Embed Size (px)
Citation preview

4 – Robot mobili
DIFFERENTIAL DRIVE ROVER
Jacopo Sini
ROBOTICS@MIDDLESCHOOL
v.2 - Torino, 25/05/2015Revisione da 1.1 a 2.0 del 15/02/2016

ROBOTICS@MIDDLESCHOOL 4DDR.2
In queste slide verranno trattati:
• Attuatori
• Controllori
Controllore ProcessoObiettivo Attuatori
Sensori
+-
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.3
In queste diapositive vedremo:
• Pianificazione della traiettoria
• Differential drive rover
• Guida differential drive
• Programmazione
• Calcolo delle distanze
• (Appendice) Descrizione analitica
Jacopo Sini
ROBOTICS@MIDDLESCHOOL 4DDR.4
In alcune applicazioni dei robot mobiliterrestri (chiamati rover), potrebbe esseretroppo costoso o complesso realizzare unsistema di sterzatura delle ruote, come quelloche si trova comunemente nelle auto.
In questi casi è possibile fornire direzionalitàal robot tramite la tecnica differential drive.
Jacopo Sini

La tecnica differential drive consiste nel farmuovere le ruote del robot a velocitàindipendenti l’una dall’altra.
Analizzeremo, fra tutte le possibiliconfigurazioni, quella a due ruote motricisullo stesso asse e terza ruota condotta.
ROBOTICS@MIDDLESCHOOL 4DDR.5Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.6
Vista del differential driver rover dall’alto:
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.7
Le RUOTE MOTRICI sono poste in
rotazione dai MOTORI.
Come si puo’ vedere le due
ruote stanno sullo stesso asse
e sono parallele, ma essendo
collegate a due differenti
motori possono avere diverse
velocita’
RUOTE MOTRICI
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.8
La ruota condotta fornisce il
terzo appoggio al robot.
Ruota condotta
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.9
Oltre a fornire l’appoggio al
rover, la ruota condotta non
deve opporre resistenza alla
rotazione.
Ruotando attorno alla
cerniera èe’ in grado di seguire
fluidamente la traiettoria
imposta dalle ruote motrici, in
modo simile a quanto fanno le
ruote dei carrelli dei
supermercati.
Cerniera ruota
condotta

ROBOTICS@MIDDLESCHOOL 4DDR.10
Abbiamo appena visto che solo la ruotacondotta è in grado di sterzare, ma non hanessun motore.
Per affrontare le curve è necessario usare unatecnica differente da quella usata per la guidadelle automobili, che solitamente vieneimpiegata sui mezzi cingolati (quali carriarmati, pale meccaniche o spazzaneve).
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.11Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.12Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.13Jacopo Sini
ROBOTICS@MIDDLESCHOOL 4DDR.14Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.15Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.16Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.17Jacopo Sini
ROBOTICS@MIDDLESCHOOL 4DDR.18
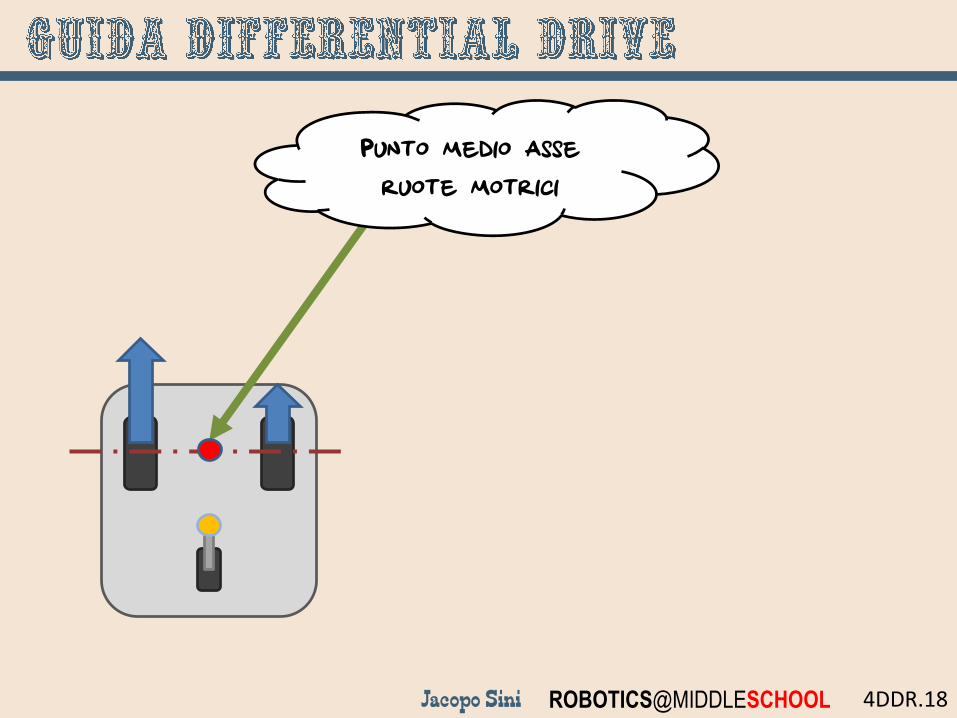
Punto medio asse
ruote motrici
Jacopo Sini

