Embed Size (px)
Citation preview

Modelización Aplicada a la Ingeniería
Editores
Walter Legnani Pablo Jacovkis
Ricardo Armentano
Volumen I
Universidad Tecnológica Nacional Facultad Regional Buenos Aires
Año 2005

Modelización aplicada a la ingeniería / Walter Legnani…[et al]. – 1a .ed. – Buenos Aires : Universidad Tecnológica Nacional, 2005. 480 p. ; 23x17 cm. ISBN 950-42-0057-5 1. Ingeniería-Modelado Matemático. CDD 620 Modelización aplicada a la ingeniería / Walter Legnani…[et al]. – 1a .ed. – Buenos Aires : Universidad Tecnológica Nacional, 2005. Internet ISBN 950-42-0058-3 1. Ingeniería-Modelado Matemático. CDD 620 Modelización aplicada a la ingeniería / Walter Legnani…[et al]. – 1a .ed. – Buenos Aires : Universidad Tecnológica Nacional, 2005. 1 CD ROM ISBN 950-42-0059-1 1. Ingeniería-Modelado Matemático. CDD 620
Fecha de catalogación 04-01-05

Modelización Aplicada a la Ingeniería
Editores
Walter Legnani Pablo Jacovkis
Ricardo Armentano
Volumen I

I
Introducción de los editores
La modelización matemática computacional se ha convertido en una poderosa
herramienta de trabajo en las ciencias naturales y en tecnología: los complejos diseños
tecnológicos actuales sólo pueden estudiarse a través de su correcta modelización.
A esto se le debe acompañar el hecho de que en casi todos los sistemas de
modelado se dispone de herramientas de visualización y animación muy amigables para
el usuario y de gran poder de representación gráfica, lo que ha posibilitado interpretar la
solución de determinados problemas de una forma nunca antes llevada a cabo.
Este tipo de planteo del quehacer científico-tecnológico requiere una estrecha
colaboración entre los científicos y los tecnólogos.
En muchos casos la modelización ha dado resultados sorprendentes, y en
algunos revolucionarios; ha contribuido a avanzar en áreas del conocimiento que hasta
hace un par de décadas parecían excesivamente lejanas y que hoy en día están casi al
alcance de la mano, y en otros casos, dado el profundo impacto en la forma de pensar de
los investigadores, ha planteado nuevas e inquietantes preguntas. En este sentido el
diseño e implementación de modelos para estudiar problemas del mundo real es en sí
mismo una metodología de investigación autónoma que se está consolidando, con una
acabada capacidad de formación profesional y con prometedores horizontes.
Disponer de un laboratorio para realizar complejos y/o peligrosos ensayos
requiere fuertes inversiones, una considerable dotación de personal y una infraestructura
que le dé soporte. En cambio, muchas veces un laboratorio de modelado del mismo
proceso o sistema, con unos pocos escritorios, algunas computadoras, y media docena
de investigadores, tiene una elevadísima posibilidad de ser igualmente exitoso, a un
bajo costo, muchas veces en menor tiempo y en forma segura. A veces, incluso, razones
éticas impiden la experimentación física y no la experimentación matemática. Por
supuesto, los laboratorios computacionales también pueden ser más caros que los antes
indicados, cuando están formados por clusters o por supercomputadoras destinadas a
modelizaciones extremadamente complejas o procesos con cantidades inmensas de

II
datos y simulaciones, pero en muchos casos los problemas pueden encararse con
equipamiento computacional simple como el antes indicado.
Las teorías científicas siempre se expresan en un lenguaje formal: el
matemático. Este lenguaje formal se traduce en la mayoría de los casos a pseudocódigos
computaciones que implementados en forma adecuada producirán los resultados
buscados: la computadora pasa a ser el laboratorio del modelista matemático.
Los modelos, en sí mismos, pueden tener diversas aplicaciones: reproducir
algún fenómeno de la realidad, hallar la solución de un problema nuevo que hasta ese
momento no había sido resuelto y, sobre todo, predecir un enorme rango de escenarios
posibles.
El presente libro recoge importantes experiencias de modelado en varias áreas
del campo de la ingeniería con diversas y novedosas aplicaciones.
La convocatoria a aportar artículos para este libro ha sido considerablemente
exitosa, dado que se han podido reunir en una sola obra 22 capítulos sobre un amplio
abanico de temas. El lector podrá encontrar en estas páginas desarrollos que van desde
la bioingeniería y la hidráulica fluvial hasta modelos de transporte de carga. Todos
ellos desarrollados por investigadores de diversos centros y grupos, tanto de
Universidades nacionales como extranjeras.
A modo de reconocimiento en el desarrollo de este proyecto los editores desean
expresar su gratitud al MsC. Franco Pessana, quien contribuyó muy amablemente en la
edición y referato de algunos de los capítulos.
También queremos reconocer el apoyo brindado por las autoridades de la
Facultad Regional Buenos Aires de la Universidad Tecnológica Nacional, a través de su
Decano, Arq. Luis A. De Marco, y su Secretario de Ciencia y Tecnología, Lic. Oscar
Noguez. Es importante además destacar el aliento y el apoyo brindado por la Dra.
Graciela Boente Boente, directora del Instituto de Cálculo de la Facultad de Ciencias
Exactas y Naturales de la Universidad de Buenos Aires.
Para coronar esta sección de agradecimientos se debe destacar la desinteresada y
muy profesional participación de todos los autores, que han brindado sus aportes y han
colaborado en las diversas etapas de la edición a la par de los que suscriben.

III
Finalmente es la esperanza de los editores que este libro sea de la más rápida y
amplia difusión, que se emplee como material de referencia para investigadores y que
las secciones que lo permitan se puedan utilizar en los diferentes cursos, ya sean de
grado o de posgrado.
Dr. Walter Legnani
Departamento de Ingeniería Eléctrica, Facultad Regional Buenos Aires, Secretaría de Ciencia y Tecnología
Facultad Regional Buenos Aires, Universidad Tecnológica Nacional, Argentina.
Dr. Pablo M. Jacovkis Departamento de Computación e Instituto de Cálculo, Facultad de Ciencias Exactas y
Naturales, Universidad de Buenos Aires, Buenos Aires, Argentina.
Dr. Ricardo Armentano.
Facultad de Ingeniería, Ciencias exactas y Naturales, Universidad Favaloro, Buenos Aires, Argentina.
Secretaría de Ciencia y Tecnología Facultad Regional Buenos Aires, Universidad Tecnológica Nacional, Argentina.


Índice
Capítulo Página
Ingeniería cardiovascular: modelos y aplicaciones 1 Armentano, R. L., Barra, J. G., Graf, S., Pessana M. y Craiem D.
Soldadura por fricción agitación “friction stir welding” 28 Cassanelli, A., Lombera, G., De Vedia, L., Urquiza, S. y Santiago, D.
Modelización de estructuras laminares cilíndricas, aplicación práctica al caso de silos Parte I: silos horizontales
43
Ciancio, P., Ercoli, N. y Berardo, C.
Teoría general linealizada de vigas rectas y curvas de paredes delgadas construidas con materiales compuestos.
70
Cortinez, V. y Piovan, M.
Some approaches to the Río de la Plata modeling 94 Jacovkis, P. Técnicas asintóticas de análisis de inestabilidad estructural 105 Jouglard, C.
Modelado de conductos colectivos para evacuación de gases de combustión 124 Legnani, W., Quadri, N., Ibáñez, F. y Piñeiro, A.
Modelación de procesos de falla en hormigón mediante los criterios meso y macromecánicos
150
Lorecife, R. y Patron, M.
La utilización de la técnica de bond graphs en la simulación de transitorios hidráulicos
177
Martins, A., Tiago Filho, G. y Laurent, R.

Índice (continuación)
Capítulo Página
Simulación de procesos estocásticos aplicada a sistemas de transporte. El caso del transporte de carga
191
Millin, E. y Quiroga, S.
Modelación del flujo alrededor de un cilindro infinito: Métodos de Lagrange – Volúmenes Finitos
204
Molina, N.
Un enfoque del problema de difusión atmosférica 224 Nagornov, O., Caligaris, R., Rodríguez, G., Quaranta, N. y Caligaris, M.
Modelo de empaquetamiento a partir de la estructura del núcleo celular interfásico
251
Nasazzi, N. y Otero, D.
Tópicos en la valuación de derivados dependientes del camino 261 Neuman, C. y Zanor, M.
Análisis tridimensional de fisuras de intercara utilizando el método de los elementos de contorno
284
Ortiz, J. y Cisilino, A.
Modelización estadística del movimiento de separadores 313 Otero, D.
Análisis de deformación de dentados en trenes de engranajes 326 Piovan, M. y Cortinez, V.
Simulación del flujo superficial y subterráneo acoplados 347 Porta, P.

Índice (continuación)
Capítulo Página
Modelado de fenómenos aeroelásticos lineales y no-lineales Parte 1: Los modelos aerodinámico y estructural
365
Preidikman, S. y Mook, D.
Modelado de fenómenos aeroelásticos lineales y no-lineales Parte 2: Combinando los modelos y ejemplos numérico
389
Preidikman, S. y Mook, D.
Aceleradores de partículas: Modelos para su diseño y la dinámica del haz 411 Strangis. R.
Aplicación de estrategias de adaptación biológica a la optimización de formas estructurales
442
Wessel, C., Cisilino, A. y Sensale, B.


Modelización Aplicada a la Ingeniería
1
Ingeniería cardiovascular: modelos y aplicaciones
RICARDO L. ARMENTANO ab, JUAN GABRIEL BARRA a, SEBASTIÁN GRAF ab,
FRANCO M. PESSANA ab, DAMIAN CRAIEM ab
a Facultad de Ingeniería, Ciencias exactas y Naturales, Universidad Favaloro, Buenos Aires, Argentina.
b Secretaría de Ciencia y Técnica, FRBA, Universidad Tecnológica Nacional, Buenos Aires, Argentina.
Introducción
La Ingeniería Cardiovascular integra elementos de la biología, la ingeniería eléctrica, la ingeniería mecánica, la matemática y la física con el fin de describir y comprender al sistema cardiovascular. Su objetivo es desarrollar, comprobar y validar una interpretación predictiva y cuantitativa del sistema cardiovascular en un adecuado nivel de detalle, y aplicar conceptos resultantes hacia la solución de diversas patologías. La dinámica del sistema cardiovascular caracteriza al corazón y al sistema vascular como un todo, y comprende la física del sistema circulatorio incluyendo el continente (las paredes arteriales) y el contenido (sangre), así como la interrelación entre ambos. La pared arterial y la sangre contienen la información esencial sobre el estado fisiológico del sistema circulatorio completo, en tanto que la interdependencia de estos componentes está relacionada con procesos complejos que podrían explicar la formación de lesiones en la pared vascular, tales como las placas de ateroma, o el aumento en la rigidez de la pared como está descrito en la hipertensión arterial. Los incipientes cambios morfológicos de la pared arterial inducidos por procesos patológicos pueden ser considerados marcadores precoces de futuras alteraciones circulatorias. La modelización matemática de la pared arterial, a partir de la estimación de los coeficientes de la ecuación del modelo, obtenida a través de estudios en animales conscientes, constituye una herramienta de valor indispensable para una mejor comprensión de la génesis de las enfermedades cardiovasculares. Modelos de conocimiento deben ser aplicados, para lograr un mejor abordaje clínico que permita evaluar los efectos del envejecimiento y eventos patológicos como la hipertensión, la hipercolesterolemia y la ateroesclerosis.
La hemodinámica arterial abarca diversos dominios, sin embargo, su campo de investigación podría resumirse en la descripción y comprensión de los fenómenos fisiológicos y fisiopatológicos que se relacionan a la onda de presión y al flujo de sangre en las arterias.

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
2
Breve Historia El conocimiento de la física (propiedades hidrodinámicas y mecánicas) del
sistema cardiovascular, y su relación con datos fisiológicos y patológicos ha sido el objetivo de varios científicos desde tiempos muy remotos. Aristóteles (384-322 a.C.) fue un elocuente defensor de la relación entre la física (que él entendía como la descripción general del Universo) y el estudio de las cosas vivientes. En 1615, William Harvey (1578-1658) describió la circulación en un descubrimiento que puede ser catalogado como un desarrollo teórico debido a que llegó a tamizar sus convicciones a través de razonamientos lógicos, sin la necesidad de una comprobación experimental, postulando la obligada y lógica existencia de los vasos capilares, demostrados efectivamente en un microscopio por Marcello Malpigie (1628-1694) 45 años después. Un contemporáneo de Harvey fue Galileo Galilei (1564-1642), quien fue estudiante de medicina antes de trascender como un físico famoso. Él descubrió la constancia del período del péndulo y la utilizó para medir la frecuencia cardíaca; fue asimismo inventor del termoscopio y diseñador de un microscopio (en el sentido actual), pero su mayor contribución al campo de la medicina fue tal vez su prédica sobre estos tópicos en Padua, donde Harvey era estudiante. Otro colega de Galileo fue Santorio Santorio (1561-1636), profesor de medicina en Padua y pionero en el uso de las mediciones físicas en medicina; diseñó y experimentó con una gran balanza para estudiar cambios metabólicos, por lo cual podría ser considerado el fundador del estudio moderno del metabolismo.
Los descubrimientos de Galileo y las demostraciones de Harvey y Santorio impulsaron la explicación de los procesos vitales mediante métodos físicos. Los fundamentos matemáticos de la fisiología inspiraron a René Descartes (1596-1650) a proponer una teoría fisiológica sobre bases mecánicas en el que se considera el primer libro moderno sobre este enfoque de la fisiología (publicado después de su muerte en 1662). Sobre bases teóricas desarrolló un complicado modelo animal incluyendo las funciones nerviosas. Estudios posteriores no pudieron comprobar la veracidad de este modelo lo cual provocó una gran pérdida de confianza en el enfoque de Descartes. A Giovanni Alfonso Borelli (1608-1679) celebre matemático, astrónomo y amigo de Galileo, se le atribuyó la escuela “iatrofísica” o “iatromatemática”. En su obra maestra, el libro De motu animalium (1680-1681), presenta una fisiología mecanística basada enteramente sobre la naturaleza corpuscular de la materia, en un intento de extender a la biología el riguroso estilo del análisis geométrico usado por Galileo en mecánica. Robert Boyle (1627-1691) estudió los pulmones y Robert Hooke (1635-1703) postuló la famosa ley de la elasticidad y fue además quién acuñó la palabra célula para designar a la unidad anatómica y fisiológica de los seres vivos. De la propagación de ondas en las arterias se ocupó Leonhard Euler (1707-1783) en 1775. Thomas Young (1773-1829), el creador del módulo que lleva su nombre, fue un célebre médico londinense; sus trabajos sobre la teoría de la luz estaban dirigidos al

Modelización Aplicada a la Ingeniería Armentano, R. et al.
3
astigmatismo en lentes y al color de la visión. Mientras era estudiante de medicina, Jean Poiseuille (1799-1869) inventó el manómetro de mercurio para medir la presión en la aorta de un perro y desarrolló su ley de flujos viscosos luego de su graduación. Pero quién ha recibido el título de Padre de la bioingeniería ha sido Herrmann von Helmholtz (1821-1894), quién fue profesor de fisiología y patología en Konigsberg, profesor de anatomía y fisiología en Bonn, profesor de fisiología en Heidelberg y finalmente profesor de física en Berlín (1871). Sus contribuciones abarcaron la óptica, la acústica, la termodinámica, la electrodinámica, la fisiología y la medicina. Se deben mencionar otros nombres por demás conocidos en los ámbitos de la ingeniería y la fisiología. Adolf Fick (1829-1901) fue el autor de la ley que rige la transferencia de masa, mientras que Diederik Johanes Korteweg (1848-1941) y Horace Lamb (1849-1941) escribieron excelentes trabajos sobre la propagación de ondas en arterias. Otto Frank (1865-1944) trabajó sobre hidrodinámica cardíaca, y Balthazar Van der Pol (1889-1959) modelizó en 1929 el corazón con osciladores no lineales para producir electrocardiogramas con semejanza a la realidad. Para completar esta amalgama entre la física y la biología sería interesante recordar que Thomas Young, cuando intentaba conocer la formación de la voz humana justificaba su licenciatura en física, diciendo que sin ella jamás hubiera podido escribir su disertación médica ni entender los temas referidos a ella.
Biomecánica vascular
La biomecánica, término acuñado por Jean-Baptiste de Monet de Lamarck (1744-1829), es la mecánica aplicada a la biología. En otras palabras, es el estudio de las propiedades mecánicas de los tejidos, órganos y sistemas fisiológicos de los seres vivos. La complejidad de los sistemas biológicos necesita numerosas hipótesis simplificadoras para su representación física y matemática, y sólo a partir de entonces puede lograrse su desarrollo permitiendo un conocimiento cada vez más realista de un determinado sistema. Este último está en estrecha relación con la evolución de los métodos de medición utilizados para obtener la información sobre la fisiopatología del sistema. La riqueza de la información contenida en los nuevos métodos de medición de las variables hemodinámicas no puede ser extraída ni extrapolada si no lo es a partir de modelos físico-matemáticos cuyo grado de elaboración deseable es función del objetivo esperado. De aquí resulta que la capacidad de resolver la mayoría de los problemas encontrados en los centros de exploración funcional cardiovascular estaría en relación directa con el desarrollo de los diferentes modelos teóricos y físicos llevados a cabo en los centros de hidrodinámica cardiovascular.
Por todo lo expuesto, la aplicación de la mecánica al estudio de las arterias permite un enfoque que complementa y amplía los ya existentes, suministrando un marco conceptual al análisis fisiopatológico. Por lo tanto, no se debe considerar al uso de principios físico-matemáticos para explicar fenómenos biológicos como

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
4
una invasión de otro campo sino como la utilización de lo que siempre debió haberse aplicado.
La aplicación de la mecánica al estudio de los grandes troncos arteriales es consecuencia de razones técnicas y de necesidades fisiológicas. Con el advenimiento de métodos de medición más modernos se ha logrado conocer las variaciones de flujo, presión y deformación de las arterias de mediano y grueso calibre, sobre todo aquellas que dada su ubicación permiten ser exploradas sin mayor dificultad, tales como las arterias humeral, femoral y carótida. Para asociar este progreso a la fisiología es importante recordar que la macrocirculación (es decir, el territorio arterial de grueso y mediano diámetro) está dominada por el efecto amortiguador de la función capacitiva de estas arterias; en tanto que la microcirculación lo está por el efecto disipativo debido a la predominancia resistiva del lecho arteriolar. Este concepto nos lleva a razonar que todo fenómeno dinámico, como la propagación de la pulsatilidad y los fenómenos de ella derivados, deberían ser analizados en las grandes arterias ya que es allí donde se concentra más del 70% de la capacitancia del árbol arterial. En concordancia con ello existe evidencia experimental que estos vasos de capacitancia (aorta y grandes arterias) podrían además tener un rol primordial en la protección del sistema circulatorio ante ciertas patologías. Esta descrito que las células de músculo liso en estos vasos desarrollan hipertrofia sólo en los casos en que la presión de distensión supere un cierto umbral, y nunca precede a la hipertensión, aun cuando anormalidades neurohumorales responsables de la hipertensión arterial estén presentes con anterioridad (Lehoux, 2003).
Para cerrar este anillo de fundamentos sobre el análisis de las propiedades mecánicas de la pared aórtica debe establecerse que las modernas teorías que tratan la transferencia óptima de energía entre la bomba cardíaca y la carga arterial toman en consideración principalmente las características viscoelásticas de la pared aórtica junto a las propiedades contráctiles del ventrículo izquierdo.
La biomecánica permite un estudio del sistema circulatorio desde dos diferentes aspectos, la mecánica de medios continuos y la mecánica de los fluidos. Es decir que un análisis racional incluye, por un lado, el estudio de la pared arterial, y por otro, el de la sangre que está contenida en su interior. Con la ayuda de la mecánica de los medios continuos, la pared arterial, material heterogéneo y anisotrópico por excelencia, se estudia como un material compuesto por fluido y tejido. En la pared vascular se consideran tres características principales, elasticidad, viscosidad e inercia. La pared arterial puede sufrir alteraciones extrínsecas generadas en forma pasiva, tal como el aumento o la disminución de la presión arterial, lo que conlleva a su vez a una modificación pasiva en su geometría; y por otro lado, puede sufrir alteraciones intrínsecas, habitualmente mediadas por estímulos nerviosos y humorales, o provocadas farmacológicamente por un sinnúmero de sustancias químicas. Si bien este material (la pared vascular), como cualquier otro, está regido por las mismas leyes de la conservación de la

Modelización Aplicada a la Ingeniería Armentano, R. et al.
5
masa, del momento de fuerzas, del balance energético y la entropía, respecto de cualquier otro material de uso común en la ingeniería, tiene como distintivo su ecuación constitutiva. Es ésta una de las causas más comunes de fracaso entre los mecánicos analíticos: la falta de información para la construcción de las relaciones tensión–deformación de los tejidos vivientes. Por tal motivo el informe de situación es complejo. Los materiales biológicos son sistemas multifase, no homogéneos, y anisotrópicos; los fluidos son no newtoneanos; los sólidos son no hookoneanos y están sujetos a una deformación finita en condiciones de vida normal. Las dificultades al abordar el trabajo con estos materiales son obvias.
Se pueden clasificar los modelos vasculares en dos grandes categorías. Los modelos de representación y los modelos de conocimiento. En los primeros el sistema estudiado es abordado como una caja negra donde solamente el comportamiento entrada–salida se considera interesante. Por el contrario, los modelos de conocimiento son elaborados a partir de consideraciones físicas donde se hacen intervenir las leyes que las gobiernan y donde los parámetros del modelo tienen ahora un significado físico preciso. Los modelos matemáticos así elaborados pueden ser utilizados por el clínico como apoyo al diagnóstico y para prever las reacciones del paciente a ciertos estímulos.
El presente capítulo tiene como objetivo presentar los últimos pasos en la modelización de la pared de las arterias a partir de datos obtenidos en animales conscientes. El modelo utilizado será un modelo de conocimiento donde el comportamiento reológico de los parámetros del modelo será simulado en el dominio temporal. Seguidamente se presentarán las bases para trasladar esta modelización al abordaje clínico utilizando métodos enteramente no invasivos.
Modelos cardiovasculares
La carga hidráulica presentada por el sistema circulatorio al ventrículo izquierdo está representada por tres componentes principales: la resistencia vascular sistémica, la elasticidad y la onda reflejada (Nichols, 1987). Aunque la carga arterial ejerce el mayor efecto sobre la eyección ventricular, un incremento de la elasticidad arterial podría resultar en una pérdida en el acoplamiento óptimo del corazón a las arterias, concomitante con una utilización menos eficiente de la energía entregada por el ventrículo izquierdo (Fitchett, 1991). En particular, una disminución en la capacitancia del sistema arterial podría incrementar la presión sistólica y crear una carga extra al corazón (Cohn, 1973), (Simon, 1987), (Randall, 1982).
Tanto la resistencia periférica, la elasticidad y la onda reflejada presentes en la circulación están gobernadas por complejos procesos reológicos en los cuales la física de la pared de las arterias, de la sangre y de los fenómenos hemodinámicos que tienen lugar en la interfase entre continente y contenido, juega un rol primordial.

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
6
Ecuación constitutiva de la pared vascular La aorta y las grandes arterias constituyen un filtro hidráulico pasa bajos cuya
función principal es amortiguar las oscilaciones del flujo sanguíneo a fin de nutrir con un régimen estacionario a los tejidos. Las propiedades mecánicas de la pared arterial son preponderantemente viscoelásticas, siendo la inercia de la pared, un factor generalmente despreciable en el análisis de la dinámica circulatoria. La elasticidad arterial total es ejercida por componentes pasivos (fibras de elastina y colágeno) y componentes activos (células de músculo liso vascular). La función de las fibras de elastina y colágeno es mantener una tensión estable contra la presión transmural presente en el vaso (Burton, 1972). La contribución individual de las fibras de elastina y de colágeno a la elasticidad total ha sido completamente caracterizada en animales conscientes normales y en diversas arteriopatías (Armentano et al, 1991 a), (Cabrera Fischer et al, 1991), (Cabrera Fischer et al, 1993). En estos estudios, el módulo elástico de la pared arterial fue descompuesto en el correspondiente a las fibras de elastina (EE), el módulo elástico de las fibras de colágeno (EC) y el reclutamiento de fibras de colágeno (fC) que soportan la tensión parietal a un dado nivel de presión transmural, basado en el modelo de dos resortes en paralelo (Cox, 1978). La contribución elástica del músculo liso vascular a la elasticidad de las arterias de animales conscientes, fue modelizada usando un modelo de Maxwell modificado de tres elementos, el cual además toma en cuenta a la elastina y al colágeno (Figura 1). Consiste de un elemento contráctil (CE) que se comporta como un simple elemento viscoso que en reposo no ofrece resistencia al estiramiento, un resorte puramente elástico (SEC) acoplado en serie con el CE y un resorte en paralelo (PEC) el cual representa la conducta elástica de la pared arterial cuando el músculo liso está relajado o bajo tono vasomotor normal donde su conducta elástica es despreciable (Barra, 1993). Este enfoque ha permitido una completa evaluación del aporte elástico de los principales componentes estructurales de la pared aórtica.

Modelización Aplicada a la Ingeniería Armentano, R. et al.
7
elastina colágeno
PECSEC
M
CE
σPEC σησSM
σ-σM
η
Figura 1: Representación esquemática de un modelo de Maxwell modificado. SEC: componente elástico serie. PEC: componente elástico paralelo. CE: elemento contráctil. El reclutamiento de fibras de colágeno en función del
estiramiento queda explicitado utilizando el modelo de resortes desconectados de Wiederhielm (Wiederhielm, 1965). Las fibras de colágeno están representadas por
el número de resortes que se enganchan a diferentes grados de extensión y así simular la conducta elástica de las fibras de colágeno representadas por el
producto EC × fC. M representa el elemento inercial mientras que η representa la viscosidad parietal.
Las contribuciones viscosas e inerciales a la mecánica de la pared aórtica,
evidenciada por la histéresis presente en la relación tensión–deformación no han sido todavía estudiadas extensamente (Milnor, 1982), (Bauer et al, 1979), (Bauer et al, 1984), (Lundholm, 1966). Por otro lado, una de las tareas más importantes en la bioreología, es el establecimiento de las relaciones matemáticas entre las tensiones (esfuerzos de corte) y las variables dinámicas involucradas en los cambios de las dimensiones espaciales de una sustancia sometida a deformaciones, lo cual recibe el nombre de ecuación constitutiva (Bauer et al, 1979), (Bauer et al, 1984), (Fung, 1977, 1981). En los últimos años, se observa la necesidad de desarrollar la ecuación constitutiva del músculo liso, debido a la importancia que conlleva tal propuesta para analizar la función de diferentes órganos y a que poco se conoce al respecto en condiciones de fisiología integrativa, es decir algo más allá del preparado in vitro (Fung, 1981), (Armentano et al, 1995 b).
Para ir aproximándose al desarrollo de la ecuación constitutiva, un primer paso es la determinación de la relación tensión (τ)–deformación (ε) elástica pura. La tensión total generada por la pared para oponerse al estiramiento se atribuye

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
8
comúnmente a los efectos combinados de la elasticidad, la viscosidad y la inercia de la pared arterial. Bauer (Bauer et al, 1979), (Bauer et al, 1984) ha desarrollado un procedimiento que subdivide la tensión parietal en tres términos, el primero que depende de ε, el segundo dependiendo de la primera derivada de ε (velocidad), y el tercero de la segunda derivada de ε (aceleración)
inercialviscosoelásticotM
tE σ+σ+σ=ε⋅+ε⋅η+ε⋅=σ 2
2
dd
dd , (1)
donde E, η y M son los módulos elástico, viscoso e inercial respectivamente. El primer término es la tensión elástica, el segundo la viscosa y el tercero la inercial. Por definición la relación tensión–deformación elástica pura se desarrolla siguiendo el mismo lugar geométrico ya sea para aumentos en la deformación como para la disminución, por lo tanto, en este diagrama el lazo de histéresis no aparece. Bajo tales bases, a partir de (1), hemos desarrollado un algoritmo para encontrar la relación elástica pura, sustrayendo las tensiones viscosas e inerciales hasta hallar un valor óptimo utilizando el criterio de la desaparición del lazo de histéresis. En un primer paso, M es considerado nulo y se incrementa los valores de η desde cero hasta un valor en el cual la superficie de la relación tensión–deformación encuentra un mínimo sin alterar el sentido horario de giro. Se fija ese valor de viscosidad y se comienza a incrementar M hasta lograr la desaparición total del lazo de histéresis. En la Figura 2 puede apreciarse el efecto de este procedimiento cuando es aplicado a la relación tensión–deformación de la aorta torácica descendente obtenida en una experiencia realizada en un animal.
Se ha formulado la ecuación constitutiva de la pared arterial en animales conscientes y crónicamente instrumentados para la caracterización total de la mecánica parietal utilizando el modelo descrito en la Figura 1 y los coeficientes de la dinámica parietal que surgen de aplicar el procedimiento para obtener la relación elástica pura. Esta ecuación tomará en cuenta la respuesta elástica de las fibras de elastina (σE), del colágeno (σC) y del músculo liso (σSM), y la conducta viscosa (ση) e inercial (σM) de la pared aórtica.

Modelización Aplicada a la Ingeniería Armentano, R. et al.
9
1.08 1.12 1.16 1.20 1.240.8
1.2
1.6
2.0
deformación1.08 1.12 1.16 1.20 1.24
0.8
1.2
1.6
2.0
deformación
Tens
ión
(106 d
inas
/cm
2 )
Tens
ión
(106 d
inas
/cm
2 )
período diastólico
Figura 2: Determinación experimental de la relación tensión–deformación elástica pura en la aorta torácica descendente en un animal consciente
crónicamente instrumentado. La relación tensión–deformación aórtica (línea fina), involucra las propiedades elásticas, viscosas e inerciales, conformando un lazo de
histéresis. Izquierda: mínimo valor de superficie encontrada mediante la sustracción viscosa (línea gruesa). Obsérvese el área remanente correspondiente en la parte inferior del rulo. Derecha: incrementos ulteriores del módulo inercial
producen la desaparición total del lazo de histéresis. La relación elástica pura (línea gruesa) es coincidente con la relación tensión–deformación diastólica. Dicho modelo asume que la tensión total desarrollada por la pared para resistir
el estiramiento está gobernado por la ecuación siguiente (Armentano et al, 1995 a)
MSMCE σ+σ+σ+σ+σ=σ η . (2)
2
2
dd
dd
tM
tfEfEE ASMCCE
ε⋅+ε⋅η+ε⋅⋅+ε⋅⋅+ε⋅=σ . (3) El primer término caracteriza la conducta elástica de las fibras de elastina,
mientras que el segundo representa la conducta no lineal de las fibras de colágeno. Ambos términos toman en cuenta la conducta pasiva parietal (PEC). El tercero existe sólo bajo activación del músculo liso y toma una forma similar al del colágeno, pero en este caso, ESM es el módulo del músculo liso en máxima activación, y fA es una función no lineal representada por la morfología típica de la curva de activación del músculo liso. Los términos restantes (η y M) conforman la conducta dinámica de la pared arterial y son responsables del lazo de histéresis.

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
10
Como se desprende de la Figuras 3 y 4, la conducta mecánica de la pared arterial es esencialmente viscoelástica. Es interesante destacar que bajo activación del músculo liso por fenilefrina (5µg/kg/min), además de aumentar la rigidez de la pared arterial, la viscosidad de la pared se incrementa notoriamente, sugiriendo que la conducta viscosa refleja el estado de actividad de las células de músculo liso, material viscoso por excelencia (Armentano et al, 1995 a). Lo más destacado de esta conducta es que el aumento en viscosidad podría estar relacionado con el aumento en presión (propio de un estado generalizado de vasoconstricción mediado por la activación del músculo liso) como podría esperarse en cualquier material de uso industrial. Sin embargo, se ha demostrado que la viscosidad es independiente de los cambios en presión y sólo aumenta por cambios en las fibras de músculo liso (Barra et al, 1997), (Armentano y Barra, 1996). Si este hallazgo también tenía lugar en los animales hipertensos, podríamos estar frente a uno de los métodos de diagnóstico más poderosos y sutiles para la discriminación de las alteraciones musculares propias de la hipertensión, como lo son la hiperplasia y la hipertrofia de las células de músculo liso en la pared vascular.

Modelización Aplicada a la Ingeniería Armentano, R. et al.
11
ELASTICIDAD
elastina
VISCOSIDAD
-0.1
0.0
0.1
0.2
0.0
0.4
0.8
1.2
1.6
1.10 1.15 1.20 1.25 1.30 1.35
1.10 1.15 1.20 1.25 1.30 1.35
Deformación
Deformación
Tens
ión
(106 d
inas
/cm
2 ) Te
nsió
n (1
06 din
as/c
m2 )
colágeno
INERCIA
-0.1
0.0
0.1
0.2
0.0
0.4
0.8
1.2
1.6
1.10 1.15 1.20 1.25 1.30 1.35
1.10 1.15 1.20 1.25 1.30 1.35
Deformación
Deformación
Tens
ión
(106 d
inas
/cm
2 ) Te
nsió
n (1
06 din
as/c
m2 )
Figura 3: Contribución individual de las propiedades elásticas, viscosas e inerciales a la conducta mecánica de la pared arterial en un latido cardíaco,
simulada a partir de la ecuación constitutiva de la pared y tomando como entrada la deformación medida en un animal en situación control (sin el músculo liso
activado). Similar comportamiento con índices viscoelásticos superiores, puede ser observado con el músculo liso activado.
Estudios referenciales han sido publicados por nuestro grupo destacando las
alteraciones de la viscosidad parietal en animales con hipertensión renovascular y su reversión con distintas terapias antihipertensivas (Barra et al, 1997). También se demuestra que dichas alteraciones no presentan dependencia en presión y son propias del comportamiento intrínseco del músculo liso (Armentano et al, 1996). El siguiente paso fue el desarrollo de las herramientas de diagnóstico no invasivo

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
12
para que estos conceptos puedan ser llevados al estudio de humanos como se describirá en los próximos párrafos.
Deformación
1.10 1.15 1.20 1.25 1.30 1.35 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.6
0.9
1.2
1.5
1.8
0.6
0.9
1.2
1.5
1.8
Tiempo (s)
Tens
ión
(106 d
inas
/cm
2 )
Tens
ión
(106 d
inas
/cm
2 )
Figura 4: Izquierda: comparación entre la relación tensión–deformación medida (trazo fino) y simulada (trazo grueso) en un animal en situación control. Derecha:
curvas temporales de la tensión parietal medida (trazo fino) y simulada (trazo grueso).
El modelo de la pared vascular en el dominio frecuencial
Un enfoque alternativo al de la ecuación constitutiva en el dominio temporal es el concepto de módulo complejo de Young. Utilizando señales de tensión deformación en el dominio de la frecuencia, el cociente se define como módulo de elasticidad complejo
)()()(*
ωεωσ=ωE . (4)
Suponiendo que el sistema arterial trabaja alrededor de una presión media,
donde la respuesta es lineal, el cociente correspondiente a cada componente armónica permite estudiar la respuesta frecuencial de la elasticidad arterial. Separando en parte real e imaginaria, se definen el módulo de almacenamiento (E’) y el de pérdida (E’’). El primero se asocia con la capacidad de almacenar energía potencial elástica, mientras el segundo con la disipación de energía en forma de calor.
)('')(')(* ω+ω=ω iEEE . (5)

Modelización Aplicada a la Ingeniería Armentano, R. et al.
13
Los primeros estudios in vitro que mostraron estas dependencias frecuenciales
(Bauer et al, 1979) evidenciaron que E’ resultaba relativamente constante en la banda de 1 a 20Hz. Por otro lado, el módulo de pérdida E’’ crecía hasta los 4Hz para luego alcanzar una meseta en altas frecuencias. Numerosos intentos se realizaron para obtener ecuaciones integro diferenciales que modelen este comportamiento frecuencial, manteniendo cierta coherencia con estudios de relajación y estiramiento temporales. La generalización de un modelo con parámetros a determinar mediante métodos de cuadrados mínimos fue planteada por Westerhof y Noordergraaf (Westerhof y Noordergraaf, 1970) en la siguiente ecuación
( )
( )∑
∑
=
=
ω
ω=ω P
m
mm
Q
n
nn
ia
icE
0
0* )( . (6)
El limitar el orden del modelo es de importancia significativa, dado que se
debe tener en cuenta la cantidad de parámetros a utilizar, el costo computacional, y por sobre todo, la asociación teórica de los mismos con variables fisiológicas mensurables. El orden mínimo establecido fue de 2 coeficientes en el numerador y 2 en el denominador. De esta manera, se asegura una respuesta temporal razonable sin oscilaciones ni sobre picos, y un ajuste frecuencial comprometido.
Recientemente hemos aplicado métodos adaptativos para con el fin de hallar los coeficientes del modelo, y a la vez, intentar relacionarlos con los parámetros de la ecuación constitutiva (Gamero et al, 2001). Se trabajó esencialmente con las señales digitalizadas, el modelo en el dominio frecuencial normalizado y su pasaje al dominio de Laplace mediante una transformación bilineal. El ajuste de coeficientes se realizó en el dominio temporal (Figura 5) mediante modelos adaptativos tipo caja negra con entrada exógena (ARX). El orden del modelo fue analizado y establecido mediante el criterio de Akaike (Akaike et al, 1969). Los resultados permiten, a diferencia del análisis de Fourier, obtener una respuesta continua en el eje frecuencial. Más aun, esta metodología adaptativa podría ser implementada en tiempo real, pudiendo seguir latido a latido los cambios en las propiedades mecánicas parietales que se verán evidenciadas en la alteración de los coeficientes. A continuación detallamos algunos resultados específicos para clarificar la metodología.

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
14
Tensiónσ(t)
Deformaciónε(t) Error
ARX 3×3
ωωω
ωωω
++++++=ω 3
32
210
33
2210* )( iii
iii
eaeaeaaebebebbE
Paredarterial
-deformación
calculada
Σ
Figura 5: Esquema del modelado adaptativo de la pared arterial. En base a las señales de tensión–deformación se obtienen los parámetros del modelo. La
respuesta en frecuencia del módulo de Young utiliza un modelo de 3×3, minimizando el error cuadrático medio.
Los módulos mecánicos de la pared se hallaron con el método de filtrado
adaptativo en el cual la entrada a un filtro digital ARMA (Auto Regresive Moving Average), más comúnmente conocido como IIR (Infinite Impulse Response), es la señal de presión arterial instantánea, y la salida es el diámetro arterial instantáneo. A partir de estas magnitudes se obtienen las equivalentes a tensión–deformación detalladas en la Figura 5. El filtro intentará adaptar los coeficientes de sus polinomios del numerador y denominador (que determinarán la ubicación de los polos y ceros del sistema arterial). La ecuación a adaptar será la ecuación dada por
( ) ( ) ( ) ( )2
2
dttDdM
dttdDtDEtP ⋅+⋅η+⋅= . (7)
El filtro va adaptando sus coeficientes muestra a muestra, minimizando la
función de error hasta llegar a un mínimo de variación. La transferencia del filtro digital H(z) será

Modelización Aplicada a la Ingeniería Armentano, R. et al.
15
( ) ( )( ) 3
32
21
10
33
22
110
······
−−−
−−−
++++++==
zazazaazbzbzbb
zPzDzH . (8)
Una vez llegado a un mínimo, se hace uso de la transformada bilineal que
relaciona la Transformada de Laplace con la Transformada Z mediante la siguiente expresión
1
1
112
−+−=
zz
Ts
s, (9)
siendo Ts el período de muestreo al cual se adquirieron las señales presión–diámetro. Se obtiene de esta forma un sistema en el dominio de Laplace como el que se indica a continuación:
( ) ( )( ) 01
22
301
22
3
····
msmsmsnsnsns
sPsDsH
++++++== , (10)
donde los coeficientes ni y mi de la transferencia H(s) estarán relacionados con los coeficientes ai y bi del filtro digital adaptativo H(z) de la expresión (8).
Finalmente, se pueden hallar relaciones entre los coeficientes ni, mi y la ecuación diferencial (7), de los cuales se obtienen los módulos parietales buscados: elasticidad E, viscosidad η e inercia M.
En la Figura 6 se muestra el resultado del algoritmo desarrollado por nuestro grupo, utilizado para el cálculo de componentes mecánicos de la pared arterial. La figura corresponde a la arteria aorta de una oveja. Puede apreciarse en los primeros dos gráficos la señal de entrada P(t), seguida por la señal de diámetro, D(t). En la tercera ventana de observación se realiza una superposición del diámetro obtenido a través del ajuste del filtro adaptativo y la salida real de diámetro. En la cuarta ventana se observa la transferencia del filtro digital (pared arterial), donde puede apreciarse claramente la característica de filtro pasa bajos hidráulico de la pared arterial.
El algoritmo entrega los componentes de la pared arterial, calculados a partir de este filtro adaptativo, que caracterizan la dinámica de la pared bajo análisis. Del mismo modo, también entrega los coeficientes del filtro digital y una composición xy de las señales de entrada y salida del sistema (presión y diámetro respectivamente).
En el ejemplo mostrado en la Figura 6, correspondiente a la aorta de una oveja, la transferencia final del filtro adaptativo resultó

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
16
( ) 321
33
21
·6153.0·63.1·012.21·01234.0·002066.0·01758.000271.0
−−−
−−−
−+−−−+−=
zzzzbzzzH , (11)
y la transferencia del filtro pasa bajos de la pared arterial estuvo dada por
( ) 4423
23
10·113.3·10·665.3·9.1165543·1476·618.4·001908.0
+++++−−=
sssssssH . (12)
El tiempo de muestro utilizado en este ejemplo fue (Ts ) igual a 5 ms.
Figura 6: Salida del algoritmo de cálculo de filtrado adaptativo de la pared arterial. Puede observarse el resultado de las componentes de la pared arterial de la ecuación (7), así también como los coeficientes del filtro ARMA adaptativo. Los datos corresponden a la aorta de una oveja.
Se aprecia en la Figura 6 (panel superior), la determinación de las fases
sistólicas y diastólicas del ciclo cardíaco que se utilizan para establecer el cálculo de los componentes de la pared arterial para cada ciclo y realizar comparaciones posteriores de variación de las observaciones. Este procedimiento permite determinar la conducta dinámica de la pared arterial latido a latido, y derivar

Modelización Aplicada a la Ingeniería Armentano, R. et al.
17
parámetros esencialmente significativos, tales como los tiempos de relajación, de fluencia, el rango dinámico de la pared y la disipación energética de la pared entre otros.
En síntesis, lo expuesto hasta este punto sería sólo uno de los grandes temas de la dinámica arterial, pero en nuestra opinión, de gran trascendencia teórica, experimental y clínica, ya que además del comportamiento funcional de la pared, este enfoque nos permite analizar alteraciones morfológicas de la pared vascular de gran ayuda al diagnóstico.
La sangre y su interrelación con la pared vascular
Hasta aquí hemos analizado y desarrollado un modelo que expresa el comportamiento dinámico de la pared vascular. Ahora analizaremos los otros dos grandes componentes de la dinámica del sistema arterial: la sangre y su interrelación con la pared. La sangre porque, si bien al ser un líquido heterogéneo y no newtoniano es de difícil abordaje, conlleva información de inmensa utilidad. La viscosidad sanguínea depende de las condiciones de la velocidad del flujo sanguíneo, la cual va a depender fundamentalmente de la ubicación del eritrocito dentro del eje transversal del vaso. El conjunto de las velocidades de desplazamiento da un lugar geométrico definido como perfil de velocidades. Este perfil presenta tensiones y deformaciones por cizallamiento contra la pared vascular (Pessana, 2003). La deformación de tal perfil en las bifurcaciones arteriales suele asignarse como una de las causas principales de desarrollo de las placas de ateroma. De igual forma, la tensión de cizallamiento contra la pared arterial actuaría sobre el endotelio, el cual a través de mediadores químicos enviaría la información sobre el contenido al continente; esto cerraría un proceso de control interno en ambos componentes. En la actualidad, estos mecanismos de mecanotrasducción son estudiados con incipiente crecimiento en el campo de la biología molecular. Nuevas herramientas, cada vez más precisas, permiten el seguimiento de receptores y la síntesis de determinadas proteínas que evidencian procesos precoces de modelado arterial en respuesta a estímulos mecánicos.
La viscosidad sanguínea, altamente dependiente del hematocrito, juega un papel preponderante en la relación entre las tensiones y las deformaciones por cizallamiento en la interfase pared fluido y dentro del vaso. Para evidenciar la influencia del endotelio sobre las propiedades mecánicas de la pared arterial mostramos un estudio en 7 arterias subclavias con y sin endotelio, en condiciones idénticas de frecuencia (80 latidos por minuto), viscosidad sanguínea (3 mPa·s) y presión (80 mmHg). Bajo estas condiciones se demuestra que la ausencia de endotelio genera un aumento significativo (p<0.05) de la elasticidad arterial y de la viscosidad parietal. Este comportamiento de rigidificación de la pared arterial se hace más notorio cuando aumenta el cizallamiento en ausencia de endotelio, mientras que la misma situación pero con el endotelio intacto disminuye la rigidez (Cabrera Fischer et al, 2002). Finalmente, puede establecerse que la presencia de

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
18
endotelio produce una disminución de la viscosidad y elasticidad arterial, mediadas posiblemente por la liberación de sustancias vasoactivas presentes en el endotelio.
Impedancia arterial
La determinación de la impedancia arterial en forma totalizadora, no sólo permite evaluar el estado hemodinámico del árbol arterial, sino también el estado de carga hidráulica que el sistema vascular presenta a la eyección del ventrículo izquierdo.
Metodológicamente, evaluar la impedancia arterial en su totalidad requiere la medición de un número complejo (módulo y fase). Para ello sería necesario medir las señales de presión y flujo a la salida del ventrículo izquierdo recurriendo a métodos invasivos. No obstante, se puede realizar una interpretación del fenómeno por medio de un modelo de Windkessel modificado de tres elementos como el indicado en la Figura 7. Este modelo provee información cuantitativa de la resistencia periférica, la resistencia característica y la compliance arterial, incluyendo además la evaluación de los parámetros asociados a la propagación de la onda reflejada, utilizando técnicas totalmente no invasivas (Casanave y Armentano,1995). Esta metodología ha sido previamente validada en laboratorio (Casanave et al, 1994) en la experimentación animal, permitiendo además detectar en los pacientes hipertensos las mismas alteraciones hemodinámicas que han sido encontradas mediante cateterismo cardíaco (Ting et al, 1991).
ZCV Ao
VI C RP
Figura 7: Esquema eléctrico del modelo de Windkessel modificado. C: compliance arterial, RP: resistencia periférica, ZC: resistencia característica, V Ao:
válvula aórtica, VI: ventrículo izquierdo. La impedancia hidráulica arterial puede separarse conceptualmente en tres
componentes principales, resistencia periférica, compliance y onda reflejada.

Modelización Aplicada a la Ingeniería Armentano, R. et al.
19
Resistencia periférica La disipación de la energía está generalmente asociada a fenómenos viscosos
y por lo tanto a la disipación de calor por fricción. En el caso de sistema arterial, la resistencia periférica (RP) está concentrada en el lecho arteriolocapilar y dos magnitudes físicas tienen una acción destacada sobre ella: la viscosidad de la sangre y la dimensión de los vasos, relacionadas por
48
RL
medio Flujomedia PresiónRP ⋅π
⋅µ⋅== , (13)
siendo µ la viscosidad sanguínea, L la longitud del segmento arterial analizado y R el radio de la arteria.
En la práctica clínica, la resistencia periférica se calcula mediante el cociente entre la presión media, determinada en por medio de un esfigmomanómetro semiautomático (Dinamap Critikon), y el flujo medio, determinado por el producto de la sección del vaso y la velocidad media de la sangre mediante un ecógrafo vascular (Eco-Doppler Hewlett Packard Sono 1500).
Compliance Arterial
La compliance arterial se define como la variación de volumen del vaso por unidad de variación de presión arterial. Ésta caracteriza la performance de amortiguación de la pulsatilidad, para cumplir así con la principal función de los grandes vasos que consiste en actuar como un filtro hidráulico pasa bajos, provocando una atenuación en la pulsatilidad impuesta por el corazón, a fin de que un flujo continuo alcance a los tejidos. Entre los métodos más exactos para la determinación no invasiva de la compliance arterial se encuentra el que utiliza la tonometría, para la obtención de la presión instantánea, y el análisis automático de imágenes ecográficas en modo B, para la forma de onda del diámetro arterial instantáneo. Su expresión analítica (para el caso no invasivo) está dado por
22 VOPDC M
⋅ρ⋅= , (14)
siendo DM el diámetro arterial medio, ρ la densidad de la sangre y VOP la velocidad de propagación de la onda de presión.
Onda reflejada
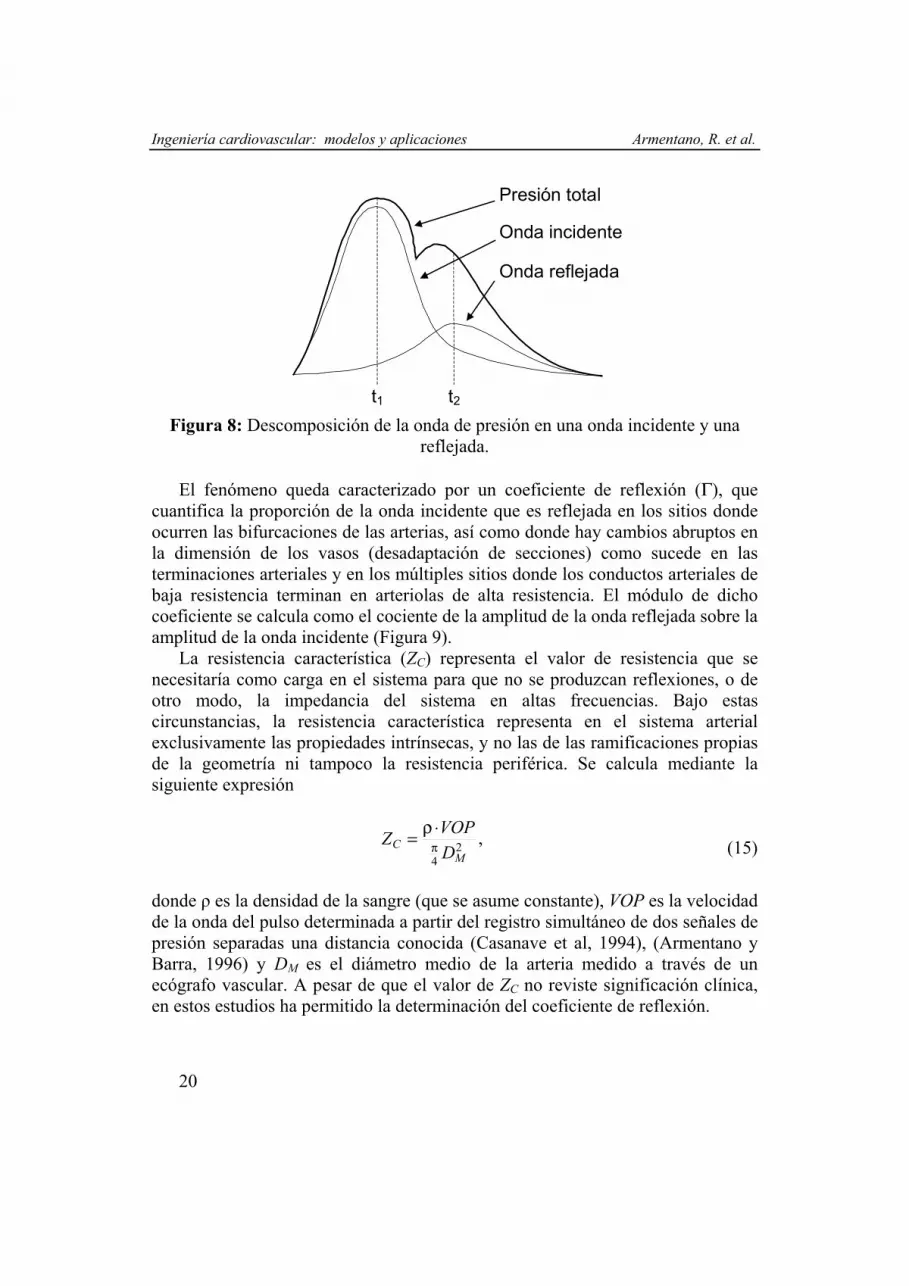
La onda del pulso propagado a través del árbol arterial se descompone en dos ondas que tienen sentidos de propagación opuestos (onda incidente y onda reflejada, Figura 8).
Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
20
Presión total
Onda incidente
Onda reflejada
t1 t2 Figura 8: Descomposición de la onda de presión en una onda incidente y una
reflejada. El fenómeno queda caracterizado por un coeficiente de reflexión (Γ), que
cuantifica la proporción de la onda incidente que es reflejada en los sitios donde ocurren las bifurcaciones de las arterias, así como donde hay cambios abruptos en la dimensión de los vasos (desadaptación de secciones) como sucede en las terminaciones arteriales y en los múltiples sitios donde los conductos arteriales de baja resistencia terminan en arteriolas de alta resistencia. El módulo de dicho coeficiente se calcula como el cociente de la amplitud de la onda reflejada sobre la amplitud de la onda incidente (Figura 9).
La resistencia característica (ZC) representa el valor de resistencia que se necesitaría como carga en el sistema para que no se produzcan reflexiones, o de otro modo, la impedancia del sistema en altas frecuencias. Bajo estas circunstancias, la resistencia característica representa en el sistema arterial exclusivamente las propiedades intrínsecas, y no las de las ramificaciones propias de la geometría ni tampoco la resistencia periférica. Se calcula mediante la siguiente expresión
24 M
C DVOPZ π
⋅ρ= , (15)
donde ρ es la densidad de la sangre (que se asume constante), VOP es la velocidad de la onda del pulso determinada a partir del registro simultáneo de dos señales de presión separadas una distancia conocida (Casanave et al, 1994), (Armentano y Barra, 1996) y DM es el diámetro medio de la arteria medido a través de un ecógrafo vascular. A pesar de que el valor de ZC no reviste significación clínica, en estos estudios ha permitido la determinación del coeficiente de reflexión.

Modelización Aplicada a la Ingeniería Armentano, R. et al.
21
Del análisis de la propagación de una onda electromagnética en una línea de transmisión, que es un sistema de constantes distribuidas, se puede obtener la expresión del coeficiente de reflexión:
CP
CP
ZRZR
+−=Γ . (16)
El tiempo de llegada de la onda reflejada depende fundamentalmente de la
longitud de las arterias y de la velocidad de la onda de pulso. En patologías tales como la hipertensión arterial, se observa un aumento de la velocidad de la onda del pulso provocando un arribo temprano de la onda reflejada, la cual incrementa la presión sistólica media y disminuye la presión diastólica media (O’Rourke, 1982), (Armentano, 1999).
Onda incidente
Onda reflejada
RPZC
Figura 9: Cálculo del coeficiente de reflexión deducida a partir de la teoría de líneas de transmisión, donde RP es la resistencia periférica o carga del sistema y
ZC es la resistencia característica. El aumento de la presión sistólica media implica una mayor demanda de
oxígeno del miocardio, produce un incremento de la poscarga ventricular izquierda, disminuye la eyección ventricular y puede generar hipertrofia ventricular izquierda como una consecuencia secundaria a largo plazo (O’Rourke, 1982). Por otra parte, la disminución de la presión diastólica media, tiende a decrementar la cantidad de sangre perfundida al miocardio. En consecuencia, estos cambios en la presión que afectan la presión ventricular izquierda como también la presión aórtica, llevan a un desajuste en la interrelación entre el ventrículo izquierdo y la carga arterial (O’Rourke, 1982), (Nichols et al, 1987).
Para evaluar la desadaptación provocada por una mayor reflexión y por aumento en la VOP, se ha propuesto el índice de desajuste (ID) (Casanave y

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
22
Armentano,1995), que se calcula como el producto de la VOP por el coeficiente de reflexión Γ
Γ⋅= VOPID . (17)
Consideraciones finales
Los modelos matemáticos son útiles en la formalización de conceptos y para evaluar los datos. Además, pueden ser muy útiles en la predicción de la respuesta de un sistema biológico a un agente externo o droga. Por otro lado, la comprobación experimental de un modelo matemático en animales (modelo animal) es absolutamente esencial y no puede ser dejado de lado, puesto que los modelos animales son la más completa analogía y lo más reproducible en lo que respecta al humano. Entre las ventajas que presenta los modelos animales puede destacarse a) que sirven para confirmar o rechazar hipótesis sobre sistemas complejos, b) que revelan contradicciones o parcialidad en los datos obtenidos, c) que permiten la predicción del rendimiento de un sistema no probado en la práctica, d) que pueden predecir o suministrar valores inaccesibles en la experimentación y e) que pueden sugerir la existencia de un nuevo fenómeno
Entre las precauciones que deben tenerse al trabajar con modelos pueden considerarse las siguientes: a) la selección del modelo puede no ser la adecuada, b) modelos incorrectos pueden ajustar a datos limitados, llevando a conclusiones erróneas, c) modelos simples son fáciles de manejar, pero tal vez se requiera un modelo más complejo y d) simulaciones realísticas, necesitan de un gran número de variables las cuales pueden ser difíciles de determinar.
En resumen, los modelos son indispensables en la investigación biomédica. El progreso en la guerra contra las enfermedades depende no solo de un flujo estable de hallazgos provenientes de modelos sino además de investigaciones basadas en una variedad y, más frecuentemente, en una combinación de modelos.
Las bases teóricas que sustentan la dinámica del sistema arterial permiten desarrollar una serie de herramientas de apoyo al diagnóstico y al tratamiento, debidamente fundamentadas y de fácil acceso al médico especialista. Estas han sido y están siendo extensamente utilizadas en nuestro país y en varios centros de Europa. El nexo más importante entre la teoría física y la aplicación clínica ha sido sin duda la experimentación animal como un banco de pruebas viviente de los procedimientos anteriormente desarrollados.
Se ha realizado la validación experimental de la ecuación constitutiva (Armentano et al, 1995 a) y su contraste en tubos de látex con módulo de elasticidad patrón en la cual se demostró que las ecuaciones provenientes de la física, podrían determinar con sorprendente aproximación los valores de elasticidad determinada en el proceso de fabricación (Armentano 1999). Asimismo, se ha realizado la validación de distintos modelos matemáticos para la relación presión–diámetro, por ejemplo el logarítmico, utilizado en arterias

Modelización Aplicada a la Ingeniería Armentano, R. et al.
23
carótidas y femorales en seres humanos, previo paso por arterias similares de animales crónicamente instrumentados (Armentano et al, 1991 b). Se validaron los algoritmos de tratamiento de imágenes para la determinación del espesor íntima–media y del diámetro instantáneo, utilizando el contraste con un “fantasma” de lucite y con arterias medidas por sonomicrometría en animales conscientes (Graf, 1999). Finalmente, se analizó la relación entre el endotelio y la vasomotricidad arterial (cambios de diámetro mediados por de tensión de cizallamiento) en humanos de ambos sexos (Levenson et al, 2001).
Quedan aún varias incógnitas a resolver. La viscosidad parietal podría llevar información mucho más compleja que la asignada hasta el momento. El músculo liso es el material viscoso por excelencia, pero es probable que los procesos tales como la proliferación de células musculares y su aumento en dimensión, sean mejor explicados por el módulo de inercia de la pared que va a tomar en cuenta procesos de tal naturaleza. Se ha sugerido que existe una muy buena correlación entre el espesor del complejo íntima–media y la viscosidad parietal en la arteria carótida, relacionando por primera vez parámetros morfológicos con funcionales de gran impacto en estudios clínicos (Armentano et al, 1998). En esa dirección, este tipo de estudios deben llevarse a la clínica para evaluar si las terapias antihipertensivas, que producen la reversión de tales fenómenos proliferativos, también reducen el módulo de viscosidad o en su defecto el de inercia, como ya ha sido evidenciado en animales (Barra et al, 1997).
Por último, posteriores estudios serán necesarios para caracterizar el contenido y sus componentes tales como plasma, eritrocitos, fibrinógeno y los perfiles de velocidad asociados, para ver si pueden desarrollarse métodos de identificación de procesos incipientes de ateroesclerosis. La relación entre estos procesos y las propiedades mecánicas parietales traerá abundante información sobre la dinámica de las células endoteliales, en un entorno integrativo como lo son los animales crónicamente instrumentados y posteriormente en pacientes hipertensos, hipercolesterolémicos, diabéticos y en todos aquellos que presenten factores de riesgo cardiovasculares.
La modelización del sistema cardiovascular fue extensamente desarrollado y aplicado para el estudio y predicción de enfermedades cardiovasculares. Se describieron modelos enfocados en la pared arterial como elemento esencial del árbol arterial. El estudio de la respuesta tensión–deformación de esta celda constitutiva permite progresar en los conocimientos del conjunto de la circulación. Por otro lado, y teniendo en cuenta fenómenos propagatorios, se adicionaron modelos distribuidos destinados a comprender la realidad fisiológica del conjunto corazón–carga hidráulica. La relación entre los modelos locales y globales es motivo de investigaciones actuales que apuntan a integrar los conceptos más tradicionales de la fisiología circulatoria para brindar una teoría unificada. La comprensión de los orígenes precoces de las enfermedades cardiovasculares es, sin duda, el objetivo final de esta metodología.

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
24
Los parámetros de los modelos se adquirieron a partir de sistemas in vitro, de animales instrumentados en forma crónica, de experiencias in vivo y finalmente de pacientes. En este último caso, las técnicas no invasivas permiten acceder a señales de presión y diámetro en arterias superficiales. Con técnicas de adquisición innovadoras, sumadas a nuevas capacidades de procesamiento digital de señales, los parámetros de los modelos pueden ser ajustados para obtener valores de normalidad. El seguimiento de estos parámetros permitirá de manera precoz, detectar pequeños desvíos que señalen el comienzo de anormalidades vasculares. La integración multidisciplinaria de técnicas y tecnologías, sumado a la matemática aplicada, conforman la estructura medular de la ingeniería cardiovascular que promete proveer nuevas soluciones clínicas partiendo de un campo formal y teórico.
Referencias
Akaike H (1969). “Fitting autoregressive models for prediction”. Ann Inst Stat
Math 21: 243-247.
Armentano RL, Levenson J, Barra JG, Cabrera Fischer EI, Breitbart GJ, Pichel RH, Simon A (1991 a). “Assessment of elastin and collagen contribution to aortic elasticity in conscious dogs”. Am J Physiol 260: H1870-H1877.
Armentano RL, Simon A, Levenson J, Chau NP, Megnien JL, Pichel RH (1991 b). “Mechanical pressure versus intrinsic effects of hypertension on large arteries in human”. Hypertension 18: 657-664.
Armentano RL, Barra JG, Levenson J, Simon A, Pichel RH (1995 a). “Arterial wall mechanics in conscious dogs. Assessment of viscous, inertial and elastic moduli to characterize aortic wall behavior”. Circ Res 76: 468-469.
Armentano RL, Megnien LJ, Simon A, Bellenfant F, Barra JG, Levenson J (1995 b). “Effects of hypertension on viscoelasticity of carotid and femoral arteries in humans”. Hypertension 26: 48-54.
Armentano RL, Barra JG (1996). “Velocidad de propagación de la onda del pulso: valor pronóstico y diagnóstico en la fisiopatología arterial”. Rev Arg Bioing 2: 11-15.
Armentano RL, Barra JG, Simon A, Pichel RH, Levenson J (1996). “Pressure dependent-elasticity and pressure independent-wall viscosity induced by renovascular hypertension in the canine aorta”. 16th Scientific Meeting of the International Society of Hypertension. Glasgow, UK.

Modelización Aplicada a la Ingeniería Armentano, R. et al.
25
Armentano RL, Graf S, Barra JG, Gerardo Velikovsky G, Baglivo H, Sanchez R, Simon A, Pichel RH, Levenson J (1998). “Carotid wall viscosity increase is related to intima-media thickening in hypertensive patients”. Hypertension 31 (part 2): 534-539.
Armentano RL (1999). “Détermination in vivo des caractéristiques hémodynamiques artérielles, application à l’hypertension”. Université de Paris VII, Denis Diderot. Doctorat de Biomécanique: Mécanique des Systèmes Biologiques. Director: Dr. Patrice Flaud. Laboratoire de Biorheologie et Hydrodynamique Physicochimique. CNRS. URA 343. Paris, Francia.
Bauer RD, Busse R, Schabert A, Summa Y, Wetterer E (1979). “Separate determination of the pulsatile elastic and viscous forces developed in the arterial wall in vivo”. Pflügers Arch 380: 221-226.
Bauer RD (1984). “Rheological approaches of arteries”. Biorheology Suppl I: 159-167.
Barra JG, Armentano RL, Levenson J, Cabrera Fischer EI, Pichel RH, Simon A (1993). “Assessment of smooth muscle contribution to descending thoracic aortic elastic mechanics in conscious dogs”. Circ Res 73: 1040-1050.
Barra JG, Levenson J, Armentano RL, Cabrera Fischer EI, Pichel RH, Simon A (1997). “In vivo effects of angiotensin-II receptor blockade and converting enzyme inhibition on the aortic canine viscoelasticity”. Am J Physiol 272: H859-H868.
Burton AC (1972). “Physiology and Biophysics of the Circulation”. Chicago: Year Book, pp 63-75.
Cabrera Fischer EI, Armentano RL, Levenson J, Barra JG, Morales MC, Breitbart GJ, Pichel RH, Simon AC (1991). “Paradoxically decreased aortic wall stiffness in response to vitamin D3-induced calcinosis: a biphasic analysis of segmental elastic properties in conscious dogs”. Circ Res 68: 1549-1559.
Cabrera Fischer E, Levenson J, Barra JG, Armentano RL, Breitbart GJ, Pichel RH, Simon Ach (1993). “Preventive effect of chronic converting enzyme inhibition on aortic constriction and stiffening induced by renovascular hypertension in conscious dogs”. Cardiovasc Res 27: 1039-1044.
Cabrera Fischer E, Armentano R, Pessana F , Graf S, Romero L, Christen A, Simon A, Levenson J (2002). “Endothelium-dependent arterial wall elasticity modulated by blood viscosity”. Am J Physiol 282: H389-H394.
Casanave G, Armentano RL, Fischer EIC, Tonelli A, Sánchez R, Pichel RH (1994). “Noninvasive assessment of forearm impedance in normal subjects, and patients suffering sustained and borderline hypertension”. World Congress on Medical and Biomedical Engineering. Rio de Janeiro.

Ingeniería cardiovascular: modelos y aplicaciones Armentano, R. et al.
26
Casanave G, Armentano RL (1995). “Impedancia arterial: evaluación no-invasiva de sus parámetros constitutivos en la hipertensión”. Rev Arg Bioing 1: 23-32.
Cohn JN (1973). “Blood pressure and cardiac performance”. Am J Med 55: 351-361.
Cox RH (1978). “Passive mechanics and connective tissue composition of canine arteries”. Am J Physiol 234: H533-H541.
Fitchett DH (1991). “LV-arterial coupling: interactive model to predict effect of wave reflections on LV energetics”. Am J Physiol 261: H1026-H1033.
Fung YC (1977). “A First Course in Continuum Mechanics”. New Jersey: Prentice-Hall Inc.
Fung YC (1981). “Biomechanics”. New York: Springer-Verlag.
Gamero LG, Armentano RL, Barra JG, Simon A, Levenson J (2001). “Identification of arterial wall dynamics in conscious dogs”. Exp Physiol 86: 519-528.
Graf S, Gariepy J, Massonneau M, Armentano RL, Mansour S, Barra JG, Simon A, Levenson J (1999). “Experimental and clinical validation of arterial diameter waveform and intimal media thickness obtained from B-mode ultrasound images processing”. Ultrasound Med Biol 25: 1353-1363.
Lehoux S, Tedgui A (2003). “Cellular mechanics and gene expression in blood vessels”. J Biomech 36: 631-643.
Levenson J, Pessana F, Gariepy J, Armentano R, Simon A (2001). “Gender differences in wall shear-mediated brachial artery vasoconstriction and vasodilatation”. J Am Coll Cardiol 38: 1668-1674.
Lundholm L, Mohme-Lundholm E (1966). “Length at inactivated contractile elements, length-tension diagram, active state and tone of vascular smooth muscle”. Acta Physiol Scand 68: 347-359.
Milnor WK (1982). “Hemodynamics”. Baltimore: Williams & Wilkins, pp 56-96.
Nichols WW, O’Rourke MF, Avolio AP, Yaginuma T, Murgo JP, Pepine CJ, Conti CR (1987). “Age-related changes in left ventricular arterial coupling”. In: Yin FCP (Ed), “Ventricular Vascular Coupling: Clinical, Physiological, and Engineering Aspects”. New York: Springer-Verlag, pp 79-114.
O’Rourke MF (1982). “Arterial Function in Health and Disease”. Edinburgh: Churchill 94-132, 185-243.
Pessana FM (2003). “Influencia del Cizallamiento Sanguíneo sobre la vasomotricidad de las Arterias Periféricas en Humanos”. Tesis de Maestría.

Modelización Aplicada a la Ingeniería Armentano, R. et al.
27
Magister en Ingeniería Biomédica. Facultad de Ingeniería y Ciencias Exactas y Naturales. Universidad Favaloro.
Randall OS (1982). “Effect of arterial compliance on systolic blood pressure and cardiac function”. Clin Exper Hypertens [A] (Proc Symp on Systolic Hypertension) A4: 1045-1057.
Simon A, Levenson J (1987). “Overview on atherosclerotic systolic hypertension”. Int J Cardiol 16: 1-18.
Ting CT, Chou CY, Chang MS, Wang SP, Chiang BN, Yin F (1991). “Arterial hemodynamics in human hypertension. Effects of adrenergic blockade”. Circulation 84: 1049-1057.
Westerhof N, Noordergraaf A (1970). “Arterial viscoelasticity: a generalized model”. J Biomech 3, 357-379.
Wiederhielm CA (1965). “Distensibility characteristics of small blood vessels”. Fed Proc 24: 1075-1084.

Modelización Aplicada a la Ingeniería
28
Soldadura por fricción agitación “friction stir welding”
ANIBAL CASSANELLI a, GUILLERMO LOMBERA a, LUIS A. DE VEDIA b, SANTIAGO URQUIZA a y DIEGO SANTIAGO a
a Facultad de Ingeniería, Universidad Nacional de Mar del Plata,
Mar del Plata Argentina. b ITPJAS, Universidad Nacional de San Martín-CNEA, CIC
San Martín, Buenos Aires, Argentina.
Resumen
El proceso por Fricción-Agitacion (FSW) “Friction Stir Welding” es un método de soldadura desarrollado por el (TWI) “The Welding Institute” de Inglaterra en la década anterior. Es un nuevo concepto en soldadura en fase sólida por fricción especialmente apto para la soldadura del aluminio y sus aleaciones que ofrece aspectos interesantes y que en muchos casos puede reemplazar con ventaja a los procesos usuales por arco.
Fricción Stir Welding es un proceso automático que permite soldar juntas
a tope y a solape de gran longitud y por consiguiente supera la mayor limitación del proceso convencional por fricción que consiste precisamente en la restricción de su aplicación a piezas con simetría de revolución.
El FSW se basa esencialmente en la utilización de una herramienta
cilíndrica de un perfil especial, la cual se inserta entre las superficies de encuentro de los materiales a unir con una cierta velocidad de rotación y bajo una fuerza determinada. Las piezas deben estar rígidamente vinculadas a tope o superpuestas para evitar su movimiento cuando avanza la herramienta a lo largo de la junta produciendo la dispersión de los óxidos, la plastificación localizada del material y la soldadura.
La unión se produce por el calentamiento por fricción que experimentan las mismas promoviendo un comportamiento pastoso/viscoso del material y el correspondiente flujo de material entre las chapas a unir.
Por otra parte, los métodos numéricos proporcionan la posibilidad de
predecir comportamientos sin necesidad de ensayos específicos, pudiendo acelerar

Modelización Aplicada a la Ingeniería Cassanelli , A. et al.
29
los procesos de diseño, bajando los costos y optimizando las variables tecnológicas a utilizar. Las uniones soldadas, fundamentalmente las correspondientes a piezas comprometidas en servicio, requieren de un conocimiento del comportamiento mecánico de la unión ante solicitaciones externas. Por eso, poder predecir el comportamiento de piezas soldadas es decisivo en el diseño de componentes estructurales.
En este trabajo se modela el proceso de soldadura por fricción, mediante la utilización de un programa de elementos finitos de propósito general, reproduciendo el mapa térmico y la distribución del flujo del material. A partir de estos resultados, que forman parte de proyectos de investigación más abarcativos, es posible inferir las variables externas a utilizar en el proceso de soldadura, de manera de obtener las propiedades del material requeridas para su comportamiento en servicio. Introducción
El proceso de soldadura por fricción agitación “friction stir welding” fue desarrollado por el TWI “The Welding Institute” de Inglaterra a principio de la década de los noventa. Esta variante de la soldadura por fricción permite unir piezas planas de gran extensión, y en ese sentido introduce un avance muy importante en la soldadura por fricción que estaba limitada solo a uniones de partes con simetría de revolución.
Una herramienta de rotación produce la coalescencia de los materiales.
Esta herramienta, se introduce y avanza a lo largo de la junta. La fricción, agitación y presión generada plastifica y forja el material circundante consolidando la unión, En la Figura 1 se muestra una representación esquemática del proceso.

Soldadura por fricción agitación “friction stir welding” Cassanelli , A. et al.
30
Figura 1: Esquema del proceso de FSW
El método proporciona ventajas tales como:
• capacidad de unión de aleaciones de difícil soldabilidad, • soldadura de 15 mm de espesor en una pasada y 30 mm en dos sin
necesidad de biseles, • ausencia de metal de aporte y gas de protección, • ausencia de distorsión, • no generación de humos tóxicos. • las propiedades mecánicas y sanidad de las uniones producidas
resultan en general superiores a las obtenidas por procesos de arco convencionales.
Las restricciones fundamentales son:
• reducida versatilidad propia de un proceso automático, • necesidad de firme sujeción de las piezas, • aplicación limitada a piezas planas o de gran radio de curvatura, • producción de hueco residual al final de la soldadura en el lugar de
extracción de la herramienta.
xyz
Perno
Apoyo
Herramienta
Placas
300
19.1
200

Modelización Aplicada a la Ingeniería Cassanelli , A. et al.
31
Si bien en una primera etapa el desarrollo se focalizó en unión de aleaciones base aluminio, actualmente se esta experimentando para aplicar con aceros, cobre, titanio, magnesio, plomo, zinc, etc.
La herramienta consiste de un apoyo normal al eje de rotación de la herramienta, y un perno de diámetro pequeño conectado a dicho apoyo (Figura 2).
Figura 2: Placa discretizada por elementos finitos y esquema de la herramienta
El apoyo de la herramienta, cuyo diámetro es relativamente grande respecto del perno, actúa como un respaldo superior para prevenir que el material salga expulsado de las piezas a soldar. Esto minimiza la formación de huecos en la zona soldada. Usualmente el perno es “roscado” para proveer una mayor área de calentamiento por fricción, mientras se mantiene el diámetro del perno relativamente pequeño.
Una vez que las láminas o placas se colocan a tope en un eje común, el perno rotativo se hunde dentro de las piezas a soldar hasta que el apoyo de la herramienta está en contacto íntimo con la superficie de trabajo. Después que el perno se inserta, este se mueve en la dirección de soldadura. A medida que la herramienta se mueve a lo largo de la costura, el material calentado y ablandado

Soldadura por fricción agitación “friction stir welding” Cassanelli , A. et al.
32
fluye alrededor del perno hacia su parte posterior donde se consolida para crear la soldadura. El resultado es una soldadura de estado sólido y alta calidad. Nótese que el eje de la herramienta típicamente está inclinado unos grados (2º o 3º) respecto de la vertical, para facilitar la consolidación de la soldadura.
Se han escrito varios trabajos sobre el tema de FSW entre los cuales vale la pena destacar los de: (Cabot et al, 2003), (Flores et al, 1998), (Murr et al, 1998), (Liu et al, 1997) y (Midling, 1994) sobre los aspectos microestructurales de las aleaciones de aluminio soldadas, y también los trabajos de (Dawes & Thomas, 1996) y (Dawes, 1995) quienes describieron el proceso de FSW resumiendo sus ventajas y desventajas. Sin embargo, aunque se han reportado considerables trabajos experimentales en la literatura publicada, aparecen pocos trabajos sobre modelado del proceso de FSW. (Gould & Feng, 1998) desarrolló un modelo analítico de flujo de calor para FSW. El modelo se basa en la bien conocida ecuación de (Rosenthal and Schemerber, 1938), que describe un campo de temperaturas cuasi -estacionario en una placa semi-infinita debido a una fuente de calor móvil. En el mismo se tuvieron que introducir muchas simplificaciones para poder obtener una solución cerrada en el campo de temperaturas; (Stewart et al, 1998) usaron un balance de energía aproximado para predecir la forma de la soldadura y las temperaturas dentro de la zona soldada. El campo de temperaturas también se predijo usando el método desarrollado en (Dawes, 1995). Es de destacar que por las características del problema, donde las deformaciones plásticas son dominantes, pueden lograrse buenos resultados empleando modelos de flujo viscoplástico termomecánicamente acoplados (Cabot et al, 2003). Por otra parte, en virtud de las características geométricas y cinemáticas, el problema es netamente tridimensional, lo que conjuntamente con la existencia de fuertes gradientes en las velocidades de deformación en las inmediaciones del perno imponen una alta exigencia computacional. Recientemente (Cabot et al, 2003) ha abordado este tipo de modelado pero con cierto tipo de limitaciones en cuanto a las posibilidades de densificación localizada entre otras cuestiones.
Es de destacar, que una adecuada obtención del campo de temperaturas es capital a la hora de predecir las propiedades microestructurales en la zona afectada y a la hora de contar con buenos criterios de diseño y mejora de las herramientas de soldado. En virtud de la compleja física involucrada durante el proceso de FSW, el objetivo de este estudio es mejorar la comprensión del proceso mediante el modelado numérico, indagando en los aspectos básicos del proceso para determinar el nivel de exigencia computacional que este tipo de modelado requiere para la representación adecuada de los principales fenómenos involucrados, con vistas a un posterior análisis de sensibilidad.

Modelización Aplicada a la Ingeniería Cassanelli , A. et al.
33
Ecuaciones Gobernantes
Modelo mecánico
Despreciando las fuerzas inerciales y de volumen, las ecuaciones de equilibrio en un volumen de material Ω con una frontera ∂Ω se pueden escribir de la siguiente manera0:
Ω=⋅∇ en 0σ , (1)
donde σ es el tensor de tensiones de Cauchy. Las tracciones Tºi se pueden describir en una porción de la frontera ∂Ωt (condiciones de Neumann), mientras los componentes de la velocidad uºi se puede especificar en el resto de la superficie ∂Ωu (condiciones de Dirichlet). Esto se puede expresar como:
( )
NDimiºueNDimiºTe
uiii
tiii
,..,1,en ,..,1,en
=Ω∂=⋅=Ω∂=⋅
unσ
, (2)
donde ∂Ω = ∂Ωt ∪ ∂Ωu y ∂Ωt ∩ ∂Ωu = ∅, n es la normal unitaria externa en el contorno ∂Ω, ei es el vector unitario en un sistema de coordenadas cartesianas tridimensional y u el vector velocidad. El vector de velocidad de deformación está relacionado con la parte simétrica del gradiente del campo de velocidades de acuerdo a
( )2
T uuD ∇+∇= . (3)
Suponiendo que el material es incompresible, la ecuación de continuidad que sigue se debe cumplir en todo el dominio Ω es
0=⋅∇ u . (4)
Si se adopta una formulación de flujo para modelar las grandes deformaciones plásticas involucradas en el proceso de stir-welding, el tensor desviador de tensiones S se puede relacionar con el tensor de velocidades de deformación D –que es en realidad un desviador en virtud de la hipótesis de incompresibilidad- por la siguiente relación:
.
2
e
e
3
I.-S D,S
εσµ
σµ
=
== p (5)

Soldadura por fricción agitación “friction stir welding” Cassanelli , A. et al.
34
donde µ es la viscosidad efectiva del material y p la presión hidrostática. Además, σe es la tensión efectiva o el segundo invariante de la tensión y εe es la velocidad de deformación efectiva o el segundo invariante de la velocidad de deformación. Estos se pueden escribir como
D,D
S,S
2e
2e
⋅=
⋅=
3223
ε
σ (6)
En este trabajo se asumió un material viscoplástico y rígido donde la tensión de flujo depende de la velocidad de deformación y de la temperatura. Esto se representa por la siguiente relación¡Error! No se encuentra el origen de la referencia.:
⎟⎠⎞
⎜⎝⎛=
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛=
RTQZ
AZSh
n
expcon ,arg1e
/1
e εα
σ , (7)
donde α, Q, A y n son constantes del material, R es la constante de los gases y T la temperatura absoluta. Las constantes del material se pueden determinar usando ensayos de compresión estándar. El modelo mecánico se completa luego de describir las condiciones de contorno apropiadas.
Modelo térmico
La distribución de temperaturas se obtiene resolviendo la ecuación de balance de calor0
( ) γθθρ +∇⋅∇= kDtDCp , (8)
donde ρ es la densidad, Cp la capacidad calorífica, k la conductividad térmica, θ la temperatura y γ la tasa de generación de calor interna por disipación de la potencia viscoplástica. Se asume que alrededor del 90% de la potencia plástica se convierte en calor. El término de tasa de generación de calor por trabajado mecánico (γ) se puede expresar como el producto contraído de la tensión con la velocidad de deformación, como sigue:

Modelización Aplicada a la Ingeniería Cassanelli , A. et al.
35
DS :ηγ = , (9)
con η fracción de potencia que no es absorbida en defectos microestructurales. Se asume que aproximadamente el 90%(η≅0.9) de la deformación plástica se transforma en calor0.
Además se adoptaron las propiedades del aluminio puro, tanto para los parámetros mecánicos como para la conductividad y el calor específico dependientes de la temperatura. Los flujos qº se puede prescribir en una porción del contorno ∂Ωq, mientras que la temperatura θ º se puede especificar en el resto de la superficie ∂Ωθ. Esto se puede expresar como:
,en º ,Ωen θθθθ Ω∂=∂=⋅∇ q qºk n (10)
donde ∂Ω = ∂Ωq + ∂Ωθ y n es la normal unitaria externa en el contorno ∂Ω. La contribución de qº se puede deber, por ejemplo, al enfriamiento de la superficie por convección.
Modelo geométrico
En el presente estudio se asume un marco de referencia fijado a la herramienta de soldado, de tal manera que la placa se mueve hacia ella con una velocidad (1.37mm/seg) y temperaturas (32ºC) impuestas en la superficie de entrada a la zona de estudio.
La superficie del perno de la herramienta está mecanizada en forma de espiral. El efecto de flujo descendente producido por dicho espiral se simula imponiendo una componente de velocidad descendente en la superficie del perno. Esta velocidad es función del paso del espiral (1.067 mm/vuelta) y la velocidad de rotación de la herramienta (8.17 vueltas/seg).
Los datos del material y otros parámetros del modelo figuran en las Tablas 1 y 2.
Modelado Numérico
Se modeló la placa base con una malla de elementos finitos tetraédricos del tipo Taylor-Hood (Zienkiewicz, 1991) , es decir, tetraedros P2-P1, con interpolaciones cuadráticas para las velocidades y lineales para las presiones, en

Soldadura por fricción agitación “friction stir welding” Cassanelli , A. et al.
36
orden a lograr estabilidad de las interpolaciones de presión por la condición de divergencia nula conjuntamente con una adecuada captura de los gradientes de tensión en las capas límites. La malla implementada resultó tener aproximadamente 19700 elementos con 23200 nodos de velocidad (Figura 2).
El algoritmo de resolución consiste en dos subpasos: en el primero de ellos se obtiene el campo de velocidades asumiendo fijo el campo de temperaturas. Se itera por reemplazos sucesivos para adaptar no-linealmente los valores de viscosidad de acuerdo a las velocidades de deformación obtenidas en la iteración anterior. Las ecuaciones discretas son obtenidas a partir de la formulación clásica del problema de Stokes para flujos totalmente viscosos incompresibles y de acuerdo a las interpolaciones antes mencionadas, con el agregado de seudo-compresibilidad artificial. El sistema de ecuaciones lineales para cada iteración es resuelto por el método de gradientes conjugados cuadrados con un precondicionador de factorización incompleta de tipo LU de acuerdo al esquema propuesto por Y. Saad en SparseKit (Saad, 1994). En el segundo sub-paso se resuelve el campo de temperaturas con interpolación cuadrática como un problema de convección difusión, asumiendo el campo de velocidades resultante en el primer sub-paso. El método de resolución numérica es el mismo que en el primero.
Aunque se requiere la solución estacionaria, se implementó un esquema de avance en el tiempo totalmente implícito, usado fundamentalmente como precondicionador del sistema de ecuaciones.
Resultados
Campos de velocidades
En la Figura 3 se muestran las líneas de flujo del material en la zona del perno de la herramienta. Se observa claramente el efecto descendente que produce el estriado de la superficie. También se puede ver como el material se mantiene cerca de la superficie del perno de la herramienta durante varias vueltas de la misma antes de seguir su curso en la dirección de soldadura.
En la Figura 4 se grafica el módulo de la velocidad en los planos XZ e YZ que pasan por el eje de simetría de la herramienta. Para una mejor visualización de los resultados no se graficó la herramienta. Se observa una fuerte capa límite en la superficie del perno.
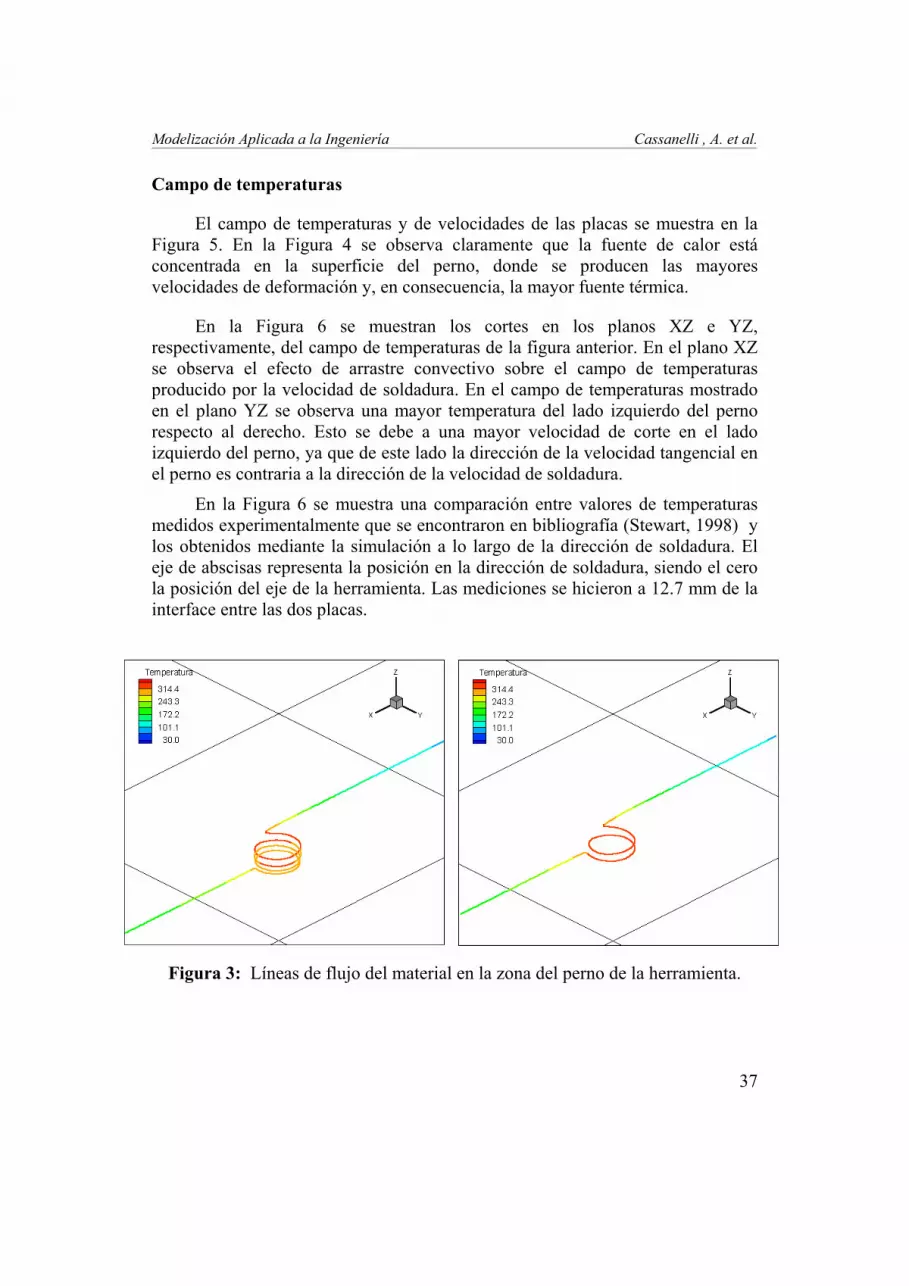
Modelización Aplicada a la Ingeniería Cassanelli , A. et al.
37
Campo de temperaturas
El campo de temperaturas y de velocidades de las placas se muestra en la Figura 5. En la Figura 4 se observa claramente que la fuente de calor está concentrada en la superficie del perno, donde se producen las mayores velocidades de deformación y, en consecuencia, la mayor fuente térmica.
En la Figura 6 se muestran los cortes en los planos XZ e YZ, respectivamente, del campo de temperaturas de la figura anterior. En el plano XZ se observa el efecto de arrastre convectivo sobre el campo de temperaturas producido por la velocidad de soldadura. En el campo de temperaturas mostrado en el plano YZ se observa una mayor temperatura del lado izquierdo del perno respecto al derecho. Esto se debe a una mayor velocidad de corte en el lado izquierdo del perno, ya que de este lado la dirección de la velocidad tangencial en el perno es contraria a la dirección de la velocidad de soldadura.
En la Figura 6 se muestra una comparación entre valores de temperaturas medidos experimentalmente que se encontraron en bibliografía (Stewart, 1998) y los obtenidos mediante la simulación a lo largo de la dirección de soldadura. El eje de abscisas representa la posición en la dirección de soldadura, siendo el cero la posición del eje de la herramienta. Las mediciones se hicieron a 12.7 mm de la interface entre las dos placas.
Figura 3: Líneas de flujo del material en la zona del perno de la herramienta.

Soldadura por fricción agitación “friction stir welding” Cassanelli , A. et al.
38
Figura 4: Modulo de la velocidad en los planos XZ(en Y=0) e YZ(en X=0).
Figura 5: Campo del modulo de la velocidad y de temperaturas de las placas y la herramienta en 3D .

Modelización Aplicada a la Ingeniería Cassanelli , A. et al.
39
Figura 6: Temperatura en los planos XZ(en Y=0) e YZ(en X=0)
Figura 7: comparación entre datos experimentales de temperatura y los obtenidos con la simulación.
0,0
50,0
100,0
150,0
200,0
250,0
300,0
-15,0 -10,0 -5,0 0,0 5,0 10,0 15,0 Posición
Temperatura
Experimental Simulación

Soldadura por fricción agitación “friction stir welding” Cassanelli , A. et al.
40
Conclusiones
Se presentó un modelo computacional tridimensional por Elementos Finitos del proceso de FSW con el objetivo de resaltar los principales aspectos del proceso y poner de manifiesto y evaluar los requerimientos computacionales necesarios para la adecuada captura de los principales fenómenos involucrados. Los resultados obtenidos son congruentes con los reseñados en la literatura. Se destaca la presencia de muy fuertes gradientes en el campo de velocidades en las adyacencias del perno de soldadura, lo cual requiere una reevaluación de las densificaciones utilizadas en dichas zonas y con vistas a futuros análisis de sensibilidad, de manera de obtener redes bien sintonizadas con los requerimientos del problema y optimizadas desde el punto de vista del costo computacional.
Referencias Cabot, P., A. Moglioni, E. Carella, (2003). “Soldadura por friccion agitación (FSW) de” AA 6061 T6, Materia Vol 8, Nº 2, 187-195.
Dawes, C. J., W.M. Thomas, (1996). “Friction stir process for aluminum alloys”, Welding J. 75, p. 41.
Dawes, C. J., (1995). “An introduction to friction stir welding butt welding and its Developments”, Welding and Fabrication Jan.
Flores, O. V., C. Kennedy, L.E. Murr, D. Brown, S. Pappu, B.M. Nowak, J. McClure, (1998). “Microstructural issues in a friction-stir welded aluminum alloy”, Scr. Mater. 38. 703.
Gould, J. E., Z. Feng, (1998). “Heat flow model for friction stir welding of aluminum alloys”, Journal of Material Processing and Manufacturing Science 7.
Liu, G., L.E. Murr, C.S. Niou, J.C. McClure, F.R. Vega, (1997).” Micro- structural aspects of the friction-stir welding of 6061-T6 aluminum alloy”, Scr. Mater. 37. p. 335.
Midling, O. T., (1994).” Material flow behavior and microstructural integrity of friction stir butt weldments”, Proceedings of the Fourth International Conference on Al Alloys(ICAAS), Atlanta GA, p. 11.
Murr, L.E., G. Liu, J.C. McClure, (1998). “A TEM study of precipitation and related microstructures in friction-stir-welded 6061 aluminum”, J. Mater. Sci. 33. p. 1243.

Modelización Aplicada a la Ingeniería Cassanelli , A. et al.
41
Rosenthal, D., R. Schemerber, (1938). “Thermal study of arc welding”, Welding J. 17, 208s.
Saad, Y., (1994). SPARSEKIT: a basic tool kit for sparse matrix computation,version2,University of Illinois:
http://wwwusers.cs.umn.edu/~saad/software/SPARSKIT/sparskit.html, 1994.
Stewart, M. B., G. P. Adams; A. C. Nunes, P. Romine,(1998). “A combined experimental and analytical modeling approach to understanding friction stir-welding”, Developments in Theoretical and Applied Mechaninics, SECTAM XIX, p. 472.
Zienkiewicz, O.C., R.L. Taylor (Eds.) (1991), “The Finite Element Method”, fourth ed., McGraw-Hill, UK, 1991, p. 2.

Soldadura por fricción agitación “friction stir welding” Cassanelli , A. et al.
42
Apéndice
Property Steel Tool Aluminum Plates
ρ [Kg/m3] 7.8 103 2.7 103
Cp [J/Kg ºC] 0.5 103 1.05 103
k [W/m ºC] 40.0 207.0
Tabla 1: Propiedades térmicas de la herramienta y las placas de aluminio.
[mm] Steel Tool [mm] Alumin
um Pl t
Pin Diameter 6.4 Long (dimension in X axis) 100
Pin High 6.4 Width (dimension in Y axis) 60
Support Diameter 19 Thick (dimension in Z axis) 19.1
Support High 20
Tabla 2: Dimensiones de la herramienta y de las placas de aluminio.
Material A α [mm2 N-
1] N H [J mol-1]
Alloys 1S 0.224 1013 0.052 4.54 177876.4
Tabla 3: Parámetros de la ley de viscosidad

Modelización Aplicada a la Ingeniería
43
Modelización de estructuras laminares cilíndricas, aplicación práctica al caso de silos
Parte I: silos horizontales
PATRICIA M. CIANCIOA , NORMA L. ERCOLIA, CARLOS M. BERARDOA
A Departamento de Ingeniería Civil, Facultad de Ingeniería, Universidad Nacional del Centro de la Provincia de Buenos Aires, Olavarría, Argentina.
Introducción
Los silos son tipologías estructura1es que se han utilizado en todas las civilizaciones desde los tiempos más antiguos para almacenar las cosechas.
En la actualidad se siguen utilizando para el almacenamiento agrícola, pero también para toda clase de productos como los obtenidos de procesos mineros, industriales y de la construcción. La diversidad de densidades, capacidad de abrasión, ataque químico, contenido de humedad y finura de esta gama tan amplia de materiales hace que las características de cada silo específico y los acabados internos de los mismos sean diferentes.
Se aborda en este capítulo el tratamiento de silos circulares unicelulares. Se trata un caso particular que corresponde a un silo de hormigón para almacenar clinker, en una planta cementera del partido de Olavarría, en la provincia de Buenos Aires. Para obtener el comportamiento estructural, esto es, los esfuerzos y desplazamientos de la estructura, se implementan a través de técnicas numérico-computacionales diferentes modelos, utilizando un software adecuado, disponible en el mercado. Se adoptan como fundamentos y parámetros de comparación la teoría de láminas cilíndricas circulares, códigos, reglamentos y criterios vigentes.
La implementación computacional involucra diferentes etapas: adopción del modelo adecuado, geometría, mallado y tipo de elemento finito a utilizar, estudio de las condiciones de contorno, hipótesis de cargas, y el tipo de análisis a efectuar. Para el diseño se consideran las disposiciones del Código americano (ACI 313 1991) y del Reglamento argentino (CIRSOC 102 1984), fundamentalmente en los aspectos relacionados con verificación de las condiciones de servicio: estanqueidad, control de fisuración y análisis de tensiones originadas por la temperatura del material ensilado.
Datos del Proyecto del Silo de Clinker correspondientes a la documentación de obra
Seguidamente en las Figuras 1 a 4 aparecen los esquemas correspondientes a las características geométricas del silo de clinker, fundación, tipo de apoyo, bocas de vaciado.

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
44
Galeria de hormigónpara cinta trans. desdeenfriador.
Silo de clinker
34,0035,00
Tunel de salida declinker hacia molinode cemento
Entrada de clinkerdesde enfriador
Acceso al silo
0.50
Figura 1: Corte diametral del silo.
1,40
Figura 2: Fundación del silo.

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
45
INSERTO DE ACERO 250 x 500mmespesor = 12.5 mm cantidad = 112
0,996
Figura 3: Detalle dentado entre pared del silo y fundación.
8,75
8,75
.
.
Las boquillas de salida Del clinker están Compuestas por tres Orificios rectangulares De 1,20 x 1,20 separados a 8,75 m cada una lo que genera un vaciado excéntrico
El clinker cae desde los orificios a una cinta transportadora que lo traslada al molino de cementos
Figura 4: Bocas de salida del material.
Características del material a ensilar Densidad γcl = 1300 kg/m3 (Se estima entre 1000 y 1100 kg/m3 pero aumenta con la altura y el tiempo de almacenaje, por lo que se adopta el valor mostrado arriba). • Angulo de rozamiento interno φ = 30° = 0,53 rad. • Angulo de rozamiento grano-pared φ´= 30° = 0,53 rad. • Coeficiente de rozamiento clinker-H°A° µ´ = tan(ρ´) µ´ = 0,58
Por razones operativas, se proyectó una abertura de acceso, cuyas dimensiones son: 3.50m por 5m. Esto introduce un problema de discontinuidad en la geometría y una perturbación en el estado membranal correspondiente, con zonas de

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
46
concentraciones de tensiones a considerar (Belluzzi 1970). En la modelización del silo efectuada con el software ALGOR®, se considera dicha abertura para estudiar la distribución de tensiones resultantes. Cuando la longitud de la abertura no es superior a cinco veces el espesor de la pared en cualquier longitud o dirección, y la armadura principal es horizontal, es suficiente considerar el aumento de armadura horizontal necesaria para la abertura y disponer la mitad en cada borde de la misma. En caso contrario es necesario efectuar un diseño adecuado de las armaduras necesarias para resistir los esfuerzos de tracción, con especial cuidado en las esquinas. (Ravenet 1977).
Características de los materiales a emplear en la construcción del proyecto Hormigón H-30 f´c = 300 kg/cm2 Módulo de elasticidad del hormigón Ec = 250.000 kg/cm2 Módulo de Poisson del hormigón ν = 0.15 Coeficiente de dilatación térmica del hormigón αc = 10,8.10-6 Acero ADN-420 fs = 4.200 kg/cm2 Módulo de elasticidad del acero Es=2.100.000 kg/cm2
Análisis del comportamiento estructural del silo para almacenamiento de clinker
En el siguiente cuadro se muestran las presiones que se pueden presentar en un silo
Los resultados experimentales de llenado y vaciado de silos han determinado que las presiones difieren notablemente de las calculadas con el material en reposo. Estos factores se deben considerar para el diseño, lo cual implica el cálculo de las presiones de llenado y a partir de las mismas cuantificar a través de un coeficiente de mayoración las sobrepresiones producidas durante el vaciado, y/o llenado y vaciado simultáneos.
Cargas “estáticas” debidasal llenado del silo o al silolleno en reposo.
Cargas “dinámicas”debidas al vaciado delsilo
Vaciado centrado
Vaciado excéntrico
Presiones

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
47
Clasificación de silos
Debido a factores relacionados con la capacidad de producción instalada, en la
operatoria normal de las plantas cementeras se considera que el silo de clinker se encuentra con material ensilado en un rango que varía entre un 40 a un 70% de su capacidad total, datos que forman parte de los requisitos de diseño a cumplir por el proyecto.
Con la finalidad de caracterizar al silo en estudio como silo horizontal o vertical, y considerando que el material adopta una superficie libre inclinada siguiendo el ángulo de rozamiento interno φ se efectúan las siguientes comprobaciones:
Si se cumple la relación
⎟⎠⎞
⎜⎝⎛ −
⎟⎠⎞
⎜⎝⎛ −
≥
32
4sen
cos34
sen.h.2d
φπ
φφπ
, (1)
el silo es horizontal. Para las dimensiones d y h, del silo en estudio, se llega a que la relación anterior se cumple hasta un volumen de material ensilado del 53% del total, hallándose dicho valor dentro de los volúmenes que se presentan dentro en la operatoria normal del silo. Para porcentajes de material ensilado mayores la relación deja de cumplirse; esto indica que no se puede clasificar al silo en horizontal o vertical de manera absoluta. Este comportamiento indefinido del mismo lleva a que el cálculo de presiones debidas al material ensilado se deba realizar mediante la teoría de Empujes, válida para silos horizontales y mediante: la teoría de Janssen para estado en reposo, según el Código ACI 313 y Ravenet para el vaciado. Se debe aclarar también que según Reimbert aunque el silo se
Clasificación
Según la forma Según el comportamiento de sus paredes
Rectangulares Circulares
UUnniicceelluullaarreess Multicelulares
Horizontales Verticales

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
48
encuentre dentro de la clasificación de horizontal se debe realizar el cálculo mediante las fórmulas obtenidas para silos verticales y adoptar la curva que arroje los mayores valores de presión. Ravenet obtuvo para una relación altura-diámetro de 1,5, vaciado excéntrico y fondo plano, un coeficiente de sobrepresión de 1,48 para la pared opuesta a la boca de salida. Se adopta, para el caso del silo particular (relación altura-diámetro ~ 1) un coeficiente de sobrepresión de 1,5 quedando del lado de la seguridad. Este coeficiente de sobrepresión se aplicará también al cálculo de las presiones horizontales obtenidas por la teoría de empujes en muros para tener en cuenta el efecto de vaciado.
Para el cálculo de las presiones de vaciado el código ACI 313 especifica que se deben afectar a los valores de presiones obtenidas mediante las expresiones de la teoría de Janssen por un coeficiente Cd=1,65 correspondiente a una relación altura-diámetro menor a 2.
Para silos circulares, el coeficiente de sobrepresión debe ser constante alrededor de la circunferencia tomando el mayor de éstos. En la práctica este coeficiente también se toma constante en la altura. Se debe tener en cuenta que para una esbeltez inferior a 1.5 prácticamente no se producen sobrepresiones apreciables debidas al vaciado. Cálculo de las presiones según teoría de Janssen
⎟⎟⎠
⎞⎜⎜⎝
⎛−==
− hR
k´
e1´R.Pv.kPh
µ
µγ ,
φφ
sen1sen1
PvPhk
+−== =0,33 , (2)
Phmáx = 10.290 kg/m2
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
− hR
k´
e1k´R.Pv
µ
µγ , (3)
Pvmáx= 31.282 kg/m2. Cálculo de presiones según código ACI 313
Cd = 1,65
Cd.e1´R.Ph
h.R
k´.
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
µ
µγ , (4)
Phmáx=16.978 kg/m2
kPhPv máx
máx = , (5)
Pvmáx = 51.450 kg/m2

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
49
Cálculo de presiones según teoría de Ravenet kvaciado = 1.5
vaciadoh.
Rk´.
ke1´R.Ph
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
µ
µγ , (6)
Phmáx = 15.435 kg/m2
kPhPv máx
máx = , (7)
Pvmáx = 43.743 kg/m2 Cálculo de las presiones según la teoría de empuje sobre muros
Para el cálculo de empujes sobre muros se considera el estado de carga correspondiente a silo lleno y considerando la superficie libre inclinada, siguiendo el ángulo de rozamiento interno del material ensilado, situación de muy baja probabilidad de ocurrencia real pero que no debe descartarse considerando que en el marco de esta teoría se adoptarán las presiones con las cuales a posteriori se establecerán los esfuerzos internos para el dimensionado.
⎟⎠⎞
⎜⎝⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛+−=
πφ
φπφπγ 21
22
2h.Ph
22
máx , (8)
Phmáx = 22.525 kg/m2 En la Figura 5 se muestran las presiones obtenidas según se detalló en los
párrafos anteriores.
0.0
2.5
5.0
7.5
10.0
12.5
15.0
17.5
20.0
22.5
25.0
27.5
30.0
32.5
35.0
0 5000 10000 15000 20000 25000Presión [kg/m2]
Altu
ra d
el s
ilo [m
] .
JanssenACI 313-91RavenetEmpuje
Figura 5: Gráfica comparativa de presiones.

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
50
Vinculación
Como se puede apreciar en la Figura 5, la curva que se debe tomar por razones de seguridad es la correspondiente a la teoría de empuje sobre muros. Por lo cual esta opción es la que se considerará para efectuar el dimensionado del silo.
En consecuencia la distribución de presión provocada por el material pulverulento se considera del tipo de una presión hidrostática.
Determinación teórica de desplazamientos y esfuerzos para el caso de lámina cilíndrica bajo presión hidrostática
Se resolverá analíticamente un ejemplo de lámina cilíndrica, con el objetivo de establecer la diferencia en el comportamiento estructural según la condición de sustentación y para determinar la cuantificación del estado flexional que perturba el comportamiento membranal puro, sometido a presión hidrostática.
En la Figura 6 aparecen los datos del ejemplo a resolver y en la Tabla 1 los resultados obtenidos, al aplicar la teoría clásica de láminas (Timoshenko 1959) según las condiciones de borde correspondientes a los respectivos tipos de vinculación considerados.
Figura 6: Datos del ejemplo teórico.
Nφ [kg/m]
(altura) Mx [kgm/m]
(altura) Mφ [kgm/m]
(altura)
Articulado 16.164,31 (1 m)
-188 (0.5 m)
-28,20 (0.5 m)
Empotrado 14.623,18 (1m)
+582,45 -97,45(0 m) (0.5m)
+87,37 -14,61 (0 m) (0.5m)
Apoyo Simple 18.000 (0 m) 0 0
Tabla 1: Influencia de la vinculación en la distribución de esfuerzos. Analizando los resultados mostrados en Tabla 1, con sustentación articulada y
empotrada, respectivamente, se puede apreciar que, en el caso empotrado, se produce un estado flexional de mayor complejidad que en el de apoyo articulado,
h=6 m r=3 m d=0.12 m γ =1000 kg/m3

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
51
provocando un alejamiento del comportamiento en estado membranal que es el que se busca mantener en el diseño de este tipo de estructuras. El caso de apoyo simple presenta un comportamiento membranal puro, pero esta sustentación no es aplicable para la estructura que se desea analizar. En la Tabla 2 se muestran los valores de los desplazamientos y las tensiones máximas principales y longitudinales calculadas a partir de dichos esfuerzos.
Vinculación wmáx [m]
(altura) σmáx= Nφ/A+ Mφ/ W
[N/m2] (altura)
σzz= Mx / W [N/m2]
(altura) Articulado 1.35. 10-4
(1 m) 1.35.106
(1 m) 783.350 (0.5 m)
Empotrado 1.22.10-4 (1 m)
1.26.106 (1 m)
-242.687 (0 m)
Apoyo Simple 1.5.10-4 (0 m)
1.5.106 (0 m)
0
Tabla 2: Desplazamientos y tensiones teóricos. Instrumentación y análisis computacional
La modelización se efectúa utilizando un software (ALGOR® 1999), que emplea el Método de los Elementos Finitos para la resolución (Oñate 1992), (Bathe 1982). De acuerdo a los comentarios realizados en el ítem anterior se modelizará el caso de apoyo articulado.
Para ello se debe definir el modelo global que contempla: De la librería de elementos disponibles en el software ALGOR®, se
seleccionaron elementos tipo shell, cuadrilátero de cuatro nodos. Este elemento posee un total de doce grados de libertad, dos rotacionales y uno traslacional por nodo. Aunque estas láminas correspondan a la clasificación de delgadas, también se realizaron modelos utilizando elementos sólidos tipo brick y tetrahedral con el objeto de comparar el comportamiento entre diferentes tipos de elementos, y de calibrar el modelo a través de la contrastación con los resultados teóricos obtenidos mediante la aplicación de la teoría clásica. Se debe aclarar que, al existir en todos los casos simetría geométrica y de carga, se modela un cuarto de
Modelo Físico o Geométrico
Modelo de las Condiciones de Borde
Modelo Constitutivo oMaterial
Modelo de las Acciones
MODELOGLOBAL

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
52
tubo y no se considera el peso propio, en concordancia con las hipótesis asumidas por la teoría clásica de láminas.
En la Tabla 3 aparecen los distintos modelos, tipo de elemento y mallado para el caso teórico con base articulada
Modelo Elemento Mallado Total de elementos
a Shell Uniforme 1776
b Shell 1216 elem. entre 0 y 1 metro de altura 608 elem. entre 1 y 2 metros de altura 1216 elem. entre 2 y 4 metros de altura
3040
c Brick Uniforme 1776
d Brick 1216 elem. entre 0 y 1 metro de altura 608 elem. entre 1 y 2 metros de altura 1216 elem. entre 2 y 4 metros de altura
3040
e Tetrahedral Uniforme 3056
Tabla 3: Modelos con base articulada. Se reportan, por razones de espacio, sólo los resultados de las salidas gráficas
correspondientes al modelo b, de la Tabla 3; según muestra la Figura 7.
Desplazamiento a 1 m de altura. [m]
Teórico 1,35.10-4
ALGOR® 1,362.10-4
Mallado

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
53
Figura 7: Mallado y salidas gráficas de tensiones. El programa cuenta con la posibilidad de obtener el valor de deformación o
tensión en cada nodo. Los valores que aparecen en correspondencia con la leyenda ALGOR®, en la Figura 7, han sido obtenidos de esta manera, donde el color de la celda indica la zona donde se encuentran las deformaciones y tensiones de tal magnitud.
Se debe mencionar que si bien sólo se muestra el caso b, en las Tablas 4 y 5 se transcriben los resultados correspondientes a todos los modelos planteados según la Tabla 3.
Desplazamiento [m]Modelo (elementos) Teórico ALGOR®
Diferencia [%]
a(1776) 1,39.10-4 2,8
b(3040) 1,38.10-4 2,2
c(1776) 1,20.10-4 11,1
d(3040) 1,20.10-4 11,1
e(3056)
1,35.10-4
1,22.10-4 9,7
Tabla 4: Desplazamientos para los modelos analizados con base articulada.
Máximas principales a 1m de altura [N/m2]. Teórico 1.35.106 ALGOR® 1.35.106
Tensión σzz a 0,5 m de altura [N/m2]
Teórico 783.350 ALGOR® 766.699

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
54
Max. Ppal [N/m2] σzz [N/m2] Diferencia [%] Modelo
(Nºelem.) Teórico ALGOR®
Diferencia [%]
Teórico ALGOR®
a(1776) 1,38195.106 2,2 710.311 9,3
b(3040) 1,3745.106 1,6 751.025 4,1
c(1776) 1,22957.106 9,9 362.962 53,7
d(3040) 1,20875.106 10.5 379.929 51,5
e(3056)
1,35141.106
1,25634.106 7,0
783.350
697.522 38,5
Tabla 5: Tensiones para los modelos analizados con base articulada.
A medida que se densifica el mallado, el elemento shell es el que mejor se comporta dado que este elemento de la librería del software es el indicado para el análisis de láminas delgadas.
Por lo tanto, el modelo con base articulada y elemento tipo shell con mallado densificado, que corresponde al modelo b de Tabla 3, es el que se considera para modelizar el silo particular. Análisis de cargas
Además de los mencionados estados de silo lleno en reposo y silo lleno vaciándose, se analizan los siguientes estados de carga: Peso propio, viento, variación de temperatura, carga de cubierta metálica y carga de cinta transportadora. Acción del viento sobre la estructura: presión
La carga producida por el viento, se calcula por el Reglamento CIRSOC. Se debe contar con la velocidad de referencia β, según el mapa de distribución, la velocidad de referencia, que corresponde a la zona de Olavarría es: β=30 m/s
Se toma como vida útil de la construcción 25 años y una probabilidad: Pm de 0.5 obteniéndose un coeficiente cp=1.65, con lo cual, la velocidad básica de diseño Vo cp= β es Vo = 49.5m / seg
Presión dinámica básica 2o Vo0613,0Q = , resulta: Qo=150 kg/m2
Presión dinámica de cálculo dzoz ccQQ = , se adopta :cz = 1.398 y cd = 1, resultando: Qz=210 kg/m2 Cálculo de las acciones debidas al viento: La dirección del viento se supone normal a la superficie maestra para los cilindros, categorías II a VI (CIRSOC 102 1984).

