Embed Size (px)
Citation preview

1 MASTER GENIE MECANIQUE
OUTILS DE CONCEPTION EN
MECANIQUE
Spécification Géométrique des Produits : GPS

2
Objectifs
Objectifs : - Proposer une démarche pour réaliser la cotation
fonctionnelle d ’un mécanisme, c ’est à dire de traduire une condition de fonctionnement en spécifications dimensionnelles et géométriques sur les pièces du mécanisme en utilisant le langage ISO de tolérancement.
- Intégrer cette démarche dans le concept de la Spécification Géométrique des Produits GPS

3
Introduction
La cotation fonctionnelle a pour but de déterminer et/ou de traduire des Conditions d ’Aptitudes à l ’Emploi (CAE aussi appelée Conditions Fonctionnelles) associées à un mécanisme en Spécifications sur les pièces.
Comme son nom l ’indique, une Condition Fonctionnelle, c ’est une condition que doit respecter le mécanisme pour qu ’il fonctionne correctement et respecte le cahier des charges fonctionnel. Cette condition peut-être issue d ’un critère de précision, de résistance, de rendement, de durée de vie, de montage, … et se traduit en Spécifications sur les pièces intervenant dans cette condition.
Les spécifications sur une pièce doivent permettre de caractériser les dimensions des surfaces, leurs formes, leurs orientations, leurs positions,… mais aussi les variations acceptables de ces dernières pour que la CAE soit respectée.

4
Introduction
Le concepteur doit concevoir un produit qui répond à un cahier des charges fonctionnel à ce titre il doit être capable :
• d’imposer les CAE relatives à une fonction du CDCF
• de traduire les CAE en spécifications sur les pièces
• de déterminer les intervalles de tolérances ( limites acceptables de la variation).
• d’utiliser un langage normalisé pour que ces spécifications puissent être interprétées par les autres acteurs. En effet, les spécifications devront être utilisées pour choisir les moyens de production, et de contrôle.
Remarque : Les CAE doivent déterminer l ’ensemble des spécifications, dans ce document, nous nous attacherons plus particulièrement aux spécifications dimensionnelles et géométriques. Les spécifications (choix des matériaux, états de surface,…) seront fixées par le cdcf

5
La (une) démarche
4 - Traduire pour chaque pièce, les conditions fonctionnelles sous la forme de contraintes dimensionnelles et géométriques en utilisant le langage ISO (point de vue nominal plusieurs solutions possibles et sans quantification des IT)
1 - Représenter le mécanisme par un modèle nominal 2 - Exprimer pour ce mécanisme les conditions de bon fonctionnement (montage, précision, rendement, durée de vie,…) 3 - Définir les surfaces influentes du mécanisme permettant de transformer les conditions fonctionnelles en conditions géométriques entre pièces
5 - Proposer un modèle d’écarts ( hypothèses)
6 - Proposer un modèle géométrique cohérent : modèle d’écarts et l ’ensemble des spécifications ( choix et relation écart-IT)
7 - Déterminer l ’inéquation issue du modèle géométrique afin de respecter la condition fonctionnelle étudiée
8 - Répartir les IT

6
1 - Représenter ce mécanisme par un modèle nominal
- Base rotative -

7
2 - Exprimer les conditions de bon fonctionnement
Bon fonctionnement de la liaison pivot plateau/bâti
Bon fonctionnement de la butée à rouleaux coniques (5)
Données constructeur rotulage admissible adm = 5 ’ d ’angle adm = 1,45 10-3 rad

