по пеленгу (± 2º) и дистанции (± 1 % от используемой шкалы) за-
благовременно идентифицировать цель и вывести ее данные на монитор АИС;
– проверить идентификацию по совпадению курса цели и ее скоро-
сти по САРП и АИС (неманеврирующая цель, идущая со скоростью более 10 уз):
курсы не должны отличаться более чем на 10º;
скорости – более чем на два узла (если САРП стабилизирова-
но относительно грунта);
на скорость течения ± 2 уз (если САРП стабилизировано от-
носительно воды);
187
– в течение процесса расхождения контролировать эффективность
предпринятых действий и дистанции расхождения CPA с другими целями по
САРП, периодически контролируя курс и скорость цели по АИС;
особенности использования информации АИС, представленной на гра-
фическом дисплее:
– полноценное использование отдельного графического дисплея
АИС в условиях высокой плотности движения возможно только при усилении
ходовой навигационной вахты, когда обеспечено непрерывное наблюдение и
анализ радиолокационной информации на дисплее САРП;
– представление информации, символы, сигналы и индикация, ус-
ловные обозначения и терминология на графических дисплеях могут отличаться
и не совпадать полностью;
– перед началом эксплуатации необходимо тщательно изучить ру-
ководство для пользователя конкретного графического дисплея, установленного
на судне;
– чтобы не затенять «сырую» радиолокационную информацию и, по
возможности, уменьшать информационную перегрузку оператора, следует ис-
пользовать фильтрацию неактивированных целей АИС (например, по дальности
целей, их CPA/TCPA, классу станций A/B и т. д.). Фильтрация неактивированных
целей по дальности предпочтительнее, так как при фильтрации по CPA/TCPA
могут быть не показаны потенциально опасные цели, CPA/TCPA которых боль-
ше установленного критерия, но которые могут стать опасными в случае пред-
полагаемого маневра своего судна и которые следует учитывать при выборе ма-
невра по расхождению с опасной целью;
– зоны автоматической активации целей совпадают с зонами авто-
матического захвата радиолокационных целей и не должны быть слишком
большими, чтобы не приводить к переполнению каналов обработки сообщенных
АИС целей. Если индикация показывает, что объем обработки/отображения це-
лей приближается к пределу, или срабатывает аварийно-предупредительная сиг-
нализация превышения объема обработки/отображения целей, следует умень-
шить зону автоматической активации целей. Дополнительно к зоне автоматиче-
ской активации целей могут быть заданы параметры автоматической активации
(например, CPA/TCPA);
использование АИС не снимает ответственности с вахтенного помощ-
ника капитана за выполнение всех требований МППСС.
Использование АИС на судне не нацелено на оказание особого влияния на
состав ходовой навигационной вахты, который продолжает определяться соот-
ветствием с Конвенцией ПДМНВ.
К преимуществам АИС по сравнению с обычным радиолокационным на-
блюдением и использованием САРП следует отнести (рис. 105):
постоянный межсудовой обмен координатами, определенными с гораз-
до большей точностью (с помощью ДГНСС – от 2 до 10 метров), а также инфор-
мацией об истинном текущем курсе повышает точность определения практиче-
ски в реальном времени любого маневра судна-цели (для САРП – от одной до
трех минут), его параметров движения, что существенно влияет на эффектив-
ность решения задачи безопасного расхождения судов в море;
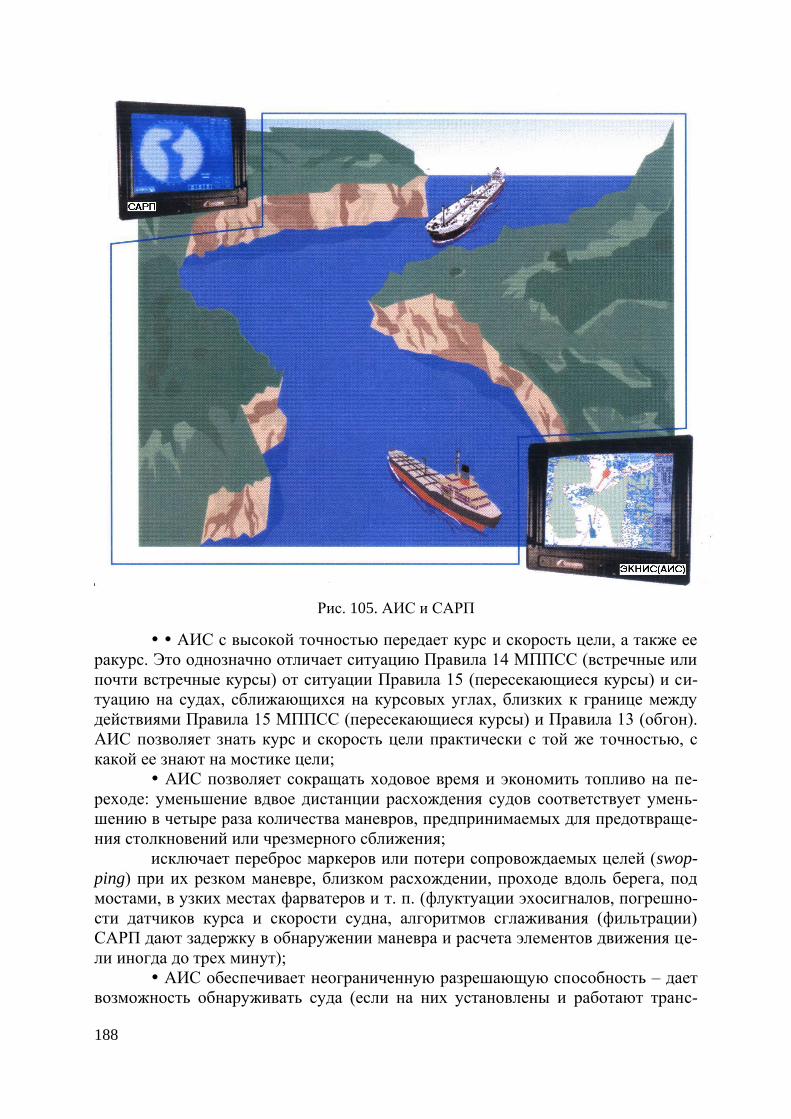
188
Рис. 105. АИС и САРП
АИС с высокой точностью передает курс и скорость цели, а также ее
ракурс. Это однозначно отличает ситуацию Правила 14 МППСС (встречные или
почти встречные курсы) от ситуации Правила 15 (пересекающиеся курсы) и си-
туацию на судах, сближающихся на курсовых углах, близких к границе между
действиями Правила 15 МППСС (пересекающиеся курсы) и Правила 13 (обгон).
АИС позволяет знать курс и скорость цели практически с той же точностью, с
какой ее знают на мостике цели;
АИС позволяет сокращать ходовое время и экономить топливо на пе-
реходе: уменьшение вдвое дистанции расхождения судов соответствует умень-
шению в четыре раза количества маневров, предпринимаемых для предотвраще-
ния столкновений или чрезмерного сближения;
исключает переброс маркеров или потери сопровождаемых целей (swop-
ping) при их резком маневре, близком расхождении, проходе вдоль берега, под
мостами, в узких местах фарватеров и т. п. (флуктуации эхосигналов, погрешно-
сти датчиков курса и скорости судна, алгоритмов сглаживания (фильтрации)
САРП дают задержку в обнаружении маневра и расчета элементов движения це-
ли иногда до трех минут);
АИС обеспечивает неограниченную разрешающую способность – дает
возможность обнаруживать суда (если на них установлены и работают транс-
189
пондеры АИС) как отдельные цели, даже если они ошвартованы друг к другу.
САРП же имеет ограничения по наблюдению близко расположенных целей раз-
дельно в пределах разрешающей способности по пеленгу и расстоянию;
при правильной эксплуатации АИС не создает ложных целей, чем об-
легчает оценку ситуации. При наблюдении с помощью САРП достаточно часто
возникают ложные цели: вследствие боковых лепестков горизонтальной диа-
граммы излучения, от переотражения деталями конструкции судна, вследствие
многократного переотражения от близкой цели, от линий электропередач, эхо-
сигналы от очень далеких целей, приходящие во время второй и последующих
разверток;
малое судно-цель, оборудованное АИС, обнаруживается на расстоянии
не менее 8–10 (практически 20–30) миль как и крупное судно с помощью РЛС,
благодаря тому, что транспондер – активное излучающее средство и дальность
обнаружения целей существенно повышается (дальность уверенного обнаруже-
ния и автоматического сопровождения с помощью РЛС/САРП лежит в пределах
6–15 миль);
передача каждым транспондером позывных или названия судна пре-
доставляет возможность телефонного вызова конкретного судна по УКВ в непо-
нятных или опасных ситуациях для взаимного безопасного расхождения, что
особенно важно при ограниченной видимости или ночью (эхо-сигнал на РЛС не
имеет нужной для этого информации);
практически отсутствует влияние на работу транспондеров атмосфер-
ных осадков, волнения моря и, как следствие, неграмотного использования орга-
нов управления для настройки работы РЛС и САРП, «мертвой зоны», «теневых
секторов» из-за различного рода препятствий, рельефа местности и прямой ви-
димости радиоволн сантиметрового диапазона частот, применяемого в радиоло-
кации (метровые радиоволны УКВ-диапазона, излученные ненаправленной ан-
тенной АИС, огибают эти препятствия, отражаются от них и надежно передают
всю информацию автоматически в пределах УКВ-видимости);
благодаря взаимному обмену между судами информацией о размерах,
навигационных параметрах, типе, осадке судна, а также о планируемых манев-
рах, АИС позволяет отображать контуры судов в масштабе электронной карты
или шкалы РЛС и обеспечивается уникальная возможность учесть во всех расче-
тах планируемые маневры и повороты собственного судна и всех целей для пре-
дупреждения столкновений судов;
использование АИС позволяет уменьшить теоретически безопасную
дистанцию (дистанция опасной зоны CPA limit) расхождения судов, рассчитан-
ную для использования САРП, практически вдвое;
АИС позволяет повысить устойчивость потоков судов: при большой
плотности движения судов маневрирование любого судна сказывается не только
на расхождении с конкретной целью, но и на движении других судов. Наличие
полной информации обо всех судах в зоне действия VTS позволит операторам
VTS предпринять эффективные меры к упорядочиванию движения всех судов,
заблаговременному предотвращению чрезмерного сближения и сведению до
минимума значительных маневров судов как курсом, так и скоростью;
190
АИС позволят учитывать «особенности судов» в соответствии с Пра-
вилом 2 МППСС, которое требует при толковании и применении Правил обра-
щать должное внимание на «все особые обстоятельства, включая особенности
самих судов». При визуальном (минимальная дальность видимости огней – 2–3,
с использованием бинокля – 4–5 миль) и слуховом (0,5–2 мили в условиях огра-
ниченной видимости) наблюдении особенности судов могут быть в какой-то ме-
ре оценены, а при радиолокационном наблюдении невозможно их установить и
учитывать. Наличие информации АИС о типе судна и его навигационном стату-
се, получаемой немедленно при обнаружении цели, или возможность запроса
этой информации позволяют как на виду друг у друга, так и при ограниченной
видимости заблаговременно получить информацию об особенностях целей и
учесть их при оценке ситуации и выборе маневра;
автоматически передаваемая в цифровом формате информация АИС
позволяет ее легко регистрировать, хранить, воспроизводить, в том числе и с
помощью баз данных, что существенно снижает интенсивность радиотелефон-
ного трафика при плавании в районах активного судоходства, обеспечивает эф-
фективный мониторинг судов в системах судовых сообщений и организацию ра-
боты береговых и портовых служб.
Как видно из сказанного, информация АИС при надлежащем использовании
и индикации для предотвращения столкновений с целями может обладать всеми
достоинствами визуального, слухового и радиолокационного наблюдения без
ограничений, свойственных этим видам наблюдения. Кроме того, информация
АИС обладает рядом дополнительных достоинств, которых не было ранее ни у
одного из существовавших традиционных видов наблюдения.
Внедрение АИС означает качественный скачок в предотвращении столкно-
вений судов, по меньшей мере, сопоставимый с качественным скачком при по-
явлении САРП. Накопление опыта использования АИС для предотвращения
столкновений судов, вероятно, приведет к изменению технологии и процедур
расхождения судов.
4.7. ОСОБЕННОСТИ РАБОТЫ СУДОВЫХ ТРАНСПОНДЕРОВ АИС
Эффективное и безопасное использование АИС на судах возможно при ус-
ловии надлежащей подготовленности судоводителей к применению этого нового
вида навигационного оборудования. Судоводительский состав должен быть дос-
таточно хорошо знаком с принципами работы, информационно-техническими
характеристиками, возможностями и ограничениями АИС. Особую важность
имеют навыки интерпретации отображаемой информации и ее практического
использования в целях предупреждения столкновений. В настоящее время не ус-
тановлены официальные обязательные требования к подготовке судоводителей
по использованию АИС. Однако целесообразность таких требований уже обсуж-
дается в ИМО и других международных и национальных организациях, связан-
ных с безопасностью мореплавания, и в ближайшее время будет введена обяза-
тельная тренажерная подготовка судоводительского состава по совместному ис-
пользованию АИС с традиционной РЛС/САРП и далее с ЭКС/ЭКНИС и ИНС.
На международном рынке специальной технической аппаратуры в связи со
вступлением в силу требований обновленной Конвенции СОЛАС к оснащению
191
современных морских судов конкурируют около десятка компаний-
разработчиков судовых транспондеров АИС из различных стран мира.
Приоритет в разработке первых образцов аппаратуры универсальной АИС
принадлежит шведской компании GP&C, которая в конце 90-х годов передала
права на промышленное производство разработанной аппаратуры компании
SAAB Transponder Tech (Швеция). Последняя является признанным мировым ли-
дером в усовершенствовании и промышленном производстве судовой и берего-
вой аппаратуры АИС.
Хорошо известными разработчиками и производителями АИС из иностран-
ных поставщиков аппаратуры являются:
южноафриканская компания Marine Data System (АИС AISM 7100 в су-
довом и базовом вариантах);
норвежская компания Seatex, входящая в концерн Kongsberg (модель
Seatex AIS 100);
японская компания Izumi Boeki, входящая в концерн JRC и разрабаты-
вающая аппаратуру АИС с привлечением своих филиалов и партнеров в Украи-
не и в России;
южнокорейская компания «Saracom», знакомая нам по аппаратуре
ГМССБ, со своей первой моделью судового транспондера SI-10, которая в нача-
ле 2004 года предъявилась российскому регистру на соответствие национальным
требованиям;
американская компания «L-3 Communications» со станцией АИС «L-3
PROTEC».
Среди российских разработчиков следует особо отметить компанию «Тран-
зас Евразия», предлагающую серию судовых станций АИС Т100, Т110, причем
Т100 имеют комбинированные приемники ГЛОНАСС/GPS. Компания «Транзас
Евразия» одна из первых в мире реализовала совместное отображение информа-
ции АИС и радиолокационной информации на экране электронных картографи-
ческих систем.
В 2003 году российская фирма ООО «Радиома» завершила разработку судо-
вого универсального транспондера «Тритон-92» класса «А», который прошел
соответствующие испытания и освидетельствован морским регистром судоход-
ства России.
Для того чтобы было полное представление о приборах, с которыми совре-
менному вахтенному помощнику придется работать на флоте, ниже предлагает-
ся для изучения и анализа иллюстрированная информация по судовому оборудо-
ванию АИС класса «А» фирм-изготовителей, указанных выше и получивших
одобрение российского регистра.
Судовая аппаратура российской компании «Транзас» Судовая транспондерная аппаратура УАИС (рис. 106) выполняет следую-
щие функции:
– выдача данных, принятых из радиоканала от других объектов УАИС,
для отображения в устройстве представления данных (МКД, САРП, ЭКНИС,
ИНС);
– автоматическая идентификация судов;
– самоорганизация системы и управление доступом к радиоканалам;
192
Рис. 106. Судовая станция АИС Transas Т100
– обмен данными с другими объектами УАИС и судовым оборудованием
в соответствии со стандартами УАИС;
– использование сигналов системы Глонасс для синхронизации прие-
ма/передачи информации УАИС;
– выдача информации о работоспособности и режиме работы АИС;
– выдача на дисплеи пеленгов и дистанций до судов, рассчитанных по их
координатам, полученным по линии передачи данных АИС (VHF Data Link –
VDL), и собственным координатам;
– прием дифференциальных поправок ГНСС по каналу УАИС и выдача
их приемнику ГНСС;
– в случае неисправности внешнего приемника – определение координат
и параметров движения судна при помощи встроенного приемника ГНСС, спо-
собного повышать точность определения координат при использовании диффе-
ренциальных поправок;
– отображение относительного расположения судов на пульте управле-
ния и отображения.
Станция АИС комплектуется пультом управления и отображения (ПУО),
обеспечивающим доступ со стороны оператора ко всем основным функциям
станции АИС даже при отсутствии внешнего оборудования.
Особенностью минимального дисплея (ПУО) является использование техно-
логии «touch screen» (по периметру экрана расположены инфракрасные излуча-
тели и приемники – парами: излучатель напротив приемника), то есть контекст-
ное отображение функциональных «клавишей» непосредственно на экране дис-
плея, и, таким образом, служит устройством ввода. Ввод осуществляется при
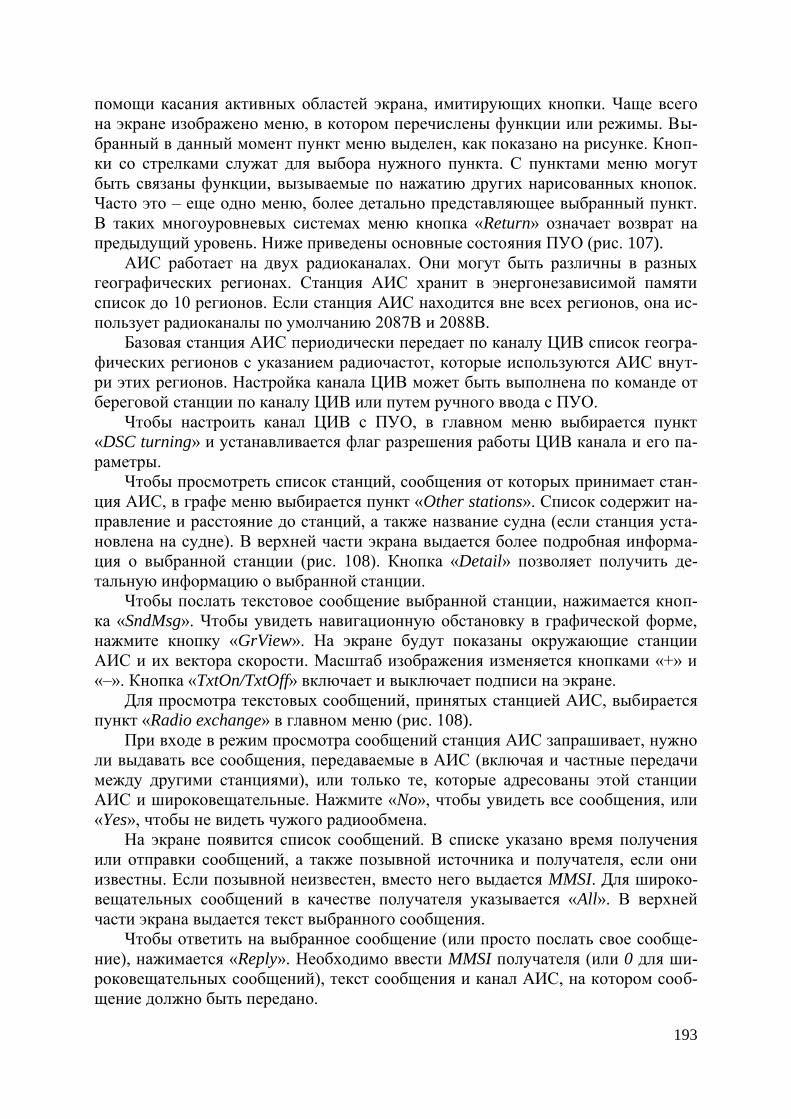
193
помощи касания активных областей экрана, имитирующих кнопки. Чаще всего
на экране изображено меню, в котором перечислены функции или режимы. Вы-
бранный в данный момент пункт меню выделен, как показано на рисунке. Кноп-
ки со стрелками служат для выбора нужного пункта. С пунктами меню могут
быть связаны функции, вызываемые по нажатию других нарисованных кнопок.