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
55
El cálculo de la relación de dimensiones según apartado 7.1.3 para cilindros de
generatrices verticales viene dada por la siguiente expresión: dho=λ , siendo: ho
la altura propia de la construcción de 34 m y d el ancho de la superficie maestra de 35 m , por lo cual se toma igual a 1. Clasificación de la construcción según apartado 7.1.4 (CIRSOC 102 1984), se obtiene de tabla 10 y corresponde a clase V. Coeficiente de forma según apartado 7.1. (CIRSOC 102, 1984), con λ=1 resulta: γo=0.90. Cálculo de la acción unitaria, de la acción de conjunto según apartado 7.4. (CIRSOC 102 1984), y obtención de la carga equivalente. A partir del cálculo de la acción unitaria resultante zeQcw = , para el cálculo de la fuerza horizontal de empuje Pxi se integra el diagrama de presiones. A continuación se calcula la fuerza total Pxt adicionando las fuerzas horizontales de empuje correspondientes a cada longitud de arco, se multiplica este valor por dos para considerar el perímetro en forma completa y se divide por el diámetro del silo, se obtiene una carga equivalente constante (Q equiv) que se incluye en el modelo de silo analizado con el software ALGOR®, resultando, resultando Qequiv=138 kg/m2. Efecto de la temperatura del material ensilado, según código ACI 313-91 Determinación de la diferencia de temperatura entre las caras de la pared del silo • Temperatura exterior To = 15 ºC • Temperatura máxima del producto Ti = 100ºC • Temperatura del material (Ti)des = 73,33ºC • Resistencia térmica según expresión Kt = 0,24 • Diferencia de temperatura entre caras ∆t = 13,74 ºC
El producto a ensilar ingresa a una temperatura elevada, la que produce tensiones térmicas a tener en cuenta en el cálculo de las paredes. Estas tensiones se superponen a los máximos esfuerzos de tracción correspondientes al silo lleno. El diseño de la pared del silo para tener en cuenta los efectos de la temperatura requiere:
1) La determinación de la diferencia de temperatura en las caras de la pared del silo.
2) El cálculo del momento flector originado por la diferencia de temperatura entre las caras.
1- Determinación de la diferencia de temperatura entre las caras de la pared del silo: Se debe calcular la diferencia de temperatura ∆t entre el interior y el exterior de la pared. Se considera que una diferencia de temperatura de 80 ºF (1ºC=5/9F) no es tenida en cuenta. Por lo tanto la temperatura de diseño (Ti)des del material caliente cuya temperatura interna es Ti se obtiene como:

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
56
( ) ( )67,26TT 1des1 −= [ºC]. (9) Se ha observado que la temperatura de los materiales granulares en silos no es
uniforme sino que desciende apreciablemente cerca de la pared, en función del grado de carga del silo, de la temperatura de entrada del material, de los coeficientes de conductividad térmica, como también de las fluctuaciones diarias y estacionales de la temperatura. Teniendo en cuenta todas estas variables, y considerando que una capa de 8 pulgadas (20 cm) de cemento en contacto con la cara interior del silo actúa como aislante, provocando un descenso lineal de la temperatura a través de esa capa, se producirá una variación de la temperatura a través de las 8”(20 cm) de cemento y de la pared del silo, según Figura 8.
Figura 8: Variación de temperatura a través de la pared del silo. La diferencia de temperatura entre el interior y exterior del silo es
∆t =T2 - T1 . (10)
La caída de temperatura ∆t dentro de la pared es una porción de la diferencia total de la temperatura de diseño, y está en función de Kt: coeficiente de resistencia térmica a lo largo de la capa de cemento antes mencionada, la resistencia térmica de la pared y la combinación con el aire exterior. Teniendo en cuenta lo expuesto, el valor de ∆t puede ser obtenido a partir de la fórmula
( )[ ] todes1 K.TTt −=∆ , (11)
Kt se determina teniendo en cuenta principios de transferencia de calor. 2 - Cálculo del momento producido por la variación de la temperatura, según ACI 313-91
( )Mt E h tc c= −14 12. . . . . /α υ∆ (12)

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
57
Mt: momento flector en lb x pie debido al ensilado de productos a altas temperaturas T1, Ec: módulo de elasticidad de hormigón en unidades psi. Su valor se reduce para tener en cuenta el efecto del creep, y algunos autores adoptan el módulo del acero dividido por 8, h: espesor de la pared en pulgadas, αc: coeficiente de conducción térmica de la pared de hormigón, υ: módulo de Poisson, ∆t: diferencia de temperatura entre las caras exterior e interior de la pared del silo.
La armadura adicional correspondiente al momento debido al efecto térmico debe colocarse cerca de la superficie de pared más fría (usualmente la exterior) aunque por simplicidad la misma cantidad de armadura se coloca en la cara interior para evitar tener diferentes tamaños de barras en una cara y en la otra. Las tensiones térmicas en dirección axial generalmente son reducidas debido a las tensiones de compresión producidas por las cargas actuantes en dicha dirección; por lo tanto, generalmente no es necesario agregar armaduras verticales para absorber este efecto térmico. El momento obtenido de la ecuación (12) se debe mayorar en un 50%, estableciendo de esta manera un margen de seguridad, resultando
( ) tut M5,1M = . (13) Momento debido a ∆t: Mt = 11.036 kgm/m Carga de cinta transportadora
La cinta transportadora, que descarga el clinker del enfriador, llega a la parte superior del silo. Ella se apoya sobre la pared del silo mediante una columna siendo uno de sus lados igual al espesor de la pared del silo y el otro de 3 m, según planos de obra. La carga total que pasa a la pared del silo es de 21600 kg. Carga de la cubierta metálica
Se estima de acuerdo a las dimensiones indicadas en plano: Carga de cubierta metálica: 3190 kg/m2. Verificación del espesor de la pared.
Según el código ACI 313-91, el espesor de la pared de un silo de hormigón armado, en ningún caso puede ser inferior a 15 cm. Se debe tener en cuenta al adoptar el espesor de la pared la condición de estanqueidad, como requisito de diseño. Según Ravenet, el espesor necesario a adoptar para el silo se calcula mediante las siguientes fórmulas: En función del esfuerzo de tracción Nφ
Mediante la utilización de la siguiente expresión para el cálculo del espesor mínimo de la pared del silo se tiene en cuenta la condición de estanqueidad

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
58
Tfct.fs.100
fct.nfsEs.mrhnec−+= , (14)
hnec: espesor necesario de la pared expresado en cm, mr: módulo de retracción del hormigón e igual a 0,0003, Es: módulo elástico del acero en kg/cm2, fs: tensión admisible del acero a tracción expresado en kg/cm2 e igual al valor correspondiente al límite elástico dividido por 2,5, 2cm/kg1680fs = , n: relación entre los módulos elásticos del acero y del hormigón siendo n: 8, fct: tensión admisible de tracción del H°, fct =0,1x f´c= 30 kg/cm2, T = Nφ = esfuerzo de tracción en el silo.
En la Figura 9 se visualizan las tensiones alcanzadas durante el vaciado del silo. En función de estas tensiones se obtiene el esfuerzo de tracción actuante con el que se calculará el espesor necesario.
g
Figura 9: Tensiones principales máximas para silo de espesor 50 cm vaciándose.
Si se analizan las tensiones producidas en la pared del silo, sin considerar las concentraciones de tensiones ocasionadas por la abertura, se puede apreciar que entre 2 y 4.5 metros de altura (zona identificada con color verde) se encuentran las máximas tensiones. El valor máximo obtenido en esa zona es de 7,40.106 N/m2
que equivale a 74 kg/cm2, por lo que se concluye que en esta zona el silo se encuentra totalmente fisurado por sobrepasarse la tensión admisible de tracción de 30 kg/cm2 correspondiente a la calidad de hormigón utilizada en este proyecto. Esta tensión es producida por un esfuerzo de tracción de: Nφ = 370.000 kg/m
Para este valor de esfuerzo se obtiene, a partir de la ecuación, el espesor necesario para que no se produzca la fisuración del hormigón, resultando este valor hnec ≅ 150 cm. La Figura 10 muestra los valores de tensiones para el espesor de pared de 150 cm

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
59
Figura 10: Tensiones principales para silo de espesor 150 cm y vaciándose. Como se puede observar, en este caso, las tensiones alcanzan un valor máximo
de 2.5.106 N/m2 (zona verde) que equivale a 25 kg/cm2, menor que la tensión admisible a tracción. Por lo tanto para un espesor de 150 cm el silo trabaja sin fisurarse, o sea en estado I. Prácticamente un espesor de esta magnitud no es empleado por razones técnicas y económicas; entre ellas es de destacar el efecto de estados tensionales producidos por el desarrollo de un importante calor de hidratación en espesores significativos de hormigón. Tendiente a adoptar una solución con menor espesor, en el orden de los 50 cm, y teniendo en cuenta la condición de no fisuración como restricción de diseño, se considera como solución la realización de un postesado diametral del silo, con la finalidad de tomar con la armadura activa que resulte del cálculo un importante porcentaje del esfuerzo de tracción producido mayoritariamente por las presiones ejercidas por el material ensilado.
El espesor adoptado de 50 cm debe verificar otras dos condiciones en función de sus dimensiones, que a continuación se detallan. Cálculo del espesor en función del diámetro del silo
⎟⎠⎞
⎜⎝⎛ −+=
33D5,210h ,reemplazando valores resulta : h = 37 cm.
Cálculo del espesor en función de la altura del silo
⎟⎠⎞
⎜⎝⎛ −+=
126H5.210h , siendo: H = altura del silo. Se obtiene: h = 16 cm. Por lo
tanto el espesor de 50 cm verifica estas dos últimas condiciones.

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
60
Factores a tener en cuenta en el cálculo de silos A continuación se enumeran otros esfuerzos y factores que se deben
considerar para el diseño de silos de hormigón. Presión sobre el fondo, cálculo de tolvas
Estas presiones se calculan con las mismas teorías utilizadas para obtener la presión horizontal. Con el valor de la presión máxima sobre el fondo se calculan las tolvas en el caso que se deban construir. Esfuerzos de rozamiento
La fuerza de rozamiento se produce por la fricción entre el grano del material ensilado y la pared, generándose esfuerzos de compresión importantes que se deben tener en cuenta en el dimensionado de las paredes y la fundación.
Esta fuerza de rozamiento se obtiene como el peso de la masa ensilada menos la presión sobre el fondo, y es máxima durante el llenado del silo.
Verificación de la fisuración, según ACI 313-91
Se debe asegurar, en los grandes silos de almacenamiento de cemento, que el ancho de las fisuras no supere los 0,2 mm de espesor. En primer lugar se simplifica el sistema de cálculo al suponer que las paredes están sujetas a tracción pura y que las armaduras son simétricas, de tal manera que no aparecen momentos flectores.
La anchura total de una grieta vertical wcr debido a la acción simultánea de las cargas a corto y largo plazo, se determina de acuerdo con la siguiente fórmula:
321cr wwww +−= , (15)
siendo wcr = ancho total de la grieta en cm, w1 = ancho de la grieta debida a la aplicación de la carga total (presión estática más sobrepresión a corto plazo), w2 = ancho de la grieta debida a la presión estática durante el tiempo que dura la sobrepresión (corto plazo), w3 = ancho de la grieta debida a la presión estática a largo plazo. Cálculo de la estabilidad del silo
Si la distancia entre tímpanos es mayor a 3 veces el radio del silo, se debe efectuar un análisis de la estabilidad del silo. Para el caso en estudio esta distancia es de 52,5m y como la altura del silo es de 34m, no es necesario realizar dicha verificación.
A partir de los acciones y las combinaciones de los estados de carga considerados, se pueden verificar los estados tensionales y de deformaciones resultantes, que para el caso de estos silos tiene su fundamento en la teoría de láminas cilíndricas. A partir de los esfuerzos se verificará el espesor adoptado y se

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
61
determinarán los requerimientos de armaduras horizontales y verticales necesarios. Dimensionado de las armaduras horizontal y vertical
La distribución de las armaduras horizontales y verticales obedece fundamentalmente de la variación de los esfuerzos a lo largo de las generatrices del silo y ésta última depende principalmente del tipo de vinculación realizada. En el caso del silo en análisis, la vinculación se materializó mediante la colocación, entre el pie del silo y la estructura de fundación, de placas de acero pulidas al espejo. Este tipo de apoyo funciona como una articulación, pero a la vez permite que se produzcan pequeños desplazamientos radiales, que están acotados por la fricción existente entre las placas. Esta fricción que es propia del material constitutivo de la placa va a producir que un determinado porcentaje del empuje horizontal generado por el material ensilado sea transmitido a la fundación. El resto del empuje que logre vencer dicho rozamiento genera el desplazamiento radial de la pared del silo. Estos desplazamientos hacen que los momentos producidos en la generatriz del silo sean menores que los que se producen para una articulación perfecta. El tipo de apoyo del silo estudiado requiere una ejecución muy esmerada, por lo tanto el control de la misma en obra es fundamental. Estos apoyos presentan una gran sensibilidad de la construcción a posibles cambios. Por ejemplo, si por alguna causa, después de un determinado tiempo se produce un aumento de la fricción entre placas, el comportamiento del apoyo estaría más cercano a una articulación perfecta (Franz 1971).
La vinculación del silo, a los fines del cálculo, se considera como una articulación perfecta. Armaduras horizontales
Las armaduras horizontales se dimensionan para absorber los esfuerzos de tracción Nφ producidos por el material ensilado, y para los correspondientes al momento en la dirección anular, Mφ. Para absorber los esfuerzos de tracción Nφ se disponen cordones de postesado. Esta armadura activa se calcula para condición de silo lleno. Estará complementada por una armadura pasiva la cual se calculará para absorber el esfuerzo correspondiente a Mφ. Para la determinación de los valores correspondientes a los esfuerzos de tracción, se tiene en cuenta la combinación de estados de carga que figura a continuación: peso propio+clinker+cubierta+cinta y puede observarse en Figura 11. Armadura activa
Las fuerzas que ejerce el cable pretensado sobre el hormigón compensan directamente las presiones en la superficie debidas a las cargas. Para cumplir con la condición de estanqueidad, se efectúa el pretensado con una fuerza mayor, para tener en cuenta el efecto de tensiones propias y de retracción, donde se adopta una

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
62
reserva de tensión de compresión de 5 a 10 kg / cm2. Dada la distribución de las tensiones máximas principales del modelo analizado y con el objetivo de disponer
Figura 11: Tensiones máximas principales.
armaduras uniformes en fajas, se considera la altura del silo dividida en cuatro franjas desde la fundación hasta el extremo superior, X1, X2 , X3 y X4 respectivamente. En dichas fajas se colocan secciones de armadura constantes obtenidas para el máximo esfuerzo actuante en las mismas, según Tabla 6. Para realizar el anclaje y tesado de los cables, se diseñan cuatro pilares, dispuestos en planta a 90º entre sí, en el perímetro externo del silo. Esta disposición de armaduras por fajas, y el diseño de los cuatro pilares es concordante con lo dispuesto en el proyecto original según la documentación técnica analizada.
En el modelo computacional, que se muestra en la Figura 12, el efecto del postesado se introduce haciendo actuar en las franjas mencionadas una presión distribuida uniformemente equivalente al efecto de postesado, sin considerar las pérdidas diferidas y considerando el peso propio, como estado más desfavorable.
Como se observa en la Figura 12, el máximo esfuerzo provocado por el postesado es de 1.107 N/m2 (100 kg/cm2), valor alejado de la tensión admisible del hormigón utilizado en esta obra.

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
63
Faja Esfuerzo máx. [kg/m]
As activa por metro
[kg/m]
Esfuerzo tomado con postesado
[kg/m]
Esfuerzo a tomar con As pasiva
[kg/m]
X1 370.000 16 266.240 103.760
X2 358.000 16 266.240 91.760
X3 226.000 12 199.680 26.320
X4 137.000 8 133.120 3880
Tabla 6: Armadura activa En la Figura 13 se puede observar la distribución de tensiones principales
máximas para el silo postesado. De la comparación con la Figura 11, surge la apreciable disminución de tensiones lograda al realizar el tesado.
Figura 12: Tensiones debidas al postesado Figura 13: Tensiones máximas.
Cálculo de la armadura pasiva La armadura pasiva se deberá calcular para absorber el momento anular Mφ, y
parte del esfuerzo de tracción Nφ, que no fue posible absorber con armadura activa (Leonhardt 1977). El momento anular Mφ se obtiene del producto entre el módulo de Poisson del hormigón y el momento en la directriz Mx , según la teoría clásica . Este último valor se obtiene a partir del desarrollo de tensiones en la dirección vertical, Figura 14. Se debe mencionar que debido a la realización del postesado se produce una disminución en las perturbaciones de borde originadas por la vinculación; esto hace que el valor resultante del momento anular sea muy pequeño. El estado tensional en la dirección z, se muestra en la Figura 14 para el siguiente estado de carga: peso propio+clinker+cubierta+cinta.
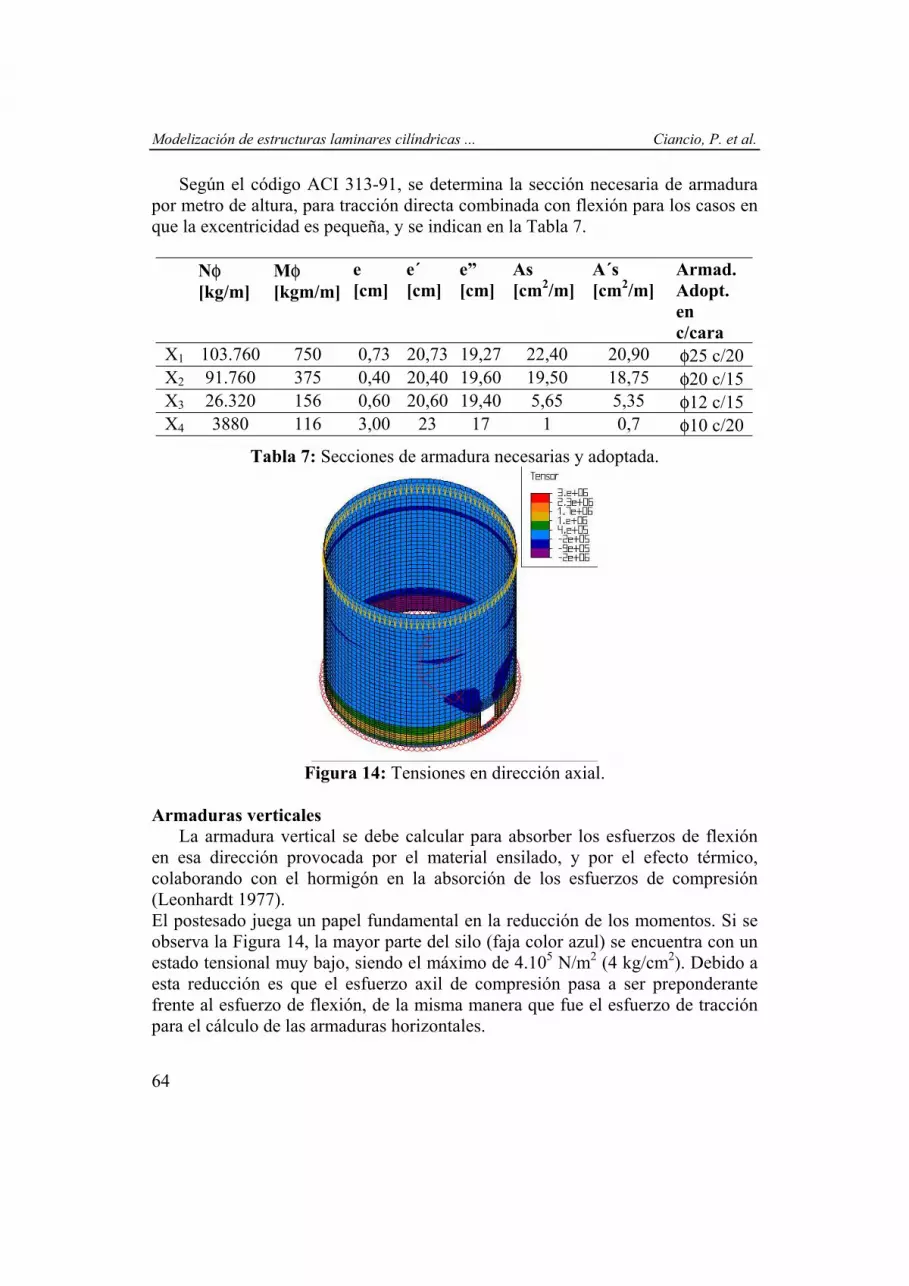
Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
64
Según el código ACI 313-91, se determina la sección necesaria de armadura por metro de altura, para tracción directa combinada con flexión para los casos en que la excentricidad es pequeña, y se indican en la Tabla 7.
Nφ [kg/m]
Mφ [kgm/m]
e [cm]
e´ [cm]
e” [cm]
As [cm2/m]
A´s [cm2/m]
Armad. Adopt. en c/cara
X1 103.760 750 0,73 20,73 19,27 22,40 20,90 φ25 c/20 X2 91.760 375 0,40 20,40 19,60 19,50 18,75 φ20 c/15 X3 26.320 156 0,60 20,60 19,40 5,65 5,35 φ12 c/15 X4 3880 116 3,00 23 17 1 0,7 φ10 c/20
Tabla 7: Secciones de armadura necesarias y adoptada.
Figura 14: Tensiones en dirección axial.
Armaduras verticales
La armadura vertical se debe calcular para absorber los esfuerzos de flexión en esa dirección provocada por el material ensilado, y por el efecto térmico, colaborando con el hormigón en la absorción de los esfuerzos de compresión (Leonhardt 1977). El postesado juega un papel fundamental en la reducción de los momentos. Si se observa la Figura 14, la mayor parte del silo (faja color azul) se encuentra con un estado tensional muy bajo, siendo el máximo de 4.105 N/m2 (4 kg/cm2). Debido a esta reducción es que el esfuerzo axil de compresión pasa a ser preponderante frente al esfuerzo de flexión, de la misma manera que fue el esfuerzo de tracción para el cálculo de las armaduras horizontales.
Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
65
Armadura necesaria para absorber la flexión producida por las cargas actuantes
Observando la Figura 14, se puede apreciar que la máxima tensión debida a esfuerzos de flexión se produce en los primeros cuatro metros del silo y tiene un valor de 1.2.106 N/m2 (12 kg/cm2). Esta tensión es producida por un momento flector de Mx = 5000 kgm/m; siendo la armadura necesaria para absorber dicha flexión de As = 4,50 cm2/m Armadura necesaria para absorber la flexión producida por el efecto térmico
El momento producido por la diferencia de temperaturas entre caras según lo visto es Mt = 11.036 kgm/m, siendo la armadura necesaria As ∆t = 9.2 cm2/m Armadura mínima por cuantía
En los dos incisos anteriores se evidencia que la compresión es el esfuerzo preponderante en la dirección vertical; por lo tanto se debe calcular la armadura por cuantía mínima y verificar si las secciones calculadas anteriormente cumplen con dicha cuantía (Leonhardt 1977). Para secciones comprimidas la cuantía no debe ser inferior a 0,01 de la sección de hormigón y no debe superar el 0.08 de la misma, según en el código ACI 318-95, apartado10.9.1. Si se toma una cuantía mínima de 0,035 de la sección de hormigón se obtiene una sección de acero de: Asmin = 2.25 pulg2/pie; siendo este valor aproximadamente igual a Asmín= 48 cm2/m.
Como se puede observar, las secciones obtenidas anteriormente no superan el valor mínimo por cuantía; por lo tanto se debe adoptar esta sección como necesaria. Dicha sección es aproximadamente equivalente a As= φ 25 c/20 cm en cada cara. Refuerzos en la zona de la abertura
Como se puede apreciar en la Figura 15, la abertura produce una zona de importante concentración de tensiones. La solución práctica, para mantener las tensiones dentro de valores admisibles y para generar una zona de mayor rigidez, consistió en realizar una estructura tipo marco en el contorno de la misma. Dicho marco se construyó, en los dos laterales y en la parte superior con un ancho de 1,50 m y un espesor de 0,50 m, que sumado al espesor de la pared del silo da un espesor de 1m. La parte inferior del marco posee un ancho de 0,60 m y el mismo espesor. De la misma manera, se realizó un refuerzo de la armadura. La presencia de la abertura genera una discontinuidad en las trayectorias de los cables de postesado; por ello, los cables próximos a la parte superior e inferior de la puerta se desviaron por debajo y por arriba de la abertura. El resto de los cables se anclaron en el

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
66
marco del pase, en donde el aumento de espesor permitió la realización de los anclajes sin que se produzca problema alguno. También se colocó armadura pasiva adicional horizontal y vertical con un total de 60φ de 25mm en cuatro capas en la parte superior del marco, 40φ de 25mm en ocho capas en la parte inferior y 20 φ de 25mm en dos capas en cada parante. También se colocaron en la parte superior del marco 2 estribos de φ 12mm c/20 y en la inferior 2 estribos φ 16 c/20. Por último, para prevenir la formación de fisuras en los vértices de la abertura se colocó armadura oblicua formada por 6 barras φ 20mm en dos capas. Cálculo de la fundación
Si bien no se propone el cálculo de la fundación, solamente nos remitimos al dimensionado del anillo perimetral, razón por la cual se establecerán las acciones sobre el mismo, a partir del comportamiento estructural global del silo en análisis. Debido a la elevada resistencia del suelo, la fundación en dirección vertical se comporta como un sólido en equilibrio, estando representado el esfuerzo principal por la tracción anular, generada por la transmisión de los esfuerzos a los que se encuentran sometidas las paredes del silo. (Gimenez Salas 1981).
Figura 15:Distribución tensional en la puerta de acceso al silo.
Datos de proyecto Nivel de fundación =194,50 m, Tensión admisible del suelo: qadm = 7 kg/cm2 , Perímetro del silo: P = 110 m Cálculo de las cargas Cargas permanentes: Peso de la pared del silo = 4600 tn, Peso total del techo = 350 tn. Cargas vivas (L): Rozamiento del clinker en la pared del silo: La fuerza de rozamiento máxima se produce durante el llenado del silo y se obtiene resolviendo la siguiente expresión:
( )V H Pv R= −γ . . (16)

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
67
siendo V = fuerza de rozamiento en kg/m, γ= peso específico del material ensilado en kg/m3, H = altura del silo en metros, R = radio hidráulico del silo en metros, Pv= presión vertical en kg/m2.
Como la máxima presión se produce durante el llenado, se utilizará la presión correspondiente al método de Janssen. Reemplazando estos valores en la expresión (16) se obtiene: V=113.033 kg/m, siendo Vtotal = 12.433,5 tn. Cálculo de las dimensiones del anillo Altura de la viga: La altura de la viga está definida según proyecto hviga = 2,80 m Ancho de la viga: El ancho queda definido por motivos constructivos, ya que el mismo no puede ser inferior al espesor de la pared sumado al cordón interior donde se realiza el cierre del muro del silo con la fundación, más el ancho del marco en la zona de la abertura, resultando un ancho mínimo de viga de 1,40 m.(Leonhardt 1977). Ancho de la losa: Se toma como ancho de losa: blosa = 3 m. Altura de la losa: La altura de las zapatas está generalmente controlada por la verificación del esfuerzo de corte. Se trata de evitar la utilización de armadura para tomar este esfuerzo por resultar poco económico, y teniendo en cuenta que se exige un recubrimiento de 3 pulg (7,6 cm),la altura de la losa es: hlosa = 100 cm.
Figura 16: Fundación. Cálculo de armaduras de la viga
Como se mencionó, el rozamiento entre las placas de acero, Figuras 2 y 3, genera un empuje horizontal. Un porcentaje del mismo es transmitido a la fundación. Este porcentaje es función del coeficiente de rozamiento µ existente entre las placas. El valor de dicho coeficiente es igual a 0,1.(Franz 1971). La magnitud del empuje que debe absorber la fundación se puede calcular, quedando del lado de la seguridad, como: Ph D= µ. , siendo: Ph = valor del

Modelización de estructuras laminares cilíndricas ... Ciancio, P. et al.
68
empuje resultante a absorber por el anillo de fundación, µ = coeficiente de rozamiento, D = suma de las fuerzas verticales. De esto resulta Ph = 4.500 kg/m
También, se debe tener en cuenta el empuje que realiza el suelo sobre la fundación, el mismo se calcula con la siguiente expresión:
ka.h.21E 2
vigasγ= . (17)
siendo: γs = peso específico del suelo igual a 1500 kg/m3, hviga = altura de la fundación en metros, ka = coeficiente de empuje activo igual a 0,30. Se obtiene: E=1.710kg/m. Sumando los dos últimos valores obtenidos y multiplicando por el radio de la fundación, se obtiene el esfuerzo de tracción T a la que está solicitada la misma. La magnitud de dicho esfuerzo es: T = 108.675 kg
La sección de armadura necesaria para absorber dicho esfuerzo se obtiene
como: AsTfs
=φ.
, siendo la armadura necesaria: As = 45 cm2
Consideraciones finales
La utilización de un software disponible en el mercado, de amplio alcance, permitió instrumentar modelos numéricos–computacionales, para resolver estática y cinemáticamente estructuras laminares cilíndricas correspondientes a silos. El análisis del comportamiento global y local de esta tipología estructural se efectúa a partir de adecuadas visualizaciones gráficas de los mapeos de deformaciones y tensiones respectivos.
La técnica de modelización en el ámbito de las estructuras requiere, conocer los fundamentos del método de los Elementos Finitos y los alcances del software utilizado para el análisis. Es de relevancia la etapa de validación de los resultados obtenidos de los modelos numérico-computacionales, teniendo como base los fundamentos que aporta la teoría clásica, de la literatura abierta. A partir de los estados tensionales y deformacionales, se obtienen las secciones de hormigón y armadura necesarios que verifican las pautas de proyecto establecidas para estas estructuras. Arribar a los planos de ingeniería con los que se construyó el silo, implica una etapa de decisiones con marcado criterio ingenieril. Las que tienen sustento en la bibliografía específica del tema y en la consideración de esa relación íntima entre la teoría y la práctica, las cuales deben conducir al resultado, o producto del proyecto: la obra civil ejecutada y en condiciones de cumplir las condiciones de servicio para las que fue concebida y diseñada.

Modelización Aplicada a la Ingeniería Ciancio, P. et.al.
69
Referencias ACI 313-91 (1991). Standard Practice for Design and Construccion of Concrete
Silos and Stacking Tubes for Storing Granular Materials.
ALGOR Profesional Mech/V. 12.04 (1999). Division Pittsburg, Pennsylvania, USA, Algor Inc.
Bathe, K. (1982). “Finite element procedures in engineering análisis”. New Jersey
Belluzzi, Odone (1970). “Ciencia de la construcción”, Tomo III, Aguilar, Madrid. CIRSOC 102 (1984). “Acción del viento sobre las estructuras”, Ed. INTI, Bs As.
Franz, Gotthard (1971). “Tratado del Hormigón Armado”, Tomo II, Editorial Gustavo Gili S.A, Barcelona.
Gimenez Salas-Justo Alpañes (1981). “Geotecnia y Cimientos”, Tomo III, Parte II, Editorial Rueda, Madrid.
Leonhardt, Fritz (1977). “Hormigón pretensado”, Instituto Eduardo Torrojas de la Contrucción y del Cemento, Madrid.
Nilson, Arthur H (2000). “Diseño de estructuras de concreto”, Ed. McGraw-Hill.
Oñate, E. (1992). “Cálculo de estructuras por el Método de los Elementos Finitos. Análisis elástico lineal”. Barcelona.
Ravenet, Juan (1977). “Silos, teoría, investigación y construcción”, Editores Técnicos y Asociados, Madrid.
Reimbert, Marcel (1983). “Silos”, Editorial Americalee.
Timoshenko-Woinowsky-Krieger (1959). “Teoría de placas y láminas”, Ed.Urmo.

Modelización Aplicada a la Ingeniería
70
Teoría general linealizada de vigas rectas y curvas de paredes delgadas construidas con materiales compuestos
VICTOR H. CORTINEZ a, Y MARCELO T. PIOVAN a
a Grupo Análisis de Sistemas Mecánicos, Facultad Regional Bahía Blanca,
Universidad Tecnológica Nacional, Bahía Blanca, Argentina.
Introducción Las estructuras esbeltas de paredes delgadas son utilizadas en muchas
aplicaciones de la ingeniería civil, mecánica y aeronáutica entre otras. Existen diversos métodos con los cuales estudiar y calcular tales estructuras, que van desde las simples teorías de vigas hasta modelos de la elasticidad tridimensional. En este contexto las teorías de vigas con sección transversal de paredes delgadas aparecen como un importante nexo entre tales extremos, pues permiten estudiar el comportamiento mecánico mediante un sistema de ecuaciones diferenciales relativamente sencillo. Para los materiales isótropos, la teoría de Vlasov, originaria de la década de 1930, representa un hito importante en la modelación de vigas de paredes delgadas. Sin embargo, la modelación de vigas construidas con materiales compuestos laminados es de desarrollo contemporáneo. El constante auge de utilización de materiales compuestos en las industrias aeronáutica, mecánica y civil, exige la necesidad de contar con modelos teóricos que permitan predecir el comportamiento de tales elementos estructurales.
En este capítulo se presenta una teoría dinámica general linealizada para vigas curvas y rectas con sección de paredes delgadas construidas con materiales compuestos, aplicable a su vez, al campo de materiales isótropos y homogéneos. En el modelo se admite la flexibilidad por corte en forma completa y acoplada, que no fue contemplada ni en la teoría de Vlasov, ni en otras extensiones en el contexto de materiales isótropos y aún de materiales compuestos. El concepto de flexibilidad por corte en forma completa significa que se incorporan las deformaciones de corte por flexión y por alabeo torsional no uniforme. Además, en esta teoría se introduce una cinemática enriquecida por el uso de rotaciones finitas semitangenciales, lo cual permite el estudio de problemas de inestabilidad y de dinámica con tensiones iniciales y bajo solicitaciones generales, entre otros.
Se muestran diferentes estudios numéricos empleado el método de elementos finitos, para evidenciar las diferencias existentes entre formulaciones que desprecian o contemplan la deformabilidad por corte. Los estudios se ciernen sobre problemas de estática lineal, cálculo de frecuencias y de cargas de pandeo, poniendo especial énfasis en estudios de vibraciones con estados arbitrarios de tensiones iniciales y también en estudios de estabilidad, pandeo lateral debido a solicitaciones no ubicadas en los centros de referencia o polos.

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
71
Contexto contemporáneo en vigas rectas y curvas de materiales compuestos En el contexto de materiales compuestos, una de las primeras teorías que se
desarrollaron sobre vigas rectas de materiales plásticos reforzados con fibras, fue la de Bauld y Tzeng (1984), quienes presentaron una extensión a la teoría de Vlasov de vigas rectas con sección abierta para materiales compuestos con laminados simétricos respecto a la línea media de la pared. Este modelo, que no contempla la flexibilidad por corte, fue retomado por Ghorbanpoor y Omidvar (1996), quienes introdujeron módulos de elasticidad equivalentes que permiten desacoplar en forma aproximada las ecuaciones de Bauld y Tzeng efectuando el análisis a semejanza de un modelo Vlasov. Otras teorías contemporáneas a la de Bauld y Tzeng fueron las de Mansfield y Sobey (1979) y Mansfield (1981) para vigas de sección cajón, en las cuales tampoco fueron consideradas, ni la flexibilidad por corte ni el alabeo, aunque sí algunos acoplamientos elásticos. Bauchau (1985) desarrolló una teoría sin considerar la flexibilidad por corte, aunque sí tuvo en cuenta el alabeo no uniforme empleando una función genérica como incógnita, aplicable a problemas dinámicos de vigas con sección cerrada de múltiples celdas y con material especialmente ortótropo cuya dirección principal es paralela al eje de la viga. Recientemente Volovoi y colaboradores (1997), introdujeron una teoría de Vlasov para vigas anisótropas con secciones H basada en criterios asintóticos.
Debido a que las vigas construidas con materiales compuestos presentan una gran flexibilidad por corte (lo cual se puede colegir, considerando que son muy bajas las relaciones entre los módulos de elasticidad transversal equivalente y módulo de elasticidad longitudinal), es necesario incorporar esta clase de efectos en su análisis. Aparentemente Giavotto y colaboradores (1983) fueron los primeros en presentar una teoría clásica de vigas anisótropas considerando la flexibilidad por corte. Entre 1985 y 2002 se reportaron en el mundo, según el Science Citation Index, cuanto menos 60 trabajos donde se introducen nuevas teorías de vigas rectas anisótropas o construidas con materiales compuestos varios, que incluyen o desprecian la flexibilidad por corte. Mientras que en no menos de otros 100 trabajos se presentaron ciertas variantes a los modelos establecidos, suministrando a su vez, diversas aplicaciones y esclarecedores estudios. Kapania y Raciti (1989) efectuaron una extensa recopilación del estado del arte de vigas y placas construidas con materiales compuestos, entre las cuales se citan varias referencias tradicionales del tema particular de vigas de paredes delgadas. Entre 1988 y 1998 se desarrollaron varios modelos de vigas rectas compuestas con deformabilidad por corte debido a flexión, sin considerar específicamente el aporte de la deformabilidad por corte debida al alabeo no uniforme. La mayoría de estos modelos estaba pensado para secciones rectangulares típicas de aplicaciones de ingeniería aeronáutica. Entre los más importantes se pueden mencionar los trabajos de Smith y Chopra (1991), Chandra y colaboradores (1990, 1992a, 1992b) y Rehfield y colaboradores (1990). Estos

Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
72
últimos analizaron efectos no convencionales de acoplamiento flexional-cortante y alabeo torsional en ejemplos simples de vigas cantilever con sección cajón-rectangular.
Los modelos de vigas anisótropas desarrollados mediante el principio de trabajos virtuales por Librescu y colaboradores (1992, 1997, 1998) y Song y Librescu (1993, 1997), consideran la deformabilidad por corte debida a la flexión pero no la deformabilidad de corte ocasionada por el alabeo no uniforme, aun cuando tienen en cuenta efectos de corte en el espesor e inercias rotatorias de diversa índole. Las aplicaciones de estas teorías se orientaron hacia una variada gama de problemas de dinámica: vibraciones libres y forzadas, control dinámico de modelos elementales de alas de aviones ante impactos acústicos, etc.
A conocimiento de los autores, el primer modelo de vigas rectas en el cual se tuvo en cuenta el efecto de corte por alabeo torsional no uniforme en el ámbito de los materiales compuestos, fue el introducido por Wu y Sun (1990). Estos autores desarrollaron su teoría para vigas con secciones abiertas y de laminados simétricos, aplicándola a problemas de vibraciones libres. Chen (2000) desarrolló una teoría donde se incluye efectos de flexibilidad por corte en forma completa junto con efectos inerciales diversos, además de considerar en forma simplificada el amortiguamiento estructural. Aun así, ni Wu y Sun (1990) ni Chen (2000) consideraron la inclusión de estados arbitrarios de tensiones iniciales, ni en la posibilidad de analizar problemas de inestabilidad, que pueden ser tratados con el modelo de este capítulo. Los autores han desarrollado (Cortínez y Rossi, 1998, Cortínez y Piovan, 2002 y Piovan y colaboradores, 2001) algunos modelos que contemplan en forma completa la flexibilidad por corte en vigas rectas construidas con materiales isótropos y también con materiales compuestos laminados, tanto para los casos particulares de laminaciones simétricas balanceadas o especialmente ortótropas como el caso general de vigas anisótropas. En tales formulaciones, basadas en una cinemática lineal, se incluyeron efectos de inercia rotatoria y de alabeo, así como también estados arbitrarios de tensiones iniciales.
En los párrafos anteriores se ha expuesto un resumen sucinto de los principales aportes en la modelación de vigas rectas de materiales compuestos con secciones de paredes delgadas. Ahora bien, en cuanto a la modelación de vigas curvas de materiales compuestos con secciones de paredes delgadas, la investigación asociada a las mismas es más bien limitada.
La mayoría de los modelos matemáticos para vigas curvas se desprende de extensiones de las teorías Vlasov, Umanskii o Benscoter (Gjelsvik, 1981) para materiales isótropos. Algunas descripciones suficientemente comprehensivas del estado del arte de los últimos 15 años en la modelación de vigas curvas isótropas, pueden hallarse en Chidamparan y Leissa (1993) y Piovan (2002, págs. 69-74). Palani y Rajasekaran (1992) efectuaron una extensión a los modelos de vigas curvas isótropas, con secciones de paredes delgadas, añadiendo las relaciones

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
73
constitutivas de materiales compuestos, aun cuando no consideraron el efecto de la deformabilidad por corte.
Algunas teorías de vigas curvas construidas con materiales compuestos están relacionadas a variantes de modelos de vigas con pretorsión y precurvatura. Estos últimos se basan en formulaciones cinemáticas referidas desde sistemas intrínsecos sobre el eje de la viga, los cuales traen aparejados no pocos problemas a la hora de obtener los términos de tensiones iniciales. Para desarrollar una teoría dinámica de vigas pretorsionadas y precurvadas, Bauchau y Hong (1987) emplearon una formulación curvilínea; sin embargo, incluyeron grandes rotaciones mediante la consideración de los ángulos de Euler en la formulación cinemática, sin tocar temas de inestabilidad. Cesnik y colaboradores (1996) efectuaron un análisis particular del efecto de curvatura, mediante la anulación de la pretorsión, considerando alabeo no uniforme, pero utilizando una sección rectangular maciza, aun cuando fuera formulado para secciones genéricas. En tales estudios no se hicieron menciones a problemas de vibraciones libres ni a problemas de inestabilidad elástica.
A conocimiento de los autores los modelos linealizados introducidos por Cortínez y colaboradores (2001), Piovan y Cortínez (2002a, 2003) son los primeros que contemplan la deformabilidad por corte completa (debida a flexión y a torsión por alabeo no uniforme) en vigas curvas de materiales compuestos con secciones de paredes delgadas genéricas. Estos modelos abordan algunos problemas de vibraciones y de estática de vigas anisótropas con diferentes acoplamientos elásticos. Posteriormente Piovan y Cortinez (2002a, 2002b) y Piovan, Cortínez y Saravia (2002) desarrollaron modelos más completos de vigas curvas (anisótropas e isótropas) introduciendo un campo de desplazamientos con términos no lineales basado en el concepto de rotaciones finitas semitangenciales (Argyris, 1982). El uso de tal formulación cinemática permite analizar con mayor detalle problemas escasamente tratados en la literatura especializada, tales como vibraciones libres con estados de tensiones iniciales y problemas de inestabilidad con solicitaciones generalizadas fuera de los ejes de referencia. Se debe destacar que Kim et al (2000a, 2000b) y por otro lado Kim y Kim (2000) dedujeron modelos de vigas curvas empleando campos de desplazamiento no lineales basados en las rotaciones semitangenciales, dentro del contexto de materiales isótropos. El modelo de este capítulo se reduce al de aquellos autores y extiende a su vez el alcance de algunos problemas como por ejemplo el de dinámica con estados de tensiones iniciales arbitrarias.
A continuación se presenta el modelo matemático de vigas curvas anisótropas con secciones de paredes delgadas, desde un enfoque de trabajos virtuales para poder ser implementado con el método de elementos finitos.

Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
74
Breve desarrollo del modelo de vigas curvas de materiales compuestos Se considera una viga curvada en el plano, con sección genérica de paredes delgadas como la expuesta en Figura 1. Téngase presente que el modelo general de viga curva se puede reducir al modelo general de viga recta, al fijar la condición de radio infinito. Así pues, en ambas figuras se pueden apreciar los dos sistemas de referencia cartesianos y dextrógiros, que se emplean. El sistema principal de referencia zyx ˆ,ˆ,ˆ:C , se ubica en el centro geométrico de la sección y sobre el mismo se mide la mecánica global de la viga. El sistema de referencia secundario nsx ˆ,ˆ,ˆ:A es solidario a la línea media del perfil seccional, y es en el cual se evalúan las características y constantes propias de la sección transversal. Las coordenadas (s, n) son la tangente y la normal a la línea media, respectivamente. En las Figura 2a y 2b, puede observarse claramente el perfil de la sección con las ramas o segmentos que la conforman y la superficie media de la pared, cuyo espesor “e” es solo función de la coordenada “s”, es decir e(s). Normalmente se considera que una sección es de paredes delgadas cuando se cumple la relación e(s)/li <0.1, siendo li la longitud de una rama. En la Figura 1 se puede apreciar el plano de curvatura que contiene al eje de la viga curva, normal al vector z .
Figura 1: Viga curva genérica con sus sistemas de referencia básicos
(a) (b) Figura 2: Descripción del perfil y entidades geométricas de una sección genérica.

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
75
Examinadas las características del modelo de viga curva, la teoría general de la misma se desarrolla bajo el cumplimiento de las siguientes hipótesis:
1) La sección es indeformable en su plano, es decir plano YZ. 2) La sección se considera compuesta por una sucesión de placas de pequeño
ancho tal como se ve en la Figura 2.b. cuyo espesor puede variar a lo largo de la coordenada perimetral “s” pero se mantiene constante a lo largo del eje de la viga.
3) La viga tiene un solo polo de reducción ubicado en el centroide geométrico de la sección. Los ejes de referencia no son necesariamente paralelos a las direcciones principales.
4) El campo de desplazamiento se considera formado por componentes lineales y componentes de segundo orden.
5) La función de alabeo consta de dos componentes: el alabeo primario o en el contorno ωP(s) y el alabeo secundario ωS(s,n), el cual se supone con variación lineal en el espesor.
6) Se consideran tres tipos de componentes del tensor de deformaciones (Piovan 2002) las cuales son: “Deformaciones de primer orden debidas a desplazamientos lineales”, “Deformaciones de segundo orden debidas a desplazamientos lineales” y “Deformaciones de primer orden debidas a desplazamientos de segundo orden”. Para cada una de ellas se supone como más representativas las componentes normales en la dirección X, y las componentes transversales en los planos XZ y XY, despreciando las restantes junto con las componentes de deformación de orden superior debidas a los desplazamientos de segundo orden.
7) Se considera que las componentes más representativas del tensor de tensiones de Piola-Kirchhoff son la normal en la dirección X, y las transversales en los planos XY y XZ.
8) Se contempla la existencia de un estado arbitrario de tensiones iniciales correspondientes con las de hipótesis 7).
9) Se considera el aporte de solicitaciones iniciales no actuantes en la línea de referencia de la viga, cuyos trabajos virtuales son ponderados por las componentes no lineales de los desplazamientos.
10) Para la consideración de tensiones y deformaciones de origen térmico se supone que las variaciones térmicas y de humedad son uniformes en el espesor.
11) El amortiguamiento estructural se tendrá en cuenta mediante un modelo simplificado del tipo Rayleigh.
12) La densidad se supone constante a lo largo del eje de la viga, aunque podrá variar en el espesor de la pared seccional
En virtud de las hipótesis 1) a 5) se puede deducir el campo de desplazamientos (Piovan 2002), el cual tiene la siguiente forma:

Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
76
⎟⎟⎠
⎞⎜⎜⎝
⎛ −−−⎟⎠⎞
⎜⎝⎛ −−=
Rtx
txtxzR
txutxytxutxu y
xyxc
zxcLx
),(),(),(
),(),(),(),(
θθωθθ , (1.a)
),( ),(),( txztxutxu xycLy φ−= , (1.b)
),( ),(),( txytxutxu xzcLz φ+= , (1.c)
⎥⎦⎤
⎢⎣⎡ −⎟
⎠⎞
⎜⎝⎛ −= ),(),(
),(),(),(),( y txtxy
Rtxu
txtxz21txu x
xczx
NLx θφθφ , (1.d)
( ) ),(),(
),(),(
),(),(),( y txR
txutx
2z
Rtxu
txtx2ytxu xc
z
2xc
z2
xNLy θθθφ ⎟
⎠⎞
⎜⎝⎛ −−⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −+−= , (1.e)
( ) ( )[ ] ),(),(
),(2
),(),(2
),( 22 txR
txutxytxtxztxu xc
zxNLz yy θθθφ ⎟
⎠
⎞⎜⎝
⎛ −−+−= , (1.f)
En (1), ),( txuxc es el desplazamiento axial, ),(y ),( txtx yz θθ son parámetros de rotación flexionales (que coinciden con las rotaciones flexionales en vigas rectas),
),( txu yc y ),( txuzc los desplazamientos transversales de la sección, ),( txxφ es la rotación torsional de la sección y ),( txxθ es la variable de alabeo. ω es la función de alabeo definida de la siguiente manera
[ ] )( )()(),()(),( slnDdsssrnssns Cs
sp +−−=+= ∫ ψωωω , (2)
donde ωP y ωS son las funciones de alabeo primario y secundario
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
∫∫
S 66
s
66 dssA
dssr
sA1s
)(
1
)(
)()(ψ ,
[ ]
∫∫ −
=
S11
S11
CdssA
dssAssrD
)(
)()()( ψ, (3.a,b)
dsdZsY
dsdYsZsr )( )()( −= ,
dsdZsZ
dsdYsYsl )( )()( += , (3.c,d)
donde 11A y 66A son constantes elásticas de la pared seccional, las cuales se definen en Barbero (1999). El campo de desplazamiento (1) es empleado para obtener las componentes representativas del tensor de deformaciones como (Kim et al 2000a, y Piovan 2002)
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
∂∂
=⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
+∂
∂=⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂∂
+∂∂
=j
Lh
i
LhL
ijj
NLi
i
NLjNL
ijj
Li
i
LjL
ij xu
xu
21
xu
xu
21
xu
xu
21 ηεε , , , i,j =1,2,3 , (4)
siendo Lijε , NL
ijε y Lijη las componentes de primer orden debidas a desplazamientos
lineales, las componentes de primer orden debidas a desplazamientos no lineales (de segundo orden) y las componentes de segundo orden debidas a

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
77
desplazamientos lineales, respectivamente. En la expresión (4) los subíndices numéricos para las variables independientes y dependientes se interpretan de la siguiente forma: x1, x2, x3=x, y, z y k
zky
kx
k3
k2
k1 uuuuuu ,,,, = con k = L o NL.
Ahora bien, introduciendo (1) en (4) y luego en la siguiente expresión linealizada del principio de trabajos virtuales (Piovan y Cortínez 2002b)
( ) ( )0
00
0
22
=−−−−
−−−++
∫∫∫∫∫∫∫
V
LiiV
NLiiS
NLiiS
Lii
V
Li
LiiV
NLij
LijijV
Lijij
dVudVuXdAuTdAuT
dVuuXdVdV
δδδδ
δρδεδησδεσ, (5)
y operando en la forma convencional se puede obtener la siguiente expresión general del principio de trabajos virtuales para una viga curva de materiales compuestos con secciones de paredes delgadas
[ ][ ]
[ ][ ][ ][ ]
[ ] −+++−
−+++−
+′+′+′+′+
+′+′+′++
+++++
+++++
+−−−
=
∫∫∫∫∫∫
Lxxyzxc
L xyzxc
L xxyzc
L zycxcx
L xyzycxc
L DDDD
L DDDD
u
dxu
dxu
dxuu
dxuu
dx
dx
,0)0(
6)0(
5)0(
3)0(
1
)0(6
)0(5
)0(3
)0(1
)0(71
)0(61
)0(51
)0(41
)0(31
)0(21
)0(11
)0(70
)0(60
)0(50
)0(30
)0(20
)0(10
7865
4231
δφδθδθδ
δφδθδθδ
θδφδθδδ
θδδδδθ
δφδθδθδδ
δεδεδεδε
δεδεδεδε
TTTT
XXXX
PPPP
PPPP
PPPPP
WSVZ Y
ZYX
TTQQ
BMMQ
[ ][ ] +++−
−+++−
∫∫
L xzcyc
L xyzxc
dxtxutxutx
dxtxtxtxutx
δφδδ
δθδθδθδ
),(),(),(
),(),(),(),(
642
7531
QQQ
QQQQ (6)
[ ][ ] ++++
+++++
∫∫
L xzcyc
L xyzxc
dxxuxux
dxxxxux
δφδδ
δθδθδθδ
)()()(
)()()()(
642
7531
MMM
MMMM
[ ][ ] 0)()()(
)()()()(
642
7531
=++−
−+++−
∫∫
L xzcyc
L xyzxc
dxxuxux
dxxxxux
δφδδ
δθδθδθδ
DDD
DDDD.
En la expresión precedente QX, QY, QZ, MZ, MY, B, MX, TW y TSV son resultantes de tensión en el área seccional que corresponden al esfuerzo normal, esfuerzos de corte en las direcciones y y z, momentos flectores en las direcciones y y z, bimomento, momento torsor total, momento flexo-torsional y momento de torsión de Saint Venant, respectivamente. Las funciones )0(
ijP , )0(jX y )0(
1T están vinculadas con las resultantes de tensiones iniciales en el área seccional, las
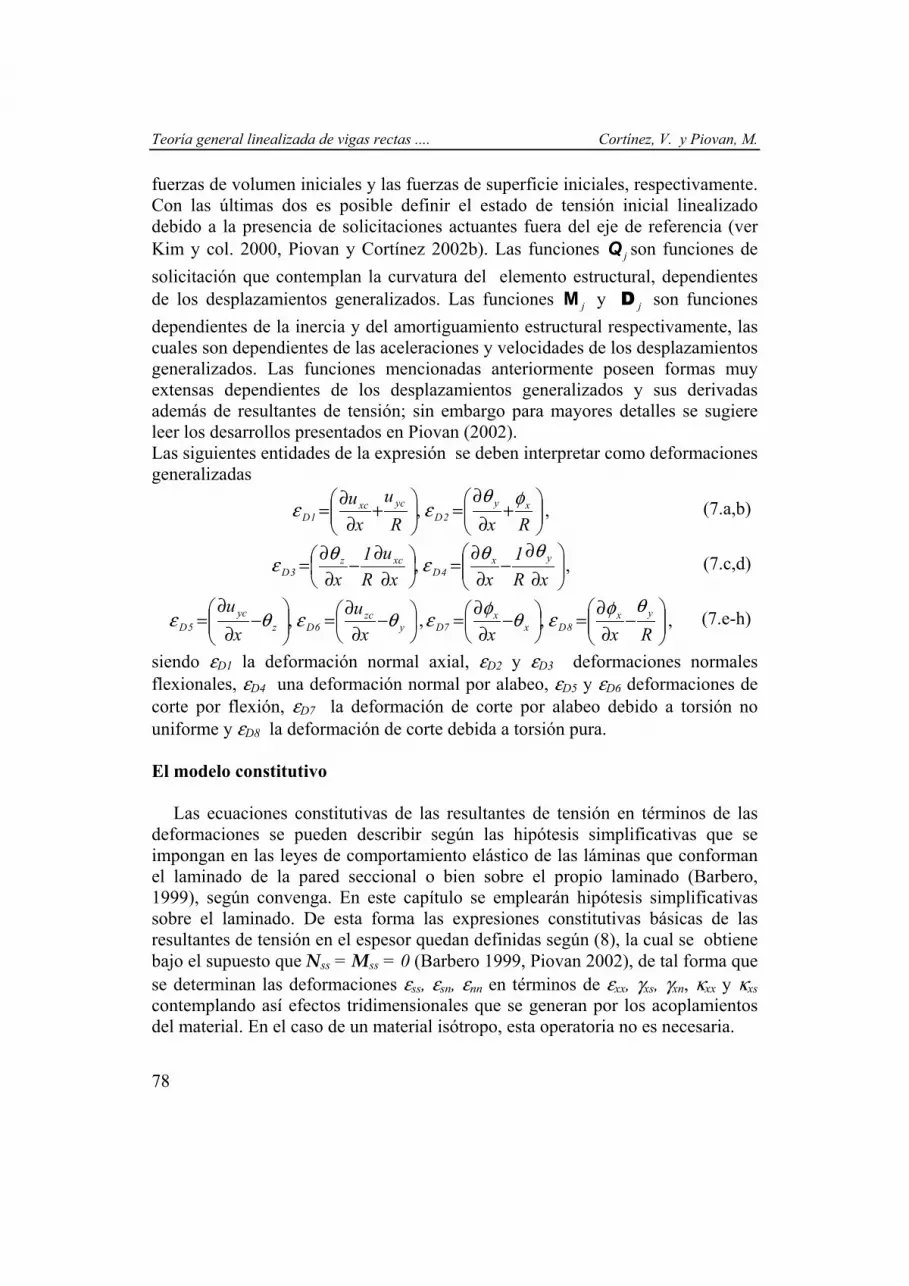
Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
78
fuerzas de volumen iniciales y las fuerzas de superficie iniciales, respectivamente. Con las últimas dos es posible definir el estado de tensión inicial linealizado debido a la presencia de solicitaciones actuantes fuera del eje de referencia (ver Kim y col. 2000, Piovan y Cortínez 2002b). Las funciones jQ son funciones de solicitación que contemplan la curvatura del elemento estructural, dependientes de los desplazamientos generalizados. Las funciones jM y jD son funciones dependientes de la inercia y del amortiguamiento estructural respectivamente, las cuales son dependientes de las aceleraciones y velocidades de los desplazamientos generalizados. Las funciones mencionadas anteriormente poseen formas muy extensas dependientes de los desplazamientos generalizados y sus derivadas además de resultantes de tensión; sin embargo para mayores detalles se sugiere leer los desarrollos presentados en Piovan (2002). Las siguientes entidades de la expresión se deben interpretar como deformaciones generalizadas
⎟⎟⎠
⎞⎜⎜⎝
⎛ +∂
∂=⎟⎟
⎠
⎞⎜⎜⎝
⎛ +∂
∂=
RxRu
xu xy
2Dycxc
1Dφθ
εε , , (7.a,b)
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
=⎟⎠⎞
⎜⎝⎛
∂∂
−∂
∂=
xR1
xxu
R1
xyx
4Dxcz
3D
θθεθε , , (7.c,d)
⎟⎠⎞
⎜⎝⎛ −
∂∂
=⎟⎟⎠
⎞⎜⎜⎝
⎛ −∂
∂= y
zc6Dz
yc5D x
ux
uθεθε , , ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −∂
∂=⎟
⎠⎞
⎜⎝⎛ −
∂∂
=Rxx
yx8Dx
x7D
θφεθφε , , (7.e-h)
siendo εD1 la deformación normal axial, εD2 y εD3 deformaciones normales flexionales, εD4 una deformación normal por alabeo, εD5 y εD6 deformaciones de corte por flexión, εD7 la deformación de corte por alabeo debido a torsión no uniforme y εD8 la deformación de corte debida a torsión pura. El modelo constitutivo
Las ecuaciones constitutivas de las resultantes de tensión en términos de las
deformaciones se pueden describir según las hipótesis simplificativas que se impongan en las leyes de comportamiento elástico de las láminas que conforman el laminado de la pared seccional o bien sobre el propio laminado (Barbero, 1999), según convenga. En este capítulo se emplearán hipótesis simplificativas sobre el laminado. De esta forma las expresiones constitutivas básicas de las resultantes de tensión en el espesor quedan definidas según (8), la cual se obtiene bajo el supuesto que Nss = Mss = 0 (Barbero 1999, Piovan 2002), de tal forma que se determinan las deformaciones εss, εsn, εnn en términos de εxx, γxs, γxn, κxx y κxs contemplando así efectos tridimensionales que se generan por los acoplamientos del material. En el caso de un material isótropo, esta operatoria no es necesaria.

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
79
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
xs
xx
xn
xs
xx
66166616
16111611
)H(55
66166616
16111611
xs
xx
xn
xs
xx
DD0BBDD0BB00A00
BB0AABB0AA
κκγγε
MMNNN
, (8)
siendo [ ]F 4231 )()()( DPDDDxx ssZsY εωεεεε −−−= , (9.a)
F ⎥⎦⎤
⎢⎣⎡ −−= 423 )( DDDxx sl
dsdY
dsdZ εεεκ , (9.b)
[ ] F ⎥⎦⎤
⎢⎣⎡ +−++= 8765 )()()( DDDDxs sssr
dsdZ
dsdY εψεψεεγ , (9.c)
F ⎥⎦⎤
⎢⎣⎡ ++−= 765 )( DDDxn sl
dsdY
dsdZ εεεγ , (9.d)
[ ] 7D8Dxs 2 εεκ +−= , (9.e)siendo Φ la función de curvatura de las vigas, aproximada en series de Taylor con la expresión:
2
2
21)()(1
RsY
RsY χχ +−≅F . (10)
Empleando (8) en las expresiones de las resultantes de tensión en el área definidas en términos de las resultantes de tensión en el espesor (ver Piovan 2002, cap. 4 Apartado 4.6) se puede obtener la siguiente expresión
[ ] ∆EE JQ = , (11)
siendo
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
6688
6678
6677
6668
6667
6666
6658
6657
6656
6655
1648
1647
1646
1645
1144
1638
1637
1636
1635
1134
1133
1628
1627
1626
1625
1124
1123
1122
1618
1617
1616
1615
1114
1113
1112
1111
sim
JJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJ
JE , (12.a)
TSVWZYZYX
E TTQQBMMQQ = , (12.b)
T8D7D6D5D4D3D2D1D εεεεεεεε ,,,,,,, −−−=∆ . (12.c)
Los elementos de la matriz constitutiva de los esfuerzos (4.54.3) se obtienen con la expresión:

Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
80
( ) ( )( ) ( )
∫∫∫∫++
+++=
S
dj
dikhS
cj
ci
H
S
bj
di
dj
bikhS
bj
bikh
dsggDdsggA
dsggggBdsggA
FF
FFkhij
)()()()()(55
)()()()()()(J (13)
para i, j=1,..,8 y h, k=1,6 y con los vectores
⎭⎬⎫
⎩⎨⎧ −= )(),()(,,),(),(),(,)( sssr
dsdZ
dsdYssYsZ1g P
b ψψω , (14.a)
⎭⎬⎫
⎩⎨⎧ −−= 0sl
dsdY
dsdZ0000g c ),(,,,,,,)( , (14.b)
⎭⎬⎫
⎩⎨⎧ −−= 2100sl
dsdZ
dsdY0g d ,,,),(,,,)( . (14.c)
En cuanto a las ecuaciones constitutivas de las resultantes de tensiones iniciales, presentan la siguiente forma
[ ] (0)∆(0)C
(0) JQ = , (15)con
[ ] [ ][ ][ ] dsS
∫= PC(0)C DMHJ , (16)
donde [ ]CM y [ ]PD vienen dados por
[ ]
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
66166616
16111611
)H(55
66166616
16111611
DD0BBDD0BB00A00
BB0AABB0AA
CM , (17.a)
[ ]
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
=
210000000000)s(l00)s(l0000
)s()s()s(r00000000)s()s(Y)s(Z1
dsdZ
dsdY
dsdY
dsdZ
dsdZ
dsdY
P
ψψω
PD . (17.b)
La expresión (16) permite hallar todos los esfuerzos iniciales generalizados en términos de las deformaciones iniciales generalizadas a lo largo de la viga. Claramente se puede apreciar la integración a lo largo de la línea media de la pared seccional, ya que todos los esfuerzos iniciales se definen en términos de las resultantes iniciales en el espesor (0)N xx , (0)N xs , (0)N xn , (0)M xx y (0)M xs , lo cual simplifica el esfuerzo computacional. El vector de deformaciones generalizadas iniciales (0)∆ tiene una forma similar a (12.c). Por otro lado el vector (0)Q y la matriz [ ]H vienen dados por
Tcba ,, HHHH = , (18.a)

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
81
Tcba ,, (0)(0)(0)(0) QQQQ = , (18.b)
Ta
(0)SV
(0)W
(0)Z
(0)Y
(0)(0)Z
(0)Y
(0)X
(0) TTQQBMMQQ ,,,,,,, = , (19.a)
T
b
(0)WW
(0)WY
(0)WZ
(0)ZW
(0)YW
(0)YZ
(0)ZW
(0)YW
(0)WW
(0)ZZ
(0)YY
(0)
TTTQQN
NNNNNQ
,,,,,
,,,,, = (19.b)
T
c
(0)Y2Z
(0)Y2W
(0)YZ2
(0)Y2ZW
(0)YZW
(0)Y3Z
(0)YW2
(0)Y3W
(0)Y2Z2
(0)Y2W2
(0)Y3
(0)Y4
(0)
NNNNNN
NNNNNNQ
,,,,,
,,,,,, =. (19.c)
[ ]
[ ]⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−
−
=
200)s(010)s(l)s()s(r00000000)s(l00)s(000)s(Y000)s(Z00001
dsdY
dsdZ
dsdZ
dsdY
P
dsdZ
dsdY
a
ψψ
ωH , (19.d)
[ ]
[ ][ ]
[ ]
[ ] [ ][ ] [ ][ ] [ ] ⎥
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−
−−
−−+−
−
=
)s(lr0)s(lr0r0Y)s(lYr0
r0Z)s(lZr0)s(l00)s(l00
0ZY00ZY0)s(lZ00Z0)s(lY00Y0)s(l200ω0Z200Z0Y200Y
PP
dsdZ
dsdY
dsdZ
dsdY
PdsdZ
P
dsdY
dsdZ
PdsdY
P
dsdZ
dsdY
dsdY
PP
dsdZ
PP
P2P
dsdY2
dsdZ2
b
ψωωψψψ
ψψωωωω
ωωωω
ω
H , (19.e)

Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
82
[ ]
[ ][ ]
[ ][ ][ ]
[ ][ ]
[ ][ ][ ] ⎥
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−+−+
−−
−−−
−−
=
0YZ2)s(lY00ZY0Y2)s(lY00Y0ZYZ200YZ0YZ2Y)s(ZlY00ZY0ZY)s(YZl00YZ0ZY3Y00ZY0)s(Yl200Y0Y3)s(lY00Y0YZZY200ZY0Y)s(lY200Y0Y300Y0Y400Y
dsdZ22
dsdZ
P2
P2
dsdZ2
dsdY2
PdsdZ
PdsdY22
P2
dsdZ
PdsdY
PP
dsdZ2
dsdY33
dsdZ2
PP2P
PdsdZ23
P3
dsdZ2
dsdY222
PdsdZ
P22
P2
dsdZ23dsdZ34
c
ωω
ωωωωωω
ωωωωω
ωωω
H . (19.f)
Formulación de Elementos Finitos
La teoría descripta en el apartado anterior se ha implementado numéricamente
mediante el método de elementos finitos. Para ello, se ha desarrollado un elemento de tipo isoparamétrico de cinco nodos que permite representar apropiadamente la mecánica de los movimientos “en el plano” y “fuera del plano”, característicos de una viga curva como la de la Figura 1.
En la Figura 3 se puede observar el elemento finito con los desplazamientos genéricos. La forma de interpolación de un desplazamiento generalizado Ui(x) vendrá dada por la siguiente expresión genérica
( ) ( )∑=
=NN
1j
jiji UxxU )( f con 71i ,..., = con [ ]10x ,∈ . (20)
NN es el número de nodos del elemento, x es la coordenada intrínseca del elemento y ( )xjf son las funciones de forma de un elemento isoparamétrico, de cuarto grado, definidas en la manera usual (Oñate, 1992).
Figura 3: Descripción geométrica del elemento.
El vector de desplazamientos nodales se describe como )5()4()3()2()1( UUUUUU ,,,,= , (21)

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
83
con T
jxjxjyjzcjzjycjxc(i)j uuu θφθθ , , , , , ,)( =U .
(22)
Reemplazando (22) en (21), luego en las expresiones del trabajo virtual (6) y operando en la forma convencional, se obtiene la clásica ecuación general del método de elementos finitos
[ ] [ ]( ) [ ] PWMWKK G =++ , (23)donde [ ]K , [ ]GK y [ ]M son la matriz de rigidez global, la matriz de rigidez geométrica global y la matriz de masa global, respectivamente. En tanto que, W , W y P son el vector global de desplazamientos nodales, el vector global de aceleraciones nodales y el vector global de cargas nodales.
De la ecuación general (23) se derivan las siguientes expresiones particulares [ ] [ ] [ ]( ) PWMKK *
G =−+ 2Ω , (24)
[ ] [ ] [ ]( ) 0WMKK *G =−+ 2Ωλ , (25)
cuando se impone un movimiento armónico como el siguiente [ ]tCos Ω*WW = , (26)
siendo Ω la frecuencia circular del movimiento armónico, tal que Ω = 2π f y siendo f la frecuencia medida en Hertz.. Para evitar problemas de bloqueo por corte se recurre al uso de integración reducida (Oñate 1992) en los términos del funcional de trabajos virtuales que contengan a las deformaciones por corte εD5, εD6 y εD7. Con este elemento se pueden obtener las soluciones correspondientes a la teoría sin flexibilidad por corte o teorías similares a las basadas en hipótesis de Vlasov (1961), mediante la inclusión de funciones de penalización en los coeficientes de rigidez por corte 66
55J , 6666J y 66
77J y anulando los restantes coeficientes de las filas y columnas adyacentes (Cortínez y col. 2000). Estudios Numéricos, comparaciones y validaciones
A continuación se mostrarán algunos resultados obtenidos con el modelo desarrollado en este capítulo. Se pretende, en esta instancia, mostrar la importancia e influencia en el análisis estructural de los diversos aspectos derivados del efecto de la deformabilidad de corte. En primer lugar se mostrarán algunos resultados de convalidación del modelo de viga con otros enfoques de mayor jerarquía, como por ejemplo las soluciones computacionales con modelos de placas, o bien con resultados experimentales.
En la Figura 4 se muestran dos tipos de sección de paredes delgadas que pueden ser construidas con materiales isótropos o compuestos como los indicados en la misma. En la Tabla 1 se muestran comparaciones entre soluciones de viga y de placas (COSMOS/M, 1995) de las cargas de pandeo lateral de una viga recta
Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
84
isótropa de perfil U, para la condición de bordes empotrada en un extremo y libre en el otro, donde actúa la carga.
Material Isótropo: Acero E = 210 GPa, G = 80.76 GPa
Material FCRE AS4/3501-6/c
E11 = 144 Gpa, E22=E33 = 9.65 Gpa, G12=G13 = 4.14 Gpa, G23 = 3.45 Gpa
ν12 = 0.3, ν23=0.48
(a) (b)
Figura 4: Puntos donde se ubican las cargas de pandeo en los perfiles H y U.
H/L Tipo de carga
Punto de Aplicación Modelo
0.05 0.10 0.15 Presente 30138 145735 383304
C COSMOS/M 30115 143210 378250 Presente 25406 93252 185586
A1 COSMOS/M 25125 92950 179868 Presente 33492 177327 503952
A2 COSMOS/M 33250 176452 498510 Presente 25806 93159 184424
(0)ZQ
A3 COSMOS/M 24812 91981 179520
Tabla 1: Cargas de pandeo Lateral. Viga Isótropa (Empotrada-Libre) de Perfil U.
H/L Tipo de carga
Tipo de Laminado Modelo
0.05 0.10 0.15 Presente 19175 75559 166120
0/0/0/0 COSMOS/M 19058 73564 162258
Presente 10561 41861 92984 0/90/90/0
COSMOS/M 10350 40698 90898 Presente 2003 8012 18018
(0)XQ
45/-45/-45/45 COSMOS/M 2033 7958 17960
Tabla 2. Cargas de pandeo. Viga compuestas (Empotrada-Libre) de Perfil H.

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
85
Por otro lado en la Tabla 2 se muestran las cargas de pandeo por solicitación axial de una viga de material compuesto con empotrada en un extremo y libre en el otro. Nótese que en ambas circunstancias la correlación es muy buena. Ahora en la Tabla 3 se muestran las características de una viga de perfil circular y en la Tabla 4 se comparan valores de frecuencias naturales para la configuración de laminación 45/-45/45/-45S del material de resina epoxy reforzado con fibras de carbono T-300. En la Tabla 4, los identificadores de los modos 1F-XY, 1FT-XZ y 2FT-XZ significan primer modo flexional en el plano XY, y primero y segundo modo flexotorsional en el plano XZ, respectivamente.
Material: FCRE-T300 E11 =128.00 GPa E22 = 11.00 GPa G12 = 4.48 GPa ν12 = 0.25 ρ =1500 Kg/m3 L = 456 mm Espesor de cada lámina: 0.13 mm Laminas en cada segmento: 8 Condiciones de Borde: Empotramiento en x=0 Libre en x=L
Tabla 3. Características de la viga C ensayada por Wu y Sun (1990).
Frecuencia 1° 2° 3° MODO de vibración 1F-XY 1FT-XZ 2FT-XZ Experimento Wu y Sun (1990) 145,3 222,0 712,0 MEF-Placas: Wu y Sun (1990) 147,0 238,0 768,1 Modelo de viga de Wu y Sun (1990) 134,5 232,8 743,4 Modelo de viga del presente capítulo 134,4 228,4 724,2
Tabla 4: Comparación de frecuencias [Hz] naturales de una viga de sección C.
En la Figura 5 se muestra el esquema de una viga curva isótropa monosimétrica de perfil U, empotrada en un extremo y solicitada por una carga en el centro de referencia. En la Tabla 5 se muestran los valores de la carga de pandeo lateral empleando diferentes enfoques de modelación, desde teorías de vigas que desprecian la flexibilidad por corte hasta enfoque de estructuras laminares.

Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
86
Figura 5: Esquema de carga de una viga monosimétrica de perfil U.
Paradigmas de Cálculo QX [N] Poligonal de vigas rectas
no deformables por corte: Kim y col (2000b) 6.902
Viga curva no deformable por corte: Kim y col (2000b)
6.125
Poligonal de vigas rectas deformables por corte Kim y col (1996)
5.813
Viga Curva deformable por corte del presente modelo 5.698
COSMOS/M 4651 elementos Shell3T
5.648
ABAQUS: Kim y col (2000b) 255 elementos S9R5
5.639
Tabla 5: Comparación de diferentes modelos.
Para poder evaluar cualitativa y cuantitativamente, el efecto de corte por
alabeo torsional en la dinámica de vigas rectas de material compuesto se contemplan dos tipos de laminados especialmente ortótropos sobre una sección abierta de perfil H, y sobre una sección cerrada de perfil rectangular como las que se muestran en la Figura 6. Cada perfil está construido con el mismo material descripto en la Figura 4, cuya densidad es de 1389 kg/m3. Los segmentos de cada perfil poseen la misma secuencia de laminación, que puede ser 0/0/0/0 o 0/90/90/0. Se contempla las condiciones de borde con empotramiento en cada extremo. La diferencia porcentual del modelo flexible (MCFCC) por corte al modelo que desprecia tal efecto (MSFC), se puede calcular empleando la expresión (27)
[ ] 100MSFCi
MSFCiMCFCCif f
ff −=%Λ con i = 1,..., 5. (27)

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
87
Figura 6: Secciones empleadas en el análisis del corte por alabeo.
Laminado h/L Modelo f1 f2 f3 f4 MCFCC 56,51 113,34 170,82 229,20 MSFC 58,21 117,21 177,77 240,64
0,05
Λf[%] (2,92) (3,30) (3,91) (4,75) MCFCC 173,18 347,55 525,89 707,89 MSFC 195,09 411,88 667,30 972,42
0/0/0/0
0,15
Λf[%] (11,23) (15,62) (21,19) (27,20) MCFCC 56,32 112,86 169,83 227,44 MSFC 57,50 115,43 174,20 234,24
0,05
Λf[%] (2,06) (2,23) (2,51) (2,90) MCFCC 171,99 345,40 522,29 703,04 MSFC 186,18 384,26 604,59 855,22
0/90/90/0
0,15
Λf[%] (7,62) (10,11) (13,61) (17,79)
Tabla 6. Comparación de frecuencias [Hz] torsionales para la sección rectangular.
En las Tablas 6 y 7 se comparan los valores de las primeras cuatro frecuencias, para un perfil cajón y uno abierto, respectivamente. Nótese que el efecto de la flexibilidad por corte es más predominante en las secciones abiertas que en las cerradas, pudiéndose observar variaciones cualitativas de 4.75% en la cuarta frecuencia de una viga cajón para la laminación 0/0/0/0 y con h/L = 0.05, mientras que en el homónimo caso de la sección abierta se tiene una variación porcentual aproximadamente 10 veces mayor.

Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
88
Laminado h/L Modelo f1 f2 f3 f4 MCFCC 30,77 73,61 126,41 184,98 MSFC 35,91 98,58 192,92 318,66 0,05 Λf[%] (15,79) (27,53) (36,92) (44,44)
MCFCC 154,98 315,08 498,62 685,52 MSFC 320,83 883,97 1732,65 2864,19
0/0/0/0
0,15 Λf[%] (54,19) (66,35) (72,92) (77,53)
MCFCC 24,23 60,64 107,85 162,08 MSFC 26,50 72,47 141,59 233,71 0,05 Λf[%] (9,36) (17,85) (25,82) (32,88)
MCFCC 141,54 296,43 476,14 663,21 MSFC 235,19 647,75 1269,42 2098,28
0/90/90/0
0,15 Λf[%] (42,30) (56,47) (64,45) (70,14)
Tabla 7: Comparación de frecuencias [Hz] torsionales para el perfil H.
A continuación se evalúa el efecto de las cargas no actuantes en el centroide sobre las vibraciones de una viga curva de material compuesto. Para ello considérese el arco de perfil I, de la Figura 7. El mismo posee una abertura de 180°. Las solicitaciones se aplicarán en los puntos A1 o A2, en la sección a x = L/2 pudiendo ser orientadas en dirección y negativa o en dirección y positiva.
Figura 7: Arco para el estudio de vibraciones libres bajo estado de tensión inicial.
En la siguiente Tabla 8 se pueden apreciar las variaciones de las primeras tres frecuencias naturales para diferentes laminados simétricos balanceados. Específicamente se comparan las frecuencias obtenidas, libres de tensiones iniciales (STI) y bajo estados de tensiones iniciales (CTI) generadas por la

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
89
aplicación de solicitaciones en los puntos A1 o A2, de una magnitud igual a la mitad de la carga crítica correspondiente en cada punto. Téngase presente que en el punto A2 es posible obtener dos cargas críticas asociadas a modos flexionales-torsionales acoplados o dominantemente torsionales, de acuerdo a la dirección de la solicitación. En la Tabla 8 se pueden observar entre paréntesis, al lado de cada frecuencia bajo estado de tensiones iniciales, la diferencia porcentual con respecto a la frecuencia libre de tensiones iniciales. Se puede observar la influencia que tienen los estados de tensiones iniciales en la dinámica de vibraciones libres que son más notables en la primera frecuencia. Sin embargo, también se puede ver claramente que la magnitud de influencia de las tensiones iniciales depende fuertemente de la forma de solicitación.
Angulo de Laminación Número
de Orden Estado
Tensional 0° 15° 30° 45° STI 20.90 20.06 14.93 10.19
CTI (-QY en A1) 15.42 (-26.2%) 14.78 (-26.3%) 10.98 (-26.4%) 7.47 (-26.6%) CTI (-QY en A2) 15.16 (-27.4%) 14.52 (-27.6%) 10.78 (-27.7%) 7.34 (-27.7%)
f1
CTI (+QY en A2) 34.24 (+63.8%) 33.14 (+65.2%) 24.40 (+63.4%) 16.54 (+62.3%) STI 58.86 55.87 40.95 27.94
CTI (-QY en A1) 56.37 (-4.2%) 53.46 (-4.3%) 39.02 (-4.7%) 26.48 (-5.2%) CTI (-QY en A2) 54.71 (-7.1%) 51.96 (-6.9%) 38.06 (-7.1%) 25.96 (-7.1%)
f2
CTI (+QY en A2) 72.86 (+23.8) 69.32 (+24.1%) 50.44 (+23.2%) 34.26 (+22.6%) STI 122.06 116.18 85.74 58.98
CTI (-QY en A1) 116.94 (-4.2%) 111.29 (-4.2%) 82.00 (-4.3%) 56.41 (-4.3%) CTI (-QY en A2) 118.37 (-3.0%) 112.69 (-3.1%) 82.84 (-3.4%) 56.70 (-3.8%)
f3
CTI (+QY en A2) 132.37 (+8.4%) 126.51 (+8.8%) 94.89 (+10.6%) 66.44 (+12.6%)
Tabla 8: Frecuencias [Hz], bajo estados de tensiones iniciales, debidos a solicitaciones actuantes fuera del centro de referencia. (±QY) Carga aplicada con
su signo en el punto correspondiente.
Las frecuencias obtenidas en este último caso, bajo estados de tensiones iniciales, no se podrían haber hallado sin la inclusión en el funcional general (5), del aporte del trabajo virtual de los desplazamientos no lineales sobre las cargas externas superficiales y por unidad de volumen.

Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
90
Conclusiones En este capítulo se ha expuesto una teoría linealizada general para el análisis
de vigas curvas y rectas con materiales compuestos o anisótropos. La teoría puede reducirse, a su vez, para contemplar materiales isótropos.
Tal modelo contempla la flexibilidad de corte en forma completa además de otros efectos tales como la existencia de un estado arbitrario de tensiones iniciales.
Se ha presentado una formulación de elementos finitos basado en la presente teoría con la cual pueden estudiarse los problemas clásicos del análisis estructural lineal.
Los ejemplos numéricos analizados permiten observar la influencia de los nuevos efectos considerados.
Actualmente dicha teoría está siendo extendida para el análisis estático y dinámico geométricamente no lineal.
Agradecimientos
El presente trabajo fue solventado por la Secretaría de Ciencia y Tecnología de la Universidad Tecnológica Nacional y por el CONICET. Referencias Argyris J.H. (1982)."An excursion into large rotations". Computer Methods in
Applied Mechanics and Engineering 32, 85-155.
Barbero, E.J. (1999). Introduction to Composite Material Design. Taylor and Francis Inc. New York.
Bauld N.R. and Tzeng L.S. (1984). "A Vlasov theory for fiber-reinforced beams with thin-walled open cross sections". International Journal of Solids and Structures, 20(3), 277-297.
Bauchau O.A. (1985). “A Beam Theory for Anisotropic Materials”. Journal of Applied Mechanics 52(2), 416-422.
Bauchau O.A and Hong C.H. (1987)."Large displacements Analysis of Naturally Curved and Twisted Composite Beams". AIAA Journal 25(11), 1469-1475.
Cesnik C.E., Sutyrin V.G. and Hodges D. (1996)."Cross-sectional analysis of composite beams including large initial twist and curvature effects". AIAA Journal 34(9), 1913-1920.
Chandra R, and Chopra I (1992a)."Structural Response of Composite Beams and Blades with Elastic Couplings". Computers and Engineering 2, 347-374.
Chandra R. and Chopra I (1992b). "Structural Behavior of two/cell Composite rotor Blades with Elastic Couplings ". AIAA Journal 30, 2914-2921.

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
91
Chandra R, Stemple A.D. y Chopra I (1990). "Thin walled composite beams under bending, torsional and extensional loads". Journal of Aircraft 27, 619-626.
Chen C.N. (2000)."Dynamic equilibrium Equations of Composite Anisotropic Beams Considering the Effects of Transverse Shear deformations and Structural damping". Composite Structures 48, 287-303.
Chidamparam P. y Leissa A. W. (1993). "Vibrations of planar Curved Beams, rings and Arches". Applied Mechanics Reviews (ASME) 46(9), 467-483.
Cortínez., V.H. y Rossi, R.E. (1998). “Dinámica de Vigas de Sección Abierta de Pared Delgada, Deformables por Corte, sujetas a Un Estado Inicial de Tensiones”. Revista Internacional de Métodos Numéricos para Cálculo y Diseño en Ingeniería, Vol. 14, 3, 293-316.
Cortínez., V.H. Piovan M.T. y Rossi, R.E. (2000). “Mecánica de Vigas Curvas de Paredes Delgadas Construidas con Materiales Compuestos”. Mecánica Computacional (AMCA) 19 269-274.
Cortínez, V.H. Piovan M.T. and Machado S. (2001). “DQM Vibration analysis of composites thin-walled curved beams”. Journal of Sound and Vibration 246(3), 551-555.
Cortínez, V.H. and Piovan, M.T. (2002). “Vibration and buckling of composite thin-walled beams with shear deformability”. Journal of Sound and Vibration, 258(4), 701-723.
COSMOS/M Users Manual. (1995). Structural Reseach Analysis Corporation.
Ghorbanpoor A. and Omidvar B. (1996) "Simplified Analysis of Thin Walled Composite Members". Journal of Structural Engineering 122(11), 1379-1383.
Giavotto V, Borri M, Mantegaza, L y otros (1983). "Anisotropic Beam Theory and Applications". Computers and Structures 16, 403-413.
Gjelsvik A. (1981). "Theory of Thin Walled Beams". John Wiley and Sons Inc. New York.
Kapania R.K. and Raciti S. (1989). "Recent Advances in Analysis of Laminated Beams and Plates 1.Shear Effects and Buckling". AIAA Journal 27(7) 923-934.
Kim M.Y., Chang S.P. and Kim S.B. (1996). "Spatial Stability Analysis of Thin Walled Space Frames". International Journal of Numerical Methods in Engineering 39. 499-525

Teoría general linealizada de vigas rectas .... Cortínez, V. y Piovan, M.
92
Kim S.B. and Kim M.Y. (2000). “Improved Formulation for Spatial Stability and Free Vibration of Thin Walled Tapered Beams and Space Frames”. Engineering Structures 22, 446-458.
Kim M.Y., Min B.C. and Suh M.W. (2000a)."Spatial Stability of nonsymmetric Thin Walled Curved Beams I: Analytical approach". Journal of Engineering Mechanics (ASCE) 126(5), 497-505.
Kim M.Y., Min B.C. and Suh M.W. (2000b)."Spatial Stability of nonsymmetric Thin Walled Curved Beams II: Numerical approach". Journal of Engineering Mechanics (ASCE) 126(5), 506-514.
Librescu L. and Na S. (1998). "Bending Vibration control of Cantilevers via Boundary Moment and Combined Feedback Control Laws". Journal of Vibration and Control 4, 733-746.
Librescu L. and Song O. (1992). "On the static aeroelastic tailoring of Composite aircrafts swept wings modelled as TWB structures". Composites Engineering 2(5-7), 497-512.
Librescu L., Meirovitch L. and Na S. (1997)."Control of cantilever vibration via structural tailoring and adaptative materials". AIAA Journal 35(8) 1309-1315.
Mansfiled, E.H. (1981). "The Stiffness of a two-cell Anisotropic tube". Aeronautics Quarterly 32, 338-353.
Mansfiled, E.H. and Sobey A.J. (1979). "The fiber Composite helicopter Blade. Part I: Stiffness Properties. Part II: prospects of aeroelastic tailoring". Aeronautics Quarterly 30, 413-449.
Oñate E. (1992) "El Cálculo de estructuras con Elementos Finitos". Cimne. Barcelona.
Palani G.S. y Rajasekaran S. (1992). "Finite Element Analysis of Thin Walled Curved Beams made of Composites". Journal of Structural Engineering (ASCE) 118(8), 2039-2062.
Piovan M.T., Cortínez V.H. y Rossi R.E. (2001). "Estática y dinámica de vigas Anisótropas de paredes delgadas deformables por corte". Mecánica Computacional (AMCA) 20, 258-265.
Piovan M.T. (2002). “Estudio teórico y computacional sobre la mecánica de vigas curvas de materiales compuestos, con secciones de paredes delgadas, considerando efectos no convencionales”. Tesis Doctoral. Universidad Nacional del Sur. Bahía Blanca, Argentina.
Piovan M.T. y Cortínez. V.H. (2002a). “Vibration studies of composite thin-walled curved box-beam using structural tailoring”. Journal of Sound and Vibration 256(5), 989-995.

Modelización Aplicada a la Ingeniería Cortinez, V. y Piovan, M.
93
Piovan M.T. y Cortínez V.H. (2002b). “Mecánica de vigas curvas anisótropas de paredes delgadas considerando efectos de corte por flexión y por alabeo”. Mecánica Computacional 21, 1730-1749.
Piovan, M.T. Cortínez V.H. y M. Saravia. (2002). “Inestabilidad de arcos de paredes delgadas deformables por corte: Paradigmas de cálculo”. Mecánica Computacional 21, 1770-1789.
Piovan M.T. y Cortínez. V.H. (2003).” Mecánica de vigas curvas anisótropas con sección de paredes delgadas”. Revista Internacional de Métodos Numéricos para Cálculo y Diseño en Ingeniería, 19(3), 341-362.
Rehfield, L.W., Atilgan A.R. and Hodges D.H. (1990)."Non-classical behavior of Thin-Walled Composite Beams with Closed cross Sections". Journal of American Helicopter Society 35(3), 42-50.
Smith E.C. and Chopra I. (1991). "Formulation and Evaluation of an Analytical Model for Composite Box Beams". Journal of American Helicopter Society 36(3), 23-35.
Song O. and Librescu L. (1993). "Free Vibration of Anisotropic Composite Thin-Walled Beams of Closed Cross-Section Contour". Journal of Sound and Vibration 167(1), 129-147.
Song O. and Librescu L. (1997)."Structural modeling and Free Vibration Analysis of rotating Composite Thin Walled Beams". Journal of American Helicopter Society 42(4) – October.
Vlasov V, (1961). Thin Walled Elastic Beams, traducido del Ruso y publicado por la National Science Foundation, Washington, DC y por el U.S. Dept. of Commerce por el Programa de Traducciones Científicas Israelíes, Jerusalem.
Volovoi V.V., Hodges D.H., Berdichevsky V.L. and Sutyrin V.G. (1999). "Asymptotic Theory for Static Behavior of Elastic Anisotropic I-Beams". International Journal of Solids and Structures, 36(7), 1017-1043.
Wu X.X and Sun C.T. (1990). "Vibration Analysis of Laminated Composite Thin Walled Beams using Finite Elements". AIAA Journal 29(5), 736-742.

Modelización Aplicada a la Ingeniería
94
Some approaches to the Río de la Plata modeling
PABLO MIGUEL JACOVKIS a
a Departamento de Computación e Instituto de Cálculo, Facultad de Ciencias Exactas y Naturales, Universidad de Buenos Aires, Buenos Aires, Argentina.
Introduction
It is very difficult to underestimate the social, historic, economic and political importance of the Río de la Plata. It is the entrance to the Plata basin, composed of the Paraná River, the Uruguay River, and their tributaries; its main port, Buenos Aires, was the only outlet of a vast hinterland, and its importance forced the Spanish Kings to create first the city of Colonia, to assure their domain over both bands of it, and then (with its name) a Viceroyalty with enough authority to confront the Portuguese from Brazil. To avoid that the Republic created after the independence from Spain continued to hold both bands, the Portuguese invaded the East Band, and, after the war between Argentina and Brazil (just independent from Portugal) that followed, Britain maneuvered to guarantee the independence of Uruguay. After the consolidation of the organization of Argentina, its harbor, Buenos Aires, was practically the only one in the country, and the control of its tolls almost divided the new country and provoked civil wars (only with the defeat of the Indians around 1880 other harbors, in southern Buenos Aires Province and in Patagonia, developed). Practically all the millions of immigrants that arrived in the new country during the second half of the nineteenth century and the first half of the twentieth landed at Buenos Aires, and most Argentineans live in its hinterland. Almost all the naval commerce of Argentina uses the Buenos Aires port, or the ports on the navigable waterway through the Paraná River, mainly Rosario and Santa Fe. The Río de la Plata currently suffers from many problems: on the one hand, suspended material transported from upstream Paraná River originates sediments and solid discharges that force a constant dredging, to allow navigation; on the other hand, the permissiveness and lack of control of industrial pollution during the last fifty years have originated a grave pollution problem: fish are endangered, swimming is dangerous and prohibited, and many tourist activities cannot be performed. Moreover, the population do not and can not use the Río de la Plata as they should, were it clean. The contrast with Montevideo is striking. And, last but not least, floods during a certain type of storm (“sudestadas”, caused by southeastern winds) are responsible for important losses of human lives and property. A future plan for solving the above-mentioned problems of the Río de la Plata may take into account, besides, two important controversial works proposed: a bridge across the Río de la Plata, uniting

Modelización Aplicada a la Ingeniería Jacovkis, P.
95
Argentina and Uruguay (one end should be in or near Buenos Aires, the other in or near Colonia) and the creation of an island to put there the new airport of Buenos Aires, the closest one being dangerous, because is too close to downtown, the farthest one (Ezeiza) being too far away.
Evidently, mathematical models are nowadays a very useful and rather cheap mean to study all these subjects. Several different models can be used, and sometimes integrated into global models. In the following we shall describe some different useful models applicable to the Río de la Plata modeling. Two-dimensional shallow water models The Río de la Plata (see Figure 1) is clearly two-dimensional and “shallow”. So it can be assumed that the equations that govern the unsteady two-dimensional shallow water hydrodynamic flow with free surface are apt to model it. These equations are
∂ (hU)/∂ t + ∂ (hU2)/∂ x + ∂ (hUV)/∂ y – fhV +
gh∂ Z/∂ x + cf U√(U2 + V2) = 0 , (1)
∂ (hV)/∂ t + ∂ (hUV)/∂ x + ∂ (hV2)/∂ y + fhU +
gh∂ Z/∂ y + cf V√(U2 + V2) = 0 , (2)
∂ h/∂ t + ∂ (hU)/∂ x + ∂ (hV)/∂ y = 0 , (3)
where x and y are the horizontal Cartesian axes, t is the time, U and V indicate the velocities in the x- and y-directions, h is the height from the bed level or total water depth, cf is a friction coefficient, that must be calibrated, and f is the Coriolis parameter. Equations (1) and (2) are the momentum equations, and equation (3) is the conservation-of-mass equation; they may be consulted for instance in (Haidvogel and Beckmann, 1999). As in all unsteady models, initial conditions for the three unknown functions U(x,y,t), V(x,y,t), h(x,y,t) are necessary, namely,
U (x,y,0) = U0 (x,y) ; V(x,y,0) = V0 (x,y) ; h(x,y,0) = h0 (x,y) , (4) where U0, V0 and h0 are known functions. Besides, the Río de la Plata (as well as all estuaries, rivers, lakes, bays, and regions of seas and oceans modeled) is a

Some approaches to the Río de la Plata modeling Jacovkis, P.
96
Figure 1: The Río de la Plata (courtesy of Claudia Simionato and CIMA)
bounded domain in space, and boundary conditions must be prescribed. From a mathematical point of view, equations (1-3), with initial conditions (4), and boundary conditions, are a two-dimensional system of quasilinear hyperbolic partial differential equations, written in conservation form; but as no explicit solution of the shallow water equations exist, except in very trivial cases, a numerical solution must be found. An enormous amount of numerical methods have been studied and implemented in models, since the pioneer work of (Leendertse, 1967); many of them are described in (Vreugdenhil, 1994). Of course the Río de la Plata has often been modeled; in fact, this author has participated in the preparation and implementation of hydrodynamic models of the Río de la Plata more than twenty years ago (DIGID 1978), (Hydrocéano Consultores S.A.-Estudio Gradowcyk y Asociados S.A.T. 1984); many models have been developed at the Argentinean National Water Agency (INA), formerly National Agency for Water Science and Technology (INCyTH).
It is of course difficult, because many data are necessary, to obtain precise initial conditions for a run of a Río de la Plata model: “warming-up” the model

Modelización Aplicada a la Ingeniería Jacovkis, P.
97
Figure 2: Discretization of a two-dimensional shallow water model
during an initial simulation time usually works. The real problem is calibrating a two-dimensional model, because, if the friction coefficient cf varies according to the spatial position and to the water level, the number of parameters to calibrate is subject to “the curse of dimensionality”; fortunately, in general we are satisfied with a calibration of fewer values of cf, because (and this is an advantage over a one-dimensional fluvial model) in this case the geometry of each cross-section is very simple (for instance, for a finite-difference discretization, is rectangular along both axes x, y , see Figure 2) except near a closed boundary, and cf is a not a
Figure 3: A one-dimensional fluvial cross-section

Some approaches to the Río de la Plata modeling Jacovkis, P.
98
too complicated function of h; then the number of values of the parameter to be calibrated is linear with respect to the total number of discretization points or model elements; the geometry of a one-dimensional model of a natural water course, on the other hand, is more complex, as can be seen in Figure 3, and it is much more difficult to find a suitable algebraic function of h that represents it. A possible discretization may be seen in Figure 4. Mobile bed models
A mobile-bed two-dimensional model requires, if the particles only slide and roll, a fourth (conservation of solid mass) equation,
(1 – p’)∂ e(x,y,t)/∂ t + ∂ Qbx(h,U,V)/∂ x + ∂ Qby(h,U,V)/∂ y = 0 , (5)
where now Qbx and Qby are the bed-loads, that is, the solid discharges per unit width, in the x- and y-direction, respectively and p’ is the porosity of the material. Formulae for the bed-loads are generally semi-empirical. A careful analysis may be consulted in (Wu et al, 2000), where Qbx = αbxQb and Qby = αbyQb, αbx and αby are the direction cosines, and Qb is the total bed load. Wu and his coauthors assume that the bed load is in the direction of the bed shear stress so that these cosines are given by the flow calculation. This formula neglects the effect of transverse bed slope, so that it may be used when this slope is small. A more detailed formula may be consulted for instance in (van Rijn, 1993).
Figure 4: Discretization of a fluvial cross-section

Modelización Aplicada a la Ingeniería Jacovkis, P.
99
We remark that, although of course a two-dimensional mobile-bed hydrodynamic model is more complex than a one-dimensional one, in a sense the capability of a one-dimensional mobile bed model to really represent the bed behavior is controversial: analyzing Figure 3, for instance, what is really the river bed level? We must generally assume a rectangular cross-section, to be able to define a determined bed level, as in Figure 5. Sometimes this is a reasonable approximation (or we are studying, say, an artificial laboratory channel). But often we must, at least, consider a “quasi-two-dimensional” model, in which we work with parallel streamtubes, each with its own bed level, as may be seen in (Gradowczyk and Jacovkis, 1984). To sum up, eventually a two-dimensional model is necessary for an accurate representation of the bed load. b
Z
e
Figure 5: A simple rectangular cross-section
If particles are also transported in suspension, and can be subject to the entrainment (resuspension) or deposition processes, that is, there is exchange of sediment between the bed-load layer and the suspended load region above it, an additional diffusive equation must be included, namely,
∂ C/∂ t + ∂ (uC)/∂ x + ∂(vC)/∂ y =
∂ (ε x ∂ C/∂ x)/∂ x + ∂ (ε y ∂ C/∂ y) /∂ y + Eb –Db (6)
where now C = C(x,y,t) is the local sediment concentration, ε x and ε y the sediment mixing coefficients in the x- and y- directions, respectively, Es the entrainment (or resuspension) rate from the bed-load layer (upward flux) and Db the deposition rate (downward sediment flux) of the material. These last two
h

Some approaches to the Río de la Plata modeling Jacovkis, P.
100
terms form the source or sink, depending on the sign. The deposition rate Db is proportional to the settling velocity of particles ωs , Db = ωs C, and the entrainment rate Es has to be introduced with an empirical relation, that can be consulted, for instance, in (Celik and Rodi, 1988). In this case the right hand side of equation (5) must also include a source or sink term Db – Es .
The total load is now the sum of the bed load and the suspended load, namely
(1 – p’)∂ zb /∂ t + ∂ (hC)/∂ t + ∂ QTx /∂ x + ∂ QTy /∂ y = 0 (7)
where QTx and QTy are the components of the total-load sediment-transport in the x- and y-directions, respectively.
Evidently, a complete model two-dimensional hydrodynamic model that includes bed load and suspended load is sometimes too involved (currently not necessarily for computational reasons, because two-dimensional models are in general in the range of memory and run-time feasibility for modern computers, but for the amount of data necessary, that sometimes are not easy to obtain); therefore, some simplifications have been implemented. For instance, a two-dimensional hydrodynamic model with a fixed bed, that does not take into account suspended material, can be used (or perhaps velocity and water depth data already known can be used) and then the results can be used as external values for a sedimentation and mobile bed model, as for example in the report prepared by (Estudio Gradowczyk y Asociados S.A.T. and Hydrocéano Consultores S.A., 1982), where this author has participated. Other approach is to consider an integrated model, that includes bed movements, but steady in the liquid velocity and water depth. Water quality models
Equation (6), replacing conveniently the sink and source terms, governs the transport of pollutants. Taking into account that one of the main problems with the Río de la Plata is its pollution, it is no surprise that water quality models for it have been implemented a long time ago. We may mention, for instance, (Marshall et al, 1978) and (Menéndez, 1991). Generalizing to three dimensions, the water quality equation is
∂ C/∂ t + u∂ C/∂ x + v∂ C/∂ y + w∂ C/∂ z = ∂ (ε x ∂ C/∂ x)/∂ x +
∂ (ε y ∂ C/∂ y)/∂ y + ∂ (ε z ∂ C/∂ z)/∂ z + r(C,p) (8)

Modelización Aplicada a la Ingeniería Jacovkis, P.
101
where w is now the velocity in the vertical direction z, ε x , ε y and ε z are the turbulent or molecular diffusion coefficients, and r, function of the concentration and the parameters p to be calibrated, represents the conversion rates of state variables due to conversion processes. See for instance (Shanehan et al, 2000).
Analysis of open boundaries For a shallow water two-dimensional model we have in general three types of
boundaries: closed boundary (the boundary condition is normal velocity nil), open boundary, and influx of one-dimensional flows (from one-dimensional fluvial models), represented by a linear combination of Dirac deltas at each time. For the Río de la Plata, these are of course the inflows of the Uruguay River and of the several Paraná delta watercourses, that may be modeled separately. In fact, this has been done for fluvial basins (Jacovkis, 1989), and for fluvial deltas (Jacovkis, 1990). The theoretical analysis of boundary conditions may be seen in (Jacovkis, 1991). Other tributaries may be included, for instance the Riachuelo. Boundary conditions are more involved than for one-dimensional problems, because in an open boundary usually there exists the phenomenon of numerical reflection of waves, and it is not easy to get rid of it (Enquist and Majda, 1977): in one-dimensional models, there are less data (one for open boundary); but in any study of the Río de la Plata it is impossible to avoid the outer open boundary.
Besides, when the boundary of a two-dimensional model is closed, that is, when the boundary is the coast, part of the coast may dry up at low water height, and be flooded at high water height, and this phenomenon means that the boundary is moving. In the Río de la Plata, this situation is regretfully common when sudestadas occur. From a theoretical point of view, some difficulties appear related with the treatment of this situation; from the numerical point of view, several ad-hoc schemes have been applied. We may for instance mention (Johns et al, 1982) and (Gopalakrishnan, 1989).
If the model includes mobile bed and/or water quality aspects, boundary conditions can be more involved (for complete integrated models) or simpler (when one restricts the analysis to the mobile bed or water quality equations).
Dredging models and technicalities
One of the main problems that affect the Río de la Plata is the continuous sedimentation of suspended material carried by the Paraná River. Taking into account the navigation through the Río de la Plata to Buenos Aires, the main port in Argentina, and upstream through the Paraná River to Rosario and Santa Fe, it is

Some approaches to the Río de la Plata modeling Jacovkis, P.
102
of paramount importance to conveniently dredge the navigation channels in the Río de la Plata, and in the Paraná River. In fact, the freight that ships can store depends on the depth of the dredging, so that the correct dredging of the channels has a strong impact in the cost of goods transported. A general dredging model has to assess the balance between the dredged and settled material: usually, the volume of material to be dredged is a boundary condition, that is, the dredging policy is known for each simulation, and after dredging is interrupted or finished the model must compute the time necessary for the sedimentation to nullify its effects. A general model may be used, taking into account that dredging is applied not to the complete two-dimensional region modeled, but only to specially chosen channels (usually for navigation purposes), so that two possible simplified approaches are the following: a general two-dimensional model is run, without dredging, that computes sedimentation and erosion, and then, only over the channels to be dredged, dredging volume is imposed to the results, or a one-dimensional model including only a navigation channel is prepared, that considers only velocities, water depths and bed movements along the navigation channel, modifying the bed movements according to dredging. Usually one tries to experimentally find the best dredging policy, that is, the policy that maintain the navigation channel operative with the least dredging activity. In the past decade, this author has participated in dredging studies of the Río de la Plata and the Paraná River using the one-dimensional approach, plus a special model that locally computes sedimentation and erosion for several types of channels; see (Deloitte & Co. et al, 1999).
A reasonable policy of maintenance dredging establishes two bed level values, emax and emin. When the bed level reaches emax, dredging begins until the value emin. This approach allows us to simulate, for extensive periods, the embankments that would be produced in a navigable channel without dredging. So the evolution of volumes to sediment can be forecast when solid discharged transported in suspension and the hydraulic and sedimentological data are known.
Conclusions
Although often a simplified solution is enough for many purposes, as has been described above, and this simplified solution obviously requires cheaper computational equipment (sometimes several order of magnitude cheaper), one does not has to think that if a complete two-dimensional (or perhaps three-dimensional) model is necessary the computational expenses must compulsorily be very expensive. One thinks in a supercomputer, maybe, but often it is not necessary to buy – or rent – a supercomputer. More and more clusters of personal computers may (although not in all cases) replace supercomputers because, on the one hand, they have a better performance, and, on the other hand, they cost much

Modelización Aplicada a la Ingeniería Jacovkis, P.
103
less and have less maintenance costs. Sometimes a very complete two-dimensional model can be efficiently run in a not too complex cluster, using much less money than was originally thought. Sometimes the real cost in not in the computational equipment, but in the feasibility of obtaining complete and correct data, especially in underdeveloped countries. One can distinguish current trends visiting the web site www.top500.org where the 500 faster computers are shown.
Acknowledgements The author gratefully acknowledges the support of the University of Buenos
Aires through grant I050 and of the Project IAI CNR-055-PROSUR. Figure 1 was kindly provided by Dr. Claudia Simionato and the Centro de Investigaciones del Mar y de la Atmósfera (CIMA/CONICET-UBA).
References Celik, I. and Rodi, W. (1988). “Modeling suspended sediment transport in non-
equilibrium situations”, J. Hydr. Engrg., ASCE, 114: 1157-1191.
Deloitte & Co., Estudio Gradowczyk y Asociados S. A. T., Hydrocéano Consultores S. A., Severgnini, Robiola, Grinberg & Larrechea (1999). “Estudio hidrosedimentológico de las áreas de dragado experimental”, Informe para la Dirección Nacional de Vías Navegables, Buenos Aires.
DIGID (1978). “Estudio de suelos y fundaciones y estudios hidráulicos por modelos matemáticos del canal costanero Norte en el Río de la Plata”, Informe Final, Tomo II: Estudios hidráulicos por modelos matemáticos, Dirección Nacional de Construcciones Portuarias y Vías Navegables, Buenos Aires.
Enquist, B. and Majda, A. (1977). “Absorbing boundary conditions for the numerical simulation of waves”, Math. Comp. 31: 629-651.
Estudio Gradowczyk y Asociados S. A. T. – Hydrocéano Consultores S. A. (1982). “Estudio de los sedimentos del río Paraná de las Palmas”, Informe Final para CONSULTARA, Buenos Aires.
Gopalakrishnan, T. C. (1989). “A moving boundary circulation model for regions with large tidal flats”, Int. J. Num. Meth. in Eng. 28: 245-260.
Gradowczyk, M. H. and Jacovkis, P. M. (1984). “Un modelo hidrodinámico impermanente de simulación de escurrimiento sobre fondo móvil, transporte de partículas en suspensión, decantación y resuspensión”, Buenos Aires, Anales del XI Congreso Latinoamericano de Hidráulica, Vol. II: 465-476.

Some approaches to the Río de la Plata modeling Jacovkis, P.
104
Haidvogel, D. B. and Beckmann, A. (1999). “Numerical ocean circulation modeling”, London, Imperial College Press.
Hydrocéano Consultores S. A. - Estudio Gradowczyk y Asociados S. A. T. (1984). “Dirección de obra y supervisión técnica del dragado de profundización y ensanche de los canales de acceso al Puerto de Buenos Aires”, Informe Final, Parte II, Tomo II, Dirección Nacional de Construcciones Portuarias y Vías Navegables, Buenos Aires.
Jacovkis, P. M. (1989). “Modelos hidrodinámicos en cuencas fluviales”, Revista Internacional de Métodos Numéricos para Cálculo y Diseño en Ingeniería, 5: 295-319.
Jacovkis, P. M. (1990). “Modelos numéricos hidrodinámicos en redes fluviales complejas”, Revista Internacional de Métodos Numéricos para Cálculo y Diseño en Ingeniería, 6: 543-572.
Jacovkis, P. M. (1991). “One-dimensional hydrodynamic flow in complex networks and some generalizations”, SIAM J. of Applied Math. 51: 948-966.
Johns, B., Dube, S. K. Sinha, P. C., Mohanty, U. C. and Rao, A. D. (1982). “The simulation of continuously deforming lateral boundaries in problems involving the shallow water equations”, Comp. & Fluids 10: 105-116.
Leendertse, J. A. (1967). “Aspects of a computational model for long-period water-wave propagation”. The Rand Corporation, Santa Monica, California.
Marshall, G., Modedo, L. and Makler, S. (1978), “Aspectos computacionales de un modelo de calidad de aguas para el estuario del Río de la Plata utilizando el método de los residuos ponderados con el criterio de Galerkin”, in “Métodos numéricos en la mecánica del continuo” by Marshall, G. Buenos Aires Editorial Universitaria de Buenos Aires: 159-165.
Menéndez, Á. (1991). “Dispersión de los residuos urbanos de la ciudad de Buenos Aires en el Río de la Plata”, in: “Mecánica Computacional”, by S. R. Idelsohn, Vol. 12: 335-352.
Van Rijn, L. C. (1993), “Principles of sediment transport in rivers, estuaries and coastal seas”, Amsterdam, Aqua Publications.
Vreugdenhil, C. B. (1994). “Numerical methods for shallow-water flow”, Dordrecht, Kluver.
Wu, W., Rodi, W. and Wenka, T. (2000). “3D numerical modeling of flow and sediment transport in open channels”, J. Hydr. Engrg 126: 4-15.
Modelización Aplicada a la Ingeniería
105
Técnicas asintóticas de análisis de inestabilidad estructural
CLAUDIO E. JOUGLARD
Departamento de Ingeniería Civil, Facultad Regional Buenos Aires,
Universidad Tecnológica Nacional, Buenos Aires, Argentina.
Introducción Un sistema estructural está formado por una estructura física de geometría
definida, compuesta de uno o varios materiales y por las fuerzas que actúan sobre ella. Una de las premisas básicas del análisis estructural es estudiar el comportamiento del sistema estructural ante variaciones de las cargas y de alguna de sus magnitudes características. Para ello es necesario definir parámetros de control que miden dichas variaciones respecto de valores de referencia. Así, si la distribución relativa de las cargas sobre la estructura no varía es posible definir un parámetro de carga λ que mide la magnitud de las cargas respecto de un estado de cargas de referencia. Ante la acción de las cargas los sistemas estructurales se deforman variando su geometría y se generan fuerzas internas que equilibran a las fuerzas externas aplicadas. Estas configuraciones de equilibrio quedan completamente definidas por los desplazamientos de la estructura respecto de su configuración original o de referencia. Si asumimos que las cargas de referencia no varían en el tiempo y se incrementan de forma lenta y gradual podemos despreciar los efectos inerciales y la dependencia del tiempo de las configuraciones de equilibrio.
Para modelar el comportamiento estructural usualmente se recurre a técnicas de discretización, tales como el método de elementos finitos, de manera que las configuraciones del sistema estructural quedan definidas por un número finito de coordenadas generalizadas o parámetros de estado. Utilizando esta descripción discreta las ecuaciones que representan el equilibrio estático de un sistema estructural se expresan como
0pufuF =λ−=λ )(),( , (1) donde u es un vector de coordenadas generalizadas, usualmente asociadas con los desplazamientos de los nodos de la discretización, f(u) es un vector de fuerzas internas generadas por la deformación de la estructura, p es un vector de fuerzas externas de referencia y λ es un parámetro de control asociado a la magnitud de las cargas.

Técnicas asintóticas de análisis de inestabilidad estructural Jouglard, C.
106
Luego el comportamiento estructural se puede caracterizar por curvas de respuesta en diagramas de parámetro de carga versus coordenada generalizada. Cada punto de estas curvas de respuesta representa una configuración de equilibrio de la estructura por lo que estas curvas suelen llamarse caminos de equilibrio (ver Figura 1).
u
λ
camino de equilibrio
configuración de referencia
aproximación lineal
Figura 1: Diagrama de respuesta.
Si las fuerzas internas f(u) son una función lineal de las coordenadas
generalizadas u entonces el modelo se caracteriza por tener una respuesta única y lineal. Los modelos estructurales lineales se basan en hipótesis tales como asumir materiales elásticos perfectos, deformaciones y desplazamientos infinitesimales, resistencia infinita. Luego existen limitaciones para la validez de tales modelos lineales, sin embargo, pueden proveer buenas aproximaciones, en particular en las proximidades de la configuración original. Además, como para muchas estructuras este segmento representa el rango operacional ó de servicio, el modelo lineal es bastante utilizado en cálculos en la etapa de diseño. Para ciertas estructuras esbeltas como láminas y cáscaras de espesor delgado no siempre es posible asumir modelos lineales pues ello puede producir resultados físicamente irreales. Por lo tanto para estos modelos las ecuaciones de equilibrio no son lineales y sus soluciones pueden ser múltiples y de forma compleja.
En la figura 2 podemos observar algunos diagramas de respuesta típicos de sistemas estructurales no lineales. En el diagrama de la figura 2.a se observa un camino de equilibrio que presenta un punto de máximo y otro de mínimo. Dichos puntos son llamados puntos límites y los hemos identificados con una letra L. Estos puntos representan la carga máxima o mínima que se puede alcanzar sobre una parte determinada del camino. Es posible que existan varias soluciones a las ecuaciones de equilibrio no lineales cada una caracterizada por un camino de equilibrio. Siempre habrá al menos un camino pasando por la configuración de

Modelización Aplicada a la Ingeniería Jouglard, C.
107
referencia. Dicho camino se denomina camino fundamental. A las intersecciones entre dos caminos de equilibrio se las denomina bifurcaciones y son indicadas con una B en la figura 2.b. Los caminos que intersectan un camino fundamental se denominan caminos secundarios, a los caminos que intersectan un camino secundario se los denomina caminos terciarios, y así sucesivamente.
u
λ
camino fundamental
u
λ
camino fundamental
L
L
B
camino secundario
camino terciario
B
(a) (b)
Figura 2: Respuestas para sistemas no lineales.
El estudio de la estabilidad de los sistemas estructurales consiste en analizar su
comportamiento ante pequeñas perturbaciones de la configuración de equilibrio sin alterar la magnitud de la carga. Esto es, se aparta la estructura una pequeña distancia de su configuración de equilibrio y se observa su comportamiento posterior. Si la estructura retorna a su configuración de equilibrio ó permanece oscilando en un entorno acotado de esta, se dice que dicha configuración de equilibrio es estable; caso contrario es inestable. Las configuraciones de equilibrio inestables no tienen sentido físico pues si bien representan estados de equilibrio ante la mínima perturbación las estructuras se apartan de dichas configuraciones inestables buscando otras configuraciones de equilibrio estables en su proximidad. De particular importancia es la detección de los puntos límites y de bifurcación pues estos representan puntos de transición para la estabilidad de los caminos de equilibrio, como veremos más adelante, y por ello se los llama puntos críticos.
La descripción precisa de la estabilidad de sistemas estructurales requiere la solución de las ecuaciones no lineales de equilibrio; esto incluye la descripción de los caminos de equilibrio y la localización de puntos límites y de bifurcación sobre estos caminos. Pueden distinguirse, al menos, dos formas de solución para este tipo de problemas. La primera corresponde a las técnicas de representación analítica, también conocidas cómo técnicas de perturbación, donde las soluciones no lineales son expresadas en formas de series de potencias de un parámetro del camino. Koiter, en su tesis doctoral (Koiter, 1970), sentó las bases de este procedimiento. En dicho trabajo desarrolló una metodología general para el análisis de problemas de bifurcaciones en elasticidad no lineal. Este método estaba orientado a sistemas continuos y sus aplicaciones fueron

Técnicas asintóticas de análisis de inestabilidad estructural Jouglard, C.
108
predominantemente analíticas. Las extensiones de este tipo de análisis a sistemas discretos fueron desarrolladas a partir de los sesenta (Thompson y Hunt, 1973), (Thompson y Hunt, 1984), (Flores y Godoy, 1992). La segunda forma de solución está basada en métodos de continuación (Riks, 1984), (Rheinboldt, 1981) y sus primeras aplicaciones a problemas de ingeniería estructural son más recientes y están relacionadas con el análisis no lineal mediante elementos finitos (Argyris, 1967), (Walker, 1969). Los métodos de continuación pertenecen a la clase de procedimientos del tipo predictor-corrector, tales cómo el método de Newton-Raphson. Estos métodos obtienen la solución como un conjunto de puntos calculados paso a paso sobre las curvas solución. Las primeras aplicaciones presentaban un comportamiento no muy robusto en las cercanías de puntos críticos, pero estas dificultades fueron superadas mediante el uso de parámetros de continuación adaptativos (Riks, 1979), (Ramm, 1981), (Crisfield, 1983).
Las técnicas de perturbación están basadas en series de potencias; por lo tanto sus resultados aproximan localmente a la solución en las cercanías de puntos conocidos de equilibrio donde los coeficientes de las series son calculados. En contraste, los métodos de continuación producen resultados que no están confinados a una región particular del espacio solución. Para extender la región de aplicación de las técnicas de perturbación es posible combinar esta técnica con los métodos de continuación usando las expansiones asintóticas como predictores de alto orden. Los primeros desarrollos (Walker, 1969) usaban una forma incremental de la técnica de perturbación usando al parámetro de carga como parámetro del camino. Más recientemente se han adoptado como parámetros del camino a algunas aproximaciones a la longitud de arco definidas por ecuaciones de restricción (Eriksson, 1992). Otros autores han utilizado también técnicas combinadas para trazar los caminos de equilibrio basadas en expansiones asintóticas usando una seudo longitud de arco como parámetro, pero limitada a puntos límites (Cochelin, 1994). Aquí utilizaremos una longitud de arco ponderada como parámetro de los caminos de equilibrio, que incluye a la verdadera longitud de arco como caso especial. Se mostrará una técnica incremental asintótica para la descripción de los caminos de equilibrio.
Primero haremos un repaso de la teoría de estabilidad, luego presentaremos las aproximaciones asintóticas de los caminos de equilibrio en puntos normales y puntos críticos, y finalmente la metodología numérica para el trazado del los caminos será presentada.
Teoría de la estabilidad de sistemas conservativos
La teoría general de la estabilidad de sistemas conservativos (Thompson y Hunt, 1973) parte de la hipótesis de que existe una función de energía potencial V a partir de la cual se pueden determinar los trabajos de todas las fuerzas que

Modelización Aplicada a la Ingeniería Jouglard, C.
109
actúan en un sistema. Para sistemas estructurales conservativos la energía potencial se puede expresar como
V = U(u) + λ Ω(u),
(2)
donde u es un vector de n coordenadas generalizadas usualmente asociado a desplazamientos nodales ui de una discretización de elementos finitos, U(u) es la energía de deformación asociada a las fuerzas internas y Ω(u) es una función de energía potencial asociada a cargas estáticas aplicadas proporcionales a un parámetro de cargas λ.
De la ecuaciones de Lagrange (Thompson y Hunt, 1973) tenemos que una condición necesaria y suficiente para el equilibrio estático de un sistema conservativo es que todas las derivadas primeras de la energía potencial respecto de las coordenadas generalizadas se deben anular.
0=⎭⎬⎫
⎩⎨⎧
∂∂=
iu u
VV , (3)
quedando el siguiente sistema de ecuaciones de equilibrio
0pufuF =λ−== )(),( λuV , (4)donde f(u) = Uu es el vector de fuerzas internas generalizadas y p = Ωu es el vector de fuerzas externas generalizadas de referencia, que es asumido constante.
Para asegurar la estabilidad de una configuración de equilibrio E de un sistema discreto conservativo, una condición necesaria y suficiente es que la energía potencial V sea mínima respecto de las n coordenadas generalizadas ui (Thompson y Hunt, 1973) en dicha configuración. Esto implica que la siguiente matriz, llamada matriz de estabilidad:
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂∂
∂∂∂
∂∂∂
∂∂∂
∂∂∂
∂∂∂
=⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂∂∂=
Enn
EnE
EnEE
EjiEuu
uuVsimétrica
uuV
uuV
uuV
uuV
uuV
uuVV
......
...
...
222
12111
,
(5)
debe ser definida positiva. Dado que es una matriz simétrica una condición suficiente para asegurar que sea definida positiva es que todo sus autovalores sean positivos y en ese caso tenemos una configuración de equilibrio estable. Si algunos de los autovalores es negativo entonces tenemos una configuración de

Técnicas asintóticas de análisis de inestabilidad estructural Jouglard, C.
110
equilibrio inestable. Si alguno de los autovalores es nulo entonces tenemos un estado de equilibrio crítico y la matriz de estabilidad es singular en dicha configuración.
Definimos el grado de inestabilidad de una configuración de equilibrio como el número de autovalores negativos de la matriz de estabilidad en esa configuración. Una manera sencilla de determinar el grado de inestabilidad es mediante el uso de la factorización de Gauss de la matriz, dado que los pivotes de la factorización tienen el mismo signo que los autovalores (Bathe, 1982); luego el número de pivotes negativos es el grado de inestabilidad.
Descripción paramétrica de los caminos de equilibrio
Un camino de equilibrio puede ser descrito parametricamente por funciones u(t), λ(t), donde t es el parámetro del camino. Si las relaciones funcionales F(u,λ) son analíticas entonces u(t), λ(t) son también funciones analíticas y pueden representarse por series de Taylor:
...)( 3]3[2]2[]1[]0[ ++++= tttt uuuuu , (6)
...)( 3]3[2]2[]1[]0[ +λ+λ+λ+λ=λ tttt , donde hemos indicado al i-ésimo coeficiente de cada serie con un supraíndice entre corchetes. Estos coeficientes pueden ser obtenidos a partir de las derivadas paramétricas
0
)(][
!1
==
t
mm
muu ,
0
)(][
!1
=λ=λ
t
mm
m,
(7)
donde hemos usado la notación
m
mm
dtd (.)(.) )( = ,
(8)
para indicar la m-ésima derivada con respecto a t y m! es el factorial de m, esto es, m! = m(m-1)(m-2)…1 y 0!=1.
El parámetro t es arbitrario, pero es conveniente identificarlo con alguna variable que asegure la existencia de las relaciones funcionales u(t), λ(t). Esta identificación es impuesta por ecuaciones de restricción paramétricas que vinculan los coeficientes de las series. Un parámetro que presenta una ventaja particular respecto de otros es la longitud de arco, pues asegura la convergencia de las series de Taylor para cualquier punto del camino.
Para deducir las ecuaciones de restricción asociadas a la longitud de arco, consideremos al vector posición ρ(t) de una curva definida por u(t), λ(t):
Tttututut )(...)()()( )( 321 λ=ρ . (9)
El vector tangente viene dado por la derivada del vector posición

Modelización Aplicada a la Ingeniería Jouglard, C.
111
Tuuut
)1()1(3
)1(2
)1(1 ... λ=
∂∂= ρρ(1) .
(10)
Si consideramos un segmento diferencial de curva ds
dtds (1)ρ= , (11)
donde (1)ρ es la norma Euclidiana del vector tangente definida como
( ) 21
2)1()1()1( )(λ+= uuT(1)ρ .
(12)
la longitud de arco s de la curva es definida como la distancia medida a lo largo de la curva
∫=t
dts0
(1)ρ . (13)
Luego la condición necesaria y suficiente para asegurar que el parámetro del camino t sea coincidente con la longitud de arco s, es que el vector tangente sea un vector unitario en todo punto de la curva
01)(1 2)1()1()1(2=−+=− λuu
T(1)ρ . (14)
Si derivamos sucesivamente esta ecuación con respecto a t y evaluamos en t=0 obtenemos las ecuaciones de restricción paramétricas que definen a la longitud de arco como parámetro del camino
,][][]1[][]1[ mmmT
βλλ =+uu (15)
donde β[1]=1, β[2]=0 y
( ) )22
)1(1
2
]1[][]1[][][ >++−−= ∑−
=
+−+− mmpmpm
p
pmppmpm T
( , uu λλβ . (16)
Notemos que existe una relación biunívoca entre la longitud de arco y cada punto del camino. Esto implica que las relaciones funcionales u(s), λ(s) existen en todo punto de la curva y por lo tanto, para este caso, el radio de convergencia de las series de Taylor debe ser infinito.
Si bien la longitud de arco asegura la convergencia de las series de Taylor, esta convergencia puede ser muy lenta en algunos casos requiriendo un gran número de términos en las series para obtener una representación aceptable. Una forma sencilla de mejorar la convergencia de las series localmente es mediante una transformación lineal de coordenadas
).()(),()(tt
ttλλw
uTv=Λ=
(17)
Técnicas asintóticas de análisis de inestabilidad estructural Jouglard, C.
112
donde T es una matriz de transformación. Si ahora imponemos la condición de vector tangente unitario a la curva definida por v(t), Λ(t) resultan la siguientes ecuaciones de restricción paramétricas:
01)( 2)1()1()1( =−+ λλwT
Wuu , (18)
donde W=TtT es una matriz de ponderación definida positiva, o al menos semi-definida positiva. Si derivamos sucesivamente esta ecuación respecto del parámetro t y evaluamos en t=0 obtenemos las siguientes ecuaciones de restricción
,)( ][][]1[2][]1[ mmm wT
βλλλ −=+Wuu (19)
donde β[1]=1, β[2]=0 y
( ) )22
)1(1
2
]1[][]1[][][ >++−= ∑−
=
+−+− mwmpmpm
p
pmppmpm T
( , Wuu λλβ λ . (20)
Diferentes ponderaciones W, wλ representarán diferentes parámetros t, pero ahora es posible que para algunas elecciones de estas ponderaciones las relaciones funcionales ui(t), λ(t) sólo sean válidas en una región local del camino y consecuentemente las series sólo serán convergentes en dicha región.
Algunos parámetros usuales pueden ser reconocidos si rescribimos la ecuación (18) como
22 )()( λλdwdddt T += uWu . (21)
Notemos que esta ecuación representa un elipsoide en el espacio (ui, λ), de manera que en el caso general el parámetro del camino definido por estas ecuaciones de restricción es llamado longitud de arco elipsoidal (Crisfield, 1991). Si W=I (matriz identidad) y wλ =1 el parámetro del camino es llamado longitud de arco esférica. Si wλ =0 la curva transformada (17) se proyecta sobre el subespacio de coordenadas ui y el parámetro del camino es llamado longitud de arco elíptica. Si W=I y wλ =0 el parámetro del camino es llamado longitud de arco cilíndrica. Para el caso particular de W=0 y wλ =1 el parámetro del camino coincide con el parámetro de carga λ. Esta ha sido la opción habitualmente usada para describir el camino fundamental desde las primeras aplicaciones de la técnica de las perturbaciones. Si la matriz W es diagonal con coeficientes diagonales wi y si wλ =0 y wj =0 (j≠i), entonces el parámetro del camino coincide con la coordenada generalizada ui.
Otra técnica interesante para mejorar la convergencia de las series consiste en rescribir estas expansiones mediante aproximaciones de Padé (Cochelin, 1994).

