Embed Size (px)
Citation preview

2015 Signal Processing Symposium(SPSympo)
Debe VillageJune 10-12, 2015
Poland
2015 Signal Processing Symposium(SPSympo)
Debe VillageJune 10-12, 2015
Poland
1

Editors
Anna Kurowska
Jacek MisiurewiczKrzysztof Różanowski
Olaf TruszczyńskiWarsaw University of TechnologyNowowiejska 15 / 19 00-665 Warsaw, Poland
Military Institute of Aviation MedicineKrasińskiego 54 / 5601-755 Warsaw, Poland
Phone:+48 22 234 74 78Fax: +48 22 825 23 00Email: [email protected]: [email protected]
Phone:+48 26 185 26 01Fax: +48 22 633 41 54Email: [email protected]: [email protected]
Web: http://www.spsympo2015.ise.pw.edu.pl
Copyright ©2015 by The Warsaw University of Technology (WUT). All rights reserved.
No part of the 2015 Signal Processing Symposium (SPSympo) proceedings (text passages, figures, data
or other material) may be reproduced, stored in a retrieval system, or transmitted in any form or by any
means, electronic, photocopying, recording, scanning, or otherwise, without either prior written
permission of the authors of an article or written permission of the WUT.
ISBN 978-83-7798-159-1
Printed in BEL Studio, ul. Powstańców Śl. 67B, 01-355 Warszawa, Poland
Editors
Anna Kurowska
Jacek MisiurewiczKrzysztof Różanowski
Olaf TruszczyńskiWarsaw University of TechnologyNowowiejska 15 / 19 00-665 Warsaw, Poland
Military Institute of Aviation MedicineKrasińskiego 54 / 5601-755 Warsaw, Poland
Phone: +48 22 234 74 78Fax: +48 22 825 23 00Email: [email protected]: [email protected]
Phone: +48 26 185 26 01Fax: +48 22 633 41 54Email: [email protected]: [email protected]
Web: http://www.spsympo2015.ise.pw.edu.pl
Copyright ©2015 by The Warsaw University of Technology (WUT). All rights reserved.
No part of the 2015 Signal Processing Symposium (SPSympo) proceedings (text passages, figures, data
or other material) may be reproduced, stored in a retrieval system, or transmitted in any form or by any
means, electronic, photocopying, recording, scanning, or otherwise, without either prior written
permission of the authors of an article or written permission of the WUT.
ISBN 978-83-7798-160-3
2

Table of Contents
SESSION A0Requirements of RADAR Techniques for Defence Activities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Carole E. Nahum (Office for Advanced Research and Innovation, DGA, French MoD, France)
SESSION A1 Passive Radar Algorithms / ProcessingDirect Signal Suppression Schemes for Passive Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
J.L. Garry, G.E. Smith, C.J. Baker (Electrical and Computer Engineering, The Ohio State University, USA)
Effective implementation of passive radar algorithms using General-Purpose computing on Graphics Processing Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Karolina Szczepankiewicz (Institute of Computer Science Warsaw University of Technology, Po-land), Mateusz Malanowski (Institute of Electronic Systems Warsaw University of Technology, Po-land), Michał Szczepankiewicz (Institute of Computer Science Warsaw University of Technology, Poland)
First results on ground targets tracking using UHF passive radars under non line-of-sight conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Pedro Gomez-del-Hoyo, Nerea del-Rey-Maestre, David Mata-Moya, María-Pilar Jarabo-Amores, Jaime Martin-de-Nicolas (Signal Theory and Communications Department Polytechnic School, University of Alcalá, Spain)
Range Only Target Localization in Multi-Static Passive Radar System: A Gradient Descent Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Salaheddin Alakkari, Khalid Jamil and Sami Alhumaidi (Prince Sultan Advanced Technologies Re-search Institute King Saud University, Saudi Arabia)
Tracking algorithm analysis for the PCL-PET fusion system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Leszek Lamentowski, Roman Mularzuk, Tadeusz Brenner (PIT-RADWAR S.A., Poland), Maciej Nieszporski (PIT-RADWAR S.A. and Wydział Fizyki Uniwersytet Warszawski, Poland)
SESSION B1 Biomedical Signals IPatient-specific epileptic seizure prediction using correlation features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Oleg Panichev, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Volodymyr Kharytonov (Kyiv Munici-pal Clinical Psychoneurological Hospital №1, Ukraine)
Robust Estimation of Respiratory Rate Based on Linear Regression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Michal Momot, Ewelina Piekar (Institute of Medical Technology and Equipment, Poland), Alina Momoty (Silesian University of Technology, Institute of Computer Science, Poland)
5
Table of Contents
SESSION A0Requirements of RADAR Techniques for Defence Activities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Carole E. Nahum (Office for Advanced Research and Innovation, DGA, French MoD, France)
SESSION A1 Passive Radar Algorithms / ProcessingDirect Signal Suppression Schemes for Passive Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
J.L. Garry, G.E. Smith, C.J. Baker (Electrical and Computer Engineering, The Ohio State University, USA)