8
3 - Définir les surfaces influentes du mécanisme - contrainte géométrique
//
9
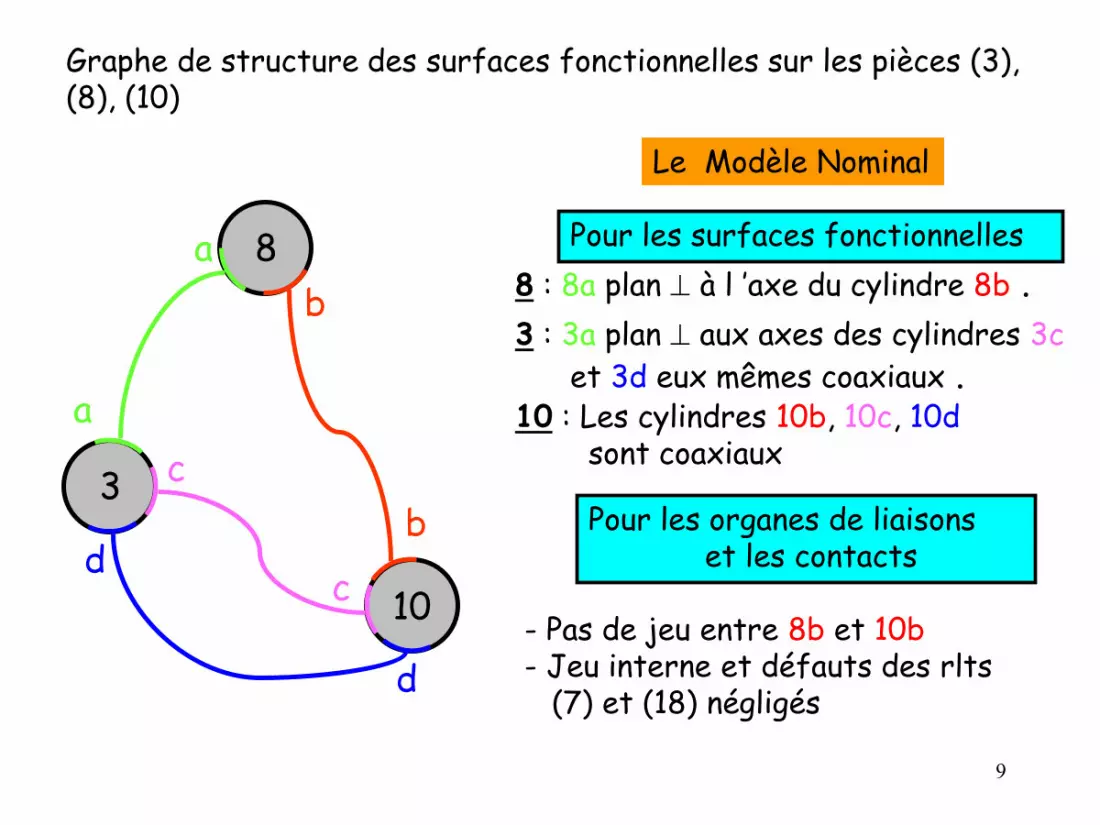
Graphe de structure des surfaces fonctionnelles sur les pièces (3), (8), (10)
8
10
3
a
a
c
c d
d
b
b
Le Modèle Nominal
8 : 8a plan à l ’axe du cylindre 8b . 3 : 3a plan aux axes des cylindres 3c
et 3d eux mêmes coaxiaux . 10 : Les cylindres 10b, 10c, 10d sont coaxiaux
- Pas de jeu entre 8b et 10b - Jeu interne et défauts des rlts (7) et (18) négligés
Pour les surfaces fonctionnelles
Pour les organes de liaisons et les contacts