Modelización Aplicada a la Ingeniería Jouglard, C.
113
Aproximación asintótica de los caminos de equilibrio Considérese una representación paramétrica u(t), λ(t) donde el origen t = 0
coincide con una configuración equilibrada (uE, λE) que satisface las ecuaciones de equilibrio (4). Si derivamos sucesivamente estas ecuaciones respecto del parámetro t y evaluamos en t = 0 obtenemos
][][][ mmE
mEu rFuF −−= λλ , (22)
donde Fu, Fλ son las derivadas parciales respecto de las coordenadas generalizadas ui y el parámetro de cargas λ, respectivamente. Estas ecuaciones son llamadas ecuaciones de equilibrio de m-ésimo orden (Thompson y Hunt, 1984). Los vectores r[m] tienen unidades de fuerzas generalizadas y son llamados vectores de fuerzas residuales de m-ésimo orden, siendo r[1]
= 0, y para m>1
( ) 1).( , FuFr >+−= ∑−
=
−− mp
pmm
m
p
pm
E
ppm
E
pu
m1
1
][)(][)(][
!1 λλ
(23)
Definiendo a la matriz de rigidez tangente K como
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
==
n
nnn
n
n
u
uF
uF
uF
uF
uF
uF
uF
uF
uF
...
.
....
.
...
...
...
21
2
2
2
1
2
1
2
1
1
1
FK .
(24)
Notemos que esta matriz evaluada en la configuración E, KE = FuE, aparece en el lado izquierdo de todas las ecuaciones de equilibrio de orden m. Para sistemas conservativos las ecuaciones de equilibrio Fi vienen dadas por las derivadas primeras de la energía potencial respecto de las coordenadas generalizadas, ec.(4); por lo tanto la matriz de rigidez tangente coincide con la matriz de estabilidad en el punto E. Notemos que esta matriz es siempre simétrica pues
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∂∂∂=
⎭⎬⎫
⎩⎨⎧
∂∂
=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∂∂===
jii
j
j
ijiiju uu
VuF
uFFFF .
(25)
Si asumimos que el vector de fuerzas de referencia generalizadas es constante
.0)( =−=E
mE λλ F , pF (26)
Para obtener los n+1 coeficientes u[m], λ[m] necesitamos n+1 ecuaciones relacionando estos coeficientes. Por una lado tenemos las n ecuaciones de

Técnicas asintóticas de análisis de inestabilidad estructural Jouglard, C.
114
equilibrio de orden m, ecs.(22) y precisamos una ecuación adicional que viene dada por la m-ésima ecuación de restricción paramétrica, ec(15), donde adoptamos por simplicidad W=I, resultando
( ) .
,][][2]1[][]1[
][][][
mmm
mmmE
wT
βλλ
λ
λ −=+
−=
uu
rpuK
(27)
Estas ecuaciones se pueden solucionar sucesivamente para cada orden m. Asumiendo que la matriz KE no es singular en la configuración E entonces podemos definir los vectores intermedios d[m] como
1).( ,rdKpdK
>=
=
mmmE
E][][
]1[ ,
(28)
Luego los coeficientes u[m] se pueden escribir como
1).( , ddudu
>−=
=
mmmm ][]1[][][
]1[]1[]1[ ,λ
λ
(29)
Sustituyendo estos coeficientes en las ecuaciones de restricción obtenemos
1).( , )-du
dd
>=
+±=
m
wmmTm
T
][][]1[]1[][
2]1[]1[]1[
(
,)(1
βλλ
λ λ (30)
El signo en la primera ecuación define la dirección de recorrido, positivo para un factor de cargas creciente y negativo para cargas decrecientes.
Luego podemos concluir que si la matriz de rigidez tangente KE no es singular entonces la solución a las ecuaciones (27) es única y sólo pasa un camino de equilibrio por el punto E.
Caminos de equilibrio poscríticos
Considérese una representación paramétrica u(t), λ(t) de los caminos de equilibrio. Asumiremos que las ecuaciones de equilibrio F(u, λ) son funciones analíticas de las variables ui, λ. Luego esto implica que también son analíticas en el parámetro t y por lo tanto la matriz de rigidez tangente K(t)=Fu(t) es también una función analítica del parámetro t. Luego se puede demostrar (Gohberg et al, 1982) que sus autovalores ω(t) y sus autovectores asociados ξ(t) deben ser funciones analíticas del parámetro t también.
Para cada punto del camino de equilibrio cada autovalor ω(t) y su autovector asociado ξ(t) deben satisfacer la ecuación de autovalor
)()()()( tttt ξξ ω=K . (31)Como la matriz de rigidez tangente K(t) varía continuamente con el parámetro
t entonces sus autovalores también varían sobre el camino y es posible que en

Modelización Aplicada a la Ingeniería Jouglard, C.
115
algún punto algún autovalor se haga nulo. Si recordamos que para un sistema conservativo la matriz de rigidez tangente coincide con la matriz de estabilidad, esto implica que un autovalor nulo representa un estado de equilibrio crítico y la configuración asociada (uC, λC) es llamada punto de equilibrio crítico.
En un punto de equilibrio crítico algún autovalor ωC será nulo y como la matriz de rigidez tangente en el punto crítico KC es una matriz simétrica su autovector asociado ξC debe satisfacer la ecuación
0KK == CTCCC ξξ . (32)
Luego si premultiplicamos las ecuaciones de equilibrio de m-ésimo orden por la traspuesta del autovector crítico obtenemos
1).( ,r >==
mbb
mTC
m ][][
]1[ ,0ξλ
λ
(33)
donde
pTCb ξ= . (34)
Notemos que si la matriz de rigidez tangente es singular no es posible asegurar la unicidad de la solución de las ecuaciones de equilibrio de m-ésimo orden en el punto crítico, dado que si añadimos un vector proporcional al autovector crítico a una solución conocida obtenemos otra solución. Del álgebra lineal sabemos que si el lado derecho de un sistema de ecuaciones es ortogonal a cualquier autovector de la matriz del sistema, entonces el vector solución debe ser ortogonal a este autovector también. Luego ortogonalizando el lado derecho de las ecuaciones de equilibrio podemos obtener los únicos vectores intermedios d[m]
C, ortogonales al autovector crítico como
1).( 0d , rrrdK0,d , pppdK
>=−=−=
=−=−=
mb
bm
CTCC
mmC
mTC
mmCC
CTCCC
TCCC
][][][][][][
]1[]1[
)(
)(
ξξξξ
ξξξξ
λ
(35)
En estas ecuaciones hemos asumido que la matriz de rigidez tangente tiene un solo autovector crítico que ha sido normalizado
1=CTC ξξ . (36)
Luego la solución de las ecuaciones de equilibrio se puede expresar como
1).( ,ddudu
>+−=
+=
mCmm
CCmm
CC
ξ
ξ][][]1[][][
]1[]1[]1[]1[ ,
αλαλ
(37)
Notemos que tenemos incógnitas escalares λ[m], α[m] por cada vector u[m]; luego necesitamos dos ecuaciones adicionales por cada uno de estos vectores. Una es obtenida de las condiciones de ortogonalidad (33) que se pueden escribir como

Técnicas asintóticas de análisis de inestabilidad estructural Jouglard, C.
116
).( , 2
,2)(2)(,0
]1[][2
]1[1
]1[
]2[3
2]1[2
]1[]1[1
2]1[
]1[
>−=+
=++=
−−− mCbBB
bAAAb
mmmm λλαλλλαα
λ
(38)
donde
.
,
,
][][3
][2
1
mC
mCCuu
TC
mCCCuu
TC
CCCuuTC
A
A
A
ddF
dF
F
ξ
ξξ
ξξξ
=
=
=
(39)
y
.31
21
2
,21
11
1
AAB
AAB][][
][][
λα
λα
+=
+=
(40)
y
).2,
,
2
1
1
][]1[)(!)1(
))(1(
1
2
]1[][1
1][]1[][
]1[]1[)1(61]2[]1[]2[
>+
+=
+=
∑∑
∑
=
−
=
−+−+
−+−
−
=
+−+
+−
m
C
C
m
p
p
q
qppm
C
quu
TCqpm
qppm
m
p
pmpCuu
TCm
pmmCCuu
TC
m
CuuTCCCuu
TC
( uuF
uuFduF
uuFduF
ξ
ξξ
ξξ
(41)
Notemos que Fuu es tensor de tercer orden que puede ser representado por una hipermatriz con tres dimensiones que es completamente simétrica para sistemas conservativos.
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∂∂∂∂=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∂∂∂==
kjikj
iijkuu uuu
Vuu
FFF . (42)
El otro conjunto de ecuaciones viene dado por las ecuaciones de restricción paramétricas que luego de la sustitución de las componentes u[m] de la ecs.(37) se pueden escribir como
1).( , aaa
>+−=+=+
mmmmm ]1[][][][]1[1
][]1[
2]1[]1[2]1[ ,1)()(λβλλαα
λα
(43)
donde
1).( ,dda
dda][
[1]
>=
+=
m
wm
CT
Cm
CT
C
][]1[
2]1[]1[ ,)( λ (44)

Modelización Aplicada a la Ingeniería Jouglard, C.
117
La solución simultanea de las ecuaciones (38) y (43) nos da los coeficientes α[m], λ[m] para cualquier camino poscrítico.
Puntos límites
De la primera de las ecuaciones (38) consideramos el caso donde b ≠ 0; luego tenemos
0[1] =λ . (45)Notemos que esto implica que la pendiente de la curva λ(t) es cero en el punto
crítico, luego debemos tener un máximo o mínimo local en dichos puntos. Además, de la primera de las ecuaciones (43) para λ[1] = 0 tenemos
1]1[ ±=α . (46)Luego la componente u[1] se puede escribir como
Cξ±=[1]u . (47)Esto implica que en un punto límite el vector tangente es paralelo al
autovector crítico, y su signo define la dirección de recorrido. Los coeficientes de mayor orden α[m], λ[m], pueden ser obtenidos de las
ecuaciones (33) y (43) como
.)(
,
][1
][
][
mm
mTCm
signb
βαα
λ
−=
=r][ ξ
(48)
Notemos que para un punto límite con b ≠ 0 hay un único camino de equilibrio pasando por el punto crítico.
Puntos de bifurcación
Si b = 0 entonces la primera de las ecuaciones (38) no da ninguna información y debemos usar las otras ecuaciones. Por ejemplo, si analizamos la segunda de las ecuaciones (38)
0)(2)( 32]1[
2]1[]1[
12]1[ =++ AAA λλαα . (49)
Esta es una ecuación cuadrática en α[1], λ[1] y por el teorema de Bezout sabemos que puede tener dos soluciones (Thompson y Hunt, 1984). Esto implica que en el punto crítico existe una intersección de dos caminos de equilibrio y este punto es llamado punto de bifurcación. Luego de las ecuaciones (49) y (43) tenemos
1
312
22[1]
DDDDD −±
±=λ , (50)
donde

Técnicas asintóticas de análisis de inestabilidad estructural Jouglard, C.
118
.
,2
,24
213
213122
31212
31
AD
AAAAD
AAAAAD
=
+−=
−++=[1]
[1][1][1]
a
aaa2
222
(51)
El signo ± dentro de la raíz cuadrada en (50) define las dos soluciones y el primer signo ± define la dirección de recorrido. El coeficiente α[1] se obtiene de (43)
2]1[]1[]1[ )(a1 λα −±= , (52)
donde el signo se elige de manera de satisfacer la ec. (49). Luego tenemos dos casos dependiendo del valor de A1. Si A1 ≠ 0 se puede
demostrar que los dos caminos que se cruzan deben tener su componente λ[1] ≠ 0 y en este caso la bifurcación se llama asimétrica. Si A1 = 0 entonces un camino tiene λ[1] = 0; esto implica que para este camino el punto de bifurcación es también un mínimo o máximo local del factor de carga y la bifurcación es llamada simétrica. En cualquier caso, salvo algún caso patológico, al menos uno de los caminos tendrá λ[1] ≠ 0.
Las componentes de alto orden del camino se obtienen de las ecuaciones (38) y (43). Para el camino fundamental tenemos
,
,
1
][
]1[
]1[][][
]1[
1
][]1[][]1[][
F
mF
F
FmF
mF
FF
mF
Fm
FFm
F
BC
CB
C
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛++−=
λαλα
λαβλλ a
(53)
donde el índice F indica cantidades relacionadas con el camino fundamental. Para la rama secundaria en una bifurcación asimétrica distinguimos dos casos. Si B1
S > B2S usamos
,
,
1
][
]1[
]1[][][
][]1[
1
][]1[][]1[][
S
mS
S
SmS
mS
mSSS
mS
Sm
SSm
S
BC
BC
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛++−=
λαλα
λαβλλ a
(54)
y si B1S < B2
S usamos
,
,
2
][
]1[
]1[][][
][]1[
2
][]1[]1[][]1[][
S
mS
S
SmS
mS
mSSS
mS
SSm
SSm
S
BC
BC
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛++−=
αλαλ
λλβαα aa
(55)
Para una bifurcación simétrica tenemos

Modelización Aplicada a la Ingeniería Jouglard, C.
119
.
,
][][2
][][
mS
mS
S
mSm
S AC
βα
λ
−=
−= (56)
Variación del grado de inestabilidad en un punto crítico
Como fue mencionado anteriormente, los autovalores ω(t) de la matriz de rigidez tangente y sus autovectores asociados ξ(t) deben ser funciones analíticas del parámetro t. Por lo tanto el autovalor crítico ωC(t) y su autovector asociado ξC(t) pueden ser expresados mediante series de Taylor a partir del punto crítico.
....)(
,...)(3]3[2]2[]1[
3]3[2]2[]1[
++++=
+++=
tttt
tttt
CCCCC
CCCC
ξξξξξ
ωωωω
(57)
Luego se puede demostrar que en un punto límite
02 ]2[1
]1[ ≠== bAC λω . (58)Esto implica que en un punto límite el autovalor crítico tendrá signos opuestos
a cada lado del punto límite, por lo tanto en estos puntos el grado de inestabilidad siempre varia y un lado del camino es siempre inestable.
Para el camino fundamental se puede demostrar que
01]1[ ≠= F
C BF
ω . (59)
Esto implica que en un punto de bifurcación el grado de inestabilidad del camino fundamental siempre cambia. Si B1
F > 0 entonces el grado de inestabilidad se incrementa en uno, caso contrario decrece en uno.
El signo de la primera derivada del autovalor crítico da la variación del grado de inestabilidad en el punto de bifurcación. Sobre los caminos fundamental y secundario estas derivadas están relacionadas como
.]1[]1[
]1[]1[
FCF
SSC ω
λλω −=
(60)
Esta relación indica que para cargas crecientes (λ[1]F>0, λ[1]
S>0) estas derivadas tienen signos opuestos, esto es, si un camino incrementa su grado de inestabilidad a medida que aumenta la carga entonces el otro camino debe decrecer su grado de inestabilidad en la misma medida. Este fenómeno es conocido como intercambio del grado de inestabilidad.
Para una bifurcación simétrica tenemos λ[1]S = 0 esto implica que ωC
[1]S = 0.
Dado que el primer término de la serie (57) de ωC(t) es cero entonces el autovalor crítico varía cuadráticamente alrededor del punto de bifurcación. Esto implica que el grado de inestabilidad no cambia sobre el camino secundario en las

Técnicas asintóticas de análisis de inestabilidad estructural Jouglard, C.
120
proximidades del punto de bifurcación. La derivada del autovalor critico sobre el camino secundario se puede expresar como
,]1[]1[
]1[]1[
FCF
SSC ω
λλω −=
(61)
Notemos que 2 λ[1]S es componente del vector curvatura en la dirección del
factor de carga en el punto de bifurcación. Para cargas crecientes sobre el camino fundamental (λ[1]
F>0) si consideramos un incremento del grado de inestabilidad (ωC
[1]F < 0) entonces el signo del autovalor crítico sobre el camino secundario en
las proximidades de la bifurcación viene dado por su curvatura de este camino. Estas ecuaciones que confirman resultados previos basados en argumentos
topológicos son interesantes pues relacionan la variación del grado de inestabilidad con la geometría de los caminos.
Implementación de un método de continuación asintótico
Se implementó una técnica de continuación para el análisis de estabilidad de pórticos planos basada en el método de Newton-Raphson. Se usaron los primeros cinco términos de las series (6) como predictores de alto orden y se usó un control adaptativo del incremento del paso analizando el error de truncamiento de las series.
Se utilizó la longitud de arco cilíndrica (wλ =0) como parámetro del camino. Para los sistemas estructurales usuales la variación paramétrica de las componentes de desplazamientos ui(t) es más suave que la componente del factor de cargas λ(t). Por lo tanto el control del error se aplica únicamente sobre λ(t).
Para detectar puntos críticos verificamos el grado de inestabilidad inspeccionando los pivotes de la factorización de la matriz tangente al comienzo y final de cada paso. Los puntos críticos fueron calculados por un método directo (Wriggers y Simo, 1990).
Fue analizado un arco triangular rebajado bajo carga central usando 32 elementos finitos. Las dimensiones del arco son: longitud = 65.712 cm, altura = 0.98 cm, módulo de Young = 7200000 N/cm2, área = 1.18 cm2, inercia = 0.003784 cm4. Este arco presenta dos puntos límites y dos bifurcaciones simétricas antes del primer punto límite. En las figuras 4 y 5 tenemos la variación de la carga P con los desplazamientos central v1 y en el medio del lado v2.
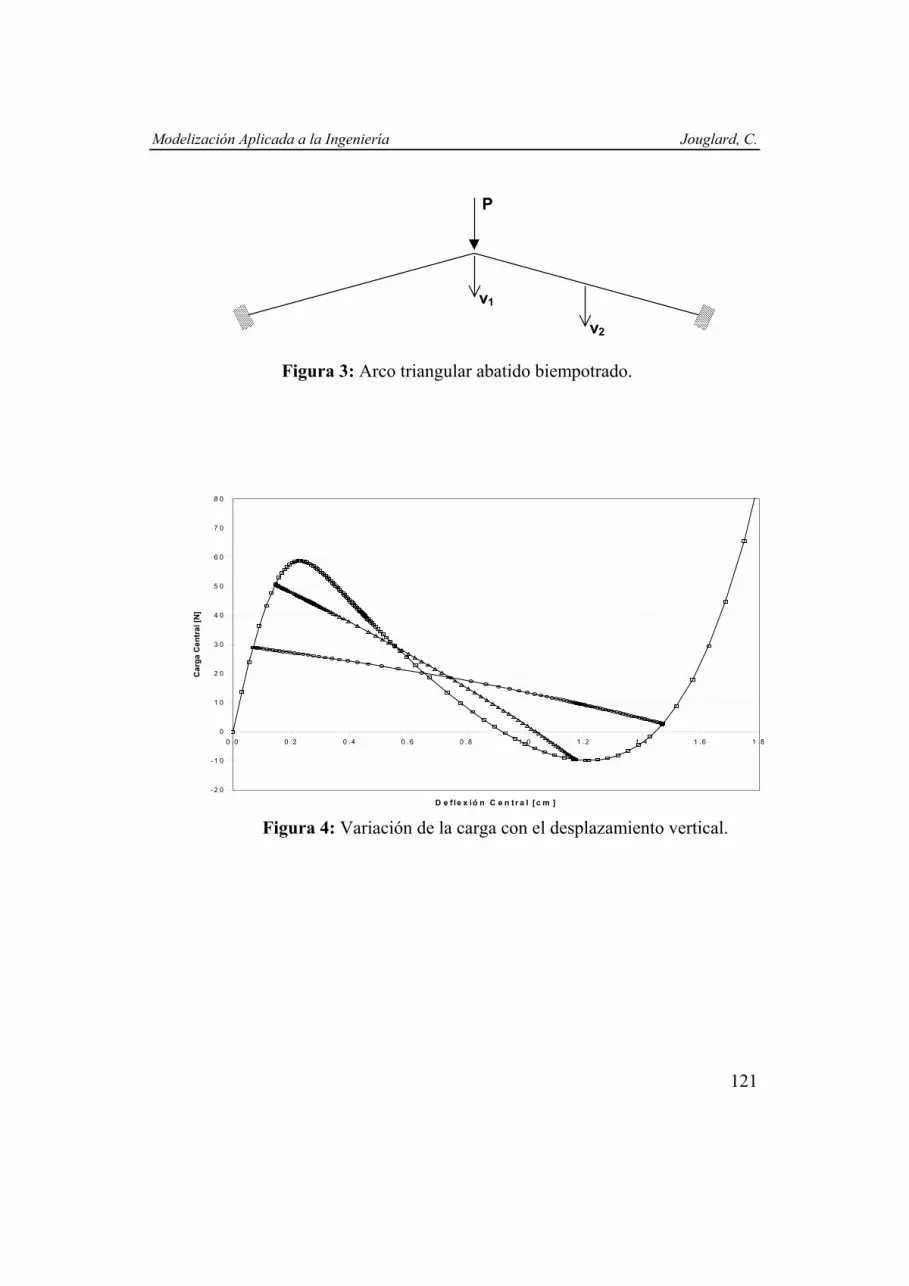
Modelización Aplicada a la Ingeniería Jouglard, C.
121
P
v2
v1
Figura 3: Arco triangular abatido biempotrado.
- 2 0
- 1 0
0
1 0
2 0
3 0
4 0
5 0
6 0
7 0
8 0
0 .0 0 .2 0 .4 0 .6 0 .8 1 .0 1 .2 1 .4 1 .6 1 .8
D e f le x ió n C e n t r a l [ c m ]
Car
ga C
entr
al [N
]
Figura 4: Variación de la carga con el desplazamiento vertical.
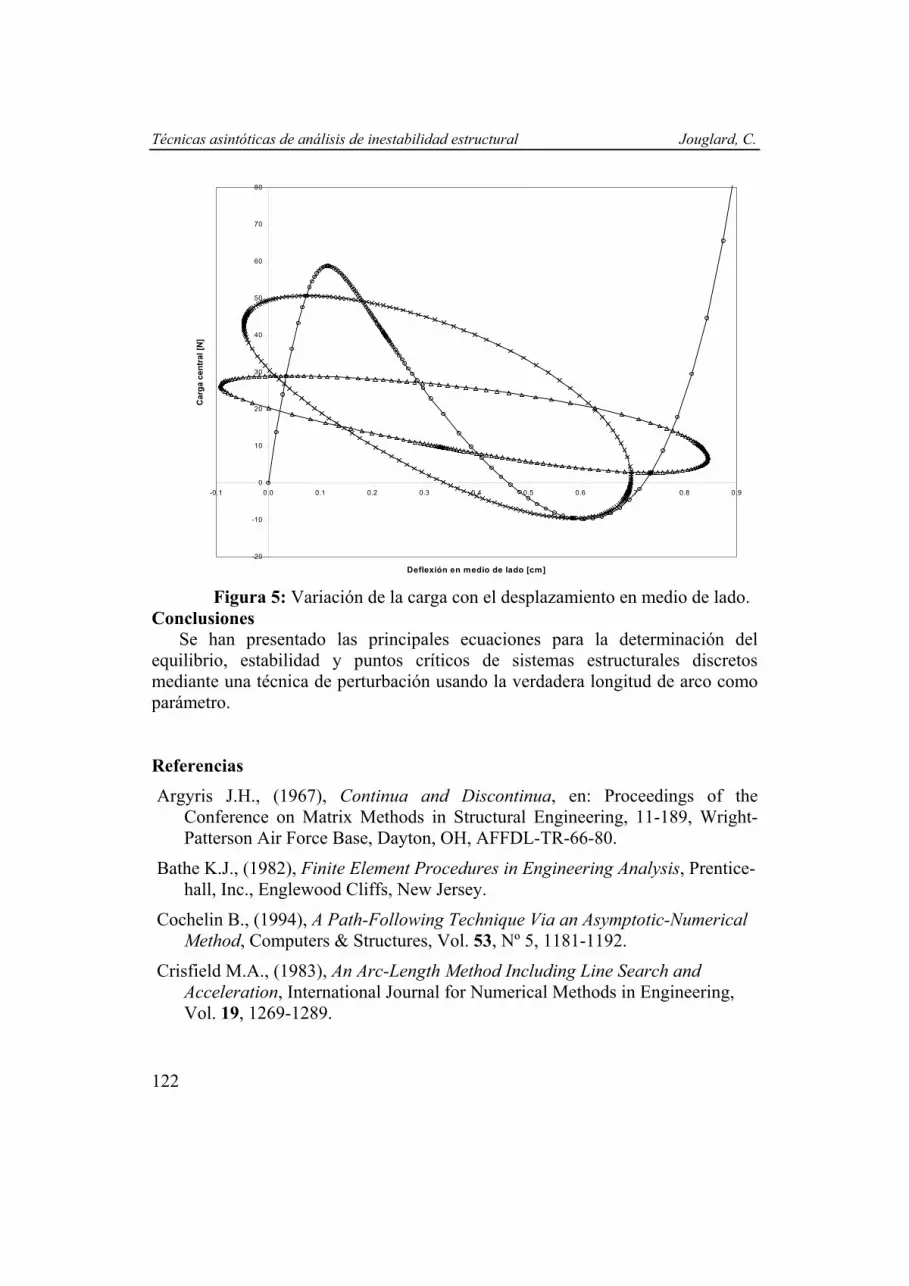
Técnicas asintóticas de análisis de inestabilidad estructural Jouglard, C.
122
-20
-10
0
10
20
30
40
50
60
70
80
-0.1 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Deflexión en medio de lado [cm]
Car
ga c
entr
al [N
]
Figura 5: Variación de la carga con el desplazamiento en medio de lado.
Conclusiones Se han presentado las principales ecuaciones para la determinación del
equilibrio, estabilidad y puntos críticos de sistemas estructurales discretos mediante una técnica de perturbación usando la verdadera longitud de arco como parámetro.
Referencias Argyris J.H., (1967), Continua and Discontinua, en: Proceedings of the
Conference on Matrix Methods in Structural Engineering, 11-189, Wright-Patterson Air Force Base, Dayton, OH, AFFDL-TR-66-80.
Bathe K.J., (1982), Finite Element Procedures in Engineering Analysis, Prentice-hall, Inc., Englewood Cliffs, New Jersey.
Cochelin B., (1994), A Path-Following Technique Via an Asymptotic-Numerical Method, Computers & Structures, Vol. 53, Nº 5, 1181-1192.
Crisfield M.A., (1983), An Arc-Length Method Including Line Search and Acceleration, International Journal for Numerical Methods in Engineering, Vol. 19, 1269-1289.

Modelización Aplicada a la Ingeniería Jouglard, C.
123
Crisfield M.A., (1991), Non-Linear Finite Element Analysis of Solids and Structures, John Wiley and Sons Ltd, Chichester.
Eriksson A., (1992), On Accurate Descriptions for Primary and Secondary Paths in Equilibrium Problems, Computers & Structures, Vol. 44, Nº 1/2, 229-242.
Flores F. y Godoy L., (1992), , Elastic Postbuckling Analysis Via Finite Element and Perturbation Techniques. Part I: Formulation, International Journal for Numerical Methods in Engineering, Vol. 33, 1175-1794.
Gohberg I., Lancaster P. y Rodman L., (1982), Matrix Polynomials, Academic Press Inc., New York.
Koiter W.T., (1970), The Stability of Elastic Equilibrium, traducción al Inglés del original Holandés de 1945. Reporte AFFDL-TR-70-25, Air Force Flight Dynamics Laboratory, Wright-Patterson Air Force Base, OH.
Ramm E., (1981), Strategies for Tracing the Nonlinear Response Near Limit Points, en Nonlinear Finite Element Analysis in Structural Mechanics, W. Wunderlich, E. Stein y K.J. Bathe (eds.), Springer-Verlag, Berlin, 63-89.
Rheinboldt W.C., (1981), Numerical Analysis of Continuation Methods for Nonlinear Structural Problems, Computers & Structures, Vol. 13, 103-113.
Riks E., (1979), An Incremental Approach to the Solution of Snapping and Buckling Problems, International Journal of Solids and Structures, Vol. 15, 529-551.
Riks E., (1984), Some Computational Aspects of the Stability Analysis of Nonlinear Structures, Computer Methods in Applied Mechanics and Engineering, Vol. 47, 219-259.
Thompson J.M.T. y Hunt G.W., (1973), A General Theory of Elastic Stability, John Wiley, London.
Thompson J.M.T. y Hunt G.W., (1984), Elastic Instability Phenomena, John Wiley, London.
Walker A.C. , (1969), A Nonlinear Finite Element Analysis of Shallow Circular Arches, International Journal of Solids and Structures, Vol. 5, 97-107.
Wriggers P. y Simo J.C., (1990), “A General Procedure for the Direct Computation of Turning and Bifurcation Points”, International Journal for Numerical Methods in Engineering, 30, 155-176.

Modelización Aplicada a la Ingeniería
124
Modelado de conductos colectivos para evacuación de gases de combustión
WALTER LEGNANI1,4 , NESTOR QUADRI2,4 , FEDERICO IBÁÑEZ4,
MARÍA ALICIA PIÑEIRO3
1 Departamento de Ingeniería Eléctrica, Facultad Regional Buenos Aires, 2 Departamento de Ingeniería Civil, Facultad Regional Buenos Aires,
3Departamento de Ingeniería en Sistemas, Facultad Regional Buenos Aires, 4 Secretaría de Ciencia y Tecnología
Universidad Tecnológica Nacional, Argentina
Introducción El presente trabajo es el resultado de un proyecto requerido por la empresa
SPIRO S.A. para su línea de productos utilizados en la evacuación de gases de combustión en conductos colectivos de ventilación natural.
El modelo surgido del trabajo ha sido validado frente a las pruebas de escritorio clásicas y frente a resultados teóricos y experimentales obtenidos en su momento para SPIRO por la empresa Gas del Estado.
Una de las motivaciones del proyecto fue obtener una herramienta computacional que permitiese responder determinadas preguntas de interés tecnológico e ingenieril mediante el uso de un modelo. Este es uno de los logros mas importantes de la tarea realizada. El modelo SPIRO-UTN, desarrollado a tal fin, fue presentado a la comunidad especializada en la exposición “BATIMAT 2004” provocando un impacto sumamente alentador en los profesionales del área, a tal punto que el futuro reglamento del Ente Regulador del Gas para instalaciones del tipo como la estudiada en este trabajo podrá contar con el apoyo del presente modelo.
Existe más de una manera de plantear este tipo de modelos. En el presente trabajo se tomó como eje de estudio a las ecuaciones de balance entre la presión disponible por diferencias de densidad y las pérdidas de presión en los conductos y accesorios. Esta forma de plantear el modelo presenta varias ventajas desde el punto de vista tecnológico, dado que todas las variables son de medición accesible y los parámetros son de fácil calibración. En este sentido se hizo necesario el modelado adicional de las leyes de fricción en los tramos rectos del conducto, secciones curvas y accesorios.
Como síntesis conceptual del mismo se puede decir que se parte de un predimensionamiento del sistema de ventilación, se calculan las pérdidas de presión en todos los tramos del mismo, y por último se emplea la relación de balance entre presiones como ecuación de clausura, resultando así un modelo de

Modelización Aplicada a la Ingeniería Legnani, W. et al.
125
tipo algebraico en donde los resultados obtenidos corresponden a los valores medios de las variables en estudio. Una descripción del sistema modelado
Los conductos colectivos de ventilación (COVE) están destinados a la evacuación de gases de combustión de varios artefactos, como ser calderas, estufas, calefones, termotanques, etc., encolumnados en varias plantas de un edificio colectivo. Están compuestos de un conducto principal que colecta los gases de combustión de todos los artefactos y uno o dos, como máximo, conductos secundarios que permiten descargar los gases de cada artefacto conectado por piso al conducto principal, según se indica en la Figura 1.
Figura 1: Esquema de un conducto de ventilación para artefactos de gas.
Estos conductos deben rematar a los cuatro vientos por medio de un
sombrerete estático de diseño aerodinámico para eliminar los efectos desfavorables del viento (Michel, 1961); su diseños típicos pueden apreciarse en la Figura 2.
Figura 2: Esquema de sombretetes para conductos de ventilación natural para artefactos de gas.

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
126
Para la instalación de los sombreretes su base debe ubicarse a los 4 vientos con una altura de 1,80 m por sobre el nivel del techo o terraza accesible. Además se recomienda sobrepasar en 40 cm la intersección del eje del conducto y los planos imaginarios trazados a 45º desde la parte mas alta de los paramentos como se muestra en la Figura 3.
Figura 3: Ubicación de la base del sombrerete. En la reglamentación en vigencia (RGDE, 1982) se exige que en la parte
superior, ubicada a un metro de la base del sombrerete, debe haber una abertura de 10 x 15cm2, para inspección del conducto principal.
En todos los diseños donde se empleen estos sistemas de ventilación deben cumplimentarse diversos requisitos, como ser (Croome, 1994):
- Sólo es admisible la conexión de artefactos de gas de tiro natural y con
válvula de seguridad en caso de corte de llama. - No deben instalarse para artefactos en baños, dormitorios, pasos o ambientes
únicos. - Se aplica hasta 8 pisos consecutivos. Para más de 8 pisos debe instalarse otro
conducto colectivo. - En estufas la altura máxima es de 5 pisos, pudiendo llegar a 6 como
excepción, si la distancia hasta la descarga es mayor de 12 m. - En la parte inferior debe haber una abertura de 100 cm2 de superficie libre protegida con una rejilla adecuada para entrada de aire del exterior en forma directa o eventualmente por medio de un conducto horizontal de igual sección a la indicada y cuya longitud no debe superar los 3 m. El estudio del funcionamiento de este último punto, o sea la entrada de aire del exterior, es uno de los objetivos más importantes de este modelo.

Modelización Aplicada a la Ingeniería Legnani, W. et al.
127
Estimación de la sección de conductos principales y secundarios
Tanto los conductos principales como los secundarios (ID, 1986, RIGLO 2002) pueden ser de forma cuadrada o rectangular; la relación entre los lados no debe ser superior a 1,5, pudiendo ser según cuatro modelos básicos indicados en la Tabla 1.
Tipo Conducto principal Conducto secundario
Sección (cm2) Dimensiones (cm) Sección (cm2) Dimensiones (cm)
I 400 16,6 x 24,1 200 12,1 x 16,6
II 600 20 x 20 250 20 x 12,5
III 1000 26 x 38,5 400 31,8 x 15,7
IV 1500 31,8 x 47,2 500 31,8 x 15,7
Tabla 1: Tipo de conducto y dimensiones de los conductos principal y
secundario
En la Tabla 2 se indica cómo puede estimarse la sección interna del conducto principal y secundario, de acuerdo al ejemplo que se desarrolla seguidamente.
Artefacto
Cantidad de Pisos
Carga máx. por cm2 del conducto
principal (kcal/h cm2)
Carga térmica máx. según tipo de conducto
(kcal/h)
I 12500 II 18750 III 31280
Termotanque, Caldera, Equipo de aire caliente
8
250
IV 46875 5 pisos 6 pisos
I 5600 I 4670 II 8400 II 7000 III 14000 III 11670
Estufas
5 a 6
70
IV 21000 IV 17500 I 32000 II 48000 III 80000
Calefones
8
640
IV 120000 Tabla 2: Artefactos de gas, cantidad de pisos permitidos para conductos
COVE y tipos de cargas máximas admitidas.

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
128
Ejemplo de aplicación
A modo de ejemplo supóngase un edificio de 8 pisos en el que descargan un calefón por piso alimentado a gas natural de 25000 kcal/h cada uno, correspondiendo una sección de 640 kcal/h cm2 según la Tabla 2. Se tiene
Sección del conducto principal = 25000 kcal/h x 8 pisos = 312,5 cm2.
640 kcal/h cm2
Corresponde, según la Tabla 1 un conducto tipo I con un conducto principal
constante de 400 cm2, y conductos secundarios para conexión de cada artefacto de 200 cm2; este conducto admite una carga térmica de hasta 32000 kcal/h según se aprecia en la Tabla 2. Se adopta entonces un conducto de las siguientes medidas interiores; para el conducto principal de sección rectangular 24,1 cm x 16,6 cm, y para el conducto secundario de sección rectangular 12,1 cm x 16,6 cm.
Cálculo de verificación del conducto principal Si se quiere mantener un fluido en movimiento constante, la presión
generada, o presión eficaz, debe ser igual a la suma de las pérdidas o caídas de presiones que se originan en el conducto y de acuerdo al principio general de conservación de la energía se puede expresar de la forma (Nielsen, 1998)
tpH ∆≥ , (1)
donde H es la presión eficaz o tiraje en el conducto generado por los humos de la combustión en milímetros de columna de agua (mmca) y ∆pt es la pérdida o caída de presión en el conducto (mmca).
De modo que debe calcularse la presión eficaz y la caída de presión en los conductos para verificar si se cumple la relación (1), también denominada relación de tiraje.
De esta forma se hace necesario conocer cuál es el tiraje del conducto colectivo de ventilación (COVE) comparándolo con la caída de presión que se produce en el mismo. Para ello es necesario determinar los caudales de humos circulantes en los tramos. En el esquema de la Figura 4 se detalla la nomenclatura de los elementos que intervienen en el cálculo y que se empleó para implementar el modelo.

Modelización Aplicada a la Ingeniería Legnani, W. et al.
129
Figura 4: Esquema de conducto COVE para evacuación de gases de combustión
en columnas colectivas.
Hipótesis de cálculo
Se considera como hipótesis de cálculo que todos los artefactos se hallan funcionando simultáneamente, que es la situación mas desfavorable. Las dimensiones de los elementos del ejemplo con los cuales se han calculado los conductos, en base a las normas vigentes, son las siguientes:
- Altura del conducto para la planta baja: 3 m - Altura de los tramos del 1 al 6º piso: 3 m - Tramo 7 de descarga al sombrerete exterior: 4 m

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
130
- Se adopta en la parte inferior una entrada de aire de 10 cm x 10 cm con persiana tipo celosía y un conducto horizontal de 3 m de largo.
Caudal de humos El caudal de humos de la combustión puede determinarse mediante
Ch = Ca (1 + 1/273 x th), (2)
donde Ch es el caudal de humos (m3/h), Ca es el caudal del aire para la combustión (m3/h) y th es la temperatura de los humos (ºC).
Puede estimarse que
Ca = 9,5 m3 de aire por m3 de gas x Qh / pc (3)
siendo Qh (kcal/h artefacto) y pc el poder calorífico del gas natural (9000 kcal/m3).
De este modo, la expresión (2) puede escribirse en la forma
Ch = 9,5 x Qh/pc (1 + 1/273 th), (4)
donde Qh cantidad de calor de cada artefacto (25000 kcal/h), lo que conduce a un valor de Ch de 43,8 m3/h.
Cada artefacto conectado debe tener la misma capacidad, de acuerdo a las normas, y en la Tabla (3) se identifica cada tramo.
Artefacto N° Piso Tramo N° Caudal N° Caudal de humos
1 PB 1 C1 43.8 m3/h 2 1° P 2 C2 43.8 m3/h 3 2° P 3 C3 43.8 m3/h 4 3° P 4 C4 43.8 m3/h 5 4° P 5 C5 43.8 m3/h 6 5° P 6 C6 43.8 m3/h 7 6° P 7 C7 43.8 m3/h
Total 306.6 m3/h
Tabla 3: Valores de los caudales de humo para los diferentes tramos del conducto.

Modelización Aplicada a la Ingeniería Legnani, W. et al.
131
El último artefacto del piso 7º, según se observa de la Figura 4, no descarga en el conducto principal sino en un secundario, que llega directo al exterior, cuya operación se verifica por separado.
Cálculo de las temperaturas y pesos específicos de los gases de la combustión
Primera sección: Tramo 0
Se considera que el tramo inicial vertical “0” del conducto colectivo se
encuentra a la temperatura del aire exterior y que ese aire es el que ingresa por el conducto y la rejilla de entrada indicada en la Figura 5, y es debido al efecto del tiraje remanente que se va a producir en el conducto. De modo que se fijará como temperatura de ingreso t0= 0 ºC (valor fijado para poder validar los resultados con estudios previos).
Figura 5: Detalle del tramo 0.
El peso específico del aire a 0 ºC es de 1,293 kg/m3. El volumen de un gas se
incrementa en 1/273 veces por cada grado de aumento de temperatura y consecuentemente el peso específico se reduce en 1/273 veces, de modo que esta magnitud puede calcularse para cada temperatura t de la siguiente manera
(1.293 273)( )(273 )
tt
γ ⋅=+
. (5)
Segunda sección, Tramo 1: Temperatura y peso específico de los gases de entrada (t1 y g1)
El caudal C1 de los gases de la combustión es la mezcla de los humos del
primer artefacto de PB que descarga a la temperatura th con el aire exterior del tramo inicial t0, que tiene un caudal C0 a la temperatura t0, como se consigna en la Figura 6.

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
132
De este modo que el caudal en el tramo 1 es el caudal de humos que se compone del aporte de C1 y C0.
Figura 6: Detalle del tramo 1. La temperatura de entrada t1 valdrá
t1 = (C1 gh th + C0 g0 t0) / (C1 gh + C0 g0), (6)
donde t1 es la temperatura de entrada en el tramo 1 de la mezcla de los humos del primer artefacto y el aire exterior proveniente del tramo 0, C1 es el caudal de humos descargado por el artefacto de PB y C0 es el caudal de aire nuevo que proviene del tramo 0 a la temperatura exterior.
Este caudal puede considerarse en principio como un porcentaje dado del caudal de humos total circulante (puede estimarse con todos los artefactos funcionando en un 40% según literatura). De modo que C0 será un dado porcentaje de Ch total ( por ejemplo si se toma un 40 % del total del caudal de humos C0 valdrá 122,6 m3/h), th es la temperatura de los humos de descarga del artefacto a 180 ºC, t0 es la temperatura del aire exterior que penetra por la rejilla inferior o sea 0 ºC, gh es el peso específico de los humos de la combustión a la temperatura th (vale 1,304 kg/m3 a 0 ºC) de modo que las diversas temperaturas del conducto se puede calcular mediante la expresión (5).
Sustituyendo los valores antes mencionados en la expresión correspondiente resulta
γh = =+⋅ 3/
273273304,1 mkgth
0.786 kg/m3 . (7)
De modo que sustituyendo en la expresión (6) se llega a que t1 vale 32.11 °C,
y con estos valores se tendrá un valor de g1 de 1.167 kg/m3. Para determinar los tramos subsiguientes es necesario determinar el
enfriamiento de los humos que se producen por transmisión de calor a través de las paredes de los diversos tramos de los conductos.

Modelización Aplicada a la Ingeniería Legnani, W. et al.
133
Temperatura y peso específico los gases de salida del tramo 1 (t1' y g'1) Para determinar las temperaturas y los pesos específicos de los tramos
subsiguientes es necesario calcular previamente la temperatura y peso específico de salida de los gases de combustión del tramo 1, para lo cual es necesario analizar las caídas de temperatura que se producen en los gases de la combustión por efecto de las pérdidas de calor a través de las paredes del tramo de conducto.
El análisis de la pérdida de calor se efectúa siguiendo las leyes de la transmisión de calor en régimen estacionario.
A los efectos de simplificar los cálculos se estima el coeficiente de transmisión total de pérdida de calor K de un tramo de un conducto, en las condiciones más desfavorables y considerando la pared del conducto que linda con el aire exterior, de acuerdo a lo indicado en la Figura 7.
El coeficiente de transmisión total de calor K de la pared del tramo del conducto se calcula con la expresión (Fontaine, 1995)
1/K = 1/ah + e/l+ 1/ac +e1/l1+ 1/a0 . (8)
donde K es el coeficiente de transmisión total del conducto al exterior (kcal/h m2 ºC), ah es el coeficiente de convección de los gases de la combustión (kcal/hm2ºC), ac es el coeficiente de convección de la cámara de aire (kcal/h m2 ºC) , a0 es el coeficiente aire exterior (kcal/h m2 ºC), e es el espesor del tubo (m), e1 es el espesor de la pared de mampostería (m), l es el coeficiente de conductibilidad de la pared del conducto (kcal/h m ºC), l1 es el coeficiente de conductibilidad de la pared de mampostería (kcal/h m ºC).
El análisis de la pérdida de calor, de acuerdo a lo consignado en la Figura 7, se
efectúa siguiendo las leyes de la transmisión de calor.
Figura 7: Esquema transmisión de calor conducto.

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
134
De modo que sustituyendo en la expresión (8) resulta un valor de 1/K igual a 0,615 h m2 ºC/ kcal. Por lo tanto K valdrá 1,63 kcal/h m2 ºC.
Debido a que no todos los constructores de edificios emplean los mismos materiales , se fijará un margen de seguridad de 10 % en las estimaciones de los cálculos, lo que conduce a u n valor de K de 1,8 kcal/h m2 ºC.
El calor que entonces pierde el conducto se puede calcular a partir de
Q = KA (t1p – ti), (9) siendo Q es la cantidad de calor que pierde el conducto por transmisión (kcal/h), K el coeficiente total de transmisión de las paredes del conducto, t1p la temperatura promedio de los humos del tramo 1, ti la temperatura del aire que rodea al caño y A el área de las paredes del tramo.
Se considera la hipótesis de pérdida de sólo un lado que limita con el aire
exterior a la temperatura t0, dado que el otro limita con el conducto secundario y por lo tanto no se considera pérdida. Los otros lados laterales se consideran que limitan con el aire interior del local que se encuentra a temperatura ti. De modo que la expresión queda
Q = K0 L a (t1p - t0) + Ki L 2b (t1p – ti), (10)
siendo a la longitud del lado del conducto que da al exterior, b la longitud de los lados de los conductos que dan al interior, K0 el coeficiente total de transmisión de la pared a del conducto al exterior, Ki el coeficiente total de transmisión de las paredes b del conducto al interior, t0 la temperatura exterior, ti la temperatura del ambiente y L la longitud del tramo.
Considerando como simplificación en los cálculos que K es igual a K0 e igual
a Ki y que tlp es igual a la temperatura de entrada en el tramo, dado que la variación es pequeña, manipulando algebraicamente resulta
Q = K L ( a (t1 - t0)+ 2 b (t1 – t1’)). (11)
Por otra parte, la cantidad de calor transportada puede establecerse en
función del flujo de gases desplazados en el conducto mediante la expresión
Q = Ceh g1 (C1+C0) (t1 – t1’), (12)
donde Ceh es el calor específico de los gases de la combustión. Se puede adoptar como valor de referencia (kcal/kg ºC), gi es el peso específico de los humos a la

Modelización Aplicada a la Ingeniería Legnani, W. et al.
135
entrada del tramo 1, (C1 + C0) es el caudal de humos circulante, t1 es la temperatura de los gases de la combustión a la entrada del tramo 1, t1’ es la temperatura del aire de salida de los gases de la combustión en el tramo.
Igualando (11) y (12) resulta para Q
K L (a (t1 – t0)+ 2 b (t1 - ti)) = Ceh g1 (C1+C0) (t1 – t1’). (13)
Por lo tanto, se puede despejar la temperatura ts de salida de los gases en el tramo, de modo que:
t1’ = t1 - (K L (a (t1 - t0)+ 2 b (t1 - ti))/ Ceh g1 (C1+C0)). (14) De esta manera reemplazando los valores t1 que es la temperatura de los gases
de la combustión a la entrada del tramo 1, K es el coeficiente total de transmisión del conducto, L es la longitud del tramo, t0 es la temperatura del aire exterior, ti es la temperatura del aire interior de los locales (fijada en 0ºC), a es la dimensión mas larga del conducto interior (0,241m), b es la dimensión mas corta del conducto interior (0,166 m), Ceh es el calor específico de los humos de la combustión, g1 es el peso específico de los gases de la combustión a la entrada del tramo 1, C1+C0 es el caudal que circula en el tramo 1; resulta entonces que t'1 vale 30,33ºC.
El peso específico g'1 a la salida del tramo del conducto 1 valdrá 1,174 kg/m3 .
Tercera sección, Tramo 2: Temperatura y peso específico de los gases de entrada (t2 y g2)
En el tramo 2, la descarga del segundo artefacto con el caudal de humos C2 a
la temperatura th se va a mezclar con el caudal de gases (C1 + C0) que provienen del tramo 1 a la temperatura t1', por lo que, de acuerdo a la ecuación general de mezcla. la temperatura de entrada t2 a tramo 2 valdrá
t2 = (C2 gh th) + ((C1+C0) g1' t1') / (Ch gh) + ((C1+C0) g'1), (15)
donde los otros valores son similares a los anteriores y t1’ es la temperatura de los gases de combustión de salida del tramo 1, g'1 es el peso específico de los gases de combustión de salida del tramo 1, y C1 + C0 es el caudal que circula en el tramo 1, lo que da como resultado t2 igual a 52,76ºC.
El peso específico g2 de los gases de la combustión en la entrada del tramo 2 a una temperatura t2 de 52,76ºC resulta ser de 1,093 kg/m3.

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
136
Temperatura y peso específico de los gases de salida del tramo 2 (t2' y g2’) De este modo, la temperatura de mezcla t'2 de la salida de los humos del
tramo 2 por efecto del enfriamiento valdrá, teniendo en cuenta la expresión (14),
t'2 = t2 - (K L (a (t2 - t0)+ 2 b (t2 - ti))/ Ceh g2 (C2+C1+C0)), (16)
donde (los otros valores son similares a los anteriores) t2 es la temperatura de los gases de la combustión a la entrada del tramo 2°, g2 es el peso específico de los gases de la combustión a la entrada del tramo 2, C2 + C1 + C0 caudal que circula en el tramo 2, lo que conduce a que t'2 vale 49,74ºC
El peso específico g'2 a la salida del tramo del conducto 2 valdrá 1,103 Kg/m3.
Demás tramos De manera análoga, en la Tabla 4 se resume el resultado para el cálculo de las
temperaturas y pesos específicos de los gases de la combustión hasta el tramo mas elevado o sea el séptimo (ver Figura 4), anterior a la descarga en el sombrerete. En el último tramo la longitud L es de 4 metros, de modo que
Tramo Temperatura de
entrada (°C) Temperatura de
salida(°C) Densidad del aire
de entrada (kg/m3)
Densidad del aire de salida
(kg/m3) 3 66.58 63,11 1.048 1.059 4 76,37 72,78 1,019 1,030 5 83,60 80,05 0,998 1,008 6 89,13 85,59 0,983 0,992 7 93,47 89,07 0,971 0,987
Tabla 4: Valores de entrada y salida de temperatura y densidad del aire para
tramos 3 a 7 según el esquema de la Figura 4.
Tiraje en el conducto principal Para producir la circulación de la masa gaseosa es necesario contar con un
tiraje natural que se produce por la diferencia de densidad entre el aire más caliente de la red de conducto y el más frío exterior y puede expresarse por la siguiente relación:
H = hp ( go- gm), (17)

Modelización Aplicada a la Ingeniería Legnani, W. et al.
137
donde H es la presión eficaz o tiraje producido, hp es la altura total del conducto principal desde el artefacto mas bajo al remate, go es el peso específico del aire exterior a la temperatura t0 y gm es el peso específico promedio de los gases de la combustión.
De este modo, la presión o tiraje que se engendra en el conducto es directamente proporcional a la altura y a la diferencia de pesos específicos de los gases originada por la diferencia de temperatura de los mismos.
El peso específico medio gm del fluido en el conducto principal puede determinarse por el promedio ponderado de los de los valores ya calculados en cada tramo mediante la fórmula
gm = (go Lo + 0.5(g1+g1’) L1+ 0.5 (g2+g2’) L2+ . . .+ 0.5 (gT +gT‘) LT)/ hp, (18)
siendo T el número de tramos, L la longitud o altura de cada uno de los tramos del conducto principal, hp la altura total del conducto principal (ver Figura 4) (se estima en 25 m para el ejemplo), g0 el peso específico de los gases de la combustión en la entrada del tramo y g' el peso específico de los gases de la combustión en la salida del tramo.
De este modo, reemplazado los valores hallados anteriormente y aplicando la
expresión (18), gm resulta valer 1,072 kg/m3. De esa manera, la presión eficaz, H disponible por efecto del tiraje en el conducto vale aplicando la expresión (17) 5,525 mmca.
La presión así generada debe vencer todas las resistencias, caídas de presión o pérdidas de cargas que se opongan a su desplazamiento.
De esta manera, si se quiere mantener un fluido en movimiento constante en el conducto, la presión generada debe ser igual a la suma de las pérdidas de presión que se originan en el conducto y de acuerdo al principio general de conservación de la energía se puede expresar mediante la expresión (1) en la cual se sustituye la desigualdad por la igualdad
H = ∆ pt. (19)
Resta ahora como tarea el cálculo de las pérdidas de presión debidas a
múltiples factores, y eso precisamente se encara en la siguiente sección.
Caída de presión total en el conducto Las caídas de presión total en el conducto pueden dividirse en tres partes
fundamentales y se expresan por la fórmula (Allard, 1998)

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
138
∑ ∑= =
+∆+∆=∆T
i
A
iiit Zpdp
1 1,
(20)
donde ∆d es la pérdida de presión dinámica debido al aumento de velocidad, ∆pi son las pérdidas de presión por frotamiento en las partes rectas, Zi representa las pérdidas de presión por frotamiento en los accesorios de los conductos denominados resistencias individuales como ser codos, curvas, tés, etc., T es el número de tramos y A es el número de accesorios.
Pérdida de presión por el aumento de velocidad
La pérdida de presión dinámica provocada por el aumento de velocidad en el
conducto puede expresarse por la ecuación
2
2vd
gγ∆ = , (21)
donde ∆d es la pérdida dinámica debido al aumento de velocidad, v es la velocidad media de circulación, γ es el peso específico del fluido, y g es la aceleración de la gravedad.
Pérdidas de presión por rozamiento en el conducto Si se considera un tramo recto de una conducción de igual sección y longitud
l, por la cual circula un caudal o cantidad de fluido constante por unidad de tiempo, se produce una caída de presión entre el punto inicial 1 y el final 2 dada por
∆p = p1- p2 . (22) Esa caída de presión que es debida al frotamiento que se produce al circular el
fluido se denomina pérdida de carga, la que se considera proporcional a lo largo de la longitud l del tramo. como se detalla en la Figura 8.

Modelización Aplicada a la Ingeniería Legnani, W. et al.
139
Figura 8: Pérdida de presión en un conducto.
De modo que puede expresarse que
1 2p p p Rl l− ∆= = . (23)
R es denominado gradiente hidráulico o pérdida de carga por unidad de longitud y en la práctica se lo mide en mmca/m. De esa manera, la caída de presión en un tramo recto de un conducto estará dada por
∆p = l / R . (24) El gradiente hidráulico R depende de las características del fluido, diámetro,
tipo de canalización y de la velocidad de circulación, pudiéndose expresar, en el caso de conductos hidráulicamente lisos, por la ecuación simplificada, propuesta por Körting (Körting, 1941), que es de aplicación para conductos de chapa o de cemento bien alisado
1.924
1.2816.61 vRd
= , (25)
siendo v la velocidad media de circulación (m/seg.) y d el diámetro del conducto (mm).
Para casos de conductos de albañilería de paredes rugosas la experiencia adquirida muestra que es conveniente aumentar el gradiente R en un 20%.
De modo, que en cada uno de los tramos del conducto el gradiente hidráulico se puede calcular si se conoce el valor de la velocidad y el valor del diámetro en cada sección.
Como las dimensiones de los conductos cuadrados o rectangulares o cuadrados se seleccionan con la tabla antes mencionada, deben establecerse los conductos circulares equivalentes, para lo cual puede emplearse la fórmula (Aubertin, 1998)

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
140
3
5( )1.265( )
a bda b
=+
, (26)
donde a es un lado de conducto rectangular o cuadrado y b es el otro lado, ambos expresados en metros.
Caída de presión en las resistencias individuales del conducto Los rozamientos en las resistencias individuales están constituidos por las
pérdidas de carga de cada uno de los accesorios como codos, curvas, rejillas, etc. que integran cada circuito de la red de conductos propiamente dicha. Su valor depende de sus características geométricas y es proporcional a la presión dinámica que se origina en cada resistencia individual.
La caída de presión en cada resistencia puede establecerse con la siguiente
fórmula
2
2vZ
gγτ= , (27)
donde τ es el valor de la resistencia de cada accesorio (sin unidades).
Se pueden adoptar los valores de τ indicados en la Tabla 5 para los accesorios comunes.
Elemento Coeficiente Codo 90º 0,5 Curva 90º 0,1 Curva 135º 0,05
Rejilla de malla metálica 2 Persiana fija tipo celosía 4
Tabla 5: Coeficientes para distintos tipos de curvas y elementos de ventilación
(Körting, 1941).
Determinación de la pérdida de presión total De modo que reemplazando los valores anteriores, la ecuación 20 queda en
forma general como se sigue para los diversos tramos que compone el conducto

Modelización Aplicada a la Ingeniería Legnani, W. et al.
141
∑ ∑= =
++=∆T
i
A
i
iaciaciii
mt g
vRl
gv
p1 1
)(2
)(2
22γ
τγ, (28)
siendo vm la velocidad media de circulación en todos los tramos, vac la velocidad de circulación en el accesorio considerado, gm el peso específico medio del fluido de los tramos, gac el peso específico de los humos por el accesorio considerado, g la aceleración de la gravedad, L la longitud de los tramos, R el gradiente hidráulico en cada tramo y τ el valor de la resistencia de cada accesorio (sin unidades) que pueden obtenerse de la Tabla 5. Por lo tanto es necesario determinar estos valores para resolver obtener el valor de (28).
Cálculo de las velocidades de circulación de los gases de la combustión La velocidad de circulación en cada uno de los tramos puede determinarse en
función de los caudales de los gases de la combustión que circulan y de la sección uniforme predimensionada en función de la reglamentación vigente
V = (C/ S). (29)
donde C es el caudal de los gases de combustión que circulan en cada tramo, S es el área transversal constante real del conducto preseleccionada, V es la velocidad media del aire en la sección (Clements y Croome, 1997).
En cada tramo del conducto principal las velocidades valdrán según se indica
en la Tabla 6. Velocidad en cada tramo
Expresión
Valor calculado
(m/s) Vo Vo = C0 /S 3600 = 122,6/0,040 x3600 m/s 0,851 V1 V1 = (C1 +C0) /S 3600= 166.4/0,040 x 3000 m/s 1,155 V2 V2 = (C1+C2+C0 )/S 3600 = 210,2/0,040 x 3000 m/s 1,459 V3 Etc... 1,763 V4 Etc... 2,068 V5 Etc... 2,372 V6 Etc... 2,676 V7 Etc... 2,980
Tabla 6: Velocidades en cada uno de los tramos.

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
142
Además se construye un conducto de toma de aire exterior de longitud horizontal L'0 de 3 m, de una sección interior de 100 cm2 , en donde el aire circulante tendrá una velocidad Vo'
V'o = C0 /0,01. 3600= Co/36=3.406 m/s. (30) La velocidad media, expresada en forma de promedio ponderado para cada
uno de los tramos vale Vm = (V' o L' o + Vo L o + V1 L1 + V2 L2+ V3 L3+ .......+VT LT)/( h + L' o) , (31)
lo que da como resultado para la velocidad media ponderada aplicando la expresión (31) un valor de 2,113 m/s.
Cálculos de los gradientes hidráulicos
De modo, en cada uno de los tramos del conducto el gradiente se puede
calcular si se conoce el valor de la velocidad y el valor de d en cada uno. Se preseleccionaron los valores del lado de conducto seleccionado (a) 241mm y (b) lado del conducto preseleccionado 166 mm; los resultados se muestran en la Tabla 7.
Gradiente hidráulico en cada tramo Valor (mmca) Ro’ 0,070 Ro 0,005 R1 0,009 R2 0,014 R3 0,020 R4 0,027 R5 0,035 R6 0,044 R7 0,054
Tabla 7: Valores del gradiente hidráulico en cada tramo del COVE para
artefactos de gas.
Cálculo de las velocidades, pesos específicos y coeficientes de caída de presión en accesorios
La velocidad vac y el peso específico γac de los gases que circulan por los
accesorios considerados en el circuito del conducto principal se determinan por las

Modelización Aplicada a la Ingeniería Legnani, W. et al.
143
fórmulas anteriores establecidas de acuerdo al emplazamiento del accesorio considerado.
La velocidad que se adoptó fue la del conducto v'a; por lo tanto (vac) será de 3,406 m/s. El peso específico corresponde al aire exterior a 0ºC y γ0 será γac igual a 1,293 kg/m3.
Con respecto a la resistencia de los accesorios que intervienen en el circuito puede adoptarse para los casos generales indicados en la Tabla 5.
Se consideran que intervienen como accesorio en el circuito del conducto principal más desfavorable una persiana fija tipo celosía de toma de aire exterior (τ = 4) y un codo en la vinculación del conducto de toma de aire y el principal (τ = 0,5).
De este modo, con estos datos se puede calcular la expresión para la caída de presión total del conducto ∆pt
∑ ∑= =
++=∆T
i
A
i
iaciaciii
mt g
vRl
gv
p0 0
)(2
)(2
22γ
τγ,
(32)
resultando a partir de (32) un valor de ∆pt de 4,221 mmca. De esa manera se verifica que la presión disponible o tiraje originado por diferencia de temperatura en el conducto es mayor que la caída de presión ∆pt, o sea
5,525 mmca ≥ 4,221 mmca, (33)
lo que garantiza la evacuación de los gases de la combustión originados en los artefactos.
Verificación de los conductos secundarios
En este caso se debe verificar cada uno de los conductos secundarios por separado, pero de todos ellos hay uno que opera en las condiciones más desfavorables y es el que corresponde al del último piso. Este conducto secundario descarga hacia el sombrerete en forma directa, y por lo tanto si se verifica la circulación en éste se tendrá asegurada la circulación en todos los demás. Para estos cálculos no su tenido en cuenta el enfriamiento dado que la longitud de los tramos es pequeña y su valor es despreciable en los cálculos.
La presión disponible del conducto secundario del artefacto mas alto se obtiene aplicando la expresión (17) :

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
144
Nuevamente deberá verificarse que la presión disponible o tiraje engendrado en el conducto calculado anteriormente sea mayor o igual a ∆pt, obteniéndose una expresión similar a la (32):
∑ ∑= =
++=∆T
i
A
i
iaciaciii
mt g
vRl
gv
p0 0
)(2
)(2
22γ
τγ, (35)
en donde vm es la velocidad de circulación en el conducto, vac es la velocidad de circulación en el accesorio considerado, γm es el peso específico medio del fluido en el conducto, γac es el peso específico de los humos por el accesorio considerado, g es la aceleración de la gravedad, L es la longitud del tramo del conducto secundario, R es el gradiente hidráulico en cada tramo y τ es el valor de la resistencia de cada accesorio (sin unidades). Para determinar la velocidad en el conducto secundario se emplean razonamientos similares a los utilizados para el conducto principal. El peso específico γac de los humos que circulan por el accesorio considerado, se determina por el valor en la ubicación del accesorio, y puede ser considerado igual al peso específico de los humos de la combustión.
El peso específico medio γm del fluido puede determinarse por el promedio de los valores ya calculados.
Una vez calculado ∆pt que es en este caso es la pérdida de carga en el conducto secundario, debe verificarse que sea igual o menor que la presión disponible o tiraje engendrado en el mismo H. O sea que debe verificarse que
H ≥ ∆pt . (39) En el caso del ejemplo bajo consideración estos valores resultan
2.028 mmca ≥ 0.403 mmca , (40) con lo cual claramente de la expresión (40) se verifica también la relación de tiraje para el conducto secundario. Condiciones de funcionamiento del conducto principal
Verificación del caudal de aire nuevo real que ingresa en el conducto
Se había considerado como hipótesis del cálculo del conducto colectivo principal que todos los artefactos estaban funcionando y el caudal Co que es el caudal de aire nuevo que proviene del tramo 0 a la temperatura exterior to y que proviene de la entrada de la rejilla anterior, fue estimado en principio en un 40%

Modelización Aplicada a la Ingeniería Legnani, W. et al.
145
del caudal de humos total circulante en el conducto principal (ver tramo 1 ecuación (6)).
Toda vez que el caudal de humos con todos los artefactos era de 306,6 m3/h el 40% representaba un caudal Co de 122,6 m3/h. Ahora bien, ese caudal Co que ingresa y que es más denso que los humos de la combustión representa una resistencia a la circulación de los mismos y constituye un elemento regulador de modo de lograr el equilibrio entre el tiraje generado y la contrapresión producida en los conductos.
De la verificación final del ejemplo, expresión (19) anterior, surge un cierto remanente entre el tiraje engendrado y la contrapresión de acuerdo a lo siguiente:
5,525 mmca ≥ 4,221 mmca . (41)
O sea que si bien la estimación del 40% del caudal Co puede considerarse aceptable atento a que la diferencia es mínima, como el tiraje es algo mayor que la contrapresión, se puede calcular el valor real de Co inducido en el sistema con el mismo procedimiento, fórmulas de cálculo y nomenclaturas anteriores, mediante un método de aproximaciones sucesivas y, para ello, se ha incluido en el modelo computacional un módulo de cálculo por aproximaciones sucesivas, obteniéndose los resultados que se detallan en la tabla 8. Validación Se compararon los resultados obtenidos utilizando el modelo de la presente propuesta con lo obtenido previamente por cálculos y mediciones llevadas a cabo por la empresa Gas del Estado para el estudio del COVE; en todos los casos las diferencias relativas porcentuales resultaron ser inferiores al 2.5 %. Resultados del modelo:
Para los valores descriptos precedentemente se muestran las curvas obtenidas para las distribuciones de temperatura, velocidad, peso específico de los humos de la combustión y de los caudales de los mismos. Como era de esperarse, para un conducto de sección uniforme, tanto la distribución de velocidades como de caudales siguen un comportamiento lineal (Figuras 9c y 9d) que se halla vinculado por la expresión (29).

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
146
a)
0 10 20 30 40 50 60 70 80 900
1
2
3
4
5
6
7
Temperatura (ºC)
b)
0.5 1 1.5 2 2.5 3 3.50
1
2
3
4
5
6
7
Velocidad en el conducto principal (m/s) Distribución de temperatura en el conducto
principal. Distribución de velocidad en el conducto
principal. c)
0.95 1 1.05 1.1 1.15 1.2 1.25 1.30
1
2
3
4
5
6
7
Peso especifico en el Conducto Principal(Kg/m3)
d)
100 150 200 250 300 350 400 4500
1
2
3
4
5
6
7
Caudal de humos en el Conducto Principal (m3/h) Distribución de peso específico de los humos de
combustión en el conducto principal. Caudal de los humos de combustión a lo largo
del conducto principal.
Figura 9: Resultados del modelo para los valores estudiados del conducto principal en el ejemplo.
Con los valores obtenidos se verifica ahora exactamente que
H = ∆pt = 5,525 mmca . (42)
De esta manera, según surge de la tabla anterior, se determina que el caudal
real Co que ingresa en el sistema es de 139,09 m3/h en lugar de los 122,6 m3/h que se había supuesto originalmente y que tradicionalmente son presentados en la

Modelización Aplicada a la Ingeniería Legnani, W. et al.
147
literatura; en cambio el valor hallado representa aproximadamente un 45% del caudal de humos total del conducto principal.
Consideraciones finales
Surge de los análisis precedentes que el dimensionamiento de los conductos colectivos de acuerdo a las normas vigentes sólo es adecuado en la medida que se cuente con un elemento regulador de tiraje, como lo es la entrada de aire exterior en la parte inferior del conducto principal.
En efecto, si se supone cerrada dicha entrada de aire y se consideran todos los artefactos conectados, surge como resultado del modelo que el tiraje mas elevado se producirá en el artefacto mas bajo que tiene mayor desnivel con respecto a la descarga.
Considerando la misma altura del COVE y condiciones de funcionamiento que el caso anterior y aplicando el modelo propuesto como herramienta de cálculo, se han hallado los resultados indicados en la tabla 9.
CALCULOS DE TEMPERATURAS, DENSIDADES, VELOCIDADES Y CAUDALES CONDUCTO PRINCIPAL
Artefactos Entrada aire 1 2 3 4 5 6 7 t (ºC) ---------- ---------- 180.000 134.744 129.064 127.078 126.141 125.624 125.309
γ (Kg/m3) ---------- ---------- 0.786 0.873 0.885 0.890 0.892 0.893 0.894
v (m/s) 0.000 0.000 0.304 0.608 0.912 1.216 1.520 1.824 2.128
t' (ºC) ---------- ---------- 97.703 107.659 112.080 114.618 116.276 117.451 116.002
γ' (Kg/m3) ---------- ---------- 0.960 0.935 0.924 0.918 0.914 0.912 0.915 R (mmca/m) 0.000 0.000 0.001 0.003 0.006 0.010 0.015 0.021 0.028
Caudal (m3/h) 0.000 0.000 43.790 87.580 131.370 175.160 218.950 262.740 306.530
Tabla 9: Valores calculados para la operación del sistema con la entrada de aire
exterior cerrada. Con los valores obtenidos se produce en el artefacto más bajo un tiraje H de
8,65 mmca contra una caída de presión en el conducto ∆pt de 0,322 mmca. O sea que la presión remanente es de
H - ∆pt = (8,65 - 0,322) mmca = 8,328 mmca . (43)
Ese tiraje remanente originado por el conducto es muy elevado, de modo que,
si el artefacto de gas conectado no está diseñado para contrarrestarlo, se puede originar arrastre de llama.
Se muestra entonces que el aire nuevo que ingresa a menor temperatura y que es por lo tanto más denso que los gases de la combustión produce un efecto regulador natural en el tiraje en el sistema.

Modelado de conductos colectivos para evacuación de gases de combustión Legnani, W. et al.
148
Por otra parte, al efectuar la dilución de los gases de la combustión con aire exterior, la presión parcial de vapor disminuye y por consiguiente, la temperatura de condensación será tanto menor cuanto mayor es el porcentaje de aire ingresado.
De esta manera, también desde este punto de vista el ingreso de aire nuevo es positivo, porque tiende a disminuir la temperatura de punto de rocío de los gases de la combustión, y con ello se reduce la probabilidad de condensación sobre las paredes del conducto.
Conclusiones finales
Desgraciadamente, durante la época de bajas temperaturas de todos los años se deben lamentar victimas fatales debidas a la intoxicación con monóxido de carbono y otros residuos de la combustión (Droz, 1998), emanados de artefactos hogareños. Las desigualdades de las expresiones (33) y (40) en cierta medida están garantizando que estos hechos desafortunados no sucedan. Los ajustes introducidos en la relación de presiones son una mejora de diseño que optimiza la obtención de calor disminuyendo el consumo innecesario de combustible, contribuyendo de esta forma a la preservación del medio ambiente.
El avance en el conocimiento del elemento regulador del tiraje provocará una cascada de mejoras de diseño en las obras civiles, y el ajuste que llevó de un valor del 40 al 45 % la relación entre el caudal de aire del exterior y el total del caudal humos de combustión es un aporte que sin dudas es novedoso y restará limitaciones en los proyectos de ingeniería. Referencias y bibliografía Aubertin, G., (1998) - Indoor air quality and ventilation systems design: an over-
view - Ventilation Systems and Air Quality VKI LS 1998-07.
Allard, F., (1998). Natural Ventilation in Buildings: A Design Handbook, James & James, London.
Clements-Croome, (1997), Specifying Indoor Climate in Book Naturally Ventilated Buildings, part author and editor, E & FN Spon (Chapman & Hall). ISBN 0419 21520 4, 35-91.
Croome, D.J. (1994), History of Airconditioning and Ventilation, Dictionary of Art. Macmillan.
Droz, P.O., (1998) - Lausanne University, Switzerland Chemical hazards and ventilation - Ventilation Systems and Air Quality VKI LS 1998-07.

Modelización Aplicada a la Ingeniería Legnani, W. et al.
149
Fontaine, J.R. (1995) - CFD applications in ventilation Industrial computational fluid dynamics II VKI LS 1995-03.
Körting J., (1941) Calefacción y Ventilación. Editorial Labor.
Michel F., (1961) La evacuación de aire, gases y humo por conductos y el tiraje en general- Revista Gas e Industria, Vol 1, Nº2.
Nielsen, P.V., (1998) - Ventilation in commercial and residential buildings Ventilation Systems and Air Quality VKI LS 1998-07
ID (1986) Informe sobre dimensionamiento de conducto de evacuación de gases de combustión. Departamento técnico de Gas del Estado.
RGDE (1982) Reglamento de Gas del Estado. RIGLO (2002) Reglamento Español de Instalaciones de Gas en locales de usos domésticos, colectivos o comerciales. Agradecimientos Los autores desean expresar su agradecimiento a la empresa comitente del presente modelo SPIRO S.A. por su total confianza y apoyo a la Facultad Regional Buenos Aires de la Universidad Tecnológica Nacional al autorizar la publicación parcial de estos resultados.

Modelización Aplicada a la Ingeniería
150
Modelación de procesos de falla en hormigón mediante los criterios meso y macromecánicos
RICARDO LORECIFE A, MARCIA RIZO PATRON B
A Grupo de Mecánica Computacional, Universidad Nacional de
Santiago del Estero, Argentina B Departamento de Estructuras y Construcciones, Universidad Nacional de .
Santiago del Estero, Argentina
Introducción
Es sabido que el avance en el campo tecnológico depende fuertemente de los progresos que se realicen en el área de la ciencia de los materiales. En los últimos años, gracias a los avances en el área de la informática, la capacidad de cálculo y manejo de datos ha crecido a un punto tal que hace posible el análisis de problemas ingenieriles a niveles de observación cada vez más detallados. Tradicionalmente, los nuevos conocimientos acerca de los materiales consistían en descubrimientos realizados mediante técnicas experimentales orientadas principalmente a conocer las propiedades físicas del material, lo cual ampliaba el conocimiento en cuanto a resistencia, ductilidad, tenacidad, etc. En las últimas tres décadas, se ha avanzado en el conocimiento de la ciencia de los materiales mediante una nueva vía, que es la numérica o computacional. Esta permite estudiar diversos aspectos concernientes al comportamiento del material, tales como propagación de fisuras, localización de deformaciones, efectos de interfase, efecto tamaño y, sobre todo, realizar el monitoreo y predicción de procesos de fractura, por mencionar sólo algunas de las ventajas de la investigación teórico-numérica. En los últimos años, el desarrollo de complejos modelos materiales en conjunción con el uso de técnicas numéricas sofisticadas como el Método de los Elementos Finitos, sumado al fuerte incremento de la capacidad de cálculo de las computadoras ha dado a la vía numérica una gran aceptación tanto en el campo industrial y tecnológico como en el campo de la investigación académica. De hecho, su importancia ha crecido hasta el punto de llegar en la actualidad a la par de la ciencia experimental en el estudio de procesos de falla en materiales cuasi-frágiles, heterogéneos o compuestos, el cual presenta aún hoy enormes retos. Se discuten a continuación las principales características de los criterios meso y macromecánicos poniendo énfasis en su utilidad para modelar numéricamente la fractura del hormigón.

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
151
Niveles de observación
Tradicionalmente, la Ciencia de los Materiales es la disciplina científica que estudia el comportamiento material a diferentes escalas con el fin de observar y cuantificar los procesos físico-químicos que ocurren a nivel micromecánico, molecular o atómico. A partir de las observaciones a nivel micro es posible deducir leyes constitutivas que permitan reproducir el comportamiento global a nivel macroestructural para su aplicación a las estructuras de ingeniería. Para entender acabadamente tales mecanismos, es necesario recurrir a diferentes niveles de descripción o escalas, ver Figura 1. Desde el punto de vista del nivel de observación, podemos distinguir (Willam, 2002)
Figura 1: Niveles de análisis (Willam, 2002).
• Escala metro: es la escala en la que se definen los problemas prácticos en
ingeniería civil, mecánica, etc. • Escala milímetro: es la que se emplea en los análisis de laboratorio para
modelar las probetas a partir de las cuales se deducirán las propiedades mecánicas del material. A este nivel, el material puede considerarse como un continuo, homogéneo, y los defectos y/o discontinuidades observadas en la microestructura se engloban dentro del concepto de tensión efectiva.
• Escala micro: esta escala es apta para el estudio de las propiedades de los granos en la microestructura (policristales por ejemplo), y para el estudio de los cambios producidos en la microestructura por procesos tales como la hidratación del cemento. Dentro de esta clasificación, los materiales se
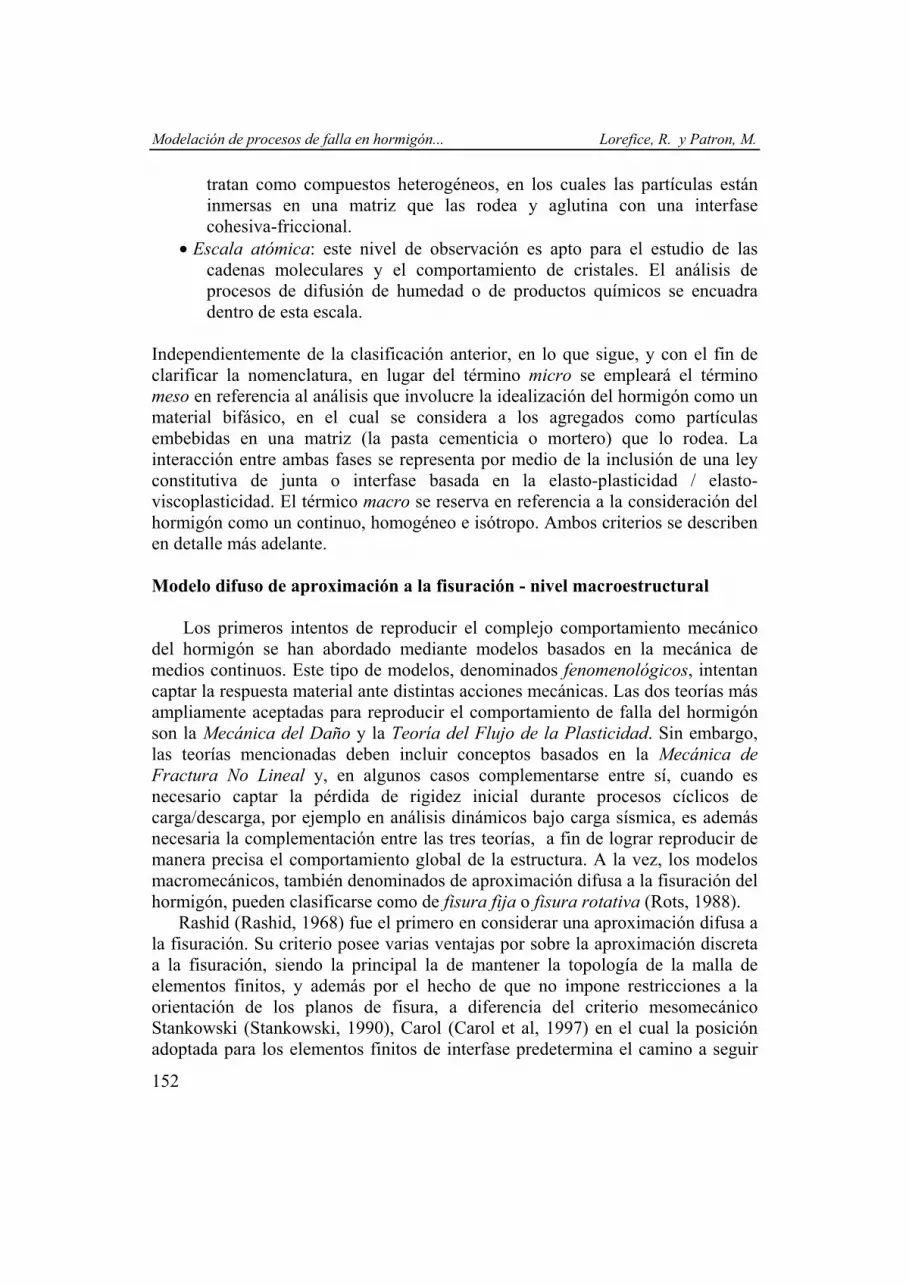
Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
152
tratan como compuestos heterogéneos, en los cuales las partículas están inmersas en una matriz que las rodea y aglutina con una interfase cohesiva-friccional.
• Escala atómica: este nivel de observación es apto para el estudio de las cadenas moleculares y el comportamiento de cristales. El análisis de procesos de difusión de humedad o de productos químicos se encuadra dentro de esta escala.
Independientemente de la clasificación anterior, en lo que sigue, y con el fin de clarificar la nomenclatura, en lugar del término micro se empleará el término meso en referencia al análisis que involucre la idealización del hormigón como un material bifásico, en el cual se considera a los agregados como partículas embebidas en una matriz (la pasta cementicia o mortero) que lo rodea. La interacción entre ambas fases se representa por medio de la inclusión de una ley constitutiva de junta o interfase basada en la elasto-plasticidad / elasto-viscoplasticidad. El térmico macro se reserva en referencia a la consideración del hormigón como un continuo, homogéneo e isótropo. Ambos criterios se describen en detalle más adelante. Modelo difuso de aproximación a la fisuración - nivel macroestructural
Los primeros intentos de reproducir el complejo comportamiento mecánico del hormigón se han abordado mediante modelos basados en la mecánica de medios continuos. Este tipo de modelos, denominados fenomenológicos, intentan captar la respuesta material ante distintas acciones mecánicas. Las dos teorías más ampliamente aceptadas para reproducir el comportamiento de falla del hormigón son la Mecánica del Daño y la Teoría del Flujo de la Plasticidad. Sin embargo, las teorías mencionadas deben incluir conceptos basados en la Mecánica de Fractura No Lineal y, en algunos casos complementarse entre sí, cuando es necesario captar la pérdida de rigidez inicial durante procesos cíclicos de carga/descarga, por ejemplo en análisis dinámicos bajo carga sísmica, es además necesaria la complementación entre las tres teorías, a fin de lograr reproducir de manera precisa el comportamiento global de la estructura. A la vez, los modelos macromecánicos, también denominados de aproximación difusa a la fisuración del hormigón, pueden clasificarse como de fisura fija o fisura rotativa (Rots, 1988).
Rashid (Rashid, 1968) fue el primero en considerar una aproximación difusa a la fisuración. Su criterio posee varias ventajas por sobre la aproximación discreta a la fisuración, siendo la principal la de mantener la topología de la malla de elementos finitos, y además por el hecho de que no impone restricciones a la orientación de los planos de fisura, a diferencia del criterio mesomecánico Stankowski (Stankowski, 1990), Carol (Carol et al, 1997) en el cual la posición adoptada para los elementos finitos de interfase predetermina el camino a seguir

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
153
para la apertura de las fisuras. A pesar de esto, existen aún hoy controversias acerca de cuál es el mejor criterio para modelar la fractura del hormigón. El concepto de fisura discreta coincide con la idea natural subyacente de que una fractura es una discontinuidad física en el material. Por el contrario, los modelos de fisura difusa son adecuados cuando se estudia el caso de fractura distribuida. Este es el caso de las estructuras de hormigón armado, en las cuales la presencia de las armaduras controla y limita la formación de grandes fisuras, generando en su lugar un patrón de fisuración distribuido. En este tipo de situaciones, el empleo de los modelos basados en el concepto de fisura difusa es ventajoso, siempre y cuando la escala representativa del continuo sea mayor que el tamaño esperado para el ancho de las fisuras. En la aproximación difusa a la fisuración puede distinguirse entre modelos de fisura fija o fisura rotatoria. Los modelos de fisura fija conservan la dirección de la fisura a medida que el proceso de degradación avanza. En los modelos de fisura rotativa, se permite que la orientación vaya cambiando a medida que se modifican las direcciones de las tensiones (deformaciones) principales. Existe un tercer criterio, considerado un estado intermedio entre los anteriores, que es el de los modelos de aproximación a la fisuración multi-direccionales (Carol y Prat, 1990). Este criterio considera una serie de planos o direcciones de fisuración predeterminadas, que pueden ocurrir simultáneamente en un punto de integración. De este modo, cada plano puede contribuir a la fisuración total, llegado el caso. El concepto de fisura difusa descripto anteriormente, representa el caso límite superior de este criterio.
Por las ventajas mencionadas, el tipo de modelo adoptado en este trabajo para la modelación macromecánica del hormigón es el de fisura difusa rotativa. Modelo de aproximación discreto - nivel mesoestructural
En este nivel de observación se han propuesto distintos tipos de modelos. Entre los criterios existentes, los más empleados son los siguientes:
• Método generalizado de celdas (MGC): esta técnica es muy empleada para la modelación de microestructuras con patrones conocidos (Aboudi, 1989), (Paley y Aboudi, 1992), (Herakovich, 1998). Recientemente, el método se ha empleado con éxito para el análisis de materiales compuestos consistentes en una matriz metálica con inclusiones de partículas y para estudio de adherencia en materiales fibrados. Con respecto al estudio de la microestructura de materiales compuestos por fases bien diferenciadas, tal como el hormigón simple, los primeros trabajos realizados empleando este criterio consideran al mismo como un compuesto de tres fases bien diferenciadas, a saber: la pasta de cemento o matriz de mortero (ya hidratada), los agregados y una zona de transición interfacial, que se

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
154
supone extendida en una longitud de 20-50 µm alrededor del agregado. La zona de transición interfacial se forma debido a que, cerca de los agregados, una parte de la pasta de mortero cementicio no se hidrata completamente, originando una zona con mayor porosidad y menos rigidez y resistencia que en el resto del mortero. La malla mesomecánica se genera a partir del procesamiento de imágenes digitales, ver Figura 2. El principal inconveniente del método es que los resultados dependen fuertemente de la orientación de las partículas de agregado, y, por sobre todo, que el comportamiento no lineal de pospico se obtiene mediante un proceso de homogeneización de los resultados a nivel tensión-deformación correspondientes a sub-celdas similares, a las cuales previamente se les asignan parámetros materiales medios.
Figura 2: Método GCM – Generación de la mesoestructura.
• Hormigón numérico: este criterio consiste en realizar un mapeo a partir de la microestructura de un material cementicio o del hormigón sobre una grilla predefinida (Wittmann, 1989). Tomando como base esta grilla, se genera una malla de elementos finitos de modo tal que pueda calcularse la distribución de tensiones térmicas y/o mecánicas. Este modelo numérico del hormigón así generado representa al material a un nivel de sub-partículas. El mapeo se realiza a partir de imágenes digitales de una microestructura existente, ver Figura 3.
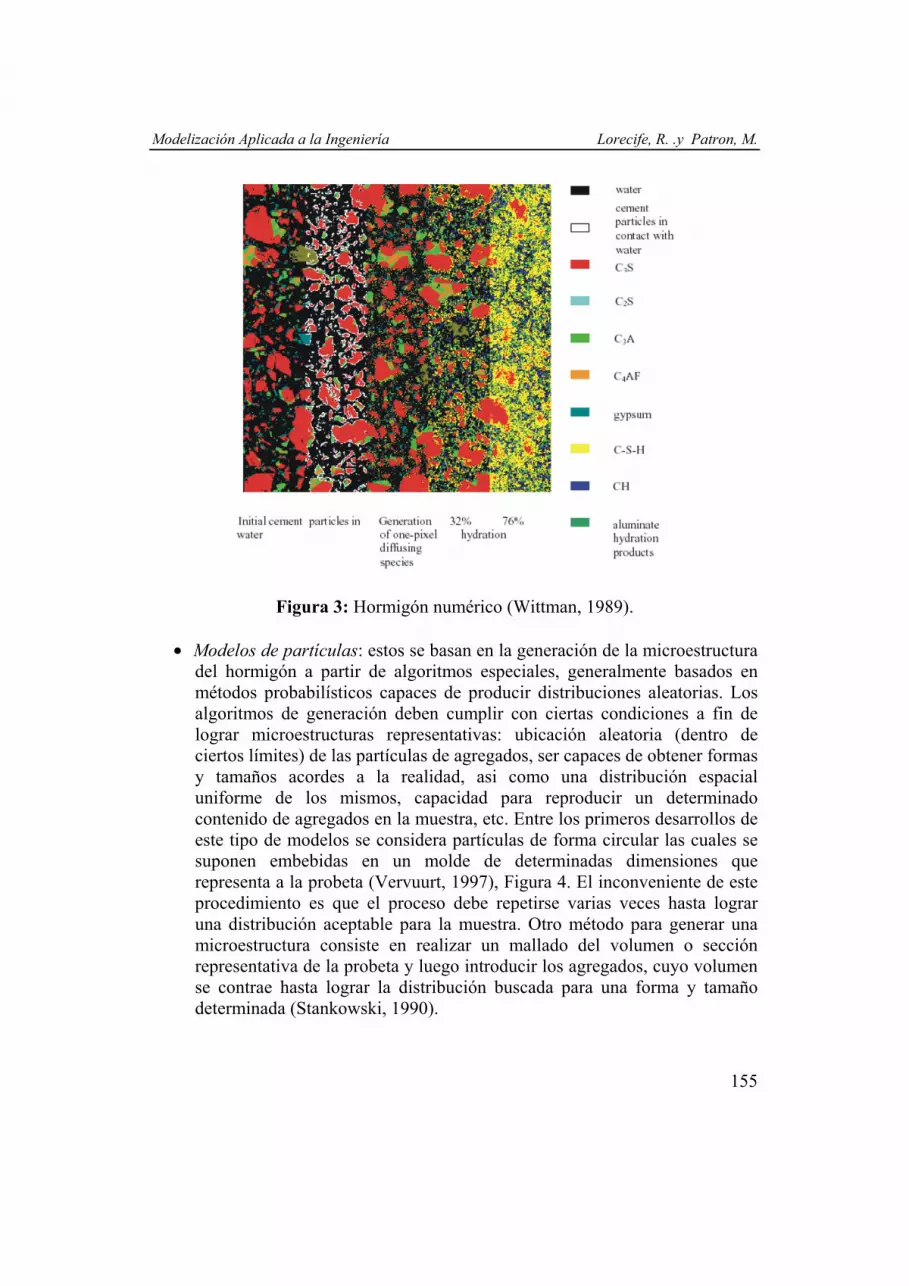
Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
155
Figura 3: Hormigón numérico (Wittman, 1989).
• Modelos de partículas: estos se basan en la generación de la microestructura
del hormigón a partir de algoritmos especiales, generalmente basados en métodos probabilísticos capaces de producir distribuciones aleatorias. Los algoritmos de generación deben cumplir con ciertas condiciones a fin de lograr microestructuras representativas: ubicación aleatoria (dentro de ciertos límites) de las partículas de agregados, ser capaces de obtener formas y tamaños acordes a la realidad, asi como una distribución espacial uniforme de los mismos, capacidad para reproducir un determinado contenido de agregados en la muestra, etc. Entre los primeros desarrollos de este tipo de modelos se considera partículas de forma circular las cuales se suponen embebidas en un molde de determinadas dimensiones que representa a la probeta (Vervuurt, 1997), Figura 4. El inconveniente de este procedimiento es que el proceso debe repetirse varias veces hasta lograr una distribución aceptable para la muestra. Otro método para generar una microestructura consiste en realizar un mallado del volumen o sección representativa de la probeta y luego introducir los agregados, cuyo volumen se contrae hasta lograr la distribución buscada para una forma y tamaño determinada (Stankowski, 1990).

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
156
Figura 4: Modelo de partículas (Vervuurt, 1997)
• Modelos de barras (Lattice model): en estos modelos, el continuo es
discretizado en una red formada por elementos lineales de viga o de barra para resolver problemas de elasticidad (Hrennikoff , 1941). Este criterio se empleó luego para el análisis de procesos de fractura (Herrmann et al, 1989). En este caso, los elementos que cumplían con la condición de falla se removían de la malla. El modelo propuesto por Herrmann fue posteriormente aplicado para la modelación de falla discreta mediante el MEF, usando configuraciones de mallas estructuradas y no estructuradas. En ambos casos, el elemento lineal era un elemento de viga, es decir, con rigidez a flexión y corte, ver Figura 5. En este último caso, la microestructura del hormigón se genera considerando también tres regiones, agregado, matriz y zona de interfase entre ambos. En este método, la diferenciación de las tres regiones de interés se logra mediante una superposición de una imagen digital de una microestructura real de una muestra de hormigón sobre la red formada por los elementos de barra. Finalmente, las propiedades materiales y geométricas de los elementos de barra se asignan en función de la región correspondiente. En general, el criterio que se emplea es el de considerar un comportamiento elástico hasta alcanzar la envolvente de falla, y luego un comportamiento perfectamente frágil.

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
157
Figura 5: Modelo de barras (Lattice model) (Herrmann, 1989) • Modelo mesomecánico de Carol y López: siguiendo el criterio de
(Stankowski, 1990) y (Vonk, 1991), estos investigadores emplean mallas mesomecánicas generadas a partir de un algoritmo especial basado en el procedimiento de triangulación de Delaunay y en polígonos de Voronoi que permite la generación de distribuciones aleatorias de agregados embebidos en una matriz representativa del mortero, Figura 6. A diferencia del criterio seguido por Stankowski, aquí se considera la existencia de elementos de interfase continuos de espesor nulo entre los elementos finitos representativos de los agregados y la matriz de mortero (elementos de interfase de la zona de transición) y además se discretiza el mortero mismo intercalando elementos de interfase o junta entre las caras adyacentes de los elementos finitos triangulares convencionales que componen la matriz. En el caso de la modelación mesomecánica propuesta por Stankowski, el comportamiento no lineal de la pasta cementicia se consideraba suponiendo que ésta respondía al criterio de falla de Drucker-Prager, el cual se asignaba a los elementos de medio continuo que constituían la pasta cementicia. Para los elementos de interfase de la zona de transición se consideraba un criterio de falla particular que tiene en cuenta la degradación mecánica de la

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
158
interfase en función del modo de fractura imperante (Modo I ó Modo II). Un aspecto importante a destacar es que el modelo propuesto por Carol y López
posibilita analizar varios aspectos de la fractura del hormigón bajo diferentes estados de solicitación, permitiendo además estudiar hormigones de alta resistencia mediante la introducción de elementos de junta en los áridos.
Figura 6: Malla mesomecánica.
Debido a estas ventajas, este último criterio es el adoptado aquí para la
modelación mesomecánica y estudio de la respuesta de falla del hormigón.
Evidencia experimental - ensayos cuasiestáticos
Se abordan aquí las características fundamentales del comportamiento mecánico del hormigón cuando es sujeto a solicitaciones simples. Inicialmente se describen los mecanismos básicos de microfisuración, considerando la interacción entre las fases constituyentes a nivel de su mesoestructura. La descripción de estos mecanismos, conjuntamente con la consideración de la respuesta a nivel macro observada en ensayos experimentales, sirve de soporte a la modelación del proceso de fractura desde los puntos de vista meso y macromecánico.
• Nivel mesoestructural: desde el punto de vista mesoestructural, el hormigón
puede considerarse como un material bifásico compuesto por una fase agregado y por una fase constituida por la matriz de cemento o pasta cementicia formada por las partículas de agregados más finos y el cemento como aglomerante. La heterogeneidad de esta estructura de mortero se relaciona con las variaciones volumétricas que ocurren durante el proceso

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
159
de curado, generándose un material que desde el inicio presenta ya defectos o degradaciones iniciales (microdefectos o microfisuras) de naturaleza irreversible. Desde el punto de vista constitutivo, en general, la degradación inicial está constituida por defectos en la zona de interfase entre las fases constituyentes y por vacíos o poros en la estructura de la matriz de mortero. La existencia por un lado de una fase estable (agregados) y, por otro, de una fase evolutiva (formada por la pasta que sufre retracción y expansión en el período de curado, cuando la resistencia es muy poca), conduce a la caracterización de una zona de debilidad alrededor de los granos denominada zona de transición. En esta zona, los defectos de adherencia y vacíos están casi siempre relacionados con la dirección de moldeo de las probetas, ver Figura 7 (van Mier, 1997). El proceso de evolución de los microdefectos en la masa del hormigón esta asociado directamente con el tipo de solicitación a que se somete al material.
Figura 7: Formación de vacíos bajo agregados. Los principales mecanismos de degradación, comunes a todos los estados de solicitaciones, pueden caracterizarse observando la respuesta del mismo bajo estados de carga básicos tales como tracción y compresión uniaxial. Con el fin de simplificar el análisis, podemos admitir que los agregados son de forma circular. La evolución de la fisuración del hormigón bajo tracción uniaxial se produce en dos etapas, Figura 8 (Mazars, 1984):
a) Inicio de un modo mixto de apertura o deslizamiento (I ó II
respectivamente) a lo largo de un hemisferio de los granos. Esto puede suceder en un hemisferio superior o inferior, de acuerdo con la distribución de los defectos iniciales.
b) Completado un hemisferio, ocurre la propagación inestable en modo I, culminando con una fractura perpendicular a la dirección de carga.

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
160
Figura 8: Inicio del daño en zona de transición.
Figura 9: Desarrollo de modos de falla.
Bajo el estado de compresión uniaxial, el proceso de daño tiene las características indicadas en la Figura 9. La primera fisura aparece bajo modo II de falla en la región del contorno del agregado, aproximadamente a 30o con la horizontal. La fisura progresa a lo largo de la interfase pasando a un modo I de falla. En- seguida, su evolución pasa a coincidir con la dirección de la solicitación, dejando la región de interfase para propagarse por la matriz. Bajo elevados niveles de solicitación, el patrón de fisuración se vuelve paralelo a la dirección de carga (Buyukozturk et al, (1972).
• Comportamiento macroscópico en compresión uniaxial: en ensayos de
compresión uniaxial con control de deformaciones, (van Mier, 1997), se observa
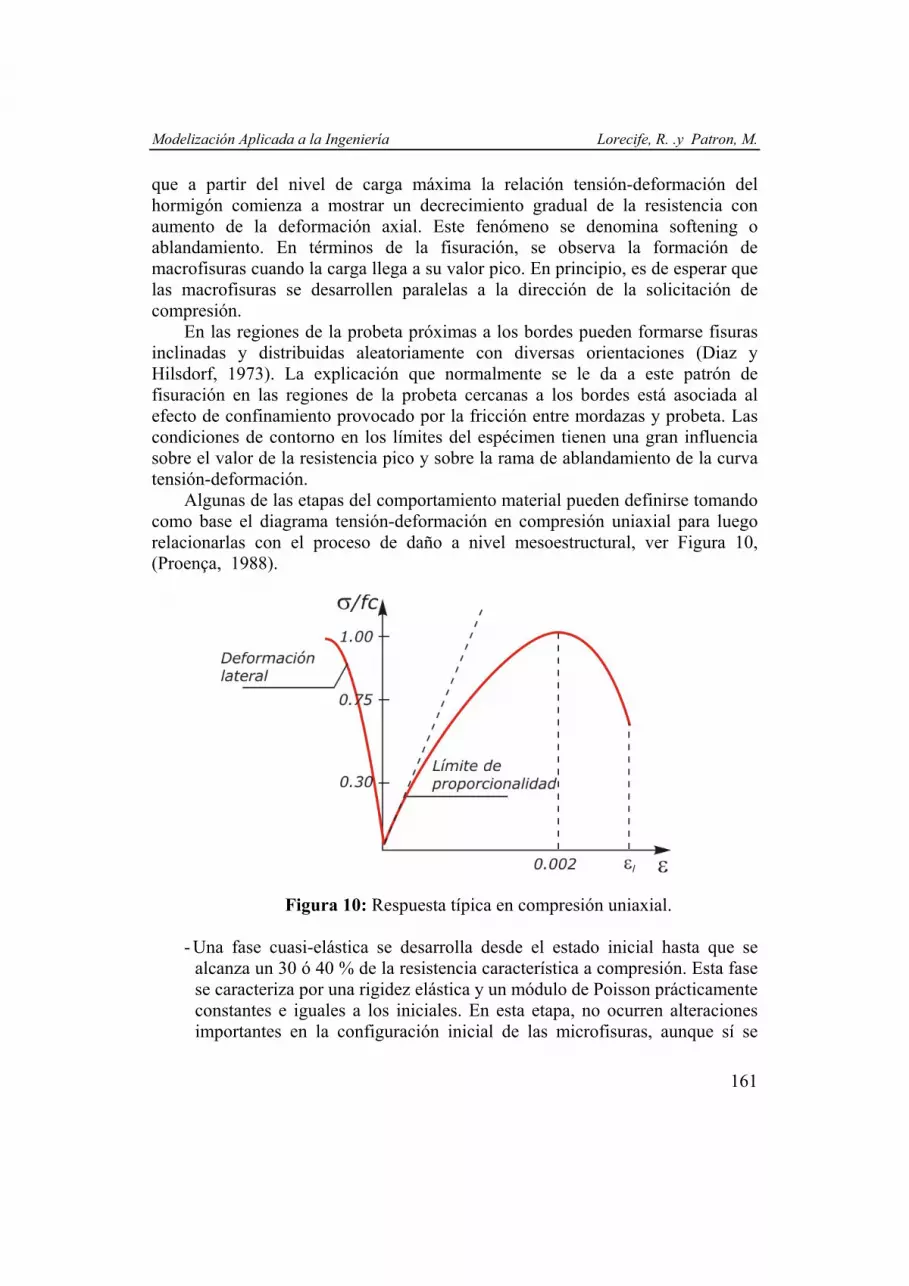
Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
161
que a partir del nivel de carga máxima la relación tensión-deformación del hormigón comienza a mostrar un decrecimiento gradual de la resistencia con aumento de la deformación axial. Este fenómeno se denomina softening o ablandamiento. En términos de la fisuración, se observa la formación de macrofisuras cuando la carga llega a su valor pico. En principio, es de esperar que las macrofisuras se desarrollen paralelas a la dirección de la solicitación de compresión.
En las regiones de la probeta próximas a los bordes pueden formarse fisuras inclinadas y distribuidas aleatoriamente con diversas orientaciones (Diaz y Hilsdorf, 1973). La explicación que normalmente se le da a este patrón de fisuración en las regiones de la probeta cercanas a los bordes está asociada al efecto de confinamiento provocado por la fricción entre mordazas y probeta. Las condiciones de contorno en los límites del espécimen tienen una gran influencia sobre el valor de la resistencia pico y sobre la rama de ablandamiento de la curva tensión-deformación.
Algunas de las etapas del comportamiento material pueden definirse tomando como base el diagrama tensión-deformación en compresión uniaxial para luego relacionarlas con el proceso de daño a nivel mesoestructural, ver Figura 10, (Proença, 1988).
Figura 10: Respuesta típica en compresión uniaxial. - Una fase cuasi-elástica se desarrolla desde el estado inicial hasta que se
alcanza un 30 ó 40 % de la resistencia característica a compresión. Esta fase se caracteriza por una rigidez elástica y un módulo de Poisson prácticamente constantes e iguales a los iniciales. En esta etapa, no ocurren alteraciones importantes en la configuración inicial de las microfisuras, aunque sí se
Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
162
observa una leve no linealidad como consecuencia del deslizamiento entre granos y mortero.
- Una fase no lineal estable se observa a partir de un nivel de tensión de entre un 40-50 % de la resistencia característica a compresión, extendiéndose hasta un nivel de un 70-80 % por ciento de la misma. En esta fase la rigidez disminuye sensiblemente pero el coeficiente de Poisson permanece prácticamente inalterado. A partir de aquí, la componente de deformación plástica longitudinal crece lentamente y su componente transversal es prácticamente nula. A nivel mesoestructural, se produce una cierta degradación de la resistencia de la interfase agregado-pasta de cemento y arena.
- Una vez superado el 70-80% por ciento del valor pico de resistencia, se produce un aumento del módulo de Poisson y una evolución de la deformación plástica. A nivel meso, existe una fuerte interacción entre las fisuras de interfase, siendo ahora las mismas visibles.
- Superada la tensión pico, se produce la denominada rama de ablandamiento, alcanzándose la ruptura del material por compresión. En esta última fase, se produce una fuerte alteración de la microestructura debido a la evolución e interacción entre las fisuras de la matriz de mortero.
La evolución del proceso de daño a partir de las fases no lineales conduce a la
anisotropía material, evidenciada por la preponderancia de la microfisuración en la dirección vertical. Existen un par de aspectos adicionales de la respuesta macroscópica que merecen destacarse: la variación volumétrica y el cambio del coeficiente de Poisson. En cuanto a la deformación volumétrica, (Stroeven, 1979) muestra que existe un nivel de tensión de compresión a partir del cual ocurre una reversión en el diagrama de tensión-deformación volumétrica (ver Figura 11).

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
163
Figura 11: Deformaciones volumétricas en compresión uniaxial.
En esta etapa de reversión de la deformación volumétrica, la superficie de fisuras por unidad de volumen aumenta más rápidamente que en las etapas restantes. En los hormigones normales, un valor típico del coeficiente de Poisson es ν = 0.2, mientras que este valor crece y tiende al valor ν = 0.5 cuando el nivel de tensión se aproxima al valor pico y durante el desarrollo de la rama de ablandamiento. Este fenómeno es consecuencia directa del aumento del área superficial de fisuras, ver Figura 12.
Figura 12: Evolución del coeficiente de Poisson.

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
164
• Comportamiento macroscópico en tracción uniaxial: es sabido que el ensayo de tracción directa en hormigón es de difícil realización e interpretación. Estas dificultades pueden explicarse principalmente teniendo en cuenta los aspectos siguientes:
- la inestabilidad del comportamiento de pospico - los efectos de escala, y - los altos gradientes locales de tensiones Además de los problemas citados previamente, existe una gran sensibilidad
en la región entre probeta y mordazas de la máquina de ensayo, existiendo siempre el riesgo de rotura en esta zona. (Terrien, 1980) obtuvo una curva tensión deformación en base a ensayos de cuerpos de prueba cilíndricos, ver Figura 13, en la cual podemos distinguir dos etapas: antes y después de alcanzar la tensión pico. Antes de alcanzar el valor de la resistencia característica en tracción, la curva de respuesta es inicialmente una recta que pasa a una forma ligeramente no lineal a partir de superar aproximadamente la mitad del valor de la resistencia a tracción. Esto ocurre como consecuencia de la evolución de la degradación en la superficie de interfase entre las fases agregado-mortero. Después del pico, la tensión cae fuertemente, y el ensayo se vuelve altamente inestable debido a la formación de fisuras localizadas en la mesoestructura.
Si a partir de aquí se somete a la probeta a sucesivos ciclos de carga-descarga, se puede verificar una fuerte reducción de la rigidez al final del ensayo, con una reducción del módulo de Young de aproximadamente 10 veces su valor inicial.
Figura 13: Curva tensión-deformación bajo tracción uniaxial.

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
165
(Heilmann et al, 1969), realizaron ensayos de tracción en los que colocaron
una serie de extensómetros a lo largo de un cuerpo de prueba, con lo cual pudieron identificar deformaciones localizadas y dar una mejor interpretación de la etapa de pospico. A partir del análisis de sus resultados, se pudo determinar que previamente a la formación de una macrofisura final se produce una fuerte localización de las deformaciones. A partir de un 60 % del valor de la resistencia a tracción, la deformación evoluciona más rápidamente en esta zona que en las otras zonas de la probeta, acentuándose la diferencia a medida que la tensión se aproxima al valor pico. Una vez alcanzado este punto, las deformaciones se concentran definitivamente en la zona correspondiente a la fisura final. Las zonas vecina sufren una descarga. La razón principal por la cual se produce la localización de deformaciones es la existencia previa de microfisuras o defectos que originan una variación de los valores locales de resistencia en el interior del material. Teniendo en cuenta la respuesta macroscópica observada y el fenómeno de la localización en particular (Hillerborg et al, 1981) llegaron a las siguientes conclusiones con respecto a la representatividad del ensayo de tracción en el hormigón:
- Inicialmente, los defectos de la microestructura están distribuidos en todo el
volumen de forma aproximadamente uniforme, y en esas condiciones se considera que el comportamiento antes del pico es característico del material y puede ser representado por un diagrama tensión-deformación, ver Figura 14 a)
- Debido a la localización de deformaciones, la respuesta después del pico ya no es representativa del comportamiento del material, sino de la estructura que constituye el cuerpo ensayado. En esta etapa del diagrama tensión deformación corresponde hacer referencia a la relación local σ - w, con w el desplazamiento de apertura de fisura, ver Figura 14 b).
Figura 14: Interpretación del ensayo de tracción uniaxial.

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
166
Respecto a la influencia de la forma o volumen de la probeta sobre la resistencia a tracción directa, la tensión de ruptura es comparativamente menor cuando el volumen es mayor. Asimismo, existe una dispersión mayor de resultados para volúmenes pequeños. Ambos fenómenos son característicos del denominado efecto escala o size effect (Kadlecek y Spetla, 1967), (L'Hermite, 1973). Estos mismos autores realizaron ensayos de tracción directa y de flexión con vigas apoyadas en tres y cuatro puntos. Los resultados obtenidos fueron dispares entre los dos tipos de ensayo (tracción y flexión). Estas discrepancias se relacionaron con la distribución de los defectos en la masa del hormigón y con los gradientes de tensiones. Estos últimos son mucho menores en el caso de los ensayos de flexión. En los ensayos de flexión, el efecto del gradiente de tensiones es mucho menor si se aumenta el tamaño de la muestra, obteniéndose en esta situación valores que se aproximan a la resistencia media obtenida en el ensayo de tracción. Como observaciones complementarias, se destaca que el módulo longitudinal determinado para el hormigón es mayor en el ensayo de tracción que en el de compresión, siendo válido lo inverso para el coeficiente de Poisson. Evidencia experimental - ensayos dinámicos
Hasta aquí se han descripto los aspectos salientes del comportamiento mecánico del hormigón bajo acciones cuasiestáticas. Es importante además tener en cuenta que es muy frecuente que las estructuras de hormigón se hallen sometidas a solicitaciones de tipo dinámico, siendo casos típicos las acciones sísmicas, vibraciones, problemas de impacto, etc, ver Figura 15. En este sentido, los primeros ensayos experimentales tendientes a clarificar la respuesta dinámica del hormigón se deben a (Evans,1942), (Watstein, 1953), (Hughes y Gregory, 1972), (Sparks y Menzies, 1973), (Ross et al, 1995), (You et al, 1992), (Zhou y Hillerborg, 1992). Esencialmente, se deben distinguir aquí dos tipos de efectos tiempo-dependientes:
Figura 15: Velocidad de cargas (Bischoff y Perry, 1991)
Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
167
a) Influencia de la tasa de deformación en el proceso de fractura (desarrollo de la microfisuración), fenómeno relacionado con la energía de activación necesaria para la rotura de los enlaces interatómicos, y
b) Fenómenos de fluencia lenta y relajación de tensiones, bajo carga constante o bajo deformación sostenida, respectivamente.
Mientras que los primeros ensayos eran dirigidos a lograr un conocimiento cualitativo acerca de los efectos de la variación de la tasa de deformación en propiedades mecánicas relevantes como ser la resistencia, rigidez, fatiga y absorción de energía, los ensayos más recientes se han orientado a comprender el mecanismo de falla tanto en tracción como compresión, bajo tasas de deformación entre moderadas y altas. La mayoría de los experimentos confirman que la resistencia a tracción del hormigón es más sensible a la velocidad de deformación que la resistencia a compresión. A partir de esta confirmación, es evidente que la influencia de la micro y macrofisuración es muy significativa a la hora de determinar la incidencia de las tasas de deformación o tensión sobre las propiedades del hormigón. (Takeda et al, 1974) observaron un incremento en el módulo de Poisson en el caso de tracción y un decrecimiento en el caso de compresión con el incremento de la velocidad de carga hasta valores cercanos al 40 % del valor de resistencia característica. (Birkimer y Lindeman, 1971) observaron que durante ensayos dinámicos a tracción en hormigones realizados con agregados gruesos de tamaño grande se obtenía un incremento de resistencia mayor que en los realizados con agregados gruesos de menor tamaño. Otro aspecto importante que se observó experimentalmente es que bajo cargas repetidas este aumento de resistencia dinámica se reducía en gran medida.
El comportamiento dinámico de falla en tracción ha sido estudiado por (Gran y Seaman, 1993), en especial en lo que concierne al desarrollo de las microfisuras. La velocidad en estos ensayos fue de aproximadamente 20 seg-1 aplicada mediante una súbita liberación de una presión impuesta previamente. En estos ensayos, las ondas de presión liberadas se transmiten hacia el centro de la probeta generando una tensión dinámica de tracción derivada de la liberación de la tensión de compresión inicial. Durante el ensayo, las magnitudes monitoreadas eran la deformación y presión. Finalmente, se estimaba la reducción de rigidez y la resistencia dinámica. Como resultado de esto, se encontró que la tensión de tracción medida superaba la resistencia a tracción en mas de un 40 %. En ensayos realizados en régimen de ablandamiento, los ensayos indicaron que la sobreresistencia dinámica superaba en alrededor de un 30 % a la resistencia estática. En el caso de pruebas con confinamiento, se alcanzaron sobreresistencias de alrededor de un 50 %. Por otro lado, diferentes ensayos se llevaron a cabo con el objeto de estudiar la propagación de las microfisuras. Se concluyó que la velocidad de propagación de la onda en la probeta tenía influencia en el valor de sobreresistencia alcanzado a una velocidad de carga de 20 seg-1. (Shah, 1985) y

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
168
(Koermeling, 1986) indicaron que debido a que velocidades de fisuración mayores de 100 m/seg, es decir, cerca de un 5 % de la velocidad de propagación de las ondas de Rayleigh cR no se han observado en los experimentos, para una relación v/cR pequeña no puede explicarse el factor de sobreresistencia observado por el efecto de velocidad de la onda. En cuanto a la sobreresistencia dinámica en compresión, (Malvern et al, 1985) realizó ensayos mediante el dispositivo denominado Barra de Presión de Hopkinson a altas velocidades de deformación (entre 10 seg-1 y 100 seg-1), demostrando la importancia de la consideración de la velocidad de deformación, alcanzando valores de sobreresistencia dinámica de alrededor del doble del valor estático. La existencia de una presión de confinamiento debido a efectos inerciales sólo fue significativa para niveles de deformación cercanos a la deformación de rotura, estimándose valores cercanos al 25 % de la resistencia estática en el centro de la probeta y cercanos al 20 % a una distancia igual a la mitad del radio de la probeta medida desde el centro de la probeta. En otros ensayos, realizados sobre probetas cilíndricas de hormigón, primeramente se aplicó una presión de confinamiento en forma estática, y luego se impuso una carga de tracción o compresión en forma dinámica. Las tensiones de falla observadas a tres diferentes niveles de velocidad de deformación (entre 1.E-6 seg -1 y 1 seg -1 ) no mostraron diferencias significativas al relacionarse con la tensión uniaxial de compresión correspondiente al ensayo no confinado a cada velocidad particular (Takeda et al, 1974). Análisis computacional A fin de ilustrar la utilidad de las dos estrategias de análisis previamente descriptas, se estudia el comportamiento de falla de probetas de hormigón simple sometidas a tracción uniaxial mediante simulaciones numéricas mediante el Método de los Elementos Finitos. Para introducir la dependencia de la respuesta estructural con la velocidad de deformación, se emplea tanto en el caso macromecánico como en el mesomecánico la formulación elastoviscoplástica tiempo-dependiente de (Perzyna, 1966), la cual se incorpora en los modelos constitutivos de medio continuo, denominado Modelo Extendido de Leon, (Etse y Willam, 1994) y el modelo de interfase usado en el análisis a nivel mesomecánico (López, 1999). Con el fin de discernir la influencia que cada fase de la mesoestructura del hormigón introduce en la respuesta de falla. Se analizan los cuatro casos siguientes: Caso 1: análisis macromecánico en el cual todos los elementos de las mallas mostradas en la Figura 15 siguen la ley constitutiva de continuo denominada Modelo Extendido de Leon extendida con la ley viscoplática de Perzyna, (Carosio et al, 2000).

