Embed Size (px)
Citation preview
ORIGINAL PAPER
Soft sets combined with fuzzy sets and rough sets:a tentative approach
Feng Feng Æ Changxing Li Æ B. Davvaz ÆM. Irfan Ali
Published online: 27 June 2009
� Springer-Verlag 2009
Abstract Theories of fuzzy sets and rough sets are
powerful mathematical tools for modelling various types of
uncertainty. Dubois and Prade investigated the problem of
combining fuzzy sets with rough sets. Soft set theory was
proposed by Molodtsov as a general framework for rea-
soning about vague concepts. The present paper is devoted
to a possible fusion of these distinct but closely related soft
computing approaches. Based on a Pawlak approximation
space, the approximation of a soft set is proposed to obtain
a hybrid model called rough soft sets. Alternatively, a soft
set instead of an equivalence relation can be used to
granulate the universe. This leads to a deviation of Pawlak
approximation space called a soft approximation space, in
which soft rough approximations and soft rough sets can
be introduced accordingly. Furthermore, we also consider
approximation of a fuzzy set in a soft approximation space,
and initiate a concept called soft–rough fuzzy sets, which
extends Dubois and Prade’s rough fuzzy sets. Further
research will be needed to establish whether the notions put
forth in this paper may lead to a fruitful theory.
Keywords Soft set � Fuzzy set � Rough set � Rough
fuzzy set � Approximation space � Approximation operator
1 Introduction
In some sense almost all concepts we are meeting in
everyday life are vague rather than precise. On the con-
trary, it is interesting to see that classical mathematics
requires that all mathematical notions must be exact,
otherwise precise reasoning would be impossible (Pawlak
and Skowron 2007). This gap between the real word full of
vagueness and the traditional mathematics purely con-
cerning precise concepts becomes smaller in recent years.
In fact, philosophers and recently scientists as well as
engineers are showing increasing interests in vague con-
cepts, due to the fact that many practical problems
emerging within fields such as economics, ecology, engi-
neering, environmental science, social science, and medi-
cal science require us to deal with the complexity of data
containing uncertainties. The nature of the vagueness
arising in these fields can be very different. Among many
mathematical theories designed for modelling various
types of vague concepts, fuzzy and rough sets have
received much attention and been actively studied by a
number of researchers worldwide. While some authors
argue that one theory is more general then the other, it is
accepted by majority that these two theories are closely
related, but distinct in essence because they model different
types of uncertainties. In general, a fuzzy set may be
viewed as a class with unsharp boundaries, whereas a
rough set is a coarsely described crisp set (Yao 1998).
Over the years, the theories of fuzzy sets and rough
sets have become much closer to each other for practical
needs to use both of these two theories complementarily
F. Feng (&) � C. Li
Department of Applied Mathematics and Applied Physics,
Xi’an Institute of Posts and Telecommunications,
710061 Xi’an, People’s Republic of China
e-mail: [email protected]
B. Davvaz
Department of Mathematics, Yazd University, Yazd, Iran
e-mail: [email protected]
M. I. Ali
Department of Mathematics, Quaid-i-Azam University,
Islamabad, Pakistan
e-mail: [email protected]
123
Soft Comput (2010) 14:899–911
DOI 10.1007/s00500-009-0465-6
for managing uncertainty that arises from inexact, noisy,
or incomplete information. Hybrid models combing fuzzy
set with rough sets have arisen in various guises in dif-
ferent settings. For instance, based on an equivalence
relation, Dubois and Prade introduced the lower and
upper approximations of fuzzy sets in a Pawlak approxi-
mation space to obtain an extended notion called rough
fuzzy sets (Dubois and Prade 1990). Alternatively, a
fuzzy similarity relation can be used to replace an
equivalence relation, and the result notion is called fuzzy
rough sets (Dubois and Prade 1990). In general, a rough
fuzzy set is the approximation of a fuzzy set in a crisp
approximation space, whereas a fuzzy rough set is the
approximation of a crisp set or a fuzzy set in a fuzzy
approximation space.
Molodtsov (1999) initiated a novel concept called soft
sets as a new mathematical tool for dealing with uncer-
tainties. The soft set theory is free from many difficulties
that have troubled the usual theoretical approaches. It
has been found that fuzzy sets, rough sets, and soft sets
are closely related concepts (Aktas and Cagman 2007).
Soft set theory has potential applications in many different
fields including the smoothness of functions, game
theory, operational research, Perron integration, probability
theory, and measurement theory (Molodtsov 1999, 2004).
Research works on soft sets are very active and progressing
rapidly in these years. Maji et al. (2002) discussed the
application of soft set theory to a decision-making problem.
Maji et al. (2001) investigated the fuzzification of a soft set
and obtained many useful results on fuzzy soft sets. Based
on fuzzy soft sets, Roy and Maji (2007) presented a method
of object recognition from an imprecise multi-observer
data. Chen et al. (2005) presented a new definition of soft
set parametrization reduction, and compared it with attri-
butes reduction in rough set theory. Kong et al. (2008)
introduced the notion called normal parameter reduction
of soft sets, by which they investigated the problem of
suboptimal choice and added parameter set in soft set
parametrization reduction. Zou and Xiao (2008) discussed
data analysis approaches of soft sets as well as fuzzy soft
sets under incomplete information. Maji et al. (2003)
defined and studied several operations on soft sets. Aktas
and Cagman (2007) related soft sets to fuzzy sets and rough
sets, providing examples to clarify their differences. They
also defined soft groups, derived some basic properties, and
showed that soft groups extended fuzzy groups. Jun (2008)
introduced and investigated soft BCK/BCI-algebras. Jun
and Park (2008) discussed the applications of soft sets to
study the ideal theory of BCK/BCI-algebras. Furthermore,
Feng et al. (2008) applied soft set theory to the study of
semirings (Feng et al. 2005, 2007; Feng and Jun 2009) and
initiated the notion called soft semirings. The present paper
aims at providing a framework to combine fuzzy sets,
rough sets, and soft sets all together, which gives rise to
several interesting new concepts such as rough soft sets,
soft rough sets, and soft–rough fuzzy sets. Although many
results reported here are only concerned with basic prop-
erties about these new notions, one could see that this study
presents a very preliminary, but potentially interesting
research direction. It will be necessary to carry out further
research to establish whether the notions put forth in this
paper may lead to a fruitful theory.
2 Fuzzy sets and rough sets
In this section, we recall some basic notions relevant to
fuzzy sets and rough sets. The following notations will be
used in what follows. Let U be a nonempty set, called
universe. The family of all subsets of U [resp. all fuzzy sets
in U] is denoted by PðUÞ [resp. FðUÞ].The theory of fuzzy sets initiated by Zadeh (1965)
provides an appropriate framework for representing and
processing vague concepts by allowing partial member-
ships. Since established, this theory has been actively
studied by both mathematicians and computer scientists.
Many applications of fuzzy set theory have arisen over the
years, for instance, fuzzy logic, fuzzy cellular neural
networks, fuzzy automata, fuzzy control systems, and
so on.
A fuzzy set l in a universe U is defined by a member-
ship function l : U ! ½0; 1�: For x 2 U; the membership
value l(x) essentially specifies the degree to which x 2 U
belongs to the fuzzy set l. There are many different defi-
nitions for fuzzy set operations. With the min–max system
proposed by Zadeh, fuzzy set intersection, union, and
complement are defined componentwise as follows:
• ðl \ mÞðxÞ ¼ lðxÞ ^ mðxÞ;• ðl [ mÞðxÞ ¼ lðxÞ _ mðxÞ;• lcðxÞ ¼ 1� lðxÞ;where l; m 2FðUÞ and x 2 U: By l � m; we mean that
lðxÞ� mðxÞ for all x 2 U: Clearly l ¼ m if both l � m and
m � l; i.e. lðxÞ ¼ mðxÞ for all x 2 U:
A fuzzy set can be related to a family of crisp sets by
means of level sets. Given a number t 2 ½0; 1�; a t-level set
(or t-cut) of a fuzzy set l 2FðUÞ is a crisp subset of U
defined by lt ¼ fx 2 U : lðxÞ>tg: By taking t 2 ½0; 1�; a
fuzzy set l determines a family of nested subsets of U; i.e.,
flt � U : t 2 ½0; 1�g: Conversely, a fuzzy set can be
reconstructed from its t-level sets by means of the fol-
lowing formula lðxÞ ¼Wft : x 2 ltg; where l 2FðUÞ
and x 2 U: This observation is usually summarized by a
representation theorem in fuzzy set theory, which estab-
lishes a one-to-one correspondence between a fuzzy set and
a family of crisp sets satisfying certain conditions.
900 F. Feng et al.
123

One of the most important applications of fuzzy set theory
is the concept of linguistic variables. The value of a linguistic
variable is defined as an element of its term set, a predefined
set of appropriate linguistic terms. Linguistic terms are
essentially subjective categories for a linguistic variable,
which do not hold exact meaning, however, and may be
understood differently by different people. The boundaries of
a given term are rather subjective, and may also depend on the
situation. Linguistic terms therefore cannot be expressed by
ordinary set theory; rather, each linguistic term is associated
with a fuzzy set (Aktas and Cagman 2007).
