Embed Size (px)
Citation preview

KINETO-ELASTIC ANALYSIS OF A COMPOUND BOW
Ming Yang, Yuyi Lin University of Missouri Columbia, MO, USA [email protected]
Xiaoyi Jin Shanghai University of Engineering Science
Shanghai, CHINA
X Xiao
ABSTRACT This paper presents the kineto-elastic analysis of a
compound bow which in each side of the limbs has two stacked
eccentric cams connected by two inextensible cables and one
inextensible string. A large deformation cantilever beam
model was created to determine the center trajectories of the
cams. The principle of finite element method was applied to
calculate the deformation of the limbs by combining small
deflections of segmented cantilever beam elements. Another
part of this work is the construction of a quasi-static model to
simulate the draw process. The displacements of cams, cables
and string were analyzed by gradually drawing the bow string.
The required draw force as a function of draw length was
obtained, and verified by experiments. The kineto-elastic
analysis procedure described in this paper can be used later for
the optimal design of the shapes of the cams and limbs. The
modeling and simulation procedure used for combining elastic
components, flexible but inextensible string-cable components,
and rigid component in a precision dynamic model of a
mechanical system can also be applied to archery bows with
more complex configuration, and to other similar mechanical
systems.
INTRODUCTION
As one of the most important inventions in history for all
cultures, the archery bow has been a major hunting tool and
weapon from prehistoric times until the appearance of firearms
[Grayson, 2007]. Now it is still used in many fields including
the hunting, sports, and shooting practice. Different types of
bows have been invented and improved with the development
of human civilizations in thousands of years. The newest type
is compound bow (referring to Fig.1). Holless Allen [1968] of
Missouri invented the first compound bow in the 1960’s.
Improvements to compound bows continue with over 300
related patents filed since the 1960’s. Most improvements and
re-designs apparently used empirical methods. There are few
related technical and engineering analysis papers in the open
literature. Other than the obvious purpose of protecting trade
secrets, a compound bow design involves a system of stack
cams, cables and string, and two flexible limbs, creating a
challenging task for engineering analysis. Compared with
other types of bows, the main characteristics of compound
bows include storing more energy so that the arrow speed is
higher and reduced drawing force at full drawn position so that
it is easy to aim.
Among the components of the compound bow, the limbs
are considered the primary energy storage components. The
limbs can be modeled as cantilever beams with a variable force
at the free end. This force will change direction and
magnitude when the bow is used. The modeling of limbs’
deflection is the first and most basic part of the whole analytical
model. Kincy [1981] analyzed Allen’s compound bow using a
numerical approach. With a series of circular arc segments,
developed a numerical technique which approximates the
deformation of the neutral axis of the bow limb. It was
showed [Miller, 1985] that it was incorrect to claim Allen’s
original design increased arrow speed. Miller’s design used
two attached cams in the end of the limbs to increase stored
strain energy. The numerical deduction on large deflection of
cantilever beam was described in Visner’s thesis [2007]. He
used a static analysis method, a second order nonlinear
differential deflection curve equation was obtained to represent
the deformation of the free end of the beam which was assumed
weight negligible and inextensible. Then Euler’s method was
applied to solve the deflection curve equation with known
boundary conditions. A program employing the shooting
method was created to find the correct curvature at the fixed
end of the beam to obtain the deflection of beam. The
assumption of a load of constant magnitude and direction at the
end of the cantilever beam in Visner’s model limits its
applicability to any general bow design.
Early study of compound bow in our group started from a
simple design, the dual and symmetrical cam design as shown
Proceedings of the ASME 2015 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference
IDETC/CIE 2015 August 2-5, 2015, Boston, Massachusetts, USA
DETC2015-46818
1 Copyright © 2015 by ASME

in Fig.1 [Lin, 2008]. Kudlacek [1977] invented this design
that uses eccentric cam elements. Two cams in the stack of
each side are not concentric, which increase the freedom in
design, and it is still in production. In Hanson’s thesis [2009],
the cam system (referring to Fig.2) is more complex than
Kudlacek’s design, and can be considered an improvement over
earlier designs. Hanson did simulations to study the
characteristics of the draw force curve using a static model.
He [2011] analyzed the kinematics of a compound bow with
concentric circles cams (Fig.3). For bow draw, the pivot point
was assumed to travel on a straight line, and the line can be
experimentally determined. Su [2009] used ABAQUS to
solve for the trajectory of the pivot point in a cam system
design as described in Fig.4, and proved the trajectory is close
to a straight line. Su [2009] shows a kinematic model and
static simulation, but the elastic model is not integrated in the
optimization program.
