Embed Size (px)
Citation preview

757
The most notable advance in our knowledge of path integrationin insects is a new understanding of how the honeybeemeasures the distance that it travels during its foraging trips.Data from two groups show that the bee’s odometer recordsdistance in terms of the net amount of image motion over theretina that is accumulated during a flight. Progress has alsobeen made in clarifying the relation between path integrationand other navigational strategies. On unfamiliar ground, pathintegration is the only available means of navigation. In familiarsurroundings, however, guidance by landmarks may overrideguidance by path integration. Path integration then becomes aback-up strategy that is used primarily when landmarks fail.
Addresses*Sussex Centre for Neuroscience, School of Biological Sciences,University of Sussex, Brighton BN1 9QG, UK;e-mail: [email protected]†Department of Zoology, Michigan State University, East Lansing,MI 48824, USA; e-mail: [email protected]
Current Opinion in Neurobiology 2000, 10:757–762
0959-4388/00/$ — see front matter© 2000 Elsevier Science Ltd. All rights reserved.
AbbreviationPI path integration
IntroductionA remarkably wide range of animals, from insects to man,has discovered how to navigate using path integration (PI).On leaving some significant starting point, such as a nest,an animal updates an accumulator that keeps a runningtally of its current direction and distance from the origin sothat it can always take a direct path back to its startingpoint. The study of PI in insects began in the early 1900s:Pièron [1] displaced a foraging ant that was returninghome. The ant continued in the same compass directionand then, at the appropriate point, stopped and searchedfor its nest as though the displacement had not occurred. Alittle later, Santschi [2] proved that the sun provides antswith a compass for directional control. The next milestonewas von Frisch’s discovery that the waggle dance of hon-eybees encodes the distance and direction betweenfeeding sites and the hive [3]. Bees are recruited by thisdance and extract from it the necessary information to nav-igate to the site guided by PI. One of the problems vonFrisch raised, but did not fully solve, was how bees mightmeasure the distance they fly. The first half of our reviewsurveys new work on this question. In the second part, wediscuss navigation using PI and its relationship to othernavigational strategies.
OdometryThe retinal image movement experienced by insects fly-ing through their surroundings provides ‘optic flow’ that
Path integration in insectsThomas S Collett* and Matthew Collett†
Figure 1
Ants, Cataglyphis fortis, are initially trained to travel eastward 15 mfrom their nest (grey circle) to an enclosed feeder (black circle).Throughout their journey the foraging ants are confined to an enclosedchannel that is open to the sky but gives them no sight of thesurrounding landscape. Data show individual trajectories of ants afterleaving a shortened channel that points 38° to the east of the trainingchannel. Ants are immediately directed towards the feeder, showingthat they can at any point compute the direction to the goal. Dashedline shows mean direction of trajectories. Food is not provided in testsand the ants search beyond the point where they found food on theirprevious trip. Note the small systematic error in direction (datafrom [16•]).
N
Current Opinion in Neurobiology
serves to controls many aspects of flight. Three recentstudies show that flying honeybees measure and controlthe distance that they travel by integrating such optic flowduring the flight. Experimental proof is possible becausethe system monitoring optic flow is ignorant of the dis-tance of features in the world that generate it: flying a shortdistance close to a surface produces the same integratedoptic flow as flying a longer distance further from the sur-face. Esch and Burns [4] trained bees to collect sucrosefrom a balloon, the height of which could be varied. Thehigher the feeder, the less the optic flow and the shorterthe distance signalled by the waggle dance, although thelonger the actual distance flown. Srinivasan et al. [5,6]trained bees to collect sucrose from a feeder within a22 cm-wide channel. When the channel was narrowed, giv-ing more image motion per unit distance, bees searched forthe feeder closer to the entrance. They searched furtheralong the channel when it was wider. In the third experi-ment, Srinivasan et al. [7•] compared the distance signalledby waggle runs from bees flying over open ground withthose after flight through an 11 cm-wide channel.Perceived distance in this narrow channel is greatly exag-gerated: each meter of flight along it increased the distancesignalled by an amount that was equivalent to 30 m flightover open ground.