The rough set theory proposed by Pawlak (1982)
provides a systematic method for dealing with vague
concepts caused by indiscernibility in situation with
incomplete information or a lack of knowledge. The rough
set philosophy is founded on the assumption that with
every object in the universe, we associate some informa-
tion (data, knowledge). From a practical point of view, it
is better to define basic concepts of rough set theory in
terms of data. In fact, information and knowledge are
stored and represented in a data table in many data anal-
ysis applications. This data table containing rows labelled
by objects and columns labelled by attributes is called an
information system (also known as a knowledge repre-
sentation system) which can be formulated in the fol-
lowing way:
Definition 1 (Pawlak and Skowron 2007) An information
system is a pair I ¼ ðU;AÞ, where U is a nonempty finite
set of objects and A is a nonempty finite set of attributes.
Every attribute a 2 A is a function a : U!Va; where Va is
the set of values of attribute a.
Let R be an equivalence relation on the universe U.
Then the pair (U, R) is usually called a Pawlak approx-
imation space. Conventionally, we refer to R as an in-
discernibility relation (Pawlak and Skowron 2007) for the
reason that it is often obtained from an information sys-
tem (see Definition 1) and gives a partition of U due to
the indiscernibility of objects in U. For x; y 2 U; x and y
are said to be R-indiscernible if ðx; yÞ 2 R: The family of
all equivalence classes of R, i.e., the partition determined
by the equivalence relation R, will be denoted by U/R. An
equivalence class of R, i.e., the block of the partition U/R,
containing x will be denoted by ½x�R: These equivalence
classes of R are referred to as R-elementary sets
(or R-elementary granules). The elementary sets repre-
sent the basic building blocks (concepts) of our knowl-
edge about reality.
Using the indiscernibility relation R, we can define the
following two operations:
R�X ¼ fx 2 U : ½x�R � Xg;R�X ¼ fx 2 U : ½x�R \ X 6¼ ;g;
assigning to every subset X � U two sets R�X and R�Xcalled the lower and upper approximations of X with
respect to ðU;RÞ: In addition,
PosRX ¼ R�X;
NegRX ¼ U � R�X;
BndRX ¼ R�X � R�X
are called the positive, negative, and boundary regions of
X, respectively. Now, we are ready to give the definition of
rough sets:
Definition 2 (Pawlak and Skowron 2007) Let (U, R) be a
Pawlak approximation space. A subset X � U is called
definable if R�X ¼ R�X; in the opposite case, i.e., if
BndRX 6¼ ;; X is said to be rough (or inexact).
Note that sometimes a pair ðA;BÞ 2 PðUÞ �PðUÞ is
also called a rough set if A ¼ R�X and B ¼ R�X for some
X � U (Radzikowska and Kerre 2002). If the set X � U is
defined by a predicate P and x 2 U; then we have the
following:
• x 2 R�X means that x certainly has property P,
• x 2 R�X means that x possibly has property P,
• x 2 NegRX means that X definitely does not have
property P:
Theorem 1 Suppose that (U, R) is a Pawlak approxi-
mation space and A;B � U: Then we have
1. R�ðAÞ � A � R�ðAÞ;2. R�ð;Þ ¼ ; ¼ R�ð;Þ;3. R�ðUÞ ¼ U ¼ R�ðUÞ;4. R�ðR�ðAÞÞ ¼ R�ðAÞ;5. R�ðR�ðAÞÞ ¼ R�ðAÞ;6. R�ðR�ðAÞÞ ¼ R�ðAÞ;7. R�ðR�ðAÞÞ ¼ R�ðAÞ;8. R�ðAÞ ¼ ðR�ðAcÞÞc;9. R�ðAÞ ¼ ðR�ðAcÞÞc;
10. R�ðA \ BÞ ¼ R�ðAÞ \ R�ðBÞ;11. R�ðA \ BÞ � R�ðAÞ \ R�ðBÞ;12. R�ðA [ BÞ � R�ðAÞ [ R�ðBÞ;13. R�ðA [ BÞ ¼ R�ðAÞ [ R�ðBÞ;14. A � B) R�ðAÞ � R�ðBÞ;R�ðAÞ � R�ðBÞ:
Proof See Pawlak (1991).
3 Soft sets and fuzzy soft sets
Let U be an initial universe set and EU (simply denoted
by E) be the set of all possible parameters with respect to
U. Usually, parameters are attributes, characteristics, or
properties of the objects in U. The notion of a soft set is
defined as follows:
Soft sets combined with fuzzy sets and rough sets: a tentative approach 901
123
Definition 3 (Molodtsov 1999) A pair S ¼ ðF;AÞ is
called a soft set over U; where A � E and F : A! PðUÞ is
a set-valued mapping.
In other words, a soft set over U is a parameterized
family of subsets of the universe U. For � 2 A; Fð�Þ may be
considered as the set of � -approximate elements in S ¼ðF;AÞ: For illustration, Molodtsov (1999) considered sev-
eral concrete examples of soft sets. The following is one
type of illuminating examples considered by many authors
(Aktas and Cagman 2007; Chen et al. 2005; Maji et al.
2002, 2003).
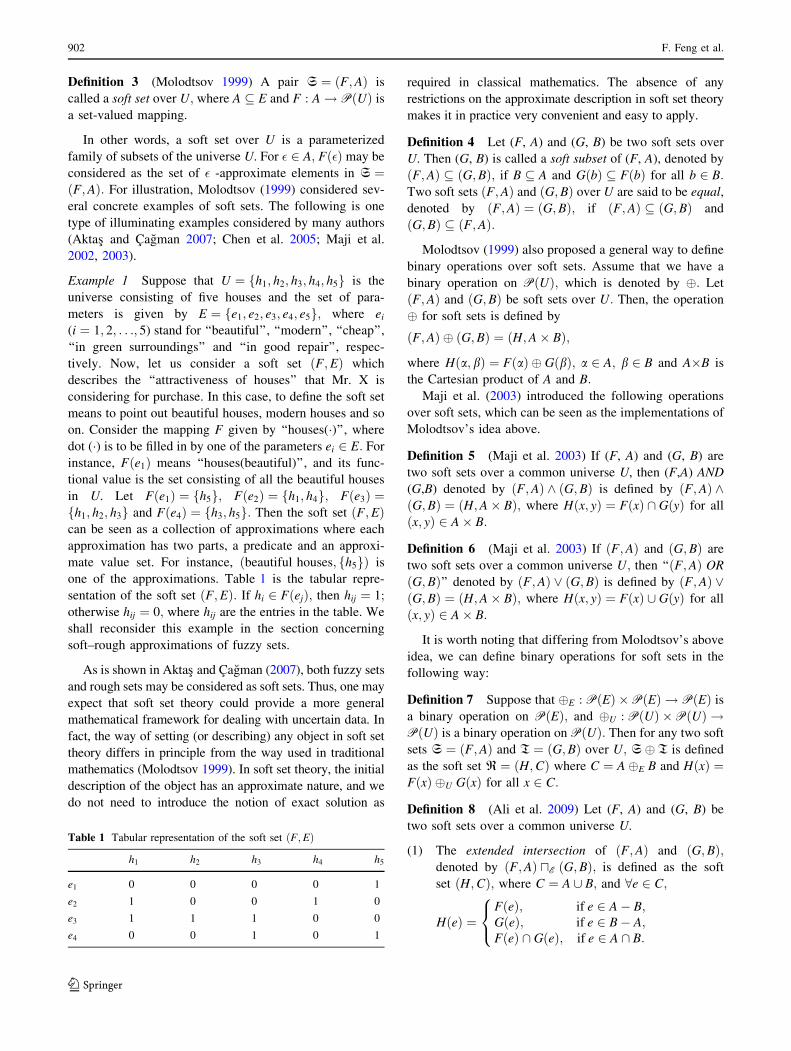
Example 1 Suppose that U ¼ fh1; h2; h3; h4; h5g is the
universe consisting of five houses and the set of para-
meters is given by E ¼ fe1; e2; e3; e4; e5g; where ei
(i ¼ 1; 2; . . .; 5) stand for ‘‘beautiful’’, ‘‘modern’’, ‘‘cheap’’,
‘‘in green surroundings’’ and ‘‘in good repair’’, respec-
tively. Now, let us consider a soft set ðF;EÞ which
describes the ‘‘attractiveness of houses’’ that Mr. X is
considering for purchase. In this case, to define the soft set
means to point out beautiful houses, modern houses and so
on. Consider the mapping F given by ‘‘houses(�)’’, where
dot (�) is to be filled in by one of the parameters ei 2 E: For
instance, Fðe1Þ means ‘‘houses(beautiful)’’, and its func-
tional value is the set consisting of all the beautiful houses
in U. Let Fðe1Þ ¼ fh5g; Fðe2Þ ¼ fh1; h4g; Fðe3Þ ¼fh1; h2; h3g and Fðe4Þ ¼ fh3; h5g: Then the soft set ðF;EÞcan be seen as a collection of approximations where each
approximation has two parts, a predicate and an approxi-
mate value set. For instance, ðbeautiful houses; fh5gÞ is
one of the approximations. Table 1 is the tabular repre-
sentation of the soft set ðF;EÞ: If hi 2 FðejÞ; then hij ¼ 1;
otherwise hij ¼ 0; where hij are the entries in the table. We
shall reconsider this example in the section concerning
soft–rough approximations of fuzzy sets.
