Embed Size (px)
Citation preview

Circuits Syst Signal Process (2011) 30: 73–87DOI 10.1007/s00034-010-9210-8
Nonfragile Observer for Discrete-Time SwitchedNonlinear Systems with Time Delay
Zhengrong Xiang · Ronghao Wang · Bin Jiang
Received: 9 March 2008 / Revised: 30 January 2010 / Published online: 9 October 2010© Springer Science+Business Media, LLC 2010
Abstract This paper investigates the problem of the nonfragile observer design fordiscrete-time switched nonlinear systems with time delay. Based on the averagedwell-time approach and linear matrix inequality (LMI) techniques, an exponentialstability criterion for the discrete-time switched delay system with Lipschitz non-linearity is derived. Based on several technical lemmas, the discrete-time observerdesign can be transferred to the problem of solving a set of LMIs. Furthermore, incases when the gain of the state observer varies, a kind of nonfragile observer is pro-posed, and the solution to the observer gain is also obtained by solving a set of LMIs.Finally, a numerical example is given to illustrate the effectiveness of the proposedmethod.
Keywords Time delay · Exponential stability · Discrete-time systems · Switchednonlinear systems · Nonfragile observer
This work was supported by the National Natural Science Foundation of China (No. 60974027).
Z. Xiang (�)School of Automation, Nanjing University of Science and Technology, Nanjing 210094, People’sRepublic of Chinae-mail: [email protected]
R. WangEngineering Institute of Engineering Corps, PLA University of Science and Technology, Nanjing210007, People’s Republic of Chinae-mail: [email protected]
B. JiangCollege of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing210016, People’s Republic of Chinae-mail: [email protected]
74 Circuits Syst Signal Process (2011) 30: 73–87
1 Introduction
Switched systems have attracted the interest of several scientists in the last decades.Typically, a switched system consists of a number of subsystems and a switchingsignal, which defines a specific subsystem being activated during a certain interval.Study of switched systems mainly focuses on stability and stabilization, and a largenumber of results in this field have appeared (see, e.g., [4, 6, 9, 12–14, 19]). Hespanhaaddressed the uniform stability of switched linear systems using multiple Lyapunovfunctions (MLF) approach [5]. Li et al. considered the problem of tracking control fora class of switched time-varying delays systems with stabilizable and unstabilizablesubsystems using the dwell-time method [8]. Wang and Zhao studied guaranteed costcontrol for a class of uncertain switched delay systems [16].
However, in actual operation, the states of the systems are not all measurable, itis necessary to design state observers for the systems. Several design procedures,such as transfer-function, geometric, algebraic, singular value decomposition and soon, have been successfully proposed (see, e.g., [3, 11, 15]). Alessandri and Colettastudied the design of the state observers for continuous-time linear switched systemsand discrete-time linear switched systems by solving a set of LMIs [1]. Juloski etal. studied the convergence of state estimation of switched systems, which has to bedecreasing for all possible trajectories of the estimation error dynamics [7]. Xianget al. developed an observer design methodology for a class of switched nonlinearsystems with Lipschitz nonlinearities in [18], an estimated state updated relation isproposed to guarantee the convergence of estimated state error for the systems.
It is well known that time delay phenomenon is very common in many kinds of en-gineering systems, for instance, long-distance transportation systems, hydraulic pres-sure systems, network control systems and so on. Time delay is frequently a sourceof instability and often causes undesirable performance. So state observer design forthe systems with time delays has also received increasing attention. Pearson et al.designed the observer for time lag systems by finite-dimensional state variable tech-niques [10]. Xiang and Wang proposed a kind of nonfragile observer design method-ology for switched nonlinear continuous-time systems with time delay in [17]. How-ever, to the best of our knowledge, the problem of nonfragile observer design fordiscrete-time switched nonlinear systems with state delay has not been investigated,which motivated us for this study.
In this paper, we deal with the problem of observer design for a class of discrete-time switched nonlinear systems with state delay, which nonlinearities are assumedto satisfy the Lipschitz conditions. Furthermore, we consider that the state observergain variations could not be avoided in several applications, a kind of nonfragile ob-server for the discrete-time switched nonlinear systems is proposed. The remainderof the paper is organized as follows. In Sect. 2, problem formulation and some nec-essary lemmas are given. In Sect. 3, based on the average dwell-time approach andLMI technique, sufficient conditions for the existence of the switched observers arepresented in terms of a set of LMIs. Then we investigate the problem of nonfrag-ile observer design for the discrete-time nonlinear switched systems with time delay.A numerical example illustrates the design procedure in Sect. 4. Concluding remarksare given in Sect. 5.

