Embed Size (px)
Citation preview
Proyecto de tesis:“SILLA DE RUEDAS ELÉCTRICA EMPLEANDO ELECTROMIOGRAFO”
Ponente : Jazmín Ariadne Villa Hernández, Armando Pérez Flores.
Integrantes: J. A. Villa, A. Pérez Flores, M. Alfaro Ponce, G. Y. Vega.
Ingeniería en Computación
1
Thesis Project: "Power Wheelchair Using Electromyogram".
ABSTRACT
Using an electromyogram (EMG) for controlling a power wheelchair will be shown.The signal that sends the EMG electrodes used to detect muscle activity together.The signal electrode is connected to a signal processor that classifies based on a microcontroller which converts the signal activity in a single movement of the power Wheelchair.
2

Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
CONTENIDO
♠ Historia♠ Problemática♠ Marco Teórico♠ Objetivo General♠ Objetivos Específicos♠ Propuesta♠ Avances♠ Trabajo Futuro♠ Referencias 2
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
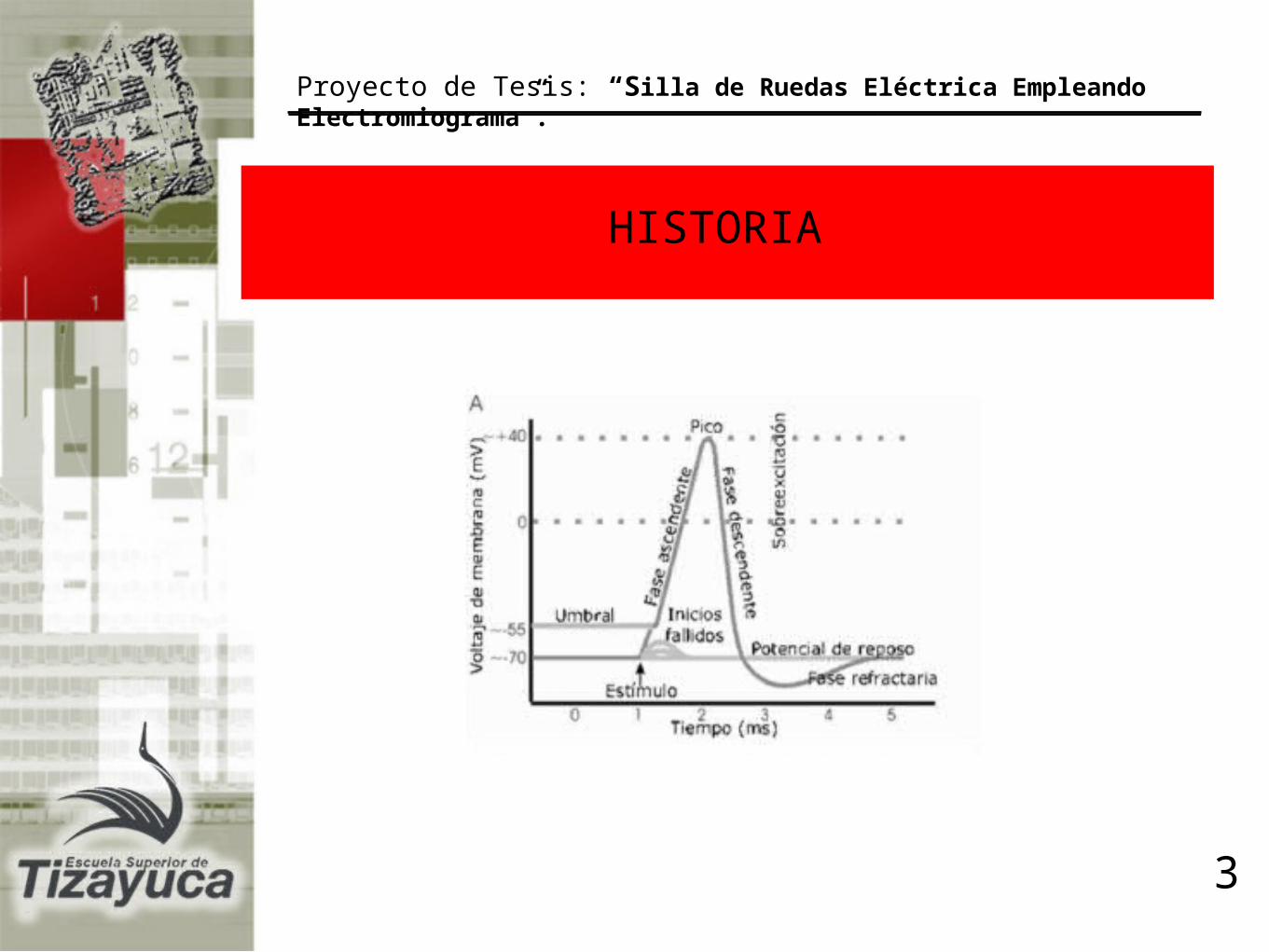
HISTORIA
3
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
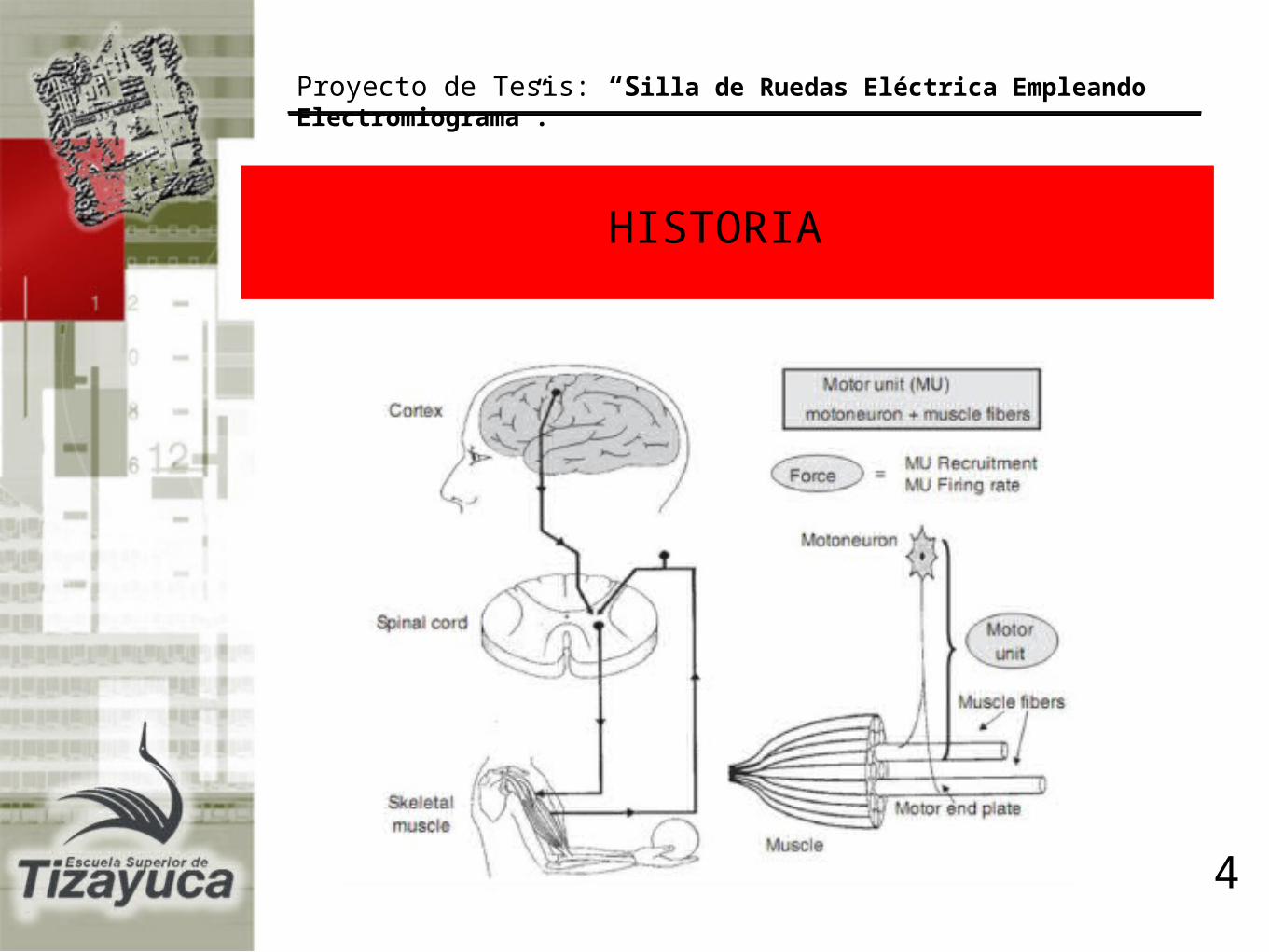
HISTORIA
4

Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
HISTORIA
5
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