As is shown in Aktas and Cagman (2007), both fuzzy sets
and rough sets may be considered as soft sets. Thus, one may
expect that soft set theory could provide a more general
mathematical framework for dealing with uncertain data. In
fact, the way of setting (or describing) any object in soft set
theory differs in principle from the way used in traditional
mathematics (Molodtsov 1999). In soft set theory, the initial
description of the object has an approximate nature, and we
do not need to introduce the notion of exact solution as
required in classical mathematics. The absence of any
restrictions on the approximate description in soft set theory
makes it in practice very convenient and easy to apply.
Definition 4 Let (F, A) and (G, B) be two soft sets over
U. Then (G, B) is called a soft subset of (F, A), denoted by
ðF;AÞ � ðG;BÞ; if B � A and GðbÞ � FðbÞ for all b 2 B:
Two soft sets ðF;AÞ and ðG;BÞ over U are said to be equal,
denoted by ðF;AÞ ¼ ðG;BÞ; if ðF;AÞ � ðG;BÞ and
ðG;BÞ � ðF;AÞ:
Molodtsov (1999) also proposed a general way to define
binary operations over soft sets. Assume that we have a
binary operation on PðUÞ; which is denoted by : Let
ðF;AÞ and ðG;BÞ be soft sets over U: Then, the operation
for soft sets is defined by
ðF;AÞ ðG;BÞ ¼ ðH;A� BÞ;
where Hða; bÞ ¼ FðaÞ GðbÞ; a 2 A; b 2 B and A�B is
the Cartesian product of A and B:
Maji et al. (2003) introduced the following operations
over soft sets, which can be seen as the implementations of
Molodtsov’s idea above.
Definition 5 (Maji et al. 2003) If (F, A) and (G, B) are
two soft sets over a common universe U, then (F,A) AND
(G,B) denoted by ðF;AÞ ^ ðG;BÞ is defined by ðF;AÞ ^ðG;BÞ ¼ ðH;A� BÞ; where Hðx; yÞ ¼ FðxÞ \ GðyÞ for all
ðx; yÞ 2 A� B:
Definition 6 (Maji et al. 2003) If ðF;AÞ and ðG;BÞ are
two soft sets over a common universe U; then ‘‘ðF;AÞ OR
ðG;BÞ’’ denoted by ðF;AÞ _ ðG;BÞ is defined by ðF;AÞ _ðG;BÞ ¼ ðH;A� BÞ; where Hðx; yÞ ¼ FðxÞ [ GðyÞ for all
ðx; yÞ 2 A� B:
It is worth noting that differing from Molodtsov’s above
idea, we can define binary operations for soft sets in the
following way:
Definition 7 Suppose that E : PðEÞ �PðEÞ ! PðEÞ is
a binary operation on PðEÞ; and U : PðUÞ �PðUÞ !PðUÞ is a binary operation on PðUÞ: Then for any two soft
sets S ¼ ðF;AÞ and T ¼ ðG;BÞ over U; S T is defined
as the soft set R ¼ ðH;CÞ where C ¼ AE B and HðxÞ ¼FðxÞ U GðxÞ for all x 2 C:
Definition 8 (Ali et al. 2009) Let (F, A) and (G, B) be
two soft sets over a common universe U.
(1) The extended intersection of ðF;AÞ and ðG;BÞ;denoted by ðF;AÞ uE ðG;BÞ; is defined as the soft
set ðH;CÞ; where C ¼ A [ B; and 8e 2 C;
HðeÞ ¼FðeÞ; if e 2 A� B;GðeÞ; if e 2 B� A;FðeÞ \ GðeÞ; if e 2 A \ B:
8<
:
Table 1 Tabular representation of the soft set ðF;EÞ
h1 h2 h3 h4 h5
e1 0 0 0 0 1
e2 1 0 0 1 0
e3 1 1 1 0 0
e4 0 0 1 0 1
902 F. Feng et al.
123

(2) The restricted intersection of ðF;AÞ and ðG;BÞ;denoted by ðF;AÞeðG;BÞ; is defined as the soft set
ðH;CÞ; where C ¼ A \ B and HðcÞ ¼ FðcÞ \ GðcÞfor all c 2 C:
(3) The extended union of ðF;AÞ and ðG;BÞ; denoted by
ðF;AÞ e[ðG;BÞ; is defined as the soft set ðH;CÞ; where
C ¼ A [ B; and 8e 2 C;
HðeÞ ¼FðeÞ; if e 2 A� B;GðeÞ; if e 2 B� A;FðeÞ [ GðeÞ; if e 2 A \ B:
8<
:
(4) The restricted union of ðF;AÞ and ðG;BÞ; denoted by
ðF;AÞ [R ðG;BÞ; is defined as the soft set (H,C),
where C ¼ A \ B and HðcÞ ¼ FðcÞ [ GðcÞ for all
c 2 C:
Note that restricted intersection was also known as
bi-intersection in Feng et al. (2008), and extended union was
at first introduced and called union by Maji et al. (2003).
Definition 9 (Ali et al. 2009) Let U be an initial universe
set, E be the universe set of parameters, and A;B � E:
(1) fN ðU;AÞ ¼ ðN;AÞ is called a relative null soft set (with
respect to the parameter set A) if NðxÞ ¼ ; for all
x 2 A:
(2) fWðU;BÞ ¼ ðW ;BÞ is called a relative whole soft set
(with respect to the parameter set B) if WðxÞ ¼ U for
all x 2 B:
The relative whole soft set with respect to the universe
set of parameters E is called the absolute soft set (or whole
soft set) over U and simply denoted by eAU instead offWðU;EÞ: Dually fN ðU;EÞ is called the null soft set over U and
denoted by fN U :
Definition 10 (Ali et al. 2009) The relative complement
of a soft set (F, A), denoted by ðF;AÞr; is defined as the soft
set ðFr;AÞ where FrðxÞ ¼ U � FðxÞ for all x 2 A:
The following result indicates that soft sets and binary
relations are closely related.
Theorem 2 Let S ¼ ðf ;AÞ be a soft set over U. Then S
induces a binary relation RS � A� U; which is defined by
ðx; yÞ 2 RS , y 2 f ðxÞ;
where x 2 A; y 2 U:
Conversely, assume that R is a binary relation from A to
U. Define a set-valued mapping fR : A! PðUÞ by
fRðxÞ ¼ fy 2 U : ðx; yÞ 2 Rg;
where x 2 A: Then SR ¼ ðfR;AÞ is a soft set over U.
Moreover, we have that SRS¼ S and RSR
¼ R:
Proof One easily sees that the first part holds. Thus it
suffices to show that SRS¼ S and RSR
¼ R: Suppose that
S ¼ ðf ;AÞ is a soft set over U and x 2 A: Then for any
y 2 U; by definition we have that
y 2 fRSðxÞ , ðx; yÞ 2 RS , y 2 f ðxÞ:
That is, fRSðxÞ ¼ f ðxÞ for all x 2 A: Hence, fRS
¼ f ; and so
ðfRS;AÞ ¼ ðf ;AÞ: That is, SRS
¼ S:
Next, assume that R � A� U; x 2 A and y 2 U: Then
by definition, it is clear that
ðx; yÞ 2 RSR, y 2 fRðxÞ , ðx; yÞ 2 R:
Therefore we conclude that RSR¼ R as required.
In what follows, RS will be called the canonical relation
of the soft set S; and SR will be called the canonical soft
set of the binary relation R:
Definition 11 (Ganter and Wille 1999) A formal context
is a triple (U, V, I) where U, V are two finite sets called
object set and property set, and I is a binary relation
between U and V.
Corollary 1 Every formal context can be seen as a soft
set and vice versa.
Proof This follows immediately from Theorem 2.
As pointed out by several researchers, information sys-
tems and soft sets are closely related (Chen et al. 2005;
Zou and Xiao 2008). Given a soft set S ¼ ðF;AÞ over a
universe U. If U and A are both nonempty finite sets, then
S could induce an information system in a natural way. In
fact, for any attribute a 2 A; one can define a function
a : U ! Va ¼ f0; 1g by
aðxÞ ¼ 1; if x 2 FðaÞ;0; otherwise:
�
Therefore, every soft set may be considered as an
information system. This justifies the tabular represen-
tation of soft sets used widely in the literature. Conversely,
it is worth noting that a soft set can also be applied
to express an information system. Let I ¼ ðU;AÞ be an
information system. Taking
B ¼[
a2A
fag � Va;
as the parameter set, then a soft set (F, B) can be defined by
setting
Fða; vÞ ¼ fx 2 U : aðxÞ ¼ vg;
where a 2 A and v 2 Va:Maji et al. (2001) initiated the study on hybrid structures
involving both fuzzy sets and soft sets. In Maji et al. (2001)
the notion of fuzzy soft sets was introduced as a fuzzy
generalization of (classical) soft sets and some basic
properties are discussed in detail.
Soft sets combined with fuzzy sets and rough sets: a tentative approach 903
123

Definition 12 (Roy and Maji 2007) Let FðUÞ be the set
of all fuzzy sets in U. Let E be the parameter set and
A � E: A pair (F,A) is called a fuzzy soft set over U, where
F is a mapping given by F : A!FðUÞ:
In the definition of a fuzzy soft set, fuzzy sets in the
universe U are used as substitutes for the crisp subsets of U.
