Embed Size (px)
Citation preview
ROBOT PENGANTAR MAKANANDI RUMAH SAKIT UMUM
OLEH :
NAMA : AL – ANSHAR
NIM : 55201 11 201
PROGRAM STUDI TEKNIK INFORMATIKASEKOLAH TINGGI MANAJEMEN INFORMATIKA DAN KOMPUTER
STMIK ADHI GUNA PALU
2014
KATA PENGANTAR
Puji dan syukur Penulis panjatkan kehadirat Allah
Subahanawataala. atas limpahan rahmat dan karunia-Nya kepada
penulis, sehingga penulis dapat menyelesaikan makalah dengan
judul “Robot Line Follower Pengantar Makanan di Rumah
Sakit”.
Penulisan Malakah ini didasarkan sebagai tugas tengah
semester matakuliah robotika, yang bertujuan untuk mengajari
kepada mahasiswa bagaimana merancang sebuah robot yang dapat
dimanfaatkan dibidang / keperluan umum
Dengan keterbatasan pengetahuan yang ada, penulis tidak
akan dapat meyelesaikan tugas ini tanpa peran serta pihak
lain. Oleh karena itu izinkan penulis untuk menyampaikan
ucapan terimakasih kepada orang tua tercinta yang telah banyak
membantu baik dari segi moril dan materil, dalam kesempatan
ini pula penulis ingin mengucapkan terimakasih kepada pihak-
pihak yang terlibat didalamnya.
Penulis menyadari sepenuhnya bahwa penulisan malakah ini
masih jauh dari sempurna, hal ini di sebabkan karena
keterbatasan kemampuan dan waktu bagi penulis dalam menyusun
malakah ini. Oleh karena itu penulis dengan senang hati
mengharapkan saran dan kritik yang membangun dari pembaca guna
kesempurnaan malakah ini.
Palu, 17 November
2014
Penulis
Al - Anshar
DAFTAR ISI
COVER MAKALAH................................................I
KATA PENGANTAR..............................................II
DAFTAR ISI.................................................III
DAFTAR GAMBAR...............................................IV
DAFTAR TABEL.................................................V
BAB I PENDAHULUAN............................................1
1.1.........................................Latar Belakang
......................................................1
1.2........................................Rumusan Masalah
......................................................2
1.3........................................Batasan Masalah
......................................................3
1.4....................................Tujuan Peneliatian
......................................................3
1.5.....................................Mafaat Penelitian
......................................................3
BAB II TINJAUAN PUSTAKA......................................4
2.1......................................Asal Muasal Robot
......................................................4
2.2.......................................Pengenalan Robot
......................................................4
2.3.........................................Definisi Robot
.....................................................10
2.4............................................Dasar Teori
.....................................................10
2.5...................................Dasar Sistem Kontrol
.....................................................12
2.6...................................Sistem Kontrol Robot
.....................................................12
2.7....................................Line Follower Robot
.....................................................21
2.8...................................Sensor Line Follower
.....................................................22
2.9..................................Robot Pengikuti Garis
.....................................................23
2.10 Contoh Lintasan Robot ………………………………………………………......24
BAB III KESIMPULAN DAN SARAN...........................25
3.1 Kesimpulan...................................25
3.2 Saran..........................................
25
DAFTAR GAMBAR
1. Humanoid...........................................6
2. Aibo...............................................7
3. Robot Industri.....................................8
4. Robot Mars Over....................................9
5. Robot Pengantar Makanan...........................10
6. Struktur robot bergerak otonom tipikal............11
7. Blok Kontrol PID close loop.......................15
8. Tanggapan sistem terhadap masukan fungsi langkah..17
9. Tanggapan sistem terhadap aksi kontrol proporsional
18
10. Tanggapan sistem terhadap aksi control
Proporsional Derivative.........................18
11. Tanggapan sistem terhadap aksi kontrol
Proporsional Integral.............................19
12. Tanggapan sistem terhadap aksi kontrol PID.....20
13. Pergerakan Robot Tanpa Kontrol PID.............21
14. Intensitas Cahaya Pantulan Sedikit.............23
15. Intensitas Cahaya Pantulan Banyak..............23
16. Sensor Garis...................................24
17. Contoh Desain Lintasan.........................24
DAFTAR TABEL

1. Tanggapan system Kontrol PID terhadap perubahan
parameter.........................................16
BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan teknologi telah membawa perubahan
besar bagi kehidupan manusia yang begitu pesat. Tujuan
dari penggunaan robot sebagai alat bantu untuk tugas
rutinitas dalam ruangan menjadi mimpi manusia diawal
penciptaannya. Pada periode delapan dekade setelah
manusia bermimpi pertama kali tentang robot, sekarang
sudah banyak diciptakan robot yang bisa dipekerjakan
dibeberapa tempat khusus seperti rumah, departement
stores dan rumah sakit (Ali meghdari et.al, 2004)
Penggunaan robot saat ini sudah mencakup seluruh
sendi atau pekerjaan manusia, Teknologi dan otomasi
industry yang semakin pesat, canggih dan modern
mendorong manusia untuk memenuhi kebutuhan hidupnya
dengan cepat, tepat dan efisien sehingga dikembangkan
teknologi robot untuk membantu dan mempermudah
pekerjaan manusia di masa datang.
Banyak negara maju seperti: Amerika, Jerman,
Inggris, Jepang, Perancis, china berlomba-lomba untuk
menciptakan robot-robot mutakhir dengan keistimewaan-
keistimewaan khusus. Tidak ketinggalan juga robot yang
didesain untuk membantu pekerjaan/aktifitas dirumah
sakit, Sebuah robot dalam dunia kesehatan/rumah sakit
saat ini mampu didesain untuk memberikan berbagai
macam tindakan seperti robot pembedahan dan
intervensional dalam tindakan operasi, pengganti
kekurangan atau melengkapi fungsi tubuh yang hilang,
penyembuhan dan rehabilitasi, terapi behavioral,
pemenuhan kebutuhan perseorangan dalam populasi khusus
dan promosi kesehatan (Maja Mataric et al,2008).
Robot perawat atau robot nurse adalah salah satu
contoh robot yang difungsikan dirumah sakit, robot
yang awalnya diciptakan untuk membantu manajemen
asuhan keperawatan di nursing home, tetapi penulis
belum pernah mendengar robot pengantar makanan yang
difungsikan untuk membantu pekerjaan koki (tukang
masak) dirumah sakit yang bertugas untuk mengantarkan
makanan kepada pasien setiap harinya keruangan-
ruangan, adapun robot yang dapat diikut sertakan dalam
peran untuk membantu dan meringankan beban koki
dirumah sakit salah satunya adalah Robot line
follower (robot pengikut garis) merupakan suatu jenis
robot bergerak (mobile robot) yang mempunyai misi
mendeteksi dan mengikuti suatu garis pandu.
Maka dari itu penulis mengambil sebuah judul
makalah mengenai “Robot Follower Pengantar Makanan
Menggunakan PID Controler”, yang dapat melakukan tugas
dalam mengantarkan makanan kepada pasien secara tepat,
cepat
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah dipaparkan diatas
maka penulis akan merumuskan masalah mengenai
“Bagaimana sebuah System kontrol yang baik pada Robot,
agar dapat mengantarkan makanan keruangan pasien
dirumah sakit secara tepat dan cepat”
1.3 Batasan Masalah
Untuk memperkecil bahasan pada makalah ini maka penulis
memberikan batasan terhadap penulisan yang dibahas
yaitu Robot Menggunakan system PID controller dan Robot
yang dibahas adalah robot Line follower (pengikut
garis)
1.4 Tujuan
Tujuan dalam penulisan makalah ini, Untuk memahami
prinsip kerja robot line follower dan mengetahui
manfaat dan peranan robot pada dunia kerja salah
satunya di rumah sakit.
1.5 Manfaat
Dapat memberikan pengetahuan dan menambah wawasan
tentang manfaat sebuah robot pada rumah sakit. Walaupun
sampai saat ini belum ada implementasi nyata dari robot
line follower untuk RS. tetapi diharapkan kedepannya
robot ini dapat membantu pekerjaan manusia
BAB II
TINJAUAN PUSTAKA
2.1 Asal Muasal Robot
Istilah robot berasal dari kata robota yang berarti :
pekerja sendiri dan dalam bahasa Ceko (negara Eropa
Timur) berarti kerja paksa, pertama sekali muncul pada
tahun 1920. Kata robot pertama kali diperkenalkan oleh
seorang penulis dari Ceko yang bernama Karel Capek
pada tahun 1921. 13 Kata robot diperkenalkan kepada
masyarakat dalam permainannnya di drama pentas RUR
(Rossum’s Universal Robot), yang diterbitkan pada
tahun 1920.[1]
2.2 Pengenalan Robot
robot adalah sebuah alat mekanik yang dapat melakukan
tugas fisik. baik menggunakan pengawasan dan kontrol
manusia, atau menggunakan program yang telah
didefinisikan atau yang disebut dengan kecerdasan
buatan (Artificial Intelegent). Istilah robot yang
biasa terdengar umumnya mengandung pengertian suatu
alat yang menyerupai manusia atau bahkan bertingkah
laku seperti manusia, namun struktur tubuhnya tidak
seperti manusia malainkan terbuat dari bahan logam.
pada hakekatnya robot mengandung beberapa unsur-unsur
pendukung yaitu.[12]
a. Programable
b. Automatic (otomatis)
c. Manipulator (Perangkat Manipulasi)
d. Human like (Mempunyai kemiripan dengan manusia)
Dari unsur-unsur diatas jelaslah bahwa robot bukan
hanya sekedar perkakas biasa, namun merupakan mesin
khusus yang dapat dikontrol oleh manusia lewat suatu
prosesor atau controler. terdapat dua definisi yang
dapat diterima dikalangan indutri mengenai robot,
yaitu :
a. menurut RIA (Robotik Institute of Amerika) robot
adalah "Manipulator yang berfungsi jamak dan dapat
diprogram ulang dan dirancang untuk mengangkut
materian, part, peralatan atau perangkat khusus
melalui perubahan pergerakan terprogram untuk
melakukan tugas bervariasi.
b. robot merupakan peralatan yang melakukan fungsi-
fungsi yang biasa dilakukan oleh manusia, atau
peralatan yang bekerja dengan kecerdasan buatan yang
mirip dengan keceradasan manusia.[12]
2.2.1 Jenis-Jenis Robot
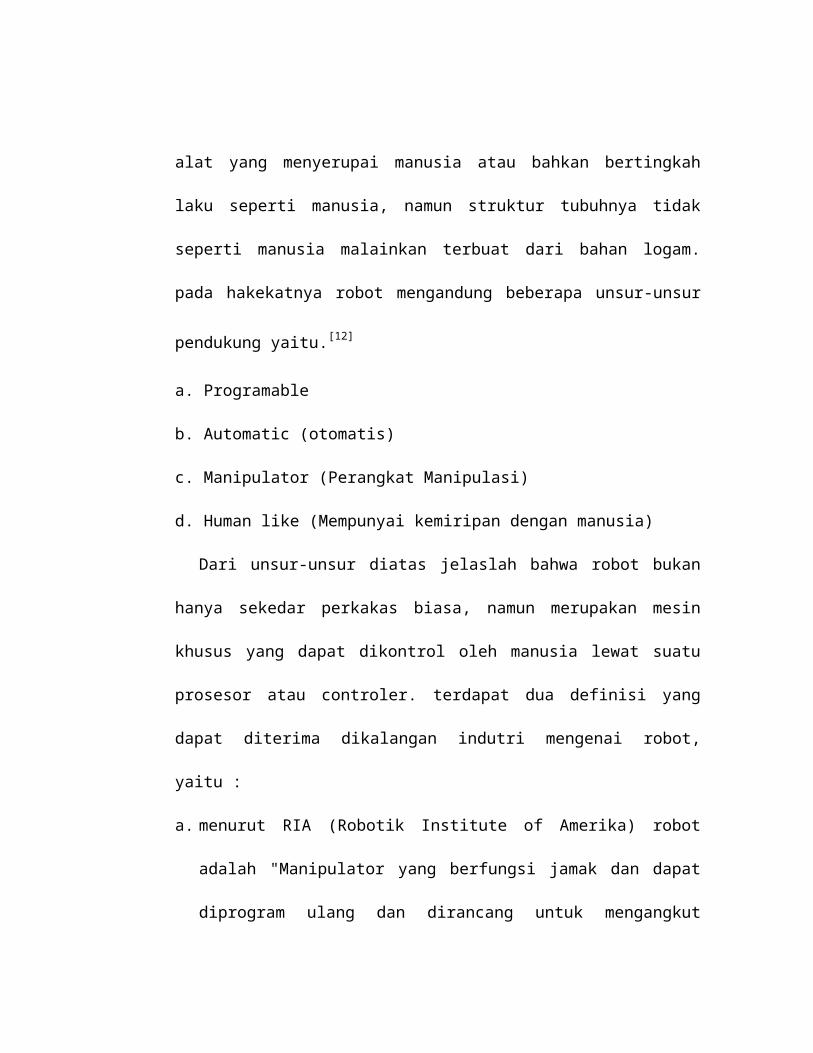
1. Humanoid
Robot humanoid adalah robot yang termasuk dalam
kategori robot berkaki yang memiliki bentuk
struktural menyerupai manusia. robot ini memiliki
penampilan keseluruhan yang didasarkan pada bentuk
tubuh manusia, yaitu : memiliki dua buah kaki, dua
buah tangan, badan, dan kepala.[13] Adapun salah satu
contoh jenis robot Humanoid yang telah dikenal
dikalangan luas yaitu robot Asimo.