Jacopo Sini ROBOTICS@MIDDLESCHOOL 4DDR.19
Centro di
istantanea
rotazione
ROBOTICS@MIDDLESCHOOL 4DDR.20
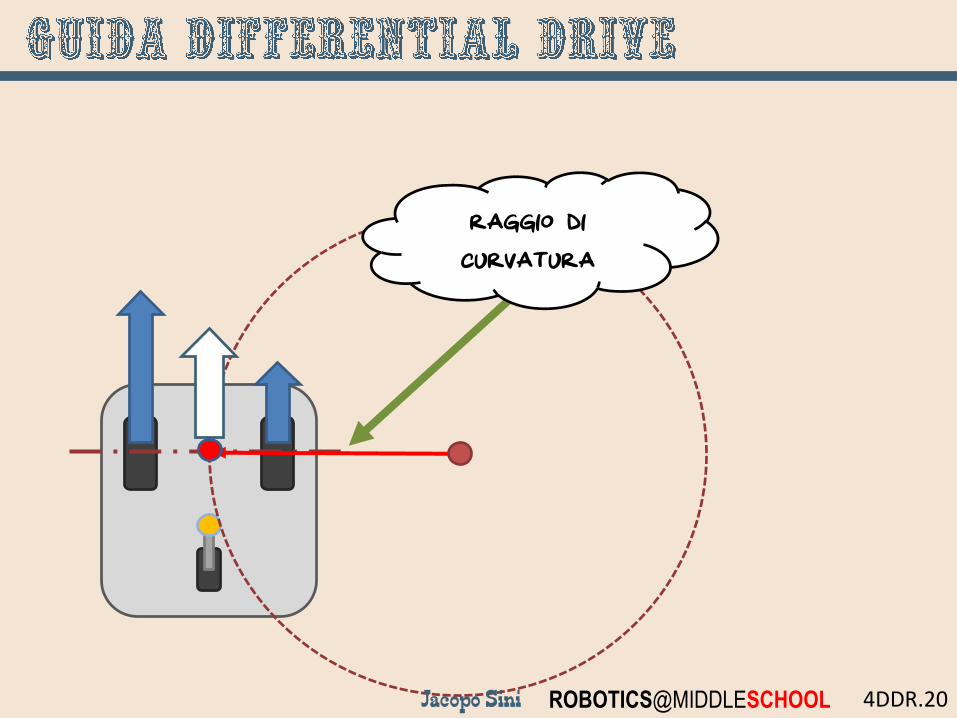
raggio di
curvatura
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.21
velocita’
periferica
delle ruote
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.22
velocita’
periferica del
punto medio
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.23
La ruota
condotta si
allinea alla
tangente alla
circonferenza
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.24
Il caso limite si ha quando il raggio dicurvatura è pari all’interasse (cioè alladistanza tra le ruote).
Questo avviene quando una e una sola delledue ruote è ferma.
Per semplicità e a causa della struttura conruota condotta montata su un carrellino non siconsidereranno le ruote in rotazione con versiopposti.
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.25Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.26Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.27Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.28Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.29Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.30Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.31
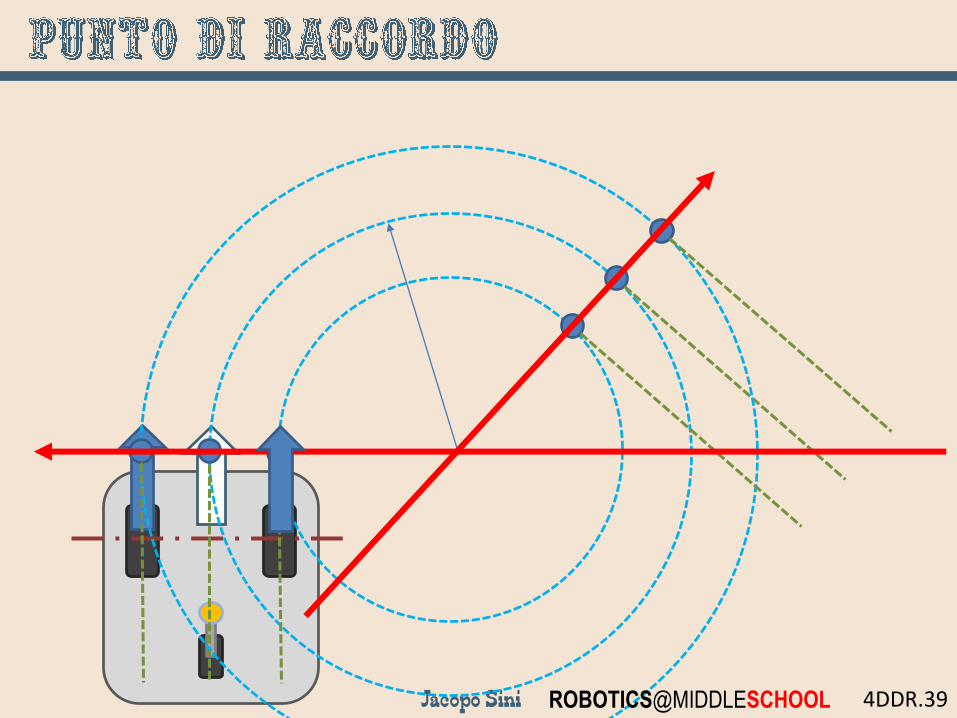
Ora che abbiamo trovato tutti i punti diraccordo e tutti i raggi di curvatura dobbiamoancora fornire al rover i due angoli che le dueruote devono percorrere.
Attenzione: ricorda che le ruote devonopercorrere l’angolo assegnato, impiegando lostesso tempo (dunque avranno velocitàperiferiche diverse).
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.32
Forniamo ora un angolo di rotazione al nostroattuatore:
𝜃
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.33
Che effetto ha questa rotazione sul punto dicontatto del rover con il suolo?
Per rispondere a questa domanda è necessariocapire qual è la relazione che lega l’angolo e ladistanza percorsa da una ruota.
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.34
Per prima cosa misuriamo il raggio della ruota
𝑟
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.35
𝜃
𝑙
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.36
𝜃
𝑙
𝑟
𝑙 = 𝑟 ⋅𝜃
360
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.37
Per percorrere un segmento di lunghezza 𝑙 èquindi sufficiente far ruotare entrambe leruote dello stesso angolo 𝜃.
𝜃 =𝑙 ⋅ 360
𝑟
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.38
Per percorrere un arco di circonferenza ènecessario far percorrere distanze diversealle due ruote.
Come calcolare le due distanze noto il raggiodi curvatura?
Jacopo Sini
Jacopo Sini 4DDR.39ROBOTICS@MIDDLESCHOOL