Effective implementation of passive radar algorithms using General-Purpose computing on Graphics Processing Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Karolina Szczepankiewicz (Institute of Computer Science Warsaw University of Technology, Po-land), Mateusz Malanowski (Institute of Electronic Systems Warsaw University of Technology, Po-land), Michał Szczepankiewicz (Institute of Computer Science Warsaw University of Technology, Poland)
First results on ground targets tracking using UHF passive radars under non line-of-sight conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Pedro Gomez-del-Hoyo, Nerea del-Rey-Maestre, David Mata-Moya, María-Pilar Jarabo-Amores, Jaime Martin-de-Nicolas (Signal Theory and Communications Department Polytechnic School, University of Alcalá, Spain)
Range Only Target Localization in Multi-Static Passive Radar System: A Gradient Descent Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Salaheddin Alakkari, Khalid Jamil and Sami Alhumaidi (Prince Sultan Advanced Technologies Re-search Institute King Saud University, Saudi Arabia)
Tracking algorithm analysis for the PCL-PET fusion system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Leszek Lamentowski, Roman Mularzuk, Tadeusz Brenner (PIT-RADWAR S.A., Poland), Maciej Nieszporski (PIT-RADWAR S.A. and Wydział Fizyki Uniwersytet Warszawski, Poland)
SESSION B1 Biomedical Signals IPatient-specific epileptic seizure prediction using correlation features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Oleg Panichev, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Volodymyr Kharytonov (Kyiv Munici-pal Clinical Psychoneurological Hospital №1, Ukraine)
Robust Estimation of Respiratory Rate Based on Linear Regression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Michal Momot, Ewelina Piekar (Institute of Medical Technology and Equipment, Poland), Alina Momoty (Silesian University of Technology, Institute of Computer Science, Poland)
5
5

Comparison of First Order Statistical and Autoregressive Model Features for Activity Prediction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Ömer Kayaaltı (Erciyes University Dept. of Computer Technologies Develi Hüseyin Şahin Vocatio-nal College, Turkey), Musa Hakan Asyalı (Yıldız Technical University Dept. of Biomedical Engine-ering Engineering Faculty, Turkey)
Polish Emotional Natural Speech Database . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Dorota Kamińska and Tomasz Sapiński and Adam Pelikant (Institute of Mechatronics and Informa-tion Systems Lodz Technical University, Poland)
SESSION A2 Passive Radar - ApplicationsRetrieving aircraft motion parameters, using acoustic passive radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Eugene Chervoniak, Rustem Sinitsyn, Felix Yanovsky (Electronics Department National Aviation University Kiev, Ukraine)
Passive radar imaging capabilities using space-borne commercial illuminators in surveillance applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
J.-L. Bárcena-Humanes, N. del-Rey-Maestre, M.P. Jarabo-Amores, D. Mata-Moya, P. Gomez-del--Hoyo (Signal Theory and Communications Department Polytechnic School, University of Alcal´a, Spain)
Signal Processing of GPS Radio Shadows Formed by Moving Targets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79Chr. Kabakchiev (Sofia University, Bulgaria), I. Garvanov (ULSIT, Bulgaria), V. Be-har (IICT-BAS, Bulgaria), D. Kabakchieva (UNWE, Bulgaria), K. Kabakchiev (Uni-versity of Birmingham, UK), H. Rohling (TU Hamburg-Harburg, Germany), K. Kulpa (TU Warsaw, Poland), A. Yarovoy (TU Delft, The Netherland)
SESSION B2 Biomedical Signals II Application of fuzzy logic for Alzheimer’s disease diagnosis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Igor Krashenyi, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Javier Ramirez, Juan Manuel Gorriz (Department of Signal Theory, Telematics and Communications University of Granada, Spain)
R-R Interval Prediction for Adaptive Sensing of ECG Signal using Robust Regression . . . . . . . . . . . . . . . . . 89Michal Momot, Ewelina Piekar (Institute of Medical Technology and Equipment, Poland), Alina Momoty (Silesian University of Technology, Institute of Computer Science, Poland)
Parameters analyzed of Higuchi’s fractal dimension for EEG brain signals . . . . . . . . . . . . . . . . . . . . . . . . . . . 93Christian Flores Vega (School of Electrical Engineering, Universidad de Ingenieria y Tecnologia, Peru), Julien Noel (School of Energy Engineering, Universidad de Ingenieria y Tecno-logia, Peru)
k-NN Binary Classification of Heart Failures Using Myocardial Current Density Distribution Maps . . . . . 98Yevhenii Udovychenko, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Illya Chaikovsky (Glushkov Institute of Cybernetics of NAS of Ukraine, Ukraine)
6
Comparison of First Order Statistical and Autoregressive Model Features for Activity Prediction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Ömer Kayaaltı (Erciyes University Dept. of Computer Technologies Develi Hüseyin Şahin Vocatio-nal College, Turkey), Musa Hakan Asyalı (Yıldız Technical University Dept. of Biomedical Engine-ering Engineering Faculty, Turkey)
Polish Emotional Natural Speech Database . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Dorota Kamińska and Tomasz Sapiński and Adam Pelikant (Institute of Mechatronics and Informa-tion Systems Lodz Technical University, Poland)
