Embed Size (px)
Citation preview
A comparative analysis of a post-processed RINEXdata and absolute positioning data, obtained from ahand held GPS to that of a geodetic GPS receiver
Tata H, Oyatayo K.T, Abimiku E.SDepartment of Geography, Kwararafa University, Wukari,
Taraba State Nigeria
Corresponding Author’s e-mail: [email protected] [email protected]
ABSTRACTA comparative analysis of a post-processed RINEX data andabsolute positioning data obtained from a hand held GPS tothat of a geodetic GPS receiver, the fundamental principlesand field procedure of the two methods are discussed. Theraw RINEX GPS data obtained from the field were downloadedinto the computer using GRIGO software and were later postprocessed using a P4 software; while that of absolutepositioning data, the result was put into a statistical testand compared to that of the geodetic GPS receiver, todetermine which method is more precise and meets theintegrity requirement for surveying. Base on the analysis,the post processed data was more precise to that of theabsolute positioning. Hence the post-processed RINEX datacan now be recommended for meaningful jobs.Keywords: RINEX, Absolute, Handheld GPS, Geodetic
INTRODUCTIONSince the beginning of time, mankind has been trying to
figure out a dependable way to know where they are, and toguide them where they wanted to go and get back again. Seamen followed the coast line to keep them from getting lost.They discovered when they sailed out into the open sea, thatthey could use the position of the stars to chart theircourse.The needle of the compass always point north. So even ifthey didn’t know where they were at least they know in whatdirection they were travelling. The sextant measures theexact angle of stars the moon and the sun above the horizon
1
by the use of adjustable mirror. Early sextant could onlymeasure the latitude and sailors were still not able to workout their longitude. Handheld GPS receivers are becoming increasingly popularamong out door enthusiasts and other leisure users. Publicawareness of GPS has risen and prices have dropped to thepoint where these devices are now common in high streetconsumer electronic shops. With a growing market place andincreasing turnover, manufacturers have been able toincrease the performance and capabilities of handheld GPSdevices, and many now sports an impressive array offeatures, such as the ability to apply received differentialcorrections in real-time and built in and/or unloadablemapping.
The global positioning system, now commonly known asGPS was designed and built and is operated and maintained bythe US department of defence. It used to be firstbrainstormed at the pentagon in 1973 as they were lookingfor a satellite system that was error proof. In 1978 thefirst operational GPS satellite system was launched. By themid 1990s the system was fully operational with 24 satelliteConsidering the lack of trust in the use of hand held GPSfor surveying, the hand-held GPS could provide a betterresult if raw GPS RINEX data are collected and processed.This research is to see, if the handheld GPS will actuallyprovide a better result when the raw data obtained in RINEXformat from a handheld GPS are processed.
METHODOLOGY:GPS surveying differs essentially from classical
surveying because it is weather independent and there is noneed for inter-visibility between sites. Some termsassociated with GPS point positioning include real timeobservation and post-processing observation. In real timeGPS position result are obtained in the field immediatelywhile still at the station. In Post – processing data arecollected in the field and processed later.Different method or mode of observation exists. Some includeStatic and kinematics methods.a) Static Method;Static implies a stationary observation. In staticpositioning (also known as absolute point positioning)
2
coordinates of a single point are determined using a singlereceiver with measures pseudo ranges to (normally four ormore) satellites. Static point positioning is used if pointsare needed with moderate accuracy, say 5-10m. The statictechnique was primarily used for early GPS surveys (NdukweN. 2001).b) Kinematics Method;The kinematics method denotes mobile observation. Kinematicssurveying (relative positioning) is a method where tworeceivers are used and measurements to the same satellitesare simultaneously made at two sites. This produces betteraccuracy than in the case of point positioning as aconsequences of processing data from two sites. Normally thecoordinates of other side is determined, relative to theknown site i.e. the vector between the two sites isdetermine to a high degree of accuracy. In general,kinematics method involves one stationary receiver placed ona known site and one moving (Ndukwe N. 2001).For the purpose of this research, the static method wasused.