10
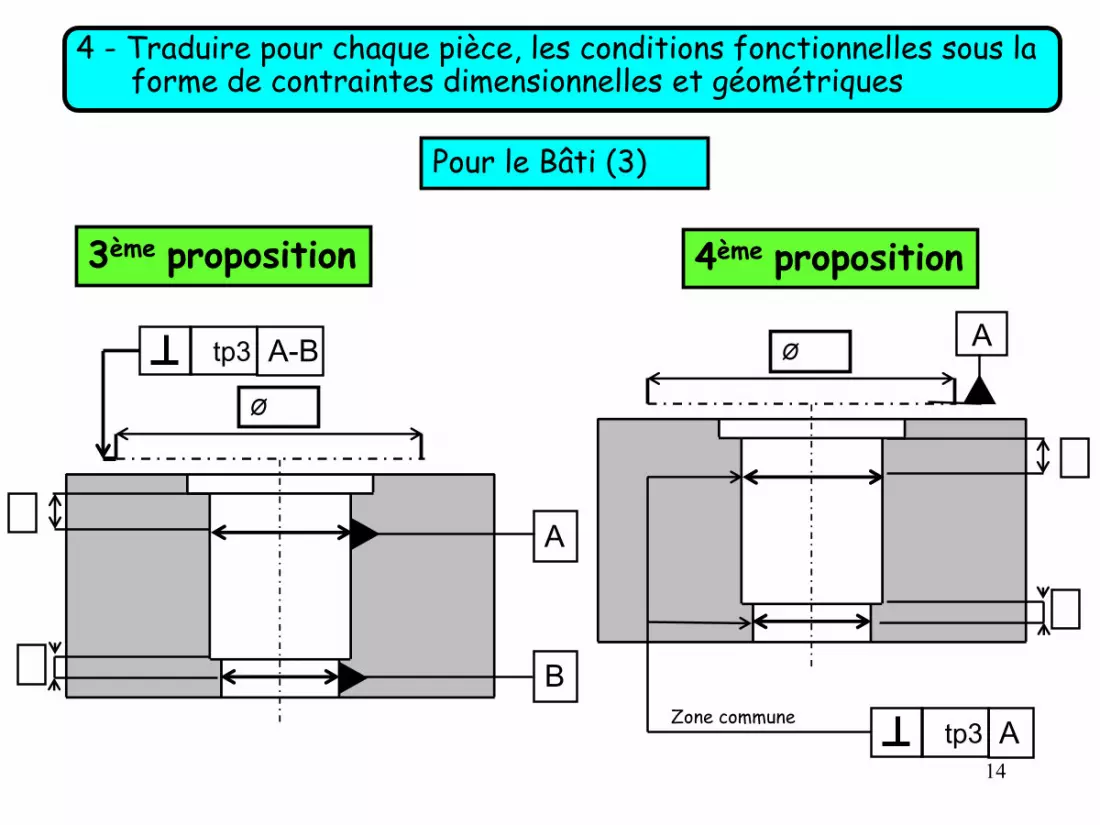
4 - Traduire pour chaque pièce, les conditions fonctionnelles sous la forme de contraintes dimensionnelles et géométriques
1ère proposition tp8 A
A
tp8 A
A
2ème proposition
Pour le plateau (8)

11
1ère proposition 2ème proposition
Pour l ’arbre (10)
A
A Ø t...
A Ø t...
A
B
A-B Ø t...
4 - Traduire pour chaque pièce, les conditions fonctionnelles sous la forme de contraintes dimensionnelles et géométriques

12
3ème proposition 4ème proposition
A-B Ø t...
A
B
A
B
A-B t...
Pour l ’arbre (10)
4 - Traduire pour chaque pièce, les conditions fonctionnelles sous la forme de contraintes dimensionnelles et géométriques

13
D - Traduire pour chaque pièce, les conditions fonctionnelles sous la forme de contraintes dimensionnelles et géométriques
1ère proposition 2ème proposition
Pour le Bâti (3)
A
tp3 A
A Ø t...
A
tp3 A-B
B
4 - Traduire pour chaque pièce, les conditions fonctionnelles sous la forme de contraintes dimensionnelles et géométriques
14
A
B
Ø A
tp3 A-B
Ø
tp3 A Zone commune
D - Traduire pour chaque pièce, les conditions fonctionnelles sous la forme de contraintes dimensionnelles et géométriques
3ème proposition 4ème proposition
Pour le Bâti (3)
4 - Traduire pour chaque pièce, les conditions fonctionnelles sous la forme de contraintes dimensionnelles et géométriques