Bees fly faster in wider channels or at higher altitudes[5,8•]. Thus, like flies [9], they adjust their flight speed tokeep the speed of optic flow constant. A constant imagespeed means that in the experiments described above[5,6,7•], flight time and the amount of optic flow are bothproportional to perceived distance. The relative impor-tance of time and of optic flow in estimating distance can,however, be disentangled because speed compensation isimperfect in windy weather. Ground speed is slower inhead-winds than in tail-winds, and optic flow turns out tobe a better predictor of distance flown in the channel thanis flight time [6]. It is possible that the PI system hasbecome optimised to a particular image speed, with theaccumulator performing most accurately with that input,but producing errors in strong winds.
Keeping their optic flow speed fixed makes bees automat-ically decelerate as they lose height [5]. It has recently beenshown that a bee’s rate of descent when landing on a hori-zontal surface is linked to its forward speed, so enabling itto achieve a smooth landing without explicit knowledge ofheight or of velocity [8•]. Because flying a short distanceclose to the ground or close to objects in the lateral visualfield is perceived as equivalent to flying a longer distancehigh above the ground or further from a lateral surface
758 Neurobiology of behaviour
Figure 2
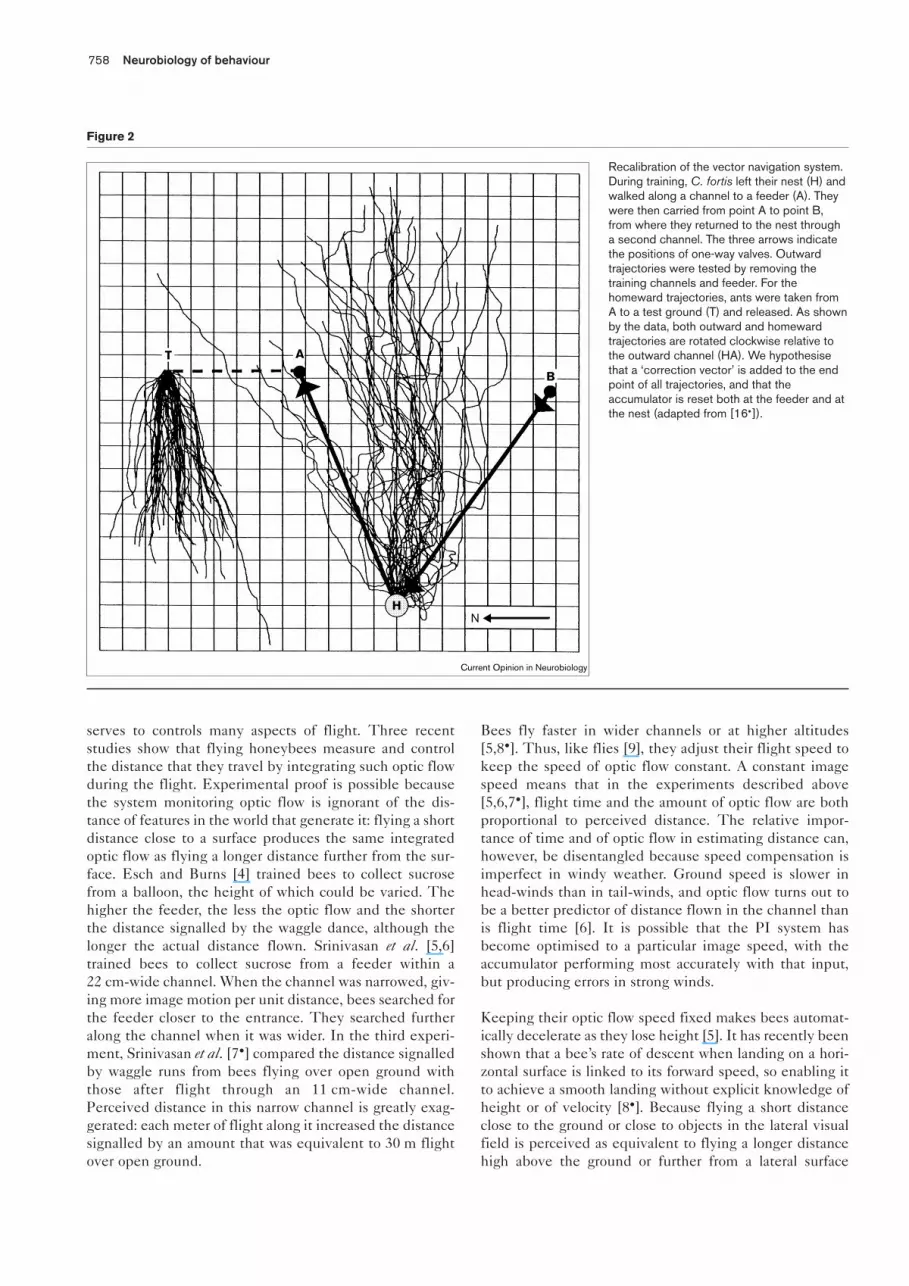
Recalibration of the vector navigation system.During training, C. fortis left their nest (H) andwalked along a channel to a feeder (A). Theywere then carried from point A to point B,from where they returned to the nest througha second channel. The three arrows indicatethe positions of one-way valves. Outwardtrajectories were tested by removing thetraining channels and feeder. For thehomeward trajectories, ants were taken fromA to a test ground (T) and released. As shownby the data, both outward and homewardtrajectories are rotated clockwise relative tothe outward channel (HA). We hypothesisethat a ‘correction vector’ is added to the endpoint of all trajectories, and that theaccumulator is reset both at the feeder and atthe nest (adapted from [16•]).
N
Current Opinion in Neurobiology
T A
B
H