Hence, every soft set may be considered as a fuzzy soft set.
In addition, by analogy with soft sets, one easily sees that
every fuzzy soft set can be viewed as an (fuzzy) informa-
tion system and be represented by a corresponding data
table with entries belonging to the unit interval [0, 1]
instead of 0 and 1 only.
4 Rough fuzzy sets
Based on an equivalence relation on the universe of dis-
course, Dubois and Prade (1990) introduced the lower and
upper approximations of fuzzy sets in a Pawlak approxi-
mation space, and obtained a new notion called rough
fuzzy sets.
Definition 13 (Dubois and Prade 1990) Let ðU;RÞ be a
Pawlak approximation space. For a fuzzy set l 2FðUÞ;the lower and upper rough approximations of l in ðU;RÞare denoted by RðlÞ and RðlÞ; respectively, which are
fuzzy sets in U defined by
RðlÞðxÞ ¼^flðyÞ : y 2 ½x�Rg;
and
RðlÞðxÞ ¼_flðyÞ : y 2 ½x�RÞg;
for all x 2 U: The operators R and R are called the lower
and upper rough approximation operators on fuzzy sets. If
RðlÞ ¼ RðlÞ; the fuzzy set l is said to be definable;
otherwise, l is called a rough fuzzy set.
By definition, it is easy to see that if l ¼ X is a crisp
subset of U; then we have that
RðXÞ ¼ R�X ¼ fx 2 U : ½x�R � Xg;
and
RðXÞ ¼ R�X ¼ fx 2 U : ½x�R \ X 6¼ ;g:
In this case, it follows that X 2 PðUÞ is a rough fuzzy set if
and only if X is a rough set. Thus, one can say that rough
fuzzy sets are natural extensions of rough sets.
In general, a rough fuzzy set can be seen as an
approximation of a fuzzy set in a crisp approximation
space. This hybrid model combining the concepts of both
fuzzy sets and rough sets may be used to deal with
knowledge acquisition in information systems with fuzzy
decisions (Slowinski and Stefanowski 1999).
5 Rough soft sets
Motivated by Dubois and Prade’s original idea about rough
fuzzy sets, we consider the lower and upper approxima-
tions of a soft set in a Pawlak approximation space, which
gives rise to the following notions in a natural way.
Definition 14 Let ðU;RÞ be a Pawlak approximation
space and S ¼ ðF;AÞ be a soft set over U: The lower and
upper rough approximations of S ¼ ðF;AÞ with respect to
ðU;RÞ are denoted by R�ðSÞ ¼ ðF�;AÞ and R�ðSÞ ¼ðF�;AÞ; which are soft sets over U with the set-valued
mappings given by
F�ðxÞ ¼ R�ðFðxÞÞ;
and
F�ðxÞ ¼ R�ðFðxÞÞ;
where x 2 A: The operators R� and R� are called the lower
and upper rough approximation operators on soft sets. If
R�ðSÞ ¼ R�ðSÞ; the soft set S is said to be definable;
otherwise S is called a rough soft set.
One can verify the following basic properties of rough
soft sets:
Theorem 3 Suppose that ðU;RÞ is a Pawlak approxi-
mation space and S ¼ ðF;AÞ is a soft set over U: Then we
have
1. R�ðSÞ � S � R�ðSÞ;2. R�ðfN ðU;AÞÞ ¼ fN ðU;AÞ ¼ R�ðfN ðU;AÞÞ;3. R�ðfWðU;AÞÞ ¼ fWðU;AÞ ¼ R�ðfWðU;AÞÞ;4. R�ðR�ðSÞÞ ¼ R�ðSÞ;5. R�ðR�ðSÞÞ ¼ R�ðSÞ;6. R�ðR�ðSÞÞ ¼ R�ðSÞ;7. R�ðR�ðSÞÞ ¼ R�ðSÞ;8. R�ðSÞ ¼ ðR�ðSrÞÞr;9. R�ðSÞ ¼ ðR�ðSrÞÞr:
Proof This is easily obtained from Theorem 1, Definition
9, Definition 10, and Definition 14.
Theorem 4 Suppose that ðU;RÞ is a Pawlak approxi-
mation space and S ¼ ðF;AÞ;T ¼ ðG;BÞ are soft sets
over U: Then we have
1. R�ðSeTÞ ¼ R�ðSÞeR�ðTÞ;2. R�ðS uE TÞ ¼ R�ðSÞ uE R�ðTÞ;3. R�ðSeTÞ � R�ðSÞeR�ðTÞ;4. R�ðS uE TÞ � R�ðSÞ uE R�ðTÞ;5. R�ðS [R TÞ � R�ðSÞ [R R�ðTÞ;6. R�ðS e[TÞ � R�ðSÞ e[ R�ðTÞ;7. R�ðS [R TÞ ¼ R�ðSÞ [R R�ðTÞ;8. R�ðS e[TÞ ¼ R�ðSÞ e[ R�ðTÞ;9. S � T) R�ðSÞ � R�ðTÞ;R�ðSÞ � R�ðTÞ:
904 F. Feng et al.
123

Proof Let ðU;RÞ be a Pawlak approximation space, and
let S ¼ ðF;AÞ; T ¼ ðG;BÞ be soft sets over U.
(1) Let SeT ¼ R ¼ ðH;CÞ: Then C ¼ A \ B and
HðxÞ ¼ FðxÞ \ GðxÞ; 8x 2 C: Using Definition (Maji
et al. 2002), R�ðRÞ ¼ ðH�;CÞ; where
H�ðxÞ ¼ R�ðHðxÞÞ ¼ R�ðFðxÞ \ GðxÞÞ;
for all x 2 C: Now by Theorem 1,
R�ðFðxÞ \ GðxÞÞ ¼ R�ðFðxÞÞ \ R�ðGðxÞÞ;
and so we deduce that H�ðxÞ ¼ F�ðxÞ \ G�ðxÞ for all
x 2 C: Hence, R�ðRÞ ¼ R�ðSÞeR�ðTÞ:(2) Let S uE T ¼ R ¼ ðH;CÞ: Then C ¼ A [ B and for
all e 2 C;
HðeÞ ¼FðeÞ; if e 2 A� B;GðeÞ; if e 2 B� A;FðeÞ \ GðeÞ; if e 2 A \ B:
8<
:
Using Definition (Maji et al. 2002), R�ðRÞ ¼ ðH�;CÞ;where
H�ðeÞ ¼R�ðFðeÞÞ; if e 2 A� B;R�ðGðeÞÞ; if e 2 B� A;R�ðFðeÞ \ GðeÞÞ; if e 2 A \ B;
8<
:
for all e 2 C: Now by Theorem 1,
R�ðFðeÞ \ GðeÞÞ ¼ R�ðFðeÞÞ \ R�ðGðeÞÞ;
and so we deduce that
H�ðeÞ ¼F�ðeÞ; if e 2 A� B;G�ðeÞ; if e 2 B� A;F�ðeÞ \ G�ðeÞ; if e 2 A \ B;
8<
:
for all e 2 C: Hence, R�ðRÞ ¼ R�ðSÞ uE R�ðTÞ:(3) This is similar to the proof of (1).
(4) This is similar to the proof of (2).
(5) Let S [R T ¼ R ¼ ðH;CÞ: Then C ¼ A \ B and
HðxÞ ¼ FðxÞ [ GðxÞ; 8x 2 C: Using Definition (Maji
et al. 2002), R�ðRÞ ¼ ðH�;CÞ; where
H�ðxÞ ¼ R�ðHðxÞÞ ¼ R�ðFðxÞ [ GðxÞÞ;
for all x 2 C: Now by Theorem 1,
R�ðFðxÞ \ GðxÞÞ � R�ðFðxÞÞ \ R�ðGðxÞÞ;
and so we deduce that H�ðxÞ � F�ðxÞ \ G�ðxÞ for all
x 2 C: Hence, R�ðRÞ � R�ðSÞ [R R�ðTÞ:(6) Let S e[T ¼ R ¼ ðH;CÞ: Then C ¼ A [ B and for all
e 2 C;
HðeÞ ¼FðeÞ; if e 2 A� B;GðeÞ; if e 2 B� A;FðeÞ [ GðeÞ; if e 2 A \ B:
8<
:
Using Definition 14, R�ðRÞ ¼ ðH�;CÞ; where
H�ðeÞ ¼R�ðFðeÞÞ; if e 2 A� B;R�ðGðeÞÞ; if e 2 B� A;R�ðFðeÞ [ GðeÞÞ; if e 2 A \ B;
8<
:
for all e 2 C: Now by Theorem 1,
R�ðFðeÞ [ GðeÞÞ � R�ðFðeÞÞ \ R�ðGðeÞÞ;
and so we deduce that R�ðRÞ � R�ðSÞ e[R�ðTÞ:(7) This is similar to the proof of (5).
(8) This is similar to the proof of (6).
(9) Assume that S � T: Then by Definition 4, we have
A � B and FðxÞ � GðxÞ; 8x 2 A: Now it follows from
Theorem 1 that R�ðFðxÞÞ � R�ðGðxÞÞ and R�ðFðxÞÞ �R�ðGðxÞÞ for all x 2 C: Hence, we conclude that
R�ðSÞ � R�ðTÞ and R�ðSÞ � R�ðTÞ: This completes
our proof.
