Embed Size (px)
Citation preview

TOPOGRAFIA I
APUNTES DEL PROFESOR: CLAUDIO RIVERA VARGAS
DEFINICIÓN Y OBJETO DE LA TOPOGRAFÍA
La topografía es una ciencia aplicada que se encarga de determinar las posiciones relativas o absolutas de los puntos sobre la Tierra, así como la representación en un plano de una porción (limitada) de la superficie terrestre. En otras palabras, la topografía estudia los métodos y procedimientos para hacer mediciones sobre el terreno y su representación gráfica o analítica a una escala determinada. Ejecuta también replanteos sobre el terreno (trazos sobre el terreno) para la realización de diversas obras de ingeniería, a partir de las condiciones del proyecto establecidas sobre un plano. Realiza también trabajos de deslinde, división de tierras , catastro rural y urbano, así como levantamientos y replanteos o trazos en trabajos subterráneos.
Para practicar la topografía es necesario tener conocimientos de matemáticas en general, así como un adiestramiento adecuado sobre el manejo de instrumentos para hacer mediciones. Para comprender mejor esta ciencia y para profundizar en ella, es necesario poseer también conocimientos de física, cosmografía, astronomía, geología y otras ciencias.
La topografía está en estrecha relación con dos ciencias en especial: la geodesia y la cartografía. La primera se encarga de determinar la forma y dimensiones de la Tierra y la segunda se encarga de la representación gráfica, sobre una carta o mapa, de una parte de la Tierra o de toda ella.
La diferencia entre la topografía y la geodesia está en los métodos y procedimientos de medición y cálculo que emplean cada una de estas ciencias, pues la topografía realiza sus trabajos en porciones relativamente pequeñas de la superficie terrestre, considerándola como plana, mientras que la geodesia toma en cuenta la curvatura terrestre, pues sus mediciones son sobre extensiones más grandes: poblados, estados, países, continentes o la Tierra misma.
ASPECTO HISTÓRICO
En realidad se desconoce el origen de la topografía. Se cree que fue en Egipto donde se hicieron los primeros trabajos topográficos de acuerdo con referencias por las escenas representadas en muros, tablillas.
Los egipcios conocían como ciencia pura lo que después los griegos bautizaron con el nombre de geometría (medida de la tierra) y su aplicación

en lo que pudiera considerarse como topografía o quizá, mejor dicho etimológicamente, "topometría". Hace más de 5000 años existía la división de parcelas con fines fiscales, así como para la reinstalación de linderos ante las avenidas del Nilo.
Posiblemente, a partir de que el hombre se hizo sedentario y comenzó a cultivar la tierra nació la necesidad de hacer mediciones o, como señala el ingeniero geógrafo francés P. Merlin, la topografía "nace al mismo tiempo que la propiedad privada".
Las pruebas fehacientes que ubiquen la realidad histórica de la topografía se han encontrado en forma aislada como lo muestra una tablilla de barro encontrada en Ur, en Mesopotamia, que data de tres siglos antes de nuestra era y los testimonios encontrados en otros territorios, en diversas partes del mundo , pero es de Egipto de donde se han obtenido mayores y mejores referencia
Las mediciones hechas en Egipto por los primeros cadeneros o estira cables, como al parecer los llamaban, eran realizadas con cuerdas anudadas, o con marcas, que correspondían a unidades de longitud convencionales, como el denominado "codo". Cada nudo o marca estaba separada, en la cuerda, por el equivalente de 5 codos y esto daba una longitud aproximada de 2.5 m.
La necesidad de medir regiones más o menos extensas gestó conocimientos empíricos, desconectados y rudimentarios que después evolucionaron. Quizá en un principio el hombre usó como patrones de medida las cosas que le eran familiares, particularmente su propio cuerpo; por ejemplo, la altura de un caballo era medida en palmos, es decir, tantas veces la anchura de la mano. La distancia entre la punta del dedo meñique y la punta del dedo pulgar, con la mano totalmente extendida, era considerada como medio codo y ésta era la distancia entre el codo y la punta de los dedos. El pie fue otra medida y se la consideraba como las tres cuartas partes del codo
La braza o altura del hombre era considerada de cuatro codos, pero todas estas unidades de medida presentaban dificultades, debido a las distintas tallas entre los individuos. Ello hizo en Egipto que se estableciera, hacia el año 3000 antes de nuestra era, el codo real como patrón de medida convencional. Posiblemente basado en la medida del "codo" de algún faraón, su dimensión era de 52.3 centímetros.
Los griegos, herederos de varias culturas (Mesopotamia, Asiría, India y especialmente Egipto) buscaron explicaciones racionales del "porqué", y la lógica de las cosas y dieron forma a lo que designaron como geometría (medida de la Tierra) unos 500 años A.C., aportando más y mayores conocimientos al patrimonio de la humanidad. Son notables las aportaciones hechas entre otras ciencias, a la geometría por parte de Tales de Mileto, Pitágoras, y Euclides, el más notable quizá. Todos ellos y posteriormente Arquímedes y Apolonio de Pérgamo continuaron con el desarrollo de esta ciencia; se convirtieron en los legisladores de la geometría. Varios siglos permaneció un tanto estancado el avance de la geometría pues ni griegos, romanos, árabes o persas hicieron grandes aportaciones. Herón, Tolomeo y Papo aportan nueva savia ya en los albores de nuestra era. Herón, de quien es suficiente citar que encontró la fórmula para la determinación del área de un triángulo, en función de sus lados:
A = √ P (P-a) (P-b) (P-c)
en la que P es el semiperimetro y es igual a (a + b + c)/2, siendo a, b y c los lados de un triángulo. Herón además fue una figura destacada y una

autoridad entre los topógrafos de su época. Escribió varias obras dedicadas a procedimientos y métodos de medición que fueron utilizados por ingenieros de esa época, así de servir de base a otros tratados de topografía.
Para citar también un solo ejemplo, Tolomeo demostró la inscripción de cuadriláteros a la circunferencia en donde el producto de sus diagonales es igual a la suma de los productos de los lados opuestos. Este teorema lo utilizó para el cálculo de sus cuerdas. Papo es célebre por el cálculo de superficies generadas por una línea que gira sobre un eje situado en su plano, así como de volúmenes producidos por rotación de superficies alrededor de un eje.
Los romanos, con un sentido más práctico, desarrollaron notablemente la arquitectura y la ingeniería.. haciendo una mayor aplicación de los conocimientos heredados de los egipcios y griegos. Trazaron mapas con fines bélicos y catastrales, construyeron caminos, ciudades, presas, puentes, canales, etc., debido a la expansión de su imperio; para ello era indispensable el desarrollo de métodos e instrumental topográfico. Fueron escritos varios libros que describían estos métodos, así como la explicación del uso y construcción de diversos e ingeniosos instrumentos.
Durante la Edad Media los árabes, portadores de toda cultura acumulada hasta entonces, lograron avances sobre todo en la astronomía y la geografía.
Debido a los grandes descubrimientos, se avanzó en la elaboración de mapas y cartas, con lo cual los trabajos de topografía y los geodésicos avanzaron en su técnica e instrumental.
Con la aparición del telescopio a fines del siglo XVI y principios del XVII, estas dos disciplinas tuvieron un gran avance, realizándose trabajos espectaculares en lo relativo a la determinación de la forma y tamaño de la Tierra. Nombres como los del abate Picard, Snellius y Casini fueron importantísimos para el conocimiento y desarrollo de la topografía y el establecimiento de los fundamentos de la geodesia y de la cartografía modernas.

El incremento de la población mundial, las necesidades de comunicación, de vivienda, de desarrollo de la producción agrícola, la expansión territorial y otros factores hicieron que esta disciplina superara la época de sus métodos primitivos hasta ser considerada como un arte.
El aumento del costo de los terrenos y el progreso de la última parte del siglo XIX y sobre todo del siglo XX hizo que se inventaran instrumentos y métodos en forma vertiginosa. En efecto, es bien sabido que, sobre todo en las últimas décadas, se han conseguido más avances que en todos los siglos anteriores en lo relativo a las ciencias y a la tecnología. Así, hoy en día contamos para los trabajos topográficos con teodolitos de alta precisión, tanto los ópticos como los electrónicos, distanciómetros electrónicos de fuente luminosa y de fuente electromagnética, colimadores láser, la percepción remota por medio de fotografías aéreas, de satélites artificiales, el radar, aplicación de la tecnología georreferencial (GPS) y lo que aún falta por ver.
ACTIVIDADES Y DIVISIONES PARA SU ESTUDIO

La topografía realiza sus actividades principales en el campo y el gabinete. En el campo se efectúan las mediciones y recopilaciones de datos suficientes para dibujar en un plano una figura semejante al terreno que se desea representar. A estas operaciones se les denomina levantamientos topográficos.
Sobre los planos, se hacen proyectos cuyos datos y especificaciones deben replantearse sobre el terreno. A esta operación se le conoce como trazado.
Dentro de las actividades de gabinete se encuentran los métodos y procedimientos para el cálculo y el dibujo.
Para su estudio la topografía se divide en: planimetría, altimetría, planimetría y altimetría simultáneas, De todo lo dicho se deduce que el objeto de la Topografía es el estudio de los métodos necesarios para llegar a representar un terreno con todos sus detalles naturales o creados por la mano del hombre, así como el conocimiento y manejo de los instrumentos que se precisan para tal fin.
LATITUD Y LONGITUD.
La latitud es la distancia de un lugar con relación al paralelo del Ecuador ó 0°. Como los paralelos están en grados, la latitud también lo está. El polo norte tiene una latitud de 90° norte, mientras el polo sur está en la latitud 90° sur.
La longitud es la distancia que separa un punto determinado del globo del meridiano de Greenwich. Al igual que los meridianos, la longitud también se mide en grados, puede ser hasta de 180° este ó 180° oeste.

SISTEMAS DE MEDIDAS.
Medidas de distancias.-
Corresponden a unidades de medida que sirven para saber cuán largo es un objeto.
La unidad que se utiliza internacionalmente para medir longitudes, es el metro (m). De esta unidad provienen otras más pequeñas (llamadas submúltiplos) o más grandes (llamadas múltiplos).
Equivalencias de longitud:
A continuación se indican algunas unidades más pequeñas (submúltiplos) del metro, éstas son el decímetro (dm) y el centímetro (cm).
1 metro (1m) = 100 centímetros (100 cm)
1 metro = 10 decímetros 10 (dm)
1 decímetro = 10 centímetro
Cuando se quiere transformar una unidad de longitud que va desde el metro al decímetro o al centímetro se debe multiplicar por 10 o por 100, respectivamente.
Ejemplos:
Cantidad metros
multiplicar por 10 da decímetros
multiplicar por 100 da centímetros
1 10 1003 30 30040 400 4.00089 890 8.90095 950 9.500
100 1.000 10.000
También se pueden convertir los decímetros a centímetros. Para hacerlo

debemos multiplicar por 10 el número de decímetros.
Ejemplos.
Cantidad decímetros
multiplicar por 10 da centímetros
10 10030 300
400 4.000890 8.900950 9.500
1.000 10.000
Si se quiere transformar al revés, es decir, desde centímetro a decímetro o a metro, se debe dividir el total de centímetros por 10 y por 100, respectivamente.
Ejemplos:
Cantidad centímetros dividir por 10 da decímetros dividir por 100 da metros100 10 1300 30 3
4.000 400 408.900 890 899.500 950 9510.000 1.000 100
También se pueden convertir los decímetros a metros, dividiendo por 10 el número de decímetros.
Ejemplos:
Cantidad decímetros dividir por 10 da metros10 130 3400 40890 89950 95
1.000 100
Medidas de superficie.-
El metro cuadrado.
El metro cuadrado es el área de un cuadrado que tiene un metro de lado. Se escribe así: m2.