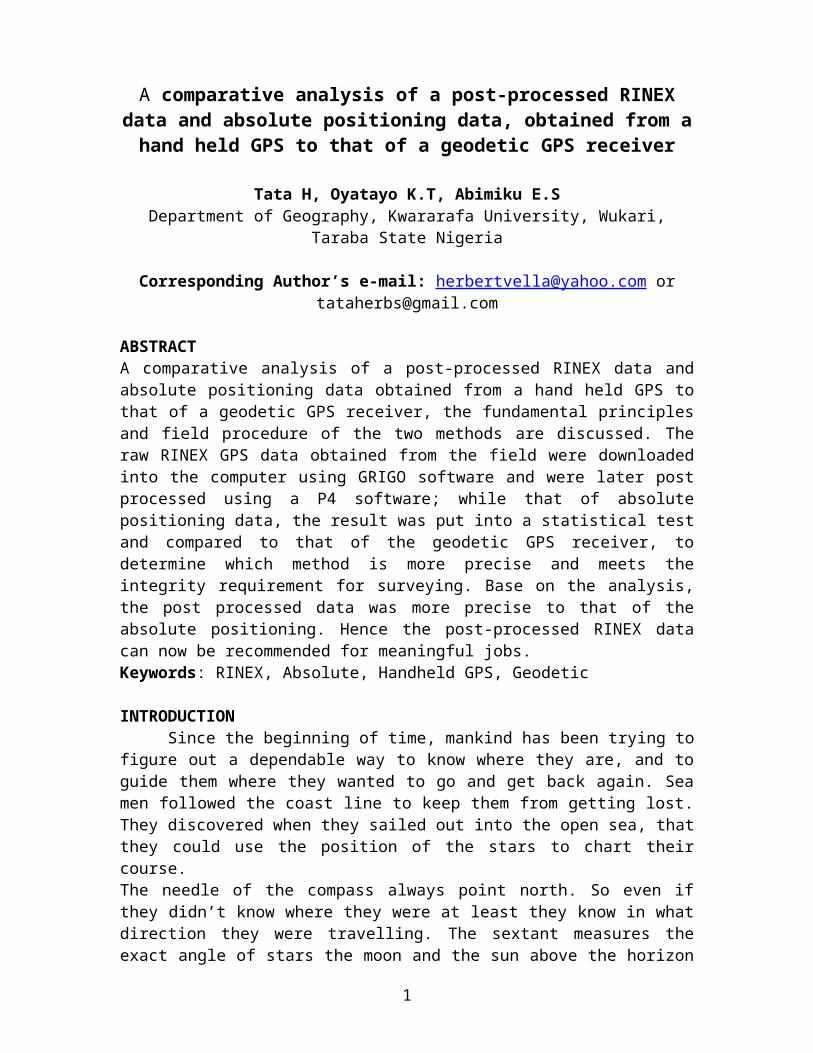
Set Up The Laptop, GPS and a generator were set up. Thelow cost external antenna was connected to the GPs, with theantenna set up over each of the control point, allowing fora clear view of satellite. An interface cable was connectedfrom the GPS to the Laptop for proper logging and transferof the raw RINEX data from the satellite. The Laptop waspowered by the generator to enable the laptop carry out longtime observation. The configuration of the set up is shownbelow.