Fig.1 Symmetric dual disk cam design studied [Lin, 2008]
Fig.2 A different compound bow design (Buckmaster) studied
by Hanson [2009]
Fig.3 Concentric disk cam model in He’s thesis [2011]
2 Copyright © 2015 by ASME
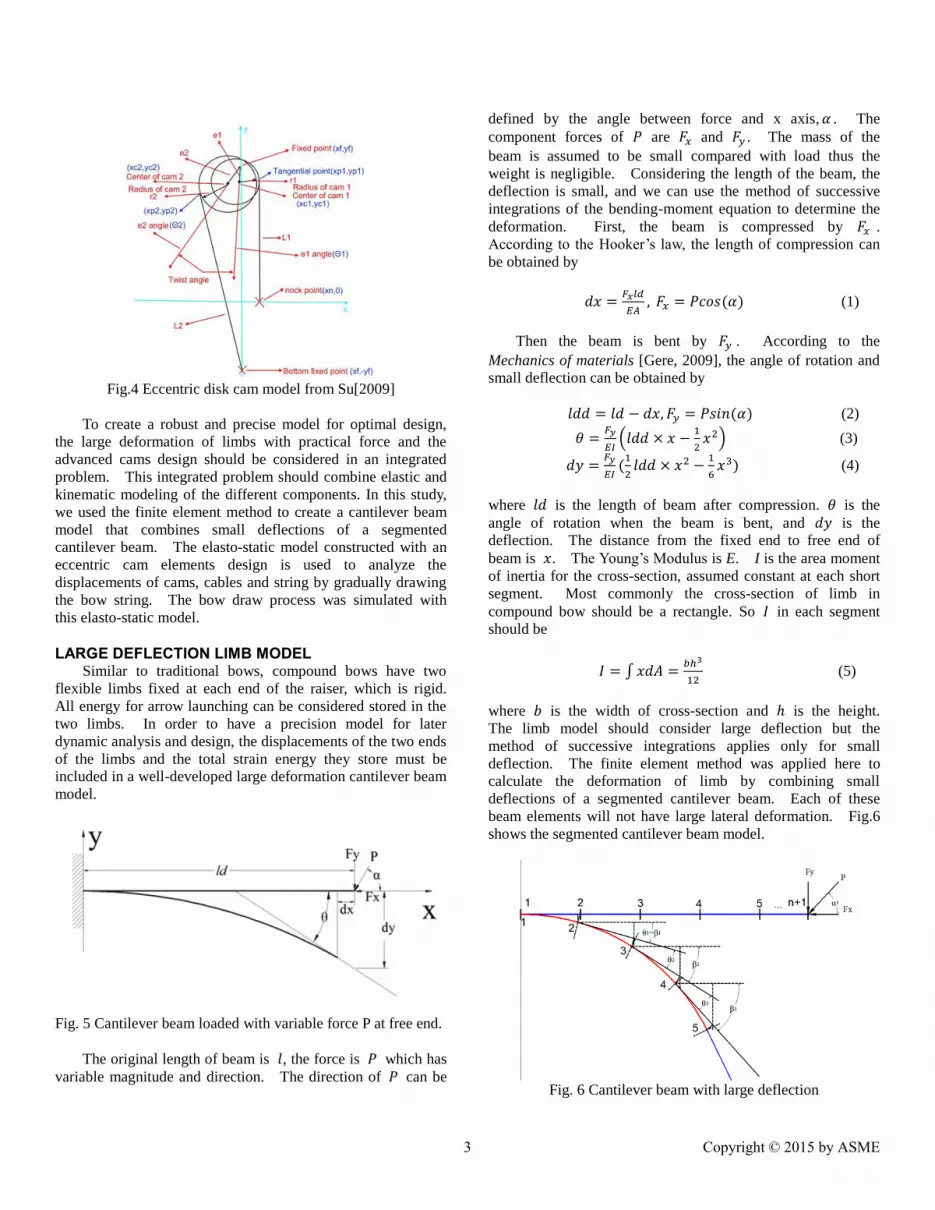
Fig.4 Eccentric disk cam model from Su[2009]
To create a robust and precise model for optimal design,
the large deformation of limbs with practical force and the
advanced cams design should be considered in an integrated
problem. This integrated problem should combine elastic and
kinematic modeling of the different components. In this study,
we used the finite element method to create a cantilever beam
model that combines small deflections of a segmented
cantilever beam. The elasto-static model constructed with an
eccentric cam elements design is used to analyze the
displacements of cams, cables and string by gradually drawing
the bow string. The bow draw process was simulated with
this elasto-static model.