[4,7•], a controlled height is needed for accurate PI. Heightcontrol is not yet well understood, but it probably relies oninformation from a textured ground. When the texture isfine, as over a lake, bees descend until they detect surfacefeatures [10]. More generally, bees fly at approximately2–3 m above open ground, with small up and down move-ments (F Dyer, personal communication) that generateparallax cues with which height could be set.
Because bees can be subject to unpredictable winds duringflight, ground speed and distance are most reliably con-trolled and measured through image motion. Insects thatwalk on the ground, and are not subject to passive transportby wind, need not rely on optic flow to monitor theirprogress. Optic flow has no detectable influence on thewalking speed of various beetles [11] and only a small effecton the walking speed of fruit flies [12] and honeybees [13].In desert ants, the control of distance is slightly altered bythe optic flow that is generated by a moving belt beneath atransparent floor [14]. The ant’s odometer, however, canfunction independently of ventral or lateral optic flow [15•],implying that the ant assesses distance through some pro-prioceptive or internal monitor of motor performance.
Navigation using PIPI is not only used on homeward journeys. Desert ants,like bees, can navigate by PI to a food site. To demonstratethis use of PI, the possibility of landmark guidance mustbe excluded. Such proof was obtained in ants [16•] by
allowing them to learn feeder co-ordinates within a chan-nel that excluded sight of the surrounding landscape. Theants’ paths were then recorded over open ground with thechannel shortened and the feeder removed. When thechannel was rotated to force ants along a detour, ants leav-ing the channel immediately re-directed their path towardsthe approximate site of the feeder (Figure 1). Desert antshave several search strategies to cope with the inaccuraciesof PI. A newly discovered example is the use of scent tolocate food. If a food source is first discovered by its smell,then subsequent trips are not directed to the food itself,but to a position slightly downwind of it. The finalapproach to the food can then be guided by the ‘odourplume’ [17•].