Múltiplos del metro cuadrado.
Son éstos:
1 decámetro cuadrado es igual a 100 metros cuadrados: 1 dam2 = 100 m2 . 1 hectómetro cuadrado es igual a 100 00 metros cuadrados: 1 hm2 = 100 00 m2. 1 kilómetro cuadrado es igual a 100 00 00 metros cuadrados: 1 km2 = 100 00 00 m2. Se usan medidas agrarias para medir campos. Sus unidades son: 1 hectárea es igual al hm2: ha = hm2 = 100 00 m2. 1 área es igual al dam2: a = dam2 = 100 m2. 1 centiárea igual al m2: ca = m2 = 1 m2.
Las unidades de superficie aumentan y disminuyen de 100 en 100. La unidad superior vale 100 más que la inferior.
Unidades de volumen.-
La medida fundamental para medir volúmenes es el metro cúbico.
Otras unidades de volúmenes son:
kilómetro cúbico km3 1 000 000 000 m3 hectómetro cúbico hm3 1 000 000m3 decámetro cúbico dam3 1 000 m3 Metro m3 1 m3 decímetro cúbico dm3 0.001 m3 centímetro cúbico cm3 0.000001 m3 milímetro cúbico mm3 0.000000001 m3
Observamos que desde los submúltiplos, en la parte inferior, hasta los múltiplos, en la parte superior, cada unidad vale 1000 más que la anterior.
MEDIDAS ANGULARES.-
SISTEMA SEXAGESIMAL: Resulta de dividir el ángulo recto en noventa partes iguales, constituyendo cada parte, un grado sexagesimal. Por tanto, un círculo se divide en 360 partes iguales (4 ángulos rectos que tiene el círculo x 90 partes por cada ángulo recto = 360 partes), o lo que es lo mismo, tiene 360 grados. Este sistema de medidas de unidades angulares es el mas utilizado por todos nosotros y muchos aún recordamos cuando en el colegio estudiábamos trigonometría. Los submúltiplos del grado sexagesimal (°), el minuto sexagesimal (‘) y el segundo sexagesimal (“).
1° = 60’ = 3600”
1’= 60”
La notación en este sistema es 48° 12’ 36”
SISTEMA CENTESIMAL: Resulta de dividir el ángulo recto en cien partes iguales, constituyendo cada parte un grado centesimal. Por tanto, un circulo se divide en 400 partes iguales (4 ángulos rectos que tiene el círculo x 100

partes por cada ángulo recto = 400 partes), o lo que es lo mismo, tiene 400 grados. Los submúltiplos del grado centesimal (g), el minuto centesimal (c) y el segundo centesimal (cc).
1g = 100c = 10000cc
1c = 100cc
La notación en este sistema es 177,3542g
TEORIA DE ERRORES
Todas las medidas o cantidades observadas, contienen errores de magnitud desconocida, debidos a una variedad de causas y por tanto, una medida nunca es exacta, pero sí debe tratarse de mantener las mediciones dentro de ciertos límites de precisión, de acuerdo a la clase y finalidad de los trabajos a ejecutar-
La mejor forma de tratar un material en observación es evidenciando y agrupando los errores, de manera que se pueda establecer un juicio sobre la precisión alcanzada, para luego por diversos métodos de compensaciones, distribuirlos de la mejor forma.
Al hablar de mediciones, es conveniente definir algunos términos que intervienen en ella, como:
Exactitud: Es el grado de conformidad con un patrón o modelo.
Precisión: Es el grado de perfección con que se realiza una operación o se establece un resultado.
Tolerancia: Es un intervalo numérico, determinado a partir de la categoría de un trabajo, escala, métodos e instrumental utilizado.Los errores pueden definirse en forma teórica, como la discrepancia entre el valor exacto y el valor medio de una medida.
Como principales causas del error, pueden argumentarse las siguientes:a) Limitación de los sentidos, La visión humana tiene un límite de
percepción del cual no se puede pasar, toda medición realizada con intervención de la vista, no será nada más que aproximada.
b) Instrumentales, los propios aparatos topográficos han sido construídos con algunas limitaciones específicas, asi un instrumento que trabaja bajo condiciones distintas que lo diseñado, causará errores.
c) Ambientales, las condiciones atmosféricas hacen cambiar las diferentes lecturas, ya sea por el viento, presión, humedad, temperatura, refracción, etc.
TIPOS DE ERRORES.-
Se denomina error a la diferencia entre un valor obtenido y el real.
a) Sistemáticos. Son aquellos que mientras que las condiciones se mantengan permanezcan invariables, siempre tendrá la misma magnitud y el mismo signo. Si las condiciones no cambian durante una serie de medidas, el error recibe el nombre de sistemático constante, en caso de que las condiciones cambien durante el proceso de medición, el error será sistemático variable.
b) Accidental. Este tipo de error proviene de una combinación de causas que no alcanza el observador a controlar. Para cada observación la

magnitud y signo del error será producto del azar y no puede determinarse como ocurre con el sistemático.
c) Groseros o equivocaciones. No son admisibles y por lo tanto se descartan.
Errores Sistemáticos Pendiente Graduación Temperatura Tensión Catenaria
Errores Accidentales Pendiente Temperatura Tensión Catenaria Alineación Verticalidad del marcado
Errores Groseros Confundir marcas en el terreno Error de lectura Error de anotación Errores aritméticos al sumar distancias parciales
Nótese que los errores de pendiente, temperatura, tensión y catenaria aparecen tanto en los errores sistemáticos como en los accidentales. Esto se debe a que, aunque sean corregidos sistemáticamente, existe la posibilidad de error en la determinación de los parámetros de corrección; por ejemplo, en la medición de la pendiente o de la temperatura.
Corrección de Errores Sistemáticos.Corrección por PendienteComo se mencionó previamente, las distancias topográficas son distancias proyectadas sobre el plano horizontal.En el proceso de medición, dependiendo del tipo de terreno y de la longitudinal del tramo a medir, la distancia puede ser medida directamente en su proyección horizontal o inclinadaparalela a la superficie del terreno tal y como se muestra en la figura .
Para medir directamente la distancia horizontal, es necesario la utilización de un nivel de mano para chequear la horizontalidad de la cinta.En el caso de que se mida la distancia inclinada, es necesario medir la inclinación de la cinta o la distancia vertical (desnivel) entre los puntos para calcular la distancia horizontal.Según la figura., la distancia horizontal puede ser calculada:

DH = Di cosαDH = Di senφDH = Di − Dven donde:DH = distancia horizontalDi = distancia inclinadaα = ángulo de inclinación de la cintaφ = ángulo cenitalDv = distancia vertical o desnivelEjemplo 1 Calcular la distancia horizontal entre los puntos A y B, conociendo:α = 3°20’Di = 28,427 mSolución:DH = 28,427 x cos(3°20’) = 28,379 mDH= 28,379 mEjemplo 2Para la determinación de la distancia horizontal entre dos puntos, se midió una distancia inclinada Di = 24,871 m y con la ayuda de un eclímetro se determinó que la pendiente de la cinta en el momento de la operación fue del 3,4%. Calcule la distancia horizontal.Solución:P= tg α = 3,4/100 α=1° 56’ 50”DH= 24,871 x cos(α ) = 24,857m
Ejemplo 3Con los datos de la figura, calcule la distancia horizontal entre A y B

Solución:
DH = 47,5312 − 2,8212 = 47,447DH = 47,447 mLógicamente podría pensarse que lo descrito anteriormente es simplemente el proceso de convertir una distancia inclinada a una distancia horizontal; sin embargo, sería interesante preguntarse cuál podría ser la magnitud del error en la determinación de la distancia horizontal cuando el ángulo de inclinación es medido con instrumentos de poca precisión (como el nivel de mano)Para responder la interrogante planteada, supondremos operaciones de medición con cintas inclinadas 2, 4, 6, 8 y 10°, con errores de 10 minutos en la lectura.Los cálculos realizados, resumidos en la tabla , muestran que para mantenernos dentro de las precisiones requeridas al hacer mediciones con el empleo del nivel , el ángulo de inclinación de la cinta no debe superar los cuatro grados.
Tabla: Error Relativo para Diferentes Angulos de Inclinación con apreciación de ± Ap10’
α 2° 4° 6° 8° 10°Er 1/10000 1/5000 1/3000 1/2500 1/2000
Corrección por GraduaciónPor diferentes razones, como por ejemplo la calidad de la cinta, errores de graduación o separación entre marcas, o simplemente variación de la longitud original de la cinta debido al uso o reparaciones efectuadas a la cinta, la longitud original o nominal de la cinta no coincide con la longitud actual de la misma, generando por lo tanto errores en la medición de distancias.Para corregir estos errores, es necesario que la cinta sea comparada con una distancia patrón, medida con precisión sobre una base de longitud igual a la longitud de la cinta y bajo las condiciones normales especificadas por el fabricante.La longitud actual de cinta puede ser mayor o menor que el valor nominal de la misma, por lo que en la operación de medir una distancia en el campo la corrección puede ser positiva onegativa respectivamente.En operaciones de replanteo con cintas no estándar, las correcciones son de signo contrario a las de medición.La corrección por graduación es lineal y se calcula por medio de la ecuación:
Cg= ((La-Ln)/Ln)xD
Dc= D+/- Cg
En donde:Cg = corrección por graduaciónLa = longitud actual de la cintaLn = longitud nominal de la cintaD = distancia medidaDc = distancia corregidaEjemplo 1:En una operación de campo se midió una distancia de 192,354 m con una cinta metálica de 30 m.La cinta fue previamente comparada con una base, arrojando una longitud real de 30,005 m.Calcule la corrección por graduación (Cg) y distancia corregida.Solución:Cg= ((30,005-30,000)/30,000)x192,354Cg=+=0,032 m.Dc= 192,354+0,032Dc= 192,386 m.
Ejemplo 2:Suponga que se requiere replantear una distancia de 27,854 m con la misma cinta del ejemplo 1.Calcule la corrección por graduación y la lectura en la cinta para eliminar el error de graduación.Solución:Cg=((30,005-30,000)/30,000)x27,854Cg= +0,005 m.Como se trata de una operación de replanteo con una cinta con longitud mayor que la nominal, la corección debe ser negativa.Dc = 27,854 – 0,005 = 27,849 mPor lo tanto, para colocar la marca sobre el terreno debemos medir una distancia de 27,849 m.
Corrección por TemperaturaRecordemos, de los cursos de física, que los materiales al ser sometidos a cambios de temperatura, experimentan un cambio en sus dimensiones.Se define como dilatación lineal a la variación de longitud que experimenta un cuerpo al ser sometido a una variación de temperatura.La variación lineal es directamente proporcional a la longitud inicial y a la variación de la temperatura.Δl = α . L . Δt Donde:Δl = variación lineal (corrección por temperatura)L = longitud de la medidaΔt = variación de la temperatura en °Cα = coeficiente de dilatación lineal (variación de la longitud por unidad de longitud para un Δt igual a un grado)Para el acero α = 0,000012 (1/C°)Como sabemos, las cintas de acero vienen normalizadas por los fabricantes para medir la longitud nominal a la temperatura de calibración, generalmente de 20°C.Por lo general, en la medición de distancias la temperatura a la cual se realiza la medición es distinta a la temperatura de calibración, siendo necesario hacer correcciones por temperatura.La ecuación puede ser escrita de la siguiente manera:Ct = α . (t – tc). L Siendo:Ct = corrección por temperatura en mt = temperatura de la cinta en el momento de la medicióntc = temperatura de calibración en °C