LARGE DEFLECTION LIMB MODEL Similar to traditional bows, compound bows have two
flexible limbs fixed at each end of the raiser, which is rigid.
All energy for arrow launching can be considered stored in the
two limbs. In order to have a precision model for later
dynamic analysis and design, the displacements of the two ends
of the limbs and the total strain energy they store must be
included in a well-developed large deformation cantilever beam
model.
Fig. 5 Cantilever beam loaded with variable force P at free end.
The original length of beam is 𝑙, the force is 𝑃 which has
variable magnitude and direction. The direction of 𝑃 can be
defined by the angle between force and x axis,𝛼 . The
component forces of 𝑃 are 𝐹𝑥 and 𝐹𝑦 . The mass of the
beam is assumed to be small compared with load thus the
weight is negligible. Considering the length of the beam, the
deflection is small, and we can use the method of successive
integrations of the bending-moment equation to determine the
deformation. First, the beam is compressed by 𝐹𝑥 .
According to the Hooker’s law, the length of compression can
be obtained by
𝑑𝑥 =𝐹𝑥𝑙𝑑
𝐸𝐴, 𝐹𝑥 = 𝑃𝑐𝑜𝑠(𝛼) (1)
Then the beam is bent by 𝐹𝑦 . According to the
Mechanics of materials [Gere, 2009], the angle of rotation and
small deflection can be obtained by
𝑙𝑑𝑑 = 𝑙𝑑 − 𝑑𝑥, 𝐹𝑦 = 𝑃𝑠𝑖𝑛(𝛼) (2)
𝜃 =𝐹𝑦
𝐸𝐼(𝑙𝑑𝑑 × 𝑥 −
1
2𝑥2) (3)
𝑑𝑦 =𝐹𝑦
𝐸𝐼(1
2𝑙𝑑𝑑 × 𝑥2 −
1
6𝑥3) (4)
where 𝑙𝑑 is the length of beam after compression. 𝜃 is the
angle of rotation when the beam is bent, and 𝑑𝑦 is the
deflection. The distance from the fixed end to free end of
beam is 𝑥. The Young’s Modulus is E. I is the area moment
of inertia for the cross-section, assumed constant at each short
segment. Most commonly the cross-section of limb in
compound bow should be a rectangle. So 𝐼 in each segment
should be
𝐼 = ∫ 𝑥𝑑𝐴 =𝑏ℎ3
12 (5)
where 𝑏 is the width of cross-section and ℎ is the height.
The limb model should consider large deflection but the
method of successive integrations applies only for small
deflection. The finite element method was applied here to
calculate the deformation of limb by combining small
deflections of a segmented cantilever beam. Each of these
beam elements will not have large lateral deformation. Fig.6
shows the segmented cantilever beam model.
Fig. 6 Cantilever beam with large deflection
(5)
3 Copyright © 2015 by ASME

The undeformed beam is placed horizontally on the x-axis
and cut into 𝑛 segments with 𝑛 + 1 nodes. If the beam
length is 𝑙, the length of every segment is 𝑙𝑑 = 𝑙/𝑛. θ𝑖 is
the local angular deformation for one element, and β𝑖 is the
cumulative angle. For every segment, the angle of rotation
and small deflection can be determined as above; then all the
small deflections of the segmented cantilever beams are
combined to obtain the total deformation. The procedure is
shown in Fig. 7. The coordinate of node 1 is assumed as
(0, 0), therefore, all the coordinates of all nodes can be
obtained.
Fig.7 Procedure to model beam with large deflection
The node changes from number 𝑛 to 𝑛𝑎, then to 𝑛𝑏 .
(𝑥𝑓𝑛, 𝑦𝑓𝑛) is the coordinates of the node 𝑛. The coordinates of
the free end is
(𝑥𝑓𝑛+1, 𝑦𝑓𝑛+1)
= (𝑥𝑓𝑛 + 𝑙𝑑𝑑 𝑐𝑜𝑠 𝛽(𝑛 − 1) − 𝑑𝑦(𝑛) 𝑠𝑖𝑛 𝛽(𝑛 − 1) ,
𝑦𝑓𝑛 − 𝑙𝑑𝑑 𝑠𝑖𝑛 𝛽(𝑛 − 1) − 𝑑𝑦(𝑛) 𝑐𝑜𝑠 𝛽(𝑛 − 1))
(6)
And the deformation of beam is
𝑥𝑑𝑓 = 𝑙 − 𝑥𝑓𝑛+1, 𝑦𝑑𝑓 = −𝑦𝑓𝑛+1 (7)
According the analysis above, in this large deflection limb
model, the deformation in x-direction and y-direction can be
obtained from the magnitude and direction of the limb force.