To navigate towards a goal using PI, an individual requiresboth an accumulator to provide instantaneous position, anda memory of the goal’s position. The two positions mustthen be compared in order to determine the direction ofsubsequent movement (for example, at the end of thechannel in Figure 1). This process appears to be calibratedthroughout the lifetime of a forager [16•]. If desert antsexperience consistent errors in PI on reaching a goal, theyadjust their computational process. Re-calibration isobserved when ants are carried repeatedly over part oftheir journey, so that PI on the outward and return jour-neys does not agree (Figure 2). The form of there-calibration suggests that the accumulator of the PI nav-igation system is not updated continuously over a whole
Path integration in insects Collett and Collett 759
Figure 3
Honeybees learn the distance of a feederfrom a landmark. A group of bees is trained tocollect sucrose from either feeder A or fromfeeder B in an 800 cm-long channel. Thepositions of A and B are shown by ▼s. Thecurves show search distributions in a testchannel after the feeder has been removed.● and ■ plot distributions of groups trained tofeeders A and B, respectively. Both groupslook predominantly in the correct place butthe group trained to B searches more widelythan that trained to the closer feeder A. Athird group of bees was trained to feeder Bwith a landmark 370 cm from the entrance.The effect of the landmark is to narrow thesearch distribution (∆), suggesting that beesmeasure distance from the landmark. Thissupposition is confirmed by tests in which thelandmark is displaced back by 180 cm to aposition 250 cm from the entrance. The bees’search (●●) is shifted back by the sameamount. ∇ indicates the position 180 cm afterthe landmark (adapted from [6]).
0
25
50
75
100
0 100 200 300 400 500 600 700 800
Position in tunnel (cm)
Rel
ativ
e fre
quen
cy o
f sea
rch
Landmark at 250cm Landmark at 370cm
Current Opinion in Neurobiology
A B

trip, but that it is reset to a zero value at both the nest andthe turning point (e.g. a food site) [18•].
Von Frisch’s decipherment of the waggle dance raised thequestion of how potential recruits can obtain the PI co-ordinates of the food site that are encoded in the dance.The direction of the food source relative to the sun is givenby the direction of the waggle run with respect to gravity.Followers must determine this direction among a jostlingcrowd in the dark (for a review, see [19•]). Only followerspositioned behind the dancer seem to do so successfully[20]. Followers gradually attain this position during a wag-gle run, at the same time aligning themselves with thedancer [21•]. Antennal contact may start the process [21•],while the final alignment may be determined by a narrowjet of air produced by the wings of the dancer (J Storm, AMichelsen, K Rohrseitz, personal communication).Whereas potential recruits face the problem of accuratelydetermining the direction of waggle runs, dancers seem to
build scatter into their waggle runs so as to spread recruitsevenly over patches of flowers [22]. The scatter in thedirections of the waggle runs of bees trained to forage at afeeder decreases with increasing distance of the feederfrom the hive [3,23•]. In contrast, dances signalling apotential nest site have less directional scatter, and thescatter is independent of distance [23•].
PI and landmark navigationOn familiar terrain, ants, bees and wasps tend to follow fixedpaths guided by visual landmarks (for reviews, see[3,24,25]). A desert ant returning from a food site will followprecisely the same route whether it homes normally, orwhether it is first allowed to reach the vicinity of the nestbefore being carried back and replaced near to the food [24],suggesting, perhaps, that routes can be run independentlyof PI. How do PI and landmark guidance interact in suchsituations? We consider three questions of current interest.
First, do insects associate some kind of local vector withlandmarks so that, on passing a landmark, they take thecorrect course for the next segment of their route? Insmall-scale laboratory environments, honeybees associate avector of a given direction [26] and distance [6,26] with thesight of a particular scene or landmark and reproduce thatvector on encountering the landmark. The same processprobably occurs in large-scale natural environments as well[27,28]. Although ants have been shown to link a particu-lar direction of travel to the passing of a familiar landmark[29], there is as yet no evidence that such local vectorshave a length that corresponds to the distance to the goalor to the next landmark. Instead, landmarks initiate aninertial effect, possibly related to a new behaviourdescribed in Drosophila [30]: walking flies approaching alandmark will temporarily keep to the same directionshould the landmark suddenly disappear, as happens whenwalking over irregular ground. The direction of local vec-tors can be determined by celestial compass cues [29]. Thedirection of responses cued by landmarks can also be ego-centric. Honeybees flying through mazes can, for instance,be trained to turn left or right on seeing a particular colourirrespective of compass direction [31].