SESSION A2 Passive Radar - ApplicationsRetrieving aircraft motion parameters, using acoustic passive radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Eugene Chervoniak, Rustem Sinitsyn, Felix Yanovsky (Electronics Department National Aviation University Kiev, Ukraine)
Passive radar imaging capabilities using space-borne commercial illuminators in surveillance applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
J.-L. Bárcena-Humanes, N. del-Rey-Maestre, M.P. Jarabo-Amores, D. Mata-Moya, P. Gomez-del--Hoyo (Signal Theory and Communications Department Polytechnic School, University of Alcal´a, Spain)
Signal Processing of GPS Radio Shadows Formed by Moving Targets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79Chr. Kabakchiev (Sofia University, Bulgaria), I. Garvanov (ULSIT, Bulgaria), V. Be-har (IICT-BAS, Bulgaria), D. Kabakchieva (UNWE, Bulgaria), K. Kabakchiev (Uni-versity of Birmingham, UK), H. Rohling (TU Hamburg-Harburg, Germany), K. Kulpa (TU Warsaw, Poland), A. Yarovoy (TU Delft, The Netherland)
SESSION B2 Biomedical Signals II Application of fuzzy logic for Alzheimer’s disease diagnosis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Igor Krashenyi, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Javier Ramirez, Juan Manuel Gorriz (Department of Signal Theory, Telematics and Communications University of Granada, Spain)
R-R Interval Prediction for Adaptive Sensing of ECG Signal using Robust Regression . . . . . . . . . . . . . . . . . 89Michal Momot, Ewelina Piekar (Institute of Medical Technology and Equipment, Poland), Alina Momoty (Silesian University of Technology, Institute of Computer Science, Poland)
Parameters analyzed of Higuchi’s fractal dimension for EEG brain signals . . . . . . . . . . . . . . . . . . . . . . . . . . . 93Christian Flores Vega (School of Electrical Engineering, Universidad de Ingenieria y Tecnologia, Peru), Julien Noel (School of Energy Engineering, Universidad de Ingenieria y Tecno-logia, Peru)
k-NN Binary Classification of Heart Failures Using Myocardial Current Density Distribution Maps . . . . . 98Yevhenii Udovychenko, Anton Popov (Physical and Biomedical Electronics Department National Technical University of Ukraine “Kyiv Polytechnic Institute”, Ukraine), Illya Chaikovsky (Glushkov Institute of Cybernetics of NAS of Ukraine, Ukraine)
6
6

Signal Processing of GPS Radio Shadows Formed by Moving Targets
Chr. Kabakchiev Sofia University Sofia, Bulgaria
I. Garvanov ULSIT
Sofia, Bulgaria [email protected]
V. Behar IICT-BAS
Sofia, Bulgaria [email protected]
D. Kabakchieva UNWE
Sofia, Bulgaria [email protected]
K. Kabakchiev University of Birmingham,
Birmingham, UK [email protected]
H. Rohling TU Hamburg-Harburg
Hamburg,Germany [email protected]
K. Kulpa TU Warsaw
Poland [email protected]
A. Yarovoy TU Delft
The Netherland [email protected]
Abstract— This paper focuses on scientific issues related to new application of GPS in the construction and development of radar networks using the effect of Forward Scatter (FS) of electromagnetic waves for detection of objects by using of their GPS radio shadows. The paper theme is new, it combines two thematic areas: processing of GPS signals and processing of radar signals in FS radar systems.
Keywords— FS effect, FSR, GPS, detection and estimation
I. INTRODUCTION Forward Scatter radar is bistatic radar, where the bistatic
angle between the directions "receiver-target'' and "transmitter-purpose" should be around 180
0 [1]. These radar systems have
some limitations - lack of resolution in distance, the target must be very close to the baseline "transmitter-receiver''. But these FS radars offer a range of features that make them interesting to study and use [2, 3]. Their most attractive feature is the sharp increase in the effective reflectivity of the object when it is near the baseline, leading to a dramatic amplification of the received signal from the object compared to traditional monostatic radar [4-7].
The idea is to use the information available from the radio shadow (length, depth and spectrum) in order to enhance the performance of the algorithms in conventional GPS receivers.
The aim of the paper is to make experimental studies of GPS radio shadows of different objects irradiated by GPS signals and develop algorithms for automatic detection of the shadows of these objects [8, 9].
The scientific hypothesis is that radio shadows contain valuable information about the objects that can be used to improve the performance of systems with secondary application of wireless technologies. These are FS passive bistatic positioning systems based on radio communication or radio navigation systems, in particular the GPS system. Normally in conditions of radio shadow of the subject these passive radio systems lose the object. When the object is close to the line between the transmitter and the receiver, the receiver
loses the reradiated signal from the object (radio shadow). When the user of the GPS information moves in urban, he kept losing signal because of tall buildings or trees, bridges, etc.