Часто это – еще одно меню, более детально представляющее выбранный пункт.
В таких многоуровневых системах меню кнопка «Return» означает возврат на
предыдущий уровень. Ниже приведены основные состояния ПУО (рис. 107).
АИС работает на двух радиоканалах. Они могут быть различны в разных
географических регионах. Станция АИС хранит в энергонезависимой памяти
список до 10 регионов. Если станция АИС находится вне всех регионов, она ис-
пользует радиоканалы по умолчанию 2087В и 2088В.
Базовая станция АИС периодически передает по каналу ЦИВ список геогра-
фических регионов с указанием радиочастот, которые используются АИС внут-
ри этих регионов. Настройка канала ЦИВ может быть выполнена по команде от
береговой станции по каналу ЦИВ или путем ручного ввода с ПУО.
Чтобы настроить канал ЦИВ с ПУО, в главном меню выбирается пункт
«DSC turning» и устанавливается флаг разрешения работы ЦИВ канала и его па-
раметры.
Чтобы просмотреть список станций, сообщения от которых принимает стан-
ция АИС, в графе меню выбирается пункт «Other stations». Список содержит на-
правление и расстояние до станций, а также название судна (если станция уста-
новлена на судне). В верхней части экрана выдается более подробная информа-
ция о выбранной станции (рис. 108). Кнопка «Detail» позволяет получить де-
тальную информацию о выбранной станции.
Чтобы послать текстовое сообщение выбранной станции, нажимается кноп-
ка «SndMsg». Чтобы увидеть навигационную обстановку в графической форме,
нажмите кнопку «GrView». На экране будут показаны окружающие станции
АИС и их вектора скорости. Масштаб изображения изменяется кнопками «+» и
«–». Кнопка «TxtOn/TxtOff» включает и выключает подписи на экране.
Для просмотра текстовых сообщений, принятых станцией АИС, выбирается
пункт «Radio exchange» в главном меню (рис. 108).
При входе в режим просмотра сообщений станция АИС запрашивает, нужно
ли выдавать все сообщения, передаваемые в АИС (включая и частные передачи
между другими станциями), или только те, которые адресованы этой станции
АИС и широковещательные. Нажмите «No», чтобы увидеть все сообщения, или
«Yes», чтобы не видеть чужого радиообмена.
На экране появится список сообщений. В списке указано время получения
или отправки сообщений, а также позывной источника и получателя, если они
известны. Если позывной неизвестен, вместо него выдается MMSI. Для широко-
вещательных сообщений в качестве получателя указывается «All». В верхней
части экрана выдается текст выбранного сообщения.
Чтобы ответить на выбранное сообщение (или просто послать свое сообще-
ние), нажимается «Reply». Необходимо ввести MMSI получателя (или 0 для ши-
роковещательных сообщений), текст сообщения и канал АИС, на котором сооб-
щение должно быть передано.
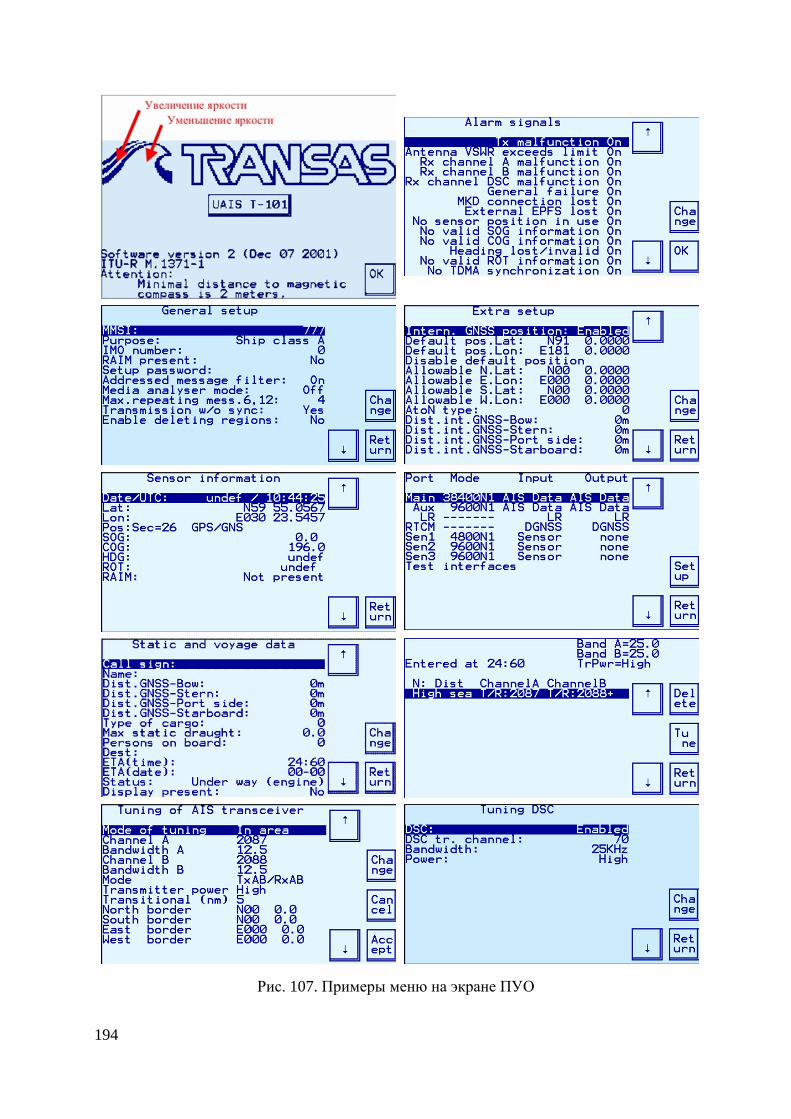
194
Рис. 107. Примеры меню на экране ПУО
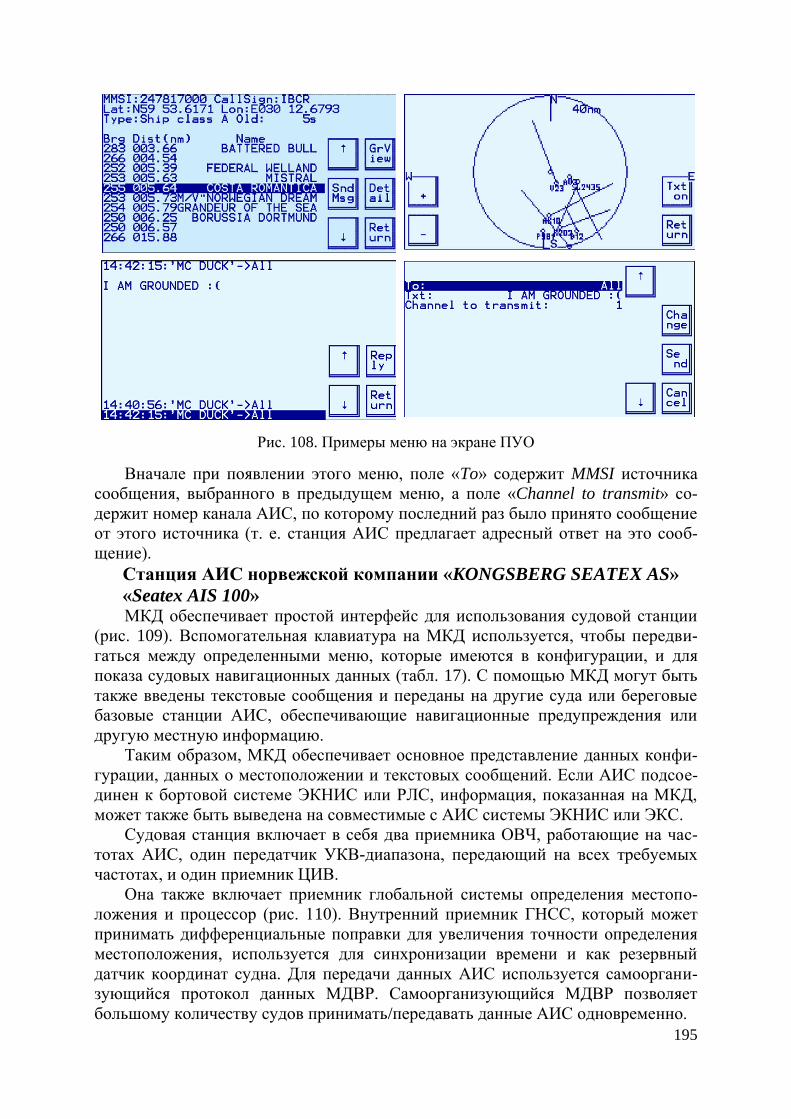
195
Рис. 108. Примеры меню на экране ПУО
Вначале при появлении этого меню, поле «To» содержит MMSI источника
сообщения, выбранного в предыдущем меню, а поле «Channel to transmit» со-
держит номер канала АИС, по которому последний раз было принято сообщение
от этого источника (т. е. станция АИС предлагает адресный ответ на это сооб-
щение).
Станция АИС норвежской компании «KONGSBERG SEATEX AS»
«Seatex AIS 100» МКД обеспечивает простой интерфейс для использования судовой станции
(рис. 109). Вспомогательная клавиатура на МКД используется, чтобы передви-
гаться между определенными меню, которые имеются в конфигурации, и для
показа судовых навигационных данных (табл. 17). С помощью МКД могут быть
также введены текстовые сообщения и переданы на другие суда или береговые
базовые станции АИС, обеспечивающие навигационные предупреждения или
другую местную информацию.
Таким образом, МКД обеспечивает основное представление данных конфи-
гурации, данных о местоположении и текстовых сообщений. Если АИС подсое-
динен к бортовой системе ЭКНИС или РЛС, информация, показанная на МКД,
может также быть выведена на совместимые с АИС системы ЭКНИС или ЭКС.
Судовая станция включает в себя два приемника ОВЧ, работающие на час-
тотах АИС, один передатчик УКВ-диапазона, передающий на всех требуемых
частотах, и один приемник ЦИВ.
Она также включает приемник глобальной системы определения местопо-
ложения и процессор (рис. 110). Внутренний приемник ГНСС, который может
принимать дифференциальные поправки для увеличения точности определения
местоположения, используется для синхронизации времени и как резервный
датчик координат судна. Для передачи данных АИС используется самооргани-
зующийся протокол данных МДВР. Самоорганизующийся МДВР позволяет
большому количеству судов принимать/передавать данные АИС одновременно.
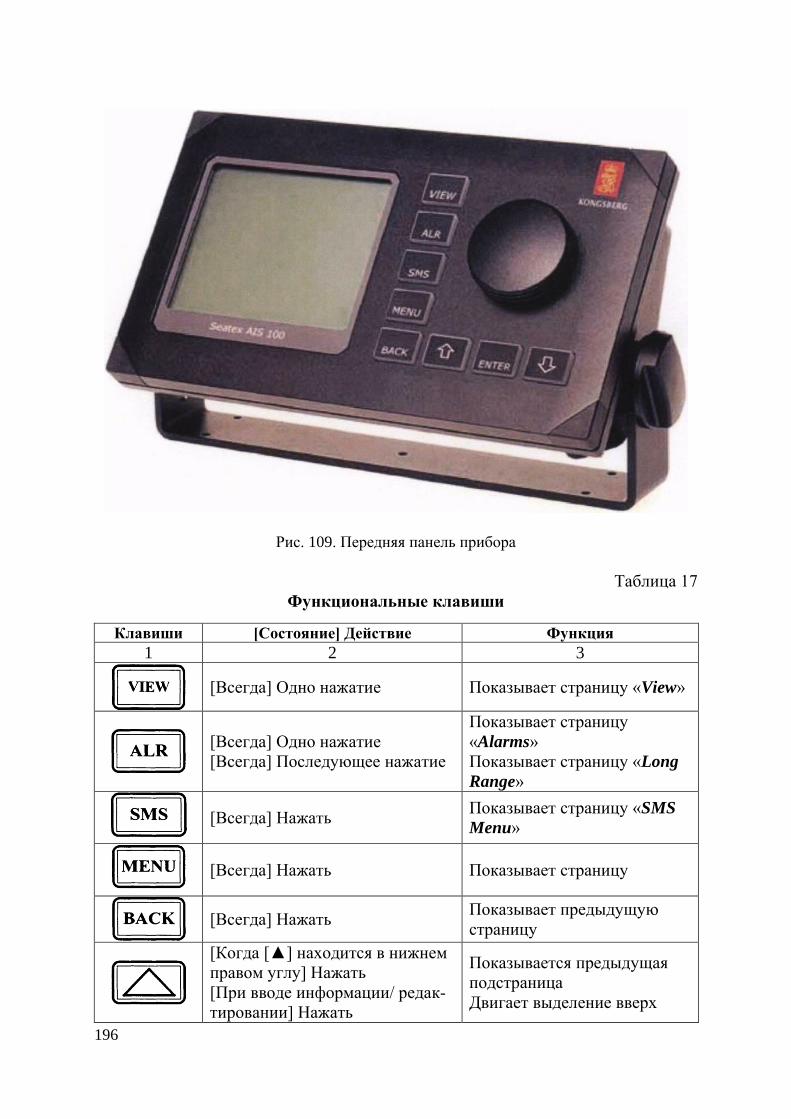
196
Рис. 109. Передняя панель прибора
Таблица 17
Функциональные клавиши
Клавиши [Состояние] Действие Функция
1 2 3
[Всегда] Одно нажатие Показывает страницу «View»
[Всегда] Одно нажатие
[Всегда] Последующее нажатие
Показывает страницу
«Alarms»
Показывает страницу «Long
Range»
[Всегда] Нажать Показывает страницу «SMS
Menu»
[Всегда] Нажать Показывает страницу
[Всегда] Нажать
Показывает предыдущую
страницу
[Когда [▲] находится в нижнем
правом углу] Нажать
[При вводе информации/ редак-
тировании] Нажать
Показывается предыдущая
подстраница
Двигает выделение вверх
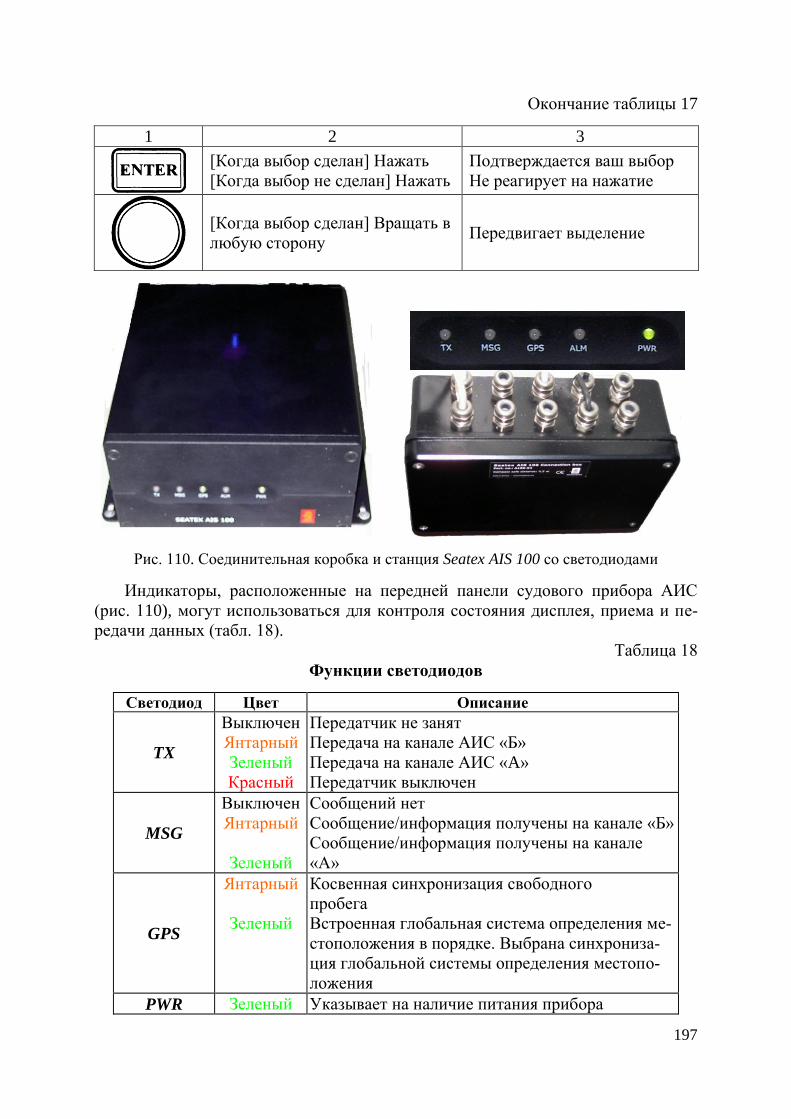
197
Окончание таблицы 17
1 2 3
[Когда выбор сделан] Нажать
[Когда выбор не сделан] Нажать
Подтверждается ваш выбор
Не реагирует на нажатие
[Когда выбор сделан] Вращать в
любую сторону Передвигает выделение
Рис. 110. Соединительная коробка и станция Seatex AIS 100 со светодиодами
Индикаторы, расположенные на передней панели судового прибора АИС
(рис. 110), могут использоваться для контроля состояния дисплея, приема и пе-
редачи данных (табл. 18).
Таблица 18
Функции светодиодов
Светодиод Цвет Описание
TX
Выключен
Янтарный
Зеленый
Красный
Передатчик не занят
Передача на канале АИС «Б»
Передача на канале АИС «A»
Передатчик выключен
MSG
Выключен
Янтарный
Зеленый
Сообщений нет
Сообщение/информация получены на канале «Б»
Сообщение/информация получены на канале
«А»
GPS
Янтарный
Зеленый
Косвенная синхронизация свободного
пробега
Встроенная глобальная система определения ме-
стоположения в порядке. Выбрана синхрониза-
ция глобальной системы определения местопо-
ложения
PWR Зеленый Указывает на наличие питания прибора
198
Окончание таблицы 18
Светодиод Цвет Описание
ALM
Выключен
Красный
Прибор работает нормально
Тревога. Сигнальный ретранслятор активизиро-
ван
Соединительная коробка (рис. 110) используется для соединения с внешни-
ми датчиками местоположения, курса и скорости поворота (если имеется). Эти
датчики принудительны, в то время как интерфейсы к электронным картографи-
ческим системам и системам дальней связи – дополнительные.
Антенна ОВЧ используется для связи в УКВ диапазоне. Антенна связана с
подвижной станцией, используя кабели с ослаблением не более трех децибелов.
Антенна глобальной системы определения местоположения – антенна инди-
катора длины, принимающая сигналы от всех видимых спутников. Антенна гер-
метично запечатана, и кабель, соединяющий антенну глобальной системы опре-
деления местоположения и судовую станцию, должен иметь качество, которое
гарантирует минимальное ослабление сигнала не более 20 децибелов.
