Embed Size (px)
Citation preview

Sophia Vyzoviti
Department of Architecture University of Thessaly
Greece
Pleat and Play
190 ENHSA - EAAE no 55 Rethinking the Human in Technology Driven Architecture
The paper discusses ways to embed a critically responsive design methodology in ar-chitectural education and illustrates the argument with a case of a deployable proto-type fabrication. While robotics and structural engineering are today considered the dominant constituents of a responsive architectural prototype, the paper focuses on the architectural layers of responsive form generation in terms of �exibility and pro-grammatic instability. In compliance with the conference theme the paper also poses a critical question on the overriding technological paradigm and suggests possibili-ties for low- tech adaptable and responsive prototypes actuated by human agents. Considering shape control in adaptable prototypes some kinetic, and polymorphic examples are discussed drawing from the bibliography on folded plate structures and origami based deployables as well as the author’s past research1 (Vyzoviti, 2011) in of form generation experiments which employ the continuous surface, its aggregates, and its subdivisions as a tool. In this framework the paper attempts to make a contri-bution towards a responsive design process agenda in architectural education focus-ing on three positions:
• Physicalmodelingasacomplementandasachallengetodigitalmodeling, • Participatoryformfindingasacollectiverepositoryofformgenerationrulesthat
can be shared between members of a creative community, • Behavioralresearchasdatatobeincorporatedinformgenerationprocesses,de-
scribing systems of human activities as algorithms.
The argument is illustrated with the fabrication of a deployable shell prototype based on a geometric transformation of the ‘Miura-ori’ origami pattern. Form-�nding is in-troduced as collective play between the pleated shell and small group of architecture students. Considered as material exploration and topological propedia to a techno-logically equipped one, this prototype draws knowledge from research on deployable structures developed from membrane folding and explores in its design the biaxial shortening of a plane into a developable double-corrugation surface. Further, consid-ering creativity as the ultimate intrinsically human activity and exploring the architec-tural potential of the fabricated prototype improvisational group play is introduced as program evoking the paradox of rule following that determines all human activity. Activated by human agents the performance of the deployable prototype exceeds its expectations, manifesting spatial enclosures and containments that were not predict-ed in its original design, enriching and augmenting its architectural predicaments.
Responsive Surface
According to Tristan d’Estrée Sterk (2003) what is commonly de�ned as responsive architecture is “a type of architecture that has the ability to alter its form in response to changing conditions”2 and comprises a research �eld that combines interdisciplinary knowledge from architecture, robotics, arti�cial intelligence, and structural engineer-ing. The term responsive is usually combined with the term adaptive, broadening the de�nition for architecture as a system which changes its structure, behaviour or re-sources according to demand. A state of the art outlook in adaptive architecture re-veals four thematic foci of research in progress3: dynamic façade systems, transforma-ble structures, bio-inspired materials, and intelligent actuation technology. Excluding
Sophia Vyzoviti Greece 191
intelligent eco-systems and actuation technology an integrated research entity can be established around the notion of surface with emphasis on the geometric and struc-tural component.
Since the early 1990’s the notion of surface has evolved into a formal trait among the avant-garde architectural discourses. Conceptualized within the Deleuzian ontol-ogy of the fold it has become associated with diagrammatic techniques and digital morphogenesis, proli�cally materializing in the projected and the built by continuity, curvature, smooth layering and manipulations of the ground. Liberating architects from typology and the order of the box, the focus on surface processes diversi�es architectural research in exploring and making explicit form de�ning strategies that envision a rede�nition of architectural performance. As a diagrammatic practice that appeals to morphogeneticists as well as urban conceptualists, the surface has acquired conceptual, operational and material depth.
If we consider the current term structural façade (or structural skin) the modernist dichotomy between the ornamental - geometric character of the building envelope and its structural support appears to have merged. In the architectural production of the past decade the single surface has evolved into an omnipotent architectural tool combining landform, structure, ornament, aperture, and environmental comfort. Stan Allen (2009) attends to the innovative capacity of single surface implying that “green roofs, arti�cial mountains and geological forms; buildings you walk on or over; networks of ramps and warped surfaces; buildings that carve into the ground or landscapes lifted high into the air” that may seem commonplace in architecture today have been exac-erbated by the single surface projects of the 1990’s and particularly that “the emergent �eld landscape urbanism predicated on a series of formal experiments carried out in the early 1990s by architects working with strategies of folding, surface manipulation and the creation of arti�cial terrains”.4 In this context I would argue that it would be valid to in-vestigate the responsive or adaptive potential of surface as an integral architectural strategy with a radical programmatic function in terms of indeterminacy and �exibil-ity, beyond dynamic façade design.