3
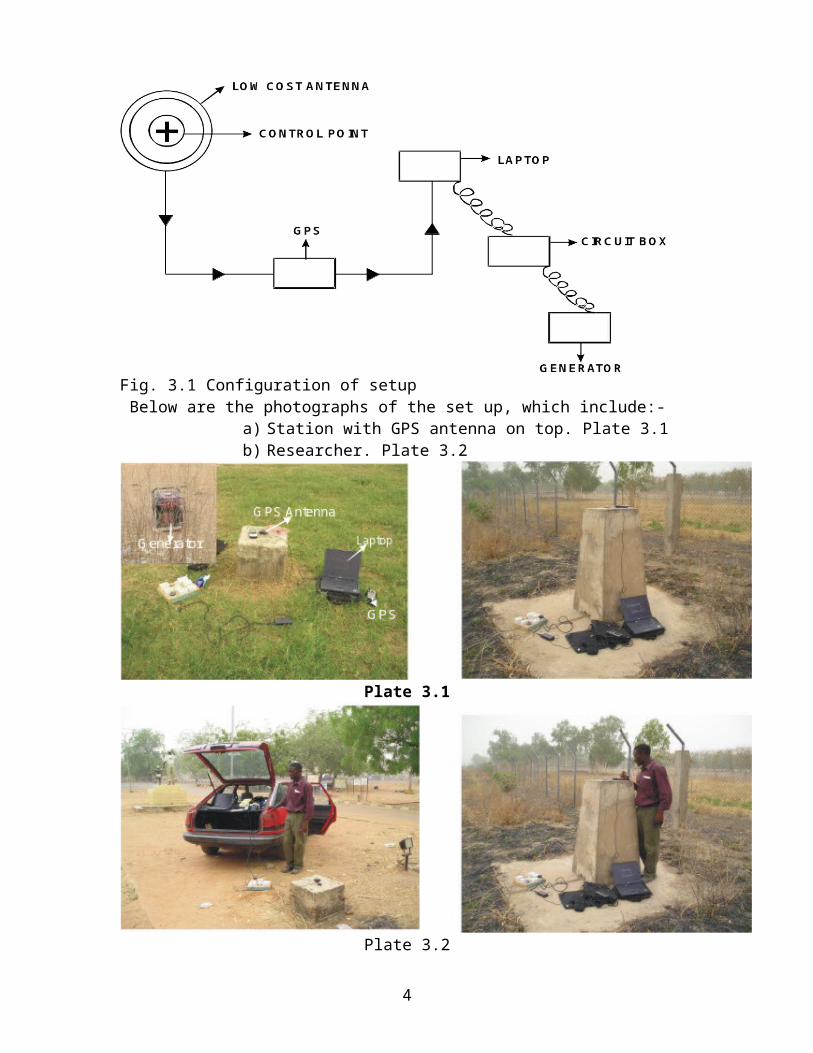
Fig. 3.1 Configuration of setup Below are the photographs of the set up, which include:-
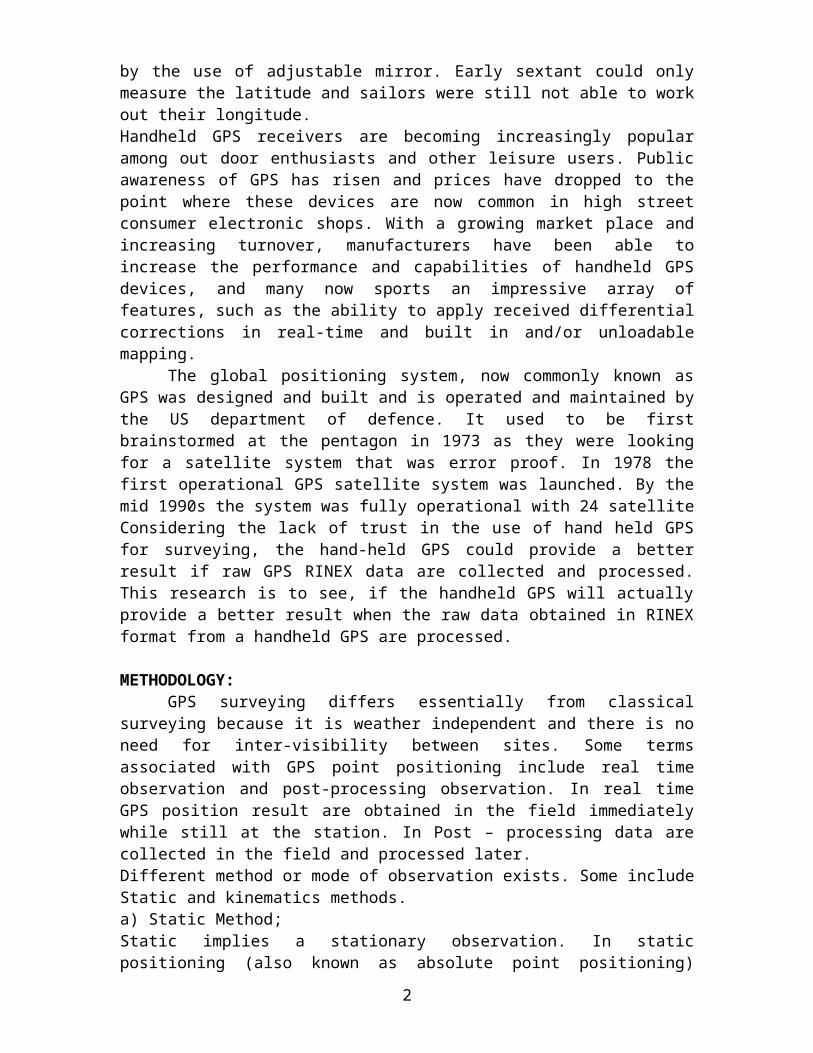
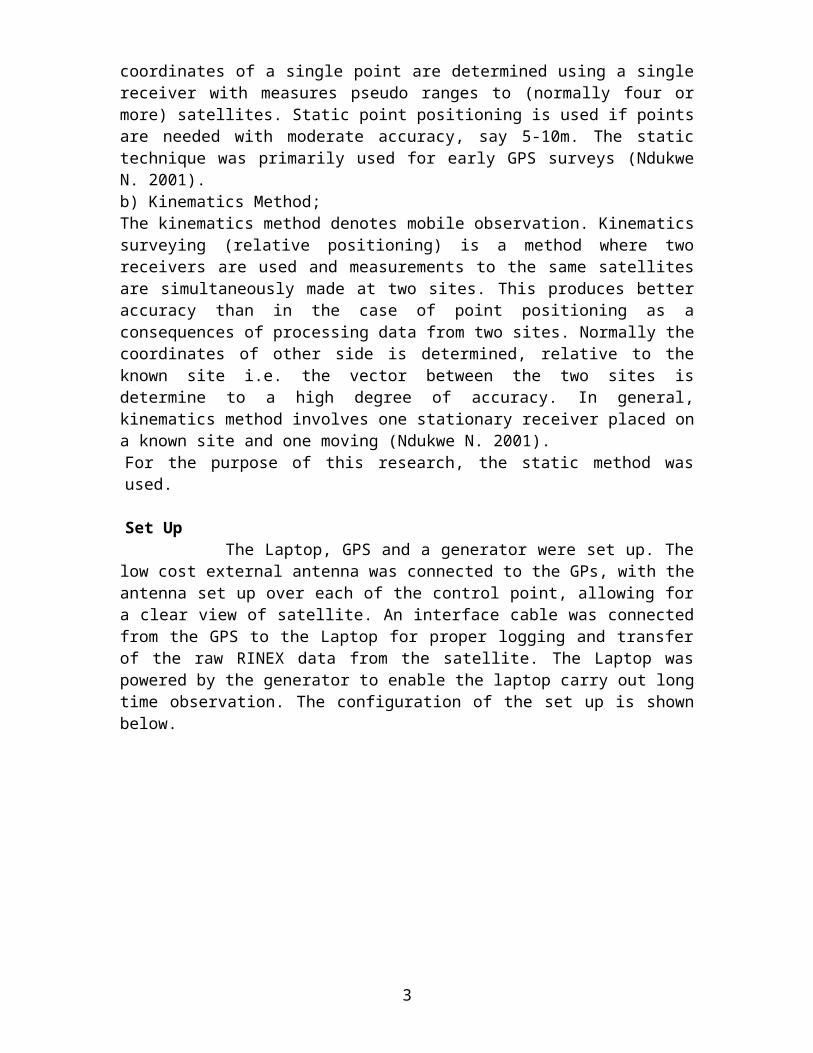
a) Station with GPS antenna on top. Plate 3.1b) Researcher. Plate 3.2
Plate 3.1
Plate 3.2
4
3.3.2 Rinex Data Logging:- A GPS RINEX generator soft ware called GRINGO isa window programm which decodes the relevance protocols andlogs the raw data to a file using the widely accepted RNEXformat. The garmin receiver must all be connected to aserial port on their laptop computer and run GRINGO realtime, to capture the pseudo range data as the measurementare generated and bring out the needed out put. With theGRINGO RINEX generator software, the static method was used,data were logged and recorded at 5 minute interval for aperiod of 1 hour on each station.Below is the picture of a GRINGO screen.