АИС совместим с ЭКНИС/ЭКС и соединяется через последовательную про-
водную связь. Электропитание поставляется к подвижной станции АИС через
соединительную коробку.
Транспондер АИС должен быть всегда включен. Рекомендуют не выключать
АИС в течение всего пребывания в порту, чтобы обеспечить получение инфор-
мации от портовых властей. В районах, где возможно пиратство, капитан может
отключить передатчик. Если передатчик выключен, статические данные и ин-
формация, относящаяся к рейсу, будет сохранена. После того, как прибор был
установлен, он работает автоматически без любого пользовательского вмеша-
тельства.
После подачи питания инициация происходит в течение двухминутного пе-
риода, по окончании которой все светодиоды будут подсвечены. Транспондер
готов к действию, когда светодиод глобальной системы определения местопо-
ложения замигает с интервалами в одну секунду и на дисплее появится страница
«View».
Первоначально дисплей показывает положение собственного судна и рядом
его курс (в градусах) и скорость (в узлах) относительно грунта. Другие суда по-
казываются в возрастающем порядке относительно собственного положения
судна (рис. 111). Остальные меню работы основного прибора Seatex AIS 100 вы-
глядят по сравнению с транспондером компании «Транзас» практически одина-
ковыми, за исключением некоторых отличий, вызванных немного разными тех-
нологиями производства аппаратуры. Для примера ниже приводятся основные
меню программного обеспечения Seatex AIS 100 (рис. 112).
Судовая УАИС фирмы «Радиома» «Тритон-92» класса «А»
«Тритон-92» является универсальным транспондером АИС класса «А» (рис.
113). Транспондер разработан в соответствии с требованиями международных и
национальных документов и состоит из УКВ-передатчика, двух МДВР-
приемников, приемника ЦИВ, интерфейсной части, коммуникационного процес-
сора, ЖК-дисплея и внутреннего ГЛОНАСС/GPS-приемника.
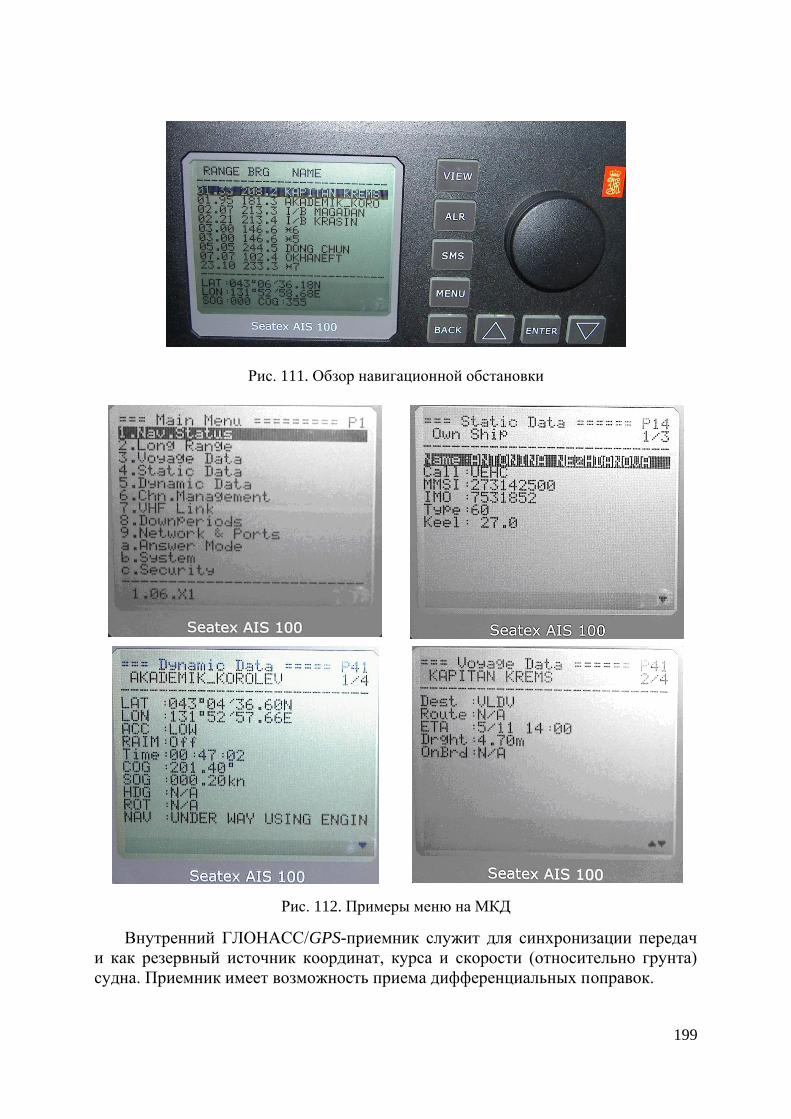
199
Рис. 111. Обзор навигационной обстановки
Рис. 112. Примеры меню на МКД
Внутренний ГЛОНАСС/GPS-приемник служит для синхронизации передач
и как резервный источник координат, курса и скорости (относительно грунта)
судна. Приемник имеет возможность приема дифференциальных поправок.

200
Рис 113. Внешний вид транспондера
Подключаемые внешние устройства:
– внешний судовой ГНСС-приемник;
– гирокомпас;
– лаг;
– датчик угловой скорости;
– внешний АИС-плоттер, ЭКНИС, РЛС/САРП;
– лоцманский комплект;
– приемник дифференциальных поправок;
– система дальней связи;
– аварийная сигнализация;
– локальная вычислительная сеть.
«Тритон-92» имеет удобную панель управления, расположенную на лицевой
панели прибора. Удобное, разветвленное меню (табл. 19) позволяет выполнять
необходимые функции с минимальными сложностями.
«Тритон-92» имеет встроенный ЖК-дисплей (95×65 мм). Дисплей служит
для отображения текстовой информации: принятых из эфира сообщений, своих
параметров, пунктов меню, результатов диагностики. Также может отображаться
графическая информация – относительное расположение судов, от которых при-
нята навигационная информация (рис. 114). Возможность соединения транспон-
дера с внешними устройствами (судовой ГНСС-приемник, гирокомпас, лаг, ра-
диолокатор, ЭКНИС и др.) обеспечивает соединительный модуль ТР-100. Для
более полного отображения обстановки и решения различных навигационных
задач используется внешний АИС-плоттер, на экране которого суда отобража-
ются на фоне электронной карты из коллекции С-MAP (рис. 114).
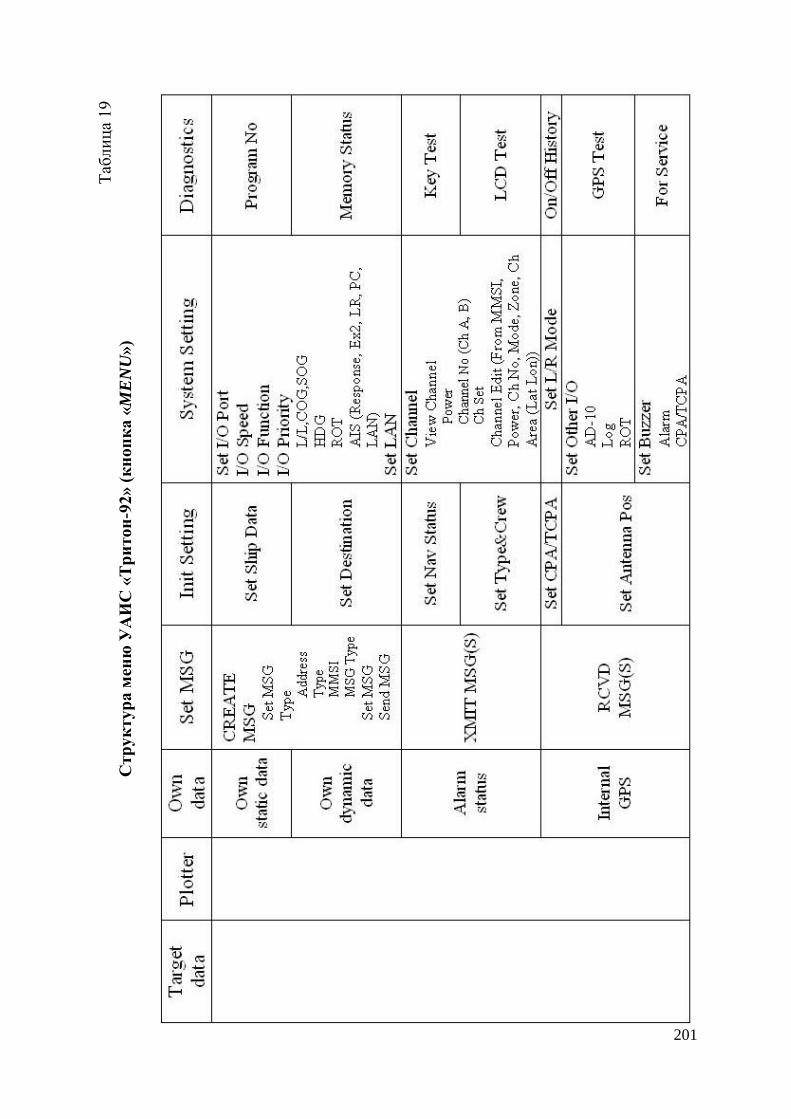
201
Таб
ли
ца
19
Стр
ук
тур
а м
еню
УА
ИС
«Т
ри
тон
-92» (
кн
оп
ка «
ME
NU
»)
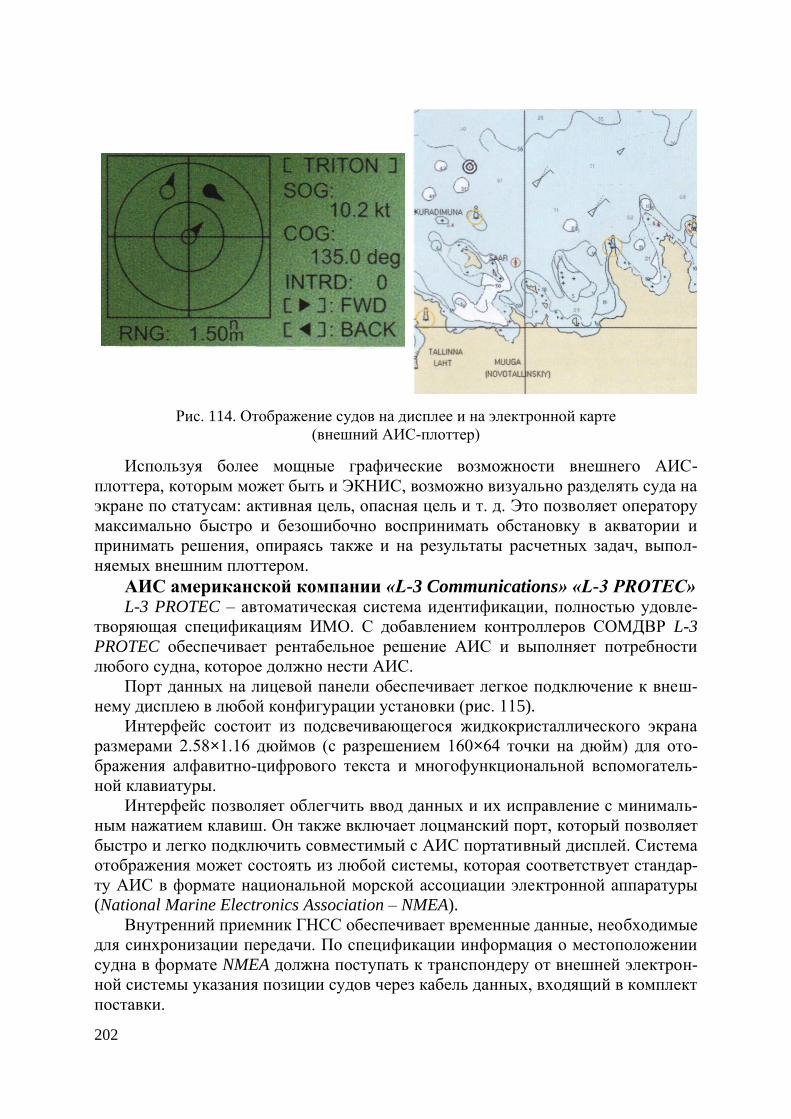
202
Рис. 114. Отображение судов на дисплее и на электронной карте
(внешний АИС-плоттер)
Используя более мощные графические возможности внешнего АИС-
плоттера, которым может быть и ЭКНИС, возможно визуально разделять суда на
экране по статусам: активная цель, опасная цель и т. д. Это позволяет оператору
максимально быстро и безошибочно воспринимать обстановку в акватории и
принимать решения, опираясь также и на результаты расчетных задач, выпол-
няемых внешним плоттером.
АИС американской компании «L-3 Communications» «L-3 PROTEC» L-3 PROTEC – автоматическая система идентификации, полностью удовле-
творяющая спецификациям ИМО. С добавлением контроллеров СОМДВР L-3
PROTEC обеспечивает рентабельное решение АИС и выполняет потребности
любого судна, которое должно нести АИС.
Порт данных на лицевой панели обеспечивает легкое подключение к внеш-
нему дисплею в любой конфигурации установки (рис. 115).
Интерфейс состоит из подсвечивающегося жидкокристаллического экрана
размерами 2.58×1.16 дюймов (с разрешением 160×64 точки на дюйм) для ото-
бражения алфавитно-цифрового текста и многофункциональной вспомогатель-
ной клавиатуры.
Интерфейс позволяет облегчить ввод данных и их исправление с минималь-
ным нажатием клавиш. Он также включает лоцманский порт, который позволяет
быстро и легко подключить совместимый с АИС портативный дисплей. Система
отображения может состоять из любой системы, которая соответствует стандар-
ту АИС в формате национальной морской ассоциации электронной аппаратуры
(National Marine Electronics Association – NMEA).
Внутренний приемник ГНСС обеспечивает временные данные, необходимые
для синхронизации передачи. По спецификации информация о местоположении
судна в формате NMEA должна поступать к транспондеру от внешней электрон-
ной системы указания позиции судов через кабель данных, входящий в комплект
поставки.
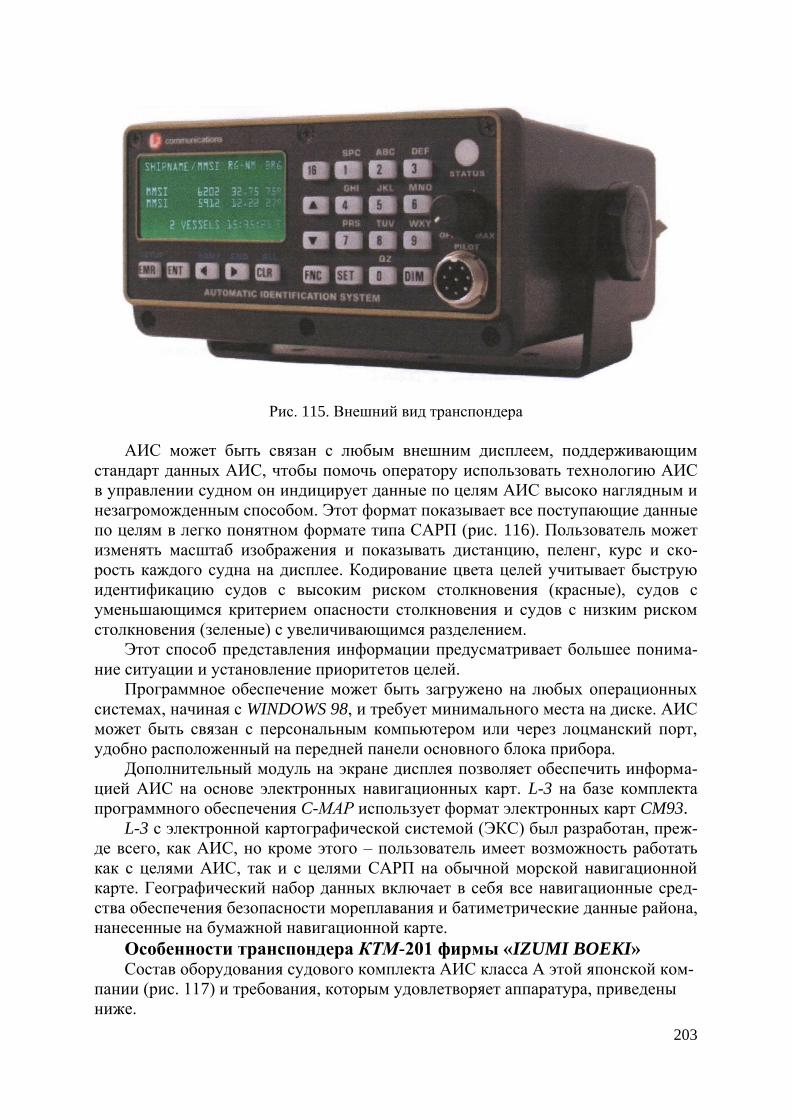
203
Рис. 115. Внешний вид транспондера
АИС может быть связан с любым внешним дисплеем, поддерживающим
стандарт данных АИС, чтобы помочь оператору использовать технологию АИС
в управлении судном он индицирует данные по целям АИС высоко наглядным и
незагроможденным способом. Этот формат показывает все поступающие данные
по целям в легко понятном формате типа САРП (рис. 116). Пользователь может
изменять масштаб изображения и показывать дистанцию, пеленг, курс и ско-
рость каждого судна на дисплее. Кодирование цвета целей учитывает быструю
идентификацию судов с высоким риском столкновения (красные), судов с
уменьшающимся критерием опасности столкновения и судов с низким риском
столкновения (зеленые) с увеличивающимся разделением.
Этот способ представления информации предусматривает большее понима-
ние ситуации и установление приоритетов целей.
Программное обеспечение может быть загружено на любых операционных
системах, начиная с WINDOWS 98, и требует минимального места на диске. АИС
может быть связан с персональным компьютером или через лоцманский порт,
удобно расположенный на передней панели основного блока прибора.
Дополнительный модуль на экране дисплея позволяет обеспечить информа-
цией АИС на основе электронных навигационных карт. L-3 на базе комплекта
программного обеспечения C-МАР использует формат электронных карт CM93.
L-3 с электронной картографической системой (ЭКС) был разработан, преж-
де всего, как АИС, но кроме этого – пользователь имеет возможность работать
как с целями АИС, так и с целями САРП на обычной морской навигационной
карте. Географический набор данных включает в себя все навигационные сред-
ства обеспечения безопасности мореплавания и батиметрические данные района,
нанесенные на бумажной навигационной карте.
Особенности транспондера КТМ-201 фирмы «IZUMI BOEKI» Состав оборудования судового комплекта АИС класса А этой японской ком-
пании (рис. 117) и требования, которым удовлетворяет аппаратура, приведены
ниже.