Second, does the use of landmarks increase the accuracy ofnavigation? The uncertainty of a bee’s measurement ofdistance within a channel increases with the distance thatit travels (Figure 3) [6,32•]. Precision is greater if the beepasses a familiar landmark positioned partway along thechannel [6], because the shorter vector from the landmarkto the feeder determines where the bee searches (Figure 3;see also [33]). Accuracy is thus improved by breaking thejourney into segments that are defined by landmarks [6].
Third, what happens when there is conflict between theinformation supplied by PI and landmarks? In a situation inwhich PI and landmarks signal different directions of trav-el, a desert ant takes the direction normally linked to thelandmarks [29]. After a couple of metres without further
760 Neurobiology of behaviour
Figure 4
Fiddler crab’s foraging path, demonstrating continuous readout of itsPI system. A crab leaves its burrow and forages on the beach. Whenstartled it returns straight to its burrow, guided by PI. The crab usuallywalks sideways along a radial path from the burrow, as in the initial partof the track. The orientation of its body axis is shown by the line andthe dot represents its big claw. The crab can move in either direction.In this case, the big claw trails the rest of the animal on the outwardjourney but leads on the return. If the crab walks circumferentiallyaround the burrow, as in the middle section of the journey, itcontinuously adjusts its orientation so that one side always pointstoward the burrow entrance, even though the entrance may be invisibleto the crab. The crab's rate of turning depends on both its currentassessment of its distance from home and its direction of travel relativeto the burrow. The orientation of its body axis thus reveals its jointestimate of these parameters (adapted from [43]).
20cm
Current Opinion in Neurobiology

cues, the ant reverts to the path given by PI. Informationfrom the landmark briefly overrides that from PI. A similareffect is seen in honeybees flying through a channel, past alandmark, to a feeder [6]. When the landmark is shiftedtowards the entrance of the channel, the distance that thebees fly before searching for the feeder is shortened by thesame amount (Figure 3).
Drawing together the answers to our questions, we see thaton familiar landmarked terrain, directional guidance fromPI can be suppressed, and that landmark cues lead theinsect with greater certainty to its goal. The PI accumulatoris probably updated all the while, so that, in the absence oflandmark cues, PI information is available as a backup [29].
Conclusions and future directionsThis review has emphasised the progress that can be madeby applying an old and technologically undemandingmethod to new problems. Channels provide a controlledvisual environment and their use has improved our under-standing of the odometer and the way in which informationfrom familiar landmarks and PI combine to guide an ani-mal’s path. New technologies should expand our horizonsfurther. So far, the use of virtual reality to simulate the opticflow experienced by moving insects has been limited toflies [34]. Work on PI using such techniques holds promise,but is still uncommon [35]. To date, only the sensory inputsto PI have been studied neurophysiologically, most notablythe sky compass [36,37•–39•]. The combination of tetheredanimals and virtual reality may make it possible to study theneural mechanisms of more-central components of PI nav-igation. Genetic techniques may help in working out whichneural structures mediate different navigational strategies.Strauss [40•] gives an example of this approach inDrosophila. On a larger scale, radar tracking enables the pathof individual bees to be followed during foraging [41•,42•]and may help to clarify how different navigational strategiesare deployed in complex, natural environments.