Jacopo Sini 4DDR.40ROBOTICS@MIDDLESCHOOL
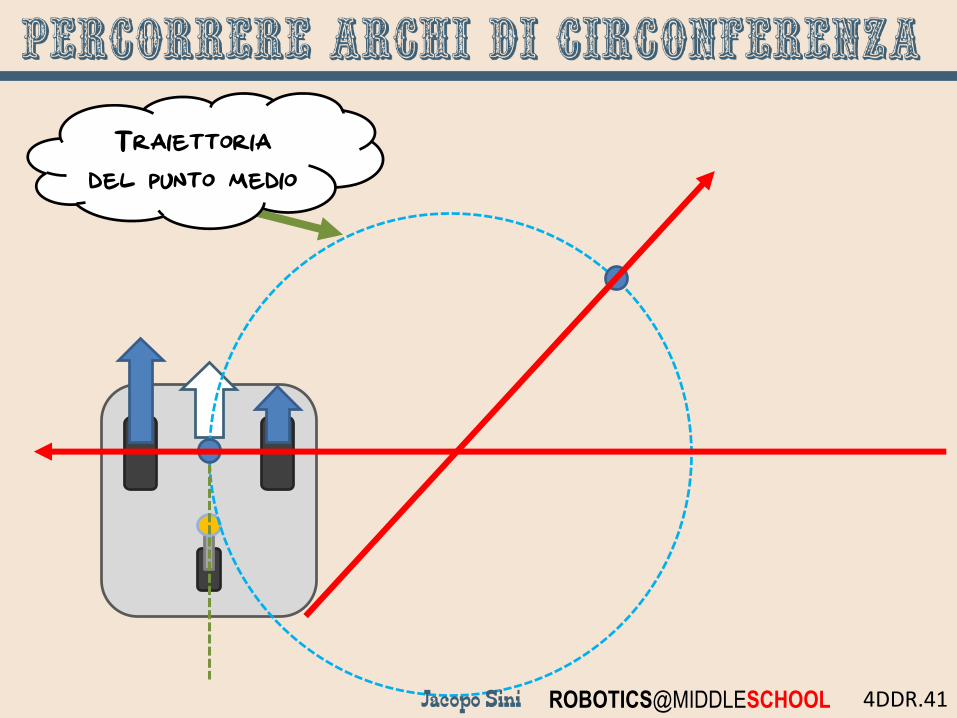
4DDR.41ROBOTICS@MIDDLESCHOOL
Traiettoria
del punto medio
Jacopo Sini