The responsive surface has a distinguished set of intrinsic properties. The respon-sive surface is able to change shape –in terms of its overall form or texture – and over di�erent time-scales, and therefore it is dynamic. Its dynamics are embedded within the design and fabrication process and also manifest interactivity and/or kinetics in the completed work. Surface Kinematics is enhanced by surface geometry, trough patterning: tessellations of a single surface or assemblages of kinetic components. Surface geometry is becoming increasingly smarter. Surface kinetics is actuated through intelligent components comprising of systems of sensors, servo mechanisms, pistons, sliders, leds, or lower tech con�gurations four-bar linkages, gliders, etc.
According to Tristan d’Estrée Sterk (2006)5 structural systems used within respon-sive building envelopes and exoskeleton frameworks they must have controllable ri-gidity, must be lightweight and capable of undergoing asymmetrical deformations. These essential characteristics work together to provide the most robust and �exible outcomes and form a core set of principles that can be applied in the development of all successful responsive architectures. Tensegrity structures comprise the prime research �eld for adaptive structures – as exempli�ed in the adaptive tensegrity of orambra6- with a large number of potential applications, due to their small transpor-tation or storage volume, tunable sti�ness properties, active vibration damping and

192 ENHSA - EAAE no 55 Rethinking the Human in Technology Driven Architecture
deployment or con�guration control. However I intend to focus and further invest a certain depth to another genre of potentially responsive or adaptive surfaces that in-tegrate structural and formal characteristics and manifest kinetic performance while maintaining continuity and cohesion attending to according to the single surface prin-ciple: the origami based deployables.
Origami based Deployables
Another genre of kinetic and potentially responsive surfaces, are the folded and tes-sellated surfaces whose geometry originates in Origami, the ancient Japanese art of paper folding. Folded surfaces most usually encountered in architecture are static structures, folded plate shells, with applications as roofs, load baring walls, or combi-nations of both. Martin Bechthold (2007) who investigates cementitious composite folded plate systems, de�nes shells7, as material e�cient structurally active surfaces that are extremely thin in proportion to their load baring capacity for large spans, and epitomizes their aesthetics in the early built works by Eduardo Torroja, Pier Luigi Nervi and Felix Candella. Folded plate structures that are kinetic are rarely realized in architecture despite their high performance for wide span and formal qualities. Mar-tin Trautz, and Arne Künstler (2009)8 investigate possibilities to combine the advan-tages of folded plate structures with the possibility of a reversible building element through folding and unfolding by considering the existing plate thickness and asso-ciated sti�ness that constrains the kinetic behaviour of origami originating patterns. The most relevant -in architectural terms - kinetic property of origami patterns and their derivatives is deployment. Origami based deployables transform from a two di-mensional into a three dimensional kinetic surface and then into a �at packaged one. In this sequence of transformations deployment occurs by translation and by rotation. When constructed of thin sheets of paper origami based deployables are extremely lightweight yet rigid, manifesting in overall zero Gaussian curvature. Further -as we will discover in the last part of the presentation they bare the potential for secondary asymmetrical deformations. Therefore origami based deployables bear the potential to constitute a research depository for adaptive – responsive surfaces.
Origami based deployables of architectural relevance, are tessellated kinetic sur-faces based on 4-fold mechanisms that manifest synchronous deployment. The most prominent pattern in this respect is Miura-ori. Devised by Prof. Koryo Miura of Tokyo University’s Institute of Space and Aeronautical Science in 1980, the Miura-ori folding technique allows the unfolding and refolding of a surface in one action9.
Miura-ori pattern comprises a grid of creases arranged along zig-zag lines at an-gles of small deviation to the vertical. According to Pellegrino and Vincent (2001, pp. 64)10 who compare the behaviour of a sheet surface folded according to an orthogo-nal grid –as applied in road maps- and the Miura-ori pattern, the zig-zag geometry introduces a radical change in the unfolding behaviour of the surface compared to the orthogonal grid, that of synchronous –rather than sequential- deployment. The unfolding of a sheet folded according to Miura-ori manifests biaxial shortening of a plane into a �at-foldable yet rigid double-corrugation surface.
Complementary to the Miura-ori, there are two more origami patterns based on 4-fold mechanisms that appear in the bibliography of origami originating surface structures, the Yoshimura pattern and the Diagonal pattern. Buri and Weinand (2008)11
Sophia Vyzoviti Greece 193
outline two fundamental geometric characteristics in the structure of these patterns with operational potential, their parallel corrugations, and the principle of the reverse fold. They proceed through geometric analysis and employ digital form-�nding soft-ware to generate variations of complex folded patterns by two generative paths, the section pro�le and the corrugation line. Buri and Weinand (2008) prove that numeri-cal models of complex folded plate structures enable them to be milled by Computer Numerically Controlled machines, and fabricated by cross laminated timber panels. However, despite the innovative form generation contribution of their research in the domain, the prototypes produced are static structures.