Ejemplo 1:¿Cuál debe ser la corrección por temperatura que debe aplicarse a una distancia de 47,825 m, si la temperatura de la cinta en el momento de la medición fue de 29°C?.Calcule la distancia real.Solución:Ct = 0,000012 x (29 – 20) x 47,825 = + 0,005 mCt = + 0,005 mDr = 47,825 + 0,005 = 47,830 m
Ejemplo 2:En las especificaciones para el replanteo de un punto en una obra se indica que se debe medir una distancia de 40,00 m. Si la temperatura de la cinta durante la operación es de 27°C, calcule la corrección que debe aplicarse a la medida a replantear.Solución:Ct = 1,2 x 10-5 (27-20) 40,00 = + 0,003Ct = + 0,003 mComo se trata de una operación de replanteo, inversa a la operación de medida, debemos cambiar el signo a la corrección por temperatura.Dr = 40,000 – 0,003 = 39,997 mDr = 39,997 m
Corrección por TensiónCuando una cinta de acero es sometida a una tensión distinta a la tensión de calibración ésta se alarga o acorta según la tensión sea mayor o menor a la tensión de calibración.El cambio de longitud de una cinta sometida a tensiones distintas a la tensión de calibración se puede calcular mediante la aplicación de la ley de Hooke, expresada por la siguiente ecuación:CT= ((T-Tc)xL)/(AxE)
En donde:T = tensión aplicada a la cinta al momento de la medición, en kgTc = tensión de calibración en kgL = longitud de la medida en mA = área de la sección transversal en cm2E = módulo de elasticidad de Young. Para el acero E = 2100000 kg/cm2Ejemplo 1:¿Cuál debe ser la corrección por tensión que debe aplicarse a una medida de longitud L = 43,786 m, tomada con una cinta calibrada para una tensión Tc = 4,5 kg, de sección transversal A = 0,036 m2 si al momento de la medida se aplicó una T = 9 kg?.Solución:CT= ((9-4,5)x43,786)/(0,036x2100000)CT= 0,003 m.Luego la distancia real seráDR = 43,786 + 0,003 = 43,789 mDR = 43,789 mEl error por tensión sólo se tiene en cuenta en mediciones de alta precisión ya que además de ser de poca magnitud es difícil aplicar tensiones mucho mayores que la tensión de calibración.
Corrección por CatenariaUna cinta sostenida solamente en sus extremos describe, debido a su propio peso, una curva o catenaria que introduce un error positivo en la medición de la distancia.

Observando la figura podemos darnos cuenta que medir una distancia con una cinta apoyada solamente en sus extremos, dará un valor erróneo mayor que al medirla con una cinta apoyada en toda su extensión, debido a que la longitud de la cuerda es menor que la longitud del arco.La corrección por catenaria se calcula mediante la siguiente ecuación:Cc=-(w˄2xL˄3)/(24T˄2)en donde:Cc = corrección por catenariaw = peso de la cinta por unidad de longitud en kg/mL = longitud de la medida en mT = tensión aplicada a la cinta en el momento de la medida en Kg. Algunas personas prefieren calcular la tensión que debe aplicarse en el momento de tomar la medida para compensar los errores de tensión y catenaria. Esta tensión se conoce como tensión normal (Tn).Ejemplo 1:Calcular la tensión normal que hay que aplicar a una cinta de acero para medir una distancia L= 46,538 m, si la tensión de calibración es Tc = 4,5 kg, w = 0,015 kg/ml, A = 0,020 cm2SoluciónComo por definición la tensión normal Tn es la tensión que hay que aplicar a la cinta en el momento de la medida para que las correcciones por tensión y catenaria se compensen, tenemos:CT + Cc=0(((T-Tc)xL)/(AxE))-((w˄2xL˄˄3)/(24xT˄2))haciendo T = Tn y despejandoTn=wxLx√((AxE)/(24x(Tn-Tc)))Sustituyendo valores y resolviendo por iteraciones, tenemos que:Tn ≅ 11,245 kg
Errores Accidentales
Error de AlineaciónCuando la longitud de la distancia a medir es mayor que la longitud de la cinta métrica disponible, se hace necesario trazar en el campo un alineamiento con tramos parciales menores o iguales a la longitud de la cinta. Si este alineamiento es hecho a ojo, sólo con la ayuda de jalones, se puede introducir un error en el alineamiento que afecte el valor final de la medida.

La figura representa el error de alineamiento en la medición de la distancia AB en donde d1, d2 y d3 son las distancias parciales medidas y e1, e2 representan el desplazamiento de los puntos 1 y 2.
La distancia medida entre A y B será D’AB = d1 + d2 + d3La distancia real entre AB será DAB = DA1 + D12 + D2BLuego, el error de alineamiento EA = D’AB - DAB
Como se puede observar, el error de alineamiento siempre será positivo por lo que la corrección debe ser negativa.
Ejemplo :Supongamos que: d1 = d2 = 30 m e1 = 18 cm d3 = 26,542 m e2 = 15 cm
Solución:D’AB = 30 + 30 + 26,542 mpor Pitágoras:DA-1=√(d1˄2-e1˄2)DA-1=√(30˄2-0,18˄2)DA-1=29,999 m.D1-2=√(d˄2-(e1+e2)˄2)D1-2=√(30˄2-0,33˄˄2)D1-2=29,998 m.D2-B=√(d3˄2-e2˄2)D2-B=√(26,542˄2-0,15˄2)D2-B=26,542 m.DAB=86,539 m.EA=0,003 m.
Obsérvese que el error por alineamiento es pequeño, y en operaciones de alta precisión se puede evitar trazando los alineamientos con la ayuda de un teodolito.
Error de VerticalidadEs el error que se comete al no proyectar perpendicularmente el punto del terreno sobre la cinta en posición horizontal.
Como se puede observar en la figura a y b , el error de verticalidad puede ser positivo o negativo, y dependiendo de la inclinación de la señal y de la altura (h) a la cual se realiza la medida, la magnitud del error puede ser apreciable.El error de verticalidad se elimina mediante el auxilio de una plomada y de un jalón como se muestra en la figura c.

Errores GroserosLos errores groseros o equivocaciones son errores que se cometen por distracción del operador o por otras causas y son totalmente impredecibles.Las equivocaciones más comunes en la medición de distancias son las siguientes:
Identificación errónea de un punto Error de lectura por transposición de números como por ejemplo, leer
34,43 por 43,34. Error de anotación por transposición de números. Similar al anterior
pero al momento de anotar. Errores aritméticos al sumar mentalmente distancias en el campo.
La manera de minimizar la ocurrencia de los errores es estableciendo una rutina para el proceso de medición, como por ejemplo, la medida de la distancia en ambos sentidos.
Errores AccidentalesSon aquellos errores inevitables que el operador no puede detectar ni con equipos ni con métodos determinados.Los errores accidentales están presentes en todas las mediciones, sus causas son múltiples y no conocidas por lo que obedecen a las leyes del azar y deben ser tratados de acuerdo con las leyes de probabilidad.El estudio de los errores accidentales nos permite determinar la bondad de las mediciones, seleccionar el método requerido para lograr una mayor precisión y establecer las tolerancias relativas.
Cuantificación de los errores.-
Valor probable.-El valor más probable de una cantidad es un termino matemático, que se usa para designar aquel valor calculado que, de acuerdo a los principios de los mínimos cuadrados, tenga más probabilidad de ser correcto que cualquier otro.
Para una misma cantidad.- Para una serie de medidas de la misma cantidad hecha en idénticas condiciones, el valor más probable es el promedio de las medidas o media aritmética.
Ejemplo: Después que se han eliminado todos los errores sistemáticos, las diferentes medidas de la longitud de una línea son: 1012,35 m., 1012,32 m., 1012,33 m., 1012,30 m., 1012,36 m., 1012,38 m. El valor más probable es el promedio de las medidas : Ẋ = 1012,34 m.
Para cantidades relacionadas.- Para las medidas relacionadas, tomadas bajo condiciones idénticas, la suma de las cuales debería ser igual a una cantidad matemáticamente exacta, los valores más probables serán los valores observados corregidos por una parte igual al error total. La corrección se hace de acuerdo al número de medidas realizadas y no respecto a la magnitud de cada medida.
Ejemplo: Los ángulos horizontales planos medidos alrededor de un punto, siempre en el sentido de los punteros del reloj, tienen los siguientes valores:130° 15’ 20”142° 37’ 30” 87° 07’ 40”La suma de estos tres ángulos es 360° 00’ 30” y la suma real debiera ser 360° , por lo tanto hay un excedente de 30” que deberán repartirse entre los tres angulos, por que cada valor original deberá quitarsele 10” a cada uno.Por lo tanto, los valores más probables son:130° 15’ 10”

142° 37’ 20” 87° 07’ 30”
Error probable.-El error probable es una cantidad más o menos dentro de cuyos límites puede caer o no el error accidental real.
El promedio aritmético representa al valor más probable en una serie de medidas, por lo que se deberá comparar con cada medida y así obtener un valor o residuo.
Para obtener el error probable de una serie de medidas, se aplica la siguiente formula:
E = 0,6745 * √(∑v2/n-1)
∑v2 = ( xi - Ẋ ) ↑2
n= número de mediciones
Ejemplo: Determinar el error probable de las siguientes series de medidas:
Medidas (xi) Ẋ v v22467 2465 0,002 0,0000042460 2465 0,005 0,0000252469 2465 0,004 0,0000162465 2465 0,000 0,0000002471 2465 0,006 0,0000362461 2465 0,004 0,0000162463 2465 0,002 0,0000042466 2465 0,001 0,0000012460 2465 0,005 0,0000252468 2465 0,003 0,000009
∑v2= 0,000136
E=0,0026
Tolerancia máxima permitida.-Es la relación entre los errores que se cometen y aquellos que se encuentran dentro de los límites permitidos, esto permite determinar el nivel de cada medida.De acuerdo al registro anterior, podemos calcular la tolerancia máxima:
T = Ẋ/ E
T = 94807.692
Esto quiere decir que la precisión con que se trabajó es 1:94807.692
MEDICIÓN DE DISTANCIAS.-

La medición de la distancia entre dos puntos constituye una operación común en todos los trabajos de topografía. El método y los instrumentos seleccionados en la medición de distancias dependerá de la importancia y precisión requeridas.
En estudios de reconocimientos previos, en algunos trabajos geológicos, de agricultura, en localización de puntos o marcas sobre el terreno para operaciones de replanteo, etc., es común medir la distancia con telémetro o por conteo de pasos.
En el proceso de control de demarcaciones sobre el pavimento, determinación de la longitud de una vía construida, etc., es común el uso del odómetro. En levantamientos que requieran mayor precisión, se emplean cintas de acero y distanciómetros electrónicos.
En algunos casos especiales, donde se requiere de cierta precisión y rapidez, se utilizan el teodolito y las miras verticales u horizontales como métodos indirectos para la medida de distancias.
Distancia TopográficaTodos los levantamientos topográficos son representados a escala sobre el plano horizontal, por lo que cuando se mide una distancia entre dos puntos sobre la superficie terrestre, ésta debe ser en proyección horizontal.Si como sabemos, la Tierra puede ser considerada como una esfera, ¿hasta qué punto podemos admitir que la distancia proyectada sobre el plano horizontal es, sin apreciable error, igual a la distancia real? en otras palabras, ¿hasta qué punto, la Tierra puede ser considerada plana?.Para resolver el problema planteado, supongamos, con la ayuda de la figura , que conocemos la distancia real entre los puntos A y B ; la distancia en proyección sobre el plano horizontal tangente en el punto A es la distancia AB’; la diferencia entre la distancia en proyección ( AB’) y la distancia real AB es el error E que se comete al considerar la Tierra como plana.
De la figura tenemos:AB' = R * tanα
en donde:R = radio de la Tierra = 6.367 km y α= (180/Pi) * (AB/R)
E= AB’ – AB
Tabla para los distintos valores de AB AB(m) Α AB’(m) E(m) Er20000 0° 10’ 48“ 20000,0658 0,0658 1/300000

25000 0° 13’ 30“ 25000,1285 0,1285 1/20000030000 0° 16’ 12“ 30000,2220 0,2220 1/13500035000 0° 18’ 54“ 35000,3525 0,3525 1/10000040000 0° 21’ 38“ 40000,5263 0,5263 1/76000
Considerando que los modernos instrumentos para la medición de distancias nos pueden dar precisiones de hasta 5 mm/km, podríamos tomar 25 km como límite del campo topográfico para la medición de distancias, ya que el error relativo que se comete al considerar al Tierra como plana, es aproximadamente igual a la máxima precisión obtenida.
En la medición de distancias con cinta métrica, en donde la máxima precisión que se puede obtener el alrededor de 1/10.000, se podría aumentar el límite de campo topográfico hasta 30 km, ya que como veremos más adelante, en el capítulo correspondiente a mediciones angulares, el límite del campo topográfico angular es de 30 km.
Medición de Distancias con OdómetroEl odómetro o rueda de medición , es una rueda que al girar sobre la superficie del terreno, convierte el número de revoluciones obtenidas en distancia inclinada , la cual puede ser leída directamente sobre un contador o pantalla digital.
A pesar de ser un instrumento rápido y fácil de utilizar, su precisión es limitada, por lo que básicamente se utiliza en el chequeo de distancias realizadas por otros métodos, reconocimientos previos, inventarios viales etc.
La máxima precisión relativa que puede lograrse en la medición de distancias con el odómetro es 1:200 sobre superficies lisas.
Odómetro
Medición de Distancias con TelémetroEl telémetro , es un instrumento óptico que mide distancias inclinadas por simple colimación, sin necesidad de colocar miras ni señales en el punto al cual se desea determinar la distancia.