CONSTRUCTION OF KINETO-STATIC MODEL The special motion of a compound bow with an elaborate
cam profile design makes the bow significant in archery. With
a set of cams, cables and limbs, this structure can be held easily
at full draw and can store more energy due to the pulley system.
In this paper, the cam profile with two eccentric circular cams
(Fig. 8) is selected for the kineto-static model.
Fig.8 Structure and kinematic diagram of a type of compound
bow studied in this work
This design has more flexible mechanical advantage and
can be produced with commercial components. The analysis
based on this design can be applied to other cam profiles.
Fig.8b shows that the bow structure is symmetric, and the angle
between limbs and the x-direction is 𝛼. So only the upper
cam needs to be analyzed, and the motion of the lower cam can
be obtained by symmetry. The motion procedure is
demonstrated by gradually drawing the bow string in Fig. 9.
The first part showed before drawing situation, the present
situation is the intermediate position, and the motion ends at the
third one. The fixed point is the end of the limb which holds
the rotation center of a cam. It is assumed that the cables and
string are inextensible, and the cam is non deformable. It is
convenient to combine previous and present situations to
analyze the displacements of cams, cables and string. The two
circular stacked cams can be separated to calculate their
motion. The bigger circle is cam1, and the smaller one is
cam2.
Fig.9 Displacement of the limbs and bow string
4 Copyright © 2015 by ASME

Fig.10 shows the analysis of cam1. The initial position
should be constructed first. The fixed point is F, the center of
cam1 is C1, and the tangent point of cable1 and cam1 is T1.
The eccentric distance from F to C1 is e1, the radius of cam1 is
r1. And the length from the tangent point to bottom fixed
point is S1. It is assumed that the original coordinate of the
fixed point is (𝑥𝑓(1), 𝑦𝑓(1)). From Fig. 10a the original
coordinate of the center of cam1 can be determined
Fig.10 Cam 1 diagram for kinematic modeling
𝑥𝑐1(1) = 𝑥𝑓(1) − 𝑒1 sin(𝑎𝑔1(1))
𝑦𝑐1(1) = 𝑦𝑓(1) − 𝑒1 cos(𝑎𝑔1(1)) (8)
𝑎𝑔1 is the angle between line F to C1 and y-axis. The
tangent point can be determined once the angle between the
cable and the y-axis is calculated. From Fig. 10b, the equation
of the cable angle is
𝑒1 cos(𝑎𝑔1(1)) + r1 sin(agcb(1)) +
𝑒1 sin(𝑎𝑔1(1))+r1 cos(agcb(1))
tan(𝑎𝑔𝑐𝑏(1))= 2𝑦𝑓(1) (9)
Solving this equation (9) to determine the angle of cable
we find:
𝑥𝑡𝑝1(1) = 𝑥𝑐1(1) − 𝑟1 𝑐𝑜𝑠(𝑎𝑔𝑐𝑏(1))
𝑦𝑡𝑝1(1) = 𝑦𝑐1(1) − 𝑟1 𝑠𝑖𝑛(𝑎𝑔𝑐𝑏(1)) (10)
Other geometry information obtained from the initial
conditions is the length from the tangent point to the bottom
fixed point:
𝑆1(1) = √(𝑥𝑡𝑝1(1) − 𝑥𝑓(1))2+ (𝑦𝑡𝑝1(1) + 𝑦𝑓(1))
2 (11)
Next is the kinematic analysis. The limb deflection is given
a constant increment 𝑑𝑙𝑡𝑦 by gradually drawing the bow
string, thus the position of cam, cable and string are calculated.
As shown in Fig. 10a, the algorithm for the next state is similar
to the algorithm for the initial one, but the deformation in the
x-direction is unknown, and a new variable (𝑟𝑜𝑎𝑔(1)) which
is the rotation of cam must be calculated first.