6 Soft rough sets
In the last section, based on an equivalence relation on the
universe of discourse, we introduced rough approximations
of soft sets and obtained a hybrid concept called rough soft
sets. We shall discuss another way to combine soft sets
with rough sets in this section. In fact, a soft set instead of
an equivalence relation can be used to granulate the uni-
verse of discourse. The result is a deviation of Pawlak
approximation space called a soft approximation space, in
which soft rough approximations and soft rough sets can be
introduced accordingly.
Definition 15 Let S ¼ ðf ;AÞ be a soft set over U: Then
the pair P ¼ ðU;SÞ is called a soft approximation space.
Based on P; we define the following two operations:
aprPðXÞ ¼ fu 2 U : 9a 2 A½u 2 f ðaÞ � X�g;
aprPðXÞ ¼ fu 2 U : 9a 2 A½u 2 f ðaÞ; f ðaÞ \ X 6¼ ;�g;
assigning to every subset X � U two sets aprPðXÞ and
aprPðXÞ called the lower and upper soft rough
approximations of X in P; respectively. Moreover,
PosPðXÞ ¼ aprPðXÞ;
NegPðXÞ ¼ U � aprPðXÞ;BndPðXÞ ¼ aprPðXÞ � apr
PðXÞ
are called the soft positive, soft negative and soft boundary
regions of X; respectively. If aprPðXÞ ¼ aprPðXÞ; X is said
to be soft definable; otherwise X is called a soft rough set.
By definition, we immediately have that X � U is a soft
definable set if BndPðXÞ ¼ ;: Also, it is clear that
aprPðXÞ � X and apr
PðXÞ � aprPðXÞ for all X � U:
Soft sets combined with fuzzy sets and rough sets: a tentative approach 905
123

Nevertheless, it is worth noting that X � aprPðXÞ does not
hold in general as illuminated by the following example.
Example 2 Suppose that U ¼ fu1; u2; u3; u4; u5; u6g; E ¼fe1; e2; e3; e4; e5; e6g and A ¼ fe1; e2; e3; e4g � E: Let S ¼ðf ;AÞ be a soft set over U given by Table 2 and the soft
approximation space P ¼ ðU;SÞ:
For X ¼ fu3; u4; u5g � U; we have aprPðXÞ ¼ fu3g;
and aprPðXÞ ¼ fu1; u2; u3; u5g: Thus, aprPðXÞ 6¼ aprPðXÞ
and X is a soft rough set. It is clear that X ¼ fu3; u4; u5g* aprPðXÞ ¼ fu1; u2; u3; u5g: Moreover, we have
PosPðXÞ ¼ fu3g; NegPðXÞ ¼ fu4; u6g and BndPðXÞ ¼fu1; u2; u5g: On the other hand, let us consider X1 ¼fu3; u4g � U: Since apr
PðX1Þ ¼ fu3g ¼ aprPðX1Þ; by
definition X1 is a soft definable set.
Proposition 1 Let S ¼ ðf ;AÞ be a soft set over U and
P ¼ ðU;SÞ be a soft approximation space. Then,
aprPðXÞ ¼
[
a2A
ff ðaÞ : f ðaÞ � Xg
and
aprPðXÞ ¼[
a2A
ff ðaÞ : f ðaÞ \ X 6¼ ;g
for all X � U:
Proof This is easily obtained from the definition of soft
rough approximations.
Let S ¼ ðf ;AÞ be a soft set over U; P ¼ ðU;SÞ be a
soft approximation space and X � U: We can define four
basic classes of soft rough sets:
• X is said to be roughly soft definable if aprPðXÞ 6¼ ;
and aprPðXÞ 6¼ U;
• X is internally soft indefinable if aprPðXÞ ¼ ; and
aprPðXÞ 6¼ U;
• X is externally soft indefinable if aprPðXÞ 6¼ ; and
aprPðXÞ ¼ U;
• X is totally soft indefinable if aprPðXÞ ¼ ; and
aprPðXÞ ¼ U:
The intuitive meaning of this classification is as follows:
If X is roughly soft definable, this means that we are able to
decide for some elements of U that they belong to X; and
meanwhile for some elements of U we are able to decide that
they belong to U � X; using available knowledge from the
soft approximation space P: If X is internally soft indefin-
able, this means that we are able to decide about some ele-
ments of U that they belong to U � X; but we are unable to
decide for any element of U that it belongs to X; by
employing P: If X is externally soft indefinable, this means
that we are able to decide for some elements of U that they
belong to X; but we are unable to decide, for any element of
U that it belongs to U � X; by employing P: If X is totally
soft indefinable, we are unable to decide for any element of
U whether it belongs to X or U � X; by employing P:
Theorem 5 Let S ¼ ðf ;AÞ be a soft set over U;P ¼ðU;SÞ be a soft approximation space and X; Y � U: Then
we have
1. aprPð;Þ ¼ aprPð;Þ ¼ ;;
2. aprPðUÞ ¼ aprPðUÞ ¼
Sa2A f ðaÞ;
3. X � Y ) aprPðXÞ � apr
PðYÞ;
4. X � Y ) aprPðXÞ � aprPðYÞ;5. apr
PðX \ YÞ � apr
PðXÞ \ apr
PðYÞ;
6. aprPðX [ YÞ � apr
PðXÞ [ apr
PðYÞ;
7. aprPðX [ YÞ ¼ aprPðXÞ [ aprPðYÞ;8. aprPðX \ YÞ � aprPðXÞ \ aprPðYÞ:
Proof
(1) Straightforward.
(2) This follows directly from Proposition 1 by substi-
tuting U for X:
(3) Assume that X � Y: If u 2 aprPðXÞ; then by defini-
tion, there exists some a 2 A such that u 2 f ðaÞ � X:
Hence, it follows that u 2 f ðaÞ � Y; and so u 2apr
PðYÞ: This shows that apr
PðXÞ � apr
PðYÞ:
(4) This is similar to the proof of (3).
(5) Since X \ Y � X; we deduce from (3) that aprPðX \
YÞ � aprPðXÞ: Similarly we have apr
PðX \ YÞ �
aprPðYÞ; and so apr
PðX \ YÞ � apr
PðXÞ \ apr
PðYÞ:
(6) Since X � X [ Y; by (3) we have aprPðXÞ �
aprPðX [ YÞ: Similarly apr
PðYÞ � apr
PðX [ YÞ; and
so aprPðX [ YÞ � apr
PðXÞ [ apr
PðYÞ:
(7) Let u 2 aprPðX [ YÞ: By definition, there exists some
a 2 A such that u 2 f ðaÞ and f ðaÞ \ ðX [ YÞ 6¼ ;:Thus we have that either f ðaÞ \ X 6¼ ; or f ðaÞ \ Y 6¼;; indicating that u 2 aprPðXÞ or u 2 aprPðYÞ: This
shows that aprPðX [ YÞ � aprPðXÞ [ aprPðYÞ:To prove the reverse inclusion, note that X � X [ Y
and so it follows from (4) that aprPðXÞ � aprPðX [YÞ . Dually we have that aprPðYÞ � aprPðX [ YÞ .
Hence we conclude that aprPðX [ YÞ ¼ aprPðXÞ[ aprPðYÞ:
(8) This is similar to the proof of (5).
It should be noted that the inclusions in Theorem 5 may
be strict, as shown in the following example.