Circuits Syst Signal Process (2011) 30: 73–87 75
2 Problem Formulation and Preliminaries
Consider the following discrete-time switched nonlinear systems with time delay:
xk+1 = Aσ(k)xk + Adσ(k)xk−τ + Bσ(k)uk + fσ(k)(xk, k), (1)
yk = Cσ(k)xk, (2)
xk = φk, ∀k ∈ {−τ,−τ + 1, . . . ,0} (3)
where xk ∈ Rn is the state vector at the kth instant, uk ∈ Rl is the control inputof the system at the kth instant, φk is a vector-valued initial function, the norm ofwhich can be defined as ‖φ‖h = max−τ≤k<0 ‖φk‖. The function σ(k) : Z → N ={1,2, . . . ,N} is the switching signal, which is deterministic, piecewise constant andright continuous. Moreover, σ(k) = i means that the ith subsystem is activated. N
denotes the number of the subsystems. Ai,Adi,Bi for i ∈ N are real-valued matriceswith appropriate dimensions. fi(·,·) : Rn × R → Rn is a known nonlinear function.The switching signal σ(k) : Z → N = {1,2, . . . ,N} discussed in this paper is time-dependent, i.e., σ : {(k0, σ (0)), (k1, σ (1)), . . . , (kn, σ (n))}, n ∈ Z, where k0 = 0 isthe initial time and kn denotes the nth switching instant.
We construct the following discrete-time switched system to estimate the state ofsystem (1)–(3):
xk+1 = Aσ(k)xk + Adσ(k)xk−τ + Bσ(k)uk
+ fσ(k)(xk, k) + Lσ(k)(yk − yk), (4)
yk = Cσ(k)xk, (5)
xk = 0, ∀k ∈ {−τ,−τ + 1, . . . ,0} (6)
where xk ∈ Rn is the estimated state vector of xk, yk ∈ Rp is the observer outputvector, Li ∈ Rn×p for i ∈ N is the observer gain.
Let xk = xk − xk be the estimated state error, then we can obtain the followingerror system from (1)–(6):
xk+1 = (Aσ(k) − Lσ(k)Cσ(k))xk + Adσ(k)xk−τ
+ fσ(k)(xk, k) − fσ(k)(xk, k), (7)
xk = φk, ∀k ∈ {−τ,−τ + 1, . . . ,0}. (8)
If the state observer gain variations could not be avoided, a kind of nonfragile stateobserver will be designed as follows
xk+1 = Aσ(k)xk + Adσ(k)xk−τ + Bσ(k)uk
+ fσ(k)(xk, k) + (Lσ(k) + �Lσ(k))(yk − yk), (9)
yk = Cσ(k)xk, (10)
xk = 0, ∀k ∈ {−τ,−τ + 1, . . . ,0} (11)

76 Circuits Syst Signal Process (2011) 30: 73–87
where �Li ∈ Rn×p are uncertain real-valued matrix functions representing norm-bounded parameter uncertainties.
We can obtain the following error system from (1)–(3) and (9)–(11)
xk+1 = [Aσ(k) − (Lσ(k) + �Lσ(k))Cσ(k)
]xk
+ Adσ(k)xk−τ + fσ(k)(xk, k) − fσ(k)(xk, k), (12)
xk = φk, ∀k ∈ {−τ,−τ + 1, . . . ,0}. (13)
Without loss of generality, we make the following assumptions.
Assumption 1 fi(xk, k) for i ∈ N are nonlinear functions satisfying∥∥fi(xk, k) − fi(xk, k)
∥∥ ≤ ∥
∥Ui(xk − xk)∥∥ (14)
where Ui are known real constant matrices.
Assumption 2 The gain perturbations �Li are of the norm-bounded form
�Li = HiFikEi (15)
where Hi , Ei are known real constant matrices with proper dimensions, and Fik areunknown time-varying matrices which satisfy
FTikFik ≤ I. (16)
The unknown matrices Fik contain the uncertain parameters in the linear part of thesubsystem and the matrices Hi , Ei specify how the unknown parameters in Fik affectthe elements of the nominal matrices Li .
The parameter uncertainty structure in (15) has been widely used and can representparameter uncertainty in many cases (see, e.g., [17] and the references cited therein).