The practical utility of the proposed idea is to use a specific processing of the received signal in the GPS receiver, then the extracted information can be used for positioning and classification of moving objects; for accurate assessment of the geographic location of fixed objects by method triangulation in systems for transport management; security of zones; for subsequent identification of the detected objects with these from digital geographical maps, and the like.
The originality is that it is proposed to use additional information derived from radio shadows of different objects in urban environments in order to improve the accuracy of the work of traditional radio navigation systems.
The innovation is to develop new secondary applications of GPS technology, which will bring more profits for businesses in Europe.
II. SIGNAL PROCESSING The paper presents a possible variant of signal processing in
passive GPS-based FSR [8, 9]. The general block-scheme of a possible algorithm for FSR shadow detection is shown in Fig 1. According to this block-scheme, several visible GPS satellites are acquired and tracked over the complete duration of recorded signals [10]. We consider the case when the acquisition and tracking algorithms of a GPS receiver are implemented in MATLAB. The absolute values of the Ip component at the output of the Code&Carrier tracking block are filtered in the Moving Average Filter with Jumping Window (MAFJW) in order to improve the Signal-to-Noise Ratio (SNR) before signal detection and in the Constant False Alarm Rate (CFAR) detector.
The CFAR processor firstly detect single samples and then counts them using a binary nonparametric procedure for detection of sample packages of unknown length, with the decision rule “M/N–L”, in order to estimate their unknown length. After estimation of the sample package length in the time domain using the CFAR processor, we use the same
79
Signal Processing of GPS Radio Shadows Formed by Moving Targets
Chr. Kabakchiev Sofia University Sofia, Bulgaria
I. Garvanov ULSIT
Sofia, Bulgaria [email protected]
V. Behar IICT-BAS
Sofia, Bulgaria [email protected]
D. Kabakchieva UNWE
Sofia, Bulgaria [email protected]
K. Kabakchiev University of Birmingham,
Birmingham, UK [email protected]
H. Rohling TU Hamburg-Harburg
Hamburg,Germany [email protected]
K. Kulpa TU Warsaw
Poland [email protected]
A. Yarovoy TU Delft
The Netherland [email protected]
Abstract— This paper focuses on scientific issues related to new application of GPS in the construction and development of radar networks using the effect of Forward Scatter (FS) of electromagnetic waves for detection of objects by using of their GPS radio shadows. The paper theme is new, it combines two thematic areas: processing of GPS signals and processing of radar signals in FS radar systems.
Keywords— FS effect, FSR, GPS, detection and estimation
I. INTRODUCTION Forward Scatter radar is bistatic radar, where the bistatic
angle between the directions "receiver-target'' and "transmitter-purpose" should be around 1800 [1]. These radar systems have some limitations - lack of resolution in distance, the target must be very close to the baseline "transmitter-receiver''. But these FS radars offer a range of features that make them interesting to study and use [2, 3]. Their most attractive feature is the sharp increase in the effective reflectivity of the object when it is near the baseline, leading to a dramatic amplification of the received signal from the object compared to traditional monostatic radar [4-7].
The idea is to use the information available from the radio shadow (length, depth and spectrum) in order to enhance the performance of the algorithms in conventional GPS receivers.
The aim of the paper is to make experimental studies of GPS radio shadows of different objects irradiated by GPS signals and develop algorithms for automatic detection of the shadows of these objects [8, 9].
The scientific hypothesis is that radio shadows contain valuable information about the objects that can be used to improve the performance of systems with secondary application of wireless technologies. These are FS passive bistatic positioning systems based on radio communication or radio navigation systems, in particular the GPS system. Normally in conditions of radio shadow of the subject these passive radio systems lose the object. When the object is close to the line between the transmitter and the receiver, the receiver
loses the reradiated signal from the object (radio shadow). When the user of the GPS information moves in urban, he kept losing signal because of tall buildings or trees, bridges, etc.
The practical utility of the proposed idea is to use a specific processing of the received signal in the GPS receiver, then the extracted information can be used for positioning and classification of moving objects; for accurate assessment of the geographic location of fixed objects by method triangulation in systems for transport management; security of zones; for subsequent identification of the detected objects with these from digital geographical maps, and the like.
The originality is that it is proposed to use additional information derived from radio shadows of different objects in urban environments in order to improve the accuracy of the work of traditional radio navigation systems.
The innovation is to develop new secondary applications of GPS technology, which will bring more profits for businesses in Europe.
II. SIGNAL PROCESSING The paper presents a possible variant of signal processing in
passive GPS-based FSR [8, 9]. The general block-scheme of a possible algorithm for FSR shadow detection is shown in Fig 1. According to this block-scheme, several visible GPS satellites are acquired and tracked over the complete duration of recorded signals [10]. We consider the case when the acquisition and tracking algorithms of a GPS receiver are implemented in MATLAB. The absolute values of the Ip component at the output of the Code&Carrier tracking block are filtered in the Moving Average Filter with Jumping Window (MAFJW) in order to improve the Signal-to-Noise Ratio (SNR) before signal detection and in the Constant False Alarm Rate (CFAR) detector.