The study of a wider array of animals may also allow newinsights into the mechanisms of PI. Fiddler crabs [43,44•]are unusually informative in displaying a continuous readoutof the state of their PI system. The crab leaves its burrow toforage on the open beach. If startled, it scuttles sidewaysstraight home. Escape time is reduced by turning continu-ously so that one side always points at the burrow entrance,even if the entrance hole is masked (Figure 4). This behav-iour makes it possible to examine the precision of pathintegration while the accumulator is being updated, ratherthan waiting for the results to be expressed in the perfor-mance of a homing vector. Artificial animals have also madea contribution. Robots enable the performance of differentmodels to be compared under natural conditions. Thus,work with robot ‘desert ants’ has sharpened the discussionof how information from polarised light might be used tomaintain an ant’s direction [45]. A robot honeybee mimick-ing the waggle dance has been able to inform foragers of thedirection, although not the distance, of a food source [46].
AcknowledgementsWe are very grateful to Fred Dyer, Tom Labhart, Axel Michelsen,Mandyam Srinivasan, Harald Wolf and Jochen Zeil for information, and toMandyam Srinivasan and Jochen Zeil for illustrations. Few papers on PIhave been published within the annual period of review and we havemarked and annotated all the papers that we have seen.
References and recommended readingPapers of particular interest, published within the annual period of review,have been highlighted as:
• of special interest••of outstanding interest
1. Pièron H: Du rôle du sens musculaire dans l’orientation dequelques espèces de fourmis. Bull Inst Gen Psychol Paris 1904,4:168-186. [Title translation: On the role of idiothetic cues in theorientation behaviour of various species of ants.]
2. Santschi F: Observations et remarques critiques sur lemécanisme de l’orientation chez les fourmis. Rev Suisse Zool1911, 19:305-338. [Title translation: Observations and criticalremarks on the mechanism of ant orientation.]
3. von Frisch K: The Dance Language and Orientation of Bees.Cambridge, MA: Harvard University Press; 1967.
4. Esch HE, Burns JE: Distance estimation by foraging honeybees.J Exp Biol 1996, 199:155-162.
5. Srinivasan MV, Zhang SW, Lehrer M, Collett TS: Honeybeenavigation en route to the goal: visual flight control and odometry.J Exp Biol 1996, 199:155-216.
6. Srinivasan MV, Zhang SW, Bidwell NJ: Visually mediated odometryin honeybees navigation en route to the goal: visual flight controland odometry. J Exp Biol 1997, 200:2513-2522.
7. Srinivasan MV, Zhang S, Altwen M, Tautz J: Honeybee navigation:• nature and calibration of the odometer. Science 2000, 287:851-853.Esch and Burns [4] established that the duration of the waggle componentof the bee dance depends on perceived optic flow. To calibrate the relationbetween waggle duration and flow more precisely, waggle dances wereobserved after bees had flown through a channel. Waggle duration after fly-ing 1 m through an 11 cm-wide channel is equivalent to that performed afterflying 30 m over open ground.
8. Srinivasan MV, Zhang SW, Chahl JS, Barth E, Venkatesh S: How• honeybees make grazing landings on flat surfaces. Biol Cybern
2000, 83:171-183.Bees achieve smooth landings by keeping image speed constant so thatthey decelerate as they lose height, and by linking their speed of descent totheir forward velocity.
9. David CT: Compensation for height in the control of ground speedby Drosophila in a new, ‘barber’s pole’ wind tunnel. J CompPhysiol 1982, 147:485-493.
10. Heran H, Lindauer M: Windkompensation und Seitenwindkorrekturder Bienen beim Flug über Wasser. Z. vergl. Physiol 1963,47:39-55. [Title translation: Compensation for head and side winds byhoneybees flying over water.]
11. Zanker JM, Collett TS: The optomotor system on the ground: onthe absence of visual control of speed in walking ladybirds.J Comp Physiol 1985, 156:395-402.
12. Götz KG, Wenking H: Visual control of locomotion in the walkingfruitfly Drosophila. J Comp Physiol A 1973, 85:235-266.
13. Schöne H: Optokinetic speed control and estimation of traveldistance in walking honeybees. J Comp Physiol A 1996, 179:587-592.
14. Ronacher B, Wehner R: Desert ants (Cataglyphis fortis) useself-induced optic flow to measure distances travelled. J CompPhysiol A 1995, 177:21-27.