Definition 1 If there exist positive constants M ≥ 1, c > 0 and 0 < a < 1 such that
‖xk‖ ≤ M‖φ‖hack, k ≥ 0 (17)
then the discrete-time system (1)–(3) is said to be exponentially stable.
Definition 2 [21] For any switching signal σ(k) and any two integers k1 ≥ k2 > 0,let Nσ (k1, k2) denote the switching number of σ(k) on an interval (k1, k2); then thefollowing constant τσ
τσ =[
k1 − k2
Nσ (k1, k2)
](18)
is called the average dwell time, where [ ] denotes the integral part of a real numberin the square bracket.
The following lemmas play an important role in our later development.

Circuits Syst Signal Process (2011) 30: 73–87 77
Lemma 1 [2] (Schur Complement) For a given matrix S = [ S11 S12
ST12 S22
]with S11 = ST
11,
S22 = ST22, then the following condition is equivalent:
(1) S < 0,(2) S22 < 0, S11 − S12S
−122 ST
12 < 0.
Lemma 2 [20] For matrices X, Y of appropriate dimension and Q > 0, we have
XT Y + YT X ≤ XT QX + YT Q−1Y.
Lemma 3 [20] Let U , V , W and X be real matrices of appropriate dimensions withX satisfyingX = XT , then for all V T V ≤ I
X + UV W + WT V T UT < 0
if and only if there exists a scalar ε > 0 such that
X + εUUT + ε−1WT W < 0.
3 Main Results
3.1 Stability Analysis
To obtain our main results, we first consider exponential stability of the followingswitched system:
xk+1 = Aσ(k)xk + Adσ(k)xk−τ + fσ(k)(xk, k) (19)
where ‖fi(xk, k)‖ ≤ ‖Gixk‖, Gi for i ∈ N is known real constant matrix.The following theorem presents sufficient conditions for the existence of exponen-
tial stability of system (19).
Theorem 1 Consider system (19), α > 1, 0 < μ < 1, and δi > 0 are given positivescalars; if there exist positive definite symmetric matrices Pi,Q
li > 0, l = 1,2, . . . , τ
and εi, ηi > 0 such that
Pi < αPj , Pi < δiI, (20)
Qs+1i < μQs
i , Qri < αQr
j , s = 1,2, . . . , τ − 1, r = 1,2, . . . , τ, (21)
⎡
⎢⎢⎢⎣
Q1i − μPi + δi(1 + εi + ηi)G
Ti Gi 0 AT
i Pi ATi Pi 0
0 −μQτi AT
diPi 0 ATdiPi
PiAi PiAdi −Pi 0 0PiAi 0 0 −εiPi 0
0 PiAdi 0 0 −ηiPi
⎤
⎥⎥⎥⎦
< 0,
i, j ∈ N, i �= j (22)

78 Circuits Syst Signal Process (2011) 30: 73–87
and the average dwell time satisfies τσ > logμ(1/α), then system (19) is exponentiallystable.
Proof Choose the Lyapunov functional candidate for the ith subsystem as:
Vi(xk) = xTk Pixk +
τ∑
s=1
xTk−sQ
si xk−s . (23)
Along the trajectories of system (19), we have
Vi(xk+1) − Vi(xk) = xTk+1Pixk+1 +
τ∑
s=1
xTk−s+1Q
si xk−s+1 − xT
k Pixk
−τ∑
s=1
xTk−sQ
si xk−s
= xTk+1Pixk+1 + xT
k
(Q1
i − Pi
)xk
+τ−1∑
s=1
xTk−s
(Qs+1
i − Qsi
)xk−s − xT
k−τQτi xk−τ
= xTk
(AT
i PiAi + Q1i − Pi
)xk
+τ−1∑
s=1
xTk−s
(Qs+1
i − Qsi
)xk−s + xT
k ATi PiAdixk−τ
+ xTk−τA
TdiPiAixk + xT
k−τ
(AT
diPiAdi − Qτi
)xk−τ
+ xTk AT
i Pifi + f Ti PiAixk
+ xTk−τA
TdiPifi + f T
i PiAdixk−τ + f Ti Pifi .