The CFAR processor firstly detect single samples and then counts them using a binary nonparametric procedure for detection of sample packages of unknown length, with the decision rule “M/N–L”, in order to estimate their unknown length. After estimation of the sample package length in the time domain using the CFAR processor, we use the same
79
79
2015 Signal Processing Symposium (SPSympo), 10-12 June 2015, Debe, Poland2015 Signal Processing Symposium (SPSympo), 10-12 June 2015, Debe, Poland
approach for estimation of the target characteristics in the frequency domain. In that way we obtain several important parameters of moving FS targets – the energy of the targets and their frequency. The obtained target signature can be used for estimation of various target parameters in the time and frequency domains. The CFAR processing is a very important procedure and very often used especially in real systems, because it results in producing of precise target images separated from the existing interference. It is performed by removing clutter from the receive signals using the adaptive CFAR threshold. Next the extracted target signatures that are free of clutter can be used to estimate different target parameters for their classifications. Fig. 1. The general block-sheme of signal processing for target detection used
in a passive GPS-based FSR system
III. EXPERIMENTAL RESULTS The experimental scenario includes targets moving into
two directions and a stationary FS-GPS recording system that registers FS shadow formed by ground moving targets (Figure 2). The GPS receiver is positioned at one side of the road.
Fig. 2. GPS-GSR topology
The purpose of the experiments is to verify that with a small and omnidirectional commercial GPS antenna is possible to register differences in GPS FS shadows of moving targets depending on their size and velocity, and also to verify whether the differences in the shadows allows classifying the objects (Figure 3). During the experiment, the conditions for the occurrence of the FS-GPS effect are guaranteed. The GPS receiver is positioned from the one side of the road and records the signal from GPS satellites. For recording are selected such visible satellites, which are located at low elevation angles and form a baseline (between satellite and receiver) perpendicular to the road, in order to form the FS effect. During the experiment the satellite signals are recorded when targets move
on the road. Targets passing on the road have different dimensions (cars, vans, buses, trucks, pedestrian etc.). The GPS receiver is positioned at the one side of the road, 1 m above the ground (Figure 3). The street has four lanes each with the width of 3m, two in one direction.
Fig. 3. Experimental equipment
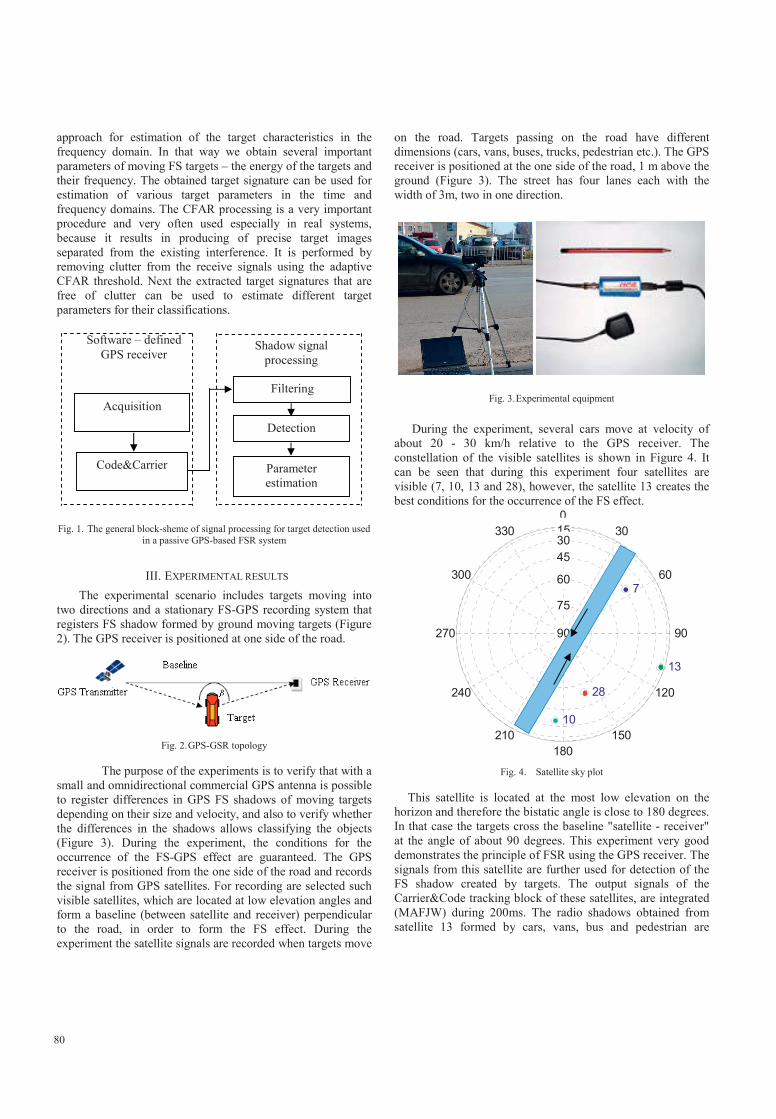
During the experiment, several cars move at velocity of about 20 - 30 km/h relative to the GPS receiver. The constellation of the visible satellites is shown in Figure 4. It can be seen that during this experiment four satellites are visible (7, 10, 13 and 28), however, the satellite 13 creates the best conditions for the occurrence of the FS effect.