15
Hypothèses :
A- On néglige les jeux radiaux dans les roulements (7) et (18). L ’axe de rotation sera défini par les centres des portées de roulement sur (3) et (10).
B - On néglige le jeu radial entre plateau (8) et l ’arbre (10)
C - On néglige les défauts de forme devant les défauts d ’orientation
D - Les défauts d ’orientation sont tels que l ’hypothèse des petits déplacements pourra être posée
5- Proposer un modèle d’écart
16
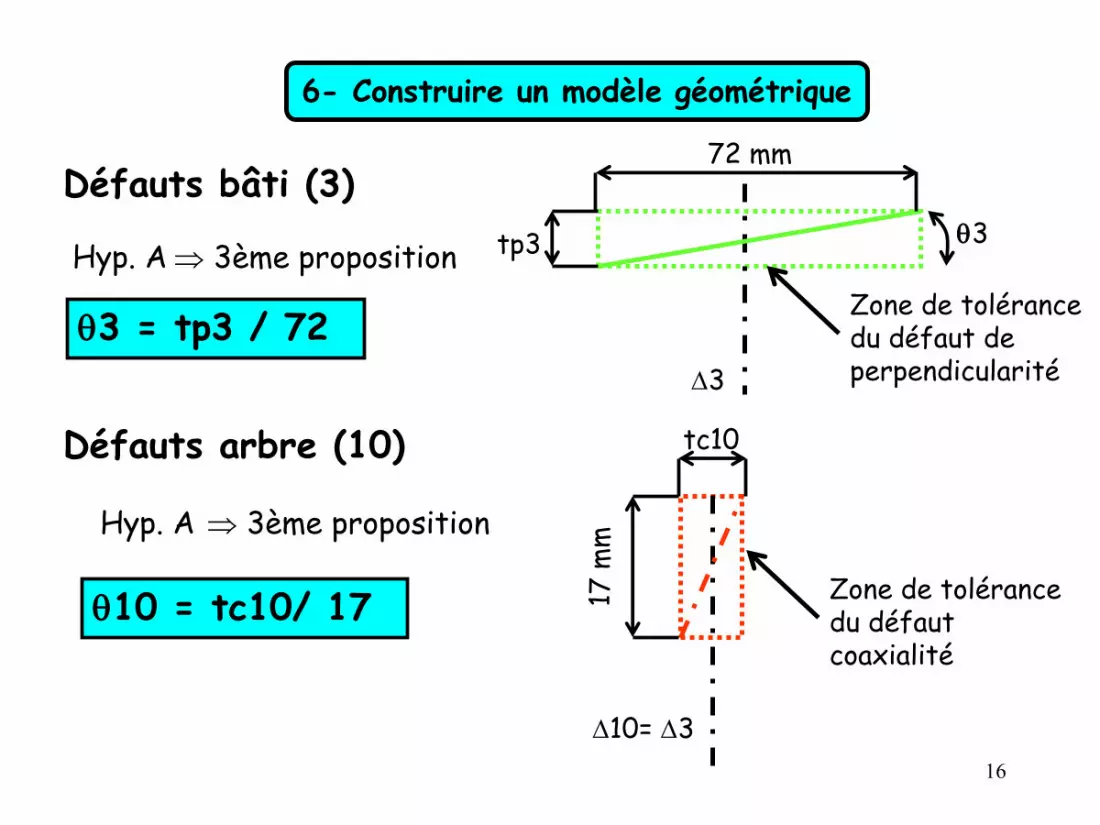
Défauts bâti (3)
3 = tp3 / 72
Défauts arbre (10)
10 = tc10/ 17
6- Construire un modèle géométrique
Hyp. A 3ème proposition
3
tp3
72 mm
3
17 m
m
tc10
10= 3
Hyp. A 3ème proposition
Zone de tolérance du défaut coaxialité
Zone de tolérance du défaut de perpendicularité

17
Défauts plateau (8)
8 = tp8 / 72
6- Construire un modèle géométrique
Hyp. B +centrage long
1ère proposition
8= 10 ’
tp8
72 mm
8
Zone de tolérance du défaut de perpendicularité

18
Dans le cas le + défavorable : 8 + 10+ 3 < adm
En prenant 8 = 10 = 3 = adm/3 = 4.8 10-4 rad
On obtient : tp8 = tp3 = 0.035 mm et tc10 = 0,009 mm !!!
Conclusions
- IT assez faibles dans l ’absolu mais pas trop en regard de la dimension des éléments tolérancés
- Cas le + défavorable
- Structure de liaison hyperstatique 7 - Déterminer l ’inéquation issue du modèle géométrique afin de respecter la condition fonctionnelle étudiée
8 - Répartir les IT
- Structure de liaison hyperstatique