𝑦𝑓(2) = 𝑦𝑓(1) − 𝑑𝑙𝑡𝑦
𝑎𝑔1(2) = 𝑎𝑔1(1) + 𝑟𝑜𝑎𝑔(1)
𝑦𝑐1(2) = 𝑦𝑓(2) − 𝑒1 cos(𝑎𝑔1(2))
𝑒1 cos(𝑎𝑔1(2)) + r1 sin(agcb(2))
+𝑒1 sin(𝑎𝑔1(2)) + r1 cos(agcb(2))
tan(𝑎𝑔𝑐𝑏(2))= 2𝑦𝑓(2)
𝑦𝑡𝑝1(2) = 𝑦𝑐1(2) − 𝑟1 𝑠𝑖𝑛(𝑎𝑔𝑐𝑏(2))
𝑆1(2) = √(𝑒1 sin(𝑎𝑔1(2)) + 𝑟1𝑐𝑜𝑠(𝑎𝑔𝑐𝑏(2)))2+ (𝑦𝑡𝑝1(2) + 𝑦𝑓(2))
2
(12)
Since 𝑆1(1) = 𝑆1(2) + 𝑑𝑙𝑡𝑆1(1) , 𝑟𝑜𝑎𝑔(1) can be
solved by this equation. And from Fig. 10c, 𝑑𝑙𝑡𝑆1(1) is
solved as follows:
𝑑𝑙𝑡𝑆1(1) = 𝑟1𝑠𝑒𝑎𝑔(1)
𝑠𝑒𝑎𝑔(1) = 𝑎𝑔𝑐𝑏(2) − 𝑎𝑔𝑐𝑏(1) + 𝑟𝑜𝑎𝑔(1) (13)
The abscissa can then be calculated as:
𝑥𝑓(2) = 𝑥𝑓(1) − 𝑑𝑙𝑡𝑥 𝑥𝑐1(2) = 𝑥𝑓(2) − 𝑒1 sin(𝑎𝑔1(2))
𝑥𝑡𝑝1(2) = 𝑥𝑐1(2) − 𝑟1 𝑐𝑜𝑠(𝑎𝑔𝑐𝑏(2)) (14)
The x-direction increment of deformation (𝑑𝑙𝑡𝑥) will be
solved later. So for next 𝑛 − 1 states of cam1, the position
information can be obtained as above.
Fig.11 shows the analysis of cam2. The procedure is
similar to the analysis of cam1. The fixed point is F, the
center of circle 2 is C2, and the tangent point of string and
cam2 is T2. The nock point is Xn. The eccentric distance
from F to C2 is e2, the radius of cam2 is r2. And the length
from tangent point to nock point is S2. From Fig. 11a the
original coordinate of the center of cam2 can be determined.
Fig.11 Diagram for kinematic modeling of Cam2
5 Copyright © 2015 by ASME

𝑥𝑐2(1) = 𝑥𝑓(1) − 𝑒2 sin(𝑎𝑔2(1))
𝑦𝑐2(1) = 𝑦𝑓(1) − 𝑒2 cos(𝑎𝑔2(1)) (15)
where 𝑎𝑔2 is the angle between line F to C2 and y-axis.
The coordinates of tangent point, nock point and the
half-string length:
𝑥𝑡𝑝2(1) = 𝑥𝑐2(1) + 𝑟2
𝑦𝑡𝑝2(1) = 𝑦𝑐2(1)
𝑋𝑛(1) = 𝑥𝑡𝑝2(1)
𝑆2(1) = 𝑦𝑡𝑝2(1) (16)
The kinematic analysis shown in Fig.11a is similar to the
algorithm for the initial one (the rotation obtained for cam1).
But the x-direction deformation remains unknown. Hence we
have:
𝑦𝑓(2) = 𝑦𝑓(1) − 𝑑𝑙𝑡𝑦
𝑎𝑔2(2) = 𝑎𝑔2(1) + 𝑟𝑜𝑎𝑔(1)
𝑦𝑐2(2) = 𝑦𝑓(2) − 𝑒2 cos(𝑎𝑔2(2)) (17)
The angle between the string and the y-direction (𝑎𝑔𝑠𝑡)
needs to be determined to calculate the coordinate of the
tangent point. From Fig. 11b, the equation for 𝑎𝑔𝑠𝑡 is:
𝑟2 𝑡𝑎𝑛 (𝑎𝑔𝑠𝑡
2) +
𝑟2 𝑡𝑎𝑛 (𝑎𝑔𝑠𝑡
2) + 𝑦𝑐2
𝑐𝑜𝑠(𝑎𝑔𝑠𝑡)= 𝑟2(𝑥 + 𝑟𝑜𝑎𝑔) + 𝑆2(1)
(18)
So the ordinate of the tangent point is:
𝑦𝑡𝑝2(2) = 𝑦𝑐2(2) + 𝑟2 𝑠𝑖𝑛(𝑎𝑔𝑠𝑡(2)) (19)
The other coordinates can be calculated with the value of
𝑑𝑙𝑡𝑥.