4DDR.42ROBOTICS@MIDDLESCHOOL
Traiettoria
ruota esterna
Jacopo Sini

4DDR.43ROBOTICS@MIDDLESCHOOL
Traiettoria
ruota interna
Jacopo Sini

Jacopo Sini ROBOTICS@MIDDLESCHOOL 4DDR.44
Traiettoria
seguita dal
punto medio

ROBOTICS@MIDDLESCHOOL 4DDR.45
Traiettoria
seguita dal
punto medio
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.46
Traiettoria
seguita dal
punto medio
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.47
Traiettoria
seguita dal
punto medio
Jacopo Sini

4DDR.48ROBOTICS@MIDDLESCHOOL
Raggiunta la fine del tratto
da spazzare, secondo una
traiettoria circolare, il robot
continuera’ la sua traiettoria
orientato nel modo indicato a
fianco (ossia la freccia bianca
indicante il frontale del
rover segue sempre la
direzione tangente alla
circonferenza seguita).
Jacopo Sini

4DDR.49ROBOTICS@MIDDLESCHOOL
Cosa accade se facciamo
continuare il moto del rover
con entrambe le ruote alla
stessa velocita’?
Il rover si muove secondo la
direzione tangente alla
circonferenza appena seguita.
Jacopo Sini

4DDR.50ROBOTICS@MIDDLESCHOOL

4DDR.51ROBOTICS@MIDDLESCHOOLJacopo Sini

4DDR.52ROBOTICS@MIDDLESCHOOLJacopo Sini

4DDR.53ROBOTICS@MIDDLESCHOOLJacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.54
Vediamo ora come calcolare l’angolo dapercorrere per spazzare un arco di 𝜑 gradisu una circonferenza di raggio 𝑅.
Per prima cosa, ricordiamo che la distanza
percorsa 𝑙 è pari a 𝑙 = 2𝜋𝑅 ⋅𝜑
360
Jacopo Sini