Table 2 Tabular representation of the soft set S
u1 u2 u3 u4 u5 u6
e1 1 0 0 0 0 1
e2 0 0 1 0 0 0
e3 0 0 0 0 0 0
e4 1 1 0 0 1 0
906 F. Feng et al.
123
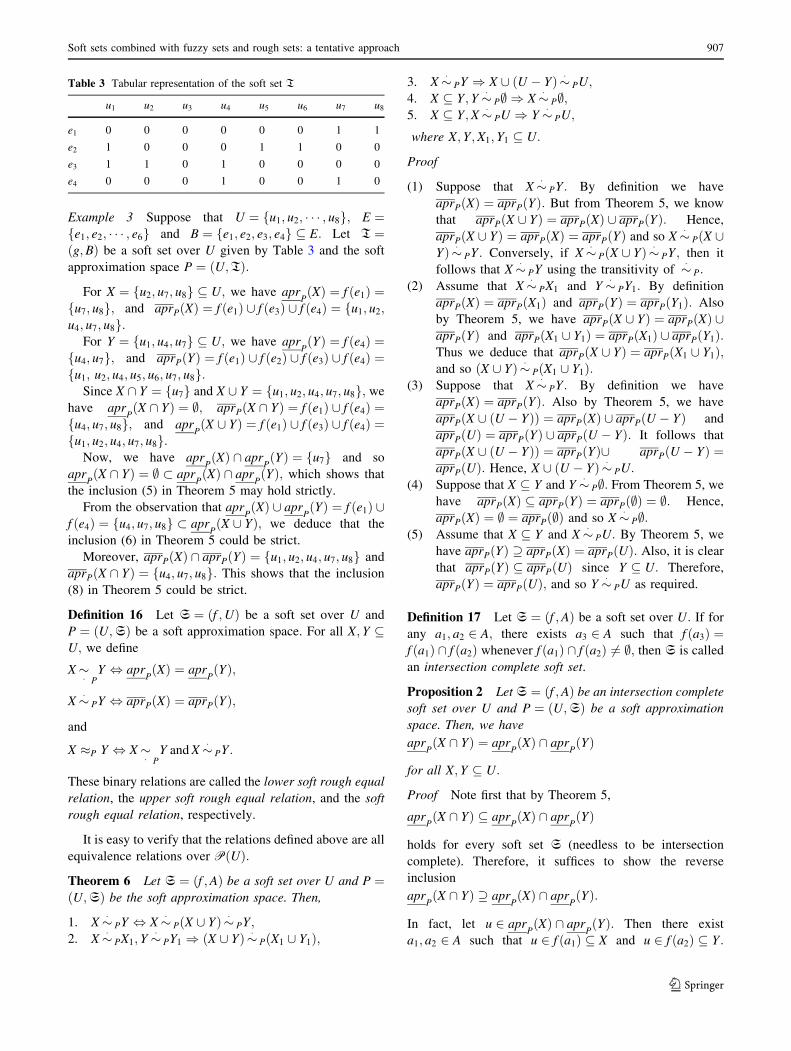
Example 3 Suppose that U ¼ fu1; u2; � � � ; u8g; E ¼fe1; e2; � � � ; e6g and B ¼ fe1; e2; e3; e4g � E: Let T ¼ðg;BÞ be a soft set over U given by Table 3 and the soft
approximation space P ¼ ðU;TÞ:
For X ¼ fu2; u7; u8g � U; we have aprPðXÞ ¼ f ðe1Þ ¼
fu7; u8g; and aprPðXÞ ¼ f ðe1Þ [ f ðe3Þ [ f ðe4Þ ¼ fu1; u2;
u4; u7; u8g:For Y ¼ fu1; u4; u7g � U; we have apr
PðYÞ ¼ f ðe4Þ ¼
fu4; u7g; and aprPðYÞ ¼ f ðe1Þ [ f ðe2Þ [ f ðe3Þ [ f ðe4Þ ¼fu1; u2; u4; u5; u6; u7; u8g:
Since X \ Y ¼ fu7g and X [ Y ¼ fu1; u2; u4; u7; u8g; we
have aprPðX \ YÞ ¼ ;; aprPðX \ YÞ ¼ f ðe1Þ [ f ðe4Þ ¼
fu4; u7; u8g; and aprPðX [ YÞ ¼ f ðe1Þ [ f ðe3Þ [ f ðe4Þ ¼
fu1; u2; u4; u7; u8g:Now, we have apr
PðXÞ \ apr
PðYÞ ¼ fu7g and so
aprPðX \ YÞ ¼ ; apr
PðXÞ \ apr
PðYÞ; which shows that
the inclusion (5) in Theorem 5 may hold strictly.
From the observation that aprPðXÞ [ apr
PðYÞ ¼ f ðe1Þ [
f ðe4Þ ¼ fu4; u7; u8g aprPðX [ YÞ; we deduce that the
inclusion (6) in Theorem 5 could be strict.
Moreover, aprPðXÞ \ aprPðYÞ ¼ fu1; u2; u4; u7; u8g and
aprPðX \ YÞ ¼ fu4; u7; u8g: This shows that the inclusion
(8) in Theorem 5 could be strict.
Definition 16 Let S ¼ ðf ;UÞ be a soft set over U and
P ¼ ðU;SÞ be a soft approximation space. For all X; Y �U; we define
X�� P
Y , aprPðXÞ ¼ apr
PðYÞ;
X�� PY , aprPðXÞ ¼ aprPðYÞ;
and
X �P Y , X�� P
Y and X�� PY:
These binary relations are called the lower soft rough equal
relation, the upper soft rough equal relation, and the soft
rough equal relation, respectively.
It is easy to verify that the relations defined above are all
equivalence relations over PðUÞ:
Theorem 6 Let S ¼ ðf ;AÞ be a soft set over U and P ¼ðU;SÞ be the soft approximation space. Then,
1. X�� PY , X�� PðX [ YÞ�� PY;
2. X�� PX1; Y �� PY1 ) ðX [ YÞ�� PðX1 [ Y1Þ;
3. X�� PY ) X [ ðU � YÞ�� PU;
4. X � Y; Y �� P; ) X�� P;;5. X � Y;X�� PU ) Y �� PU;
where X; Y ;X1; Y1 � U:
Proof
(1) Suppose that X�� PY: By definition we have
aprPðXÞ ¼ aprPðYÞ: But from Theorem 5, we know
that aprPðX [ YÞ ¼ aprPðXÞ [ aprPðYÞ: Hence,
aprPðX [ YÞ ¼ aprPðXÞ ¼ aprPðYÞ and so X�� PðX [YÞ�� PY: Conversely, if X�� PðX [ YÞ�� PY; then it
follows that X�� PY using the transitivity of �� P:
(2) Assume that X�� PX1 and Y �� PY1: By definition
aprPðXÞ ¼ aprPðX1Þ and aprPðYÞ ¼ aprPðY1Þ: Also
by Theorem 5, we have aprPðX [ YÞ ¼ aprPðXÞ [aprPðYÞ and aprPðX1 [ Y1Þ ¼ aprPðX1Þ [ aprPðY1Þ:Thus we deduce that aprPðX [ YÞ ¼ aprPðX1 [ Y1Þ;and so ðX [ YÞ�� PðX1 [ Y1Þ:
(3) Suppose that X�� PY: By definition we have
aprPðXÞ ¼ aprPðYÞ: Also by Theorem 5, we have
aprPðX [ ðU � YÞÞ ¼ aprPðXÞ [ aprPðU � YÞ and
aprPðUÞ ¼ aprPðYÞ [ aprPðU � YÞ: It follows that
aprPðX [ ðU � YÞÞ ¼ aprPðYÞ[ aprPðU � YÞ ¼aprPðUÞ: Hence, X [ ðU � YÞ�� PU:
(4) Suppose that X � Y and Y �� P;: From Theorem 5, we
have aprPðXÞ � aprPðYÞ ¼ aprPð;Þ ¼ ;: Hence,
aprPðXÞ ¼ ; ¼ aprPð;Þ and so X�� P;:(5) Assume that X � Y and X�� PU: By Theorem 5, we
have aprPðYÞ � aprPðXÞ ¼ aprPðUÞ: Also, it is clear
that aprPðYÞ � aprPðUÞ since Y � U: Therefore,
aprPðYÞ ¼ aprPðUÞ; and so Y �� PU as required.
Definition 17 Let S ¼ ðf ;AÞ be a soft set over U: If for
any a1; a2 2 A; there exists a3 2 A such that f ða3Þ ¼f ða1Þ \ f ða2Þ whenever f ða1Þ \ f ða2Þ 6¼ ;; then S is called
an intersection complete soft set.
Proposition 2 Let S ¼ ðf ;AÞ be an intersection complete
soft set over U and P ¼ ðU;SÞ be a soft approximation
space. Then, we have
aprPðX \ YÞ ¼ apr
PðXÞ \ apr
PðYÞ
for all X; Y � U:
Proof Note first that by Theorem 5,
aprPðX \ YÞ � apr
PðXÞ \ apr
PðYÞ
holds for every soft set S (needless to be intersection
complete). Therefore, it suffices to show the reverse
inclusion
aprPðX \ YÞ � apr
PðXÞ \ apr
PðYÞ:
In fact, let u 2 aprPðXÞ \ apr
PðYÞ: Then there exist
a1; a2 2 A such that u 2 f ða1Þ � X and u 2 f ða2Þ � Y:
Table 3 Tabular representation of the soft set T
u1 u2 u3 u4 u5 u6 u7 u8
e1 0 0 0 0 0 0 1 1
e2 1 0 0 0 1 1 0 0
e3 1 1 0 1 0 0 0 0
e4 0 0 0 1 0 0 1 0
Soft sets combined with fuzzy sets and rough sets: a tentative approach 907
123

Since by hypothesis S is an intersection complete soft set,
we deduce that there exists a3 2 A such that
u 2 f ða3Þ ¼ f ða1Þ \ f ða2Þ � X \ Y :
Hence, u 2 aprPðX \ YÞ as required.
Using the above assertion, one can verify the following
result on lower soft rough equal relations.
Theorem 7 Let S ¼ ðf ;AÞ be an intersection complete
soft set over U and P ¼ ðU;SÞ be a soft approximation
space. Then, we have
1. X�� P
Y , X�� PðX \ YÞ�
� PY;
2. X�� P
X1; Y �� PY1 ) ðX \ YÞ�
� PðX1 \ Y1Þ;
3. X�� P
Y ) X \ ðU � YÞ�� P;;
4. X � Y; Y �� P; ) X�
� P;;
5. X � Y;X�� P
U ) Y �� P
U;
where X; Y ;X1; Y1 � U:
Proof This can be obtained from Proposition 2 using
similar techniques as in the proof of Theorem 6.
7 Soft–rough fuzzy sets
In this section, we shall consider lower and upper soft
rough approximations of fuzzy sets in a soft approximation
space, and obtain a new hybrid model called soft–rough
fuzzy sets, which can be seen as an extension of Dubois
and Prade’s rough fuzzy sets.