PRESENTATION OF MEAN OF PROCESSED DATAMEAN OF POST PROCESSED DATAStation Northings Easthings
FSN – XSM 31 224892.953 1017686.571FSN – YSM 65 221641.592 1022436.331FSN – YSM 80 220481.881 1023569.718FSN – YSM 41 220573.593 1024452.142FSN – XSM 30 210912.193 1027056.770
MEAN OF ABSOLUTE POSITIONINGStation Northings EasthingsFSN – XSM 31 224898.385 1017683.769FSN – YSM 65 221647.167 1022434.846FSN – YSM 80 220483.000 1023561.923
5
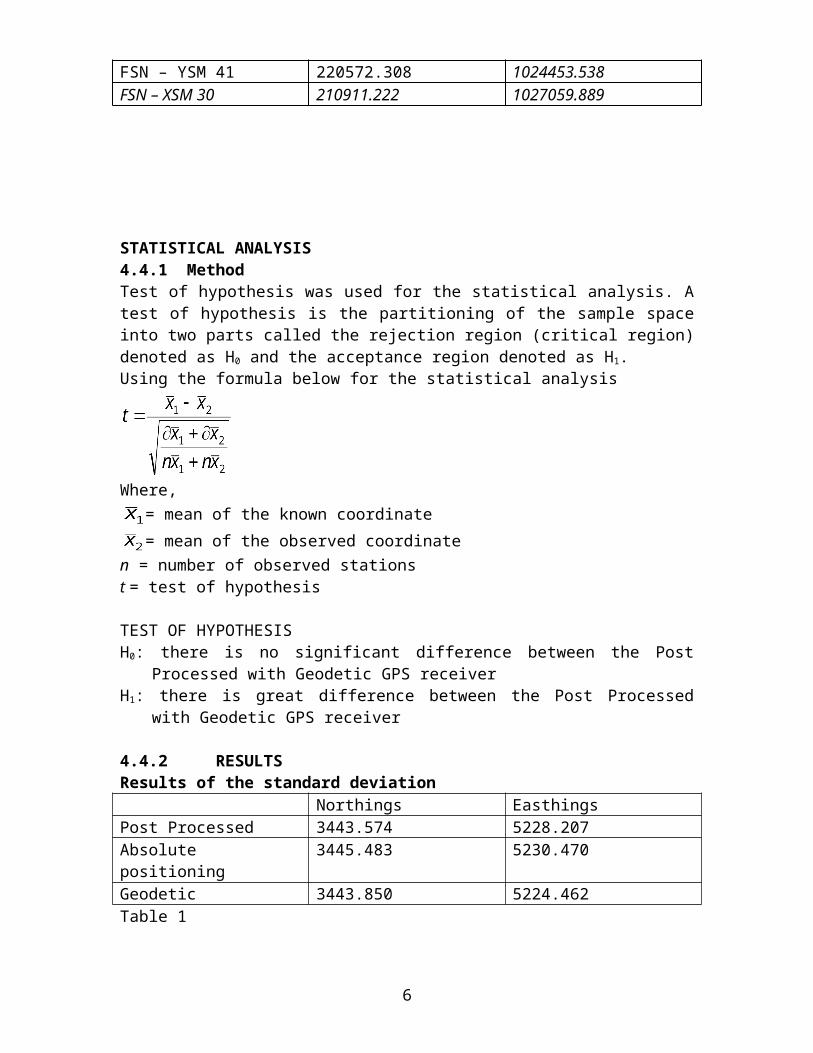
FSN – YSM 41 220572.308 1024453.538FSN – XSM 30 210911.222 1027059.889
STATISTICAL ANALYSIS4.4.1 MethodTest of hypothesis was used for the statistical analysis. Atest of hypothesis is the partitioning of the sample spaceinto two parts called the rejection region (critical region)denoted as H0 and the acceptance region denoted as H1.Using the formula below for the statistical analysis
Where, = mean of the known coordinate = mean of the observed coordinate
n = number of observed stations t = test of hypothesis
TEST OF HYPOTHESIS H0: there is no significant difference between the Post
Processed with Geodetic GPS receiverH1: there is great difference between the Post Processed
with Geodetic GPS receiver
4.4.2 RESULTSResults of the standard deviation
Northings EasthingsPost Processed 3443.574 5228.207Absolute positioning
3445.483 5230.470
Geodetic 3443.850 5224.462Table 1
6
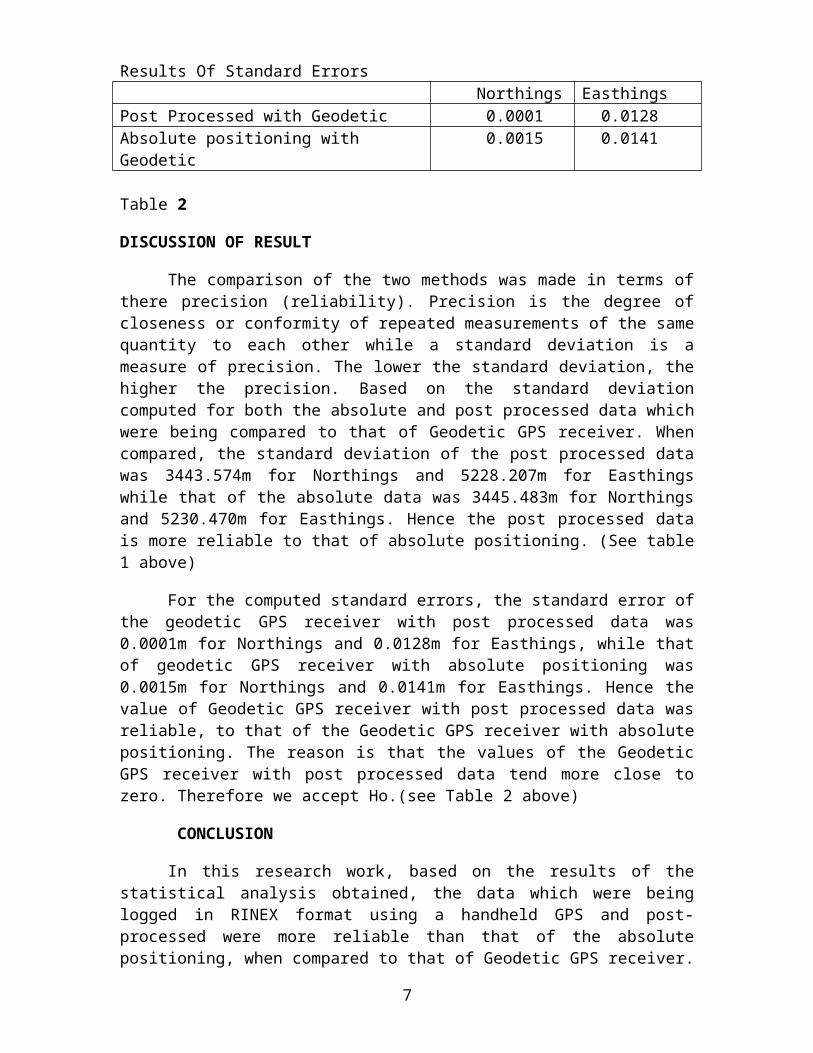
Results Of Standard Errors Northings Easthings
Post Processed with Geodetic 0.0001 0.0128Absolute positioning with Geodetic
0.0015 0.0141
Table 2
DISCUSSION OF RESULT