Gambar 2.1 Asimo
(Sumber : http://world.honda.com/ASIMO/technology/
2011/specification/image/img_specification.jpg)
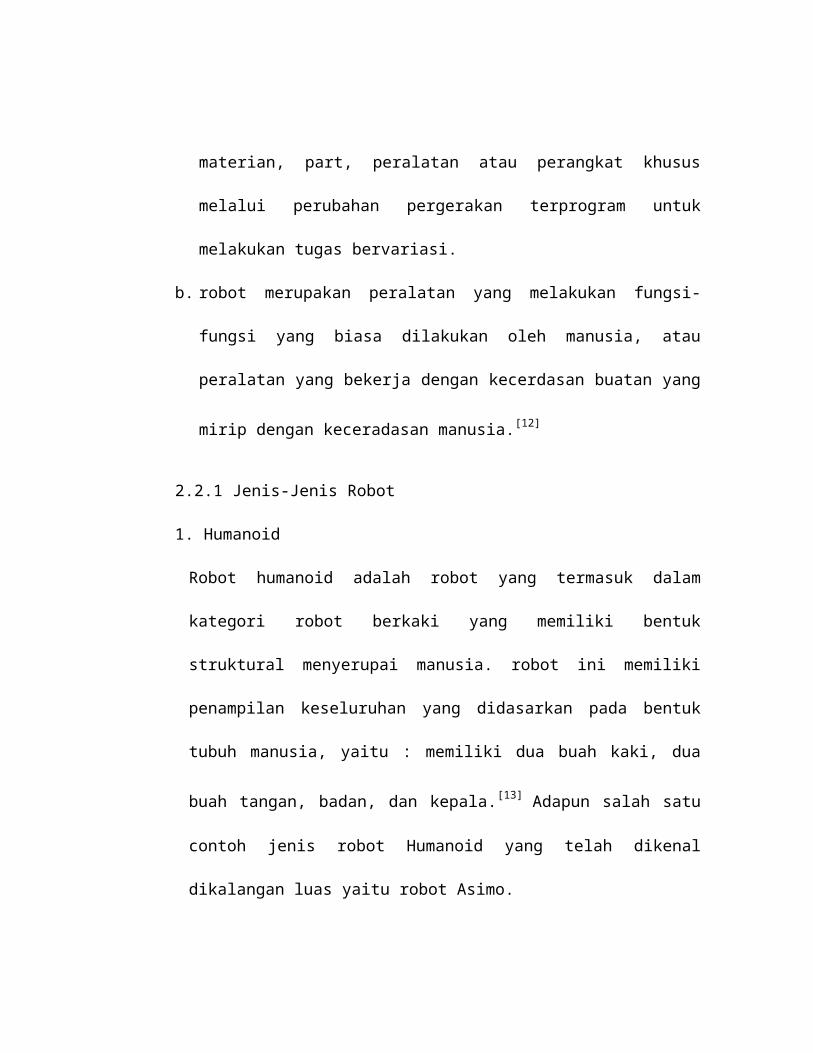
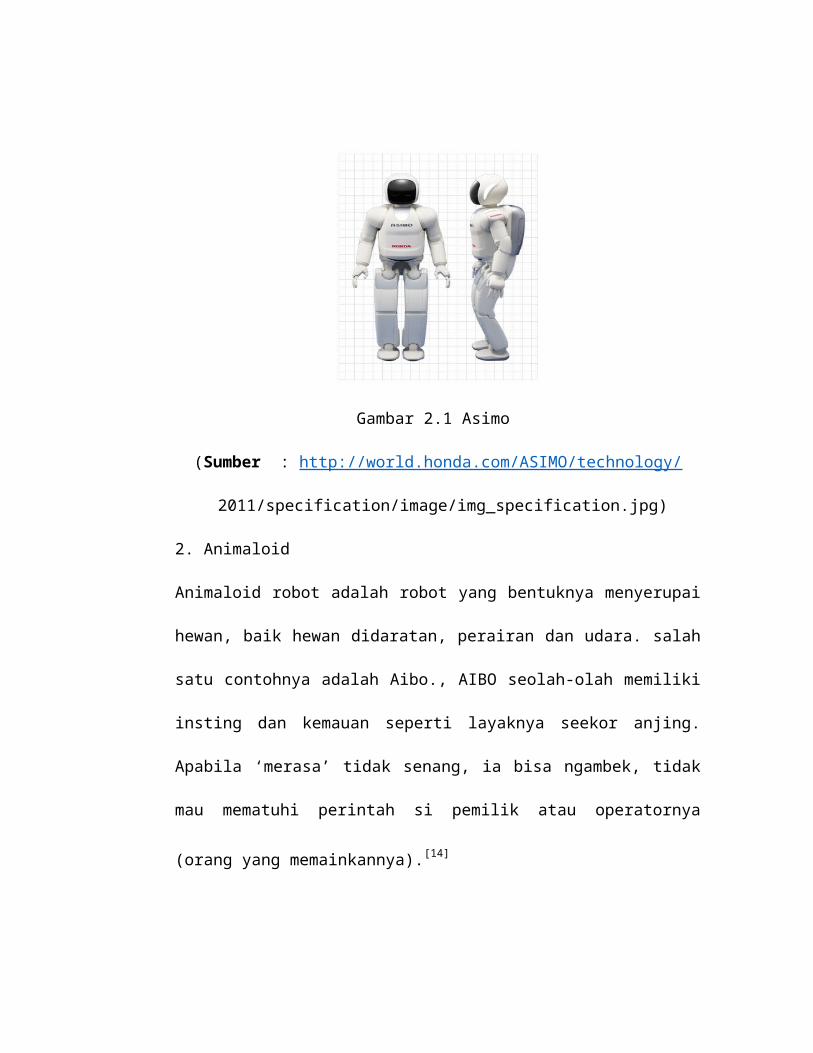
2. Animaloid
Animaloid robot adalah robot yang bentuknya menyerupai
hewan, baik hewan didaratan, perairan dan udara. salah
satu contohnya adalah Aibo., AIBO seolah-olah memiliki
insting dan kemauan seperti layaknya seekor anjing.
Apabila ‘merasa’ tidak senang, ia bisa ngambek, tidak
mau mematuhi perintah si pemilik atau operatornya
(orang yang memainkannya).[14]
Gambar 2.2 Aibo
(Sumber :
http://www.sony-aibo.com/wp-content/uploads/2013/01/So
ny-AIBO-ERS-7M2-B1.jpg)
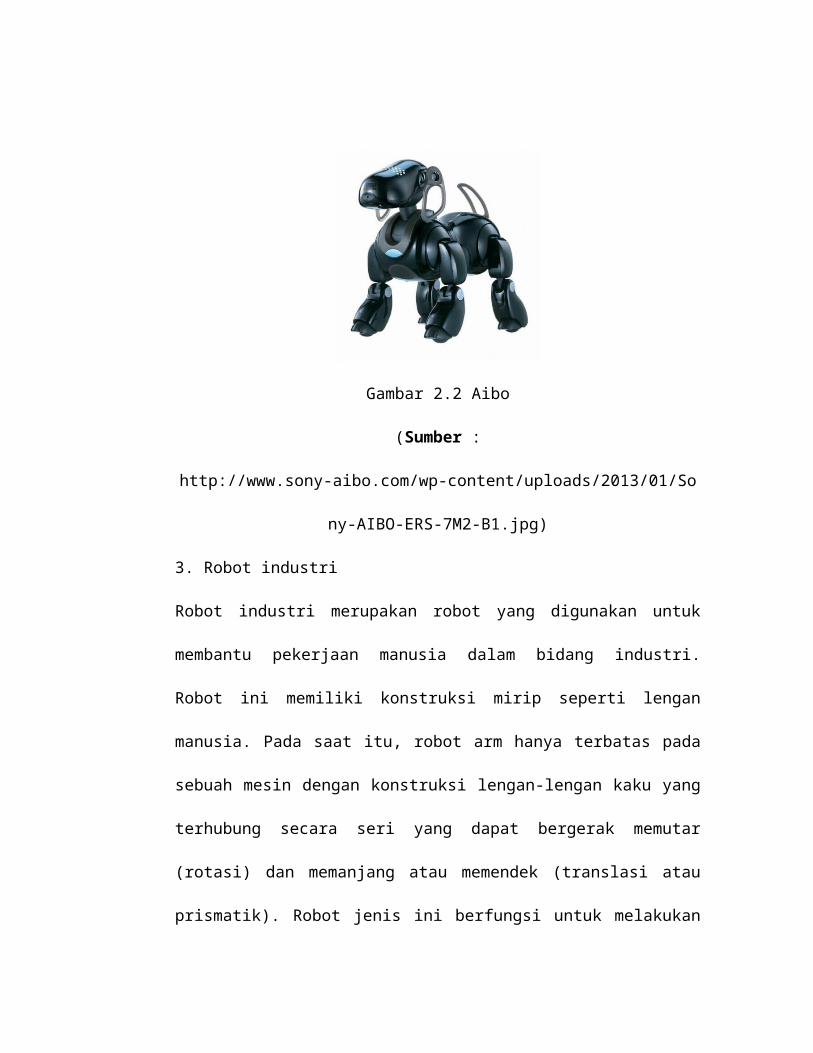
3. Robot industri
Robot industri merupakan robot yang digunakan untuk
membantu pekerjaan manusia dalam bidang industri.