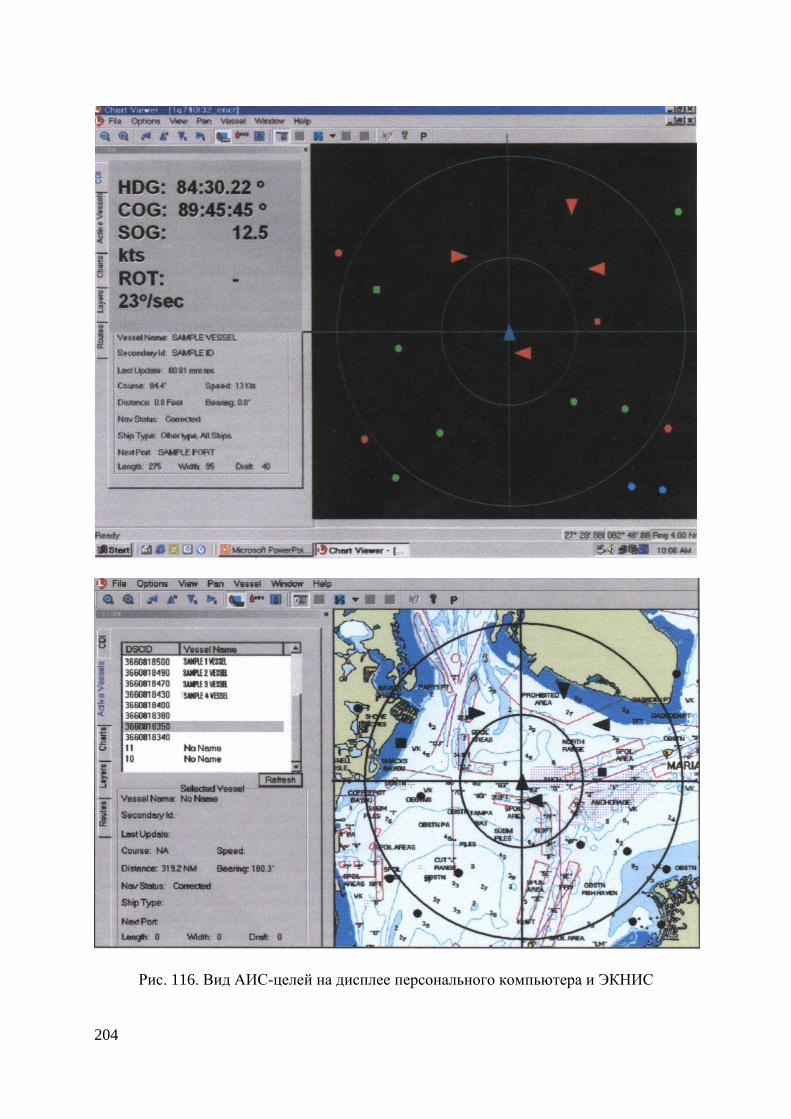
204
Рис. 116. Вид АИС-целей на дисплее персонального компьютера и ЭКНИС
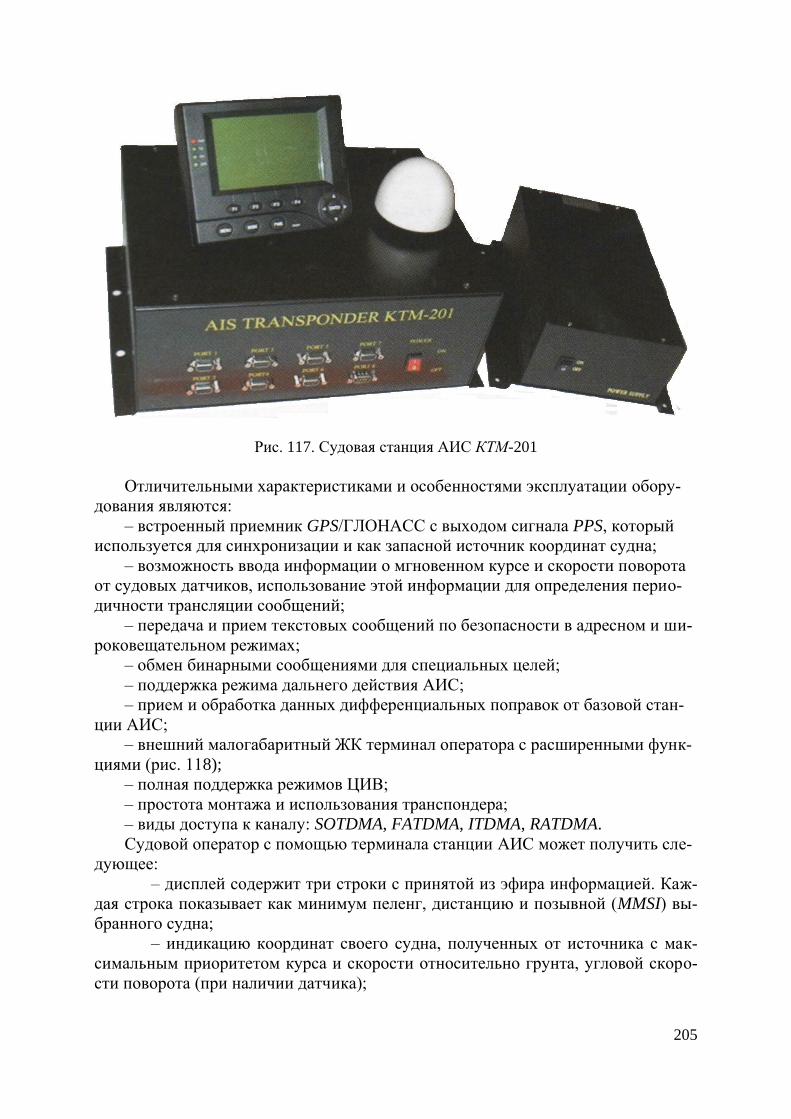
205
Рис. 117. Судовая станция АИС КТМ-201
Отличительными характеристиками и особенностями эксплуатации обору-
дования являются:
– встроенный приемник GPS/ГЛОНАСС с выходом сигнала PPS, который
используется для синхронизации и как запасной источник координат судна;
– возможность ввода информации о мгновенном курсе и скорости поворота
от судовых датчиков, использование этой информации для определения перио-
дичности трансляции сообщений;
– передача и прием текстовых сообщений по безопасности в адресном и ши-
роковещательном режимах;
– обмен бинарными сообщениями для специальных целей;
– поддержка режима дальнего действия АИС;
– прием и обработка данных дифференциальных поправок от базовой стан-
ции АИС;
– внешний малогабаритный ЖК терминал оператора с расширенными функ-
циями (рис. 118);
– полная поддержка режимов ЦИВ;
– простота монтажа и использования транспондера;
– виды доступа к каналу: SOTDMA, FATDMA, ITDMA, RATDMA.
Судовой оператор с помощью терминала станции АИС может получить сле-
дующее:
– дисплей содержит три строки с принятой из эфира информацией. Каж-
дая строка показывает как минимум пеленг, дистанцию и позывной (MMSI) вы-
бранного судна;
– индикацию координат своего судна, полученных от источника с мак-
симальным приоритетом курса и скорости относительно грунта, угловой скоро-
сти поворота (при наличии датчика);
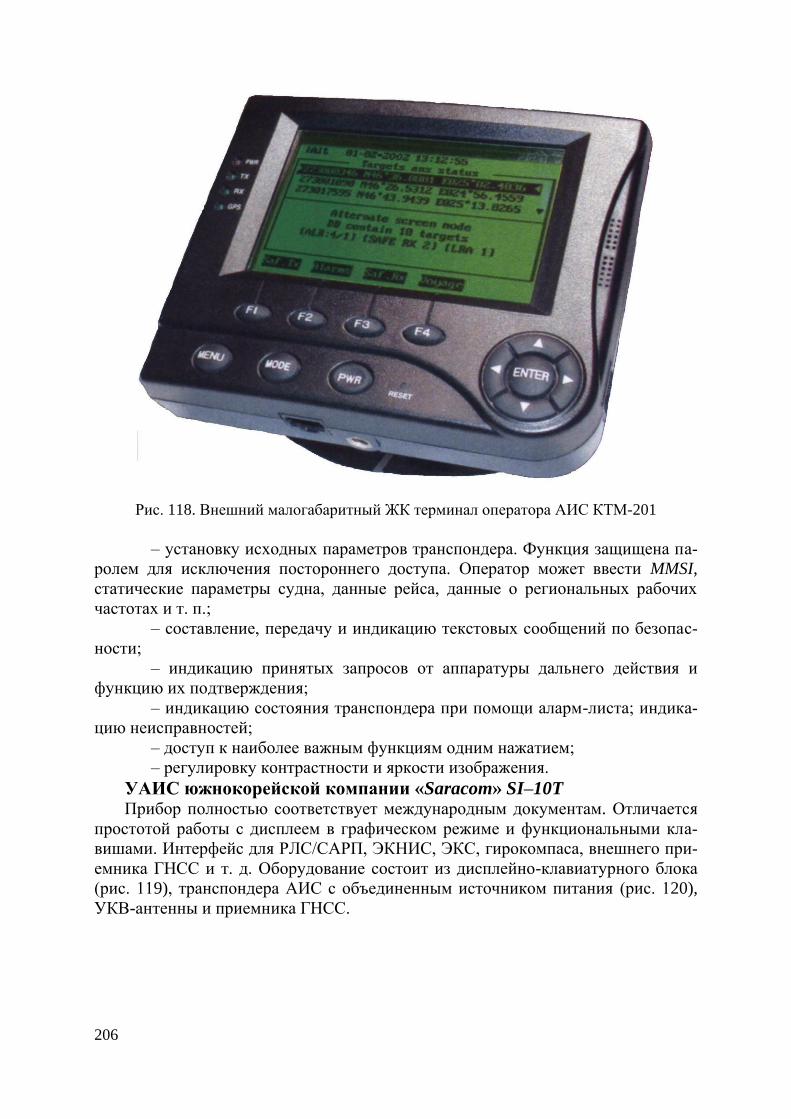
206
Рис. 118. Внешний малогабаритный ЖК терминал оператора АИС КТМ-201
– установку исходных параметров транспондера. Функция защищена па-
ролем для исключения постороннего доступа. Оператор может ввести MMSI,
статические параметры судна, данные рейса, данные о региональных рабочих
частотах и т. п.;
– составление, передачу и индикацию текстовых сообщений по безопас-
ности;
– индикацию принятых запросов от аппаратуры дальнего действия и
функцию их подтверждения;
– индикацию состояния транспондера при помощи аларм-листа; индика-
цию неисправностей;
– доступ к наиболее важным функциям одним нажатием;
– регулировку контрастности и яркости изображения.
УАИС южнокорейской компании «Saracom» SI–10T Прибор полностью соответствует международным документам. Отличается
простотой работы с дисплеем в графическом режиме и функциональными кла-
вишами. Интерфейс для РЛС/САРП, ЭКНИС, ЭКС, гирокомпаса, внешнего при-
емника ГНСС и т. д. Оборудование состоит из дисплейно-клавиатурного блока
(рис. 119), транспондера АИС с объединенным источником питания (рис. 120),
УКВ-антенны и приемника ГНСС.
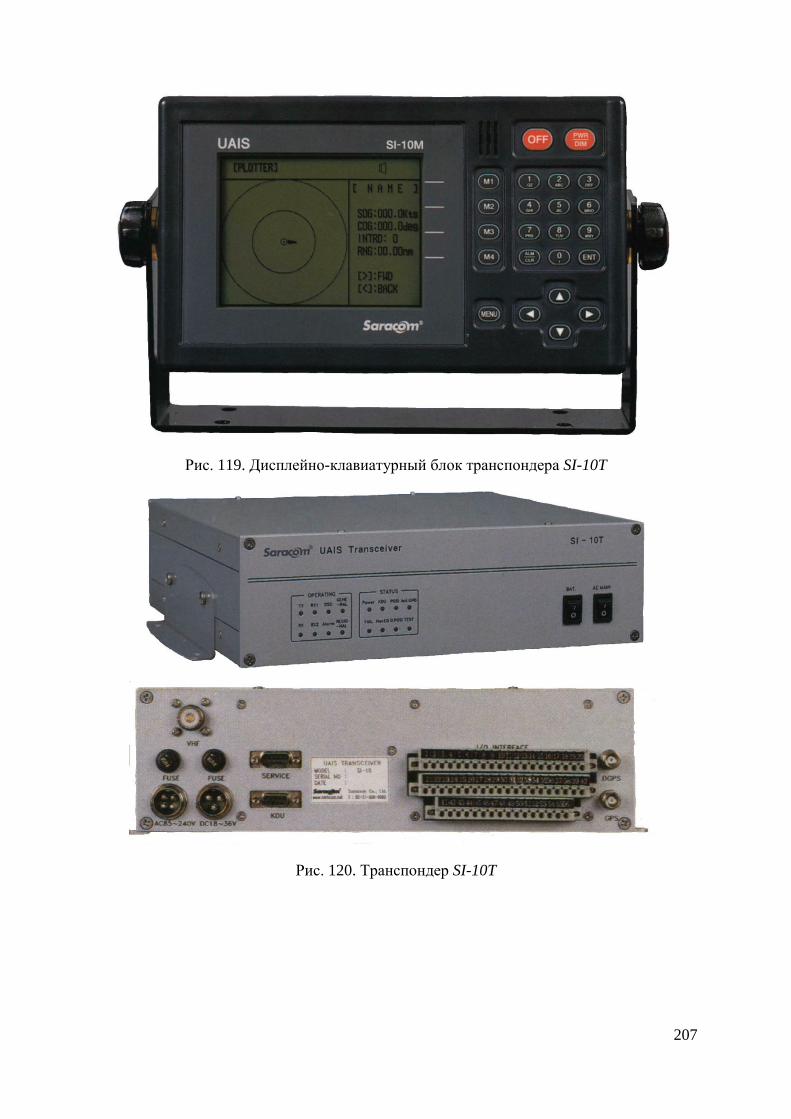
207
Рис. 119. Дисплейно-клавиатурный блок транспондера SI-10T
Рис. 120. Транспондер SI-10T
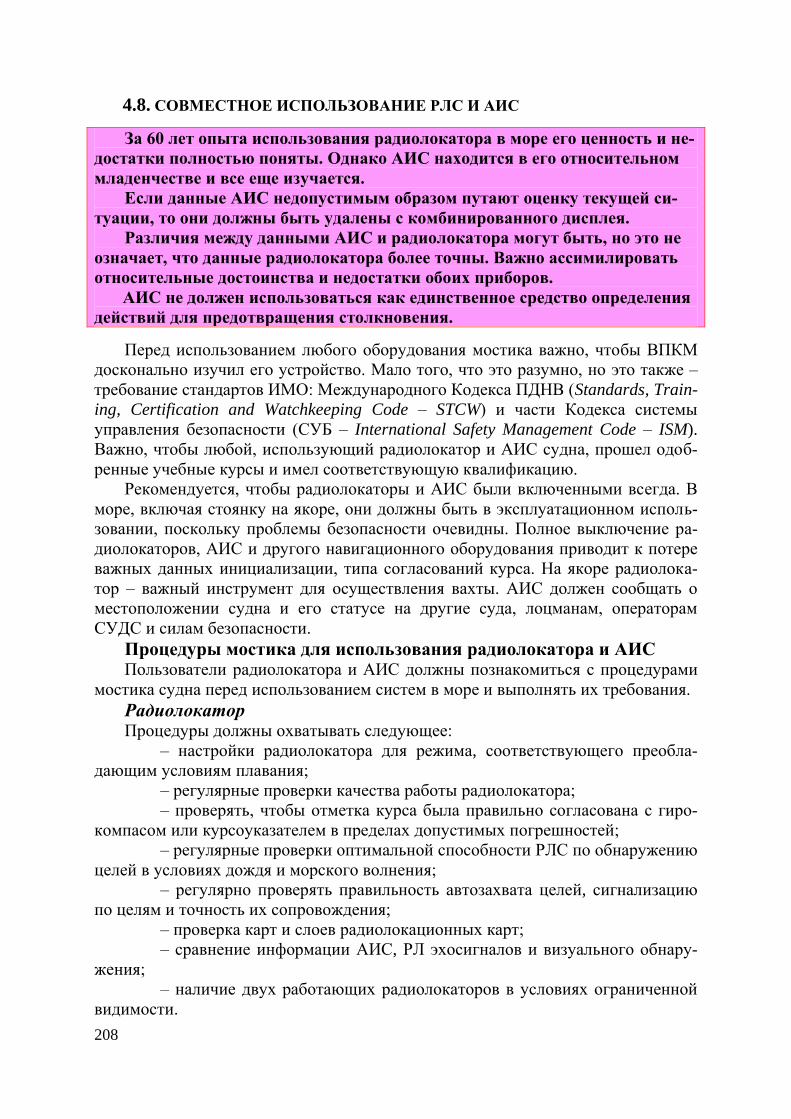
208
4.8. СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ РЛС И АИС
За 60 лет опыта использования радиолокатора в море его ценность и не-
достатки полностью поняты. Однако АИС находится в его относительном
младенчестве и все еще изучается.
Если данные АИС недопустимым образом путают оценку текущей си-
туации, то они должны быть удалены с комбинированного дисплея.
Различия между данными АИС и радиолокатора могут быть, но это не
означает, что данные радиолокатора более точны. Важно ассимилировать
относительные достоинства и недостатки обоих приборов.
АИС не должен использоваться как единственное средство определения
действий для предотвращения столкновения.
Перед использованием любого оборудования мостика важно, чтобы ВПКМ
досконально изучил его устройство. Мало того, что это разумно, но это также –
требование стандартов ИМО: Международного Кодекса ПДНВ (Standards, Train-
ing, Certification and Watchkeeping Code – STCW) и части Кодекса системы
управления безопасности (СУБ – International Safety Management Code – ISM).
Важно, чтобы любой, использующий радиолокатор и АИС судна, прошел одоб-
ренные учебные курсы и имел соответствующую квалификацию.
Рекомендуется, чтобы радиолокаторы и АИС были включенными всегда. В
море, включая стоянку на якоре, они должны быть в эксплуатационном исполь-
зовании, поскольку проблемы безопасности очевидны. Полное выключение ра-
диолокаторов, АИС и другого навигационного оборудования приводит к потере
важных данных инициализации, типа согласований курса. На якоре радиолока-
тор – важный инструмент для осуществления вахты. АИС должен сообщать о
местоположении судна и его статусе на другие суда, лоцманам, операторам
СУДС и силам безопасности.
Процедуры мостика для использования радиолокатора и АИС Пользователи радиолокатора и АИС должны познакомиться с процедурами
мостика судна перед использованием систем в море и выполнять их требования.
Радиолокатор Процедуры должны охватывать следующее:
– настройки радиолокатора для режима, соответствующего преобла-
дающим условиям плавания;
– регулярные проверки качества работы радиолокатора;
– проверять, чтобы отметка курса была правильно согласована с гиро-
компасом или курсоуказателем в пределах допустимых погрешностей;
– регулярные проверки оптимальной способности РЛС по обнаружению
целей в условиях дождя и морского волнения;
– регулярно проверять правильность автозахвата целей, сигнализацию
по целям и точность их сопровождения;
– проверка карт и слоев радиолокационных карт;
– сравнение информации АИС, РЛ эхосигналов и визуального обнару-
жения;
– наличие двух работающих радиолокаторов в условиях ограниченной
видимости.