If Qs+1i < μQs
i , using Lemma 2, it follows from (20) that
Vi(xk+1) − Vi(xk)
< xTk
[(1 + ε−1
i
)AT
i PiAi + Q1i − Pi
]xk
+ (μ − 1)
τ−1∑
s=1
xTk−sQ
si xk−s + xT
k ATi PiAdixk−τ + xT
k−τATdiPiAixk
+ xTk−τ
[(1 + η−1
i
)AT
diPiAdi − Qτi
]xk−τ + (1 + εi + ηi)f
Ti Pifi
< xTk
[(1 + ε−1
i
)AT
i PiAi + Q1i − Pi
]xk
+ (μ − 1)
τ−1∑
s=1
xTk−sQ
si xk−s + xT
k ATi PiAdixk−τ + xT
k−τATdiPiAixk

Circuits Syst Signal Process (2011) 30: 73–87 79
+ xTk−τ
[(1 + η−1
i
)AT
diPiAdi − Qτi
]xk−τ + δi(1 + εi + ηi)x
Tk GT
i Gixk
=[
xk
xk−τ
]T
×[
(1 + ε−1i
)ATi
PiAi + Q1i
− Pi + δi (1 + εi + ηi)GTi
Gi ATi
PiAdi
ATdi
PiAi (1 + η−1i
)ATdi
PiAdi − Qτi
]
×[
xk
xk−τ
]
+ (μ − 1)
τ−1∑
s=1
xTk−sQ
si xk−s .
Denote
i =[
(1 + ε−1i
)ATi
PiAi + Q1i
+ δi (1 + εi + ηi)GTi
Gi − μPi ATi
PiAdi
ATdi
PiAi (1 + η−1i
)ATdi
PiAdi − μQτi
].
(24)
Consequently, i < 0 leads to
Vi(xk+1) − Vi(xk) < (μ − 1)xTk Pixk + (μ − 1)xT
k−τQτi xk−τ
+ (μ − 1)
τ−1∑
s=1
xTk−sQ
si xk−s
= (μ − 1)Vi(xk).
Then we have
Vi(xk+1) < μVi(xk).
By Lemma 1, we have that i < 0 is equivalent to (22).Without loss of generality, we assume that the j th subsystem and ith subsystem
operate at the interval [kn − �j, kn), [kn, kn + �i), respectively, we can obtain from(21) that
Vi(xkn+�i) < μVi(xkn+�i−1) < μ2Vi(xkn+�i−2) < · · · < μ�i Vi(xkn) (25)
from (20) and (21), we know thatVi(xkn) < αVj (xkn). Thus
Vi(xkn+�i) < μ�i Vi(xkn) < αμ�i Vj (xkn) < αμ�i+�j Vj (xkn−�j
). (26)
Let k0 < k1 < · · · < km be the switching instants in [0, k], where 0 ≤ m ≤ n.Consider the piecewise Lyapunov functional
V (xk) = Vi(xk), k ∈ [kn, kn + �i).

80 Circuits Syst Signal Process (2011) 30: 73–87
Thus we can see from (26) that
V (xk) < αNσ (k0,k)μk−k0V (xk0) = μk−k0+Nσ (k0,k) logμ αV (xk0). (27)
By Definition 2, we have
Nσ (k0, k)τσ < k − k0 < Nσ (k0, k)(τσ + 1). (28)
Substituting (28) into (27) leads to
V (xk) < μ(logμ α/τσ +1)(k−k0)V (xk0). (29)
Notice that
V (x0) ≤ maxi∈N
[λmax(Pi) + λmax
(Q1
i
) + λmax(Q2
i
) + · · ·λmax(Qτ
i
)]‖φ‖2h, (30)
V (xk) ≥ mini∈N
λmin(Pi)‖xk‖2. (31)
Combining (29), (30) and (31), we obtain
‖xk‖ <
√maxi∈N [λmax(Pi) + λmax(Q
1i ) + λmax(Q
2i ) + · · · + λmax(Q
τi )]
mini∈N λmin(Pi)‖φ‖h
× μ(logμ α/τσ +1)(k−k0)/2.
This completes the proof. �
3.2 Observer Design
Now we consider system (7)–(8); the following theorem presents sufficient conditionsfor the existence of exponential stability of system (7)–(8).
Theorem 2 Consider system (7)–(8), α > 1, 0 < μ < 1, and δi > 0 are given positivescalars, if there exist symmetric positive definite matricesPi,Q
li > 0, l = 1,2, . . . , τ ,
matrices Xi and εi, ηi > 0 such that
Pi < αPj , Pi < δiI, (32)
Qs+1i < μQs
i , Qri < αQr
j , s = 1,2, . . . , τ − 1, r = 1,2, . . . , τ, (33)
⎡
⎢⎣
Q1i
− μPi + δi (1 + εi + ηi )UTi
Ui 0 ATi
Pi − CTi
Xi ATi
Pi − CTi
Xi 0
0 −μQτi
ATdi
Pi 0 ATdi
Pi
PiAi − XiCi PiAdi −Pi 0 0PiAi − XiCi 0 0 −εiPi 0
0 PiAdi 0 0 −ηiPi
⎤
⎥⎦ < 0,
i, j ∈ N, i �= j (34)
and the average dwell time satisfies τσ > logμ(1/α), then the system (7)–(8) is expo-nentially stable.