Robot ini memiliki konstruksi mirip seperti lengan
manusia. Pada saat itu, robot arm hanya terbatas pada
sebuah mesin dengan konstruksi lengan-lengan kaku yang
terhubung secara seri yang dapat bergerak memutar
(rotasi) dan memanjang atau memendek (translasi atau
prismatik). Robot jenis ini berfungsi untuk melakukan
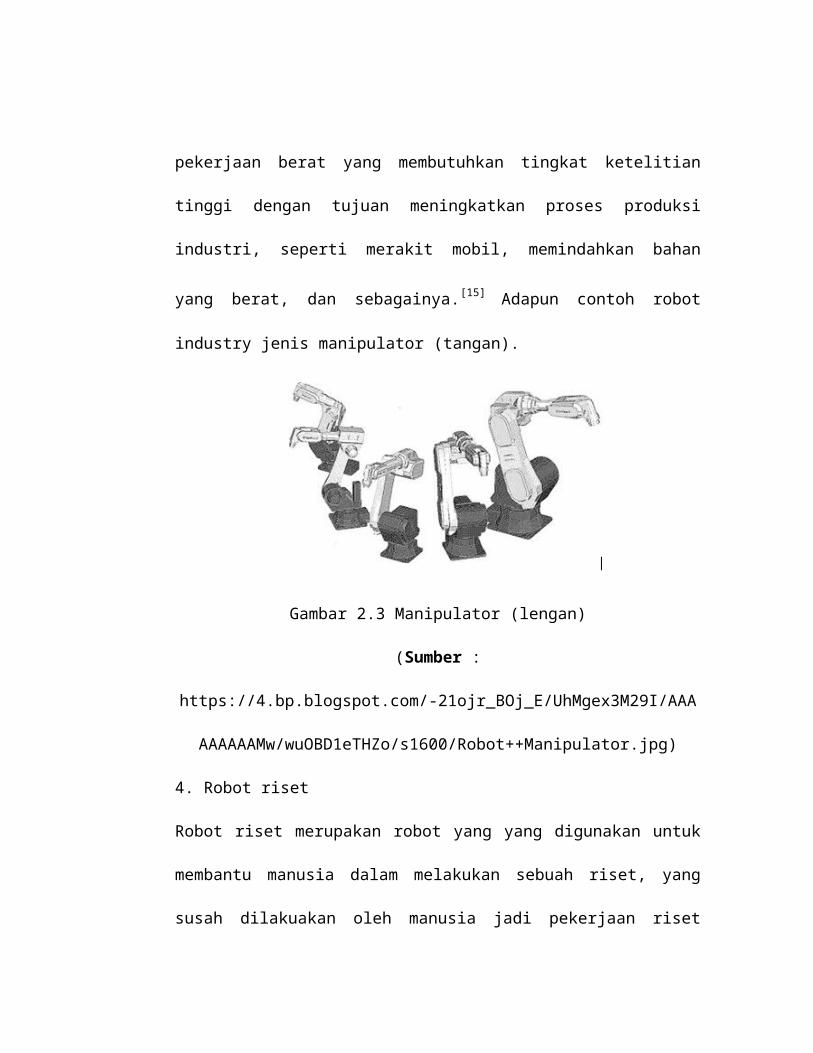
pekerjaan berat yang membutuhkan tingkat ketelitian
tinggi dengan tujuan meningkatkan proses produksi
industri, seperti merakit mobil, memindahkan bahan
yang berat, dan sebagainya.[15] Adapun contoh robot
industry jenis manipulator (tangan).
Gambar 2.3 Manipulator (lengan)
(Sumber :
https://4.bp.blogspot.com/-21ojr_BOj_E/UhMgex3M29I/AAA
AAAAAAMw/wuOBD1eTHZo/s1600/Robot++Manipulator.jpg)
4. Robot riset
Robot riset merupakan robot yang yang digunakan untuk
membantu manusia dalam melakukan sebuah riset, yang
susah dilakuakan oleh manusia jadi pekerjaan riset
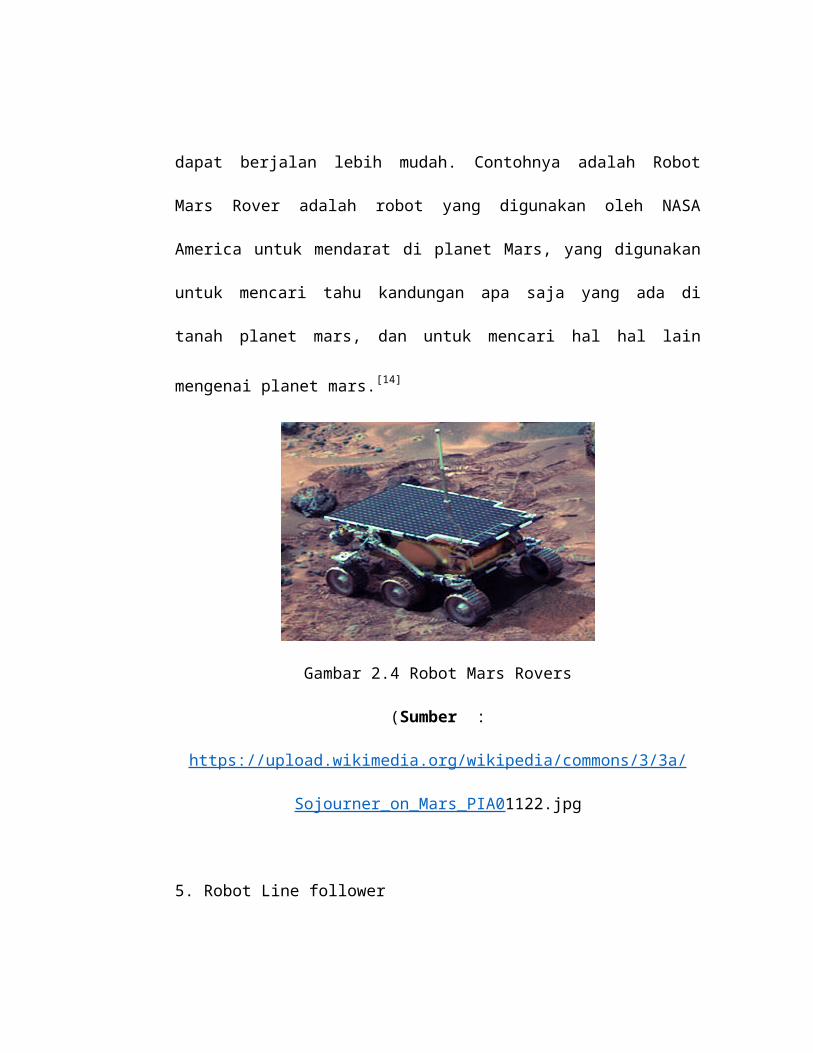
dapat berjalan lebih mudah. Contohnya adalah Robot
Mars Rover adalah robot yang digunakan oleh NASA
America untuk mendarat di planet Mars, yang digunakan
untuk mencari tahu kandungan apa saja yang ada di
tanah planet mars, dan untuk mencari hal hal lain
mengenai planet mars.[14]
Gambar 2.4 Robot Mars Rovers
(Sumber :
https://upload.wikimedia.org/wikipedia/commons/3/3a/
Sojourner_on_Mars_PIA01122.jpg
5. Robot Line follower
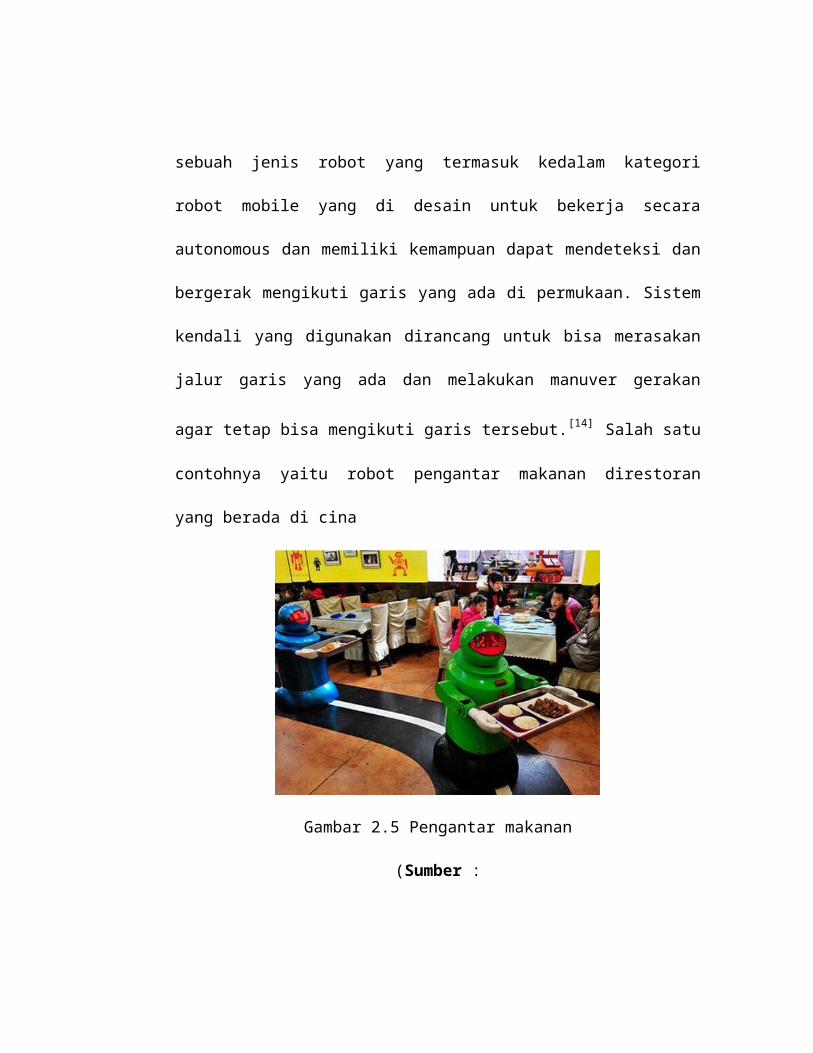
sebuah jenis robot yang termasuk kedalam kategori
robot mobile yang di desain untuk bekerja secara
autonomous dan memiliki kemampuan dapat mendeteksi dan
bergerak mengikuti garis yang ada di permukaan. Sistem
kendali yang digunakan dirancang untuk bisa merasakan
jalur garis yang ada dan melakukan manuver gerakan
agar tetap bisa mengikuti garis tersebut.[14] Salah satu
contohnya yaitu robot pengantar makanan direstoran
yang berada di cina
Gambar 2.5 Pengantar makanan
(Sumber :
http://www.dreamersradio.com/article/5502/unik-kita-
bisa-dilayani-oleh-robot-di-restoran-ini)
2.3 Definisi Robot
Definisi robot menurut Robot Institute Of America
(1979) yaitu sebuah robot adalah sesuatu yang dapat di
program dan diprogram ulang, dengan memiliki
manipulator mekanik / pengerak yang didisain untuk
memindahkan barang-barang, komponen-komponen atau
alat-alat khusus dengan berbagai program yang
fleksibel / mudah disesuaikan untuk melaksanakan
berbagai macam tugas.[16] Pada dasarnya robot dibuat
untuk membantu pekerjaan manusia.
2.4 Dasar Teori
Dasar sistem robot Pengikut Garis mengacu pada dasar
sistem robot bergerak otonom. Secara umum, struktur
robot bergerak otonom yang tipikal digambarkan dalam
gambar dibawah ini. .[9]
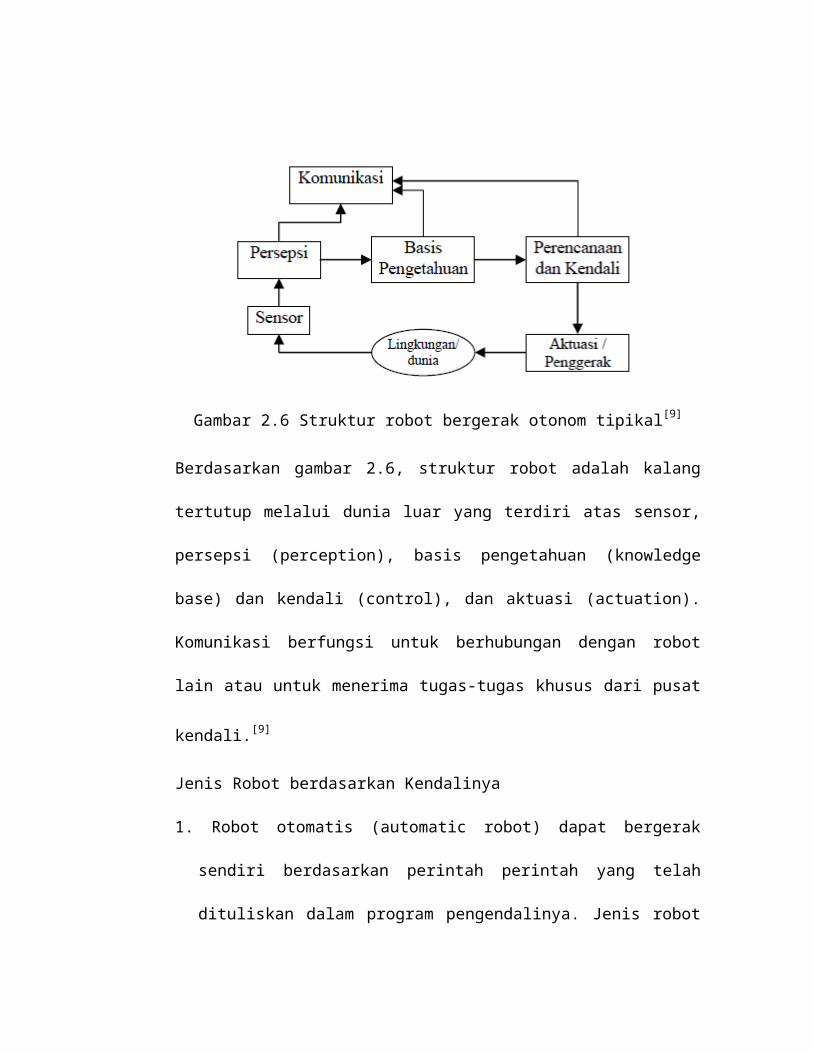
Gambar 2.6 Struktur robot bergerak otonom tipikal[9]
Berdasarkan gambar 2.6, struktur robot adalah kalang
tertutup melalui dunia luar yang terdiri atas sensor,
persepsi (perception), basis pengetahuan (knowledge
base) dan kendali (control), dan aktuasi (actuation).