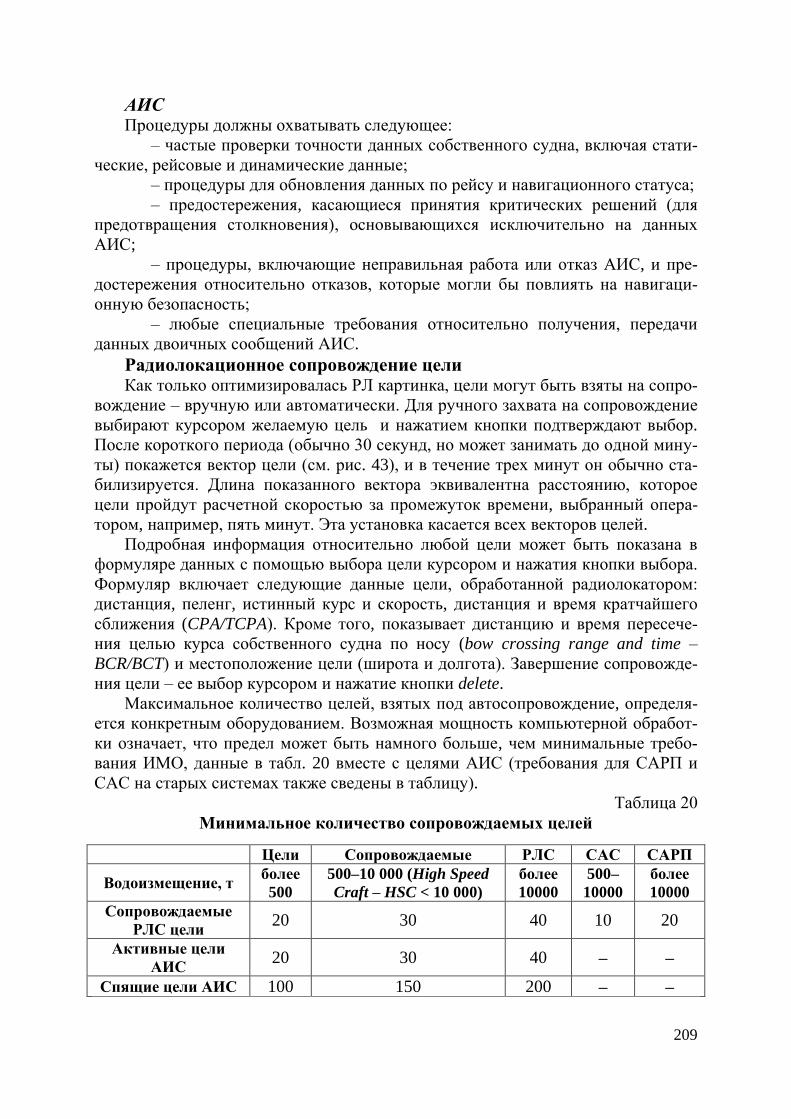
209
АИС Процедуры должны охватывать следующее:
– частые проверки точности данных собственного судна, включая стати-
ческие, рейсовые и динамические данные;
– процедуры для обновления данных по рейсу и навигационного статуса;
– предостережения, касающиеся принятия критических решений (для
предотвращения столкновения), основывающихся исключительно на данных
АИС;
– процедуры, включающие неправильная работа или отказ АИС, и пре-
достережения относительно отказов, которые могли бы повлиять на навигаци-
онную безопасность;
– любые специальные требования относительно получения, передачи
данных двоичных сообщений АИС.
Радиолокационное сопровождение цели Как только оптимизировалась РЛ картинка, цели могут быть взяты на сопро-
вождение – вручную или автоматически. Для ручного захвата на сопровождение
выбирают курсором желаемую цель и нажатием кнопки подтверждают выбор.
После короткого периода (обычно 30 секунд, но может занимать до одной мину-
ты) покажется вектор цели (см. рис. 43), и в течение трех минут он обычно ста-
билизируется. Длина показанного вектора эквивалентна расстоянию, которое
цели пройдут расчетной скоростью за промежуток времени, выбранный опера-
тором, например, пять минут. Эта установка касается всех векторов целей.
Подробная информация относительно любой цели может быть показана в
формуляре данных с помощью выбора цели курсором и нажатия кнопки выбора.
Формуляр включает следующие данные цели, обработанной радиолокатором:
дистанция, пеленг, истинный курс и скорость, дистанция и время кратчайшего
сближения (CPA/TCPA). Кроме того, показывает дистанцию и время пересече-
ния целью курса собственного судна по носу (bow crossing range and time –
BCR/BCT) и местоположение цели (широта и долгота). Завершение сопровожде-
ния цели – ее выбор курсором и нажатие кнопки delete.
Максимальное количество целей, взятых под автосопровождение, определя-
ется конкретным оборудованием. Возможная мощность компьютерной обработ-
ки означает, что предел может быть намного больше, чем минимальные требо-
вания ИМО, данные в табл. 20 вместе с целями АИС (требования для САРП и
САС на старых системах также сведены в таблицу).
Таблица 20
Минимальное количество сопровождаемых целей
Цели Сопровождаемые РЛС САС САРП
Водоизмещение, т более
500
500–10 000 (High Speed
Craft – HSC < 10 000)
более
10000
500–
10000
более
10000
Сопровождаемые
РЛС цели 20 30 40 10 20
Активные цели
АИС 20 30 40 – –
Спящие цели АИС 100 150 200 – –
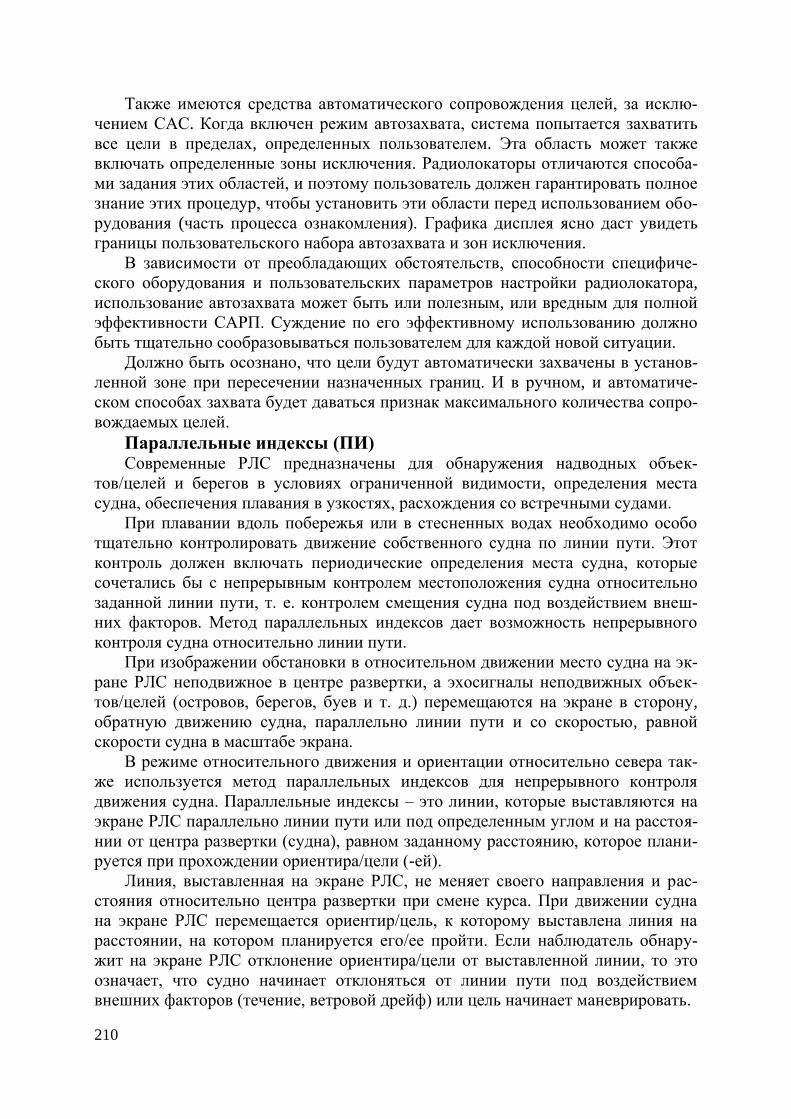
210
Также имеются средства автоматического сопровождения целей, за исклю-
чением САС. Когда включен режим автозахвата, система попытается захватить
все цели в пределах, определенных пользователем. Эта область может также
включать определенные зоны исключения. Радиолокаторы отличаются способа-
ми задания этих областей, и поэтому пользователь должен гарантировать полное
знание этих процедур, чтобы установить эти области перед использованием обо-
рудования (часть процесса ознакомления). Графика дисплея ясно даст увидеть
границы пользовательского набора автозахвата и зон исключения.
В зависимости от преобладающих обстоятельств, способности специфиче-
ского оборудования и пользовательских параметров настройки радиолокатора,
использование автозахвата может быть или полезным, или вредным для полной
эффективности САРП. Суждение по его эффективному использованию должно
быть тщательно сообразовываться пользователем для каждой новой ситуации.
Должно быть осознано, что цели будут автоматически захвачены в установ-
ленной зоне при пересечении назначенных границ. И в ручном, и автоматиче-
ском способах захвата будет даваться признак максимального количества сопро-
вождаемых целей.
Параллельные индексы (ПИ) Современные РЛС предназначены для обнаружения надводных объек-
тов/целей и берегов в условиях ограниченной видимости, определения места
судна, обеспечения плавания в узкостях, расхождения со встречными судами.
При плавании вдоль побережья или в стесненных водах необходимо особо
тщательно контролировать движение собственного судна по линии пути. Этот
контроль должен включать периодические определения места судна, которые
сочетались бы с непрерывным контролем местоположения судна относительно
заданной линии пути, т. е. контролем смещения судна под воздействием внеш-
них факторов. Метод параллельных индексов дает возможность непрерывного
контроля судна относительно линии пути.
При изображении обстановки в относительном движении место судна на эк-
ране РЛС неподвижное в центре развертки, а эхосигналы неподвижных объек-
тов/целей (островов, берегов, буев и т. д.) перемещаются на экране в сторону,
обратную движению судна, параллельно линии пути и со скоростью, равной
скорости судна в масштабе экрана.
В режиме относительного движения и ориентации относительно севера так-
же используется метод параллельных индексов для непрерывного контроля
движения судна. Параллельные индексы – это линии, которые выставляются на
экране РЛС параллельно линии пути или под определенным углом и на расстоя-
нии от центра развертки (судна), равном заданному расстоянию, которое плани-
руется при прохождении ориентира/цели (-ей).
Линия, выставленная на экране РЛС, не меняет своего направления и рас-
стояния относительно центра развертки при смене курса. При движении судна
на экране РЛС перемещается ориентир/цель, к которому выставлена линия на
расстоянии, на котором планируется его/ее пройти. Если наблюдатель обнару-
жит на экране РЛС отклонение ориентира/цели от выставленной линии, то это
означает, что судно начинает отклоняться от линии пути под воздействием
внешних факторов (течение, ветровой дрейф) или цель начинает маневрировать.
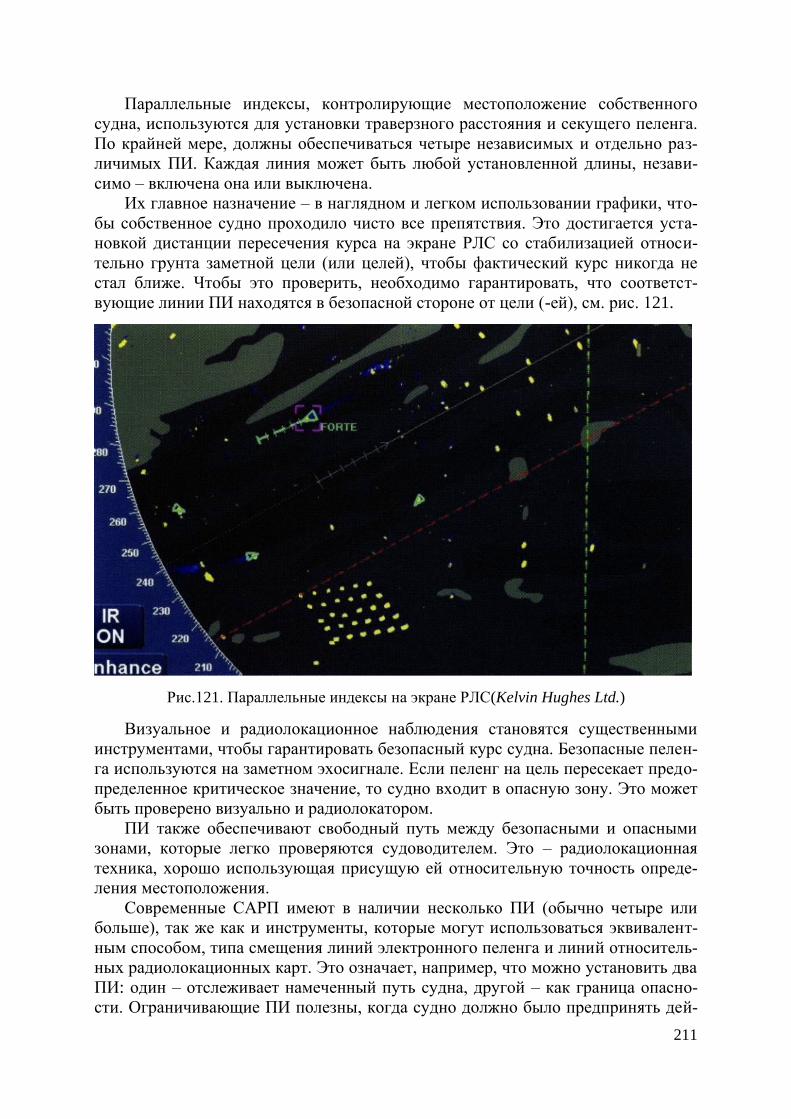
211
Параллельные индексы, контролирующие местоположение собственного
судна, используются для установки траверзного расстояния и секущего пеленга.
По крайней мере, должны обеспечиваться четыре независимых и отдельно раз-
личимых ПИ. Каждая линия может быть любой установленной длины, незави-
симо – включена она или выключена.
Их главное назначение – в наглядном и легком использовании графики, что-
бы собственное судно проходило чисто все препятствия. Это достигается уста-
новкой дистанции пересечения курса на экране РЛС со стабилизацией относи-
тельно грунта заметной цели (или целей), чтобы фактический курс никогда не
стал ближе. Чтобы это проверить, необходимо гарантировать, что соответст-
вующие линии ПИ находятся в безопасной стороне от цели (-ей), см. рис. 121.
Рис.121. Параллельные индексы на экране РЛС(Kelvin Hughes Ltd.)
Визуальное и радиолокационное наблюдения становятся существенными
инструментами, чтобы гарантировать безопасный курс судна. Безопасные пелен-
га используются на заметном эхосигнале. Если пеленг на цель пересекает предо-
пределенное критическое значение, то судно входит в опасную зону. Это может
быть проверено визуально и радиолокатором.
ПИ также обеспечивают свободный путь между безопасными и опасными
зонами, которые легко проверяются судоводителем. Это – радиолокационная
техника, хорошо использующая присущую ей относительную точность опреде-
ления местоположения.
Современные САРП имеют в наличии несколько ПИ (обычно четыре или
больше), так же как и инструменты, которые могут использоваться эквивалент-
ным способом, типа смещения линий электронного пеленга и линий относитель-
ных радиолокационных карт. Это означает, например, что можно установить два
ПИ: один – отслеживает намеченный путь судна, другой – как граница опасно-
сти. Ограничивающие ПИ полезны, когда судно должно было предпринять дей-
212
ствие для предотвращения столкновения – легко проверить, что заметный РЛ
объект/цель остается на безопасной стороне ограничивающего ПИ, даже при
том, что судно должно было изменить свой намеченный курс.
Преимущество ПИ состоит в том, что без непрерывной прокладки местопо-
ложения судна на карте легко проверить, входит ли судно в потенциально опас-
ный курс. Однако остается очень важным то, что местоположение судна прове-
рено другими средствами, кроме РЛС (обычно визуальные определения и обсер-
вации по приемнику ГНСС), и правильно проложено на карте.
Использование параллельных индексов преподается в морских учебных за-
ведениях и высоко ценится опытными моряками, морскими администрациями,
исследователями морских аварий и клубом P&I.
Несмотря на все это, ПИ универсально не используются. Если бы они ис-
пользовалось, много несчастных случаев было бы предотвращено. Лондонский
клуб P&I выдвинул на первый план два случая, которые были бы предотвраще-
ны при помощи ПИ. В обоих случаях сильные течения влияли на восприятие
движения судов.
Одна из причин редкого использования ПИ – сложность их настраивания на
некоторых САРП. Этому не помогает и другой тип РЛС, имеющий совсем дру-
гие подходы к использованию ПИ.
Возможно некоторые изготовители думают, что ПИ – вторичная функция, и
поэтому они не удобны в использовании. Фактически это неправильно, и спо-
собность легко и часто устанавливать ПИ в течение всего прибрежного плавания
существенна. Идеально средства обслуживания и хранения ПИ должны быть та-
кими, чтобы к ним можно было легко получить доступ на протяжении всего рей-
са.
Конечно, здесь может помочь лучший проект САРП, но, тем не менее, паро-
ходства должны должным образом следовать требованиям кодекса СУБ, гаран-
тируя, что судовые пользователи достаточно ознакомлены с оборудованием мос-
тика, связанным с безопасностью. К настоящему времени известно, что иногда
суда все еще сталкиваются с тем, когда их оборудование ГНСС не работает – по-
тому что никто не замечает этот отказ.
Все операторы судна должны поощрять использование методов параллель-
ных индексов, а изготовители РЛС должны предусматривать простоту их ис-
пользования и создания адекватного хранения множества ПИ, которые будут
предварительно спланированы.
Дисплей целей АИС Бортовое оборудование АИС отслеживает цели не так, как это делает радио-
локатор. Полученная от цели информация о координатах и скорости использует-
ся непосредственно для показа цели на экране. Позиционное фильтрование пе-
реданных данных АИС было фактически выполнено приемником ГНСС на суд-
не-цели. Это означает, что изменение курса цели быстро будет показано на дис-
плее собственного судна.
Цели АИС спят, пока они не активизированы. Спящие цели показываются
как маленькие треугольники. Активация цели может быть ручной или основан-
ной на автоматическом сопровождении и исключения зон, установленных для
РЛ целей. Кроме того, активация срабатывает, когда цель АИС достигает опре-
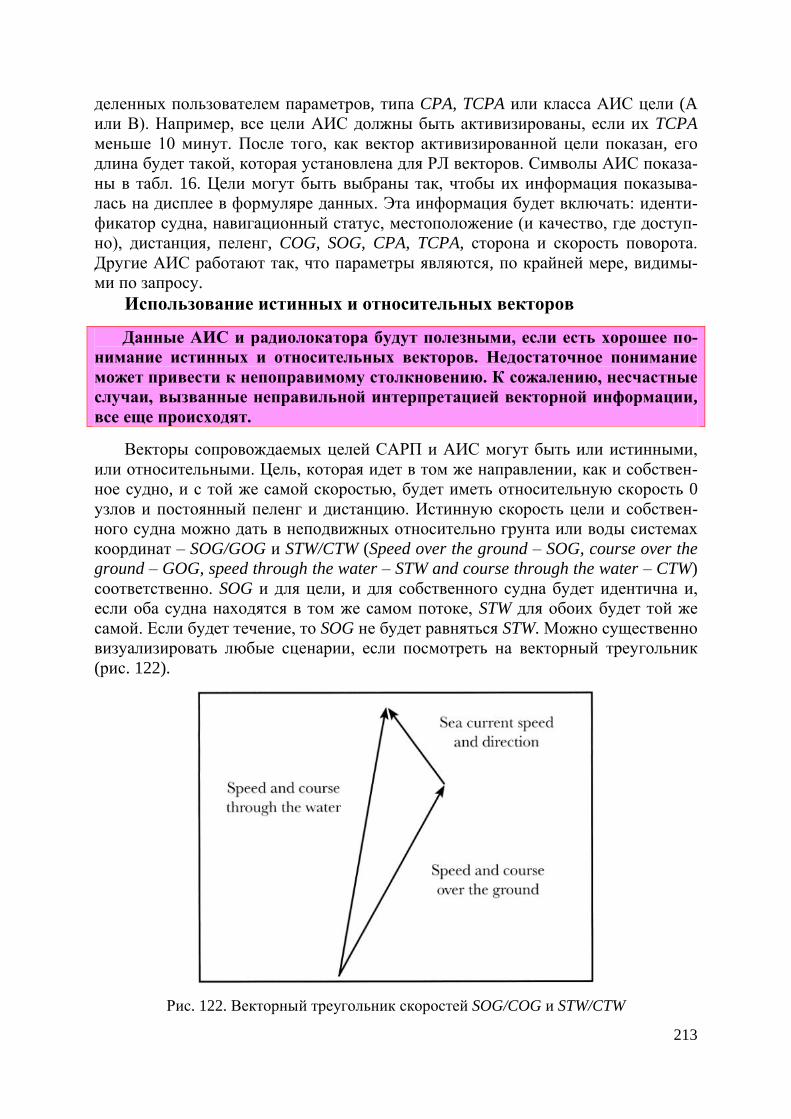
213
деленных пользователем параметров, типа CPA, TCPA или класса АИС цели (A
или B). Например, все цели АИС должны быть активизированы, если их TCPA
меньше 10 минут. После того, как вектор активизированной цели показан, его
длина будет такой, которая установлена для РЛ векторов. Символы АИС показа-
ны в табл. 16. Цели могут быть выбраны так, чтобы их информация показыва-
лась на дисплее в формуляре данных. Эта информация будет включать: иденти-
фикатор судна, навигационный статус, местоположение (и качество, где доступ-
но), дистанция, пеленг, COG, SOG, CPA, TCPA, сторона и скорость поворота.