Circuits Syst Signal Process (2011) 30: 73–87 81
Proof Let Li = P −1i Xi , substituting Li = P −1
i Xi into (21) leads to
⎡
⎢⎣
Q1i
− μPi + δi (1 + εi + ηi)UTi
Ui 0 (Ai − LiCi)T Pi (Ai − LiCi)
T Pi 0
0 −μQτi
ATdi
Pi 0 ATdi
Pi
Pi (Ai − LiCi) PiAdi −Pi 0 0Pi(Ai − LiCi) 0 0 −εiPi 0
0 PiAdi 0 0 −ηiPi
⎤
⎥⎦ < 0.
By Theorem 1, we can conclude that system (7)–(8) is exponentially stable.The proof is completed. �
The procedure of observer design of system (1)–(3) can be summarized as follows:
The Procedure of Observer DesignStep 1. For given constants α > 1, 0 < μ < 1, and δi > 0, if there exist posi-
tive definite symmetric matrices Pi,Qli > 0, l = 1,2, . . . , τ , matrices Xi and some
scalars εi, ηi > 0 (i = 1,2, . . . ,N), LMIs (32)–(34) have a feasible solution, then goto Step 2.
Step 2. If the average dwell time satisfies:
τσ > logμ(1/α)
where τσ ∈ Z+, then the observer can be constructed as (4)–(6), where the observergain Li = P −1
i Xi .
3.3 Nonfragile Observer Design
Theorem 3 Consider system (12)–(13), α > 1, 0 < μ < 1, and δi > 0 are givenpositive scalars, if there exist symmetric positive definite matrices Pi,Q
li > 0, l =
1,2, . . . , τ , matrices Li and εi, ηi, σi > 0 such that
Pi < αPj , Pi < δiI, (35)
Qs+1i < μQs
i , Qri < αQr
j , s = 1,2, . . . , τ − 1, r = 1,2, . . . , τ, (36)
⎡
⎢⎢⎢⎢⎣
�i 0 (Ai − LiCi)T Pi (Ai − LiCi)
T Pi 0 0 −σiCTi ET
i
0 −μQτi AT
diPi 0 ATdiPi 0 0
Pi(Ai − LiCi) PiAdi −Pi 0 0 PiHi 0Pi(Ai − LiCi) 0 0 −εiPi 0 PiHi 0
0 PiAdi 0 0 −ηiPi 0 00 0 HT
i P Ti HT
i P Ti 0 −σiI 0
−σiEiCi 0 0 0 0 0 −σiI
⎤
⎥⎥⎥⎥⎦
< 0,
i, j ∈ N, i �= j (37)
where �i = Q1i − μPi + δi(1 + εi + ηi)U
Ti Ui , and the average dwell time satisfies
τσ > logμ(1/α), then system (12)–(13) is exponentially stable.
82 Circuits Syst Signal Process (2011) 30: 73–87
Proof Let
Ti =⎡
⎣
Q1i
− μPi + δi (1 + εi + ηi )UTi
Ui 0 [Ai − (Li + �Li )Ci ]T Pi [Ai − (Li + �Li )Ci ]T Pi 0
0 −μQτi
ATdi
Pi 0 ATdi
PiPi [Ai − (Li + �Li )Ci ] PiAdi −Pi 0 0Pi [Ai − (Li + �Li )Ci ] 0 0 −εiPi 0
0 PiAdi 0 0 −ηiPi
⎤
⎦ .