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
169
Caso 2: análisis mesomecánico donde los elementos de mortero se consideran elastoviscoplásticos mientras que los agregados permanecen elásticos. El modelo elastoviscoplástico considerado aquí es el Modelo Extendido de Leon. Caso 3: análisis mesomecánico, con elementos de mortero elastoviscoplásticos, agregados elásticos y elementos de interfase (juntas de espesor nulo) entre mortero y agregados equipados con la ley hiperbólica de interfase viscoplástica (Etse, 2004). Caso 4: análisis mesomecánico con el criterio de Carol y López (aproximación discreta pura) modelando tanto agregados como mortero cementicio mediante una ley constitutiva elástica y asignando todo el comportamiento no lineal a los elementos de interfase, que en este caso se disponen tanto en la matriz de mortero como entre mortero y agregados. Cabe aclarar que previamente, tanto el Modelo Extendido de Leon como la ley constitutiva de interfase fueron calibradas empleando los resultados experimentales de (Suaris y Shah, 1985).
Figura 15: Discretizaciones empleadas a) Malla fina b) Malla gruesa.

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
170
Figura 16: Comparación de los casos – η/∆t = 0.
Figura 17: Comparación de los casos – η/∆t = 100.

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
171
Figura 18: Comparación de los casos – η/∆t = 500.
Discusión de resultados Los resultados de Figuras 16, 17 y 18 indican que la estrategia macromecánica,
correspondiente al Caso 1, es la mas sensible a la relación de viscosidad η/∆t tanto en relación a la predicción de la carga pico como al comportamiento posterior de pos-pico. Entre las tres alternativas diferentes de análisis mesomecánico consideradas, los casos 3 y 4 son los menos sensibles. Se puede concluir que el criterio mesomecánico que incluye elementos de interfase conlleva a un comportamiento de pospico más frágil tanto en el caso invíscido (el cual corresponde a un ensayo de tipo cuasi-estático) así como en las situaciones que involucran la simulación de estados de carga dinámica (η/∆t > 0) mediante la viscoplasticidad. El comportamiento más frágil se obtiene en el caso 4, cuando la no linealidad del mortero se modela mediante los elementos de junta de espesor nulo. Con respecto a la comparación entre las dos discretizaciones (fina y gruesa), se aprecia poca dependencia en el tamaño de la malla. Finalmente, en la Figura 19 se presentan los resultados para un ensayo con velocidad controlada de 1.E-6 seg-1

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
172
y 1.E-2 seg-1 comparadas con los datos experimentales obtenidos por (Suaris y Shah, 1985) para la discretización mas fina. Se aprecia un muy buen ajuste de la predicción de carga pico, y una respuesta en ablandamiento muy frágil, típica del caso de tracción uniaxial.
Figura 19: Caso mesomecánico 4 versus experimento.
Conclusiones
Los resultados numéricos obtenidos muestran que los dos criterios de análisis considerados aquí, los denominados aproximación difusa o macromecánica y la aproximación discreta o mesomecánica son capaces de reproducir las principales características del comportamiento no lineal del hormigón, tanto en la rama de prepico, como en la de pospico, siendo la respuesta de falla de los casos mesomecánicos puros (con interfases tanto en matriz de mortero como entre matriz y agregados) los que producen respuestas más frágiles. Ambos criterios pueden capturar la dependencia de la resistencia aparente con la velocidad de carga, que es el hecho más relevante observado en los ensayos experimentales. En este sentido, la teoría de la elastoviscoplasticidad se muestra prometedora, tanto para reproducir situaciones de carga dinámica en el rango de excitación más probable de una obra civil, como para otros aspectos de interés, tales como cargas de muy lenta duración pero sostenidas en largos períodos de tiempo como en el caso de la fluencia lenta (deformación diferida) de estructuras de hormigón o en
0.0
2.0
4.0
6.0
8.0
10.0
0.0E+00 4.0E-04 8.0E-04 1.2E-03 1.6E-03
Experiment - du/dt =1.E-2/segMesomechanical mesh - du/dt = 1.E-2/segExperiment - du/dt = 1.E-6/segMesomechanical mesh - du/dt = 1.E-6/seg
ε
σy (MPa)

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
173
situaciones de relajación de tensiones. Finalmente, es de destacar que si bien ambas formulaciones producen resultados similares luego de una calibración adecuada de sus parámetros materiales, cada una de ellas encuentra un campo óptimo de aplicación en diferentes casos. La formulación de medio continuo es más eficiente para el análisis a nivel estructural de problemas tiempo-dependientes a escala macroscópica, mientras que la formulación discreta es muy potente para el estudio detallado de la influencia de la heterogeneidad de la estructura del hormigón en la respuesta de falla y en el análisis de patrones de fisuración, modo de fractura, apertura y cierre de fisuras, etc. Asimismo, el empleo de modelos tiempo-dependientes como el propuesto por Perzyna empleado a nivel mesomecánico de análisis permite simular el comportamiento dinámico de materiales cuasi-frágiles en un amplio rango de velocidades de carga bajo un marco teórico unificado brindado por la teoría de la elasto-viscoplasticidad. Referencias
Aboudi, J., (1989). “Micromechanical analysis of composites by the method of cells”. Applied Mechanics Reviews, 42(7), Págs. 193-221.
Birkimer, D. L. and R. Lindeman, (1971). “Dynamic tensile strength of concrete materials”. (1985). “ACI Journal, 71, pags. 47-49.
Bischoff, P. H. and S. H. Perry, (1991).”Compressive behavior of concrete at high strain rates”. Material and Structures, 24, págs. 425-450.
Buyukozturk, O., A.H. Nilson y F.O. Slate, (1972). “Deformation and fracture of particulate composite”. Journal of Engineering Mechanics, ASCE, 98, págs. 581-593.
Carol, I., P.C. Prat, C.M. López, (1997). ”Normal/shear cracking model: application to discrete crack analysis”. Journal of Engineering Mechanics, ASCE, 123 (8), págs. 765-773.
Carol, I. P.C. Prat, (1990). “A statically constrained microplane model for the smeared analysis of concrete cracking”. Computer aided analysis and design of concrete structures, Bicanic and Mang (Eds), (2), Págs. 919-930, Austria. Pineridge Press.
Carosio, A., K. Willam, G. Etse, (2000). “On the consistency of viscoplastic formulations”. Int. J. of Solids and Structures, Vol. 37, págs. 7349-7369.
Díaz, S. y S.K. Hilsdorf, (1973). “Fracture mechanisms of concrete under compressive loads”. Cement and Concrete Research, 3 págs. 363-388.

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
174
Etse, G., R. Lorefice, C.M. López and I. Carol, (2004). ”Meso and macromechanic approaches for rate dependent analysis of concrete behavior”. International Workshop in Fracture Mechanics of Concrete Structures. Boulder, Colorado, USA.
Etse, G., K. Willam, (1994). “A fracture energy formulation for inelastic behavior of plain concrete”. ASCE J. Mech. Div., 120(9), pags. 1983-2011.
Evans, R.H., (1942). “Effect of rate of loading on the mechanical properties of some materials”. Journal Inst. of Civ. Engineers, 18 págs. 296-306.
Gran, J. K. y L. Seaman, Observations and analysis of microcracks produced in dynamic tension tests of concrete”. Final Report, Sri International.
Heilmann, H.G., H.H. Hilsdorf y K.Finsterwalder, (1969). “Festigkeit und verformung von beton unter zugspannungen”. Deutschet Ausschuss Für Stahlbeton, 203.
Hillerborg, A., M. Modeer y P. Peterson, (1976). “Analysis of crack formation and crack growth in concrete by means of fracture mechanics and finite elements”. Cement Concrete Research, 6, págs. 773-782.
Herakovich, C. T., (1998). “Mechanics of fibrous composites”. John Wiley and Sons, Inc., New York, USA.
Herrmann, H.J., H. Hansen y S. Roux, (1989). “Fracture of disordered, elastic lattices in two dimensions”. Phys. Rev. B., 39.
Hrennikoff, A., (1941). “Solutions of problems of elasticity by a framework method”. Journal of Applied Mechanics, 8, págs. 169-175.
Hughes B. P. y R. Gregory, (1972). “Concrete subject to high rates of loading in compression”. Magazine of Concrete Research, 24 (78), págs. 189-199.
Kadlecek V. and Z. Spetla, (1967). “Effect of size and shape of test specimens on the direct tensile strength of concrete”. Bulletin Rilem, 36 pags. 175-184.
Koermeling, H.A., (1986). “Strain rate and temperature behavior of steel fibre concrete in tension”. Delft University Press.
L'Hermite, R., (1973). “Influence de la dimension absolue sur la résistance a la flexion“. Annales de L’Itbtp, 309, pags. 39-41.
López Garello, C. M., (1999). ”Análisis microestructural de la fractura del hormigón utilizando elementos tipo junta. Aplicación a diferentes hormigones”. Tesis doctoral, Universitat Politécnica de Catalunya, Barcelona, España.

Modelización Aplicada a la Ingeniería Lorecife, R. .y Patron, M.
175
Malvern, L. E., T. Tang, D.A. Jenkins y J.C.Gong, (1985). “Dynamic Compressive Strength of Cementitious Materials”. Symposium Material Research Society.
Mazars, J., (1984). “Application de la mécanique de l'endommagement au comportement non-linéaire et a la rupture du béton de struture“. Thèse de Doctorat D'Etat, Univ. Paris , Cachan, France.
Paley, M. y J. Aboudi, (1992). “Micromechanical analysis of composites by the generalized cells model”. Mechanics of Materials, 14 págs. 127-139.
Perzyna, P., (1966). “Fundamental problems in viscoplasticity”. Advances in Applied Mechanics, 9, págs. 244–368.
Proença, S.P.B., (1988). “Sobre modelos matemáticos do comportamento não-linear do concreto: Análise crítica e contribuições”. Tese De Doutorado, Eesc/Usp.
Rashid, Y. R., (1968). “Analysis of prestressed concrete pressure vessels”. Nuclear Engineering and Design, 7, pags. 334-344.
Ross, C. A., J. W. Tedesco y S.T. Kuennen, (1995). “Effects of strain rate on concrete strength”. ACI Materials Journal, 92(1), Págs. 37-47.
Rots, J., (1988) “Computational modelling of concrete fracture”. PhD. Thesis, Delft University of Technology, Delft , The Netherland.
Shah, S. P., (1985). “A fracture mechanics model to predict the rate sensitivity of mode II fracture of concrete”. Center for Concrete and Geomaterials-Northwestern University.
Stankowski, T., (1990). “Numerical simulation of progressive failure in particle composites”. PhD. Thesis, University of Colorado, Boulder, Colorado, EE. UU.
Sparks P.R. y J.B. Menzies, (1973). “The effect of rate of loading upon the static and fatigue strength of plain concrete in compression”. Magazine of Concrete Research, 25(83), Págs. 73-80.
Stroeven, P., (1979).”Geometric probability approach to the examination of microcracking in plain concrete”. Journal of Materials Science, 14, pags. 1141-1151.
Suaris, W. y S. Shah, (1985). ”Rate-sensitive damage theory for brittle solids. J. Engineering Mechanics, ASCE, Vol.111, N.3, págs. 563-576.
Takeda, J., H. Tachikawa y K. Fujimoto, (1974). “Mechanical behavior of concrete higher rate of loading than in the static test”. Proc. of Second Canadian Conference On Earthquake Engineering, pags. 21-32.

Modelación de procesos de falla en hormigón... Lorefice, R. y Patron, M.
176
Terrien, M., (1980). ”Emission acoustique et comportement mécanique post-critique d’un béton sollicité en traction”. Bulletin De Liaison Ponts Et Chaussées, 105, pags. 65-72.
van Mier, J. G., (1997). “Fracture processes of concrete”. CRC Press.
Vervuurt, A., (1997). “Interface Fracture in Concrete”. Phd. Dissertation, Delft University of Technology, The Netherland.
Vonk, R., (1992). “Softening of concrete loaded in compression”. PhD. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherland.
Watstein, D., (1953). “Effect of straining rate on the compressive strength and elastic properties of concrete”. Journal of American Concrete Institute, 49.
Willam, K. (2002).“Constitutive modelling for engineering materials”. Encyclopedia Of Physical Science and Technology. Boulder (USA).
Wittmann, F. H., (1989). “Simulation and analysis of composite structures”. Material Science Enginnering , 68, pags. 239-248.
You, J. H., N. M. Hawkins y A. S. Kobayashi, (1992). “Strain-rate sensitivity of concrete mechanical properties”. ACI Materials Journal, 89(2), Págs. 146-153.
Zhou, F.P. y A. Hillerborg, (1992). “Time-dependent fracture of concrete. Testing and modeling”. Fracture Mechanics of Concrete Structures, pags. 906-911. Prentice.

Modelización Aplicada a la Ingeniería
177
La utilización de la técnica de bond graphs en la
simulación de transitorios hidráulicos
ADAIR MARTINSA, GERALDO LÚCIO TIAGO FILHOB Y ROBERTO LAURENTC
ADepartamento de Ciencias de la Computación, Facultad de Economía y Administración, Universidad Nacional del Comahue,
Neuquén, Argentina, e-mail: [email protected].
BInstituto de Recursos Naturais, Universidade Federal de Itajubá, Itajubá, Brasil.
CDepartamento de Electrotecnia, Facultad de Ingeniería,
Universidad Nacional del Comahue, Neuquén, Argentina.
Introducción
Los fenómenos transitorios en sistemas hidráulicos pueden causar serios problemas en los equipos y tuberías. El golpe de ariete es el fenómeno transitorio de elevación (golpe de ariete positivo) o disminución (golpe de ariete negativo) de la presión provocado por el cierre o apertura rápida del mecanismo de control (válvula, inyector, distribuidor, etc.) de caudal en un conducto forzado. Un caso de interés es el cierre del distribuidor que el regulador de velocidad ejecuta cuando ocurre un rechazo de carga parcial o total en una central hidroeléctrica para limitar la sobrevelocidad del generador y la turbina. El conocimiento de este fenómeno transitorio es fundamental para el dimensionamiento técnica y económicamente adecuado de los sistemas hidráulicos (Souza et al, 1999).
El método más utilizado para la simulación de transitorios hidráulicos es el denominado método de las características, introducido en la década de 1960 por Streeter (Wylie y Streeter, 1990). Las ecuaciones diferenciales parciales fundamentales de la cantidad de movimiento y de la continuidad que modelan una tubería son expresadas en forma de diferencias finitas e integradas numéricamente en el plano (x, t) con intervalos ∆t y ∆x constantes. Lamentablemente, los programas computacionales basados en este método resultan pocos flexibles y tienen la desventaja de estar limitados a casos particulares y de presentar

La utilización de la técnica de bond graphs en... Martins, A. et al.
178
dificultades para modelar la interacción entre los diferentes dominios de energía: hidráulico, mecánico, eléctrico, etc., en una central hidroeléctrica, por ejemplo.
Un método que no tiene estas limitaciones y que ha comenzado a ser utilizado en los últimos años para este fin es el método de Bond Graphs. Curiosamente, fue creado por el profesor Henry Paynter del Departamento de Ingeniería Mecánica del Instituto de Tecnología de Massachussets en 1959 para modelar justamente la interacción entre los subsistemas hidráulico, mecánico y eléctrico en el proceso de generación hidroeléctrica, pero desde entonces no ha sido muy utilizada para este fin, aunque su uso es creciente y muy popular en otras aplicaciones (Karnopp, et al, 2000), (Montbrum et al, 1991). El objetivo de Paynter fue superar las limitaciones de los modelos clásicos basados en funciones de transferencia y diagramas de bloques que sólo manejan una entrada y una salida. En esta metodología los componentes de un sistema intercambian potencia o energía a través de conexiones (bonds), siendo el flujo de potencia determinado como el producto de dos variables denominadas esfuerzo y flujo. Por ejemplo: presión y caudal en un componente hidráulico, torque y velocidad en un motor o turbina, tensión y corriente en una máquina eléctrica, etc.
En aplicaciones a sistemas hidráulicos se distinguen en los últimos años los trabajos de Tiago Filho (Tiago Filho, 1994), que lo utilizó para modelar y simular una válvula de alivio anti golpe de ariete, y de Martins (Martins et al, 2003, Martins, 2004, y Martins et al, 2004) que analizó su aplicabilidad en la simulación de transitorios hidromecánicos en centrales hidroeléctricas. Los programas utilizados en los primeros trabajos requerían algunas aproximaciones en el modelado que hacían que los resultados no tuviesen toda la exactitud deseable. Pero su evolución ha sido formidable y estas restricciones han sido superadas completamente, ganando en flexibilidad y facilidad de uso.
Después de una presentación de los conceptos y ecuaciones que definen la resistencia, inertancia y capacitancia en tuberías y válvulas, lo que permite tratar a los sistemas hidráulicos en forma análoga a los sistemas eléctricos, se realiza una breve introducción al método de Bond Graphs y se muestra un modelo básico para simulación de golpe de ariete y su aplicación a un caso clásico de referencia basado en resultados experimentales de laboratorio publicados por (Watt et al, 1980).
Analogía entre circuitos hidraúlicos y eléctricos
La metodología de Bond Graphs se basa en las analogías entre sistemas de distinta naturaleza física y los sistemas eléctricos. Una tubería hidráulica responde a un modelo matemático, sistema de ecuaciones diferenciales parciales hiperbólicas, análogo al de una línea de transmisión de energía eléctrica. El

Modelización Aplicada a la Ingeniería Martins, A. et al.
179
proceso de cierre de una válvula es análogo al de apertura de un interruptor. A continuación se discuten estas analogías y sus modelos matemáticos. Tubería
Para entender la analogía entre los sistemas hidráulicos con los eléctricos se puede considerar el elemento diferencial de longitud ∆x de una línea de transmisión de energía eléctrica monofásica esquematizado en la figura 1.
Figura 1: Elemento diferencial de una línea de transmisión.
En la figura U es la tensión, i es la corriente y L/x, R/x y C/x son la inductancia, resistencia y capacitancia por unidad de longitud respectivamente. Este circuito responde a las ecuaciones diferenciales parciales siguientes (Grainger y Stevenson, 1997) y (Greenwood, 1991)
,iRtiL
xU
X/X/ −∂∂−=
∂∂ (1)
.t
UCxi
X/ ∂∂−=
∂∂ (2)
Las ecuaciones diferenciales que gobiernan los fenómenos transitorios en
tuberías hidráulicas se pueden obtener analizando un volumen de control diferencial contenido en un elemento diferencial de tubería en forma similar al caso de la línea (Wylie y Streeter, 1990). Aplicando la segunda ley de Newton y la sumatoria de fuerzas al volumen diferencial se obtiene la ecuación diferencial de movimiento, ecuación 3, y aplicando la ley de conservación de masa la ecuación diferencial de la continuidad, ecuación 4:

La utilización de la técnica de bond graphs en... Martins, A. et al.
180
,0D2
VVftV
xVV
xHg =+
∂∂+
∂∂+
∂∂ (3)
,0xV
gasenV
tH
xHV
2
=∂∂+−
∂∂+
∂∂ α (4)
donde H es la altura piezométrica, V la velocidad del fluido, f el factor de fricción, D el diámetro de la tubería, a la celeridad, α la inclinación y g la aceleración de la gravedad.
Para la aplicación del método de Bond Graphs es conveniente la utilización del Sistema Internacional de Unidades expresando la presión en Pascales; también es conveniente utilizar caudal en vez de velocidad (Karnopp et al, 2000). Con estas consideraciones y despreciando los términos convectivos y de la inclinación, como es en general razonable en sistemas hidráulicos, las ecuaciones 3 y 4 quedan
,QR
tQI
AD2QQf
tQ
AxP
x/x/2 −∂∂−=−
∂∂−=
∂∂ ρρ (5)
,tPC
tP
aA
xQ
x/2 ∂∂−=
∂∂−=
∂∂
ρ (6)
donde P es la presión, Q el caudal, A la sección de la tubería, ρ la densidad del agua e I/x, R/x y C/x la inertancia, resistencia y capacitancia fluida por unidad de longitud respectivamente. Comparando las ecuaciones 1 y 2 con las ecuaciones 5 y 6 las analogías entre circuitos hidráulicos y eléctricos es obvia. La única diferencia es la dependencia de la resistencia con el caudal en el caso hidráulico.
Los sistemas con parámetros distribuidos son, analíticamente, aquellos que se representan con ecuaciones diferenciales parciales y los sistemas con parámetros concentrados aquellos que se representan con ecuaciones diferenciales ordinarias. El método de Bond Graphs trabaja con parámetros concentrados por lo que es necesario “concentrar” los diferentes efectos en uno o más tramos. Para un tramo de tubería de longitud L se pueden definir los valores totales de inertancia, capacitancia y resistencia. Para la inertancia fluida I se tiene entonces:
.ALI ρ= (7)
La inertancia fluida representa la inercia de la masa de agua contenida en el interior de un tramo de tubería. Es una medida de la capacidad del fluido de

Modelización Aplicada a la Ingeniería Martins, A. et al.
181
acumular energía cinética. Parece ir contra la intuición que la inertancia sea inversamente proporcional a la sección, esto es debido a que se usa presión como esfuerzo en vez de fuerza y caudal como flujo en vez de velocidad. La capacitancia fluida total C resulta
.aLAC 2ρ
= (8)
La capacitancia fluida representa la compresibilidad del fluido y la elasticidad de las paredes de la tubería. Es una medida de la capacidad del sistema de acumular energía potencial.
Finalmente, la resistencia fluida total R es
.DA2
QLfR 2
ρ= (9)
La parte constante de esta ecuación puede ser denominada resistencia por unidad de caudal R/Q, correspondiéndole la siguiente ecuación
.DA2
Lf R 2/Qρ= (10)
La resistencia fluida representa la disipación de energía en sistemas hidráulicos. En su forma más simple está asociada a la pérdida por fricción a lo largo de la tubería.
Válvula
En el caso más común una válvula sigue la ley general de la caída de presión proporcional al cuadrado del caudal dada por la ecuación
Q|Q| )(A)(C2
P22
d θθρ
= = ,Q|Q| R v/Q (11)
donde Cd(θ) y A(θ) son el coeficiente de descarga y la sección de paso de la válvula respectivamente, θ el grado de apertura de la misma en por unidad y Rv/Q la resistencia en por unidad de caudal.
En forma similar a la tubería se puede definir una resistencia de la válvula Rv dada por

La utilización de la técnica de bond graphs en... Martins, A. et al.
182
.|Q| R R v/Qv = (12)
Durante una maniobra de la válvula su grado de apertura es una función de
tiempo θ(t) y como consecuencia la resistencia por unidad de caudal es también una función del tiempo. Durante el cierre la resistencia varía desde un valor finito a infinito. La simulación de este proceso se realiza por medio de la ley de cierre de la válvula τ (t), que consiste en
.)t(R)0(R
)0(A)0(C(t)A(t)C
)t(τQ/v
Q/v
d
d == (13)
Breve introducción al método de bond graphs Este método se basa en el flujo de potencia entre los componentes del sistema, consiste en señales, líneas y símbolos propios que permiten representar gráficamente el modelo físico. Proporciona una visualización de las interacciones entre sus distintos componentes y suministra implícita y sistemáticamente la modelización matemática del sistema en forma de variables de estado, facilitando el uso de recursos computacionales para la simulación, que se realiza directamente de esta representación gráfica. Es especialmente apto para modelar los elementos de un sistema entre los cuales haya flujo de potencia, por ejemplo: tubería, turbina, generador y transformador en una central hidroeléctrica, y se puede combinar con diagramas de bloques y otras técnicas para modelar los componentes donde interesa solamente el flujo de señales, por ejemplo: el regulador de velocidad y de tensión.
El método permite la construcción de modelos complejos con sólo nueve elementos básicos. Estos elementos son los siguientes:
• Fuentes de potencia: fuentes de esfuerzo Se (tensión, presión, torque,
fuerza etc.) y fuentes de flujo Sf (corriente, caudal, velocidad angular, velocidad lineal, etc.). Nótese que el producto del esfuerzo y el flujo respectivo en cualquier sistema físico resulta en potencia.
• Disipadores de potencia: resistores R (resistencia eléctrica, resistencia de fluido, fricción, etc.).
• Acumuladores de energía: capacitancia C (capacitancia eléctrica, capacitancia de fluido, momento de inercia, masa etc.) e inertancia I (inductancia eléctrica, inertancia de fluido, rigidez recíproca de rotación o translación, etc.).

Modelización Aplicada a la Ingeniería Martins, A. et al.
183
• Acopladores: transformadores TF (transformador, pistón hidráulico, caja de engranajes, poleas, etc.) y giradores GY (generador y motor eléctrico, etc.).
• Vínculos: vínculo “1” (generalización de la Ley de Kirchhoff de tensiones) y vínculo “0” (generalización de la ley de Kirchhoff de corrientes)
Los parámetros que representan a los elementos pueden no ser constantes o ser no lineales, en cuyo caso se denominan modulados porque sus parámetros se “modulan” por funciones externas. Los componentes de un sistema con elementos distribuidos sólo pueden ser representados con elementos básicos concentrados. El modelo de una tubería, por ejemplo, se puede modelar con resistencias, inertancias y capacitancias concentradas formando un número adecuado de circuitos en serie "π" o "T".
Un modelo de Bond Graphs está formado por componentes o subsistemas conectados por enlaces que representan el flujo de potencia entre ellos. Con una media flecha se indica el sentido de la potencia que fluye y con una barra vertical (barra causal) la relación entre causa y efecto entre dos elementos como ilustra la figura 2, la posición de la barra muestra el sentido en que es aplicado el esfuerzo. La potencia será positiva si el esfuerzo “e” y el flujo “f” son positivos, y será negativa si una de las variables es negativa.
Figura 2: Media flecha, barra causal y diagrama de bloques equivalente. El requerimiento de conservación numérica de la potencia en los acopladores,
transformadores y giradores para representar turbinas, bombas, motores, generadores, transformadores, etc., implica la imposibilidad práctica de utilizar unidades técnicas, como rpm o metros de columna de agua. Este requerimiento también hace que no tenga sentido utilizar el método por unidad debido a que no se tiene la libertad para elegir como bases los valores nominales de todos los equipamientos. Los valores de salida pueden siempre ser convertidos en las

La utilización de la técnica de bond graphs en... Martins, A. et al.
184
unidades de interés utilizando los factores de escala adecuados, pero la simulación es mejor hacerla siempre en el consistente Sistema Internacional de Unidades. Una alternativa interesante es usar uno de los valores en un dominio de energía, esfuerzo o flujo, en “kilo”, por ejemplo: kPa, kNm y kV para presión, torque y tensión respectivamente.
Principales Programas Computacionales
La evolución de los programas computacionales basados en esta técnica permite actualmente editar, parametrizar, asignar la causalidad automáticamente y simular un sistema en forma interactiva directamente de la representación gráfica. Generalmente permiten la modelización híbrida posibilitando combinar Bond Graphs con diagramas de bloques, diagramas de íconos y ecuaciones. Los principales que se ofrecen en la web: 20-SIM, SYMBOLS 2000, CAMP-G, PowerDynaMo, AMESIM, MS1, BONDLAB, etc. Un análisis preliminar permite sugerir que, por su facilidad de uso, precios relativamente bajos o nulos y la disponibilidad de versiones en la web, los tres programas probablemente más recomendables para uso académico y de pequeñas instituciones son: 20-SIM: Twente Sim. Fue desarrollado en el Control Laboratory of University of Twente como sucesor del programa TUTSIM. Sobresale por su facilidad de uso, interfaz con el usuario muy intuitiva y amigable, y una gran variedad de recursos. Posee una interfaz con el programa MATLAB para posprocesamiento. Una de sus ventajas principales es no necesitar un programa externo para ser ejecutado. Se ofrece una versión académica de bajo costo. Una versión se encuentra disponible en: http://www.rt.el.utwente.nl, esta tiene la restricción de no permitir guardar el modelo. SYMBOLS2000: System Modeling by Bondgraph Language and Simulation. Fue desarrollado en el Indian Institute of Technology, Kharagpur. Se distingue por su notable interfaz con el usuario y la modelización híbrida jerárquica orientada a objeto. Dispone de un gran número de submodelos avanzados llamados cápsulas para aplicación en diferentes dominios de la ingeniería. Requiere una versión 5 o superior de Microsoftware Developer Studio preinstalado. La compilación directa en C++ permite una fácil integración de código externo si el usuario posee alguna experiencia. Están disponibles versiones académicas de bajo costo para 50 o 100 estados. Una versión demo para 9 estados se encuentra en: http://www.symbols2000.com. PowerDynaMo: Fue desarrollado por el Prof. Ernesto Kofman (1999) de la Universidad Nacional de Rosario, Argentina. Es un programa de fácil utilización,

Modelización Aplicada a la Ingeniería Martins, A. et al.
185
con un ambiente simple y bastante amigable. Se caracteriza por requerir necesariamente de SIMULINK para poder simular, previa conversión del modelo a diagramas de bloques mediante una interfaz automática. Puede obtenerse gratuitamente en la dirección: http://www.eie.fceia.unr.edu.ar. Modelado y simulación de un caso de referencia En una primera aproximación la simulación de golpe de ariete se puede realizar con un sistema que se limita a una fuente de presión ideal, una tubería forzada y una válvula. Por ejemplo, un rechazo total de carga en una pequeña central hidroeléctrica puede estimarse simulando el cierre automático de una válvula inmediatamente antes de la entrada de la turbina. En esta aproximación se desprecia cualquier influencia de la turbina y del regulador de velocidad.
En la figura 3 se puede observar el esquema de un sistema físico como el mencionado para registrar resultados experimentales implementado por (Watt et al, 1980). Los registros obtenidos han sido utilizados en varias oportunidades para validar diferentes modelos matemáticos.
Figura 3: Esquema original del artículo de Watt..
En la figura 4 se muestra la representación con 20-SIM de un sistema como el esquematizado en la figura 3 mediante un diagrama híbrido, Bond Graphs más diagrama de bloques. A la izquierda del esquema se observa la fuente de presión Se y a continuación la tubería discretizada con un único circuito equivalente “π”. Este circuito consiste en la inertancia total I, ecuación 7, en serie (vínculo “1”) con la resistencia modulada total MR y la mitad de capacitancia total C, ecuación 8, en paralelo (vínculo “0”) en el extremo derecho La resistencia está modulada

La utilización de la técnica de bond graphs en... Martins, A. et al.
186
con el valor absoluto del caudal (|x|) para modelar su no linealidad, ecuación 9. La mitad de la capacitancia que correspondería al extremo izquierdo fue obviada por estar en “paralelo” con la fuente de presión ideal. A continuación está representada la válvula con una resistencia MR modulada también por el caudal, pero además por la ley de cierre de la válvula τ(t), ecuación 13, generada por los tres bloques de la derecha.
Figura 4: Modelo típico de Bond Graphs para simular golpe de ariete con 20-SIM
El registro experimental obtenido por Watt y sus colegas en el banco de ensayo se muestra en la figura 5. Los datos suministrados más algunos otros adicionales identificados del registro son: longitud de la tubería L = 15 m, diámetro D = 5 cm, factor de fricción f = 0.026, altura piezométrica H = 1.3 m, caudal inicial Q0 = 0.00319 m3/s, coeficiente inicial de la válvula (CdAG)0 = 0.00144, tiempo de cierre tc = 1 s, y la ley de cierre de la válvula τ(t) representado en los once tramos lineales que se muestran en la tabla 1 y figura 5.
τ t (s)1 0
0,900 0,200,634 0,400,328 0,520,201 0,5670,156 0,6280,145 0,7150,0917 0,8020,0793 0,8550,0687 0,8770,0258 0,9450,001 1
Tabla1: Ley de cierre de la válvula

Modelización Aplicada a la Ingeniería Martins, A. et al.
187
En la figura 5 se comparan los resultados de la simulación con Bond Graphs y
la tubería modelada mediante cuatro circuitos “π” con los registros experimentales, observándose una diferencia mínima desde el punto de vista práctico. La simulación muestra una gran correlación durante el segundo que dura el cierre de la válvula y alguna diferencia cuando la tubería oscila libremente después de culminada la maniobra. La similitud de la primera parte se debe a que el cierre de la válvula es lento con relación al tiempo de viaje de las ondas de presión en la tubería, por lo que el proceso está dominado por la inertancia, teniendo poca importancia cómo es modelada la capacitancia (concentrada o distribuida). Una vez que cierra la válvula la tubería oscila a su frecuencia natural y sus armónicos impares, proceso en el cual es importante la capacitancia y como está distribuida. Estos conceptos son de aplicación bastante general a las centrales hidroeléctricas donde se recomienda que los procesos de cierre sean lentos.
Figura 5: Transitorio de presión experimental y simulado con Bond Graphs.
La figura 6 muestra las simulaciones con Bond Graphs y el método de las
características haciendo un “zoom” entre 0.9 y 1.1 segundos, cuando se producen los picos de sobrepresión positiva y negativa y los mayores errores por la discretización del modelo de la tubería con Bond Graphs. Se comparan los resultados con la tubería modelada con un tramo, con cuatro tramos y con el método de las características. Se observa que los resultados son prácticamente

La utilización de la técnica de bond graphs en... Martins, A. et al.
188
coincidentes alrededor de la sobrepresión máxima, con alguna diferencia en el resto, más notable en la forma de las ondas que en los valores. Con un solo tramo la tubería oscila en forma “sinusoidal” y con una frecuencia algo menor, pero ya con cuatro tramos la solución se acerca al aspecto “triangular“ y a la frecuencia fundamental de la solución con el método de las características. Obviamente, la solución con modelos de tuberías con parámetros concentrados obtenida con Bond Graphs tiende a la solución con parámetros distribuidos obtenida con el método de las características al aumentar el número de tramos, debido simplemente al hecho de que ambos modelos matemáticos tienden a coincidir.
Figura 6: Simulación con el método de las características y Bond Graphs.
Conclusiones
El entorno gráfico de los simuladores basados en la metodología de Bond Graphs ha evolucionado notablemente en los últimos años tornándola una herramienta muy eficiente y de carácter universal para simular sistemas donde ocurren intercambios de energía entre componentes de naturaleza física distinta. La disponibilidad de versiones demo o inclusive gratuitas en la web la hacen muy atractiva para uso académico y de pequeñas empresas.
La simulación del golpe de ariete de un caso de referencia mostró resultados con una gran correlación con mediciones de laboratorio y simulaciones con el
Modelización Aplicada a la Ingeniería Martins, A. et al.
189
método de las características. La necesidad de discretizar la tubería no significó una restricción de importancia mostrándose que bastan unos pocos tramos cuando la maniobra de la válvula es lenta. Está claro que la metodología de Bond Graphs posee un gran potencial para la simulación de los diversos transitorios que pueden ocurrir en centrales hidroeléctricas.
Referencias Grainger, J. J. y Stevenson, W. D. (1997), Análisis de Sistemas de Potencia,
México: McGraw Hill. Greenwood, A. (1991), Electrical Transients in Power Systems, New York:
Wiley Interscience. Karnopp, D. C., Margolis, D. L., Rosenberg, R.C. (2000), System Dynamics
Modeling and Simulation of Mechatronic Systems,”USA: John Wiley & Sons.
Kofman, E. y Junco, S. (1999), “Un Ambiente Computacional para la Modelación
de Sistemas Dinámicos no Lineales con Bond Graphs,” RPIC, Argentina. Martins, A., Tiago Filho, G. L. y Laurent, R.(2003), “Bond Graphs versus
Mediciones de Laboratorio y el Método de las Características en la Simulación del Golpe de Ariete”, Revista PCH Notícias & SHP News 19 (5): 20-21, Brasil.
Martins, A. (2004), “O Uso da Técnica dos Grafos de Ligação para a Simulação
de Centrais Hidrelétricas em Regime Transitório,”Dissertação de Mestrado, UNIFEI, Brasil.
Martins, A., Tiago Filho, G. L. y Laurent, R.(2004), “Simulación de Transitorios
Hidromecánicos en Centrales Hidroeléctricas Utilizando Bond Graphs,” Mecánica Computacional XXIII: 3069-3077, Argentina.
Montbrum-Di Filipo, J., Delgado, M., Brie, C. y Paynter, H. (1991), “A Survey of
Bond Graphs: Theory, Applications and Programs," Journal of the Franklin Institute, 565- 606.
Souza, Z., Santos, A. y Bortoni, E. (1999), Centrais Hidrelétricas – Estudos
para Implantação, Brasil: Eletrobrás.

La utilización de la técnica de bond graphs en... Martins, A. et al.
190
Tiago Filho, G. L. (1994), “Aplicação do Método dos Gráficos de Ligações na Simulação de uma Válvula de Alivio, Anti-Golpe de Aríete, Auto Operada,” Tese de Doutorado, EPUSP, Brasil.
Watt, C.S., Boldy A.P. y Hobbs, J. M. (1980), “Combination of Finite Difference
and Finite Element Techniques in Hydraulic Problems,” 3ª International Conference on Pressure Surges, 43-62, England.
Wylie, E.B. y Streeter, V.L. (1990), Fluids Transients, USA: McGraw-Hill.

Modelización Aplicada a la Ingeniería
191
Simulación de procesos estocásticos aplicada a sistemas de transporte.
El caso del transporte de carga
ERICA MILIN Y SILVIA QUIROGA
Departamento de Sistemas, Facultad Regional Buenos Aires, Universidad Tecnológica Nacional, Argentina.
Introducción
En los últimos años, la globalización económica dio paso a conceptos de integración en el transporte automotor de cargas que fueron de alguna manera el motor que ha incrementado la operatoria que terminó con un notable aumento en las relaciones comerciales bilaterales. Se busca entonces corredores internacionales, pasos de frontera y todo otro medio que permita la unión de dos o más puntos internacionales para el intercambio de bienes en forma eficiente.
Este intercambio internacional de mercadería requiere de una serie de
actividades e infraestructura en la que interviene el sector público y el sector privado.
La existencia de corredores viales, el nivel de servicios; la documentación
exigida para realizar el transporte, los controles en ruta, las exigencias viales, los trámites de exportación/importación, los trámites aduaneros, entre otros, son dependientes de la actividad pública. Los vehículos, equipos, normas y prácticas comerciales, entre otros, son dependientes de la actividad privada.
El análisis de cada uno de los factores anteriores deberán ser tenidos en cuenta
a fin de proporcionar información suficiente a los fines de mejorar la relación costo/beneficio (u$s por tonelada/kilómetro transportada) y/o proponer diferentes soluciones tanto para el sector público como el privado (Demzuk, 2003).
Para lograr más eficientes sistemas de transporte se busca menores costos y
tiempos operativos y mejores y más confiables servicios, esto dependerá de la combinación de varias partes. Entre ellas un mejor aprovechamiento de las condiciones existentes y un análisis profundo de nuevas situaciones, que sólo puede lograrse mediante una simulación estocástica de los procesos en juego (Aracil, 1997), ya que mediante esta técnica es posible analizar situaciones que no existen y brindar posibles soluciones para su análisis, selección e implementación de mejores soluciones tendientes a minimizar costos e incrementar ganancias futuras (Forrester, 1968).

Simulación de procesos estocásticos, aplicada ... Millin, E. y Quiroga, S.
192
Simulación Estocástica La simulación es vista como una técnica fundamental para diversos ámbitos, y
permite una visión global del sistema en análisis y una comprensión acabada del mismo. Es además la herramienta fundamental para solucionar problemas (donde no pueden hacerlo otras disciplinas) tendiente a generar información para la toma de decisiones.
La simulación y en general todos los instrumentos relacionados con el procesamiento de la información forman parte de la interacción entre el conocimiento y la realidad (Börje, 1985).
Si seguimos visualizando el entorno que nos rodea y sus problemas mediante modelos perceptivos con el mismo nivel de simplificación que hace años, no habría necesidad de utilizar simulación. Ocurre que el mundo actual exige tomar decisiones mucho más ajustadas a las características del sistema real que se desea gobernar, y para ello nos vemos en la necesidad de utilizar modelos menos simplificados (Churchman, 1963). Para conocer el comportamiento de estos sistemas recurrimos a la simulación.
Entonces, la simulación puede ser considerada como un contexto de investigación que, aunque no difiere apreciablemente de la investigación tradicional, se caracteriza porque la frecuencia con que un experimento puede ser repetido modificando sus parámetros y las variables controlables es muchísimo mayor que la correspondiente a una investigación de campo. Posibilita repetir un experimento con sujetos y en contextos diferentes.
Clasificación de los modelos La realidad es lo suficientemente compleja para ser analizada sin realizar una
simplificación de aquellos aspectos que resultan irrelevantes para nuestros objetivos. Entonces un modelo es una simplificación de la realidad.
Según el punto de vista que se tome, el modelo representativo de una realidad puede ser clasificado en forma diferente, a saber:
Estático: Representa las relaciones de un sistema cuando está en régimen estacionario o en equilibrio.
Dinámico: Refleja los cambios un el sistema a través del tiempo; muestra la evolución del mismo desde el principio hasta el final.
Determinístico: Existen relaciones exactas para las características de operación, en lugar de funciones de densidad de probabilidad.
Estocástico: Un cambio en el modelo produce resultados aleatorios, es decir, que por lo menos una de las características de operación está dada por una función de densidad de probabilidad.
El mecanismo de flujo de tiempo La simulación permite construir un modelo a partir de la realidad, y operarlo a
lo largo del tiempo. Es entonces fundamental determinar cuál será el mecanismo

Modelización Aplicada a la Ingeniería Millin, E. y Quiroga, S.
193
de avance del tiempo, la manera en que simularemos que los eventos ocurren y la forma en que haremos que el tiempo transcurra.
A lo largo del tiempo en el modelo se pueden producir eventos "ei": El avance del tiempo en el modelo puede realizarse por incrementos variables
(evento a evento), o por incrementos constantes. Por eso existen, básicamente dos metodologías para incrementos del tiempo: a) Por incrementos variables (evento a evento) Proceso iterativo que permite lograr el avance del tiempo de un evento ei al
siguiente ei+1 y a través de su encadenamiento nos permite analizar el comportamiento del modelo.
b) Por incrementos constantes de tiempo: El incremento del tiempo (∆t) es siempre igual; durante el mismo pueden
ocurrir varios, uno o ningún evento. Este es un proceso iterativo que permite lograr el avance del tiempo de un tiempo ti al siguiente ti+1 y a través de su encadenamiento el funcionamiento del modelo.
En el caso que se quiere simular es el recorrido de uno o más vehículos de
carga en una traza determinada; los datos que arroja la realidad serán analizados como variables aleatorias (como se verá más adelante), ya que una simplificación (innecesaria) de los datos, para convertirlos en determinísticos, nos alejaría aún más de la realidad en estudio. Es por lo tanto necesario construir un modelo dinámico y estocástico (para mas detalle ver (Lakshamanan, 2002), y (Schmitt, 1986)).
Se elige como metodología para avanzar el tiempo aquella que nos permita simular la ocurrencia de un evento, y a partir de éste concatenar el siguiente para poder simular que una unidad de transporte recorre un determinado trayecto en el cual pueden a su vez ir sucediendo otros acontecimientos que irán reflejando distintas situaciones que deberá enfrentar el transportista en la realidad. La metodología elegida es la que permite simular el avance del tiempo por incrementos variables, que brinda información sobre la ubicación de una unidad por los distintos puntos que podremos identificar como críticos.
En la Figura 1 puede observarse cómo la simulación aporta información al
sistema general del transporte. Se puede apreciar la interacción de los sectores público y privado y la importancia de la simulación como investigación orientada a la mejora de todo el proceso. La simulación permite la generación de información válida, como así también información tendiente a analizar la relevancia e impactos que pueden generar nuevas inversiones.

Simulación de procesos estocásticos, aplicada ... Millin, E. y Quiroga, S.
194
Figura 1 Condiciones del transporte de carga.
El término corredor es utilizado en relación al comercio internacional y en particular en el transporte asociado al mismo. Es vinculado fundamentalmente a una dimensión geográfica en el desarrollo de esas actividades.
No obstante, conforme a la definición empleada por la CEPAL (Documento de la CEPAL: Los canales de comercialización y la competitividad de las exportaciones latinoamericanas (1992), un corredor es un concepto que integra cuatro componentes: normas y prácticas comerciales y financieras; exigencias gubernamentales; infraestructura, vehículos, equipos e instalaciones; y actores.
Estos cuatro componentes pueden ser constituidos, en alternativas decisorias utilizadas como variables controlables y planteados frente a distintos escenarios para su posterior simulación.
Sector Público Exigencias Gubernamentales
Infraestructura Vial, etc.
Sector Privado Vehículos, Equipos e Instalaciones
Prácticas comerciales, etc.
SIMULACIÓN Investigación,
Análisis de nuevos escenarios, etc.
Condiciones del Transporte: Menores Costos y Tiempos
operativos
Datos Escenarios
Alternativas Decisorias
Alternativas Decisorias
Datos Escenarios
Sistema de transporte y simulación
Modelización Aplicada a la Ingeniería Millin, E. y Quiroga, S.
195
La búsqueda continua de menores costos en el transporte por carretera ha impulsado una tendencia creciente en cuanto a tener en cuenta diversos factores, entre ellos la infraestructura, relacionado también con las dimensiones y pesos por eje de los vehículos.
La falta de homogeneidad en los distintos países y entre países, en cuanto a la infraestructura vial, hace que los efectos de las restricciones existentes en un tramo de la red asiento de un corredor de transporte internacional, se extiendan al mismo, traduciéndose en mayores costos en los tráficos involucrados.
Dicha falta de homogeneidad se detecta no sólo en el ámbito señalado por la Red de Transporte del Cono Sur de América sino también en un mismo país como es el caso de la República Argentina.
La inseguridad en cuanto a la posibilidad de circulación ininterrumpida en un corredor ocasiona graves perjuicios a los diferentes actores en la cadena de transporte.
Existen diferentes ejemplos de corredores de transporte operativos en los que se producen interrupciones en la circulación por motivos climáticos, asociados generalmente, aunque no en todos los casos, al mal estado de la infraestructura.
Algunas de estas condiciones, las más relevantes, serán tenidas en cuenta a la hora de la simulación; o bien se comportarán como distintas alternativas decisorias a fin de analizar el comportamiento del sistema a partir de la información generada por el modelo.
Un denominador común de la situación de los diferentes países de América del Sur es, sin lugar a duda, la falta de disponibilidad de recursos para encarar obras de infraestructura de transporte, sean éstas destinadas a dar satisfacción a necesidades internas o a contribuir con los procesos de integración bilateral o multilateral.
Las inversiones en infraestructura y el desarrollo económico de las regiones están relacionadas por el impacto sobre los costos empresarios. También tienen la capacidad de hacer más eficientes las cadenas de provisión de insumos, de almacenamiento y de distribución, aumentando la productividad de los factores, el bienestar de la población, y la competitividad. Simulación de una traza
Se vio en el análisis precedente que se produce actualmente una marcada subutilización del bien de capital que no resulta aprovechado en la forma en que debería por la falta de conocimiento de las distintas alternativas posibles.
La simulación permite analizar las demoras que existen en los diferentes puntos conflictivos y lograr mediante el conocimiento de la traza el traslado del bien de capital en el menor tiempo posible y con el menor costo posible, aspectos que pueden considerarse con cambios en la práctica operativa.

Simulación de procesos estocásticos, aplicada ... Millin, E. y Quiroga, S.
196
Si consideramos por ejemplo, el corredor entre las ciudades de Buenos Aires (Argentina) y San Pablo (Brasil), ya que el mismo es transitado por mas de 800 vehículos de transporte de carga por día (como se analizará más adelante), es necesario realizar un análisis más profundo del mismo, considerando las distintas alternativas decisorias de la traza.
Alternativas decisorias (distintas hipótesis para el análisis de una traza): Se deberá definir, previo al planteo de las distintas alternativas, la
conformación de la traza, como la determinación de los puntos conflictivos de la misma, a saber: Horarios de atención en los puestos de frontera. Distintos itinerarios dentro de la misma traza. Análisis referido a las horas de conducción, sólo un conductor, doble
conducción, sistema de postas. Variación de los tiempos de control en frontera. Utilización de distintos tipos de unidades según capacidad de carga:
tractores- camiones, acoplados – semirremolques, utilización de unidades de mayor porte (b-dobles).
A partir de la determinación de las distintas alternativas, se procederá a la recopilación de la información en forma de datos estocásticos representativos de la realidad, expresados a través de funciones de densidad de probabilidad a fin de expresar distintos escenarios Tiempo de recorrido, dependiente de: ciudad- ruta, tipo de camino, ruta-
autopista, velocidad máxima de acuerdo al tipo de carga transportada, analizada por tramo. Demora en la atención en la frontera. Demora en la carga en origen. Demora en la descarga en destino.
Los datos anteriores se complementarán con situaciones de entorno que pueden afectar el modelo, como por ejemplo incidencia climática, desperfectos mecánicos aleatorios, etc.
Los resultados que se espera obtener a partir de la simulación, para confrontar con los distintos escenarios, son entre otros: ventaja en la utilización de los vehículos de gran porte respecto a los semirremolques actuales, costo total promedio por tonelada transportada, tiempo promedio del recorrido, etc.
Así también es importante destacar que la simulación, por sí misma, permitirá realizar un análisis profundo del comportamiento del sistema en la traza analizada, pudiéndose observar claramente los mayores puntos conflictivos, las demoras asociadas, etc., que permitirán a los sectores público y privado tomar las medidas correctivas necesarias para la mejora de todo el sistema. A modo de ejemplo:

Modelización Aplicada a la Ingeniería Millin, E. y Quiroga, S.
197
Figura 2
Traza 1 Paso de Frontera: Paso de los libres / Uruguayana

Simulación de procesos estocásticos, aplicada ... Millin, E. y Quiroga, S.
198
Alternativas decisorias Las alternativas decisorias para el análisis son las siguientes: 1) La utilización de un paso de frontera entre los siete pasos existentes. 2) La cantidad de choferes que se asignan a un vehículo. 3) Los distintos horarios operativos de las aduanas según el paso. Opción Número 1: (Figura N°2, sintetizada en Figura N°3) 1) Itinerario Buenos Aires (AR) San Pablo (BR) a través del Paso fronterizo
Paso de los Libres (AR) – Uruguayana (BR) 2) La traza completa estará a cargo de un solo conductor. 3) Los controles en frontera operan en forma ininterrumpida.
Figura 3
Opción Número 2: 1) Itinerario Buenos Aires (AR) San Pablo (BR) a través del Paso fronterizo
Paso de los Libres (AR) – Uruguayana (BR) 2) La traza completa se realizará mediante el sistema de doble conducción (o
sistema de postas) 3) Los controles en frontera operan en forma ininterrumpida
Escenarios Posibles • La carga transportada se realiza en aduana de origen. El tiempo estimado
para la carga e intervención aduanera en origen responde a una función de
Traza 1 Paso de Frontera: Paso de los libres / Uruguayana
Argentina
Brasil

Modelización Aplicada a la Ingeniería Millin, E. y Quiroga, S.
199
densidad de probabilidad entre 3 y 6 horas equiprobable. Estos valores contemplan un tiempo efectivo de carga del camión y un tiempo similar para la realización de los controles aduaneros el dato es estocástico ya que existen tiempos evitables que son atribuibles a la falta de presencia oportuna de los agentes aduaneros.
• La cantidad de horas diarias que puede trabajar un conductor es generalmente inferior a 14, que se materializa en el horario de 6 a 20 hs.; dentro del mismo se contemplará un tiempo de ocurrencia aleatoria y estocástico de “detención” ocasionado por refrigerio, descanso, etc.
• La velocidad de un vehículo de carga en la traza analizada puede variar entre 40 y 54 km. por hora, respondiendo a una función de densidad de probabilidad.
• La velocidad en la traza analizada en zonas urbanas y en acceso a ciudades puede disminuir en un porcentaje de aproximadamente 10%.
• Se analizarán restricciones de capacidad en las rutas utilizadas y controles policiales que impliquen demoras, tomadas como porcentajes.
• Existe un porcentaje de disminución en la velocidad dada por las influencias climáticas que pueden afectar el recorrido.
• El tiempo de los controles en frontera se estima en una función de densidad de probabilidad conocida entre 3 a 6 horas.
• En el paso utilizado, el tiempo insumido para la liberación de los vehículos que ingresan al Brasil es un valor estocástico, equiprobable de 3 a 8 horas.
• El tiempo de descarga de la unidad en destino responde a un valor estocástico (función de densidad de probabilidad de entre 2 y 6 horas).
El modelo con el que se efectúan las corridas puede verse en la figura N° 4.

Simulación de procesos estocásticos, aplicada ... Millin, E. y Quiroga, S.
200
CONDICIONES INICIALES
IS
T = TPS
TPS = T + IS
TA = T NC = NC + 1
Carga en Origen (CO)
TS = TA + CO
Tramo Zona Urbana Bs . As. (TZUBA)
TFZU = TS + TZUBA
Tramo Ruta Bs. As. (TRBA)
TLLB = TFZU + DA
R1 < PP
R1
TFZU = TFZU + DEPP
DEPP
R2 < PC
R2
TFZU = TFZU + DEPC
DEPC
Fijación de las condiciones iniciales del modelo
Avance del tiempo a Tiempo de salida del camión
Generación de Intervalo entre Salidas de camiones
Determinar el Tiempo en que saldrá el próximo camión
TA: Tiempo de Arranque - NC: Contador de Camiones
Generación de la Demora de Carga en Origen
TS: Tiempo de Salida a ruta
Generar Tiempo de recorrido del Tramo
TFZU: Tiempo en que llegó a fin de Zona Urbana
Generar Tiempo de recorrido del Tramo
Generar número aleatorio entre 0 y 100
Si existe la probabilidad de Control Policial , se suma esa Demora (que es generada)
Si existe la probabilidad de Demora por Problemas Climáticos , se suma esa Demora (que es generada)
R3 < PR
R3
TFZU = TFZU + DEPR
DEPRSi existe la probabilidad de Demora por Refrigerio,
se suma esa Demora (que es generada)
Tramo Zona Urbana Brasil (TZUB)
TFZUB = TLLB + TZUB
Tramo Ruta Brasil (TRB)
Generar Tiempo de recorrido del Tramo
TFZUB: Tiempo en que llegó a fin de Zona Urbana (Brasil)
Generar Tiempo de recorrido del Tramo
Demora En Aduana (DA)
TF = TFZUB + TRB
STR = STR + (TF – TA)
TF: Tiempo de Fin de Recorrido
STR: Sumatoria de Tiempos de Recorrido
T > TF¿Fin de Simulación? PR= STR /NC
TLLB: Tiempo de llegada a Brasil
NO SI PR: Promedio de Tiempos de Recorrido(En relación a cada variable de Control)
Figura 4

Modelización Aplicada a la Ingeniería Millin, E. y Quiroga, S.
201
Resultados obtenidos En la tabla que sigue se muestran los resultados obtenidos desagregados en
cada una de las alternativas decisorias y las etapas de cada tramo. Se simularon 1000 camiones para cada opción. Para la columna “ponderación” se consideró como 100% el total de tiempo
insumido en el recorrido, de modo tal que se expresa el porcentaje de tiempo que se dedico a cada tramo.
Etapas del Tiempo promedio en horas Ponderación
Viaje Opción 1 Opción 2 Opción 1 Opción 2 Carga y aduana en origen 4 4 4% 6,25% Salida de zona metropolitana 1 1 1% 1,56% Tramo Autovía 2 2 2% 3,12% Tramo Bs. As. – Frontera por ruta Nacional 19 12 19% 18,75% Tiempo en frontera 6 7 6% 10,93 Tramo Frontera - San Pablo por ruta 55 26 55% 40,62 Ingreso zona metropolitana 9 8 9% 5,12% Descarga 4 4 4% 6,25% Tiempos totales 100 64 100% 100%
Figura 5 Las diferencias fundamentales entre las dos opciones se notan en los tramos de
ruta (marcados en negrita en el cuadro), ya que ahí incide la diferencia de la doble conducción. El tiempo de ruta en la traza es superior al 60% con cualquier modalidad.
Los tiempos restantes: carga, descarga, aduana, etc., no inciden en la doble conducción, y esto se notó en los resultados de la simulación.

Simulación de procesos estocásticos, aplicada ... Millin, E. y Quiroga, S.
202
Con respecto a los porcentajes de detención, debido fundamentalmente a los cambios climáticos y/o controles policiales, no influyó de manera significativa en la corrida del modelo, ya que no alteró el tiempo promedio final de recorrido de los vehículos.
Conclusiones
La simulación estocástica aplicada al sistema de transporte de carga, permitió realizar un análisis particular en la traza Buenos Aires – San Pablo, considerando dos alternativas decisorias, como fue el caso de la simple y doble conducción.
Cabe aclarar que esta decisión corresponde al ámbito privado, pudiéndose analizar de igual forma aspectos vinculados al sector público como por ejemplo infraestructura, atención de aduanas, entre otros.
Asimismo, sería oportuno realizar un análisis de costos, que puede concluir
con la adopción, o no, de una de las dos alternativas. De acuerdo al análisis precedente, puede verse que la simulación estocástica
orientada a la toma de decisiones resulta ser una herramienta de fundamental importancia ya que la misma permite, en forma dinámica, reproducir procesos reales a lo largo del tiempo.
Referencias Aracil, J., y GORDILLO, F., (1997). “Dinámica de sistemas”, Alianza, Madrid.
Börje, L., (1985). “Teoría de los Sistemas de Información“ , El Ateneo, Buenos Aires.
Churchman, C. W., (1963). "An Analysis Of The Concept Of Simulation". Simposium on Simulation Models, Edit. South-Western Publishing Co., Cincinnati.
Demczuk, I. y DOMECQ, R. (2003). “MERCOSUR, Experiencia en el Desarrollo Regional del Transporte de Cargas, Transporte de Carga por Automotor”, Instituto de Investigación para el Desarrollo y Finanzas. Banco de Japón para la Cooperación Internacional (JBIC), Buenos Aires.
Forrester, J. (1968). “Principles of Systems”, Productivity Press.
Lakshmanan, T. R. and ANDERSON W. P. (2002). “Transportation Infrastructure, Freight Services Sector and Economic Growth”; Report; Center for Transportation Studies; Boston University; January.

Modelización Aplicada a la Ingeniería Millin, E. y Quiroga, S.
203
Rheault, J. P.,(1973). “Introducción a la Teoría de las Decisiones con Aplicaciones a la Administración”, Limusa, México.
Schmitt, J. E. (1986). "La Revolución Informática". UNESCO-KOSTLAC. Boletín MCII, Año 4 Nro 2 (noviembre 1986).

Modelización Aplicada a la Ingeniería
204
Modelación del flujo alrededor de un cilindro infinito: Métodos de Lagrange – Volúmenes Finitos
MOLINA, Norberto Eduardo a, b,
a Departamento de Ingeniería Mecánica, Pontificia Universidade Católica, Río de
Janeiro, Brasil. b Departamento de Ingeniería, Universidad Nacional del Sur, Bahía Blanca,
Buenos Aires, Argentina.
Introducción El objetivo es modelar numéricamente el flujo externo en torno de un cuerpo
cilíndrico de una corriente laminar, incompresible, permanente y bajo número de Reynolds. Se utiliza una combinación de los métodos de Lagrange y de Volúmenes Finitos, para resolver las ecuaciones de conservación. Se emplea en la formulación el sistema de coordenadas curvilíneas (o generalizadas), a partir de la solución potencial. Se visualiza el campo de velocidades, en particular la distribución en zonas próximas a la superficie y el perfil de presiones; determinándose el coeficiente de arrastre en la superficie sólida. Los resultados son evaluados y comparados con datos publicados tanto de experiencias de laboratorio (Tritton, 1959), (Taneda y Sadatoichi, 1957), (Underwood, 1969) como numéricos (Molina, 1990). Revisión de la literatura
Las experiencias de laboratorio, exhaustivas y costosas, acompañaron el desarrollo tecnológico en todo aquello que se relacionaba con el desplazamiento de un cuerpo en un medio fluido; no obstante ello se desarrollaron técnicas numéricas que permitieron analizar el comportamiento de los distintos tipos de flujos, Figura 1, facilitando en algunos casos la interpretación del efecto de éste sobre el cilindro, y a la inversa. Uno de los primeros métodos para resolver las ecuaciones de conservación fueron las diferencias finitas (centradas), altamente dependiente del modelado de los términos convectivos (no lineales). Posteriormente, dependiendo de la característica de la malla y ubicación de las variables donde los fenómenos de convección son dominantes y la no incidencia de los valores del vector velocidad corriente abajo con los de corriente arriba (nodos de interpolación próximos en la dirección y sentido del flujo), el método de diferencia corriente arriba (o del tipo upwind) (Patankar, 1980), (Maliska, 1986). En ambos casos se presentaron fenómenos de ‘falsa difusión’. Las mejoras al utilizar el método de los volúmenes finitos en el modelado de geometrías

Modeación del flujo alrededor de un cilindro infinito... Molina, N.
205
arbitrarias resultan de obtener la conservación global de las magnitudes físicas y ecuaciones lineales, teniendo especial cuidado en el tratamiento de los términos de acoplamiento entre la presión y la velocidad, la orientación de los elementos y el refinamiento. La formulación incompresible restringe a que la densidad se considere constante, originando la solución potencial o de vorticidad. La introducción del concepto de variables primitivas de los términos convectivos (formulación de Lagrange), permite resolver el problema de acoplamiento y extender el análisis a fenómenos reales (tridimensionales). Las velocidades características, en cada instante de tiempo así como la posición de las partículas involucradas, se calculan mediante el empleo de las características.
1Re <<
1Re ≈
210Re ≈
310Re ≈
510Re >
Flujo permanente
Flujo permanente, sin circulación
Flujo permanente, con circulación
Estela con vórtices estables
Estela turbulenta, no
estable
Figura 1: Esquema del flujo.
Basados en la teoría clásica, distintos investigadores realizaron experiencias de laboratorio, logrando establecer rangos de números de Reynolds y fenómenos característicos en condiciones semejantes. Particularmente algunos de estos resultados se utilizan para corroborar los datos obtenidos por técnicas semi-analíticas y / o numéricas. En presente trabajo, se comparan las resultados con valores dados por (Taneda y Tadatoichi, 1957), (Tritton, 1959), (Underwood, 1969), (Nishioka y Sato, 1974) , obtenidos experimentalmente; verificándose entre otras la solución de Ossen para 1Re = (Schlichting, 1948). Para números de Reynolds mayores a 10 , el flujo deja de comportarse como un flujo simétrico estable, debido al desprendimiento de la capa límite y posterior generación de vórtices, estables y asimétricos (Gresho et al, 1978), (Jordan y Stanley, 1972), (Roache, 1980). Desarrollo matemático
La ecuación de transporte se obtiene a partir de la ecuación de conservación para el flujo neutoniano, donde la viscosidad (absoluta) se mantiene constante. En

Modelización Aplicada a la Ingeniería Molina, N.
206
el caso de Euler, la fuerza del cuerpo es despreciable. La ecuación completa es no lineal y acoplada. La aceleración convectiva queda definido por:
( )VVVt
VtD
D ∇•+∂∂= . (1)
El modelado en el presente trabajo consiste en un enfoque lagrangeano. ),(),( tMtMF
tDD φ= . (2)
Definida una función ),( tMF , en el tiempo t de posición M , sobre una curva perteneciente al plano ),( tM ; si la función permanece constante, se obtienen soluciones para los diferentes instantes de tiempo, a partir de la ecuación diferencial. La hipótesis del movimiento de partículas asociadas al fluido, resulta al integrar la ecuación (2) como sigue:
),(1*1 trFF n
n
tt
nk φ∫ +=−+ , (3)
1+nkF , corresponde al instante )1( +n en el nodo k ; mientras que la función *F corresponde al valor de interpolación asociado a los nodos vecinos. La
integral de línea para una formulación implícita tiene solución exacta al sustituirse por una integral simple. En forma discreta, se tiene lo siguiente:
tFF n
n
tt
nk δφ 1*1 +=−+ . (4)
Luego las ecuaciones de transporte en notación discreta, son
( ) 121*11 +++∇+∇−=−
∂nnn
VpVVt
µρ , (5)
01
=⋅∇+n
V . (6)
La función característica discreta en correspondencia al los nodos vecinos resulta
( ) 121*11 +++∇+∇−=−
∂nnn
VpVVt
µρ . (7)
Al aplicar la divergencia en ambos términos de la ecuación (5), el sistema se transforma en elíptico y desacoplado, ecuación (8); con lo cual, conocidos los valores de la función en un instante, se calculan los valores de la funciones para otro instante cualesquiera )1( +t ; introduciendo las condiciones de contorno establecidas, en el esquema del problema estudiado, Figura 2.
( ) 12*1 +∇=•∇∂
npVt
ρ . (8)

Modeación del flujo alrededor de un cilindro infinito... Molina, N.
207
Geometría y coordenadas adoptadas En la Figura 2 se especifican las condiciones de contorno para el flujo
estudiado, la sección del cilindro de longitud infinita, y superpuestas las coordenadas en correspondencia con la solución de un potencial (coordenadas cilíndricas), simétrico respecto al eje de abscisas ξ , el radio del cilindro es ‘ a ’ y
∞U la velocidad alejada del cuerpo. (Thomson et al,1982)
Figura 2: Geometría, coordenadas y esquema del flujo; condiciones de contorno.
El sistema ortogonal adoptado simplifica el análisis de las componentes del
campo de velocidades, en sus direcciones, en coincidencia con la solución de un potencial en las fronteras; introduciendo condiciones de Neumann para el caso particular en el cual es necesario cuantificar el gradiente de la presión derivado de la ecuación de conservación. Sobre la superficie sólida, el gradiente de presión normal se desprecia, debido a lo extremadamente pequeño del valor de la componente normal de la velocidad (teoría de la capa limite) (Thomson, 1984). Adimensionalización de las variables involucradas
Con el objeto de identificar los parámetros predominantes del fenómeno físico, se definen el diámetro del cilindro como aD 2= y la velocidad sin perturbar igual a ∞U (flujo de corriente libre). Manipulando algebraicamente las ecuaciones se obtienen los demás términos: operador gradiente, Re, etc. Las ecuaciones resultantes de velocidad característica: *V , son
01 1'2'*''' =∇+•∇ +npV
tδ, (9)

Modelización Aplicada a la Ingeniería Molina, N.
208
01Re1 *'
1´'
1'2'1'' =⎟
⎠⎞⎜
⎝⎛ −−∇+∇
+++ VVt
Vpnnn
δ. (10)
Ecuación en coordenadas curvilíneas
Escribiendo las ecuaciones de transporte en forma más general (u escalar), e introduciendo el concepto de término fuente asociados a la velocidad y la presión, junto a las métricas o coeficientes de curvatura:
ϑξ cos2
⎟⎟⎠
⎞⎜⎜⎝
⎛+= ∞ r
arU , (11)
En el caso de la velocidad, los términos fuentes asociados cambian, debiéndose calcular en cada una de las respectivas direcciones de las componentes de la función velocidad; y los vectores unitarios: ξe( y ηe( , no son constantes.
La velocidad característica en sus componentes:
Para la presión, función escalar, los términos fuentes son: 0=PS y 0=CS .
Para el caso de la dirección ξ , y V=Φ : *11 V
tpSC δνξµ
∂+∇∂∂−= , (16)
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂−−=
22
22
111ηξ
ηξ ξηδνhh
hhtSP , (17)
Método numérico
En el primer paso, se resuelve las ecuaciones de conservación, utilizando el enfoque lagrangeano, haciendo uso del método de las características, y resolviendo el sistema, mediante Runge-Kutta de segundo orden. Definida la velocidad característica *V , correspondientes al nodo ( ** , ηξ uu ), de radio *r ; para
ϑη senr
arU ⎟⎟⎠
⎞⎜⎜⎝
⎛−= ∞
2
, (12)
ηηξξ eueuV (( += . (13)
ηηξξ eueuV (( *** += . (14)
011 =Φ++⎟⎟⎠
⎞⎜⎜⎝
⎛Φ
∂∂−
∂∂+⎟
⎟⎠
⎞⎜⎜⎝
⎛Φ
∂∂−
∂∂
PC SShh
hhhh
hh ηηξξ η
ξ
ηξξ
η
ξη
, (15)

Modeación del flujo alrededor de un cilindro infinito... Molina, N.
209
el nodo ),( ji e instante nt = . Para el paso siguiente, se deben resolver las ecuaciones elípticas, en las que se involucran las componentes de la velocidad (ambas direcciones) y la presión utilizando el método de los volúmenes finitos (dirección ξ ):
( )ηξξ ξξ ,nutd
dh = . (18)
La condición de régimen permanente se obtiene cuando no hubiere variación
en el tiempo del campo de velocidades y de presión en cada punto nodal de la malla de cálculo definida.
Los polinomios para realizar las interpolaciones para tener en cuenta las grandezas físicas en los nodos vecinos y en cada una de las direcciones, son:
2ξηξηξξ edcbau ++++= , (19)2ηηξηξη EDCBAu ++++= . (20)
Método de los volúmenes de control (finitos): generalidades
El método consiste en subdividir el dominio de cálculo computacional o volúmenes de control discretos, asociando cada uno de estos a un nodo de la malla previamente definida. Los puntos o nodos vecinos se indican con letras mayúsculas, a saber: N, norte; S, sur; W, oeste y E, este. Almacenando en cada uno de los centros geométricos de los volúmenes de control el valor de la presión (líneas llenas, en la Figura 3) y en correspondencia con ésta, las velocidades en sus respectivas direcciones, almacenadas en las caras del respectivo volumen de control en la Figura 3, líneas de trazo (indicadas con letras minúsculas).
Figura 3: Esquema del malla y volumen de control.
La ecuación más general en el sistema de coordenadas curvilíneas, en la cual las métricas en cada una de las direcciones resultan iguales: ηξ hh = , es
Presión
Volumen de control Velocidad
Cara

Modelización Aplicada a la Ingeniería Molina, N.
210
Al integrar la ecuación en el volumen finito, con la hipótesis de que los términos fuentes 1CSC = y 2CS P = , permanecen constantes al ser evaluados en el nodo central resulta
( ) 02 =∆∆Φ++⎥⎥⎦
⎤
⎢⎢⎣
⎡∆⎥
⎦
⎤Φ
∂∂−⎥
⎦
⎤Φ
∂∂+
⎥⎥⎦
⎤
⎢⎢⎣
⎡∆⎥
⎦
⎤Φ
∂∂−⎥
⎦
⎤Φ
∂∂
PPPPCPWe
PSn
hSS ξηηξξ
ξηη
(22)
Asumiendo para la función interpolación, entre los nodos principales vecinos, un perfil con características lineales.
El término fuente para la presión es nulo, y los coeficientes del polinomio (de la velocidad), en cada fase están dados por
La ecuación discreta del término fuente, para la presión es
( ) ( )⎥⎦
⎤⎢⎣
⎡−
∆+−
∆−= ssnn
Pwwee
PPC uhuhuhuh
thS
ηξδρ 11
2. (24)
En la componente de velocidad ξu para los puntos ( ), Pw ηξ el polinomio es buauauauaua ssnnwwwweeww ++++= , (25)
s
we
n
ww
w
Pww
P
Pe aaaa
ηξ
ηξ
ξη
ξη
∂∆
=∂∆
=∂∆
=∂∆
= ,,, , (26)
la ecuación discreta del término fuente, para la velocidad (dirección ξ ), es
( ) ( )⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡−
∆+⎥
⎦
⎤⎢⎣
⎡−
∆−=
22
,,4
11WP
Pswsnwn
PwP hhhh
hS
ξηρ . (27)
Generación de la malla dominio de cálculo
El criterio adoptado es de que las interfaces (sólido - fluido) deben coincidir con las caras del volumen de control definido, y en el caso particular el espesor de éste es la unidad. Sobre el contorno, el espesor del volumen de control es nulo, de esta forma, el centro del mismo coincide con el nodo. El método descrito es similar al sugerido por (Patankar, 1980), método B; donde se especifican las coordenadas (
ji vu ηξ , ) o lo que es igual al nodo ( SW ηξ , ) en la Figura 4 puede observarse las características de la malla desarrollada: no uniforme en la dirección η , incrementándose en número de nodos en la proximidad del cuerpo con el
012 =++⎥
⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛Φ
∂∂
∂∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛Φ
∂∂
∂∂
PC SSh ξξηη
. (21)
S
PS
n
PN
W
PW
n
PE aaaa
ηξ
ηξ
ξη
ξη
∂∆
=∂∆
=∂∆
=∂∆
= ,,, . (23)

Modeación del flujo alrededor de un cilindro infinito... Molina, N.
211
objeto de aumentar la sensibilidad de captación de los efectos físicos, donde j es el incremento ( 22 +≤≤ VCNj ).
La formulación de recurrencia utilizada para generar las ordenadas en correspondencia con las caras de los volúmenes de control es
( )[ ] ∞−= ηη ψjj VCVC Nj /2 . (28)
En abscisas, el dominio se dividió en cuatro regiones en correspondencia con el flujo y líneas típicas de solución de un potencial, para la distribución de la velocidad nula (punto de estancamiento, delante y detrás del cilindro) y la máxima, sobre la vertical al centro del cilindro. Como ejemplo, para la región II,
02 ≤≤− ∞ jaU ξ donde 23211++≤≤+
ξξξ VCVCVC NNjN , es
( )⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +−−−= ∞
2
2
12
12ξ
ψ
ξ
ξξVC
VCju N
NjaU .
(29)
Cálculo de las métricas
El cálculo de las métricas se realiza a partir de la posición ξ y η , de cada nodo, determinando el valor en coordenadas cilíndricas r y ϑ ; junto a las operaciones de cálculo para resolver el polinomio solución. Sistema de ecuaciones algebraico: cálculo
El sistema constituido como resultante al discretizar las ecuaciones de conservación se resuelve a partir del empleo del método TDMA (Three dimentional method approach) línea por línea, en las cuatro direcciones: de arriba hacia abajo, retornando intervalo a intervalo y posteriormente desde la izquierda hacia la derecha, retornado en la dirección contraria (iteraciones). A partir de un conjunto de valores definidos (en cada línea) del dominio (Raithby y Scheider, 1979), (Patankar, 1980). Se introdujo el algoritmo de corrección por bloques (Settari y Aziz, 1984).
Como criterio de convergencia se aplica el método de los residuos. La ecuación general discreta es
baa nbnbPP +Φ=Φ ∑ . (30) Con el objeto de establecer en forma porcentual un criterio de aceptación se
aplico el residuo medio para el número total de nodos internos N , esto es ∑ =
= N
P Presto RR1
2100 . (31)

Modelización Aplicada a la Ingeniería Molina, N.
212
Resultados Dada la condición de bajos números de Reynolds, como hipótesis, las corridas
de ejecución del programa correspondieron a valores de Re iguales a 0.4; 0.416; 1.00; 1.06; 1.32; 1.60; 1.64; 3.51; 5.00; 5.45 y 10.00.
Se definió el dominio de cálculo en ordenadas quince veces el radio del cilindro, estableciéndose para abscisas diez y cuarenta veces el radio del cilindro delante y detrás de éste.
La tolerancia para el residuo, para el cual no varían los valores de presión en cada uno de los nodos del campo, es un valor menor a 10-3.
El intervalo de tiempo de cálculo satisface en todo instante las condiciones -CFL- Courant, Frierich y Lewis, (Courant, 1952): 10.0=t a 001.0=t .
N°de Reynolds Malla
(n° nodos) CPU (s)
Coef. arrastre
Error (%)
0.1 40x15 58x20 74x25
8209 61.76 64.26 62.38
*** 3.9 3.0
0.4 40x15 58x20 74x25
8542 19.22 19.14 19.21
*** 0.4 0.3
1.0 40x15 58x20 74x25
12022 9.90 9.54 9.78
*** 3.8 2.3
Tabla 1: Coeficiente de arrastre vs. tamaño de la malla.
En la Tabla 1 se indica el número de nodos correspondiente a las mallas utilizadas para la modelación y simulación del flujo para bajos números de Reynolds alrededor de un cilindro.
Figura 4: Malla de 74x25 nodos.

Modeación del flujo alrededor de un cilindro infinito... Molina, N.
213
En la Figura 4 se ilustra una de las mallas. El equipo utilizado ‘main frame’ es un CYBER 750, y el equipo gráfico un Plotter Calcop 1044/GT/01 S6224004. El algoritmo de cálculo fue escrito en lenguaje FORTRAN, y el Software gráfico NACAR. Los valores para el exponente kΨ (distribución de nodos no uniforme) en la dirección η=k son ηΨ : 2.25, 1.90 y 1.85 respectivamente. Se utilizaron en la dirección ξ para las regiones I y IV los siguientes valores, ξΨ : 0.475 y 1.65; 0.55 y 1.80; y 0.375 y 1.75; y en las regiones II y III, ξΨ =1, en cada malla analizada, (Thomson, 1984).
En las Figuras 5 (a) y (b), se representan los esquemas de mallas desplazadas, el volumen de control y nodos correspondientes a la presión y velocidad, para diferentes situaciones de interpolación y direcciones.
Figura 5 (a) y (b): Esquema de las mallas, volumen de control y nodos.
En las figuras siguientes se representan los valores de la presión adimensional para diferentes mallas y números de Reynolds; se observa resultados concordantes.
β (grados)
20.0
Malla 40 x 15 Malla 58 x 20 Malla 74 x 25
Coef. de presión, Re = 0.1
Volumen de control
Velocidad
Cara
β (grados)
Coef. de presión, Re = 0.4 Malla 40 x 15 Malla 58 x 20 Malla 74 x 25

Modelización Aplicada a la Ingeniería Molina, N.
214
Figura 6: Distribución de presión, 1.0Re = (a) y 4.0Re = (b). Se representan en la Figura 7 (b) los valores de la velocidad adimensional
para diferentes mallas, observándose un comportamiento acorde a la ausencia de
recirculación (no hay separación de la capa límite cuando 02
2
≥∂∂
ξξu ),
(Lighthill, 1963) .
Figura 7: Distribución de presión (a) y velocidad (b).
Figura 8: Distribución de tensión, 1.0Re = (a) y 4.0Re = (b).
En las Figura 8 (a) y (b), se representan los valores de la distribución de
tensión ( Cf adimensional vs. β grados) para diferentes mallas, observándose de que ésta es nula en los puntos de estancamiento, no detectándose separación en proximidades de estos puntos (gradiente de presión adverso nulo) (Madelaine 1977). La diferencia es del orden 0.60 % para las mallas de 58x20 y 74x25 nodos, similares con valores obtenidos en experiencias de laboratorio. El perfil de la
β (grados)
Coef. de presión, Re = 1.00 Malla 40 x 15 Malla 58 x 20 Malla 74 x 25
Distrib. de velocidad, Re = 0.1
Malla 40 x 15 Malla 58 x 20 Malla 74 x 25
eloc
idad
Distrib. de tensión Re = 0.1 Malla 40 x 15 Malla 58 x 20 Malla 74 x 25
β(grados)
Distrib. de tensión Re = 0.4 Malla 40 x 15 Malla 58 x 20 Malla 74 x 25
β(grados)

Modeación del flujo alrededor de un cilindro infinito... Molina, N.
215
distribución de velocidad es el esperado en la dirección del flujo, debido a la ausencia de circulación.
En las Figura 9, se representan los valores de arrastre Cd para diferentes mallas, junto a los resultados obtenidos por otros autores en forma experimental (Lamb, 1952), (Tritton, 1959), (Underwood, 1969) y en proximidades de estos, sobrepuesto a la curva dada por (Schlichting, 1965); la diferencia es del orden 5.00%.
Figura 9: Coeficiente de arrastre o de resistencia Cd .
Se agregan los resultados obtenidos para las simulaciones con la condición de
Courant, y un número mayor de Reynolds.
Figura 10: Distribución de presión 00.5Re = .
En las Figura 10, se representan los valores de distribución de presión
adimensional, sobre el semi-cilindro, para diferentes mallas (Kawaguti, 1959a,b).
Presente trabajo Malla 58 x 20 Malla 90 x 27
β(grados)
Presente trabajo Tritton, D. J. Underwood, R. L. Schlichting, H. Lamb H

Modelización Aplicada a la Ingeniería Molina, N.
216
En las Figura 11 (a), se representa el perfil de velocidad de la componente ξu resultando un perfil semejante a los obtenidos experimentalmente por (Nishioka y Sato, 1974).
Figura 11: Perfil de velocidad ξu (a), perfil del flujo sobre el cuerpo (b).
En la Figura 11 (b) se grafica el campo de velocidades utilizando un Software
desarrollado para micro PC y Plotter BBC Goerz MetraWatt SE284. Obteniéndose para diferentes mallas, resultados concordantes con los registrados por otros autores siendo estos datos experimentales, analíticos o por simulación numérica. Conclusiones
El método de los volúmenes finitos es utilizado para resolver las ecuaciones
elípticas: para la presión y de la velocidad en cada una de las direcciones. El método de las características permitió determinar las posiciones de las
partículas, en el transcurso del tiempo y sus respectivas velocidades utilizando para ello la interpolación cuadrática de segundo orden; resolviendo el sistema aplicando el método de Runge - Kutta. Las ecuaciones discretas para cada volumen de control de la malla se obtienen a partir de las componentes de las componentes de la velocidad en cada cara del volumen de control desplazado respecto a la presión considerada en el centro del mismo.
Para la determinación del dominio computacional y realización del ‘test’, se considero un flujo viscoso, en régimen permanente y bajo número de Reynolds, lo cual permitió inicialmente modelar el campo a partir de la solución potencial. Dada la complejidad del flujo, se utilizo coordenadas generalizadas o curvilíneas, adaptándose el modelado del conjunto de puntos en los cuales coincidirían los
Vel
ocid
ad u
ξ
Distribución de velocidad, Re = 0.1 Presente trabajo Malla 58 x 20

Modeación del flujo alrededor de un cilindro infinito... Molina, N.
217
nodos de la grilla o malla respectivamente para los campos de velocidad como los de la presión. El esquema de las métricas escogido, permitió la distribución de los nodos en regiones de gradientes mas acentuados (mayor concentración, minimizando la falsa difusión) y disminuir el número de los mismos en regiones donde el flujo no presenta mayores cambios (incremento de recursos computacionales). La solución se obtuvo posteriormente a la obtención de los campos de velocidad y presión independientes del tiempo con parámetros de convergencia semejantes a los utilizados en la literatura. La comparación de los resultados obtenidos en el rango del número de Reynolds simulados con datos y valores obtenidos por diversos métodos, de laboratorio y por simulación numérica, presentan buena aproximación (state of the art). Por las características del flujo, es de esperar una separación de la corriente detrás del cuerpo, en el rango 10Re6 ≤≤ , la cual no fue captada por las restricciones de capacidad informática disponible. Requiriendo para ello mayor capacidad de memoria y tiempo de CPU.
Los datos obtenidos para el cálculo del arrastre, presión y tensión sobre la superficie del cuerpo, así como los perfiles de velocidad en la zona posterior, en este trabajo, tienen como objetivo contribuir a la literatura existente.
Apéndice La superposición de una fuente y un sumidero junto a una corriente uniforme, nos permite obtener un flujo potencial. Expresando el campo de velocidades en forma global a partir de las coordenadas polares
ψϑ∂∂=
ru r
1 , (32)
ψϑ ru
∂∂−= , (33)
definiendo el vector unitario en coincidencia con la línea de corriente SeVV (= , (34)
se obtiene la conocida expresión de D. Bernoulli.
( )22
21
potUUpp −+= ∞∞ ρ . (35)
Las coordenadas curvilíneas resultantes se obtienen a partir de la conveniente manipulación de los términos involucrados dado que las funciones no resultan simplemente su inversa. El orden del polinomio, es de octavo grado. Se implementó en el algoritmo, para su resolución, las subrutinas IMSL (ZPORC – DZPORC – ZPLRC), con raíces reales y complejas, especialmente de doble precisión para el caso de abscisas nulas (Jenkins y Traub, 1970). El vector velocidad en coordenadas es

Modelización Aplicada a la Ingeniería Molina, N.
218
ηηξξ eueuV (( += , (36)
El tensor escrito en sus componentes resulta
ηηηηξηηξηξξηξξξξ eeTeeTeeTeeTT (((((((( +++= , (37)
el operador gradiente a aplicar es del tipo .)(1).(1
ηξ ηη
ξξ ∂
∂+∂∂=∇ e
he
h(( , (38)
y las métricas están dadas por 22
2⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂=− ξξξ yx
h , (39)
222
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂=− ηηη yx
h . (40)
La derivada substantiva, en sus componentes, se obtiene como sigue
ηη
ξξ
eVtD
DeVtD
DVtD
D ((⎥⎦
⎤+⎥
⎦
⎤= . (41)
La asociación de las partículas (o celdas) con el volumen de control, y éste a su vez, definido por la presión en el centro y las componentes de la velocidad desplazadas en sus caras, respectivas; resultan convenientes para evaluar su incidencia en el campo con el empleo de polinomios de aproximación respecto a los volúmenes de control vecinos, de los cuales se tiene información de referencia. Las interpolaciones se realizan con los polinomios de la forma a)Perfil parabólico en cada dirección: ξ y η , respectivamente
211111 ξηξηξξ edcbau ++++= , (42)
211111 ηηξηξη EDCBAu ++++= . (43)
b) Perfil lineal en cada dirección: ξ y η , respectivamente ηξξ 222 cbau ++= , (44)
ηξη 222 CBAu ++= . (45) Regiones de cálculo en el dominio El dominio de cálculo en dirección del flujo se dividió en cuatro regiones a saber: Región I: aU ∞∞− −≤≤ 2ξξ . Región II: 0<2 ≤− ∞ ξaU . Región III: aU ∞≤ 2<0 ξ . Región IV: ∞∞ ≤≤ ξξaU2 .
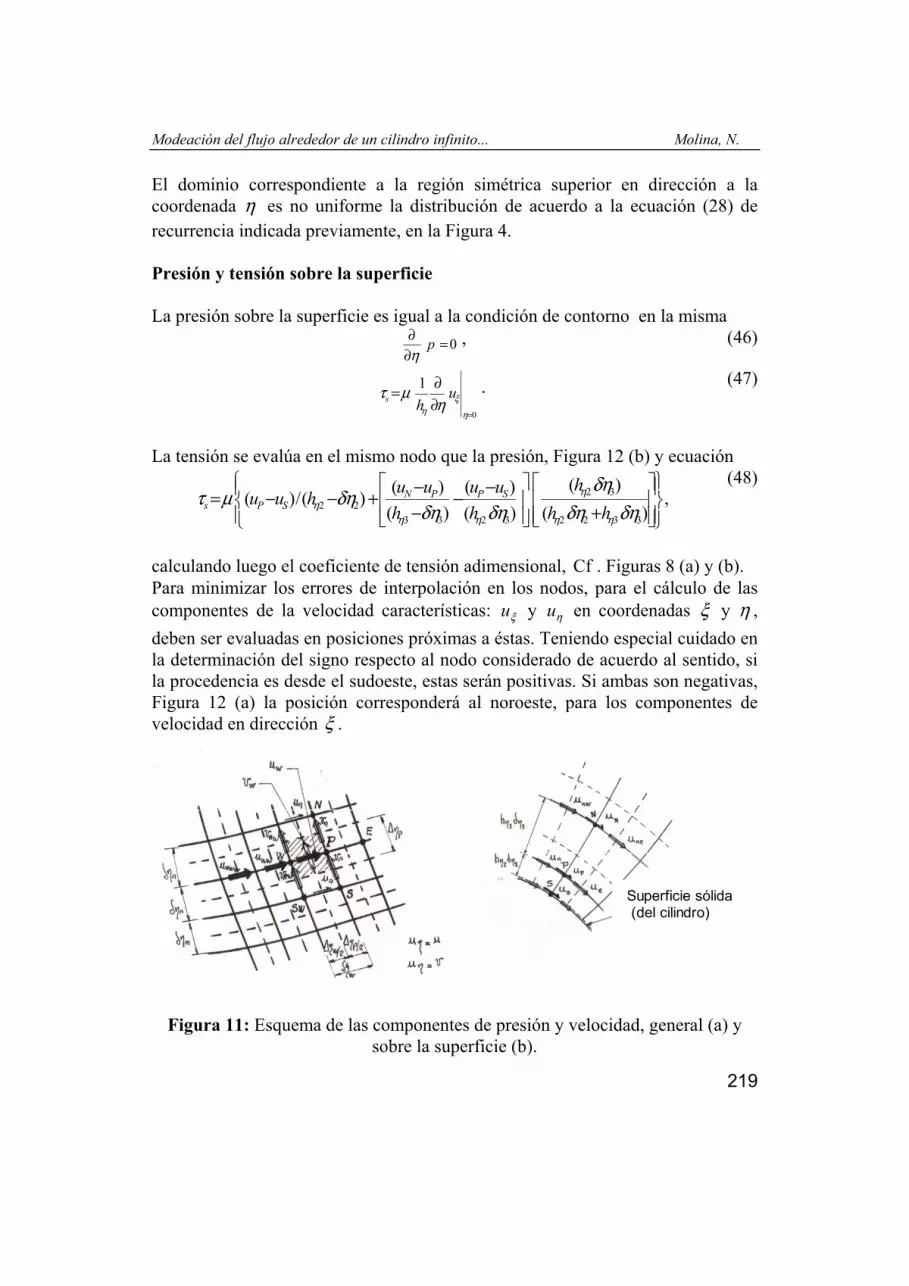
Modeación del flujo alrededor de un cilindro infinito... Molina, N.
219
El dominio correspondiente a la región simétrica superior en dirección a la coordenada η es no uniforme la distribución de acuerdo a la ecuación (28) de recurrencia indicada previamente, en la Figura 4. Presión y tensión sobre la superficie La presión sobre la superficie es igual a la condición de contorno en la misma
0=∂∂ pη
, (46)
0
1
=∂∂=
η
ξη η
µτ uhs
. (47)
La tensión se evalúa en el mismo nodo que la presión, Figura 12 (b) y ecuación
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+⎥⎥⎦
⎤
⎢⎢⎣
⎡ −−−−+−−=
)()(
)()(
)()()(/)(
3322
32
323322 ηδηδ
ηδηδηδ
ηδµτηη
η
ηηη hh
hh
uuh
uuhuu SPPNSPs ,
(48)
calculando luego el coeficiente de tensión adimensional, Cf . Figuras 8 (a) y (b). Para minimizar los errores de interpolación en los nodos, para el cálculo de las componentes de la velocidad características: ξu y ηu en coordenadas ξ y η , deben ser evaluadas en posiciones próximas a éstas. Teniendo especial cuidado en la determinación del signo respecto al nodo considerado de acuerdo al sentido, si la procedencia es desde el sudoeste, estas serán positivas. Si ambas son negativas, Figura 12 (a) la posición corresponderá al noroeste, para los componentes de velocidad en dirección ξ .
Figura 11: Esquema de las componentes de presión y velocidad, general (a) y sobre la superficie (b).
Superficie sólida (del cilindro)

Modelización Aplicada a la Ingeniería Molina, N.
220
En el instante t si las celdas cuya componentes de velocidad están almacenadas en la cara oeste del volumen de control Wju uu
i=),( ηξξ . Las constantes de los
polinomios se calculan según la dirección y para las condiciones de contorno dadas. Como ejemplo, para la componente de velocidad
0>u y 0<u , con nηδ si 0=ξ entonces nuu = . En el caso de Wξξ ∆= es nWn uu = , las constantes del polinomio están dadas por
nWn uuc ηδ/)(1 −= , (49)
[ ] nWWWnWWWn uuuud ηδξξ //)(/)(1 ∆−−∆−= . (50)Las condiciones de contorno definen el valor de la componente de velocidad ξu , para las diferentes regiones es el gradiente de la componente la característica fundamental para el cálculo teniendo en cuenta la conservación global de la masa en el volumen de control y de componentes con dirección normal en las fronteras de este (Maliska, 1986). En el presente trabajo, las ecuaciones discretas consideran los puntos internos para la solución de las mismas, en el caso de que la derivada de la función es nula el coeficiente resulta nulo en correspondencia con el volumen de control próximo al contorno. El ángulo entre los vectores unitarios, está dado por
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂=• ξξξ x
hee x(( , (51)
el ángulo proyección entre ambas componentes del vector es calculado con
⎟⎟⎠
⎞⎜⎜⎝
⎛=
ξ
ηγuu
garctan . (52)
En una primera aproximación, con la hipótesis en la cual las métricas son iguales y las variaciones de velocidades ξu y ηu , en dirección de ξ , son despreciables (teoría de la capa límite) en la superficie sólida las componentes son nulas:
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂∂=
∂∂
ξηξ ηξξη
µη
uhh
uph 3
21 . (53)
En cada nodo o punto de la malla del dominio los vectores unitarios cambian en función de sus métricas, derivadas de sus componentes y direcciones de éstos:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂+
∂∂= yx e
ye
xhe ((( ξξξξ
, (54)
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂+
∂∂= yx e
ye
xhe ((( ηηηη
. (55)

Modeación del flujo alrededor de un cilindro infinito... Molina, N.
221
Intervalo de tiempo en la simulación de cálculo El intervalo t , de tiempo adecuado se obtuvo luego de sucesivas corridas del programa de cálculo, resultando este proceso más indicado que la variación continua, calculado con
1
11−
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∆+
∆≤
ηξδ η
η
ξ
ξ
uh
uh
t . (56)
Con el objeto de garantir el esquema de cálculo y su convergencia, durante el desplazamiento y cálculo sobre las curvas características, se verifica la condición de Courant, en cada paso del tiempo. Referencias Courant, R. (1952). "On the solution of non linear hyperbolic differential equation
by finite differences." Comm. Pure Appl. Math. Vol.5 pp243-244.
Gresho, P. M.; Lee, R. L. & Sani R. L. (1978). "On time dependent solution of the incompressible Navier Stokess equations in two and three dimensions." Chapter 2. Lawrece Livermore Laboratory Livermore CA 94550 USA CIRES/NOAA Uiversity of Colorado, Boulder CO8302, USA.: pp27-79.
Jenkins, M. A. &. Traub, J. F. (1970), IMSL. "A three stage algorithm for real polynomials using quadratic iteration." SIAM Journal on Numerical Analaysis, 7,545-566.
Jordan, K. Stanley (1972). "Oscillatory drag, lift and torque on circular cylinder in a uniform flow the physics of fluid." Vol.15, number 3. American Institute of Physics.
Kawaguti, M. (1959a). "Numerical solution of the Navier Stokes equations for the flow around a circular cylinder at the Raynolds numbers 40." Journal Phys. Soc. Japan Vol.11: 747-757
Kawaguti, M. (1959b). Note on Allen & Southwell’s paper, "Relaxation methods applied to determine motion in two dimensions of a viscous fluid past a fixed cylinder." Quart. Journal Mech. Appl. Math. Vol.12: 261-263.
Lamb, H. (1952). "Hidrodynamics." Dover, N.Y..

Modelización Aplicada a la Ingeniería Molina, N.
222
Lighthill, M. J. (1963). "Fluid memories laminar boundary layers." In Chap.II "Introduction boundary layer theory" pp102-106 ad Chap.IV "Flow at small Reynolds number." Oxford at the Clarendon press: pp171-179.
Maliska, C. R. (1986). "Solução numérica de problemas de transferência de calor e mecânica dos fluidos em coordenadas generalizadas." I ENCIT, R.J., Brasil: pp27-38.
Molina, Norberto E. (1990). "Aplicação do Metodo Lagrangeano à solução numérica do escoamento laminar transversal a um cilindro infinito.", Dissertação de Mestrado em Ciências em Engenharia Mecânica. M.Sc. Pontificia Universidade Católica do Río de Janeiro, PUC. Río de Janeiro, Rep. Fed. de Brasil: pp1-131.
Patankar, S. V. (1980). "Numerical heat transfer ad fluid flows." Mc. Graw Hill, N. Y..
Roache, P. E. (1980). "Computational fluid mechanics." Sandia Labor, Albuqerque, New Mexico - Hermosa Publishers.
Raithby, G. D. & Scheider (1979). "Numerical solution of problems in incompressible fluid flows treatment of the velocity - presure coupling." J. Num. Heat Trans. Vol.2, Methods.
Settari, A. & Aziz, K. (1973). "A generalization of the additive correction method for the iterative solution of matrix equations." SIAM J. Num. Analysis Vol.10: pp506-521.
Schlichting, H. (1965). "Boundary layer theory." N.Y., Mc.GrawHill.
Taneda, Sadatochi (1957). "Experimental investigation of the wakes behin cylinders ad plates at low Reynolds numbers." J. Physics Society Japan Vol.11, Part 3: pp302-307.
Thomson, Joe. F. (1984). "Grid generation in computational fluid dynamics." AIAA, Journal, Vol.2, number2.
Thomson, Joe. F. & Zahir U.A. Warsi (1982). "Boundary fitted coordinate systems for numercal solutions of partial equations a review." Journal of Computational Physics Vol.47: pp1-108.
Tritton, D.J. (1959). "Experimental on the flow past a cicular cylinder at low Reynolds numbers." In Journal Fluid Mechanics Vol.6, Part 4: pp547-576.
Underwood, R. L. (1969). "Calculation of incompressible flow past a cicular cylinder at moderate Reynolds numbers." In Journal Fluid Mechanics Vol.37, Part 1: pp95-114

Modeación del flujo alrededor de un cilindro infinito... Molina, N.
223
Nishioka, M. & Sato, H. (1974). “Measurment of velocity distribution in the wake of a circular cylinder at low Reynolds numbers.“Journal Fluid Mechanics Vol.65, Part 1: pp97-112.

Modelización Aplicada a la Ingeniería
224
Un enfoque del problema de difusión atmosférica
OLEG V. NAGORNOV a, ROBERTO E. CALIGARIS b, GEORGINA B. RODRIGUEZ b, NANCY E. QUARANTA b, c Y MARTA G. CALIGARIS b
a Moscow Engineering Physics Institute
Moscú, Rusia. b Facultad Regional San Nicolás, Universidad Tecnológica Nacional
San Nicolás, Argentina. c Investigador CICPBA.
Introducción
El propósito fundamental de los cálculos de dispersión atmosférica es evaluar las concentraciones de uno o más contaminantes, en el espacio y en el tiempo, en función de una serie de variables independientes tales como emisiones a la atmósfera, condiciones meteorológicas, características del terreno y parámetros que describen los procesos de transformación de los contaminantes.
El modelo perfecto de concentración de contaminantes del aire debería predecir las concentraciones que resultasen de cualquier conjunto especificado de emisiones, para cualquier condición meteorológica especificada, en cualquier lugar, durante cualquier período de tiempo, con confianza total en la predicción. Los mejores modelos con los que se cuenta en la actualidad se encuentran lejos de este ideal.
Es común referirse al comportamiento de gases y partículas en flujo turbulento como “difusión” turbulenta o, en este caso, como “difusión” atmosférica, a pesar de que los procesos responsables de la dispersión no son los mismos que aquellos que actúan en la difusión molecular ordinaria. Un término más preciso sería dispersión atmosférica, pero para estar de acuerdo con la terminología usual, se usará difusión atmosférica.
Casi todos los modelos de difusión surgen de una ecuación de balance de materiales. En este caso, los materiales son los contaminantes del aire que se estudian.
En este capítulo se analizan diferentes enfoques y modelos matemáticos del problema de difusión atmosférica. Se mencionan las dos formas básicas para describir el problema: la euleriana, donde se analizan las concentraciones relativas a un sistema de coordenadas fijo, y la lagrangiana, que estudia los cambios de concentración relativos al fluido en movimiento. Se desarrolla en detalle la formulación euleriana. También se presentan ejemplos de aplicación de algunos modelos en el estudio de la dispersión de contaminantes en la ciudad de San Nicolás de los Arroyos, provincia de Buenos Aires, República Argentina.

Modelización Aplicada a la Ingeniería Nagornov, et al.
225
Clasificación de los modelos de difusión
En la práctica, se aplican principalmente dos modelos: los estadísticos, y los dinámicos. Estos modelos difieren fundamentalmente en el nivel de dificultad de sus bases matemáticas, su dificultad computacional y el método de ingreso de sus parámetros de entrada.
Los modelos estadísticos describen el flujo real de una manera simplificada. Se basan en la ecuación de difusión, en donde prevalece el transporte en la dirección del viento. En las direcciones vertical y horizontal, perpendiculares a la dirección del flujo, la difusión turbulenta se describe estadísticamente mediante la distribución normal. Es posible trabajar la solución en forma analítica para la ecuación de difusión simplificada, por la aplicación de la observación práctica.
Los modelos dinámicos, en cambio, se basan en la aplicación directa de ecuaciones básicas de dinámica de fluidos, y se resuelven en forma numérica, con elementos finitos o volúmenes finitos.
Por otro lado, la difusión turbulenta se puede modelizar desde los dos enfoques típicos en lo que respecta al punto de observación: el enfoque euleriano, en donde la concentración de una especie se analiza relativa a un sistema de coordenadas fijo, y se analiza en un punto fijo del espacio, o el enfoque lagrangiano, donde los cambios de concentración se describen relativos al fluido en movimiento.
Ambos enfoques producen distintos tipos de relaciones matemáticas para la concentración de contaminantes, que pueden relacionarse. Cada uno de estos modelos (euleriano y lagrangiano) son descripciones válidas de la difusión turbulenta, y según la situación en estudio, se decidirá el modelo a utilizar.
Los modelos eulerianos tratan de formular las estadísticas de las concentraciones en términos de las propiedades estadísticas de las velocidades eulerianas del fluido, es decir, las velocidades medidas en puntos fijos del fluido. Las formulaciones de este tipo tienen la ventaja de que las expresiones matemáticas son directamente aplicables en situaciones en las que ocurren reacciones químicas, además de que los datos eulerianos necesarios son medibles (velocidad del viento en un punto determinado). Una desventaja de este enfoque es que conduce a modelos matemáticos sin solución. Para resolverlos, se deben hacer simplificaciones.
En cambio, los modelos lagrangianos, que describen la concentración en términos de los desplazamientos de grupos de partículas distribuidos en el fluido, tienen la ventaja de que se pueden resolver siempre, pero poseen la gran desventaja de que su aplicabilidad es limitada, ya que no sirven para problemas que involucran reacciones químicas no lineales.
En esta ocasión se hará una descripción de los modelos eulerianos.

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
226
Enfoque euleriano
Al estudiar un fluido con una cierta cantidad N de contaminantes, la concentración de cada uno de ellos, en un instante de tiempo determinado, debe satisfacer una ecuación de balance sobre un elemento diferencial de volumen dV. Cualquier acumulación de material en el tiempo en dV, sumado a la cantidad neta de material que se agrega en forma convectiva, debe ser igual a una cantidad equivalente de material producida por reacciones químicas en el elemento dV, más la que se emite por fuentes en dV y aquella que entra por difusión molecular.
El modelo matemático toma como hipótesis para el fenómeno de difusión de contaminantes la ley de Fick de la difusión de masa: el flujo de materia que atraviesa una determinada superficie, en el interior de un fluido en reposo, es proporcional al gradiente de concentración de esta misma materia. Cuando el fluido está en movimiento, esta ley se combina con el transporte convectivo para dar la siguiente ecuación diferencial en derivadas parciales (Seinfeld, 1985)
( )R +⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂∂
∂∂=
∂∂
+∂∂
jj
jj
j
xcD
xxcu
tc , (1)
donde
c es la concentración instantánea del contaminante en estudio. W = (u1, u2, u3) es el vector velocidad del viento. D = (kx, ky, kz) es el vector de los coeficientes de difusión molecular
según las distintas direcciones. R es un término de reacción química, que aparece cuando se estudian
dos o más contaminantes que interactúan.
Simplificaciones. Un ejemplo
Con el fin de obtener una solución analítica de la ecuación (1) en el estudio de la dispersión atmosférica de contaminantes, se efectúan simplificaciones, según las siguientes hipótesis:
Se hace un estudio del problema en régimen estacionario; por lo
tanto 0=∂∂
tc .
Se supone que la velocidad del viento es constante y en dirección del eje x; por lo tanto, resulta W = (u, 0, 0). Al ser u constante, puede salir fuera de la derivada.

Modelización Aplicada a la Ingeniería Nagornov, et al.
227
Como regla general, la dispersión turbulenta longitudinal es despreciable frente al transporte de masa convectivo
xc
xc
x xk∂∂<<⎥⎦
⎤⎢⎣⎡
∂∂
∂∂ u .
Se suponen los coeficientes en las direcciones horizontal y vertical, ky =KH y kz = KV, constantes respecto de las variables y, z; por lo tanto, pueden salir de la derivada que los afecta.
Con las simplificaciones propuestas, la ecuación queda
2
2
V2
2
H K K uzc
yc
xc
∂∂+
∂∂=
∂∂ . (2)
En la literatura sobre contaminación de aire, por razones históricas, se hacen
las siguientes sustituciones (u/x)σ 0,5Kk 2
yHy == ,
(u/x)σ 0,5Kk 2ZVZ == ,
donde σy y σz se denominan coeficientes de dispersión (De Nevers, 1998). La ecuación obtenida admite solución analítica si se supone que el espacio de
integración es un medio isótropo donde existe una sola fuente emisora, situada en (0, 0, H), que emite un caudal másico Q.
La solución de la ecuación diferencial es
)σ 2 / H) ( ( )σ 2/ ( 2222ee
σσu 2πQ)( Zy
ZY
z yzy,x,c −−−= . (3)
La expresión (3) se denomina ecuación básica de la columna de humo
gaussiana. Este nombre proviene del hecho que los términos exponenciales tienen la misma forma que la función de distribución normal de Gauss.
Más adelante se hace un estudio del modelo gaussiano, y se analiza un ejemplo de aplicación. A continuación se presenta un ejemplo en el que no se hace la suposición del régimen estacionario.
Propagación de ozono
Los modelos matemáticos para los problemas de distribución de ozono debido a la presencia de óxidos de nitrógeno se basan en la solución numérica de ecuaciones de difusión que incluyen reacciones fotoquímicas entre gases.
Se estudia aquí la concentración de ozono en el aire, debido a la emisión de una chimenea. En realidad, la chimenea no emite ozono, sino que éste se produce

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
228
como resultado de las reacciones químicas que se dan en la atmósfera, debido a la emisión de gases como óxidos de nitrógeno y la acción de la luz solar.
Las reacciones fotoquímicas de formación de ozono a partir de óxidos de nitrógeno pueden escribirse como sigue
NO + O3 ⎯→⎯1k
NO2 + O2 ,
2 NO + O2 ⎯→⎯2k
2NO2 ,
NO2 + O2 + hν ⎯→⎯3k
NO + O3 ,
NO2 + O3 ⎯→⎯4k
NO3 + O2 .
(4)
Las constantes de estas reacciones valen
k1 = 2,3 10-18 e (-1450/T) , k2 = 1,5 10-52 e (-1780/T) ,
k3 = 6,2 10-3 I , k4 = 1,2 10-19 e (-2450/T), (5)
donde T es temperatura, I es la intensidad de la radiación solar que varía de 0 a 1, [k1] = [k4] = m3/(molec s), [k2] = m6/(molec2 s), [k3] = 1/s. Estas constantes difieren entre sí en varios órdenes de magnitud.
El proceso que transforma los óxidos de nitrógeno en ozono, está descripto por las siguientes ecuaciones diferenciales
)(k)(k)()(k)( 232
123111 tCtCtCtCtCt
+−−=∂∂ ,
)()(k)(k)(k)()(k)( 324232
123112 tCtCtCtCtCtCtCt
−+−=∂∂ ,
)()(k)(k)()(k)( 324233113 tCtCtCtCtCtCt
−+−=∂∂ .
(6)
El sistema principal está basado en la ecuación de convección-difusión para cada componente
( )kR +⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂∂
∂∂=
∂∂
+∂
∂
j
kj
jj
kjk
xC
Dxx
Cut
C. (7)
En estas ecuaciones, Ck(x, t) es la concentración de la fase k, W = (u1, u2, u3) es el vector de velocidad del viento, D es el vector de difusividad, Rk representa el término de reacción química y k es el número de sustancia. Cada término de reacción química puede escribirse como sigue: Rk = Rk (C1, C2, ..., Cn), 1≤ k ≤ n.

Modelización Aplicada a la Ingeniería Nagornov, et al.
229
Las constantes de las reacciones químicas están calculadas para una temperatura de 25 °C.
El método para resolver las ecuaciones diferenciales bajo estudio se basa en el concepto de pasos fraccionarios en el tiempo.
Las ecuaciones que poseen términos de difusión convectiva se resuelven separadamente de las que consideran las reacciones químicas debido a la gran diferencia que existe en la escala de los tiempos. Las primeras se resuelven utilizando la técnica de diferencias finitas de Crank-Nicolson, y para las ecuaciones que describen las concentraciones de ozono y óxidos de nitrógeno se utiliza una solución estándar de las ecuaciones denominadas ecuaciones diferenciales ordinarias rígidas. Este procedimiento se aplica para cada sustancia, una vez que se ingresan los datos iniciales correspondientes a un problema específico, en cada paso del tiempo.
Aproximación por diferencias finitas del sistema de ecuaciones
Se desarrolla a continuación la aproximación por diferencias finitas para una ecuación de las que constituyen el sistema (7). Para ello, es necesario discretizar la región considerada, un paralelepípedo. Esta se divide mediante planos paralelos a los planos frontera superior, inferior y laterales del paralelepípedo. Por simplicidad, se omite el índice que corresponde al número de sustancia.
Cada nodo de la grilla se identifica por tres índices (i, j, k), según los ejes coordenados. El paso en el tiempo τ se indica mediante un superíndice m en la concentración. Así, m
ijkC es la concentración en el nodo (i, j, k) en el tiempo t = m τ. La derivada en el tiempo se aproxima con una aproximación por diferencias
hacia adelante
O(τE;τ
nijk
1nijk =
−≅
∂∂ + CC
tC ) es el error de truncamiento. (8)
Las segundas derivadas espaciales se aproximan con diferencias centrales, y
los términos convectivos con una fórmula de diferencias hacia adelante (o hacia atrás) suponiendo que u es positivo (o negativo), según se muestra en las expresiones (9) y (10)
( ) ,
)O(hE0;u si;h
u
)O(hE0;u si;h
)u(
)(u
xx
1n1jki
1nijk
xx
1nijk
1n1jki
⎪⎪
⎩
⎪⎪
⎨
⎧
=>−
=<−
≅∂
∂+
−+
+++
CC
CC
xC (9)

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
230
.)O(hE;h
2kk 2
x2x
1n1jki
1nijk
1n1jki
x2
2
x =⎥⎥⎦
⎤
⎢⎢⎣
⎡ +−≅⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂ +
+++
− CCCxC (10)
Una ecuación similar puede escribirse para las otras derivadas espaciales, utilizando hy, hz, donde τ indica el paso del tiempo, y hx, hy, hz son los pasos en las coordenadas x, y, z respectivamente. Los superíndices n, n+1 corresponden al tiempo, y los subíndices i, j, k corresponden a las coordenadas x, y, z respectivamente.
Entonces, se puede construir el esquema implícito de diferencias finitas, reemplazando las aproximaciones dadas por las expresiones (8), (9) y (10) en las ecuaciones diferenciales del sistema (7), sin reacciones químicas. Resulta entonces el siguiente sistema de ecuaciones algebraicas
.)(L)(L)(L 1nzz
1nyy
1nxx
nijk
1nijk
++++ ++=− CCCCC (11)
En la expresión (11) el operador Lxx está definido por la fórmula (12), donde x es variable mientras que z e y están fijas. En la misma, se omitieron los subíndices j y k de las coordenadas fijas.
1n1ix
1nixx
1n1ixx
1nxx λ)2λω()λω()(L +
+++
−+ ++−+= CCCC ,
con x
x hu τω = y 2
x
Hx h
k τλ = . (12)
Análogamente se definen los operadores Lyy y Lzz.
Análisis de consistencia (aproximación)
Cuando hay consistencia, los errores 1nijkE + tienden a cero en los puntos fijos de
la malla. El error de truncamiento está dado por
⎪⎩
⎪⎨⎧
+++
+++=+
.convección de procesohay si)h~h~h~τ~O(
,convección de procesohay no si)h~h~h~τ~O(E~
zyx
2z
2y
2x1)(n
ijk (13)
El método de los pasos fraccionarios
Se considera la siguiente fórmula
)(R)(L)(L)(L ni
1nzz
1nyy
1nxx
nijk
1nijk CCCCCC +++=− ++++ . (14)

Modelización Aplicada a la Ingeniería Nagornov, et al.
231
El sistema de ecuaciones algebraico puede resolverse mediante la división de los procesos del problema en tres pasos. En cada paso consideramos sólo términos asociados a una dirección específica x, y o z (Fletcher, 1991).
Luego, en cada paso, se utiliza la correspondiente concentración inicial y: Resolviendo el problema unidimensional en la dirección x, se obtiene C~ . Repitiendo este procedimiento para la dirección y, se obtiene C , usando
C~ como condición inicial.
Finalmente, para la dirección z se obtiene )1n(CC~~ += , usando C como
condición inicial. En este caso, el sistema fraccionario para obtener la solución numérica
toma la siguiente forma
⎪⎪
⎩
⎪⎪
⎨
⎧
=
=∂∂=
∂∂
=−
==
,),,C(0) ,,,(~
,0x
~
x
~,~L~
Lxx0x
xxn
zyxzyxC
CC
CCC
(15a)
⎪⎪
⎩
⎪⎪
⎨
⎧
=
=∂∂=
∂∂
=−
==
,),,(C~,0),,(C
,0
,L~
Lyy0y
yy
zyxzyx
yC
yC
CCC
(15b)
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
=∂∂=
∂∂−
=−
==
.),,(,0),,(~~
,0~~
,q~~
k ρ
,~~L
~~
Hz
ij
0z
V
zz
zyxCzyxC
zC
zC
CCC
(15c)
En forma resumida, se puede escribir como sigue
1)(n~~
3 paso2 paso~
1 paso +=⎯⎯⎯ →⎯⎯⎯⎯ →⎯⎯⎯⎯ →⎯ CCCCC n . (16)
La descripción de uno de estos pasos está dada por
)(L 1nxx
ni
1ni
++ =− CCC . (17)
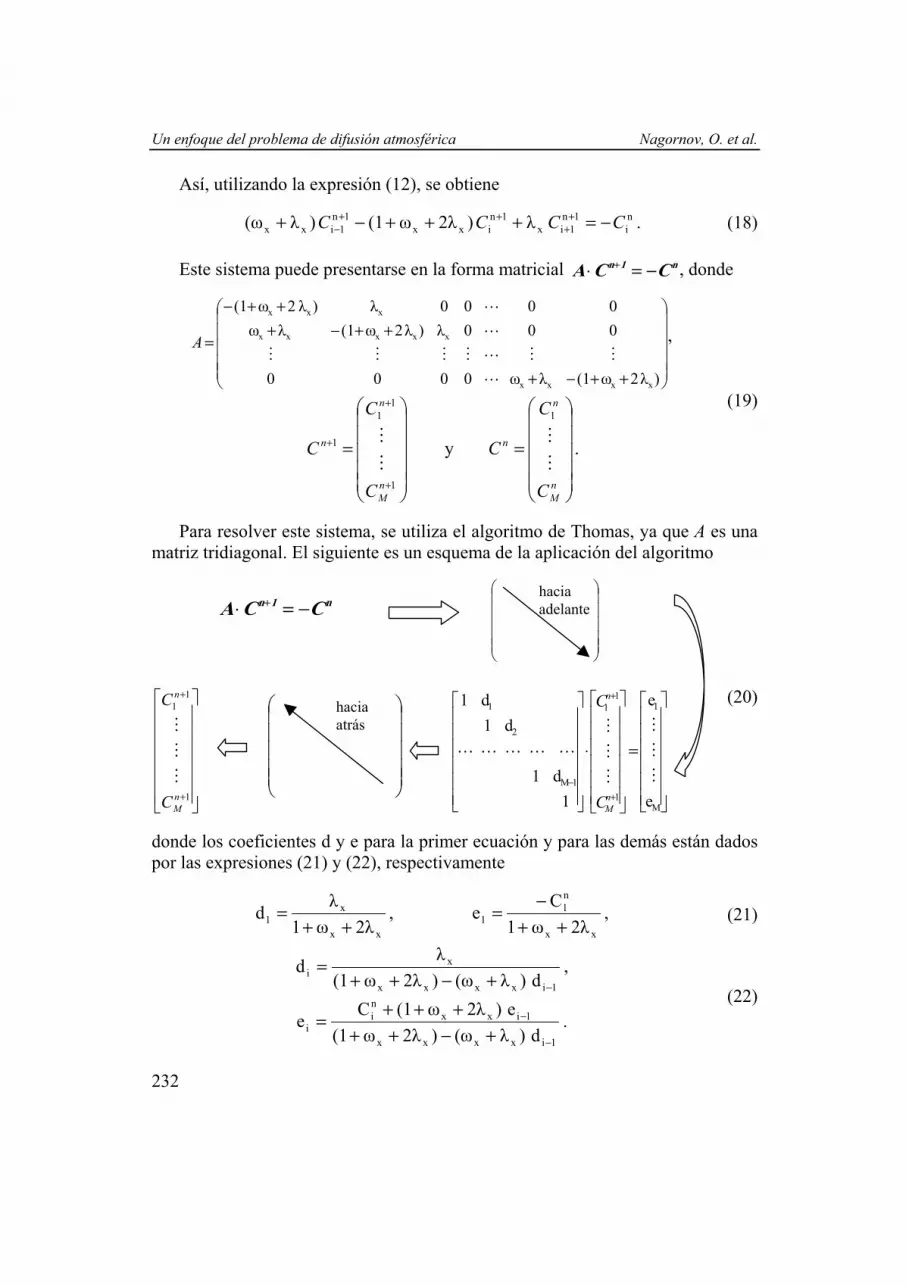
Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
232
Así, utilizando la expresión (12), se obtiene
ni
1n1ix
1nixx
1n1ixx λ)2λω(1)λ(ω CCCC −=+++−+ +
+++
− . (18) Este sistema puede presentarse en la forma matricial n1n CCA −=⋅ + , donde
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
++−+
++−+++−
=
)λ 2ω(1λω0000
000λ)λ 2ω(1λω0000λ)λ 2ω(1
xxxx
xxxxx
xxx
A ,
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
+
+
+
1
11
1
nM
n
n
C
C
C y
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
nM
n
n
C
C
C
1
.
(19)
Para resolver este sistema, se utiliza el algoritmo de Thomas, ya que A es una
matriz tridiagonal. El siguiente es un esquema de la aplicación del algoritmo
n1n CCA −=⋅ +
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+
+
1
11
nM
n
C
C
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+
+
−
M
1
1
11
1M
2
1
e
e
1d1
d1d1
nM
n
C
C
(20)
donde los coeficientes d y e para la primer ecuación y para las demás están dados por las expresiones (21) y (22), respectivamente
xx
x1 2λω1
λd++
= , xx
n1
1 2λω1Ce++
−= , (21)
1ixxxx
xi d)λ(ω)2λω(1
λd−+−++
= ,
1ixxxx
1ixxni
i d)λ(ω)2λω(1e)2λω(1Ce
−
−
+−+++++
= . (22)
hacia adelante
hacia atrás

Modelización Aplicada a la Ingeniería Nagornov, et al.
233
Estos coeficientes se obtienen en el paso hacia adelante. El segundo paso, consiste en la sustitución hacia atrás
M1n
M e=+C , i1n
1ii1n
i de ++
+ += CC . (23) El algoritmo de Thomas es muy económico. Para poder aplicarlo, es necesario
que la matriz A sea diagonal dominante, es decir, que se cumpla
xxxxx λλω)2λω(1 ++>++− . (24) El uso de pasos fraccionarios para problemas multidimensionales usualmente
genera sistemas tridiagonales de ecuaciones que pueden ser resueltos eficientemente utilizando el algoritmo de Thomas.
Cabe notar que el método de pasos fraccionarios es también llamado localmente unidimensional. Estos métodos se utilizan en ecuaciones de reacción-difusión en espacios multidimensionales. Los términos de reacciones no lineales se tratan en una manera linealmente implícita, que evita la necesidad de iterar en cada paso del tiempo, mientras que mantiene las propiedades de estabilidad correspondientes al operador unidimensional. Estabilidad
La estabilidad de la solución numérica se da cuando los errores no aumentan con el paso del tiempo. Si hay inestabilidad, los resultados numéricos son erróneos y divergen en un comportamiento oscilatorio, en tiempo y espacio.
El método es estable si nj
*nj
nj ε CC −= no aumenta con el tiempo, donde
nj
*C es la solución computacional del sistema de ecuaciones algebraicas, y
njC es la solución exacta, desconocida.
Estos errores se introducen debido a redondeos en cualquier paso de los cálculos.
El método de Von Neumann es el más utilizado para determinar la estabilidad, ya que es fácil de aplicar. Desafortunadamente, este método sólo se usa para establecer condiciones necesarias y suficientes de estabilidad en problemas lineales. Pero, en los problemas prácticos, se trabaja habitualmente con ecuaciones no lineales.
En casos no lineales, el resultado de la teoría lineal puede utilizarse como guía; la justificación depende del experimento numérico. En esta situación, el método proporciona condiciones necesarias para la estabilidad, pero no suficientes.