Definition 18 A soft set S ¼ ðf ;AÞ over U is called a full
soft set ifS
a2A FðaÞ ¼ U:
Definition 19 A full soft set S ¼ ðf ;AÞ over U is called a
covering soft set if FðaÞ 6¼ ;; 8a 2 A:
Definition 20 Let S ¼ ðf ;AÞ be a full soft set over U and
S ¼ ðU;SÞ be a soft approximation space. For a fuzzy set
l 2FðUÞ; the lower and upper soft rough approximations
of l with respect to S are denoted by sapSðlÞ and sapSðlÞ;
respectively, which are fuzzy sets in U given by
sapSðlÞðxÞ ¼
^flðyÞ : 9a 2 A½fx; yg � FðaÞ�g;
and
sapSðlÞðxÞ ¼_flðyÞ : 9a 2 A½fx; yg � FðaÞ�g;
for all x 2 U: The operators sapS
and sapS are called the
lower and upper soft rough approximation operators on
fuzzy sets. If sapSðlÞ ¼ sapSðlÞ; l is said to be soft
definable; otherwise l is called a soft–rough fuzzy set.
Theorem 8 Let S ¼ ðf ;AÞ be a full soft set over U; S ¼ðU;SÞ be a soft approximation space and l; m 2FðUÞ:Then we have
1. sapSðlÞ � l � sapSðlÞ;
2. sapSð;Þ ¼ sapSð;Þ ¼ ;;
3. sapSðUÞ ¼ sapSðUÞ ¼ U;
4. ðsapSðlÞÞc ¼ sapSðlcÞ;
5. ðsapSðlÞÞc ¼ sapSðlcÞ;
6. sapSðl \ mÞ ¼ sap
SðlÞ \ sap
SðmÞ;
7. sapSðl [ mÞ � sap
SðlÞ [ sap
SðmÞ;
8. sapSðl [ mÞ ¼ sapSðlÞ [ sapSðmÞ;9. sapSðl \ mÞ � sapSðlÞ \ sapSðmÞ;
10. l � m) sapSðlÞ � sap
SðmÞ;
11. l � m) sapSðlÞ � sapSðmÞ:
Proof
(1) Let l 2FðUÞ and x 2 U: Since S ¼ ðf ;AÞ is a full
soft set over U; there exists some a0 2 A such that
x 2 Fða0Þ: By definition, we have
sapSðlÞðxÞ ¼
^flðyÞ : 9a 2 A½fx; yg � FðaÞ�g;
and
sapSðlÞðxÞ ¼_flðyÞ : 9a 2 A½fx; yg � FðaÞ�g:
Hence, it follows that sapSðlÞðxÞ� lðxÞ� sapS
ðlÞðxÞ: This shows that sapSðlÞ � l � sapSðlÞ:
(2) Straightforward.
(3) Straightforward.
(4) Let l 2FðUÞ; x 2 U and let
NðxÞ ¼ fy : 9a 2 A½fx; yg � FðaÞ�g:
Note that sapSðlÞðxÞ ¼WflðyÞ : y 2 NðxÞg: Hence,
we have that lðyÞ� sapSðlÞðxÞ for all y 2 NðxÞ:Now it follows that
ðsapSðlÞÞcðxÞ ¼ 1� sapSðlÞðxÞ� 1� lðyÞ¼ lcðyÞ;
for all y 2 NðxÞ: Thus we deduce that
ðsapSðlÞÞcðxÞ�^flcðyÞ : y 2 NðxÞg
¼ sapSðlcÞðxÞ:
This shows that ðsapSðlÞÞc � sap
SðlcÞ:
Next, we only need to prove the reverse inclusion
ðsapSðlÞÞc � sapSðlcÞ . To see this, note first that by
virtue of similar methods as used above, we can
prove that ðsapSðmÞÞc � sapSðmcÞ hold for all fuzzy
set m 2FðUÞ . Taking m ¼ lc , it follows that
ðsapSðlcÞÞc � sapSðlÞ . Consequently we have
sapSðlcÞ � ðsapSðlÞÞ
cas required.
(5) This is similar to the proof of (4).
(6) Let l; m 2FðUÞ; x 2 U and let
NðxÞ ¼ fy : 9a 2 A½fx; yg � FðaÞ�g:
At first, note that
908 F. Feng et al.
123

sapSðl \ mÞðxÞ ¼
^flðyÞ ^ mðyÞ : y 2 NðxÞg:
Hence, sapSðl \ mÞðxÞ� lðyÞ ^ mðyÞ� lðyÞ for all
y 2 NðxÞ: Since sapSðlÞðxÞ ¼
VflðyÞ : y 2 NðxÞg;
it follows that sapSðl \ mÞðxÞ� sap
SðlÞðxÞ:
Similarly, we obtain sapSðl \ mÞðxÞ� sap
SðmÞðxÞ:
Therefore,
sapSðl \ mÞðxÞ� sap
SðlÞðxÞ ^ sap
SðmÞðxÞ:
This says that sapSðl \ mÞ � sap
SðlÞ \ sap
SðmÞ:
Now it remains to show the reverse inclusion. To
prove this, notefirst that
ðsapSðlÞ \ sap
SðmÞÞðxÞ ¼ sap
SðlÞðxÞ ^ sap
SðmÞðxÞ
� sapSðlÞðxÞ� lðyÞ;
for all y 2 NðxÞ . In a similar way, we have
ðsapSðlÞ \ sap
SðmÞÞðxÞ� sap
SðmÞðxÞ� mðyÞ
for all y 2 NðxÞ . Thus
ðsapSðlÞ \ sap
SðmÞÞðxÞ� lðyÞ ^ mðyÞ
for all y 2 NðxÞ . Now it follows that
ðsapSðlÞ \ sap
SðmÞÞðxÞ�
^flðyÞ ^ mðyÞ : y 2 NðxÞg
¼ sapSðl \ mÞðxÞ:
Thus, sapSðl \ mÞ � sap
SðlÞ \ sap
SðmÞ as required.
(7) Let l; m 2FðUÞ; x 2 U and let
NðxÞ ¼ fy : 9a 2 A½fx; yg � FðaÞ�g:
Then it is clear that
sapSðlÞðxÞ ¼
^flðyÞ : y 2 NðxÞg� lðyÞ
� lðyÞ _ mðyÞ;
for all y 2 NðxÞ: Thus we have
sapSðl [ mÞðxÞ ¼
^flðyÞ _ mðyÞ : y 2 NðxÞg
sapSðlÞðxÞ:
Similarly, we obtain that sapSðl [ mÞðxÞ sap
SðmÞðxÞ: Hence, it follows that
sapSðl [ mÞðxÞ sap
SðlÞðxÞ _ sap
SðmÞðxÞ
¼ ðsapSðlÞ [ sap
SðmÞÞðxÞ:
Thus, we conclude that sapSðl [ mÞ � sap
SðlÞ[
sapSðmÞ:
(8) This is similar to the proof of (6).
(9) This is similar to the proof of (7).
(10) Let l; m 2FðUÞ; x 2 U and let
NðxÞ ¼ fy : 9a 2 A½fx; yg � FðaÞ�g:
If l � m; then it is easy to see that
sapSðlÞðxÞ ¼
^flðyÞ : y 2 NðxÞg� lðyÞ� mðyÞ;
for all y 2 NðxÞ:(11) This is similar to the proof of (10).
To illustrate soft–rough approximations of fuzzy sets, let
us consider the following example which is a continuation
to Example 1.
Example 4 Let U; E and the soft set S ¼ ðF;EÞ over U
be the same as in Example 1. Let S ¼ ðU;SÞ be a soft
approximation space. Then for fuzzy set
l ¼ f0:8=h1; 0:5=h2; 0:7=h3; 0:2=h4; 0:3=h5g;
by definition we compute
sapSðlÞ ¼ f0:2=h1; 0:5=h2; 0:3=h3; 0:2=h4; 0:3=h5g;
and
sapSðlÞ ¼ f0:8=h1; 0:8=h2; 0:8=h3; 0:8=h4; 0:7=h5g:
Similarly for fuzzy set
m ¼ f0:1=h1; 0:3=h2; 0:6=h3; 0:8=h4; 0:5=h5g;
we have
sapSðmÞ ¼ f0:1=h1; 0:1=h2; 0:1=h3; 0:1=h4; 0:5=h5g;
and
sapSðmÞ ¼ f0:8=h1; 0:6=h2; 0:6=h3; 0:8=h4; 0:6=h5g:
It is easy to see that
l [ m ¼ f0:8=h1; 0:5=h2; 0:7=h3; 0:8=h4; 0:5=h5g;
and
l \ m ¼ f0:1=h1; 0:3=h2; 0:6=h3; 0:2=h4; 0:3=h5g:
By computation we obtain
sapSðl [ mÞ ¼ f0:5=h1; 0:5=h2; 0:5=h3; 0:8=h4; 0:5=h5g;
and
sapSðl \ mÞ ¼ f0:6=h1; 0:6=h2; 0:6=h3; 0:2=h4; 0:6=h5g:
Furthermore, we have
sapSðlÞ[sap
SðmÞ¼f0:2=h1;0:5=h2;0:3=h3;0:2=h4;0:5=h5g;
and
sapSðlÞ\sapSðmÞ¼f0:8=h1;0:6=h2;0:6=h3;0:8=h4;0:6=h5g:
This shows that the inclusions in Theorem 8 may hold
strictly.