30
210
60
240
90 270
120
300
150
330
180
00153045
60
75
90
7
13
28
10
Fig. 4. Satellite sky plot
This satellite is located at the most low elevation on the horizon and therefore the bistatic angle is close to 180 degrees. In that case the targets cross the baseline "satellite - receiver" at the angle of about 90 degrees. This experiment very good demonstrates the principle of FSR using the GPS receiver. The signals from this satellite are further used for detection of the FS shadow created by targets. The output signals of the Carrier&Code tracking block of these satellites, are integrated (MAFJW) during 200ms. The radio shadows obtained from satellite 13 formed by cars, vans, bus and pedestrian are
Software – defined GPS receiver
Shadow signal processing
Acquisition
Code&Carrier
Filtering
Detection
Parameter estimation
80
approach for estimation of the target characteristics in the frequency domain. In that way we obtain several important parameters of moving FS targets – the energy of the targets and their frequency. The obtained target signature can be used for estimation of various target parameters in the time and frequency domains. The CFAR processing is a very important procedure and very often used especially in real systems, because it results in producing of precise target images separated from the existing interference. It is performed by removing clutter from the receive signals using the adaptive CFAR threshold. Next the extracted target signatures that are free of clutter can be used to estimate different target parameters for their classifications. Fig. 1. The general block-sheme of signal processing for target detection used
in a passive GPS-based FSR system
III. EXPERIMENTAL RESULTS The experimental scenario includes targets moving into
two directions and a stationary FS-GPS recording system that registers FS shadow formed by ground moving targets (Figure 2). The GPS receiver is positioned at one side of the road.
Fig. 2. GPS-GSR topology
The purpose of the experiments is to verify that with a small and omnidirectional commercial GPS antenna is possible to register differences in GPS FS shadows of moving targets depending on their size and velocity, and also to verify whether the differences in the shadows allows classifying the objects (Figure 3). During the experiment, the conditions for the occurrence of the FS-GPS effect are guaranteed. The GPS receiver is positioned from the one side of the road and records the signal from GPS satellites. For recording are selected such visible satellites, which are located at low elevation angles and form a baseline (between satellite and receiver) perpendicular to the road, in order to form the FS effect. During the experiment the satellite signals are recorded when targets move
on the road. Targets passing on the road have different dimensions (cars, vans, buses, trucks, pedestrian etc.). The GPS receiver is positioned at the one side of the road, 1 m above the ground (Figure 3). The street has four lanes each with the width of 3m, two in one direction.
Fig. 3. Experimental equipment
During the experiment, several cars move at velocity of about 20 - 30 km/h relative to the GPS receiver. The constellation of the visible satellites is shown in Figure 4. It can be seen that during this experiment four satellites are visible (7, 10, 13 and 28), however, the satellite 13 creates the best conditions for the occurrence of the FS effect.
30
210
60
240
90270
120
300
150
330
180
00153045
60
75
90
7
13
28
10
Fig. 4. Satellite sky plot
This satellite is located at the most low elevation on the horizon and therefore the bistatic angle is close to 180 degrees. In that case the targets cross the baseline "satellite - receiver" at the angle of about 90 degrees. This experiment very good demonstrates the principle of FSR using the GPS receiver. The signals from this satellite are further used for detection of the FS shadow created by targets. The output signals of the Carrier&Code tracking block of these satellites, are integrated (MAFJW) during 200ms. The radio shadows obtained from satellite 13 formed by cars, vans, bus and pedestrian are
Software – defined GPS receiver
Shadow signal processing
Acquisition
Code&Carrier
Filtering
Detection
Parameter estimation
80
80

shown in Figure 5. It can be seen that the parameters of these radio shadows can be used to classify different moving targets.
05101520253095
100
105
110
115
120Integration time=200 ms
Time [s]
20log10(Ip) in dB
VANBUS
CARCARCARCAR
CARPEDESTRIAN
VAN
VAN
DIRECTION
DIRECTION
Satellite - 13
Fig. 5. Integrated power from 13 satellite
A. Length of target estimation in time domain The size of a target shadow detected by FS-GPS can be
related to the approximately physical size of the object. For this aim we assume that the number of detected samples of the target shadow could be roughly equal to the target length. The estimation of the target length is based on the estimation of the number of the detected target shadow samples when the target crosses of the FS-GPS antenna beam. Moreover, the target linear dimensions are individual and are very much depend on the target speed, movement direction and the distance from the target to the FS-GPS system antenna. The estimation of the number of the detected target shadow samples makes the CFAR detector.
B. Signal energy of target estimation in time domain An object reflects a limited amount of radar energy. A
number of different factors determine how much electromagnetic energy returns to the source such as relative size of the target. While important in detecting relative size of the target, strength of emitter and distance are not factors that affect the calculation of a Radar cross section (RCS) because the RCS is (approximately) only a property of the target. As a rule, the larger an object, the stronger it’s Radar reflection and thus the greater it’s RCS. The standard statistical average procedure calculates roughly average estimation of the target energy in our case. For this reason we use only difference between all amplitude of the signal package subtract from average CFAR detection threshold.