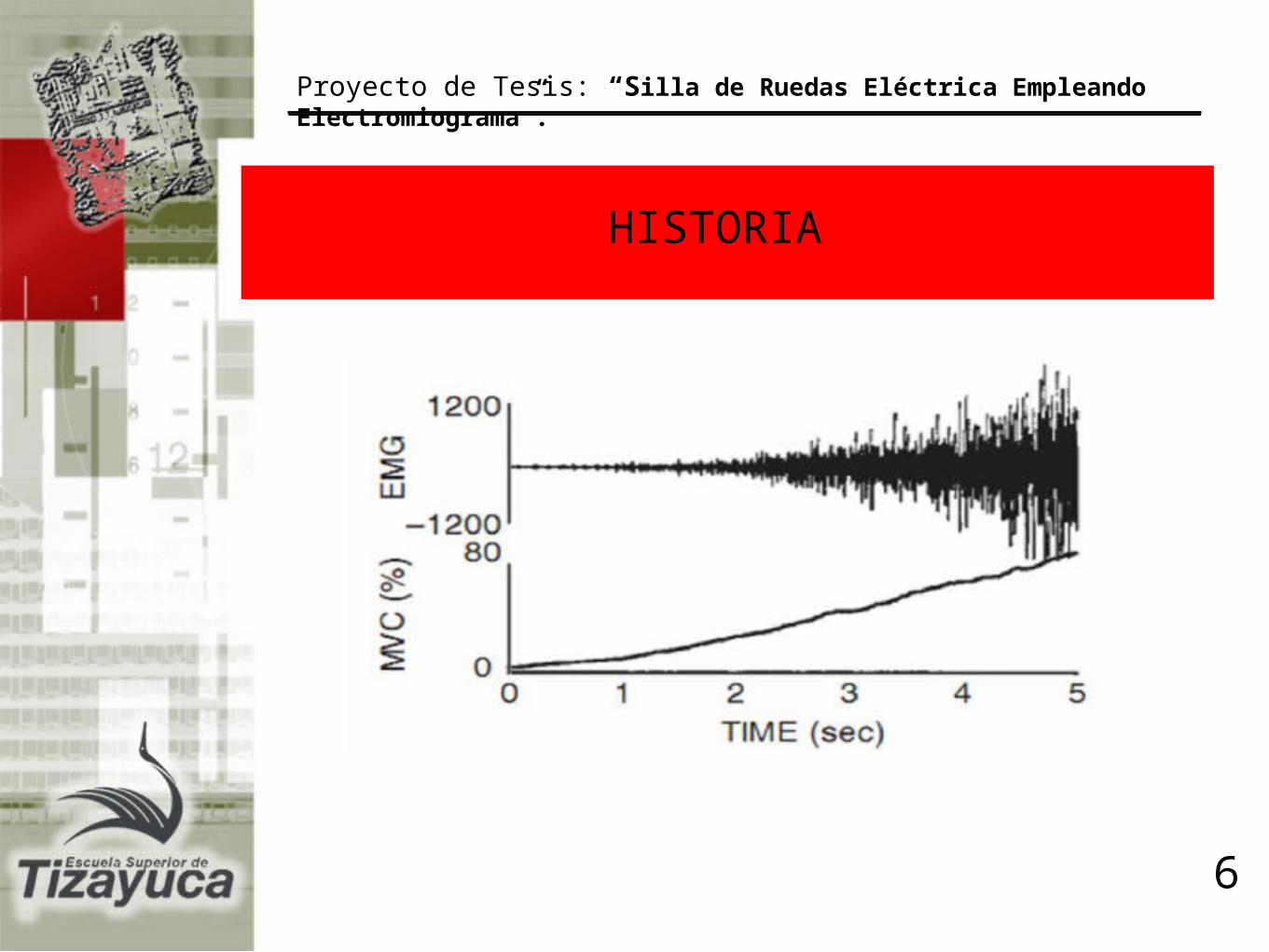
HISTORIA
6
PROBLEMÁTICA
Desplazamiento de personas con problemas de locomoción o movilidad reducida, debido a una lesión, enfermedad física (paraplejia, tetraplejia, etc.) o psicológica. El usuario debe tener movilidad de un solo brazo.
7
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
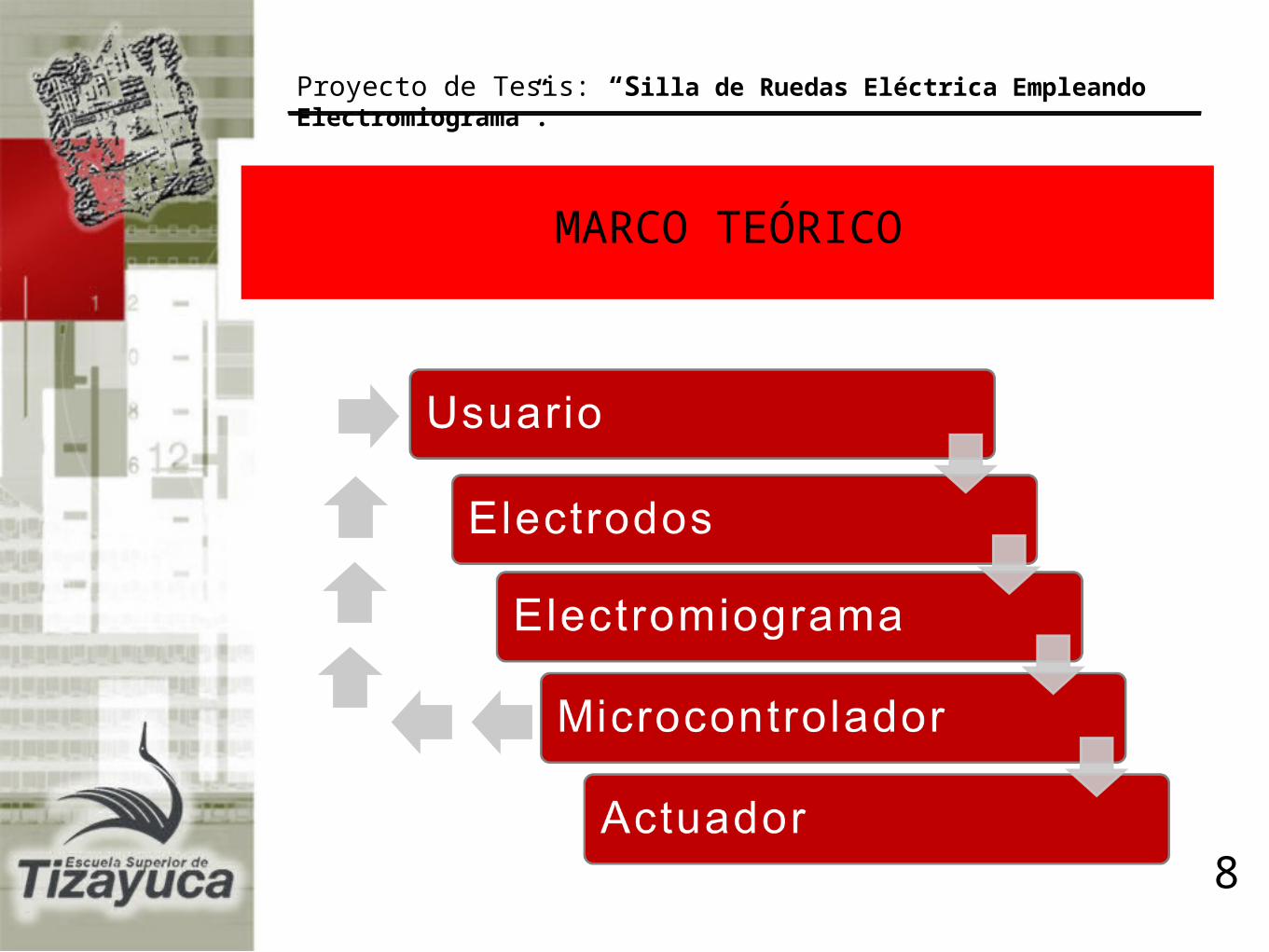
MARCO TEÓRICO
8
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
OBJETIVO GENERAL
9
Construir el prototipo de una Silla de Ruedas Eléctrica, la cual, facilitará el control del desplazamiento controlada por señales Electromiográficas, en aquellas personas con problemas de locomoción o movilidad reducida.