Pellegrino and Vincent (2001, pp: 60)12 deliver the proof of one fundamental con-straint for all deployable membranes which are modelled as zero thickness surfaces. The ‘inextensionality constraint’ is necessary condition for �at fold ability, also known as compact packaging. Accordingly the inextensional folding of a membrane requires that whenever di�erent creases meet at a common point there should be at least four folds, of which three have one sign, and one fold has the opposite sign. The inex-tensionality constraint can be applied on origami based deployable surface patterns, enriching the basic origami rule that crease patterns are two colourable, that is, either concave creases (also known as mountains) or convex creases (also known as valleys). Therefore prototypical origami patterns such as the Miura-ori, the Yoshimura and the Diagonal as well as their geometric transformations intrinsically bare the potential to become deployable surfaces.
Digital Simulation vs Material Computing
Origami based deployable surfaces have until recently resisted digital simulation ac-cessible to architects, their production relying exclusively on relentlessly disciplined sequences of paper folding and their representations on mathematical models. Nev-ertheless in the past few years the possibility to simulate the biaxial shortening of a plane into a �at –foldable and developable double-corrugation surface is available in a user friendly interface. Tomohiro Tachi (2009)13 has developed a system for computer based interactive simulation of origami, based on a rigid origami model that manifests the continuous process of folding a piece of paper into a folded shape by calculating the con�guration from the crease pattern. Rigid Origami Simulator is a GUI program in windows that simulates kinematics of rigid origami from the origami crease pattern which helps users to understand the structure of the origami model and the way to fold the model from the crease pattern. It requires as input a minimum necessary rep-resentation of a folded surface, a two dimensional crease pattern which complies with the two colourable rule - the notation of convex and concave creases - upon a �at state. Rigid Origami Simulator is open source and facilitates the formation of an online interest community.
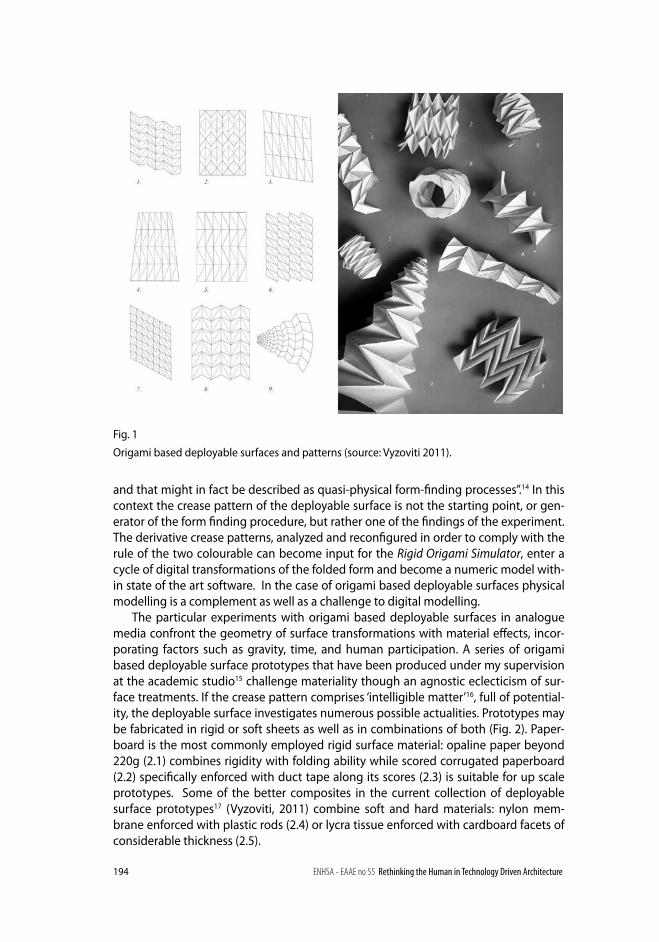
My contribution to the �eld of research in origami based deployable surfaces com-prises of form-�nding experiments conducted primarily in analogue media incorpo-rating the basic morphogenetic rules- parallel corrugations, the principle of the re-verse fold and the inextensionality constraint in hands on paper folding experiments (Fig. 1). A state-of-the-art de�nition of the research methodology conforms to the no-tion of material computing. Patrick Schumacher (2007) de�nes material computing as “analogue form-�nding processes that can complement the new digital design tools
194 ENHSA - EAAE no 55 Rethinking the Human in Technology Driven Architecture
and that might in fact be described as quasi-physical form-�nding processes”.14 In this context the crease pattern of the deployable surface is not the starting point, or gen-erator of the form �nding procedure, but rather one of the �ndings of the experiment. The derivative crease patterns, analyzed and recon�gured in order to comply with the rule of the two colourable can become input for the Rigid Origami Simulator, enter a cycle of digital transformations of the folded form and become a numeric model with-in state of the art software. In the case of origami based deployable surfaces physical modelling is a complement as well as a challenge to digital modelling.