15. Ronacher B, Gallizi K, Wohlgemuth S, Wehner R: Lateral optic flow• does not influence distance estimation in the desert ant
Cataglyphis fortis. J Exp Biol 2000, 203:1113-1121. Walking speed and distance measurement are unaffected either by the ant'sdistance from lateral optic stimuli, or by painting over the ventral area of retina. Ants do not need optic flow for measuring distance.
16. Collett M, Collett TS, Wehner R: Calibration of vector navigation in• desert ants. Curr Biol 1999, 9:1031-1034. Training ants to follow a one-way circuit can cause their trajectories to betransformed. A fuller explanation of this recalibration is found in [18•].
Path integration in insects Collett and Collett 761

17. Wolf H, Wehner R: Pinpointing food sources: olfactory and• anemotactic orientation in desert ants. J Exp Biol 2000,
203:857-868.Desert ants use odour plumes to help locate a food source. They aim slightlydownwind of the source so that they can follow the plume upwind.
18. Collett M, Collett TS: How do insects use path integration for their• navigation? Biol Cybern 2000, 83:245-259.A review that links interactions between PI and landmarks to a new model ofhow insects use PI for navigation.
19. Michelsen A: The dance language of honeybees: recent findings• and problems. In The Design of Animal Communication. Edited by
Hauser MD, Konishi M. Cambridge, MA: MIT Press; 1999:111-131.A review of the waggle dance that discusses possible ways in which followerbees might extract the direction of the waggle run.
20. Judd TM: The waggle dance of the honey bee: which beesfollowing a dancer successfully acquire the information. J InsectBehav 1995, 8:343-354.
21. Rohrseitz K, Tautz J: Honey bee dance communication: waggle run• direction coded in antennal contacts? J Comp Physiol A 1999,
184:463-470.During the course of a waggle run, followers gradually move behind thedancing bee with their long axis aligned with that of the dancer. Antennalcontact with the dancer may help bees achieve this position.
22. Towne WF, Gould JL: The spatial precision of the honey bee’sdance communication. J Insect Behav 1988, 1:129-155.
23. Weidenmüller A, Seeley TD: Imprecision in waggle dances of the• honeybee (Apis mellifera) for nearby food sources: error or
adaptation? Behav Ecol Sociobiol 1999, 46:190-199.An experimental test of the hypothesis that bees indicate direction impre-cisely in order to spread a foraging force evenly over a patch of flowers:bees signal the direction of a potential nest site more accurately than theydo a feeder.
24. Wehner R, Michel B, Antonsen P: Visual navigation in insects:coupling of egocentric and geocentric information. J Exp Biol1996, 199:129-140.
25. Collett TS, Zeil J: Places and landmarks: an arthropod perspective.In Spatial Representation in Animals. Edited by Healy S. Oxford:Oxford University Press; 1998:18-53.
26. Collett TS, Baron J, Sellen K: On the encoding of movementvectors by honeybees. Are distance and direction representedindependently? J Comp Physiol A 1996, 179:395-406.
27. Chittka L, Kunze J, Shipman C, Buchmann SL: The significance oflandmarks for path integration of homing honey bee foragers.Naturwissenschaften 1995, 82:341-342.
28. Menzel R, Geiger K, Joerges JM, ller U, Chittka L: Bees travel novelhomeward routes by integrating separately acquired vectormemories. Anim Behav 1998, 55:139-152.
29. Collett M, Collett TS, Bisch S, Wehner R: Local and global vectorsin desert ant navigation. Nature 1998, 394:269-272.
30. Straus R, Pichler J: Persistence of orientation toward a temporarilyinvisible landmark in Drosophila melanogaster. J Comp Physiol A1998, 182:411-423.
31. Zhang SW, Bartsch K, Srinivasan MV: Maze learning by honeybees.Neurobiol Learn Mem 1996, 66:267-282.
32. Cheng K, Srinivasan MV, Zhang SW: Error is proportional to• distance measured by honeybees: Weber’s law in the odometer.