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
OBJETIVOS ESPECÍFICOS
10
♣ Generar el circuito para amplificar las señales.
♣ Generar el modelo matemático. ()♣ Realizar pruebas con la muestra,
electrodos y el circuito de amplificación de señales. (act.)
♣ Realizar la programación del microcontrolador para clasificar las señales.
♣ Hacer pruebas del sistema completo (muestra, EMG, prototipo, movimiento de los motores). (act.)
♣ Construir el prototipo de una Silla de Ruedas Eléctrica.
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
PROPUESTA
11
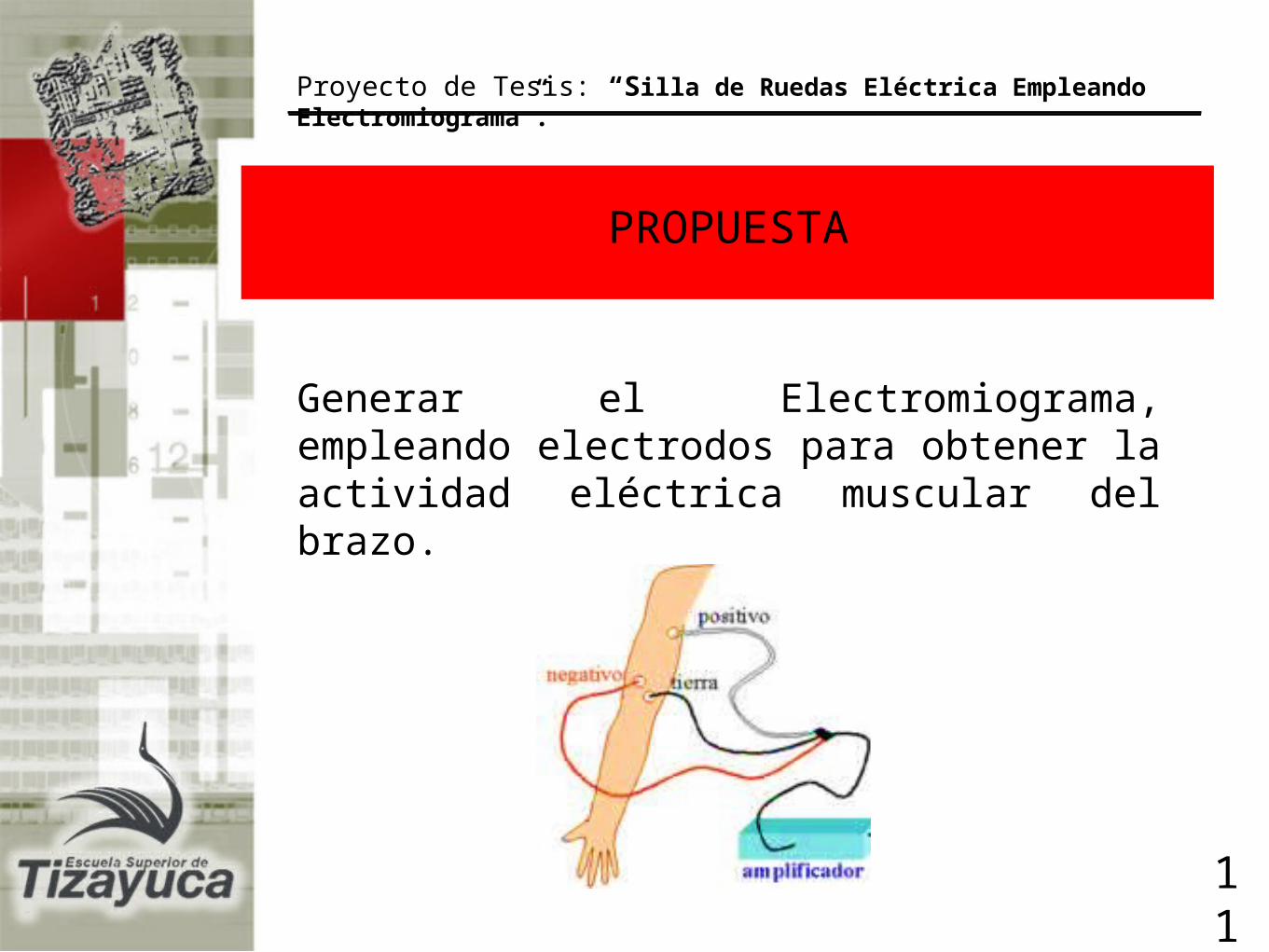
Generar el Electromiograma, empleando electrodos para obtener la actividad eléctrica muscular del brazo.
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.

PROPUESTA
12
La señal obtenida de los electrodos pasará al microcontrolador, clasificando la señal y obteniendo un patrón de movimiento especifico del actuador.
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
AVANCES
13
Estado del arte de las etapas que conforman el proyecto:Silla de Ruedas EléctricaElectromiogramaClasificación de señalesActuadores