𝑥𝑐2(2) = 𝑥𝑓(2) − 𝑒2 sin(𝑎𝑔2(2))
𝑥𝑡𝑝2(2) = 𝑥𝑐2(2) + 𝑟2 𝑐𝑜𝑠(𝑎𝑔𝑠𝑡(2))
𝑋𝑛(2) = 𝑋𝑛(1) + 𝑥𝑡𝑝2(1)tan(𝑎𝑔𝑠𝑡(2)) (20)
The position information of the next 𝑛 − 1 cam2 states
can be calculated as above. Now we need the value of 𝑑𝑙𝑡𝑥.
As discussed in the large deflection limb model, the value of
the limb force can be determined from the known direction of
the force and limb deflection. Then 𝑑𝑙𝑡𝑥 can be calculated
with the required force. First determine the direction of the
limb force.
Fig.12 Forces and moments on the cam
Fig.13 Force equilibrium diagram of the cam
Fig.12 shows the cam moment equilibrium diagram. For
the static case the moments sum to zero:
∑𝑀 = 𝑀1 + 𝑀2 = 𝐹𝑐𝑏1𝑑1 sin(𝑎𝑔𝑑1) − 𝐹𝑠𝑡𝑑2 sin(𝑎𝑔𝑑2) = 0
(21) From equation (21), the relationship between string force
and cable force is
𝐹𝑠𝑡 = 𝑘𝐹𝑐𝑏1, 𝑘 =𝑑1sin(𝑎𝑔𝑑1)
𝑑2𝑠𝑖𝑛(𝑎𝑔𝑑2) (22)
where 𝐹𝑐𝑏1 is the force of cable 1, 𝐹𝑠𝑡 is the string force, 𝑑1
is the distance from tangent point of cam1 to the fixed point,
and 𝑑2 is the distance from tangent point of cam2 to the fixed
point. The angle of 𝑑1 and cable 1 is 𝑎𝑔𝑑1 and 𝑎𝑔𝑑2 is
the angle between 𝑑2 and the string. The coefficient for
𝐹𝑐𝑏1and 𝐹𝑠𝑡 is k.
𝑑1 = √(𝑥𝑡𝑝1 − 𝑥𝑓)2 + (𝑦𝑡𝑝1 − 𝑦𝑓)2 =
√(𝑒1 𝑠𝑖𝑛(𝑎𝑔1) + 𝑟1 𝑐𝑜𝑠(𝑎𝑔𝑐𝑏))2 + (𝑦𝑡𝑝1 − 𝑦𝑓)2
6 Copyright © 2015 by ASME

𝑑2 = √(𝑥𝑡𝑝2 − 𝑥𝑓)2 + (𝑦𝑡𝑝2 − 𝑦𝑓)2 =
√(𝑟2 𝑐𝑜𝑠(𝑎𝑔𝑠𝑡) − 𝑒2 𝑠𝑖𝑛(𝑎𝑔2))2 + (𝑟2 𝑠𝑖𝑛(𝑎𝑔1) − 𝑒2𝑐𝑜𝑠 (𝑎𝑔2))2
𝑎𝑔𝑑1 = 𝑎𝑔𝑐𝑏 +𝜋
2− 𝑎𝑡𝑎𝑛
𝑦𝑓 − 𝑦𝑡𝑝1
𝑒1𝑠𝑖𝑛(𝑎𝑔1) + 𝑟1𝑐𝑜𝑠(𝑎𝑔𝑐𝑏)
𝑎𝑔𝑑2 =𝜋
2− 𝑎𝑔𝑠𝑡 + 𝑎𝑡𝑎𝑛
𝑟2𝑠𝑖𝑛(𝑎𝑔𝑠𝑡) − 𝑒2𝑐𝑜𝑠(𝑎𝑔2)
𝑟2𝑐𝑜𝑠(𝑎𝑔𝑠𝑡) − 𝑒2𝑠𝑖𝑛(𝑎𝑔2)
(23)
Fig.13 shows the cam force equilibrium diagram. The
forces must sum to zero for the static case:
∑𝐹 = 𝐹𝑐𝑏1 + 𝐹𝑐𝑏2
+ 𝐹𝑠𝑡1 + 𝐹𝑙𝑖𝑚𝑏
= 2𝐹 + 𝐹𝑠𝑡1 + 𝐹𝑙𝑖𝑚𝑏
= 0
(24)
where 𝐹𝑙𝑖𝑚𝑏 is the limb force. The angle of force 𝑃 (𝑎𝑔𝑝) is:
𝐹𝑙𝑖𝑚𝑏2 = (2𝐹)2 + (𝐹𝑠𝑡)
2 − 4𝐹𝐹𝑠𝑡cos(𝜋 − 𝑎𝑔𝑠𝑡)
𝑎𝑔𝑝 =𝜋
2−
𝐹𝑙𝑖𝑚𝑏2+(2𝐹)2−𝐹𝑠𝑡
2
4𝐹𝑙𝑖𝑚𝑏𝐹 (25)
Now, the value of limb force can be obtained from the
known y-direction deflection (𝑑𝑙𝑡𝑦) and the direction of limb
force (𝛼, 𝑎𝑔𝑝). The solution can be applied to calculate the
x-direction limb deformation (𝑑𝑙𝑡𝑥) . Then all the
displacements of cams, cables, string and limbs are solved for
the motion of this class of compound bow. Other parameters
of the bow can also be obtained. The maximum limb
deflection is 𝑀𝑎𝑥_𝐿𝑖𝑚𝑏𝐷 = 𝑑𝑙𝑡𝑦 × 𝑛. The maximum spring
force is 𝑀𝑎𝑥_𝐷𝑟𝑎𝑤𝐹 = 𝑀𝑎𝑥(𝐹𝑙𝑖𝑚𝑏). The maximum draw
force is 𝑀𝑎𝑥_𝐷𝑟𝑎𝑤𝐹 = 2 × 𝑀𝑎𝑥(𝐹𝑠𝑡) × 𝑠𝑖𝑛(𝑎𝑔𝑠𝑡) . The
let-off rate is 𝑙𝑒𝑡_𝑜𝑓𝑓 = (𝑀𝑎𝑥_𝐷𝑟𝑎𝑤𝐹 − 𝐸𝑛𝑑_𝐷𝑟𝑎𝑤𝐹)/𝑀𝑎𝑥_𝐷𝑟𝑎𝑤𝐹 × 100.