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
234
El método de Von Neumann se aplica sólo para puntos internos, pero provee información heurística sobre la influencia de condiciones de frontera en derivadas en la estabilidad numérica, si se aplica separadamente a los algoritmos utilizados en las fronteras.
Para analizar la estabilidad, se simplifican las ecuaciones a una ecuación unidimensional:
2
2
kuxC
xC
tC
∂∂=
∂∂+
∂∂ . (25)
Las reacciones fotoquímicas pueden ser consideradas e involucradas
suponiendo que los coeficientes se mantienen constantes durante la reacción. Para esta ecuación aplicamos los esquemas implícitos con una fórmula de diferencias
hacia atrás para xC
∂∂ y diferencias centrales para 2
2
xC
∂∂ . Se puede escribir
nj
1n1j
1nj
1n1j λ)2λω1(λ)(ω CCCC −=+++−+ +
+++
− , (26)
donde hτuω = y 2h
kτλ = son los números característicos.
La ecuación es satisfecha por nj
*C , y por njε también:
nj
1n1j
1nj
1n1j εελε)λ 2ω1(ελ)(ω −=+++−+ +
+++
− . (27) La solución de la ecuación del error se encuentra mediante separación de
variables, en la forma j θ innj eGε = , donde G contiene la dependencia del tiempo y
θ = j π h contiene la dependencia espacial. El error distribuido a lo largo de las líneas de la grilla a un nivel de tiempo se desarrolla en serie de Fourier.
El error inicial se define en la forma ∑=m
j iθm
0j eaε , donde 1i −= .
Como se supuso, el problema lineal es suficiente para estudiar la propagación del error debido a cada armónico (componentes separados de Fourier). Si cada armónico decae o amplifica al pasar al siguiente nivel de tiempo, el algoritmo computacional es estable o inestable, respectivamente.
Se puede observar que G depende del tamaño del espaciamiento de la grilla, y del modo de Fourier θ, es decir, G = G(h, θ). El error se mantendrá restringido si G no es mayor que la unidad, para todo θ. Entonces, el requerimiento general para la estabilidad es 1G ≤ , para todo θ.
Después de la sustitución, la ecuación principal puede transformarse como sigue

Modelización Aplicada a la Ingeniería Nagornov, et al.
235
j θ in)1j( θ i1njθ i1n)1j(θ i1n eGeGλeG)2λω1(eG)λω( −=+++−+ +++−+ , (28)
112
22G12coscos2G 2 =⎟⎟⎠
⎞⎜⎜⎝
⎛ −⎟⎠⎞
⎜⎝⎛ −+−=−++−+ θω seniθω)senλ(iωω senθ)ωλ(θωθλ( , (29)
θsenω2θsen)ωλ2(21
1G22
22 +⎟
⎠⎞
⎜⎝⎛ ++
= . (30)
Si u > 0 resultan ω > 0 y 1G ≤ para todo θ. Entonces se tiene estabilidad incondicional de la solución.
Análisis de la convergencia de la solución
El esquema en diferencias finitas es matemáticamente convergente si todos los valores de la solución en diferencias finitas n
iC alcanzan niC , la solución de la
ecuación diferencial exacta. Simbólicamente, se puede escribir, ni
ni CC → cuando
0τy 0h x →→ . La diferencia entre la solución exacta de la ecuación diferencial continua n
iC y la solución exacta del esquema en diferencias finitas se llama “error de solución” y se escribe n
ini
ni )()(e C,txC,tx nini −= .
Se utiliza el teorema de Lax para probar la convergencia de la solución numérica a la solución del sistema de ecuaciones diferenciales en derivadas parciales. El mismo establece que las propiedades de consistencia y estabilidad de la solución numérica son condiciones necesarias y suficientes para la convergencia. Una introducción a los sistemas rígidos de ecuaciones diferenciales ordinarias
El sistema de reacciones químicas describe la formación de compuestos fotoquímicos. Este es un sistema de primer orden que puede reescribirse en la forma
y’ = f(t, y), donde y = (y1, y2, …, yn). (31)
Para resolver este sistema pueden utilizarse dos tipos de métodos implícitos
multipasos: el primero es la fórmula de diferencias hacia atrás (BDF) de quinto orden, o también llamado método rígido de Gear; el segundo método es el de Adams-Moulton de orden duodécimo. Como el sistema de reacciones químicas es

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
236
no lineal, las ecuaciones pueden linealizarse en cada paso del tiempo para calcular el jacobiano que se necesita para estos métodos. Se puede resolver la dificultad de tener un sistema de ecuaciones diferenciales ordinarias (EDO) no lineal mediante la linealización del sistema (31), obteniendo
y’ = A y + g(t) , (32)
donde A es la matriz jacobiana de f, y se supone que los autovalores son todos negativos. En el sistema linealizado (32), se debe utilizar un paso de tiempo muy pequeño para tener estabilidad en la solución numérica.
La rigidez es particulamente crítica en el conjunto de EDO. La definición de rigidez se formula a través de las siguientes condiciones
1) Re (λi) < 0
2) s = )Re(mín)Re(máx
ii
ii
λλ
>> 1 , I = 1, 2, ..., m, (33)
donde m es la dimensión de la matriz A.
Las constantes de las reacciones químicas determinan la rigidez del sistema. Grandes diferencias entre estas constantes resultan en grandes diferencias en los autovalores y, como consecuencia, resultan en la complejidad de la construcción de métodos numéricos para encontrar soluciones de estas EDOs. Por ejemplo, en el método explícito de Euler para resolver un sistema EDO, el paso del tiempo está limitado de la siguiente manera
iλmáx2τ ≤ . (34)
En este caso, se considera un método implícito, porque es el más conveniente
para integrar el sistema rígido de ecuaciones diferenciales ordinarias. Se utiliza el método BDF de orden “p” para resolver el problema de valor
inicial constituido por la ecuación (31) y la condición y(t0) = y0. El método BDF queda determinado mediante la fórmula
),( bf τa nnkn
p
1kkn ytyy =+ −
=∑ ,
donde
0ak, 1ak , 1a k
p
1k
qp
1kk
p
1kk =−=−= ∑∑∑
===
, q = 2, 3, …, m, max q = p.
(35)

Modelización Aplicada a la Ingeniería Nagornov, et al.
237
Los coeficientes de la fórmula (35) se presentan en la tabla 1:
p α b a1 a2 a3 A4 a5 1 90º 1 -1 2 90º 3
2 34− 3
1
3 88º 116 11
18− 119 11
2−
4 73º 2512
2548− 25
36 2516− 25
3
5 51º 13760 137
300− 137300 137
200− 13775 137
12−
Tabla 1: Coeficientes de la fórmula (35).
Si se considera que y' = f ( t, y) = λ y, reemplazando en la ecuación (35), se obtiene
nkn
p
1kkn λ b a yyy τ=+ −
=∑ . (36)
Llamando µ λ τ = , la ecuación anterior resulta
nkn
p
1kkn µ b a yyy =+ −
=∑ . (37)
Se dice que un método de diferencias es: A-estable, si la región de estabilidad contiene 0)µRe( < . Es decir,
0)µRe(/µA <⊇ℜ . A(α)-estable, α∈(0, 2
π ), si se verifica que ( ) µarg-π /µ α<⊇ℜ A . Rígidamente estable si la región de estabilidad contiene la unión de las
regiones, 21A ℜ∪ℜ⊇ℜ donde, siendo c y a números reales positivos, )µRe(/µ1 c−<=ℜ y ( ) µIm ,0)µRe(/µ2 ac ≤<<−=ℜ .
Los distintos casos se muestran en los gráficos de la figura 1.
Figura 1: Regiones de estabilidad para los distintos casos.
0
Im(µ)
Re(µ) Re(µ) 0
Im(µ)
α Re(µ) 0
Im(µ)
| c
- a
A- estable A(α)- estable Rígidamente estable

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
238
Si se llama qn = yn, y se sustituye q = reiθ con 0 < θ < 2π y 0 < r ≤ 1, entonces se obtiene una región de estabilidad absoluta cuando 1q ≤ .
En la tabla 2 se muestran las fórmulas BDF y sus regiones de estabilidad acordes al orden del método.
Orden Fórmula BDF y la región de estabilidad con 0 < θ < 2π y 0 < r ≤ 1
1
Fórmula )y,t(f yy nn1nn τ=− −
Regiónr
e1iθ
µ−
−= , 0)Re( <µ
2
Fórmula )y,t(f yyy nn32
2n31
1n34
n τ=+− −−
Región 0)Re(,2
22
2
23 <+−=
−−
µµθθ
re
re ii
3
Fórmula )y,t(f yyyy nn116
3n112
2n119
1n1118
n τ=−+− −−−
Región 0)Re(,32
333
3
2
2
611 <−+−=
−−−
µµθθθ
re
re
re iii
4
Fórmula )y,t(f yyyyy nn25
124n25
33n25
162n25
361n25
48n τ=+−+− −−−−
Región 0)Re(,43
4344
4
3
3
2
2
1225 <+−+−=
−−−−
µµθθθθ
re
re
re
re iiii
5
Fórmula
)y,t(f yyyyyy nn13760
5n13712
4n13775
3n137200
2n137300
1n137300
n τ=−+−+− −−−−−
Región
0)Re(,54
53
10555
5
4
4
3
3
2
2
60137 <−+−+−=
−−−−−
µµθθθθθ
re
re
re
re
re iiiii
Tabla 2: La fórmula BDF y su región de estabilidad, para valores de p ≤ 5.

Modelización Aplicada a la Ingeniería Nagornov, et al.
239
Un ejemplo sencillo
Se muestran a continuación los resultados obtenidos para un modelo de contaminación originado por una central termoeléctrica que emite NOx a la atmósfera. Se desea conocer la distribución de ozono debido a las reacciones fotoquímicas de los óxidos de nitrógeno, en una región de 2 x 2 x 0.6 km3, donde la fuente está en el centro de la región. La escala de tiempos se expresa en minutos. La velocidad de las reacciones químicas está calculada para una temperatura de 25°C. En este modelo no se consideraron las otras sustancias químicas emitidas por la central.
Se pueden analizar los resultados graficando la distribución de las sustancias químicas en la región (x, y) a cualquier altura z, y considerando distintas temperaturas de la atmósfera y características de emisión. En el siguiente gráfico se muestra la distribución de ozono en la superficie.
(a)
(b)
Figura 2: Concentración de ozono en los alrededores de la fuente de emisión para
distintas situaciones de viento.
En la figura 2(a) se observa la influencia del viento en las direcciones x e y de la propagación de ozono. El pico de distribución está cerca de la fuente. Cuando la velocidad del viento es cercana a cero, la propagación de ozono se determina sólo por difusión, y la distribución de la concentración es muy suave, como se muestra en la figura 2(b) (Nagornov et al, 1998).
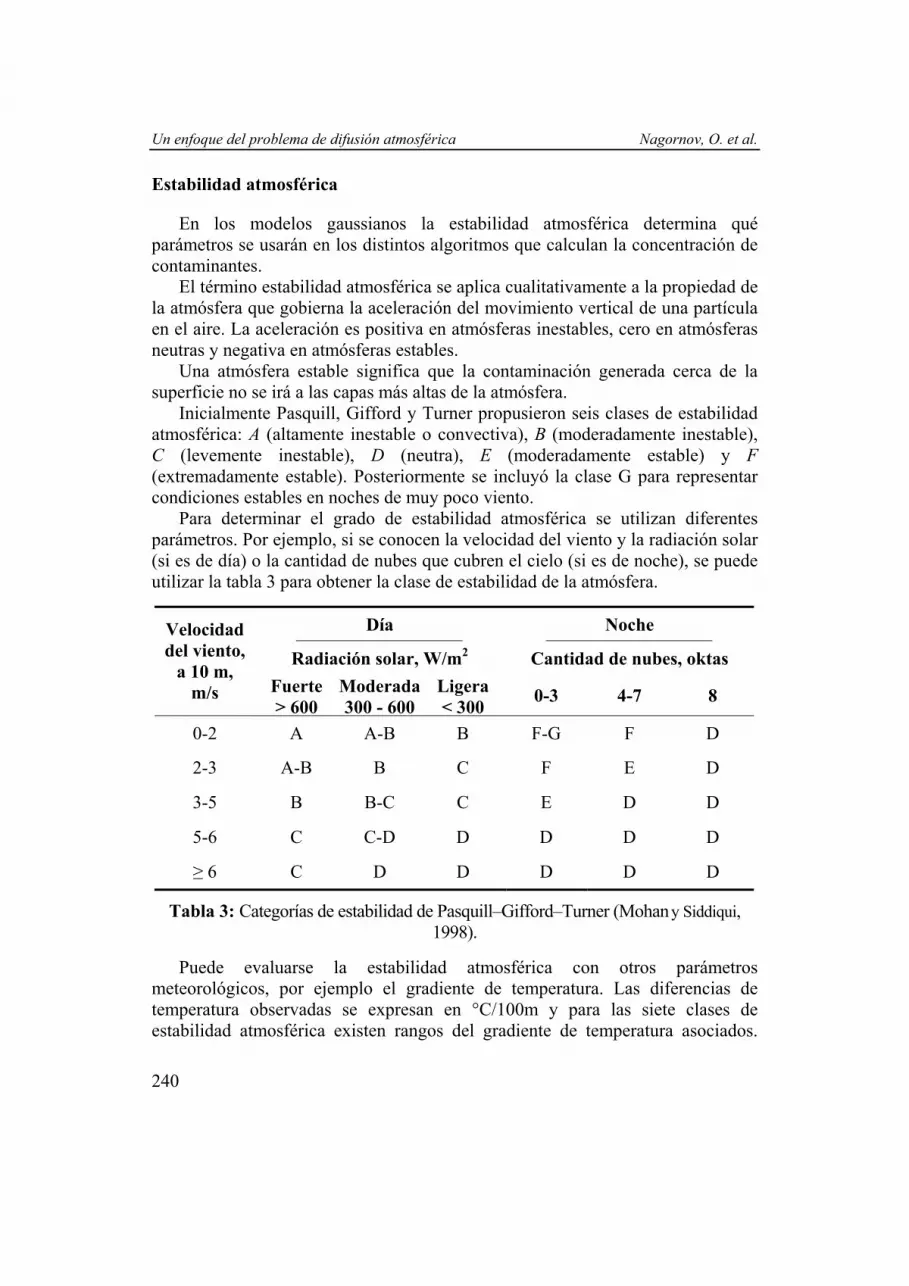
Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
240
Estabilidad atmosférica
En los modelos gaussianos la estabilidad atmosférica determina qué parámetros se usarán en los distintos algoritmos que calculan la concentración de contaminantes.
El término estabilidad atmosférica se aplica cualitativamente a la propiedad de la atmósfera que gobierna la aceleración del movimiento vertical de una partícula en el aire. La aceleración es positiva en atmósferas inestables, cero en atmósferas neutras y negativa en atmósferas estables.
Una atmósfera estable significa que la contaminación generada cerca de la superficie no se irá a las capas más altas de la atmósfera.
Inicialmente Pasquill, Gifford y Turner propusieron seis clases de estabilidad atmosférica: A (altamente inestable o convectiva), B (moderadamente inestable), C (levemente inestable), D (neutra), E (moderadamente estable) y F (extremadamente estable). Posteriormente se incluyó la clase G para representar condiciones estables en noches de muy poco viento.
Para determinar el grado de estabilidad atmosférica se utilizan diferentes parámetros. Por ejemplo, si se conocen la velocidad del viento y la radiación solar (si es de día) o la cantidad de nubes que cubren el cielo (si es de noche), se puede utilizar la tabla 3 para obtener la clase de estabilidad de la atmósfera.
Día Noche
Radiación solar, W/m2 Cantidad de nubes, oktas Velocidad del viento,
a 10 m, m/s Fuerte
> 600 Moderada300 - 600
Ligera < 300 0-3 4-7 8
0-2 A A-B B F-G F D
2-3 A-B B C F E D
3-5 B B-C C E D D
5-6 C C-D D D D D
≥ 6 C D D D D D
Tabla 3: Categorías de estabilidad de Pasquill–Gifford–Turner (Mohan y Siddiqui, 1998).
Puede evaluarse la estabilidad atmosférica con otros parámetros
meteorológicos, por ejemplo el gradiente de temperatura. Las diferencias de temperatura observadas se expresan en °C/100m y para las siete clases de estabilidad atmosférica existen rangos del gradiente de temperatura asociados.

Modelización Aplicada a la Ingeniería Nagornov, et al.
241
Así, por ejemplo para la clase A el gradiente es menor que –1,9°C/100m y para la clase F es mayor que 4°C/100m.
Modelos gaussianos
La hipótesis gaussiana implica que la concentración en un penacho de humos sigue, vertical y lateralmente, una ley de Gauss en relación con la dirección del viento, cualquiera sea la distancia a la fuente emisora. En estos modelos se considera una fuente puntual, como la chimenea de una fábrica (que en realidad no es un punto sino una fuente pequeña) y se intenta calcular la concentración en la dirección del viento.
La corriente de gas contaminado se eleva desde la chimenea y después se nivela para viajar en la dirección x. Lo normal es que esas columnas de humo suban una distancia considerable por encima de la chimenea porque son emitidas a temperaturas más elevadas que la de la atmósfera y con una velocidad vertical.
Para los cálculos de la columna de humo gaussiana, se supone que la columna se emite desde una fuente virtual, V en la figura 3. El desplazamiento horizontal de la fuente, x0, es difícil de cuantificar pero, como su orden de magnitud es despreciable frente al resto de las longitudes significativas, puede asumirse x0 = 0.
Figura 3: Idea gaussiana de la columna de humo.
La altura efectiva de la chimenea es la suma de la altura física y la altura de la columna de humo: H = h + ∆h. La altura de la columna de humo se calcula empleando expresiones de carácter semi-empírico. Una de las más utilizadas es la fórmula de Moses y Carson (Carson y Moses, 1969)
u Q CD V C
h 2S1 +=∆ , (38)
donde VS es la velocidad de salida de la chimenea, D es el diámetro de la chimenea, Q la velocidad de emisión de calor y u la velocidad del viento. Los parámetros C1 y C2 dependen del tipo de atmósfera según la tabla 4.

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
242
Atmósfera estable Atmósfera neutra Atmósfera inestable C1 – 1,04 0,35 3,47 C2 0,145 0,171 0,330
Tabla 4: Parámetros C1 y C2 de la fórmula de Moses y Carson.
La ecuación básica de la columna de humo gaussiana, ecuación (3), constituye
el modelo más sencillo para la predicción de la concentración en columnas de humo. La tierra sofoca la dispersión vertical. Los remolinos atmosféricos hacia arriba y hacia abajo, que dispersan la columna de humo en dirección vertical, no pueden penetrar en el suelo. Por lo tanto la dispersión vertical termina a nivel de la superficie. Para tener en cuenta esto en los cálculos, es común suponer que los contaminantes que hubieran sido arrastrados por debajo de z = 0 son reflejados hacia arriba, es decir se supone una chimenea hipotética en z = – H.
Entonces, la concentración en cualquier punto se debe a la propia columna de humo más la que es reflejada desde el suelo. La ecuación (3) se modifica entonces, resultando de la siguiente forma
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+=
+−−−− )σ 2 / H) ( ( )σ 2 / H) ( ( )σ 2/ ( 22222
y2
eeeσσu 2π
Q)( ZZ
ZY
zzyx,y,zc . (39)
Si la tierra absorbiera los contaminantes, la concentración de éstos en z = 0
sería nula. En este caso la ecuación de la columna de humo resulta
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛=
+−−
−−− )σ 2 / H) ( ( )σ 2 / H) ( ( )σ 2/ ( 22222
y2
eeeσσu 2π
Q)c( ZZ
ZY
zzyx,y,z . (40)
Para aplicar la ecuación de la columna de humo gaussiana, se deben conocer
los valores σy y σz. Existen gráficos, conocidos como curvas de Pasquill Gifford, en los que se muestran los valores de los coeficientes de dispersión atmosférica: se dibuja log σ vs log x para las distintas clases de estabilidad atmosférica.
Para usar en las fórmulas es preferible tener una expresión analítica de σy y σz
m10 2,10-1
m (x)σ 44-
x≤= xx
xy , (41)

Modelización Aplicada a la Ingeniería Nagornov, et al.
243
22 b2
1b1
2
11
11z a1a g(x) ,
c1cln x),F( siendo ),g( ) ,F( )(σ d
d
xx
xxzxxzx
+=
+== , (42)
donde m, denominado parámetro de Pasquill – Turner, a1, a2, b1, b2, c1, c2, d1 y d2 son constantes cuyos valores están tabulados para las distintas clases de estabilidad atmosférica (Ver tabla 5).
m a1 a2 b1 b2
A 0,22 0,112 0,000538 1,06 0,815 B 0,16 0,130 0,000652 0,95 0,750
C 0,11 0,112 0,000905 0,92 0,718
D 0,08 0,098 0,00135 0,889 0,688
E 0,06 0,0609 0,00196 0,895 0,684
F 0,04 0,0638 0,00136 0,738 0,672
Tabla 5: Valores de m, a1, a2, b1 y b2. En la tabla 6 se observan los valores de c1, c2, d1 y d2, que son funciones de z1.
z1 c1 c2 d1 d2
0,01 1,56 0,00673 0,048 0,45 0,04 2,02 0,00776 0,0269 0,37
0,1 2,718 0 0 0
0,4 5,16 18,6 – 0,098 – 0,225
1 7,37 0,00429 – 0,0957 – 0,60
4 11,7 0,00459 – 0,128 – 0,78
Tabla 6: Valores de c1, c2, d1 y d2. Los valores del parámetro z1, dependen de la superficie. Por ejemplo sobre una
superficie con césped de 1,5 cm vale 0,002 m y en las ciudades z1 = 1 m. Un ejemplo con tres chimeneas
Cuando no pueden hacerse las simplificaciones que llevaron a la ecuación (3), la solución analítica de la ecuación de difusión atmosférica no puede encontrarse

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
244
y se debe recurrir a una aproximación numérica. Como ejemplo se muestra una estimación de la contaminación del aire en la ciudad de San Nicolás.
San Nicolás es una ciudad de aproximadamente 160.000 habitantes, situada en una zona en donde desarrollan sus actividades diversas empresas entre las que se pueden mencionar como las más importantes una industria siderúrgica, una química y una planta de generación de energía eléctrica.
Durante el día la concentración de vehículos en la zona céntrica (~ 5 km2), es muy alta, pero durante la noche, el tránsito en la ciudad no es significativo. Por ello, se considera que los contaminantes del aire en este horario provienen de las emisiones industriales.
Dada la ubicación de la zona industrial, con respecto al centro de la ciudad no es posible identificar allí el aporte individual de las empresas. En cambio, la posición relativa entre ellas permite ubicar una estación de monitoreo de calidad de aire que para las diferentes direcciones del viento posibilite tal identificación, y que pueda utilizarse posteriormente para comparar medidas reales con los resultados del modelo.
El modelo tiene en cuenta la difusión por turbulencia, las condiciones de estabilidad de la atmósfera, la estratificación vertical y remoción superficial. La altura efectiva de las chimeneas es calculada por la ecuación de Moses y Carson para distintas condiciones de estabilidad atmosférica.
Los coeficientes de difusión turbulenta son parámetros importantes en la difusión turbulenta. En general, son las componentes de un tensor de tercer orden. Sin embargo, para el problema de difusión atmosférica, este tensor puede considerarse diagonal, en la forma
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
zz
yy
xx
K000K000K
K , (43)
donde Kxx, Kyy, Kzz son los coeficientes de la difusión turbulenta a lo largo de los ejes x, y, z. En la práctica, se asume la isotropía de la difusión turbulenta, con lo que se consideran iguales las componentes en ambas direcciones horizontales. Es por ello, que en los problemas de difusión atmosférica, se utilizan los coeficientes horizontal y vertical, llamadas difusividades atmosféricas
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
V
H
H
K000K000K
K , (44)
donde KH = Kxx = Kyy, y KV = Kzz. Hay varios métodos experimentales para la determinación de estos coeficientes. Una forma está basada en la determinación

Modelización Aplicada a la Ingeniería Nagornov, et al.
245
del coeficiente de difusividad vertical midiendo la temperatura y la velocidad del viento en la capa límite. Se supone que la temperatura y la velocidad del viento dependen de la altura según las siguientes leyes
,blnablna
22
,11
+=+=
zTzu
(45)
donde las constantes a1, a2, b1, b2 se determinan experimentalmente con mediciones. Luego, es posible encontrar el promedio del coeficiente de difusión vertical como el valor específico
)aa1(a 2
1
21
21 −= εk , (46)
donde ε2 es constante. El coeficiente de difusión vertical en cualquier otra altura z se determina con la fórmula
iV RzzkzK −= 1)(1
1, (47)
donde z1 es la altura específica, Ri es el número de Richardson que se promedia sobre la capa límite. Otra forma para determinar el coeficiente vertical de difusión turbulenta está basado en el balance de calor sobre la superficie terrestre. Se supone que el coeficiente de difusión vertical depende linealmente de la altura
zz 1V k)(K = , donde Q561T
QR770k1 δ−δ−=,
, . (48)
La constante k1 es el coeficiente de difusividad en la altura específica de 1 m. Aquí R es el balance de radiación, Q es el flujo de calor en suelo, que puede determinarse a partir del conocimiento de la humedad y la temperatura del suelo, y QT δδ , son las diferencias de temperatura y humedad, respectivamente, en la capa estudiada.
La tercera forma de determinar el coeficiente de difusividad vertical está basado en mediciones obtenidas mediante instrumentos especiales colocados en aeroplanos, mediante la fórmula
utuw w
′′
=2
K2
V , (49) donde w′ es el valor de cambio de la componente vertical de la velocidad del viento, u’ es el cambio de la componente horizontal de la velocidad del viento,

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
246
wt es el tiempo que se mantiene el signo de w′ , u es la velocidad promedio del flujo de aire relativo al instrumento de medida.
Además de los métodos instrumentales para determinar los coeficientes de difusión, existe también el método visual, basado en la observación de las columnas de humo de las chimeneas. En este caso, el coeficiente horizontal de la difusión turbulenta se determina como
u0H kK = , con
xx
kLln8
d 2
0 = , (50)
donde u es la velocidad del viento, y en la expresión del coeficiente k0, L es la longitud total de la columna de humo, y d es la mitad del ancho de la columna de humo a la distancia x de la fuente.
El coeficiente vertical de difusión turbulenta se determina como
mV zkK 1= , con
xxn
huk
n
n
Lln)1(2 21
1
1
1
+=
+
+
, (51)
siendo u1 la velocidad del viento a la altura específica de 1 m, L la longitud total de la columna de humo y h la altura vertical de la columna de humo a la distancia x de la chimenea. La velocidad del viento depende de la altura, según la expresión
nzuu 1= , donde m y n son constantes empíricas. Los experimentos muestran que los coeficientes horizontales de difusión
turbulenta pueden tomarse en promedio, sin depender de las coordenadas. Son simplemente un parámetro de las condiciones meteorológicas para la región estudiada. Al mismo tiempo, el coeficiente vertical de difusión turbulenta es función de la altura. Actualmente hay varias fórmulas empíricas para esta dependencia. Una de ellas está dada por la siguiente expresión:

Modelización Aplicada a la Ingeniería Nagornov, et al.
247
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
≤≤−+−
<≤
<≤+
=
1H
0,8 6,123q 5H
q) 9,30(5
8,0H
0,4 q
4,0H
0 9,30H
77,3) - q 5,2(
)(K
mm
m
mm
V
zz
z
zz
z , (52)
donde q = 0,85 U + 232 y Hm es la altura de mezclado.
En el problema planteado, si KH y KV no son constantes, la ecuación que debe resolverse es
( )( ) ( )
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=∂
∂−
−⋅−⋅=⋅
>∞<<∞−>⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂∂=
∂∂
+∂∂
0,,CV0,,
K
yδ)hδ(Q),(0,U
0,0,;KK
dH
iii
VH
yxzyxC
yzzyC
zyxzC
zyC
yyC
wxCu
, (53)
donde C(x, y, z) es la concentración de contaminantes, U → (u, w, 0) es la velocidad del viento, KH y KV son los coeficientes de difusión, Vd es la velocidad de deposición y Qi es la energía de la chimenea i de coordenadas y = yi, z = hi.
Se aplica el modelo a la empresa generadora de energía eléctrica, que posee tres chimeneas. Las mediciones se realizan en dos estaciones de monitoreo que registran las concentraciones de algunos contaminantes primarios y secundarios tales como CO, NOx, VOC, SO2, PM10 y O3. Una de las estaciones está ubicada en la zona céntrica, a 5 km de la empresa, y la otra en la dirección del viento predominante y a una distancia menor (1,5 km). Los niveles de contaminantes registrados durante la noche en esta última estación concuerdan con los resultados obtenidos con el modelo propuesto.
Los parámetros necesarios para el modelo se muestran en las tablas 7 y 8.
N° de chimenea Ubicación Diámetro Velocidad del gas
1 (– 48, – 120, 90) 5 m 12,78 m/s 2 (– 10, – 86, 90) 5 m 6,62 m/s
3 (0, 0, 120) 8,1 m 11,25 m/s
Tabla 7: Datos de las tres chimeneas.

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
248
Especies Flujo de masa, g/s, chimeneas 1 / 2 / 3 Velocidad de deposición, cm/s
NOx 77,22 / 38,67 / 232,33 Entre 0,10 y 0,50 SO2 14,98 / 0 / 326,39 0,20
Material Particulado 2,98 / 0,52 / 43,54 Entre 0,10 y 0,50
Tabla 8: Datos de los contaminantes. Se utilizó el coeficiente de difusión vertical dado por la ecuación (52). Para encontrar la solución numérica se utilizó el método de pasos
fraccionarios. Así la aproximación a la ecuación de difusión–convección es
( ) ( ) ( )
)54(.
h KK KK2K KK
2U1
h
,h
2UK
h
2z
1m1kj1kVkV
1mkj1kV1kVkV
1m1kj1kVkV
k
x
1/2mjk
1mjk
2y
1/2mk1j
1/2mjk
1/2mk1j
k
H
x
mjk
1/2mjk
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
++++−+⋅
=−
+−⋅=
−
+++
++−
+−−
++
++
++−
+
CCC
CC
CCCCC
Los resultados obtenidos con el modelo se compararon con los datos
registrados en una estación de monitoreo en la que no hay influencia de otras fuentes de contaminantes. Las concentraciones máximas calculadas de NOx y PM10, 0,15 ppm y 0,021 mg/m3, respectivamente, concuerdan con los picos medidos de concentración: 0,12 ppm y 0,024 mg/m3 (Nagornov et al, 1999).
La figura 4 muestra la concentración máxima, calculada con el modelo, del material particulado (PM10) en los alrededores de la estación de monitoreo. Las coordenadas de la estación en el gráfico son (5, 5).

Modelización Aplicada a la Ingeniería Nagornov, et al.
249
Figura 4: Concentraciones máximas calculadas de PM10.
Referencias
Carson, J. y Moses, H. (1969). "The validity of several plume rise formulas". J. Air Poll. Contr. Ass., 19, 862 - 866.
De Nevers, N. (1998) "Ingeniería de control de la contaminación del aire", Mc Graw Hill.
Fletcher, C.A.J. (1991) "Computational Techniques for Fluid Dynamics", Vol. 1, Springer Verlag.
Mohan, M and Siddiqui, T.A. (1998) “Analysis of various schemes for the estimation of Atmospheric Stability Classification” Atmospheric Environmental 32 [21] 3775-3781.
Nagornov, O., Quaranta, N., Caligaris, M., Rodríguez, G. y Caligaris, R. (1998) "Propagation of Air Pollution in Urban Area" MapleTech, 5 [2 & 3] 102-106.
Nagornov, O., Quaranta, N., Caligaris y Caligaris, R. (1999) "Contaminantes del aire en el área urbana. Influencia del sector industrial" VI Congreso Interamericano sobre el Medio Ambiente (CIMA VI) Monterrey, Méjico.
Seinfeld, J.H. (1985)"Atmospheric Chemistry and Physics of Air Pollution", John Wiley and Sons.

Un enfoque del problema de difusión atmosférica Nagornov, O. et al.
250
Agradecimientos
Los autores agradecen a la empresa Central Térmica San Nicolás y a la Comisión de Investigaciones Científicas de la Provincia de Buenos Aires por el permanente apoyo recibido.
Modelización Aplicada a la Ingeniería
251
Modelo de empaquetamiento a partir de la estructura del núcleo celular interfásico
NORA NASAZZI a y Dino Oterob
a Autoridad Regulatoria Nuclear, Buenos Aires, Argentina. b Comisión Nacional de Energía Atómica, Buenos Aires, Argentina.
Introducción
El ácido desoxirribonucleico (ADN) constituye el material genético de todos los organismos eucariotas (aquellos que poseen un núcleo diferenciado del citoplasma por la membrana nuclear) unicelulares y de las células que conforman los organismos pluricelulares.
La doble hélice del ADN constituye los cromosomas, siendo una
macromolécula de peso molecular no definido dado que los cromosomas que constituyen el cariotipo de cada especie puede estar formados por moléculas de diferente longitud. El ADN eucariota se encuentra asociado a proteínas, mediante las cuales se organiza en estructuras de complejidad y compactación diferente a lo largo de la vida de la célula.
La vida de un organismo unicelular o de una célula integrante de un tejido transcurre por etapas definidas en cuanto a los acontecimientos que en ellas se desarrollan y, en particular para el interés de este artículo, en cuanto al grado de compactación y empaquetamiento del ADN. En base a este parámetro, el ciclo celular puede considerarse dividido en dos etapas: interfase y división celular o mitosis.
Si bien la interfase se divide en varias subetapas, todas ellas son semejantes en cuanto a la escasa compactación del ADN, denominado aquí cromatina. En cambio durante la mitosis se produce una progresiva compactación a medida que avanza en sus respectivas etapas formando los cromosomas, hasta alcanzar un máximo en la llamada metafase, para luego decondensarse hasta alcanzar los niveles de la interfase.
Cabe destacar que la nomenclatura es convencional ya que al estado de
cromatina las moléculas de ADN que constituyen los cromosomas conservan su individualidad.

Modelo de empaquetamiento a partir de la estructura ... Nasazzi, N. y Otero, D.
252
Figura 1: Vista al microscopio óptico de cultivo de linfocitos fijado: núcleos en
interfase y cromosomas metafásicos.
Figura 2: Esquema probable de compactación del ADN y proteínas desde la cromatina interfásica (microscopio óptico) hasta un cromosoma metafásico
(microscopio electrónico de barrido). Puede observarse que el empaquetamiento en interfase no es visible al
microscopio óptico, a diferencia de la división celular en que se observan claramente los cromosomas debido a la compactación.
A fin de proponer un modelo de empaquetamiento y estructura espacial del
ADN en interfase se utilizó la frecuencia de aberraciones cromosómicas radioinducidas.

Modelización Aplicada a la Ingeniería Nasazzi, N. y Otero, D.
253
Las radiaciones ionizantes producen efectos clastogénicos sobre el material
genético que conducen a la producción de aberraciones cromosómicas generalmente reconocidas en el período de metafase del ciclo celular.
El mecanismo molecular más aceptado para la producción de aberraciones
cromosómicas es la reunión ilegítima intra o intercromosómica de las rupturas producidas en ambas hélices del ADN (double-strand breaks: DSB) alterando la secuencia original de bases nitrogenadas. (Obe, 2002), (Savage, 1998).
Las aberraciones cromosómicas se clasifican en estables (ACE) e inestables
(ACI) de acuerdo a su capacidad de sobrevivir a la división celular (IAEA 2001). Como se muestra en la siguiente figura las ACI implican la formación de un “resto” o fragmento “acéntrico”. La pérdida de la estructura del centrómero (indicado con un circulo blanco en la figura), con la consecuente imposibilidad de unirse al huso mitótico que dirige la división celular, hace que ambas copias del ADN puedan quedar incluidas en sólo una de las células hijas, existiendo entonces exceso o defecto de información en los productos de la mitosis. Este hecho es fundamental para que se produzca la “muerte en división” en el caso de producirse una ACI.
ANILLO Y RESTO INVERSIÓN
RUPTURA POR EL IMPACTO
FORMACIÓN DE ABERRACIONES CROMOSÓMICAS
INESTABLES
TRAZA IONIZANTE
ESTABLES
DICÉNTRICO Y RESTO TRANSLOCACIÓN
Figura 3: Esquema de producción de aberraciones cromosómicas inestables (ACE) y estables (ACI).

Modelo de empaquetamiento a partir de la estructura ... Nasazzi, N. y Otero, D.
254
Las ACI (dicéntricos y anillos) constituyen un dosímetro adecuado para la estimación de dosis recibida en caso de irradiaciones accidentales agudas, su reconocimiento se realiza por tinción convencional ó FPG (Fluoresence plus Giemsa) y requiere menor entrenamiento citogenético (Awa, 1997), (Edwards, 1997), (Perry and Wolf, 1974).
Figura 4: Metafases de cultivos de linfocitos humano.
Las flechas señalan las ACI a) dicéntrico b) tricéntrico c) anillo. Tinción FPG, Microscopio Nikon Optiphot, Objetivo seco 100X, (Nasazzi et al, 2004).
Las ACE (translocaciones e inversiones) proveen una estimación más adecuada para las irradiaciones prolongadas o en el caso de dosimetría retrospectiva, requieren técnicas de bandeo especiales para su detección: Bandeo G, Bandeo R, mFISH) y su reconocimiento insume más tiempo que en el caso de las ACI.(Lucas and Deng, 2000), (Darroudi et al, 2000), (Prakash et al, 2003), (Nasazzi et al, 2004).

Modelización Aplicada a la Ingeniería Nasazzi, N. y Otero, D.
255
a)
b)
Figura 5: a) Bandeo G (según Seabright modificado) Microscopio Nikon Optiphot, Objetivo seco 100X, (Nasazzi et al 2004). Las flechas señalan una ACE intercromosómica (translocación). b) mBAND. Bandeo por Hibridación in situ por Fluorescencia. (Prakash et al, 2003). Las flechas señalan ACE intracromosómica (inversión) Cabe mencionar dos hechos ampliamente aceptados, tanto teórica como experimentalmente:

Modelo de empaquetamiento a partir de la estructura ... Nasazzi, N. y Otero, D.
256
1- Tanto la producción de ACI como de ACE por radiaciones ionizantes de baja Transferencia Lineal de Energía (TLE), rayos X y γ, siguen una distribución de Poisson, comprobándose una igualdad de la varianza con la media. No es así el caso de de radiaciones de alta TLE (p.ej. neutrones) donde la varianza excede la media y su dependencia con la dosis es aún una cuestión abierta. (Merkle, 1983).
2- La producción de ACE y ACI sigue una relación 1:1 y que no se observa asociación preferencial entre los distintos cromosomas involucrados en ambos tipos de aberraciones intercromosómicas (Nakamura et al, 2004).
Se define el factor F como la relación entre aberraciones cromosómicas
intercromosómicas respecto de las intracromosómicas, aplicable tanto para ACI como ACE. El presente trabajo analiza la relación (F) entre las ACE radioinducidas resultantes de la recombinación de DSB producidos en distintos cromosomas (translocaciones) respecto de los producidos en un mismo cromosoma (inversiones pericéntricas) a fin de obtener información y proponer un modelo de geometría cromosómica a gran escala en el núcleo interfásico.
Los datos de ACE utilizados pertenecen al autor, obtenidos a partir de cultivos de linfocitos humanos irradiados in vivo con radiación γ de Co60 e identificando la ACE mediante Bandeo G (según Seabright modificado por el autor). Modelo
Asumiendo que la producción y recombinación de DSB es aleatoria y
proponiendo que la distribución de DSB sobre un determinado brazo cromosómico sigue una distribución de Poisson y es proporcional a la longitud en megabases (Mb) de dicho brazo, se puede obtener una estimación teórica de la relación de translocaciones e inversiones según la siguiente fórmula (Morton, 1991), (Hlatky, 1992), (Folle et al, 1998), (Prise et al, 2001)
FL S T S L
L S
i i i ii
i ii
=+ − −
==
=
∑
∑
( )( )1
46
1
46
286

Modelización Aplicada a la Ingeniería Nasazzi, N. y Otero, D.
257
donde Li es la longitud en Mb. del brazo largo del iésimo cromosoma, Si es la longitud en Mb. del brazo corto del iésimo cromosoma, Ti es la longitud en Mb del conjunto diploide promedio pesado para ambos sexos. Las consideraciones previas a la estimación teórica implican que los cromosomas se encuentran libremente distribuidos en el volumen del núcleo. El valor obtenido F=86 es significativamente mayor que nuestro valor experimental F=13.5 y que los obtenidos por otros autores (Sachs et al, 1993). Una consideración plausible para interpretar el exceso de inversiones pericéntricas es el “efecto de proximidad”.
Una función g(r) establece la probabilidad de que dos DSB separados por una distancia r interactúen siendo:
g = cte si r ≤ h y g = 0 si r > h. Aquí h es la distancia máxima de interacción y su orden de magnitud es h ≈ 1µ. (Kellerer, 1985) Si se asume que los cromosomas presentan un confinamiento espacial por plegamiento sobre sí mismos constituyendo dominios cromosómicos esféricos de volumen menor al volumen del núcleo, dos DSB producidos en un mismo cromosoma tendrán una probabilidad de interacción mayor que dos DSB producidos en distintos cromosomas viéndose favorecida la producción de inversiones pericéntricas y obteniéndose menores valores teóricos de F. Las consideraciones sobre “efecto de proximidad” y confinamiento espacial conducen a la necesidad de analizar las interacciones de DSB en base a la existencia de primeros vecinos. Se eligió un modelo de empaquetamiento máximo de dominios cromosómicos esféricos con 12 primeros vecinos en contacto, corregido por efecto de superficie del núcleo. Nuestro modelo propone además que la producción de DSB es proporcional a la sección eficaz geométrica del dominio cromosómico definida por (longitud en Mb)2/3.
En base a las hipótesis propuestas la relación teórica entre translocaciones e inversiones pericéntricas resulta

Modelo de empaquetamiento a partir de la estructura ... Nasazzi, N. y Otero, D.
258
FL S
L S L SL S
i ii
i ii i
i ii
=+
++
=
=
∑
∑
( )
( )( )
/ /
/
2 3
1
462 3
4 32
1
46
2
α βδ
α = longitud promedio de un cromosoma en Mb (140.3) β = número promedio de cromosomas vecinos considerando la corrección por efecto de superficie (12 * 0.58) δ = factor de corrección por distancia máxima de interacción (1µ) Los dominios cromosómicos en contacto sin imbricación tienen un radio promedio de 1µ considerando el radio nuclear de 4 µ. La interacción entre rupturas está dada fundamentalmente por la distancia máxima de interacción = 1µ. El valor obtenido en estas condiciones es F =10.7 para dominios de radio mayor estos deben imbricarse aumentando por lo tanto la probabilidad translocaciones y el valor de F. El límite superior (imbricación total), radio del dominio 4 µ = radio del núcleo) corresponde a F = 86.
El valor experimental de los autores, F = 13.5, indicaría una leve imbricación de los dominios. Los resultados de otros laboratorios muestran una amplia dispersión en los valores de F = 16.4±13 por lo que se propone que la dimensión de los dominios cromosómicos in vivo podría variar temporalmente. El presente modelo permite representar la dispersión de los valores de F experimentales, variando el radio del dominio cromosómico y respetando la cota de distancia máxima de interacción = 1µ (parámetro δ). En consecuencia los dominios cromosómicos fluctuarían entre el contacto y cierto grado de imbricación que favorecería la producción de translocaciones y por lo tanto valores mayores de F. Con la expansión del uso de la técnica de Hibridación in situ por Fluorescencia (FISH) utilizando sondas de cromosomas enteros ha sido posible visualizar, con microscopio de Fluorescencia, el empaquetamiento de los cromosomas interfásicos, tomados individualmente, en forma de dominios esféricos. Haciendo algunas asunciones, de las cuales es la más relevante que el volumen nuclear y de los dominios incluidos al ser fijados en el portaobjetos toman un espesor constante, se hicieron estimaciones del radio del dominio, las cuales concuerdan con los valores propuestos por el modelo.

Modelización Aplicada a la Ingeniería Nasazzi, N. y Otero, D.
259
Más aún, ha podido observarse que en núcleos interfásicos del mismo cultivo fijados y observados simultáneamente, el radio varía entre ciertos valores, haciendo plausible el postulado del modelo de la variación temporal del dominio a lo largo de las etapas de la interfase y la concomitante variación del grado de imbricación de los mismos. Conclusiones
Se propone un modelo de empaquetamiento del ADN en el núcleo interfásico a partir del valor F que toma la relación de ACE. Éste postula una distribución semilocalizada de los cromosomas en el núcleo celular en forma de dominios esféricos, distribuidos en forma aleatoria y cuyo grado de imbricación podría variar temporalmente. Referencias
Awa, A. (1997). “Analysis of chromosome aberrations in atom bomb survivors for dose assessment at the Radiation Effects Research Foundation” Stem Cells 15, Suppl. 2: 163-173.
Darroudi, F., Fomina, J., Natarajan, A.T. (2000). “Induction and stability of chromosomal exchanges in rhesus mon key lymphocytes following whole body irradiation, analysed by using FISH technique” Int. J.radiat. Biol. 85: 2035-2042.
Edwards, A. A. (1997). “he use of chromosomal aberrations in human lymphocytes for biological dosimetry” Rad. Res. 148: S39-S44.
Folle, G., Martinez-López, W., Boccardo, E. and Obe, G. (1998). “Localization of chromosome breakpoints: implication of the chromatin structure and nuclear architecture” Mut. Res. 404: 17-26.
International Atomic Energy Agency (IAEA) (2001). “Cytogenetic Analysis for Radiation dose Assessment.” Technical Report Series 405.
Kellerer, A. M. (1985). “The Dosimetry of Ionizing Radiation” Academic Press”:78-162.
Lucas, J.N., Deng, W. (2000). “Views on issues in radiation biodosimetry based on chromosome translocations measured by FISH. Radiat. Prot. Dosim. 88: 77-86.
Merkle, W., (1983). “Statiscal methods in regression and calibration analysis of chromosome aberration data” Radiat. Environ. Biophys. 21: 217-233.
Morton, N. E. (1991). “Parameters of the human genome” Proc. Natl. Acad. Sci. USA 88: 7474-7476.

Modelo de empaquetamiento a partir de la estructura ... Nasazzi, N. y Otero, D.
260
Nakamura, N., Nakano, M., Kodama, Y., Ohtaki, K., Cologne, J., Awa, A.A. (2004). “Prediction of clonal chromosome aberration frequency in human lymphocytes” Radiat. Res, 161: 282-289.
Nasazzi, N, Otero, D, Muhlmann, M. (2004). ”Retrospective biological dosimetry using FISH and alternative techniques” 11th International Radiation Protection Association Congress. Full papers.
Obe, G (2002). “Chromosomal aberrations: formation, identification and distribution” Mutation Research/Fundamental and Molecular Mechanisms of Mutagenesis 504, Issues 1-2: 17-36.
Perry, P., Wolff, S. (1974). “New Giemsa method for the differential staining of sister chromatids” Nature (London) 251: 156-158.
Prakash H., M., Azizova, V., Geard, R., et al (2003). “Past Exposure to Densely Ionizing Radiation Leaves a Unique Permanent Signature in the Genome” A. J. Hum. Genet., 72: 1162-1170
Prise, K.M., Pinto, M., Newman, H.C., Michael, B.D. (2001). “A review of syudies of ionizing radiation induces double strand breaks clustering” Rad. Res. 156: 572-576.
Sachs, R. K., Awa, A., Kodama,Y. et al (1993). ”Ratios of radiation produced chromosome aberrations as indicator of large scale DNA geometry during intephase” Radiat. Res.133, 345-350.
Savage, J.R.K. (1998), ”A brief study of aberration origin theories”. Mut. Res. 404 : 330-340.

Modelización Aplicada a la Ingeniería
261
Tópicos en la valuación de derivados dependientes del camino
CARLOS NEUMAN Y MÓNICA ZANOR
Departamento de Matemática, Facultad de Ingeniería Química,
Universidad Nacional del Litoral, Santa Fe, Argentina.
In memoriam L. A. Santaló
Introducción
El subyacente de una opción puede incluir, e.g., acciones, índices de acciones,
bienes transables, divisas, futuros. Existen dos tipos principales de opciones: call y put (opciones de compra y de venta respectivamente) . Un call le da al tenedor el derecho, pero no la obligación, de comprar el activo subyacente hasta una fecha dada, a un cierto precio. Un put da al tenedor el derecho, pero no la obligación, de vender el activo subyacente hasta una cierta fecha, a un cierto precio.
La mayor parte de las opciones que se negocian son americanas y, usualmente, cada contrato es un acuerdo para comprar o vender cien opciones de copias del activo subyacente cada una.
El precio de ejercicio y la fecha de expiración están definidas en el contrato. Las opciones se clasifican entre Vanilla y exóticas. Las opciones exóticas son variantes de las tradicionales (estándar o Vanilla); entre las exóticas se cuentan las asiáticas, binarias, barrera, compuestas, lookback. Una de las características excelentes de las opciones Vanilla es que se emiten sin tener en cuenta necesidades específicas del comprador y en un mercado controlado; en cambio las exóticas se contratan "over the counter" (fuera de un mercado controlado, por contrato no estándar, explícito o implícito, entre las partes).
Una de las partes de estos contratos tiene una posición long (larga), i.e. la parte que compra la opción, la otra tiene la posición short (corta), i.e. la que vende o suscribe la opción. Los árboles binomiales fueron los instrumentos básicos para valuar opciones de acciones y bonos, europeas y americanas. El modelo supone que los movimientos de los precios de los activos están formados por un gran número de pequeños movimientos binomiales. La utilidad básica esperada de un activo debe ser mayor que la provista por la tasa de interés libre de riesgo, r. La desviación típica, s, o volatilidad, del cambio en el precio del activo en un intervalo pequeño de tiempo es fundamental en el proceso de valuación numérica.
En la próxima sección introduciremos las opciones Lookback, un caso representativo de opción exótica dependiente del camino. En el resto del texto el

Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
262
objetivo principal es obtener resultados de la aplicación de métodos trinomiales para la evaluación de estas opciones y otras similares dependientes del camino y comparar la performance de los algoritmos utilizados para obtener las distintas aproximaciones numéricas.
Los métodos que desarrollamos están enfocados en las opciones de tipo Lookback pero pueden ser aplicados a un conjunto completo de derivados de la misma clase tanto de opciones como de futuros.
El texto se ocupa también de la construcción eficiente de algoritmos algebraicos, aunque no se dan detalles de los algoritmos mismos por razones de reserva de la propiedad de la heurística o del copyright según el caso. Nuestros algoritmos de ejemplo están basados en Matlab (pero pueden ser traducidos a cualquier sistema computacional). El objetivo de desarrollar en Matlab es simplificar el proceso de vectorización y paralelización del algoritmo, lo que es necesario en el caso de la resolución de portafolios reales de activos y derivados (para cada uno se debe realizar un tratamiento similar y en la mayoría de los casos hay que tratar interacciones entre los valores de los productos).
Opciones Lookback sobre acciones Las opciones Lookback son aquellas opciones exóticas cuyo precio de
ejercicio es el máximo valor que alcanza la acción durante la vida de la opción. Esto así dicho es una simplificación para el caso de las opciones de venta (put) puesto que existen diversos Lookbacks para puts y calls dependiendo de que se tengan en cuenta los valores máximos o mínimos en relación al valor actual o al de ejercicio de la opción y que el extremo se tome en forma continua o discreta en algunos puntos seleccionados del recorrido del precio del subyacente.
Las variantes de la definición simplificada previa llevan a productos similares que solamente necesitan algunas modificaciones del algoritmo original para ser tratados; por ello solo nos concentraremos en el caso enunciado teniendo en cuenta que los métodos desarrollados en realidad se aplican a un muy amplio espectro de productos dependientes del camino, no solamente lookback (pueden ser por ejemplo asiáticas) donde se toma el promedio del valor de la acción subyacente a lo largo del recorrido, y este proceso puede ser continuo, parcialmente continuo o discreto.
El proceso de evaluación puede comenzar con la construcción del árbol binomial (ver más adelante el análisis trinomial que es el objetivo principal de este trabajo) que es necesario complementar con métodos de simulación y retro-recorrido en el árbol. En el momento de expiración de la opción el precio Lookback es conocido y entonces se inicia el proceso de recorrido del árbol hacia atrás para determinar el valor. Para opciones europeas el proceso es directo pero para americanas es necesario optimizar en cada uno de los nodos para decidir si el
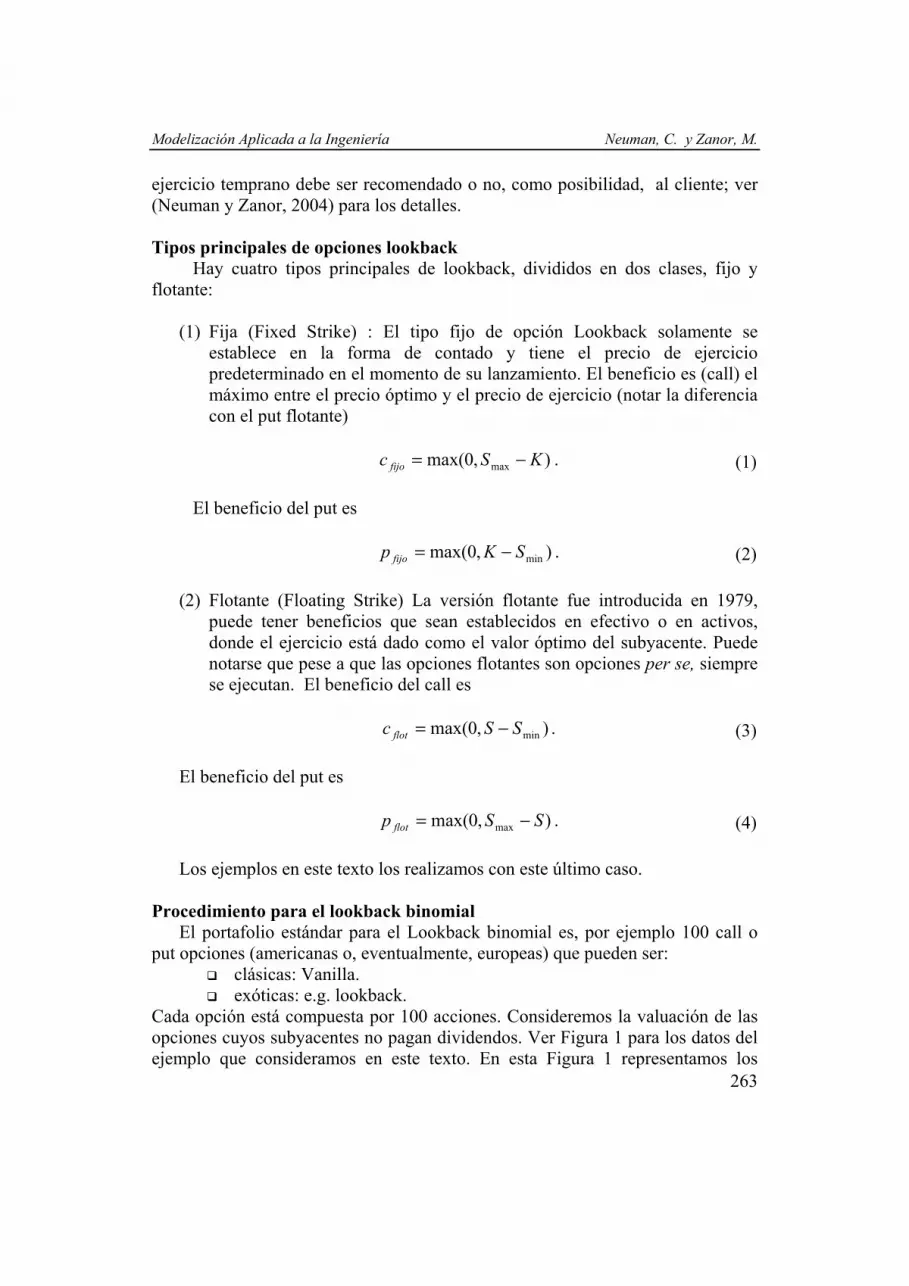
Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
263
ejercicio temprano debe ser recomendado o no, como posibilidad, al cliente; ver (Neuman y Zanor, 2004) para los detalles.
Tipos principales de opciones lookback
Hay cuatro tipos principales de lookback, divididos en dos clases, fijo y flotante:
(1) Fija (Fixed Strike) : El tipo fijo de opción Lookback solamente se establece en la forma de contado y tiene el precio de ejercicio predeterminado en el momento de su lanzamiento. El beneficio es (call) el máximo entre el precio óptimo y el precio de ejercicio (notar la diferencia con el put flotante)
),0max( max KSc fijo −= . (1)
El beneficio del put es
),0max( minSKp fijo −= . (2)
(2) Flotante (Floating Strike) La versión flotante fue introducida en 1979, puede tener beneficios que sean establecidos en efectivo o en activos, donde el ejercicio está dado como el valor óptimo del subyacente. Puede notarse que pese a que las opciones flotantes son opciones per se, siempre se ejecutan. El beneficio del call es
),0max( minSSc flot −= . (3)
El beneficio del put es ),0max( max SSp flot −= . (4)
Los ejemplos en este texto los realizamos con este último caso.
Procedimiento para el lookback binomial El portafolio estándar para el Lookback binomial es, por ejemplo 100 call o
put opciones (americanas o, eventualmente, europeas) que pueden ser: clásicas: Vanilla. exóticas: e.g. lookback.
Cada opción está compuesta por 100 acciones. Consideremos la valuación de las opciones cuyos subyacentes no pagan dividendos. Ver Figura 1 para los datos del ejemplo que consideramos en este texto. En esta Figura 1 representamos los

Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
264
valores de la acción ACIN (Acindar) desde Agosto de 2004 al 15 de octubre de 2004 en que expira la opción que estudiamos como ejemplo en este trabajo. (Datos tomados del periódico Ámbito Financiero). Solamente se consignan los días hábiles en que hay cotización. ACIN crece de $2.90 a $3.70 en el período de dos meses. Al principio del período el crecimiento es pausado pero después entra en un tramo de crecimiento más rápido. El objetivo es valuar las opciones al principio del período en la hipótesis de desconocimiento del devenir posterior del subyacente.
Figura 1: Valores de la acción ACIN (Acindar) desde Agosto de 2004 al 15 de octubre de 2004 en que expira la opción que estudiamos como ejemplo en este trabajo. Datos tomados del periódico Ámbito Financiero. Solamente se consignan los días hábiles en
que hay cotización. ACIN crece de $2.90 a $3.70 en el período de dos meses. En la Figura 2 se muestra el análisis del call Vanilla para ACIN
correspondiente a la Figura 1. En lo que sigue queremos distinguir ese análisis del que hacemos en términos del derivado Lookback. Esta opcion es la que se valúa tomando el máximo (versión más simple; máximo para el put, mínimo para el

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
265
call) valor que alcanza la acción hasta el momento presente. Para el análisis binomial nos referimos a (Neuman y Zanor, 2004) .
Antes de proseguir incluimos datos del balance de Acindar (indican que la acción subyacente probablemente tendrá un comportamiento positivo; fuente: Diario Ámbito Financiero, 20 de agosto de 2004, página 13):
Acíndar: Objeto social: Siderometalúrgica • Intensa actividad en colada continua: ganancias continuas • Brillante nivel operativo • Mejora del 48% respecto del ejercicio anterior • Aumento del margen de ganancia: 43.3%(2003)-> 48%(2004) • Buen flujo de ventas • Buen margen de beneficios • Aumento del resultado operativo de 2000 a 2004.
Figura 2: Valores de la opción Call ACIN (Acindar) K=3.0, madurez el 15 de octubre desde Agosto de 2004. Datos tomados del periódico Ámbito Financiero. Solamente se consignan los días hábiles en que hay cotización. ACIN crece de
$0.10 a $0.60 en el período de dos meses.

Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
266
En la Figura 3 se representa la tasa de interés teórica que se utiliza para el análisis de valor del call de la Figura 2; nos referimos a (Neuman y Zanor, 2004) para los detalles.
Figura 3: Valores de la tasa de interés teórica r, asociada al análisis de la opción
ACIN (ver Fig 1 y 2). Datos tomados del periódico Ámbito Financiero.
Valuación trinomial de Lookbacks El valor de un lookback call estándar europeo es (Hull, 2000)
⎥⎦
⎤⎢⎣
⎡−
−−−−
−− −−− )(
)(2)()(
)(2)( 3
2
2min1
2
0101 aNe
qraNeSaN
qreSaNeS YrTqTqT σσ , (5)
donde
T
TqrSS
aσ
σ )2
()log(2
min
0
1
+−+= ,
(6)
Taa σ−= 12 , (7)

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
267
T
TqrSS
aσ
σ )2
()log(2
min
0
3
++−+= ,
(8)
2min
02
1
)log()2
(2
σ
σSSrq
Y−−
−= , (9)
y Smin es el precio mínimo alcanzado por la acción hasta la fecha.
El valor de un Lookback put europeo estándar es, análogamente
)()(
)(2)(
)(2)( 202
2
03
2
1max2 bNeSbN
qreSbNe
qrbNeS qTqTYrT −−− −−
−+⎥
⎦
⎤⎢⎣
⎡−
−− σσ
(10)
donde
T
TqrS
S
bσ
σ )2
()log(2
0
max
1
++−+= , (11)
Tbb σ−= 12 (12)
T
TqrS
S
bσ
σ )2
()log(2
0
max
3
−−+= , (13)
20
max2
2
)log()2
(2
σ
σS
SqrY
−−= ,
(14)
y Smax es el máximo valor alcanzado por el precio de la acción hasta la fecha.
El principal problema con estas expresiones es que son útiles para los
Lookbacks estándar, si se conoce el valor máximo o mínimo correspondiente, cada variación (que es factible de ser tratada con el procedimiento numérico) conduce a problemas difíciles y en algunos casos imposibles donde las ecuaciones de frontera no están bien planteadas. En el caso general se necesita un método numérico como el de elementos finitos (MEF) o diferencias finitas (DF) (pero DF
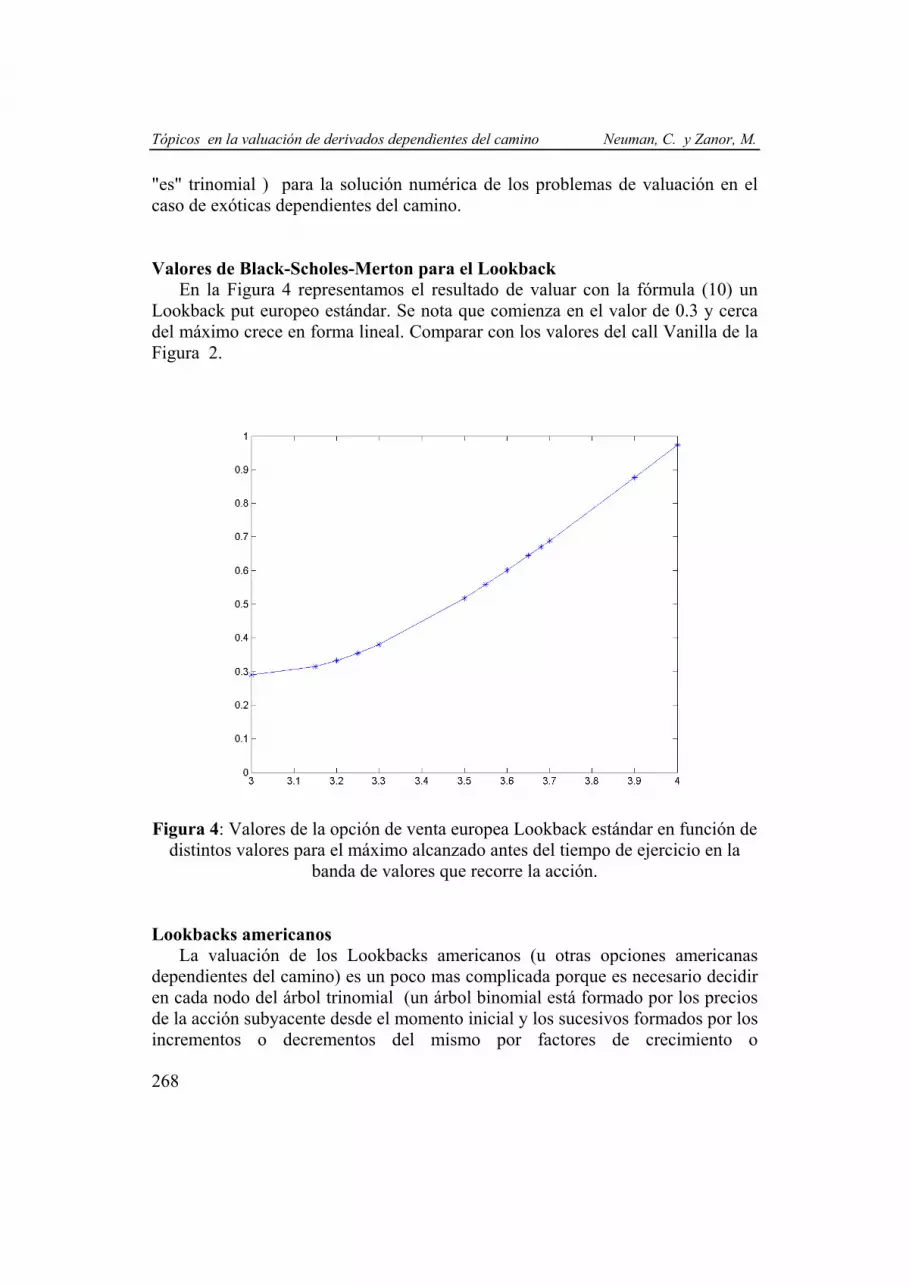
Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
268
"es" trinomial ) para la solución numérica de los problemas de valuación en el caso de exóticas dependientes del camino.
Valores de Black-Scholes-Merton para el Lookback En la Figura 4 representamos el resultado de valuar con la fórmula (10) un
Lookback put europeo estándar. Se nota que comienza en el valor de 0.3 y cerca del máximo crece en forma lineal. Comparar con los valores del call Vanilla de la Figura 2.
Figura 4: Valores de la opción de venta europea Lookback estándar en función de
distintos valores para el máximo alcanzado antes del tiempo de ejercicio en la banda de valores que recorre la acción.
Lookbacks americanos
La valuación de los Lookbacks americanos (u otras opciones americanas dependientes del camino) es un poco mas complicada porque es necesario decidir en cada nodo del árbol trinomial (un árbol binomial está formado por los precios de la acción subyacente desde el momento inicial y los sucesivos formados por los incrementos o decrementos del mismo por factores de crecimiento o

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
269
decrecimiento que surgen de las ecuaciones de probabilidad de suba o baja del precio de la misma, un árbol trinomial es como uno binomial pero que además admite que el precio de la acción subyacente pueda mantenerse constante en el período siguiente de modo que la estructura del mismo es más rica y representa mejor lo que sucede en la realidad con el precio de la acción, ver los ejemplos más adelante, el factor de crecimiento se denomina u y el de decrecimiento en el precio del subyacente se denomina d, para el arbol trinomial el restante se denomina m) si el ejercicio temprano es mejor que la valuación hacia atrás y tomar el mejor de los dos valores. En consecuencia la complejidad del algoritmo aumenta en principio puesto que obligaría a recorrer todos los nodos del árbol trinomial. Aquí es donde es necesario excluir casos que no pueden darse y otros que son infactibles de modo de reducir la complejidad y mantener acotada la complejidad total.
Ecuaciones para el árbol discreto trinomial El árbol trinomial es similar al binomial, pero hay tres posibilidades en cada
paso (subir, medio, y bajar) Existen varias posibles determinaciones de los valores de estos incrementos y sus 'probabilidades' asociadas. Por simplicidad tomamos, como problema test las fórmulas del libro (Hull, 2000), al tratar con diversas caminatas al azar se tienen que calibrar los parámetros
βσ 13 t
eu∆
= , d=1/u, m=1, ud=m2, (15)
61)
2(
12
2
2 =−∆−= σσ
rtpd , (16)
3/2=mp , (17)
61)
2(
12
2
2 =−∆= σσ
rtpd . (18)
Para una acción que paga un dividendo continuo con tasa q, se reemplaza r por r-q en estas ecuaciones. El factor de corrección de la ecuación (15) es necesario puesto que si se aplica el valor uno que figura en la bibliografía, el árbol no converge (comparar con (Hull, 2000). En las Figuras 5 a 8 representamos los resultados para el caso del algoritmo de fuerza bruta (que considera todos los casos, complejidad exponencial de orden O(3n)). En estas figuras representamos resultados trinomiales por el algoritmo de fuerza bruta (todos los casos) en 12 pasos. En la Figura 5, S es el valor de la acción. En la figura 6, p es el valor de la opción. En la Figura 7, S es la diferencia

Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
270
para volatilidades 0.70 y 0.40. Y en la Figura 8, p es la diferencia para volatilidades 0.70 y 0.40. En todos los casos los datos fueron tomados de El Cronista Comercial (Buenos Aires, mayo 24 de 2000, S0=1.45, X=1.52, r=0.0503, s=0.6945, T=0,1644). Comparar los valores de la figura 5 con los de la figura 1 (agosto-octubre 2004).
Figuras 5 a 8: Resultados trinomiales en 12 pasos. (5) (sup. izq.) S, valor de la acción (6) (sup. der.) p, valor de la opción (7) (inf. izq.) S, diferencia para
volatilidades 0.70 y 0.40, (8) (inf. der.) p, idem. Datos tomados de El Cronista Comercial (Buenos Aires, mayo 24 de 2000, S0=1.45, X=1.52, r=0.0503, s=0.6945,
T=0,1644). Comparar los valores de la figura 5 con los de la figura 1 (agosto-octubre 2004)

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
271
El principal problema con el análisis utilizando el algoritmo exhaustivo es la complejidad exponencial. Sin embargo esto no es necesario aquí, en esta clase de opciones exóticas (y en una amplia clase de opciones dependientes del camino) solo es necesario considerar el peor y el mejor (casos mínimo y máximo) e interpolar entre ellos. De este modo es posible estudiar solamente una cantidad lineal de casos. Con esta mejora la complejidad cae a O(2n).
El siguiente paso es vectorizar el algoritmo. Esto se logra por el método de calcular todos los caminos al mismo tiempo, de modo que, cuando se dispone de un cluster paralelo de computadoras, el programa envía cada cálculo a un diferente procesador y este problema test (primera parte) se resuelve casi instantáneamente.
Figura 9: Peores casos para árbol trinomial
En el caso normal, cuando se considera un portafolio de activos y opciones
clásicas y exóticas, la paralelización del algoritmo se hace más necesaria porque se deben distribuir las diferentes valuaciones de los productos entre los miembros del cluster y además aprovechar el resto de poder de computación paralelo para tratar las valuaciones mismas. En muchos casos se presenta correlación positiva entre los componentes del portafolio y también debe incluirse en el programa.
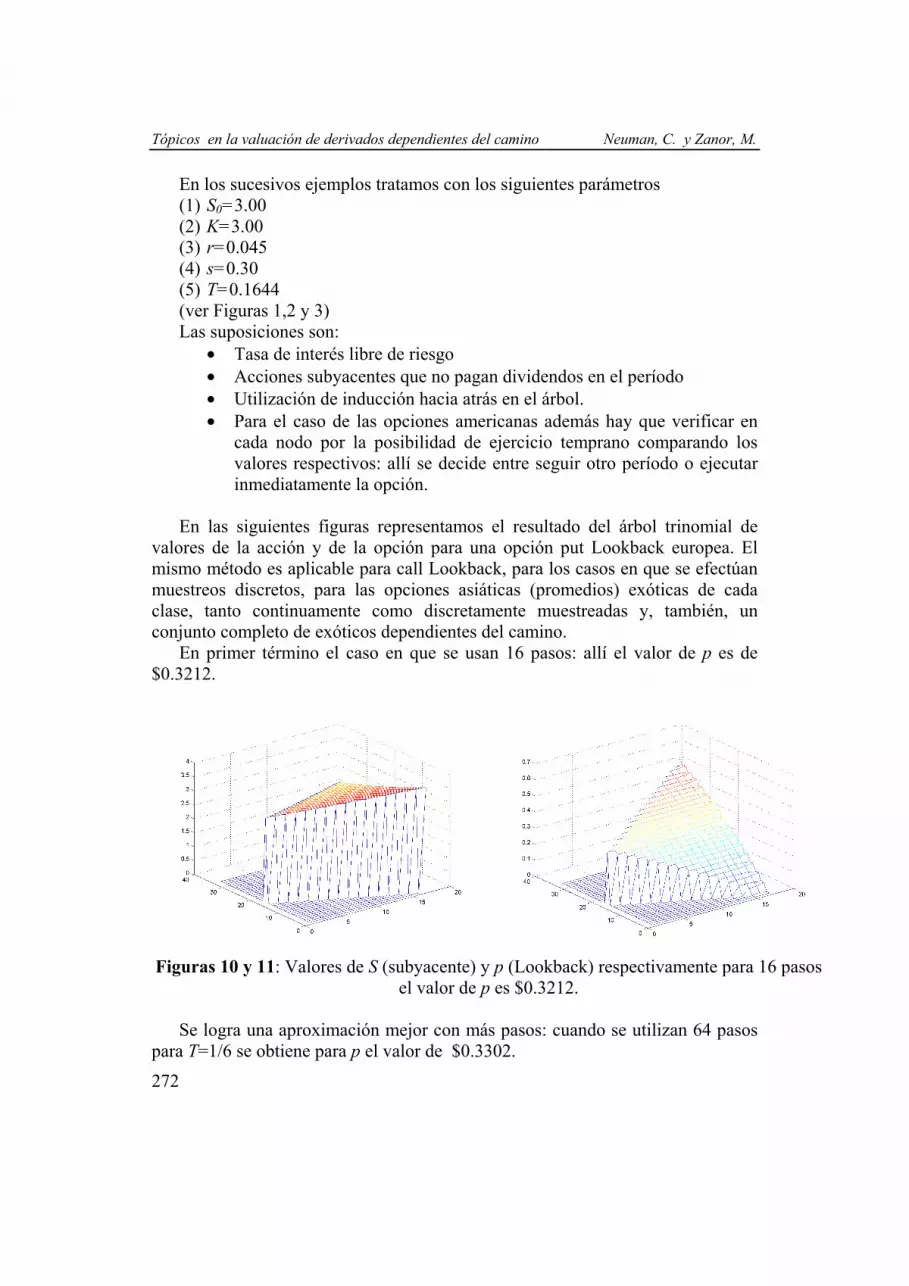
Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
272
En los sucesivos ejemplos tratamos con los siguientes parámetros (1) S0=3.00 (2) K=3.00 (3) r=0.045 (4) s=0.30 (5) T=0.1644 (ver Figuras 1,2 y 3) Las suposiciones son:
• Tasa de interés libre de riesgo • Acciones subyacentes que no pagan dividendos en el período • Utilización de inducción hacia atrás en el árbol. • Para el caso de las opciones americanas además hay que verificar en
cada nodo por la posibilidad de ejercicio temprano comparando los valores respectivos: allí se decide entre seguir otro período o ejecutar inmediatamente la opción.
En las siguientes figuras representamos el resultado del árbol trinomial de
valores de la acción y de la opción para una opción put Lookback europea. El mismo método es aplicable para call Lookback, para los casos en que se efectúan muestreos discretos, para las opciones asiáticas (promedios) exóticas de cada clase, tanto continuamente como discretamente muestreadas y, también, un conjunto completo de exóticos dependientes del camino.
En primer término el caso en que se usan 16 pasos: allí el valor de p es de $0.3212.
Figuras 10 y 11: Valores de S (subyacente) y p (Lookback) respectivamente para 16 pasos el valor de p es $0.3212.
Se logra una aproximación mejor con más pasos: cuando se utilizan 64 pasos
para T=1/6 se obtiene para p el valor de $0.3302.

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
273
Figuras 12 y 13: Valores de S (subyacente) y p (Lookback) respectivamente; para 64 pasos el valor de p es $0.3302.
Cuando se refina mucho más, 256 pasos, se obtiene p=$0,3324
Figuras 14 y 15: Valores de S (subyacente) y p (Lookback) respectivamente; para 256 pasos el valor de p es $0.3324.

Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
274
Comparar el resultado obtenido en este caso con el análisis del call (y del put
por la paridad put-call) de la Figura 2.
Estimación del orden empírico del método
Con los valores obtenidos se puede estimar el orden del método en primera aproximación
09,4
3324,03302,03302,03212,0 =
−− , (19)
de manera que el orden aproximado es uno. Con este orden, la extrapolación de los dos primeros valores da aproximadamente el tercero (0.3332). Árbol para Lookback americano
Realizamos un ejemplo discreto de pocos pasos para verificar los resultados numéricos y dar un ejemplo del caso americano de ejecución anticipada. Debe notarse que la estimación del put coincide con la del caso europeo y que para este ejemplo la variación es mínima y la ejecución anticipada es prácticamente teórica puesto que la diferencia de valores está por debajo del error de estimación. Aquí el valor que da el árbol es de P=0.37, teniendo en cuenta los valores de optimización en los nodos de posible ejecución anticipada. El valor no sería muy distinto si se tomara como europea. Los pares de valores a la derecha de los nodos terminales centrales indican que puede haber más de un valor posible para un nodo terminal o central; eso lo tiene en cuenta el algoritmo, puesto que toma la banda completa de valores posibles e interpola entre ellos según el caso en que esté en el nodo en cuestión; los detalles de esta operación son parte de la heurística del algoritmo y lo que permite reducir la complejidad.

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
275
Figura 16: Árbol trinomial Lookback americano con ejecución anticipada. Notar que el valor del put es P es 0.37 (Lookback americano).
Muestreo continuo del máximo
Se toma en consideración una opción de venta donde el valor máximo de la acción subyacente es medida de manera continua, i.e. Lookback put europeo.
Cuando el valor máximo es actualizado en forma continua se tiene que el precio de la acción se mantiene menor o igual al máximo
JS ≤≤0 . (20)
Como es una opción que depende del camino su valor P será una función tal
que
4.330.00
3.83 3.830.07 0.000.00
3.39 3.39 3.39 3.83 3.390.31 0.36 0.44 0.000.00 0.00
3.00 3.00 3.00 3.00 3.39 3.000.37 0.38 0.38 0.39 0.00
0.00 0.39
2.65 2.65 2.65 3.39 3.000.40 0.34 0.74 0.350.00 0.35
2.35 2.350.71 0.65
Referencias 0.653.00 S0.37 Popt 2.080.35 P 0.92

Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
276
P = P(S, J, t). (21)
Se supondrá, siguiendo a (Wilmott et al, 1997), que una cantidad dependiente del camino puede definirse como una integral
( ) ττ dSI
t nn ∫=
0)( , (22)
y sea
nnn IJ 1)(= . (23)
La estrategia es considerar una opción que depende de nJ y tomar el límite
para ∞→n ; entonces
)(lim0
ττ
SmáxJJtnn ≤≤∞→
== . (24) Desde el instante t al t + dt, nJ cambia por una cantidad ndJ dada por
ndtt nnn dSdJJ
1
0))(( ⎟
⎠⎞⎜
⎝⎛=+ ∫
+ττ . (25)
Luego
dt
JS
ndJ n
n
n
n 1)(1
−= . (26)
Así nJ es una variable determinística sin términos aleatorios.
Se procede al armado de un portafolio consistente en una opción y ∆−
acciones:
SP ∆−=Π . (27)
En un lapso de tiempo dt el valor del mismo cambia en
dSdPd ∆−=Π . (28)

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
277
Se elige
SP
∂∂=∆ . (29)
Se deduce, recordando que P depende de tres variables
dtSPSdt
JP
JS
ndt
tPd
nn
n
n
2
222
21
1)(1
∂∂+
∂∂+
∂∂=Π − σ . (30)
Como el beneficio debe superar el de la tasa libre de riesgo será
dt
SPSPrdtrd ⎟⎠⎞
⎜⎝⎛
∂∂−=Π≤Π . (31)
Para el caso de una opción europea en esta última se verifica la igualdad.
Combinando las últimas dos expresiones se obtiene que
0
)(1
2
222
21
1 ≤−∂∂+
∂∂+
∂∂+
∂∂
− PrSPSr
SPS
JP
JS
ntP
nn
n
n
σ . (32)
Tomando límite cuando ∞→n , como JSmáxS =≤ , el coeficiente nJP ∂∂
tiende a cero. Luego queda
02
222
21 ≤−
∂∂+
∂∂+
∂∂ Pr
SPSr
SPS
tP σ , (33)
que es simplemente la ecuación de Black-Scholes-Merton, para una opción europea. La variable independiente J aparece en esta ecuación solamente como un parámetro y también aparece en las condiciones de frontera y final. La condición final es el beneficio en la fecha de vencimiento.

Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
278
Por ejemplo para un Lookback de venta es
)0,(),,( SJmáxTJSP −= .
(34)
De estas ecuaciones se obtienen las expresiones como la ecuación (10) que utilizamos para obtener valores a posteriori del put Lookback. Muestreo discreto del máximo
Muchos contratos Lookback comerciales se basan en un máximo obtenido observando un conjunto discreto de momentos en el desarrollo del subyacente. Hay varias razones:
(1) es más fácil medir en un conjunto pequeño de valores (2) todos los precios son reales
(3) se evita en alguna medida precios en picos del subyacente
(4) los contratos son más baratos por bajar la frecuencia del muestreo Aquí la relación entre S y J, el máximo muestreado discreto, puede ser más
compleja. El beneficio formalmente es el mismo pero puede pasar que la opción no se ejecute: no se ejecutará al expirar si S es mayor que J, por ejemplo.
El algoritmo y los resultados son similares

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
279
Algoritmos discretos Los algoritmos que son aptos para los Lookbacks y la mayor parte de los
derivados exóticos dependientes del camino van desde el esquema binomial simple hasta los métodos más complejos basados en ondelettes (descomposición en bases).
Figura 17: Métodos numéricos El método trinomial que, en esencia, es un método de diferencias finitas para
aproximar las ecuaciones diferenciales en derivadas parciales (EDPs) tiene la
Esquema más complejo,más lento, pero necesita menos puntos de discretización
Esquema más simple, pero necesita muchos puntos de discretización
Binomial
Trinomial
EDPs Integración Numérica Completa Métodos de
descomposición con bases(Fourier, ondelettes…)

Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
280
propiedad plausible de ser simple de entender para el usuario no matemático, y, aunque aquí, el grupo interdisciplinario es casi obligatorio, en muchos casos es necesario explicar los resultados a un administrador y la versión trinomial es suficientemente edible (digestible) para lograr esa meta también.
En algunos casos tenemos variantes bien definidas de las EDPs de Black-Scholes-Merton con condiciones de frontera no totalmente imposibles de tratar. Pero en buena parte de los casos, la deducción de éstas es difícil y si el derivado, como suele ser la práctica, se pactó fuera de un mercado y es único, probablemente no sea razonable atacar el problema teórico de su valuación mediante herramientas analíticas (debido a que existen incertezas ocultas en los parámetros y datos iniciales y, también, en la estructura del portafolio donde el derivado se establece). El curso natural sería en estos casos el método algebraico o discreto. El mejor de estos (simple, preciso, adaptativo) es el trinomial.
Así en este texto se han estudiado métodos trinomiales. Las clases principales de estos métodos tienen complejidad, para la primera parte de la construcción del árbol:
(1) Árbol completo o lleno, complejidad O(3n) (2) Montecarlo, por lo menos O(n³) (3) Árbol simplificado, a lo sumo O(d n), d un entero pequeño (4) Árbol simplificado con muestreo en puntos prescritos puede llevarse a
algoritmo lineal.
y, para la segunda parte (construcción del valor recorriendo el arbol hacia atrás), en primera aproximación es O(n²) teniendo en cuenta que se interpola entre máximo y mínimo en los nodos pero, mediante una selección cuidadosa de los nodos para evaluar, utilizando los valores teóricos para los adyacentes es posible acercarse al orden lineal (un algoritmo general de orden lineal todavía no lo hemos completado; lo mejor que hemos alcanzado, por técnicas de separación, es un algoritmo O(n log n) ).
Si las opciones son americanas en lugar de europeas las complejidades no cambian (pero sí las constantes de los órdenes).
Los métodos trinomiales son una clase de algoritmos simples y directos (una vez que se descubre cómo programarlos.) Los que en el esquema de la Figura 17 están ubicados en el centro, implican una discretización o algebrización del problema pero lo mantienen en un formato comprensible para el observador no especialista. La principal ventaja del método trinomial es que es fácilmente comprensible y es muy útil para la comprensión completa de las principales características del proceso de valuación.
El núcleo del algoritmo lineal más ‘loglineal’ no se describe en detalle por razones de reservar la heurística o copyright del programa pero las principales características (en lugar de su implementación en detalle) fueron descriptas en este trabajo.

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
281
Estimación del error y adaptatividad
Para la estimación de errores aplicamos métodos que hemos desarrollado en los
últimos años (Bergallo et al, 2000). Los mismos se orientan a estimar los errores a posteriori basando el cálculo en la utilización de dobles mallas o mallas mixtas. En esta clase de problemas la estimación por dobles mallas resulta bien adaptada. Basada en la estimación del error y en la estimación de áreas críticas del árbol donde la determinación del valor debe ser más precisa es posible refinar el mismo. En la Figura 18 mostramos un posible método para lograr la refinación de malla:
Figura 18: Posible implementación de refinamiento de malla trinomial
El método de mallas mezcla funciona mediante el mezclado de la malla actual
con una mas gruesa (o mas fina), generalmente doblando el paso de modo que suele ser necesario trabajar con grillas potencias de dos, y promediando los valores en los nodos comunes (nodos a tierra). Los cálculos prosiguen como es habitual (lo que no altera el orden de complejidad) y de los residuos (ver (Bergallo et al, 2000)), calculados de la malla mezcla, es posible estimar el error a posteriori. Los criterios para el refinamiento son:
(1) norma local de residuos mayor que el umbral de adaptatividad (2) zona crítica del árbol definida por la interacción del derivado con los otros
componentes del portafolio, la estructura de las tasas de interés u otras razones

Tópicos en la valuación de derivados dependientes del camino Neuman, C. y Zanor, M.
282
(3) zona crítica del árbol asociada al muestreo de valores en la versión de muestreo discreto de estos exóticos.
Conclusiones En este texto hemos presentado un conjunto de algoritmos basados en métodos
trinomiales que son lineales en el número de pasos de discretización y pueden hacerse lineales en el proceso completo. Sus características son:
Efectividad: superan los métodos usuales binomiales y trinomiales en
evaluación en los nodos y en la optimización en los mismos. Simplicidad: hacen lineal la parte más compleja de construcción del árbol, y
resuelven la cuestión frente a los métodos de tipo Montecarlo. Precisión: dan una precisión razonable que puede ser estimada por medio de
métodos de dobles mallas o similares y que está en consonancia con la precisión de los datos y parámetros de entrada
Rapidez: el orden del método facilita una gran rapidez de cálculo Paralelizabilidad: la versión vectorizada del algoritmo es implementable en
clusters de computadoras paralelas. Se está desarrollando investigación en esta dirección en asociación con colegas del CIMEC, INTEC, Santa Fe.
En resumen el método es completo, es más rápido que el método trinomial
exhaustivo y da una cobertura suficiente desde el punto de vista de la valuación del árbol de discretización.
El método propuesto es aplicable a una amplia clase de derivados exóticos del
tipo dependientes del camino: Lookbacks, opciones alfa-cuantiles, Lookbacks asiáticas, opciones Hindsight, opciones Lookback repartidas, opciones Mocatta, Lookbacks de tiempo parcial, Lookback Cuantificadas, swaptiones Bermudas, notas duales reversales Callable power, asiáticas, etc) y permite muestreo discreto, es decir en un subconjunto de tiempos de evaluación, lo que es muy popular porque los derivados con muestreo discreto son más baratos que los de muestreo total.
Respecto de los métodos en sí en este trabajo hemos propuesto un factor de
corrección a las fórmulas estándar para la caminata trinomial de Hull que permite calcular con precisión la caminata al azar (factor beta) y la hace independiente del

Modelización Aplicada a la Ingeniería Neuman, C. y Zanor, M.
283
número de pasos, aumentando así la precisión y, de hecho, corrigiendo un error típico de la literatura.
Referencias
Bergallo, M.B., Neuman, C.E., y Sonzogni, V.E., (2000) “Composite mesh
concept based FEM error estimation and solution improvement”, Computer Methods in Applied Mechanics and Engineering, 188, 755—774.
Hull, John. (2000). "Options, Futures & Other Derivatives", 4th edition, Prentice Hall.
Neuman, Carlos E. y Zanor (2004). "Numerical valuation algorithms for exotic derivatives. I: The trinomial lookback case", Mecánica Computacional, 23
Wilmott, P., Howison, S., and Dewyne, J., (1997). "The Mathematics of Financial Derivatives", Cambridge University Press, Cambridge.
Nota:
(1) Este trabajo ha sido parcialmente sostenido por la Universidad Nacional del Litoral, subsidio 12-H168.

Modelización Aplicada a la Ingeniería
284
Análisis tridimensional de fisuras de intercara utilizando el método de los elementos de contorno
JHONNY E. ORTIZ T.a Y ADRIÁN P. CISILINOb
a Escuela de Ingenieros, Universidad de Sevilla
Sevilla, España b División Soldadura y Fractomecánica INTEMA
Facultad de Ingeniería, Universidad Nacional de Mar del Plata Mar del Plata, Argentina
1 Introducción La propagación de fisuras alojadas en la intercara entre materiales disímiles es un
mecanismo de falla típico en los materiales compuestos. Este se presenta tanto en la escala macromecánica (delaminación de compuestos construidos por capas, ver Figura 1a) como en la escala micromecánica (despegue de la intercara fibra/matriz, ver Figura 1b).
La necesidad de mejorar la resistencia mecánica de los materiales compuestos ha conducido durante las últimas décadas a progresos importantes en la mecánica de fractura de las fisuras de intercara. Sin embargo, estos avances son el resultado de estudios basados en la idealización bidimensional del problema. Los estudios que consideran los aspectos tridimensionales son escasos. Esto se debe por un lado a la extrema complejidad de su solución analítica, y por otro al elevado costo computacional de su solución numérica. De todas formas, dada la discontinuidad entre las propiedades mecánicas de los materiales ubicados a ambos lados de la fisura, se espera que los efectos tridimensionales cumplan un papel más importante para las fisuras de intercara que para las fisuras alojadas en materiales homogéneos.
El Método de los Elementos de Contorno (MEC) se ha utilizado para el análisis de muchos fenómenos relacionados con las fisuras de intercara en materiales compuestos. Sin embargo, todos estos estudios se limitan al análisis de modelos bidimensionales. Por ejemplo, entre otros autores (Cho et al, 1992) analizaron el comportamiento de fisuras alojadas en la intercara entre dos materiales anisótropos, (Yuuki y Xu, 1994) evaluaron el efecto de las tensiones residuales, (Sladeck y Sladeck, 1997), estudiaron las “T-stresses”, (Kwon y Dutton, 1991) analizaron el comportamiento de fisuras orientadas en la dirección perpendicular a la intercara, y (Selcuk et al, 1994) y (Beer, 1993) utilizaron el MEC para predecir la propagación de fisuras en la intercara. De forma similar, (París et al, 1996), y (Varna et al, 1997) estudiaron la influencia del contacto entre las caras de la fisura sobre el despegue entre la fibra y la matriz, mientras que (Liu y Xu, 2000) consideraron el efecto del tratamiento superficial de la fibra sobre el mecanismo de despegue.

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
285
Una metodología clásica adoptada por muchos autores para el cálculo de los
factores de intensidad de tensiones en fisuras de intercara a partir de los resultados de modelos de MEC consiste en la extrapolación de los campos de desplazamientos y tensiones en la zona próxima al vértice de fisura (ver por ejemplo (Tan y Gao, 1990), (Yuuki y Cho, 1989), (Mao y Sun, 1995) y (He et al, 1994)). Sin embargo, los métodos basados en la evaluación de integrales independientes del camino (entre ellos la integral J) se presentan como una alternativa más robusta y confiable. En este sentido, es importante mencionar que el MEC se adapta especialmente a la evaluación de las integrales independientes del camino, dado que las tensiones, deformaciones y derivadas de desplazamientos necesarios para su cálculo pueden ser calculadas en forma directa y precisa a partir de sus respectivas representaciones integrales sobre el contorno del problema. La aplicación de la metodología de la integral J a fisuras de intercara en dos dimensiones puede encontrarse en los trabajos de (Miyazaki et al, 1993), y de (de Paula y Aliabadi, 1997).
Entre los esquemas disponibles para el cálculo de la integral J para problemas tridimensionales, se emplea en este trabajo la Integral de Energía de Dominio (IED) propuesta por (Moran y Shih, 1987). Uno de los autores de este trabajo ya ha demostrado la versatilidad y eficiencia de la IED para el análisis de fisuras tridimensionales alojadas en sólidos isótropos (Cisilino et al., 1998, Cisilino y Alibadi, 1999), por lo que la extensión de la metodología al análisis de fisuras de intercara resulta promisoria. Junto con la IED se emplea además en este trabajo la metodología de la integral de interacción o de la integral M1 (propuesta originalmente por (Chen y Shield, 1977)) para desacoplar los modos mixtos del factores de intensidad de tensiones a partir de J. La metodología de la integral M1 ha sido
(a)
(b)
Figura 1: Fisuras de intercara en materiales compuestos: (a) delaminación de una placa construida por capas, (b) fisura transversal en un compuesto
de fibras unidireccionales inducida por el despegue en la intercara fibra/matriz.

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
286
aplicada en un serie de trabajos recientes (ver (Gosz et al., 1998) y (Nagashima et al, 2003)) para el cálculo de los factores de intensidad de tensiones a lo largo del frente de fisuras de intercara en tres dimensiones utilizando modelos de elementos finitos. En lo relacionado con el MEC, la metodología de la integral M1 ha sido únicamente utilizada en el análisis de problemas bidimensionales por (Miyazaki et al, 1993).
2 Características de las fisuras alojas en la intercara entre dos materiales disímiles 2.1 Campos de tensiones en el vértice de la fisura
Consideremos el problema plano de una fisura de intercara alojada entre dos materiales isótropos disímiles como se ilustra en la Figura 2. Por conveniencia adoptamos un sistema local de coordenadas polares con el origen en el vértice de la fisura, e identificamos el material ocupando la mitad superior como material 1 con módulo de Young E1 y coeficiente de Poisson ν1. De forma similar las constantes elásticas del material que ocupa la mitad inferior de la placa son E2 y ν2. De acuerdo a las hipótesis de la mecánica de fractura lineal elástica, el campo de tensiones en la zona vecina al frente de la fisura corresponde al de la solución asintótica de (Williams, 1959), la que se presenta en la Ecuación 1 con el agregado del modo III de acuerdo al trabajo de (Rice et al, 1990).
[ ] ( ) [ ] ( ) ( ) θσεθσεθσπ
σ εε IIIijIII
IIij
iIij
iij Krr
r~;~Im;~Re
21 ++= KK , (1)
donde r y θ son las coordenadas del sistema de coordenadas polares; K se define como el factor de intensidad de tensiones complejo para los modos planos
III iKK +=K , y ijσ~ son las variaciones angulares de las componentes del tensor de tensiones (la forma explícita de los campos asintóticos de tensiones y desplazamientos se da en el Apéndice 1). Por su parte el símbolo ε corresponde al denominado la índice oscilatorio que se define como
⎥⎦
⎤⎢⎣
⎡+−=⎥
⎦
⎤⎢⎣
⎡++=
ββ
πµµκµµκ
πε
11ln
21ln
21
212
121,
(2)
donde αα νκ 43−= para la condición de deformación plana y )1/()3( ααα ννκ +−= para la condición de tensión plana; )1(2/ ααα νµ +=E es el modulo de corte, y los subíndices α=1,2 hacen referencia a los materiales por encima y por debajo de la intercara. El símbolo β es uno de los parámetros de Dundurs. Para problemas en dos dimensiones, la solución del problema queda caracterizada por los dos parámetros de (Dundurs, 1969), los que se definen como

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
287
( ) ( )( ) ( )
( ) ( )( ) ( )11
11,1111
2112
1221
2112
1221
+++−−−=
++++−+=
κµκµκµκµβ
κµκµκµκµα . (3)
Vale la pena mencionar aquí que, a diferencia de los casos bidimensionales, los
parámetros de Dundurs antes presentados no son suficientes para caracterizar la solución del problema tridimensional. En tal sentido nótese que una misma combinación de materiales tendrá distintos valores de los parámetros de Dundurs según ésta se encuentre en condiciones de tensión o deformación plana.
2.2 Zona de contacto en el vértice de fisura En 1977 (Comninou, 1977) demostró que las soluciones para el campo de
tensiones y desplazamientos de la fisura de intercara implican una zona de contacto entre las caras de la fisura en la zona vecina a su vértice. Los procedimientos de la mecánica de fractura lineal elástica (es decir, la caracterización de la fisura en términos del factor de intensidad de tensiones III iKK +=K ) resultan únicamente
∞yyσ
L
µ1 ν1
µ2 ν2
x
y
rθ
T
∞xyσ
ϕ
Figura 2: Esquema de una placa plana con una fisura de intercara: sistema de coordenadas locales en el vértice de fisura y aplicación de la carga
remota.

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
288
válidos cuando la zona de contacto en la zona del vértice es suficientemente pequeña (ver (Rice, 1988)).
Utilizando los campos de desplazamientos asintóticos de Williams (Williams, 1959), Rice (Rice, 1988) demostró que la dimensión de la zona de contacto es función del índice oscilatorio ε y la dirección de la carga ϕ (ver Figura 2). Si se adopta como límite práctico que la dimensión de la zona de contacto no debe exceder el 1% de la longitud de fisura para verificar la validez de K, se obtiene la condición επϕ 605.42 +−> (Hutchinson et al., 1987). A modo de ejemplo resulta entonces que °−< 50ϕ para ε = 0.15, °−< 77ϕ para ε = 0.05, y °−< 87ϕ para ε = 0.01. Estas restricciones son usualmente satisfechas en casos de interés práctico en los que se presenta una componente de carga de tracción en la dirección perpendicular al plano de la fisura (Hutchinson et al., 1987).
2.3 La tasa de liberación de energía para fisuras tridimensionales
La relación entre la tasa de liberación de energía G (o su equivalente de la integral J en el caso de sólidos elásticos) y los factores de intensidad de tensiones para una fisura de intercara tridimensional es (Nakamura, 1991)
[ ] 2*
222* 2
1)(cosh
1IIIIII KKK
EG
µπε++= , (4)
donde E* y µ* son los módulos de Young y de corte equivalentes en la condición de deformación plana. Estos se definen como
⎟⎟⎠
⎞⎜⎜⎝
⎛+=⎟
⎟⎠
⎞⎜⎜⎝
⎛ −+
−=
21*
2
22
1
21
*11
211,
11211
µµµνν
EEE . (5)
3 Cálculo de la integral J y de los factores de intensidad de tensiones 3.1 La integral de energía de dominio
La integral J según fuera presentada originalmente por (Rice, 1968) sirve únicamente para la caracterización de fisuras bidimensionales. La integral J precisa entonces ser reformulada para su aplicación en el análisis de fisuras tridimensionales de geometría arbitraria. Se cuenta para este propósito con tres esquemas principales: los métodos basados en la extensión virtual de fisura (Hellen, 1975 y Parks, 1974), la generalización de la integral J de camino de Rice (Carpenter et al, 1986), y los métodos basados en integrales de dominio (Moran y Shih, 1987, Nikishkov et al., 1987 y Saliva et al., 2000). Entre estos esquemas se adoptó para este trabajo la Integral de Energía de Dominio (IED) propuesta por (Moran y Shih, 1987).
Consideremos un frente de fisura tridimensional como el que se ilustra en la Figura 3a. Definamos un sistema de coordenadas local *x en la posición η, donde se evaluará la tasa de liberación de energía, dado por *
1x normal al frente de fisura, *2x

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
289
normal al plano de fisura, y *3x tangente al frente de fisura. De acuerdo al trabajo de
(Natha y Moran, 1993), la expresión de la integral de dominio para la tasa de energía liberada cuando un segmento Lc del frente de fisura experimenta un avance virtual en el plano *
1x - *3x es (ver Figura 3a)
( )∫ ⋅−=V ikkikjij dVqwuG ,
*,
* δσ, (6)
donde w es la densidad de energía de deformación, *ijσ y *
,j ku son las componentes cartesianas del tensor de tensiones y de las derivadas de los desplazamientos en el sistema de coordenadas local. La integral es evaluada para un dominio tubular V que rodea al segmento de frente de fisura Lc, mientras que el avance virtual del frente de fisura está dado por la función q que cumple con las siguientes condiciones (ver Figura 3b)
( ) ( ) en el frente de fisura0 en o
a lq
Sη δ η∆ ⋅⎧⎪= ⎨
⎪⎩ .
(7)
Nótese que )(ηa∆ que varía en forma continua a lo largo de Lc y se anula en los extremos del segmento.
En ausencia de fuerzas de volumen, la Ecuación (7) se reduce a la expresión de dominio de la integral J. Una relación simple entre J(η) e G(η) puede ser obtenida si G(η) se asume constante a lo largo del segmento Lc. De esta forma es posible obtener la relación
( ) ( )( )∫ ∆
==CL
daGGJ
ηη
ηη , (8)
donde la expresión en el denominador corresponde al incremento de la superficie de fisura debida al avance virtual de su frente.
Figura 3: (a) Definición del sistema de coordenadas locales en la posición η y extensión virtual del frente de fisura, (b) dominio tubular rodeando un
segmento del frente de fisura.
2x*
1
3x*
x*
(a)
ηLc
a(η)
∆a(η) δl(η)
S0
(b)

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
290
3.2 La integral de interacción
La integral de interacción o integral M1 es una metodología basada en el principio de superposición para desacoplar los modos mixtos del factores de intensidad de tensiones a partir del cálculo de J. Consideremos con este propósito dos estados de equilibrio con sus variables identificadas por los superíndices (1) y (2) respectivamente. La superposición de los dos estados de equilibrio resultan en un tercer estado de equilibrio, (1+2). Para este nuevo estado, los factores de intensidad de tensiones )21( +
jK pueden ser escritos como
).,,()2()1()21( IIIIIIjKKK jjj =+=+ (9)
Los factores de intensidad de tensiones pueden ser relacionados con la integral J para el estado de equilibrio (1+2) utilizando la Ecuación (4), lo que resulta en
( ) ( ) ( )2)21(*
2)21(2)21(2*
)21(
21
)(cosh1 ++++ +⎥⎦
⎤⎢⎣⎡ += IIIIII KKK
EJ
µπε , (10)
donde E* y µ* son los módulos de Young y de corte efectivos dados en la Sección 2, y ε corresponde al índice oscilatorio definido en la Ecuación (2). La Ecuación (10) puede ser rescrita en función de los factores de intensidad de tensiones de los estados de equilibrio (1) y (2) lo que resulta en
[ ] )2()1(*
)2()1()2()1(2*
)2()1()21( 1)(cosh
2IIIIIIIIIII KKKKKK
EJJJ
µπε++++=+ . (11)
De esta forma, la integral M1 se define como
[ ] )2()1(*
)2()1()2()1(2*
)2()1()21(1
1)(cosh
2IIIIIIIIIII KKKKKK
EJJJM
µπε++=−−= +
(12)
La Ecuación (6) permite formular la integral M1 como una integral de volumen,
( )∫ −+=V
ikiijijkjijkjij dVquuM .,)2*()1*()1*(
,)2*()2*(
,)1*(
1 δεσσσ (13)
Para desacoplar los modos mixtos de los factores de intensidad de tensiones, el problema objeto del análisis se selecciona como el estado de equilibrio (1), de forma que las variables )1*(
ijσ y )1*(,kju son obtenidas a partir de los resultados del modelo de
MEC. Al mismo tiempo, las soluciones asintóticas para el caso de deformación plana dadas en el Apéndice 1 son seleccionadas como el estado de equilibrio (2). De esta

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
291
forma, las variables )2*(ijσ , )2*(
,kju y )2*(ijε son calculadas utilizando las soluciones
asintóticas con valores prescriptos de KI, KII y KIII. Finalmente la integral M1 definida en la Ecuación (13) puede ser calculada utilizando las variables obtenidas para los estados de equilibrio (1) y (2). Es así que utilizando tres conjuntos de soluciones asintóticas, ( 1)2( =IK , 0)2( =IIK , 0)2( =IIIK ), ( 0)2( =IK , 1)2( =IIK , 0)2( =IIIK ) y ( 0)2( =IK , 0)2( =IIK , 1)2( =IIIK ), la Ecuación (12) permite obtener las soluciones para los tres modos del factor de intensidad de tensiones
aI MEK 1
2*)1(
2)(cosh πε= ,
bII MEK 1
2*)1(
2)(cosh πε= ,
cIII MEK 1
2*)1(
2)(cosh πε= ,
(14)
donde aM 1 , bM1 y cM1 son los valores de la integral M1 correspondientes a los tres conjuntos de soluciones asintóticas antes indicados.
Es importante señalar dos aspectos importantes de la presente implementación de la integral M1. En primer lugar se destaca que la integral M1 aquí presentada vale únicamente para fisuras de frente recto. La aplicación de la integral M1 a fisuras de frente curvo requiere la incorporación a la Ecuación (13) de una integral adicional debido a que la solución auxiliar incorpora campos de desplazamientos y deformaciones no compatibles (Gosz et al., 1998). En segundo lugar se señala que al estar la integral M1 basada en la utilización de las soluciones asintóticas del vértice de la fisura para el estado plano de deformaciones, la misma no resulta estrictamente válida en la intersección del frente de fisura con la superficie libre. La singularidad del campo de tensiones en este punto es más severa que r1 , y por lo tanto las soluciones asintóticas para el estado de deformación plana no satisfacen exactamente la Ecuación (13) (Xie y Chaudhuri, 1998). 4 Modelado utilizando el Método de los Elementos de Contorno 4.1 Principales características del programa de MEC
El modelo de fisuras de intercara utilizando el MEC requiere de una formulación de múltiples dominios, los que permiten considerar las distintas propiedades elásticas de los materiales a cada lado de la fisura (ver Figura 4). Con este propósito se implementó en este trabajo una formulación clásica del MEC basada en la ecuación integral de desplazamientos, en la que se imponen las condiciones de equilibrio de

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
292
tensiones y continuidad de desplazamientos en la frontera común entre los dominios (Brebbia et al., 1984).
Como podrá observarse en la Sección 5, la mayor parte de los ejemplos analizados
en este trabajo presentan condiciones de simetría en su geometría, propiedades elásticas y estado de cargas. El procedimiento usual para analizar estos ejemplos consiste en discretizar únicamente la porción simétrica del problema, a la que se le aplican las condiciones de contorno apropiadas en el plano de simetría. Para este trabajo, sin embargo, se incorporó a la formulación del MEC un procedimiento que no necesita ni de la discretización ni de la especificación de condiciones de contorno en el plano de simetría. Este procedimiento denominado de “simetría implícita”, permitió implementar un algoritmo más eficiente y con una menor demanda de memoria al reducir el número de grados de libertad del problema. Debido a las limitaciones en espacio no es posible dar aquí los detalles sobre la implementación del algoritmo de MEC. Para una descripción más detallada el lector puede recurrir al trabajo de (Kaijevic y Sargal, 1995).
Es interesante además recordar que las cargas que actúan sobre la parte simétrica de un dominio pueden ser siempre descompuestas en componentes simétrica y antisimétrica. De esta forma, y dado que la formulación del MEC implementada en este trabajo no requiere de la especificación de condiciones de contorno en los planos de simetría, sólo se necesita de la construcción de un único modelo para resolver los
x2
x3
x1
ΩII(X)
ΓII(x)
t(x)
ΩI(X)
Γ12(x)
fisura de intercara
ΓI(x)
Figura 4: Esquema con la representación de la formulación de múltiples dominios el MEC para un sólido no homogéneo.