The comparison of the two methods was made in terms ofthere precision (reliability). Precision is the degree ofcloseness or conformity of repeated measurements of the samequantity to each other while a standard deviation is ameasure of precision. The lower the standard deviation, thehigher the precision. Based on the standard deviationcomputed for both the absolute and post processed data whichwere being compared to that of Geodetic GPS receiver. Whencompared, the standard deviation of the post processed datawas 3443.574m for Northings and 5228.207m for Easthingswhile that of the absolute data was 3445.483m for Northingsand 5230.470m for Easthings. Hence the post processed datais more reliable to that of absolute positioning. (See table1 above)
For the computed standard errors, the standard error ofthe geodetic GPS receiver with post processed data was0.0001m for Northings and 0.0128m for Easthings, while thatof geodetic GPS receiver with absolute positioning was0.0015m for Northings and 0.0141m for Easthings. Hence thevalue of Geodetic GPS receiver with post processed data wasreliable, to that of the Geodetic GPS receiver with absolutepositioning. The reason is that the values of the GeodeticGPS receiver with post processed data tend more close tozero. Therefore we accept Ho.(see Table 2 above)
CONCLUSION
In this research work, based on the results of thestatistical analysis obtained, the data which were beinglogged in RINEX format using a handheld GPS and post-processed were more reliable than that of the absolutepositioning, when compared to that of Geodetic GPS receiver.
7
From the results analysed for both the post-processedRINEX data and absolute positioning data, the handheld GPSRINEX data when post processed can be used for anymeaningful work.
ACKNOWLAGEMENT
I wish to express my sincere gratitude to God Almighty forthe grace, strength and good health He gave me to completethis research.