C. Spectrum energy of target estimation in frequency domain
Applying FFT or PWELCH to our records for different targets, we obtain the corresponding signal power spectrum (Fig.6). The estimate of the average target energy is calculated by means of the standard statistical average procedure. For this reason we use only difference between all amplitudes of the detected signal and the level of -40 dB. For the higher target, the spectrum expands to a greater frequency range. At -40 dB level of the spectrum can be seen that the spectrum of the human is concentrated to 15 Hz as opposed to the car and a bus, where the spectrum is up to 20-30 Hz.
051015202530-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Frequency [Hz]
Magnitude [dB
]
Power Spectrum
buscarpedectrian
Fig. 6. Power spectrum of bus, car and pedestrian
Table 1 summarizes all estimates obtained for different targets, as follows: target signal length, signal energy, Doppler frequency and power. These estimates are calculated using real signal records obtained during the experiment
Table 1. Parameter estimation
Bus Car Ped. Target length / s 2.5 1 0.5
Signal energy / dB 12 6 3 Freq. (for -40 dB) / Hz 35 21 15 Spectrum power / dB 14.5 13 10
IV. CONCLUSIONS The paper shows that using a small commercial GPS antenna and software-defined GPS receiver it is possible to detect different objects on their GPS shadows with a moving or stationary receiver. Topology of the experiment suggests the presence of the conditions of occurrence of FS effect. This means that the satellite receiver and a transmitter are located on the same line, which crosses the object.
81
shown in Figure 5. It can be seen that the parameters of these radio shadows can be used to classify different moving targets.
0 5 10 15 20 25 3095
100
105
110
115
120Integration time=200 ms
Time [s]
20lo
g10(
Ip) i
n dB
VAN BUS
CAR CAR CAR CAR
CARPEDESTRIAN
VAN
VAN
DIRECTION
DIRECTION
Satellite - 13
Fig. 5. Integrated power from 13 satellite
A. Length of target estimation in time domain The size of a target shadow detected by FS-GPS can be
related to the approximately physical size of the object. For this aim we assume that the number of detected samples of the target shadow could be roughly equal to the target length. The estimation of the target length is based on the estimation of the number of the detected target shadow samples when the target crosses of the FS-GPS antenna beam. Moreover, the target linear dimensions are individual and are very much depend on the target speed, movement direction and the distance from the target to the FS-GPS system antenna. The estimation of the number of the detected target shadow samples makes the CFAR detector.
B. Signal energy of target estimation in time domain An object reflects a limited amount of radar energy. A
number of different factors determine how much electromagnetic energy returns to the source such as relative size of the target. While important in detecting relative size of the target, strength of emitter and distance are not factors that affect the calculation of a Radar cross section (RCS) because the RCS is (approximately) only a property of the target. As a rule, the larger an object, the stronger it’s Radar reflection and thus the greater it’s RCS. The standard statistical average procedure calculates roughly average estimation of the target energy in our case. For this reason we use only difference between all amplitude of the signal package subtract from average CFAR detection threshold.
C. Spectrum energy of target estimation in frequency domain
Applying FFT or PWELCH to our records for different targets, we obtain the corresponding signal power spectrum (Fig.6). The estimate of the average target energy is calculated by means of the standard statistical average procedure. For this reason we use only difference between all amplitudes of the detected signal and the level of -40 dB. For the higher target, the spectrum expands to a greater frequency range. At -40 dB level of the spectrum can be seen that the spectrum of the human is concentrated to 15 Hz as opposed to the car and a bus, where the spectrum is up to 20-30 Hz.
0 5 10 15 20 25 30-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Frequency [Hz]
Mag
nitu
de [d
B]
Power Spectrum
buscarpedectrian
Fig. 6. Power spectrum of bus, car and pedestrian
Table 1 summarizes all estimates obtained for different targets, as follows: target signal length, signal energy, Doppler frequency and power. These estimates are calculated using real signal records obtained during the experiment
Table 1. Parameter estimation
Bus Car Ped. Target length / s 2.5 1 0.5
Signal energy / dB 12 6 3 Freq. (for -40 dB) / Hz 35 21 15 Spectrum power / dB 14.5 13 10
IV. CONCLUSIONS The paper shows that using a small commercial GPS antenna and software-defined GPS receiver it is possible to detect different objects on their GPS shadows with a moving or stationary receiver. Topology of the experiment suggests the presence of the conditions of occurrence of FS effect. This means that the satellite receiver and a transmitter are located on the same line, which crosses the object.
81
81

ACKNOWLEDGMENT This work is partly supported by the projects DFNI-T 02/3/2014.
REFERENCES [1] Cherniakov M., (ed.), “Bistatic Radar: Principles and Practice”, Wiley &
Sons, 2007. [2] Koch, V., R. Westphal, “New approach to a multistatic passive radar
sensor for air/space defense”, IEEE AES Systems Magazine, pp. 24-32, November 1995.