Komunikasi berfungsi untuk berhubungan dengan robot
lain atau untuk menerima tugas-tugas khusus dari pusat
kendali.[9]
Jenis Robot berdasarkan Kendalinya
1. Robot otomatis (automatic robot) dapat bergerak
sendiri berdasarkan perintah perintah yang telah
dituliskan dalam program pengendalinya. Jenis robot
ini dilengkapi dengan sensor yang berfungsi sebagai
masukan (input) yang dapat
memberikan data mengenai lingkungannya kepada
prosesor.[16]
2. Robot teleoperasi (teleoperated robot) robot jenis
ini bergerak berdasarkan
perintah-perintah yang dikirimkan secara manual,
baik tanpa kabel/wireless
(remote control), atau dengan kabel(joystick).[16]
2.5 Dasar Sistem Kontrol
Komponen kontrol PID ini terdiri dari tiga jenis yaitu
Proportional, Integratif dan Derivatif. Ketiganya
dapat dipakai bersamaan maupun sendiri-sendiri
tergantung dari respon yang kita inginkan terhadap
suatu plant.[2]
1. Kontrol Proporsional
Kontrol P jika G(s) = kp, dengan k adalah konstanta.
Jika u = G(s) • e maka u = Kp • e dengan Kp adalah
Konstanta Proporsional. Kp berlaku sebagai Gain
(penguat) saja tanpa memberikan efek dinamik kepada
kinerja kontroler. Penggunaan kontrol P memiliki
berbagai keterbatasan karena sifat kontrol yang
tidak dinamik ini. Walaupun demikian dalam aplikasi-
aplikasi dasar yang sederhana kontrol P ini cukup
mampu untuk memperbaiki respon transien khususnya
rise time dan settling time. [2]
2. Kontrol Integratif
Jika G(s) adalah kontrol I maka u dapat dinyatakan
sebagai u(t)=[integral e(t)dT]Ki dengan Ki adalah
konstanta Integral, dan dari persamaan di atas, G(s)
dapat dinyatakan sebagai u=Kd.[delta e/delta t] Jika
e(T) mendekati konstan (bukan nol) maka u(t) akan
menjadi sangat besar sehingga diharapkan dapat
memperbaiki error. Jika e(T) mendekati nol maka efek
kontrol I ini semakin kecil. Kontrol I dapat
memperbaiki sekaligus menghilangkan respon steady-
state, namun pemilihan Ki yang tidak tepat dapat
menyebabkan respon transien yang tinggi sehingga
dapat menyebabkan ketidakstabilan sistem. Pemilihan
Ki yang sangat tinggi justru dapat menyebabkan
output berosilasi karena menambah orde system. [2]
3. Kontrol Derivatif
Sinyal kontrol yang dihasilkan oleh control D dapat
dinyatakan sebagai G(s)=s.Kd Dari persamaan di atas,
nampak bahwa sifat dari kontrol D ini dalam konteks
"kecepatan" atau rate dari error. Dengan sifat ini
ia dapat digunakan untuk memperbaiki respon transien
dengan memprediksi error yang akan terjadi. Kontrol
Derivative hanya berubah saat ada perubahan error
sehingga saat error statis kontrol ini tidak akan
bereaksi, hal ini pula yang menyebabkan kontroler
Derivatif tidak dapat dipakai sendiri. [2]
2.6 Sistem kontrol Robot
Sistem kontrol adalah suatu proses
pengaturan/pengendalian terhadap satu atau beberapa
besaran (variabel, parameter) sehingga berada pada
suatu harga atau dalam rangkuman harga (range)
tertentu.[4]
Untuk mengendalikan pergerakan robot diperlukan suatu
pengendali (controller) agar pergerakan pada robot
lebih halus . Pada pembahasan ini pengendali yang
digunakan adalah PID controller.[3]
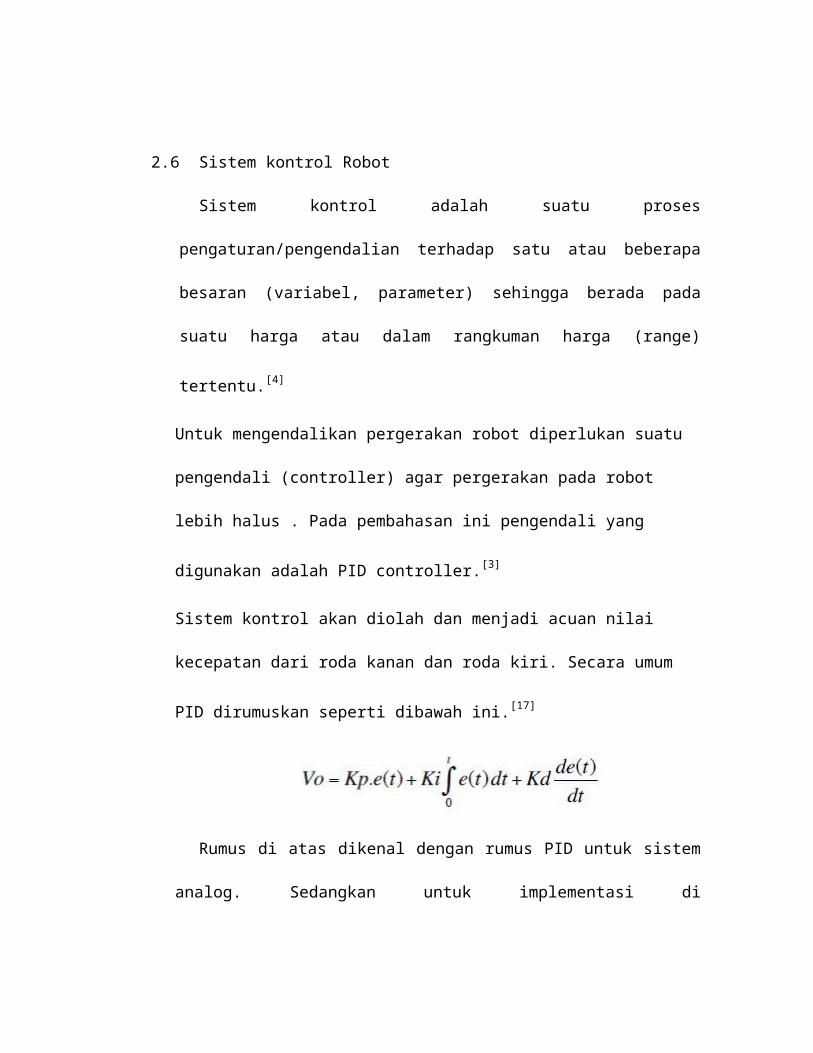
Sistem kontrol akan diolah dan menjadi acuan nilai
kecepatan dari roda kanan dan roda kiri. Secara umum
PID dirumuskan seperti dibawah ini.[17]
Rumus di atas dikenal dengan rumus PID untuk sistem
analog. Sedangkan untuk implementasi di
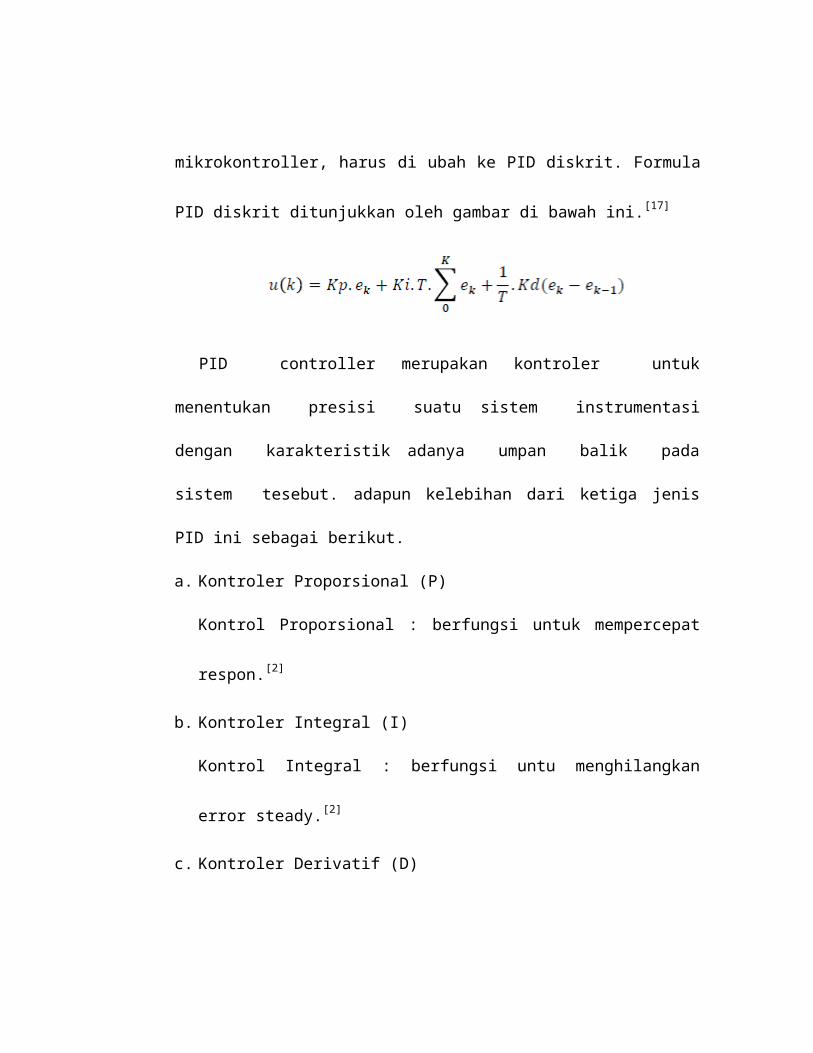
mikrokontroller, harus di ubah ke PID diskrit. Formula
PID diskrit ditunjukkan oleh gambar di bawah ini.[17]
PID controller merupakan kontroler untuk
menentukan presisi suatu sistem instrumentasi
dengan karakteristik adanya umpan balik pada
sistem tesebut. adapun kelebihan dari ketiga jenis
PID ini sebagai berikut.