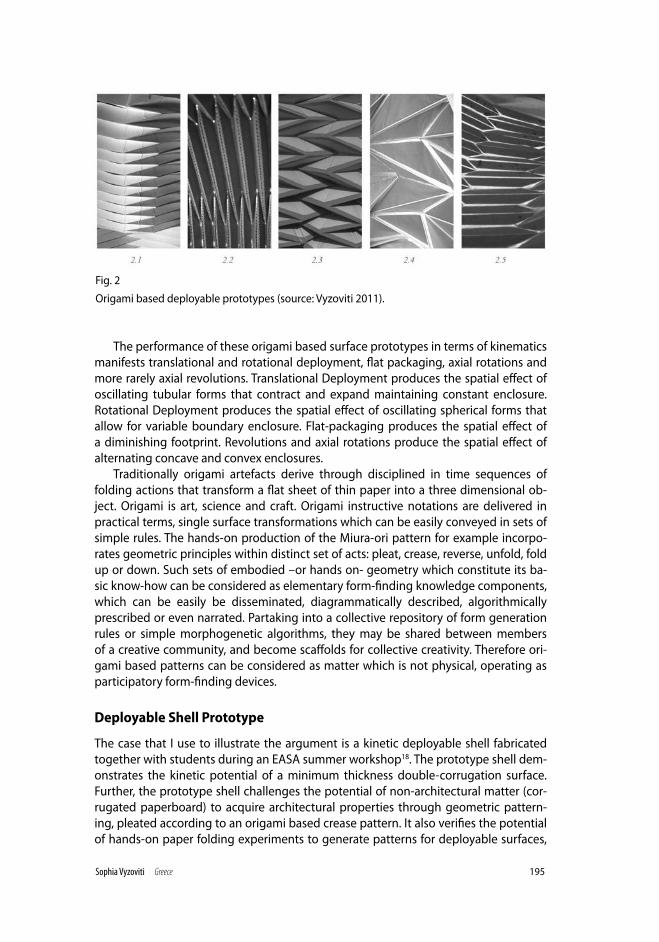
The particular experiments with origami based deployable surfaces in analogue media confront the geometry of surface transformations with material e�ects, incor-porating factors such as gravity, time, and human participation. A series of origami based deployable surface prototypes that have been produced under my supervision at the academic studio15 challenge materiality though an agnostic eclecticism of sur-face treatments. If the crease pattern comprises ‘intelligible matter’16, full of potential-ity, the deployable surface investigates numerous possible actualities. Prototypes may be fabricated in rigid or soft sheets as well as in combinations of both (Fig. 2). Paper-board is the most commonly employed rigid surface material: opaline paper beyond 220g (2.1) combines rigidity with folding ability while scored corrugated paperboard (2.2) speci�cally enforced with duct tape along its scores (2.3) is suitable for up scale prototypes. Some of the better composites in the current collection of deployable surface prototypes17 (Vyzoviti, 2011) combine soft and hard materials: nylon mem-brane enforced with plastic rods (2.4) or lycra tissue enforced with cardboard facets of considerable thickness (2.5).
Fig. 1
Origami based deployable surfaces and patterns (source: Vyzoviti 2011).
Sophia Vyzoviti Greece 195
The performance of these origami based surface prototypes in terms of kinematics manifests translational and rotational deployment, �at packaging, axial rotations and more rarely axial revolutions. Translational Deployment produces the spatial e�ect of oscillating tubular forms that contract and expand maintaining constant enclosure. Rotational Deployment produces the spatial e�ect of oscillating spherical forms that allow for variable boundary enclosure. Flat-packaging produces the spatial e�ect of a diminishing footprint. Revolutions and axial rotations produce the spatial e�ect of alternating concave and convex enclosures.
Traditionally origami artefacts derive through disciplined in time sequences of folding actions that transform a �at sheet of thin paper into a three dimensional ob-ject. Origami is art, science and craft. Origami instructive notations are delivered in practical terms, single surface transformations which can be easily conveyed in sets of simple rules. The hands-on production of the Miura-ori pattern for example incorpo-rates geometric principles within distinct set of acts: pleat, crease, reverse, unfold, fold up or down. Such sets of embodied –or hands on- geometry which constitute its ba-sic know-how can be considered as elementary form-�nding knowledge components, which can be easily be disseminated, diagrammatically described, algorithmically prescribed or even narrated. Partaking into a collective repository of form generation rules or simple morphogenetic algorithms, they may be shared between members of a creative community, and become sca�olds for collective creativity. Therefore ori-gami based patterns can be considered as matter which is not physical, operating as participatory form-�nding devices.