[3] Suberviola I., I. Mayordome, J. Mendizabal, “Experimental results of air target detection with GPS forward scattering radar, 2012, In IEEE Geoscience and Remote Sensing Letters, vol. 9, no. 1, pp.47-51 January 2012.
[4] Behar V., Chr. Kabakchiev, “Detectability of Air Target Detection using Bistatic Radar Based on GPS L5 Signals”, Proc. IRS’2011, Leipzig, 2011, pp. 212-217.
[5] Behar V., Chr. Kabakchiev, H. Rohling,” Air Target Detection Using Navigation Receivers Based on GPS L5 Signals”, Proc. of ION GNSS’ 2011, Portland OR, 2011, pp. 333-337.
[6] Kabakchiev C., I. Garvanov, V. Behar, H. Rohling, “The Experimental Study of Possibility for Radar Target Detection in FSR Using L1-Based Non-Cooperative Transmitter”, Proc. of IRS’13, Dresden, Germany, 2013, pp.625-630.
[7] Kabakchiev C., I. Garvanov, V. Behar, H. Rohling, A. Lazarov, “The Experimental Study of Target FSR Shadows Detection using GPS signals”, Proc. of the Third International Symposium on Radio Systems and Space Plasma, Sofia, Bulgaria, 2013, pp. 64-73.
[8] Kabakchie Chr., I. Garvanov, V. Behar, P. Daskalov, H. Rohling, “Moving Target FSR Shadow Detection using GPS signals”, Proc. of Third International Conference on Telecommunications and Remote Sensing (ICTRS 2014), 26-27 June, 2014, Luxembourg, ISBN 978 ‐ 83 ‐ 931525 ‐ 3 ‐ 7 , pp. 34-40.
[9] Kabakchiev C., I. Garvanov, V. Behar, “Study of Moving Target Shadows using Passive Forward Scatter Radar Systems“, Proc. of the International Radar Symposium – IRS’14, Poland, Gdansk, June 16-18, ISBN 978-83-931525-3-7, pp. 345-348, 2014.
[10] Borre K., D. Akos, N. Bertelsen, P. Rinder, S. Jensen, “A Software-Defined GPS and Galileo Receiver: Single-Frequency Approach”, Birkhäuser, Boston, MA, 2006.
82
ACKNOWLEDGMENT This work is partly supported by the projects DFNI-T 02/3/2014.
REFERENCES [1] Cherniakov M., (ed.), “Bistatic Radar: Principles and Practice”, Wiley &
Sons, 2007. [2] Koch, V., R. Westphal, “New approach to a multistatic passive radar
sensor for air/space defense”, IEEE AES Systems Magazine, pp. 24-32, November 1995.
[3] Suberviola I., I. Mayordome, J. Mendizabal, “Experimental results of air target detection with GPS forward scattering radar, 2012, In IEEE Geoscience and Remote Sensing Letters, vol. 9, no. 1, pp.47-51 January 2012.
[4] Behar V., Chr. Kabakchiev, “Detectability of Air Target Detection using Bistatic Radar Based on GPS L5 Signals”, Proc. IRS’2011, Leipzig, 2011, pp. 212-217.
[5] Behar V., Chr. Kabakchiev, H. Rohling,” Air Target Detection Using Navigation Receivers Based on GPS L5 Signals”, Proc. of ION GNSS’ 2011, Portland OR, 2011, pp. 333-337.
[6] Kabakchiev C., I. Garvanov, V. Behar, H. Rohling, “The Experimental Study of Possibility for Radar Target Detection in FSR Using L1-Based Non-Cooperative Transmitter”, Proc. of IRS’13, Dresden, Germany, 2013, pp.625-630.
[7] Kabakchiev C., I. Garvanov, V. Behar, H. Rohling, A. Lazarov, “The Experimental Study of Target FSR Shadows Detection using GPS signals”, Proc. of the Third International Symposium on Radio Systems and Space Plasma, Sofia, Bulgaria, 2013, pp. 64-73.
[8] Kabakchie Chr., I. Garvanov, V. Behar, P. Daskalov, H. Rohling, “Moving Target FSR Shadow Detection using GPS signals”, Proc. of Third International Conference on Telecommunications and Remote Sensing (ICTRS 2014), 26-27 June, 2014, Luxembourg, ISBN 978 ‐ 83 ‐ 931525 ‐ 3 ‐ 7 , pp. 34-40.
[9] Kabakchiev C., I. Garvanov, V. Behar, “Study of Moving Target Shadows using Passive Forward Scatter Radar Systems“, Proc. of the International Radar Symposium – IRS’14, Poland, Gdansk, June 16-18, ISBN 978-83-931525-3-7, pp. 345-348, 2014.
[10] Borre K., D. Akos, N. Bertelsen, P. Rinder, S. Jensen, “A Software-Defined GPS and Galileo Receiver: Single-Frequency Approach”, Birkhäuser, Boston, MA, 2006.
82
82




