a. Kontroler Proporsional (P)
Kontrol Proporsional : berfungsi untuk mempercepat
respon.[2]
b. Kontroler Integral (I)
Kontrol Integral : berfungsi untu menghilangkan
error steady.[2]
c. Kontroler Derivatif (D)
Kontrol derivatif : berfungsi untuk memperbaiki
sekaligus mempercepat respon transsien.[2]
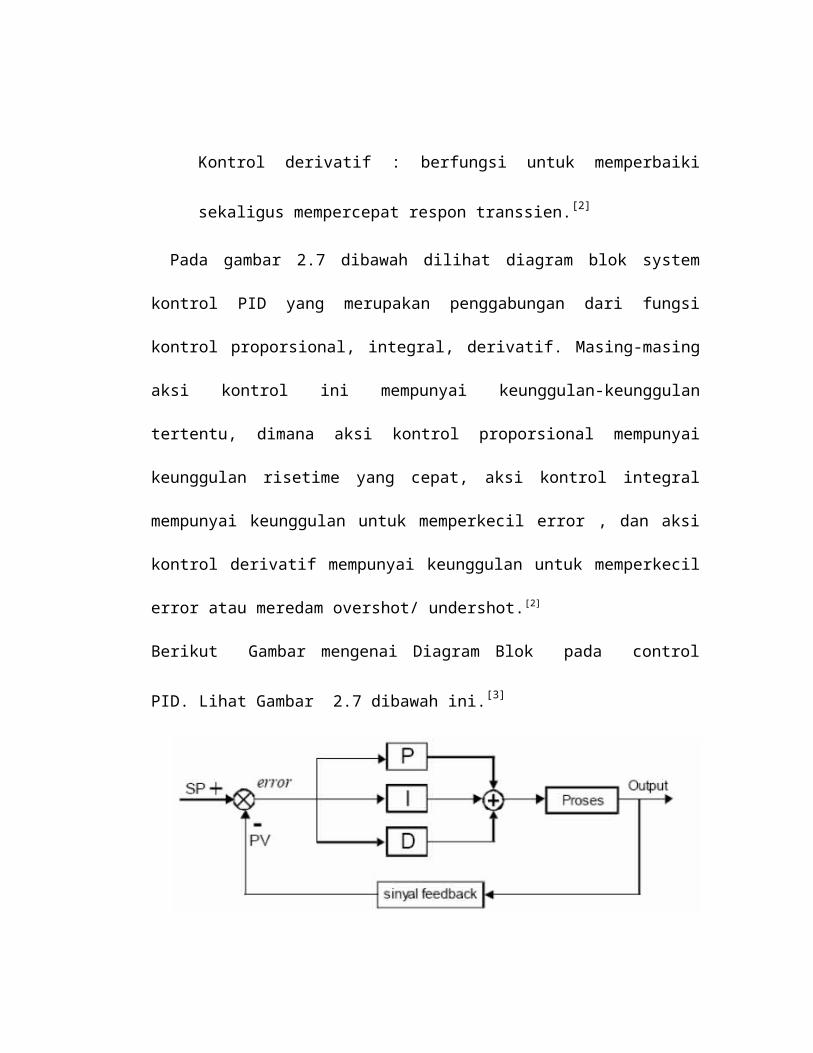
Pada gambar 2.7 dibawah dilihat diagram blok system
kontrol PID yang merupakan penggabungan dari fungsi
kontrol proporsional, integral, derivatif. Masing-masing
aksi kontrol ini mempunyai keunggulan-keunggulan
tertentu, dimana aksi kontrol proporsional mempunyai
keunggulan risetime yang cepat, aksi kontrol integral
mempunyai keunggulan untuk memperkecil error , dan aksi
kontrol derivatif mempunyai keunggulan untuk memperkecil
error atau meredam overshot/ undershot.[2]
Berikut Gambar mengenai Diagram Blok pada control
PID. Lihat Gambar 2.7 dibawah ini.[3]
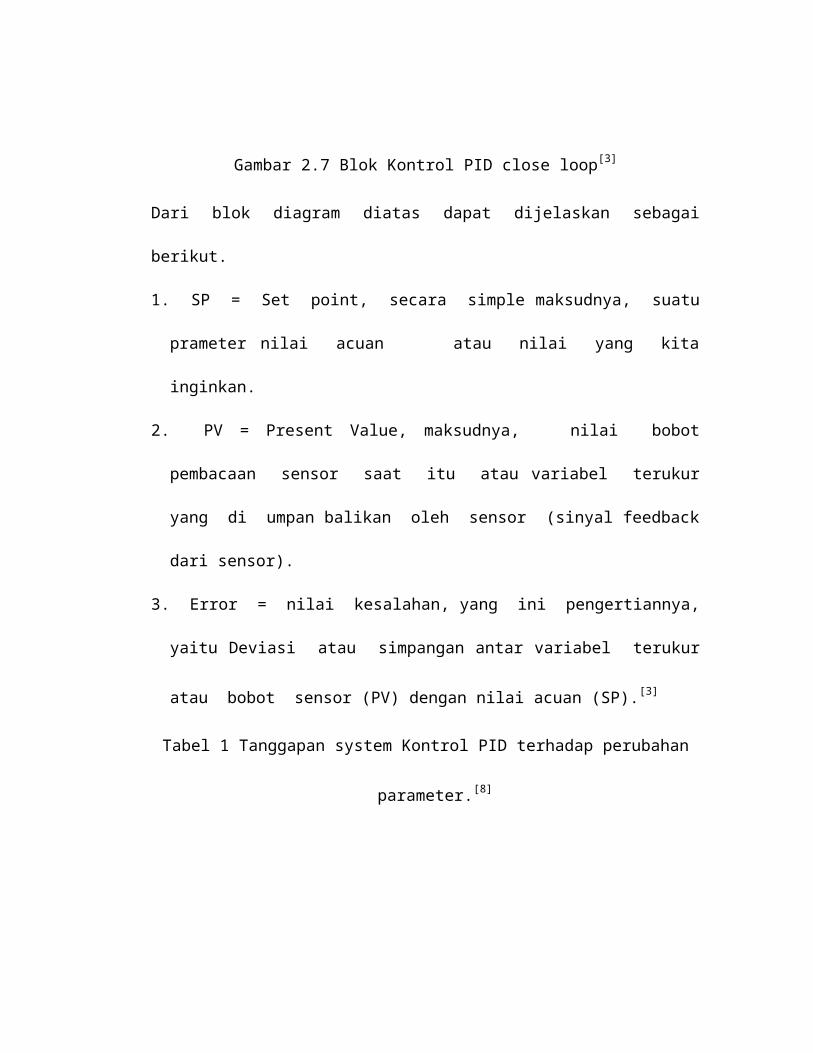
Gambar 2.7 Blok Kontrol PID close loop[3]
Dari blok diagram diatas dapat dijelaskan sebagai
berikut.
1. SP = Set point, secara simple maksudnya, suatu
prameter nilai acuan atau nilai yang kita
inginkan.
2. PV = Present Value, maksudnya, nilai bobot
pembacaan sensor saat itu atau variabel terukur
yang di umpan balikan oleh sensor (sinyal feedback
dari sensor).
3. Error = nilai kesalahan, yang ini pengertiannya,
yaitu Deviasi atau simpangan antar variabel terukur
atau bobot sensor (PV) dengan nilai acuan (SP).[3]
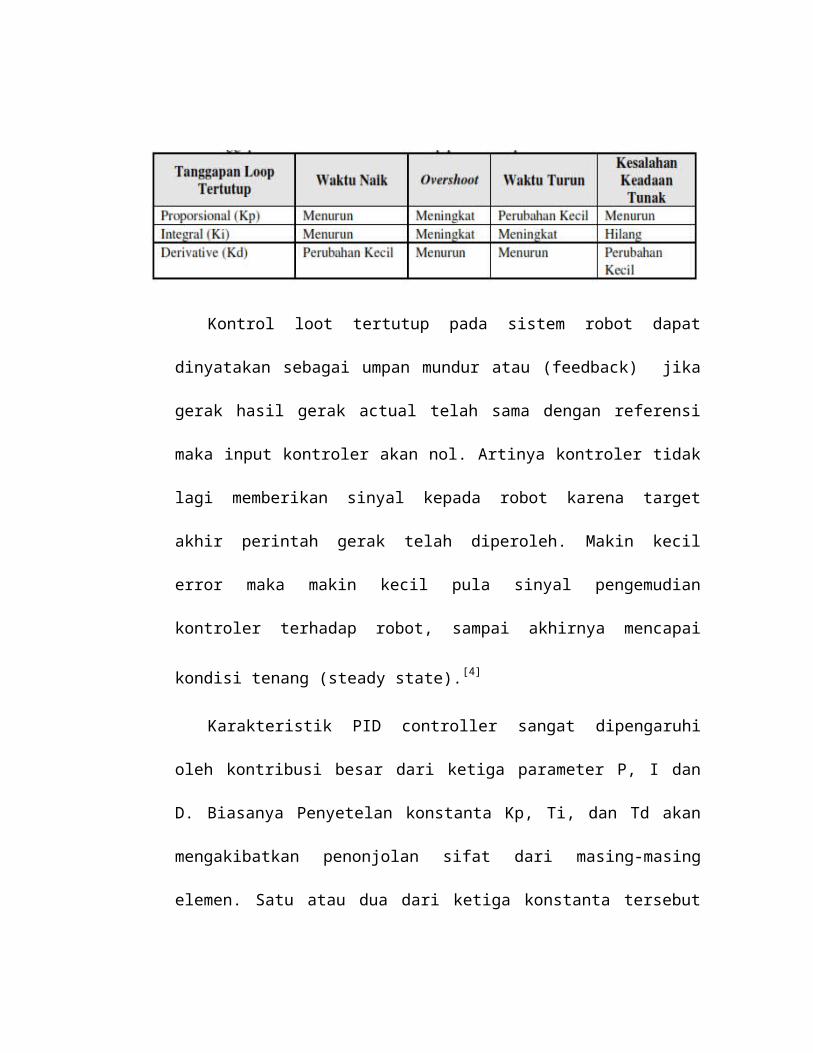
Tabel 1 Tanggapan system Kontrol PID terhadap perubahan
parameter.[8]
Kontrol loot tertutup pada sistem robot dapat
dinyatakan sebagai umpan mundur atau (feedback) jika
gerak hasil gerak actual telah sama dengan referensi
maka input kontroler akan nol. Artinya kontroler tidak
lagi memberikan sinyal kepada robot karena target
akhir perintah gerak telah diperoleh. Makin kecil
error maka makin kecil pula sinyal pengemudian
kontroler terhadap robot, sampai akhirnya mencapai
kondisi tenang (steady state).[4]
Karakteristik PID controller sangat dipengaruhi
oleh kontribusi besar dari ketiga parameter P, I dan
D. Biasanya Penyetelan konstanta Kp, Ti, dan Td akan
mengakibatkan penonjolan sifat dari masing-masing
elemen. Satu atau dua dari ketiga konstanta tersebut
dapat diset lebih menonjol dibanding yang lain.