Другие АИС работают так, что параметры являются, по крайней мере, видимы-
ми по запросу.
Использование истинных и относительных векторов
Данные АИС и радиолокатора будут полезными, если есть хорошее по-
нимание истинных и относительных векторов. Недостаточное понимание
может привести к непоправимому столкновению. К сожалению, несчастные
случаи, вызванные неправильной интерпретацией векторной информации,
все еще происходят.
Векторы сопровождаемых целей САРП и АИС могут быть или истинными,
или относительными. Цель, которая идет в том же направлении, как и собствен-
ное судно, и с той же самой скоростью, будет иметь относительную скорость 0
узлов и постоянный пеленг и дистанцию. Истинную скорость цели и собствен-
ного судна можно дать в неподвижных относительно грунта или воды системах
координат – SOG/GOG и STW/CTW (Speed over the ground – SOG, course over the
ground – GOG, speed through the water – STW and course through the water – CTW)
соответственно. SOG и для цели, и для собственного судна будет идентична и,
если оба судна находятся в том же самом потоке, STW для обоих будет той же
самой. Если будет течение, то SOG не будет равняться STW. Можно существенно
визуализировать любые сценарии, если посмотреть на векторный треугольник
(рис. 122).
Рис. 122. Векторный треугольник скоростей SOG/COG и STW/CTW
214
Направление движения целей, исключая особые обстоятельства, будет отли-
чаться в зависимости от того, как установлен дисплей – в режим относительного
движения, истинного движения относительно грунта или относительно воды.
Если относительный вектор цели направлен в сторону собственного судна, то
есть риск столкновения. Нет никаких легких предположений для определения
риска столкновения, когда показываются истинные векторы. Отображение на
дисплее со стабилизацией относительно грунта истинных векторов облегчает
понимание полной ситуации о движении, особенно в районе, где есть обозна-
ченные буями каналы и системы разделения движения. На дисплее со стабили-
зацией относительно воды истинные векторы – лучшая индикация курса цели,
когда информация АИС о курсе недоступна. Это помогает определить визуаль-
ное положение собственного судна, когда необходимо правильно применить
МППСС-72 (COLlision REGulations – COLREGS).
Инструменты предотвращения столкновения для РЛС/АИС
Прошлые местоположения целей Прошлые позиции можно показать и на цели, сопровождаемой САРП и
АИС. Они обычно изображаются рядом точек. Временной интервал между ис-
тинными или относительными положениями цели может быть также выбран.
Те же самые истинные или относительные прошлые позиции цели могут
быть отображены установкой следа послесвечения на РЛС. Для обновления ра-
диолокационных следов послесвечения и прошлых позиций цели достаточно
двух вращений антенны.
Проигрывание маневра Функция проигрывания маневра требуется на новых радиолокаторах для су-
дов водоизмещением более 10 000 т. САРП также имеют возможность проигры-
вания маневра. Это обеспечивает графическую оценку предсказанной ситуации,
рассчитанной по пользовательской информации об ожидаемом изменении эле-
ментов движения собственного судна. Судоводитель вводит курс, скорость и
время начала выполнения маневра собственного судна. В некоторых системах
информация о скорости поворота также должна быть введена, хотя динамиче-
ская информация судна, включая инерционно-тормозные характеристики и эле-
менты поворотливости, может быть вычислена автоматически по данным, пред-
варительно введенным в систему. Использование этого средства может быть
очень ценным в сложных ситуациях, где необходимо рассмотреть много судов,
принимая решение о предотвращении столкновения и оценивая ситуацию перед
достижением расчетной точки поворота.
Когда установлен режим проигрывания маневра, дисплей покажет ожидае-
мую ситуацию в начале маневра. Это означает, что все сопровождаемые и акти-
визированные цели САРП/АИС будут показаны в их ожидаемых позициях,
предполагая, что все они за прошедший период сохраняли курс неизменным.
Время и режим моделирования также показаны на дисплее. Режим проигрыва-
ния маневра доступен во всех режимах движения и способах стабилизации.
215
Оценка цели Сегодня есть три главных независимых способа обнаружения и оценки рис-
ка столкновения:
1) визуально, включая использование таких средств, как бинокль, пелен-
гатор, дальномер и оборудование ночного видения;
2) радиолокатором;
3) с помощью транспондера АИС.
Важно отметить, что четвертый независимый путь может быть полезным
при определенных обстоятельствах – прямая связь судна с целью в настоящее
время типична для УКВ-радиообмена или сообщениями АИС. Вопрос использо-
вания коммуникаций для уменьшения риска столкновений остается до сих пор
очень спорным. Однако в водах некоторых прибрежных государств и при опре-
деленных обстоятельствах использование УКВ для объявления своих намерений
обязательно.
Несомненно, лучше всего использовать все три способа в определении зна-
чения цели для безопасности плавания собственного судна. Если информация о
цели от этих независимых источников одинакова, это дает чрезвычайно расши-
ренную уверенность команде мостика, что параметры траектории цели точно из-
вестны, в особенности ее дистанция, пеленг, курс, скорость и риск столкновения.
Поэтому не должно быть и доли сомнения относительно правильного действия,
которое будет предпринято относительно такой цели, чтобы избежать любой
возможности столкновения. При хорошей визуальной и радиолокационной ви-
димости обычно будет необходимо только удостовериться, что никакая другая
визуальная цель не могла быть перепутана с наблюдаемой САРП/АИС целью.
Опытный ВПКМ (Officer On Watch, OOW) был бы в состоянии определить, нуж-
на ли визуальная оценка без средств измерения точного пеленга и дистанции.
При ограниченной видимости трудно или невозможно подтвердить цель
САРП/АИС визуальными средствами. В такой ситуации действующим стано-
вится Правило 19 МППСС. При ограниченной видимости и до появления АИС
радиолокатор был действительно единственным хорошим источником данных
относительно судов-целей (хотя использование звука, как отстаивает Правило
19, никогда не должно игнорироваться). В настоящее время АИС – очень необ-
ходимая помощь радиолокатору. САРП и технологии АИС не конкурируют; они
служат дополнением друг другу:
они обеспечивают два независимых способа обнаружения цели;
они дают две независимых оценки дистанции, пеленга, курса и скорости
цели;
радиолокатор может обнаружить цели, которые не несут АИС;
на передачи АИС почти не влияют морское волнение и сильный дождь,
позволяя обнаруживать цели в условиях, где они будут невидимы для радиоло-
катора;
частоты УКВ, используемые АИС лучше, чем радиолокационные при
дифракции от мысов и островов, что позволит обнаруживать цели;
радиолокатор неотъемлемо базируется на относительном движении,
стабилизации по курсу судна и поэтому естественно удовлетворяет для решения
задач по предотвращению столкновения. АИС полностью зависит от наличия
216
ГНСС, а также навигационных датчиков судна-цели, которые используются,
чтобы вычислить относительные параметры движения;
транспондер АИС, безусловно, точнее, чем радиолокатор, если он не-
прерывно снабжается информацией от надежных датчиков;
радиолокатор имеет очень малую точность, отслеживая цель, которая
маневрирует. АИС поддерживает эту точность и быстро передает изменения
курса и скорости поворота, если это от цели доступно;
обмен целей может произойти и в АИС и в САРП. Самое неожиданное,
что это может произойти одновременно на радиолокаторе и АИС для отдельной
цели. Поэтому обмен целей должен тщательно контролироваться;
команда мостика должна знать эффективность их собственных радиоло-
каторов и то, когда можно положиться на них и когда быть более осторожными.
Судоводители не имеют никакого контроля над эффективностью данных, по-
ставляемых оборудованием АИС другого судна;
при ограниченной видимости АИС позволяет ВПКМ знать статус пока-
зываемого судна, например, рыболовное судно или судно, ограниченное в воз-
можности маневрировать, что недоступно на радиолокаторе.
Объединение целей ИМО использует термин «объединенная», если есть достаточное свидетель-
ство того, что цель САРП и цель АИС являются одним и тем же объектом. Дру-
гой термин общего использования – то, что они коррелированны. Третий термин
– то, что они соединены, или есть «сплав» цели. Предпочтительно применение
последнего термина, если система приняла один общий набор параметров этой
цели (см. табл. 16 на стр. 179). Это будет означать, что больше не будет векторов
САРП и АИС, связанных с целью – только вектор цели, хотя это обычно исполь-
зуется в военных системах.
Данные АИС и САРП никогда не могут быть точными. Однако, если дис-
танция, пеленг, курс и скорость цели подобны из обоих источников, тогда они
должны быть объединены. Это может быть оценено пользователем или автома-
тическим процессом. Автоматический процесс должен иметь параметры пользо-
вательского набора, например, слияние целей будет принято, если все следую-
щее верно:
разделение целей: < 0.1 мили;
различие дистанций: < 0.2 мили;
различия пеленга < 3.0°;
различие скорости < 0.5 уз;
различие курса < 5.0°.
Подчеркивается, что эти параметры должны быть выбраны пользователем из
своего опыта и являются подходящими для фактических условий. Судоводитель
может решить, должны ли они основываться на данных АИС или САРП. Не-
хватка слияния целей САРП и АИС ощутима, когда они, как кажется, имеют
большее подобие в скорости и маневре, но разделены коротким расстоянием, что
всегда стоит проверять: могла быть та же самая цель, но ее местоположение
ошибочно передается транспондером АИС; это мог быть, например, буксиров-
щик и буксируемый объект и т. п..
217
Короткие сообщения АИС, связанные с безопасностью Этот сервис текстовых сообщений АИС должен использоваться только для
безопасности и связанных с безопасностью сообщений для передачи или на ука-
занное судно, или в направлении береговой станции, или ко всем станциям сра-
зу. Это не должно использоваться в ситуациях бедствия, но его использование
должно быть уместным в случае навигационной или общей безопасности, на-
пример, увиденный айсберг или буй не на своем месте. Неправильное употреб-
ление этого средства для личных сообщений или использование непристойного
языка приведет к признанию любой администрацией этих действий как преступ-
ных.
Подтверждение переданному сообщению оператор может требовать в пре-
делах текста. Важно понять, что, даже если оборудование адресата указало, что
сообщение было успешно получено, это не означает, что сообщение было про-
читано или понято любым на том судне, кто его получил. Единственный способ
гарантировать, что сообщение было получено, состоит в том, чтобы получить
подтверждение оператора, получившего сообщение или посредством АИС, или
на другом канале радиосвязи. Большинство оборудования АИС облегчает ответ
на полученное сообщение, например, автоматически вставляя MMSI отправителя
в сообщение.
Короткие сообщения этого типа – только дополнительное (но иногда удоб-
ное) средство радиовещания морской безопасности и информации связанной с
безопасностью. Оно не исключает ни одного из требований глобальной морской
системы связи при бедствии и обеспечении безопасности (ГМССБ или Global
Maritime and Distress and Safety System – GMDSS). Однако должно быть важно,
что принятые сообщения рассматривают и, если необходимо, ответ должен быть
сделан.
Этому сервису несколько препятствует ограниченный набор, входящий в
средства обслуживания на МКД, и лучше всего использовать стандартную ком-
пьютерную клавиатуру, если это обеспечивается аппаратурой.
Согласно правилу СОЛАС V/31 (Сообщения об опасностях), «Капитан каж-
дого судна, встретившего опасные льды или покинутое судно, представляющее
опасность для плавания, любую другую прямую навигационную опасность или
… обязан всеми имеющимися в его распоряжении средствами передать об этом
информацию находящимся поблизости судам, а также компетентным властям».
Обычно это делается голосом по УКВ, но «всеми средствами» подразумева-
ет дополнительное использование короткого, связанного с безопасностью сооб-
щения АИС, которое имеет преимущество в сокращении трудностей понимания,
особенно записывая правильное местоположение. Вводя любые данные вруч-
ную, нужно уделить внимание конфиденциальности этой информации, особенно
когда международные соглашения, правила или стандарты предусматривают
защиту навигационной информации.
Морские радиолокаторы стали существенными инструментами для безопас-
ной навигации и предотвращения столкновения. Они удовлетворяют строгим
стандартам одобрения типа и имеют очень хорошую надежность. Радиолокаторы
увеличивают информацию, доступную для принятия решения ВПКМ, обеспечи-
вая точную дистанцию и пеленг вместе с прогнозирующей помощью прокладки
218
САРП. Радиолокаторы поддерживают автономию плавания для капитана. Этот
принцип является центральным в МППСС и обязательным для безопасности
плавания во все времена.
С другой стороны, АИС, основанная на глобальной навигационной спутни-
ковой системе и УКВ-радиосвязи с берегом и другими судами, может сообщить
наблюдателям о местоположении и движении целей, поддерживая это соответ-
ствующими описаниями и прогнозирующей прокладкой.
Авиационная промышленность также развивала радиолокационные систе-
мы, чтобы оснастить транспондерами воздушные средства для идентифицика-
ции самолетов на дисплее управления воздушными транспортными потоками.
Судоходство, использующее АИС, имеет более диалоговую систему, которая ра-
ботает во всем мире и не ограничена диапазоном базируемого на берегу радио-
локатора. Именно это универсальное качество делает АИС настолько многосто-
ронней.
Использование радиолокатора было включено в МППСС собственным пра-
вилом (правило 19), и мы можем ожидать, что АИС сыграет существенную роль
в безопасной навигации судов в будущем. АИС может подтвердить подлинность
радиолокационной информации, идентифицировать статус привилегированных
типов судов и обеспечить полезной информацией для принятия решения и на
берегу, и в море. Способность передавать короткие сообщения без дальнейшего
вмешательства оператора делает систему эффективной для сообщений и других
применений.
Моряков учат проверять навигационные определения места судна, по край-
ней мере, двумя различными методами. До сих пор не было никакой альтерна-
тивной системы, чтобы проверить правдивость РЛ-информации через другую
систему (наличие более одного радиолокатора не уменьшило недостатков РЛС
по обнаружению объектов).
Введение АИС в формате МКД привело моряков к мнению, что АИС – пре-
жде всего инструмент для берега, контролирующего цели, и также отмечается
несоответствие МКД для принятия решения капитаном на борту судна.
Однако с 2008 года все новые морские радиолокаторы должны быть совмес-
тимыми с АИС, а дисплеи РЛС должны быть способными к индикации значащей
информации АИС.
АИС играет большую роль в улучшении навигационной целостности и точ-
ности. Кроме того, увеличение использования реального и виртуального, несо-
мненно, улучшит информацию, доступную для мореплавателя.
219
4.9. АВАРИЙНОСТЬ НА МОРСКОМ ТРАНСПОРТЕ
Аварийность мирового флота Из анализа статистики следует, что по мере повышения качества флота и
ужесточения международного контроля над техническим состоянием судов ко-
личество полных конструктивных потерь судов уменьшается. Полные конструк-
тивные потери судов в год составляли в среднем:
220 – в 80-х гг.,
175 – в 90-х.,
140 – в 2000 г.
67 – в 2006 г.
В последнем случае это составляет 0,1 % от численности всего мирового
флота (0,3 % – в 1996 г. и 0,5 % – в 1990 г.). Самым рекордным по количеству
полных потерь судов был 1982 год, а в тоннажном выражении – начало 90-х го-
дов, когда в морской пучине пропадало ежегодно судов до двух млн. бр. р. т.
Что касается человеческих жертв, то здесь не просматривается определенной
тенденции: из года в год статистика сильно разнится то в одну сторону, то в дру-
гую. Так в 90-х годах их число изменялось от 246 до 1552 человек. Только на
борту парома «Эстония» погибло более 900 человек. В 2003 году число челове-
ческих жертв было наименьшим – 197 человек, а в 2004 году оно подскочило до
589 человек.
Но в последние пять–десять лет при сокращении общего количества проис-
шествий на море, был отмечен рост числа тяжелых происшествий, даже в секто-
ре танкеров, где меры безопасности особенно строги. Судя по статистике, коли-
чество частичных конструктивных потерь с 228 единиц в 1998 году увеличилось
до 685 в 2006 или на 200 %. Частичные потери за последние пять лет в 35 % слу-
чаев были вызваны поломкой машин и механизмов на судах, на втором месте
были посадки на мель, далее – столкновения судов с частичными конструктив-
ными потерями.
Причина увеличения частичных потерь заключатся в интенсификации меж-
дународных морских перевозок в связи с повышением уровня их прибыльности
в мире. Погоня за прибылью привела к увеличению нагрузки на экипажи и суда
и заставила многих судовладельцев «по мелочам» пренебрегать международны-
ми стандартами и правилами безопасности мореплавания.
Второй фактор – продолжение эксплуатации устаревших судов, поскольку
их сдача на слом стала невыгодна в условиях высокого спроса на перевозки, и
вместо этого такие суда пополняют флот субстандартных или потенциально не-
стандартных судов.
На третьем месте – человеческий фактор. Аналитики говорят об общем сни-
жении уровня квалификации и опыта офицерских кадров, вызванном недоста-
точной по количеству и качеству их подготовки, необоснованно быстрым про-
движением молодых офицеров по службе при высоком спросе на командный со-
став в условиях бума в пополнении мирового флота. К тому же, постоянно уве-
личиваются нагрузки на судовых офицеров из-за увеличения отчетности и коли-
чества инспекций судов в портах. Нехватка опыта, помноженная на усталость –
идеальное условие для морских трагических происшествий.