My sincere thanks and appreciation go to Dr. J.D. Dodoforhis advice, assistance and guidance throughout my period ofresearch. I will ever remain grateful to the staff of theDepartment of Surveying and Geoinformatics, Federaluniversity of Technology Yola; your effort to see to thesuccess of this research is very much commendable. ToOyatayo K.T, Abimiku E.S my colleagues with whom thisresearch was carried out together, God blessed you all.
Many thanks and appreciations are truly for my parents, brothers and sisters. Dad, thanks for your endless love and your knowledge that enriches my life. You are the one who understands me the most. Mum, thanks for your love and gentle care that you raise me each day with. To my Brothers and Sisters, you perhaps do not really realize how wonderfulyou both are to me. I love you all.
REFERENCEHill C. J. (1999), “P4 User Guide pseudorange and phasepost-processor” Institute of Engineering Surveying andspace Geodesy. University of Nottingham.UK
8
Jone S., Brian G, Phili Hand Jone B. (2003), “ GlobalPosition System” Published by Back well Ltd. UK
Kaplan E. D. (1996), “Understanding GPS principles andapplication “ Paraclet publication. UK
Musa A.A. (2003), “The role of digital technology insurveying” A seminar paper presented at the NigerianInstitute of surveying student week. Federal universitytechnology Yola.(Unpublished)
Ndukwe K. N. (2001), “Digital technology in surveying andmapping “Rhyce Rerec p.110. Enugu campus
Nworgu B. G. (1991), ”Educational Research” Wisdom PublisherLtd Ibadan
Peter H. Dana (1994) “ Global positioning system overview”Department of Geography, university of Texas
WEBSITES
General Application of GPS (last accessed on 12/23/2005)
http://www.gmat.unsw.edu.an/snap/gps/gpssurvey/chap2/23/ .htm
9





