Debido a su limitada precisión, su uso queda prácticamente restringido a operaciones de exploración y reconocimiento, estudios de rutas, etc., siendo su mayor aplicación en operaciones militares.
Telémetros Sokkia
Medición de Distancias con Cintas de AceroComo se vio en capítulo correspondiente a instrumentos simples, la precisión de la medición de distancias con cintas métricas depende de las condiciones de calibración especificadas por el fabricante.
Difícilmente en campo podemos obtener las condiciones de calibración; además, en el proceso de medición se introducen una serie de errores tanto sistemáticos como aleatorios que son inevitables, pero que podemos corregir o reducir al mínimo mediante el empleo de técnicas y equipos adecuados.
Medición Óptica de Distancias. Con Visual Horizontal.En el proceso de levantamientos topográficos de detalles en donde los puntos de relleno a levantar no requieren de una gran precisión, se utiliza, debido a su sencillez y rapidez, el método óptico de medición de distancias.
En la figura a se representa en forma idealizada el sistema óptico de un telescopio con sistema de enfoque interno.
En el retículo del telescopio vienen incorporados un par de hilos distanciométricos horizontales, equidistantes del hilo horizontal central, tal y como se muestra en la figura b.
De la figura a, podemos obtener, por relación de triángulosD=(f/h)xHsiendo:D = distancia entre el punto de estación “E” y “M” el punto de mira

f = distancia focal (constante)h = separación entre el retículo superior y el inferior constanteH = distancia de mira interceptada por los retículosH = Ls – LiLa relación f/h es la constante distanciométrica K, con un valor generalmente de 100 para facilitar el cálculo de la distancia.
K=(f/h)= (1/2xtg(w/2))x100
SustituyendoD = KH D = 100.HReemplazando el valor de HD = 100 (ls-li)
Estas ecuaciones se utilizan en el cálculo de distancias con telescopios con sistema de enfoque interno y eje de colimación horizontal.
Para telescopios más antiguos, en donde el foco del objetivo no coincide con el centro del telescopio, es necesario tomar en cuenta la distancia constante entre el foco y el centro del instrumento, conocida como constante aditiva.
Con Visual InclinadaEn terrenos con pendiente, se hace necesario inclinar el telescopio un ángulo α con respecto a la horizontal.
Calculando la distancia horizontal a partir de la figura , se tiene:
D=ACxcos(α-w/2)Del triángulo ABC:(AC)/sen(90-(α+(w/2))=H/senwAC=(H/senw)xcos(α+w/2)

D=(H/senwxcos(α+w/2)xcos(α-w/2))D=Hx(cos˄2 α/(2xtgw/2)-(sen˄ αxtgw/2)/2K=0,5xtgw/2D=KH xcos˄2-(H/4K)xsen˄2 α
La ecuación nos da la distancia horizontal tomada con un telescopio inclinado un ángulo α con respecto a la horizontal.
Analizando el último término de la ecuación para valores máximos de H y α, y para K=100.Hmax = 4 m (altura de la mira vertical)K = 100 para la mayoría de los instrumentos modernos αmax = ± 45°tenemos:(4/(4x100))xsen˄2 45°=0,005 m.valor despreciable que nos permite simplificar la ecuaciónD = KHcos˄2α D = 100(ls – li).cos˄2αPara teodolitos que miden ángulos cenitales (ϕ), el valor de la distancia horizontal se calcula mediante la ecuación.D = KHsen˄2ϕD = 100(ls – li).sen˄2ϕ
Ejemplo: Con los datos de la figura:
Determine la diferencia para calcular la distancia y calcule el error relativo.
K=100 H=(3,853-1,432)=2,421
D=100x2,421xcos˄2(33° 52’ 39”) – ((2,421/(4x100))xsen˄2(33° 52’ 30”))D=166,883 m.
D=100x2,421xcos˄2(33°52’ 30”)D=166,885 m.
Er= 1/(166,883/0,002)Er=1/83500
Errores en la Determinación Óptica de Distancias

Además del error por simplificación de la ecuación , en la determinación óptica de distancias con mira vertical podemos observar los siguientes errores:
Error de apreciación en la lectura de la tercera cifra decimal a la mira vertical.
Salvo en mediciones de distancias con mira vertical de “invar” y micrómetro óptico, en la lectura a una mira vertical la tercera cifra decimal se determina a ojo con una apreciación de hasta 1 mm que al ser multiplicado por la constante K introducirá un error de 10 cm en la determinación de la distancia.
Error de graduación de la mira. Error por temperatura. Error inducido por las articulaciones para el pliegue de las miras. Error por refracción de la visual. Error por la evaporación del aire. Se detecta en la parte inferior de la
mira por efecto de la humedad y el calor. Error instrumental por inexactitud en la determinación de K. Este error
se considera despreciable debido a la precisión de las técnicas de construcción de los instrumentos.
Error de inclinación de la mira.
La mayoría de los errores descritos se pueden reducir al mínimo siguiendo las reglas y procedimientos que se indican:
Mantener el ángulo de inclinación de la visual lo más horizontal posible.
Utilizar nivel esférico de mano para la verticalización de la mira. Tomar las lecturas a la mira a una altura del suelo donde no se afecten
por el movimiento del aire por evaporación. No hacer lecturas en horas de mucho calor. No tomar lecturas a distancias mayores de 100 a 120 m. Ajustar periódicamente las articulaciones de la mira.
Medición de Distancias con Distanciómetros Electrónicos.
Como se mencionó anteriormente, correspondiente a instrumentos topográficos, los distanciómetros electrónicos utilizan microondas u ondas luminosas para la determinación de distancias.
Los distanciómetros de microondas (ondas de radio) requieren en ambos extremos de emisores y receptores de onda, mientras que los distanciómetros de ondas luminosas (rayos láser y rayos infrarrojos) requieren de un emisor en un extremo y un refractor o prisma en el extremo opuesto.

Los distanciómetros electrónicos determinan la distancia en términos del número de ondas, moduladas con frecuencia y longitud de onda conocida, que caben entre el emisor y el receptor en ambos sentidos.
Con la ayuda de las figuras describiremos los parámetros involucrados en la medición electrónica de distancias.
Figura : Representación de una onda luminosa
λ = V/f siendo:λ = longitud de onda en mV = velocidad en km/sf = frecuencia o tiempo en completar una longitud de onda, en hertz (1 ciclo/s)
Como por lo general, el número de ondas entre el emisor y el receptor no es un número entero, la distancia D vendrá dada por:2λ +φD = (n λ +φ)/2
donde:D = distancia a medir, en mn = número entero de ondas entre el emisor y el receptor medido en ambos sentidosφ = longitud parcial de onda, o diferencia de fase, en m.
Figura : Medición de distancias con distanciómetro electrónicoA=Estación del distanciómetro.M=Estación del prisma.E=Plano interno de referencia del distanciómetro, para la comparación de fases, entre la onda trasmitida y la onda recibida.

R=Plano reflector de diferencia para la onda emitida por el distanciómetro.e=Excentricidad del plano de referencia, constante aditiva.r=Excentricidad del plano del prisma refrector, constante aditiva.L=Longitud de la onda modulada.Desface de la onda modulada (∆λ)
La diferencia de fase se determina midiendo el tiempo de demora de fase necesario para hacer coincidir exactamente las ondas en ambos recorridos.
Correcciones AtmosféricasLa velocidad de la onda (V) varía de acuerdo a las condiciones atmosféricas según la siguiente ecuación:
V = V0/nen donde:V = velocidad de la luz en condiciones atmosféricas prevalecientes, en km/sV0 = velocidad de la luz en el vacío (V0 = 299.792,5 km/s)n = índice de refracción (n > 1)
Los valores del índice de refracción para condiciones normales (0°C, 760 mmHg y 0,03 CO2) y para condiciones prevalecientes pueden ser calculados utilizando las ecuaciones de Barrel y Sears.
Ns=l+(287,604+(4,8864/ λ˄2)+(0,068/ λ˄4)x10-6en donde:ns = índice de refracción para condiciones normalesλ = longitud de onda de la onda luminosa transportadora en micrometros (μm) y para condiciones prevalecientes, el valor del índice de refracción viene dado por la ecuación:n=l+(0,35947x(ns-1)xp)/(273,2+t))siendo:p = presión atmosférica, en mmHgt = temperatura, en °CEn distanciómetros de microondas, se debe tomar en cuenta el efecto de la presión de vapor (e).(n-1)x10-6=(103,49/(273,2+t))x(p-e)+(86,26/(273,2+t))x(l+(5,748/(273,2+t))
Los distanciómetros electrónicos modernos, con microprocesadores incorporados, automáticamente calculan las correcciones atmosféricas tomando en cuenta la presión atmosférica y la temperatura.
MEDIDAS DE ANGULOS Y DIRECCIONES
La dirección de una línea definida por dos puntos, se determina por una medición angular horizontal, entre la línea y alguna otra de referencia. Así el ángulo entre A y B es el ángulo horizontal AOB.
A
O B

Las direcciones relativas que unen puntos de un levantamiento, pueden ser materializadas en terreno o ser puramente imaginarias y se llama MERIDIANO.
N
O A
De acuerdo a esto y teniendo en cuenta el origen del Meridiano, este puede ser:
Meridiano Supuesto, cuyo origen es tomado arbitrariamente.
Meridiano Magnético, su dirección es determinada por la posición de la aguja magnética de la brújula.
Meridiano Geográfico, determinado por observaciones astronómicas(observaciones al sol o a las estrellas).
Meridiano Cartográfico, determinado por las coordenadas UTM (Universal Transversal de Mercator)
RUMBO
La dirección de una línea con respecto a un meridiano dado, puede definirse por el ángulo agudo que la línea forma con el meridiano.
Características principales:a) Su valor angular máximo es un recto (90º o 100g)b) Pueden medirse desde el Norte o desde el Sur.c) El valor angular va flanqueado por dos letras.
Rumbo OA= N-30°-ERumbo OB= S -30°-ERumbo OC= S -60°-WRumbo OD= N-45°-W

AZIMUT
El azimut de una línea es su dirección dada por el ángulo entre el meridiano (Norte) y la línea siempre medida en el sentido de los punteros del reloj.
Características principales:a) Se miden generalmente desde el Norte, aunque algunas
observaciones pueden orientarlas hacia el Sur.b) Su valor máximo es de 4 rectos (360º o 400g)c) Se miden siempre hacia la derecha y solamente poseen valor angular.
Azimut OA= 30°Azimut OB= 150°Azimut OC= 240°Azimut OD= 315°
Ejercicio de transformar Rumbo a Azimut o viceversa.
a) N-34,5643g-W = 365,4357
b) 118,5555= S- 81,4445-E
LA BRÚJULA.-Generalmente un instrumento de mano que se utiliza fundamentalmente en la determinación del norte magnético, direcciones y ángulos horizontales. Su aplicación es frecuente en diversas ramas de la ingeniería. Se emplea en reconocimientos preliminares para el trazado de carreteras, levantamientos topográficos, elaboración de mapas geológicos, etc.