Se obtuvo la simulación del circuito del Electromiograma.
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
TRABAJO FUTURO
14
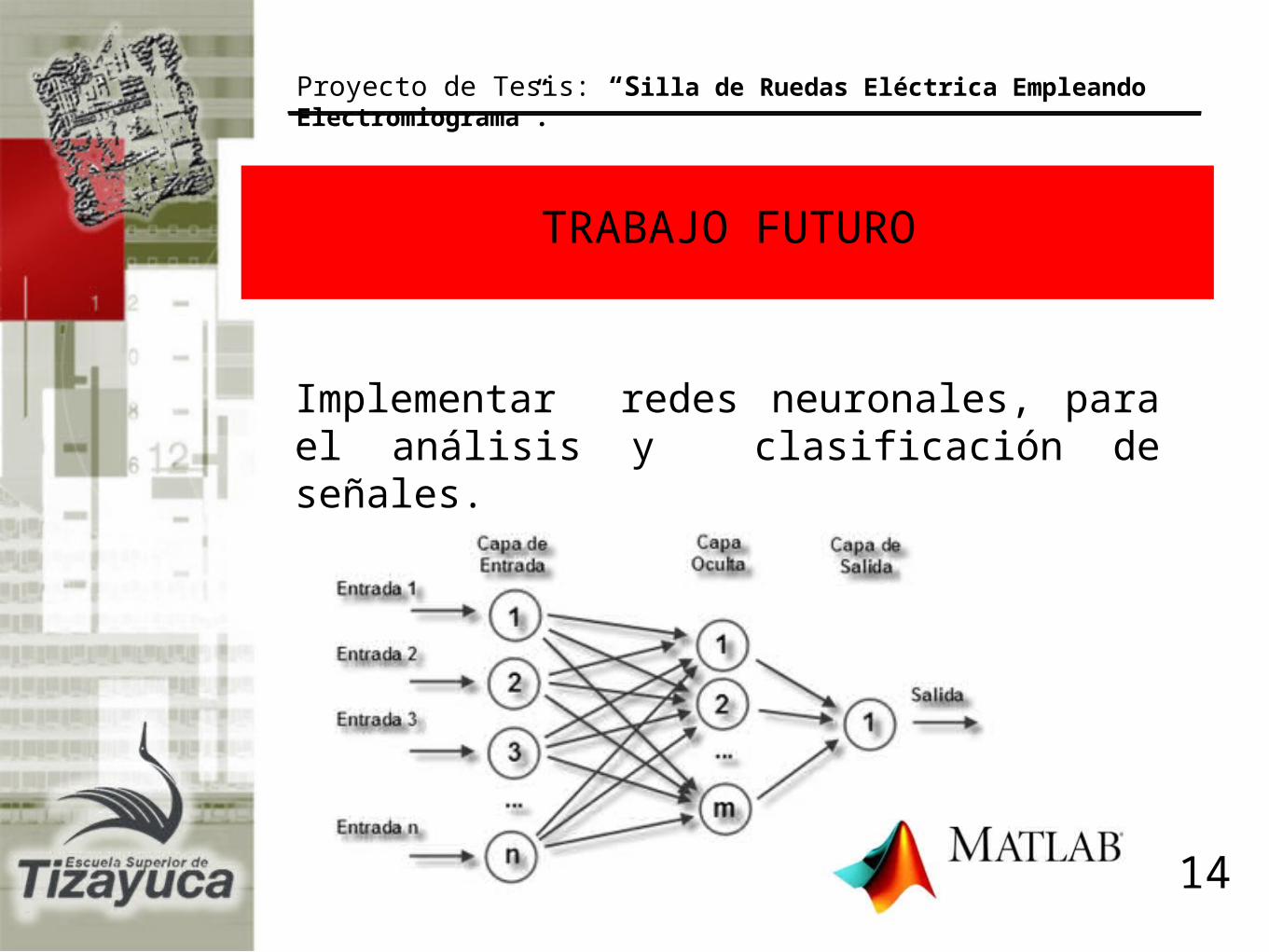
Implementar redes neuronales, para el análisis y clasificación de señales.
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
GRACIAS POR SU ATENCIÓN

REFERENCIAS
12
Proyecto de Tesis: “Silla de Ruedas Eléctrica Empleando Electromiograma”.
• T. Iberall, G. Sukhatme, D. Beattie, and G. Bekey, “On the Development of EMG Control for a Prosthetic Hand,” Proc. of IEEE Int’l Conf. On Robotics and Automations (ICRA94), 1994, pp. 115-120, Shenzhen, China, December 2013.
• I. Moon, M. Lee, J. Ryu, and M. Mum, “Intelligent Robotic Weelchair with EMG-, -GESTURE-, and Voice-based Interfaces,” Proc. of IEEE/RSJ IROS 2003, pp. 3453-3458, Las Vegas, Nevada, October 2003.
• Z. Bien, W. –K. Song, D,-J Kim, J,-S. Han, J.
Choi, H.-E. Lee, and J.-S. Kim, “Vision-based Control with Emergency Stop through EMG of the Weelchair-based Rehabilitation Robotic Arm, KARES II,” Proc, of 7th International Conference on Rehabitation Robotics (ICORR 2001), pp. 177-185, Evry Cedex, France, April 25-27, 2001.





