Anim Cogn 1999, 2:11-16. Bees’ errors in measuring distance flown through a channel increase linearlywith the distance.
33. Chittka L, Geiger K, Kunze J: The influence of landmarks ondistance estimation of honeybees. Anim Behav 1995, 50:23-31.
34. Strauss R, Schuster S, Götz KG: Processing of artificial visualfeedback in the walking fruit fly Drosophila melanogaster. J ExpBiol 1997, 200:1281-1296.
35. Wolf R, Heisenberg M: Visual space from visual motion: turnintegration in tethered flying Drosophila. Learn Memory 1997,4:318-327.
36. Labhart T: How polarization-sensitive interneurones of crickets performat low degrees of polarization. J Exp Biol 1996, 199:1467-1475.
37. Labhart T: How polarization-sensitive interneurones of crickets• see the polarization pattern of the sky: a field study with an
optoelectronic model neurone. J Exp Biol 1999, 202:757-770.Many insects obtain directional information from the polarisation pattern inthe sky, even when the pattern is partially obscured by cloud cover or by pol-lutants. The ability of insects to detect weak polarisation patterns wasanalysed using an optoelectronic model of the insect polarisation system,which was tested under a natural autumn sky in different weather conditions.
38. Labhart T, Meyer EP: Detectors for polarized skylight in insects: a• survey of ommatidial specializations in the dorsal rim of the
compound eye. Microsc Res Tech 1999, 47:368-379. This survey of ommatidial adaptations for detecting polarized light in the dor-sal rim area reveals that polarisation sensitivity is a common feature amonginsects and that it may have evolved independently in different families.
39. Labhart T: Polarization sensitive interneurons in the optic lobes of• the desert ant, Cataglyphis bicolor. Naturwissenschaften 2000,
87:133-136.Polarisation-sensitive neurones in ants have similar properties to thoserecorded in crickets.
40. Strauss, R: Altered spatio-temporal orientation and course control• in walking Drosophila mutants with structural central-complex
defects in the brain. J Neurogenet 1999, 13:71.Normal Drosphila will maintain a course towards a landmark for 20 cm afterthe landmark has vanished. With no object to induce fixation, flies changedirection after walking about 2 cm. Mutant Drosophila with a structurally dis-ordered central complex (an area within the protocerebrum) fail to maintaina persistent course towards landmarks that disappear.
41. Riley JR, Reynolds DR, Smith AD, Edwards AS, Osborne JL,• McCartney HA: Compensation for the wind by foraging bumble
bees. Nature 1999, 400:126. A radar tracking study showing how well foraging bumble bees compensatefor wind.
42. Osborne JL, Clark SJ, Morris RJ, Williams IH, Riley JR, Smith AD,• Reynolds DR, Edwards AS: A landscape-scale study of bumble
bee foraging range and constancy, using harmonic radar. J ApplEcol 1999, 36:519-533.
Individual bumblebees fitted with radar transponders were tracked for sev-eral hundred metres over complete foraging trips. Bees generally stuck tothe same direction and destination on successive trips.
43. Zeil J: Homing in fiddle crabs (Uca lactea annulipes and Ucavomeris: Ocypodidae). J Comp Physiol A 1998, 183:367-377.
44. Zeil J, Layne J: Path integration in fiddler crabs and its relation to• habitat and social life. In The Crustacean Nervous System. Edited
by Wiese K. Berlin: Heidelberg; in press.A review of recent work on PI in fiddler crabs stressing the many differentuses of PI in these animals.
45. Lambrinos D, Maris M, Kobyashi H, Pfeifer R, Wehner R: Anautonomous agent navigating with a polarized light compass.Adapt Behav 1997, 6:131-161.
46. Michelsen A, Bach B, Storm J, Kirchner WH, Lindauer M: Howhoneybees perceive communication dances, studied by means ofa mechanical model. Behav Ecol Sociobiol 1992, 30:143-150.
762 Neurobiology of behaviour





