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
293
casos de carga simétrico y antisimétrico que conducen a la solución final del problema.
Finalmente se menciona que los algoritmos para el cálculo de la integral J y de los factores de intensidad de tensiones fueron implementados en el programa de MEC como subrutinas de post procesamiento. De esta forma los resultados de un modelo pueden ser analizados y procesados en forma independiente a la de su solución. Como se indicó en la Sección 3, el cálculo de la integral J requiere de la soluciones de los campos de tensiones, deformaciones y derivadas de los desplazamientos. De acuerdo a la metodología propuesta por (Cisilino et al, 1998, Cisilino y Aliabadi, 1999), para los puntos ubicados en el dominio del modelo las derivadas de los desplazamientos son evaluadas utilizando sus ecuaciones integrales de contorno, y luego a partir de éstas se calculan las deformaciones y las tensiones aplicando relaciones básicas de la mecánica del continuo. Por otro lado, para los puntos ubicados sobre la superficie del modelo las deformaciones y las derivadas de los desplazamientos son evaluadas a partir de los desplazamientos y tracciones en el contorno, siguiendo un procedimiento similar al usualmente utilizado por el método de los elementos finitos.
4.2 Implementación
Como se señaló en la Sección 2, las Ecuaciones (6) y (13) permiten calcular la integral J y los factores de intensidad de tensiones para cualquier posición η sobre el frente de fisura. Para cada caso, esto requiere de la evaluación de una integral de volumen sobre un dominio cerrado que rodea un segmento Lc del frente de fisura. Un selección natural es tomar las posiciones η de forma coincidente con los nodos de los elementos sobre el frente de fisura, al tiempo que Lc se toma como el lado o los lados de los elementos sobre los que se encuentra el punto η (ver Figura 5). La porción del dominio del modelo sobre en el que se evalúa la integral de volumen es discretizado utilizando celdas isoparamétricas de 27 nodos, en las que las tensiones, deformaciones y derivadas de los desplazamientos son interpoladas como el producto de sus respectivos valores nodales y las funciones de forma Ψi. La discretización del volumen se diseña con una geometría radial alrededor del frente de fisura, mientras que los volúmenes de integración incluyen las celdas ubicadas a diferentes distancias radiales. Esto se ilustra para el ejemplo de la Figura 6, donde la cara frontal del modelo ha sido parcialmente removida para permitir la visualización de la discretización de la fisura y los recintos de integración.
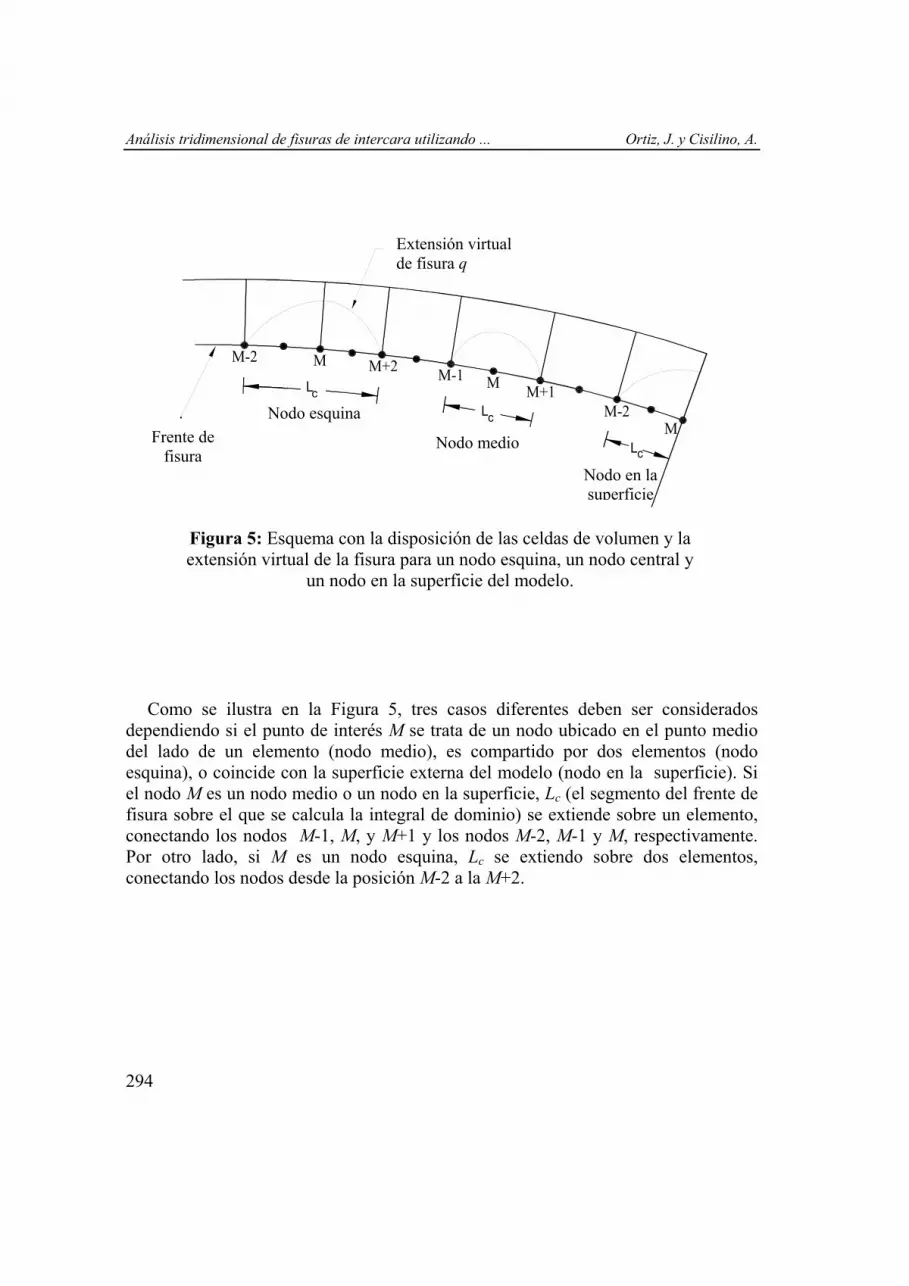
Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
294
Como se ilustra en la Figura 5, tres casos diferentes deben ser considerados dependiendo si el punto de interés M se trata de un nodo ubicado en el punto medio del lado de un elemento (nodo medio), es compartido por dos elementos (nodo esquina), o coincide con la superficie externa del modelo (nodo en la superficie). Si el nodo M es un nodo medio o un nodo en la superficie, Lc (el segmento del frente de fisura sobre el que se calcula la integral de dominio) se extiende sobre un elemento, conectando los nodos M-1, M, y M+1 y los nodos M-2, M-1 y M, respectivamente. Por otro lado, si M es un nodo esquina, Lc se extiendo sobre dos elementos, conectando los nodos desde la posición M-2 a la M+2.
Virtual crackextension q
Crack front
MM-2
Lc
M+2
Lc
M-1 M M+1M-2
MLc
Frente de fisura
Nodo esquina
Nodo medio
Nodo en la superficie
Extensión virtual de fisura q
Figura 5: Esquema con la disposición de las celdas de volumen y la extensión virtual de la fisura para un nodo esquina, un nodo central y
un nodo en la superficie del modelo.
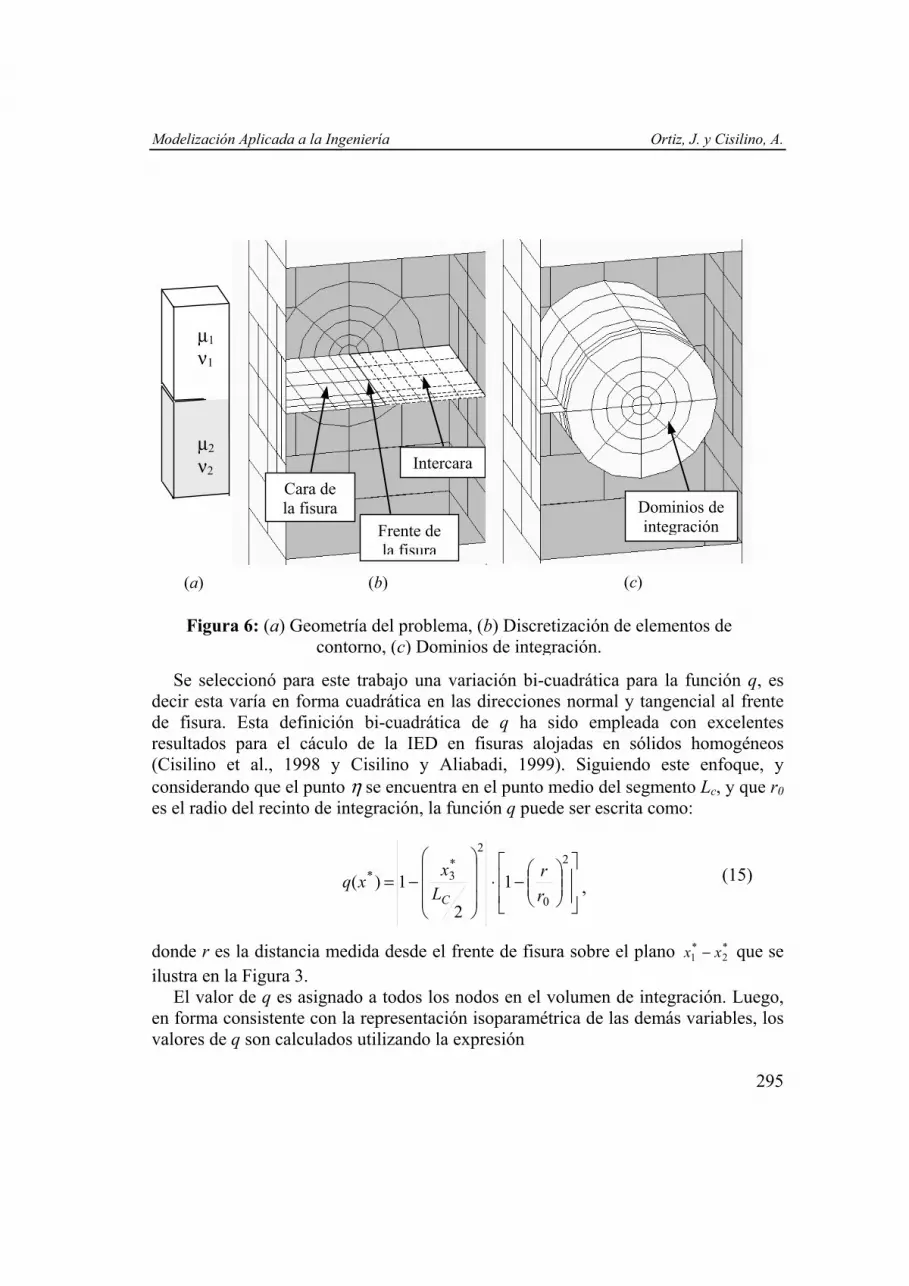
Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
295
Se seleccionó para este trabajo una variación bi-cuadrática para la función q, es decir esta varía en forma cuadrática en las direcciones normal y tangencial al frente de fisura. Esta definición bi-cuadrática de q ha sido empleada con excelentes resultados para el cáculo de la IED en fisuras alojadas en sólidos homogéneos (Cisilino et al., 1998 y Cisilino y Aliabadi, 1999). Siguiendo este enfoque, y considerando que el punto η se encuentra en el punto medio del segmento Lc, y que r0 es el radio del recinto de integración, la función q puede ser escrita como:
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
2
0
2*3* 1
2
1)(rr
Lx
xqC
, (15)
donde r es la distancia medida desde el frente de fisura sobre el plano *2
*1 xx − que se
ilustra en la Figura 3. El valor de q es asignado a todos los nodos en el volumen de integración. Luego,
en forma consistente con la representación isoparamétrica de las demás variables, los valores de q son calculados utilizando la expresión
Figura 6: (a) Geometría del problema, (b) Discretización de elementos de contorno, (c) Dominios de integración.
Cara de la fisura
Frente de la fisura
Intercara
(b)
Dominios de integración
(c) (a)
µ1
ν1 µ2
ν2

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
296
∑=
Ψ=27
1i
iiQq ,
(16)
donde Ψi son las funciones de forma de las celdas y Qi el valor nodal de q en el nodo i-ésimo. A partir de la definición de q (ver Ecuación 7), Qi = 0 si el nodo se encuentra sobre la superficie S0, mientras que para los nodos en el interior del volumen V, los Qi son dados por la interpolación entre los valores nodales sobre Lc y S0. Siguiendo procedimientos corrientes, las derivadas de la función q,j son calculadas de acuerdo con la expresión
∑∑= = ∂
∂∂
Ψ∂=
27
1
3
1,
i k
i
j
k
k
ij Q
xq
ζζ ,
(17)
donde kζ son las coordenadas isoparamétricas de las celdas y jkx ζ∂∂ es la matriz Jacobiana de la transformación.
Finalmente, la versión discretizada de la integral J (ver Ecuación 6) y de la integral M1 (ver Ecuación 16) resultan
( ) p
pV
m
p k
jikki
*ij
*ijkj
*ij w
xquG ∑ ∑
= ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
−=incells 1
,*
, detζ
δεσσ (18)
y
( )∑ ∑= ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−+=Vincells
m
pp
pk
jikkiijijkjijkjij w
xquuM
1,
)2(*)1(*)1(*,
)2(*)2(*,
)1(*1 det
ζδεσσσ ,
(19)
donde m es el número de puntos de integración de Gauss y wp son sus pesos. 5 Ejemplos
Se presentan en esta sección tres ejemplos con el propósito de demostrar la versatilidad y efectividad del algoritmo implementado. Los dos primeros ejemplos corresponden a geometrías de fisura bidimensionales (una barra cilíndrica con una fisura circular exterior y una placa con una fisura central inclinada), y tienen por objetivo validar los cálculos de J y K con resultados reportados en la literatura. En segundo lugar se presenta el modelo y discusión de los resultados de un ejemplo con características tridimensionales: una placa bimaterial gruesa con una fisura central en la intercara.

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
297
5.1 Barra cilíndrica con una fisura circunferencial externa
El primer ejemplo analizado consiste en una barra cilíndrica con una fisura circular externa sometida a tensión remota σ y torsión T (ver Figura 7(a)). El material de la barra es homogéneo y por ello las cargas de tracción y torsión producen sobre la fisura solicitaciones en modos I y II, respectivamente. El radio de la barra es b=5a; y su altura h=24a, donde a es la profundidad de la fisura. Debido a la simetría en la geometría del problema, solamente un cuarto de su geometría fue considerado para el análisis de ambos casos de carga. El modelo fue discretizado utilizando 2 zonas como se ilustra en la Figura 7(b), y se le aplicaron condiciones de contorno de simetría y antisimetría implicita para los casos de carga de tensión y torsión, respectivamente (nótese la ausencia de discretización sobre los planos de simetría). Un total de 96 elementos y 453 nodos fueron empleados en la discretización del
Figura 7: Fisura circular externa en una barra cilíndrica, (a) Geometría y dimensiones, (b) Discretización del modelo, (c) Malla deformada para el caso de cargas de tracción, (d) Malla deformada para el caso de carga de torsión.
(b)(a)
h=24
a
a θ
b=5a
(d)
T
T
(c)
σ
σ

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
298
modelo. Cuatro anillos de celdas con radios de r/a=0.25, 0.5, 0.75 y 1 fueron dispuestos alrededor del frente de fisura para el cálculo de K. La discretización de los dominios de integración consta de 108 celdas.
Las Figuras 7(c) y (d) ilustran las configuraciones deformadas para los casos de cargas de tensión y torsión, respectivamente. Los resultados del factor de intensidad de tensiones para el caso de carga de tensión se reportan en la Tabla 1 en dos posiciones sobre el frente de fisura: para un punto localizado en el plano de simetría,
0)2//( =πθ , y para un punto en el interior de la porción discretizada del modelo, 5.0)2//( =πθ . Los resultados se presentan normalizados con respecto a aπσ y
comparados con los reportados por (Tada et al, 2000). Puede observarse que los resultados obtenidos resultan casi independientes con el volumen de integración y constantes a lo largo del frente de fisura. Su desviación del valor de referencia está alrededor del 5%, lo que se considera aceptable para la discretización utilizada.
Los resultados para el caso de carga de torsión se presentan en la Tabla 2, y normalizados una vez más con respecto a aπσ . En este caso la desviación del valor de referencia es menor al 3%. Los volúmenes de integración más pequeños (r/a=0.25) no permiten obtener resultados precisos y por lo tanto han sido excluidos del análisis.
r/a 2πθ
0.25 0.50 0.75 1.00 Prom. Ref
(Tada, 2000) ∆ [%]
0.00 1.177 1.183 1.193 1.197 1.188 1.256 -5.41 0.50 1.180 1.185 1.192 1.197 1.189 1.256 -5.33
Tabla 1: Resultados normalizados de KI para la fisura
circunferencial externa en una barra cilíndrica bajo tensión.
Tabla 2: Resultados normalizados de KIII para la fisura circunferencial externa en una barra cilíndrica bajo torsión.
r/a 2πθ
0.25 0.50 0.75 1.00 Prom.* Ref
(Tada, 2000) ∆ [%]
0.00 0.278 0.321 0.322 0.324 0.322 0.332 -2.91 0.50 0.278 0.322 0.322 0.325 0.323 0.332 -2.71
* se excluyen los resultados para r/a=0.25

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
299
5.2 Placa con fisura central inclinada
El segundo ejemplo consiste en una placa bimaterial con una fisura central inclinada y sometida a una de carga de tracción remota σ. La fisura esta inclinada 45º respecto a la horizontal, de forma que la carga aplicada la solicita en los modos I y II. Una representación esquemática con la geometría del problema y sus dimensiones se presenta en la Figura 8 junto con una vista de la malla deformada. Las dimensiones de la probeta son a=2.5mm, b=2a, h=3b and t=a. El modelo fue dividido en dos zonas y discretizado usando 842 nodos y 171 elementos de contorno. Los desplazamientos normales de las caras laterales del modelo fueron restringidos para considerar una condición de deformación plana y comparar los resultados del modelo con los disponibles en la literatura. En la discretización de la fisura fueron usados veinte elementos. Seis anillos de celdas con radios r/a = 0.167, 0.33, 0.5, 0.666, 0.833 y 1 fueron utilizados para el cálculo de K. Asimismo se emplearon 44 celdas en la discretización de los dominios de integración. Las propiedades del material de la
(c)
σ
σ
2h=6
a
θ = 45º
t=a
2b=4
z
x
y
2a
σ
σ
(b)
µ1 ν1 µ2 ν2
(a)
Figura 8: (a) Representación esquemática de la placa con una fisura central inclinada, (b) Dimensiones del modelo, (c) Malla deformada en
elementos de contorno.

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
300
placa fueron consideradas homogéneas (idéntico material en ambas zonas) y disímiles con E1 /E2=10 y ν1 =ν2 = 0.3.
Los resultados de los factores de intensidad de tensiones se presentan en las Tablas 3 y 4 para el ejemplo de material homogéneo, mientras los resultados para caso de la probeta bimaterial son reportados en las Tablas 5 y 6. Todos los valores están normalizados con respecto a aπσ y comparados con los reportados por (Miyazaki et al, 1993). Se puede apreciar que ambos resultados presentan un excelente acuerdo con los de la referencia.
r/a Posición 0.250 0.333 0.4165 0.500
Prom. Ref. (Miyazaki
1993)
∆ [%]
Superficie -0.378 -0.379 -0.380 -0.380 -0.379 -0.386 1.81 Plano medio -0.380 -0.382 -0.383 -0.383 -0.382 -0.386 1.04
Tabla 4: Resultados normalizados de KII para la placa homogénea.
r/a Posición 0.250 0.333 0.4165 0.500
Prom. Ref. (Miyazaki
1993)
∆ [%]
Superficie 0.431 0.431 0.431 0.431 0.431 0.433 -0.46 Plano medio 0.430 0.430 0.430 0.431 0.430 0.433 -0.70
Tabla 3: Resultados normalizados de KI para la placa homogénea.
r/a Posición 0.250 0.333 0.4165 0.500
Prom. Ref. (Miyazaki
1993)
∆ [%]
Superficie 0.367 0.367 0.368 0.368 0.368 0.368 0.22 Plano medio 0.365 0.365 0.365 0.365 0.365 0.368 0.96
Tabla 5: Resultados normalizados de KI para la placa bimaterial.
Tabla 6: Resultados normalizados de KII la placa bimaterial.
r/a Posición 0.250 0.333 0.4165 0.500
Prom. Ref. (Miyazaki
1993)
∆ [%]
Superficie -0.466 -0.465 -0.464 -0.462 -0.464 -0.474 2.11 Plano medio -0.464 -0.465 -0.463 -0.462 -0.464 -0.474 2.11

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
301
5.3 Placa gruesa bimaterial con fisura central en la intercara En este ejemplo considera el caso de una placa bimaterial gruesa conteniendo una
fisura central en la intercara. Una representación esquemática de la geometría del problema y sus dimensiones se presenta en la Figura 9. El ejemplo fue analizado para siete combinaciones de materiales. El primero es el caso homogéneo, el que fue considerado para comparar los resultados con los reportados en la literatura. Los 5 casos adicionales corresponden a las siguientes relaciones entre los módulos de Young E1/E2=3, 10, 20, 40 y 80 y coeficiente de Poisson v1=0.2 y v2=0.4 (µ1/µ2= 3.5, 11.67, 23.33, 46.67, 93.33 para cada caso). Para estas combinaciones de constantes elásticas el comportamiento oscilatorio en el campo asintótico de las tensiones y deformaciones está dados por los valores del parámetro ε = 0, 0.00548, 0.0355, 0.044, 0.0486 y 0.051, mientras que el parámetro de Dundurs α =0.448, 0.795, 0.892, 0.944 y 0.972. El séptimo caso considerado corresponde a una placa compuesta por vidrio (E2= 70.8GPa, v2=0.22) y epoxy (E1=2.79GPa, ν1=0.33) con α = 0.919, y ε=0.074. Debido a la simetría del problema sólo fue discretizado un cuarto del modelo, para lo que se emplearon 296 elementos y 1341 nodos. El diseño de la malla es similar al ilustrado en la Figura 6. Para el computo de la integral J y los factores de intensidad de tensiones se dispusieron seis anillos de celdas con radios r/a = 0.09, 0.15, 0.225, 0.338, 0.5 y 0.75. Un total de 312 celdas fueron utilizadas en su discretización.
2h= 1
2a
2b=4a
σ
2a
σ
t=3a
µ1 ν1 µ2 ν2
σ
(a) (b)σ
x
y
z
Figura 9: (a) Representación esquemática de una placa gruesa bajo tensión con una fisura central en la intercara, (b) dimensiones del
modelo.

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
302
Los resultados para integral J y el factor de intensidad de tensiones están presentados en la Figura 10 y Figuras 11 a 13, respectivamente. El origen de las coordenadas normalizadas z/t corresponde al centro de la probeta. Los resultados son normalizados con respecto a los valores de la integral J y el factor de intensidad de tensiones para una fisura en una placa bimaterial infinita dada por Jo=(K)2/[E*cosh2(πε)], y K=σ∞[(1+4ε2)πa]1/2, donde E* es el modulo elástico efectivo definido en la Ecuación (5). En las Figuras 10 y 11 se han incluido también los valores de referencia debidos a (Raju y Newman, 1977) para placas homogéneas. Estos valores de referencia fueron calculados usando el método de elementos finitos con una precisión reportada del 5% para el factor de intensidad de tensiones. Los valores de referencia para la integral J fueron obtenidos de los respectivos factores de intensidad de tensiones utilizando la Ecuación (4). Las barras de error en los gráficos indican el error de los valores de la referencia.
Figura 10: Resultados de J a lo largo del frente de fisura para varias combinaciones de materiales.
0.0 0.1 0.2 0.3 0.4 0.50.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
2.2
Raju & Newman (homogeneous plate) E2 / E1=1 ε =0 (homogeneous plate) E2 / E1=3 ε =0.00548 E2 / E1=10 ε =0.0355 E2 / E1=20 ε =0.044 E2 / E1=40 ε =0.0486 E2 / E1=80 ε =0.051
J/ (K
2 )/[E* co
sh2 (π
ε)]
z/t

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
303
Figura 11: Resultados de KI a lo largo del frente de fisura para varias combinaciones de materiales.
0.0 0.1 0.2 0.3 0.4 0.50.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
1.4
1.5
Raju & Newman (homogeneous plate) E2 / E1=1 ε =0 (homogeneous plate) E2 / E1=3 ε =0.00548 E2 / E1=10 ε =0.0355 E2 / E1=20 ε =0.044 E2 / E1=40 ε =0.0486 E2 / E1=80 ε =0.051 E2 / E1=25.4 ε =0.074 (glass-epoxy)
K I / σ
h w π
a
z/t
Figura 12: Resultados de KII a lo largo del frente de fisura para varias combinaciones de materiales.
0.0 0.1 0.2 0.3 0.4 0.5-0.2
-0.1
0.0
0.1
0.2
0.3
E2 / E1=1 ε =0 (homogeneous plate) E2 / E1=3 ε =0.00548 E2 / E1=10 ε =0.0355 E2 / E1=20 ε =0.044 E2 / E1=40 ε =0.0486 E2 / E1=80 ε =0.051 E2 / E1=25.4 ε =0.074 (glass-epoxy)
K II / σ
h w π
a
z/t

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
304
De los gráficos se aprecia que los valores de J calculados y los reportados en la
referencia muestran una muy buena correlación a lo largo del espesor de la probeta. El mismo comportamiento se encuentra para los resultados de K, excepto para el punto localizado sobre la superficie libre (z/t = 0.5) donde se presenta el efecto de la frontera libre y los resultados son afectados por la singularidad de la esquina.
Los resultados en la Figura 10 permiten observar la variación de la integral J a lo largo del frente de fisura para los casos de materiales disímiles. Tomando al caso homogéneo como un valor de referencia, el incremento del índice oscilatorio ε induce a una reducción en el valor de J en la zona cercana al plano medio de la probeta (z/t=0) donde prevalece la condición de deformación plana. Para posiciones en el frente de fisura cercanas a la superficie libre (z/t=0.5), los valores de la integral J presentan una fuerte dependencia con las propiedades relativas de los materiales. Puede observarse que para bajos valores de ε, los valores de J permanecen casi constantes o decrecen hacia la superficie libre. Al mismo tiempo, valores elevados de ε hacen que J aumente hacia la superficie libre. Este mismo comportamiento ha sido reportado por (Nakamura, 1991), quien estudió una fisura de intercara en una placa bimaterial infinita de espesor delgado (2b=2h=60a, t=a/10) utilizando modelos de elementos finitos de alta resolución. Los resultados de (Nakamura, 1991) son reproducidos en la Figura 14, para dos condiciones. La primera corresponde a
Figura 13: Resultados de KIII a lo largo del frente de fisura para varias combinaciones de materiales.
0.0 0.1 0.2 0.3 0.4 0.5-0.1
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
E2 / E1=1 ε =0 (homogeneous plate) E2 / E1=3 ε =0.00548 E2 / E1=10 ε =0.0355 E2 / E1=20 ε =0.044 E2 / E1=40 ε =0.0486 E2 / E1=80 ε =0.051 E2 / E1=25.4 ε =0.074 (glass-epoxy)
K III /
σh w π
a
z/t

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
305
combinaciones de materiales que, aunque con propiedades disímiles, el comportamiento oscilatorio en el campo de tensiones asintótico desaparece debido a que ε=0. La segunda situación corresponde al caso límite de la combinación de un material elástico y un sustrato rígido con ε=0.1255. Puede observarse que mientras los valores de J disminuyen hacia la superficie libre para todos las combinaciones de materiales con ε=0, para el modelo con el sustrato rígido el valor de J se incrementa. Este comportamiento es atribuido al efecto de las tensiones de corte en el vértice de la fisura. En el mismo sentido, los resultados de (Nakamura y Parks, 1989) han mostrado que el comportamiento de la tasa de disipación de energía de a lo largo del frente de fisura está directamente relacionado a la cantidad de corte plano y antiplano en la región vecina del frente de fisura. En una placa bimaterial, aun en ausencia de cualquier carga remota, las condiciones de antisimetría son inducidas por las propiedades disímiles de los materiales a lo largo de la intercara.
Las Figuras 11 a 13 muestran la variación de los factores de intensidad de tensiones a lo largo del frente de fisura. Debido a las pequeñas diferencias relativas entre las propiedades de los materiales, la fuerza de tensión es dominante y los valores de KII y KIII son relativamente pequeños comparados con KI. Cerca de la superficie libre, las amplitudes de ambos modos antisimétricos se incrementan, mientras que KI muestra un comportamiento similar al exhibido por la integral J. Resultados similares fueron también reportados por (Nakamura, 1991) para el caso de placas de espesor delgado con ε=0 (ver Figura 14). Los resultados obtenidos permiten
Figura 14: (a) Tasa de energía de disipación normalizada, y (b) Componentes del factor de intensidad de tensiones a lo largo del frente
de la fisura de intercara en una placa delgada infinita con varios combinaciones de materiales (Nakamura, 1991).
(a) (b)
sustrato rígido

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
306
concluir que aunque KI exhibe un comportamiento similar a la integral J, el nivel de KI es dominado por la rigidez relativa de E2/E1 en lugar de parámetro oscilatorio ε. Como se ilustra en la Figura 11, el incremento de E2/E1 esta acompañado por un decremento en el valor del nivel de KI en el interior del espécimen. En este contexto, vale la pena notar la respuesta del bimaterial vidrio/epoxy, que con rigidez relativa E2/E1 =25 y el máximo calor de ε de los casos analizados, presenta un KI con un comportamiento muy similar a los obtenidos para E2/E1 =20.
Por otro lado, se observa que el índice oscilatorio gobierna el comportamiento de KII (ver Figura 12). En este caso, los valores pequeños de ε inducen altos valores de de KII, que disminuyen monótonamente con el incremento de ε. Finalmente el comportamiento de KIII es casi independiente de ε y E2/E1, como se observa en la Figura 13. 6 Conclusiones
Se ha presentado en este trabajo una aplicación del Método de los Elementos de Contorno (MEC) para el análisis tridimensional de fisuras en intercara en materiales compuestos. La misma incluye herramientas para el cálculo de la integral J y el factor de intensidad de tensiones, utilizando las metodologías de la integral de energía de dominio y de la integral de interacción, respectivamente. La eficiencia de la metodología y de su implementación se demuestra mediante el análisis de dos ejemplos cuyos resultados son comparados con los disponibles en la bibliografía.
La herramienta numérica desarrollada ha sido empleada para analizar el caso de una placa bimaterial gruesa con una fisura central en la intercara. Los resultados obtenidos permiten estudiar el comportamiento en la integral J y el modo mixto del factor de intensidad de tensiones para distintas combinaciones de materiales. Se ha observado que para posiciones en el frente de fisura cerca de la superficie libre los valores de la integral J presentan una fuerte dependencia con las propiedades elásticas relativas de los materiales. Para valores bajos del índice oscilatorio ε, la integral J permanece casi constante a lo largo del frente de fisura o decrece hacia la superficie libre. Por otra lado, valores altos de ε hacen que el valor de J se incremente hacia la superficie libre. El factor de intensidad de tensiones KI exhibe un comportamiento en general muy similar al de J, pero dominado por la rigidez relativa E2/E1 en lugar del índice oscilatorio ε. Por su parte el índice oscilatorio ε gobierna el comportamiento de KII, mientras que el comportamiento de KIII es casi independiente de ambos, ε y E2/E1. Agradecimientos Este trabajo fue parcialmente financiado por el PICT 12-12528 “Modelado y diseño computacional de materiales microheterogéneos” de la ANPCyT.

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
307
Apéndice Se presentan en este apéndice las soluciones asintóticas auxiliaries de los campos locales de tensiones σij y desplazamientos ui utilizadas para el cálculo de los factores de intensidad de tensiones. Las expresiones corresponden al trabajo de (Williams, 1959).
( ) ( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡Θ−+−
⎥⎥⎦
⎤
⎢⎢⎣
⎡Θ−−= θ
ωω
πθ
ωω
πσ sin1
22cos1
22 111111j
IIj
II
j
Ij
Ij f
rK
fr
K , (A.1)
( ) ( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡Θ−−−
⎥⎥⎦
⎤
⎢⎢⎣
⎡Θ−+= θ
ωω
πθ
ωω
πσ sin1
22cos1
22 222222j
IIj
II
j
Ij
Ij f
rK
fr
K, (A.2)
( ) ( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡Θ−−−
⎥⎥⎦
⎤
⎢⎢⎣
⎡Θ−−= θ
ωω
πθ
ωω
πσ cos1
22sin1
22 121212j
IIj
II
j
Ij
Ij f
rK
fr
K , (A.3)
( )
⎥⎥⎦
⎤
⎢⎢⎣
⎡+−
+⎥⎥⎦
⎤
⎢⎢⎣
⎡+−=
232221
1312111
14
2
14
2
hhhrK
hhhrK
u
jj
jjj
II
jj
jjj
Ij
ωω
ωκπµ
π
ωω
ωκπµ
π
, (A.4)
( )
⎥⎥⎦
⎤
⎢⎢⎣
⎡++−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡−−=
131211
2322212
14
2
14
2
hhhrK
hhhrK
u
jj
jjj
II
jj
jjj
Ij
ωω
ωκπµ
π
ωω
ωκπµ
π
, (A.5)
donde
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
12
2
21
1 11ln21
µµκ
µµκ
πα , (A.6)
22ln θα +⎟
⎠⎞
⎜⎝⎛=Θ
ar , (A.7)
jj νκ 43 −= , (A.8)
)(1
θπαω −−= e , (A.9)
)(2
θπαω += e , (A.10)

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
308
( ) ( )Θ+−Θ++Θ= θθθθα sinsincossin2cos311If , (A.11)
( ) ( )Θ++Θ++Θ= θθθθα cossinsinsin2sin311IIf , (A.12)
( ) ( )Θ++Θ+−Θ= θθθθα sinsincossin2cos22If , (A.13)
( ) ( )Θ+−Θ+−Θ= θθθθα cossinsinsin2sin22IIf , (A.14)
( ) ( )Θ++Θ++Θ= θθθθα cossinsinsin2sin12If , (A.15)
( ) ( )Θ++Θ+−Θ−= θθθαθ sinsincos2cos12IIf , (A.16)
( ) ( )[ ]Θ−−Θ−+
= θαθα
sin2cos411
211h , (A.17)
[ ]Θ+Θ+
= sin2cos411
212 αα
h , (A.18)
Θ= sinsin13 θh , (A.19)
( ) ( )[ ]Θ−+Θ−+
= θαθα
cos2sin411
221h , (A.20)
[ ]Θ+Θ−+
= cos2sin411
222 αα
h , (A.21)
Θ= cossin23 θh , (A.22)
( ) ⎟⎠⎞
⎜⎝⎛−=
2sin
213θ
πσ
rK III
j , (A.23)
( ) ⎟⎠⎞
⎜⎝⎛=
2cos
223θ
πσ
rK III
j , (A.24)
( ) ⎟⎠⎞
⎜⎝⎛+
=2
sin2123
θπ
νIII
j
jj Kr
Eu , (A.25)

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
309
Referencias Beer G. (1993). “An efficient numerical method for modelling initiation and
propagation of cracks along material interfaces”. International Journal of Numerical Methods in Engineering 3579-3594.
Brebbia C.A., Telles J.L.F, y Wrobel, L.C. (1984). “Boundary Element Techniques”. Springer Verlag, Berlin.
Carpenter W.C., Read D.T. y Dodds R.H. (1986). “Comparison of several path
independent integrals including plasticity effects”. International Journal of Fracture 303-323.
Cho S.B., Lee K.R., Coi Y.S. y Yuuki R. (1992). “Determination of stress intensity factors and boundary element analysis for interface cracks in dissimilar anisotropic materials”. Engineering Fracture Mechanics 43: 603-614.
Chen F.H.K. y Shield R.T. (1977). “Conservation laws in elasticity of the J-integral type”. Journal of Applied Mathematical Physics (ZAMP) 28: 1-22.
Cisilino A.P., Aliabadi M.H., y Otegui J.L. (1998). “Energy domain integralapplied to solve center and double-edge crack problems in three-dimensions”. Theoretical and Applied Fracture Mechanics 29: 181-194.
Cisilino A.P. y Aliabadi M.H. (1999). “BEM implementation of the energy domain integral for the elastoplastic analysis of 3D fracture problems”. International Journal of Fracture 96: 229-245.
Comninou M. (1977). “The interface crack”. ASME Journal of Applied Mechanics 44: 631-636.
de Paula F.A. y Aliabadi M.H. (1997). “Boundary element analysis of interface cracks in dissimilar orthotropic materials using path independent contour integral”. Boundary Elements XIX, Computational Mechanics Publications, Southampton, UK.
Dundurs J. (1969). “Edge-bonded dissimilar orthogonal elastic wedges under normal and shear loading”. ASME Journal of Applied Mechanics 36: 650-652.
Gosz M., Dolbow J. y Moran B. (1998). “Domain integral formulation for stress intensity factor computation along curved three-dimensional interface cracks”. International Journal of Solids and Structures 35(15): 1763-1783.
He W.J., Lin D.S. y Ding H.J. (1994). “A boundary element for crack analysis at a bimaterial interface”. Engineering Fracture Mechanics 49(3): 405-410.

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
310
Hellen, T.K. (1975). “On the method of virtual crack extensions”. International Journal of Numerical Methods in Engineering 187-207.
Hutchinson J.W., Mear W., y Rice J.R. (1987). “Crack paralleling and interface between dissimilar materials”. ASME Journal of Applied Mechanics 54: 828-832.
Kaijevic I. y Saigal S. (1995). “Analysis of symmetric domains in advanced applications with the boundary element method”. International Journal of Numerical Methods in Engineering 38: 2373-2388.
Kwon Y.W. y Dutton R. (1991). “Boundary element analysis of cracks normal to bimaterial interfaces”. Engineering Fracture Mechanics 40: 487-491.
Lui Y.J. y Xu N. (2000). “Modelling of interface cracks in fibre-reinforced composites with the presence of interphases using the boundary element method”. Mechanics of Materials 32: 769-783.
Mao R. y Sun G. (1995). “A study of the interaction between matrix crack and matrix-fibre interface”. Engineering Fracture Mechanics 51(3): 469-477.
Miyazaki N., Ikeda T., Soda T. y Munakata T. (1993). “Stress intensity factor analysis of interface crack using boundary element method – Application of contour-integral method”. Engineering Fracture Mechanics 45(5): 599-610.
Moran B. y Shih C.F. (1987). “A general treatment of crack tip contour integrals”. International Journal of Fracture 295-310.
Nagashima T., Omoto Y. y Tani S. (2003). “Stress intensity factor analysis of interface cracks using X-FEM”. International Journal of Numerical Methods in Engineering 56: 1151-1173.
Nakamura T. (1991). “Three-dimensional stress fields of elastic interface cracks”. ASME Journal of Applied Mechanics 58: 939-946.
Nakamura T., y Parks D.M. (1989) “Anti-symmetrical 3D stress field near the crack front of a thin elastic plate”. International Journal of Solids and Structures 25: 1411-1416.
Natha R. y Moran B. (1993). “Domain integrals for axisymmetric interface crack problems”. International Journal of Solids & Structures 30(15): 2027-2040.
Nikishkov G.P. y Atluri S.N. (1987). “Calculation of fracture mechanics parameters for an arbitrary three-dimensional crack by the equivalent domain integral method”. International Journal of Numerical Methods in Engineering 1801-1821.
París F., del Caño J.C., y Varna J. (1996). “The fibre-matrix interface crack – A numerical analysis using boundary elements”. International Journal of Fracture 82:11-29.

Modelización Aplicada a la Ingeniería Ortiz, J. y Cisilino, A.
311
Parks, D.M. (1974). “A stiffness derivative finite element technique for determination of elastic crack tip stress intensity factors”. International Journal of Fracture 487-502.
Raju I.S. and Newman J.C. (1977). Three-dimensional finite element analysis of finite-thickness fracture mechanics, Technical Report NASA TN D-8414.
Rice J.R. (1968). “A path independent integral and the approximate analysis of strain concentration by notches and cracks”. ASME Journal of Applied Mechanics 379-386.
Rice J.R. (1988). “Elastic fracture mechanics concepts for interfacial cracks”. ASME Journal of Applied Mechanics 55: 98-103.
Rice J.R., Suo Z., y Wang J.S. (1990). “Mechanics and thermodynamics of brittle interfacial failure in bimaterial systems”. Metal-Ceramics Interfaces, M.Ruhle et al., Eds, Pergamon Press 269-294.
Saliva R., Vénere M.J., Padra C., Taroco E. y Feijoo R.A. (2000). “Shape sensitivity analysis and energy release rate of planar cracks embedded in three-dimensional bodies”. Computer Methods in Applied Mechanics and Engineering 188: 649-664.
Selcuk S., Hurd D.S., Crouch S.L., y Gerberich W.W. (1994). “Prediction of interfacial crack path: a direct boundary integral approach and experimental study”. International Journal of Fracture 67:1-20.
Sladek J. y Sladek V. (1997). “Evaluation of the T-stress for interface cracks by the boundary element method”. Engineering Fracture Mechanics 56(6): 813-825.
Tada H., Paris P. y Irwin G.R (2000). The stress Analysis of Crack Handbook. ASME Press.
Tan C.L. y Gao Y.L. (1990). “Treatment of bimaterial interface crack problems using the boundary element method”. Engineering Fracture Mechanics 36: 919-932.
Varna J., París F. y del Caño J.C. (1997). “The effect of crack-face contact on fibre/matrix debonding in transverse tensile loading”. Composites Science and Technology 57: 523-532.
Williams M.L. (1959). “The stress around a fault or crack in dissimilar media”. Bulletin of the Seismological Society of America 49: 199-204.
Xie M., y Chaudhuri R.A. (1998). “Three-dimensional stress singularity at a bimaterial interface crack front”. Composite Structures 40(2): 137-147.
Yuuki R. y Cho S.B. (1989). “Efficient boundary element analysis of stress intensity factors for interface cracks in dissimilar materials”. Engineering Fracture Mechanics 34: 179-188.

Análisis tridimensional de fisuras de intercara utilizando ... Ortiz, J. y Cisilino, A.
312
Yuuki R. y Xu J-Q. (1994). “Boundary element analysis of dissimilar materials and interface crack”. Computational Mechanics 14: 116-127.
Modelización Aplicada a la Ingeniería
313
Modelización estadística del movimiento de separadores
DINO OTERO
Dirección de Posgrado, Facultad Regional Buenos Aires, Universidad Tecnológica Nacional, Buenos Aires, Argentina.
Instituto de Estudios Nucleares, Centro Atómico Ezeiza, Comisión Nacional de Energía Atómica, Ezeiza, Argentina.
Introducción
Es bien conocido el efecto de desplazamiento de tuercas y abrazaderas sometidas a vibraciones mecánicas. En general puede asumirse como un buen modelo el ejemplo del paseo al azar del borracho en una dimensión (sobre una línea). Se asigna una probabilidad 0,5 de avanzar y 0,5 de retroceder. La dispersión del movimiento crece como la raíz cuadrada del número de pasos y como la vibración no genera un empuje suficiente como para apretar definitivamente a la tuerca, ésta termina desprendiéndose. Existen varias posibilidades de modelizar este movimiento. Uno de ellas consiste en utilizar el método de Monte Carlo (Metropolis and Ulam,1949). Para aplicarlo a este caso basta con utilizar un generador de números al azar. Estos generadores son algoritmos no lineales muy simples que, a partir de un valor inicial (semilla) generan una salida numérica aleatoria establecida entre 0 y 1. Por ser un algoritmo el proceso de generación de números es totalmente determinístico. De acuerdo con la teoría de ecuaciones no lineales la evolución de la solución puede ser extremadamente sensible a las condiciones iniciales haciéndose muy difícil de prever dicha evolución. Sin embargo esta aleatoriedad en la evolución de la solución no asegura que los números que aparecen cumplan la condición de estrictamente aleatorios. Existen numerosas pruebas para determinar si los números son tan aleatorios como se requiere para la simulación. Antes de comenzar el trabajo se debe verificar, mediante esas pruebas, que el algoritmo utilizado cumple con ellas. El cubrimiento homogéneo del intervalo [0,1] se verifica evaluando la dimensión de Hausdorff (Shuster, 1984) que en este caso debe valer 1. El grado de aleatoriedad se determina calculando el exponente de Lyapunov (Shuster, 1984) que debe ser mayor que cero. Existen criterios menos fisticados que permiten establecer el grado de aleatoriedad. Uno de los problemas más serios son las posibles correlaciones “internas” generadas por el determinismo de la ecuación madre. Alcanzado un cierto grado de confianza en el generador de número al azar se puede utilizar el número obtenido mediante el algoritmo para simular la evolución del “borracho” en una dimensión: Si el número es mayor que 0,5 se avanza un paso y si es menor se retrocede un paso. Si bien el valor promedio de la posición del “borracho” es la de partida, la dispersión comienza a crecer a partir de cero hasta alcanzar y eventualmente superar los límites del sistema. En el simple caso de una tuerca que aprieta un tornillo llegado ese límite se desprende. Si el sistema consta de más

Modelización estadística del movimiento de separadores Otero, D.
314
vínculos que pueden moverse el tratamiento es menos trivial ya que al sortear la posición pueden sobrepasarse la posición de un vínculo por la de otro, puede haber asimetrías, el orden en que se mueva cada vínculo es importante pues puede bloquear el movimiento de otro vínculo, etc. La distribución está condicionada por correlaciones entre todos los vínculos. Expondremos aquí como puede simularse un sistema complejo de varios vínculos sobre una línea de trabajo. El modelo La necesidad de tratar un problema de este tipo surgió hace algunos años cuando, como parte de un proyecto de mantenimiento de la Central Nuclear Embalse, se trató de establecer la posición de separadores entre dos caños: uno interior con agua a alta presión y temperatura y otro exterior que cumple las funciones de aislantes térmico como se muestra en la Figura 1.
Figura 1: Corte del tubo de presión. Estos separadores consisten en resortes que se “abrazan” al tubo interior y evitan que ambos tubos se toquen (“garter spring”: GS). En el ejemplo que estamos tratando el problema de que se toquen radica en que en el punto de contacto la temperatura del tubo interior desciende convirtiéndose en una zona que atrapa impurezas intersticiales del metal. En particular este metal, por tratarse de una aleación de circonio, tiene la propiedad de adsorber el hidrógeno. Cuando la concentración de hidrógeno supera un cierto umbral el metal se fragiliza y puede romperse. Entonces en el punto de contacto se forma una “ampolla” (blister) donde el tubo puede perforarse. Más detalle sobre este tema se puede consultar en los informes técnicos (Leger and Leemans, 1987), (Otero y Terlistki, 1989). El modelo y las hipótesis asociadas no se limitan a este caso particular y pueden ser utilizadas en otros sistemas unidimensionales con numerosos vínculos. En el ejemplo planteado la simulación se hace necesaria porque es extremadamente costoso realizar una inspección ocular de la real localización de los separadores (GS). Originalmente se posicionan cuatro separadores a 1,0 m uno de

Modelización Aplicada a la Ingeniería Otero, D.
315
otro sobre una longitud total de los tubos de seis metros, como se muestra en la Figura 2.
Figura 2: Posición de diseño de los separadores. El movimiento de los separadores (GS) está correlacionado como señalamos en la introducción de tal forma que un tratamiento adecuado demandaría utilizar una matriz tetradimensional. Como primera simplificación se analizarán sólo las correlaciones de pares de separadores aunque no necesariamente contiguos: GS1-GS2, GS1-GS3, GS1-GS4, GS2-GS3, GS2-GS4, GS3-GS4. De las inspecciones realizadas se estableció que la deslocalización, luego del golpe de ariete de la puesta en marcha del sistema, está centrada alrededor de las posiciones de origen. Se asume en consecuencia que cada GS se ubicará luego del movimiento siguiendo alguna distribución picada, aunque restringida por el movimiento de los otros GS y los límites del sistema. Entre las posibles distribuciones estadísticas picadas se seleccionaron: a) Distribución de Gauss, 2) Distribución de Gauss con colas exponenciales y 3) Distribución de Cauchy. El comportamiento de estas distribuciones en el intervalo determinado por la longitud de los tubos puede verse en la Figura 3. El parámetro de dispersión quedó como parámetro libre y el usado en la Figura 3 corresponde al obtenido con el mejor ajuste luego de la simulación. Las funciones densidad de probabilidad son entonces GAUSS, fi = A exp[-(xi – µ)2/2σ2], (1) donde µ es la posición de diseño, σ es el parámetro de ajuste (dispersión) y A la normalización que, como la distribución ha sido “cortada” en dos valores finitos, 0 y 600 cm., no tiene un valor analítico sino debe ser evaluada en cada ajuste. CAUCHY (t-student, m=1) fi = A[1+ (xi – µ) / σ]-1
, (2)

Modelización estadística del movimiento de separadores Otero, D.
316
GAUSS con colas exponenciales, fio = A exp[-(xi – µ)2/2σ2], x1 < xi < x2. (3) fi1 = B1exp(xiλ1), 0 < xi < x1. (4) fi2 = B2exp(-xiλ2), x2 < xi < 600. (5)
Figura 3: Distribuciones estadísticas exploradas. Las constantes A, B1, B2 quedan determinadas como antes por normalización y por la condición que la funciones deben igualarse en los puntos de empalme, x1 y x2. Los nuevos parámetros libres son λ1 y λ2. Esta libertad en la elección de los parámetros

Modelización Aplicada a la Ingeniería Otero, D.
317
permite introducir una asimetría que puede estar asociada a la nivelación o a la dirección del golpe de ariete. El movimiento de los GS podría ser simultáneo o sucesivo. Por simplicidad en el modelo el sorteo será sucesivo pero teniendo en cuenta la posibilidad de simultaneidad o no simultaneidad: a1) ORDEN DE MOVIMIENTO POR SORTEO: Se sortea previamente el orden con el cual luego se sorteará la posición de los GS. Se trata a sí de evitar el privilegio de un GS sobre otro imitando la simultaneidad. a2) MOVIMIENTO ORDENADO: El orden de sorteo es fijo, por ejemplo 4321, 1234, 3421, etc. Se trata así de simular posibles privilegios que se generan en la no simultaneidad de los movimientos y la existencia de zonas de mayor vibración y pandeo. El segundo aspecto a considerar fue la posible interacción entre los GS la cual podría ser: b1) CHOQUE PLÁSTICO: Al tratar de ubicar al GSk de acuerdo con el resultado del sorteo puede suceder que el GSj esté en el camino sobre el que debiera desplazarse GSk para alcanzar su posición. En ese caso el GSk queda detenido en la posición previa y contigua a la del GSj, incluso aunque el GSj posteriormente se moviera. No reconsideraron choques elásticos, que sería equivalente a considerar los GS indistinguibles y “transparentes”, pues se asume un gran rozamiento con los caños que elimina esa posibilidad. B2) CHOQUE CON ARRASTRE: Se trata de simular la disminución de fricción cuando el GSk está en movimiento con lo cual puede arrastrar al GSj que encuentre en su camino hasta su posición final. El GSk en “movimiento” puede arrastrar tantos GSj como encuentre en su camino. Sin embargo si alguno de ellos, por el ejemplo el GSi, ya se ha movido y se encuentra en su camino, entonces el GSk y todos los arrastrados se detienen en la posición del GSi. Se trata de simular de esta manera la posible existencia de zonas de “libre camino” y de zonas de “atropamiento”. En las zonas de atropamiento el primero que llega se queda allí y luego el resto comienza a apilarse en dicha zona o en su cercanía. Finalmente es necesario si existen tendencias orientadas en el movimiento de los GS. Para el movimiento isotrópico no es necesario introducir ninguna variante adicional. En el caso de anisotropía podemos considerar dos casos. C1) ANISOTROPÍA DEFINIDA: Todos los GS se mueven en el mismo sentido, por ejemplo sólo se aceptan resultados de sorteo que posicionen los GS a la derecha de su posición de diseño.

Modelización estadística del movimiento de separadores Otero, D.
318
C2) ANISOTROPÍA INDEFINIDA: El sentido de movimiento del primer GS que se localiza , determina el sentido del resto. Las variantes a), b) y c) cubren una amplia gama de posibilidades para este tipo de movimientos y de ser necesario pueden ampliarse las variaciones sin demasiada dificultad. El paso siguiente consiste en optimizar la posible distribución. Optimización del modelo
Este es un típico problema de optimización con distribuciones a priori, vínculos y parámetros libres. El mejor test para obtener el ajuste que determine la distribución de densidad de probabilidad, vínculos y parámetros es el de Kullback-Leibler, KLS (Senton and Bowman, 1977). Este método de máxima verisimilitud se basa en el principio de Máxima Entropía, (Jaynes, 1957), (Otero et al, 1981), y permite tratar casos con un bajo número de datos. Para este test si la estimación de la distribución esperada depende de un conjunto de parámetros θi, entonces se puede representar la probabilidad para una dada partición j como, pj(θi) y la frecuencia observada como nj/N, donde N es el número de casos totales observados y nj el número de casos correspondiente a cada posibilidad j. El estimador que mide la deficiencia entrópica o falta de información se escribe como, KLS = - ∑M ln nj/N [pj (θi)*N/nj]. (6) Y resulta definido positivo y se anula si pj (θi) = nj/N. M es el número total de particiones en el intervalo 0-600 cm. El procedimiento consiste en variar el conjunto de parámetros θihasta alcanzar el menor valor de KLS. En este caso se varían los parámetros y los vínculos o reglas de localización. Este método tiene una fuerte fundamentación teórica pues se trata de minimizar la falta de información respetando los vínculos conocidos y el principio de la navaja de Occam1. Este método de máxima verisimilitud se basa en el principio básico de la Teoría de la Información por el cual se debe reducir al máximo el número de hipótesis adicionales a la evidencia experimental. Típicamente la distribución menos prejuiciosa para una distribución aleatoria de posiciones centradas alrededor de un valor medio resulta ser la distribución normal. Respecto de esa distribución se ensayaron distribuciones alternativas similares en forma pero que permitiesen considerar una caída menos abrupta que la exponencial a distancia grandes del valor promedio de la posición de los GS. La expresión (5) es definida positiva para cualquier pj (θi) lo cual asegura que la minimización converge desde uno de los lados de la distribución real,
1 Occam u Ockham, Guillermo de, (Surrey, Inglaterra, 1285 Munich, 1348) Filósofo y teólogo franciscano inglés. Guillermo de Occam es conocido sobre todo por su famosa exigencia de no multiplicar innecesariamente los presupuestos, conocida como la navaja de Occam.

Modelización Aplicada a la Ingeniería Otero, D.
319
evitándose posibles oscilaciones que demoren el proceso de optimización. En ese sentido el proceso es mucho mejor que una optimización, por ejemplo, mediante la distribución de χ2 que, se puede demostrar es una aproximación de segundo orden a la KLS. Tanto en los resultados obtenidos por simulación como para los datos frecuenciales, existen múltiples pj y nj nulos. El cálculo del KLS se realiza sobre la intersección de elementos no nulos pj y nj, renormalizándose las distribuciones. Entonces el mínimo KLS depende de la distribución frecuencial de datos, la distribución de densidad de probabilidad propuesta y la partición adoptada.
Simulación usando el criterio de mínimo KLS El proceso de simulación comienza construyendo las distribuciones teóricas centradas en las posiciones de diseño: 150, 250, 350 y 450 cm. Luego se realiza un primer sorteo de números al azar mediante un algoritmo que cumpla con los criterios enunciados en la introducción. Estos algoritmos generan números distribuidos homogéneamente en el intervalo [0,1] por lo que como primer paso se los debe renormalizar al intervalo [0,600]. Mediante este número se localiza una posición xi en el intervalo [0,600] para, por ejemplo el GS3. Luego se realiza un segundo sorteo y la posición xi se acepta si se cumple que, p < f(xi), (7) el proceso se reitera hasta obtener el número N de casos totales deseados. La minimización se realiza sobre la distribuciones correlacionadas de las posiciones GSk,GSj con (k,j) variando de 1 a 4. Se obtienen así 6 KLS parciales y el mínimo se busca sobre la suma total Smín = KLS12 + KLS13 + KLS14 + KLS32 + KLS42 + KLS34. (8) Considerando el número de datos y la dispersión intrínseca que tienen es posible establecer la cota mínima que puede alcanzar S. Para con todas las distribuciones propuestas las mejores condiciones resultaron de CHOQUE CON ARRASTRE-ORDEN POR SORTEO-ISOTROPÍA. Los datos utilizados fueron provistos por los valores medidos en la central nuclear BRUCE 6. En la Figura 4 se muestra un primer ajuste que permite seleccionar la distribución de Gauss con colas exponenciales como la que mejor ajusta los datos. Luego se procedió a determinar el mejor ajuste variando el punto de empalme y el parámetro λ (se usó una misma exponencial a izquierda y derecha). En la Figura 5 se

Modelización estadística del movimiento de separadores Otero, D.
320
Figura 4: Optimización de la distribución estadística. pueden observar los diferentes ajustes para distintos valores de 1/λ. Finalmente se procedió a empalmar diferentes exponenciales a derecha e izquierda simulando una leve anisotropía. Los resultados se observan en la Figura 6, la línea continua corresponde a un empalme simétrico (x1=x2) y es la proyección del espacio tridimensional (KLS, σ, x1=x2) al bidimensional (KLS, σ). La línea quebrada corresponde a la trayectoria de la convergencia para x1 ≠ x2 y corresponde a la proyección del espacio tetradimensional (KLS, σ, x1, x2) al espacio bidimensional (KLS, σ). Este resultado parecería indicar que el movimiento de los GS tiene una leve tendencia hacia uno de los extremos. Aunque la asimetría es muy leve, esto podría indicar algún problema de nivelación. Obsérvese la diferencia en el modelo entre la asimetría de movimiento, caracterizada en el instante del sorteo y la asimetría de localización caracterizada por la asimetría de la función densidad de distribución de la posición. Verificación del ajuste y conclusiones La bondad del ajuste puede verificarse evaluando la correlación entre cada par de GS. Aquí mostraremos en la Figura 7 sólo un caso representativo, GS1,GS2. También es interesante verificar la relación entre las posiciones simuladas por el

Modelización Aplicada a la Ingeniería Otero, D.
321
modelo y todas las posiciones medidas en el reactor BRUCE 6 de los GS, las cuales se muestran en las Figuras 8a y 8b.
Figura 5: Optimización del empalme de colas exponenciales.

Modelización estadística del movimiento de separadores Otero, D.
322
Figura 6: Ajuste de la dispersión estándar.
Figura 7: Comparación de la correlación del GS1 con el GS2 entre el modelo y la
inspección de 17 tubos en la CNE.

Modelización Aplicada a la Ingeniería Otero, D.
323
Figura 8: Comparación entre la simulación y la posición real en la
Central Nuclear BRUCE 6.
La simulación demostró ser una buena estimación de las deslocalización de los separadores en la Central Nuclear Embalse y se utilizó varios años para decidir el recambio e inspección de los tubos de combustibles en la central nuclear. Esta simulación se combinaba con otra que estimaba el porcentaje de hidrógeno acumulado en el metal del tubo.

Modelización estadística del movimiento de separadores Otero, D.
324
Sin embargo el método propuesto puede ser utilizado para estimar los movimientos de cualquier conjunto de separadores, tornillos, abrazaderas, etc., que puedan sufrir desplazamientos por efecto de vibraciones en el montaje. La potencia de la vibración se ajusta mediante el valor de la dispersión y los valores de λ, x1 y x2 permiten estimar la incidencia de asimetrías originadas en deformaciones, desbalanceos o desniveles en el montaje. El número de elementos puede ser arbitrario pero es necesario asegurarse que el generador de números al azar tiene un comportamiento suficientemente aleatorio para uno o dos órdenes de magnitud superiores al número de datos utilizados en la simulación. Esta simulación es un excelente ejemplo del uso de Monte Carlo con vínculos fuertemente no lineales. En general la simulación es realmente útil para sistemas no lineales que no pueden analizarse mediante lógica lineal. Conviene resaltar las razones teóricas desarrolladas en los últimos años que justifican el método desarrollado por Metrópolis y Ulam1). Resulta totalmente legítimo plantearse cuál puede ser la relación que permite simular el resultado de la evolución de un grupo de separadores (o de cualquier otro proceso) mediante el uso de números aleatorios generados por un algoritmo que no tiene ninguna relación con el proceso real. La teoría de caos ha permitido aclarar este planteo. Como señalamos al principio, al algoritmo que genera los números al azar se le deben exigir una serie de pruebas que aseguren la aleatoriedad total sobre el espacio de configuración en el cual pretende proveer los valores de simulación. Una “sopa” de números de este tipo puede ser provista por cualquier algoritmo, altamente complejo o extremadamente simple que cumpla los requisitos expuestos. En particular podría ser provista por un algoritmo determinista, llamémoslo M0, que representara tan fielmente como hipotéticamente se deseara al proceso real. Por otra parte el código de computación puede proveer una algoritmo tan simple como se pueda lograr que también cumpla con dichos requisitos, llamémoslo M1. Para un número N grande de simulaciones tendremos que, M0 → u0N ↔ u1N ← M1. (9) Es decir que M1 y M0 generan dos conjuntos equivalentes de número aleatorios u. La aproximación será más o menos válida en tanto el proceso real y el algoritmo propuesto se ajusten a los requisitos de aleatoriedad total. Sin embargo en ambos las leyes básicas son determinísticas y salvo casos especiales el comportamiento podrá ser caótico pero no necesariamente al azar en lo que se entiende por este último término. En ese sentido hay que entender que la simulación por el método de Monte Carlo es una aproximación, mejor o peor de lo que realmente sucede en el proceso real. Pero esta situación no es peor que la que presenta cuando se evalúa la evolución de un proceso “determinístico”. Siempre existen numerosos grados de libertad no considerados que perturbarán la evolución del sistema e irán apartando su trayectoria

Modelización Aplicada a la Ingeniería Otero, D.
325
de los valores esperados. Podemos considerar que se tratan de dos casos extremos de evolución dinámica:
El gran capítulo, aún abierto, son las evoluciones dinámicas “intermedias” entre ambos extremos. Por ejemplo los flujos turbulentos o un gas de polvo interactuando gravitatoriamente. Si bien el segundo caso es sólo de interés (al menos por ahora) académico el primer caso es de enorme importancia tecnológica. Referencias Jaynes, E. T. (1957). Phys. Rev. 106: 620, Phys. Rev. 108: 171.
Leger, M. y D.V. Leemans (1987). “Ontario Hydro Research Division”, Report
Metropolis, N. and Ulam, S.( 1949). "The Monte Carlo Method." J. Amer. Stat. Assoc. 44: 335-341.
Otero D., A.N. Proto and A.Plastino (1981). Phys. Letters B98: 2691.
Otero, D. y S. Terlisky (1989). CCTP24-códE, CNEA.
Senton, L.R. and K.O. Bowman (1977). “Maximun likelihood estimation in small simple”, Charles Griffin & Co Ltd.
Shuster, H.G., “Deterministic Chaos” (1984). Physik Verlag, Weinheim.
86-153-K, 87-244-P.

Modelización Aplicada a la Ingeniería
326
Análisis de deformación de dentados en trenes de engranajes
MARCELO T. PIOVAN a Y VICTOR H. CORTINEZ a,b
a Grupo Análisis de Sistemas Mecánicos, Facultad Regional Bahía Blanca,
Universidad Tecnológica Nacional, Bahía Blanca, Argentina. b CONICET
Introducción
Las líneas de transmisión de potencia en maquinaria industrial pesada y también en maquinaria liviana cuentan con innumerables variedades de trenes de engranajes. Estos trenes de engranajes pueden ser cajas reductoras con diverso grado de complejidad en la cantidad de ejes y engranajes en funcionamiento, hasta simples transmisiones de un par de engranajes con un fin particular como por ejemplo servir de soporte a un proceso de extrusión de plásticos.
Los procedimientos básicos de análisis, cálculo y dimensionamiento de engranajes y trenes de engranajes se hallan adecuadamente tratados en la bibliografía especializada (Shigley y Mische, 2002), o bien en las normas profesionales publicadas bajo el amparo de institutos de normalización o asociaciones de profesionales, tales como los estándares internacionales de ISO (Internacional Standard Organization) o los alemanes de DIN (Deutsche Institut für Normung) o bien los estadounidenses de AGMA (American Gear Manufacturers Association).
No obstante, los tratados clásicos sobre mecánica de engranajes se ocupan principalmente del diseño geométrico así como del cálculo de resistencia considerando fórmulas para el análisis estático aunque corregidas con diversos factores que tienen en cuenta efectos dinámicos y otras características específicas.
Sin embargo, no se presentan con el suficiente grado de detalle, aspectos relacionados con la deformabilidad de los engranajes, cuyo objetivo es la representación de la distribución efectiva del esfuerzo de contacto sobre los dientes. Este problema resulta de importancia en engranajes esbeltos, es decir cuando la relación entre la longitud y el diámetro es alta. Es frecuente encontrar situaciones en la industria en las cuales se manifiestan fallas inesperadas de engranajes con un patrón de daño concentrado en una zona determinada. Varios de estos casos se producen porque la deformabilidad del engranaje provoca una distribución no uniforme de la carga sobre las zonas aludidas, efecto que no siempre es considerado en el diseño. No obstante, es posible corregir tales problemas mediante un maquinado que permita compensar la deformación que sufre el diente (se quita material en las zonas más cargadas), de manera que el esfuerzo de contacto sea uniforme a lo largo del ancho de faja del diente, con lo

Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
327
cual se mejora el servicio del engranaje, y paralelamente aumenta su duración. Para diseñar tales correcciones es fundamental el conocimiento de la distribución no uniforme de esfuerzo de interacción.
Para algunas situaciones simples, existen algunos métodos basados en la utilización de la teoría clásica de vigas sometidas a flexo-torsión, conjuntamente con la aplicación de un método iterativo para la solución del problema. Un ejemplo de tal metodología se puede encontrar en el conocido texto de Darle W. Dudley (1984). La solución basada en expresiones analíticas de resistencia de materiales está restringida a casos muy simples tales como piñones deformables por flexo-torsión interactuando con ruedas prácticamente rígidas (de muy poca esbeltez). Otros métodos analíticos de diseño sugeridos por normas AGMA (ANSI-AGMA 2101-C95) han supuesto hipótesis tales como una distribución de carga en configuración linealmente distribuida a través del dentado. Estos modelos producen valores muy altos para los factores de distribución de carga, es decir para los cocientes entre las cargas máximas y las medias. Recientemente se ha propuesto un procedimiento práctico mejorado para el cálculo de la distribución de carga no uniforme en dentados consistente en un método iterativo que combina la deformación elástica del piñón con otros desalineamientos (AGMA 927-A01). En este método debe analizarse por separado cada par de engranajes lo que puede resultar tedioso en el caso de un tren de engranajes. Por otra parte, se basa en la utilización de la teoría de vigas Bernoulli-Euler que desprecia el efecto de corte transversal. Dada las geometrías usuales de los dentados, tal hipótesis puede ser puesta en duda.
En el presente capítulo se desarrollan modelos matemáticos para enfocar el estudio de deformación de engranajes con diferentes configuraciones, considerando que los engranajes están representados por vigas Timoshenko y los dentados por resortes. Las ecuaciones resultantes se resuelven mediante el método de elementos finitos. Paralelamente, se pretende mostrar la forma de resolver ciertos problemas técnicos relacionados con la deformabilidad de engranajes empleando modelos relativamente simples. Es de destacar que los mencionados modelos fueron desarrollados en respuesta a demandas del sector industrial. Análisis de deformación de piñones “desdobladores”
En este trabajo se describe el modelo matemático (Cortínez y Piovan, 2003 a) utilizado para calcular la deformación en el dentado correspondiente a la segunda etapa de una caja desdobladora perteneciente a una siderúrgica nacional. Así mismo se presentan gráficamente los resultados numéricos obtenidos. Estos datos son de utilidad para corregir la interacción no uniforme entre los piñones.
Se analiza la deformación de dos piñones en contacto mediante un engranaje helicoidal (Figuras 1 a 3). A los efectos de la formulación matemática se adoptan las siguientes hipótesis:

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
328
a) Los cilindros son deformables por torsión y flexión. Se desprecia la deformabilidad axial.
b) Los dientes son deformables elásticamente. c) Se supone que el torque entrante se equilibra con dos torques iguales y
opuestos a la salida.
Figura 1: Esquema de los piñones en contacto (1: Piñón superior, 2: Piñón inferior).
(+)
Figura 2: Desplazamientos generalizados y esfuerzos (convención de signos).
Se adopta un modelo de viga Timoshenko a los efectos de representar la deformación por flexión y corte, considerándose la torsión de acuerdo a la teoría clásica (Coulomb, Saint-Venant). La necesidad de usar la teoría de Timoshenko en lugar del modelo de Bernoulli-Euler se debe a que los cilindros en consideración presentan, en general, muy poca esbeltez, consecuentemente la
L
1
2
x
x
1
2
x
y
φ, T
z v, Q
θ, -M

Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
329
flexibilidad de corte podría resultar relevante. La interacción elástica en el dentado se modela como un resorte distribuido actuando en la dirección del plano de trabajo.
Figura 3: Esquema del contacto entre cilindros.
A partir de las Figuras 1 a 3 pueden escribirse las siguientes ecuaciones que gobiernan la deformación flexo-torsional de los cilindros
111 mQ
dxdM −=− , 0f
dxdQ1 =− , 0rf
dxdT
1b1 =− ,
222 mQ
dxdM −=− , 0f
dxdQ2 =+ , 0rf
dxdT
2b2 =− .
(1)
Estas ecuaciones representan el equilibrio flexional, transversal (en dirección
paralela al plano de trabajo) y torsional, respectivamente de los cilindros 1 y 2 en contacto. Se ha definido a M1 y M2 como los momentos flectores, Q1 y Q2 como los esfuerzos de corte (actuando en forma paralela al plano de trabajo), T1 y T2 como los momentos torsores, f es la fuerza de interacción por unidad de longitud en el plano de trabajo, mientras que rb1 y rb2 representan los correspondientes radios base. Las ecuaciones constitutivas para un material elástico se expresan en la forma:
rb1
rb2
v2
v1
φ2
φ1
f
f U1 = v1 + φ1 rb1
U2 = v2 - φ2 rb2
Plano de Trabajo

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
330
dxdEIM i
iiθ−= , ⎟
⎠⎞
⎜⎝⎛ −= i
iisi dx
dvGAkQ θ , dxdGJT i
iiφ= , i = 1,2. (2)
En estas expresiones v1 y v2 representan los desplazamientos de los centros
geométricos, de las secciones transversales de los cilindros, en la dirección del plano de trabajo, θ1 y θ2 representan las rotaciones flexionales, φ1 y φ2 representan los giros torsionales. Por otra parte EIi, ksGAi, GJi (i = 1,2) son las rigideces de flexión, de corte y de torsión de las vigas correspondientes. ks denota al factor de corte. La fuerza de interacción por unidad de longitud se expresa en la forma:
( )2b221b1 rvr1vkf φφ +−+= , (3)
Siendo k es la rigidez del contacto por unidad de longitud.
Sustituyendo (2) y (3) en (1) se obtiene un sistema acoplado de seis ecuaciones diferenciales de segundo orden. Para la situación considerada, el sistema resultante va acompañado de las siguientes condiciones de borde:
( ) ( ) ( ) 2/0,00,00 0111 TTv === θ , ( ) ( ) ( ) 00,0,0 111 === TLLv θ ,
( ) ( ) ( ) 2/0,00,00 0222 TTv −=== θ , ( ) ( ) ( ) 0,0,0 222 === LLLv φθ . (4)
Para las determinaciones numéricas realizadas se despreciaron los momentos flectores por unidad de longitud m1 y m2. Las constantes de seccionales I, J y A han sido obtenidas empleando la norma AGMA 927-A01 Apartado 7.2. La constante de rigidez de contacto k se ha obtenido siguiendo la norma ISO 6336-1:1996(E) Apartado 9 (1996). El factor de corte ks se ha determinado mediante la expresión
2
2
s
c1c207
6k⎟⎠⎞⎜
⎝⎛
++
= ,
donde c es el cociente entre el radio interno y el radio externo.
El modelo matemático fue implementado computacionalmente en el sistema FlexPDE (2001). Éste es un “solver“ de problemas de contorno y de valores iniciales formulados mediante ecuaciones diferenciales basado en el método de los elementos finitos.
Resolviendo el sistema se obtienen las distribuciones longitudinales de v1, v2, θ1, θ2, φ1 y φ2. A partir de estas funciones pueden determinarse los desplazamientos U1 y U2 en el plano de trabajo de los cilindros 1 y 2:

Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
331
1111 brvU φ+= , 2222 brvU φ−= . (5)
Luego es posible obtener el desplazamiento relativo
U3= U1-U2. (6) Es útil también obtener el factor de distribución longitudinal definido de la
siguiente manera:
( )( )
Medio
MaxH f
fK =β . (7)
Donde (f)Max es el máximo valor absoluto de f(x), mientras que (f)Medio es su valor promedio definido en la forma:
( )L
dxff
L
Medio
∫= 0 .
(8)
Se ha obtenido el desplazamiento relativo U3 para los siguientes casos: A) Cilindros sólidos en contacto considerando solamente deformación
torsional. B) Un cilindro sólido (1) en contacto con uno hueco (2) considerando
solamente deformación torsional. C) Cilindros sólidos en contacto considerando deformación flexo-torsional. D) Un cilindro sólido (1) en contacto con uno hueco (2) considerando
deformación flexo-torsional. E) Como (A) disminuyendo los torques externos en 20%. F) Como (B) disminuyendo los torques externos en 20%. G) Como (C) disminuyendo los torques externos en 20%. H) Como (D) disminuyendo los torques externos en 20%. A manera de ejemplo se muestran los resultados numéricos para el caso A en
la Figura 4. Los datos numéricos utilizados pueden observarse en la Tabla 1. A partir de los resultados numéricos se pudieron inferir las siguientes
observaciones: • No existen diferencias apreciables en el desplazamiento relativo U3
considerando el eje (2) macizo o hueco.

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
332
• El valor máximo del desplazamiento relativo U3 es ligeramente superior cuando se considera la deformación flexo-torsional completa con respecto al eje deformable solamente por torsión. De todas maneras debe utilizarse el modelo completo (flexo-torsional) para obtener la distribución longitudinal correcta de la interacción entre cilindros.
• El sistema de piñones analizado presenta una marcada no uniformidad de la fuerza de interacción, de manera tal que los dientes en la zona de entrada están fuertemente sobrecargados.El máximo desplazamiento relativo alcanza una magnitud de 16 centésimas de milímetro para carga plena. El factor de distribución longitudinal adopta el valor 1.78.
rb2 : Radio Base del Piñón Inferior [m] 0.2545655rb1 : Radio Base del Piñón Superior [m] 0.2545655L: Longitud de contacto [m] 0.760J1: Constante de Rigidez Torsional Equivalente del Piñón Superior [m4] 6.88706 10-3
J2: Constante Rigidez Torsional Equivalente Piñón Inferior (macizo) [m4] 6.88706 10-3
J2: Constante Rigidez Torsional Equivalente Piñón Inferior (hueco) [m4] 6.83736 10-3
k: Constante Rigidez por unidad de longitud. Contacto [N/m²] 16.057 109
ks1: Constante de corte por flexión. Piñón Superior e inferior (eje macizo) 6/7
ks2: Constante de corte por flexión. Piñón Inferior (eje hueco) 0.7065I1: Momento de Inercia del Piñón Superior [m4] 3.1795 10-3
I2: Momento de Inercia del Piñón Inferior (macizo) [m4] 3.1795 10-3
I2: Momento de Inercia del Piñón Inferior (hueco) [m4] 3.1547 10-3
A1: Area seccional. Piñon Superior e inferior (eje macizo) [m2] 0.1998A2: Area seccional. Piñon inferior (eje hueco) [m2] 0.1822T0: Momento torsor a la entrada del Piñón Inferior [N.m] 951109.8E: Modulo de Elasticidad Longitudinal [N/m²] 2.06 1011
ν: Coeficiente de Poisson 0.3Tabla 1: Datos para la rutina de cálculo del tren de piñones.
Utilizando los valores del desplazamiento relativo pudo efectuarse la
corrección correspondiente en el dentado.

Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
333
Figura 4: CASO (C) Cilindros sólidos en contacto considerando.
deformación flexo-torsional.
Análisis de deformación de los piñones de una caja reductora de extrusor Este ejemplo corresponde al estudio de deformación en el dentado de los
engranajes helicoidales correspondientes a los subconjuntos superior e inferior de la caja de transmisión de una máquina extrusora perteneciente a una empresa petroquímica nacional (Piovan y Cortínez, 2004). Se trata de dos subsistemas compuestos por tres ejes en cada uno de ellos. El esquema de los mismos se muestra en la Figura 5.
El modelo matemático se desarrolla siguiendo hipótesis similares al ejemplo anterior, aunque en este caso las ecuaciones para cada eje deben plantearse con respecto a sistemas de referencia generales, ya que los planos de trabajo en cada contacto entre engranajes no son paralelos entre sí. La interacción elástica se modela, según se aprecia de las Figuras 1 a 3, con un resorte distribuido actuando en la dirección de trabajo. En términos generales el modelo matemático de cada subconjunto estará compuesto por tres vigas acopladas deformables por torsión y flexión. Es importante observar que las fuerzas de interacción no son uniformes en toda la longitud sino que deben ser definidas donde exista contacto entre árboles con las características propias de dichos contactos. Por ejemplo para el subconjunto superior el esquema de definición del dominio para las correspondientes ecuaciones es el que se muestra en la Figura 6 y en la Tabla 2

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
334
(a) (b)
Figura 5: Sistemas de referencia (a-Subconjunto superior, b-Subconjunto inferior).
Figura 6: Dominio de definición de las ecuaciones.
Dominio EJE Constante D1 D2 D3 D4 D5 D6 D7
Fb2 [N] 0 0 0 841116 0 0 0 f34 f34 0 0 0 0 0 f34 mZ3 mZ3 0 0 0 0 0 mZ3
3
mY3 mY3 0 0 0 0 0 mY3 f34 f34 0 0 0 0 0 f34 f45 f45 0 0 0 0 0 f45 mZ4 mZ4 0 0 0 0 0 mZ4
4
mY4 mY4 0 0 0 0 0 mY4 f34 f34 0 0 0 0 0 f34 f45 f45 0 0 0 0 0 f45 mZ5 mZ5 0 0 0 0 0 mZ5 mY5 mY5 0 0 0 0 0 mY5
5
Kfe 0 0 1015 1015 1015 0 0 Tabla 2: Fuerzas e interacciones en el subconjunto superior.

Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
335
Cada uno de los subdominios tiene una longitud Li con i = 1,..,7 e identifica
propiedades de rigidez diferentes para cada uno de los tres ejes de cada subconjunto. En cada uno de los subdominios se ejercen diferentes fuerzas y/o interacciones que pueden tener un valor determinado o ser nulas, según se muestra en la Tabla 2
Como en el ejemplo anterior, los movimientos transversales se consideran según la teoría de vigas de Timoshenko. Para cada subsistema, entonces, deben obtenerse 15 funciones incógnita (dos desplazamientos transversales, dos giros flexionales y un giro torsional para cada eje). El sistema resultante es fácilmente resuelto mediante el método de los elementos finitos. Una vez resuelto deben recuperarse los desplazamientos relativos en cada plano de trabajo en forma similar al ejemplo anterior. A partir de los mismos fue posible corregir el dentado para provocar una distribución uniforme en cada contacto.
Análisis de deformación torsional en tren planetario de camiones Komatsu
El presente ejemplo corresponde a un estudio realizado con el propósito de determinar las causas posibles de las fallas de dientes de engranajes ocurridas en reductores planetarios de accionamiento de camiones KOMAT´SU 930E pertenecientes a una empresa minera chilena (Cortínez y Piovan, 2003 b). Durante la visita a planta (efectuada en el año 2003 por el ESTUDIO J.L.Piña de la ciudad de Bahía Blanca) se realizó la evaluación del estado de los internos del Planetario de Baja Velocidad según los diseños I.S.G. Industries (ISG) y General Electric (GE). A partir de dicha evaluación surgió como causa probable de las fallas detectadas en los dientes del engranaje solar de la segunda etapa, la falta uniformidad en la distribución de las cargas sobre los dientes. Esto es debido a la flexibilidad torsional que poseen el engranaje solar y los engranajes planetarios, considerando su excesiva esbeltez.
El estudio computacional entonces tuvo como objetivo la evaluación cuantitativa del comportamiento torsional estático de los mencionados engranajes planetarios.
Aquí se presenta el modelo matemático del problema como también la solución computacional de las ecuaciones gobernantes, la cual permite obtener conclusiones pertinentes al comportamiento del sistema.
Se analiza un tren de engranajes planetarios como el que se muestra en la Figura 7. Se adoptan las siguientes hipótesis:
a) El engranaje solar y los planetarios son deformables torsionalmente. b) El engranaje anillo y el porta-planetario son rígidos. c) El engranaje anillo está fijo. d) Los engranajes planetarios se deforman de manera idéntica. e) Además de la configuración geométrica, se conoce el torque de entrada al
engranaje solar T0 y el torque de salida del porta-planetario Tc.

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
336
Se pretende averiguar la deformación torsional de los engranajes planetarios y solar, la distribución de momentos torsores y la fuerza de interacción entre el solar y el planetario. Engranaje Anillo Engranaje Solar Porta-Planetario Engranaje Planetario
Figura 7: Esquema del tren planetario. Ts(x) Ts(x+dx) sθ fsp dx
Figura 8: Diagrama de cuerpo libre del engranaje solar.

Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
337
α α
Figura 9: Diagrama de cuerpo libre del engranaje planetario. Tc
D cθ FT
FAxial FAxial FT Tc
I Centro del Porta-planetario
Figura 10: Diagrama de cuerpo libre (esquemático) del porta-planetario (En el desarrollo solo se considera Tc
D aplicado a la salida, o sea TcD=Tc y Tc
I=0).
Tp(x+dx) (anti-horario) Tp(x) (sentido horario)
fsp dx frp dx
Faxial pθ
FT

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
338
TR
I
TR
D
fsrdx
Figura 11: Diagrama de cuerpo libre (esquemático) del engranaje anillo (En el desarrollo solo se considera Tc
D aplicado a la salida, o sea TRD=TR y TR
I=0). rbs sθ sδ rbp pθ
rbs cθ
Figura 12: Esquema del Desplazamiento Relativo entre Puntos Correspondientes del Contacto Solar-Planetario.

Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
339
A partir de las Figuras 8 a 11 pueden plantearse las ecuaciones de equilibrio torsional para el engranaje solar, un engranaje planetario, el porta-planetario, y el anillo. Dichas ecuaciones se expresan de la siguiente manera: Equilibrio torsional del engranaje solar
0 =− fn rdxdT
spbss . (9)
Equilibrio torsional del engranaje solar
( ) 0 - ff rdxdT
rpspbpp =− . (10)
Equilibrio torsional del porta-planetario
0 F n r T Tcc =+ . (11) Equilibrio torsional del engranaje anillo
0 F - n rT RPbRR = . (12)
En las ecuaciones anteriores se han efectuado las siguientes definiciones: Ts, Tp , Tc y TR corresponden a los momentos torsores del engranaje solar, del engranaje planetario , del porta-planetario y del engranaje anillo, respectivamente. rbs, rbp y rbR son los radios de las circunferencias de base de los engranajes solar, planetario y anillo, respectivamente, mientras que rc es el radio desde el centro del porta-planetario hasta el centro de los planetarios. fsp y frp corresponden a las fuerzas de interacción por unidad de longitud entre los engranajes solar y planetario y entre los engranajes anillo y planetario, respectivamente, FT es la fuerza de interacción (tangente a la circunferencia de radio rc) entre planetario y porta-planetario, y FRP es la fuerza de interacción entre engranajes planetario y anillo. Por otra parte, n representa al número de planetarios. La expresión de la fuerza de interacción entre los engranajes solar y planetario expresase en la forma:
sssp δ k f = , (13) Donde ks es la constante de rigidez por unidad de longitud del contacto mientras que el desplazamiento relativo entre los puntos de contacto de ambos engranajes en sus respectivas circunferencias de base está dado por la expresión (Figura 12).

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
340
cbspbpsbss θ - r θ r θ r δ += , (14)
Donde sθ , pθ y cθ representan las rotaciones torsionales del engranaje solar, del engranaje planetario y del porta-planetario, respectivamente. Reemplazando (14) en (13) y considerando la definición de los desplazamientos tangenciales Ui dados por:
sbss θ r U = , pbpp θ r U = , ccc θ r U = . (15) Luego es posible expresar la fuerza de interacción en la forma
( )cspsssp U - γ U U k f += , (16)
Donde se ha definido c
bss r
rγ = .
De manera similar puede determinarse la expresión de la fuerza de interacción entre el anillo y el engranaje planetario como:
( )cRprrp U γ U - k f += , (17)
Donde se ha utilizado la definición c
bRR r
rγ = .
La fuerza que el engranaje planetario le transmite al porta-planetario por medio de su eje se obtiene integrando las fuerzas que actúan sobre el planetario proyectadas en la dirección tangente a la circunferencia de radio rc
( )∫ +=L
0 rpspT dx f fαcos F . (18)
De manera similar la fuerza de contacto entre el anillo y el planetario se obtiene en la forma
∫=L
0 rpRp dx f F . (19)
Las ecuaciones constitutivas en función de los torques y las deformaciones
torsionales para un material elástico lineal se expresan por las clásicas relaciones de Resistencia de Materiales:

Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
341
dxdU
rGJ T s
bs
ss = ,
dxdU
r
GJ T p
bp
pp = . (20)
Considerando que se conoce el valor de Tc es posible obtener la siguiente
expresión para Uc a partir de las ecuaciones (11), (16), (17), (18) y (19).
( )[ ]( ) L k γ kγα cos n r
dx U - kk dx Ukαcos n r T U
RRssc
L
0 p
L
0 Rsssccc +
++= ∫∫ . (21)
Sustituyendo ahora las expresiones (16), (17), (20) y (21) en las ecuaciones (9)
y (10), se obtiene el siguiente sistema de ecuaciones integro-diferenciales
( )
( )0
kkcosrn
dxUkkdxUkcosrnTUUkrn
dxUd
rGJ
RRssc
L
0
L
0pRssscc
spssbs2s
2
bs
s =
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+
⎥⎦
⎤⎢⎣
⎡−++
−+−∫ ∫
γγα
αγ .
( ) ( )( )
( )0
kγkγαcosrn
dxUkkdxUkαcosrnTkγkγUkkUkr
dxUd
rGJ
rRssc
L
0
L
0pRssscc
rRsspRsssbp2p
2
bp
p =
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+
⎥⎦
⎤⎢⎣
⎡−++
−−++−∫ ∫
(22)
El sistema (22) está sujeto a las condiciones de borde:
en x=0: 00 Tdx
dUr
GJTT s
bs
ss =⇒= , 00 =⇒=
dxdU
rGJ
T p
bp
pp ,
en x=L: 00 =⇒=dx
dUr
GJT s
bs
ss , 00 =⇒=
dxdU
rGJ
T p
bp
pp .
(23)
Las condiciones (23) expresan que los extremos de los engranajes solar y
planetarios están descargados a excepción de la entrada al solar que está soportando la acción del torque T0.
La solución del sistema (22) y (23) permite determinar los desplazamientos Us y Up. Luego, es posible obtener la distribución de momentos torsores en el solar y los planetarios a partir de (20). Finalmente puede determinarse la fuerza de interacción entre el solar y el planetario mediante las expresiones (16) y (21). Es útil también obtener el factor de distribución longitudinal definido por la expresión (7).

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
342
Las constantes de rigidez torsional JP y JS han sido obtenidas empleando la norma AGMA 927-A01 Apartado 7.2, mientras que las constantes de rigidez de contacto kS y kR se han obtenido siguiendo la norma ISO 6336-1:1996(E) Apartado 9.
El modelo matemático fue implementado computacionalmente en el sistema FlexPDE. Se han calculado las siguientes situaciones, correspondientes a una de las cuatro unidades motrices del camión Komat´su:
A) Tren de engranajes planetarios en la etapa de alta velocidad: La cual se
caracteriza por la presencia de un conjunto de tres engranajes planetarios. B) Tren de engranajes planetarios en la etapa de baja velocidad: La cual se
caracteriza por la presencia de un conjunto de cuatro engranajes planetarios.
En la Tabla 3 se exponen los valores de todas las propiedades geométricas y
mecánicas empleadas en el tren de engranajes planetarios de alta velocidad, en la rutina de solución numérica. En la Tabla 4 se hace lo propio para el tren de engranajes de baja velocidad. rbs : Radio Base del Engranaje Solar [m] 0.074460rbp : Radio Base del Engranaje Planetario [m] 0.129436rbR : Radio Base del Engranaje Anillo [m] 0.332980rc: Radio centro del porta-planetario hasta centro del planetarios [m] 0.231173ks: Rigidez por unidad de longitud. Contacto solar-planetario [N/m²] 20.47 109
kR: Rigidez por unidad de longitud. Contacto anillo-planetario [N/m²] 21.69 109
L: Longitud de contacto [m] 0.1219JS: Constante de Rigidez Equivalente de Torsión. Engranaje Solar [m4] 5.6276 10-5
JP: Constante de Rigidez Equivalente de Torsión Engranaje Planetario [m4] 56.704 10-5
T0: Momento torsor de entrada al engranaje solar [N.m] 22813.00Tc : Momento torsor del porta-planetario [N.m] 124975.00E: Modulo de Elasticidad Longitudinal [N/m²] 2.06 1011
ν: Coeficiente de Poisson 0.3Tabla 3: Datos básicos del tren de engranajes de alta velocidad.
En las Figuras 13 y 14 se muestran los resultados obtenidos para la fuerza de
interacción solar-planetario fsp y el desplazamiento relativo δs entre puntos correspondientes del contacto solar-planetario en el caso del tren de alta velocidad. En las Figuras 15 y 16 se hace lo propio para el caso del tren de baja velocidad.
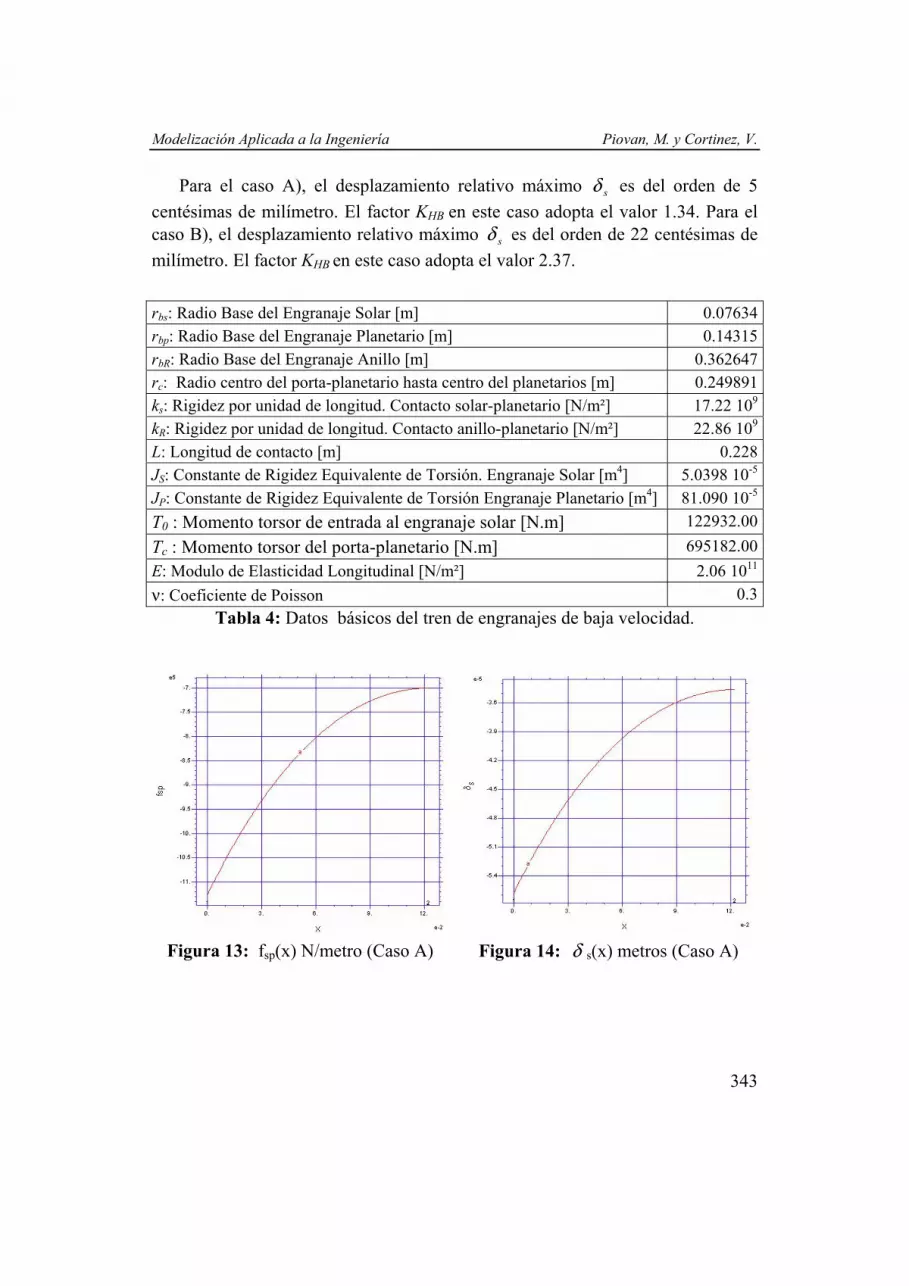
Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
343
Para el caso A), el desplazamiento relativo máximo sδ es del orden de 5 centésimas de milímetro. El factor KHB en este caso adopta el valor 1.34. Para el caso B), el desplazamiento relativo máximo sδ es del orden de 22 centésimas de milímetro. El factor KHB en este caso adopta el valor 2.37.
rbs: Radio Base del Engranaje Solar [m] 0.07634rbp: Radio Base del Engranaje Planetario [m] 0.14315rbR: Radio Base del Engranaje Anillo [m] 0.362647rc: Radio centro del porta-planetario hasta centro del planetarios [m] 0.249891ks: Rigidez por unidad de longitud. Contacto solar-planetario [N/m²] 17.22 109
kR: Rigidez por unidad de longitud. Contacto anillo-planetario [N/m²] 22.86 109
L: Longitud de contacto [m] 0.228JS: Constante de Rigidez Equivalente de Torsión. Engranaje Solar [m4] 5.0398 10-5
JP: Constante de Rigidez Equivalente de Torsión Engranaje Planetario [m4] 81.090 10-5
T0 : Momento torsor de entrada al engranaje solar [N.m] 122932.00Tc : Momento torsor del porta-planetario [N.m] 695182.00E: Modulo de Elasticidad Longitudinal [N/m²] 2.06 1011
ν: Coeficiente de Poisson 0.3Tabla 4: Datos básicos del tren de engranajes de baja velocidad.
Figura 13: fsp(x) N/metro (Caso A) Figura 14: δ s(x) metros (Caso A)

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
344
Figura 15: fsp(x) N/metro (Caso B) Figura 16: δ s(x) metros (Caso B)
Puede concluirse del análisis realizado que el tren planetario correspondiente a la etapa de alta velocidad está diseñado de tal manera que la interacción entre el solar y el planetario es razonablemente uniforme. En cambio el tren planetario correspondiente a la zona de baja velocidad presenta una marcada no uniformidad de la fuerza de interacción entre el solar y el planetario, de manera tal que los dientes en la zona de entrada están fuertemente sobrecargados.
Una corrección a esta situación debería ser del orden de dos décimas de milímetro en la zona más cargada. Conclusiones
Se ha presentado el desarrollo de tres modelos matemáticos para analizar la deformabilidad de trenes de engranajes. Fundamentalmente, se buscó determinar el grado de distribución no uniforme de la fuerza de interacción en cada engranaje en contacto (a partir del factor de distribución longitudinal) y el correspondiente desplazamiento relativo. Este último es de gran utilidad práctica puesto que se utiliza para la determinación de la corrección de la situación mediante el maquinado de los dientes. Los tres ejemplos corresponden a problemas industriales que los autores han tenido la ocasión de analizar.
El artículo pretende demostrar que el análisis matemático-estructural de diferentes situaciones a partir de modelos relativamente simples conduce a la adecuada comprensión de situaciones de diversa gravedad en la mecánica de las transmisiones. En todos los casos analizados, la formulación matemática lleva a sistemas acoplados de ecuaciones diferenciales ordinarias. Dichos sistemas pueden ser fácilmente resueltos con la ayuda de entornos de computación desarrollados para tal fin. Existe una cantidad apreciable de sistemas comerciales adecuados. Funciones destinadas a tal fin pueden encontrarse en programas matemáticos generales tales como Mathcad®, Matlab® o Matemática® (cada una

Modelización Aplicada a la Ingeniería Piovan, M. y Cortinez, V.
345
de las precedentes son marcas registradas de Mathsoft Inc., Mathworks Inc. y Wolfram Research Inc.). En este capítulo se ha utilizado Flex-PDE® (marca registrada de PDESolutions Inc.) que es un sistema para la solución de ecuaciones diferenciales a derivadas parciales basado en el método de elementos finitos. La solución simultánea con ayuda de estos programas conduce a soluciones en forma muy directa, siendo en opinión de los autores de mayor practicidad que los métodos analíticos iterativos usualmente propuestos para la realización de tales análisis. Otro de los objetivos de este trabajo fue mostrar en forma más o menos detallada la formulación matemática de este tipo de problemas considerando su escaso tratamiento en los textos clásicos.
Debe finalmente mencionarse que para el caso de trenes de engranajes más complicados (con mayor número de vinculaciones o ejes no paralelos, entre otras) los conceptos mostrados pueden generalizarse para desarrollar programas de elementos finitos especialmente orientados para este tipo de situaciones.
Sin pretensión de originalidad, los autores creen que este trabajo puede ser de utilidad para ingenieros involucrados en el estudio de transmisiones mecánicas.
Agradecimientos
Los trabajos a los que se hace referencia en este artículo forman parte de proyectos realizados conjuntamente con el Ing. J. L. Piña, director del Estudio de Ingeniería J. L. Piña. Los autores desean agradecer su colaboración en la presentación de este capítulo.
Referencias ANSI/AGMA 2101-C-95. “Fundamental rating factors and calculation methods
for involute spur and helical gear teeth. American Gear Manufacturers Asociation. Virginia, U.S.A.
AGMA 927-A01. “Load distribution factors- Analytical methods for cylindrical gears”. American Gear Manufacturers Asociation. Virginia, U.S.A.
Cortínez, V.H. y Piovan, M.T. (2003, a) “Análisis de Deformación de Piñones desdobladores de salida (del tren de laminación de la empresa ACINDAR). Informe Técnico GASM 11a03. Bahía Blanca, Argentina.
Cortínez, V.H. y Piovan, M.T. (2003, b) “Análisis de deformación torsional de un tren de engranajes de camiones Komatsu pertenecientes a la empresa Codelco, Chile”. Informe Técnico GASM 05a03. Bahía Blanca, Argentina.
Dudley, D.W. (1984) “Handbook of practical gear design”, Mc Graw-Hill, New York. U.S.A
FlexPDE (2001) “FlexPDE versión 2.23e”. http://www.pdesolutions.com PDESolutions, Inc. California. U.S.A

Análisis de deformación de dentados en trenes de engranajes Piovan, M. y Cortínez, V.
346
ISO 6336-1:1996(E). (1996) “Calculation of load capacity of spur and helical gears - Part 1: Basic principles, introduction and general influence factors”
Internacional Organization for Standardization. Ginebra, Suiza.
Piovan, M.T. y Cortínez, V.H. (2004) “Análisis de deformación de piñones de la caja reductora de extrusor perteneciente a Petroquímica Cuyo”. Informe Técnico GASM 2b04. Bahía Blanca, Argentina.
Shigley, J.E. y Mischke, C.R. (2002) “Diseño en Ingeniería Mecánica”, Mc Graw Hill (sexta edición).

Modelización Aplicada a la Ingeniería
347
Simulación del flujo superficial y subterráneo acoplados
PAULO PORTAa
a Zentrum für Unweltsimulation, Universität Augsburg, Alemania.
Introducción Existen diversos problemas de importancia práctica que involucran la
interacción de distintos tipos de flujos: la lubricación de articulaciones humanas y de prótesis, el flujo arterial, el transporte de calor en paredes con aislaciones fibrosas, la evolución de los procesos de solidificación, o el efecto de inundaciones sobre terrenos secos o el transporte de contaminantes en sistemas hidráulicos son algunos ejemplos de este tipo de flujos.
En particular, se estudiará la interacción de los flujos superficial y subterráneo saturado. Desde el punto de vista del modelado, la descripción de este tipo de flujos consiste en partir el dominio de interés ,dℜ⊂Ω en dos o más subdominios, cuya intersección es una variedad que indicaremos por ,Γ de dimensión ).1( −d En una de las regiones, se realiza el flujo superficial, que en general puede ser modelado mediante las ecuaciones de Navier-Stokes, mientras que en la otra, se realiza un flujo de Darcy. En particular, en este trabajo, se considera, i) que ambos flujos son estacionarios y ii) que el flujo superficial está representado por el flujo de Stokes; la justificación para dicha elección es de orden práctico, ya que el flujo estacionario de Stokes aparece como bloque básico en las discretizaciones temporales de las ecuaciones de Navier-Stokes. La teoría de cada uno de estos flujos es bien conocida y se dispone de códigos confiables para su resolución; sin embargo no es el caso para el problema acoplado. Algunos trabajos en esta dirección son los de (Jäger y Mikelic, 2000), (Discacciati et al, 2002), (Discacciati y Quarteroni, 2004), (Layton et al, 2003), (Salinger et al, 1994), (Hoppe et al, 2004).
En términos abstractos, el problema puede ser escrito como sigue: sea d el dominio de interés, 21 ΩΩ=Ω ∪ una partición del mismo, tal que su
intersección Γ=ΩΩ 21 ∩ es una variedad de dimensión ).1( −d Sean además S y D los operadores de Stokes y Darcy. Entonces podemos plantear el siguiente problema:
Problema 1: Hallar ℜ×ℜ→Ω= dpuU 111 :),( (velocidad y presión), y
ℜ→Ω= 22 :φU (altura piezométrica), tal que
11 fSU = en 1Ω , 22 fDU = en 2Ω . (1)

Simulación de flujo superficial y subterráneo acoplados Porta, P.
348
junto a condiciones de contorno apropiadas para jU sobre Γ−Ω∂ j para .2,1=j Mas aún, sobre Γ deben satisfacerse k condiciones de transmisión, de la forma
)()( 21 UU jj Ψ=Φ sobre Γ para .,,1 kj = Esta formulación permite introducir en forma natural, una estrategia iterativa
basada en la descomposición de dominios heterogénea. En particular, en (Discacciati et al, 2002, Discacciati y Quarteroni, 2003 y Discacciati y Quarteroni, 2004) se propone y analiza una iteración de Newton-Dirichlet. En términos físicos, el procedimiento consiste en obtener mediante iteraciones los flujos a través de Γ fijando la continuidad de la tensión normal.
En (Quarteroni y Valli, 1999), se muestra que es posible también desacoplar el problema utilizando para ello el problema de Poincaré-Steklov,
χλ =S sobre Γ , donde χ depende de los datos del problema –la función forzante y las condiciones de contorno- mientras que λ es una función definida sobre la frontera común a ambos subdominios y que permitirá, a posteriori, determinar las soluciones
2,1, =jU j mediante la resolución de los subproblemas (1), con las condiciones de contorno sobre Γ−Ω∂ j y otra, dependiente de λ sobre .Γ Es posible, también, realizar una formulación equivalente, basada en obtener iterativamente la tensión normal sobre Γ fijando los flujos (Hoppe et al, 2004).
El presente trabajo se organiza como sigue: en la sección siguiente, se discute el modelo para el flujo acoplado y las condiciones de transmisión. Se discuten las denominadas ecuaciones de interfase y se analizan las propiedades de los operadores de Poincaré-Steklov. Seguidamente, se presenta la forma débil del modelo y su aproximación mediante elementos finitos. Para la resolución del problema acoplado aproximado, se formula y se analiza un procedimiento iterativo tipo Neumann-Dirichlet. Del análisis, se concluye que la performance no es satisfactoria para aplicaciones de interés ambiental o industrial de modo que se propone otra metodología, basada en la recuperación del operador de iteración para el error. Finalmente se presentan algunos resultados numéricos. Modelo del flujo de Stokes-Darcy
El modelo para el flujo de Stokes-Darcy puede formularse como sigue
Problema 2: Hallar ℜ×ℜ→Ω dpu 11 :),( y ℜ→Ω 2:φ , velocidad, presión y altura piezométrica, tal que

Modelización Aplicada a la Ingeniería Porta, P.
349
,.,,
,0,
111
11
11
11
ΓΓ=⋅⋅Γ=
Ω=⋅∇Ω=⋅∇
sobrentransmisiócondsobremnTnsobreuu
enuenfT
D
DD
donde ND
111 ΓΓ=Γ−Ω∂ ∪ y
(2a)
(2b)
(2c)
(2d)
,.,,
,,
22
2
22
222
ΓΓ=∇⋅⋅−Γ=
Ω∇=Ω=⋅∇
sobrentransmisiócondsobreKnsobre
enuenfu
DN
DD
φφφφφε
ε
donde ND
222 ΓΓ=Γ−Ω∂ ∪ .
(3a)
(3b)
(3c)
(3d)
Aquí, T es el tensor de tensiones, dividido por la densidad, que se vincula con el tensor rapidez de deformación )(2
1)( 111 uuuD T∇+∇= mediante la ley de
Newton ),(2 1uDpIT ν+−=
donde p es la presión, dividida por la densidad yν la viscosidad cinemática. Además,ε indica la porosidad y K el tensor de conductividad del medio poroso.
Como indicamos más arriba, es necesario especificar las condiciones de transmisión sobre .Γ La primer condición es una expresión del equilibrio mecánico de la tensión normal sobre Γ : la tracción que actúa sobre el fluido en el subdominio 1Ω viene dada por
.1 Tnt ρ⋅= donde T es nuevamente el tensor de tensiones dividido por la densidad. La tracción que el fluido ejerce sobre la interfase es –t; la única fuerza que ejerce el fluido que ocupa 2Ω es producto de la presión de Darcy, representada por la altura piezométrica según la relación .φρgpD = El equilibrio mecánico implica entonces que
φρρ gnTnnt =⋅⋅−=⋅− 111 sobre .Γ

Simulación de flujo superficial y subterráneo acoplados Porta, P.
350
Reemplazando T por la expresión de la ley de Newton, resulta
φν gnuDnp =⋅⋅− 111 )(2 sobre .Γ (4)
La segunda condición de transmisión es la continuidad de la componente normal de la velocidad a través de .Γ Esta es una expresión de la conservación de la masa y establece que no existen fuentes ni sumideros sobre la interfase:
02211 =⋅+⋅ nunu sobre .Γ (5)
El flujo de Stokes quedará determinado en forma unívoca, si se especifica
además de la componente normal de la velocidad, la tangencial sobre .Γ La condición tradicional de no deslizamiento, que implica que dicha componente se anula no está acompañada por la evidencia experimental; de las muchas relaciones disponibles, la que mejor se ajusta es la denominada relación de Beavers, Joseph y Saffman (Jäger y Mikelic, 2000): originalmente, en (Beavers y Joseph, 1967) se proponía un modelo en el cual la diferencia entre las correspondientes componentes tangenciales de las velocidad del flujo superficial y subterráneo era proporcional a la tensión de corte sobre el flujo superficial
,)()( 121 jjj
j Tng
Kuu τρ
αττ
τ ⋅−⋅⋅
=⋅−
donde 2,1, =jjτ definen con 1n un sistema de coordenadas cartesiano local sobre .Γ Posteriormente, y en virtud de algunas consideraciones de estabilidad de la solución (Saffman, 1971), la relación que se adopta considera ,02 =u con lo que esta condición de trasmisión se transforma en una restricción cinemática sobre .1u En nuestro análisis y siguiendo lo sugerido en (Discacciati et al, 2002, Discacciati y Quarteroni, 2003 y 2004) y para simplificar la discusión se considera que
0)( 1 =⋅⋅− jTn τρ sobre .Γ (6)
Forma débil y formulación por elementos finitos Sean los siguientes espacios funcionales
,0:)(: 111 DsobrevHvH Γ=Ω∈=
,:1dHH = ),(: 1
2 Ω= LQ DsobreHH 22
12 0:)(: Γ=Ω∈= ψψ ,

Modelización Aplicada a la Ingeniería Porta, P.
351
y las siguientes funciones
,, 101
011 Huuuu e ∈+= ., 2
00 He ∈+= φφφφ Considérese ahora la ecuación para el flujo en el medio poroso, que resulta de
combinar las Ecuaciones (3a) y (3b): multiplicando dicha expresión por una funcion de prueba 2H∈ψ se obtiene
∫ ∫∫∫ ∈∀+∇⋅⋅∇−=∇⋅⋅−∇⋅⋅∇ .2220 HfKKnK e ψψφψφψφψ (7)
Para escribir explícitamente el acoplamiento, la integral de superficie puede escribirse como suma de integrales, en virtud de que .222
ND ΓΓΓ=Ω∂ ∪∪ En la integral que resulta sobre Γ el integrando puede rescribirse en términos de la condición de transmisión (5) y de la Ecuación (3b) como .112 nuKn ⋅=∇⋅⋅ εφ
Procediendo en forma análoga con el problema de Stokes, se elige una
función de prueba 1Hw ∈ de modo que
∫∫ ∫ ∈∀=⋅∇−∇ .)(2 111 HwfwuDwpw ν
En virtud de la simetría de )( 1uD y utilizando las identidades integrales
∫∫ ∫ ∇−∇=∇ wpwppw )( y ∫ ∫∫ ∇⋅−⋅∇=⋅∇ ,)(2))((2)(2 111 wuDuwDuDw ννν se obtiene
∫ ∫ ∫ ∫ ∈∀=⋅−+∇⋅∇+∇− ))(2()()(2 1111 wwfwnuDpIwDuDwp νν (8)
Nuevamente, el acoplamiento puede ponerse de manifiesto en la integral de superficie: en efecto, en virtud de la condición de transmisión (4),
.))(2( 111 ngnuDpI φν =⋅− A partir de las Ecuaciones (7), (8) y de la forma débil para la condición de flujo solenoidal -Ecuación (2b)- resulta
Problema 3: Hallar ,,),( 2
01
01 HQHpu ∈×∈ φ tal que
∫ ∫∫∫∫ ∈∀++∇⋅⋅∇−=⋅+−∇⋅⋅∇ ,)( 22101
0 HfKnuuK Nee ψψψφφψψεφψ

Simulación de flujo superficial y subterráneo acoplados Porta, P.
352
∫ ∫ ∫∫ ∫∫
∈∀+∇⋅∇−=
=++∇⋅∇+∇−
,,)()(2
)()()(2
11
100
1
HwwfwDuDmw
wngwDuDwp
e
e
νφφν
∫∫ ∈∀⋅∇−=⋅∇ .,01 Qququq e
Sean ahora, dos triangulaciones conformes, h,1Ω y h,2Ω de los dominios
1Ω y 2Ω respectivamente, las que coinciden sobre la interfase .Γ Los siguiente espacios de elementos finitos están basados en dichas triangulaciones
,)(,0:)(: ,12|,11 hEhDhhhh EEisoPvsobrevCvH Ω∈∀∈Γ=Ω∈=
,:,1d
hh HH = ,)(:)(: ,11|1 hEhhh EEPqCqQ Ω∈∀∈Ω∈=
.)(,0:)(: ,21|22,2 hEhD
hhh EEPsobreCH Ω∈∀∈Γ=Ω∈= ψψψ
Sean además Dhφ y D
hu los análogos discretos de eφ y .eu Estos se pueden construir, por ejemplo, asignando los valores de eφ y eu sobre los nodos de la triangulación que están sobre D
2Γ y D1Γ respectivamente.
Sean hhDhhh Huuuu ,1
0,1
0,1,1 , ∈+= y ., ,2
00hh
Dhhh H∈+= φφφφ Escribimos
Problema 4: Hallar hhhh QHpu ×∈ ,1
0,1 ),( y hh H ,2
0 ∈φ tal que
∫ ∫∫∫∫ ∈∀++∇⋅⋅∇−=⋅+−∇⋅⋅∇ ,)( ,2210,1
0hhhh
Nh
Dhh
Dhhhhh HfKnuuK ψψψφφψψεφψ
∫ ∫ ∫∫ ∫∫
∈∀+∇⋅∇−=
=++∇⋅∇+∇−
,,)()(2
)()()(2
,1,1
100
,1
hhhhhDhhh
Dhhhhhh
HwfwwDuDwm
wngwDuDwp
νφφν
∫∫ ∈∀⋅∇−=⋅∇ .,0,1 hh
Dhhhh Qququq
Solución iterativa del problema acoplado
De acuerdo a lo sugerido en (Discacciatti et al, 2002 y Discacciatti y Quarteroni 2003), el acoplamiento fuerte del problema 3, se reemplaza por un problema iterativo sobre la interfase .Γ Para ello, se define el espacio
,::: ,1 hhhh Hwnww ∈⋅==Λ ΓΓ
y la función auxiliar .)(: 1,1 nuu Dh
Dh
Dhhhh ⋅+=+Λ∈ λλλ La estrategia consiste en
determinar iterativamente hh Λ∈λ tal que la versión aproximada de la condición de transmisión (5) se satisfaga

Modelización Aplicada a la Ingeniería Porta, P.
353
( ) .)(1 01 hhh
Dhhh
Dhh Kn Λ∈∀+∇⋅⋅−=+∫ ∫ ψψφφεψλλ
Procedimiento 1: Iteración de Neumann-Dirichlet Sea hh Λ∈0λ una semilla y θ un parámetro de relajación dado; para 0≥k
1 Hallar hoh H
k
,2
1
∈+
φ tal que
∫ ∫∫∫∫ ∈∀++∇⋅⋅∇−=⋅+−∇⋅⋅∇+
,)( ,2210 1
hhhhNh
Dhh
Dh
khhhh HfKnK
k
ψψψφφψλλψεφψ
y calcular .101 D
hhkh
k
φφφ +=++
2 Hallar hhkk
h QHpu ×∈++,1
110,1 ),)(( tal que
[ ]∫ ∫ ∫
∫ ∫∫∈∀+∇⋅∇−=
=++∇⋅∇+∇−+++
,,)()(2
)()()(2
,1,1
1010
,11 1
hhhhhDhhh
Dhhh
khh
kh
HwfwwDuDwm
wngwDuDwpk
νφφν
∫∫ ∈∀⋅∇−=⋅∇ + .,)( 10,1 hh
Dhh
khh Qququq
y calcular .)( 101
1,1
Dh
kh
kh uuu += ++
3 Calcular la nueva aproximación .)1()( 1
10,1
1 kh
kh
kh nu λθθλ −+⋅= ++
Este procedimiento puede expresarse en forma algebraica. Para ello, sea
2/,1 hΩ la triangulación que resulta de dividir cada tetrahedro en ocho
subtetrahedros. Sea 0U el vector que contiene los valores de 0,1 hu en los nodos de
ΓΓΓ−Ω UDh ),( 12/,1 ∪ el vector que contiene los valores de 0
,1 hu sobre ,2/,1 Γ∩Ω h P el vector con los valores de la presión en el fluido sobre h,1Ω . Sea además 0Φ el
vector con los valores de altura piezométrica 0hφ en los nodos de )( 22
DΓΓ−Ω ∪ y ΓΦ el de los valores de altura piezométrica en los nodos de .2 Γ∩Ω La representación algebraica del problema débil resulta
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
ΦΦ
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
− Γ
Γ
Γ
Γ
Γ
ΓΓΓΓ
Γ
ΓΓΓΓΓ
Γ
0
0
0
0
00
0
0
0
00
00000
000000
GGFFF
PUU
DDDDPM
BBMPBAA
BAA
PT
nU
nTT
To
φ
.
(9)
El proceso 1 admite, en consecuencia la siguiente forma algebraica
Procedimiento 2: Forma algebraica de la iteración de Neumann-Dirichlet

Simulación de flujo superficial y subterráneo acoplados Porta, P.
354
Sea 0hλ una semilla y θ un parámetro de relajación dado; para 0≥k
1 Hallar ⎥⎦
⎤⎢⎣
⎡
ΦΦ
+
+Γ
10
1
k
k
tal que
.0000
0⎥⎦
⎤⎢⎣
⎡ +=⎥
⎦
⎤⎢⎣
⎡ΦΦ
⎥⎦
⎤⎢⎣
⎡ ΓΓΓ
Γ
ΓΓ
GMG
DDDD k
UT λ
2 Hallar ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
+Γ
+
1
1
10
k
k
k
PUU
tal que
.0
100
0
0
000
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡Φ−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
ΓΓΓΓΓ
Γ
ΓΓΓ
ΓkT
nTT
T
MPFF
PUU
BBBAABAA
φ
3 Calcular la nueva aproximación .)1(11 kk
nk UP λθθλ −+= +
ΓΓ+
Los pasos descriptos implican la solución iterativa del problema de ensilladura
simétrico, definido positivo. Los esquemas más apropiados para tal fin son el de gradientes conjugados precondicionado (PCG) y residuos mínimos generalizados (GMRES).
Antes de realizar un análisis del esquema iterativo, escríbase explícitamente la ecuación de interfase. Esta se obtiene a partir de la Ecuación 9; eliminando primero [ ]TPU 00 ,, Φ se obtiene el sistema de ecuaciones
[ ]⎪⎩
⎪⎨
⎧
−=Φ−+−
=Φ++⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
ΓΓΓΓΓ−
ΓΓΓΓΓ
ΓΓΓΓΓΓΓΓ
Γ−
ΓΓ
.)(
,0
00001
00
001
0
000
DDDGDDDDUPM
FMPUAUBA
FF
BBA
BA
TTTnU
Tn
P
TTT
φ
Resolviendo para ΓΦ ),(1
ΓΓΓ−
Γ +=Φ UPMGS nUSD donde
Γ−
ΓΓ −= 01
00 DDDDS TD y Γ
−ΓΓ −= 0
100 DDDGG T
S . Se obtiene así
SDT
nSnUDT
nS GSMPFUPMSMPS 11 )( −ΓΓΓΓΓ
−ΓΓ −=+ φφ (10)
donde

Modelización Aplicada a la Ingeniería Porta, P.
355
[ ] ⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−=
Γ
Γ−
ΓΓΓ BA
BBA
BAAST
TTS
01
0
000 0
y [ ] .0
01
0
000 ⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−=
−
ΓΓΓΓ
P
TTTT
S FF
BBA
BAFF
La Ecuación (10) es la denominada ecuación de interfase. DS SS , pueden interpretarse como las versiones algebraicas de los operadores de Poincaré-Steklov. Tomando la proyección normal a ambos miembros y observando que
λ=ΓΓUPn resulta la expresión [ ].1111
SDT
nSSnUDT
nSn GSMPFSPMSMPSP −ΓΓ
−ΓΓ
−ΓΓ
−Γ −=+ φφ λλ (11)
Se procede en este punto con un análisis esquemático del esquema iterativo.
La Ecuación 11 sugiere una iteración de la forma:
• Sea 0λ una aproximación inicial de la solución, para 0≥k ( )[ ].1111 k
UDT
nSDT
nSSnkk MSMPGSMPFSP λλλ φφ Γ
−ΓΓ
−ΓΓ
−Γ
+ −−+= Esta es una iteración precondicionada de Richardson, donde SS es el precondicionador. El resultado principal sobre su convergencia se resume en el siguiente teorema, cuya demostración puede encontrarse en (Quarteroni y Valli, 1999) Teorema 1: Considérese la solución del problema RQ =⋅ λ con ,X∈λ un espacio de Hilbert y *XR ∈ en su dual, y donde .21 QQQ += Supóngase que 1Q es continuo con constante 1β y coercivo con constante ,1α que 2Q es continuo con constante 2β y que existe 0>κ tal que
2111 ,, ηκηηηη ≥+− QQQQ para todo .X∈η
Entonces, para todo ,0 X∈λ y para todo)(
:0211
21
βββκαθθ
+=≤≤ MAX la sucesión
)(11
1 kkk QRQ λθλλ −+= −+ converge a la solución del problema en X. Asociando los operadores de Poincaré-Steklov DS SS , con los operadores
21 ,QQ del teorema, concluimos que la convergencia del esquema iterativo depende sólo de las constantes de coercividad y continuidad. La dependencia respecto de los parámetros del problema resultan (Quarteroni y Valli, 1999):
),(1 νβ O≈ ),/(2 KgO εβ ≈ ),(1 νκα O≈≈ con los cuales,

Simulación de flujo superficial y subterráneo acoplados Porta, P.
356
[ ] ⋅+
= 2
2
/:
KgMAX
εννθ
Bajo la hipótesis Kg /εν << se puede estimar MAXθ -a menos de constantes que dependen de los subdominios- como
⋅= 22
22
:ε
νθ
gK
MAX
Para valores de conductividad del orden de 10-5 m/seg, porosidades del orden de 0.1, y viscosidad cinemática del orden de 1 m2/seg, MAXθ es del orden de 10-10. Este valor hace que, para valores como los indicados, el proceso iterativo resulte prácticamente impracticable.
Recuperación del operador de iteración para el error
Como se desprende de la discusión anterior, la velocidad de convergencia depende de la apropiada elección del parámetroθ de la geometría de los dominios y de los coeficientes del problema, .,, Kνε Además, y debido a los valores que pueden alcanzar estos parámetros, la velocidad de convergencia puede volver impracticable el esquema iterativo. Visto esto, se propone una técnica alternativa, basada en la recuperación del operador de iteración para el error. La idea es simple: considérense tres aproximaciones iterativas sucesivas de la solución .,,: 321
hhhh λλλλ En virtud de la linealidad del operador de iteración AT resulta:
)( 01hhAhh T λλλλ −=− , )( 12
hhAhh T λλλλ −=− de modo que ).( 0112
hhAhh T λλλλ −=− Eliminando 2
hλ resulta una ecuación para hλ : .)( 01
hAhhA TTI λλλ −=−
Esta expresión sugiere el siguiente procedimiento: Procedimiento 3: 1 Para cada nodo sobre la interfase D
1Γ−Γ que indicaremos por ,,,1 Nk =
tomar ,kok E
k
=λ que es el vector con todas sus componentes nulas, menos la
−k ésima, que es la unidad, y calcular el par kk
hh21 ,λλ con dos pasos del
Procedimiento 2. 2 Formar las matrices 1201 ,TT con las columnas
kk
hoh
1λλ − y kk
hh21 λλ −
respectivamente.