Deployable Shell Prototype
The case that I use to illustrate the argument is a kinetic deployable shell fabricated together with students during an EASA summer workshop18. The prototype shell dem-onstrates the kinetic potential of a minimum thickness double-corrugation surface. Further, the prototype shell challenges the potential of non-architectural matter (cor-rugated paperboard) to acquire architectural properties through geometric pattern-ing, pleated according to an origami based crease pattern. It also veri�es the potential of hands-on paper folding experiments to generate patterns for deployable surfaces,
Fig. 2
Origami based deployable prototypes (source: Vyzoviti 2011).

196 ENHSA - EAAE no 55 Rethinking the Human in Technology Driven Architecture
capable to become the intelligible matter of digital simulations. Finally the prototype shell investigates the performance of a deployable shell in the context of user interac-tion, in this case partaking of improvisational group play. The installation of the proto-type in a low tech context poses a critique to the dominant norm that actuated shape change and control occurs exclusively in the �eld of robotics and arti�cial intelligence. It also poses a critical question to the desires and intentions of possible users of re-sponsive architecture.
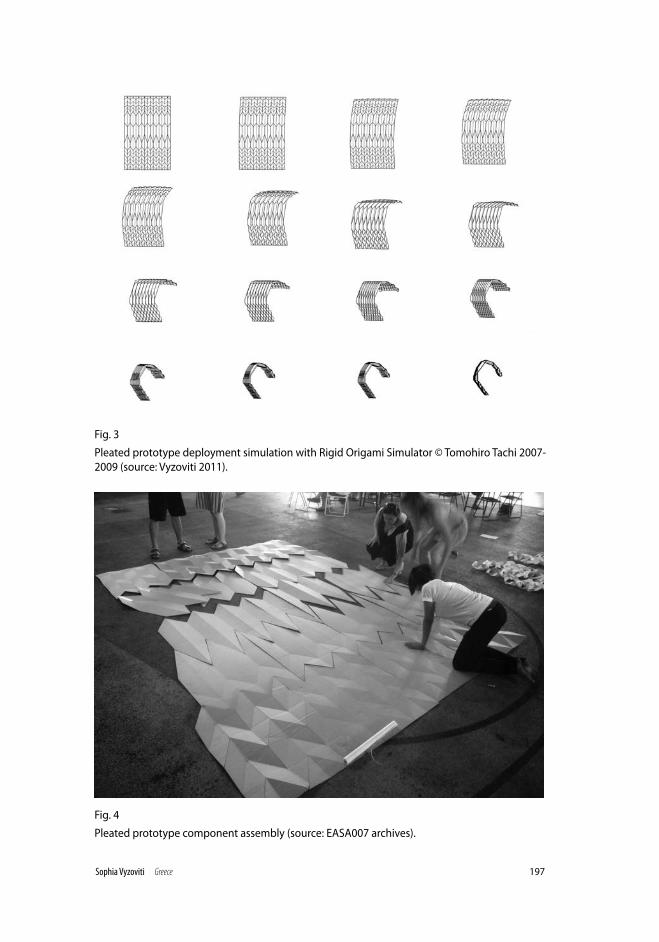
The pattern selected for the prototype derived from a hands-on paper folding session with the EASA students. It was �rst created in lightweight opaline paper. Its deployment ability is based on a four-fold mechanism, and its pattern comprises a geometric recombination of the ‘Miura-ori’ and Yoshimura origami patterns. The dig-ital simulation of the pattern’s deployment process is a post production made only re-cently with Rigid Origami Simulator19 and demonstrates in discrete steps the transfor-mation of the two-dimensional crease pattern to the three-dimensional folded form and further into to �at packaging. Two formal states comprise minimum and maximum values the object achieves: �at state (two dimensional pattern) and �at package state (inextensional folding). In between the object acquires a variety of vault con�gurations producing an oscillating tubular spatial e�ect. Synchronous translational deployment is evident in all steps of the transformation from vault to �at package (Fig. 3).
The fabrication of the prototype shell explored the potential of a physical double corrugation surface in terms of kinematics and formal e�ects. The architectural –or programmatic- objective in this case was a manipulable and deployable space enclos-ing object which was larger than a piece of furniture and smaller than a room. The selected pattern was scaled to �t – in vault con�guration – the height of a sitting adult or a standing child. The shell was fabricated in corrugated paperboard and duct tape. It was produced by assembling components of 100x70 sheets of double wall corru-gated board. The sheets were scored according to the crease pattern on both surfaces of the board. There are three layers that compose double wall corrugated board, the external liners and the corrugated medium of �utes. The external liners enable the board to receive scores along valley creases and cuts along mountain creases comply-ing with the two colourable origami rule. Component sheets were initially folded ac-cording to the pattern and then assembled in semi-�at state (Fig. 4). Mountain creases were covered with duct tape ensuring that the shell remained cohesive and establish-ing continuity between independent pleated components. Two identical prototype shells were fabricated.