ROBOTICS@MIDDLESCHOOL 4DDR.55
Misuriamo quindi l’interasse, cioè la distanza𝑘 tra il centro delle due ruote del nostro rover:
𝑘
Jacopo Sini
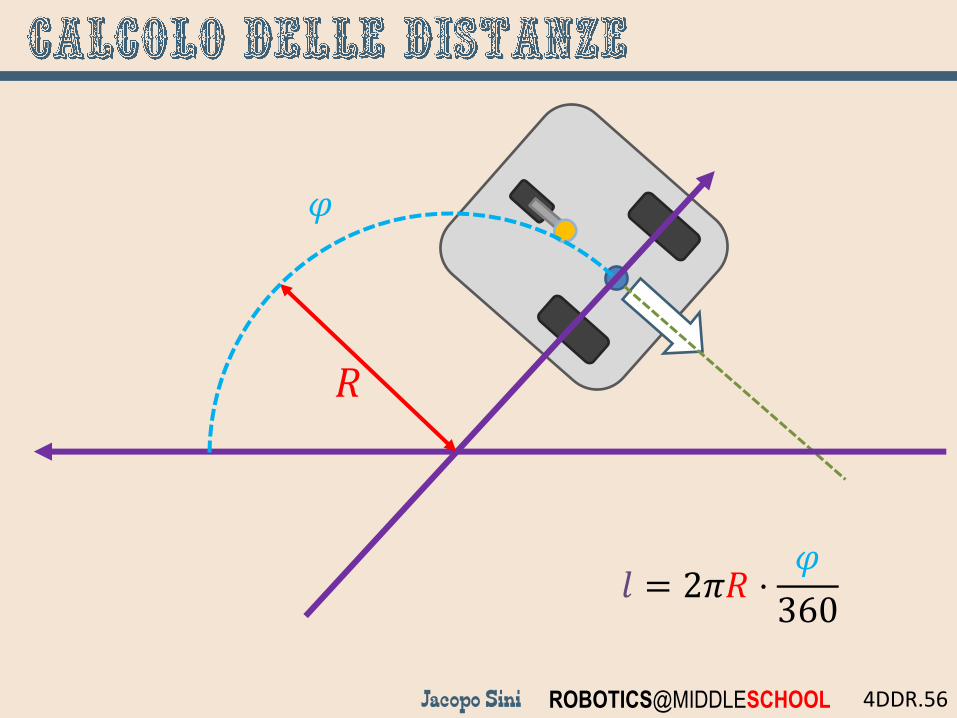
4DDR.56ROBOTICS@MIDDLESCHOOL
𝑅
𝜑
𝑙 = 2𝜋𝑅 ⋅𝜑
360
Jacopo Sini

4DDR.57ROBOTICS@MIDDLESCHOOL
𝑙𝑒 = 2𝜋 𝑅 +𝑘2
⋅𝜑
360
𝑅 +𝑘2
𝜑
Jacopo Sini

4DDR.58ROBOTICS@MIDDLESCHOOL
𝑙𝑖 = 2𝜋 𝑅 −𝑘2
⋅𝜑
360
𝜑
𝑅 −𝑘2
Jacopo Sini

4DDR.59ROBOTICS@MIDDLESCHOOL
𝜃𝑖
𝑙𝑖
𝜃𝑖 =𝑙𝑖 ⋅ 360
𝑅 −𝑘
2
𝜃𝑒
𝑙𝑒
𝜃𝑒 =𝑙𝑒 ⋅ 360
𝑅 +𝑘
2
Jacopo Sini

𝑟 Raggio ruota motrice.
𝑅 Raggio di curvatura.
𝜃𝑖 Angolo (coordinate di giunto percorso dalla i-esima ruota
motrice.
𝜑 Angolo (coordinate nello spazio di lavoro) spazzato durante la
percorrenza di una traiettoria circolare.
𝑙 Distanza (lungo la curva) percorsa dal rover.
𝑙𝑖 Distanza (lungo la rispettiva curva) percorsa dalla i-esima ruota.
𝑘 Distanza euclidea tra i punti di appoggio delle due ruote motrici.
ROBOTICS@MIDDLESCHOOL 4DDR.60Jacopo Sini

BONA B. Modellistica dei robot industriali, Celid, Torino, 2002
CORKE P. Robotics, Vision and Control, star, Springer , 2011
FERRARESI C., RAPARELLI T., Meccanica Applicata, CLUT, 1992
ROBOTICS@MIDDLESCHOOL 4DDR.61Jacopo Sini

Quest'opera è distribuita con Licenza
Creative Commons Attribuzione - Non commerciale - Condividi allo stesso modo 4.0 Internazionale.
http://creativecommons.org/licenses/by-nc-sa/4.0/
ROBOTICS@MIDDLESCHOOL 4DDR.62Jacopo Sini
Per ottenere in versione digitale questo file egli altri della serie
polito.academia.edu/JacopoSini
http://www.roboticsMS.altervista.org/

ROBOTICS@MIDDLESCHOOL 4DDR.63
Per completezza, anche se ben conscio delladifficoltà intrinseca della descrizione, vengonodi seguito riportate le descrizioni analitichenecessarie per implementare concretamenteuna pianificazione di traiettoria tramite latecnica differential drive.
Jacopo Sini