La figura muestra el corte esquemático de una brújula. La brújula consiste de una aguja magnética [A] que gira sobre un pivote agudo de acero duro [B] apoyado sobre un soporte cónico ubicado en el centro de la aguja. La aguja magnética esta ubicada dentro de una caja [C], la cual, para medir el rumbo, contiene un circulo graduado [D] generalmente dividido en cuadrantes de 0° a 90° , marcando los cuatro puntos cardinales; teniendo en cuenta que debido al movimiento aparente de la aguja los puntos Este y Oeste estén intercambiados.Algunas brújulas llamadas brújulas azimutales, tienen el circulo horizontal dividido en 360° .Coincidiendo con la alineación norte – sur poseen un dispositivo de colimación.A objeto de contrarrestar los efectos de la inclinación magnética, la aguja posee un pequeño contrapeso de bronce [E] y su ubicación depende de la latitud del lugar. En zonas localizadas al norte del ecuador, el contrapeso estará ubicada en el lado sur de la aguja, y en zonas localizadas al sur del ecuador el contrapeso estará ubicado en el lado norte de la aguja.Para proteger el pivote sobre el cual gira la aguja, las brújulas poseen un dispositivo elevador [F] que separa la aguja del pivote cuando las brújulas no están siendo utilizadas. En el interior se ubica un pequeño nivel esférico de burbuja [G]. Un vidrio ubicado en la parte superior de la caja [H] sirve para proteger la aguja, el circulo y el nivel esférico. Para hacer coincidir el eje de rotación de la aguja con la vertical del vértice donde se esta efectuando la medida, algunas brújulas se utilizan con plomada [I] y otras se apoyan sobre un bastón de madera.A fin de corregir la declinación magnética del lugar, algunas brújulas poseen un arco de declinación [J] graduado en grados, cuyo cero coincide con la

alineación norte, de manera que conociendo la declinación del lugar, mediante un dispositivo especial, se puede hacer girar el circulo horizontal hasta hacer coincidir la lectura con el valor de la declinación del lugar; de esta manera, el rumbo medido con la brújula es el rumbo real.
METODOS DE LEVANTAMIENTO
La determinación de la posición de un punto en un plano horizontal, queda resuelto de las siguientes maneras:
a) Conocida la dirección y distancia desde un punto
b) Conocidas las direcciones desde dos puntos

c) Conocidas las distancias desde dos puntos
d) Conocida la dirección desde un punto y la distancia desde otro
e) Conocidas sus coordenadas rectangulares, respecto de un sistema ortogonal

f) Conocidos los ángulos formados por las visuales a tres puntos conocidos
La aplicación simple o combinadas de uno o varios de estos procedimientos, dá origen a los siguientes métodos de levantamiento:
a) Método de radiación. Cuando en torno de una estación de instrumento, es necesario tomar un gran número de puntos de detalle, distribuídos en direcciones y distancias diferentes, es ventajoso el procedimiento de determinar el azimut de cada punto y la distancia desde la estación, este es el método de Radiación.

b) Método de poligonación. Cuando desde una sola estación no es posible abarcar todos los puntos de un levantamiento, será necesario colocar otras estaciones ligadas entre ellas, formando una serie de líneas quebradas o poligonal, este es el método de Poligonación.
c) Método de intersección. Cuando no es posible el empleo del método de radiación, por ser imposible la medida de distancias, se hace uso de este método, que consiste en determinar las direcciones desde dos estaciones a los puntos característicos.
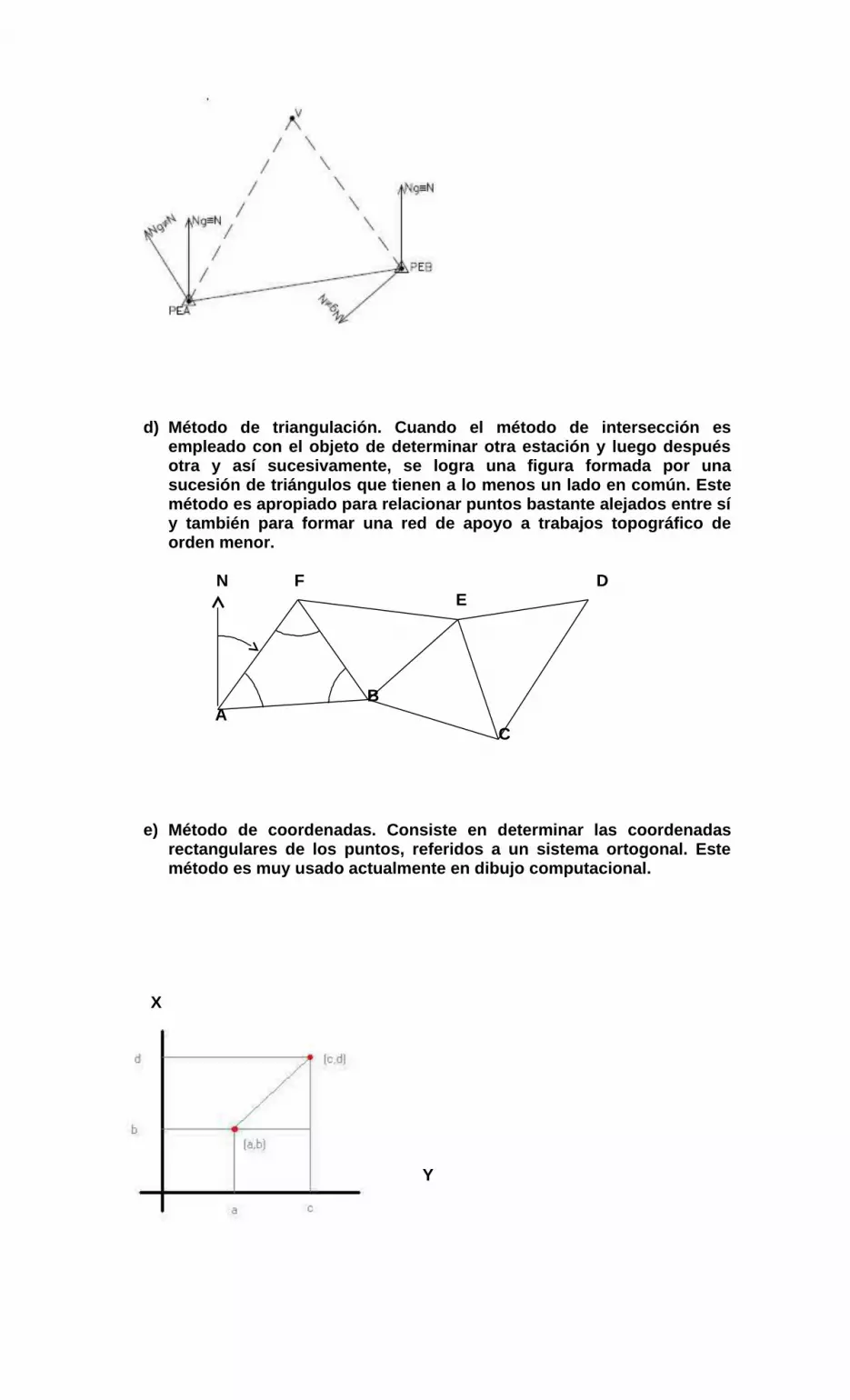
d) Método de triangulación. Cuando el método de intersección es empleado con el objeto de determinar otra estación y luego después otra y así sucesivamente, se logra una figura formada por una sucesión de triángulos que tienen a lo menos un lado en común. Este método es apropiado para relacionar puntos bastante alejados entre sí y también para formar una red de apoyo a trabajos topográfico de orden menor.
N F DE
BA
C
e) Método de coordenadas. Consiste en determinar las coordenadas rectangulares de los puntos, referidos a un sistema ortogonal. Este método es muy usado actualmente en dibujo computacional.
X
Y

f) Método de resección sobre tres puntos conocidos. Es un método que consiste en medir ángulos desde una estación desconocida, referida a tres estaciones conocidas. Se utiliza bastante en el traslado de coordenadas al lugar de la obra.
Métodos combinados.
Como se puede apreciar, cada uno de estos métodos tiene su empleo limitado, por lo que es necesario realizar una serie de combinaciones para lograr un mejor trabajo. Las más comunes son:
a) Poligonación y radiación.
b) Poligonación e intersección.
c) Triangulación, poligonación y otro.
.
NIVELACIONES
Se llama altura o elevación de un punto sobre la superficie de la tierra, a su

distancia vertical respecto de un plano, arbitrariamente tomado como superficie de nivel, o respecto a una superficie curva (real o imaginaria) elegida como superficie de referencia.
El desnivel o diferencia de altura entre dos puntos, es la distancia vertical entre las dos superficies de nivel, que pasan por los mismos.
Nivelar es la operación de medir distancias verticales, ya sea directa como indirectamente, con el objeto de encontrar desniveles.
La superficie de referencia absoluta se considera el nivel medio del mar, que se obtiene de las variaciones de mareas, que son registradas por mareógrafos.
Cuando se realizan levantamientos, cuyo objeto solamente es obtener diferencias de alturas entre puntos, se puede optar como nivel de referencia una cota relativa, que puede ser: 100, 200, 500, etc.
Curvatura y refracción.- En nivelación se deben tener en cuenta dos fenómenos: efecto de curvatura de la tierra y efecto de la refracción atmosférica sobre las visuales. Generalmente estos dos efectos se compensan en conjunto, siendo su valor igual a:
(Dh^2/2*R)*(1-k)
En que:Dh= Distancia horizontalR = Radio de la tierra (6378388 m.)K = Coeficiente que depende de la refracción Atmosférica (valor medio= 0,08)

Cota de un punto.-Es la altura sobre o bajo una superficie de nivel de referencia o sobre o bajo un plano horizontal de referencia, en cualquiera de los casos, se supone que los elementos geométricos de referencia, tienen cota cero, por lo tanto, para obtener la cota de un punto B, a partir de una cota conocida del punto A, se deberá conocer su diferencia de altura h, en consecuencia nivelación es un conjunto de operaciones, destinadas a obtener las cotas entre los distintos puntos importantes de una obra de ingeniería.
C(B) = C(A) + h