19
Etude 2 : Traduction d’une condition de précision
a < 0,1 mm

20
Etude 2 : Traduction d’une condition de précision
8
10
3 c
c d
d
a
a
b
b
Le Modèle Nominal
8 : 8a plan à l ’axe du cylindre 8b et 8c 8b (8c // 8a)
3 : 3a plan aux axes des cylindres 3c
et 3d eux mêmes coaxiaux .
10 : Les cylindres 10b, 10c, 10d sont coaxiaux
- Pas de jeu entre 8b et 10b - Jeu interne et défauts des rlts (7) et (18) négligés
Pour les surfaces fonctionnelles
Pour les organes de liaisons et les contacts
c

21
Etude 2 : Traduction d’une condition de précision
Ajout d ’une condition géométrique sur (8)
1ère possibilité : ajouter une condition : 8c 8b
Cela signifie que l ’on fait l ’hypothèse que c ’est la surface 8b qui oriente la pièce 8. Ceci est d ’autant plus vérifié que le jeu entre 8b et 10b est faible (voire serrage)
2ème possibilité : ajouter une condition : 8c // 8a
Cela signifie que l ’on fait l ’hypothèse que c ’est la surface 8a par l ’intermédiaire de la (butée) qui oriente la pièce 8.
tp8 ’ A
A
Tp8 ’ C
C

22
Le modèle d’écart
Hypothèses : A, B, C de la 1ère étude + 1ère possibilité
Construire un modèle géométrique
10 = rot 10
10 ’ = 8 8 ’
tp8 ’
a
8 ’=tp8 ’/(2.r8)
a = 2.r8.sin(8 ’+ 10) a 2.r8.(8 ’+ 10)

23
Inéquation issue du modèle géométrique pour respecter la condition fonctionnelle
Dans le cas le + défavorable : 8 ’ + 10 < a/(2.r8) 8 ’ + 10 < 1.2 10-3 rad
En prenant 10 = 4.8 10-4 rad
On obtient : tp8 ’ = 2.r8. 8 ’ = 0,06 mm
Il faut 8 ’ = 7.4 10-4 rad
Répartir les IT

24
Etude 3 : Traduction d ’une condition de montage
Montage du flasque (6) Mise en position :
- Appui plan - Centrage court Ø45 H8/f7
Maintien en position :
- 3 vis M5 à 120° sur Ø38mm - taraudage - trou de passage Ø5,5 H13 (Série Moyenne)

25
Etude 3 : Traduction d ’une condition de montage
6
14.1 3
e
e
f
g
f
g
g
g
14.2
14.3
g g
g
g

26
Spécifications sur le flasque (6)
Localisation des trous de passage sur (6)
A
A
B
B
x3 à 120°
Ø t6 Ø5.5 H13

27
Spécifications sur le bâti (3)
Localisation des taraudages sur (3)
A
A
B
x3 à 120°
Ø t3 ØM5
B P 4
.5
P

28
(3)
Détermination des IT : t6 et t3
Cas 1 : centrage court + 1 Vis
(6)

29
Détermination des IT : t6 et t3
On se place dans la configuration suivante :
- les défauts de localisation du trou de passage et du taraudage sont dans le cas le plus défavorable
- les jeux dans le centrage court et le trou de passage/vis permettent de corriger les défauts de localisation (on cherche une position qui permet le montage)
- les différentes pièces sont dans leur état maximal de matière (cas le plus défavorable du point de vue montage)
- on néglige le jeu vis/taraudage

30
Détermination des IT : t6 et t3
Cas 1 : centrage court + 1 Vis
(3)
(6)
t3 + t6 (D3- D6 ) + (Dpass - Dvis )
J = - Dvis - t3 + D + D3 - D6 - D - t6 + Dpass)
2 0