Modelización Aplicada a la Ingeniería Porta, P.
357
3 Recuperar el operador de iteración TA TTT 0112 ⋅=
4 Recuperar la solución )()( 011 kk
hAhAh TTI λλλ −⋅−= − para k arbitrario. El costo de este procedimiento esta dominado por la construcción de las matrices ., 1201 TT En efecto, la construcción de un par de columnas correspondiente a un nodo de la interfase implica dos soluciones del problema acoplado, y cada una de estas, la solución del problema de Stokes y del de Darcy: si 1M y 2M son los nodos involucrados en las discretizaciones 1Ω y 2Ω el costo de resolver el problema de Stokes es ( ) SS MMO +××− 83log 1ε , mientras que el costo de resolver el problema de Darcy .)(log 1
DMO −ε Para la construcción de los precondicionadores, se empleó el método AMG (Stuben, 1983) que asegura una complejidad aritmética lineal y tasa de convergencia independiente del tamaño de la grilla.
La relación entre 1M y 2M y el orden de la matriz AT depende de los detalles de la geometría. Por ejemplo, en el caso de un cubo de lado unitario dividido en dos subdominios idénticos por un plano horizontal, con una grillado uniforme, ,, 3
212 hMMhN DS === de donde el costo de formar 1201 ,TT es
.)26(log2 5.11 NON ×−ε
Experimentos numéricos A continuación, se presentan algunos resultados numéricos, que además de
mostrar la performance del esquema iterativo, se investiga la influencia de las condiciones de contorno.
Sea )5.0,0()1,0( 22 ×=Ω y )1,5.0()1,0( 2
1 ×=Ω y 1=== gνε mientras que .IK = Definimos h,1Ω y h,2Ω como la partición en tetraedros de la grilla cúbica de
paso .161=h En ausencia de la interacción entre los flujos, las condiciones de
contorno sobre 1Ω∂ son dadas por las trazas de un flujo de Poiseuille: .0),5.0)(5.1()1(24 ==−−−= zyx uuzzyyu Debido al acoplamiento y a que el
flujo no se anula sobre Γ este flujo de Poiseuille puede no satisfacerse (ver Figura 1). Para determinar las condiciones de contorno apropiadas se realiza una simulación previa del problema acoplado: sea D
1Γ la ventana de entrada del flujo de Stokes (x=0), la superficie superior (z=1) y las caras laterales (y=0, y=1) de ,1Ω mientras que D
1Γ coincide con la salida (x=1) donde se imponen condiciones de tensión normal nula (do-nothing condition). Luego de la solución del problema acoplado, se toma las traza de la solución a la salida para las tres componentes de velocidad de la velocidad de Stokes y se las asigna como condición de Dirichlet sobre la ventana de entrada, la que junto al flujo de Poiseuille sobre las caras

Simulación de flujo superficial y subterráneo acoplados Porta, P.
358
superior y laterales y la do-nothing condition, definen las condiciones de contorno para el flujo de Stokes.
Figura 1: Traza de las velocidades en los subdominios 1Ω (izquierda) y .2Ω
(derecha)
Las condiciones de contorno para el flujo de Darcy se construyen de la siguiente manera: se impone la condición homogénea de Neumann para la superficie inferior (z=0) y laterales (y=0, y=1) de 2Ω lo que implica impermeabilidad de las mismas. En cuanto a las condciones de contorno sobre las ventanas de entrada y salida, consideramos los siguientes casos: 1 Condiciones homogéneas de Dirichlet en ambas ventanas (x=0, x=1) de 2Ω que
implica un flujo uniforme en ambas ventanas. 1 Condiciones homogéneas de Neumann en ambas ventanas (x=0, x=1) de
2Ω que implica la impermeabilidad de ambas ventanas 2 Condición homogénea de Neumann sobre la ventana de entrada (x=0) y
homogénea de Dirichlet sobre la ventana de salida (x=1) que implica impermeabilidad a la entrada y flujo uniforme a la salida.
3 Condiciones de Dirichlet inhomogéneas, con un salto prescripto entre las ventanas de entrada y salida. Los resultados de las simulaciones se resumen en las siguientes Figuras
(Figuras 2, 3, 4 y 5):

Modelización Aplicada a la Ingeniería Porta, P.
359
Figura 2: Simulación con condiciones de contorno homogéneas de Dirichlet
a la entrada y salida de .2Ω Sección longitudinal sobre el plano y=0.5 (proyección sobre el XZ), para las isolíneas de módulo de velocidad en las regiones de Stokes y Darcy (arriba), altura piezométrica (centro) y campo de velocidades en el medio
poroso (abajo).

Simulación de flujo superficial y subterráneo acoplados Porta, P.
360
Figura 3: Simulación con condiciones de contorno homogéneas de Neumann a la entrada y salida de .2Ω Sección longitudinal sobre el plano y=0.5
(proyección sobre el XZ), para las isolíneas de módulo de velocidad en las regiones de Stokes y Darcy (arriba), altura piezométrica (centro) y campo de
velocidades en el medio poroso (abajo).

Modelización Aplicada a la Ingeniería Porta, P.
361
Figura 4: Simulación con condiciones de contorno homogéneas de Neumann a la entrada y de Dirichlet a la salida de .2Ω Sección longitudinal sobre el plano y=0.5 (proyección sobre el XZ), para las isolíneas de módulo de velocidad en las
regiones de Stokes y Darcy (arriba), altura piezométrica (centro) y campo de velocidades en el medio poroso (abajo).

Simulación de flujo superficial y subterráneo acoplados Porta, P.
362
Figura 5: Simulación con condiciones de contorno inhomogéneas de Dirichlet a la entrada y salida de .2Ω Sección longitudinal sobre el plano y=0.5
(proyección sobre el XZ), para las isolíneas de módulo de velocidad en las regiones de Stokes y Darcy (arriba), altura piezométrica (centro) y campo de
velocidades en el medio poroso (abajo).

Modelización Aplicada a la Ingeniería Porta, P.
363
Los detalles técnicos de la solución son los siguientes: en cada subdominio se utilizaron 12288 tetrahedros, lo que da 2601 grados de libertad para el flujo de Darcy y 3 x 18513 + 2601 grados de libertad para el flujo de Stokes.
En el esquema iterativo de Neumann-Dirichlet, se adopta para el parámetro de relajación .5.0=θ En dicha iteración, para lograr una reducción relativa de 104 en el incremento máximo de k
hλ se requirieron 14 iteraciones. Este número resulta independiente del paso de la grilla o de las condiciones de contorno utilizadas en el problema de Darcy.
Adoptando como parámetro de parada para la iteración PCG o GMRES, utilizada en la solución del problema 3, que la norma del residuo sea menor que
610− las iteraciones necesarias se resumen en la Tabla 1.
It. Neumann-Dirichlet Nro: 1 3 5 7 9 11
#PCG 4 4 3 3 2 1
#GMRES 48 15 10 5 2 1
Tabla 1: Performance de las iteraciones PCG y GMRES.
Una iteración GMRES y una iteración PCG lleva 0.5 seg y 0.01 seg,
respectivamente en un Pentium4, 2.5GHz. La simulación total, incluyendo el paso previo para determinar las condiciones de contorno llevó cerca de un minuto y 26 iteraciones de Neumann-Dirichlet.
Podemos observar también que, como era de esperar y debido a la dinámica propia de los flujos involucrados, el flujo de Stokes se ve poco afectado al modificar las condiciones de contorno en el subdominio de Darcy.
Conclusiones
En el presente trabajo, se ha considerado el acoplamiento iterativo de los flujos de Darcy y Stokes. El método es una iteración de Neumann-Dirichlet, en el marco de las técnicas de descomposición de dominio heterogénea. En términos físicos, es el ajuste iterativo de flujos, asegurando la continuidad de la tensión normal a través de la interfase que separa ambos subdominios. El análisis de las propiedades de la convergencia, demuestra que la velocidad de convergencia se deteriora hasta volver impracticable la solución para valores corrientes de los coeficientes del sistema.
En vista de esto, se propuso un esquema basado en la recuperación del operador de iteración para el error. Siendo un método directo, este esquema requiere resolver tantos pares de problemas acoplados como grados de libertad haya sobre la interfase.

Simulación de flujo superficial y subterráneo acoplados Porta, P.
364
Agradecimientos Deseo agradecer al Dr. Ronald H. W. Hoppe (Lehrstuhl für Angewandte
Mathematik mit Schwerpunkt Numerik, Universität Augsburg) por su dirección y al Dr. Yuri Vassilevski (Instituto de Matemática Numérica, Academia Rusa de Ciencias) por sus enriquecedores comentarios y la confección de algunas de las figuras del presente trabajo. El presente trabajo fue desarrollado dentro del Zentrum für Unweltsimulation, financiado por el proyecto HTO-Bayern. Referencias Beavers, G. S. Y Joseph D. D. (1967). "Boundary conditions at a naturally
permeable wall" J. Fluid Mech. 30: 197-207.
Discacciati, M. Miglio, E. y Quarteroni, A (2002). "Mathematical and numerical models for coupling surface and groundwater flows”. Appl. Num. Math., 43: 57-74.
Discacciati, M. y Quarteroni, A (2003). "Analysis of a domain decomposition method for the coupling of Stokes and Darcy equations”. En “Numerical mathematics and advanced applications, ENUMATH 2001” por Brezzi, F., Buffa, A., Corsaro, S. Y Murili, A. (Eds.). Milano : Springer. pp 57-74.
Discacciati, M. y Quarteroni, A (2004). "Convergence analysis of a subdomain iterative method for the finite element approximation of the coupling of Stokes and Darcy equations”. Computing and Visualization in Science
Hoppe, R. H. W., Porta, P. y Vassilevski, Yu. (2004) “Computational issues of simulation of coupled subsurface and channel flow: iterative matching normal stresses under fluxes continuity assumption”. Enviado a J. Numer. Math.
Jäger, W. y Mikelic, A. (2000) “On the interface boundary condition of Beavers, Joseph and Saffman”. SIAM J. Appl. Math. 60(4): 1111-1127.
Layton, W., Schieweck, F. y Yotov, I. (2003). “Coupling fluid flow with porous media flow”. SIAM J. Numer. Anal. 40(6):2195-2218.
Quarteroni, A. y Valli, A. (1999). “Domain decomposition methods for partial differential equations”. Oxford: Oxford University Press.
Saffman, P. (1971) “On the boundary conditions at the interface of a porous medium”. Stud. Appl. Math., 1: 93-101.
Salinger, A. G., Aris, R. y Derby, J. J. (1994). “Finite element formulation for large-scale, coupled flows in adjacent porous and open fluid domains”. Int. J. Numer. Methods Fluids 18: 1185-1209.
Stuben, K. (1983) Algebraic multigrid (AMG): experiences and comparisons. Appl. Math. Comput. 13: 419-452.

Modelización Aplicada a la Ingeniería
365
Modelado de fenómenos aeroelásticos lineales y no-lineales
Parte 1: Los modelos aerodinámico y estructural
SERGIO PREIDIKMANa Y DEAN T. MOOK b
aFacultad de Ingeniería, Universidad Nacional de Río Cuarto, 5800, Río Cuarto Departamento de Estructuras, Facultad de C. E. F. y N. Universidad Nacional de Córdoba, Córdoba, Argentina
bDepartment of Engineering Science and Mechanics, Virginia Polytechnic Institute and State University, Blacksburg, Virginia, U.S.A.
Introducción
El comportamiento aeroelástico inestacionario y no-lineal es un tópico de mucha importancia de larga data. Son de especial interés inestabilidades de origen aeroelástico tales como: aleteo/batimiento (“flutter”) de alas, paneles y alerones; trepidación (“buffeting”); galope (“galloping”) y divergencia, entre otros. En este trabajo, se presenta un método para simular comportamientos aeroelásticos, inestacionarios y no-lineales en flujos incompresibles. Para demostrar el funcionamiento de dicho método, nos focalizamos en flutter de alas. La manera de resolver el problema consiste en tratar el flujo de aire y la estructura de las alas como elementos de un único sistema dinámico, e integrar numéricamente todas las ecuaciones que gobiernan dicho sistema, simultánea e interactivamente en el dominio del tiempo. Para lograr esto, se debe calcular el flujo de aire y el movimiento de las alas simultáneamente. Para desarrollar la presente simulación, es necesario superar una complicación fundamental: para calcular el flujo de aire y las cargas aerodinámicas, es necesario conocer el movimiento de las alas, y para calcular dicho movimiento, es necesario conocer las cargas aerodinámicas. Para salvar este obstáculo, se utiliza un esquema iterativo que tiene en cuenta la interacción entre las cargas aerodinámicas y el movimiento de las alas. No quisimos restringir estas simulaciones a ecuaciones lineales de movimiento o a respuestas periódicas; por lo tanto, las formas clásicas de resolver este dilema no eran aplicables. La presente simulación no esta acotada a movimientos periódicos o a ecuaciones lineales; por lo tanto, puede ser utilizada para predecir comportamientos subcriticos, críticos y supercríticos. Es una herramienta muy efectiva para el diseño de sistemas de control para suprimir flutter y para reducir respuesta a ráfagas (Mracek, 1988; Luton and Mook, 1993; Preidikman and Mook, 1997a, 1998; Hall et al., 2001).
Las simulaciones aeroelásticas presentadas en este trabajo requieren del desarrollo de cuatro componentes esenciales: (1) un modelo aerodinámico para predecir cargas en las alas, (2) un modelo estructural para predecir la respuesta de

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
366
las alas a dichas cargas y proveer las condiciones de bordes para el flujo de aire, (3) un método que combine los dos modelos, y (4) un método para integrar todas las ecuaciones que gobiernan el sistema, simultanea e interactivamente en el dominio del tiempo.
El modelo aerodinámico es el método general red de vórtices no-lineal e inestacionario (UVLM). Este modelo permite modelar correctamente no-linealidades aerodinámicas asociadas con grandes ángulos de ataque, deformaciones estáticas, y flujos dominados por vorticidad en los que el fenómeno conocido como “vortex bursting” no ocurre. El modelo predice correctamente la emisión de vorticidad desde el ala hacia el campo del flujo. Esta vorticidad es transportada por el flujo de aire desde las alas hacia el fluido y forma así las estelas. La distribución de la vorticidad en las estelas y la forma de las mismas son, también, parte de la solución del problema.
El flujo asociado con la vorticidad en la estela cercana al ala afecta el flujo alrededor de ésta y por lo tanto las cargas actuantes sobre ella. Debido a que la vorticidad presente en las estelas “ahora” fue generada y convectada desde el ala en un tiempo anterior, las cargas aerodinámicas dependen de la historia del movimiento; las estelas son los historiadores. El campo de velocidades, asociado con la vorticidad existente en un punto del espacio, decae con la distancia a dicho punto; en consecuencia, a medida que la vorticidad en la estela va siendo transportada flujo abajo, su influencia decrece y por lo tanto se dice que “el historiador” va perdiendo memoria.
Si bien el modelo aerodinámico aquí utilizado es similar a otros como por ejemplo VSAERO y PMARC, significantes innovaciones fueron introducidas para llevar a cabo este proyecto. El método fue totalmente programado en FORTRAN 90. El código hace extensivo uso de las ventajas que este lenguaje ofrece en cuanto a eficiencia.
Se escogió un método basado en el UVLM porque existen numerosas aplicaciones previas de dicho método en las cuales éste ha probado ser confiable y un muy buen predictor de cargas aerodinámicas inestacionarias y no-lineales. Por ejemplo, (Konstadinopoulos et al., 1985) lo usaron para simular experimentos en túnel de viento del rolido de alas delta de bajo alargamiento en flujos subsónicos. También (Preidikman y Mook, 1997a, 1997b) lo usaron para predecir flutter en puentes colgantes y obtuvieron resultados que coinciden con los del análisis clásico de (Fung, 1969). El modelo aerodinámico es inherentemente no-lineal. Puede decirse que la evolución de los modelos aerodinámicos no-lineales comenzó con un trabajo de (Bollay, 1939), pero el verdadero florecimiento no comenzó sino hasta que el uso de las computadoras digitales se generalizó. La simiente del trabajo numérico para estudiar flujos estacionarios se le atribuye a un pionero ruso, el aerodinamicista (Belotserkovskii, 1968) y para flujos inestacionarios inestables a (Belotserkovskii y Nisht, 1974). Existen desarrollos de modelos numéricos lineales para flujos inestacionarios que datan de 1955 (ver

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
367
por ejemplo, Belotserkovskii, 1955) y continuaron hasta por lo menos 1972 (ver por ejemplo, Rodden et al., 1972). El modelo presentado en este trabajo es una suerte de mejora a dichos trabajos realizada por un grupo de Virginia Tech (Mook and Maddox, 1974; Kandil et al., 1976; Atta et al., 1976; Thrasher et al.,1978; Konstadinopoulos, et al., 1985). (Katz y Plotkin, 1991) también dan una descripción del UVLM. Este texto contiene un buen bagaje de material útil como así también algunas referencias, muchas de ellas relacionadas con sus trabajos previos, pero no contiene la expresión necesaria para evaluar las fuerzas elementales sobre un “vortex-lattice” deformable. El presente trabajo ofrece una presentación concisa del desarrollo del modelo aerodinámico necesario para llevar a cabo estas simulaciones.
La versión no estacionaria de la ecuación de Bernoulli se usa para calcular la distribución de la presión sobre la superficie del ala. Esta presión es integrada para calcular las cargas aerodinámicas. La derivada respecto del tiempo del potencial de velocidad aparece en esta ecuación. Este potencial es proporcional a la velocidad del ala, y por lo tanto su derivada respecto del tiempo es proporcional a la aceleración del ala; consecuentemente, algunas componentes de las cargas aerodinámicas son proporcionales a la aceleración del ala. Estas componentes son las asociadas con la llamada “masa agregada”, la cual desempeña un rol muy importante en la dinámica de barcos y submarinos. En las ecuaciones que gobiernan el sistema dinámico, la aceleración aparece explícitamente en un lado e implícitamente en el otro.
El modelo estructural presentado en el ejemplo numérico de este trabajo es un modelo de elementos finitos lineales que representan una viga en voladizo con la raíz perfectamente empotrada. Este modelo ha sido generado por un fabricante de aeronaves usando elementos “CBAR” de la librería del programa MSC/NASTRAN. La viga puede flexionarse libremente alrededor de dos ejes perpendiculares, torsionarse, y elongarse según la dirección de la envergadura del ala; por lo tanto, cada nodo del modelo de elementos finitos posee 6 grados de libertad. El centro de masa de cada sección transversal del ala no esta ubicado sobre el eje elástico (la viga), y la inercia rotacional de dichas secciones es tenida en cuenta por el modelo estructural; en consecuencia, existe acoplamiento dinámico flexional-torsional-extensional. El modelo no incluye amortiguamiento estructural.
La combinación de los modelos es el corazón de esta simulación. Para poder alcanzar este objetivo, es necesario: (1) transferir las cargas aerodinámicas desde la grilla aerodinámica a los nodos de la grilla estructural, y (2) generar el movimiento de la grilla aerodinámica a partir del movimiento de la grilla estructural. Para lograr el primer objetivo: para cualquier conjunto arbitrario de desplazamientos virtuales de los nodos estructurales se requiere que el trabajo virtual realizado por las cargas aerodinámicas sea igual al realizado por las cargas estructurales. Para el segundo: se asume que las secciones transversales del ala

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
368
son rígidas y están rígidamente unidas a la viga. Interpolando con las funciones de forma de los elementos finitos utilizados, pueden encontrarse sus rotaciones y desplazamientos. La deformación del ala se expresa como una expansión en términos de sus modos lineales de vibrar libremente; los cuales se obtiene del modelo de elementos finitos. Los coeficientes de dicha expansión, dependientes del tiempo, son las coordenadas generalizadas del sistema dinámico completo.
Para integrar el conjunto de ecuaciones diferenciales ordinarias que gobiernan las coordenadas generalizadas se adapta un método predictor-corrector de cuarto orden desarrollado por Hamming. Se seleccionó este método debido a que: requiere que las cargas sean evaluadas solamente en aquellos instantes de tiempo que coinciden con un múltiplo entero del paso de tiempo elegido (lo cual es claramente ventajoso para el modelo aerodinámico); es un método iterativo y, consecuentemente permite resolver ecuaciones de movimiento en las cuales las aceleraciones aparecen en los dos lados; y es un método muy robusto.
En las dos partes que componen este trabajo se describen el modelo aerodinámico, el modelo estructural y los métodos para combinar ambos modelos e integrar las ecuaciones que gobiernan las coordenadas generalizadas. Finalmente, se presentan algunos resultados, los cuales claramente muestran cómo las frecuencias modales se superponen tan pronto la velocidad crítica de flutter es alcanzada, como así también la aparición de ciclos límites. Más aún, de dichos resultados se puede también observar que cuando la velocidad de postflutter aumenta, las amplitudes de dichos ciclos límites aumentan también, experimentando una bifurcación secundaria supercrítica de Hopf.
Este trabajo es parte de una nueva metodología de trabajo, que actualmente esta recibiendo considerable atención en diferentes lugares. Esta nueva manera de resolver problemas aeroelásticos se basa en la combinación numérica de los modelos estructural y aerodinámico para calcular el movimiento de ambos, la estructura y el fluido, simultáneamente. La mayor parte del trabajo esta dedicado a movimientos pequeños en flujos transónicos. La simulación descripta en este esfuerzo no esta restringida a movimientos pequeños o a pequeños ángulos de ataque pero se basa en un modelo aerodinámico incompresible. Este trabajo completa los trabajos de (Strganac y Mook, 1990) y (Luton y Mook, 1993). No se caracteriza por ser el primero en aplicar los conceptos que caracterizan el UVLM, pero sí agrega algunas innovaciones al procedimiento. Tampoco es el primero en usar un modelo de elementos finitos del ala pero, hasta donde los autores conocen, es el primero en combinar un código general de UVLM con un código industrial standard de elementos finito. El resultado es una simulación en el dominio del tiempo que revela claramente la física del fenómeno flutter, entre otros.
En un trabajo previo relacionado con el presente estudio, (Mortan and Beran, 1999) simularon el movimiento de una estructura rígida montada sobre un soporte elástico inmerso en un flujo transónico. Ellos observaron bifurcaciones de

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
369
Hopf y ciclos límites. Sin embargo, el problema tratado por ellos difiere significativamente del trabajo desarrollado en el presente estudio. (Tang et al., 1998) consideraron el fenómeno flutter en un perfil rígido, con un flap también rígido inmerso en un flujo incompresible. Los autores consideraron “juego” entre el ala y el flap, lo cual produce una relación no-lineal entre el momento y el ángulo de deflexión del flap (esto es, una estructura no-lineal) y usaron un modelo aerodinámico lineal basado en los llamados “modos aerodinámicos”. En este estudio se pudieron observar también ciclos límites. El análisis estuvo limitado a una sola frecuencia. Nuestra simulación no sufre de dicha limitación, y por lo tanto es más compleja. Permite capturar respuestas tanto transitorias como estacionarias; permite además observar que las múltiples frecuencias en la respuesta a velocidades menores que la crítica se fusionan cuando la primera velocidad critica es alcanzada; y permite capturar también bifurcaciones secundarias de Hopf a la segunda velocidad crítica, la cual produce amplitudes y frecuencias moduladas, es decir, movimiento sobre un toro. (Lee et al.,1999) estudiaron el fenómeno flutter de un perfil rígido montado sobre un resorte con una relación momento/rotación cúbica inmerso en un flujo incompresible. Sin embargo, ellos usaron un modelo aerodinámico simplificado diseñado por (Fung, 1969) que considera la función de Wagner. En un estudio previo de flutter de puentes colgantes, (Preidikman y Mook, 1997b) analizaron la misma estructura, pero con la versión bidimensional del modelo aerodinámico presentado en este trabajo, y encontraron la misma velocidad critica que Fung. En los dos estudios los autores encontraron ciclos límites cuando la estructura era no-lineal.
En el trabajo de (Tang et al., 1999), que es el trabajo que quizás más se relaciona con el presente esfuerzo, los autores encontraron oscilaciones de ciclos límites usando ecuaciones no lineales de placas para modelar un ala rectangular de bajo alargamiento. Tang y sus colegas usaron una versión cruda del método de red de vórtices para predecir las cargas aerodinámicas, calculando las cargas sobre la placa plana no deformada aún habiendo deformación. En nuestro trabajo se calculan las cargas aerodinámicas en el ala en su posición deformada, usando una versión del UVLM que es inherentemente no- lineal y algo más refinada que la utilizada por Tang y colaboradores. Más aún, se incluye curvatura inicial en la descripción del ala y se varía el ángulo de ataque. Sin embargo, el modelo estructural es lineal. Por lo tanto, es posible encontrar ciclos límites con un modelo estructural no lineal y un modelo aerodinámico lineal, con un modelo estructural lineal y un modelo aerodinámico no lineal, y con ambos modelos no lineales.
En el ejemplo numérico, que será presentado en la segunda parte de este artículo, se ha utilizado un modelo estructural lineal sin amortiguamiento. Dicho modelo fue desarrollado para un fabricante de aeronaves usando MSC/NASTRAN. De todos modos, la presente simulación no está restringida a dichos modelos y podría incluir modelos estructurales no lineales, como ha sido

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
370
demostrado para el caso bidimensional, como así también amortiguamiento estructural. El modelo aerodinámico provee amortiguamiento aerodinámico. Las cargas sobre la estructura fueron calculadas en su posición deformada, considerando torsión, flexión y extensión. Este procedimiento requiere iteración. La integración numérica provee la deflexión estática cuando el ala es estable, y describe las oscilaciones alrededor de la posición de equilibrio estático cuando el ala es inestable. La presente simulación tiene la capacidad de modelar efectivamente la influencia del ángulo de ataque sobre la velocidad crítica de flutter; entre otros factores, diferentes ángulos de ataque producen diferentes posiciones de equilibrio estático. El modelo aerodinámico
En flujos sobre alas donde el número de Reynolds es alto, vorticidad es generada por efectos viscosos en capas muy delgadas, llamadas capas límites, que están pegadas a la superficie de las mismas. Los efectos viscosos son los responsables de la existencia de las capas límites. Parte de esta vorticidad es emitida desde el borde de fuga y la punta de las alas, es transportada por el fluido, y forma las estelas. El campo de velocidades asociado con toda esta vorticidad interactúa con la llamada corriente libre: mientras las condiciones de borde de no-penetración y no-deslizamiento son satisfechas sobre las superficies sólidas generadoras de vorticidad, la vorticidad en las estelas se mueve libremente en el fluido de forma tal que no se produzcan saltos de presión a través de las estelas.
El método de red de vórtices inestacionario esta basado en la idea de imitar las capas límites y las estelas mediante sábanas vorticosas. Nos referiremos a estos dos tipos de sábanas vorticosas como “sábanas adheridas” (Bound-Vortex Sheets) y “sábanas libres” (Free-Vortex Sheets.) En la Figura 1 están representadas las dos sábanas vorticosas (adherida y libre) usadas para modelar un jet ejecutivo moderno, aeronave que ha sido usada en el ejemplo numérico presentado en este trabajo. En dicha figura, las estelas corresponden a un flujo estacionario, y fueron calculadas como parte de la solución. (Mook and Dong, 1994) encontraron muy buena concordancia entre su predicción numérica de la forma de la estela y resultados experimentales correspondientes a un flujo bidimensional.
Una característica básica de cualquier campo de velocidades es la vorticidad Ω r,tb g , la cual es definida como
= ∇×Ω v , (1)donde ( ), tv r es la velocidad, r es el vector posición, t es el tiempo, × denota el producto vectorial, y ∇ es el operador vectorial que tiene la siguiente forma familiar en un sistema de coordenadas cartesianas
x y z∂ ∂ ∂∇ ≡ + +∂ ∂ ∂
i j k . (2)

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
371
La ecuación de continuidad para un flujo incompresible es 0∇⋅ =v , (3)
donde i denota el producto escalar. Las ecuaciones (1) y (3) pueden ser “invertidas” a los efectos de expresar la velocidad como función de la vorticidad (ver por ejemplo, Batchelor, 1967)
( )0
0 002
, 0
( , ) ( )1( , ) ( , )4 V t
tt dV tπ
× −=−∫∫∫
r
Ω r r rv r rr r
, (4)
donde 0( , )V tr es la región del espacio ocupada por el fluido y 0r es el vector posición que sirve de variable de integración.
Y
Z
X
Bound-Vortex Sheets
Free-Vortex SheetsSábanas Vorticosas Libres
Sábanas Vorticosas Adheridas
Y
Z
X
Bound-Vortex Sheets
Free-Vortex SheetsSábanas Vorticosas Libres
Sábanas Vorticosas Adheridas Figura 1: Grillas aerodinámicas utilizadas para modelar la configuración
completa de la aeronave y las estelas. Es oportuno hacer algunas observaciones: la ecuación (4) fue obtenida sin
tener en cuenta las propiedades del fluido, salvo su incompresibilidad; por lo tanto resulta válida para los llamados flujos viscosos como así también para los no viscosos. Las ecuaciones (1) y (4) describen la relación que existe entre el campo de vorticidad y el campo de velocidad asociados con un flujo. Las regiones del fluido donde el campo de velocidad es irrotacional ( 0( , )t =Ω r 0 ), no contribuyen a ( , )tv r ; por lo tanto, en muchas aplicaciones de relevante importancia práctica debe integrarse solamente sobre una pequeña subregión del campo. Si existe vorticidad en alguna subregión del campo, existe una velocidad asociada en todo el campo. La velocidad asociada decae con el recíproco del cuadrado de la

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
372
distancia medida desde la zona con vorticidad diferente de cero. La integración indicada en la ecuación (4) se lleva a cabo en un instante de tiempo fijo, y para obtener ( , )tv r como una función de tiempo se debe evaluar dicha integral, también, como una función del tiempo.
En un flujo real, la velocidad asociada a las sábanas adheridas y libres (comúnmente llamada “perturbación”) interfiere con la corriente libre (o aparente), de tal manera que las condiciones de borde sobre la superficie de la aeronave son satisfechas. Imitando la física de este fenómeno, en el UVLM determinamos Ω (o una aproximación a Ω ) imponiendo las condiciones de borde.
A efectos de simplificar el cálculo de v , reemplazamos las láminas vorticosas por arreglos o redes de líneas vorticosas. La justificación para flujos tri-dimensionales está lejos de ser rigurosa; alcanza con decir que numerosas comparaciones con una pocas soluciones exactas que existen, observaciones experimentales, y soluciones numéricas de las ecuaciones de Navier-Stokes, han demostrado que esta simplificación conduce a buenos resultados cuando las líneas de separación son conocidas y el “vortex bursting” no ocurre en las proximidades del sólidos inmerso en el fluido. Más aún, es posible demostrar que el campo de velocidades asociado a una distribución de dobletes de intensidad constante distribuidos sobre un panel plano es exactamente igual al asociado a un “loop” de segmentos vorticosos con circulación constante ubicados alrededor de los bordes de dicho panel. Para flujos en dos dimensiones, la situación es un poco más simple. La distribución de la vorticidad sobre una placa plana, inmersa en una corriente estacionaria, puede ser reemplazada por un único vórtice concentrado en la posición correspondiente a un cuarto de cuerda, con una circulación que satisface la condición de no-penetración en un punto ubicado a tres cuartos de la cuerda; esto constituye la bien conocida regla “un cuarto/tres cuartos”.
Los elementos de la red de vórtices están compuestos por segmentos rectos cortos unidos conectados entre sí en los nodos aerodinámicos (los nodos estructurales serán tratados en la siguiente sección). Uno de los resultados de la teoría de Kelvin-Helmholtz es que, para un instante determinado y en cualquier fluido, en el cual los efectos viscosos sean importantes o no, la circulación alrededor de una línea de vorticosa es constante. Esto implica que, para cualquier instante de tiempo, las líneas vorticosas ni empiezan ni terminan en el campo de flujo; este resultado es comúnmente referido como conservación espacial de la circulación. Para un segmento vorticoso, recto, de longitud finita, y con circulación constante, la Ecuación (4) se reduce a la siguiente (ver Figura 2)
( ) ( ) ( )1 2 ˆ, cos cos4
tt
hθ θ
πΓ
= −v r e , (5)
donde Γ tb g es la circulación alrededor del segmento vorticoso, h es la distancia desde dicho segmento al punto del campo donde la velocidad está siendo

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
373
evaluada, θ 1 y θ 2 son los ángulos entre los vectores de posición relativa del punto en el campo de movimiento y el segmento vorticoso, y e es un vector unitario perpendicular al plano formado por uno de los vectores de posición relativa y el segmento vorticoso, y con dirección consistente con la de la circulación Γ tb g , como se puede observar en la Figura 2.
1
2
h
v (r ,t)
L
r1
r2
e
vortex segment
nodes and field point
P1
2
segmento vorticoso
nodo inmerso en el fluido
segmento vorticoso
1
2
h
v (r ,t)
L
r1
r2
e
vortex segment
nodes and field point
P1
2
segmento vorticoso
nodo inmerso en el fluido
segmento vorticoso
Figura 2: Nomenclatura y geometría correspondientes a la Ecuación (5).
Para describir la geometría del avión, se utilizaron tres sistemas de
referencia: (1) uno fijo a la tierra o Newtoniano (N), (2) uno fijo al cuerpo de la aeronave (B), y (3) uno asociado al eje elástico del ala (E). Los tres sistemas se muestran en la Figura 3. Estos tres sistemas de referencia se utilizan para transferir datos entre los programas MSC/NASTRAN y CATIA. El sistema (N) es primero introducido por CATIA para definir las posiciones de puntos sobre la superficie de la aeronave, y los ejes 1X , 2X , y 3X son comúnmente llamados “Fuselage station”, “Butt line”, and “Water line”, respectivamente. MSC/NASTRAN también usa este sistema de referencia (también llamado cero) como el sistema básico. Debido a que este sistema no es el más apropiado para describir deformaciones y analizar la dinámica de vuelo de la nave, se introduce el sistema (B). Este sistema tiene su origen próximo al centro de masa de la aeronave. En general, el sistema (B) no es el sistema mas apropiado para analizar los diferentes elementos estructurales y entonces se introduce el tercer sistema de referencia, el sistema (E).
Muchas aeronaves modernas tienen alas muy delgadas, y normalmente es posible lograr suficiente precisión combinando las sábanas vorticosas en las superficies superior e inferior en una sola sábana ubicada en la superficie media del ala. Se realizaron experimentos numéricos y se halló que, para la aeronave utilizada en el ejemplo numérico presentado en este trabajo, esta simplificación provee resultados suficientemente precisos. Dicha simplificación permite ahorrar
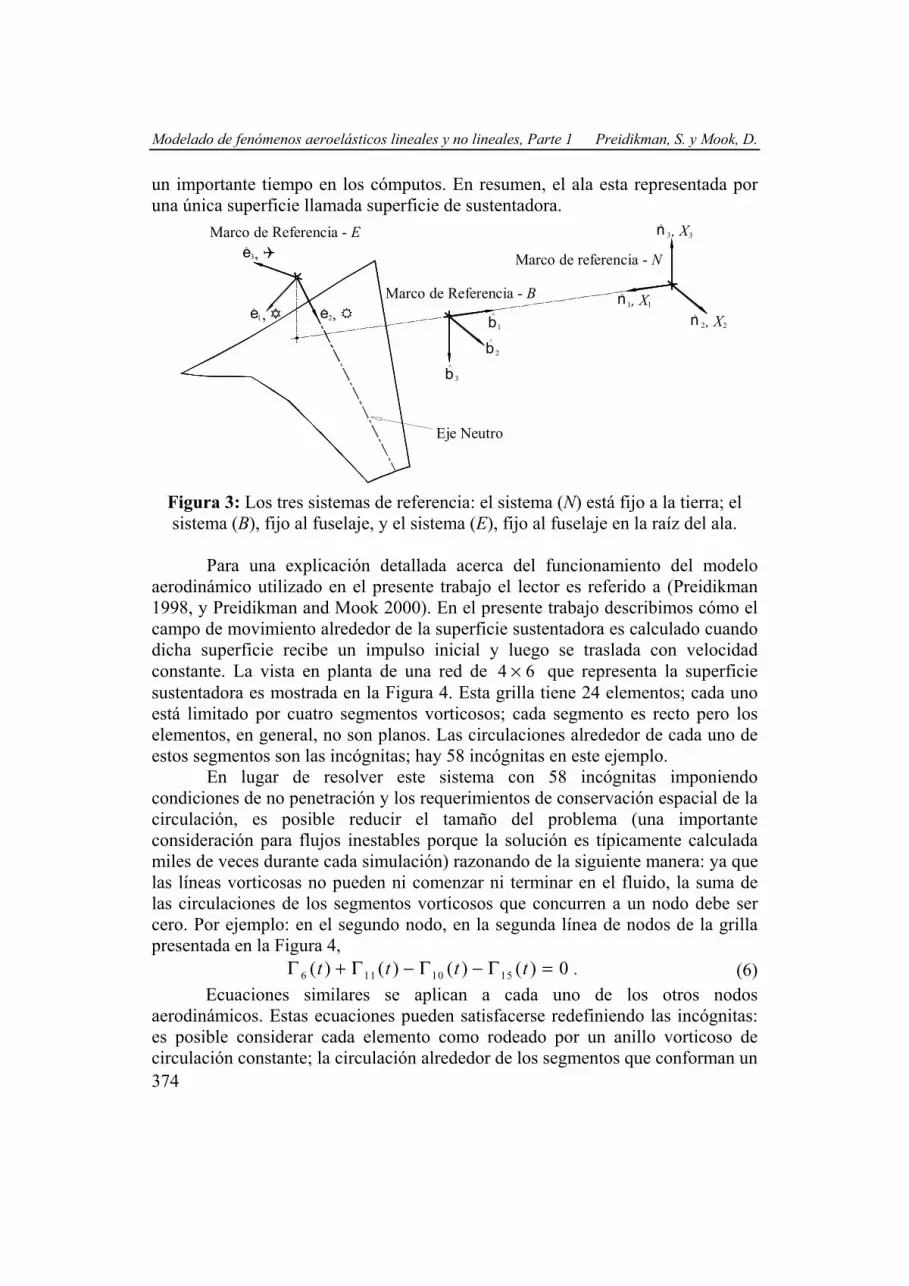
Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
374
un importante tiempo en los cómputos. En resumen, el ala esta representada por una única superficie llamada superficie de sustentadora.
^1e ^
1b^
2b^
3b
1n^
Eje Neutro
Marco de Referencia - B
Marco de referencia - N
, X1
n , X^2 2
, X^n 3 3
, , e2
, e^ 3
Marco de Referencia - E
^1e ^
1b^
2b^
3b
1n^
Eje Neutro
Marco de Referencia - B
Marco de referencia - N
, X1
n , X^2 2
, X^n 3 3
, , e2
, e^ 3
Marco de Referencia - E
Figura 3: Los tres sistemas de referencia: el sistema (N) está fijo a la tierra; el sistema (B), fijo al fuselaje, y el sistema (E), fijo al fuselaje en la raíz del ala.
Para una explicación detallada acerca del funcionamiento del modelo
aerodinámico utilizado en el presente trabajo el lector es referido a (Preidikman 1998, y Preidikman and Mook 2000). En el presente trabajo describimos cómo el campo de movimiento alrededor de la superficie sustentadora es calculado cuando dicha superficie recibe un impulso inicial y luego se traslada con velocidad constante. La vista en planta de una red de 4 6× que representa la superficie sustentadora es mostrada en la Figura 4. Esta grilla tiene 24 elementos; cada uno está limitado por cuatro segmentos vorticosos; cada segmento es recto pero los elementos, en general, no son planos. Las circulaciones alrededor de cada uno de estos segmentos son las incógnitas; hay 58 incógnitas en este ejemplo.
En lugar de resolver este sistema con 58 incógnitas imponiendo condiciones de no penetración y los requerimientos de conservación espacial de la circulación, es posible reducir el tamaño del problema (una importante consideración para flujos inestables porque la solución es típicamente calculada miles de veces durante cada simulación) razonando de la siguiente manera: ya que las líneas vorticosas no pueden ni comenzar ni terminar en el fluido, la suma de las circulaciones de los segmentos vorticosos que concurren a un nodo debe ser cero. Por ejemplo: en el segundo nodo, en la segunda línea de nodos de la grilla presentada en la Figura 4,
6 11 10 15( ) ( ) ( ) ( ) 0t t t tΓ + Γ − Γ − Γ = . (6)Ecuaciones similares se aplican a cada uno de los otros nodos
aerodinámicos. Estas ecuaciones pueden satisfacerse redefiniendo las incógnitas: es posible considerar cada elemento como rodeado por un anillo vorticoso de circulación constante; la circulación alrededor de los segmentos que conforman un

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
375
anillo se denota por ( )iG t , donde 1, , 24i = … ; estos anillos son mostrados en la Figura 5 para el tiempo inicial ( 0)t = . Ahora, en lugar de tener que resolver 58 ecuaciones para las 58 incógnitas ( )i tΓ , se resuelven solamente 24 ecuaciones para las 24 incógnitas ( )iG t . Para calcular un valor particular de ( )i tΓ , reconocemos que un segmento vorticoso entre dos elementos está compuesto, realmente, por dos segmentos coincidentes, cada uno perteneciente a cada uno de los anillos alrededor de los elementos separados por ese segmento vorticoso. Por ejemplo, de las Figura 4 y 5 se concluye que,
( ) ( ) ( )10 5 1t G t G tΓ = − . (7)Las excepciones son los segmentos que están ubicados a lo largo de los bordes de la superficie sustentadora; por ejemplo, ( ) ( )5 1t G tΓ = .
14
19
20
21
22
29
31
30
28
37
46
55
38
47
56
4839
57
58
4049
23
32
41
5024
33
42
51
2534
4352
2635
4453
5445
3627
10
1
2
11
123
134
15
16 (t)
17
18
5
6
7
8
9
138
Figura 4: Grilla de cuatro filas por seis columnas usada en este ejemplo. →
representa un segmento de vorticoso y Γ denota la circulación alrededor de un segmento.
Se utilizan las condiciones de no penetración para obtener los valores de
( )iG t
( ) 0B W F S+ + − ⋅ =v v v v n , (8)donde, Bv , Wv , y Fv son las velocidades asociadas a las sábanas vorticosas adheridas (capas limites), las sábanas vorticosas libres (estelas), y la corriente
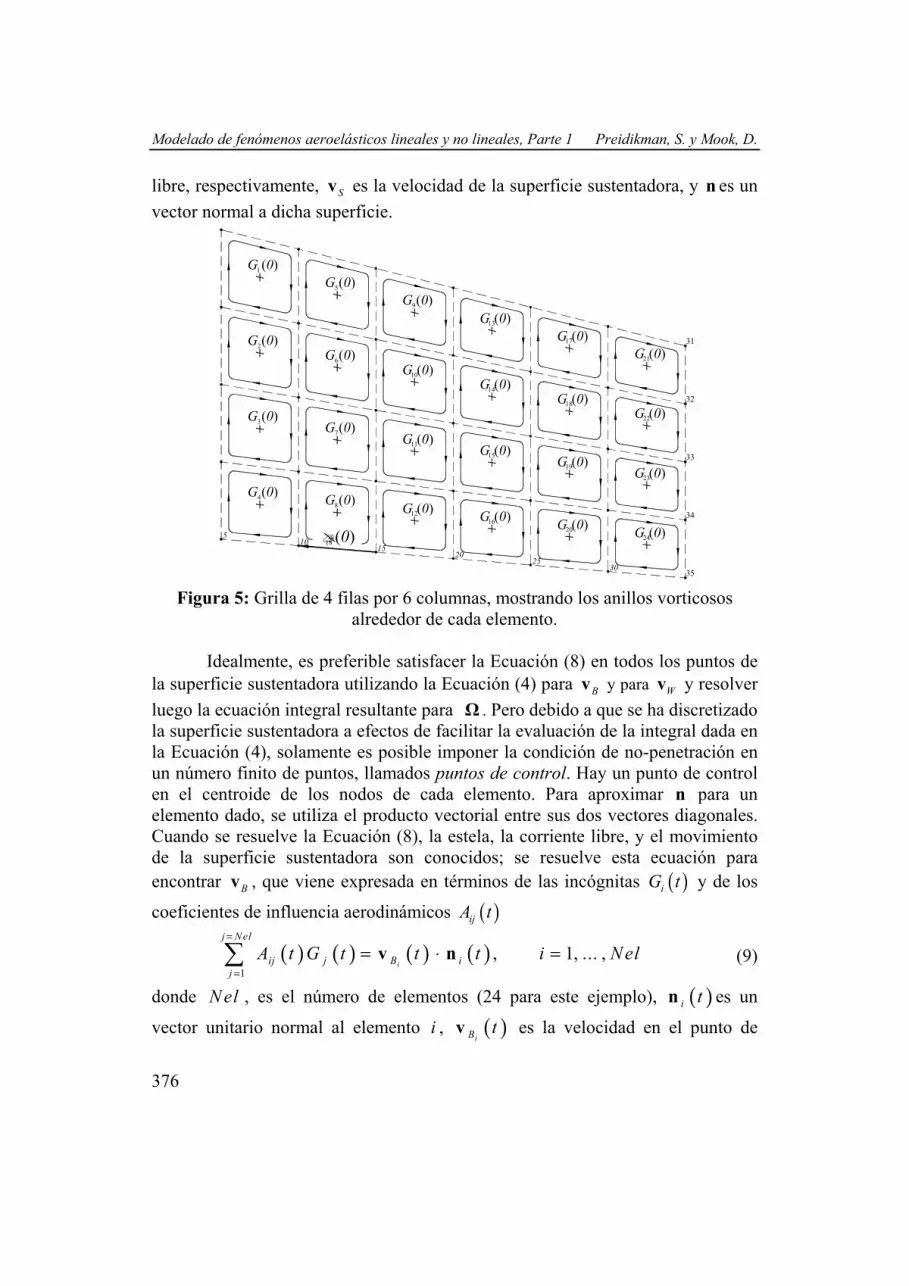
Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
376
libre, respectivamente, Sv es la velocidad de la superficie sustentadora, y n es un vector normal a dicha superficie.
510
1520
2530
31
32
33
34
35
18 (0)
3G (0)
4G (0)8G (0)
7G (0)
5G (0)
6G (0)
9G (0)
G (0)10
G (0)11
12G (0)16G (0)
15G (0)
14G (0)
13G (0)17G (0)
18G (0)
19G (0)
20G (0)
G (0)21
G (0)22
G (0)23
G (0)24
G (0)2
G (0)1
Figura 5: Grilla de 4 filas por 6 columnas, mostrando los anillos vorticosos
alrededor de cada elemento.
Idealmente, es preferible satisfacer la Ecuación (8) en todos los puntos de la superficie sustentadora utilizando la Ecuación (4) para Bv y para Wv y resolver luego la ecuación integral resultante para Ω . Pero debido a que se ha discretizado la superficie sustentadora a efectos de facilitar la evaluación de la integral dada en la Ecuación (4), solamente es posible imponer la condición de no-penetración en un número finito de puntos, llamados puntos de control. Hay un punto de control en el centroide de los nodos de cada elemento. Para aproximar n para un elemento dado, se utiliza el producto vectorial entre sus dos vectores diagonales. Cuando se resuelve la Ecuación (8), la estela, la corriente libre, y el movimiento de la superficie sustentadora son conocidos; se resuelve esta ecuación para encontrar Bv , que viene expresada en términos de las incógnitas ( )iG t y de los
coeficientes de influencia aerodinámicos ( )ijA t
( ) ( ) ( ) ( )1
, 1, ... ,i
j Nel
ij j B ij
A t G t t t i Nel=
=
= ⋅ =∑ v n (9)
donde Nel , es el número de elementos (24 para este ejemplo), ( )i tn es un
vector unitario normal al elemento i , ( )iB tv es la velocidad en el punto de

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
377
control del elemento i asociada con la sábana vorticosa adherida, y ( )ijA t es la componente normal de la velocidad de una partícula de fluido ubicada en el punto de control del elemento i asociada a un anillo vorticoso de circulación unitaria alrededor del elemento j (ver Figura 6). El cálculo de ( )ijA t se lleva a cabo utilizando la Ecuación (5) repetidamente. Debido a que el ala es deformable, las orientaciones relativas y las formas de los elementos cambian; consecuentemente, los coeficientes ( )ijA t y los vectores unitarios normales a la superficie
sustentadora ( )i tn son funciones del tiempo y deben ser recalculados a cada instante de tiempo. La Ecuación (8) puede ser entonces reordenada de la siguiente manera
( ) ( ) ( )1
, 1, ... ,i i
j Nel
ij j S i W F ij
A t G t i Nel=
=
= − − ⋅ =∑ v v v n (10)
donde el subíndice i indica que esa cantidad será evaluada en el punto de control de elemento i . Para el primer instante de tiempo no hay estela y por lo tanto
iW =v 0 para todo i .
=1
=1
=1=1
v
n
Aij
CP
Elemento emisor, j
Elemento receptor, i
=1
=1
=1=1
v
n
Aij
CP
Elemento emisor, j
Elemento receptor, i
Figura 6: Elementos emisores y elementos receptores utilizados para construir la
matriz de influencia ( )ijA t⎡ ⎤⎣ ⎦ .
Después de determinar el valor de ( )0jG , correspondiente al impulso inicial (la solución esta representada en la Figura 5), se requiere que los flujos provenientes de las caras superior e inferior de la superficie sustentadora a lo largo de la punta del ala y del borde de fuga tengan la misma presión, de manera que el campo de presiones adyacente a esos bordes sea continuo; esta condición es usualmente llamada condición Kutta. Para imponer esta condición se apela nuevamente a la teoría Kelvin-Helmholtz. En un flujo, en el cual los efectos viscosos son despreciables y la presión es continua, la circulación alrededor de un

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
378
circuito cerrado de partículas de fluido no cambia con el tiempo; condición
conocida como conservación temporal de la circulación ( ) 0D tDt
Γ = .
Para imponer la condición Kutta, se asume que los efectos viscosos se van haciendo despreciables tan pronto como el fluido abandona los bordes de la superficie sustentadora; consecuentemente, los segmentos vorticosos son convectados desde la punta del ala y desde el borde de fuga hacia el interior del campo de flujo con la velocidad local de las partículas de fluido. La vorticidad así convectada forma el modelo numérico de la estela.
Para lograr que no haya un salto de presión a través de la estela, los segmentos vorticosos discretos se mueven también con la velocidad local de las partículas de fluido. Para mover un segmento vorticoso discreto, se calculan los desplazamientos de los nodos en sus extremos. El desplazamiento de un nodo genérico ∆rnode esta dado por
( ) ( ), ,t t
node nodet
d t t tτ τ τ+∆
∆ = ≅ ∆⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦∫r v r v r , (11)
donde ( )node τr es la posición del nodo al tiempo τ= , t t tτ≤ ≤ + ∆ . Existen varias aproximaciones que se pueden usar para evaluar la integral de la Ecuación (11). Algunos experimentos numéricos fueron desarrollados con algoritmos de mayor orden y precisión y se encontró que el algoritmo simple de Euler provee resultados suficientemente precisos. Por supuesto, este requiere del mínimo tiempo de cómputo. El valor de t∆ debe elegirse de manera tal que los elementos sobre la estela no sufran grandes deformaciones; en general se espera que mantengan la misma forma de los elementos utilizados para dicretizar la sábana adherida.
La presencia de segmentos vorticosos a lo largo del borde de fuga y de la punta del ala se debe a los requerimientos impuestos por la condición de conservación espacial de la circulación. Estos segmentos vorticosos discretos son una imitación de los llamados “vórtices de arranque” que han sido observados experimentalmente. La emisión de dichos vórtices debe realizarse para satisfacer el requerimiento de que la carga aerodinámica en el borde de fuga y en la punta del ala debe ser igual a cero. La convección de vorticidad se debe al requerimiento de que la presión sea continua a través de la estela, y por lo tanto, que ésta esté libre de fuerzas; lo que fuerza este requerimiento es la conservación temporal de la circulación. En la estela, hay vorticidad y los efectos viscosos son despreciables.
En la Figura 5, la flecha representa el segmento del vórtice de arranque entre los nodos 10 y 15; su circulación es Γ 18 80 0b g b g= G . La solución para el instante de tiempo siguiente t t= ∆ esta representada en la Figura 7. Durante el intervalo de tiempo ∆t , este segmento se movió (ahora está entre los nodos 37 y

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
379
38 de la estela) pero su circulación continúa siendo Γ18(0) . Simultáneamente, un nuevo “vórtice de arranque” se forma entre los nodos 10 y 15; su circulación es
( )18 tΓ ∆ . El vector que conecta los nodos 10 y 37 y el que conecta los nodos 15 y 38 pueden calcularse utilizando la Ecuación (11)
( ) ( )37 10 10 10 10 38 15 15 15 15,0 y ,0t t= + ∆ ≅ + ∆ = + ∆ ≅ + ∆r r r r v r r r r r v r . (12)
510
1520
2530
3637
3839
4041
31
32
33
34
35
45
44
43
42
G ( t)1
( t)18
(0)
2G ( t)
3G ( t)
4G ( t)
4G (0)8G (0)
8G ( t)
7G ( t)
5G ( t)
6G ( t)
9G ( t)
G ( t)10
G ( t)11
12G ( t)
12G (0)16G (0)
16G ( t)
15G ( t)
14G ( t)
13G ( t)17G ( t)
18G ( t)
19G ( t)
20G ( t)
G (0)20
G ( t)21
G ( t)22
G ( t)23
G ( t)24
G (0)24
G (0)21
G (0)22
G (0)23
18
ConnectorsConectores
510
1520
2530
3637
3839
4041
31
32
33
34
35
45
44
43
42
G ( t)1
( t)18
(0)
2G ( t)
3G ( t)
4G ( t)
4G (0)8G (0)
8G ( t)
7G ( t)
5G ( t)
6G ( t)
9G ( t)
G ( t)10
G ( t)11
12G ( t)
12G (0)16G (0)
16G ( t)
15G ( t)
14G ( t)
13G ( t)17G ( t)
18G ( t)
19G ( t)
20G ( t)
G (0)20
G ( t)21
G ( t)22
G ( t)23
G ( t)24
G (0)24
G (0)21
G (0)22
G (0)23
18
ConnectorsConectores Figura 7: Representación figurativa de la solución para el primer instante de
tiempo siguiente al impulso inicial.
Debido a que las circulaciones cambian de segmento a segmento a lo largo del borde de fuga, y por lo tanto a lo largo de la primera fila de la estela, la circulación alrededor del segmento entre los nodos 38 y 39 no es igual a ( )18 0Γ . Para satisfacer la condición de conservación espacial de circulación para 0t = , los nodos 38 y 15 deben ser conectados con un vórtice “conector” que tenga su circulación igual a la diferencia ( ) ( )12 80 0G G− (los conectores se muestran en Figura 7). Siguiendo el mismo procedimiento que el usado para satisfacer la condición de conservación espacial de la circulación en la sábana adherida, podemos automáticamente satisfacer dicha condición en la sábana libre introduciendo segmentos vorticosos con circulación constante alrededor de los elementos de la estela. Para el elemento definido por los cuatro nodos 10, 15, 38 y

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
380
37, esta circulación es igual a ( )8 0G , y por lo tanto, se puede deducir que
( ) ( ) ( )18 8 8 0t G t GΓ ∆ = ∆ − . Una construcción similar para los otros segmentos puede observarse en la Figura 7.
Los segmentos vorticosos de la estela están representados en forma plana en las Figuras 7 y 8 para poder observar fácilmente el procedimiento numérico seguido para obtenerla. La verdadera solución, representada en la Figura 9, permite observar como los segmentos discretos rotan y se torsionan mientras el tiempo transcurre.
La solución para el instante de tiempo siguiente, 2t t= ∆ , esta representada en la Figura 8. Durante el segundo intervalo de tiempo, un segundo vórtice discreto fue emitido de la línea comprendida entre los nodos 10 y 15; su circulación es ( )18 tΓ ∆ . Simultáneamente, se formó un nuevo vórtice de arranque
con circulación ( ) ( ) ( )18 8 82 2t G t G tΓ ∆ = ∆ − ∆ . Las construcciones restantes también se ven representadas en la Figura 8. Este mismo proceso puede repetirse cuantas veces sea necesario. Al tiempo que la estela crece, los elementos convectados al comienzo del vuelo tienen menos influencia en el flujo cercano a la superficie sustentadora, y cuando ellos están lo suficientemente lejos corriente abajo, son descartados.
510
1520
2530
3637
4647
38
48
39
49
40
50
41
51
31
32
33
34
35
45
55
44
54
43
53
42
52
G (2 t)1
(2 t)18
( t)18
(0)18
2G (2 t)
3G (2 t)
4G (2 t)
5G (2 t)
6G (2 t)
7G (2 t)
8G (2 t)
8G ( t)4G ( t)
4G (0)8G (0)
G (2 t)9
G (2 t)10
G (2 t)11
G (2 t)12
G ( t)12
G (0)12
G (2 t)13
G (2 t)14
G (2 t)15
G (2 t)16
G ( t)16
G (0)16
G (2 t)17
G (2 t)18
20G (2 t)
20G ( t)
20G (0)
21G (2 t)
22G (2 t)
23G (2 t)
24G (2 t)
21G ( t)21G (0)
22G ( t)22G (0)
23G ( t)23G (0)
G (2 t)19
G (0)24
24G ( t)
Figura 8: Representación figurativa de la solución para el segundo instante de
tiempo siguiente al impulso inicial. En la Figura 9 se muestra una solución computacional para flujo simétrico
alrededor de dos superficies sustentadoras, para seis pasos de tiempos diferentes.

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
381
La formación del sistema de vórtices de punta de ala y del sistema de vórtices de arranque, el cual está formado por varios de los vórtices discretos que fueron primeramente convectados, puede observarse claramente en dicha figura. El “enrrollamiento” natural, el cual es visible en esta figura, es el resultado de la influencia del campo de velocidades asociada a la vorticidad en la estela sobre la estela misma. Es posible observar que la vorticidad emitida desde el borde de fuga y orientada en la dirección de la corriente nominal, va siendo succionada por el sistema de vórtices de punta de ala. Más aún, es posible observar que la vorticidad en la dirección perpendicular a la corriente nominal va siendo succionada por el sistema de vórtices de arranque.
Figura 9: Representación actual de la solución para diferentes instantes de tiempo siguientes al impulso inicial.
Cuerpos de tres dimensiones pueden ser modelados de la misma manera, y a modo de ejemplo, el flujo computado para toda la aeronave es mostrado en la

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
382
Figura 1. El flujo computado alrededor de toda la aeronave fue usado para evaluar la interferencia aerodinámica entre alas, fuselaje, motores, empenajes, etc. Como resultado de esta evaluación, se decidió que para llevar a cabo el análisis aeroelástico es posible considerar el ala sola.
A continuación, se considera el cálculo de las cargas aerodinámicas sobre la superficie sustentadora. Para cada elemento, primero se debe hallar la presión en el punto de control y luego multiplicarla por el área del elemento y por el vector unitario normal. Finalmente, las fuerzas y los momentos de dichas fuerzas sobre todos los elementos son sumados.
Para flujos inestacionarios, la ecuación de Bernoulli toma la siguiente forma
una constante2 2
F F Fppt ρ ρ
⋅∂ Φ ⋅+ + = + =∂
v vv v, (13)
donde ( ), tΦ r es la función potencial de velocidad, ( ), tv r es la velocidad,
( ),p tr es la presión, ρ es la densidad del aire (considerada constante), y Fv y
Fp son la velocidad y la presión en la corriente libre, respectivamente. La derivada parcial de Φ se calcula en un punto fijo al sistema de referencia N; este cálculo no es conveniente para la presente aplicación. Para llevar a cabo un cálculo más conveniente, se expresa la derivada de Φ de la siguiente forma
( ) ( ) ( ) ( ) ( ) ( )/ /
,,
P
P B B P B P BP
t D t t t t tt Dt
=
∂Φ Φ= − ⋅ + × +⎡ ⎤⎣ ⎦∂r r
rv r v ω r v , (14)
donde el lado izquierdo representa la derivada deseada, el primer término del lado derecho es una derivada “sustancial” de Φ siguiendo un punto fijo P en la grilla aerodinámica deformable (no fijo en el sistema inercial) y relativamente fácil de computar, Pr es la posición instantánea del punto P en el sistema de coordenadas N, ( ),P tv r es la velocidad de la partícula de fluido adyacente al punto P, ( )B tv
es la velocidad del origen del sistema de referencia B, ( )B tω es la velocidad
angular de dicho sistema en referencia relativa al sistema N, ( )/P B tr es la posición
del punto P relativa al sistema B, y ( )/P B tv es la velocidad del punto P relativa al sistema B (resultado de las deformaciones elásticas cuando el punto P es un punto de control). La velocidad del punto P en el sistema N y ( ), tv r no son iguales en general. Para obtener la Ecuación (14), se debe expandir Φ en una serie de Taylor alrededor de Pr . En las simulaciones presentadas en este trabajo, la Ecuación (14) reemplaza el cálculo de la derivada de Φ que aparece en la Ecuación (13) y una diferencia finita de primer orden es utilizada para aproximar la derivada del primer término del miembro derecho de la Ecuación (14). Más detalles de esta implementación pueden encontrarse en (Preidikman, 1998).

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
383
El modelo estructural
Un fabricante de estructuras aéreas generó el modelo estructural del ala usando MSC/NASTRAN. El ala es modelada como una viga no prismática en voladizo, linealmente elástica, sin amortiguamiento estructural y con la raíz rígidamente empotrada al fuselaje. La distribución de la rigidez flexional y torsional en el modelo numérico fue ajustada de tal forma que las predicciones en lo que hace a frecuencias y modos de vibrar coincidieron con aquellas obtenidas en experimentos (Ground Vibration Tests.) La viga que representa el ala es considerada del tipo Euler-Bernoulli. Elementos finitos de viga con dos nodos por elemento (elementos hermitianos) fueron usados para modelar la flexión. Elementos lagrangeanos lineales fueron usados para modelar la extensión y la torsión. En MSC/NASTRAN, torsión y flexión alrededor de dos ejes y deformación axial se combinan en un solo elemento llamado “CBAR”. La malla de elementos finitos usada aquí tiene 28 nodos; éstos están ubicados en el eje elástico del ala y cada uno posee 6 grados de libertad (GDL). Conectadas a los diferentes nodos estructurales están las secciones transversales del ala. Estas se consideran rígidas y poseen, ambas, inercia rotacional y translacional. Los centros de masa de dichas secciones no siempre caen sobre el eje elástico, y tienen inercia rotacional; por lo tanto, existe un acoplamiento dinámico entre torsión, extensión y flexión. La Figura 10 muestra el eje elástico del ala, los nodos estructurales, los centros de masa y las conexiones rígidas.
ConectoresRígidos
Centros de Masa
NodosEstructurales
Eje Neutro
ConectoresRígidos
Centros de Masa
NodosEstructurales
Eje Neutro
Figura 10: El modelo estructural.
Las grillas estructural y aerodinámica están representadas juntas en la Figura 11. Los nodos estructurales tienen 6 GDL mientras que los nodos
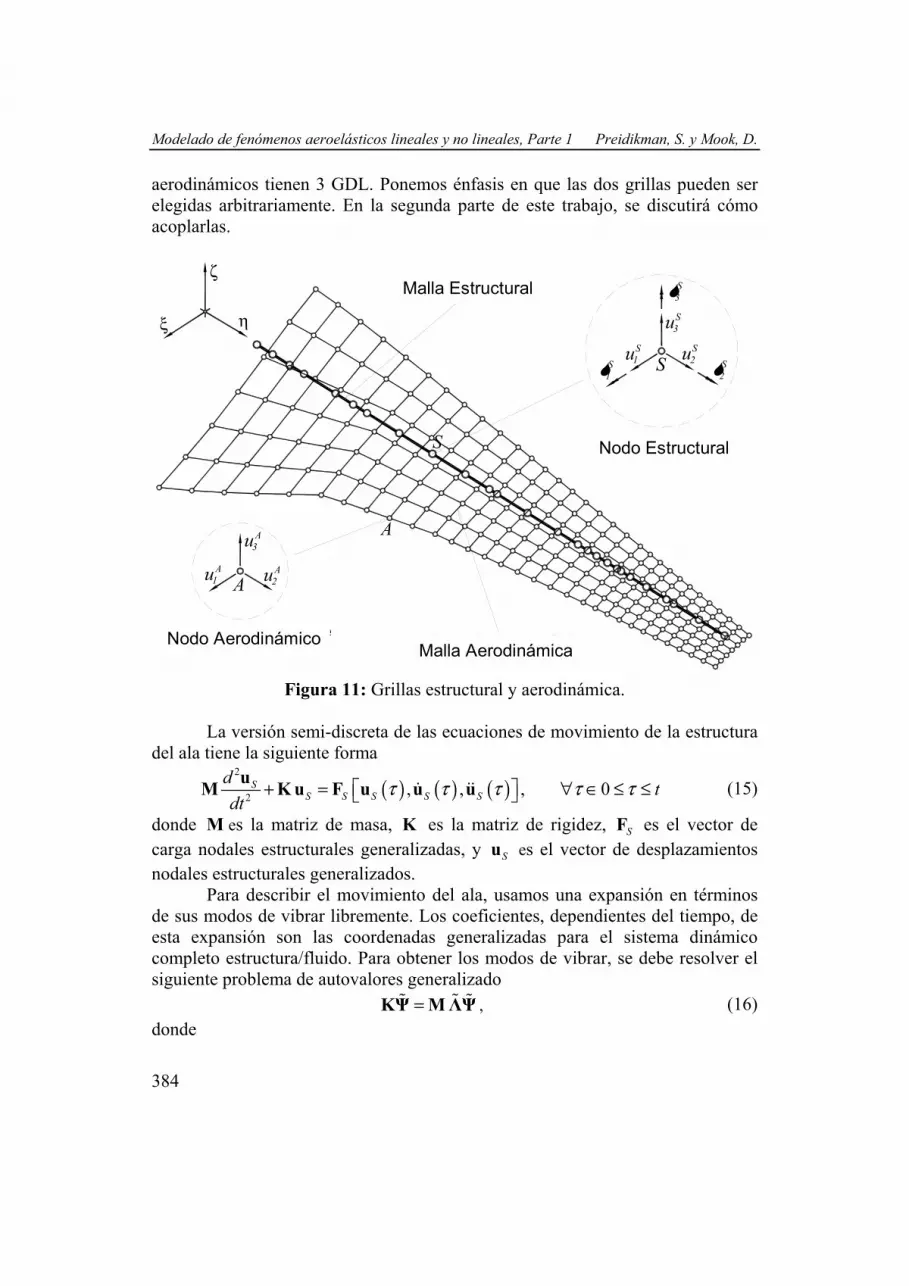
Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
384
aerodinámicos tienen 3 GDL. Ponemos énfasis en que las dos grillas pueden ser elegidas arbitrariamente. En la segunda parte de este trabajo, se discutirá cómo acoplarlas.
ηξ E-Frame
ζ
uAu A1 2
AuA
3
1u 2uS1S S
2
SuS
3
3S
S
A
S Structural Node
Aerodynamic Node Aerodynamic Grid
Structural GridMalla Estructural
Malla AerodinámicaNodo Aerodinámico
Nodo Estructural
ηξ E-Frame
ζ
uAu A1 2
AuA
3
1u 2uS1S S
2
SuS
3
3S
S
A
S Structural Node
Aerodynamic Node Aerodynamic Grid
Structural GridMalla Estructural
Malla AerodinámicaNodo Aerodinámico
Nodo Estructural
Figura 11: Grillas estructural y aerodinámica.
La versión semi-discreta de las ecuaciones de movimiento de la estructura
del ala tiene la siguiente forma
( ) ( ) ( )2
2 , , , 0SS S S S S
d tdt
τ τ τ τ τ+ = ∀ ∈ ≤ ≤⎡ ⎤⎣ ⎦uM K u F u u u (15)
donde M es la matriz de masa, K es la matriz de rigidez, FS es el vector de carga nodales estructurales generalizadas, y uS es el vector de desplazamientos nodales estructurales generalizados.
Para describir el movimiento del ala, usamos una expansión en términos de sus modos de vibrar libremente. Los coeficientes, dependientes del tiempo, de esta expansión son las coordenadas generalizadas para el sistema dinámico completo estructura/fluido. Para obtener los modos de vibrar, se debe resolver el siguiente problema de autovalores generalizado
=KΨ MΛΨ , (16)donde

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
385
1 2 3 . . . m= ⎡ ⎤⎣ ⎦Ψ ψ ψ ψ ψ , (17)
es una matriz ( )m m× (aquí, [ ] [ ] [ ]28 nodos 6 GDL/nodo 168 GDLm = × = ) con sus columnas igual a los m autovectores iψ y
2( )idiag ω=Λ , (18)es una matriz diagonal ( )m m× con sus elementos diagonales igual a los cuadrados de las frecuencias naturales.
A continuación, se introduce la siguiente expansión para lograr una aproximación de la deformación del ala
( ) ( ) ( )1
k n m
S k kk
t q t t= <
=
≅ =∑u ψ Ψ q , (19)
donde Ψ es una matriz formada por las primeras n columnas de Ψ y ( )tq es
el vector ( )1n × de coordenadas generalizadas
( ) ( ) ( ) ( )1 2T
nt q t q t q t= ⎡ ⎤⎣ ⎦q , (20)En las simulaciones presentadas más adelante en este trabajo, se usa 7n = .
Introduciendo la Ecuación 19 en la Ecuación 15, premultiplicando el resultado por TΨ , y teniendo en cuenta la ortogonalidad de Ψ respecto de ambas matrices, de masa y rigidez, se obtiene
( ) ( ) ( )2
12 , , , 0T
S S S Sd tdt
τ τ τ τ τ−+ = ∀ ∈ ≤ ≤⎡ ⎤⎣ ⎦q Λq m Ψ F q q q (21)
donde ( )T
idiag m= =m Ψ MΨ , (22)
( )Tidiag k= =k Ψ KΨ , (23)
y
( )1 2ii
i
kdiag diagm
ω− ⎛ ⎞= = =⎜ ⎟
⎝ ⎠Λ m k . (24)
En segunda parte de este trabajo se describe cómo las cargas estructurales generalizadas son obtenidas a partir de las cargas aerodinámicas, y cómo las coordenadas generalizadas son usadas para obtener el movimiento de la grilla aerodinámica. Finalmente, en la segunda parte de este trabajo, se describe como la Ecuación (21) es integrada numéricamente en el dominio del tiempo.
Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
386
Referencias Atta, E. H., Kandil, O. A., Mook, D. T., and Nayfeh, A. H. (1976). ‘‘Unsteady
flow over wings having sharp edge separations,’’ in Proceedings of the Vortex Lattice Utilization Workshop, NASA SP-405: 407-418.
Batchelor, G. K. (1967). An Introduction to Fluid Dynamics, Cambridge University Press, Cambridge, UK.
Belotserkovskii, S. M., (1955). ‘‘Horseshoe vorticies in nonsteady motion,’’ Prikl. Mat. Mekh. 19(2): 159-164.
Belotserkovskii, S. M. (1968). ‘‘Calculation of the flow around wings of arbitrary planform over a wide range of angle of attack,’’ Izv. Nauk SSSR Mekh Shidk. Gaza 4: 32-44; Fluid Dynamics 3(4): 20-27. Also NASA TT F-12 291, 1969.
Belotserkovskii, S. M. and Nisht, M. I. (1974). ‘‘Nonstationary nonlinear theory of a thin wing of arbitrary planform,’’ Izv. Nauk SSSR Mekh Shidk. Gaza 4: 100-108; Fluid Dynamics 9(4): 583-589.
Bollay, W. (1939). ‘‘A non-linear theory and its application to rectangular wings of small aspect ratio,’’ ZAMM 19(1): 21-35.
Fung, Y. C. (1969). An Introduction to the Theory of Aeroelesticity, Springer-Verlag, New York.
Hall, B. D., Mook, D. T., Nayfeh, A. H., and Preidikman, S. (2001). ‘‘A novel strategy for suppressing the flutter oscillationsof aircraft wings,’’ AIAA Journal 39(10): 1843-1850.
Kandil, O. A., Mook, D. T., and Nayfeh, A. H. (1976). ‘‘Nonlinear prediction of aerodynamic loads on lifting surfaces,’’ Journal of Aircraft 13(1): 22-28.
Katz, J. and Plotkin, A. (1991). Low-Speed Aerodynamics, McGraw-Hill, New York.
Konstadinopoulos, P., Mook, D. T., and Nayfeh, A. H. (1985). ‘‘Subsonic wing rock of slender delta wings,’’ Journal of Aircraft 22(3): 223-228.
Konstadinopoulos, P., Thrasher, D. F., Mook, D. T., Nayfeh, A. H., and Watson, L. (1985). ‘‘A vortex-lattice method for general, unsteady aerodynamics,’’ Journal of Aircraft 22(1): 43-49.
Lee, B.H.K., Jiang, L. Y., and Wong, Y. S. (1999). ‘‘Flutter of an airfoil with a cubic restoring force,’’ Journal of Fluids and Structures 13: 75-101.
Luton, J. A. and Mook, D. T. (1993). ‘‘Numerical simulations of flutter and its suppression by active control,’’ AIAA Journal 31(12): 2312-2319.

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
387
Mook, D. T. and Dong, B. (1994). ‘‘Perspective: Numerical simulations of wakes and blade-vortex interaction,’’ Journal of Fluids Engineering 116: 5-21.
Mook, D. T. and Maddox, S. A. (1974). ‘‘Extension of a vortex-lattice method to include the effects of leading-edge separation,’’ Journal of Aircraft 11(2): 127-128.
Mortan, S. A. and Beran, P. S. (1999). ‘‘Hopf-bifurcation analysis of airfoil flutter at transonic speeds,’’ Journal of Aircraft 36: 421-429.
Mracek, C. P. (1988). A Vortex Panel Method for Potential Flows with Applications to Dynamics and Controls, Ph.D. dissertation, Department of Engineering Science and Mechanics, Virginia Polytechnic Institute and State University, Blacksburg, VA.
Preidikman, S. and Mook, D. T. (1997a). ‘‘A new method for suppressing flutter of suspension bridges,’’ Journal of Wind Engineering and Industrial Aerodynamics 69-71: 955-974.
Preidikman, S. and Mook, D. T. (1997b). ‘‘Numerical simulation of flutter of suspension bridges,’’ Applied Mechanics Reviews 50(11): 174-179.
Preidikman, S. (1998). Numerical Simulations of Interactions among Aerodynamics Structural Dynamics, and Controls, Ph.D. dissertation, Department of Engineering Science and Mechanics, Virginia Polytechnic Institute and State University, Blacksburg, VA.
Preidikman, S. and Mook, D. T. (1998). ‘‘On the development of a passive-damping system for wind-excited oscillations of long-span bridges,’’ Journal of Wind Engineering and Industrial Aerodynamics 77-78: 443-456.
Preidikman, S. and Mook, D. T. (2000). “Time-Domain Simulations of Linear and Non-Linear Aeroelastic Behavior,” Journal of Vibration and Control, 6(8): 1135-1176.
Rodden,W. P., Giesing, J. P., and Kalman, T. P. (1972). ‘‘Refinement of the nonplanar aspects of the subsonic doublet-lattice lifting-surface method,’’ Journal of Aircraft 9(1): 69-73.
Strganac, T. W. and Mook, D. T. (1990). ‘‘A numerical model of subsonic aeroelastic behavior,’’AIAA Journal 28(5): 903-906.
Tang, D., Dowell, E. H., and Hall, K. C. (1999). ‘‘Limit cycle oscillations of a cantilevered wing in low subsonic flow,’’ AIAA Journal 37(3): 364-371.
Tang, D., Dowell, E. H., and Virgin, L. N. (1998). ‘‘Limit cycle behavior of an airfoil with a control surface,’’ Journal of Fluids and Structures 12: 839-858.

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 1 Preidikman, S. y Mook, D.
388
Thrasher, D. F., Mook, D. T., and Nayfeh, A. H. (1978). ‘‘Nonlinear dynamic-aerodynamic interaction,’’ AIAA Atmospheric Flight Mechanics Conference, Palo Alto, CA, August, AIAA Paper No. 78-1346.

Modelización Aplicada a la Ingeniería
389
Modelado de fenómenos aeroelásticos lineales y no-lineales
Parte 2: Combinando los modelos y ejemplos numéricos
SERGIO PREIDIKMANa Y DEAN T. MOOK b
aFacultad de Ingeniería, Universidad Nacional de Río Cuarto, 5800, Río Cuarto. Departamento de Estructuras, Facultad de C. E. F. y N. Universidad Nacional de Córdoba,Córdoba, Argentina.
bDepartment of Engineering Science and Mechanics, Virginia Polytechnic Institute and State University, Blacksburg, Virginia, U.S.A.
Combinando los Modelos
Comenzamos con la descripción de cómo los modelos estructural y aerodinámico, desarrollados en la primera parte de este trabajo, se combinan relacionando los desplazamientos de un punto arbitrario, B, en la grilla aerodinámica, con los desplazamientos nodales estructurales generalizados. Después de seleccionar el punto B, se localiza un punto A sobre el eje elástico, de tal forma que A y B se encuentren en el mismo plano perpendicular al eje elástico. En el sistema de referencia E, las coordenadas de esos puntos son ξ η ζA A A, ,b g y ξ η ζB B B, ,b g. Ambos puntos tienen la misma coordenada η y, por lo tanto, la
posición relativa del punto B respecto del A en el estado no deformado tiene la siguiente forma:
( ) ( )/B A B A B Aξ ξ ζ ζ ξ ζ= − + − = ∆ + ∆r i k i k . (1)Se asume que las secciones perpendiculares al eje elástico son rígidas y se
mueven y rotan con el punto sobre el eje elástico al cual están unidas; por lo tanto, el desplazamiento del punto B está dado por
uuu
uuu
B
A
1
2
3
1
2
3
1
2
3
1 0 00 1 00 0 1
0 00
0 0
RS|T|UV|W|
= −−
O
QPPP
L
NMMM
R
S
|||
T
|||
U
V
|||
W
|||
∆ζ∆ζ ∆ξ
∆ξθθθ
, (2)
o
U I R U G VBA
AA=
RSTUVW
=Θ
~ , (3)

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
390
donde u u uB1 2 3, ,b g son las componentes del desplazamiento del punto B,
u u uA1 2 3, ,b g son las componentes del desplazamiento del punto A, y θ θ θ1 2 3, ,b g A
son las componentes de la rotación del punto A. Generalmente, el punto A no coincide con un nodo estructural y, por lo
tanto, VA deberá ser determinado por interpolación utilizando las funciones de forma de los elementos finitos utilizados en la discretización. Como ejemplo, supongamos que el punto A esta ubicado entre los nodos estructurales I e I +1, cuyas coordenadas en el sistema E son 0 0, ,η Ib g y 0 01, ,η I +b g, respectivamente. Los campos de desplazamiento y rotación para el elemento CBAR usado en la presente simulación están dados por
11 12 13 14
1 121 22 23 24
1 1
I I
A I IA A
I IA
I I
+ +
+ +
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎡ ⎤⎧ ⎫ Θ Θ⎪ ⎪ ⎪ ⎪= = =⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥Θ⎩ ⎭ ⎣ ⎦ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪Θ Θ⎩ ⎭ ⎩ ⎭
U UN N N NUV NU UN N N N
, (4)
donde
( )( )
( )( )
( )( )
( )
3 5
11 1 12
3 5
0 0 0 00 0 , 0 0 0 ,0 0 0 0
N NN
N N
η ηη η η
η η
−⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
N N (5a)
( )( )
( )( )
( )( )
( )
4 6
13 2 14
4 6
0 0 0 00 0 , 0 0 0 ,0 0 0 0
N NN
N N
η ηη η η
η η
−⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
N N (5b)
( )( )
( )( )
( )( )
( )
' '3 5
'21 22 5
' '3 5
0 0 0 00 0 0 , 0 0 ,
0 0 0
N NN
N N
η ηη η η
η η
⎡ ⎤ ⎡ ⎤−⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
N N (5c)
( )( )
( )( )
( )( )
( )
' '4 6
'23 24 2
' '4 6
0 0 0 00 0 0 , 0 0
0 0 0 0
N NN
N N
η ηη η η
η η
⎡ ⎤ ⎡ ⎤−⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
N N , (5d)
donde ( ) ' indica la derivada respecto de η , el argumento de las funciones de forma ( )iN η usadas en el elemento CBAR de la biblioteca de MSC/NASTRAN.
Ahora, la Ecuación (3) se puede escribir de la siguiente manera:
U G V G N
U
U G VVB A A
I
I
I
I
I II
I
= =
RS||
T||
UV||
W||
=RSTUVW+
+
++
~ ~,
Θ
Θ1
1
11
. (6)
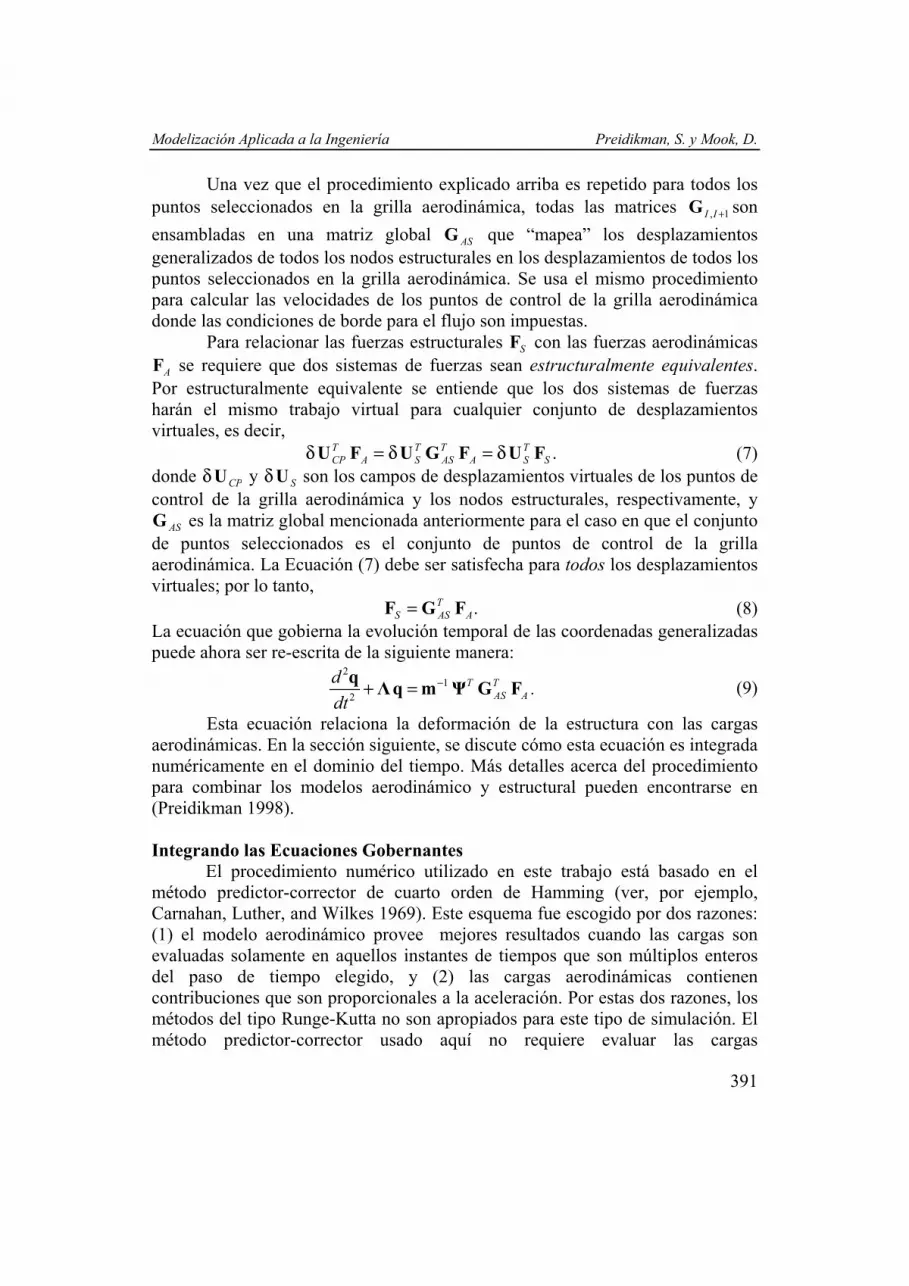
Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
391
Una vez que el procedimiento explicado arriba es repetido para todos los puntos seleccionados en la grilla aerodinámica, todas las matrices , 1I I +G son ensambladas en una matriz global G AS que “mapea” los desplazamientos generalizados de todos los nodos estructurales en los desplazamientos de todos los puntos seleccionados en la grilla aerodinámica. Se usa el mismo procedimiento para calcular las velocidades de los puntos de control de la grilla aerodinámica donde las condiciones de borde para el flujo son impuestas.
Para relacionar las fuerzas estructurales FS con las fuerzas aerodinámicas FA se requiere que dos sistemas de fuerzas sean estructuralmente equivalentes. Por estructuralmente equivalente se entiende que los dos sistemas de fuerzas harán el mismo trabajo virtual para cualquier conjunto de desplazamientos virtuales, es decir,
δ δ δU F U G F U FCPT
A ST
AST
A ST
S= = . (7)donde δ UCP y δ U S son los campos de desplazamientos virtuales de los puntos de control de la grilla aerodinámica y los nodos estructurales, respectivamente, y G AS es la matriz global mencionada anteriormente para el caso en que el conjunto de puntos seleccionados es el conjunto de puntos de control de la grilla aerodinámica. La Ecuación (7) debe ser satisfecha para todos los desplazamientos virtuales; por lo tanto,
F G FS AST
A= . (8)La ecuación que gobierna la evolución temporal de las coordenadas generalizadas puede ahora ser re-escrita de la siguiente manera:
21
2T T
AS Addt
−+ =q Λq m Ψ G F . (9)
Esta ecuación relaciona la deformación de la estructura con las cargas aerodinámicas. En la sección siguiente, se discute cómo esta ecuación es integrada numéricamente en el dominio del tiempo. Más detalles acerca del procedimiento para combinar los modelos aerodinámico y estructural pueden encontrarse en (Preidikman 1998).
Integrando las Ecuaciones Gobernantes
El procedimiento numérico utilizado en este trabajo está basado en el método predictor-corrector de cuarto orden de Hamming (ver, por ejemplo, Carnahan, Luther, and Wilkes 1969). Este esquema fue escogido por dos razones: (1) el modelo aerodinámico provee mejores resultados cuando las cargas son evaluadas solamente en aquellos instantes de tiempos que son múltiplos enteros del paso de tiempo elegido, y (2) las cargas aerodinámicas contienen contribuciones que son proporcionales a la aceleración. Por estas dos razones, los métodos del tipo Runge-Kutta no son apropiados para este tipo de simulación. El método predictor-corrector usado aquí no requiere evaluar las cargas

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
392
aerodinámicas en instantes de tiempo fraccional y, como se trata de un método iterativo, es posible tratar problemas en los que la aceleración aparece en ambos miembros de las ecuaciones de movimiento. En otros trabajos de los autores se demuestra que este esquema numérico, con algunas modificaciones adicionales, es idealmente el más apropiado para resolver problemas de dinámica de barcos. La Ecuación (9) se re-escribe como un sistema de ecuaciones diferenciales ordinarias de primer orden, quedando
( ) ( ), 0 .tτ τ τ τ= ∀ ∈ ≤ ≤⎡ ⎤⎣ ⎦y F y y (10) Primero se discute el procedimiento general, el cual se usa cuando la solución se conoce para los cuatro instantes de tiempo previos; a continuación, se hace una breve descripción del procedimiento utilizado para “arrancar” el algoritmo de integración numérica. Para todo instante de tiempo, hay dos movimientos ocurriendo simultáneamente: ambas, el ala y la estela, cambian a la posición que tendrán al final de cada paso de tiempo. Y, tan pronto esos movimientos van teniendo lugar, la distribución de la vorticidad sobre el ala también cambia. Deben calcularse nuevas posiciones del ala, la estela, y también la nueva distribución de vorticidad sobre el ala simultánea e interactivamente. Así es como se procede: 1. Se mueve la estela para que adopte su nueva posición usando la solución
corriente y el algoritmo de Euler dado en la Ecuación (11) de la primera parte de este trabajo.
2. Se predice una solución de la Ecuación (10) al final del siguiente paso de tiempo, paso j :
y y F F Fjp
j j j jt= + − +− − − −1 1 2 3
43
2∆ d i. (11)
3. Se corrige la solución lograda en el punto anterior usando una medida del error de truncación correspondiente al paso de tiempo previo e j−1. Se calcula la predicción inicial, y j
1 , para dar comienzo al proceso iterativo que sigue:
y y ej jp
j1
1112
9= + − . (12)
4. Se usa la solución predicha en el paso (3) para determinar las condiciones de borde sobre del flujo, las cuales son utilizadas para calcular la vorticidad sobre el ala y luego las cargas aerodinámicas sobre la estructura correspondientes al paso de tiempo j .
5. Para lograr una mejor estimación de la solución, se corrige la solución predicha usando la última estimación de las cargas aerodinámicas correspondientes al paso de tiempo j , obtenidas en el paso (4),
y y y F F Fjk
j j jk
j jt+− − − −= − + + −1
1 3 1 218
9 3 2∆ d i . (13)

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
393
6. Se coteja que las soluciones corregidas durante las dos últimas iteraciones sean aproximadamente iguales: esto es,
1k kj j ε+
∞− <y y , (14)
donde ε está prescripto. Si la respuesta a esta pregunta es NO, entonces se regresa al paso (4), se recalculan las cargas aerodinámicas, y así sucesivamente. Si en cambio la respuesta es SI, se avanza hasta el paso (7).
7. Se calcula la medida del error de truncación:
e y yj jk
jp= −+9
1211d i . (15)
8. Se realiza la corrección final de la solución correspondiente al paso j , y y ej j
kj= −+1 . (16)
9. Se incrementan todos los subíndices y se retorna al paso (1).
Este procedimiento puede ser repetido tantas veces como se desee. En la presente simulación, fueron necesarias entre 4 y 6 iteraciones para cada paso de tiempo. Esta técnica fue implementada de manera que es posible detener la ejecución del programa, examinar los resultados, y luego reiniciar el proceso de cálculo exactamente en el instante en que la ejecución fue detenida, si así desea. Durante las simulaciones se encontró que, si bien las amplitudes del quinto modo y los modos superiores son muy pequeñas, estos modos pueden causar problemas numéricos si el paso de tiempo elegido no es lo suficientemente pequeño como para capturar eficientemente sus transitorios de relativamente alta frecuencia.
Usando las condiciones iniciales, se comienza la integración numérica con el algoritmo de Euler para predecir la solución y luego se cambia al algoritmo modificado de Euler para iterar y así mejorar la solución. A continuación, se cambia a los algoritmos de dos y tres pasos de Adams-Bashforth para el segundo y tercer pasos de tiempo. Para todos los pasos de tiempo, la estela es convectada justamente antes del comienzo del proceso iterativo. Se han tratado de usar otros algoritmos que incluyen el recálculo de la estela durante cada iteración dentro de un paso de tiempo dado, pero se ha encontrado que estos procedimientos, mucho más costosos, no presentan mejoras significativas en los resultados.
Resultados
En esta sección, se computa la respuesta aeroelástica no estacionaria y no lineal para un ala del tipo que puede encontrarse en “jets” ejecutivos modernos. La matriz de frecuencias naturales de vibrar del ala está dada por
( )11.96,132.4, 214.3,582.8,638.0,1860.,1873.diag=Λ . (17)
Las unidades de Λ son ( )2Hz . Los primeros cuatro modos de vibrar libremente están representados en la Figura 1. La parte sombreada de la figura representa el ala en su posición deformada para ese modo; la parte no sombreada

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
394
representa el ala indeformada para ese modo. El primer y segundo modos se asimilan a los dos primeros modos de flexión de una viga en voladizo. El tercer modo, en cambio, representa al primer modo de flexión en el plano del ala (esto es, flexión alrededor del eje nominalmente vertical). Finalmente, el cuarto modo aparece como un modo de torsión pura. Los tres modos restantes usados en la simulación juegan un papel menor y no están representados.
Figura 1a: Los cuatro primeros modos de vibrar libremente del ala para velocidad
del aire igual a cero. Las frecuencias naturales son: (a) 1 3.458 Hzf = , (b) 2 11.51 Hzf = , (c) 3 14.64 Hzf = , y (d) 4 24.14 Hzf = .
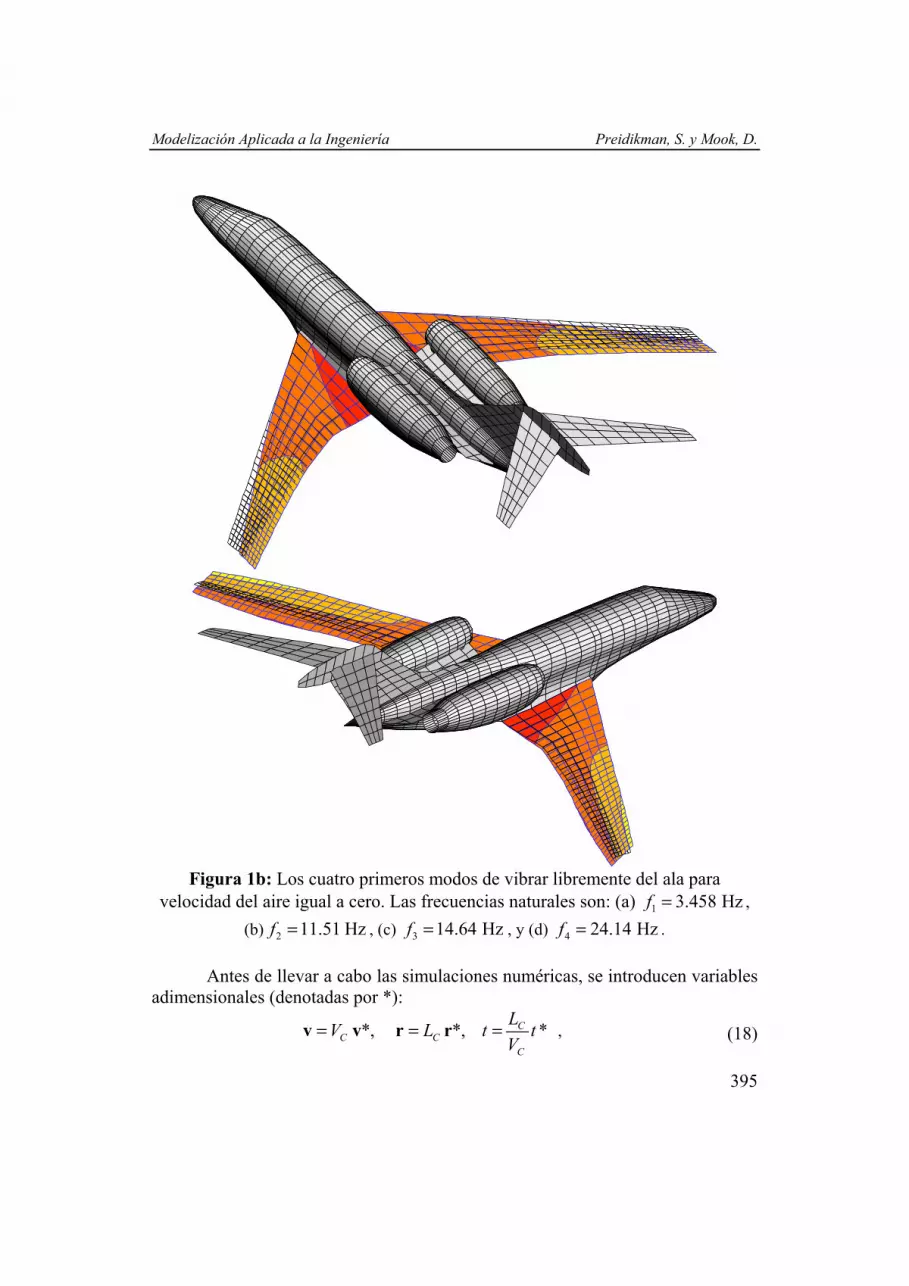
Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
395
Figura 1b: Los cuatro primeros modos de vibrar libremente del ala para
velocidad del aire igual a cero. Las frecuencias naturales son: (a) 1 3.458 Hzf = , (b) 2 11.51 Hzf = , (c) 3 14.64 Hzf = , y (d) 4 24.14 Hzf = .
Antes de llevar a cabo las simulaciones numéricas, se introducen variables
adimensionales (denotadas por *):
*, *, * CC C
C
LV L t tV
= = =v v r r , (18)

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
396
donde CV (velocidad característica) es la velocidad de la corriente libre o la velocidad que caracteriza a la velocidad hacia adelante de la aeronave, y CL (longitud característica) es la longitud, en la dirección de la cuerda, de un elemento típico de la grilla aerodinámica.
En las Figuras 2 y 3, la respuesta computada a partir de una perturbación inicial está representada para dos ángulos de ataque ( 0 y 4.5 ); las siete coordenadas modales generalizadas son representadas como funciones del tiempo. Las condiciones iniciales deben describir dos cosas: la estructura y el flujo, porque se está buscando la solución para ambas, simultánea e interactivamente. En los dos casos, 0 y 4.5 , las condiciones iniciales corresponden a la situación de darle al ala indeformada un impulso inicial (todas las ( )0 0iq = y todas las
( )0 0iq = ), y luego trasladarla hacia adelante a velocidad constante. Tan pronto el ala se mueve hacia delante, ésta comienza a flexionarse hacia arriba por la acción de las fuerzas aerodinámicas mientras el modelo aerodinámico genera la estela; los resultados numéricos simulan el vuelo.
La velocidad del aire está por debajo de la velocidad crítica de flutter, y todas las amplitudes evolucionan hacia valores en régimen que corresponden a la deformación estática del ala (el ala tiene curvatura, “camber”, y por lo tanto hay sustentación para un ángulo de ataque 0= ). Luego, cuando se considere flutter, se verá que el movimiento ocurre alrededor del la posición de equilibrio estático. (Para llevar a cabo un desarrollo analítico equivalente a la presente simulación, uno debería encontrar la deflexión estática del ala y considerar dicha deflexión al momento en que se calculan las cargas aerodinámicas, y luego hacer una expansión alrededor de la posición estática del ala para obtener las ecuaciones que gobiernen las oscilaciones de la misma. Las no-linealidades aerodinámicas deberían tenerse en cuenta durante estos dos pasos.)
La diferencia entre las dos respuestas es notable; sin embargo, en los dos casos, el tercer modo decae muy lentamente. Este modo representa un movimiento en el plano del ala. No hay amortiguamiento en el modelo estructural, y las fuerzas aerodinámicas provocan muy poco amortiguamiento para este movimiento.

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
397
Figura 2: Coordenadas modales generalizadas como funciones del tiempo, para
un caso estable: ángulo de ataque de 4.5 a nivel del mar.

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
398
Figura 3: Coordenadas modales generalizadas como funciones del tiempo, para
un caso estable: ángulo de ataque de cero grado a nivel del mar. Las Transformadas Rápidas de Fourier (FFTs) correspondientes a las
historias computadas se muestran en las Figuras 4 y 5. Todas las FFTs han sido normalizadas de tal manera que en cada caso la amplitud máxima es igual a la unidad.

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
399
Figura 4: FFTs de las señales mostradas en la Figura 2.

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
400
Figura 5: FFTs de las señales mostradas en la Figura 3.
La respuesta del ala, la cual es una combinación lineal de los siete modos
incluidos en este análisis, consiste claramente de componentes a varias frecuencias. Para el ángulo de ataque menor ( 0 ) hay una considerable contaminación cruzada de un modo con los otros. Para el ángulo de ataque mayor ( 4.5 ), el movimiento es algo más organizado, con cada modo con su energía concentrada alrededor de una frecuencia. Más tarde se verá que, a medida que la

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
401
velocidad crítica de flutter es alcanzada, el movimiento comienza a organizarse de una manera similar, concentrando energía primero alrededor de unas pocas frecuencias y luego alrededor de solamente una frecuencia. El resultado sugiere que, a una velocidad fija, es posible inducir flutter aumentando el ángulo de ataque y, de hecho, otros cálculos con el mismo modelo verifican que esto es verdad (Preidikman, 1998). En el siguiente conjunto de figuras se puede observar cómo esta organización evoluciona a medida que la velocidad de vuelo se incrementa. El fortalecimiento de dicha organización es un buen indicador de que la aeronave está cercana a su velocidad crítica de flutter.
En la Figura 6, las FFTs y las historias en el tiempo son dadas para una serie de respuestas, a diferentes velocidades, con el mismo impulso inicial anteriormente descrito, y para un ángulo de ataque de cero grado. En cada gráfico, se muestran solamente el primer modo (“casi” flexión pura, representado en líneas continuas) y el cuarto modo (“casi” torsión pura, representado en líneas de puntos). Una medida de la velocidad del aire es indicada en cada gráfico de la serie. A bajas velocidades, estos dos modos se ven claramente separados y puede observarse que cada modo contiene algo de energía a la frecuencia del otro; esto es, existe algo de contaminación cruzada o interacción a través de la aerodinámica. A medida que la velocidad del aire aumenta, esta contaminación cruzada también aumenta, mientras las frecuencias reducidas decrecen. La frecuencia reducida más baja decrece más lentamente que la frecuencia más alta, y de esta manera ellas comienzan a unirse. Durante las instancias finales de esta unión, la energía en el modo de flexión se concentra a la frecuencia más alta (torsión). Finalmente, alrededor de una medida de la velocidad de aire indicada por 11.000 , la unión es completa y la respuesta evoluciona hacia un ciclo límite de pequeña amplitud (más abajo verificaremos que la respuesta es un verdadero ciclo límite).
Tan pronto como la velocidad del aire continúa creciendo por encima de la velocidad crítica de flutter, la amplitud de la respuesta (amplitud del ciclo límite) también aumenta. El crecimiento gradual de la amplitud de las respuestas con la velocidad del aire sugiere fuertemente que la inestabilidad causada por flutter es una bifurcación supercrítica de Hopf. Cuando la medida de la velocidad del aire alcanza un valor de 12.000 , aproximadamente, puede observarse una suave modulación en la amplitud de lo que fuera un ciclo límite. Esta modulación crece con el incremento de la velocidad del aire. Este comportamiento sugiere que el sistema ha experimentado una bifurcación secundaria supercrítica de Hopf (más adelante se dan más detalles de esta bifurcación secundaria). La respuesta del ala puede, ahora, ser descripta como un movimiento sobre un toro.

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
402
Figura 6a: FFTs y coordenadas modales como funciones de tiempo para el
primer y cuarto modos a diferentes velocidades, para un ángulo de ataque 0.5 y a nivel del mar, mostrando la unión (“merger”) de las frecuencias, la evolución de
los ciclos límites y la modulación de la amplitud del ciclo límite.

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
403
Figura 6b: FFTs y coordenadas modales como funciones de tiempo para el primer y cuarto modos a diferentes velocidades, para un ángulo de ataque 0.5 y a nivel del mar, mostrando la unión (“merger”) de las frecuencias, la evolución de
los ciclos límites y la modulación de la amplitud del ciclo límite.

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
404
Figura 6c: FFTs y coordenadas modales como funciones de tiempo para el primer y cuarto modos a diferentes velocidades, para un ángulo de ataque 0.5 y a nivel del mar, mostrando la unión (“merger”) de las frecuencias, la evolución de los
ciclos límites y la modulación de la amplitud del ciclo límite.

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
405
En la Figura 6 se puede observar como las frecuencias asociadas al primer y cuarto modos se unen cuando la primera velocidad crítica de flutter es alcanzada desde abajo y los dos modos comienzan a responder a la misma frecuencia. De hecho, los siete modos incluidos en la simulación responden ahora a la misma frecuencia, que depende de la amplitud del movimiento, como puede observarse en la Figura 7 donde se muestran las historias en el tiempo como así también las correspondientes FFTs de todos los modos usados en la presente simulación. Estos modos, respondiendo a la misma frecuencia, se combinan para generar un único modo llamado “modo no-lineal de flutter.”
El movimiento del tercer modo contiene su más fuerte componente a la frecuencia correspondiente a la unión de los modos de torsión y flexión; esto es, el movimiento en el plano del ala responde a la frecuencia de unión. Sin embargo, hay también una notable cantidad de energía concentrada a una frecuencia menor, la cual parece estar asociada a las vibraciones libres del ala en su plano. Las transiciones desde las frecuencias naturales (o cercanas a las naturales) de cada modo hacia frecuencias comunes de flutter también son aparentes en la parte inicial (transitorias) de todas las respuestas.
Para que las respuestas sean verdaderos ciclos límites estables, todas las condiciones iniciales localizadas en la misma cuenca de atracción (“basin of attraction”) deben evolucionar hacia la misma respuesta en régimen. Para ver si esto ocurre aquí, se resolvieron varios casos con la misma velocidad del aire y ángulo de ataque, con diferentes condiciones iniciales. Algunos resultados típicos se muestran en la Figura 8, en la cual las historias en el tiempo de la segunda coordenada generalizada son presentadas en la columna izquierda y los correspondientes planos de fase en la columna derecha. Todos estos gráficos están construidos utilizando la misma escala. El valor inicial de ( )1 0q ha sido variado, como se indica en la parte superior de cada gráfico, y todas las condiciones restantes permanecieron invariables. Las historias en el tiempo de todas las corridas parecen alcanzar el mismo ciclo límite, y una comparación más cuidadosa de los datos numéricos verifica que esto es verdad. El ciclo límite también se hace evidente en los planos de fase. En el gráfico que está ubicado en la parte superior de la columna derecha se observa cómo el ciclo límite es alcanzado desde adentro (aunque las condiciones iniciales están dadas fuera del ciclo límite); por lo tanto, el borde exterior de la región oscura en el gráfico es el ciclo límite. La región oscura se forma porque los movimientos alcanzan el ciclo límite asintótica y suavemente. En el resto de los gráficos mostrados en esta columna el ciclo límite es alcanzado desde afuera; por lo tanto, en estas figuras, el ciclo límite esta representado por el borde interno de la región oscura. No se encontró ningún otro ciclo límite, pero esto no quiere decir que no lo haya.

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
406
Figura 7: FFTs y coordenadas modales como funciones de tiempo de los
primeros siete modos cuando ocurre flutter, ángulo de ataque 0.5 y a nivel del mar, mostrando que las oscilaciones ocurren alrededor de la posición de equilibrio
estática y que todos los modos responden a la misma frecuencia.

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
407
Figura 8: La segunda coordenada modal como función del tiempo y los
correspondientes planos de fase para diferentes condiciones iniciales, ángulo de ataque 0.5 y a nivel del mar, mostrando que todas las condiciones iniciales
evolucionan hacia la misma respuesta en régimen.
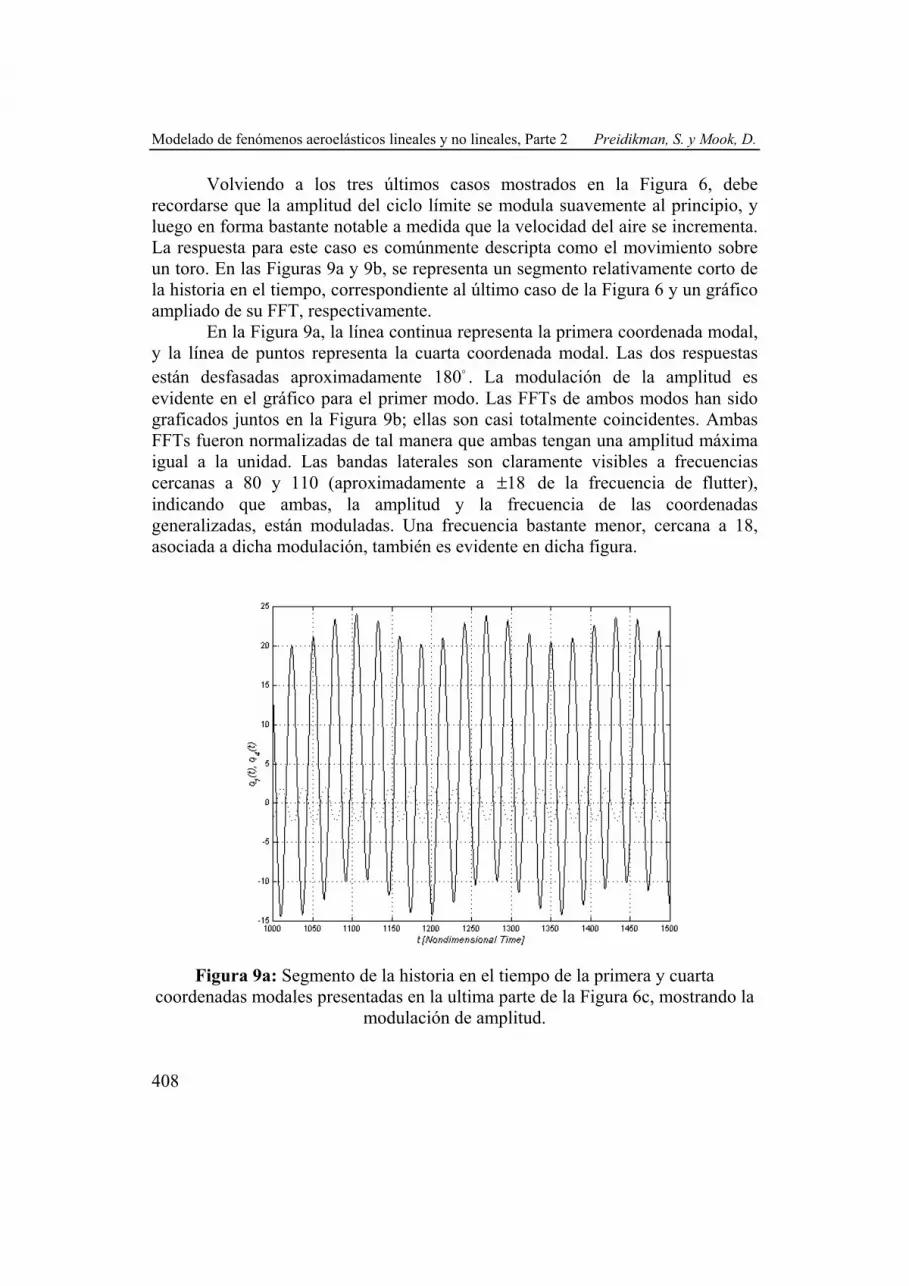
Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
408
Volviendo a los tres últimos casos mostrados en la Figura 6, debe recordarse que la amplitud del ciclo límite se modula suavemente al principio, y luego en forma bastante notable a medida que la velocidad del aire se incrementa. La respuesta para este caso es comúnmente descripta como el movimiento sobre un toro. En las Figuras 9a y 9b, se representa un segmento relativamente corto de la historia en el tiempo, correspondiente al último caso de la Figura 6 y un gráfico ampliado de su FFT, respectivamente.
En la Figura 9a, la línea continua representa la primera coordenada modal, y la línea de puntos representa la cuarta coordenada modal. Las dos respuestas están desfasadas aproximadamente 180 . La modulación de la amplitud es evidente en el gráfico para el primer modo. Las FFTs de ambos modos han sido graficados juntos en la Figura 9b; ellas son casi totalmente coincidentes. Ambas FFTs fueron normalizadas de tal manera que ambas tengan una amplitud máxima igual a la unidad. Las bandas laterales son claramente visibles a frecuencias cercanas a 80 y 110 (aproximadamente a 18± de la frecuencia de flutter), indicando que ambas, la amplitud y la frecuencia de las coordenadas generalizadas, están moduladas. Una frecuencia bastante menor, cercana a 18, asociada a dicha modulación, también es evidente en dicha figura.
Figura 9a: Segmento de la historia en el tiempo de la primera y cuarta
coordenadas modales presentadas en la ultima parte de la Figura 6c, mostrando la modulación de amplitud.

Modelización Aplicada a la Ingeniería Preidikman, S. y Mook, D.
409
Figura 9b: FFT de los resultados mostrados en la parte (a) mostrando la presencia
de “side bands” y la presencia de una frecuencia más baja asociada a la modulación.
Conclusiones
Un método para simular el comportamiento aeroelástico subsónico, inestacionario, y no-lineal ha sido desarrollado. El aire y la estructura deformable del ala han sido tratados como elementos del mismo sistema dinámico. La simulación consiste de las siguientes cuatro partes, descriptas en detalle más arriba: (1) un modelo aerodinámico para predecir las cargas en el ala, (2) un modelo estructural para predecir la respuesta del ala a dichas cargas y proveer las condiciones de borde del flujo, (3) un esquema para conectar los dos modelos entre sí, y finalmente, (4) un método para integrar las ecuaciones que gobiernan el sistema completo. Con el propósito de ilustrar el método con un ejemplo numérico, se estudia la respuesta de un ala característica de un jet ejecutivo moderno. Los resultados numéricos predicen que a bajas velocidades todas las disturbancias iniciales decaen; que a medida que la velocidad aumenta, la respuesta se vuelve más organizada; y que eventualmente las frecuencias en la respuesta convergen hacia una sola frecuencia. Coincidente con esta unión de frecuencias, la respuesta estática se convierte en inestable. En la porción inicial de la respuesta inestable, la amplitud del movimiento crece linealmente con el tiempo, pero eventualmente la respuesta evoluciona hacia un ciclo límite. Las amplitudes de los ciclos límites

Modelado de fenómenos aeroelásticos lineales y no lineales, Parte 2 Preidikman, S. y Mook, D.
410
son pequeñas inicialmente, pero crecen con la velocidad, comportamiento que sugiere que la inestabilidad generada por flutter es una bifurcación subcrítica de Hopf. Si la velocidad aumenta suficientemente, la respuesta experimenta una bifurcación secundaria de Hopf, después de la cual la amplitud y la fase de dicha respuesta modulan. En esta instancia, la respuesta puede ser descripta como el movimiento sobre un toro.
La riqueza del comportamiento no-lineal de este sistema dinámico se debe enteramente al modelo aerodinámico, el cual es inherentemente no-lineal. Estudios previos han encontrado ciclos límites en la respuesta cuando se usan modelos estructurales no-lineales. Aquí, el modelo estructural es lineal y el modelo aerodinámico no-lineal. Se espera observar un mayor rango de fenómenos no-lineales en futuras simulaciones que utilicen, también, modelos estructurales no-lineales.
Referencias
Carnahan, B., Luther, H. A., and Wilkes, J. O. (1969). Applied Numerical Methods, John Wiley, New York.
Preidikman, S. (1998). Numerical Simulations of Interactions among Aerodynamics Structural Dynamics, and Controls, Ph.D. dissertation, Department of Engineering Science and Mechanics, Virginia Polytechnic Institute and State University, Blacksburg, VA.

Modelización Aplicada a la Ingeniería
411
Aceleradores de partículas: Modelos para su diseño y la dinámica del haz
ROBERTO STRANGIS
CYCLOTOPE, Houston, Texas, Estados Unidos.
Introducción
En 1924, Ising propuso la aceleración por resonancia, en la cuál se aplica en forma repetitiva el potencial de aceleración usando campos oscilantes. En 1928, Wideröe construyó un acelerador lineal (linac) aplicando este mecanismo de aceleración. Al año siguiente, ideó un acelerador circular de electrones por el mecanismo de inducción, conocido como el betatrón. El primer acelerador de este tipo fue construído por Steenbeck, en 1935, quién logró acelerar electrones hasta 2.2 MeV* con este betatrón. Unos años antes, en 1932, Lawrence inventó el ciclotrón, un acelerador circular resonante de frecuencia fija, con cuyo prototipo podía acelerar protones hasta 1.25 MeV. Incentivados por Rutherford, en el mismo año, Crockoft y Walton construyeron el primer acelerador de protones de corriente continua (CC) o electrostático, capaz de alcanzar energías de hasta 700 keV. Con este acelerador lograron la primera fisión artificial de un átomo, el de Litio, por lo cuál recibieron el premio Nobel. De esta manera, en el transcurso de unos pocos años, fueron ideados los tres métodos principales de aceleración: CC, resonancia e inducción. Al mismo tiempo nacían las dos ramas principales de aceleradores: lineales y circulares (Bryant, 1994).
Progresivamente, la física atómica y después la nuclear comenzaron a requerir mayores energías e intensidades de haz. Hoy día, existen aceleradores capaces de alcanzar energías de hasta 900 GeV de protones y 100 GeV de electrones. Con los años, las aplicaciones de los aceleradores de partículas se han diversificado. Entre otras aplicaciones, a la física de altas energías y física nuclear se han agregado radiación de sincrotrón, radiación coherente, haces radioactivos, medicina nuclear, generación de potencia, implantación de iones y otras aplicaciones industriales. Actualmente, los aceleradores constituyen un campo con su propio grupo de profesionales dedicados al estudio, diseño, construcción y operación de los mismos. La exigencia constante de superar los límites de energía y corriente del haz de partículas ha impulsado el desarrollo de teorías, técnicas y modelos para el diseño de aceleradores.
En este capítulo se realizará una introducción a los principios físicos de funcionamiento de aceleradores de partículas y a la dinámica de haces de partículas cargadas. Luego, se abordarán aspectos de la óptica lineal para * 1 eV es una unidad de energía equivalente a la alcanzada al acelerar una carga igual a la del electrón aplicando un potencial de aceleración de 1V.

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
412
partículas simples. El modelo de haz uniforme permitirá analizar el comportamiento de un haz de partículas bajo la influencia de campos externos y campos propios lineales. Los efectos no lineales se incluirán a través del modelo de Vlasov para haces con dispersión de momento y se verá que la distribución de Maxwell-Boltzmann satisface este modelo aún cuando las fuerzas provenientes de colisiones son significativas. Finalmente, se presentarán las técnicas, herramientas y códigos de computación utilizados para el diseño de los componentes del acelerador y para la simulación de la dinámica del haz.
Aceleradores de partículas cargadas
Antes de abordar el tema principal de este capítulo, los modelos utilizados para el diseño de los componentes del acelerador y la dinámica del haz, se van a introducir los métodos utilizados para aceleración de partículas cargadas y los distintos tipos de aceleradores. Para ampliar esta información se recomienda al lector referirse a (Livingood, 1961, Livingston y Blewet 1962, Wiedemann, 1993). Información actualizada está disponible en los procedimientos de los cursos de aceleradores de partículas publicados por las escuelas de aceleradores de partículas en Europa (CERN-CAS)† y los Estados Unidos de Norteamérica (US Summer School Series)‡.
Dinámica de haz
La dinámica de haz es una parte de la electrodinámica clásica que se ocupa del movimiento de partículas cargadas libres en campos electromagnéticos estáticos o variables con el tiempo. Estos campos pueden ser externos o ser generados por la propia distribución de cargas cuando su densidad es considerable (campos propios). La energía cinética de las partículas puede ser relativista. La radiación electromagnética debida a las partículas aceleradas impone un límite máximo en aceleradores circulares de electrones o positrones. Entre otros, éstos efectos deben ser considerados en los modelos que estudian la dinámica del haz.
Un conjunto de partículas cargadas forma un haz si las componentes del momento de las mismas en una dirección dada, conocida como longitudinal, son mucho mayores que en las direcciones transversales. Si la longitud del haz es mucho mayor que su diámetro, la distribución de partículas se conoce como haz continuo. En el caso opuesto, cuando las dimensiones longitudinales y transversales son comparables se dice que se tiene un haz divido en paquetes.
La dinámica de partículas cargadas en el vacío en presencia de campos electromagnéticos externos o propios es descripta por las ecuaciones de Maxwell (Jackson,1980). La forma vectorial de las mismas para los campos eléctrico E y magnético B, en el Sistema Internacional de Unidades es
† CERN Accelerator Schools, CAS, CERN, Ginebra, Suiza, http://cas.web.cern.ch. ‡ US Summer School Series, American Institute of Physics, USA, http://uspas.fnal.gov.