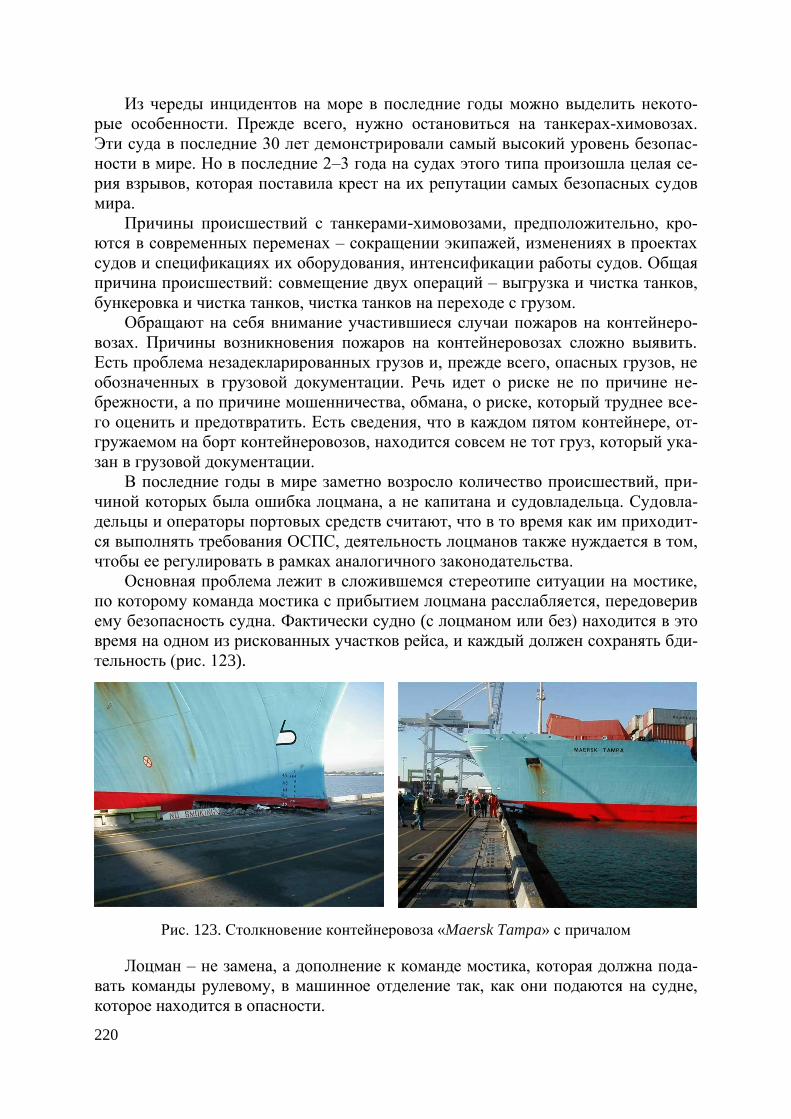
220
Из череды инцидентов на море в последние годы можно выделить некото-
рые особенности. Прежде всего, нужно остановиться на танкерах-химовозах.
Эти суда в последние 30 лет демонстрировали самый высокий уровень безопас-
ности в мире. Но в последние 2–3 года на судах этого типа произошла целая се-
рия взрывов, которая поставила крест на их репутации самых безопасных судов
мира.
Причины происшествий с танкерами-химовозами, предположительно, кро-
ются в современных переменах – сокращении экипажей, изменениях в проектах
судов и спецификациях их оборудования, интенсификации работы судов. Общая
причина происшествий: совмещение двух операций – выгрузка и чистка танков,
бункеровка и чистка танков, чистка танков на переходе с грузом.
Обращают на себя внимание участившиеся случаи пожаров на контейнеро-
возах. Причины возникновения пожаров на контейнеровозах сложно выявить.
Есть проблема незадекларированных грузов и, прежде всего, опасных грузов, не
обозначенных в грузовой документации. Речь идет о риске не по причине не-
брежности, а по причине мошенничества, обмана, о риске, который труднее все-
го оценить и предотвратить. Есть сведения, что в каждом пятом контейнере, от-
гружаемом на борт контейнеровозов, находится совсем не тот груз, который ука-
зан в грузовой документации.
В последние годы в мире заметно возросло количество происшествий, при-
чиной которых была ошибка лоцмана, а не капитана и судовладельца. Судовла-
дельцы и операторы портовых средств считают, что в то время как им приходит-
ся выполнять требования ОСПС, деятельность лоцманов также нуждается в том,
чтобы ее регулировать в рамках аналогичного законодательства.
Основная проблема лежит в сложившемся стереотипе ситуации на мостике,
по которому команда мостика с прибытием лоцмана расслабляется, передоверив
ему безопасность судна. Фактически судно (с лоцманом или без) находится в это
время на одном из рискованных участков рейса, и каждый должен сохранять бди-
тельность (рис. 123).
Рис. 123. Столкновение контейнеровоза «Maersk Tampa» с причалом
Лоцман – не замена, а дополнение к команде мостика, которая должна пода-
вать команды рулевому, в машинное отделение так, как они подаются на судне,
которое находится в опасности.
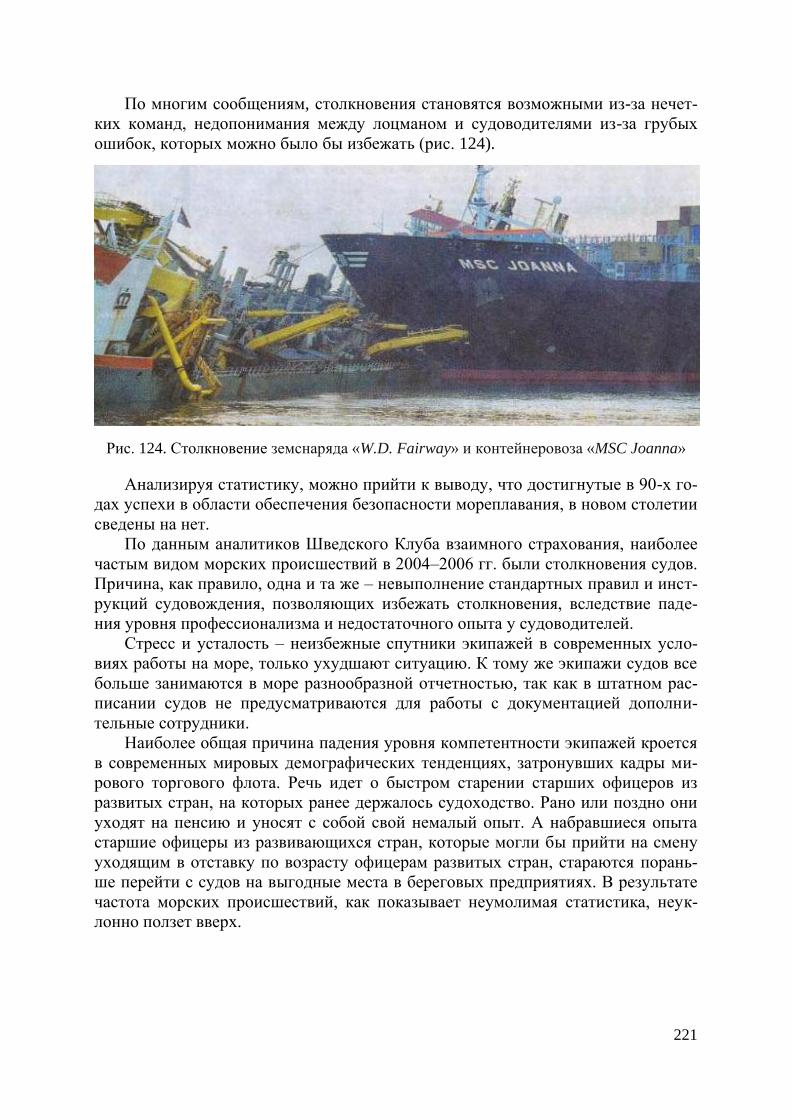
221
По многим сообщениям, столкновения становятся возможными из-за нечет-
ких команд, недопонимания между лоцманом и судоводителями из-за грубых
ошибок, которых можно было бы избежать (рис. 124).
Рис. 124. Столкновение земснаряда «W.D. Fairway» и контейнеровоза «MSC Joanna»
Анализируя статистику, можно прийти к выводу, что достигнутые в 90-х го-
дах успехи в области обеспечения безопасности мореплавания, в новом столетии
сведены на нет.
По данным аналитиков Шведского Клуба взаимного страхования, наиболее
частым видом морских происшествий в 2004–2006 гг. были столкновения судов.
Причина, как правило, одна и та же – невыполнение стандартных правил и инст-
рукций судовождения, позволяющих избежать столкновения, вследствие паде-
ния уровня профессионализма и недостаточного опыта у судоводителей.
Стресс и усталость – неизбежные спутники экипажей в современных усло-
виях работы на море, только ухудшают ситуацию. К тому же экипажи судов все
больше занимаются в море разнообразной отчетностью, так как в штатном рас-
писании судов не предусматриваются для работы с документацией дополни-
тельные сотрудники.
Наиболее общая причина падения уровня компетентности экипажей кроется
в современных мировых демографических тенденциях, затронувших кадры ми-
рового торгового флота. Речь идет о быстром старении старших офицеров из
развитых стран, на которых ранее держалось судоходство. Рано или поздно они
уходят на пенсию и уносят с собой свой немалый опыт. А набравшиеся опыта
старшие офицеры из развивающихся стран, которые могли бы прийти на смену
уходящим в отставку по возрасту офицерам развитых стран, стараются порань-
ше перейти с судов на выгодные места в береговых предприятиях. В результате
частота морских происшествий, как показывает неумолимая статистика, неук-
лонно ползет вверх.
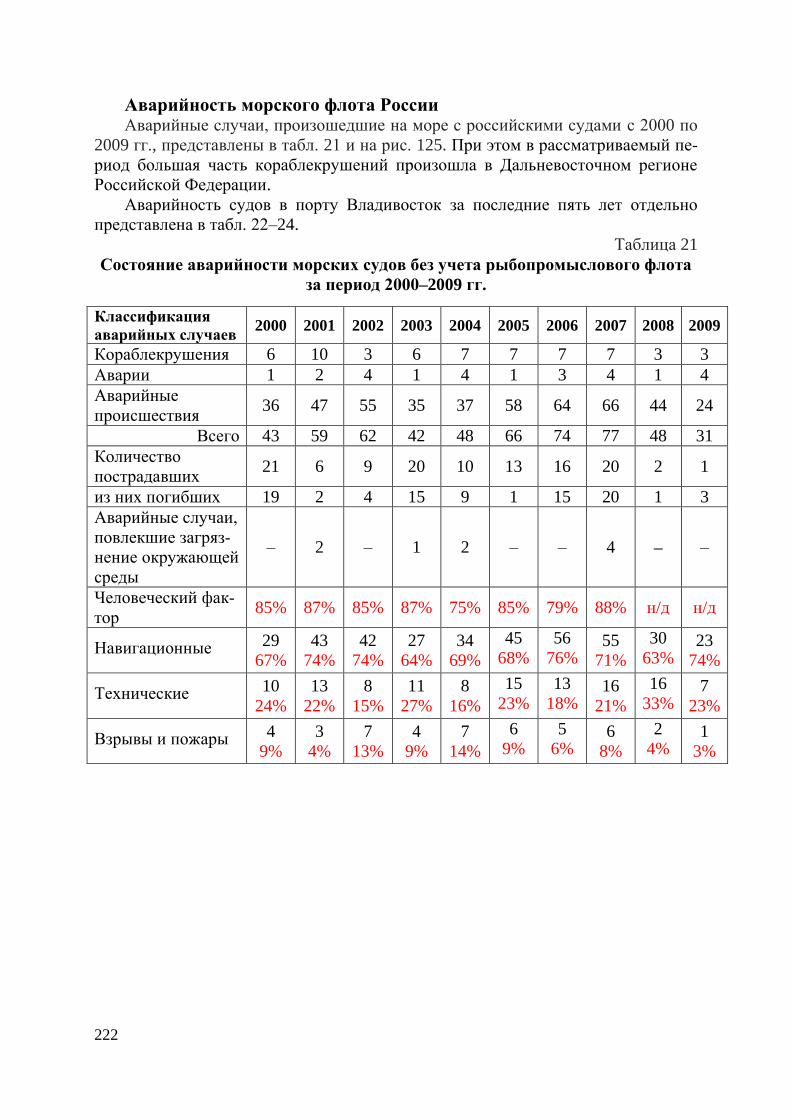
222
Аварийность морского флота России Аварийные случаи, произошедшие на море с российскими судами с 2000 по
2009 гг., представлены в табл. 21 и на рис. 125. При этом в рассматриваемый пе-
риод большая часть кораблекрушений произошла в Дальневосточном регионе
Российской Федерации.
Аварийность судов в порту Владивосток за последние пять лет отдельно
представлена в табл. 22–24.
Таблица 21
Состояние аварийности морских судов без учета рыбопромыслового флота
за период 2000–2009 гг.
Классификация
аварийных случаев 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009
Кораблекрушения 6 10 3 6 7 7 7 7 3 3
Аварии 1 2 4 1 4 1 3 4 1 4
Аварийные
происшествия 36 47 55 35 37 58 64 66 44 24
Всего 43 59 62 42 48 66 74 77 48 31
Количество
пострадавших 21 6 9 20 10 13 16 20 2 1
из них погибших 19 2 4 15 9 1 15 20 1 3
Аварийные случаи,
повлекшие загряз-
нение окружающей
среды
– 2 – 1 2 – – 4 – –
Человеческий фак-
тор 85% 87% 85% 87% 75% 85% 79% 88% н/д н/д
Навигационные 29
67%
43
74%
42
74%
27
64%
34
69%
45
68%
56
76% 55
71%
30
63% 23
74%
Технические 10
24%
13
22%
8
15%
11
27%
8
16%
15
23%
13
18% 16
21%
16
33% 7
23%
Взрывы и пожары 4
9%
3
4%
7
13%
4
9%
7
14%
6
9%
5
6% 6
8%
2
4% 1
3%
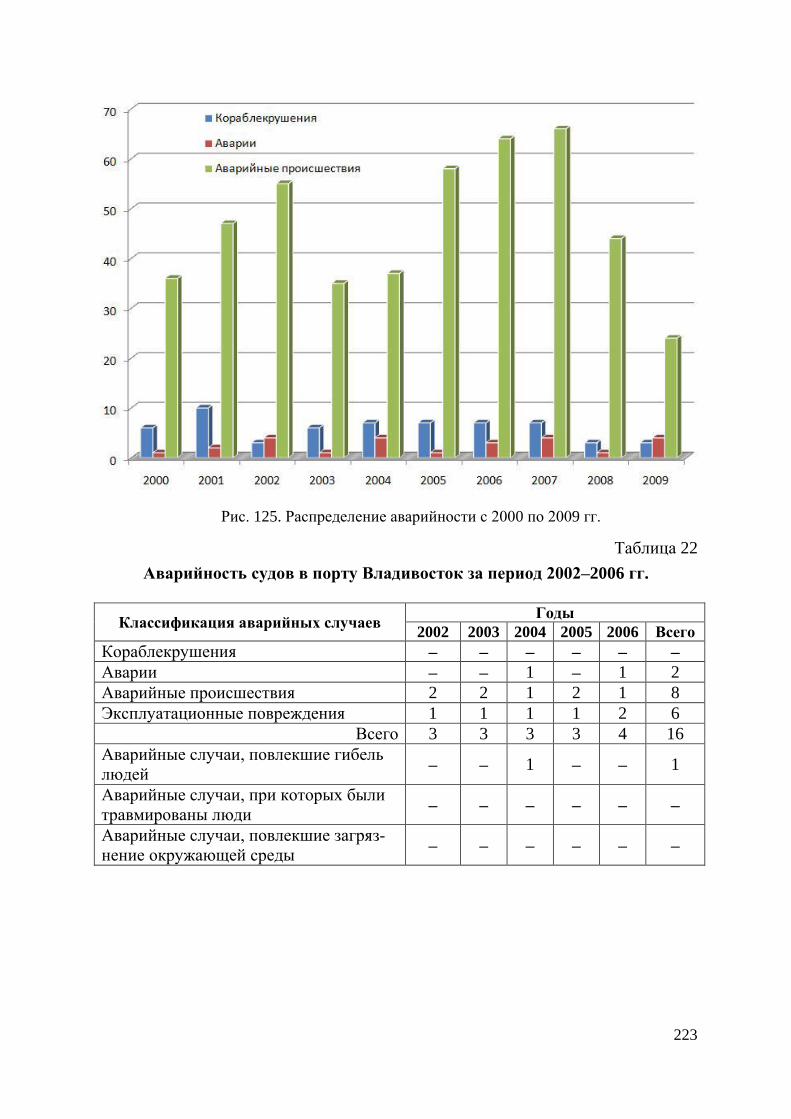
223
Рис. 125. Распределение аварийности с 2000 по 2009 гг.
Таблица 22
Аварийность судов в порту Владивосток за период 2002–2006 гг.
Классификация аварийных случаев Годы
2002 2003 2004 2005 2006 Всего
Кораблекрушения – – – – – –
Аварии – – 1 – 1 2
Аварийные происшествия 2 2 1 2 1 8
Эксплуатационные повреждения 1 1 1 1 2 6
Всего 3 3 3 3 4 16
Аварийные случаи, повлекшие гибель
людей – – 1 – – 1
Аварийные случаи, при которых были
травмированы люди – – – – – –
Аварийные случаи, повлекшие загряз-
нение окружающей среды – – – – – –
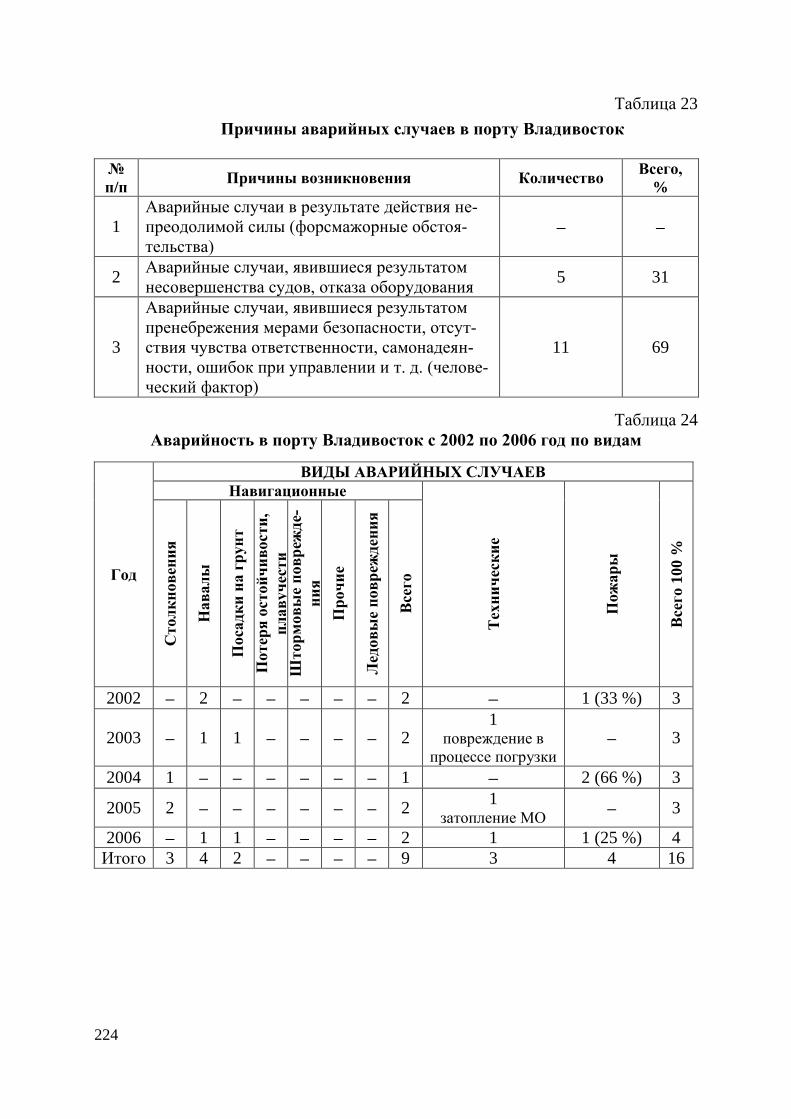
224
Таблица 23
Причины аварийных случаев в порту Владивосток
№
п/п Причины возникновения Количество
Всего,
%
1
Аварийные случаи в результате действия не-
преодолимой силы (форсмажорные обстоя-
тельства) – –
2 Аварийные случаи, явившиеся результатом
несовершенства судов, отказа оборудования 5 31
3
Аварийные случаи, явившиеся результатом
пренебрежения мерами безопасности, отсут-
ствия чувства ответственности, самонадеян-
ности, ошибок при управлении и т. д. (челове-
ческий фактор)
11 69
Таблица 24
Аварийность в порту Владивосток с 2002 по 2006 год по видам
Год
ВИДЫ АВАРИЙНЫХ СЛУЧАЕВ
Навигационные Т
ехн
ич
еск
ие
Пож
ар
ы
Все
го 1
00 %
Стол
кн
ов
ени
я
Нав
ал
ы
Поса
дк
и н
а г
рун
т
Потер
я о
стой
чи
вост
и,
пл
ав
уч
ести
Ш
тор
мов
ые
пов
реж
де-
ни
я
Пр
оч
ие
Лед
ов
ые
пов
реж
ден
ия
Все
го
2002 – 2 – – – – – 2 – 1 (33 %) 3
2003 – 1 1 – – – – 2 1
повреждение в
процессе погрузки – 3
2004 1 – – – – – – 1 – 2 (66 %) 3
2005 2 – – – – – – 2 1
затопление МО – 3
2006 – 1 1 – – – – 2 1 1 (25 %) 4
Итого 3 4 2 – – – – 9 3 4 16
225
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Автоматическая информационная система (АИС): Концепция внедрения на
морском флоте. – СПб.: ЦНИИМФ, 1999. – 16 с.