Métodos de nivelación.-Según sea la forma de medir la distancia vertical, da origen a los siguientes métodos de nivelación:A.- Métodos directos:
1.- Nivelaciones geométricas
B.- Métodos Indirectos:1.- Nivelaciones Barométricas2.- Nivelaciones Trigonométricas
Nivelación directa o geométrica.-
Es la que se realiza midiendo directamente la distancia vertical entre los diversos puntos y el plano horizontal generado por el nivel de ingeniero.
El Nivel de ingeniero Está constituído por:Anteojo topográfico (A), nivel tubular o esférico (T), collares (B), base nivelante (D).
Este instrumento está destinado a trazar visuales horizontales en todas direcciones y permitir leer las alturas, en miras instaladas sobre éstos.
La parte más importante del nivel es el anteojo topográfico, que consiste en tres tubos que se deslizan uno dentro del otro, llamados:
Porta objetivo, que lleva el objetivo, cuya función es formar dentro del sistema de tubos, una imagen real del objeto observado.
Porta retículo, que lleva el retículo, que es una pantalla destinada a captar la imagen real y la imagen de los hilos del retículo. En general, el retículo es una placa de vidrio, que lleva grabada dos hilos principales, perpendiculares

entre sí, llamados hilos principales o cruz filiar y dos hilos más pequeños paralelos al hilo horizontal o axial, llamados hilos extremos o estadimétricos.
Porta ocular, lleva el ocular, que es un pequeño microscopio compuesto, su función es obtener una imagen virtual , tanto del objeto como el retículo. Además, desde el punto de vista geométrico, se puede considerar como una serie de rectas y ejes (reales o imaginarios), que deben ocupar determinadas posiciones o requisitos, que cumplidos con cierta aproximación, nos permita que el eje óptico genere un plano horizontal, cuando gire una circunferencia completa en torno del eje vertical de rotación del nivel.
Condiciones que debe cumplir un nivel.
a) Línea de fé de la ampolleta de nivel, debe ser perpendicular al eje vertical de rotación.b) Hilo horizontal del retículo debe ser perpendicular con el eje vertical de rotación.c) El eje óptico debe ser paralelo a la línea de fé de la ampolleta de nivel.
Se entiende por: Línea de fé, a la línea imaginaria que pasa tangente al centro de la
ampolleta de nivel. Eje vertical de rotación, es el eje en torno al cual gira todo el conjunto,
llamado nivel. Hilo horizontal de retículo, es el hilo principal horizontal que se
encuentra en el retículo, es también llamado hilo axial. Eje óptico, es un eje imaginario que pasa por el centro de objetivo,
pasando por el centro de la cruz de retículo y llega al centro de la lente ocular.
Para poder comprobar las condiciones del nivel, se procede de la siguiente manera:
a) La primera condición: se orienta el anteojo topográfico paralelo a dos tornillos velantes, se centra la burbuja de la ampolleta de nivel, se gira el instrumento en dos ángulos rectos y se verifica si la burbuja ha sufrido

alguna modificación, si permanece centrada, la primera condición se cumple, si se desplaza, la mitad de este desplazamiento se corrige accionando sobre los tornillos de ajuste, que para este efecto lleva la ampolleta de nivel y se repite el proceso.
b) La segunda condición: consiste en marcar sobre una superficie clara, un punto que quede sobre el hilo axial y se gira lentamente el anteojo observando si el punto de desplaza del hilo horizontal, si permanece en la línea, la condición se cumple, caso contrario se deberá accionar sobre los tornillos antagónicos horizontales, que para este efecto lleva el retículo y por tanteo conseguir que se cumpla la condición.
c) La tercera condición: consiste en medir una distancia entre 50 a 100 mts. en un terreno mas o menos plano y colocar estacas. Se instala el nivel equidistante entre ambas estacas y luego se efectúan lecturas sobre miras colocadas sobre las estacas, enseguida se traslada el nivel hacia una de estas estacas, de tal manera que se mire de objetivo a ocular, para realizar una lectura en la mira, debido a que el campo de vista es muy reducido, se deberá ayudar mediante la punta de un lápiz. Como en la primera posición se determinó la diferencia de nivel entre las estacas, por cálculo se determinará la lectura que debiera hacerse hacia la otra estaca. Si coinciden las lecturas, la condición se cumple, caso contrario, se deberá llevar la lectura en la mira real, accionando sobre los tornillos antagónicos verticales del retículo.
Teoría de la nivelación directa.-
Sean A y B dos puntos pertenecientes a una misma superficie de nivel, por lo tanto, de igual cota y en consecuencia sin diferencia de nivel entre ellos, pero si empleando un nivel de ingeniero, instalado próximo al punto A, de tal forma que el horizonte que pasa por el punto A, sea el mismo que pasa por el eje óptico del nivel y que la lectura l(A) sea igual a 0.
Al pretender determinar la diferencia de nivel entre ellos, en el punto B se tendrá una lectura l(B), que representará el valor “x”, correspondiente al error de altura por efecto de la curvatura de la tierra.
h= l(A) - l(B)l(A)=0h= 0 - l(B)

De la figura se tiene:
(R+x)2 = R2 + D2
Como x es muy pequeño, x2 tiende a 0, por lo que finalmente queda:
x= D2/(2*R)
Si se quisiera determinar la diferencia de altura exacta entre dos puntos, será necesario colocar el nivel equidistante entre ambos puntos, debido a lo siguiente:
L(A)= l(A)-x(A) L(B)= l(B)-x(B)
h= (l(A)-x(A)) - (l(B).x(B))
h= (l(A)-l(B)) - (h(A)-h(B))
h = l(A)-l(B) - (D(A)2/(2*R)) - (D(B)2/(2*R))
Si D(A)=D(B), se tiene:
h= l(A) - l(B)

Marcha de la nivelación.-
Cuando se trata de determinar la diferencia de nivel entre dos puntos, cuya altura entre sí es mayor que longitud de la mira, o cuando están separados por una distancia considerable, o por problemas de intervisibilidad y especialmente cuando se requiere conocer las cotas de varios puntos, que indican la dirección de una obra de ingeniería, esta determinación se realizará por etapas sucesivas, lo que se conoce con el nombre de “marcha de la nivelación”.
En una marcha de nivelación se distinguen los siguientes puntos:
Puntos extremos, son aquellos donde se inicia y termina una nivelación, estos generalmente son puntos de referencias (PR).
Puntos de cambio, son aquellos que por razones de distancia, altura, intervisibilidad, etc., se debe cambiar el nivel con el fin de proseguir con la marcha de la nivelación.
Puntos intermedios, son aquellos que no intervienen en la marcha de la nivelación y solo sirven para determinar la cota del punto o su diferencia de altura con sus adyacentes.
En cuanto a las lecturas en la mira, estas son:
Lectura de atrás, es la que se realiza a una mira colocada sobre un punto de cota conocida, como los puntos de inicio de la nivelación y los puntos de cambio.
Lectura de adelante, es aquella que se realiza sobre una mira colocada sobre un punto, cuya cota se desea conocer, como el punto final de la nivelación y los puntos de cambio.
Lectura intermedia, es la que se realiza sobre una mira colocada en un punto de intermedio.
Registros de nivelación.-
Las lecturas de miras que se obtienen en los diversos puntos en que instalarían y otros datos necesarios, se anotarán en registros especiales, los que contienen algunas columnas destinadas a las anotaciones de terreno y otras destinadas para los cálculos.

ESTACAS DISTANCIAPARCIAL
DISTANCIAACUMULADA
LECTURAATRAS
LECTURAINTERMEDIA
LECTURAADELANTE
PR1 L(PR1)1 L(1)2 L’(2) L(2)3 L(3)4 L’(4) L(4)
Se puede observar en este registro que los puntos 2 y 4 tienen dos lecturas, debido a ser puntos de cambio.Las columnas destinadas a las distancias, se emplean cuando la nivelación se realiza a lo largo de una obra de ingeniería y en que los puntos por nivelar se encuentran a distancias que interesa dejar constancia, para el posterior dibujo del perfil longitudinal.Para realizar los cálculos de los puntos por nivelar, será necesario agregar más columnas y habrá dos sistemas o métodos de cálculos, lo que da origen a dos tipos de registros de nivelación: por cota instrumental y por diferencia de nivel.
a) Registro por cota instrumental.
Cuando se agrupan en un término la cota del punto y la lectura de atrás, esta se llama cota instrumental y sirve para dar cota a los siguientes puntos.
C(B)=(C(A)+l(A)) - l(B)
En que: (C(A)+l(A)) es la cota instrumental
ESTACAS DISTANCPARCIAL
DISTANCACUMUL
LECTURAATRAS
LECTURAINTERMEDIA
LECTURAADELANTE
COTAINSTRUM-
COTAPUNTO
PR1 L(PR1) I1 C(PR1)1 L(1) C(1)2 L’(2) L2) I2 C(2)3 L(3) C(3)4 L’(4) L(4) I3 C(4)5 L(5) C(5)6 L’(6) L(6) I4 C(6)7 L(7) C(7)8 L(8) C(8)9 L(9) C(9)PR2 L(PR2) C(PR2)
La primera cota instrumental (I1), se obtiene sumando a la cota del PR1 la lectura de atrás realizada al mismo PR1.
Para obtener la cota de 1 y 2 se resta a la cota instrumental I1, las lecturas realizadas a 1 y 2 (L(1) y L2)).
En el punto 2 se produce el primer punto de cambio, por lo tanto, se procede a calcular la nueva cota instrumental I2, sumando a la cota de 2 la lectura de atrás realizada en el mismo punto, es decir:C(2)+L’(2)
El cálculo se realiza del mismo modo, solamente que los puntos 7, 8 y 9 son intermedios y para obtener las cotas, se deberá restar a la última cota instrumental I4, las lecturas respectivas.

La cota del punto PR2 se obtiene restando a la cota instrumental I4,la lectura de adelante al punto PR2.
b) Registro por diferencia de nivel. Cuando las lecturas de miras se agrupan en un solo término, es decir, (l(A)-l(B))es igual a la diferencia de nivel, el cálculo de la cota de B es igual a la cota del punto A más su diferencia de nivel.
ESTACA DISTANCPARCIAL
DISTANCACUMU
ATRAS INTERM ADEL DIF.NI-VEL(+)
DIF.NI-VEL(-)
COTA
PR1 L(PR1) C(PR1)1 L(1) DN1 C(1)2 L’(2) L(2) DN2 C(2)3 L(3) DN3 C(3)4 L’(4) L(4) DN4 C(4)5 L(5) DN4 C(5)6 L’(6) L(6) DN5 C(6)7 L(7) DN6 C(7)8 L(8) DN7 C(8)9 L(9) DN8 C(9)PR2 L(PR2) DN9 C(PR2)
La primera diferencia de nivel DN1, se obtiene restando la lectura al PR1 la lectura al punto1.
La segunda diferencia de nivel DN”, se obtiene restando la lectura al punto 1 la lectura al punto 2.
Así sucesivamente se van obteniendo las diferencias de nivel, ya sea positivas o negativas, según sea el valor obtenido en la resta de las lecturas.
Las cotas se calculan sumando o restando la diferencia de nivel a la cota del punto anterior. Así la cota de1 es igual a la DN1 más la cota del PR1, la cota del punto 2 es la cota de 1 más la DN2 y de esta manera se consiguen todas las cotas de los puntos
Ejemplo numérico:
ESTACAS DISTANCPARCIAL
DISTANCACUMUL
LECTURAATRAS
LECTURAINTERMEDIA
LECTURAADELANTE
COTAINSTRUM-
COTAPUNTO
PR1 0,738 50,738 50,0001 0,00 0,00 1,206 49,5322 25,00 25,00 0,028 1,873 48,893 48,8653 25,00 50,00 0,832 3,758 45,967 45,1354 15,00 65,00 1,802 44,1655 25,00 90,00 3,128 3,122 45,973 42,8456 30,,00 120,00 3,674 0,408 49,239 45,5657 25,00 145,00 3,168 46,0618 25,00 170,00 1,974 47,2659 25,00 195,00 1,792 0,865 50,166 48,374PR2 1,092 49,074
Se debe comprobar que los cálculos matemáticos, sumas y rectas estén bién realizadas, para lo cual se deben sumar todas las lecturas de atrás y todas las lecturas de adelante, siendo su diferencia igual a la cota final menos la cota inicial.
∑lect. atrás - ∑lect. adelante = Cota final – Cota inicial
10,192 - 11,118 = 49,074 - 50,000