SIMULATION TO STUDY THE EFFECTS OF DESIGN VARIABLES
Simulation studies to observe the effects of design
parameter changes can be performed with a combined large
deformation elastic beam model and kinematic cam-cable
model Table 1 shows the design parameters used in this
simulation.
Table 1 List of Design Variables
Parameters symbol value
Radius of cam1 𝑟1 35(𝑚𝑚)
Radius of cam2 𝑟2 25(𝑚𝑚)
Eccentricity of cam1 𝑒1 17.5(𝑚𝑚)
Eccentricity of cam2 𝑒2 12.5(𝑚𝑚)
Angle between line FC2 and
y-axis 𝑖𝑛𝑎𝑔 10°
Angle between line FC1 and
line FC2 𝑡𝑎𝑔 10°
Angle of limb and x-axis 𝛼 𝑎𝑡𝑎𝑛(4/3)
Width of limb 𝑏 20(𝑚𝑚)
Height of limb ℎ 10(𝑚𝑚)
Length of limb 𝐿 300(𝑚𝑚)
Young’s Modulus of limb 𝐸 30(𝐺𝑃𝑎)
Fig.14. shows the deflection (y-displacement) of the limb
versus the horizontal deformation (x-displacement). The error
from using the dotted line as a linear approximation to the
actual calculated displacement is small. Intuitively if the limb
is softer, the error from a linear approximation will be larger.
Fig.14 Trajectory of pivot point of the cam
Fig.15 shows the change of limb force, cable force and
string force, as a function of the draw length. These forces are
significant in the evaluation of the bow performance. Among
the three forces displayed, if the limb force is large, usually this
is good for larger strain energy storage and faster arrow speed.
However, large limb force can result in large draw force which
is not desirable for the archer. The control of the let-off
percentage in the string force and in the design process is also
important, since this will affect how easy it is to hold and aim
the bow in the fully drawn position.
The relationship of draw force as a function of draw length
plotted is shown in Fig.16 to signify the effect of let-off. Area
under this curve is the bow input energy stored in the limbs.
Table 2 lists some numerical results of the simulation.
7 Copyright © 2015 by ASME

Fig.15 Various forces as a function of draw-length.
Fig.16 Draw force, let-off and work done by draw force in the
drawing process
Table 2 Results of simulation study
Parameters value
Maximum limb deflection 81.0032(𝑚𝑚)
Maximum limb force 722.2(𝑁)
Maximum draw force 291.5963(𝑁)
Let-off rate 22.6795(%)
Stored energy 72738.7(𝑁 ∙ 𝑚𝑚)
The kinematic and elastic analysis calculates the
displacement of compound bow, and the motion animation of
bow is shown in Fig.17 and Fig.18. This animation helps the
understanding of effects from design parameters r1 and r2.