4DDR.64ROBOTICS@MIDDLESCHOOL
Con 𝑘 interasse tra le ruote, 𝑅 raggio dicurvatura, 𝑣𝑙 e 𝑣𝑟 rispettivamente velocitàperiferica delle ruote sinistra e destra, 𝜔velocità angolare, le seguenti equazioniforniscono la cinematica del rover:
𝑣𝑙 = 𝜔 𝑅 −𝑘
2
𝑣𝑟 = 𝜔 𝑅 +𝑘
2
𝑣𝑟 − 𝑣𝑙 =2𝜔𝑘
2→ 𝜔 =
𝑣𝑟 − 𝑣𝑙𝑘
𝑣𝑟 + 𝑣𝑙 = 2𝜔𝑅 → 𝑅 =𝑙(𝑣𝑟 + 𝑣𝑙)
2(𝑣𝑟 − 𝑣𝑙)
Jacopo Sini

4DDR.65ROBOTICS@MIDDLESCHOOL
Considerando le equazioni a tempo discreto i eassumendo valori costanti durante l’intervallodi tempo:
𝐶𝐼𝑅𝑖 =𝐶𝑥𝑖𝐶𝑦𝑖
=𝑥𝑖 − 𝑅𝑖 sin(𝜑𝑖)𝑦𝑖 + 𝑅𝑖 cos(𝜑𝑖)
𝜔𝑖 =𝑣𝑟𝑖 − 𝑣𝑙𝑖
𝑘; 𝛿𝜑𝑖 =
𝑙𝑟𝑖 − 𝑙𝑙𝑖𝑘
𝑣𝑖 =𝑣𝑟𝑖 + 𝑣𝑙𝑖
2
𝜔𝑖 𝑅𝑖 +𝑘
2= 𝑣𝑟𝑖
𝜔𝑖 𝑅𝑖 −𝑘
2= 𝑣𝑙𝑖
𝑅𝑖 =𝑣𝑖𝜔𝑖
=𝑘(𝑣𝑟𝑖 + 𝑣𝑙𝑖)
2(𝑣𝑟𝑖 − 𝑣𝑙𝑖)Jacopo Sini

4DDR.66ROBOTICS@MIDDLESCHOOL
Considerando le equazioni a tempo discreto i eassumendo valori costanti durante l’intervallodi tempo:
𝐶𝐼𝑅𝑖 =𝐶𝑥𝑖𝐶𝑦𝑖
=𝑥𝑖 − 𝑅𝑖 sin(𝜑𝑖)𝑦𝑖 + 𝑅𝑖 cos(𝜑𝑖)
𝜔𝑖 =𝑣𝑟𝑖 − 𝑣𝑙𝑖
𝑘; 𝛿𝜑𝑖 =
𝑙𝑟𝑖 − 𝑙𝑙𝑖𝑘
𝑣𝑖 =𝑣𝑟𝑖 + 𝑣𝑙𝑖
2
𝜔𝑖 𝑅𝑖 +𝑘
2= 𝑣𝑟𝑖
𝜔𝑖 𝑅𝑖 −𝑘
2= 𝑣𝑙𝑖
𝑅𝑖 =𝑣𝑖𝜔𝑖
=𝑘(𝑣𝑟𝑖 + 𝑣𝑙𝑖)
2(𝑣𝑟𝑖 − 𝑣𝑙𝑖)
Centro di
istantanea
rotazione
Jacopo Sini

4DDR.67ROBOTICS@MIDDLESCHOOL
Considerando le equazioni a tempo discreto i eassumendo valori costanti durante l’intervallodi tempo:
𝐶𝐼𝑅𝑖 =𝐶𝑥𝑖𝐶𝑦𝑖
=𝑥𝑖 − 𝑅𝑖 sin(𝜑𝑖)𝑦𝑖 + 𝑅𝑖 cos(𝜑𝑖)
𝜔𝑖 =𝑣𝑟𝑖 − 𝑣𝑙𝑖
𝑘; 𝛿𝜑𝑖 =
𝑙𝑟𝑖 − 𝑙𝑙𝑖𝑘
𝑣𝑖 =𝑣𝑟𝑖 + 𝑣𝑙𝑖
2
𝜔𝑖 𝑅𝑖 +𝑘
2= 𝑣𝑟𝑖
𝜔𝑖 𝑅𝑖 −𝑘
2= 𝑣𝑙𝑖
𝑅𝑖 =𝑣𝑖𝜔𝑖
=𝑘(𝑣𝑟𝑖 + 𝑣𝑙𝑖)
2(𝑣𝑟𝑖 − 𝑣𝑙𝑖)
Velocita’ punto
medio asse
ruote
Jacopo Sini