- 0,926 = - 0,926
ESTACA DISTANCIAPARCIAL
DISTANCIAACUMULADA
ATRAS INTERM ADEL DIF.NI-VEL(+)
DIF.NI-VEL(-)
COTA
PR1 0,738 C(PR1)1 0,00 0,00 1,206 0,468 C(1)2 25,00 25,00 0,028 1,873 0,667 C(2)3 25,00 50,00 0,832 3,758 3,730 C(3)4 15,00 65,00 1,802 0,970 C(4)5 25,00 90,00 3,128 3,122 1,320 C(5)6 30,00 120,00 3,674 0,408 2,720 C(6)7 25,00 145,00 3,168 0,506 C(7)8 25,00 170,00 1,974 1,194 C(8)9 25,00 195,00 1,792 0,865 1,109 C(9)PR2 1,092 0,700 C(PR2)
Al igual que el caso anterior se debe comprobar que los cálculos matemáticos estén bien realizados, en este caso la sumatoria de las lecturas de atrás menos la sumatoria de las lecturas de adelante es igual a la diferencia entre la sumatoria de las diferencias de nivel, tanto positivas como negativas.
∑lect. atrás - ∑lect. adelante = ∑dif. Nivel(+) - ∑dif. Nivel(-)
10,192 - 11,118 = 6,229 - 7,155
- 0,926 = - 0,926
Clasificación de las nivelaciones directas.
De acuerdo a la forma de llevar la nivelación, estas se clasifican en:
a) Nivelación abierta: Cuando se realiza una nivelación desde un punto a otro, por una sola vez, se habla de una nivelación simple y no tiene más medio de combatir los errores, que el cuidado que se tenga por parte del operador al realizar las operaciones.
b) Nivelaciones cerradas:
b.1) Sobre el mismo punto: Cuando la nivelación se inicia y termina en el mismo punto, se habla de una nivelación cerrada y los errores son compensados solamente si están dentro de la tolerancia permitida.
b.2) Enlazadas: Si la nivelación se inicia en un punto con cota determinada y se termina sobre otro también con cota conocida, siempre que ambas pertenezcan a un mismo sistema, se habla de una nivelación cerrada enlazada y sus errores son compensados si estan dentro de la tolerancia permitida.
c) Nivelaciones por doble posición instrumental: Cuando se requiere realizar una nivelación a lo largo de una obra de
ingeniería, que es demasiado extensa, se puede asegurar el control de los errores realizando una nivelación por doble posición instrumental, que consiste en llevar un registro por diferencia de nivel y haciendo lecturas entre dos estacas en dos posiciones distintas del instrumento, ambas diferencias deben estar con una tolerancia determinada previamente.

Compensación de nivelaciones cerradas
a) Nivelaciones cerradas sobre el mismo punto.
En la práctica es muy difícil obtener resultados auspiciosos sin errores, generalmente hay pequeñas discrepancias, que cuando están dentro del límite de las tolerancias permitidas son sometidos a distribuirlos siguiendo criterios determinados, esto es lo que llamamos compensaciones.
De acuerdo a lo ya analizado:∑lect. atrás - ∑lect. adelante = Cota final – Cota inicial (teórico)
∑lect. atrás - ∑lect. adelante = Cota final – Cota inicial + Error (practica)
Este error (e) se puede compensar en forma proporcional a la distancia acumulada, de acuerdo a lo siguiente:
c(k) = (-e/L) * l(k)
donde:
c(k) = compensación correspondiente al punto ke = error de cierreL = Longitud total de la nivelaciónl(k) = distancia acumulada hasta el punto k
También se puede compensar en forma proporcional a las diferencias de nivel, de acuerdo a mlo siguiente:
c(i) = (-e/∑|DN|) * |DN(i)|
Donde:
c(i) = compensación correpondiente al punto ie = error de cierre∑DN= sumatoria de las diferencias de nivel en valor absolutoDN(i)= diferencia de nivel en el punto i
Ejemplo numérico:
ESTACA DISTPARC
DISTACUM
ATRAS INTERM ADEL COTAINST
COTAPUNTO
CORREC COTACORR
PR 0,738 50,738 50,000 50,0001 00,00 00,00 1,206 49,532 0,000 49,5322 25,00 25,00 0,028 1,873 48,893 48,865 0,001 48,8863 25,00 50,00 0,832 3,758 45,967 45,135 0,001 45,1364 15,00 65,00 1,802 44,165 0,002 44,1675 25,00 90,00 3,128 3,122 45,973 42,845 0,002 42,8476 30,00 120,00 3,674 0,408 49,239 45,565 0,003 45,5687 25,00 145,00 3,168 46,071 0,004 46,0758 25,00 170,00 1,974 47,265 0,005 47,2709 25,00 195,00 1,792 0,865 50,166 48,374 0,005 48,37910 25,00 220,00 0,233 1,092 49,307 49,074 0,006 49,0806 0,648 3,748 46,207 45,5595 2,852 3,372 45,687 42,8353 3,914 0,558 49,043 45,1292 2,853 0,188 51,708 48,855PR 1,720 49,988 0,012 50,000
∑= 20,692 ∑= 20,704
e= -0,012

ESTACA DISTPARC
DISTACUM
ATRAS INTER ADEL DN(+)
DN(-)
COMP DNC (+)
DNC (-)
COTAS
PR 0,738 50,0001 00,00 00,00 1,206 0,468 0,000 0,468 49,5322 25,00 25,00 0,028 1,873 0,667 0,000 0,667 48,8653 25,00 50,00 0,832 3,758 3,730 0,002 3,728 45,1374 15,00 65,00 1,802 0,970 0,000 0,970 44,1675 25,00 90,00 3,128 3,122 1,320 0,001 1,319 42,8486 30,00 120,00 3,674 0,408 2,720 0,001 2,721 45,5697 25,00 145,00 3,168 0,506 0,000 0,506 46,0758 25,00 170,00 1,974 1,194 0,001 1,195 47,2709 25,00 195,00 1,792 0,865 1,109 0,000 1,109 48,37910 25,00 220,00 0,233 1,092 0,700 0,000 0,700 49,0796 0,648 3,748 3,515 0,002 3,513 45,5665 2,652 3,372 2,724 0,001 2,723 42,8433 3,914 0,558 2,294 0,001 2,295 45,1382 2,853 0,188 3,726 0,002 3,728 48,866PR 1,720 1,133 0,001 1,134 50,000
∑=20,692 ∑=20,704 ∑=13,382 ∑=13,394 0,012 e= -0,012
b) Nivelaciones abierta con enlace.Cuando se parte de un punto y se llaga a otro, siguiendo una marcha de nivelación, estamos en presencia de una nivelación controlada, ya que se determinará el error de cierre de acuerdo a dos vértices con cotas conocidas, siempre que pertenezcan a un mismo sistema.
PR1 2 PR2
1 3
Este error se compensa de acuerdo a los métodos utilizados en la nivelación cerrada sobre el mismo punto.
Ejemplo numérico:
PUNTOS DISTPARC
DISTACUM
LECTATRÁS
LECTINTERM
LECTADEL
COTAINST
COTATERREN
COMP COTACOMP
PR1 0,246 528,844 528,598 0,000 528,5981 00,00 00,00 3,848 524,996 0,000 524,9962 20,00 20,00 3,686 525,158 0,001 525,1593 20,00 40,00 2,803 526,041 0,002 526,0434 20,00 60,00 1,106 527,738 0.003 527,7415 20,00 80,00 2,222 0,126 530,940 528,718 0,004 528,7226 20,00 100,00 0,946 2,684 529,202 528,256 0,005 528,2617 20,00 120,00 1,102 528,100 0,007 528,1078 20,00 140,00 1,426 527,776 0,008 527,7849 20,00 160,00 2,369 526,833 0,009 526,84210 20,00 180,00 2,996 3,001 529,197 526,201 0,010 526,21111 20,00 200,00 3,401 525,796 0,011 525,80712 20,00 220,00 3,502 525,695 0,012 525,707PR2 220,00 0,026 529,171 0,012 529,183
Cota PR1= 528,598 Cota PR2= 529,183
Diferencia entre PR calculados= 529,171 – 528,598 = - 0,573Diferencia entre PR reales= 529,183 – 528,598 = - 0,585Error de cierre= - 0,585 – (-0,573) = - 0,012
Comp= ( -Error/ Dist acum total) * Dist acum parcial

NIVELACION TRIGONOMETRICA
Manteniéndonos dentro de los límites del campo topográfico altimétrico a fin de despreciar los efectos de curvatura y refracción al considerar la tierra como plana, podemos definir la nivelación trigonométrica como el método de nivelación que utiliza ángulos verticales para la determinación del desnivel entre dos puntos.
Las ecuaciones generales utilizadas en la nivelación trigonométrica se pueden deducir de la figura .
ΔAB = Dtanα + hI - lmΔAB = Dcotgφ + hI – lm ΔAB= (( P D)/100) + hI − lm⋅En donde

ΔAB = Desnivel entre A y BD = Distancia horizontalα = Angulo vertical de elevaciónφ = Angulo cenitalP = Inclinación de la visual en %hI = Altura del instrumentohs = Altura de la señal (lectura en mira)
En ángulo vertical se puede medir con teodolito o con Eclímetro, dependiendo de la precisión deseada.
Para el caso de visual horizontal, en el que α = 0 y φ = 90° (visual con nivel), la ecuación queda:ΔAB = hI - hs que es el caso particular de la nivelación geométrica o nivelación diferencial que estudiaremos más adelante.
Ejemplo.-
Con los datos de la figura , determine el desnivel entre los puntos A y B y la cota del punto B.
Solución:Aplicando la ecuación ya descritaΔAB = 85,320 x tan (-15° 22' 18") + 1,50 - 3,572 = -25,528 m.El signo negativo indica que el punto B está por debajo del punto.
Para calcular la cota del punto B aplicamos la ecuación :ΔAB = QB – QA ∴ QB = ΔAB + QAQB = 25,528 + 154,816 = 126,288QB = 129,288 m.