Konstanta yang menonjol itulah akan memberikan
kontribusi pengaruh pada respon sistem secara
keseluruhan. Setiap kekurangan dan kelebihan dari
masing-masing kontroler P, I dan D dapat saling
menutupi dengan menggabungkan ketiganya secara paralel
menjadi kontroler PID. [3]
Untuk menganalisis suatu sistem, hanya memerlukan
masukan berupa fungsi alih yang ditulis dalam
Transformasi Laplace (kawasan frekuensi) atau
matriks ruang keadaan. Tanggapan sistem yang baik
dari suatu sistem kontrol mempunyai criteria:
Waktu naik cepat, Minimasi overshoot dan minimasi
kesalahan keadaan tunak. Adapun contoh langkah-langah
yang harus dilakukan untuk analisisi dengan Menentukan
nilai R, L dan C (misal R = 100 Ohm, L = 1,25 mH, C =
6250 uF). memasukkan koefisien pembimbing (Ps) dan
penyebut (Qs) dari fungsi alih, dan memilih jenis
masukan yang akan dimasukkan ke sistem (fungsi
langkah, unduh, impuls atau lainnya). [8]
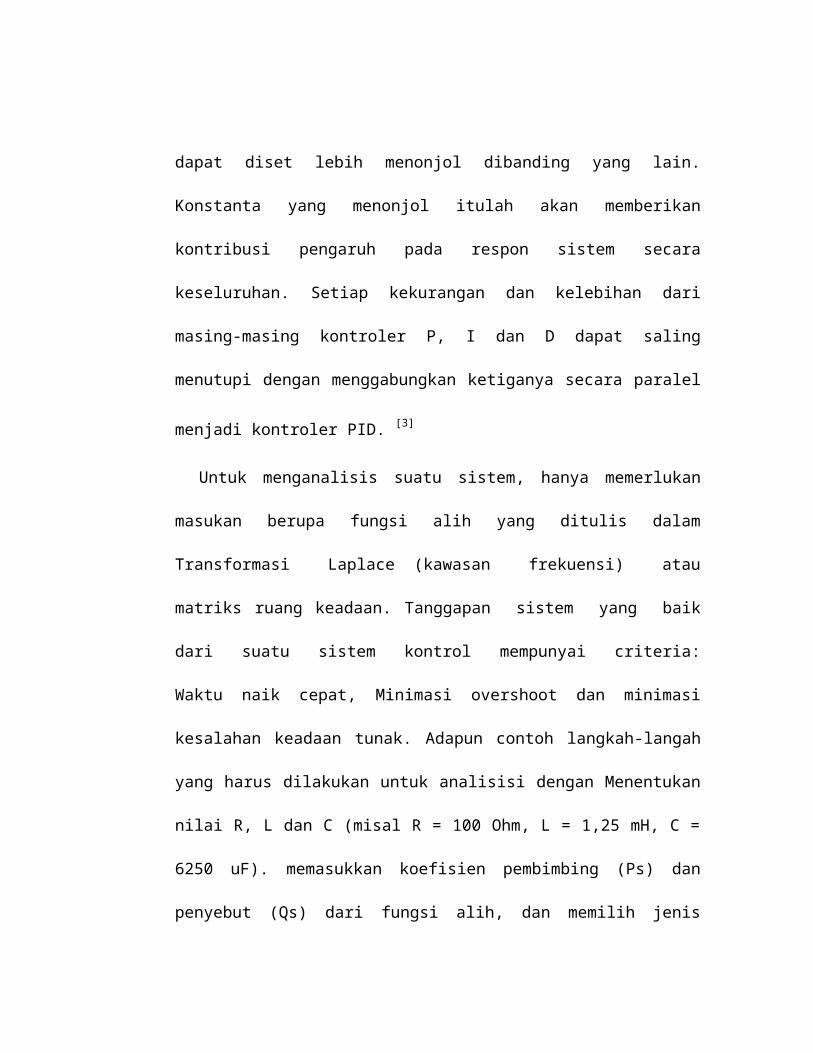
Gambar 2.8 Tanggapan sistem terhadap masukan fungsi
langkah. [8]
Grafik di atas menunjukkan bahwa sistem memiliki
kesalahan keadaan tunak yang tinggi sebesar 0,88 hal
ini dapat dilihat pada tanggapan sistem menuju ke
nilai amplitude. [8]
a. Pembelajaran Aksi Kontrol Proporsional
Aksi pengontrolan Proporsional adalah mengurangi
waktu naik, menambah overshoot, dan mengurangi
kesalahan keadaan tunak.
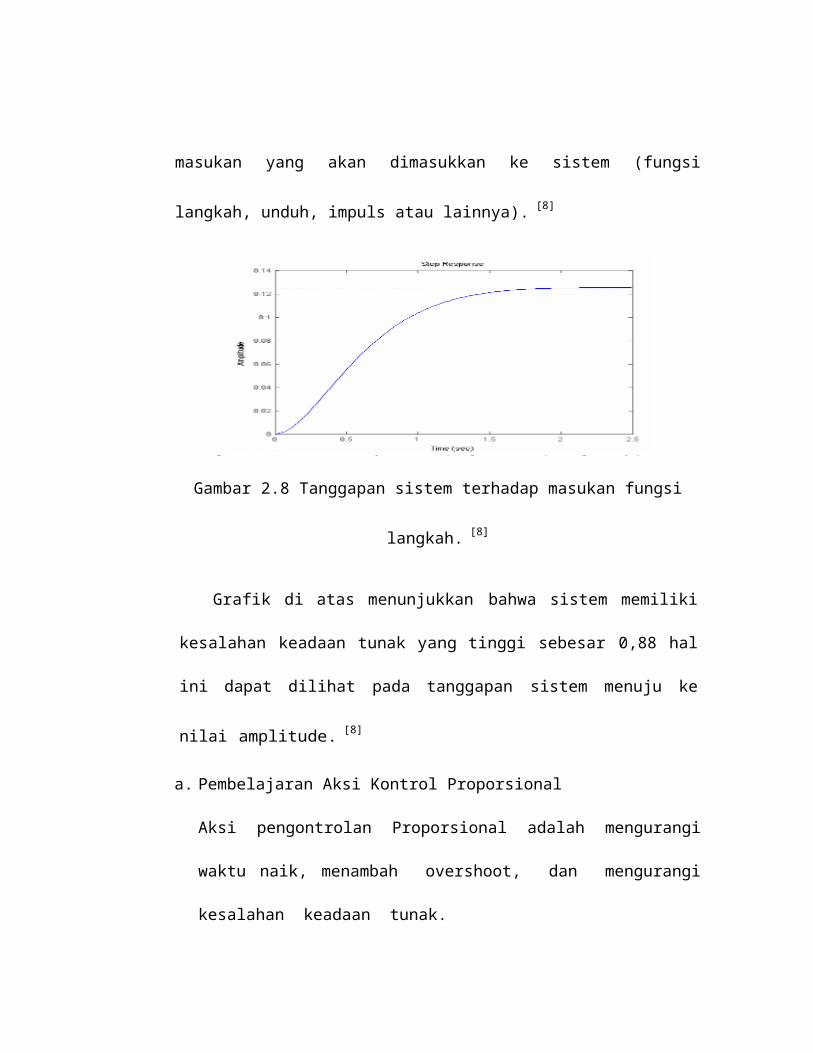
Gambar 2.9 Tanggapan sistem terhadap aksi kontrol
proporsional[8]
Penambahan aksi kontrol P mempunyai pengaruh
mengurangi waktu naik dan kesalahan keadaan tunak,
tetapi konsekuensinya overshoot naik cukup besar.
Kenaikan overshoot ini sebanding dengan kenaikan
nilai parameter Kp. Waktu turun juga menunjukkan
kecenderungan yang membesar. [8]
b. Pembelajaran Aksi Kontrol Proporsional Derivatif
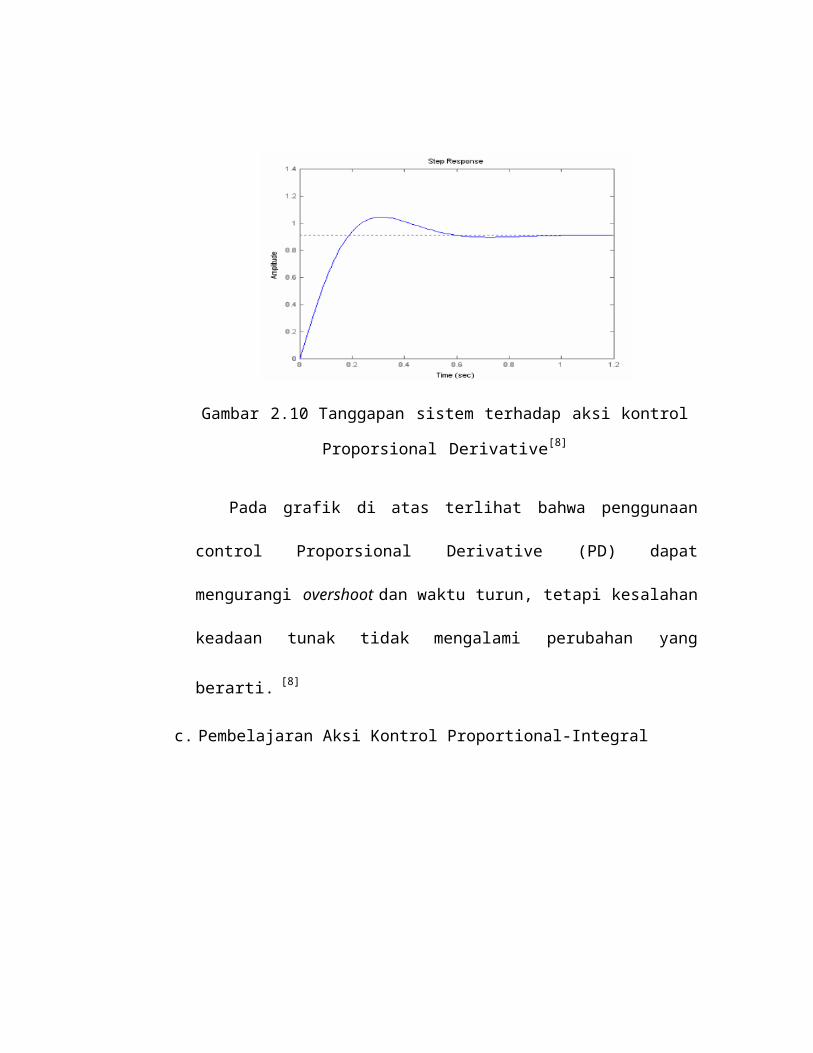
Gambar 2.10 Tanggapan sistem terhadap aksi kontrol
Proporsional Derivative[8]
Pada grafik di atas terlihat bahwa penggunaan
control Proporsional Derivative (PD) dapat
mengurangi overshoot dan waktu turun, tetapi kesalahan
keadaan tunak tidak mengalami perubahan yang
berarti. [8]
c. Pembelajaran Aksi Kontrol Proportional-Integral
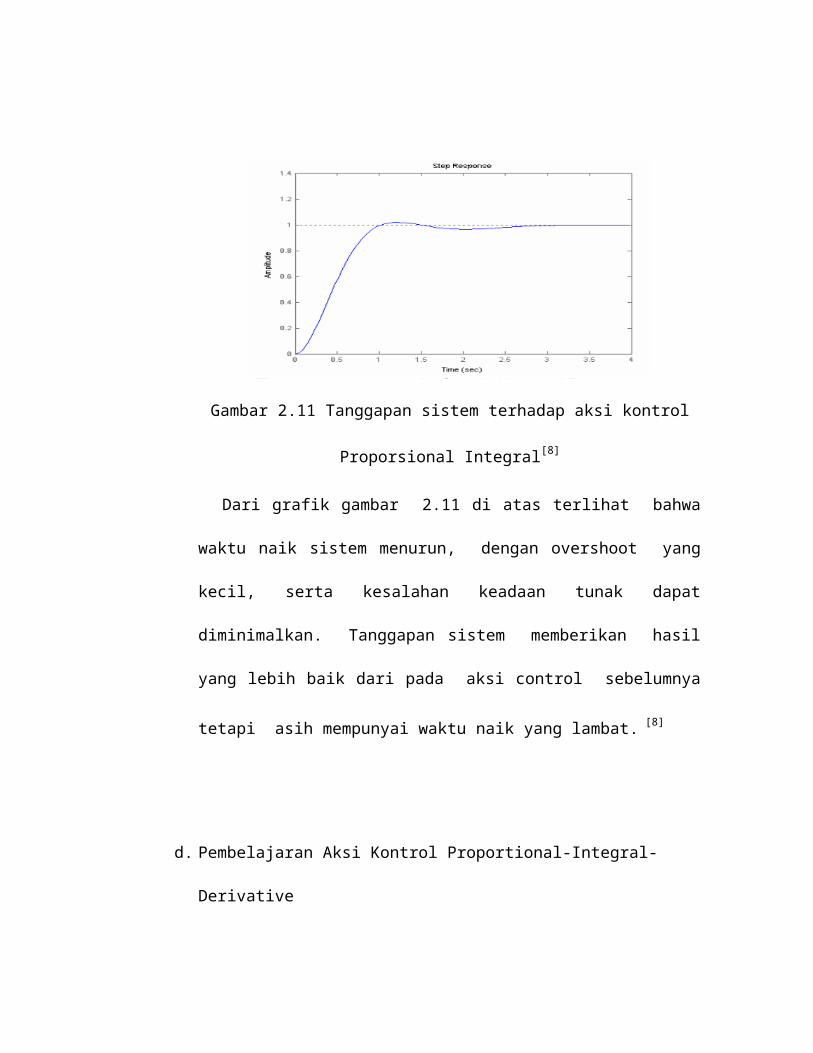
Gambar 2.11 Tanggapan sistem terhadap aksi kontrol
Proporsional Integral[8]
Dari grafik gambar 2.11 di atas terlihat bahwa
waktu naik sistem menurun, dengan overshoot yang
kecil, serta kesalahan keadaan tunak dapat
diminimalkan. Tanggapan sistem memberikan hasil
yang lebih baik dari pada aksi control sebelumnya
tetapi asih mempunyai waktu naik yang lambat. [8]
d. Pembelajaran Aksi Kontrol Proportional-Integral-
Derivative
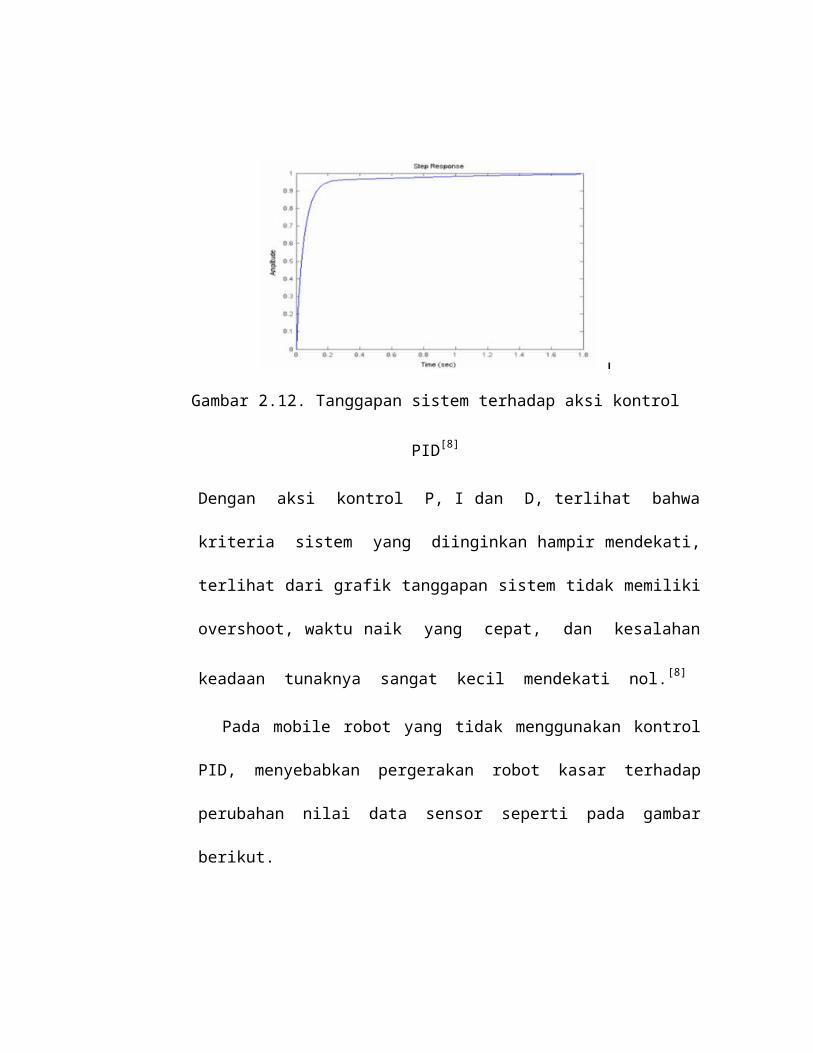