31
Détermination des IT : t6 et t3
t3 + t6 (D3- D6 )mini + (Dpass - Dvis )mini
t3 + t6 0,525 mm
Dans le cas le plus défavorable (jeux mini) :
Ø45 H8/f7 (D3- D6 ) mini = 0,025 mm
(Dpass - Dvis )mini = 0,5 mm
1ère proposition Øtl6 = Øtl3 = 0,26 mm
Remarque : le jeu dans le Ø45 H8/f7 aurait pu être négligé dans ce cas précis
Avec :

32
Détermination des IT : t6 et t3
Cas 2 : centrage court + 2 vis diamétralement opposées
(3)
(6)
Le jeu dans le centrage court ne permet de corriger les défauts de localisation !!!
t3 + t6 (Dpass - Dvis )mini
2ème proposition Øtl6 = Øtl3 = 0,25 mm

33
Utilisation du Maximum de matière
2ème proposition = cas le + défavorable pour le trou de passage Ø 5.5 H13
Mais Ø 5.5 H13 = Ø 5.5
+0.18 0
Si le trou était Ø 5.68 la pièce aurait était non conforme alors qu ’elle aurait pu se monter !!!
M Ø0.25 Ø5.5 H13
A B Notation :
signification :
Ø 5.68
0.43
Ø 5.5
0.25
Ø M Ø0.25 A B M
Dans notre cas 1 l ’Exigence du Maximum de matière aurait pu s ’appliquer aussi à l ’élément de référence B :
Remarque :

34
EXIGENCE du MAXIMUM DE MATIERE
(2)
Etude du montage de (2) sur (1) : appui plan + assemblage cylindrique
(1)
La précision du montage nécessite un ajustement du
type Ø 20 H8 / f7 avec Exigence de l ’enveloppe Ø 20 H8 / f7 E
Appui plan tolérance de sur (1) et (2)
A
Ø 20 f7 E
A
Ø 20 H8 E
A Ø to1
A Ø to2

35
EXIGENCE du MAXIMUM DE MATIERE
(2)
Détermination de to1 et to2
(1)
Analyse du montage dans le cas le + défavorable
Pour (1) : Ø20 f7 d1max = Ø19,8 Pour (2) : Ø20 H8 D2min = Ø20
Si pas de défaut de Jeu = 0,2 mm
jeu
Sans défaut géo. de
Ce jeu permet donc des défauts de sur (1) et (2) :
to1+ to2 = 0,2 mm
On peut choisir :
to1= to2 = 0,1 mm

36
EXIGENCE du MAXIMUM DE MATIERE
Le choix de to1= to2 = 0,1mm garantit le montage mais il peut conduire à
refuser des pièces qui sont aptes à l ’emploi.
Si d1 < d1max on pourrait augmenter to1 Si D2 > D2min on pourrait augmenter to2
0.41 0.53
Ø 20,33 Ø 20
0.2
d2
to2
Ø 19,59 Ø 19.8
0.2
d1
to1
Créer une dépendance entre la dimension et la géométrie : M

37
Cette frontière permet de décrire la frontière d interchangeabilité pour la
condition de montage.
EXIGENCE du MAXIMUM DE MATIERE : L ’exigence du maximum matière implique que l ’état virtuel *de l ’élément tolérancé (et si indiqué, l ’état de forme parfaite au maximum de matière pour l ’élément de référence) ne soit pas dépassé. Cette exigence prend en compte la relation mutuelle de la dimension et de la tolérance géométrique concernée. Cette exigence est notée : M
Etat virtuel : Etat de l ’enveloppe limite de forme parfaite permis par les exigences
du dessin pour l ’élément. Il est généré par l ’effet collectif de la dimension au
maximum de matière et des tolérances géométriques.
L ’état virtuel est une frontière qui ne doit pas être franchie par la matière de la pièce.
Le contrôle peut s ’effectuer facilement grâce à un calibre
A Ø to M





























![S. Verdan, A. Kenzelmann Pfyffer, C. Léderrey, Céramique géométrique d'Erétrie. Eretria, Fouilles et recherches XX, Gollion, 2008 [contents + summary]](https://img.pdfslide.net/doc/110x75/631d322193f371de1901d08d/s-verdan-a-kenzelmann-pfyffer-c-lederrey-ceramique-geometrique-deretrie.jpg)