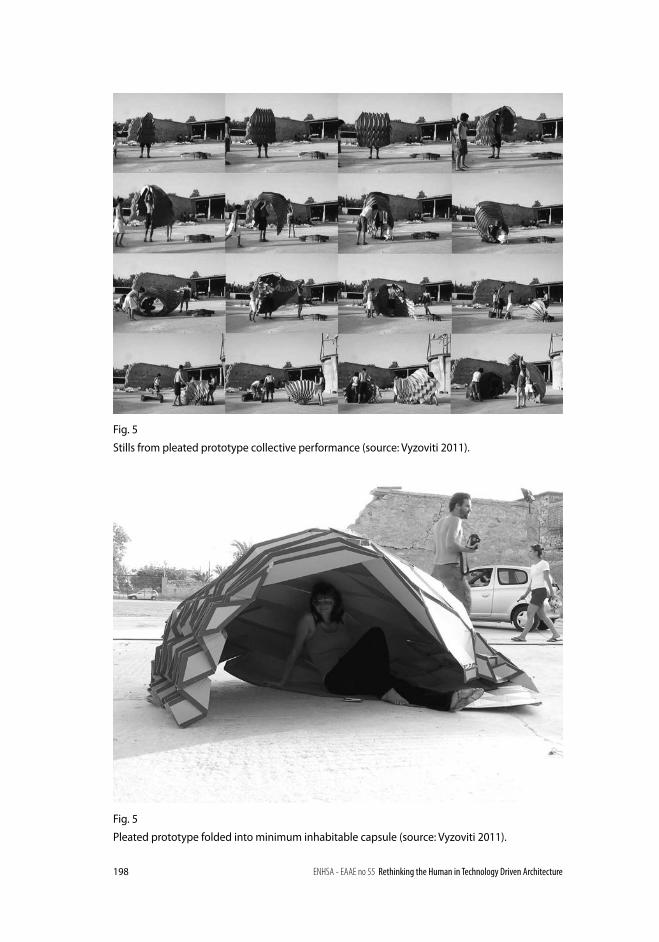
Initially, the prototype shells were considered completed when folded into a vault con�guration, smoothly performing translational and rotational deployment. They were carried �at packaged to the installation location. Form-�nding was further in-troduced as improvisational collective play within the small group of participants (Fig. 5). The group explored deployment ability of each shell in an indeterminate se-ries of transformations alternating overall enfolding of the pleated shell in order to produce minimum inhabitable spaces. Considering creativity as the ultimate intrin-sically human activity, improvisational group play was introduced as a form genera-tion program, an activity that actuated the pleated surface challenging the limits of its deployment while exploring the kinetic behaviour of the fabricated prototype. Par-taking in a series of transformations the pleated shell became animated, constantly a�ected by the improvisational choreography informing and deforming it. Through-
Sophia Vyzoviti Greece 197
Fig. 3
Pleated prototype deployment simulation with Rigid Origami Simulator © Tomohiro Tachi 2007-2009 (source: Vyzoviti 2011).
Fig. 4
Pleated prototype component assembly (source: EASA007 archives).
198 ENHSA - EAAE no 55 Rethinking the Human in Technology Driven Architecture
Fig. 5
Stills from pleated prototype collective performance (source: Vyzoviti 2011).