(38)
Substituting (15) into (38) leads to
Ti = T1i + T2i
where
T1i =⎡
⎢⎣
Q1i − μPi + δi (1 + εi + ηi)U
Ti Ui 0 (Ai − LiCi)
T Pi (Ai − LiCi)T Pi 0
0 −μQτi AT
diPi 0 ATdiPi
Pi(Ai − LiCi) PiAdi −Pi 0 0Pi(Ai − LiCi) 0 0 −εiPi 0
0 PiAdi 0 0 −ηiPi
⎤
⎥⎦ ,
T2i =
⎡
⎢⎢⎢⎣
0 0 CTi (−HiFikEi)
T Pi CTi (−HiFikEi)
T Pi 00 0 0 0 0
Pi(−HiFikEi)Ci 0 0 0 0Pi(−HiFikEi)Ci 0 0 0 0
0 0 0 0 0
⎤
⎥⎥⎥⎦
=
⎡
⎢⎢⎢⎣
00
PiHi
PiHi
0
⎤
⎥⎥⎥⎦
Fik[−EiCi 0 0 0 0 ]
+
⎛
⎜⎜⎜⎝
⎡
⎢⎢⎢⎣
00
PiHi
PiHi
0
⎤
⎥⎥⎥⎦
Fik [−EiCi 0 0 0 0 ]
⎞
⎟⎟⎟⎠
T
.
According to Lemma 3, we have
Ti ≤ T1i + σ−1i
⎡
⎢⎢⎢⎣
00
PiHi
PiHi
0
⎤
⎥⎥⎥⎦
⎡
⎢⎢⎢⎣
00
PiHi
PiHi
0
⎤
⎥⎥⎥⎦
T
+ σi[−EiCi 0 0 0 0 ]T [−EiCi 0 0 0 0 ]. (39)
Circuits Syst Signal Process (2011) 30: 73–87 83
Denote Zi is the right term of inequality (39), by Lemma 1, Zi < 0 are equivalent to
⎡
⎢⎢⎢⎢⎢⎣
�i 0 (Ai − LiCi)T Pi (Ai − LiCi)
T Pi 0 0 −CTi
ETi
0 −μQτi
ATdi
Pi 0 ATdi
Pi 0 0Pi(Ai − LiCi) PiAdi −Pi 0 0 PiHi 0Pi(Ai − LiCi) 0 0 −εiPi 0 PiHi 0
0 PiAdi 0 0 −ηiPi 0 00 0 HT
iPT
iHT
iP T
i0 −σiI 0
−EiCi 0 0 0 0 0 −σ−1i
I
⎤
⎥⎥⎥⎥⎥⎦
< 0.
(40)Using diag{I, I, I, I, I, I, σi} pre- and post-multiply the left term of (40), respec-tively, then (40) is equivalent to (37). By Theorem 1, we conclude that system (12)–(13) is exponentially stable.
The proof is completed. �
Remark 1 Denote Yi = PiLi , then (37) becomes the following LMIs:⎡
⎢⎢⎢⎢⎢⎣
�i 0 ATi
Pi − CTi
YTi
ATi
Pi − CTi
YTi
0 0 −σiCTi
ETi
0 −μQτi
ATdi
Pi 0 ATdi
Pi 0 0PiAi − YiCi PiAdi −Pi 0 0 PiHi 0PiAi − YiCi 0 0 −εiPi 0 PiHi 0
0 PiAdi 0 0 −ηiPi 0 00 0 HT
iPT
iHT
iP T
i0 −σiI 0
−σiEiCi 0 0 0 0 0 −σiI
⎤
⎥⎥⎥⎥⎥⎦
< 0
where �i = Q1i − μPi + δi(1 + εi + ηi)U
Ti Ui .
If the state observer gain variations could not be avoided, then the nonfragile ob-server for system (1)–(3) can be designed according to the following procedure.
The Procedure of Nonfragile Observer DesignStep 1. For given constants α > 1, 0 < μ < 1, and δi > 0, if there exist positive
definite symmetric matrices Pi,Qli > 0, l = 1,2, . . . , τ , matrices Yi and εi, ηi, σi > 0
(i = 1,2, . . . ,N), LMIs (35)–(37) have a feasible solution, then go to Step 2.Step 2. If the average dwell time satisfies:
τσ > logμ(1/α)
where τσ ∈ Z+, then the nonfragile observer can be constructed as (9)–(11), wherethe observer gain can be obtained by Li = P −1
i Yi .
4 Numerical Example
In this section we present an example to illustrate the theory in the previous sections.Consider system (1)–(3) with parameters as follows:
A1 =[−0.5 0.1
0.2 −0.1
], Ad1 =
[0.1 −0.10.1 0
], C1 =
[0.2 00.1 0.3
],
A2 =[−0.1 0.2
−0.2 0.1
], Ad2 =
[0.1 −0.10.1 0
], C2 =
[0.1 0.20 −0.3
],

84 Circuits Syst Signal Process (2011) 30: 73–87
Fig. 1 The estimated error ofthe observer without gainperturbations
τ = 2, α = 2, μ = 0.25, δ1 = 1, δ2 = 2, and Lipschitz nonlinearities
f1(xk, k) − f1(xk, k) =[
0.01 sink
0
], f2(xk, k) − f2(xk, k) =
[0
0.01 sink
].