4DDR.68ROBOTICS@MIDDLESCHOOL
Considerando le equazioni a tempo discreto i eassumendo valori costanti durante l’intervallodi tempo:
𝐶𝐼𝑅𝑖 =𝐶𝑥𝑖𝐶𝑦𝑖
=𝑥𝑖 − 𝑅𝑖 sin(𝜑𝑖)𝑦𝑖 + 𝑅𝑖 cos(𝜑𝑖)
𝜔𝑖 =𝑣𝑟𝑖 − 𝑣𝑙𝑖
𝑘; 𝛿𝜑𝑖 =
𝑙𝑟𝑖 − 𝑙𝑙𝑖𝑘
𝑣𝑖 =𝑣𝑟𝑖 + 𝑣𝑙𝑖
2
𝜔𝑖 𝑅𝑖 +𝑘
2= 𝑣𝑟𝑖
𝜔𝑖 𝑅𝑖 −𝑘
2= 𝑣𝑙𝑖
𝑅𝑖 =𝑣𝑖𝜔𝑖
=𝑘(𝑣𝑟𝑖 + 𝑣𝑙𝑖)
2(𝑣𝑟𝑖 − 𝑣𝑙𝑖)
Distanza percorsa
ruota destra e
sinistra
Jacopo Sini

4DDR.69ROBOTICS@MIDDLESCHOOL
𝑥 𝑡 = න0
𝑡
cos 𝜑 𝜏 𝑣 𝜏 𝑑𝜏; 𝑦 𝑡 = න0
𝑡
sin𝜑 𝜏 𝑣 𝜏 𝑑𝜏
𝜑 𝑡 = න0
𝑡
𝜔 𝜏 𝑑𝜏
Se il tempo di campionamento è piccolo:
𝜔𝑖 =𝑑
𝑑𝑡𝜑 → 𝜔𝑖 ≅ 𝜑𝑖+1 ≝ 𝛿𝜑𝑖
𝑥𝑖+1𝑦𝑖+1𝜑𝑖+1
=cos(𝛿𝜑𝑖) − sin(𝛿𝜑𝑖) 0sin(𝛿𝜑𝑖) cos(𝛿𝜑𝑖) 0
0 0 1
𝑥𝑖 − 𝐶𝐼𝑅𝑥𝑖𝑦𝑖 − 𝐶𝐼𝑅𝑦𝑖
𝜑𝑖
+
𝐶𝐼𝑅𝑥𝑖𝐶𝐼𝑅𝑦𝑖𝛿𝜑𝑖
Jacopo Sini

4DDR.70ROBOTICS@MIDDLESCHOOL
Approssimazione di Eulero
ቐ
𝑥𝑖+1 = 𝑥𝑖 + 𝑣𝑖𝑇 cos(𝜑𝑖)𝑦𝑖+1 = 𝑦𝑖 + 𝑣𝑖𝑇 sin(𝜑𝑖)
𝜑𝑖+1 = 𝜑𝑖 + 𝜔𝑖𝑇𝛿𝑙
𝑞𝑖
𝑞𝑖+1
𝛿𝜑 𝑅
Jacopo Sini

4DDR.71ROBOTICS@MIDDLESCHOOL
Approssimazione di Runge-Kutta
𝑥𝑖+1 = 𝑥𝑖 + 𝑣𝑖𝑇 cos 𝜑𝑖 +1
2𝜔𝑖𝑇
𝑦𝑖+1 = 𝑦𝑖 + 𝑣𝑖𝑇 sin 𝜑𝑖 +1
2𝜔𝑖𝑇
𝜑𝑖+1 = 𝜑𝑖 + 𝜔𝑖𝑇
𝑞𝑖+1
𝛿𝑙
𝑞𝑖𝛿𝜑 𝑅
Jacopo Sini

4DDR.72ROBOTICS@MIDDLESCHOOL
Integrazione esatta
𝑥𝑖+1 = 𝑥𝑖 +𝜔𝑖
𝑣𝑖sin𝜑𝑖+1 − sin𝜑𝑖
𝑦𝑖+1 = 𝑦𝑖 +𝜔𝑖
𝑣𝑖cos𝜑𝑖+1 − cos𝜑𝑖
𝜑𝑖+1 = 𝜑𝑖 + 𝜔𝑖𝑇𝑞𝑖+1
𝛿𝑙
𝑞𝑖𝛿𝜑 𝑅
Jacopo Sini





