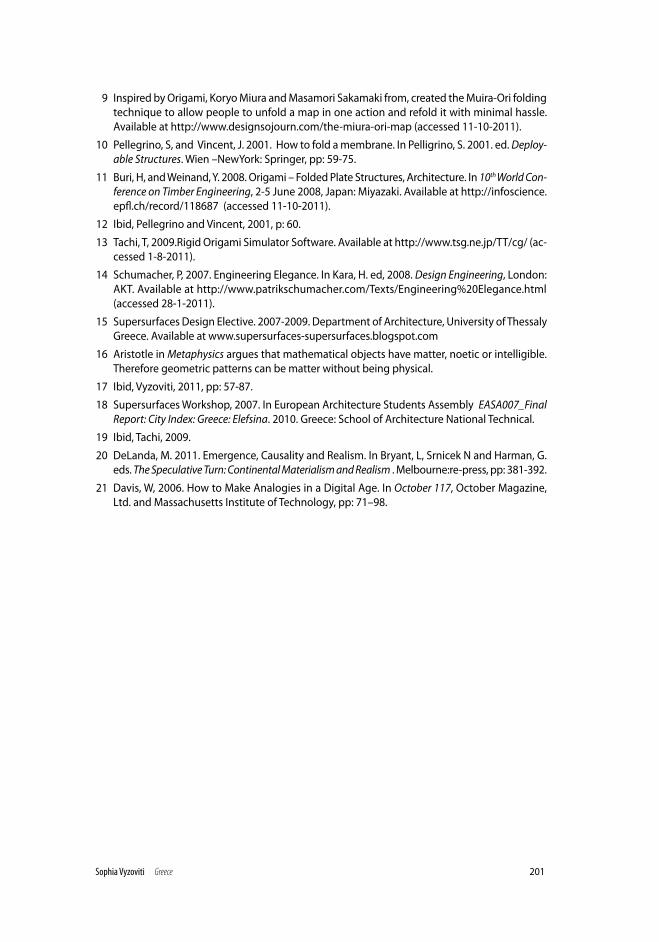
Fig. 5
Pleated prototype folded into minimum inhabitable capsule (source: Vyzoviti 2011).

Sophia Vyzoviti Greece 199
out the performance the prototype remained cohesive and self-supporting asserting the potential of corrugated paperboard to physically substantiate an origami based deployable pattern. Complementary to translational deployment which was predict-ed in the digital simulations counterintuitive or unexpected con�gurations were also observed. Noteworthy con�gurations of the shell were achieved in-between stages of translational and rotational deployment, such as asymmetrical deployment and tilt-ing of the deployment axis. Enfolding of the pleated shell produced spatial enclosures and containments that were later evaluated as minimum inhabitable capsules (Fig. 6) Activated by human agents the deployable surface surpassed the groups’ initial ex-pectations, enriching and augmenting its architectural performance.
Multiple shape con�gurations that appeared during the performance were not considered in advance when designing the prototype shell. The digital simulation of the deployable pattern is not adequate to predict (beyond translational deployment) the full spectrum of shape change in the physical, animated through human activa-tion prototype. The prototype shell’s multiple responses to improvisational group moves are not a case of e�cient causality. Formal instability and plurality is triggered by human interaction within the group and between group and kinetic prototype. The pleated surface generated shape changes operating as a morphological automa-ton. This performance can be partly attributed to the intrinsic behaviour of the ma-terial pattern (synchronous deployment) and partly to material failure since thickness of sheet and surface fatigue may also in�uence the transformations of the prototype. The physical deployable prototype and the group can be considered as one unity – pleat | play- and described as one complex functional structure. I would argue that in terms of kinematics and shape change the unity pleat | play processes an emergence property. The behaviour of the whole in terms of kinematics and polymorphics can-not be reduced to the sum of its parts. As Manuel De Landa (2011, pp. 385) de�nes “a whole is said to be emergent if it is produced by causal interactions among its compo-nent parts. Those interactions, in which the parts exercise their capacities to a�ect and be a�ected, constitute the mechanism of emergence behind the properties of the whole.”20 And this emergence property constitutes the pleat | play experiment extremely rel-evant in the debate for rethinking the human factor in technology driven architecture.
Concluding Remarks
In conclusion, rather than strictly summarizing the preceding argument I would like to submit some propositions on the way digital technology may be embedded in archi-tectural education today. In order to educate in the �eld of architecture today we need to create. As new technologies facilitate us towards prototype production through digital fabrication apparatuses our role as educators has shifted towards invent-ing ways to sustain and promote a culture of making rather than emulating projects through drawings. Computer Aided Design interfaces has liberated architectural form �nding from the tediousness of technical drawing, as in the traditional plan – section – elevation - model compositional sequence, providing utilities for immediate three dimensional form �nding experiments with digital dynamic models. Paradoxically physical modelling as material computing or analogue rami�cations of digital modes of representation21 (Davis, 2006, pp. 98) have become extremely relevant in current ar-chitectural form �nding. And even more paradoxically analogue materiality has con-

200 ENHSA - EAAE no 55 Rethinking the Human in Technology Driven Architecture
tributed to digital morphogenesis some pre-digital techniques and modes of think-ing such as bricolage and making do with collective repositories of form generation knowledge (scripts, rules, patterns, etc). Form �nding in the digital era has become not only more immediate but also more collective and collaborative.