Definition 21 A soft set S ¼ ðf ;AÞ over U is called a
partition soft set if fFðaÞ : a 2 Ag forms a partition of U:
Soft sets combined with fuzzy sets and rough sets: a tentative approach 909
123

By definition, every partition soft set is a covering soft
set. The following example shows that every quotient set
may be considered a partition soft set.
Example 5 Let R be an equivalence relation on U: Then
the set-valued mapping fR : U ! PðUÞ in Theorem 2
coincides with the natural mapping of the equivalence
relation R: That is, fRðxÞ ¼ ½x�R for all x 2 U: Then the
canonical soft set SR of the equivalence relation R can be
identified with the quotient set U=R: Moreover, we claim
that SR ¼ ðfR;UÞ is a partition soft set since ffRðxÞ : x 2Ug ¼ U=R is a partition of U:
Theorem 9 Let R be an equivalence relation on U: Let
SR ¼ ðfR;UÞ be the canonical soft set of R and S ¼ðU;SRÞ be the soft approximation space. Then,
sapSðlÞðxÞ ¼
^flðyÞ : y 2 ½x�Rg;
and
sapSðlÞðxÞ ¼_flðyÞ : y 2 ½x�Rg;
where l 2FðUÞ; x 2 U: Thus in this case, l is a rough
fuzzy set with respect to the approximation space ðU;RÞ if
and only if l is a soft–rough fuzzy set with respect to the
soft approximation space S ¼ ðU;SRÞ:
Proof Let l 2FðUÞ and x 2 U: Since SR ¼ ðfR;UÞ is
the canonical soft set of R and S ¼ ðU;SRÞ; by definition
we have
sapSðlÞðxÞ ¼
^flðyÞ : 9a 2 U; fx; yg � fRðaÞg
¼^flðyÞ : 9a 2 U; fx; yg � ½a�Rg
¼^flðyÞ : y 2 ½x�Rg:
The second assertion
sapSðlÞðxÞ ¼_flðyÞ : y 2 ½x�Rg
can be proved in a similar way.
Theorem 10 Let S ¼ ðf ;AÞ be a partition soft set over U
and S ¼ ðU;SÞ be the soft approximation space. Define a
binary relation R on U by
ðx; yÞ 2 R, 9a 2 A; fx; yg � FðaÞ;
where x; y 2 U: Then R is an equivalence relation on U
such that
sapSðlÞðxÞ ¼
^flðyÞ : y 2 ½x�Rg;
and
sapSðlÞðxÞ ¼_flðyÞ : y 2 ½x�Rg;
where l 2FðUÞ; x 2 U: Thus in this case, l is a soft–
rough fuzzy set with respect to the soft approximation
space S ¼ ðU;SÞ if and only if l is a rough fuzzy set with
respect to the approximation space ðU;RÞ:
Proof First, we show that the relation R induced by the
partition soft set S ¼ ðf ;AÞ is an equivalence relation on
U: For any x 2 U; since S ¼ ðf ;AÞ is clearly a full soft set,
there exists a 2 A such that x 2 FðaÞ; and so ðx; xÞ 2 R;
which shows that R is reflexive. If ðx; yÞ 2 R; then there
exists a 2 A such that fx; yg ¼ fy; xg � FðaÞ: Thus, we
deduce that ðy; xÞ 2 R; indicating that R is symmetric.
Assume that ðx; yÞ 2 R and ðy; zÞ 2 R: Then there exist
a; b 2 A such that fx; yg � FðaÞ and fy; zg � FðbÞ: Hence,
FðaÞ \ FðbÞ 6¼ ;: But fFðaÞ : a 2 Ag is a partition of U for
S ¼ ðf ;AÞ is a partition soft set over U: It follows that
FðaÞ ¼ FðbÞ and so ðx; zÞ 2 R: This shows that R is tran-
sitive as required.
Now let l 2FðUÞ and x 2 U: By definition,
sapSðlÞðxÞ ¼
^flðyÞ : 9a 2 A; fx; yg � FðaÞg
¼^flðyÞ : ðx; yÞ 2 Rg
¼^flðyÞ : y 2 ½x�Rg:
The second assertion
sapSðlÞðxÞ ¼_flðyÞ : y 2 ½x�Rg
can be proved in a similar way.
From the above results, one easily sees that (classical)
rough fuzzy sets can be identified with soft–rough fuzzy
sets when the underlying soft set in the soft approximation
space is a partition soft set. Consequently, every rough
fuzzy set may be considered a soft–rough fuzzy set.
However, we claim that the reverse statement is generally
not true, since a (full) soft set is not necessarily a partition
soft set. In this sense, the notion of soft–rough fuzzy sets
can be seen as a natural generalization of rough fuzzy sets
by applying soft set theory.
8 Conclusions
We have investigated in this paper the problem of combing
soft sets with fuzzy sets and rough sets. In general, three
different types of hybrid models are presented, which are
called rough soft sets, soft rough sets and soft–rough fuzzy
sets, respectively. A rough soft set is the approximation of
a soft set in a Pawlak approximation space, whereas a soft
rough set is based on soft rough approximations in a soft
approximation space. The approximation of a fuzzy set in a
soft approximation space is also investigated to obtain
soft–rough fuzzy sets which extend Dubois and Prade’s
rough fuzzy sets in a natural way. In addition, we have
investigated some basic properties of these new
910 F. Feng et al.
123

hybridizations with illustrating examples. Further study
will be needed to establish whether the notions put forth in
this paper may lead to a fruitful theory.
Acknowledgments We are highly grateful to the anonymous ref-
erees for their helpful comments and suggestions for improving the
paper. We are indebted to Dr. Brunella Gerla and Dr. Vincenzo Marra
for their kindly help. This work is supported by a grant (No. 08JK432)
from the Education Department of Shaanxi Province of China, and by
the Shaanxi Provincial Research and Development Plan of Science
and Technology under Grant No. 2008K0133.
References
Aktas H, Cagman N (2007) Soft sets and soft groups. Inf Sci 177:
2726–2735
Ali MI, Feng F, Liu XY, Min WK, Shabir M (2009) On some new
operations in soft set theory. Comput Math Appl 57:1547–1553
Chen D, Tsang ECC, Yeung DS, Wang X (2005) The parametrization
reduction of soft sets and its applications. Comput Math Appl
49:757–763
Dubois D, Prade H (1990) Rough fuzzy sets and fuzzy rough sets. Int
J Gen Syst 17:191–209
Feng F, Jun YB (2009) Inductive semimodules and the vector
modules over them. Soft Comput 13:1113–1121
Feng F, Zhao XZ, Jun YB (2005) *-l -semirings and *-k -semirings.
Theoret Comput Sci 347:423–431
Feng F, Jun YB, Zhao XZ (2007) On *-k -semirings. Inf Sci
177:5012–5023
Feng F, Jun YB, Zhao XZ (2008) Soft semirings. Comput Math Appl
56:2621–2628
Ganter B, Wille R (1999) Formal concept analysis—mathematical
foundations. Springer, New York
Jun YB (2008) Soft BCK/BCI-algebras. Comput Math Appl 56:1408–
1413
Jun YB, Park CH (2008) Applications of soft sets in ideal theory of
BCK/BCI-algebras. Inf Sci 178:2466–2475
Kong Z, Gao LQ, Wang LF, Li S (2008) The normal parameter
reduction of soft sets and its algorithm. Comput Math Appl
56:3029–3037
Maji PK, Biswas R, Roy AR (2001) Fuzzy soft sets. J Fuzzy Math
9(3):589–602
Maji PK, Roy AR, Biswas R (2002) An application of soft sets in a
decision making problem. Comput Math Appl 44:1077–1083
Maji PK, Biswas R, Roy AR (2003) Soft set theory. Comput Math
Appl 45:555–562
Molodtsov D (1999) Soft set theory—first results. Comput Math Appl
37:19–31
Molodtsov D (2004) The theory of soft sets. URSS Publishers,
Moscow (in Russian)
Pawlak Z (1982) Rough sets. Int J Inf Comp Sci 11:341–356
Pawlak Z (1991) Rough sets—theoretical aspects of reasoning about
data. Kluwer, Dordrecht
Pawlak Z, Skowron A (2007) Rudiments of rough sets. Inf Sci
177:3–27
Radzikowska AM, Kerre EE (2002) A comparative study of fuzzy
rough sets. Fuzzy Sets Syst 126:137–155
Roy AR, Maji PK (2007) A fuzzy soft set theoretic approach to
decision making problems. J Comput Appl Math 203:412–418
Slowinski R, Stefanowski J (1999) Medical information systems-
problems with analysis and way of solution. In: Pal SK, Skowron
A (eds) Rough fuzzy hybridization: a new trend in decision-
making. Springer, Singapore, pp 301–315
Yao YY (1998) A comparative study of fuzzy sets and rough sets. Inf
Sci 109:227–242
Zadeh LA (1965) Fuzzy sets. Inf Control 8:338–353
Zou Y, Xiao Z (2008) Data analysis approaches of soft sets under
incomplete information. Knowl Based Syst 21:941–945
Soft sets combined with fuzzy sets and rough sets: a tentative approach 911
123





