Modelización Aplicada a la Ingeniería Strangis, S.
413
,t∂
∂−=×∇ BE
,0ε
ρ=⋅∇ E
.0=⋅∇ B
.0=∂∂+⋅∇
tρJ
).( BvEF ×+= q
),( BvEFp ×+== qdtd
,βp mcγ=
.1
12β
γ−
=
(1)
(2)
,120 tc ∂
∂+=×∇ EJB µ (3)
(4)
donde J y ρ son las densidades de corriente y de carga, ε0 y µ0 la permitividad y la permeabilidad del vacío, t el tiempo y c la velocidad de la luz (c2=1/ε0µ0). Las ecuaciones (1), (2) y (3) son las formas vectoriales de las leyes de Faraday, Gauss y Ampere. De estas dos últimas se obtiene la ecuación de continuidad,
(5)
Sea una partícula con carga q cuyo vector posición es x y que se mueve con
velocidad v=dx/dt. La fuerza de Lorentz, debida a la combinación de los campos eléctrico E y magnético B, ejercida sobre esta partícula esta dada por
(6)
La ecuación de movimiento debida a esta fuerza es
(7)
donde p es el momento mecánico de la partícula, el cuál, de acuerdo a la teoría especial de la relatividad, está dado por
(8)
aquí m es la masa en reposo y γ el factor de Lorentz, el cuál está relacionado con β=|β|=|v|/c=v/c, por
(9)

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
414
,∫ ⋅=∆cLk dqE sE
.t∂
∂−Φ−∇= AE
Para describir la trayectoria de las partículas se suele separar sus coordenadas en dos sistemas: uno fijo que describe la trayectoria de referencia o ideal y otro móvil que describe la desviación de las partículas individuales respecto a la trayectoria ideal. La trayectoria de referencia es diseñada de acuerdo a la aplicación. Como la mayoría de los aceleradores se construyen horizontalmente, se acostumbra usar un sistema de coordenadas (x,y,z) para trayectorias rectilíneas ó (x,y,s) para trayectorias curvas, donde el plano vertical, x-y, es normal a la dirección de la trayectoria de la partícula de referencia, z ó s. Comúnmente, los haces tienen simetría rotacional. El plano vertical es descrito en este caso en coordenadas cilíndricas por (r,θ), donde r es el radio y θ la coordenada angular. En este sistema de coordenadas, x´=dx/dz (ó x´=dx/ds) denota la pendiente de la trayectoria longitudinal en la dirección horizontal. Mecanismos de aceleración
Las partículas viajan dentro de los aceleradores bajo la influencia de campos de guía y campos de aceleración. Las secciones de aceleración son aquellas en las cuales se aplican los campos de aceleración externos de corriente contínua (CC) o radio frecuencia (RF). El término del campo magnético en la ecuación de movimiento (7) es responsable de la trayectoria del haz, mientras que el término del campo eléctrico causa la aceleración. Integrando este último término con respecto a la longitud de camino, se puede calcular la ganancia de energía cinética de la partícula, ∆Ek, obtenida por el haz al pasar por una sección de aceleración
(10)
donde Lc es la longitud de la sección de aceleración y ds=vdt es el vector tangencial a la trayectoria. La ganancia de energía es una propiedad de la sección para un dado tipo de partícula y es independiente del movimiento de la misma.
El campo eléctrico puede expresarse como la suma de dos términos, uno proveniente del potencial escalar eléctrico Ф y el otro del potencial vectorial A
(11)
El primer término describe el campo electrostático utilizado en la aceleración por CC. La integral en la expresión (10) para la ganancia de energía cinética corresponde a la diferencia de potencial dΦ entre ambos extremos de la sección.
En un acelerador circular, el método de CC no es aplicable dado que, la partícula es acelerada y desacelerada después de recorrer una vuelta completa,

Modelización Aplicada a la Ingeniería Strangis, S.
415
.AB ×∇=
siendo la ganancia de potencial nula. En estos aceleradores se debe utilizar aceleración por RF. Su dinámica está gobernada por la ley de Faraday (1), la cuál se recupera del segundo término de la ec. (11), aplicando la relación
(12)
Existen dos modos prácticos de aplicar el mecanismo de aceleración por RF: resonancia e inducción. La aceleración por resonancia es el método más ampliamente usado en la actualidad. Este método fue propuesto por Ising para aceleradores lineales. En estos aceleradores, múltiples sistemas de RF se alinean para que las partículas cargadas los atraviesen uno tras otro. Al pasar por cada sistema de RF la energía de las partículas aumenta. Mientras que, en los aceleradores circulares, tales como ciclotrones y sincrotrones, las partículas son forzadas por un campo guía a recorrer trayectorias aproximadamente cerradas, llamadas órbitas, para pasar por el mismo potencial de aceleración de RF repetidas veces. En los aceleradores que emplean el modo de inducción, los linacs de inducción y el betatrón, el principio del transformador se utiliza para inducir campos eléctricos de aceleración por variación de un campo magnético. Para poder lograr una aceleración continua por RF es necesario que se cumplan ciertas condiciones de sincronismo entre el campo de aceleración y el movimiento de las partículas A diferencia de los aceleradores por CC, en los cuales el haz es continuo, en la aceleración por RF el haz consiste en un tren de pulsos o en un haz continuo de intensidad modulada.
Cuando se aceleran haces intensos, las fuerzas internas entre partículas, conocidas como efectos de espacio-carga, se hacen significativas debido a la repulsión coulombiana entre cargas de igual signo. A causa de estas fuerzas repulsivas, hay que proveer fuerzas de enfoque para controlar el aumento de tamaño del haz y evitar que colisione con las paredes de la cámara de vacío en la cuál se mueve. En los aceleradores por RF, el enfoque para mantener el paquete compacto es debido a la componente axial del campo eléctrico en la dirección longitudinal y a campos magnéticos en la dirección transversal. El enfoque en el plano transversal a la dirección de movimiento utilizado en los primeros ciclotrones se conoce como enfoque débil. En 1952, Courant, Livingston y Snyder propusieron el mecanismo de enfoque fuerte o de gradiente alternado (AG). Este nuevo principio revolucionó el diseño de sincrotrones y ciclotrones de frecuencia fija. La idea se basa en alternar lentes electromagnéticas de enfoque-desenfoque (FODO) en la dirección longitudinal, obteniendo un efecto neto de enfoque, análogamente a las lentes ópticas. Este concepto permitió elevar los límites máximos de energía y al mismo tiempo reducir los tamaños de los imanes.
Tipos de Aceleradores
El proceso de aceleración se divide en varias secciones. La primera sección se encarga de producir las partículas a acelerar. Para esto se utilizan fuentes de iones

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
416
o cañones de electrones. Las siguientes secciones generalmente son inyección en el acelerador, aceleración y extracción. En ocasiones se utilizan varios aceleradores en cascada. Entre una etapa y la otra se utilizan líneas de transporte de haz. Cada una de estas secciones está compuesta por imanes, cavidades de RF, guías de onda, cámaras de vacío, etc.
Teniendo en cuenta la geometría de la trayectoria del haz, rectilínea o curva, los aceleradores se clasifican como lineales o circulares. En la década de 1920, las limitaciones técnicas para obtener generadores de RF de alta frecuencia y potencia para aceleradores lineales desviaron el interés hacia el diseño de aceleradores circulares. En 1937, los hermanos Varian inventaron el Klistron, un tubo de vacío utilizado en generadores de RF de alta potencia capaz de alcanzar varias decenas de GHz. Desde entonces, los aceleradores lineales recuperaron importancia y ambos tipos de aceleradores se han desarrollado paralelamente. Sólo la aplicación particular dicta el uso de uno u otro, basado en sus ventajas y desventajas.
Otro factor a tener en cuenta es el tipo de partícula a acelerar. En aceleradores de electrones o de positrones, las velocidades involucradas son mucho más altas que para protones o iones más masivos. Los electrones pueden alcanzar velocidades próximas a la de la luz en distancias muy cortas. Debido a esto, se necesitan frecuencias del orden de algunos GHz para que las dimensiones del acelerador no superen los límites prácticos. En aceleradores circulares de electrones la pérdida de energía debida a la radiación de sincrotrón limita la máxima energía obtenible a unos 100 MeV. Mas allá de este punto la potencia de radiofrecuencia (RF) exigida para compensar las pérdidas por este efecto supera los límites prácticos. Para protones y partículas más pesadas, los aceleradores circulares se han convertido en el método más conveniente de aceleración.
En los aceleradores lineales se utilizan los tres mecanismos de aceleración mencionados anteriormente. Los aceleradores lineales electrostáticos (Crockoft-Walton, Van de Graaf, Tandem) utilizan aceleración por CC. La combinación del generador de Van de Graaf y el acelerador Tandem provee haces estables con poca dispersión de energía, pero no pueden producir corrientes tan altas como el acelerador de Crockoft-Walton. Este último es aún utilizado como etapa de inyección en grandes aceleradores. Los aceleradores lineales por inducción y por resonancia se componen de tubos de deriva entre los cuales se aplica el potencial de aceleración. Cuando la aceleración es por resonancia se conecta un generador de RF entre un tubo y el siguiente. En los linacs de inducción el generador de RF es reemplazado por un toroide por el cual circula una corriente pulsante. Este genera un campo magnético, cuya componente azimutal induce un campo eléctrico dipolar de aceleración entre tubos.
La sección más común en los aceleradores de partículas es la línea de transporte de haz. La misma está compuesta por una secuencia de componentes electromagnéticos de enfoque y de guía. Estos últimos tienen campos magnéticos
Modelización Aplicada a la Ingeniería Strangis, S.
417
,y
s
y qBp
qBmcR == γβ
.2 0γπm
qBf y
rev =
homogéneos. Si su campo es vertical, tal que B=(0,By,0), una partícula con carga q sufrirá una desviación en el plano horizontal cuyo radio de curvatura es
(13)
dado por el equilibrio de las fuerzas de Lorentz y centrífuga, donde p=(0,0,ps) es el momento de la partícula y m es la masa de la partícula acelerada. Este efecto es también aprovechado para forzar a las partículas a describir trayectorias circulares. El primer acelerador circular fue el ciclotrón de frecuencia fija. En este acelerador, la cavidad de RF se ubica entre los polos de un imán. Esta tiene forma de caja cilíndrica achatada, dividida diametralmente en dos mitades, conocidas como Des debido a su aspecto. Cada De está conectada a uno de los polos de un generador de RF. De acuerdo a la ec. (13), las partículas describen una orbita circular cuyo radio depende de su energía. Éstas son aceleradas cada vez que atraviesan el campo eléctrico entre las Des en sincronismo con la frecuencia de RF, entrando en una órbita de mayor radio. El resultado neto es una órbita en forma de espiral cuyo tamaño está limitado por el del imán y la cavidad. Para que se mantenga el sincronismo, la frecuencia de RF, fRF, debe ser igual a la frecuencia de revolución,
(14)
siendo mo la masa de la partícula en reposo. Cuando la energía de la partícula se hace relativista (γ>>1) la frecuencia de revolución de las partículas disminuye debido al incremento de γ y se pierde el sincronismo. Debido a este efecto, en el caso de protones, la máxima energía obtenible con este ciclotrón es de unos 20 a 25 MeV. Para superar este límite, el aumento relativísta de la masa es compensado por modulación de frecuencia en una variante conocida como sincrociclotrón. Con estos aceleradores se pueden alcanzar energías de hasta 1 GeV para protones. La modulación de frecuencia es técnicamente complicada y reduce drásticamente la corriente máxima alcanzable. En el ciclotrón isócrono, otro tipo de acelerador circular, se vuelve a usar frecuencia fija, pero esta vez los polos del imán se diseñan con una geometría tal, que la relación B0(r)/γ(r) sea constante. Esta geometría trae aparejada una pérdida de enfoque transversal, la cuál es compensada por la aplicación de técnicas de gradiente alternado. La idea de estos ciclotrones recién cobró sentido práctico después de 1952 con la aparición de estas técnicas. Este tipo de acelerador es muy eficiente y es actualmente una fuente de protones de alta energía. Ejemplos de estos ciclotrones son el de 590 MeV de PSI (Paul Scherrer Institute, Suiza) y el de 500 MeV de TRIUMF (Tri University Meson Facility, Canadá).

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
418
Un concepto un poco diferente es el del microtrón. En este acelerador, las partículas pasan a través de una cavidad de aceleración y retornan a la misma luego de describir un círculo. Al pasar nuevamente por esta cavidad ganan energía y repiten el ciclo describiendo un círculo de mayor radio. Las órbitas son un conjunto de círculos que se unen en un punto tangencial. Al igual que en los ciclotrones, el límite de energía esta dado por el tamaño del imán. Debido a su principio de funcionamiento, para mantener el sincronismo se debe tener una ganancia de energía equivalente a la masa en reposo de la partícula. Esto hace que este acelerador sea práctico sólo para electrones hasta 25-30 MeV. Una variante mas eficiente es el race track microtrón, donde el imán se separa en dos mitades a lo largo de su diámetro, de manera de alojar un acelerador lineal entre ellas. Las órbitas tienen forma de pista de carreras, de donde proviene su nombre.
En los aceleradores circulares mencionados hasta ahora, la energía máxima está limitada por el volumen/costo del imán. En cambio, en el betatrón y en el sincrotrón el centro del imán es eliminado, bajando de esta forma su volumen en forma drástica. El betatrón emplea el mecanismo de inducción, actuando como un transformador, en el cuál el secundario se reemplaza por un haz de electrones que circula en un toroide. El campo eléctrico se genera alrededor de un campo magnético dipolar oscilante y su componente azimutal provee el potencial de aceleración. En el caso del sincrotrón, la idea se basa en tener una única órbita cerrada. Su estructura consiste básicamente en una secuencia de secciones de aceleración e imanes de guía y enfoque. Cuando la partícula atraviesa el interior de los imanes de guía, su trayectoria se desvía, con un radio de curvatura dado por la ec. (13). Para que este radio se mantenga constante con el aumento de energía de la partícula, la relación entre el momento mecánico, Ps, y el campo magnético By debe permanecer constante. Por lo tanto, después que la partícula pasa por una sección de aceleración, el campo magnético debe ser incrementado en la proporción de aumento del momento mecánico γβ/γ0β0, donde los subíndices corresponden a las condiciones antes de pasar por la sección de aceleración. Debido a esta variación del campo magnético, la expresión a la derecha de la ecuación (14) ya no es constante. Para que se mantenga el sincronismo se debe modular la frecuencia en forma proporcional a β(t). En resumen, se tiene modulación de frecuencia y campo magnético. Al igual que en el sincrociclotrón, solo las partículas que se mantienen en sincronismo durante todo el ciclo de modulación son aceleradas. Esto resulta en una disminución de la corriente de haz obtenible. Actualmente, la más alta energía alcanzada por un acelerador de protones es de 900 GeV en el sincrotrón con imanes superconductores del Fermi Nacional Accelerator Laboratory (FNAL).
En aplicaciones para física de altas energías y para radiación de sincrotrón, anillos de almacenamiento son utilizados para retener al haz orbitando por varias horas. Su principio básico de funcionamiento es el mismo que el del sincrotrón,

Modelización Aplicada a la Ingeniería Strangis, S.
419
pero su función es mantener constante la energía del haz proveyendo la energía necesaria para compensar la pérdida por radiación de sincrotrón.
Tanto para los aceleradores lineales o circulares, como para las líneas de transporte de haz o los anillos de almacenamiento del mismo, los dos tópicos principales a considerar para su diseño son la estructura y la dinámica del haz. Los campos electromagnéticos en cada uno de sus componentes deben ser cuidadosamente modelados y construidos. Pequeños errores de diseño o fabricación pueden llevar a resultados totalmente indeseables. Particularmente, en los aceleradores circulares, las partículas están expuestas repetidas veces a las perturbaciones o errores, pudiendo llevar a resonancias destructivas del haz.
Óptica de haz lineal
Los haces de partículas se mueven en el vacío bajo la influencia de imanes de guía que fuerzan a las mismas a recorrer las trayectorias deseadas. Estos haces tienen una tendencia a dispersarse por su propia divergencia, similarmente a los rayos de luz. Para contener el haz evitando que este colisione con las paredes de la cámara de vacío se utilizan dispositivos de enfoque. Un campo magnético que desvíe las partículas en un ángulo proporcional a la distancia al eje de simetría actúa en la misma forma que una lente óptica sobre un haz de luz. Por analogía, el estudio de las trayectorias de las partículas bajo la influencia de estos campos de enfoque se conoce como óptica de haz. Las velocidades de las partículas en la dirección transversal son generalmente muy inferiores a su velocidad relativista en la dirección longitudinal. Bajo estas condiciones, las pendientes de las trayectorias son muy pequeñas frente a la unidad y se puede trabajar a primer orden, al igual que en la aproximación paraxial en óptica geométrica. El estudio de la dinámica de las partículas bajo esta aproximación se conoce como óptica lineal.
Los aceleradores y sistemas de transporte se diseñan de modo de proveer un camino libre de dispersión para las partículas. Para esto, las mismas deben moverse principalmente en regiones libres de material. En estas regiones, el campo magnético puede obtenerse a partir del potencial escalar magnético, ФM, el cuál es solución de la ecuación de Laplace para regiones libres de carga. Los términos del desarrollo de ФM en series de potencias se conocen como momentos multipolares y sus coeficientes son los parámetros de intensidad multipolar. Los imanes que sólo presentan un momento de orden n se llaman 2n-polares (dipolo, cuadrupolo, sextupolo, etc). Las superficies de sus piezas polares deben diseñarse de manera que sean equipotenciales. Para esto, las piezas polares de un dipolo deben ser dos planos paralelos y las de un cuadrupolo, cuatro planos hiperbólicos. Estos últimos son los componentes más comunes de una línea de transporte de haz. La trayectoria de una partícula bajo la influencia del campo generado por estos imanes puede describirse por medio de las ecuaciones de la óptica lineal,

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
420
( ) ( )
( ) ,0
,012
=−′′
=⎟⎟⎠
⎞⎜⎜⎝
⎛++′′
ysky
xsks
xρ (15)
donde, x e y son las coordenadas de la partícula en el plano vertical perpendicular a la trayectoria s. Mientras que, ρ y k son los parámetros de intensidad que corresponden a los campos dipolar y cuadrupolar (orden 1 y 2) respectivamente. El campo magnético de un imán dipolar es constante y homogéneo. En el caso de un campo vertical, se produce un desvío en la trayectoria en el plano horizontal, cuyo radio de curvatura local ρ esta dado por la ec. (13), ρ=|p/(qBy)|. Por otro lado, un imán cuadrupolar posee un campo magnético de enfoque azimutal cuya intensidad de enfoque esta dada por k=(q/p)∂By/∂x. Sobre el plano horizontal, este cuadrupolo magnético actúa como una lente óptica con distancia focal f=(kl)-1, dónde l es la distancia recorrida por la partícula dentro del imán. Mientras que, en el plano vertical el campo es divergente con distancia focal -f. Análogamente a la óptica de lentes delgadas, la combinación dos cuadrupolos de igual intensidad, rotados 90º, produce un efecto neto de enfoque en ambas direcciones con distancia focal f2/d, donde d es la separación entre los mismos. La dinámica de haz basada en el uso de cuadrupolos magnéticos alternados se conoce como enfoque fuerte.
En general, no se puede obtener una solución analítica de las ecuaciones (15) porque esta depende de los parámetros de la distribución particular de imanes a lo largo de la línea de transporte de haz, por lo tanto son función de la variable longitudinal s. En el modelo de borde abrupto (hard edge), los campos varían abruptamente con s entre un componente y el siguiente, siendo constantes dentro de los imanes y nulos en las secciones libres. Dentro de cada sección, las ecuaciones de movimiento (15) tienen la misma forma que las de un oscilador armónico cuya frecuencia varía con el tiempo. Las oscilaciones de las partículas debidas a las fuerzas de restauración aplicadas se conocen como oscilaciones betatrón. Dentro de cada sección, podemos resolver la ecuación del oscilador armónico con frecuencia constante. Las soluciones son funciones cosenoidales C(s) y sinusoidales S(s) trigonométricas o hiperbólicas, dependiendo de las condiciones de contorno. En la formulación matricial, esta solución se suele expresar en la forma de matriz de transferencia
,)()(
)()()()(
)()(
0
0⎥⎦
⎤⎢⎣
⎡′⎥
⎦
⎤⎢⎣
⎡′′
=⎥⎦
⎤⎢⎣
⎡′ su
susSsCsSsC
susu
(16)
donde, u-u´representan a uno de los pares x-x´ o y-y´ y s0 representa la posición de la partícula antes de entrar a esa sección. Cada elemento de la línea de transporte

Modelización Aplicada a la Ingeniería Strangis, S.
421
de haz es representado por una matriz. En este formalismo, se puede seguir una partícula a lo largo de una trayectoria complicada multiplicando las matrices de elemento en elemento. Las soluciones para ambos planos x-x´ e y-y´ pueden obtenerse simultáneamente usando matrices de 4x4 donde los cuadrantes izquierdo superior y derecho inferior representan la expresión (16). Los otros dos cuadrantes serán no nulos en caso de existir acoplamiento entre ambos planos. Haces de partículas y espacio de la fase
De aquí en más, se seguirá aproximadamente el esquema del libro “Teoría y diseño de haces de partículas cargados” de M.Reiser para la presentación de los modelos teóricos para la dinámica del haz (Reiser, 1994). Para un desarrollo más detallado y ejemplos prácticos, se recomienda al lector dirigirse a esa bibliografía.
La solución de las ecuaciones de movimiento lineales permite seguir una única partícula a través de una combinación arbitraria de elementos magnéticos. Un haz de partículas está compuesto por numerosas partículas y es imposible obtener soluciones analíticas siguiendo una por una. Para poder describir el movimiento colectivo de las mismas se debe representar el haz de partículas en el espacio de la fase. En este espacio de seis dimensiones (x,p), cada partícula se representa por un punto y el haz por un volumen. El movimiento del conjunto de partículas o haz está asociado con el movimiento de los puntos asociados en el espacio de la fase. Cuando el conjunto de partículas se mueve, el volumen que este ocupa en el espacio de fase también se mueve y su forma cambia. La proyección del espacio de fase en los planos x-px e y-py (ó x-x´ e y-y´) se conoce como espacio de la traza.
Para describir la evolución del haz en forma colectiva, sin concentrarse en las partículas individuales, se recurre a la mecánica estadística. El teorema de Liouville es fundamental a estos efectos. Este establece que bajo la influencia de fuerzas conservativas la densidad de las partículas en el espacio de fase permanece constante. Si se define la densidad de partículas como n=n(xi,pi,t), la derivada total respecto del tiempo se puede escribir como
.p
px
x∂∂⋅+
∂∂⋅+
∂∂= nn
tn
dtdn (17)
El número total de partículas en el espacio de fase debe permanecer constante, por lo tanto se debe cumplir la ecuación de continuidad (5). Al aplicar la misma al lado derecho de la ec. (17) este se anula, demostrando el teorema de Liouville
.0=dtdn (18)

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
422
Como el número de partículas y la densidad permanecen constantes, el volumen ocupado por las mismas en el espacio de la fase también es un invariante de movimiento. Las partículas contenidas en un volumen cuyo contorno es cerrado permanecen dentro del mismo y el haz puede representarse por este contorno o envolvente. El teorema de Liouville es válido para un sistema de partículas que no interactúan o para el caso en que la interacción con los vecinos sea despreciable comparada con el campo colectivo producido por el resto de las partículas. Emitancia
Los iones a acelerar son usualmente generados en fuentes de iones por bombardeo de un plasma neutro con electrones. Posteriormente los iones deseados son extraídos en forma selectiva utilizando campos electrostáticos. Existe una dispersión térmica de velocidades propia de este proceso, que permanece presente en el haz a lo largo de su aceleración. La emitancia, ε, provee una medida cuantitativa de esta dispersión y se usa para describir la calidad del haz. En el espacio de la traza x-x´, se puede definir la emitancia εx en términos del producto entre el tamaño del haz, X, y la divergencia máxima, X´, εx= XX´. De acuerdo al teorema de Liouville, si no hay acople entre el movimiento en la dirección x y las otras direcciones, el área de la envolvente en el espacio de la traza, Ax, se mantendrá constante. En un sistema dónde las fuerzas actuantes sobre las partículas son lineales, es útil asumir una forma elíptica para esta distribución, entonces Ax =∫∫dxdx´=πXX´, siendo X y X´ los ejes mayores de la elipse. En este caso particular, la emitancia εx esta relacionada con el área de la elipse por
πε x
xAXX =′= . (19)
Como X´ es inversamente proporcional al momento p, ni el área ni la
emitancia se conservan cuando hay aceleración. Por esta razón, se introduce la emitancia normalizada εn=βγε, la cuál es constante de movimiento aún cuando hay aceleración. Para medir la calidad del haz interesa relacionar la emitancia con la dispersión de velocidades en valor cuadrático medio (rms). El valor rms de la emitancia normalizada, εn
rms, es función del ancho rms xrms y de la velocidad rms, vx
rms=(vx2)½. Esta última a su vez es proporcional a la temperatura transversal
del haz, Tb, medida en el sistema del mismo, vxrms=(kBTb/γm)½, donde, kB es la
constante de Boltzmann.
Modelos de óptica lineal de haz con espacio-carga Cuando las corrientes de haz son lo suficientemente grandes, los efectos de
espacio-carga hacen que la dinámica de haz sea matemáticamente más compleja. La distribución de partículas genera campos internos que alteran los campos

Modelización Aplicada a la Ingeniería Strangis, S.
423
externos, produciendo fuerzas que a su vez modifican la distribución de partículas. La interacción mutua de las partículas cargadas puede dividirse en una parte proveniente de una fuerza colectiva y otra de una fuerza debida a las colisiones. El potencial de espacio-carga para los campos provenientes de los efectos colectivos obedece la ecuación de Poisson y puede tratarse en forma equivalente a la de los campos externos. En la práctica, el efecto macroscópico de las colisiones es mucho menor y aparece en forma de fluctuaciones estadísticas en la distribución de partículas.
Una medida comparativa de estas dos interacciones esta dada por la longitud de Debye, λD. En un plasma neutro con igual densidad de iones positivos y negativos, n, una partícula cargada genera un exceso de potencial eléctrico que es efectivamente apantallado por la redistribución de cargas a una distancia λD, conocida como longitud de Debye. Este es un efecto conocido en física de plasmas como apantallamiento de Debye y puede ser aplicado a haces de partículas cargadas. La longitud de Debye para un plasma no relativista esta dada por la razón de la frecuencia de plasma, ωp, y la velocidad rms (λD= vx
rms/ωp.). En función de la temperatura transversal del haz medida en su propio sistema, Tb, tenemos λD=(ε0γkBTb/q2n)½. Para el modelado teórico de la dinámica de haces estacionarios, se pueden diferenciar tres regímenes en función de la razón entre λD y el radio efectivo del haz, a.
A altas temperaturas, altas energías y/o bajas densidades, λD>>a, no habrá apantallamiento, dominará el efecto de partícula simple y los campos propios pueden ignorarse. El efecto de las colisiones lleva a un perfil de densidades de cargas del estado estacionario con distribución Gaussiana de Maxwell-Boltzmann. No obstante, el movimiento puede describirse aplicando la óptica lineal a funciones suavizadas de las distribuciones de campos y cargas. Debido a la presencia de fuerzas no conservativas (colisiones), el teorema de Liouville no es aplicable en este caso.
En el caso intermedio, cuando la dispersión térmica de velocidades transversales se hace comparable a los efectos de los campos propios, λD ~ a, la densidad del perfil del haz estacionario no es uniforme. Las fuerzas debidas a los campos propios son no lineales. Como se verá mas adelante, se requiere un análisis no laminar, matemáticamente más complicado, utilizando la Teoría de Vlasov.
En el régimen de bajas temperaturas y/o altas densidades, la longitud de Debye es muy pequeña comparada con el radio del haz, λD<<a, los efectos colectivos predominarán. Matemáticamente, se puede despreciar la dispersión térmica de velocidades y usar un modelo de flujo laminar. La distribución de partículas en este caso es uniforme y la fuerza de espacio-carga es una función lineal de la posición en el interior del haz. Como la fuerza externa es también lineal, se puede considerar los efectos de espacio-carga utilizando el principio de

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
424
superposición. El tratamiento óptico en ausencia de espacio-carga de la sección anterior es válido y es posible aplicar el modelo de haz uniforme.
Modelo de haz uniforme
Sea un haz continuo en la dirección de propagación, cuya sección es circular de radio a, que viaja en el vacío dentro de un tubo de transporte cilíndrico de radio b, propagándose estacionariamente con flujo laminar. Las distribuciones de cargas y densidades de corriente son uniformes (ρ,J constantes) y axialmente simétricas en el volumen ocupado por el haz y que se anulan abruptamente fuera de este volumen. Asumiendo que las trayectorias de las partículas obedecen la condición de rayo paraxial (r´<<1, pr,pθ<<p), la componente axial Ez del campo eléctrico y la componente radial Br del campo magnético pueden ser despreciadas. Considérese además, que la diferencia de potencial eléctrico ∆Φ entre el eje del haz y la pared del tubo de transporte es despreciable frente al voltaje equivalente a la energía cinética de las partículas. Bajo estas condiciones, sólo hay componente radial del campo eléctrico Er y azimutal del campo magnético Bθ. De la ecuación de movimiento (7), la componente radial de la trayectoria es
.θβB
pqE
cpqr r −=′′ (20)
Por aplicación de la Ley de Gauss, se obtiene un campo Er lineal dentro del cilindro y proporcional a 1/r fuera de él. Similarmente, por aplicación de la Ley de Ampere, se obtiene la misma dependencia para la componente azimutal Bθ del campo magnético. Reemplazando estos campos en la ec. (20), se obtiene la ecuación de movimiento para una partícula en la posición radial r dentro del haz
,2 raKr =′′ (21)
).1(2 23
0
βγβ
−=IIK
(22)
donde I0≡4πε0mc3/q es la corriente característica y K la perveancia generalizada. Esta última se define por extensión de la perveancia, una cantidad es adimensional que caracteriza el haz en función de la razón I/V3/2, entre la corriente del mismo I y el potencial V equivalente a su energía.
Puede verse, de la expresión (22) que K>0. Esto conduce a un efecto de desenfoque en la ec. (21), cuyo significado físico es la divergencia del haz debido a la repulsión coulombiana. Cuando las velocidades se hacen relativistas el campo magnético propio compensa parcialmente esta repulsión. En este caso (1-β2)→0 y

Modelización Aplicada a la Ingeniería Strangis, S.
425
K≈0. La fuerza de espacio-carga es insignificante y las partículas siguen trayectorias rectilíneas.
La trayectoria de la envolvente, R(z), se obtiene sustituyendo r=a=R y r″=R″,
.RKR =′′ (23)
La solución de esta ecuación tiene la forma
,0
2
∫± ±x u due (24)
cuyos valores están tabulados. Debido al desenfoque, la pendiente inicial de la trayectoria, R´(z=0)=R´0, es nula o divergente (R´0≥0). En este último caso se puede usar una lente de enfoque en la entrada al tubo para obtener un haz convergente, R´0<0. De los valores tabulados de la ec. (24) se puede obtener una familia de curvas para la envolvente R(z,R´0). Para cada valor de R´0, existe una posición z en la trayectoria para la cuál la envolvente alcanza un mínimo, más allá del cual vuelve a ser divergente. Para R´0≈-0.92(2|K|)½ existe un máximo z=zm=2.16R0/(2K)½. Para un haz de radio inicial igual al del tubo (R0=a=b), de la expresión (22) se obtiene la máxima corriente que puede pasar a través del tubo de longitud L=2zm, sin que el haz colisione con las paredes del mismo
.166.12
330 ⎟
⎠⎞
⎜⎝⎛=
LbIIm γβ (25)
Cuando el haz diverge fuertemente, las condiciones de haz paraxial dejan de
cumplirse y el modelo de haz uniforme deja de ser válido. Una expresión mas precisa para el límite de corriente se debe a Bogdankevich-Rudkhadze (1971).
En ausencia de campos de enfoque, la fuerza de espacio-carga convierte la energía cinética en energía potencial electrostática y el haz se expande radialmente sin límites. Para contrarrestar este efecto se puede recurrir a la neutralización parcial de la carga. Cuando se hace circular el haz a través de un gas a muy baja presión, se producen efectos de ionización debido a las colisiones de las partículas del haz con las moléculas de gas. Las partículas de igual carga son rechazadas y las de carga opuesta quedan atrapadas dentro del plasma.
La reducción de la carga debida a la neutralización puede incluirse en la expresión (22) reemplazando el término (1-β2) por (1-β2-fe)=(1/γ2-fe). Para un haz de electrones, por ejemplo, el factor fe=np/ne es la razón entre la densidad de iones positivos, np, atrapados en el haz y la densidad de electrones, ne. Su valor varía entre 0 y 1 para neutralización nula o total. El campo magnético no se ve afectado

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
426
porque el flujo de las cargas atrapadas es despreciable frente a la corriente de haz. Para que sea válido el modelo paraxial, debe cumplirse R´´<<1 y por lo tanto |K|<<1, o sea fe>>1/γ2. Se puede establecer un valor crítico de corriente para un haz totalmente neutralizado, fe=1, conocido como corriente de Alfvén IA
.0βγII A = (26)
Cuando la corriente de haz se hace comparable a la corriente de Alfvén, el modelo pierde validez. Si se alcanza este límite, el campo magnético propio refleja las partículas hacia atrás y el haz deja de propagarse. Para aumentar IA, se puede provocar una neutralización magnética, inyectando por ejemplo, partículas de carga opuesta que se muevan con el haz (neutralización de carga y corriente).
Cuando la neutralización de cargas es tal que, fe>1/γ2, K<0 y se tiene el enfoque, el haz se colapsa para un z dado. Aquí el modelo falla, dado que las pendientes son muy grandes y no se puede aplicar el modelo paraxial. En la práctica esto no sucede porque el haz tiene emitancia no nula. Para un haz con emitancia finita ε, cuyas partículas tienen una distribución elíptica en el espacio de la traza r-r´, la ecuación de movimiento de la envolvente tiene un término adicional ε2/R3
.3
2
RRKR ε+=′′ (27)
Para valores infinitesimales de corriente, los efectos de espacio-carga son despreciables (K≈0). En este caso, la solución tiene forma hiperbólica para la envolvente y trayectorias rectilíneas para las partículas individuales. Cuando la corriente aumenta hay que resolver la expresión (27) numéricamente.
Los haces reales en general tienen perfiles de densidad no uniformes, sin embargo este modelo lineal provee información de mucho valor sobre el comportamiento promedio del haz y es una herramienta necesaria en el diseño y operación de aceleradores.
Ecuación paraxial
Las ecuaciones de movimiento de primer orden se pueden reformular combinando las propiedades de campos paraxiales, la conservación del momento angular canónico y de la energía obteniendo la ecuación de rayo paraxial. Ésta puede usarse para determinar la envolvente del haz en función de la posición longitudinal en términos de los potenciales electrostático y magnetostático. El modelo de haz uniforme es útil para incluir los efectos de espacio-carga en esta

Modelización Aplicada a la Ingeniería Strangis, S.
427
ecuación. Para un haz con emitancia finita, en presencia de campos aplicados y propios en la ecuación paraxial para la coordenada radial de la envolvente es
.122 3
2
3
22
22 RK
RRmcpR
mcqBRRR ++⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−′′
−′′−=′′
εγββγγβ
γγβγ θ (28)
Los tres primeros términos de la derecha representan los efectos de enfoque. El primer término contiene el efecto de variación de la pendiente R´ cuando la componente axial del campo eléctrico produce aceleración-desaceleración. El segundo término introduce el enfoque-desenfoque electrostático debido a la componente axial del campo eléctrico aplicado. Este término sólo es de importancia para electrones a bajas energías. El tercer término representa la fuerza de enfoque magnética aplicada debida a la componente longitudinal del campo Bz. Los últimos tres términos contienen los procesos de desenfoque. El cuarto término tiene relevancia cuando la fuente de partículas esta inmersa en un campo magnético, caso mas usual. Debido al flujo magnético encerrado por el haz en la fuente de partículas, las mismas son extraídas de la fuente con momento angular canónico pθ no nulo, siendo pθ=γmr2dθ/dt+qAθr. Los últimos dos términos agregan los efectos debidos a la emitancia y a los campos propios (espacio-carga), vistos anteriormente (Humphries, 1999).
En ausencia de los términos de desenfoque la ecuación paraxial (28) es una ecuación diferencial lineal de segundo orden. Sólo para algunas geometrías especiales esta ecuación tiene solución analítica. En la mayoría de los casos hay que recurrir a métodos numéricos para la solución de la misma. Cuando los campos aplicados pueden representarse por la aproximación de lentes delgadas, la solución para la envolvente se puede simplificar dividiendo el problema en varias secciones. Primero se considerará un haz sin emitancia ni espacio-carga que pasa a través de una lente delgada. La ecuación de movimiento correspondiente es lineal y su forma es simple cuando los campos externos pueden representarse por su matriz de transferencia. Las partículas individuales siguen trayectorias rectilíneas cuya pendiente cambia al atravesar la lente. En la siguiente sección sólo se consideran los efectos de espacio-carga y emitancia en el espacio libre entre lentes. Las trayectorias en este caso son descriptas por la expresión (27). La fuerza centrífuga se puede agregar al término de la emitancia, ya que tiene la misma dependencia radial.
Optica no lineal
El modelo de haz uniforme considerado en la sección anterior no satisface las ecuaciones de Maxwell en forma consistente cuando las suposiciones hechas son violadas (ρ, J y v independientes de las coordenadas transversales). En la práctica, hay muchos efectos no lineales que deben tenerse en cuenta, tales como no

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
428
uniformidades en los campos aplicados, crecimiento de emitancia, pérdida de partículas, etc., los cuales generan acoplamiento entre los movimientos transversal y longitudinal. Estos efectos deben considerarse en los modelos teóricos y códigos de simulación para que estos sean autoconsistentes.
Para entender el significado de esta autoconsistencia, se debe observar que cambios en la distribución de partículas producirán variaciones en los campos y las fuerzas asociados. A su vez, debido a estos cambios en los campos, la distribución de partículas se modificará. Por lo tanto, se tiene un circuito realimentado que debe formar parte del modelo autoconsistente. Matemática-mente, un problema es autoconsistente cuando las funciones que describen el problema, Φ(x), v(x), n(x) y J(x), están unívocamente relacionadas entre sí por las ecuaciones de Poisson, de continuidad y de conservación de energía y momentos. Así, basta elegir una de estas funciones y las otras quedan determinadas de manera autoconsistente.
Las dificultades matemáticas del problema de autoconsistencia son tales que sólo una cantidad muy limitada de problemas simples pueden resolverse analíticamente. En esta sección trataremos la ecuación autoconsistente de Vlasov, la cuál es aplicable a haces con flujo no laminar. Las distribuciones no laminares en canales de enfoque lineales que satisfacen la ecuación estacionaria de Vlasov son la distribución K-V (Kapchinsky-Vladimirsky) y la distribución de Maxwell-Boltzman. Esta última es el estado de equilibrio natural cuando las colisiones coulombianas entre partículas son consideradas. Las colisiones entre haces son tratadas con la ecuación autoconsistente de Focker-Planck, la cuál se reduce a la ecuación de Vlasov en ausencia de estas colisiones.
Modelo de Vlasov
Cuando el efecto de la dispersión de velocidades del haz es considerable en comparación con las fuerzas de espacio-carga el flujo no es laminar. Esta situación se representa por el término correspondiente a la emitancia en la ecuación paraxial de la envolvente. El modelo de Vlasov es el método más aceptado para describir haces estacionarios en forma autoconsistente. La ecuación de Vlasov, al igual que el teorema de Liouville, es válida para haces neutros o no dónde las colisiones entre partículas son despreciables.
Denótese por f(x,p,t) a la función de distribución para partículas cargadas idénticas, cuya integral en los momentos da la densidad de partículas n(x,t). La expresión del teorema de Liouville (18) aplicada a esta función de distribución es
.0=∂∂+
∂∂+
∂∂ p
px
xff
tf (29)
Esta expresión es conocida como ecuación de Vlasov-Poisson (Vlasov, 1945). Los potenciales escalar Φ y vector A representan la suma de los campos aplicados y

Modelización Aplicada a la Ingeniería Strangis, S.
429
los campos propios de las partículas. Las contribuciones de los campos propios están determinadas por la integral de f(x,p,t) en el espacio de momentos, de la cual se obtienen la densidad de carga ρ y de corriente J
( ) ( )∫= ,,,, 3 pdtfqt pxxρ (30)
( ) ∫= .),,(, 3 pdtfqt pxvxJ (31)
En el sistema de laboratorio, cuando la dependencia temporal es explicita hay
que resolver las ecuaciones de onda para Φ y A. Estas últimas, en conjunto con las expresiones (29), (30) y (31) determinan la dinámica autoconsistente de un haz que obedece al teorema de Liouville.
Los estados de equilibrio de la distribución de partículas cargadas están definidos por las soluciones independientes del tiempo (∂f/∂t=0) de las ecuaciones de Vlasov-Maxwell. La derivada temporal del momento mecánico, dP/dt, en la ecuación de Vlasov (29) es reemplazada por la expresión de Lorentz para la fuerza (6). Para que el sistema sea autoconsistente, la densidad de carga ρ y de corriente J en las ecuaciones de Maxwell son reemplazadas por sus correspondientes expresiones (30) y (31).
Para cualquier función de distribución arbitraria que dependa únicamente de constantes de movimiento, su derivada total respecto del tiempo será nula, dado que todas sus derivadas parciales lo son. Por lo tanto, la solución a la ecuación de Vlasov no es única, cualquier función de distribución arbitraria que dependa únicamente de las constantes o integrales de movimiento es solución de la misma. La clase de problemas más importantes que puede tratarse por el método de Vlasov, sin excesivas dificultades matemáticas, son aquellos en los cuales el problema puede separarse en sus componentes longitudinal y transversal.
En el sistema de coordenadas del haz, donde el movimiento de las partículas es no relativista, la velocidad de la distribución como conjunto es nula, por lo tanto la fuerza magnética es nula. El potencial de espacio-carga, Φs, se obtiene integrando la ecuación de Poisson,
( ) ( ).,,0
2
ερ tts
xx −=Φ∇ (32)
La ecuación de Vlasov correspondiente, en función de los vectores de campo eléctrico aplicado y de espacio-carga, Ea y Es, es
( ) .0=+∂∂+
∂∂+
∂∂= sam
qfftf
dtdf EE
vv
x (33)

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
430
Cuando se consideran las colisiones coulombianas aleatorias, la ecuación de
Vlasov deja de tener validez, dado que la derivada temporal total de la función de distribución ya no es nula, sino que es igual a la tasa de cambio de la función de distribución debida a estos efectos, [∂f/∂t]c,
( ) .c
sa tf
mqff
tf
dtdf
⎥⎦⎤
⎢⎣⎡
∂∂=+
∂∂+
∂∂+
∂∂= EE
vv
x (34)
Esta expresión se conoce como ecuación de Boltzmann-Vlasov. El término derecho puede modelarse como un proceso de difusión al cuál se le opone una fuerza de fricción: [∂f/∂t]c=βf∂(vf)/∂v+D∂2f/∂v2 (Jansen, 1990), donde βf es el coeficiente dinámico de fricción y D es el coeficiente de difusión. En este caso, la ecuación de Boltzmann-Vlasov toma la forma conocida como ecuación de Focker-Planck. Esta ecuación junto con la (32) para Φs representan una descripción autoconsistente en el espacio-tiempo para la función de distribución f.
Distribuciones M-B y K-V
La solución no relativista a la ecuación de Focker-Planck es la distribución de Maxwell-Boltzmann (M-B),
( ) .)(21exp2
,22/3
⎥⎦
⎤⎢⎣
⎡ Φ+−⎟⎟⎠
⎞⎜⎜⎝
⎛=
Tkqmv
Tkmf
BB
xvxπ
(35)
En ausencia de potencial aplicado, las derivadas temporales y parciales de la función de distribución se anulan. A diferencia de la ecuación de Vlasov, la ecuación de Focker-Planck tiene una única solución estacionaria. La misma es una distribución Gaussiana en las componentes de la velocidad y coincide con la distribución de Maxwell de la mecánica estadística,
( ) .2
exp2
22/3
⎥⎦
⎤⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛=
Tkmv
Tkmf
BBπv (36)
Esta se puede obtener integrando la ec. (35) sobre las coordenadas espaciales, donde la masa y temperatura se relacionan con los coeficientes de fricción y difusión por D/βf=kBT/m. Si en cambio, la integración se realiza sobre las velocidades, se obtiene la relación de Boltzmann para la densidad de partículas,

Modelización Aplicada a la Ingeniería Strangis, S.
431
( ) ( ) .exp0 ⎥⎦
⎤⎢⎣
⎡ Φ−=Tk
qnnB
xx (37)
En ausencia de fuerza de enfoque y de fricción (Φa=0 y βf=0) no hay solución
estacionaria, la distribución de partículas se expande en el espacio-tiempo. Cuando hay potencial aplicado y la fuerza de fricción es nula (Φa≠0 y βf=0) existe equilibrio pero pueden existir pérdidas a altas energías. Estas se deben a que la energía cinética de algunas partículas exceden los límites del potencial de confinamiento a causa de la expansión de la distribución de cargas. Ejemplos de estas pérdidas se dan en los anillos de almacenamiento y limitan el tiempo de vida del haz en el mismo.
La distribución microcanónica es conocida en mecánica estadística como aquella en la cual las fuerzas son lineales y las áreas en el espacio de fase permanecen constantes. Kapchinsky y Vladimirsky utilizaron esta distribución para estudiar los efectos de espacio-carga en la dinámica de haz transversal. Su modelo autoconsistente se conoce como distribución K-V (Kapchinsky and Vladimirsky 1959). Para que las fuerzas transversales sean lineales, las condiciones de haz paraxial deben cumplirse. Adicionalmente, las fuerzas longitudinales se podrán despreciar si los cambios de tamaño del haz ocurren suavemente. Como resultado de estas simplificaciones, la distribución microcanónica K-V es la única que produce ecuaciones lineales de movimiento desacopladas. Esta distribución es aplicable a haces con sección transversal elíptica, en campos de enfoque con fuerzas aplicadas lineales, las cuales pueden diferir en las direcciones transversales. Esta teoría es una aproximación muy útil para la mayoría de los aceleradores donde la corriente de haz no está limitada por espacio-carga.
Técnicas y Herramientas para diseño de aceleradores Como hemos mencionado anteriormente, los aceleradores juegan un rol muy
importante en distintos ámbitos de la física básica y aplicada. El diseño de futuros aceleradores requiere la capacidad de generar modelos de alta resolución numérica, tanto para reducir los costos y riesgos tecnológicos, como para mejorar la eficiencia, rendimiento y confiabilidad de los mismos. Los modelos mas avanzados deben combinarse con la tecnología informática actual para aprovechar su capacidad al límite. Técnicas similares deben aplicarse tanto al diseño de los componentes del acelerador como a la simulación de la dinámica del haz. Los enormes números de partículas simulados en la dinámica de haz requieren una desmesurada capacidad de almacenamiento de datos.
Para cada tipo de partícula a acelerar, dos tópicos principales deben analizarse al diseñar un acelerador; la estructura del mismo y la dinámica del haz. Una vez establecido el tipo de acelerador a utilizar y el objetivo a alcanzar en términos de

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
432
los parámetros del haz, comienza un proceso iterativo. Este proceso involucra distintos métodos de aproximarse al diseño final. Inicialmente es suficiente con realizar algunos cálculos básicos que no requieren más que lápiz, papel y una calculadora de bolsillo. Con esto basta para desarrollar un modelo, entender la física básica del mismo, verificar los órdenes de magnitud involucrados y estimar si el diseño propuesto es capaz de alcanzar las características de haz deseadas. En una segunda aproximación, se pueden realizar cálculos analíticos basados en modelos simplificados, como ser la ecuación paraxial, para analizar la dinámica del haz en el modelo propuesto. Finalmente, hay que recurrir a los programas de seguimiento de partículas para obtener información mas precisa (Rinolfi, 1996).
Tradicionalmente, los métodos disponibles para el análisis de los campos electromagnéticos involucrados en cada componente se dividían entre los campos experimental y teórico. Con la globalización del uso de las computadoras se abrió una rama numérica de la física teórica, la cuál permite tratar geometrías complicadas que anteriormente estaban fuera del alcance práctico. Históricamente estas geometrías debían tratarse por métodos experimentales construyendo modelos a escala. Sus características se investigaban, para cavidades de RF por ejemplo, con tanques electrolíticos o introduciendo perturbaciones y midiendo parámetros tales como coeficientes de transmisión y reflexión. Los resultados de extensos cálculos numéricos se compilaban en forma de tablas para facilitar su uso al tratar problemas similares.
Algunos métodos actuales se basan en suposiciones que permiten tratar los casos más sencillos, por ejemplo explotando simetrías geométricas para poder trabajar en dos dimensiones (2D). Los métodos más avanzados representan el mundo real por un sistema de ecuaciones simples que aproximan el mismo comportamiento. Las ventajas del alto poder y bajo costo de las computadoras actuales son el nivel de refinamiento en la discretización de los problemas y la velocidad de cálculo.
Métodos experimentales
Los métodos experimentales para estudiar los campos en estructuras tridimensionales (3D) generalmente utilizan algún tipo de sonda que interactúa con el mismo para producir una cantidad mesurable. Esta cantidad puede ser una corriente, voltaje, variación en la frecuencia de resonancia, algún cambio visible u otra propiedad física. La introducción de sondas produce perturbaciones en los campos a medir. En aplicaciones de alta potencia de RF, una pequeña fracción puede ser suficiente para producir efectos visibles que aporten información cualitativa sobre la distribución del campo sin perturbarlo significativamente. En este caso, se puede utilizar dispositivos que convierten pequeñas fracciones del campo en luz, tales como un lazo conectado a un tubo fluorescente. O en calor, tales como laminas resistivas en guías de onda cuyo cambio térmico puede hacerse visible o monitorearse electrónicamente.

Modelización Aplicada a la Ingeniería Strangis, S.
433
Para obtener un barrido de los campos de RF que provea información cuantitativa precisa, se introduce deliberadamente un objeto que produzca una pequeña perturbación cuyo efecto sea mesurable en una cantidad tal como la frecuencia de resonancia de una cavidad, la impedancia, la potencia transmitida o reflejada de una línea de transmisión, etc. Estos métodos son generalmente utilizados para caracterizar campos de aceleración en cavidades de RF y linacs. Instrumentos tales como osciloscopios con anchos de banda de varias decenas de gigaHertz (GHz), analizadores de espectro y de red simplifican las mediciones para caracterizar los campos de RF (Caspers, 1992). A diferencia de un osciloscopio que muestra la señal en el dominio temporal (amplitud-tiempo), los analizadores de espectro caracterizan la misma en el dominio de frecuencias (amplitud-frecuencia). Hoy día, esto se logra utilizando trasformadas rápidas de Fourier (FFT) sobre la señal amplitud-tiempo digitalizada en tiempo real. Los analizadores de red se dividen en escalares y vectoriales. Los escalares miden el módulo de coeficientes complejos de transmisión y reflexión utilizando un generador de RF y un dispositivo para medir potencia de RF, tal como un diodo Schottky. Los analizadores de red vectoriales miden además la fase utilizando un segundo generador de RF.
Los electroimanes usados en aceleradores requieren tolerancias muy ajustadas en sus campos magnéticos y en su posicionamiento geométrico. Las técnicas de diseño, construcción, medición y alineamiento deben adecuarse a estos requisitos. Debido a que la longitud de onda de las oscilaciones de las partículas es mucho más grande que el tamaño de los imanes, sólo las mediciones de la integral del campo magnético y de sus derivadas en la dirección del eje del haz son de importancia. Desde los comienzos del electromagnetismo, un método muy preciso utilizado para medir los campos magnéticos es a través de la forma integral de la ley de inducción de Faraday (1). Este método es el único que permite determinar con precisión la dirección de las líneas de flujo magnético. Por esto, hoy día es el más utilizado en imanes para aceleradores de partículas. Las mediciones se efectúan utilizando bobinas fijas o móviles, según se trate de campos dinámicos o estáticos. Otros métodos que se utilizan para medir los campos magnéticos son el del generador de Hall, efectos magneto-resistivos, el magnetómetro de saturación ("Fluxgate magnetometer"), basado en la saturación de materiales magnéticos, y la técnica de resonancia magnética, la cuál es la más precisa en la actualidad (Henrichsen, 1992). Algunas técnicas visuales cualitativas para estudiar la distribución geométrica del campo magnético consisten en distribuir polvo de hierro, utilizar una brújula, líquido polarizable ubicado entre lentes de polarización (efecto Faraday) o el método del alambre flotante.
Métodos numéricos
Predominantemente, tres métodos numéricos son aplicados con éxito en diferentes áreas de la física, tales como mecánica del continuo, dinámica de

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
434
fluidos, acústica, y electrodinámica; la técnica de integración finita (en inglés FIT), el método de las diferencias finitas (en inglés FDM) y el método de elementos finitos (en inglés FEM).
En la técnica de integración finita (FIT) (Wieland, 1977), la forma integral de las ecuaciones de Maxwell se resuelve directamente. Siguiendo una sugerencia de Yee (1966), se utilizan los campos electromagnéticos o las densidades de flujo directamente, en lugar de utilizar funciones intermedias como los potenciales. La discretización espacial se lleva a cabo por integración de las ecuaciones diferenciales sobre un cierto volumen de control o celda de integración. La discretización temporal se efectúa por diferencias centrales de segundo orden en el tiempo. Este método es aplicable tanto a partículas moviéndose libremente en campos homogéneos o inhomogéneos, lineales y no lineales, estáticos o dependientes del tiempo, así como al diseño de imanes, cavidades resonantes, guías de ondas etc. La geometría del problema se divide en grillas con celdas cuyo tamaño y forma no son necesariamente homogéneos. Cada celda se caracteriza por las propiedades del material que ocupa la misma. Las ecuaciones de Maxwell son llevadas a una forma matricial discreta, la cuál es conveniente para su implementación a gran escala en computadoras (Wieland, 1984).
El método de diferencias finitas (FDM) fué introducido por Yee (1966) para discretizar la forma diferencial de las ecuaciones de Maxwell. En este método, las ecuaciones diferenciales parciales acopladas que describen la física del problema se discretizan en el tiempo y el espacio directamente usando diferencias centrales, las cuales resultan en una solución explícita.
En el método de elementos finitos (FEM), en lugar de discretizar las ecuaciones básicas de la física directamente, estas son resueltas usando el principio variacional para minimizar la función energía correspondiente. La discretización temporal puede llevarse a cabo explícitamente por diferencias centrales o implícitamente por métodos tales como el de integración de Newmark.
Dinámica de haces
En los sistemas reales, los efectos no lineales debidos a aberraciones, resonancias y perturbaciones juegan un rol muy importante. Parámetros como la calidad y la estabilidad del haz son determinados por la capacidad de controlar tales efectos. Para que el acelerador opere apropiadamente es necesario conocer la estabilidad del haz a lo largo del proceso de aceleración y transporte del mismo. Para este propósito, se utiliza un parámetro conocido como apertura dinámica o área de estabilidad. Para un gran número de partículas distribuido uniformemente, ésta se define como la proyección de las partículas que salen de la sección de aceleración en estudio sobre el área transversal a la entrada de la misma. No existen métodos analíticos capaces de calcular los límites de la apertura dinámica, con excepción de algunos casos limitados. El modo más eficiente de determinar

Modelización Aplicada a la Ingeniería Strangis, S.
435
las características de estabilidad del haz para un caso particular es el la simulación de la dinámica del haz por códigos de seguimiento de partículas.
Los programas de seguimiento necesitan configurar la entrada de datos en forma de una disposición lineal consecutiva de componentes. Luego el programa sigue la pista de una o múltiples partículas simulando el haz. Los efectos no lineales se incluyen sistemática o estadísticamente como lentes finas en forma de imanes multipolares aislados. Adicionalmente, el momento de la partícula puede tener una cierta desviación fija o puede oscilar alrededor del momento promedio del haz para simular oscilaciones betatrón.
Cuando la función de distribución se desvía de la forma de Maxwell-Boltzmann (35), la solución de la dinámica no se puede obtener por integración de la misma y hay que resolver la ecuación de Boltzmann-Vlasov (34) numéricamente. Los códigos de Vlasov resuelven esta ecuación diferencial por diferencias finitas en el espacio Euleriano de 6 dimensiones. Estos códigos son costosos desde el punto de vista computacional, ya que deben incluir vastas regiones vacías como parte de las matrices numéricas. Una opción más eficiente es hacer uso del método de elementos finitos. En este caso, la función de distribución se muestrea utilizando elementos finitos en fase fluida (FEFF). El centro de la función de distribución es transportado por la fase fluida a lo largo de las características de la ecuación de Boltzmann-Vlasov. El elemento finito en fase fluida sigue de este modo las ecuaciones relativistas de movimiento (7) y (8). La matriz del espacio de configuraciones tiene sólo 3 dimensiones en este caso ya que solo necesita mantener información de los espacios ocupados por partículas.
El método Particle-In-Cell (PIC) es el mas ampliamente utilizado para estudiar la dinámica del haz en aceleradores de partículas. Este método se basa en generar macro-partículas con la misma relación carga-masa que las partículas reales del haz. Estas macro-partículas pueden considerarse como una nube de partículas individuales que ocupa un volumen finito en el espacio y que se mueven juntas a la misma velocidad a lo largo de caminos lagrangianos en el espacio de fase de seis dimensiones bajo la influencia de la fuerza de Lorentz. Las macro-partículas interactúan entre sí en el código PIC a modo de haz numérico, similarmente a las partículas reales del haz bajo la acción de los campos propios. La diferencia es que son muy menores en número y cada una sustituye a muchas partículas reales. La suposición que las partículas dentro de una macro-partícula viajan juntas a la misma velocidad en general no se aleja mucho de la realidad. Tal como en otros códigos de simulación, los parámetros del modelo, tales como tamaño de celda, número de macropartículas, etc., deben elegirse cuidadosamente. De lo contrario, pueden aparecer resultados artificiales, como ser un crecimiento irreal de la emitancia debido a las colisiones entre macro-partículas en el haz numérico.
Introduciendo las ecuaciones de Maxwell estacionarias (2) y (4) en las condiciones iniciales del código PIC, el problema se reduce a resolver las dos restantes ecuaciones de Maxwell (leyes de Ampere y Faraday). En cada paso

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
436
temporal, la información se intercambia entre celdas vecinas (algoritmo local). Esta propiedad hace que los códigos PIC sean fácilmente adaptables para computación en paralelo y reduce la influencia de las condiciones de contorno no físicas. Básicamente un código PIC electrostático se divide en cuatro partes principales para efectuar los pasos temporales: (a) depósito de cargas para generar la distribución inicial de las mismas, (b) integración de las trayectorias de macro-partícula, (c) redistribución de la densidad de cargas, y (d) solución de los campos propios. Los pasos (b) a (d) se repiten tantas veces como sea necesario. Los pasos de redistribución y depósito (a) y (c) se caracterizan por tener referencias a la memoria que son aleatorias y cambian de un paso temporal al siguiente. Esto es un reto a los sistemas de memoria de almacenamiento, los cuales están optimizados para patrones regulares de acceso.
En los programas que permiten la visualización del haz, el método actual mas generalizado involucra la simulación numérica representando las partículas por un vector de seis dimensiones en el espacio de fase. Las coordenadas y momentos de las partículas, sus campos propios y las fuerzas externas se actualizan a medida que las partículas avanzan a través de los distintos componentes del acelerador. La visualización de las partículas puede ser directa, por representación volumétrica de densidades o por combinación de ambas técnicas (Wilson et al, 2002).
Códigos de computación para aceleradores de partículas
Desde los sesenta, existen programas para la dinámica del haz y el diseño de aceleradores de partículas. La precisión y utilidad de los mismos era frecuentemente limitada por la velocidad de los procesadores y la disponibilidad de memoria de almacenamiento rápida y suficiente. En los últimos años estas limitaciones han sido superadas y los programas pueden ser corridos aún en computadoras de escritorio. Con cada generación de aceleradores aparecen nuevas limitaciones en los códigos existentes que llevan a la modificación de los mismos o la creación de nuevos programas. Estos códigos, en general están agrupados en paquetes de software cuyos módulos tienen funciones específicas. Algunos de estos sirven tanto para el diseño de componentes como para la dinámica del haz. Esto dificulta un poco la tarea de clasificación de los mismos. En esta sección se brindará una introducción a algunos de los códigos de computación utilizados en la actualidad. Para una visión mas completa y actualizada de los códigos para aceleradores de partículas se recomienda acceder a la base de datos del Grupo de Código para Aceleradores de Los Alamos (LAACG)§.
En general, los programas incluyen pre-procesadores y post-procesadores, los cuales facilitan la entrada de datos y el análisis de resultados respectivamente. Un factor a ponderar son los formatos de archivo que se utilizan para la entrada de datos y para los archivos de salida. Es beneficioso, por ejemplo, si los archivos de
§ Véase el sitio web http://laacg1.lanl.gov/laacg

Modelización Aplicada a la Ingeniería Strangis, S.
437
entrada conteniendo los campos electromagnéticos necesarios para un código de simulación pueden obtenerse directamente de archivos de salida de otros códigos. La posibilidad de utilizar archivos con campos electromagnéticos experimentales creados por la propia persona que los midió elimina errores de pasaje de datos. Los códigos más potentes están preparados para correr en grandes ordenadores. Algunos de ellos aprovechan las ventajas de la computación en paralelo.
La familia de códigos POISSON/SUPERFISH-PANDIRA es ampliamente utilizada para el diseño y análisis de imanes y cavidades de RF en aceleradores lineales. Estos códigos son aplicables a problemas con geometría bidimensional, en coordenadas cartesianas o cilíndricas. SUPERFISH se utiliza para cálculos de de frecuencias de resonancias y campos en cavidades de RF manipulando dieléctricos y materiales magnéticos lineales (Halbach y Holsinger, 1976). POISSON se aplica para cálculos magnetostáticos. En lugar de resolver directamente la ecuación de Poisson, el procedimiento numérico resuelve una forma de la Ley de Ampere sobre una región cerrada dividida en celdas triangulares. El procedimiento es iterativo usando sobre-relajación sucesiva (SOR). El tercero de estos códigos, PANDIRA, se utiliza para cálculos magnetostáticos, incluyendo materiales para imanes permanentes, utilizando eliminación Gaussiana. Desde 1992, esta familia de códigos ha sido mantenida y distribuida por el Grupo de Código para Aceleradores de Los Alamos (Krawczyk et al, 1995).
FQ conceptual design at 201.25 MHz F = 201.24987 MHz
2
4
6
8
10
12
14
16
Figura 1. Ejemplo de diseño conceptual de un cuadrupolo de radiofrecuencia
(RFQ) a 201.25 MHz usando SUPERFISH. Acelerador de Los Alamos Neutron Science Center (LANSCE). Copyright © 1998, Universidad de California.

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
438
El código MAFIA (solution of Maxwell equations by the Finite Integration Algorithm) se usa para el análisis y diseño de estructuras electromagnéticas tridimensionales y para el análisis de la dinámica del haz por el método PIC. MAFIA es un programa modular que usa la técnica de integración numérica (FIT) para producir un conjunto de ecuaciones de diferencias finitas para los vectores de campo eléctrico y magnético. Estas ecuaciones proveen soluciones para las ecuaciones de Maxwell en los dominios temporal y de frecuencias. La salida de un módulo en particular se utiliza a su vez como entrada para el siguiente. MAFIA usa una rutina de generación de reticulado rectangular suficientemente flexible para modelar las geometrías mas complejas. El usuario puede especificar el “granulado” de la retícula para un área de interés particular (The MAFIA Collaboration, 1997).
EGU
N
FLU
X 2
D/3
D
ISIS
MA
D
MA
FIA
M
AG
IC
PAN
DIR
A
PAR
MEL
A
PAR
MIL
A
POIS
SON
REL
AX
2D
/3D
SCA
LA
SUPE
RFI
SH
TOSC
A
TRA
NSP
OR
T
TUR
TLE
Cavidades de RF
Imanes
Dis
eño
de
com
pone
ntes
Fuentes de iones y
electrones
Linacs Ciclotrones
Aceleradores circulares
Din
ámic
a de
ha
z
Líneas de transporte
FIT
MEF
DF
PIC Mét
odos
N
umér
icos
Matricial
3D 2 ½
Dim
.
2D
Tabla 1: Características de algunos de los códigos más populares para la dinámica de haz y el diseño de componentes en aceleradores.

Modelización Aplicada a la Ingeniería Strangis, S.
439
OPERA-3D es otro paquete de análisis tridimensional. Algunos de sus módulos de análisis son: TOSCA y SCALA. TOSCA, es un módulo para análisis estático. Este puede ser usado para calcular flujo de corriente, campos magnetostáticos o electrostáticos, incluyendo efectos de medios no lineales en 3D. El programa utiliza técnicas de elementos finitos avanzadas y procedimientos de análisis numérico para ecuaciones no lineales. Por su parte, SCALA es un módulo para análisis de espacio-carga.
PARMELA y PARMILA son programas multi-partícula típicos para el estudio de partes de aceleradores lineales de electrones e iones respectivamente. Se aplican para bajas energías en la presencia de efectos espacio-carga. Estos programas hacen seguimiento de partículas a través de campos previamente calculados por un programa de diseño de cavidades e incluyen impulsos espacio- carga, calculados mediante una rutina PIC.
TRANSPORT y TURTLE son programas que usan el formalismo matricial para estudiar la dinámica del haz en líneas de transporte.
Conclusiones Las órbitas en sistemas ópticos complejos con muchos elementos de enfoque
pueden calcularse usando las correspondientes matrices de transferencia. El álgebra matricial provee información sobre las trayectorias en los límites de las lentes. Cuando se desea información más detallada de las trayectorias en el interior de las lentes o para algunos aceleradores dónde la óptica matricial no es aplicable, como el betatrón, hay que recurrir a métodos numéricos para solucionar la ecuación paraxial sobre el sistema óptico como conjunto.
El modelo lineal de haz uniforme utilizado para hallar la ecuación paraxial con espacio-carga y emitancia provee información valiosa sobre el comportamiento promedio de un haz cilíndrico y es una herramienta necesaria en el diseño y operación de aceleradores. Los haces reales en general tienen perfiles de densidad no uniformes y debe utilizarse el modelo de Vlasov para obtener resultados mas precisos. La distribución de K-V es una solución paraxial a la ecuación de Vlasov que provee ecuaciones desacopladas en las coordenadas transversales cartesianas. La distribución M-B es solución no laminar de las ecuaciones de Vlasov-Boltzmann y Focker-Planck en canales de enfoque lineales. Cuando se consideran los efectos no lineales se debe resolver numéricamente la ecuación autoconsistente de Vlasov-Boltzmann. Los modelos numéricos son indispensables para el entendimiento de la dinámica del haz y el diseño de sus componentes. No obstante sólo los modelos analíticos permiten un entendimiento conceptual de la física de haces de partículas.

Aceleradores de partículas: modelos para su diseño y dinámica del haz Strangis, S.
440
Referencias Bogdankevich, L.S., Rukhadze, A.A. (1971), Usp.Fiz.Nauk 103: 609.
Bryant, P.J. (1994), “A brief history and review of accelerators”, CAS-CERN 94-01(1): 1-18.
Caspers, F. (1992), “Measurements”, CAS-CERN 92-03(1): 220-244.
Halbach, K. y Holsinger, R.F. (1976), `SUPERFISH - a computer program for evaluation of RF cavities with cylindrical symmetry', Part. Accel. 7: 213.
Henrichsen, K.N. (1992), “Classification of magnetic measurement methods”, CAS-CERN 92-05: 70-83.
Humphries, S. Jr., “Principles of Charged particles acceleration”, digital edition, Stanley Humphries, Jr., 1999.
Jackson, J.D. (1980), “Electrodinámica clásica”, 2da. Edición, Editorial Alambra, Madrid.
Jansen, G.H. (1990), “Coulomb interations in particle beams”, Academic Press, Nueva York.
Kapchinsky, I.M., Vladimisrsky, V.V. (1959), Proc. International Conference on High Energy Accelerators, CERN: 254.
Krawczyk, F., Billen, J.H., Ryne, R.D., Takeda, H., Young, L.M. (1995), “The Los Alamos code group”, PAC 95: 2306-8.
Livingood, J. (1961), “Principles of Cyclic Accelerators”, Van Nostrand.
Livingston, M.S., Blewett, J., (1962), “Particle Accelerators”, Mc-Graw Hill.
Reiser, M. (1994), “Theory and design of charged particle beams”, J. Wiley & Sons, Nueva York.
Rinolfi, L. (1996), “Computational tools for accelerator design”, CAS-CERN 96-02: c. 21.
The MAFIA Collaboration, (1997), "User Guide MAFIA", CST GmbH, Darmstadt.
Vlasov, A.A. (1945), “On the kinetic theory of an assembly of particles with colective interactions”, J. Phys., USSR 9: 25.
Weiland, T. (1977), Electronics and Communication AEÜ, 31: 116.
Weiland, T. (1984), “On the numerical solution of Maxwell´s equations and applications in the field of accelerator physics”, Particle Accelerators 15: 245-292.
Wiedemann, H. (1993), “Particle accelerator physics”, Springer-Verlag, Berlin.

Modelización Aplicada a la Ingeniería Strangis, S.
441
Wilson, B., Ma, K.L., Qyang, J. y Ryne, R. (2002), “Interactive visualization of particle beams for accelerator design”, P.M.A. Sloot et al 2331: 352-361.
Yee, K.S. (1966), “Numerical solution of initial boundary value problems involving Maxwell’s equations in isotropic media”, IEEE Transactions on Antennas and Propagation, 40(3): 302-307.

Modelización Aplicada a la Ingeniería
442
Aplicación de estrategias de adaptación biológica a la optimización de formas estructurales
CAROLINA WESSELa ADRIAN P. CISILINOa Y BERARDI SENSALEb
a División Soldadura y Fractomecánica, INTEMA, Universidad Nacional de Mar del Plata, CONICET. Argentina
b Instituto de Estructuras y Transporte, Facultad de Ingeniería,
Universidad de la República, Uruguay
Introducción La presencia de concentradores de tensión en estructuras en servicio da
frecuentemente lugar a la propagación de fisuras, y los consecuentes accidentes catastróficos. Es por esta causa que la optimización para reducir tensiones ha sido durante largo tiempo un tema de sumo interés en la comunidad ingenieril, como puede verse en Belegundu y Chandrupatla (1999). Las estrategias determinísticas para la optimización estructural pueden clasificarse en métodos de programación matemática, por un lado, y métodos basados en criterios de optimalidad, por el otro.
Entre los primeros, que hacen uso de extensamente estudiadas herramientas matemáticas, pueden citarse los métodos directos (Trosset, 1997, Dennis y Torczon, 1991, Roekaerts y Schwarz, 1987), los métodos llamados “derivative free” (Lucidi et al, 2002, Lucidi and Sciandrone 2002, Zhu and Wu 2003, Lewis et al, 2000, Peng, 1998, Platen, 1987, Conn et al, 2000) y los denominados “gradientless” (Schnack, 1988 a), Schnack, 1988 b), Schnack et al, 1988, Schnack and Iancu, 1989, Schnack and Iancu, 1991, Schnack and Iancu, 1993).
Los segundos, vale decir, los métodos basados en criterios de optimalidad, hacen uso de información física y mecánica del problema particular (Sauter et. al. 1996), proporcionando condiciones necesarias para que exista un mínimo de la función objetivo. Ese conocimiento físico y mecánico es, a su vez, su principal desventaja, ya que limita la aplicación de criterios de optimalidad a determinadas áreas específicas.
La naturaleza ofrece múltiples ejemplos en los que las estructuras biológicas se adaptan a las condiciones de carga. Es por ello que resulta de gran interés estudiar su comportamiento para copiar su estrategia de adaptación. Un ejemplo clásico de adaptación natural es el de cambio de forma que presenta el tejido óseo ante la variación del estado tensional al que se ve sometido. Pueden citarse (Goodship y Cunningham, 2001) infinidad de ejemplos, tal como el de la pérdida significativa de masa ósea en los miembros inferiores de astronautas sometidos a microgravedad durante los vuelos espaciales. Se han construido numerosos

Modelización Aplicada a la Ingeniería Wessel, C et al.
443
dispositivos, como el clásico modelo in vivo sobre cúbitos de pavo (descritos por ejemplo en (Lanyon y Rubin, 1984) o (Lanyon et al, 1982), los cuales han mostrado el efecto de tensiones, deformaciones, velocidad de carga, etc. sobre tejido óseo.
Entre los métodos basados en criterios de optimalidad cabe mencionar el método de crecimiento biológico (en inglés BGM). Puede incluirse, también, entre aquellos que intentan imitar a la naturaleza y que pueden aplicarse en todo tipo de estructuras. Fue formulado por (Mattheck, 1990) basándose en sus observaciones sobre crecimiento de cornamentas y árboles. Como se describirá con detalle en la próxima sección, a partir de la definición de diseño óptimo como aquel para el cual las tensiones son uniformes en parte o toda la superficie de la estructura, Mattheck sostuvo que la naturaleza siempre optimiza sus diseños hasta alcanzar ese estado óptimo. Fue un paso más allá al afirmar que el fenómeno de optimización para la uniformización se da en un delgado estrato superficial de módulo de Young reducido en el que puede observarse la expansión o contracción. El ejemplo más claro resulta el de los árboles: exclusivamente la corteza modifica su geometría para adaptarse a la variación del estado tensional. Las ideas de Mattheck han sido implementadas hasta el momento utilizando el llamado método de elementos finitos (en inglés FEM) (Mattheck y Burkhardt, 1990, Mattheck y Huber-Betzer, 1992, Chaperon, 2001, Li et al, 1999, Tekkaya and Güneri, 1995). En este trabajo, a diferencia de éstos, se ha implementado BGM a través del llamado método de elementos de contorno (en inglés BEM).
Por otro lado, con respecto a los criterios de optimización basados en la observación del fenómeno de adaptación1 de huesos y que se aplican exclusivamente en este tipo de tejidos, se ha llevado a cabo extensa investigación y se han propuesto formulaciones íntegramente disímiles (una interesante revisión puede consultarse en (Hart, 2001). Dado que la variación en la geometría en tejido óseo se da por aposición, todas ellas consideran fenómenos puramente superficiales. Todas las formulaciones citadas, tanto como BGM, son modelos fenomenológicos, que prescinden de consideraciones biológicas pero pueden contrastarse fácilmente con observaciones clínicas (Cowin, 2004) y han arrojado resultados cualitativamente correctos al ser aplicados a casos clínicos concretos. Cabe destacar dentro de ellos el método de elasticidad adaptiva (en inglés MAE), propuesto por (Cowin y Hegedus, 1976), el cual postula que, en el estado óptimo las deformaciones son uniformes. En este trabajo se mostrarán los resultados obtenidos al implementar MAE por medio del método de elementos de contorno.
1 En la literatura específica de tejidos óseos suelen encontrarse dos términos asociados al proceso de adaptación. Modelado se refiere al cambio en las superficies externa e interna del hueso; remodelado suele reservarse para el proceso por el cual el hueso se regenera, sin variar su geometría. Para evitar confusión con el término modelado numérico se ha optado por utilizar adaptación.

Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
444
,1 )σ=k(σdtdv
v=e refvmsw -
El método de elementos de contorno (BEM) se ha convertido en una alternativa ventajosa al FEM ya que sólo requiere el modelado del contorno de la estructura (y no la de todo el dominio), mientras que los resultados que provee son precisos tanto en desplazamientos como en tensiones en el contorno (Brebbia et. al, 1984). Ya que, por ejemplo, el fenómeno de uniformización de tensiones se da en BGM en el dominio cercano a la superficie de la estructura, su implementación a través del BEM resulta especialmente atractiva, ya que este último requiere exclusivamente de la discretización del contorno del problema.
Se presenta en este trabajo un algoritmo numérico evolutivo para la optimización de estructuras bidimensionales. Este algoritmo utiliza el método de elementos de contorno (BEM) para implementar, en primer lugar, el método de crecimiento biológico (en inglés BGM) y, en segundo, el método de elasticidad adaptiva (MAE). Se emplean aquí dos formulaciones distintas de BEM; la estándar (para calcular tensiones o deformaciones en la estructura) y el denominado método de reciprocidad dual (para determinar la geometría final luego de la optimización).
Luego de reseñar la teoría subyacente a los métodos utilizados se describe la implementación del algoritmo llevada a cabo por estos autores. Finalmente se muestran los ejemplos corridos tanto para BGM (Wessel et al, 2004) como para MAE, con lo cual se pone en evidencia la robustez y versatilidad del algoritmo.
Marco Teórico a. Método de Crecimiento Biológico (BGM)
El método de crecimiento biológico fue introducido en 1990 (Mattheck, 1990). Se basa en la observación del crecimiento de estructuras naturales como árboles o cornamentas. Mattheck postuló que el crecimiento en estructuras naturales es tal que el diseño final es óptimo, considerando como óptimo aquel que satisface el requerimiento de distribución uniforme de tensiones en el contorno o en parte de él. Este crecimiento se da solamente en un entorno cercano a la superficie, en forma de “abultamiento” (swelling) de las regiones más solicitadas. Por tanto, este fenómeno sigue una ley del tipo:
(1)
donde esw es la deformación volumétrica, v es el volumen, t el tiempo, k es una constante de proporcionalidad, σvm es la tensión equivalente de Von Mises en el punto en cuestión y σref es una tensión de referencia, algún valor que se presupone puede alcanzarse en el estado óptimo. Esta ecuación muestra que, si en una posición dada σvm es mayor que cierto valor σref, el volumen tenderá a crecer, agregándose masa, mientras que si es menor el volumen tenderá a disminuir, decreciendo la masa, tal cual lo observado en la naturaleza.

Modelización Aplicada a la Ingeniería Wessel, C et al.
445
)),()(()( Q(Q)QDQnS 0EE -=
Para modelar (1) es necesario contar con los valores locales de σvm, los que se obtienen a partir de un análisis puramente mecánico de la estructura teniendo en cuenta las solicitaciones a la que está sometida. Contando con dichos valores y determinando un valor de σref, debe someterse al pequeño entorno cercano a la superficie de la pieza a la deformación descrita por la ecuación arriba mencionada, para establecer la nueva geometría. Al realizar un análisis mecánico sobre la nueva estructura se deberán obtener valores de la diferencia σvm-σref menores. Estos últimos serán los que den lugar a un nuevo “abultamiento”, que a su vez, dará lugar a diferencias σvm-σref todavía menores.
b. Método de Elasticidad Adaptiva (MAE)
El fenómeno de cambio de forma en tejido óseo se da en modo de aposición,
por lo cual se da exclusivamente en su superficie (Cojín, 2004). En 1976 (Cowin y Hegedus, 1976) postularon que, para tejido óseo cortical, la velocidad normal con la que se desplaza un punto de dicha superficie durante el proceso de adaptación es proporcional a la deformación a la que está sometido. En términos matemáticos,
(2)
donde Sn(Q) es la velocidad normal de desplazamiento del punto Q, D(Q) es un tensor de parámetros de adaptación que varía punto a punto, E(Q) es el tensor de deformaciones y E0(Q) es el valor de referencia del tensor de tensiones, para el cual el proceso de adaptación se detiene -el estado óptimo para el cual ya no se producen cambios en la geometría-. Si el término de la derecha en (2) es positivo habrá deposición de material, mientras que si es negativo, habrá reabsorción. Puede observarse la completa simetría entre (1) y (2) si se reemplazan las tensiones por cada una de las componentes del tensor de deformaciones y teniendo en cuenta que ambas describen fenómenos superficiales.
Cabe señalar que tanto las componentes de D(Q) como las de E0(Q) deben determinarse a partir de consideraciones teóricas o experimentales, las cuales no siempre resultan asequibles.
Pueden incorporarse, en algunos casos simplificados, a esta teoría los efectos de actividad celular, dada por el número presente de osteoblastos y osteoclastos.
La teoría de elasticidad adaptiva puede utilizarse también para simular el proceso de adaptación del tejido esponjoso (Cowin, 1985 y Cowin, 1998). Para ello se incluye en la formulación al llamado "fabric tensor", el cual da cuenta de la porosidad del medio y de su carácter anisótropo. De esta manera se reproducen los efectos de cambios de orientación de la trabécula tanto como de cambios en densidad.

Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
446
c. Método de Elementos de Contorno En el presente trabajo se utilizaron dos formulaciones distintas de BEM. La
estándar para el cálculo estructural (análisis de tensiones de Von Mises en la superficie) y una variante de BEM denominada método de reciprocidad dual de elementos de contorno (en inglés DRM, introducido por Partridge et al, 1992) (para analizar el cambio de forma ("swelling")
El método de los elementos de contorno, presenta una ventaja importante sobre los restantes métodos numéricos aplicados a problemas de optimización debido a su particularidad de “trabajar solamente en el contorno” , por lo cual se deberá discretizar exclusivamente el contorno de la pieza cuya forma se quiere optimizar y por lo tanto, al no necesitarse una malla interior, los subsecuentes remallados a realizarse en el proceso de optimización son muy fáciles de automatizar.
A continuación se desarrollarán las ideas fundamentales del método de los elementos de contorno aplicado a elasticidad.
c.i. Ecuación Integral de Contorno.
Se probará en primer lugar que es posible determinar el campo de desplazamientos de un problema elástico a partir de las denominadas “soluciones fundamentales”.
Para comprender qué son las soluciones fundamentales consideremos un plano ∗Ω , y 21 ,ee una base de vectores ortonormales de su espacio vectorial asociado;
sea ∗ib una fuerza unitaria concentrada en un punto P de dicho plano, colineal
con el vector ie , la cual puede ser representada por medio de la función ),( XP∆ , Delta de Dirac como
∗∗ Ω∈∀∆= XeXPb ii ,),( ,
siendo ⎩⎨⎧
=≠∀
=∆PXsiPX
XP10
),( .
(3)
Bajo la hipótesis de que el plano ∗Ω está ocupado por un medio elástico de módulo de elasticidad transversal µ y coeficiente de Poisson ν , es posible determinar el vector desplazamiento )()( Xu i
∗ , en un punto cualquiera X del plano ∗Ω debido a la acción de la carga ∗
ib aplicada en el punto P . Dichos desplazamientos están dados en (Kane, 1994) y responden a la expresión

Modelización Aplicada a la Ingeniería Wessel, C et al.
447
( )
( )νπµ
δν
−
+⎟⎠⎞
⎜⎝⎛−
=⋅18
1ln43 ,,*
)(
jiij
ji
rrreu ,
(4)
donde r X P= − , es la distancia entre los puntos P y X ; mientras que el parámetroν toma los valores νν = para problemas de estado de plano de deformaciones, y )1/( ννν += para problemas de estado plano de tensiones.
También es posible determinar el vector tensión )()( Xp i∗ actuante sobre un
plano de normal saliente n , en un punto cualquiera X del plano ∗Ω debido a la acción de la carga ∗
ib aplicada en el punto P . El cual está dado por la fórmula:
( )[ ] ( )( )( )r
rnrnnrrr
epijjijiij
ji νπ
ν∂∂δν
−
−−++−=⋅
14
21221 ,,,,*
)( .
(5)
Llamando soluciones fundamentales ),( XPu ji∗ y ),( XPp ji
∗ a los componentes
en la dirección je de los vectores desplazamiento )()( Xu i∗ y tensión )()( Xp i
∗ en
un punto X del plano ∗Ω , obtenidos al aplicar una carga unitaria ∗ib en el punto
P según la dirección del vector ie es posible definir dos tensores de orden dos ∗U , y ∗P que tienen como matrices asociadas en la base 21 ,ee a las matrices de
componentes ),( XPu ji∗ y ),( XPp ji
∗ respectivamente. Considerando ahora otro cuerpo elástico con la misma ecuación constitutiva
que el cuerpo anterior, que ocupa una región del espacio ∗Ω⊆Ω compacta (ver Figura 1), de contorno Γ , el cual se encuentra sometido a una densidad de fuerzas de masa b , a una densidad de fuerzas de contacto p en una parte 1Γ de su contorno, y a un campo de desplazamientos prescriptos u en otra parte 2Γ de su contorno, disjunta con la anterior y tales que 1 2Γ ∪ Γ = Γ .
Figura 1. Plano Ω de contorno Γ.

Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
448
Ahora sí, para probar que es posible determinar el campo de desplazamientos )(Xu de este último problema a partir de las soluciones fundamentales es
necesario sustituir en el primer problema propuesto, donde el dominio era todo el plano ∗Ω , la acción dinámica que la región Ω−Ω∗ realiza sobre la región Ω por las fuerzas de contacto ∗p ; que dicha región ejerce sobre el contorno Γ , fuerzas que están dadas por la ecuación (5). Con esto se tiene que el cuerpo elástico que ocupa la región Ω está sometido a dos sistemas de fuerzas diferentes ),( tb y
),( ∗∗ tb y por tanto se encuentra en las hipótesis del teorema de reciprocidad de Betti, que presenta la siguiente formulación matemática, (Gurtin, 1981)
∫ ∫∫∫Γ Γ
∗
Ω
∗∗
Ω
∗ Γ⋅+Ω⋅=Γ⋅+Ω⋅ dupdubdupdub . (6)
En el caso que estamos analizando ii eXPb ),(∆=∗ , por lo que
∫ ∫∫Γ Γ
∗
Ω
∗∗ Γ⋅+Ω⋅=Γ⋅+⋅ deUpdeUbduePePu iT
iT
iT
i)( . (7)
Aplicando la definición de adjunto de una transformación lineal
∫ ∫∫Γ Γ
∗
Ω
∗∗ Γ⋅+Ω⋅=Γ⋅+⋅ depUdebUdeuPePu iiii)( . (8)
Como la igualdad anterior se verifica para todos los vectores ie de la base
∫ ∫∫Γ Γ
∗
Ω
∗∗ Γ+Ω=Γ+ dpUdbUduPPu )( . (9)
La expresión anterior se conoce como identidad de Somigliana, y es válida si el punto P es interior a la región Ω .
Para el caso particular en que el punto P pertenezca al contorno Γ se puede demostrar (Kane, 1994), que la ecuación anterior se transforma en la ecuación integral de contorno
( )c u P P u d U b d U p d∗ ∗ ∗
<Γ> Ω <Γ>
+ Γ = Ω + Γ∫ ∫ ∫ , (10)
donde c es una matriz que depende solamente de la geometría del contorno en el punto P en consideración, y >Γ< denota la integral en el sentido de valor principal de Cauchy.
Obsérvese que en la ausencia de fuerzas de masa 0=b , todas las integrales que aparecen en la ecuación (10) son integrales de contorno, lo que da la característica al método. Veremos luego, que en el caso de aparecer integrales de dominio, como en el caso que nos preocupa de termoelasticidad, estas pueden llevarse al contorno con el método de reciprocidad dual.

Modelización Aplicada a la Ingeniería Wessel, C et al.
449
c.ii. Formulación del Método de los Elementos de Contorno. Trabajemos por el momento bajo la hipótesis de ausencia de fuerzas de masa,
por lo cual en la ecuación (10) solamente van a aparecer integrales de contorno. La idea fundamental del método de los elementos de contorno es aplicar la
ecuación (10) después de haber discretizado el contorno en un número NE de elementos.
Dentro de cada elemento se pueden aproximar los vectores desplazamiento )(Xu y tensión )(Xp en función de sus valores nu y np en los nodos de ese
elemento por medio de funciones de interpolación φ , obteniéndose nuXXu )()( φ= , npXXp )()( φ= .
(11)
Nótese que a diferencia de la formulación compatible del método de los elementos finitos aquí los desplazamientos y las tensiones son interpolados en forma independiente.
Tomando el punto P , llamado punto fuente, de la ecuación (10) coincidiendo con uno de los nodos de la discretización y aplicando las ecuaciones (11) se obtiene en el caso que estamos analizando con ausencia de fuerzas de masa
1 1j j
NE NEk k j j
j jc u U d p P d uφ φ∗ ∗
= =<Γ > <Γ >
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟= Γ − Γ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
∑ ∑∫ ∫ . (12)
Escribiendo la ecuación anterior para todas las posiciones el punto fuente coincidiendo con los N nodos en que se discretizó el contorno, se obtiene un sistema de N ecuaciones de la forma
PGUH = , (13)
donde U y P son dos vectores que contienen a los desplazamientos y tensiones nodales nu y np respectivamente.
Introduciendo las condiciones de borde cinemáticas y mecánicas del problema 1( ) ,u X u X= ∀ ∈ Γ , y 2( ) ,p X p X= ∀ ∈ Γ , en cada uno de los nodos en que
fue discretizado el contorno, se observa que si en un nodo y en una dirección es conocido el desplazamiento se puede determinar la tensión y viceversa. Esto implica que el sistema de ecuaciones (13), puede reordenarse de manera tal que las incógnitas, sean estas desplazamientos o tensiones se escriban dentro de un mismo vector en el lado izquierdo de la ecuación, obteniéndose un sistema
YZA = . (14)
Es importante remarcar, que el sistema de ecuaciones obtenido, no es ni banda ni simétrico como lo es el del método de los elementos finitos y tiene como incógnitas tanto componentes de los vectores desplazamiento como tensión, en lugar de solamente desplazamientos como en la formulación compatible del FEM.

Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
450
También a diferencia del FEM, en el método de los elementos de contorno, si no actúan fuerzas de masa, no se necesita discretizar todo el dominio, bastando con discretizar solamente su contorno.
c.iii. Ecuación integral de contorno en Termoelasticidad
La ecuación integral de contorno en termoelasticidad (Kane, 1994) es
* * * *( ) ( )cu P U p d P u d U b d m U dθ<Γ> <Γ> Ω Ω
= Γ − Γ + Ω − ∇⋅ Ω∫ ∫ ∫ ∫ , (15)
donde θ es la temperatura y m es el módulo tensión-temperatura, ligado con el coeficiente de expansión térmica α y las constantes de Lamé, por la ecuación
αµλ )23( +=m . (16)
Se observa que en esta ecuación aún en el caso de ausencia de fuerzas de masa aparece una integral de dominio, la cual procuraremos llevar al contorno mediante el método de reciprocidad dual.
c.iv. Método de Reciprocidad Dual en Termoelasticidad
En la hipótesis de ausencia de fuerzas de masa, la ecuación de Navier de equilibrio desplazamiento-temperatura (Lin, 1968) y la ecuación integral de contorno (15) se expresan como
( ) ( ) 0)( 0 =−∇+⋅∇∇++∆ θθµλµ muu . (17)
* * *( ) ( )cu P U p d P u d m U dθ<Γ> <Γ> Ω
= Γ − Γ − ∇⋅ Ω∫ ∫ ∫ .
(18)
El método de reciprocidad dual (Partridge et al, 1992) es empleado para expresar la última integral de la ecuación (18) como una integral de contorno. Para ello se aproxima el campo de temperatura ( )θ X mediante
( ) ( ) ( ) ( )θ αX f Xk k
k
Np
=∧
=∑
1
,
(19)
donde ( )f k∧
son funciones de interpolación y ( )α k sus coeficientes respectivos.
Suponiendo que en el cuerpo Ω actúa un campo de temperatura ( ) ( )f Xk∧
, entonces la solución en desplazamientos ( )ku verificará las ecuaciones
( ) 0ˆ)ˆ(ˆ )()()( =∇+⋅∇∇++∆ kkk fmuu µλµ . (20)

Modelización Aplicada a la Ingeniería Wessel, C et al.
451
( ) * ( ) * ( ) ( ) *ˆˆ ˆ ˆ( ) ( )k k k kcu P U p d P u d m f U d<Γ> <Γ> Ω
= Γ − Γ − ∇⋅ Ω∫ ∫ ∫ . (21)
El último término de (18) se puede escribir a partir de las ecuaciones (19) y (21)
( )
( )( )
( ) ( )
( )
1
1
( ) ( )
( )
Npk k
k
kNpk k k
k
m U d f m U d
c u P U p d P u d
θ α
α
∗ ∗
=Ω Ω
∗ ∗
= <Γ> <Γ>
∧− ∇ ⋅ Ω = − ∇ ⋅ Ω =
∧ ∧ ∧⎡ ⎤= − Γ + Γ⎢ ⎥
⎣ ⎦
∑∫ ∫
∑ ∫ ∫
.
(22)
Sustituyendo este valor en la expresión (18) se tiene finalmente que: * *( )c u P U p d P ud
<Γ> <Γ>
= Γ − Γ +∫ ∫
+ ( ) ( ) ( ) ( )* *
1( )
Npk k k k
kcu P U p d P u d α
= <Γ> <Γ>
⎡ ⎤− Γ + Γ⎢ ⎥
⎣ ⎦∑ ∫ ∫ ,
(23)
donde es importante observar que esta ecuación tiene todas sus integrales de contorno.
Cabe recalcar que la elección de las funciones de aproximación f∧
dadas en la ecuación (19) es fundamental para la exactitud del método; (Partridge, 2000) y (Golberg y Chen, 1994) determinaron que las funciones de aproximación óptimas son las llamadas ″augmented thin plate splines″ (ATPS), las cuales son una combinación lineal de ″radial basis functions″ (RBF) y funciones lineales. Se omitirá aquí una descripción detallada de estas funciones, remitiéndose al lector a la bibliografia citada y (Partridge y Cénsale, 1997).
c.v. Solución en Elementos de Contorno.
Luego de discretizar el contorno Γ en NE elementos de contorno, con N puntos nodales, de aproximar los vectores desplazamiento y tensión en función de sus valores nodales y de aplicar la ecuación (23) con P coincidiendo con cada uno de los puntos nodales se llega al sistema de N ecuaciones
H U G P H U G P− =∧
−∧⎛
⎝⎜⎞⎠⎟α con α = −F 1 Θ .
(24)
Aplicando las condiciones de contorno y pasando todas las incógnitas al miembro de la izquierda, se obtiene el sistema (25), el cual una vez resuelto permite conocer los vectores desplazamiento y tensión en los N puntos en que se discretizó el contorno.
Θ⎟⎠⎞
⎜⎝⎛ ∧
−∧
+= −1FPGUHYZA .
(25)

Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
452
Metodología Implementada
Como ya se ha mencionado, se ha implementado un algoritmo de optimización utilizando BEM, empleando como criterios de optimización BGM en primer término y MAE en segundo. La descripción de la metodología se hará por simplicidad con respecto a BGM en lo que sigue, dada la simetría entre (1) y (2), correspondientes a cada uno.
De lo dicho en la sección del marco teórico se desprende que, para modelar computacionalmente el proceso descripto por (1) es necesario realizar dos cálculos: el primero es el análisis de tensiones del sistema para determinar las tensiones de Von Mises; el segundo provee los desplazamientos dados por el "swelling" con los que se determina la nueva geometría.
Tradicionalmente BGM ha sido implementado computacionalmente aplicando el método de elementos finitos. En este trabajo se emplea BEM, lo cual le da su carácter original. A diferencia del método de elementos finitos, BEM tiene la característica de prescindir de la discretización de todo el dominio del problema, es decir, requiere exclusivamente que el usuario provea la información sobre la geometría del contorno o superficie externa de la estructura. Este hecho hace a BEM especialmente atractivo para modelar cambios de forma, ya que la actualización de la geometría se limita a "mover" su contorno.
Implementación de BGM utilizando BEM
En resumen, la implementación de BGM utilizando BEM consta de los siguientes pasos:
1. Proponer un diseño inicial. 2. Someterlo a un análisis de tensiones para determinar σvm en la
superficie (formulación de BEM para elasticidad). 3. Someterlo a un análisis de "swelling" de acuerdo a la ecuación (1)
utilizando la formulación DRM, el cual provee los valores de desplazamientos de los puntos en ambas direcciones ∆ux y ∆uy..
4. Actualizar la geometría.
donde (xo,yo) y (x,y) corresponden a la geometría inicial y final
respectivamente y C es un factor de amplificación. 5. La geometría actualizada se suaviza mediante funciones spline
(Späth, 1995).
yuCoyyxuCoxx
∆+=
∆+=

Modelización Aplicada a la Ingeniería Wessel, C et al.
453
Los pasos 2 a 5 se repiten hasta obtener diferencias σvm-σref suficientemente pequeñas.
Resultados Se proponen a continuación dos ejemplos de implementación de BGM para
demostrar la capacidad de la metodología implementada y uno de implementación de MAE para mostrar la posibilidad de modificar el criterio de optimización.
a.i. CAVIDAD CIRCULAR
El primer caso analizado es el de una placa cuadrada (ver Figura 2) con un cavidad circular en el centro, sometida a tensiones en las direcciones x y y. Como criterio de optimización se utiliza BGM. El dominio de optimización es la cavidad. El valor elegido de tensión de referencia es σref = 40MPa, igual a la tensión nominal remota. Dada su simetría, solamente es necesario analizar un cuarto del problema.
Los resultados se compararán con los publicados por (Tekkaya y Güneri, 1995), quienes resolvieron idéntico problema implementando BGM con FEM.
La solución analítica de este problema prevé que en el estado óptimo la
cavidad será elíptica (Savin, 1961) y que las tensiones de von Mises resultarán uniformes si y sólo si el cociente entre el semieje mayor y el menor es igual al valor de (σx/σy), en este caso, 2.
8 mm
Figura 2. Placa cuadrada con cavidad circular
300 mm
300m
mσy= 22.5 MPa
∅= 80 mm
σx = 45 M
Pa

Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
454
Siguiendo a Tekkaya, se optimizó el dominio parametrizando con σref = 40 MPa, C=500 y se realizaron 5 iteraciones. Los resultados de las tensiones de von Mises normalizadas (σvm/σref) se muestran en la Figura 3 en función del ángulo θ que forma el punto con la horizontal.
Puede observarse cómo las tensiones normalizadas varían en las sucesivas
iteraciones hasta alcanzar un valor aproximadamente uniforme, del orden de σvm/σref=1.75. Cabe resaltar que la tensión de Von Mises no iguala a la tensión de referencia (σvm/σref=1), como podría esperarse. Sin embargo, la reducción global de la diferencia σvm-σref muestra el éxito del método utilizado para optimizar.
Las sucesivas iteraciones dan lugar a respectivos cambios en la geometría, como puede observarse en la Figura 4, donde se muestra solamente un cuarto de la placa, por las razones arriba mencionadas. En la configuración final, el cociente entre el semieje mayor y el menor es de 2.00058, en completo acuerdo con el valor teórico antes citado.
Figura 3. Evolución de la tensión de Von Mises normalizada, para las sucesivas iteraciones

Modelización Aplicada a la Ingeniería Wessel, C et al.
455
En los mapas de tensión de Von Mises para la placa en su configuración
original y en configuración óptima (Figura 5) puede observarse cómo las tensiones han disminuido en aquellas áreas donde eran superiores a σref, mientras que han aumentado en la situación opuesta.
La Figura 5 permite también observar que la tensión de von Mises en zonas más alejadas a la cavidad es aproximadamente 40 MPa, lo que justifica la elección de la tensión de referencia.
Figura 4. Evolución de la geometría de la placa, en las distintas iteraciones.
Figura 5. Mapas de tensiones para las configuraciones inicial y final (óptima).
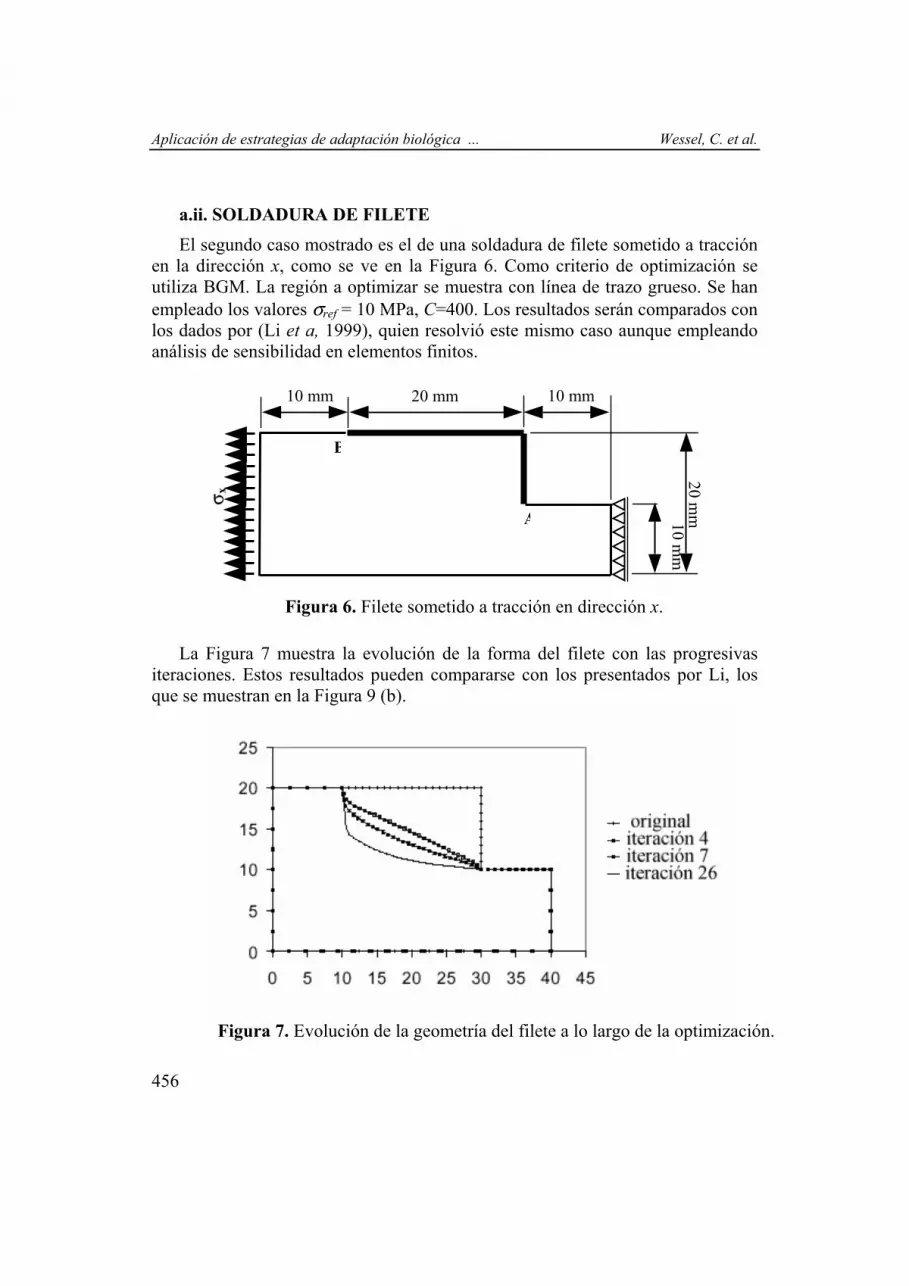
Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
456
a.ii. SOLDADURA DE FILETE El segundo caso mostrado es el de una soldadura de filete sometido a tracción
en la dirección x, como se ve en la Figura 6. Como criterio de optimización se utiliza BGM. La región a optimizar se muestra con línea de trazo grueso. Se han empleado los valores σref = 10 MPa, C=400. Los resultados serán comparados con los dados por (Li et a, 1999), quien resolvió este mismo caso aunque empleando análisis de sensibilidad en elementos finitos.
La Figura 7 muestra la evolución de la forma del filete con las progresivas
iteraciones. Estos resultados pueden compararse con los presentados por Li, los que se muestran en la Figura 9 (b).
Figura 7. Evolución de la geometría del filete a lo largo de la optimización.
Figura 6. Filete sometido a tracción en dirección x.
10 mm20 mm
σ x
10 mm
20 mm10 m
m
A
B

Modelización Aplicada a la Ingeniería Wessel, C et al.
457
La Figura 8 muestra la tension de Von Mises normalizada para algunas de las iteraciones. En la configuración final las tensiones normalizadas son aproximadamente iguales a 1 salvo en los puntos donde, dada la solicitación aplicada, deben ser nulas.
Finalmente la Figura 9 (a) muestra los mapas de tensión en el filete para la configuración original y final. Puede observarse cómo, a medida que la geometría cambia, las tensiones en la región de optimización (incluido el concentrador de tensiones) disminuyen, uniformizándose. Se pueden comparar los resultados de este trabajo con los reportados por (Li et al, 1999) Figura 9 (b).
Figura 7. Evolución de la geometría del filete obtenida por Li et al.Figura 8. Tensiones normalizadas en función de la posición
en la zona de optimización
Figura 9. (a) Mapa de tensiones del filete en su configuración inicial y final. (b) Resultados cualitativos reportados por Li.

Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
458
b.i CRECIMIENTO DE TEJIDO OSEO DENTRO DE RANURAS Algunos implantes óseos presentan ranuras de tal manera que, al crecer el
tejido se genere cohesión mecánica hueso-implante. Este fenómeno fue estudiado por Sadegh (Sadegh et al, 1993) empleando BEM y, como criterio de optimización el método de elasticidad adaptiva (MAE). Cabe recordar que, tal como se describiera previamente este criterio postula que la configuración óptima presenta deformaciones uniformes en el dominio de optimización, sin considerar las tensiones como BGM. Sadegh analizó la optimización en superficies libres de tracción en problemas planos, por lo que la única componente del tensor de deformaciones que tuvo en cuenta fue la tangente al contorno. Además, tomó E0(Q)=-0.002. Para estudiar, entonces, el fenómeno de crecimiento dentro de ranuras Sadegh analizó el problema de una placa de tejido como la que se muestra en la Figura 10. El frente de optimización corresponde a la curva ABC.
Figura 10. Placa de tejido óseo apoyada sobre un implante con ranura y sometida a tensiones σx y σy.

Modelización Aplicada a la Ingeniería Wessel, C et al.
459
En este trabajo se realizó la optimización de deformaciones en el problema de la figura 10 en idénticas condiciones que Sadegh, a saber, módulo de Young de 17.12 GPa, módulo de Poisson de 0.28, valor de C negativo, E0(Q)=-0.002, σx=8 MPa y σy=80 MPa. El proceso de optimización ha dado lugar a la evolución de deformaciones E-E0 en el frente de optimización (ABC) que se muestra en la Figura 11 para algunas de las iteraciones. Puede observarse que las diferencias tienden a reducirse hasta alcanzar un valor de 0 en las cercanías del punto B, lo cual muestra el éxito del método utilizado para optimizar según MAE, dado el valor de E0 constante elegido.
En particular, para el punto B, de y=0, el valor de E-E0 para las sucesivas
iteraciones se muestra en la Figura 12. Puede observarse cómo las diferencias E-E0 tienden suavemente a anularse.
-0,10 -0,05 0,00 0,05 0,10-0,003
-0,002
-0,001
0,000
0,001
0,002
0,003
iteración 1 iteración 3 iteración 5 iteración 7 iteración 9 iteración 11 iteración 14
ε-ε 0
posición a lo largo del frente de optimización
Figura 11. Evolución de la deformación en el frente de optimización para iteraciones seleccionadas.

Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
460
El proceso de optimización da lugar al desplazamiento de los puntos de la curva ABC. La posición del punto B (llamada x en la Figura 10) en las sucesivas iteraciones se muestra en la Figura 13. Puede observarse cómo esta curva tiende suavemente al valor de 0.0250 mm, resultado que coincide con el obtenido por Sadegh.
0 2 4 6 8 10 12 14
-0,0025
-0,0020
-0,0015
-0,0010
-0,0005
0,0000
ε-ε 0
iteración
Figura 12. Evolución de las deformaciones en el punto B para las sucesivas iteraciones.
Figura 13. Posición del punto B en las sucesivas iteraciones.
0 2 4 6 8 10 12 140,000
0,005
0,010
0,015
0,020
0,025
x
iteraciones

Modelización Aplicada a la Ingeniería Wessel, C et al.
461
Finalmente la Figura 14 muestra los mapas de deformación E-E0 para la configuración original y final. Puede observarse cómo, a medida que el frente de optimización se desplaza, las deformaciones en el dominio de optimización disminuyen, uniformizándose hacia E0.
Conclusiones
Se revisaron en este trabajo las principales leyes propuestas para describir el proceso de adaptación de las estructuras biológicas. Entre ellas se seleccionaron el método de crecimiento biológico (BGM) y el método de elasticidad adaptiva (MAE) para su implementación computacional y aplicación para la optimización de formas. Los ejemplos presentados muestran que los resultados obtenidos con el algoritmo implementado coinciden con los de la literatura. Además puede verse que el algoritmo puede, sin perder calidad de resultados, adaptarse para utilizar diversos criterios de optimización, por lo que se aplicará en el futuro a otros existentes en la bibliografía.
De esta forma, mediante la observación de la naturaleza es posible inferir una estrategia de optimización sencilla y eficiente. Asimismo, la elegancia de la implementación propuesta está relacionada con la utilización de BEM.
BEM resulta especialmente atractivo ya que los resultados que provee son precisos tanto en deformaciones como en tensiones en el contorno. Además, dado
Figura 14. Mapa de deformaciones en la configuración inicial y final (optimizada).

Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
462
su esquema de discretización, la actualización de la geometría del modelo resulta sumamente sencilla.
Referencias Belegundu, A. D. and Chandrupatla, T. R. (1999). “Optimization concepts and
applications in engineering”. New Jersey, USA: Prentice Hall.
Brebbia, C., Telles, J. C. F. and Wrobel, L. C. (1984). “Boundary Element Techniques”, Springer-Berlin.
Conn, A. R.; Scheinberg, K. and Toint, Ph. L. (2000). “Recent progress in unconstrained nonlinear optimization without derivatives”. Math. Program. 79: 397-415.
Cowin, S. C. and Hegedus, D. H., (1976). “Bone remodeling I: Theory of adaptive elasticity”, J. Elasticity, 6: 313-326.
Cowin, S. C., (1985). “The Relationship between the Elasticity Tensor and the Fabric Tensor” Mechanics of Materials 4(2): 137-147.
Cowin, S. C., (1998). “Imposing Thermodynamic Restrictions on the Elastic Constant-Fabric Tensor Relationship”, J. of Biomechanics 31: 759-762.
Cowin, S. C., (2004). “Tissue Growth and Remodeling”. Annu. Rev. Biomed Eng 6:77-107.
Chaperon, P., (2001). “Shape Optimization of Damage Tolerant Structures for Maximum Residual Static Strength and Fatigue Life”, BENCHmark: 14-16.
Dennis, J. E.; Torczon, V. (1991). “Direct search methods on parallel machines”. SIAM J. Opt 1, 4: 448-474.
Golbert, M. A. and Chen, C. S. (1994). “The theory of radial basis functions applied to BEM for inhomogeneous partial differential equations”. Boundary Elements Communications, 5: 57-61.
Goodship, A. E. and Cunningham, J. L. (2001). “Pathophysiology of functional adaptation of bone in remodeling and repair in vivo”. In “Bone Mechanics Handbook”, Boca Raton, FL: CRC Press.
Gurtin, M. E. (1981). “An introduction to Continuum Mechanics”, Academic Pres Inc., San Diego, California.
Hart, R. L., (2001). “Bone Modeling and remodeling: Theories and Computation”. In Bone Mechanics Handbook, Boca Raton, FL: CRC Press.

Modelización Aplicada a la Ingeniería Wessel, C et al.
463
Kane, J. H. (1994). “Boundary Element Analysis in Engineering Continuum Mechanics “. Prentice Hall, USA.
Lanyon, L. E., Paul, I. L., Rubin, C. T., Thrasher, E. L., De Laura, R., Rose, R. M., and Radin, E. L. (1982). “In vivo strain measurements form bone and prosthesis following total hp replacement”. Journal of Bone Joint Surgery, 63-A: 989-1001.
Lanyon, L. E. and Rubin, C. T. (1984). “Static vs. Dynamic loads as an influence on bone remodelling”. Journal of Biomechanics, 17: 897-905.
Lewis, R. M.; Torczon, V.; Trosset, M. W. (2000). “Direct search methods: Then and now”. J. Comput. Appl. Math. 124(1): 191-207.
Li, Q., Steven, G. P, Querin, O. M. and Xie, Y. M. (1999). “Evolutionary Shape Optimization for Stress Minimization”, Mech. Res. Comm. 26( 6): 657-664.
Lin, T. H. (1968). “Theory of Inelastic Structures”. John Willey & Sons, Inc. New York.
Lucidi, S.; Sciandrone, M. (2002). “On the global convergence of derivative-free-methods for unconstrained optimization”. SIAM J. Optim. 13(1): 97-116.
Lucidi, S.; Sciandrone, M; Tseng, P. (2002). “Objective-derivative-free-methods for constrained optimization”. Math. Program. 92A (1): 37-39.
Mattheck, C. (1990). “Design and Growth Rules for Biological Structures and their Application to Engineering”, Fatigue Fracture and Engineering Material Structures 13 (5): 535-550.
Mattheck, C. and Burkhardt, S. (1990). “A New Method of Structural Shape Optimization based on Biological Growth”, International Journal of Fatigue, 12 (3): 185-190.
Mattheck, C. and Huber-Betzer, H., (1992), “CAO: Computer simulation of Adaptive Growth in Bones and Trees”, Computers in Biomedicine, 35: 243-252.
Partridge, P. W., Brebbia, C. A. y Wrobel L. C., (1992). “The Dual Reciprocity Element Method”, Elsevier Applied Science, UK.
Partridge, P. W. and Sensale, B. (1997). “Hybrid Approximation Functions in the Dual Reciprocity Boundary Element Method” Communications in Numerical Methods in Engineering , 13: 83-94.
Partridge, P. W. (2000). “Towards criteria for selecting approximation functions in the Dual Reciprocity Method”, Engineering Analysis with Boundary Elements, 24: 519-529.
Aplicación de estrategias de adaptación biológica ... Wessel, C. et al.
464
Peng, J. M. (1998). “Derivative-free methods for monotone variational inequality and complementarity problems”. J. Optim Theory Appl. 99(1): 235-252.
Platen, E. (1987). “Derivative free numerical methods for stochastic differential equations”. In Stochastic differential systems, Proc. IFIP-WG 7/1Work Conf., Eisenach/GDR 1986, Lect. Notes Control Inf. Sci. 96: 187-193.
Roekaerts, D.; Schwarz, F. (1987). “Painlevé analysis, Yoshida´s theorem and direct methods in the search for integrable Hamiltonians”. J. Phys. A 20, L127-L133.
Sadegh, A. M., Luo, G. M. and Cowin, S. C., (1993). “Bone Ingrowth: An Application of the Boundary Element Method to Bone Remodeling at the Implant Interface”. J. Biomech, 26 (2): 167-182.
Sauter, J., Bakhtiary, N., Allinger, P., Friedrich, M., Mulfinger, F., Müller, O. y Puchinger, M. (1996). “A new approach for sizing, shape and topology optimization”. In Proc. 1996 SAE International Congress and Exposition.
Savin, G. N. (1961). “Stress Concentration around Holes”, Pergamon Press, Oxford.
Schnack, E. (1978). “Ein Iterationsverfahren zur Optimierung von Spannungskonzentrationen”, VDI-Forsch. Heft 589.
Schnack, E. (1988 a). “Application of finite elements for shape optimization”. In Vegeselem-Modszer-IparAlkalmazas, 37-52.
Schnack, E. (1988 b). “A method of feasible direction with FEM for shape optimization”. In Structural Optimization. Dordrecht, Boston, London: Kluwer Academic Publishers, 299-306.
Schnack, E.; Spörl, U.; Iancu, G. (1988). “Gradientless Shape Optimization with FEM”. Forschungsheft 647/88: 1-44.
Schnack, E.; Iancu, G. (1989). “Shape design of elastostatic structures based on local perturbation analysis”. Struct. Opt 1: 117-125.
Schnack, E.; Iancu, G. (1991). “Gradientless Computer Methods in shape optimization”. In Optimization of Structural Systems and Industrial Applications. Southampton, Boston, Computational Mechanics Publictions, London, New York, Elsevier Applied Science, 363-376.
Schnack, E.; Iancu, G. (1993). “Optimization of large scale systems in elasticity”. In Optimization of Large Structural Systems, Vol II. Dordrecht: Kluwer Academic Publishers. 1073-1086.

Modelización Aplicada a la Ingeniería Wessel, C et al.
465
Späth, H. (1995). “Spline Interpolation Algorithms”, A K Peters.
Tekkaya, A. And Güneri, A. (1995). “Shape Optimization with the Biological Growth Method. A parameter study”, Eng. Comp. 13 (8): 4-18.
Trosset, M. W. (1997). “I know it when I see it: toward a definition of direct search methods”. SIAG/OPT Views and News. 9: 7-10.
Wessel, C., Cisilino, A. P. and Semsale B. (2004). “Structural Shape Optimization using Boundary Elements and the Biological Growth Method”, Struct. Mutidisc Optim, 28: 221-227.
Zhu, Y.; Wu, X. (2003). “A free derivative iteration method of order three having convergence of both point and interval for nonlinear equations”. Appl. Math. Comp 137: 49-55.