In addition workshop teaching as an educational model, which is becoming in-creasingly popular today, also equips and facilitates the educators towards creating. Workshops accelerate and intensify standard design processes in the �eld of architec-ture providing the frame for exhaustive investigation of one single topic, in brief and in depth. Workshops allow diversions from and enrichment of standard architectural content by forming interdisciplinary teams. Their experimental nature promotes risk taking. The capacity of problem solving or unveiling all parameters that structure a problem increases signi�cantly through collaboration. Workshops function as social condensers providing platforms for community bonding. Collective creativity sessions are enjoyable and rewarding. Evaluating the deployable prototype fabrication and in-stallation of the previous section in terms of educational bene�ts I can conclude that these bene�ts were not only knowledge based but also enhancing communication and collaboration skills. There are two necessary conditions to bind a group of archi-tecture students into a creative community: working together in creative sessions to-wards a collective product and sharing a palette of comprehensible and achievable forms. These conditions ought to be considered towards a design methodology that critically embeds new technologies in the academic design studio.
Notes
1 Vyzoviti, S, 2011. Soft Shells: Porous and Deployable Architectural Screens. Amsterdam: BIS Publishers.
2 Sterk, TdE, 2003. Building Upon Negroponte: A Hybridized Model Of Control Suitable For Responsive Architecture available at http://www.sciencedirect.com/science/article/pii/S0926580504000822 (accessed 28-1-2011).
3 Adaptive Architecture, 2011. International Conference. 3-5 March 2011. London: Building Center. available at http://www.buildingcentre.co.uk/adaptivearchitecture/adaptive.html (accessed 1-11-2011).
4 Landform Building -Architecture’s New Terrain. 2009. A working Conference at Princeton Uni-versity School of Architecture. 18 April 2009. available at http://soa.princeton.edu/landform/ (accessed 28-1-2011).
5 Sterk, TdE, 2006. Shape Control in Responsive Architectural Structures – Current Reasons and Challenges. In 4th World Conference on Structural Control and Monitoring (accessed 11-08-2011).
6 www.orambra.com (accessed 11-08-2011).
7 Bechthold, M,. 2007. Surface Structures in the Digital Age: Studies in Ferrocement. In Lloyd-Thomas , K. ed. 2007. Material Matters: Architecture and Material Practice. London: Routledge, pp: 139-150.
8 Trautz, M, and Künstler, A. 2009. Deployable folded plate structures – Folding patterns based on 4-fold-mechanism using sti� plates. In International Association for Shell and Spatial Struc-tures (IASS) Symposium. 28 September – 2 October 2009. Spain: Universidad Politecnica de Valencia. available at: http://trako.arch.rwth-aachen.de/publikationen/aufsaetze.php (accessed 11-10-2011).
Sophia Vyzoviti Greece 201
9 Inspired by Origami, Koryo Miura and Masamori Sakamaki from, created the Muira-Ori folding technique to allow people to unfold a map in one action and refold it with minimal hassle. Available at http://www.designsojourn.com/the-miura-ori-map (accessed 11-10-2011).
10 Pellegrino, S, and Vincent, J. 2001. How to fold a membrane. In Pelligrino, S. 2001. ed. Deploy-able Structures. Wien –NewYork: Springer, pp: 59-75.
11 Buri, H, and Weinand, Y. 2008. Origami – Folded Plate Structures, Architecture. In 10th World Con-ference on Timber Engineering, 2-5 June 2008, Japan: Miyazaki. Available at http://infoscience.ep�.ch/record/118687 (accessed 11-10-2011).
12 Ibid, Pellegrino and Vincent, 2001, p: 60.
13 Tachi, T, 2009.Rigid Origami Simulator Software. Available at http://www.tsg.ne.jp/TT/cg/ (ac-cessed 1-8-2011).
14 Schumacher, P, 2007. Engineering Elegance. In Kara, H. ed, 2008. Design Engineering, London: AKT. Available at http://www.patrikschumacher.com/Texts/Engineering%20Elegance.html (accessed 28-1-2011).
15 Supersurfaces Design Elective. 2007-2009. Department of Architecture, University of Thessaly Greece. Available at www.supersurfaces-supersurfaces.blogspot.com
16 Aristotle in Metaphysics argues that mathematical objects have matter, noetic or intelligible. Therefore geometric patterns can be matter without being physical.
17 Ibid, Vyzoviti, 2011, pp: 57-87.
18 Supersurfaces Workshop, 2007. In European Architecture Students Assembly EASA007_Final Report: City Index: Greece: Elefsina. 2010. Greece: School of Architecture National Technical.
19 Ibid, Tachi, 2009.
20 DeLanda, M. 2011. Emergence, Causality and Realism. In Bryant, L, Srnicek N and Harman, G. eds. The Speculative Turn: Continental Materialism and Realism . Melbourne:re-press, pp: 381-392.
21 Davis, W, 2006. How to Make Analogies in a Digital Age. In October 117, October Magazine, Ltd. and Massachusetts Institute of Technology, pp: 71–98.





