Fig. 17 Draw force as function of r1
Fig.18 Draw force as function of r2
CONCLUSIONS Many patents related to the design and improvements of
compound bow have been issued since the invention of the
compound bow in the 1960’s. However, few published
technical papers or engineering analyses on this subject exist.
Previously unreported conclusions from our work include:
1. In an automated design or optimization system, combining
finite element analysis and kinematic analysis using
commercial software can significantly slow convergence
to a solution. To increase speed, we developed a
relatively short MATLAB program, based on the essence
of the finite element method, to do large deformation
cantilever beam analysis. The program computes the
elastic deformation of the bow limbs, where the pivots of
the stacked cams are located at the end of each limb.
Compared with the trajectory previously computed by
8 Copyright © 2015 by ASME

commercial software, the resulting trajectory seems
reasonably accurate.
2. Today’s compound bows use many different cam and
cable system designs. This paper addresses one of the
commonly used types: a dual and symmetrical cam with
an eccentric-cylindrical cam profile. This cam profile is
simple and elegant, and probably the least expensive to
manufacture. In addition to the elastic subsystem
modeling, a quasi-static kinematic model was developed
and combined into an integrated mechanical simulation
system. The kinematic part of the model analyzes the
force system acting on the stacked cams and cables, and
the string. The kinematic model provides a connection
between the variable loading for limb analysis, and draw
force (which the archer must provide).
3. Effects of cam profile design variables on the bow
performance were studied. However, optimal design of
the cam profile has not been included in this paper.
Equipped with a good elasto-kinematic model, as
described in this paper, the optimal design of cams for
minimizing draw force and maximum energy storage
should be straight forward. However, for maximizing
the arrow speed and minimizing the energy left in the bow
to reduce noise and vibration, a more complex dynamic
model, an elasto-kinetic model will be needed to analyze
for motion after the arrow is released.
ACKNOWLEDGMENTS The authors thank Mr. Yu Cheng Su, a former MS student
who started the modeling work in this subject. The authors
also thank Dr. Peter Hodges for proof reading the manuscript.
REFERENCES Allen, H. W., 1968, Archery Bow with Draw Force
Multiplying Attachments, US Patent, No.3486495.
Gere, J.M. and Goodno, B.J., 2012, Mechanics of Materials,
Cengage Learning.
Grayson, C.E., French, M., and O’Brien, M.J, 2007,
Traditional Archery from Six Continents: The C.E. Grayson
Collection, University of Missouri Press.
Hanson, A., 2009, Kinematic Analysis of Cam Profiles used
in Compound Bows, MS Thesis, University of Missouri.
He, Jiahuan, 2011, Kineto-Elasto Dynamic Modeling and
Optimal Design of Mechanical Systems—as Applied to
Compound Bow Design, MS Thesis, University of Missouri.
Kincy, M.A., 1981, A Model for Optimization of the Archer’s
Compound Bow, MS Thesis, University of Missouri-Rolla
Kooi, B.W., 1983, On the Mechanics of the Bow and Arrow,
Netherlands.
Kooi, B.W., 1991, “Archery and Mathematical Modeling,” J.
of the Society of Archer-Antiquaries, v.34, pp.21-29.
Kudlacek, D. S., 1977, Compound Archery Bow with
Eccentric Cam Elements, U.S. Pat. No.4060066.
Lin, Yuyi and Hanson, A., 2008, “Analysis and Design of a
Class of Cam Profile—as Applied to Compound Archery Bow
Machine Design and Research,” Machine Design and
Research, v.24, pp.90-94.
Marlow, W.C., 1980, Bow and Arrow Dynamics,
Perkin-Elmer Corporation, Connecticut.
Miller, L.D., 1985, Compound Archery Bow, US Patent,
No.4519374.
Su, Yu-Cheng, 2009, The Effect of the Twist Angle and the
Optimization for the Compound Bow, MAE7930 Project
Report, University of Missouri.
Visner, J.C., 2007, Analytical and Experimental Analysis of
the Large Deflection of a Cantilever Beam Subjected to a
Constant, Concentrated force, with a Constant Angle, Applied
at the Free End, MS Thesis, University of Akron.
9 Copyright © 2015 by ASME




