2. Автоматическая идентификационная система (АИС). Краткое описание. Ин-
формационный документ компании «Транзас». – СПб., 1999. – 30 с.
3. Автоматическая идентификационная система (АИС). Концепция внедрения на
морском флоте: информационный документ ЦНИИМФ. – СПб., 2000. – 38 с.
4. Временное руководство по использованию автоматической информационной
(идентификационной) системы (АИС) на судах и в береговых службах. – Мо-
сква: Государственная служба морского флота Министерства транспорта РФ,
2002. – 59 с.
5. Всероссийский семинар «Проблемы радиосвязи, обеспечение безопасности
мореплавания и тренажерной подготовки судовых специалистов».: материалы
конференции, г. Владивосток, 20–21 декабря 2001 года. – Владивосток: Мор.
гос. ун-т, 2002.
6. Еремчук М. И., Зубков Р. А. Предупреждение столкновений кораблей в море.
– М.: Военное издательство, 1993 – 140 с.
7. Коккрофт А. Н., Ламеер Дж. Н.Ф. Руководство по правилам предупреждения
столкновения. Пер. с англ. Шайхутдинова Н. Т. и Щиголева К. В. – СПб.: ООО
«МОРСАР», 2005. – 302 с.
8. Коростелев И. Ф. Использование радиолокационной информации при плава-
нии в условиях ограниченной видимости: учеб. пособие. – Владивосток: Даль-
рыбвтуз (ТУ), 1997. – 86 с.
9. Маринич А. Н. Судовая автоматическая идентификационная система / А. Н.
Маринич, И. Г.Проценко, В. Ю.Резников, Ю. М.Устинов, Р. Н. Черняев, А. Р.
Шигабутдинов. Под общ. ред. докт. техн. наук проф. Ю. М. Устинова. –
СПб.: Судостроение, 2004. – 180 с.
10. Материалы научно-практической конференции «Безопасность судоходства в
Дальневосточном бассейне», г. Владивосток, 24–25 октября 2007 года. – Вла-
дивосток: Мор. гос. ун-т, 2007.
11. Международная конвенция о подготовке и дипломировании моряков и несе-
нии вахты 1978 года (ПДМНВ-78). (консолидированный текст с поправками).
– СПб.: ЗАО ЦНИИМФ, 2002. – 600 с.
12. Международная конвенция по охране человеческой жизни на море 1974 года
(СОЛАС-74). (Консолидированный текст, измененный Протоколом 1988 года
к ней, с поправками). – СПб.: ЗАО ЦНИИМФ, 2008. – 984 с.
13. Международная конференция «Состояние и перспективы развития береговых
систем управления движением судов», г. Владивосток, 24–26 сентября 2002
года. 1 электрон. опт. диск (CD-ROM).
14. Международные научно-практические конференции «Перспективы развития
систем связи и электрорадионавигации на морском и речном транспорте».
Первая–Четвертая. Материалы конференций. – Москва, 2000–2003 гг.
15. Международные правила предупреждения столкновений судов в море, 1972 г.
(МППСС-72). – 3-е изд., испр. – М.: МОРКНИГА, 2009. – 152 с.: 115 илл.
16. Общие правила плавания и стоянки судов в морских портах Российской Феде-
226
рации и на подходах к ним. – СПб.: ЗАО «ЦНИИМФ», 2009. – 54 с., цв. ил.
(Серия «Судовладельцам и капитанам», вып. № 28).
17. Письменный М. Н. Краткий курс по изучению международных правил преду-
преждения столкновений судов в море: учеб. пособие. – Владивосток, ДВГМА
им. адм. Г. И. Невельского, 1999. – 78 с.
18. Письменный М. Н., Пузачѐв А. Н. Использование судовой автоматической
идентификационной системы. – Владивосток: Мор. гос. ун-т, 2004. – 86 с.
19. Причкин О. Б. Морская автоматическая идентификационная система (АИС):
учеб. пособие. – Владивосток: ВМТ, 2003, – 88 с.
20. Пузачев А. Н. Методические указания к решению задач по расхождению с су-
дами с помощью радиолокатора. – Владивосток: ДВГМА, 1994. – 31 с.
21. Резолюция ИМО А.601(15) Представление на судах информации о маневренных
характеристиках. – СПб.: ЗАО «ЦНИИМФ», 2001. – 20 с.
22. Резолюция ИМО А.917(22) от 29 ноября 2001 года. Руководство по эксплуатации
на судах морской автоматической идентификационной системы. Сборник № 18
резолюций ИМО. – СПб.: ЗАО «ЦНИИМФ», 2002. – 320 с.
23. Резолюция ИМО MSC.74(69) от 12 мая 1998 года. Приложение 3 «Рекоменда-
ции по эксплуатационным характеристикам универсальной морской автома-
тической идентификационной системы (АИС). Сборник № 10 резолюций ИМО.
– СПб.: ЗАО «ЦНИИМФ», 1999. – 189 с.
24. Резолюция ИМО MSC.140(76) «Рекомендация по защите ОВЧ-радиоканала
передачи данных АИС на УКВ» от 06 декабря 2002 года. Сборник № 21 резо-
люций ИМО. – СПб.: ЗАО «ЦНИИМФ», 2003. – 229 с.
25. Резолюция MSC 191(79) «Эксплуатационные требования к представлению от-
носящейся к судовождению информации на судовых устройствах отображе-
ния». Сборник № 27 резолюций ИМО. – СПб.: ЗАО «ЦНИИМФ», 2005. – 227 с.
26. Резолюция MSC 192(79) «Принятие пересмотренных эксплуатационных тре-
бований к радиолокационному оборудованию». Сборник № 27 резолюций
ИМО. – СПб.: ЗАО «ЦНИИМФ», 2005. – 227 с.
27. Рекомендации по использованию радиолокационной информации для преду-
преждения столкновений судов. – М.: В/О «Мортехинформреклама», 1991. –
72 с.
28. Рекомендации по организации штурманской службы на судах Минморфлота
(РШС 89). М.: В/О «Мортехинформреклама», 1990. – 64 с.
29. Сборник характерных аварийных случаев с судами на морском транспорте за
2004–2006 гг. – СПб.: ЗАО «ЦНИИМФ», 2007. – 124 с.
30. Снопков В. И. Управление судном. – СП: «Профессионал», 2004. – 531 с.
31. Судовая и береговая аппаратура автоматической идентификационной системы
(Т100, Т110, Т200, Т210). Спецификация. Информационный документ компа-
нии «Транзас». – СПб., 2001. – 10 с.
32. Судовое оборудование универсальной автоматической информационной
(идентификационной) системы (АИС) (Класс «А»). Временные технико-
эксплуатационные требования. МФ-02-22/848-62. Государственная служба
морского флота Министерства транспорта РФ. (Введены в действие с 15 марта
2002 года). – Москва, 2002. – 117 с.
33. Универсальная автоматическая идентификационная система. Общее описание.
227
Информационный документ компании «Транзас». – СПб., 2002. – 17 с.
34. Шарлай Г. Н. Управление и маневрирование морским судном. – Владивосток:
Мор. гос. ун-т, 2008. – 492 с.
35. Яскевич А. П., Зурабов Ю. Г. Новые МППСС (с крат. комментариями). 2-е
изд. перераб. и доп. – М.: Транспорт, 1979. – 391 с.
36. Circular Letter MSC/Circ.244 adopted on 8 December 2004 Guidance On The Use
Of UN/LOCODE In The Destination Field In AIS Messages
37. Circular Letter MSC.l/Circ.1252 adopted on 9 October 2007 Guidelines On Annual
Testing Of The Automatic Identification System (AIS)
38. Circular Letter SN.1/Circ.227/Corr.l adopted on 4 July 2008 Guidelines For The
Installation Of A Shipborne Automatic Identification System (AIS)
39. Dr Andy Norris. Radar and AIS. A practical guide volume 1. Integrating ship bridge
systems. The Nautical Institute, London, 2008, – 148 p.
40. Gilbert WU Lee MNI And Mr. C.J. Parker OBE FNI. Managing Collisions Avoid-
ance At Sea. The Nautical Institute, London, 2007, – 181 p.
41. IMO Model Course 1.35 "Operational use of AIS", 2006
42. IMO SN/Circ.217 (11 July 2001) Interim Guidelines For The Presentation And Dis-
play Of AIS Target Information.
43. IMO SN/Circ.226 (16 December 2002) Dangers Of Conflicting Actions In Collision
Avoidance.
44. IMO SN/Circ.227 (6 January 2003) Guidelines For The Installation Of A Shipborne
Automatic Identification System (AIS).
45. IMO SN/Circ.236 (28 May 2004) Guidance On The Application Of AIS Binary Mes-
sages.
46. Resolution MSC.246(83) adopted on 8 October 2007 Adoption Of Performance
Standards For AIS Search And Rescue Transmitter (AIS-SART) For Use In search
And Rescue Operations
47. Richard A. Cahill. Collisions And Their Causes. USA, 1997, – 260 p.
48. Richard A. Cahill. Strandings And Their Causes. The Nautical Institute, London,
2002, – 175 p.
49. Ships Routing. London, IMO. Ninth edition, 2008.
50. Summary On The Amendments Of Maritime Traffic Safety Low. Maritime Safety
Agency, Japan, June 1977, – 30 p.
228
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ 3
1. МЕЖДУНАРОДНЫЕ ПРАВИЛА ПО ПРЕДУПРЕЖДЕНИЮ
СТОЛКНОВЕНИЙ СУДОВ (МППСС-72)
7
ЧАСТЬ А. ОБЩИЕ ПОЛОЖЕНИЯ 7
Правило 1 . Применение 8
Правило 2. Ответственность 10
Правило 3. Общие определения 11
ЧАСТЬ В. ПРАВИЛА ПЛАВАНИЯ И МАНЕВРИРОВАНИЯ 15
Раздел I. Плавание судов при любых условиях видимости 16
Правило 5. Наблюдение 16
Правило 6. Безопасная скорость 17
Правило 7. Опасность столкновения 17
Правило 8. Действия для предупреждения столкновения 19
Правило 9. Плавание в узкости 21
Правило 10. Плавание по системам разделения движения 23
Раздел II. Плавание судов, находящихся на виду друг у друга 24
Правило 12. Парусные суда 24
Правило 13. Обгон 27
Правило 14. Ситуация сближения судов, идущих друг на
друга
28
Правило 15. Ситуация пересечения курсов 30
Правило 16. Действия судна, уступающего дорогу 31
Правило 17. Действия судна, которому уступают дорогу 32
Правило 18. Взаимные обязанности судов 34
Раздел III. Плавание судов при ограниченной видимости 36
Правило 19. Плавание судов при ограниченной видимости 36
ЧАСТЬ С. ОГНИ И ЗНАКИ 42
Правило 21. Определения 42
Правило 22. Видимость огней 42
Правило 23. Суда с механическим двигателем на ходу 43
Правило 24. Суда, занятые буксировкой и толканием 45
Правило 25. Парусные суда на ходу и суда на веслах 47
Правило 26. Рыболовные суда 48
Правило 27. Суда, лишенные возможности управляться
или ограниченные в возможности маневрировать
49
Правило 28. Суда, стесненные своей осадкой 51
Правило 29. Лоцманские суда 51
Правило 30. Суда на якоре и суда на мели 51
ЧАСТЬ D. ЗВУКОВЫЕ И СВЕТОВЫЕ СИГНАЛЫ 53
Правило 37. Сигналы бедствия 53
МЕЖДУНАРОДНЫЙ СВОД СИГНАЛОВ (МСС-65) 57
229
2. ПРАВИЛА ПЛАВАНИЯ В ТЕРРИТОРИАЛЬНЫХ ВОДАХ
РОССИЙСКОЙ ФЕДЕРАЦИИ
58
Правила подъема сигналов пограничными кораблями для
остановки невоенных судов в территориальных и внутрен-
них водах РФ
58
О сигналах для обозначения присутствия подводных лодок и
их аварийного состояния
59
Особые случаи расхождения российских судов гражданских
ведомств с кораблями ВМФ РФ
62
Сигналы плавучих маяков, не находящихся на своих постах 63
Правила выполнения маневров, связанных с прохождением
судов относительно морских дноуглубительных судов при
встречном плавании
64
Порядок расхождения судов с дноуглубительными судами 64
Огни и знаки работающих дноуглубительных судов 65
Сигналы, регулирующие заход судов в морские порты и вы-
ход судов из морских портов
66
3. ПРАВИЛА ПЛАВАНИЯ ВО ВНУТРЕННИХ ВОДАХ ЯПОНИИ 67
4. ИНФОРМАЦИОННЫЕ СРЕДСТВА, ИСПОЛЬЗУЕМЫЕ ДЛЯ
ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ СУДОВ
70
4.1. ОСНОВЫ РАДИОЛОКАЦИИ 70
Передатчик и переданный сигнал 70
Антенна 71
Приемник 73
Процессор РЛС 73
Дисплей и пользовательский интерфейс 74
Эксплуатационные качества РЛС 74
Настраиваемые средства управления: усиление, дождь,
море
78
Методы корреляции 82
Стабилизация изображений в РЛС 84
Радиолокационное сопровождение 85
Новые технологии в радиолокаторах 87
4.2. РАСХОЖДЕНИЕ С СУДАМИ С ПОМОЩЬЮ РАДИОЛОКАТОРА 91
Истинное и относительное движение 93
Закономерности относительного движения 96
4.2.1. Ведение радиолокационного наблюдения и прокладки 104
4.2.2. Организация радиолокационных наблюдений на ходовом
мостике
106
4.2.3. Получение радиолокационной информации и ее докумен-
тирование с помощью ТОРЛИ
107
4.2.4. Ручная обработка радиолокационной информации на ма-
невренном планшете с помощью палетки
109
230
4.2.4.1. Нанесение относительных местоположений целей 109
4.2.4.2. Внесение вектора скорости судна в точки относитель-
ного местоположения целей
111
4.2.4.3. Определение степени опасности (DКР, ТКР) целей 111
4.2.4.4. Определение ЭД (ИК, V) и ракурса целей 113
4.2.4.5. Уточнение элементов движения целей 113
4.2.4.6. Полная оценка и анализ ситуации сближения 115
4.2.4.7. Выбор и расчет маневра при расхождении с нескольки-
ми судами
117
4.2.4.8. Проверка расчетного маневра по другим судам 119
4.2.4.9. Выполнение маневра по безопасному расхождению 121
4.2.4.10. Расчет времени возвращения на прежние элементы
движения по всем целям
124
4.2.4.11. Возвращение на прежние элементы движения 125
4.2.5. Алгоритм решения задачи по расхождению с судами 129
4.3. ПЛАВАНИЕ В ПОТОКЕ СУДОВ ПО СИСТЕМАМ РАЗДЕЛЕНИЯ
ДВИЖЕНИЯ
130
Основные понятия в СРД 131
Плавание в потоке 132
Пересечение потока 134
Графические построения на маневренном планшете 134
Некоторые случаи расхождения судов с помощью РЛС 134
Отворот от судна, которое имеет помеху справа 134
Обгон 134
Уход с курса догоняющего судна 136
Плавание в зоне действия системы управления движением
судов
136
4.4. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СОВРЕМЕННЫХ САРП 137
Радиолокатор на интегрированном мостике 138
Радиолокационные станции BridgeMaster E 139
Радиолокационный комплекс NAVI-RADAR 144
4.5. ИСПОЛЬЗОВАНИЕ САРП ДЛЯ РАСХОЖДЕНИЯ С СУДАМИ 145
Представление информации в САРП 153
Оценка опасности столкновения 155
Проигрывание маневра 155
Документирование информации 156
4.6. АВТОМАТИЧЕСКАЯ ИДЕНТИФИКАЦИОННАЯ СИСТЕМА (АИС) 156
Исторический обзор развития АИС 156
Назначение, принцип действия, режимы работы, состав
оборудования и сферы применения АИС
162
Основы использования АИС на судах 169
Обязанности ВПКМ по обслуживанию судовой станции
АИС
174
231
Представление информации АИС 177
Ограничения, присущие АИС 182
Использование АИС для предотвращения столкновений
судов
184
4.7. ОСОБЕННОСТИ РАБОТЫ СУДОВЫХ ТРАНСПОНДЕРОВ АИС 190
Судовая аппаратура российской компании «Транзас» 191
Станция АИС норвежской компании «KONGSBERG
SEATEX AS» «Seatex AIS 100»
195
Судовая УАИС фирмы «Радиома» «Тритон-92» класса «А» 198
АИС американской компании «L-3 Communications» «L-3
PROTEC»
202
Особенности транспондера КТМ-201 фирмы «IZUMI
BOEKI»
203
УАИС южнокорейской компании «Saracom» SI–10T 206
4.8. СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ РЛС И АИС 208
Процедуры мостика для использования радиолокатора и
АИС
208
Радиолокационное сопровождение цели 209
Параллельные индексы (ПИ) 210
Дисплей целей АИС 212
Использование истинных и относительных векторов 213
Инструменты предотвращения столкновения для
РЛС/АИС
214
Оценка цели 215
Объединение целей 216
Короткие сообщения АИС, связанные с безопасностью 217
4.9. АВАРИЙНОСТЬ НА МОРСКОМ ТРАНСПОРТЕ 219
Аварийность мирового флота 219
Аварийность флота России 222
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 225
ОГЛАВЛЕНИЕ 228
232
Позиция № 123
в плане издания
учебной литературы
МГУ на 2011 г.
Учебное издание
Александр Николаевич Пузачѐв
ИСПОЛЬЗОВАНИЕ ТЕХНИЧЕСКИХ СРЕДСТВ ДЛЯ
ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ СУДОВ
Учебное пособие
15,4 уч.-изд. л. Формат 60 84 ⅛
Тираж 150 экз. Заказ №
Отпечатано в типографии РПК МГУ им. адм. Г. И. Невельского
690059, Владивосток, Верхнепортовая, 50а





