The initial condition xk = 0, k ∈ {−2,−1}, x0 = [2 −1]T , Lipschitz constant matri-ces
U1 =[
0.01 00 0
], U2 =
[0 00 0.01
].
By solving the LMIs (32)–(34) in Theorem 2, we can obtain
L1 =[−2.6667 0.3333
1.1667 −0.3333
], L2 =
[−1.0000 −1.3333−2.0000 −1.6667
]
the average dwell timeτσ > 0.5.Choose the switching signal as follows:
σ(k) ={
1, 2nτ ∗ ≤ k < (2n + 1)τ ∗,
2, (2n + 1)τ ∗ ≤ k < (2n + 2)τ ∗
where n = 0,1,2, . . . , τ ∗ = 1, i.e., σ(k) represents a periodic switching signal of thedwell interval τ ∗ = 1. The simulation result of the estimated state error is shown inFig. 1.
We can see that the proposed observer can guarantee the exponential stability ofthe estimated state error.
However, the observer gain perturbations cannot be avoided in actual operation,and we consider that the gain perturbations with parameters are as follows:
F1k = F2k =[
sink 00 sin k
], E1 =
[−5 48 6
],
Circuits Syst Signal Process (2011) 30: 73–87 85
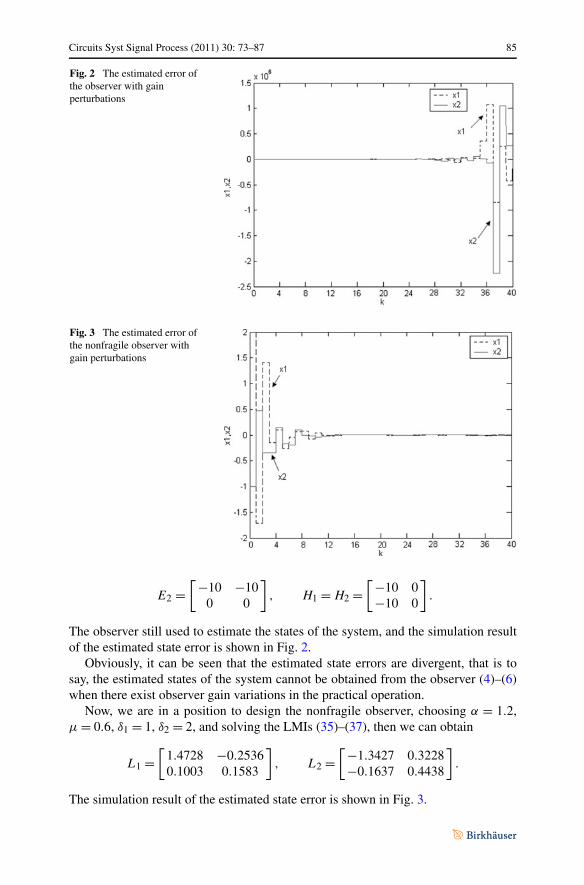
Fig. 2 The estimated error ofthe observer with gainperturbations
Fig. 3 The estimated error ofthe nonfragile observer withgain perturbations
E2 =[−10 −10
0 0
], H1 = H2 =
[−10 0−10 0
].
The observer still used to estimate the states of the system, and the simulation resultof the estimated state error is shown in Fig. 2.
Obviously, it can be seen that the estimated state errors are divergent, that is tosay, the estimated states of the system cannot be obtained from the observer (4)–(6)when there exist observer gain variations in the practical operation.
Now, we are in a position to design the nonfragile observer, choosing α = 1.2,μ = 0.6, δ1 = 1, δ2 = 2, and solving the LMIs (35)–(37), then we can obtain
L1 =[
1.4728 −0.25360.1003 0.1583
], L2 =
[−1.3427 0.3228−0.1637 0.4438
].
The simulation result of the estimated state error is shown in Fig. 3.

86 Circuits Syst Signal Process (2011) 30: 73–87
It can be seen that the proposed nonfragile observer guarantees the exponentialconvergence of the estimated state error for admissible observer gain perturbations.