Gambar 2.12. Tanggapan sistem terhadap aksi kontrol
PID[8]
Dengan aksi kontrol P, I dan D, terlihat bahwa
kriteria sistem yang diinginkan hampir mendekati,
terlihat dari grafik tanggapan sistem tidak memiliki
overshoot, waktu naik yang cepat, dan kesalahan
keadaan tunaknya sangat kecil mendekati nol.[8]
Pada mobile robot yang tidak menggunakan kontrol
PID, menyebabkan pergerakan robot kasar terhadap
perubahan nilai data sensor seperti pada gambar
berikut.
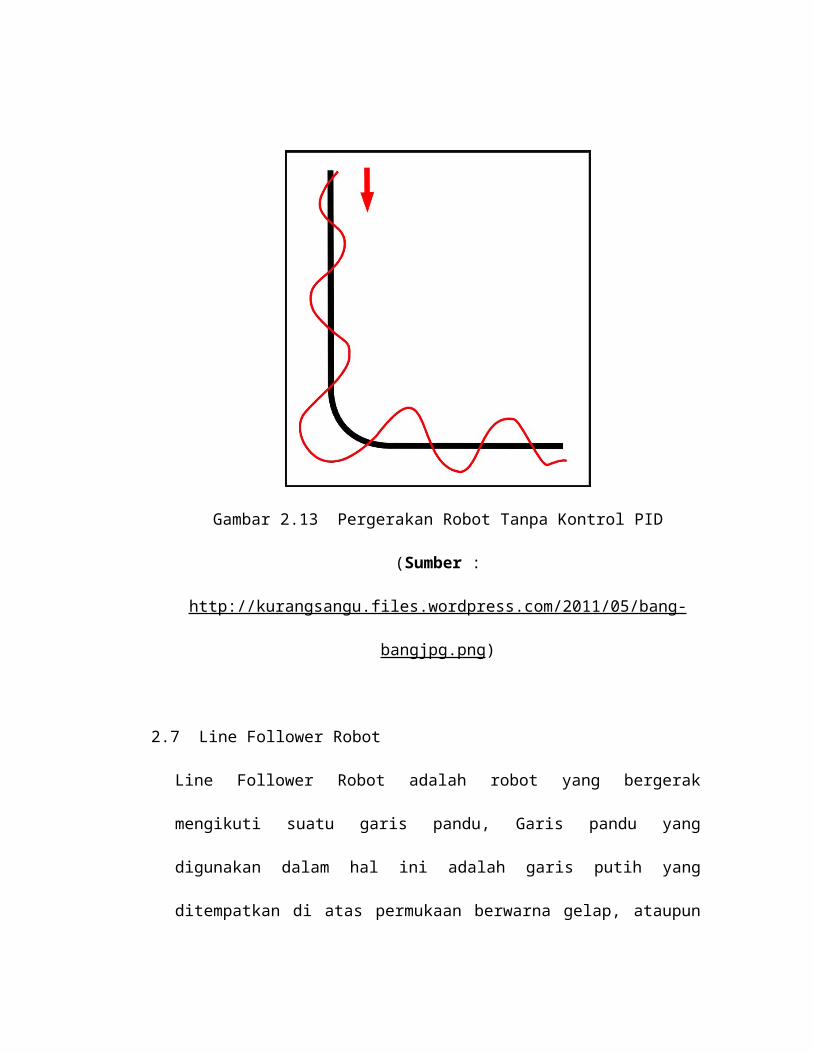
Gambar 2.13 Pergerakan Robot Tanpa Kontrol PID
(Sumber :
http://kurangsangu.files.wordpress.com/2011/05/bang-
bangjpg.png)
2.7 Line Follower Robot
Line Follower Robot adalah robot yang bergerak
mengikuti suatu garis pandu, Garis pandu yang
digunakan dalam hal ini adalah garis putih yang
ditempatkan di atas permukaan berwarna gelap, ataupun
sebaliknya, garis hitam yang ditempatkan pada
permukaan berwarna putih (cerah). Menurut Priyank
Patil dari Departemen of Information Technology, K. J.
Somaiya College of Engineering Mumbai, India, Line
Follower adalah sebuah mesin yang dapat berjalan
mengikuti suatu lintasan jalur (path).[5]
2.8 Sensor Line follower
Robot Pengikut Garis merupakan suatu bentuk robot yang
bergerak mengikuti suatu garis pandu yang telah
ditentukan. Robot ini memiliki sensor yang terdiri
dari dua pasang, yaitu sebuah LED dan sebuah
photodiode, berfungsi sebagai pengiriim sinyal dan
penerima sinyal yang berada dibagian bawah robot yang
berfungsi untuk mendeteksi lintasan garis.[6]
Sensor pendeteksi garis untuk mendeteksi adanya
garis atau tidak pada permukaan lintasan robot, dan
informasi yang diterima sensor garis kemudian
diteruskan ke pengontrol untuk diolah sedemikian rupa
dan akhirnya hasil informasi hasil olahannya akan
diteruskan ke penggerak atau motor agar motor dapat
menyesuaikan gerak tubuh robot sesuai garis yang
dideteksinya. Sensor yang digunakan pada Line follower
merupakan perpaduan LED dan Photodiode. Sebagai sumber
cahaya dapat menggunakan LED (Light Emiting Diode)
yang akan memancarkan cahaya merah dan untuk menangkap
pantulan cahaya LED menggunakan photodiode. Jika
sensor berada diatas garis hitam maka photodioda akan
menerima sedikit sekali cahaya pantulan. Tetapi jika
sensor berada diatas garis putih maka photodioda akan
menerima banyak cahaya pantulan. Berikut adalah
ilustrasinya : [7]
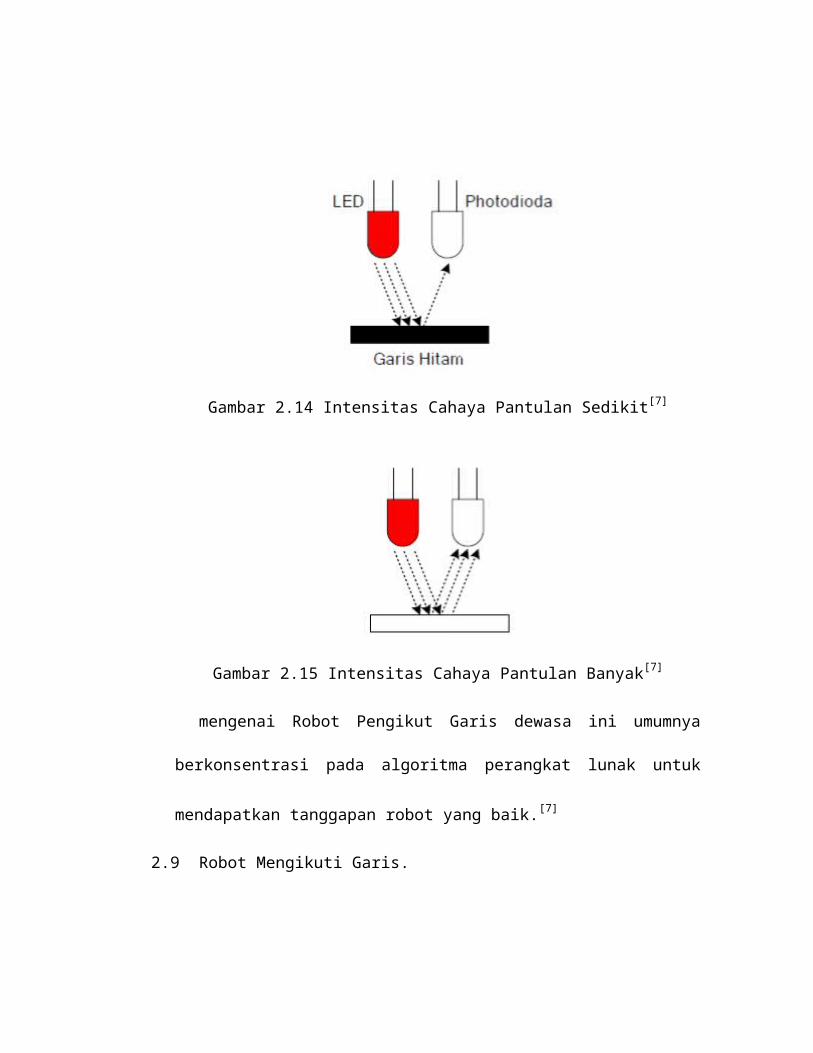
Gambar 2.14 Intensitas Cahaya Pantulan Sedikit[7]
Gambar 2.15 Intensitas Cahaya Pantulan Banyak[7]
mengenai Robot Pengikut Garis dewasa ini umumnya
berkonsentrasi pada algoritma perangkat lunak untuk
mendapatkan tanggapan robot yang baik.[7]