NIVELACION BAROMETRICA
Esta basada en la medición de la presión atmosférica, que cambia según las alturas de los lugares.
La presión al nivel de mar vale 76.2 Cm. de columna de mercurio.
En la ciudad de México a 2300m sobre el nivel del mar la Presión es 55Cm de columna de mercurio.
Cada 100 mts. de altura la presión atmosférica varia aprox. de 0.07 a 1 cm. de columna de mercurio.
Para la nivelación barométrica se emplean barómetro de mercurio o de cubeta tipo fortín Dieroide, Termo barómetro e hipsómetro.
PERFIL LONGITUDINAL
Se denomina cilindro a la superficie formada por un conjunto de rectas paralelas a una recta dada, llamada generatriz y que sigue la dirección de una curva dada denominada directriz, la cual no está contenida en el plano de la generatriz.
Las obras hidráulicas como: canales, acueductos, etc. y las obras de comunicación y transporte, están formadas por una serie de tramos rectos acodados por tramos curvos, generalmente circulares. La sección transversal de las obras mencionadas tienen un eje de simetría, o bién, un eje de referencia a lo largo del trazado, denominandose eje longitudinal a la línea formada por la proyección horizontal del trazado.
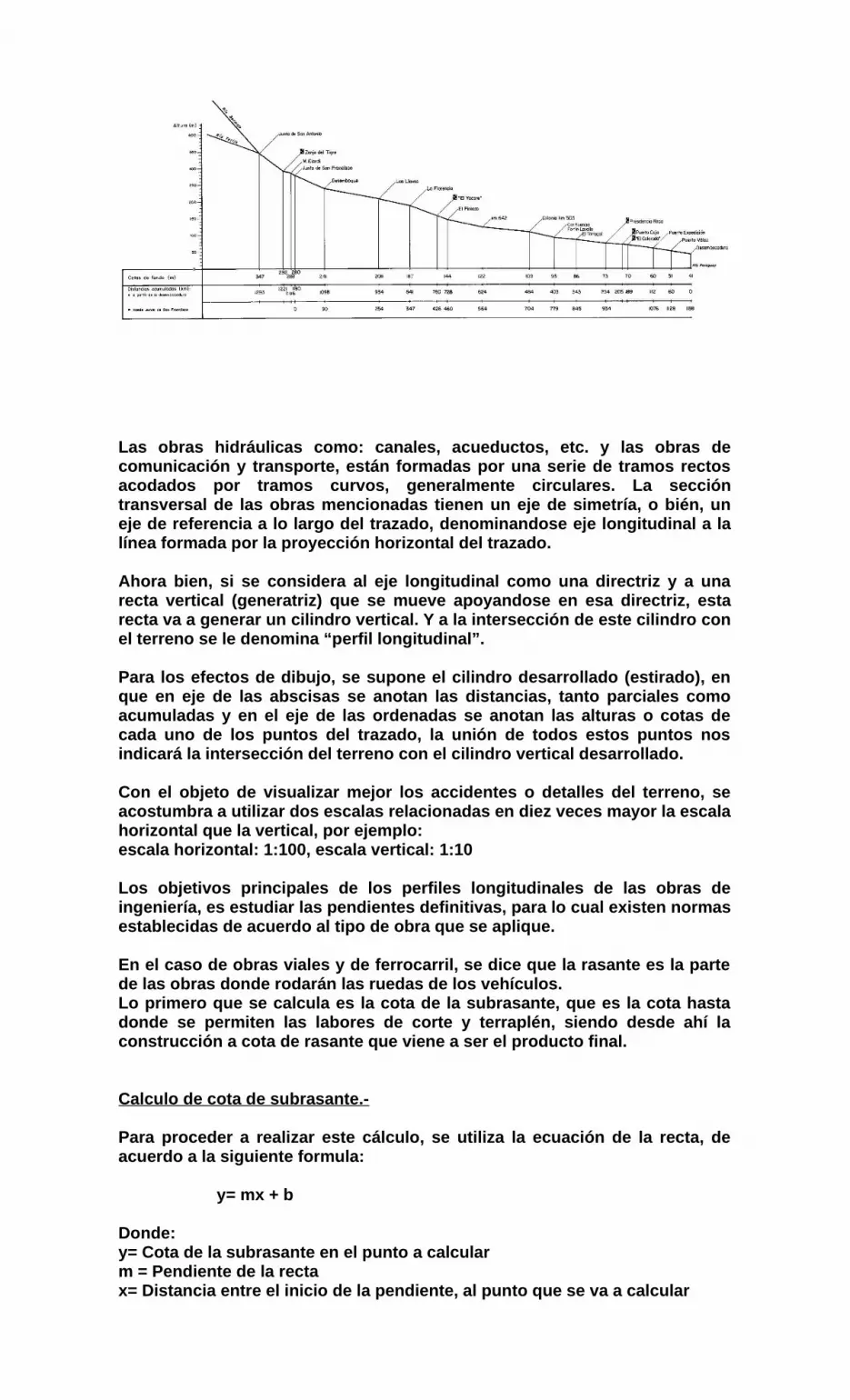
Ahora bien, si se considera al eje longitudinal como una directriz y a una recta vertical (generatriz) que se mueve apoyandose en esa directriz, esta recta va a generar un cilindro vertical. Y a la intersección de este cilindro con el terreno se le denomina “perfil longitudinal”.
Para los efectos de dibujo, se supone el cilindro desarrollado (estirado), en que en eje de las abscisas se anotan las distancias, tanto parciales como acumuladas y en el eje de las ordenadas se anotan las alturas o cotas de cada uno de los puntos del trazado, la unión de todos estos puntos nos indicará la intersección del terreno con el cilindro vertical desarrollado.
Con el objeto de visualizar mejor los accidentes o detalles del terreno, se acostumbra a utilizar dos escalas relacionadas en diez veces mayor la escala horizontal que la vertical, por ejemplo:escala horizontal: 1:100, escala vertical: 1:10
Los objetivos principales de los perfiles longitudinales de las obras de ingeniería, es estudiar las pendientes definitivas, para lo cual existen normas establecidas de acuerdo al tipo de obra que se aplique.
En el caso de obras viales y de ferrocarril, se dice que la rasante es la parte de las obras donde rodarán las ruedas de los vehículos. Lo primero que se calcula es la cota de la subrasante, que es la cota hasta donde se permiten las labores de corte y terraplén, siendo desde ahí la construcción a cota de rasante que viene a ser el producto final.
Calculo de cota de subrasante.-
Para proceder a realizar este cálculo, se utiliza la ecuación de la recta, de acuerdo a la siguiente formula:
y= mx + b
Donde:y= Cota de la subrasante en el punto a calcularm = Pendiente de la rectax= Distancia entre el inicio de la pendiente, al punto que se va a calcular

b= Cota del inicio de la pendiente
Sea o, el punto de origen del perfil, entonces b=yo y :
m1= (yj-yo)/(xj-xo)
Para cualquier punto i del tramo, las coordenadas de la rasante son xi e yi, en que xi es la distancia acumulada del punto i e yi es la cota de la subrasante del punto i, cuyo valor se puede determinar por:
yi= m1* xi + yo
A partir del punto j la subrasante cambia de dirección y si se quiere calcular los valores que generará esta nueva ecuación, se tendrá que determinar un valor m2 de acuerdo a:
m2= (yl-yj)/(xl-xj)
Por lo que , para determinar la cota de la subrasante en el punto n, se obtiene de la siguiente manera:
yn= m2* (xn-xj) + yj
CURVAS VERTICALES
Cuando existen cambios de pendientes o de gradientes, o de pendiente a gradiente y de gradiente a pendiente. (entendiendose por pendiente la que va bajando y gardiente la que va subiendo) en que la diferencia algebraica sea mayor al 0,2 % , las normas de vialidad de Chile, exigen el trazado de curvas verticales, con el objeto de aumentar las distancias de visibilidad en las cimas y las condiciones estéticas y rodadura en los valles.

En general estas curvas verticales son arcos de parábola, por ser esta curva la que mejor se adapta al cambio gradual de la pendiente y por la facilidad en el cálculo de las alturas en el desarrollo de la curva.
La ecuación de la parábola más utilizada es de la forma:
y= a+x^2
Donde:
a= E/T^2
Siendo:
E= Secante, que es la distancia entre el vértice de la parábola y el vértice de la intersección de las rectas, o bién, entre el vértice de la parábola y el punto medio de la cuerda que une los extremos de la curva.
T= Tangente, que es la distancia entre el vértice de intersección de las rectas y los puntos principio y final de la curva vertical.
Tanto la tangente como la secante se calculan aplicando las siguientes formulas:
E= (R/8)*(m1-m2)^2
T= (R/2)*(m1-m2)
Por lo tanto al reemplazar estos valores en y, se tiene:
y= (x^2/2*R)
Con estos valores se determinan los valores de la rasante, que es la cota definitiva del proyecto, a las curvas verticales concavas, el valor “y” se suma a la subrasante, en cambio en curvas convexas este valor se le resta a la subrasante.

Cálculo de las alturas de corte y terraplén.-
Para determinar las alturas de corte y terraplén, se deberá efectuar una resta entre la cota de terreno y la de rasante y se aplica el siguiente criterio:
Cota de terreno – cota de rasante
Valor positivo corresponde a altura de corteValor negativo corresponde a altura de terraplén
Perfiles transversales.-
Son las intersecciones del terreno con un cilindro vertical, perpendicular a la dirección del trazado.
El objetivo principal de los perfiles transversales es:Determinar el proyecto de la sección transversal de la obra y obtener la cubicación del material a extraer o rellenar, en un tramo comprendido entre dos estacas consecutivas.
Para la obtención de cada perfil, este se trata por separado y se puede desde una posición de instrumento tomar los antecedentes de varios perfiles.
Estos antecedentes son: eje de la obra y puntos ubicados a distancias hacia la derecha o hacia la izquierda, dependiendo de los cambios de pendientes laterales.
Registro de perfiles transversales.
ESTACAS DISTANCIADERECHA
DISTANCIAIZQUIERDA
ATRÁS INTERM ADELANT COTAINST
COTAPTOS
6 2,26 47,829 45,569D1 3,00 0,98 46,849D2 6,00 0,02 47,809I1 3,00 3,40 44,429I2 6,00 3,94 43,889
Para el dibujo se procede con cada uno de ellos en forma independiente, pero correlativamente distribuídos sobre el papel, empleándose en algunos

casos los milimetrados , pues las dos escalas pueden ser las mismas si el terreno es más o menos plano, si éste presenta demasiada pendiente lateral, la escala vertical deberá modificarse. Si usamos papel milimetrado se acostumbras a usar como escala única 1:100
CÁLCULO DE LAS SUPERFICIES O ÁREAS.-
Suponemos dibujado el perfil 6 del registro anterior, donde aparecen 5 áreas por medir y los antecedentes de los taludes, en este caso:Talud de corte: 1:1Talud de terraplén: 3:2
Cálculo de las alturas (h)
h1= 45,29 – 44,429 = 0,861h2= 45,569 – 45,29 = 0,279h3= 46,849 – 45,29 = 1,559
Tc= 1/1 1/Tc= 1Tt= 3/2 1/Tt= 0,67
Cálculo de p1 y p2 (pendientes)
p1=(44,429 – 43,889)/3,00 = 0,18p2=(47,809 – 46,849)/3,00 = 0,32
a= ancho de la pista = 3,00 m.Cálculo de s1:
s1= h1^2/((2*(1/Tt)-p1)s1= 0,756 m2.
Cálculo de s2:
s2= (h1^2/(h1+h2))*as2= 1,951 m2.
Cálculo de s3:
s3= (h2^2)/(h1+h2))*as3= 0,205 m2.
Cálculo de s4:
S4= ((h2+h3)/2)*aS4= 2,757 m2.
Cálculo de s5:
S5=h3^2/((2*(1/Tc)-1)-p2)S5= 1,787 m2.
Resumen del perfil 6
Superficie de terraplén = s1 + s2St= 0,756 + 1,951 = 2,707 m2.
Superficie de corte = s3 + s4 + s5Sc = 0,205 + 2,757 + 1,787 = 4,749 m2.
CÁLCULO DE VOLÚMENES.-
Conocidas las áreas o superficies de cada perfil transversal, se procede al cálculo de volúmenes entre perfiles y así obtener las cubicaciones totales del proyecto.
Para el cálculo de volúmenes se pueden presentar los siguientes casos generales:
a) Cuando se presenta el caso en que los dos perfiles a calcular sean o de corte o de terraplén, para lo cual se utilizan las siguientes formulas:
Vc1-2= ((Sc1+Sc2)/2) * d
Siendo:Vc1-2 = Volumen de corte entre los perfiles 1 y 2d = Distancia parcial entre los perfiles 1 y 2
Vt1-2= ((St1+St2)/2) * d
Siendo:Vt1-2 = Volumen de terraplén entre los perfiles 1 y 2
b) Cuando se presenta el caso en que un perfil está en corte y el otro en terraplén, se procede a calcular el volumen aplicando la siguiente fórmula:
Vc2-3= (Sc2^2/(2*(Sc2+St3)))*d
Vt2-3=(St3^2/(2*(Sc2+St3)))*d

c) El caso más generalizado se puede apreciar en la siguiente lámina:
Una vez completado todo el proceso de cálculo, se realizará el resumen final, donde se sumarán todos los volúmenes de corte y todos los volúmenes de terraplén.
Volumen total de corte = Vc1 + Vc2 + Vc3 + etc.
Volumen total de terraplén = Vt1 + Vt2 + Vt3 + etc.





