5 Conclusions
In this paper, we have studied the problem of observer design for a class of Lipschitznonlinear discrete-time switched systems with time delay. An exponential stabilitycriterion for the discrete-time switched delay system with Lipschitz nonlinearity isderived. Based on several technical lemmas, the discrete-time observer design canbe transferred to the problem of solving a set of LMIs. Furthermore, a kind of non-fragile observer is proposed. A numerical example has shown the effectiveness of theproposed approach. Our future work will focus on extending the proposed observerdesign method to discrete-time switched nonlinear systems with time-varying delays.
Acknowledgements This work was supported by the National Natural Science Foundation of Chinaunder Grant No. 60974027. The authors would like to thank the editor and anonymous reviewers for theirvaluable comments, which helped to significantly improve the quality and presentation of this paper.
References
1. A. Alessandri, P. Coletta, Switching observers for continuous-time and discrete-time linear systems,in Proceedings of the American Control Conference, Arlington, Virginia, 2516–2521 (2001)
2. S.P. Boyd, L.E. Ghaoui, E. Feron, V. Balakrishnan, Linear Matrix Inequalities in System and ControlTheory (SIAM, Philadelphia, 1994)
3. C.T. Chen, Linear System Theory and Design (Holt, Rinehart and Winston, New York, 1984)4. D. Cheng, L. Guo, Y. Lin, Y. Wang, Stabilization of switched linear systems. IEEE Trans. Autom.
Control 50(5), 661–666 (2005)5. J.P. Hespanha, Uniform stability of switched linear systems: extension of LaSalle’s invariance princi-
ple. IEEE Trans. Autom. Control 49(4), 470–482 (2004)6. J.P. Hespanha, D. Liberzon, D. Angeli, E.D. Sontag, Nonlinear norm-observability notions and sta-
bility of switched systems. IEEE Trans. Autom. Control 50(2), 154–168 (2005)7. A.L. Juloski, W.P.M.H. Heemels, S. Weiland, Observer design for a class of piecewise affine systems,
in Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, Nevada, USA,2606–2611 (2002)
8. Q.K. Li, J. Zhao, G.M. Dimirovski, Tracking control for switched time-varying delays systems withstabilizable and unstabilizable subsystems. Nonlinear Anal., Hybrid Syst. 3(2), 133–142 (2009)
9. H. Lin, P.J. Antsaklis, Stability and stabilizability of switched linear systems: a survey of recent re-sults. IEEE Trans. Autom. Control 54(2), 308–322 (2009)
10. A.E. Pearson, Y.A. Fiagbedzi, An observer for time lag systems. IEEE Trans. Autom. Control 34(8),775–777 (1989)
11. S. Pettersson, Observer design for switched systems using multiple quadratic Lyapunov functions, inProceedings of the 2005 IEEE International Symposium on Intelligent Control, pp. 262–267 (2005)
12. Y. Song, J. Fan, M. Fei, T. Yang Robust, H∞ control of discrete switched system with time delay.Appl. Math. Comput. 205(1), 159–169 (2008)
13. Z. Sun, A robust stabilizing law for switched linear systems. Int. J. Control 77(4), 389–398 (2004)14. Z. Sun, S.S. Ge, Analysis and synthesis of switched linear control systems. Automatica 41(2), 181–
195 (2005)15. V. Sundarapandian, General observers for discrete-time nonlinear systems. Math. Comput. Model.
39(1), 87–96 (2004)16. R. Wang, J. Zhao, Guaranteed cost control for a class of uncertain switched delay systems: an average
dwell-time method. Cybern. Syst. 38(1), 105–122 (2007)
Circuits Syst Signal Process (2011) 30: 73–87 87
17. Z. Xiang, R. Wang, Non-fragile observer design for nonlinear switched systems with time delay. Int.J. Intell. Comput. Cybern. 2(1), 175–189 (2009)
18. Z.R. Xiang, W.M. Xiang, Observer design for a class of switched nonlinear systems. Control Intell.Syst. 36(4), 318–322 (2008)
19. Z.R. Xiang, W.M. Xiang, Stability analysis of switched systems under dynamical dwell time controlapproach. Int. J. Syst. Sci. 40(4), 347–355 (2009)
20. D. Xie, L. Wang, F. Hao, Robust stability analysis and control synthesis for discrete-time uncertainswitched systems, in Proceedings of Conference Decision and Control, pp. 4812–4817 (2003)
21. G.S. Zhai, B. Hu, K. Yasuda, A.N. Michel, Disturbance attenuation properties of time-controlledswitched systems. J. Franklin Inst. 338(7), 765–779 (2001)





