2.9 Robot Mengikuti Garis.
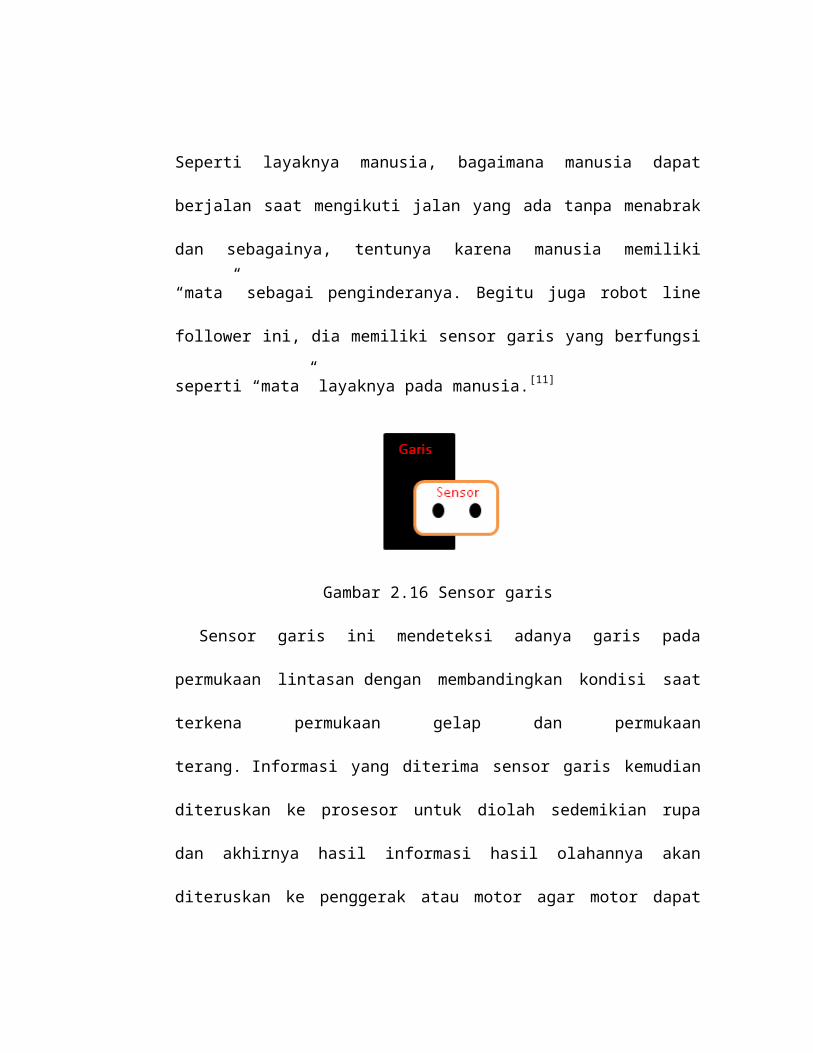
Seperti layaknya manusia, bagaimana manusia dapat
berjalan saat mengikuti jalan yang ada tanpa menabrak
dan sebagainya, tentunya karena manusia memiliki
“mata” sebagai penginderanya. Begitu juga robot line
follower ini, dia memiliki sensor garis yang berfungsi
seperti “mata” layaknya pada manusia.[11]
Gambar 2.16 Sensor garis
Sensor garis ini mendeteksi adanya garis pada
permukaan lintasan dengan membandingkan kondisi saat
terkena permukaan gelap dan permukaan
terang. Informasi yang diterima sensor garis kemudian
diteruskan ke prosesor untuk diolah sedemikian rupa
dan akhirnya hasil informasi hasil olahannya akan
diteruskan ke penggerak atau motor agar motor dapat
menyesuaikan gerak tubuh robot sesuai garis yang
dideteksinya.[11]
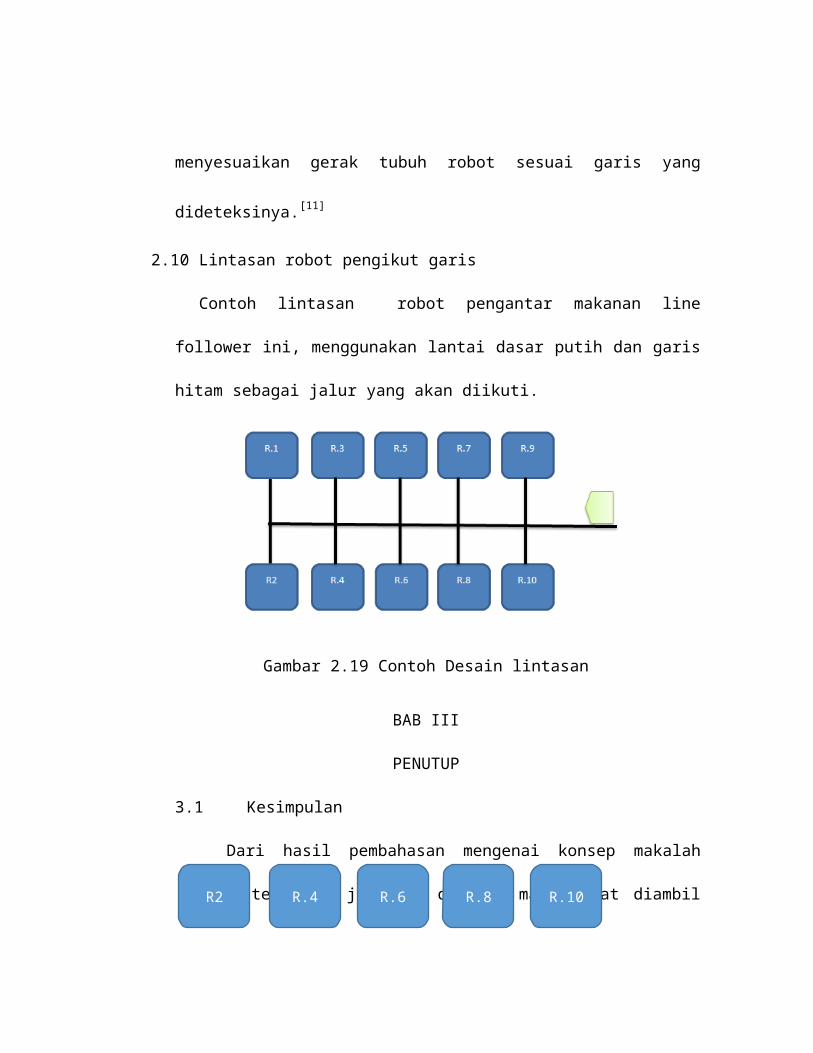
2.10 Lintasan robot pengikut garis
Contoh lintasan robot pengantar makanan line
follower ini, menggunakan lantai dasar putih dan garis
hitam sebagai jalur yang akan diikuti.
Gambar 2.19 Contoh Desain lintasan
BAB III
PENUTUP
3.1 Kesimpulan
Dari hasil pembahasan mengenai konsep makalah
yang telah di jabarkan diatas, maka dapat diambilR.8 R.10R.6R.4R2
sebuah kesimpulan bahwa Sistem controller/sistem
kendali P.I.D ini dapat diimplementasikan pada robot
pengantar makanan, dengan adanya system kendali ini
membuat robot merespon adanya error dan bergerak
lebih cepat dalam tugasnya untuk mengantarkan
makanana keruangan tujuan .
Memang penggunaan PID Controller tidak dapat
menghilangkan sepenuhnya perubahan “eror” yang
terdapat pada system, tetapi dengan diterapkannya
PID controller dapat mengoptimalkan pergerakan lebih
cepat pada robot.
3.2 Saran
Dalam Implementasi sistem controller PID masing-
masing memiliki kelebihan dan kekurangan, maka dari
itu pada sistem PID perlu dilakukan adalah mengatur
parameter P,I atau D agar tanggapan sinyal keluaran
sistem terhadap masukan tertentu akan didapat
sebagaimana yang diinginkan.
Adapun pengembangan selanjutnya, pada PID
controller dapat menambahkan algoritma fuzzy agar
robot dapat melalui lintasan/daerah dynamic
DAFTAR PUSTAKA
[1] Putri Atiqah Purnama Sari, "Strategi Jepang Dalam
Mempertahankan Dominasi Ekspor Robot Di China"
Universitas Riau
[2] Yani Prabowo, TW Wisjhnuadji, Andika Alie Wibowo.
2013 ”Aplikasi Pid Pada Robot Line Follower Berbasis
Mikrokontroler At-8535”, Fakultas Teknik Universitas
Budi Luhur, Vol. 4 No. 1 Juni
[3] Sonie Ruswanto, Endah Suryawati Ningrum, Irwan Ramli.
2011, “Pengaturan Gerak Dan Keseimbangan Robot Line
Tracer Dua Roda Menggunakan PID Controlle”, Politeknik
Elektronika Negeri Surabaya, Surabaya
[4] Daisy A.N Janis, 2014.” Rancang Bangun Robot
Pengantar Makanan Line Follower”, Teknik Elektro-FT,
UNSRAT, Manado-95115, ISSN: 2301-8402.
[5] Hariz Bafdal Rudiyanto, “Rancang Bangun Robot
Pengantar Surat Menggunakan Mikrokontroler At89s51”,
Teknik Elektro, Universitas Gunadarma. Depok, NPM :
10405805
[6] Epan Adi Chandra1), Prof.Dr.Ir.H. Didik
Notosudjono.,M.Sc.2), Ir. Dede Suhendi.,MT, “Robot
Line Follower (Line Tracking Robot)”, Fakultas Teknik,
Universitas Pakuan
[7] Reynold F., 2010, “Rancang Bangun Robot Pengikut
Garis (Line Follower) Menggunakan Sensor Infra Merah
(Photodiode)”
[8] Muhamad Ali, 2004, “Pembelajaran Perancangan Sistem
Kontrol Pid Dengan Software Matlab”, Teknik Elektro
Fakultas Teknik Universitas Negeri Yogyakarta.
[9] Stevanus Budi Raharjo1, Bambang Sutopo2, “Robot
Pengikut Garis Berbasis Mikrokontroler At89c51
Menggunakan Sensor Infra Merah”, Universitas Gajah
Mada, Yogyakarta
[10] Dwi Kartika Rukmi, “Robot Nurse (Robot Perawat)”,
Fakultas Ilmu Keperawatan, Universitas Indonesia, NPM
0906504695
[11] Adri Kamil, 2014, “Penerapan algoritma line maze
pada robot line follower untuk menyelesaikan line maze
dengan menggunakan left hand rule”, Universitas
Pendidikan Indonesia.
[12] Muhammad Agus Sahbana, 2010 "Robot adalah sebuah
alat mekanik" Fakultas Tehnik, Universitas Widyaagama
Malang.
[13] Pramudita Johan Iswara, Agfianto Eko Putra, 2012,
"Sistem Kontrol Keseimbangan Statis Robot Humanoid
Joko Klana Berbasis Pengontrol PID",Fakultas MIPA,
Universitas Gajah Mada, Vol.2, No.1, April 2012, pp.
67~76, ISSN: 2088-3714.
[14] Rahmad Hidayat, 2014,"Perancangan Simulasi Robot
Line Follower Menggunakan Software Simulasi Robomind",
Fakultas Ilmu Komputer Universitas Ubudiyah Indonesia,
Banda Aceh
[15] Faikul Umam, 2013, "Pengembangan Sistem Kendali
Pergerakan Autonomous Mobile Robot Untuk Mendapatkan
Jalur Bebas Hambatan Menggunakan Fuzzy Logic
Controller", Fakultas Teknik, Universitas Trunojoyo
Madura.
[16] Wensiscilius Sibau, 2013, "Rancang Lengan Robot
Dengan Metode Kinematik Menggunakan Atmega 168",
Sekolah Tinggi Manajemen Informatika Dan Computer
Amikom Yogyakarta
[17] Candra Herdianto, Muhammad Ary Murti, ST, MT., Agung
Nugroho Jati, ST, MT,. "Desain Dan Implementasi
Sistem Navigasi Robot Beroda Menggunakan Algoritma
Wall Following Berbasis Pid (Proporsional-Integral-
Differensial)", Fakultas Elektro dan Komunikasi,
Institut Teknologi Telkom, Bandung.





























